Z 8907:2012
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 2
3 用語及び定義 ··················································································································· 2
4 空間的方向性及び運動方向の設計 ························································································ 6
4.1 一般 ···························································································································· 6
4.2 空間的方向性及び運動方向に関するユーザインタフェース(UI)の人間工学的設計 ···················· 6
4.3 方向設計の工程計画 ······································································································· 7
4.4 ヒューマンマシンインタフェース(HMI)の設計要求事項・推奨事項 ······································ 7
4.5 グラフィカルユーザインタフェース(GUI)の設計推奨事項 ················································· 11
4.6 複合操作系の設計推奨事項······························································································ 17
5 適合······························································································································ 18
5.1 要求事項及び推奨事項の適用··························································································· 18
5.2 製品の評価 ·················································································································· 18
附属書A(規定)使用性の構成要因 ························································································ 19
附属書B(規定)参照モデル:空間的方向性及び運動方向 ··························································· 20
附属書C(参考)人間中心設計活動の流れ ··············································································· 27
附属書D(参考)空間的方向性及び運動方向設計チェックリスト ·················································· 28
附属書JA(規定)表示及び操作機器の配置 ·············································································· 36
附属書JB(規定)推奨配置領域 ····························································································· 45
参考文献 ···························································································································· 46
附属書JC(参考)JISと対応国際規格との対比表 ······································································ 47
Z 8907:2012
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
人間工学会(JES)及び財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改正す
べきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS Z 8907:1987は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
Z 8907:2012
空間的方向性及び運動方向−人間工学的要求事項
Spatial orientation and direction of movement-Ergonomic requirements
序文
この規格は,2008年に第2版として発行されたISO 1503を基とし,対応国際規格中の未発行の引用規
格の引用事項を,附属書JA(規定)として記載するため,技術的内容を変更して作成した日本工業規格で
ある。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JCに示す。また,側線を施してある箇所,附属書JA及び附属書JBは
対応国際規格にはない事項である。
ユーザオペレータによる操作の方向とそれによって制御される対象物の運動の方向との間の関係が標準
化されていることが,全てのシステム又は製品の安全性及び使用性にとって不可欠である。
例えば,消火器の操作が標準化されていなければ,火事のときの迅速かつ適切な操作は困難である。電
車を加速するレバーの操作が,A形車両では前に押し,B形車両では後ろに引くのであれば,運転者の誤
りを,更には事故さえをも引き起こしやすくなる。画面内容に沿った応答をコンピュータがしなければ,
そのシステムの使用性及びユーザオペレータの効率は損なわれる。土木建設工事で,対象物に動的変化を
もたらそうとするユーザオペレータの意図に従って,工事車両がうまく制御されなければ,土木建設作業
の使用性,すなわち,有効さ,効率及びユーザオペレータの満足度は低下する。
この規格の目的の一つは,システム及び/又は製品使用時に,同じく保守時に,ユーザオペレータが犯
す誤りを防止することによって,安全性の向上に役立つことである。もう一つの目的は,ユーザオペレー
タの意図に沿った対象物の状態及び/又は運動の変化をもたらすことによって,作業の有効さ,効率及び
ユーザオペレータの満足度を向上させることである。
対応国際規格の第1版は,三次元の軸線,空間的方向性,並びに操作機器及び表示物の運動方向の定義
に関する幾何学的枠組みを主として構成していた。対応国際規格の第2版,すなわちこの規格では,より
直接的に現実世界の状況に適用できることを目指して,方向の設計に影響を及ぼす人間工学的な事項を取
り込んでいる。この規格は,製品及び作業システムに向けた,方向に関する人間工学的な原則及び要求事
項を,従来の工学系及び新規の情報技術系の両方に適する形で扱う。
1
適用範囲
この規格は,工作機械,産業用ロボット,事務機械,建設機械,輸送機械(自動車,鉄道,飛行機,船
舶など),情報機器,日用品,公共設備,建築物などに関する空間的方向性,並びにそれらで用いる制御要
素の操作方向と制御対象物の運動方向との間の関係に関する,設計原則,設計手順,要求事項及び推奨事
項について規定する。
この規格は,制御要素の操作方向に対して,対象物の運動方向,状態変化などを決定する上での基本的
2
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
な要求事項を規定する。
この規格は,次の事項について規定する。
− 三次元空間の軸線,観察者,観察方式,並びに動的空間内での直線運動,回転運動,二次元運動及び
三次元運動を定義する。
− 操作機器の操作方向と,対象物及び/又は表示の運動方向との適切な関係を決定するための四つの原
則を記述する。
注記1 四つの原則とは,4.4.2.2〜4.4.2.5を指す。
− コンピュータの操作と画面上に表示されるものの動きとの関係を,人間の特性に沿いながら,コンピ
ュータ支援の作業を安全かつ効率的に行えるように統合設計するための要求事項及び推奨事項を,グ
ラフィカルユーザインタフェース(GUI)環境に向けて提供する。
− 多方向操作機器を用いる複合操作系の操作の方向と対象物の動きとを,行おうとする複雑な操作をユ
ーザオペレータが容易に行えるように決定する上での設計原則及び推奨事項を提示する。
− 既存のシステムだけでなく,最新のシステムについても方向設計についての原則及び推奨事項を提供
する。
注記2 この規格の人間工学上の要求事項又は推奨事項は,医療機器,ゲーム機などの他の産業機
械の運動の方向設計に対しても当てはめることができる。
注記3 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 1503:2008,Spatial orientation and direction of movement−Ergonomic requirements(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正してい
る”ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS Z 8501 人間工学−作業システム設計の原則
注記 対応国際規格:ISO 6385:2004,Ergonomic principles in the design of work systems(IDT)
JIS Z 8520 人間工学−人とシステムとのインタラクション−対話の原則
注記 対応国際規格:ISO 9241-110:2006,Ergonomics of human-system interaction−Part 110: Dialogue
principles(IDT)
JIS Z 8530 人間工学−インタラクティブシステムの人間中心設計プロセス
注記1
対応国際規格:ISO 13407:1999,Human-centred design processes for interactive systems(IDT)
注記2
ISO 13407は,2010年にISO 9241-210:2010,Ergonomics of human-system interaction−Part
210: Human-centred design for interactive systemsへと改正された。
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
軸線(axis)
対象物の中心点を通り互いに直交する3本の仮定した直線。
注記1 対象物の前後,左右及び上下の運動方向と一致する軸を,(右手直交座標系に基づいて)それ
3
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ぞれ前後軸(X軸),左右軸(Y軸)及び上下軸(Z軸)と呼ぶ。
注記2 右手直交座標系とは,三次元空間中の直交する三つの軸(X軸,Y軸及びZ軸)の正の方向
を,右手の互いに直交させた親指,人差し指及び中指の指す方向にそれぞれ取った3軸から
なる座標系をいう。
3.2
中心点(centre point)
対象物の方向を決定するために仮定した基準点。
注記 中心点は,三つの軸線又は三つの基準面の交点となる最も基本的な基準である。内視式(3.20.2
参照)の場合には,観察者(3.10参照)の視点の位置が中心点と一致しているものと考える。
また,外視式(3.20.1参照)では,中心点を,観察の目的に応じて対象物内の任意の位置に設
定することができる。
なお,中心点は,対象物の重心と一致しなくてもよい。
3.3
単方向操作機器,一方向操作機器(mono-direction controls, single-direction controls)
対象物の一つの運動方向だけを制御する一つ又は1組の操作機器。
3.4
多方向操作機器(multi-direction controls)
一つの操作機器で,X軸,Y軸又はZ軸のいずれか二つ以上の方向に運動を制御できる操作機器。
3.5
複合操作系(combined control system)
複数の多方向操作機器(3.4参照)を操作して,対象物を三次元に連続した運動で制御できる操作系。
注記 複合操作系は,最近の土木建設車両によく見られる。
3.6
方向(direction)
空間における一つの点の他の点に対する距離にかかわらない相対的な位置。
3.7
人間中心設計,ユーザ中心設計(human-centred design, user-centred design)
ユーザの積極的な設計への関与,ユーザ及び作業の要求項目の明確な理解,ユーザと技術とに対する適
切な機能配分,設計案の繰返し改訂,並びに多種の専門領域に基づいた設計で,特徴付けられる設計方法。
注記1 設計原則については,JIS Z 8530の5.1(一般)参照。
注記2 ユーザビリティ工学が,人間中心設計の代わりをするものとしてしばしば用いられる。しか
し,ユーザビリティ工学の適用では,人間中心設計の本質であるユーザの積極的な関与を必
ずしも想定していない。さらに,ユーザビリティ工学は,評価手法の果たす役割に重点を置
くことが多い。一方,人間中心設計は,利用の状況の分析,ユーザの要求項目の抽出,設計
案の作成,及び要求項目に照らした設計案の評価という過程並びにそれらの過程の繰返しを,
重要視する。
3.8
時計回り(連体修飾,連用修飾),右回り(連体修飾,連用修飾)[clockwise (adjective, adverb), right-hand
(adjective, adverb)]
文字板に正対したとき,時計の針の回転方向と一致する対象物の回転方向。
4
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 数字を右から左に表記する言語圏では,針が我が国の時計とは反対方向に動く時計が用いられ
ることがある。
3.9
反時計回り(連体修飾,連用修飾),逆時計回り(連体修飾,連用修飾),左回り(連体修飾,連用修飾)
[anticlockwise (adjective, adverb), counter-clockwise (adjective, adverb), left-hand (adjective, adverb)]
時計回り(3.8参照)の回転に対して逆回りの回転方向。
3.10
観察者(observer)
対象物(3.15参照)の方向又は動きを決定するため,対象物をその外部又は内部から見る実際の人又は
想像上の人。
3.11
ユーザ(user)
システムとやり取りする個人(JIS Z 8530参照)。
3.12
オペレータ(operator)
機械又はシステムの設置,運転,調整,保守,清掃,修繕又は運搬に携わる人。
注記 この規格が扱う範囲では,行う仕事には機器又は装置の制御が関わる。
3.13
基準平面(reference plane)
対象物(3.15参照)の中心点を通り互いに垂直な三つの平面であって,それぞれ,その対象物の2軸線
を含むもの。
注記 対象物の前後軸及び左右軸を含む平面を基礎平面(Pxy),対象物の前後軸及び上下軸を含む平
面を前後方向平面(Pxz)並びに対象物の左右軸及び上下軸を含む平面を左右方向平面(Pyz)
と呼ぶ。
3.14
空間的方向性(spatial orientation)
対象物(3.15参照)が方向についてもっている固有の性質。
注記 対象物の空間的方向性は,前−後,右−左,上−下などの対概念で特徴付けられる。
3.15
対象物(target object)
空間的方向性(3.14参照)を定め若しくは確立しようとする,又は動きを制御しようとする対象となる
物体(画像を含む。)。
3.16
使用性(usability)
ある製品が,指定された利用者によって,指定された利用の状況下で,指定された目的を達成するため
に用いられる際の,有効さ,効率及び利用者の満足度の度合い。
注記1 附属書A参照。
注記2 この規格においては,ユーザ(3.11参照)とオペレータ(3.12参照)とを,両者とも操作具
又は対象物の運動に関わるという点で,互換的に扱う。
注記3 JIS Z 8521の3.1(使用性)を参照。
5
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.16.1
有効さ(effectiveness)
利用者が指定された目標を達成する上での正確さ及び完全さ。
例 達成した目標の割合。
注記 JIS Z 8521の3.2(有効さ)を参照。
3.16.2
効率(efficiency)
利用者が目標を達成する際に正確さと完全さに関連して費やした資源。
例 仕事の完了に要した時間。
注記 JIS Z 8521の3.3(効率)を参照。
3.16.3
満足度(satisfaction)
不快さのないこと,及び製品使用に対する肯定的な態度。
例 進んで利用しようとする頻度。
注記 JIS Z 8521の3.4(満足度)を参照。
3.16.4
利用の状況(context of use)
ある製品を利用するときの,製品を利用するユーザ(3.11参照)又はオペレータ(3.12参照),製品を用
いて果たそうとする仕事,利用する装置(ハードウェア,ソフトウェア及び資材),及び製品が利用される
物理的及び社会的環境。
3.17
ユーザインタフェース,UI(省略形)[user interface, UI (abbreviation)]
インタラクティブシステムを用いて特定の仕事を遂行するユーザに対して情報及び制御を提供する,イ
ンタラクティブシステムの構成要素。
注記1 JIS Z 8520の3.9(ユーザインタフェース)をこの規格に合わせて修正した。
注記2 構成要素によって,次の略称で区別して呼ぶ場合がある。
MMI(マンマシンインタフェース):構成要素が機械装置類である場合。
HMI(ヒューマンマシンインタフェース):構成要素が機械装置類である場合。
GUI(グラフィカルユーザインタフェース):構成要素が画面上の論理的な対象を含む場合。
3.18
視方向(viewing direction)
対象物(3.15参照)の方向(3.6参照)を決定するときに観察者(3.10参照)が見る方向。
3.18.1
視方向X(E)[viewing direction X (E)]
外視式(3.20.1参照)において,前後軸(3.1参照)に沿って対象物(3.15参照)の前側から中心点(3.2
参照)を見る方向。
注記 附属書B参照。
3.18.2
視方向X(I)[viewing direction X (I)]
内視式(3.20.2参照)において,前後軸(3.1参照)に沿って対象物(3.15参照)の中心点(3.2参照)
6
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
から前側を見る方向。
注記 附属書B参照。
3.18.3
視方向Y(viewing direction Y)
左右軸Yに沿って右の方を見る方向。
注記 附属書B参照。
3.18.4
視方向Z(viewing direction Z)
上下軸Zに沿って下の方を見る方向。
注記 附属書B参照。
3.19
視点(viewing point)
観察者(3.10参照)の目の位置。
3.20
観察方式(viewing system)
方向を明確にするため,観察者(3.10参照)の視点及び視方向(3.18参照)を対象物(3.15参照)の3
軸線を基に決める方式。
3.20.1
外視式,EVS(省略形)[external viewing system, EVS (abbreviation)]
観察者(3.10参照)の位置が,対象物(3.15参照)の外部にある場合の観察方式。
注記 附属書B参照。
3.20.2
内視式,IVS(省略形)[internal viewing system, IVS (abbreviation)]
観察者(3.10参照)の位置が,対象物(3.15参照)の内部にある場合の観察方式。
注記 附属書B参照。
4
空間的方向性及び運動方向の設計
4.1
一般
この箇条は,方向の設計について,次の細分箇条で扱う。
− ユーザインタフェースについての人間工学上の基本的な推奨事項(4.2)。
− 人間工学的方向設計の手順(4.3)。
− ヒューマンマシンインタフェース向けの個別要求事項及び推奨事項(4.4)。
− グラフィカルユーザインタフェース向けの個別要求事項及び推奨事項(4.5)。
− 複合操作系の設計推奨事項(4.6)。
空間的方向性及び運動方向についての詳細な要求事項を,附属書Bに規定する。
4.2
空間的方向性及び運動方向に関するユーザインタフェース(UI)の人間工学的設計
ユーザインタフェースの人間工学的設計には,次の人間特性及び環境についての配慮が必要である。
− 人体計測の側面(例えば,身体寸法,手腕の可動域,視野),
− 認知的側面(例えば,情報の表示と操作との間の整合性,間違いにくさ),
7
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 情報処理における生理的能力の側面(例えば,作業負担,情報処理の速さ,正確さ),及び
− 環境側面(例えば,照明,色彩,騒音)。
ユーザインタフェースの設計は,人間中心であることが望ましい。対象物の空間的方向性及び運動方向
の設計はユーザインタフェース設計の極めて重要な構成要素であるから,表示及び制御,並びに両者の関
係は,分かりやすく,使いやすいことが望ましい。ユーザインタフェースは,安全性,使用性及び人の特
性(感覚生理,感覚意欲,知覚,コミュニケーションなど)を考慮して設計することが望ましい。
人間中心の設計は,次による(JIS Z 8530及び附属書C参照)。
a) ユーザオペレータの及び仕事の要求仕様・制約を,ユーザオペレータを積極的に参加させながら明確
に理解する。
b) 仕事の目的を達成するための機能を,ユーザオペレータと機械システムとの間で適切に配分する。
c) ユーザオペレータからのフィードバック情報をい(活)かしながら,解決案の考案を繰り返す(反復
設計)。
d) 多様な専門領域の経験をもつ人員を設計チームに含める。
4.3
方向設計の工程計画
方向設計の主要目的は,安全性,効率,使いやすさ及び快適さである。設計者が最初に行うことは,シ
ステム設計において,操作及び/又は表示の方向設計の主目標を明確化することである。
設計においては,中でも安全性に高い優先度を与えることが望ましい。運動方向の設計は,設計対象の
作業(果たそうとする目的)を特定し,ユーザオペレータを決定し,そして,安全性,効率,使いやすさ
及び快適さの間の相対的優先度を決めることである。
方向設計の手順は,次による。
a) 作業(果たそうとする目的)及びそれに必要な機能を定義する。
b) ユーザオペレータを,JIS Z 8530の手順に従って特定する。
c) 作業を次の観点から詳細指定する。
1) 作業遂行のための対象物及び操作機器の動き・表示。
2) 作業を行う上での相対的優先順位(安全性,効率,使いやすさ,快適さなど)。
3) 作業を実行するときのユーザオペレータの作業姿勢。
4) 作業を実行する作業場所。
5) 作業を行う上での情報の流れ。
6) 環境要因(例えば,周囲照明,保護衣の必要性)。
d) 対象物の又は対象物の表示の動き,及び操作機器の場所を決定する。
1) 領域内で用いる操作機器の使用頻度及び重要度を考慮しながら,図JB.1及び図JB.2に従って,配
置領域を決定する。
注記 図JB.1及び図JB.2は,ISO 9355-2:1999の図1及び図2を翻訳したものである。
2) 仕事の機能の優先順位に合わせて,JA.1に従って,表示及び操作機器の位置を決定する。
3) JA.2に従って,表示及び操作機器の配置を決定する。
4.4
ヒューマンマシンインタフェース(HMI)の設計要求事項・推奨事項
4.4.1
一般
ヒューマンマシンインタフェース(HMI)の設計においては,設計者は,表示装置及び操作機器の操作
の方向を,ポピュレーションステレオタイプを配慮するとともに,JIS Z 8501の3.6.5(作業機器,ハード
8
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ウェア及びソフトウェアの設計)に従って人間工学的な設計原則を考慮して決めなければならない。適用
できるステレオタイプがないときは,メンタルモデル又はメタファの利用を考慮に入れる。
注記 “ポピュレーションステレオタイプ”とは,操作の方向及びその操作によって起こる対象の動
きの方向について人間が抱く自然な感覚を指す言葉である[6]。例えば,運転者は,車のハンド
ルを右に回せば車は右に回るものと予想する。運転者は,練習時に膝の曲げ伸ばしでブレーキ
をかけることを身に付け,類形行動(ステレオタイプ)は,このようにして形成されていく。
複数の表示及び操作機器を配置する場合,それらの間の方向の一貫性に注意を払わなければならない。
このための推奨事項については,次による。
a) 表示及び操作機器は,人が誤りを犯す可能性を減らすように機能することが望ましい。
b) 表示は,人間の知覚特性及び遂行すべき作業の特性に合うように,選定,設計及び配置することが望
ましい。
c) 操作機器は,操作を実行する身体の部分の特性(特に動きの特性)及び遂行すべき作業の特性に合う
ように,選定,設計及び配置することが望ましい。また,操作の技能,正確さ,速度及び強さを,並
びに器用さがどの程度必要かを,考慮することが望ましい。
d) 操作機器は,利用可能な空間の制約範囲内で,できるだけ対象集団のもつポピュレーションステレオ
タイプ並びに制御の順序及び動きに適切であるように選定し,配置することが望ましい。
e) 操作機器は,制御過程の動特性及びその動特性に対してユーザオペレータが抱く空間的な把握に沿う
ように,選定し配置することが望ましい。
f)
交互に操作する又は素早く引き続いて操作する複数の操作機器は,正しい動作を容易にするためにで
きるだけ近くに配置することが望ましい。ただし,不注意によって誤操作の起こる危険が生じるほど
近づけないことが望ましい。
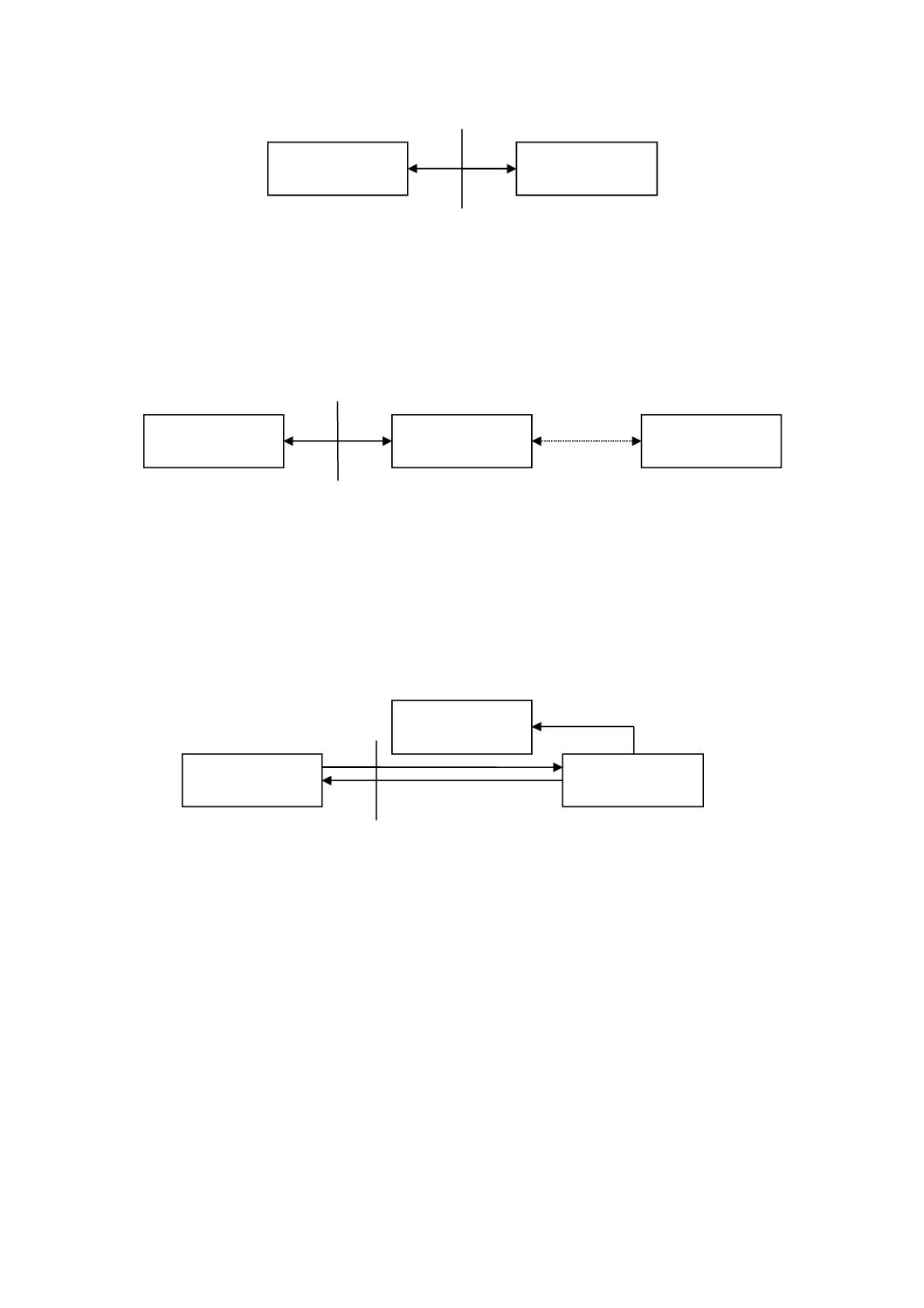
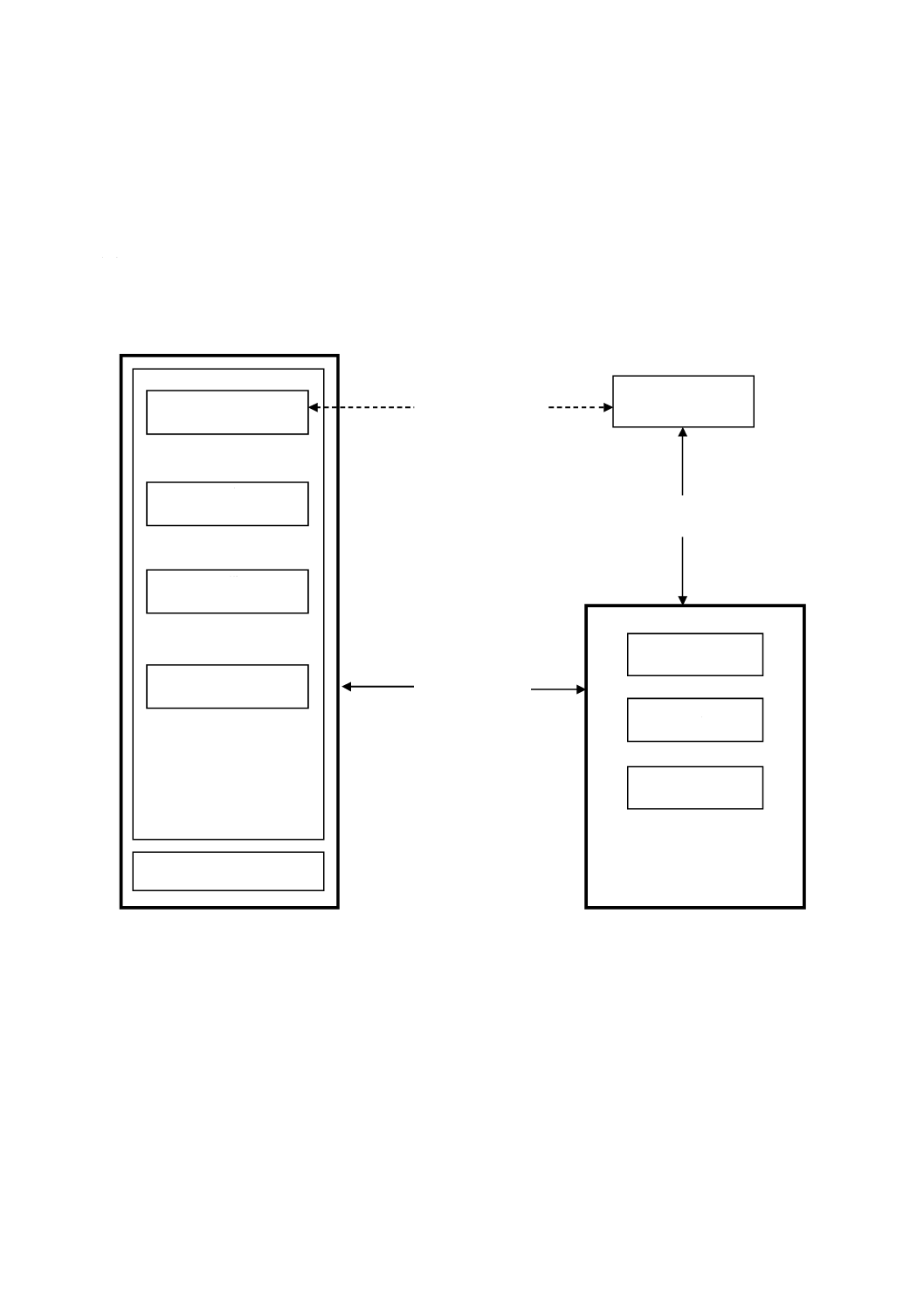
図1に,ユーザオペレータと実世界対象物との間で,機能上及び形態上形成される直接的な境界につい
ての枠組みを示す。
図1−ヒューマンマシンインタフェースの概念図
4.4.2
操作機器の操作方向
4.4.2.1
操作機器の操作方向と制御結果との整合
操作機器の操作方向は,対象物に期待する運動方向と融和しなければならない。
例1 レバーを右方へ動かすと,対象物は右方へ直線運動する。
例2 操作輪を時計回りに回すと,対象物は時計回りに回転する。
しかしながら,場合によっては,ユーザオペレータ集団のもつステレオタイプが,この原則の自然な関
係と相反しているために,別の解決案が求められることがある。
例3 かじ付きボートは,かじ棒を動かす方向とは,反対の方向に曲がる。
4.4.2.2
類似した操作機器の間での整合
対象物が,同種か異種かにかかわりなく,それらの間に同様な運動又は同様な変化をさせるためには,
同種類又は類似の操作機器を用いて,それらを同じ方向に操作することが望ましい。
実世界対象物
ユーザオペレータ
インタフェース
9
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.4.2.3
異種の操作機器の間での整合
技術的理由などで,異なる操作機器を用いて異なる対象物の間に同様な運動又は同様な変化をさせる必
要がある場合には,操作機器の運動と対象物における変化とを,表1に示す一連の対概念に対応させて,
A群又はB群内でそれぞれ整合させなければならない。
表1−対象物の変化と操作機器との整合のための対語
A群
B群
位置
左,左舷,取かじ
下
下部
底部
後
外視式 観察者に向いている側の反対側で
内視式 船尾で,尾部で
末尾
右,右舷,面かじ
上
上部
頂部
前
外視式 観察者に向いている側で
内視式 船首で,機首で
先端
運動方向
左方へ
下方へ
ユーザオペレータに近づく方へ
反時計回りの回転
後へ
外視式 ユーザオペレータの視方向へ
内視式 ユーザオペレータの視方向と反対方向へ
右方へ
上方へ
ユーザオペレータから遠ざかる方へ
時計回りの回転
前へ
外視式 ユーザオペレータの視方向と反対方向へ
内視式 ユーザオペレータの視方向へ
状態
暗
寒
静
遅
減(−)
減速(ブレーキ)
効果の減少(例:明るさ,速さ,動力,圧力,温
度,電圧,電流,周波数,光度)
明
暖
騒
速
加(+)
加速
効果の増大(例:明るさ,速さ,動力,圧力,温
度,電圧,電流,周波数,光度)
動作
スイッチ切り
電気回路開
停止
中止
緩め
バルブの開
消火
排出
引く
取り外す
ダウンロードする
スクロールダウンする
スイッチ入り
電気回路閉
始動
開始
締付け
バルブの閉
点火
充満
押す
組み込む
アップロードする
スクロールアップする
4.4.2.4
操作機器の変更
従来の操作機器の操作方向が,4.4.2.2及び4.4.2.3の要求事項に合わない場合でも,設計者は,要求事項
に合わせようとして,従来の操作方向を逆転してはならない。
代わりに,次によって,操作機器の方式を変更し不可欠な安全性を確保しなければならない。
a) これまで操作輪を時計回りに操作して,機械部分を左方へ動かした場合,操作輪を反時計回りに操作
10
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
して,機械部分を左方へ動かすようにしてはならない。4.4.2.1及び4.4.2.2の要求事項に合うように,
操作輪による操作をレバー又は押ボタンによる操作に替える。
b) 自動車で,これまでレバーを上方へ操作して,左の方向指示灯を点灯していた場合,レバーを下方へ
操作して,左の方向指示灯を点灯させるようにしてはならない。4.4.2.1及び4.4.2.2の要求事項に合う
ように,レバーを90°回して取り付けるか,押ボタン又は回転式操作機器に取り替える。
c) レバーが使えない場合には,操作輪を時計回りに回すか,又は2個の並んだ押ボタンの右側の押ボタ
ンを押して,対象物を右方へ直線運動させるようにする。
4.4.2.5
表示
操作機器には,明瞭な記号又は文字による表示を付けなければならない。一般に記号のほうが理解しや
すいので好まれる。
4.4.3
対象物の動き及び操作機器の操作方向
対象物の動きと操作機器の操作の方向との対応関係は,次による。
注記 ただし,操作者が制御対象物の内部にいる場合には,4.4.4.4を参照する。
a) 直線操作系の方向(JA.2.3参照)
− 垂直のパネルのスイッチ,レバーでは,ON・増加は上方向,OFF・減少は下方向とする。
− 水平のパネルのスイッチ,レバーでは,ON・増加は前方向(ユーザオペレータから離れる方向),
OFF・減少は後ろ方向(ユーザオペレータに近づく方向)とする。
b) 回転操作系の方向(JA.2.3参照)
− ON・増加は時計回りの方向,OFF・減少は反時計回りの方向とする。
注記 操作機器の機構の設計上の理由で,ステレオタイプが,この原則と相反する場合がある。
例えば,流量制御のバルブは,通常,反時計回りの方向に回すと,原則とは反対に流量が
増加する,これは,時計回りに回したときには,使われている弁のねじが,流量を減らす
方向に進むように作られているからである。
4.4.4
対象物の動きと操作機器の操作方向及び配置との対応関係
4.4.4.1
対象物の動きと操作機器の操作とは同じ方向に合わせる
対象物の動きが直線運動の場合は,操作機器も直線操作とし,対象物の動きが回転運動の場合には,操
作機器も回転操作とすることが望ましい。
しかしながら,もしこの原則を当てはめて決まる方向とステレオタイプとが相反する場合には,違和感
を減らすために操作機器を置く面を傾斜させることを検討する。
例 制御対象を前方へ動かすために,レバーを後方へ引く場合には,レバーを後方へ引く動きが同時
に上方への動きともなるように,レバーを付ける面を前方に傾ける。
4.4.4.2
対象物の動きが直線運動で操作機器が回転操作の場合
対象物の動きが直線運動で操作機器が回転操作の場合は,対象物の下側又は右側に操作機器を配置する
ことが望ましい。
注記 この場合の対象物とは,操作機器で制御する量を表示する表示装置を指す(例えば,ボイラの
液温を表示する直線形温度ゲージ)。通常,操作機器と操作対象との関連が明確となるように,
操作機器と対象物とは同一のパネル上に隣り合って配置される。
4.4.4.3
対象物の動きが回転運動で操作機器が直線操作の場合
対象物の動きが回転運動で操作機器が直線操作の場合は,対象物の左側又は上側に操作機器を配置する
ことが望ましい。ただし,操作によって対象物が隠れる場合には,対象物の右側又は上側に操作機器を配
11
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
置することが望ましい。
注記 この場合の対象物とは,操作機器で制御する量を表示する表示装置を指す(例えば,ボイラの
液温を表示する円形温度ゲージ)。通常,操作機器と操作対象との関連が明確となるように,操
作機器と対象物とは,同一のパネル上に隣り合って配置される。
4.4.4.4
体に加わる力
ユーザオペレータが動く対象物の内部にいる場合,体に加わる力が,望ましい操作機器の位置及び操作
の方向に影響を及ぼすことがある。その場合には,たとえこの規格の規定と異なる設計となっても,体に
加わる力を考慮に入れることが望ましい。
例 列車の運転において,運転操作で生じた加速度の影響で運転者の体が加速度の作用する方向へ傾
くことによって,その後の操作に思わぬ効果を引き起こすことがある。
4.4.5
複数の表示装置,操作機器の配列
複数の表示又は操作機器を,何らかの順序を付けて並べて配置する必要のあるときは,JA.3の規定に従
って配置することが望ましい。しかしながら,それらを配置する場合には,表示及び操作機器両者の運動
の方向を,機能的関係を含めて考慮することが重要である。
4.5
グラフィカルユーザインタフェース(GUI)の設計推奨事項
4.5.1
一般
4.5.2〜4.5.4.10では,ユーザオペレータがGUIを介して仮想世界又は実世界の対象物とやり取りする状
況の方向設計に関する推奨事項を規定する。この種の状況では,多くは,情報通信技術(ICT: information and
communication technology)を駆使して,画像表示装置,ポインティングデバイス及びキーボードが使われ
る。
なお,ユーザオペレータが,物理的な操作装置を介して実世界の対象と,直接に(又は,場合によって
は遠隔で)やり取りする状況は扱わない。
4.5.2
仮想オブジェクトとの直接操作及び実世界オブジェクトとの間接操作
次に示すa),b)及びc)の間の区別は,必ずしも明確にはつかないことに留意する必要がある。例えば,
同じ運転シミュレータでも,運転教習のつもりでやり取りしているユーザオペレータであれば,b)の,さ
らにはc)の枠組みで実物の車を念頭に置いて,捉えているであろうし,一方,開発又は試験のために用い
ているのであれば,a)の種類の仮想対象としてのやり取りを行っていると考えられる。電子文書は,通常
はa)のやり取りを行う仮想世界の対象として,捉えられるが,高細精度の表示装置と高速の印刷装置とを
利用できる環境での,十分に習熟したユーザオペレータにとっては,あたかも実世界の紙文書として作業
している,b)の,さらにはc)の種類のやり取りの対象と捉えることもある。
a) 仮想オブジェクトの直接操作 ユーザオペレータは,情報通信技術を通して仮想対象物と直接にやり
取りする,又は仮想対象物を操作する。仮想対象物としては,対応する実世界対象物のない純粋に抽
象的な操作対象を含む。図2を参照。
例1 VRML(virtual reality modelling language)ビューアで,仮想美術館中の美術品を鑑賞する。
例2 膨大な情報空間(例えば,大規模なウェブサイト)中の探索・検索・ナビゲーション。
例3 自動車運転シミュレータ又は飛行シミュレータの使用。
12
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図2−仮想オブジェクトの直接操作の概念図
b) 実世界オブジェクトとの間接操作 ユーザオペレータは,実世界対象物を情報通信技術によって表象
し提示した仮想の対象とやり取りする。図3を参照。
例1 表示画面上のダイアログボックスを用いたコンピュータの停止。
例2 ウェブページ中のフォームのスライダ,ノブなどで撮影方向を変えられるウェブカメラ
図3−実世界オブジェクトの間接操作の概念図
c) 仮想世界オブジェクトからの情報を用いる実世界オブジェクトの直接操作 ユーザオペレータは,情
報通信技術を介して表示空間中に生成した仮想対象物を利用して,実世界対象物と直接にやり取りす
る,又は操作する。図4を参照。
例1 内視鏡,超音波CT映像などの可視化技術を介して患部を見ながらの外科手術。
例2 後方視界カメラ又はモニタを見ながらの,車の車庫入れ。
図4−仮想世界オブジェクトからの情報を用いる実世界オブジェクトの直接操作の概念図
4.5.3
対話の原則
設計への対話の原則の適用については,JIS Z 8520による。
4.5.4
仮想世界対象の設計
4.5.4.1
一般
4.5.4.2〜4.5.4.10に,ユーザオペレータがグラフィカルユーザインタフェース(GUI)環境において,仮
想対象物とやり取りする場合に特有の方向設計に関する推奨事項を規定する。推奨事項のほとんどは,4.5.2
に規定するa)〜c)のやり取りの全てに当てはまるが,いずれか一つにだけ当てはまる場合には,細分箇条
中でそのことを示す。
4.5.4.2
仮想対象物と実世界対象物との対応
実世界対象物の仮想世界の対象物への写像は,作業を遂行するのに必要な情報に直接的に対応している
ことが望ましい。
仮想世界
対象物
ユーザオペレータ
インタフェース
仮想世界
対象物
ユーザオペレータ
実世界
対象物
ICTによる写像
インタフェース
仮想世界
対象物
ユーザオペレータ
実世界
対象物
ICTによる写像
インタフェース
13
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記1 外観,挙動などの面で,仮想対象物を実世界対象物に似せる,又は例えることは,ユーザオ
ペレータの経験を活用する及び情況自覚を高めるという観点から望ましい。
注記2 仮想対象物を身近ななじみのある実世界対象物に似せることは,たとえ,実世界対象物に直
接的に対応するものがない場合でも,同じ理由で大事である。
数学で扱う複素数,電気回路理論で扱う負性抵抗などの純粋に抽象的であり,実世界対象物との対応を
欠く仮想対象物を使用する場合には,オンラインヘルプ又は案内付き指導などの支援手段を用意して,ユ
ーザオペレータがその種の対象を困難なく操作するのを助けることが望ましい。
4.5.4.3
環境情報の提示
環境の又は周辺の情報の与え方は,ユーザオペレータの捉え方に沿ったものであることが望ましい。仮
想対象物空間を設計するとき,ユーザオペレータの情況自覚を高め,情況の判断及び意思決定を支援する
よう,その種の情報に配慮することが望ましい。
4.5.4.4
次元の減少
ユーザオペレータが仮想対象物とやり取りする表示空間(表示面)は,通常,二次元空間である。三次
元の実世界対象空間を,何らかの投影・写像手段を用いて二次元空間に提示する場合には,ある程度の情
報の損失が避けられない。その種の情報の損失による悪影響を防止又は限定するために,次によって,対
策を講じることが望ましい。
a) 作業成績に最も影響の少ない軸を,投影空間の前後軸にとることが望ましい。
b) 三つの軸全てが作業成績に等しく重要である場合には,実世界空間との対応を犠牲にしても,抽象的
な又は理想化した仮想空間を検討することが望ましい。
c) (たとえ,三次元表示技術が利用できても)奥行き知覚が不足する場合には,奥行き知覚の不足を補
う対策を講じること(例えば,3面図の採用)が望ましい。
4.5.4.5
表示の容量
仮想空間として用いられる表示面に提示可能な情報の量は,実世界空間を十分忠実に表現するには,通
常不十分である。仮想対象物空間の設計においては,次によって,対策を講じることが望ましい。
a) 表示すべき情報の量が,表示装置の表示容量をはるかに超えている場合,精粗表示,魚眼表示,鳥か
ん(瞰)表示,スクロール表示などの表示手法を,ただし,作業の遂行に差し支えるような大きなひ
ずみを表示する情報にもたらさない範囲内で,利用することが望ましい。
注記1 精粗表示とは,関心を寄せる特定の領域を詳細に拡大して,周辺をかす(霞)ませて示す
手法である。
注記2 魚眼表示は,魚眼レンズで撮影した写真のように,狭い中心部分を高倍率で詳細に,広い
周辺部分を低倍率で粗く表示し,ユーザオペレータの周りの広い領域を見せるのに用いる。
注記3 鳥かん(瞰)表示とは,高所から広域を見下ろした三次元景観であって,見下ろす真下の
景観は詳細に,遠くの景観は概要を表示する。
b) 作業の遂行に必要な実世界空間の情報が保たれる範囲内で,情報の抽象化及び理想化を,行うことが
望ましい。
4.5.4.6
感覚様態
仮想対象物空間として用いる表示装置が伝えることができる情報は,通常,視覚及び聴覚情報に限定さ
れる。匂い,振動,傾斜などの,嗅覚その他の情報(周辺情報)は,通常,ユーザオペレータには伝える
ことができない。仮想対象物空間の設計においては,次によって,対策を講じることを推奨する。
a) 十分な表示能力が得られる場合,適切な情報視覚化技術の利用,又は香り,振動などの環境情報の代
14
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
替提示を,検討することが望ましい。
b) 周辺情報を伝える手段として,触力覚装置の利用を検討することが望ましい。
4.5.4.7
参照の枠組み
ユーザオペレータの視野内で,仮想対象物空間(表示面)を見るとき,表示枠及びその周辺が参照枠の
役割を果たし,ユーザオペレータはその枠組みを通して対象物を認識する。表示枠内の対象物のある方向
への動きが,表示枠又は観察者の反対方向への動きの知覚を引き起こすことがある。仮想対象物空間の設
計では,運動知覚又は乗り物酔いの思いがけない影響が生じて,仮想対象物空間内で行おうとする作業の
遂行に悪影響を及ぼさないように配慮することが望ましい。
例 文書表示画面でページの下の方を読もうとしてスクロールバーを下方へ下げる(スクロールダウ
ンする)と,文章は表示枠内で見かけ上,上方へ移動する。
4.5.4.8
対象物及び視点の操作
対象物を操作する働き及び/又は視点を操作する働きを,作業の必要性に従って提供することが望まし
い。実世界の対象物を扱う場合には,前後の対概念に関しては,対象物を操作する働きには内視式を,視
点を操作する働きには外視式を採用することが望ましい。いずれの働きを備えているかを,区別しやすい
ことが望ましい。特に両者を備えている場合には,どの操作機器が,対象物を動かすものか又は視点を動
かすものかを,ユーザオペレータが見分けやすいことが望ましい。
4.5.4.9
抽象的な量の表記方向[4.5.2 c)の場合のインタフェース]
この規格は,本来空間的方向性及び運動方向を扱うが,この細分箇条では,操作の方向との関連におい
て,論理的又は抽象的な量の表示の方向についての推奨事項を規定する。この細分箇条で扱うのは,加法
的な量,順次的な量,階層構造及び時間の表記の方向,並びに表示の方向と操作の方向との間の関係であ
る。水平方向に配置する場合の記述は,表記に用いる言語の書記方向に関連する。ここでは,左横書きの
場合だけを扱う。
a) 加法的な量 加法的な量(例えば,質量,長さ,個数及び価格)は,単に量と呼ぶことも,間隔尺度
上の量と呼ぶこともある。その種の量の間の加算及び減算は,意味をもつ。
加法的な量の,その量の大小に応じた配置の仕方は次による。
1) 水平方向に並べるときは,量の少ないものから左から右へと並べることが望ましい。
2) 垂直方向に並べるときは,量の少ないものから下から上へと並べることが望ましい。
3) 回転方向に並べるときは,量の少ないものから時計回りに並べることが望ましい。
注記 加法的な量には,複素数,負性抵抗などの概念的又は抽象的な量を含む。
例
(1) 水平方向 (2) 垂直方向 (3) 回転方向
10 20 30 ・ ・ ・
・
1
・
2
300
3
200
4
100
5
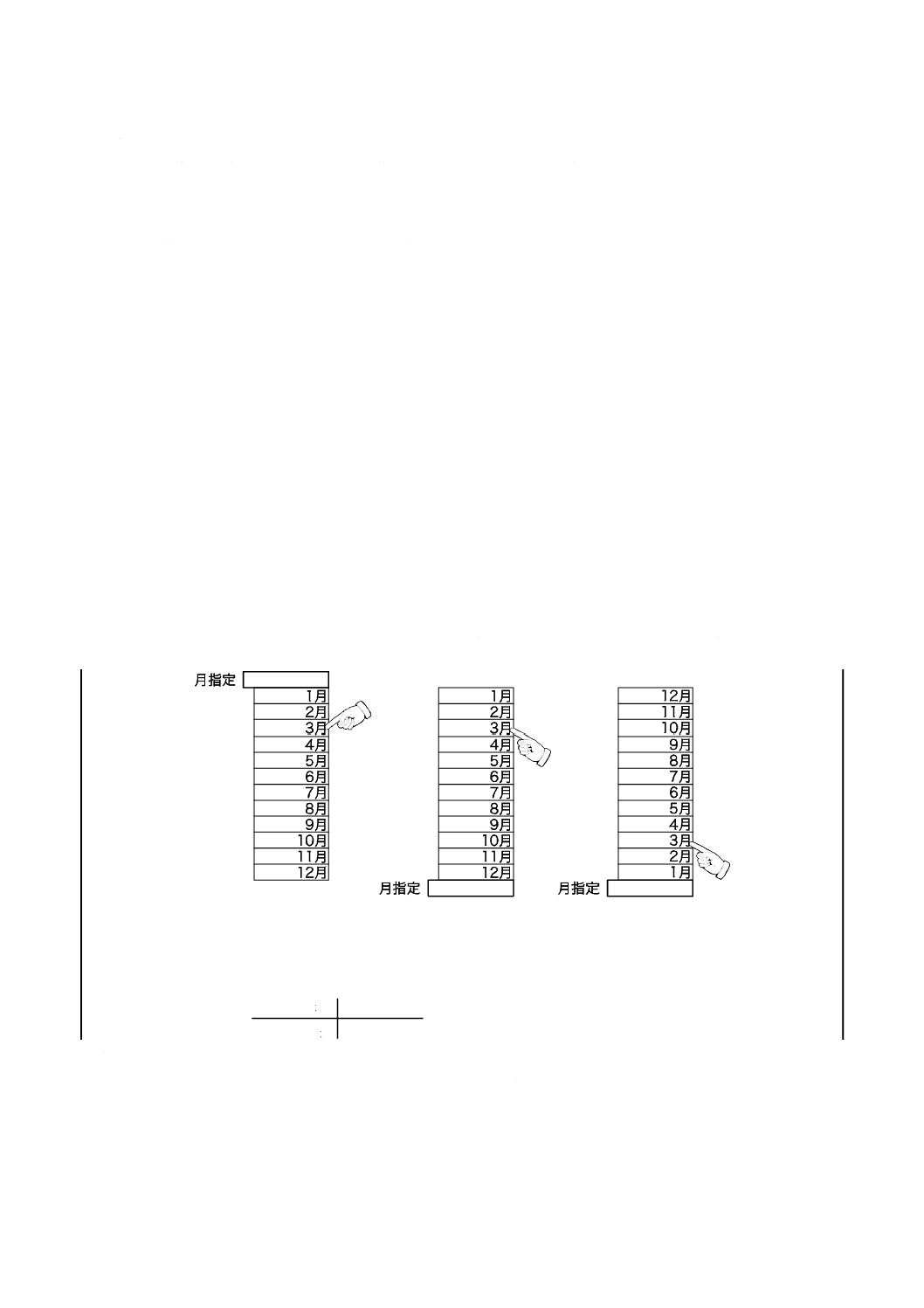
b) 順次的な量 順次的な量{例えば,月[む(睦)月,きさらぎ(如月),…],学年(第1学年,第2
学年,…)}は,順序尺度上の量とも呼ばれる。順次的な量は,固有の順位をもち,この順位に従って
並べることができる。
順次的な量の,その順位に応じた配置の仕方は次による。
15
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1) 水平方向に並べるときは,順位の高いものから左から右へと並べることが望ましい。
2) 垂直方向に並べるときは,順位の高いものから上から下へと並べることが望ましい。
3) 回転方向に並べるときは,順位の高いものから時計回りに並べることが望ましい。
例1
(1) 水平方向 (2) 垂直方向 (3) 回転方向
1位 2位 3位 ・ ・
1位
1位
2位
2位
3位
3位
4位
4位
・
5位
注記1 表示する情報(例えば,エレベータの階表示)の並び方を,情報として表示される実体(例
えば,建物の階)の実世界での物理的配置に合わせる必要が生じることもある。
注記2 同じ問題領域内で,一貫した順序付けの仕方を採用することは重要である。
注記3 要素を順序付ける方略は,習慣,好みその他で異なる場合がある。例えば,学年は,第1
学年,第2学年,第3学年の順で並べられることもあれば,第3学年,第2学年,第1学
年の順で並べられることもある。自動車の変速ギアの“1”,“2”,“3”,“R”,“P”につい
ても同様である。
注記4 表示だけが目的ではなく,表示してある項目リストのうちからあるものを選ぶ操作が関わ
る場合には,選び始める先頭又は初期位置からの相対的距離が重視され,選び始める位置
の近くに系列上位のものを置くほうが適切となる[図4A b)よりも,c)が適切となる。]。
a)
b)
c)
図4A−順次的量のリスト表示
注記5 回転方向に並べる場合,順位の高いものから反時計方向に並べる慣例もある。
例2 第II象限
第I象限
第III象限
第IV象限
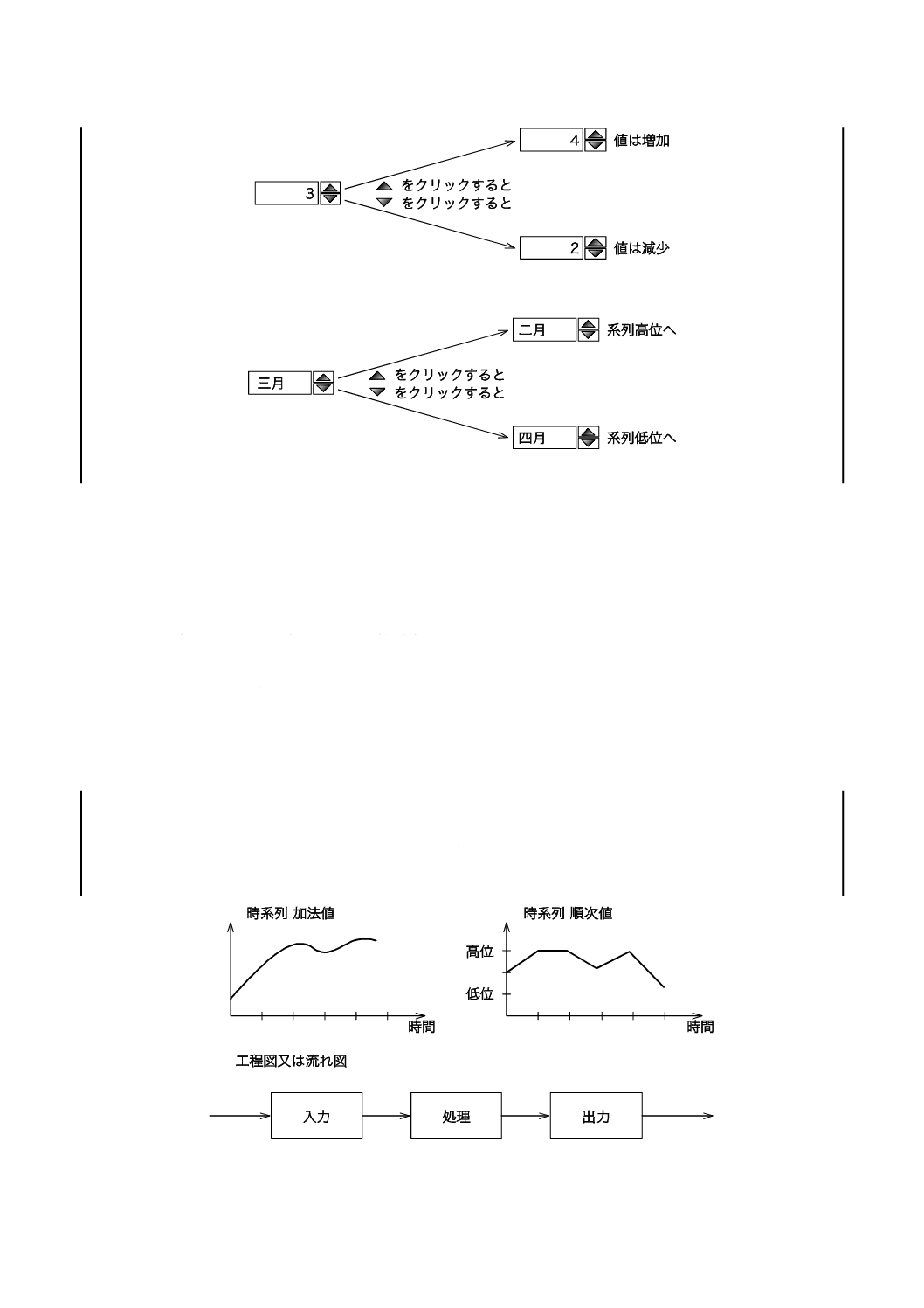
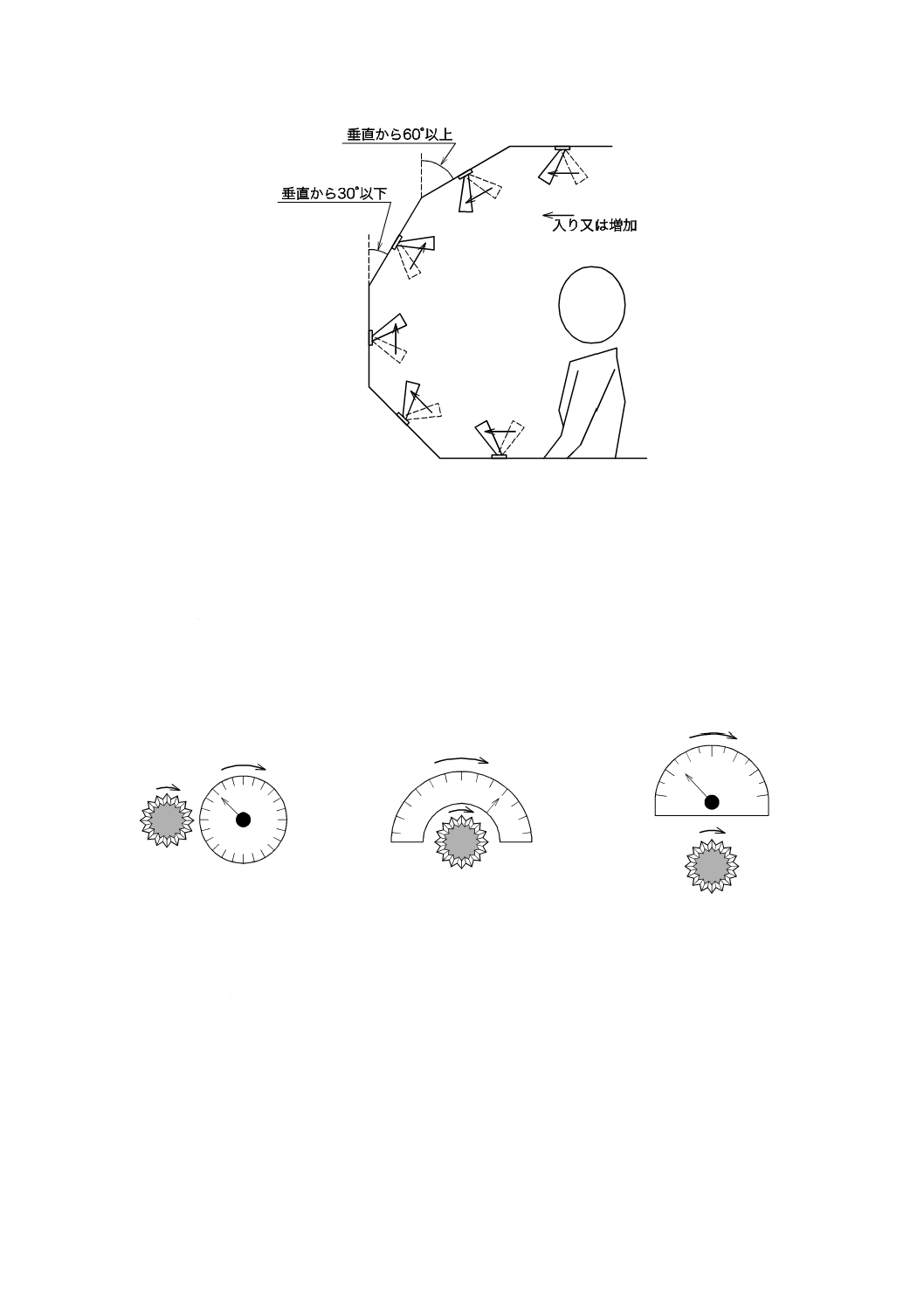
c) 値の動的な表示 情報を動的(固定した値ではなく)に表示する場合,加法的な量の場合には,値を
増加させるためには操作機器は,“上”(例えば,上向き矢印)を示し,減少させるためには,“下”(例
えば,下向き矢印)を示すことが,順次的な量の場合には,順位を上げるためには操作機器は,“上”
(例えば,上向き矢印)を示し,順位を下げるためには,“下”(例えば,下向き矢印)を示すことが
望ましい(図4B及び図4C参照)。
16
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図4B−加法的な量の動的表示
図4C−順次的な量の動的表示
注記 変化の方向を示すことが重要な場合には,値の表示に加えて,値の変化の方向をも示す(例
えば,矢印)と役に立つ。
d) 階層構造(木構造) 樹形に表現する階層構造は,最上位の階層を,木の頂点に置くことが,及びより
下位の階層を上位の階層の下に置くことが望ましい。
同じ階層中の各要素間に,順序関係が成り立つ場合には,それら要素の配置の仕方は,順次的な量
の水平方向の配置の仕方についての推奨事項b)に沿うことが望ましい。
e) 時間 時間を表示する(仮想オブジェクト空間内で)ときには,生起の早遅という優先順位をもつ順
次的な量として,推奨事項b)に記載した原則に従って,時間を表示するのがよい。時系列の図及び工
程図(process chart)では,時間を水平軸に沿って取り,前に生じた事象を後に生じた事象の左方に配
置するのが,一般に望ましい。
例として,図5を参照。
注記 時間は,順次的な量としての側面のほかに,ある基準時点からの経過時間長という加法的な
量としての側面をもっている。加法的な量として時間を扱う場合には,例えば,前日の22
時から翌日の3時までの経過時間長を算出するときのように,時間表記の周期的な性質を考
慮する必要がある。
図5−表記の方向(時間表示の例)
17
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
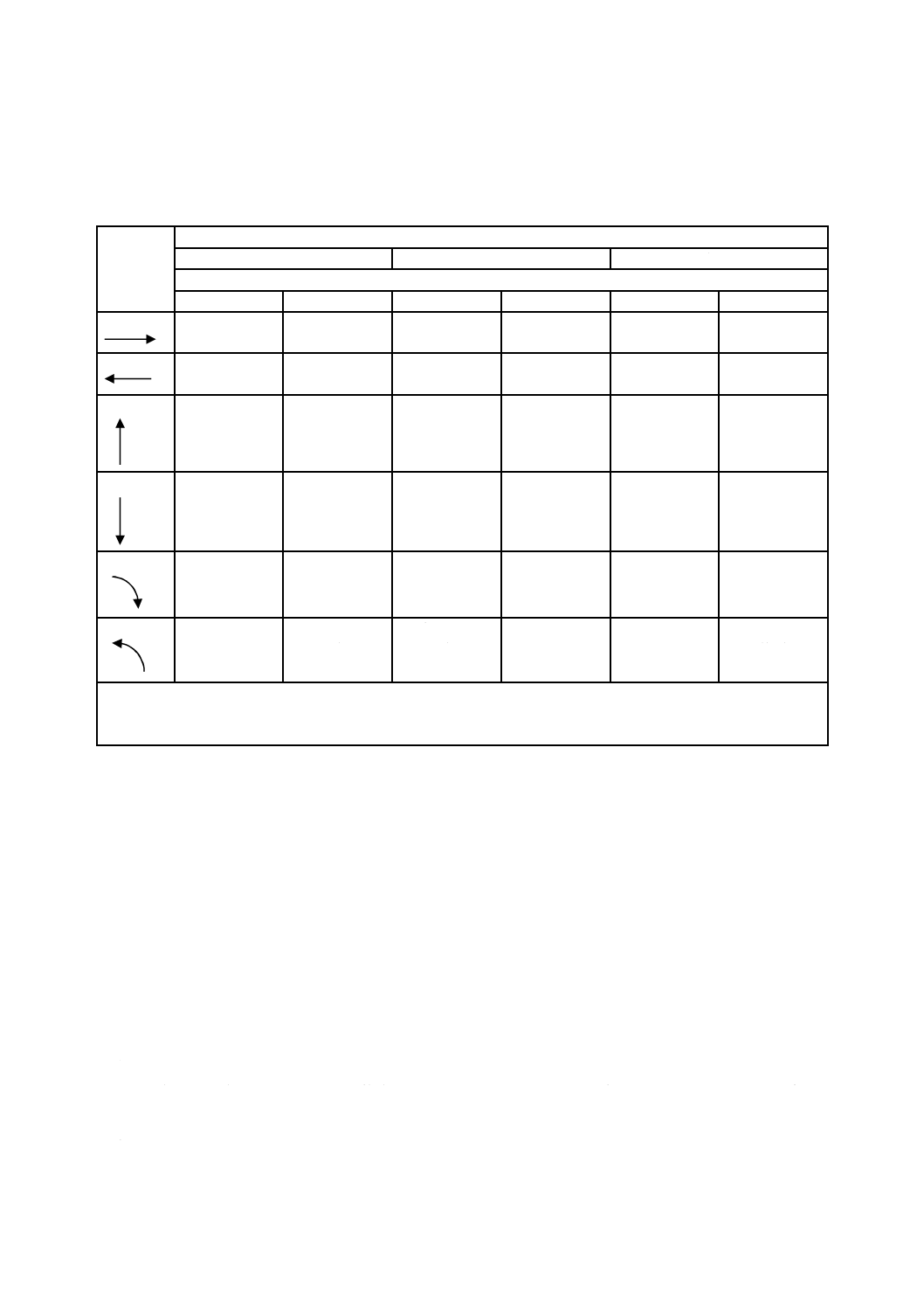
4.5.4.10 操作の方向と表示対象の運動方向との関係
表示対象の運動方向及び関連する操作の方向の間の関係は,表2に示すものが望ましい。
表2−操作の方向と表示対象の運動方向との推奨する関係
操作の
方向
表示対象の移動方向
水平方向
垂直方向
回転方向
量
加法的
順次的
加法的
順次的
加法的
順次的
水平
推奨
場合によって
推奨
適
場合によって
適
適
不適
水平
不適
場合によって
推奨
不適
場合によって
適
不適
不適
垂直
適
場合によって
適
推奨
場合によって
推奨
不適
場合によって
適
垂直
不適
場合によって
適
不適
推奨
適
適
回転
適
場合によって
適
不適
場合によって
適
推奨
推奨
回転
不適
場合によって
適
場合によって
適
不適
不適
場合によって
推奨
注記 “場合によって推奨”及び“場合によって適”の“場合によって”とは,表示要素の配列方向及び操作の方
向の間の不整合が,ユーザオペレータのメンタルプロセスにおいて解消される,又は実世界の物理的関係に
よって解消される場合には,という意味である。
4.6
複合操作系の設計推奨事項
最近の産業用機器に見られる,複数の動きを同時に制御する系を複合操作系と呼ぶ(例えば,土工機械
の一つである油圧ショベルのアーム・ブーム・バケットの各操作及び旋回操作)。
移動機能と作業機能を兼ね備えた機械システムなどでは,複合操作系を採用することによって作業の質
及び効率を高める効果を期待できる。自動車,建設機械,農業機械,産業用遠隔マニュピレータ,医療機
器などで,このようなシステムの例がよく見られる。複合操作系には,単方向操作系の組合せ同時操作
(single direction simultaneous operation system)と多方向操作系(multi-directional operation system)との2
分類がある。
両手及び/又は両足を使って行う複合操作系及び対象物の運動方向に関する要求事項及び推奨事項は,
次による。
a) 操作要素及び対象の動きとの関係は,次による。
1) 個々の多方向操作機器の操作方向は,対象物の運動方向に対して対応していることが望ましい。
2) 対象物の総合的な運動方向が,複合操作系を操作するときのユーザオペレータのメンタルモデルに
対して整合することが望ましい。
3) 作業遂行の過程全体にわたって関係の一貫性を維持しなければならない。
b) 姿勢及び筋負担は,次による。
18
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1) ユーザオペレータの基本作業姿勢は,複合操作系によって不自然に変化しないことが望ましい。
2) 筋肉を効率的に使用すること,及び特定の上下肢筋を集中して使用せずに,全体的筋負担を妥当な
範囲に収めることが望ましい。
c) 技能及び経験の効果は,次による。
1) 他の類似した操作方式の機器においても,獲得した技能及び経験がい(活)かせるような適切な配
慮をすることが望ましい。
2) 方向の設計には,他の関連機器の操作方式を考慮しながら進めることが望ましい。
5
適合
5.1
要求事項及び推奨事項の適用
箇条4の各要求事項及び推奨事項について,適用が可能かどうかを検討し,適用可能な場合には,その
規定を満たすように設計する。ただし,満たすように設計すると設計目標から外れることが明白である場
合にはこの限りではない。附属書D中のチェックリストを,適用可能かの判断,及び要求事項又は推奨事
項を満たしていることの確認のために用いてよい。
5.2
製品の評価
製品がこの規格の適用可能な要求事項又は推奨事項を満たしていると主張するには,その製品を評価す
るのに用いた手順を,詳細に文書化しなければならない。記述の詳細度は,関係者間の協議事項とする。
19
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
使用性の構成要因
A.1 構成要因
使用性は,図A.1に示すように,製品の利用に関して,利用の目標,利用の状況及び利用の結果から構
成される(JIS Z 8521も参照)。
図A.1−使用性
製品
ユーザ・オペレータ
仕事
設備
環境
利用の状況
意図した結果
使用性
利用の結果
使用性の測度
有効さ
効率
満足度
目標
20
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
参照モデル:空間的方向性及び運動方向
B.1
観察方式
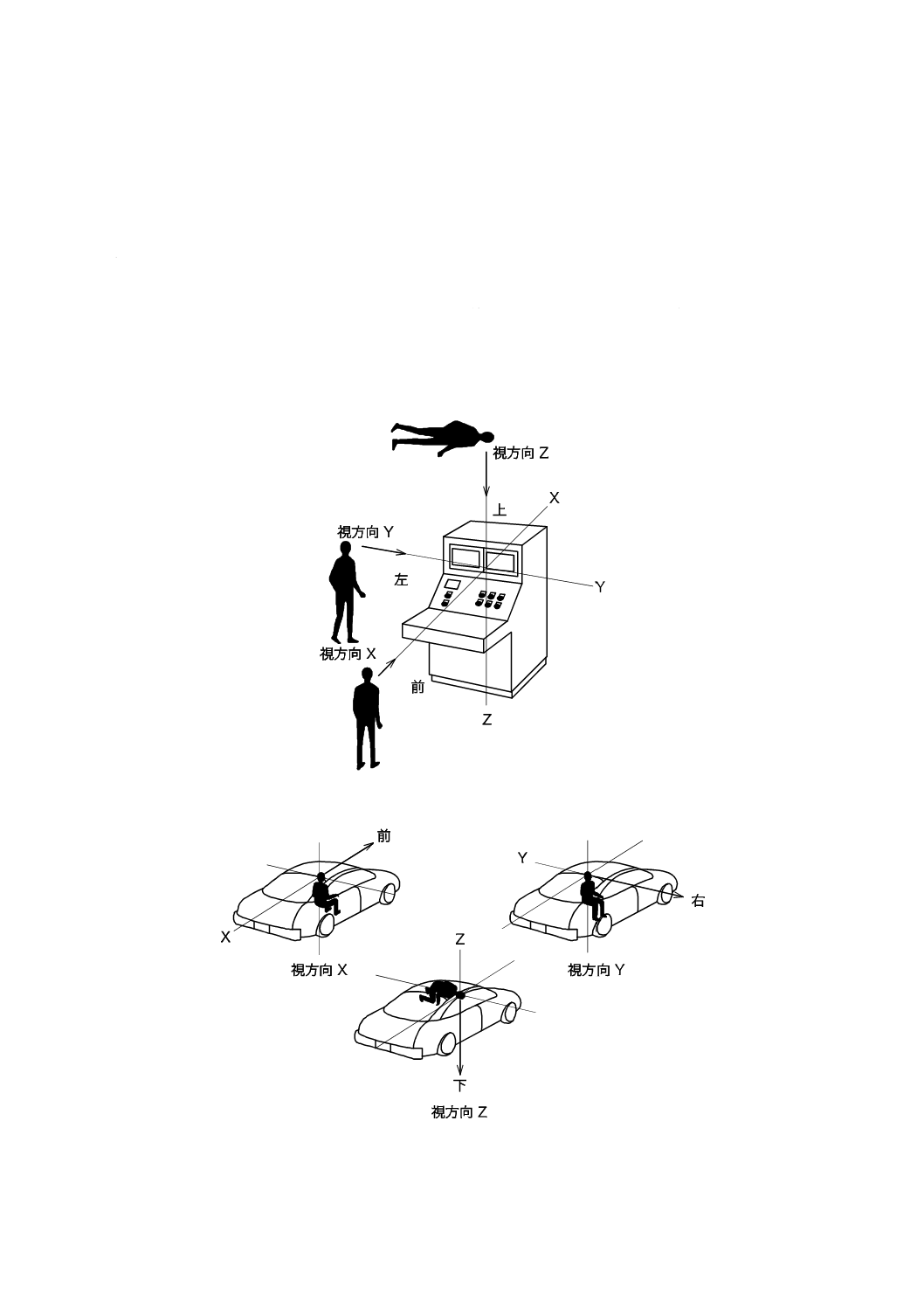
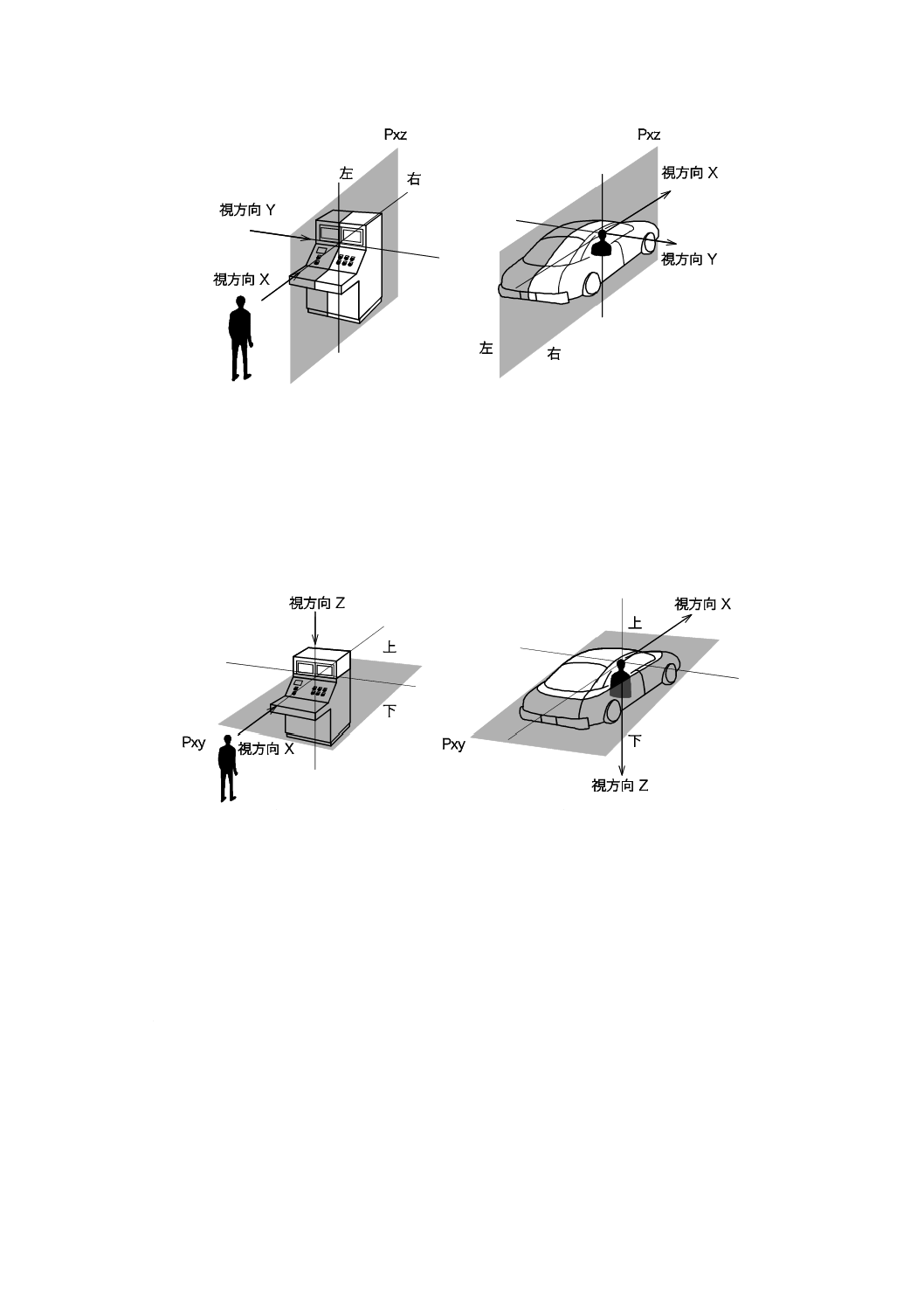
B.1.1 観察者の場所及び視方向
観察者の場所及び視方向は,三つのうちの一つの軸線上に取り,視方向Xを,対象物の性質及び観察の
目的に従って決定する(図B.1及び図B.2参照)。外視式の場合には,観察者は対象物の前側に位置すると
仮定し,その位置から視方向Xで対象物を見るものとする。内視式の場合には,観察者は対象物の中心点
に位置すると仮定し,視方向Xに沿って,中心点から前方を見るものとする。
図B.1−外視式による視方向X,Y及びZの決定
図B.2−内視式による視方向X,Y及びZの決定
21
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.1.2 観察方式の選択
対象物の性質及び視認の目的によって,外視式又は内視式のいずれか一つを選択しなければならない。
注記 隣接している対象物又は関連部分が異なった観察方式をとることがしばしばある。例えば,自
動車では内視式を採用するが,計器盤の計器類は外視式を採用する。
B.2
対象物の空間的方向性の概念
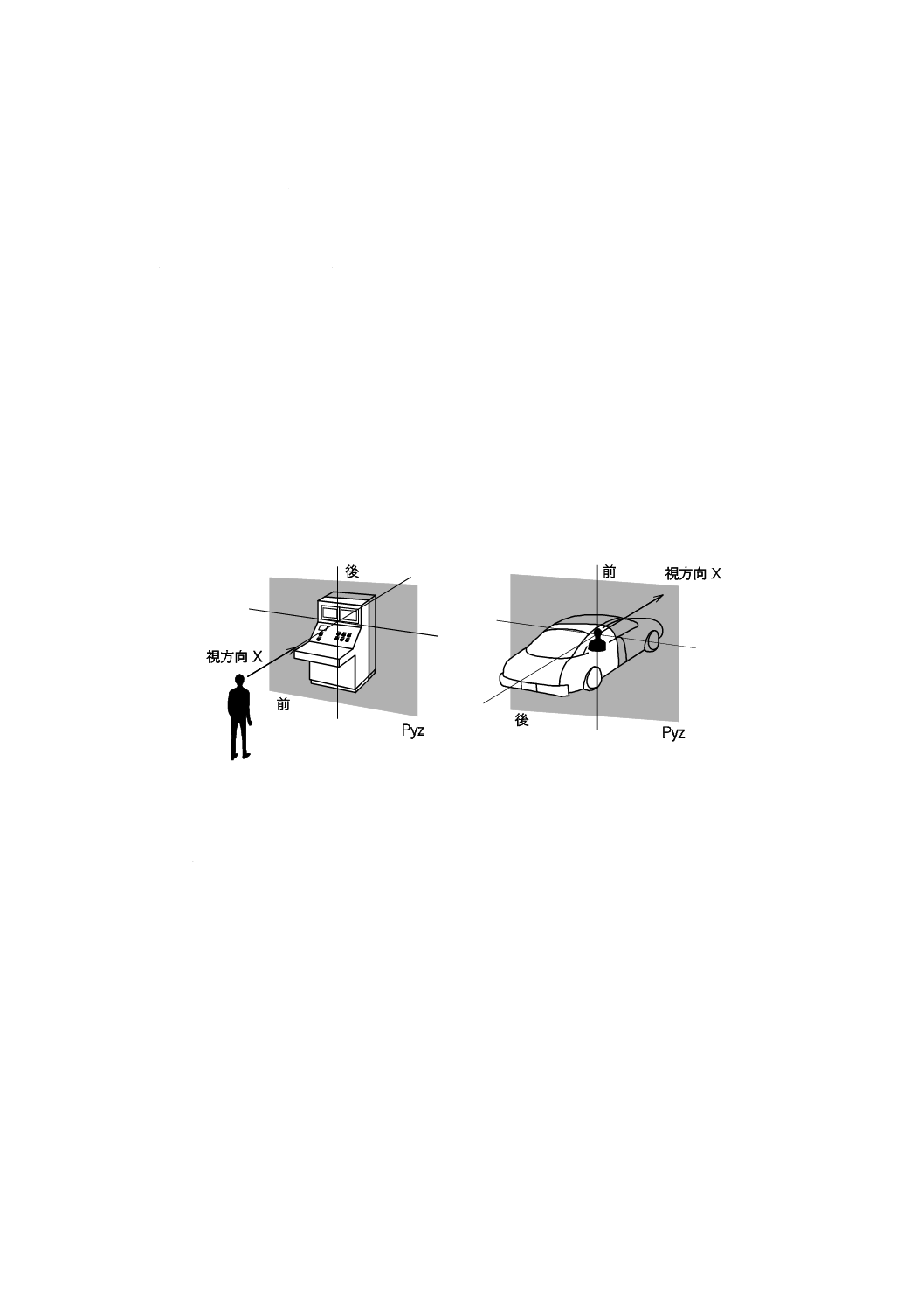
B.2.1 前・後の対概念
前・後の対概念は,次による。
− 外視式の場合
左右方向平面Pyzから視方向Xの反対側にある全ての点の位置を,前とする。
左右方向平面Pyzから視方向Xの側にある全ての点の位置を,後とする。
例として,図B.3 a)参照。
− 内視式の場合
左右方向平面Pyzから視方向Xの側にある全ての点の位置を,前とする。
左右方向平面Pyzから視方向Xの反対側にある全ての点の位置を,後とする。
例として,図B.3 b)参照。
a) 外視式
b) 内視式
図B.3−前・後の対概念−例
B.2.2 右・左の対概念
右・左の対概念は,外視式及び内視式に共通であり,次による。
− 前後方向平面Pxzから視方向Yの反対側にある全ての点の位置を,左とする。
− 前後方向平面Pxzから視方向Yの側にある全ての点の位置を,右とする。
例として,図B.4参照。
22
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 外視式
b) 内視式
図B.4−右・左の対概念−例
B.2.3 上・下の対概念
上・下の対概念は,外視式及び内視式に共通であり,次による。
− 基礎平面Pxyから視方向Zの反対側にある全ての点の位置を,上とする。
− 基礎平面Pxyから視方向Zの側にある全ての点の位置を,下とする。
例として,図B.5参照。
a) 外視式
b) 内視式
図B.5−上・下の対概念−例
B.3
直線運動における方向概念
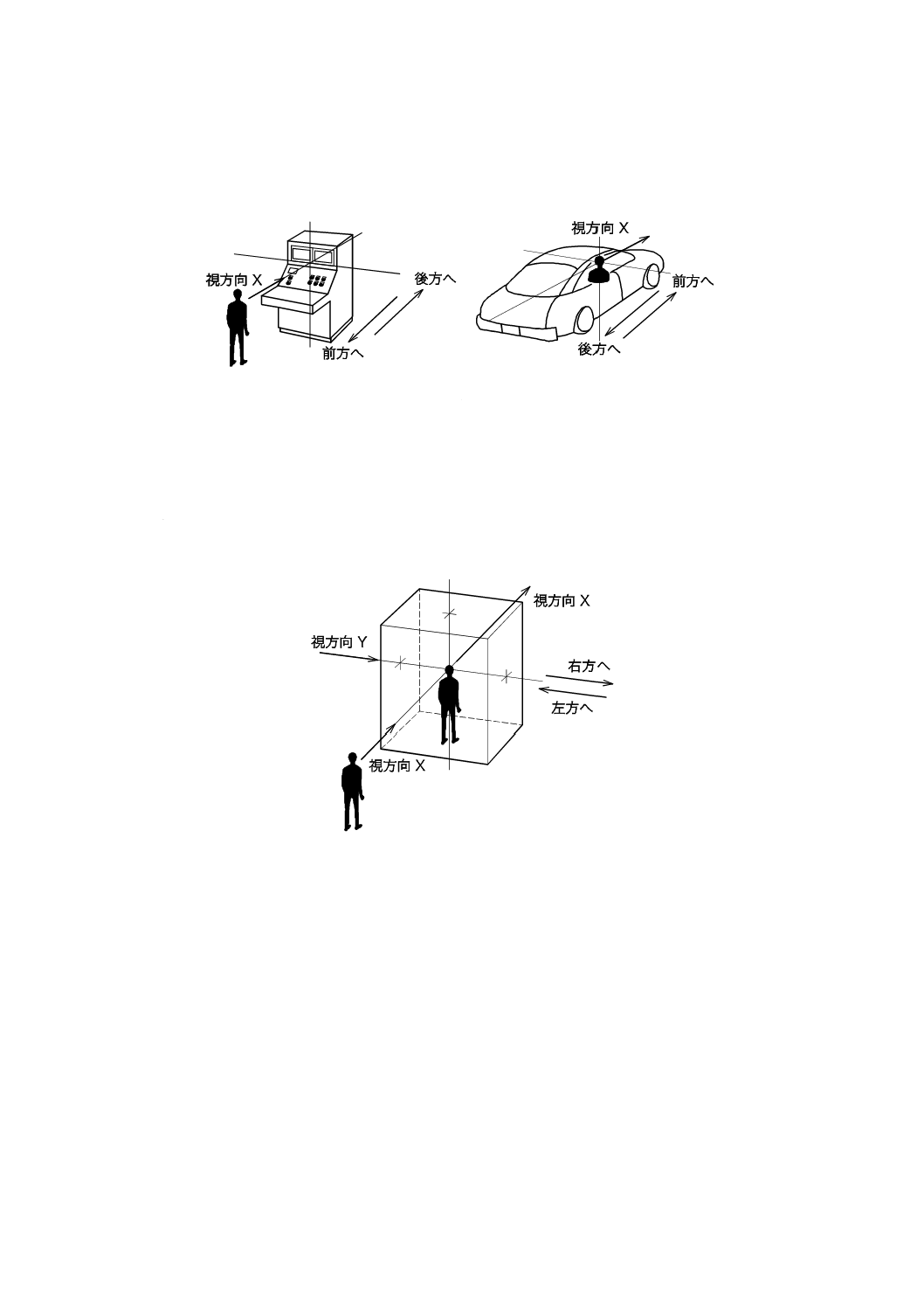
B.3.1 前方へ・後方への対概念
前方へ・後方への対概念は,次による。
− 外視式の場合
前後軸に平行で視方向Xに対して反対方向への全ての運動を,前方への運動とする。
前後軸に平行で視方向Xの方向への全ての運動を,後方への運動とする。
図B.6 a)参照。
− 内視式の場合
前後軸に平行で視方向Xの方向への全ての運動を,前方への運動とする。
前後軸に平行で視方向Xに対して反対方向への全ての運動を,後方への運動とする。
図B.6 b)参照。
23
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 “操作機器の運動方向”中の運動という用語は,所望の操作結果を得ようとして,操作機器に,
直線運動,回転運動,円運動又はねじ運動をもたらすユーザオペレータによる行為を示してい
る。
a) 外視式
b) 内視式
図B.6−前方へ・後方への対概念−例
B.3.2 右方へ・左方への対概念
右方へ・左方への対概念は,外視式及び内視式に共通であり,次による。
− 左右軸に平行で視方向Yに対して反対方向への全ての運動を,左方への運動とする。
− 左右軸に平行で視方向Yの方向への全ての運動を,右方への運動とする。
図B.7参照。
図B.7−右方へ・左方への対概念
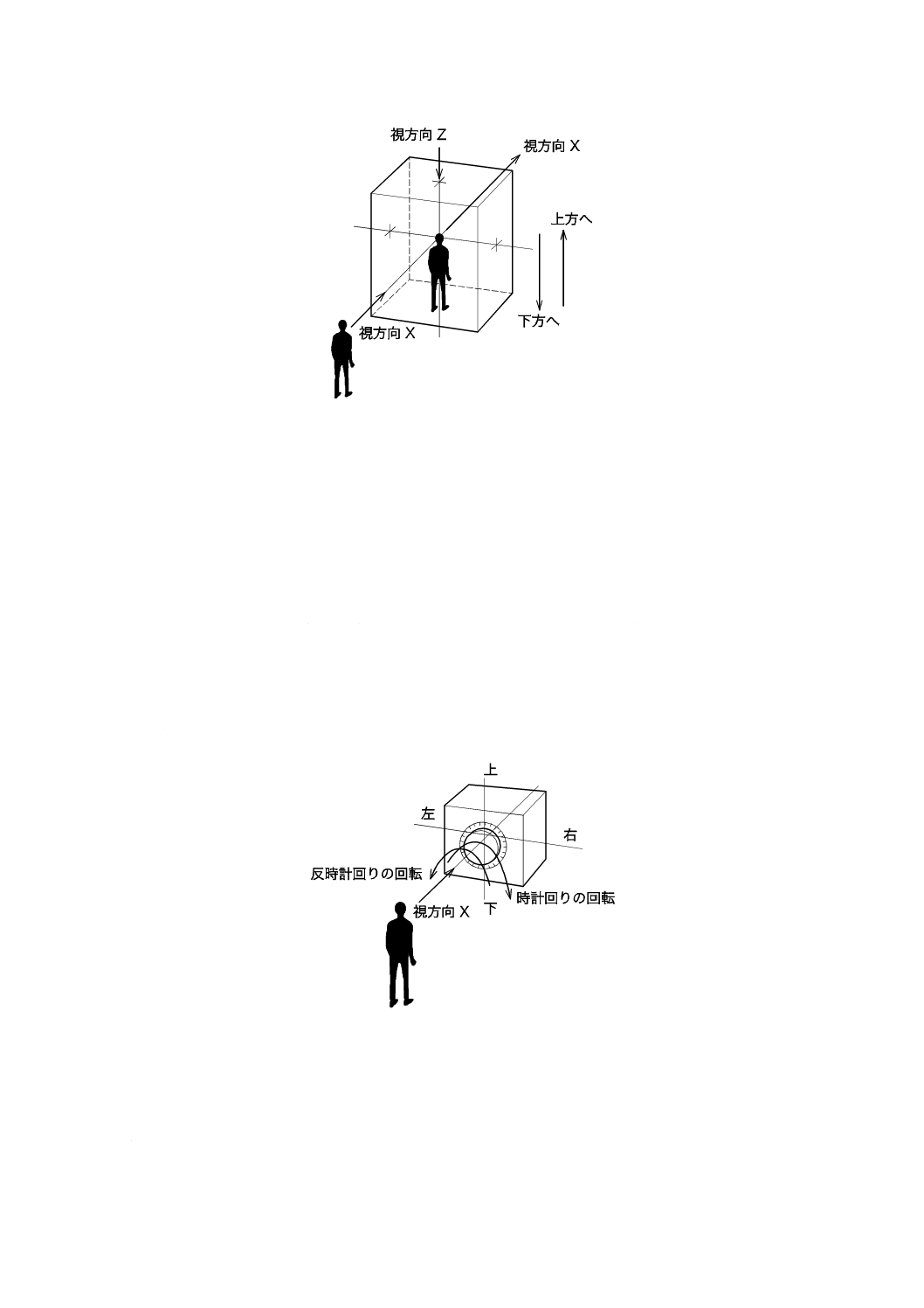
B.3.3 上方へ・下方への対概念
上方へ・下方への対概念は,外視式及び内視式に共通であり,次による。
− 上下軸に平行で視方向Zに対して反対方向への全ての運動を,上方への運動とする。
− 上下軸に平行で視方向Zの方向への全ての運動を,下方への運動とする。
図B.8参照。
24
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.8−上方へ・下方への対概念
B.4
回転運動における方向概念
B.4.1 回転運動における視方向
回転方向を決める場合には全て,観察者の実際の居場所と視方向に関係なく,観察者の視点及び視方向
は,対象物又はその部分が回転する軸と一致すると仮定する。
B.4.2 前後軸Xの周りの回転
前後軸Xの周りの回転は,次による。
− 視方向Xの方向に見て対象物が前後軸の周りを時計回りに回る回転を,前後軸の周りの時計回りの回
転とする。
− 視方向Xの方向に見て対象物が前後軸の周りを反時計回りに回る回転を,前後軸の周りの反時計回り
の回転とする。
図B.9参照。
図B.9−前後軸Xの周りの時計回りの回転及び反時計回りの回転
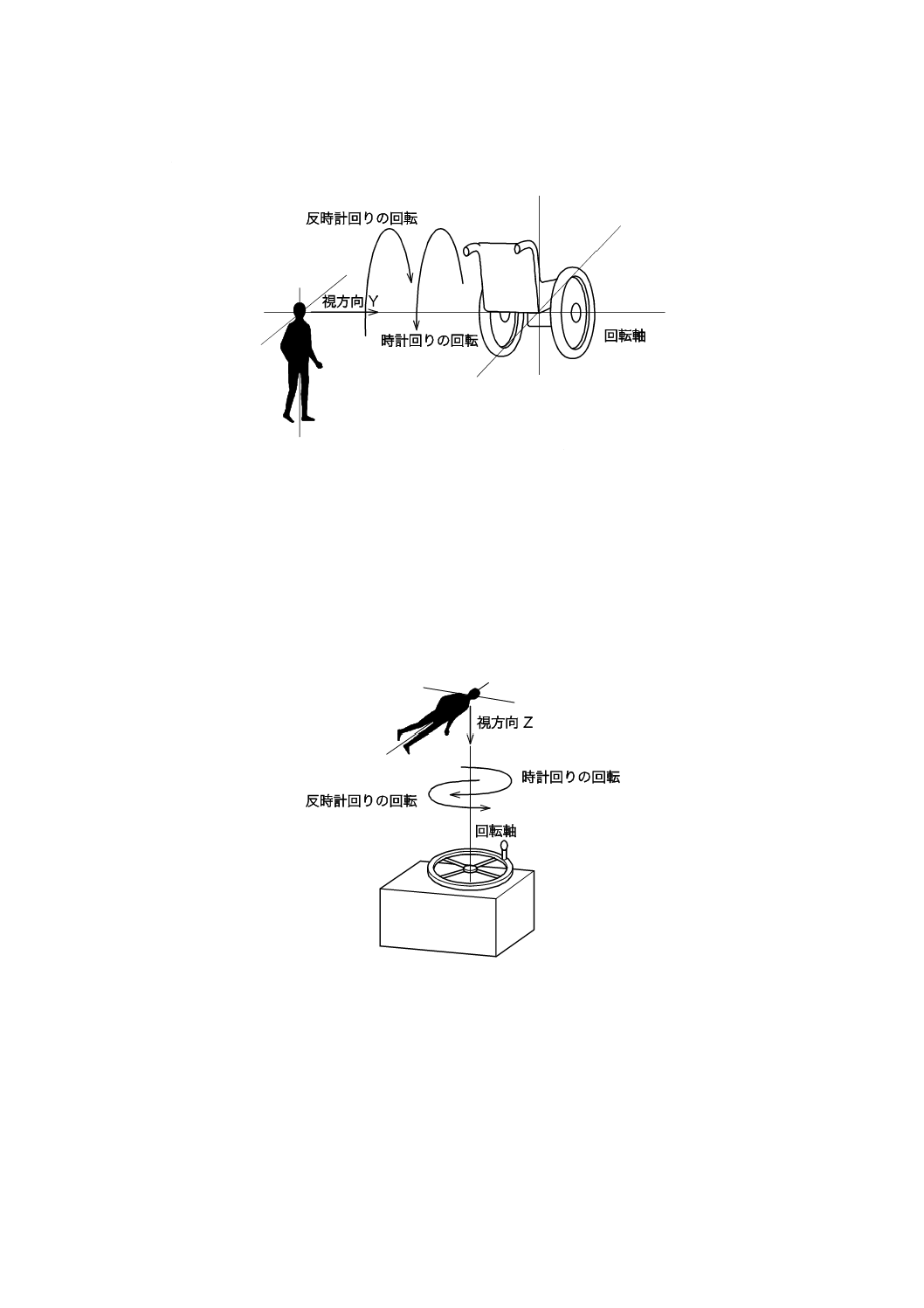
B.4.3 左右軸Yの周りの回転
左右軸Xの周りの回転は,次による。
− 視方向Yの方向に見て対象物が左右軸の周りを時計回りに回る回転を,左右軸の周りの時計回りの回
転とする。
− 視方向Yの方向に見て対象物が左右軸の周りを反時計回りに回る回転を,左右軸の周りの反時計回り
25
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の回転とする。
図B.10参照。
図B.10−左右軸Yの周りの時計回りの回転及び反時計回りの回転
B.4.4 上下軸Zの周りの回転
上下軸Xの周りの回転は,次による。
− 視方向Zの方向に見て対象物が上下軸の周りを時計回りに回る回転を,上下軸の周りの時計回りの回
転とする。
− 視方向Zの方向に見て対象物が上下軸の周りを反時計回りに回る回転を,上下軸の周りの反時計回り
の回転とする。
図B.11参照。
図B.11−上下軸Zの周りの時計回りの回転及び反時計回りの回転
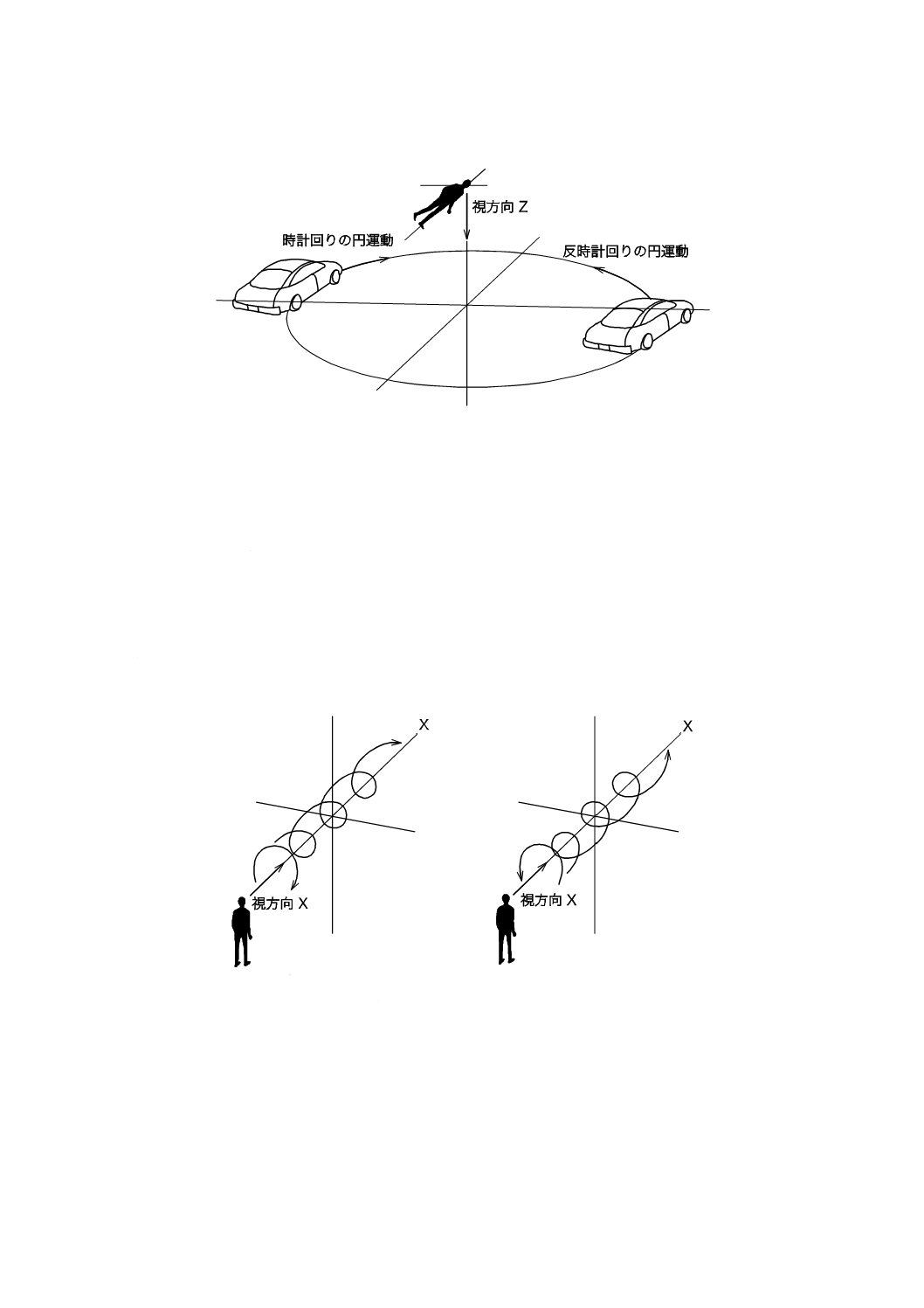
B.5
円運動における方向概念
円運動における方向概念は,次による。
− 観察者が円の中心を通る回転軸に沿って基礎平面の方を見て,対象物が時計回りとなる円運動を,時
計回りの円運動とする。
− 観察者が円の中心を通る回転軸に沿って基礎平面の方を見て,対象物が反時計回りとなる円運動を,
反時計回りの円運動とする。
26
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例として,図B.12参照。
図B.12−上下軸Zの周りの時計回りの円運動及び反時計回りの円運動−例
B.6
ねじ運動における方向概念
B.6.1 ねじ運動の観察方式
ねじ運動の方向を決定する場合には,観察者の視点及び視方向に関係なく常に内視式による。
B.6.2 ねじ運動の方向
ねじ運動の方向は,次による。
− 観察者の視方向に沿う直線運動と時計回りの回転とを同時に組み合わせた運動を,右ねじ運動とする。
− 観察者の視方向に沿う直線運動と反時計回りの回転とを同時に組み合わせた運動を,左ねじ運動とす
る。
例として,図B.13参照。
a) 右ねじ運動
b) 左ねじ運動
図B.13−前後軸の周りで視方向Xのねじ運動−例
27
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
人間中心設計活動の流れ
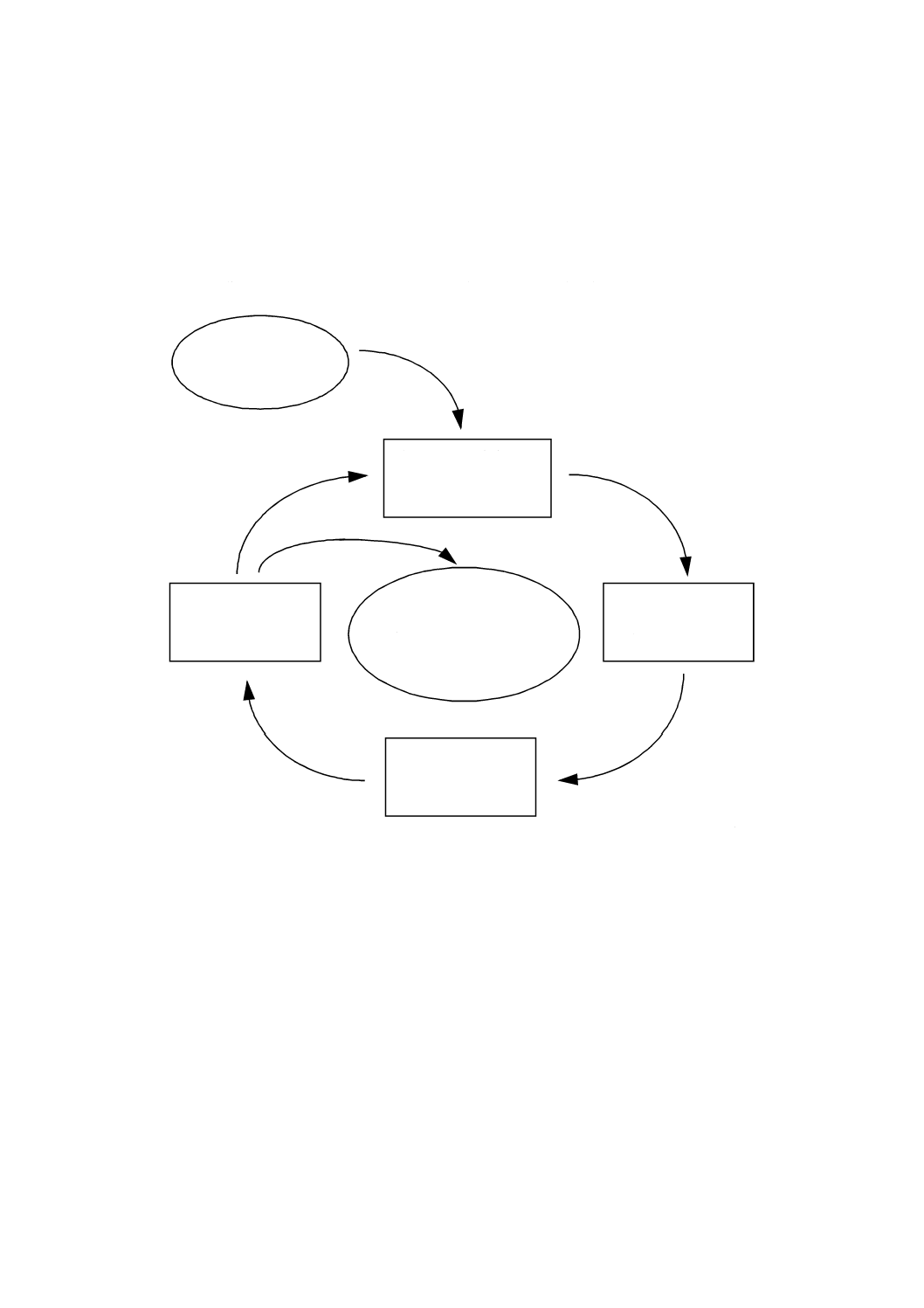
C.1 人間中心設計活動の手順
人間中心設計を進めるための手順を図C.1に示す(JIS Z 8530も参照)。
注記 空間的方向性及び運動方向の設計には,機能及び操作の必要性の特定,並びにユーザオペ
レータの目標,経験,メンタルモデル及びステレオタイプの特定を必要とする。
図C.1−人間中心設計活動の流れ
ユーザオペレータ及び組織の
要求項目を満たすシステムが
得られる。
利用の状況を把握し
詳細指定する。
設計案を
作成する。
設計を要求項目に
照らして評価する。
ユーザオペレータ及
び組織の要求項目を
詳細指定する。
人間中心設計の
必要性を特定する。
28
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
空間的方向性及び運動方向設計チェックリスト
D.1 設計及び評価チェックリスト
表D.1にこの規格の要求事項又は推奨事項についてのチェックリストを示す。チェックリストの利用は
次による。
a) 方向設計について検討する製品を定義する。
b) 表中の各要求事項又は推奨事項について,その要求事項又は推奨事項が検討対象の製品に対して適用
できるか否かを調べ,適用可能であれば,設計案がその要求事項又は推奨事項に適合しているかを調
べる。
c) 設計案が各要求事項又は推奨事項に沿っていることを明確に示すために,注釈欄に,注釈又は参考文
献一覧を記載する。
d) 技術分野ごとのより詳細な検討項目を考案する。
e) チェックリスト利用の便宜のために,“要求事項又は推奨事項”欄には,この規格の対応する細分箇条
の番号と標題とを細分箇条の要約を添えて記載している。
要求事項,推奨事項その他の厳密な内容に関しては,箇条4を参照。
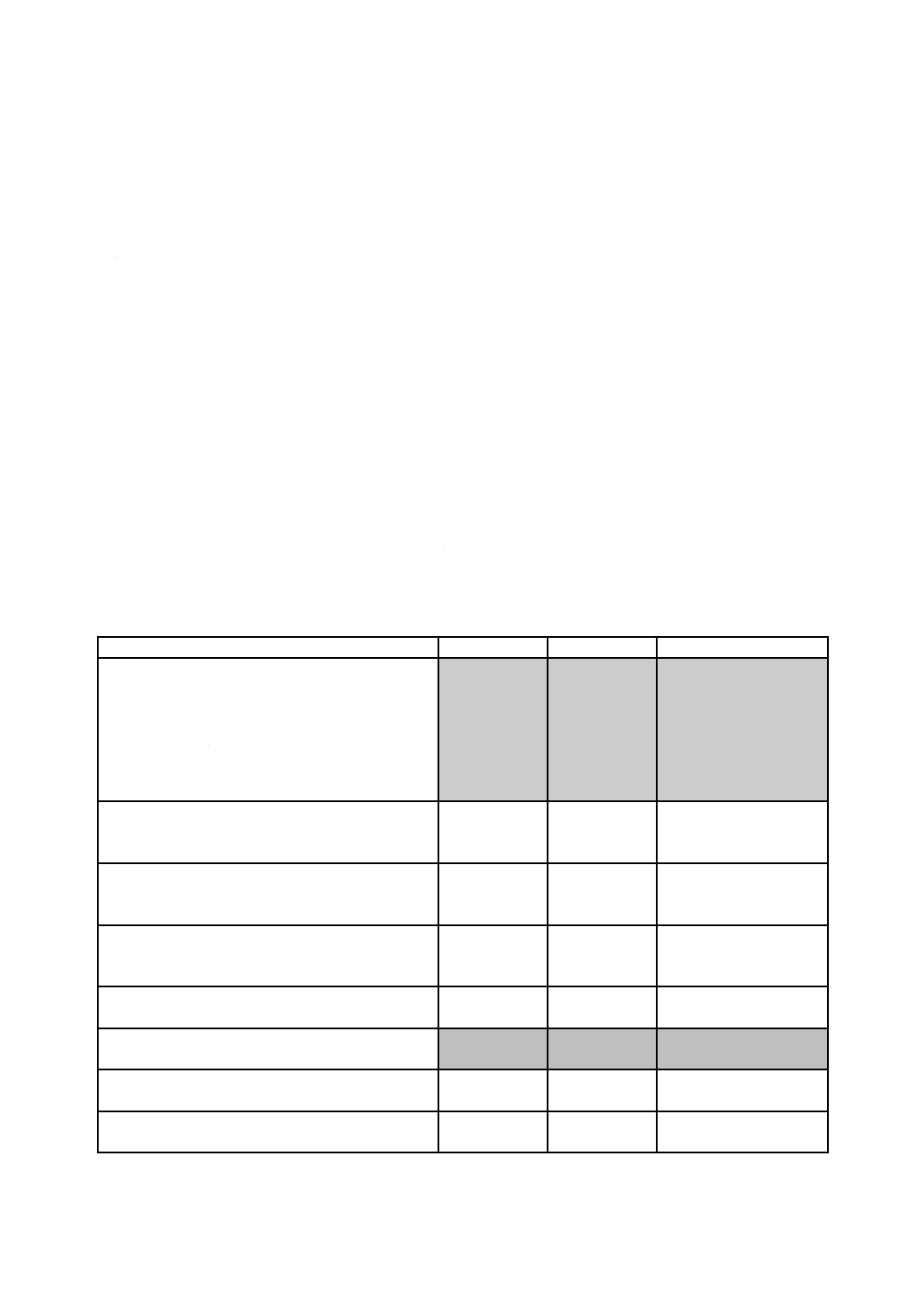
表D.1−設計チェックリスト
要求事項又は推奨事項
適用可能か
適合か
注釈
4.2 空間的方向性及び運動方向に関するユーザイン
タフェース(UI)の人間工学的設計
ユーザインタフェースは,安全性,使用性及び人
の特性(感覚生理,感覚意欲,知覚,コミュニケー
ションなど)を考慮して設計することが望ましい。
人間中心の設計は,次による(JIS Z 8530及び附属
書C参照)。
a) ユーザオペレータの及び仕事の要求仕様・制約
を,ユーザオペレータを積極的に参加させなが
ら明確に理解する。
b) 仕事の目的を達成するための機能を,ユーザオ
ペレータと機械システムとの間で適切に配分す
る。
c) ユーザオペレータからのフィードバック情報を
い(活)かしながら,解決案の考案を繰り返す
(反復設計)。
d) 多様な専門領域の経験をもつ人員を設計チーム
に含める。
4.3 方向設計の工程計画
方向設計の手順は,次による。
a) 作業(果たそうとする目的)及びそれに必要な
機能を定義する。
b) ユーザオペレータを,JIS Z 8530の手順に従って
特定する。
29
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
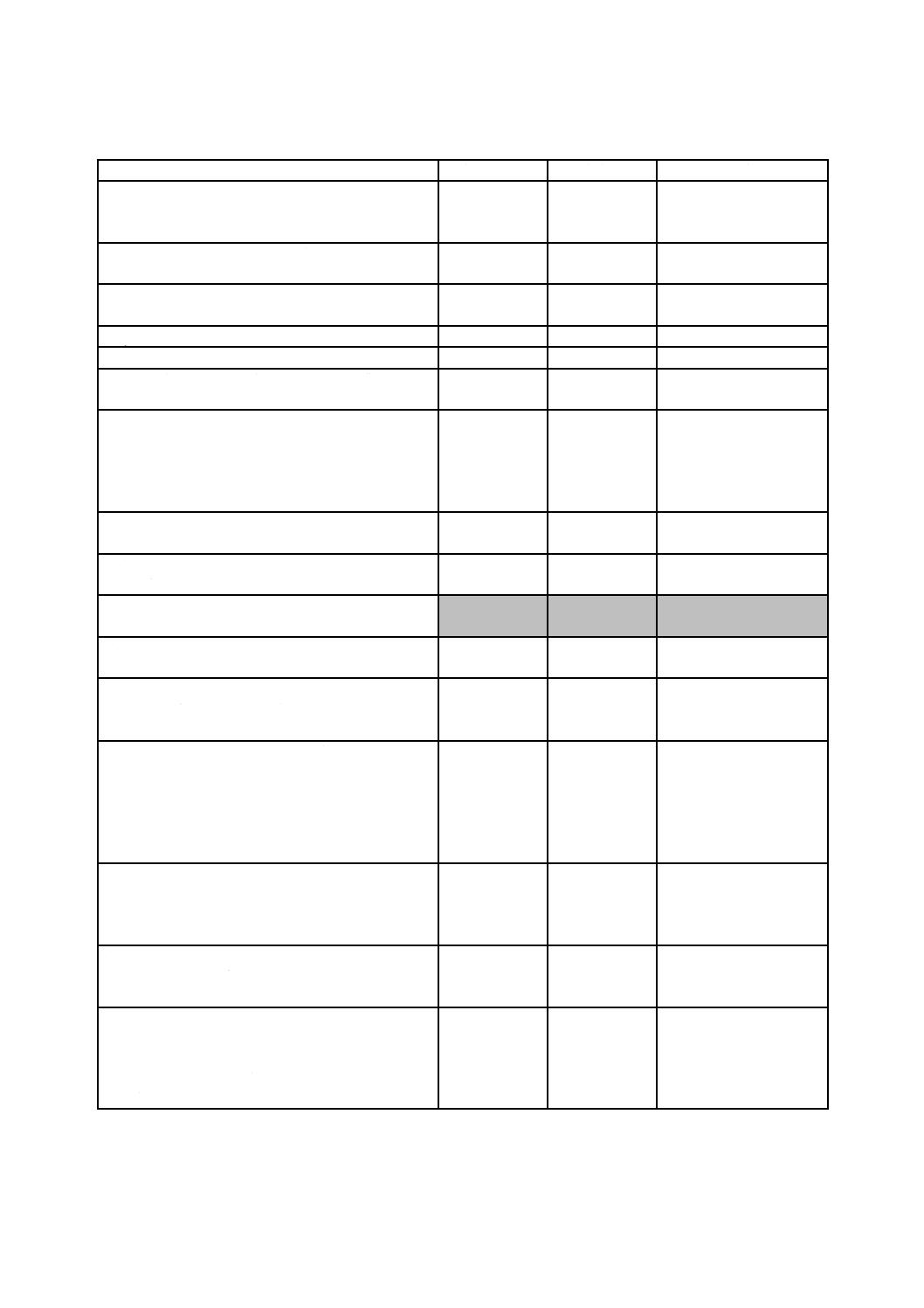
表D.1−設計チェックリスト(続き)
要求事項又は推奨事項
適用可能か
適合か
注釈
c) 作業を次の観点から詳細指定する。
1) 作業遂行のための対象物及び操作機器の動
き・表示。
2) 作業を行う上での相対的優先順位(安全性,
効率,使いやすさ,快適さなど)。
3) 作業を実行するときのユーザオペレータの作
業姿勢。
4) 作業を実行する作業場所。
5) 作業を行う上での情報の流れ。
6) 環境要因(例えば,周囲照明,保護衣の必要
性)。
d) 対象物の又は対象物の表示の動き,及び操作機
器の場所を決定する。
1) 領域内で用いる操作機器の使用頻度及び重要
度を考慮しながら,図JB.1及び図JB.2に従っ
て,配置領域を決定する。
2) 仕事の機能の優先順位に合わせて,JA.1に従
って,表示及び操作機器の位置を決定する。
3) JA.2に従って,表示及び操作機器の配置を決
定する。
4.4 ヒューマンマシンインタフェース(HMI)の設
計要求事項・推奨事項
a) 表示及び操作機器は,人が誤りを犯す可能性を
減らすように機能することが望ましい。
b) 表示は,人間の知覚特性及び遂行すべき作業の
特性に合うように,選定,設計及び配置するこ
とが望ましい。
c) 操作機器は,操作を実行する身体の部分の特性
(特に動きの特性)及び遂行すべき作業の特性
に合うように,選定,設計及び配置することが
望ましい。また,操作の技能,正確さ,速度及
び強さを,並びに器用さがどの程度必要かを考
慮することが望ましい。
d) 操作機器は,利用可能な空間の制約範囲内で,
できるだけ対象集団のもつポピュレーションス
テレオタイプ並びに制御の順序及び動きに適切
であるように選定し,配置することが望ましい。
e) 操作機器は,制御過程の動特性及びその動特性
に対してユーザオペレータが抱く空間的な把握
に沿うように,選定し配置することが望ましい。
f) 交互に操作する又は素早く引き続いて操作する
複数の操作機器は,正しい動作を容易にするた
めにできるだけ近くに配置することが望まし
い。ただし,不注意によって誤操作の起こる危
険が生じるほど近づけないことが望ましい。
30
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表D.1−設計チェックリスト(続き)
要求事項又は推奨事項
適用可能か
適合か
注釈
4.4.2 操作機器の操作方向
4.4.2.1 操作機器の操作方向と制御結果との整合
操作機器の操作方向は,対象物に期待する運動方
向と融和しなければならない。
4.4.2.2 類似した操作機器の間での整合
対象物が,同種か異種かにかかわりなく,それら
の間に同様な運動又は同様な変化をさせるために
は,同種類又は類似の操作機器を用いて,それらを
同じ方向に操作することが望ましい。
4.4.2.3 異種の操作機器の間での整合
技術的理由などで,異なる操作機器を用いて異な
る対象物の間に同様な運動又は同様な変化をさせる
必要がある場合には,操作機器の運動と対象物にお
ける変化とを,表1に示す一連の対概念に対応させ
て,A群又はB群内でそれぞれ整合させなければな
らない。
4.4.2.4 操作機器の変更
従来の操作機器の操作方向が,4.4.2.2及び4.4.2.3
の要求事項に合わない場合でも,設計者は,要求事
項に合わせようとして,従来の操作方向を逆転して
はならない。
代わりに,次によって,操作機器の方式を変更し,
不可欠な安全性を確保しなければならない。
a) これまで操作輪を時計回りに操作して,機械部
分を左方へ動かした場合,操作輪を反時計回り
に操作して機械部分を左方へ動かすようにして
はならない。4.4.2.1及び4.4.2.2の要求事項に合
うように,操作輪による操作をレバー又は押ボ
タンによる操作に替える。
b) 自動車で,これまでレバーを上方へ操作して左
の方向指示灯を点灯していた場合,レバーを下
方へ操作して左の方向指示灯を点灯させるよう
にしてはならない。4.4.2.1及び4.4.2.2の要求事
項に合うように,レバーを90°回して取り付け
るか,押ボタン又は回転式操作機器に取り替え
る。
c) レバーが使えない場合には,操作輪を時計回り
に回すか,又は2個の並んだ押ボタンの右側の
押ボタンを押して対象物を右方へ直線運動させ
るようにする。
4.4.2.5 表示
操作機器には,明瞭な記号又は文字による表示を
付けなければならない。一般に記号のほうが理解し
やすいので好まれる。
31
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表D.1−設計チェックリスト(続き)
要求事項又は推奨事項
適用可能か
適合か
注釈
4.4.3 対象物の動き及び操作機器の操作方向
対象物の動きと操作機器の操作の方向との対応関
係は,次による。
a) 直線操作系の方向
− 垂直のパネルのスイッチ,レバーでは,ON・
増加は上方向,OFF・減少は下方向とする。
− 水平のパネルのスイッチ,レバーでは,ON・
増加は前方向(ユーザオペレータから離れる
方向),OFF・減少は後ろ方向(ユーザオペレ
ータに近づく方向)とする。
b) 回転操作系の方向
− ON・増加は時計回りの方向,OFF・減少は反
時計回りの方向とする。
4.4.4 対象物の動きと操作機器の操作方向及び配置
との対応関係
4.4.4.1 対象物の動きと操作機器の操作とは同じ方向
に合わせる
対象物の動きが直線運動の場合には,操作機器も
直線操作とすることが望ましい。
対象物の動きが回転運動の場合には,操作機器も
回転操作とすることが望ましい。
4.4.4.2 対象物の動きが直線運動で操作機器が回転操
作の場合
対象物の動きが直線運動で操作機器が回転操作の
場合は,対象物の下側又は右側に操作機器を配置す
ることが望ましい。
4.4.4.3 対象物の動きが回転運動で操作機器が直線操
作の場合
対象物の動きが回転運動で操作機器が直線操作の
場合は,対象物の左側又は上側に操作機器を配置す
ることが望ましい。ただし,操作によって対象物が
隠れる場合には,対象物の右側又は上側に操作機器
を配置することが望ましい。
4.4.4.4 体に加わる力
ユーザオペレータが動く対象物の内部にいる場
合,体に加わる力が,望ましい操作機器の位置及び
操作の方向に影響を及ぼすことがある。その場合に
は,たとえこの規格の規定と異なる設計となっても,
体に加わる力を考慮に入れることが望ましい。
4.4.5 複数の表示装置,操作機器の配列
複数の表示又は操作機器を,何らかの順序を付け
て並べて配置する必要のあるときは,JA.3の規定に
従って配置することが望ましい。しかしながら,そ
れらを配置する場合には,表示及び操作機器両者の
運動の方向を,機能的関係を含めて考慮することが
重要である。
32
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表D.1−設計チェックリスト(続き)
要求事項又は推奨事項
適用可能か
適合か
注釈
4.5 グラフィカルユーザインタフェース(GUI)の設
計推奨事項
4.5.2 仮想オブジェクトとの直接操作及び実世界オ
ブジェクトとの間接操作
a) 仮想オブジェクトの直接操作
b) 実世界オブジェクトとの間接操作
c) 仮想世界オブジェクトからの情報を用いる実世
界オブジェクトの直接操作
4.5.3 対話の原則
設計への対話の原則の適用については,JIS Z 8520
による。
4.5.4 仮想世界対象の設計
4.5.4.2 仮想対象物と実世界対象物との対応
実世界対象物の仮想世界の対象物への写像は,作
業を遂行するのに必要な情報に直接的に対応してい
ることが望ましい。
4.5.4.3 環境情報の提示
環境の又は周辺の情報の与え方は,ユーザオペレ
ータの捉え方に沿ったものであることが望ましい。
仮想対象物空間を設計するとき,ユーザオペレータ
の情況自覚を高め,情況の判断及び意思決定を支援
するよう,その種の情報に配慮することが望ましい。
4.5.4.4 次元の減少
ユーザオペレータが仮想対象物とやり取りする表
示空間(表示面)は,通常,二次元空間である。三
次元の実世界対象空間を,何らかの投影・写像手段
を用いて二次元空間に提示する場合には,ある程度
の情報の損失が避けられない。その種の情報の損失
による悪影響を防止又は限定するために,次によっ
て,対策を講じることが望ましい。
a) 作業成績に最も影響の少ない軸を,投影空間の
前後軸にとることが望ましい。
b) 三つの軸全てが作業成績に等しく重要である場
合には,実世界空間との対応を犠牲にしても,
抽象的な又は理想化した仮想空間を検討するこ
とが望ましい。
c) (たとえ,三次元表示技術が利用できても)奥
行き知覚が不足する場合には,奥行き知覚の不
足を補う対策を講じること(例えば,3面図の採
用)が望ましい。
33
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表D.1−設計チェックリスト(続き)
要求事項又は推奨事項
適用可能か
適合か
注釈
4.5.4.5 表示の容量
仮想空間として用いられる表示面に提示可能な情
報の量は,実世界空間を十分忠実に表現するには,
通常不十分である。仮想対象物空間の設計において
は,次によって,対策を講じることが望ましい。
a) 表示すべき情報の量が,表示装置の表示容量を
はるかに超えている場合,精粗表示,魚眼表示,
鳥かん(瞰)表示,スクロール表示などの表示
手法を,ただし,作業の遂行に差し支えるよう
な大きなひずみを表示する情報にもたらさない
範囲内で,利用することが望ましい。
b) 作業の遂行に必要な実世界空間の情報が保たれ
る範囲内で,情報の抽象化及び理想化を,行う
ことが望ましい。
4.5.4.6 感覚様態
仮想対象物空間として用いる表示装置が伝えるこ
とができる情報は,通常,視覚及び聴覚情報に限定
される。匂い,振動,傾斜などの,嗅覚その他の情
報(周辺情報)は,通常,ユーザオペレータには伝
えることができない。仮想対象物空間の設計におい
ては,次によって,対策を講じることを推奨する。
a) 十分な表示能力が得られる場合,適切な情報視
覚化技術の利用,又は,香り,振動などの環境
情報の代替提示を,検討することが望ましい。
b) 周辺情報を伝える手段として,触力覚装置の利
用を検討することが望ましい。
4.5.4.7 参照の枠組み
ユーザオペレータの視野内で,仮想対象物空間(表
示面)を見るとき,表示枠及びその周辺が参照枠の
役割を果たし,ユーザオペレータはその枠組みを通
して対象物を認識する。表示枠内の対象物のある方
向への動きが,表示枠又は観察者の反対方向への動
きの知覚を引き起こすことがある。仮想対象物空間
の設計では,運動知覚又は乗り物酔いの思いがけな
い影響が生じて,仮想対象物空間内で行おうとする
作業の遂行に悪影響を及ぼさないように配慮するこ
とが望ましい。
4.5.4.8 対象物及び視点の操作
対象物を操作する働き及び/又は視点を操作する
働きを,作業の必要性に従って提供することが望ま
しい。実世界の対象物を扱う場合には,前後の対概
念に関しては,対象物を操作する働きには内視式を,
視点を操作する働きには外視式を採用することが望
ましい。いずれの働きを備えているかを,区別しや
すいことが望ましい。特に両者を備えている場合に
は,どの操作機器が,対象物を動かすものか又は視
点を動かすものかを,ユーザオペレータが見分けや
すいことが望ましい。
34
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表D.1−設計チェックリスト(続き)
要求事項又は推奨事項
適用可能か
適合か
注釈
4.5.4.9 抽象的な量の表記方向[4.5.2 c)の場合のイン
タフェース]
この規格は,本来空間的方向性及び運動方向を扱
うが,この細分箇条では,操作の方向との関連にお
いて,論理的又は抽象的な量の表示の方向について
の推奨事項を規定する。
a) 加法的な量
加法的な量の,その量の大小に応じた配置の
仕方は次による。
1) 水平方向に並べるときは,量の少ないものか
ら左から右へと並べることが望ましい。
2) 垂直方向に並べるときは,量の少ないものか
ら下から上へと並べることが望ましい。
3) 回転方向に並べるときは,量の少ないものか
ら時計回りに並べることが望ましい。
b) 順次的な量
順次的な量の,その順位に応じた配置の仕方
は次による。
1) 水平方向に並べるときは,順位の高いものか
ら左から右へと並べることが望ましい。
2) 垂直方向に並べるときは,順位の高いものか
ら上から下へと並べることが望ましい。
3) 回転方向に並べるときは,順位の高いものか
ら時計回りに並べることが望ましい。
c) 値の動的な表示
情報を動的(固定した値ではなく)に表示す
る場合,加法的な量の場合には,値を増加させ
るためには操作機器は,“上”(例えば,上向き
矢印)を示し,減少させるためには,“下”(例
えば,下向き矢印)を示すことが,順次的な量
の場合には,順位を上げるためには操作機器は,
“上”を示し,順位を下げるためには,“下”を
示すことが望ましい。
d) 階層構造(木構造)
樹形に表現する階層構造は,最上位の階層を,
木の頂点に置くことが,及びより下位の階層を
上位の階層の下に置くことが望ましい。
同じ階層中の各要素間に,順序関係が成り立
つ場合には,それら要素の配置の仕方は,順次
的な量の水平方向の配置の仕方についての推奨
事項b)に沿うことが望ましい。
35
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表D.1−設計チェックリスト(続き)
要求事項又は推奨事項
適用可能か
適合か
注釈
e) 時間
時間を表示する(仮想オブジェクト空間内で)
ときには,生起の早遅という優先順位をもつ順
次的な量として,この細分箇条の推奨事項b)に
記載した原則に従って,時間を表示するのがよ
い。時系列の図及び工程図(process chart)では,
時間を水平軸に沿って取り,前に生じた事象を
後に生じた事象の左方に配置するのが,一般に
望ましい。
4.5.4.10 操作の方向と表示対象の運動方向との関係
表示対象の運動方向及び関連する操作の方向の間
の関係は,表2に示すものが望ましい。
4.6 複合操作系の設計推奨事項
両手及び/又は両足を使って行う複合操作系及び
対象物の運動方向に関する要求事項及び推奨事項
は,次による。
a) 操作要素及び対象の動きとの関係
1) 個々の多方向操作機器の操作方向は,対象物
の運動方向に対して対応していることが望ま
しい。
2) 対象物の総合的な運動方向が,複合操作系を
操作するときのユーザオペレータのメンタル
モデルに対して整合することが望ましい。
3) 作業遂行の過程全体にわたって関係の一貫性
を維持しなければならない。
b) 姿勢及び筋負担
1) ユーザオペレータの基本作業姿勢は,複合操
作系によって不自然に変化しないことが望ま
しい。
2) 筋肉を効率的に使用すること,及び特定の上
下肢筋を集中して使用せずに,全体的筋負担
を妥当な範囲に収めることが望ましい。
c) 技能及び経験の効果
1) 他の類似した操作方式の機器においても,獲
得した技能及び経験がい(活)かせるような
適切な配慮をすることが望ましい。
2) 方向の設計には,他の関連機器の操作方式を
考慮しながら進めることが望ましい。
36
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(規定)
表示及び操作機器の配置
この附属書は,対応国際規格が引用しているISO 9355-4の案であったISO/DIS 9355-4の一部を元に作
成した。
なお,対応国際規格では,ISO 9355-4を引用して規定しているが,ISO 9355-4はDIS段階で廃止され,
現時点では未発行である。そのため,この規格では,廃案となったISO/DIS 9355-4の一部を元に作成した
附属書として規定する。
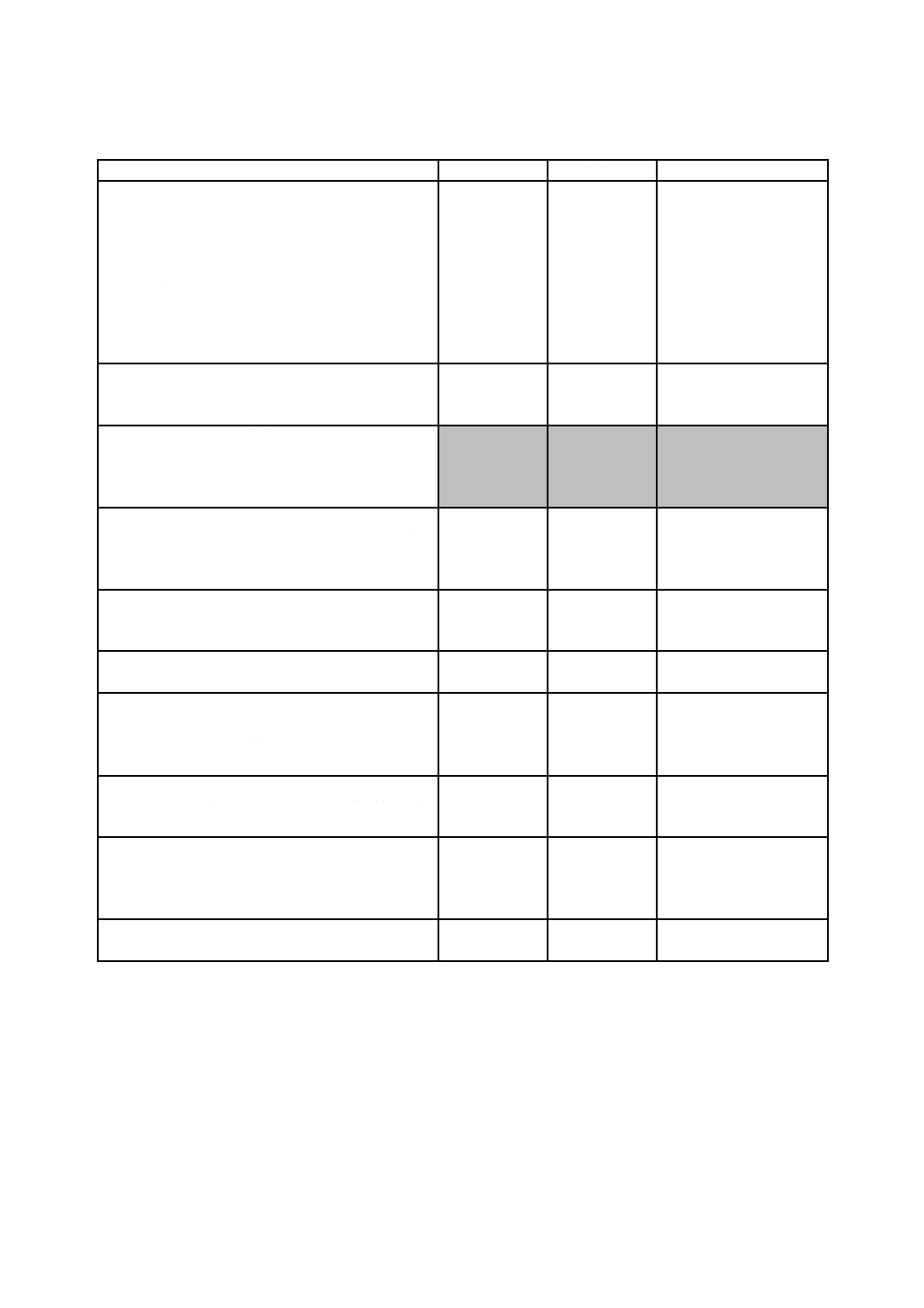
JA.1
表示及び操作機器の位置選定
JA.1.1
視野及び操作域
視野及び操作域は,作業の優先順位に対する適切さのそれぞれ異なる3種の領域に分類される。分類は
次の3種である,表示領域A(操作領域A'):推奨,表示領域B(操作領域B'):許容,表示領域C(操作
領域C'):不適。
注記 図JA.1は,座位又は立位での活動の場合に当てはまる。
操作の頻度,重要さ,求められる正確さと順序,並びに作業者の姿勢及び身体寸法を考慮して,表示及
び操作機器を置く適切な領域を決めることが望ましい。その後に,作業の優先順位,情報の流れ及び空間
の制約を考慮しながら,表示及び操作機器を設置する面を,決めた領域内に配置することが望ましい。
領域A(A')は,次に適している。
− 人員及び装置の安全性の点から最重要な読取り又は操作。
− 迅速かつ正確な読取り又は操作。
− システムの操業に重要な指示器(表示)又は操作機器。
− 頻繁な及び長時間の観測又は操作。
領域B(B')は,時折り観察又は操作すればよい,それほど重要ではない表示又は操作機器に適してい
る。
領域C(C')は,校正又は調節のような優先順位の又は重要度の低い,まれにしか使用しない表示又は
操作機器に適している。
37
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
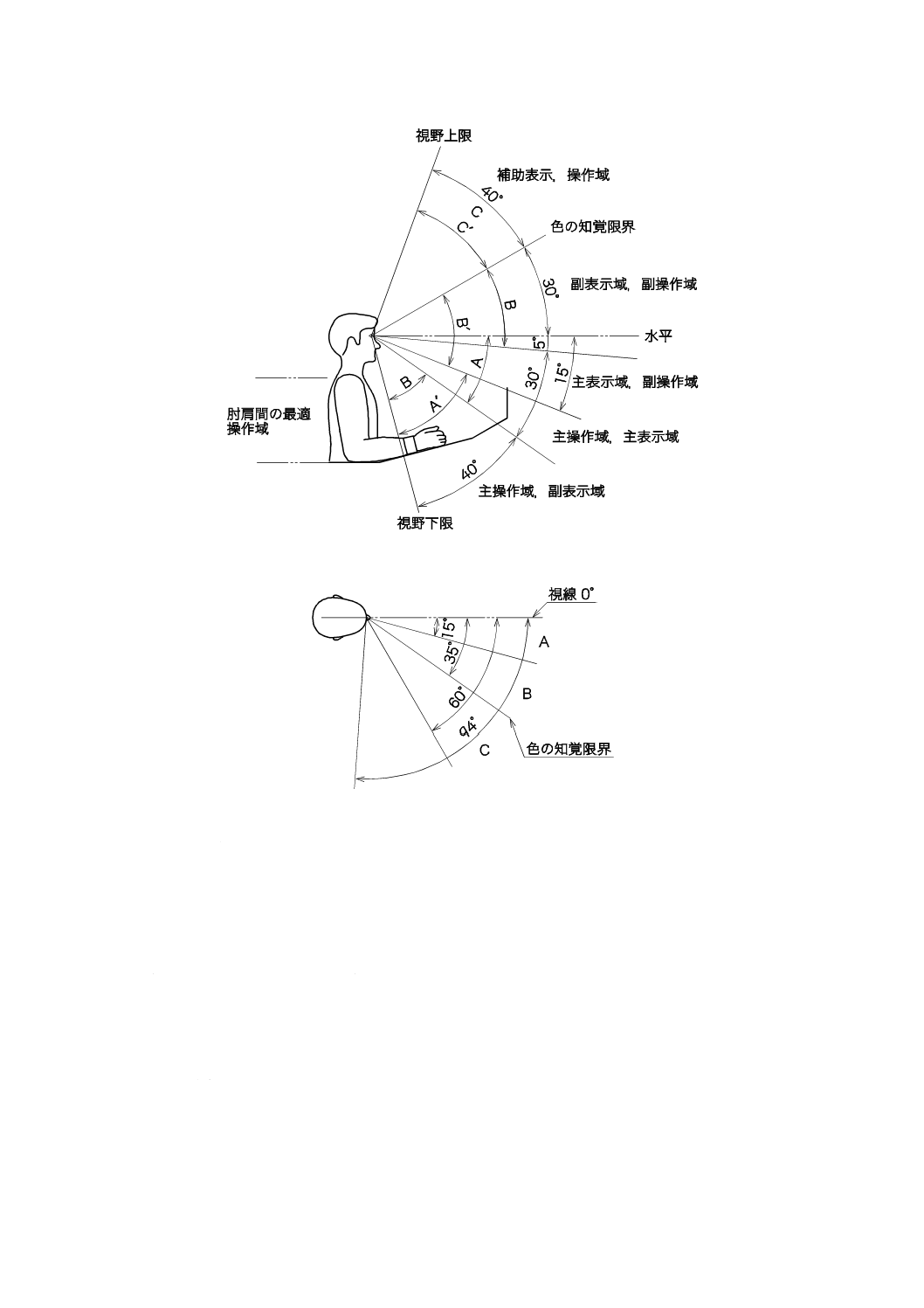
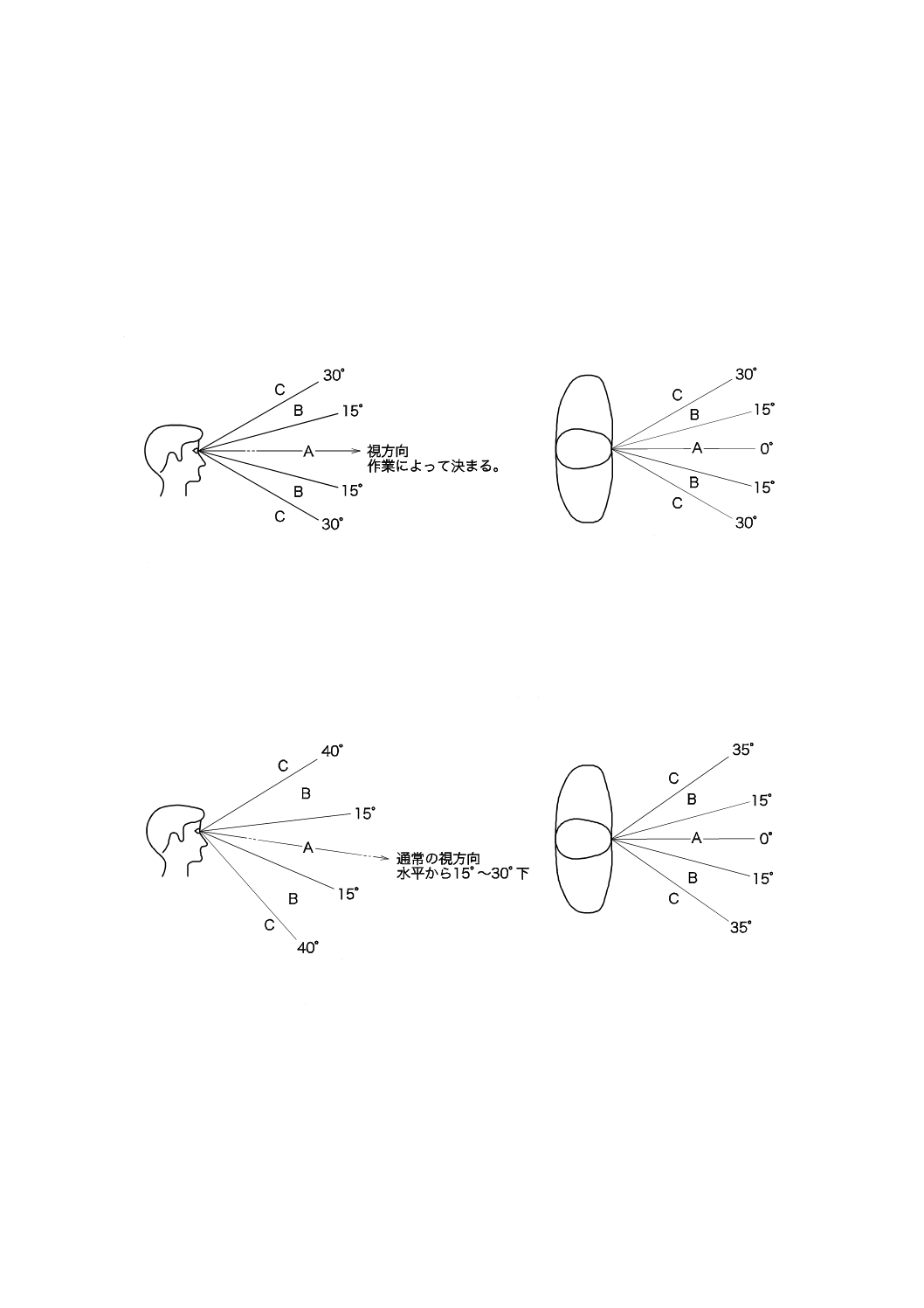
図JA.1−表示領域A,B,C及び操作領域A',B',C'の位置
図JA.2−視野(水平)の位置
JA.1.2
視野及び操作域内の領域決定
JA.1.2.1
視野内の領域(座位の場合)
図JA.1は,表示領域A,B,及びCを示している。図中の角度を用いて表示の位置を算出する場合には,
作業者の目の高さを考慮することが望ましい。ビデオ画面などの表示を快適に見るためのオペレータの目
と画面との間の典型的な距離は,400〜700 mmである。
視直線の中心は,視点を通る水平線から15°下とする。
視野の極端な周辺では,色の判別を求めないように配慮することが重要である。図JA.1及び図JA.2に,
色弁別の限界を示す。
注記 姿勢を変えると視野(又は操作域)も移動するので,着座での前かがみ,直立及び後にもたれ
る姿勢の区別をすることが必要である。
JA.1.2.2
操作域内の領域(座位の場合)
視野の領域A,B及びCは,図JA.1にA',B'及びC'として示す操作域内の領域と一部重なっている。
多用する又は重要な操作機器の場合には,操作域はオペレータから手の届きやすいこと,すなわち,体の
38
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
前面から450 mm以上離れていないことが望ましい,
操作機器全てを,操作領域A'内に収めきれない場合でも,可能な限りそれに近づけなくてはならない。
操作機器の操作に求められる肩,肘及び手首の角度を考慮することは重要である。
JA.1.2.3
視野及び操作域内の領域(立位の場合)
立位のオペレータは,一般に,どの方向にも自由に向くことができるし,場所を移ることができるので,
立位の場合には,視野及び操作域内の領域を,座位の場合ほど厳密に定義する必要はない。
立位の場合の視野及び操作域内の領域の決め方は,次による。
− 視野及び操作域内の領域を指定する基礎として,50パーセンタイル値を用いる。
− 視野内の推奨領域の高さは,水平基準面(床面)から1 370〜1 680 mmの間である。
− オペレータが自由に位置を変えることができるので,ほとんどの場合,水平方向の寸法は考慮する必
要はない。一群の操作機器を同時に素早く操作する必要がある場合,それらの操作機器は水平方向に,
760 mm以上離れていないことが望ましい。
− 操作域内の推奨領域の高さは,水平基準面から1 040〜1 370 mmの間である。
− 水平基準面からの高さが,1 830 mmを超える領域は,適切ではない(領域C')。
− 水平基準面からの高さが,920 mm未満の領域は,適切ではない(領域C')。
JA.1.2.4
視野及び操作域内の領域(立位姿勢と座位姿勢との両方を用いる場合)
座位姿勢と立位姿勢との両方で,同じ目の高さが得られるように,座面高を調節できるいすを用いる,
高さが変えられる足台を用いるなどの配慮が特に必要である。表示を配置する面の傾きの推奨値は,60°
〜70°である。
JA.1.3
優先順位及び制約に応じた操作卓及び設置面への表示及び操作機器の位置選定
JA.1.3.1
表示及び操作機器の設置面への搭載に関する指針
JA.1.3.1.1
表示及び操作機器の優先順位に応じた位置選定
表示及び操作機器を,その優先順位に応じて操作卓及び設置面へ置くときは,次による。
− 最重要の表示及び操作機器は,表示領域A又は操作領域A'に置く。
− 二次的な表示及び操作機器は,必要となった場合に扱いやすい表示領域B又は操作領域B'に置く。
− 重要度の低い(例えば,調整若しくは校正に用いられる,又は一連の操作系列から外れて用いられる。)
表示及び操作機器は,表示領域C又は操作領域C'に置く。
JA.1.3.1.2
二人のオペレータの同時使用
二人のオペレータが何らかの表示及び操作機器を同時に用いる場合には,次による。
− 表示及び操作機器が両方のオペレータにとって主要なものである場合,表示及び操作機器をそれぞれ
のオペレータに別々に用意することが望ましい,又は表示を両者のいずれからもはっきりと見える位
置に置くことが望ましい。
− 両方のオペレータで食い違いが生じないように,いずれのオペレータの操作が優先するのかの順位を
付けることが望ましい。
− 二次的な表示及び操作機器は,それを多用するオペレータの近くに置くことが望ましい。
JA.1.3.2
表示の位置選定指針
表示の位置選定では,行う作業の優先順位を考慮することが望ましい。
そのほかに考慮する必要のある事項は,次による。
− 表示はその重要さに応じて適切な領域に置く,例えば,重要かつ頻繁に読む表示を,領域A(最適視
野)に置く。
39
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 読取りの順番を考慮する。
− 同じ情況自覚を確実に複数のオペレータがもつことができるように,関連する表示は,どのオペレー
タからも見ることができ,かつ,異なる解釈を引き起こさないような位置に置く。
− 異なる機能をもつ表示には,明確に異なる外見をもたせる。
− 類似した表示の置き方は,同じにそろえる。
− 表示を配置する面を,視線に対してできるだけ直角となるように置く。
− 視差,反射,まぶしさ,鏡面反射,濃い陰などを最小限にとどめる。
JA.1.3.3
操作機器の位置選定指針
操作機器の位置選定では,行う作業の優先順位を考慮することが望ましい。
そのほかに考慮する必要のある事項は,次による。
− 重要かつ頻繁に操作する操作機器を,領域A'(最適操作領域)に置く。
− 操作機器を操作する順番を考慮する(一般に,上から下へ,左から右への流れとなるように。)。
− 異なる機能をもつ操作機器には,異なる外見をもたせる。
− 同じ機能をもつ類似した操作機器の置き方は,同じにそろえる。
JA.2
表示及び操作機器の配置
JA.2.1
表示及び操作機器群内の配置−グループ化
表示及び操作機器の配置には,秩序,単純さ,明瞭さ,一様さなどを向上させるようなグループ化の配
慮が必要である。
配置の仕方は,システムとの対話に従事するオペレータの知覚,判断及び推論能力の面で認知的負担を
最小限にするよう試みることが望ましい。
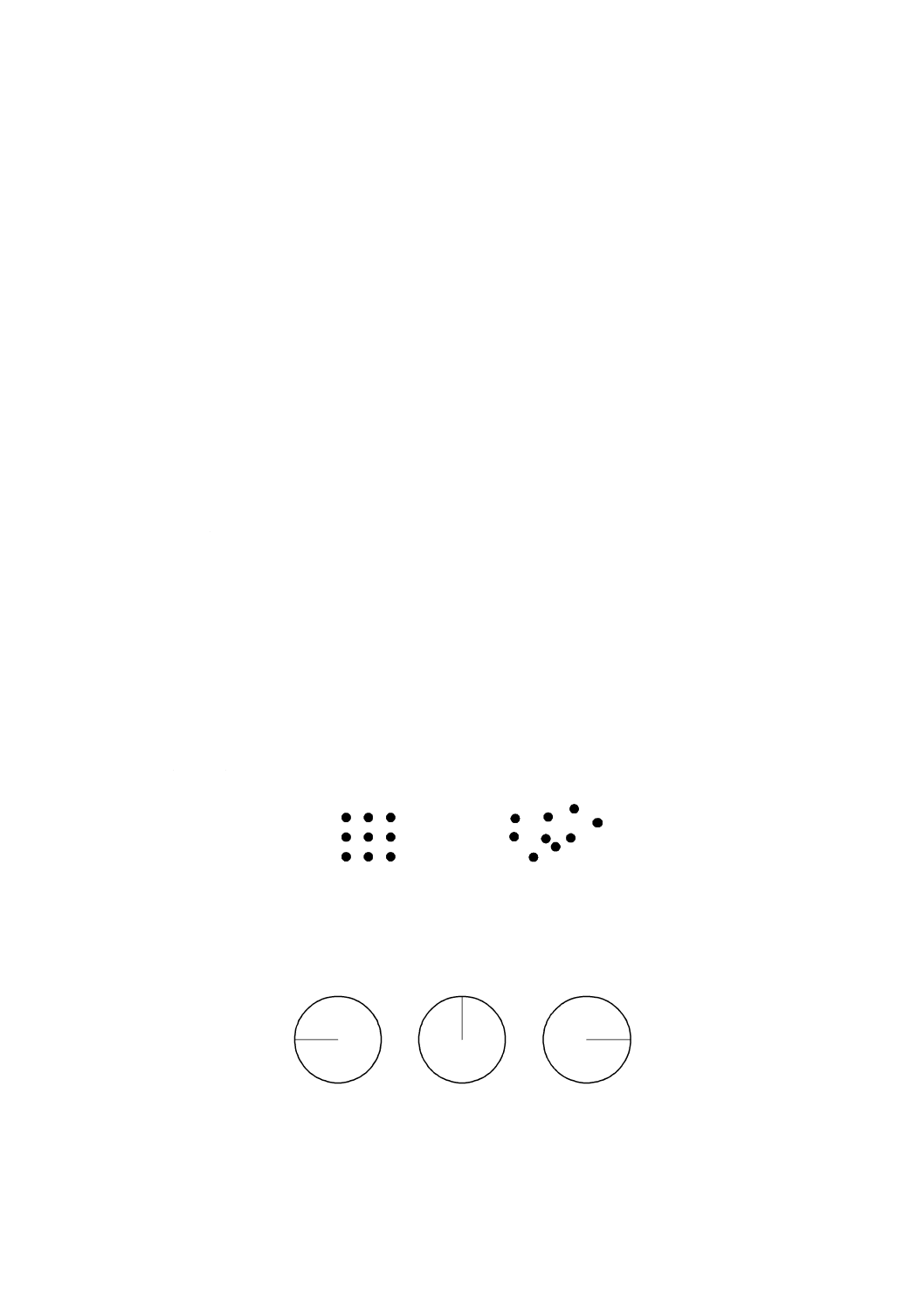
このことの実現の仕方の例としては,次による。
− 縦・横両方向にグループ化する。規則的な配置は,秩序を与え,オペレータが表示及び操作機器の位
置を探すのを助ける。不規則な配置は,使用しにくいが,特定の表示及び操作機器を強調する働きを
もつ(図JA.3)。
a) 規則的な配置
b) 不規則的な配置
図JA.3−グループ化
− 四分円を用いて作業の状況,種類を表す。例えば,“切り”状態を,時計の針の9時の向き,“正常”
状態を,時計の針の12時の向き,及び“最大”状態を,時計の針の3時の向きで表す(図JA.4)。
a) 切り
b) 正常
c) 最大
図JA.4−四分円を用いた明瞭さの向上
ある操作機器とある表示とが連携して用いられるときには,操作する時点のオペレータの手が表示にか
40
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
からないような位置に,操作機器を置かなければならない。
− 右手で操作する操作機器は,関連する表示の下又は右に置かなければならない。
− 左手で操作する操作機器は,関連する表示の下又は左に置かなければならない。
JA.2.2
方向についての整合性の確保
“オペレータが操作機器を操作するときに抱く予想と,システム又は表示の挙動との間の整合性を確保
する”とは,表示及び操作機器,それらを用いたやり取り,並びにシステムの挙動を設計するときに,オ
ペレータの期待をもたらすもの(例えば,文化的慣習,経験,訓練など)について,種々の操作情況のも
とで考慮することをいう。このことは,システムの挙動と表示及び操作機器の挙動との間に,できる限り
大きな相互関係をもたせることを意味する。
表示及び操作機器の配置設計には,オペレータの実際の必要性を考慮に入れながら,オペレータの認知
的負担の軽減と,効率,安全性,及び信頼性の向上とを,次の諸観点から,図ることが望ましい。
− 動作の所要時間及び正確さ。
− 危険な情況を検出及び判別する上での所要時間及び正確さ。
− 反応時間又は意思決定時間。
− 学習の容易さ。
− 危険な情況における,誤りの増加の低減。
− 以前の操作の状態への素早い復元。
− 環境条件の影響。
表示及び操作機器の設計指針は,次の事項を考慮する。
− 訓練を受けなくても,身についている通常の操作活動を採用する。
− 普遍的な及び特定の文化内でのポピュレーションステレオタイプを利用する。
− 動き及び方向の点で明白な関係が把握できるように,表示及び操作機器をオペレータの正面に置く。
− 相反する効果又は目的をもつ複数の操作機器を,特定の働きをもつように一つに統合する。
例 一つの操作機器の操作で,冷気のバルブを開き,暖気のバルブを閉じて,冷却効果をもたらす。
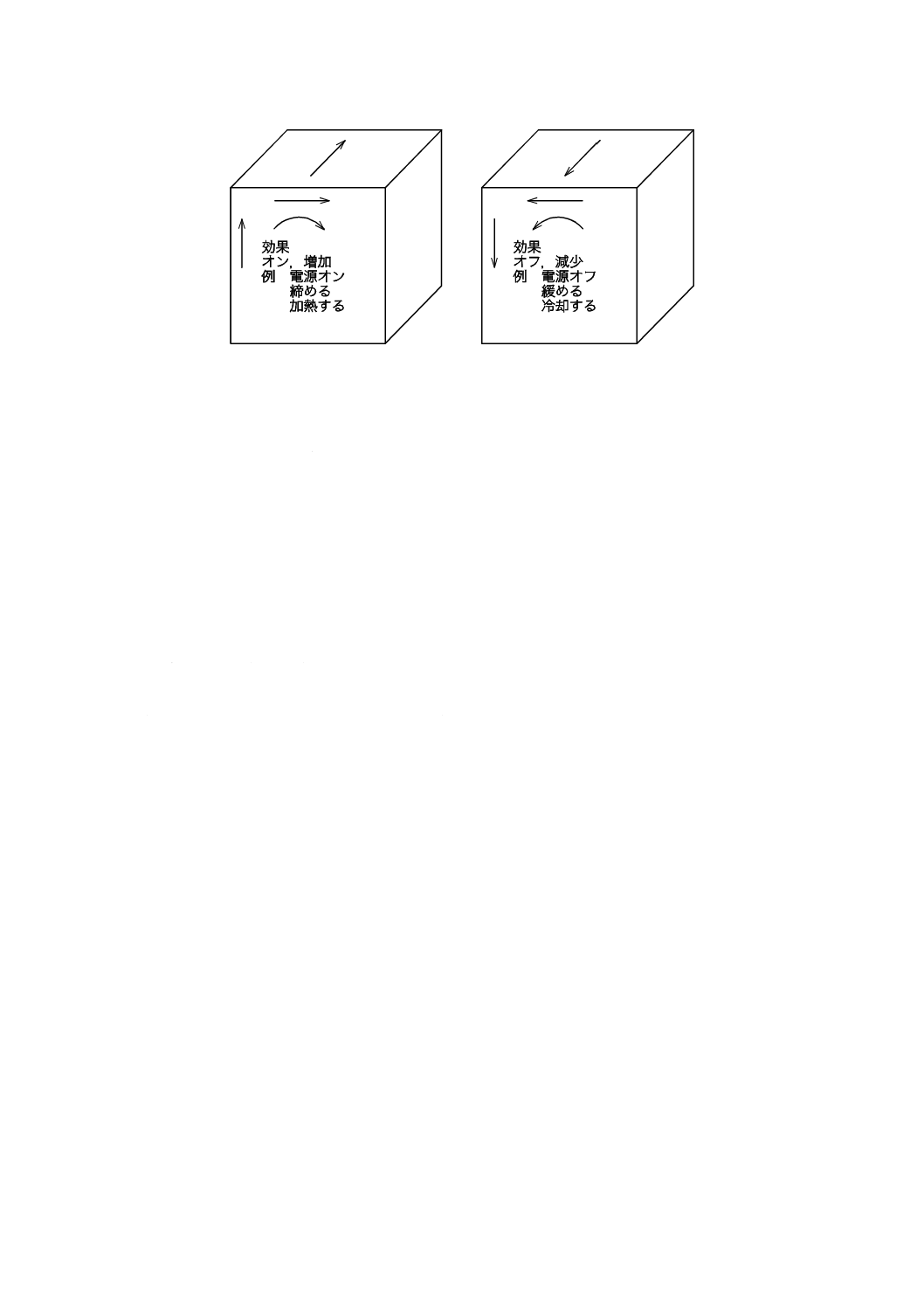
JA.2.3
操作機器とその取付位置とについての指針
操作機器の操作方向とその効果との関係は,次による。
− 操作機器の動き及び動きの結果取る位置は,対応する表示上に表れる応答と類似していなければなら
ない。
− 直線操作の操作機器の,右方へ,前方へ,又は上方への動きは,“入り”又は“増加”を,左方へ,後
方へ,又は下方への動きは,“切り”又は“減少”を,意味することが望ましい(図JA.5)。
− 回転操作の操作機器の動き及びその操作機器と関連する表示の動きは,共に,時計回りは“増加”を,
反時計回りは“減少”を意味することが望ましい(図JA.5)。
41
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図JA.5−操作機器の動きと表示の動きとの間のステレオタイプ
JA.2.4
回転操作の操作機器の向きに関する指針
回転操作の操作機器には,開始位置からどれくらい回しているかを,目で見て,又は手で触れて分かる
ような指示部分を付けなければならない。
JA.2.5
直線操作の操作機器の向きに関する指針
“入り・切り”を直線操作で切り替える操作機器の操作方向は,操作機器の取付面のオペレータに対す
る相対位置に応じて,次による。
− 取付位置が垂直の場合,“入り”又は“増加”には,上方への操作方向を,“切り”又は“減少”には,
下方への操作方向をそれぞれ対応させなければならない(図JA.6)。
− 取付位置が水平の場合,“入り”又は“増加”には,前方(オペレータから離れる方向)への操作方向
を,“切り”又は“減少”には,後方(オペレータに近づく方向)への操作方向をそれぞれ対応させな
ければならない(図JA.6)。
− オペレータの頭高よりも高い位置に,二つの設置区画を傾斜させて置く場合には,低い方の設置区画
の傾きは30°以下とし,高い方の設置区画の傾きは60°以上として,確実に二つの設置区画の区別を
付けられるようにすることが望ましい。操作機器を設置する傾斜面を頭高より高い位置に一つだけ配
置する場合には,45°以下の傾斜角度でもよい。
− 設置区画が垂直から60°以上傾斜している場合,操作機器の操作方向の違いで,混乱を生じるおそれ
があるので,上方へ,又は下方へ動かして操作する操作機器ではなく,右方へ,又は左方へ動かして
操作する操作機器を用いることが望ましい。
− 鈍角で接する幾つかの面からなる一つながりの取付け面(例えば,各面がオペレータを中心とした円
周状に配置されているような)では,全ての操作機器の操作方向を同一にそろ(揃)えなければなら
ない。統一の基準となる面は中央の面とする。
42
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図JA.6−直線操作の操作機器の操作方向
JA.2.6
表示の動きが回転運動,操作機器が回転操作の場合
表示の動きが回転運動,操作機器が回転操作の場合の,操作機器については,次による。
− 尺度が固定していて指針が移動する表示では,操作機器の時計回りの操作は,指針の時計回りの移動
を,反時計回りの操作は,指針の反時計回りの移動を引き起こすものでなければならない[図JA.7 a)]。
− 指針が固定していて,尺度が移動する表示では,操作機器の動きと表示の動きとの間の一般的な標準
は規定されていない(できれば,この種の表示の利用は避けることが望ましい。)。
− 表示が円形の尺度の一部の円周だけを表示する場合,回転操作の操作機器は,円弧の内側又は表示の
下側に置かなければならない[図JA.7 b)及びc)]。
a)
b)
c)
図JA.7−表示の動きが回転運動,操作機器が回転操作
JA.2.7
表示の動きが直線運動,操作機器が回転操作の場合
表示の動きが直線運動で,操作機器が回転操作の場合の,操作機器については次による。
− 回転操作の操作機器と直線運動の表示とが同じ設置区画上にある場合,操作機器の表示に近い部分が
動く方向は,表示の指針の動く方向と同方向でなければならない(図JA.8)。
− 操作機器の動きとそれに対する表示の反応の動きとの間の不調和を避けるために,回転操作の操作機
器は,表示の指針が水平方向に移動する場合には,表示の上側に,表示の指針が垂直方向に移動する
場合には,表示の左側に置いてはならない。
− 時計回りの操作機器の動きは,表示の指針を上方又は右方へ動かすものでなければならない(図JA.8)。

43
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図JA.8−表示の動きが直線運動,操作機器が回転操作
JA.2.8
表示の動きが回転運動,操作機器が直線操作の場合
表示が,操作機器の動きを直接に反映する場合には,次による。
− 表示の指針の移動範囲が180°以上の場合には,回転操作の操作機器を用いるのがよい。
− 表示の指針の移動範囲が180°以下の場合,又は操作機器の動きが指針の動きと並行していて,指針
と操作機器とが同じ方向に動く場合には,直線操作の操作機器を用いるのがよい[図JA.9 a)及びb)]。
a)
b)
図JA.9−直線操作の操作機器
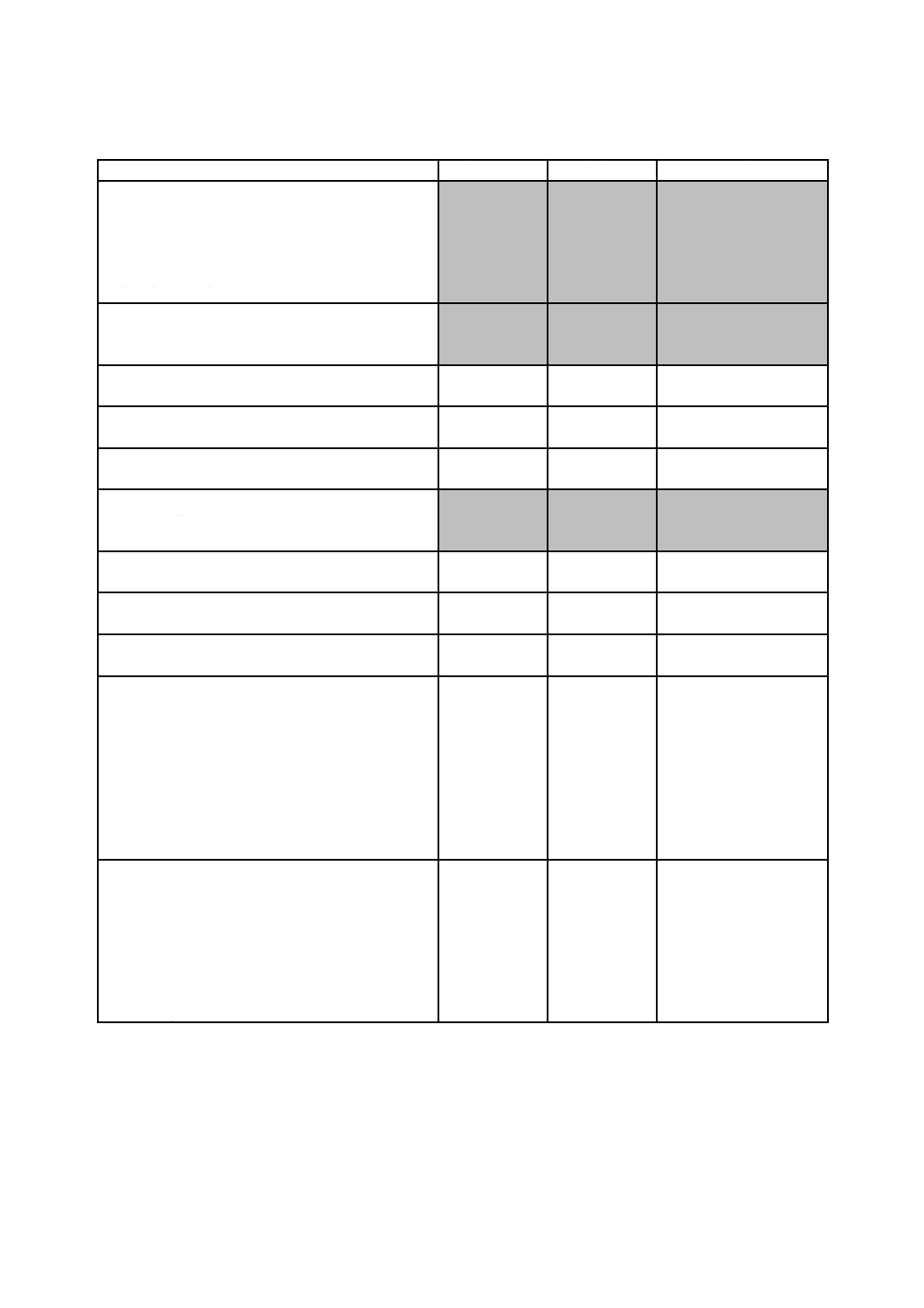
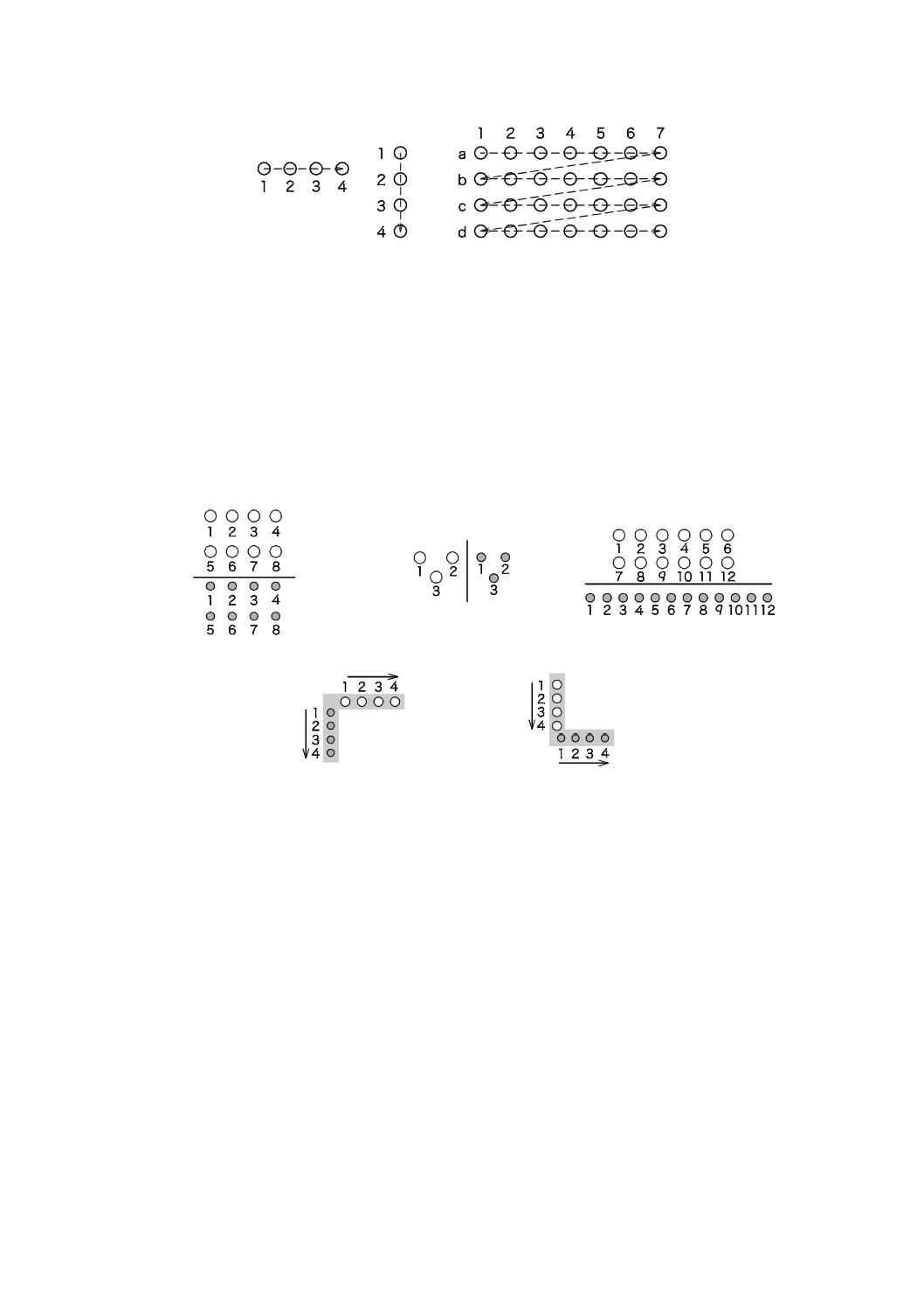
JA.3
複数の表示及び操作機器の順次配置
JA.3.1
順次配置の原則
グループ内の表示又は操作機器を原則に従って順番を付けて並べることは,次のことに役立つ。
− ある特定の順番で,操作機器を適切に操作する(操作順序に外れると安全に関わる場合には,特に重
要となる。)。
− ある順番で,表示を読む。
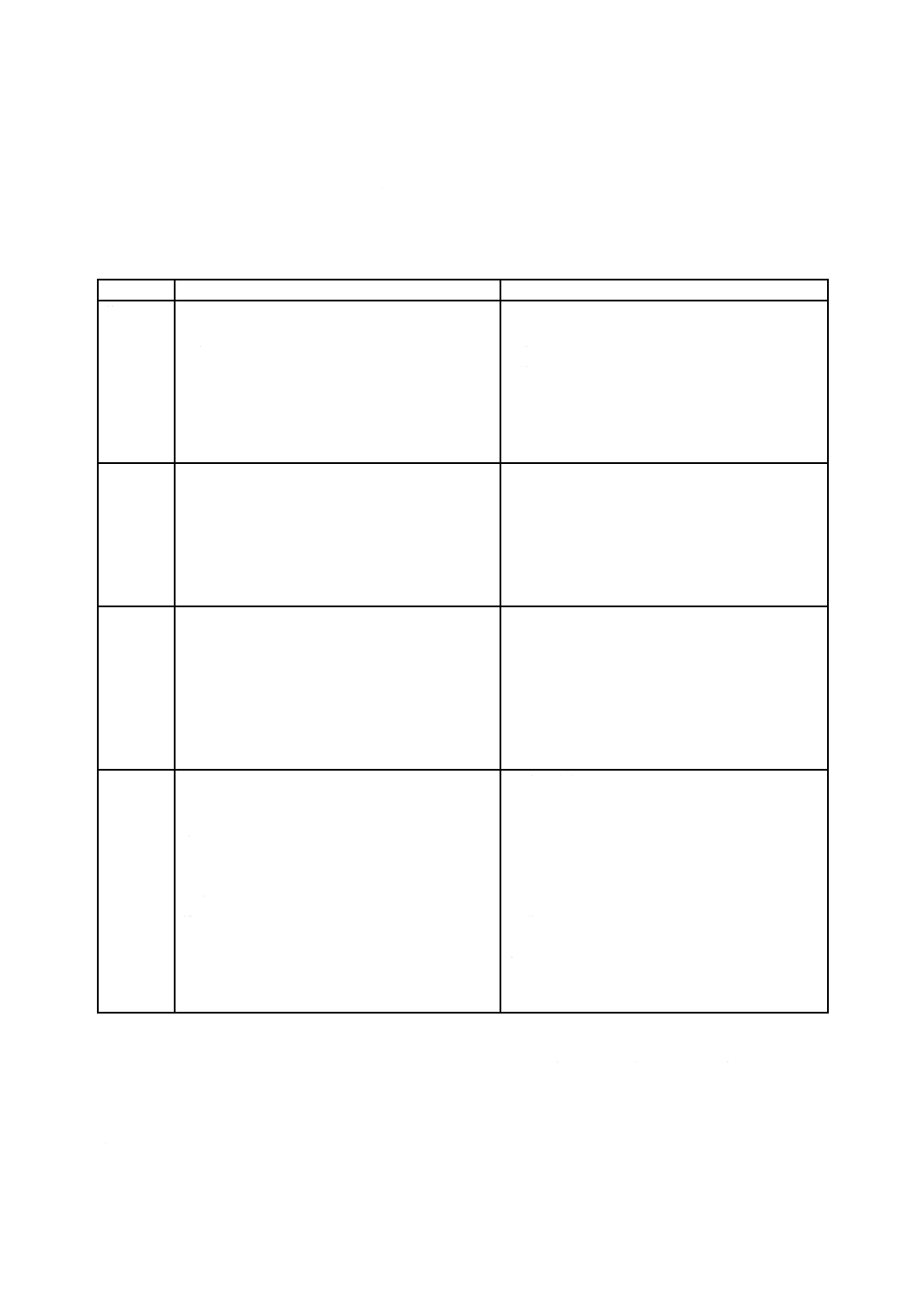
横方向に並んだ表示又は操作機器には,左から右へと,縦方向に並んだ表示又は操作機器には,上から
下へと,それぞれ順番を付けることが望ましい。縦と横との両方向に配列した表示又は操作機器には,先
ず横方向(列)に順番を付け,次に縦方向(行)に順番を付けることが望ましい(図JA.10)。
44
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図JA.10−横方向,縦方向,及び縦・横両方向の配列に対する順番付け
複数の表示及び操作機器を順番に扱う場合には,図JA.11に番号で示す順番に従って並べ,配置するこ
とが望ましい(白丸は表示を,黒丸は操作機器を,それぞれ表す。)。図JA.11のa),b),及びc)は,表示
と操作機器の順番付けを対応させる例を示す。
表示と操作機器との対応を示す見出し及び番号(必要に応じて付けるもの)は,表示及び操作機器上に
付けるか,又はそれらの下の位置に付けなければならない。
表示を横方向に,関連する操作機器を縦方向に配置する,又は表示を縦方向に,関連する操作機器を横
方向に配置する場合には,表示の順番の付け方と操作機器の順番の付け方とは,同じ原則に沿っていなけ
ればならない[図JA.11のd)及びe)]。
a)
b)
c)
d)
e)
図JA.11−表示と操作機器との番号付けの対応
操作上関連をもつ表示と操作機器とを,それぞれ別の区画上に設置する場合,混乱を避けるために,次
によって関連に気付くようにすることが望ましい。
− 表示を設置する区画と操作機器を設置する区画との両方で,表示及び操作機器の相対的位置関係をそ
ろえる。
− 表示を設置する区画と操作機器を設置する区画とを,互いに向かい合うように配置しない。
多数を配置する場合には,表示と操作機器との区別,それぞれの配置,機能の見分けやすさを保ちなが
ら,関連する表示と操作機器とをできる限り近くに置くことが望ましい。
45
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JB
(規定)
推奨配置領域
この附属書は,対応国際規格で引用しているISO 9355-2の図1及び図2を翻訳して記載した。
なお,ISO 9355-2は,現時点で対応するJISは制定されていない。
JB.1
表示及び操作機器の推奨配置領域
垂直面
水平面
A: 推奨視領域
できるだけこの領域を用いる。
B: 容認視領域
推奨視領域が利用できないときに限り用いてよい。
C: 不適視領域
この領域は用いない。
図JB.1−検出作業の場合の推奨配置領域
垂直面
水平面
A: 推奨視領域
できるだけこの領域を用いる。
B: 容認視領域
推奨視領域が利用できないときに限り用いてよい。
C: 不適視領域
この領域は用いない。
図JB.2−監視作業の場合の推奨配置領域
46
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
参照している細分箇条番号を,末尾の括弧内に示す。
[1] JIS Z 8521 人間工学−視覚表示装置を用いるオフィス作業−使用性についての手引
注記 対応国際規格:ISO 9241-11:1998,Ergonomic requirements for office work with visual display
terminals (VDTs)−Part 11: Guidance on usability(IDT)
[2] ISO 9355-1,Ergonomic requirements for the design of displays and control actuators−Part 1: Human
interactions with displays and control actuators
[3] ISO 9355-3,Ergonomic requirements for the design of displays and control actuators−Part 3: Control
actuators
[4] IEC 60447,Basic and safety principles for man-machine interface, marking and identification−Actuating
principles
[5] IEC 61131-1,Programmable controllers−Part 1: General information
[6] Bebner, John & Sandow, B., The effect of scale side on population stereotype, Ergonomics, 19 (5), pp.
571-580, 1976 (4.4.1)
47
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JC
(参考)
JISと対応国際規格との対比表
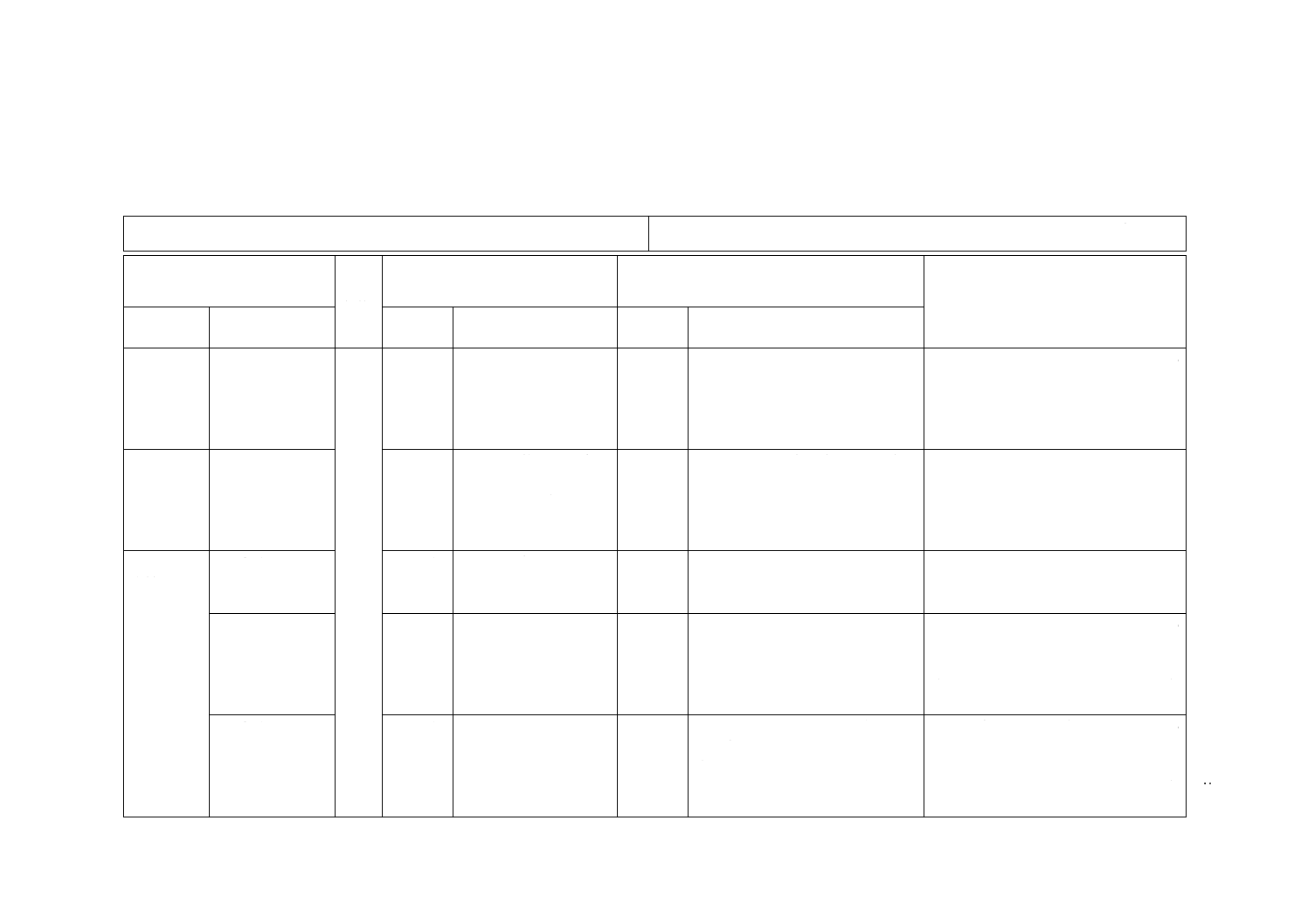
JIS Z 8907:2012 空間的方向性及び運動方向−人間工学的要求事項
ISO 1503:2008,Spatial orientation and direction of movement−Ergonomic requirements
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異の理
由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
2 引用規格
引用規格として記載し
ているISO 9355-4が,
未発行である。
変更
ISO 9355-4を引用規格から,削除
し,該当事項を,附属書JAに記載
した。
引用規格として記載しているISO
9355-4の未発行に対応するためである。
対応国際規格の見直し時に引用すべき
事項を,附属書として収録するよう提案
する。
3 用語及び
定義
3.8
時計回り
一部例外的に反対方向
に動く時計の存在を,国
際規格として考慮し,時
計の針の動く方向を用
いる定義としていない。
変更
我が国では,通常の時計と反対方向
に針が動く時計が用いられること
はないため,時計の針が動く方向を
用いる定義としている。
数字を右から左に表記することがない
我が国では,時計の針の動く方向を用い
る定義をこれからも用いる。
4 空間的方
向性及び運
動方向の設
計
4.3 d) 1)
4.3 d) 1)
JISとほぼ同じ
変更
ISO 9355-2の図1及び図2への参照
を,同じ内容をもつ図JB.1及び図
JB.2への参照へと変更した。
ISO 9355-2に対応するJISが制定され
ていないため。対応するJISの制定後,
それを引用する。
4.3 d) 2)
4.3 d) 2)
JISとほぼ同じ
変更
ISO/DIS 9355-4,4.3への参照を,
同じ内容をもつJA.1への参照へと
変更した。
引用規格として記載しているISO
9355-4の未発行に対応するためである。
対応国際規格の見直し時に,引用すべき
事項を附属書として収録するよう提案
する。
4.3 d) 3)
4.3 d) 3)
JISとほぼ同じ
変更
ISO/DIS 9355-4,4.4への参照を,
同じ内容をもつJA.2への参照へと
変更した。
引用規格として記載しているISO
9355-4の未発行に対応するためである。
対応国際規格の見直し時に,引用すべき
事項を附属書として収録するよう提案
する。
8
Z
8
9
0
7
:
2
0
1
2
48
Z 8907:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異の理
由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
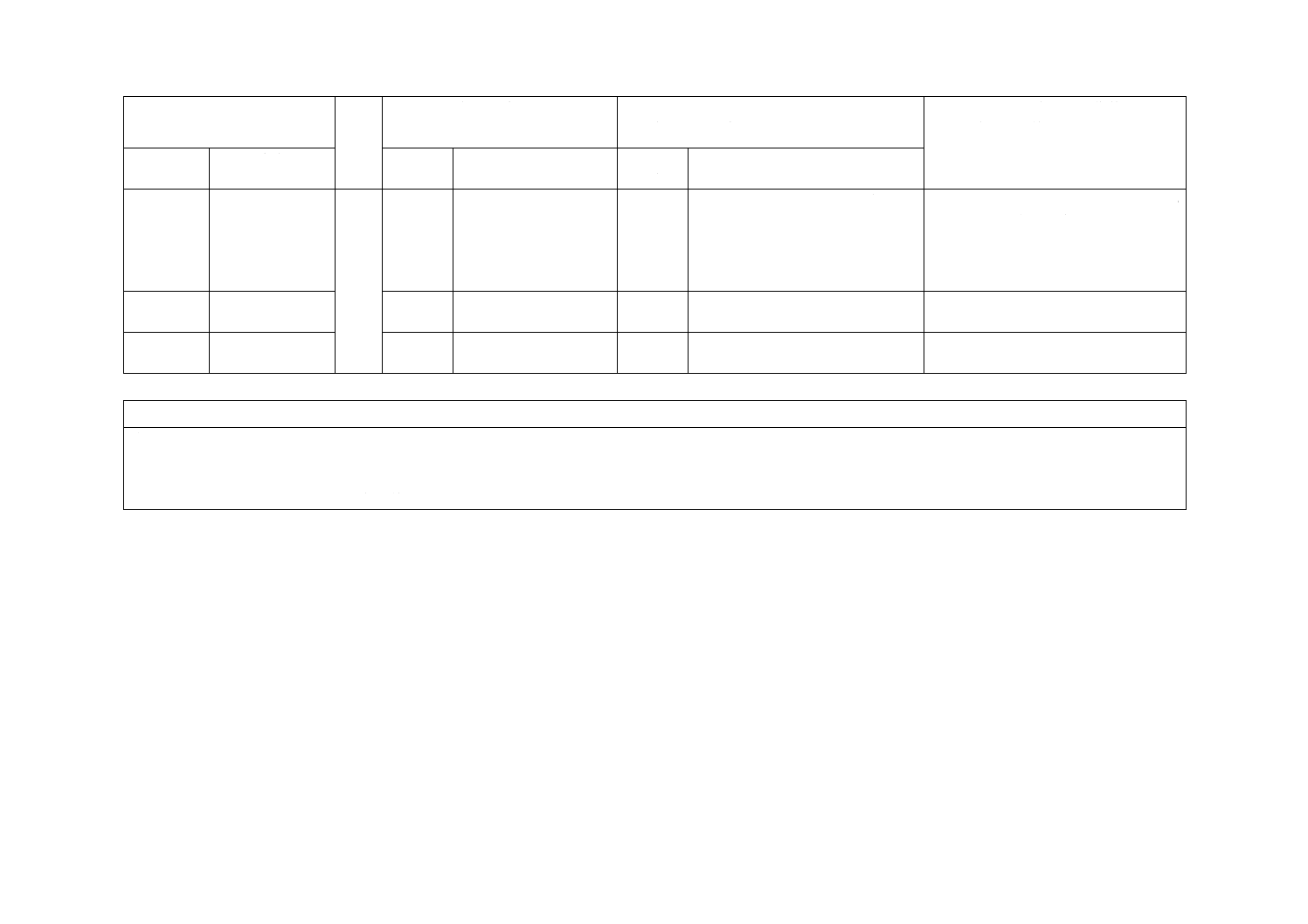
4 空間的方
向性及び運
動方向の設
計(続き)
4.4.5
4.4.5
JISとほぼ同じ
変更
ISO/DIS 9355-4,4.4.1.5への参照を,
同じ内容をもつJA.3への参照へと
変更した。
引用規格として記載しているISO
9355-4の未発行に対応するためである。
対応国際規格の見直し時に,引用すべき
事項を附属書として収録するよう提案
する。
附属書JA
(規定)
附属書JB
(規定)
JISと国際規格との対応の程度の全体評価:ISO 1503:2008,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
8
Z
8
9
0
7
:
2
0
1
2