Z 8827-2:2010
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語,定義及び記号 ·········································································································· 2
3.1 用語及び定義 ················································································································ 2
3.2 記号 ···························································································································· 2
4 原理······························································································································· 3
4.1 装置の構成 ··················································································································· 3
4.2 粒子の移動 ··················································································································· 3
4.3 粒子の測定領域 ············································································································· 3
5 装置の校正 ······················································································································ 5
6 粒子の移動による誤差 ······································································································· 6
7 測定手順························································································································· 6
7.1 試料の調製 ··················································································································· 6
7.2 撮像 ···························································································································· 6
7.3 粒子径分布の測定 ·········································································································· 7
8 報告書···························································································································· 7
附属書A(参考)試料供給方法及び撮像システムの代表例 ··························································· 8
附属書B(参考)推奨する最大粒子径······················································································ 11
附属書C(参考)推奨する粒子速度及び露光時間 ······································································ 14
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 18
Z 8827-2:2010
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人日本粉体工業技術協会(APPIE)及
び財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,
日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権及び出願公開後の実用新案登録出願にかかわる確認について,責
任はもたない。
JIS Z 8827の規格群には,次に示す部編成がある。
JIS Z 8827-1 第1部:静的画像解析法
JIS Z 8827-2 第2部:動的画像解析法
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格
JIS
Z 8827-2:2010
粒子径解析−画像解析法−第2部:動的画像解析法
Particle size analysis-Image analysis methods-
Part 2: Dynamic image analysis methods
序文
この規格は,2006年に第1版として発行されたISO 13322-2を基とし,技術的内容を変更して作成した
日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,動的画像解析法による粒子径が2 mm以下の微粒子の粒子径分布の測定方法について規定
する。粒子は液中又は気中に分散されており,位置制御されて三次元の測定領域(測定体積)へ導入され,
撮像される。粒子画像が得られればJIS Z 8827-1の静的画像解析法によって粒子径分布を測定できるが,
粒子の移動などによって測定誤差が生じる。この規格では,粒子移動などによる誤差,装置の校正方法及
び粒子径分布の測定方法について規定する。また,この規格を用いることによって,動的画像解析法を用
いた測定装置の実用上の測定粒子径範囲を求めることができる。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 13322-2:2006,Particle size analysis−Image analysis methods−Part 2: Dynamic image analysis
methods(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS Z 8120 光学用語
JIS Z 8819-1 粒子径測定結果の表現−第1部:図示方法
注記 対応国際規格:ISO 9276-1,Representation of results of particle size analysis−Part 1: Graphical
representation(IDT)
JIS Z 8824 粒子径測定のための試料調製−粉体の液中分散方法
JIS Z 8827-1 粒子径解析−画像解析法−第1部:静的画像解析法
注記 対応国際規格:ISO 13322-1,Particle size analysis−Image analysis methods−Part 1: Static image
analysis methods(MOD)
2
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3
用語,定義及び記号
3.1
用語及び定義
この規格で用いる主な用語及び定義は,JIS Z 8120及びJIS Z 8827-1によるほか,次による。
3.1.1
動的画像解析法(dynamic image analysis methods)
液中及び空気中で移動する粒子の撮像を行い,得られた個々の粒子の画像を解析することによって粒子
径,形状などを求める方法。
3.1.2
静的画像解析法(static image analysis methods)
試料台(スライドガラスなど)の上に粒子が重ならないように分散された粒子の撮像を行い,得られた
個々の粒子の画像を解析することによって粒子径,形状などを求める方法。
3.1.3
フローセル(flow-cell)
被測定粒子を含む流体が内部を流れる測定セル。
3.1.4
アパチャーチューブ(aperture tube)
粒子を分散した流体の流れが通過する細孔をもつ管。
3.1.5
シースフロー(sheath flow)
被測定粒子を含む流体を特定の測定領域まで導く清浄なさや(鞘)状の流れ。
3.1.6
測定体積(measurement volume)
被測定粒子を含む流れ,照明系及び光学検出系によって決定され,鮮明な粒子画像が得られる画像解析
装置の三次元の測定領域。
3.1.7
撮像装置(image capture device)
マトリクス状又はライン状に光電素子が配置された粒子画像を取り込むための装置。
3.2
記号
この規格で用いる主な記号は,次による。
a
時間tの間の粒子の移動距離
Ai
粒子iの投影面積
b
2値化画像から算出された粒子直径
t
露光時間
v
粒子移動速度
x
粒子直径
xA, i
粒子iの面積相当径
xFi
粒子iの最大フェレー径
ε
静止粒子の直径に対する測定粒子直径の比率
3
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4
原理
4.1
装置の構成
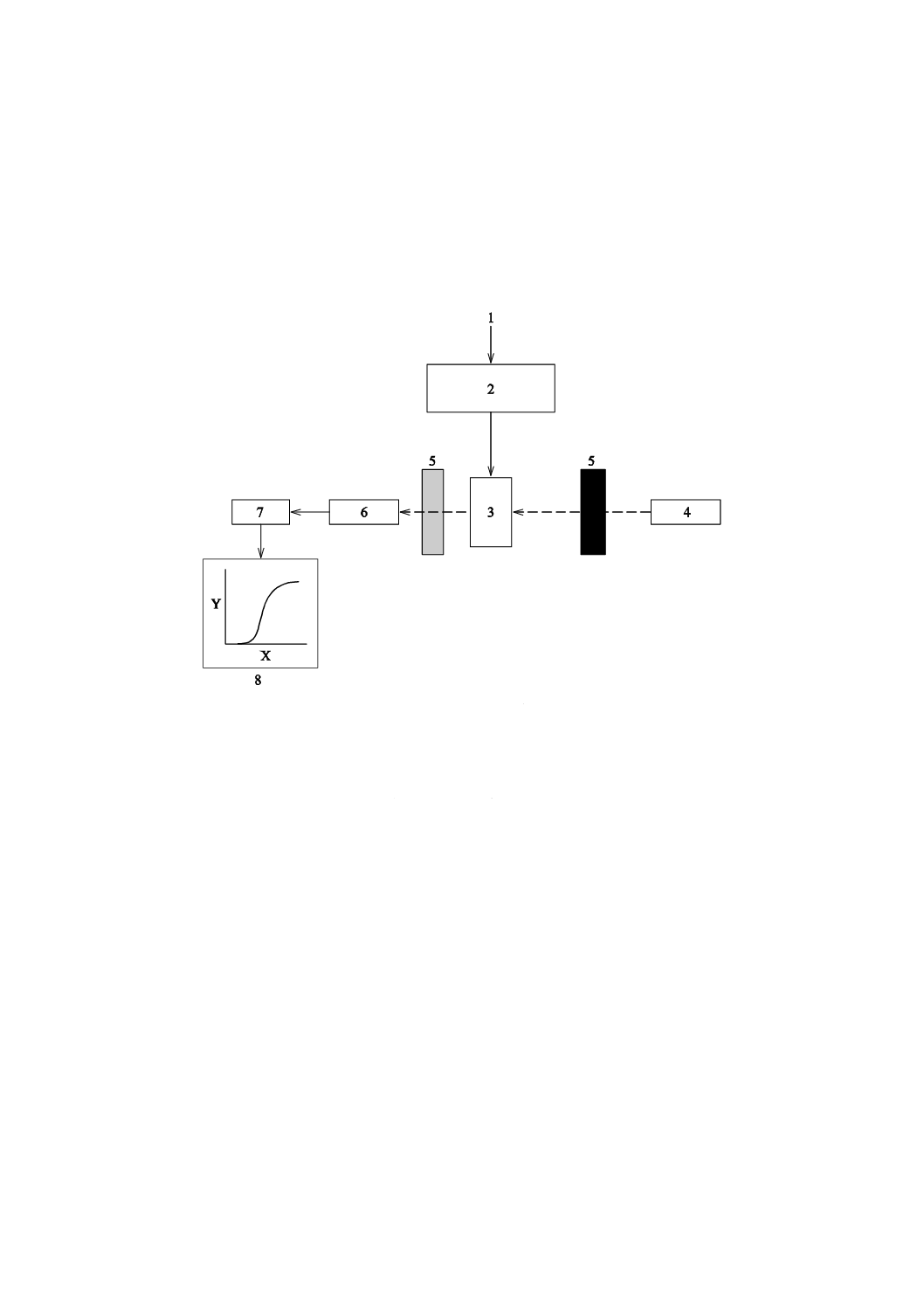
一般的な動的画像解析法の構成を図1に示す。被測定粒子は分散媒中に分散され,粒子の移動を制御す
る装置によって測定体積に導入される。測定体積内の粒子へ光源から光学系を通過した光が照射され,粒
子画像が撮像装置によって記録される。粒子画像データは画像解析装置によって処理され,粒子径分布が
表示装置によって表示される。
1 被測定粒子
2 粒子移動を制御する装置
3 測定体積
4 光源
5 光学系
6 撮像装置
7 画像解析装置
8 表示装置
図1−一般的な動的画像解析法の構成
4.2
粒子の移動
分散された被測定粒子は,次に示す2種類の方法のいずれかによって測定体積を通過する。
a) 流体中に分散した被測定粒子を,流体の移動によって測定体積を通過させる方法。
b) 静止した流体中で被測定粒子を移動させて測定体積を通過させる方法(例えば,自由落下システムに
よる粒子の移動など。)。
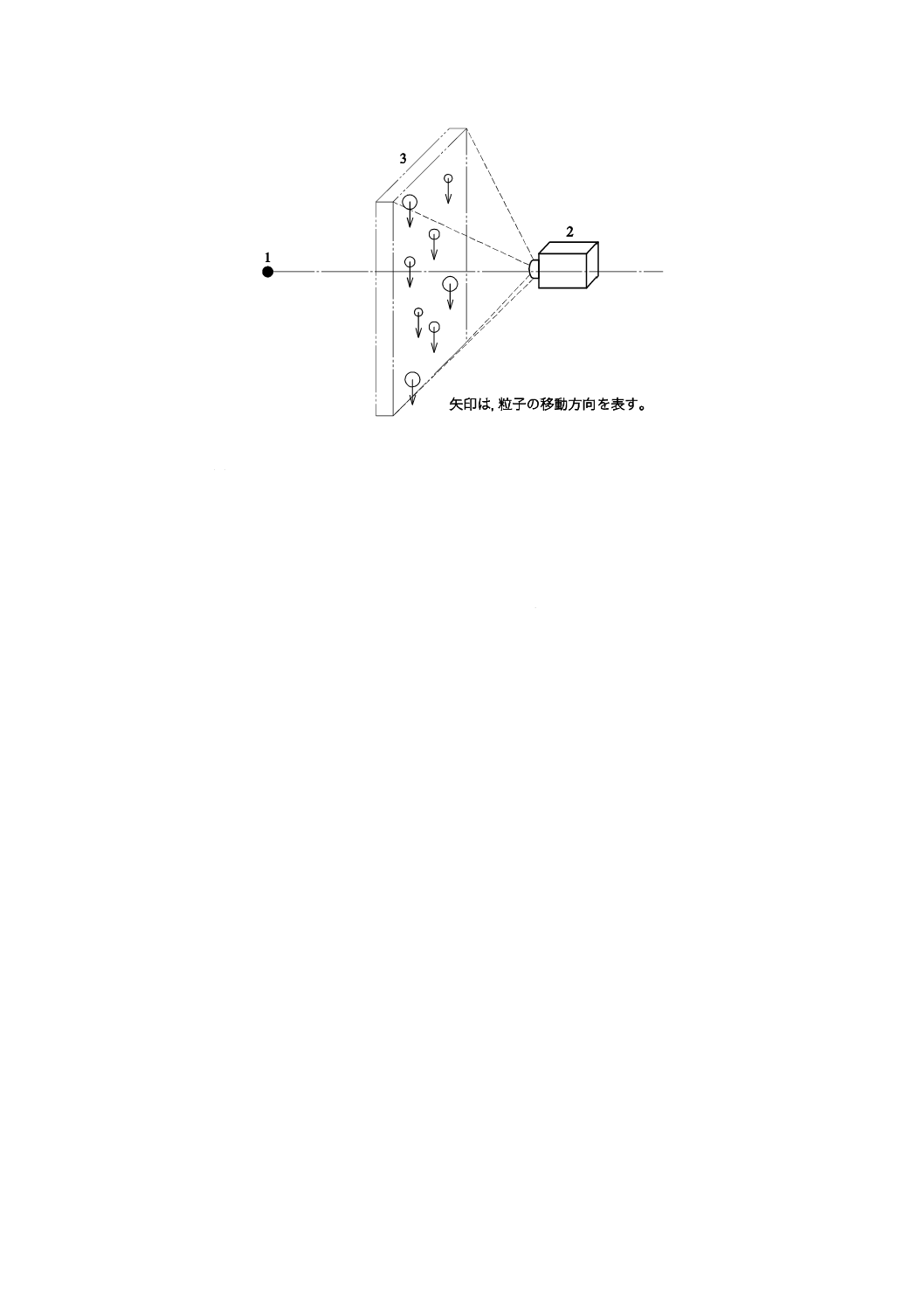
4.3
粒子の測定領域
測定体積は,被測定粒子を含む流れ,照明系及び光学検出系によって決定され,測定体積を通過した被
測定粒子が撮像される。図2に測定体積の一例を示す。
4
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1 光源
2 撮像装置
3 測定体積
図2−測定体積の一例
流体中で移動する粒子の鮮明な画像を得るためには,次のいずれかの方法によるのがよい。
a) 撮像装置の測定体積を通過する粒子の位置を制御する方法。
b) 例えば,フラッシュライトを用いて短時間粒子を照明し,撮像装置の測定領域内の特定の領域を通過
する粒子画像を撮像し,画像処理で焦点位置以外の粒子画像を除外する方法。
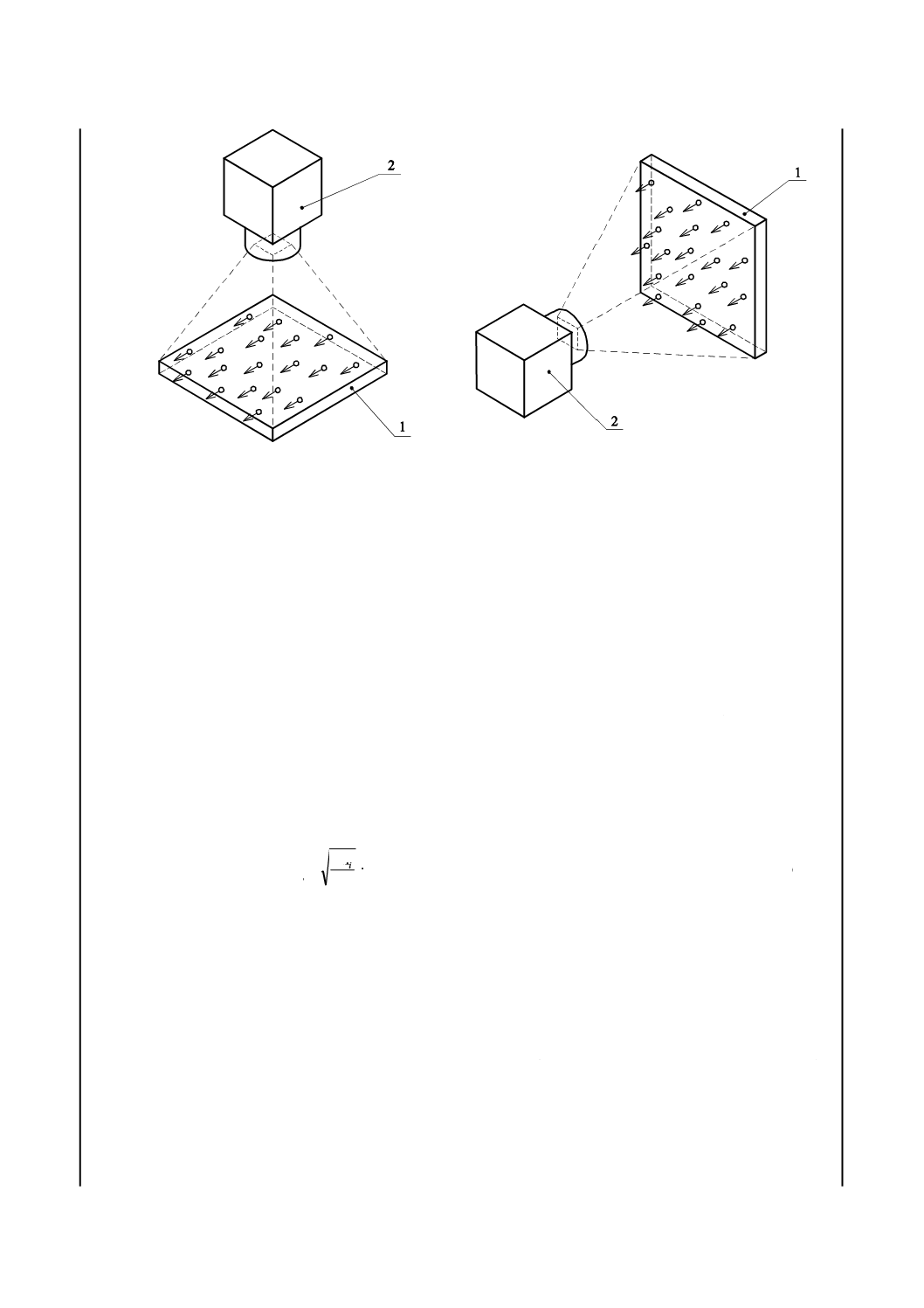
図3に示すように,粒子の観察方向(例えば,粒子の移動方向に対して平行又は垂直)は粒子径又は粒
子形状の解釈に影響する。しかし,この規格では,個々の粒子の二次元情報である投影面積を測定するこ
とを主目的としているため,粒子形状及び観察方向の粒子径測定への影響については言及しない。
5
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 粒子の移動方向と垂直な方向からの観察
b) 粒子の移動方向と平行な方向からの観察
1
測定体積
2
撮像装置
矢印は,粒子の移動方向を表す。
図3−粒子の移動及び観察方向
鮮明な粒子画像を得るために,市販の画像解析装置では様々な工夫がされている。試料供給方法及び撮
像システムの代表例を,附属書Aに示す。
5
装置の校正
装置の校正には,次の二つのパラメータを用いる。粒子周囲長の測定は使用される画像解析システムに
大きく依存するため,校正用のパラメータには適さない。
a) それぞれの粒子投影像の面積,Ai
b) それぞれの粒子のフェレー径,xFi
それぞれの粒子の投影面積は,式(1)によって円相当径xA, iに変換することができる。
π
4
A,
iA
xi=
··············································································· (1)
撮像画像からの粒子径の決定手順はJIS Z 8827-1による。動的画像解析装置システムでは,粒子の大き
さを決定する際に,特に小さい粒子に対して,撮像する間の粒子の移動が深刻な誤差を招くおそれがある。
したがって,画像解析装置システム全体の評価(Verification)は,移動している検定用粒子を用いて行わ
なければならない。検定用粒子の粒子径は,画像解析装置の測定可能な粒子径範囲に含まれる3種類,す
なわち,測定可能な最大粒子径及び最小粒子径の近傍,並びに両者の中間径を採用しなければならない。
このシステムにおいてすべての粒子が測定されるわけではなく,大きな粒子ほど測定フレームの外に粒
子の一部がはみ出す確率が大きくなり,測定されない粒子の割合が高くなる。したがって,測定領域で観
察される最も大きな粒子の粒子径が測定フレームの短辺の長さの1/3を超えない撮像倍率を選択すべきで
ある(附属書B参照)。
通常,現在の画像解析装置は,解析前に画像品質を高めるためのアルゴリズムを備えている。このよう
な画像処理は,測定結果が原画像へトレーサブルな場合においてだけ用いてもよい。
6
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6
粒子の移動による誤差
図3に示すように,粒子の移動方向と平行な方向から観察すれば粒子の移動は測定される粒子の投影面
積に影響しないが,粒子の移動方向と垂直な方向から観察すると粒子の移動によって粒子の投影面積に誤
差が生じる。動的画像解析法によって計測される粒子径の誤差は,この粒子の移動による撮像画像のぼけ
が原因である。この撮像画像のぼけは,光学検出系(レンズ倍率及び撮像装置の解像度)及び照明系だけ
でなく,粒子の移動速度に依存する。
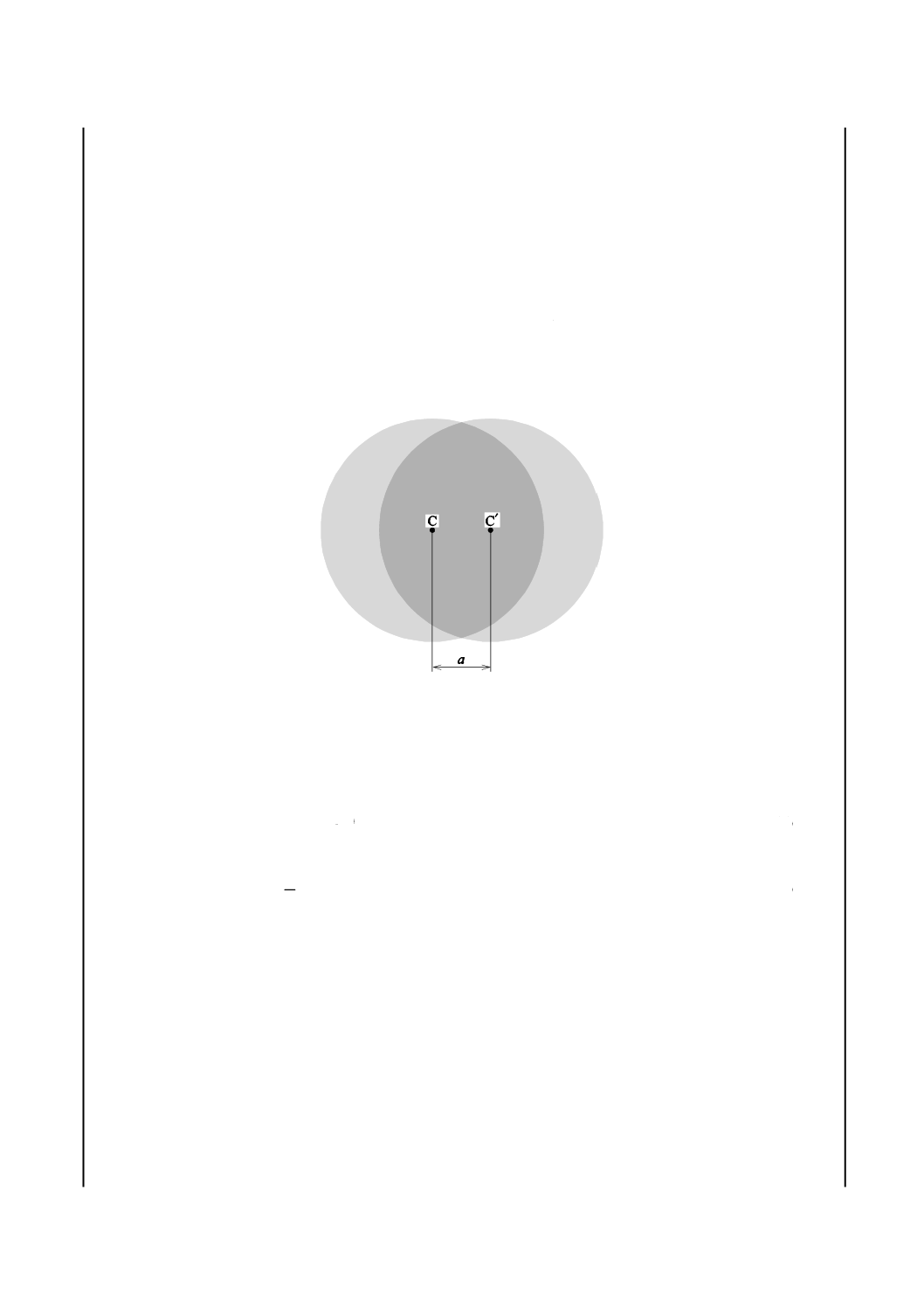
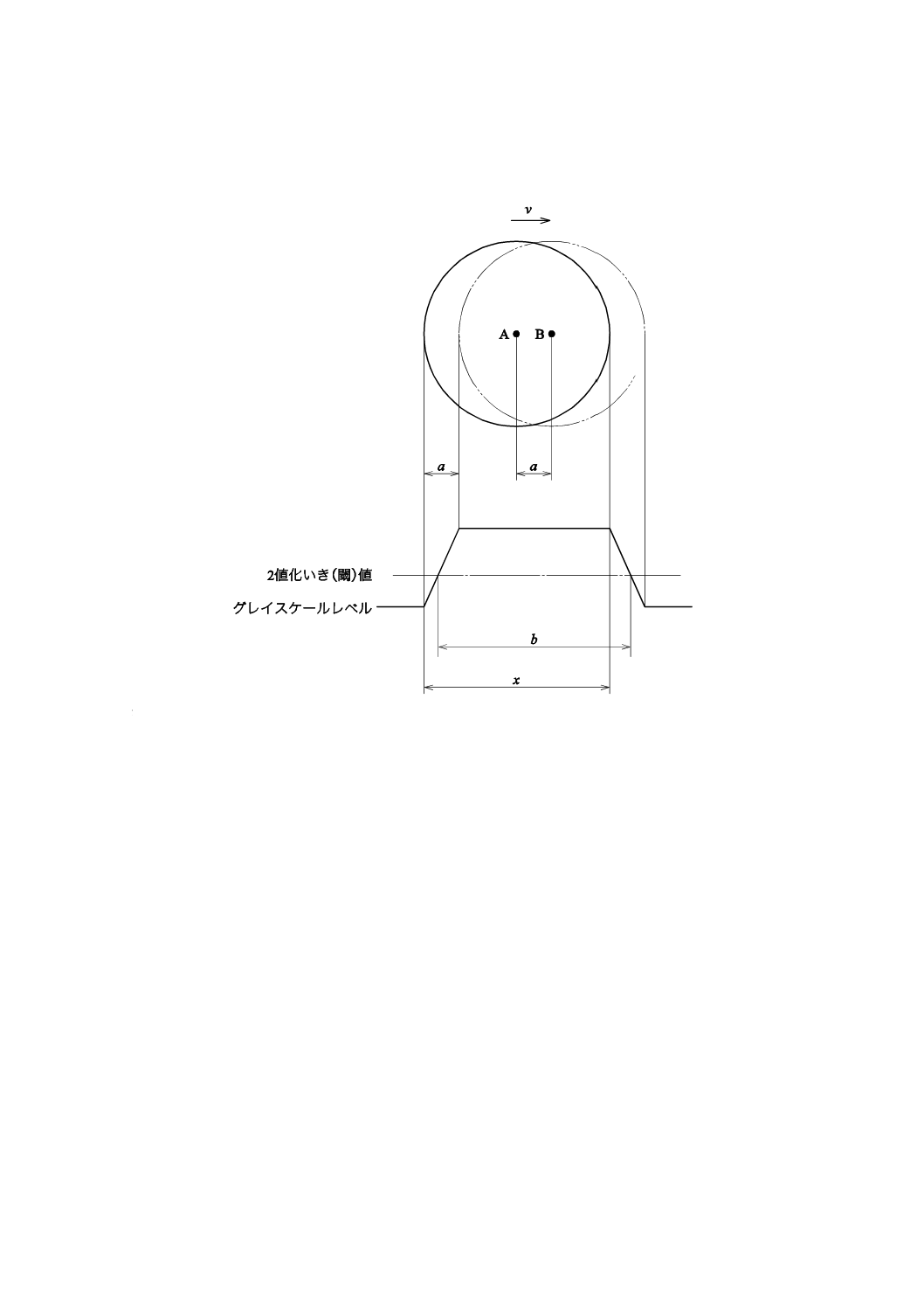
図4に示すように,直径xの球形粒子が速度vで右方向へ移動する場合,粒子投影面積の中心は露光時
間tの間にCからC'へ距離aだけ移動するため,図4のようなぼけのある画像が取り込まれる。ここで,
露光時間tはストロボの照射時間,又はカメラのシャッター開口時間のいずれか短い方の時間で,特殊な
グレイレベルの処理を実施することなしにaは0.5画素を超えてはならない。
図4−粒子の移動による撮像画像のぼけ
しかしながら,測定が大きな粒子(例えば,面積相当径の測定誤差を含め,xが10画素以上)に限定さ
れるならば,粒子径の相対誤差をεとすると,その誤差に相当する粒子の移動距離は,次の式で与えられ
る。
(
)1
2−
=ε
x
a
··············································································· (2)
例えば,εが1.1以下の場合(粒子径の相対誤差が10 %以下に相当する)には,
21
.0
<
x
a
·················································································· (3)
したがって,測定された最小粒子径が10画素の場合には,aは2画素程度となる。詳細は,附属書Cを
参照。
7
測定手順
7.1
試料の調製
分散媒中の粒子個数は粒子像の重なりが発生しないように調製する。液相での粒子の分散法については
JIS Z 8824による。
7.2
撮像
箇条6で計算される誤差によって粒子の移動速度を決定し,撮像条件を設定する。撮像倍率の決定は,
JIS Z 8827-1による。
7
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.3
粒子径分布の測定
JIS Z 8827-1によって,撮像画像から粒子径分布を測定する。
8
報告書
粒子径分布の測定結果は,JIS Z 8819-1に従って報告する。さらに,違う場所及び違う測定者によって
も測定が容易に再現できるように,次の事項を記録するのが望ましい。
a) 試料
− 試料の完全な性状:物質名(化学的組成),バッチ番号及び/又は採取場所,サンプリングの日時な
ど。
− サンプリング手順。すなわち,サンプリング法及び試料分割手順。
− 試料の前処理。例えば,前もってのふるい分け,形式及び条件。
− 超音波:装置の形式,周波数(エネルギー),測定開始までの照射時間及び休止時間
b) 試料の供給法
− 試料供給の形式:湿式,乾式のいずれかを記載
乾式供給の場合
・供給装置の仕様
・試料供給速度(試料移動速度)
・試料分散気体の流量
湿式供給の場合
・分散液:物質名
・分散剤:物質名及び使用量
・試料懸濁液濃度
・試料懸濁液供給流量(試料移動速度)
(シース液を使用する場合)
・シース液:物質名
・シース液供給速度
c) 測定
− 装置のタイプ及び番号
− ソフトウェアのバージョン
− 撮像装置の形式
− 測定体積
− 露光時間
− 最終のバリデーション日
− 測定の開始時間・気温,終了時間・気温
d) 測定者
− 測定場所
− 測定者氏名
8
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
試料供給方法及び撮像システムの代表例
A.1 一般
本体の4.3で述べたように粒子径及び粒子径分布を求めるに当たって,できるだけ正しい粒子径を得る
ための各種の工夫がされている。ここでは実用に供されている代表的な方法と原理とを例示する。
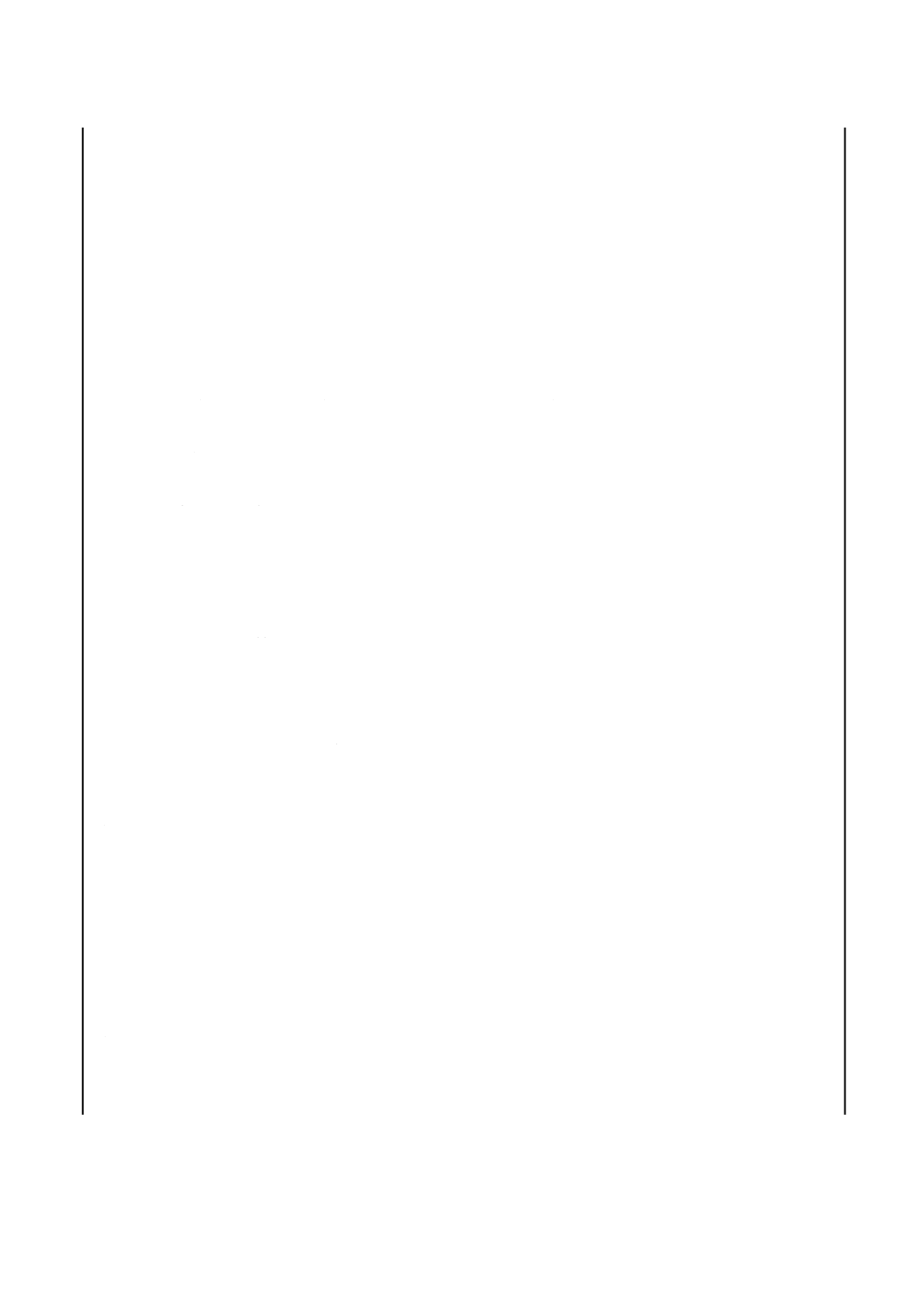
A.2 シースフローシステム
この方法では,被測定粒子を含む試料流れは,試料流れを包み込んで流れるシースフローによって位置
制御される。試料流れ及び試料流れ中の粒子は,撮像装置の焦点面に正確に位置制御されなければならな
い。試料流れのサイズ及び形状は,測定対象粒子径と形状に合わせて制御されるが,試料流れの厚さは測
定体積の厚さより薄く制御しなければならない。撮像装置が移動中粒子の静止画像を得るためには,照明
光が照射される時間内に移動する被測定粒子の移動量が,撮像装置の分解能以下となる短時間の照明光が
測定体積に照射されなければならない。この方法によって,測定体積中に存在するすべての被測定粒子に
鮮明にピントが合った静止画像を得ることができる。この方法を採用することによって,繊維状の粒子は
シースフローの流れ方向,すなわち撮像システムに対して垂直方向に配向する傾向がある。
この方法での実用上の測定範囲は,おおよそ0.2〜400 μm程度である。しかし,フローセル及び試料送
液ノズルなどに特別な工夫を施すことで,1 mm程度の粒子を測定することが可能である。
図A.1は,シースフローシステムを図解したものである。
1
試料
2
試料送液ノズル
3
カメラ
4
レンズ
5
コアフロー
6
照明光
7
シースフロー
8
測定体積
図A.1−シースフローシステム
9
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
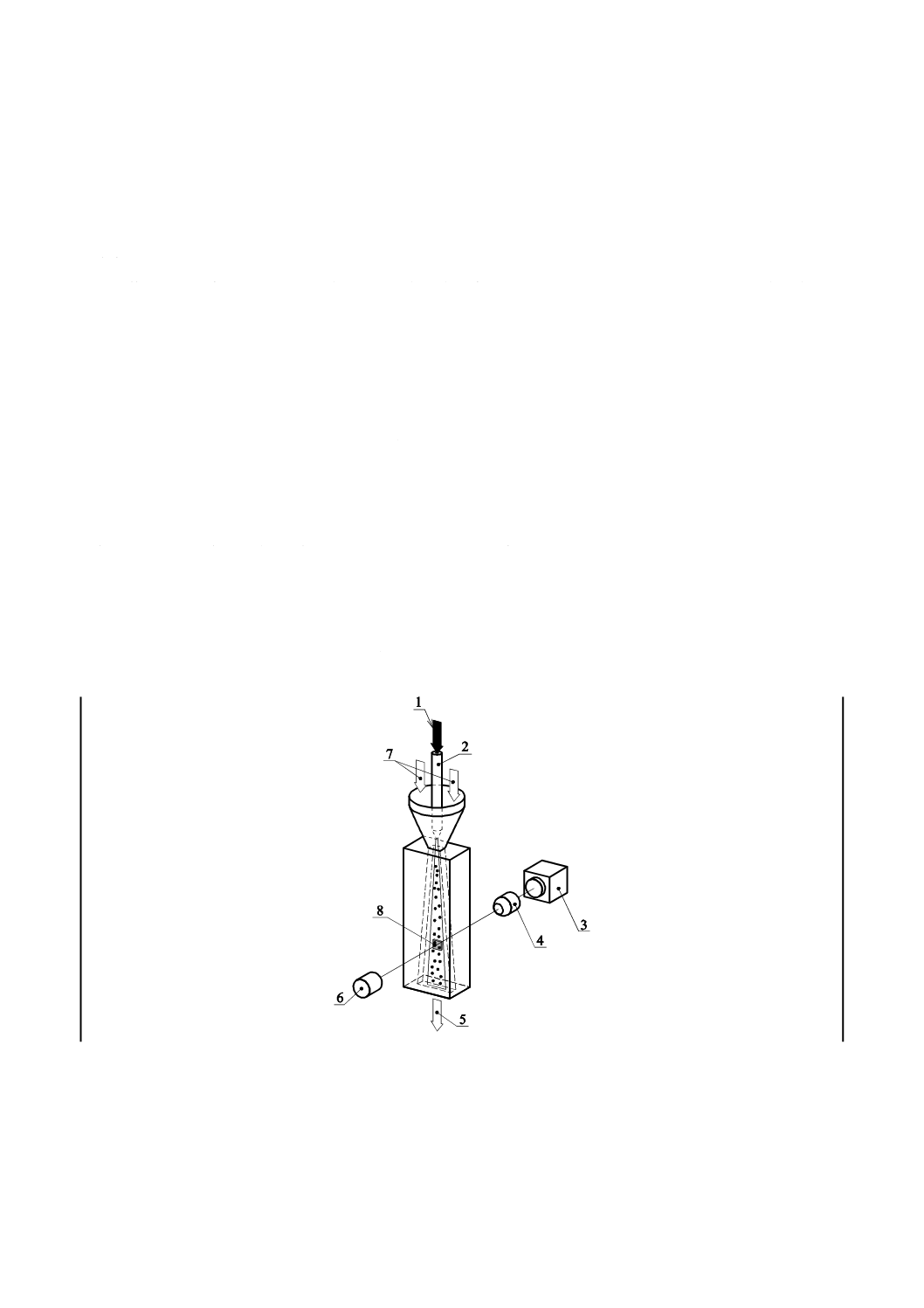
A.3 電気的検知帯システム
この方法では,撮像装置の焦点をアパチャーチューブの細孔部に合わせる。電気的検知帯と呼ばれる細
孔の両側に配置された電解液中の二つの電極の間には,電気信号が発生する。この検知帯を粒子が通過す
ると電極間のインピーダンスが変化し,それによって発生した短時間の電気パルスをストロボ光のトリガ
信号とする。撮像装置は,光学システムの焦点面を粒子が横断するその瞬間に粒子画像を撮像する。
電気的検知帯法を用いることによって,照明光が照射されるごとに1粒子に対して1画像が撮像される。
粒子画像は常に撮像面の特定位置で撮像される。偶発的なエラーが発生しない限り,相互に重なりあった
り,撮像面の外側の粒子が撮像されることはない。この方法を使用する場合,粒子の配向と粒子の流れ方
向は撮像装置の光軸に対して垂直方向になる。測定粒子径範囲は,1〜120 μmである。
図A.2は,電気的検知帯システムを図解したものである。
1
カメラ
2
光学システム
3
粒子の分散した電解液
4
アパチャー
5
ストロボ照明装置
6
トリガ信号
7
電気パルス
図A.2−電気的検知帯システム
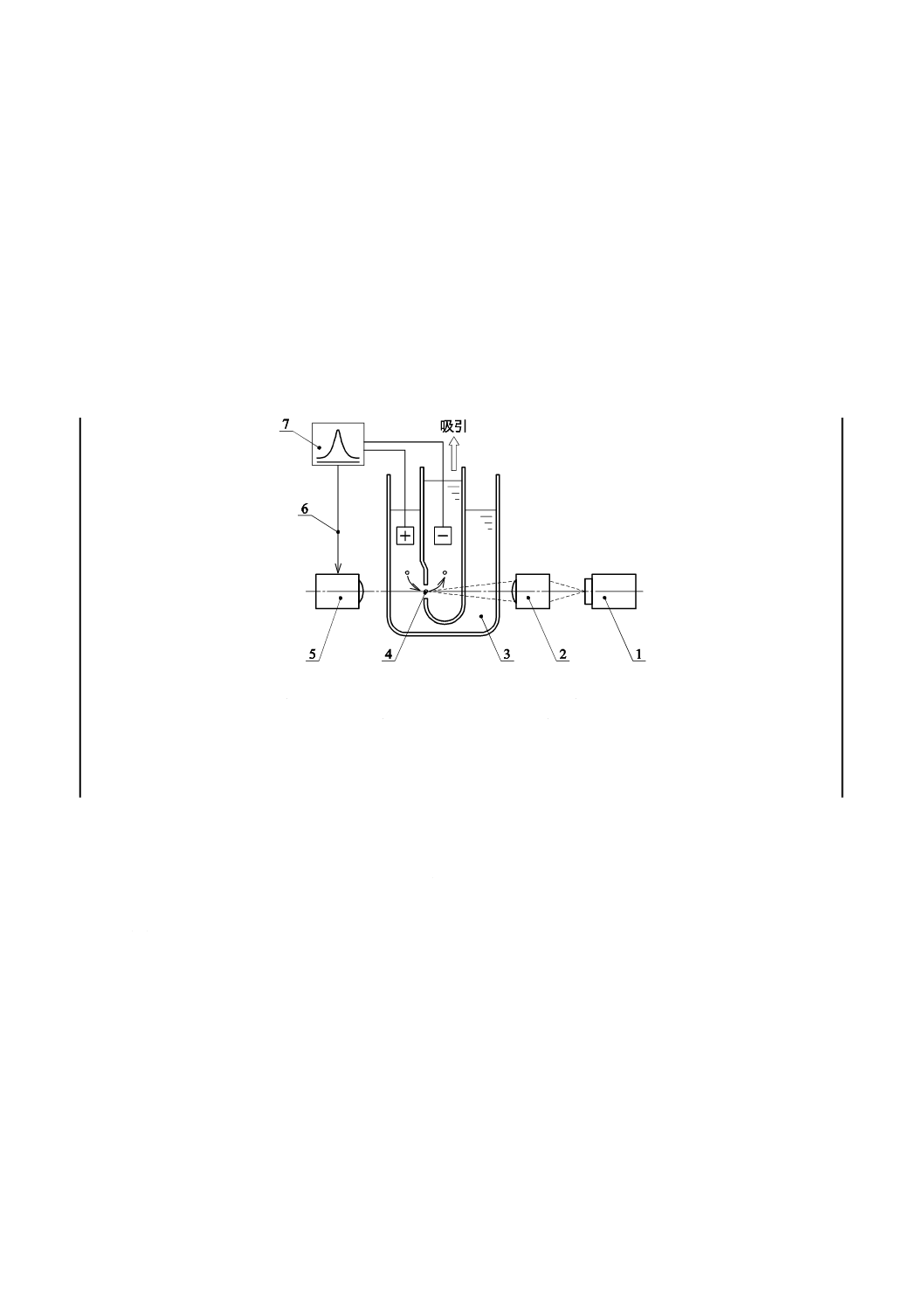
A.4 粒子循環法
この方法では,粒子を分散した液体を連続的に循環し,試料粒子すべてを対象に測定する。測定時の液
体の循環速度は,粒子径及び形状に合わせて調節する。図A.3は,粒子循環法を図解したものである。ピ
ントのぼけた粒子は,画像処理技術を用いて除外することができる。長時間測定することによって,測定
粒子径範囲20〜2 500 μmの粒子すべてを測定することができる。
10
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
照明光
2
カメラ
3
測定体積
図A.3−粒子循環法
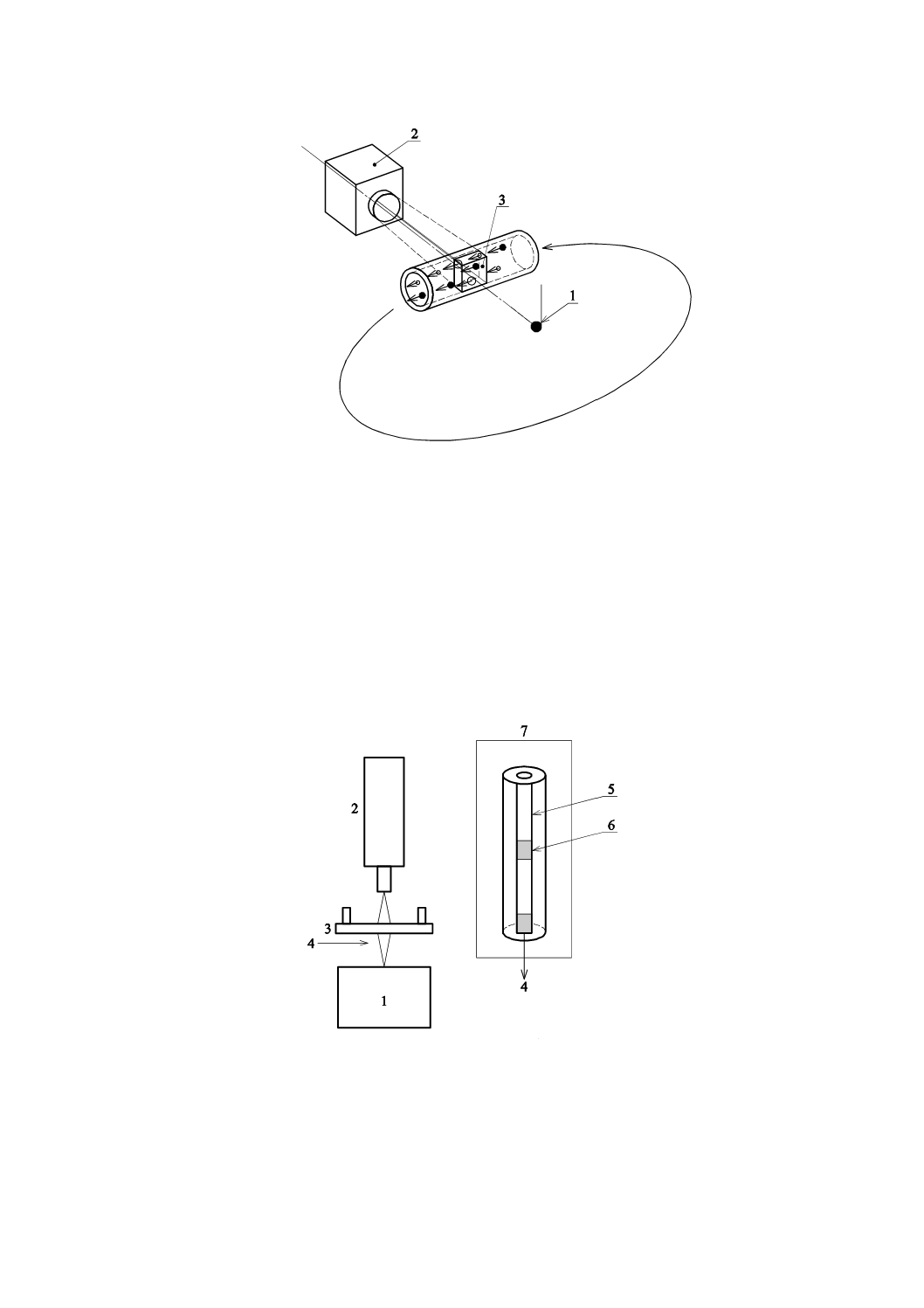
A.5 動的ストップフロー画像解析法
この方法では,試料懸濁液をフローセルに流すとき,撮像時に瞬間的に流れを静止させる。粒子が撮像
されなかったり,同じ粒子が2度撮像されないように,各画像は前回の撮像から一定時間後に撮像される。
実用的な測定粒子径範囲は2〜70 μmで,密度の大きな粒子を測定する場合には十分に粒子をかくはんす
る必要がある。動的画像解析法とはいえ撮像の瞬間には粒子が移動していないので,画像のぼけの影響が
少ない特徴がある。
図A.4は,動的ストップフロー画像解析法を図解したものである。
1
照明光
2
撮像装置
3
フローセル
4
試料流れの方向
5
撮像がスキップされる領域の粒子
6
撮像される粒子
7
フローセル上端
図A.4−動的ストップフロー画像解析法
11
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
推奨する最大粒子径
B.1
一般
二次元の測定フレーム境界上に存在する粒子の計数を補正するため,一般に二つの方法が使用される
[JIS Z 8827-1の6.3.3(測定領域の境界上に存在する粒子)参照]。それぞれの方法において,計数の補正
による誤差を少なくするために,測定対象とする粒子の最大粒子径を測定フレームの短辺長の30 %以下に
選ぶことが望ましい。
B.2
ガードライン原理
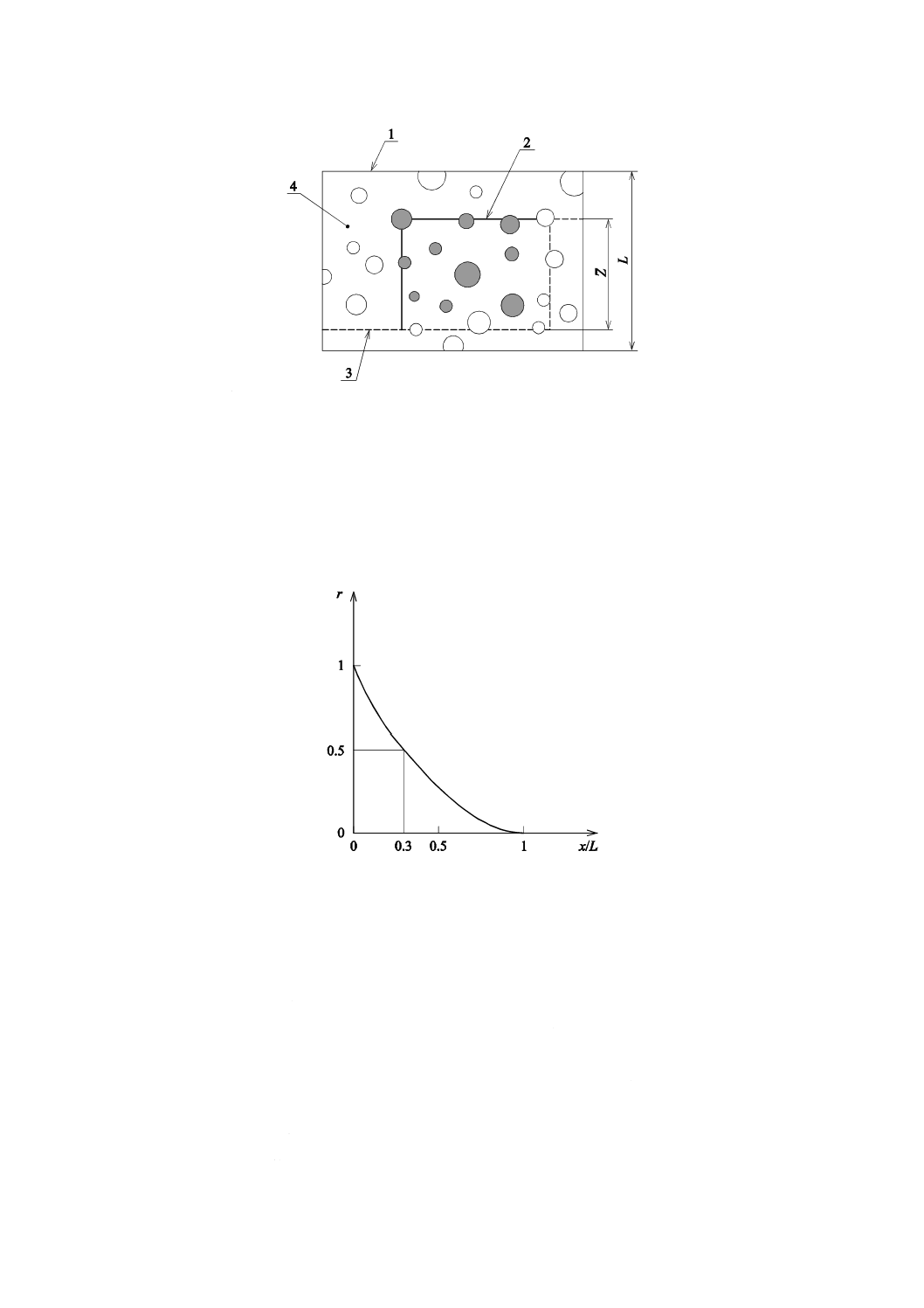
下辺と右辺とを除外縁辺と定義した長方形の測定フレームを使用する。測定フレーム内に一部又はすべ
てが入っていて,除外縁辺に接触していない粒子を測定対象とする。除外縁辺又はそれらの拡張線(ガー
ドライン)に触れる粒子は,計数から除外する。これをガードライン原理と呼ぶ。測定対象とする粒子が
視野の端部で切れないように,長方形の視野と測定フレームのそれとの間には十分に広いスペースを設け
るべきである。図B.1に示す,短辺長がLである長方形の視野と短辺長がZである長方形の測定フレーム
について考えた場合,測定対象粒子が視野の端部で切れないためには,粒子径はL−Z以下とするのがよ
い。すなわち,
x≦L−Z ················································································ (B.1)
測定フレームと視野とが相似形であるとき,両者の面積の比rは式(B.2)で与えられる。
2
2
L
Z
r=
················································································· (B.2)
式(B.1)と式(B.2)とを組み合わせると,式(B.3)が得られる。
2
1
−Lx
r≦
··········································································· (B.3)
式(B.3)及び図B.2は,測定フレームと視野との面積の比rと,ガードライン原理で測定される粒子径x
の視野の大きさとに対する関係を示している。図B.2に示すように,粒子径が視野の短辺長の30 %以下で
あれば,測定フレームの面積を視野の面積の50 %以上にとることができるので,測定の効率化が図られる
といえる。
12
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
視野
2
測定フレーム
3
ガードライン
4
二つの領域の上左角の間の十分なスペース
L
視野の短辺長
Z
測定フレームの短辺長
注記 図中の灰色の粒子は測定対象であり,白色の粒子は測定から除外される。
図B.1−ガードライン原理
r
測定フレームと視野との面積の比
x/L
視野の短辺長Lに対する粒子径xの比
注記 同じ曲線が,測定フレーム内に粒子が存在する確率にも用いられる(図B.4参照)。
図B.2−最大測定粒子径と,測定フレームと視野との面積比の関係
B.3
額縁補正法(マイルズ−ランテジュール法)
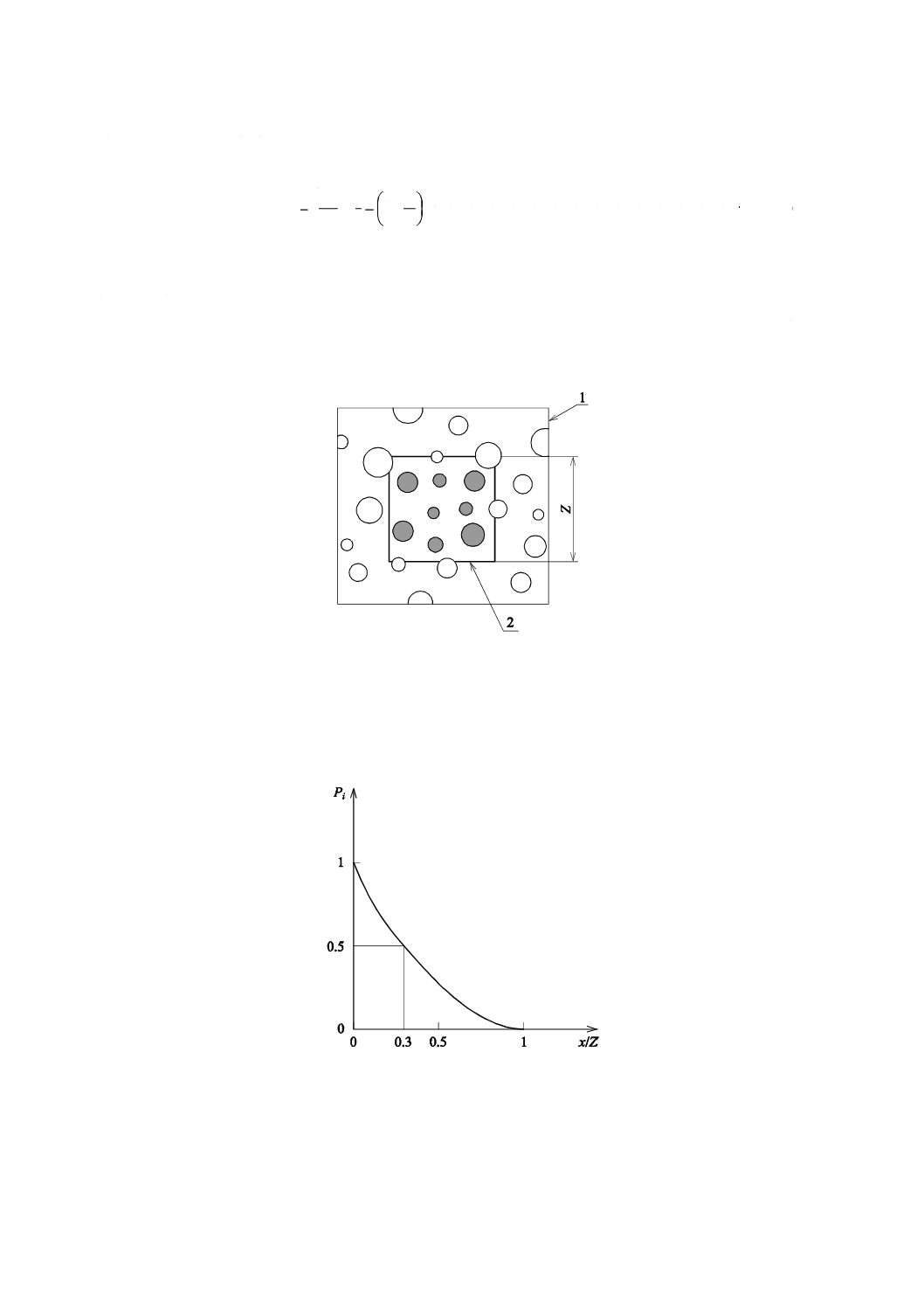
粒子全体が測定フレームに入っているすべての粒子は計数の対象となる。測定フレームの境界上の粒子
と測定フレームの外側の粒子はすべて除外される(図B.3参照)。測定フレーム内部に粒子が存在する確率
は粒子径が大きくなるにしたがって減少する。粒子iが測定フレーム内に存在する確率Pi(マイルズ−ラ
ンテジュール係数)は粒子径と測定フレームの大きさとによって決定される。測定フレーム内で計数され
る粒子の数は,粒子径に依存する確率Piによって重み付けするのがよい。非球形粒子では,マイルズ−ラ
ンテジュール係数Piの計算において,粒子の最大長が粒子径として,長方形の測定フレームの短辺長が辺
13
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
長としてそれぞれ選択される。
一辺の長さがZの正方形の測定フレームを考えた場合,粒子径xの粒子のPiは,式(B.4)で計算される。
(
)
2
2
2
1
−
=
−
=
Z
x
Z
x
Z
Pi
······························································ (B.4)
確率Piと粒子径の測定フレームの辺長に対する比との関係は図B.4に示すようになる。粒子径が視野の
大きさの30 %以下であれば,計数粒子数に対する補正係数を50 %以上にとることができるので,測定の
信頼性が増すといえる。
測定フレームを使用しない測定(例えば,観察領域が測定フレームと同一の場合など)は,額縁補正法
に従う。
1
視野
2
測定フレーム
Z
測定領域の辺長
注記 図中の灰色の粒子を測定し,白色の粒子は測定しない。
図B.3−測定フレーム内の粒子
Pi 測定フレーム内に粒子が存在する確率(マイルズ−ランテジュール係数)
x/Z 正方形の測定フレームの辺長Zに対する粒子径xの比率
注記 同一の曲線が,最大測定粒子径と,測定フレームと視野との面積比の関係に使用される(図B.2参照)。
図B.4−測定フレーム内に粒子が存在する確率
14
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
推奨する粒子速度及び露光時間
動的画像解析法では,移動する微小粒子を測定するために特別な注意が必要である。例えば,粒子径x
(画素)の球形粒子が速度v(画素/s)で移動する場合,露光時間をt(s)とすると,その間に粒子面積の
中心は,次の式(C.1)で与えられる距離a(画素)だけ移動する。
a=v×t ················································································· (C.1)
撮像装置によって移動する球形粒子の粒子像を多値画像として取り込み,その後,あるいき(閾)値に
よって2値化画像へ変換すると,その形状は円よりもむしろ引き延ばされた長円形状となる(図4及び図
C.1参照)。したがって,測定される移動方向の粒子径b(画素)は,使用するいき(閾)値によって変化
し,(x+a)と(x−a)との間の値をとる。2値化後の粒子径の最大寸法は,式(C.2)で表される。
b=x+a ················································································ (C.2)
動的な粒子測定の結果と静的な粒子測定の結果とを一致させるために,式(C.3)に示すようにxとbとの
差aを0.5画素以下とすることが望ましい。
a=v×t<0.5 ·········································································· (C.3)
しかしながら,測定が大粒子(例えば,面積相当径の測定誤差を含め,xが10画素以上)に限定される
ならば,xとbとの差(すなわちaに等しい)は,式(C.4)〜(C.7)によって算出することができる。
π
4
real
real
,
A
xA
=
=x ································································· (C.4)
2
real
4πx
A
×
=
··········································································· (C.5)
π
4
meas
meas
,
A
xA
=
····································································· (C.6)
b
x
A
×
×
=4π
meas
········································································ (C.7)
ここで,xA, real,xA, measは静止粒子と測定粒子の面積相当径,A real,A measは静止粒子と測定粒子の投影面
積である。
静止粒子の直径に対する測定粒子の直径の比εは,式(C.8)によって得られる。
x
a
x
a
x
x
b
x
x
A
A
+
=
+
=
=
=
1
real
,
meas
,
ε
················································· (C.8)
この等式は,また,式(C.9)で表現することができる。
(
)1
2−
=ε
x
a
············································································ (C.9)
例えば,εが1.1以下の場合(粒子径の相対誤差が10 %以下に相当する),式(C.9)は式(C.10)となる。
21
.0
<
x
a
·············································································· (C.10)
したがって,測定された最小粒子径が10画素の場合には,式(C.11)に示すように,aは2画素程度とな
る。
a=v×t<2.1 ········································································· (C.11)
15
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図C.1は円形粒子画像といき(閾)値との関係を,また,図C.2は非球形粒子について,粒子移動の測
定される粒子面積への影響を示す。
a
露光時間における移動距離(画素)
b
2値化粒子画像の測定粒子径(画素)
v
粒子の速度(画素/s)
x
粒子の直径(画素)
A
撮像開始時の粒子の中心
B
撮像終了時の粒子の中心
図C.1−移動する粒子の多値画像と2値化後の測定粒子径との関係
16
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
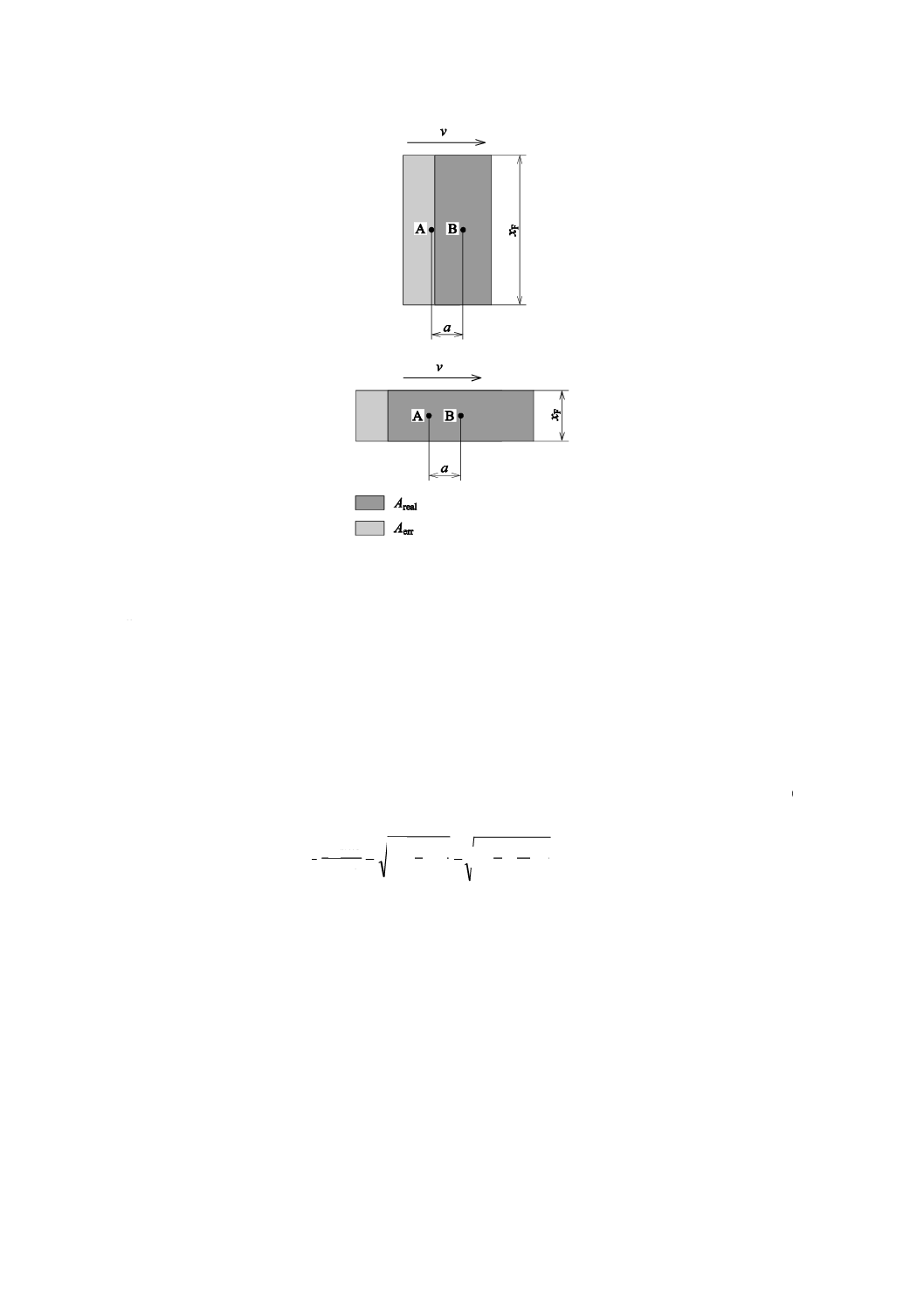
Aerr
粒子移動による最大面積の偏い(倚)
Areal 静止粒子の投影面積
a
露光時間における移動距離(画素)
v
移動方向とその速度(画素/s)
xF
移動方向に垂直方向の投影領域のフェレー径(画素)
A
撮像開始時の粒子の中心
B
撮像終了時の粒子の中心
図C.2−非球形粒子における粒子移動の測定粒子面積への影響
図C.2に示すように,粒子移動による粒子面積の最大偏い(倚)は,次の式で与えられる。
F
err
x
a
A
×
=
········································································ (C.12)
ここで,xFは,非球形粒子の場合,粒子の配向によって変化する。
2
real
,
F
real
err
real
real
,
meas
,
π
4
1
A
A
A
x
x
a
A
A
A
x
x
×
×
×
+
=
+
=
=
ε
····································· (C.13)
17
Z 8827-2:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] JIS Z 8832 粒子径分布測定方法−電気的検知帯法
注記 対応国際規格:ISO 13319,Determination of particle size distributions−Electrical sensing zone
method(MOD)
[2] BS 3406-4,Methods for determination of particle size distribution. Guide to microscope and image analysis
methods
[3] NF X11-696,Granulométrie par analyse dʼimages
[4] JIS Z 8819-2 粒子径測定結果の表現−第2部:粒子径分布からの平均粒子径又は平均粒子直径及びモ
ーメントの計算
注記 対応国際規格:ISO 9276-2,Representation of results of particle size analysis−Part 2: Calculation of
average particle sizes/diameters and moments from particle size distributions(IDT)
附属書JA
(参考)
JISと対応国際規格との対比表
JIS Z 8827-2:2010 粒子径解析−画像解析法−第2部:動的画像解析法
ISO 13322-2:2006 Particle size analysis−Image analysis methods−Part 2:
Dynamic image analysis methods
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番
号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範
囲
規定対象粒子径を2
mm以下の微粒子とし
ている。
1
規定対象粒子径を,個別測
定法ごとに規定している。
変更
JISの目的,対象を,ISO規格
よりも限定した。
一層の標準化を進める。
2 引用規
格
3 用語,
定義及び
記号
3.1.1 動的画像解析法
3.1.2 静的画像解析法
−
−
追加
ISO規格にはない。規格の内容
自体の定義を追加した。
一層の標準化を進める。
3.1.4 アパチャーチュ
ーブ
3.1.2
JISとほぼ同じ。
変更
本質的に同一
この装置を規格としたISO 13319
で,2007年に2000年版を改正し
たときに名称変更した。ISOに改
正を提案することを検討予定。
4 原理
4.2 粒子の移動
4.2
削除分を除きJISと同じ。 削除
ISO規格では3種類の方法を
規定しているが,JISでは適用
範囲の限定によって2種類の
方法を規定している。
一層の標準化を進める。
図3 粒子の移動と観
察方向
Fig.3
JISと同じ。
変更
理解しやすいように書き直し
た。
ISO規格の定期見直しのときに
変更を提案する予定。
5 装置の
校正
装置の校正について
規定
5.3
JISとほぼ同じ。
変更
校正手順を厳格化した。
5.4
JISとほぼ同じ。
変更
理解しやすいように書き直し
た。
2
Z
8
8
2
7
-2
:
2
0
1
0
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番
号
内容
箇条ごと
の評価
技術的差異の内容
6 粒子の
移動によ
る誤差
粒子の移動による誤
差の測定方法を規定
5.2
JISとほぼ同じ。
変更
理解しやすいように書き直し
た。
ISOの定期見直しのときに変更
及び追加を提案する予定。
図4 粒子の移動によ
る撮像画像のぼけ
−
−
追加
図C.1とともに利用者の理解
に役立つため追加した。
7 測定手
順
7.1 試料の調製
6
JISとほぼ同じ。
変更
理解しやすいように書き直し
た。
7.2 撮像
7.3 粒子径分布の測
定
5.2
5.6
JISとほぼ同じ。
変更
JIS Z 8827-1の引用を明記し
た。
8 報告書
報告書の記載事項を
規定
−
−
追加
ISO規格に具体的記載がない。
附属書A
(参考)
−
Annex C −
一致
本体での引用順に附属書の順
番を変更した。
−
A.1 一般
−
−
追加
附属書Aには実例を記載する
ことを明確にした。
一層の標準化を進める。
図A.1
図A.2
Fig. C.1
Fig. C.2
JISとほぼ同じ。
変更
実際の装置に近い図にした。
−
C.4
削除
他の原理(ビームスキャン法)
と類似しているため削除した。
C.6〜
C.8
削除
JISの目的,対象をISO規格よ
りも限定したため削除した。
附属書B
(参考)
−
Annex B −
一致
−
−
附属書C
(参考)
−
Annex A −
一致
本体での引用順に附属書の順
番を変更した。
ISOの定期見直しのときに変更
を提案する予定。
JISと国際規格との対応の程度の全体評価:ISO 13322-2:2006,MOD
2
Z
8
8
2
7
-2
:
2
0
1
0
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 一致………………技術的差異がない。
− 削除……………… 国際規格の規定項目又は規定内容を削除している。
− 追加……………… 国際規格にない規定項目又は規定内容を追加している。
− 変更……………… 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD…………… 国際規格を修正している。
2
Z
8
8
2
7
-2
:
2
0
1
0
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。