Z 8617-4:2008 (ISO 14617-4:2002)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 1
3 用語及び定義 ··················································································································· 2
4 基本要素 ························································································································· 3
4.1 基本的性質の記号 ·········································································································· 3
4.2 4.1の記号の適用方法 ······································································································ 5
4.3 補助記号 ······················································································································ 5
4.4 4.3の補助記号の適用方法 ································································································ 5
4.5 適用例 ························································································································· 6
5 手動アクチュエータ ·········································································································· 7
5.1 基本的性質の記号 ·········································································································· 7
5.2 5.1の記号の適用方法 ······································································································ 8
5.3 補助記号 ······················································································································ 8
5.4 5.3の図記号の適用方法 ··································································································· 9
5.5 適用例 ························································································································· 9
6 自動アクチュエータ ········································································································· 11
6.1 基本的性質の記号 ········································································································· 11
6.2 6.1の記号の適用方法 ····································································································· 12
6.3 補助記号 ····················································································································· 12
6.4 6.3の補助記号の適用方法 ······························································································· 12
6.5 適用例 ························································································································ 12
7 作動装置 ························································································································ 13
7.1 基本的性質の図記号 ······································································································ 13
7.2 7.1の記号の適用方法 ····································································································· 13
7.3 補助記号 ····················································································································· 13
7.4 7.3の補助記号の適用方法 ······························································································· 13
7.5 適用例 ························································································································ 14
参考文献 ···························································································································· 15
Z 8617-4:2008 (ISO 14617-4:2002)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,財団法人日本規格協会(JSA)から,工業標準
原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大
臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に係る確認について,責任は
もたない。
JIS Z 8617の規格群には,次に示す部編成がある。
JIS Z 8617-1 第1部:一般事項及び索引
JIS Z 8617-2 第2部:一般用途
JIS Z 8617-3 第3部:接続及び関連装置
JIS Z 8617-4 第4部:アクチュエータ及び関連装置
JIS Z 8617-5 第5部:計測及び制御装置
JIS Z 8617-6 第6部:計測及び制御機能
JIS Z 8617-7 第7部:基本的機械部品
JIS Z 8617-8 第8部:バルブ及びダンパ
JIS Z 8617-9 第9部:ポンプ,コンプレッサ及びファン
JIS Z 8617-10 第10部:フルードパワー変換器
JIS Z 8617-11 第11部:熱輸送及び熱機関用の装置
JIS Z 8617-12 第12部:分離,清浄及び混合用の装置
JIS Z 8617-13 第13部:材料加工用装置
JIS Z 8617-14 第14部:材料の輸送及び取扱い用の装置
JIS Z 8617-15 第15部:据付け線図及びネットワークマップ
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
Z 8617-4:2008
(ISO 14617-4:2002)
ダイヤグラム用図記号−
第4部:アクチュエータ及び関連装置
Graphical symbols for diagrams−Part 4: Actuators and related devices
序文
この規格は,2002年に第1版として発行されたISO 14617-4を基に,技術的内容及び対応国際規格の構
成を変更することなく作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格にはない事項である。
1
適用範囲
この規格は,アクチュエータの基本要素,完全なアクチュエータ及び作動装置に関するダイヤグラム用
図記号(以下,図記号という。)について規定する。
図記号を作成及び適用するときの基本原則については,JIS Z 8222-1を参照。
JIS Z 8617規格群の概要,図記号を特定するための登録番号の構成方法及び使用方法に関する情報,そ
れらの図記号の表示方法及び適用方法,適用例などについては,JIS Z 8617-1を参照。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 14617-4:2002,Graphical symbols for diagrams−Part 4: Actuators and related devices (IDT)
なお,対応の程度を表す記号 (IDT) は,ISO/IEC Guide 21に基づき,一致していることを示
す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS Z 8222-1 製品技術文書に用いる図記号のデザイン−第1部:基本規則
注記 対応国際規格:ISO 81714-1:1999,Design of graphical symbols for use in the technical
documentation of products−Part 1: Basic rules (IDT)
JIS Z 8617-1 ダイヤグラム用図記号−第1部:一般事項及び索引
注記 対応国際規格:ISO 14617-1:2005,Graphical symbols for diagrams−Part 1: General information
and indexes (IDT)
JIS Z 8617-2 ダイヤグラム用図記号−第2部:一般用途
注記 対応国際規格:ISO 14617-2:2002,Graphical symbols for diagrams−Part 2: Symbols having
general application (IDT)
JIS Z 8617-7 ダイヤグラム用図記号−第7部:基本的機械部品
注記 対応国際規格:ISO 14617-7:2002,Graphical symbols for diagrams−Part 7: Basic mechanical
2
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
components (IDT)
JIS Z 8617-8 ダイヤグラム用図記号−第8部:バルブ及びダンパ
注記 対応国際規格:ISO 14617-8:2002,Graphical symbols for diagrams−Part 8: Valves and dampers
(IDT)
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
注記 次の用語を定義するに当たっては,JIS,ISO及びIECの規格に定義するものを用いた。括弧
内の規格を参照。
3.1
アクチュエータ (actuator)
電気,油圧,空気圧などのエネルギーを用いて可動部品を変位させる装置。例えば,遮断弁,継電器な
どの変位部分。
[IEC 60050-581]
3.2
可動装置 (actuating device)
図記号による表示が必要で,機能的に関連する構成部品又は要素からなる装置。
[IEC 60050-581]
例 流体モータ,電気モータ,補助接点の一式及び作動される装置の実際の位置に関する情報を送信
する測定変換器からなるアクチュエータ。
3.3
手動アクチュエータ (manual actuator)
人力によって操作するアクチュエータ。
3.4
自動 (automatic)
(人間の介在を必要としない)自己動作(制御・動作)。
[ISO 5598,IEC 60050-351]
3.5
自動アクチュエータ (automatic actuator)
人間の介在なしに動作するアクチュエータ。
例 プロセス変数による作動又は遠隔操作ユニットからの作動。
3.6
自動復帰装置 (automatic return device)
可動部品を自動的に復帰させる装置。
例 作動力を除いた後に,バルブを元の位置(停止位置)へ戻す装置。
3.7
クラッチ (clutch)
駆動側,被動側間における動力を伝達又は遮断する装置。
[IEC 60050-441]
3
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.8
遅延装置 (delay device)
作動力を付加又は除去した瞬間と影響を受ける部分の位置又は状態に変化が生じ始める瞬間までの時間
との間隔を提供する装置。
3.9
デテント (detent)
可動部を,ある抵抗によって所定位置に保持する機構。
[ISO 5598]
注記 デテント機構付きバルブなどを作動する場合には,デテントの保持力に打ち勝つ力を加える必
要がある。
3.10
ラッチ (latching device)
特定の条件が満たされるまで外すことのできない機構によって,可動部を所定の位置に保持する装置。
[ISO 5598]
3.11
ブロック装置 (blocking device)
可動部品がどの方向へも動かないように保持する機械的装置。
注記 ブロック装置付きバルブなどを作動する場合には,ブロック装置を解除する必要がある。
3.12
トリップフリー装置 (trip-free device)
ある条件で,自動的に自由位置となるようにした開閉装置。
[IEC 60050-441]
例 回路遮断器。
3.13
インターロック装置 (interlocking device)
危険や誤動作を防止するため,ある動作に対して,異常を生じる他の動作が起こらないように制御回路
上防止する装置。
[IEC 60050-441]
3.14
動作 (operation)
遮断弁を閉じるための部材,電気機械式開閉器の接点などの機械部の移動。例えば,機械部品の移動。
[IEC 60050-441]
[IEC 60050-448]
注記1 移動方向は,開動作,閉動作,オン動作,オフ動作などと定義できる。
注記2 動作は,電気測定リレーとの関連において特殊な意味をもつ。過不足リレーは,その特性量
が値の増減によって設定値に達するときに動作する。
4
基本要素
4.1
基本的性質の記号
4
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
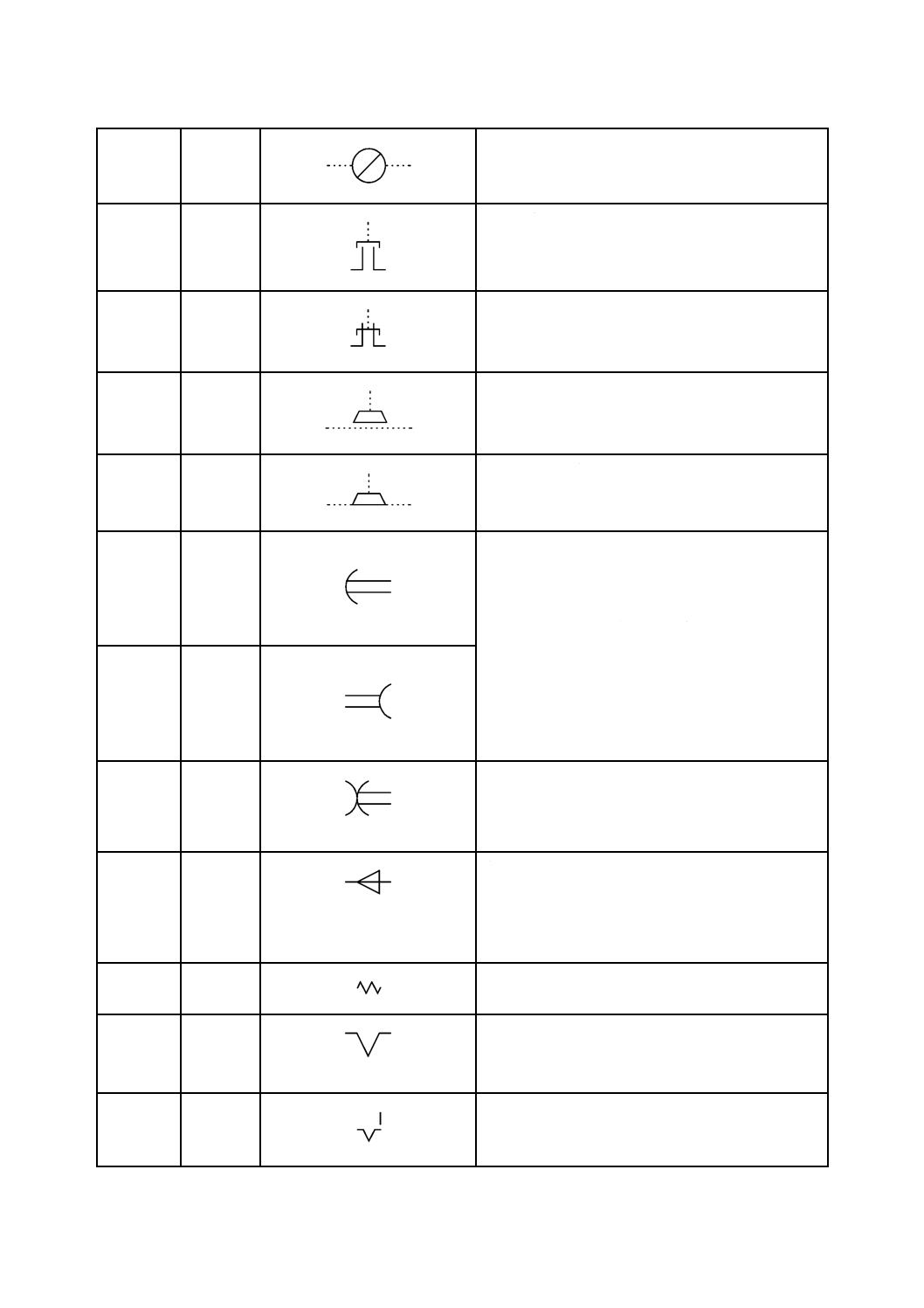
4.1.1
2008
歯車対
4.1.2
2009
非作動時開放クラッチ
4.1.3
2010
非作動時作動クラッチ
4.1.4
2011
非作動時開放ブレーキ
4.1.5
2012
非作動時作動ブレーキ
4.1.6
651
様式1
200 %
遅延装置
動きの方向が円弧の中心へ向かっているとき,作用
は遅延する。
R651 (4.2.1) 参照。
注記 200 %は,図記号を2倍に表示していることを示
す。
4.1.7
652
様式2
200 %
4.1.8
653
200 %
遅延装置
両方向で作用が遅延する。
R651 (4.2.1) 参照。
4.1.9
654
200 %
自動復帰装置
復帰方向は,頂点が指す方向である。
R652 (4.2.2) 及びR653 (4.2.3) 参照。
この記号とバルブ記号との併用については,R2101
(8-4.2.1) 参照。
4.1.10
2002
ばね
R2001 (7-4.2.2) 参照。
4.1.11
655
200 %
特定位置に保持する戻り止め
R652 (4.2.2) 参照。
4.1.12
656
かみ合いなしの特定位置に保持する戻り止め
5
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
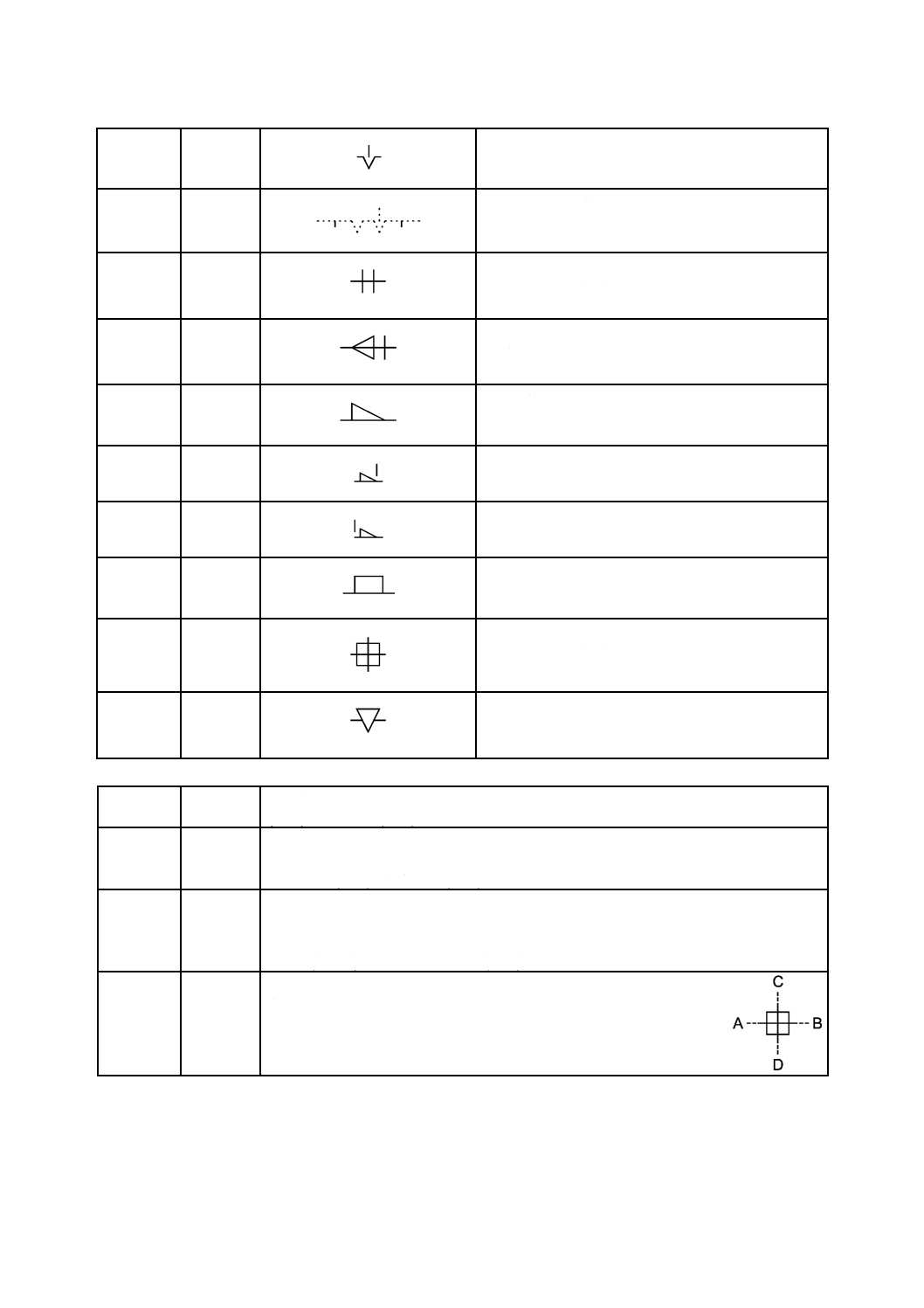
4.1.13
657
かみ合いの特定位置に保持する戻り止め
4.1.14
658
戻り止めなしの位置の表示
2か所を示す。
4.1.15
659
200 %
任意の位置に保持する戻り止め
R652 (4.2.2) 参照。
4.1.16
660
200 %
左方向へのドリフトは,許される任意の位置に保持す
るデテント
4.1.17
661
200 %
ラッチ装置
4.1.18
662
常時作動開放ラッチ装置
4.1.19
663
常時作動ラッチ装置
4.1.20
664
200 %
ブロッキング装置
4.1.21
665
自由移動機構
R654 (4.2.4) 参照。
4.1.22
666
200 %
内部固定装置
4.2
4.1の記号の適用方法
4.2.1
R651
二重線は,遅延するコンポーネント又は装置の要素を表す記号に付ける。例は,X653
(4.5.3) 及びX654 (4.5.4) 参照。
4.2.2
R652
機械部品の挙動がアクチュエータの図記号によって理解できる場合には,この記号を省
略してもよい。
5.1,R683 (5.2.3) 及びR685 (5.2.5) を参照。例えば,5.5を参照。
4.2.3
R653
ばね復帰機能をもつバルブの図記号は,ばね用図記号2002 (4.1.10) に置き換えてもよい。
置き換えた図記号は,バルブが本来の停止位置に復帰したときに,ばねが開放されると
予測できる場所に置く。
R2001 (7-4.2.2) 参照。例は,X688 (5.5.8) 参照。
4.2.4
R654
図記号は,参照図の接続点A〜Dを,次の方法によって用いる。
A
通常の動作手段への機械的接続
B
電気機械式開閉装置の接点などの作動部への機械的接続
C,D 最重要な機能をもつアクチュエータへの機械的接続
4.3
補助記号
なし。
4.4
4.3の補助記号の適用方法
なし。
6
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.5
適用例
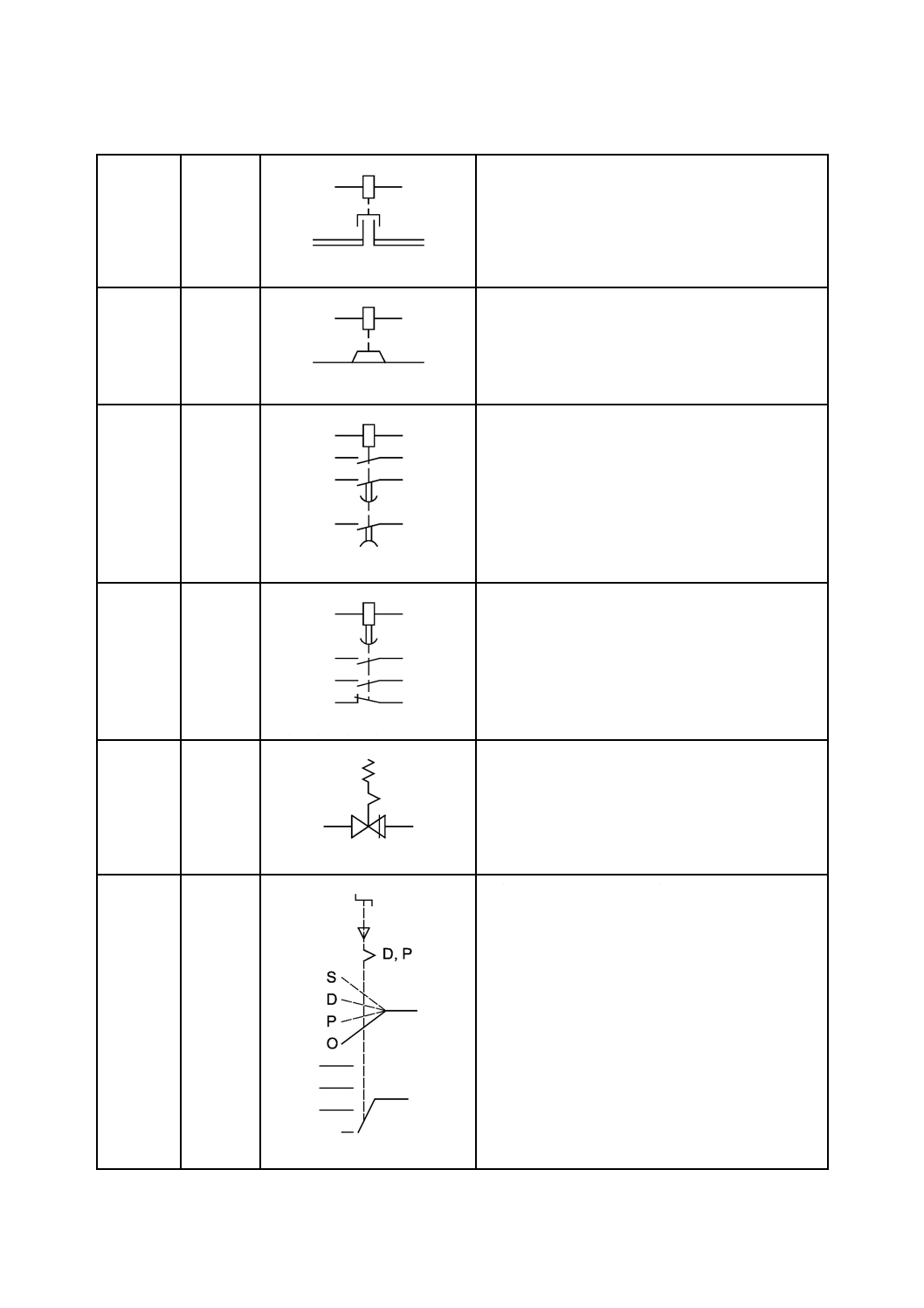
4.5.1
X651
402, 2009, IEC
無電圧時開放ソレノイド駆動クラッチ
4.5.2
X652
403, 2012, IEC
無電圧作動形ソレノイド駆動ブレーキ
4.5.3
X653
404, 651, 652, IEC, IEC
第2接点はコイルが励磁時に遅延し,第3接点はコイ
ル無励磁時に遅延する三接点電気機械式オン・オフリ
レー
4.5.4
X654
404, 651, IEC, IEC, IEC
コイルが励磁するとき,リレー全体が遅延する電気機
械式オン・オフリレー
4.5.5
X655
403, 655, 2002, 2101, 2112
操作後,開放保持されるばねをもつ負荷式安全弁
4.5.6
X656
404, 654, 655, 685, 701, IEC
現在位置O(オフ)にある複数位置制御手動スイッチ
位置P(駐車)及びD(ドライブ)で保持され,位
置Sから位置Dへ自動復帰する。
図記号701 (5.3.1) 参照。
7
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.5.7
X657
404, 654, 662, 681, IEC, IEC
ラッチが手動でかみ合っている手動制御スイッチ
4.5.8
X658
404, 654, 662, 681, IEC, IEC, IEC
ラッチが電気的にかみ合っている手動制御スイッチ
4.5.9
X659
171, 404, 665, 682, 741, 2002,
IEC, IEC, IEC, IEC, IEC, IEC
次のものを附属する三極電気機械式開閉装置
− トリップフリー機構
− ばね駆動機構
− ばね蓄力用電気モータ
− 閉止コイル
− トリップフリーコイル
− 瞬時過電流引き外し装置
− 熱過負荷引き外し装置
5
手動アクチュエータ
5.1
基本的性質の記号
注記 並列する二つのアクチュエータ記号の適用方法については,R681 (5.2.1) を参照。
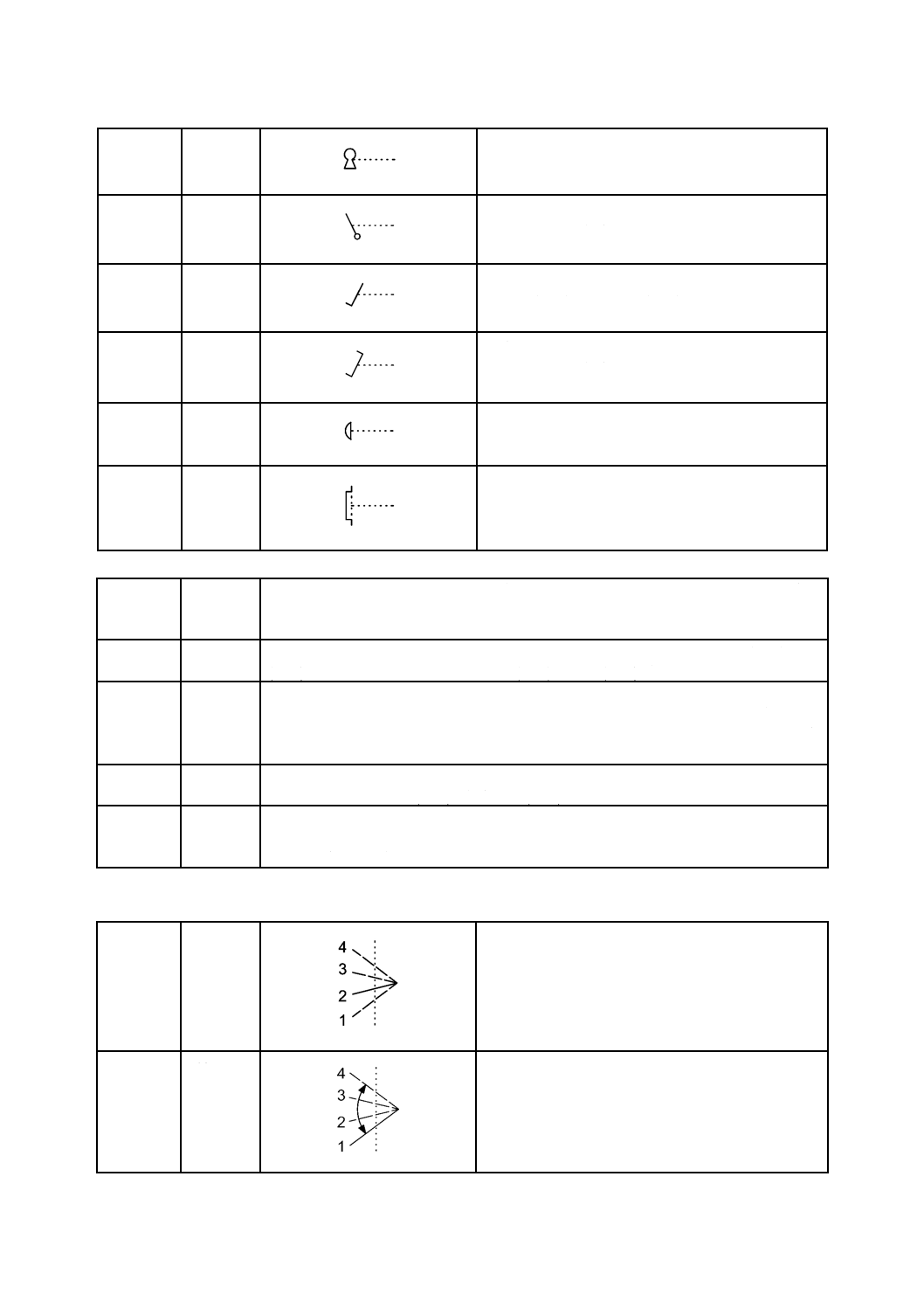
5.1.1
681
手動アクチュエータ
R682 (5.2.2) 参照。
5.1.2
682
押し操作手動アクチュエータ
R682 (5.2.2) 及びR683 (5.2.3) 参照。
5.1.3
683
引き操作手動アクチュエータ
R682 (5.2.2) 及びR683 (5.2.3) 参照。
5.1.4
684
押し引き操作手動アクチュエータ
R682 (5.2.2) 及びR684 (5.2.4) 参照。
5.1.5
685
回転操作手動アクチュエータ
R682 (5.2.2) 及びR685 (5.2.5) 参照。
5.1.6
686
脱着式ハンドル形手動アクチュエータ
R682 (5.2.2) 及びR685 (5.2.5) 参照。
8
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.1.7
687
鍵形手動アクチュエータ
R682 (5.2.2) 及びR685 (5.2.5) 参照。
5.1.8
688
レバー形手動アクチュエータ
R682 (5.2.2) 及びR684 (5.2.4) 参照。
5.1.9
689
ペダル形手動アクチュエータ
R682 (5.2.2) 及びR683 (5.2.3) 参照。
5.1.10
690
足踏み形手動アクチュエータ
R682 (5.2.2) 及びR684 (5.2.4) 参照。
5.1.11
691
安全目的用特殊握り形手動アクチュエータ
例えば,非常停止など。
5.1.12
692
アクチュエータへのアクセスを制限する装置
例えば,引き上げるタイプのカバーなど。
5.2
5.1の記号の適用方法
5.2.1
R681
2台以上のアクチュエータ(手動又は自動)の図記号が並列に配置されるとき,他に合流
点でのAND機能の図記号142 (2-4.3.2.28) などの表示がなければ,アクチュエータ間に
はOR機能となる。
5.2.2
R682
各位置に関連した機能は,該当する場合には,この図記号の近傍に記号701 (5.3.1)〜704
(5.3.4) を表示してもよい。例は,X684 (5.5.4)〜X687 (5.5.7) 参照。
5.2.3
R683
押し動作,引き動作又はペダルを表す記号を用いる場合,自動復帰を仮定する。したが
って,自動復帰を表す記号654 (4.1.9) は省略してもよい。例は,X681 (5.5.1) 及びX682
(5.5.2) 参照。一方,自動復帰が該当しない場合には,戻り止めを表す記号655 (4.1.11) を
用いる。
5.2.4
R684
押し引き動作,レバー又は足踏みを表す記号を用いる場合には,自動又は非自動復帰を
表示する。例は,X683 (5.5.3) 及びX684 (5.5.4) 参照。
5.2.5
R685
回転,脱着式ハンドル又は鍵を表す記号を用いる場合には,非自動戻り止めを仮定する。
したがって,戻り止めを表す記号655 (4.1.11) は省略してもよい。一方,戻り止めが該当
しない場合には,自動復帰を表す図記号を用いる。
5.3
補助記号
注記 実線及び鎖線の意味及び適用方法については,R701 (5.4.1) を参照。
5.3.1
701
4位置リターン形時計方向回転操作によって位置4に
向かう制御要素の位置表示
実位置は,位置2である。
5.3.2
702
4位置リターン形回転操作する制御要素の位置表示
アクチュエータは,位置1と4との間だけを時計方
向(復路は反時計方向)に動くことができる。
実位置は,位置1である。
9
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
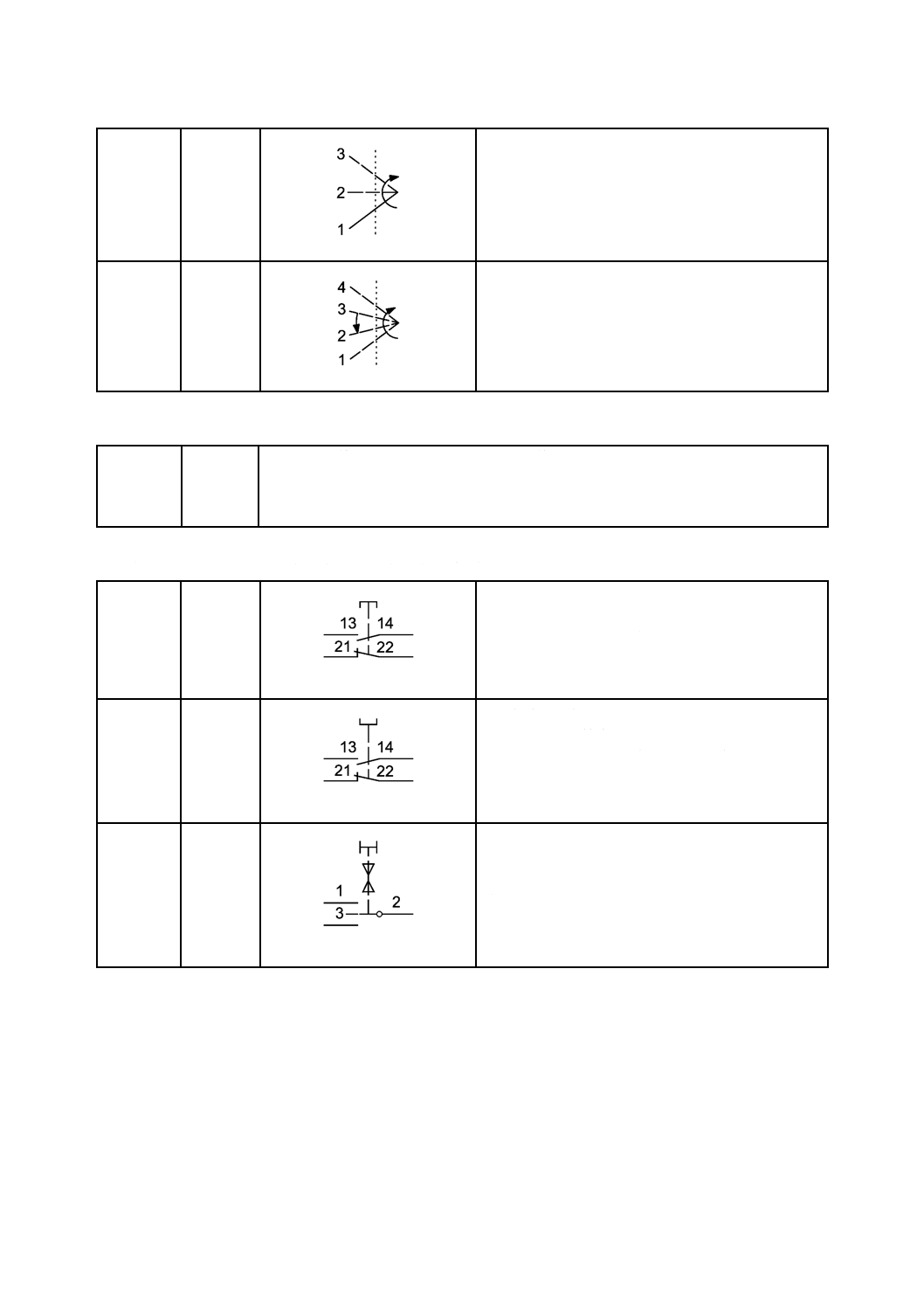
5.3.3
703
3位置リターン形回転操作する制御要素の位置表示
アクチュエータは,時計方向に回転できる。
実位置は,位置1である。
5.3.4
704
4位置リターン形回転操作する制御要素の位置表示
アクチュエータは,位置3から2への動き以外に,
時計方向に360°だけ回転できる。
実位置は,位置1である。
5.4
5.3の図記号の適用方法
注記 例は,X656 (4.5.6)〜X658 (4.5.8) を参照。
5.4.1
R701
実位置を実線で表示し,その他の位置は鎖線で表示する。図記号は,アクチュエータの
実際の回転方向を示す向きに置く。すなわち,図記号701 (5.3.1) において,位置1から4
への変更は左方向の回転を示す場合には,図記号は左に蝶番を付けた状態で,その代わ
りの鏡像対称面をもつ。
5.5
適用例
注記 適用例は,X656 (4.5.6)〜X658 (4.5.8) を参照。
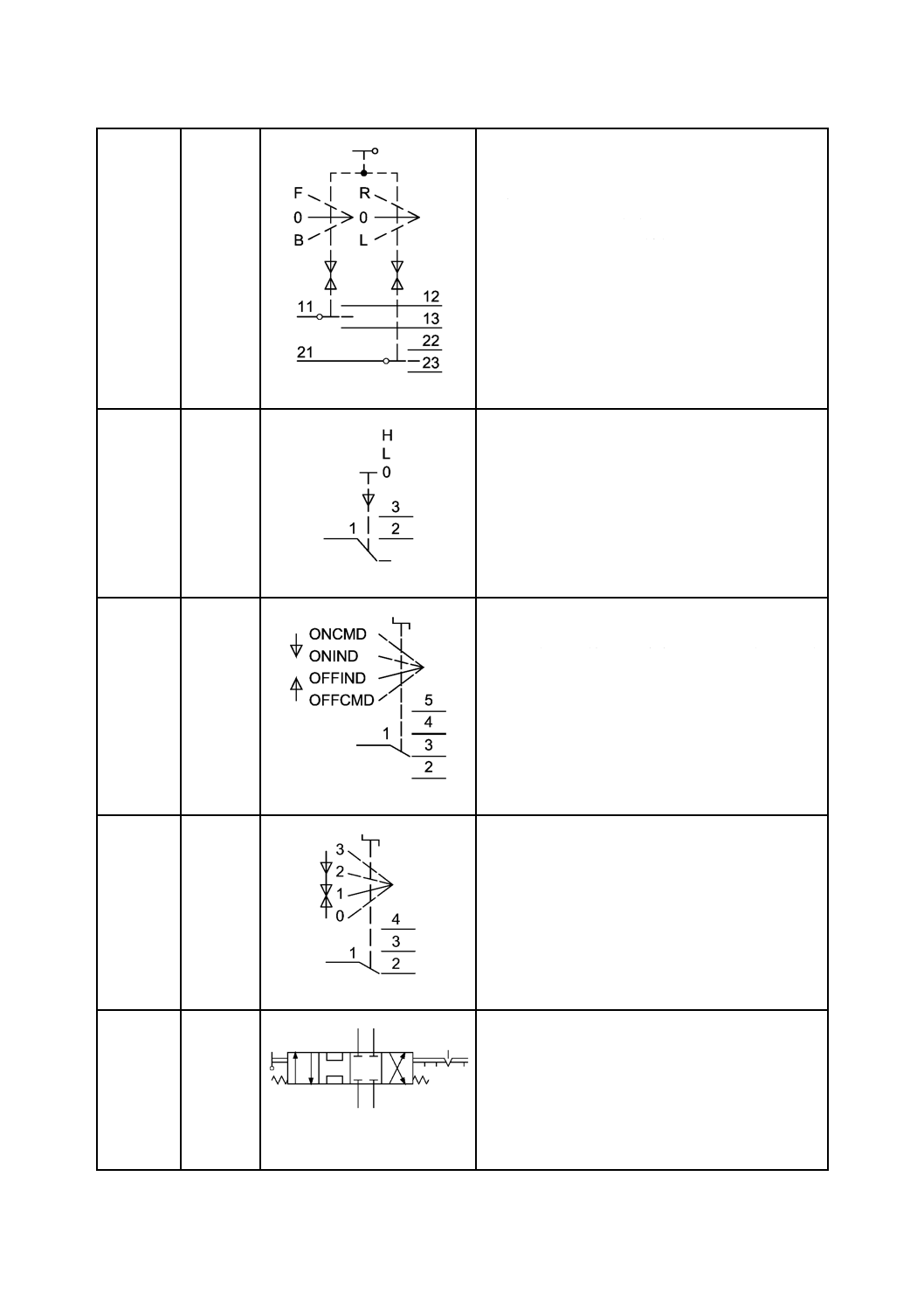
5.5.1
X681
404, 682, IEC, IEC
押し操作形制御スイッチ
押したとき,接点13-14間が閉じ,21-22間が開く。
R683 (5.2.3) によって,自動復帰を仮定する。
5.5.2
X682
404, 683, IEC, IEC
引き操作形制御スイッチ
引いたとき,接点13-14間が閉じ,21-22間が開く。
R683 (5.2.3) によって,自動復帰を仮定する。
5.5.3
X683
404, 654, 684, IEC
3位置リターン形押し引き操作形制御スイッチ
引いたときにパス1-2が閉じ,押したときにパス2-3
が閉じる。自動復帰では,両パスが開く中間位置へ戻
る。
10
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.5.4
X684
404, 501, 654, 688, 701, IEC
4位置リターン形の制御スイッチ
レバーを位置0(オフ)からB(後退)へ動かすと,
電流パス11-13が閉じる。レバーを0からF(前進)
へ動かすと,パス11-12が閉じる。
レバーを0からL(左)へ動かすと,パス21-23が
閉じ,レバーを0からR(右)へ動かすと,パス21-22
が閉じる。
このスイッチは,位置0へ自動復帰する。F-0-B動
作及びR-0-L動作は,互いに独立している。
5.5.5
X685
404, 654, 681, IEC
0(オフ),L(ロー)及びH(ハイ)の三つの位置を
もつ手動制御スイッチ
位置0へ自動復帰をする。
5.5.6
X686
404, 654, 685, 701, IEC
4位置リターン形回転操作形制御スイッチ
両端ONCMD(オンコマンド)及びOFFCMD(オフ
コマンド)から,最も近い安定位置ONIND(オン表示)
及びOFFIND(オフ表示)へ自動復帰をする。
5.5.7
X687
404, 654, 685, 701, IEC
4位置リターン形回転操作形制御スイッチ
位置0,2及び3から位置1への自動復帰をする。
5.5.8
X688
242, 402, 658, 688, 2002, 2161,
2171, 2172
4位置リターン形レバー操作形方向制御弁
一つの安定位置をもち,その他の位置から自動復帰
をする。
右巻き/左巻きばね記号は,右又は左への自動復帰
を示す。
11
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6
自動アクチュエータ
6.1
基本的性質の記号
注記 平行する二つのアクチュエータの図記号の適用方法については,R681 (5.2.1) を参照。
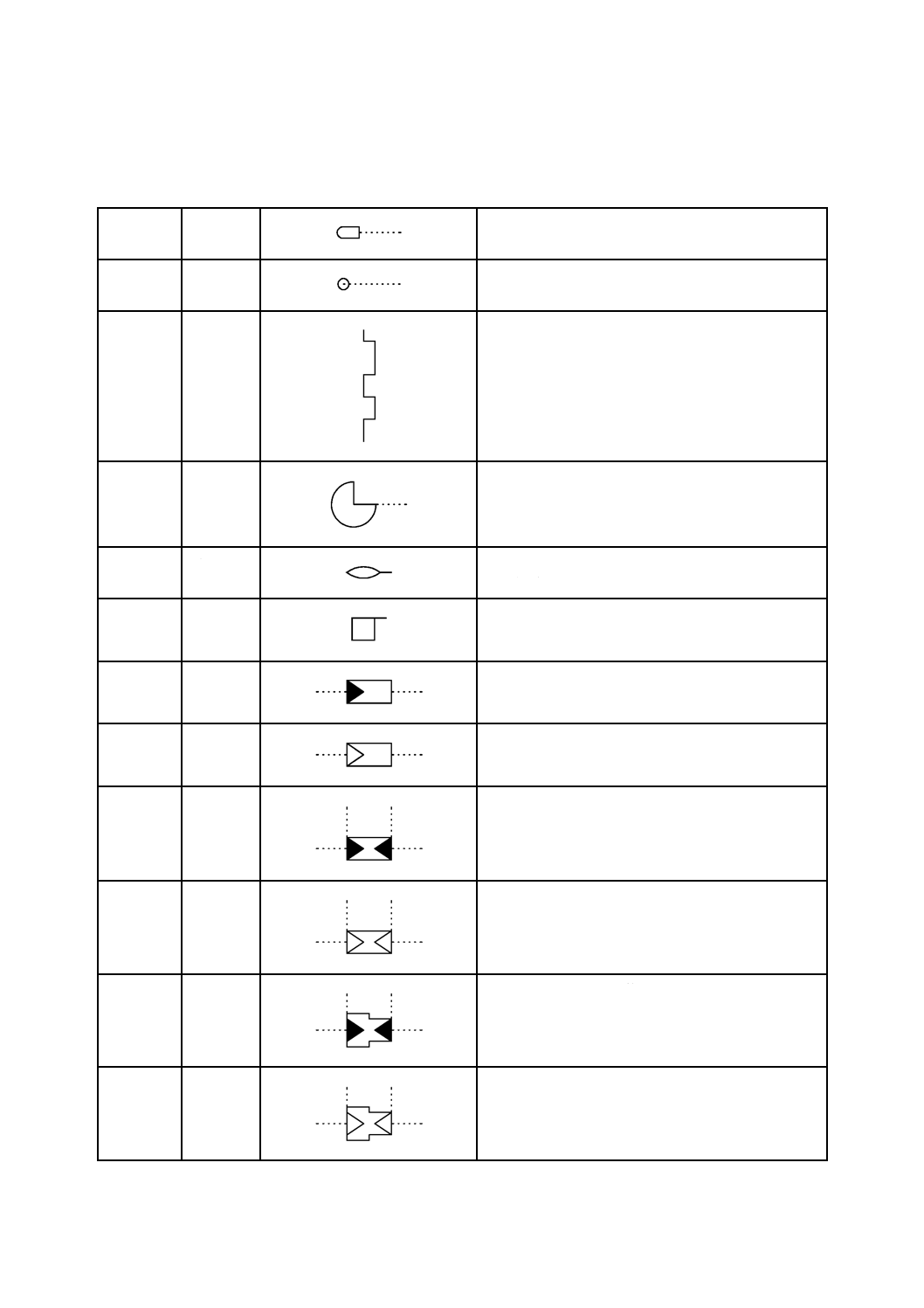
6.1.1
711
プランジャ,トレーサ
6.1.2
712
ローラ
6.1.3
713
カム輪郭
R711 (6.2.1) 参照。
6.1.4
714
カム駆動アクチュエータ
6.1.5
715
液面高さ操作アクチュエータ
例えば,フロート。
6.1.6
716
目標流量操作アクチュエータ
例えば,機械的フラグ。
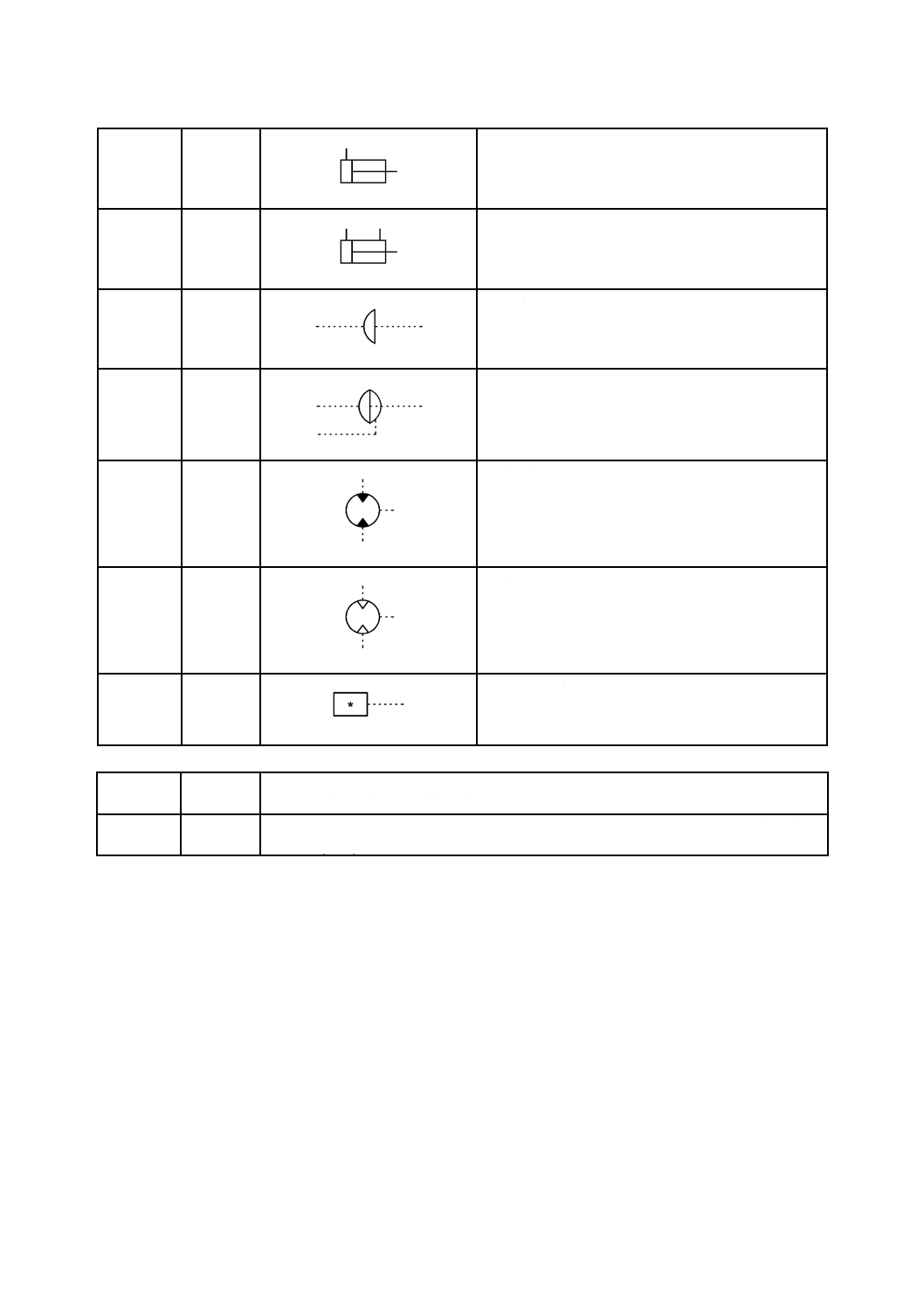
6.1.7
717
単動油圧アクチュエータ
6.1.8
718
単動空気圧アクチュエータ
6.1.9
719
複動油圧アクチュエータ
6.1.10
720
複動空気圧アクチュエータ
6.1.11
721
異なる動作領域をもつ複動油圧アクチュエータ
6.1.12
722
異なる動作領域をもつ複動空気圧アクチュエータ
12
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.1.13
723
単動流体圧シリンダ形アクチュエータ
6.1.14
724
複動流体圧シリンダ形アクチュエータ
6.1.15
725
単動ダイアフラムアクチュエータ
6.1.16
726
複動ダイアフラムアクチュエータ
6.1.17
2407
両方向流れの油圧モータ形アクチュエータ
6.1.18
2408
両方向流れの空気圧モータ形アクチュエータ
6.1.19
733
特性量が設定値を通過するときに作動するアクチュ
エータ
R712 (6.2.2) 参照。
6.2
6.1の記号の適用方法
6.2.1
R711
記号の形は,カムそのものの形に対応する。例は,X711 (6.5.1) 参照。円形カムは,図示
した両記号のように,展開して表示してもよい。
6.2.2
R712
アスタリスク(*)は,2-4.3.4によって量を表す補助記号に置き換える。例は,X716 (6.5.4) 及
びX717 (6.5.5) 参照。
6.3
補助記号
なし。
6.4
6.3の補助記号の適用方法
なし。
6.5
適用例
13
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
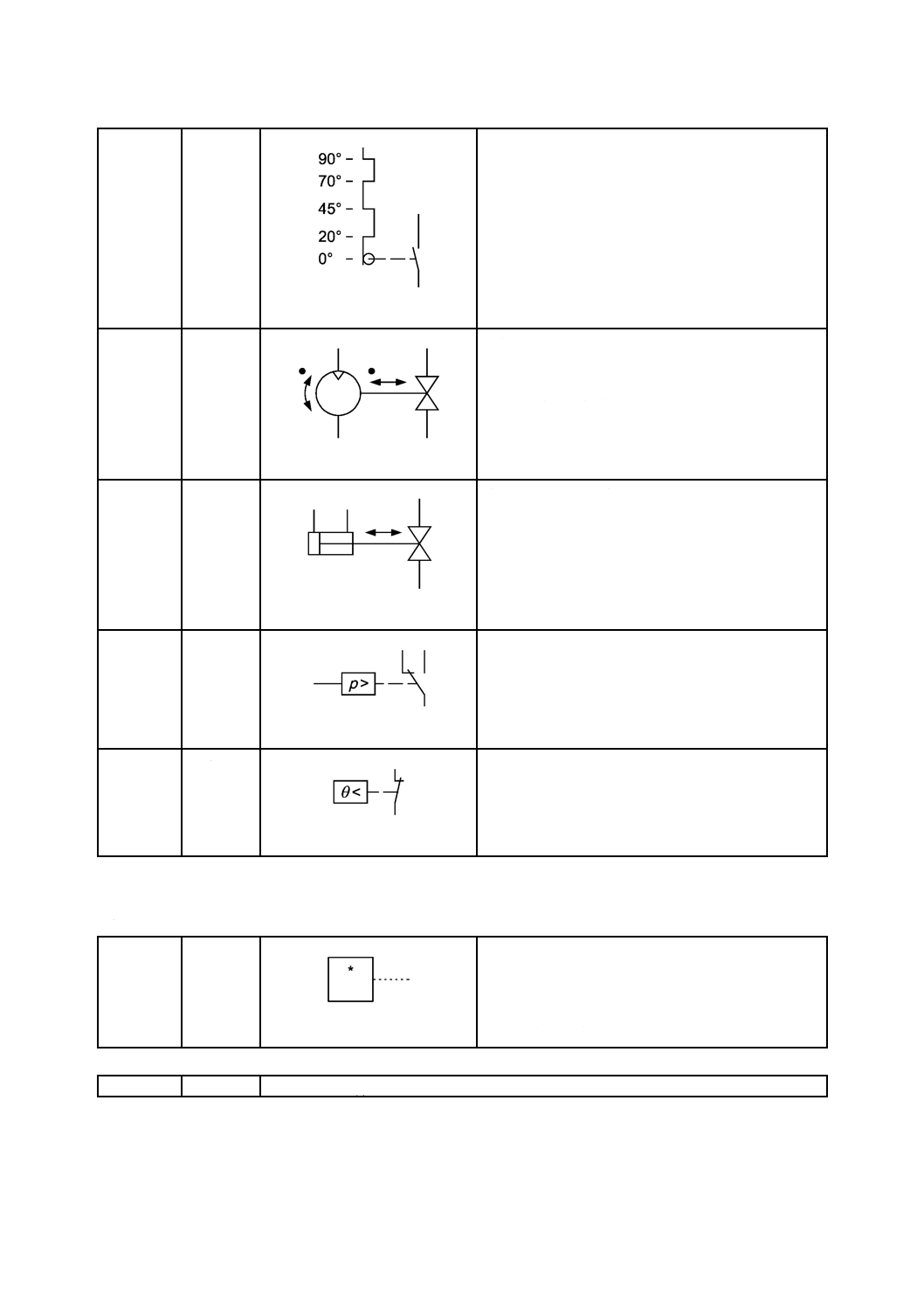
6.5.1
X711
404, 712, 713, IEC
強制的接点に影響するカム輪郭及びローラ
接点は,20〜45°及び70〜90°で閉止する。
6.5.2
X712
245, 256, 263, 403, 2101, 2406
空気圧モータ形アクチュエータ
モータが時計方向/反時計方向に回転すると,バル
ブは開閉する。
R2101 (8-4.2.1) 参照。
6.5.3
X713
245, 403, 724, 2101
複動流体圧シリンダ形アクチュエータ
シリンダが左右に動くと,バルブは開閉する。
R2101 (8-4.2.1) 参照。
6.5.4
X716
171, 404, 733, IEC
実圧力が設定値より大きくなるときに作動する圧力
パイロットスイッチ
6.5.5
X717
172, 404, 733, IEC
実温度が設定値未満のときに作動する温度パイロッ
トスイッチ
7
作動装置
7.1
基本的性質の図記号
7.1.1
741
作動装置は,次のものから構成される。
− 主な要素(手動操作用レバー,ソレノイド,エネ
ルギー保存用のばね装置など。)。
− 補助要素(補助接点,ブロック装置など。)。
R741 (7.2.1) 参照。
7.2
7.1の記号の適用方法
7.2.1
R741
アスタリスク(*)は,作動方法を表す記号に置き換える。
7.3
補助記号
なし。
7.4
7.3の補助記号の適用方法
14
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
なし。
7.5
適用例
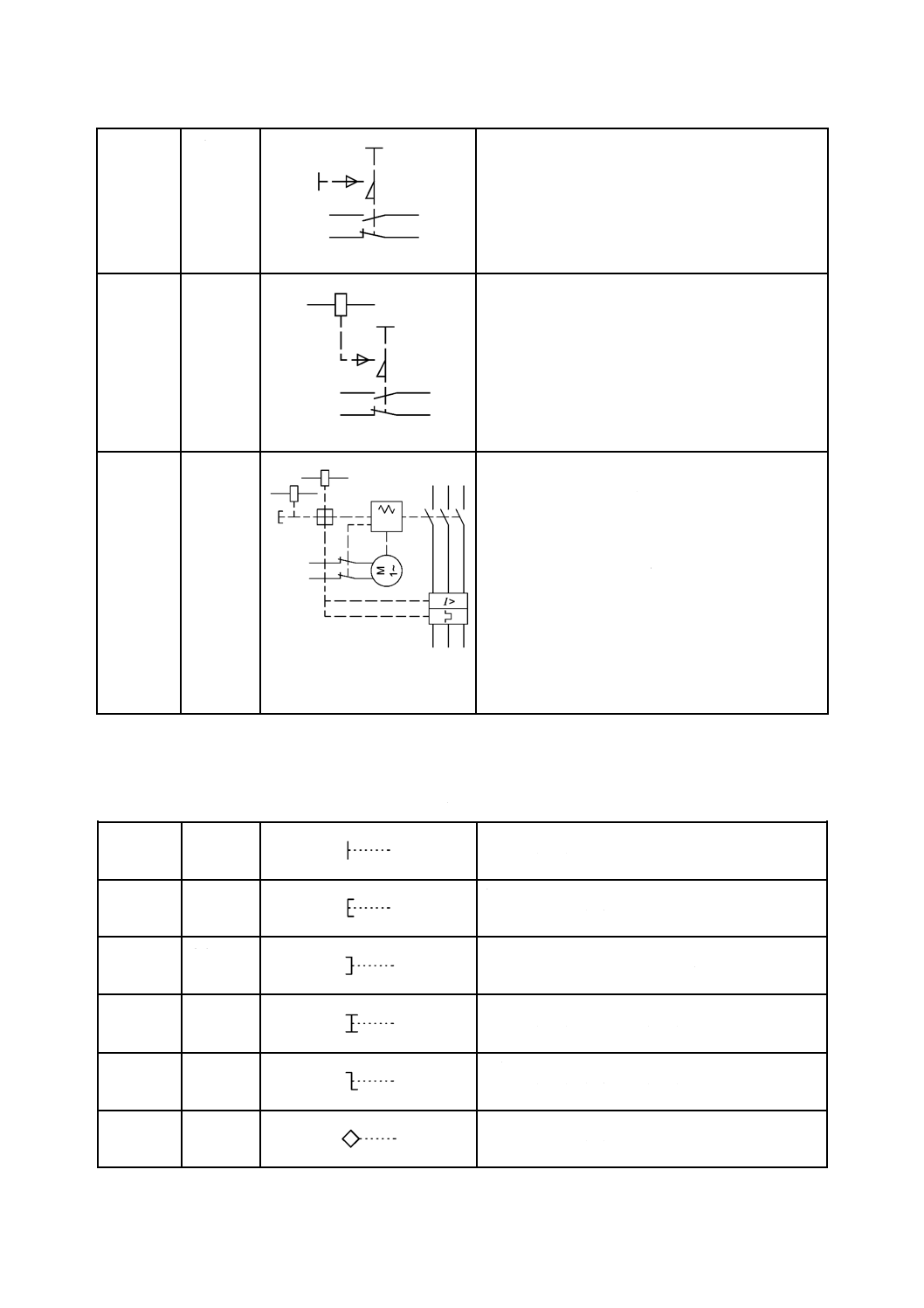
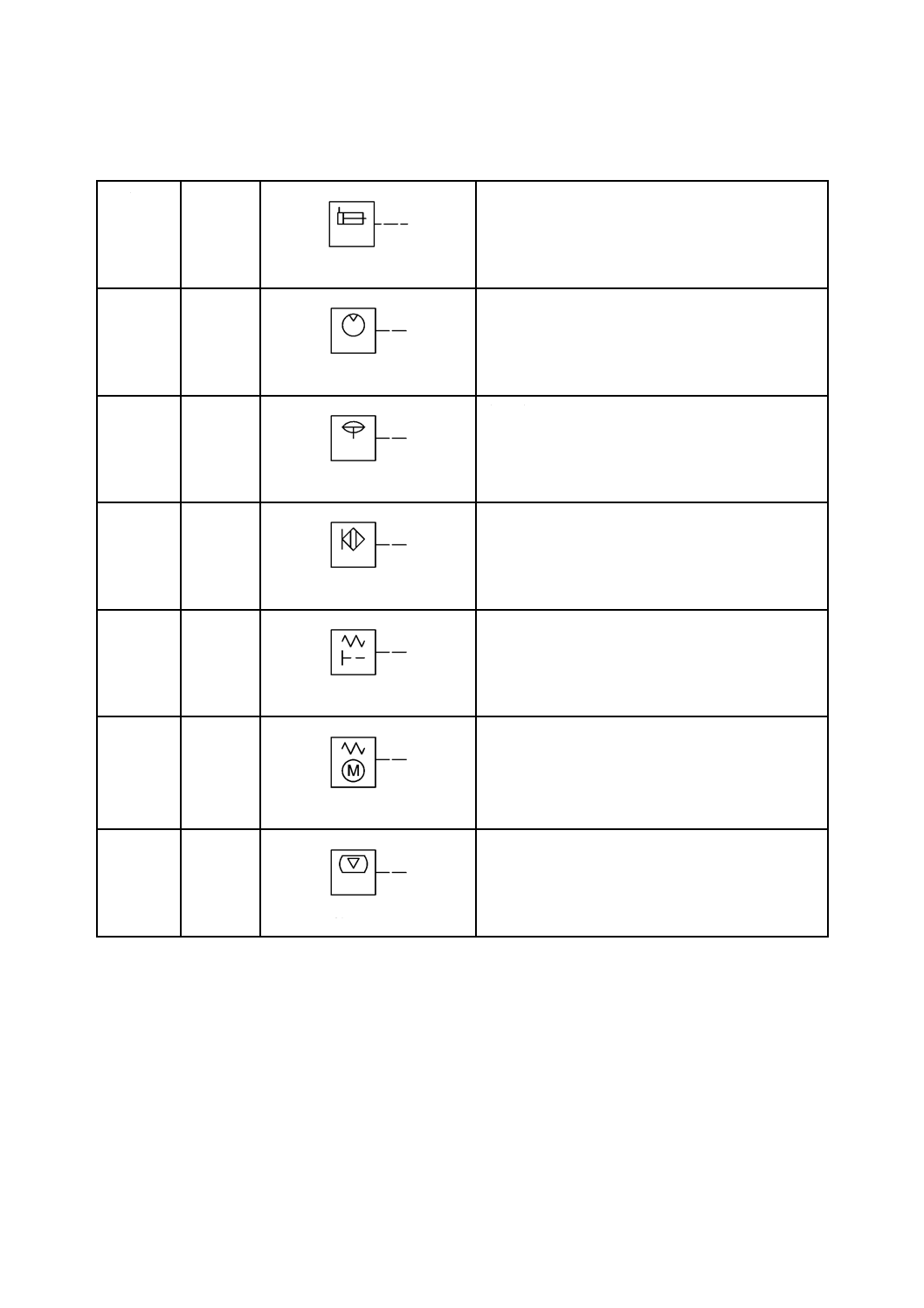
7.5.1
X741
404, 723, 741
単動流体シリンダが主要素であるアクチュエータ装
置
7.5.2
X742
404, 741, 2406
空気圧モータが主要素であるアクチュエータ装置
7.5.3
X743
404, 726, 741
複動ダイアフラムアクチュエータが主要素である作
動装置
7.5.4
X744
122, 404, 741
接触効果操作の作動装置
7.5.5
X745
404, 681, 741, 2002
手動ばね操作の作動装置
7.5.6
X746
404, 741, IEC, 2002
電動ばね操作の作動装置
7.5.7
X747
244, 404, 741, 2062
アクチュエータ内への空気圧蓄積によって操作する
作動装置
15
Z 8617-4:2008 (ISO 14617-4:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] ISO 5598:1985,Fluid power systems and components−Vocabulary
[2] IEC 60050-351,International Electrotechnical Vocabulary−Part 351: Automatic control
[3] IEC 60050-411,International Electrotechnical Vocabulary−Part 411: Rotating machinery
[4] IEC 60050-441,International Electrotechnical Vocabulary−Part 441: Switchgear, controlgear and fuses
[5] IEC 60050-448,International Electrotechnical Vocabulary−Part 448: Power system protection
[6] IEC 60050-581,International Electrotechnical Vocabulary−Part 581: Electromechanical components for
electronic equipment