2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
Z 8116-1994
自動制御用語−一般
Automatic control−Vocabulary−General
1. 適用範囲 この規格は,鉱工業における自動制御に関して一般に用いる主な用語及び定義について規
定する。
備考 この規格の引用規格を,次に示す。
JIS Z 8103 計測用語
2. 分類 用語の分類は,次による。
(1) 全般
(2) システム
(3) システムの構造表現
(4) 制御方式
(5) 制御系の構成
(6) 信号
(7) 動特性表現
(8) 制御動作
(9) 特性
(10) 応答
(11) 制御パラメータ
備考 制御方式の用語に関連した制御動作,制御パラメータは,(4)制御方式に含めた。
3. 用語及び定義 用語及び定義は,次のとおりとする。
なお,対応英語を参考として示す。
備考1. 一つの用語欄に,二つ以上の用語がコンマで区切って併記してある場合には,記載の順位に
従って優先使用する。
2. 用語欄で,用語の下の丸括弧内の仮名書きは読み方を示す。
2
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(1) 全般
番号
用語
定義
対応英語(参考)
1-1
制御
ある目的に適合するように,制御対象に所要の操作を加え
ること。
備考 目的としては,制御対象の特性を改善すること,
その特性の変動を相殺すること,外乱など制御
対象に外部から加わる好ましくない影響を相殺
すること,制御量を目標値に近づけること,又
は追従させること,などがある。
control
1-2
補償
(1) 制御対象の特性を改善すること。
(2) 制御対象に加わる好ましくない影響を相殺すること。
compensation
1-3
調整
量・状態を一定に保つか,又は一定の基準に従って変化さ
せること。
adjustment
1-4
チューニング
制御系又は制御ループが,望ましい特性又は応答を示すよ
うに,補償要素・制御装置のパラメータの値を調節するこ
と。
tuning
1-5
同定
(どうてい)
モデルの構造(伝達関数・差分方程式などの形)をあらか
じめ定めておいて,システムの入出力データに基づいてそ
のモデルに含まれるパラメータの値を決定すること。
備考 モデリングの一つの段階として位置付けられ
る。
identification
1-6
モデリング
システムの解析及び制御系設計のために,対象システムの
特性を記述すること。
備考 モデリングには大きく分けて,次の二つの方法
がある。
(1) システムの内部構造を,科学的な知識に基づい
て解析してシステムの変数間の関係式を導き,
パラメータを実験や実データから決定する。
(2) システムをブラックボックスとみなし,その入
出力データの観測値から統計的手法などによっ
てモデルを形成する。
model (l) ing
1-7
計測
特定の目的をもって,事物を量的にとらえるための方法・
手段を考究し,実施し,その結果を用い初期の目的を達成
させること。
measurement science
1-8
モニタリング,
監視
システムの機能,又は稼働状況の正常性を注視したり,記
録したりすること。
monitoring
1-9
計装
対象とするシステムの運転及び管理を具現するために,対
象システムの計測,制御,管理方法などの方法を検討して,
制御及び監視のための装置を装備すること。
instrumentation
(2) システム
番号
用語
定義
対応英語(参考)
2-1
系,
システム
所定の目的を達成するために要素又は系を結合した全体。 system
2-2
線形系
入力,状態又は出力の関係が,線形方程式で記述される系。
備考 特性が時間的に変化する時変線形系があるが,
時間的に変化しない時不変線形系を単に線形系
ということが多い。
linear system
2-3
非線形系
(ひせんけいけい)
入力と出力との関係が非線形である系。すなわち,入力と
状態との関係,又は状態と出力との関係の少なくとも一方
が非線形方程式で記述される系。
nonlinear system

3
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語(参考)
2-4
集中定数系
(しゅうちゅうて
いすうけい)
時間を独立変数とし,有限個の状態変数成分で記述される
系。すなわち,状態方程式が常微分方程式である系。
lumped parameter
system
2-5
分布定数系
(ぶんぷていすう
けい)
時間を独立変数とし,無限個の状態変数成分を必要とする
系。すなわち,状態方程式が偏微分方程式である系。例え
ば,時間と場所とを独立変数としてもつ系。
distributed parameter
system
2-6
確率系
確率的な不確かさが伴う系。
stochastic system
2-7
離散事象系
離散的な事象が間欠的に生起し,それに伴って状態が離散
的に遷移する系。
discrete event system
(3) システムの構造表現
番号
用語
定義
対応英語(参考)
3-1
ブロック線図
システムを構成する要素間の信号伝達による結合関係を
表現する線図。
備考 要素をブロックと呼ばれる四角形で,信号をそ
の伝達の向きに合わせた矢印で,信号の分岐を
引き出し点で,加減算を加え合わせ点で表す。
block diagram
3-2
信号伝達線図,
シグナルフローグ
ラフ
変数相互間の影響関係を表現する重み付き有向グラフ。
備考 変数を節点で表し,変数xから変数yへの伝達
関数がGyxであるときに,x節点からy節点へ向
かって,Gyxを重みとする重み付き有向枝を設け
る(重みGyxをトランスミッタンスと呼ぶことが
多い。)。変数yは,節点yへ向かう枝のそれぞ
れについて始端の変数に枝のトランスミッタン
スを乗じたものの和として与えられる。
signal flow graph
3-3
ボンドグラフ
構成要素がエネルギーの流れで結合されているシステム
の構造を表現する線図。
備考1. エネルギーの流れ,すなわちパワーをボンド
と呼ばれる線分で表し,パワーの分岐及び合
流を2種類の接点で表す。
2. ボンドにはパワーの伝達方向を規定する矢印
及び変数の入出力関係を表すストロークと呼
ばれる記号が付加される。
bond graph
3-4
ペトリネット
非同期的,並行的に進展する事象相互間の因果関係を表現
する線図。
備考 条件(局所状態)をプレース,事象をトランジ
ションと呼ばれる記号で表し,事象発生の前提
となる条件のプレースから,その事象のトラン
ジションへ矢印(枝)を,トランジションから
はその事象発生の結果として生じる条件のプレ
ースへ矢印を設ける。条件が充足されているこ
とはプレースにトークンと呼ばれるマークを置
いて表し,トークンの移動によって事象の進展
が表現される。
Petri net
4
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語(参考)
3-5
マークフローグラ
フ
ペトリネットにおいて,シーケンス制御系をモデル化する
際の便宜を考慮して,幾つかの拡張と制約を導入した線
図。
備考 プレースでトークンの追突が生じないようにト
ークンの移動が制約され,また,外部の状況に
応じて事象の発生を制御できるように,許可枝
及び抑止枝という拡大機能をもつ矢印が用いら
れる。
mark flow graph
(4) 制御方式
番号
用語
定義
対応英語(参考)
4-1
手動制御
直接又は間接に人が操作量を決定する制御。
manual control
4-2
自動制御
制御系を構成して自動的に行われる制御。
automatic control
4-3
開ループ制御
フィードバックループがなく,制御量を考慮せずに操作量
を決定する制御。
open-loop control
4-4
フィードバック制
御,
閉ループ制御
フィードバックによって制御量を目標値と比較し,それら
を一致させるように操作量を生成する制御。
備考 制御量をそのまま目標値側にフィードバックす
る場合には,単一フィードバックという。
feedback control ;
closed-loop control
4-5
フィードフォワー
ド制御
目標値,外乱などの情報に基づいて,操作量を決定する制
御。
feedforward control
4-6
カスケード制御
フィードバック制御系において,一つの制御装置の出力信
号によって他の制御系の目標値を決定する制御。
cascade control
4-7
二自由度制御
一つのフィードバック制御に関して,例えば目標値から制
御量への伝達関数,外乱から制御量への伝達関数,検出器
に入る雑音から制御量への伝達関数というように何種類
もの伝達関数が考えられ,これらの中の二つの伝達関数を
独立に調整することができる制御方式。
two-degree-of-freedo
m control
4-8
多変数制御
複数の制御入力と複数の制御量との間に相互干渉がある
系において,制御入力をまとめて操作することによって,
複数の制御量を同時に制御する制御方式。
multivariable control
4-9
非干渉制御
複数の制御入力と複数の制御量との間に相互干渉がある
系において,一つの制御入力の影響が一つの制御量だけに
及ぶようにする制御方式。
decoupling control ;
non-interacting control
4-10
分散制御
制御対象に分散的に配置された複数の制御装置による協
調的な制御。
distributed control ;
decentralized control
4-11
階層制御
制御系が階層的に構成されている分散制御。
hierarchical control
4-12
定値制御
目標値が一定の制御。
set-point control
4-13
追従制御
変化する目標値に追従させる制御。
備考 追値制御ともいう。
follow-up control ;
tracking control
4-14
比率制御
二つ以上の量の間に,ある比例関係を保たせる制御。
ratio control
4-15
サーボ系
変化する目標値に追従させるフィードバック制御系。
備考 元来,物体の位置,方位,姿勢,力などの力学
量を制御量とし,目標値の任意の変化に追従す
るように構成された制御系であるが,追従制御
を主な目的として構成された制御系を指すこと
も少なくない。
servo system
4-16
予見制御
目標値及び外乱の未来値があらかじめ分かっている場合
に,その情報を利用して現時点での操作量を決定する制御
方式。
preview control

5
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語(参考)
4-17
予測制御
目標値,外乱,又は制御対象の出力などの未来値の予測情
報に基づいて,現時点での操作量を決定する制御方式。
predictive control
4-18
最適制御
制御過程又は制御結果を,与えられた基準に従って評価
し,その評価成績を最も良くする制御。
optimal control ;
optimum control
4-19
ロバスト制御
制御対象の特性に多少の変動があっても,制御系全体が不
安定にならず,制御性能の劣化が少ないという強健性を考
慮して設計された制御。
備考 通常,パラメータの固定された制御装置によっ
てこれを実現する。
robust control
4-20
サンプル値制御
制御系の一部にサンプリングによって得られた間欠的な
信号を用いる制御。
sampled-data control
4-21
ディジタル制御
目標値,制御量,外乱,負荷などの信号のディジタル値か
ら,制御演算部でのディジタル演算処理によって操作量を
決定する制御。
digital control
4-22
プログラム制御
あらかじめ定められた変化をする目標値に追従させる制
御。
program control
4-23
ファジイ制御
ファジィ推論演算を行って操作量を決定する制御方式。
備考 ルールベース制御に比べて滑らかな制御が可能
であり,広い意味での非線形制御に入る。
fuzzy control
4-24
シーケンス制御
あらかじめ定められた順序又は手続きに従って制御の各
段階を逐次進めていく制御。
sequential control
4-25
ルールベース制御
制御対象の実際的な運転知識・経験などを,コンピュータ
で処理できるルール形式で表現し,コンピュータでこれら
のルール群を用いた推論を行うことで,操作量を決定する
制御方式。
備考 代表的なものとしては,“もし (IF) …ならば,
(THEN) …である”という,IF-THENルール表
現を用いた推論によって操作量を決定する
IF-THENルールベース制御がある。結果として
可変構造制御的な動作をするので,非線形制御
に入る。
rule-based control
4-26
非線形制御
少なくとも一つの非線形演算要素を制御演算部に含む制
御方式。
備考1. 非線形演算要素とは,その入出力関係が線形
演算では得られない演算要素である。例えば,
出力が入力の開平演算又は二次以上の高次関
数演算によって与えられるような演算要素を
いう。
2. 代表的なものとして,ゲインスケジューリン
グ制御,厳密な線形化を用いた制御,可変構
造制御などがある。
3. ファジィ制御,ルールベース制御も推論演算
部では非線形演算を行っているので非線形制
御に入る。
nonlinear control
6
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語(参考)
4-27
可変構造制御
制御対象の状態又は変数の値に応じて,二つ以上の制御演
算要素を切り換えることによって,制御構造を変えること
ができる制御方式。
備考1. 代表的なものとして,制御構造を変える切換
え面上を制御対象の状態が振動及び滑り動作
を行いながら移動して制御目的を果たす,す
べり状態制御 (sliding mode control) が知られ
ている。
2. 制御対象の特性変動に対する強健性の向上を
図ることが可能であり,変数の全動作範囲で
は非線形制御となる。
Variable structure
control
4-28
ゲインスケジュー
リング制御
制御演算部で用いるゲインを,目標値,制御量,外乱,負
荷などの信号によって変えながら行う制御。
備考1. ゲインとは,信号が増幅される度合をいう。
2. 変数の全動作範囲では非線形制御となる。
gain scheduled control
4-29
適応制御
制御対象の特性・環境などの変化に応じて,制御系の特性
を所要の条件を満たすように変化させる制御。
adaptive control
4-30
学習制御
過去の制御経験を基に,目的により良く合うように制御方
式を変化させていく制御。
learning control
4-31
PID制御
(ぴーあいでぃー
せいぎょ)
比例動作,積分動作,及び微分動作の三つの動作を含む制
御方式。
備考 その一部を含まない場合には,含むものだけを
明示してP制御,PI制御,PD制御などと呼ぶ。
PID制御という用語は,これらの総称としても
用いられる。
PID control
4-31-1
微分先行型PID制御 PID制御の構成のなかで,比例動作,積分動作は制御偏差
に働き,微分動作は制御量にだけ働くような構成にした制
御。
備考 PI-D制御とも書く。
PI-D control
4-31-2
I-PD制御
PID制御の構成のなかで,積分動作は制御偏差に働き,比
例動作及び微分動作は制御量にだけ働くような構成にし
た制御。
備考1. 制御対象に比例動作,微分動作などのフィー
ドバック補償をほどこし,積分動作で行う制
御である。
2. 比例・微分先行型PID制御ということもある。
I-PD control
4-31-3
比例動作
入力に比例する大きさの出力を出す制御動作。
備考 P動作と略称することもある。
proportional action
4-31-4
積分動作,
リセット動作
入力の時間積分値に比例する大きさの出力を出す制御動
作。
備考 I動作と略称することもある。
integral action ;
reset action
4-31-5
微分動作
入力の時間微分値に比例する大きさの出力を出す制御動
作。
備考 D動作と略称することもある。
derivative action
4-31-6
PID定数
(ぴーあいでぃー
ていすう)
PID制御において,比例ゲイン,積分時間,及び微分時間
に単位を付けた定数。
PID parameters
7
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語(参考)
4-31-7
比例ゲイン
比例動作の強さを表すパラメータで,入力変化分に対する
出力変化分の比。
備考 以下のPID定数などの説明ではPID制御装置の
伝達関数が
+
+
s
T
s
T
K
D
I
P
1
1
,
また,不完全微分を用いたときは
+
+
+
s
T
s
T
s
T
K
D
D
I
P
ε
1
1
1
であることを前提としている。
ここに,KP:比例ゲイン
TI:積分時間
TD:微分時間
1/ε:微分ゲイン
である。
proportional gain
4-31-8
比例帯
比例動作において,出力が有効変化幅の0〜100%変化する
のに要する入力の変化幅 (%)。
備考 比例帯は,無次元化した比例ゲインの逆数 (%)
に相当する。
proportional band
4-31-9
積分時間
PI動作(比例及び積分の各動作を組み合わせた動作)又は
PID動作(比例,積分及び微分の各動作を組み合わせた動
作)の制御装置にステップ入力を加えたとき,比例動作だ
けによる出力と積分動作だけによる出力とが等しくなる
までの時間。
備考1. 比例動作に対する積分動作の弱さを表すパラ
メータ。
2. 積分時間の逆数をリセット率という。
integral time ;
reset time
4-31-10 微分時間
PD動作(比例及び微分の各動作を組み合わせた動作)又
はPID動作の制御装置にランプ入力を加えたとき,比例動
作だけによる出力が微分動作だけによる出力に等しくな
るまでの時間。
備考 比例動作に対する微分動作の強さを表すパラメ
ータ。
derivative time ;
rate time
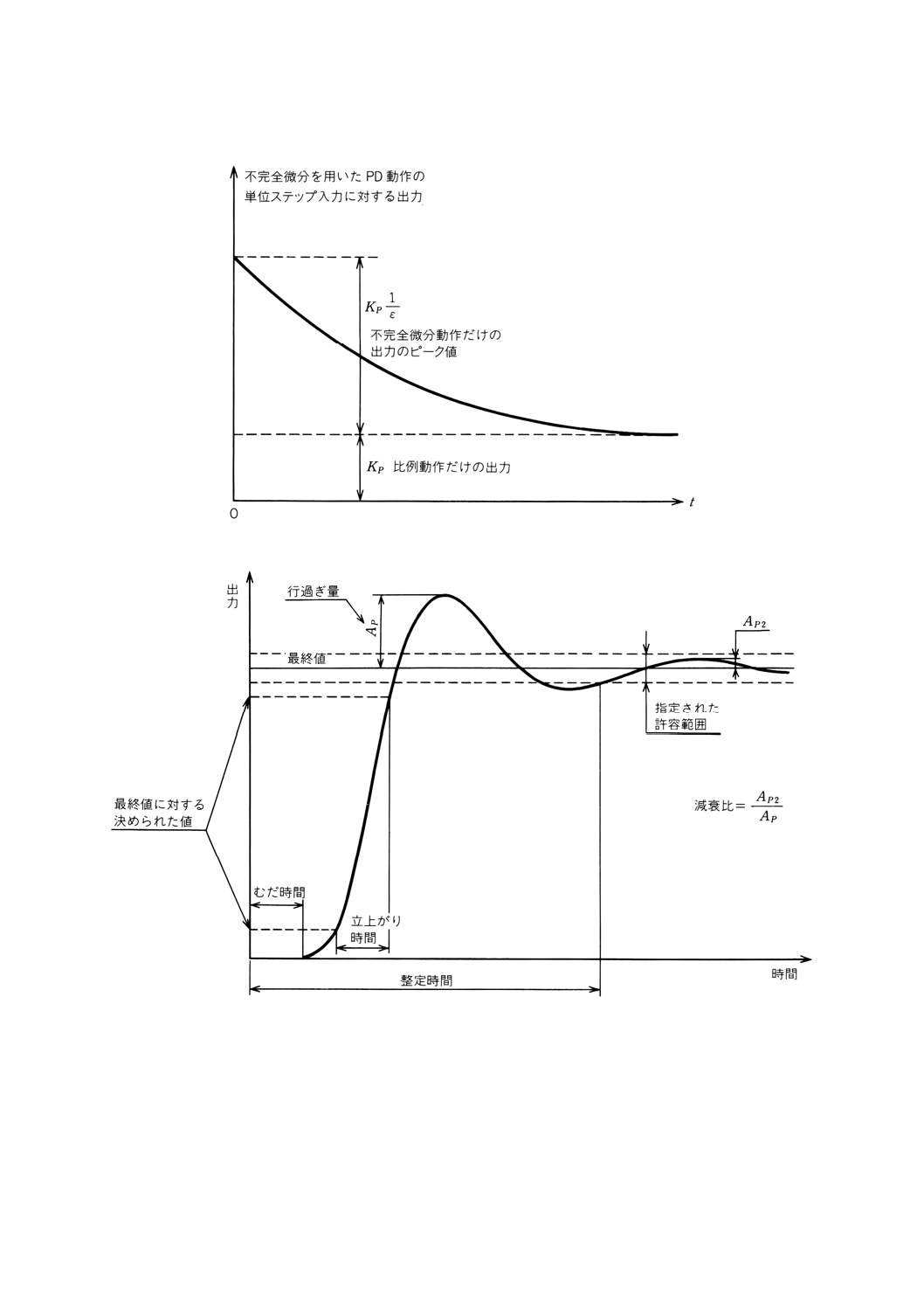
4-31-11
微分ゲイン
不完全微分を用いたPD動作の制御装置にステップ入力を
加えたとき,比例動作だけによる出力に対する不完全微分
動作だけの出力のピーク値の比(付図1参照)。
備考1. 微分動作を近似的に実現する不完全微分動作
の近似の良さを表すパラメータ。
2. 比例動作だけのゲインに対する不完全微分を
用いたPD動作の高周波帯域におけるゲイン
の比に相当する。
derivative gain ;
rate gain
(5) 制御系の構成
番号
用語
定義
対応英語(参考)
5-1
制御系
制御のために制御対象に制御装置を結合して構成された
系。
control system
5-1-1
比較部
制御装置において,目標値と,制御量又は制御対象からフ
ィードバックされる信号とを比較する部分。
comparing element
8
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語(参考)
5-1-2
制御演算部
制御装置において,目標値に基づく信号及び検出部からの
信号を基にして,制御系が所要の働きをするのに必要な信
号を作り出して操作部へ送り出す部分。
備考 調節部ともいう。
controlling element
5-1-3
操作部
制御装置において,制御演算部などからの信号を操作量に
変えて,制御対象に働きかける部分。
備考 サーボ機構などでは操作部を明確にすることが
できないこともある。
final controlling
element
5-1-4
検出部
制御装置において,制御対象,環境などから制御に必要な
信号を取り出す部分。
備考 取り出した信号について演算処理を行うことも
少なくない。
detecting element
5-1-5
フィードバックル
ープ,
制御ループ
操作の結果を制御演算部に戻すために形成されるループ。
備考1. 作用又は信号の伝達の下流側から上流側へ信
号を戻すことをフィードバックという。
2. 制御量をそのまま目標値側にフィードバック
する場合には,単一フィードバックという。
feedback loop ;
control loop
5-2
制御対象
制御の対象となる系で,機械,プロセス,プラントなどの
全体又は一部がこれに当たる。
controlled object
5-3
制御装置
検出部,比較部,制御演算部,操作部からなり,操作量を
生成する装置。
controller ;
control device
5-4
調節計
制御演算部を構成する要素。
controller
5-5
補償要素
制御演算部において制御対象の特性を改善するため,又は
好ましくない入力の影響を低減するために,有効な信号を
生成する要素。
compensator ;
compensating element
5-6
直列補償要素
制御ループの前向き経路中に制御対象と直列に入れられ
た補償要素。
tandem compensator
5-7
フィードバック補
償要素
フィードバック経路中に入れられた補償要素。
feedback compensator
5-8
フィードフォワー
ド補償要素
目標値,外乱などの情報に基づいて操作量を生成する補償
要素。
feedforward
compensator
5-9
検出器
制御対象,環境などから制御に必要な信号を取り出す機
器,要素。
sensor
5-10
変換器,
トランスデューサ
測定量又は信号を,それに対応する同種の信号又は異種の
処理しやすい信号に変換する装置。
transducer
5-11
サンプラ
連続時間信号の瞬時値を間欠的に(例えば,一定時間間隔
で)取り込み,出力する要素。
備考1. ここでいう瞬時値には短い時間幅をもたせる
ことがある。
2. 間欠的に信号を取り込むことをサンプリング
という。
sampler
5-12
ホールド
間欠的に送られてくる信号の値を,次の値が来るまで保持
する要素。
備考 一定値で保持する0次ホールド,過去の値の関
数で外挿する高次ホールドなどがある。
hold
5-13
オブザーバ,
状態観測器
対象の状態を,対象のモデルに基づいてその入出力信号か
ら推定する方法又は装置。
observer
5-14
カルマンフィルタ
雑音の平均的大きさ(分散値)を考慮して,最適設計され
たオブザーバ。
Kalman filter
5-15
不感帯
出力に変化を及ぼさない入力の範囲。
dead band
9
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語(参考)
5-16
飽和
出力が上限又は下限に達し,変化しない特性。
saturation
5-17
ヒステリシス
入力の方向性前歴に依存して,入力値に対応する出力値が
異なる特性。
hysteresis
(6) 信号
番号
用語
定義
対応英語(参考)
6-1
入力信号,
入力
機器又は装置に供給される,情報を担っている信号,又は
物理的作用。
input signal ;
input
6-2
出力信号,
出力
機器又は装置から出る,情報を担っている信号,又は物理
的作用。
output signal ;
output
6-3
外乱
制御系の状態を乱そうとする外部からの作用。
disturbance
6-4
状態変数,
状態量
システムの挙動を記述する(必要にして最小限の)変数の
組。
state variable ;
state
6-5
目標値
制御系において,制御量がその値を取るように目標として
与えられる量。
備考 定値制御では,これを設定値 (set point) ともい
う。
desired value ;
command
6-6
制御量
制御対象に属する量のうちで,それを制御することが目的
となっている量。
controlled variable
6-7
制御偏差
目標値と制御量との差。
deviation ;
error
6-8
操作量,
制御入力
制御系において,制御量を制御するために制御対象に加え
る量。
manipulated variable ;
control input
6-9
アナログ信号
連続的な量の大きさで表した信号。
analog (ue) signal
6-10
サンプル値信号
サンプリングによって得られた間欠的な信号。
sampled signal
6-11
ディジタル信号
数値に対応した離散的な符号で表した信号。
digital signal
6-12
白色雑音,
白色ノイズ
(はくしょくざつ
おん)
平たんなパワースペクトル密度をもち,時間相関をもたな
い不規則な雑音。
white noise
6-13
有色雑音,
有色ノイズ
パワースペクトル密度が平たんでなく,時間相関をもつ不
規則な雑音。
colo (u) red noise
6-14
疑似ランダム信号
(ぎじらんだむし
んごう)
人工的に発生された不規則な信号。例えばM系列信号な
ど。
pseudo random noise
(7) 動特性表現
番号
用語
定義
対応英語(参考)
7-1
状態方程式
入力の過去から現在までの影響を縮約した量である状態
変数の変化を記述する方程式。
備考 連続時間系(離散時間系)の場合には,状態変
数の変化速度(未来値)が状態変数及び入力信
号の現在値で決定される微分(差分)方程式で
表される。これに,出力と状態変数及び入力信
号との関係を表す代数方程式である出力方程式
を合わせて,状態方程式表現といい,この状態
方程式表現を状態方程式と呼ぶこともある。
state equation
7-2
伝達関数
時不変線形な連続時間要素・系の入出力関係表現の一つ。
初期状態を零としたときの,入力信号のラプラス変換に対
する出力信号のラプラス変換の比。
transfer function
10
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語(参考)
7-3
パルス伝達関数
時不変線形な離散時間要素・系の入出力関係表現の一つ。
初期状態を零としたときの,入力信号のz変換に対する出
力信号のz変換の比。
pulse transfer function
7-4
閉ループ伝達関数
フィードバック制御系において,目標値・外乱などループ
外から入る外生信号から,制御量・制御偏差までの伝達関
数。
closed-loop transfer
fanction
7-5
一巡伝達関数
フィードバック制御系において,フィードバックループの
一点を切断したときに,切断した直後の点からその直前の
点までの伝達関数の符号を変えたもの。
loop transfer function
7-6
還送差
フィードバック制御系において,目標値,外乱などループ
外から入る外生信号の加わる直前でループを切断したと
きに,外生信号からその加わった直後までの伝達関数(す
なわち1)から,外生信号から切断した直前までの伝達関
数を引いた差。1+(一巡伝達関数)に等しい。
return difference
7-7
感度関数
(1) 伝達関数G (s) に含まれるパラメータaの変化に対す
る伝達関数の変化率
()
da
s
dG。
(2) 系を構成する要素の伝達関数の変化に対する系の伝達
関数の変化率。
備考1. 制御対象の伝達関数P (s) の相対変化PP
∆に対
する制御系の伝達関数W (s) の相対変化WW
∆の
比のように,変化の代りに相対変化で考える
こともある。
2. 制御対象P (s) と制御装置C (s) とからなる単
一フィードバック制御系で,制御対象の伝達
関数の相対変化PP
∆に対する制御系の伝達関数
W (s) の相対変化WW
∆の比は,⊿P→0のとき
()()
s
C
s
P
+
1
1
となる。
sensitivity function
(8) 制御動作
番号
用語
定義
対応英語(参考)
8-1
制御動作
制御演算部が操作量を生成するアルゴリズム。例えば,PID
制御における比例動作,積分動作,微分動作,オンオフ動
作など。
control action
8-2
オンオフ動作
入力の大きさによって,出力が二つの定まった値のどちら
かをとる制御動作。
備考 オンオフは,全開・全閉を意味するが,必ずし
も全開・全閉とならない場合もオンオフ動作と
呼ばれる。
on-off action
(9) 特性
番号
用語
定義
対応英語(参考)
9-1
安定性
系の状態が,何らかの原因で一時的に平衡状態又は定常状
態からはずれても,その原因がなくなれば元の平衡状態又
は定常状態に復帰するような特性。
備考1. 時間的変化の特性が時間的に変化しないと
き,定常状態という。
2. 時間的に変化していない状態を平衡状態とい
う。
stability
9-2
根軌跡
伝達関数の一つのパラメータを媒介変数として,伝達関数
の極(特性方程式の根)を複素平面上に描いた軌跡。
root locus
11
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語(参考)
9-3
ハンティング,
乱調
フィードバック制御系において現れる,振幅の減衰しない
振動現象。
備考 時不変線形集中定数系についていえば,閉ルー
プ伝達関数の極の中に,実部が負でない共役複
素極が含まれる場合に現れる。
hunting
9-4
リミットサイクル
一定の波形,振幅,周期の振動現象に漸近する場合の振動。 limit cycle
9-5
自己平衡性
入力が一定の場合には,出力も入力の値に対応した一定値
に落ちつく特性。
self-regulation
9-6
ドリフト
一定であるはずの信号が,機器の特性の変化及び/又は環
境の影響で,ゆっくりと変動すること。
drift
9-7
可制御性
系の状態を,適切な操作によって,有限時間内に,任意の
状態から別の任意の状態に移動させることができるか否
かという特性。
controllability
9-8
可観測性
系の出力を,有限時間観測することによって,観測開始時
の系のすべての状態変数の成分を知ることができるか否
かという特性。
observability
(10) 応答
番号
用語
定義
対応英語(参考)
10-1
応答
要素・系の,入力の変化に対する出力の変化の様相。
response
10-2
時間応答
要素・系の,入力の変化に対する出力の時間的変化の様相。
備考 一般に応答又は動的応答という。
time response
10-3
過渡応答
要素・系で,入力がある定常状態から別の定常状態に変化
したとき,出力が変化後の定常状態に達するまでの応答。
備考 インパルス応答,ステップ応答は過渡応答の代
表例である。
transient response
10-4
インパルス応答
要素・系にインパルス入力が加わったときの応答。
備考1. インパルス入力の大きさ(δ関数の面積)が1
のときのインパルス応答を単位インパルス応
答という。さらに,単位インパルス応答を重
み関数ともいう。
2. 単位インパルス応答は線形な要素・系の動特
性を反映していて,入力と単位インパルス応
答との畳込み積分で出力が計算される。
impulse response
10-5
ステップ応答
要素・系にステップ入力が加わったときの応答。
備考 単位ステップ(高さが1のステップ状変化の)
入力に対する応答を単位ステップ応答という。
step response
10-6
ランプ応答
要素・系にランプ入力が加わったときの応答。
ramp response
10-7
立上り時間
ステップ応答において,出力がその最終変化量のあるパー
セントから別のパーセント(たとえば10%から90%,5%
から95%など)に変化するのに要する時間(付図2参照)。
備考 最終変化量の何パーセントから何パーセントま
でかを明記する必要がある。
rise time
10-8
遅れ時間,
遅延時間
ステップ応答において,出力が入力から遅れる時間。
備考 出力が最終変化量の50%に達するまでの時間,
95%に達するまでの時間,最初の行過ぎの極大
点に達するまでの時間,5%に達してから95%に
達するまでの時間などが採られる。線形一次遅
れ系では時定数を使うことも多い。
delay time
12
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語(参考)
10-9
むだ時間
入力に変化が発生した時刻から,それによって出力に変化
が現れる時刻までの時間(付図2参照)。
dead time
10-10
時定数
線形一次遅れ系において,ステップ応答が最終変化量の
63.2%に達するまでの時間。
備考 線形一次遅れ系のステップ応答は,
K (1−e-t/T)
と記述され,Tが時定数である。
time constant
10-11
整定時間
ステップ応答において,出力が最終平衡値の指定された許
容範囲内(例えば,±5%)に収まるまでに要する時間(付
図2参照)。
settling time
10-12
行過ぎ量,
オーバシュート
ステップ応答において,出力が最終平衡値を超えた後,最
初にとる極大値の最終平衡値からの隔たりを,最終変化量
の百分率で表したもの(付図2参照)。
overshoot
10-13
減衰
信号の大きさ又は振動の振幅が時間とともに減少するこ
と。
damping ;
attenuation
10-14
減衰比
ステップ応答において,出力が最終平衡値を超えた後,最
初にとる極大値の最終平衡値からの隔たりに対する,第2
番目の極大値の最終平衡値からの隔たりの比(付図2参
照)。
damping ratio
10-15
逆応答
ステップ応答が零でない最終平衡値に落ち着くが,当初そ
れとは反対方向に向かって動き始め,やがて引き返して最
終平衡値の方へと向かう現象。
備考 1入力1出力の時不変線形集中定数系について
いえば,伝達関数の極の実部がすべて負で,原
点に零点がなく,実部が正の零点が奇数個存在
する場合に現れる。
reverse reaction
10-16
定常応答
要素・系で,過渡応答が消えて定常状態に達したときの応
答。
備考 通常,安定な要素・系について考える。
steady-state response
10-17
定常偏差
制御系で,過渡応答が消えて定常状態に達したとき,一定
値に落ちついた制御偏差の値。
備考 入力がステップ入力の場合の定常偏差を定常位
置偏差又はオフセット,ランプ入力の場合の定
常偏差を定常速度偏差,定加速度入力の場合の
定常偏差を定常加速度偏差という。
steady-state deviation ;
steady-state error
10-18
周波数応答
線形で安定な要素・系で,正弦波入力に対するその出力の
振幅比及び位相差が,入力の角周波数とともに変化する様
相。
備考1. 伝達関数がG (s) である要素・系の周波数応答
は,複素関数G (jω) で記述することができる。
ゲイン特性は|G (jω)|で,また,位相特性は
∠G (jω) で計算される。
2. 要素・系が線形でない場合には,正弦波入力
に対する出力が必ずしも正弦波になるとは限
らず,歪んだ波形となることが多い。この場
合には,入力角周波数と同じ角周波数の基本
波出力成分に着目して,入力に対する振幅比
(ゲイン)及び位相差を求めることがある。
frequency response
13
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
用語
定義
対応英語(参考)
10-19
ベクトル線図,
ナイキスト線図
周波数応答G (jω) を,その実部を横軸に,虚部を縦軸にと
り,角周波数ωを0から∞まで変化させて描いた線図。
備考 一巡伝達関数のベクトル線図で安定判別を行う
ときナイキスト線図という。
vector locus ;
Nyquist diagram
10-20
ボード線図
周波数応答G (jω) を,角周波数の対数logωを横軸に,ゲ
インの対数(dB単位で描くことが多い)及び位相差を縦軸
にとって描いた二本一組の線図。
備考 ゲインを描いたものをゲイン線図,位相差を描
いたものを位相線図と呼ぶ。
Bode diagram
10-21
ゲイン位相線図
周波数応答G (jω) を,位相差を横軸に,ゲインの対数(dB
単位で描くことが多い)を縦軸にとり,角周波数 (ω) を0
から∞まで変化させて描いた線図。
gain-phase diagram
10-22
ニコルス線図
ゲイン位相線図上に一巡伝達関数の周波数応答を描いた
とき,単一フィードバック系の目標値から制御量までの閉
ループ伝達関数のゲインと位相差が読み取れるように,ゲ
イン位相線図上に閉ループ伝達関数のゲイン及び位相差
が一定となる曲線を重ね書きした線図。
Nichols chart
10-23
帯域幅
目標値から制御量までの閉ループ伝達関数の周波数応答
のゲインが直流ゲイン(角周波数ω=0におけるゲイン)よ
り,例えば,3dB下がる角周波数。
備考 速応性の評価指数の一つである。
band width
10-24
安定余裕
一巡伝達関数のゲイン・位相の遅れが増加しても,なお,
安定である余裕。
備考1. 安定性の評価指数の一つで,一巡伝達関数の
ナイキスト線図が複素点 (−1, j0) から離れ
ている程度を表す。
2. ∠G (jω) =−180°となる角周波数ω1におけ
る−20log10|G (jω1) |をゲイン余裕といい,
|G (jω) |=1.0となる角周波数ω2における
∠G (jω2) +180°を位相余裕という。ここに,
ω1は,位相差が−180°になる角周波数で位相
交点,ω2は,ゲインが0dBになる角周波数で
ゲイン交点という。
stability margin
10-25
ピークゲイン
目標値から制御量までの閉ループ伝達関数の周波数応答
のゲインの最大値の,直流ゲイン(角周波数ω=0における
ゲイン)に対する比。通常MPで表す。
備考 ピークゲインは安定性の評価指数の一つで,共
振の程度を表す。
peak gain
10-26
最小位相系
ゲイン特性が同一の周波数応答をもつ線形系の中で,位相
の遅れが最も小さい系。
minimum phase
system
(11) 制御パラメータ
番号
用語
定義
対応英語(参考)
11-1
サンプリング周期,
サンプリング間隔
連続時間信号のサンプリングを行うときの時間間隔。
sampling period ;
sampling interval
14
Z 8116-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付図1 (4-31-11)
付図2 (10-7,10-9,10-11,10-12,10-14)