C 5630-26:2017 (IEC 62047-26:2016)
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 1
4 マイクロトレンチ構造の形状表示 ························································································ 2
4.1 一般 ···························································································································· 2
4.2 記号及び説明 ················································································································ 2
4.3 形状表示 ······················································································································ 4
5 マイクロニードル構造の形状表示 ························································································ 4
5.1 一般 ···························································································································· 4
5.2 記号及び説明 ················································································································ 5
5.3 形状表示 ······················································································································ 6
6 計測手順························································································································· 6
附属書A(参考)マイクロトレンチ構造及びマイクロニードル構造の計測方法例 ······························ 7
附属書B(参考)計測の不確かさ ··························································································· 19
参考文献 ···························································································································· 21
C 5630-26:2017 (IEC 62047-26:2016)
(2)
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般財団法人マイクロマシンセンター(MMC)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 5630の規格群には,次に示す部編成がある。
JIS C 5630-1 第1部:マイクロマシン及びMEMSに関する用語
JIS C 5630-2 第2部:薄膜材料の引張強さ試験方法
JIS C 5630-3 第3部:薄膜材料の標準試験片
JIS C 5630-6 第6部:薄膜材料の軸荷重疲労試験方法
JIS C 5630-12 第12部:MEMS構造体の共振振動を用いた薄膜材料の曲げ荷重疲労試験方法
JIS C 5630-13 第13部:MEMS構造体のための曲げ及びせん断試験による接合強度試験方法
JIS C 5630-18 第18部:薄膜曲げ試験方法
JIS C 5630-19 第19部:電子コンパス
JIS C 5630-20 第20部:小型ジャイロ
JIS C 5630-26 第26部:マイクロトレンチ構造及びマイクロニードル構造の寸法,形状表示及び計測
法
日本工業規格 JIS
C 5630-26:2017
(IEC 62047-26:2016)
マイクロマシン及びMEMS−
第26部:マイクロトレンチ構造及び
マイクロニードル構造の寸法,形状表示及び計測法
Semiconductor devices-Micro-electromechanical devices-
Part 26: Description and measurement methods for micro trench and needle
structures
序文
この規格は,2016年に第1版として発行されたIEC 62047-26を基に,技術的内容及び構成を変更する
ことなく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,マイクロメートルサイズのトレンチ構造(以下,マイクロトレンチ構造という。)及びニー
ドル構造(以下,マイクロニードル構造という。)の寸法,形状表示及び計測法を規定する。
この規格は,両構造の形状寸法計測例も規定する。
トレンチ構造は,深さが1 μm〜100 μm,ウォール部及びトレンチ部の幅がそれぞれ5 μm〜150 μm,ア
スペクト比が0.006 7〜20の範囲内にある構造を対象としている。
ニードル構造は,3面又は4面で形成され,その高さ,上面図における水平方向幅及び上下幅が2 μm以
上の大きさをもち,かつ,1辺100 μmの立方体に内包される寸法範囲の構造を対象としている。
この規格はMEMSデバイス(Micro-electromechanical devices)構造設計及び同デバイス構造の加工評価
に適用される。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 62047-26:2016,Semiconductor devices−Micro-electromechanical devices−Part 26: Description
and measurement methods for micro trench and needle structures(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
(引用規格はない。)
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
2
C 5630-26:2017 (IEC 62047-26:2016)
3.1
トレンチ構造(trench structure)
平面基板上に加工された一つ以上の互いに平行な溝構造で,その断面曲線がく(矩)形形状であるもの。
3.2
ニードル構造(needle structure)
三つ以上の面で形成された針状の先端形状を含み,平面基板上の垂直面に対して面対称を成す突起構造。
3.3
ウォール及びトレンチ(wall and trench)
二つ以上のトレンチ構造を等間隔かつ平行に配置することで形成される壁及び溝の組となった構造。
3.4
スキャロップ(scallop)
ポリマー保護膜の堆積とその選択的異方性エッチングとを繰り返す深掘反応性イオンエッチング
(DRIE)加工によって,シリコン基板の壁面に形成される周期的な凹凸。
4
マイクロトレンチ構造の形状表示
4.1
一般
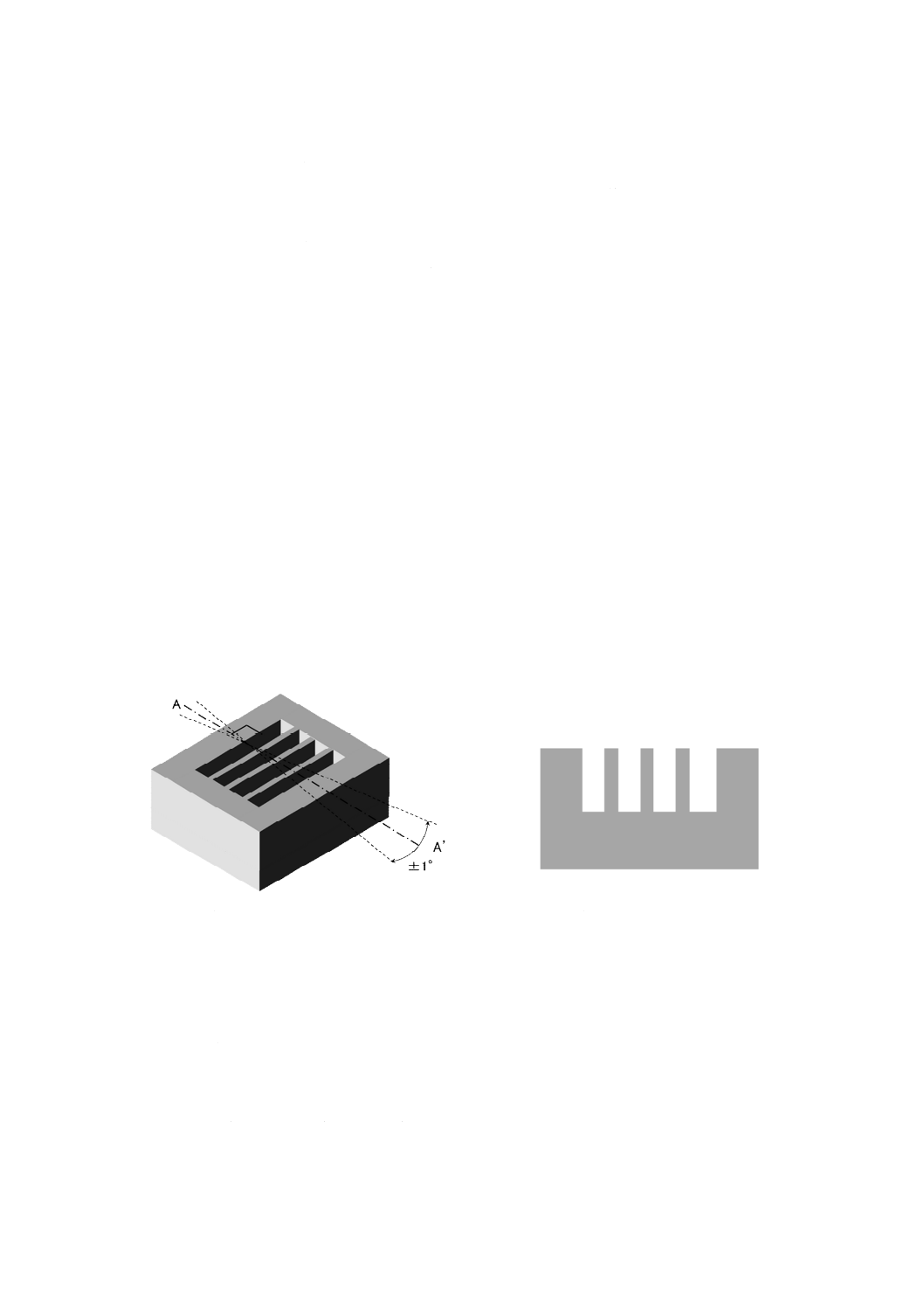
この箇条はマイクロトレンチ構造の断面幾何学形状の表示方法を規定するものである。図1のa) 及び
b) に,この規格で対象とするトレンチ構造の断面形状の例を表示する。トレンチ構造の断面形状は,基板
上面から見て,溝構造長手方向に対して誤差±1°以内で直交する断面形状である。
なお,トレンチ構造の断面形状及び寸法の計測法については,箇条6及び附属書Aを参照。
A-Aʼ 断面
a) トレンチ構造の例
b) A-Aʼ 線の断面の例
図1−マイクロトレンチ構造及び断面形状の例
4.2
記号及び説明
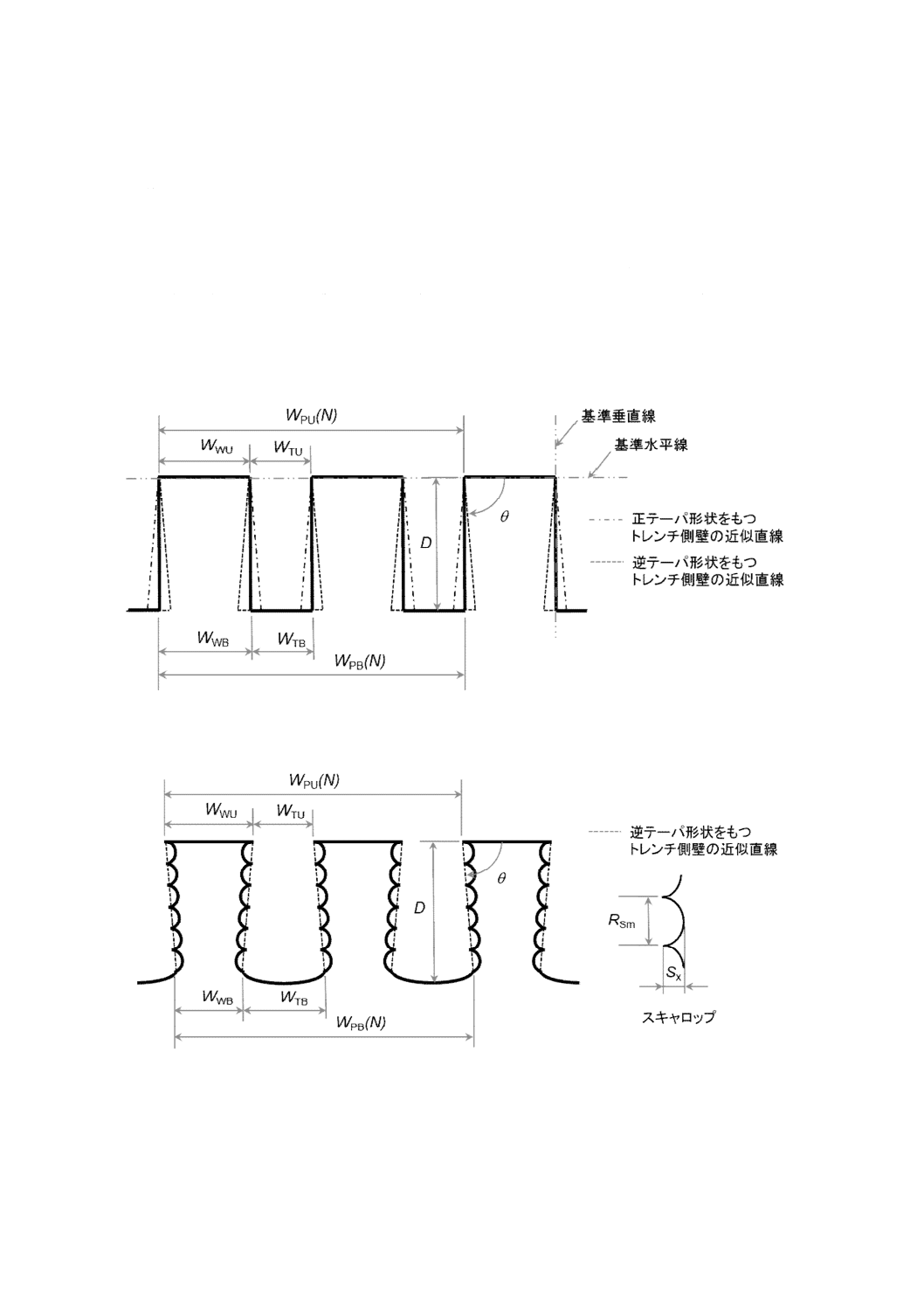
図2に代表的なトレンチ構造の断面形状を示す。また,表1に同構造断面形状を表記するために用いる
記号,説明及び単位をそれぞれ示す。
図2の断面形状を表記する際の基準水平線は,平面基板上面を直線近似した線である。基準垂直線は,
基準水平線に直交する線と定義する。トレンチ側壁は,同側壁の直線近似した線で表示する。トレンチ底
部は,同底部を直線近似又は曲線近似した線で表示する。平面基板上面において,エッチングを受けず,
基準水平線と同一であるとみなされる部分をウォール部,エッチングを受けたとみなされる部分をトレン
3
C 5630-26:2017 (IEC 62047-26:2016)
チ部と定義する。この定義に従い,図2のようにウォール部の幅及びトレンチ部の幅を表示する。トレン
チ側壁角度は,基準水平線とトレンチ側壁の近似直線とのなす角度と定義し,ウォール上面に位置する基
準水平線上から時計回りに,最短距離でウォール壁面に向かって計測した値で表す。トレンチ底部でのウ
ォール幅及びトレンチ幅は,トレンチ側壁の近似曲線と同底面の近似線との交点間距離を用いて表示する。
トレンチ深さはトレンチ部中央位置の基準水平線から溝底面までの最短距離と定義する。
一方,マイクロトレンチ構造が,シリコン基板上で堆積及びエッチングを繰り返す深掘反応性イオンエ
ッチング(DRIE)加工によって製造される場合は,トレンチ側壁にスキャロップが形成される。図3に,
上記エッチング加工によって製造された,逆テーパ側壁をもつトレンチ構造の断面形状の例,及びその寸
法表示記号を示す。
図2−マイクロトレンチ構造の断面形状
図3−シリコン基板上で深掘反応性イオンエッチング(DRIE)加工によって製造した
マイクロトレンチ構造の断面形状
4
C 5630-26:2017 (IEC 62047-26:2016)
表1−マイクロトレンチ構造の記号及び説明
記号
単位
説明
WWU
μm
基準水平線上のウォール部の幅
WTU
μm
基準水平線上のトレンチ部の幅
WWB
μm
底面近似線上のウォール部の幅
WTB
μm
底面近似線上のトレンチ部の幅
WPU(N)
μm
基準水平線上のウォール部とトレンチ部のNピッチとの距離
WPB(N)
μm
底面近似線上のウォール部とトレンチ部のNピッチとの距離
N
−
ピッチ数
D
μm
基準水平線上のトレンチ部中央部の深さ
θ
°
トレンチ側壁角度
Sx
μm
スキャロップの平均水平距離
RSm
μm
スキャロップの平均垂直距離
4.3
形状表示
4.1及び4.2に従って,図2又は図3を用いてトレンチ構造を表示する。寸法の表示法はJIS Z 8317-1を
参照。
5
マイクロニードル構造の形状表示
5.1
一般
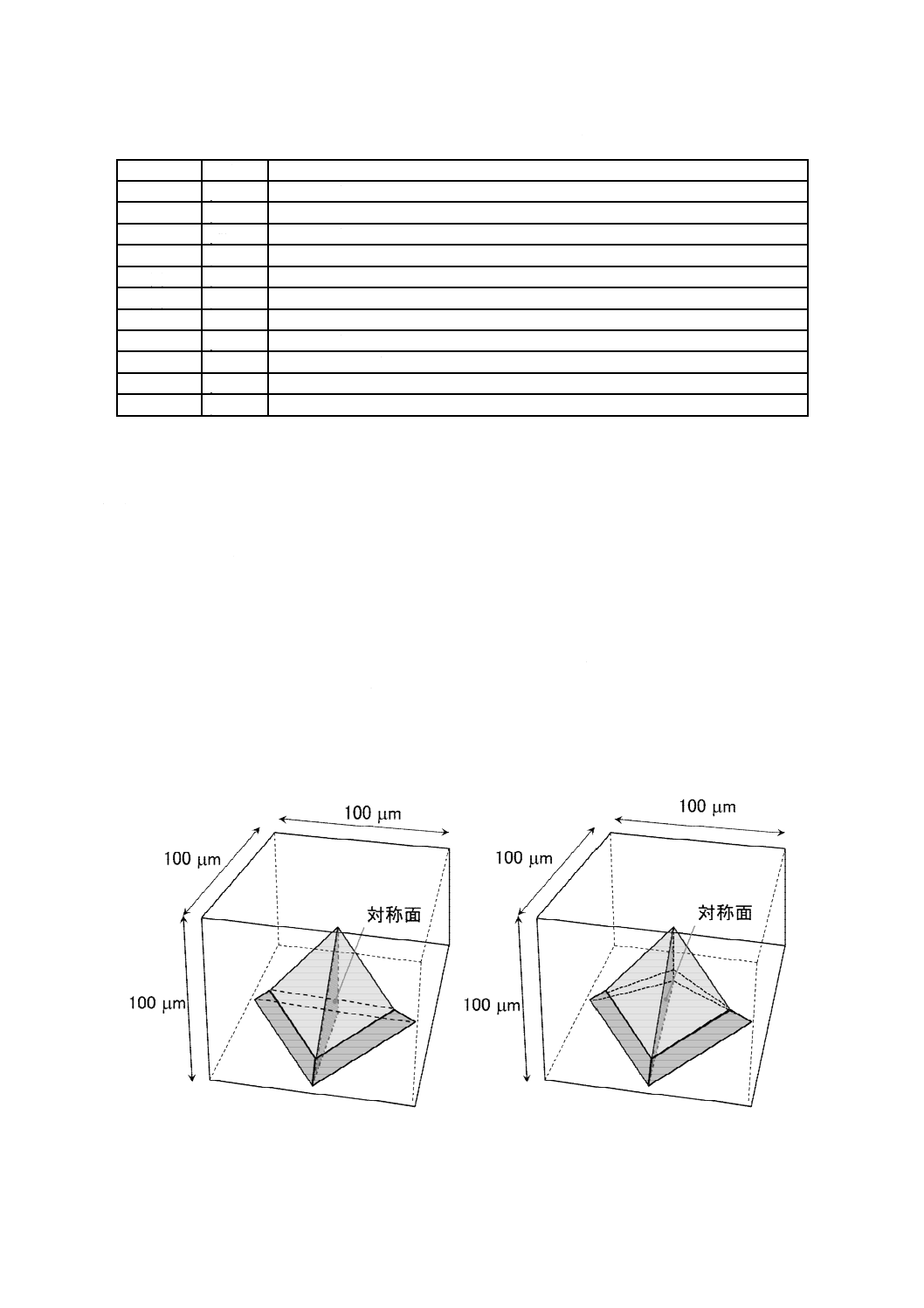
この箇条は,マイクロニードル構造の幾何学形状の表示方法を規定するものである。図4に代表的なニ
ードル構造の外観図を示す。この規格で規定するニードル構造は,平面基板上に形成された3面又は4面
で構成された針状の先端をもつ突起構造であり,かつ,同針状先端を含む垂直面に関して面対称を成す突
起構造と定義する。ここで,図中の斜線面が対称面である。また,平面基板面とニードル構造の底面とは
一致している。
なお,ニードル構造の幾何学形状及び寸法の計測法については,箇条6及び附属書Aを参照。
図4−代表的な3面又は4面のニードル構造の外観図
5
C 5630-26:2017 (IEC 62047-26:2016)
5.2
記号及び説明
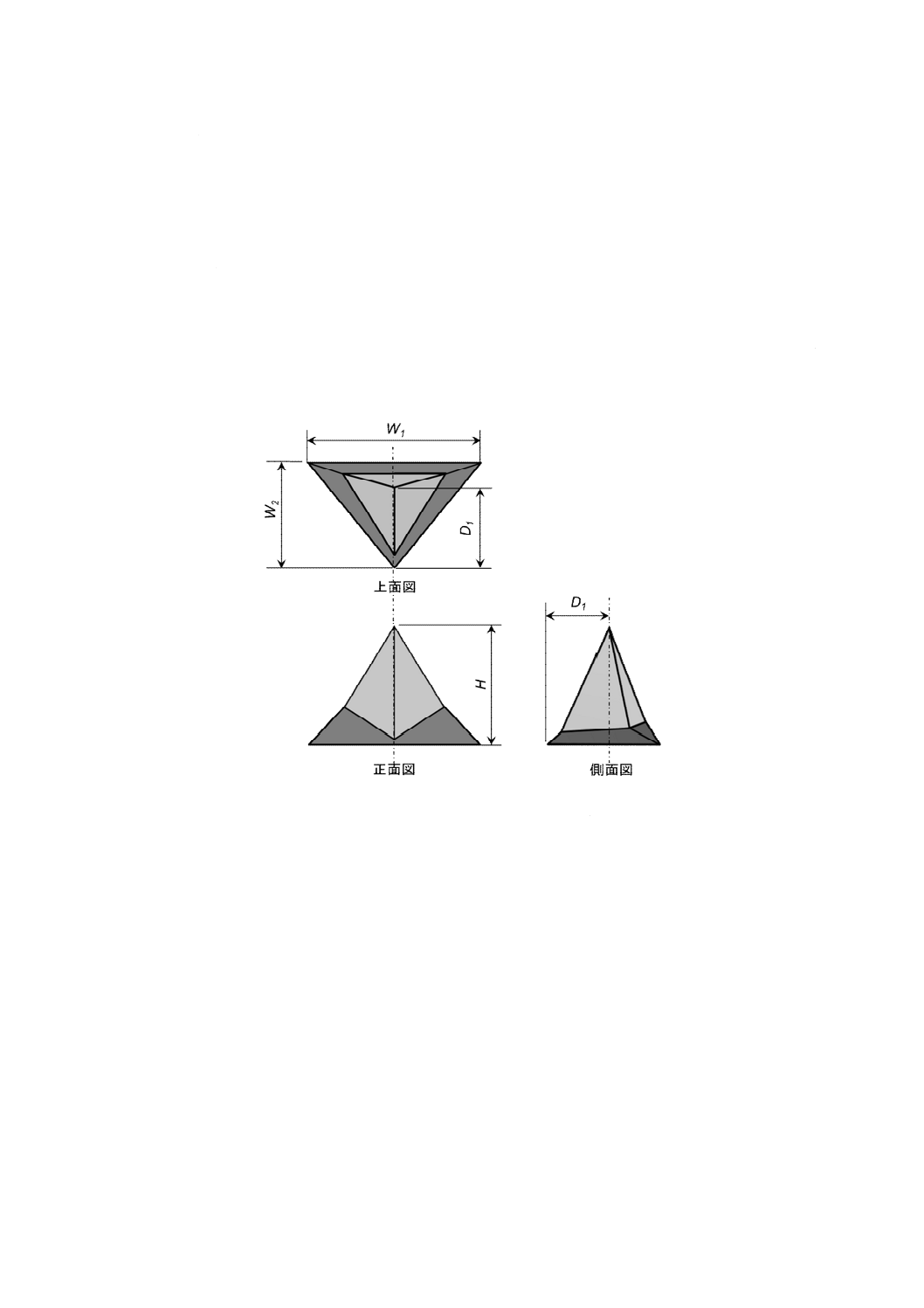
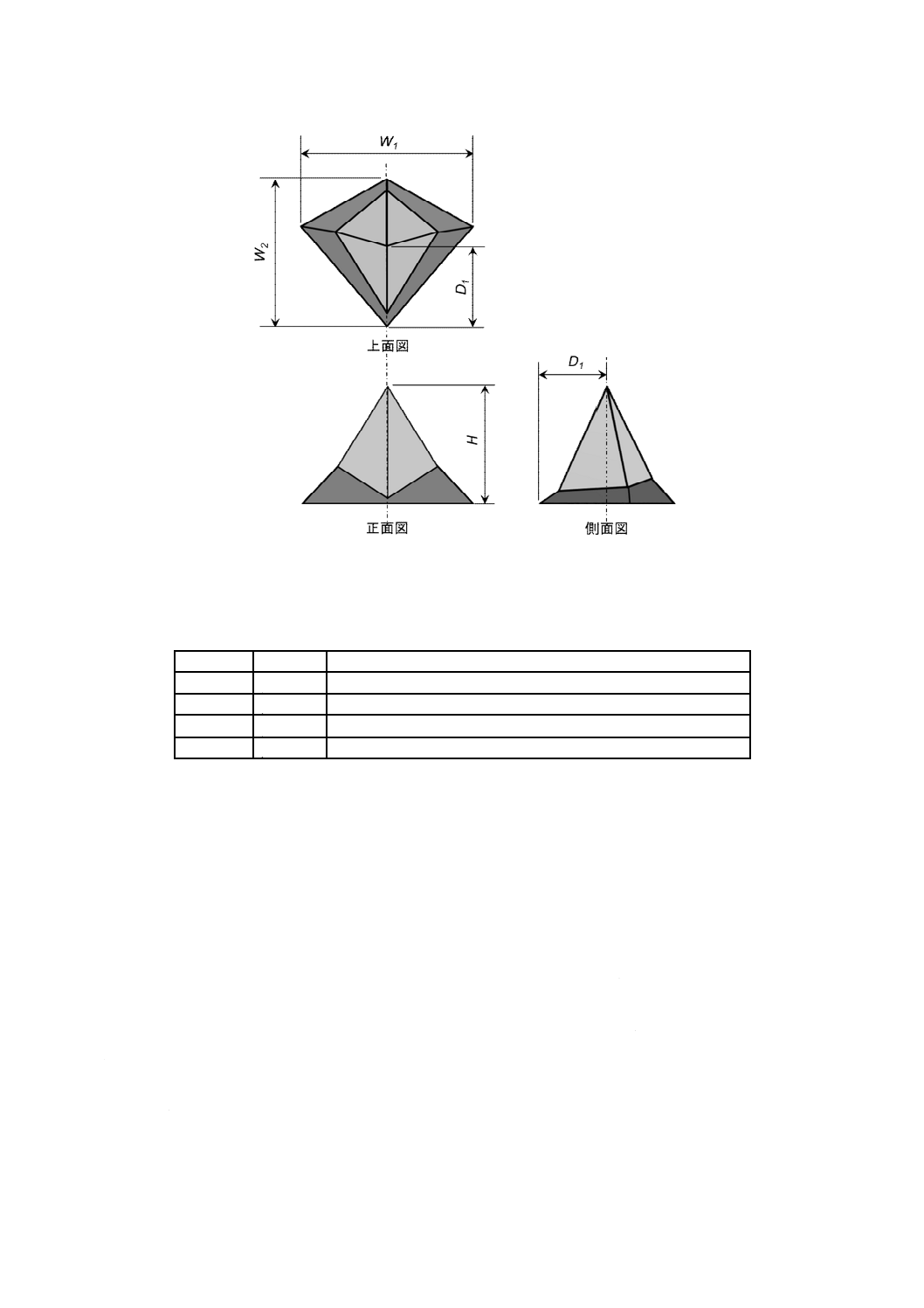
図5に代表的なニードル構造の3面図を示す。また,表2に同構造の寸法を表記するために用いる記号,
説明及び単位を示す。
同構造の正面位置は,構造底面を水平面に一致させた状態で,5.1の対称面を中心に同構造が左右対称に
なる位置と定義する。ここで,先端が3面から構成されるニードル構造の場合[図5 a)]は,5.1の対称面
を中心に二面を前方に配置した位置とする。また,先端が4面から構成されるニードル構造[図5 b)]の
場合は,5.1の対称面を中心に面積が大きい二面を前方に配置した位置とする。
この規格で規定するニードル構造の寸法は,ニードル高さ(H),ニードル構造の底面幅(W1及びW2)
及びニードル頂点からニードル前方までの距離(D1)である。ここで,距離(D1)は図5のa) 及びb) に
おける上面図又は側面図内に示す寸法である。
a) 代表的な3面のニードル構造
図5−代表的なニードル構造の正面,側面及び上面の図
6
C 5630-26:2017 (IEC 62047-26:2016)
b) 代表的な4面のニードル構造
図5−代表的なニードル構造の正面,側面及び上面の図(続き)
表2−マイクロスケールのニードル構造の記号及び説明
記号
単位
説明
W1
μm
上面図におけるニードル構造の水平幅
W2
μm
上面図におけるニードル構造の上下幅
D1
μm
側面図におけるニードル頂点からニードル前面までの距離
H
μm
ニードル構造の高さ
5.3
形状表示
5.1及び5.2に従って,図5を用いてニードル構造を表示する。寸法の表示はJIS Z 8317-1を参照。
6
計測手順
トレンチ構造及びニードル構造の形状寸法の計測例は,附属書Aを参照。各計測において共通する要求
事項は次のとおりである。
a) 各計測を実施する際には,温度,湿度,及び必要計測条件を記録する。
b) 各計測においては使用する機器が保証する寸法測定範囲内で計測を実施する。
c) 校正された計測機器を使用する。
d) 計測機器の校正方法については,必要があれば機器供給者と使用者とが協議する。
e) 計測機器内に試料を設置する際は,試料の水平度及び垂直度を使用する機器の保証範囲内で確保する。
f)
トレンチ構造の形状寸法の表示に必要となる,直線近似又は曲線近似の方法を明記する。
g) 測定結果はB.2に従って記録することが望ましい。
7
C 5630-26:2017 (IEC 62047-26:2016)
附属書A
(参考)
マイクロトレンチ構造及びマイクロニードル構造の計測方法例
A.1 一般
この附属書は,マイクロトレンチ構造及びマイクロニードル構造の寸法及び形状に対する計測例につい
て記載したものである。この附属書は,A.2〜A.6において,両構造の各計測対象項目に対する寸法計測法
の原理,試料準備方法及び計測実験方法を記載しており,ある一つの計測対象項目に対して,一つ以上の
具体的な計測例について情報提供している。
A.2 トレンチ深さの計測
A.2.1 電界放出型走査電子顕微鏡
A.2.1.1 計測原理
電界放出型走査電子顕微鏡(Field emission type-scanning electron microscopy: FE-SEM)は試料に電子線を
照射し,その表面形態を観察する装置である。電子線源にはシリコンチップ又はタングステンチップを用
いて,同チップに電界をかけることで電子を発生させる。FE-SEMが試料に電子線を照射すると,試料表
面から2次電子が発生する。細く絞られた入射電子ビームを試料表面上で走査しながら,このときに発生
した2次電子を検出し,2次電子の発生量を輝度の信号に変換すると電子顕微鏡像が得られる。
A.2.1.2 試料の準備
FE-SEMによってトレンチ深さ寸法を計測するには,試料の断面形状を直接計測する必要がある。この
ため,表1で定義する試料断面が明確に現れるように,試料を分割する。
A.2.1.3 計測手順
4.2で規定しているように,トレンチ深さはトレンチ部中央の基準水平線から溝底面までの最短距離とす
る。機器供給者が提供する装置の取扱い手順に従い計測するが,次の点に留意することが望ましい。
a) FE-SEM電子ビームの方向が試料断面の法線と一致するように,試料をSEM試料室内に設置する。
なお,試料の水平度は装置の保証範囲内で確保する。
b) 計測対象であるトレンチ構造の全体像が電子顕微鏡像内に収まるよう測定倍率を設定する。
c) 機器供給者が提供する装置の取扱い手順に従って,焦点,コントラストなどを調整する。
d) 機器供給者が提供する測長機能を用いて,計測対象の幾何学寸法を測定する。
e) 計測回数は一つの計測対象箇所に対して,推奨繰返し測定回数(B.2参照)計測し,計測結果の平均
値を計測値として採用する。
なお,計測の再現性については附属書Bによる。
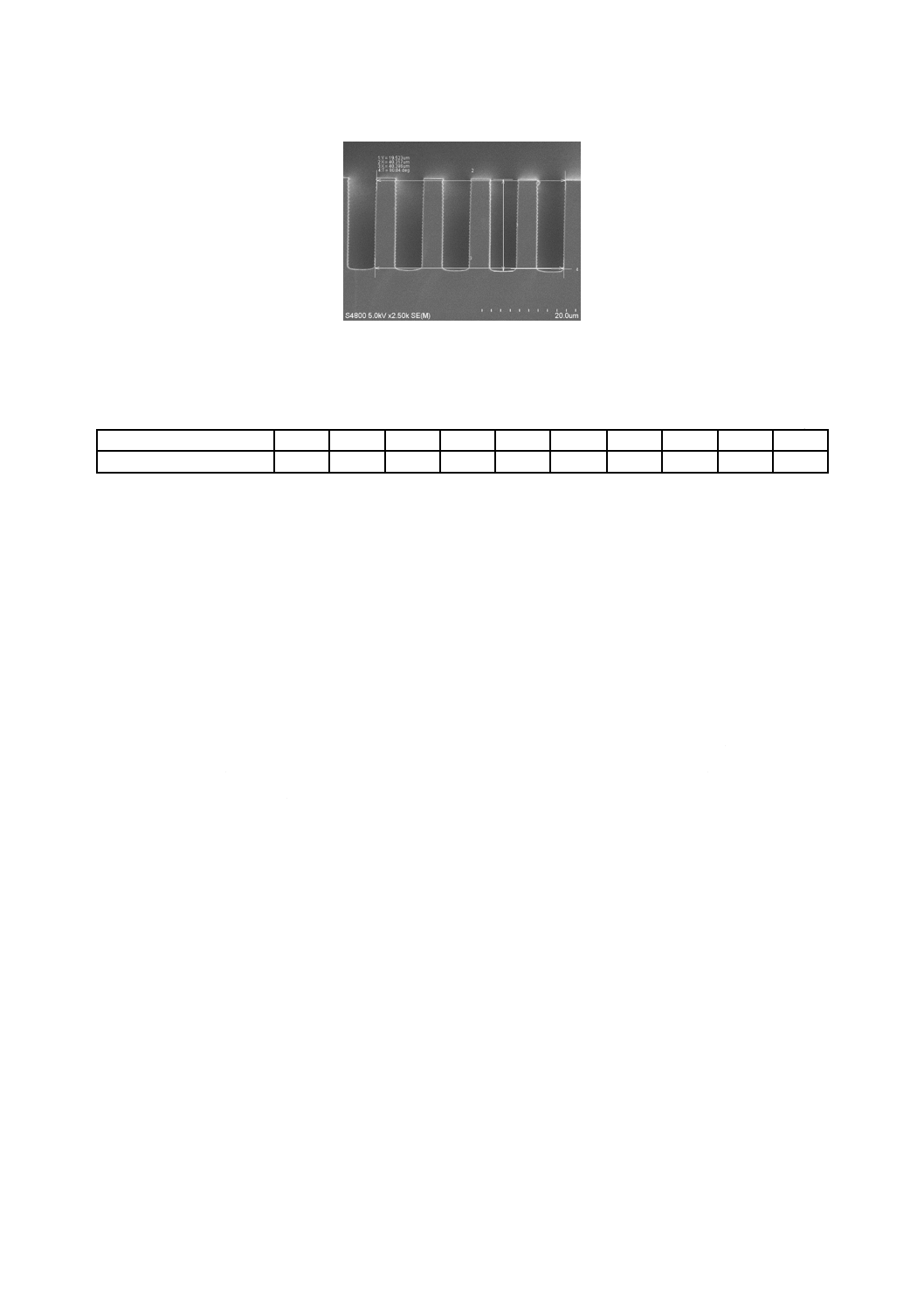
A.2.1.4 計測範囲
4.1に規定した寸法範囲内にあるトレンチ構造に対して適用可能である。図A.1及び表A.1に,倍率2 500
倍でのFE-SEMによるトレンチ深さ計測例をそれぞれ示す。
8
C 5630-26:2017 (IEC 62047-26:2016)
図A.1−ウォール幅5 μm及びトレンチ幅5 μmのトレンチ構造のFE-SEM画像
表A.1−トレンチ深さの計測データ例
単位 μm
回
1
2
3
4
5
6
7
8
9
10
トレンチ深さ,D
19.6
19.5
19.6
19.6
19.5
19.6
19.5
19.5
19.5
19.6
A.2.2 垂直走査型低コヒーレンス干渉計(CSI)
A.2.2.1 計測原理
垂直走査型低コヒーレンス干渉計(Coherence Scanning Interferometer: CSI)は,等光路干渉計を構成して
いる対物レンズを試料面と垂直方向に走査することで,表面上の凹凸(高さ)を測定するシステムである。
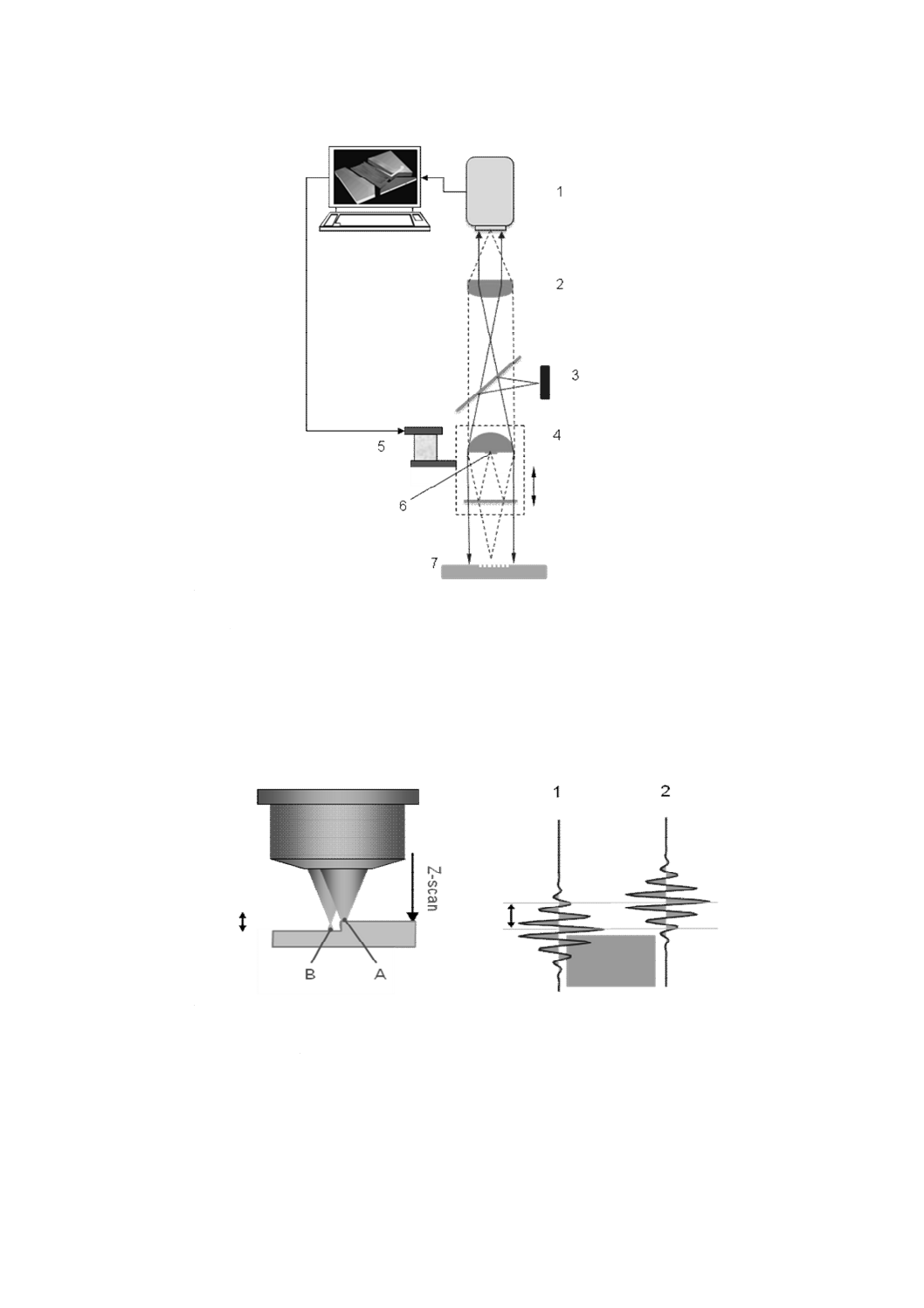
図A.2 a) にCSI顕微鏡の基本構造を図示する。測定対象である試料は,その表面全体に高さ(h)の凹
凸が存在しているものとする。同顕微鏡は,駆動装置によって,同図中のZ-scan方向に,スムーズかつ連
続的に干渉計対物レンズを走査する。走査中,コンピュータがCCD各画素の干渉光強度信号を連続した
フレームごとに記録する。
図A.2 b) は,試料表面上にある段差(h)の上下(図中のA地点及びB地点)で取得された,二つの干
渉強度信号を示している。両地点に相当するCCD画素の干渉強度信号の比較によって対象物の表面高さ
が決定される。具体的には,視野内における各画素で,コントラストが最大となる干渉信号に対応した走
査位置(等光路位置)を演算処理によって求めている。
9
C 5630-26:2017 (IEC 62047-26:2016)
1 CCDカメラ
2 撮像レンズ
3 白色光源
4 干渉対物
5 Z軸駆動装置
6 参照ミラー
7 測定対象
a) 干渉計の基本構成
1 カメラのピクセルBにおける干渉信号
2 カメラのピクセルAにおける干渉信号
b) 二つのカメラのピクセルA及びBによる干渉信号
図A.2−干渉計の構成及び干渉信号
A.2.2.2 試料の準備
試料は分割しない。
h
h
Z-scan
10
C 5630-26:2017 (IEC 62047-26:2016)
A.2.2.3 計測手順
4.2に規定しているように,トレンチ深さはトレンチ部中央の基準水平線から溝底面までの最短距離とす
る。機器供給者が提供する装置の取扱い手順に従い計測するが,次の点に留意することが望ましい。
a) 測定対象となるウォール部及びトレンチ部が観察できる倍率の干渉対物レンズを取り付ける。必要に
応じて,中間レンズの倍率を変更する。測定倍率は,トレンチの深さにかかわらずウォール部の幅及
びトレンチ部の幅によって選択すればよい。ここで,種々のウォール部の幅及びトレンチ部の幅に対
する測定倍率の一例を表A.2に示す。
b) 顕微鏡の光軸方向が試料面の法線と一致するように試料を設置する。
c) 機器供給者が提供する装置の取扱い手順に従い,焦点及びコントラストなどを調整する。
d) 機器供給者が提供する装置の取扱い手順に従い,Z軸の走査範囲などの測定条件を設定し,試料表面
の凹凸形状を測定する。
e) 得られた形状測定データから,機器供給者が提供する測長機能を用いて,トレンチ深さ,ウォール部
の幅及びトレンチ部の幅の寸法を解析する。
f)
計測回数は一つの計測対象箇所に対して,推奨繰返し測定回数(B.2参照)計測し,計測結果の平均
値を計測値として採用する。
なお,計測の再現性については附属書Bによる。
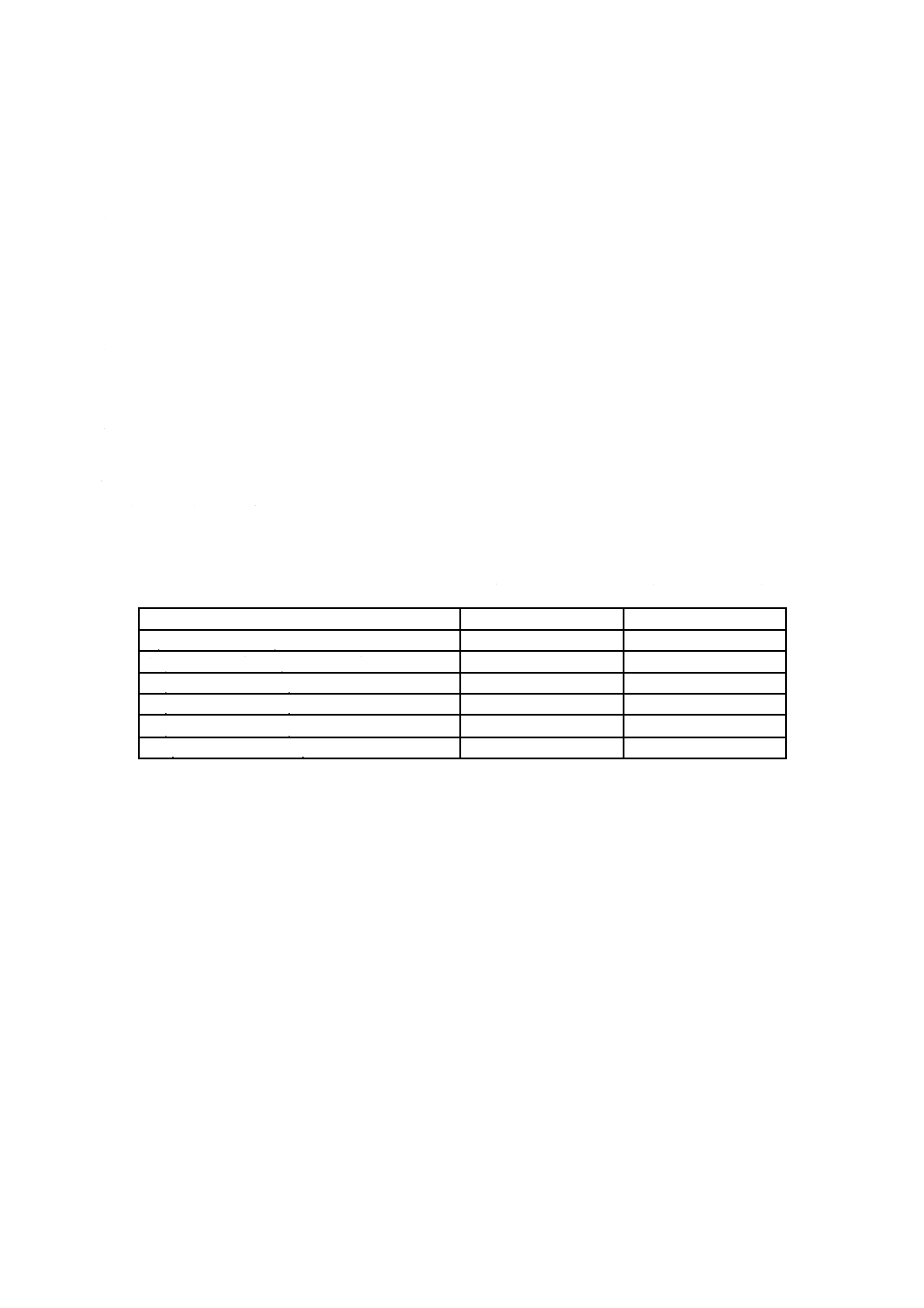
表A.2−トレンチ構造測定における干渉計のレンズ倍率(干渉対物レンズ及び中間レンズ)
ウォール及びトレンチ(公称値)
干渉対物レンズ倍率
中間レンズ倍率
5 μmウォール幅,5 μmトレンチ幅
50
2.0
15 μmウォール幅,5 μmトレンチ幅
50
2.0
20 μmウォール幅,10 μmトレンチ幅
50
1.0
30 μmウォール幅,20 μmトレンチ幅
50
1.0
50 μmウォール幅,50 μmトレンチ幅
50
1.0
150 μmウォール幅,100 μmトレンチ幅
10
1.0
A.2.2.4 計測範囲
4.1に規定した寸法範囲内にあるトレンチ構造に対して適用可能である。
A.2.3 触針式表面形状測定機
A.2.3.1 計測原理
触針式表面形状測定機は,鋭い先端をもつ触針を試料上に接触させて走査させることによって,表面の
粗さ曲線及びうねり曲線を計測する装置である。触針としては先端を球状にした円すい形状のものが使わ
れ,形状は触針先端の曲率半径及び円すいのテーパ角度で表される。測定機は,触針を一定の測定力で試
料に押し当てた際の垂直方向の触針変位を精密に測定する。試料位置の水平方向への走査を組み合わせて,
1次元形状プロファイル(測定断面曲線)を計測する装置が一般的である。触針変位の分解能は0.1 nm程
度である。触針の形状による測定形状の制限がある。
A.2.3.2 試料の準備
試料は分割しない。
A.2.3.3 計測手順
機器供給者が提供する装置の取扱い手順に従い,測定を行う。測定機の特性についてはJIS B 0651[3]に
よる。ただし,次の点に留意することが望ましい。
11
C 5630-26:2017 (IEC 62047-26:2016)
a) 測定に使用する触針を光学顕微鏡で観察し,先端及びテーパ面に破損又は異物の付着がないことを確
認する。
b) 触針の測定力及び走査速度はトレンチ構造の深い段差に十分に追従できる値に設定し,走査範囲はト
レンチが十分に収まるように設定する。
c) 走査測定を行い,1次元のプロファイル(測定断面曲線)を電子ファイルに記録する。フィルタリン
グ処理は行わないことが望ましい。
d) 測定断面曲線から,トレンチの両側の基板上面2点を結ぶ基準水平線を定義する。
e) 測定断面曲線の形状からトレンチ底面が測定されているかどうかを判定する。触針がトレンチ底面に
接触せず,底面が測定できない場合は,触針形状を反映したV字型の測定断面曲線が得られる。トレ
ンチ底面が観測された場合は,トレンチ中央における基準水平線からの距離をトレンチ深さの測定値
(D)とする。
f)
計測回数は一つの計測対象箇所に対して,推奨繰返し測定回数(B.2参照)計測し,計測結果の平均
値を計測値として採用する。
なお,計測の再現性については附属書Bによる。
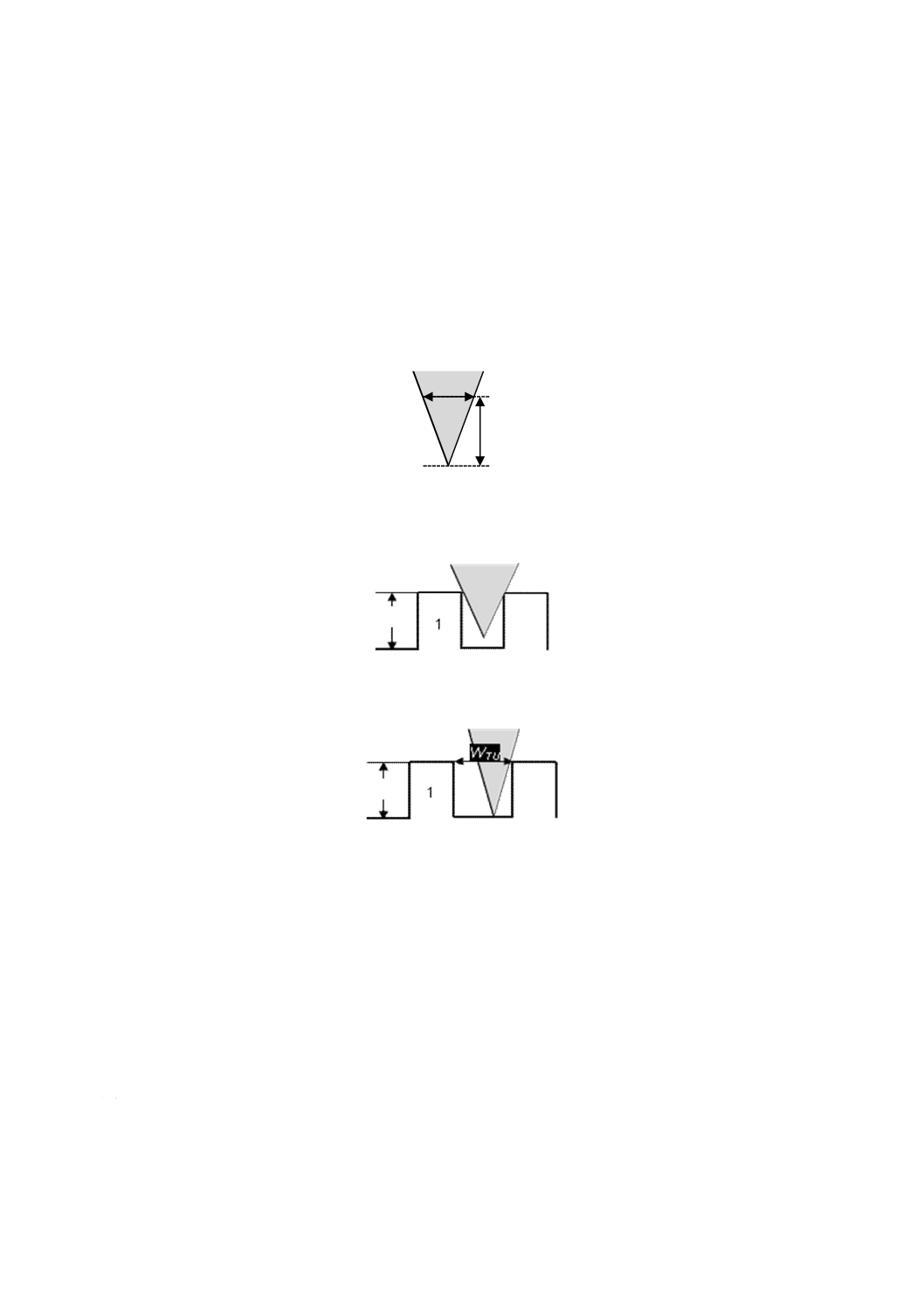
A.2.3.4 計測範囲
触針式測定機では触針の形状によって,触針先端がトレンチの底面に接触しない場合があり,この場合
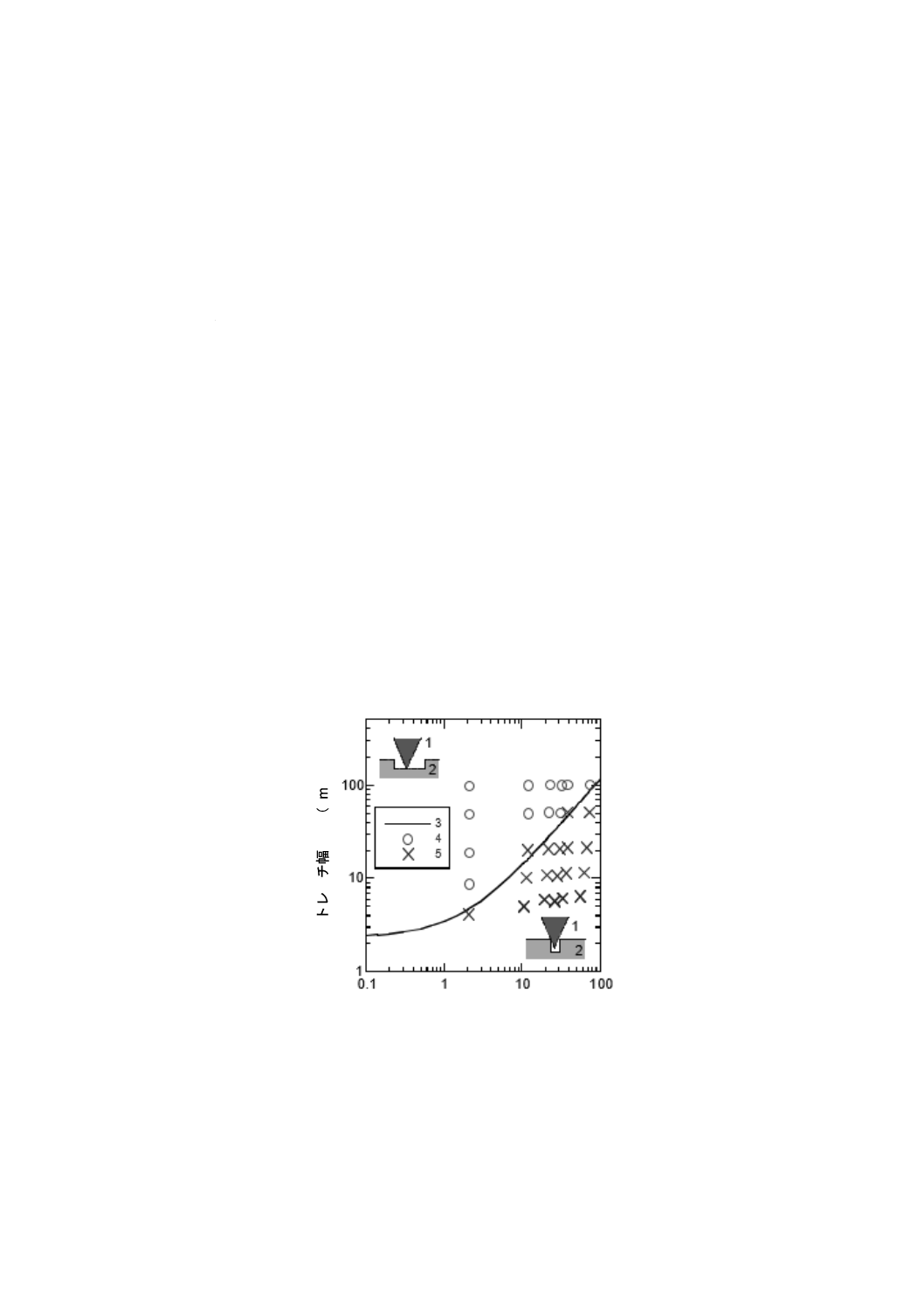
は,トレンチ深さは測定できない。触針先端の曲率半径2 μm及び円すいのテーパ角度60°の触針を用い
て測定の可否を検討した一例を図A.3に示す。測定の可否の境界は,触針先端形状,トレンチ部の上面幅
(WTU)及びトレンチの深さ(D)によって決まる幾何的接触境界線(図A.3の実線を参照)とほぼ一致す
る。この境界は触針先端の形状に依存する。また,触針式測定機には縦方向の測定範囲に上限があり,こ
れを超える深さは測定することができない。
1 触針
2 トレンチ構造
3 幾何的接触境界線
4 計測可能域
5 計測不可能域
図A.3−触針式表面形状測定機によるトレンチ深さ測定における測定可能範囲
トレンチ深さD(mm)
ト
レ
ン
チ
幅
W
T
U
(
μ
m
)
12
C 5630-26:2017 (IEC 62047-26:2016)
A.2.4 共焦点走査型レーザ顕微鏡
A.2.4.1 計測原理
共焦点走査型レーザ顕微鏡(Confocal Laser Scanning Microscopy: CLSM)は,レーザビーム走査で試料の
表面形態を高解像度で観察する手法である。集束させたレーザビームでサンプル面上を2次元的にスキャ
ンし,表面からの反射光を光検出器で検出することによって表面形態の情報を得ることができる。さらに,
共焦点顕微鏡のイメージセンサは,焦点が合った位置からの反射光だけを検出することから,高精細な画
像を得ることができる。焦点位置を高さ方向に移動させながら各高さ位置での2次元画像を収集すること
によって,精密な3次元画像が得られる。
なお,CLSMの解像度は,レーザ源の波長,レンズのNA(開口数)などによって決定される。
A.2.4.2 試料の準備
試料は分割しない。
A.2.4.3 計測手順
機器供給者が提供する装置の取扱い手順に従い,測定を行う。ただし,次の点に留意することが望まし
い。
a) 試料は,観察対象となる試料表面を光軸(z軸)に対して垂直に設置する。通常は表面をx-y平面と
平行にする。
b) 倍率は,計測対象のトレンチが計測エリアに収まるように選択する。このとき,可能な限り高倍率で
あることが望ましい。
c) z方向の走査範囲を,測定対象であるトレンチ溝深さ以上に設定する。
d) 計測回数は一つの計測対象箇所に対し,推奨繰返し測定回数(B.2参照)計測し,計測結果の平均値
を計測値として採用する。
なお,計測の再現性については附属書Bによる。
A.2.4.4 計測範囲
4.1に規定した寸法範囲内にあるトレンチ構造に対して適用可能である。
A.2.5 原子間力顕微鏡
A.2.5.1 計測原理
原子間力顕微鏡(Atomic force Microscopy: AFM)は高分解能な走査型プローブ顕微鏡の一つであり,AFM
探針と試料表面とに作用する原子間力を利用することによって,表面形態像を得る装置である。原子間力
を一定に保ちながら先端の鋭い探針が2次元的に試料表面(x-y平面)上で走査され,各x-y位置での探針
の高さ(z)方向変位を計測することで,試料表面の断面曲線が3次元的に測定される。AFM測定には,
コンタクトモード,非接触モード,タッピングモードなどの幾つかの測定方法がある。コンタクトモード
(静的測定モード)では,探針が試料表面に軽く接触しながら,探針先端と試料表面との斥力を一定に保
つように試料表面を走査する。非接触モード(動的モード)では,僅かに振動させた探針が,探針先端と
試料表面との引力の振幅を一定に保つように試料表面を走査する。一方,タッピングモードでは,振動さ
せた探針が,連続的に試料表面をタッピングしながら試料表面を走査する。AFMの分解能は,プローブ先
端半径及び測定モード,並びにスキャナの精度に依存する。
A.2.5.2 試料の準備
試料は分割しない。
A.2.5.3 計測手順
機器供給者が提供する装置の取扱い手順に従い,測定を行う。ただし,次の点に留意することが望まし
13
C 5630-26:2017 (IEC 62047-26:2016)
い。
a) 試料は,観察対象となる試料表面がAFMのz方向(探針の高さ方向)に対して垂直になるように,
かつ,試料表面上のトレンチ・ウォール間のエッジラインが,探針の水平走査方向に対して垂直にな
るように設置する。
b) AFM探針の先端がトレンチ底に到達する形状の探針を選択する(図A.4参照)。
c) 計測回数は一つの計測対象箇所に対して,推奨繰返し測定回数(B.2参照)計測し,計測結果の平均
値を計測値として採用する。
なお,計測の再現性については附属書Bによる。
d
D
a) AFM探針の構造
b) 不適切なAFM探針の場合
c) 適切なAFM探針の場合
1 トレンチ構造試験片
d AFM探針の頂点からDの位置の直径
図A.4−AFM探針とトレンチ構造との関係
A.2.5.4 計測範囲
この計測法は,用いるAFMの測定性能によって,測定可能なトレンチ構造の形状寸法が制限される。
次の点に留意する。
トレンチ溝深さ(D)はAFMのzスキャナの最大走査範囲内にあることが望ましい。
A.3 トレンチ構造の表面のウォール幅の測定
A.3.1 電界放出型走査電子顕微鏡
A.3.1.1 計測原理
D
WTU>d
D
WTU<d
14
C 5630-26:2017 (IEC 62047-26:2016)
A.2.1.1による。
A.3.1.2 試料の準備
A.2.1.2による。
A.3.1.3 計測手順
A.2.1.3のa)〜e) による。
なお,ウォール部の幅及びトレンチ部の幅の測長は試料表面の観察からも可能である。
A.3.1.4 計測範囲
A.2.1.4による。
A.3.2 垂直走査型低コヒーレンス干渉計
A.3.2.1 計測原理
A.2.2.1による。
A.3.2.2 試料の準備
A.2.2.2による。
A.3.2.3 計測手順
A.2.2.3のa)〜f) による。
A.3.2.4 計測範囲
A.2.2.4による。
A.3.3 触針式表面形状測定機
A.3.3.1 計測原理
1次元形状プロファイルの測定原理はA.2.3.1に準じる。トレンチ上端のエッジ部分では,触針先端の球
状部分が試料エッジに接触するため,先端の形状を反映して,直線及び円弧を接続した測定断面曲線が得
られる。そのため,触針先端形状を仮定すれば,測定された断面曲線から試料エッジ位置を推定すること
ができる。トレンチ両端のエッジ位置推定値2点,及び隣接するトレンチのエッジ位置推定値を併せた3
点の位置からWTU及びWWUを算出する。
A.3.3.2 試料の準備
A.2.3.2による。
A.3.3.3 計測手順
A.2.3.3のa)〜f) による。
A.3.3.4 計測範囲
4.1に規定した寸法範囲内にあるトレンチ構造に対して適用可能である。
A.3.4 共焦点走査型レーザ顕微鏡
A.3.4.1 計測原理
A.2.4.1による。
A.3.4.2 試料の準備
A.2.4.2による。
A.3.4.3 計測手順
A.2.4.3のa)〜d) による。
A.3.4.4 計測範囲
A.2.4.4による。
なお,この計測法では,図2に示すトレンチ側壁角度(θ )が90°未満の場合,トレンチ底部のトレン
15
C 5630-26:2017 (IEC 62047-26:2016)
チ幅(WTB)及びウォール幅(WWB)は測定できない。
A.3.5 光学顕微鏡
A.3.5.1 計測原理
落射照明型顕微鏡(光学顕微鏡)を利用して,トレンチ構造エッジ部の間隔を計測し,校正用スケール
及び寸法を比較することによって,トレンチ構造のウォール部の幅及びトレンチ部の幅の寸法を測定する
手法である。可視光を用いる場合,分解能は200 nm程度となる。計測値は使用レンズの倍率によって決
定される。
A.3.5.2 試料の準備
試料は分割しない。
A.3.5.3 計測手順
機器供給者が提供する装置の取扱い手順に従い,測定を行う。ただし,次の点に留意することが望まし
い。
a) 光学顕微鏡の長さ校正用の対物マイクロメータをトレンチ間隔計測時の倍率で撮影,又は撮像素子を
用いて画像を取り込み,長さの校正を行う。校正に使用するミクロメータの間隔は,計測倍率に応じ
て適切に選択する。
b) 計測対象物を対物レンズ下に設置し,校正を行った倍率にてトレンチ構造をフィルムに撮影,又は撮
像素子を利用して画像を取り込み,必要とされるトレンチ構造の間隔を計測する。
c) 上記a) で行った長さの校正値を用いて,トレンチ構造のウォール部の幅(WWU)及びトレンチ部の幅
(WTU)を算出する。
d) トレンチ間隔の計測回数は一つの計測対象箇所に対して,推奨繰返し測定回数(B.2参照)計測し,
計測結果の平均値を計測値として採用する。
なお,計測の再現性については附属書Bによる。
A.3.5.4 計測範囲
4.1に規定した寸法範囲内にあるトレンチ構造に対して適用可能である。
A.4 電界放出型走査電子顕微鏡によるトレンチ側壁角度の測定
A.4.1 計測原理
A.2.1.1による。
A.4.2 試料の準備
A.2.1.2による。
A.4.3 計測手順
A.2.1.3のa)〜e) による。
なお,トレンチ側壁に明確なスキャロップス構造がある場合は,図3及び表1に示す寸法Sx及びRSmを
計測する。
A.4.4 計測範囲
A.2.1.4による。
A.5 電界放出型走査電子顕微鏡によるトレンチ構造底面のウォール部の幅及びトレンチ部の幅の測定
A.5.1 計測原理
A.2.1.1による。
16
C 5630-26:2017 (IEC 62047-26:2016)
A.5.2 試料の準備
A.2.1.2による。
A.5.3 計測手順
A.2.1.3のa)〜e) による。
A.5.4 計測範囲
A.2.1.4による。
A.6 ニードル構造の形状計測
A.6.1 電界放出型走査電子顕微鏡
A.6.1.1 計測原理
A.2.1.1による。
A.6.1.2 試料の準備
ニードル構造は破壊(破損及び分割)してはならない。
A.6.1.3 計測手順
a) FE-SEM電子ビームの方向がニードル構造底面の法線と一致するようにSEM試料室内の試料ステージ
に試料を設置する。
なお,試料の水平度は装置の保証範囲内で確保する。
b) 計測対象であるニードル構造の全体像が電子顕微鏡像内に収まるよう測定倍率を設定する。
c) 機器供給者が提供する装置の取扱い手順に従い,焦点,コントラストなどを調整する。
d) 機器供給者が提供する測長機能を用いて,計測対象であるW1,W2及びD1寸法を測定する。
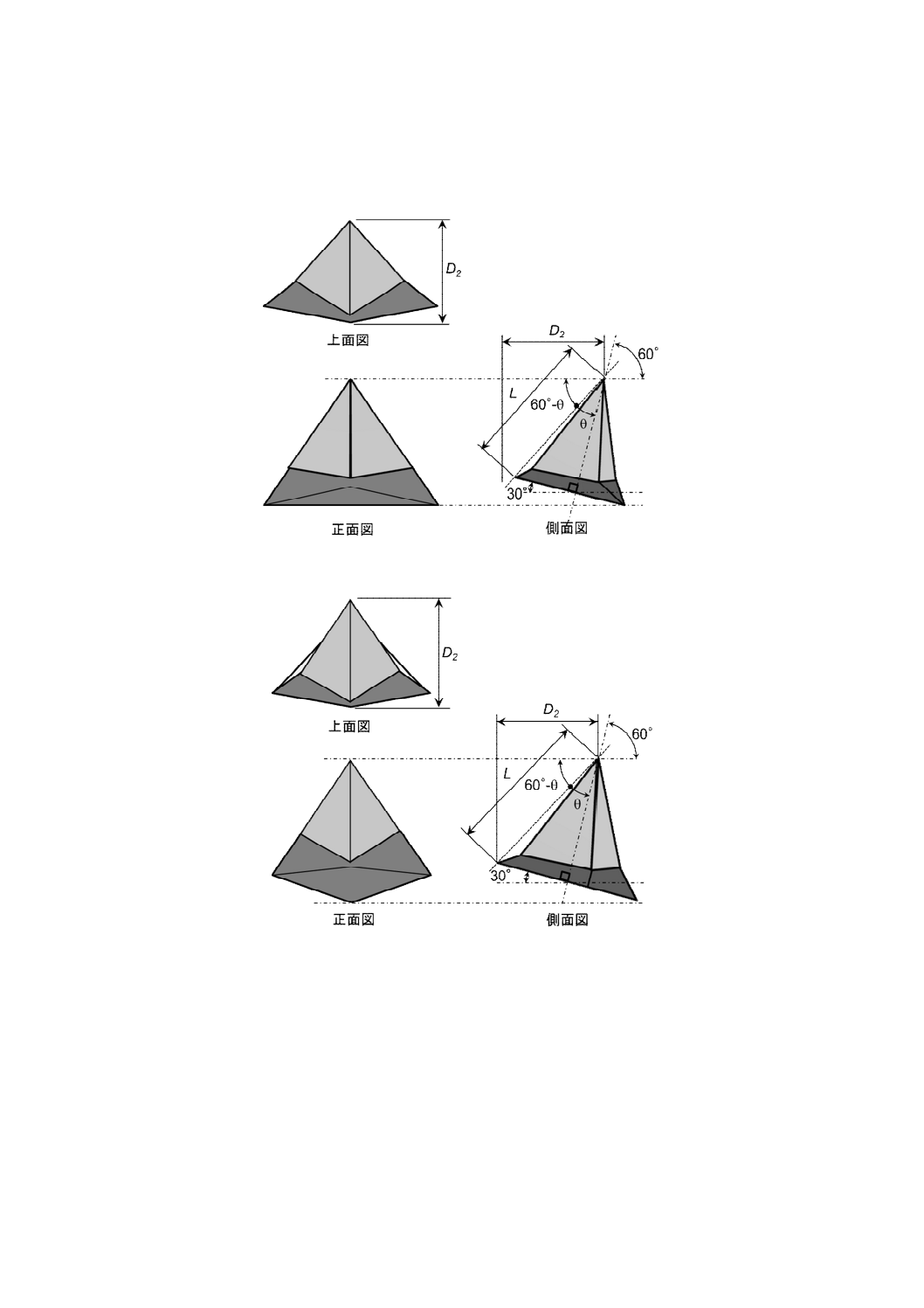
e) 図A.5に示すように,試料ステージをニードル構造の対称面内で30°傾斜させ,機器供給者が提供す
る測長機能を用いて同図中のD2を測定する。
f)
図5及び図A.5に示す幾何学的条件に基づいて,次の式を用いてニードル高さ(H)を算出する。
H
D1
tan =
θ
··············································································· (1)
また,式(2)及び式(3)による。
(
)
L
D2
60
cos
=
−
°θ
······································································· (2)
L
H
=
θ
cos
················································································ (3)
式(2)及び式(3)から,式(4)となる。
(
)
H
D2
cos
60
cos
=
−
°
θ
θ
······································································· (4)
よって,式(4)は式(5)とすることができる。
H
D2
tan
2
3
2
1
tan
60
sin
60
cos
=
+
=
°
+
°
θ
θ
·········································· (5)
式(5)に式(1)を代入すると,式(6)となり,ニードル高さ(H)を算出できる。
1
2
3
2
D
D
H
−
=
········································································· (6)
g) 計測回数は一つの計測対象箇所に対して,推奨繰返し測定回数(B.2参照)計測し,計測結果に基づ
17
C 5630-26:2017 (IEC 62047-26:2016)
いて算出した計算値の平均を採用する。
なお,計測の再現性については附属書Bによる。
a) 代表的な3面のニードル構造
b) 代表的な4面のニードル構造
図A.5−ニードル構造を30°傾けた場合の正面,側面及び上面の図
A.6.1.4 計測範囲
5.1に規定した寸法範囲内にあるニードル構造に対して適用可能である。
A.6.2 原子間力顕微鏡
A.6.2.1 計測原理
A.2.5.1による。
18
C 5630-26:2017 (IEC 62047-26:2016)
A.6.2.2 試料の準備
試料は分割しない。
A.6.2.3 計測手順
機器供給者が提供する装置の取り扱い手順に従い,ニードル構造の各寸法を測定する。ただし,次の点
に留意することが望ましい。
a) ニードル底面(又は基板面)はAFMのZスキャン方向に対して垂直になるように設置する。
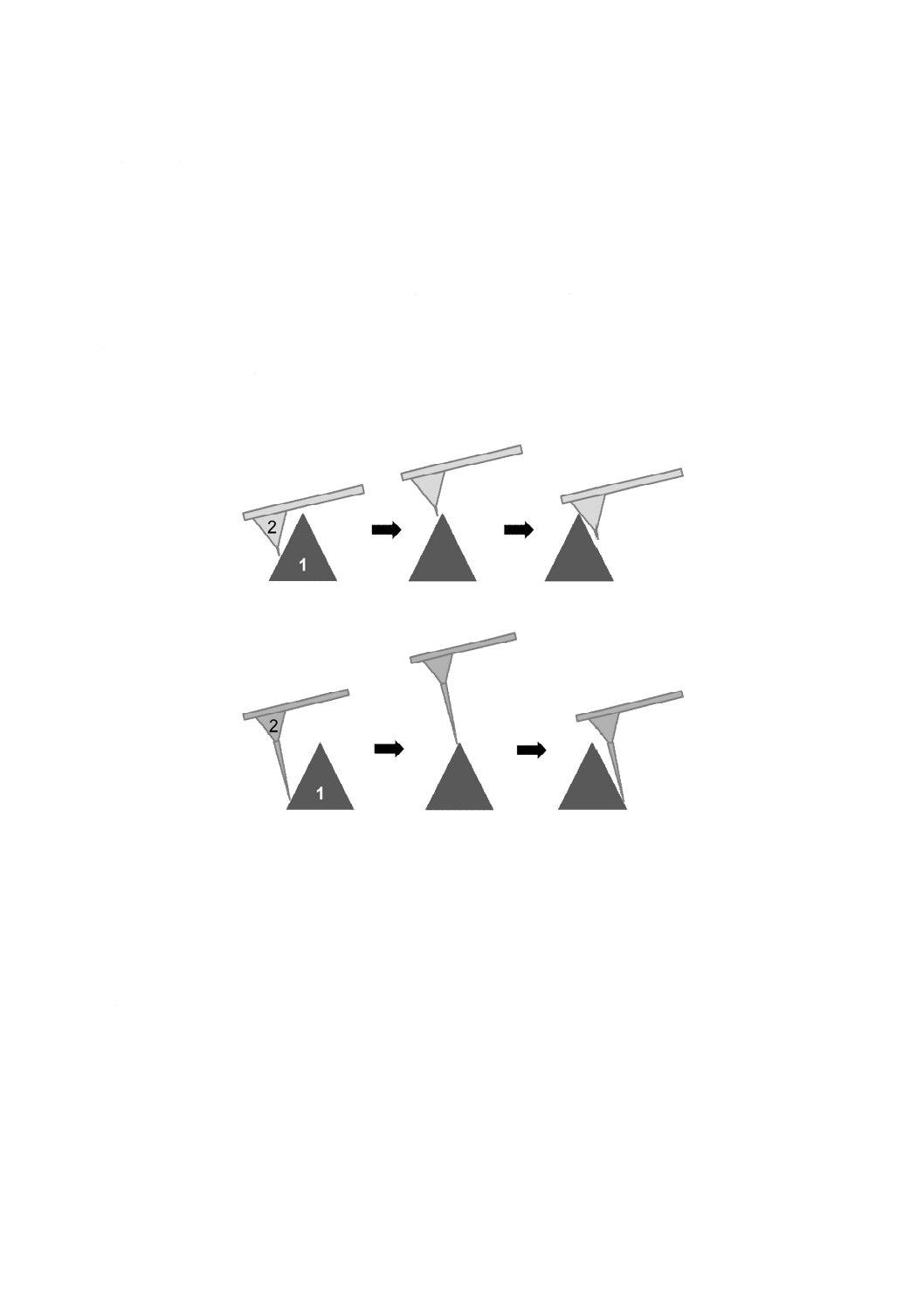
b) ニードルの側面の高さプロファイルを測定するためには,AFM探針先端が,ニードル側面及び根本に
届く形状を選択する[図A.6 a) 及び図A.6 b) を参照]。
c) 計測回数は一つの計測対象箇所に対して,推奨繰返し測定回数(B.2参照)計測し,計測結果の平均
値を計測値として採用する。
なお,計測の再現性については附属書Bによる。
a) 不適切なAFM探針の場合
b) 適切なAFM探針の場合
1 ニードル構造試料
2 AFM探針
図A.6−AFM探針先端形状とニードル構造との関係
A.6.2.4 計測範囲
この計測法は,AFMの測定性能によって測定可能なニードル構造が制限される。次の点に留意すること
が望ましい。
a) 水平方向のニードル幅(W1及びW2)は,AFMのx-yスキャナの走査範囲より十分に小さい。
b) ニードル高さ(H)は,AFMのzスキャナの走査範囲内である。
19
C 5630-26:2017 (IEC 62047-26:2016)
附属書B
(参考)
計測の不確かさ
B.1
一般
計測対象をMEMS(micro-electromechanical systems)に用いられるトレンチ構造及びニードル構造に限
定し,さらに,測定量を,この規格によって規定された形状の表示法に示されている寸法としたときの計
測結果の信頼性について述べる。MEMS寸法計測における測定結果の信頼性は,不確かさによって評価・
表現するものとする。ここで定めている不確かさの定義及び表示法は,JCGM(Joint Committee for Guides in
Metrology)によってISO/IEC Guide 98-3[2] として発行されたGUM(Guide to the expression of uncertainty in
measurement)の規定に準拠する。また,本文の記述に当たってはGUMに定義された用語を用いる。
B.2
考え方
附属書Aにおいて示されている,推奨される計測法及び共通する注意事項の下で行われたMEMS寸法
計測結果の表示法について記す。
測定値(報告される値)は,n回の繰返し測定によって得られた値を用いて算出される,最良推定値(X)
によって表示する。ここで,繰返し測定回数nは4〜10程度を推奨値とする。測定値を求めるための測定
の原理,測定の方法,使用する測定装置・機器,測定手順などを簡潔に記述する。また,直接の測定器の
読みから測定値を得るために行った補正又は平均操作などの解析手順(データ処理)を明示する。測定結
果は,最良推定値(X)及び拡張不確かさ(U)を用いて,次のように表示する。
(
)2
=
±
k
U
X
ただし,kは包含係数(Coverage factor)を表す。
B.3
平均トレンチ深さの不確かさの評価例
B.3.1 不確かさ評価の計測データ例
FE-SEMによる実際の測定結果を用いて,測定の不確かさ解析について表B.1に例示する。測定量は,
4.2で定義している“トレンチ構造深さ:寸法(D)”とする。測定試料には,一例として仕様ウォール幅
150 μm,トレンチ幅100 μm及び深さ70 μmのトレンチ構造を採用する。試料断面の寸法(D)をFE-SEM
の測長機能を用いて直接測定する。測定はA.2.1.3の手順に従って実施した。
なお,不確かさ解析のため,同一試料内の計測対象箇所に対して,推奨繰返し測定回数(B.2参照)計
測し,データを収集する。ここでは,10回計測した。
B.3.2〜B.3.7で記述する不確かさ解析に用いる,仕様ウォール幅150 μm,トレンチ幅100 μm及び深さ
70 μmのトレンチ構造のトレンチ深さ(D)の測定データを表B.1に示す。
表B.1−トレンチ深さの測定例
単位 μm
測定回数
1
2
3
4
5
6
7
8
9
10
トレンチ深さD
68.5
68.0
68.0
68.5
68.0
68.0
68.0
68.5
68.0
68.0
20
C 5630-26:2017 (IEC 62047-26:2016)
B.3.2 不確かさ要因
試料測定における不確かさ要因の解析は,特性要因図などを利用してなるべく詳細に検討する。この事
例では,次の三つの不確かさ要因について検討した。
a) 測定の繰返しu(s):同一試料を推奨繰返し測定回数だけ計測したデータから求めた実験標準偏差
b) 測定器の分解能u(R):測定に用いたFE-SEMの最小分解能(400倍での値)
c) 測定器の校正の不確かさu(C):標準器の校正の不確かさに相当するFE-SEMの校正不確かさ
B.3.3 標準不確かさの評価タイプA
同一試料の繰り返し計測結果を用いて,実験標準偏差を求めた。最良推定値は68.2 μm(68.15 μm),実
験標準偏差は0.2 μm(0.242 μm),及び平均の実験標準偏差は0.08 μm(0.076 μm)であった。よって,u(s)
=0.08 μmと見積もられる。
B.3.4 標準不確かさの評価タイプB
u(R) 及びu(C) を次のように見積もった。
a) u(R) は,測定に用いたFE-SEMの最小分解能が倍率400倍で0.1 μmであるので,±0.05 μmのく(矩)
形分布と見積もった。く(矩)形分布に対する除数は3が用いられるので,u(R)=0.03 μmと見積も
られる。
b) u(C) は,FE-SEMの校正証明書に記載される不確かさは,正規分布における0.05 μmの値を用いた。
正規分布に対する除数は2が用いられるので,u(C)=0.025 μmと見積もられる。
B.3.5 合成標準不確かさ
標準不確かさ成分u(s),u(R) 及びu(C) から合成標準不確かさucは,0.09 μm(0.089 μm)と求められる。
B.3.6 拡張不確かさ
包含係数を2として,拡張不確かさUは0.18(0.178)μmと求められる。
以上から,測定結果は68.2 μm±0.18 μm(k=2)となる。
B.3.7 不確かさの見積表
不確かさの見積表を表B.2に示す。
表B.2−計測の不確かさの見積表
記号
不確かさ要因(Type)
値
μm
確率分布
除数
標準不確かさ
μm
感度係数
標準不確かさ成分
μm
u(s)
測定の繰返し(A)
0.08
正規分布
1
0.08
1
0.08
u(R)
測定器の分解能(B)
0.05
く(矩)形分布
3
0.03
1
0.03
u(C)
測定器の校正(B)
0.05
正規分布
2
0.025
1
0.025
uc
合成標準不確かさ
0.09
U
拡張不確かさ
0.18(k=2)
21
C 5630-26:2017 (IEC 62047-26:2016)
参考文献
[1] JIS Z 8317-1 製図−寸法及び公差の記入方法−第1部:一般原則
注記 対応国際規格:ISO 129-1,Technical drawings−Indication of dimensions and tolerances−Part 1:
General principles
[2] ISO/IEC Guide 98-3:2008,Uncertainty of measurement−Part 3: Guide to the expression of uncertainty in
measurement (GUM: 1995)
[3] JIS B 0651 製品の幾何特性仕様(GPS)−表面性状:輪郭曲線方式−触針式表面粗さ測定機の特性
注記 対応国際規格:ISO 3274:1996,Geometrical Product Specifications (GPS)−Surface texture: Profile
method−Nominal characteristics of contact (stylus) instruments