C 5630-20:2015 (IEC 62047-20:2014)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義··················································································································· 1
4 定格特性························································································································· 2
4.1 ジャイロのカテゴリー区分 ······························································································ 2
4.2 絶対最大定格 ················································································································ 2
4.3 推奨動作条件 ················································································································ 3
4.4 電気的特性 ··················································································································· 4
5 特性の計測法··················································································································· 5
5.1 スケールファクタ ·········································································································· 5
5.2 他軸感度 ····················································································································· 16
5.3 バイアス測定法 ············································································································ 19
5.4 出力ノイズ ·················································································································· 27
5.5 周波数帯域の測定法 ······································································································ 32
5.6 分解能 ························································································································ 37
附属書A(参考)ジャイロ特性項目の計測正確性 ······································································ 39
参考文献 ···························································································································· 40
C 5630-20:2015 (IEC 62047-20:2014)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般財団法人マイクロマシンセンター(MMC)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 5630の規格群には,次に示す部編成がある。
JIS C 5630-1 マイクロマシン及びMEMSに関する用語
JIS C 5630-2 第2部:薄膜材料の引張強さ試験方法
JIS C 5630-3 第3部:薄膜材料の標準試験片
JIS C 5630-6 第6部:薄膜材料の軸荷重疲労試験方法
JIS C 5630-12 第12部:MEMS構造体の共振振動を用いた薄膜材料の曲げ荷重疲労試験方法
JIS C 5630-13 第13部:MEMS構造体のための曲げ及びせん断試験による接合強度試験方法
JIS C 5630-18 第18部:薄膜曲げ試験方法
JIS C 5630-19 第19部:電子コンパス
JIS C 5630-20 第20部:小型ジャイロ
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 5630-20:2015
(IEC 62047-20:2014)
マイクロマシン及びMEMS−
第20部:小型ジャイロ
Semiconductor devices-Micro-electromechanical devices-
Part 20: Gyroscopes
序文
この規格は,2014年に第1版として発行されたIEC 62047-20を基に,技術的内容及び構成を変更する
ことなく作成した日本工業規格である。
1
適用範囲
この規格は,ジャイロスコープ(以下,ジャイロという。)の用語,定義,定格特性及び測定法について
規定する。この規格のジャイロは,主として民生,一般産業及び航空宇宙用途に使用できる。また,ジャ
イロは,MEMS又は半導体レーザー技術を使用している。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 62047-20:2014,Semiconductor devices−Micro-electromechanical devices−Part 20: Gyroscopes
(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
(引用規格はない。)
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
レートテーブル(rate table)
測定するジャイロ(DUT)を搭載する回転装置。
3.2
地球自転角速度(earth rate)
慣性空間上で地球の自転によって発生する回転角速度。
注記 慣性空間における角速度を定義する場合,例えば国際地球回転事業(IERS)によって定義され
ている恒星日(stellar day)(23時間56分4.098 903 691秒)を基準にするため,約15.04°/時間
が慣性空間における地球自転角速度である。その他詳細の定義などはIERS(International Earth
Rotation and Reference System, http://www.iers.org)を参照。
2
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.3
スケールファクタ(scale factor)
ジャイロの出力(電圧又はデジタル信号)と印加した回転角速度との比率で,単位は,V/(°/s)又は
bit/(°/s)とする。
4
定格特性
4.1
ジャイロのカテゴリー区分
ジャイロのカテゴリー区分は,表1による。
表1−ジャイロのカテゴリー区分
カテゴリーの区分
内容
1
バイアスの変動に基準を設けていない,主として民生用
2
バイアスの変動に基準を設けて設計している,主として一般産業用
3
地球自転角速度を検出できる,主として航空宇宙用
4.2
絶対最大定格
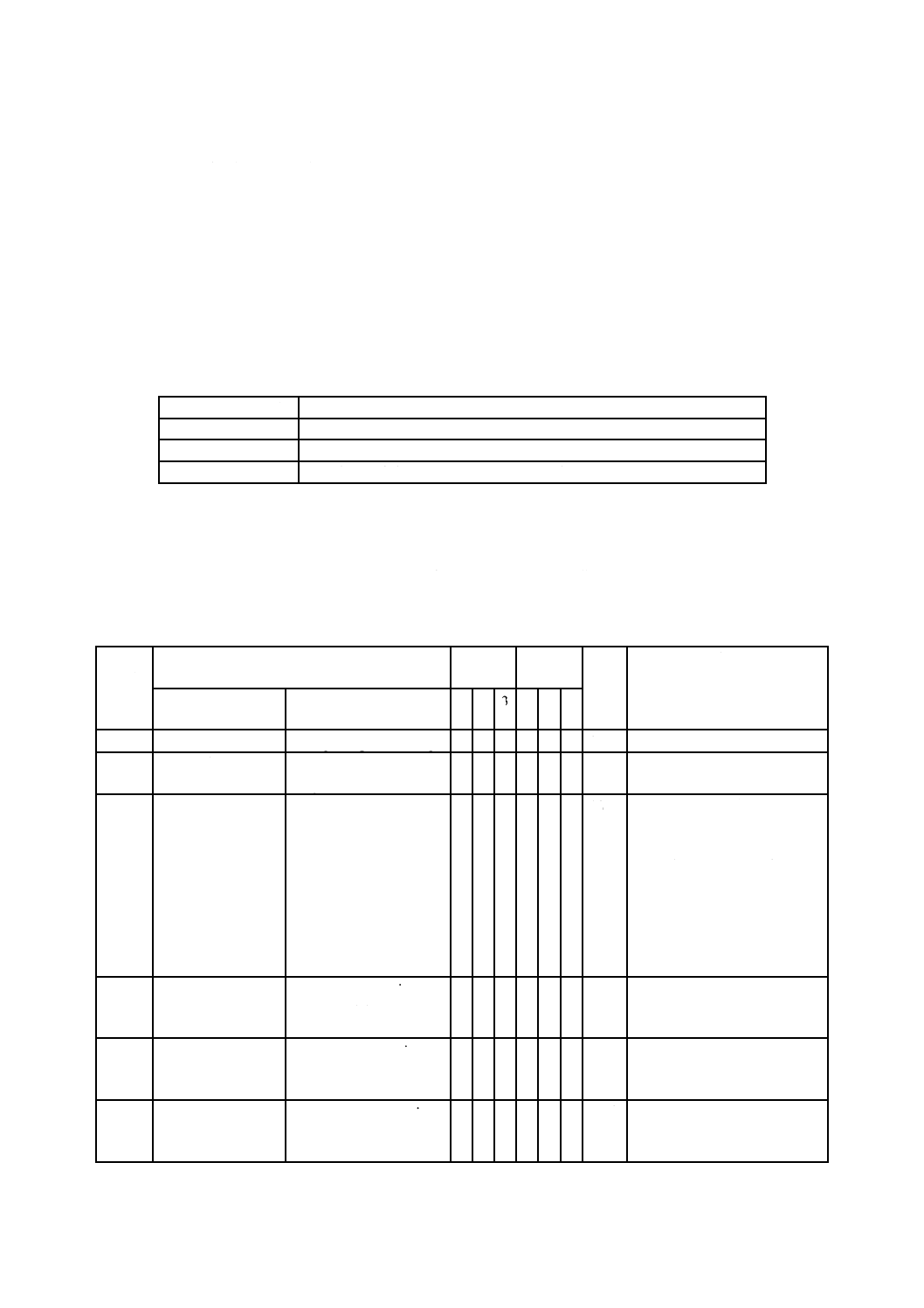
絶対最大定格は,表2による。関連する調達仕様書に記載のない限り,次の項目を明細書に記載する。
これらの表記内容以上のストレスを加えると,デバイスに恒久的な損傷を与える可能性がある。
表2−絶対最大定格
箇条
番号
絶対最大定格
カテゴリ
ー
表記
内容
単位
(参考)
注記
和文表記
英文表記
1 2 3 最
小
標
準
最
大
4.2.1
保存温度範囲
Storage temperature range x x x x
x ℃
4.2.2
動作温度範囲
Operating temperature
range
x x x x
x ℃
4.2.3
保存湿度範囲
Storage humidity range
%
リフローはんだ付けに対する
吸湿管理レベル(例えば,
IPC/JEDEC J-STD-020D[1],7
ページのtable5-1に定められ
るレベル)を表記する。記載
は任意とし,リフローはんだ
付けを行わないもの及び気密
パッケージ品については,記
載は不要とである。
4.2.4
耐衝撃性能(動作
時)
Mechanical shock in
operating state
x x x
x m/s2
動作状況下において,製品が
損傷しない衝撃値。加速度,
時間及び波形を表記する。
4.2.5
耐衝撃性能(非動
作時)
Mechanical shock in non
operating state
x x x
x m/s2
非動作状況下において製品が
損傷しない衝撃値。加速度,
時間及び波形を表記する。
4.2.6
耐振動性能(動作
時)
Mechanical vibration in
operating state
x x x
x m/s2
動作状況下において製品が損
傷しない振動加速度値及び周
波数
3
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
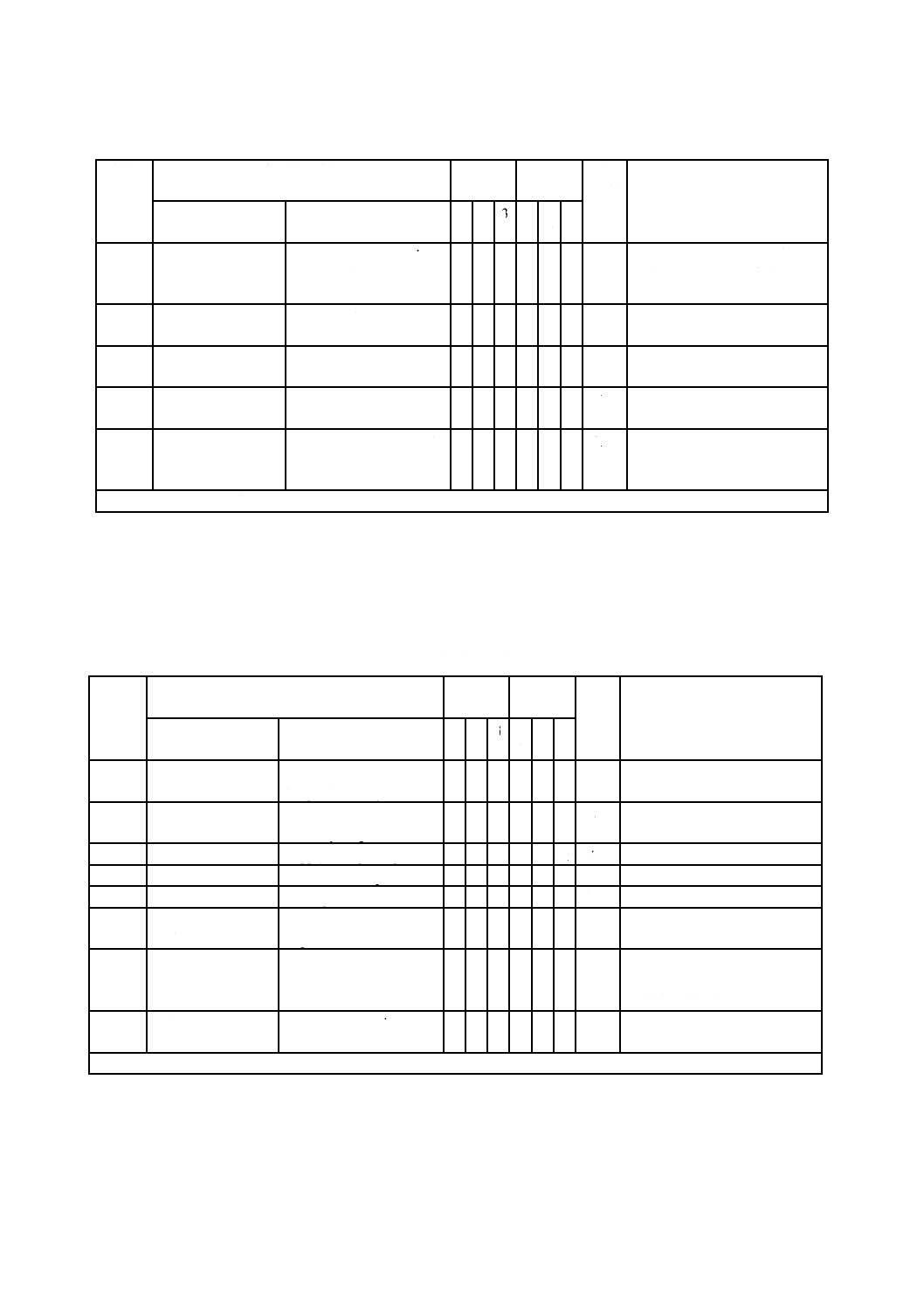
表2−絶対最大定格(続き)
箇条
番号
絶対最大定格
カテゴリ
ー
表記
内容
単位
(参考)
注記
和文表記
英文表記
1 2 3 最
小
標
準
最
大
4.2.7
耐振動性能(非動
作時)
Mechanical vibration in
non operating state
x x x
x m/s2
非動作状況下において製品が
損傷しない振動加速度値及び
周波数
4.2.8
制限角速度
Angular rate limit
x x x
x °/s
動作状況下において製品が損
傷しない角速度値
4.2.9
制限角加速度
Angular acceleration limit
x x x
x °/s2 動作状況下において製品が損
傷しない角加速度値
4.2.10
最大定格電圧
Maximum supply voltage
x x x
x V
製品が損傷に至らない供給電
圧範囲
4.2.11
最大定格電流
Maximum supply current
x A
製品が損傷に至らない供給電
流範囲(定電流駆動型の場合
にだけ記載する。)
注記 x:必須, 空白:選択
4.3
推奨動作条件
推奨動作条件は,表3による。関連する調達仕様書に記載のない限り,次の項目は明細書に記載するこ
とが望ましい。デバイスの安定的な稼働時は,次の条件を維持することが望ましい。
表3−推奨動作条件
箇条
番号
推奨動作条件
カテゴリ
ー
表記
内容
単位
(参考)
注記
和文表記
英文表記
1 2 3 最
小
標
準
最
大
4.3.1
保証動作温度範囲
Guarantee operating
temperature range
x x x x
x ℃
性能を保障する温度範囲
4.3.2
保証動作湿度範囲
Guarantee operating
humidity range
x x x
x %
性能を保障する湿度範囲
4.3.3
性能保証電圧範囲
Supply voltage range
x x x x x x V
性能を保障する電圧範囲
4.3.4
消費電流
Current consumption
x x x
x A
通常消費電流
4.3.5
起動時消費電流
Start up current
x
x A
4.3.6
供給電源リップル
要求
Power supply ripple
requirement
x
x Vpp
最大電源変動
4.3.7
その他の環境条件
Other environmental
condition
x
x
性能が保証されるその他の環
境条件(電磁環境,圧力等)
で最大・最小値を示す
4.3.8
過負荷復帰時間
Overload recovering time
x
x s
計測最大値からの最大復帰時
間
注記 x:必須, 空白:選択
4
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.4
電気的特性
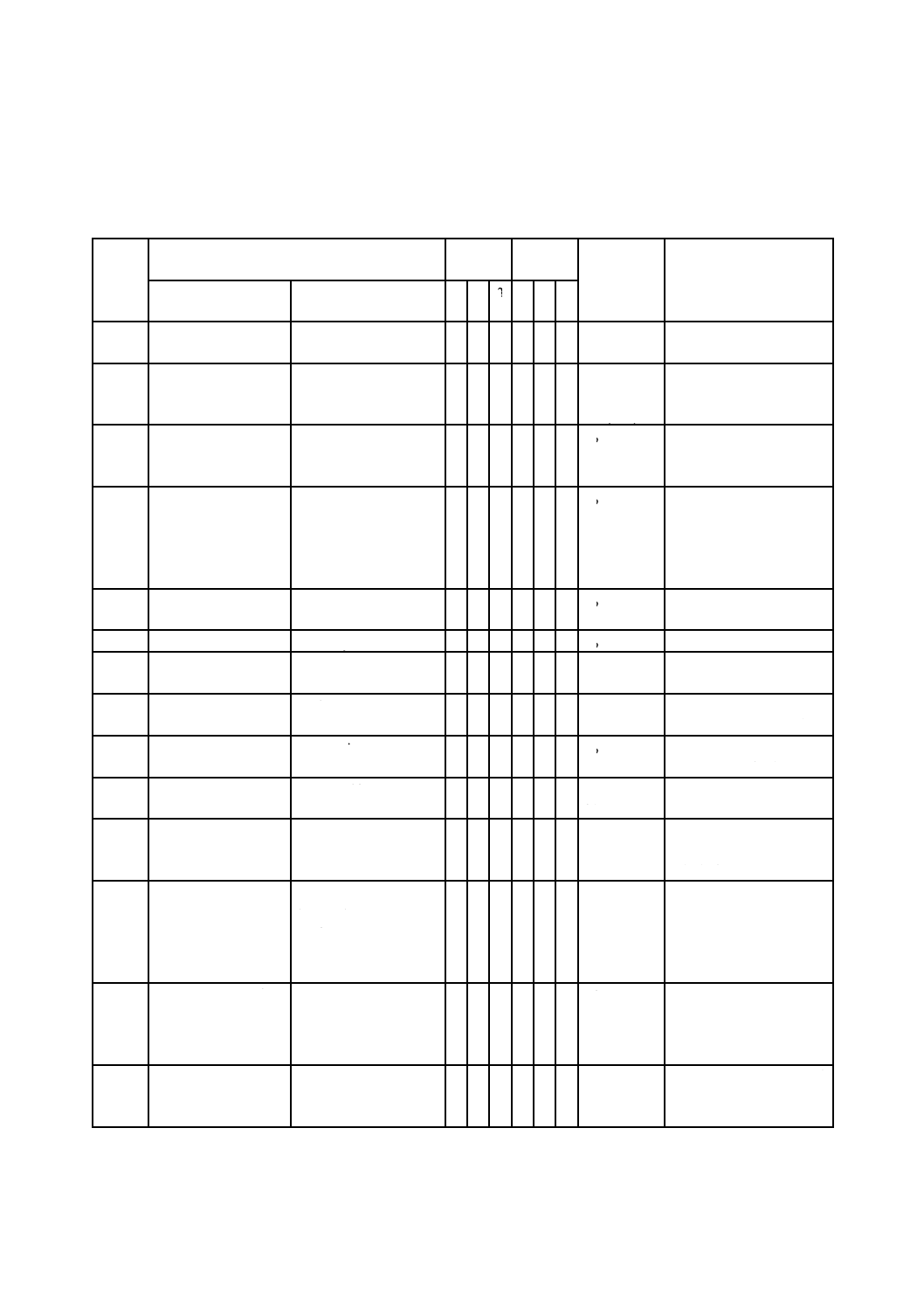
電気的特性は,表4による。
表4−電気的特性
箇条
番号
電気的特性
カテゴリ
ー
表記
内容
単位
(参考)
注記
和文表記
英文表記
1 2 3 最
小
標
準
最
大
4.4.1
角速度計測範囲
Measurement range
x x x
x °/s
性能を保証する角速度
計測範囲
4.4.2
標準感度
Nominal scale factor
x x x
x
V/(°/s)
又は
bit/(°/s)
−
4.4.3
初期感度ばらつき
Initial scale factor
variation
x x x
x %
規定温度における標準
感度からのかい(乖)離
分
4.4.4
温度による感度変動
又は
感度の温度係数
Scale factor variation
with temperature
又は
Temperature coefficient
of scale factor
x x x
x %
温度変化を加えた際の
標準感度からのかい
(乖)離
4.4.5
感度のレシオメトリ
ック誤差
Ratiometric error for
scale factor
x
x %
電源電圧変動に起因す
る感度誤差
4.4.6
感度直線性
Linearity
x %
直線性
4.4.7
感度安定性
Scale factor stability
n
x
x
一定入力下における感
度の安定性
4.4.8
感度対称性
Scale factor symmetry
n
x
x
+入力と−入力の感度
の非対称性,5.1.3.8参照
4.4.9
他軸感度
Cross axis sensitivity
x
x %
他軸感度,測定原理につ
いて5.2.3を参照
4.4.10
定格バイアス
Nominal bias
x x x
x
V又は
bit
標準バイアス値
4.4.11
初期バイアス変動
Initial bias variation
x x
x °/s
規定温度における標準
バイアスからのかい
(乖)離
4.4.12
温度によるバイアス
変動
又は
バイアス温度係数
Bias variation with
temperature
又は
Temperature coefficient
of bias
x x
x °/s
温度変化を加えた際の
標準バイアスからのか
い(乖)離
4.4.13
バイアスのレシオメ
トリック誤差
Ratiometric error for
bias
x
x V
電源電圧変動に起因す
るバイアス誤差,デジタ
ル出力の場合は表記不
要
4.4.14
バイアス再現性
Bias repeatability
(switch on to switch
off)
x
x °/s
電源をオン・オフするご
とのバイアスのばらつ
き
5
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
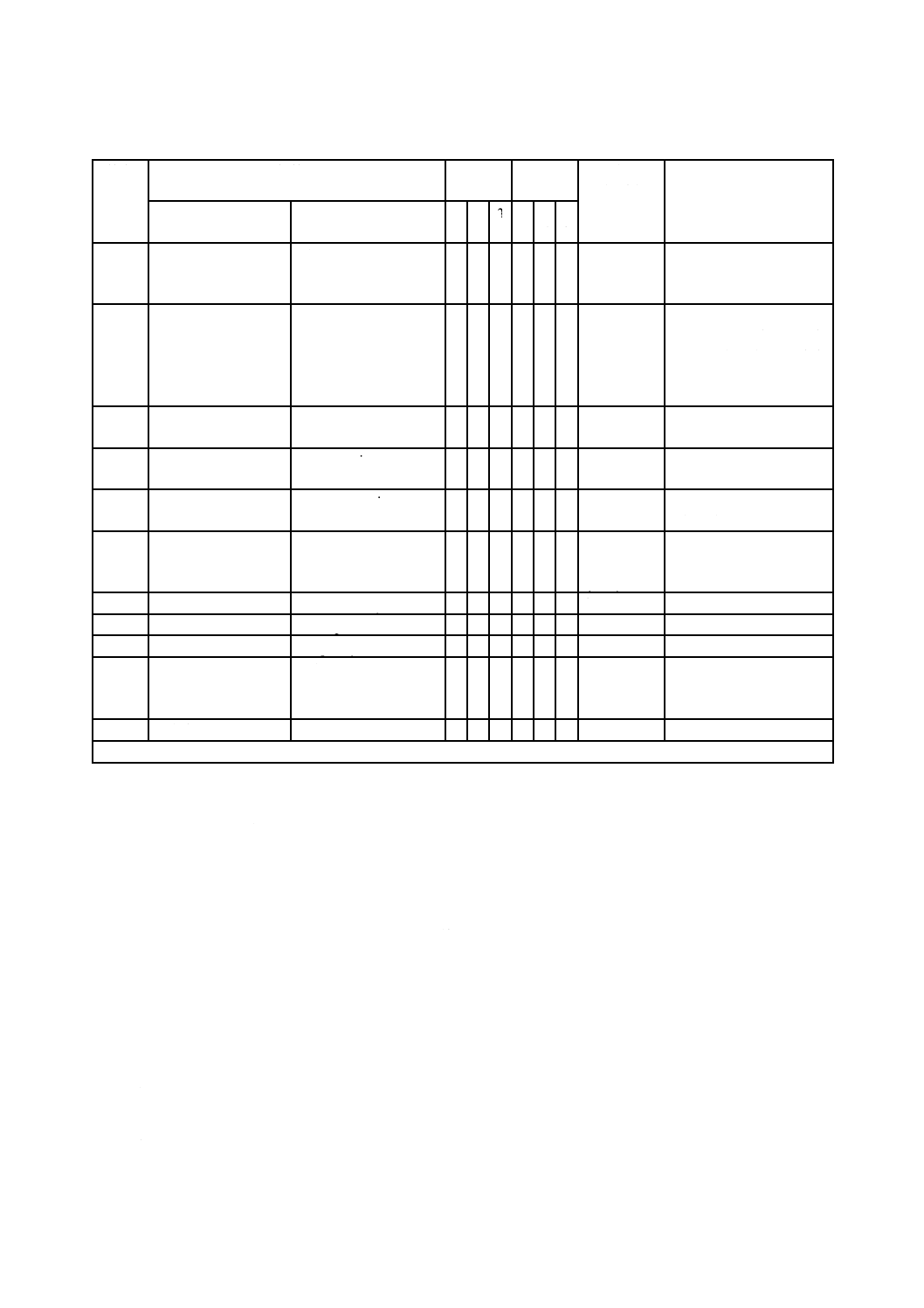
表4−電気的特性(続き)
箇条
番号
電気的特性
カテゴリ
ー
表記
内容
単位
(参考)
注記
和文表記
英文表記
1 2 3 最
小
標
準
最
大
4.4.15
バイアスヒステリシ
ス
Bias hysteresis
x
x °/s
温度変化を加えた際の
バイアスが示すヒステ
リシス
4.4.16
バイアス直線g感度 Linear g sensitivity
x
x
一定加速度環境下にお
けるバイアス変化量,自
由落下(重力)の加速度
gとの比[(°/s)/g]で示
す。
4.4.17
パワーオンバイアス
ドリフト
Bias drift after power on
x
x °/s
電源オン後のバイアス
の経時変化量
4.4.18
帯域内出力ノイズ
In-band noise
x
x °/s
帯域内出力ノイズ,実効
値(RMS)で表す。
4.4.19
広帯域出力ノイズ
Broadband noise
x
x °/s
広域出力ノイズ,実効値
(RMS)で表す。
4.4.20
アングルランダムウ
ォーク
Angular random walk
x
x °/h
又は
(°/h)/Hz
ノイズによる出力変動,
実効値(RMS)で表す。
4.4.21
バイアス非安定性
Bias instability
x
x °/s
実効値(RMS)で表す。
4.4.22
起動時間
Start up time
x
x s
−
4.4.23
周波数帯域
Frequency band
x x x x
Hz
−
4.4.24
利得の最大値
Gain peak
x
x dB
周波数特性のゲイン最
大値で,周波数(Hz)を
表記する。
4.4.25
分解能
Resolution
x x
°/s
−
注記 x:必須, 空白:選択, n:不要
5
特性の計測法
5.1
スケールファクタ
5.1.1
目的
ジャイロにおけるスケールファクタに関する測定方法を規定する。
5.1.2
測定回路
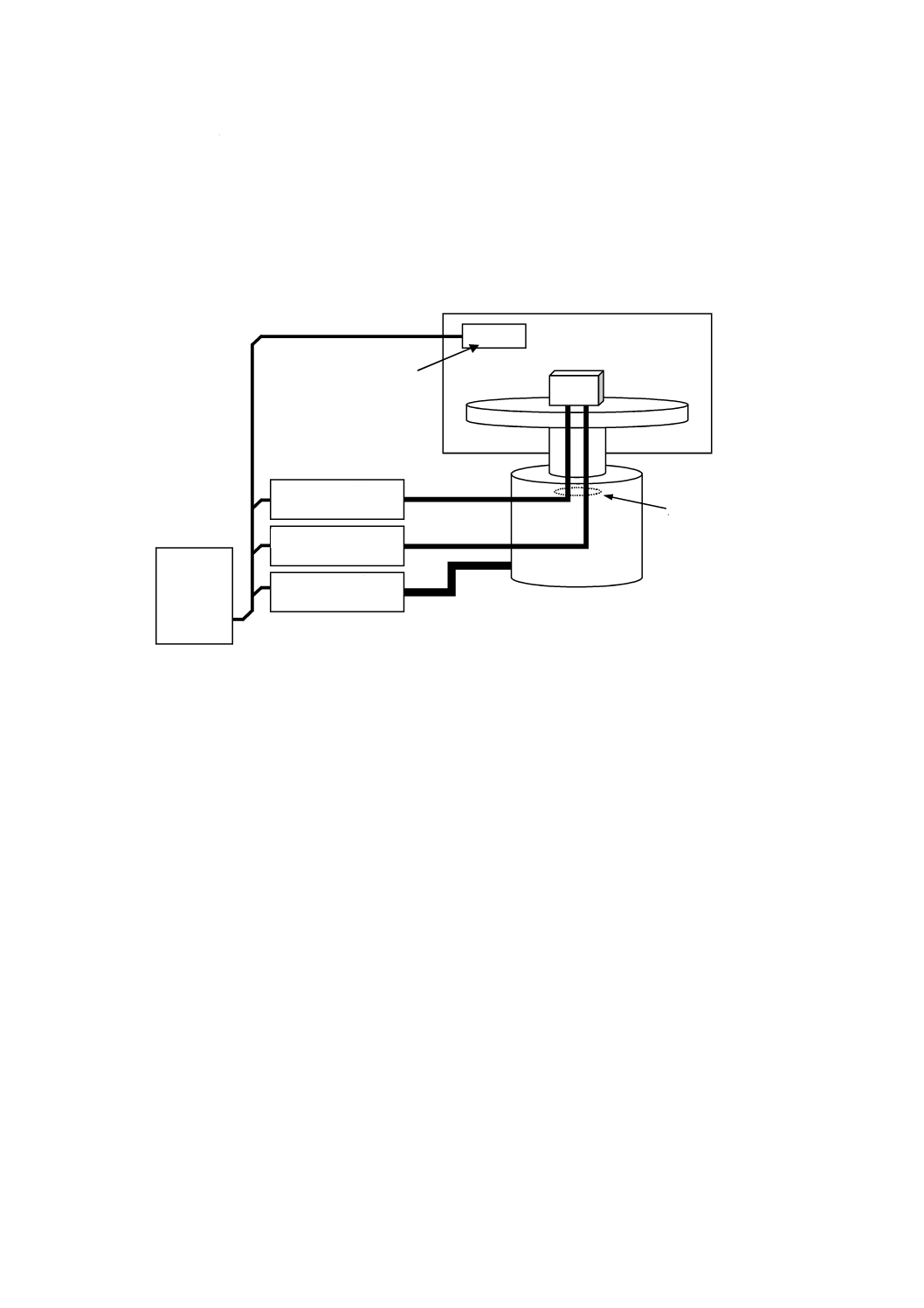
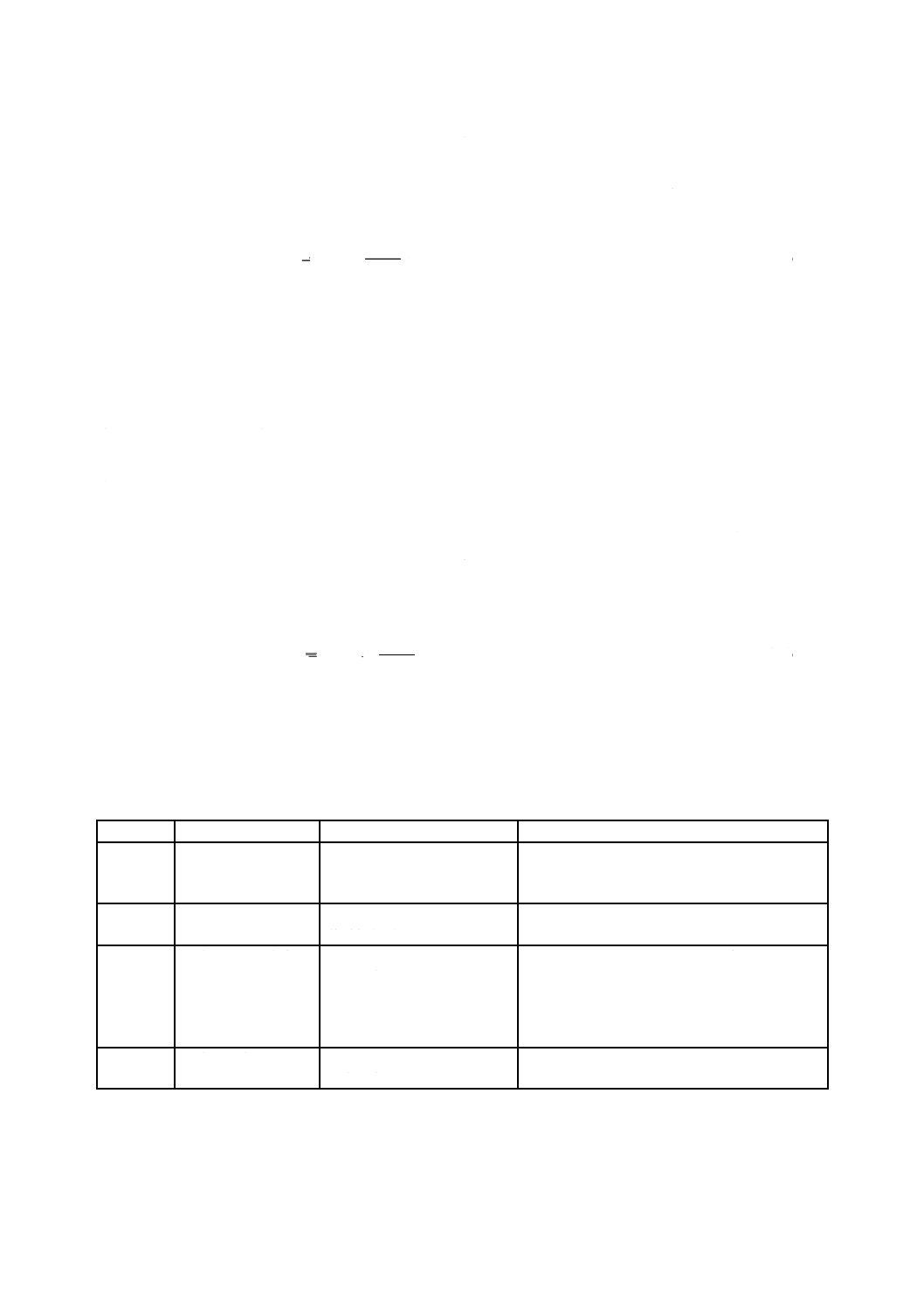
スケールファクタ測定回路構成例を図1に,配線形態例を図2に示す。測定回路は,測定するジャイロ
と次に規定する装置とで構成する。測定回路の構成機器は,次の規定を満足するものとする。
− 恒温槽 ジャイロの雰囲気温度を一定温度に保つことができる装置とする。
なお,温度コントロール範囲はジャイロの動作温度範囲以上とする。
− 温度計 恒温槽内部の温度測定が可能とする。恒温槽にあらかじめに設置されている温度計を用いて
もよい。
− ジャイロ電源 ジャイロが要求する電圧・電流を供給することができ,かつ,その供給状態において,
リップル電圧などの変動幅がジャイロ要求値を満足する。
− データ取得システム ジャイロの出力形態に合わせた計測器又は計測システムとする。例えば,ジャ
イロ出力が電圧(アナログ)であれば,デジタルマルチメータ,データロガーなどの計測器を用いる。
6
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− レートテーブル制御装置 レートテーブルに与える角速度入力を制御する装置。ジャイロの検出範囲
以上の回転角速度を与えられ,かつ,最少分解能相当の角速度の入力変化が可能なであることが望ま
しい。レートテーブルによる計測正確性は,附属書Aに示す。
− 計測システム制御装置 電源,ジャイロ,データ取得システム及びレートテーブル制御装置を自動制
御する場合の統括システム。手動測定の場合,この制御機は不要とする。
− スリップリング ノイズの発生源にもなり得るので,それを留意したうえで使うことが望ましい。
図1−スケールファクタ測定回路例
恒温槽
レートテーブル
DUT
計測シス
テム制御
装置
レートテーブル制
御装置
データ取得システム
DUTの電源
スリップリング
温度計
7
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
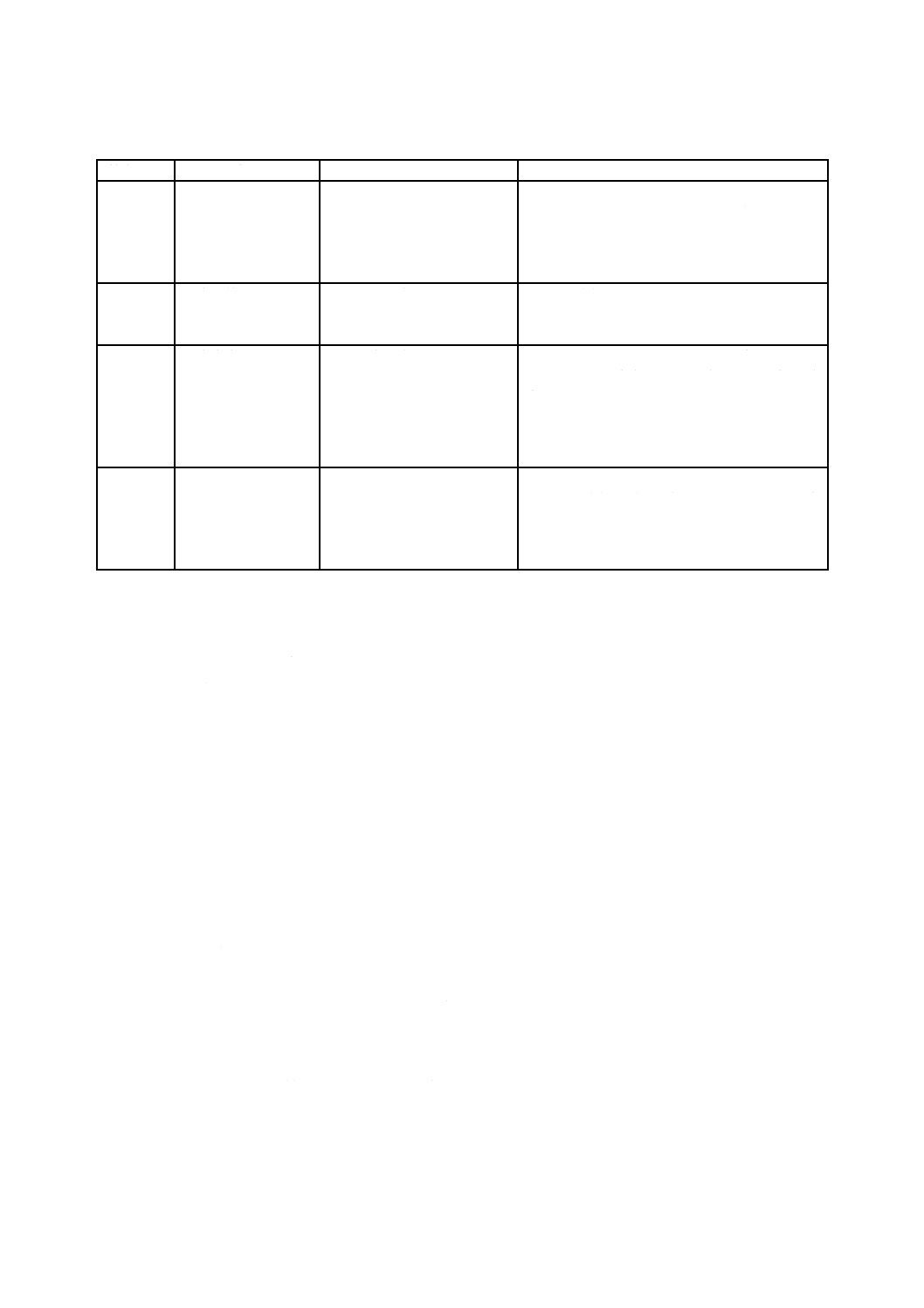
スリップリング
スリップリング位置(スリップリング使用時)
a
電源フィードバック位置からジャイロ供給端子位置まで(できる限り短い配線長とすることが
望ましい。)
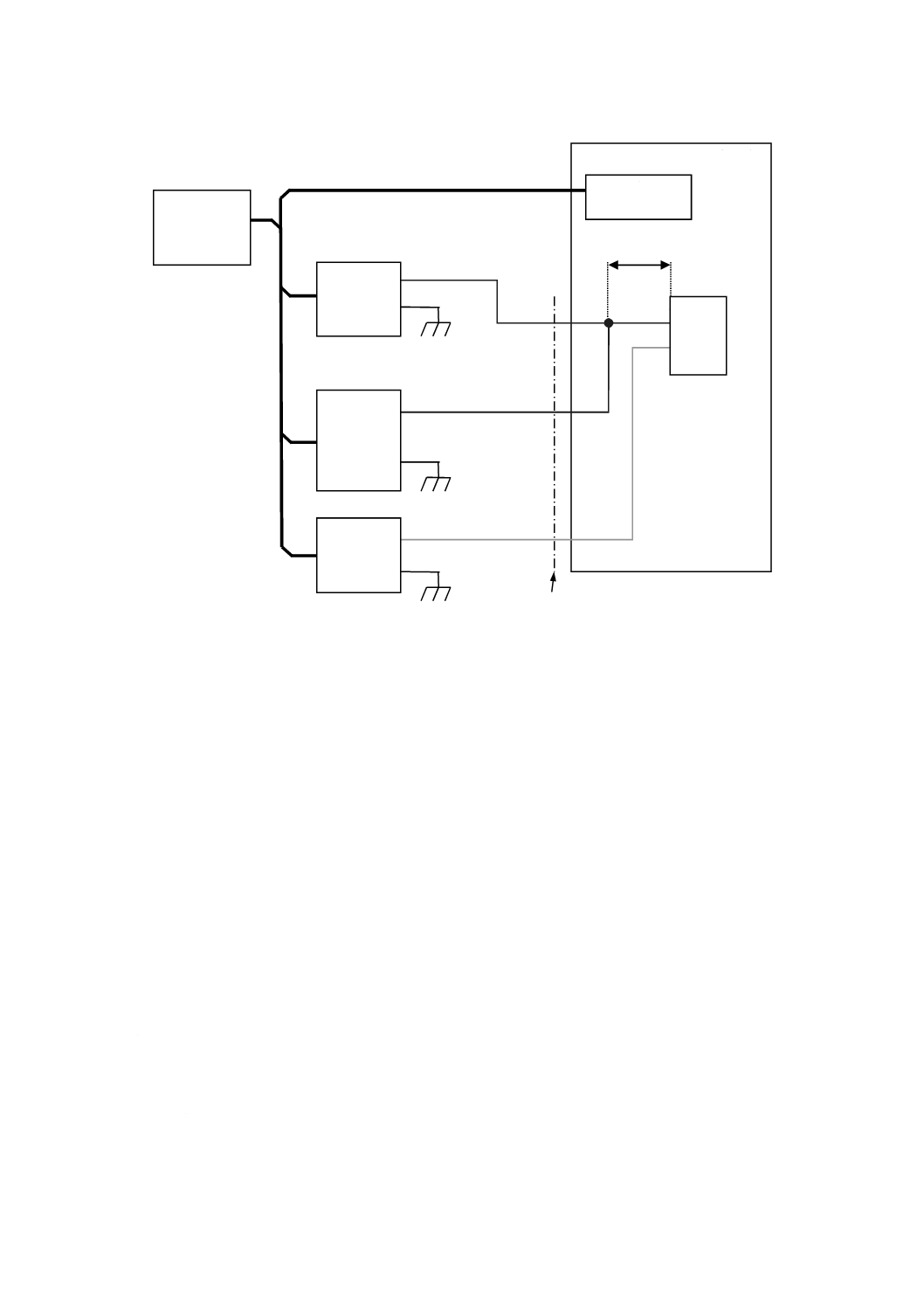
図2−スケールファクタ測定の配線形態例
5.1.3
測定原理
5.1.3.1
スケールファクタ測定原理
図1の測定回路を用いて,ジャイロが基準測定温度TBASE及び基準供給電圧VBASE条件下において,ジャ
イロの片側検出範囲をn分割(n≧5が望ましい。)した回転角速度x1,x2〜x2n+1を与え,そのときの出力
値y1,y2〜y2n+1を測定[単位はV/(°/s)又はbit/(°/s)]する。TBASEは,最低動作温度と最高動作温度との
中間値として設定する。(図4参照)
なお,nの値については,製造業者が規定できるものとするが,必要に応じて,使用者と製造業者との
協議によって変更できるものとする。
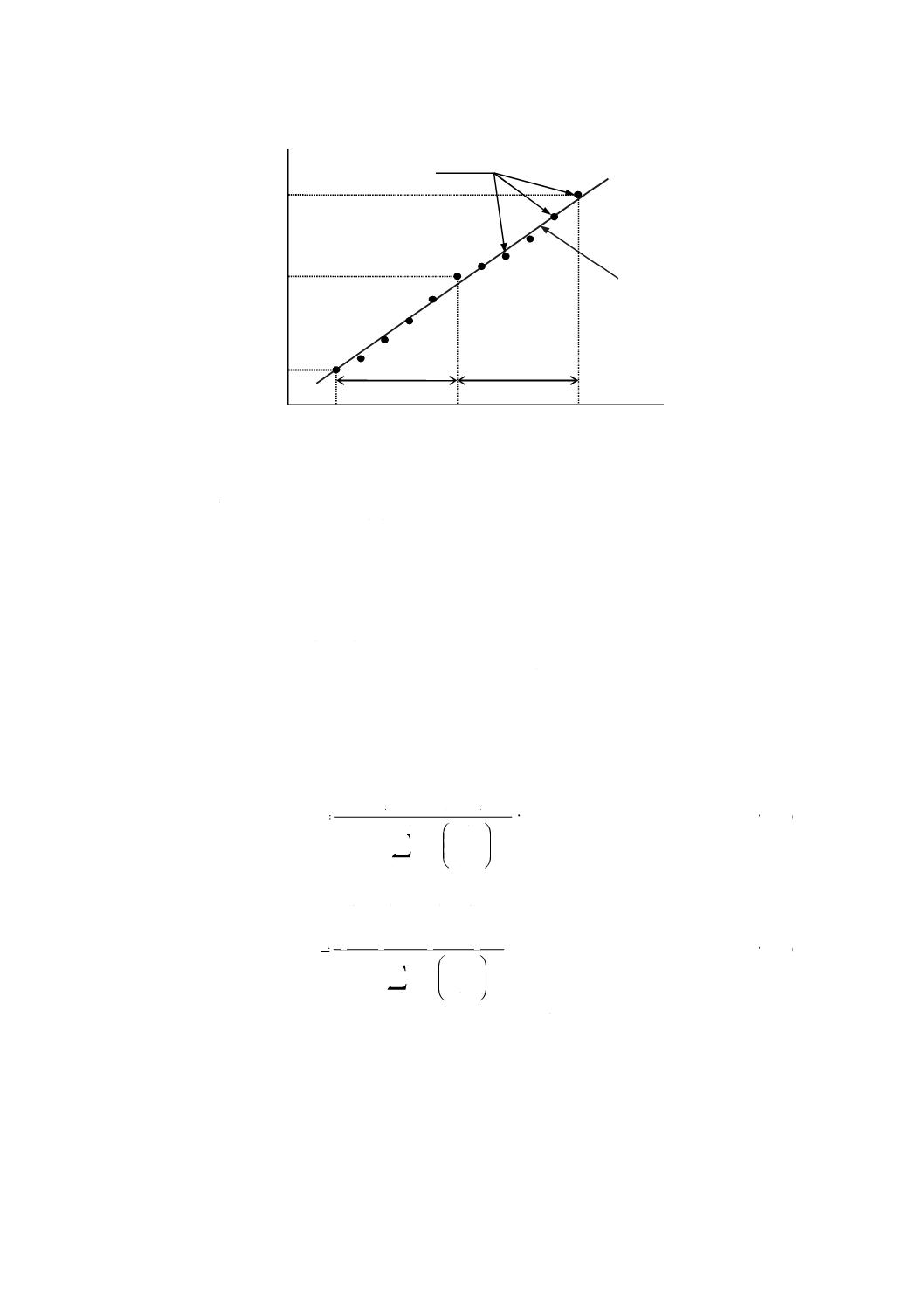
測定データの例を図3に示す。
なお,図中のCCW及びCWはそれぞれ,左回り(反時計回り=counter clockwise)及び右回り(時計回
り=clockwise)を意味する。(図3の場合は,n=5で等分割してあり,静止状態を含める11点のデータと
なる。)
スケールファクタは,これらの点によって計算して求められるものであるが,取得データは,図3のよ
うに,直線上の値をとらないため,二乗和が最少となる直線(以下,この直線をベストフィットラインと
いう。)を計算によって求める。
恒温槽
電圧
電圧モニタ
DUT出力
a
温度計
DUT
計測システ
ム制御装置
DUTの
電源
供給電源
モニタ計
測器
データ取
得システ
ム
スリップリング
8
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
角速度印加時の測定データ群
2
ベストフィットライン
3
n分割
X
入力角速度(°/s)
x1
CCW最大検出角速度入力
xn+1
静止状態
x2n+1
CW最大検出角速度入力
Y
ジャイロ出力信号(V又はbit)
y1
CCW側最大出力値
yn+1
静止時出力値
y2n+1
CW側最大出力値
図3−角速度印加時の測定データ例
各測定点におけるジャイロ出力値をyi,ジャイロに入力する角速度をxiとすると,ベストフィットライ
ンy=aBASE×x+bBASEの定数は,式(1)及び式(2)によって求める。
(
)
(
)∑
∑
∑
∑∑
+
=
+
=
+
=
+
=
+
=
−
+
−
+
=
1
2
1
2
1
2
1
i
2
i
1
2
1
1
2
1
1
2
1
i
i
i
i
BASE
1
2
1
2
n
i
n
i
n
i
n
i
n
i
x
x
n
y
x
y
x
n
a
················································· (1)
(
)∑
∑
∑
∑ ∑
∑
+
=
+
=
+
=
+
=
+
=
+
=
−
+
−
=
1
2
1
2
1
2
1
i
2
i
1
2
1
1
2
1
1
2
1
i
i
i
1
2
1
i
2
i
BASE
1
2
n
i
n
i
n
i
n
i
n
i
n
i
x
x
n
x
y
x
y
x
b
·················································· (2)
このときのベストフィットラインの傾きaBASEが,基準測定温度TBASE及び基準供給電圧VBASE条件下に
おけるスケールファクタとする。
5.1.3.2
初期感度ばらつき測定原理
ジャイロの基準測定温度TBASE及び基準供給電圧VBASE条件下でのスケールファクタであるaBASEと,そ
のジャイロの標準感度値aTYPとのかい(乖)離量を示した値とする。
初期感度ばらつきであるSF,VAR,BASEは,式(3)によって求める。
3
3
1
2
(°/s)
(V又はbit)
Y
X
x2n+1
xn+1
x1
y1
y2n+1
yn+1
9
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
TYP
TYP
BASE
BASE
VAR,
F,
a
a
a
S
−
=
······························································ (3)
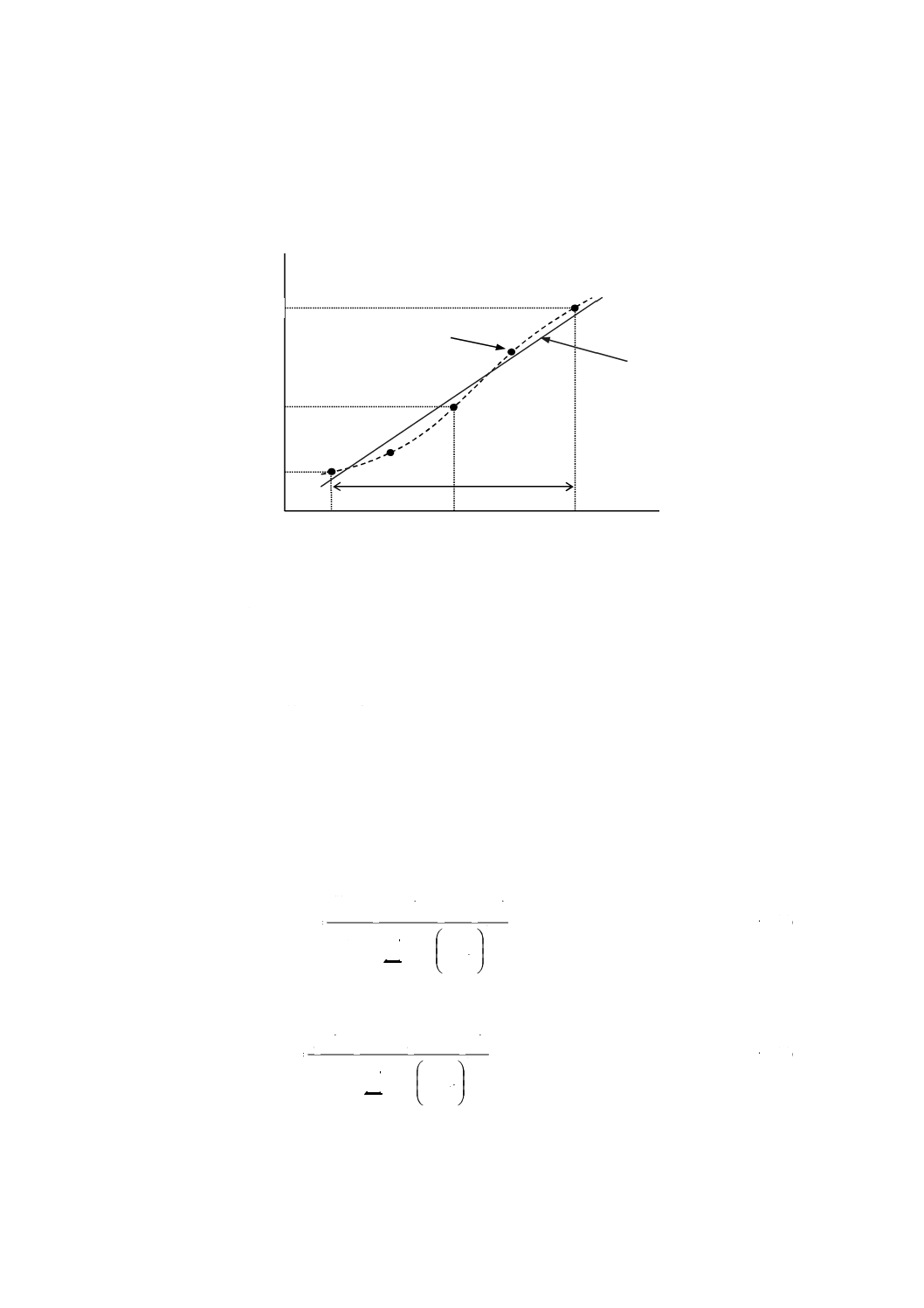
5.1.3.3
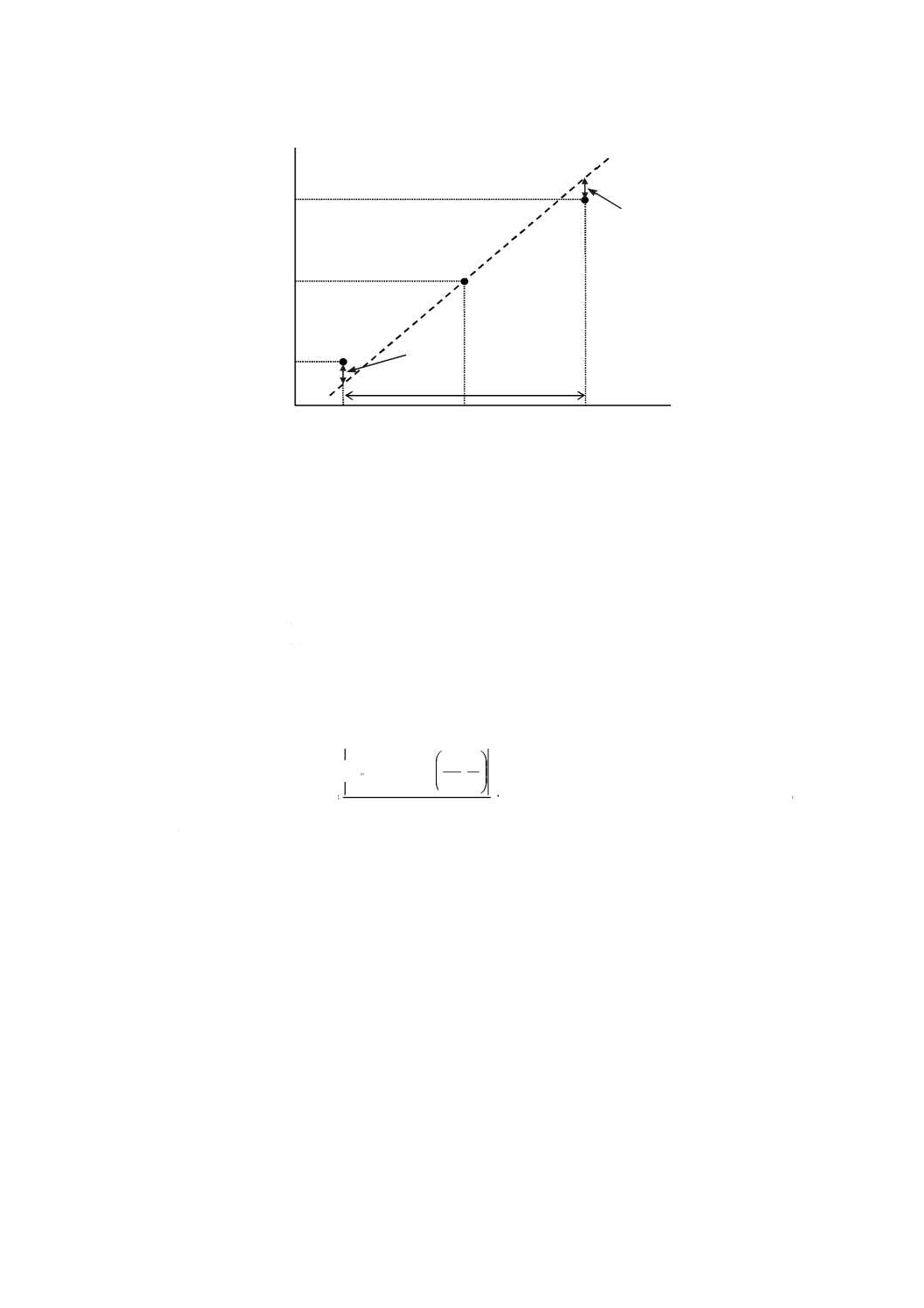
温度による感度変動測定原理
ジャイロの基準供給電圧VBASE条件下において,そのジャイロの動作温度範囲をm分割(m≧4が望まし
い)したとき,それぞれの温度T1,T2〜Tm+1において得られるスケールファクタをそれぞれaT,1,aT,2〜
aT,m+1とすると,これらの値とaBASEのかい(乖)離量が,その温度における温度誤差となる。
なお,mの値については,製造業者が規定できるものとするが,必要に応じて,使用者と製造業者との
協議によって変更できるものとする。
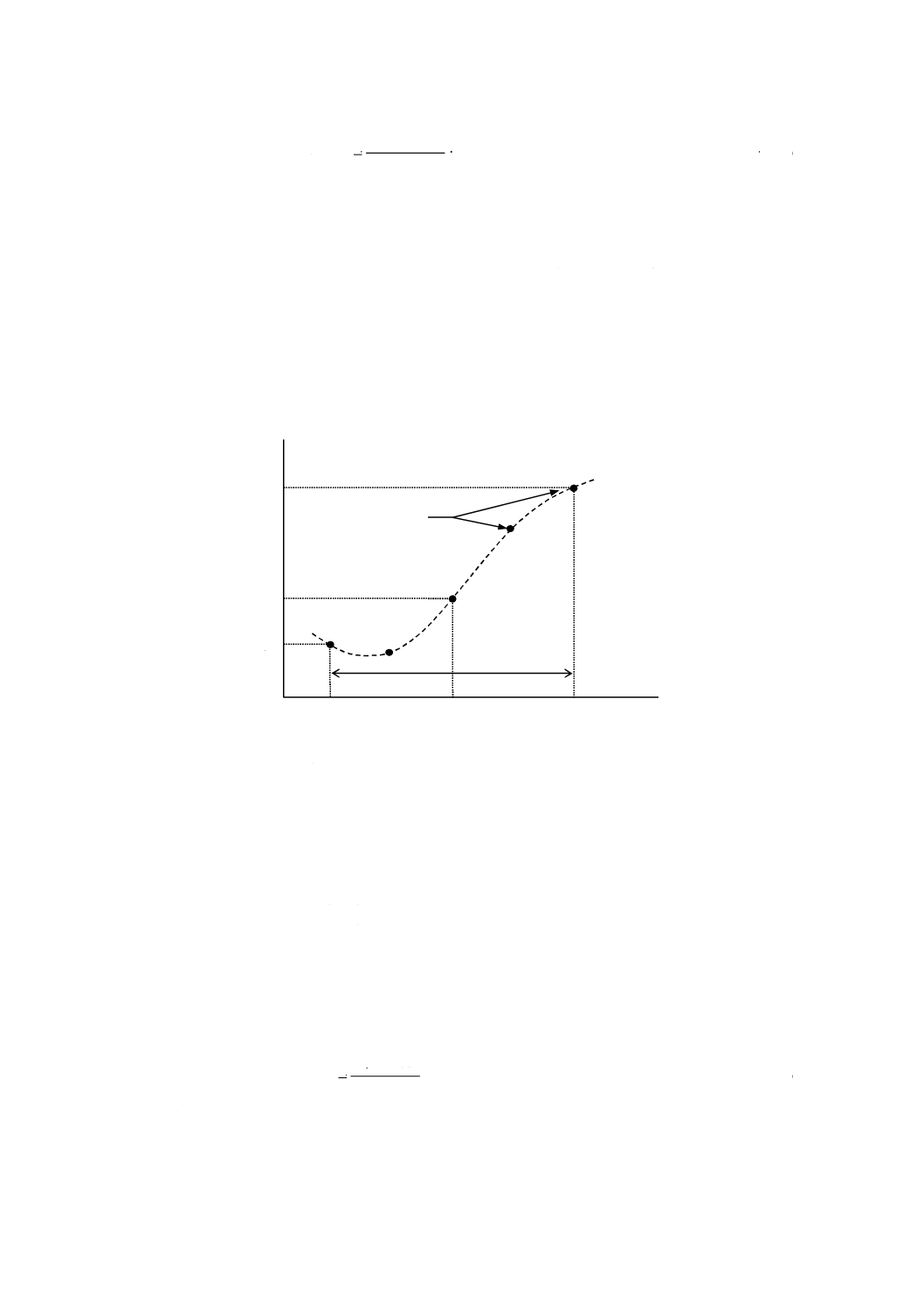
スケールファクタデータの例を,図4に示す。(図4の場合は,m=4で等分割とし,m=3のときを基準
測定温度としてある。)
1
各温度でのスケールファクタ値
2
m分割
X
ジャイロ環境下温度
T1
低動作温度
TBASE 基準測定温度
Tm+1
最高動作温度
Y
ジャイロ スケールファクタ値
aT,1
最低動作温度でのスケールファクタ値
aBASE 基準測定温度でのスケールファクタ値
aT,m+1 最高動作温度でのスケールファクタ値
図4−各温度でのスケールファクタデータ例
温度TiにおけるスケールファクタをaTiとすると,その温度における温度による感度変動であるSF,VAR,Ti
は,式(4)によって求める。
BASE
BASE
Ti
Ti
VAR,
,F
a
a
a
S
−
=
·································································· (4)
上記の演算を,それぞれの温度T1,T2〜Tm+1について行い,得られた値SF,VAR,Tiがその温度Tiにおける
温度による感度変動値である。
aBASE
T1
TBASE
Tm+1
2
1
X
Y
aT,1
aT,m+1
10
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
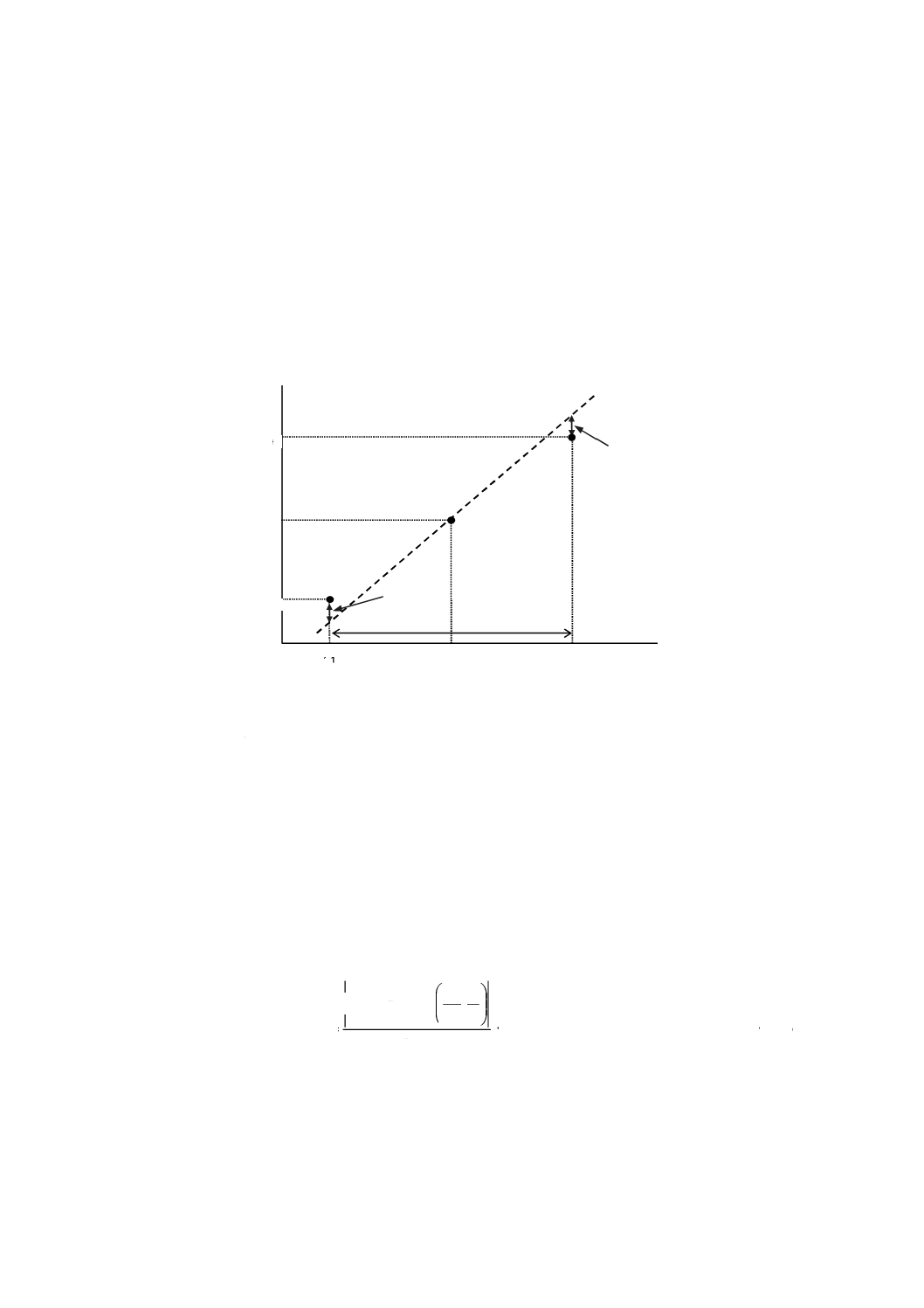
5.1.3.4
感度の温度係数測定原理
ジャイロの基準供給電圧VBASE条件下における,温度による感度変動の温度変化の傾き量が,感度の温
度係数となる。図5に例を示す。
1
各温度でのスケールファクタ値
2
m分割
3
ベストフィットライン(温度係数=Tc,SF)
X
ジャイロ環境下温度
T1
最低動作温度
TBASE 基準測定温度
Tm+1
最高動作温度
Y
ジャイロ スケールファクタ値
aT,1
最低動作温度でのスケールファクタ値
aBASE 基準測定温度でのスケールファクタ値
aT,m+1 最高動作温度でのスケールファクタ値
図5−各温度でのスケールファクタと感度の温度係数の関係例
5.1.3.3で求めたaT,1,aT,2〜aT,m+1に対して,二乗和が最少となる直線ベストフィットラインy=Tc,SF×x
+cを式(5)及び式(6)によって求める。
(
)
(
)∑
∑
∑
∑∑
+
=
+
=
+
=
+
=
+
=
−
+
−
+
=
1
1
2
1
1
i
2
i
1
1
1
1
1
1
Ti
i
Ti
i
SF
c,
1
1
m
i
m
i
m
i
m
i
m
i
T
T
m
a
T
a
T
m
T
················································· (5)
(
)∑
∑
∑
∑
∑
∑
+
=
+
=
+
=
+
=
+
=
+
=
−
+
−
=
1
1
2
1
1
i
2
i
1
1
1
1
1
1
i
Ti
i
1
1
Ti
2
i
1
m
i
m
i
m
i
m
i
m
i
m
i
T
T
m
T
a
T
a
T
c
····················································· (6)
このときのベストフィットラインの傾きTc,SFが,感度の温度係数である。
2
1
3
X
Y
Tm+1
TBASE
T1
aT,m+1
aBASE
aT,1
11
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.1.3.5
感度のレシオメトリック誤差測定原理
ジャイロの基準測定温度TBASE条件下において,そのジャイロの動作する動作電源電圧範囲をp分割(p
≧2が望ましい。)したとき,それぞれの電源電圧V1,V2〜Vp+1におけるスケールファクタがそれぞれaV,1,
aV,2〜aV,P+1となる。
pの値については,製造業者が規定できるものとするが,必要に応じて,使用者と製造業者との協議に
よって変更できるものとする。
感度のレシオメトリック誤差データの例を,図6に示す。(図6の場合は,p=2で等分割とし,p=2の
ときを基準供給電圧としてある。)
1
レシオメトリックエラー分 (Rerror,V1)
2
レシオメトリックエラー分 (Rerror,Vp+1)
3
p分割
X
ジャイロ動作電圧
V1
動作電圧下限
VBASE 基準供給電圧
Vp+1
動作電圧上限
Y
ジャイロ スケールファクタ値
aV,1
動作電圧下限でのスケールファクタ値
aBASE 基準供給電圧でのスケールファクタ値
aV,p+1 動作電圧上限でのスケールファクタ値
図6−感度のレシオメトリック誤差測定例
感度のレシオメトリック誤差であるRerror,Viは,式(7)によって求める。
(
)
BASE
BASE
i
BASE
Vi
Vi
error,
a
V
V
a
a
R
×
−
=
····················································· (7)
上記の演算を,それぞれの電圧V1,V2〜Vp+1について行い,得られた値Rerror,Viがその電圧Viにおける感
度のレシオメトリック誤差値である。
5.1.3.6
感度直線性測定原理
5.1.3.1と同様に,ジャイロが基準測定温度TBASE及び,基準供給電圧VBASE条件下において,測定した出
3
1
p
V,+
a
BASE
a
V,1
a
1V
BASE
V
2
1
1
p+
V
X
Y
12
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
力データとベストフィットライン上の値とのかい(乖)離量を示した値である。
ある角速度xiを加えたときのジャイロ出力値をyi,そのときのベストフィットラインから求められる値
をaBASE×xi+bBASE,そのジャイロの検出範囲をFullScaleとすると,その角速度における感度直線性誤差であ
るLerror,iは,式(8)によって求める。
(
)
ullScale
BASE
i
BASE
i
i
error,
F
b
x
a
y
L
+
−
=
······················································· (8)
図3の場合は,式(9)によって求める。
1
1
2n
CCW
MAX,
CW
MAX,
ullScale
y
y
y
y
F
−
=
−
=
+
············································ (9)
上記の演算を,それぞれの測定点y1,y2〜y2n+1について行い,得られた値Lerror,iがその回転角速度yiに
おける感度直線性誤差値である。
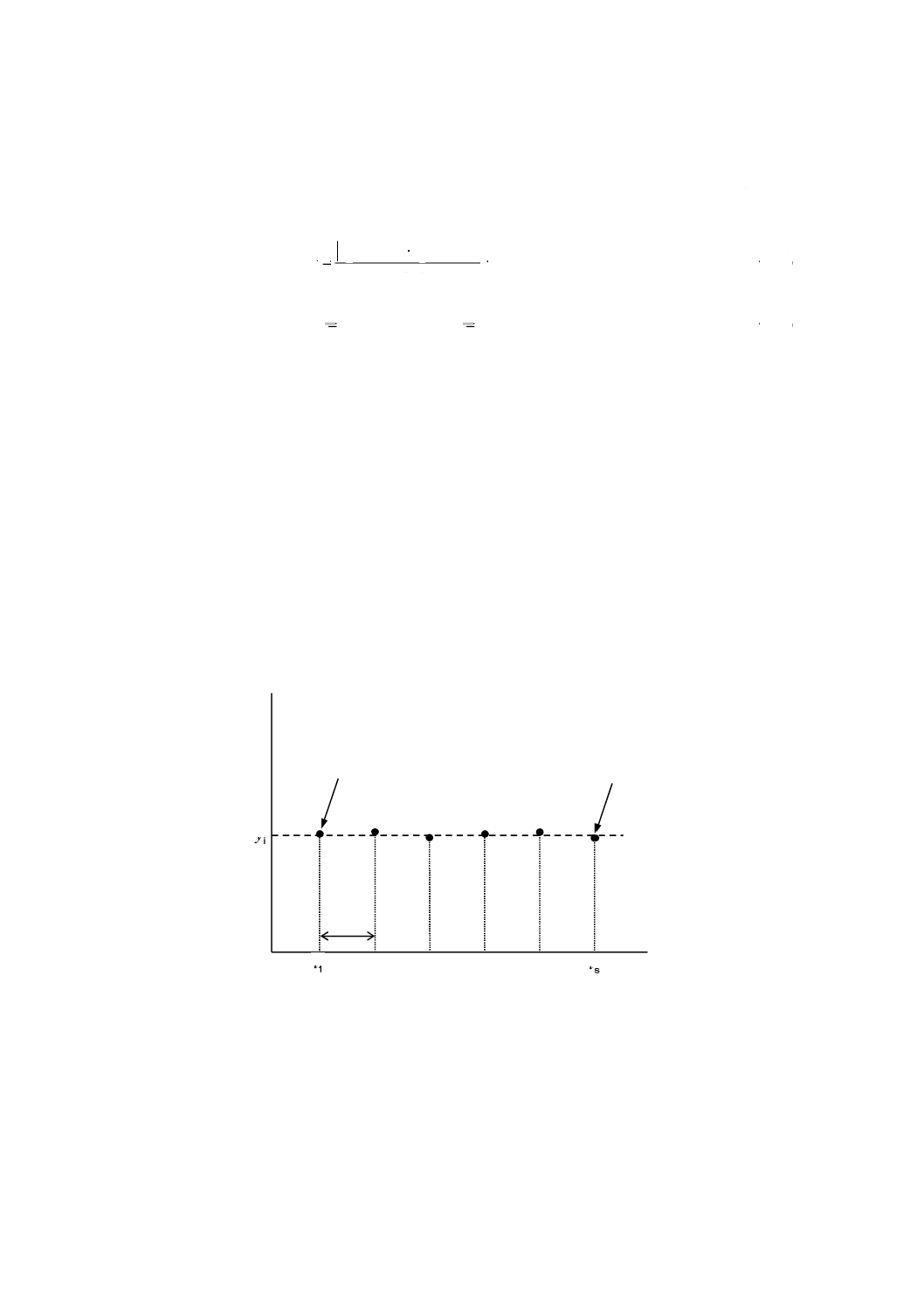
5.1.3.7
感度安定性測定原理
ジャイロが基準測定温度TBASE及び基準供給電圧VBASE条件下において,ジャイロを一定角速度状況下で
連続回転している状況での安定性を示す量であり,ジャイロの検出範囲をq分割した回転角速度xi(xiは
x1,x2〜xq+1のうちのどれか一角速度)を与え,そのときの出力値yi(yiはy1,y2〜yq+1のうちの一出力)
を一定サンプリング時間rで,サンプリング数sの間,連続的に測定する。(したがって測定時間はr×s
時間となる。)
q,r及びsの値は,製造業者が規定できるものとするが,必要に応じて,使用者と製造業者との協議に
よって変更できるものとする。
感度安定性測定データの例を,図7に示す。(図7の場合は,入力角速度xiにおける出力安定度を示す
説明図。)
1
開始時出力 (yi̲1)
2
測定終了時出力 (yi̲s)
3
サンプリング時間
X
経過時間
t1
測定開始時間
ts
測定終了時間
Y
ジャイロ出力値
yi
一定角速度下のジャイロ出力値
図7−感度安定性測定例
3
1t
iy
1
2
st
X
X
Y
13
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
入力角速度xiにおけるジャイロ出力値のデータ群をyi,1,yi,2…yi,s,検出範囲をFullScaleとすると,これら
の値の安定度δiは,式(10)及び式(11)によって求める。
(
)
ullScale
1
2
i
j
i,
i
F
s
y
y
s
j∑
=
−
=
δ
································································· (10)
∑
=
×
=
s
j
y
s
y
1
ji,
i
1
·········································································(11)
図3の場合は,式(12)によって求める。
1
1
n
2
CCW
MAX,
CW
MAX,
ullScale
y
y
y
y
F
−
=
−
=
+
·········································· (12)
上記の測定を設定する回転角速度x1,x2〜xq+1について行い,得られた値δiがその回転角速度xiにおけ
る感度安定性値である。
なお,この測定は静止状態には適用しない。
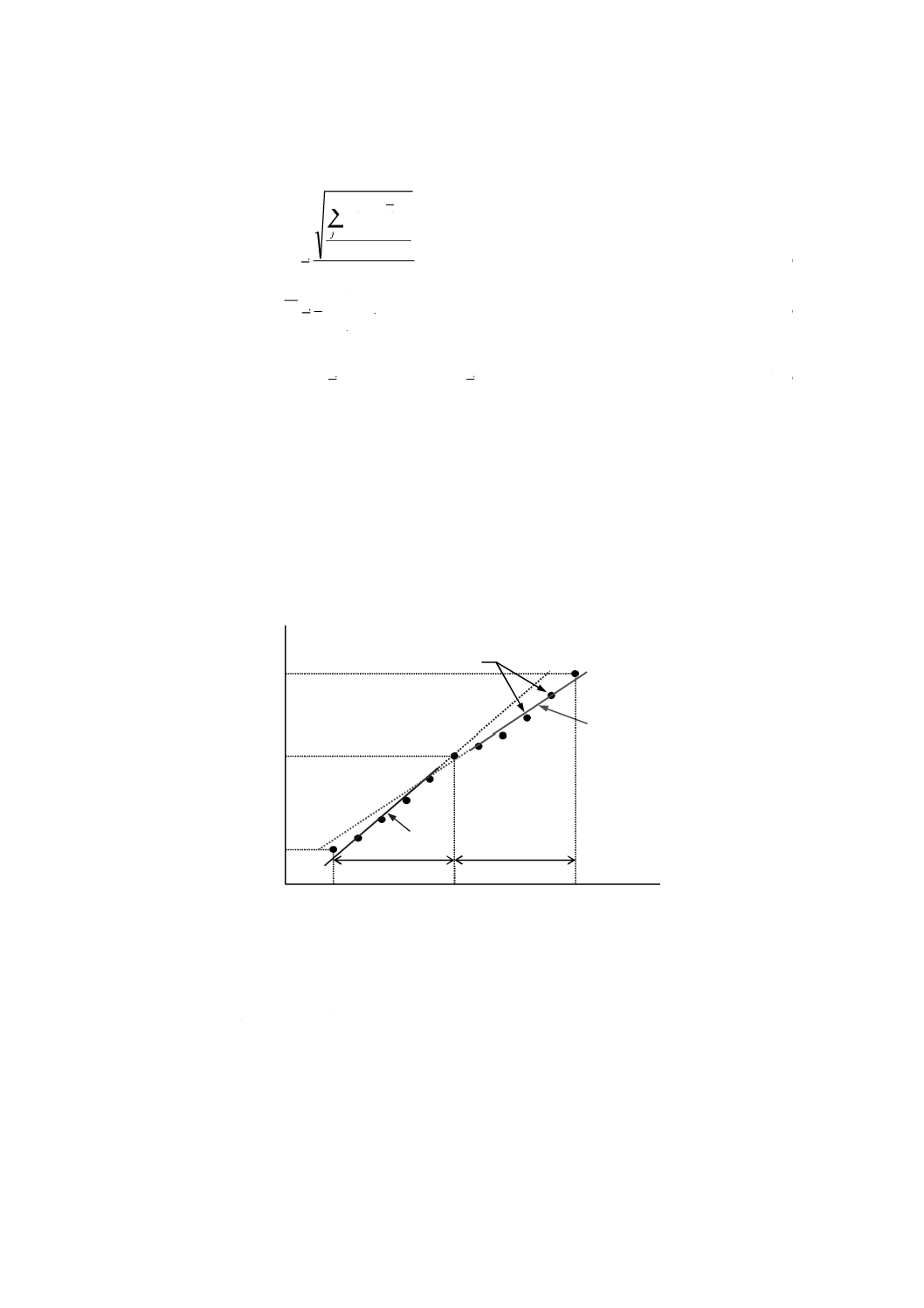
5.1.3.8
感度対称性測定原理
5.1.3.1と同様に,ジャイロが基準測定温度TBASE及び基準供給電圧VBASE条件下において,測定した出力
データをCW(右回転),CCW(左回転)に分離してそれぞれベストフィットラインを算出したときに得
られるスケールファクタ値の差分量を示した値である。
1
角速度印加時の測定データ群
2
ベストフィットライン(CW)
3
ベストフィットライン(CCW)
X
入力角速度
x1
CCW最大検出角速度入力
xn+1
静止状態
x2n+1
CW最大検出角速度入力
Y
ジャイロ出力信号
y1
CCW側最大出力値
yn+1
静止時出力値
y2n+1
CW側最大出力値
図8−感度対称性の測定例
1
2
3
X
Y
x2n+1
xn+1
x1
yn+1
y2n+1
y1
14
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図8を例として,CW及びCCWのそれぞれのベストフィットラインをyi=aCW×xi+bCW,yi=aCCW×xi
+bCCWとすると,aCW,bCW,aCCW及びbCCWは,式(13)〜式(16)によって求める。
∑
∑
∑
∑∑
+
+
=
+
+
=
+
+
=
+
+
=
+
+
=
−
−
=
1
2
2
2
1
2
2
i
2
i
1
2
2
1
2
2
1
2
2
i
i
i
i
CW
n
n
i
n
n
i
n
n
i
n
n
i
n
n
i
x
x
n
y
x
y
x
n
a
······················································ (13)
∑
∑
∑
∑
∑
∑
+
+
=
+
+
=
+
+
=
+
+
=
+
+
=
+
+
=
−
−
=
1
2
2
2
1
2
2
i
2
i
1
2
2
1
2
2
1
2
2
i
i
i
1
2
2
i
2
i
CW
n
n
i
n
n
i
n
n
i
n
n
i
n
n
i
n
n
i
x
x
n
x
y
x
y
x
b
················································ (14)
∑
∑
∑
∑∑
=
=
=
=
=
−
−
=
n
i
n
i
n
i
n
i
n
i
x
x
n
y
x
y
x
n
a
1
2
1
i
2
i
1
1
1
i
i
i
i
CCW
······················································ (15)
∑
∑
∑
∑ ∑
∑
=
=
=
=
=
=
−
−
=
n
i
n
i
n
i
n
i
n
i
n
i
x
x
n
x
y
x
y
x
b
1
2
1
i
2
i
1
1
1
i
i
i
1
i
2
i
CCW
················································· (16)
このときの演算には,静止状態の測定データyn+1は用いない。
上記によって得られたCW,CCWのスケールファクタであるaCW及びaCCWに対して,式(17)によって感
度対称性誤差(symmetry error)であるSy,error量を算出する。
TYP
CCW
CW
error
y,
a
a
a
S
−
=
································································· (17)
5.1.4
測定手順
5.1.4.1
スケールファクタ
温度Ti及び供給電圧Viにおけるスケールファクタ測定手順は,次による。
なお,温度による感度変動及び感度のレシオメトリック誤差は,次の手順に従い,温度又は電圧を変化
させて測定し,その測定結果によって算出する。
a) 電圧供給 電圧Viをジャイロに印加する。このとき,配線による電圧降下も考えられるので,図2の
ように,電源供給ライン及び電圧モニタラインを個別に配線し,電圧モニタラインの電圧が設定電圧
になっていることを確認する。
b) 温度設定 測定する温度Tiにジャイロ及びレートテーブル(回転部分だけで可)を放置する。このと
きの最低放置時間は,ジャイロが設定温度に到達するまでとする。
c) 電圧再調整 上記の温度設定時に,時間経過又は消費電流の変化等によって設定電源電圧が微小に変
動していることがあるので,ジャイロが設定温度に到達した後,再度電圧を調整する。このとき,完
全に設定すべき電圧に設定できない(例えば,設定電圧5.000 0 Vに対して,4.999 8 Vになってしま
う。)こともあるため,実際に供給する電圧も記録する。
d) 出力確認 ジャイロの静止時出力が安定していることを確認したのち,5.1.3.1で規定するように,回
転角速度を与え,そのときの出力を測定する。
e) 出力補正 ジャイロがレシオメトリックに動作する場合,電源電圧による微小誤差(例 設定電圧
15
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.000 0 Vに対して測定時の供給電圧が4.999 8 Vになっていることによる誤差)を最小化するために,
測定された出力が理論値にそってレシオメトリックに動くものとして,実測した出力値を補正する。
実測した出力値をyRAW,i,設定電圧値をVBASE,供給電圧をViとすると,出力補正値yiは,式(18)とな
る。
i
BASE
i
RAW,
i
V
V
y
y
×
=
···································································· (18)
f)
各データ演算 5.1.3.1の数式に基づき,演算にて求める。
感度安定性を除く項目は,温度及び電圧を変化させることで求めることができる。
5.1.4.2
感度安定性
温度Ti,供給電圧Viにおける感度安定性の測定手順は,次による。
a) 電圧供給 5.1.4.1 a) による。
b) 温度設定 5.1.4.1 b) による。
c) 電圧再調整 5.1.4.1 c) による。
d) 出力確認 ジャイロの静止時出力が安定していることを確認したのち,5.1.3.7で規定したように,一
定回転角速度を与え,そのときの出力を測定する。
e) 出力補正 ジャイロがレシオメトリックに動作する場合,電源電圧による微小誤差(例 設定電圧
5.000 0 Vに対して測定時の供給電圧が4.999 8 Vになっていることによる誤差)を最小化するために,
測定した出力が理論値にそってレシオメトリックに動くものとして実測した出力値を補正する。実測
した出力値をyRAW,i̲j,設定電圧値をVBASE,供給電圧をViとすると,出力補正値yi̲jは,式(19)となる。
i
BASE
i̲j
RAW,
i̲j
V
V
y
y
×
=
································································· (19)
f)
各データ演算 5.1.3.7の数式に基づき,演算にて求める。
5.1.5
規定条件
測定前にあらかじめ決めておく必要のある測定条件パラメータは,表5のとおりとする。
表5−スケールファクタ測定の規定条件
箇条番号
測定項目
パラメータ
補足説明
5.1.3.1
スケールファクタ
基準測定温度=TBASE
基準供給電圧=VBASE
回転角速度=x1,x2〜x2n+1
図3におけるx1,x2〜x2n+1の角速度値。したが
って,スケールファクタの算出には,2n+1個
のデータが必要となる。
5.1.3.2
初期感度ばらつき
基準測定温度=TBASE
基準供給電圧=VBASE
−
5.1.3.3
温度による感度変動
基準供給電圧=VBASE
測定温度=T1,T2〜Tm+1
図4におけるT1,T2〜Tm+1の温度値。
各温度におけるスケールファクタ算出には2n
+1点のデータが必要なので,温度による感度
変動の算出には,(2n+1)×(m+1) 個のデータ
が必要となる。
5.1.3.4
感度の温度係数
基準供給電圧=VBASE
測定温度=T1,T2〜Tm+1
5.1.3.3と同一。
16
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表5−スケールファクタ測定の規定条件(続き)
箇条番号
測定項目
パラメータ
補足説明
5.1.3.5
感度のレシオメトリ
ック誤差
基準測定温度=TBASE
測定電圧=V1,V2〜Vp+1
図6におけるV1,V2〜Vp+1の測定電圧値。
各温度におけるスケールファクタ算出には2n
+1点のデータが必要なので,感度のレシオメ
トリック誤差の算出には,(2n+1)×(p+1) 個の
データが必要となる。
5.1.3.6
感度直線性
基準測定温度=TBASE
基準供給電圧=VBASE
回転角速度=x1,x2〜x2n+1
5.1.3.1に同一。
5.1.3.7
感度安定性
基準測定温度=TBASE
基準供給電圧=VBASE
回転角速度=x1,x2〜xq+1
サンプリング時間=r
サンプリング数=s
図7におけるr,sのサンプリング時間,サンプ
リング数の測定条件及び測定を行う回転角速
度値x1,x2〜xq+1。
各角速度における安定度算出には,s点のデー
タが必要なので,感度安定性の算出には,s×(q
+1) 個のデータが必要となる。
5.1.3.8
感度対称性
基準測定温度=TBASE
基準供給電圧=VBASE
測定角速度=x1,x2〜x2n+1
[ただし,xn+1(静止点)は
除く]
図8におけるx1,x2〜x2n+1の角速度値。[ただ
し,xn+1(静止点)は除く]したがって,感度
対称性の算出には,2n個のデータが必要とな
る。
5.2
他軸感度
5.2.1
目的
ジャイロにおける他軸感度の測定方法について規定する。
5.2.2
測定回路
他軸感度の測定回路を,図9に示す。測定回路は,測定されるジャイロ,電源,レートテーブル,デー
タ取得システム及び配線にて構成される。測定回路の構成機器は,次を満足するものとする。
− 電源 ジャイロが要求する電圧・電流を供給することができ,かつ,その供給状態において,リップ
ル電圧などの変動幅がジャイロ要求値を満足するものとする。
− レートテーブル ジャイロの検出範囲以上の回転角速度を与えられ,かつ,最少分解能相当の角速度
の入力変化が可能な回転装置であることが望ましい。
なお,他軸感度の計測では,連続的に角速度を印加する必要があるので,電源の供給又は信号の取得は,
スリップリング経由で行うことが望ましいが,スリップリングのノイズなどが測定に影響を及ぼさないも
のを使用しなければならない。
− レートテーブル制御装置 レートテーブルの制御によってジャイロに与える角速度入力を制御でき
る。
− データ取得システム ジャイロの出力形態に合わせた計測器又は計測システムとする。例えば,ジャ
イロ出力が電圧(アナログ)の場合,デジタルマルチメータ,データロガーなどの計測器を用いる。
− 配線 電源,ジャイロ及びデータ取得システムの電気的接続を行うケーブル。機器が発生する影響及
び外乱ノイズの重畳を最小限とする工夫を施す。
17
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
X
DUT(ジャイロ)非検出軸
Y
DUT(ジャイロ)非検出軸
Z
DUT(ジャイロ)検出軸
図9−他軸感度の測定回路
5.2.3
測定原理
他軸感度の測定原理は,次による。
− 図10はX軸まわりに角速度ωを印加したときを示し,他軸感度=印加したときのジャイロ出力角速
度/印加角速度と定義する。
1
印加角速度(ジャイロ非検出軸)
2
ジャイロ出力角速度
X
ジャイロ非検出軸
Y
ジャイロ非検出軸
Z
ジャイロ検出軸
図10−他軸感度の測定原理
− 基本的な測定原理を,次に示す。
なお,5.2.3では,原理記述のため入力軸が1軸のケースとしてある。
ジャイロの基準軸として,機構的な筐体等で構成される直交3軸の基準軸を設定し,ジャイロ入力軸と
レートテーブル
DUT
レートテーブル
制御装置
データ取得システム
DUTの電源
スリップリング
Z
X
Y
2
1
ω
X
Z
Y
18
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
直交した,本来不感軸であるはずの2方向の各軸に,各々の角速度を印加しジャイロ出力を計測する。
例えば,図9及び図10のように,きょう(筐)体Z方向に入力軸をもつジャイロを,Z軸が水平になる
ようレートテーブルに取り付け,まずX軸回りに角速度を印加しジャイロ出力Out,xを計測する。
同様に,Y軸回りに角速度を印加し,ジャイロ出力Out,yを計測し,式(20)〜式(23)によって他軸感度を計
算する。
ωx=(Out,x×SF) ········································································· (20)
ωy=(Out,y×SF) ········································································· (21)
ω
ω
K
x
x=
················································································ (22)
ω
ω
K
y
y=
················································································ (23)
ここに,
ωx: X軸に角速度印加時の角速度出力
ωy: X軸に角速度印加時の角速度出力
Out,x: X軸に角速度印加時の取得データ
Out,y: Y軸に角速度印加時の取得データ
SF: スケールファクタ
Kx: X軸に角速度を印加した時の他軸感度
Ky: Y軸に角速度を印加した時の他軸感度
ω: 印加した角速度
5.2.4
測定上の注意事項
− レートテーブルの軸ぶれ又はジャイロ取付けのジグの直交精度及びジャイロ取付け面精度は,測定し
たい他軸感度より十分(≦0,1,...,0,2)に小さくなければならない。
− 一般に,印加する角速度は,大きいほうが他軸感度による出力が大きくなり計測しやすくなるが,ジ
ャイロの絶対最大定格を超えた角速度を印加すると,ジャイロ故障が発生する可能性があるので注意
する。
− 他軸感度の計測の有意性又は有効性について,次のような観点で事前に検討して,この測定の意義を
明確にしておく。例えば,計測レンジが±200 (°/s) で,角速度出力の安定性が0.5 (°/s) のジャイロ
の場合,200 (°/s) の角速度印加時においても,ジャイロ出力の安定性が0.5 (°/s) であるなら,他軸
感度が原因で発生している出力であるかどうか分離できるのは,安定性の2倍[1 (°/s)]程度以上の
出力が発生しなければならない。これは,200 (°/s) 印加時に他軸感度による出力が1 (°/s) 程度なら,
有意な測定ができるということを意味しており,これを他軸感度に換算すると,1/200=0.5 %程度と
なる。つまり,このジャイロ性能の場合,これ以下の他軸感度は測定できない。
− この他軸感度を補正に使用する場合は,極性などについて,製造業者と使用者との協議によって合意
しておくことが望ましい。
5.2.5
測定手順
ジャイロの他軸感度測定手順は,次による。複数の入力軸をもつジャイロの測定手順についても同様で
ある。
a) 入力軸に直交する軸に角速度を印加できるよう,レートテーブルにジャイロを取り付ける。
b) ジャイロに電源を供給して起動する。
c) a) でセットした“ジャイロ入力軸に直交した軸回り”に角速度を印加する。
d) 角速度印加中のジャイロ出力を測定する。
19
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
e) ジャイロの電源供給を停止し,a) でセットした軸に直交かつ入力軸と直交する軸とに角速度を印加で
きるよう,レートテーブルにジャイロを取り付ける。
f)
ジャイロに電源を供給し起動後,e) でセットした“ジャイロ入力軸に直交する軸回り”に角速度を印
加する。
g) 角速度印加中のジャイロ出力を測定する。
h) d) 及びg) の結果を用いて,5.2.3によって他軸感度を求める。
5.2.6
規定条件
− 印加角速度
− 測定温度
− 電源電圧
5.3
バイアス測定法
5.3.1
目的:
ジャイロにおけるバイアスに関わる各項目の測定方法を規定する。
5.3.2
測定回路
5.3.2.1
全般
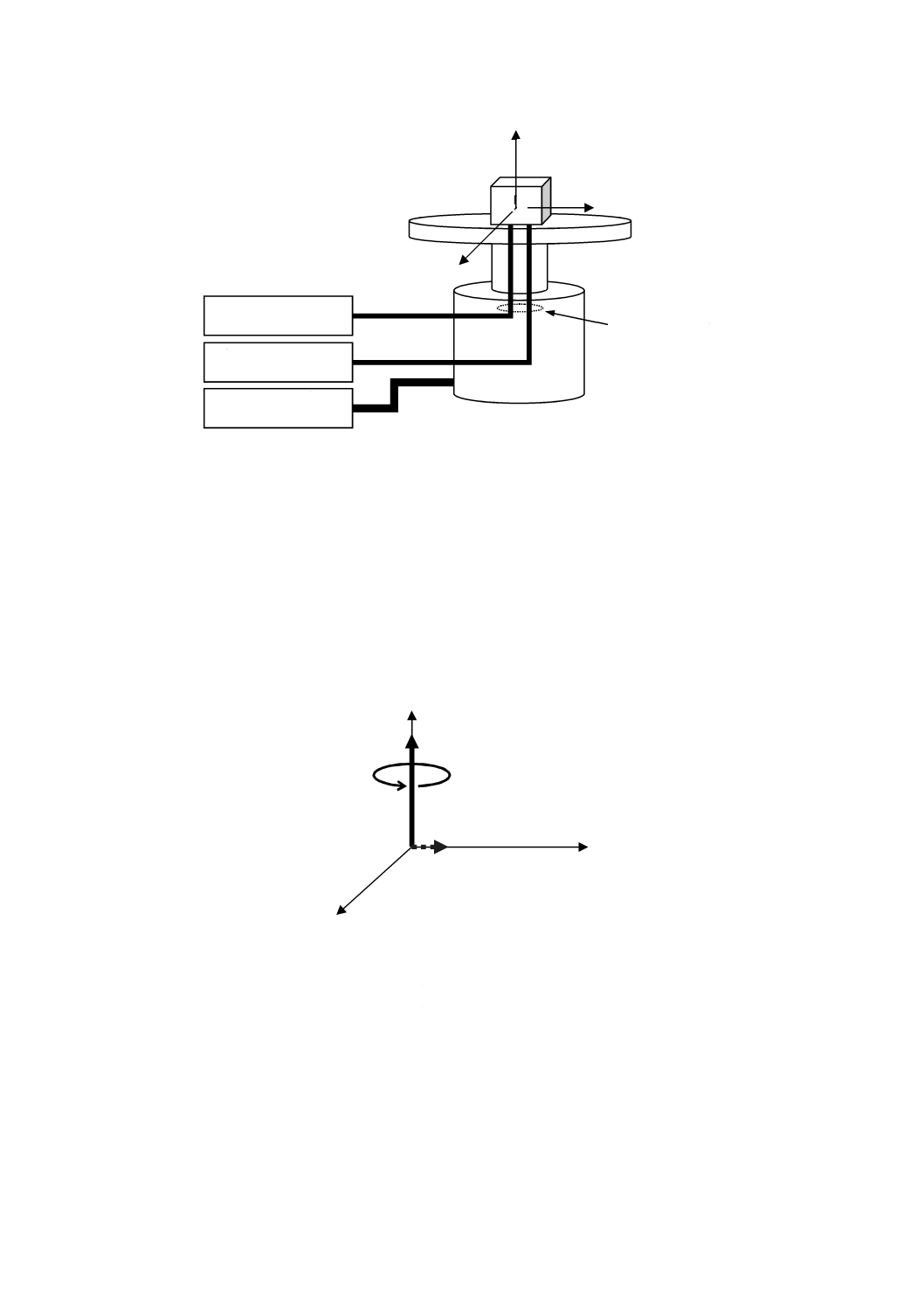
測定回路−1を図11に,測定回路−2及び計測器の構成を図12に示す。測定回路−2は,5.3.3.8 バイア
ス直線加速度感度の測定に使用し,測定回路置−1は,その他のバイアス関連項目の測定に使用する。
5.3.2.2
測定回路−1
図11に示す測定回路−1は,測定するジャイロ,電源,固定台,データ取得システム及び恒温槽(温度
計を含む)からなる。測定回路の構成機器は,次を満足する必要がある。
− 固定台 ジャイロを確実に固定可能,かつ,振動等外的要因を排除可能な環境下に設置し,固定した
ジャイロの入力軸を既知の方向に向けることが可能なもの。角速度が入力可能な構造の必要はない。
注記 入力軸方向の規定はバイアス測定時に地球自転角速度分を差し引くためであり,地球自転角
速度:4.178E-3 (°/s) が無視できる場合は不要である。
− 電源 ジャイロの仕様に定められた電圧,電流及び雑音特性を満足する。
− データ取得システム ジャイロの出力仕様(アナログ又はデジタル)によって選択し,バイアス計測
の精度を満たす計測器とする。ジャイロがアナログ出力(アナログ電圧又はアナログ電流)の場合は,
電圧計又は電流計を使用し,計測範囲及び分解能は,供試体の仕様を十分満足するもの。デジタル出
力の場合も同様に,ジャイロの仕様を十分満足できる計測範囲(ビット数)をもつこととする(“十分”:
計測範囲は,2倍以上,分解能は1/10以下が望ましい。)。
− 恒温槽 固定台に設置された供試体の周囲温度をコントロールすることが可能な恒温槽であり,周囲
温度を出力可能とする。周囲温度は,恒温槽の機能とは別の温度計を用いて計測してもよい。
20
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図11−バイアス測定回路−1
5.3.2.3
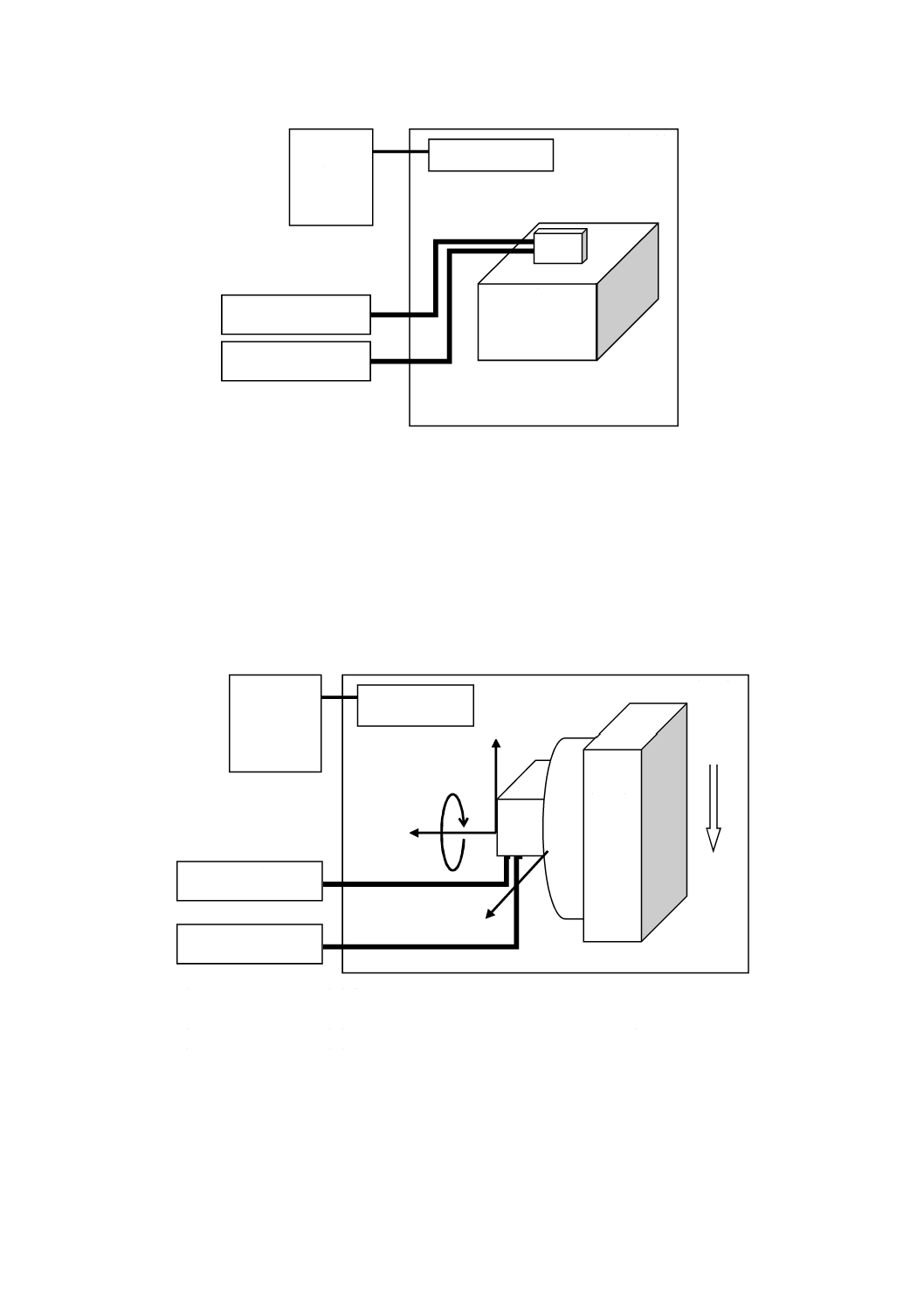
測定回路−2
図12に示す測定回路−2の固定台は,次の仕様を満たすものとし,その他は測定回路−1と同一とする。
− 固定台 ジャイロを確実に固定可能かつ振動等外的要因を排除可能な環境下に設置し,固定したジャ
イロの入力軸を既知の方向[自由落下(重力)の加速度方向及び自由落下(重力)の加速度方向と直
交する軸との2方向]に向けることが可能なもので,自由落下(重力)の加速度の方向に対し直交し
た軸回りに回転可能,かつ,指定の角度間隔で固定可能なもの。
a
自由落下(重力)の加速度方向
b
回転によって検出軸にかかる自由落下(重力)の加速度量の変化
l
自由落下(重力)の加速度方向(Perpendicular)設定=Z:ジャイロ検出軸
自由落下(重力)の加速度方向及び直交方向(Vertical)設定=Y:ジャイロ非検出軸
m
自由落下(重力)の加速度方向設定=X:ジャイロ非検出軸
自由落下(重力)の加速度方向及び直交方向設定=Z:ジャイロ検出軸
n
自由落下(重力)の加速度方向設定=Y:ジャイロ非検出軸
自由落下(重力)の加速度方向及び直交方向設定=X:ジャイロ非検出軸
図12−バイアス測定回路−2
恒温槽
固定台
DUT
データ取得システム
DUT電源
温度制御
装置
温度計
a
n
恒温槽
データ取得システム
DUT電源
温度計
温度制御
装置
a
DUT
回転可
能固定
台
l
b
m
n
l
b
a
m
n
21
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.3
測定原理
5.3.3.1
バイアス
周囲温度一定(規定温度),角速度入力ゼロ又は既知の環境下(地球自転角速度入力の存在)におけるジ
ャイロ出力を測定する。
電源投入してから規定時間経過後のジャイロ出力の規定時間内(規定データ長)全平均値から既知の入
力角速度(地球自転角速度)を差し引いた値を求める。
Nbias=Out,ave−Earthrotation (°/s) ······················································· (24)
ここに,
Nbias: バイアス
Out,ave: ジャイロの出力平均値
Earthrotation: 地球自転角速度成分
地球自転角速度成分は,入力軸の方向から算出する。
入力軸垂直の場合
Earthrotation:4.178×10−3×cos λ
ここに,
λ: 計測地点の緯度
入力軸水平の場合
自転成分=4.178×10−3×sin λ×cos φ
ここに,
φ: 入力軸方位(北向きを0°)
5.3.3.2
初期バイアス変動
初期バイアス変動は,次の手順でジャイロ出力を計測し,式(25)によって求める。
周囲温度一定(規定温度),角速度入力ゼロ又は既知の環境下におけるジャイロ出力のバイアス値からの
かい(乖)離分を示した値を求める。
電源投入後,規定時間経過後のジャイロ出力の規定時間内(規定データ長)全平均値から既知の入力角
速度(地球自転角速度)を差し引いて求めた出力をOutとし,定格バイアスをOut,typとすると,初期バイア
ス変動Initial bias variationは,次による。
Initial bias variation: Out−Out,typ (°/s) ············································· (25)
5.3.3.3
バイアスのレシオメトリック誤差
バイアスのレシオメトリック誤差は,図13に示す値と式(26)とによって求める。
ジャイロの基準測定温度TBASE条件下において,そのジャイロの動作する動作電源電圧範囲をp分割(p
≧2が望ましい。)したとき,それぞれの電源電圧V1,V2〜Vp+1におけるBiasがそれぞれaV,1,aV,2〜aV,p+1
となる。
pの値は,製造業者が規定できるものとするが,必要に応じて,使用者と製造業者間の協議によって変
更できるものである。
バイアスのレシオメトリック誤差データの例を,図13に示す(図13の場合は,p=2で等分割とし,p
=2の時を基準供給電圧としてある。)。
22
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
レシオメトリックエラー分 (Rerror,V1)
2
レシオメトリックエラー分 (Rerror,Vp+1)
3
p分割
X
ジャイロ動作電圧
V1
動作電圧下限
VBASE 基準供給電圧
Vp+1
動作電圧上限
Y
ジャイロの バイアス値
aV,1
動作電圧下限でのバイアス値
aBASE 基準供給電圧でのバイアス値
aV,p+1 動作電圧上限でのバイアス値
図13−バイアスのレシオメトリック誤差測定例
バイアスのレシオメトリック誤差であるRerror,Viは,式(26)によって求める。
(
)
BASE
BASE
i
BASE
Vi
Vi
error,
a
V
V
a
a
R
×
−
=
··················································· (26)
上記の演算を,それぞれの電圧V1,V2… Vp+1について行い,得られた値Rerror,Viがその電圧Viにおける
バイアスのレシオメトリック誤差値である。
5.3.3.4
バイアス再現性
バイアス再現性は,次のジャイロ出力変化の計測によって求める。
周囲温度一定(規定温度),角速度入力ゼロ又は既知の環境下におけるジャイロ出力の電源オン−オフに
よるバイアス値の変化(ばらつき)を示す。
規定回数のバイアスを計測し,その最大/最小(±°/s)を求め,バイアス再現性とする。
5.3.3.5
パワーオンバイアスドリフト
パワーオンバイアスドリフトは,次に示す測定手順のジャイロ出力及び式(27)によって求める。
周囲温度一定(規定温度),角速度入力ゼロ又は既知の環境下におけるジャイロ出力の電源オン後の変動
を示す。
電源投入直後,規定時間内の出力の平均値を基準とし,規定時間(規定データ長)内のジャイロ出力の
絶対値の最大値と基準値との差とする。
3
2
1
X
Y
Vp+1
VBASE
V1
aV,p+1
aBASE
aV,1
23
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ジャイロ出力の絶対値の最大値をOut,max,電源投入直後の規定時間長(データ長)の平均値をOut,aveとす
るとパワーオンバイアスドリフトは,式(27)による。
Bias drift after power on: Out,max−Out,ave (°/s max) ······························ (27)
5.3.3.6
温度によるバイアス変動(バイアス温度係数)
周囲温度が変化した際の,角速度入力ゼロ又は既知の環境下におけるジャイロ出力のバイアス値の変化
を,図14に示す。
a) 温度によるバイアス変動 動作温度範囲におけるバイアスの基準温度におけるバイアスからの変動
の最大/最小を示す。(±°/s)
b) バイアス温度係数 動作温度範囲における温度変化に対するバイアスの変動の傾きを示す。(°/s)/℃
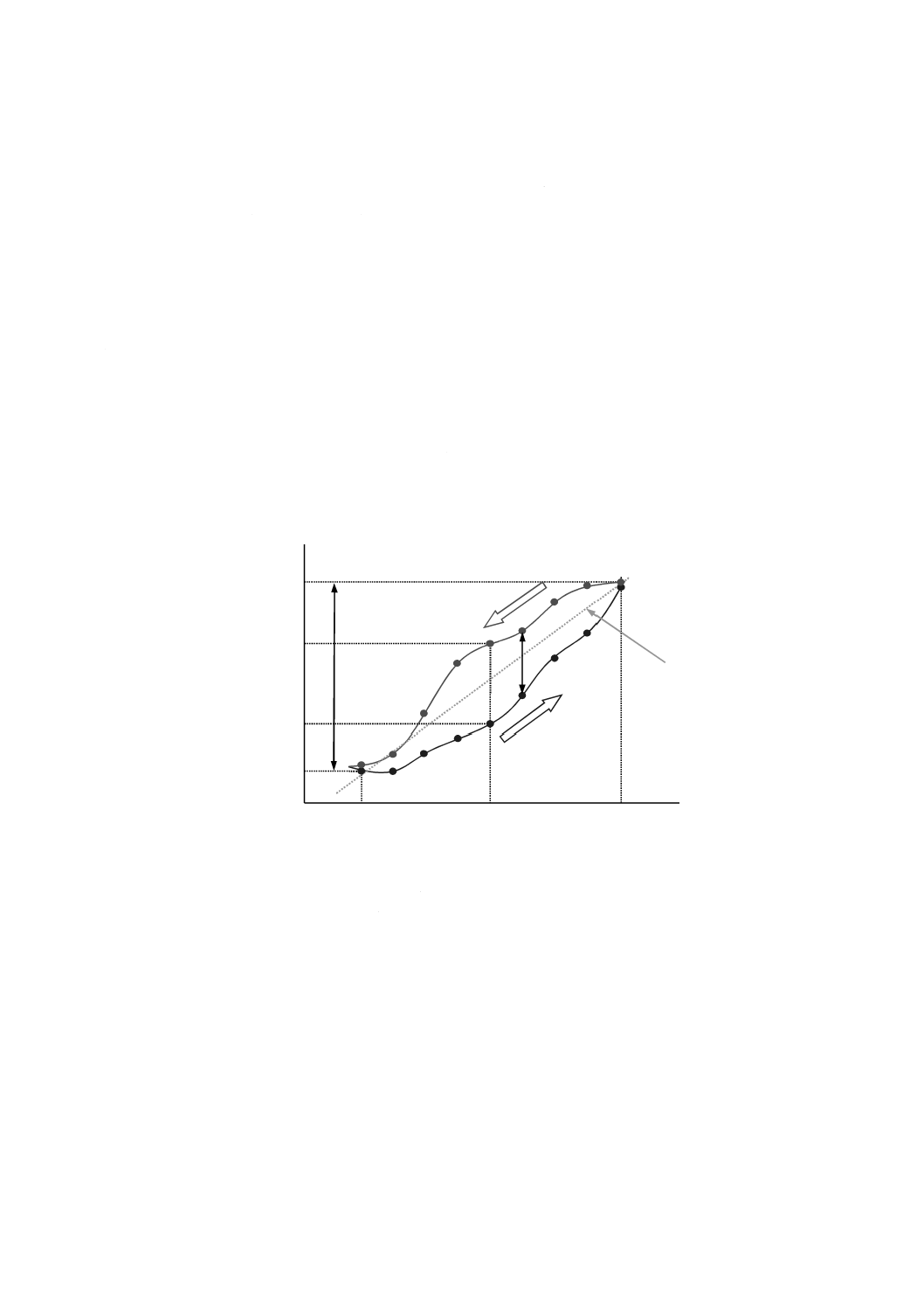
5.3.3.7
バイアスヒステリシス
周囲温度が変化した際の,角速度入力ゼロ又は既知の環境下におけるジャイロ出力のバイアス値のヒス
テリシス(温度変化の方向による同一温度でのバイアス値の差)を示す。
温度変化がTMINからTMAXへ上昇しTMINに下降するときの同一温度におけるバイアス値の差の最大値
(°/s)を,図14に示す。
1
バイアスヒステリシス
2
バイアス温度感度係数
3
バイアス温度感度
X
ジャイロ環境下温度
TMIN
最低動作温度
TBASE
基準測定温度
TMAX
最高動作温度
Y
ジャイロ出力値
yBASE-UP
温度上昇時における基準温度でのジャイロ出力値
yBASE-DOWN 温度下降時における基準温度でのジャイロ出力値
図14−バイアス温度感度及びバイアスヒステリシス
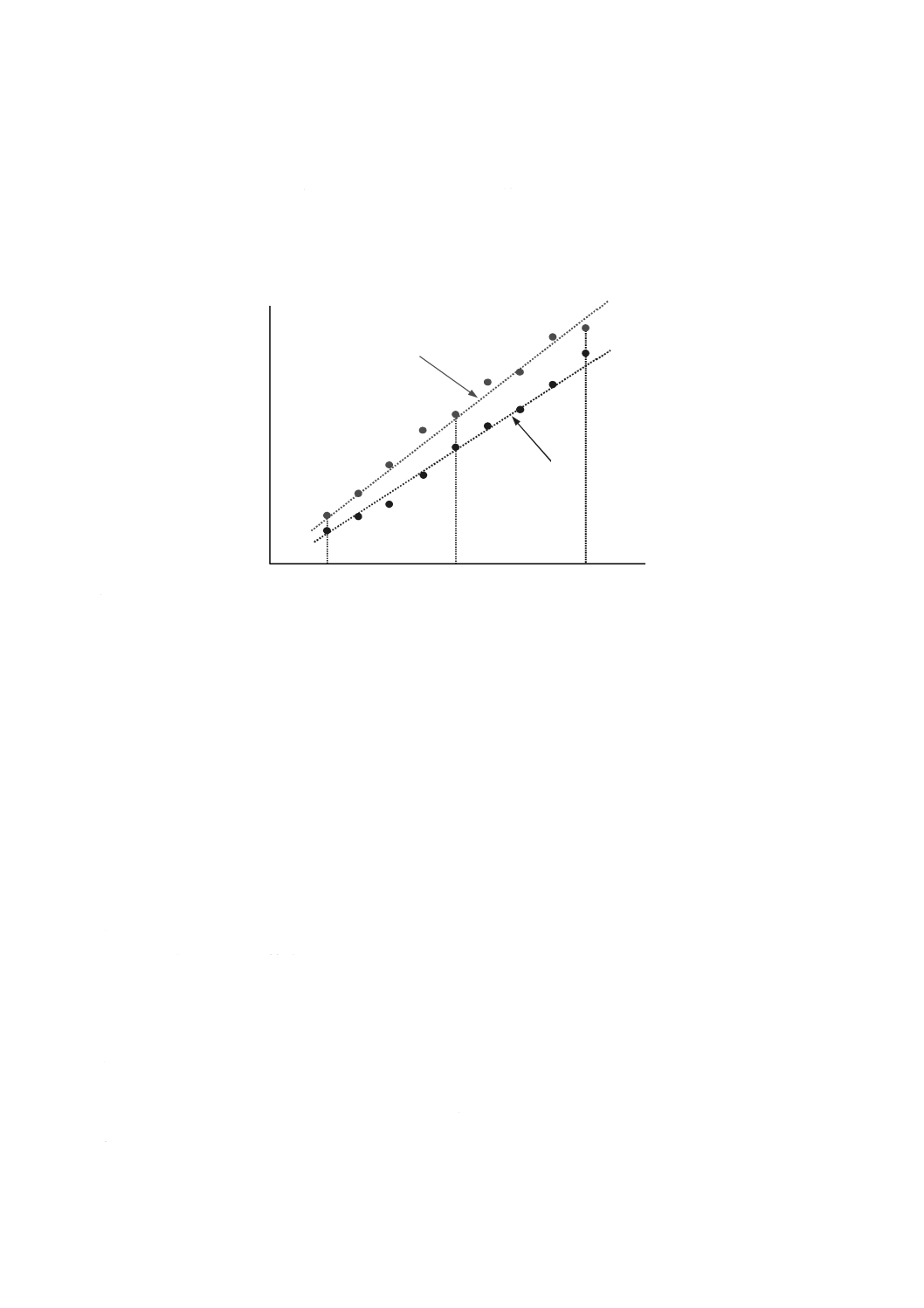
5.3.3.8
バイアス直線加速度感度
周囲温度一定(規定温度),角速度入力ゼロ又は既知の環境下におけるジャイロ出力のバイアス値が直線
加速度によって変化する量を,図15に示す。
3
1
2
UP
BASE−
y
MIN
T
MAX
T
DOWN
BASE−
y
BASE
T
X
Y
24
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
直線加速度の印加は,自由落下(重力)の加速度を基準入力 (±1 g) とする方法について規定する。
ジャイロの入力軸と平行に直線加速度を印加し,印加加速度に関するジャイロ出力変動の一次近似直線
の傾きをOut,gp [(°/s)/g max] とし,入力軸と直交方向に直線加速度を印加した場合の印加加速度に関する
ジャイロ出力変動の一次近似直線の傾きOut,gv [ (°/s)/g max] とすると,バイアス直線加速度感度は,Out,gp,
Out,gvの大きい方を示す。
1
自由落下(重力)の加速度方向(Perpendicular)設定におけるジャイロ出力変化ベストフィットライン
2
自由落下(重力)の加速度方向及び直交方向(Vertical)設定におけるジャイロ出力変化ベストフィットライン
X
印加加速度(±1 g範囲)
g−1
−1 g印加状態
g0
加速度入力無状態
g+1
+1 g印加状態
Y
ジャイロ出力値
図15−バイアス直線加速度感度
5.3.3.9
起動時間
周囲温度一定(規定温度),角速度入力ゼロ又は既知の環境下におけるジャイロ出力が電源オン後,規定
の出力になるまでの時間を示す (s max)。
5.3.4
測定手順
5.3.4.1
バイアス及び初期バイアス変動
a) ジャイロを固定台に固定し,仕様に定められたとおり,電源ケーブル及び信号ケーブルを電源及びデ
ータ収録システムに接続する。
b) ジャイロの入力軸方向を確認し,試験場所の緯度に応じた地球自転角速度成分を求める。
c) ジャイロ周囲温度を設定する。設定温度はジャイロの仕様に定められた温度とする。
d) 電源を投入し,ジャイロの仕様に定められた時間(規定時間)後から出力を収録する。
e) データ収録時間は規定時間以上とする。
5.3.4.2
バイアス再現性
a) 1回目の測定はバイアスの測定手順によって実施する。
b) 1回目の測定終了後,ジャイロの電源をオフにする。電源オフはジャイロだけで,データ収録装置及
び恒温槽はオンのままとする。
1
2
1
−
g
1
+
g
0
g
X
Y
25
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) 規定時間の電源オフ時間後,バイアスの測定を行う。
d) 本測定を規定回数実施する。
5.3.4.3
パワーオンバイアスドリフト及び起動時間
a) ジャイロを固定台に固定し,仕様に定められたとおり,電源ケーブル,及び信号ケーブルを電源及び
データ収録システムに接続する。
b) ジャイロ周囲温度を設定する。設定温度はジャイロの仕様に定められた温度とする。
c) 電源を投入し,投入直後からジャイロ出力を収録する。
d) データ収録時間は規定時間以上とする。
e) 電源オンから規定出力到達までの時間を起動時間,電源オン後規定時間内の平均値(基準値)と規定
時間長(データ長)内のジャイロ出力の絶対値との差の最大値をバイアスターンオンドリフトとする。
5.3.4.4
温度によるバイアス変動(バイアス温度係数),バイアスヒステリシス及びレシオメトリックエ
ラー
a) ジャイロを固定台に固定し,仕様に定められたとおり,電源ケーブル,及び信号ケーブルを電源及び
データ収録システムに接続する。
b) ジャイロの入力軸方向を確認し,試験場所の緯度に応じた地球自転角速度成分を求める。スケールフ
ァクタ温度感度の影響を排除するため,入力角速度は0であることが望ましい。入力角速度0はジャ
イロの入力軸を水平・東向き(又は西向き)で実現できる。
c) ジャイロ周囲温度を設定する。設定温度は,ジャイロの仕様に定められた基準温度(規定温度)とす
る。
d) 電源を投入し,ジャイロの仕様に定められた時間後からデータを収録する。
e) バイアス温度感度(バイアス温度感度係数)及びバイアスヒステリシスについては,恒温槽の温度を
規定量変化させ,一定温度になってから規定時間後,規定時間出力を収録する。温度変化は基準温度
から最大動作温度,基準温度,最低動作温度,基準温度の順に規定量ごと変化させる。一回の温度変
化量は,動作温度範囲の1/m(規定温度変化)とし,変温レートは,n ℃/min以上(規定変温レート)
とする。
なお,n,mの値については,製造業者が規定できるものとするが,必要に応じて,使用者と製造業
者間の協議によって変更できるものである。
f)
レシオメトリックエラーについては,電圧を変化させ,バイアスを測定する。
5.3.4.5
バイアス直線加速度感度
5.3.4.5.1
全般
バイアス直線加速度感度は図12に示す装置で測定する。
印加直線加速度は,固定台を回転させることによって自由落下(重力)の加速度の方向を変化させ,式
(28)によって求める。
Alin=Agr×sin γ ········································································ (28)
ここに,
Alin: 印加直線加速度
Agr: 自由落下(重力)の加速度
γ: 固定台の回転角
5.3.4.5.2
入力軸が加速度に平行の場合
a) ジャイロを固定台に固定し,仕様に定められたとおり,電源ケーブル及び信号ケーブルを電源及びデ
ータ収録システムに接続する。
26
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) ジャイロの入力軸方向を確認し,入力軸が自由落下(重力)の加速度の方向と平行になるよう固定す
る。固定台の回転軸[自由落下(重力)の加速度と直交]と入力軸とは直交とする。
c) ジャイロ周囲温度を規定温度に設定する。
d) 電源を投入し,ジャイロの仕様に定められた時間後から出力を収録する。
e) 入力軸が上向き[自由落下(重力)の加速度方向と逆向き]を基準とし,時計回り(又は反時計回り)
に規定の角度ごとに回転する。
f)
回転角度ごとに規定時間ジャイロ出力を収録する。
5.3.4.5.3
入力軸が加速度に直交の場合
a) ジャイロを固定台に固定し,仕様に定められたとおり,電源ケーブル及び信号ケーブルを電源及びデ
ータ収録システムに接続する。
b) ジャイロの入力軸方向を確認し,入力軸が自由落下(重力)の加速度の方向と直交するよう固定する。
固定台の回転軸[自由落下(重力)の加速度と直交]と入力軸とは平行とする。
c) ジャイロ周囲温度を規定温度に設定する。
d) 電源を投入し,ジャイロの仕様に定められた時間後から出力を収録する。
e) 入力軸が上向き[自由落下(重力)の加速度方向と逆向き]を基準とし,時計回り(又は反時計回り)
に規定の角度ごとに回転する。
f)
回転角度ごとに規定時間ジャイロ出力を収録する。
5.3.5
規定条件
バイアス計測時の規定条件を,表6に示す。
27
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表6−バイアス計測時の規定条件
測定項目
単位
規定条件
単位
バイアス
°/s
周囲温度
℃
ウォームアップ時間
min又はs
測定時間(データ長)
min又はh
入力角速度
°/s
初期バイアス変動
°/s max
周囲温度
℃
ウォームアップ時間
min又はs
測定時間(データ長)
min又はh
入力角速度
°/s
バイアス再現性
°/s
周囲温度
℃
ウォームアップ時間
min又はs
測定時間(データ長)
min又はh
入力角速度
°/s
測定回数
パワーオンバイアスドリフト
°/s max
周囲温度
℃
基準時間
s
測定時間(データ長)
min又はh
起動時間
s
周囲温度
℃
基準出力
°/s
温度によるバイアス変動
°/s
基準温度
℃
ウォームアップ時間
min又はs
ステップ温度変化量
℃
温度保持時間(測定時間)
min
変温レート
℃/min
バイアスヒステリシス
°/s max
基準温度
℃
ウォームアップ時間
min
ステップ温度変化量
℃
温度保持時間(測定時間)
min
変温レート
℃/min
バイアス直線g感度
(Bias linear g sensitivity)
(°/s)/g
周囲温度
℃
ウォームアップ時間
min
ステップ回転角
°
測定時間(データ長)
min
5.4
出力ノイズ
5.4.1
目的
ジャイロの出力ノイズ特性に関する測定方法を規定する。
5.4.2
測定回路
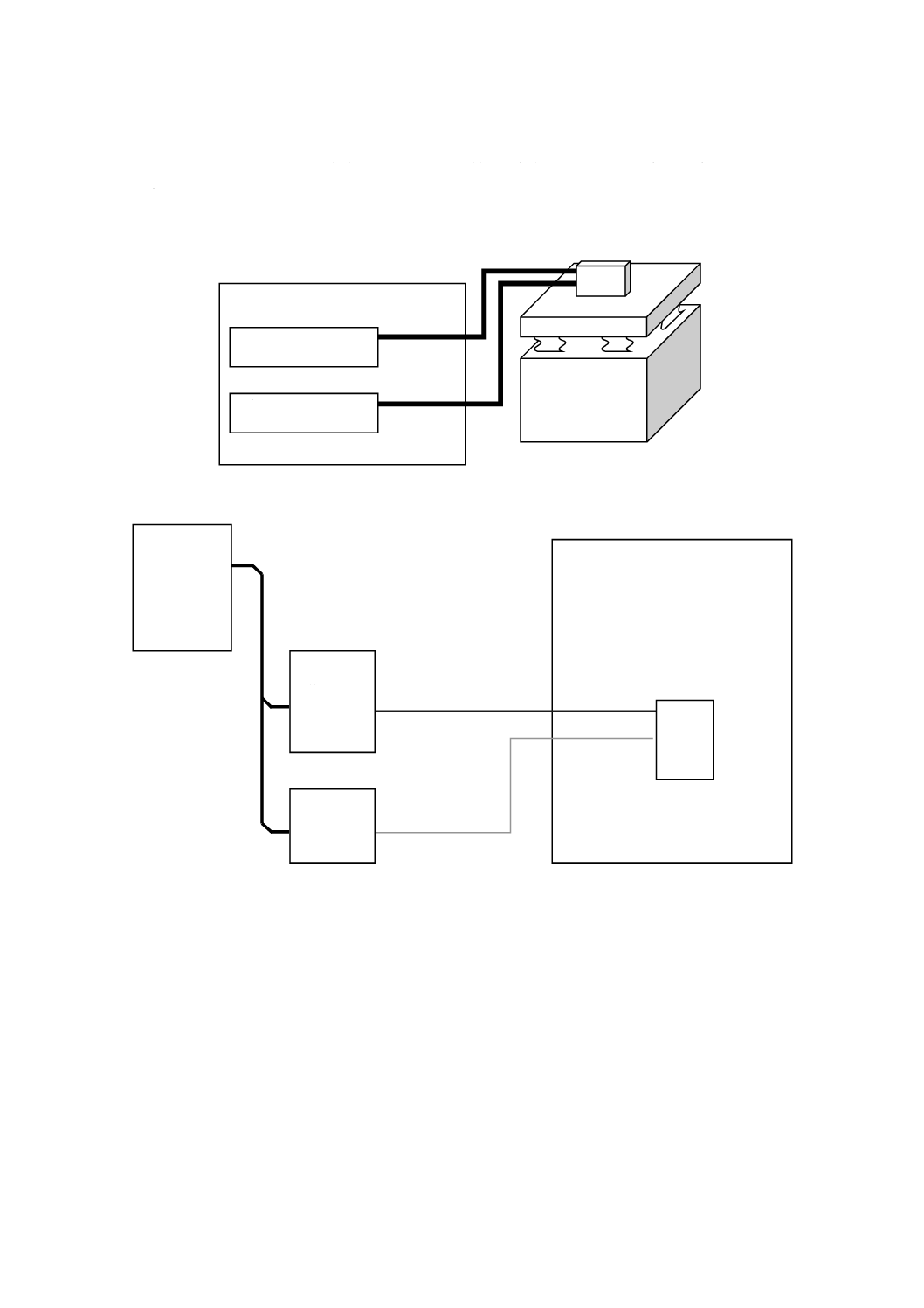
ジャイロの測定回路構成例を図16に,配線形態例を図17に示す。測定回路は,測定されるジャイロ
(DUT),電源,免振台,データ取得システム及び配線にて構成される。測定回路の構成機器は,次を満
足するものとする。
− 電源 ジャイロが要求する電圧・電流を供給することができ,かつ,その供給状態において,リップ
ル電圧などの変動幅がジャイロ要求値を満足する。
− 免振台 振動(特に応答帯域内の回転振動)などの外乱ノイズ源から隔絶できる。
− データ取得システム ジャイロの出力形態に合わせた計測器又は計測システム。例えば,ジャイロ出
28
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
力が電圧(アナログ)であれば,デジタルマルチメータやデータロガーなどの計測器を用いる。
なお,本システムの計測分解能は,計測したい最少分解能の1/10以下の変化が読み取れる。
− 配線 電源,ジャイロ及びデータ取得システムの電気的接続を行うケーブル。機器が発生する影響及
び外乱ノイズの重畳を最小限とする工夫を施す。
図16−出力ノイズ測定システム
図17−出力ノイズ測定の配線形態例
5.4.3
測定原理
安定状態動作(0レート入力)時のジャイロからの出力電圧を測定し,そこに含まれる出力ノイズ成分
を測定する。
5.4.4
測定上の注意事項
− 電源リップルに測定値が影響しないよう,安定化電源の電圧を,出力ノイズ測定の基準にするなど注
意する。
− 外来振動などの影響をさけるため,免振台の上で測定するなどの安定化をさせる。
− ジャイロに印加する電源電圧及び偏差は,各々の規定された仕様の範囲内で行う。ジャイロが電源比
例特性をもつ場合,電源ノイズがジャイロの出力ノイズとならないように,ジャイロの出力ノイズに
制御装置
免振台
DUT
電源
データ取得システム
免振台
DUT出力
DUT
制御装置
電源
データ取
得システ
ム
29
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
対して十分小さいフロアノイズである。また,電源ノイズをキャンセルするように,Vdd及びGNDを
モニタすることが望ましい。
− 周囲温度は,25 ℃±5 ℃を基準とする。
− 相対湿度は,45 %〜75 %を基準とする。
− 気圧は,86 kPa〜106 kPa{860 mbar〜1 060 mbar}を基準とする。
5.4.5
測定手順
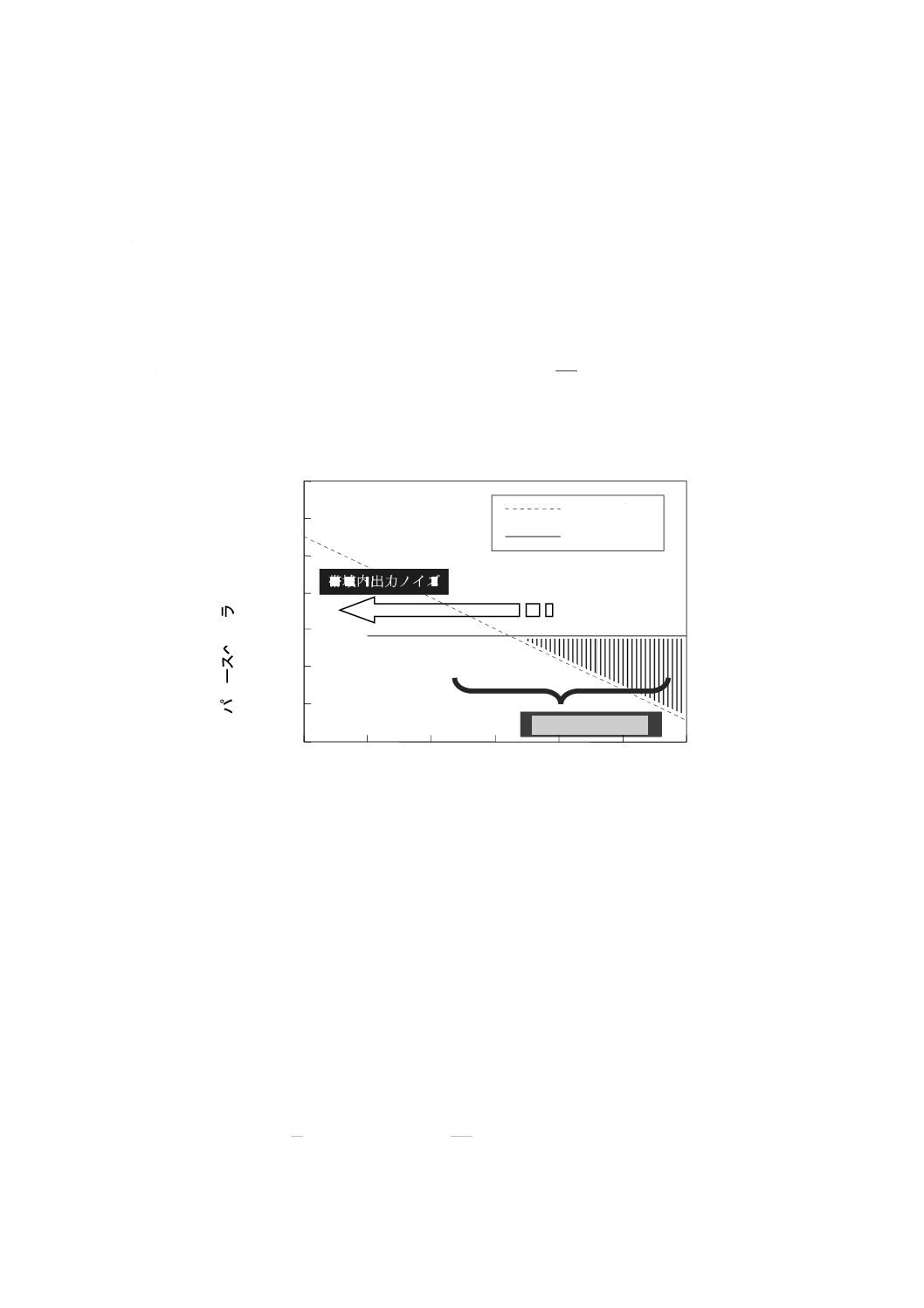
5.4.5.1
出力ノイズ(帯域内出力ノイズ及び広帯域出力ノイズ)
a) ジャイロ出力をデータ計測器(例えばスペクトラムアナライザー)に接続し電源の入力を行う。
b) 帯域内出力ノイズは,ジャイロで定義された帯域上限より低い周波数で,図18に示す出力電圧の実効
値 (rms) を測定し帯域内及び/又は角速度に換算し,(°/s)/Hzで示す。
c) 広帯域出力ノイズは,出力電圧の実効値 (rms) と1/fノイズの交差点より周波数の高い領域で,20
dB/dec値を測定し,その単位は °/s1.5で表す(図18参照)。
図18−周波数パワースペクトラム
5.4.5.2
アングルランダムウォーク
a) ジャイロ出力をデータ計測器に接続し,電源の入力を行い,初期ドリフトが十分に収束する状態まで
その状態を保持する。
b) 初期ドリフトが収束したのち,データ計測器(例えば,データロガーなど)帯域内サンプリングレー
トにて,所望時間(目安1時間以上)バイアスデータ(rms値)を測定する。
c) データを抽出し,アラン分散を算出する(算出の方法はIEEE 952-1997[2]を参照)。
d) 算出した分散値を用いて,時間τにおける分散値σ(時間積分角度)を用いて対数表示(LogLog)グ
ラフを作成する。(図19参照)
e) このうち,短いクラスター時間のグラフの傾きが−1/2となる性質をもつもの。すなわち,短いクラ
スター時間の領域に−1/2の傾きをもつ直線をフィッティングし,フィッティングした直線の1時間
値を読み,その値 °/hから,帯域内 °/h/Hzで示したものをアングルランダムウォークとする。
帯域内出力ノイズ
広帯域出力ノイズ
10-07
10-06
10-05
10-04
10-03
10-02
10-01
1
10-04
10-03
10-02
10-01
1
10
10+02
周波数
パ
ワ
ースペ
ク
トラ
ム
[°
/s
,r
m
s]
実効値(rms)
1/fノイズ
30
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
h
08
.0
°
Hz
h
8.4°
······································· (29)
σ(τ):時間τにおける分散値(時間積分角)
図19−アングルランダムウォーク
5.4.5.3
バイアス非安定性
a) 測定方法は5.4.5.2のa)〜d) による。
b) 算出した分散値を用いて,時間τにおける分散値σ(時間積分角度)を用いて対数表示(LogLog)グ
ラフを作成する。(図20参照)
c) アラン分散曲線の底値(Slope=0)を読み
664
.0
2
ln
2
=
π
で割る。
アラン分散曲線の底値が0.4°/hの場合,バイアス非安定性は0.4/0.664=0.6°/hとなる。
τ
σ
(
τ
)
10 N
1 N
0.1 N
0.1
1
10
Slope = 1/2
100
60倍
31
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) バイアス非安定性
σ(τ)
時間τにおける測定値(time integration angle)
σ(τ)bottom 底値(slope=0)の測定値
τ
時間
1
slope=−1
2
slope=−1/2
3
slope=0(bias instability)
4
slope=+1/2
5
slope=+1
b) アラン分散曲線の底値
図20−バイアス非安定性及びアラン分散曲線
1
2
3
4
5
τ
σ(τ)
σ(τ)bottom
0.01
σ
(τ
)
0.664B
Slope=0
0.1
1
10
0.01
0.01B
0.1B
1B
Slope=+1
32
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.4.6
規定条件
− 温度
− 湿度
− 気圧
− 電源電圧
5.5
周波数帯域の測定法
5.5.1
目的
ジャイロの周波数帯域に関する測定方法を規定する。
5.5.2
測定回路
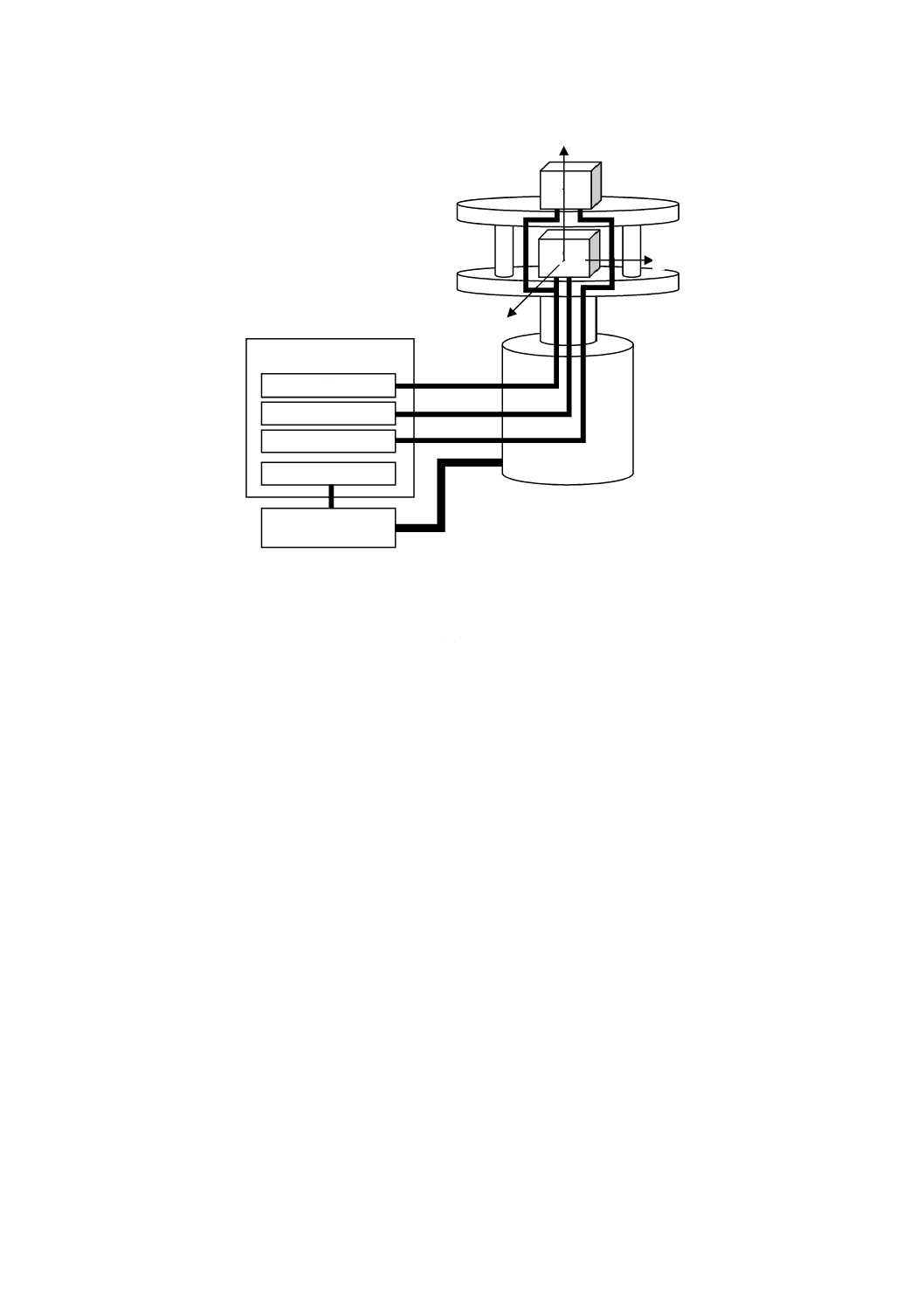
ジャイロの測定回路構成例を図21に,配線形態の例を図22に示す。測定回路は,測定されるジャイロ,
電源,レートテーブル,データ比較取得システム及び配線にて構成する。測定回路の構成機器は,次を満
足するものとする。
− 電源 ジャイロが要求する電圧・電流を供給することができ,かつ,その供給状態において,リップ
ル電圧などの変動幅がジャイロ要求値を満足する。
− レートテーブル 計測したい被測定物を載せたイナーシャモーメントに対して,印加角速度×測定周
波数を発生させるのに十分なトルクをもつものを使用する。ジャイロの検出範囲以上の回転角速度を
与えられ,かつ,最少分解能相当の角速度の入力変化が可能であることが望ましい。レートテーブル
による計測正確性については,附属書Aを参照。
− ジャイロ計測器 ジャイロの出力形態に合わせた計測器又は計測システム。例えば,ジャイロ出力が
電圧(アナログ)であれば,デジタルマルチメータ,データロガーなどの計測器を用いる。
なお,本システムのサンプリング周波数は,計測したい上限周波数より十分高く設定する。
− 参照角速度検出器及び角速度計測器 レートテーブルの運動を検出する検出器及び計測器又は計測
システム。ジャイロの応答特性より十分高い応答特性をもっているものとする(角度検出器が望まし
い)。また,測定周波数まで,角度(印加角速度/測定周波数)分解能をもつものを使用する。
− データ比較取得システム ジャイロの出力形態に合わせた計測器又は計測システムとする。例えば,
ジャイロ出力が電圧(アナログ)であれば,デジタルマルチメータ,データロガーなどの計測器を用
いる。
なお,このシステムのサンプリング周波数は,計測したい上限周波数より十分高く設定する。参照
との比較を行うものであるため,ジャイロと参照の時間的同期が取ることができるものとする。
− 配線 電源,ジャイロ及びデータ取得システムの電気的接続を行うケーブル。機器が発生する影響,
特に回転に対する反力の発生を抑えるべく留意する必要がある。
なお,反力を低減するために,この配線はスリップリングを介してもよいが,ノイズの干渉を最小
限とすることが望ましい。
33
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
DUT
ジャイロ
Ref
参照角速度検出器
電源
DUT(ジャイロ)及び参照角度検出器電源
データ取得システム
DUT(ジャイロ)データ比較取得システム
モニタ
参照角速度検出器計測器
x
センサ非検出軸
y
センサ非検出軸
z
センサ検出軸(IRA)
図21−周波数応答の測定装置
計測システム制御装置
レートテーブル
電源制御装置
周波数発振器
電源
データ取得システム
モニタ
DUT
Ref
x
y
z
34
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
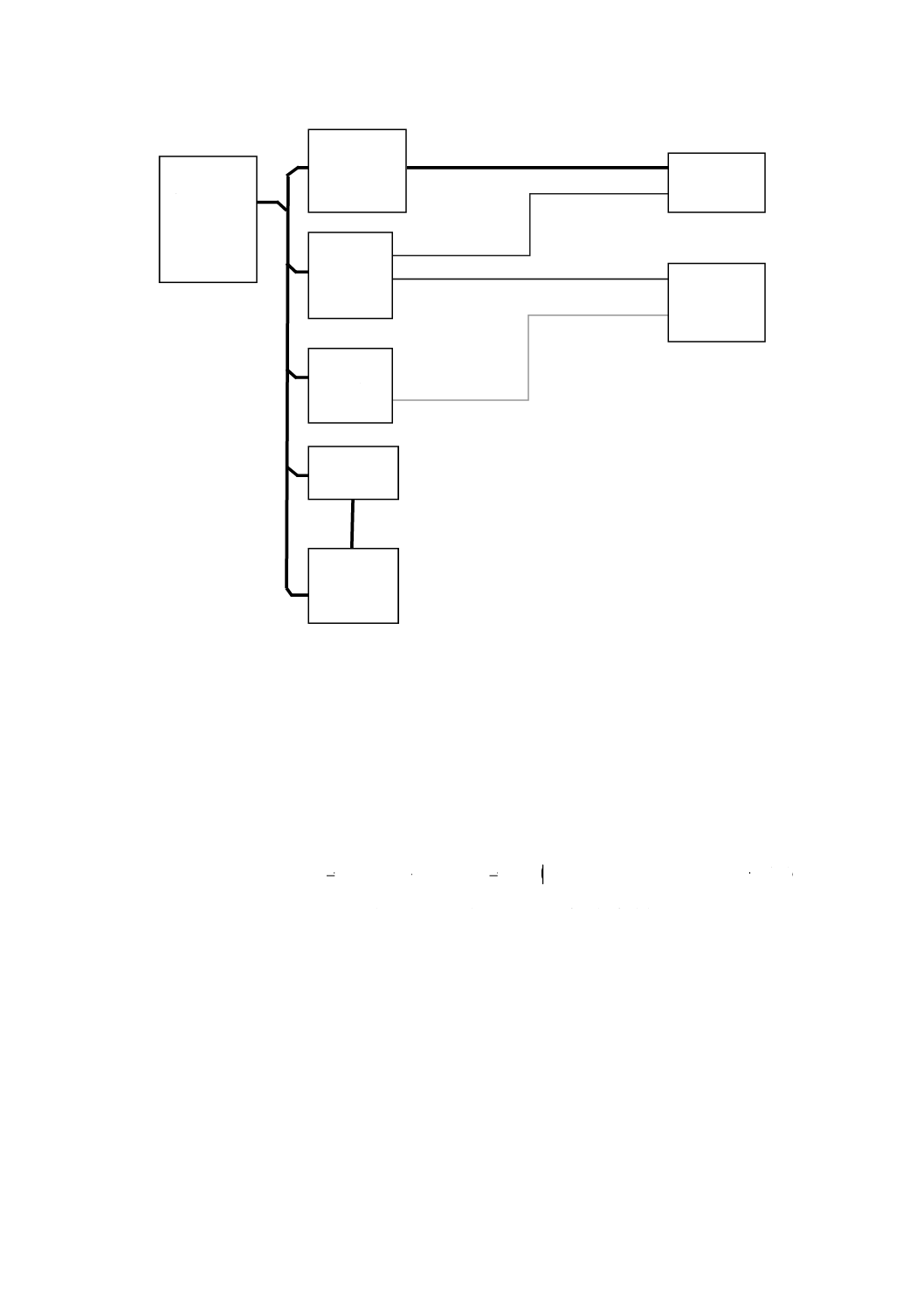
図22−周波数応答測定の配線形態例
5.5.3
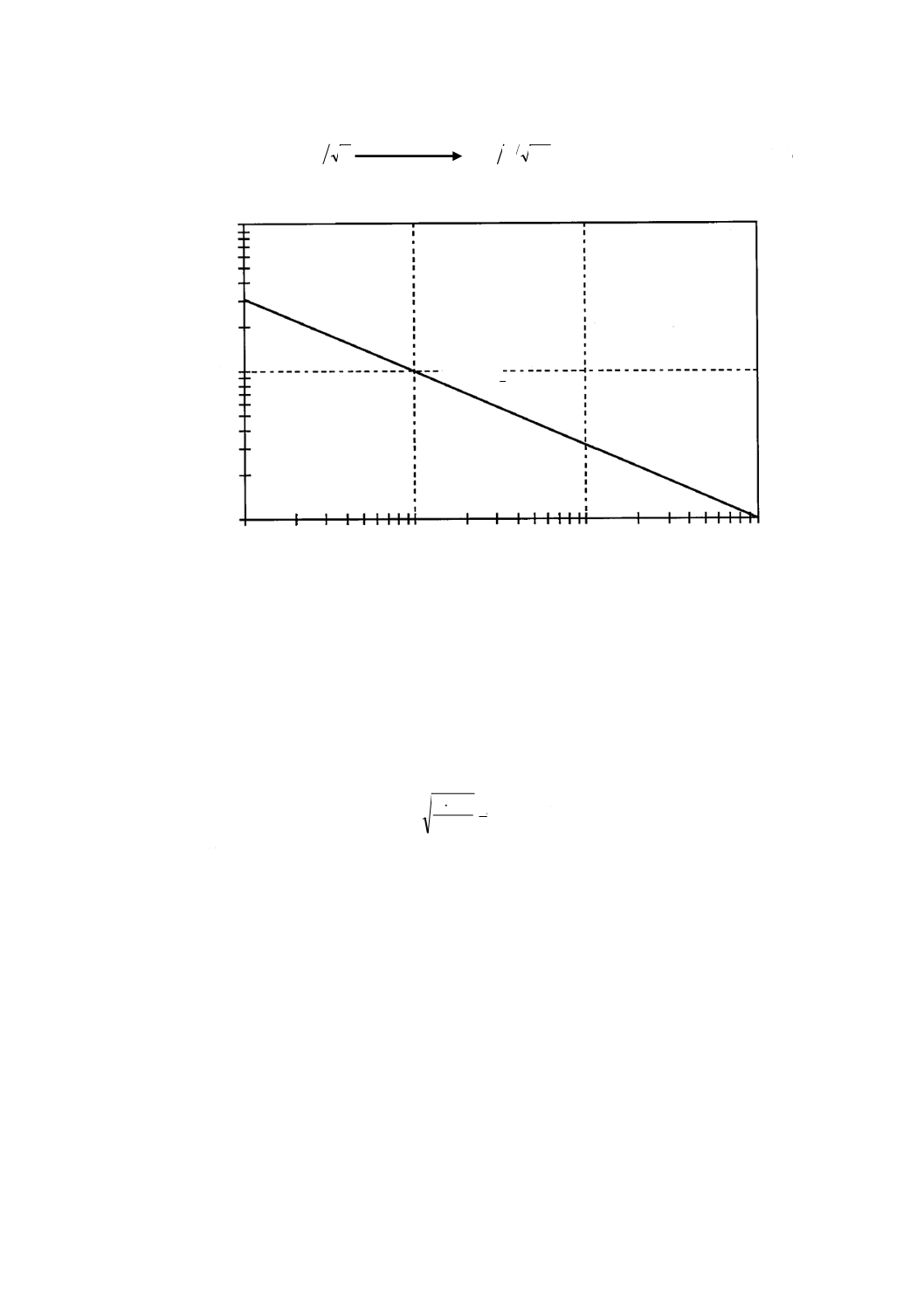
測定原理
図21の測定システムを用いて,センサ検出軸(IRA)方向に周波数可変した回転角速度を印加し,参照
となる回転角速度出力(Rref)に対して,ジャイロから出力された信号(Sout)を比較し,その入出力の
伝達特性を測定する。この伝達特性の測定によって,減衰特性及び時間遅れによる位相を測定する。
入出力周波数特性は,式(30)に示すような伝達関数G(jw)と表すことができ,式(30)のように,実数及び
虚数のベクトル和で表す。
()
()
[
]
()
[
]
()
()
jw
G
j
e
jw
G
jw
G
j
jw
G
jw
G
∠
=
+
=
Im
Re
································ (30)
周波数伝達関数の絶対値 |G(jw)| を利得といい,偏角
()
jw
G
∠
を位相(位相角)という。
電源制御
装置
DUT出力
Ref
DUT
計測システム
制御装置
電源
周波数
発振器
データ取得
システム
モニタ
35
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
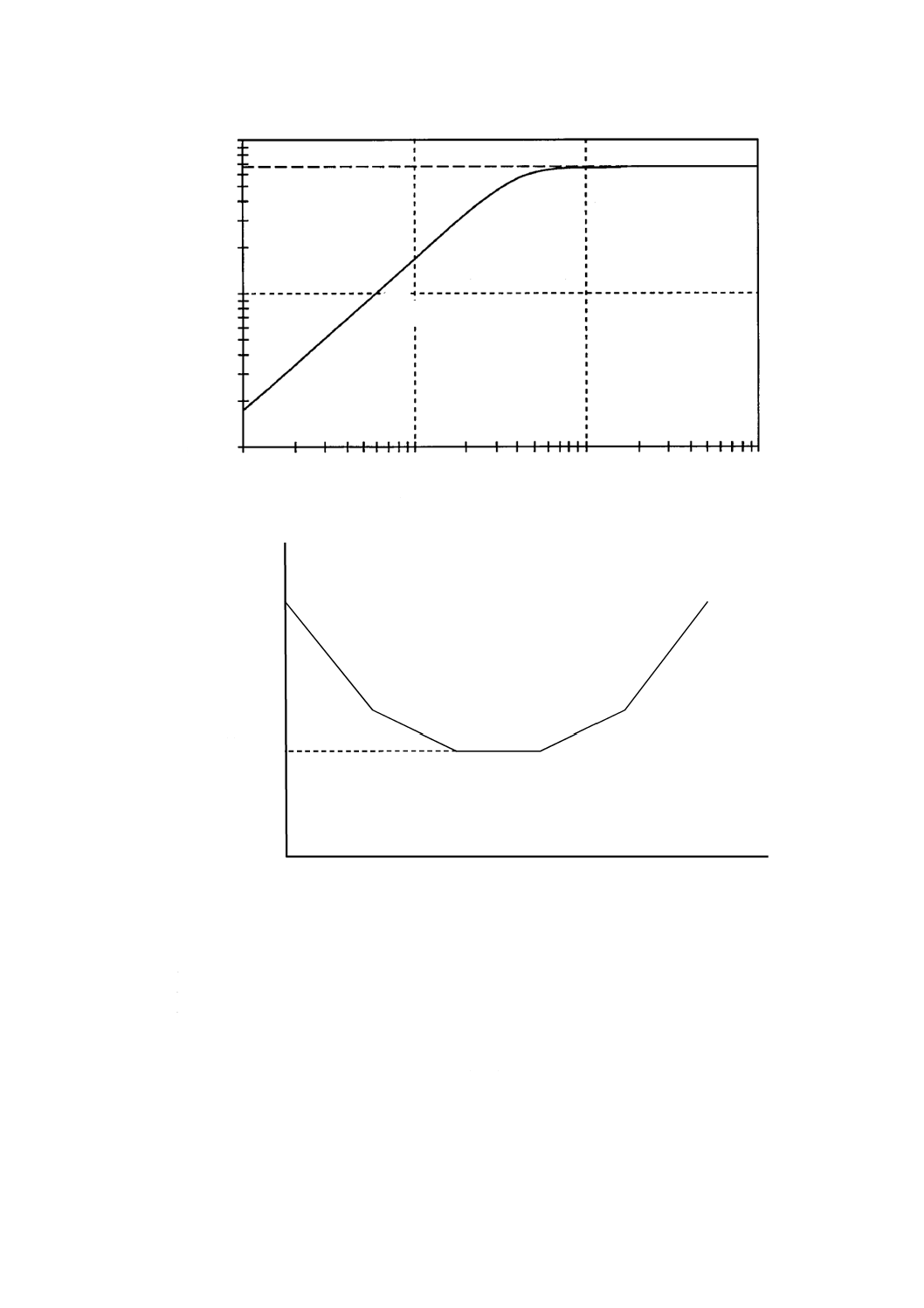
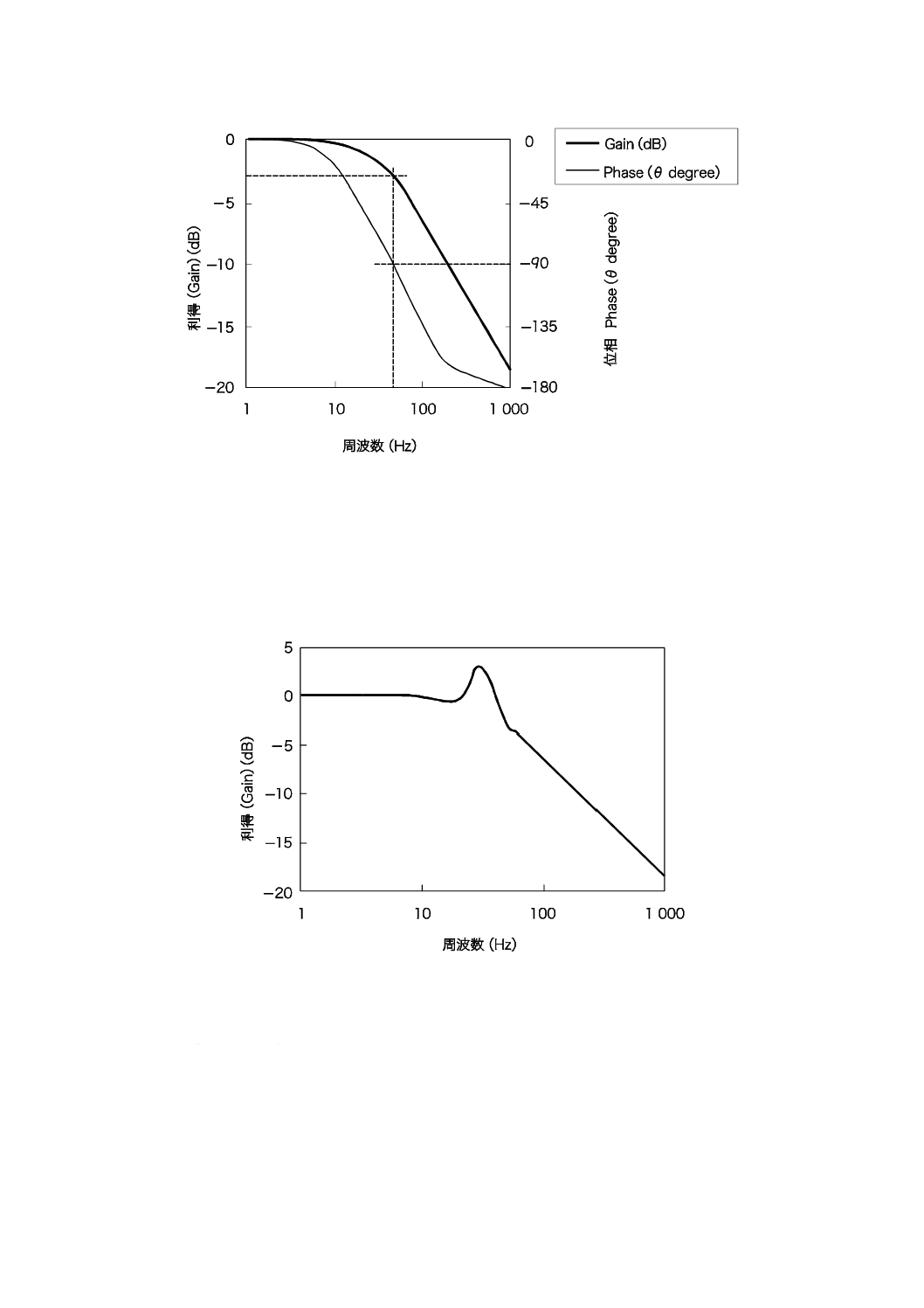
図23−周波数応答特性
図23の周波数応答特性に見られるように,利得(Gain)が初期値(0)に対して−3 dBとなったところ
か,又は入力に対する出力の位相が90°遅れる周波数までを,周波数帯域とする。
さらに,図24ゲインピーク応答特性において利得(Gain)の極大値をもつ場合は,ゲインピークとして
スペックに記載することが望ましい。
図24−ゲインピーク応答特性
5.5.4
測定上の注意事項
− 参照の角度検出器と被測定ジャイロの入力基準軸(IRA)とを一致させる。
− 参照の角度検出器は,測定周波数まで,角度(印加角速度/測定周波数)分解能をもつものを使用す
る。
− レートテーブルは,被測定物を載せたイナーシャモーメントに対して,印加角速度×測定周波数を発
生させるのに十分なトルクをもつものを使用する。
36
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− ジャイロに印加する電源電圧及び偏差は,各々の規定したスペックの範囲内で,かつ,角速度を印加
し出力する測定振幅に対して,十分安定した状態とする。
− 印加角速度は,ジャイロからの出力振幅が十分取れ,かつ,周波数に対して一定速度となるよう印加
する。(例えば,ダイナミックレンジの1/2〜1/10の角速度を印加するなどすることが望ましい。)
− 測定周波数は,スペックに記載された応答周波数又はゲインピークの周波数の2倍程度まで測定する
ことが望ましい。
− 周波数の挿引時間(可変速度)が早すぎる場合,位相遅れなどの判定が困難となるため,例えば,一
定周波数のステップ入力の場合は,測定周波数の1波長時間に対して4倍以上とすることが望ましい。
− 周囲温度は,25 ℃±5 ℃を基準とする。
− 相対湿度は,45 %〜75 %を基準とする。
− 気圧は,86 kPa〜106 kPa{860 mbarから1 060 mbar}を基準とする。
5.5.5
測定手順
a) 校正
DUT
ジャイロ
Ref
参照角速度検出器
電源
DUT及び参照角度検出器電源
データ取得システム
DUTデータ比較取得システム
モニタ
参照角速度検出器計測器
x
センサ非検出軸
y
センサ非検出軸
z
センサ検出軸(IRA)
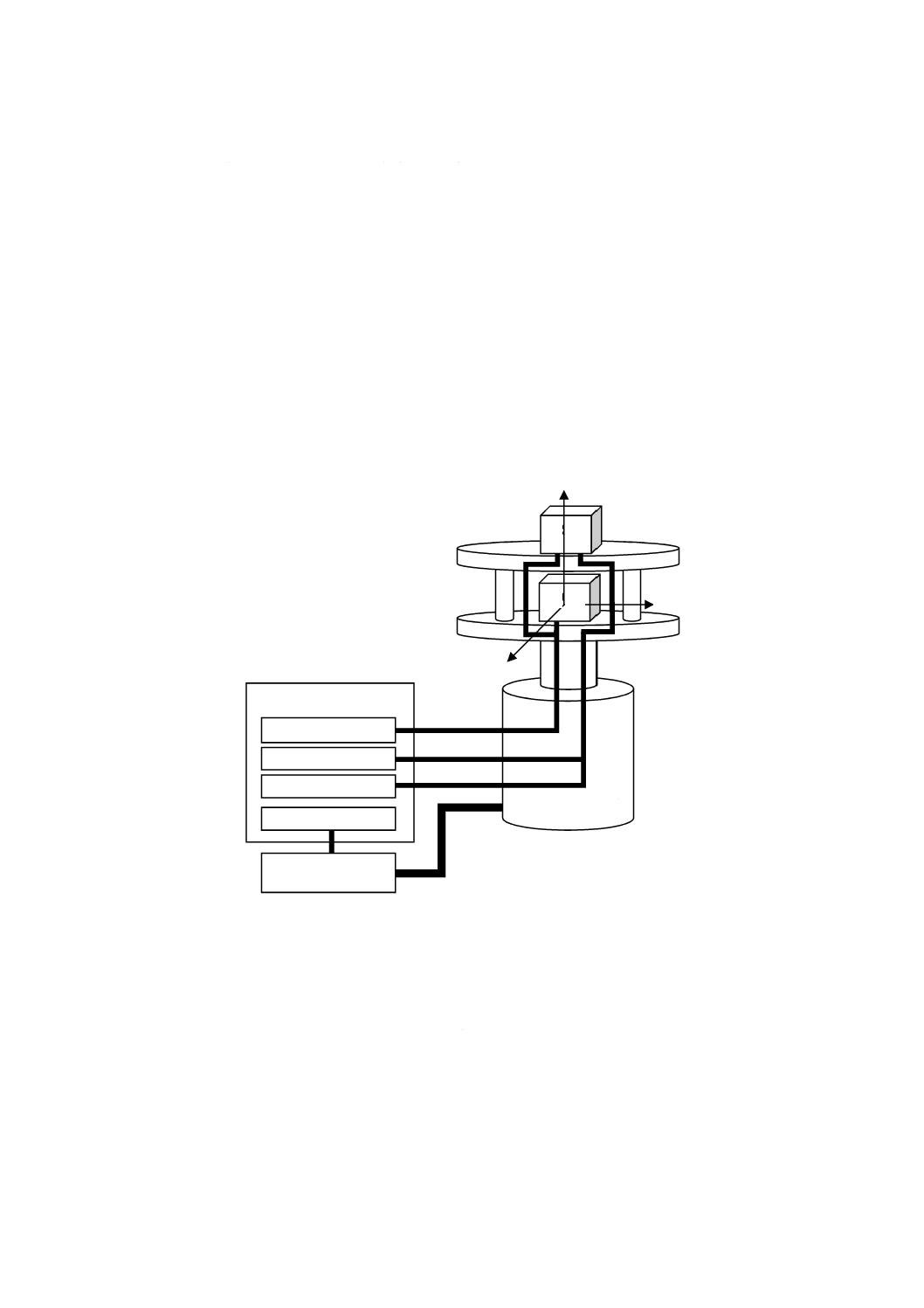
図25−周波数応答の校正
計測システム制御装置
レートテーブル
電源制御装置
周波数発振器
電源
データ取得システム
モニタ
DUT
Ref
y
x
z
37
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参照角速度検出器の出力とDUT(ジャイロ)のスケールファクタとが同等の出力が得られている信号を
ジャイロのデータ比較取得システム及び参照角速度検出器計測機に分岐させ入力する(図25参照)。
得られた応答特性の差分(オフセット)を調整し,振幅差が0 dB,位相差が0°となるように,あらか
じめ校正をしておく。
b) 周波数帯域 規定条件の角速度及び周波数を入力し,出力の利得が−3 dBとなる周波数,又は90°±
5°遅れとなる周波数(Hz)を測定する。
c) 利得の最大値 規定条件の角速度及び周波数を入力し,出力の信号の利得が,極大を示す周波数(Hz)
及び極大を示す振幅利得(dB)を測定する。
5.5.6
規定条件
測定前にあらかじめ決めておく必要のある測定条件パラメータを,表7に示す。
表7−周波数帯域を測定する場合の規定事項
測定項目
パラメータ
補足説明
周波数応答測定
測定温度=TBASE
供給電圧=VBASE
−
5.6
分解能
5.6.1
目的
ジャイロにおける分解能に関する測定方法を規定する。
5.6.2
測定回路
ジャイロの測定回路構成例を図1に,配線形態例を図2に示す。
なお,分解能の測定はノイズの影響を受けやすいので,配線については,機器が発生するノイズ,及び
外乱ノイズの影響を最小限にする工夫を施すのが望ましい。
5.6.3
測定原理
まず,ジャイロからの出力に,ノイズが含まれない理想的な出力について述べる。
図1の測定回路において,レートテーブルによって入力角速度を変化させたときに,ジャイロの出力計
測器に,入力角速度の50 %以上の出力が確認できる最少の入力角速度の変化を分解能と規定する。
例えば,レートテーブルから0.01°/sの角速度変化を加えたときに,そのジャイロ出力値の変化量Δy
が0.005°/s以上変化し,レートテーブルからの入力が0.01°/s未満の角速度変化においては,それに対す
るジャイロ出力値の変化が,レートテーブルから与える角速度変化の50 %に満たない場合,分解能=
0.01°/sとなる。
次に,ノイズを含む実際の出力について述べる。
ジャイロの出力計測器にノイズに起因する変動が常に観測される場合,フィルタリングによって,ノイ
ズの影響を除去したうえで,上記と同様な方法で得られた値を分解能と規定する。
その後,この値(Out,resolution)を5.4.5.1 b) で規定した帯域内出力ノイズと比較する。
分解能は,次によって求める。
Out,resolution>Noise,RMS: Minimum resolution=Out,resolution
Out,resolution<=Noise,RMS: Minimum resolution=Noise,RMS
なお,フィルタリングの方法は,製造業者が規定できるものとするが,必要に応じて,使用者と製造業
者との協議によって変更できる。
38
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.6.4
測定手順
a) 電圧供給 電圧VBASEをジャイロに印加する。このとき,配線による電圧降下も考えられるので,電
源供給ライン及び電圧モニタラインを個別に配線し,電圧モニタラインの電圧が設定電圧になってい
ることを確認する(図2参照)。
b) 温度設定 測定温度TBASEにジャイロ及びレートテーブル(回転部分だけで可)を放置する。このと
きの最低放置時間はジャイロが測定温度に到達するまでとする。
c) 電圧再調整 上記の温度設定によって,時間経過,消費電流の変化などによって設定電源電圧が微小
に変動していることがあるので,ジャイロが設定温度に到達した後,再度電圧を調整する。このとき,
完全に設定すべき電圧に設定できない(例えば,設定電圧5.000 0 Vに対して,4.999 8 Vになってし
まう)こともあるため,実際に供給される電圧も記録する。
d) 出力確認 ジャイロの静止時出力が安定していることを確認したのち,5.6.3で規定したように,回転
角速度を与え,そのときの出力を測定する。
e) 出力補正 ジャイロがレシオメトリックに動作する場合,電源電圧による微小誤差(例:設定電圧
5.000 0 Vに対して測定時の供給電圧が4.999 8 Vになっていることによる誤差)をミニマイズするた
めに,測定された出力が理論値にそってレシオメトリックに動くものとして,実測した出力値を補正
する。実測した出力値をyRAWi,設定電圧値をVBASE,供給電圧をVSUPPLYとすると,出力補正値yiは,
式(31)となる。
SUPPLY
BASE
RAWi
i
V
V
y
y
×
=
··································································· (31)
f)
結果の確認 5.6.3で規定した原理に基き,分解能を決定する。
5.6.5
規定条件
測定前にあらかじめ決めておく必要のある測定条件パラメータは,表8のとおりとする。
表8−分解能の規定条件
測定項目
パラメータ
補足説明
分解能測定
測定温度=TBASE
供給電圧=VBASE
−
39
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
ジャイロ特性項目の計測正確性
A.1 概要
この規格に規定するジャイロ特性項目の計測値の正確性は,各々の特性項目に関係する物理量(角度,
角速度,電圧,温度,湿度,周波数など)を計測又は制御する機器の校正を測定時と等価な条件下で行う
ことによって,担保される。これらの校正は,国家標準へのトレーサビリティを確保することが望ましい。
附属書Aでは,角度又は角速度を測定する計測機器の正確性を確保するための実装例を示す。
なお,次に示した実装方法は参考例であり,それ以外の方法の使用について,特に妨げるものではない。
A.2 角度及び角速度
スケールファクタ,他軸感度,周波数特性などの特性項目の計測では,レートテーブルに内蔵されるロ
ータリエンコーダ,タコメータ,ジャイロなどの測定器によって測定された角度値又は角速度値が一般に
用いられる。
これらの測定器の校正は,ISO 16063シリーズで規格化される一次校正法[3]や二次校正法(比較法),等
分割平均法[4]をはじめとするロータリエンコーダの各種角度校正法[5],[6]によって,実現することが可能
である。ただし,校正後に生じ得る角度又は角速度の偏差要因については,十分考慮する必要がある。例
えば,校正後のロータリエンコーダの設置では,エンコーダ軸とレートテーブルの回転軸との取付け偏心,
取付時のエンコーダのゆがみ,レートテーブルのベアリングの品質に依存した軸ぶれなどによる動的な偏
心によって,角度偏差が起こる[7]。したがって,計測の正確性を向上するためには,偏差の大きさに応じ
て,取付ジグ又はカップリングの機能向上による偏心の低減,温度変化にロバストな部材,剛性が高い部
材を用いたゆがみの低減などの対策の検討も必要になると考えられる。
さらに,偏心を効果的にキャンセルするために,センサヘッドの増設も考えられる。
A.3 校正後に生じ得る角度偏差の低減例
ロータリエンコーダの設置によって生じる角度偏差を低減するための対策の一例として,等分割平均方
式を用いた自己校正機能付きロータリエンコーダ[8],[9]の適用がある。等分割平均法の原理は,フーリエ
級数で表すことのできる任意の曲線があるとき,任意の自然数nに対して,その曲線の位相を2π/nずつシ
フトしたn個の曲線の平均値をとると,元の曲線がもつnの整数倍次のフーリエ級数の和が得られるとい
うものである。一般に,この原理を利用して,複数個のセンサヘッドを等角度間隔に配置した参照用ロー
タリエンコーダと校正器物であるロータリエンコーダとの間で,角度比較による自己校正が行われる。自
己校正機能付きロータリエンコーダは,この角度校正法を更に拡張し,基準センサヘッドを等角度間隔で
配置したセンサヘッドの一つに代用させることで,当分割平均法を可能にしたものであり,校正装置がな
くても角度偏差を自ら検出できる機能をもつ。したがって,このロータリエンコーダをレートテーブルに
設置することで,校正後においても,設置によって生じた角度偏差を低減することが可能となる。
40
C 5630-20:2015 (IEC 62047-20:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] IPC/JEDEC J-STD-020D, March 2008, Supersedes IPC/JEDEC J-STD-020D August 2007, JOINT
INDUSTRY STANDARD Moisture/Reflow Sensitivity Classification for Nonhermetic Solid State Surface Mount
Devices
[2] IEEE Std 952-1997: IEEE Standard Specification Format Guide and Test Procedure for Single-Axis
Interferometric Fiber Optic Gyros - Annex B (informative) Dynamic and stochastic modeling overview
[3] ISO 16063-15:2006, Methods for the calibration of vibration and shock transducers−Part 15: Primary
angular vibration calibration by laser interferometry
[4] T. Masuda and M. Kajitani: High-accuracy calibration system for angular encoders, J. Robotics and
Mechatronics, 5 (5), 448-452 (1993)
[5] X.-D. Lu, D. L. Trumper: Self-calibration of on-axis rotary encoders, Annals of the CIRP, 56 (1), 499-504
(2007)
[6] E. W. Palmer: High-accuracy angle measurement, NPL, Teddington, U.K. (1984)
[7] T. Watanabe: Is an angular standard necessary for rotary encoders?: development of a rotary encoder that
enables visualization of angle deviation, Synthesiology, Vol.1, No.4, pp. 296-304 (2008)
[8] Patent 3826207: Angle detector with self-calibration capability (available in Japanese only)
[9] T. Watanabe, H. Fujimoto and T. Masuda: Self-calibratable rotary encoder, J. Physics: Conference Series, 13,
240-245 (2005)