C 5630-19:2014 (IEC 62047-19:2013)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 1
3 用語及び定義 ··················································································································· 1
4 定格特性 ························································································································· 2
4.1 電子コンパスの構成 ······································································································· 2
4.2 絶対最大定格 ················································································································ 4
4.3 推奨動作条件 ················································································································ 4
4.4 電気的特性 ··················································································································· 4
5 測定法···························································································································· 5
5.1 磁気センサ部の感度 ······································································································· 5
5.2 磁気センサ部のリニアリティ···························································································· 7
5.3 磁気センサ部の無磁場環境での出力 ··················································································· 8
5.4 磁気センサ部の他軸感度 ································································································ 10
5.5 加速度センサ部の感度及びオフセット ··············································································· 13
5.6 磁気センサ部の周波数帯域(アナログ出力) ······································································ 14
5.7 消費電流 ····················································································································· 16
附属書A(参考)定格特性に関する考察 ·················································································· 18
附属書B(参考)電子コンパスの端末座標系 ············································································· 19
附属書C(参考)図によるピッチ角,ロール角,及びヨー角の説明 ··············································· 21
C 5630-19:2014 (IEC 62047-19:2013)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般財団法人マイクロマシンセンター(MMC)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 5630の規格群には,次に示す部編成がある。
JIS C 5630-1 マイクロマシン及びMEMSに関する用語
JIS C 5630-2 第2部:薄膜材料の引張強さ試験方法
JIS C 5630-3 第3部:薄膜材料の標準試験片
JIS C 5630-6 第6部:薄膜材料の軸荷重疲労試験方法
JIS C 5630-12 第12部:MEMS構造体の共振振動を用いた薄膜材料の曲げ荷重疲労試験方法
JIS C 5630-13 第13部:MEMS構造体のための曲げ及びせん断試験による接合強度試験方法
JIS C 5630-18 第18部:薄膜曲げ試験方法
JIS C 5630-19 第19部:電子コンパス
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 5630-19:2014
(IEC 62047-19:2013)
マイクロマシン及びMEMS−
第19部:電子コンパス
Semiconductor devices-Micro-electromechanical devices-
Part 19: Electronic compasses
序文
この規格は,2013年に第1版として発行されたIEC 62047-19を基に,技術的内容及び構成を変更する
ことなく作成した日本工業規格である。
1
適用範囲
この規格は,磁気センサ及び加速度センサ,又は磁気センサだけで構成する電子コンパスの用語,定義,
定格特性及び測定法について規定する。この規格は携帯電子機器用電子コンパスにも適用できる。
なお,船用電子磁気コンパスは,JIS F 9102:2002の規定による。
電子コンパスはe-コンパスと略称される。e-コンパスの種類には,2軸e-コンパス,3軸e-コンパス,6
軸e-コンパスなどがあり,いずれもこの規格の対象である。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 62047-19:2013,Semiconductor devices−Micro-electromechanical devices−Part 19: Electronic
compasses(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。この引用
規格は,記載の年の版を適用する。
JIS F 9102:2002 船舶及び海洋技術−船用電子磁気コンパス
注記 対応国際規格:ISO 11606,Ships and marine technology−Marine electromagnetic compasses(IDT)
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
3軸ヘルムホルツコイル(3-axis Helmholtz coil)
発生磁界が互いに直交している3系統のヘルムホルツコイル。
3.2
無磁場環境(zero magnetic field environment)
2
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
測定対象デバイス(DUT)を含む空間の磁場が,指定した磁場強度未満である磁場環境。
注記 DUT(Device Under Test)については4.1.7で規定している。
3.3
電子コンパス,e-コンパス(electronic compass,e-compass)
電気的出力をもつセンサの出力から方位を計算し出力する方式のコンパス。
3.4
2軸e-コンパス(2-axis e-compass)
2軸の磁気センサを地磁気の検出素子として使用するe-コンパス。
3.5
3軸e-コンパス(3-axis e-compass)
3軸の磁気センサを地磁気の検出素子として使用するe-コンパス。
3.6
6軸e-コンパス(6-axis e-compass)
3軸の磁気センサを地磁気の検出素子とし,3軸の加速度センサを重力の検出素子とするe-コンパス。
3.7
磁北(magnetic north)
現在地における環境磁気ベクトルの水平成分が示す方向。方位磁針が指す方向に等しい。
注記 特に都市部においては,地磁気が人工構造物(ビル,車両など)によって湾曲していたり,そ
の着磁の影響を受けるため,地磁気ベクトルは,厳密には,環境磁気ベクトルと呼ぶべきこと
が望ましい。また,その環境磁気ベクトルは,必ずしも北磁極の方向を指しているとは限らな
いが,“磁北”を環境磁気ベクトルの水平成分で定義する。
3.8
真北(true north)
現在地から地球の北極(自転軸の北端)を指すベクトルの水平成分が示す方向,経線又は子午線の指す
北の方向に等しい。
3.9
方位角(azimuth angle)
端末座標系のxy平面が水平で,かつ,yz平面が北極を含む場合を0度とし,z軸を回転軸として,z軸
を正の方向から負の方向へ見たときに,時計回りの回転を正とする回転角度。
注記1 方位角はヨー角と同じである(附属書C参照)。
注記2 電子コンパスの端末座標系については,附属書Bを参照。
注記3 図を用いた説明は,附属書Cを参照。
注記4 端末座標系のxy平面が水平以外の場合における定義は検討中。
4
定格特性
4.1
電子コンパスの構成
4.1.1
一般
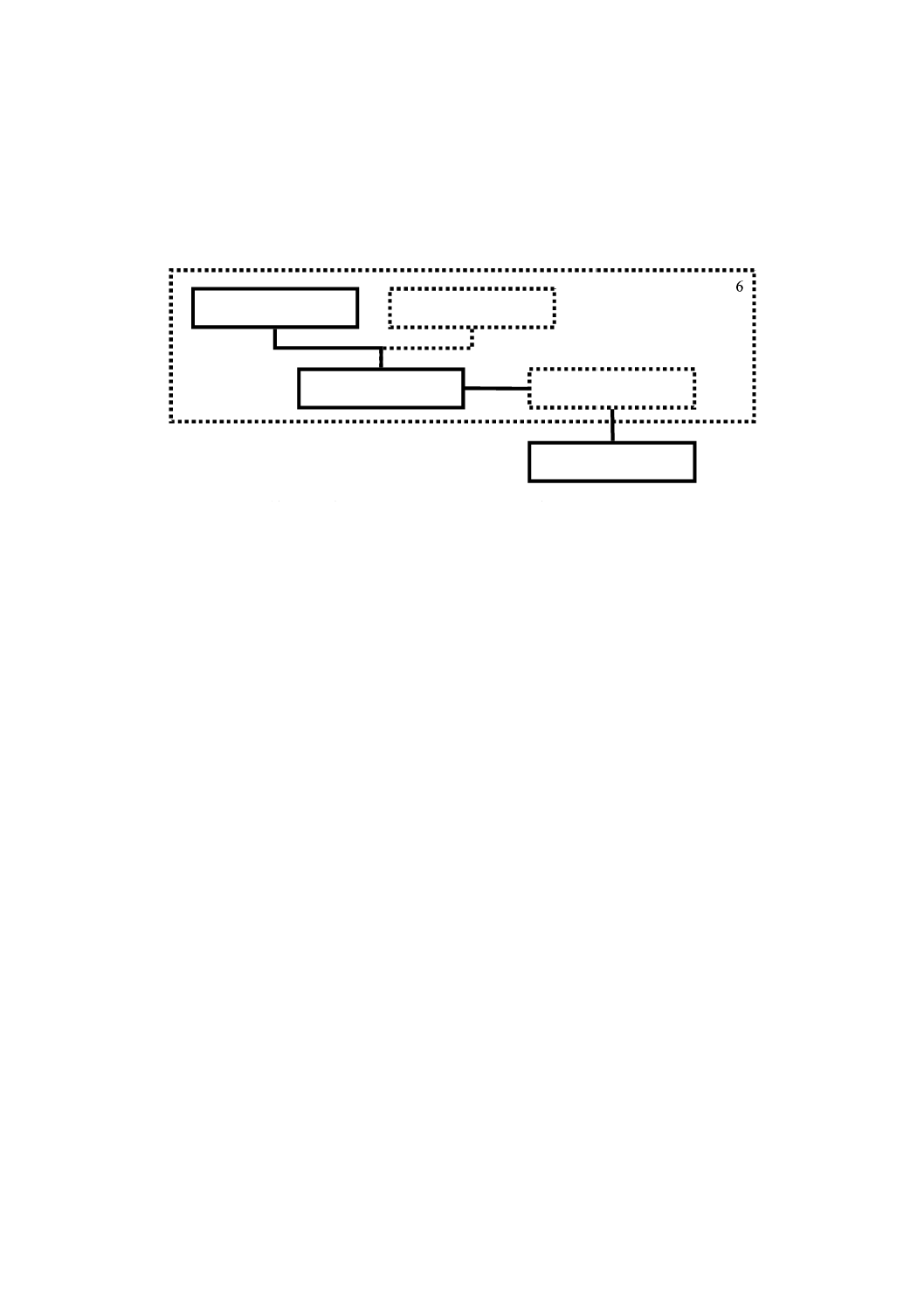
電子コンパスは,次の部分で構成する(図1参照)。
− 磁気センサ部
− 加速度センサ部
3
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 信号処理部
− 周辺ハードウエア部
− 周辺ソフトウエア部
なお,加速度センサ部及び/又は周辺ハードウエア部は構成要素としてもたなくてもよい。
1 磁気センサ部
4 周辺ハードウエア部
2 加速度センサ部
5 周辺ソフトウエア部
3 信号処理部
6 DUT
図1−電子コンパスの構成
4.1.2
磁気センサ部
磁気センサ部は,地磁気レベルの磁場を測定する磁気センサであって,出力から方位角を計算するため
に,直交する2軸以上の磁場を測定する。例えば,3軸の磁気センサの場合は,磁気センサ部はx軸セン
サ,y軸センサ及びz軸センサで構成し,x軸センサの感度軸がx軸となる。
4.1.3
加速度センサ部
加速度センサ部は,重力を測定する加速度センサであって,出力から鉛直方向(水平面)を求め,その
情報を基に,磁気センサ部の姿勢(傾斜角)を補正した方位角を計算する。例えば,3軸の加速度センサ
部の場合,加速度センサ部はx軸センサ,y軸センサ及びz軸センサで構成し,x軸センサの感度軸がx
軸となる。
4.1.4
信号処理部
信号処理部は,センサ部を駆動し,センサ部の信号を増幅する回路部であって,アナログ/デジタル変
換部を含むこともある。
4.1.5
周辺ハードウエア部
周辺ハードウエア部は,デジタルインタフェース部,レジスタ,デバイスの調整情報などのデータ記憶
部,情報処理部などを含む。
4.1.6
周辺ソフトウエア部
周辺ソフトウエア部は,データを取得するデバイスドライバ部だけでなく,磁気センサ・加速度センサ
からのデータ座標軸を変換し,その結果を基に,方位角を計算するソフトウエアを含む。
4.1.7
DUT
DUTは磁気センサ部,加速度センサ部,信号処理部及び周辺ハードウエア部で構成する。ただし,加速
度センサ部及び/又は周辺ハードウエア部をもたない電子コンパスの場合には,DUTは,磁気センサ部及
6
1
2
3
4
5
4
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
び信号処理部で構成する。定格特性の測定は,DUTを用いて行う。
4.2
絶対最大定格
絶対最大定格は,次の項目とし,関連する調達仕様書に記載がない限り,仕様書に記載することが望ま
しい。ただし,最大磁場は記載しなくてもよい。これらの項目の限界値以上のストレスは,デバイスに永
久的な損傷の原因となり得る。
− 電源電圧
− 入力電圧
− 入力電流
− 保存温度
− 耐衝撃性。6軸e-コンパスは記載必須とする。
− 最大磁場
4.3
推奨動作条件
推奨動作条件は,次の項目とし,関連する調達仕様書に記載がない限り,仕様書に記載することが望ま
しい。これらの項目は,デバイスの動作中に特性を維持するための推奨条件である。
− 電源電圧
− 入力電圧
− 周囲温度
4.4
電気的特性
4.4.1
一般
電気的特性は,センサ部の特性及びDC特性とする。定格特性の選定は,附属書Aを参照。
4.4.2
センサ部の特性
センサ部の特性は,表1による。
表1−センサ部の特性
パラメータ
記載
表記する値
測定法
注
必須
任意
最小
標準
最大
磁気センサ部の1回の測定時間
x
x
5.1
a)
磁気センサ部の感度
x
x
5.1
a)
磁気センサ部の測定範囲
x
x
x
5.1
a),d)
磁気センサ部のリニアリティ
x
x
5.2
a)
磁気センサ部の無磁場での出力
x
x
5.3
a)
磁気センサ部の他軸感度
x
x
5.4
a),b)
磁気センサ部の周波数帯域(アナログ出力)
x
x
x
5.6
a)
加速度センサ部の1回の測定時間
6軸は必須
x
5.5
c)
加速度センサ部の感度
6軸は必須
x
x
x
5.5
c)
加速度センサ部の測定範囲
6軸は必須
x
5.5
c),d)
注記 xは該当することを意味する。
注a) 磁気センサ部の測定は,図1の1(磁気センサ部),3(信号処理部),4(周辺ハードウエア部)及び5(周辺
ソフトウエア部)を使用して行う。
b) 規定が2種あるので,どちらの規定によるものかを明記する。2種の規定については,5.4.3.1及び5.4.4.1を
参照。
c) 加速度センサ部の測定は,図1の2(加速度センサ部),3(信号処理部),4(周辺ハードウエア部)及び5(周
辺ソフトウエア部)を使用して行う。
d) 正方向及び負方向の最小値を記載する。
5
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.4.3
DC特性
DC特性を,表2に示す。
表2−DC特性
パラメータ
記載
表記する値
参照測定法
必須
任意
最小
標準
最大
磁場測定時の消費電流の平均値(測定周期を明示)
x
x
5.7
測定中の最大消費電流
x
x
5.7
スタンバイ時の消費電流
x
x
5.7
間欠測定時の平均消費電流
x
x
5.7
注記 xは該当することを意味する。
5
測定法
5.1
磁気センサ部の感度
5.1.1
目的
磁気センサの感度を指定する条件下で測定する。
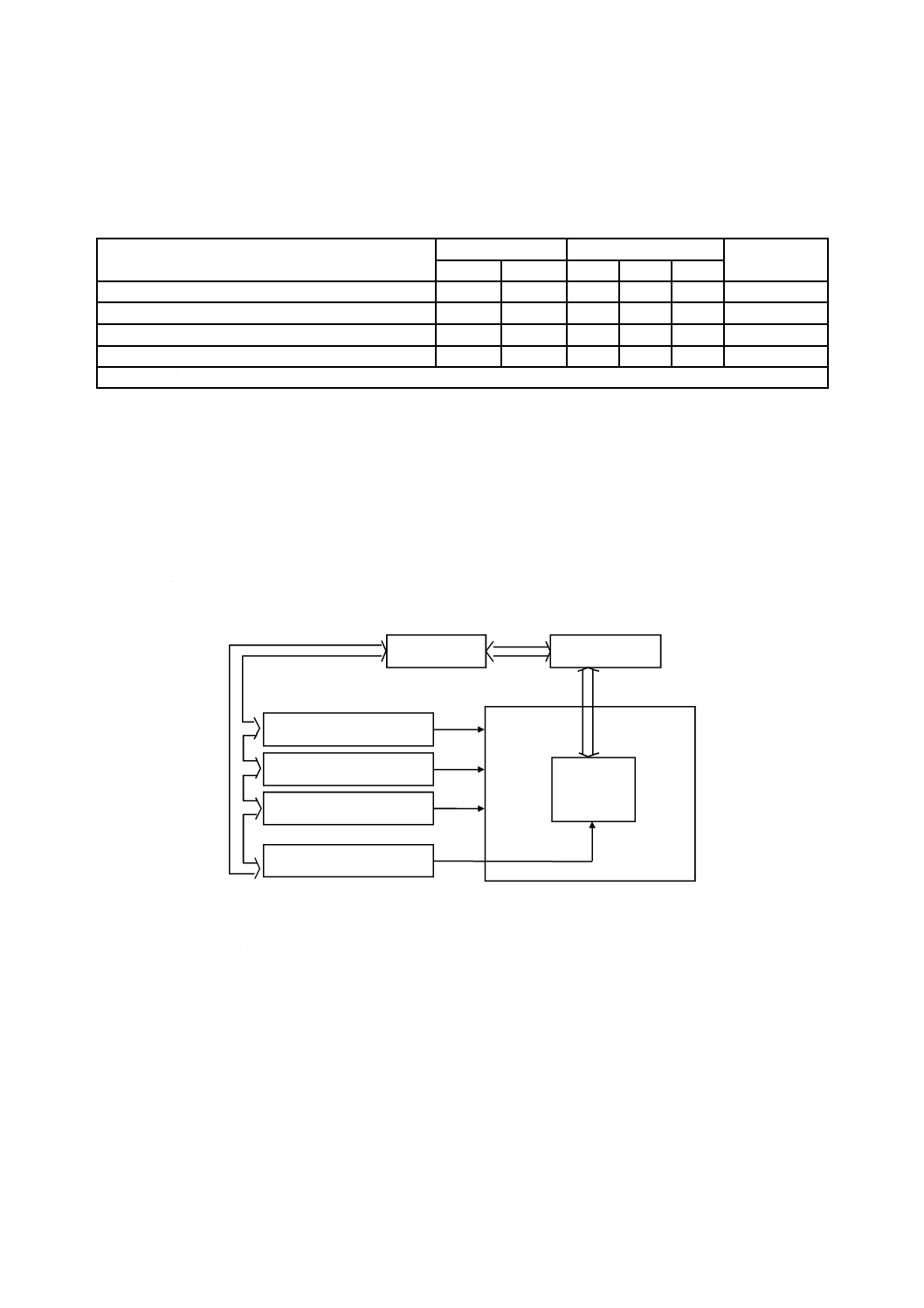
5.1.2
回路図
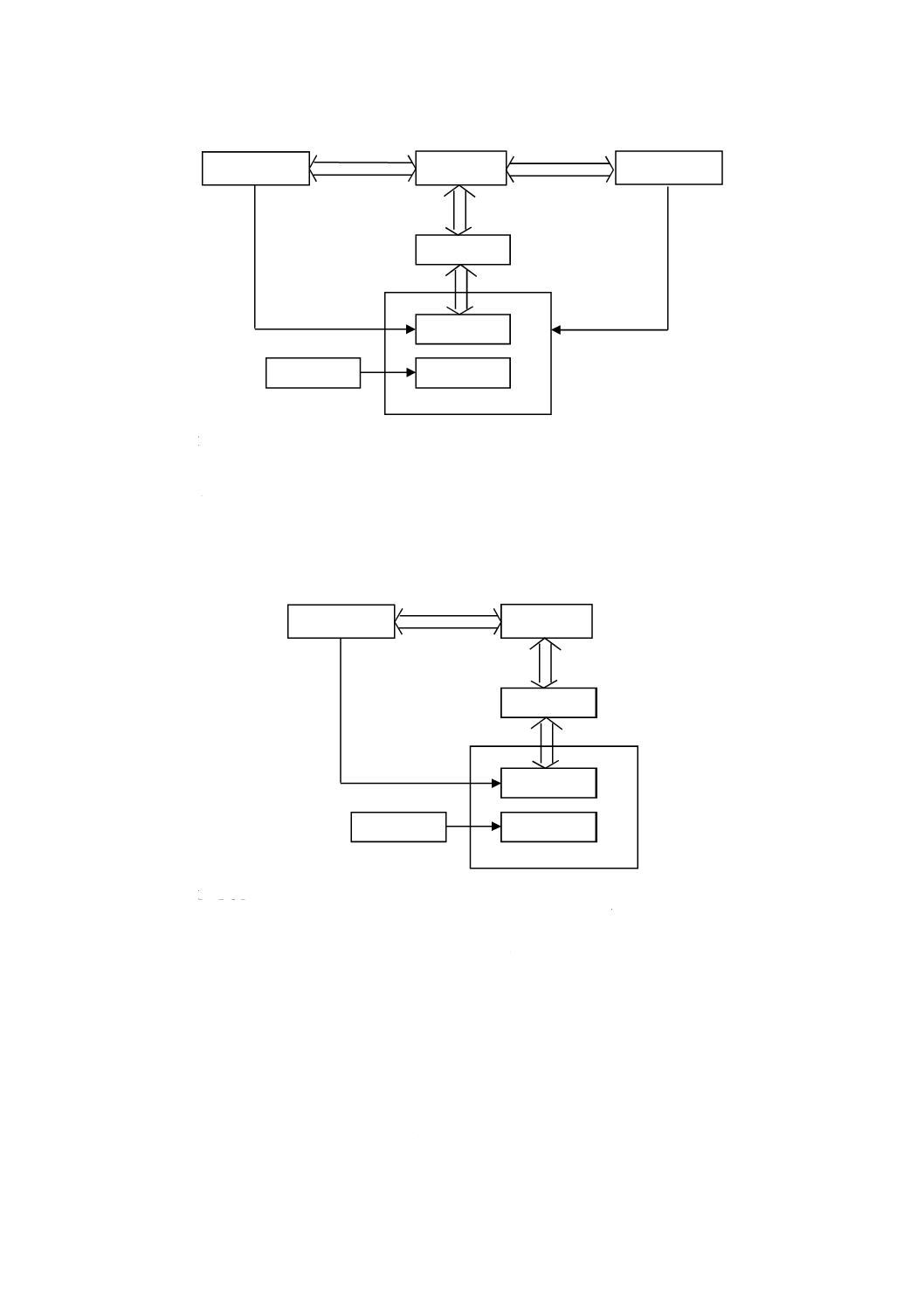
回路図を,図2に示す。
アナログ出力センサの場合も同様の構成とする。
1 データ処理用コンピュータ
6 DUT用電源
2 データリーダー
7 3軸ヘルムホルツコイル
3 x軸コイル用電源
8 DUT
4 y軸コイル用電源
⇒ 信号系
5 z軸コイル用電源
→ 電源系
図2−感度の測定回路
5.1.3
測定原理
5.1.3.1
一般
各センサ(x軸センサ,y軸センサ及びz軸センサ)の感度軸方向に磁界を印加することによる出力変化
を,印加磁界で除したものを感度と規定する。
7
3
1
8
2
4
5
6
6
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.1.3.2
x軸センサの感度の測定原理
x軸センサの感度Axは,式(1)によって求める。
H
V
V
A
2
xn
xp
x
−
=
··········································································· (1)
ここに,
Ax: x軸センサの感度で,その単位はLSB(注記1参照)で表し
たV・m/Aである。この単位はA(電流),s(時間)などで
もよい。
Vxp: 強さHの磁界を磁気センサ部のx軸正方向に印加したとき
の,磁気センサ部のx軸センサ出力で,その単位はLSB(注
記1参照)で表したボルト(V)である。
Vxn: 強さHの磁界を磁気センサ部のx軸負方向に印加したとき
の,磁気センサ部のx軸センサ出力で,その単位はLSB(注
記1参照)で表したボルト(V)である。
H: 磁場の強さで,単位はA/mである(注記2参照)。
注記1 LSB(Least Significant Bit)はバイナリーデータの最下位ビットを表す。
測定系において,信号系のデータはバイナリーデータであり,その値
は1 LSBを基に扱われるため,センサ出力をLSB表記とした。
注記2 Hは磁界の代わりに磁束密度(単位:T)を用いてもよい。
5.1.3.3
y軸センサの感度の測定原理
y軸センサの感度の測定原理は5.1.3.2と同様な原理である。
5.1.3.4
z軸センサの感度の測定原理
z軸センサの感度の測定原理は5.1.3.2と同様な原理である。
5.1.4
測定上の注意事項
センサの感度軸とコイルの磁界方向とを一致させる。アナログ出力の磁気センサの場合も,この測定に
従う。
5.1.5
測定手順
5.1.5.1
x軸センサの感度の測定手順
x軸センサの感度の測定手順は,次による。
a) 周囲温度を設定する。
b) DUTに電源電圧を印加して,必要に応じてレジスタを初期化する。
c) 指定の印加磁界をDUTのx軸正方向に印加する。
d) DUTのx軸センサ出力を測定する。
e) 指定の印加磁界をDUTのx軸負方向に印加する。
f)
DUTのx軸センサ出力を測定する。
g) x軸センサ出力値から式(1)を用いて感度を求める。
5.1.5.2
y軸センサの感度の測定手順
y軸センサの感度の測定手順は5.1.5.1と同様とする。
5.1.5.3
z軸センサの感度の測定手順
z軸センサの感度の測定手順は5.1.5.1と同様とする。
5.1.6
指定条件
測定条件は,次による。
− 印加磁界強度
7
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 周囲温度
− 電源電圧
5.2
磁気センサ部のリニアリティ
5.2.1
目的
印加磁界に対する磁気センサの出力のリニアリティを指定の条件下で測定する。
5.2.2
測定回路
測定回路は,図2と同じ回路を用いる。
5.2.3
測定原理
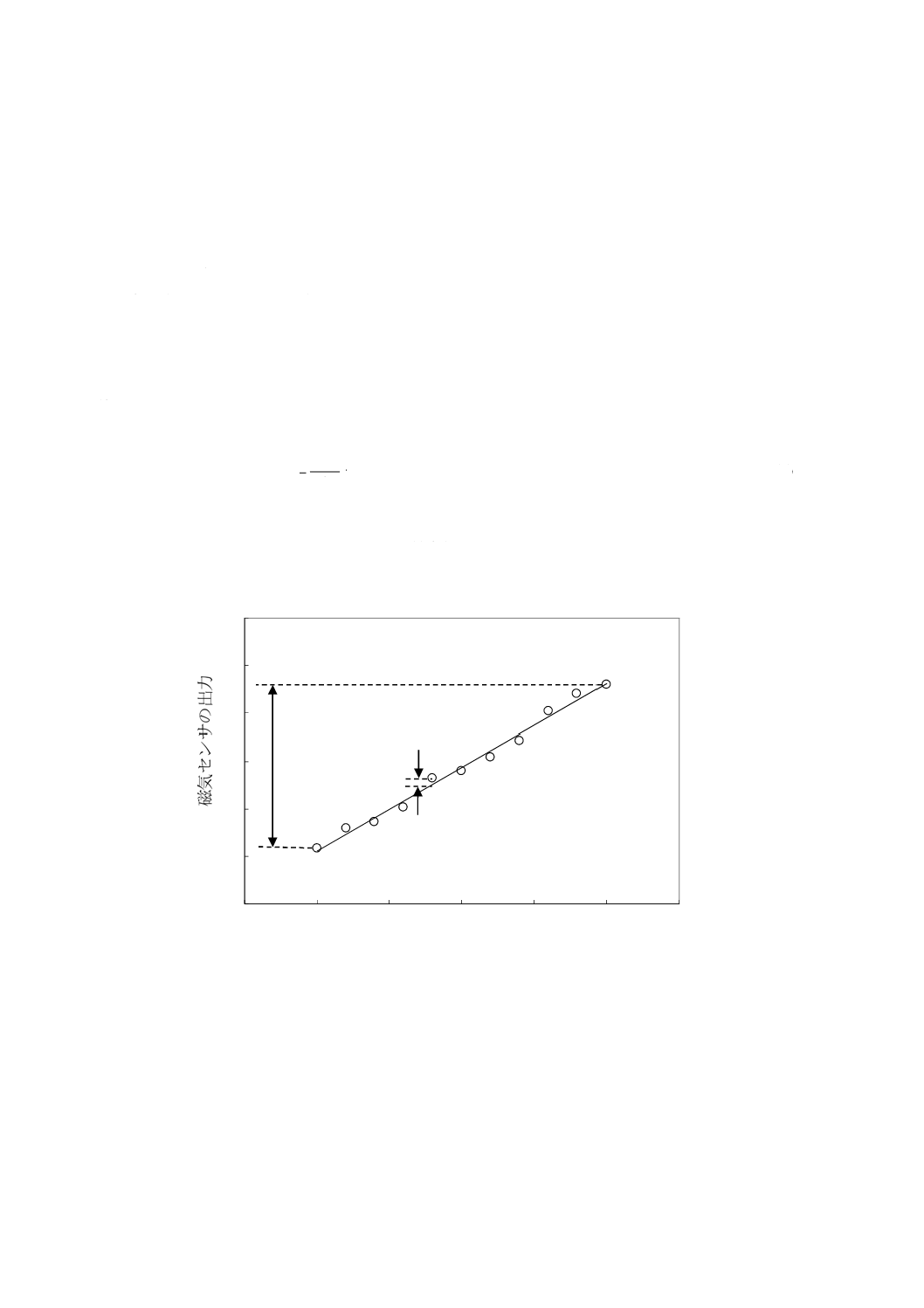
各印加磁界に対する磁気センサの出力を測定する。図3に示すように印加磁界に対する磁気センサの出
力値を図上にプロットし,最小2乗法を用いて直線を引き,各測定点で磁気センサの出力値と最小2乗直
線との差aを求める。
リニアリティLは,式(2)によって求める。
b
a
L
max
=
·················································································· (2)
ここに,
L: リニアリティ(%)
amax: 各測定点で計算したセンサ出力値と最小2乗直線との差aの
最大値。
b: センサ出力値の最大値と最小値との差。
図3−リニアリティの測定法
5.2.4
測定上の注意事項
測定上の注意事項は,次による。
− 磁界を印加する場合,負値から正値へ増大させていく方式と正値から負値へ減少させていく方式との
両方で行う。
− 印加磁界を増大させた方式と印加磁界を減少させた方式とでセンサ出力値が異なる場合は,磁界を正
値と負値との両方向から印加して評価する。
(−)
0
(+)
印加磁界
b
a
8
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 印加磁界の範囲は,測定範囲の全範囲とするか,又は実際に地磁気として用いる特定範囲内とする。
5.2.5
測定手順
5.2.5.1
x軸センサの測定手順
x軸センサの測定手順は,次による。
a) 3Dコイル及びDUTに電源を投入する。
b) 周囲温度を指定の温度に設定する。
c) DUTにx軸方向の磁界を,指定の印加磁場強度範囲及び印加磁場強度ステップから定まる強度で印加
する。
d) DUTのx軸センサ出力を測定する。
e) 式(2)を用いて,リニアリティを計算する。
5.2.5.2
y軸センサの測定手順
y軸センサの測定手順は,5.2.5.1に規定する測定手順による。
5.2.5.3
z軸センサの測定手順
z軸センサの測定手順は,5.2.5.1に規定する測定手順による。
5.2.6
指定条件
測定条件は,次による。
− 印加磁場強度範囲
− 印加磁場強度ステップ又は測定点数
− 周囲温度
− 電源電圧
5.3
磁気センサ部の無磁場環境での出力
5.3.1
目的
指定の条件下における磁気センサ部の無磁場環境での出力を測定する。
5.3.2
測定回路
3軸ヘルムホルツコイルを用いた場合の測定回路を図4に,シールドルーム又はシールドボックスを用
いた場合の測定回路を図5にそれぞれ示す。
9
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1 DUT
6 DUT用電源
2 3軸ヘルムホルツコイル
7 3軸ヘルムホルツコイル用電源
3 磁気計
8 データリーダ
4 磁気センサ
⇒ 信号系
5 データ処理用コンピュータ
→ 電源系
図4−3軸ヘルムホルツコイルを用いた場合の測定回路
1 DUT
6 DUT用電源
2 シールドルーム又はシールドボックス
7 データリーダ
3 磁気計
⇒ 信号系
4 磁気センサ
→ 電源系
5 データ処理用コンピュータ
図5−シールドルーム又はシールドボックスを用いた場合の測定回路
5.3.3
測定原理
無磁場環境でのDUTからの出力値を測定する。出力の単位はLSB(注記参照)で表したボルト(V)で
ある。この単位はボルト以外にもアンペア(A),秒(s)などを用いてもよい。
注記 LSBについては5.1.3.2の注記1を参照。
5.3.4
測定上の注意事項
2
5
8
7
6
1
4
3
2
5
7
6
1
4
3
10
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
シールドルーム又はシールドボックスを利用し,無磁場環境を形成することがDUTからの出力値を正
確に測定する上で効果的である。ただし,3軸ヘルムホルツコイルを用いて無磁場環境を形成する場合,
シールドルーム又はシールドボックスを用いる必要はない。
5.3.5
測定手順
5.3.5.1
3軸ヘルムホルツコイルを用いる場合
3軸ヘルムホルツコイルを用いる場合は,次による(図4参照)。
a) 指定の無磁場相当磁場強度以下になるように,3軸ヘルムホルツコイルの特定コイルに特定電流を印
加する。
b) 3軸ヘルムホルツコイルに設置した磁気センサによって,無磁場環境が形成されていることを確認す
る。
c) DUTのパッケージの各辺方向と3軸ヘルムホルツコイルによる各磁界軸が平行になるように,3軸ヘ
ルムホルツコイル内にDUTを設置する。
d) DUTを動作状態にするために,所望の電源電圧をDUTに印加する。
e) DUTからのデジタル出力値をPCでシリアル通信によって取得する。
注記 測定順序は,c) → a) → b) → d) → e) でもよい。
5.3.5.2
シールドルーム又はシールドボックスを用いる場合
シールドルーム又はシールドボックスを用いる場合は,次による(図5参照)。
a) シールドルーム又はシールドボックスに設置した磁気センサによって,ルーム又はボックス内が無磁
場相当磁場強度以下であることを確認する。
b) DUTを動作状態にするために,所望の電源電圧をDUTに印加する。
c) PCを用い,DUTからのデジタル出力値をシリアル通信によって取得する。
5.3.6
指定条件
測定条件は,次による。
− 周囲温度
− 無磁場相当磁場強度
5.4
磁気センサ部の他軸感度
5.4.1
目的
磁気センサの他軸感度を指定の条件下で測定する。他軸感度の規定が2種類あるため,測定法が2種類
ある。2種類の規定は,5.4.3.1及び5.4.4.1を参照する。
5.4.2
測定回路
測定回路は,図2と同じ回路を用いる。
5.4.3
測定法1
5.4.3.1
測定原理
各センサ(x軸センサ,y軸センサ,z軸センサ)の感度軸方向に垂直の方向に磁界印加することによる
出力変化を感度で除したものを他軸感度と規定する。
x軸センサのy軸方向他軸感度Axyは,式(3)によって求める。
100
2
x
yn
yp
xy
×
−
=
HA
V
V
A
···································································· (3)
ここに,
Axy: x軸センサのy軸方向の他軸感度(%)
Vyp: 強さHの磁界を磁気センサ部のy軸正方向に印加したとき
11
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の,磁気センサ部のx軸センサ出力,単位はLSB(注記1参
照)で表したボルト(V)である。
Vyn: 強さHの磁界を磁気センサ部のy軸負方向に印加したとき
の,磁気センサ部のx軸センサ出力で,単位はLSB(注記1
参照)で表したボルト(V)である。
H: 磁場の強さで,単位はA/mである(注記2参照)。
Ax: x軸センサの感度で,単位はLSBで表したV・m/Aである。
注記1 LSBについては5.1.3.2の注記1を参照。
注記2 Hは磁界の代わりに磁束密度(単位:T)を用いてもよい。
5.4.3.2
測定上の注意事項
パッケージ各面とコイルの磁界方向と一致させる。
5.4.3.3
測定手順
5.4.3.3.1
x軸センサのy軸方向感度の測定法
x軸センサのy軸方向感度の測定法は,次のとおりである。
a) 周囲温度を設定する。
b) DUTに電源電圧を印加して,必要に応じてレジスタを初期化する。
c) 指定の印加磁界をDUTのy軸正方向に印加する。
d) DUTのx軸センサ出力を測定する。
e) 指定の印加磁界をセンサのy軸負方向に印加する。
f)
DUTのx軸センサ出力を測定する。
g) x軸センサ出力値から式(3)を用いて他軸感度を求める。
5.4.3.3.2
x軸センサのz軸方向感度の測定法
測定法は5.4.3.3.1の規定による。
5.4.3.3.3
y軸センサのx軸方向感度の測定法
測定法は5.4.3.3.1の規定による。
5.4.3.3.4
y軸センサのz軸方向感度の測定法
測定法は5.4.3.3.1の規定による。
5.4.3.3.5
z軸センサのx軸方向感度の測定法
測定法は5.4.3.3.1の規定による。
5.4.3.3.6
z軸センサのy軸方向感度の測定法
測定法は5.4.3.3.1の規定による。
5.4.4
測定法2
5.4.4.1
測定原理
5.4.4.1.1
xy他軸感度の測定原理
x軸センサとy軸センサとの出力間の直交性のずれをδとした場合,tan δを百分率で表したものを,xy
他軸感度とする。xz他軸感度及びyz他軸感度についても同様とする。
具体的には,xy他軸感度Axyは,式(4)及び式(5)で求める。
100
tan
xy
×
=
δ
A
········································································· (4)
−
−
+
−
−
−
=
yyn
yyp
xyn
xyp
xxn
xxp
yxn
yxp
arctan
arctan
V
V
V
V
V
V
V
V
δ
·································· (5)
12
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに,
Axy: xy他軸感度(%)
Vxxp: 強さHの磁界をセンサのx軸正方向に印加したときの,磁気
センサのx軸センサ出力,単位はLSB(注記1参照)で表し
たボルト(V)である。
Vxxn: 強さHの磁界をセンサのx軸負方向に印加したときの,磁気
センサのx軸センサ出力,単位はLSB(注記1参照)で表し
たボルト(V)である。
Vxyp: 強さHの磁界をセンサのx軸正方向に印加したときの,磁気
センサのy軸センサ出力,単位はLSB(注記1参照)で表し
たボルト(V)である。
Vxyn: 強さHの磁界をセンサのx軸負方向に印加したときの,磁気
センサのy軸センサ出力,単位はLSB(注記1参照)で表し
たボルト(V)である。
Vyxp: 強さHの磁界をセンサのy軸正方向に印加したときの,磁気
センサのx軸センサ出力,単位はLSB(注記1参照)で表し
たボルト(V)である。
Vyxn: 強さHの磁界をセンサのy軸負方向に印加したときの,磁気
センサのx軸センサ出力,単位はLSB(注記1参照)で表し
たボルト(V)である。
Vyyp: 強さHの磁界をセンサのy軸正方向に印加したときの,磁気
センサのy軸センサ出力,単位はLSB(注記1参照)で表し
たボルト(V)である。
Vyyn: 強さHの磁界をセンサのy軸負方向に印加したときの,磁気
センサのy軸センサ出力,単位はLSB(注記1参照)で表し
たボルト(V)である。
H: 磁場の強さで,その単位はA/mである(注記2参照)。
注記1 LSBについては5.1.3.2の注記1を参照。
注記2 Hは磁界の代わりに磁束密度(単位:T)を用いてもよい。
5.4.4.1.2
xz他軸感度の測定原理
xz他軸感度の測定原理は5.4.4.1.1と同様な測定原理である。
5.4.4.1.3
yz他軸感度の測定原理
yz他軸感度の測定原理は5.4.4.1.1と同様な測定原理である。
5.4.4.2
測定上の注意事項
コイルの各軸を直交させる。
5.4.4.3
測定手順
5.4.4.3.1
xy他軸感度の測定手順
xy他軸感度の測定手順は次による。
a) 周囲温度を設定する。
b) DUTに電源電圧を印加して,必要に応じてレジスタを初期化する。
c) 指定の印加磁界をDUTのx軸正方向に印加する。
d) DUTのx軸センサ出力及びy軸センサ出力を測定する。
e) 指定の印加磁界をDUTのx軸負方向に印加する。
f)
DUTのx軸センサ出力及びy軸センサ出力を測定する。
g) 指定の印加磁界をDUTのy軸正方向に印加する。
h) DUTのx軸センサ出力及びy軸センサ出力を測定する。
i)
指定の印加磁界をDUTのy軸負方向に印加する。
13
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
j)
DUTのx軸センサ出力及びy軸センサ出力を測定する。
k) x軸センサ出力値及びy軸センサ出力値から,式(4)及び式(5)を用いて他軸感度を求める。
5.4.4.3.2
xz他軸感度の測定手順
xz他軸感度の測定手順は,5.4.4.3.1の規定による。
5.4.4.3.3
yz他軸感度の測定手順
yz他軸感度の測定手順は,5.4.4.3.1の規定による。
5.4.5
指定条件
測定条件は,次による。
− 印加磁界強度
− 周囲温度
− 電源電圧
5.5
加速度センサ部の感度及びオフセット
5.5.1
目的
加速度センサ部の感度及びオフセットを指定条件下で測定する。
5.5.2
測定回路
測定回路は,図2と同じ回路を用いる。
5.5.3
測定原理
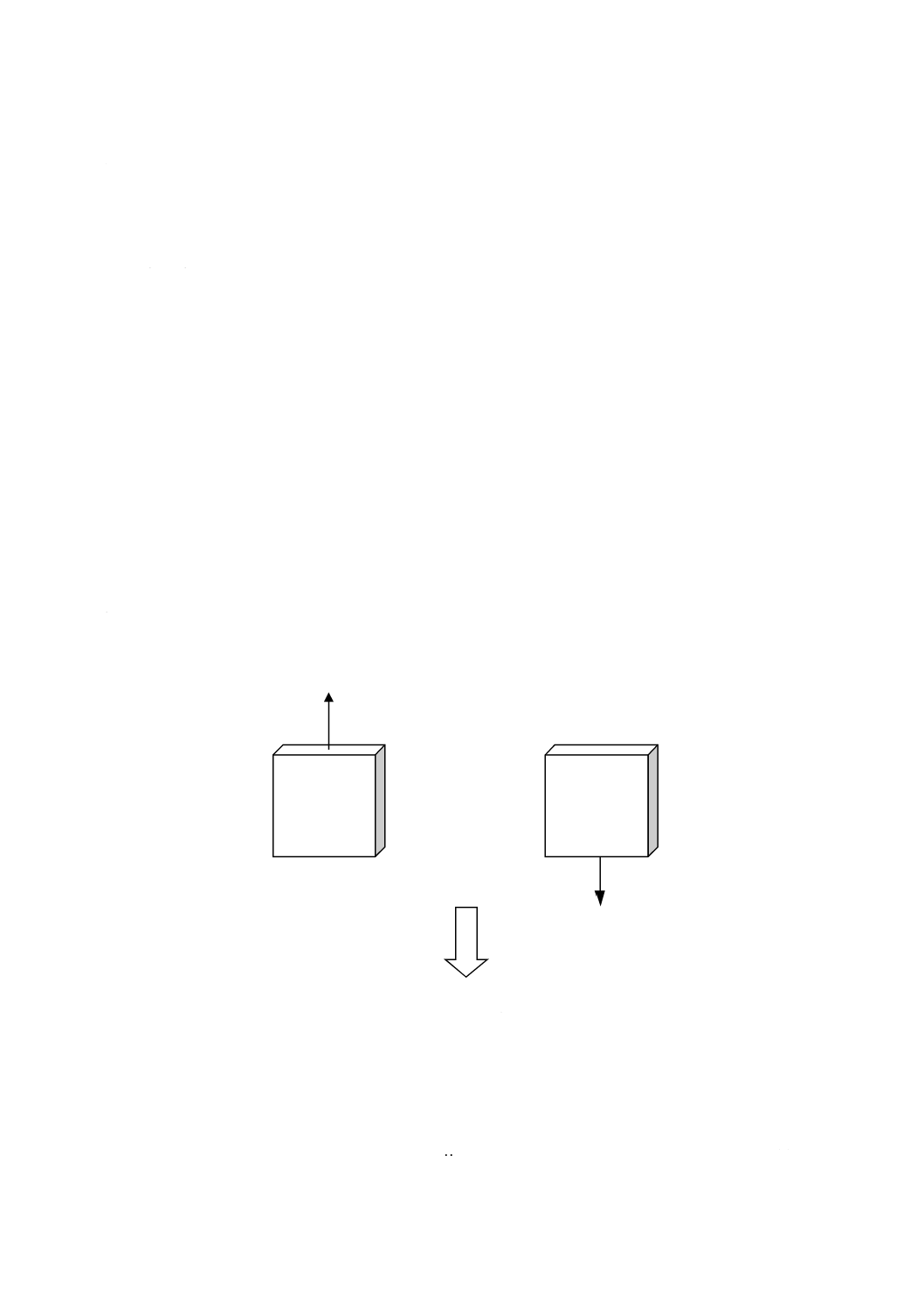
加速度センサ部の感度は,x,y及びzの各軸について同様に定義される。以下では,x軸を例に説明す
る。
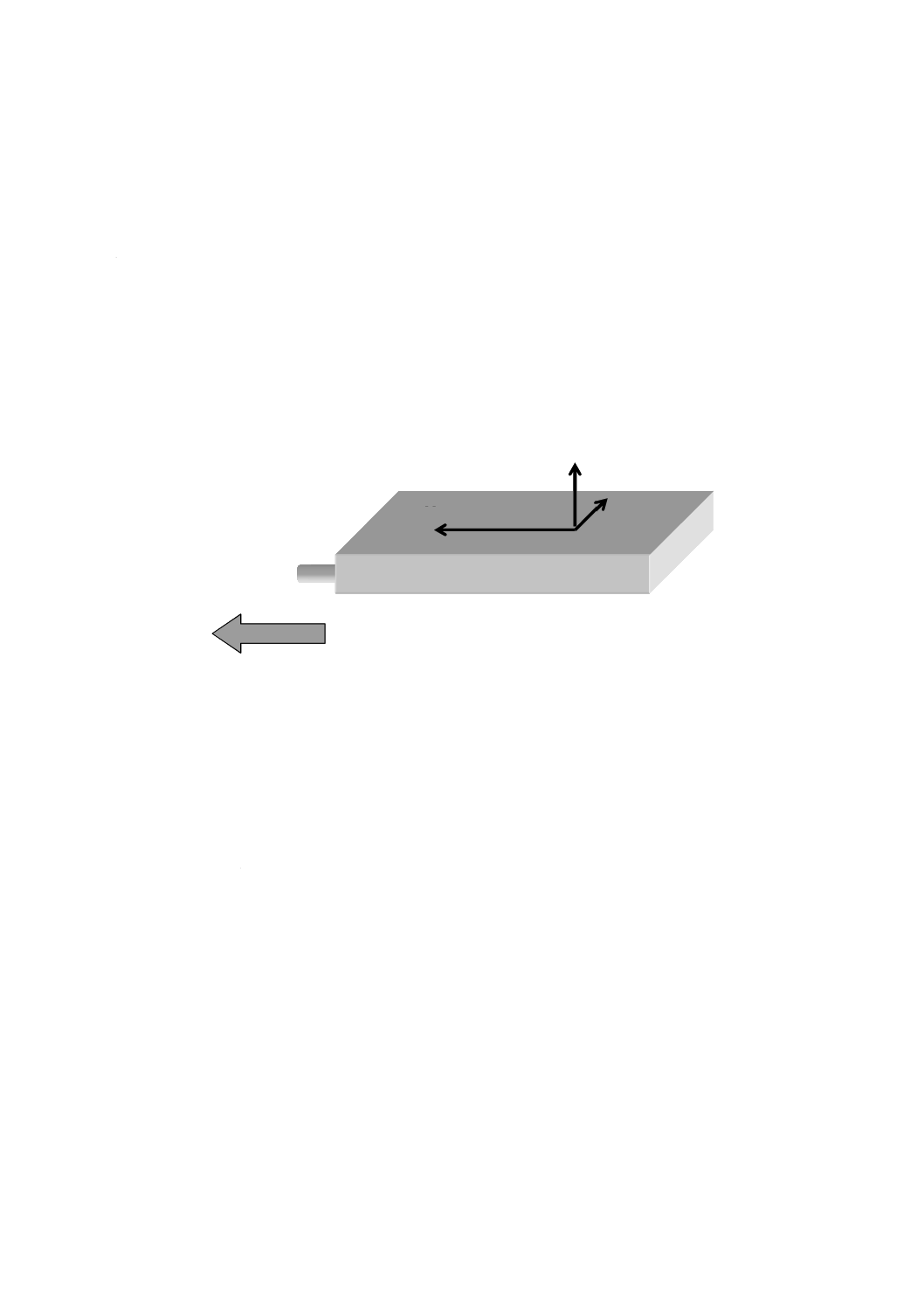
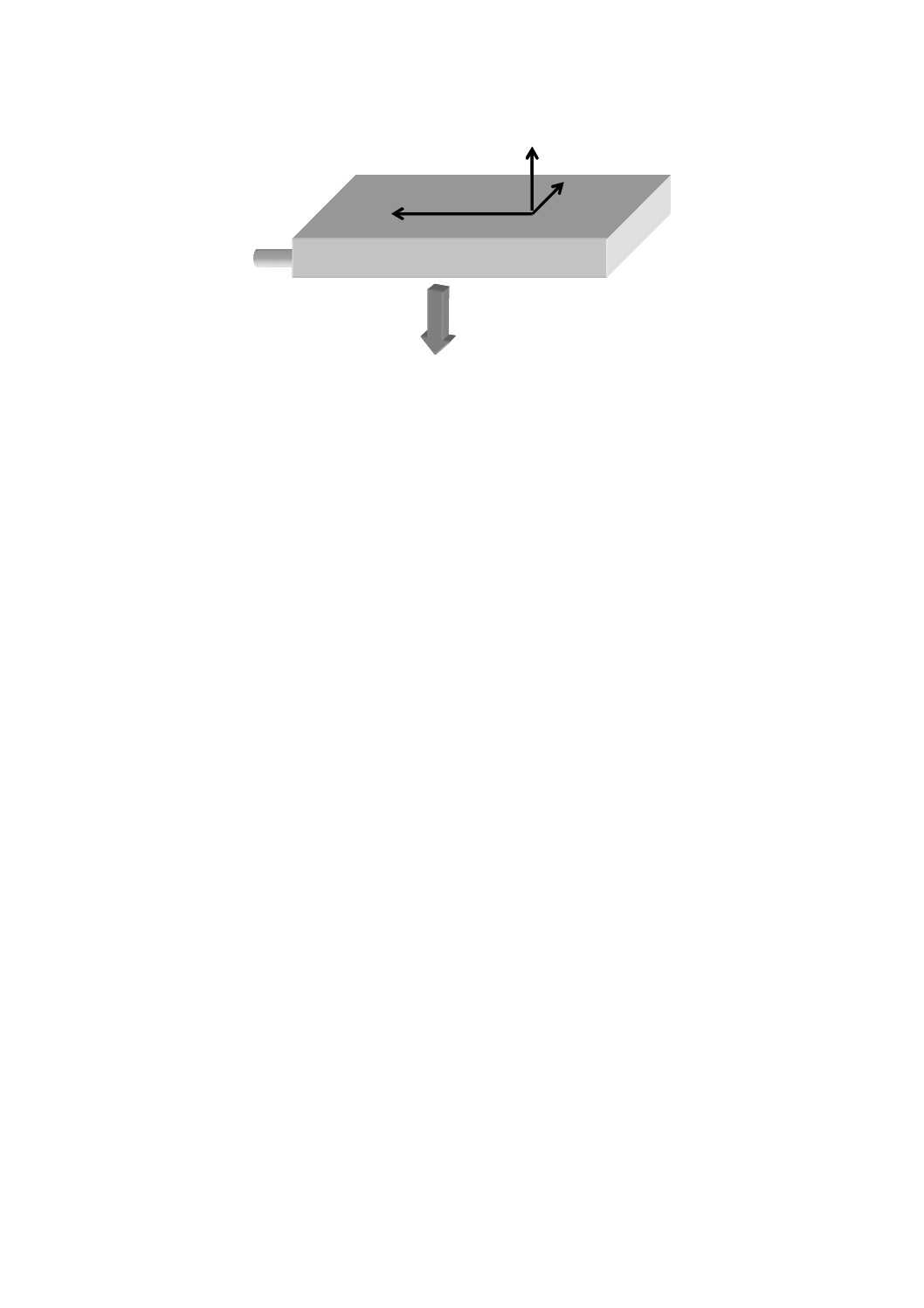
x軸感度の測定時のDUTの向きを,図6に示す。
a) x軸鉛直上向き
b) x軸鉛直下向き
図6−DUTの向き
DUTの向きを,x軸が鉛直上向き及び鉛直下向きとなるよう2通りに変化させたとき,x軸センサの出
力及び加速度は,それぞれ次の式で求める。
x軸鉛直上向き時のx軸センサの出力Vux及び加速度Guxは,式(6)及び式(7)による。
Vux=−bx+Voffx ········································································ (6)
x軸
x軸
g
14
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Gux=−1g ··············································································· (7)
x軸鉛直下向き時のx軸センサの出力Vdx及び加速度Gdxは,式(8)及び式(9)による。
Vdx=bx+Voffx ··········································································· (8)
Gdx=+1g ··············································································· (9)
ここに,
bx: x軸センサの重力加速度による成分
Voffx: x軸センサのオフセット成分
g: 地球の重力加速度
このとき,式(6)〜式(9)よって,x軸センサの感度Sxは,x軸センサ出力の変化とx軸に加わる加速度の
変化との比として,式(10)で求める。
(
)
(
)
(
)
g
2
ux
dx
ux
dx
ux
dx
x
V
V
G
G
V
V
S
−
=
−
−
=
······································································· (10)
また,式(6)及び式(8)によって,x軸センサのオフセット成分Voffxは,式(11)で求める。
(
)
2
ux
dx
offx
V
V
V
+
=
·······································································(11)
5.5.4
測定上の注意事項
DUTは,安定した測定台に固定して測定する。
5.5.5
測定手順
測定手順は,次による。
a) 周囲温度を指定の値に設定する。
b) 指定の電源電圧を印加する。
c) DUTをx軸が鉛直上向きとなるように固定し,x軸加速度センサ出力を測定する。
d) DUTをx軸が鉛直下向きとなるように固定し,x軸加速度センサ出力を測定する。
e) 式(10)を用いて,x軸の感度を算出する。
f)
式(11)を用いて,x軸のオフセットを算出する。
g) 同様に,y軸及びz軸について測定を繰り返す。
5.5.6
指定条件
測定条件は,次による。
− 周囲温度
− 電源電圧
5.6
磁気センサ部の周波数帯域(アナログ出力)
5.6.1
目的
アナログ出力電子コンパスについて,指定条件の下に交流磁場(alternating magnetic field)に対する出力
の周波数特性を測定する。
5.6.2
測定回路
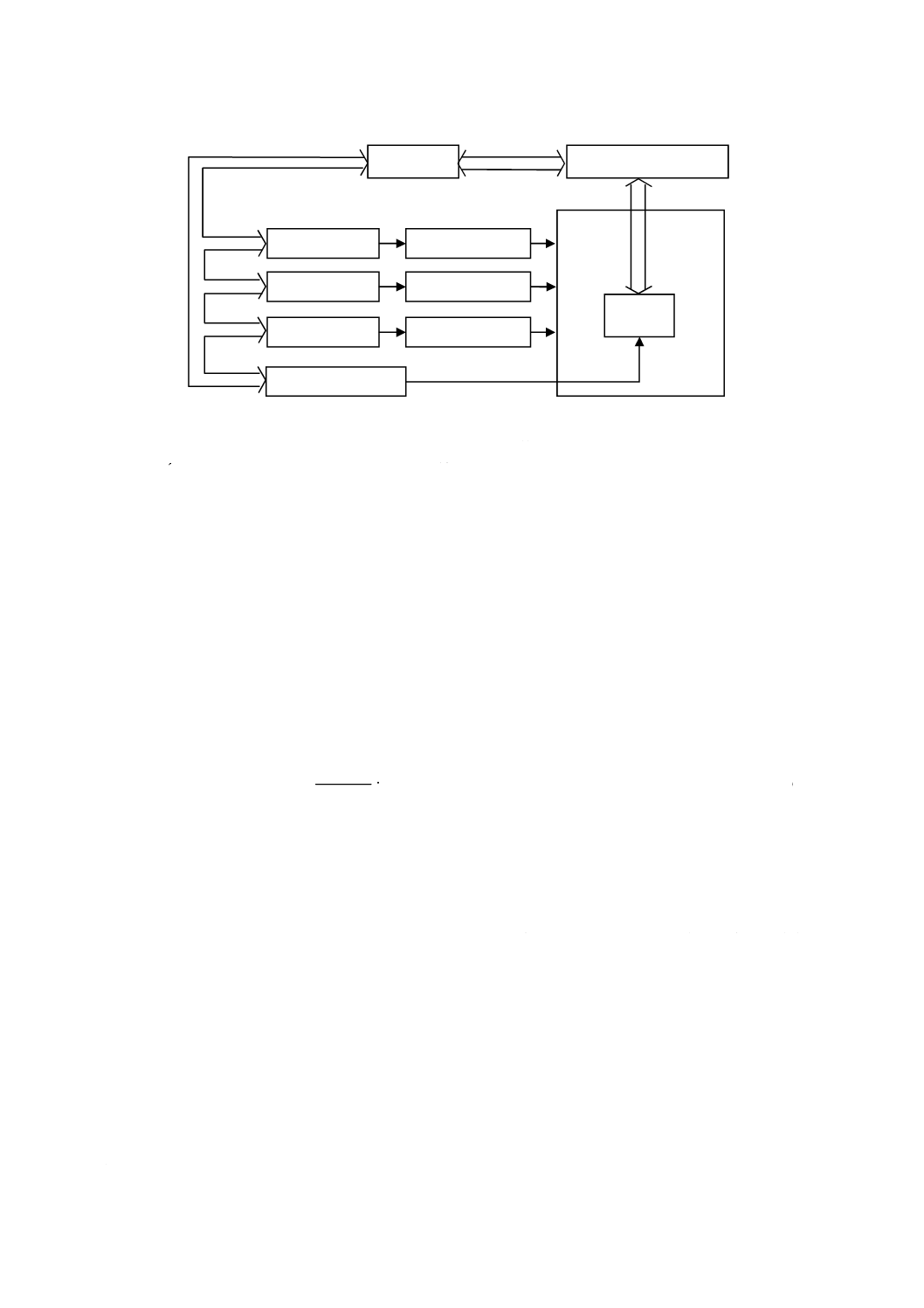
磁気センサ部の周波数帯域(アナログ出力)の測定回路を,図7に示す。
15
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1 データ処理用コンピュータ
8
z軸コイル用電源
2 アナログ/デジタルコンバータ
9
DUT用電源
3 x軸コイル用オシレータ
10 3軸ヘルツホルムコイル
4 y軸コイル用オシレータ
11 DUT
5 z軸コイル用オシレータ
⇒ 信号系
6 x軸コイル用電源
→ 電源系
7 y軸コイル用電源
図7−周波数測定のブロックダイアグラム
5.6.3
測定原理
一定磁場(constant magnetic field)に対する,オフセット成分を除いた出力電圧をV0,各周波数での出
力電圧をVfnとする。Vfn/V0をその周波数での相対出力とし,dBで表示する。Vfn/V0が−3 dBとなるときの
周波数を周波数帯域とする。
x軸センサの,オフセット成分を除いた出力電圧V0は,式(12)で求める。
2
xn
xp
0
V
V
V
−
=
·········································································· (12)
ここに,
V0: x軸センサのオフセット成分を除いた出力電圧で単位はボ
ルト(V)である。
Vxp: 一定磁場を磁気センサ部のx軸正方向に印加したときの,磁
気センサ部のx軸センサ出力で,その単位はボルト(V)で
ある。
Vxn: 一定磁場を磁気センサ部のx軸負方向に印加したときの,磁
気センサ部のx軸センサ出力で,その単位はボルト(V)で
ある。
y軸センサ及びz軸センサの,オフセット成分を除いた出力電圧は,同様な測定原理で求める。
5.6.4
測定手順
5.6.4.1
x軸センサの測定手順
x軸センサの測定手順は,次のとおりである。
a) 周囲温度を設定する。
b) DUTに電源電圧を印加する。
c) 指定の印加磁界をDUTのx軸正方向に印加する。
d) DUTのx軸センサ出力を測定する。
10
1
6
7
8
9
2
11
3
4
5
16
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
e) 指定の印加磁界をDUTのx軸負方向に印加する。
f)
DUTのx軸センサ出力を測定する。
g) x軸センサ出力値から式(12)を用いてV0を求める。
h) 発振器によって,指定の周波数範囲と周波数ステップとから定まる周波数fnの正弦波交流磁場
(sinusoidal magnetic field)を発生させ,x軸センサの出力Vfnを測定する。出力電圧は正弦波の片振幅
(single amplitude)とする。
i)
指定の周波数範囲全てについてVfnを測定する。
j) Vfn/V0を周波数に対しグラフ表示し,Vfn/V0が−3 dBとなる周波数を求める。
5.6.4.2
y軸センサの測定手順
y軸センサの測定手順は5.6.4.1の規定による。
5.6.4.3
z軸センサの測定手順
z軸センサの測定手順は5.6.4.1の規定による。
5.6.5
指定条件
測定に当たっては,次の項目について測定条件を指定する。
− 測定周波数範囲
− 測定周波数ステップ
− 周囲温度
− 電源電圧
− 印加磁場
5.7
消費電流
5.7.1
目的
磁気センサの動作時の消費電流を指定条件の下に測定する。
5.7.2
測定回路
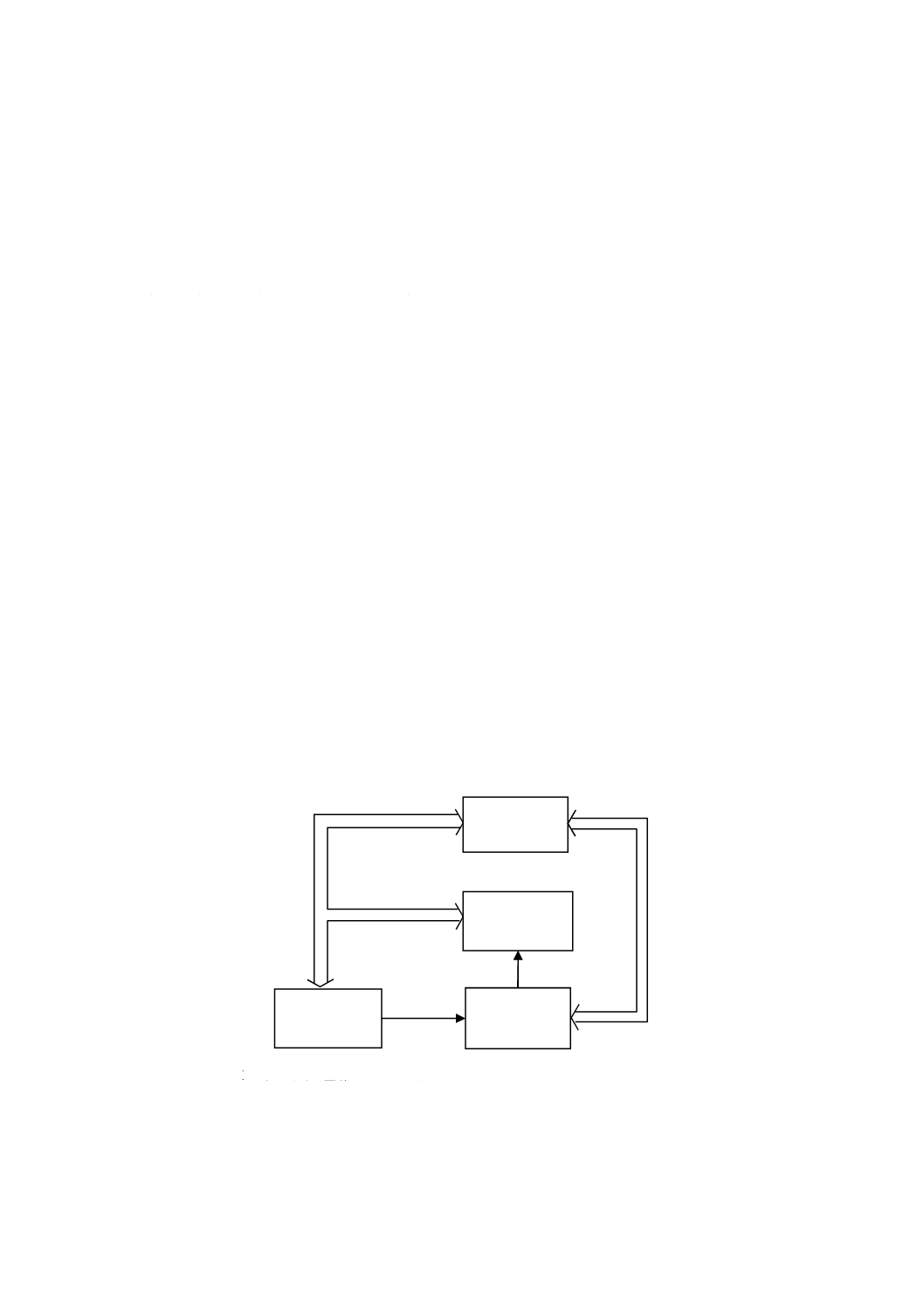
消費電力の測定回路を,図8に示す。
1 データ処理用コンピュータ
⇒ 信号系
2 DUT
→ 電源系
3 電源
4 電流計
図8−消費電流の測定回路
4
2
1
3
17
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.7.3
測定原理
電流計(current detector)の指示値を消費電流とする。
5.7.4
測定上の注意事項
DUTに複数の動作モード(operation modes)が設定されている場合は,それぞれのモードごとに測定す
る。
5.7.5
測定手順
測定手順は,次による。
a) 周囲温度を指定値に設定する。
b) 指定の電源電圧を印加する。
c) PCからの入力によって消費電流を測定したい動作モードを選び,DUTを動作させる。
d) 電流計により消費電流を測定する。
5.7.6
指定条件
測定条件は,次による。
− 周囲温度
− 電源電圧
− 動作モード
18
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
定格特性に関する考察
方位角の定義は,真北(地球の自転軸上の北:地図上の北)の方向を0度として,そこから水平面内で
回転した角度,真北方位であると理解するのが一般的である。
一方,電子コンパスだけでなく旧来の方位磁針など地磁気を測定対象とするものは,全て地磁気(環境
磁場)水平成分の方向を0度として,そこから水平面内で回転した角度,磁北方位を測定していることに
注意しなくてはならない。
ここで地磁気は,基本的に磁北(北磁極)を指し示し,真北と磁北とが異なるために,真北方位と磁北
方位との間に偏角という差異が存在する。
すなわち,電子コンパスの出力から一旦,磁北方位を計算し,これに偏角分を補正して真北方位を計算
する偏角補正が必須である。
したがって,例えば,理想的な電子コンパスであっても,その方位角精度は,測定する場所における偏
角の大きさがどの程度正確であるかに依存する。つまり,与えられる偏角の精度に依存することとなり,
電子コンパス自身で,一般ユーザが期待する真北方位における方位角精度の規定は,原理的に不可能であ
る。
また仮に,電子コンパスが独自に磁北方位における方位角精度を定義したとしても,この精度は,携帯
機器内部に実装される磁性体部品及び磁石部品から電子コンパスが受ける漏えい(洩)磁場の大きさに依
存する。 つまり,この場合においても方位角精度は,上記漏えい(洩)磁場によるオフセットを,携帯機
器全体として,どの程度正確に補正できるかというデータ処理精度に依存することとなり,電子コンパス
自身(デバイス:ハードウエア自身)で,上記方位角精度を規定することは無意味であり,一般ユーザに
誤解を与える可能性が高い。
以上の理由によって,電子コンパスの方位角精度を,特性項目として規定する意味は乏しい。
以上の考察の結果,この規格では,センサ部の特性及びDC特性を特性項目として規定する。
19
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
電子コンパスの端末座標系
B.1
磁気センサの端末座標系
端末の座標系(端末座標系)は,右手座標系とする。
磁気センサの端末座標系を,図B.1に示す。
端末の画面を上向き水平にして,鉛直下向きにこの画面を見た場合,各軸の正方向は,次による。
− 画面に平行な横方向の右がx軸の正である。
− 画面に平行な縦方向の上がy軸の正である。
− 画面に垂直な鉛直方向の上がz軸の正である。
図B.1−磁気センサの端末座標系
また,出力の符号は,磁力線の向きと座標軸の向きとが一致しているときに,正の出力とする。
例 端末を水平に保持してy軸正方向を磁北へ向けたとき,y軸に正の値が出力される。
B.2
加速度センサの端末座標系
6軸e-コンパスに含まれる“加速度センサの端末座標系”は,B.1の“磁気センサの端末座標系”と統一
する。
すなわち,右手座標系であり,端末の画面を上向き水平にして,鉛直下向きにこの画面を見た場合,各
軸の正方向は,次による。
− 左右方向の右がx軸の正である。
− 上下方向の上がy軸の正である。
− 前後方向の鉛直上がz軸の正である。
Y
X
Z
磁北
Y
X
Z
磁北
20
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.2−加速度センサの端末座標系
また,出力の符号は加速度の向きと座標軸の向きとが一致しているとき,正の出力とする。
これは,重力加速度の場合,重力の向きと座標軸の向きとが一致しているとき,負の出力が出ることを
意味する。
例 端末が+y軸の方へ動かされたとき,y軸に正の値が出力される。
端末を図B.2のように水平に保持したとき,z軸に正の値が出力される。
Y
X
Z
重力
Y
X
Z
重力
21
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
図によるピッチ角,ロール角,及びヨー角の説明
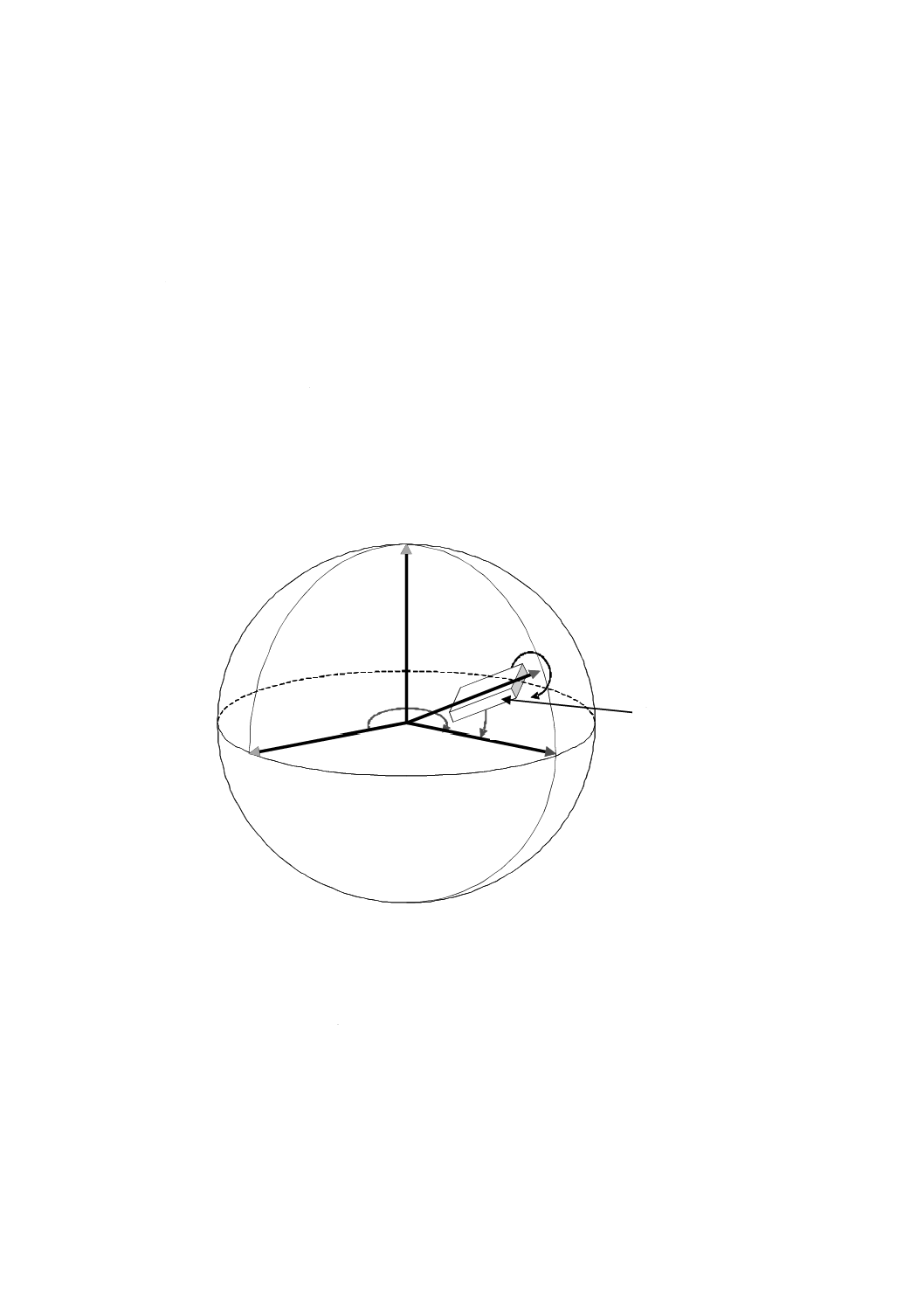
ピッチ角,ロール角及びヨー角の関係を,図C.1 a) に示す。
ピッチ角は図C.1 b) に示すように,端末座標系のx軸を中心にした回転角度である。端末座標系のxy
面が水平な状態を0度とする。
ロール角は図C.1 c) に示すように,端末座標系のy軸を中心にして回転角度である。端末座標系のxy
面が水平な状態を0度とする。
ヨー角は図C.1 d) に示すように, 端末座標系のz軸を中心にした回転角度である。端末座標系のxy面
が水平な状態,かつyz面に真北を含む状態を0度とする。
角度の符号は,回転軸を正の方向から負の方向に見たときに,時計回り回転を正の角度とする。
端末座標系は附属書Bを参照する。
1 e-コンパス
2 北極
3 ピッチ角
4 ロール角
5 ヨー角
a) ピッチ角,ロール角及びヨー角の関係
図C.1−ピッチ角,ロール角及びヨー角の図による説明
5
3
4
1
2
22
C 5630-19:2014 (IEC 62047-19:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
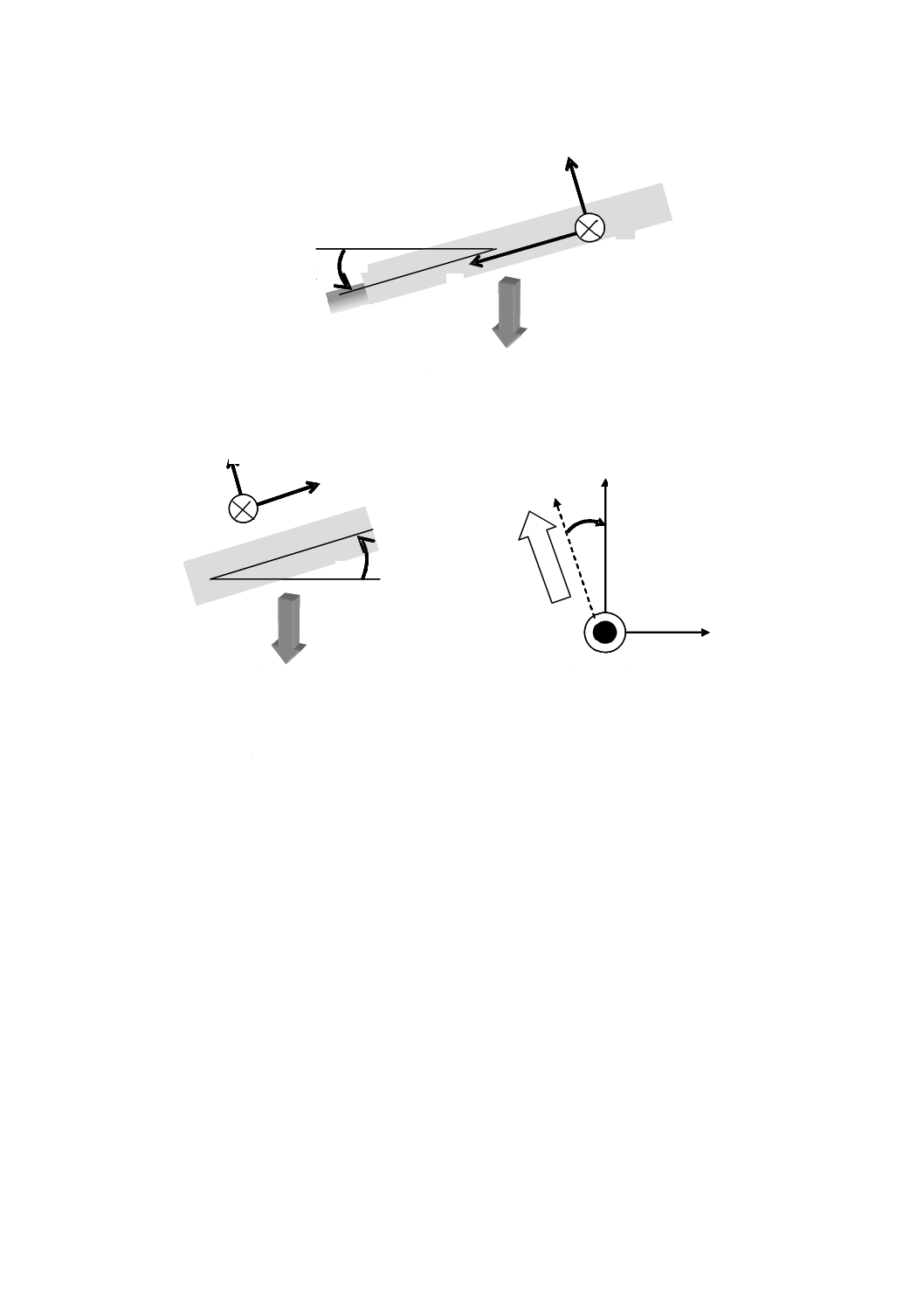
b) ピッチ角
c) ロール角
d) ヨー角
1 ピッチ角
2 重力
3 ロール角
4 ヨー角
図C.1−ピッチ角,ロール角及びヨー角の図による説明(続き)
X
z
y
3
+
2
X
+
4
N
S
+
y
X
N
S
+
X
Z
2
1
+
y
x
+