Z 8617-6:2008 (ISO 14617-6:2002)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 1
3 用語及び定義 ··················································································································· 2
4 機能連結子及び接続 ·········································································································· 4
4.1 基本的性質の記号 ·········································································································· 4
4.2 4.1の記号の適用方法 ······································································································ 4
4.3 補助記号 ······················································································································ 4
4.4 4.3の補助記号の適用方法 ································································································ 5
4.5 適用例 ························································································································· 5
5 測定点···························································································································· 5
5.1 基本的性質の記号 ·········································································································· 5
5.2 5.1の図記号の適用方法 ··································································································· 5
5.3 補助記号 ······················································································································ 5
5.4 5.3の補助記号の適用方法 ································································································ 5
5.5 適用例 ························································································································· 5
6 最終制御要素の操作 ·········································································································· 5
6.1 基本的性質の図記号 ······································································································· 5
6.2 6.1の図記号の適用方法 ··································································································· 5
6.3 補助記号 ······················································································································ 6
6.4 6.3の補助記号の適用方法 ································································································ 6
6.5 適用例 ························································································································· 7
7 情報処理機能 ··················································································································· 9
7.1 基本的性質の記号 ·········································································································· 9
7.2 7.1の記号の適用方法 ······································································································ 9
7.3 補助記号 ····················································································································· 10
7.4 7.3の補助記号の適用方法 ······························································································· 13
7.5 適用例 ························································································································ 14
8 2値論理機能 ·················································································································· 19
9 バックアップ機能 ············································································································ 19
9.1 基本的性質の記号 ········································································································· 19
9.2 9.1の記号の適用方法 ····································································································· 19
9.3 補助記号 ····················································································································· 19
9.4 9.3の補助記号の適用方法 ······························································································· 19
9.5 適用例 ························································································································ 19
Z 8617-6:2008 (ISO 14617-6:2002) 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
10 制御ループにおける図記号の使用例 ·················································································· 19
参考文献 ···························································································································· 22
Z 8617-6:2008 (ISO 14617-6:2002)
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,財団法人日本規格協会(JSA)から,工業標準
原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大
臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に係る確認について,責任は
もたない。
JIS Z 8617の規格群には,次に示す部編成がある。
JIS Z 8617-1 第1部:一般事項及び索引
JIS Z 8617-2 第2部:一般用途
JIS Z 8617-3 第3部:接続及び関連装置
JIS Z 8617-4 第4部:アクチュエータ及び関連装置
JIS Z 8617-5 第5部:計測及び制御装置
JIS Z 8617-6 第6部:計測及び制御機能
JIS Z 8617-7 第7部:基本的機械部品
JIS Z 8617-8 第8部:バルブ及びダンパ
JIS Z 8617-9 第9部:ポンプ,コンプレッサ及びファン
JIS Z 8617-10 第10部:フルードパワー変換器
JIS Z 8617-11 第11部:熱輸送及び熱機関用の装置
JIS Z 8617-12 第12部:分離,清浄及び混合用の装置
JIS Z 8617-13 第13部:材料加工用装置
JIS Z 8617-14 第14部:材料の輸送及び取扱い用の装置
JIS Z 8617-15 第15部:据付け線図及びネットワークマップ
Z 8617-6:2008 (ISO 14617-6:2002) 目次
(4)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
白 紙
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
Z 8617-6:2008
(ISO 14617-6:2002)
ダイヤグラム用図記号−
第6部:計測及び制御機能
Graphical symbols for diagrams−Part 6 : Measurement and control functions
序文
この規格は,2002年に第1版として発行されたISO 14617-6を基に,技術的内容及び対応国際規格の構
成を変更することなく作成した日本工業規格である。
1
適用範囲
この規格は,計測及び制御機能に用いるダイヤグラム用図記号(以下,図記号という。)について規定す
る。同じ機能をもつコンポーネント及び装置に同じ記号を簡略的に使用することもできる。計測及び制御
装置のための図記号は,JIS Z 8617-5を参照。
図記号を作成及び適用するときの基本規則については,JIS Z 8222-1を参照。
JIS Z 8617規格群の概要,図記号を特定するための登録番号の構成方法及び使用方法に関する情報,そ
れらの図記号の表示方法及び適用方法,適用例などについては,JIS Z 8617-1を参照。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 14617-6:2002,Graphical symbols for diagrams−Part 6: Measurement and control functions (IDT)
なお,対応の程度を表す記号 (IDT) は,ISO/IEC Guide 21に基づき,一致していることを示
す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS C 0450 電気及び関連分野−信号指定及び接続指定
注記 対応国際規格:IEC 61175:1993, Designations for signals and connections (IDT)
JIS C 0617-12 電気用図記号 第12部:2値論理素子
注記 対応国際規格:IEC 60617-12:1997, Graphical symbols for diagrams−Part 12: Binary logic
elements (IDT)
JIS C 0617-13 電気用図記号 第13部:アナログ素子
注記 対応国際規格:IEC 60617-13:1993, Graphical symbols for diagrams−Part 13: Analogue elements
(IDT)
JIS Z 8201 数学記号
注記 対応国際規格:ISO 31-11:1992, Quantities and units−Part 11: Mathematical signs and symbols for
2
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
use in the physical sciences and technology (MOD)
JIS Z 8222-1 製品技術文書に用いる図記号のデザイン−第1部:基本規則
注記 対応国際規格:ISO 81714-1:1999, Design of graphical symbols for use in the technical
documentation of products−Part 1: Basic rules (IDT)
JIS Z 8617-1 ダイヤグラム用図記号−第1部:一般事項及び索引
注記 対応国際規格:ISO 14617-1:2005, Graphical symbols for diagrams−Part 1: General information
and indexes (IDT)
JIS Z 8617-2 ダイヤグラム用図記号−第2部:一般用途
注記 対応国際規格:ISO 14617-2:2002, Graphical symbols for diagrams−Part 2: Symbols having
general application (IDT)
JIS Z 8617-3 ダイヤグラム用図記号−第3部:接続及び関連装置
注記 対応国際規格:ISO 14617-3:2002, Graphical symbols for diagrams−Part 3: Connections and
related devices (IDT)
JIS Z 8617-4 ダイヤグラム用図記号−第4部:アクチュエータ及び関連装置
注記 対応国際規格:ISO 14617-4:2002, Graphical symbols for diagrams−Part 4: Actuators and related
devices (IDT)
JIS Z 8617-5 ダイヤグラム用図記号−第5部:計測及び制御装置
注記 対応国際規格:ISO 14617-5:2002, Graphical symbols for diagrams−Part 5: Measurement and
control devices (IDT)
JIS Z 8617-8 ダイヤグラム用図記号−第8部:バルブ及びダンパ
注記 対応国際規格:ISO 14617-8:2002, Graphical symbols for diagrams−Part 8: Valves and dampers
(IDT)
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
注記 次の用語を定義するに当たっては,JIS,ISO及びIECの規格に定義するものを用いた。括弧
内の規格を参照。
3.1
制御 (control)
指定された目的にかなうシステムで行われる特定の動作。
[IEC 60050-351]
注記 制御には,制御動作それ自体のほかに,監視及び異状検知がある。
3.2
動作 (operation)
可動部品の動き。
[IEC 60050-441]
例 遮へい弁の弁部品又はリレーの可動接点。
注記1 動きの方向は,開閉動作,ON/OFF動作などで表してもよい。
注記2 過負荷リレーのように,単純にON/OFF機能だけでなく,設定された電流よりも大か小かを
検知して自動的に作動することも含む (IEC 60050-448)。
3
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.3
手動制御 (manual control)
人の介入による制御。
[ISO 5598,IEC 60050-351]
3.4
自動制御 (automatic operation)
人の介入を必要としない操作。電気的又は機械的に,ある操作の必要を検知し,機器に行わせる制御。
[ISO 5598,IEC 60050-351]
3.5
最終制御要素 (final controlling element)
制御システムの出力(制御量)に直接対応する可動部品。
[IEC 60050-351]
3.6
遅延装置 (delay device)
指令を与えた瞬間からその影響を受けて部品の位置又は状態が変化し始める瞬間までに対して時間差を
与える装置。
3.7
自動復帰装置 (automatic return device)
可動部品を,自動的に復帰させる装置。
例 動作力を除いた後に,バルブを元の位置(停止位置)に戻す装置。
3.8
デテント (detent)
保持力を超える力を与えるまで,移動可能部品(例えば,バルブのスプール)をある位置に保持する装
置。
[ISO 5598]
例 バルブのスプールをある位置に保持する装置。力を与えることによって動かすことができる。
3.9
ラッチ装置 (latching device)
止め具が外されるまでは元の状態に戻らないが,可動部品(例えば,バルブの可動部品)の一方向移動
を可能にする装置。
[ISO 5598]
例 バルブのスプールを元に戻らないようにする装置。
3.10
ブロック装置 (blocking device)
止め具が外されるまで,可動部品(例えば,バルブの可動部品)を両方向に動かないようにする装置。
例 バルブのスプールをどの方向へも移動できないようにする装置。
3.11
インタロック装置 (interlocking device)
コンポーネントの可動部品の位置又は動きによって,開閉機器を動作させる装置。
[IEC 60050-441]
4
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.12
情報処理 (information processing)
情報を得るため又は扱うために行うデータ操作。
3.13
正面位置 (primary location)
操作者が容易に操作できる測定装置,ポテンショメータなどの設置場所。
注記 補助位置 (3.14) を参照。
3.14
補助位置 (auxiliary location)
操作者が常時操作する必要のない測定装置,ポテンショメータなどの設置場所。
例 パネルの背面。
注記 正面位置 (3.13) を参照。
4
機能連結子及び接続
4.1
基本的性質の記号
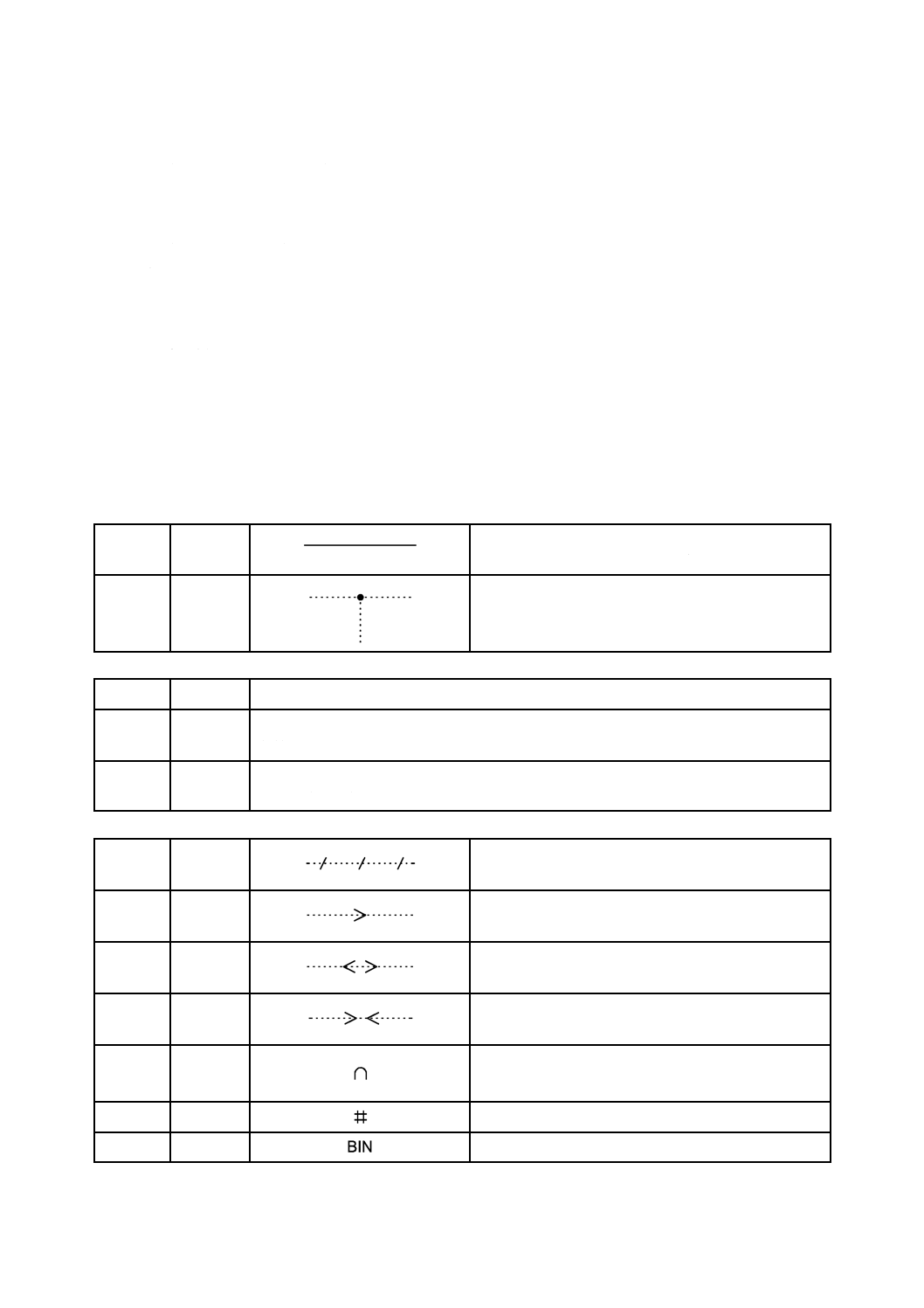
4.1.1
401
機能接続
R401 (4.2.1) 及びR402 (4.2.2) 参照。
4.1.2
501
接続点
R501 (4.2.3) 参照。
4.2
4.1の記号の適用方法
4.2.1
R401
接続を表す線は,互いに交差してもよい。
4.2.2
R402
図記号401 (4.1.1),405 (3-4.1.5) 及び410 (3-4.1.10) の間で混乱が起きそうな場合には,図
記号431 (4.3.1) を付加しなければならない。
4.2.3
R501
(接続部の)黒丸は,線幅の5倍とする。T字結合の場合には,黒丸を省略してもよい。
X505 (3-5.5.5) 参照。
4.3
補助記号
4.3.1
431
機能を特定する表示
4.3.2
249
エネルギー又は信号の一方向の流れ
R247 (4.4.1) 参照。
4.3.3
250
エネルギー又は信号の交互方向 (half-duplex) の流れ
R247 (4.4.1) 参照。
4.3.4
251
エネルギー又は信号の同時双方向 (full-duplex) の流れ
R247 (4.4.1) 参照。
4.3.5
234
アナログ信号
4.3.6
235
デジタル信号
4.3.7
236
バイナリ信号
5
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.4
4.3の補助記号の適用方法
4.4.1
R247
記号は,接続線上に示し,他の(補助)記号と接触してはならない。
記号は,コンポーネント又は装置の移動方向を示すために使ってもよい。この場合,記号
は基本図記号の輪郭上に示す。
4.5
適用例
箇条10を参照。
5
測定点
5.1
基本的性質の記号
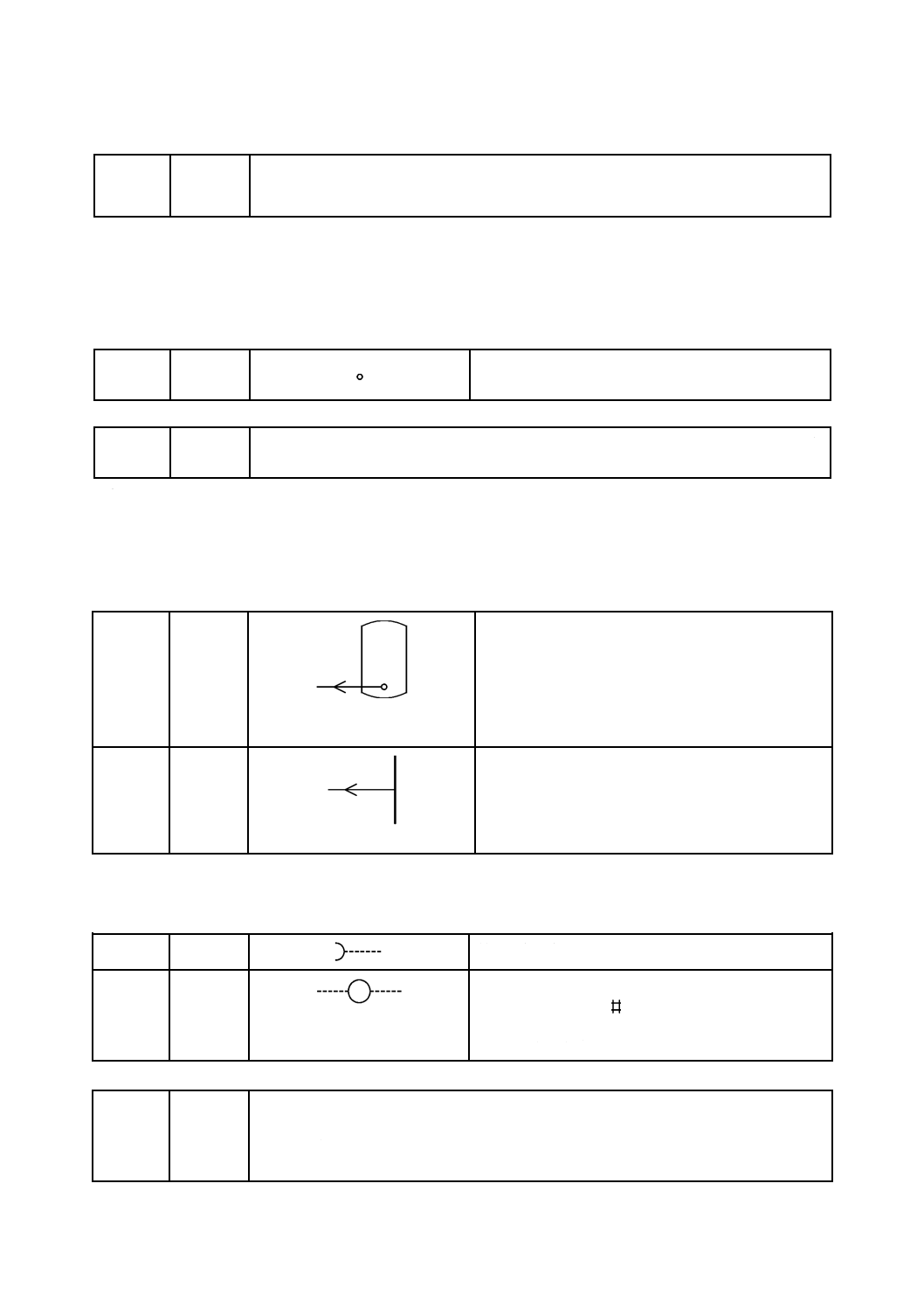
5.1.1
1011
測定点
R1011 (5.2.1) 参照。
5.2
5.1の図記号の適用方法
5.2.1
R1011
測定点の位置をはっきり示す必要がある場合には,記号を用いる。例えば,X1011 (5.5.1) 参
照。
5.3
補助記号
なし。
5.4
5.3の補助記号の適用方法
なし。
5.5
適用例
5.5.1
X1011
249, 401, 1011, 2062
圧力容器の内側の底近くで測定。
5.5.2
X1012
249, 401, 405
管路内で測定。
図記号1011 (5.1.1) を使う必要はない。
6
最終制御要素の操作
6.1
基本的性質の図記号
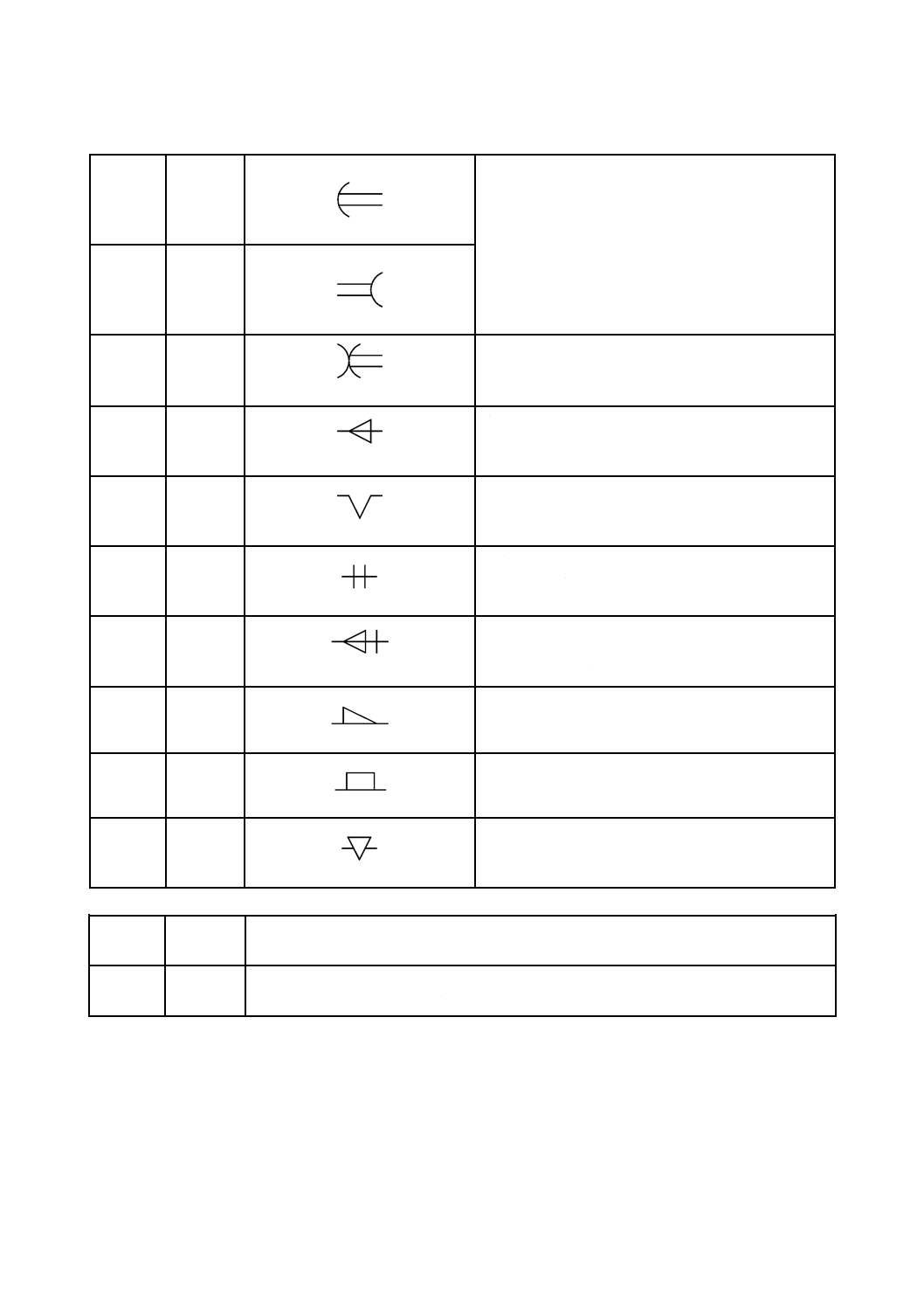
6.1.1
1021
最終制御要素の手動操作
6.1.2
1022
最終制御要素の自動操作
入力は2値信号 (
) でもアナログ信号 (∩) でもよ
い。
R1021 (6.2.1) 参照。
6.2
6.1の図記号の適用方法
6.2.1
R1021
必要であれば,入力は信号の動作を示す信号表示(JIS C 0450参照)とともに示す。
最終制御要素が双安定型の場合には,二つの入力信号が必要である。例えば,X1032 (6.5.12)
を参照。多くの場合,省略して一つだけの機能結合に二つの信号名を付けて示すことがで
きる。例えば,X1033 (6.5.13) を参照。
6
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.3
補助記号
6.3.1
651
様式1
200 %
移動方向が円弧の中心方向の場合に,動作を遅延する
遅延装置
R651 (6.4.1) 参照。
6.3.2
652
様式2
200 %
6.3.3
653
200 %
双方向への動作を遅延する遅延装置
R651 (6.4.1) 参照。
6.3.4
654
200 %
自動復帰装置
復帰方向は,頂点方向。
R652 (6.4.2) 及びR1022 (6.4.3) 参照。
6.3.5
655
200 %
孤立した位置で保持する移動止め
R652 (6.4.2) 参照。
6.3.6
659
200 %
任意の位置で保持する移動止め
R652 (6.4.2) 参照。
6.3.7
660
200 %
任意の位置で保持する移動止めで,左方向へのずれは
許される。
R1023 (6.4.4) 参照。
6.3.8
661
200 %
ラッチ装置
6.3.9
664
200 %
ブロック装置
6.3.10
666
200 %
連動装置
6.4
6.3の補助記号の適用方法
6.4.1
R651
この二重線は,遅延するコンポーネント又は装置の要素を示す記号に接触する。例えば,X653
(4-4.5.3),X654 (4-5.5.4) 及びX1023 (6.5.3) を参照。
6.4.2
R652
アクチュエータの図記号によって,要素の動きが分かる場合には,この記号は省略してもよ
い。4-5.1,R683 (4-5.2.3) 及びR685 (4-5.2.5) を参照。適用例は,4-5.5を参照。
7
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.4.3
R1022
この補助記号は,制御信号がゼロに変化した場合(遮断弁)又は低い値になった場合(制御
弁)に自動復帰の意味を示す以外に,補足の電圧又は圧力を付加しない場合の自動復帰の表
示にも使われる。
この図記号が弁の図記号(JIS Z 8617-8を参照。)とともに使われた場合には,次を意味する。
− 弁の図記号に向かっている補助記号:制御信号がゼロ又は減少した場合,又は補足信号
がない場合には,弁は戻るか,閉弁位置に向かう。例えば,X1022 (6.5.2),X1026 (6.5.6) 及
びX1028 (6.5.8) を参照。
R5101 (8-4.2.1) も参照。
他の解釈ができない場合には,この記号は省略してもよい。
− 弁の図記号から出ている補助記号:制御信号がゼロ又は減少した場合,又は補足信号が
ない場合には,弁は戻るか,開弁位置に向かう。例えば,X1027 (6.5.7) を参照。
R5101 (8-4.2.1) も参照。
補助記号には,制限された開状態又は閉状態を示n %の数値を付加してもよい。例えば,
X1029 (6.5.9) 及びX1030 (6.5.10) を参照。
この記号を弁以外の装置(例えば,ポンプ)の記号と接続する場合には,それに対応する操
作原理が適用される。例えば,ポンプの記号に向かう自動復帰の補助記号は,制御信号がゼ
ロ又は減少した場合,又は補足信号がない場合には,ポンプが停止(無稼動状態)する。例
えば,X1031 (6.5.11) を参照。
6.4.4
R1023
この記号を弁の図記号と接続して用いる場合には,次を意味する。
− 弁の図記号に向かっている図記号:安全で許容されるずれは,閉弁方向である。例えば,
X1035 (6.5.15) を参照。
− 弁の図記号から出ている図記号:安全で許容されるずれは,開弁方向である。
6.5
適用例
注記 この他の自動復帰,移動止め,止め装置,遅延などの適用例は,JIS Z 8617-4の4.5を参照。
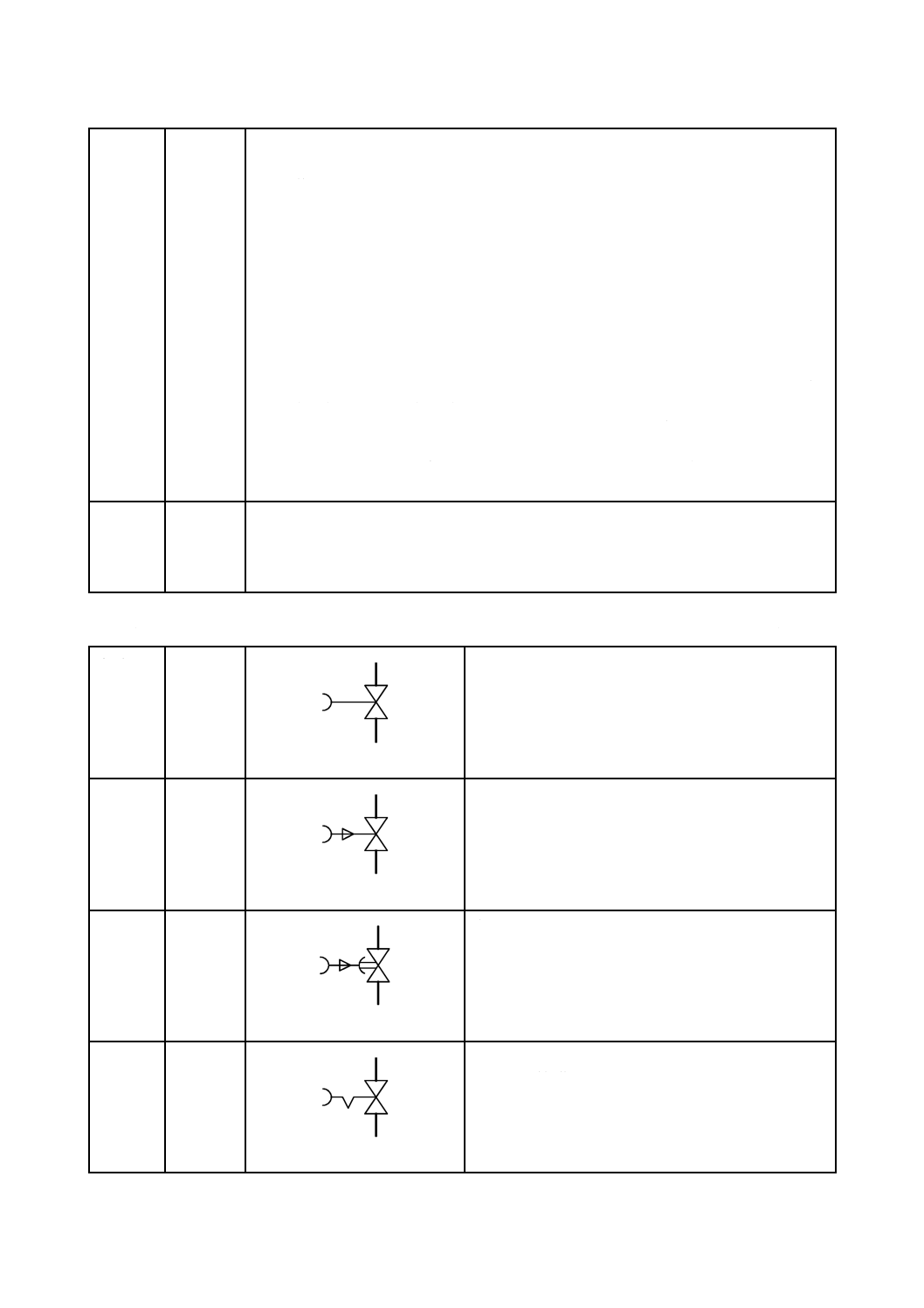
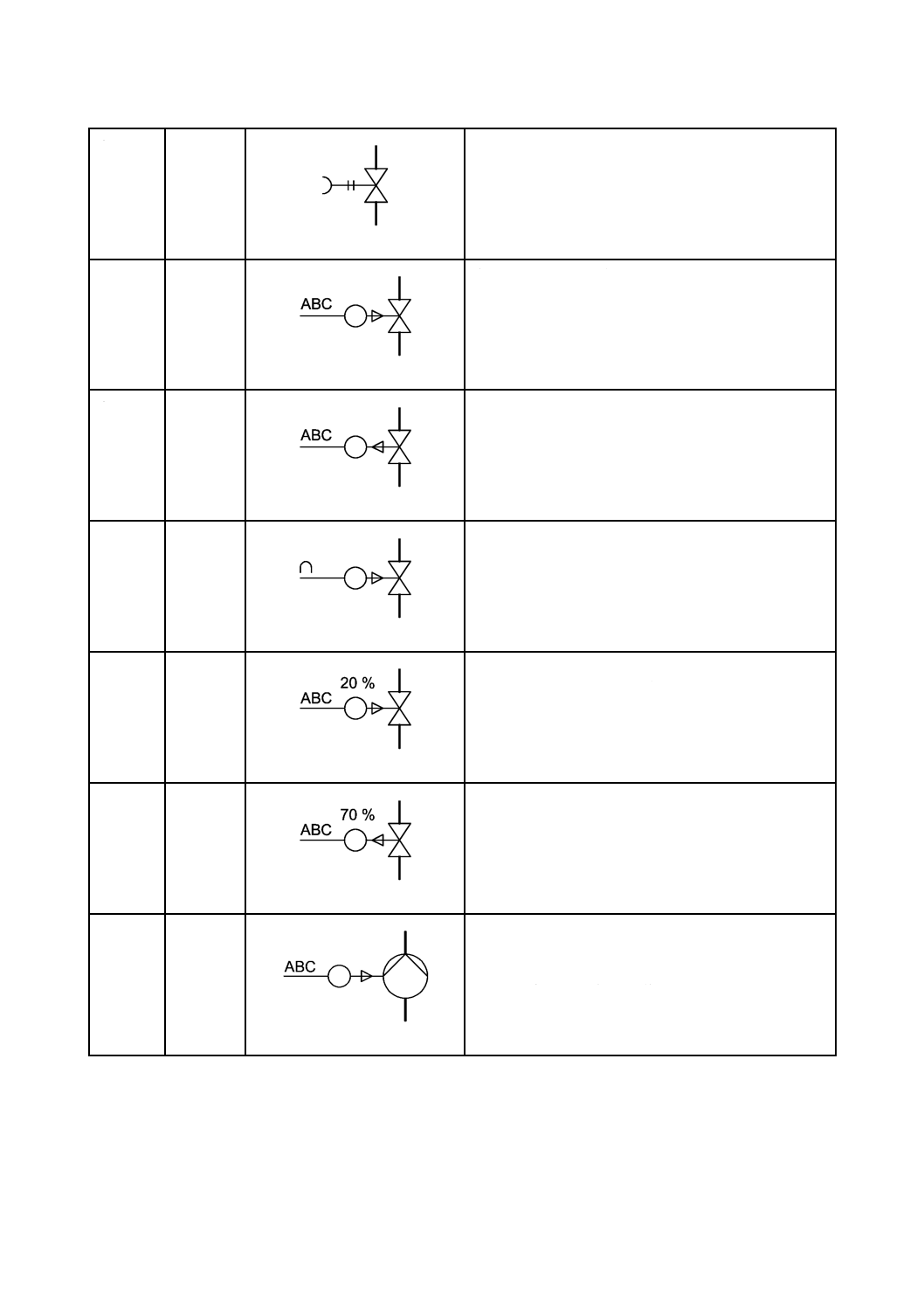
6.5.1
X1021
403, 1021, 2101
弁の手動操作
6.5.2
X1022
403, 654, 1021, 2101
自動閉弁機能付き弁の手動操作
6.5.3
X1023
403, 651, 654, 1021, 2101
自動遅延閉弁機能付き弁の手動操作
6.5.4
X1024
403, 655, 1021, 2101
二つの安定位置,すなわち,閉弁状態及び開弁状態をも
つ弁の手動操作
8
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.5.5
X1025
403, 659, 1021, 2101
無数の安定位置をもつ弁の手動操作
6.5.6
X1026
401, 403, 654, 1022, 2101
自動閉弁機能付弁の自動操作
ABCという補助情報が存在する(信号が1状態である)
場合に,弁は開く。ABCという補助情報がない(信号は
0状態である)場合,又は補足説明がない場合には,弁
は閉位置に戻る。
6.5.7
X1027
401, 403, 654, 1022, 2101
自動開弁機能付弁の自動操作
ABCという補助情報が存在する(信号が1状態である)
場合に,弁は閉じる。ABCという補助情報がない(信号
は0状態である)場合,又は補足説明がない場合には,
弁は開位置に戻る。
6.5.8
X1028
234, 401, 403, 654, 1022, 2101
アナログ信号によって制御される弁の自動操作
アナログ信号が増/減した場合に,処理量が増/減する。
アナログ信号が最大値になった場合,又は補足説明がな
い場合には,弁は閉じる。
6.5.9
X1029
401, 403, 654, 1022, 2101
閉方向への自動復帰機能をもった弁の自動操作
ABCという補助情報が存在する(信号が1状態である)
場合に,弁は開く。ABCという補助情報がない(信号は
0状態である)場合,又は補足説明がない場合には,弁
は開位置の20 %に戻る。
6.5.10
X1030
401, 403, 654, 1022, 2101
開方向への自動復帰機能をもった弁の自動操作
ABCという補助情報が存在する(信号が1状態である)
場合に,弁は閉じる。ABCという補助情報がない(信号
は0状態である)場合,又は補足説明がない場合には,
弁は開位置の70 %に戻る。
6.5.11
X1031
401, 403, 654, 1022, 2301
ポンプの自動操作
2値化した入力信号が1状態にあると,ポンプは動く。
2値化した入力信号が0状態にある場合,又は補足説明
がない場合には,ポンプは停止する。
9
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
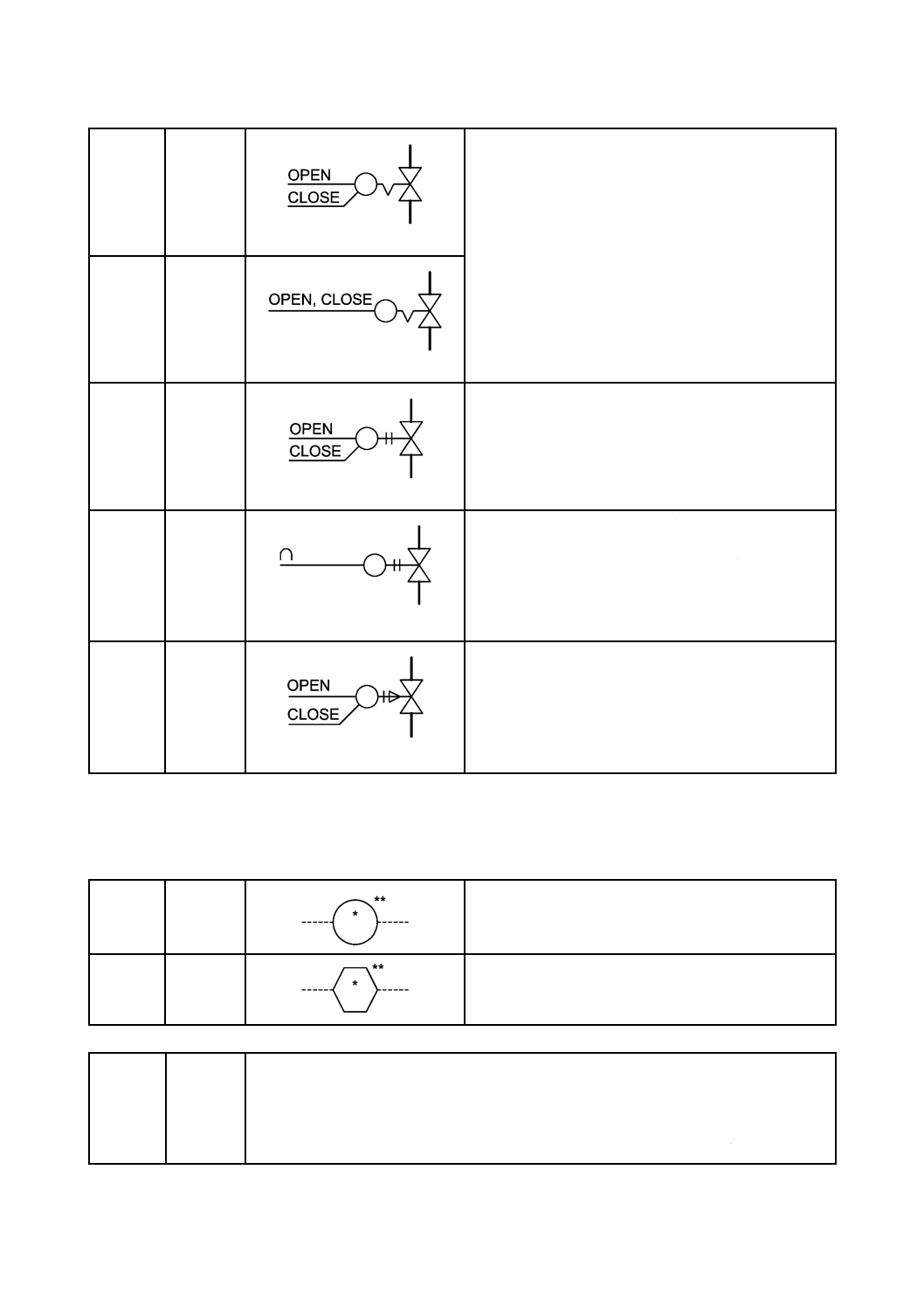
6.5.12
X1032
401, 403, 655, 1022, 2101
二つの安定位置,すなわち,閉弁状態及び開弁状態をも
つ弁の自動操作
2値信号OPENがパルスの形で1状態にある場合に,
バルブは直ちに開く。2値信号CLOSEがパルスの形で1
状態にある場合に,バルブは直ちに閉じる。
二つの指示方法を示す。
6.5.13
X1033
401, 403, 655, 1022, 2101
6.5.14
X1034
401, 403, 659, 1022, 2101
無数の安定位置をもつ弁の自動操作
2値信号OPENがパルスの形で1状態にある場合に,
バルブは開き始める。2値信号CLOSEがパルスの形で1
状態にある場合に,バルブは閉じ始める。
入力信号が0状態になると,直ちに中断する。
6.5.15
X1035
234, 401, 403, 659, 1022, 2101
アナログ信号で制御される弁の自動操作
アナログ信号が増/減した場合に,処理量が増/減する。
アナログ信号が最大値になった場合又は補足説明がない
場合に,弁は閉じる。アナログ信号又は補足説明(もし
あるなら)がない場合には,弁は最後の位置にとどまる。
6.5.16
X1036
401, 403, 660, 1022, 2101
無数の安定位置をもつ弁の自動操作
2値信号OPENがパルスの形で1状態にある場合に,
バルブは開き始める。2値信号CLOSEがパルスの形で1
状態にある場合に,バルブは閉じ始める。入力信号が0
状態になると,直ちに中断する。閉まる方向のずれは許
容される。
7
情報処理機能
7.1
基本的性質の記号
注記 一般的な適用方法は,R1041 (7.2.1)〜R1045 (7.2.5) を参照。
7.1.1
1041
情報処理機能
7.1.2
1042
時間分割方式によって行われる情報処理機能
例えば,プログラム可能な装置又はコンピュータ
R1046 (7.2.6) 参照。
7.2
7.1の記号の適用方法
7.2.1
R1041
図記号に使用可能にするための入力を伴う場合には,入力に対して90°離して示す。例えば,
X1043 (7.5.3) 及びX1044 (7.5.4) を参照。
図記号がアナログ信号で使われ,使用を可能にする入力 (enabling input) を伴う場合で,適用
するものがある場合には,それを使用しない状態にあるときの使用を可能にする入力の効果
を,使用を可能にする入力の反対側に注記する。例えば,X1073 (7.5.33) を参照。
10
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.2.2
R1042
アスタリスク(*)は,次のものと置き換える。
− 第1番目は,7.3.1による測定される変数又は初期変数。
− 第2番目は,適用するものがある場合は,7.3.1による変更子を表す文字記号。
− 第3番目は,7.3.1による機能を表す文字記号。
二重の星印は,次のものと置き換える。
− 機能を表す文字記号がA, S 又は Zで,適用するものがある場合には,7.3.2による記号,
その他は省略する。
− 機能を表す文字記号がYの場合には,7.3.3による記号。
7.2.3
R1043
多くの文字からなるコードを記入する必要がある場合には,図記号は引き伸ばしてもよい。
7.2.4
R1044
識別番号を,機能を表す文字コードの下に付けてもよい。
7.2.5
R1045
アナログ変換や演算機能に対して(文字コードY),7.1の記号の代わりにJIS C 0617-13に
よる記号を用いてもよい。
7.2.6
R1046
(プロセス流れに直接関係するものを除いて)すべての測定及び制御機能が時間分割方式の
場合には,代わりに1041 (7.1.1) を用いてもよい。
7.3
補助記号
7.3.1
データ処理機能のための文字記号
注記 適用方法は,R1051 (7.4.4)〜R1067 (7.4.20) を参照。
記号
測定変数又は初期変数 変更子,モディファイヤ
機能
7.3.1.1
1051
A
警告
7.3.1.2
1052
B
不連続状態の表示
7.3.1.3
1053
C
制御
7.3.1.4
1054
D
密度
差
7.3.1.5
1055
E
電気的変数
検出
7.3.1.6
1056
F
流量
比,分率
7.3.1.7
1057
G
容積,位置,長さ
観察
7.3.1.8
1058
H
手
7.3.1.9
1059
I
表示
7.3.1.10
1060
J
力
走査
7.3.1.11
1061
K
時間
変化の時間変化
7.3.1.12
1062
L
レベル
7.3.1.13
1063
M
湿り気,湿度
刻々
7.3.1.14
1064
N
使用者の選択
使用者の選択
7.3.1.15
1065
O
使用者の選択
7.3.1.16
1066
P
圧力,真空圧
試験点の接続
7.3.1.17
1067
Q
質,量
積分,全体
積分,合計
11
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.3.1.18
1068
R
ふく(輻)射
登録,記録
7.3.1.19
1069
S
速さ,周波数
切り替え
7.3.1.20
1070
T
温度
伝導
7.3.1.21
1071
U
多変数
多機能
7.3.1.22
1072
V
使用者の選択
弁によるプロセス上
の影響,ポンプなど
7.3.1.23
1073
W
重量,力
掛け算
7.3.1.24
1074
X
分類されず
分類されず
7.3.1.25
1075
Y
使用者の選択
変換,演算
7.3.1.26
1076
Z
事象数,量
緊急又は安全行為
7.3.2
設定値のための文字コード
7.3.2.1
1081
H
高い
7.3.2.2
1082
HH
非常に高い
7.3.2.3
1083
H2
7.3.2.4
1084
HHH
極度に高い
7.3.2.5
1085
H3
7.3.2.6
1086
L
低い
7.3.2.7
1087
LL
非常に低い
7.3.2.8
1088
L2
7.3.2.9
1089
LLL
極度に低い
7.3.2.10
1090
L3
7.3.2.11
1091
HL
高い又は低い
7.3.3
その他の一般機能
注記 その他の一般的な機能を表す図記号は,JIS Z 8617-2に規定している。しかし,この規格を使
うために幾つかの図記号を次に示す。機械的な表現の構築方法は,JIS Z 8201を参照。
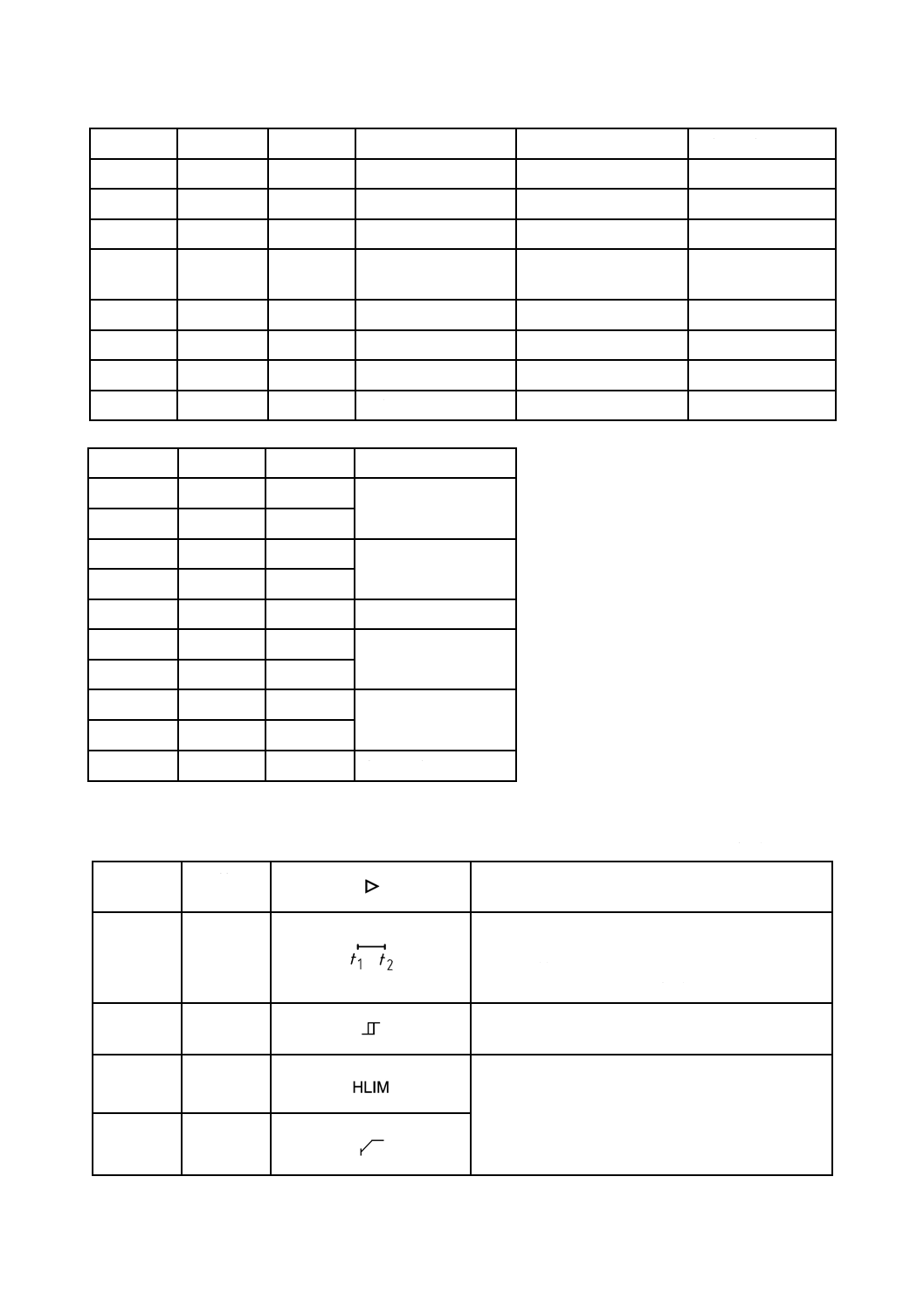
7.3.3.1
115
増幅
注記 三角形は,伝ぱ(播)の方向に向ける。
7.3.3.2
123
遅延
t1 は,スイッチ入り遅れ (switch-on delay),t2 はスイ
ッチ切れ遅れ (switch-off delay)。
R112 (7.4.1) 及び2-4.3.2.9参照。
7.3.3.3
124
ヒステリシス
7.3.3.4
133
様式 1
高域側限界
7.3.3.5
134
様式 2
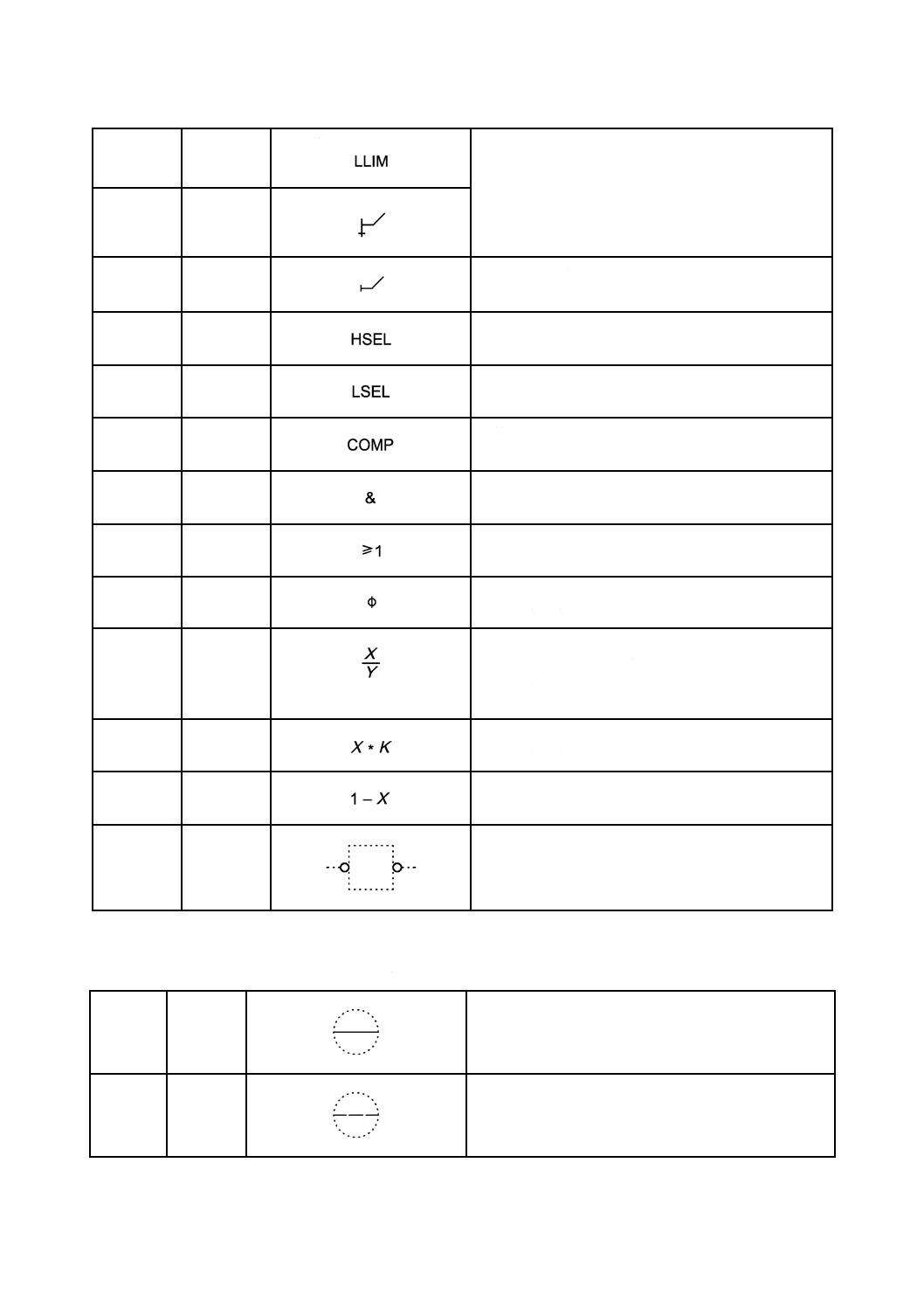
12
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.3.3.6
135
様式 1
低域側限界
7.3.3.7
136
様式 2
7.3.3.8
137
しきい(閾)値
7.3.3.9
138
最大値の選択
7.3.3.10
139
最小値の選択
7.3.3.11
140
比較
7.3.3.12
142
AND機能
7.3.3.13
143
OR機能
7.3.3.14
145
複合機能
R116 (7.4.2) 参照。
7.3.3.15
161
除算
注記 (除算を表す)斜線は,変換に使われているので,
除算には使わない。
図記号112 (2-4.3.2.2) 参照。
7.3.3.16
162
バイアス
R117 (7.4.3) 参照。
7.3.3.17
163
反転
7.3.3.18
181
否定(入力と出力とで示す。)
7.3.4
位置の表示
注記 適用方法は,R1101 (7.4.21) を参照。
7.3.4.1
1101
中央制御室の主位置
例えば,コントロール本部
7.3.4.2
1102
中央制御室の副位置
13
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
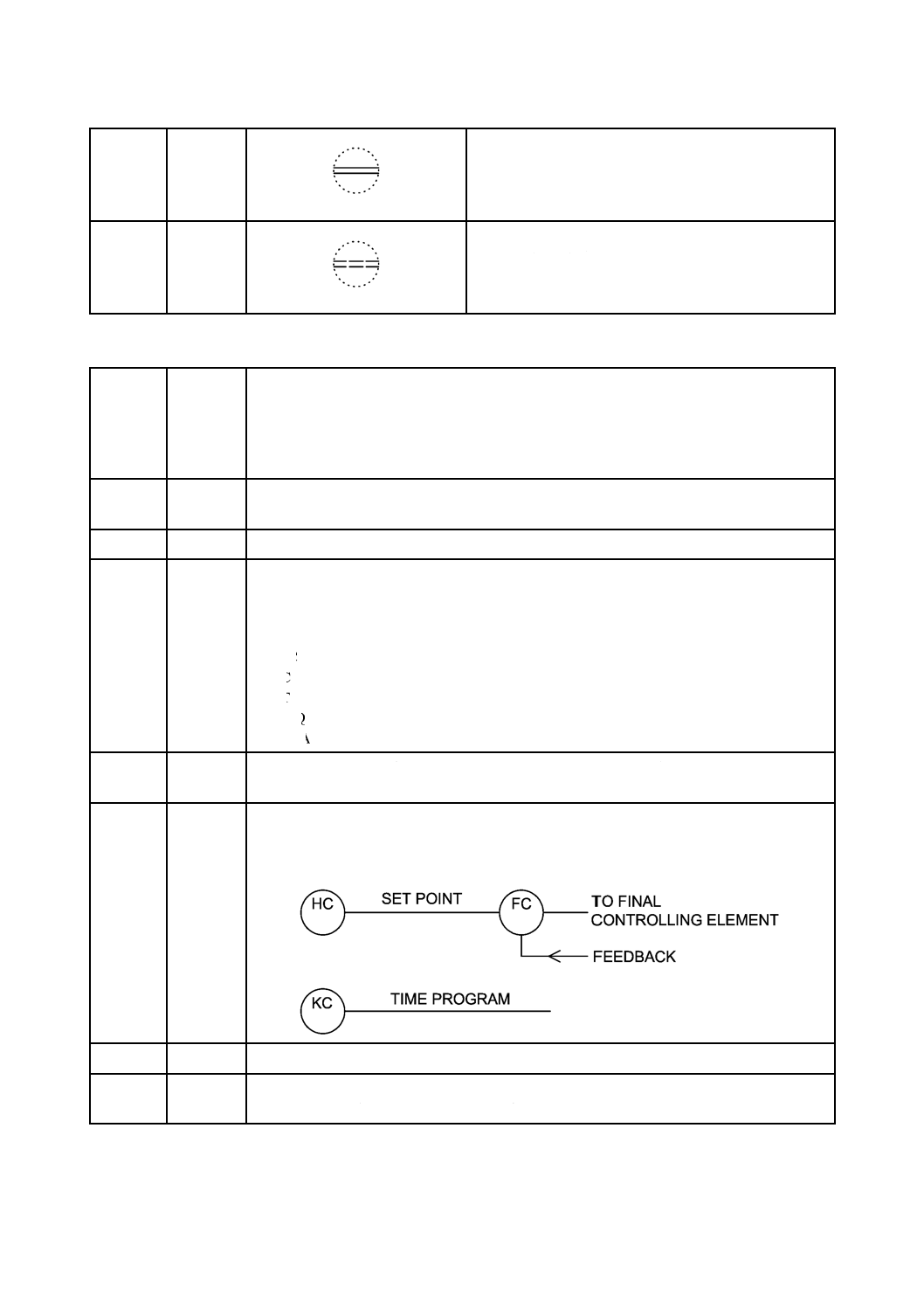
7.3.4.3
1103
現場制御室又は現場制御盤の主位置
R1102 (7.4.22) 参照。
7.3.4.4
1104
現場制御室又は現場制御盤の副位置
R1102 (7.4.22) 参照。
7.4
7.3の補助記号の適用方法
7.4.1
R112
スイッチが入る遅れだけが生じる場合には,t2を省略するか0と置き換える。スイッチが切
れる遅れだけが生じる場合には,t1 を省略するか0と置き換える。t1 = t2の場合には,t と
置き換えて中央に表示してもよい。
表記は,実際の値で示してもよい。
遅延の形が明らかな場合には,表示はなくてもよい。
7.4.2
R116
φは,機能の指示又は説明のための参照で示す。
情報は,四角形の枠で示す。例えば,表1。
7.4.3
R117
アスタリスク(*)は,バイアスの形式によって,+,−又は±に置き換える。
7.4.4
R1051
7.3.1の最後の欄によって,2又はそれ以上の機能を表すコード文字が必要な場合の順序の順
番は次のようにする。
G, I, B, R, C, T, X, Y, Q, S, Z, A
この規則による完全な文字コードの例:
QRC 質の記録及び制御
EIC 電気的変数の指示及び制御,例えば,電圧
TIT 温度の指示及び伝導
FRCQ 流量の記録及び積分値で制御
PDICA 圧力差の指示,制御及び警告
7.4.5
R1052
“使用者の選択”の文字は,プロジェクトで繰り返し使われる一覧表にない意味として使う。
意味は,ダイヤグラム上又は補助文書で説明する。
7.4.6
R1053
機能を表す文字Cは,比較値の設定に加えてフィードバック及び開ループ機能にも使う。し
かし,操作する者によるスイッチの開閉又はプロセス自体による制御に対しては,文字Sを
用いる。
7.4.7
R1054
機能を表す文字Gは,例えば,のぞき窓又はテレビジョンモニタによる観察を表す。
7.4.8
R1055
初期変数を表す文字Hは,すべての手動による作動を表す。例えば,フィードバック制御及
びポンプの稼動停止に対する参照値の設定。
14
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.4.9
R1056
機能を表す文字Iは,実際の測定でアナログ値及びデジタル値の読み出しに用いる。設定値
の表示にも使うことができる。
注記1 不連続の表示に対しては,文字B参照。
注記2 同時に行う表示と記録に対しては,R1062 (7.4.15) 参照。
7.4.10
R1057
電気分野では,測定された変数としての文字Jは,active powerを表す。reactive power及び
apparent powerに対して,文字Jを使い,円の外に注釈REACT.又はAPPAR.を付ける。
7.4.11
R1058
変更子を表す文字Kは,例えば,加速度 (SK) 及び温度の微分値 (TK) に対して用いる。
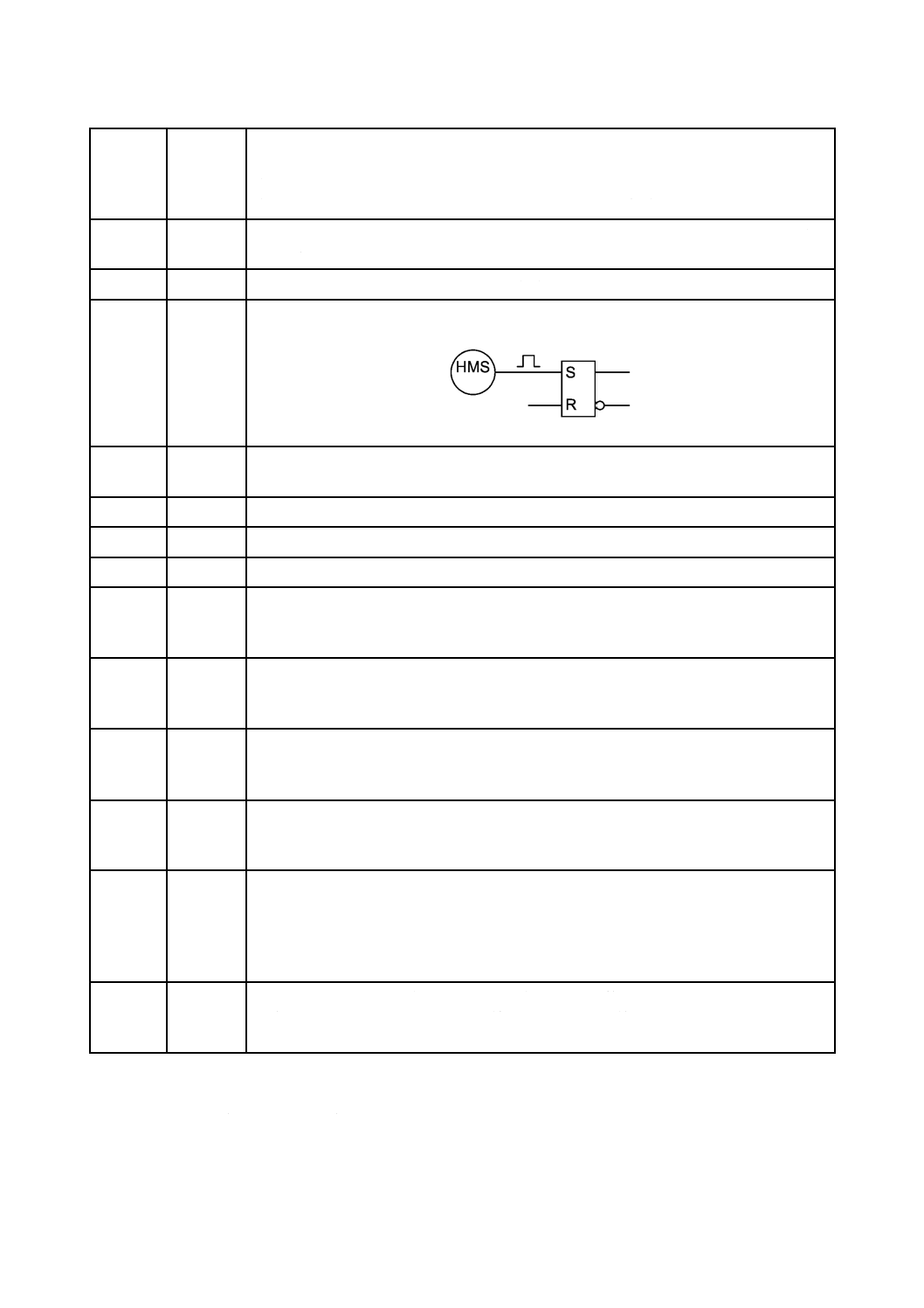
7.4.12
R1059
変更子を表す文字Mは,パルス状の出力信号とみなす。手動の押しボタン(自動復帰付き)
は,次のように表す。
7.4.13
R1060
機能を表す文字Pは,接続の可能性を表すために使う。例えば,試験装置,流量計をプロセ
スの流路に結ぶ。例えば,X1052 (7.5.12) を参照。
7.4.14
R1061
測定変数を表す文字Qは,円の外側に質の形を特定する表示を追加する。
7.4.15
R1062
機能を表す文字Rは,同時に記録と指示を行う場合に用いる。
7.4.16
R1063
機能を表す文字C及びSの選択は,R1053 (7.4.6) を参照。
7.4.17
R1064
多変数を表す文字Uを用いる場合には,例えば,ダイヤグラムそのもの又は説明のための“参
考”を用いて,ダイヤグラムを読む者にどの変数を表示しているかを明確にしなければなら
ない。
7.4.18
R1065
多機能を表す文字Uを用いる場合には,例えば,ダイヤグラムそのもの又は説明のための参
考を用いて,ダイヤグラムを読む者にどの変数を表示しているかを明確にしなければならな
い。
7.4.19
R1066
文字Xは,限定された範囲内でだけ,一覧表にない意味で用いる。この文字は,測定変数を
表す幾つもの意味及び機能を表す幾つもの意味に用いることができる。意味は,円の外側に
定義する。
7.4.20
R1067
測定変数を表す文字Zは,制御又は監視に対する応答が時間又は時間計画によって実行され
るのではなく,事象によって実行される場合に用いる。この文字は,presence又はstateを表
すこともできる。
7.4.21
R1101
位置を表すための記号は,7.1に示した図記号中のどの高さ位置に記入してもよい。位置を
示す記号がない場合には,次の意味になる。
− 位置が決まっていない若しくは影響がほとんどない,又は
− 機能を果たす装置は,現場に設置されている。
明らかでない場合には,二つの可能性のどちらに相当するかをダイヤグラム上に明記する。
7.4.22
R1102
この図記号は,現場の制御室又は現場の制御盤に関する情報を7.1に示す図記号の外側直近
に追加することができる。例えば,圧縮機,すなわち,圧縮機用の現場の制御室又は現場の
制御盤。
7.5
適用例
注記 適用例の中で,信号の方向は図記号249 (4.3.2)〜251 (4.3.4) によって,他の状態を指定してい
ない場合には,左から右である。
15
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
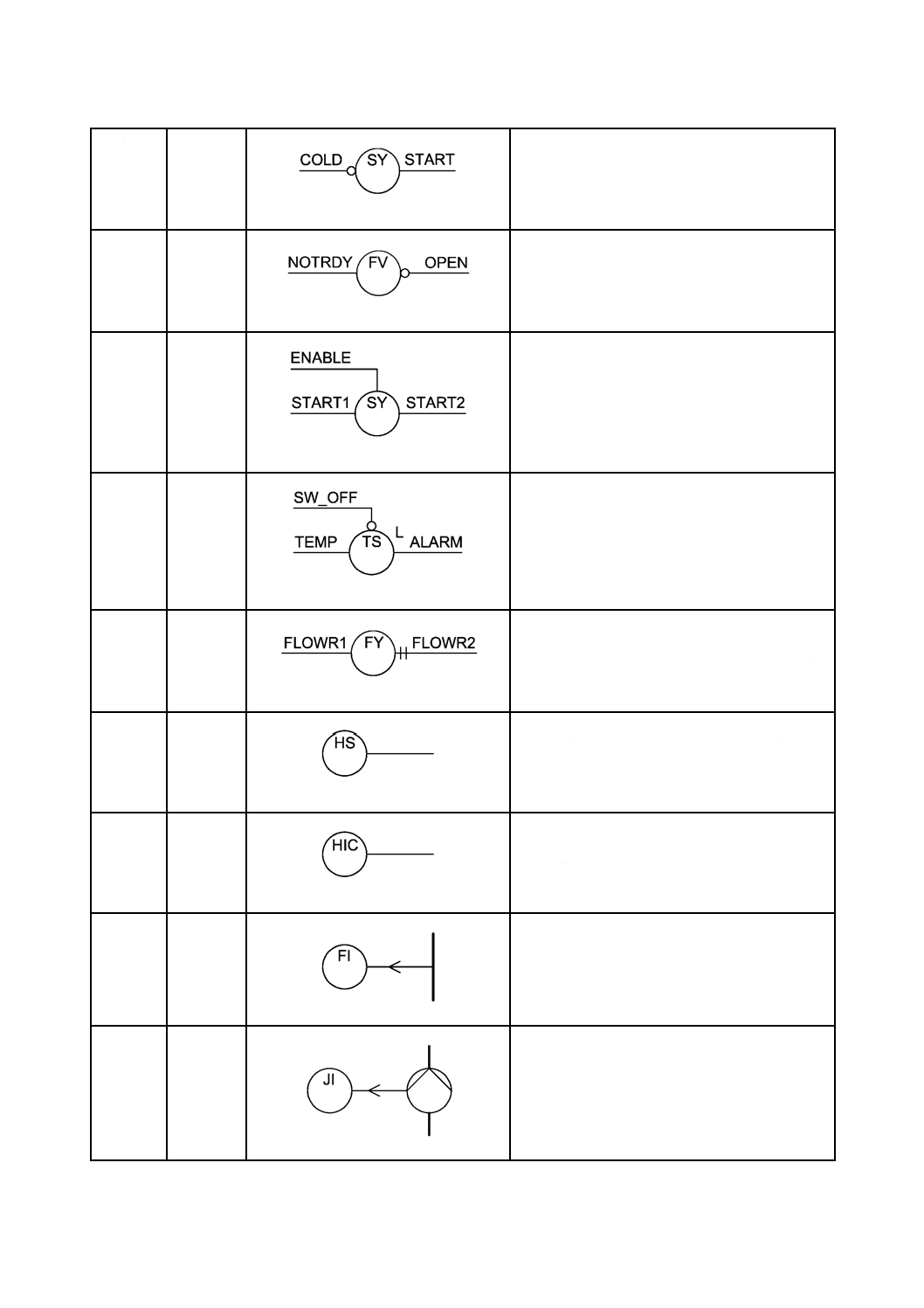
7.5.1
X1041
181, 401, 1041, 1069, 1075
否定の入力の情報処理機能
命令COLDが真のとき,命令STARTが真でな
い(偽である。)。
7.5.2
X1042
181, 401, 1041, 1056, 1072
否定の出力 (negated input) の情報処理機能
命令NOTRDY(準備ができていない。)が真の
とき,命令OPENが真でない。
7.5.3
X1043
401, 1041, 1069, 1075
権能が付加されている情報処理機能
命令START1が真のとき,命令ENABLEが真
であれば,命令START2は真である。
7.5.4
X1044
181, 401, 1041, 1069, 1070
否定の権能(機能を無効にする。)が付加されて
いる情報処理機能
命令TEMPが低のとき,命令SW̲OFFが真で
あれば,ALARMは真である。
7.5.5
X1045
401, 659, 1041, 1056, 1075
持続出力信号の情報処理機能
信号FLOER2(流量2)は,信号FLOWR1と同
じである。しかし,FLOWR1が消えたならば,
FLOWR2の最後の流量が維持される。
7.5.6
X1046
401, 1041, 1058, 1069
手動による切替え
例えば,電動機付きポンプの始動及び停止。
7.5.7
X1047
401, 1041, 1053, 1058, 1059
手動による設定値表示機能付きフィードバック
制御機能用設定値の設定又は表示付き制御弁の
手動制御
7.5.8
X1048
249, 401, 405, 1041, 1056, 1059
流量指示計
7.5.9
X1049
249, 401, 1041, 1059, 1060, 2301
ポンプ用モータの動力指示
16
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
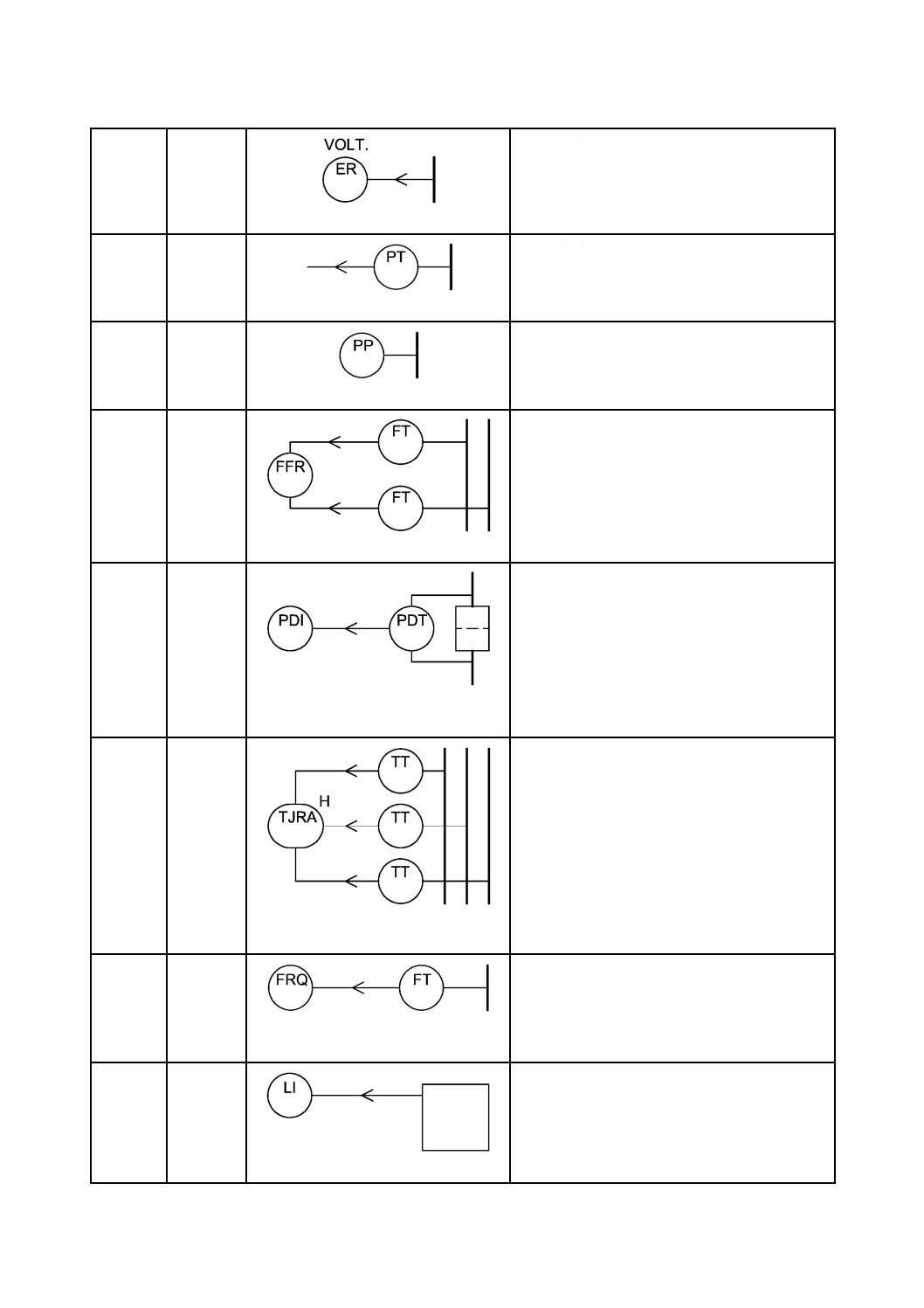
7.5.10
X1050
249, 401, 405, 1041, 1055, 1068
電圧の記録
7.5.11
X1051
249, 401, 405, 1041, 1066, 1070
圧力の伝達
7.5.12
X1052
401, 405, 1041, 1066
プロセス流れと直結した圧力測定機器
7.5.13
X1053
249, 401, 405, 1041, 1056, 1068, 1070
流量の伝送及び二つの流量比の記録
7.5.14
X1054
249, 301, 401, 405, 1041, 1054, 1059,
1066, 1070, 2602
ろ過器の差圧の伝送及び記録
7.5.15
X1055
249, 401, 405, 1041, 1051, 1060, 1068,
1070, 1081
走査による温度記録及び高温での警告
7.5.16
X1056
249, 401, 405, 1041, 1056, 1067, 1068,
1070
流量の伝送及び累積流量の記録
7.5.17
X1057
249, 401, 1041, 1059, 1062, 2061
容器内水位の表示
17
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
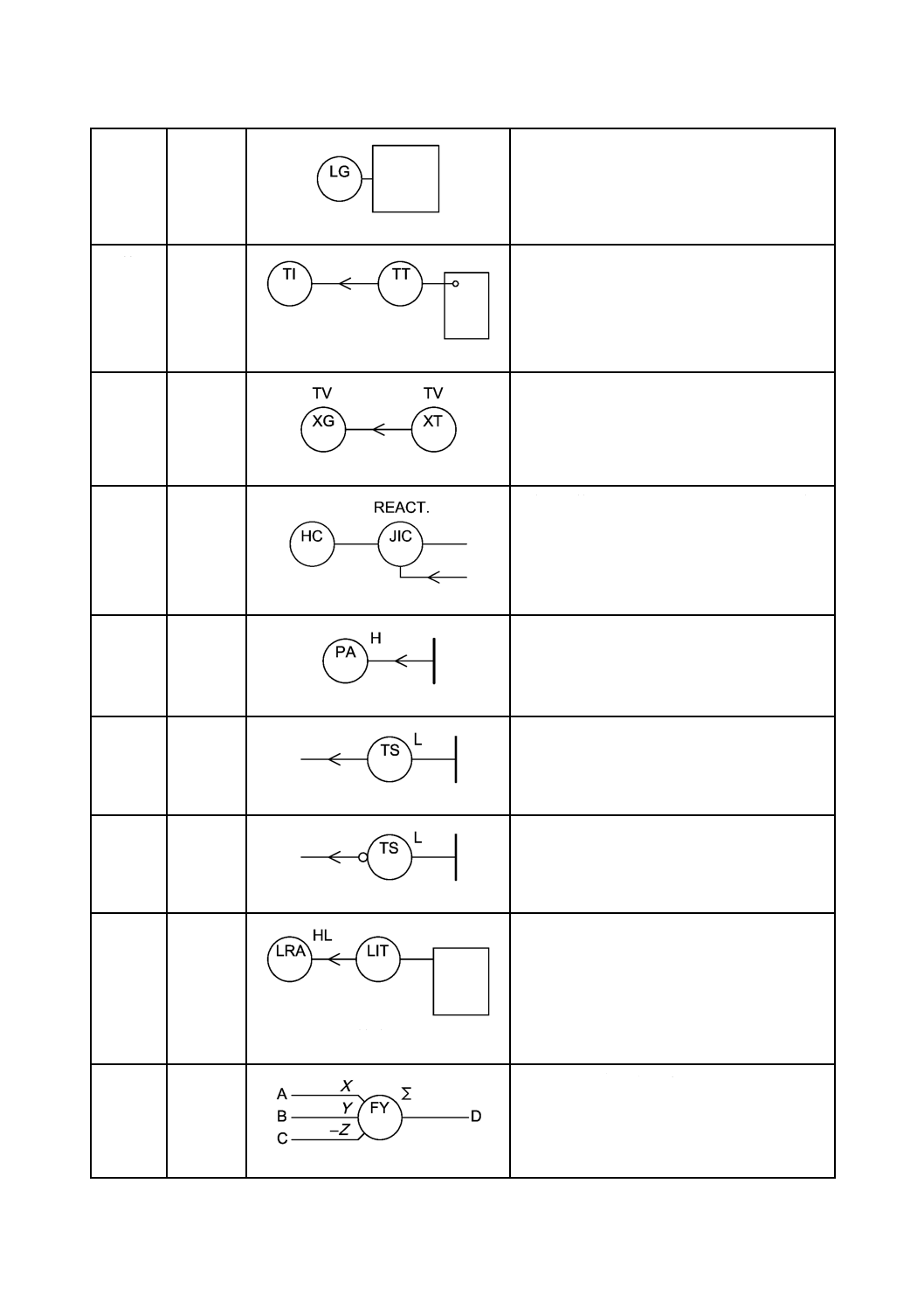
7.5.18
X1058
401, 1041, 1057, 1062, 2061
観察による容器内水位の表示
7.5.19
X1059
249, 401, 1011, 1041, 1059, 1070, 2061
容器の内側上部の温度測定,温度の伝送及び表示
7.5.20
X1060
249, 401, 1041, 1057, 1070, 1074
テレビジョンによる伝送及び監視
7.5.21
X1061
249, 401, 1041, 1053, 1058, 1059, 1060
電気反応的な力の表示及びフィードバック制御
7.5.22
X1062
249, 401, 405, 1041, 1051, 1066, 1081
高圧警告
7.5.23
X1063
249, 401, 405, 1041, 1069, 1070, 1086
温度の切替え
温度が設定値よりも低い値になると,出力信号
は1の状態をとる。
7.5.24
X1064
181, 249, 401, 405, 1041, 1069, 1070, 1086
温度の切替え
温度が設定値よりも低い値になると,出力信号
は0の状態をとる。
7.5.25
X1065
249, 401, 1041, 1051, 1059, 1062, 1068,
1070, 1091, 2061
容器内水位の表示及び伝送,高水位又は水位で警
告
7.5.26
X1066
106, 401, 1041, 1056, 1075
流量信号の加算:D = A + B −C
18
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
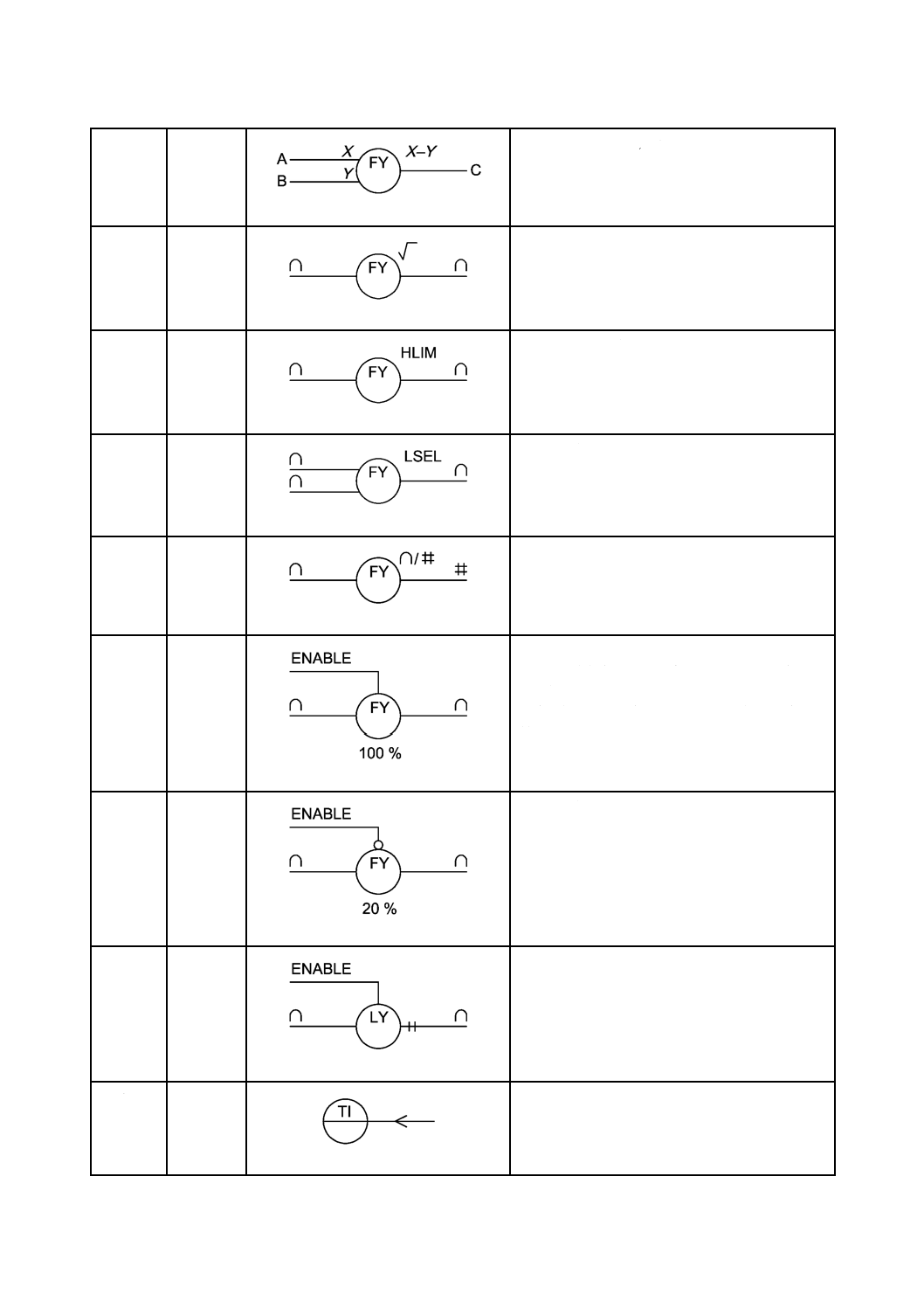
7.5.27
X1067
106, 401, 1041, 1056, 1075
流量信号の減算:C = A −B
7.5.28
X1068
234, 401, 1041, 1056, 1075
流量信号の平方根の算出
7.5.29
X1069
133, 234, 401, 1041, 1056, 1075
高流量側の流量信号の制限
7.5.30
X1070
139, 234, 401, 1041, 1056, 1075
最低流量信号の選択
7.5.31
X1071
112, 234, 235, 401, 1041, 1056, 1075
アナログの流量信号をデジタル信号に変換
7.5.32
X1072
234, 401, 1041, 1056, 1075
流量の計算
2値の権能信号が1状態のときは,出力信号は
入力信号と同じである。
権能信号が0状態になると,出力信号は定格流
量の100 %に相当する値になる。
7.5.33
X1073
181, 234, 401, 1041, 1056, 1075
流量の計算
2値の権能信号が0状態のときは,出力信号は
入力信号と同じである。
権能信号が1状態になると,出力信号は定格流
量の20 %に相当する値になる。
7.5.34
X1074
234, 401, 659, 1041, 1062, 1075
水位の計算
2値の権能信号が1状態のときは,出力信号は
入力信号と同じである。
権能信号が0状態になると,出力信号は最終時
点の値を維持する。
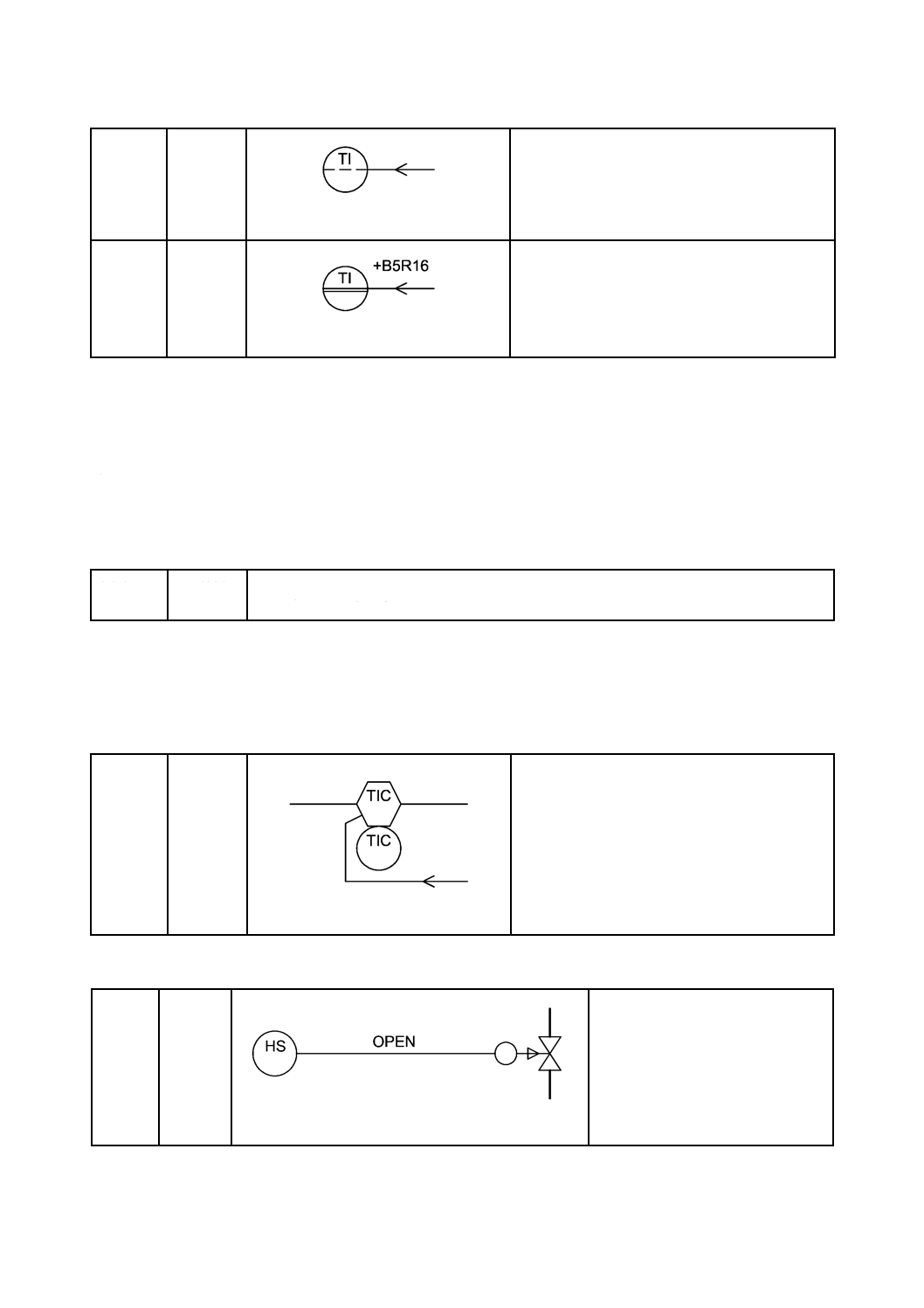
7.5.35
X1075
249, 401, 1041, 1059, 1070, 1101
中央制御室で温度指示
19
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.5.36
X1076
249, 401, 1041, 1059, 1070, 1102
中央制御室で温度指示
操作者は,機器に近づけない。
7.5.37
X1077
249, 401, 1041, 1059, 1070, 1103
+B5R16と表示された現場の制御室又はその制御
室での制御盤上の温度指示
8
2値論理機能
JIS C 0617-12による。
9
バックアップ機能
9.1
基本的性質の記号
7.1を参照。
9.2
9.1の記号の適用方法
9.2.1
R1201
バックアップ機能は,正規の機能を表す図記号に隣接して表し,機能連結子と接続しない。
例えば,X1081 (9.5.1) を参照。
9.3
補助記号
なし。
9.4
9.3の補助記号の適用方法
なし。
9.5
適用例
9.5.1
X1081
249, 401, 1041, 1042, 1053, 1059, 1070
異なる装置によるバックアップを伴う温度表示
及びコンピュータによる制御
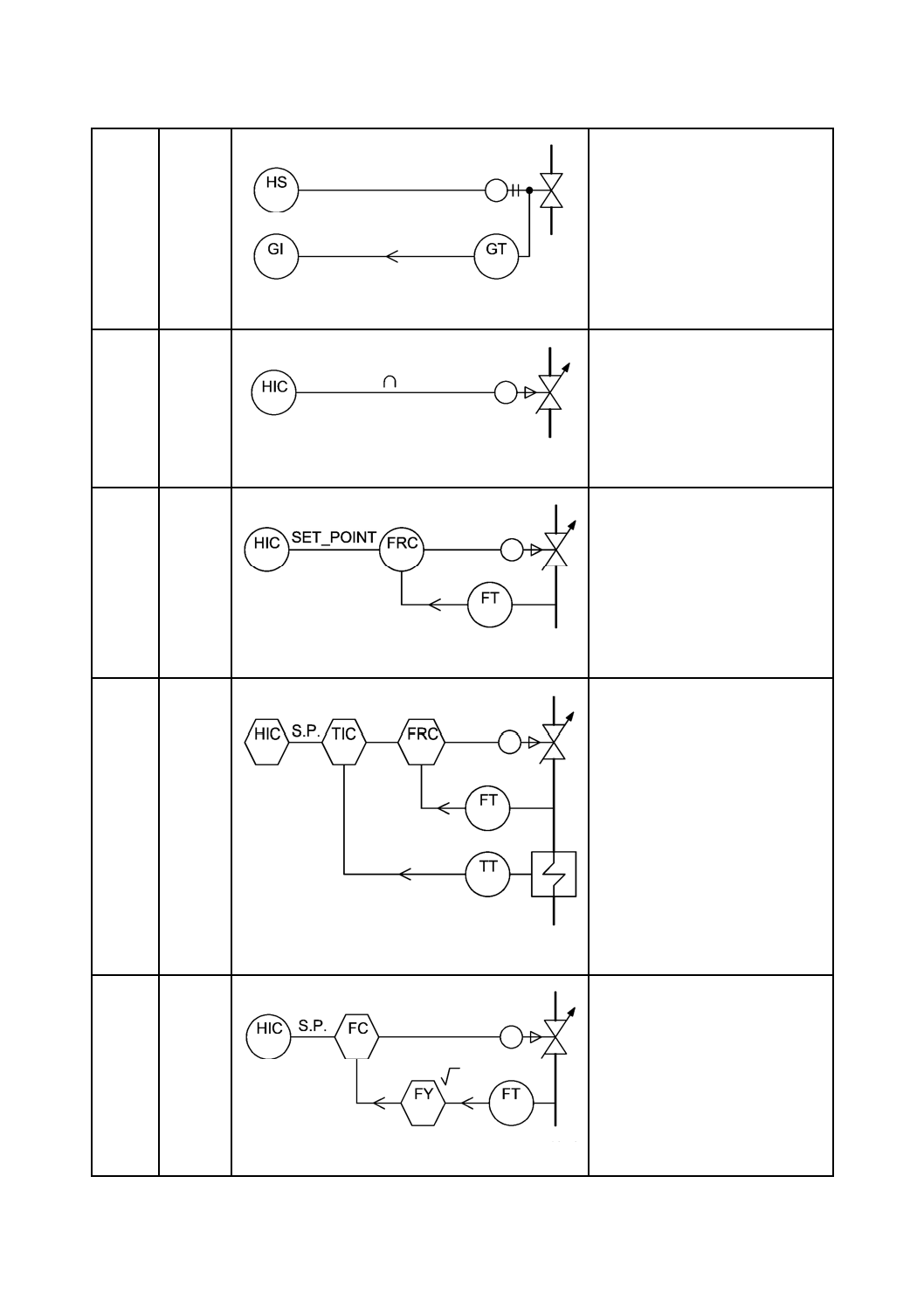
10 制御ループにおける図記号の使用例
10.1
X1101
401, 403, 654, 1022, 1041, 1058, 1069, 2101
閉位置への自動復帰機能付き弁を手
動で遠隔制御
20
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.2
X1102
249, 401, 403, 501, 659, 1022, 1041, 1057, 1058, 1059,
1069, 1070, 2101
無限の安定位置をもつ弁を手動で遠
隔制御及び弁位置の表示
10.3
X1103
201, 234, 401, 403, 654, 1022, 1041, 1053, 1058, 1059,
2101
設定値表示付き制御弁を手動で遠隔
制御
10.4
X1104
201, 249, 401, 403, 654, 1022, 1041, 1053, 1056, 1058,
1059, 1068, 1070, 2101
流量のフィードバック制御
10.5
X1105
201, 249, 301, 401, 403, 654, 1022, 1041, 1042, 1053, 1056,
1058, 1059, 1068, 1070, 2101, 2501
温度と流量の直列制御
10.6
X1106
201, 249, 401, 403, 654, 1022, 1041, 1042, 1053, 1056,
1058, 1059, 1070, 1075, 2101
流量の平方根値を基本とした流量の
フィードバック制御
21
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
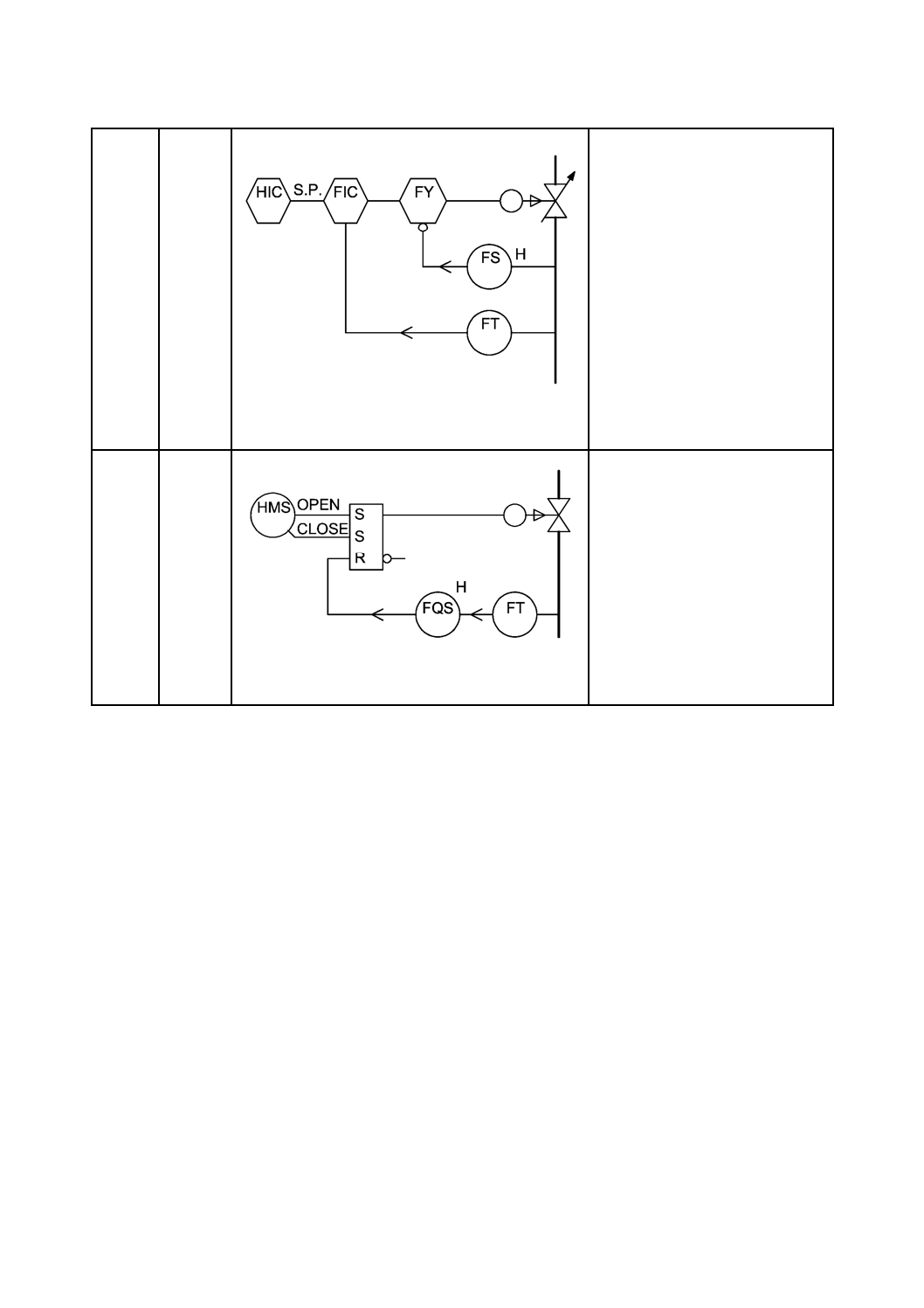
10.7
X1107
181, 201, 249, 401, 403, 654, 1022, 1041, 1042, 1053, 1056,
1058, 1059, 1069, 1070, 1075, 1081, 2101
流量が設定値より多くなったときに
弁が自動的に閉じる流量のフィード
バック制御
10.8
X1108
101, 106, 181, 249, 401, 403, 654, 1022, 1041, 1056, 1058,
1063, 1067, 1069, 1070, 1081, 2101, IEC
弁が手動命令で開き設定値に達した
時点又は手動の停止命令で閉まる流
量のフィードバック制御
22
Z 8617-6:2008 (ISO 14617-6:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] ISO 5598:1985,Fluid power systems and components−Vocabulary
[2] IEC 60050-351,International Electrotechnical Vocabulary−Part 351: Automatic control
[3] IEC 60050-441,International Electrotechnical Vocabulary−Part 441: Switchgear, controlgear and fuses
[4] IEC 60050-448,International Electrotechnical Vocabulary−Part 448: Power system protection