Z 8503-1 : 2002 (ISO 11064-1 : 2000)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,日本人間工学会 (JES) /財団法人日本規格
協会 (JSA) から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会
の審議を経て,経済産業大臣が制定した日本工業規格である。
制定に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,ISO 11064-1 : 2000,Ergonomic design of
control centres−Part 1 : Principles for the design of control centresを基礎として用いた。
JIS Z 8503-1には,次に示す附属書がある。
附属書A(参考) システムの例
附属書B(参考) 箇条6.で明確化すべき基本的要求事項と制約条件
JIS Z 8503の規格群には,“人間工学−コントロールセンターの設計”の主題部の下に,次に示す部編成
がある。
JIS Z 8503-1 第1部:コントロールセンターの設計原則
JIS Z 8503-2 第2部:コントロールスウィートの基本配置計画の原則(予定)
JIS Z 8503-3 第3部:コントロールルームの配置計画
JIS Z 8503-4 第4部:ワークステーションの配置及び寸法(予定)
JIS Z 8503-5 第5部:表示器及び制御機器(予定)
JIS Z 8503-6 第6部:コントロールルームの作業環境(予定)
JIS Z 8503-7 第7部:コントロールセンターの評価の原則(予定)
JIS Z 8503-8 第8部:特定用途に対する要求事項(予定)
参考 JIS Z 8503“人間工学−精神的作業負荷に関する原則−設計の原則”は,この規格群とは独立
の単独の規格である。
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 2
2. 引用規格 ························································································································ 2
3. 定義 ······························································································································ 2
4. 人間工学的設計の原則 ······································································································ 3
4.1 全般 ···························································································································· 3
4.2 原則1:人間中心設計を採り入れよ ··················································································· 3
4.3 原則2:設計活動に人間工学を組み入れよ ·········································································· 4
4.4 原則3:フィードバックの繰返しで設計の完成度を高めよ ······················································ 4
4.5 原則4:状況分析をせよ ·································································································· 5
4.6 原則5:タスク分析をせよ ······························································································· 5
4.7 原則6:エラートレラントなシステムを設計せよ·································································· 6
4.8 原則7:必ずユーザーを参画させよ ··················································································· 6
4.9 原則8:職際的な設計チームを作れ ··················································································· 6
4.10 原則9:人間工学的設計の根拠を文書化せよ ······································································ 6
5. 人間工学的設計手順 ········································································································· 6
6. フェイズA:明確化 ········································································································· 8
6.1 全般 ···························································································································· 8
6.2 ステップ1:到達目標と背景の要求事項の明確化·································································· 9
7. フェイズB:分析と定義 ·································································································· 10
7.1 全般 ··························································································································· 10
7.2 ステップ2:システム性能の定義(機能の分析と記述) ························································ 11
7.3 ステップ3:人間と機械への機能配分 ··············································································· 11
7.4 ステップ4:タスクの定義 ······························································································ 13
7.5 ステップ5:職務設計と作業組織の編成 ············································································ 14
7.6 ステップ6:得られた結果の検証と妥当性確認···································································· 15
8. フェイズC:概念設計 ····································································································· 16
8.1 全般 ··························································································································· 16
8.2 ステップ7:コントロールセンターの概念設計···································································· 16
8.3 ステップ8:概念設計のレビューと承認 ············································································ 17
9. フェイズD:詳細設計 ····································································································· 18
9.1 全般 ··························································································································· 18
9.2 ステップ9A:コントロールスウィートの配置計画 ······························································ 18
9.3 ステップ9B:コントロールルームの配置計画····································································· 19
9.4 ステップ9C:ワークステーションの配置及び寸法······························································· 20
Z 8503-1 : 2002 (ISO 11064-1 : 2000) 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
9.5 ステップ9D:表示器及び制御機器の設計 ·········································································· 20
9.6 ステップ9E:作業環境設計 ···························································································· 20
9.7 ステップ9F:運営・管理システムの設計 ··········································································· 21
9.8 ステップ10:詳細設計の検証と妥当性確認 ········································································ 21
10. フェイズE:運用フィードバック ····················································································· 21
10.1 全般 ·························································································································· 21
10.2 ステップ11:運用実績の収集 ························································································ 22
附属書A(参考) システムの例 ··························································································· 23
附属書B(参考) 箇条6.で明確化すべき基本的要求事項と制約条件 ············································ 24
参考文献 ···························································································································· 26
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
Z 8503-1 : 2002
(ISO 11064-1 : 2000)
人間工学−コントロールセンターの設計−
第1部:コントロールセンターの設計原則
Ergonomic design of control centres−
Part 1 : Principles for the design of control centres
序文 この規格は,2000年に第1版として発行されたISO 11064-1,Ergonomic design of control centres−Part
1 : Principles for the design of control centresを翻訳し,技術的内容及び規格票の様式を変更することなく作
成した日本工業規格である。
なお,この規格で点線の下線を施してある“参考”は,原国際規格にはない事項である。
ユーザーとシステムのインターフェイス及び関連する運用環境の設計に当たって,より安全で,より信頼
でき,かつ,効率的なオペレーションをとの要請に駆られて,情報処理技術における革新が,オートメー
ションの採用と集中監視制御の増大をもたらしてきた。オペレータは,こうした技術の発展に逆らわず,
これら複雑に自動化されたシステムを監視し統括するというぎりぎりの役割を果たしてきた。自動化が進
んだ結果,機器の故障や人的被害が発生している。
オペレータの仕事は,しばしば極めて過酷なものとなる。コントロールルームでのオペレータの不適切な
アクション−見落し,誤操作,タイミング遅れ,手順の誤りなどによってひき起こされる結果は,悲惨な
ものとなることがある。この規格は,こうしたことから,ヒューマンエラーを絶滅又は最小にするという
観点から,コントロールセンターの設計と評価に,人間工学やヒューマンファクターの要求事項と推奨事
項を適用するための包括的な枠組みを周知させるために作成された。この規格は,コントロールセンター
設計プロジェクトの設計思想と設計手順,物理的な設計,最終的な評価についての推奨事項,要求事項及
び手引きを含む。
ある特定のコントロールセンターを設計するプロジェクトは,往々にして,もっと大きなシステムを設計
するプロジェクトの一部である。コントロールセンターの設計は,このより広いシステムにちりばめられ
た目的や最終到達目標と独立に展開しないほうがよい。したがって,一見又は従来の見方からすれば人間
工学的設計プロジェクトの範囲外と思われるような問題にも関連付けて,コントロールルームの設計の人
間工学的側面をよく見ることが必要である。こうしたことは,ケースバイケースで判断するのがよく,既
定の方法で解決できるものではない。
この規格は,コントロールセンター設計プロジェクトの設計思想と設計手順,物理的な設計及び最終的な
評価についての推奨事項及び要求事項を含む。この規格は,ワークステーションとオーバービューディス
プレイなどコントロールルームプロジェクトの一要素にも,またプロジェクト全体の総合計画や企画にも
適用できる。この規格群の他の部は,コントロールセンターの特定の要素に関連するより詳細な要求事項
を扱っている。
2
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1. 適用範囲 この規格は,コントロールセンターの新設,拡張,改造及び技術的改善の設計に適用する
人間工学的原則,推奨事項及び要求事項について規定する。
この規格は,典型的には,プロセス工業,交通及び物流の管制システム,及び人員配備サービスなどの
あらゆるコントロールセンターに適用する(附属書A参照)。
この規格は,主として定置のコントロールセンターを想定しているが,多くの原則は,船舶や航空機な
どの移動体上のコントロールセンターにも適用してもよい。
備考 この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO 11064-1 : 2000, Ergonomic design of control centres−Part 1 : Principles for the design of control
centres (IDT)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格のうちで,発効年を付記してあるものは,記載の年の版だけがこの規格の規定を構
成するものであって,その後の改正版・追補には適用しない。発行年を付記していない引用規格は,その
最新版(追補を含む。)を適用する。
JIS Z 8503-3 : 1999 人間工学−コントロールセンターの設計−第3部:コントロールルームの配置計
画
備考 ISO/FDIS 11064-3 : 1998, Ergonomic design of control centres−Part 3 : Control room layoutがこ
の規格と一致している。
ISO 6385 Ergonomic principles in the design of work systems.
3. 定義 この規格で用いられる主な用語の定義は,次による。
a) コントロールセンター (control centre) 機能的に関連し,すべて同一のサイト内にある,コントロー
ルルーム,コントロールスウィート及びローカルコントロールステーションの複合体。
b) コントロールルーム (control room) 集中化された制御,監視,管理業務を行うために,オペレータ
が常駐する中核的機能の総体,及びそれに関連する物理的構造。
c) コントロールスウィート (control suite) コントロールルームと機能的に関連し,位置的にも密接し
た部屋の総体。コントロールルームそれ自体,及びコントロールルームを支援するための事務室,機
器室,休憩室,訓練室などを含む。
d) 設計仕様書 (design specification) コントロールセンターについての詳細記述。これには,その全体
としての機能要求事項を満たしてコントロールセンターの開発,調達及び建設を可能にする,室内の
配置,機器,ワークステーション上の表示器,制御器などに関する記述を含む。
e) 機能配分 (function allocation) 人間と機械への機能の配分。
f)
機能分析 (functional analysis) システムの運用目標を達成するために,人間と機械のそれぞれを満足
させる要求を明確にする分析。
g) 機能仕様書 (functional specification) 機能分析の結果に基づく仕様。これには,その目的,機能,そ
こに含まれる人間と機械の支援,外部との関連,物理的及び環境的な属性などの面からコントロール
センターに含めるべきものを示す。
h) 人間中心設計 (human-centred design approach) 使いやすいシステムにすること,及び稼動システムの
3
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
最終権限をオペレータにおくことに焦点をおいた設計手法。
i)
職務設計 (job design) 職務を構成する一群のタスクを定め,タスクの組合せと関連を定める過程。
j)
ローカルコントロールステーション (local control station) 監視又は制御の対象である現場の装置,
又はシステムの近くに置かれたオペレータ用のインターフェイス。
k) 一次ユーザー (primary users) コントロールセンターの活動に常時携わっている人々。
例 オペレータ,補助オペレータ,当直長など。
l)
二次ユーザー (secondary users) コントロールルームの維持にかかわる人々又はたまに使用する
人々。
例 保守技術者,清掃員,マネージャー,来訪者など。
m) 状況分析 (situational analysis) 作業の仕組みややり方(よく知られている実務経験,非公式なコミュ
ニケーション,実際のユーザーの期待及び苦情,その他再設計に有益と思われる事柄)をあらゆる面
から分析するために,既存のシステムの作業状況について行う,行動の分析。
n) タスク分析 (task analysis) 人々が装置を操作するとき,又は作業するときに必要となる,特定の行
動を決定するための分析手法。
o) 妥当性確認 (validation) 定められた用途に対する特有の要求事項が満たされていることを,照合と
客観的証拠によって確認すること。
参考 設計及び開発において,妥当性確認は,ユーザーのニーズへの適合性を確定するための,製品
の検討の過程に関係する。
p) 検証 (verification) 規定要求事項が満たされていることを,系統的な照合と客観的証拠によって確認
すること。
備考 客観的証拠とは,観察,測定,試験又はその他の手段を通じて得られた事実に基づいて,真実
であると証明できる情報とみなされるものをいう。
参考 設計及び開発において,検証はある活動に対する規定要求事項への適合性を確定するための,
その活動結果の検討の過程に関係する。
4. 人間工学的設計の原則
4.1
全般 コントロールセンターの人間工学的設計には,次に述べる9項目の原則を考慮しなければな
らない。
4.2
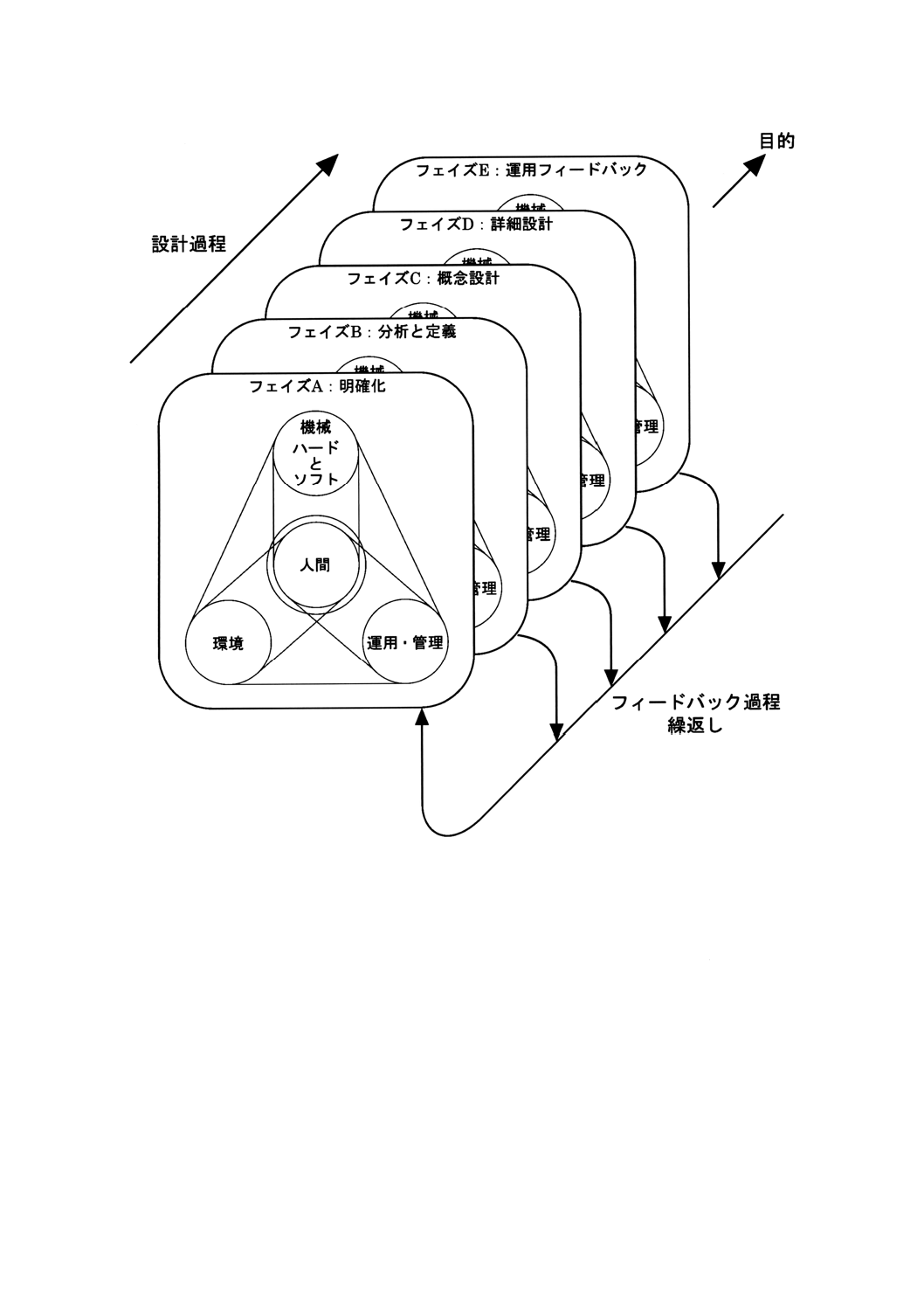
原則1:人間中心設計を採り入れよ 人間中心設計では,図1に示すように,設計を進める過程のあ
らゆる段階で,人間,機械(ハードウェアとソフトウェア),作業環境,管理(運用及び管理)を調和させ
て統合しなければならない。人間中心設計の諸活動には,計画,概念設計,詳細設計,組立て・据付・建
設工事,運転準備・試運転,要員訓練と運用などを含む。
参考 人間中心設計では,人間と機械のかかわりを,その組織・管理体制や環境のなかで最適化すべ
き総合システムとして考える。この最適化は,人間と機械それぞれの優位な点,特徴,能力な
どを,相互に補完する形でいっそう強め,最大にするような方策を積み上げることによって達
成される。
従来の機能中心設計に,人間中心設計を融合する。人間中心設計にあっては,設計に対する基本要求事
項として,人間のもついろいろな特性を取り上げ,それらに基づいて最終的な仕様を決定する。考慮すべ
き人間の特性とは,もともとの肉体的な能力や限界だけでなく,人間の優れた認知能力(洞察力,問題解
決力,意思決定力など)を含む。更には,オペレータが設計対象である機械,置かれている環境などに対
4
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
するのと同様に,システムの運用,管理に対してどのように感じ,また,それらと相互にどのように影響
し合うかを考慮しなければならない。高度に自動化された大型のシステムによってもたらされた表面的な
人間工学的要求事項だけでなく,より内面的な心理的必要条件をも考慮したほうがよい。これらは,自己
実現,動機付け,及び文化的な問題を含む。
身体障害者がコントロールセンターでの作業に定常的に従事する場合は,その特定な要求に応じた適切
な設計を行わなければならない。
参考 ISO 6385は,作業システム設計のガイドとしての人間工学の諸原則を規定している。その目的
は,技術的及び経済的な効率を考慮しながら,人の安全,健康,充実した生活の面で適切な作
業条件を作り上げることである。この規格は,コントロールセンターという特定の事例に焦点
をあてる。
4.3
原則2:設計活動に人間工学を組み入れよ コントロールセンターの計画,設計,施工,及び運用実
証に携わるすべてのエンジニア,デザイナーが人間工学的法則を深く考慮できるように,プロジェクトマ
ネージメントのガイドラインに,人間工学とその手法を統合することが望ましい。人間工学的知見を技術
的専門性の中に取り込めるようにプロジェクトを組織するのがよい。
4.4
原則3:フィードバックの繰返しで設計の完成度を高めよ 実際の設計過程は,本来繰り返されるも
のであり,オペレータと設計対象の相互作用が,システムに対する機能的要求と目的を満たすまで,評価
を繰り返さなければならない。なぜならば,個々に分割された要素の設計においては有効性が確定された
としても,それらを組み合わせたときにシステム全体としての有効性を満足する保証はないからである。
ちょっとした変更が,それ自体は有効なものであっても,望ましくない事態を他にもたらすことがあるの
で,コントロールセンター設計のどんな側面においても,他部門に影響することがある設計変更について
の手続きと仕組みを,定義し管理する正式な手順がなければならない。
ユーザーが,システムの変更に対して意識的・無意識的にその行動を適応させたり,行動を変えたりす
ることは,人間工学的にみて,必ずしもよいものとは限らないことに注目しておくのがよい。上で述べた
繰返しの過程で特に重要なものとして,運用経験から得られた情報を取り込むこと,すなわち,運用フィ
ードバックを行うのがよい(図1参照)。
5
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1 システム設計の人間工学的手法
4.5
原則4:状況分析をせよ いかなる人間工学的設計作業を行う場合にも,改造プロジェクトも含めて,
既存の又は類似のシステムの状況を分析することを推奨する。この方法によって,将来のシステムの機能
をよく理解し,あらかじめ予測するのがよい。
参考 状況分析の方法には,タスク分析(4.6参照),オペレータインタビュー,事象分析などいろい
ろなものがある。
4.6
原則5:タスク分析をせよ コントロールルームのオペレータ,及びコントロールセンターの主要ユ
ーザーのそれぞれに課せられたタスクを十分に理解しなければならない。この分析には,運転開始,定常
運転,運転停止,緊急事態対応などの運転モード,更に保全のための部分的操業停止期間,及び設計段階
や配員計画に適用されたルールなど,すべてのモードを考慮するのがよい。状況によっては,二重三重の
配員が必要となることもあるので,それを総合的な設計に取り込まなければならない。
オペレータに対するタスク分析は,プラント,コントロールセンター,その他システムの設計それぞれ
6
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
について行わなければならない。
参考 タスク分析の方法は,個々のプロジェクトの適用範囲や内容により異なる。例えば,先例のな
い画期的な設計プロジェクトでは,対比できる状況を検討することがほとんどできない。他に
も,幾つかのコントロールルームを新しい一つのコントロールルームに統合するというような
場合には,オペレータのほとんどのタスクを新しい設計に取り込まなければならないこともあ
る。こうした個々の状況が本来異なっていても,それらの状況はある程度は比較分析ができ,
将来のシステム設計の役に立つものである。
4.7
原則6:エラートレラントなシステムを設計せよ 人のすることに誤りは避けられないので,エラー
トレラントな設計に努力しなければならない。
参考1. エラートレラントな設計:人が誤りをしてもシステムに与える影響が少ない設計。
2. ヒューマンエラーについての知見を得る重要な手法として,リスクアセスメントがある。
4.8
原則7:必ずユーザーを参画させよ ユーザーを参画させて,将来そこで仕事をするユーザーと,コ
ントロールセンターの設計にかかわる他のすべての人々とを組織化する。ユーザーが設計の全過程に関与
し,そのなかで主体性をかん(涵)養することで,長期的な人間と機械とのかかわりを最適なものにする。
経験豊かなユーザーは,コントロールセンターの設計に対し,経験に基づく貴重な貢献をすることがで
きるが,彼らの実務経験は,必ずしも文書化されていないし,設計者もそれを知らないので,ユーザーの
参画による運用上のフィードバックを分析して,過去の設計での成功例と失敗例を認識するのがよい。
4.9
原則8:職際的な設計チームを作れ 設計プロジェクトのあらゆるフェイズを見通しそれに関与する
ために,職際的な設計チームを作るのがよい。既存システムの設計チームには,メンバーとしてユーザー
又はその代表者を含めなければならない。新しいシステムについても,経験のあるユーザーとこれからの
ユーザーとを設計チームの構成員としなければならない。
ユーザーを含む設計チームは,プロジェクトの全期間を通じて,必要なときにはいつでも機能できるも
のでなければならない。チーム編成の計画と準備をプロジェクトの初期段階に詳細に決めておくのがよい。
参考 実際には,設計チームに含まれる専門職の組合せは,プロジェクト全体の範囲や設計のフェイ
ズによって変化する。これら専門職とは,システムやプロセスのエンジニア,人間工学専門家,
建築家,工業デザイナーなどである。
4.10 原則9:人間工学的設計の根拠を文書化せよ プロジェクトの人間工学的設計の根拠−背景となる項
目,タスク分析の主要な結果などを反映した内部文書を作成する。文書は,内容変更の都度更新し,この
手続きを進めるための適切な手順を決めておくのがよい。
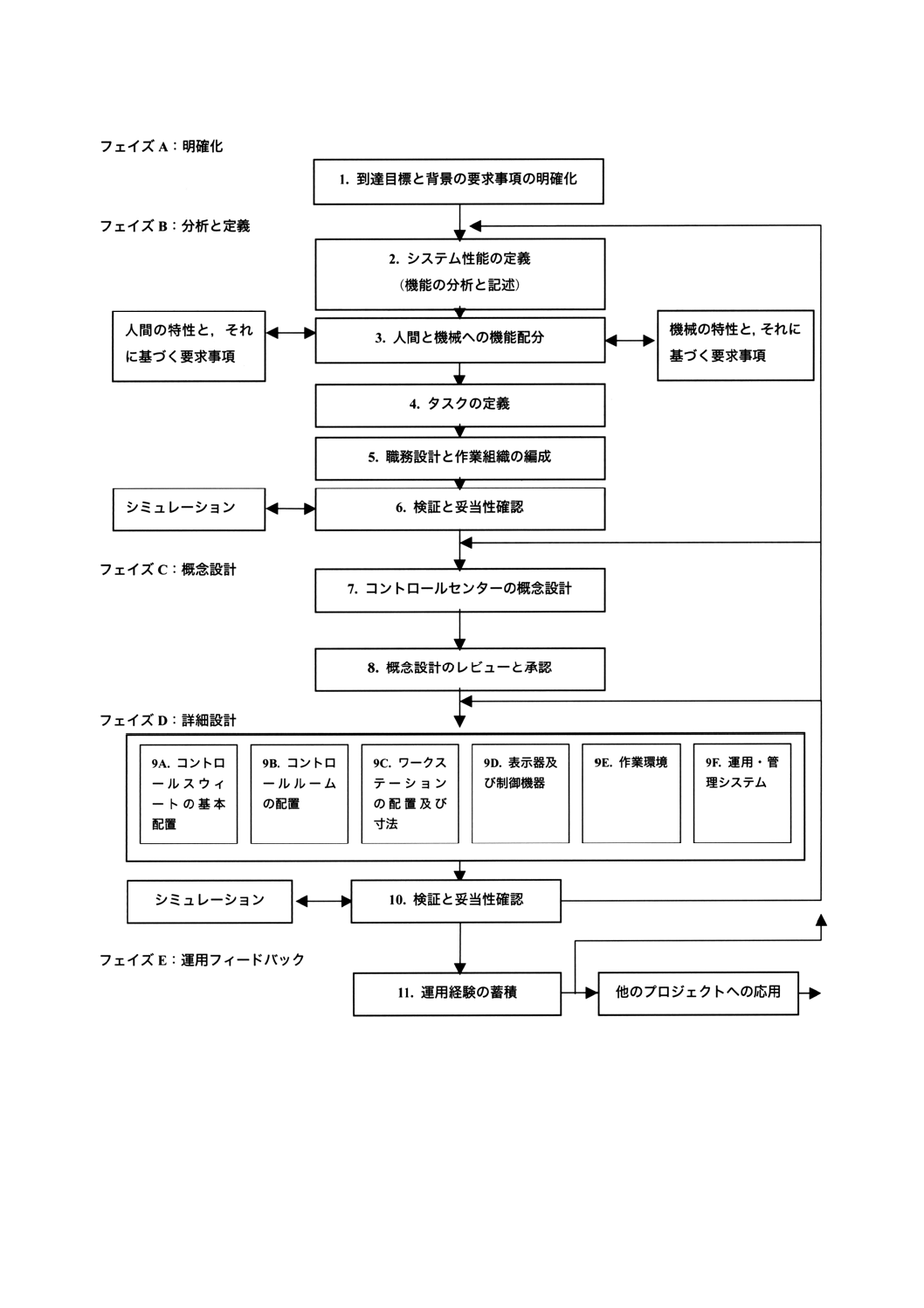
5. 人間工学的設計手順 コントロールセンターの設計手順は,図2に示すように五つのフェイズ(段階)
に分かれる。ただし,図2は繰り返しフィードバックするすべてのループを示してはいない。設計プロジ
ェクトの適用範囲全般にわたってすべてのフェイズを実行するように配慮するのがよい。
設計プロジェクトの複雑さに対しては,特定の課題,設計活動,及び繰返し評価に注意の焦点をおく,
秩序だった手順を採用することによって対応するのがよい。
参考 コントロールセンターの設計は,複雑なプロジェクトのもついろいろな特徴を含んでいる。そ
れらは,多様な顧客,相反する目的,多岐にわたる新技術と解決案,挑戦的なスケジュール,
初めての適用,未経験者の集団などである。
設計手順の枠組みは,図2にも示すように,次のフェイズを含む。
− フェイズA:明確化
7
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
設計を始めるに当たって,参考になる既存の状況を考慮に入れながら,そのプロジェクトの目
的,前後のいきさつ,利用できるリソース,制約条件などを明確にする。
− フェイズB:分析と定義
コントロールセンターの機能と効用として求められる事項を分析し,暫定的な機能割付けと職
務設計を行う。
− フェイズC:概念設計
フェイズBで明らかにされたニーズを満たすように,ルームレイアウト,じゅう器,表示機器
と制御機器,情報連絡手段などの初期計画を立てる。
− フェイズD:詳細設計
コントロールセンター及びそこに含まれるもの,運用上のインターフェイス,作業環境設備な
どの製作・建設及び調達に必要な詳細な仕様書を作成する。
− フェイズE:運用フィードバック
今後の設計に積極的に生かすために,運転準備,試運転後のレビューを行い,設計のうまくい
った点,至らなかった点を認識する。
上記の各フェイズについては,6.から10.を参照。
複雑な問題を設計で解決するためには,図2に示すように,本来幾つものフィードバックの繰返しを必
要とする。頻繁なプロジェクトレビューで設計の不備や改善策が見つかったときは,適切な設計段階へ差
し戻さなければならない。プロジェクトの予算やスケジュールに余裕をもたせて,こうした繰返し手順を
許容できるようにしておくのがよい。
備考 この規格は,図2に示す枠組みのうち,主にフェイズA,B,C及びEを扱う。
8
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図2 コントロールセンターの人間工学的設計手順
6. フェイズA:明確化
6.1
全般 このフェイズでは,コントロールセンターの設計に関連する運用目標,関連要件,制約条件
などを明確にする(附属書A参照)。
9
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
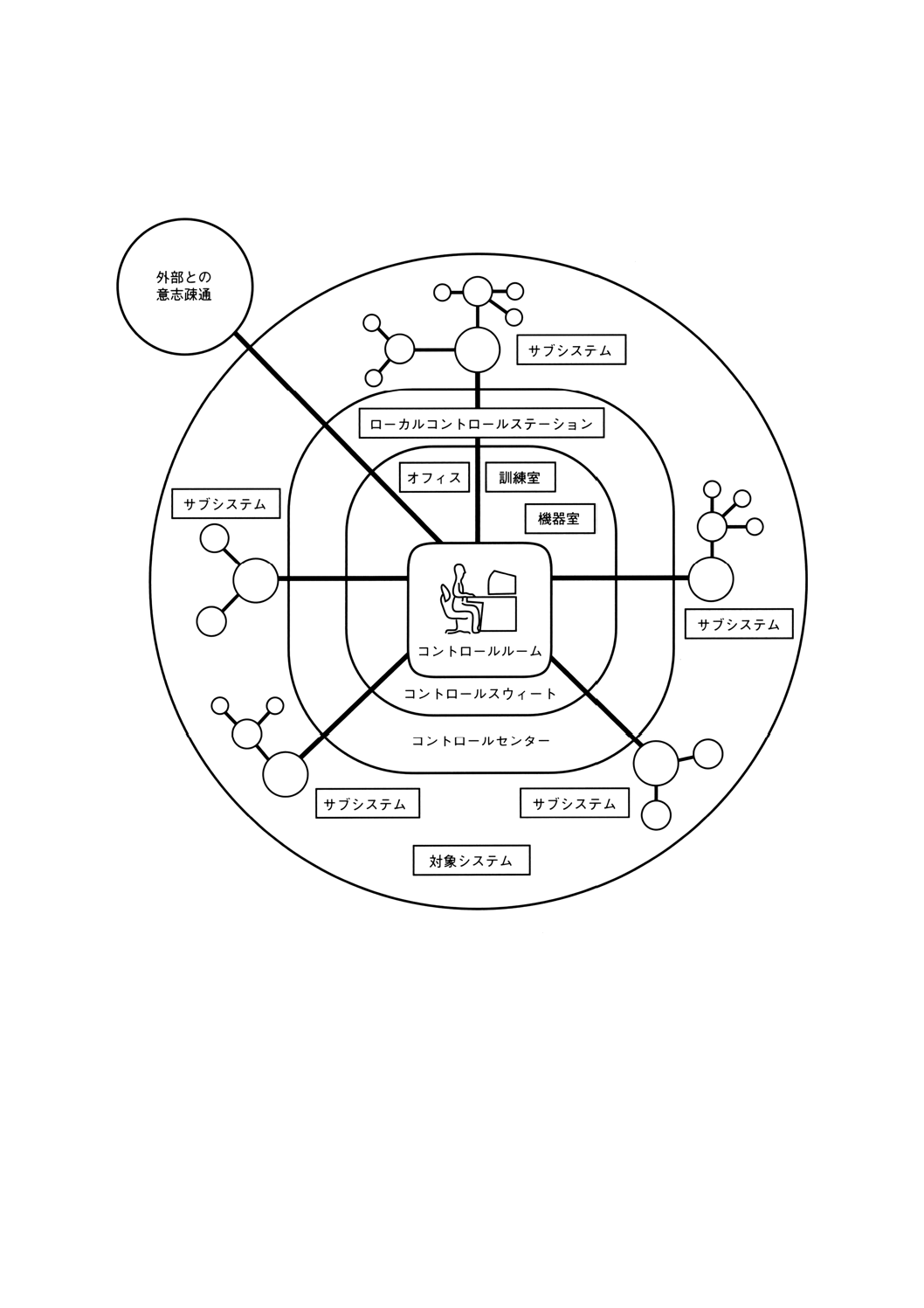
コントロールセンターの役割と,それに関連するサブシステムとの関係をはっきり規定し,文書化しな
ければならない。図3に両者の関係の典型的な例を示す。主要設備系統,電源系統,通信系統などのサブ
システムの記述と機能も,同様に規定して文書化しなければならない。
図3 コントロールセンターと関連サブシステムの関係
6.2
ステップ1:到達目標と背景の要求事項の明確化 フェイズAは,“到達目標と背景の要求事項の明
確化”のステップ一つで構成する。既設又は類似のコントロールセンターでの運用経験は,改善又は新規
プロジェクトにも有効であるので,プロジェクトの開始に当たり,この経験を適切に考慮しなければなら
ない。
ステップ1の入力情報:
− ユーザーの要求事項
− 法規制,規格,その他公式文書
− 既存のシステムとコントロールセンターに関する技術情報
10
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 運用フィードバック情報
− 既存,類似システムの状況の分析結果
ステップ1の出力情報:
− システムの機能(運用目標)
− 各種の関連要件と制約条件(附属書B参照)
− 相反条件と調整結果
ここで共通して用いる主な方法を,次に示す。
− 文書のレビュー(例えば,プロジェクト概要書,予算概略書及び概念図)
− 関係者(プラント統括管理,運転,技術・工務,保全などの部門)へのインタビューや聞き込み
情報の収集
− 類似コントロールセンターの実地調査
− 技術レビュー(人間−システムインターフェイスの最新技術など)
− 人間工学的検討とその他のトレードオフ検討
参考 例 コストとパフォーマンス,リスクとベネフィットなど。
コントロールセンターの設計で考慮するべきすべての要求事項又は制約条件を認識し,文書化しなけれ
ばならない。これらの要求事項には,附属書B(参考)に記載されている項目すべてを含むことが望まし
い。
特に,次のものを考慮に入れなければならない。
− 機能的な目標
− 法規制
− 安全とセキュリティの要求事項
− 運転と制御の要求事項
− 人間工学の要求事項
− 職務と組織の要求事項
− システムの保全
− 企業方針
− 企業標準
− 技術的制約
− リソースの制約
− 運用経験
− プロジェクトの不確実性と変更に関する管理の制度化
− 審美性と建築
他のプロジェクトからの運用経験をフィードバックしなければならない(10.2参照)。経験から得られた
相反する要求事項は,文書化し,評価し,解決しておかなければならない。
7. フェイズB:分析と定義
7.1
全般 分析と定義のフェイズには,いろいろな目的があるが,コントロールセンターの総合的な設
計提案を展開するためには,次の五つのステップに示す事項を処理しなければならない。
このフェイズにおける五つのステップは,次のとおりとする。
− ステップ2:システム性能の定義(機能の分析及び記述)。
11
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− ステップ3:人間と機械への機能配分。
− ステップ4:タスクの定義。
− ステップ5:職務設計と作業組織の編成。
− ステップ6:検証と妥当性確認。
7.2
ステップ2:システム性能の定義(機能の分析と記述) フェイズAで定義した目標を達成するに
は,人間工学(関与して分析し解決すること)を必要とする。これを明らかにするために,フェイズAス
テップ1の結果に基づいて機能分析を行い,文書化しなければならない。
参考 機能分析の方法には,機能の細分化 (IEC 60964),フローチャート,シミュレーションやウォ
ークスルーなどの方法がある。
機能分析の範囲には,対象システムについて想定されるすべての運転モードを考慮しなければならない。
a) 定常運転 例えば,正常又は日常的と考えられる運転状態,すなわち,過渡的状態やプロセスの逸脱
が対象システムに影響を与えない状態。
b) 通常の過渡運転(スタートアップ,シャットダウン,製品の品種・品質や生産量の変更) 例えば,
プロセス又は対象システムを,ある運転状態から他の運転状態に変化させる運転。
c) 緊急時・異常時運転 例えば,異常発生後の短期の回復又は緩和のための運転も含む。緊急時・異常
時運転後長期にわたる回復又は緩和のための運転も含む。
参考 そのような運転では,一時的な機能・タスクの配分の変更,特別な安全に関する考慮及び職務
の再編,作業環境の変更もあり得る。
d) 保全時(計画保全,計画外保全)運転 すべて又は一部のシステムの装置,機械,表示器・制御機器,
ユーティリティ(電気,水,空気,蒸気,通信など)などが保守作業によって一時使えなくなったと
きの運転状態。計画保全がコントロールセンターやサブシステムに及ぶ場合には,特別な手順や,タ
スク配分,機器の共用があり得る。
参考 多くの場合,後者の運転状態では,通常より多くのオペレータの関与が必要である。
ステップ2での出力情報:
全体的な運転目標とその下位目標に関する,人間工学に関連したシステム性能の要求事項と機能。
分析の内容は,例えば,次のとおりとする:
1) 各運転モードにおけるウォークスルー及び/又はトークスルー(8.3参考1.,2.参照)
2) 運転上の安全と信頼性の要求事項
3) 対象システムプロセスの階層的機能展開図
4) プラント,工場,プロセスなどの配置
7.3
ステップ3:人間と機械への機能配分 このステップでは,ステップ2で明らかにされた性能に対す
る要求事項と機能を人間と機械とに割り当てる。
参考1. よく使われる方法は,最初に仮の役割分担を決め,その後様々な評価を加えていくやり方で
ある。この方法で,要求されるすべての機能を人間又は機械が満たすように機能設計をまと
める(参考文献6参照)。
2. 初期の割当ての幾つかは,法規制が求める強制事項によって決定される(例えば,安全性の
問題など)。
割当てのときには,人間と機械との長所・短所,過去の設計経験とその効果を同時に考え,更に,それ
によってもたらされる安全性,生産性,充足感などを考慮する。
極めて重要なこととして,ユーザーの多様性も考慮する。多様性とは,年齢,認知能力,性別,経験,
12
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
体格及び仕事に関する心理的要因(監視作業,単調・退屈感及びチームワーク)などをいう。
ひとまず行った割当ては,人間と技術的規準のそれぞれに対して必要な変更を繰り返しながら確定しな
ければならない。
ステップ3の出力情報:
− 人間が担うべき機能
− 機械が担うべき機能,及びエラートレラントな機械設計のための要求事項
− 人間と機械との相互関係
おおまかな配分方法を次に述べる。他の配分方法を,表1に示す。
a) 人間と機械の特性 機能配分は,すべての安全及びその他の要求事項を満たしながら,職務が挑戦的
で,興味深く,充足感のあるものになるようにするのがよい。人間と機械への機能配分は,検証と妥
当性確認で得られるデータを必要とするので,配分はプロジェクトの早い時期に最終決定しないほう
がよい。
備考 機械は,恒常的監視作業,高精度又は反復作業に向いている。一方人間は,適応,統合化,及
び普遍化に優れている。人間はまた,戦略的,戦術的企画立案能力に優れている(参考文献2
参照)。
b) 認知面と情緒面への配慮 認知的配慮とは,人間が充足感をもって意思決定できるような,情報に関
する要求事項などをいう。自動化は,オペレータがシステムの状況が分からなくなる危険を増加させ
る。オペレータのメンタルモデル(オペレータが認識している対象システムの状況)を最適に保つた
めには,たとえ自動化できる機能でも,あえて人間に分担させるのがよい。同様に,人間がまれに必
要とされる手動又は認知的な技能を維持するために,ある機能を配分してもよい。更に,監視作業,
単調・退屈感,疲労などの要素を考慮し,それに関する知見を文書化しておくのがよい。
情緒面の配慮とは,人間の動機付けをいう。オペレータにとって,自分がシステム全体を制御して
いると感じられるようにする。要求が満足されないために,オペレータの全体的な作業成果が下がる
ことのないように,オペレータが,自分は生産的であり,有用な役割を果たしていると自覚できるよ
うに配慮するのがよい。
機能を人間に割り当てる場合には,次のような認知的,情緒的配慮の基準を考慮しなければならな
い。
− 全体的な主体性を人間に置くようにする(例えば,モード選択)。
− 機械の状態をより良く把握できるようにする(例えば,チェックポイント制御)。
− システム全体の中で自分が有用であるとの自覚を向上させる。
− 状況認識をよい状態に保つ。
− 教育と訓練の必要性を考慮する。
機能を機械に割り当てる場合には,次のような認知的,情緒的配慮の基準を考慮しなければならな
い。
− 繰返し作業や退屈な作業を割り当てる。
− システムの効率性と信頼性を向上させる作業を割り当てる。
c) 配分ステップ すべての機能を人間と機械へ固定して割り当てる代わりに,動的に対応できるように
割り当ててもよい。動的割当てでは,人間の作業負荷が飽和したときに,ある機能を機械に渡せるよ
うにシステムインターフェイスを設計する。動的割当てではまた,オペレータが自己の技能を維持す
ることや,故障の場合には機械の機能を人間が引き継ぐことができるようにする。
13
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考 動的割当ての結果,人間が機械の役割を実行できるように,追加情報又は支援システムが必要
になることもある。この割当ての過程は,本質的には多くのステップが存在する繰返し過程で
あり,このような繰返しから一応の最終的な割当て案が得られる。
配分の過程はすべての段階で適切に文書化し,そのデータをそれ以降の設計に役立てなければなら
ない。各ステップで取るべき手順を表1に示す。
表1 人間及び機械に対する機能・タスクの役割分担を決定する基本手順
No.
ステップ
手順
1
必然的割当て
− 安全及び法規制の要件に合う役割分担
1.1 自動化が必然の機能・タスクは,機械に割り当てる。
1.2 手動が必然の機能・タスクは,人間に割り当てる。
2
システムの安全性と信頼性を確保した上で,人
間の特質,技能と特徴の観点からの初期割当て
− 行動特性に従った割当て
2.1 人間及び機械によって満足に履行できないタスクを回
避するためシステムを再設計する。
2.2 手動では満足に履行できない機能・タスクを機械に割
り当てる。自動化が必然の機能・タスクとして取り扱
う(上記1.1参照)。
2.3 自動的には満足に履行できない機能・タスクを人間に
割り当てる。手動が必然の機能・タスクとして取り扱
う(上記1.2参照)。
2.4 機械及び/又は人間に適合する機能・タスクをそれぞ
れに初期割当てする。
2.5 初期にどちらとも決められない機能・タスクはそのま
まにしておく。
3
認知と情動の支援基準による割当て
− 人間工学とシステム効率の観点からの相
補的又は弾力的割当て
3.1 認知と情動の基準に従って,2.4で割り振った機能・タ
スクの再割当てを検討する。
3.2 ユーザーが割り当てを変更できるように,相補的又は
弾力的な割り当てを検討する。
4
自動化の可能性の確認
4.1 人間に割り当てた機能・タスクは利用できる自動化技
術で効果的に置き換えられるかを判断する。
5
人間の能力の可能性の確認
− 信号検知,情報収集及び意思決定に基づ
く運転支援システムが支援できるタスク
の選択
5.1 運転支援システムの供用可能性を勘案して,人間に割
り当てられた機能・タスクが有効に実施できるかを評
価する。システムが現状得られる技術レベルで実施可
能かを決定する。
6
割当ての評価
− 反復・修正の必要性の判断
6.1 もし提案した機能・タスクの割り当てが非実用的,改
善が更に必要,又はステップ5と6に容認できない技
術的限界があった場合,割当て手順を繰り返す。
表1は,人間と機械への機能配分の基本的な手順を示す。
参考 主要な目的は,人間の能力,人間の特性及び人間の尊厳などの人間工学的配慮が完全になされ
た機能配分を達成することである。
技能レベル,文化的背景の相違,教育レベル,及び障害の有無などのユーザーの母集団の幅に特別に考
慮するのがよい。この手順は,すべての機能について配分が十分に整合するまで,繰り返す方がよい。
7.4
ステップ4:タスクの定義 ステップ3で人間に割り当てた機能から,タスクの基本的な要素を決め
るために,タスク分析を行う。考慮すべきタスクの基本的要素には,手作業と認知作業,タスクの頻度,
継続時間,複雑さ,意思疎通に必要な条件,作業環境条件,その他与えられたタスクを一人又は複数でこ
なすために必要な人間固有の要因などを含む。文書には,系統的な細分化に基づいたタスクの要素を記録
しなければならない。
基本的なタスクと関連する制約条件(タイミングと頻度の要求,制御への介入,前提条件,安全要件,
作業環境条件など。)を明らかにする手段としてウォークスルー,トークスルーその他の調査・検討手段を
14
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
考慮したほうがよい。制御対象の特徴(変数の数,挙動が連続か離散かなど。)も考慮する。
タスク分析には,過去の経験や革新と改良の見通しに基づいた技術的解決案を含まなければならない。
ステップ4の出力情報:
− 機能的要件及び関連する人間工学的要件(速さ,正確さ,論理など)を満たすために行うタスク。
タスク分析の方法については,参考文献11を参照。
7.5
ステップ5:職務設計と作業組織の編成 職務設計を行い,計画された作業組織のそれぞれの役割ご
とにタスクを割り当てなければならない。
ステップ5の入力情報:
− ステップ4の出力情報(すなわち,人間によって行われるタスク)
− ユーザーの要求事項(例えば,作業組織の方針)
− 法規制上の要求事項(例えば,作業組織に対する要求)
ステップ5の出力情報:
− 各オペレータに割り当てられた職務
− 作業組織(構成と人数)
− コントロールルームとローカルコントロールステーション間,及びそこにいるオペレータ間の意
思疎通に関する要求事項
− 運転手順に関する要求事項
− 訓練に関する要求事項
− 情報と制御に関する要求事項
ステップ5の方法:
a) ユーザーと法規制上の要件を満たす仮の作業組織の作成
b) 職務設計
− 職務の割当て基準の作成
− 各オペレータの職務分担の作成
職務設計は,オペレータの肉体的特徴,認知と分析の能力,組織適応性及び統率力,並びに社会的要因
と調和していなければならない。
職務設計は,ステップ4で人間に割り当てられた正式なタスクだけでなく,作業組織の社会的見地,並
びに各個人の,任務に対する満足度,目に見える目標,及び自己実現の機会をも考慮しなければならない。
職務設計の過程では,次の二つの重要な点を考慮しなければならない。
− 各個人に割り当てられたタスクと職務の種類と量はどれほどか。
− バランスの取れた運用グループを実現するために,組織が個人をいかに関連付けているか。
各個人に対するタスクの割り当てを容易にするために,職務割り当ての基準チェックリストを作成しな
ければならない。チェックリストに含まれる項目を,次に示す。
− ワークロード
− 特別な資格の要件
− 職務分担
− 情報とデータに関する要件
− 対象システムの予測可能性
− 必要な道具,物理的スペース,及び設備
− タスク遂行の条件
15
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
職務基準チェックリストには,問題処理能力,ストレス管理,分析能力などのような教育背景や,仕事
の経験に関連する個人の技能も含めるのがよい。職務設計は,タスクを行うのに共同作業が必要な場合に,
オペレータが交換又は共有すべき情報を明らかにしなければならない。
設計した職務を,プロジェクト初期の計画で想定したそれぞれの役割にグループ化して,暫定的な作業
組織案を決定しなければならない。職務のグループ化に際して考慮すべき項目は,次のとおりとする。
− 責任と権限の階層
− チーム構成
− 伝統的な精神・社会的文化
− 労使協定
− 法規制要件
− 物理的接近度
− 内部の意思疎通要件
参考 作業割り当てが反復的なものであるために,職務組織の設計も改良のための繰り返しが必要と
なるかもしれない。
職務割当て基準と作業組織は,ステップ1で明らかにしたユーザーの要件(例えば,職務組織の方針)
及び法規制上の要件(例えば,職務組織の要件)に合致しなければならない。職務及び作業組織の設計の
結果は,運転手順,訓練システムの要件,及びコントロールセンター設計の機能仕様に反映されていなけ
ればならない。
7.6
ステップ6:得られた結果の検証と妥当性確認 ステップ3,4及び5で開発した,機能・タスク割
当て,タスク要件,職務割当てと職務組織に関する成果の中間的な検証と妥当性確認は,フェイズCの概
念設計を始める前に実行されなければならない。
参考 このステップで強調すべきことは,ステップ3,4及び5で作られたすべての個別の割り当てを
全体的に検証し,妥当性を確認することである。ステップ3,4及び5の反復過程の間にテスト
及び確認された特別な割当ては,別途定めた個々の分類や職務規定と矛盾しているかもしれな
い。
フェイズCに進む前にすべての矛盾を確認し解決しておくのがよい。
このステップでは,プロジェクトのスポンサー,オーナーなどが特に分掌と職務規定に関して検討し確
認するために,特別なやり方で妥当性を確認しなければならない。人間及び自動化に対する要求事項,並
びに関連する組織計画は,フェイズCに進む前に検討され保証されていなければならない。
ステップ5で各オペレータに割り当てられた職務の仕様は,検証され妥当性を確認されなければならな
い。
ステップ5で開発した職務割当ては,その基準に合致していることを保証するために,正式に検証され
なければならない。
ステップ6の入力情報:
− ステップ4の出力情報
− ステップ5の出力情報
ステップ6の出力情報:
− 評価後の機能・タスクの割当て
− 評価後の機能・タスクの要件
− 評価後の各オペレータの職務分担と作業組織
16
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 立案された職務分掌,配員計画,組織に対するプロジェクトスポンサー,オーナーの承認
職務設計の検証と妥当性確認には,提案された職務について,人間工学の基本及びエラートレラントな
設計の面からの評価が含まれなければならない。妥当性を確認する前に,職務割当て基準その他を含む一
連の妥当性確認基準を開発しておかなければならない。これらには,その複雑さ(例えば,並行職務,頻
繁な意志疎通の必要性)や特定のシナリオに関する全体的な時間制約などを含む。
参考 基準が合致しているか否かをチェックするために,厳しいシナリオ,例えば,シャットダウン,
緊急時,事故シナリオを使う。コンピュータシミュレーション(例えば,時系列分析)は妥当
性確認の有効な方法である。
8. フェイズC:概念設計
8.1
全般 このフェイズでは,包括的なコントロールセンター設計におけるプロジェクトを展開する。
すなわち,フェイズBで確立された,割り当てられた機能とタスクの要件,仕事の記述,及び組織計画を
満足させる。この概念設計には,コントロールセンターの有形の付帯設備,そのじゅう器・備品,なんら
かの快適性を求められるあらゆる場所,例えば,休息所,図書室,会議室などを含む。また,概念設計は,
提案されたオペレータインターフェイス,すなわち,表示器,制御機器,コミュニケーション及びマルチ
メディア応用設備を含む。この活動は,その後の詳細設計を進めるために必要な,作業の相互関連,目標
仕様,及び制約条件を確立するためのものとする。
このフェイズは,次の二つのステップから構成する。
− ステップ7:コントロールセンターの概念的な枠組みの設計
− ステップ8:概念設計の承認
8.2
ステップ7:コントロールセンターの概念設計 これまでのステップの結果をシステマティックに再
構成して一連の概念設計を行う。統合されたシステム機能の観点から,前のステップで企図した観点を含
む,コントロールセンターの物理的・機能的特性を暫定的な仕様書にまとめる。例えば,作業組織に対す
る要求事項(オペレータの構成と人数など)を含む職務設計の結果は,作業スペースを決めるためのベー
スとならなければならない。
ステップ7の入力情報:
− ステップ6の出力情報(作業組織など)
− ユーザーの要求事項,ステップ1参照
− 規制,標準,その他公式書類
ステップ7の出力情報:
− 暫定レイアウトを含む概念設計仕様書
− 既知の設計上の制約条件,すなわち,予算,立地,安全,様式,フェイルセイフのための冗長度,
材質,既定のシステムとサブシステムなど。
− 適用法規,企業関連標準,要領,規格,地域の慣行など。
− 詳細仕様書作成者の予測
− 機能間の運用上の関連
このステップの方法:
− 設計方針の決定(機器選定方針など)
− ユーザー要件や規制,標準,その他公的要求事項に合致する設計条件の決定
− 設計仕様書の作成
17
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
暫定仕様書に含めるべき概念設計項目は,次のとおりとする。
− スペースの割当て
− 機能関連
− コントロールスウィート計画
− コントロールルームの配置
− ワークステーションの配置と寸法
− 表示器と制御機器
− 情報とデータの流れ
− 安全と入出管理
− 作業環境条件
− 管理・運用システム
− 意志疎通・情報網
この過程で生まれた様々なアイディアを結び付けることによって,より価値のある概念設計を作り上げ
なければならない。
このステップでは,既に選定済の機器ベンダーやシステム設計など,プロジェクトを支配するいかなる
設計方針も,明記し,文書化しなければならない。更に,考え得るすべてのユーザー,法的なガイドライ
ン,規格,及び建築基準を考慮し,必要に応じて暫定仕様に含める。
8.3
ステップ8:概念設計のレビューと承認 このステップで,概念設計されたコントロールセンターに
ついて,オーナー,ユーザー,及び保守担当者の承認を求める。
参考 このステップが,次のことを確認する最終的な機会となる。すなわち,初期の機能的要件が,
設計上のアイディアや技術によって具備されていて,それらアイディアや技術は,実現可能で,
容認でき,かつ,適用規制,標準,方針などに準拠しているということ。このレビューは,そ
れに引き続く詳細設計を,その途中で大きな機能的・物理的変更を生じる危険性を最小にして
進めるための重要なマイルストーンとなる。
ステップ8の出力情報:
− 承認された概念設計仕様書
ステップ8の方法:
− “トークスルー”シナリオ
− “ウォークスルー”シナリオ
− インターフェイスシミュレーション,例えば,共同作業,モックアップなど
− コンピューター画像又は動画による試作検討
− 標準適合審査
参考1. ここで“トークスルー”とは,最も重要な一連のタスクに関連して,概念設計仕様書を用い
て,あらかじめ組み立てられた討議を行って概念設計をチェックするものである。
2. ここで“ウォークスルー”とは,設計の表現方法(例えば,伝統的な実物大の模型,バーチ
ャルリアリティをベースとした実物大の模型,コンピュータモデルなど)を用いて,重要な
作業系列をシミュレートすることによって,概念設計をチェックするものである。
3. 通常,エンドユーザーは,上に述べた両活動(“トークスルー・ウォークスルー”)及び作業
手順に気を配る。
ステップ7で作成される概念設計仕様書は,提案された設計がプロジェクトの機能的な要求事項を満た
18
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
しており,すべての適用法規,ガイドライン,及び方針に合致していることを検証するために,正式に見
直し検討しなければならない。
すべての決定事項をレビューし,文書化して,最終設計の前提条件として統一しておかなければならな
い。
9. フェイズD:詳細設計
9.1
全般 このフェイズでは,コントロールセンターの詳細設計仕様を作成する。その設計仕様は,コ
ントロールセンター建設の見積りや後方支援計画に必要十分な程度に詳細なものでなければならない。設
計仕様はまた,じゅう器,システム,ソフトウェア,特殊工具など,すべての調達品のベンダー向け引合
書作成の基になり得るものでなければならない。
ステップ9での設計者のリソースには,次のものを含む。
− 社内又は外部契約エンジニア
− 雇用システムインテグレーター
− 社内又は外部契約人間工学専門家
− 社内又は外部契約建築家
ステップ9の設計の方法:
− 市場にあるシステムの適否検討と選択
例えば,分散制御システム (DCS),プログラマブルロジックコントローラー (PLC),VDTシス
テムなど。
− 迅速なプロトタイプ(原型)の製作
− 使用手引きの作成
フェイズDで実施される設計活動には,適切な人間工学のデータが適用されなければならない。このフ
ェイズは,次の各ステップから構成する。
a) ステップ9:
A:コントロールスウィートの配置計画
B:コントロールルームの配置計画
C:ワークステーションの配置及び寸法
D:表示器及び制御機器の設計
E:作業環境設計
F:運用・管理システムの設計
b) ステップ10:
詳細設計提案の検証と妥当性確認
備考 上にあげたステップ9とステップ10の項目は,特に設計を遂行するための順番を意味するもの
ではない。
各々のプロジェクトは,予測された作業範囲,複雑さ,利用可能なリソース,スケジュール,予算など
に応じて適切な設計計画を確立するという目的のために,個別に評価されるのがよい。
9.2 ステップ9A:コントロールスウィートの配置計画 コントロールスウィートの配置計画のためには,
次のことを行う。
− コントロールスウィートを形成する機能エリアの確認。
− それぞれの機能エリアに必要なスペース。例えば,制御に必要な面積,管理のための面積,休憩
19
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
のための面積,更に来訪者のための面積などの推定。
− 計画された敷地の適合性,例えば,スペース的な制約条件,地域的な危険性,環境条件などの確
認。
− 関連する規格,建築基準,建物に関するオーナーの方針などの入手。
− 必要なユーティリティーが利用できることの確認。
機能エリア間の,運用上の関連付けの決定,及びコントロールスウィートの暫定配置計画の展開は,概
念設計(フェイズC)の段階で遂行されるのがよい。
前掲のタスク要件や職務設計(ステップ4及びステップ5)は,概念設計にも影響を及ぼしたが,この
ステップでも基礎とならなければならない。
要約すれば,この設計ステップで,コントロールスウィートに必要と考えられるすべての特定な施設を
取り込むのがよい。
機能的に含まれる実際の施設は,次のとおりとする。
− コントロールルーム
− 会議室
− 訓練施設
− 機器室
− 事務室
− 保守室
− 休息・休養室
− 食事の場所
− 台所
− ロッカールームと便所
− マニュアルや完成図書の図書・資料室
− 計器修理室
− 来訪者向けのギャラリー(展示室)
提案された設計仕様は,コントロールスウィートの中で行われるすべての活動が,相互に円滑に推移で
きるようなものでなければならない。
なお,機器室や事務室,会議室などの支援機能エリアについての要求事項も別途指定する。
参考 JIS Z 8503-2(予定)では,コントロールスウィートの配置計画を立案するための具体的な要求
事項とガイドラインを提供する。
9.3
ステップ9B:コントロールルームの配置計画 コントロールルームの配置計画を立案するために,
次のタスクを行う。
− 使用可能なスペースの決定
− コントロールルームのスペースに収容する家具や設備類の確認
− 人員を含め,コントロールルーム内に収容される項目間の,運用上の関連付けの確定。
− 要員と来訪者の動線についての要求事項の特定。
− メンテナンスアクセスについての要求事項の特定。
室内配置計画は,ユーザーの動態とともに,初期のステップで定義したタスク要件や職務設計に基づか
なければならない。すべての配置計画には,次の項目を考慮しなければならない。
− ワークステーション
20
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 備品棚
− ワークステーションに附属又は別置の収納棚
− 掲示板
− 入口と出口
− ワークステーション外の共用表示器
− 机,ファイリングキャビネット,本棚など
− プリンター台,複写機など
配置計画案は,対面型による意志疎通,備品の共有化と共同作業を含めて,以前に決められた運用上の
関連付けを満足しなければならない。
参考 JIS Z 8503-3は,コントロールルームの配置計画を立案するための具体的な要求事項とガイド
ラインを提供している。
9.4
ステップ9C:ワークステーションの配置及び寸法 ワークステーションの配置計画と寸法の設計仕
様を作成するために,次のタスクを行う。
− ワークステーションで行われるタスク(運転や保守)の分析と明確化
− ワークステーションに必要な機能要素の決定
− ワークステーション上の機器配置と寸法の決定
ワークステーションの機器配置に関しては,次を含むすべての人間工学的要件を考慮する。
− 表示器類
− 制御機器
− 作業スペース
− コミュニケーション機器
− 座席,ひじ(肘)掛,足台
体格が異なるオペレータが日常的に使用する場合には,すべてのワークステーションを(高さなどの)
調節機能付きのものにすることを推奨する。
9.5
ステップ9D:表示器及び制御機器の設計 このステップで,コントロールルーム内で使用する表示
器及び制御機器の設計仕様書を作成する。この仕様書では,ステップ3で割り当てられた機能仕様やタス
ク要件を満足していることが保証されていなければならない。
表示器や制御機器には,次のような選択可能な多数のハードウェア,ソフトウェアをも含むものとする。
− 従来型の計器 例えば,計測器,記録装置,アナンシエータ,押しボタンなど。
− 視覚表示装置 例えば,モニター,タッチスクリーン,関連ソフトウェアなど。
参考 基本的な人間工学の要求事項(最適観視角:optimal viewing angleなど)に加えて,ユーザーの
認知特性(最適な作業負荷など)に特段の注意を払うことが不可欠であり,情報の密度,内容,
品質やその適時な表示なども重要な設計項目となる。また,コントロール操作に最適な機器を
選択することも重要である。
9.6
ステップ9E:作業環境設計 設計仕様書案は,人間工学の基準,とりわけ安全性や快適な作業環境
に関わる基準に合致していなければならない。コントロールセンターの環境面で考慮すべき点は,次のと
おりとする。
− 温度環境
− 空調
− 空気組成
21
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 照明環境
− 音響環境
− 振動
9.7
ステップ9F:運営・管理システムの設計 このステップでは,運営・管理上の要求事項に対する詳
細な解決方法を展開する。
考慮すべき項目例は,次のとおりとする。
− 教育・訓練組織
− メンテナンス体制
− 交代勤務体制
− 訓練・選任体制
− 企業方針や文化的要因を含むユーザー要件の,設計への適切な反映。
− コントロールルーム外にいる他のグループとの交流への配慮。
− コントロールスウィートのオペレータとローカルコントロールステーションのオペレータ相互間
における意志疎通要件と運用上の要求事項との合致。
− 二次ユーザーの要求事項や特質への適切な配慮。
9.8
ステップ10:詳細設計の検証と妥当性確認 ステップ9で展開された詳細設計は,ステップ9で使
用する概念設計仕様に合致していることが正式に検証されていなければならない。更に,ステップ9で作
成された詳細設計は,ユーザーニーズにも合致していることが正式に確認されていなければならない。
ステップ10の入力情報は次を含む:
− 詳細設計仕様書
− 機能仕様書
ステップ10の出力情報:
承認された詳細設計仕様書及び想定した使い方でユーザー要求事項を満たす設計。
検証と妥当性確認とは,次のようなものでなければならない。
− 設計の過程に組み込まれている。設計が終わってから別途行われる行為ではない。
− 繰り返し行われる。
− 設計者にフィードバックすることで,でき得る限り最善の解決案を引き出すようなものである。
妥当性確認の基準を作成することもまた,妥当性確認過程の重要な一側面とする。検証と妥当性確認の
過程で使用される基準や手法を記載した特定の文書を作成しておかなければならない。
設計の過程でとられた妥協策は,妥当性の確認において重要であるので書面化しておかなければならな
い。
検証と妥当性確認では,運用上の安全性,ヒューマンエラーの削減,人間工学的設計,環境要因及び業
務に対する充足感に注意を払わなければならない。
10. フェイズE:運用フィードバック
10.1 全般 コントロールセンターの完成と使用開始の後に,そのライフサイクルを通して設計の妥当性
を継続的にチェックしていくためには,運用結果のフィードバックという手段を用いる。これは,コント
ロールセンター使用開始後の運用上のフィードバック情報を収集し,検討を加えることによって行うこと
とする。
使用開始後には,設計上の成功例や失敗例を記録に残すことを主な目的とする審査を行うことが望まし
22
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
い。
参考 その記録は,将来の新規計画又は技術検討に当たって非常に有用なものとなる。
10.2 ステップ11:運用実績の収集 運用開始後に明らかとなった人間工学的な問題点を集めておくこと
が望ましい。現場における観察,インタビュー,その他の系統立てた方法などによって行う。運用上のフ
ィードバック情報を検討するには,タスク分析という手法を使ってもよい。
参考 これらの検討結果は,新しくコントロールセンターを設計する場合や既設設備の改造を実施す
るに当たって有用な情報源となる。
ステップ11の入力情報:
− 運用上の慣例
− 事故報告
− 特異事例報告
− 運用記録
ステップ11の方法:
− 現場での観察
− ユーザーへのインタビュー
− タスク分析
− アンケート調査
ステップ11の出力情報:
− 新規計画の際に有用な情報
− ユーザーからの改善案(苦情)
− 人間工学的な問題点
23
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
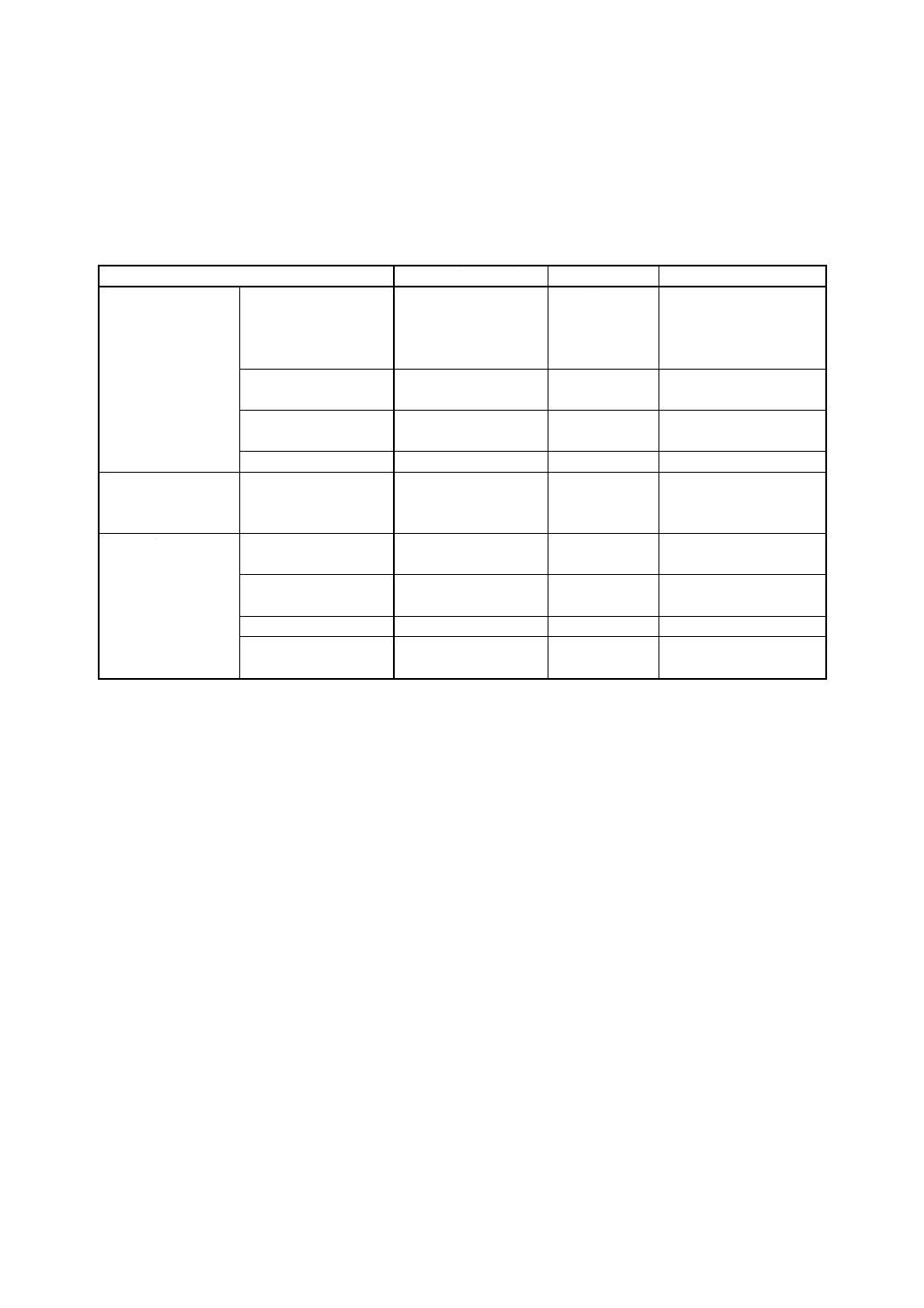
附属書A(参考) システムの例
この附属書(参考)は,本体に関連する事柄を補足するもので,規定の一部ではない。
表A.1 対象システムの例
適用分野
制御・管理の対象
操業形態
システムの例
プロセス制御
工業プロセス
原材料
エネルギー
バッチ
連続
化学プラント
食品プラント
発電所
製油所
処理・制御
原材料
廃棄物
連続
浄水プラント
ごみ処理場
配送
原材料
エネルギー
連続
ガス配送所
送配電所
製造
製品
離散
自動車工場
交通
乗り物
連続
航空管制塔
運転司令所
道路交通管制室
対人対応
警備管理
人
情報
間欠
銀行
ビルディング
公共緊急対応
人
情報
−
消防署
警察署
軍隊
情報
−
軍隊
情報サービス
情報
−
ページング
放送局
24
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B(参考) 箇条6.で明確化すべき基本的要求事項と制約条件
この附属書(参考)は,本体に関連する事柄を補足するもので,規定の一部ではない。
備考 以下の項目は,コントロールセンターの設計の過程で考慮すべき主題を参考として掲げるもの
である。
B.1 プロジェクトの適用範囲全体についての一般的記述
特に次の事項を考慮する。
− プロジェクトの名称,全体スコープ
− オーナー又は顧客(政府,公共団体,私企業)
− 場所,立地条件(気象条件,地形・地質データなど)
− 社会的特異性や背景
− 社会基盤又は利用可能な社会構造
− 対象の規模と一般的仕様(大きさ,処理量など)
− 取り扱う対象(原材料,情報,人間など)
− システムの記述(機能的,運用上など)
− プロジェクト概要(組織,実施方法,スケジュール,予算など)
− 主要な時間尺度
− 改善計画
B.2 安全に関する要求事項
特に次の事項を考慮する。
− 危険物質,汚染物質発生の原因又は発生源(可燃性気体・液体,毒性気体・液体,放射性物質な
ど)
− 防消火システム
− 侵入警戒システム
− 防爆対策
− 地震対策
− 機器・システムの診断システム
− 緊急遮断システム
− 事故管理
− 法規・規制
B.3 管理運営に関する要求事項
特に次の事項を考慮する。
− 運転の様態(連続,回分,不連続,間欠など)
− 取り扱う対象(原材料,エネルギー,交通機関,車両,情報,人間など)
− 業務(制御,監視,加工,指揮など)
− プロセス特性(連続,回分,不連続,間欠など)
25
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 運転モード(定値制御,プログラム制御,シーケンス制御など)
− 実時間・即時性の要求(ダイナミックプロセス,消防署など)
− オンライン性の要求(ネットワーク,人的介入など)
− コントロールセンターについての方針(統合,集中,分散など)
− バックアップ方針(冗長化,ハイブリッド化,ハードワイアードなど)
− 要員の階層(オペレータ,スタッフの人数など)
− 責任と権限
− 交代勤務体制
− 休暇期間調整
B.4 人間工学的要求事項
特に次の事項を考慮する。
− ユーザー母集団
− オペレータの特質
− 職務組織
− 作業手順と含む規定
− 交代勤務
− 個人的資質
− 訓練計画
− 技術移転・伝承
− 異文化交流(チームワークなど)
− 見学者の視線
− 立入禁止処置
− コントロールスウィートに関する要求事項(機器室,休憩室,洗面所,祈祷室など)
B.5 制約条件
特に次の事項を考慮する。
− 法規又は規制
− 国際標準又は規格
− オーナー企業標準
− マネージメント情報の欠如
26
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] ISO 8402, Quality management and quality assurance−Vocabulary
[2] ISO 9241-2, Ergonomic requirements for office work with visual display terminals (VDTs) −Part 2 : Guidance
on task requirements
[3] ISO 9241-5, Ergonomic requirements for office work with visual display terminals (VDTs) −Part 5 :
Workstation layout and postual requirements
[4] ISO 9355-1, Ergonomic requirements for the design of displays and control actuators−Part 1 : Human
interactions with displays and control actuators
[5] ISO 9355-2, Ergonomic requirements for the design of displays and control actuators−Part 2 : Displays
[6] ISO 13407, Human-centered design processes for interactive systems
[7] ISO 10075-2, Ergonomic principles related to mental workload−Part 2 : Design principles
[8] IEC 60964, Design for control rooms of nuclear power plants
[9] EN 614-1, Safety of machinery−Ergonomic design principles−Part 1 : Terminology and general principles
[10] IAEA International Atomic Energy Agency (ed.), 1989 ; Models and Data Requirements for Human Reliability
Analysis. IAEA-TECDOC-499. IAEA, Vienna
[11] Kirwan, B., Ainsworth, L.K., 1992, A guide to task analysis, ISBN 07484 0057 5, Taylor & Francis, London
[12] Masiano, R.E., Price, H.E., and Van Cott, H.P., 1982, Allocation of functions in man-machine systems : a
prespective and literature review, NUREG/CR-2623
[13] Pikaar, R.N., et al, 1997, Ergonomics in Process Control Rooms, Part 1 : Engineering Guideline, International
Instrument Users' Associations SIREP-WIB-EXERA, Report M2655X97
[14] Pikaar, R.N., et al, 1997, Ergonomics in Process Control Rooms, Part 2 : Design Guideline, International
Instrument Users' Associations SIREP-WIB-EXERA, Report M2656X97
[15] Pulliam, R. and Price, H.E., 1983, Methodology for allocating nuclear power control functions to human or
automatic control, NUREG/CR-3331
[16] Pulliam, R. and Price, H.E., 1984, Allocation Functions to Man or Machine in Nuclear Power Plant Control,
The Nuclear Engineer, 25 (3), 79-85
[17] Price, H.E., 1985, The allocation of functions in systems, Human Factors, 27 (1), 33-45
[18] Rijnsdrop, J.E., 1991, Integrated process control and automation, ISBN 0444 88128X, Elsevier, Amsterdam
[19] Salvendy, G., (ed.), 1997, Handbook of Human Factors, ISBN 0471116904, John Wiley & Sons, New York
[20] Van Cott, H.P., Kinkade, R.G., 1972, Human Engineering Guide to Equipment Design, American Institute for
Research, Washington, DC
[21] Wilson, J.R., Corlett, E.N., 1995, Evaluation of humanwork : a practical ergonomic methodology
[22] Woodson, W.E., 1981, Human Factors Handbook, ISBN 0-07-071765-6, McGraw Hill, New York
27
Z 8503-1 : 2002 (ISO 11064-1 : 2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS Z 8503-1(人間工学−コントロールセンターの設計−第1部:コントロールセンターの設計原則)
原案作成委員会本委員会 構成表
氏名
所属
(委員長)
林 喜 男
慶應義塾大学
(幹事)
中 野 義 彦
沖電気工業株式会社
河 内 まき子
生命工学工業技術研究所
黒 須 正 明
静岡大学
高 橋 昭 彦
生命工学工業技術研究所
谷 井 克 則
武蔵工業大学
栃 原 裕
九州芸術工科大学
中 込 常 雄
中込技術士事務所
橋 本 進
財団法人日本規格協会
持 丸 正 明
生命工学工業技術研究所
米 村 俊 一
東日本電信電話株式会社
渡 辺 武 夫
経済産業省産業技術政策局
有 光 隆 也
日本光電工業株式会社
石 裕 二
日本オフィス家具協会(株式会社イトーキ)
田 中 典 朗
三菱電機株式会社
森 剛 志
株式会社マニュアル
青 木 和 夫
日本大学
堀 野 定 雄
神奈川大学
山 本 栄
東京理科大学
吉 武 良 治
社団法人電子情報技術産業協会(日本アイ・ビー・エム株式
会社)
(事務局)
森 みどり
日本人間工学会(神奈川大学)
JIS Z 8503-1(人間工学−コントロールセンターの設計−第1部:コントロールセンターの設計原則)
原案作成委員会分科会 構成表
氏名
所属
(主査)
森 剛 志
株式会社マニュアル
(幹事)
有 光 隆 也
日本光電工業株式会社
中 込 常 雄
中込技術士事務所
橋 本 進
財団法人日本規格協会
渡 辺 武 夫
経済産業省産業技術政策局
堀 野 定 雄
神奈川大学
冨 松 脩
株式会社NECデザイン
氏 田 博 士
財団法人原子力発電技術機構
藤 田 祐 志
株式会社テクノバ
出 家 任
プロセス計装制御技術協会(東洋エンジニアリング株式会社)
若 井 正 一
社団法人日本建築学会(日本大学)
安 達 幸四郎
社団法人日本電機工業会(株式会社日立製作所)