Z 2316-2:2014
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 渦電流試験器の特性 ·········································································································· 2
4.1 一般特性 ······················································································································ 2
4.2 電気的諸特性 ················································································································ 3
5 検証······························································································································· 6
5.1 一般 ···························································································································· 6
5.2 点検のレベル ················································································································ 7
5.3 点検手順 ······················································································································ 7
5.4 是正処置 ······················································································································ 7
6 渦電流試験器の電気的特性の測定 ························································································ 8
6.1 測定要件 ······················································································································ 8
6.2 発振器 ························································································································· 8
6.3 入力段特性 ·················································································································· 10
6.4 信号処理 ····················································································································· 12
6.5 出力 ··························································································································· 20
6.6 デジタル化 ·················································································································· 20
7 試験報告書 ····················································································································· 20
附属書A(参考)周波数ビート法の原理 ·················································································· 22
附属書B(参考)出力Oと入力Iとの間の直線性範囲の測定方法 ················································· 23
附属書C(規定)等価入力インピーダンスの測定 ······································································ 24
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 25
Z 2316-2:2014
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本非破壊検査協会(JSNDI)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
これによって,JIS Z 2314:1991は廃止され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS Z 2316の規格群には,次に示す部編成がある。
JIS Z 2316-1 第1部:一般通則
JIS Z 2316-2 第2部:渦電流試験器の特性及び検証
JIS Z 2316-3 第3部:プローブの特性及び検証
JIS Z 2316-4 第4部:システムの特性及び検証
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
Z 2316-2:2014
非破壊試験−渦電流試験−
第2部:渦電流試験器の特性及び検証
Non-destructive testing-Eddy current testing-
Part 2: Instrument characteristics and verification
序文
この規格は,2008年に第1版として発行されたISO 15548-1を基とし,技術的内容を一部変更して作成
した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,一般的に用いられている渦電流試験器の機能的な特性を定義し,それらの測定方法及び検
証について規定する。
これらの機能的な特性を評価することは,渦電流試験器の性能を明確にし,相互比較を可能にする。必
要な特性を適切に選択することで,適用目的に合致した信頼性のある渦電流試験システムを構築できる。
この規格の原則は,渦電流試験器の附属機器の使用にも適用できる。
この規格は,検証の範囲及び特性の合格基準を規定しない。それらは,関連する文書1) の中で示される。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 15548-1:2008,Non-destructive testing−Equipment for eddy current examination−Part 1:
Instrument characteristics and verification(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
注1) 関連する文書とは,使用者と製造業者との間で作成される文書をいう。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS C 1002 電子測定器用語
JIS Z 2300 非破壊試験用語
JIS Z 2316-1 非破壊試験−渦電流試験−第1部:一般通則
注記 対応国際規格:ISO 15549,Non-destructive testing−Eddy current testing−General principles
(MOD)
2
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS Z 2300及びJIS C 1002によるほか,次による。
3.1
渦電流試験
試験体に生じる渦電流の変化を利用して,きず,厚さ,形状,材質などを評価する試験方法。
3.2
ベクトル成分
励磁周波数を基準とした検波によって得られた同相成分,及び直交成分。表示の水平成分をX,垂直成
分をYという。渦電流試験器の位相設定を変えることで基準とする位相を変えることができる。
4
渦電流試験器の特性
4.1
一般特性
4.1.1
渦電流試験器の種類
渦電流試験器の種類は,次による。
a) 汎用の渦電流試験器とは,測定量と表示又は出力との関係を使用者が設定でき,目的に応じて種々の
渦電流試験プローブ(以下,プローブという。)を接続できるものをいう。汎用の渦電流試験器の製造
業者は,使用者が渦電流試験システムの仕様を決めるために必要な電気的特性の詳細を明らかにしな
ければならない。この試験システムは,JIS Z 2316-1による。使用者は,渦電流試験器の周波数,利
得,ブリッジバランス(自動バランスの場合を除く。),位相,フィルタ並びに表示画面の利得及び原
点を設定できる。
b) 限定した用途を目的とした渦電流試験器とは,測定量と表示又は出力との関係が明確に定められてい
るものをいう。これには特定のプローブが用いられる。このタイプの渦電流試験器については,この
規格の適用は,その特徴に応じた項目だけとなる。
4.1.2
電源
渦電流試験器は,バッテリ又はAC電源によって動作する。正常な動作のために,電圧,周波数,及び
消費電力の定格値を許容値とともに示さなければならない。
4.1.3
安全性
渦電流試験器及びその附属器は,電気的危険性,表面温度,爆発の危険性などについて,適用可能な安
全規格に従わなければならない。
4.1.4
機能
全アナログ方式又は部分的にアナログとデジタルとを組み合わせているものとする。
単一周波数,多重周波数,掃引又はパルス波方式とする。
単一チャンネル又は複数チャンネルとする。
手動,遠隔操作,設定値の記憶又はプリセット方式とする。
出力をもたなければならないが,表示装置の有無は問わない。
4.1.5
外観
渦電流試験器は,携帯式,きょう(筐)体組込み式又はラック組込み式とする。構成部品は,一体化又
は分離しているものとする。
渦電流試験器及び附属機器の寸法・質量を明記する。
プラグ及びソケットは,形式及びピン接続を明記する。
3
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
渦電流試験器の型番及び製造番号は,分かりやすい場所に判読可能なように表示する。
4.1.6
環境の影響
渦電流試験器をその使用限界内で安定に作動させるために必要なウォームアップ(予備運転)時間を明
記する。
渦電流試験器及び附属品の正常な使用,保管及び輸送における温度,湿度及び振動条件を決めておかな
ければならない。
渦電流試験器は,電磁両立性(EMC)規則に適合していなければならない。
4.2
電気的諸特性
4.2.1
一般
ウォームアップ時間経過後に,渦電流試験器の電気的諸特性を測定する。電気的諸特性は,指定した運
転状況下における測定値である。特定の環境条件による測定値の経時変化がある場合は,その特性を明示
すべきである。
電気的特性は,渦電流試験器の各機能ブロックに対応した特性であり,製造業者によってその特性が提
供されなければならない。幾つかの特性は,箇条6に規定した方法で確認することができる。
4.2.2
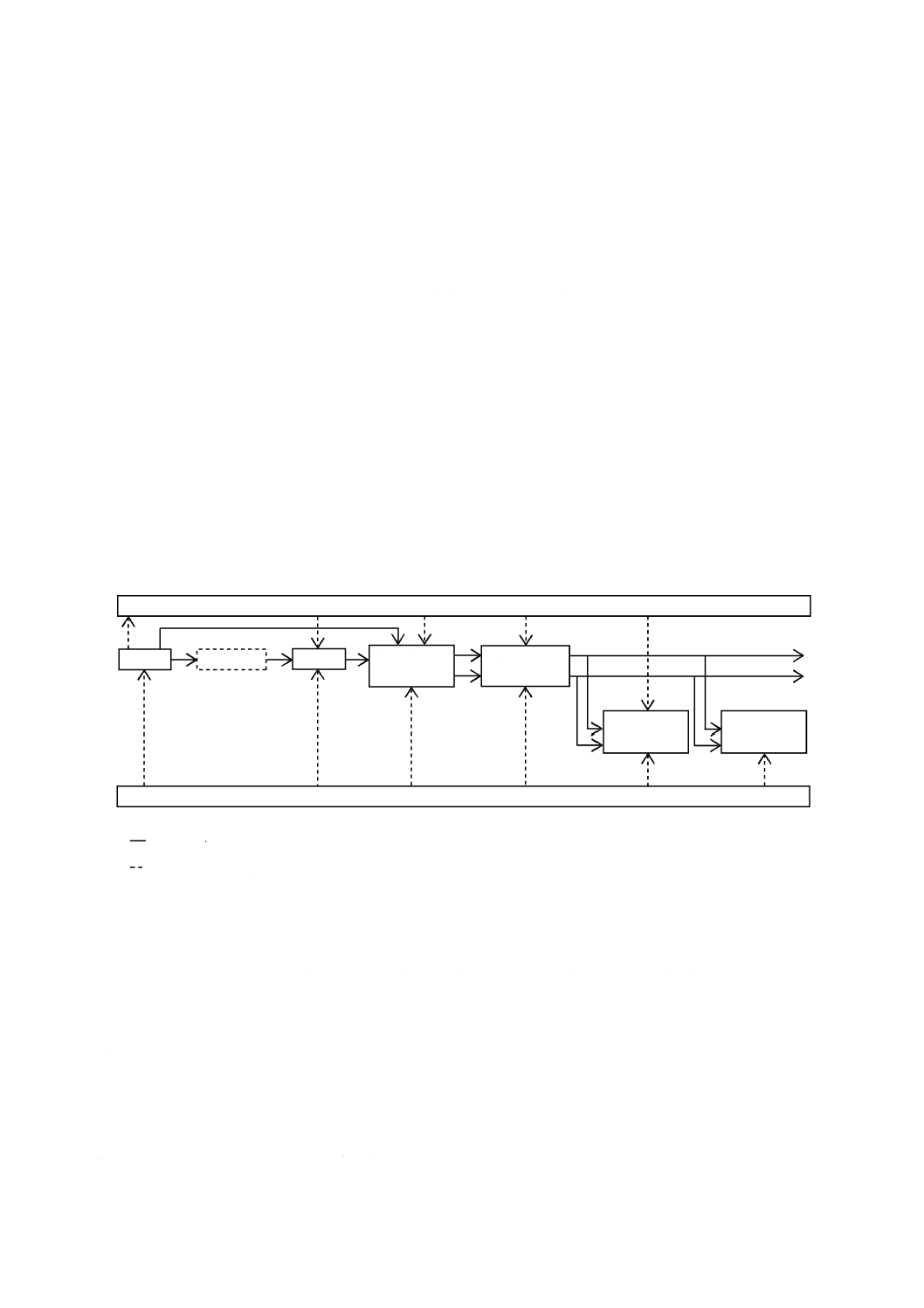
回路構成図
汎用の渦電流試験器の回路構成の例を,図1に示す。
バランス
発振器
プローブ
入力段
高周波増幅
及び検波
附属機器
信号処理
デジタル化
表示器
X出力
Y出力
信号
デジタル化
図1−渦電流試験器の回路構成の例
4.2.3
発振器
発振器は励磁源である。交流励磁[正弦波,三角波,く(矩)形波など]の場合,定める特性は,次と
する。
a) 発振器の種類 電流駆動又は電圧駆動
b) 励磁の種類 単一周波数又は多重周波数
c) 周波数設定 設定範囲,ステップ幅,及び定格値からの偏差
d) 高調波ひずみ
e) 出力レベルの設定 設定範囲,ステップ量,定格値からの偏差,及び最大出力電圧又は最大出力電流。
f)
周波数に依存する信号源インピーダンス 多重周波数励磁では,それぞれの周波数を同時に重ねて出
4
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
力するか又は時系列に出力するかを明記する。時系列に出力するときは,それぞれの周波数が独立し
ているか又は連続しているかについて記載し,また,その時系列の順序について記載する。
4.2.4
入力段特性
入力段は,渦電流試験器にプローブを接続する装置であり,インピーダンスの整合及び増幅を行う。
定める特性は,次とする。
a) 周波数依存をもつ入力インピーダンス
b) 利得の設定範囲,ステップ量,及び定格値からの偏差
c) 最大入力電圧
d) 差動増幅パラメータ
4.2.5
ブリッジバランス
事前に定められた操作点,例えば,ゼロ点をとるために,信号の補正はブリッジバランスで行われる。
この補正は,入力段,高周波信号処理段,同期検波処理段又は表示器において,手動又は自動で行う。
定める特性は,次とする。
a) 補正可能な最大入力範囲
b) ブリッジバランスの残留値(出力の最大目盛など,決められた数値に対する百分率で示す。)
4.2.6
高周波信号処理
4.2.6.1
高周波フィルタ
試験結果に望ましくない影響を及ぼす周波数成分を減少させる動作を行うために,フィルタが用いられ
る。同期検波の前に用いられるフィルタは,搬送周波数フィルタ又は高周波フィルタ(HFフィルタ)と
呼ばれるが,これらは,通常,励磁周波数以外の周波数を抑制するためのバンドパスフィルタである。
定める特性は,次とする。
a) 利得
b) 3 dB帯域幅
c) 減衰率
d) 過渡応答
4.2.6.2
高周波増幅
定める特性は,次とする。
a) 利得の設定範囲,ステップ量,及び定格値からの偏差
b) 入力信号範囲
c) 帯域幅
d) 出力飽和電圧
4.2.6.3
検波
ベクトル成分をもつ信号を高周波信号から抽出するために,同期検波を用いる。同期検波は正極性とし,
信号の遅れは時計方向へ回転する。同期検波の極性が正であることを確認しなければならない。振幅検波
は,高周波信号から振幅変動だけを抽出したものとする。
定める特性は,次とする。
a) 参照信号の波形(例えば,正弦波,方形波,パルス波など)
b) 参照信号のそれぞれの波形における帯域幅
c) 位相に依存する振幅偏差
d) 位相に依存する位相偏差
5
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2.7
検波信号処理
4.2.7.1
ベクトル増幅
ベクトル増幅では,一般に同一の二つの増幅器が用いられる。これらの増幅器は,同期検波によって生
成されたベクトル成分をそれぞれ増幅する。増幅率の異なる二台の増幅器で二つの成分を増幅するように
した渦電流試験器もある。
定める特性は,次とする。
a) 利得の設定範囲,ステップ量,及び定格値からの偏差
b) 入力信号範囲
c) 帯域幅
d) 出力飽和電圧
4.2.7.2
低周波フィルタ
検波後に用いられるフィルタは,低周波フィルタ(LFフィルタ)が用いられる。このフィルタの帯域幅
は,例えば,振動,試験速度などの適用に合わせて設定する。
定める特性は,次とする。
a) 利得
b) 3 dB帯域幅
c) 減衰率
d) 過渡応答
4.2.7.3
位相設定
位相設定することによって,複素平面表示器上の同期検波されたベクトル信号が回転する。
定める特性は,次とする。
a) 可変範囲
b) ステップ量
c) 位相設定に伴うベクトル信号の振幅の変動
d) 実際の位相回転と位相回転目盛との偏差
4.2.8
信号表示器及び出力
4.2.8.1
信号表示
表示器の種類は,指示計表示,記録紙表示又はスクリーン表示とする。表示の種類は,例えば,複素平
面,時間同期,周波数スペクトル,画像化などとする。
定める特性は,次とする。
a) 表示器の寸法
b) 表示目盛,主・副
c) 電圧及び時間の最大表示範囲
d) 変換パラメータ,例えば,1目盛当たりの電圧値
e) 直線性
f)
帯域幅
4.2.8.2
信号出力
信号は,アナログ,デジタル,論理出力などで出力する。
a) アナログ出力 定義するアナログ出力の特性は,次とする。
1) 電圧又は電流の範囲
6
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2) 出力インピーダンス
3) 直線性
4) 帯域幅
b) デジタル出力 定義するデジタル出力の特性は,次とする。
1) データ通信方式
2) シリアル・パラレル
3) 電圧及び電流のレベル
4) 速度及びフォーマット
5) サンプリングレート
6) A/D変換の分解能・範囲・直線性
c) 論理出力 定義する論理出力の特性は,次とする。
1) 電圧及び電流のレベル
2) 遅れ時間
3) ヒステリシス
4) (信号論理)アクティブハイ又はロー
4.2.9
デジタル化
4.2.9.1
一般
デジタル化をするときは必ず,次の特性を定める。
a) デジタル化の段階
b) デジタル化技術
c) A/D変換の分解能
d) サンプリング周波数
次の4.2.9.2から4.2.9.5までのパラメータの情報は,公開する。
4.2.9.2
デジタル化の段階
デジタル化は,検波の前又は後に行われる。
4.2.9.3
デジタル化技術
デジタル化は,内部のクロック又は外部のエンコーダを使用して行う。
4.2.9.4
A/D変換の分解能
分解能は,デジタル化の1ビットに対応している変換器の入力電圧値である。
デジタル化のビット数は,A/D変換器の最大入力電圧及び分解能によって直接求めることができるが,
製造業者によって供給される有益な情報である。
4.2.9.5
サンプリング周波数
サンプリング周波数は,A/D変換サンプリングの周波数であり,単位はヘルツ(Hz)である。
5
検証
5.1
一般
確実で有効な渦電流試験を実施するために,渦電流試験器の性能が許容範囲内に維持されていることを
検証することが必要である。この検証のために,各種点検及び必要であれば,その是正処置を行う。この
ための検証の手順書を作成する。その中には是正処置の手順を含む。
対比試験片の物理的状態(材質,表面状況,形状,きずなど)は,渦電流試験器の点検に用いられる前
7
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
に,許容範囲内にあることを確認しなければならない。また,検証に用いる測定機器は,校正されていな
ければならない。
5.2
点検のレベル
点検は,次の三つのレベルとする。各レベルでは,点検の内容によって適切な点検の周期を定める。
なお,初期の試験は,既に製造業者又はその管理下で実行していなければならない。
a) レベル1:日常点検 渦電流試験器の性能が指定した範囲内にあることを確認するために,対比試験
片を用いて,定められた周期で実行する。この点検は,試験現場で日常的に実行する。この周期及び
対比試験片は,点検手順書に明確に示す。
b) レベル2:定期点検 一定の継続期間後の点検は,渦電流試験器の特性の安定性を保証するために実
施する。
c) レベル3:特性点検 この点検は,製造業者による出荷時の特性と同じであることを保証するために,
渦電流試験器について実施する。
点検を必要とする組織は,確認すべき特性を指定しなければならない。点検レベルに関連する内容を,
表1に示す。
表1−点検レベルに関連する内容
点検レベル
目的
点検周期
点検に用いる機器
実施者a)
レベル1:日常点検
渦電流試験器の性能
の安定性の確認
周期的に(例えば,毎
時間,毎日)
対比試験片
使用者
レベル2:定期点検
渦電流試験器の選択
した特性の安定性の
確認
定期的に,少なくとも
毎年,又は修理の後
校正した測定器及び
対比試験片
使用者
レベル3:特性点検
渦電流試験器全ての
特性の確認
出荷時の一度,又は必
要とするとき
校正した測定器及び
対比試験片
製造業者,使用者
注a) 実施者は,点検について責任をもつ者を指し,実際に機器を点検する者と異なってもよい。
5.3
点検手順
適用する試験の内容によって,点検の対象となる特性は異なる。必須の特性及び点検レベルは,点検の
手順書に詳細に示さなければならない。
渦電流試験の手順は,点検の手順書と関連付けなければならない。限定的な適用に対しては,点検する
特性の数を限定することができる。
点検がこの規格の適用範囲内で実行できるように,渦電流試験器の重要な特性を示す十分なデータが提
供されなければならない。
5.4
是正処置
是正処置のレベルは,次による。
a) レベル1:渦電流試験器の性能が,指定した範囲内にないとき,前の正常な点検以降に試験した製品
に対して是正処置の決定を下し,渦電流試験器の性能が許容限度内になるように処置しなければなら
ない。
b) レベル2:特性の偏差が,製造業者又は検証の手順書で指定した許容限度より大きいとき,渦電流試
験器に対して是正処置の決定を下さなければならない。
8
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) レベル3:特性が,製造業者が指定する範囲又は検証の手順書で指定する受入れ範囲を外れていると
き,渦電流試験器に対して是正処置の決定を下さなければならない。
6
渦電流試験器の電気的特性の測定
6.1
測定要件
次に規定している測定は,渦電流試験器の入力と出力との間で行われるもので,渦電流試験器の内部を
開けることを必要としないブラックボックス概念に基づいている。ブラックボックス概念に基づく測定で
あれば,ほかの測定方法を用いてもよい。この場合,測定方法の互換性を示さなくてはならない。また,
測定の手順書を作成する。
測定には,電磁的に遮蔽した無誘導抵抗器を負荷として用いる。負荷抵抗は50 Ωとする。50 Ω以外の
抵抗を用いた追加測定を行ってもよい。しかし,渦電流試験器,又は測定対象の都合で異なった負荷抵抗
を用いた場合は,特性値が著しく異なる場合がある。このような場合には,使用した負荷抵抗を試験報告
書に記載しなければならない。
箇条6に規定している測定項目では,同一桁域で三つの測定周波数を用いることとし,例えば,1,2,
及び5の逓倍方式を用いるのであれば,10 kHzから100 kHzの桁では,それぞれ10 kHz,20 kHz,及び50
kHzを用いる。
特定の測定のためのフィルタ設定は,フィルタの設定値によっては帯域幅,利得の設定精度,位相設定
精度などの特性に変化を生じさせることに留意する必要がある。このような場合には,測定条件を試験報
告書に記載しなければならない。
6.2
発振器
6.2.1
励磁周波数
6.2.1.1
定義及び測定条件
励磁周波数は,6.1に基づき負荷を接続した渦電流試験器の発振出力で測定する。設定値からの偏差割合
は,次の式(1)のように求める。
100
ex
m
ex
×
−
f
f
f
(%)···································································· (1)
ここに,
fex: 設定値
fm: 測定値
測定した全周波数帯の最大の偏差割合を報告する。
6.2.1.2
測定方法
周波数は,周波数ビート法(附属書A参照),周波数カウンタ,スペクトルアナライザなどを用いて測
定する。多重周波数の場合,スペクトルアナライザなどの適切な機能を備えた,多重周波数に対応した計
測器を使用する。
6.2.2
高調波ひずみ
6.2.2.1
定義及び測定条件
励磁発振器が出力する交流信号において,その高調波成分は,基本波を除く成分として得られる。高調
波ひずみは,ひずみ率(k)を用いて表現する。ひずみ率は,高調波の実効値と交流信号の実効値との比で
あり,次の式(2)から求める。
9
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
100
×
2
2
n
∑
=
=
m
n
V
V
k
(%) ··························································· (2)
概算値は,次の式(3)から求める。
100
×
2
1
2
V
V
V
k
−
=
(%) ····························································· (3)
ここに,
V: 交流信号の実効値
V1: 第1高調波(基本波)の実効値
Vn: n番目の高調波の実効値
m: nの最大値
ひずみ率は,渦電流試験器の発振出力に6.1による負荷を接続し,測定する。
多重周波数の場合,スペクトルアナライザなどの適切な測定器を用いなければならない。
各周波数の最大のひずみ率を報告する。
6.2.2.2
測定方法
ひずみ率は,ひずみ率計,スペクトルアナライザ又はハイパスフィルタを用いて測定する。
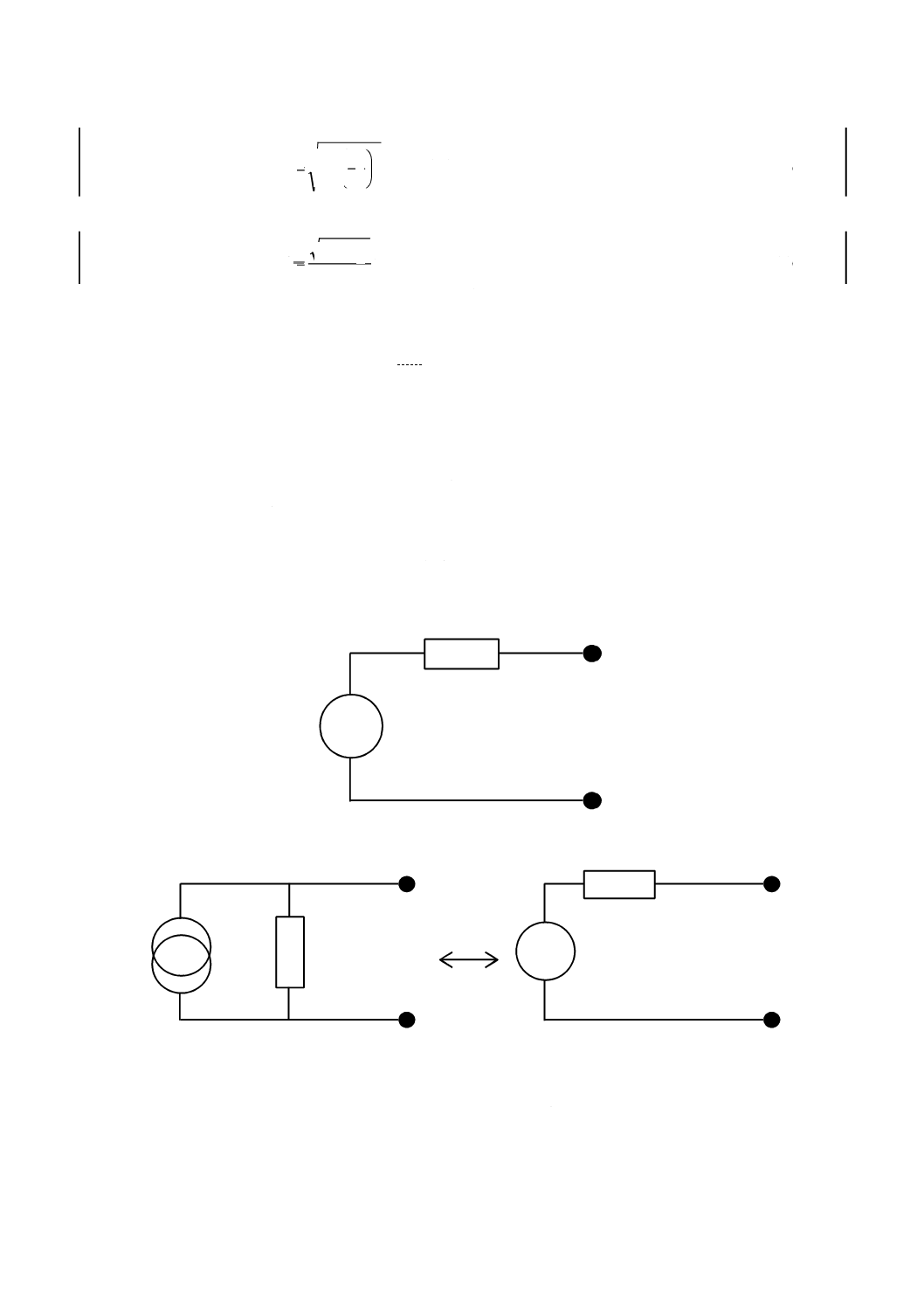
6.2.3
信号源インピーダンス
6.2.3.1
定義及び測定条件
信号源インピーダンス(Zs)は,図2のa) 及びb) に示すとおり,発振器の個々の独立出力で測定した
内部のインピーダンスである。
Ve
s
Z
a) 電圧駆動発振器
I
V=Z・I
sZ
sZ
s
Zs :信号源インピーダンス
I :Zsのときの電流
b) 電流駆動発振器
図2−発振器の内部インピーダンス
Ve
Zs
Zs
Zs
I
V = Zs・I
10
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.2.3.2
測定方法
この測定方法は,複素信号源インピーダンス(Zs)が抵抗性のものという仮定に基づいている。
渦電流試験器の発振出力は,抵抗器(R1)(通常50 Ω)を負荷とする。このときの電圧(V1)は,適切
な電圧測定器によって測定する。測定値が最大出力電圧より小さいことを確認することが重要である。
抵抗器(R2)(通常,R2=0.5 R1)で測定を繰り返し,V2を測定する。
信号源インピーダンスは,オーム(Ω)で表し,次の式(4)から求める。
(
)(
)
1
1
2
2
2
1
s
/
/
R
V
R
V
V
V
Z
−
−
=
································································ (4)
注記1 渦電流試験器の破損を防止するため,V1,V2の値及びV1/R1,V2/R2の値が,最大出力電圧及
び最大出力電流よりも小さいことを確認する。
注記2 R1及びR2の抵抗値の選択は,Zsの測定精度に影響する。
6.2.4
最大出力電圧
6.2.4.1
定義及び測定条件
最大出力電圧(VOmax)は,無負荷で最大出力に設定したときの,出力端子のピーク−ピーク値とする。
6.2.4.2
測定方法
最大出力電圧は,オシロスコープ又は適切な電圧測定器を用いて測定する。測定器は,高入力インピー
ダンス(>1 MΩ)及び渦電流試験器の周波数範囲に対応した帯域幅をもつものを使用しなければならない。
通常,測定器の最大応答周波数は,渦電流試験器の最大周波数の少なくとも2倍である。
測定値は,図表で示すこともできる。
6.2.5
最大出力電流
6.2.5.1
定義及び測定条件
最大出力電流(IOmax)は,発振出力端子に製造業者によって定義した最も低い許容抵抗負荷を接続した
ときに,測定する電流のピーク値である。発振出力は,最大出力に設定する。
6.2.5.2
測定方法
最大出力電流は,電流プローブが接続したオシロスコープ又は電流測定器を用いて測定する。
測定器は,低入力インピーダンス(一般的には,渦電流試験器の最小負荷抵抗の10 %以下)で渦電流試
験器の周波数範囲に対応した帯域幅をもつものを使用しなければならない。負荷抵抗の値を十分な精度で
評価できる場合,その電圧から電流を求めてもよい。
測定値は,図表で示すこともできる。
6.3
入力段特性
6.3.1
最大許容入力電圧
6.3.1.1
定義及び測定条件
最大許容入力電圧(入力段に加えることのできる最大電圧)は,安全性,飽和及び非直線性と関係し,
渦電流試験器の利得を最小にしたときの,次の事項に該当する最大入力電圧とする。
a) 製造業者によって提示された最大値(渦電流試験器が破損しないための安全な入力電圧の限界値であ
り,差動入力の場合もこれと同等である。)。
b) 飽和出力の90 %
c) 与えられた値を超えて非直線性が表れた値。直線性からの最大の許容差は,特性測定の手順書の中で
定義する。
全ての場合において,入力電圧はa) を超えてはならない。
11
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.3.1.2
測定方法
6.3.1.2.1
飽和に関する最大許容入力電圧の測定
周波数ビート法(附属書A参照)を用いる。入力電圧は,正弦波発振器(以下,発振器という。)によ
って与える。発振器の周波数と渦電流試験器側で設定した周波数との差は,渦電流試験器の帯域幅の10 %
以下でなければならない。渦電流試験器の利得は,最小に設定し,フィルタはその効果が最小になるよう
設定する。
渦電流試験器のブリッジバランスがとれていることを確認する。入力信号は,高入力インピーダンス電
圧測定器で測定する。出力信号は,オシロスコープ上に表示し,X及びY成分の電圧を最大値及び最小値
が測定できる電圧測定器を用いて測定する。
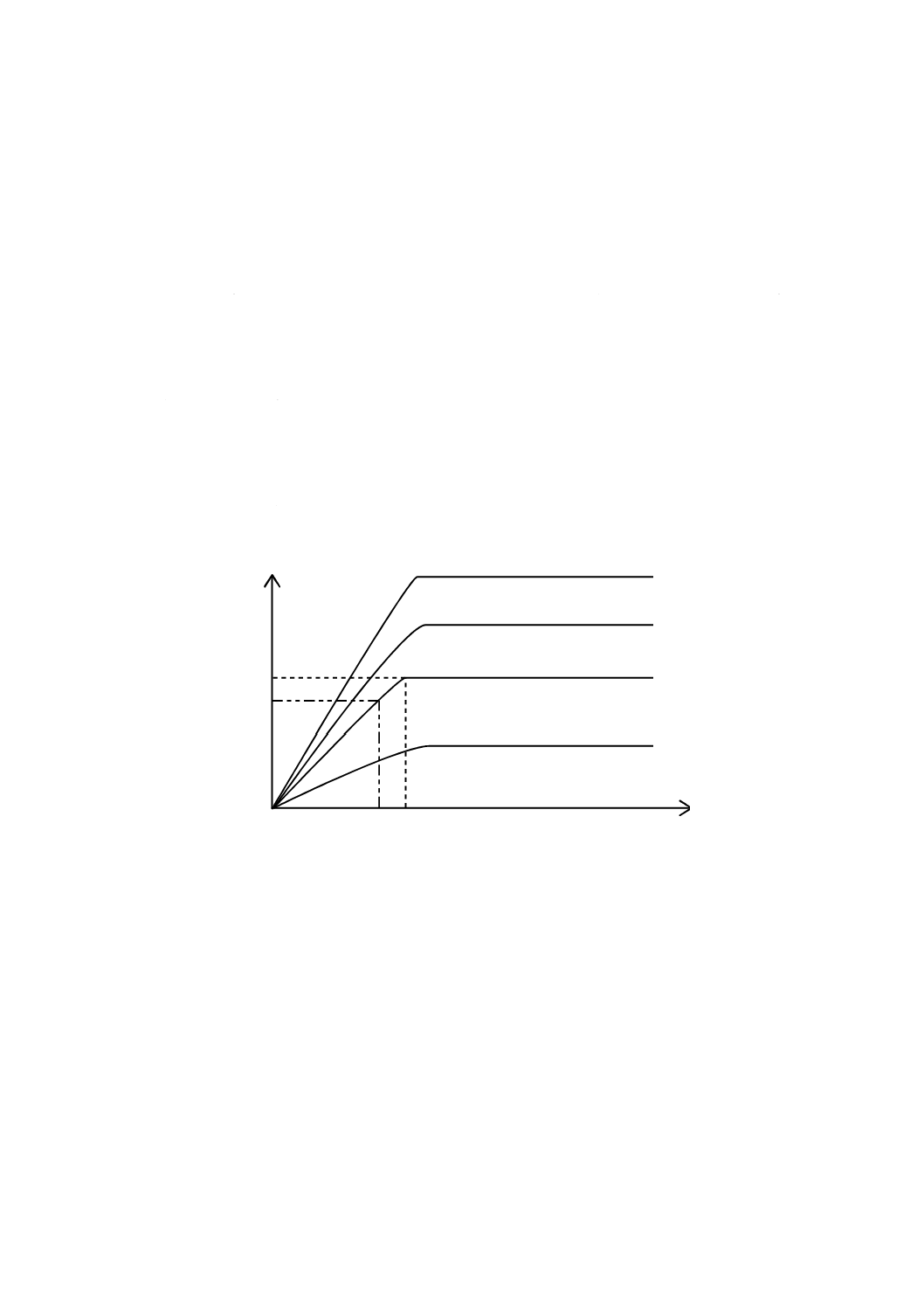
入力電圧を0から製造業者が指定する安全な最大許容入力電圧まで増加させ,出力電圧のX成分及びY
成分の正負のピーク値の絶対値(Vx+,Vx−,Vy+,及びVy−)をプロットする(図3参照)。飽和出力電圧
(Vsx+,Vsx−,Vsy+,及びVsy−)は,入力電圧の増加による出力電圧の増加がなくなった飽和状態での出力
電圧の,四つのピーク値のうち最初に飽和した電圧値(入力が最小値のときの出力値)と定義する。飽和
に関する最大許容入力電圧は,Vilimx+,Vilimx−,Vilimy+,及びVilimy−として定義し,モニタ上の飽和出力電
圧が90 %になる入力電圧値である。
90 %
Y
VS
VS
VilimVis
Vx+
Vy-
Vx-
Vy+
X
X: 入力電圧
Y: 出力電圧
Vsx−: 飽和出力電圧
Visx−: Vsが出現する入力電圧
Vilimx−: Vx−の最大許容入力電圧
注記 各出力の相対的振幅は一例である。
図3−飽和と関連した最大許容入力電圧の測定
6.3.1.2.2
非直線性に関する最大許容入力電圧の測定
6.3.1.2.1の測定法及び直線性を決定するための方法(附属書B参照)を使用して,関連の特性測定の手
順書の中で与えられた,直線性の最大許容偏差から外れる非直線性に関する最大許容入力電圧を決定する。
この場合,附属書Bにおいて,次の値を使用する。
I:入力電圧
O:出力電圧
Imin:ゼロ
Imax:飽和に関した最大許容入力電圧(6.3.1.2.1を参照)
Vsx−
90 % Vsx−
Vilimx− Visx−
12
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.3.2
入力インピーダンス
6.3.2.1
定義及び測定条件
入力インピーダンスは,入力段の見かけ上のインピーダンスである。等価回路は,抵抗及びコンデンサ
の並列の組合せである。
6.3.2.2
測定方法
ネットワークアナライザ,インピーダンスメータなどを使用する。又は附属書Cに規定の測定方法を用
いてもよい。ほかの方法を用いた場合は,報告しなければならない。
入力電圧は,製造業者によって提示された最大許容入力電圧より大きい電圧を加えてはならない。
6.4
信号処理
6.4.1
一般
図1のブロック図のとおり,信号処理段は,高周波及び低周波の信号処理によって構成する。
6.4.2
測定条件
ほかに指定のない限り,6.4.3から6.4.13までに対し,次の測定条件を適用する。
a) 入力に接続する抵抗(6.1参照)は,無誘導とする。
b) 渦電流試験器の増幅率は,最小にする。
c) 渦電流試験器の入力電圧は,0とし,ブリッジバランスをとる。
d) 全てのフィルタの効果は最小に設定する。測定に用いるフィルタの設定値は,帯域幅,利得測定精度,
位相設定精度などの特性に影響することがある。このような場合,測定条件を特性測定の手順書に明
記しなければならない。
e) 測定値は出力電圧を評価するので,高周波フィルタの効果と検波器の効果とを区別することは不可能
である。高周波フィルタが調整可能である場合には,製造業者が推奨する値に設定する。
f)
周波数ビート法(附属書A参照)を用い,渦電流試験器の入力に接続する外部発振器の出力電圧を,
直線性測定時の最大許容入力電圧値の半分に調節する。外部発振器の周波数と渦電流試験器側の選択
した周波数との差(fd)は,製造業者が指定した渦電流試験器の周波数帯域幅の10 %を超えてはなら
ない。
6.4.3
ブリッジバランス
6.4.3.1
ブリッジバランスの残留出力
6.4.3.1.1
定義及び測定条件
ブリッジバランスの残留出力とは,バランス操作後に得られる出力をいう。指定した範囲の百分率,例
えば,フル・スケールに対する出力比などとして表現する。
6.4.3.1.2
測定方法
ブリッジバランス操作に続き,各成分の出力値を測定する。
数回のブリッジバランス操作(少なくとも5回)のうちの最大値をとる。
6.4.3.2
最大補償可能入力電圧
6.4.3.2.1
定義
電気的にゼロバランスできる入力電圧の最大値である。
6.4.3.2.2
測定方法
渦電流試験器の発振器から供給された電圧が,入力に供給される。
6.4.3.1で得られるブリッジバランスの残留出力値の2倍と同等になるまで入力電圧を徐々に増大させ,
バランス操作を繰り返す。
13
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
入力信号の電圧は,適切な帯域幅の高入力インピーダンス電圧測定器で計測する。
測定値は,最大許容入力電圧との百分率として示す。
6.4.4
高調波減衰特性
6.4.4.1
定義
n番目の高調波(fn)に対する高調波減衰(Afn)は,基本周波数応答(Vf1)に対する当該高調波の周波
数応答(Vfn)の比率であり,次の式(5)から求める。
1
n
n
log
20
f
f
f
V
V
A=
········································································· (5)
6.4.4.2
測定方法
周波数ビート法(附属書A参照)を用い,外部発振器の周波数をfs=f1+fdに設定する(f1は基本周波数,
fdはf1とfsとの差の周波数)。位相検波出力の1成分(Vf1)を測定する。次に,外部発振器の周波数を2f1
+fdに再設定し,Vf2を測定する。5番目の高調波まで繰り返し測定するが,必要であれば,減衰が60 dB
を超えるまで繰り返す。
6.4.5
信号処理段の周波数応答域
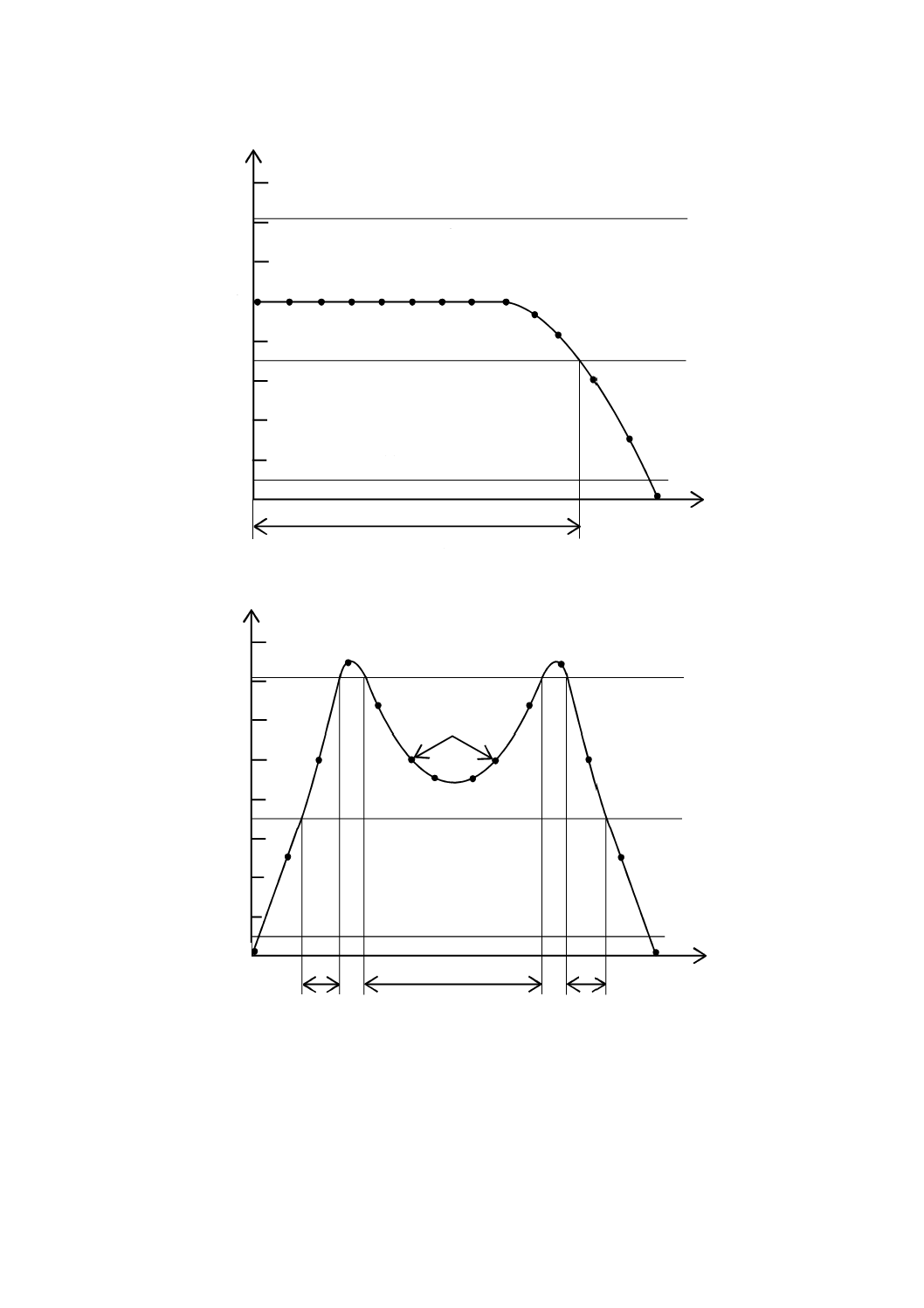
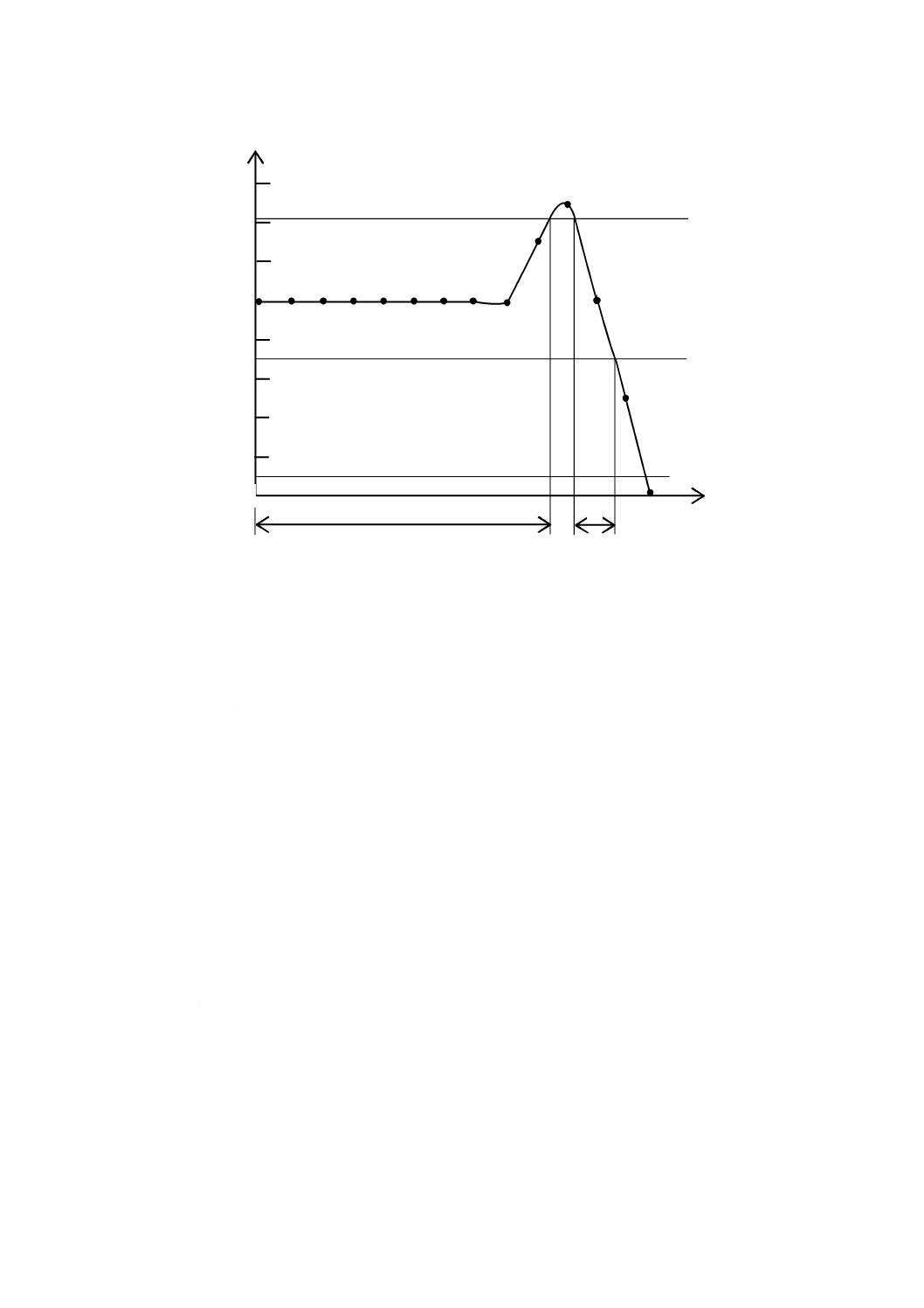
6.4.5.1
定義
図4の周波数応答域は,検波出力が中央値の+m dBから−n dBの周波数範囲から得られる。m及びn
の値は,特性測定の手順書に明記する。
一般に帯域は±3 dBで示すため,この規格でもこの数値を用いる。
6.4.5.2
測定方法
周波数ビート法(附属書A参照)を用いる。発振器の周波数と渦電流試験器の設定した周波数との差(fd)
は,対数表示とする。
fdの最も低い値は渦電流試験器の動作周波数に依存し,最も高い値は製造業者によって指定された渦電
流試験器の出力帯域幅の上限の2倍とする。
測定点は,対数表示で10等分以上とする。
各値の測定中,fdが常に一定であることを確認することが重要である。
成分出力のピーク−ピーク値及び周波数(fd)は,広帯域電圧測定器及び周波数カウンタで測定する。
結果は,出力信号の各成分の周波数及び振幅の表形式で示してもよい。
X,Y成分の測定電圧値は,次のように求める。最大振幅から開始して,中央値は,最大値と最大値の
10 %との間の範囲の測定値を基に計算する。振幅が中央値の±3 dBの点が,周波数応答範囲の両端である。
図4のa),b) 及びc) は,周波数応答帯域の異なる事例である。周波数応答帯域が幾つかの範囲を含むこ
ともある。
14
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
0
log
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
+3 dB
−3 dB
1
2
Y
fd
最大値の10 %
a) 例1
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
+3 dB
−3 dB
最大値の10 %
1
2
Y
logfd
2
2
b) 例2
図4−周波数応答例
15
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
+3 dB
−3 dB
1
2
Y
2
logfd
最大値の10 %
c) 例3
Y:出力(任意の単位)
1:中央値
2:±3 dBレベル周波数応答範囲
図4−周波数応答例(続き)
6.4.6
信号処理段の帯域幅
6.4.6.1
計測値及び測定条件
信号処理段の帯域幅は,6.4.5で測定した値を基に中央値の−n dB以上の範囲を用いて得られる。一般的
には,nの値は3である。
6.4.6.2
測定方法
測定方法は,6.4.5.2による。
6.4.7
位相直線性
6.4.7.1
定義及び測定条件
位相直線性とは,出力成分(X及びY)の位相角と入力信号の位相角との偏差特性である。
入力の位相角を0°から360°まで変化させることで得られた出力の最大の偏差を示す特性となる。
6.4.7.2
測定方法
使用する周波数ビート法(附属書A参照)は,次に示すような動的計測を必要とする。
二つの出力成分は,36 fdより大きいサンプリング周波数(fe)のデータ収集システムによって,同期し
て得ることができる(一つのサンプルは最大で10°とする。)。
出力信号の1周期分のデータフォーマットを,表2に示す。nは,データの個数である。
16
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2−周波数ビート法におけるデータフォーマット例
i
1
2
…
n
X
Y
位相角の測定値と理論値との比較表のフォーマットを,表3に示す。nは,データの個数である。継続
的な成分(渦電流試験器のオフセット分)Xav及びYavは,全てのサンプルの平均値である。Xirec及びYirec
は,計測した値のX成分及びY成分から継続的な成分を引くことによって得られ,次の式(6)及び式(7)から
求める。
av
rec
X
X
X
i
i
−
=
·········································································· (6)
av
rec
Y
Y
Y
i
i
−
=
············································································· (7)
i番目のサンプルの位相角は,次の式(8)及び式(9)から求める。
0
rec≧
i
X
の場合,
(
)
rec
rec
m
arctan
i
i
i
X
Y
Φ
/
=
··································· (8)
0
<
rec
i
X
の場合,
(
)
°
+
=
180
arctan
rec
rec
m
i
i
i
X
Y
Φ
/
························· (9)
この値を,式(10)から求めるi番目のサンプルの理論値と比較する。
(
)
mo
e
d
th
360
/
Φ
f
f
i
Φi
+
×
=
··························································· (10)
表3−理論値及び測定位相角比較表におけるデータフォーマット例
i
1
2
…
n
Xirec
Yirec
Φmi
Φthi
位相角の直線性からの最大偏差は,次の式(11)から求める。
(
)
i
iΦ
Φ
Φ
th
m
max
m
max
Δ
−
=
·····························································(11)
6.4.8
出力成分の直交性
6.4.8.1
定義及び測定条件
出力成分(X及びY)の直交性とは,各成分を直角位相に検波出力する渦電流試験器の性能をいう。
直交性の偏差,又はチャンネルXとチャンネルYとの間の実際の位相と90°との偏差を示す特性である。
6.4.8.2
測定方法
X出力とY出力との間の位相角は,位相計又はロックインアンプによって測定する,又は代替として,
サンプリング周波数(fe)が360 fd(例えば,少なくとも1°の分解能)より大きい場合,6.4.7において収
集したデータから得る。
6.4.9
利得設定精度
6.4.9.1
定義及び測定条件
利得設定精度は,線形に信号増幅する渦電流試験器の特性であり,設定値と測定値との間の直線性から
の最大の偏差でありデシベル(dB)で示す。各出力成分について測定しなければならない。
6.4.9.2
測定方法
発振器に減衰器が内蔵されていない場合は,校正した抵抗減衰器を発振器と渦電流試験器との間に組み
込む。
17
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
渦電流試験器の利得を最小に設定し,各出力成分の値を,参照電圧(Vxref,Vyref)として測定する。
渦電流試験器の利得の設定範囲は少なくとも,例えば,6 dB又は10 dBステップの5段階とする。
渦電流試験器の利得をこの間隔で増大させ,発振器の出力は同じ間隔で抵抗減衰器を用いて減少させる。
このときの各出力成分の値(Vx,Vy)を測定する。
利得の偏差(Ex,Ey)は,次の式(12)及び式(13)から求める。
(
)
ref
/
log
20
x
x
x
V
V
E=
································································· (12)
(
)
ref
/
log
20
y
y
y
V
V
E=
································································· (13)
最大偏差は,利得の偏差の最大値とする。
6.4.10 位相設定精度
6.4.10.1 定義及び測定条件
位相設定精度は,位相制御による位相回転の出力ベクトルの位相値の実際の変化と位相設定との偏差で
ある。また,位相を変化させたときの出力信号の振幅偏差も報告しなければならない。
6.4.10.2 測定方法
渦電流試験器の発振出力を,外部の抵抗減衰器を通して渦電流試験器の入力側に接続する。
渦電流試験器の入力電圧を0に設定して渦電流試験器のブリッジバランスをとり,各出力成分(X及び
Y)の値Xref及びYrefを測定する。
抵抗減衰器によって渦電流試験器の入力電圧を,非直線性と関連した渦電流試験器の最大許容入力電圧
の半分に調整する。
渦電流試験器の位相設定を0°(Φ0)にセットし,各出力成分(X及びY)の値X0及びY0を測定し,出
力ベクトルの位相角及び振幅は,次の式(14),式(15)及び式(16)から求める。
0
ref
0
≧
X
X−
の場合,
−
−
=
ref
0
ref
0
0
arctan
X
X
Y
Y
Φ
·························· (14)
0
<
ref
0X
X−
の場合,
°
+
−
−
=
180
arctan
ref
0
ref
0
0
X
X
Y
Y
Φ
··················· (15)
(
)(
)2
ref
0
2
ref
0
0
Y
Y
X
X
V
−
+
−
=
····················································· (16)
渦電流試験器の位相設定を,10°を上回らないステップ位相(Φe)を決め,0〜360°間をiステップで
変化させ(i Φe),各ステップ(i)のときの出力の測定(Xi,Yi)及び式(14)〜式(16)の計算(添え字0をi
として)を繰り返し,Φi及びViを求める。
ステップiの角度の位相偏差は,次の式(17)から求める。
(
)
e
d
Φ
i
Φ
Φ
i
i
−
=
······································································· (17)
ステップiの振幅の偏差比率は,次の式(18)から求める。
(
)
[
]100
/
0
0
d
×
−
=
V
V
V
V
i
i
····························································· (18)
渦電流試験器の位相設定精度及び位相を変化させたときの振幅偏差は,Φdi及びVdiの最大値を報告する。
6.4.11 クロストーク特性
6.4.11.1 定義及び測定条件
クロストーク特性とは,多チャンネル渦電流試験器のチャンネル間又は絶対値と,差動入力チャンネル
との間の相互干渉を示す特性のことである。
6.4.11.2 測定方法
6.4.11.2.1 多チャンネル渦電流試験器
18
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
全てのチャンネルは,同じ周波数にセットする。
各チャンネルの入力は,それぞれ外部の発振器に接続する。
発振器の出力は,直線性と関連した最大入力電圧に設定しなければならない。
ほかのチャンネルは最大感度に設定し,それぞれの各出力成分(X及びY)の値を測定する。
nチャンネルの渦電流試験器における,j=1〜nのjチャンネルの出力は,次の式(19)から求める。
2
Y
2
X
S
j
j
j
V
V
V
+
=
···································································· (19)
iチャンネルに信号を供給しているとき,そのチャンネルのクロストーク率tiは,次の式(20)から求める。
=
≠
i
j
i
j
i
V
V
t
S
S
max
log
20
································································· (20)
多チャンネル渦電流試験器のクロストークは,tiの最大値を報告する。
6.4.11.2.2 絶対値及び差動チャンネル
6.4.11.2.2.1 絶対値出力と差動出力との間のクロストーク特性
この測定は,二つのチャンネルによる6.4.11.2.1に基づく特有のケースである。絶対値出力チャンネル(番
号1及び番号A)と差動出力チャンネル(番号2及び番号D)との間におけるクロストーク特性である。
6.4.11.2.1に記載した測定によって,i及びjはA及びDの値をとる。
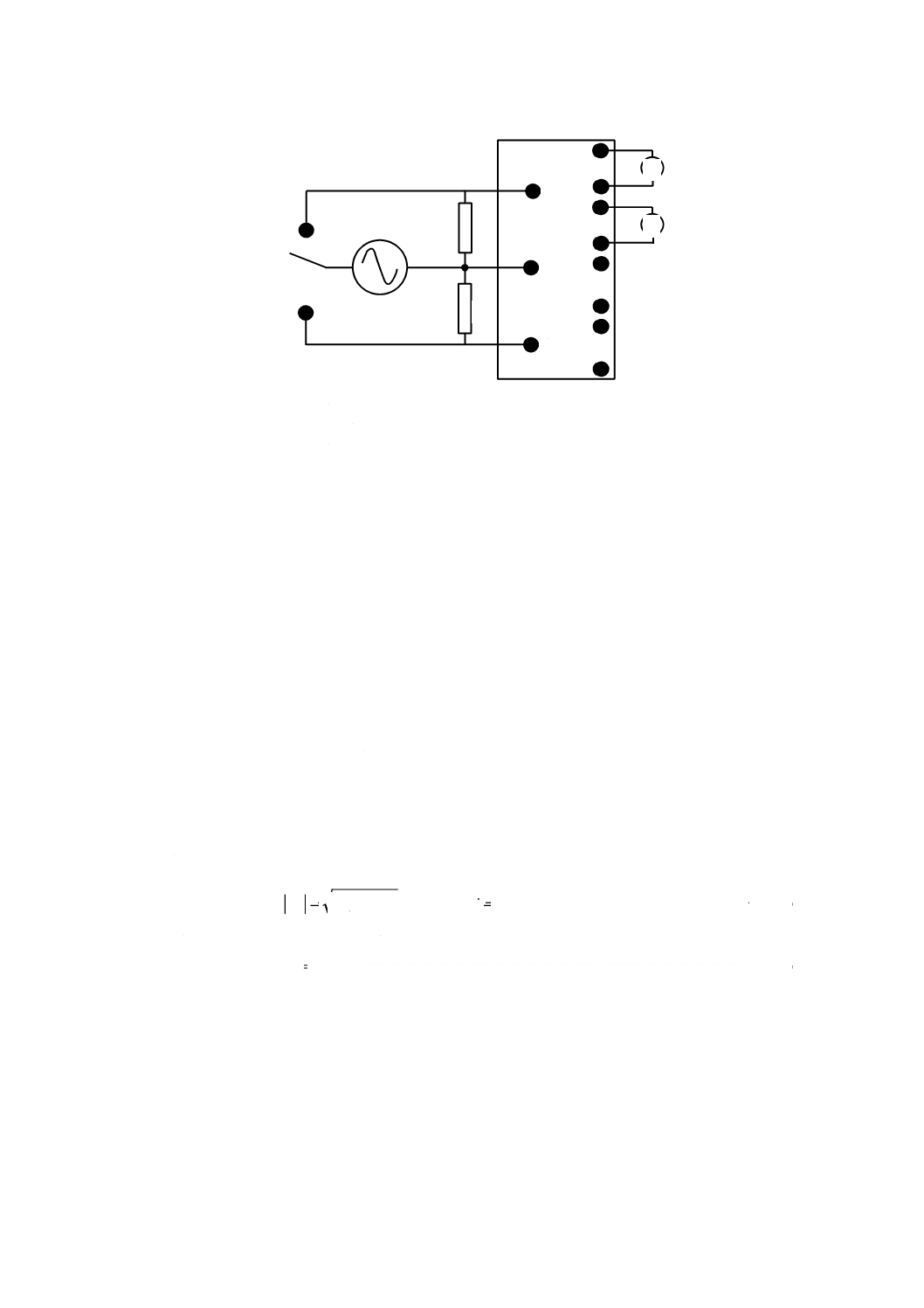
6.4.11.2.2.2 絶対値及び差動入力のクロストーク
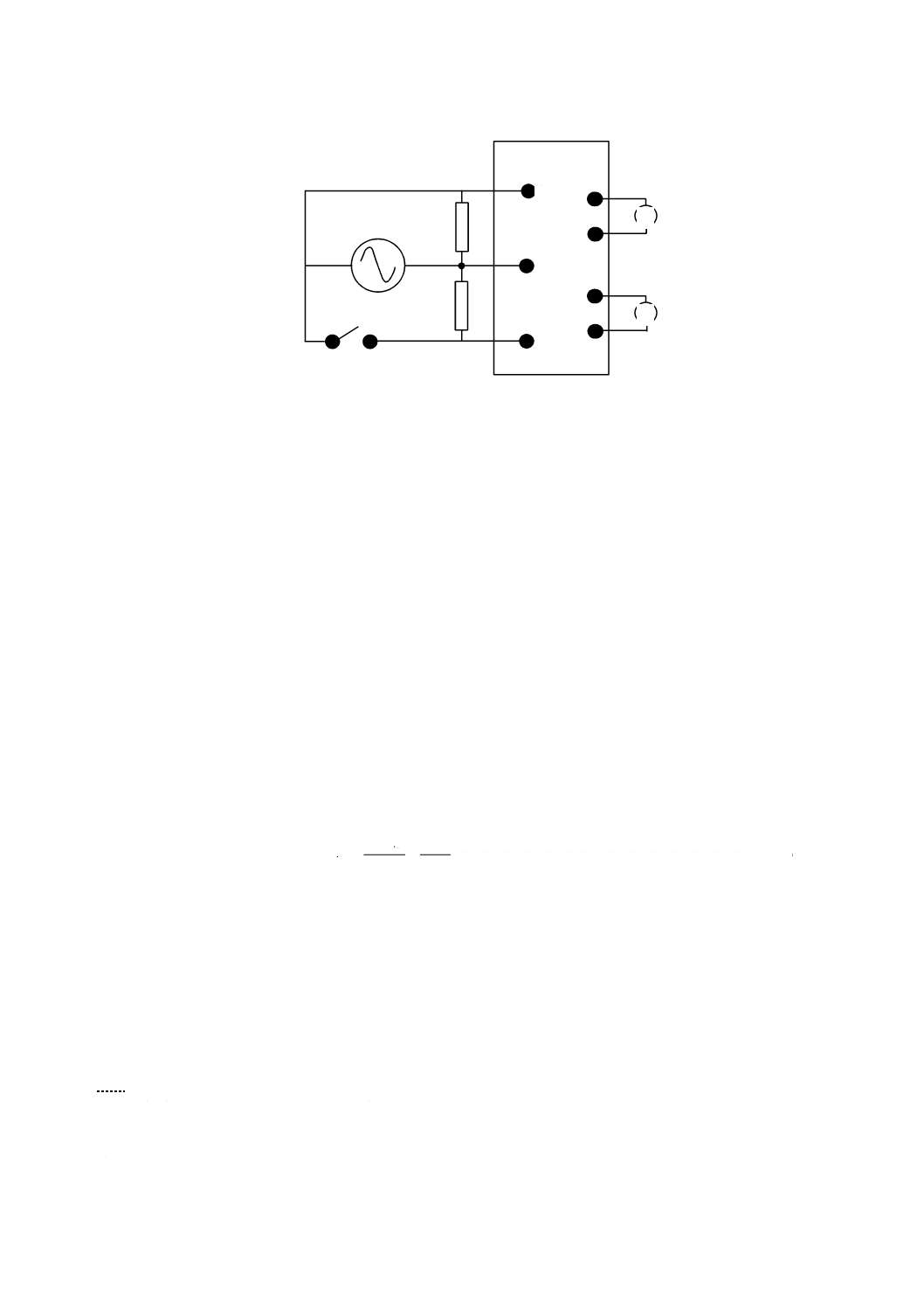
プローブを二つの抵抗器に置き換える(図5参照)。
周波数ビート法(附属書A参照)を用いて,外部の発振器を渦電流試験器の入力側に接続する。
絶対値出力信号は,オシロスコープに表示され,各出力成分(X及びY)の値VXA及びVYAを使って測
定する。
スイッチを入力1側にセットし,直線性と関連した最大入力電圧を印加する。このときVXA及びVYAを,
VXA1及びVYA1とする。
さらに,スイッチを入力2側に切り替える。このときのVXA及びVYAを,VXA2及びVYA2とする。
iチャンネルの出力を,次の式(21)から求める。
2
1
2
YA
2
XA
SA
又は
=
+
=
i
V
V
V
i
i
i
··································· (21)
クロストーク率tは,次の式(22)から求める。
SA1
SA2
log
20
V
V
ti=
······································································· (22)
19
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
S
XA
a
R
R
2
3
YA
XD
YD
b
V
V
1:入力1
2:COM端子
3:入力2
a:スイッチ(S)位置1
b:スイッチ(S)位置2
図5−絶対と差動入力との間クロストーク測定の配線図
6.4.12
同相信号除去
6.4.12.1 定義及び測定条件
この測定は,同相信号を抑制する渦電流試験器の性能を示す特性である。この評価は,差動入力の渦電
流試験器だけに適用する。
6.4.12.2 測定方法
プローブを二つの対応した抵抗器(図6参照)と置き換える。
周波数ビート法(附属書A参照)を用いて,外部の発振器を渦電流試験器の入力側に接続する。
スイッチを切り,入力1側だけに直線性と関連した最大入力電圧を印加する。このときのVX及びVYを,
VX1及びVY1とする。
さらに,スイッチを入れ,発振器の信号を両方の入力に印加する。このときのVX及びVYを,VX2及び
VY2とする。
iチャンネルの出力を次の式(23)から求める。
2
1
2
Y
2
X
S
又は
=
+
=
i
V
V
V
i
i
i
··································· (23)
同相信号除去比qrは,次の式(24)から求める。
2
S
1S
r
/V
V
q=
············································································ (24)
20
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
S
X
R
R
2
3
Y
V
V
1:入力1
2:COM端子
3:入力2
図6−同相信号除去比測定の配線図
6.4.13
最大ノイズ
6.4.13.1 定義及び測定条件
最大ノイズとは,最大帯域幅を設定した渦電流試験器の,無入力信号時における最大の残留出力信号に
対応する,入力電圧である。
最大ノイズは,特性測定の手順書の中で指定した場合,異なる使用条件下で測定することもある。
全ての場合において,設定した帯域幅を報告しなければならない。
6.4.13.2 測定方法
渦電流試験器の利得を最小(Gmin)にセットし,最大許容入力電圧(Vmax in)を印加し,得られた出力電
圧(Vmax out)を測定する。
次に,増幅率をGmaxに拡大する(可能であれば最大利得まで)。無入力において,渦電流試験器の帯域
幅以上又は等しい帯域幅の真の実効値電圧測定器を用いて,ノイズ(Vnoise out)を測定する。
最大機器ノイズに対応する入力電圧は,次の式(25)から求める。
max
min
out
max
in
max
out
noise
eq
G
G
V
V
V
V
×
=
·························································· (25)
6.5
出力
最大振幅出力とは,6.3.1に基づき測定した飽和又は非直線性に関係した最大許容入力電圧に対応した出
力値である。
6.6
デジタル化
渦電流試験器がブラックボックスであるとみなす場合は,特性の計測から4.2.9に定義するデジタル化の
パラメータを決める一般的な方法はない。これらの情報は,製造業者によって提供される。
7
試験報告書
特に指定がない限り,次の項目を選定し,記録することが望ましい。
a) 日時,場所,及び測定者
b) 渦電流試験器の名称,形式,並びに製造番号及び製造業者名
21
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) 特性項目
d) 適用規格及び関連する文書
e) 測定法,測定条件,及び測定結果
f)
点検結果,及び是正処置
22
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
周波数ビート法の原理
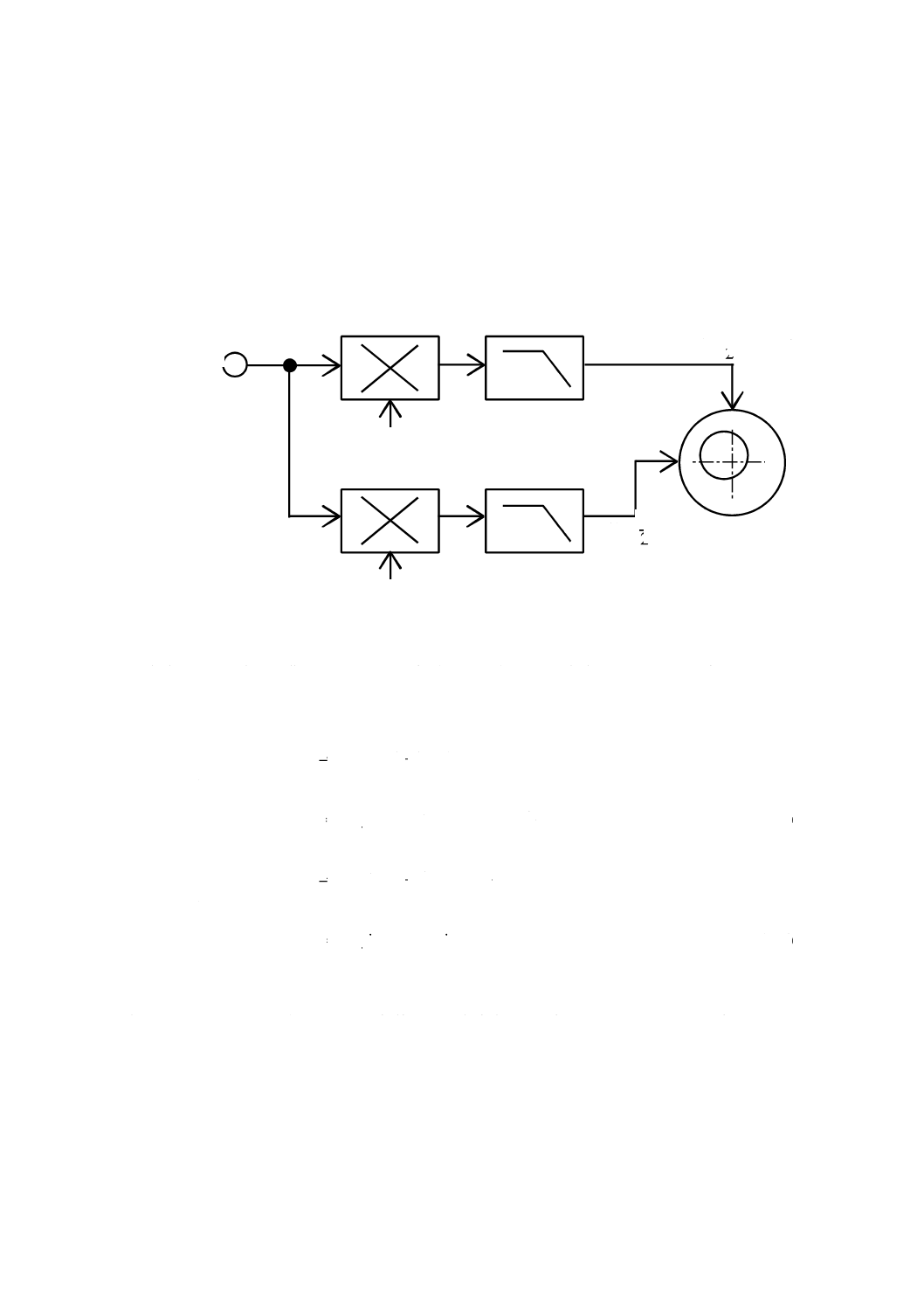
周波数ビート法の原理は,渦電流試験器の係数及び関連した検波回路(図A.1参照)を用いて説明する。
S=Asin2πf t
s
f=
s
f1+fd
Ref.0°=sin2πf t
1
Ref.90°=cos2πf t
1
Y(t) α sin2πf t
d
2A
掛算器
ローパスフィルタ
X(t) α cos2πf t
d
2A
図A.1−検波回路
渦電流試験器の周波数と僅かに異なる正弦波(fs=f1+fd)を渦電流試験器に入力する方法である。渦電
流試験器の検波回路のレベルで,ビートは渦電流試験器の発振器の周波数f1によって生み出される。
この例では,検波によって信号の実数及び虚数成分が得られる。実数成分は,
()
(
)
[
]
t
f
t
f
f
A
t
S
+
=
1
d
1
x
π
2
sin
π
2
sin
となり,書き換えると次の式(A.1)となる。
()
(
)
[
]t
f
f
t
f
A
t
S
+
−
=
d
1
d
x
2
π
2
cos
π
2
cos
2/
······································ (A.1)
虚数成分は,
()
(
)
[
]
t
f
t
f
f
A
t
S
+
=
1
d
1
y
π
2
cos
π
2
sin
となり,書き換えると次の式(A.2)となる。
()
(
)
[
]t
f
f
t
f
A
t
S
+
=
d
1
d
y
2
π
2
sin
π
2
sin
2/
+
······································· (A.2)
検波回路のローパスフィルタは,式(A.1)及び式(A.2)中の2番目の周波数(2f1+fd)に関する項を減衰さ
せる。したがって,渦電流試験器の出力は,周波数fdのコサイン及びサインによる検波でAに比例する二
つの信号X及びYの振幅が得られる。理想的な渦電流試験器の場合に,オシロスコープに加えられたこれ
らの二つの電圧で,半径がAに比例し,fdで回転する円が画面上に表示される。
一般に,発振器と渦電流試験器との周波数の違いfdは,製造業者によって指定される渦電流試験器の帯
域幅の10 %を超えてはならない。渦電流試験器の発振器の周波数を測定するためには,点が表示器の画面
の上で回転を停止するように入力信号の周波数(fs)を調整する。この場合,f1=fsである。
23
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
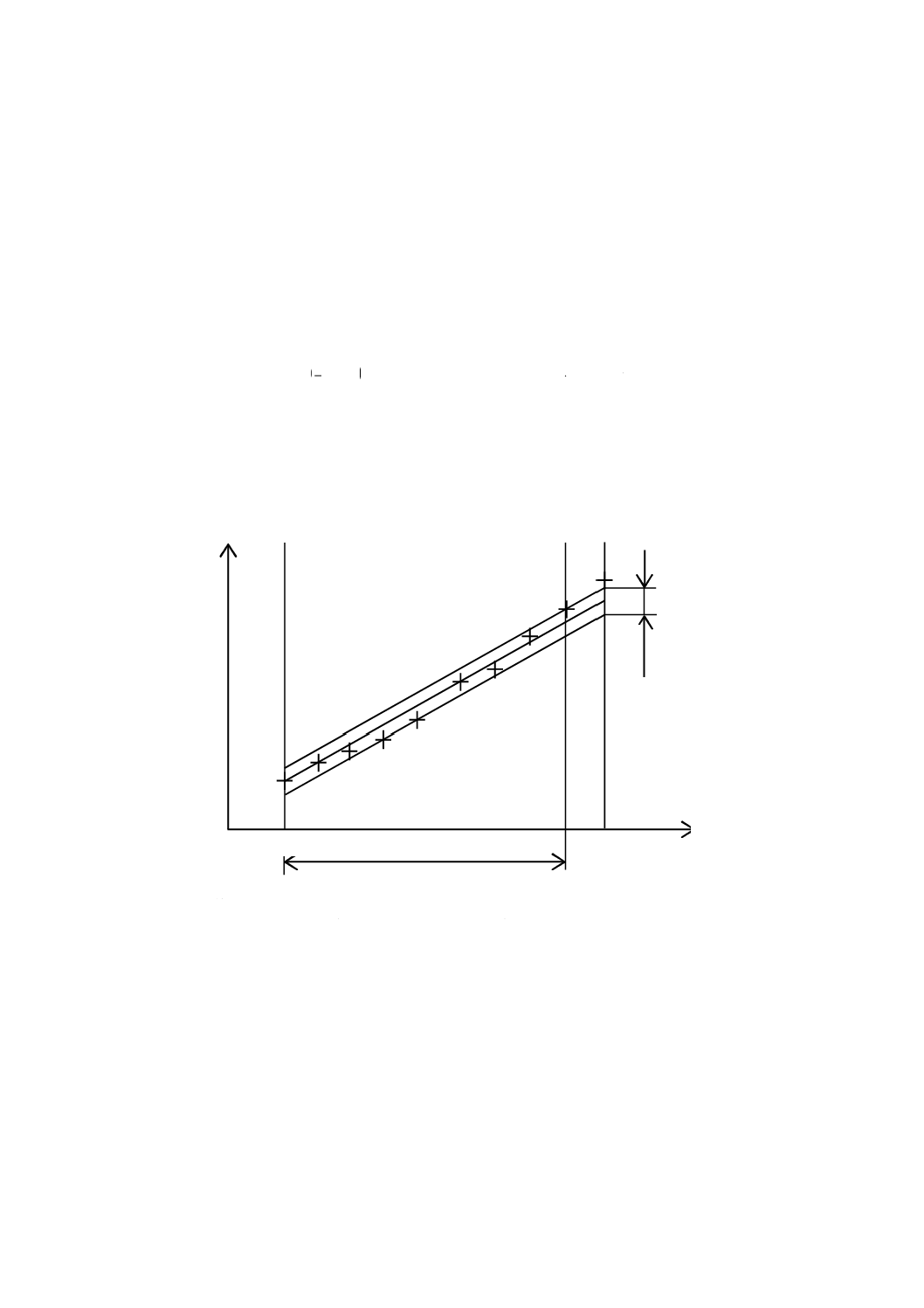
出力Oと入力Iとの間の直線性範囲の測定方法
パラメータIの測定範囲は,IminとImaxとの間とする。Iは,IminとImaxとの間で一定のステップで変化す
る。Iの個々の値で,パラメータOに対応した値が測定される。線形回帰は,IとOとの値の間で実行さ
れ,Olin (I) が得られる。
その偏差は,次の式(B.1)と定義する。
()
()
()
[
]
(
)
(
)
[
]100
lin
lin
/
lin
min
max
×
−
−
=
∆
I
O
I
O
I
O
I
O
I
·························· (B.1)
ε %直線性範囲とは,
Δ %≦ε %
を満たすIの範囲であるが,ここでεは,%で表した最大許容偏差である。
図B.1は,上記を使って求められた直線性範囲の決定を示す。
1
±
ε
%
O
I
Imin
Imax
1:直線性範囲
注記 この測定は増幅直線性に当てはまる。位相直線性のために,偏差は角度で測定される
(0〜100 %の代わりに0〜360°のスケール)。
図B.1−直線性範囲の測定法
Imax
Imin
24
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(規定)
等価入力インピーダンスの測定
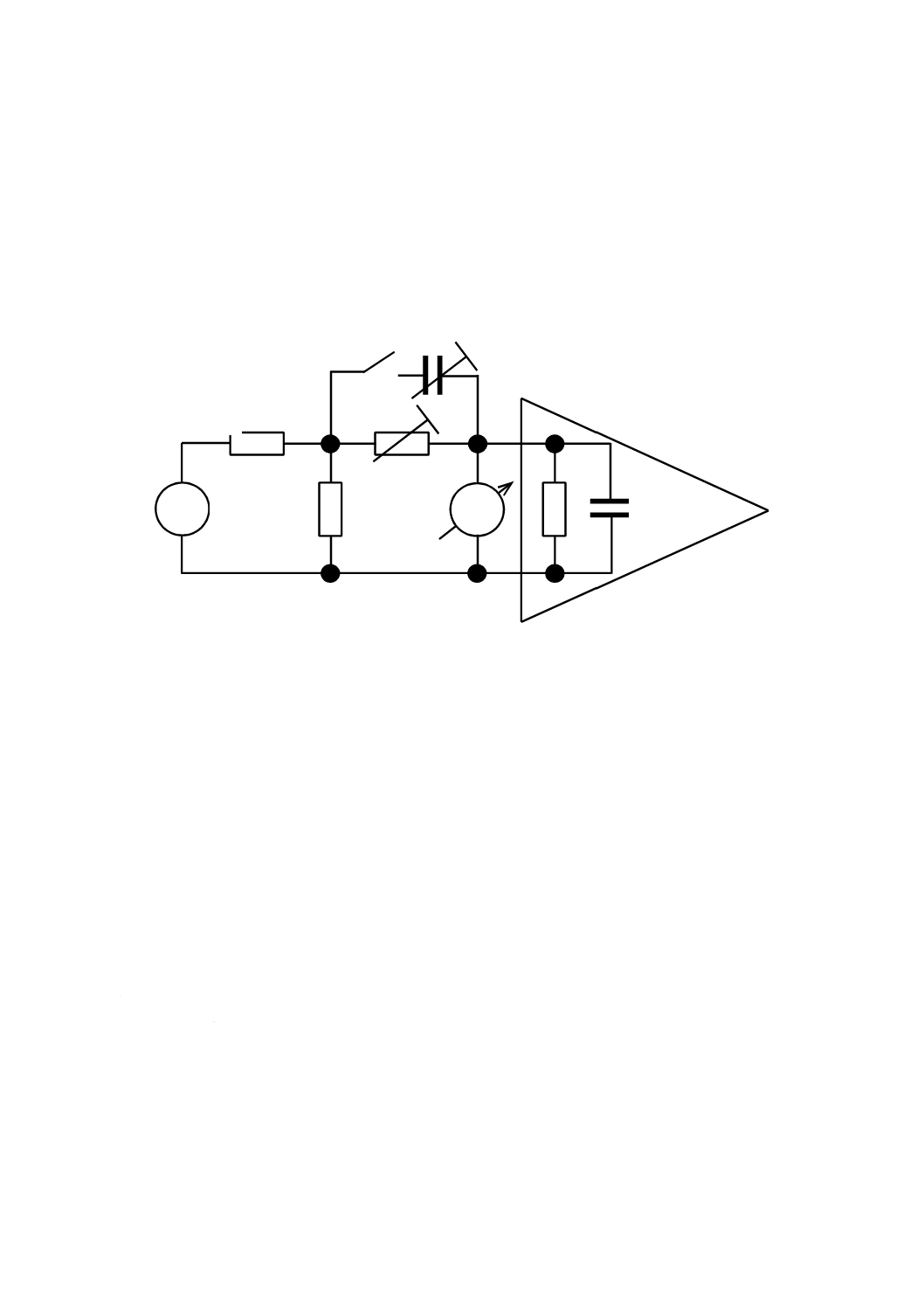
発振器は,直列抵抗(Rv)を通して渦電流試験器の入力に供給する[渦電流試験器の入力インピーダン
スがコンデンサ(Ce)及び抵抗器(Re)の並列回路によって表している。](図C.1参照)。
〜
R=50 Ω
G
Ge
50 Ω
RV
S
CV
V
Re
Ce
図C.1−入力インピーダンスの測定のための配線図
発振器(Ge)の出力インピーダンス(RG)は,渦電流試験器の入力抵抗(Re)より小さい必要がある。
一般に,50 Ωを適用すると,この条件は満たされる。
最初は,低い発振器周波数(fG1)(望ましくは1 kHz)でReを決定し,スイッチ(S)を開く。
このために,Rv=0のときのReに印加される入力電圧(Ve)を測定する。Rv=0で得た入力電圧値の半
分になるようにRvを増加する。このときの電圧をVe1とする。
Ve1=0.5 Ve (Rv=0)
このときのRv及びReの値は,同一である。
Rv=Re
次に,Sを閉め,Ceの決定のために,Rvの設定を変えないで,発振器の周波数を,入力電圧がVe1の半
分の値に減少する値(fG2)に増加する。このときの電圧をVe2とする。
Ve2=0.5 Ve1 (Rv=Re)
次に,Cvを元々の電圧Ve1(Rv=Re) になるように調整する。周波数をfG1からfG2に変えても,入力電圧
Ve1及びVe2は,変わらないはずである。
これらの条件において,
Cv=Ce
となる。Rv及びCvは,万能ブリッジによって測定してもよい。コンデンサ(Ce)の測定に用いる測定器
は,可能な限り低静電容量のものにするべきである。Ceは小さいので,測定結果から電圧測定器の入力容
量を減算する必要がある。Re及びCeは,できる限り全ての入力回路を踏まえて決定するべきである。
Cv
Rv
25
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
JISと対応国際規格との対比表
JIS Z 2316-2:2014 非破壊試験−渦電流試験−第2部:渦電流試験器の特性及び
検証
ISO 15548-1:2008 Non-destructive testing−Equipment for eddy current examination
−Part 1: Instrument characteristics and verification
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ご
との評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
3 用語及
び定義
用語及び定義
3
JISに同じ
変更
ISO 12718をJIS Z 2300及びJIS
C 1002に変更した。
国内規格を引用することで用語
の再定義を避けた。技術的差異は
ない。
渦電流試験,ベクト
ル成分
3
JISに同じ
追加
“渦電流試験”及び“ベクトル成
分”を追加した。
技術的な差異はない。
4 渦電流
試験器の
特性
4.2.8 信号表示器及
び出力
4.2.8
JISに同じ
変更
“4.2.8.1 信号表示”など,項目
を細分化した。
技術的な差異はない。
5 検証
5.1 一般
5.1
JISに同じ
追加
補足の文言を追加した。
技術的な差異はない。
5.2 点検のレベル
表1
5.2
JISに同じ
追加
表1中の“実施者”の解釈につい
て明記した。
技術的な差異はない。
6 渦電流
試験器の
電気的特
性の測定
6.1 測定要件
6.1
JISに同じ
追加
“また,測定の手順書を作成す
る。”を追加した。
技術的な差異はない。
6.2.1.1 定義及び測
定条件 式
6.2.1.1
JISに同じ
変更
周波数ビート法のfdと紛らわし
いため,設定値fdをfexに変更し
た。
技術的な差異はない。
6.2.2.1 定義及び測
定条件 式
6.2.2.1
JISに同じ
変更
交流信号を表す変数UをVに変
更した。
ここでの交流記号は電圧である。
我が国では,一般に電圧を表す変
数にはVを用いるので変更した。
技術的な差異はない。
3
Z
2
3
1
6
-2
:
2
0
1
4
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
26
Z 2316-2:2014
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ご
との評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
6 渦電流
試験器の
電気的特
性の測定
(続き)
6.2.5.2 測定方法
6.2.5.2
JISに同じ
追加
“負荷抵抗の値を十分な精度で
評価できる場合,その電圧から電
流を求めてもよい。”を追加した。
等価な測定方法を追加した。技術
的な差異はない。
6.3.1.1 定義及び測
定条件
6.3.1.1
JISに同じ
追加
“(入力段に加えることのできる
最大電圧)”を追加した。
“最大許容入力電圧”を明確にし
た。技術的な差異はない。
6.4.5.1 定義
6.4.5.1
JISに同じ
追加
“図4の”を追加した。
“中央値”を明確にした。技術的
な差異はない。
6.4.6 信号処理段の
帯域幅
6.4.6
JISに同じ
追加
“信号処理段の”を追加した。
“帯域幅”を明確にした。技術的
な差異はない。
6.4.7.2 測定方法
6.4.7.2
JISに同じ
追加
“フォーマット”及び“nは,デ
ータの個数である。”を追加した。
技術的な差異はない。
6.4.9.2 測定方法
6.4.9.2
JISに同じ
追加
ベクトル成分を追加した。
技術的な差異はない。
6.6 デジタル化
6.6
JISに同じ
追加
4.2.1の文言を追加した。
6.6の意味していることを明確に
した。技術的な差異はない。
7 試験報
告書
記録項目
−
追加
渦電流試験器の特性測定に関す
る記録項目を追加した。
国内での運用を考慮して,追加し
た。
附属書A
(参考)
周波数ビート法
附属書A JISに同じ
追加
“(図A.1参照)”を追加した。
図A.1の説明がなかった。技術的
な差異はない。
周波数ビート法
附属書A JISに同じ
追加
式(A.1)及び式(A.2)の説明を追加
した。
式(A.1)及び式(A.2)を明確にした。
技術的な差異はない。
附属書C
(規定)
Ve1,Ve2
附属書C JISに同じ
追加
Ve1及びVe2の説明を追加した。
Ve1,Ve2を明確にした。技術的な
差異はない。
JISと国際規格との対応の程度の全体評価:ISO 15548-1:2008,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 追加……………… 国際規格にない規定項目又は規定内容を追加している。
− 変更……………… 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD…………… 国際規格を修正している。
3
Z
2
3
1
6
-2
:
2
0
1
4
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。