Y 1001:2019
(1)
目 次
ページ
序文 ··································································································································· 1
0.1 背景 ···························································································································· 1
0.2 この規格の目的 ············································································································· 1
0.3 この規格の内容 ············································································································· 1
1 適用範囲························································································································· 2
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 3
4 組織の状況 ······················································································································ 9
4.1 一般 ···························································································································· 9
4.2 組織及びその状況の理解 ································································································· 9
4.3 利害関係者のニーズ及び期待の理解··················································································· 9
4.4 ロボットサービス安全マネジメントシステムの適用範囲の決定 ·············································· 10
4.5 ロボットサービス安全マネジメントシステム ······································································ 10
5 リーダーシップ ··············································································································· 10
5.1 リーダーシップ及びコミットメント·················································································· 10
5.2 方針 ··························································································································· 11
5.3 組織の役割,責任及び権限 ····························································································· 11
6 計画······························································································································ 11
6.1 リスクアセスメント ······································································································ 11
6.2 リスク低減への取組み ··································································································· 13
6.3 ロボットサービス安全目標及びそれを達成するための計画策定 ·············································· 15
7 支援······························································································································ 15
7.1 資源 ··························································································································· 15
7.2 力量 ··························································································································· 15
7.3 認識 ··························································································································· 16
7.4 コミュニケーション ······································································································ 16
7.5 文書化した情報 ············································································································ 17
8 運用······························································································································ 18
8.1 運用の計画及び管理 ······································································································ 18
8.2 受益者とのコミュニケーション ······················································································· 18
8.3 ロボットサービスにおける第三者への配慮 ········································································· 19
8.4 緊急事態への準備及び対応 ····························································································· 19
8.5 危険事象の取扱い ········································································································· 20
9 パフォーマンス評価 ········································································································· 21
9.1 監視,測定,分析及び評価 ····························································································· 21
Y 1001:2019 目次
(2)
ページ
9.2 内部監査 ····················································································································· 22
9.3 マネジメントレビュー ··································································································· 22
10 改善 ···························································································································· 23
10.1 不適合及び是正処置 ····································································································· 23
10.2 継続的改善 ················································································································· 23
附属書A(参考)ロボットサービスの運用内容と製造業者の意図した使用の限定範囲との関係の分類 ·· 24
附属書B(参考)運用によって生じる危険源及び原因の例 ··························································· 26
Y 1001:2019
(3)
まえがき
この規格は,産業標準化法に基づき,日本産業標準調査会の審議を経て,経済産業大臣が制定した日本
産業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本産業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
注記 この規格は,不正競争防止法等の一部を改正する法律附則第6条第3項の規定により,その例
によることとされる産業標準化法第2条,第11条,第13条及び第19条の規定に基づき制定し
た。
日本産業規格 JIS
Y 1001:2019
サービスロボットを活用したロボットサービスの
安全マネジメントシステムに関する要求事項
Requirements for safety management system of
robot service using service robots
序文
0.1
背景
人と共存するサービスロボットを運用する場合,残留リスクの適切な管理が必要となる。そのためには,
一般の機械類と同様に,製造業者が行う設計面での配慮だけではなく,サービスロボットを活用するロボ
ットサービスプロバイダが行う運用上の配慮が不可欠である。また,残留リスクのあるサービスロボット
をロボットサービスプロバイダが安全に運用するためには,製造業者から適切な使用上の情報が提供され
ること,ロボットサービスプロバイダが使用上の情報の不明点を製造業者への問合せなどを通じ理解した
上で運用すること,ロボットサービスプロバイダが実際の運用を通じて得た安全関連情報を製造業者にフ
ィードバックするなど,製造業者とロボットサービスプロバイダとの間でのコミュニケーションが重要で
ある。
一部のサービスロボットについては,設計面での安全要求事項が,既にJIS B 8445,JIS B 8446-1〜JIS B
8446-3及びJIS B 8456-1で規定され,それらを運用するロボットサービスプロバイダが存在している。そ
れらのロボットサービスプロバイダは,一定以上の知識及び経験に基づいた知見をいかし,安全にロボッ
トサービスを運用しているが,その方法論について,用語の整理及び体系化は行われてこなかった。安全
にロボットサービスを運用する最適解を明文化し,体系化することで,新規参入するロボットサービスプ
ロバイダが満たすべき基準を明確にし,産業の健全な発展を促進できると考えた。
0.2
この規格の目的
この規格の目的は,サービスロボットを活用するロボットサービスプロバイダに対して,ロボットサー
ビス実施時の安全運用の枠組みであるロボットサービス安全マネジメントシステムの満たさなければなら
ない要求事項を提供することである。
この規格は,組織の法的要求事項を増大又は変更させることを意図していない。
0.3
この規格の内容
ロボットサービス安全マネジメントシステムは,Plan-Do-Check-Act(PDCA)という概念に基づいてい
る。PDCAモデルは,継続的改善を達成するために組織が使用する反復的なプロセスを示している。PDCA
モデルは,次のように簡潔に説明できる。
− Plan :組織の安全方針に沿った結果を出すために必要な安全目標及びプロセスを確立する。
− Do
:計画どおりにプロセスを実施する。
− Check :コミットメントを含む安全方針,安全目標及び運用基準に照らして,プロセスを監視し,測
定し,その結果を報告する。
2
Y 1001:2019
− Act
:継続的に改善するための処置をとる。
組織は,次のいずれかの方法によって,この規格への適合を実証することができる。
− 自己決定し,自己宣言する。
− 適合について,組織に対して利害関係をもつ人又はグループ,例えば,顧客などによる確認を求める。
− 自己宣言について組織外部の人又はグループによる確認を求める。
− 外部機関によるロボットサービス安全マネジメントシステムの認証・登録を求める。
この規格では,次のような表現形式を用いている。
− “〜しなければならない”,“〜する”,“〜とする”及び“〜による”は,要求事項を示し,
− “〜することが望ましい”は,推奨を示し,
− “〜してもよい”は,許容を示し,
− “〜することができる”,“〜できる”,“〜し得る”などは,可能性又は実現能力を示す。
“注記”に記載している情報は,この規格の理解又は利用を助けるためのものである。
1
適用範囲
この規格は,サービスロボットを活用するロボットサービスプロバイダが受益者及びロボットサービス
における第三者の安全のために用いることができる安全マネジメントシステムの要求事項について規定す
る。
この規格は,次の事項を実施するいかなる組織にも適用できる。
a) ロボットサービス安全パフォーマンスを改善する。
b) ロボットサービス安全マネジメントシステムを確立し,実施し,維持し,改善する。
c) 表明したロボットサービス安全方針との適合を自ら保証する。
d) この規格との適合を実証する。
この規格の要求事項は,組織の既存のマネジメントシステム若しくは業務プロセスに統合,又はそれら
の一部として実現してもよい。
この規格の要求事項は,組織及び安全マネジメントとして実施すべき内容によって,複数の組織にまた
がって網羅し,実施してもよい。
この規格は,サービスロボット以外のロボット,ロボティックデバイスなどを用いたサービスにも適用
してもよい。
注記 この規格の要求事項に従って確立されたロボットサービス安全マネジメントシステムは,使用
するサービスロボット及びロボットサービスシステム,サービスの運用内容,実施場所,対象
とする受益者などが異なる場合には,そのまま適用できない場合があるので注意が必要である。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0134 ロボット及びロボティックデバイス−用語
JIS B 8445 ロボット及びロボティックデバイス−生活支援ロボットの安全要求事項
JIS B 8446-1 生活支援ロボットの安全要求事項−第1部:マニピュレータを備えない静的安定移動作
業型ロボット
JIS B 9700 機械類の安全性−設計のための一般原則−リスクアセスメント及びリスク低減
3
Y 1001:2019
JIS Q 9000 品質マネジメントシステム−基本及び用語
JIS Q 9001 品質マネジメントシステム−要求事項
JIS Z 8051 安全側面−規格への導入指針
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 8445によるほか,次による。
3.1
組織(organization)
自らの目標を達成するため,責任,権限及び相互関係を伴う独自の機能をもつ,個人又は人々の集まり。
注記 組織という概念には,法人か否か,公的か私的かを問わず,自営業者,会社,法人,事務所,
企業,当局,共同経営会社,非営利団体若しくは協会,又はこれらの一部若しくは組合せが含
まれる。ただし,これらに限定されるものではない。
(JIS Q 9000の3.2.1を修正)
3.2
利害関係者(interested party)
ある決定事項若しくは活動に影響を与え得るか,その影響を受け得るか,又はその影響を受けると認識
している,個人又は組織。
注記 製造業者は,ロボットサービス安全マネジメントシステムに関連する利害関係者に含まれる。
(JIS Q 9000の3.2.3参照)
3.3
要求事項(requirement)
明示されている,通常暗黙のうちに了解されている又は義務として要求されている,ニーズ又は期待。
注記1 “通常暗黙のうちに了解されている”とは,対象となるニーズ又は期待が暗黙のうちに了解
されていることが,組織及び利害関係者にとって,慣習又は慣行であることを意味する。
注記2 規定要求事項とは,例えば,文書化した情報の中で明示されている要求事項をいう。
(JIS Q 9000の3.6.4参照)
3.4
マネジメントシステム(management system)
方針及び目標並びにその目標を達成するためのプロセスを確立するための,相互に関連する又は相互に
作用する,組織の一連の要素。
注記1 一つのマネジメントシステムは,単一又は複数の分野を取り扱うことができる。
注記2 システムの要素には,組織の構造,役割及び責任,計画及び運用並びにパフォーマンス評価
及び改善が含まれる。
注記3 マネジメントシステムの適用範囲としては,組織全体,組織内の固有で特定された機能,組
織内の固有で特定された部門,複数の組織の集まりを横断する一つ以上の機能,などがあり
得る。
(JIS Q 9000の3.5.3参照)
3.5
ロボットサービス安全マネジメントシステム(robot service safety management system)
ロボットサービス安全方針に関する,マネジメントシステムの一部。
4
Y 1001:2019
3.6
トップマネジメント(top management)
最高位で組織を指揮し,管理する個人又は人々の集まり。
注記1 トップマネジメントは,組織内で,権限を委譲し,資源を提供する力をもっている。
注記2 マネジメントシステムの適用範囲が組織の一部だけの場合,トップマネジメントとは,組織
内のその一部を指揮し,管理する人をいう。
(JIS Q 9000の3.1.1を修正)
3.7
有効性(effectiveness)
計画した活動を実行し,計画した結果を達成した程度(JIS Q 9000の3.7.11参照)。
3.8
方針(policy)
トップマネジメントによって正式に表明された組織の意図及び方向付け(JIS Q 9000の3.5.8参照)。
3.9
ロボットサービス安全方針(robot service safety policy)
ロボットサービスの安全に関する方針。
3.10
目標(objective)
達成する結果。
注記1 目標は,戦略的,戦術的又は運用的であり得る。
注記2 目標は,様々な領域[例えば,財務,安全衛生,環境の到達点(goal)]に関連し得るもので
あり,様々な階層(例えば,戦略的レベル,戦術的レベル,組織全体,プロジェクト単位,
製品ごと,プロセスごと)で適用できる。
注記3 目標は,例えば,意図する結果,目的(purpose),運用基準など,別の形で表現することも
できる。また,ロボットサービス安全目標という表現の仕方もある。又は,同じような意味
をもつ別の言葉[例えば,狙い(aim),到達点(goal)]で表すこともできる。
注記4 ロボットサービス安全マネジメントシステムにおいて,組織は,特定の結果を達成するため
に,ロボットサービス安全方針と整合のとれたロボットサービス安全目標を設定する場合が
ある。
(JIS Q 9000の3.7.1を修正)
3.11
危害(harm)
人への傷害若しくは健康障害,又は財産及び環境への損害(JIS Z 8051の3.1参照)。
3.12
リスク(risk)
危害の発生確率と危害のひどさとの組合せ(JIS B 8445の3.7参照)。
3.13
力量(competence)
意図した結果を達成するために,知識及び技能を適用する能力(JIS Q 9000の3.10.4参照)。
5
Y 1001:2019
3.14
文書化した情報(documented information)
組織が管理し,維持するよう要求されている情報,及びそれが含まれている媒体。
注記1 文書化した情報は,あらゆる形式及び媒体の形をとることができ,あらゆる情報源から得る
ことができる。
注記2 文書化した情報には,次に示すものがあり得る。
− 関連するプロセスを含むマネジメントシステム
− 組織の運用のために作成された情報(文書類)
− 達成された結果の証拠(記録)
(JIS Q 9000の3.8.6参照)
3.15
プロセス(process)
インプットをアウトプットに変換する,相互に関連する又は相互に作用する一連の活動(JIS Q 9000の
3.4.1を修正)。
3.16
パフォーマンス(performance)
測定可能な結果。
注記1 パフォーマンスは,定量的又は定性的な所見のいずれにも関連し得る。
注記2 パフォーマンスは,活動,プロセス,サービス,システム又は組織の運営管理に関連し得る。
(JIS Q 9000の3.7.8参照)
3.17
ロボットサービス安全パフォーマンス(robot service safety performance)
ロボットサービスの安全に関わる測定可能な結果。
注記 ロボットサービスの安全に関わるパフォーマンスを測定する尺度として,例えば,次に示す場
合がある。
− 無事故連続稼働時間
− ヒヤリ・ハット件数
なお,一般にヒヤリ・ハットとは,危険事象のうち,結果として危害を引き起こさなか
った出来事とされている。
− 改善提案件数
− 安全関連資格保有者数
− 緊急時対応訓練実施回数
3.18
外部委託する[(outsource)動詞]
ある組織の機能又はプロセスの一部を外部の組織が実施するという取決めを行う。
注記 外部委託した機能又はプロセスはマネジメントシステムの適用範囲内にあるが,外部の組織は
マネジメントシステムの適用範囲外にある。
(JIS Q 9000の3.4.6参照)
3.19
監視(monitoring)
6
Y 1001:2019
システム,プロセス又は活動の状況を明確にすること。
注記 状況を明確にするために,点検,監督又は注意深い観察が必要な場合もある。
(JIS Q 9000の3.11.3を修正)
3.20
測定(measurement)
値を決定するプロセス(JIS Q 9000の3.11.4参照)。
3.21
監査(audit)
監査基準が満たされている程度を判定するために,監査証拠を収集し,それを客観的に評価するための,
体系的で,独立し,文書化したプロセス。
注記1 監査は,内部監査(第一人者)若しくは外部監査(第二者・第三者)のいずれでも,又は複
合監査(複数の分野の組合せ)でもあり得る。
注記2 内部監査は,その組織自体が行うか,又は組織の代理で外部関係者が行う。
注記3 監査証拠及び監査基準は,JIS Q 19011に定義されている。
(JIS Q 9000の3.13.1を修正)
3.22
適合(conformity)
要求事項を満たしていること(JIS Q 9000の3.6.11参照)。
3.23
不適合(nonconformity)
要求事項を満たしていないこと(JIS Q 9000の3.6.9参照)。
3.24
是正処置(corrective action)
不適合の原因を除去し,再発を防止するための処置(JIS Q 9000の3.12.2参照)。
3.25
継続的改善(continual improvement)
パフォーマンスを向上するために繰り返し行われる活動(JIS Q 9000の3.3.2参照)。
3.26
自律性(autonomy)
人が介入することなく,現在の状態及びセンサ計測に基づいて,意図したタスクを実行する能力(JIS B
8445の3.1参照)。
3.27
ロボット(robot)
2軸以上がプログラム可能で,一定の自律性をもち,環境内を移動して所期のタスクを実行する作動メ
カニズム(JIS B 8445の3.2参照)。
3.28
ロボティックデバイス(robotic device)
産業用ロボット又はサービスロボットの特性を満たすが,プログラム可能な軸数又は自律性の度合いが
不足している作動メカニズム(JIS B 8445の3.3参照)。
7
Y 1001:2019
3.29
サービスロボット(service robot)
産業オートメーションの用途を除き,人又は機器のために有用なタスクを実行するロボット(JIS B 8445
の3.4参照)。
3.30
ロボットサービスシステム(robot service system)
サービスロボット,ロボットサービスプロバイダが独自に設置する安全防護,付加保護方策,通信ネッ
トワークなどを含む,ロボットサービスのために構築された一連のシステム。
3.31
ロボットサービス(robot service)
サービスロボット又はロボットサービスシステムと受益者の相互作用によって,受益者に利益を与える
行為。
注記 実証実験は,ロボットサービスに含まれる。
3.32
受益者(beneficiary)
ロボットサービスの利益を受ける者(JIS B 0134の2.19を修正)。
3.33
受益者制限(beneficiary limit)
カテゴリ及び/又は特性によって,受益者となることを制限すること,又は制限するための条件。
注記 受益者制限の例として,身長,体重,年齢,技能,疾患,病歴,体調などがある。
3.34
受益者の行動制限(beneficiaryʼs behavior limit)
受益者の行動を制限すること,又は制限するための条件。
注記 受益者の行動制限の例として,製造業者が定めたサービスロボットの操作手順を順守すること,
保護具を着用することなどがある。
3.35
ロボットサービスプロバイダ(robot service provider)
受益者に対し,ロボットサービス(及びロボットサービスシステムのシステムインテグレート)を提供
し,安全性を含め,全体的な責任を負う組織。
3.36
フィールド提供者(field provider)
ロボットサービスプロバイダに対して,ロボットサービスを実施する施設又は場所を提供する人又は組
織。
3.37
製造業者(manufacturer)
ロボットを設計し,製造する者又は組織。
注記 システムインテグレータが製造業者に該当する場合がある。
(JIS B 8446-1の3.7参照)
3.38
販売者(seller)
8
Y 1001:2019
業としてロボットを販売又は賃貸する人又は組織。
3.39
使用上の情報(information for use)
ロボットの安全上の仕様,使用の限定,及び安全かつ正しい機械の使用を確実にするために必要な運用
上の順守事項及び残留リスクを含んだ情報。
注記 一般的に,使用上の情報は取扱説明書として製造業者が提供している。
3.40
使用の限定(use restriction)
製造業者が設計時に意図した,サービスロボットの,使用する環境,受益者制限,受益者の行動制限,
使用に当たって必要となる力量及び力量を獲得するための教育・訓練内容,安全に関わる性能が維持され
る期間並びに必要な保守・点検を含む使用条件。
注記 使用の限定は,JIS B 9700の5.3(機械類の制限の決定)に規定されている機械類の制限に相当
している。
3.41
ライフサイクル(life cycle)
サービスロボットの輸送及び設置から最終処分までを含む,連続的で,かつ,相互に関連するロボット
サービスにおけるマネジメントシステムの段階群。
注記 ライフサイクルの段階には,サービスロボットの輸送,設置,使用,サービス内容の変更,点
検・保守,使用後の処理及び最終処分が含まれる。
(JIS Q 14001の3.3.3を修正)
3.42
安全規格(safety standards)
サービスロボットの安全要求事項を規定する規格。
注記 代表的なものとして,JIS B 8445,JIS B 8446-1,JIS B 8446-2,JIS B 8446-3及びJIS B 8456-1
がある。
3.43
ロボットサービスにおける第三者(third party of robot service)
ロボットサービスの実施空間内において,受益者,及びロボットサービスプロバイダとしての業務を行
う者を除く人。
注記 ロボットサービスにおける第三者は,一般に,特定のロボットの安全に関する知識及び知見を
事前にはもっていないと考えられる。
(JIS B 8446-1の3.6を修正)
3.44
第三者専門家(third party who has special knowledge)
機械安全に関する知識をもつとみなされる人又は組織。
注記1 例えば,認証機関,又は厚生労働省が通達した“設計技術者,生産技術管理者に対する機械
安全に係る教育に関し留意すべき事項”(平成26年4月15日付基安安発0415第1号)に示
す,機械安全に関する知識をもつとみなされる者[システム安全エンジニア,セーフティア
セッサ(部分),労働安全衛生コンサルタント(部分)]が考えられる。
注記2 サービスプロバイダに所属する人が第三者専門家に該当する場合がある。
9
Y 1001:2019
3.45
危険事象(hazardous event)
危害を起こし得る事象(JIS B 9700の3.9参照)。
3.46
事故(accident)
危険事象のうち,結果として危害を引き起こした出来事。
4
組織の状況
4.1
一般
組織及びそのサービスの性質によって,この規格の要求事項のいずれかが適用不可能な場合には,当該
要求事項を除外することができる。ただし,除外する事項及びその理由を文書化しなければならない。こ
のような除外を行った場合,除外を行うことが,ロボットサービス安全マネジメントシステムを成功裏に
確立し,実施し,維持し,改善する組織の能力に影響を及ぼさないときに限り,この規格への適合の宣言
が認められる。
4.2
組織及びその状況の理解
組織は,組織の目的に関連し,かつ,そのロボットサービス安全マネジメントシステムの意図した成果
を達成する組織の能力に影響を与える,外部及び内部の課題を決定しなければならない。
組織は,これらの外部及び内部の課題に関する情報を監視し,レビューしなければならない(JIS Q 9001
の4.1を修正)。
注記1 外部の課題とは,例えば,次の事項が挙げられる。
− 国際,国内,地方又は地域を問わず,文化,社会,法律,技術,経済,自然及び競争の
状況
− 競合他社の状況
− 外部利害関係者との関係
− 上記のいずれかに関わる変化
注記2 内部の課題とは,例えば,次の事項が挙げられる。
− 組織の活動,戦略的な方向性,文化,能力(資本,時間,人的資源,プロセス)
− 内部の利害関係者間の関係
− 上記のいずれかに関わる変化
4.3
利害関係者のニーズ及び期待の理解
組織は,次の事項を決定しなければならない。
− ロボットサービス安全マネジメントシステムに関連する利害関係者
− それらの利害関係者の,関連する要求事項
組織は,ロボットサービス安全マネジメントシステムに関連する利害関係者を決定する際に,次の事項
を考慮しなければならない。
− ロボットの所有者
− フィールド提供者
− 関連する行政機関
− 関連する外部委託先
10
Y 1001:2019
− 製造業者
− 販売者又はリース・レンタル業者
− 受益者
注記1 一般に製造業者が使用上の情報で指定する指示事項は,利害関係者の関連する要求事項に含
まれる。
注記2 ロボットサービスの位置付けが実証実験から事業へと変化する際には,ロボットサービス安
全マネジメントシステムに関連する利害関係者及びそれらの利害関係者の関連する要求事項
が変化する場合がある。
実証実験とは,ロボットを実際の場面で使用し,実用化に向けての問題点(安全性及び/
又は価値など)を検証しながら受益者に利益を与えるための行為である。
注記3 販売者及びリース・レンタル業者が無償で提供する場合であっても,有償の場合と同等の責
任を負うと考えられる。
4.4
ロボットサービス安全マネジメントシステムの適用範囲の決定
組織は,ロボットサービス安全マネジメントシステムの適用範囲を定めるために,その境界及び適用可
能性を決定しなければならない。
この適用範囲を決定するとき,組織は,次の事項を考慮しなければならない。
− 4.2に規定する外部及び内部の課題
− 4.3に規定する要求事項
− 実施するロボットサービスの運用内容(6.1.2.2を参照)
ロボットサービス安全マネジメントシステムの適用範囲は,文書化した情報として維持しなければなら
ず,かつ,利害関係者がこれを入手できるようにしなければならない。
4.5
ロボットサービス安全マネジメントシステム
組織は,この規格の要求事項に従って,ロボットサービス安全パフォーマンスを確保するために必要な
プロセス及びそれらの相互作用を含む,ロボットサービス安全マネジメントシステムを確立し,実施し,
維持し,かつ,継続的に改善しなければならない。
5
リーダーシップ
5.1
リーダーシップ及びコミットメント
トップマネジメントは,次に示す事項によって,ロボットサービス安全マネジメントシステムに関する
リーダーシップ及びコミットメントを実証しなければならない。
− ロボットサービス安全方針及びロボットサービス安全目標を確立し,それらが組織の戦略的な方向性
と両立することを確実にする。
− 組織の事業プロセスへのロボットサービス安全マネジメントシステムのための要求事項の統合を確実
にする。
注記1 この規格で“事業”という場合,それは,組織の存在の目的の中核となる活動という広義
の意味で解釈される場合がある。
− ロボットサービス安全マネジメントシステムに必要な資源が利用可能であることを確実にする。
注記2 具体的には,例えば,ロボットサービスを安全に運用するために必要な人的資源,設備及
び予算を確保し,計画どおりに実行できるようにすることである。
− 有効なロボットサービス安全マネジメントシステムの重要性,及びロボットサービス安全マネジメン
11
Y 1001:2019
トシステムのための要求事項への適合の重要性を組織の管理下で働く人々及び関連する利害関係者へ
伝達する。
注記3 具体的には,例えば,この規格への適合だけでなくロボットサービスの安全運用について
の重要性を会議,社内報,電子掲示板,E-メールなどを通じて発信することである。
− ロボットサービス安全マネジメントシステムがその意図した成果を達成することを確実にする。
− ロボットサービス安全マネジメントシステムの有効性に寄与するよう組織の管理下で働く人々及び関
連する利害関係者を指揮し,支援する。
− 継続的改善を促進する。
注記4 具体的には,例えば,改善提案に対するインセンティブの設定である。
− その他の関連する管理層がその責任の領域においてリーダーシップを実証するよう,管理層の役割を
支援する。
5.2
方針
トップマネジメントは,次の事項を満たすロボットサービス安全方針を確立しなければならない。
a) 組織の目的に対して適切である。
b) ロボットサービス安全目標の設定のための枠組みを示す。
注記1 ロボットサービス安全目標の設定のための枠組みを示すとは,例えば,期初に今期の安全
目標を決めるための会議を行う仕組みを構築することである。
c) 適用される要求事項を満たすことへのコミットメントを含む。
d) ロボットサービス安全マネジメントシステムの継続的改善へのコミットメントを含む。
注記2 ロボットサービス安全方針には,次の事項を含む場合がある。
− 受益者及びロボットサービスにおける第三者の安全確保の重要性への言及
− 関係法令の順守
− ロボットサービス安全マネジメントシステムのための要求事項の順守
− ロボットサービス安全パフォーマンス向上のために適切な資源の割当て
− 緊急事態への対応準備の徹底
− ロボットサービス安全パフォーマンス向上につながる継続的な改善
ロボットサービス安全方針は,次に示す事項を満たさなければならない。
− 文書化した情報として利用可能である。
− 組織内に伝達する。
− 必要に応じて,利害関係者が入手可能である。
5.3
組織の役割,責任及び権限
トップマネジメントは,関連する役割に対して,責任及び権限を割り当て,組織内に伝達することを確
実にしなければならない。
トップマネジメントは,次の事項に対して,責任及び権限を割り当てなければならない。
a) ロボットサービス安全マネジメントシステムが,この規格の要求事項に適合することを確実にする。
b) ロボットサービス安全マネジメントシステムのパフォーマンスをトップマネジメントに報告する。
6
計画
6.1
リスクアセスメント
組織は,リスク分析及びリスク評価を含むリスクアセスメントを実施しなければならない。組織は,リ
12
Y 1001:2019
スクアセスメントの妥当性について,第三者専門家の意見聴取を行うことが望ましい。組織は,リスクア
セスメントの結果を文書化し,維持しなければならない。
これら(6.1)の要求事項は,全てのロボットサービスに適用しなければならない。
6.1.1
リスクアセスメントの準備
組織は,リスクアセスメントを実施する人に必要な力量を規定しなければならない。規定した内容に従
って,リスクアセスメントを実施する人を決定しなければならない。
組織は,リスク評価においてリスク低減活動の必要性を判断するための基準を決定しなければならない。
これらの決定に際しては,必要に応じて,4.3で規定するロボットサービス安全マネジメントシステムに
関連する利害関係者の参加を考慮しなければならない。
組織は,製造業者若しくは販売者又はリース・レンタル業者から使用上の情報を入手しなければならな
い。
6.1.2
リスク分析
6.1.2.1
使用上の情報
組織は,リスク分析の実施において,使用上の情報の内容を考慮しなければならない。
組織は,使用上の情報に不明点及び不足がある場合には,製造業者への問合せなどを通じて不明点及び
不足を解消した上でリスク分析を行わなければならない。
組織は,使用上の情報の妥当性について,第三者専門家の意見聴取を行うことが望ましい。あるサービ
スロボットが,第三者専門家によって安全規格への適合を確認されている場合は,その使用上の情報の妥
当性については既に第三者の専門家の意見聴取がなされていると考えてよい。
組織は,必要に応じて,フィールド提供者からロボットサービスを実施する施設又は場所に関する情報
を入手し,リスク分析の実施においてその内容を考慮しなければならない。
6.1.2.2
ロボットサービスの運用内容の規定
組織は,ロボットサービスの運用内容を規定し,文書化しなければならない。
組織が,ロボットサービスの運用内容を規定する場合には,次の事項を考慮に入れなければならない。
− ロボットサービスの運用内容と使用上の情報に含まれる製造業者の意図した使用の限定範囲との関係
(図A.1,図A.2及び図A.3参照)。
− 実施形態が,実証試験又は事業のいずれに該当するか。
注記1 ロボットサービスの運用内容を規定するための項目の例として,上記に加えて次が考えられ
る。
− 提供する便益
− 使用するロボット
− 実施場所
組織は,ロボットサービスに使用するサービスロボットを選ぶ場合に,第三者の専門家によって安全規
格への適合が確認されているサービスロボットを選ぶことが望ましい。そのようなサービスロボットを選
ばない場合は,組織は,用いたいサービスロボットについて,改めて第三者専門家の意見聴取を行うこと
が望ましい。
組織は,ロボットサービスに第三者専門家が安全規格への適合を確認していないサービスロボットを使
用する場合及びロボットサービスの運用内容と使用上の情報に含まれる製造業者の意図した使用の限定範
囲との関係は,その安全性について第三者専門家の意見聴取を行うことが望ましい。
注記2 例えば,附属書Aのケース2又はケース3に該当する場合がある。
13
Y 1001:2019
ロボットサービスの運用内容を変更する場合,組織は,変更前に箇条6〜箇条9への適合を再度確認し
なければならない。
6.1.2.3
ロボットサービスの受益者制限の規定
組織は,必要に応じて,ロボットサービス実施中の安全を確保するための受益者制限を規定し,文書化
し,保持しなければならない。
組織は,受益者制限を規定する際に,使用上の情報に含まれる製造業者が指定する受益者制限を考慮し
なければならない。
6.1.2.4
危険源の抽出及びリスク見積り
組織は,提供するロボットサービスのリスクを分析するために,ライフサイクル及びその内容に沿って,
次に示すa)〜c)の措置を実施しなければならない。
a) 提供するロボットサービスに関わる危険源を抽出する。
注記 ロボットサービスにおいて想定される危険源の例を附属書Bに示す。
b) a)で抽出した危険源に起因する危害の発生確率及びひどさを見積もる。
c) b)で見積もった危害の発生確率及びひどさを組み合わせて,その危険源のリスクを見積もる。
組織は,リスク見積りにおいて,次に示すd)及びe)を考慮に入れなければならない。
d) ロボットサービスにおける第三者へのリスク
e) 非通常の状況及び合理的に予見できる緊急事態
ロボットサービスの変更を理由として,再度リスクアセスメントを実施する際には,その変更の影響を
考慮しなければならない。
6.1.3
リスク評価
組織は,リスク見積りの結果(6.1.2.4)に対し,リスク低減活動の必要性を判断するための基準(6.1.1)
を用いて,低減の必要があるリスクを抽出しなければならない。
組織は,低減の必要があると判断したリスクに関する文書化した情報を維持しなければならない。
6.2
リスク低減への取組み
6.2.1
一般
ロボットサービス安全マネジメントシステムを策定するとき,組織は,4.2に規定する課題,4.3に規定
する要求事項及び6.1で実施するリスクアセスメントの結果に基づいて,リスク低減方策を決定し,実施
しなければならない。
組織が,リスク低減方策を決定する際には,4.3で規定するロボットサービス安全マネジメントシステム
に関連する利害関係者の参加を考慮しなければならない。
リスク低減方策の実施を担う利害関係者とは,その実施について合意し,組織は,その内容を,文書化
した情報として維持しなければならない。
6.2.2
リスク低減方策の決定
組織は,リスクアセスメントの結果に基づき,残留リスクを受容可能と判断するまで,リスク低減方策
を検討及び実施しなければならない。
リスク低減方策は,次の事項を必ずa)から順番に検討し,合理的に適用可能なものが見つかった順に採
用しなければならない。
a) 本質的安全設計
b) 安全防護及び付加保護方策によるもの
c) 運用上の順守事項によるもの
14
Y 1001:2019
注記1 上記のリスク低減方策は,有効性の高い順に列挙している。
注記2 運用上の順守事項には,a)及びb)を実行するために必要な実施事項も含む場合がある。
組織は,リスク低減方策の妥当性について,第三者専門家の意見聴取を行うことが望ましい。
組織は,次の事項に関する文書化した情報を維持しなければならない。
− リスク低減方策の内容
− リスク低減方策の選定理由
6.2.3
運用上の順守事項の決定
組織は,次の事項を行わなければならない。
a) リスク低減のために,運用上の順守事項を決定する。
運用上の順守事項には,次の事項を含めなければならない。
1) 製造業者が指定する項目を含め,サービスロボットについて組織が必要と判断した点検・保守作業
2) リスク低減方策の決定(6.2.2)によって,組織が必要と判断した安全防護策及び付加保護方策の維
持管理に必要な点検・保守作業
3) リスク低減方策の決定(6.2.2)によって,組織が必要と判断した運用上の順守事項
4) 製造業者から入手した使用上の情報に基づく,運用上の順守事項
b) これらの運用上の順守事項を組織にどのように適用するかを決定し,組織の管理下で働く人々に伝達
する。
c) ロボットサービス安全マネジメントシステムを確立し,実施し,維持し,継続的に改善するときに,
これらの運用上の順守事項を考慮に入れる。
組織は,運用上の順守事項に関する文書化した情報を維持しなければならない。
注記 運用上の順守事項に関する文書化した情報には,例えば,次のような情報が含まれる場合が
ある。このような情報の機密性の喪失及び不適切な使用は,ロボットサービス安全パフォー
マンスを低下させる可能性があるため,文書化した情報の管理(7.5.3)が特に重要である。
− サービスロボット及びロボットサービスシステムを使用及び設定するためのパスワード
− 組織が独自に設定した安全防護策及び付加保護方策の無効化に関する情報
6.2.4
リスク低減方策の実施計画の策定
組織は,リスク低減方策を実施するための計画を策定しなければならない。計画には次の事項を含めな
ければならない。
a) ロボットサービス安全マネジメントシステムプロセスとの統合及び実施の方法
注記1 具体的には,例えば,決定したリスク低減方策(6.2.2)の実施について,その内容及び責
任を負う者を明確にすることである。
b) リスク低減方策を実施後の有効性の評価方法及び基準
c) リスク低減方策の実施に関する利害関係者との合意事項
注記2 リスク低減方策の実施に関する利害関係者との合意事項の例として,次が考えられる。
− 低減の必要があるリスク
− リスク低減方策について
・ 内容
・ 選定理由
・ 実施する組織又は人
・ 実施に必要な資源及びそれを負担する組織又は人
15
Y 1001:2019
注記3 リスク低減方策の実施に関する利害関係者との合意事項を決定する場合には,トップマネ
ジメントの関与が必要な場合がある。
6.3
ロボットサービス安全目標及びそれを達成するための計画策定
組織は,リスク低減方策を考慮に入れ,関連する機能及び階層において,ロボットサービス安全目標を
確立しなければならない。
ロボットサービス安全目標は,次の事項を満たさなければならない。
a) ロボットサービス安全方針と整合している。
b) (実行可能な場合)測定可能である。
c) 適用される要求事項を考慮に入れる。
d) 監視する。
e) 伝達する。
f)
必要に応じて,更新する。
(JIS Q 9001の6.2.1を修正)
注記1 ロボットサービス安全目標とは,例えば,次のようなものが考えられる。
− 無事故連続稼働時間
− ヒヤリ・ハット件数
− 改善提案件数
− 安全関連資格保有者数
− 緊急時対応訓練実施回数
注記2 ヒヤリ・ハット件数など,危険事象の発生数をロボットサービス安全目標とした場合,発生
した危険事象の報告を当事者がためらう可能性が考えられるが,組織としては危険事象を確
実に捕捉し,改善につなげることが重要である。そのためには,危険事象の報告に対し,イ
ンセンティブを与えるなどの施策が必要な場合がある。
組織は,ロボットサービス安全目標に関する文書化した情報を保持しなければならない。
組織は,ロボットサービス安全目標をどのように達成するかについて計画するとき,次の事項を決定し
なければならない。
− 実施事項
− 必要な資源
− 責任者
− 達成期限
− 結果の評価方法
7
支援
7.1
資源
組織は,ロボットサービス安全マネジメントシステムの確立,実施,維持及び継続的改善に必要な資源
を決定し,提供しなければならない。
7.2
力量
組織は,次の事項を行わなければならない。
− 組織のロボットサービス安全パフォーマンスに影響を与える業務をその管理下で行う人(又は人々)
に必要な力量を決定する。決定に当たっては,必要に応じて,組織が決定したリスク低減方策の実施
16
Y 1001:2019
に必要となる力量を考慮しなければならない。また,製造業者が使用上の情報で要求する力量がある
場合には,その力量を考慮しなければならない。
注記1 組織のロボットサービス安全パフォーマンスに影響を与える業務をその管理下で行う人
(又は人々)とは,例えば,設置作業者,保守作業者,オペレータ,安全管理者が該当す
る。
− 適切な教育,訓練又は経験に基づいて,それらの人々が力量を備えていることを確実にする。教育・
訓練に当たっては,必要に応じて,製造業者が指定する教育内容を考慮しなければならない。
注記2 ロボットサービスに必要不可欠,かつ,獲得に時間を要する力量を備えた人の休業に備え
て,同一の力量を備えた要員を複数確保しておくことが必要な場合がある。
− 該当する場合には,必ず,必要な力量を身に付けるための処置をとり,とった処置の有効性を評価す
る。
注記3 適用する処置には,例えば,現在雇用している人々に対する,教育訓練の提供,指導の実
施,配置転換の実施などがあり,また,力量を備えた人々の雇用,そうした人々との契約
締結などが考えられる。
− 力量の証拠として,適切な文書化した情報を保持する。
7.3
認識
組織は,組織の管理下で働く人々が,次の事項に関して認識をもつことを確実にしなければならない。
− ロボットサービス安全方針
− 自分の業務に関係する著しく安全性を低下させる又は低下させる可能性のある側面及びそれに伴う顕
在する又は潜在的なリスク
注記 実務上は,“自分の業務内の安全な使用に向けての目標”という形で組織の管理下で働く人々
へ提示する場合がある。
− ロボットサービス安全パフォーマンスの向上によって得られる便益を含む,ロボットサービス安全マ
ネジメントシステムの有効性に対する自らの貢献
− ロボットサービス安全マネジメントシステムのための要求事項に適合しないことの意味
7.4
コミュニケーション
7.4.1
一般
組織は,次の事項を含む,ロボットサービス安全マネジメントシステムに関連する内部及び外部利害関
係者のコミュニケーションに必要なプロセスを確立し,実施し,維持しなければならない。
− コミュニケーションの内容
− コミュニケーションの実施時期
− コミュニケーションの対象者
− コミュニケーションの方法
− コミュニケーションを行う人
組織は,必要に応じて,コミュニケーションの証拠として,文書化した情報を保持しなければならない。
注記 コミュニケーションの証拠として文書化した情報とは,例えば,次のようなものが考えられる。
− 電子媒体
・ E-メールの通信履歴
・ コラボレーションツールのログ
− 紙媒体
17
Y 1001:2019
・ 会議の議事録
・ 講習会の結果記録
7.4.2
内部コミュニケーション
組織は,次の事項を行わなければならない。
a) 必要に応じて,ロボットサービス安全マネジメントシステムの変更を含め,ロボットサービス安全マ
ネジメントシステムに関連する情報について,組織の種々の階層及び機能間で内部コミュニケーショ
ンを行う。ロボットサービス安全マネジメントシステムに関連する情報として,組織が6.2.3によって
規定した運用上の順守事項を考慮する。
b) コミュニケーションプロセスが,組織の管理下で働く人々の継続的改善への寄与を可能にすることを
実現する。
7.4.3
利害関係者とのコミュニケーション
組織は,コミュニケーションプロセスによって確立したとおりに,ロボットサービス安全マネジメント
システムに関連する情報について利害関係者とコミュニケーションを行わなければならない。
注記 利害関係者とのコミュニケーションの例として,次が考えられる。
− フィールド提供者から,ロボットサービスを実施する設備・環境の変化に関する情報を入
手する。
− フィールド提供者に対して,ロボットサービスに生じた変更について,情報を提供する。
7.5
文書化した情報
7.5.1
一般
組織のロボットサービス安全マネジメントシステムは,次の事項を含まなければならない。
a) この規格が要求する文書化した情報
b) ロボットサービス安全マネジメントシステムの有効性のために必要であると組織が決定した,文書化
した情報
注記 ロボットサービス安全マネジメントシステムのための文書化した情報の程度は,次のような理
由によって,それぞれの組織で異なる場合がある。
− 組織の規模,活動,プロセス及びサービスの種類
− プロセス及びその相互作業の複雑さ
− 人々の力量
7.5.2
作成及び更新
文書化した情報を作成及び更新する際,組織は,次の事項を確実にしなければならない。
− 適切な識別及び記述(例えば,タイトル,日付,作成者,参照番号)
− 適切な形式(例えば,言語,ソフトウェアの版,図・表)及び媒体(例えば,紙,電子媒体)
− 適切性及び妥当性に関する,適切なレビュー及び承認
7.5.3
文書化した情報の管理
ロボットサービス安全マネジメントシステム及びこの規格で要求している文書化した情報は,次の事項
を確実にするために,管理しなければならない。
a) 文書化した情報が,必要なときに,必要なところで,入手可能,かつ,利用に適した状態である。
b) 文書化した情報が十分に保護されている(例えば,機密性の喪失,不適切な使用,完全性の喪失から
の保護)。
文書化した情報の管理に当たって,組織は,該当する場合には,必ず,次の行動に取り組まなければな
18
Y 1001:2019
らない。
− 配布,アクセス,検索及び利用
− 読みやすさが保たれることを含む,保管及び保存
− 変更の管理(例えば,版の管理)
− 保持及び廃棄
ロボットサービス安全マネジメントシステムの計画及び管理のために組織が必要と決定した外部からの
文書化した情報は,必要に応じて識別し,管理しなければならない。
注記 アクセスとは,文書化した情報の閲覧だけの許可に関する決定,又は文書化した情報の閲覧及
び変更の許可及び権限に関する決定を意味する場合がある。
8
運用
8.1
運用の計画及び管理
組織は,次に示す事項の実施によって,要求事項を満たすため,並びに6.1及び6.2で決定した取組みを
実施するために,ライフサイクルの各段階を考慮して,必要なプロセスを計画し,実施し,管理しなけれ
ばならない。
− プロセスに関する基準の決定
− その基準に従った,プロセスの管理の実施
− プロセスが計画どおりに実施されたという確信をもつために必要な程度の,文書化した情報の保持
組織は,計画した変更を管理し,意図しない変更によって生じた結果をレビューし,必要に応じて,有
害な影響を軽減する処置をとらなければならない。
組織は,外部委託したプロセスが管理されていることを確実にしなければならない。
組織は,必要に応じて,外部委託したプロセスに責任を負う者又は組織に対して,関連する安全上の要
求事項を伝達しなければならない。
注記 外部委託先に伝達する情報に,受益者のプライバシー情報が含まれる場合には,委託先に対し
て個人情報保護上の配慮を要求する必要が生じる場合がある。
8.2
受益者とのコミュニケーション
組織は,6.1.2.3に規定する受益者制限に基づいて,次に示すa)〜c)を含む受益者とのコミュニケーショ
ンを行わなければならない。
a) 必要に応じて,受益者制限を,サービス開始前に受益者に知らせる。
b) 必要に応じて,サービス開始前に,受益者が受益者制限を満たしていることを判断するために必要な
情報を確認する。
c) b)の結果,その受益者が受益者制限を満たしていない場合は,サービスの提供を停止する。
受益者とのコミュニケーションを行う場合は,多様性を考慮に入れなければならない。
注記1 考慮すべき多様性として次が考えられる。
− 年齢
− 性別
− 言語
− 文化
− 識字
19
Y 1001:2019
− 障害
組織は,必要に応じて,ロボットサービス実施中の安全を確保するために必要な技能を受益者が獲得す
るための教育を規定し,文書化し,維持し,実施しなければならない。組織は,教育を規定する際,必要
に応じて,製造業者が使用上の情報で要求する技能を受益者が獲得するために必要な教育を考慮しなけれ
ばならない。
注記2 教育の内容として,次の場合がある。
− 受益者が守るべき注意点の伝達
− 発生する可能性のある事象に対しての対応方法の伝達
教育の結果は,必要に応じて,文書化し,保持しなければならない。
注記3 組織が,教育の手段として,不特定多数の受益者に対して口頭又は掲示での伝達を選択した
場合,教育の結果を文書化することは困難と考えられる。そのような場合には,口頭又は掲
示での伝達を実施した事実だけを記録することが考えられる。
組織は,必要に応じて,受益者の行動制限及びそれを守らないことによるリスクを文書化し,保持しな
ければならない。
組織は,サービス開始前に受益者に対して,受益者の行動制限及びそれを守らないことによるリスクを
知らさなければならない。
組織は,苦情を含め,ロボットサービスの安全性に関する受益者からのフィードバックを取得するよう
努めなければならない。
8.3
ロボットサービスにおける第三者への配慮
組織は,必要に応じて,ロボットサービスにおける第三者に対して,ロボットサービスの安全に関連す
る情報を広報しなければならない。
注記 広報の方法として次が考えられる。
− 視覚的方法
・ チラシの配布
・ 看板の設置
・ デジタルサイネージの設置
− 聴覚的方法
・ アナウンス
・ アラーム
組織は,必要に応じて,ロボットサービスにおける第三者の生命,身体,財産,及びプライバシー権を
含む権利侵害に対して配慮しなければならない。
8.4
緊急事態への準備及び対応
組織は,潜在的な緊急事態への準備及び対応のために必要なプロセスを確立し,実施し,維持しなけれ
ばならない。
組織は,次の事項を行わなければならない。
a) 組織として取り組む必要のある緊急事態を規定する。
b) 緊急時対応計画として緊急事態からの安全性の低下影響を防止又は緩和するための処置を計画するこ
とによって,対応を準備する。
c) 顕在化した緊急事態に対応する。
d) 緊急事態及びその潜在的な影響の大きさに応じて,緊急事態による結果を防止又は緩和するための処
20
Y 1001:2019
置をとる。
e) 緊急事態が顕在化した場合,少なくともc)の結果を速やかにトップマネジメントに伝達する。
f)
実行可能な場合には,計画した対応処置を定期的に訓練する。
g) 定期的に,特に緊急事態の発生後又は訓練の後には,プロセス及び計画した対応処置をレビューし,
必要に応じて改訂する。
h) 必要に応じて,緊急事態への準備及び対応についての関連する情報及び教育訓練を,組織の管理下で
働く人々及び関連する利害関係者に提供する。
i)
事故が発生した場合の賠償責任に対する補償手段を整えておく。
注記1 ロボットサービスにおける考慮すべき緊急事態の例として次が考えられる。
− サービスロボット及びロボットサービスシステムの,許容できないリスクを生じる可
能性のある故障
− ロボットサービス実施中の事故
− 地震,台風などの外部事象
− 火災,停電などの内部事象
注記2 事故が発生した場合の賠償責任に対する補償手段としては,賠償責任保険への加入が一般
的である。
組織は,必要に応じて,可能な場合,サービス開始前に,緊急時対応に必要となる受益者及びロボット
サービスにおける第三者の情報を収集しなければならない。情報の収集が不要又は不可能と判断した場合
には,その根拠を文書化しなければならない。
注記3 緊急時対応に必要となる情報の例として,氏名,緊急時連絡先,特別な補助の必要性,持病
などが考えられる。
注記4 ロボットサービスの特性によって,受益者及びロボットサービスにおける第三者からの情報
の収集ができない場合がある。そのような場合には,緊急事態発生後に速やかに必要な情報
を得られるよう,情報の入手,伝達の経路などについて利害関係者間で調整しておくことが
必要な場合がある。
組織は,受益者及びロボットサービスにおける第三者の情報の収集,保管及び使用を,法規及びその他
の要求事項にのっとり適切に執り行わなければならない。
組織は,受益者に対して,サービス開始前に緊急時対応計画を広報しなければならない。
組織は,プロセスが計画どおりに実施できるという確信をもつために必要な程度の文書化した情報を維
持しなければならない。
8.5
危険事象の取扱い
危険事象の取扱いは,次による。
a) 組織は,発生した危険事象を文書化し,担当当局へ報告するためのプロセスを確立し,維持しなけれ
ばならない。危険事象として文書化する内容は,法的要求事項及び利害関係者からの要求事項を考慮
に入れなければならず,かつ,次の1)〜10)を含まなければならない。
1) ロボットサービスの運用内容
2) 日時
3) 場所
4) 参加者(受益者,スタッフ)
5) 何が起こったか
21
Y 1001:2019
6) 想定原因
注記1 想定原因には,例えば,新たに発見された,サービスロボット及びロボットサービスシ
ステムの安全上のぜい(脆)弱性に関する情報を含む場合がある。このような情報の機
密性の喪失及び不適切な使用は,ロボットサービス安全パフォーマンスを低下させる可
能性があるため,文書化した情報の管理(7.5.3)が特に重要である。
注記2 想定原因が特定できない場合は,その旨を記載することが重要である。
7) 対応内容(医療的処置を含む。)
8) 結果(最終的な被害状況など)
9) 修正対応
10) 情報元
組織は,担当当局へ危険事象を報告する必要性を判断するための基準を設定し,その基準に基づい
て担当当局へ危険事象を報告しなければならない。基準は,法的要求事項及び利害関係者からの要求
を考慮に入れなければならず,かつ,文書化し,維持しなければならない。
b) 組織は,製造業者へ危険事象を報告する必要性を判断するための基準を設定し,その基準に基づいて
製造業者へ危険事象を報告しなければならない。基準を設定する際は,サービスロボットに起因する
危険事象を全て報告することが望ましい。製造業者へ報告する内容は,a)の1)〜10)に加えて,可能な
場合,次の1)〜6)を含まなければならない。
1) サービスロボットの型番
2) サービスロボットのシリアルNo.
3) ソフトウェアのバージョン
4) 保守履歴
5) サービスロボット内に保存された,事故発生時の動作状況の推移を記録したデータ
6) 該当する場合,製造業者の意図した使用の限定範囲の超過の有無とその内容
注記3 危険事象の報告に基づいて製造業者がサービスロボットの改良を行うことで,サービスロ
ボット及びそれらを使用するロボットサービスの将来的な安全性の向上が期待できる場合
がある。
9
パフォーマンス評価
9.1
監視,測定,分析及び評価
9.1.1
一般
組織は,次の事項を決定しなければならない。
− 監視及び測定が必要な対象
− 該当する場合には,必ず,妥当な結果を確実にするための,監視,測定,分析及び評価の方法
− 監視及び測定の実施時期
− 監視及び測定の結果の,分析及び評価の時期
組織は,この結果の証拠として,適切な文書化した情報を保持しなければならない。
組織は,ロボットサービス安全パフォーマンス及びロボットサービス安全マネジメントシステムの有効
性を評価しなければならない。
9.1.2
順守評価
組織は,運用上の順守事項を満たしていることを評価するために必要なプロセスを確立し,実施し,維
22
Y 1001:2019
持しなければならない。
組織は,次の事項を行わなければならない。
a) 順守を評価する頻度を決定する。
b) 運用上の順守事項の実施状況を評価し,定められた基準に満たない事項を,改善する。
c) 順守状況に関する知識及び理解を維持する。
組織は,順守評価の結果を,文書化した情報として保持しなければならない。
9.2
内部監査
9.2.1
一般
組織は,ロボットサービス安全マネジメントシステムが次の状況にあるか否かに関する情報を提供する
ために,あらかじめ定めた間隔で内部監査を実施しなければならない。
a) 次の事項に適合している。
− ロボットサービス安全マネジメントシステムに関して,組織自体が規定した要求事項
− この規格の要求事項
b) 有効に実施され,維持されている。
9.2.2
内部監査プログラム
組織は,次に示す事項を行わなければならない。
a) 頻度,方法,責任,計画要求事項及び報告を含む,監査プログラムの計画,確立,実施及び維持。監
査プログラムは,関連するプロセスの重要性及び前回までの監査の結果を考慮に入れなければならな
い。
b) 各監査について,監査基準及び監査範囲を明確にする。
c) 監査プロセスの客観性及び公平性を確保するために,監査員を選定し,監査を実施する。
d) 監査の結果を関連する管理層に報告することを確実にする。
e) 不適合に対しては遅滞なく,適切な修正を行い,是正処置をとる。
f)
監査プログラムの実施及び監査結果の証拠として,文書化した情報を保持する。
9.3
マネジメントレビュー
トップマネジメントは,組織のロボットサービス安全マネジメントシステムが,引き続き,適切,妥当
かつ有効であることを確実にするために,あらかじめ定めた間隔で,ロボットサービス安全マネジメント
システムをレビューしなければならない。
マネジメントレビューは,次の事項を考慮しなければならない。
a) 前回までのマネジメントレビューの結果とった処置の状況
b) 次の事項の変化
− ロボットサービスの運用内容
− ロボットサービス安全マネジメントシステムに関連する外部及び内部の課題
− 利害関係者のニーズ及び期待
− リスクアセスメント結果及びリスク低減方策
c) 次に示す傾向を含めた,ロボットサービス安全パフォーマンスに関する情報
− 安全目標が達成された程度
− 不適合及び是正処置
− 監視及び測定の結果
− 監査結果
23
Y 1001:2019
− 緊急事態
− 危険事象
d) 継続的改善の機会
e) 資源の妥当性
マネジメントレビューからのアウトプットには,継続的改善の機会,及びロボットサービス安全マネジ
メントシステムのあらゆる変更の必要性に関する決定を含めなければならない。
組織は,マネジメントレビューの結果の証拠として,文書化した情報を保持しなければならない。
10 改善
10.1 不適合及び是正処置
苦情から生じたものを含め,不適合が発生した場合,組織は,次の事項を行わなければならない。
a) その不適合に対処し,該当する場合には,必ず,次の事項を行う。
− その不適合を管理し,修正するための処置をとる。
− その不適合によって起こった結果に対処する。
b) その不適合が再発又は他のところで発生しないようにするため,次の事項によって,その不適合の原
因を除去するための処置をとる必要性を評価する。
− その不適合をレビューする。
− その不適合の原因を明確にする。
− 類似の不適合の有無,又はそれが発生する可能性を明確にする。
c) 必要な処置を実施する。
d) とった全ての是正処置の有効性をレビューする。
e) 必要な場合には,ロボットサービス安全マネジメントシステムの変更を行う。
是正処置は,検出された不適合のもつ影響に応じたものでなければならない。
組織は,次に示す事項の証拠として,文書化した情報を保持しなければならない。
− 不適合の性質及びそれに対してとったあらゆる処置
− 是正処置の結果
10.2 継続的改善
組織は,ロボットサービス安全マネジメントシステムの適切性,妥当性及び有効性を継続的に改善しな
ければならない。
24
Y 1001:2019
附属書A
(参考)
ロボットサービスの運用内容と製造業者の意図した
使用の限定範囲との関係の分類
A.1 一般
ロボットサービスの安全性確保観点での分類をA.2〜A.4に示す。
A.2 ケース1 基本形態
製造業者が設計時に意図した使用の限定範囲内で,ロボットサービスプロバイダがロボットサービスを
運用する場合をケース1という。ケース1であっても,リスクアセスメント及びリスク低減方策の決定の
結果,運用上の順守事項によってリスク低減を行う場合には,運用状況次第で許容できないリスクが生じ
る可能性があり,この規格の要求事項への対応が必要と考えられる。
図A.1−ケース1:基本形態
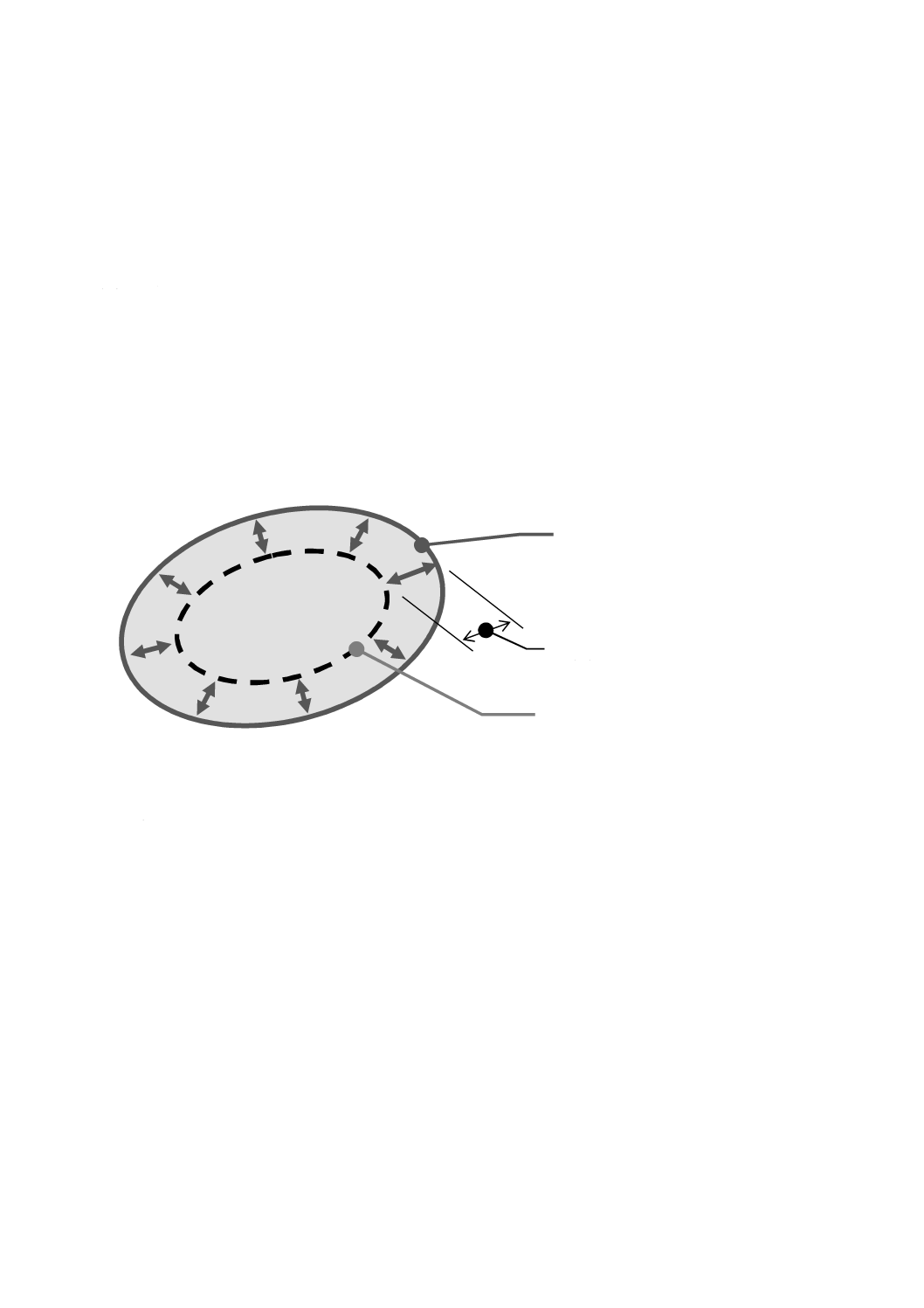
A.3 ケース2 拡張形態
製造業者が設計時に意図したサービスロボットの使用の限定範囲を,ロボットサービスプロバイダが拡
張してロボットサービスを運用する。リスクアセスメントの結果,許容できないリスクがあると判断され
た場合には,ロボットサービスプロバイダが独自に講じるリスク低減方策を実施する。安全規格への適合
が確認されていないサービスロボットを使用する場合には,製造業者が設計時に意図したサービスロボッ
トの使用の限定範囲の妥当性が確認されていないため,ケース2に分類される可能性がある。
運用状況いかんによって変化する
“安全上のマージン”
“この規格に基づく運用におけるサービス
ロボットの使用範囲”
製造業者が設計時に意図したサービス
ロボットの“使用の限定範囲”
25
Y 1001:2019
図A.2−ケース2:拡張形態
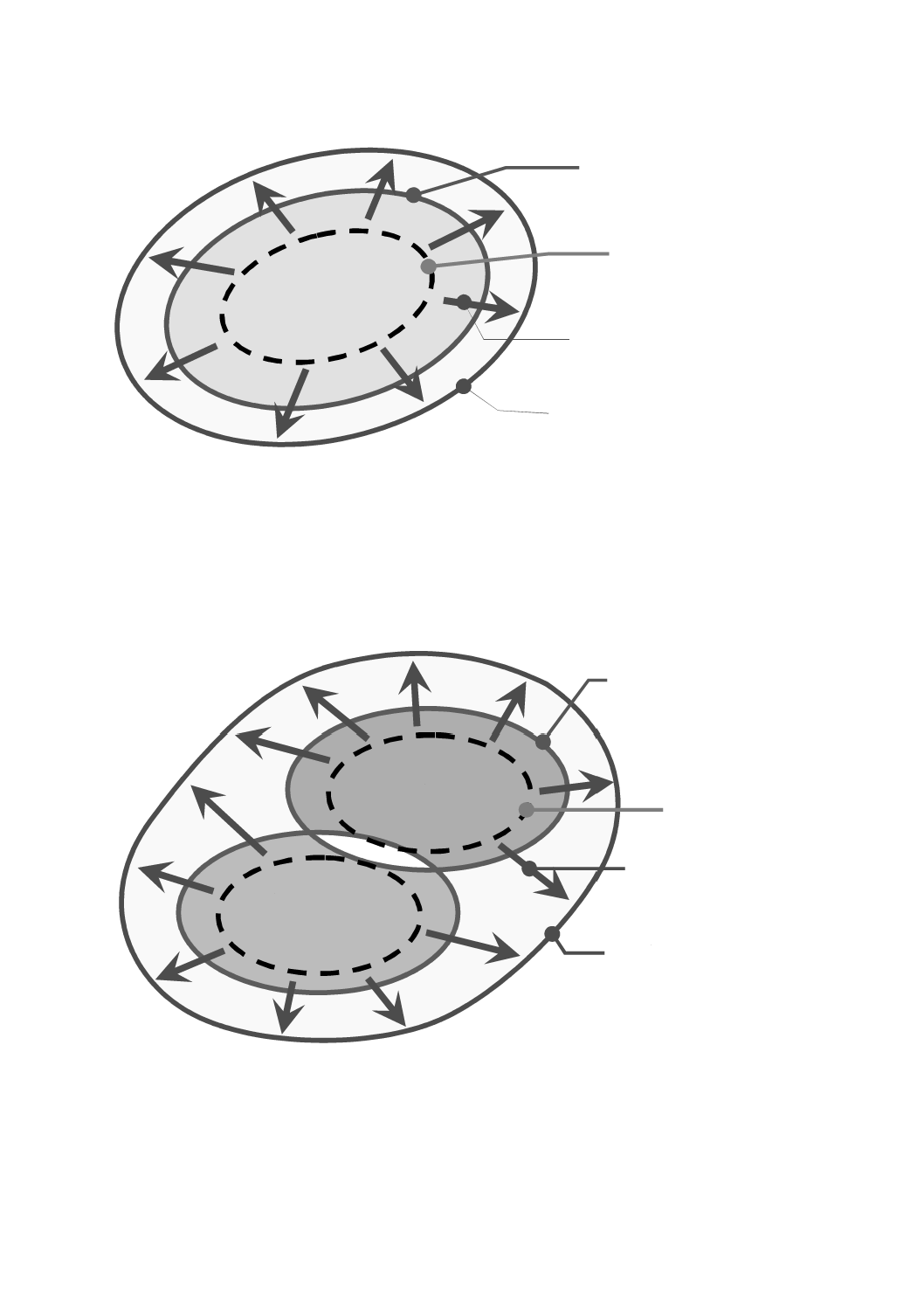
A.4 ケース3 統合形態
複数のサービスロボット又は制御システムを組み合わせて,ロボットサービスプロバイダがロボットサ
ービスを運用する。リスクアセスメントの結果,許容できないリスクがあると判断された場合には,ロボ
ットサービスプロバイダが独自に講じるリスク低減方策を実施する。
図A.3−ケース3:統合形態
ロボット“A”
ロボット“B”又は
コントロールシステム
製造業者が設計時に意図した
サービスロボットの“使用の
限定範囲”
“統合前のサービス
ロボットの使用範囲”
ロボットサービスプロバイダが
独自に講じるリスク低減方策
“統合後のロボットサービス
システムの使用範囲”
ロボットサービスプロバイダが
独自に講じるリスク低減方策
製造業者が設計時に意図したサービス
ロボットの“使用の限定範囲”
“拡張前のサービスロボットの
使用範囲”
“拡張後のサービスロボット又はロボット
サービスシステムの使用範囲”
26
Y 1001:2019
附属書B
(参考)
運用によって生じる危険源及び原因の例
B.1
一般
典型的なサービスロボットである移動作業型ロボット,搭乗型ロボット及び身体アシストロボットを例
として,ロボットサービスの安全性を確保する観点での分類(附属書A参照)ごとの使用上の情報の例及
び運用によって生じる危険源と原因の例を次に示す。
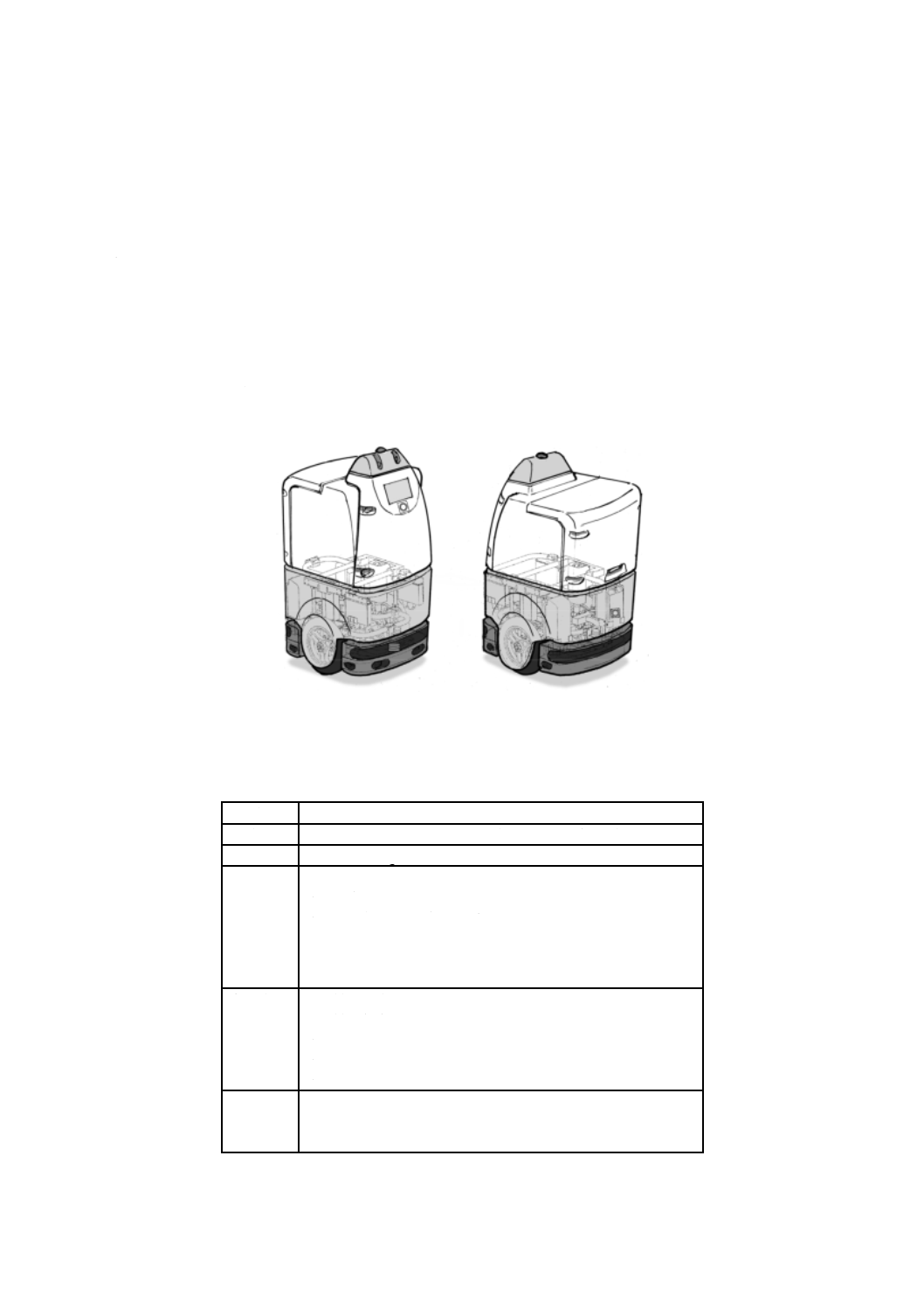
B.2
移動作業型ロボットの使用上の情報の例
図B.1に移動作業型ロボットの例,及び表B.1に移動作業型ロボットの使用上の情報の例を示す。
図B.1−移動作業型ロボットの例
表B.1−移動作業型ロボットの使用上の情報の例
項目
条件
搬送物
・ 一般アメニティ用品及び/又はペットボトル飲料
搬送能力
・ 最大20 kg
使用場所
・ 屋内
・ 温度:10 ℃〜40 ℃
・ 照明条件:(照度:150 lx〜1 000 lx)
・ 水の使用:しぶきがかかる
・ 回避障害物:(大きさ:幅10 cm以上,高さ50 cm以上)
・ 第三者の特性:説明を受けた人だけ
走行路面
・ 最小通路幅:120 cm
・ 最大斜度:10°
・ 最大段差:20 mm
・ 最大溝幅:10 mm
・ 想定路面:タイル
運行管理
・ 安全管理者:要
・ 定期検査:要(頻度,実施内容など詳細は別に規定する。
ただし,この事例においては例につき,存在しない。)
27
Y 1001:2019
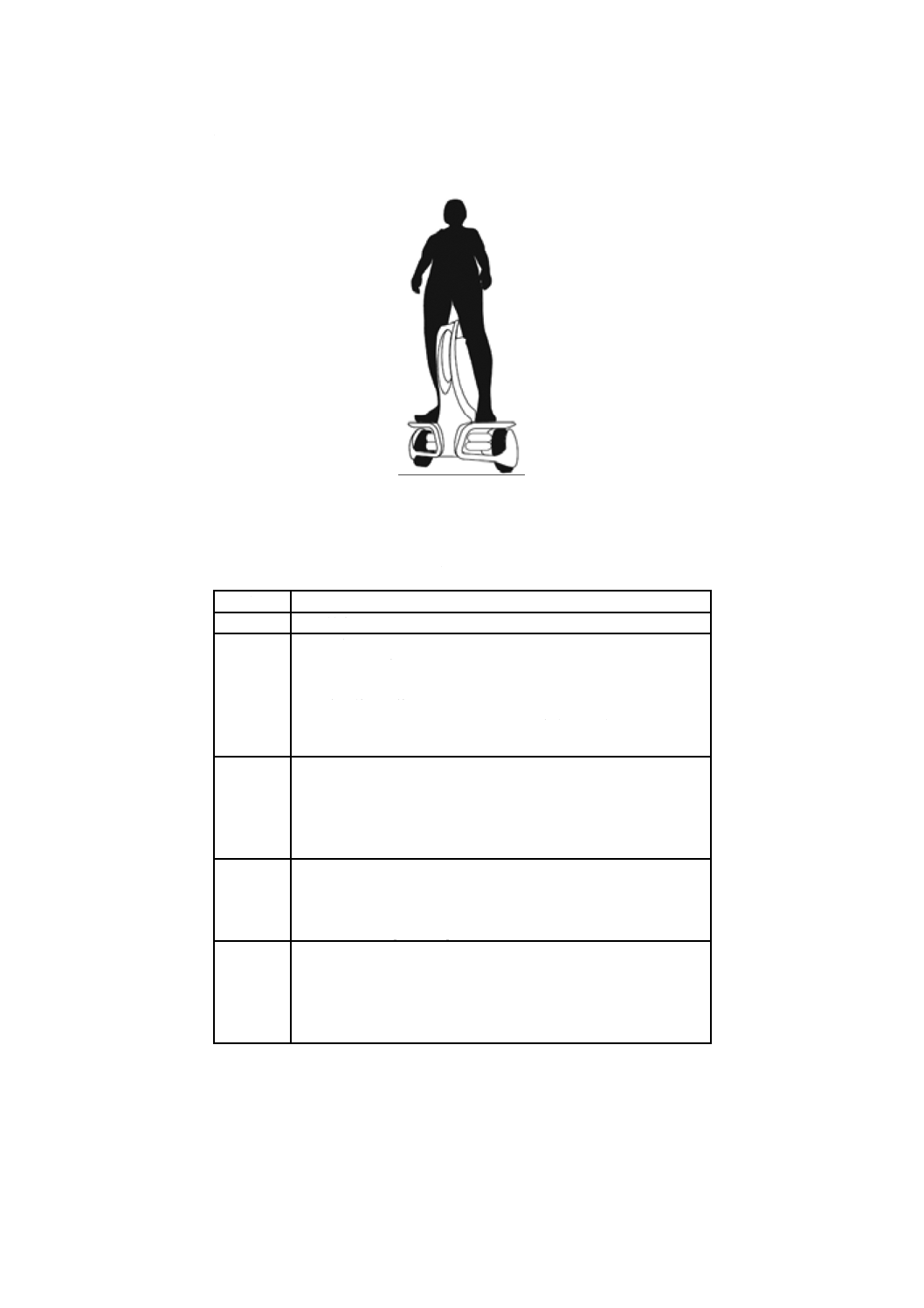
B.3
搭乗型ロボットの使用上の情報の例
図B.2に搭乗型ロボットの例,及び表B.2に搭乗型ロボットの使用上の情報の例を示す。
図B.2−搭乗型ロボットの例
表B.2−搭乗型ロボットの使用上の情報の例
項目
条件
速度
・ 最大6 km/h
使用場所
・ 屋外
・ 温度:10 ℃〜40 ℃
・ 照明条件:(照度:150 lx〜1 000 lx)
・ 水の使用:使用しない
・ 回避障害物:(大きさ:幅10 cm,高さ50 cm)
・ 第三者の特性:訓練された人だけ
走行路面
・ 最小通路幅:120 cm
・ 最大斜度:10°
・ 最大段差:20 mm
・ 最大溝幅:10 mm
・ 想定路面:タイル
受益者
・ 運転教育されている
・ 身体能力(筋力,視力など)
・ 判断能力
・ 体重:45 kg〜100 kg
運行管理
・ 安全管理者:要
・ 保守点検:要(実施者,実施内容など詳細は別に規定する。
ただし,この事例においては例につき,存在しない。)
・ 定期検査:要(頻度,実施内容など詳細は別に規定する。
ただし,この事例においては例につき,存在しない。)
28
Y 1001:2019
B.4
身体アシストロボットの使用上の情報の例
図B.3に身体アシストロボットの例,及び表B.3に身体アシストロボットの使用上の情報の例を示す。
図B.3−身体アシストロボットの例
表B.3−身体アシストロボットの使用上の情報の例
項目
条件
使用場所
・ 屋内
・ 温度:10 ℃〜30 ℃
・ 湿度:30 %〜80 %(ただし,結露しないこと)
受益者
・ 身体能力(筋力,視力など詳細は別に規定する。ただし,こ
の事例においては例につき,存在しない。)
・ 体格(体重:80 kg以下,身長:180 cm以下)
29
Y 1001:2019
B.5
ケース1 基本形態における危険源と原因の例
表B.4に移動作業型ロボット,表B.5に搭乗型ロボット,及び表B.6に身体アシストロボットの例を示
す。
表B.4−移動作業型ロボット
危害の例
危害の発生シーン
原因
運用上の原因
関連する
要求事項
衝突
ロボットサービスにお
ける第三者がロボット
にぶつかった。
ロボットサービスにおける第三者
が故意にロボットに接近した。
ロボットサービスにおける
第三者への安全に関する情
報の広報を怠った。
8.3
衝突
ロボットが人を検知し
停止しようとしたが,止
まり切れなかった。
ブレーキが摩耗して設計上の最大
ブレーキ力を発揮できなかった。
定期点検及び保守を怠った。 6.2.3
6.2.4
押し潰し
ロボットが転倒して挟
まれた。
床面に最大段差以上のごみが落ち
ていた。
ロボットサービス実施環境
の維持を怠った。
6.2.3
6.2.4
表B.5−搭乗型ロボット
危害の例
危害の発生シーン
原因
運用上の原因
関連する
要求事項
転倒
受益者がロボットに乗
ったまま転倒した。
操縦方法の訓練を受けていなかっ
た。
受益者が安全に関する技能
を獲得するための教育を怠
った。
8.2
転倒
受益者がロボットに乗
ったまま転倒した。
走行路面が劣化し,段差が大きか
った。
ロボットサービス実施環境
の維持を怠った。
6.2.3
6.2.4
転倒
転倒時,骨折した。
保護具を装着していなかった。
受益者制限を怠った。
6.1.2.3
8.2
衝突
停止操作をしたが止ま
り切れなかった。
ブレーキが摩耗して設計上の最大
ブレーキ力を発揮できなかった。
定期点検及び保守を怠った。 6.2.3
6.2.4
表B.6−身体アシストロボット
危害の例
危害の発生シーン
原因
運用上の原因
関連する
要求事項
筋骨格傷害 不適切なアシスト力と
なった。
アシスト力設定が不適切。
設定を行う作業者の力量が
不足していた。
7.2
筋骨格傷害 不適切なアシスト力と
なった。
アシスト制御系統が故障したまま
使い続けた。
定期点検及び保守を怠った。 6.2.3
6.2.4
転倒
ぬれた床上で使用して
転倒した。
床面の状況が適切でなかった。
ロボットサービス実施環境
の維持を怠った。
6.2.3
6.2.4
30
Y 1001:2019
B.6
ケース2 拡張形態における危険源と原因の例
表B.7に移動作業型ロボット(表B.4),表B.8に搭乗型ロボット(表B.5),及び表B.9に身体アシスト
ロボット(表B.6)の危険源に加えて拡張形態における危険源と原因の例を示す。
表B.7−移動作業型ロボット(表B.4)の危険源に加えて
危害の例
危害の発生シーン
原因
運用上の原因
関連する
要求事項
衝突
ロボットが人にぶつか
った。
屋内での使用を想定して設計され
たロボットを,雨天時の屋外で使
用し,水が電気回路に侵入し誤動
作した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
衝突
ロボットが人にぶつか
った。
使用温度範囲を超えた環境でロボ
ットを使用し,電気回路が故障し
誤動作した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
衝突
ロボットが人にぶつか
った。
照明条件範囲を下回った環境で使
用し,カメラで人を検知できなか
った。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
衝突
ロボットが人にぶつか
った。
家庭用の放射電磁波環境を想定し
て設計されたロボットを工場で使
用し,家庭より強い放射電磁波に
よって誤動作した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
衝突
ロボットが人にぶつか
った。
人との接近の警告を英語で発する
ロボットを日本で使用し,警告の
意図が伝わらなかった。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
その結果,受益者が安全に関
する力量を獲得するための
教育及びロボットサービス
における第三者への安全に
関する情報の広報を怠った。
6.1
6.1.2.1
6.1.2.4
8.2
8.3
押し潰し
ロボットが転倒して挟
まれた。
平らな床面上で使用することを想
定して設計されたロボットを,段
差のある床面上で使用した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
やけど
ロボットに接触してや
けどをした。
ロボットに独自の意匠カバーを設
置する改造によって冷却性能が低
下し,ロボット表面が高温になっ
た。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
その結果,受益者が安全に関
する力量を獲得するための
教育及びロボットサービス
における第三者への安全に
関する情報の広報を怠った。
6.1
6.1.2.1
6.1.2.4
8.2
8.3
31
Y 1001:2019
表B.8−搭乗型ロボット(表B.5)の危険源に加えて
危害の例
危害の発生シーン
原因
運用上の原因
関連する
要求事項
衝突
ペットがロボットにぶ
つかった。
ペットがいない空間での使用を想
定して設計されたロボットを,ペ
ットがいる空間で使用した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
衝突
ロボットが,ロボットサ
ービスにおける第三者
にぶつかった。
屋内での使用を想定して設計され
たロボットを,雨天時の屋外で使
用し,水が電気回路に侵入し誤動
作した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
衝突
ロボットが人にぶつか
った。
屋内での使用を想定して設計され
たロボットを,雨天時の屋外で使
用し,水が電気回路に侵入し誤動
作した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
衝突
ロボットが人にぶつか
った。
家庭における放射電磁波環境を想
定して設計されたロボットを工場
で使用し,家庭より強い放射電磁
波によって誤動作した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
押し潰し
ロボットが転倒して挟
まれた。
平らな床面上で使用することを想
定して設計されたロボットを,段
差のある床面上で使用した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
転倒
受益者がロボットに乗
ったまま転倒した。
斜度のない床面での使用を想定し
て設計されたロボットを,斜面で
使用した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
転落
受益者がロボットから
転落した。
成人向けに設計されたロボット
に,幼児が搭乗した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
その結果,適切な受益者制限
ができなかった。
6.1
6.1.2.1
6.1.2.4
32
Y 1001:2019
表B.9−身体アシストロボット(表B.6)の危険源に加えて
危害の例
危害の発生シーン
原因
運用上の原因
関連する
要求事項
感電
電池を液体でぬらした。 室内での使用を想定して設計され
たロボットを,雨天時の屋外で使
用し,水が装置内に侵入した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
やけど
ロボットに接触してや
けどをした。
ロボットに独自の意匠カバーを設
置する改造によって冷却性能が低
下し,ロボット表面が高温になっ
た。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
衝突
ロボットが人にぶつか
った。
家庭における放射電磁波環境を想
定して設計されたロボットを工場
で使用し,家庭より強い放射電磁
波によって誤動作した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
筋骨格傷害 不適切なサイズの機器
を使用した。
成人向けに設計されたロボット
を,幼児が装着した。
リスクアセスメントにおい
て,第三者専門家への意見聴
取を怠った。
その結果,適切な受益者制限
ができなかった。
6.1
6.1.2.3
6.1.2.4
8.2
転倒
装着者がつまづいた。
自力歩行が可能な人への装着を想
定して設計されたロボットを,自
力歩行不可能な人へ装着した。
リスクアセスメントにおい
て第三者専門家への意見聴
取を怠った。
その結果,組織の管理下で働
く人が,受益者の安全を確保
するために必要な力量を獲
得するための教育を怠った。
6.1
6.1.2.1
6.1.2.4
7.2
8.2
33
Y 1001:2019
B.7 ケース3 統合形態における危険源と原因の例
表B.10に移動作業型ロボット(表B.7),搭乗型ロボット(表B.8)及び身体アシストロボット(表B.9)の危険源に加えて統合形態における危険源
と原因の例を示す。
表B.10−移動作業型ロボット(表B.7),搭乗型ロボット(表B.8)及び身体アシストロボット(表B.9)の危険源に加えて
移動作業型ロボット
(JIS B 8446-1)
搭乗型ロボット
(JIS B 8446-3)
身体アシストロボット
(JIS B 8446-2)
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
移
動
作
業
型
ロ
ボ
ッ
ト
(
J
IS
B
8
4
4
6
-1
)
足ひ
(轢)
き
ロボットの
車輪にひ
(轢)かれ
た。
ロボット同
士がお互い
を検知でき
ず衝突し宙
に浮いた。
使用上の情
報の理解が
十分ではな
かった。
6.1
6.1.1
6.1.2.1
6.1.2.4
←
←
←
←
←
衝突
移動作業型
ロボット
に,身体ア
シストロボ
ットを装着
した人がぶ
つかった。
身体アシス
トロボット
によって人
の歩行速度
が上がり,
移動作業型
ロボットと
身体アシス
トロボット
装着者との
相対速度が
設計上の回
避可能上限
速度を上回
り,衝突し
転倒した。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
足ひ
(轢)
き
ロボットの
車輪にひ
(轢)かれ
た。
ロボット同
士の相対速
度がそれぞ
れの設計上
の回避可能
上限速度を
上回り,衝
突し宙に浮
いた。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
←
←
←
←
←
衝突
移動作業型
ロボット
に,身体ア
シストロボ
ットを装着
した人がぶ
つかった。
身体アシス
トロボット
からの放射
電磁波で移
動作業型ロ
ボットが誤
動作し,人
を回避でき
なかった。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
5
Y
1
0
0
1
:
2
0
1
9
34
Y 1001:2019
表B.10−移動作業型ロボット(表B.7),搭乗型ロボット(表B.8)及び身体アシストロボット(表B.9)の危険源に加えて(続き)
移動作業型ロボット
(JIS B 8446-1)
搭乗型ロボット
(JIS B 8446-3)
身体アシストロボット
(JIS B 8446-2)
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
移
動
作
業
型
ロ
ボ
ッ
ト
(
J
IS
B
8
4
4
6
-1
)
(
続
き
)
押し
潰し
ロボットが
転倒して挟
まれた。
ロボット同
士がお互い
を検知でき
ず衝突し,
転倒した。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
転倒
受益者が搭
乗型ロボッ
トに乗った
まま転倒し
た。
ロボット同
士の衝突に
より,倒立
振子制御の
限界以上の
外力が加わ
った。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠った。
その結果,
適切な受益
者の行動制
限を行うこ
とができな
かった。
6.1
6.1.2.1
6.1.2.4
8.2
衝突
移動作業型
ロボット
に,身体ア
シストロボ
ットを装着
した人がぶ
つかった。
身体アシス
トロボット
によって人
の可動範囲
が制限さ
れ,回避動
作を取れな
かった。
装着を行う
作業者の力
量が不足し
ていた。
7.2
8.2
押し
潰し
ロボットが
転倒して挟
まれた。
ロボット同
士の相対速
度がそれぞ
れの設計上
の回避可能
上限速度を
上回り,衝
突し転倒し
た。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
←
←
←
←
←
転倒
身体アシス
トロボット
を装着した
人が転倒し
た。
移動作業型
ロボットか
らの放射電
磁波で身体
アシストロ
ボットが誤
動作し予想
外のアシス
ト力が発生
した。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
衝突
ロボットに
ぶつかっ
た。
他ロボット
の出力する
人検知レー
ザーと自セ
ンサが干渉
し,人を検
知できなか
った。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
転落
受益者が搭
乗型ロボッ
トから転落
した。
ロボット同
士の衝突に
よって,受
益者に外力
が加わっ
た。
受益者が安
全に関する
操縦等の技
能を獲得す
るための教
育を怠っ
た。
8.2
−
−
−
−
−
5
Y
1
0
0
1
:
2
0
1
9
35
Y 1001:2019
表B.10−移動作業型ロボット(表B.7),搭乗型ロボット(表B.8)及び身体アシストロボット(表B.9)の危険源に加えて(続き)
移動作業型ロボット
(JIS B 8446-1)
搭乗型ロボット
(JIS B 8446-3)
身体アシストロボット
(JIS B 8446-2)
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
移
動
作
業
型
ロ
ボ
ッ
ト
(
J
IS
B
8
4
4
6
-1
)
(
続
き
)
衝突
ロボットに
ぶつかっ
た。
他ロボット
からの放射
電磁波で誤
動作し,人
を回避でき
なかった。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠った。
6.1
6.1.2.1
6.1.2.4
←
←
←
←
←
−
−
−
−
−
挟み
込み
ロボットと
ロボットに
挟まれた。
他ロボット
の出力する
人検知レー
ザーと自セ
ンサとが干
渉し,人を
検知できな
かった。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
←
←
←
←
←
−
−
−
−
−
落下
ロボットが
落ちてきて
押し潰され
た。
他ロボット
の出力する
人検知レー
ザーと自セ
ンサが干渉
し,階段を
検知できな
かった。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
←
←
←
←
←
−
−
−
−
−
5
Y
1
0
0
1
:
2
0
1
9
36
Y 1001:2019
表B.10−移動作業型ロボット(表B.7),搭乗型ロボット(表B.8)及び身体アシストロボット(表B.9)の危険源に加えて(続き)
移動作業型ロボット
(JIS B 8446-1)
搭乗型ロボット
(JIS B 8446-3)
身体アシストロボット
(JIS B 8446-2)
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
移
動
作
業
型
ロ
ボ
ッ
ト
(
J
IS
B
8
4
4
6
-1
)
(
続
き
)
衝突
移動作業型
ロボットが
もう一方の
移動作業型
ロボットを
認識でき
ず,衝突。
一方の移動
作業型ロボ
ットの大き
さ,高さが,
もう一方の
移動作業型
ロボットの
認識できる
範囲よりも
小さく,認
識できな
い。
使用上の情
報の理解が
十分ではな
かった。
6.1
6.1.1
6.1.2.1
6.1.2.4
衝突
挟み
込み
手ひ
(轢)
き
搭乗型ロボ
ットの搭乗
者が移動作
業型ロボッ
トの前に倒
れて衝突。
移動作業型
ロボットと
搭乗型ロボ
ットとが近
接し,搭乗
型ロボット
が急停止,
急旋回など
の動作によ
って,搭乗
者が移動作
業型ロボッ
トの前方に
転倒。
受益者が安
全に関する
操縦などの
技能を獲得
するための
教育を怠っ
た。
8.2
−
−
−
−
−
搭
乗
型
ロ
ボ
ッ
ト
(
J
IS
B
8
4
4
6
-3
)
−
−
−
−
−
押し
潰し
搭乗型ロボ
ットが転倒
してロボッ
トサービス
における第
三者が挟ま
れた。
他ロボット
からの放射
電磁波で誤
動作し転倒
した。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
衝突
身体アシス
トロボット
を装着した
人が乗る搭
乗型ロボッ
トがロボッ
トサービス
における第
三者に衝突
した。
搭乗型ロボ
ットからの
放射電磁波
で身体アシ
ストロボッ
トが誤動作
し,予想外
のアシスト
力が発生し
意図した操
縦ができな
かった。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
5
Y
1
0
0
1
:
2
0
1
9
37
Y 1001:2019
表B.10−移動作業型ロボット(表B.7),搭乗型ロボット(表B.8)及び身体アシストロボット(表B.9)の危険源に加えて(続き)
移動作業型ロボット
(JIS B 8446-1)
搭乗型ロボット
(JIS B 8446-3)
身体アシストロボット
(JIS B 8446-2)
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
搭
乗
型
ロ
ボ
ッ
ト
(
J
IS
B
8
4
4
6
-3
)
(
続
き
)
−
−
−
−
−
衝突
搭乗型ロボ
ット同士が
衝突した。
ロボット同
士の相対速
度が受益者
の操作で回
避できる上
限速度を超
えた。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
衝突
搭乗型ロボ
ットが,身
体アシスト
ロボットを
装着した人
に衝突し
た。
身体アシス
トロボット
によって人
の可動範囲
が制限さ
れ,回避動
作を取れな
かった。
装着を行う
作業者の力
量が不足し
ていた。
7.2
8.2
−
−
−
−
−
転落
受益者が搭
乗型ロボッ
トから転落
した。
ロボット同
士の相対速
度がそれぞ
れの設計上
の回避可能
上限速度を
上回り,衝
突した。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
転倒
身体アシス
トロボット
を装着した
人が搭乗型
ロボットに
乗ったまま
転倒した。
搭乗型ロボ
ットからの
放射電磁波
で身体アシ
ストロボッ
トが誤動作
し,予想外
のアシスト
力が発生し
意図した操
縦ができな
かった。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
−
−
−
−
−
転倒
受益者が搭
乗型ロボッ
トに乗った
まま転倒し
た。
ロボット同
士の相対速
度がそれぞ
れの設計上
の回避可能
上限速度を
上回り,衝
突した。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
筋骨格
傷害
身体アシス
トロボット
を装着した
人が搭乗型
ロボットを
操縦した。
搭乗型ロボ
ットからの
放射電磁波
で身体アシ
ストロボッ
トが誤動作
し不適切な
アシスト力
が印加され
た。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.4
5
Y
1
0
0
1
:
2
0
1
9
38
Y 1001:2019
表B.10−移動作業型ロボット(表B.7),搭乗型ロボット(表B.8)及び身体アシストロボット(表B.9)の危険源に加えて(続き)
移動作業型ロボット
(JIS B 8446-1)
搭乗型ロボット
(JIS B 8446-3)
身体アシストロボット
(JIS B 8446-2)
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
危害の
例
危害の発生
シーン
原因
運用上の
原因
関連する
要求事項
搭
乗
型
ロ
ボ
ッ
ト
(
J
IS
B
8
4
4
6
-3
)
(
続
き
)
−
−
−
−
−
転倒
受益者が搭
乗型ロボッ
トに乗った
まま転倒し
た。
ロボット同
士の衝突に
よって,倒
立振子制御
の限界以上
の外力が加
わった。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
その結果,
適切な受益
者の行動制
限を行うこ
とができな
かった。
6.1
6.1.2.1
6.1.2.4
8.2
−
−
−
−
−
身
体
ア
シ
ス
ト
ロ
ボ
ッ
ト
(
J
IS
B
8
4
4
6
-2
)
−
−
−
−
−
−
−
−
−
−
筋骨格
傷害
異なる複数
の身体アシ
ストロボッ
トを装着し
た。
身体アシス
トロボット
同士が干渉
し不適切な
装着とな
り,不適切
なアシスト
力が印加さ
れた。
装着を行う
作業者の力
量が不足し
ていた。
7.2
8.2
−
−
−
−
−
−
−
−
−
−
転倒
異なる複数
の身体アシ
ストロボッ
トを装着し
た。
二つの身体
アシストロ
ボットから
のアシスト
力が合わさ
り過剰なア
シスト力と
なった。
リスクアセ
スメントに
おいて,第
三者専門家
への意見聴
取を怠っ
た。
6.1
6.1.2.1
6.1.2.3
5
Y
1
0
0
1
:
2
0
1
9

39
Y 1001:2019
表B.10−移動作業型ロボット(表B.7),搭乗型ロボット(表B.8)及び身体アシストロボット(表B.9)の危険源に加えて(続き)
注記 “−”は記載なし,“←”は同左を意味する。
参考文献 JIS B 8446-2 生活支援ロボットの安全要求事項−第2部:低出力装着型身体アシストロボット
JIS B 8446-3 生活支援ロボットの安全要求事項−第3部:倒立振子制御式搭乗型ロボット
JIS B 8456-1 生活支援ロボット−第1部:腰補助用装着型身体アシストロボット
JIS Q 14001 環境マネジメントシステム−要求事項及び利用の手引
JIS Q 19011 マネジメントシステム監査のための指針
5
Y
1
0
0
1
:
2
0
1
9