X 7111:2014 (ISO 19111:2007)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 2
2 適合性···························································································································· 2
3 引用規格························································································································· 2
4 用語及び定義··················································································································· 3
5 用法······························································································································· 8
5.1 記号 ···························································································································· 8
5.2 略語 ···························································································································· 8
5.3 UML表記····················································································································· 9
5.4 属性ステータス ············································································································· 9
6 座標による空間参照−概要 ································································································· 9
6.1 座標と座標参照系との間の関係 ························································································ 9
6.2 座標による空間参照のUMLモデル−概要 ········································································· 11
7 識別オブジェクトパッケージ ····························································································· 12
7.1 一般 ··························································································································· 12
7.2 識別オブジェクトパッケージのUMLスキーマ ··································································· 13
8 座標参照系パッケージ······································································································ 15
8.1 参照系 ························································································································ 15
8.2 座標参照系 ·················································································································· 15
8.3 座標参照系パッケージのUMLスキーマ ············································································ 17
9 座標系パッケージ············································································································ 23
9.1 序文 ··························································································································· 23
9.2 座標系 ························································································································ 23
9.3 座標系の軸 ·················································································································· 24
9.4 座標系パッケージのUMLスキーマ ·················································································· 25
10 原子パッケージ ············································································································· 34
10.1 原子の型 ···················································································································· 34
10.2 測地原子 ···················································································································· 34
10.3 原子パッケージのUMLスキーマ ··················································································· 34
11 座標演算パッケージ ······································································································· 42
11.1 座標演算の一般的特性 ·································································································· 42
11.2 座標演算パッケージのUMLスキーマ ·············································································· 42
附属書A(規定)抽象試験項目群 ··························································································· 53
附属書B(参考)座標による空間参照のモデル化について ·························································· 55
附属書C(参考)座標による空間参照−測地学的概念 ································································ 64
X 7111:2014 (ISO 19111:2007) 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
附属書D(参考)実例集 ······································································································· 67
附属書E(参考)この規格に対してインタフェースをとる場合の推奨最良実施例 ···························· 81
附属書JA(参考)日本における座標参照系の例 ········································································ 82
参考文献 ···························································································································· 87
X 7111:2014 (ISO 19111:2007)
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,公益財団法人日本
測量調査技術協会(APA)から,工業標準原案を具して日本工業規格を改正すべきとの申出があり,日本
工業標準調査会の審議を経て,経済産業大臣及び国土交通大臣が改正した日本工業規格である。
これによって,JIS X 7111:2004は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣,国土交通大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
X 7111:2014
(ISO 19111:2007)
地理情報−座標による空間参照
Geographic information-Spatial referencing by coordinates
序文
この規格は,2007年に第2版として発行されたISO 19111を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。この規格は,ISO/TC 211が関与する種々の地理情報規格を基とした日
本工業規格(以下,地理情報規格シリーズという。)の一つである。
地理情報規格シリーズは,地球上の位置に直接的又は間接的に関連付けられたオブジェクト又は現象に
関する情報処理技術のための規格であり,河川,道路などに関する様々なデータを電子化し,各種情報処
理の高度化・効率化に適用される。
地理情報には,データ内に表現されている地物(天然と人工にかかわらず,地上にある全ての物の概念
のことで,河・山・植物・橋・鉄道・建築物・行政界など,実世界に存在するものに与えられる名前)を
実世界の位置に関連付ける空間参照が含まれる。空間参照は,次の二つのカテゴリに分類される。
− 座標による空間参照
− 地理識別子による空間参照
地理識別子による空間参照は,JIS X 7112で規定されている。この規格は,座標による空間参照に必要
なデータ要素,関係及び関連メタデータを記述している。地理情報に適用される様々な型の座標系と座標
参照系とを明確に定義する上で必要となる要素が記述される。必要な要素の一部は,座標の型に部分的に
依存する。この規格は,座標参照系の情報で必須ではないものを記述できる任意の項目も含む。要素は,
機械及び人間の両方に可読であるように意図されている。
伝統的に水平位置と垂直位置とが区別されてきたため,真の三次元座標とはいえないが,実質的に水平
(二次元)座標及び垂直(一次元)座標をもつ座標参照系が形成されている。三次元の位置を,水平座標
と,それとは別の座標参照系に基づいた高さ又は深さとを組み合わせて定義することは,確立された手法
である。この規格では,この概念は,複合座標参照系と規定している。
座標の概念は,厳密に空間だけを扱う場合から時間を含むものに拡張することができる。JIS X 7108は,
時間スキーマを記述する。時間は,複合座標参照系において時間座標参照系として追加することができる。
二つの座標が,異なる独立した量を記述する限り,二つの時間座標を追加することもできる。
例 地表下の点の時間/空間位置の垂直座標は,音の信号の往復の伝ぱ時間としてミリ秒単位で表現
される。これは,地震探査において一般的に行われている方法である。第2時間座標は,通常,
年単位で表現される観測時刻を示す。
ある科学分野では,水平位置に非空間的パラメタを組み合わせる三次元座標系を使用する。その分野で
は,非空間的パラメタを,第3軸又は垂直軸とみなす。このパラメタは,たとえ,高さ又は深さにつれて
単調に変動したとしても,必ずしも単純に変化するとは限らない。したがって,パラメタから高さ又は深
2
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
さへの換算は自明ではない。関係するパラメタは,通常,絶対的な測定によって得られたものであり,そ
の原子は,パラメタの直接的な物理測定値に基づいている。こうした非空間パラメタは,この規格の適用
範囲を超えている。ただし,この規格で記述されているモデル化構成概念は,その分野に固有なプロファ
イルを介して適用できる。
座標参照系の記述に加えて,この規格では,二つの異なる座標参照系間の座標変換又は座標換算も記述
する。その情報を用いて,異なる座標参照系に参照される空間データを,特定の座標参照系に関連付ける
ことができる。これによって,空間データの統合が容易になり,また,座標参照系操作の履歴を保持する
ことができる。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項を示している。これ
は日本の読者への便宜のためにこの規格で付記している。また,附属書JA(参考)は,対応国際規格には
ない附属書であり,日本における座標参照系の実例としてこの規格で追加している。
1
適用範囲
この規格は,座標による空間参照の記述についての概念スキーマを規定する。空間参照は,随意に時空
間参照に拡張される。この規格は,時空間統合参照系への拡張を含め,一次元,二次元及び三次元の空間
座標参照系を定義するために必要な最低限のデータを規定する。この規格では,座標参照系を規定するた
めの情報を追加してもよい。また,座標参照系間で座標変換するために必要となる情報も規定する。
この規格で取り扱う座標参照系は,時間の推移とともに変化しない。車,船舶,航空機,宇宙船などの
移動体上に定義された座標参照系の場合は,地球固定座標系への変換に,時間要素を含むことができる。
この規格は,地理情報の作成者及び使用者に適用できる。この規格はデジタル地理データに適用できる
が,その原則は地図,図表,文書などその他の各種地理データにも拡張することができる。
記述されているスキーマは,高さ又は深さとともに単調増加する第3番目の非空間パラメタと水平位置
との組合せにも適用できる。こうした非空間データへの拡張は,この規格の適用範囲を超えているが,プ
ロファイルを介して実装できる。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 19111:2007,Geographic information−Spatial referencing by coordinates(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
適合性
この規格は,二つの適合性クラスを規定する。クラスAは座標参照系の適合性とし,クラスBは二つの
座標参照系間の座標演算の適合性とする。座標参照系がこの規格に適合するためには,A.1の規定を満た
さなければならない。座標演算がこの規格に適合するためには,A.2の要件を満たさなければならない。
3
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS X 4170 オープン分散処理−統一モデル化言語(UML)1.4.2版
注記 対応国際規格:ISO/IEC 19501,Information technology−Open Distributed Processing−Unified
Modeling Language (UML) Version 1.4.2(IDT)
3
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS X 7108 地理情報−時間スキーマ
注記 対応国際規格:ISO 19108,Geographic information−Temporal schema(IDT)
ISO 19115,Geographic information−Metadata
注記 対応日本工業規格:JIS X 7115 地理情報−メタデータ(MOD)
ISO/TS 19103,Geographic information−Conceptual schema language
ISO 19115からの規格引用は,次のように制限する。この規格におけるISO 19115への規格引用は,
MD̲CRSクラス及びその構成要素クラスを除外する。ISO 19115のクラスMD̲CRS及びその構成要素クラ
スは,座標参照系要素の記述を指定している。それらの要素は,この規格でモデル化されている。
注記 MD̲CRSクラス及びその構成要素クラスは,ISO 19115:2003からTechnical Corrigendum 1:2006
によって削除された。
4
用語及び定義
この規格で用いる主な用語及び定義は,次による。
4.1
アフィン座標系(affine coordinate system)
ユークリッド空間において,直線の軸をもつ座標系。軸は,必ずしも相互に直交しない。
4.2
直交座標系(Cartesian coordinate system)
点の位置を,n本の相互に直交する軸に関して与える座標系。
注記 この規格では,nは,2又は3とする。
4.3
複合座標参照系(compound coordinate reference system)
少なくとも二つの独立した座標参照系を用いて位置を示す座標参照系。
注記 一方の座標参照系の座標値が他方の座標参照系の座標値に換算又は変換できない場合,二つの
座標参照系は互いに独立しているという。
4.4
連結演算(concatenated operation)
複数の座標演算を逐次的に適用する座標演算。
4.5
座標(coordinate)
n次元空間内の点の位置を示すためのn個の数値の列。
注記 座標参照系では,座標値には単位が付加される。
4.6
座標換算(coordinate conversion)
双方が同一の原子に基づいた座標参照系間における座標演算。
例 WGS 84原子に基づくだ(楕)円体座標参照系から,同じ原子に基づく直交座標参照系への変更
又はラジアンから度若しくはフィートからメートルなどへの単位の変更。
注記 座標換算は,特定の値をもつパラメタを使用するが,パラメタは観測から決定されたものでは
ない。
4
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.7
座標演算(coordinate operation)
ある座標参照系から他の座標参照系への1対1の関係に基づく座標の変更。
注記 座標変換及び座標換算の上位型である。
4.8
座標参照系(coordinate reference system)
原子によってオブジェクトに関連付けられた座標系。
注記 測地原子及び鉛直原子の場合,オブジェクトは地球となる。
4.9
座標集合(coordinate set)
同一の座標参照系に関連する座標組の集まり。
4.10
座標系(coordinate system)
点にどのように座標を割り当てるかを規定する数学的規則の集合。
4.11
座標変換(coordinate transformation)
異なる原子に基づく二つの座標参照系間の座標演算。
注記 座標変換は,両方の座標参照系での座標が知られている点の集合によって観測に基づき導出さ
れたパラメタを使用する。
4.12
座標組(coordinate tuple)
座標の列で構成する組。
注記 座標組内の座標の個数は,座標系の次元と等しくなる。座標組中の座標の順序は,座標系の軸
の順序と同一である。
4.13
円筒座標系(cylindrical coordinate system)
二つの距離座標及び一つの角度で表される三次元の座標系。
4.14
原子(datum)
座標系の原点の位置,スケール,及び軸の向きを定義するパラメタ又はパラメタの集合。
4.15
深さ(depth)
基準面からその面に立てた垂線に沿って下方向に測った点までの距離。
注記 基準面から上方の深さは,負の値で表される。
4.16
東距,E(easting,E)
南北基準線から東向きを正,西向きを負とした座標系上の距離。
4.17
だ(楕)円体(ellipsoid)
だ(楕)円を主軸の周りに回転して形成される面。
5
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 この規格では,だ(楕)円体は常にへん(扁)平とする。すなわち,回転軸は常に短軸である
ことを意味する。
4.18
だ(楕)円体座標系(ellipsoidal coordinate system,geodetic coordinate system)
測地緯度,測地経度及び(三次元の場合)だ(楕)円体高で位置を指定する座標系。
4.19
だ(楕)円体高,h(ellipsoidal height,geodetic height,h)
だ(楕)円体面からそれに垂直な線に沿って測ったある地点までの距離で,だ(楕)円体の上側又は外
側に向かう場合を正とするもの。
注記 三次元だ(楕)円体座標系の一部としてだけ使用しそれ単独では使用しない。
4.20
施工基準座標参照系(engineering coordinate reference system)
施工基準原子に基づく座標参照系。
例 局所的な施工グリッド又は構造グリッド,船又は軌道上の宇宙船などに対する局所的な座標参照
系。
4.21
施工基準原子,局所原子(engineering datum,local datum)
座標系の局所的な参照に対する関連付けを記述する原子。
注記 施工基準原子は,測地原子及び鉛直原子を含まない。
例 基準点から数キロメートル以内の相対位置を識別する系で使用される。
4.22
へん(扁)平率,f(flattening,f)
だ(楕)円体の長半径(a)と短半径(b)との差の,だ(楕)円体の長半径に対する比の値:f=(a−b)/a。
注記 時には,へん(扁)平率の逆数1/f=a/(a−b) を与えることもある。1/fは,逆へん(扁)平率
と呼ばれる。
4.23
測地座標参照系(geodetic coordinate reference system)
測地原子に基づく座標参照系。
4.24
測地原子(geodetic datum)
二次元又は三次元座標系と地球との関係を記述する原子。
4.25
測地緯度,だ(楕)円体緯度,φ(geodetic latitude,ellipsoidal latitude,φ)
赤道面と与点を通るだ(楕)円体の垂線との間の角度,北向きを正とする。
4.26
測地経度,だ(楕)円体経度,λ(geodetic longitude,ellipsoidal longitude,λ)
本初子午線面と与点の子午線面との間の角度,東向きを正とする。
4.27
ジオイド(geoid)
あらゆる場所で重力の方向に垂直な地球重力場の等ポテンシャル面で,局所的又は全地球的に平均海面
6
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
と最もよく一致するもの。
4.28
標高,H(gravity-related height,H)
地球の重力場に依存する高さ。
注記 特に正標高又は正規高のことを指し,これらはいずれもある地点の平均海面からの距離の近似
である。
4.29
高さ,h,H(height,h,H)
基準面からその面に垂直な線に沿って上方に測ったある地点までの距離。
注記 基準面から下方の高さは,負の値で表される。
4.30
画像座標参照系(image coordinate reference system)
画像原子に基づく座標参照系。
4.31
画像原子(image datum)
座標系と画像との関係を記述する施工基準原子。
4.32
一次元曲線座標系(linear coordinate system)
線形地物が軸を形成する一次元の座標系。
例 パイプラインに沿った距離,傾斜坑油井の深さ。
4.33
地図投影(map projection)
だ(楕)円体座標系から平面への座標換算。
4.34
平均海面(mean sea level)
あらゆる段階の潮位及び季節的変動を平均した海面高。
注記 局所的な意味の平均海面は,通常,1か所以上の地点で,一定の期間観測した結果から計算し
た,ある領域の平均海面を意味する。全地球的な状況では,平均海面と全地球的なジオイドと
の差は2 m以下である。
4.35
子午線(meridian)
だ(楕)円体面とそのだ(楕)円体の短半径を含む平面との交線。
注記 子午線という用語は,完全な閉曲線としてではなく,両極を結ぶ弧線を表すことが多い。
4.36
北距,N(northing,N)
東西基準線から北向きを正,南向きを負とした座標系上の距離。
4.37
極座標系(polar coordinate system)
原点からの距離と方向とによって位置を指定する二次元座標系。
注記 三次元の場合については,4.44球座標系を参照。
7
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.38
本初子午線,零子午線(prime meridian,zero meridian)
他の子午線の経度を測る基となる子午線。
4.39
投影座標参照系(projected coordinate reference system)
地図投影を適用した二次元測地座標参照系から導かれる座標参照系。
4.40
長半径,a(semi-major axis,a)
だ(楕)円体の最長軸の半径。
注記 これは,赤道面で測定されただ(楕)円体の半径に等しい。
4.41
短半径,b(semi-minor axis,b)
だ(楕)円体の最短軸の半径。
注記 最短軸は,だ(楕)円体の回転軸と一致するため両極を含む。
4.42
列(sequence)
繰返しを許した,関連する項目(オブジェクト又は値)の,有限で順序をもつ集まり(JIS X 7107参照)。
4.43
空間参照(spatial reference)
実世界における位置の記述。
注記 これは,ラベル,コード又は座標組の形態をとってもよい。
4.44
球座標系(spherical coordinate system)
原点からの距離及び二つの角度によって座標を示す三次元座標系で,通常,測地座標参照系と関連して
用いられる。
注記 だ(楕)円体を球に“簡易化”した座標系と混同してはならない。
4.45
組(tuple)
順序をもつ,値のリスト(ISO 19136)。
4.46
単位(unit)
大きさをもつパラメタを表現する定義済みの量。
注記 この規格における単位の下位型として,長さ,角度,時間,目盛り及びピクセル間隔の各単位
がある。
4.47
鉛直座標参照系(vertical coordinate reference system)
鉛直原子に基づく一次元座標参照系。
4.48
鉛直座標系(vertical coordinate system)
標高又は深さの測定値に使用される一次元座標系。
8
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.49
鉛直原子(vertical datum)
標高又は深さと地球との関係を記述する原子。
注記 鉛直原子は,平均海面に関連付けられることが多い。だ(楕)円体高は,測地原子に基づく三
次元だ(楕)円体座標系に関連付けるものとして扱う。鉛直原子には,水深測量のための原子
(水路測量目的で利用する。)を含む。この場合,高さは負の高さ又は深さであってもよい。
5
用法
5.1
記号
a
長半径
b
短半径
E
東距
f
へん(扁)平率
H
標高
h
だ(楕)円体高
N
北距
λ
測地経度
ϕ
測地緯度
E,N
投影座標参照系における直交座標
X,Y,Z
測地座標参照系における直交座標
i,j,[k]
施工基準座標参照系における直交座標
r,θ
二次元施工基準座標参照系における極座標
r,Ω,θ
三次元施工基準又は測地座標参照系における球面座標
5.2
略語
CC
座標変更(UMLモデルでのパッケージ略語)
CD
座標原子(UMLモデルでのパッケージ略語)
CCRS
複合座標参照系
CRS
座標参照系
CS
座標系(UMLモデルでのパッケージ略語でもある。)
IO
識別オブジェクト(UMLモデルでのパッケージ略語)
MSL
平均海面
ピクセル(pixel) 画素(picture element)の短縮形で,属性を割り当てる先のデジタル画像の最小要素
RS
参照系(UMLモデルでのパッケージ略語)
SC
座標による空間参照(UMLモデルでのパッケージ略語)
SI
国際単位系
UML
統一モデリング言語(Unified Modeling Language)
URI
統一資源識別子(Uniform Resource Identifier)
1D
一次元
2D
二次元
3D
三次元
9
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3
UML表記
この規格では,座標参照系及び座標演算の概念スキーマは,統一モデル化言語(UML)を用いてモデル
化する。基本データ型及びUML図表記は,ISO/TS 19103及びJIS X 4170に規定されている。
この規格では,次のUMLクラスのステレオタイプを使用する。
a) <<DataType>>
識別性(独立した存在及び副作用の可能性)をもたない値の集合に対する記述子。
DataTypeは,情報の保持を主要目的とする演算のないクラスである。
b) <<Type>>
オブジェクトのドメイン及びオブジェクトに適用できる演算の同時指定に使用され
るクラス。
c) <<CodeList>>
可能な値のリストを表現するのに文字列の値を用いた柔軟な列挙。
d) <<Union>>
属性のリストであって,どの時点でもその属性の一つだけが存在できるもの。
ISO/TS 19103で規定されている次のデータ型が使用される。
− Angle
ある直線又は平面を他と一致させるのに必要な回転量。
− Boolean
TRUE又はFALSEを指定する値。
− CharacterString
文字の列。
− Date
ISO 8601の規定に従う形式における年,月及び日からなる文字列。
− GenericName
ISO/TS 19103に規定されている名前空間の記述における汎用的な名前構造。
− Integer
整数。
− Length
距離の尺度。
− Measure
ある実体の広がり,寸法又は数量を特定する行為又はプロセスの実行結果。
− Number
特定の数値型(real,integer,decimal,double,float)を下位型としてもつ抽象クラ
ス。
− Scale
数量同士の比。
− Unit of Measure
ある物理量の測定に考案された系の単位。
さらに,指定したデータ型の値の順序リストを含むSequence型集積が使用される。使用されるフォーマ
ットは“Sequence<DataType>”である。
この規格におけるUML図では,灰色のボックスは,他のパッケージからのクラスを示す。
5.4
属性ステータス
この規格では,属性に要求度ステータスを付与する。
要求度
定義
意味
M
必須
(mandatory)
この属性は指定しなければならない。
C
条件付き
(conditional)
この属性は,条件(属性記述によって与える。)が真の場合,記述しなければな
らない。条件が偽の場合,記述してもよい。
O
任意(optional) この属性は記述しても,しなくてもいずれでもよい。
この規格では,最大出現回数欄は,属性値の許容最大発生数を示し,Nの場合には上限がないこと(no
upper limit)を表す。
6
座標による空間参照−概要
6.1
座標と座標参照系との間の関係
この規格における座標(coordinate)とは,ある点の位置を定義するn個のスカラ値のうちの一つを指す。
この規格では採用していないが,値の一つ一つをordinateと呼び,複数の値の組をcoordinateと呼ぶ用
10
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
方もある。
座標組は,単一点の位置を定義する順序付けられたn個の座標のリストである。この規格では,座標組
は,一つ,二つ又は三つの空間座標から構成しなければならない。座標は互いに独立であり,その個数は
座標空間の次元と等しくなければならない。
例 座標組は,二つの高さを含むことはできない。
座標は,それらが関連付けられている系が完全に定義されるまでは,明確にはならない。座標系の完全
な定義がない場合,座標は,最善の場合でも曖昧であり,最悪の場合は無意味となる。
座標参照系(CRS)は,座標値が明確になるように座標空間を定義する。この規格では,座標組内の座
標の順序及びその測定単位は,座標参照系の定義の一部でなければならない。
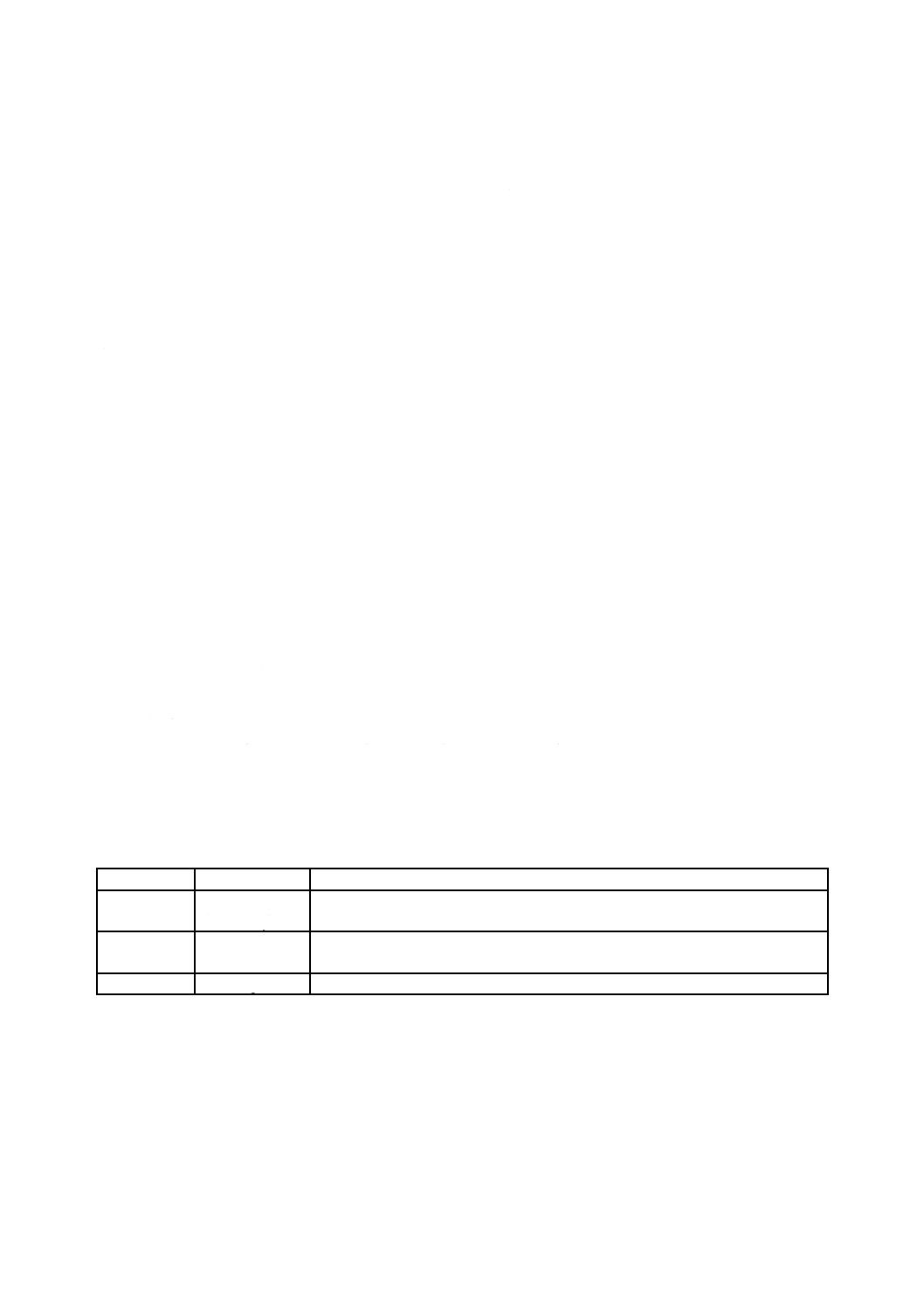
この規格での座標集合は,同一の座標参照系に適合する座標組の集まりでなければならない。あらゆる
座標組はこの規格に適合するCRSによる識別又は定義に関連付けられなければならない。一点だけを記述
する場合には,関連付けは直接的なものとする。座標集合の場合,一つのCRSによる識別又は定義を座標
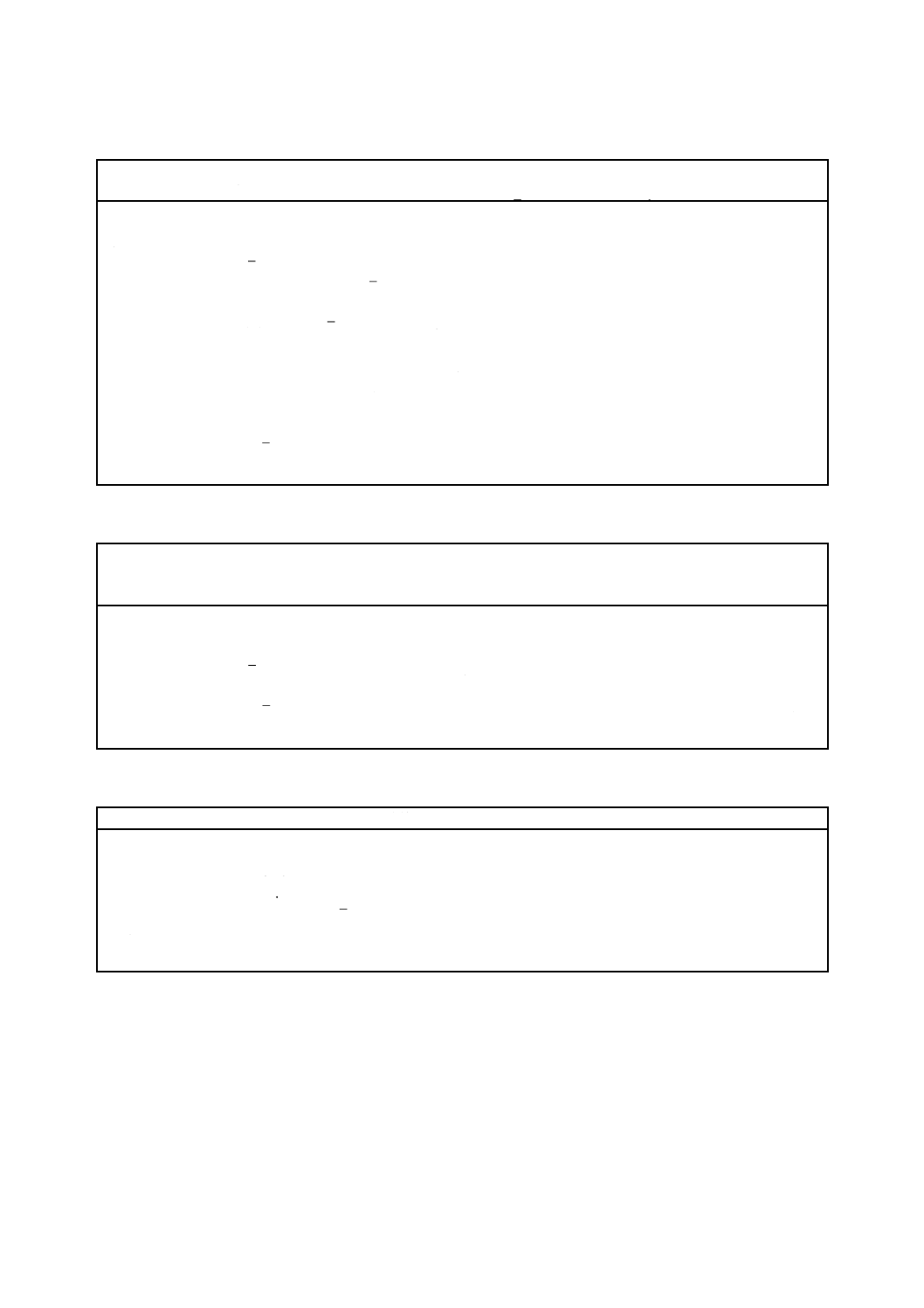
集合に関連付けた後は,その座標集合の全ての座標組がその関連を継承する。座標組及び座標集合と座標
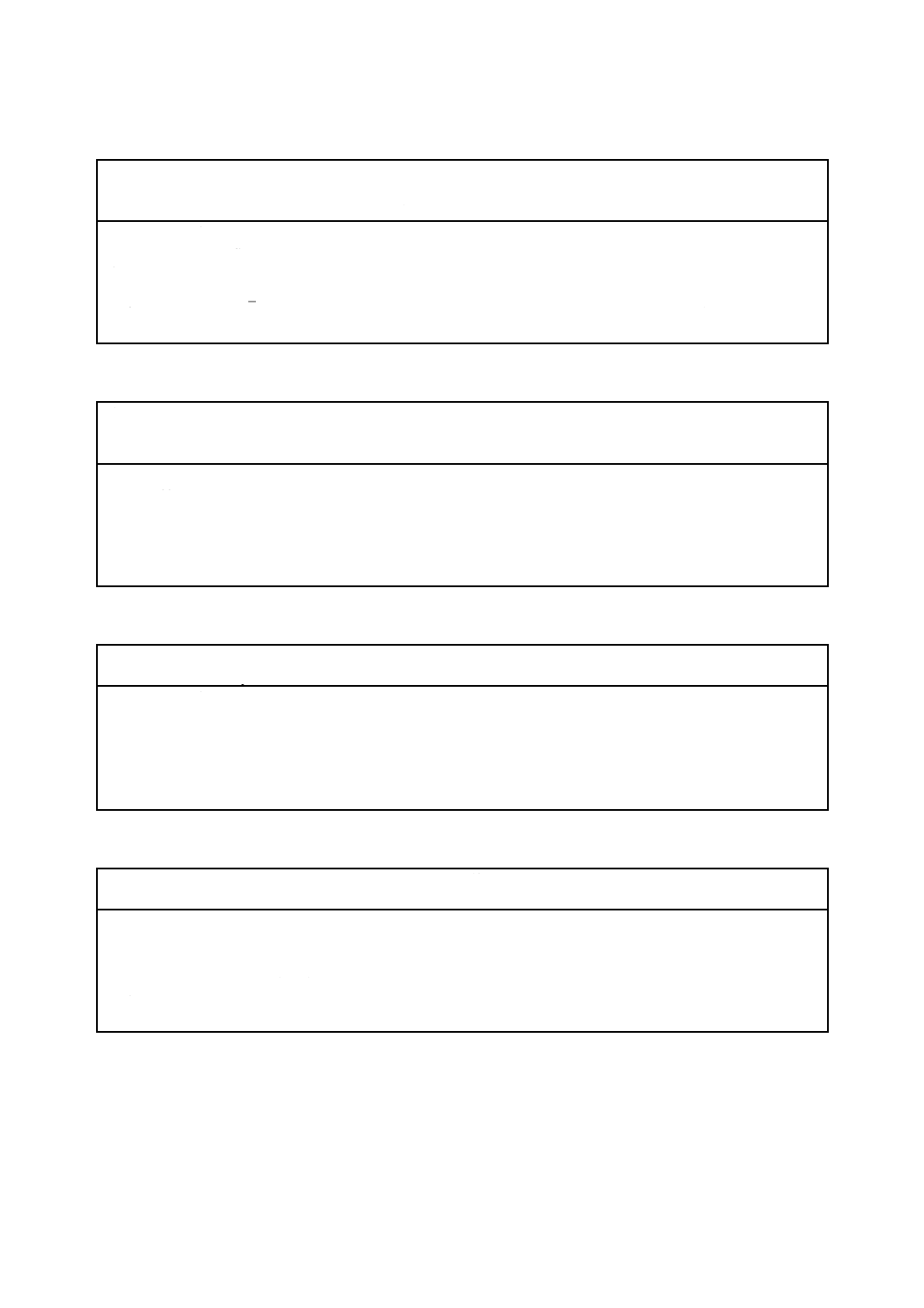
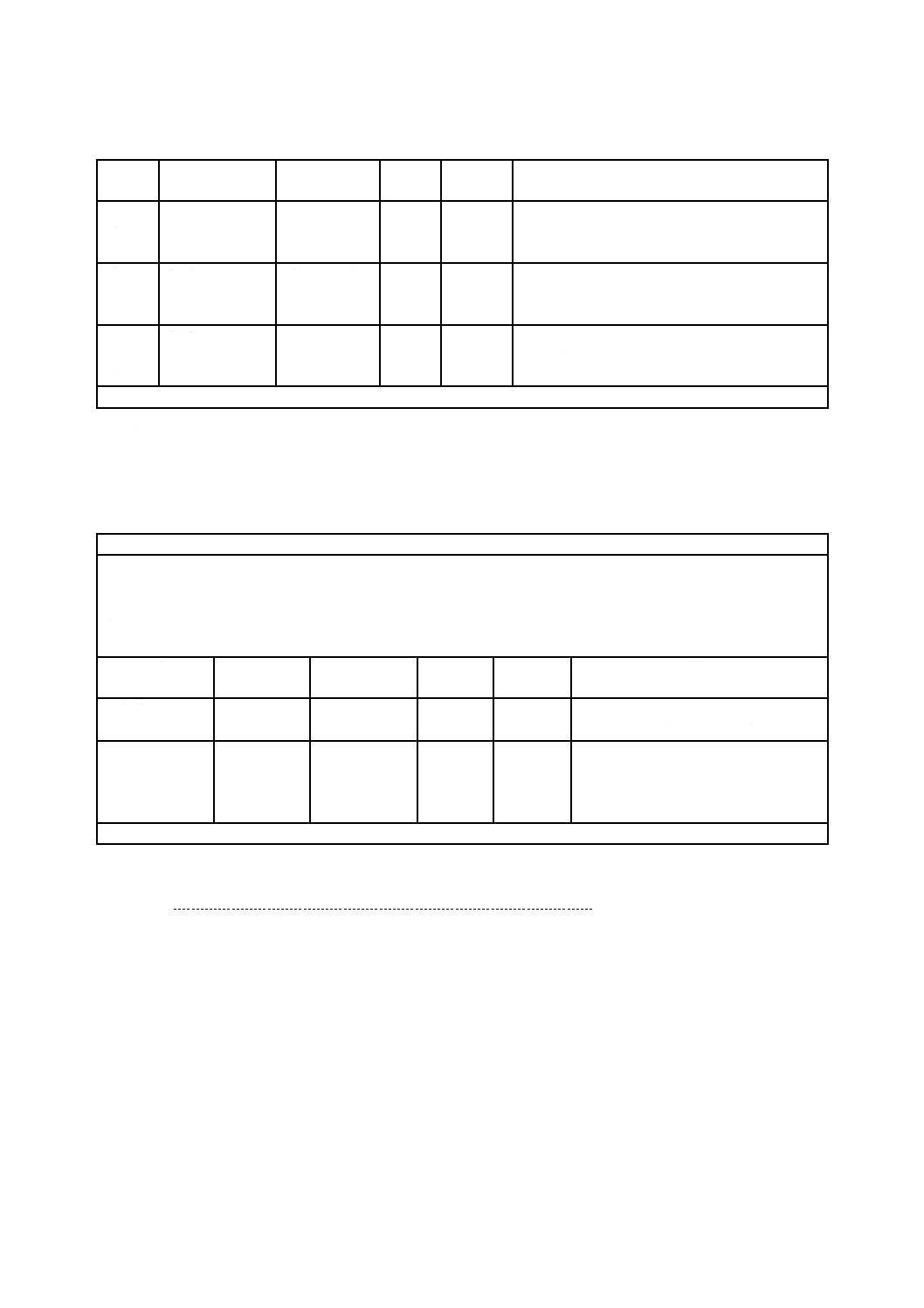
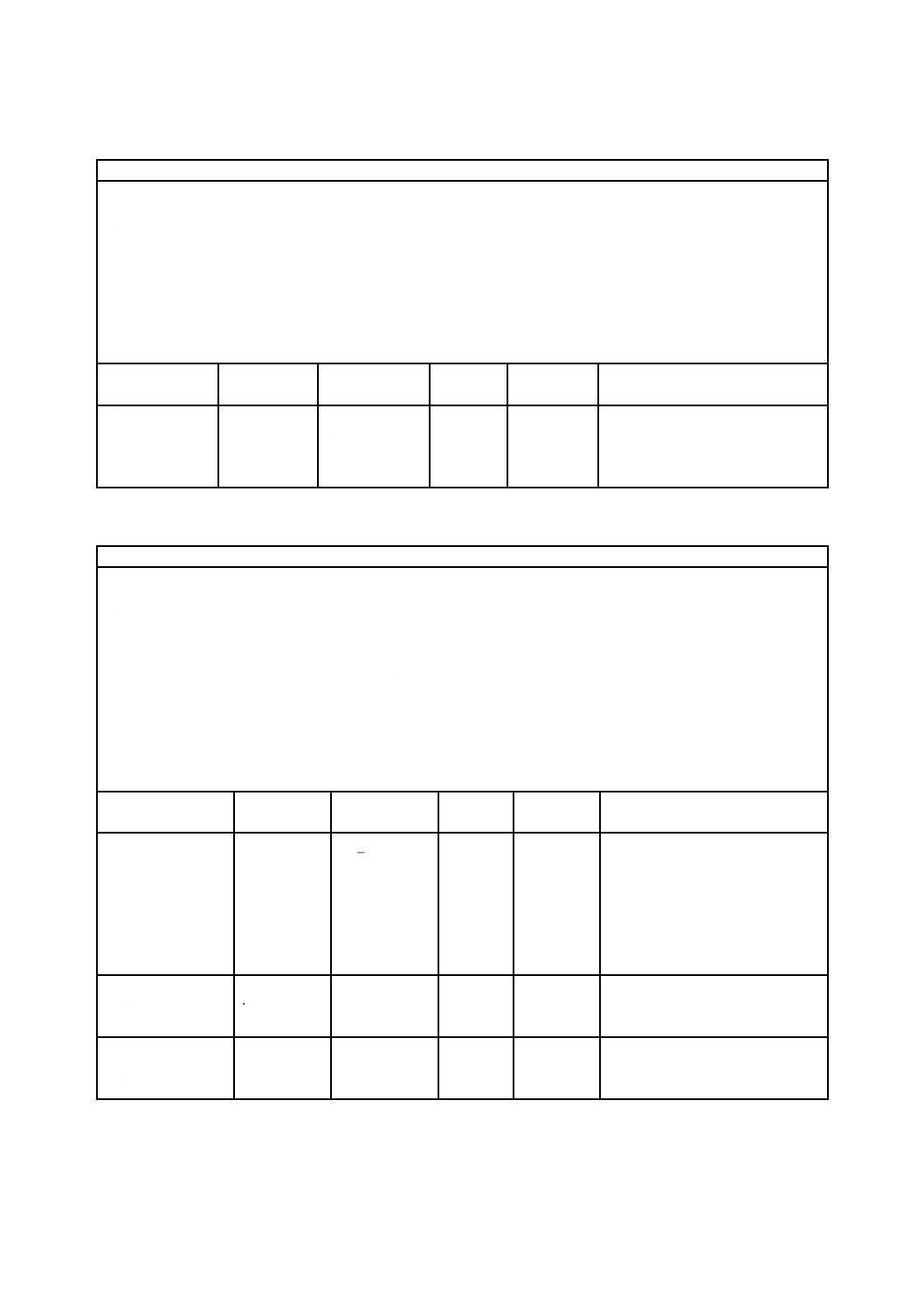
参照系との概念的関係を,図1に示す。
図1−座標組及び座標集合と座標参照系との概念的関係
座標組及び座標集合の意味論的な意味は,クラスDirectPosition及び GM̲Objectのモデル化にそれぞれ
反映されている。このモデル化は,JIS X 7107で行われている。この規格での座標参照系は,一つの座標
系及び一つの原子から構成されなければならない(図2参照)。
座標組1
(例えば,X1,Y1,Z1)
座標組2
(例えば,X2,Y2,Z2)
座標組n
(例えば,Xn,Yn,Zn)
座標組
(例えば,X,Y,Z)
座標参照系
(例えば,ETRS89)
座標集合
包含
座標組
基準に関連付け
基準に関連付け
・
・
・
11
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
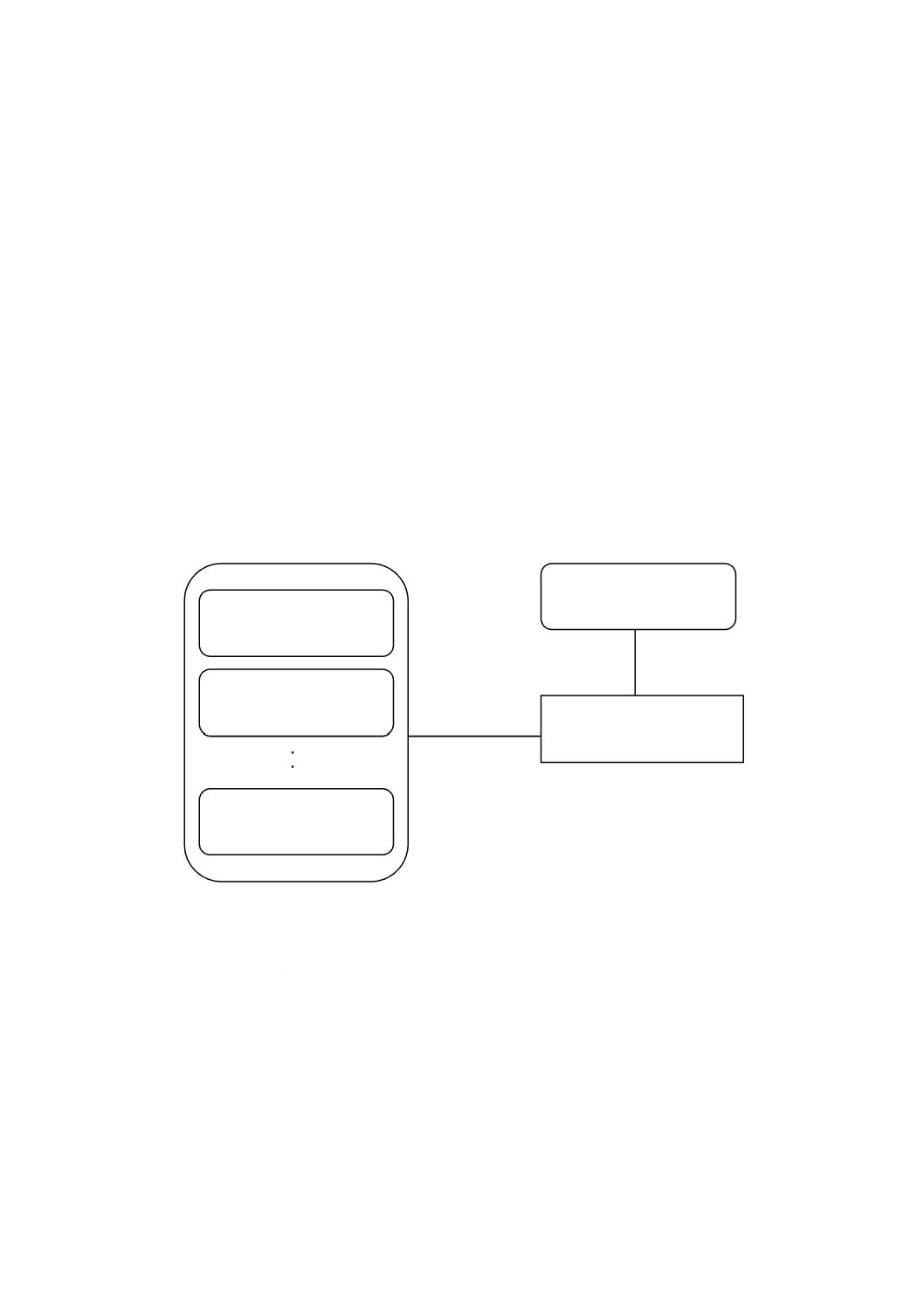
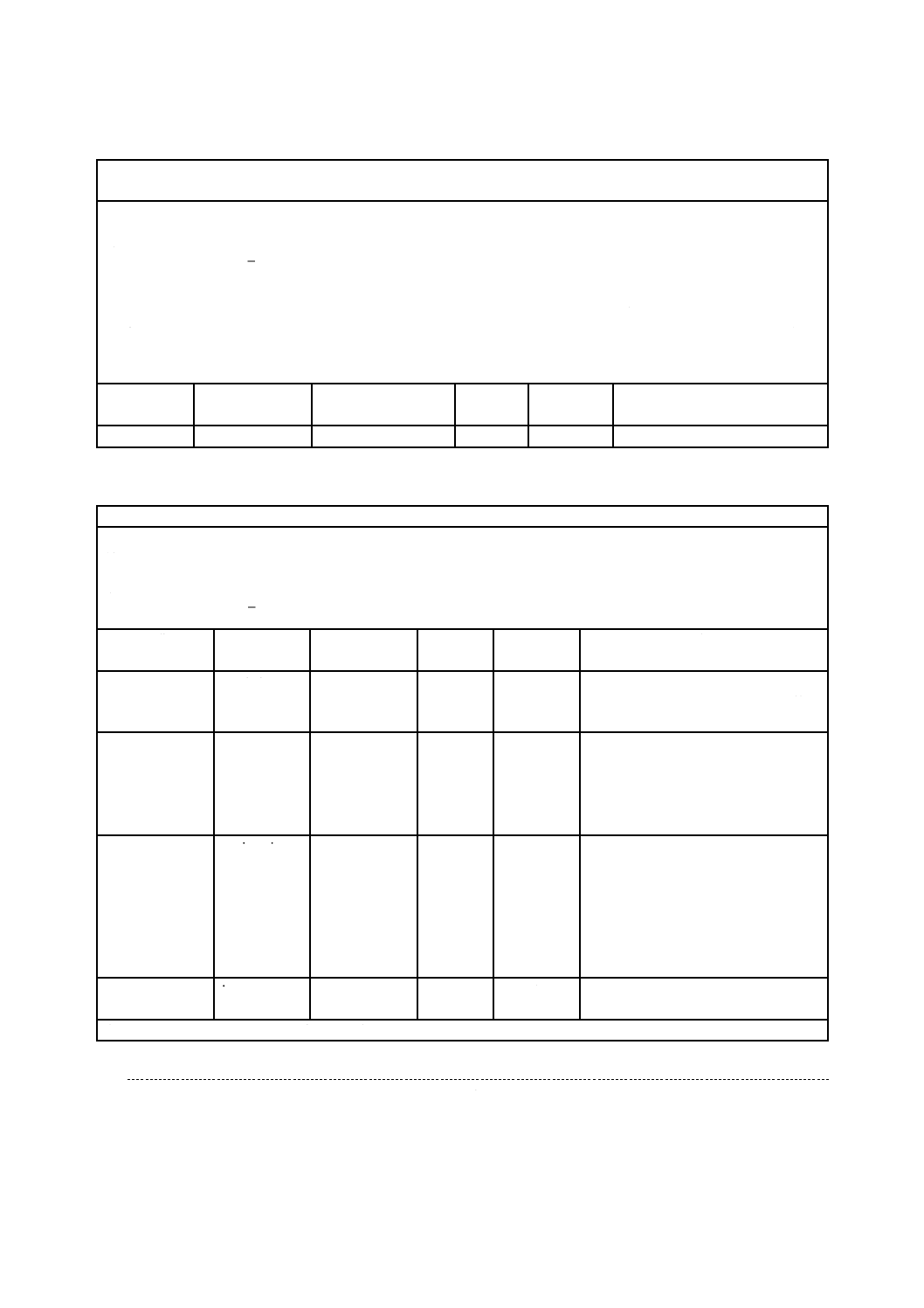
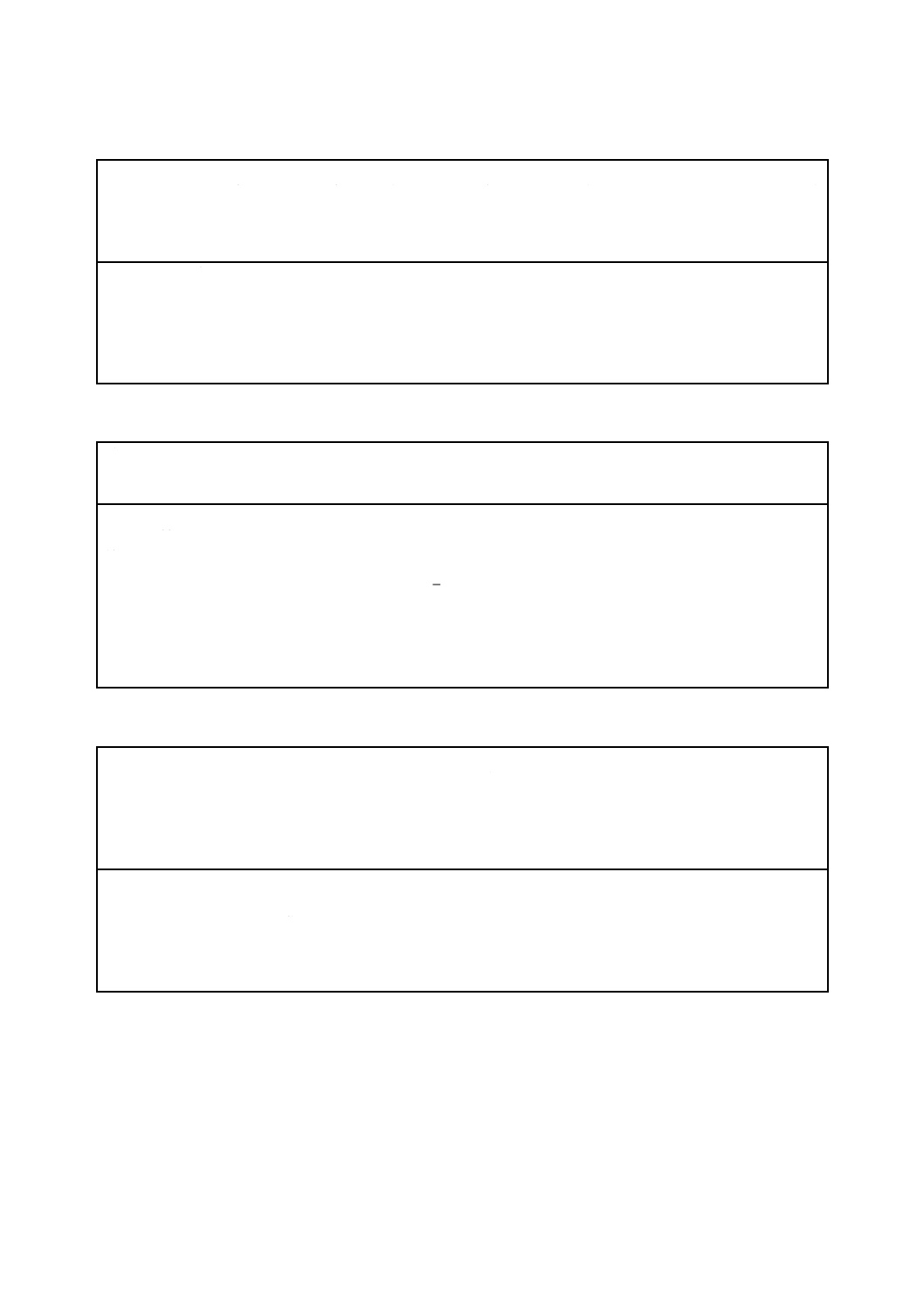
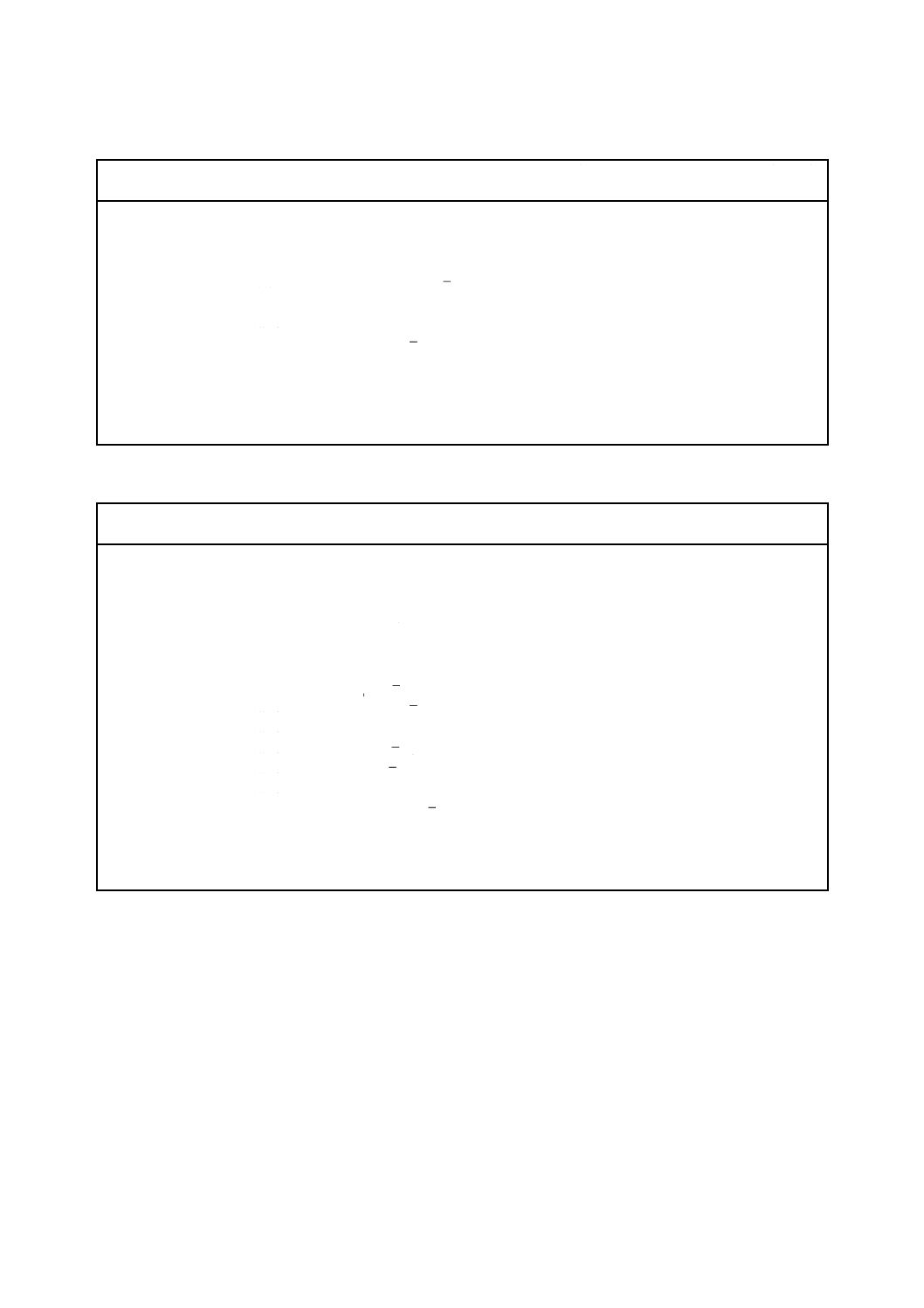
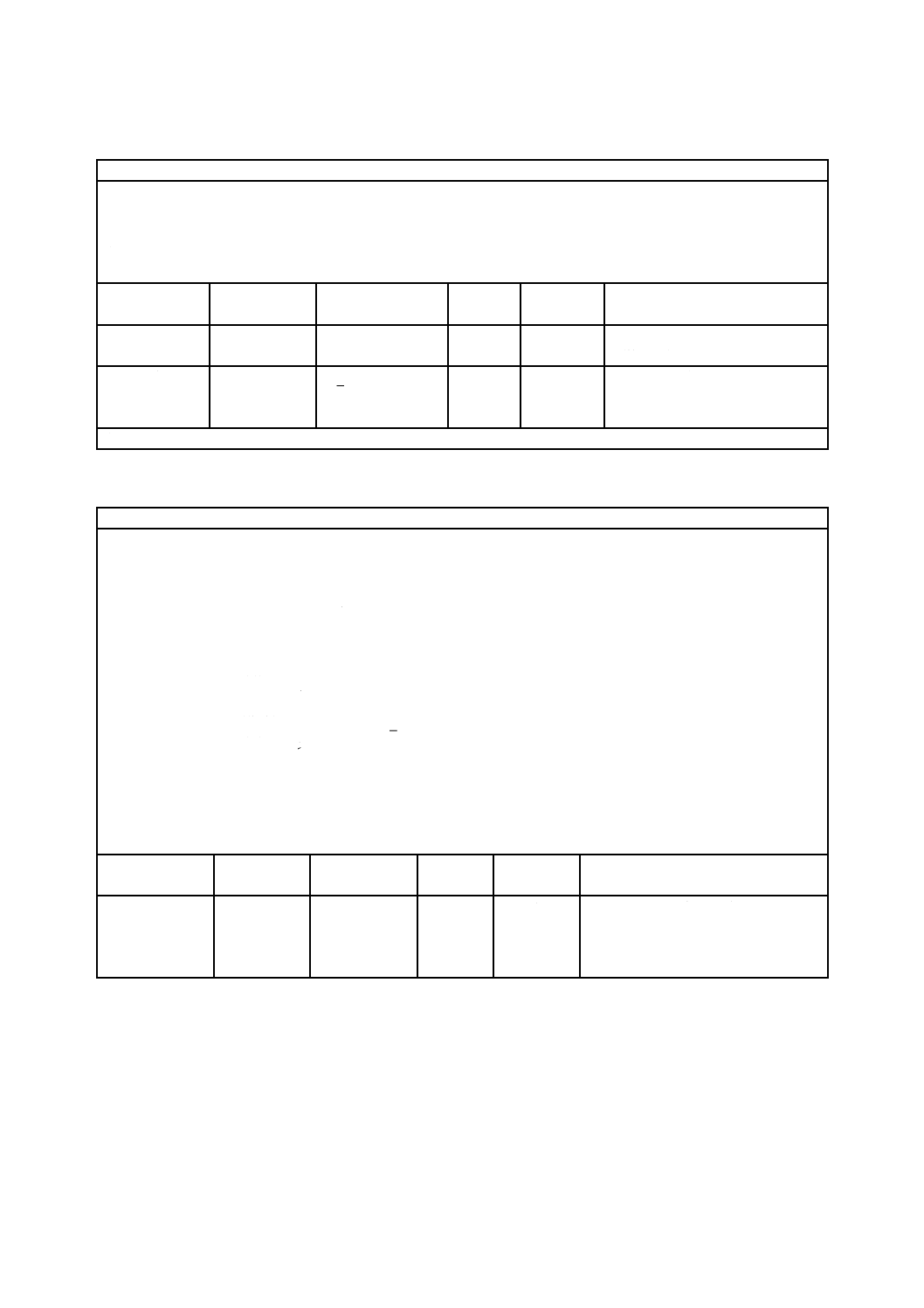
図2−座標参照系の概念モデル
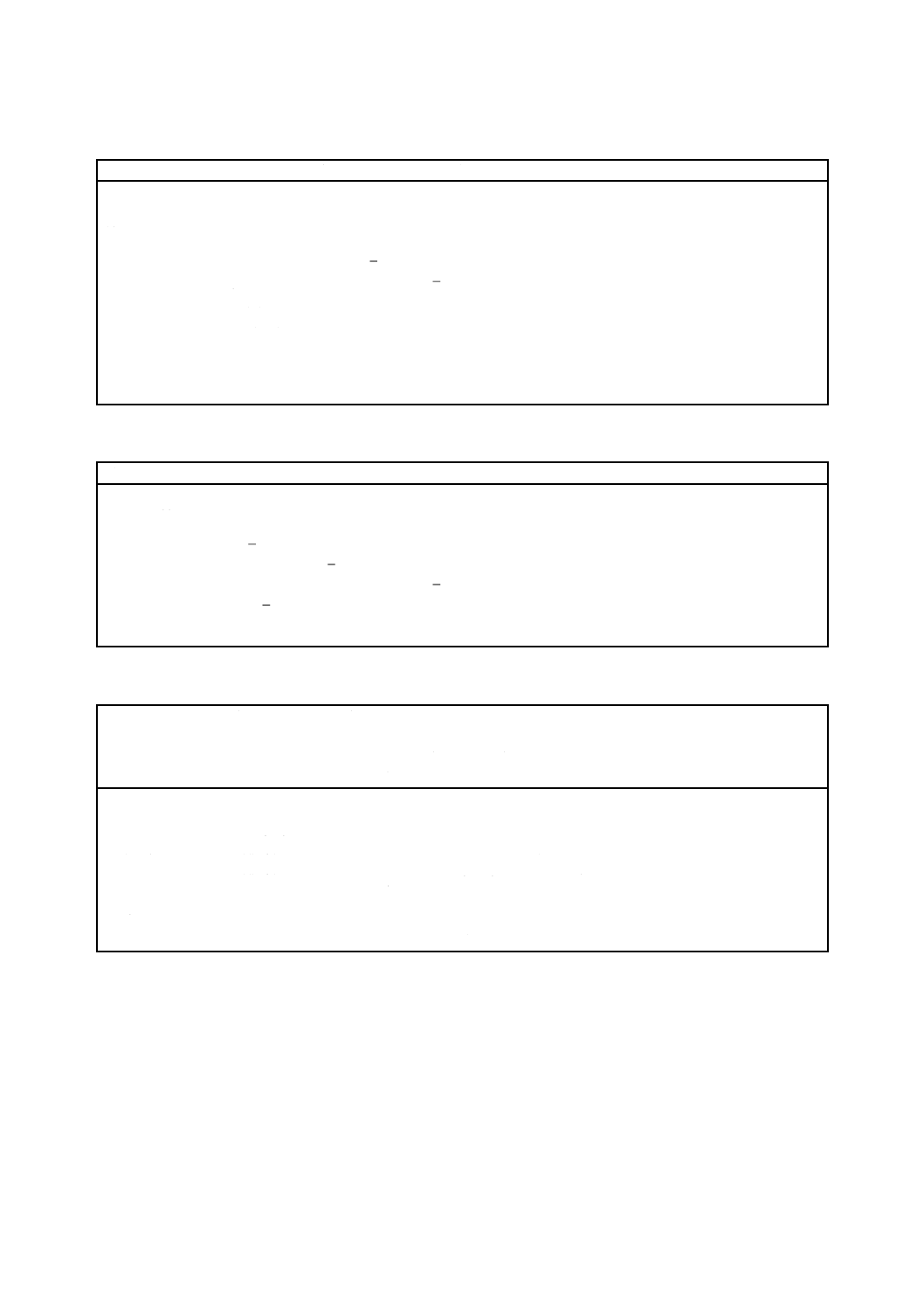
座標による空間参照の高位水準抽象モデルを図3に示す。座標変換又は座標換算は,座標参照系ではな
く,座標を演算対象とする。
座標演算は,JIS X 7107におけるGM̲Objectクラスの演算“transform(変換取得)”によって,モデル
化されている。
注記 座標演算は,単一又は連結でもよい。箇条11を参照。
図3−座標による空間参照の概念モデル
空間参照の特性の記述は,ISO 19115の規定によって取り扱われている。
6.2
座標による空間参照のUMLモデル−概要
座標による空間参照の仕様は,この規格においては補足の説明文を伴うUMLモデルの形式で規定する。
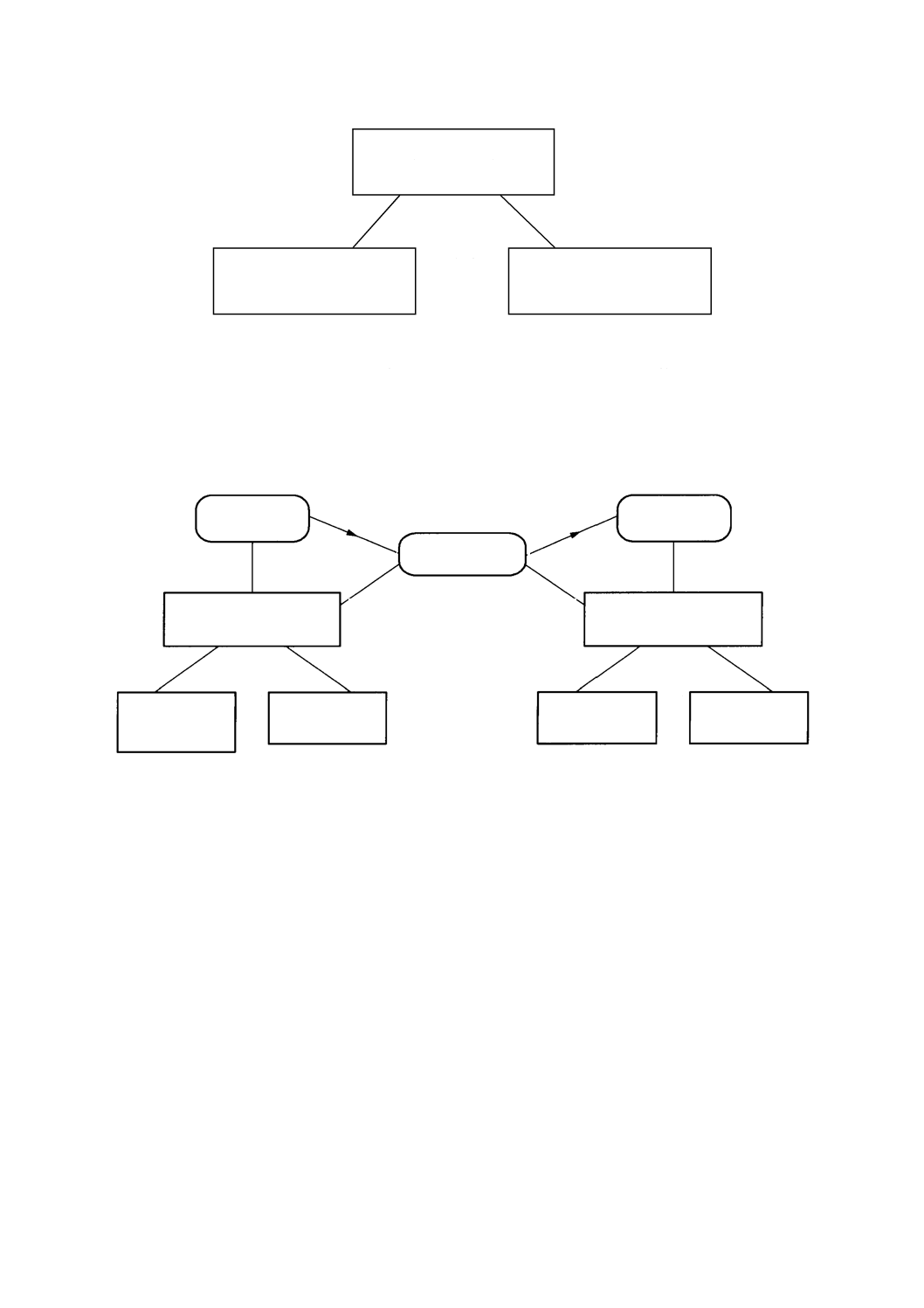
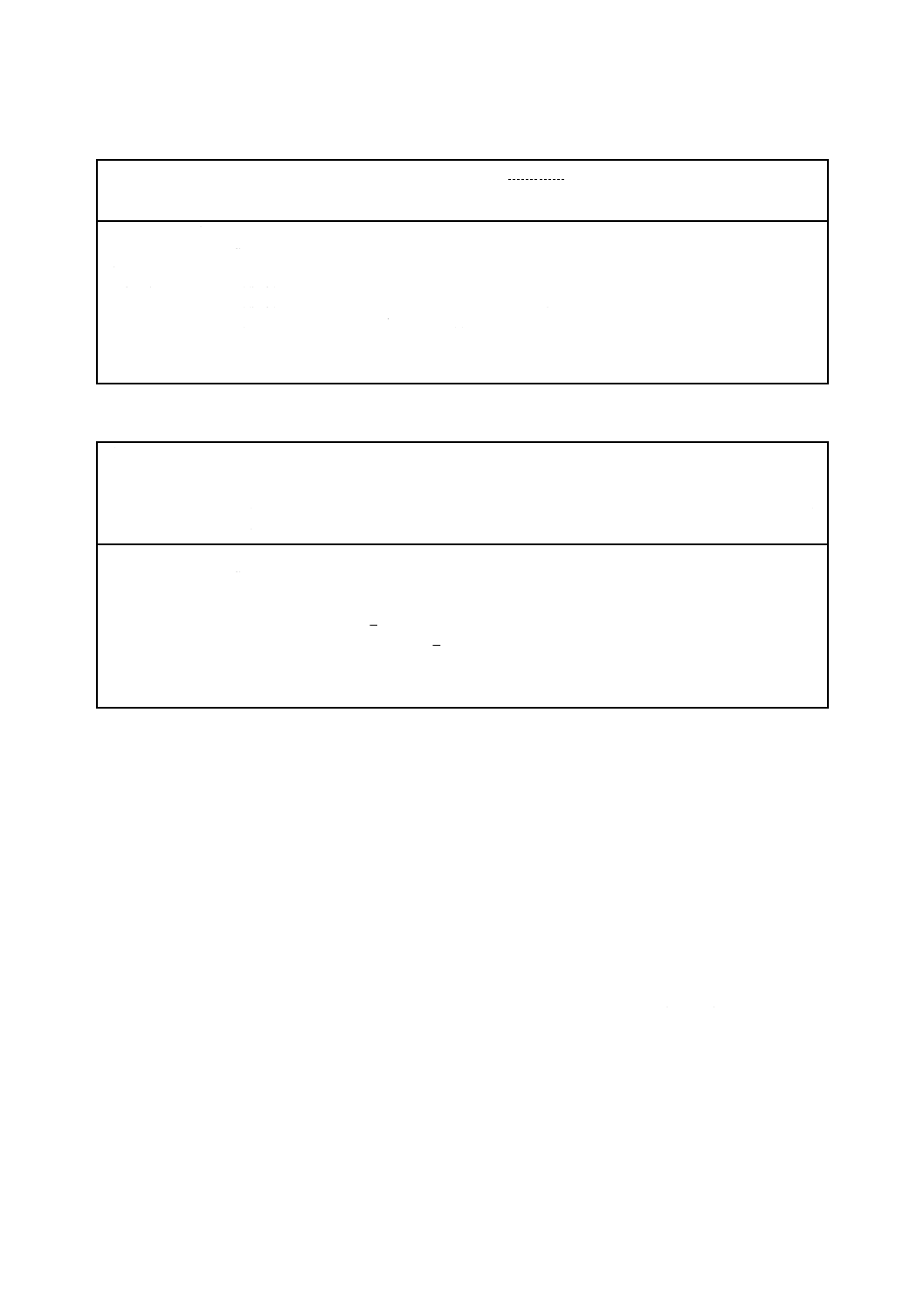
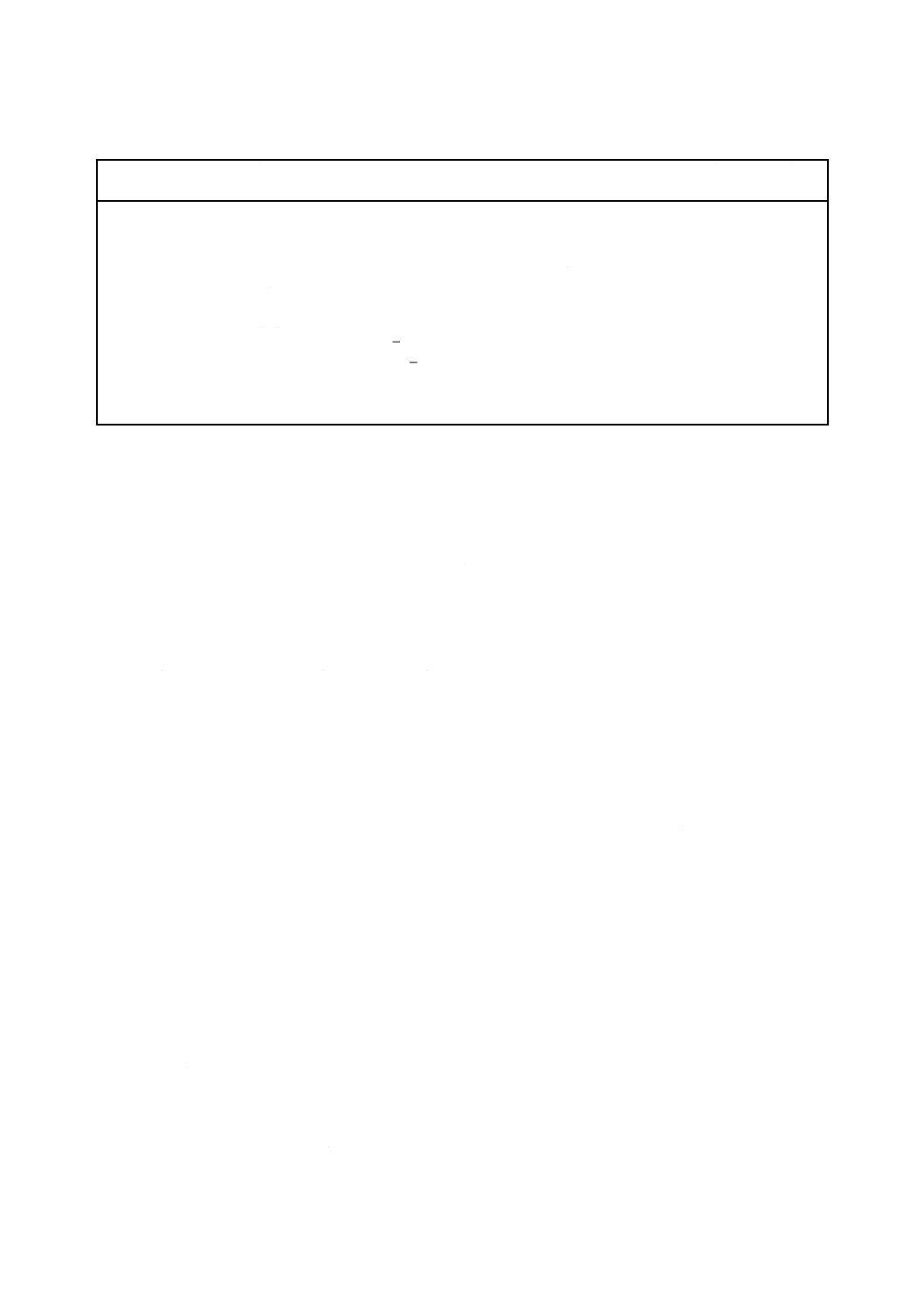
UMLモデルには,図4に示すように,五つの主要UMLパッケージが含まれている。各ボックスは,一つ
のパッケージを表し,その中にパッケージ名を示している。各矢印は,パッケージ間の依存関係(矢じり
のある方が依存されるパッケージ)を示す。
原子
(例:ETRS 1989)
座標参照系
(例:ETRS89)
座標系
(例:ECR地心座標系)
次から構成
及び
座標組
(例えば,X,Y,Z)
基準に関連付け
座標参照系
(例:ETRS89)
原子
(例:ETRS 1989)
入力
演算元
次から構成
及び
及び
座標系
(例:ECR地心座標系)
座標演算
(ETRS89からED50へ)
出力
座標組
(例:ϕ,λ)
基準に関連付け
演算先
座標参照系
(例:ED50)
次から構成
原子
(例:ED50)
座標系
(例:2Dだ(楕)円体
座標)
12
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
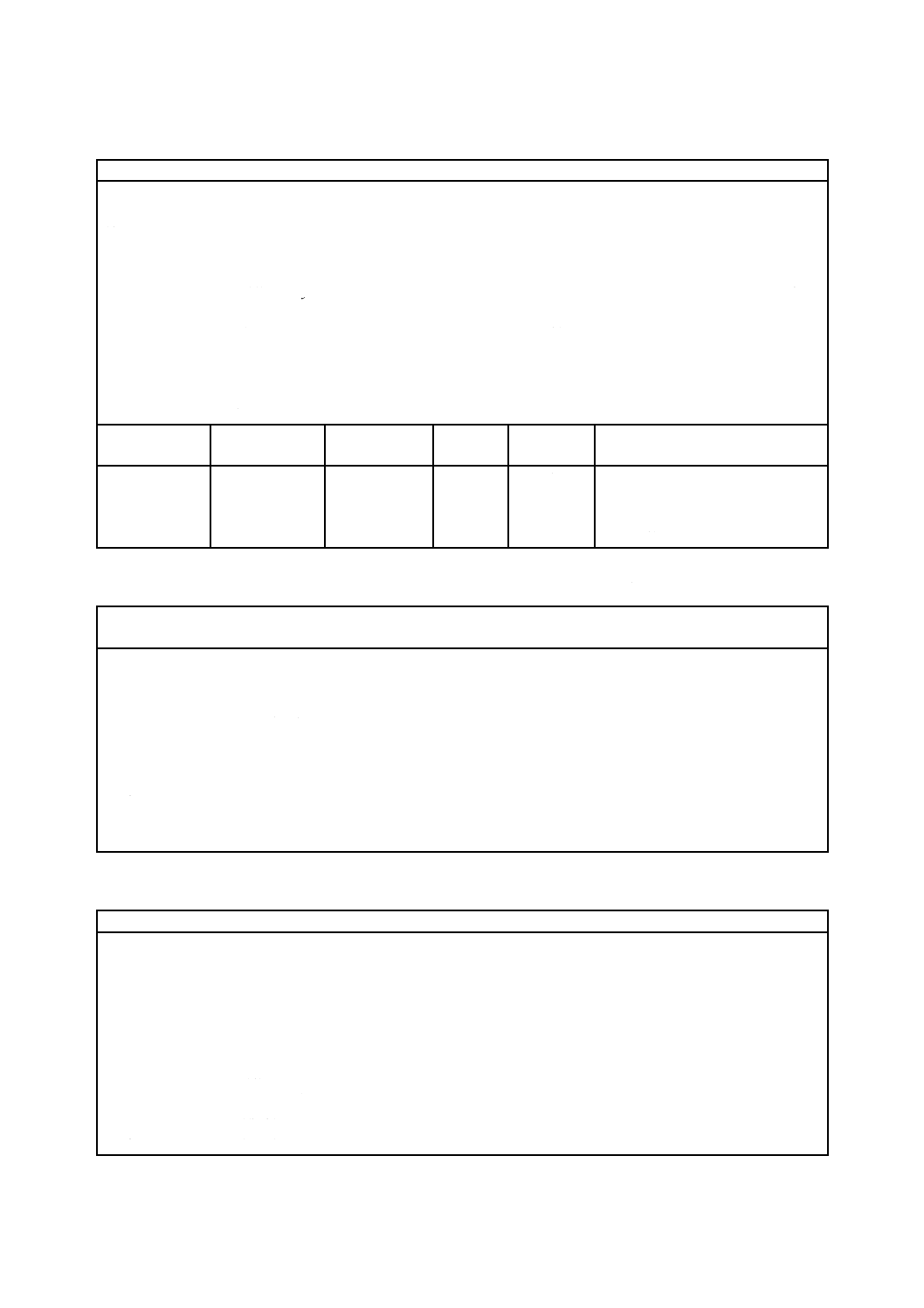
図4−UMLモデルパッケージ及び依存関係
座標による空間参照の五つのUMLパッケージは,箇条7〜箇条11において,より詳細に規定する。箇
条7から箇条11までの要件に対する説明の詳細は,附属書Bに示し,座標による空間参照を支える測地
的概念の一部は,附属書Cに示す。座標参照系又は座標演算の定義時にこの規格をいかに適用するかは,
附属書Dにおいて実例によって具体的に示す。この規格で規定されているクラスの推奨参照例は,附属書
Eに示す。
7
識別オブジェクトパッケージ
7.1
一般
識別オブジェクト(Identified Object)パッケージには,座標による空間参照に使用される幾つかのオブ
ジェクトの共通属性が含まれる。それらのオブジェクト[原子,だ(楕)円体,座標系軸及び座標演算を
含む。]は,識別オブジェクトパッケージから属性値を継承する。
属性の一つとして,オブジェクト名があり,主たる名(primary name)を表す。この名のほかに,代替
名すなわち別名をもつ場合がある。
例1 原子名として“North American Datum of 1983”及びその略称として“NAD83”などがある。
オブジェクト名は,ISO 19115で規定されているデータ型RS̲Identifierをもち,別名は,ISO/TS 19103
で規定されているデータ型GenericNameをもつ。
別の属性として,識別子がある。識別子は,指定した場所にあるオブジェクトの参照に使用される一意
のコードである。
例2 測地コード及びパラメタの登録簿において,NAD83原子に,“6269”という一意のコードを与
える場合もある。
識別子は,データ型RS̲Identifierをもつ。
識別子は,測地コード及びパラメタの登録簿における定義への参照としての使用に加えて,オブジェク
ト定義の中に含め,そのオブジェクトの参照を可能にすることもできる。
オブジェクトの識別は,次のいずれかの方法で行う。
a) この規格の規定に従った完全なオブジェクト記述。
座標参照系
座標演算
原子
座標系
識別オブジェクト
13
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 測地パラメタの登録簿内の完全なオブジェクト記述への参照(参照は,登録簿のオブジェクト識別子
に対して行われる。)。
c) 完全なオブジェクト記述及び登録簿における記述への参照の双方の間に矛盾がある場合は,登録簿記
述の方が優先される。
a) 及びb) は,完全なオブジェクト記述を行う上において同等な手段である。単純さの点でb) の方が
推奨されるが,登録簿からオブジェクト記述が利用できない場合は,オブジェクト記述を明示的に,完全
に指定しなければならない。いずれの方法においても,各座標組内の座標順序は,座標系記述の指定に従
う。
方法b) 測地登録簿へ参照の使用時,オブジェクトの識別確認だけが要求されるアプリケーションでは,
登録簿の引用及び登録簿においてオブジェクトがもつ一意の識別子によって,識別の確認を行うことがで
きる。完全なオブジェクト記述を構成する要素を引用する必要がない場合,又は座標集合に座標演算を行
う必要がない場合,そうしたアプリケーションでは,完全なオブジェクト記述を構成する要素を登録簿か
ら取り出す必要はない。
注記 実装者が注意しなければならない点は,登録簿におけるデータエラーが,担当の登録当局によ
って規定された,その登録簿に固有の規則に従って訂正されている場合があることである。要
求されているデータを見つけるためには,登録簿を参照するアプリケーションがエラーデータ
の処理規則を認識する必要がある。要求されているデータは通常は最新の登録簿情報であるが,
ときには,現在も使用されている空間データの変換に使われた,エラーを含んだ過去の情報で
あることもある。
7.2
識別オブジェクトパッケージのUMLスキーマ
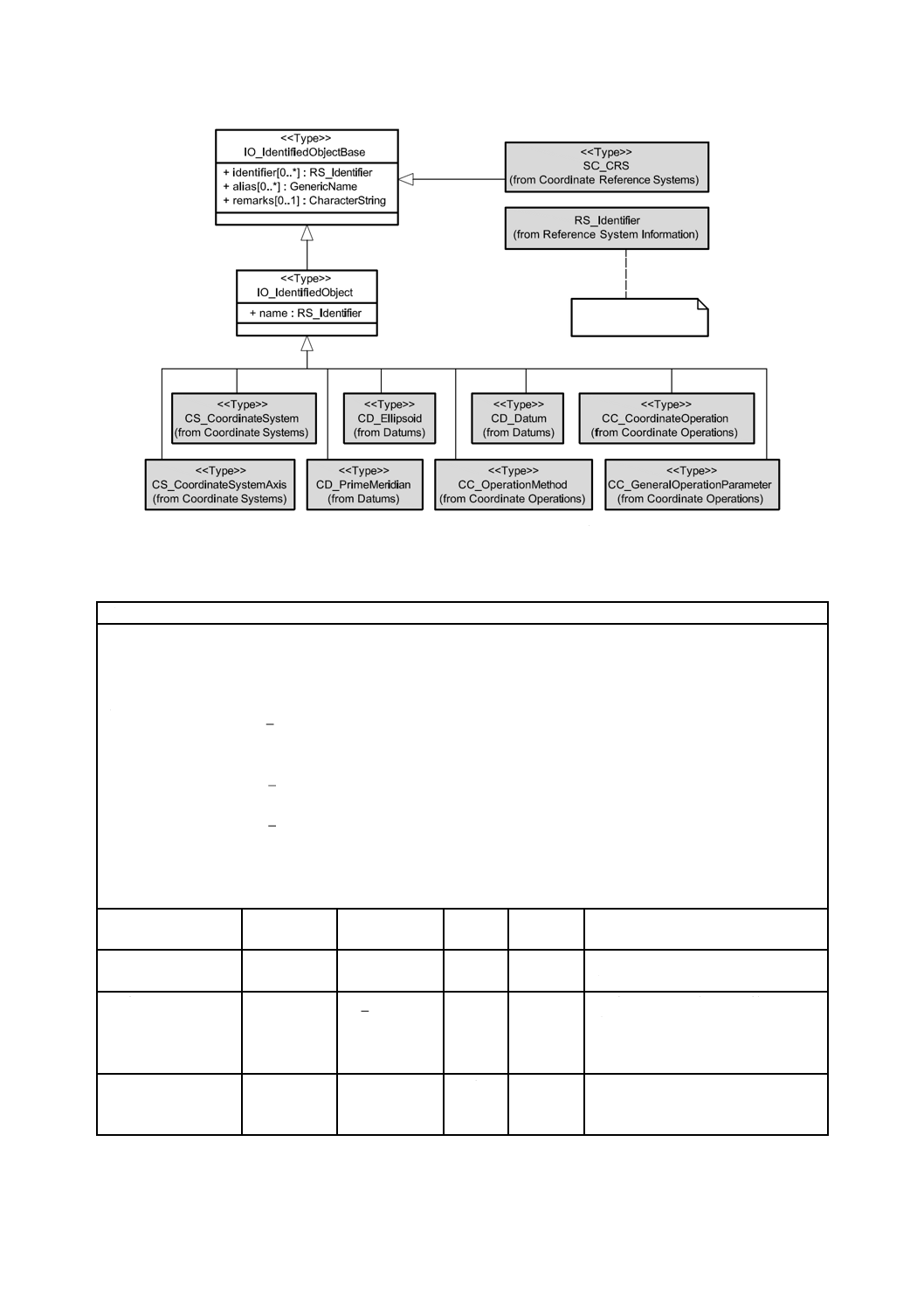
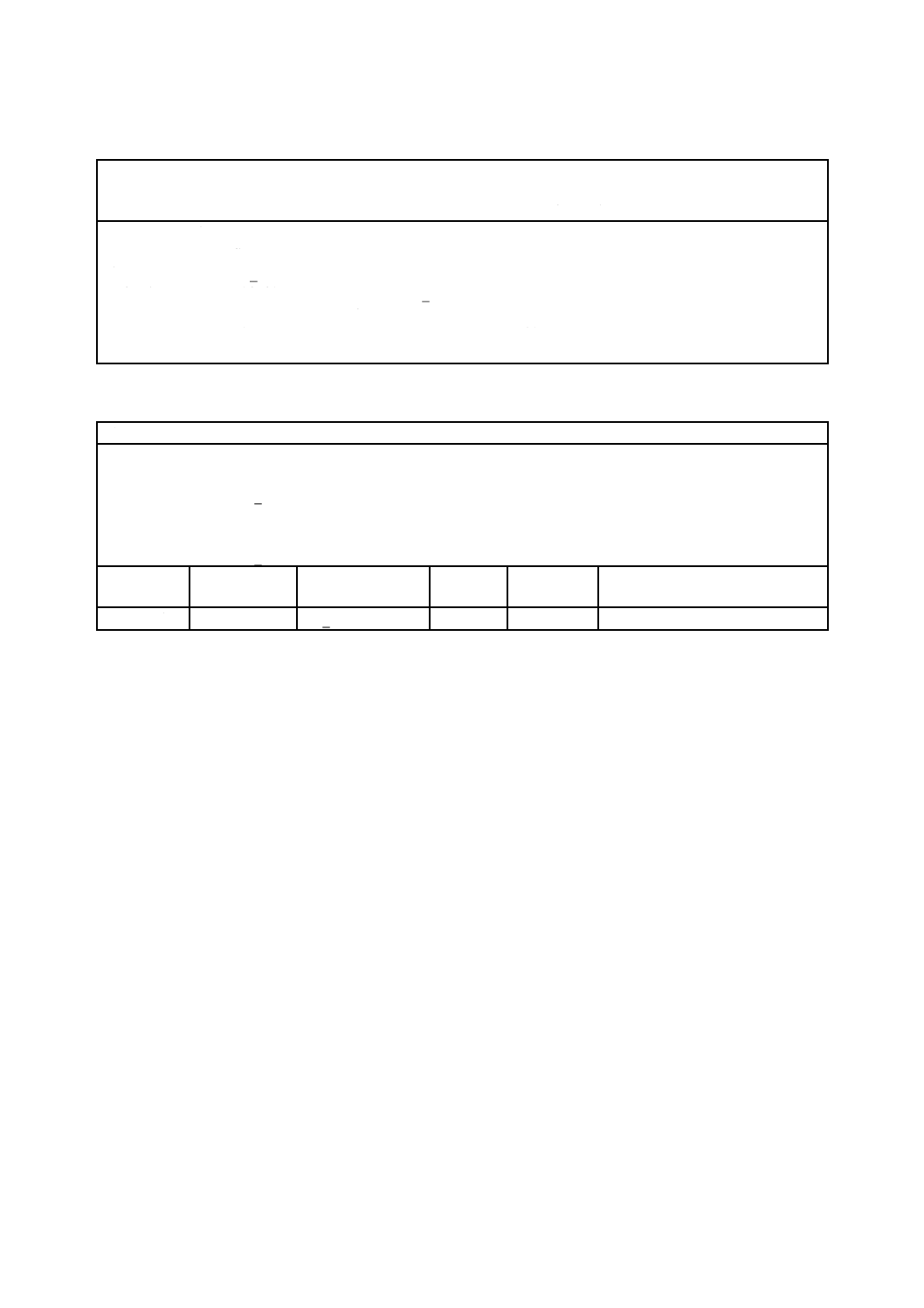
図5は,IO̲IdentifiedObjectパッケージのUMLクラス図を示す。このオブジェクトクラスの定義は,表
1及び表2に示す。
注記 ISO 19115に規定されているRS̲ReferenceSystemからのサブクラス化を通して,SC̲CRSは属
性nameを継承している。この継承によって,SC̲CRSクラスは,そのプライマリ名に
IO̲IdentifiedObjectを使用していない。ただし,この規格に記述されている他のクラスと同様に,
別名については,IO̲IdentifiedObjectBaseからの別名属性を使用してもよい。
14
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図5−IO̲IdentifiedObjectパッケージ
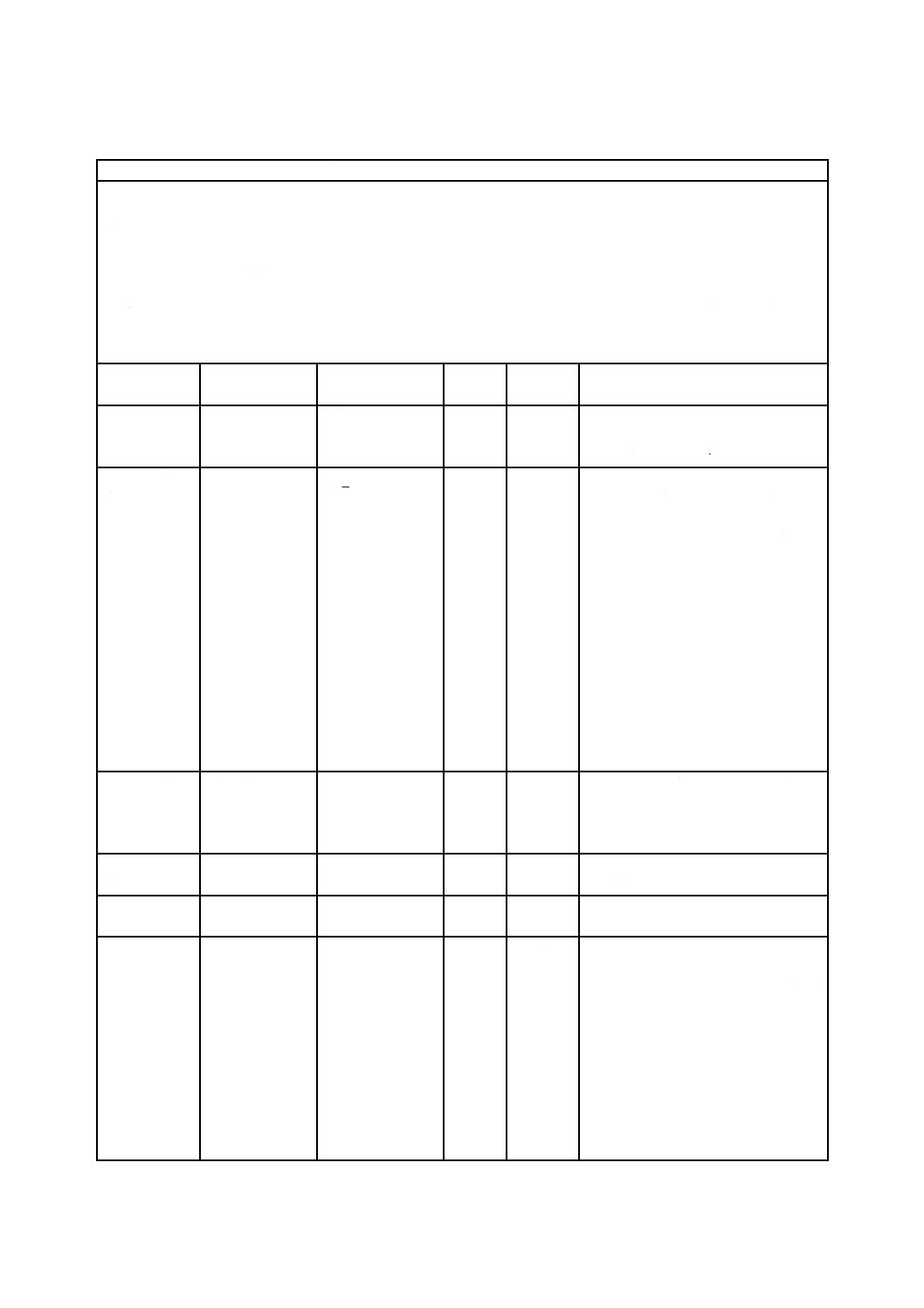
表1−IO̲IdentifiedObjectBaseクラスの要素定義
説明:
CRS又はCRS関連オブジェクトの識別及び注釈に関する補足情報。
ステレオタイプ:
Type
クラス属性:
Abstract
継承元:
(なし)
関連役割:
(なし)
利用クラス:
SC̲CRS
CS̲CoordinateSystem
CS̲CoordinateSystemAxis
CD̲Datum
CD̲Ellipsoid
CD̲PrimeMeridian
CC̲CoordinateOperation
CC̲OperationMethod
CC̲GeneralOperationParameter
パブリック属性:
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
オブジェクト別名
alias
GenericName
O
N
このオブジェクトを識別する代替
名。
オブジェクト識別子
identifier
RS̲Identifier
O
N
オブジェクトの定義する情報を別の
箇所で参照するための識別子。又は,
このオブジェクトを参照できる識別
子。
オブジェクトの注釈
remarks
CharacterString
O
1
データソース情報を含んだ,このオ
ブジェクトに関するコメント又は情
報。
ISO 19115で定義
15
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
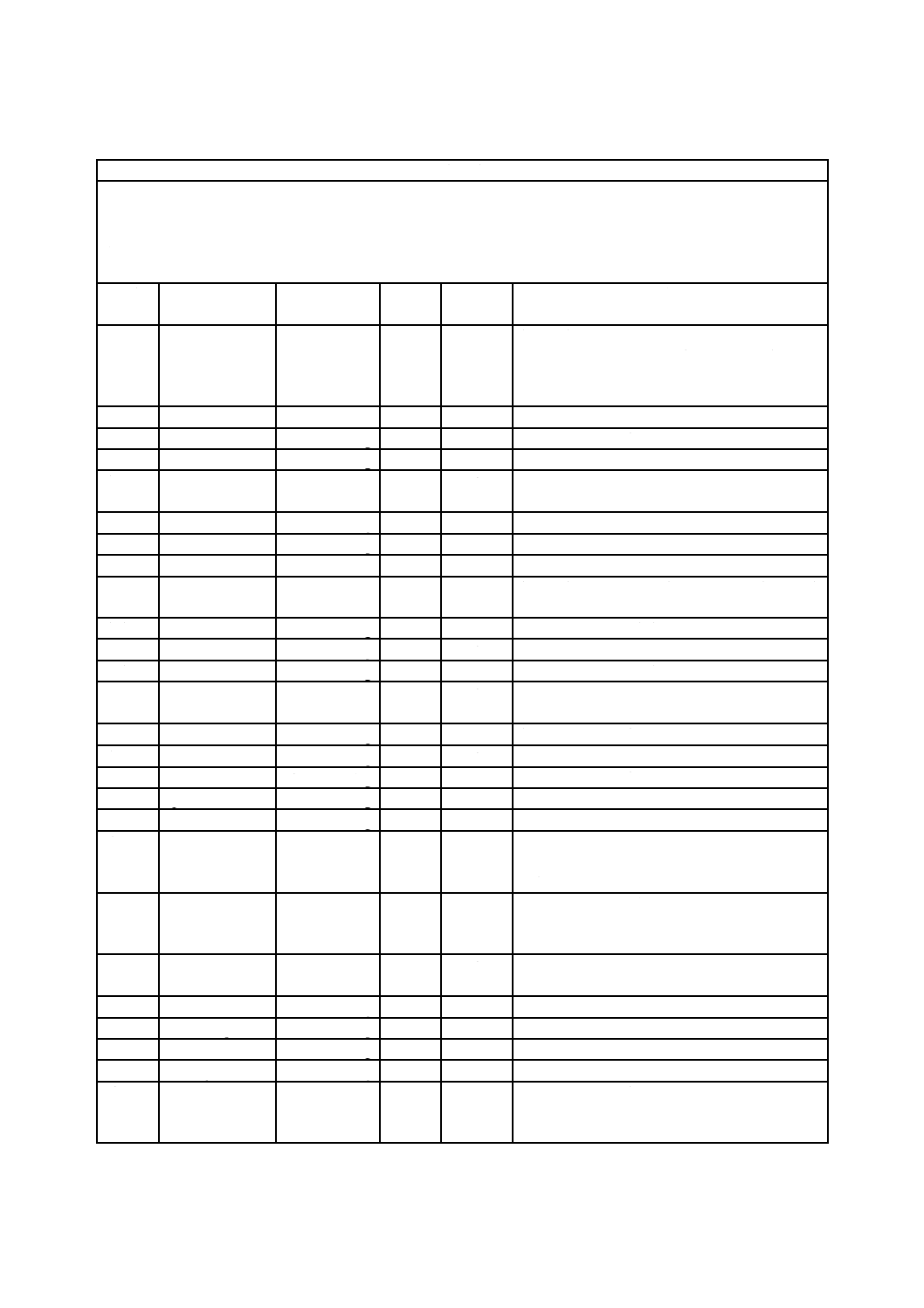
表2−IO̲IdentifiedObjectクラスの要素定義
説明:
CRS関連オブジェクトの識別。
ステレオタイプ:
Type
クラス属性:
Abstract
継承元:
IO̲IdentifiedObjectBase
関連役割:
(なし)
利用クラス:
CS̲CoordinateSystem
CS̲CoordinateSystemAxis
CD̲Datum
CD̲Ellipsoid
CD̲PrimeMeridian
CC̲CoordinateOperation
CC̲OperationMethod
CC̲GeneralOperationParameter
パブリック属性:
IO̲IdentifiedObjectBaseから継承する三つの属性(識別子,別名及び注釈)に次を加える。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
オブジェクト名
name
RS̲Identifier
M
1
このオブジェクトを識別するプライ
マリ名。
8
座標参照系パッケージ
8.1
参照系
参照系は,空間位置情報の明確な解釈に必要なメタデータを含む。空間位置の記述方法として,次の二
つが区別される。
a) 地理識別子による空間参照。地理識別子は,住所又は格子インデックスのような場所記述子である。
地理識別子による空間参照は,この規格及びその関連モデルの適用範囲外にある。地理識別子による
空間参照要件は,JIS X 7112で記述されている。
b) 座標による空間参照。この規格及び関連UMLモデルの適用範囲は,座標による位置の記述に限定さ
れる。
RS̲ReferenceSystemパッケージ及びデータ型は,ISO 19115で記述されている。表3は,CRSクラスが
継承する属性を示す。
表3−ISO 19115から継承したRS̲ReferenceSystemクラスの属性
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
参照系の名前
name
RS̲Identifier
M
1
名前空間内のオブジェクトを一意
に識別する値。
参照系の有効範囲
domainOfValidity
EX̲Extent
O
N
水平,鉛直及び時間の範囲に関す
る情報。
8.2
座標参照系
8.2.1
一般
この規格では,座標参照系は,一つの座標系及び一つの原子によって定義しなければならない。原子が
参照系とオブジェクトとの関係を指定することによって,オブジェクトの表面又は近傍にある地物の位置
を座標を用いて記述するという実際的な問題に抽象的な数学的概念の“座標系”を適用することができる。
16
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
オブジェクトは,必ずしもということではないが,一般的には,地球である。一部の座標参照系では,オ
ブジェクトが,移動するプラットフォームとなる場合がある。
この規格で取り扱う座標参照系は,時間とともに変化してはならない。車,船舶,航空機,宇宙船など
の移動するプラットフォーム上で定義された座標参照系では,地球固定座標系への変換に時間要素が含ま
れる場合がある。座標参照系の時間変動性は,連続する時期に異なる原子をもつ別々の座標参照系を作成
することによってこの規格内の空間参照モデルとして対応することができる。その場合,原子の実現時期
を定義内に含めなければならない。さらに,実現時期を原子及び座標参照系の名前に含めることを推奨す
る。
8.2.2
主な下位型座標参照系
座標参照系の下位型の分類基準は,各座標参照系と関連付けられている原子の型への参照による。次の
主要な下位型座標参照系を区別する。
a) 測地−測地原子に関連付けられている座標参照系。
b) 鉛直−鉛直原子に関連付けられている座標参照系。
c) 施工基準−施工基準原子に関連付けられている座標参照系。
d) 画像−画像原子に関連付けられている座標参照系。
以上の主要な下位型座標参照系は,B.1.2で詳述する。
8.2.3
追加の下位型座標参照系
主要な下位型座標参照系に加えて,存在する特定の関係及び制約をモデル化するため,更に,三つの下
位型を区別する。追加される下位型を次に示す。
a) 導出−別の座標参照系に座標換算を適用して定義される座標参照系(導出CRSは,その基底CRSか
ら原子を継承する。)。
b) 投影−地図投影という座標換算をだ(楕)円体の緯度及び経度座標値に適用することで,基底の測地
CRSから導出される座標参照系。
c) 複合−それ自身が複合でない二つ以上の座標参照系の,繰返しのない列。
以上の下位型座標参照系は,B.1.2で詳述する。複合座標参照系は,次にも詳述する。
8.2.4
複合座標参照系
8.2.4.1
空間複合座標参照系
空間座標の場合,複合CRSの構築には複数の制約が存在する。結合される座標参照系は,重複する軸又
は冗長な軸を含んではならない。有効な組合せは,次による。
a) 測地2D+鉛直
b) 測地2D+施工基準1D(ほぼ鉛直)
c) 投影+鉛直
d) 投影+施工基準1D(ほぼ鉛直)
e) 施工基準(水平2D)+鉛直
f)
施工基準(1D線形)+鉛直
8.2.4.2
時空間複合座標参照系
単一の座標参照系又は8.2.4.1に列挙されている空間複合座標参照系の組合せに,時間座標参照系を関連
付けて,時空間複合座標参照系を形成することができる。複数の時間座標参照系があり,それぞれの時間
軸が異なる量を表現している場合には,それらを含めてもよい。時間座標参照系は,JIS X 7108による。
17
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.2.4.3
複合座標参照系のネスト化
CCRSのネスト化は許されない。個々の単一系は集成されるだけである。図B.1に,空間複合座標参照
系及び時空間複合座標参照系の可能な複合化の例を示す。
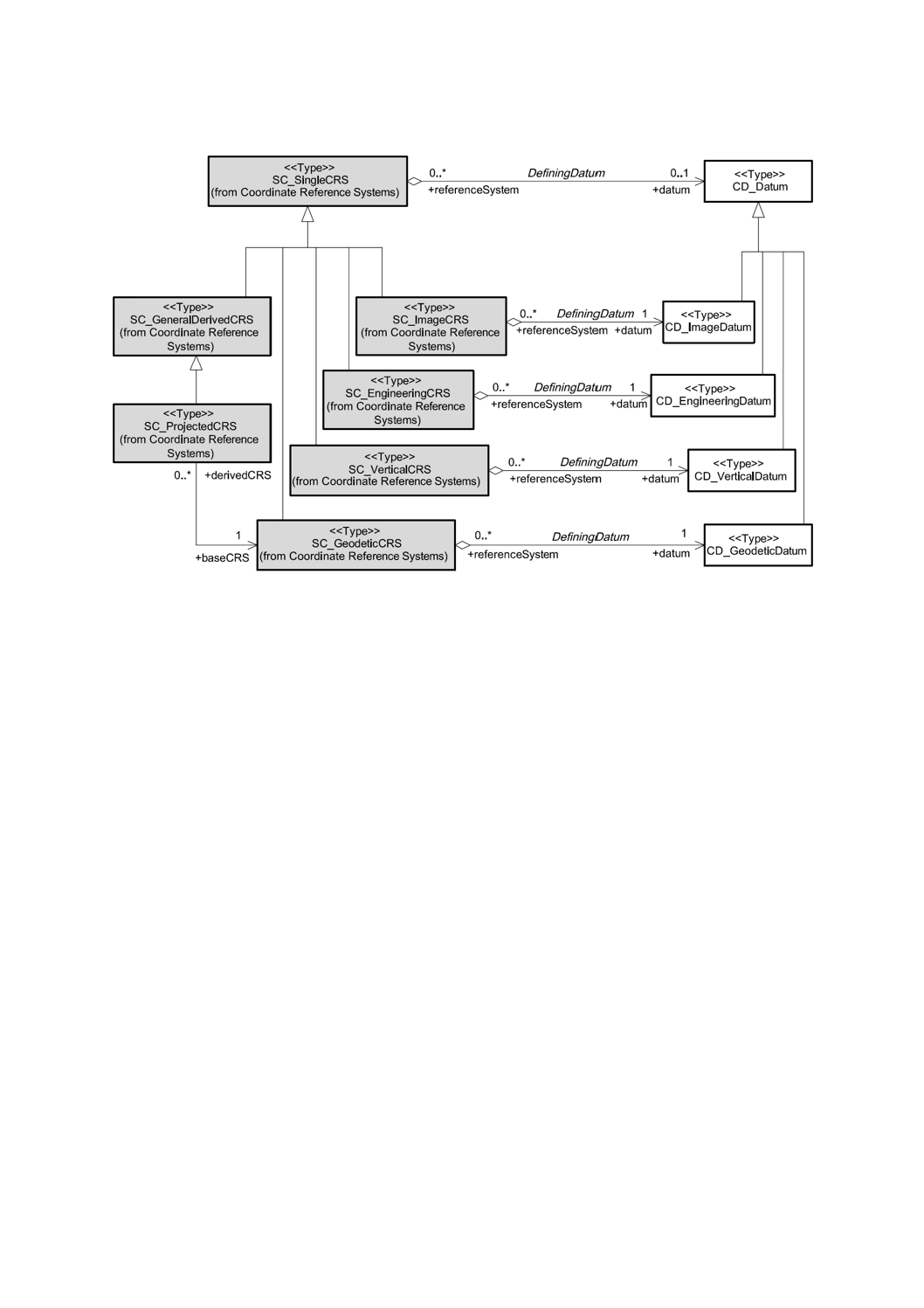
8.3
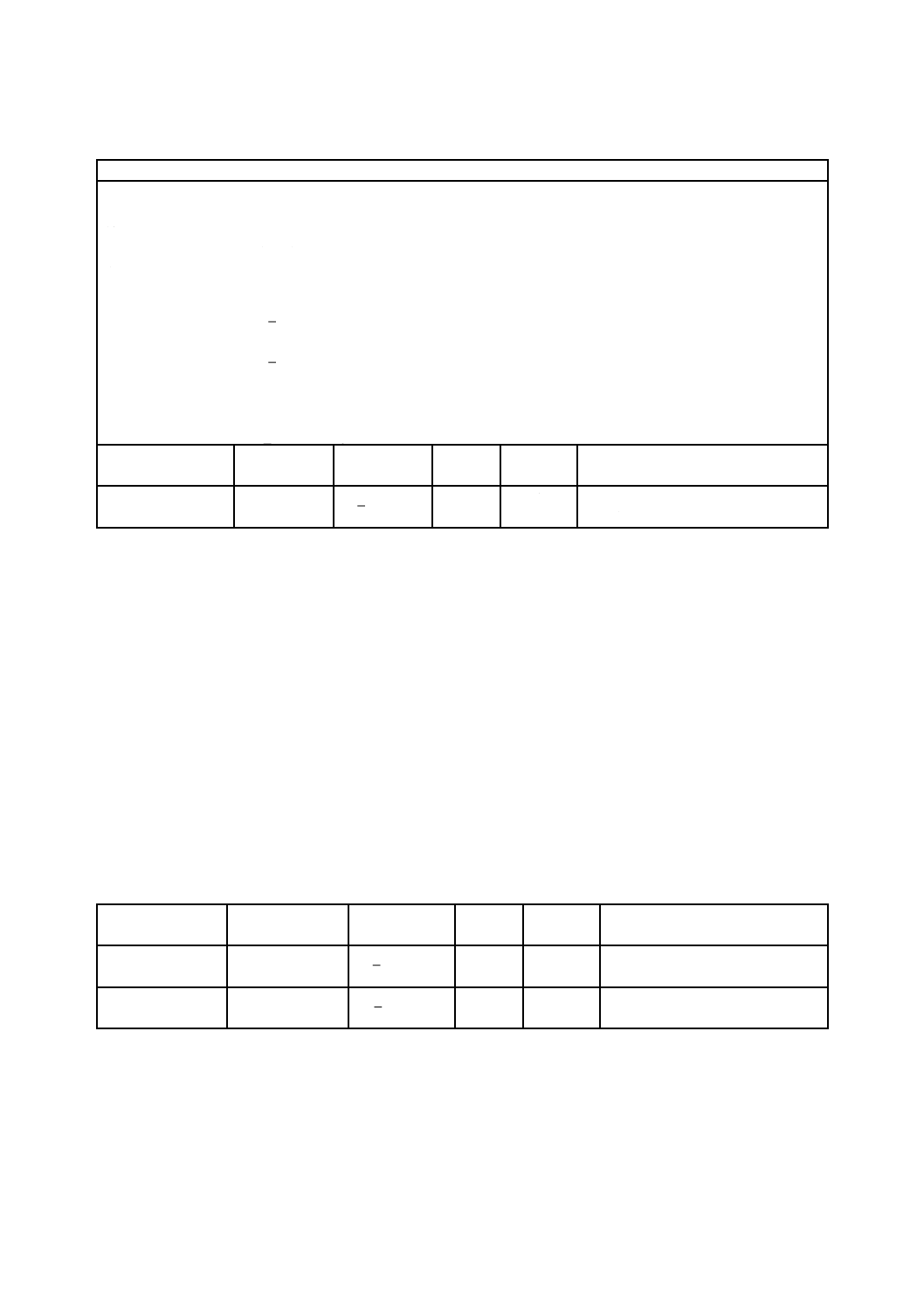
座標参照系パッケージのUMLスキーマ
図6は,SC̲CoordinateReferenceSystemパッケージのUMLクラス図を示す。そのパッケージのオブジェ
クトクラスの定義は,表4から表14までに示す。
CRS UMLクラス図は,SC̲SingleCRSクラスからCS̲CoordinateSystemクラスへのCoordinateSystemと
いう名前の関連を示している。この関連を記載するのは,SC̲SingleCRSのサブクラスの全てが,
CS̲CoordinateSystem又はそのサブクラスの一つと直接的な関連をもっていることを示すためである。これ
は,後出の箇条9の図8において詳しく示す。二つの場合で,関連の目的先の多重度は1(必須)である。
三つの場合で,SC̲SingleCRSのサブクラスが,unionクラスを介して,CS̲CoordinateSystemクラスの複数
の代替サブクラスの一つと間接的な関連をもつ。
CRS UMLクラス図は,SC̲SingleCRSクラスからCD̲DatumクラスへのDefiningDatumという名前の関
連も示している。この関連は,SC̲SingleCRSのサブクラスの全てではないが,多くが,CD̲Datum又はそ
のサブクラスの一つと直接的な関連をもっていることを示す。これは,後出の箇条10の図10に詳しく示
す。CD̲Datum又はそのサブクラスの一つと直接的な関連をもつSC̲SingleCRSのサブクラスの場合,そ
の関連の目的先の多重度は,1(必須)である。CD̲Datum又はそのサブクラスの一つと直接的な関連をも
たないSC̲SingleCRSのサブクラスの場合,その関連の目的先の多重度は,0(関連なし)である。
SC̲ProjectedCRSは,それ固有の関連特性を可能にするため,SC̲DerivedCRSとは別にモデル化されて
いる。
18
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図6−SC̲CoordinateReferenceSystemパッケージ
この関連付けは,このGM̲ObjectをそのDirect
Position座標で使われているCRSにリンクする。空
白ならば,GM̲Objectはそれが含まれている他の
GM̲ObjectからのSC̲CRSを使用する。
もし空白なら,座標のCRSは
Direct
Position
を 含 む
GM̲Objectによって決定され
る。
JIS X 7107
で定義
ISO 19115
で定義
JIS X 7108で定義
19
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表4−SC̲CRS classクラスの要素定義
説明:
通常は単一であるが,複合化することも可能な座標参照系。
ステレオタイプ: Type
クラス属性:
Abstract
継承元:
RS̲ReferenceSystem
IO̲IdentifiedObjectBase
関連役割:
coordinateOperationFrom → CC̲CoordinateOperation [0..*],関連名Source
coordinateOperationTo → CC̲CoordinateOperation [0..*],関連名Target
CRS ← GM̲Object [0..1],関連名Coordinate Reference System
(逆:object → GM̲Object [0..*],GM̲Object だけからナビゲート可能−JIS X 7107を参照)
CRS ← DirectPosition [0..1],関連名Coordinate Reference System
(逆:directPosition → DirectPosition [0..*],DirectPositionだけからナビゲート可能−JIS X 7107
を参照)
パブリック属性:
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
CRS適用分野
scope
CharacterString
M
N
このCRSが有効な用途又は用途の
制限の記述。不明の場合,“不明”
と入力する。
次の五つの属性は,IO̲IdentifiedObjectBase及びRS̲ReferenceSystemから継承される。表1及び表3を参照。
注記 この規格の他の箇所とは異なるが,継承された属性をこのクラス表に記載して,CRS名,CRS別名及びCRS
識別子の各属性を共に示すようにする。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
CRS名
name
RS̲Identifier
M
1
これは,CRSのプライマリ名であ
る。別名又は他の識別子は,属性の
別名又は識別子を通して与えるこ
とができる。
CRSの別名
alias
GenericName
O
N
このCRSの別名である。
CRS識別子
identifier
RS̲Identifier
O
N
CRSの定義する情報を別の箇所で
参照するための識別子。又は,この
CRSを参照できる識別子。
CRS有効範囲
domainOfValidity
EX̲Extent
O
N
このCRSが有効である区域,地域
又は時間枠。
CRSの注釈
remarks
CharacterString
O
1
データソース情報を含めた,この
CRSに関するコメント又は情報。
20
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表5−SC̲SingleCRSクラスの要素定義
説明:
一つの座標系及び一つの原子から構成される(複合CRSとは対照的な)座標参照系。
注記 ISO 19111:2003では,このクラスはSC̲CoordinateReferenceSystemという名称であった。
ステレオタイプ: Type
クラス属性:
Abstract
継承元:
SC̲CRS
関連役割:
(集成)datum → CD̲Datum [0..1],関連名DefiningDatum
(集成)coordinateSystem → CS̲CoordinateSystem [1],関連名CoordinateSystem
baseCRS ← SC̲DerivedCRS [1]
(逆:derivedCRS → SC̲DerivedCRS [0..*],SC̲DerivedCRSからだけナビゲート可能−表8を
参照)
(集成)componentReferenceSystem ← SC̲CompoundCRS [2..*] {ordered}
(逆:compoundCRS → SC̲CompoundCRS [0..*],SC̲CompoundCRSからだけナビゲート可能−
表6を参照)
(SC̲CRSから継承された関連)
パブリック属性: IO̲IdentifiedObjectBase,RS̲ReferenceSystem,及びSC̲CRSから継承された六つの属性(CRS
名,CRSの別名,CRS識別子,CRS有効範囲,CRS適用分野及びCRSの注釈)。表4を参照。
表6−SC̲CompoundCRSクラスの要素定義
説明:
二つ以上の独立した単一の座標参照系を通して点の位置を記述する座標参照系。
注記 二つの座標参照系は,一方の座標参照系の座標値が他方の座標参照系の座標値に換算又
は変換できない場合に相互に独立しているといわれる。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
SC̲CRS
関連役割:
(集成)componentReferenceSystem → SC̲SingleCRS [2..*] {ordered}
(SC̲CRSから継承された関連)
パブリック属性: IO̲IdentifiedObjectBase,RS̲ReferenceSystem,及びSC̲CRSから継承された六つの属性(CRS
名,CRSの別名,CRS識別子,CRS有効範囲,CRS適用分野及びCRSの注釈)。表4を参照。
表7−SC̲GeneralDerivedCRSクラスの要素定義
説明:
ある座標参照系から座標換算によって定義される座標参照系。
ステレオタイプ: Type
クラス属性:
Abstract
継承元:
SC̲SingleCRS
関連役割:
conversion → CC̲Conversion [1],関連名Definition
(SC̲SingleCRSから継承された関連)
パブリック属性: IO̲IdentifiedObjectBase,RS̲ReferenceSystem及びSC̲CRSから継承された六つの属性。表4を
参照。
21
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表8−SC̲DerivedCRSクラスの要素定義
説明:
単一の座標参照系を基底CRSとして座標換算によって定義される単一の座標参照系。基底CRS
を投影座標参照系にすることはできない。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
SC̲GeneralDerivedCRS
関連役割:
baseCRS → SC̲SingleCRS [1]
[SC̲GeneralDerivedCRSから継承された関連。次を含む。
(集成)coordinateSystem → CS̲CoordinateSystem [1],関連名CoordinateSystem]
パブリック属性: IO̲IdentifiedObjectBase,RS̲ReferenceSystem,及びSC̲CRSから継承された六つの属性(CRS
名,CRSの別名,CRS識別子,CRS有効範囲,CRS適用分野及びCRSの注釈,表4を参照)
に次を追加する。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
導出CRS型
derivedCRSType
SC̲DerivedCRSType
M
1
この導出座標参照系の型。
表9−SC̲DerivedCRSTypeクラスの要素定義
説明:
主要なCRS型の分類に基づく導出CRSの型。
ステレオタイプ: CodeList
継承元:
(なし)
関連役割:
(なし)
利用クラス:
SC̲DerivedCRS
パブリック属性:
名称
UML識別子
データ型
要求度
最大出現
回数
説明
測地CRS
geodetic
CharacterString
C
1
測地原子に基づく座標参照系。地表の
広範囲にわたる地理地物の幾何的形
状の正確な表現を可能にする。
鉛直CRS
vertical
CharacterString
C
1
高さ又は深さの記録に使用される座
標参照系。鉛直CRSは,重力の方向
を利用して,高さ又は深さの概念を定
義するが,重力との関係は,それほど,
単純でない場合がある。
施工基準CRS
engineering
CharacterString
C
1
局所的な座標参照系であり,おおまか
に次の二つのカテゴリに分割できる。
− 地表上又は近辺で行われる施工
活動に適用される地球固定系。
− 路上走行車,船舶,航空機又は宇
宙船など移動するプラットフォ
ーム上のCRS。
画像CRS
image
CharacterString
C
1
画像内の位置に適用される施工基準
座標参照系。
条件:列挙されている名称を指定する場合は,一つの名称に限る。
注記 表9は,対応国際規格と同一の内容・形式で作成したものであるが,“継承元”,“データ型”な
ど,CodeListの定義としては不要な項目も含まれている。
22
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表10−SC̲GeodeticCRSクラスの要素定義
説明:
測地原子に関連付けられている座標参照系。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
SC̲SingleCRS
関連役割:
(集成)datum → CD̲GeodeticDatum [1],関連名DefiningDatum
(集成)coordinateSystem → CS̲GeodeticCS [1],関連名CoordinateSystem
baseCRS ← ProjectedCRS [1]
(逆:derivedCRS → SC̲ProjectedCRS [0..*],SC̲ProjectedCRSからだけナビゲート可能−表11
を参照)
(SC̲SingleCRSから継承された関連)
パブリック属性: IO̲IdentifiedObjectBase,RS̲ReferenceSystem,及びSC̲CRSから継承された六つの属性(CRS
名,CRSの別名,CRS識別子,CRS有効範囲,CRS適用分野及びCRSの注釈)。表4を参照。
表11−SC̲ProjectedCRSクラスの要素定義
説明:
基底CRSとして測地座標参照系をもち,地図投影を用いて換算された導出座標参照系。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
SC̲GeneralDerivedCRS
関連役割:
baseCRS → SC̲GeodeticCRS [1]
(集成)coordinateSystem → CS̲CartesianCS [1],関連名CoordinateSystem
(SC̲GeneralDerivedCRSから継承された関連)
パブリック属性: IO̲IdentifiedObjectBase,RS̲ReferenceSystem,及びSC̲CRSから継承された六つの属性(CRS
名,CRSの別名,CRS識別子,CRS有効範囲,CRS適用分野及びCRSの注釈)。表4を参照。
表12−SC̲EngineeringCRSクラスの要素定義
説明:
施工基準原子に関連付けられた局所の座標参照系であり,おおまかに次の二つのカテゴリに分
割できる。
− 地表上又は近辺で行われる施工活動に適用される地球固定系。
− 路上走行車,船舶,航空機,宇宙船など移動するプラットフォーム上のCRS。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
SC̲SingleCRS
関連役割:
(集成)datum → CD̲EngineeringDatum [1],関連名DefiningDatum
(集成)coordinateSystem → CS̲EngineeringCS [1],関連名CoordinateSystem
(SC̲SingleCRSから継承された関連)
パブリック属性: IO̲IdentifiedObjectBase,RS̲ReferenceSystem,及びSC̲CRSから継承された六つの属性(CRS
名,CRSの別名,CRS識別子,CRS有効範囲,CRS適用分野及びCRSの注釈)。表4を参照。
23
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表13−SC̲ImageCRSクラスの要素定義
説明:
画像原子に関連付けられている座標参照系(図8参照)。関連付けされている画像原子の定義に
は,他の施工基準原子に関連しない二つの属性が含まれるため,画像座標参照系は,別の下位
型として処理される。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
SC̲SingleCRS
関連役割:
(集成)datum → CD̲ImageDatum [1],関連名DefiningDatum
(集成)coordinateSystem → CS̲ImageCS [1],関連名CoordinateSystem
(SC̲SingleCRSから継承された関連)
パブリック属性: IO̲IdentifiedObjectBase,RS̲ReferenceSystem,及びSC̲CRSから継承された六つの属性(CRS
名,CRSの別名,CRS識別子,CRS有効範囲,CRS適用分野及びCRSの注釈)。表4を参照。
表14−SC̲VerticalCRSクラスの要素定義
説明:
高さ又は深さの記録に使用される1D座標参照系。鉛直CRSは,重力の方向を利用して,高さ
又は深さの概念を定義するが,重力との関係は,単純でない場合がある。
だ(楕)円体高(h)は,鉛直座標参照系の中で表現できない。だ(楕)円体高は,独立しては
存在できず,三次元測地座標参照系で定義される三次元座標組の不可分の一部としてだけ存在
できる。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
SC̲SingleCRS
関連役割:
(集成)datum → CD̲VerticalDatum [1],関連名DefiningDatum
(集成)coordinateSystem → CS̲VerticalCS [1],関連名CoordinateSystem
(SC̲SingleCRSから継承された関連)
パブリック属性: IO̲IdentifiedObjectBase,RS̲ReferenceSystem,及びSC̲CRSから継承された六つの属性(CRS
名,CRSの別名,CRS識別子,CRS有効範囲,CRS適用分野及びCRSの注釈)。表4を参照。
9
座標系パッケージ
9.1
序文
この規格では,座標系パッケージは,座標系及び座標系の軸という二つの主要概念をモデル化している。
9.2
座標系
座標系は,繰返しのない座標軸の列から構成しなければならない。一つの座標系を複数の座標参照系が
使用してもよい。座標空間の次元,名称,測定単位,並びに,軸の方向及び順序は,全て座標系定義の一
部でなければならない。軸の個数は,その幾何的形状を記述する空間の次元と等しくなければならない。
したがって,異なる定義の二通りの高さをもつ座標組を指定することは許されない。
座標組内の座標の個数は,座標系の座標軸の個数と等しくなければならない。座標組内の座標は,座標
系の軸の定義順に指定しなければならない。
この規格では,座標系は,座標空間の幾何的特性及び軸自体の幾何的特性(直線か曲線,直交するかそ
うでないか)によって下位の型に分割しなければならない。一部の下位型の座標系は,図8のUMLクラ
ス図及び表15に見られるように,特定の下位型の座標参照系とともに使用しなければならない。導出CRS
の場合,CS関連に対する制約は,導出されたCRS下位型によるものとし,主要なCRSに同等な下位型の
制約に従わなければならない。座標系の下位型の記述は,表15に示す。
この規格は,ユーザ定義座標系の追加も含んでいる。ユーザ定義座標系は,箇条8に記述されている座
標参照系の下位型の一つとともに使用しなければならない。
24
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表15−下位型の座標系と座標参照系との関係における制約
CS下位型
説明
共に使用する
CRSの型
アフィン
必ずしも直交しない直線軸をもつ二次元又は三次元の座標系。
施工基準
画像
直交
直交する直線軸に関して点の位置を与える二次元又は三次元の座標系。全ての軸
の測定単位は同じにしなければならない。
測地
投影
施工基準
画像
円筒
極座標系をもつ平面とそれに垂直な直線座標軸とによって構成する三次元の座
標系。
施工基準
だ(楕)円体
測地緯度,測地経度及び(三次元の場合)だ(楕)円体高で位置が指定される二
次元又は三次元の座標系。
測地
線形
単一の軸上に存在する点から構成される一次元の座標系。
例:パイプラインを表す線形の地物を用いて,パイプライン上又はそれに沿った
点を記述する。この規格は,単純な(連続する)線形のシステムにだけ用いる。
輸送業界に適用されるような,この項目の更に拡張した取扱いについては,ISO
19133 [7] を参照。
施工基準
極
原点からの距離及び原点から点への直線と基準方向が形成する角度とによって
位置が指定される二次元の座標系。
施工基準
球
原点からの距離と,二つの角度座標とをもつ三次元の座標系。だ(楕)円体を球
に“簡易化”した,だ(楕)円体座標系と混同してはならない。
測地
施工基準
鉛直
地球の重力場に依存する点の高さ(又は深さ)の記録に使用される一次元の座標
系。この件は複雑で,この規格の適用範囲外となるため,正確な定義は,意図的
に記述しない。
鉛直
座標系は,B.2において詳述する。
9.3
座標系の軸
座標系は,繰返しのない座標軸の列から構成しなければならない。座標系の各軸は,軸名称,軸の略称,
軸の方向及び軸の単位の一意の組合せによって,完全に記述しなければならない。それらの属性に対して,
別名を箇条7に従って使用してもよい。
例1 組合せ {Latitude,Lat,north,degree} は,オブジェクトクラス“座標系の軸”の一つのインス
タンスを導く。組合せ {Latitude,ϕ,north,degree} は,軸の略称が異なっているので,別の
インスタンスを導く。
この規格における座標系の軸名の使用法は,座標参照系の型に対する測地学の慣行によって制約を受け
なければならない。これらの制約を表16に示す。この制約は,双方向的に適用する必要がある。
例2 “測地緯度”及び“測地経度”は,測地座標参照系を形成する座標軸の名前として使用されて
いるため,それらの用語を別の文脈で使用することはできない。
こうした制約下にある名前に対する別名は許されなければならない。
25
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表16−座標系の軸の命名上の制約
CSの型
CRSの型に
使用されるとき
許される座標系の軸名
直交
測地
地心X,地心Y,地心Z
直交
投影
北距又は南距,東距又は西距
だ(楕)円体
測地
測地緯度,測地経度,[だ(楕)円体高(3Dの場合)]
球
測地
球緯度,球経度,地心半径
鉛直
鉛直
深さ又は標高
画像座標参照系及び施工基準座標参照系は,局所的な状況又は慣行に従った名前を使用してもよい。
座標系の軸は,B.2.2において詳述する。
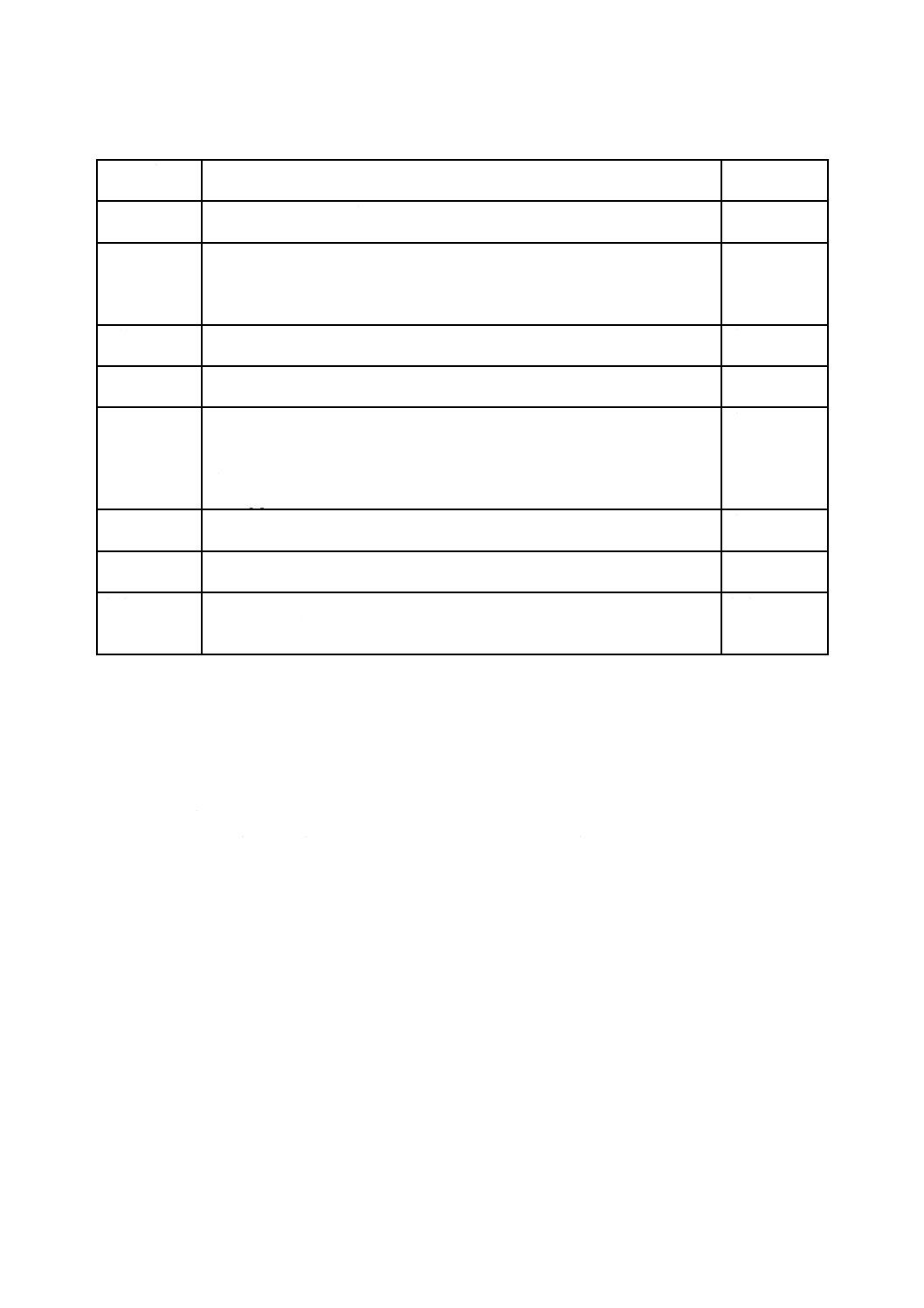
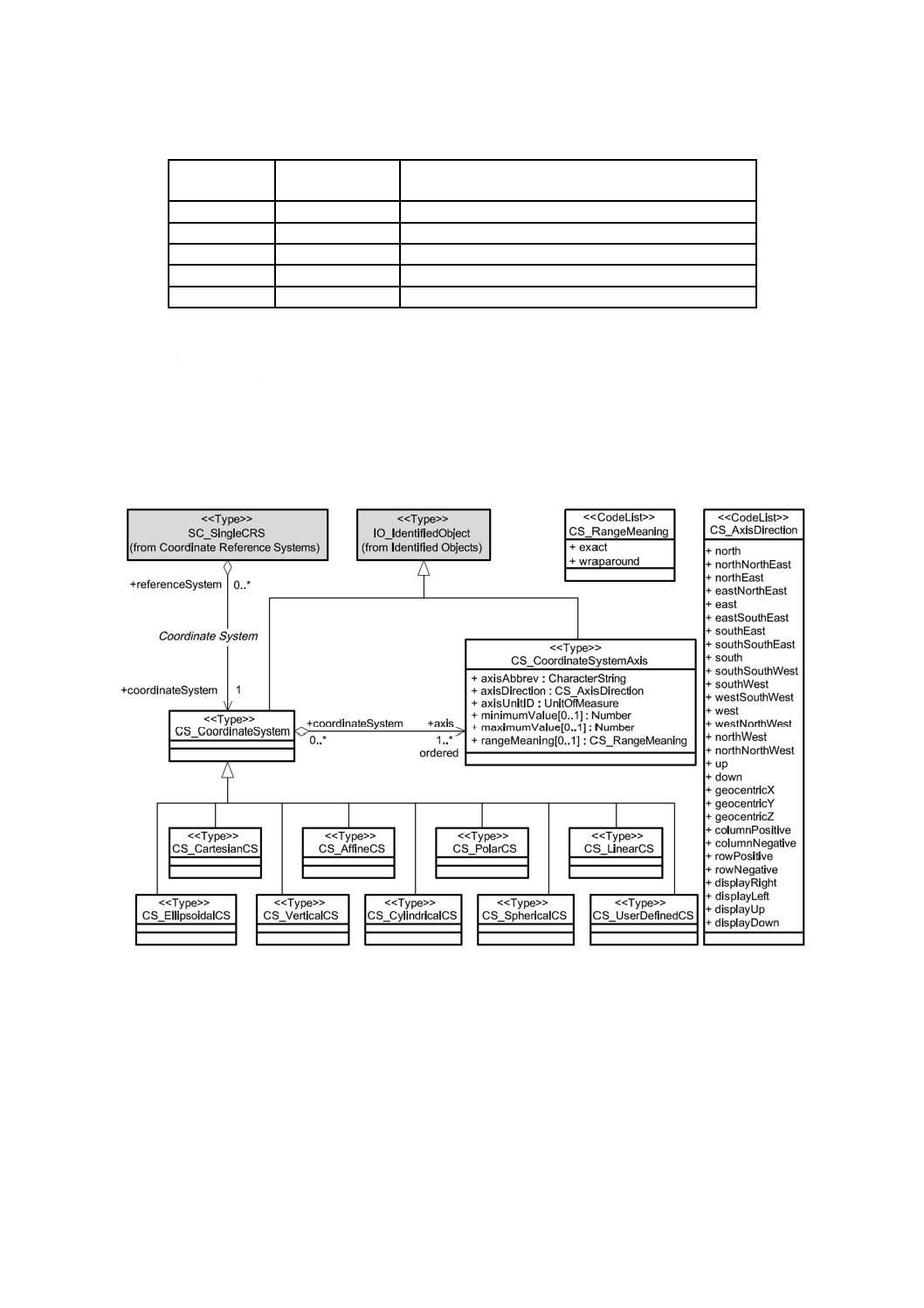
9.4
座標系パッケージのUMLスキーマ
図7は,CS̲CoordinateSystemパッケージのUMLクラス図を示す。座標参照系の下位型と座標系の下位
型との間の関連を,図8のUMLクラス図に示す。CS̲CoordinateSystemパッケージのオブジェクトクラス
の定義は,表17から表32までに示す。
図7−CS̲CoordinateSystemパッケージ
26
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
CS̲CoordinateSystemとSC̲SingleCRSとの間の関連の詳細については,図8を参照。
図8−座標系の型と座標参照系の型との関連
27
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表17−CS̲CoordinateSystemクラスの要素定義
説明:
座標系(CS)は,与えられた座標空間を張る,繰返しのない座標軸の列である。CSは,空間
内の点にどのように座標を指定するかを規定する数学的規則の集合から導かれる。座標組内の
座標値は,座標軸の順序どおりに記録されなければならない。
ステレオタイプ: Type
クラス属性:
Abstract
継承元:
IO̲IdentifiedObject
関連役割:
(集成)axis → CS̲CoordinateSystemAxis [1..*] {ordered}
(集成)coordinateSystem ← SC̲SingleCRS [1],関連名CoordinateSystem
(逆:referenceSystem → SC̲SingleCRS [0..*],SC̲SingleCRSからだけナビゲート可能−表5を
参照)
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(CS名,CSの別名,
CS識別子及びCSの注釈)。表1及び表2を参照。
表18−CS̲CartesianCSクラスの要素定義
説明:
直交する直線軸をもつ二次元又は三次元の座標系。二次元の場合,両軸とも,同一の長さ単位
をもち,三次元の場合は,全ての軸が同一の長さ単位をもたなければならない。CartesianCSは,
二つ又は三つの軸の関連をもたなければならない。関連の個数は,CSの次元に等しくなければ
ならない。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CS̲CoordinateSystem
関連役割:
(集成)coordinateSystem ← SC̲ProjectedCRS [1],関連名CoordinateSystem
(逆:referenceSystem → SC̲ProjectedCRS [0..*],SC̲ProjectedCRSからだけナビゲート可能−
表11を参照)
(CS̲CoordinateSystemから継承された関連)
利用クラス:
CS̲GeodeticCS
CS̲EngineeringCS
CS̲ImageCS
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(CS名,CSの別名,
CS識別子及びCSの注釈)。表1及び表2を参照。
表19−CS̲AffineCSクラスの要素定義
説明:
必ずしも直交しない直線軸をもつ二次元又は三次元の座標系。AffineCSは,二つ又は三つの軸
の関連をもたなければならない。関連の個数は,CSの次元に等しくなければならない。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CS̲CoordinateSystem
利用クラス:
CS̲EngineeringCS
CS̲ImageCS
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(CS名,CSの別名,
CS識別子及びCSの注釈)。表1及び表2を参照。
28
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表20−CS̲EllipsoidalCSクラスの要素定義
説明:
測地緯度,測地経度及び(三次元の場合)だ(楕)円体高で位置を指定する二次元又は三次元
の座標系。EllipsoidalCSは,二つ又は三つの軸の関連をもたなければならない。関連の個数は,
CSの次元に等しくなければならない。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CS̲CoordinateSystem
利用クラス:
CS̲GeodeticCS
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(CS名,CSの別名,
CS識別子及びCSの注釈)。表1及び表2を参照。
表21−CS̲SphericalCSクラス要素の定義
説明:
原点からの距離と,二つの角度座標とをもつ三次元の座標系。球に“簡易化”しただ(楕)円
体に基づく,だ(楕)円体座標系と混同しない。SphericalCSは,三つの軸の関連をもたなけれ
ばならない。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CS̲CoordinateSystem
利用クラス:
CS̲EngineeringCS
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(CS名,CSの別名,
CS識別子及びCSの注釈)。表1及び表2を参照。
表22−CS̲CylindricalCSクラス要素の定義
説明:
極座標系をもつ平面とそれに垂直な直線の座標軸とによって構成される三次元の座標系。
CylindricalCSは,三つの軸の関連をもたなければならない。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CS̲CoordinateSystem
利用クラス:
CS̲EngineeringCS
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(CS名,CSの別名,
CS識別子及びCSの注釈)。表1及び表2を参照。
表23−CS̲PolarCSクラスの要素定義
説明:
原点からの距離及び原点から点への直線と基準方向が形成する角度とによって位置を指定する
二次元の座標系。PolarCSは,二つの軸の関連をもたなければならない。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CS̲CoordinateSystem
利用クラス:
CS̲EngineeringCS
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(CS名,CSの別名,
CS識別子及びCSの注釈)。表1及び表2を参照。
29
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表24−CS̲LinearCSクラスの要素定義
説明:
単一の軸上に存在する点から構成される一次元の座標系。関連付けられた座標は,原点(原子
定義によって指定される。)から点までの軸に沿った距離(オフセット付き又はオフセットなし)
である。
例:パイプラインを表す線形の地物を用いて,パイプライン上又はそれに沿った点を記述する
用途。LinearCSは,一つの軸の関連をもたなければならない。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CS̲CoordinateSystem
利用クラス:
CS̲EngineeringCS
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(CS名,CSの別名,
CS識別子及びCSの注釈)。表1及び表2を参照。
表25−CS̲VerticalCSクラス要素の定義
説明:
点の高さ又は深さの記録に使用される一次元の座標系。そうした座標系は,通常,地球の重力
場に依存する。この件は複雑で,この規格の適用範囲外であるため,正確な定義は,意図的に
記述しない。VerticalCSは,一つの軸の関連をもたなければならない。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CS̲CoordinateSystem
関連役割:
(集成)coordinateSystem ← SC̲VerticalCRS [1],関連名CoordinateSystem
(逆:referenceSystem → SC̲VerticalCRS [0..*],SC̲VerticalCRSからだけナビゲート可能−表
14を参照)
(CS̲CoordinateSystemから継承された関連)
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(CS名,CSの別名,
CS識別子及びCSの注釈)。表1及び表2を参照。
表26−CS̲UserDefinedCSクラスの要素定義
説明:
座標軸の任意の組合せから構成される二次元又は三次元の座標系で,他のいかなる座標系の型
も適用できないもの。例としては,それ自体との交点をもたない任意の一次元の形状をもつ座
標軸を含む曲線座標系がある。この非直線軸を一軸又は二軸の直線軸によって補完し,二次元
又は三次元の座標系を生成する。非直線軸は,通常,直線を少しずつつなげたもの又は曲線で
ある。UserDefinedCSは,二つ又は三つの軸の関連をもたなければならない。関連の個数は,
CSの次元に等しくなければならない。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CS̲CoordinateSystem
利用クラス:
CS̲EngineeringCS
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(CS名,CSの別名,
CS識別子及びCSの注釈)。表1及び表2を参照。
30
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表27−CS̲CoordinateSystemAxisクラス要素の定義
説明:
座標系の軸の定義。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
IO̲IdentifiedObject
関連役割:
(集成)axis ← CS̲CoordinateSystem [1..*] {ordered}
(逆:coordinateSystem → CS̲CoordinateSystem [0..*],CS̲CoordinateSystemだけからナビゲー
ト可能−表17を参照)
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(座標系の軸名,座
標系の軸の別名,座標系の軸の識別子及び座標系の軸の注釈)。表1及び表2を参照し,また,
次も加える。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
座標系の軸の
略称
axisAbbrev
CharacterString
M
1
この座標系の軸に使用される略称。座
標組における座標の識別にも使用さ
れる。例:X及びY
座標系の軸の
方向
axisDirection
CS̲AxisDirection
M
1
この座標系の軸の方向(又は,直交投
影座標の場合,この座標系の軸の局所
的な方向)。例:北又は南,東又は西,
上又は下。どのような座標系の軸であ
っても,対を成す用語のいずれか一方
しか使用できない。地球固定CRSの
場合,この方向は,近似的であり,軸
を人間が解釈できるように意図され
ていることが多い。したがって,測地
原子を使用する場合は,軸の正確な方
向は,この近似的な方向から若干変動
することがある。EngineeringCRSで
は,その座標系の軸の方向の具体的記
述を要求する場合が多いことに注意
する。
座標系の軸の
単位識別子
axisUnitID
UnitOfMeasure
M
1
この座標系の軸に使用される単位の
識別子。座標組内の座標の値は,この
単位を用いて記録しなければならな
い。
座標系の軸の
最小値
minimumValue
Number
O
1
この軸に通常許容される,軸の単位に
よる最小値。
座標系の軸の
最大値
maximumValue
Number
O
1
この軸に通常許容される,軸の単位に
よる最大値。
座標系の軸の
範囲の意味
rangeMeaning
CS̲RangeMeaning
C
1
minimumValue及びmaximumValueで
指定された軸の値の範囲の意味。この
要素は,minimumValue
及び
maximumValueが共に省略されている
場合は,指定してはならない。
minimumValue
及び/又
は
maximumValueの少なくとも一方が指
定されている場合には,記述してもよ
い。minimumValue又はmaximumValue
が指定されている場合に,この要素を
省略すると,意味は未指定となる。
31
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表28−CS̲AxisDirectionクラス要素の定義
説明:
正の座標値が大きくなる座標系の軸の方向。
ステレオタイプ:
CodeList
導出元:
(なし)
関連役割:
(なし)
利用クラス:
CS̲CoordinateSystemAxis
パブリック属性:
名称
UML識別子
データ型
要求度 最大出現
回数
説明
北
north
CharacterString
C
1
軸の正方向は北である。測地又は投影CRSでは,
北は,測地原子によって定義される。施工基準
CRSでは,北は,地理上の方向ではなく施工オ
ブジェクトに対して定義される場合がある。
北北東
northNorthEast
CharacterString
C
1
軸の正方向はほぼ北北東である。
北東
northEast
CharacterString
C
1
軸の正方向はほぼ北東である。
東北東
eastNorthEast
CharacterString
C
1
軸の正方向はほぼ東北東である。
東
east
CharacterString
C
1
軸の正方向は,北から時計周りにπ/2ラジアンの
方向である。
東南東
eastSouthEast
CharacterString
C
1
軸の正方向はほぼ東南東である。
南東
southEast
CharacterString
C
1
軸の正方向はほぼ南東である。
南南東
southSouthEast
CharacterString
C
1
軸の正方向はほぼ南南東である。
南
south
CharacterString
C
1
軸の正方向は,北から時計周りにπラジアンの方
向である。
南南西
southSouthWest
CharacterString
C
1
軸の正方向はほぼ南南西である。
南西
southWest
CharacterString
C
1
軸の正方向はほぼ南西である。
西南西
westSouthWest
CharacterString
C
1
軸の正方向はほぼ西南西である。
西
west
CharacterString
C
1
軸の正方向は,北から時計周りに3π/2ラジアン
の方向である。
西北西
westNorthWest
CharacterString
C
1
軸の正方向はほぼ西北西である。
北西
northWest
CharacterString
C
1
軸の正方向はほぼ北西である。
北北西
northNorthWest
CharacterString
C
1
軸の正方向はほぼ北北西である。
上方
up
CharacterString
C
1
軸の正方向は重力に対して上方である。
下方
down
CharacterString
C
1
軸の正方向は重力に対して下方である。
地心X
geocentricX
CharacterString
C
1
軸の正方向は,赤道面において,モデル化された
地球の中心から,本初子午線と赤道との交点に向
かう。
地心Y
geocentricY
CharacterString
C
1
軸の正方向は,赤道面において,モデル化された
地球の中心から,本初子午線からπ/2ラジアン東
方向にある子午線と赤道との交点に向かう。
地心Z
geocentricZ
CharacterString
C
1
軸の正方向は,モデル化された地球の中心から,
その回転軸に平行に,北極に向かう。
正の列
columnPositive
CharacterString
C
1
軸の正方向は,上方のピクセル列の方向である。
負の列
columnNegative
CharacterString
C
1
軸の正方向は,下方のピクセル列の方向である。
正の行
rowPositive
CharacterString
C
1
軸の正方向は,上方のピクセル行の方向である。
負の行
rowNegative
CharacterString
C
1
軸の正方向は,下方のピクセル行の方向である。
ディス
プレイ
右
displayRight
CharacterString
C
1
軸の正方向は,ディスプレイの右方向である。
32
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表28−CS̲AxisDirectionクラス要素の定義(続き)
名称
UML識別子
データ型
要求度 最大出現
回数
説明
ディス
プレイ
左
displayLeft
CharacterString
C
1
軸の正方向は,ディスプレイの左方向である。
ディス
プレイ
上
displayUp
CharacterString
C
1
軸の正方向は,ほぼ垂直になっているディスプレ
イ面の最上部に向かう。
ディス
プレイ
下
displayDown
CharacterString
C
1
軸の正方向は,ほぼ垂直になっているディスプレ
イ面の最下部に向かう。
条件:列挙されている名称を指定する場合は,一つの名称に限る。
注記 表28は,対応国際規格と同一の内容・形式で作成したものであるが,“継承元”,“データ型”
など,CodeListの定義としては不要な項目も含まれている。
表29−CS̲RangeMeaningクラスの要素定義
説明:
minimumValue及びmaximumValueで指定された軸の値の範囲の意味。
ステレオタイプ: CodeList
継承元:
(なし)
関連役割:
(なし)
利用クラス:
CS̲CoordinateSystemAxis
パブリック属性:
名称
UML識別子
データ型
要求度
最大出現
回数
説明
一意的
exact
CharacterString
C
1
minimumValue及びmaximumValueを含
め,その間の全ての値は,有効である。
周期性指示
wraparound
CharacterString
C
1
軸の値は連続的であるが,
(maximumValue - minimumValue)を周
期として,同じ意味をもつ値が繰り返
し現れる。
条件:列挙されている名称を指定する場合は,一つの名称に限る。
注記 表29は,対応国際規格と同一の内容・形式で作成したものであるが,“継承元”,“データ型”
など,CodeListの定義としては不要な項目も含まれている。
33
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表30−CS̲GeodeticCSクラス要素の定義
説明:
測地CRSが使用する座標系。次のいずれかでなければならない。直交座標系,だ(楕)円体
座標系又は球座標系
ステレオタイプ:
Union
実現されたクラス: CS̲CoordinateSystem. 継承した演算及び関連を全て実装しなければならない。さらに,全て
の継承した属性を,少なくとも,“読出し専用”としてサポートしなければならない。
関連役割:
(集成)coordinateSystem ← SC̲GeodeticCRS [1],関連名CoordinateSystem
(逆:referenceSystem → SC̲GeodeticCRS [0..*],SC̲GeodeticCRSからだけナビゲート可能−
表10を参照)
(集成)cartesianCS → CS̲CartesianCS [1]
(集成)ellipsoidalCS → CS̲EllipsoidalCS [1]
(集成)sphericalCS → CS̲SphericalCS [1]
cartesianCS,ellipsoidalCS及びsphericalCSの関連全体への制約(の一つ)
(CS̲CoordinateSystemから継承された関連)
パブリック属性:
(なし)
表31−CS̲EngineeringCSクラス要素の定義
説明:
施工基準CRSが使用する座標系。次のいずれかでなければならない。アフィン座標系,直交
座標系,円筒座標系,一次元曲線座標系,極座標系,球座標系又はユーザ定義座標系。
ステレオタイプ:
Union
実現されたクラス: CS̲CoordinateSystem. 継承した演算及び関連を全て実装しなければならない。さらに,全て
の継承した属性を,少なくとも,“読出し専用”としてサポートしなければならない。
関連役割:
(集成)coordinateSystem ← SC̲EngineeringCRS [1],関連名CoordinateSystem
(逆:referenceSystem → SC̲EngineeringCRS [0..*],SC̲EngineeringCRSからだけナビゲート
可能−表12を参照)
(集成)affineCS → CS̲AffineCS [1]
(集成)cartesianCS → CS̲CartesianCS [1]
(集成)cylindricalCS → CS̲ CylindricalCS [1]
(集成)linearCS → CS̲LinearCS [1]
(集成)polarCS → CS̲PolarCS [1]
(集成)sphericalCS → CS̲SphericalCS [1]
(集成)userDefinedCS → CS̲UserDefinedCS [1]
affineCS,cartesianCS,cylindricalCS,linearCS,polar CS,sphericalCS 及び userDefinedCS
の関連全体への制約(の一つ)
(CS̲CoordinateSystemから継承された関連)
パブリック属性:
(なし)
34
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表32−CS̲ImageCSクラス要素の定義
説明:
画像CRSが使用する座標系。アフィン座標系又は直交座標系のいずれか一方でなければなら
ない。
ステレオタイプ:
Union
実現されたクラス: CS̲CoordinateSystem. 継承した演算及び関連を全て実装しなければならない。さらに,全て
の継承した属性を,少なくとも,“読出し専用”としてサポートしなければならない。
関連役割:
(集成)coordinateSystem ← SC̲ImageCRS [1],関連名CoordinateSystem
(逆:referenceSystem → SC̲ImageCRS [0..*],SC̲ImageCRSからだけナビゲート可能−表13
を参照)
(集成)affineCS → CS̲AffineCS [1]
(集成)cartesianCS → CS̲CartesianCS [1]
affineCS及びcartesianCSの関連全体への制約(の一つ)
(CS̲CoordinateSystemから継承された関連)
パブリック属性:
(なし)
10
原子パッケージ
10.1 原子の型
原子は,一次元,二次元又は三次元の系の基準として使用することができる。測地座標参照系及び鉛直
座標参照系の場合,原子は,座標系を地球に関連付けなければならない。その他の型の座標参照系では,
原子は,座標系を地球以外の物理的又は仮想的なオブジェクトに関連付けてもよい。施工基準CRSの一部
の応用例では,オブジェクトは,地球に対して移動するプラットフォームでもよい。そうした応用例では,
原子自体は時間依存しないが,関連付けられた座標の地球固定などの座標参照系への変換では,時間依存
パラメタを含まなければならない。
この規格では,測地,鉛直,施工基準及び画像の四つの下位型原子を区別する。各原子の下位型は,図
10に示すとおり,特定の下位型の座標参照系にだけ関連付けることができる。測地原子に対する制約は,
次に詳述する。
原子は,B.3で詳述する。
10.2 測地原子
10.2.1 本初子午線
原子の下位型が測地である場合は,経度の値を指定する元となる原点(本初子午線)の記述を必須とす
る。多くの測地原子は,その本初子午線として,グリニッジを使用する。属性の本初子午線の名称及びグ
リニッジ経度のデフォルト値は,それぞれ,“Greenwich”及び0でなければならない。本初子午線の名称
が“Greenwich”である場合,グリニッジ経度の値は0度でなければならない。
本初子午線のデータ属性は,表35に示す。
10.2.2 だ(楕)円体
原子の下位型が測地である場合は,関連付けられただ(楕)円体の記述を必須とする。原子の下位型が
測地でない場合は,だ(楕)円体の定義を記述してはならない。
だ(楕)円体は,長半径及び逆へん(扁)平率によって,長半径及び短半径によって,又は球として定
義しなければならない。
だ(楕)円体のデータ属性は,表36及び表37に記述する。
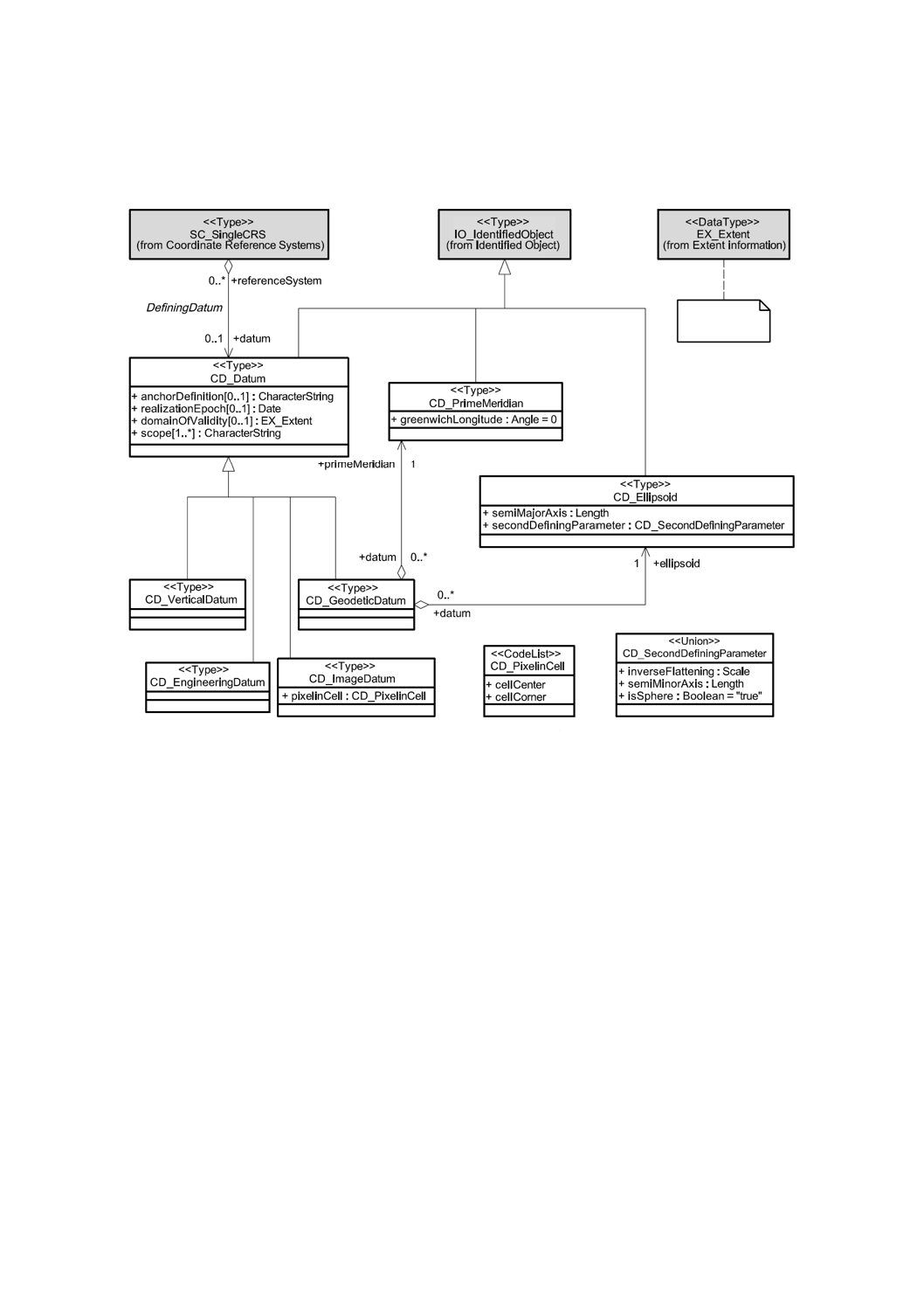
10.3 原子パッケージのUMLスキーマ
図9に,CD̲DatumパッケージのUMLクラス図を示す。座標参照系の下位型と原子の下位型との間の
35
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
関連には制約がある。それらは,図10のUMLクラス図に示す。このパッケージのオブジェクトクラスの
定義は,表33から表41までに示す。
図9−CD̲Datumパッケージ
CD̲DatumとSC̲SingleCRSとの間の関連の詳細については,図10を参照。
ISO 19115で
定義
36
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図10−座標系の型と原子の型との関連
37
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表33−CD̲Datumクラスの要素定義
説明:
原子は,座標系とオブジェクトとの関係を指定することで,座標参照系を生成する。測地座標
参照系及び鉛直座標参照系の場合,原子は,座標系を地球に関連付ける。その他の型の座標参
照系では,原子は,座標系を地球以外の物理的又は仮想的なオブジェクトに関連付けてもよい。
原子は,座標参照系の原点の位置を決定するパラメタ又はパラメタの集合を使用する。各原子
の下位型は,特定の型の座標参照系にだけ関連付けることができる。
ステレオタイプ: Type
クラス属性:
Abstract
継承元:
IO̲IdentifiedObject
関連役割:
(集成)datum ← SC̲SingleCRS [0..1],関連名DefiningDatum
(逆:referenceSystem → SC̲SingleCRS [0..*],SC̲SingleCRSからだけナビゲート可能−表5を
参照)
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(原子の名前,原子
の別名,原子の識別子及び原子の注釈)(表1及び表2を参照)に次を加える。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
原子の固定点
anchorDefinition
CharacterString
O
1
原子の定義−座標系を地球又は代替オ
ブジェクトに固定するための関係性の
記述であり,特定された点又は複数の
点の座標を含むことができる。
− 測地原子の場合,固定点は,測地
原点と呼ばれる点になることがあ
る。測地原点は,伝統的にジオイ
ドとだ(楕)円体との関係及びそ
の点からの方位が共に定義された
点のことである。その他の場合,
固定点が複数の点から構成されて
もよい。その場合,ジオイドとだ
(楕)円体との間の関係を定義す
るパラメタは,それらの点に関し
て平均され,各点の座標が原子の
定義となる。
− 施工基準原子の場合,固定点は,
オブジェクトに相対的に定義され
た方向付けをもつ物理的点でもよ
い。
− 画像原子の場合,固定点は,通常,
画像の中心又は画像の隅である。
座標系の方向付けは,
CS̲AxisDirectionクラスによって
定義される。
38
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表33−CD̲Datumクラスの要素定義(続き)
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
原子の実現時期
realizationEpoch
Date
O
1
原子の定義が有効になった時期。この
時期は正確に指定しても(例:ITRF97
に対して1997.0),単に年だけを指定し
ても[例:NAD83(86)に対して1986]
よい。後者の場合,この実現時期は,
通常,原子の基礎となる測地網の大幅
な再計算が実行されたか開始された年
を指す。現在の原子は,新しい原子が
定義された後も有効であってもよい。
又は,現在の原子を新しい原子で置き
換えてもよい。その場合,新しい原子
の実現時期は,現在の原子の有効期間
の終了時期を定義する。
原子の有効範囲
domainOfValidity EX̲Extent
O
1
この原子が有効である区域,地域又は
時間枠。
原子の適用分野
scope
CharacterString
M
N
この原子が有効な用途又は用途の制限
の記述。不明の場合,“not known”と入
力する。
表34−CD̲GeodeticDatumクラスの要素定義
説明:
測地原子は,地球の形を近似した定義済みのだ(楕)円体(又は球),又はそのだ(楕)円体(又
は球)の中心を原点とした直交座標系の,三次元空間における位置及び正確な方向付けを定義
する。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CD̲Datum
関連役割:
(集成)ellipsoid → CD̲Ellipsoid [1]
(集成)primeMeridian → CD̲PrimeMeridian [1]
(集成)datum ← SC̲GeodeticCRS [1],関連名DefiningDatum
(逆:referenceSystem → SC̲GeodeticCRS [0..*],SC̲GeodeticCRSからだけナビゲート可能−表
10を参照)
パブリック属性: IO̲IdentifiedObject,IO̲IdentifiedObjectBase及びCD̲Datumから継承した八つの属性(原子の名
前,原子の別名,原子の識別子,原子の注釈,原子の固定点,原子の実現時期,原子の有効範
囲及び原子の適用分野)。表1,表2及び表33を参照。
39
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表35−CD̲PrimeMeridianクラスの要素定義
説明:
本初子午線は,経度の値を決定する元となる原点を定義する。
注記 本初子午線名称のデフォルト値は,“Greenwich”である。デフォルト名を使用する場合
は,greenwichLongitudeの値は0(度)にしなければならない。
ステレオタイプ:
Type
クラス属性:
Concrete
継承元:
IO̲IdentifiedObject
関連役割:
(集成)primeMeridian ← CD̲GeodeticDatum [1]
(逆:datum → CD̲GeodeticDatum [0..*],CD̲GeodeticDatumからだけナビゲート可能−表34
を参照)
パブリック属性:
IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(本初子午線の名前,
本初子午線の別名,本初子午線の識別子及び本初子午線の注釈)(表1及び表2を参照)に次
を加える。
属性名
UML識別子
データ型
要求度
最大出現回数
属性説明
本初子午線グリ
ニッジ経度
greenwichLongitude Angle
M
1
東方向を正とするグリニッジ子午
線からの本初子午線の経度。
デフォルト値:0度。
注記 本初子午線の名前の値が
“Greenwich”である場合,
greenwichLongitudeの値は0
度でなければならない。
表36−CD̲Ellipsoid クラスの要素定義
説明:
だ(楕)円体は,地球の近似的な形状の記述に使用できる幾何学的図形である。数学的には,
だ(楕)円を短軸の周りに回転して形成される面である。
ステレオタイプ:
Type
クラス属性:
Concrete
継承元:
IO̲IdentifiedObject
関連役割:
(集成)ellipsoid ← CD̲GeodeticDatum [1]
(逆:datum → CD̲GeodeticDatum [0..*],CD̲GeodeticDatumからだけナビゲート可能−表34
を参照)
パブリック属性:
IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性[だ(楕)円体の名
前,だ(楕)円体の別名,だ(楕)円体の識別子及びだ(楕)円体の注釈](表1及び表2を
参照)に次を加える。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
長半径の長さ
semiMajorAxis
Length
M
1
だ(楕)円体の長半径の長さ。
第二定義パラメ
タ
secondDefiningPa
rameter
CD̲SecondDefi
ning Parameter
M
1
このだ(楕)円体の形を記述する
第二定義パラメタの定義。
40
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表37−CD̲SecondDefiningParameterクラスの要素定義
説明:
だ(楕)円体の形を定義する第二定義パラメタ。だ(楕)円体は,長半径及び逆へん(扁)平
率又は長半径及び短半径という二つの定義パラメタを必要とする。参照体がだ(楕)円体では
なく,球体である場合は,定義パラメタは一つ,すなわち,球の半径だけを必要とする。その
場合は,長半径は,球半径に“簡易化”する。
ステレオタイプ: Union
継承元:
(なし)
関連役割:
(なし)
利用クラス:
CD̲Ellipsoid
パブリック属性:
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
逆へん(扁)平
率
inverseFlattening
Scale
C
1
だ(楕)円体の逆へん(扁)平率
の値。
短半径の長さ
semiMinorAxis
Length
C
1
だ(楕)円体の短半径の長さ。
“だ(楕)円体
=球”インジケ
ータ
isSphere
Boolean
C
1
だ(楕)円体を簡易化し,実質的
に球とする。球は長半径,すなわ
ち,球の半径で完全に定義され
る。形状が球である場合,この属
性の値は“true”となる。
条件:上記の要素を指定する場合は,一つの要素に限る。
表38−CD̲EngineeringDatumクラスの要素定義
説明:
施工基準原子は,施工基準座標参照系の原点を定義し,原点の周辺地域で使用される。
この原点は,(建設現場での定義点など)地球に固定するか,移動体(船,人工衛星など)上の
決まった点にすることができる。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CD̲Datum
関連役割:
(集成)datum ← CD̲EngineeringDatum [1],関連名DefiningDatum
(逆:referenceSystem → SC̲EngineeringCRS [0..*],SC̲EngineeringCRSからだけナビゲート可
能−表12を参照)
パブリック属性: IO̲IdentifiedObject,IO̲IdentifiedObjectBase及びCD̲Datumから継承した八つの属性(原子の名
前,原子の別名,原子の識別子,原子の注釈,原子の固定点,原子の実現時期,原子の有効範
囲及び原子の適用分野)。表1,表2及び表33を参照。
41
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表39−CD̲ImageDatum クラスの要素定義
説明:
画像原子は,画像座標参照系の原点を定義し,対象となる画像内だけで使用される。画像原子
の場合,固定点は,通常,画像の中心又は画像の隅である。
注記 画像原子の定義は,画像が対地参照されているか否かに関係なく適用される。対地参照
は,画像CRSの測地CRS又は投影CRSへの変換によって実行される。この変換は,画
像原子の定義には何も関係しない。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CD̲Datum
関連役割:
(集成)datum ← CD̲ImageDatum [1],関連名DefiningDatum
(逆:referenceSystem → SC̲ImageCRS [0..*],SC̲ImageCRSからだけナビゲート可能−表13
を参照)
パブリック属性: IO̲IdentifiedObject,IO̲IdentifiedObjectBase及びCD̲Datumから継承した八つの属性(原子の名
前,原子の別名,原子の識別子,原子の注釈,原子の固定点,原子の実現時期,原子の有効範
囲及び原子の適用分野)(表1,表2及び表33)に次を加える。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
セル内のピクセ
ル
pixelinCell
CD̲PixelinCell
M
1
画像グリッドを画像データ属性に関
連付ける方法の指定。
表40−CD̲PixelinCellクラスの要素定義
説明:
画像グリッドを画像データ属性に関連付ける方法の指定。
ステレオタイプ: CodeList
継承元:
(なし)
関連役割:
(なし)
利用クラス:
CD̲ImageDatum
パブリック属性:
名称
UML識別子
データ型
要求度
最大出現
回数
説明
セルの中央
cellCenter
CharacterString
C
1
画像座標系の原点は,グリッドセル
又は画像ピクセルの中心である。
セルの隅
cellCorner
CharacterString
C
1
画像座標系の原点は,グリッドセル
の隅又は隣接する画像ピクセル間
の中央である。
条件:列挙されている名称を指定する場合は,一つの名称に限る。
注記 表40は,対応国際規格と同一の内容・形式で作成したものであるが,“継承元”,“データ型”
など,CodeListの定義としては不要な項目も含まれている。
42
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表41−CD̲VerticalDatumクラスの要素定義
説明:
高さゼロ又は深さゼロの面として使用される特定の基準面を指定する文字記述若しくはパラメ
タの集合,又はその両方で,基準面の地球上の位置も含むものである。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CD̲Datum
関連役割:
(集成)datum → CD̲VerticalDatum [1],関連名DefiningDatum
(逆:referenceSystem → SC̲VerticalCRS [0..*],SC̲VerticalCRSからだけナビゲート可能−表
14を参照)
パブリック属性: IO̲IdentifiedObject,IO̲IdentifiedObjectBase及びCD̲Datumから継承した八つの属性(原子の名
前,原子の別名,原子の識別子,原子の注釈,原子の固定点,原子の実現時期,原子の有効範
囲及び原子の適用分野)。表1,表2及び表33を参照。
11
座標演算パッケージ
11.1
座標演算の一般的特性
この規格では,次の下位型の座標演算を区別する。
a) 座標換算は,ある座標参照系から同じ原子に基づく別の座標参照系へ座標を変更する。
b) 座標変換は,ある座標参照系から異なる原子に基づく別の座標参照系へ座標を変更する。
c) 連結座標演算は,繰返しのない座標換算若しくは座標変換又はその両方の一連の処理である。
d) パススルー座標演算によって,座標組の部分集合を座標演算の対象にすることができる。その部分集
合以外の座標組の座標は,変更されない。
座標演算は,B.4において詳述する。
座標演算は時間変動してもよい。演算元CRS及び演算先CRSが相対的に移動している場合には,時間
変動しなければならない。座標演算が時間変動する場合は,用いる座標演算手法もまた時間変動しなけれ
ばならない。その座標演算の用いるパラメタの一部が時間を含むことになる。
例 パラメタによっては,時間,速度,加速度の値及び単位をもつ場合がある。
11.2
座標演算パッケージのUMLスキーマ
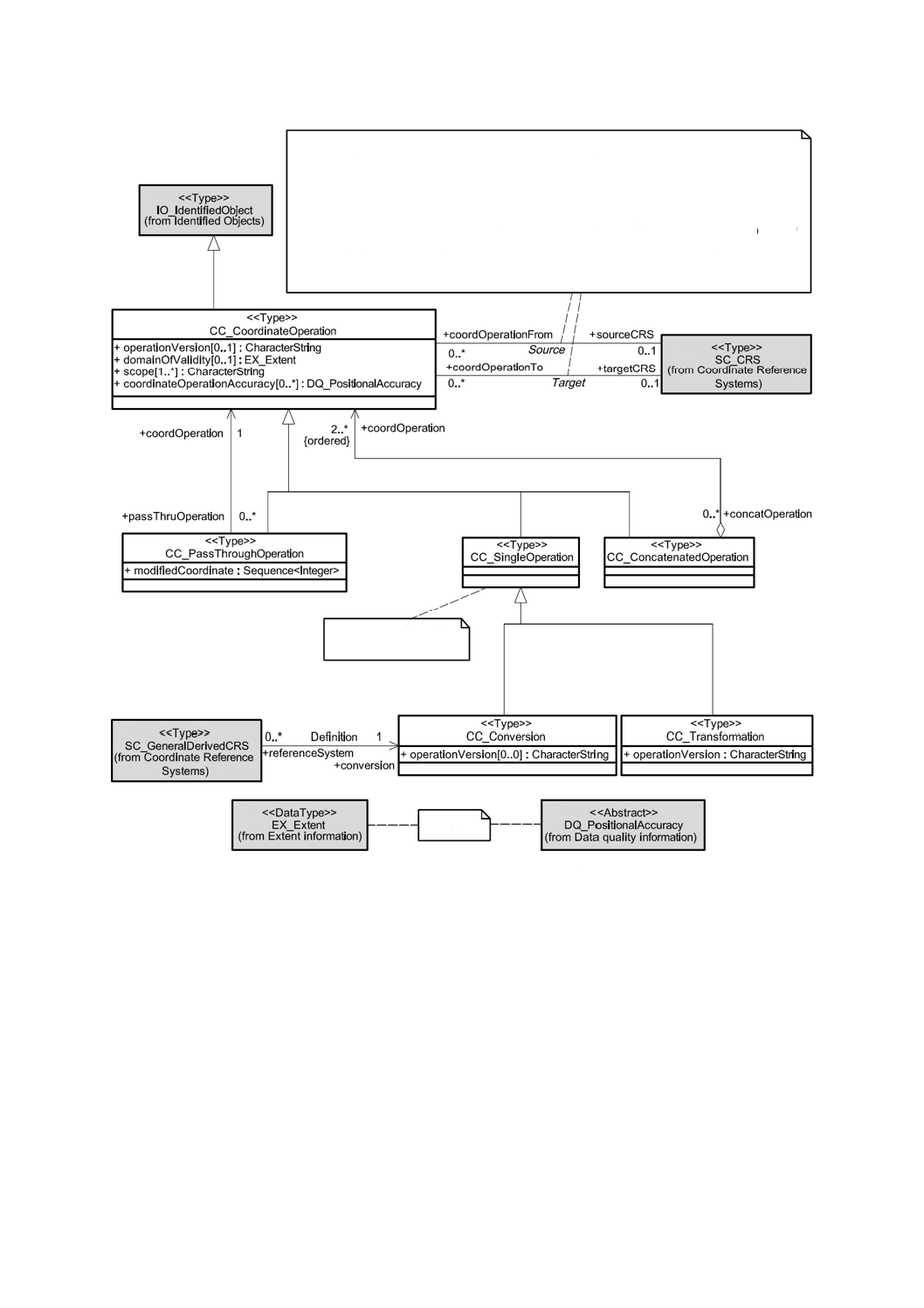
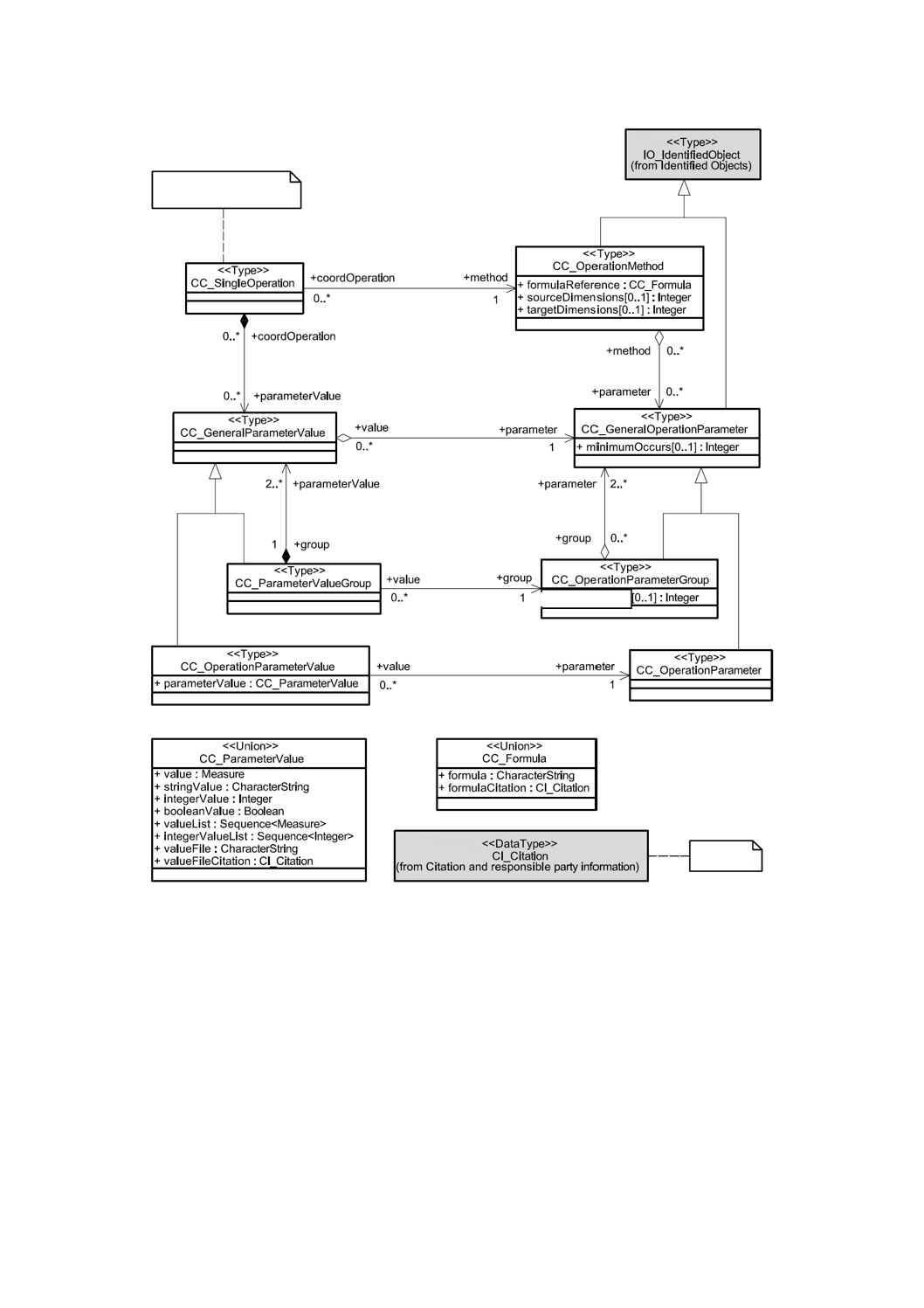
図11及び図12は,CC̲CoordinateOperationパッケージの第1部及び第2部のUMLクラス図を示す。図
11内に示されているように,図12は,図11に示すCC̲SingleOperationクラスから追加されたクラス及び
関連付けを示している。CC̲CoordinateOperation パッケージのオブジェクトクラスの定義は,表42から表
56までに示す。
43
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図11−CC̲CoordinateOperationパッケージの第1部
“sourceCRS” 及び “targetCRS” の関連付けは,座標変換の場合に限り必須となる。座標換算の演算
元CRS及び演算先CRSはそれらの関連付けでは指定されず,GeneralDerivedCRSからSingleCRS
への関連付けを通して指定される。
連結座標演算列のn個の座標演算の場合
演算元CRS(連結座標演算)= 演算元 CRS(座標演算ステップ1)
演算先CRS(座標演算ステップi)= 演算元CRS(座標演算ステップi + 1),i = 1 ...(n − 1)
演算先CRS(連結座標演算)= 演算先CRS(座標演算ステップn)
逆座標演算が,順方向座標演算手法によって一意に定義される場合は,順方向座標演算ではなく,上
記の座標演算ステップの幾つかで逆座標演算を使用してもよい。
ISO 19115
で定義
他のクラスへの追加関連付
けは,パッケージ図第2部に
示す。
44
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図12−CC̲CoordinateOperationパッケージの第2部
ISO 19115
で定義
このクラスはパッケージ図
第1部より。
+maximumOccurs
45
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表42−CC̲CoordinateOperationクラスの要素定義
説明:
座標を別の座標参照系に変換又は換算する,座標に対する数学的演算。全てではないが多くの
座標演算(CRS AからCRS B)は,逆座標演算(CRS BからCRS A)も一意に定義する。逆座
標演算の座標演算手法アルゴリズムは,順方向のアルゴリズムと同じであるが,一部の座標演
算パラメタ値の符号を逆にしなければならない場合がある。順逆両方向の座標演算に異なるア
ルゴリズムが必要であるが,同じ座標演算パラメタ値が使用される場合もある。全く異なるパ
ラメタ値が(一部)必要な場合には,異なる座標演算を定義しなければならない。
ステレオタイプ: Type
クラス属性:
Abstract
継承元:
IO̲IdentifiedObject
関連役割:
sourceCRS → SC̲CRS [0..1],関連名Source
targetCRS → SC̲CRS [0..1],関連名Target
(集成)coordOperation ← CC̲ConcatenatedOperation [2..*] {ordered}
(逆:concatOperation → CC̲ConcatenatedOperation [0..*],CC̲ConcatenatedOperationからだけ
ナビゲート可能−表46を参照)
coordOperation ← CC̲PassThroughOperation [1]
(逆:passThruOperation → CC̲PassThroughOperation [0..*],CC̲PassThroughOperationからだ
けナビゲート可能−表47を参照)
(IO̲IdentifiedObjectから継承された関連)
関連Source及びTargetに関する備考
“sourceCRS”及び“targetCRS”の関連は,座標変換の場合に限り必須となる。座標換算の演
算元CRS及び演算先CRSは,それらの関連では指定されず,GeneralDerivedCRSからSingleCRS
の関連を通して指定される。
連結座標演算列のn個の座標演算の場合
演算元CRS(連結座標演算)=演算元CRS(座標演算ステップ1)
演算先CRS(座標演算ステップi)=演算元CRS(座標演算ステップi+1),i=1...(n−1)
演算先CRS(連結座標演算)=演算先CRS(座標演算ステップn)
逆座標演算が,順方向座標演算手法によって一意に定義される場合は,順方向座標演算ではな
く,上記の座標演算ステップの幾つかで逆座標演算を使用してもよい。
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(座標演算の名前,
座標演算の別名,座標演算の識別子及び座標演算の注釈)(表1及び表2を参照)に次を加える。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
座標演算のバー
ジョン
operationVersion
CharacterString
C
1
座標変換のバージョン(パラメ
タの統計学的性質によるイン
スタンス化)。座標変換を記述
するときに,必須であるが,座
標換算に与えてはならない。
座標演算の有効
範囲
domainOfValidity
EX̲Extent
O
1
この座標演算が有効である区
域,地域又は時間枠。
座標演算の適用
分野
scope
CharacterString
M
N
この座標演算が有効な用途又
は用途の制限の記述。不明の場
合,“not known”と入力する。
座標演算の正確
度
coordinateOperation
Accuracy
DQ̲Positional
Accuracy
O
N
この座標演算が点の位置の正
確度に及ぼす影響の推測値。演
算元座標に誤差がないという
仮定のもと,この座標演算の演
算先座標の位置誤差推測値を
与える。
46
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表43−CC̲SingleOperationクラスの要素定義
説明:
単一の(連結されていない)座標演算。
ステレオタイプ: Type
クラス属性:
Abstract
継承元:
CC̲CoordinateOperation
関連役割:
method → CC̲OperationMethod [1]
(合成)parameterValue → CC̲GeneralParameterValue [0..*]
(CC̲CoordinateOperationから継承された関連)
パブリック属性: IO̲IdentifiedObject,IO̲IdentifiedObjectBase及びCC̲CoordinateOperationから継承された八つの
属性(座標演算の名前,座標演算の別名,座標演算の識別子,座標演算の注釈,座標演算のバ
ージョン,座標演算の有効範囲,座標演算の適用分野及び座標演算の正確度)。表1,表2及び
表42を参照。
表44−CC̲Transformationクラスの要素定義
説明:
入力座標及び出力座標をそれぞれ異なる原子に関連付ける座標演算。座標変換のパラメタは,
両方の座標参照系における一連の点の座標を含むデータから観測に基づき導出される。この計
算過程は,通常,“過剰決定”状態であり,座標変換の誤差(又は正確度)推定を可能にする。
また,パラメタの統計学的性質のため,同じ演算元CRSと演算先CRSとの間の同一座標変換
でありながら,複数(の異なる)バージョンが発生する場合もある。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CC̲SingleOpereration
関連役割:
(CC̲SingleOperationから継承された関連)
パブリック属性: IO̲IdentifiedObject,IO̲IdentifiedObjectBase及びCC̲CoordinateOperationから継承された八つの
属性(座標演算の名前,座標演算の別名,座標演算の識別子,座標演算の注釈,座標演算のバ
ージョン,座標演算の有効範囲,座標演算の適用分野及び座標演算の正確度)(表1,表2及び
表42を参照),そのうち,一つを次のように修正している。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
座標演算のバー
ジョン
operationVersion
CharacterString
M
1
座標変換のバージョン(パラメタの
統計学的性質によるインスタンス
化)。この属性は,座標変換では,必
須である。
47
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表45−CC̲Conversionクラスの要素定義
説明:
出力座標が入力座標と同じ原子に関連付けられる座標演算。最もよく知られている座標換算の
例は,地図投影である。座標換算を記述するパラメタ値は,観測によって導出されるのではな
く,定義として与えられる。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CC̲SingleOperation
関連役割:
conversion ← SC̲GeneralDerivedCRS [1],関連名Definition
(逆:referenceSystem → SC̲GeneralDerivedCRS [0..*],SC̲GeneralDerivedCRSからだけナビゲ
ート可能−表7を参照)
(CC̲SingleOperationから継承された関連)
パブリック属性: IO̲IdentifiedObject,IO̲IdentifiedObjectBase及びCC̲CoordinateOperationから継承された八つの
属性(座標演算の名前,座標演算の別名,座標演算の識別子,座標演算の注釈,座標演算のバ
ージョン,座標演算の有効範囲,座標演算の適用分野及び座標演算の正確度)(表1,表2,及
び表42を参照),そのうち,一つを次のように修正している。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
座標演算のバー
ジョン
operationVersion
CharacterString
O
0
この属性は,座標換算では使用され
ない。
表46−CC̲ConcatenatedOperationクラスの要素定義
説明:
単一の座標演算を二つ以上順序付けた並び。座標演算の並びは,ステップ(n+1)の演算元座
標参照系が,ステップ(n)の演算先座標参照系と同じでなければならないという要件によって
制約を受ける。第1ステップの演算元座標参照系及び最終ステップの演算先座標参照系は,連
結座標演算に関連付けられている演算元座標参照系及び演算先座標参照系となる。逆座標演算
が,順方向座標演算手法によって一意に定義される場合は,順方向座標演算ではなく,上記の
座標演算ステップの幾つかで逆座標演算を使用してもよい。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CC̲CoordinateOperation
関連役割:
(集成)coordOperation → CC̲CoordinateOperation [2..*] {ordered}
(CC̲CoordinateOperationから継承された関連)
パブリック属性: IO̲IdentifiedObject,IO̲IdentifiedObjectBase及びCC̲CoordinateOperationから継承された八つの
属性(座標演算の名前,座標演算の別名,座標演算の識別子,座標演算の注釈,座標演算のバ
ージョン,座標演算の有効範囲,座標演算の適用分野及び座標演算の正確度)。表1,表2及び
表42を参照。
48
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表47−CC̲PassThroughOperationクラスの要素定義
説明:
パススルー座標演算は,座標組の部分集合が,特定の座標演算の対象となるように指定する。
ステレオタイプ:
Type
クラス属性:
Concrete
継承元:
CC̲SingleOperation
関連役割:
(集成)coordOperation → CC̲CoordinateOperation [1]
(CC̲CoordinateOperationから継承された関連)
パブリック属性:
IO̲IdentifiedObject,IO̲IdentifiedObjectBase及びCC̲CoordinateOperationから継承された八つの
属性(座標演算の名前,座標演算の別名,座標演算の識別子,座標演算の注釈,座標演算のバ
ージョン,座標演算の有効範囲,座標演算の適用分野及び座標演算の正確度)(表1,表2及
び表42を参照)に次を加える。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
修正された座標
modifiedCoor
dinate
Sequence<Intege
r>
M
1
このパススルー演算によって影響
を受ける座標の座標組における位
置を定義する順序付けられた正の
整数の列。
表48−CC̲OperationMethodクラスの要素定義
説明:
座標演算の実行に使用される手法(アルゴリズム又は手順)。
ステレオタイプ:
Type
クラス属性:
Concrete
継承元:
IO̲IdentifiedObject
関連役割:
(集成)parameter → CC̲GeneralOperationParameter [0..*]
method ← CC̲SingleOperation [1]
(逆:coordOperation → CC̲SingleOperation [0..*],CC̲SingleOperationからだけナビゲート
可能−表43を参照)
(IO̲IdentifiedObjectから継承された関連)
パブリック属性:
IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(座標演算の手法
名,座標演算手法名の別名,座標演算手法の識別子及び座標演算手法の注釈)(表1及び表2
を参照)に次を加える。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
座標演算手法の公
式参照
formulaRefere
nce
CC̲Formula
M
1
この座標演算手法に使用される公
式又は手順。これは,出版物への
参照でもよい。演算手法は解析的
でなくてもよいが,その場合,こ
の属性は,解析的な公式ではなく,
手順を参照するか,含むかするこ
とに注意する。
演算元CRSの次元
演算元座標参照系
の次元
sourceDimens
ions
Integer
O
1
この座標演算手法の演算元CRSの
次元数。
演算先CRSの次元
演算先座標参照系
の次元
targetDimensi
ons
Integer
O
1
この座標演算手法の演算先CRSの
次元数。
49
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表49−CC̲Formulaクラスの要素定義
説明:
座標演算手法の公式の指定。
ステレオタイプ: Union
継承元:
(なし)
関連役割:
(なし)
利用クラス:
CC̲OperationMethod
パブリック属性:
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
座標演算手法
の公式
formula
CharacterString
C
1
この演算手法に使用される公式
(複数可)又は手順。
座標演算手法
の公式引用
formulaCitation CI̲Citation
C
1
この座標演算手法に使用される
公式(複数可)又は手順が得られ
る出版物への参照。
条件:列挙されている属性を指定する場合は,一つの属性に限る。
表50−CC̲GeneralOperationParameterクラスの要素定義
説明:
座標演算手法が使用するパラメタ又はパラメタのグループの定義。
ステレオタイプ: Type
クラス属性:
Abstract
継承元:
IO̲IdentifiedObject
関連役割:
(集成)parameter ← CC̲OperationMethod [0..*]
(逆:method → CC̲OperationMethod [0..*],CC̲OperationMethodからだけナビゲート可能−
表48を参照)
(集成)parameter ← CC̲OperationParameterGroup [2..*]
(逆:group → CC̲OperationParameterGroup [0..*],CC̲OperationParameterGroupからだけナ
ビゲート可能−表51を参照)
(集成)parameter ← CC̲GeneralParameterValue [1]
(逆:value → CC̲GeneralParameterValue [0..*],CC̲ GeneralParameterValueからだけナビゲー
ト可能−表53を参照)
(IO̲IdentifiedObjectから継承された関連)
パブリック属性: IO̲IdentifiedObject及びIO̲IdentifiedObjectBaseから継承された四つの属性(座標演算のパラメ
タ名,座標演算のパラメタの別名,座標演算のパラメタの識別子及び座標演算のパラメタの注
釈)(表1及び表2を参照)に次を加える。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
最小出現回数
minimumOcc
urs
Integer
O
1
このパラメタグループ又はパラメタ
の値が要求される最小回数。この属性
を省略すると,最小出現回数は1とな
る。
50
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表51−CC̲OperationParameterGroupクラスの要素定義
説明:
座標演算手法が使用する関連パラメタのグループの定義。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CC̲GeneralOperationParameter
関連役割:
(集成)parameter → CC̲GeneralOperationParameter [2..*]
group ← CC̲ParameterValueGroup [1]
(逆:value → CC̲ParameterValueGroup [0..*],CC̲ParameterValueGroupからだけナビゲート
可能−表54を参照)
(CC̲GeneralOperationParameterから継承された関連)
パブリック属性: IO̲IdentifiedObject,IO̲IdentifiedObjectBase及びCC̲GeneralOperationParameterから継承された
五つの属性(座標演算のパラメタ名,座標演算のパラメタの別名,座標演算のパラメタの識別
子,座標演算のパラメタの注釈及び最小出現回数)(表1,表2,及び表50を参照)に次を加
える。
属性名
UML識別子
データ型
要求度
最大出現回
数
属性説明
最大出現回数
maximumOccurs
Integer
O
1
このパラメタグループ又はパラメ
タの値を含めることができる最大
回数。この属性を省略すると,最大
出現回数は1となる。
表52−CC̲OperationParameterクラスの要素定義
説明:
座標演算手法が使用するパラメタの定義。多くのパラメタ値は数値であるが,ほかの型のパラ
メタ値も可能である。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CC̲GeneralOperationParameter
関連役割:
parameter ← CC̲OperationParameterValue [1]
(逆:value → CC̲OperationParameterValue [0..*],CC̲OperationParameterValueだけからナビ
ゲート可能−表55を参照)
(CC̲GeneralOperationParameterから継承された関連)
パブリック属性: IO̲IdentifiedObject,IO̲IdentifiedObjectBase及びCC̲GeneralOperationParameterから継承された
五つの属性(座標演算のパラメタ名,座標演算のパラメタの別名,座標演算のパラメタの識別
子,座標演算のパラメタの注釈及び最小出現回数)(表1,表2,及び表50を参照)。
表53−CC̲GeneralParameterValue クラスの要素定義
説明:
パラメタ値又はパラメタ値のグループ。
ステレオタイプ: Type
クラス属性:
Abstract
継承元:
(なし)
関連役割:
(合成)parameterValue ← CC̲SingleOperation [0..*]
(逆:coordOperation → CC̲SingleOperation [0..*],CC̲SingleOperationからだけナビゲート可
能−表43を参照)
(合成)parameterValue ← CC̲ParameterValueGroup [2..*]
(逆:group → CC̲ParameterValueGroup [1],CC̲ParameterValueGroupからだけナビゲート可
能−表54を参照)
(集成)parameter → CC̲GeneralOperationParameter[1]
パブリック属性: (なし)
51
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表54−CC̲ParameterValueGroupクラスの要素定義
説明:
関連パラメタ値のグループ。座標演算又は高位水準のParameterValueGroupにおいて,同じグル
ープを複数回繰り返すことができるのは,それらのインスタンスが,グループ間で適切に区別
されている一つ以上のParameterValueの異なる値を含む場合である。
ステレオタイプ: Type
クラス属性:
Concrete
継承元:
CC̲GeneralParameterValue
関連役割:
(合成)parameterValue → CC̲GeneralParameterValue [2..*]
group → CC̲OperationParameterGroup [1]
(CC̲GeneralParameterValueから継承された関連)
パブリック属性: (なし)
表55−CC̲OperationParameterValueクラスの要素定義
説明:
パラメタ値,順序付けられた値の列,又はパラメタ値のファイルへの参照。
ステレオタイプ:
Type
クラス属性:
Concrete
継承元:
CC̲GeneralParameterValue
関連役割:
(集成)parameter → CC̲OperationParameter [1]
(CC̲GeneralParameterValueから継承された関連)
パブリック属性:
CC̲GeneralParameterValueから継承された属性はなし(表53を参照)。次の属性がある。
属性名
UML識別子
データ型
要求度
最大出現
回数
属性説明
パラメタ値
parameterValue
CC̲ParameterValue
M
1
座標演算パラメタの値。
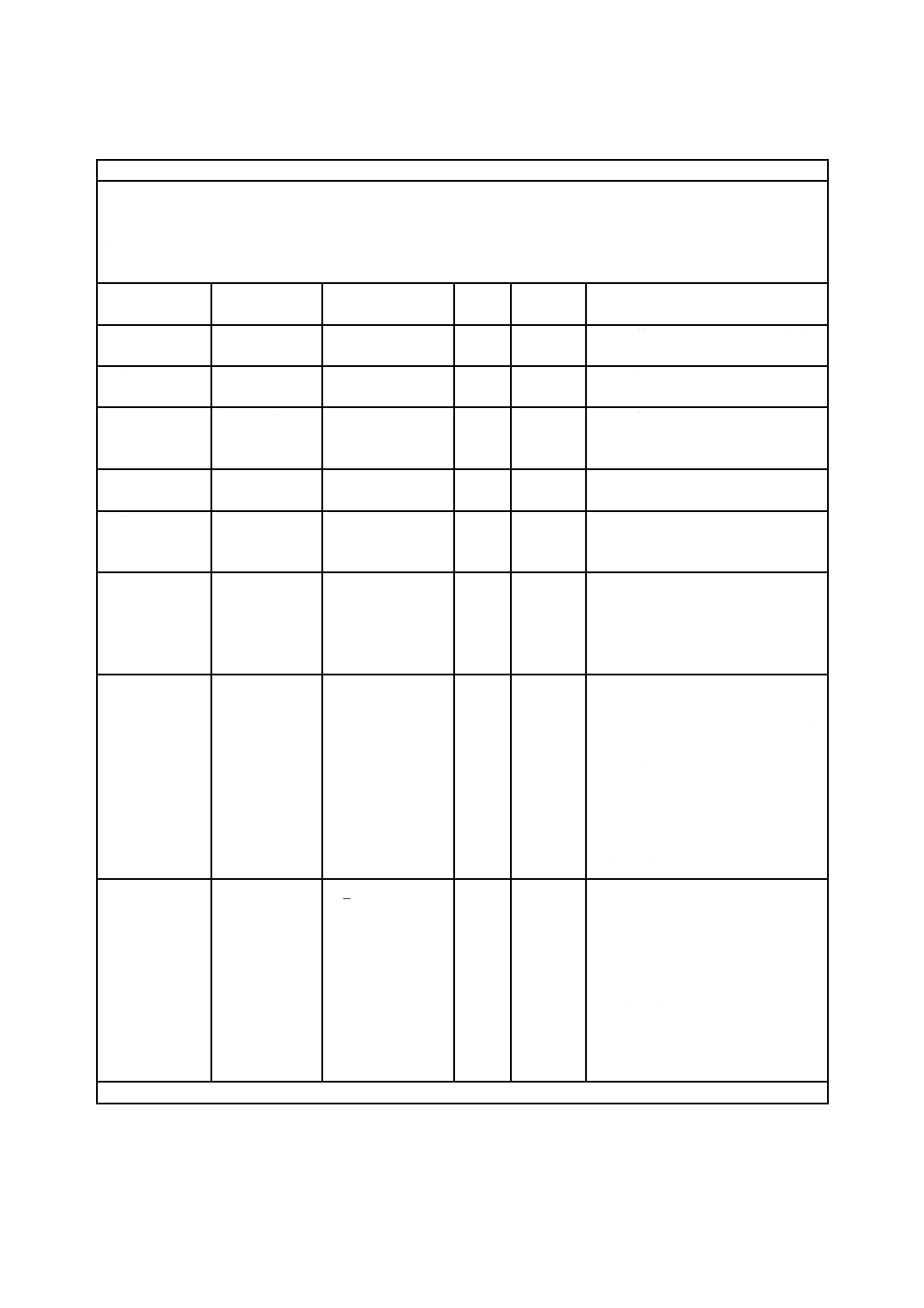
52
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表56−CC̲ParameterValueクラスの要素定義
説明:
座標演算パラメタの値。
ステレオタイプ: Union
継承元:
(なし)
関連役割:
(なし)
利用クラス:
CC̲OperationParameterValue
パブリック属性:
属性名
UML識別子
データ型
要求度 最大出現
回数
属性説明
演算パラメタの
数値
value
Measure
C
1
座標演算パラメタの数値,関連単位
付き。
演算パラメタの
文字列値
stringValue
CharacterString
C
1
座標演算パラメタの文字列値。文字
列値には,関連単位は付かない。
演算パラメタの
整数値
integerValue
Integer
C
1
座標演算パラメタの正の整数値で,
通常,計数に使用する。整数値には,
関連単位は付かない。
演算パラメタの
ブール値
booleanValue
Boolean
C
1
座標演算パラメタのブール値。ブー
ル値には,関連単位は付かない。
演算パラメタの
値リスト
valueList
Sequence<Measure>
C
1
座標演算パラメタのリストの二つ以
上の数値列(順序付けられた集まり)
で,各値は同じ関連単位をもつ。
演算パラメタの
整数値リスト
integerValueList
Sequence<Integer>
C
1
座標演算パラメタのリストの二つ以
上の整数値列(順序付けられた集ま
り)で,通常,計数に使用される。
リスト中の整数値には,関連単位は
付かない。
演算パラメタの
ファイル参照
valueFile
CharacterString
C
1
一つ以上のパラメタ値を格納するフ
ァイル又はファイルの一部への参
照。ファイルの一部を参照する場合
には,ファイルは,XML符号化文書
など,複数の識別された部分を格納
していなければならない。さらに,
参照されるファイル又はファイルの
一部は,XML文書で可能なように,
同じファイル又は別のファイルの別
の部分を参照できる。
演算パラメタの
ファイル参照の
引用
valueFileCitation CI̲Citation
C
1
一つ以上のパラメタ値を格納するフ
ァイル又はファイルの一部への参照
の引用。ファイルの一部を参照する
場合には,ファイルは,XML符号化
文書など,複数の識別された部分を
格納していなければならない。さら
に,参照されるファイル又はファイ
ルの一部は,XML文書で可能なよう
に,同じファイル又は別のファイル
の別の部分を参照できる。
条件:列挙されている属性を指定する場合は,一つの属性に限る。
53
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
抽象試験項目群
A.1 クラスA−座標参照系の適合性
A.1.1 CRSの抽象試験項目群
座標参照系がこの規格に適合していることを検査するには,座標参照系がA.1.2〜A.1.4の要件を満たし
ていることを検査する必要がある。座標参照系の記述については,箇条6〜箇条10で示した必須要素及び
条件付き要素(条件が真の場合)に対して適合性を試験しなければならない。座標参照系の型が投影であ
る場合,箇条11で要求しているように,必須要素及び条件付き要素属性(条件が真の場合)に試験を拡張
しなければならない。
A.1.2 試験項目識別子:完全性試験
a) 試験目的 必須であると規定しているか又は指定した条件の下で必須であると規定している関連要素
を全て,記述しているかどうかを判断する。
b) 試験方法 座標参照系を検査して,座標参照系の記述に表1〜表41(投影座標参照系の場合は,表42
〜表56をこれに加える。)でその系に必須と指定している全ての要素を最低限含むことを確認する。
c) 参照 箇条6〜箇条10(投影座標参照系の場合は,箇条11をこれに加える。)
d) 試験種類 性能
A.1.3 試験項目識別子:最大出現回数試験
a) 試験目的 各座標参照系要素の出現回数が,この規格で規定している回数を超えないことを確認する。
b) 試験方法 提供される各要素体及び要素の出現回数について対象の座標参照系を調査して,それぞれ
の出現回数が箇条6〜箇条10(投影座標参照系の場合は,箇条11をこれに加える。)で規定している
“最大出現回数”属性を超えないことを確認する。
c) 参照 箇条6〜箇条10(投影座標参照系の場合は,箇条11をこれに加える。)
d) 試験種類 性能
A.1.4 試験項目識別子:データ型試験
a) 試験目的 データ集合内の各座標参照系が規定のデータ型を使用しているかどうかを判断する。
b) 試験方法 座標参照系の記述の各要素のデータ型を検査して,それが,箇条6〜箇条10(投影座標参
照系の場合は,箇条11をこれに加える。)で規定しているデータ型であることを確認する。
c) 参照 箇条6〜箇条10(投影座標参照系の場合は,箇条11をこれに加える。)
d) 試験種類 性能
A.2 クラスB:座標演算の適合性
A.2.1 座標演算の抽象試験項目群
座標演算がこの規格に適合していることを検査するには,座標演算がA.2.2〜A.2.4の要件を満たしてい
ることを検査する必要がある。
A.2.2 試験項目識別子:完全性試験
a) 試験目的 必須であると規定しているか又は指定した条件の下で必須であると規定している関連要素
を全て,記述しているかどうかを判断する。
54
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 試験方法 座標演算の記述に,表42〜表56で必須と指定している全ての要素を含むことを検査する。
c) 参照 箇条11
d) 試験種類 性能
A.2.3 試験項目識別子:最大出現回数試験
a) 試験目的 各座標演算要素の出現回数が,この規格で規定している回数を超えないことを確認する。
b) 試験方法 提供される各要素体及び要素の出現回数について座標演算データ集合を調査して,それぞ
れの出現回数が表42〜表56で規定している“最大出現回数”属性を超えないことを確認する。
c) 参照 箇条11
d) 試験種類 性能
A.2.4 試験項目識別子:データ型試験
a) 試験目的 規定しているデータ型をデータ集合内の各座標演算要素で使用しているかどうかを判断す
る。
b) 試験方法 座標演算の記述の各要素のデータ型を検査して,それらが表42〜表56で規定しているデ
ータ型であることを確認する。
c) 参照 箇条11
d) 試験種類 性能
55
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
座標による空間参照のモデル化について
B.1
座標参照系
B.1.1 座標
空間地物の幾何は,幾何学的不変量,すなわち,形状及び相対的な位置・方向(厳密にいえば距離の比
と角度だけが不変量)を用いて表現することができる。ただし,これは実用的であるとはいえない。
空間データに対する計算の実行が,大変な作業となるであろう。点の位置を座標を用いて表現すれば,
概括及び計算が単純化される。ただし,この便利さには,代償が伴う。平面の三角形など単純な形状の記
述にも,一つの距離比及び角度の代わりに,六つの座標が必要となる。固有の自由度(二次元で4,三次
元で7)は,座標軸の原点,その単位及び軸の方向を選択することで満足されなければならない。この選
択という行為が意味することは,座標というものが,自然現象ではなく,人間の定義する量であるという
事実である。この点は自明であるはずだが,見過ごされることが多く,その結果,座標の解釈及びその誤
差特性に影響を及ぼす。
座標参照系(CRS)という概念は,座標空間の自由度を構成するパラメタの値の選択を表す。そのよう
な選択を行わなければならなかったため,世界中で多数の座標参照系が使用されることになった。また,
点の緯度及び経度が一意でないという事実があまり理解されていない原因にもなっている。座標参照系の
完全な定義がない場合,座標は最善の場合でも曖昧であり,最悪の場合は無意味となる。ただし,座標の
入替えのような目的では,完全な定義がなくても,座標系の出自を確認すれば十分である。
B.1.2 座標参照系−詳細
B.1.2.1 主な下位型座標参照系
下位型座標参照系は,8.2で規定されている。
座標参照系の下位型の分類基準は,各座標参照系と関連付けられている原子の型への参照による。次の
ように主要な下位型座標参照系が区別されている。
a) 測地。測地原子に関連付けられている座標参照系。測地座標参照系は,二次元又は三次元となり,だ
(楕)円体座標系及び三次元直交系に関連付けられる。二次元だ(楕)円体座標(緯度及び経度)を
用いる測地CRSは,地物の位置を,だ(楕)円体面上に記述する場合に使用される。三次元だ(楕)
円体座標[緯度,経度及びだ(楕)円体高(h)]を用いる測地CRSは,位置を,だ(楕)円体面上,
下方又は上方に記述する場合に使用される。三次元直交座標を用いる三次元測地CRSは,地球の中心
に対して位置を記述する場合に使用される。
b) 鉛直。鉛直原子に関連付けられている座標参照系。鉛直CRSは,重力の方向を利用して,高さ又は深
さの概念を定義する。したがって,だ(楕)円体高(h)は,鉛直座標参照系では表現できない。だ(楕)
円体高は,独立しては存在できず,三次元測地座標参照系で定義される三次元座標組の不可分の一部
としてだけ存在できる。
注記 深さは,重力ベクトルに局所的に従わない直線に沿って測定される場合もある。実例として,
掘削坑に沿って測定される油井又はガス井の深さがある。この掘削坑は,局所的な鉛直線と相
当に異なる場合がある。それでも掘削坑に沿った距離を“深さ”と表現する。
c) 施工基準。施工基準原子に関連付けられている座標参照系で,局所的な意味においてだけ使用される。
56
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この下位型は,次の二つの大まかなカテゴリの局所座標参照系のモデル化に使用される。
− 地表上又は近辺で行われる施工活動に適用される地球固定系。
− 路上走行車,船舶,航空機,宇宙船など移動するプラットフォーム上の座標。
地球固定施工基準CRSは,普通,地球表面の単純な平面近似に基づいており,地物の幾何的形状に対す
る地球の曲率の影響は無視される。座標の計算には,地球の曲率に対する補正なしで,単純な平面算術を
使用する。そうした施工基準CRSは相対的に小さな領域へ適用され,この場合,“局所的な意味”は“空
間的に局所”と同等になる。
移動するプラットフォーム上に用いられる施工基準CRSは,通常,測地CRS又は投影CRSに基づく座
標を計算するために計算上必要となる中間的座標参照系である。そのような施工基準座標参照系は,関連
付けられているプラットフォームの全ての動きの影響を受ける。その場合,“局所的な意味”とは,関連付
けられている座標が,移動するプラットフォームに相対であるときだけに有意であることを意味する。空
間的意味では,その適用領域が,プラットフォーム(例えば,動いている地震探査船)の直近から地球全
体(例えば,宇宙での応用)に拡張される場合がある。位置決めの計算に採用されている数学モデルが適
用領域を決定する。移動する施工基準CRSから地球基準座標参照系への座標変換には,時間依存座標演算
パラメタを含む。
d) 画像。画像CRSとは,画像に適用される施工基準CRSのことである。関連付けされている画像原子
の定義には,他の施工基準原子に関連しない二つのデータ属性が含まれる。
これらの主要な下位型座標参照系に加えて,ある種の関係及び制約のモデル化を可能にするため,さら
に,三つの下位型を区分する。追加される下位型は次による。
1) 導出座標参照系
2) 投影座標参照系
3) 複合座標参照系
B.1.2.2 導出座標参照系
座標参照系の中には,別の座標参照系に座標換算を適用して定義されるものがある。そのような座標参
照系を導出CRSといい,導出元の座標参照系を基底CRSという。導出CRSは,その基底CRSから原子
を継承する。
原則的には,全ての下位型の単一の座標参照系は,投影CRSを除いて,基底CRS又は導出CRSのいず
れかの役割を果たすことができる。
derivedCRStypeの導出CRSの例:“測地”は,前に定義した測地CRSに関して,その単位を修正したも
ので,前に定義した測地CRSは基底CRSの役割を果たす。
B.1.2.3 投影座標参照系
座標換算をだ(楕)円体の緯度及び経度座標値に適用することで,基底の測地CRSから導出される座標
参照系は,地図投影として知られている。投影CRSは,“投影”型の一般的な導出CRSとしてではなく,
それ自身の名前のオブジェクトクラスとしてモデル化される。最もよく見られる座標参照系の型の一つと
して投影CRSを認めている慣行を尊重するためである。
B.1.2.4 複合座標参照系
伝統的に水平位置と垂直位置とが区別されてきたため,真の三次元座標とはいえないが,実質的に水平
(二次元)座標及び垂直(一次元)座標をもつ座標参照系が形成されている。ある点の二つの水平座標と
別の座標参照系における高さ又は深さを組み合わせることは,確立された手法である。
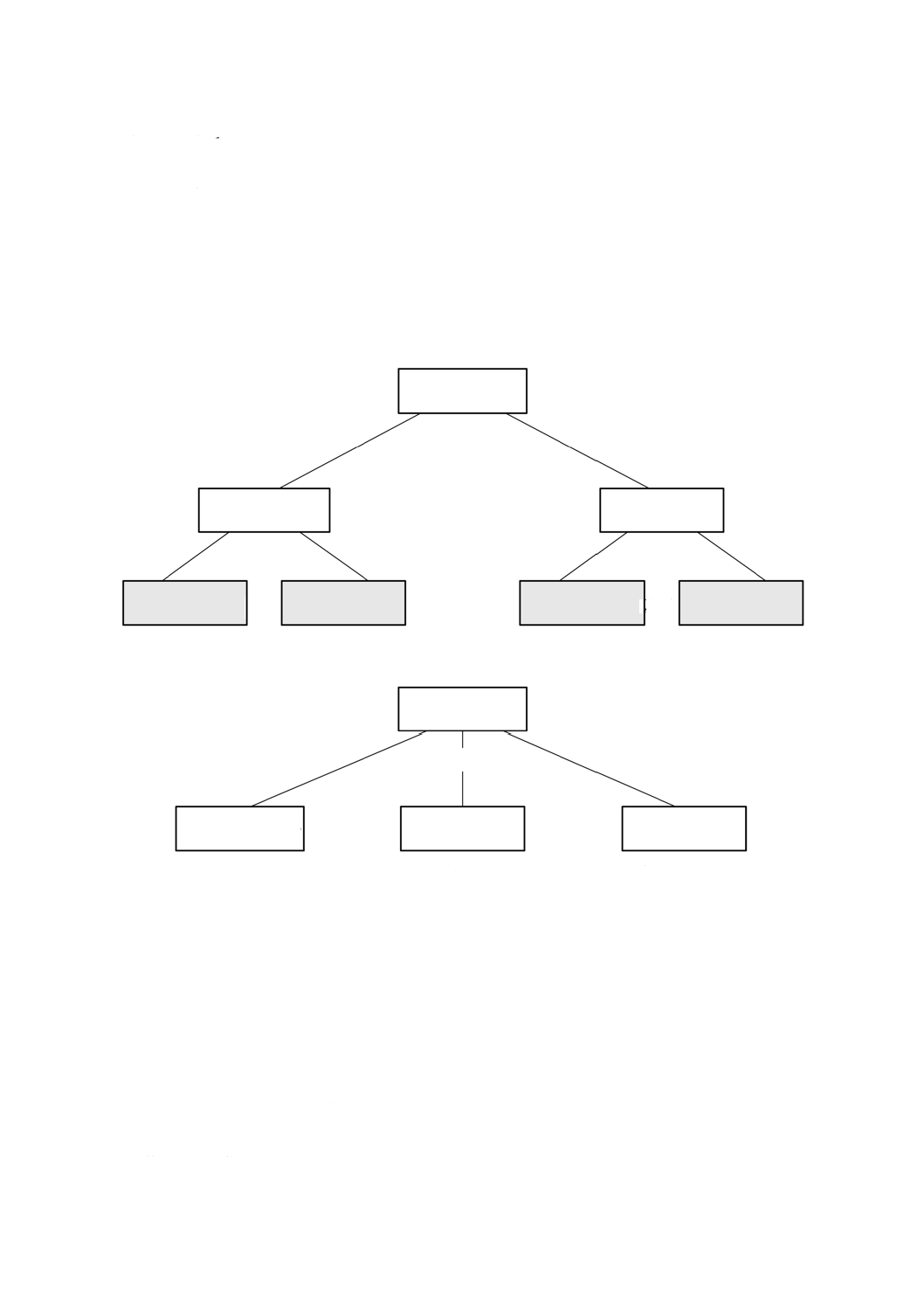
57
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
こうした二次元 + 一次元の座標が基づく座標参照系は,水平座標及び垂直座標を与える別々の水平座
標参照系及び鉛直座標系を組み合わせたものである。そのような座標系を複合座標参照系(複合CRS)と
いい,それ自身が複合でない二つ以上の単一の座標参照系の繰返しのない列から構成される。一般的に,
複合CRSは,任意の数の軸を含んでもよい。複合CRSの座標組内の座標順序は,構成要素の単一CRSの
順序,次に各CRSの座標組内の座標順序に従うことが望ましい。
二つ以上の座標系を組み合わせて,一つの複合座標参照系を形成する場合,CCRSのネスト化は許され
ない。個々の単一座標系は,集成されるだけである。図B.1は,空間複合座標参照系及び時空間複合座標
参照系の可能な複合化の例を示している。
図B.1−空間複合CRS及び時空間複合CRSの概念モデル
B.2
座標系
B.2.1 一般
座標系は,9.2で規定している。
点の座標は,座標系に記録される。座標系は,座標空間を張る座標系の軸の集合である。この概念は,
角度,距離などの不変量にいかに座標を関連付けるかを決定する数学的規則を含意している。つまり,座
標系は,距離,角度などの幾何的要素から座標をいかに算出するか,又は逆に座標から幾何的要素をいか
に算出するかを意味する。地図平面の点座標からの角度又は距離の導出に必要な計算法及びその逆の計算
法は,単純なユークリッド二次元算術である。だ(楕)円体(湾曲した二次元空間)の表面で同じことを
行うには,より複雑なだ(楕)円体計算が伴う。このような規則は,詳細には規定できないが,座標空間
の幾何的性質から導かれる。
複合CRS
次から構成
二次元測地CRS
次から構成
測地原子
及び
二次元だ(楕)
円体CS
及び
鉛直CRS
次から構成
鉛直原子
鉛直CS
及び
複合CRS
次から構成
二次元測地CRS
鉛直CRS
及び
及び
時間CRS
58
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 上記の記述では,“距離”という語を厳密な意味では使用していない。厳密には,座標系に定義
された単位で表示されるため,距離は不変な量ではない。距離の比が不変である。
B.2.2 座標系の軸
座標系の軸は,9.3で規定している。
座標軸の概念には,ある程度の説明が必要である。任意のx,y,z座標系を考えてみる。x軸は,y=z
=0による点の軌跡として定義できる。これは,x,y,z座標系が,直交系で,記述する空間がユークリッ
ド空間である場合には簡単に理解される。だ(楕)円体の表面など,曲率の大きい空間で,だ(楕)円体
座標系(2D又は3D)で幾何的形状が記述される場合,理解するのはやや難しくなる。緯度及び経度の曲
線座標に類推で同じ定義を適用すると,緯度軸は本初子午線,経度軸は赤道となるように思われるが,そ
れは満足できる定義ではない。
座標組の座標の順序は,座標軸の定義順と同じでなければならないという規定を頭におくと,座標系の
i番目の座標軸は,シーケンス番号が“i”に等しくない全ての座標が,局所的に定数値をもつ点の軌跡と
して定義される(ここで,i=1...n及びnは座標空間の次元である。)。
この定義における“局所的”という語の追加は,明らかに曖昧さが増すことになるが,それは意図的で
ある。ただし,任意の軸に関連付ける座標パラメタの定義は,一意である。座標軸自体は,一意の数学的
実体として解釈しない方がよく,関連付けられた座標パラメタはそう解釈することが望ましい。
例1 測地緯度は,与点を通るだ(楕)円体の垂線と赤道面との間の角度として定義され,北に向か
うものを通常正とする。しかし,だ(楕)円体座標系で使用される場合は,測地緯度軸は“北”
を指すものと記述される。だ(楕)円体の二つの異なる点において,“北”という方向は,空間
的に異なる方向となるが,緯度という概念は同じである。
座標軸の指定された方向が,単なる近似であることはよくあることである。したがって,一つの座標系
を若干回転させて二通りに使用することがある。
例2 同じだ(楕)円体座標系を利用する二つの測地座標参照系は,通常,二つの異なる測地原子に
よって,地球に関連付けられる。
B.3
原子
B.3.1 一般
原子は,箇条10で規定している。
原子は,座標系とオブジェクトとの関係を指定することで,座標参照系を生成する。原子は,B.1.1に記
述されているように,暗黙的に(時には明示的に),座標系の自由度を表すパラメタに対して選ばれた値を
含む。したがって,原子は,座標系の近似的な原点及び方向付けに関してある選択があったことを意味し
ている。
B.3.2 測地原子
B.3.2.1 一般
測地原子は,三次元又は水平(二次元)の座標参照系に使用される。地球の表面の広大な部分,最大限
その全体までを記述するために使用される。本初子午線の定義及びだ(楕)円体の定義を必要とする。
B.3.2.2 本初子午線
本初子午線は,経度の値を指定する元となる原点を定義する。多くの測地原子は,その本初子午線とし
て,グリニッジを使用する。
59
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.3.2.3 だ(楕)円体
だ(楕)円体は,ジオイドの表面を近似するものとして定義される。近似が有効である区域(伝統的に
は地域的であるが,衛星測位の到来によって全地球的な場合も多い。)の上で,だ(楕)円体は,通常,測
地CRSに関連づけられ,そして間接的に投影CRSに関連付けられる。
各測地原子に対して,一つのだ(楕)円体を指定しなければならない。計算上使用されない場合でも,
だ(楕)円体の指定は必要である。例えば,衛星軌道及び衛星の観測結果を用いた地上位置の計算に,測
地CRSが使用される場合である。地心直交座標系を用いた測地CRSの使用によって,明らかにだ(楕)
円体を使用する必要はなくなっているが,だ(楕)円体は,通常,関連する測地原子の決定に関係してい
る。さらに,一つ以上の測地CRSが同じ測地原子に基づくことがあるが,それには,その測地原子に関連
付けられる正確なだ(楕)円体が必要となる。
だ(楕)円体は,長半径及び逆へん(扁)平率の逆数,又は長半径及び短半径によって定義される。地
図帳における小スケールの地図作成など,ジオイド面を球で近似するような一部の応用例では,球の半径
だけを指定すればよい。
UMLモデルでは,それらの選択は,クラス“SC̲Ellipsoid”中の必須属性“semiMajorAxis”,及び
“secondDefiningParameter”属性によってモデル化される。後者の属性は,ステレオタイプ“Union”とと
もにCD̲SecondDefiningParameterクラスを使用する。すなわち,その属性中の一つだけがオブジェクトに
よって使用されることになる。上記のクラスは第二だ(楕)円体定義パラメタとして,semiMinorAxis若
しくはinverseFlatteningを指定すること,又は球体モデルが使用されていることを指定することを認めてい
る。球の場合,“Ellipsoid”クラスの属性“semiMajorAxis”は,球の半径として解釈される。
B.3.3 鉛直原子
この規格では,下位型の鉛直原子はモデル化されていないが,次の型の鉛直原子を区分できる。
a) ジオイド。(鉛直)座標系の軸のゼロ値は,等ポテンシャル面,通常,ジオイドを近似するために定義
される。そうした基準面は,通常,国家機関又は権威ある科学団体によって決定され,周知の名前を
もつ原子となる。これが,最もよく見られる型の鉛直原子である。
b) 深さ。鉛直軸のゼロ点は,鉛直測定値の使用目的にとって意味をもつ表面によって定義される。水路
図の場合,この表面は,引き潮時における公称推定海面(すなわち,波風及び潮流の影響のない海面)
である場合が多い。例として,低潮線(LAT: Lowest Astronomical Tide),Lowest Low Water Springs
(LLWS)などがある。別の例としては,定量河川放流時に現れる公称河川面として定義される傾斜
波状の河川原子がある。
c) 気圧。大気圧が,原点の定義の基準となっている場合は,鉛直原子は,型“気圧”となる。
d) 他の表面。石油の探査又は生産を例にとると,地学的に識別可能で有意な地下層の最上部,最下部な
どの地質学的形状が,鉛直原子として使用される場合がある。上記の三つの鉛直原子型の変化形も存
在するが,このカテゴリ下に一括される。
B.3.4 施工基準原子
施工基準原子は,局所的な意味でだけ使用され,施工基準(又は局所)座標参照系の原点を記述する。
施工基準原子における施工基準CRSの原点は,必ずしも,地球に相対的ではなく,移動するプラットフォ
ームであれ地表又は近傍の領域であれ,その有効範囲内の他の点に関して相対的に記述されるということ
を強調しておく。施工基準CRSと任意の測地CRS又は投影CRSとの関係は,座標演算を用いてだけ記述
できる。
60
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.3.5 画像原子
画像原子は,画像に座標系を関連付ける。画像原子の定義は,画像が対地参照されているかに関係なく
適用される。対地参照は,座標変換によって実行される。座標変換は,画像原子の定義には何も関係しな
い。画像原子は,座標系が画像平面内にあるということを暗黙的に意味する。原子は,座標系の原点及び
向きを画像平面内で定義するものである。
画像ピクセルグリッドは,一定の整数座標値をもつ直線の集合として定義される。“画像グリッド”とい
う用語は,画像CRSの概念を記述するため,他の規格でよく使用される。ただし,使用されている文脈の
中でその用語を正しく解釈するように注意を払う必要がある。“グリッドセル”という用語は,用語“ピク
セル”の代用として使用されることが多い。
画像のグリッド線は,二通りの方法で,ピクセル又はグリッドセルのデータ属性と関連付けられる(ISO
19123)。画像のデータ属性は,通常,ピクセル全体に関連付けられている値の平均値又は積分値を表す。
画像グリッドは,グリッド線が,ピクセルの中心を通るように,そのデータと関連付けることができる。
セルの中心は,したがって,整数の座標値をもつことになる。その場合,属性“セル内のピクセル”は,
値“cell centre”をもつことになる。
別の方法として,グリッド線がセルの中央でなく,セル又はピクセルの隅に関連付けられるように,画
像グリッドを定義してもよい。したがって,セルの中心は非整数の座標値をもち,少数部分は,常に,0.5
となる。属性“セル内のピクセル”は,値“cell corner”をもつことになる。
この観点の違いは,画像の解釈には何の影響も及ぼさないが,定義された画像を含む座標変換時には重
要になる。
B.4
座標演算
B.4.1 座標演算の一般的特性
座標演算は,箇条11で規定する。
任意の二つの座標参照系の間の関係が知られている場合,座標組は,別の座標参照系に変換又は換算す
ることができる。したがって,UMLモデルは,そうした座標演算の演算元座標参照系及び演算先座標参照
系を指定する。
注記1 座標演算は,一般的に,座標参照系Aを座標参照系Bに変換するといわれることが多い。こ
の表現は会話ではよいのであるが,座標演算は,座標参照系ではなく,座標に対して行われ
るということを認識しておく必要がある。これは,座標参照系が,別の座標参照系から座標
演算によっては生成できないことを意味するので,実装仕様の設計には重要となる。同様に,
座標演算は,例えば,座標の測定単位を変換するような,座標参照系定義の修正を行う場合
にも使用できない。こうした場合,常に,関係する演算元座標参照系及び演算先座標参照系
は,座標演算の前に存在している必要がある。
注記2 演算元座標参照系及び演算先座標参照系を明示するという規則には例外がある。この例外は,
いわゆる定義による座標換算に関連しており,B.4.2に示す。
この規格では,二つの下位型の単一座標演算を区別する。
− 座標換算−パラメタが存在しないか,又はパラメタが実測によって導出されるのではなく定義によっ
て与えられるもの。この演算は,原子の変更を一切伴わない。最もよく知られている型の座標換算は
地図投影である。
− 座標変換−座標に対する数学的演算で,パラメタが実測によって導出されるもの。この演算は,原子
61
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の変更を伴う。パラメタの確率的性質によって,同じ座標変換であっても,異なるバージョンが複数
生じる場合がある。したがって,所与の座標参照系の一対に対して,手法,パラメタ値及び正確度が
異なる複数の座標変換が存在する場合がある。
パラメタ値が得られれば,座標換算及び座標変換は共に類似の数学的過程を用いる。
B.4.2 座標換算
座標換算は,厳密に定義された(測定又は計算された結果でない),したがって,誤差のないパラメタ値
を使用する座標演算である。座標換算で結ばれる二つの座標参照系において対応する座標組の対は,固定
された算術的関係をもつ。座標換算の“演算元”又は“基底”座標参照系が指定されない場合,二つの座
標組の一方は,存在することができない。
この演算元からの導出による関係の最も有名な例として,投影座標参照系がある。投影座標参照系は,
常に,基底の測地座標参照系に関連付けられている。地図投影が,基底の測地座標参照系から投影座標参
照系を実効上定義する。この概念は,(導出された)座標参照系と座標換算との間の直接結合としてモデル
化されており,図6及び図11に図解がある。
B.4.3 連結座標演算
連結座標演算は,繰返しのない座標演算の列である。この座標演算の列は,各ステップの演算先座標参
照系が,次のステップの演算元座標参照系と同じでなければならないという要件によって制約を受ける。
第1ステップの演算元座標参照系及び最終ステップの演算先座標参照系は,連結座標演算に指定されてい
る演算元座標参照系及び演算先座標参照系となる。
上記の制約は,連結座標演算では,CC̲CoordinateOperationとSC̲CRSとの間の関連付けによって指定
される演算元座標参照系と演算先座標参照系とをもつ座標演算だけが許される,という意味に解釈しては
ならない。そういう解釈は,座標換算を除外することになる。連結座標演算は,座標変換若しくは座標換
算又はその両方を含むことができる。
座標換算の演算元座標参照系及び演算先座標参照系は,基底(すなわち,演算元)CRS及び定義となる
座標換算を指定して,SC̲GeneralDerivedCRSにおいて定義される。その場合,導出される座標参照系自体
が,演算先CRSとなる。連結座標演算で使用される場合,座標換算の演算元座標参照系及び演算先座標参
照系は,あるステップの演算先CRSが次のステップの演算元CRSに等しいという制約に従う。
連結座標演算クラスの主な目的は,演算元座標参照系から演算先座標参照系への座標の変更が直接的変
換によって不可であるとき,アプリケーションソフトウェアに望ましい経路を使用させる仕組みを用意す
ることである。
B.4.4 パススルー座標演算
この座標演算は,ある次元の入力座標組を必要とし,ある次元の出力座標組を生成する。演算元座標参
照系の次元が,演算先座標参照系の次元と同じである必要はない。
パススルー座標演算は,要求された座標演算の対象となる座標組の部分集合を指定する。ある座標演算
を参照し,その座標演算の影響を受ける座標の座標組での位置を定義する番号の列を指定するという形式
をとる。
注記 二つ以上の異なる座標参照系を組み合わせる複合座標参照系を定義する機能によって,ある問
題が発生する。例えば,ある複合座標参照系の水平成分だけ又は垂直成分だけを変換するよう
に要求した場合,水平座標又は垂直座標のいずれか一方だけに関する座標演算とかみあわなく
なるだろう。これは,人間にとっては小さな問題であるが,人間の操作を介さずに,自動演算
を行うべき座標変換ソフトウェアにとっては重大な問題である。ソフトウェアロジックは,二
62
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
次元CRSで行うべき座標演算を三(=2+1)次元の座標組に適用しなければならないという問
題に直面することになる。
B.4.5 座標演算手法及びパラメタ
座標演算の実行に使用されるアルゴリズムは,座標演算手法において定義される。各座標演算手法は,
複数のパラメタを使用し(ただし,一部の座標換算はパラメタを使用しない。),各座標演算が,それらの
パラメタに値を割り当てる。パラメタ及びその値は座標演算手法の公式と矛盾しないことが重要である。
一見同じような手法であるが,詳細に見ると明確に違う手法が幾つかある。その場合,異なるパラメタ値
が要求される。
大半のパラメタ値は数値であるが,座標演算手法によっては,特に,グリッド補間アルゴリズムを実装
する手法では,パラメタ値がファイル名及びロケーション(URIも想定される。)となる場合がある。例と
して,米国のNAD 27からNAD 83へのNADCON座標変換がある。そこでは,一連のグリッドファイル
の対の中の一つが使用される。
可能ならば,いつでも,よく知られている登録簿を参照するため,識別子を大いに利用するように推奨
する。多様な座標演算手法を記述するどころか,命名する標準的な方法もまだないのが現状である。した
がって,クライアントソフトウェアが,実装されている座標変換サーバによって座標演算を実行するよう
に要求する場合,別の名前を使用する完全に有効な手法が使用できるにもかかわらず,そのサーバが認識
しない座標演算手法を要求することもある。同じことが,座標演算手法によって使用される座標変換パラ
メタにもいえる。
認識及び妥当性検証を円滑に行うため,座標演算手法の公式を関連のオブジェクトに,可能ならば,動
作が確認できている実例とともに,含めるか参照することを推奨する。
注記 連結座標演算及びパススルー座標演算は,単一の座標演算を列挙しており,それ自体では,指
定すべき座標演算手法を要求しない。
B.4.6 パラメタグループ
座標演算手法によっては,幾つかの座標演算パラメタのグループを一つのグループとして繰り返し使用
することを要求するものがある。また,多数の座標演算パラメタを利用する座標演算手法もある。そうし
た場合,関連パラメタをグループ化すると便利である。各座標演算パラメタグループは,座標演算パラメ
タ又はネストされた複数の座標演算パラメタグループの集まりから構成される。その後,二つ以上の座標
演算パラメタグループが,特定の座標演算手法に関連付けられる。こうしたモデル化方法は必須ではない。
全ての座標演算パラメタを直接,座標演算手法に割り当てることもできる。
B.4.7 実装上の考慮事項
もし実装についてある程度の検討を行わなければ,この附属書の説明は,不十分であろう。座標変換サ
ービスは,恒久的なデータストアに明示的には格納されていない座標演算を自動的に導出できる必要があ
る。すなわち,それ自体で連結演算又は逆演算を導出できる必要がある。それは,明示的に定義される座
標演算に,座標参照系の想定できるあらゆる対を格納することは実際的に不可能であるという理由による。
ソフトウェア実装を成功させる鍵は,意味のある制約及び妥当性検証をその過程に適用する機能である。
例えば,North American Datum of 1927の座標をAustralian Geodetic Datum of 1966座標に変換する連結座標
演算を導出するのは数学的に可能である。ただし,実際的には,その演算は無意味であろう。そうした座
標演算を無効とマークする重要な妥当性検証とは,二つの有効範囲を比較し,それらの間に重複がないこ
とを結論するものが考えられる。
座標変換サービスは,順方向座標演算(“A”から“B”)から逆座標演算又は補完座標演算(“B”から
63
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
“A”)を導出又は推測できる必要もある。座標参照パラメタデータの恒久的なデータストアの大半は,上
記の二つの座標演算の一方だけを記録する。逆座標演算の導出ロジックは,サーバ上か又はクライアント
上かに関係なく,座標演算を実行するアプリケーションソフトウェアに組み込んでおく必要がある。
逆座標演算のアルゴリズムが,順方向アルゴリズムと同じで,逆演算を完全に定義するには,パラメタ
値の符号だけを逆にするだけでよい場合もある。例としては,7パラメタHelmert変換(位置ベクトル及
び座標枠の回転に関する手法)がある。
多項式による座標演算手法では,全てではないが,ほとんどのパラメタ値の符号を逆転することだけを
要求するものがある。また,順方向座標演算及び逆座標演算の二つのアルゴリズムを含意する座標演算手
法もある。パラメタは,その場合,一般的に同じになる。後者の場合は,普通地図投影に適用される。
最後に,パラメタ値は完全に異なるが,同じアルゴリズムを逆座標演算に使用する場合もある。これは,
多項式座標演算手法及びアフィン座標演算手法の場合である。そうした場合,逆座標演算は,順方向座標
演算から推測できず,明示的に定義しなければならない。
64
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
座標による空間参照−測地学的概念
C.1 測地学の概念
座標は,この規格のオブジェクトである。点の位置決めが,そのための中心的な技術的要素である。階
層的に順序付けられた測地参照系の作成及び維持によって,位置決め及びナビゲーションのために一貫し
た安定的基盤が与えられている。
測地学は,地球の大きさ及び形,地球の回転及び重力場の測定,並びにその表面の地図作成を取り扱う
地球科学である。地球の大きさ及び形(又は“形状”)の決定には,地球の固体表面及び流体表面,並びに,
この二表面の地球潮せき(汐)運動及び地殻運動による変化及び変形の研究が含まれる。地球の回転及び
その時間的変動は,地球参照系と天球参照系との間の変換に現れる。地球の重力場の決定は,地心,外部
重力場及びその時間変化に関係する。
空間的地球参照系は,変動を測定するための基準としての持続可能な中心的要素である。この規格の用
語では,これらの系を座標参照系という。
C.2 測地基準面
三次元空間での点の位置は,三次元直交座標X,Y,Zによって最も適切に記述される。衛星測位の到来
によって,そうした座標系は,通常,地球中心系となる。Z軸は,地球の(慣用又は瞬間的)回転軸に合
わせ,X軸は赤道面とグリニッジ観測所を通る子午面との交線とし,Y軸を右手系の座標系を形成するよ
うにとる。
衛星測位の到来前は,実際的な基準面は,地球の表面であった。地球の形状を最もよく近似する形が,
ジオイドである。ジオイドの本質は,地形を取り除いた地球の表面である。ジオイドは,平衡状態にある
海水の理想面,すなわち,潮流,気圧の変化などのない平均海面であり,大陸の下にも続いている。
鉛直基準面は,ジオイドに基づいており,通常,幾つかの場所における,ある期間にわたる平均海面と
して定義される。高さ及び深さは,重力の方向に沿って測定され,その垂直基準面に関係付けられる。標
高(H)は,“海面の上方”にあり,物理的に定義された不規則な面である。厳密には,標高は,座標と呼
ばない方がよい。むしろ,物理的量である。水平座標のx及びyに加えて,標高を垂直座標zとして扱っ
てもよいのではないかと思われ,実際,狭い地域では物理的実体の近似としては良好であるが,地域が拡
大していくと,急速に妥当性を失う。測地科学では,地球の重力場に対する仮定の違いによって,幾つか
の異なる種類の標高を区別している。それらの標高間の差異は,この規格の適用範囲を超えている。
ジオイドは,地球内部の質量の分布における変則性によって影響を受けるため,不規則な表面をもつ。
不規則なジオイドの形状は,点の位置決めなどの幾何学的な問題を計算する面としては複雑すぎる。空間
計算を簡単にするため,ジオイドを,それに最も近い規則的な形,すなわち,へん(扁)平だ(楕)円体
によって近似する。だ(楕)円体は,ジオイドを十分精確に近似しており,ジオイドはだ(楕)円体面の
周りで全地球的に±110 mの起伏をもつ。ジオイドと基準だ(楕)円体との幾何学的分離距離をジオイド
高と呼ぶ。
近似するだ(楕)円体は一つだけではない。だ(楕)円体のサイズ,形状,位置及び方向付けは,選択
の問題となり,多岐に渡る選択が可能になる。だ(楕)円体のサイズ,形状,位置及び方向付けを地球に
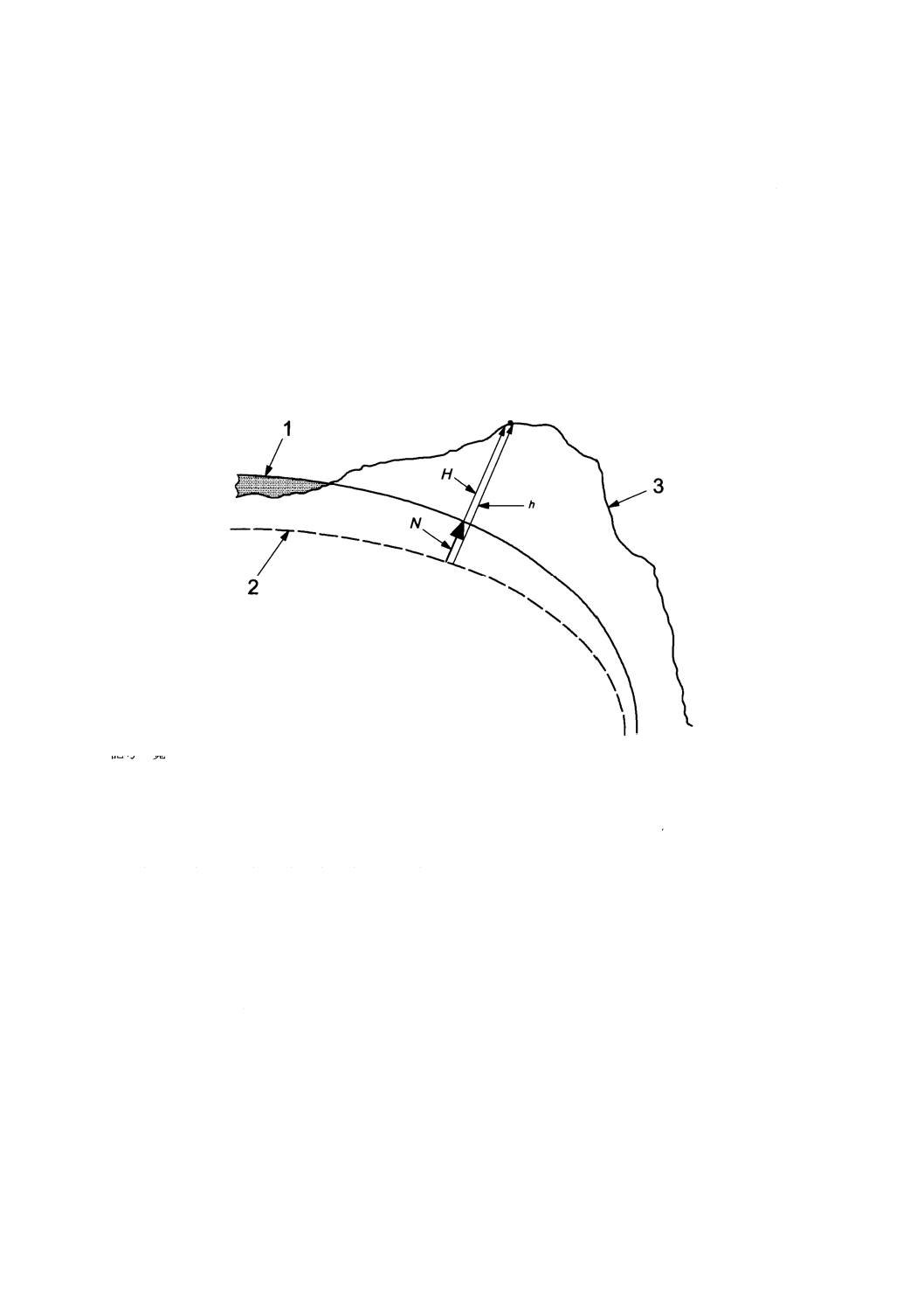
65
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
関係付けて選択することは,測地原子という概念に反映される。従来は,測地原子は,だ(楕)円体が,
局所的に,例えば,一国内で,可能な限りジオイドに一致するように定義されていた。衛星測地時代の前
は,測地原子に関連付けられていた座標系を地球中心となるように試みたが,その原点は,鉛直線の方向
の局所的な偏移によって,地心から数百メートル外れていた。ED50(European Datum 1950),NAD27(North
American Datum 1927)などの測地原子は,領域内でジオイドに最も適合する,地域的な“ベストフィット”
だ(楕)円体に関連付けられている。
だ(楕)円体に相対な点の位置は,だ(楕)円体緯度(ϕ)及びだ(楕)円体経度(λ)というだ(楕)
円体座標を用いて表現される。だ(楕)円体上方の高さ(h)は,三次元測地座標組の不可分の要素である。
ただし,だ(楕)円体高(h)は,標高(H)とは,ジオイドがだ(楕)円体に対して起伏する分だけ異な
る。図C.1を参照。
記号一覧
1 ジオイド
2 だ(楕)円体
3 地球の表面
h=だ(楕)円体高,だ(楕)円体から垂直に通過する点に沿って測定される:h=H+N
H=標高,ジオイド上の鉛直原子面から重力方向に沿って測定される
N=ジオイド高,だ(楕)円体上方のジオイドの高さ
図C.1−だ(楕)円体高及び標高
だ(楕)円体のサイズ,形状,位置又は方向付けを変更すると,点の測地座標が変化し,その点は異な
る測地原子に基づいて記述されることになる。逆に,測地座標(緯度及び経度)は,測地原子及び座標系
が識別されている場合に限り曖昧さをもたない。
歴史的には,水平位置の水平測地座標と垂直位置としての標高とを一緒に組み合わせて,三次元空間に
おける位置を記述するのが一般的であった。複合座標参照系の一例である。
C.3 地図投影
だ(楕)円体表面上の空間計算は,単純ではない。平面の直交座標での計算の方がはるかに簡単である。
66
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
正式には,そうした平面座標は,地図投影の手法を用いて,だ(楕)円体座標から取得することができる。
だ(楕)円体の曲面を地図平面にゆがみなしに写像することは可能ではない。よく行われる妥協は,角度
及び長さの比を保存するもので,小さな円は小さな円に,小さな正方形は正方形に写像される。この手法
は正角図法として知られている。正角図法の一例として,横メルカトル図法がある。保存されない特性,
例えば,スケールなどには誤差が含まれるため,投影座標参照系は,誤差が許容できる地域上に限り使用
することができる。他の投影手法では,面積など,異なる特性が保存される。
地図平面内では,直交座標のx及びyが存在する。その場合,参照に使用される北の方向は,局所的な
測地学上の北ではなく,地図上の北である。この二つの方向の相違を子午線収差という。
C.4 座標の変換
一つの原子に関連付けられている座標参照系に基づく点又は点の集合の座標を,異なる原子に関連付け
られている別の座標参照系を参照するように変更することを原子変換という(厳密にいえば,これは誤称
である。変換されるのは座標だからである。)。鉛直原子の場合,原子変換は,全ての高さの値に移動幅を
単純に加算することである(移動幅は定数であることが多い。)。平面座標又は空間座標の場合,原子変換
は,単純な平行移動に加えて,回転演算及びスケール変更演算からなる相似変換すなわちHelmert変換の
形式をとることが多い。Helmert変換は,平面では四つのパラメタをもち,空間では七つのパラメタをも
つ。
C.5 点の位置決め
点の位置決めは,座標参照系を基準として,陸上,海上又は空間の点の座標を決定することである。点
の位置決めは,地上又は地球外の既知点と,地上の未知点とを結合する測定から計算して解くことができ
る。これには,天球座標系と地球座標系との間,又は各座標系間の変換を含む場合がある。
伝統的に,国内の点の位置決めを可能にするため,網の階層が構築されてきた。階層の中で最上位に位
置したのは,三角測量網であった。三角測量網は,多角形の網に細かく分けられ,その中で,通常,巻尺,
コーナープリズム及びおなじみの赤白ポールを用いた,局所の地図作成測量の観測値が結合される。
今日では,特別な測定(例えば,地下又は高精度の施工基準測定)を除いて,観測は,全てGPSを用い
て実施されている。高次の網は,地上の点間のベクトルの決定に相対測位を用いた静的GPSで観測される。
その後,決定されたベクトルは,伝統的な網の手法で調整される。GPS連続観測局などで構成された,地
球を覆う多面体を用いて,IERSの下,単一の全地球的地心基準系が定義されており,各国内の測定値が基
づく“ゼロ次”の世界基準として機能している。
点の位置決めの一つの目的は,地図作成測定用の既知点[(水平及び鉛直)基準点]の提供にある。各国
において,そうした既知点が地域内に何千と存在して,政府の地図作成機関によって記録されている。不
動産に関係する建設会社及び測量技師はそれらの点を使用して,局所的な測定から位置を決定する。
67
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
実例集
座標参照系の定義又は座標変換時におけるこの規格の適用方法を具体的に説明するため,実例を次に記
載する。実例では,UML識別子及び属性名の両方を記載する。デジタルデータ処理には,UML識別子を
使用するのが望ましい。座標参照系のメタデータを人に提示する場合には,属性名の使用が望ましい。
次の実例を記載している。
D.1 全ての必須属性の値が引用から参照される座標参照系。
D.2 鉛直座標参照系。
D.3 二次元測地座標参照系(緯度及び経度)。
D.4 三次元測地座標参照系(地心直交X,Y,Z)。
D.5 投影座標参照系。
D.6 鉛直CRSを用いて投影CRSから形成される複合座標参照系。
D.7 座標変換。
D.8 ジオイド高モデル(座標変換の別例)。
D.9 連結演算。
例D.1:全ての必須属性の値が引用から参照される座標参照系。
この引用は,この投影座標参照系の,座標参照系,原子,座標系及び座標換算の情報の全てを定義する。
このCRSは,例D.5で完全に定義される。引用は,ISO 19115に記述されている。
UML識別子
属性
入力値
コメント
SC̲CRS
CI̲Citation
引用は,ISO 19115に文書
化されている。
title:
引用のタイトル
EPSG v6.6
dateType:
日付型
003
日付の種別は,改定日で
ある。
date:
日付
20041023
identifier:
引用の識別子
26734
引用内で与えられている
系の一意の識別子(コー
ド)である。
68
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例D.2:鉛直座標参照系。
UML識別子
属性
入力値
コメント
SC̲VerticalCRS
name:
鉛直CRS名
ODN
domainOfValidity:
CRS有効範囲
英国本土
任意指定の属性である。
この例は,文字列の入力
値を示す。ISO 19115を参
照。
scope:
CRS適用分野
国家標高系
この属性は,この規格の
改正版で必須と規定され
た。
CS̲VerticalCS
name:
鉛直座標参照系の名前
ODN高さ
CS̲CoordinateSystemAxis
name:
座標系の軸名
標高
axisAbbrev:
座標系の軸の略称
H
axisDirection:
座標系の軸の方向
上方
axisUnitID:
座標系の軸の単位識別子
メートル
CD̲VerticalDatum
name:
鉛直原子の名前
Ordnance Datum Newlyn
alias:
原子の別名
ODN
任意指定の属性である。
anchorDefinition:
原子の固定点
1915年から1921年まで
の間のニューリン平均
海面
任意指定の属性である。
例D.3:緯度及び経度が基準とする測地座標参照系。
UML識別子
属性
入力値
コメント
SC̲GeodeticCRS
name:
測地CRS名
NAD83(CSRS)
domainOfValidity:
CRS有効範囲
EX̲GeographicBounding
Box
westBL: -120
eastBL: -57.1
southBL: 43.46
northBL: 62.56
この属性は任意指定であ
る。この例は,地理的な
境界枠の入力値を示す。
ISO 19115を参照。
scope:
CRS適用分野
測地測量及び他の高精
度応用。
この属性は,この改正版
で必須と規定された。
remarks:
CRS注釈
NAD83を置き換える。
原子の注釈を参照。
この属性は任意指定であ
る。
CS̲EllipsoidalCS
だ(楕)円体CSは二次元
又は三次元の場合があ
る。軸の記述は,場合に
応じて,2回又は3回指定
することになる。
この例のCRSは三次元で
あるが,座標組が,緯度
及び経度だけを含み,し
たがって,3番目の鉛直
CS軸の記述が必要ない
ことが仮定されている。
69
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UML識別子
属性
入力値
コメント
name:
だ(楕)円体座標系の名前
度単位の緯度/経度
必須のCS名の妥当な入
力値を決めるのは,確立
された座標系の命名手法
がないため,困難な作業
になる場合が多い。
CS̲CoordinateSystemAxis
name:
座標系の軸名
測地緯度
axisAbbrev:
座標系の軸の略称
ϕ
axisDirection:
座標系の軸の方向
北
axisUnitID:
座標系の軸の単位識別子
度
CS̲CoordinateSystemAxis
name:
座標系の軸名
測地経度
axisAbbrev:
座標系の軸の略称
λ
axisDirection:
座標系の軸の方向
東
axisUnitID:
座標系の軸の単位識別子
度
CD̲GeodeticDatum
name:
測地原子の名前
NAD83 Canadian Spatial
Reference System
alias:
原子の別名
NAD83 Système canadien
de référence spatiale
任意の入力項目。
alias:
原子の別名
NAD83(CSRS)
任意の入力項目。
alias:
原子の別名
NAD83(SCRS)
任意の入力項目。
remarks:
原子の注釈
NAD83(CSRS)は,オリ
ジナル(1986) NAD83の
局所的改定版である。
NAD83(CSRS) と
NAD83座標との間の相
違は,カナダ領内での地
理的位置に応じて不規
則に変化する。
任意の入力項目。
anchorDefinition:
原子の固定点
地心
任意の入力項目。
realizationEpoch:
原子の実現時期(元期)
1998
任意の入力項目。
CD̲PrimeMeridian
原
子
ク
ラ
ス
が
CD̲GeodeticDatumであ
る
た
め
,
CD̲PrimeMeridianクラス
が欠落していた場合,属
性名及びグリニッジ経度
はそのデフォルト値をと
ることになる。
name:
本初子午線の名前
グリニッジ
この属性の値が“グリニ
ッジ”であるため,この
属性の情報を指定するの
は必須でない。
GreenwichLongitude:
本初子午線グリニッジ経度
0度
本初子午線の名前の値が
“グリニッジ”であるた
め,本初子午線グリニッ
ジ経度の情報を指定する
のは必須でない。
CD̲Ellipsoid
name:
だ(楕)円体の名前
GRS 1980
70
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UML識別子
属性
入力値
コメント
semiMajorAxis:
長半径の長さ
6 378 137.0 m
secondDefiningParameter:
第2定義パラメタ
inverseFlattening
inverseFlattening:
逆へん(扁)平率
298.257 222 1
例D.4:三次元直交座標系をもつ測地座標参照系。
UML識別子
属性
入力値
コメント
SC̲GeodeticCRS
name:
測地CRS名
WGS 84
domainOfValidity:
CRS有効範囲
世界
この属性は任意指定であ
る。この例は,文字列を
示す。ISO 19115を参照。
scope:
CRS適用分野
測地アプリケーション
この属性は,この改正版
で必須と規定された。
CS̲CartesianCS
直交CSは,二次元又は三
次元の場合がある。
軸の記述は,場合に応じ
て,二又は三回指定する
ことになる。この例では,
系は,三次元である。
name:
直交座標系の名前
ECR地心
CS̲CoordinateSystemAxis
name:
座標系の軸名
地心X
axisAbbrev:
座標系の軸の略称
X
axisDirection:
座標系の軸の方向
赤道面において,地球の
中心から,本初子午線と
赤道との交点への方向。
axisUnitID:
座標系の軸の単位識別子
メートル
CS̲CoordinateSystemAxis
name:
座標系の軸名
地心Y
axisAbbrev:
座標系の軸の略称
Y
axisDirection:
座標系の軸の方向
赤道面において,地球の
中心から,本初子午線か
らπ/2ラジアン東方向に
ある子午線と赤道の交
点への方向。
axisUnitID:
座標系の軸の単位識別子
メートル
CS̲CoordinateSystemAxis
name:
座標系の軸名
地心Z
axisAbbrev:
座標系の軸の略称
Z
axisDirection:
座標系の軸の方向
地球の中心から,その回
転軸に平行に,北極への
方向
axisUnitID:
座標系の軸の単位識別子
メートル
71
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UML識別子
属性
入力値
コメント
CD̲GeodeticDatum
原
子
ク
ラ
ス
が
CD̲GeodeticDatumであ
り,CD̲PrimeMeridianク
ラスが欠落しているた
め,属性名及びグリニッ
ジ経度はデフォルト値の
“グリニッジ”及び“0
度”をそれぞれとる。
name:
測地原子の名前
World Geodetic System of
1984
CD̲Ellipsoid
原子の型が測地であるた
め,地心直交座標系がだ
(楕)円体を使用しない
場合があるにもかかわら
ず,だ(楕)円体の定義
は必須である。
name:
だ(楕)円体の名前
WGS 84
semiMajorAxis:
長半径の長さ
6 378 137.0 m
secondDefiningParameter:
第2定義パラメタ
inverseFlattening
inverseFlattening:
逆へん(扁)平率
298.257 223 563
例D.5:必須の定義データが全て完全に与えられた投影座標参照系。
UML識別子
属性
入力値
コメント
SC̲ProjectedCRS
name:
投影CRS名
NAD27/Alaska zone 4
domainOfValidity:
CRS有効範囲
西経148〜152度の間の
アラスカ
この属性は任意指定であ
る。
scope:
CRS適用分野
地形図作成。1986年以
降,NAD83に置き換わ
っている。
この属性は,この改正版
で必須と規定された。
CS̲CartesianCS
直交CSは,二次元又は三
次元の場合がある。軸の
記述は,場合に応じて,2
回又は3回指定すること
になる。この例では,系
は,二次元である。
name:
直交座標系の名前
State Plane Coordinate
System
CS̲CoordinateSystemAxis
これらは,第1軸の属性
であり,座標組の第1座
標によって使用される。
name:
座標系の軸名
東距
axisAbbrev:
座標系の軸の略称
X
axisDirection:
座標系の軸の方向
東
axisUnitID:
座標系の軸の単位識別子
米国測量フィート
CS̲CoordinateSystemAxis
これらは,第2軸の属性
であり,座標組の第2座
標によって使用される。
name:
座標系の軸名
北距
axisAbbrev:
座標系の軸の略称
Y
72
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UML識別子
属性
入力値
コメント
axisDirection:
座標系の軸の方向
北
axisUnitID:
座標系の軸の単位識別子
米国測量フィート
CD̲GeodeticDatum
原
子
ク
ラ
ス
が
CD̲GeodeticDatumであ
り,CD̲PrimeMeridianク
ラスが欠落しているた
め,属性名及びグリニッ
ジ経度はデフォルト値の
“グリニッジ”及び“0
度”をそれぞれとる。
name:
測地原子の名前
North American Datum of
1927
alias:
原子の別名
NAD27
任意指定の属性である。
CD̲Ellipsoid
name:
だ(楕)円体の名前
Clarke 1866
semiMajorAxis:
長半径の長さ
6 378 206.4 m
secondDefiningParameter:
第2定義パラメタ
semiMinorAxis
semiMinorAxis:
短半径の長さ
6 356 583.8 m
remarks:
だ(楕)円体の注釈
長半径及び短半径から
導出される逆へん(扁)
平率は294.978 698 2
注釈は,任意指定の属性
である。
CC̲Conversion
name:
座標演算の名前
Alaska SPCS27 zone 4
domainOfValidity:
座標演算の有効範囲
西経148〜152度の間の
アラスカ
座標換算の有効範囲は,
任意指定の属性である。
scope:
座標演算の適用分野
地形図作成
CC̲OperationMethod
name:
座標演算手法名
横メルカトル
formula:
座標演算手法の公式
USGS専門論文1395 [11]
を参照。
sourceDimensions:
演算元CRSの次元
2
この属性は任意指定であ
る。
targetDimensions:
演算先CRSの次元
2
この属性は任意指定であ
る。
CC̲OperationParameter
パラメタの個数(n)は演
算手法の公式によって決
定される。パラメタ名,
値(及び必要な場合,任
意指定の属性)は場合に
応じてn回指定される。
name:
演算のパラメタ名
原点の緯度
CC̲ParameterValue
value:
演算パラメタの数値
54度
CC̲OperationParameter
name:
演算のパラメタ名
原点の経度
CC̲ParameterValue
value:
演算パラメタの数値
- 150度
CC̲OperationParameter
name:
演算のパラメタ名
縮尺係数
CC̲ParameterValue
stringValue:
演算パラメタの文字列値
0.999 9
比であり単位はない。
73
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UML識別子
属性
入力値
コメント
CC̲OperationParameter
name:
演算のパラメタ名
偏東距離
CC̲ParameterValue
value:
演算パラメタの数値
500 000米国測量フィー
ト
CC̲OperationParameter
name:
演算のパラメタ名
偏北距離
CC̲ParameterValue
value:
演算パラメタの数値
0米国測量フィート
注記 この例では,図6,表11で規定している関連役割baseCRS自体の値は省略し,この役割を用い
て得られる測地原子などの必須のデータを示している。
例D.6:鉛直CRSを用いて投影CRSから形成される複合座標参照系
UML識別子
属性
入力値
コメント
SC̲CompoundCRS
この例は,東距,北距,
標高からなる座標組をサ
ポートする。
name:
複合CRS名
British National Grid +
ODN
domainOfValidity:
CRS有効範囲
英国本土
scope:
CRS適用分野
平均海面に関する高さ
を含む,全国地図作成
複合CRSを形成する個々
のCRSは次に記述する。
順序が,座標組内の座標
の順序を含意するため,
重要である。
SC̲ProjectedCRS
投影CRSを,例D.5と同
様な方法で,次に記述す
る。
name:
投影CRS名
British National Grid
domainOfValidity:
CRS有効範囲
イギリス,ウェールズ,
スコットランド,マン島
scope:
CRS適用分野
大中小縮尺の地形図作
成,工事測量及びGIS
CS̲CartesianCS
name:
直交座標系の名前
ナショナルグリッド
CS̲CoordinateSystemAxis
name:
座標系の軸名
東距
axisAbbrev:
座標系の軸の略称
E
axisDirection:
座標系の軸の方向
東
axisUnitID:
座標系の軸の単位識別子
メートル
CS̲CoordinateSystemAxis
name:
座標系の軸名
北距
axisAbbrev:
座標系の軸の略称
N
axisDirection:
座標系の軸の方向
北
axisUnitID:
座標系の軸の単位識別子
メートル
CD̲GeodeticDatum
74
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UML識別子
属性
入力値
コメント
name:
測地原子の名前
Ordnance Survey of Great
Britain 1936
CD̲Ellipsoid
name:
だ(楕)円体の名前
Airy 1830
semiMajorAxis:
長半径の長さ
6 377 563.396 m
secondDefiningParamete
r:
第2定義パラメタ
inverseFlattening
inverseFlattening:
逆へん(扁)平率
299.324 964 6
CC̲Conversion
name:
座標演算の名前
British National Grid
scope:
座標演算の適用分野
地形図作成
CC̲OperationMethod
name:
座標演算手法名
横メルカトル
formula:
座標演算手法の公式
(公式を記述するメタ
データはここに指定す
るのがよいが,この例で
は,詳述しない。)
CC̲OperationParameter
name:
演算のパラメタ名
原点の緯度
CC̲ParameterValue
value:
演算パラメタの数値
49度
CC̲OperationParameter
name:
演算のパラメタ名
原点の経度
CC̲ParameterValue
value:
演算パラメタの数値
- 2度
CC̲OperationParameter
name:
演算のパラメタ名
縮尺係数
CC̲ParameterValue
stringValue:
演算パラメタの文字列値
0.999 601 271 7
CC̲OperationParameter
name:
演算のパラメタ名
偏東距離
CC̲ParameterValue
value:
演算パラメタの数値
400 000 m
CC̲OperationParameter
name:
演算のパラメタ名
偏北距離
CC̲ParameterValue
value:
演算パラメタの数値
- 100 000 m
SC̲VerticalCRS
鉛直CRSを,例D.2と同
様な方法で,次に記述す
る。
name:
鉛直CRS名
ODN
domainOfValidity:
CRS 有効範囲
英国本土
scope:
CRS 適用分野
国家標高系
CS̲VerticalCS
name:
鉛直座標参照系の名前
ODN標高
CS̲CoordinateSystemAxis
name:
座標系の軸名
標高
axisAbbrev:
座標系の軸の略称
H
axisDirection:
座標系の軸の方向
上方
axisUnitID:
座標系の軸の単位識別子
メートル
75
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UML識別子
属性
入力値
コメント
CD̲VerticalDatum
name:
鉛直原子の名前
Ordnance Datum Newlyn
複合CRSに基づく座標組
内の座標の順序は,E,N,
Hとなる。
例D.7:座標変換
この例では,WGS 84からED50への座標変換を示す。
UML識別子
属性
入力値
コメント
CC̲Transformation
name:
座標演算の名前
WGS 84 to ED50 NIMA
1993 mean Europe
operationVersion:
座標演算のバージョン
NIMA mean for Europe
domainOfValidity:
座標演算の有効範囲
オーストリア,ベルギ
ー,デンマーク,フィン
ランド,フランス,ドイ
ツ(西),ジブラルタル,
ギリシャ,イタリア,ル
クセンブルグ,オラン
ダ,ノルウェー,ポルト
ガル,スペイン,スウェ
ーデン,スイス
scope:
座標演算の適用分野
軍事作戦
remarks:
座標演算の注釈
文民のためには使用さ
れない。EuroGeographics
又は国家地図作成機関
に相談する。
このフィールドは任意指
定である。
coordinateOperationAccuracy:
座標演算の確度
X軸,Y軸,Z軸で,3 m,
8 m,5 m
このフィールドは任意指
定である。
SC̲GeodeticCRS
(演算元CRSを定義す
るメタデータをここに
指定するのがよいが,こ
の例では,詳述しない。)
この1番目のCRSは,座
標変換の演算元CRSを
意味しており,この例で
は,WGS 84である。
SC̲GeodeticCRS
(演算先CRSを定義す
るメタデータをここに
指定するのがよいが,こ
の例では,詳述しない。)
この2番目のCRSは,座
標変換の演算先CRSを
意味しており,この例で
は,ED50である。
CC̲OperationMethod
name:
座標演算手法名
地心平行移動
formula:
座標演算手法の公式
Xt=Xs+dX; Yt=Ys+dY;
Zt=Zs+dZ,ここでdX,
dY及びdZは,それぞれ,
X軸,Y軸,Z軸に沿っ
た平行移動である(添え
字の“t”及び“s”は,
演算先及び演算元を指
す。)。
sourceDimensions:
演算元CRSの次元
3
targetDimensions:
演算先CRSの次元
3
76
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UML識別子
属性
入力値
コメント
CC̲OperationParameter
パラメタの個数(n)は演
算手法の公式によって決
定される。パラメタ名,
値(及び必要な場合,任
意指定の属性)は場合に
応じてn回指定される。
この場合,n=3である。
name:
演算のパラメタ名
X-軸平行移動
CC̲ParameterValue
value:
演算パラメタの数値
87 m
CC̲OperationParameter
name:
演算のパラメタ名
Y-軸平行移動
CC̲ParameterValue
value:
演算パラメタの数値
98 m
CC̲OperationParameter
name:
演算のパラメタ名
Z-軸平行移動
CC̲ParameterValue
value:
演算パラメタの数値
121 m
例D.8:ジオイド高モデル(座標変換)
この例は,統一欧州水準網(UELN: United European Levelling Network)に基づく標高を,3D CRSの部分
としての欧州地球基準系(ETRS: European Terrestrial Reference System)に基づくだ(楕)円体高に変換す
るモデルを記述する。
UML識別子
属性
入力値
コメント
CC̲Transformation
name:
座標演算の名前
EGG97
alias:
座標演算の別名
European
Gravimetric
Geoid 1997
operationVersion:
座標演算のバージョン
1997
domainOfValidity:
座標演算の有効範囲
ヨーロッパ
scope
座標演算の適用分野
三次元測地CRSのだ
(楕)円体高成分から標
高への座標変換。
remarks:
座標演算の注釈
情報源:University of
Hanover Institute for Earth
Measurement.
この属性は任意指定であ
る。
SC̲GeodeticCRS
(演算元CRSを定義す
るメタデータをここに
指定するのがよいが,こ
の例では,詳述しない。)
この1番目のCRSは,座
標変換の演算元CRSを
意味しており,この例で
は,ETRSである。変換
アプリケーションは,高
さ成分を抽出する必要が
ある。
SC̲VerticalCRS
(演算先CRSを定義す
るメタデータをここに
指定するのがよいが,こ
の例では,詳述しない。)
この2番目のCRSは,座
標変換の演算先CRSを
意味しており,この例で
は,UELNである。
CC̲OperationMethod
name:
座標演算手法名
EGGジオイドモデル
77
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UML識別子
属性
入力値
コメント
formula:
座標演算手法の公式
hETRS=HUELN+NEGG97
remarks:
座標演算手法の注釈
この手法は,ジオイドモ
デル内でジオイド高(N)
の補間を必要とする。引
数として演算元CRSの
緯度及び経度成分を用
いる。
この属性は任意指定であ
る。
sourceDimensions:
演算元CRSの次元
3
targetDimensions:
演算先CRS の次元
1
CC̲OperationParameter
パラメタの個数(n)は演
算手法の公式によって決
定される。パラメタ名,
値(及び必要な場合,任
意指定の属性)は場合に
応じてn回指定される。
この例では,nは,ジオ
イドモデルの各グリッド
ノードの値であり,簡易
に直接記述するには,大
きすぎる。したがって,
ファイル参照によって,
間接的に与える。ファイ
ルのフォーマットは,演
算手法によって決定され
る。
name:
演算のパラメタ名
ジオイドモデルファイ
ル
remarks:
演算のパラメタの注釈
1 567 890個のノード
CC̲ParameterValue
CC̲ParameterValue
valueFile:
演算パラメタのファイル参
照
ファイル名
ファイル名は,URIの場
合もある。
例D.9:連結演算
この例は,Egypt 1907とWGS 84との間の連結演算を形成するため,Egypt 1907からWGS 72への変換
と,WGS 72からWGS 84への変換とを連結する場合を具体的に説明する。
UML識別子
属性
入力値
コメント
CC̲ConcatenatedOperation
name:
連結座標演算の名前
ED50 to WGS 84 Egypt
operationVersion:
座標演算のバージョン
MCE
and
DMA
concatenation
domainOfValidity:
座標演算の有効範囲
エジプトの西部砂漠
scope:
座標演算の適用分野
石油探査
SC̲GeodeticCRS
(演算元CRSを定義す
るメタデータをここに
指定するのがよいが,こ
の例では,詳述しない。)
これは,連結演算用の演
算元CRSであり,この例
では,ED50である。
SC̲GeodeticCRS
(演算先CRSを定義す
るメタデータをここに
指定するのがよいが,こ
の例では,詳述しない。)
これは,連結演算用の演
算先CRSであり,この例
では,WGS 84である。
78
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UML識別子
属性
入力値
コメント
連結演算を形成する単一
の座標演算が,順繰りに
与えられる。順序は,演
算が行われる順である。
この例では,選択されて
いる属性だけが示されて
いる。単一の座標演算の
完全な例については,例
D.7を参照。連結演算の
第1ステップを次に記述
する。
CC̲Transformation
name:
連結座標演算の名前
ED50 to WGS 72 Egypt
operationVersion:
座標演算のバージョン
MCE 1974
domainOfValidity:
座標演算の有効範囲
エジプト
scope:
座標演算の適用分野
測地測量
.
SC̲GeodeticCRS
(演算元CRSを定義す
るメタデータをここに
指定するのがよいが,こ
の例では,詳述しない。)
これは,連結演算の第1
ステップの演算元CRSで
あり,この例では,ED50
である。
SC̲GeodeticCRS
(演算先CRSを定義す
るメタデータをここに
指定するのがよいが,こ
の例では,詳述しない。)
これは,連結演算の第1
ステップの演算先CRSで
あり,この例では,WGS
84である。
CC̲OperationMethod
name:
座標演算手法名
地心平行移動
formula:
座標演算手法の公式
Xt=Xs+dX; Yt=Ys+dY;
Zt=Zs+dZ,ここでdX,
dY及びdZは,それぞれ,
X軸,Y軸,Z軸に沿っ
た平行移動である(添え
字の“t”及び“s”は,
演算先及び演算元を指
す。)。
sourceDimensions:
演算元CRSの次元
3
targetDimensions:
演算先CRSの次元
3
CC̲OperationParameter
パラメタの個数(n)は演
算手法の公式によって決
定される。パラメタ名,
値(及び必要な場合,任
意指定の属性)は場合に
応じてn回指定される。
この例では,n=3である。
name:
演算のパラメタ名
X-軸平行移動
CC̲ParameterValue
value:
演算パラメタの数値
- 121.8 m
CC̲OperationParameter
name:
演算のパラメタ名
Y-軸平行移動
CC̲ParameterValue
value:
演算パラメタの数値
98.1 m
CC̲OperationParameter
79
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UML識別子
属性
入力値
コメント
name:
演算のパラメタ名
Z-軸平行移動
CC̲ParameterValue
value:
演算パラメタの数値
- 15.2 m
CC̲OperationParameter
name:
演算のパラメタ名
経度係数v^4
CC̲ParameterValue
value:
演算パラメタの数値
7.622 36E-09
連結演算の次のステップ
を記述する。
CC̲Transformation
name:
連結座標演算の名前
WGS 72 to WGS 84 DMA
operationVersion:
座標演算のバージョン
DMA 1987
domainOfValidity:
座標演算の有効範囲
全世界
scope:
座標演算の適用分野
測地測量
SC̲GeodeticCRS
(演算元CRS を定義す
るメタデータをここに
指定するのがよいが,こ
の例では,詳述しない。)
これは,連結演算の第2
ステップの演算元CRSで
あり,この例では,WGS
72である。
SC̲GeodeticCRS
(演算先CRSを定義す
るメタデータをここに
指定するのがよいが,こ
の例では,詳述しない。)
これは,連結演算の第2
ステップの演算先CRSで
あり,この例では,WGS
84である。
CC̲OperationMethod
name:
座標演算手法名
Helmert相似変換(位置
ベクトル回転手法)
formula:
座標演算手法の公式
(手法の公式又はその
引用をここに指定する
のがよいが,この例で
は,詳述しない。)
sourceDimensions:
演算元CRSの次元
3
targetDimensions:
演算先CRSの次元
3
CC̲OperationParameter
パラメタの個数(n)は演
算手法の公式によって決
定される。パラメタ名,
値(及び必要な場合,任
意指定の属性)は場合に
応じてn回指定される。
この例の第2ステップで
は,n=7である。
name:
演算のパラメタ名
X-軸平行移動
CC̲ParameterValue
value:
演算パラメタの数値
0 m
CC̲OperationParameter
name:
演算のパラメタ名
Y-軸平行移動
CC̲ParameterValue
value:
演算パラメタの数値
0 m
CC̲OperationParameter
name:
演算のパラメタ名
Z-軸平行移動
CC̲ParameterValue
value:
演算パラメタの数値
4.5 m
CC̲OperationParameter
80
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UML識別子
属性
入力値
コメント
name:
演算のパラメタ名
X-軸回転
CC̲ParameterValue
value:
演算パラメタの数値
0 s
CC̲OperationParameter
name:
演算のパラメタ名
Y-軸回転
CC̲ParameterValue
value:
演算パラメタの数値
0 s
CC̲OperationParameter
name:
演算のパラメタ名
Z-軸回転
CC̲ParameterValue
value:
演算パラメタの数値
0.554 s
CC̲OperationParameter
name:
演算のパラメタ名
スケール差
CC̲ParameterValue
value:
演算パラメタの数値
0.226 3 ppm
81
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(参考)
この規格に対してインタフェースをとる場合の推奨最良実施例
この規格を参照する規格は,次に挙げる最良実施例を参考にするだけで,依存関係を最小にできる。
a) 座標参照系を必要とするこの規格のモデルへのインタフェースは,SC̲CRSクラス又はその具象サブ
クラスSC̲GeodeticCRS,SC̲ProjectedCRS,SC̲VerticalCRS,SC̲EngineeringCRS,SC̲ImageCRS及び
SC̲CompoundCRSのうちの一つに対するものに限定することが望ましい。
CD̲Datum(原子サブクラスを含む。)又はCS̲CoordinateSystemに対するインタフェースは,完全
な座標参照系定義を提供しないので,とらないほうがよい。
b) 座標演算が要求される場合,SC̲CRSクラスを経由してインタフェースをとることが望ましい。
SC̲CRSクラスからCC̲Operationクラスへのナビゲーションによって,座標演算に必要なメタデータ
が獲得される。
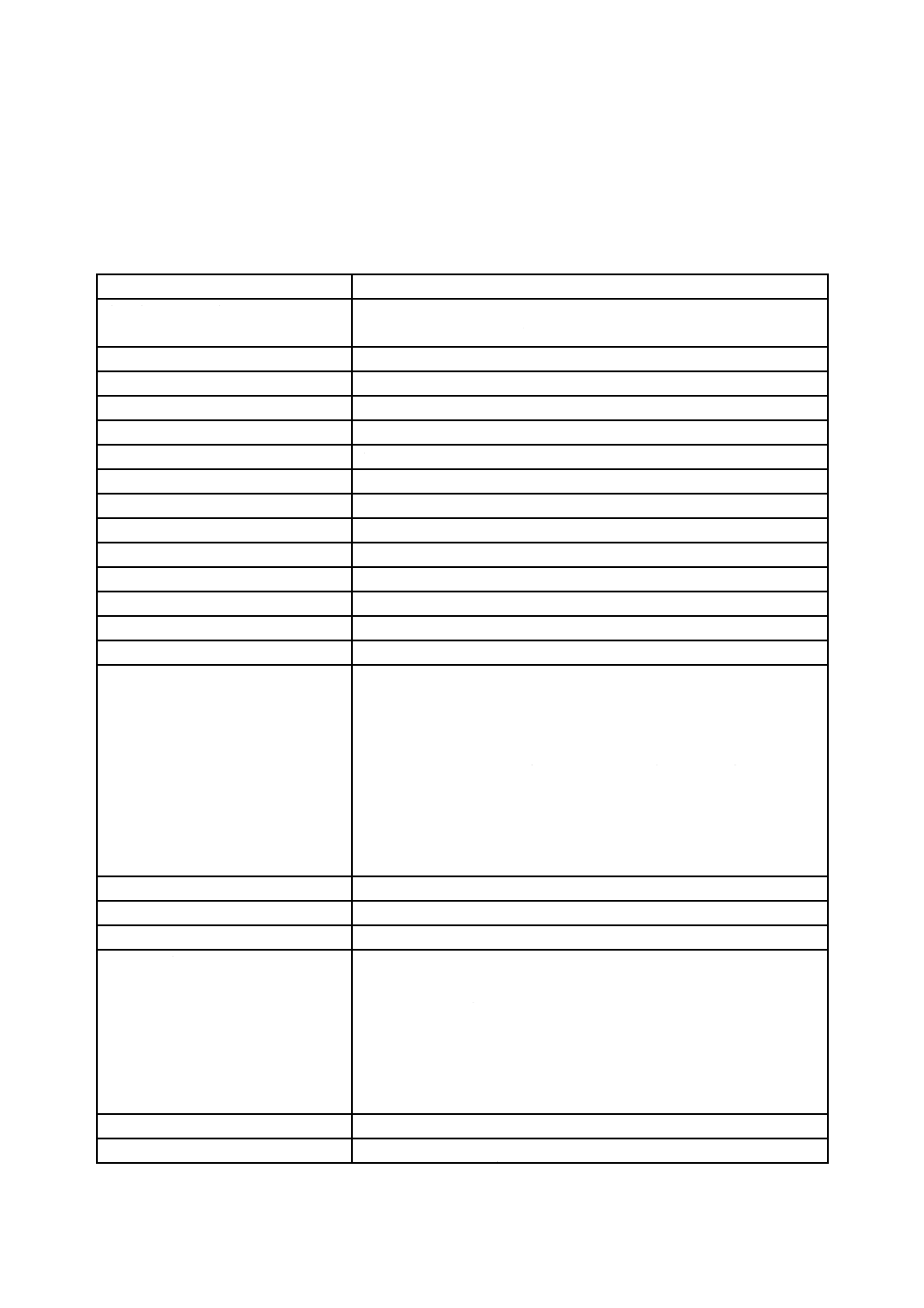
82
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
日本における座標参照系の例
例JA.1 日本測地系2011における経緯度及び高さの要素名及びその値
座標参照系の型コード
2
座標参照系の注釈
日本測地系2011に基づく経緯度及び東京湾平均海面に基づく標高
(正標高)で表される複合座標参照系
複合座標参照系の識別子
JGD2011, TP / (B, L), H
複合座標参照系の別名
日本測地系2011,東京湾平均海面/(緯度,経度),標高
複合座標参照系の有効地域
日本
複合座標参照系の適用分野
陸域の測量,地図作成など諸分野
座標参照系の型コード
1
座標参照系の注釈
日本測地系2011に基づく経緯度で表される座標参照系
座標参照系の識別子
JGD2011 / (B, L)
座標参照系の別名
日本測地系2011 /(緯度,経度)
座標参照系の有効地域
日本
座標参照系の適用分野
陸域の測量,地図作成など諸分野
原子の識別子
JGD2011
原子の別名
日本測地系2011
原子の型
測地
原子の固定原点
東京都港区麻布台2丁目18番1地内日本経緯度原点金属標の十字
の交点を
北緯35度39分29.157 2秒
東経139度44分28.886 9秒
とし,この地点において真北を基準として右回りに測定した茨城県
つくば市北郷1番地内つくば超長基線電波干渉計観測点金属標の
十字の交点の方位角を
32度20分46.209秒
とする。
原子の実現時期
2011.4
原子の有効地域
日本
原子の適用分野
陸域の測量,地図作成など諸分野
原子の注釈
日本測地系2011は,青森県,岩手県,宮城県,秋田県,山形県,
福島県,茨城県,栃木県,群馬県,埼玉県,千葉県,東京都(島し
ょを除く。),神奈川県,新潟県,富山県,石川県,福井県,山梨県,
長野県及び岐阜県において,International Terrestrial Reference Frame
2008の元期2011.4年に基づいている。それ以外の地域は,
International Terrestrial Reference Frame 1994の元期1997.0年に基づ
いている。
だ(楕)円体の識別子
GRS80
だ(楕)円体の別名
Geodetic Reference System 1980
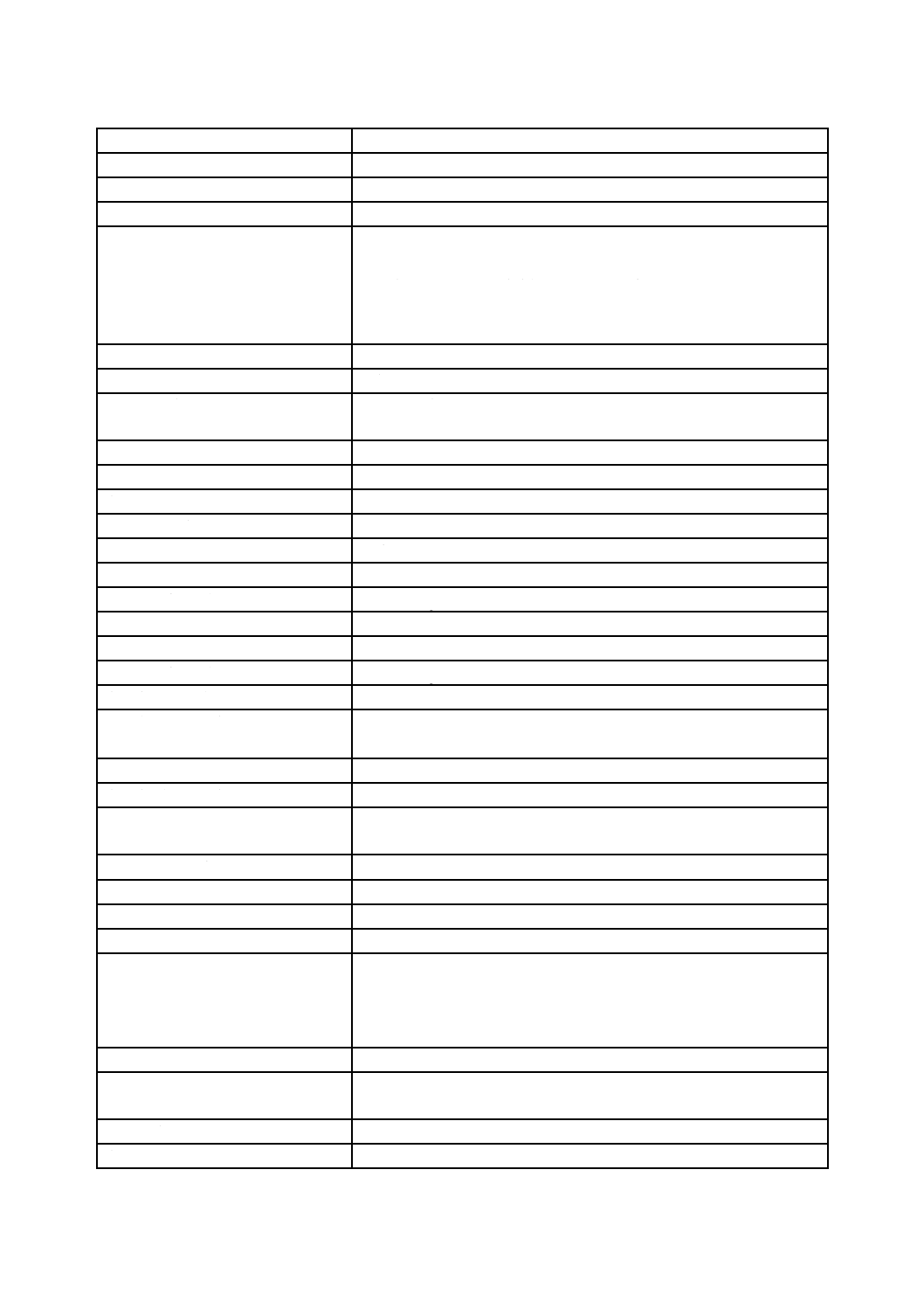
83
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
だ(楕)円体の別名
測地基準系1980だ(楕)円体
だ(楕)円体の長半径
6 378 137 m
だ(楕)円体の形状
真
だ(楕)円体の逆へん(扁)平率
298.257 222 101
だ(楕)円体の注釈
GRS80は,IAG(International Association of Geodesy:国際測地学協
会)及びIUGG(International Union of Geodesy and Geophysics:国際
測地学及び地球物理連合)が1979年に採択したもので,地球の形
状,角速度などの地球の物理学的な定数及び計算式からなる。
GRS80だ(楕)円体の原点は地球重心である。
本初子午線の識別子
グリニッジ子午線
本初子午線のグリニッジ経度
0度
本初子午線の注釈
本初子午線の位置はInternational Terrestrial Reference Systemに基づ
く。
座標系の識別子
測地座標系
座標系の型
測地
座標系の次元
2
座標系の注釈
緯度,経度
座標系の軸名
緯度
座標系の軸の方向
北
座標系の軸の単位識別子
decimal degree
座標系の軸名
経度
座標系の軸の方向
東
座標系の軸の単位識別子
decimal degree
座標参照系の型コード
1
座標参照系の注釈
“東京湾平均海面/標高(正標高)”で表される鉛直方向の座標参
照系
座標参照系の識別子
TP / H
座標参照系の別名
東京湾平均海面/標高
座標参照系の有効地域
日本国内のうち,渡海水準測量などによって標高の結合がなされて
いない離島域などを除いた地域。
座標参照系の適用分野
陸域の測量,地図作成など諸分野
原子の識別子
TP
原子の別名
東京湾平均海面
原子の型
鉛直
原子の固定原点
東京都千代田区永田町一丁目一番二地内水準点標石の水晶板の零
分画線の中点を
東京湾平均海面上24.390 0 m
とする。
原子の実現時期
2011
原子の有効地域
日本国内のうち,渡海水準測量などによって標高の結合がなされて
いない離島域などを除いた地域。
原子の適用分野
陸域の測量,地図作成など諸分野
座標系の識別子
正標高
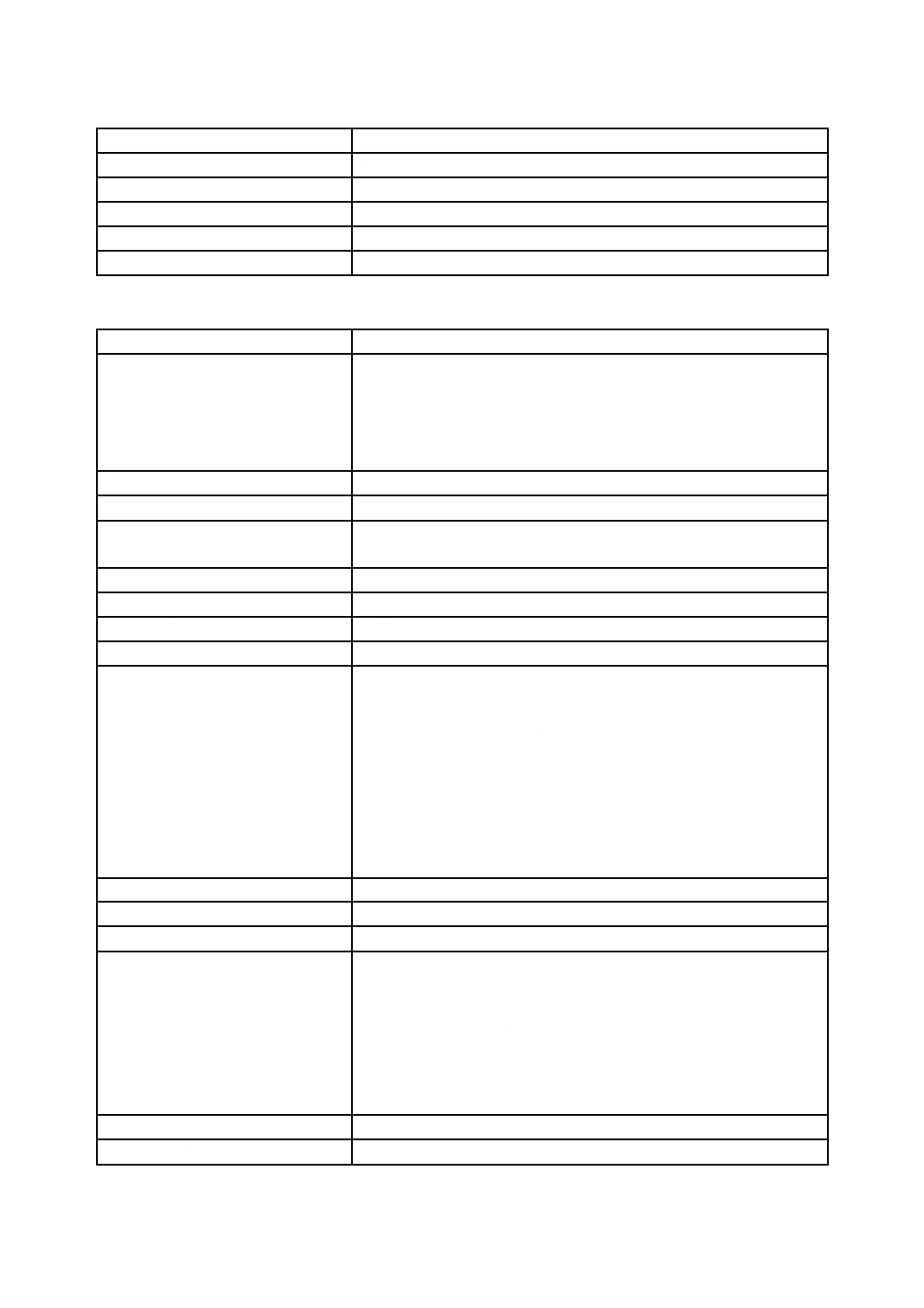
84
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
座標系の型
標高
座標系の次元
1
座標系の注釈
2002年4月から,標高を正規正標高から正標高に切替え
座標系の軸名
標高
座標系の軸の方向
上
座標系の軸の単位識別子
M
例JA.2 平面直角座標系第IX系の座標参照系に関する要素名及びその値
座標参照系の型コード
1
座標参照系の注釈
平成14年国土交通省告示第9号に定める平面直角座標系。日本測
地系2011とともに使用されなければならない。系番号はIからXIX
までの19種類ある。
第IX系は,139度50分0秒及び36度0分0秒を原点とする,ガ
ウスの等角投影法による平面直角座標系。
座標参照系の識別子
JGD2011 / 9 (X, Y)
座標参照系の別名
平面直角座標系第IX系
座標参照系の有効地域
東京都(XIV系,XVIII系及びXIX系に規定する区域を除く。),
福島県,栃木県,茨城県,埼玉県,千葉県,群馬県,神奈川県
座標参照系の適用分野
陸域の測量,地図作成など諸分野
原子の識別子
JGD2011
原子の別名
日本測地系2011
原子の型
測地
原子の固定原点
東京都港区麻布台2丁目18番1地内日本経緯度原点金属標の十字
の交点を
北緯35度39分29.157 2秒
東経139度44分28.886 9秒
とし,この地点において真北を基準として右回りに測定した茨城
県つくば市北郷1番地内つくば超長基線電波干渉計観測点金属標
の十字の交点の方位角を
32度20分46.209秒
とする。
原子の実現時期
2011.4
原子の有効地域
日本
原子の適用分野
陸域の測量,地図作成など諸分野
原子の注釈
日本測地系2011は,青森県,岩手県,宮城県,秋田県,山形県,
福島県,茨城県,栃木県,群馬県,埼玉県,千葉県,東京都(島
しょを除く。),神奈川県,新潟県,富山県,石川県,福井県,山
梨県,長野県及び岐阜県において,International Terrestrial Reference
Frame 2008の元期2011.4年に基づいている。それ以外の地域は,
International Terrestrial Reference Frame 1994の元期1997.0年に基づ
いている。
だ(楕)円体の識別子
GRS80
だ(楕)円体の別名
Geodetic Reference System 1980
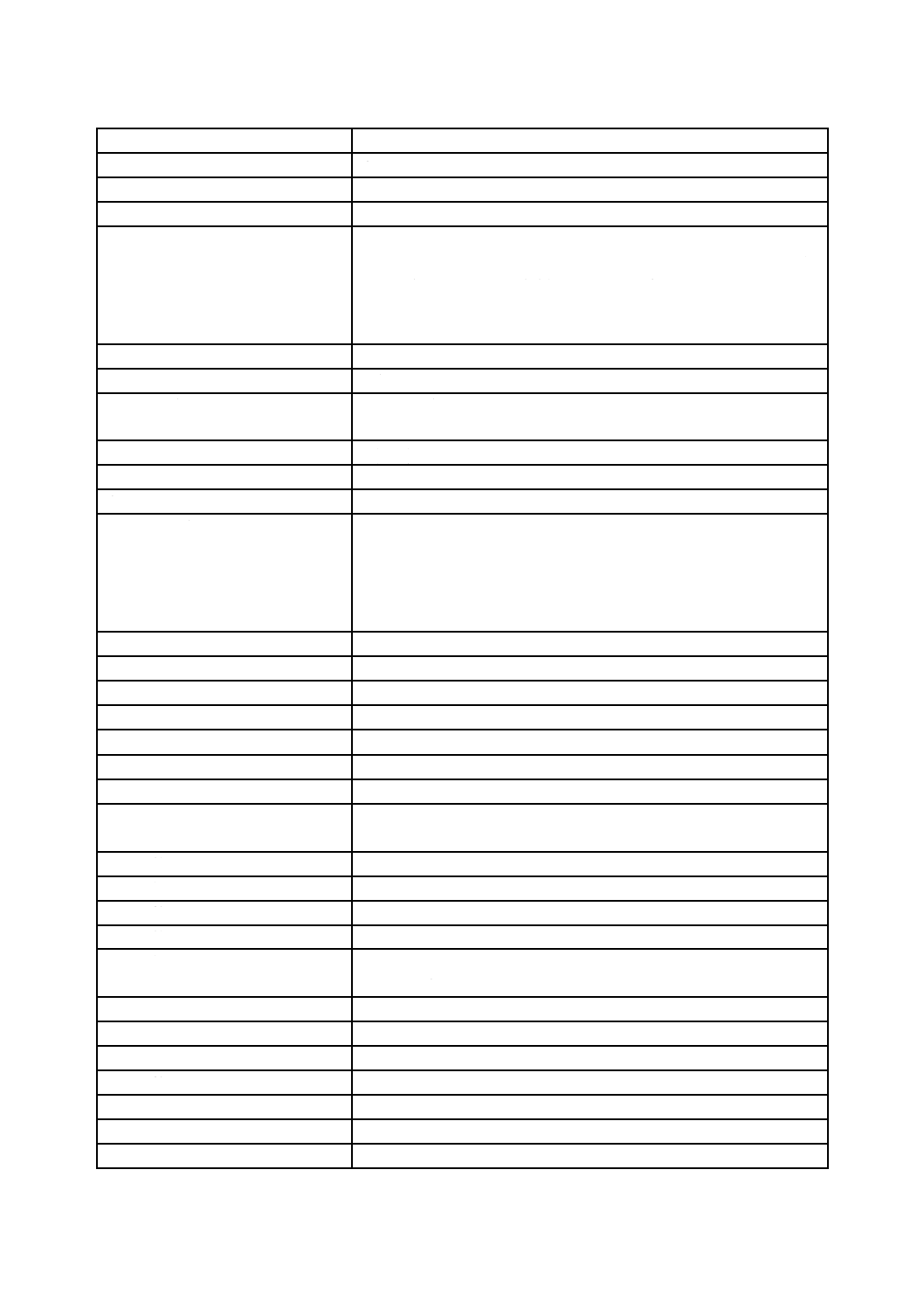
85
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
だ(楕)円体の別名
測地基準系1980だ(楕)円体
だ(楕)円体の長半径
6 378 137m
だ(楕)円体の形状
真
だ(楕)円体の逆へん(扁)平率
298.257 222 101
だ(楕)円体の注釈
GRS80は,IAG(International Association of Geodesy:国際測地学協
会)及びIUGG (International Union of Geodesy and Geophysics:国
際測地学及び地球物理連合)が1979年に採択したもので,地球の
形状,角速度などの地球の物理学的な定数及び計算式からなる。
GRS80だ(楕)円体の原点は地球重心である。
本初子午線の識別子
グリニッジ子午線
本初子午線のグリニッジ経度
0度
本初子午線の注釈
本初子午線の位置はInternational Terrestrial Reference Systemに基づ
く。
座標系の識別子
9 (X, Y)
座標系の型
投影
座標系の次元
2
座標系の注釈
平成14年国土交通省告示第9号に定める平面直角座標系。日本測
地系2011とともに使用されなければならない。系番号はIからXIX
までの19種類ある。
第IX系は,139度50分0秒及び36度0分0秒を原点とする,ガ
ウスの等角投影法による平面直角座標系。
座標系の軸名
X
座標系の軸の方向
北
座標系の軸の単位識別子
M
座標系の軸名
Y
座標系の軸の方向
東
座標系の軸の単位識別子
M
座標演算の識別子
JGD2011 / (B, L) to JGD2011 / 9 (X, Y)
座標演算の有効地域
東京都(XIV系,XVIII系及びXIX系に規定する区域を除く。),
福島県,栃木県,茨城県,埼玉県,千葉県,群馬県,神奈川県
座標演算の適用分野
陸域の測量,地図作成など諸分野
座標演算手法名
ガウス・クリューゲルの投影法
座標演算手法名の別名
ガウスの等角投影法
座標演算手法の公式
国土交通省公共測量作業規程
座標演算手法の注釈
平面直角座標系(平成14年1月10日国土交通省告示第9号)に
よって規定
座標演算手法のパラメタ数
3
座標演算のパラメタ名
座標系のX軸上における縮尺係数
座標演算のパラメタ値
0.999 9
座標演算のパラメタ名
座標原点の経度
座標演算のパラメタ値
139度50分0秒
座標演算のパラメタ名
座標原点の緯度
座標演算のパラメタ値
36度0分0秒

86
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
座標演算のパラメタの注釈
日本測地系2011における経緯度から平面直角座標系IX系への座
標換算のパラメタ
87
X 7111:2014 (ISO 19111:2007)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] ISO 31 (all parts),Quantities and units
注記 ISO 31は,ISO 80000 (all parts) によって置き換えられ,廃止されている。ISO 31 (all parts) の
対応日本工業規格は,JIS Z 8202規格群である。
[2] ISO 8601,Data elements and interchange formats−Information interchange−Representation of dates and
times
[3] JIS X 7107:2005 地理情報−空間スキーマ
注記 対応国際規格:ISO 19107:2003,Geographic information−Spatial schema(IDT)
[4] JIS X 7112:2006 地理情報−地理識別子による空間参照
注記 対応国際規格:ISO 19112:2003,Geographic information−Spatial referencing by geographic
identifiers(IDT)
[5] JIS X 7113:2004 地理情報−品質原理
注記 対応国際規格:ISO 19113:2002,Geographic information−Quality principles(IDT)
[6] ISO 19123,Geographic information−Schema for coverage geometry and functions
[7] ISO 19133,Geographic information−Location-based services−Tracking and navigation
[8] ISO 19136,Geographic information−Geography Markup Language(GML)
[9] 対応国際規格ではISO/IEC 19501が記載されているが,この規格では引用規格とし,参考文献から削
除した。
[10] HOOIJBERG,M. Practical Geodesy,Springer,1997
[11] SNYDER,JOHN P. Map Projections: A Working Manual,USGS Professional Paper 1395,1987,383 pp