X 6270:2011 (ISO/IEC 22533:2005)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
第1章 一般事項 ················································································································· 1
1 適用範囲························································································································· 1
2 適合性···························································································································· 2
2.1 光ディスクカートリッジ(ODC) ····················································································· 2
2.2 ジェネレーティングシステム ··························································································· 2
2.3 レシービングシステム ···································································································· 2
2.4 互換性表示 ··················································································································· 2
3 引用規格························································································································· 2
4 用語及び定義 ··················································································································· 2
5 表記法···························································································································· 5
5.1 数値表示 ······················································································································ 5
5.2 名称 ···························································································································· 6
6 略語······························································································································· 6
7 ODCの概要 ···················································································································· 6
8 一般要件························································································································· 7
8.1 環境条件 ······················································································································ 7
8.2 温度衝撃 ······················································································································ 8
8.3 安全性 ························································································································· 8
8.4 耐燃性 ························································································································· 8
9 基準駆動装置 ··················································································································· 8
9.1 光学系 ························································································································· 8
9.2 光ビーム ······················································································································ 9
9.3 再生チャネル ················································································································ 9
9.4 トラッキング ··············································································································· 10
9.5 ディスクの回転 ············································································································ 10
第2章 機械的特性及び物理的特性 ························································································ 10
10 ケースの寸法特性及び物理的特性 ····················································································· 10
10.1 ケースの概要 ·············································································································· 10
10.2 ケースの基準面 ··········································································································· 10
10.3 ケースの寸法 ·············································································································· 10
10.4 機械的特性 ················································································································· 15
11 ディスクの寸法,機械的特性及び物理的特性······································································· 27
11.1 ディスクの概要 ··········································································································· 27
11.2 ディスクの基準軸及び基準面 ························································································· 27
X 6270:2011 (ISO/IEC 22533:2005) 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
11.3 ディスクの寸法 ··········································································································· 27
11.4 機械的特性 ················································································································· 28
11.5 光学特性 ···················································································································· 30
12 ODCと駆動装置とのインタフェース ················································································· 30
12.1 クランプ方法 ·············································································································· 30
12.2 クランプ力 ················································································································· 31
12.3 キャプチャシリンダ ····································································································· 31
12.4 使用環境条件におけるディスクの位置 ············································································· 31
第3章 フォーマット ·········································································································· 33
13 トラックの寸法 ············································································································· 33
13.1 トラックの形状 ··········································································································· 33
13.2 トラックスパイラルの方向 ···························································································· 34
13.3 トラックピッチ ··········································································································· 34
14 トラックフォーマット ···································································································· 34
14.1 ロジカルトラック番号 ·································································································· 34
14.2 ロジカルトラックレイアウト ························································································· 34
14.3 クロック周波数及び周期 ······························································································· 35
14.4 半径方向のアライメント ······························································································· 35
14.5 セクタ番号 ················································································································· 35
15 セクタフォーマット ······································································································· 36
15.1 セクタのレイアウト ····································································································· 36
15.2 セクタマーク(SM) ··································································································· 36
15.3 VFOフィールド ·········································································································· 37
15.4 アドレスマーク(AM) ································································································ 38
15.5 IDフィールド ············································································································· 38
15.6 ポストアンブル(PA) ································································································· 38
15.7 ギャップ ···················································································································· 39
15.8 同期バイト(Sync) ····································································································· 39
15.9 データフィールド ········································································································ 39
15.10 VCOロックパターンフィールド(VLP) ······································································· 40
15.11 バッファ··················································································································· 40
16 記録符号 ······················································································································ 40
17 情報ゾーンのフォーマット ······························································································ 41
17.1 情報ゾーンの概要 ········································································································ 41
17.2 情報ゾーンの分割 ········································································································ 42
18 データゾーンのフォーマット ··························································································· 45
18.1 データゾーンのバッファトラック及び試験トラック ··························································· 45
18.2 欠陥管理領域(DMA) ································································································· 48
18.3 ディスク定義構造(DDS) ···························································································· 48
X 6270:2011 (ISO/IEC 22533:2005) 目次
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
18.4 書換形ゾーンの分割 ····································································································· 50
18.5 論理ブロックアドレス ·································································································· 50
19 欠陥管理 ······················································································································ 50
19.1 ディスクの初期化 ········································································································ 50
19.2 検証 ·························································································································· 51
19.3 非検証ディスク ··········································································································· 51
19.4 記録方法 ···················································································································· 51
19.5 一次欠陥管理表(PDL) ······························································································· 51
19.6 二次欠陥管理表(SDL) ······························································································· 52
第4章 エンボス特性 ·········································································································· 53
20 測定方法 ······················································································································ 53
20.1 使用環境 ···················································································································· 53
20.2 基準駆動装置 ·············································································································· 53
20.3 信号の定義 ················································································································· 54
21 グルーブからの信号 ······································································································· 55
21.1 デバイデドプッシュプル信号 ························································································· 55
21.2 位相深さ ···················································································································· 56
21.3 トラックの位置 ··········································································································· 56
22 ヘッダ信号 ··················································································································· 56
22.1 セクタマーク ·············································································································· 56
22.2 VFO信号 ··················································································································· 56
22.3 アドレスマーク,IDフィールド及びポストアンブル ·························································· 57
22.4 ジッタ ······················································································································· 57
22.5 非対称性 ···················································································································· 57
23 エンボス記録フィールド信号 ··························································································· 57
23.1 信号振幅 ···················································································································· 57
23.2 ジッタ ······················································································································· 58
第5章 記録層及びユーザデータの特性 ·················································································· 58
24 測定方法 ······················································································································ 58
24.1 測定環境 ···················································································································· 58
24.2 基準駆動装置 ·············································································································· 58
24.3 記録条件 ···················································································································· 59
24.4 消去条件 ···················································································································· 61
24.5 信号の定義 ················································································································· 62
25 光磁気特性 ··················································································································· 62
25.1 性能指数 ···················································································································· 62
25.2 光磁気信号の非対称性 ·································································································· 62
26 記録特性 ······················································································································ 63
26.1 分解能 ······················································································································· 63
X 6270:2011 (ISO/IEC 22533:2005) 目次
(4)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
26.2 狭帯域信号対雑音比(NBSNR) ····················································································· 64
26.3 クロストーク比 ··········································································································· 65
26.4 ジッタ ······················································································································· 65
26.5 メディア熱相互作用 ····································································································· 65
27 消去パワーの決定 ·········································································································· 65
第6章 ユーザデータの特性 ································································································· 66
28 試験方法 ······················································································································ 66
28.1 測定環境 ···················································································································· 66
28.2 基準駆動装置 ·············································································································· 66
29 セクタの最低品質 ·········································································································· 67
29.1 ヘッダ ······················································································································· 67
29.2 ユーザ記録データ ········································································································ 67
30 データ交換要件 ············································································································· 68
30.1 トラッキング ·············································································································· 68
30.2 ユーザ記録データ ········································································································ 68
30.3 ディスクの品質 ··········································································································· 68
附属書A(規定)エッジのひずみ(歪)量確認方法 ··································································· 69
附属書B(規定)カートリッジの可とう(撓)性確認方法 ··························································· 70
附属書C(規定)IDフィールドのCRC ··················································································· 72
附属書D(規定)インタリーブ,CRC,ECC及びデータフィールドの再同期化 ······························ 73
附属書E(規定)制御ゾーンの内容 ························································································ 78
附属書F(規定)再同期パターンの決定 ··················································································· 84
附属書G(規定)性能指数の測定 ··························································································· 88
附属書H(規定)NBSNR(狭帯域信号対雑音比)及びジッタを測定するための再生チャネル ············ 89
附属書I(規定)記録メディアの互換のための実装独立マーク品質決定(IIMQD) ·························· 92
附属書J(規定)空気清浄度クラス100 000··············································································· 93
附属書K(規定)基準面に関連するカートリッジの位置 ····························································· 95
附属書L(規定)信号特性が緩和できるゾーン ·········································································· 96
附属書M(規定)ハブの吸着力の測定方法 ··············································································· 97
附属書N(参考)トラックの振れ量の測定方法 ········································································· 99
附属書O(参考)使用環境条件の導出方法 ·············································································· 103
附属書P(参考)輸送·········································································································· 106
附属書Q(参考)オフィス環境 ····························································································· 107
附属書R(参考)現在及び将来の規格で実装される値 ······························································· 108
附属書S(参考)基板の垂直複屈折の測定 ··············································································· 109
附属書T(参考)交替セクタを使用するときのガイドライン ······················································· 111
附属書U(参考)メディアの感度評価のためのレーザパワー校正方法 ··········································· 112
X 6270:2011 (ISO/IEC 22533:2005) 目次
(5)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づき,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本
工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格に従うことは,次の者の有する特許権等の使用に該当するおそれがあるので,留意する。
− 氏名:ソニー株式会社
− 住所:東京都港区港南1-7-1
− 氏名:富士通株式会社
− 住所:神奈川県川崎市中原区上小田中4-1-1
上記の,特許権等の権利者は,非差別的かつ合理的な条件でいかなる者に対しても当該特許権等の実施
の許諾等をする意思のあることを表明している。ただし,この規格に関連する他の特許権等の権利者に対
しては,同様の条件でその実施が許諾されることを条件としている。
この規格に従うことが,必ずしも,特許権の無償公開を意味するものではないことに注意する必要があ
る。
この規格の一部が,上記に示す以外の特許権等に抵触する可能性がある。経済産業大臣及び日本工業標
準調査会は,このような特許権等に関わる確認について,責任はもたない。
なお,ここで“特許権等”とは,特許権,出願公開後の特許出願又は実用新案権をいう。
X 6270:2011 (ISO/IEC 22533:2005)
1
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
X 6270:2011
(ISO/IEC 22533:2005)
情報交換用90 mm/2.3 GB 光ディスクカートリッジ
Information technology-
Data interchange on 90 mm optical disk cartridges-
Capacity: 2.3 Gbytes per cartridge
序文
この規格は,2005年に第1版として発行されたISO/IEC 22533を基に,技術的内容及び対応国際規格の
構成を変更することなく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
第1章 一般事項
1
適用範囲
この規格は,カートリッジ当たり2.3ギガバイト(GB)の容量をもつ90 mmの光ディスクカートリッジ
(以下,ODCという。)の特性を規定する。この規格は,2 048バイトセクタのタイプR/WのODCだけに
ついて規定する。
タイプR/Wは,熱磁気効果及び光磁気効果を利用して,ディスクの記録面全体にわたって,何度も繰り
返して,データの記録,再生及び消去が可能である。これは,“全面書換形”とも呼ばれる。この規格は,
2 048バイトセクタだけを規定する。ディスク上の全てのセクタのサイズは同じである。
この規格は次の項目を規定する。
− 適用試験の条件及び基準駆動装置。
− ODCの使用環境及び保存環境。
− データ処理システム間の機械的互換を保証するためのODCの機械的特性及び物理的特性。
− ディスク上のエンボスデータ及びユーザ記録データのフォーマット。トラック及びセクタの物理的な
配置,誤り訂正符号,並びに使用される変調方式を含む。
− ディスクのエンボス情報の特性。
− データ処理システムがディスク上にデータを記録可能にするための,ディスクの光磁気特性。
− データ処理システムがディスクからデータを再生可能にするための,ディスク上のユーザ記録データ
の最低限の品質。
なお,別途規定のボリューム及びファイル構造の規格と合わせることによって,データ処理システム間
の完全なデータ互換性を与えるものである。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO/IEC 22533:2005,Information technology−Data interchange on 90 mm optical disk cartridges−
Capacity: 2.3 Gbytes per cartridge(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
適合性
2.1
光ディスクカートリッジ(ODC)
この規格に適合するODCは,そのタイプを明確にしなければならない。この規格で規定する全ての要
求事項を満足する場合,そのODCは,この規格に適合する。
2.2
ジェネレーティングシステム
この規格に適合するジェネレーティングシステムは,サポートするものを明確にしなければならない。
互換用ODCのジェネレーティングシステムは,サポートするタイプについてこの規格の全ての要件を満
たすとき,この規格に適合する。
2.3
レシービングシステム
この規格に適合するレシービングシステムは,どのタイプを実装するかを明確にしなければならない。
2.1に規定されたODCに記録したどの情報も扱える場合,そのデータ互換のためのODCのレシービン
グシステムは,この規格に適合する。
2.4
互換性表示
この規格に適合する駆動装置は,サポートする他の規格のリストを規定しなければならない。その規定
には,サポートする規格番号とODCのタイプ,再生だけをサポートするのか,記録及び再生ともにサポ
ートするのかの情報を記載しなければならない。
3
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。この引用
規格は,記載の年の版を適用し,その後の改正版(追補を含む。)は適用しない。
ECMA-287:2002 Safety of electronic equipment, 2nd edition
4
用語及び定義
この規格で用いる主な用語及び定義は,次による。
4.1
バンド(band)
所定数の連続するフィジカルトラックからなるデータゾーンの一部。
4.2
ケース(case)
ディスクを保護するとともに,ディスクの交換を容易にする光ディスクの入れ物。
4.3
チャネルビット(Channel bit)
ディスク上のデータの最小要素。スペース又はマークで記録される。12チャネルビットで8データビッ
トを表す。
4.4
クランプゾーン(clamping zone)
クランプ装置からの吸着力が印加されるディスクの環状部分。
4.5
制御トラック(control track)
光ディスクに記録,再生及び消去するために必要なフォーマット及びメディアパラメタを含むトラック。
3
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.6
巡回冗長検査,CRC(Cyclic Redundancy Check, CRC)
データの誤りを検出する方法の一つ。伝送単位ごとにビット列を2進数とみなし,あらかじめ定められ
た多項式で除算した余りをチェックビットとして伝送単位の最後に付加する方式。
4.7
欠陥管理(defect management)
ディスクの欠陥領域を取り扱う方法。
4.8
ディスク基準面(disk reference plane)
理想スピンドルにおいて,回転軸に対して垂直で,かつ,ディスクのクランプゾーンに対応する,完全
にフラットな環状表面として規定される面。
4.9
エンボスマーク(embossed mark)
光磁気的手段によって変更できないように形成されたマーク。
4.10
入射面(entrance surface)
光ビームが最初に入射するディスクの表面。
4.11
誤り訂正符号,ECC(Error Correcition Code, ECC)
データの中にある種の誤りを訂正するために設計された誤り検出符号の一つ。
4.12
フィールド(field)
セクタの下位区分を表す領域。特定の種類に属するデータのために用いる。
4.13
フォーマット(format)
ディスク上の情報の配置又はレイアウト。
4.14
全面書換形光ディスク(fully rewritable disk)
規定された領域のデータが,光ビームによって書換え可能であるODC。
4.15
グルーブ(groove)
4.19参照。
4.16
ハブ(hub)
駆動装置のスピンドルによって心出しを行い,かつ,吸着力を与えるためのディスクの中心部にある構
造体。
4.17
インタリーブ(interleaving)
バーストエラーによって影響を受けないように,連続するデータ群を物理的に分割して配置するプロセ
ス。
4
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.18
カー回転(Kerr rotation)
光磁気カー効果が引き起こす,記録層からの反射による光ビームの偏光面の回転。
4.19
ランド及びグルーブ(land and groove)
情報が記録される前に形成するディスクの溝状構造。トラック位置を明らかにするために用いられる。
グルーブは,それと一対でトラックを形成するランドよりも入射面に近いほうに位置する。
4.20
ロジカルトラック(logical track)
論理的に分割したトラックであり,2 048バイトのセクタをもつディスクでは17個の連続したセクタで
構成されるトラック。各ロジカルトラックの最初のセクタにはセクタ番号0を割り当てる。
4.21
ロジカルZCAV,logical ZCAV(logical Zoned Constant Angular Velocity, logical ZCAV)
角速度一定方式で,ゾーンごとにフィジカルトラック当たりのセクタ数の異なるディスクフォーマット。
データゾーンにおいては,全てのトラックをロジカルトラックとして扱う。
4.22
マーク(mark)
磁区,ピット,その他光学的に検出できる形態をもった記録層の造作。マークのパターンがディスク上
のデータを表す。
注記 セクタマーク,アドレスマークなどのセクタの下位区分としての“マーク”はここでいうマー
クと異なる。
4.23
光ディスク(optical disk)
記録層にマークの形で情報を記録したり保持したりする,光ビームで再生可能なディスク。
4.24
光ディスクカートリッジ,ODC(optical disk cartridge, ODC)
光ディスクが収納されたケースからなるデバイス。
4.25
フィジカルトラック(physical track)
ディスクが一回転する間の光ビームの焦点がたどる経路。
4.26
フィジカルトラックグループ(physical track group)
データゾーンでの一定数の連続するフィジカルトラック。
4.27
ピッチ(pitch)
隣接するフィジカルトラックの中心線の半径方向の間隔。
4.28
偏光(polarization)
光波の振動ベクトルの振動方向が規則的な状態。光ビームの偏光方向は,ビームの電気ベクトルの方向
となる。
5
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 偏光面は,電気ベクトルを含み,かつ,光ビームの伝搬方向をもつ面である。光ビームの伝搬
方向を見て電気ベクトルが時計回りで回転する偏光を右だ(楕)円偏光という。
4.29
再生パワー(read power)
再生時のディスクの入射面での光パワー。
注記 記録済みのデータを破壊することなく使えるパワーとして最大パワーを規定する。SN比及び規
格の他の要求事項を満足することを条件に,より小さいパワーを使うことができる。
4.30
記録層(recording layer)
ディスクを構成する層の一つ。製造時及び/又は使用時に,層の上又は中にデータが記録される。
4.31
リードソロモン符号(Reed-Solomon code)
誤り検出符号及び/又は誤り訂正符号の一つ。特に,バーストエラー又は高い相関をもつ誤りの訂正に
向いている。
4.32
セクタ(sector)
ディスクの情報ゾーンにあるアドレス指定可能な最小単位のトラックの部分。
4.33
スペース(space)
トラックに沿ったマークとマークとの間の領域。
4.34
スピンドル(spindle)
ディスク及び/又はハブに接触するディスク駆動装置の一部。
4.35
基板(substrate)
記録層を機械的に支持する透明なディスク構成層。光ビームはこの層を通して記録層に入射する。
4.36
ゾーン(zone)
ディスクの環状領域。
5
表記法
5.1
数値表示
数値表示は,次による。
− 測定値は,該当規定値の最下位桁に丸める。例えば,1.26
01
.0
0.02
+
−
という規定値は,1.235以上1.275未満
の測定値を許容する。
− 16進数は,括弧でくくった0〜9の数字及びA〜Fのアルファベットで表示する。
− ビットの値は,“0”及び“1”とする。
− 2進数及びビットの組合せの数値は,0及び1で表す。
− 2進数及びビットの組合せの数値は,左に最上位ビットを示す。
− 2進数の負の値は,2の補数で表す。
6
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 各フィールドのデータは,最上位バイト(バイト0)を最初に記録する。8ビットで構成する各バイト
内では,最下位ビット(0番目)を最後に記録し,最上位ビット(7番目)を最初に記録する。この記
録順は,誤り検出訂正回路のデータ入出力にも適用する。
− 特に明記されていない限り,全てのトラック番号はロジカルトラックで表す。
5.2
名称
固有のトラック,フィールドなどの実体の名前は,大文字の頭文字で示す。
6
略語
略語について規定する。
AM
Address Mark アドレスマーク
CRC
Cyclic Redundancy Check 巡回冗長検査
DDS
Disk Definition Structure ディスク定義構造
DMA
Defect Management Area 欠陥管理領域
ECC
Error Correction Code 誤り訂正符号
FA1
Function Area 1 機能定義領域1
FA2
Function Area 2 機能定義領域2
ID
Identifier 識別子
LSB
Least Significant Byte 最下位バイト
MO
Magneto-Optical 光磁気
MSB
Most Significant Byte 最上位バイト
ODC
Optical Disk Cartridge 光ディスクカートリッジ
PA
Postamble ポストアンブル
PDL
Primary Defect List 一次欠陥管理表
RLL(1,7) Run Length Limited (code) (1,7)ランレングス制限符号
R/W
Rewritable 書換形
SDL
Secondary Defect List 二次欠陥管理表
SM
Sector Mark セクタマーク
TIA
Time Interval Analyzer タイムインターバルアナライザ
VCO
Voltage Controlled Oscillator VCO(信号)
VFO
Variable Frequency Oscillator VFO(信号)
ZCAV Zoned Constant Angular Velocity ゾーン化された角速度一定方式
7
ODCの概要
この規格の主題であるODCは,光ディスクを含むケースからなる。
ケースは,ディスクを保護する覆いであり,シャッタによって覆われたアクセス窓をもつ。カートリッ
ジを駆動装置に挿入したとき,シャッタは自動的に開く構造とする。
光ディスクは,一面だけに記録可能とする。データの記録及び消去は,熱磁気効果を用いて記録層の磁
化領域に焦点を結ぶ光ビームによって行う。再生は,集束光ビームで光磁気効果を用いてデータを読み取
る。光ビームは,透明なディスクの基板を通して,記録層にアクセスする。
7
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8
一般要件
8.1
環境条件
8.1.1
測定環境
測定環境は,規定がない限り,ODCの近傍で測定し,次のとおりとする。
温度
:23±2 ℃
相対湿度
:45〜55 %
大気圧
:60〜106 kPa
空気清浄度
:クラス100 000(附属書J参照)
ODCの中又はディスク上に結露が生じてはならない。ODCは,測定の前に,48時間以上測定環境に慣
らしておかなければならない。光ディスクの表面は,ディスク製造者の条件によって清浄にしておくこと
を推奨する。
別に規定しない限り,全ての試験及び測定は,この測定環境条件で行わなければならない。
8.1.2
使用環境
使用環境は,ODCの近傍で測定し,次のとおりとする。測定環境を満足したODCは,使用環境でデー
タの互換性を保証しなければならない。
温度
:5〜55 ℃
相対湿度
:3〜85 %
絶対湿度
:1〜30 g/m3
大気圧
:60〜106 kPa
最大温度勾配
:10 ℃/h
最大相対湿度勾配
:10 %/h
空気清浄度
:オフィス環境(Q.1参照)
最大磁界強度(光ビーム照射時) :36 000 A/m(Q.2参照)
最大磁界強度(光ビーム非照射時):48 000 A/m
ODCの中又はディスク上に結露が生じてはならない。ODCは,使用環境条件を外れて保管した場合,
使用前に2時間以上使用環境に慣らしておかなければならない(附属書O参照)。
8.1.3
保存環境
保護の覆いがないODCは,保存環境を外れて保存してはならない。
保存環境は,ODC近傍の雰囲気が次の条件を満たす環境とする。
温度
:−10〜55 ℃
相対湿度
:3〜90 %
絶対湿度
:1〜30 g/m3
大気圧
:60〜106 kPa
最大温度勾配
:15 ℃/h
最大相対湿度勾配
:10 %/h
空気清浄度
:オフィス環境(Q.1参照)
最大磁界強度
:48 000 A/m
ODCの中又はディスク上に結露が生じてはならない。
8.1.4
輸送条件
この規格では規定しないが,附属書Pに従うことを推奨する。
8
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.2
温度衝撃
ODCは,駆動装置に着脱するとき,20 ℃までの温度衝撃に耐えなければならない。
8.3
安全性
ODC は,指示された方法で使用するとき,又は情報処理システムにおける予測可能な使用において,
ECMA-287の安全性要件を満たさなければならない。
8.4
耐燃性
ODC及びその部品は,ECMA-287に規定するように,HBと同等以上の耐燃性の材料とする。
9
基準駆動装置
基準駆動装置は,明確に定義された特性をもつ幾つかの重要部品からなる駆動装置であり,この規格で
規定する光ディスクの記録特性,再生特性及び消去特性を測定するために用いる。この箇条では,全ての
部品の概要について記述する。特定の箇条での測定に必要な部品については,それぞれの箇条で規定する。
9.1
光学系
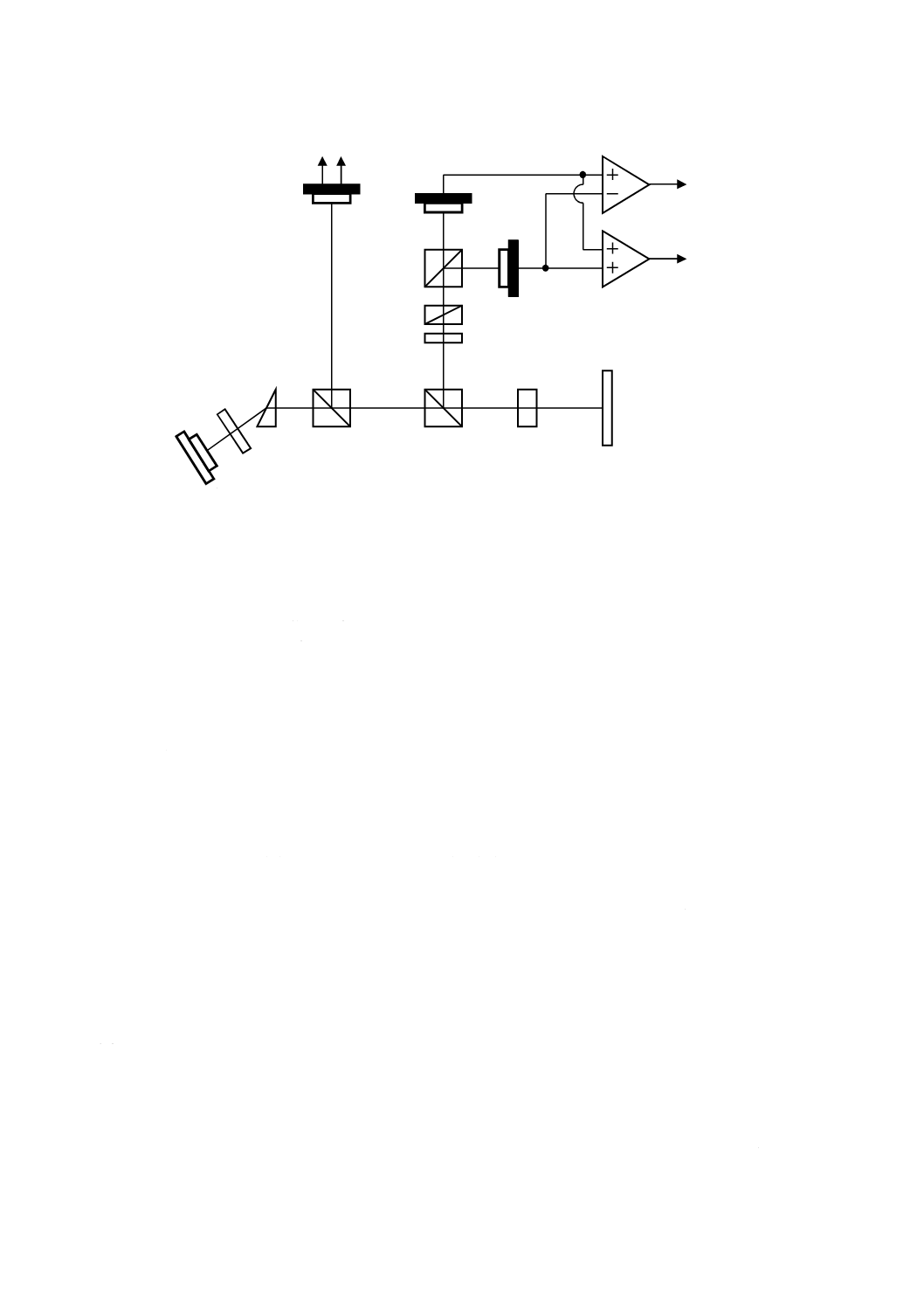
記録特性,再生特性及び消去特性を測定するために用いる基準駆動装置の光学系の基本構成は,図1に
示すとおりとする。図1の光学系と同じ動作をする限り,基準駆動装置に用いる部品及び部品の配置は問
わない。ディスクの入射面からの反射光は,測定の精度に影響を与えないように光学系の構成を配慮しな
ければならない。
ディスクによって偏光が変化しないとき,偏光ビームスプリッタJは,フォトダイオードK1の信号とフ
ォトダイオードK2の信号とが等しくなるようにする。この場合の偏光方向をニュートラル偏光方向という。
位相補償器Nは,光学系を,ニュートラル偏光方向の偏光とそれに直角方向の偏光との間の位相の遅れを
2.5°以下に調整しなければならない。この位相補償器の位置は,中立位置という。位相補償器は,狭帯域
信号対雑音比の測定のために用いる(26.2参照)。
偏光ビームスプリッタJ は,100以上のP-S強度反射率比をもたなければならない。
偏光ビームスプリッタEのFからHへのニュートラル偏光方向の反射率Rpの公称値は0.30とする。ニ
ュートラル偏光方向及び直角方向の偏光の反射率Rsの公称値は0.95とする。Rsの実際の値は,0.90以上
とする。反射率がR'p及びR'sとなる偏光ビームスプリッタEをもつ駆動装置で光磁気信号の非対称性を測
定した場合,測定値は,次の係数を乗じて補正をしなければならない。
s
p
p
s
R'
R
R'
R
チャネル1の出力は,K1とK2とのフォトダイオードの電流値の和とし,エンボスマークの再生に用い
る。
チャネル2の出力は,K1とK2とのフォトダイオードの電流値の差とし,光磁気効果によるユーザ記録
マークの再生に用いる。
9
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A
B
C
D
E
F
G
H
レーザダイオード
コリメータレンズ
光整形プリズム
ビームスプリッタ
偏光ビームスプリッタ
対物レンズ
光ディスク
1/2λ波長板
I1, I2
J
K1, K2
K3
L1, L2
M
N
2分割フォトダイオード出力
偏光ビームスプリッタ
フォトダイオード
2分割フォトダイオード
DCアンプ
トラッキングチャネル(20.3参照)
位相補償器
図1−基準駆動装置の光学系
9.2
光ビーム
データの記録,再生及び消去に使用する光ビームは次の特性をもつ。
a) 波長(λ)
665±10 nm
b) 波長(λ)と対物レンズの開口数(NA)との比
λ/NA=1.209±0.018 μm
c) 対物レンズの開口(D)と1/e2での光ビーム直径(W)との比
D/W=0.85±0.05
d) 波面収差(記録層にて)
0〜0.033λ rms
e) 偏光方向
直線 グルーブに対して平行
f)
消光比
≦0.01
消光比は,検光子を180°以上回転させたとき,測定される光強度の最大値と最小値との比とする。
g) 記録,再生及び消去のための光パワー,パルス幅及び磁界については,20.2.2,24.2.2,24.3,24.4及
び28.2.2で規定する。
9.3
再生チャネル
2個の再生チャネルは,記録層のマークからの信号の再生に用いる。チャネル1は,マークの光ビーム
の回折現象による反射光強度の変化としてエンボスマークを再生する。チャネル2は,マークの光磁気効
果による光ビームのニュートラル偏光方向からのずれをフォトダイオードK1とK2との出力差としてユー
ザ記録マークを再生する。チャネル1及びチャネル2の後の再生信号増幅器は,DCから40 MHzまで±1 dB
K2
I1
I2
A
B
C
D
E
F
G
M
H
N
J
L2
K1
L1
チャネル2
チャネル1
K3
10
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
以内の平たん(坦)な応答性とする。ほかに指示がない限り,チャネル1及びチャネル2からの信号は,
検出前に波形等化せず,チャネルクロック周波数の1/2の遮断周波数をもつ三次バターワースローパスフ
ィルタ(3-pole Butterworth low-pass filter)を通す。
9.4
トラッキング
基準駆動装置のトラッキングチャネルは,光ビームの軸方向及び半径方向のトラッキングサーボをする
ためのトラッキングエラー信号を検出する。軸方向のトラッキングエラー信号,すなわちフォーカシング
エラー信号を作る方法は,規定しない。
半径方向のトラッキングエラー信号は,トラッキングチャネルの2分割検出器によって検出する。2分
割検出器の分割線方向は,検出器上のトラック像と平行になるように配置する。
光ビームの焦点のトラック溝に対する追随の精度については,20.2.4による。
9.5
ディスクの回転
駆動軸は,12.4で規定するとおりの回転軸とする。ディスクの回転周波数は,50.0±0.5 Hzとする。回
転方向は,対物レンズから見て反時計回りとする。
第2章 機械的特性及び物理的特性
10 ケースの寸法特性及び物理的特性
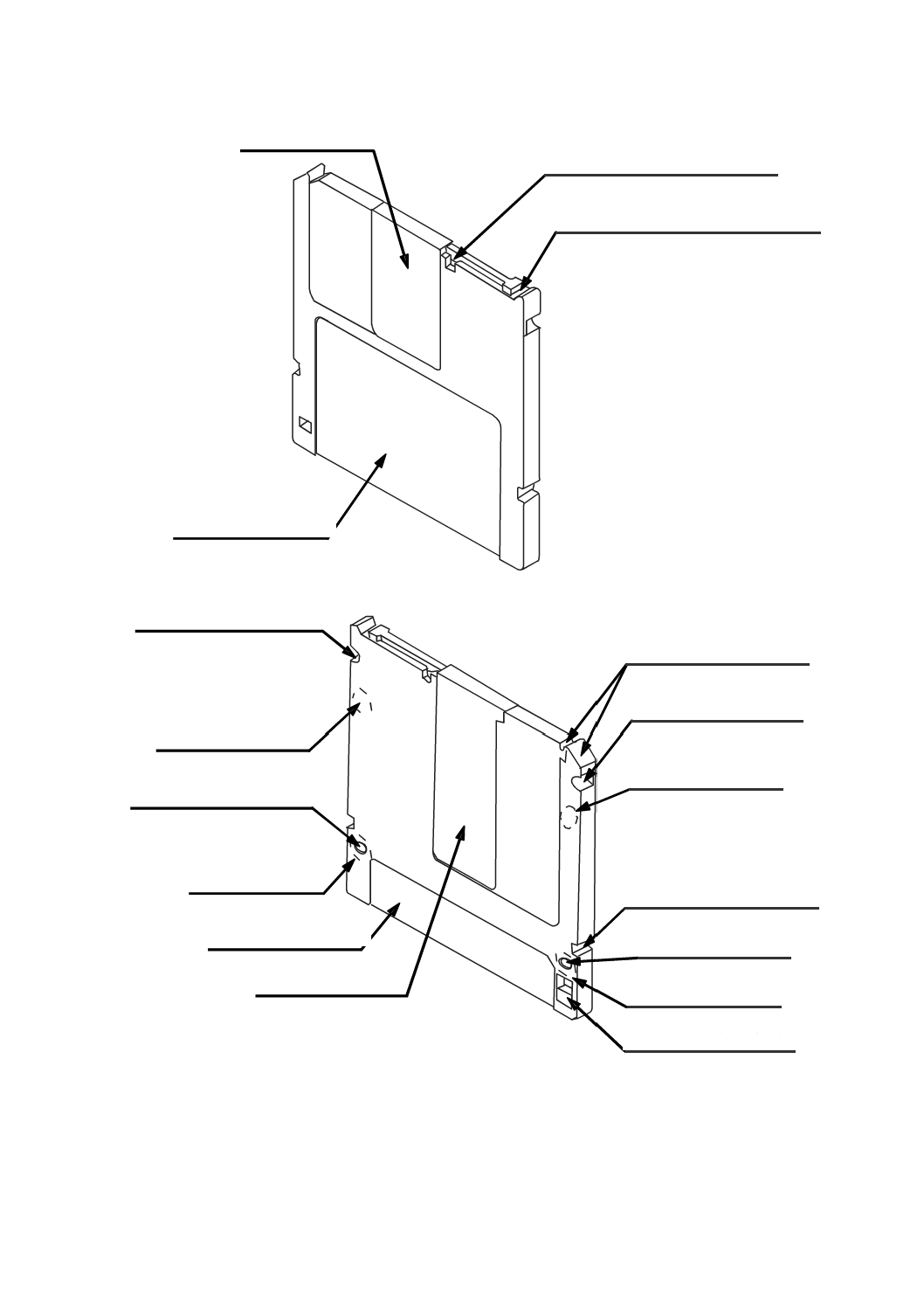
10.1 ケースの概要(図2参照)
ケースは,四角形の硬い保護用コンテナである。A面にスピンドル窓があり,駆動装置のスピンドルが
ハブによってディスクを固定できるようにする。ケースは両面にヘッド窓があり,一つは,駆動装置の光
ヘッド用,もう一つは,磁界を与える磁気ヘッド用である。その窓部は,シャッタで覆われ,ODCを駆動
装置に差し入れたときにシャッタが開き,取り出したときにシャッタが閉じて窓を覆う。ケースには,誤
挿入防止機構,記録禁止機構及び反射率検出機能があり,更に,オートチェンジャ用のグリッパスロット
がある。
10.2 ケースの基準面
ケースの基準は,三つの直交する基準面X,Y及びZとする。基準面Zは,ケースA面上に設けたS1
〜S4からなる平面とする。三つの基準面は,位置決め孔の中心で直交し,基準面Xは,ロケーション孔及
びアライメント孔の中心を結ぶ線を通る平面とする(附属書K参照)。
10.3 ケースの寸法
ケースの寸法は,測定環境で測定する。使用環境でのケースの寸法は,この箇条で規定する寸法から見
積もることができる。
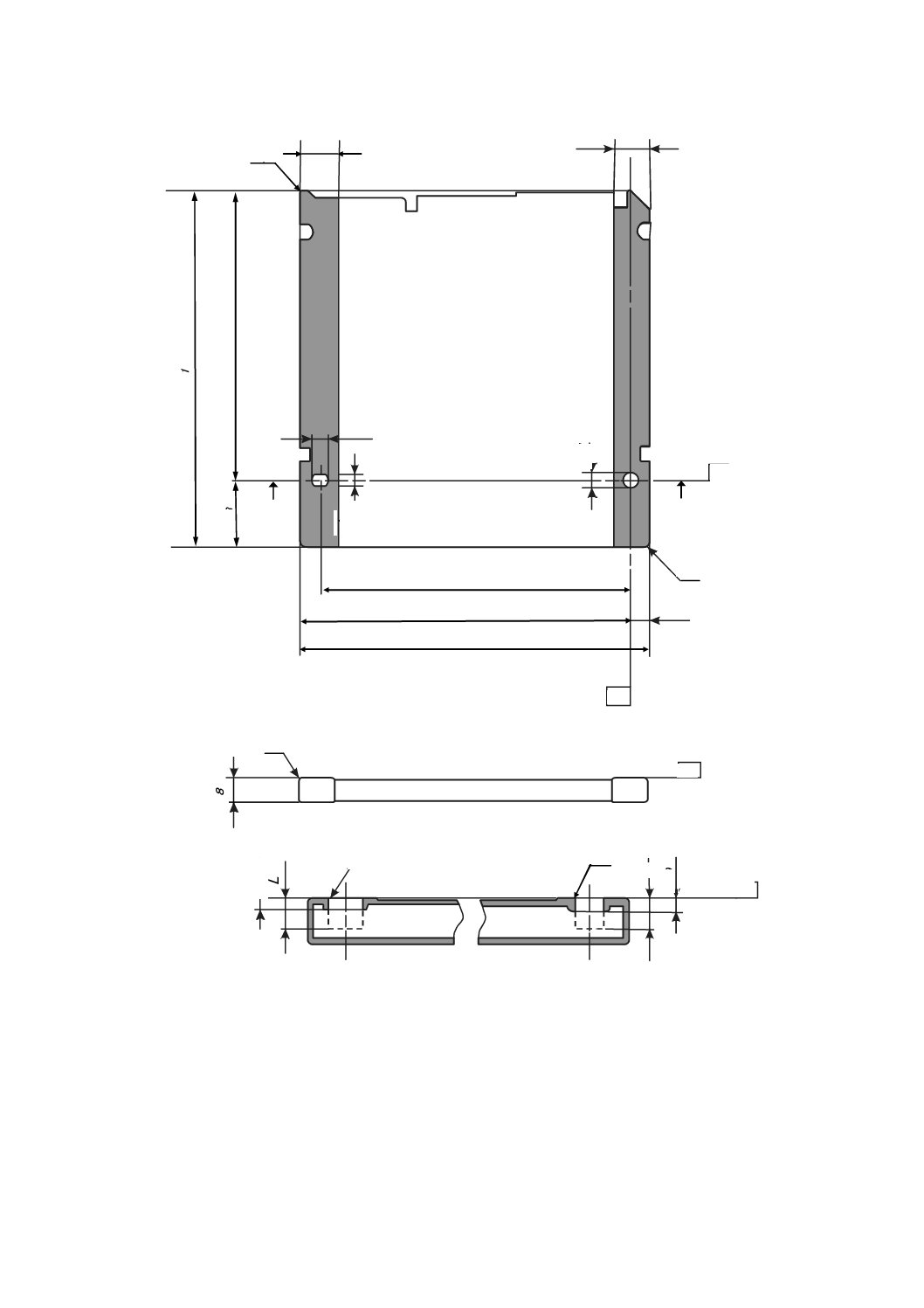
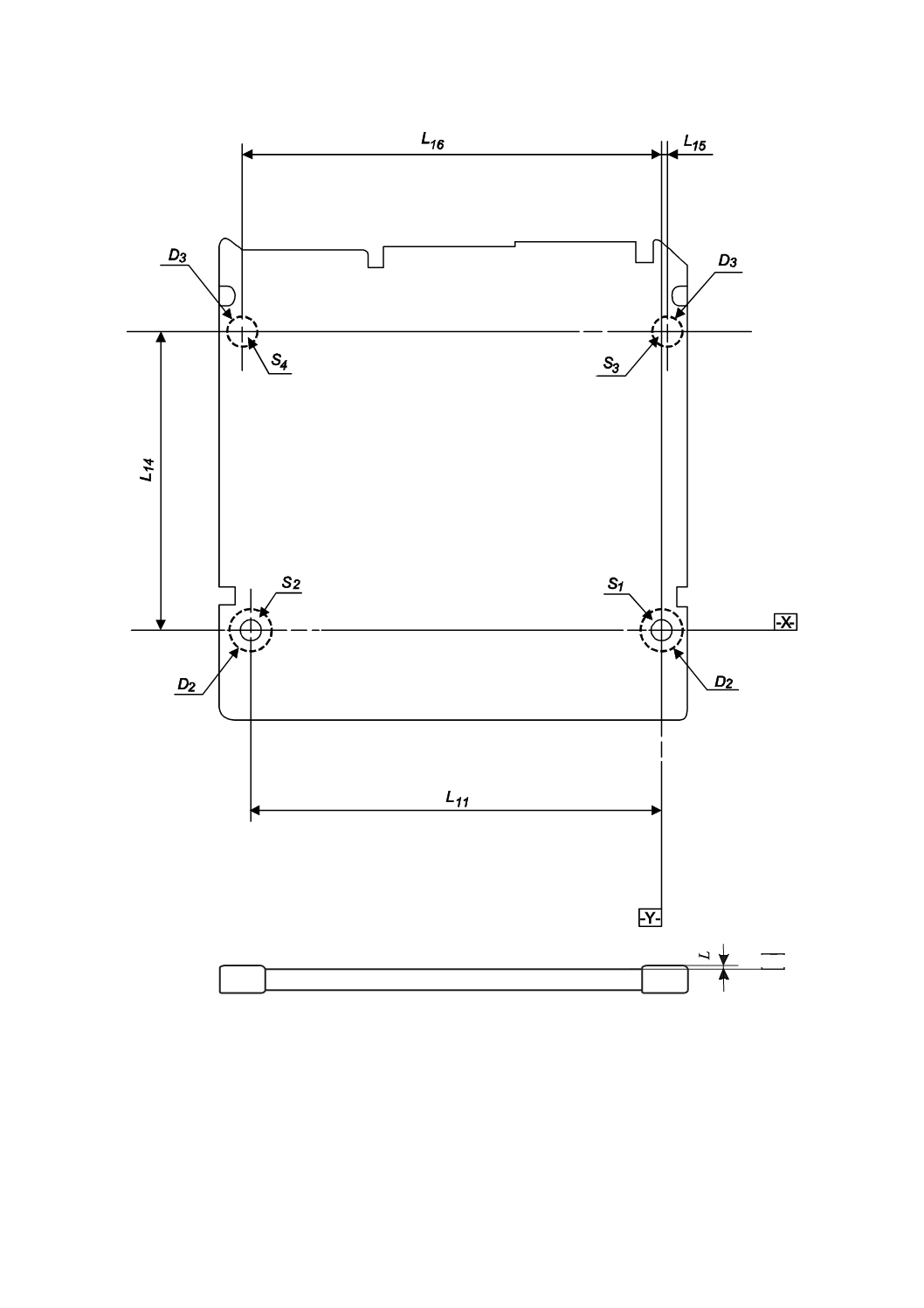
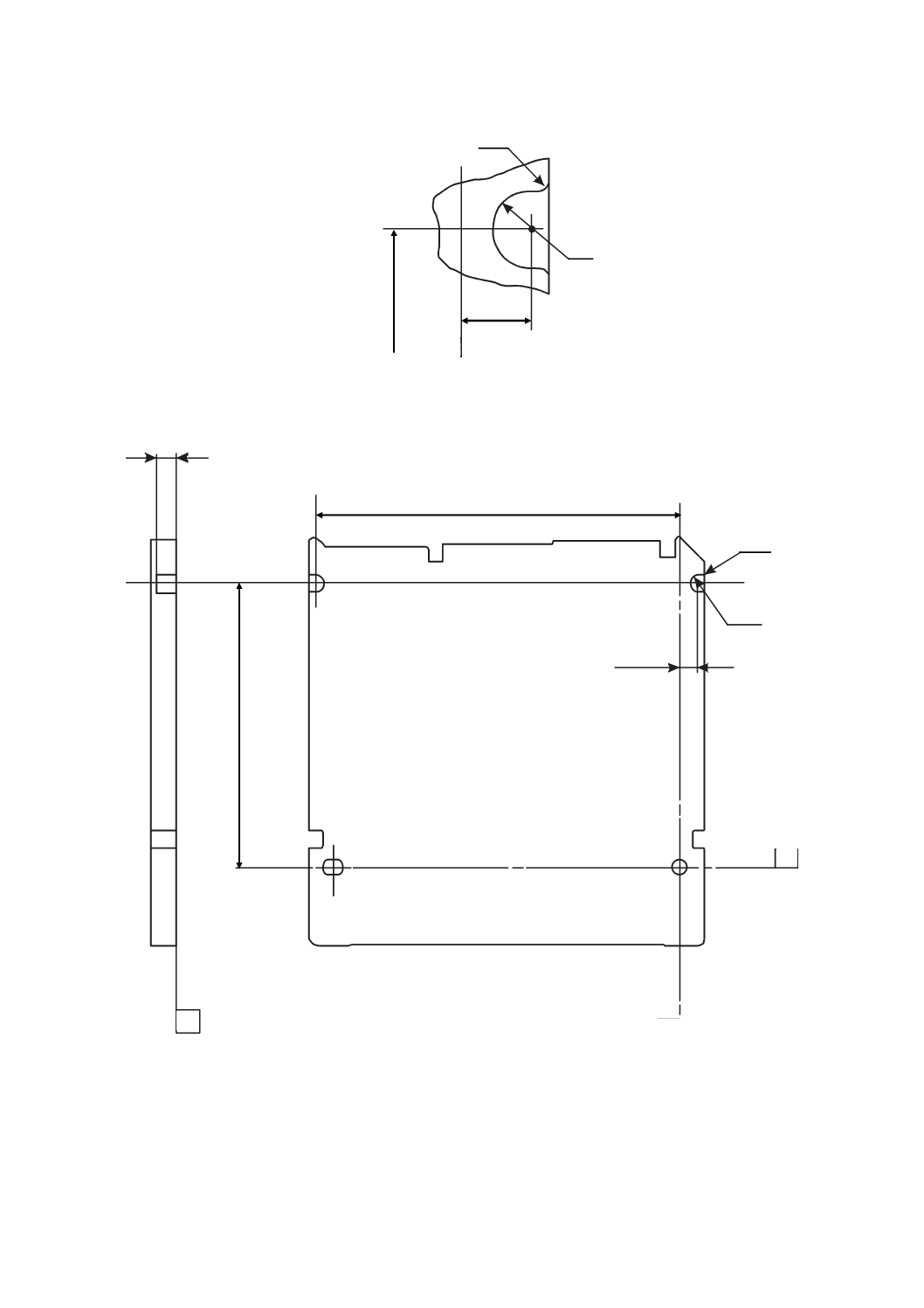
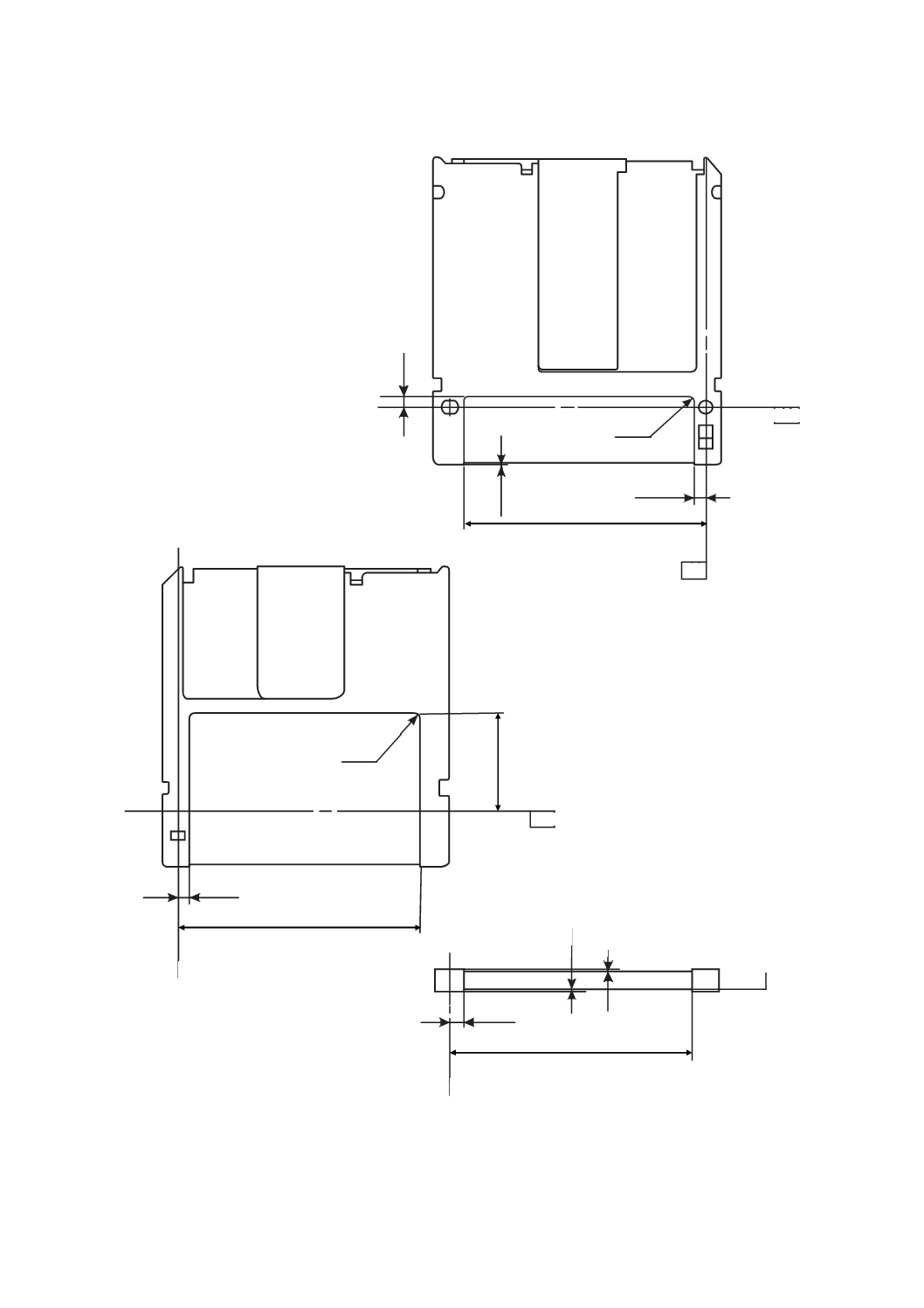
10.3.1 外形寸法(図3参照)
ケースの全長は,次による。
L1=94.0±0.3 mm
ケースの上端から基準面Xまでの長さは,次による。
L2=76.0±0.2 mm
ケースの下端から基準面Xまでの長さは,次による。
L3=18.0±0.2 mm
ケースの全幅は,次による。
L4=90.0
0
4.0
−
mm
ケースの左端から基準面Yまでの長さは,次による。
11
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
L5=85.0±0.3 mm
ケースの右端から基準面Yまでの長さは,次による。
L6=5.0±0.1 mm
上端の角部は,次の半径で丸める。
R1=1.5±0.2 mm
下端の二つの角部は,次の半径で丸める。
R2=2.0±0.2 mm
ケースA面の右端から拡張ゾーンまでの長さは,次による。
L7≧8.6 mm
ケースの厚さは,次による。
L8=6.0±0.2 mm
ケースの8か所のりょう(稜)線は,次の半径で丸める。
R3=0.3
2.0
0
+ mm
10.3.2 ロケーション孔(図3参照)
ロケーション孔の中心は,基準面X,Y及びZの交点とし,その直径は,次による。
D1=3.6
0
06
.0
−
mm
ロケーション孔の深さは,次による。
L9≧1.5 mm
ロケーション孔は,基準面Zから次の深さまで直径D1以上で広がっているものとし,B面に貫通しては
ならない。
L10≧4.0 mm
ロケーション孔の角部は,次の半径で丸める。
R4≦0.5 mm
10.3.3 アライメント孔(図3参照)
アライメント孔の中心は,基準面X上にあり,基準面Yからの距離は,次による。
L11=80.0±0.2 mm
アライメント孔の形状は,長方形とし,その寸法は,次による。
L12=3.60
0
06
.0
−
mm
及び
L13=4.4
0.2
0
+mm
深さは,ロケーション孔の深さの規定(L9,L10)に準じ,ケースB面に貫通してはならない。
アライメント孔の角部は,半径R4で丸める。
10.3.4 基準面(図4参照)
ケースのA面は,四つの基準面(S1面,S2面,S3面及びS4面)を含む平面とする。S1面及びS2面は,
ロケーション孔及びアライメント孔を中心とした円形とし,その直径は,次による。
D2≧7.0 mm
S3面及びS4面の寸法は,直径(D3)とし,S3面の中心は,基準面Xから距離(L14)及び基準面Yから
距離(L15)に,S4面の中心は,基準面Xから距離(L14)及び基準面Yからの距離(L16)に設け,その寸
法は,次による。
D3≧6.0 mm
12
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
L14=54.0±0.2 mm
L15=1.0±0.2 mm
L16=81.0±0.2 mm
ケースの表面又はシャッタ機構(10.3.8参照)は,基準面Zから次の突起(L17)があってはならない。
L17≦0.15 mm
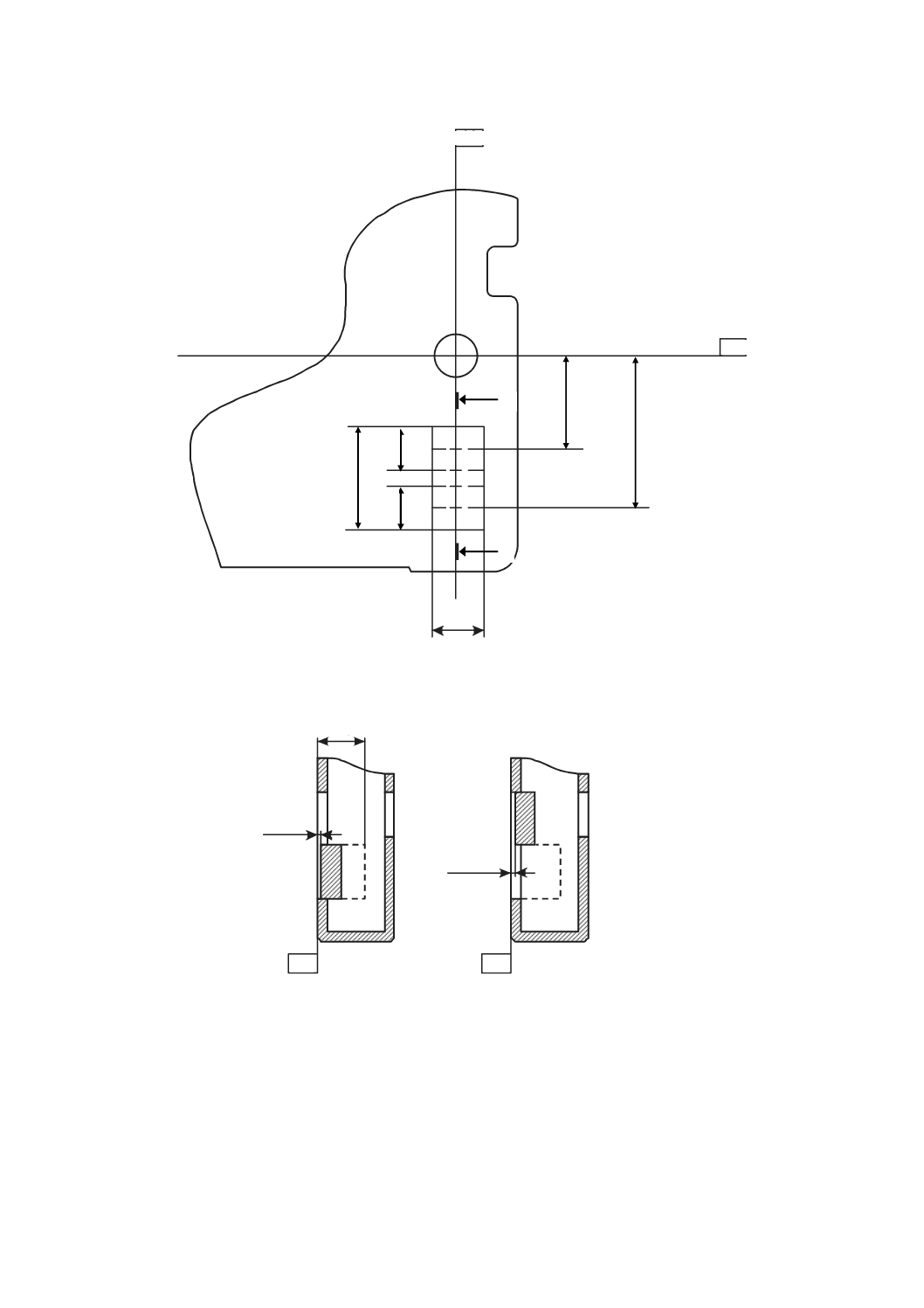
10.3.5 ディテント(図5参照)
ケースには,二つの対称的なディテントがある。
基準面Zからの深さは,次による。
L18≧5.0 mm
形状は左右対称の半円とし,半径は次による。
R5=2.1±0.1 mm
基準面Xからの位置(L19),基準面Yからの位置(L20,L21)の寸法は,次による。
L19=65.5±0.2 mm
L20≦4.0 mm
L21≦84.0 mm
挿入スロット部の外側の角は,次の半径で丸める。
R6=0.5±0.2 mm
挿入スロット部は,ケースB面に貫通してはならない。
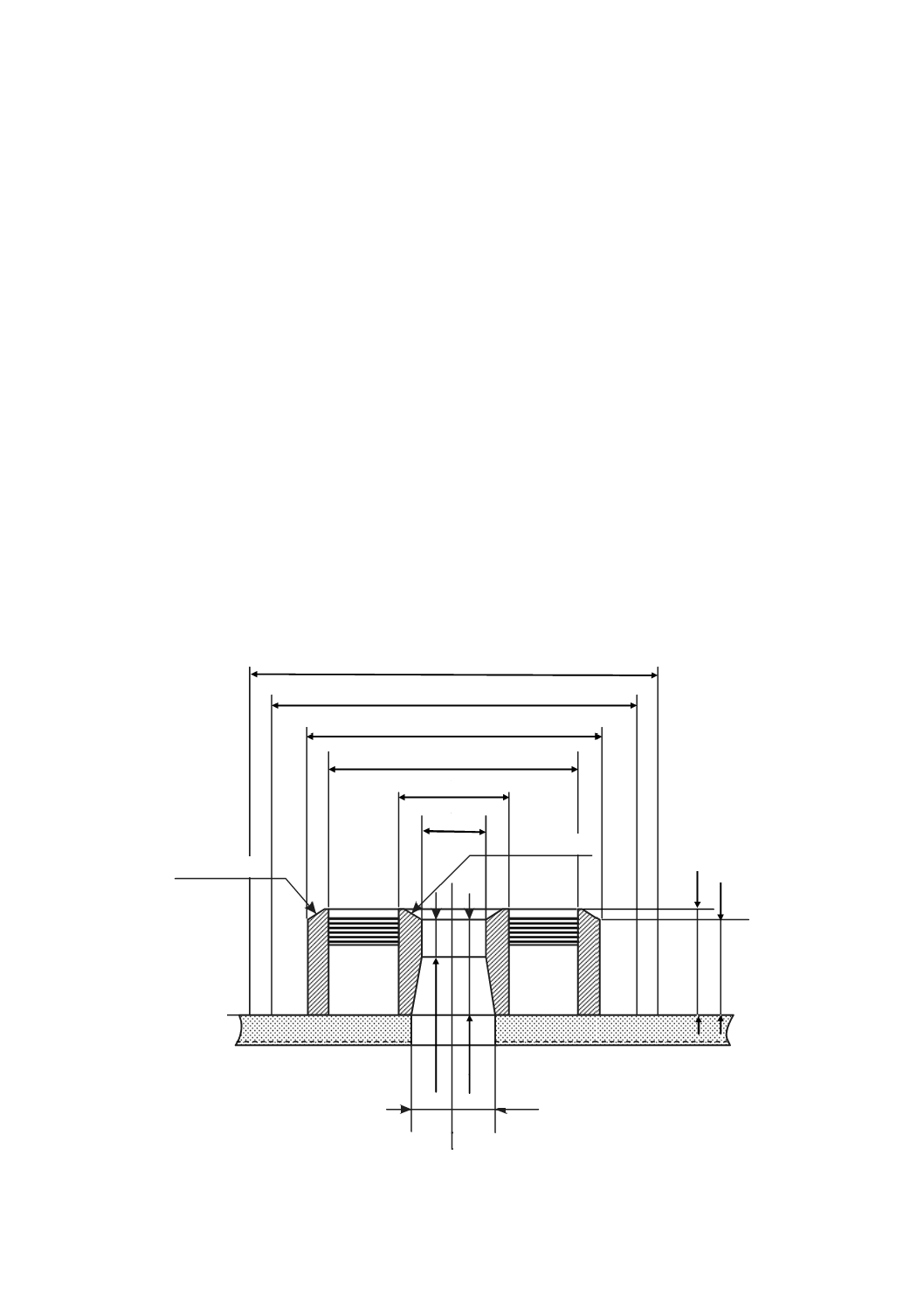
10.3.6 機能領域(図6参照)
機能領域は,FA1及びFA2からなり,ケースの孔の開閉によって表1に示す記録禁止情報,ディスク反
射率の高低情報及び再生専用機能情報を示す各機能を表す。
機能領域は,ケースA面上に基準面Y及びZの交点上に中心線をもつ,長さ(L22),幅(L23)の開口部
を設け,そのうち,各々の長さ(L24)をFA1及びFA2とする。その寸法は,次による。
L22≧8.2 mm
L23≧4.4 mm
L24≧3.6 mm
FA1の中心位置は,基準面Xからの距離(L25)に平行に設け,その寸法は,次による。
L25=7.8±0.2 mm
FA1は,ケースB面まで貫通した孔とする。
FA2の中心位置は,基準面Xからの距離(L27)に平行に設け,その寸法は,次による。
L27=12.8±0.2 mm
FA2は,ケースA面から基準面Zに平行な深さ(L26)のケースB面を貫通しない孔とし,その寸法は,
次による。
L26≧4.0 mm
FA1及びFA2の閉じたときの表面は,基準面Zからの距離(L28)とし,その寸法は,次による。
L28≦0.3 mm
13
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−機能領域FA1及びFA2の使用法
FA1
FA2
記録
反射率
ODCの種類
開
閉
不可
低
全面書換形
閉
開
可
低
全面書換形
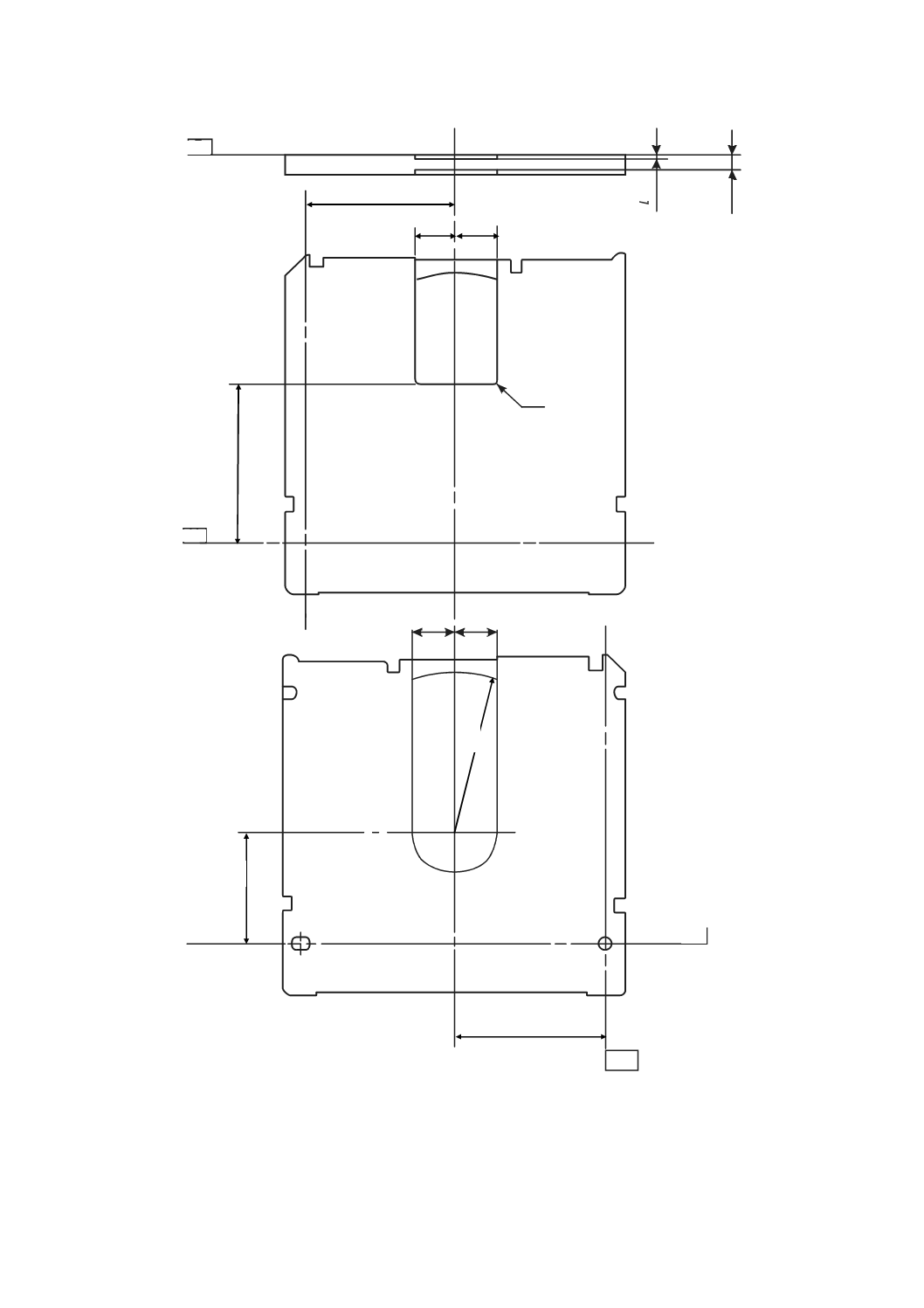
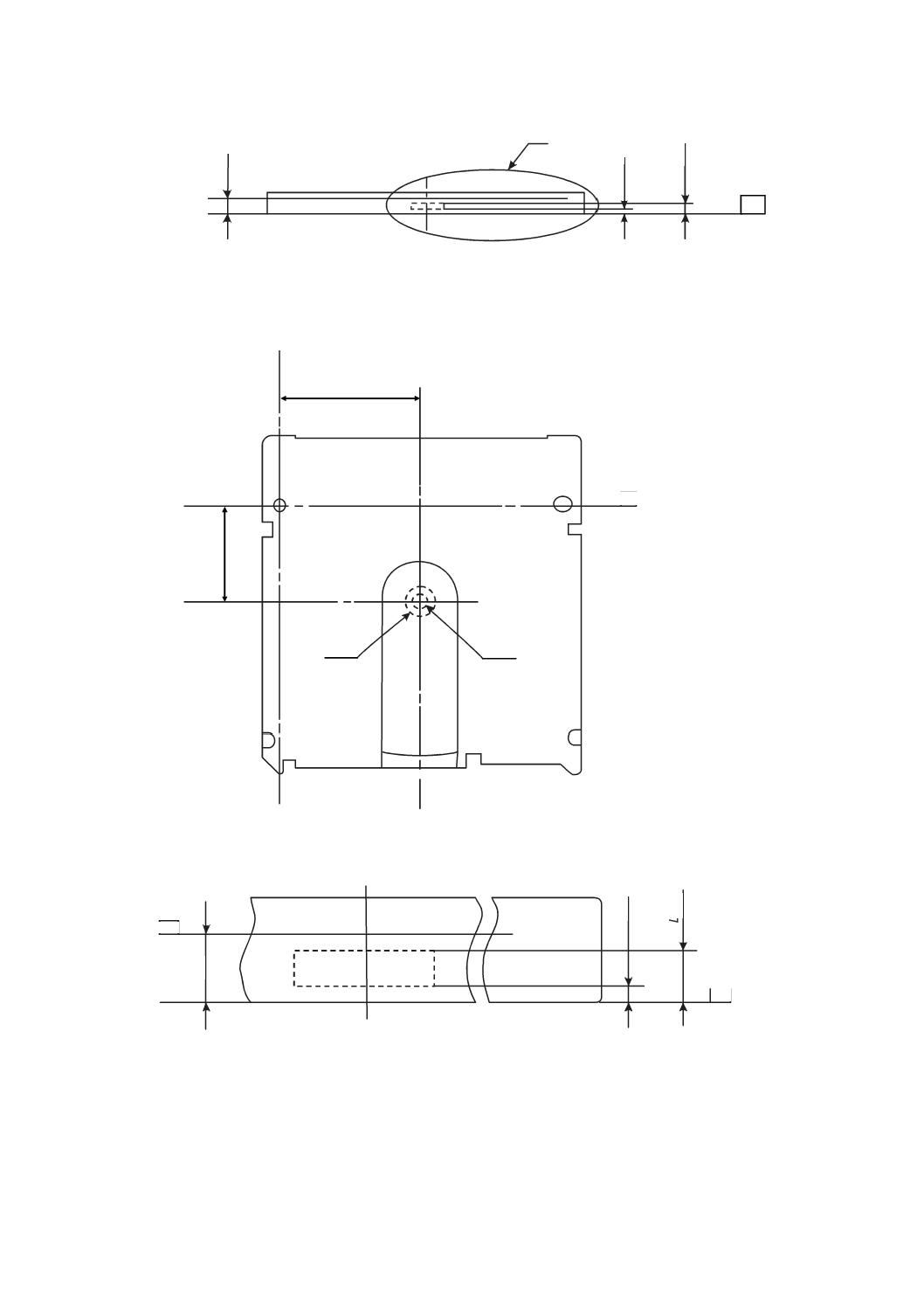
10.3.7 ヘッド窓及びスピンドル窓(図7参照)
ヘッド窓及びスピンドル窓は,ケースA面では基準面Yからの位置(L29)を中心に,幅(L30,L31),
基準面Xからの位置(L32)と基準面YからのL29との交点から半径(R7)の位置に設け,その寸法は,次
による。
L29=40.0±0.2 mm
L30=11.0
0.2
0
+mm
L31=11.0
0.2
0
+mm
L32=27.0±0.05 mm
R7≧44.3 mm
ケースの上部は,基準面Zからの幅(L33)の溝を設け,その寸法は,次による。
L33=2.0
0.2
0
+mm
また,ケースB面には,駆動装置の磁気ヘッドがディスクにアクセスするためにヘッド窓を設ける。そ
の窓は,基準面YからL29の位置にあり,中心から両側にL30及びL31の幅をもつ。基準面Xからの位置
L34から,L32 とL29 との交点を中心にした半径R7の円弧まで拡張される。L34の寸法は,次による。
L34≦40.0 mm
L34の2隅の角部は,次の半径で丸められる。
R8≦2.0 mm
ヘッド窓のケース上部の幅(L35)は,次による。
L35=4.2
0
4.0
−
mm
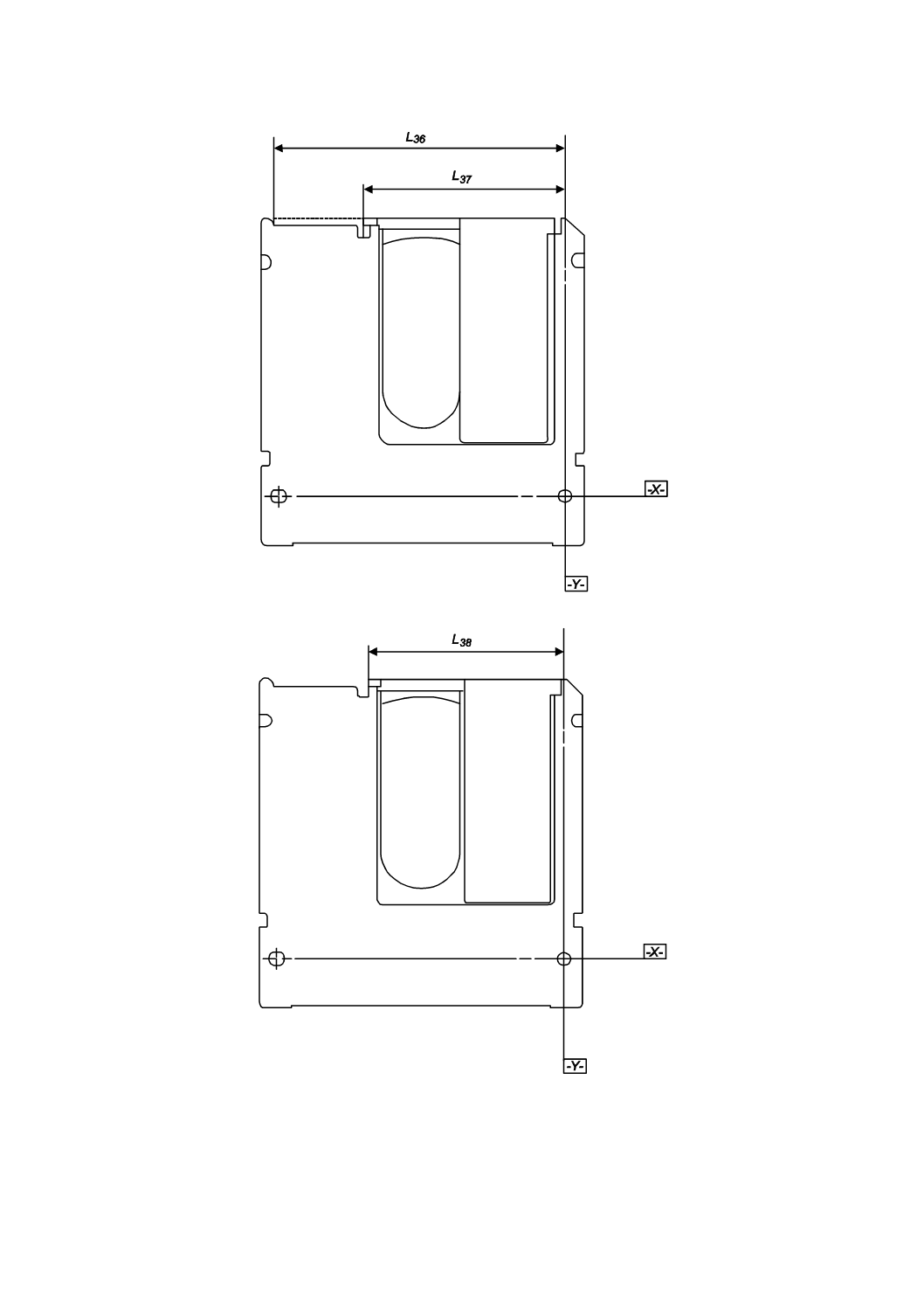
10.3.8 シャッタ(図8参照)
ケースには,スプリング方式のシャッタがあり,閉じるときに,スピンドル窓及びヘッド窓を完全に覆
うように設計されており,シャッタが開いたとき10.3.7の規定の最小値が露出しなければならない。
− ケースA面 :窓の下部の半円〜上面及びL30〜L31
− ケースB面 :L34〜ケースの上部及びL30〜L31
− ケース上部 :基準面Z〜L33,L30〜L31,L35〜ケースB面及びL30〜L31
シャッタは,ケース及びシャッタ全体の厚さがL8を超えない範囲で,自由にスライドできなければなら
ない。
シャッタには,駆動装置のシャッタオープナがシャッタを押し開くことのできる角部を設ける。シャッ
タが閉じているとき,この角部は,基準面Yからの次の距離に位置する。
L36=79.0
0
3.0
−
mm
角部は,10.3.7で規定したスピンドル窓及びヘッド窓の最小値が十分に露出する距離で可動でき,その
寸法は,次による。
L37≧55.5 mm
角部は,10.4.5の規定のシャッタを開くのに必要な力を超えない範囲で移動可能とする。その寸法は,
次による。
14
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
L38≦54.7 mm
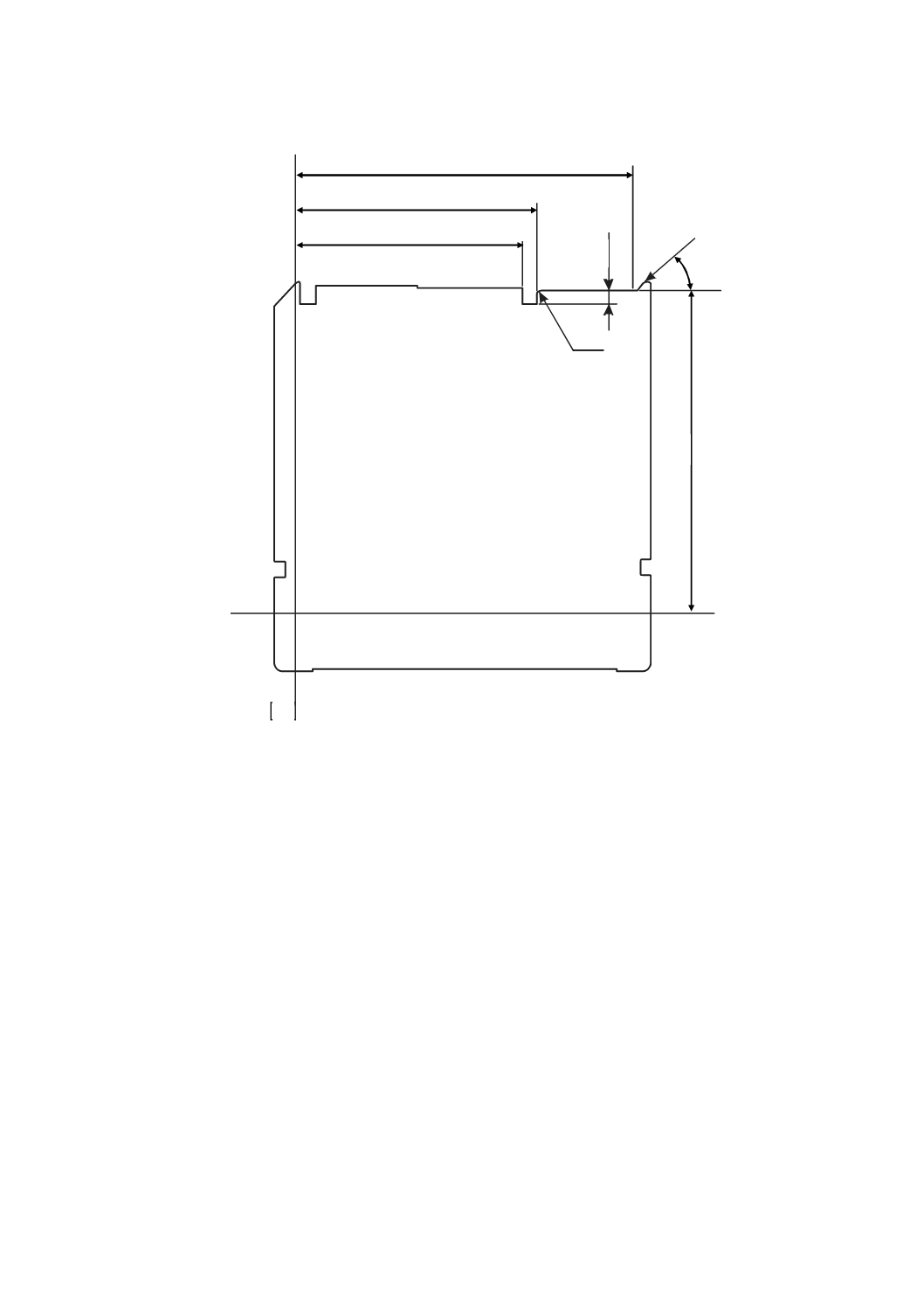
10.3.9 シャッタ開閉路及びシャッタセンサノッチ(図9参照)
ケースには,駆動装置のシャッタオープナが動作できるように,開閉路を設ける。開閉路は,基準面Y
からの距離(L39,L40)及び基準面Xからの距離(L41)の間を図9に示す形状とし,その寸法は,次によ
る。
L39=81.0±0.3 mm
L40=57.5
0.3
0
+mm
L41=74.2±0.1 mm
基準面Yからの距離(L40,L42)に深さ(L43)のシャッタセンサノッチを設ける。シャッタセンサノッ
チの右上の角部は,半径(R9)で丸める。ケースの端までは,角度(A1)をもつ形状とする。その寸法は,
次による。
L42≦54.7 mm
L43=3.1±0.1 mm
R9=1.2±0.2 mm
A1=45±5°
10.3.8で規定したシャッタエッジが距離(L37)まで移動したとき,シャッタセンサノッチのL40の位置
からL37の位置までの部分は,シャッタが完全に開いていることを駆動装置が検出できるように,露出し
なければならない。
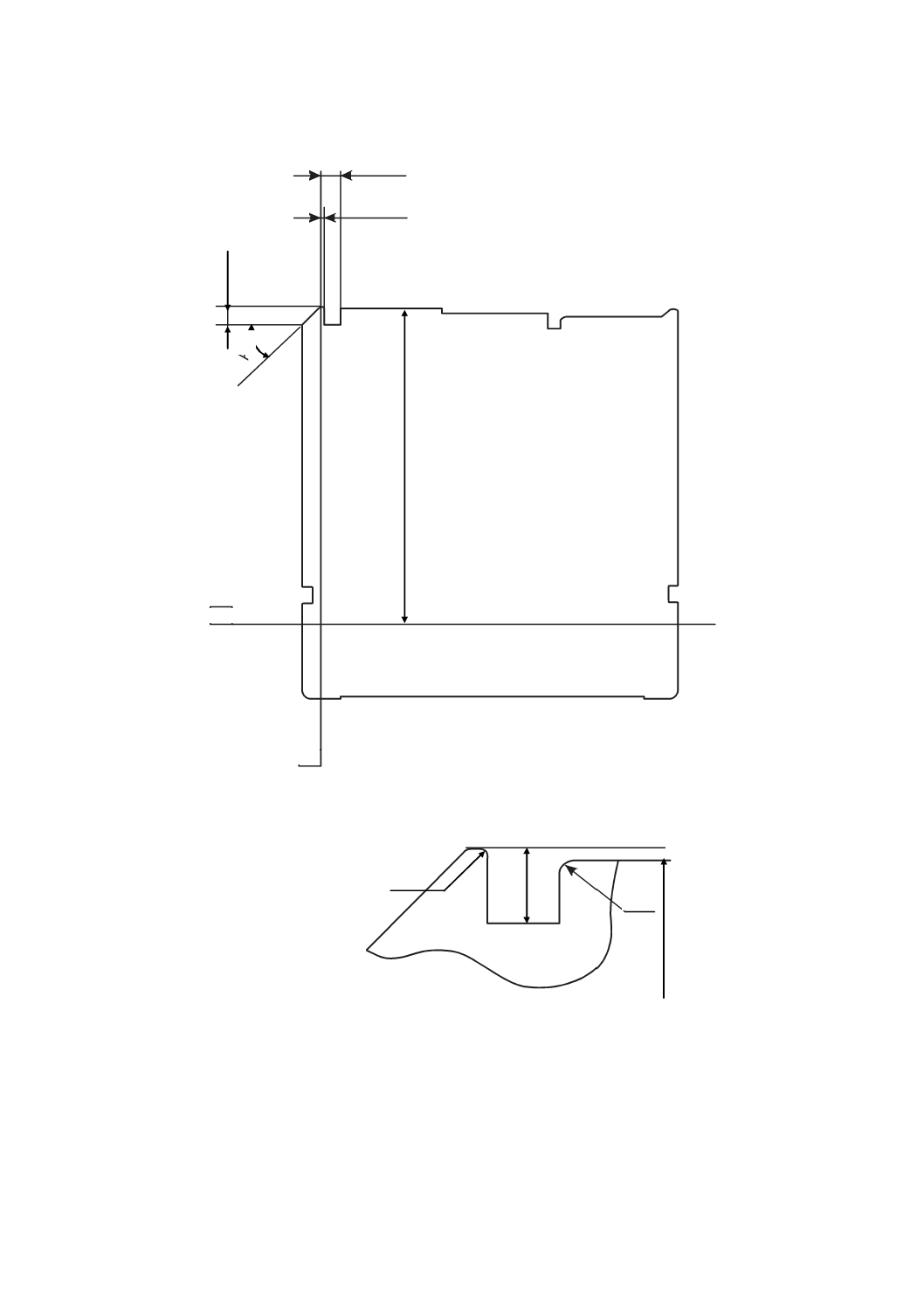
10.3.10 誤挿入防止機構(図10参照)
ケースには,ODCの駆動装置への誤挿入を防止するために,図10に示すノッチ,及びケース角部の形
状を設ける。ノッチは,基準面Yからの距離(L44,L45)に基準面Xからの距離(L47)のケース上部から
深さ(L46)とする。ノッチの角部は,半径(R10,R11)で丸める。ケースの角部は,ケースの上部からの
距離(L48)の間を角度(A2)をもつ形状とする。その寸法は,次による。
L44=4.6±0.2 mm
L45=1.0±0.2 mm
L46=3.1±0.2 mm
L47=75.4±0.2 mm
L48=5.0±0.3 mm
A2=45±2°
R10≦0.3 mm
R11=0.5±0.3 mm
10.3.11 グリッパスロット(図11参照)
グリッパスロットは,ケースの底部からの位置(L51)に左右対称に設け,その寸法(L49,L50)は,次
による。
L49=2.5
0.3
0
+mm
L50=4.0
0.3
0
+mm
L51=23.0
0
3.0
−
mm
グリッパスロットの角部は,半径(R12,R13)で丸める。その寸法は,次による。
R12=0.4±0.2 mm
R13=0.5±0.2 mm
15
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.3.12 ラベル領域(図12参照)
ラベル領域は,ケースA面,ケース底部及びケースB面に設け,ケースA面に対する位置及び寸法(L52,
L53,L55),ケース底部に対する位置及び寸法(L52,L53,L56)並びにケースB面に対する位置及び寸法(L52,
L53,L54)は,次による。
L52=4.0±0.3 mm
L53=76.0±0.3 mm
L54=30.0±0.2 mm
L55=1.2±0.2 mm
L56≧0.2 mm
ラベル領域の角部は,半径(R14)で丸め,その寸法は,次による。
R14≦2.0 mm
10.4 機械的特性
ここで規定する機械的特性は,使用環境条件下で全ての要件を満足しなければならない。
10.4.1 材料
ケースは,この規定の要件を満足する適切な材料で構成する。
10.4.2 質量
光ディスクを除いたケースの質量は,50 g を超えてはならない。
10.4.3 エッジのひずみ(歪)
ODCは,附属書Aで規定するエッジのひずみ(歪)量確認を満足しなければならない。
10.4.4 可とう(撓)性
ODCは,附属書Bで規定する可とう(撓)性確認を満足しなければならない。
この要件は,駆動装置内において適切な面でカートリッジを拘束できることを保証する。
10.4.5 シャッタ開閉力
シャッタを開くのに必要なシャッタのばねの力は,1.5 Nを超えてはならない。シャッタ開閉力の強さは,
ケースの姿勢にかかわらず,自由にスライドするシャッタを閉じるのに十分でなければならない。
16
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図2−ケース
A面
スピンドル窓及び
ヘッド窓(図7参照)
シャッタセンサノッチ(図9参照)
シャッタオープナのスロット(図8参照)
ラベル領域(図12参照)
挿入スロット部(図5参照)
基準面S4(図4参照)
アライメント孔(図3参照)
グリッパスロット(図11参照)
位置決め孔(図3参照)
FA1及びFA2(図6参照)
基準面S1(図4参照)
基準面S3(図4参照)
挿入スロット部(図5参照)
誤挿入防止機構(図10参照)
B面
シャッタ(図8参照)
基準面S2(図4参照)
ラベル領域(図12参照)
17
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
L7
L7
L13
A
A
L11
L5
R2
L4
L6
R1
-Y-
-X-
R4
R4
-Z-
R3
-Z-
L1
L2
L3
L1
2
D1
L8
L9L1
0
L9
L1
0
A−A断面
図3−外形寸法(A面側)
18
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図4−A面上の基準面
-Z-
L
1
7
19
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
R5
R5
R6
R6
L
1
9
L21
L20
L18
L
1
9
L20
-Y-
-Y-
-Z-
-X-
図5−ディテント
20
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図6−機能領域FA1及びFA2並びにその断面図
-Y-
L
2
5
L23
L26
L28
L28
L
2
4
L
2
4
L
2
2
L
2
7
B
-X-
-Z-
-Z-
B
B−B断面
書き込み禁止
B−B断面
書き込み可能
記録可能
記録禁止
21
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
-Y-
L
3
3
L31
L31
L
3
4
L30
L30
L
3
2
R8
R
7
B面
A面
L
3
5
L29
-Z-
-X-
-X-
-Y-
L29
図7−シャッタを外したケースのA面及びB面上のスピンドル窓並びにヘッド窓
22
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
破線は,シャッタが閉じたときのシャッタエッジの位置を示す。
図8−開状態のシャッタ(上図)及び最大の開状態(下図)
23
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
L39
L40
L42
L
4
3
L
4
1
R9
A1
-X-
-Y-
図9−シャッタを除いたときのB面から見たシャッタオープナの開閉路
24
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
L
4
7
L
4
6
R10
R11
L44
L45
L
4
8
A
2
L
4
7
-X-
-Y-
図10−シャッタを除いたときのB面から見た誤挿入防止機構
25
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
L
5
0
L49
L
5
1
-Y-
-Z-
-X-
R13
R12
図11−グリッパスロット
26
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
-Y-
-Z-
L
5
6
L53
L52
L
5
6
-Y-
-X-
L
5
4
R14
L53
L52
-X-
-Y-
L
5
5
L
5
6
L53
L52
R14
図12−ラベル領域
27
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
11 ディスクの寸法,機械的特性及び物理的特性
11.1 ディスクの概要
ディスクは,円い基板で構成され,一方の面にはハブが,もう一方の面にはコーティングを施した記録
層がある。記録層は,保護層によって環境的影響から保護されている。基板のフォーマット領域は,基板
を通して記録層に光ビームを集光できるように透明とする。円形のハブは,記録層の反対側の中心に取り
付ける。ハブは,駆動軸と係合し,ディスクの半径方向の位置合わせ及びハブの吸着力を発生する。
11.2 ディスクの基準軸及び基準面
ハブの寸法は,ディスク基準面Pを基準とする。ディスク基準面Pは,理想的なスピンドルの完全に平
らで環状の取付面に平行かつ同一の平面と定義される。そして,ディスクの基板の境界面であり,スピン
ドルの回転軸に垂直である。
スピンドルの回転軸Aは,ハブの中心孔の中心を通り,ディスク基準面Pに垂直である。
11.3 ディスクの寸法(図13参照)
ディスクの寸法は,測定環境条件で測定する。使用環境条件におけるディスクの寸法は,ここで規定す
る寸法から割り出す。
ディスクの外周直径は,86.0
1.0
2.0
+
− mmとする。厚さは,面振れ(11.4.5参照)を含めず,ハブのない状態
で1.4 mmを超えてはならない。ハブが付いていないディスクの中心孔の直径(D4)は,6.0 mm以上とす
る。
11.3.1 ハブの寸法(図13参照)
ハブの中心孔の直径は,次による。
D5=4.004
012
.0
0
+
mm
ハブの外周直径は,次による。
D6=15.0
0
2.0
−mm
ハブの高さは,次による。
h1=1.2
0
2.0
−mm
ディスク面からの磁性面の位置は,次による。
h2=1.2
0
15
.0
−
mm
基準面Pから中心孔上部までの高さは,次による。
h3≧0.8 mm
ハブの中心孔の高さは,次による。
h4≧0.15 mm
ハブの中心孔の内部の角には,45°で 0.2±0.1 mm の面取り(C1)を付けるか,又は次の半径で丸める。
R15=0.2±0.1 mm
ハブの外部の角には,45°で0.4±0.1 mm の面取り(C2)を付けるか,又は次の半径で丸める。
R16=0.4±0.1 mm
ディスクをクランプするための磁性体の外周直径(D9)及び内周直径(D10)は,次による。
D9≧13.0 mm
D10≦6.0 mm
ハブの吸着力は,附属書Mによって測定したとき,3.0〜4.5 Nとする。
11.3.2 クランプゾーン(図13参照)
28
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
クランプゾーンの外周直径(D7)及び内周直径(D8)は,次のとおりとする。
D7≧21.0 mm
D8≦16.0 mm
11.4 機械的特性
ここで規定する機械的特性は,使用環境条件下で満足しなければならない。
11.4.1 材料
ディスクの材料は,この規格の条件を満たす場合,材質を問わない。この規格で材料の特性を規定して
いるのは,ハブの磁気特性(附属書M参照)及び情報ゾーンの基板の光学特性(11.5参照)だけである。
11.4.2 質量
ディスクの質量は,24.0 g以下とする。
11.4.3 慣性モーメント
軸Aに関連するディスクの慣性モーメントは,0.020 g・m2以下とする。
11.4.4 アンバランス
軸Aに関連するディスクのアンバランスは,0.006 g・m以下とする。
11.4.5 軸方向の振れ
ディスクの軸方向の振れは,記録層の軸方向の変位で規定する。振れは,基板の厚さのばらつき,屈折
率のばらつき,及び基準面Pからの入射面のずれによって生じる。基準面Pに対する記録層の公称位置は,
基板の公称厚さによる。情報ゾーンでの基準面Pに垂直な方向の記録層の公称位置からのずれは,9.5で
規定する回転周波数で回転しているとき,±0.15 mm以下とする。
D7
D8
D6
D9
D10
D5
h
3
h
1
h
2
D4
h
4
-A-
-P-
C1 又はR
C2 又はR16
15
図13−ハブの寸法及びクランプゾーン
φ
φ
φ
φ
φ
φ
φ
29
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
11.4.6 軸方向の加速度
附属書Nに示すディスクの軸方向の最大許容エラー量(emax)は,9.5で規定する回転周波数で回転して
いるとき,基準サーボでサーボがかかった状態で±0.5 μm以下とする。このとき,モータの定常的な外乱
は,無視する。この測定は,次の伝達関数(Hs)をもつサーボ系によるか,又は50 Hz〜170 kHzの帯域で,
|1+Hs|が示す値の±20 %以内の値をもつ|1+H|のサーボ系による。このとき,ディスクの面振れに
よる軸方向の加速度は,22 m/s2以下とする。
0
0
2
0
s
3
1
3
1
3
1
)
(
ω
ω
ω
ω
ω
ω
ω
i
i
i
i
H
+
+
=
ここに, ω=2πf
π
2
0
ω=1 830 Hz
i=
1
−
11.4.7 半径方向の振れ
情報ゾーンでのトラックの半径方向の振れは,基準駆動装置の光学ヘッドを用いて測定する。このため,
回転軸と基準軸Aとの差,基準軸Aに対するトラックの偏心,及び屈折率の変動によって生じる偏心の影
響も含む。
半径方向の振れは,トラックの1回転の間の中心からの最大距離と最小距離との差で,9.5で規定する回
転周波数で回転しているとき,40 μm以下とする。
11.4.8 半径方向の加速度
附属書Nに示すディスクの半径方向のトラッキングエラーの最大許容量(emax)は,9.5で規定する回転
周波数で回転しているとき,基準サーボでサーボがかかった状態で±0.04 μm以下とする。このとき,モ
ータの定常的な外乱は,無視する。測定は,次の伝達関数(Hs)のサーボ系によるか,又は50 Hz〜170 kHz
の帯域で,|1+Hs|が示す値の20 %以内の|1+H|をもつサーボ系による。このとき,ディスクの半径
方向の加速度は,6.1 m/s2以下とする。
0
0
2
0
s
3
1
3
1
3
1
)
(
ω
ω
ω
ω
ω
ω
ω
i
i
i
i
H
+
+
=
ここに, ω=2πf
π
2
0
ω=3 400 Hz
i=
1
−
11.4.9 チルト
ディスクのチルトは,入射面上の1 mm径の面積で平均した入射面の垂線と基準面Pの垂線との角度と
し,情報ゾーンで次のとおりとする。
半径方向のチルト
≦4.8 mrad
接線方向のチルト
≦1.5 mrad
1回転中の合成チルトの変動
≦3.0 mradp-p
30
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
11.5 光学特性
11.5.1 屈折率
情報ゾーンでの基板の屈折率は,1.46〜1.60の範囲内になければならない。
11.5.2 基板の厚さ
基板の厚さ(t)の公称値は,情報ゾーンで入射面から記録層までの基板の厚さとし,次による。
05
.0
9
592
.0
0
265
.0
1
3
509
.0
2
2
2
3
±
×
+
+
−
n
n
n
n
mm
ここに,
n: 屈折率
11.5.3 複屈折
基板の複屈折の効果は,25.2に示す基準駆動装置のチャネル2の信号の非対称性に影響する。
11.5.4 垂直複屈折
垂直複屈折の値は,次の範囲内とする。
| Np−Nz |≦500×10−6
ここに,
Np: ディスク面の任意の方向での屈折率
Nz: ディスク面に垂直な方向での屈折率(附属書S参照)
11.5.5 反射率
11.5.5.1 概要
反射率Rは,基板を通して測定する,ディスクのデータゾーンのうち未記録のグルーブ領域のランド上
の反射率の値であり,入射面の反射率は含まない。
反射率の公称値Rは,制御トラックのバイト3及びバイト19において,製造者が規定する(附属書E
参照)。
11.5.5.2 測定値
反射率の測定値Rmは,分割フォトディテクタ(I1+I2)OLを用いて,9.2 a)〜9.2 f)の条件下及び20.2.2の条
件下で測定する。
測定は,エンボスデータフィールドのないトラックのデータゾーンで行う。
11.5.5.3 要件
9.2で規定する標準波長でのRの値は,0.15〜0.30の範囲内とする(附属書L参照)。
データゾーンのどの点においても,測定反射率Rmは,R(1±0.13)に等しく,かつ,上記のRの許容範
囲内になければならない。
この要件は,Rの値が同じ全てのディスクについて,Rmの許容範囲を規定する。さらに,Rmの偏差は,
次の要件を満たさなければならない。
13
.0
min
m
max
m
min
m
max
m
≦
R
R
R
R
+
−
ここに,
Rm max: データゾーンの測定反射率の最大値
Rm min: データゾーンの測定反射率の最小値
12 ODCと駆動装置とのインタフェース
12.1 クランプ方法
ODCを駆動装置に挿入すると,ケースのシャッタが開き,モータ駆動軸がディスク中心孔に入る。ディ
スクは,ハブの磁性体(附属書M参照)及び駆動軸に装着されている磁石によって生じる吸着力で駆動軸
31
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
に保持される。ディスクの半径方向の位置決めは,ハブの中心軸合わせ機能による。ディスクの軸方向の
位置決めは,駆動軸のターンテーブルによってディスクのクランプゾーンを支えることによる。
12.2 クランプ力
駆動軸とハブとの吸着力は,5 N以下とする。
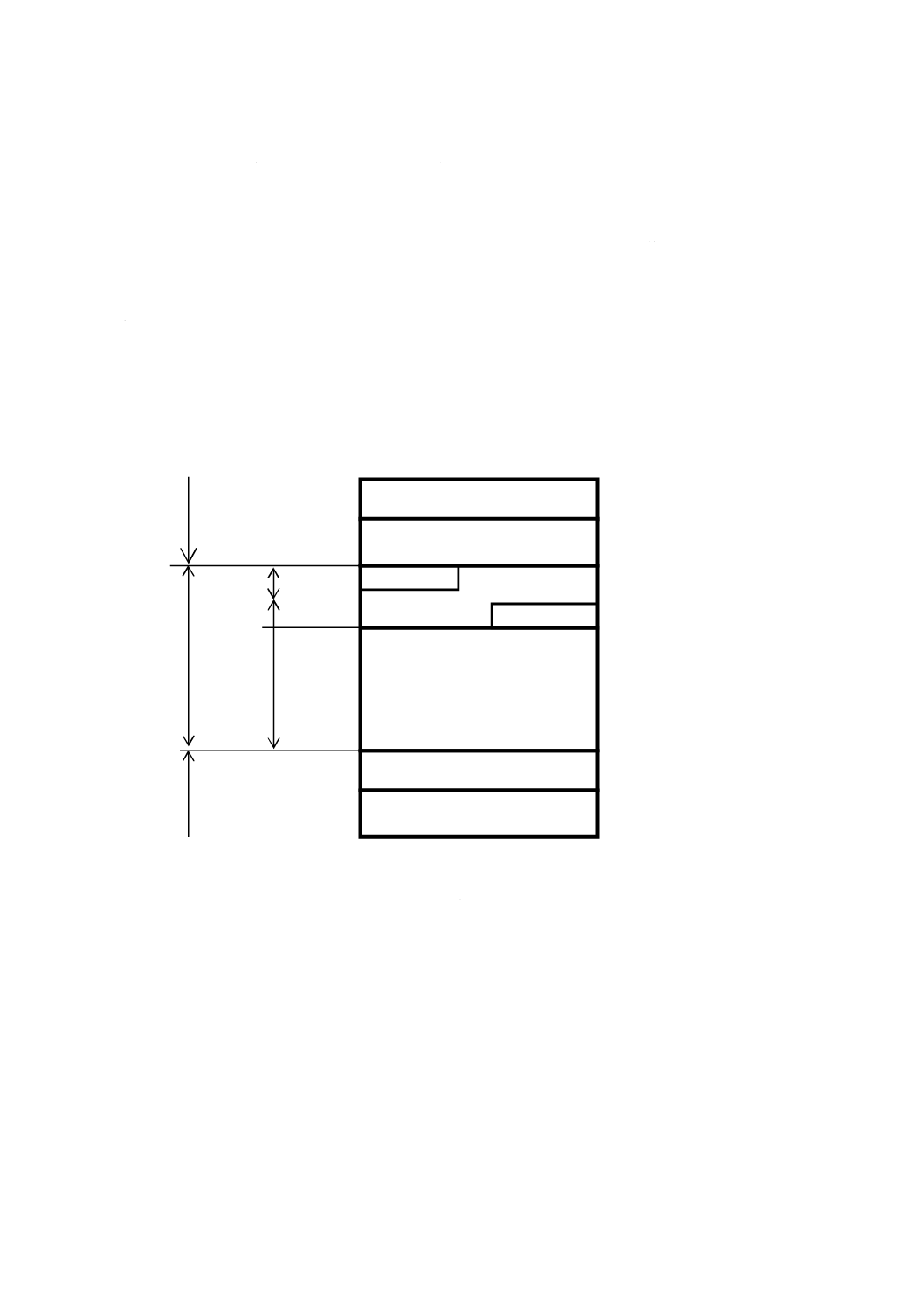
12.3 キャプチャシリンダ(図14参照)
キャプチャシリンダは,10.4.4の可とう(撓)性をもつODCを駆動装置に挿入し,駆動軸にディスクを
クランプしようとする場合,ハブの中心があると期待される空間である。ハブの中心は,軸A上のP面か
ら距離h1の位置とする(11.3.1及び図13参照)。
キャプチャシリンダの寸法は,ケースの内部空間でのディスクの許容遊び量を規定する。キャプチャシ
リンダは,駆動装置の正確な寸法のアライメントピン及び位置決めピンの,正確な位置を基準として定義
するが,ケースのサイズ,これらのピンの間のディスクのサイズ,及びハブの中心には,許容誤差を含ん
でいる。
シリンダの底部は,基準面Zから次の距離で,基準面Zに平行に配置される。
L57≧0.7 mm
シリンダの上部は,基準面Zから次の距離で配置される。
L58≦2.3 mm
シリンダの半径は,次による。
R17≦1.4 mm
中心は,L29及びL32の公称値で定義する。
12.4 使用環境条件におけるディスクの位置(図14参照)
ディスクが使用状態にあるとき,ディスクの基準面Pの位置は,ケースの基準面Zから次の位置になけ
ればならない。
L59=2.4±0.1 mm
さらに,回転軸が,L29及びL32の公称値を中心とする次の半径の円内にあるとき,使用状態で9.5に規
定する回転周波数を保つために,ディスクにかかるトルクは,0.01 N・m以下でなければならない。
R18≦0.1 mm
32
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
C
L
5
8
L
5
7
L
5
9
L
5
9
L
5
7
L
5
8
-Z-
-P-
L29
L
3
2
R17
R18
-X-
-Y-
-Z-
C部詳細図
図14−キャプチャシリンダ及び使用環境条件下でのディスクの位置
33
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
第3章 フォーマット
13 トラックの寸法
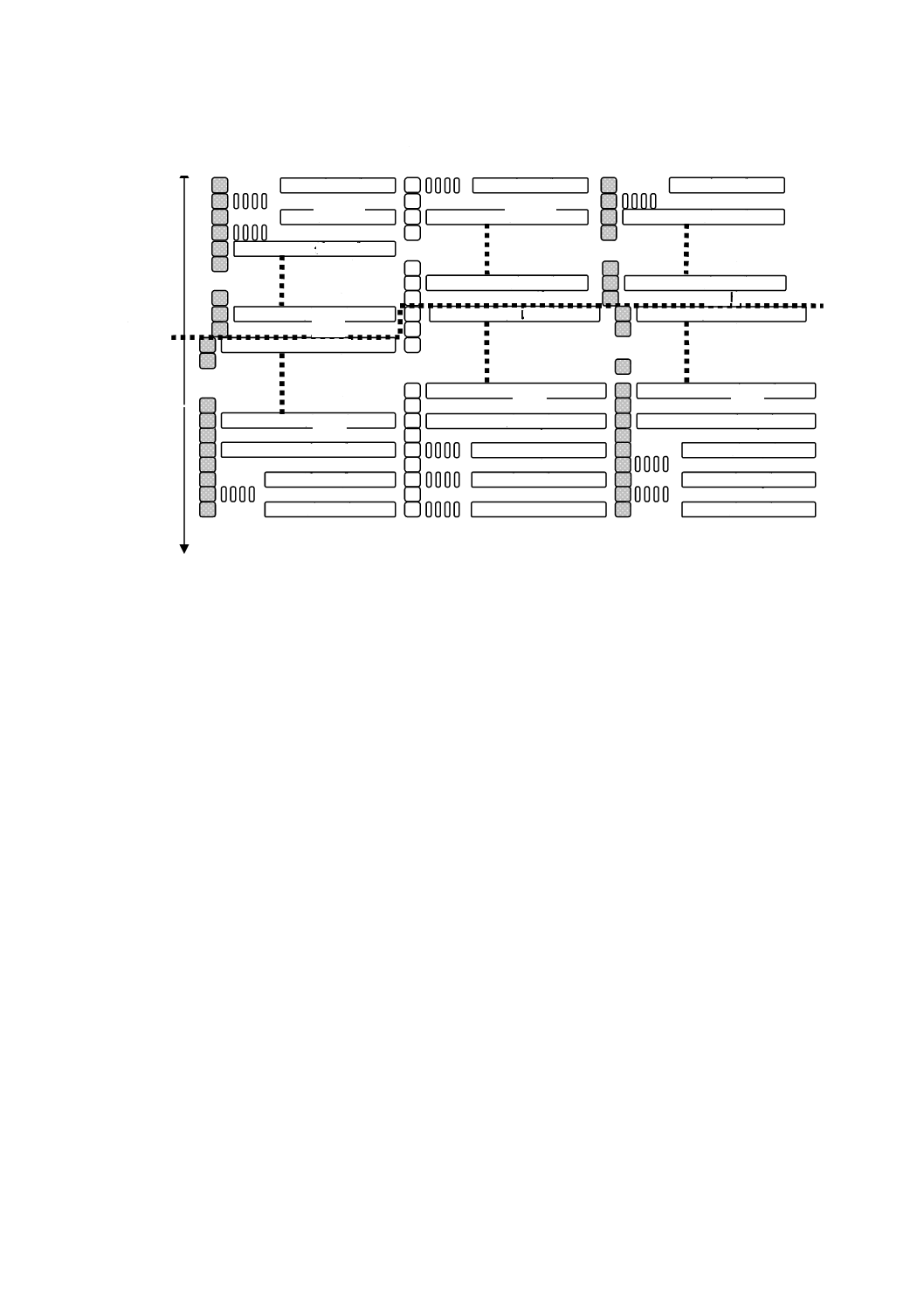
13.1 トラックの形状
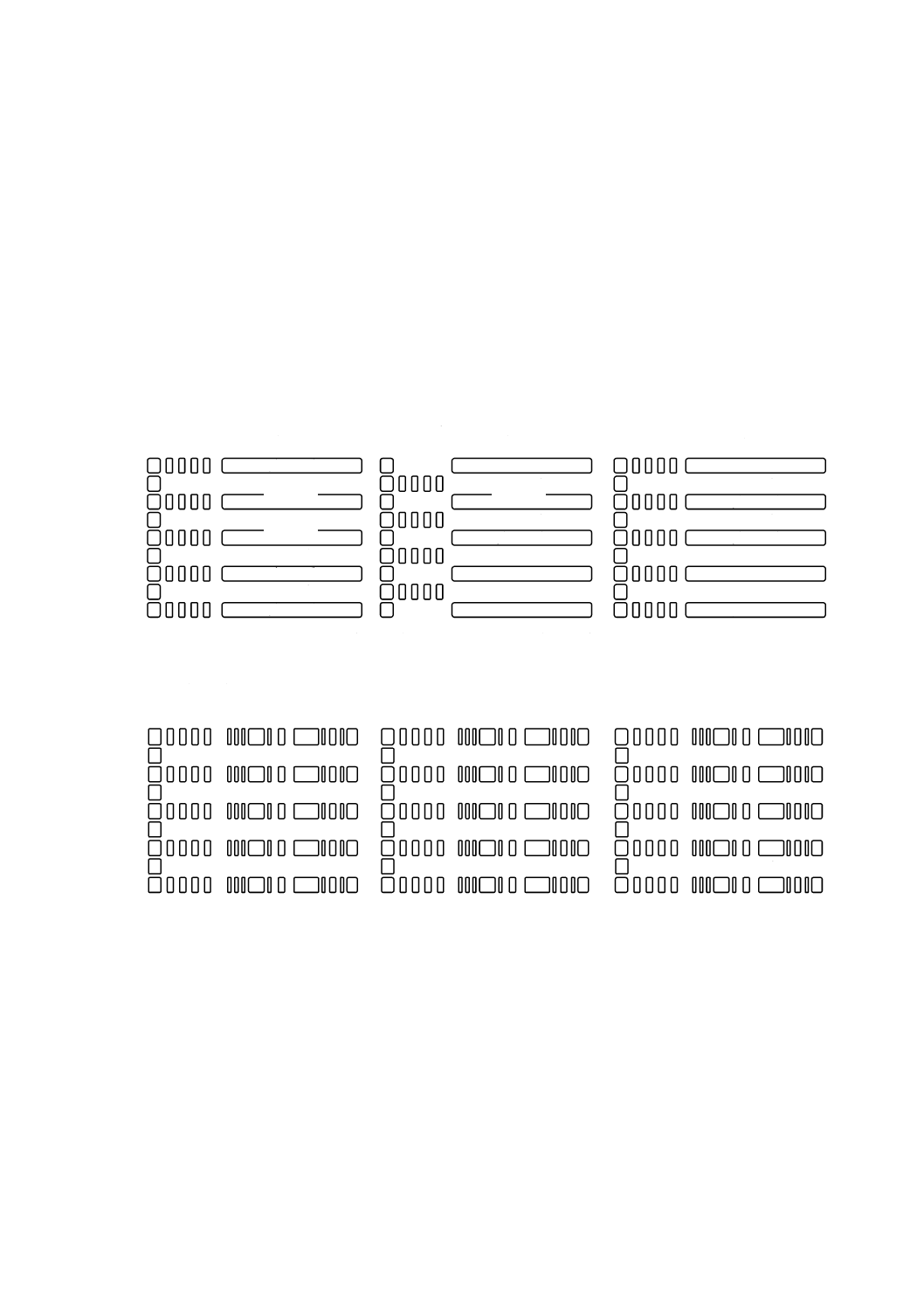
情報ゾーンは,連続トラッキングサーボ方式のためのトラックからなる。
フィジカルトラックは,隣接するランド・グルーブの組合せで構成する。グルーブは溝状であり,その
底部の位置は,ランドよりも入射面に近い。各ランド・グルーブの組合せにおいて,二つの記録トラック
が存在し,一つはランドの中心線上(ランドトラック)に,もう一つはグルーブの中心線上(グルーブト
ラック)にそれぞれ位置する。ヘッダ領域のマークは,グルーブのない領域に形成する。フィジカルトラ
ックはランド及びグルーブとも,連続的なスパイラルの360度分とする。
グルーブの形状は,箇条21の規定を満足するように定める。
図15a−データゾーンのトラック及びヘッダの配置
図15b−コントロールゾーンのトラック及びヘッダの配置
図15−ランドとグルーブとの配置
記録領域
記録領域
記録領域
セクタ
マーク1
グルーブ
ID
セクタ
マーク1
グルーブ
ID
セクタ
マーク1
グルーブ
ID
ランド
ランド
ランド
ランド
ランド
ランド
ランド
ランド
ランド
ランド
ランド
ランド
記録領域
記録領域
記録領域
ランド
ランド
ランド
セクタ
マーク1
グルーブ
ID
セクタ
マーク2
ランド
ID
セクタ
マーク1
グルーブ
ID
グルーブ
グルーブ
グルーブ
ランド
ランド
ランド
グルーブ
グルーブ
グルーブ
ランド
ランド
ランド
グルーブ
グルーブ
グルーブ
ランド
ランド
ランド
グルーブ
グルーブ
グルーブ
グルーブ
グルーブ
グルーブ
34
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図15c−ゾーン境界のトラック配置の詳細
図15−ランドとグルーブとの配置(続き)
13.2 トラックスパイラルの方向
ディスクの回転方向は,光ヘッド側から見て反時計方向とする。トラックは,外周から内周へと内に向
かってら(螺)旋を描く。
13.3 トラックピッチ
トラックピッチは,隣接するトラックの中心線間の距離として半径方向で測定し,0.67±0.05 μmとする。
10 000フィジカルトラックの幅は,6.70±0.10 mmとする。
14 トラックフォーマット
エンボスチャネルビット長は,MOチャネルビット長の3倍とする。
14.1 ロジカルトラック番号
各ロジカルトラックは,ロジカルトラック番号で識別する。トラック番号0は,データゾーンの最初の
ロジカルトラックとし,半径41.80±0.10 mmに位置する。隣接するランドトラック及びグルーブトラック
は,同じロジカルトラック番号をもつ。
トラック番号0よりも内周側のロジカルトラックのトラック番号は,各トラックにつき,1ずつ増加す
る。
トラック番号0よりも外周側のロジカルトラックのトラック番号は,負の数とし,各トラックにつき,1
ずつ減少する。負のトラック番号は,2の補数で与え,トラック−1は,(FFFF)とする。
14.2 ロジカルトラックレイアウト
各ロジカルトラック上には,セクタ数が17存在する。
制御ゾーンのセクタは922バイトからなり,他の全てのセクタは2 628バイトからなる。1バイトはディ
セクタ
マーク1
グルーブ
グルーブ
グルーブ
グルーブ
グルーブ
内周
外周
ゾーン
境界
ゾーンA
ゾーンB
ランドID
セクタ
マーク2
ランド
ランド
ランド
ランド
ランド
ランド
ランド
ランド
ランド
ランド
ランド
記録領域
グルーブID
記録領域
ランドID
セクタ
マーク2
記録領域
グルーブ
グルーブ
グルーブ
ランド
ランド
ランド
グルーブ
グルーブ
グルーブ
グルーブ
ランド
ランド
グルーブ
ランド
ランド
ランド
ランド
ランド
ランド
ランド
グルーブ
グルーブ
グルーブ
ランド
ランド
ランド
グルーブ
グルーブ
グルーブ
グルーブ
グルーブ
グルーブ
グルーブ
グルーブ
グルーブ
ランド
ランド
グルーブ
グルーブ
ランド
ランド
35
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
スク上で12チャネルビットで表される。
セクタは,セクタの最初のチャネルビットと次のセクタの最初のチャネルビットとの距離が,制御ゾー
ンでは,11 064チャネルビット±5チャネルビットに,その他のゾーンでは,31 536チャネルビット±5
チャネルビットとなるように,トラック全体に等しく配置する。
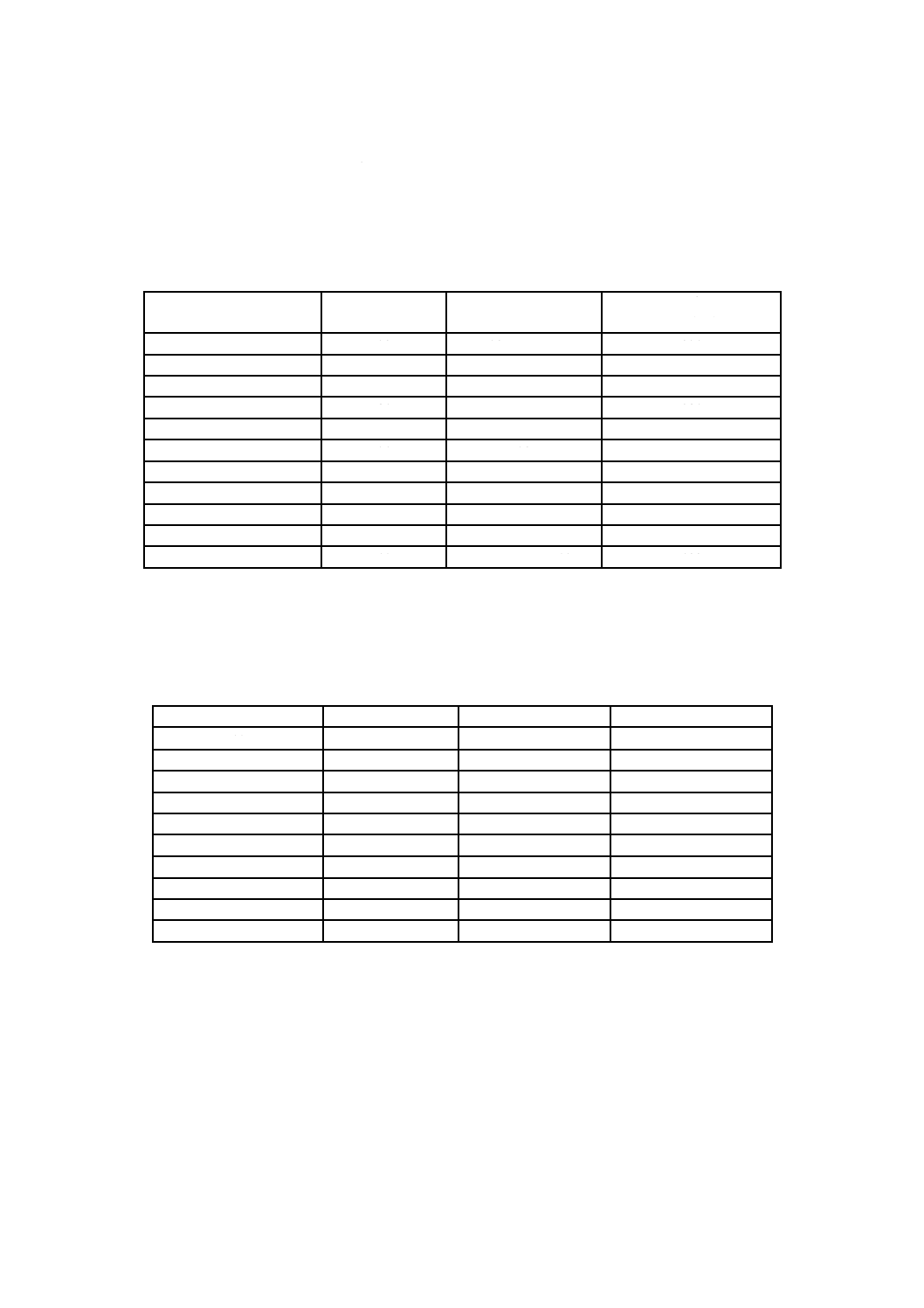
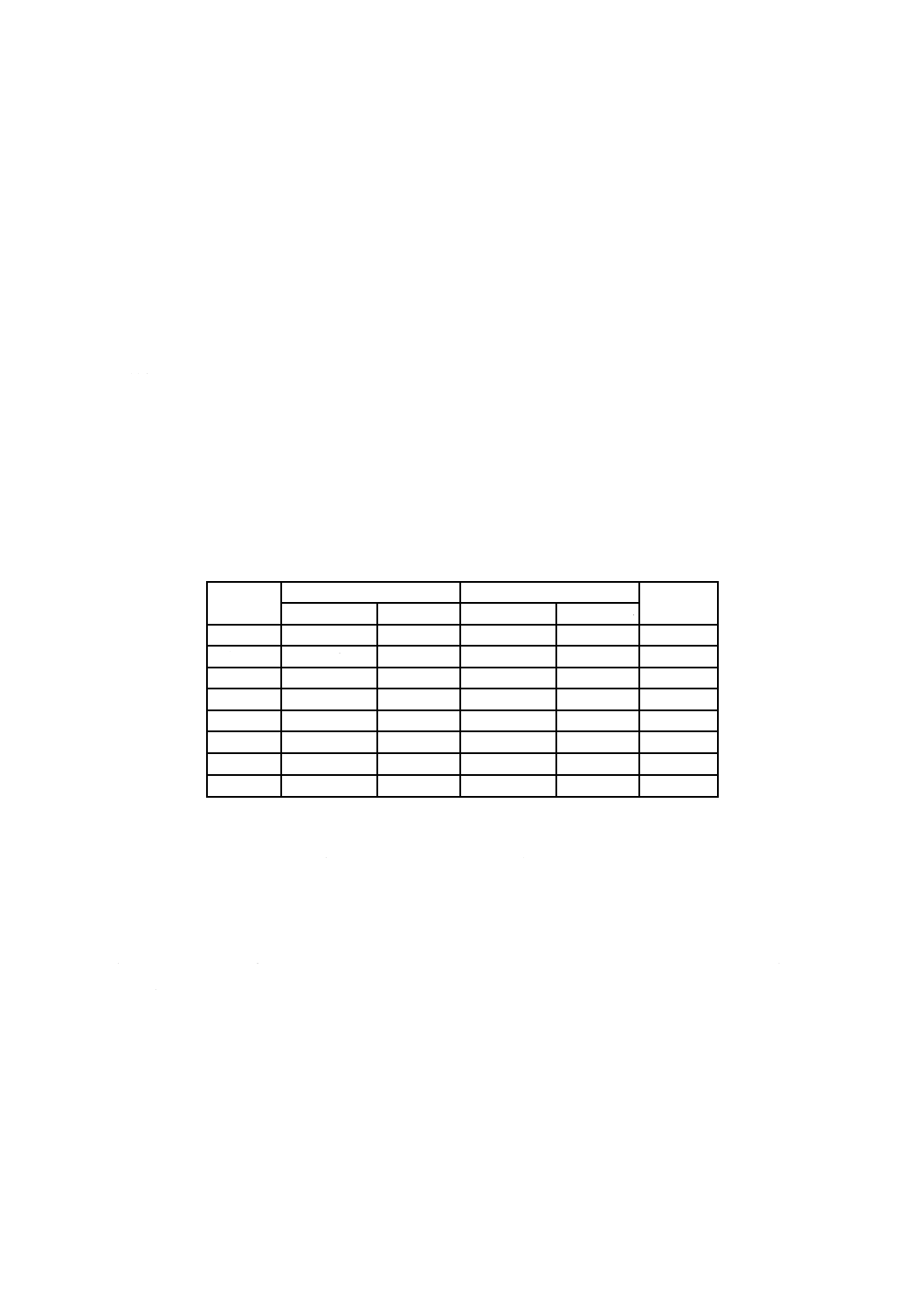
14.3 クロック周波数及び周期
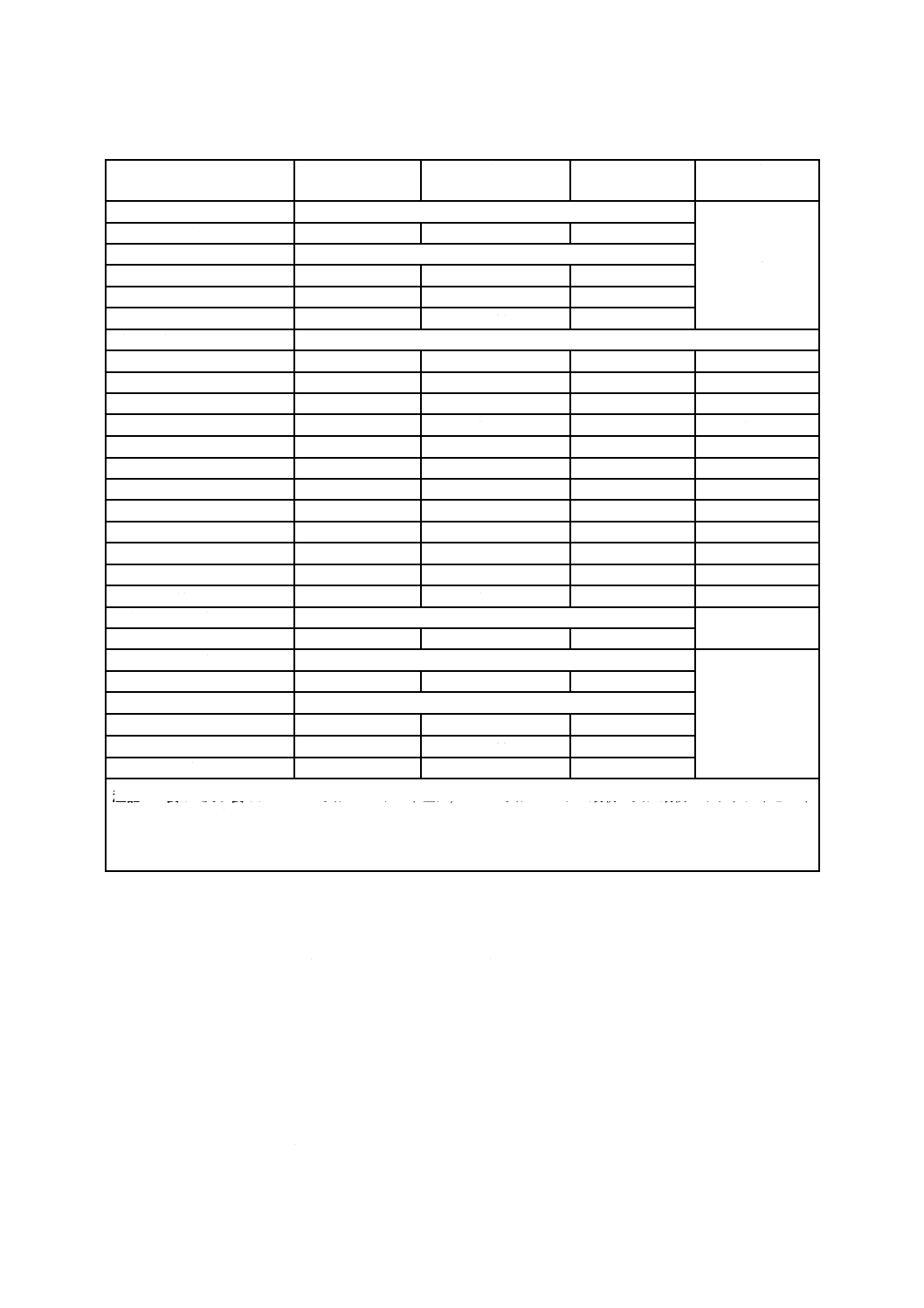
回転周波数50 Hzの場合の,各データ帯域に対する公称クロック周波数及び周期を,表2に示す。
ヘッダのクロック周波数は,ギャップ及び制御ゾーンを除く記録フィールドの1/3となる。絶対周波数
及び周期は,次の公式によって,1フィジカルトラックのチャネルビット数が正確になるように,調整す
る。
(50−2×データバンド番号)×12×2 628
ここに,12はバイト当たりのチャネルビット数であり,2 628はセクタ当たりのバイト数である。
表2−クロック周波数及び周期
フォーマット
ヘッダ
ギャップ及び記録フィールド
ゾーン及びバンド
クロック周波数
MHz
周期 T
ns
クロック周波数
MHz
周期 T
ns
リードインゾーン
バッファゾーン
27.66
36.15
82.98
12.05
試験ゾーン
27.66
36.15
82.98
12.05
バンド 0
27.66
36.15
82.98
12.05
バンド 1
26.55
37,76
79.66
12.55
バンド 2
25.45
39.30
76.34
13.10
バンド 3
24.34
41.08
73.02
13.69
バンド 4
23.23
43.04
69.70
14.35
バンド 5
22.13
45.19
66.34
15.06
データゾーン
バンド 6
21.02
47.57
63.03
15.86
バンド 7
19.92
50.21
59.75
16.74
バンド 8
18.81
53.17
56.06
17.72
バンド 9
17.70
56.49
53.11
18.83
バンド 10
16.60
60.26
49.79
20.09
バンド 11
15.49
64.56
46.47
21.52
制御ゾーン
15.49
64.56
46.47
51.55
リードアウトゾーン
試験ゾーン
15.49
64.56
15.49
64.56
バッファゾーン
15.49
64.56
46.47
21.52
14.4 半径方向のアライメント
セクタのヘッダは,各データバンド,リードインゾーン又はリードアウトゾーン内で,隣接するトラッ
クのセクタの最初のチャネルビット間の角距離が,±5チャネルビットより少なくなるように,半径方向
にそろえる。
14.5 セクタ番号
ロジカルトラックのセクタには,0から16まで連続した番号を付ける。
36
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
15 セクタフォーマット
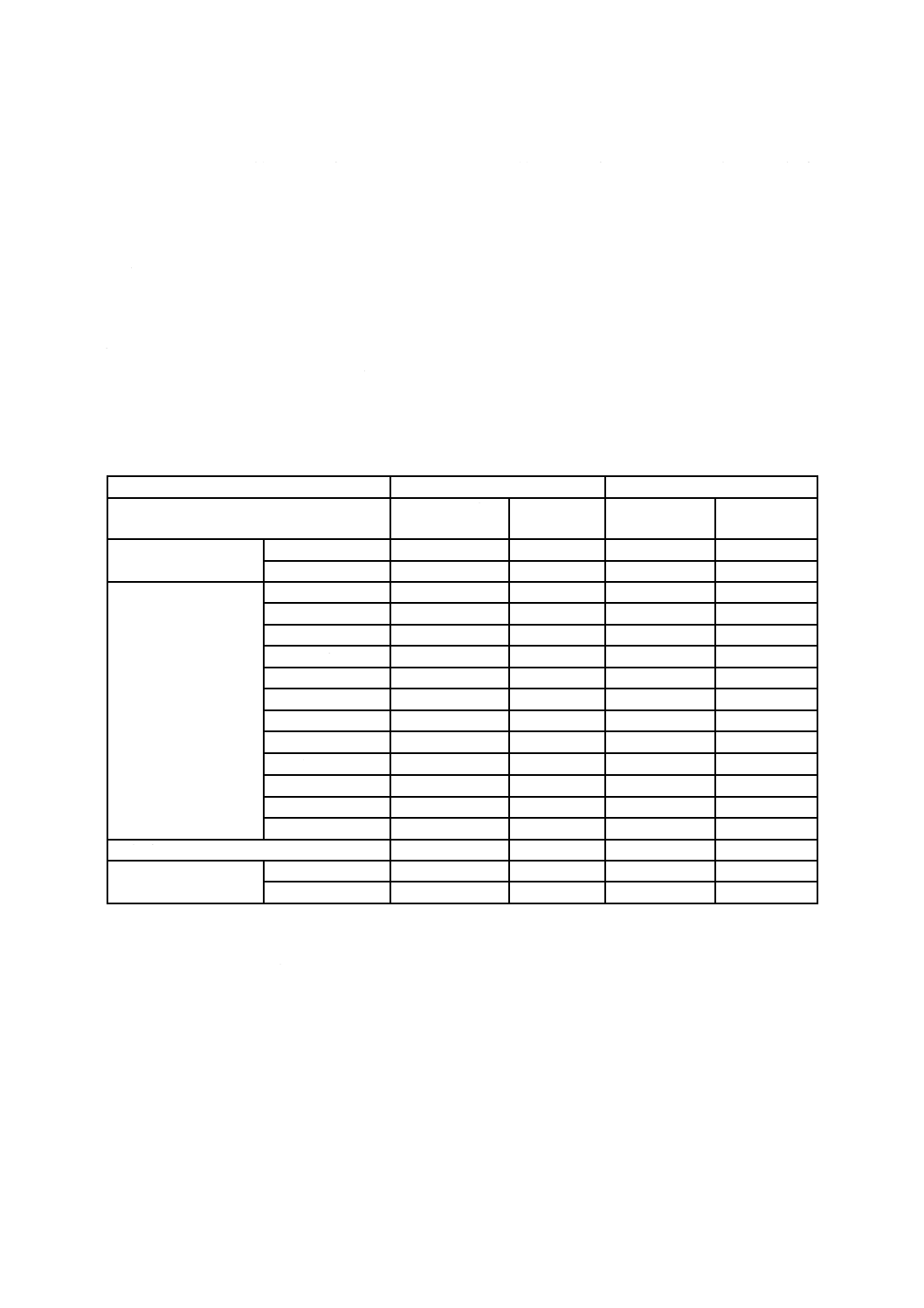
15.1 セクタのレイアウト
セクタは,ヘッダ,ギャップ及び2 048ユーザデータバイトを記録できる記録フィールドで構成する。
ヘッダは,エンボスデータとする。記録フィールドは,空白,ユーザ記録データ,又はエンボスデータで
あってもよい。セクタ長は,制御ゾーンで922バイト,その他のゾーンで2 628バイトとする。14.2で規
定する許容差は,バッファ,すなわちセクタの最終フィールドに充てられる。ヘッダフィールド長は,69
バイトとし,ギャップ長は,制御ゾーンの場合は8バイト,その他のゾーンの場合は20バイトとする。
セクタのレイアウトを図16に示す。数値はバイトで表した各部のフィールド長である。
SM1
VFO1
AM
ID1
VFO2
AM
ID2
PA
8
31
1
5
16
1
5
2
パターンG1(69バイト)
SM2
スペース
8
61
パターンG2(69バイト)
a) グルーブトラックのプリフォーマットヘッダパターン
SM2
VFO1
AM
ID1
VFO2
AM
ID2
PA
8
31
1
5
16
1
5
2
パターンL1(69バイト)
SM1
スペース
8
61
パターンL2(69バイト)
b) ランドトラックのプリフォーマットヘッダパターン
エンボスヘッダ ギャップ
VFO3
Sync
データフィールド
PA
VLP
バッファ
69
8
27
4
658
1
125
30
c) 制御ゾーンのセクタフォーマット(922バイト)
エンボスヘッダ
ギャップ
VFO3
Sync
データフィールド
PA
バッファ
69
20
47
4
2 458
2
28
d) データゾーン及びリードイン/リードアウトゾーンのセクタフォーマット(2 628バイト)
図16−セクタフォーマット
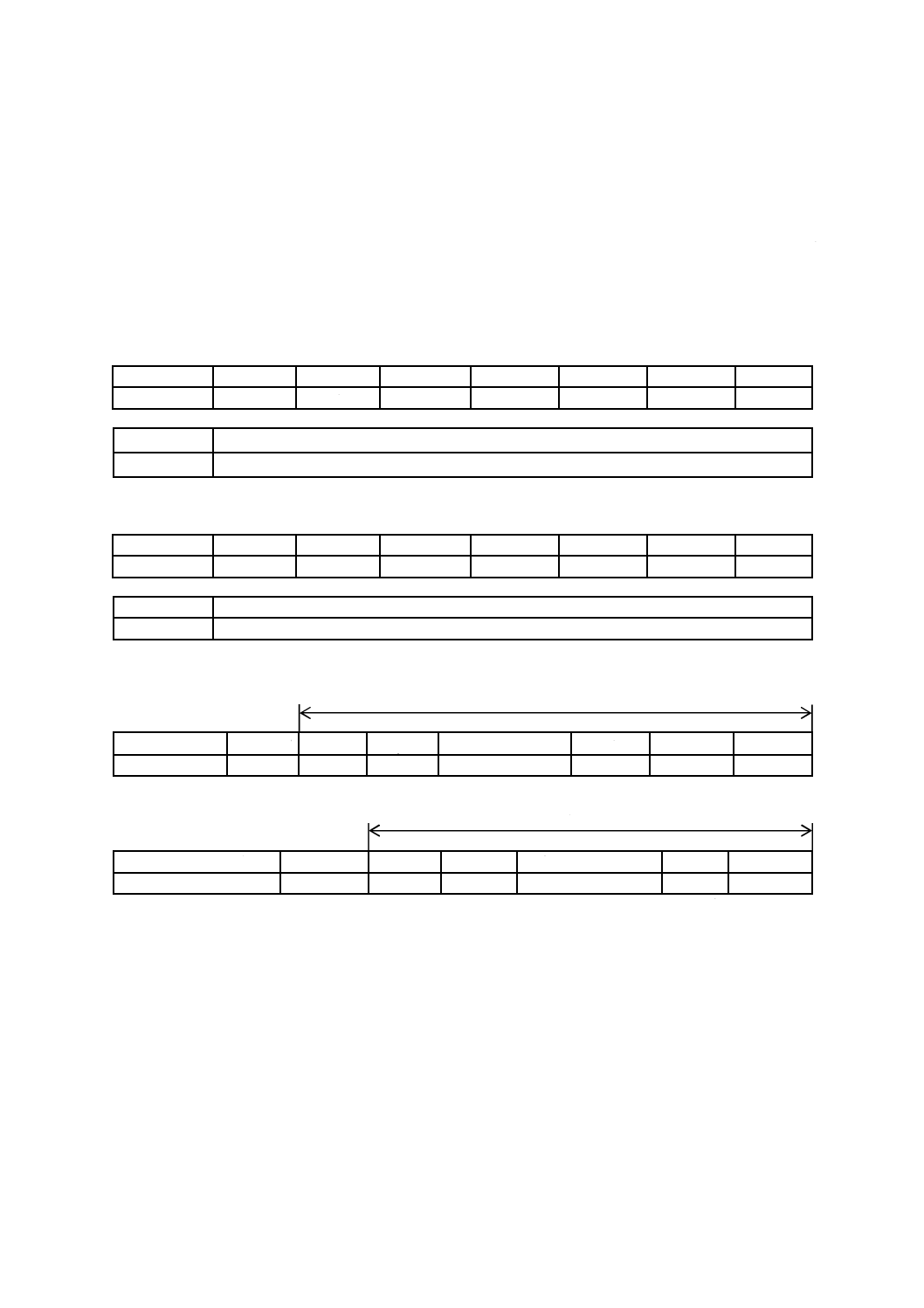
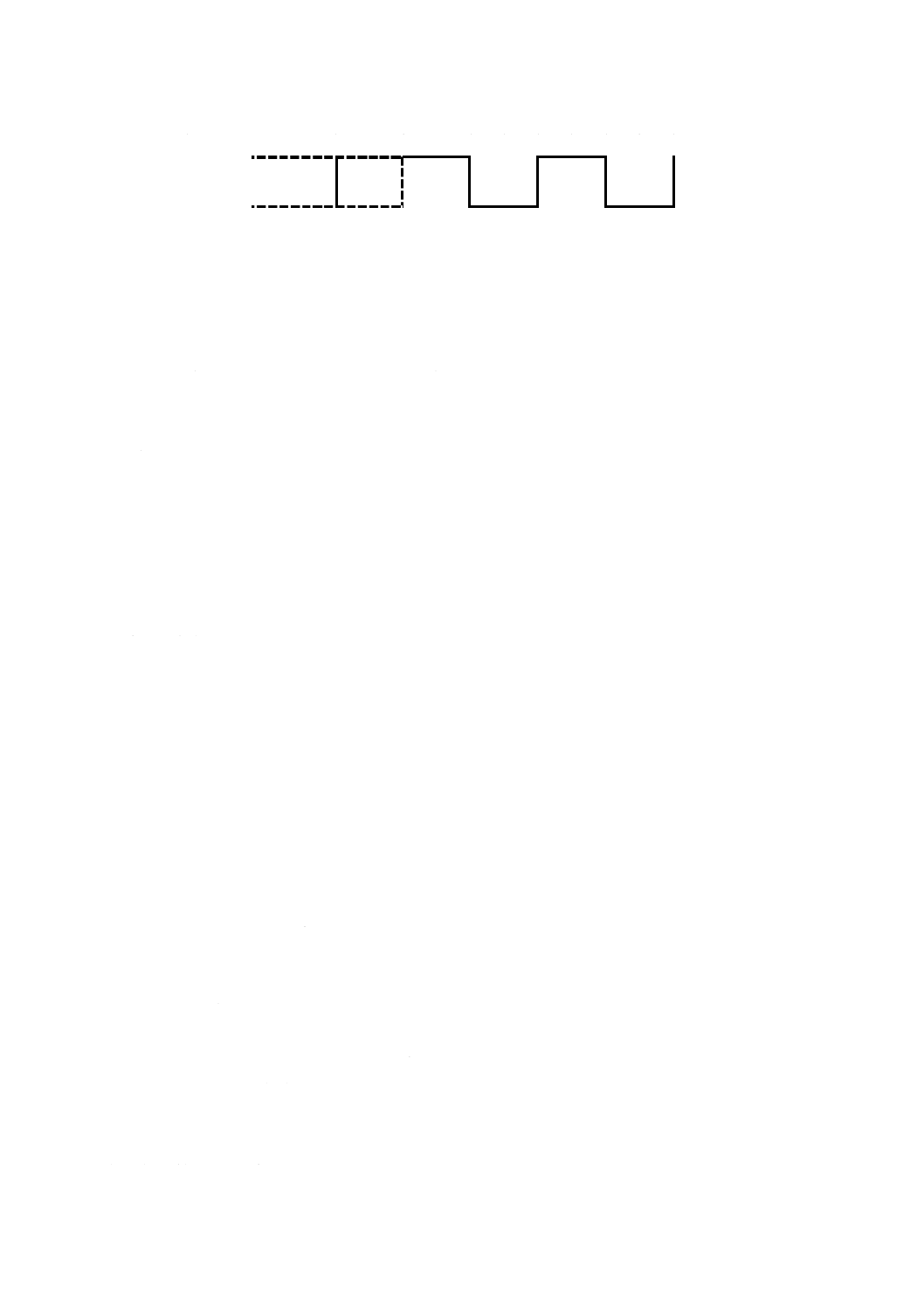
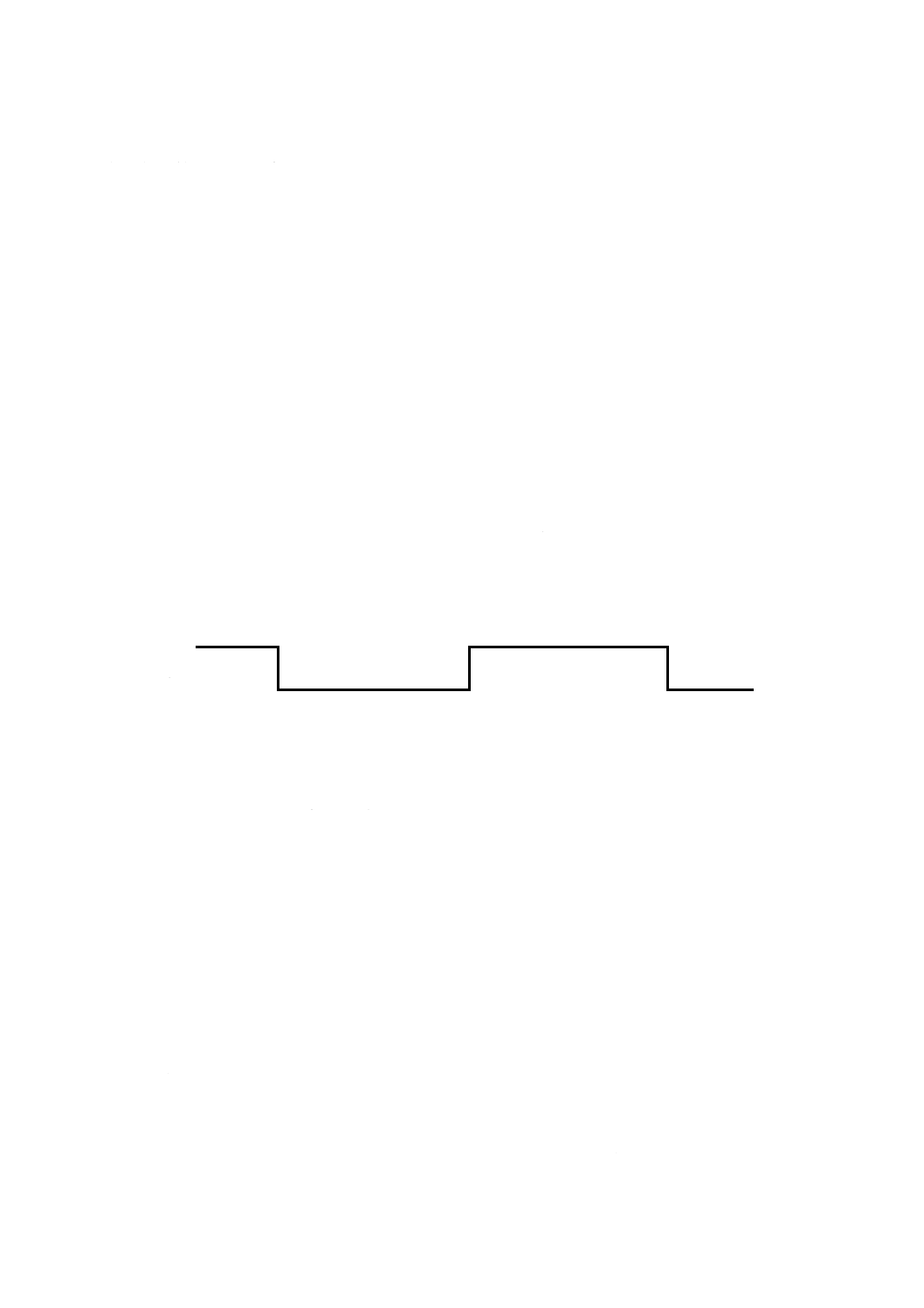
15.2 セクタマーク(SM)
セクタマークは,96チャネルビット長とし,データゾーンでは発生しないパターンのエンボスデータと,
VFO1フィールドへのリードインとからなる。
セクタマークは,図17で示すように2種類とする。SM1は,6Tマークから始まり,SM2は,6Tスペ
ースから始まる。Tはヘッダ部の1チャネルビットの時間に相当する。マークからの反射レベルは,スペ
ースからの反射レベルよりも小さい。グルーブトラック及びランドトラックに対するヘッダパターンを図
16 a)及び図16 b)に示す。
記録フィールド
記録フィールド
37
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
制御ゾーンは,図16 c)に示すデータをグルーブトラックだけに記録し,グルーブトラックのヘッダパタ
ーンは図16 a)のパターンG1とし,ランドトラックのヘッダパターンは図16 b)のパターンL2とする。
SM1パターン
SM2パターン
6T
12T
6T
12T
6T
12T
12T
6T
12T
6T
0001 01
6T
12T
6T
12T
6T
12T
12T
6T
12T
6T
000001
図17−セクタマークのパターン
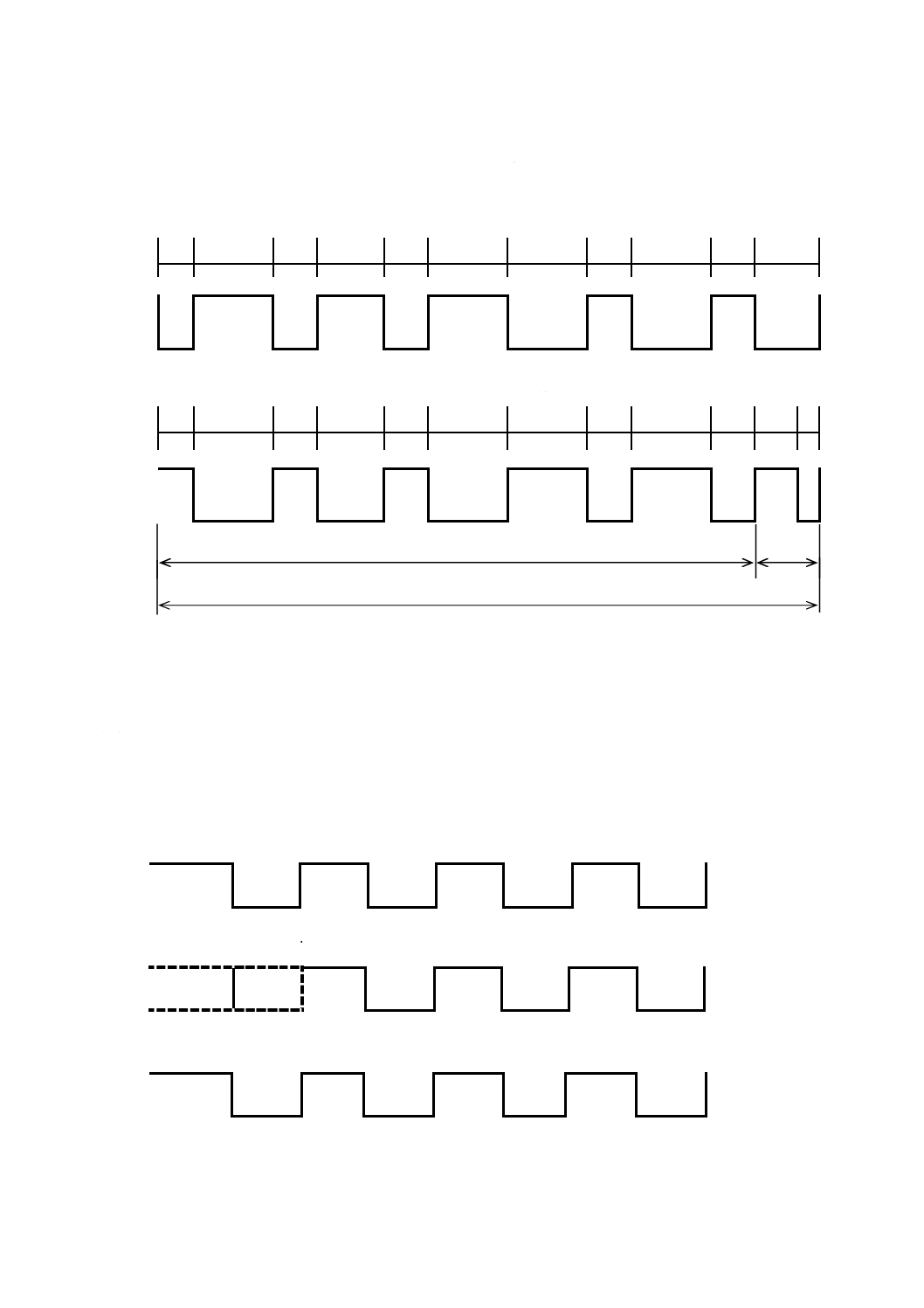
15.3 VFOフィールド
VFOをチャネルビット同期のために設け,VFO1,VFO2及びVFO3(図18参照)の三つのフィールドが
存在する。
VFOフィールドの連続チャネルビットパターンは,次による。
VFO1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
…372
チャネルビット
VFO2
0
1
0
?
0
1
0
1
0
1
0
1
0
1
0
1
…192
チャネルビット
VFO3
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
…564
チャネルビット
図18−3種類のVFOパターン
スペース
マーク
マーク
スペース
長マークパターン
セクタマーク
リード
イン
スペース
マーク
スペース
マーク
スペース
マーク
38
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
VFO2フィールドの開始ビットは,データビット10からの符号化に相当するチャネルビット010とする。
?で示すVFO2フィールドの第4チャネルビットは,それ以降のマークスペースパターンが図18に示す
パターンと同じになるように,“1”又は“0”のいずれかにする。VFOの最後をマーク後縁とすることに
よって,アドレスマークの最初のマーク前縁との間を9Tスペースにすることができる。
VFO3フィールドの開始点は,この規格で規定する理想的な位置から6チャネルビット以内でなければな
らない。この許容差は,光駆動装置の回転変動の時間的な誤差を考慮したものであり,VFO3フィールドに
先行するギャップ,及びセクタの終わりにあるバッファフィールドによって補正されることになる。
15.4 アドレスマーク(AM)
アドレスマーク(AM)は,RLL(1,7)符号では使用しないチャネルビットパターンで構成し,RLL(1,7)
符号に対するランレングス違反である。AMは,駆動装置に次のIDフィールドのバイト同期をとるための
ものであり,次の12ビットのチャネルビットパターンとする。
0000 0000 10x0
xの値は,次のように決定する。
− 後続するIDフィールドの最初のチャネルビットが00の場合,x =“1”とする。
− 後続するIDフィールドの最初のチャネルビットが00でない場合,x =“0”とする。
先行するVFOフィールドの最後のチャネルビットが“1”であり,AMの“1”との間に8個の“0”が
現れるため,AMとして検出することができる。
15.5 IDフィールド
二つのIDフィールドは,セクタのアドレス情報でできており,トラック番号,セクタ番号及びCRCバ
イトからなる。
IDフィールドは,次の5バイトで構成する。
第1バイト ロジカルトラック番号の最上位バイト
第2バイト ロジカルトラック番号の最下位バイト
第3バイト
ビット7
“0”は,ID1フィールド
“1”は,ID2フィールド
ビット6〜5
グルーブトラックとランドトラックとの識別
“00”は,グルーブトラック
“10”は,ランドトラック
ビット4〜0
2進法表記のセクタ番号
第4バイト及び第5バイト
最初の3バイトから計算した16ビットCRCデータ(附属書C参照)
IDフィールドの最初の2データビットは,AMの最後の1チャネルビットを先行チャネルビットとして,
表3を用いて符号化する。
IDフィールドの最初の3チャネルビットは,AMの最後の2チャネルビットを先行チャネルビットとし
て,表4を用いて復号化する。
15.6 ポストアンブル(PA)
ポストアンブル(PA)フィールドは,ID2フィールド及びデータフィールドの後に位置し,図19に示す
12チャネルビット長とする。
39
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PA
0
1
0
?
0
1
0
1
0
1
0
1
図19−ポストアンブルのパターン
PAの開始ビットは,入力データビット10からの符号化に相当するチャネルビット010とする。
?で示す第4チャネルビットは,PAがマーク後縁で終了するように決める。
データビットからチャネルビットへのRLL(1,7)変換表(箇条16参照)を使用すると,ID2フィールド
のCRC及びデータフィールドのECCの後に2データビットがないと最後の3チャネルビットを確定する
ことができない。
PAによって,ID2フィールドのCRC及びデータフィールドのECCの最後の3チャネルビットを確定し,
ヘッダフィールド及び記録フィールドを常にスペース状態で終了させることができ,次のフィールドとの
連続性を維持することができる。
15.7 ギャップ
各セクタには,240チャネルビット長のギャップが存在する。ギャップフィールドの内容は,規定され
ず,互換性では無視する。コントロールゾーンのエンボスセクタの場合,ギャップは,連続する2Tエン
ボスパターンとする。ギャップは,記録フィールドの最初のフィールドであり,駆動装置がヘッダの読取
りを終了した後に行う処理,及びVFO3フィールドの消去,記録又は再生前に行う処理のための時間を,
駆動装置に与える。
15.8 同期バイト(Sync)
同期バイトは,駆動装置が,後続するデータフィールドのバイトの同期をとることを目的とし,次に示
す48チャネルビット長とする。
0100 0010 0100 0010 0010 0010 0100 0100 1000 0010 0100 10x0
チャネルビットxの値は,次のように規定する。
− 後続するデータフィールドの最初のデータビットが00の場合,xを“1”に設定する。
− 後続するデータフィールドの最初のデータビットが00以外の場合,xを“0”に設定する。
15.9 データフィールド
データフィールドは,ユーザデータの記録のために用い,次のいずれかで構成する。
− 2 458バイトの構成
2 048バイト:ユーザバイト
402バイト:CRC,ECC,及び再同期バイト
8バイト:(FF)
コントロールゾーンは,658バイトとし,次のいずれかで構成する。
512バイト:ユーザバイト
142バイト:CRC,ECC及び再同期バイト
4バイト:(FF)
データフィールドにおけるこれらのバイトの配置は,附属書Dで規定する。
表3を用いてデータフィールドを符号化するとき,最初の2データビットの符号化には,同期バイト
(Sync)の最後のチャネルビットを使用する。
マーク
スペース
40
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表4を用いてデータフィールドを復号化するとき,最初の3チャネルビットの復号化には,同期バイト
(Sync)の最後の2チャネルビットを使用する。
15.9.1 ユーザデータバイト
ユーザデータバイトは,ユーザ情報の記録に用いる。
15.9.2 CRC及びECCバイト
巡回冗長検査(CRC)バイト及び誤り訂正符号(ECC)バイトは,間違ったデータを修正するために,
誤り検出及び訂正システムが使用する。ECCは,十六次のリードソロモン符号とする。バイトは,附属書
Dに規定する。
15.9.3 再同期バイト(Resync)
再同期バイト(Resync)によって,駆動装置は,データフィールドに大きな欠陥が生じた場合でも,バ
イト同期を回復することができる。
附属書Fは,再同期バイトとして使用する可能性のある二つのビットパターンを示すと同時に,どちら
を選択するかの基準を示す。
再同期バイトは,附属書Dで規定のとおり,データフィールドのバイト間に挿入する。
15.10 VCOロックパターンフィールド(VLP)
VCOロックパターン(VLP)はコントロールゾーンにだけ存在し,1 500チャネルビットとする。VLP
は,図20に示すとおり連続する3Tパターンとし,PLL同期に用いられる。
0
0
1
0
0
0
0
0
1
0
0
0
0
0
1
0
…1 500
チャネルビット
図20−VLPのチャネルビットパターン
15.11
バッファ
バッファは,コントロールゾーンでは360チャネルビット長,その他のゾーンでは336チャネルビット
長とする。このバッファは,データを含まず,駆動装置のモータ回転数誤差,及び,他の電気的及び機械
的誤差を許容するために必要となる。
このフィールドを必要とする理由は,次の四つである。
a) 14.2で規定するヘッダからヘッダまでの距離の変動幅。
b) 15.3で規定するVFO3フィールドの開始位置の誤差。
c) 記録データの実際の長さの誤差。トラックの偏心及びデータ記録中のディスクの回転変動によって生
じる。
d) 記録のときに,事前に記録された全てのデータを上記の許容差の範囲内で確実に消去するために必要
となる長さ。
16 記録符号
二つのIDフィールド及びデータフィールドは,表3及び附属書Fに従って,ディスク上のチャネルビ
ットに符号化される。これらのフィールドのチャネルビットは,表4及び附属書Fに従ってデータビット
に復号化される。セクタの他の全てのフィールドのチャネルビットは,箇条15によって定義済みである。
スペース
マーク
41
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記録パルスは,マークとスペースとの間のエッジ又はスペースとマークとの間のエッジが,チャネルビッ
ト“1”に対応するようにマークを形成する。
ディスクのフォーマット領域のデータを記録するために使用する記録符号は,表3及び表4で定義する
RLL(1,7)のランレングス符号とする。
表3−データビットのチャネルビットへの符号化
先行チャネルビット
データビット
後続データビット
符号化チャネルビット
RLL(1,7)
“0”又は“1”
00
00 又は 01
001
“0”
00
10 又は 11
000
“1”
00
10又は 11
010
“0”
01
00又は 01
001
“0”
01
10又は 11
000
“1”
01
00
010
“1”
01
01,10又は 11
000
“0”
10
00又は 01
101
“0”
10
10又は 11
010
“0”
11
00
010
“0”
11
01,10又は 11
100
符号化は,該当するフィールドの第一バイトの第一ビットから開始する。再同期バイトの後では再同期
バイトの最後のチャネルビットを使って符号化を開始する。
表4−チャネルビットのデータビットへの復号化
先行チャネルビット
チャネルビット
後続チャネルビット
復号化データビット
10
000
00,01又は10
00
00又は01
000
00,01又は10
01
00
001
00又は01
01
01又は10
001
00又は01
00
00又は10
010
00
11
00又は10
010
01又は10
10
01
010
00
01
01
010
01又は10
00
00又は10
100
00,01又は10
11
00又は10
101
00又は01
10
17 情報ゾーンのフォーマット
17.1 情報ゾーンの概要
情報ゾーンは,データ交換に関連するディスク上の全ての情報を含む。情報は,エンボストラッキング
条件,エンボスヘッダ,エンボスデータ及びユーザ記録データを含む。この箇条では,“データ”という用
語は,一般にホストに転送されるセクタのデータフィールドの内容に使用する。
箇条17は,情報ゾーンのレイアウトを定義する。情報ゾーンから得られる信号の特性は,第4章で規定
する。
42
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
17.2 情報ゾーンの分割
情報ゾーンは,リードインゾーン,データゾーン,制御トラックゾーン及びリードアウトゾーンの四つ
に分割される。データゾーンは,ユーザデータの記録に用いる。リードインゾーン及びリードアウトゾー
ンは,製造者の試験及び駆動装置の試験に用いる。制御トラックゾーンも駆動装置の制御情報を含む。
情報ゾーンの分割は,表5a及び表5bによる。データゾーンの外周半径の許容差は,14.1で規定する。
他の半径の許容差は,13.3で規定するとおり,トラックピッチ上の許容差で規定する。
17.2.1 バッファゾーン
このゾーンは,駆動装置がフォーカスサーボ引込みに用い,鏡面領域,箇条21で規定の完全グルーブ領
域,エンボスヘッダをもつグルーブ領域,又は上記の組合せをもつトラックのいずれかとする。
17.2.2 試験ゾーン
内周試験ゾーン及び外周試験ゾーンがあり,グルーブ及びランドトラック,エンボスヘッダ,ギャップ
及び記録フィールドをもつ領域である。
駆動装置の試験ゾーンは,試験によって,駆動装置がその記録パワーを設定できることを目的としてい
る。試験に使用するトラックは,駆動装置の試験ゾーンから無作為に選択し,使用による試験ゾーン全体
の劣化が少しずつ進むようにするのが望ましい。そのため,このゾーンの各トラックは,ディスクのデー
タゾーンのトラックの特性をそのまま表すこととなる。
製造者用の試験ゾーンは,ODC製造者による品質検査を目的としたものである。駆動装置の試験ゾーン
は,試験によって試験ゾーンに重大な劣化をもたらす可能性があるため,このような試験には使用しない。
17.2.3 制御ゾーン
制御ゾーンは,箇条15で規定されたフォーマットをもつ,168ロジカルトラックのエンボスセクタグル
ーブからなる。
制御ゾーンの全セクタのデータフィールドは同一であり,附属書Eに規定の駆動装置のためのエンボス
制御データからなる。
43
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表5a−グルーブの情報ゾーンのレイアウト
ゾーン及びバンド
半径位置(mm)
開始 終了
ロジカル
トラック数
トラック番号
開始 終了
フィジカル
トラック数
リードインゾーン
バッファゾーン
42.506
1 456
−1 500
外周試験ゾーン
527
製造者用
41.843
32
−94
駆動装置用
41.828
32
−62
バッファゾーン
41.814
30
−30
データゾーン
バンド 0
41.80
3 550
0
1 207
バンド 1
40.18
3 408
3 550
1 207
バンド 2
38.57
3 266
6 958
1 207
バンド 3
36.95
3 124
10 224
1 207
バンド 4
35.33
2 982
13 348
1 207
バンド 5
33.71
2 840
16 330
1 207
バンド 6
32.10
2 698
19 170
1 207
バンド 7
30.48
2 556
21 868
1 207
バンド 8
28.86
2 414
24 424
1 207
バンド 9
27.24
2 272
26 838
1 207
バンド 10
25.63
2 130
29 110
1 207
バンド 11
24.01
1 232
31 240
748
制御トラックゾーン
102
制御ゾーン
23.007
168
32 472
リードアウトゾーン
バッファゾーン
22.870
17
32 640
内周試験ゾーン
340
駆動装置用
22.856
32
32 657
製造者用
22.830
32
32 689
バッファゾーン
22.804 22.414
479
32 721 33 199
44
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表5b−ランドの情報ゾーンのレイアウト
ゾーン及びバンド
半径位置(mm)
開始 終了
ロジカル
トラック数
トラック番号
開始 終了
フィジカル
トラック数
リードインゾーン
バッファゾーン
42.506
1 456
−1 500
外周試験ゾーン
527
製造者用
41.843
32
−94
駆動装置用
41.828
32
−62
バッファゾーン
41.814
30
−30
データゾーン
バンド 0
41.80
3 550
0
1 207
バンド 1
40.18
3 408
3 550
1 207
バンド 2
38.57
3 266
6 958
1 207
バンド 3
36.95
3 124
10 224
1 207
バンド 4
35.33
2 982
13 348
1 207
バンド 5
33.71
2 840
16 330
1 207
バンド 6
32.10
2 698
19 170
1 207
バンド 7
30.48
2 556
21 868
1 207
バンド 8
28.86
2 414
24 424
1 207
バンド 9
27.24
2 272
26 838
1 207
バンド 10
25.63
2 130
29 110
1 207
バンド 11
24.01
1 232
31 240
748
制御トラックゾーン
102
予備ゾーン
23.007
168
32 472
リードアウトゾーン
バッファゾーン
22.870
17
32 640
内周試験ゾーン
340
駆動装置用
22.856
32
32 657
製造者用
22.830
32
32 689
バッファゾーン
22.804 2.414
479
32 721 33 199
注記1 表5a及び表5bのゾーン又はバンドの半径は,ゾーン又はバンドの最初の又は最後のトラック中心の半
径の公称値とする。
注記2 表5bの予備ゾーンは,グルーブトラックの制御ゾーンと対になる部分であり,仮想的にアドレスを定義
する。
17.2.4 データゾーン
データゾーンは,グルーブ及びエンボスヘッダからなる。データゾーンの記録フィールドは,箇条15
に記載のフォーマットでユーザによる記録に使われる。データゾーンのレイアウトは,箇条18で規定する。
データゾーンは,12のバンドに分割される。バンド0からバンド10は1 207フィジカルトラックから,
バンド11は748フィジカルトラックで構成され,さらに,表5a及び表5bで示すとおり,ロジカルトラ
ックに分割される。バンドごとのロジカルトラック数は,外周のバンドから内周のバンドへと必然的に減
少する。バンド内では角記録密度は一定である。バンドの各フィジカルトラックは,同じ半径線上で開始
し,終了する。
データゾーンの構成は次のようになっている。
17セクタ=1ロジカルトラック
45
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
50(外周=バンド0)〜28(内周=バンド11)ロジカルトラック=17フィジカルトラック
1 207フィジカルトラック=1バンド(バンド0〜バンド10)
748フィジカルトラック=1バンド(バンド11)
12バンド=データゾーン
データゾーンは,ロジカルトラック0で始まり,ロジカルトラック32 471で終わる。
18 データゾーンのフォーマット
データゾーンは,4個の欠陥管理領域(DMA)を含み,ゾーンの冒頭に2個,末尾に2個配置する。2
組のDMAの間の領域をユーザ領域と呼ぶ。18.1で規定のとおり,各バンド境界に,バッファトラックを
設ける。
データゾーンのレイアウトを表6に示す。
表6−リードインゾーン,データゾーン及び制御トラックゾーンのレイアウト
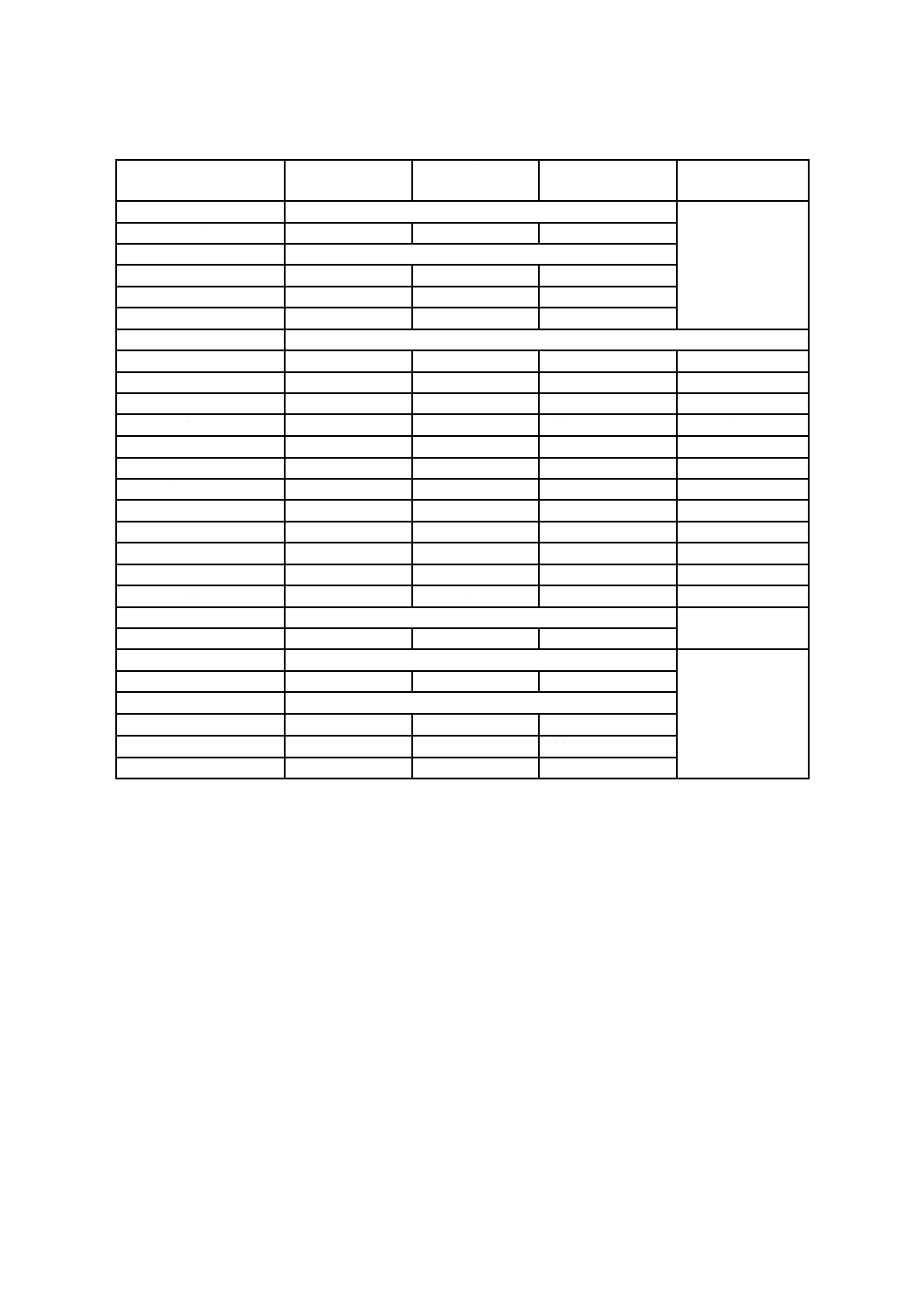
18.1 データゾーンのバッファトラック及び試験トラック
表7a 及び表7b に示すように,バンド0以外の各バンドの始まりの数トラックをバッファトラックと
し,各バンドの終わりの数トラックをバッファトラック,試験トラック及びバッファトラックとする。
各バンドの始まり及び終わりのバッファトラックの一部にはセクタマークしかないが,ロジカルトラッ
ク番号は割り当てる。バッファトラック及び試験トラックを,ユーザデータの記録に使用してはならない。
バンド11
バンド0
バンド1
データ
ゾーン
制御トラックゾーン
リードアウトゾーン
リードインゾーン
外周試験ゾーン
バッファゾーン
制御データゾーン
内周試験ゾーン
書換形ゾーン
書換形ゾーン
DMA1,DMA2
DMA3,DMA4
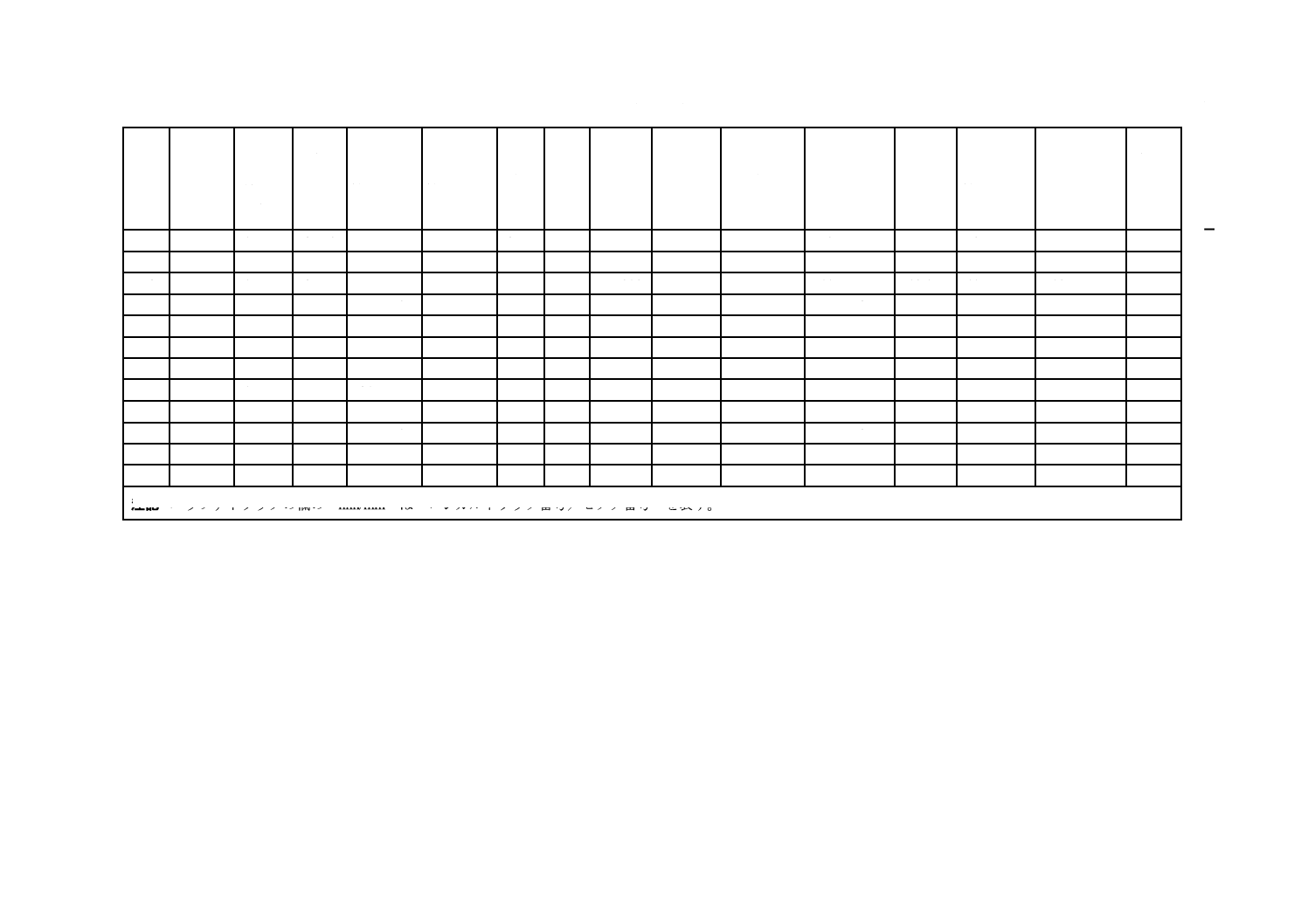
表7a−データゾーンのグルーブトラックレイアウト
バンド
番号
フィジカ
ルトラッ
ク当たり
のセクタ
数
各バン
ドのト
ラック
数
開始ト
ラック
番号
ヘッダなし
バッファ開
始トラック
番号
ヘッダ付き
バッファ開
始トラック
番号
DMA1
及び
DMA2
予備
トラッ
ク
データ開
始トラッ
ク番号
スペア開
始トラッ
ク番号
DMA3
及び
DMA4
ヘッダ付き
バッファ開始
トラック番号
試験開始
トラック
番号
ヘッダ付き
バッファ開
始トラック
番号
ヘッダなし
バッファ開始
トラック番号
終了ト
ラック
番号
0
50
1 207
3 550
−
−
0〜5 6〜25
26
3 435 3 460〜3 465
3 466/00
3 469
3 490/00
3 505/15
3 549
1
48
1 207
3 408
35 50/00
35 92/06
3 608
6 866
6 890/00
6 893
6 914/00
6 929/15
6 957
2
46
1 207
3 266
69 58/00
69 85/01
7 000
10 148
10 172/00
10 175
10 196/00
10 210/08
10 223
3
44
1 207
3 124
10 024/00 10 236/16
10 250
13 275
13 298/00
13 301
13 322/00
13 335/01
13 347
4
42
1 207
2 982
13 348/00 13 360/06
13 374
16 257
16 280/00
16 283
16 304/00
16 317/11
16 329
5
40
1 207
2 840
16 330/00 16 330/06
16 354
19 100
19 122/00
19 125
19 146/00
19 158/04
19 169
6
38
1 207
2 698
19 170/00 19 170/03
19 194
11 798
21 820/00
11 823
21 844/00
21 856/14
21 867
7
36
1 207
2 556
21 868/00 21 878/10
21 890
14 357
24 378/00
24 381
24 402/00
24 413/07
24 423
8
34
1 207
2 414
24 424/00 24 434/00
24 444
26 773
26 794/00
26 797
26 818/00
26 828/00
26 837
9
32
1 207
2 272
26 838/00 26 847/07
26 858
29 046
29 066/00
29 069
29 090/00
29 100/10
29 109
10
30
1 207
2 130
29 110/00 29 118/14
29 128
21 178
31 198/00
31 201
31 222/00
31 231/03
31 239
11
28
748
1 232
31 240/00 31 248/04
31 258
32 420
32 439/00
32 442
32 463/00
32 471
注記 バッファトラックの欄の“nnn/mm”は“ロジカルトラック番号/セクタ番号”を表す。
4
6
X
6
2
7
0
:
2
0
11
(I
S
O
/IE
C
2
2
5
3
3
:
2
0
0
5
)
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
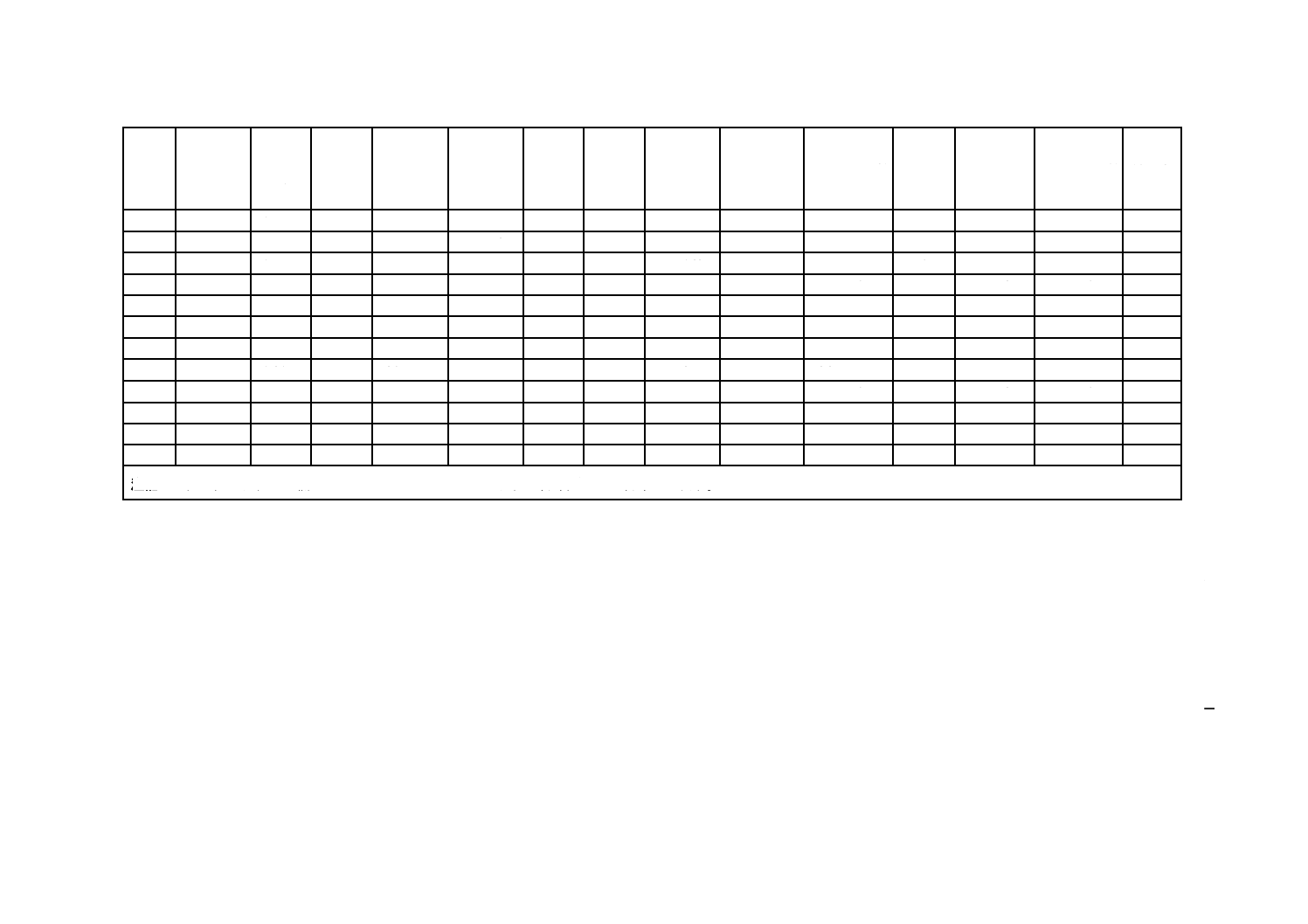
表7b−データゾーンのランドトラックレイアウト
バンド
番号
フィジカル
トラック当
たりのセク
タ数
各バンド
のトラッ
ク数
開始
トラック
番号
ヘッダなし
バッファ開
始トラック
番号
ヘッダ付き
バッファ開
始トラック
番号
予備
トラック
データ開
始トラッ
ク番号
スペア開始
トラック
番号
予備
トラック
ヘッダ付き
バッファ開始
トラック番号
試験開始
トラック
番号
ヘッダ付き
バッファ開
始トラック
番号
ヘッダなし
バッファ開始
トラック番号
終了ト
ラック
番号
0
50
1 207
3 550
−
−
0〜25
26
3 435
3 460〜3 465
3 466/00
3 469
3 490/00
3 505/15
3 549
1
48
1 207
3 408
35 50/00
35 92/06
3 608
6 866
6 890/00
6 893
6 914/00
6 929/15
6 957
2
46
1 207
3 266
69 58/00
69 85/01
7 000
10 148
10 172/00
10 175
10 196/00
10 210/08
10 223
3
44
1 207
3 124
10 024/00 10 236/16
10 250
13 275
13 298/00
13 301
13 322/00
13 335/01
13 347
4
42
1 207
2 982
13 348/00 13 360/06
13 374
16 257
16 280/00
16 283
16 304/00
16 317/11
16 329
5
40
1 207
2 840
16 330/00 16 330/06
16 354
19 100
19 122/00
19 125
19 146/00
19 158/04
19 169
6
38
1 207
2 698
19 170/00 19 170/03
19 194
11 798
21 820/00
11 823
21 844/00
21 856/14
21 867
7
36
1 207
2 556
21 868/00 21 878/10
21 890
14 357
24 378/00
24 381
24 402/00
24 413/07
24 423
8
34
1 207
2 414
24 424/00 24 434/00
24 444
26 773
26 794/00
26 797
26 818/00
26 828/00
26 837
9
32
1 207
2 272
26 838/00 26 847/07
26 858
29 046
29 066/00
29 069
29 090/00
29 100/10
29 109
10
30
1 207
2 130
29 110/00 29 118/14
29 128
21 178
31 198/00
31 201
31 222/00
31 231/03
31 239
11
28
748
1 232
31 240/00 31 248/04
31 258
32 420
32 439/00
32 442
32 463/00
32 471
注記 バッファトラックの欄の“nnn/mm”は“ロジカルトラック番号/セクタ番号”を表す。
4
7
X
6
2
7
0
:
2
0
11
(I
S
O
/IE
C
2
2
5
3
3
:
2
0
0
5
)
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
48
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
18.2 欠陥管理領域(DMA)
四つの欠陥管理領域(DMA)は,データゾーンの構造の情報,及び欠陥管理情報を含む。各DMAの長
さは,41セクタとする。DMAのうちの二つ,すなわち,DMA1及びDMA2は,バンド0の最外周に位置
し,他の二つのDMA,すなわち,DMA3及びDMA4は,バンド0の最内周に位置する。DMAの配置を
表8に示す。表8の予備セクタの内容は,この規格では規定せず,互換性では無視する。
各DMAは,ディスク定義構造(DDS),一次欠陥管理表(PDL)及び二次欠陥管理表(SDL)を含む。
四つのPDLの内容は同一とし,四つのSDLの内容は同一とする。四つのDDS間の内容の相違は,各関連
PDL及びSDLに対するポインタだけとする。
ディスクの初期化後,各DMAがもつ内容は,次による。
− 最初のセクタはDDSとする。
− 2番目のセクタはPDLの最初のセクタとする。
− SDLはPDLの直後に配置する。
PDL及びSDLの長さは,それぞれのエントリの数によって決定する。SDLの後のDMAセクタの内容は
規定されず,互換性では無視する。
DDSの内容は,18.3で規定し,PDL及びSDLの内容は,19.5及び19.6で規定する。
表8−DMAの配置
開始位置
終了位置
セクタ数
トラック番号 セクタ番号 トラック番号 セクタ番号
DMA1
0
0
2
6
41
予備
2
7
2
16
10
DMA2
3
0
5
6
41
予備
5
7
5
16
10
DMA3
3 460
0
3 462
6
41
予備
3 462
7
3 462
16
10
DMA4
3 463
0
3 465
6
41
予備
3 465
7
3 465
16
10
18.3 ディスク定義構造(DDS)
DDSは,1セクタで構成し,ディスクの初期化の方法,書換形ゾーンのグループ分割数,PDLの開始ア
ドレス及びSDLの開始アドレスを規定する。書換形ゾーンのグループ分割数はバンド数と同じとする。
DDSは,ディスクの初期化終了時に,各DMAの最初のセクタに記録する。表9は,四つのDDSに記録
される情報を示す。
各バンドは,グルーブトラックのグループ及びランドトラックのグループの二つのグループに分割する。
ユーザ領域は,バッファトラック及びDMA3とDMA4を除くトラック6のセクタ0からランドトラッ
クのトラック32 438の最後のセクタまでをユーザによるデータの記録を目的として割り当てる。DDSのバ
イト22から46までは,各グループが記録可能かエンボスデータかを表すが,全て記録可能を表す“01”
とする。
このゾーンにおけるデータフィールドのレイアウトは,附属書Dに規定する。
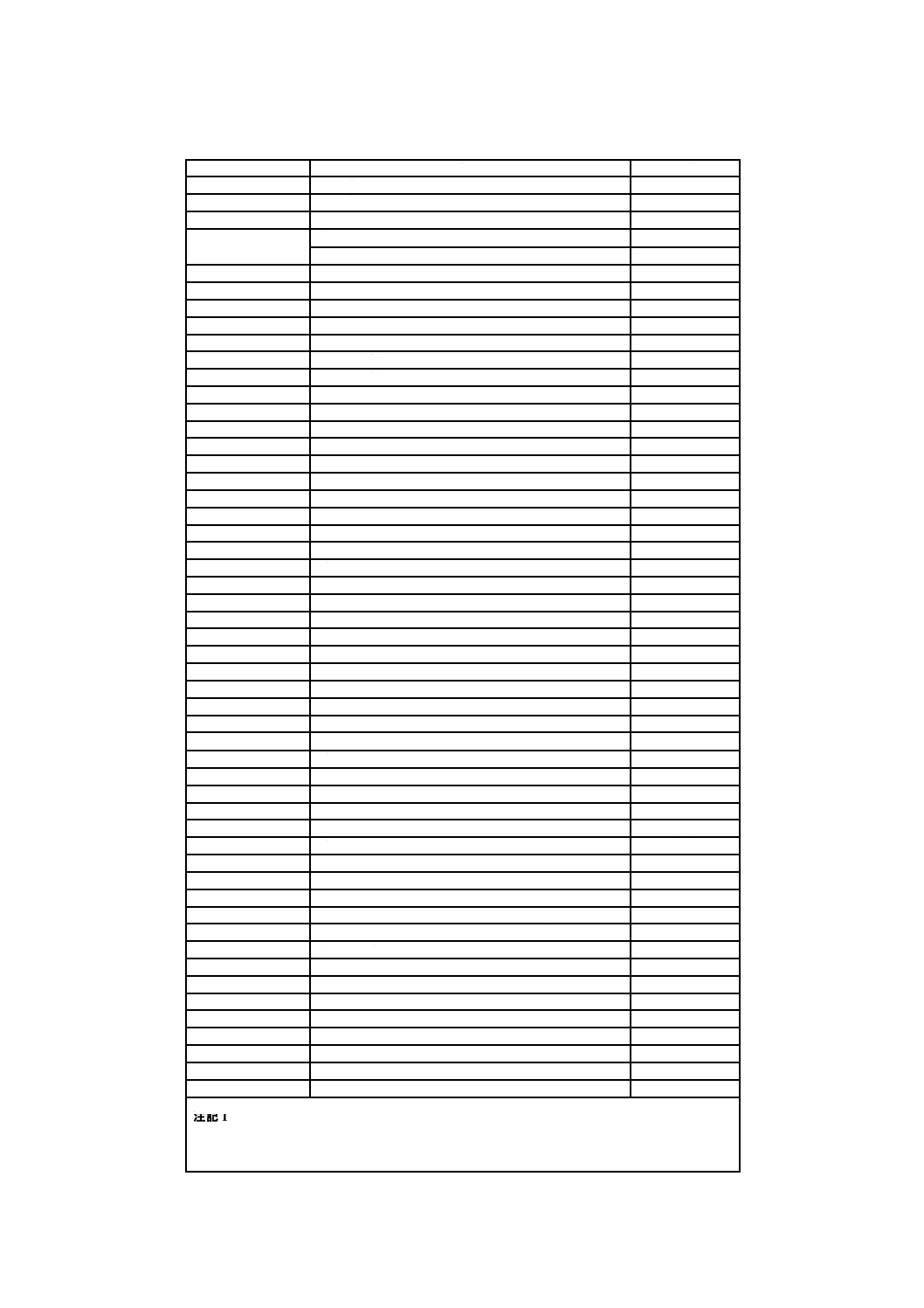
49
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表9−DDSの内容
バイト番号
内容
設定
0
DDS識別子
(0A)
1
DDS識別子
(0A)
2
メディア識別子
(00)
3
ディスク検証
(01)
ディスク非検証
(02)
4
グループ数のMSB
(00)
5
グループ数のLSB
(19)
6〜13
予備
(00)
14
PDLの開始アドレスのトラックのMSB
−
15
PDLの開始アドレス
−
16
PDLの開始アドレスのトラックのLSB
−
17
PDLの開始アドレスのセクタ
−
18
SDLの開始アドレスのトラックのMSB
−
19
SDLの開始アドレス
−
20
SDLの開始アドレスのトラックのLSB
−
21
SDLの開始アドレスのセクタ
−
22
グループ0タイプ
(01)
23
グループ1タイプ
(01)
24
グループ2タイプ
(01)
25
グループ3タイプ
(01)
26
グループ4タイプ
(01)
27
グループ5タイプ
(01)
28
グループ6タイプ
(01)
29
グループ7タイプ
(01)
30
グループ8タイプ
(01)
31
グループ9タイプ
(01)
32
グループ10タイプ
(01)
33
グループ11タイプ
(01)
34
グループ12タイプ
(01)
35
グループ13タイプ
(01)
36
グループ14タイプ
(01)
37
グループ15タイプ
(01)
38
グループ16タイプ
(01)
39
グループ17タイプ
(01)
40
グループ18タイプ
(01)
41
グループ19タイプ
(01)
42
グループ20タイプ
(01)
43
グループ21タイプ
(01)
44
グループ22タイプ
(01)
45
グループ23タイプ
(01)
46
予備
(01)
47
欠陥セクタ数,最大8セクタ
−
48〜127
(00)
128
最初の欠陥セクタ(トラック番号,MSB )
−
129
最初の欠陥セクタ(トラック番号)
−
130
最初の欠陥セクタ(トラック番号,LSB )
−
131
最初の欠陥セクタ(セクタ番号)
−
…
…
−
x−3
最後の欠陥セクタ(トラック番号,MSB )
−
x−2
最後の欠陥セクタ(トラック番号)
−
x−1
最後の欠陥セクタ(トラック番号,LSB )
−
x(最大:255 )
最後の欠陥セクタ(セクタ番号)
−
x+1〜2 047
予備
(00)
注記1
バイト2の(01)〜(0F)の値は予備とする。
注記2
記号“−”は,適正値が入ることを意味する。
注記3
バイト22〜46には書換可能を意味する(01)を記録し,(00)を記録しない。
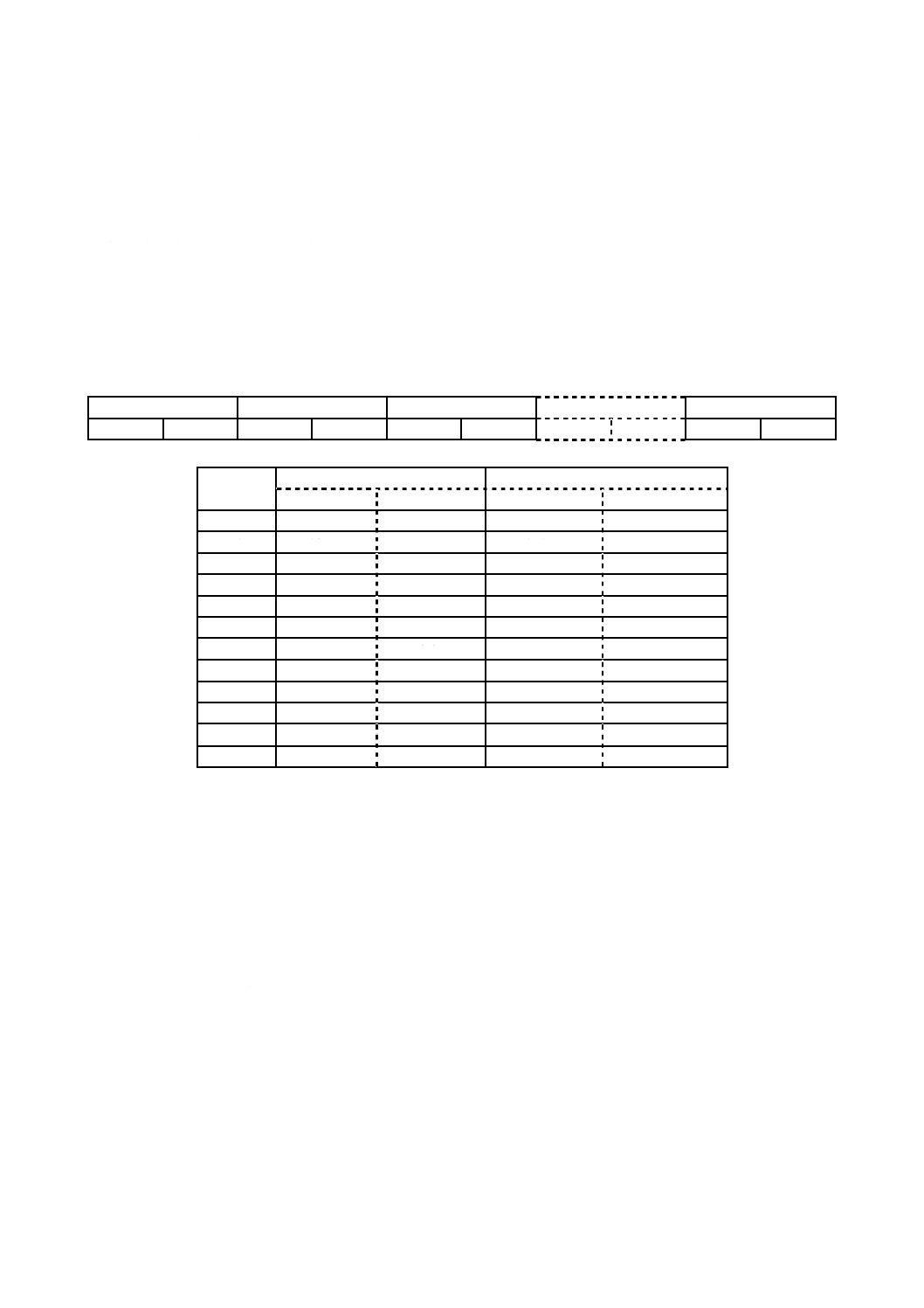
50
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
18.4 書換形ゾーンの分割
カートリッジの初期化によって,データゾーンは,12の連続グループに分割される。各グループは,バ
ンド0のトラック0からトラック5まで及びトラック3 460からトラック3 465までを除く。各グループは,
連続したデータセクタとそれに続く連続したスペアセクタとからなり,その配置を表7に示す。各グルー
プは記録可能としてDDSに記録する。
18.5 論理ブロックアドレス
論理ブロックアドレス0は,バンド0のグルーブトラックの最初のデータトラックの最初のセクタとす
る。論理ブロックアドレスは,表10で示すとおりの順序で割り当てる。
表10−論理ブロックアドレスのレイアウト
バンド0
バンド1
バンド2
バンド11
グルーブ
ランド
グルーブ
ランド
グルーブ
ランド
グルーブ
ランド
バンド
グルーブ
ランド
開始
終了
開始
終了
0
0
57 952
57 953
115 905
1
115 906
171 291
171 292
226 677
2
226 678
280 193
280 194
333 709
3
333 710
385 134
385 135
436 559
4
436 560
485 570
485 571
534 581
5
534 582
581 263
581 264
627 945
6
627 946
672 213
672 214
716 481
7
716 482
758 420
758 421
800 359
8
800 360
839 952
839 958
879 545
9
879 546
916 741
916 742
953 937
10
953 938
988 787
988 788
1 023 637
11
1 023 638
1 043 392
1 043 392
1 063 145
19 欠陥管理
書換形ゾーンの欠陥セクタは,次に記載する欠陥管理方式に従って,正常セクタに代替する。使用前に,
ディスクを初期化する。初期化のとき,検証を行っても行わなくてもよい。欠陥セクタは,セクタスリッ
プ方式,又は線形置換方式によって処理される。両方式が置換した欠陥セクタの総数は,最大で8 976以
下とする。
19.1 ディスクの初期化
ディスクの初期化とは,ディスクの最初の使用に先立って,四つのDMAを記録することをいう。各グ
ループは,連続したデータセクタと連続したスペアセクタとを含む。スペアセクタは欠陥セクタの代替と
して使うことができる。ディスクの初期化のときに,書換形グループの検証によって,欠陥セクタの検出
及び代替を行ってもよい。
全てのDDSの内容を,四つのDDSセクタに記録する。PDL及びSDLを,四つのDMAに記録する。PDL
及びSDLを記録するための要件は,表11及び表12に規定する。
51
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
19.2 検証
ディスクを検証する場合,グループ内のデータセクタ及びスペアセクタについて検証を行う。この規格
は,検証の方法について規定しないが,セクタの消去,記録及び再生を含み得る。検証中に発見された欠
陥セクタは,セクタスリップ方式によって処理されるか,又は線形置換方式によって処理される。再生又
は記録に欠陥セクタを使用してはならない。
19.2.1 セクタスリップ方式
検証を実行する場合,セクタスリップ方式は,書換形ゾーンの全てのグループに個々に適用する。
検証中に検出された欠陥データセクタは,欠陥セクタに後続する最初の正常セクタで代替し,これによ
って,グループの最後尾のセクタがスペアセクタ領域にスリップすることになる。欠陥セクタのアドレス
は,PDLに記録する。検証中に欠陥セクタが見つからない場合は,空のPDLを記録する。
セクタスリップ方式によってデータセクタとして使われなかったスペアセクタで,検証中に欠陥がある
と判明した場合は,そのアドレスをPDLに記録する。したがって,使用できるスペアセクタの数は,それ
に応じて減少する。
検証中にグループ内のスペアセクタを使い切った場合には,欠陥セクタは,線形置換方式によって処理
される。この過程は,別のグループのスペアセクタへの置換を含み,別のグループの検証が終了するまで
完了できない。これは,検証が終了するまで,すなわち,セクタスリップ方式を適用するまで,次に使用
できるスペアセクタが分からないためである。
19.2.2 線形置換方式
検証後に見つかった欠陥セクタは,線形置換方式を用いて処理する。また,検証中にグループのスペア
セクタを使い切った場合にも,線形置換方式を使用する。
欠陥セクタは,そのグループの最初に使用できるスペアセクタに代替する。グループにスペアセクタが
残っていない場合,欠陥セクタは,別のグループの最初に使用できるスペアセクタに置換する。欠陥セク
タ及び代替セクタのアドレスを,SDLに記録する。
既にPDLに記録したセクタのアドレスを,SDLに記録してはならない。
SDLに記録した代替セクタが,後に欠陥セクタであると判明した場合には,その欠陥セクタ及び代替セ
クタのアドレスを新しくSDLに記録する。
19.3 非検証ディスク
検証されていないディスクの欠陥セクタの取扱いには,線形置換方式を使用する。
欠陥セクタは,当該グループの最初に使用できるスペアセクタに代替する。当該グループに使用できる
スペアセクタが残っていない場合,欠陥セクタは,別のグループの最初に使用できるスペアセクタに代替
する。欠陥セクタ及び代替セクタのアドレスを,SDLに記録する。
検証されていないディスクであってもPDLに欠陥セクタのアドレスのリストが存在する場合は,これら
のセクタを使用せず,19.2.1で規定する検証済みディスクの場合と同様にセクタスリップ方式を適用する。
19.4 記録方法
データの記録に当たっては,PDLに記録した欠陥セクタは,スキップされ,セクタスリップ方式に従っ
て次のデータセクタで記録を行う。記録しようとするセクタがSDLに記録されている場合,線形置換方式
に従って,SDLが指示した代替セクタにデータを記録する。
19.5 一次欠陥管理表(PDL)
一次欠陥管理表(PDL)は,欠陥セクタがない場合でも必ず記録しなければならない。
欠陥セクタのリストは,検証によって得られる。
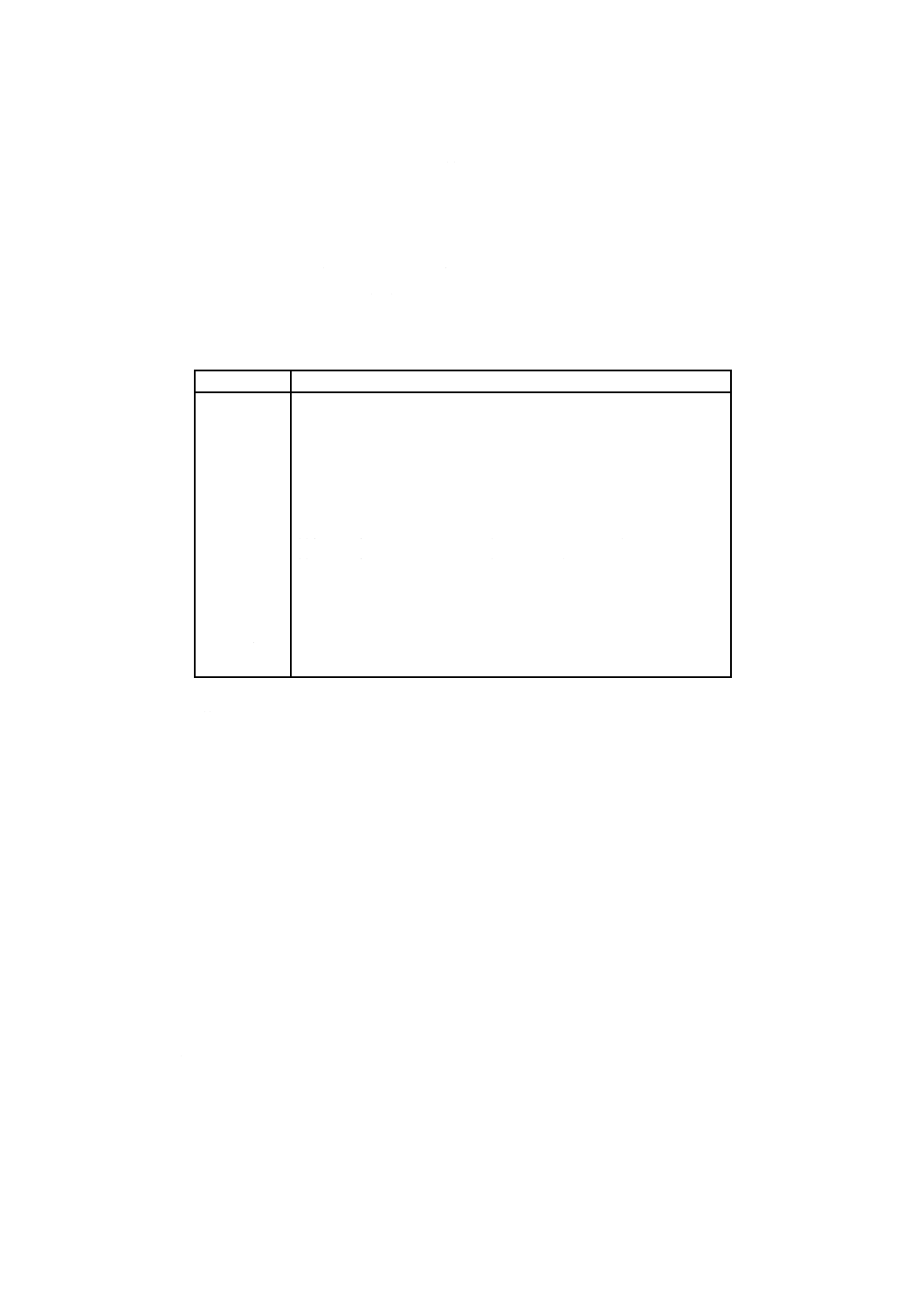
52
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PDLには,初期化のときに検証した,セクタスリップ方式によって代替された全ての欠陥セクタのアド
レスを昇順に記録する。PDLのセクタ数は,必要最小数とし,DDSの次のセクタから記録する。PDLの
最終セクタの全ての未使用バイトには,(FF)を記録する。PDLに記録する内容を表11に示す。
PDLが複数セクタにわたる場合,欠陥セクタのアドレスのリストを,2番目以降のセクタの最初のバイ
トから記録する。したがって,PDLの識別子及び欠陥セクタ登録数は最初のセクタにだけ存在する。
セクタスリップ方式による欠陥セクタがない場合,すなわち空のPDLでは,バイト2及びバイト3に(00)
を記録し,バイト4から2 047までに(FF)を記録する。
表11−PDLの内容
バイト番号
内容
0
(00),PDL識別子
1
(01),PDL識別子
2
PDLに登録された欠陥セクタ数のMSB
3
PDLに登録された欠陥セクタ数のLSB
[バイト2及びバイト3が(00)の場合,バイト3はPDLの最後]
4
最初の欠陥セクタのアドレス(トラック番号のMSB)
5
最初の欠陥セクタのアドレス(トラック番号)
6
最初の欠陥セクタのアドレス(トラック番号のLSB)
7
最初の欠陥セクタのアドレス(セクタ番号)
…
…
x−3
最後の欠陥セクタのアドレス(トラック番号のMSB)
x−2
最後の欠陥セクタのアドレス(トラック番号)
x−1
最後の欠陥セクタのアドレス(トラック番号のLSB)
x
最後の欠陥セクタのアドレス(セクタ番号)
19.6 二次欠陥管理表(SDL)
二次欠陥管理表(SDL)に,検証中にセクタスリップ方式で処理できなかった欠陥セクタ情報,及び検
証後に欠陥セクタが発見されたときの欠陥セクタ情報を記録する。初期化されたディスクは,SDLが記録
されていなければならない。
SDLに記録する欠陥セクタ情報は,欠陥セクタのアドレス4バイト及び代替セクタのアドレス4バイト
の計8バイトを一組とし,欠陥セクタのアドレスが昇順となるように記録する。
SDLのセクタ数は必要最小数とし,PDLの最終セクタの次のセクタから記録する。SDLが記録される最
後のセクタの残り全てのバイトは,(FF)に設定する。四つのSDLに表12に示す内容を記録する。
既にPDLに記録したセクタのアドレスを,SDLに記録してはならない。
SDLに記録した代替セクタが,後に欠陥セクタであると判明した場合には,その欠陥セクタ及び代替セ
クタのアドレスを新しくSDLに記録する。
SDLが複数セクタにわたる場合,欠陥セクタ及び代替セクタのアドレスのリストを,2番目以降のセク
タの最初のバイトから記録する。したがって,表12のバイト0からバイト15までの内容は,最初のセク
タだけに存在する。
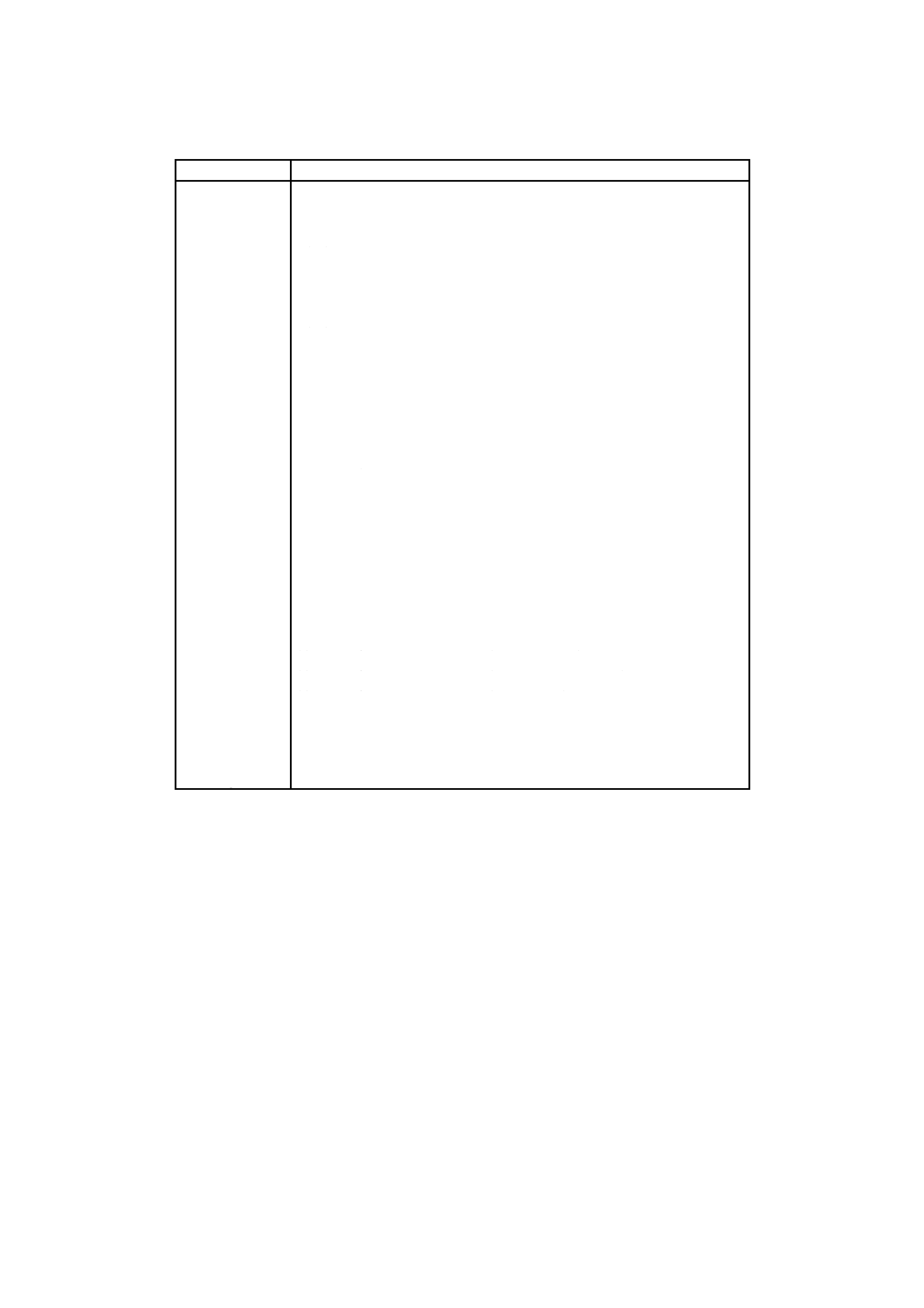
53
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表12−SDLの内容
バイト番号
内容
0
(00),SDL識別子
1
(02),SDL識別子
2
(00)
3
(01)
4
SDLのリスト長のMSB
5
SDLのリスト長
6
SDLのリスト長のLSB
7
(00)
8
(02)
9
(01)
10〜13
(00)
14
SDLの登録数のMSB
15
SDLの登録数のLSB
16
最初の欠陥セクタのアドレス(トラック番号のMSB)
17
最初の欠陥セクタのアドレス(トラック番号)
18
最初の欠陥セクタのアドレス(トラック番号のLSB)
19
最初の欠陥セクタのアドレス(セクタ番号)
20
最初の代替セクタのアドレス(トラック番号のMSB)
21
最初の代替セクタのアドレス(トラック番号)
22
最初の代替セクタのアドレス(トラック番号のLSB)
23
最初の代替セクタのアドレス(セクタ番号)
…
…
y−7
最後の欠陥セクタのアドレス(トラック番号のMSB)
y−6
最後の欠陥セクタのアドレス(トラック番号)
y−5
最後の欠陥セクタのアドレス(トラック番号のLSB)
y−4
最後の欠陥セクタのアドレス(セクタ番号)
y−3
最後の代替セクタのアドレス(トラック番号のMSB)
y−2
最後の代替セクタのアドレス(トラック番号)
y−1
最後の代替セクタのアドレス(トラック番号のLSB)
y
最後の代替セクタのアドレス(セクタ番号)
第4章 エンボス特性
20 測定方法
ディスク上のエンボスデータのフォーマットは,箇条13〜箇条18で定義する。箇条21〜箇条23は,箇
条9で規定する基準駆動装置を用いて得られるグルーブ,ヘッダ及びエンボスデータからの信号について
規定する。
箇条21〜箇条23は,エンボスデータの平均品質を規定する。規定値からの局所的な逸脱を欠陥と呼ぶ
が,これらについては,第6章に記載する。
20.1 使用環境
ODCは,8.1.2に規定する使用環境の範囲で,箇条21〜箇条23の規定を満足していなければならない。
20.2 基準駆動装置
箇条21〜箇条23で規定する全ての信号は,基準駆動装置で指定のチャネルで測定する。このため,基
準駆動装置は,次の特性をもっていなければならない。
20.2.1 光学系
光ビームは,9.2 a)〜9.2 f)で規定されたものとする。ディスクの回転方式は,9.5で規定のものとする。
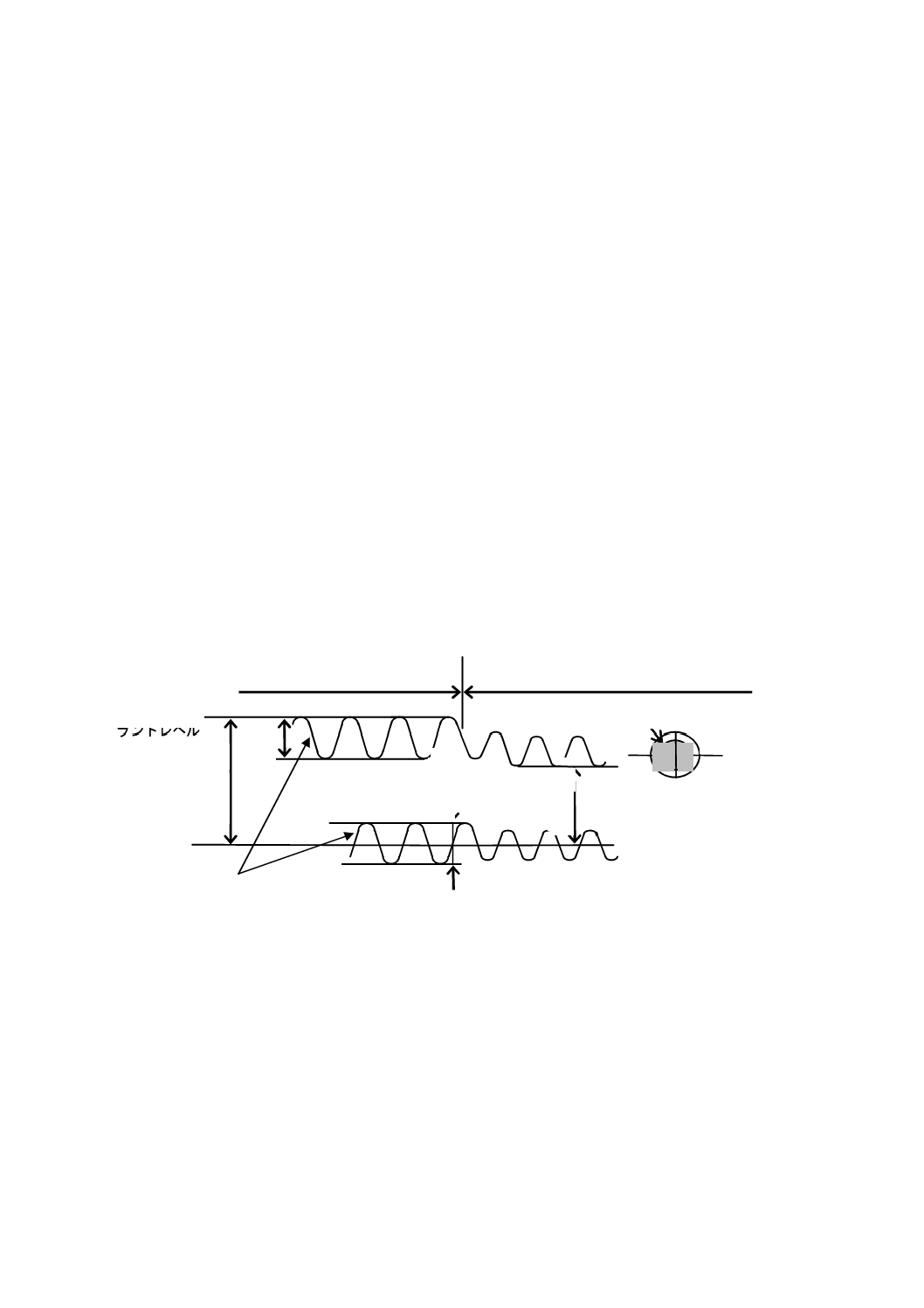
54
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
20.2.2 再生パワー
この章で規定する試験において,ディスクの入射面から入射する再生パワーは,1.3 mWとする。
制御トラックを再生するときの再生パワーは,制御ゾーンのバイト6で与えられる範囲とする(附属書
E参照)。
再生を行うときのディスク温度は,25±1 ℃とする。
20.2.3 再生チャネル
駆動装置には,対物レンズの射出瞳からの総光量を測定する再生チャネルを設ける。このチャネルは,
9.1のチャネル1とする。
20.2.4 フォーカシング及びトラッキング
測定中の光ビームの焦点と記録層との軸方向の偏位,すなわち,フォーカシングエラーの最大許容量は,
次のとおりとする。
emax (フォーカシング)=0.5 μm
トラックの中心との間の半径方向の偏位,すなわち,トラッキングエラーの最大許容量は,次のとおり
とする。
emax (トラッキング)=0.04 μm
20.3 信号の定義
図21に,箇条21〜箇条23で規定する信号を示す。
全ての信号は,フォトダイオードの出力であり,したがって,ディテクタ上の光パワーに比例する。
I1及びI2は,トラッキングチャネルの2分割フォトダイオードの出力である(9.1及び図21b参照)。
図21a−トラッキングチャネルでのグルーブからの信号
図21−ヘッダ,グルーブ,エンボス記録領域からの信号
クロストラック信号
2分割フォトダイオード
光ビーム
・
・
I2
I1
エンボスのない記録フィールド
エンボスヘッダ又はエンボス記録フィールド
(
I
1
+
I
2
)
p
p
(
I
1
+
I
2
)
O
L
(
I
1
-
I
2
)
p
p
(I
1
+
I
2
)
m
in
0レベル
ランドレベル
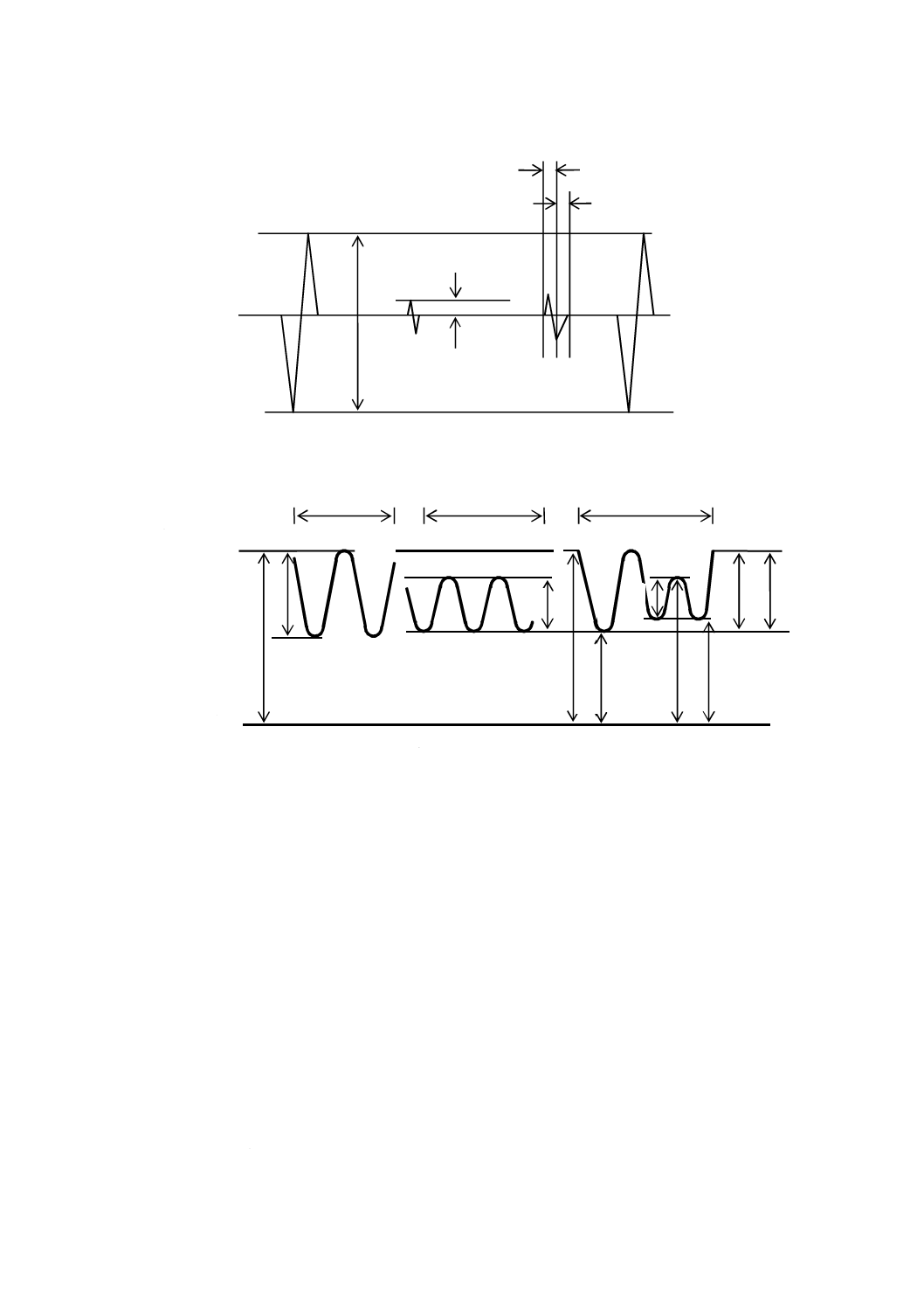
55
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図21b−オントラック時のデバイデドプッシュプル信号
図21c−トラッキングチャネル1でのヘッダからの信号
図21−ヘッダ,グルーブ,エンボス記録領域からの信号(続き)
21 グルーブからの信号
和信号(I1+I2)及び差信号(I1−I2)は,1.0 MHz以上の周波数で40 dB以上減衰するようにフィルタを
使用し,エンボスマークによる変調の影響を除去する(図21及び附属書L参照)。
21.1 デバイデドプッシュプル信号
21.1.1 オープンループトラッキング信号
デバイデドプッシュプル信号(DPP信号)は,光ビームがエンボス記録フィールド又は未記録フィール
ドのグルーブを横切るときに,2分割フォトダイオードの差信号(I1−I2)を2分割フォトダイオードの和
信号間(I1+I2)で除した信号のことであり,DPP信号の振幅の絶対値の規定,及びDPP信号の振幅のデ
ィスク内ばらつきの規定の二つを満足しなければならない。
このとき,2分割フォトダイオードの分割方向はトラック方向に平行とし,トラッキングサーボをかけ
ていない状態で測定する。
a) 光ビームがエンボスヘッダ又はエンボス記録フィールドを交差するときのDPP信号振幅は,次の条件
を満足しなければならない。
VFO
0レベル
I
S
P
I
sm
AM,ID,PA
セクタマーク
I
v
fo
I
p
m
ax
to
p
I
p
m
in
I
p
m
in
to
p
I
p
m
ax
I
p
I
p
m
in
bo
tt
o
m
I
p
m
ax
bo
tt
o
m
未記録トラック
レベル
0レベル
ヘッダ
100バイト
I
n
(0
p
)
I
k
(p
p
)
56
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(
)
(
)
58
.0
12
.0
pp
2
1
2
1
≦
≦
+
−
I
I
I
I
b) 光ビームがエンボスのない記録フィールドを交差するときのDPP信号振幅は次の条件を満足しなけ
ればならない。
(
)
(
)
29
.1
85
.0
pp
2
1
2
1
≦
≦
+
−
I
I
I
I
DPP信号振幅の最小値と最大値との比が,次の条件を満足しなければならない。
(
)
(
)
47
.0
)
(
)
(
37
.0
max
pp
2
1
2
1
min
pp
2
1
2
1
≦
≦
+
−
+
−
I
I
I
I
I
I
I
I
21.1.2 クローズドループトラッキング信号
トラッキングサーボをかけた状態でのDPP信号の0レベルからの偏り(IN)は,次の条件を満足しなけ
ればならない。ヘッダフィールドでの偏りは,図21bで示すとおり,ビームがヘッダフィールド及び追加
の100バイト上にある間に測定する。
a) ヘッダフィールド
30
.0
)
pp
(
k
)
p
0
(
N
≦
I
I
ここに,
Ik: DPP信号上のキックバック信号の振幅
b) 記録フィールド
07
.0
)
pp
(
k
)
p
0
(
N
≦
I
I
21.2 位相深さ
グルーブの位相深さは,180°未満でなければならない。
21.3 トラックの位置
トラックは,2分割フォトダイオードの差信号(I1−I2)が0に等しく,和信号(I1+I2)の値が最大値と
なる位置とする。
22 ヘッダ信号
エンボスヘッダから得られる信号は,基準駆動装置のチャネル1で測定する。
エンボスマークからの信号は,チャネル1の信号振幅として定義する(図21及び附属書L参照)。
22.1 セクタマーク
セクタマークからの信号Ismは,次の要件を満たす。
95
.0
15
.0
SP
sm≦
≦II
ここに,
ISP: ランドトラックのセクタマークの波高値
22.2 VFO信号
VFO1及びVFO2のフィールドのマークからの信号Ivfoは,次の要件を満たす。
57
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
90
.0
10
.0
SP
vfo≦
≦II
さらに,各セクタ内で次の条件を満たす。
max
p
vfo
I
I
≧0.3
ここに,
Ip max: そのセクタでの22.3で定義するIpのエンボスマーク信号
からの最大振幅
Ivfo: VFO領域からの再生信号のピークからピークまでの振
幅
22.3 アドレスマーク,IDフィールド及びポストアンブル
アドレスマーク,IDフィールド及びポストアンブルフィールドの中にあるマークからの信号Ipは,次の
要件を満たす。
90
.0
10
.0
SP
p≦
≦II
0.30
max
p
min
p
≧
I
I
2番目の要件は,全てのヘッダに対して適用される。Ip min及びIp maxは,それらのフィールドにおいて,
最小振幅及び最大振幅とする。
22.4 ジッタ
ヘッダ信号のジッタJt (H )は,附属書Hで定義する再生チャネル回路を用いて,附属書Hの手順に従っ
て,20.2.2で規定する条件下で測定し,次の条件を満足しなければならない。
T
08
.0
)
(
≦
H
Jt
ここに,
T: チャネルクロック周期
Jt (H ): マークの前縁から前縁までの長さ及びマークの後縁か
ら後縁までの長さの,各nTの区間の標準偏差(シグマ)
の合計[Jt (H )については,図H.3で示す。]
ヘッダ信号から検出される全ての時間間隔のサンプルは,Jt (H )の条件を満足しなければならない。
22.5 非対称性
非対称性は,アドレスマーク,IDフィールド及びPAフィールドの中で最大振幅及び最小振幅(Ip max及
びIp min)を与える信号の中心レベル間の偏差とし(図21参照),次の条件を満たさなければならない。
15
.0
2
2
15
.0
bottom
max
p
top
max
p
bottom
min
p
top
min
p
bottom
max
p
top
max
p
≦
≦
I
I
I
I
I
I
−
+
−
+
−
23 エンボス記録フィールド信号
23.1 信号振幅
エンボス記録フィールドから得られる信号は,基準駆動装置のチャネル1で測定する(9.1及び附属書L
参照)。容認可能なマークの欠陥は,第6章で規定する。
エンボスマークからの信号は,チャネル1の信号振幅として定義する(図21参照)。
全てのエンボス記録フィールドからの信号は,信号変調のピークからピークまでの値として定義する。
エンボス記録フィールドのマークからの信号Idは,次の条件を満足しなければならない。
58
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
90
.0
10
.0
SP
d≦
≦II
0.30
max
d
min
d
≧
I
I
最後の条件は,記録フィールド全体に適用される。Id min及びId maxは,各セクタのエンボス記録フィール
ド内のIdの最小値と最大値とする。
23.2 ジッタ
エンボス記録フィールドのジッタJt (D )は,附属書Hで定義する再生チャネル回路を用いて,附属書H
の手順に従って,20.2.2で規定する条件下で測定し,次の条件を満足しなければならない。
Jt (D )≦0.08T
ここに,
T: チャネルクロック周期
Jt (D ): マークの前縁から前縁までの長さ及びマークの後縁か
ら後縁までの長さの,各nTの区間の標準偏差(シグマ)
の合計(Jtについては,図H.3で示す。)
エンボスデータ信号から検出される全ての時間間隔のサンプルは,Jt (D )の条件を満足しなければならな
い。
第5章 記録層及びユーザデータの特性
24 測定方法
箇条25〜箇条27では,データの記録及び消去に用いる記録層の光磁気特性の測定条件及び性能につい
て規定する。測定は,書換形ゾーンのセクタの記録フィールドで行う。記録,再生及び消去の測定は,同
一の基準駆動装置で行う(附属書H参照)。
箇条25〜箇条27では,記録層の平均品質だけを規定する。指定値からの部分的な逸脱を欠陥と呼ぶが,
これは,記録又は消去の問題の原因となり得る。これらの欠陥は第6章で規定する。
24.1 測定環境
箇条25〜箇条27の全ての信号は,別に注記がある場合を除いて,8.1.2で規定する使用環境の範囲にあ
るカートリッジに関して,規定範囲内になければならない。
24.2 基準駆動装置
箇条25〜箇条27で記述する記録及び消去は,基準駆動装置のチャネル2で測定する。このため基準駆
動装置は,次の特性をもっていなければならない。
24.2.1 光学系
光ビームは,9.2 a)〜9.2 f)で規定する特性をもつ。ディスクは,9.5で規定のとおりに回転する。
24.2.2 再生パワー
この章で規定する試験において,ディスクの入射面から入射される最大再生パワーは,7.5 mWとする。
データゾーンの再生パワーは,制御ゾーンのデータフィールドに記載された制御データのバイト21から
23で与えられる範囲内とする(附属書E参照)。
24.2.3 再生磁界
全ての試験において,記録層の位置で再生磁界強度は,36 000 A/m以下でなければならない。
全ての試験において,再生磁界方向は,ディスク基準面Pの垂線に対して10°以内で,入射ビームの方
向,すなわち,入射面から記録層へ向かってN極からS極となるようにする。50 Hzの回転数に対する再
生磁界の値は,制御ゾーンに記録される。
59
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
24.2.4 再生チャネル
基準駆動装置は,記録層の磁気光学マークを検出できる9.3のチャネル2と同等の再生チャネルをもた
なければならない。
測定はマークのエッジ位置をしきい(閾)値検出方法で行い,しきい(閾)値は再生信号のピークから
ピークの包絡線の中心とする。正のピーク信号及び負のピーク信号の包絡線は,各々50 kHzで3 dB減衰
する一次ローパスフィルタを通さなければならない。
24.2.5 トラッキング
測定中の光ビームの焦点は,20.2.4で規定のとおりにトラックを追随しなければならない。
24.2.6 信号検出
再生チャネルからの信号は,検出前に等化回路を通してはならない。信号は,チャネルクロック周波数
の1/2のカットオフ周波数をもつ三次バターワースフィルタを通す。全ての再生試験は50 Hzの回転数で
行う。
データの記録条件などが理想的であれば,しきい(閾)値は0となるが,測定によっては,記録中のパ
ラメタ変化によるマークサイズの変化の影響を除くために,しきい(閾)値を調整しなければならないこ
ともある。
24.3 記録条件
24.3.1 記録パルス及び記録パワー
マークは,アシストパワーPaにパルス列を重畳させた光ビームによってディスク上に記録される。
2T,4T及び8Tの長さのマークについて,次のとおりに試験パルス列を定義する。
2Tマークの試験パルスは,パワーPsの1.5Tパルスをアシストパワーに重畳して形成する。2Tよりも長
いマークの試験パルス列は,冒頭の2T部分をパワーPsの1.5Tパルスとし,それに引き続いて0.5T(Pa)
及び0.5T(Pw)の組合せを所要の長さ分だけ追加することで形成する。ここに,Paはアシストパワー,Pw
は記録ピークパワーとする。マークの後のnTスペースは,1.5Tのパワーゼロの冷却期間,及び,(n−1.5)T
のアシストパワーPaで構成する。
Pw とPaとの関係は,次のとおりとする。
24 mmの場合,Pw:Pa=1.0:0.2
32 mmの場合,Pw:Pa=1.0:0.3
41.5 mmの場合,Pw:Pa=1.0:0.4
マークの長さ2T,4T及び8Tについて,パルス列は次のとおりとする。
2T:1.5T(Pw)0.5T(0)
4T:1.5T(Pw)0.5T(Pa)0.5T(Pw)0.5T(Pa)0.5T(Pw)0.5T(0)
8T:1.5T(Pw)0.5T(Pa)0.5T(Pw)0.5T(Pa)0.5T(Pw)0.5T(Pa)0.5T(Pw)0.5T(Pa)0.5T(Pw)
0.5T(Pa)0.5T(Pw)0.5T(Pa)0.5T(Pw)0.5T(0)
試験の目的のための汎用パルス列を,図22に示す。
パルスの10 %から90 %までの立上がり,立下がり時間は,3 ns未満とする。
レーザパワーの測定は,繰返しパルス発光の平均パワーの測定,例えばパルス幅を50 nsとして光パワ
ーメータで測定し,パルス幅とパルス振幅との積として評価することで,パルス幅及びパルス振幅の設定
誤差を小さくすることができる(附属書U参照)。
メディア試験で使用するPwは,24.3.3の方法で測定した値を用いる。ODC製造者は,24 mm,32 mm及
び41.5 mmで測定したPwの5 %以内の値を,制御ゾーンに記録しなければならない。
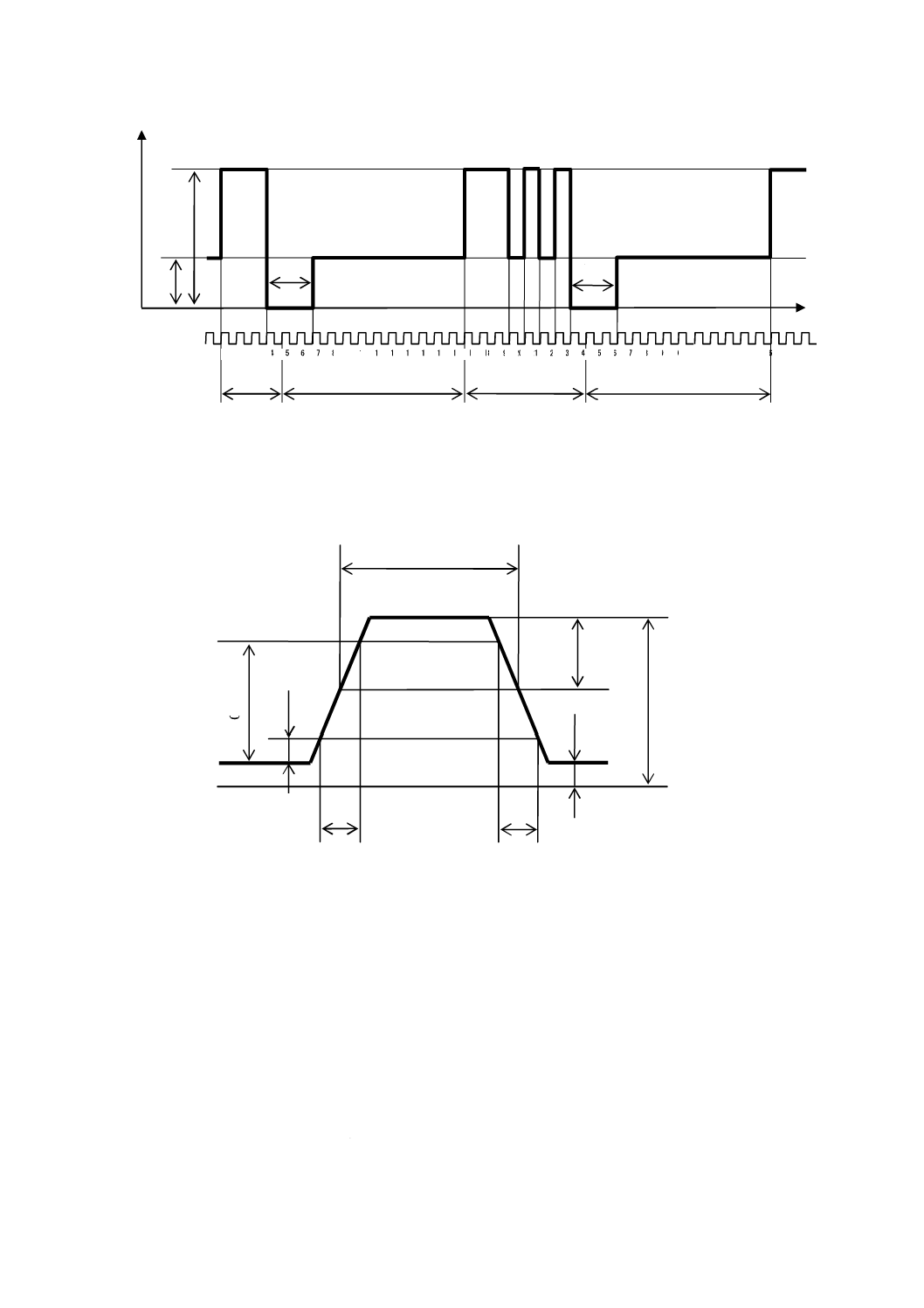
60
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに,
Pw: 記録ピークパワー
Pa: アシストパワー
図22a−記録パルスの波形
ここに,
Pw: 記録ピークパワー
Pa: アシストパワー
P: Pw−Pa,Pw,Pa,
Tf: 立下がり時間
Tr: 立上がり時間
Tp: 記録パルス幅
図22b−記録パルス形状
図22−記録パルス
24.3.2 記録磁界
特に記載がない限り,記録磁界強度は,記録層の位置で16 000 A/mから32 000 A/mまでの範囲になけれ
ばならない。
P
a
Tr
Tf
Tp
P
w
-
P
a
,
P
w
,
P
a
0
.5
P
0
.1
P
0
.9
P
6T
1.5T
1.5T
P
w
P
a
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
2T
4T
6T
記
録
パ
ワ
ー
61
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記録磁界の方向は,ディスク基準面Pの垂線に対して10°以内で,入射ビームの方向,すなわち,入射
面から記録層へ向かってN極からS極となるようにする。
24.3.3 2T及び4Tのパルスパワーの決定
メディア製造者は,次の手順を用いて,制御ゾーンに記録される4TパルスパワーPwの値を測定する。
試験のとき,次の試験パターンを繰り返し記録することによって,複数のトラック及びディスクの半径
24 mm,32 mm及び41.5 mmで,消去及び記録を行う。
ランレングス 2T 6T 4T 8T
マーク又はスペース M S M S
メディア温度25 ℃±1 ℃,磁界強度24 000 A/m±5 %,及び試験回転周波数で,記録を行う。
24.2.6で規定する検出方法を用いて,信号を再生し検出する。2Tマークを用いて,再生信号振幅が最大
となるように焦点を合わせ,ピークからピークまでの信号振幅の50 %にしきい(閾)値を設定する。焦点
を±0.25 μm動かし,熱相互作用エラーEth が最良であることを確認する。
半径24 mm,32 mm及び41.5 mmでタイムインターバルアナライザ(TIA)を用いて,エッジ間の平均
距離,すなわち2Tに対してはL2,4Tに対してはL4,6Tに対してはL6を測定する。各半径位置で,複数
トラック上の105個以上の独立した時間間隔サンプルの平均をとる。TIA上の6Tの分布は,一般に二つの
山に分離されることに注意する。この分離の度合いは,メディアの温度特性に依存する。L6の値は,この
二つの山の分布の平均とする。
L6ができる限り6Tに近くなるように記録パワーPwを調整する。L6の長さは2点で極小となるため,制
御ゾーンに記録するPwは,記録パワーが増加するに従って,L6の長さが減少していく点とする。
24.3.4 メディアの感度
Pwは,パルス幅Tpの関数として,4Tマークの形成を要求するパワーの上限とする。PwとTpとの相互関
係は,次による。
mW
1
1
p
p
w
+
T
T
C
P=
ここに,
2
5.0
5.0
5.1
25
.1
p
T
T
T
T
T
+
+
=
=
メディア製造者は,24.3.3で測定したTp及びPwから次の公式を用いてメディアパワー感度Cの値を求
める(図22参照)。
+
×
p
p
p
p
w
T
T
T
T
P
C=
Cの値は,半径24 mm,32 mm及び41.5 mmのところで,50未満でなければならない。
24.4 消去条件
マークは,磁界の存在下で,一定光パワーを照射することで消去される。
24.4.1 消去パワー
消去パワーは,24.3に従って記録されたマークを消去するために,入射面から入射される連続光パワー
とする(箇条27参照)。
データゾーンを消去するための消去パワーは,制御トラックゾーンのバイト41〜43で与えられる範囲内
とする(附属書E参照)。
62
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
その他の半径位置での消去パワーは,直線補完した値±5 %の範囲とする。
連続消去パワーは,13 mWを超えてはならない。
24.4.2 消去磁界
消去磁界は,記録層の位置で24 000 A/m以上でなければならない。
消去磁界の方向は,ディスク基準面Pの垂線に対して10°以内で,反射ビームの方向,すなわち,記録
層から入射面へ向かってN極からS極となるようにする。
24.5 信号の定義
チャネル2の信号は,フォトダイオードK1及びK2の電流の差に比例し,したがって,フォトダイオー
ドに入射する光パワーに比例する(9.1参照)。
25 光磁気特性
この箇条では,9.1で定義した光学系で−8°と+8°との間の全ての位相差の範囲で満足すべき光磁気特
性を規定する。
25.1 性能指数
記録層の性能指数Fは,光磁気マークから得られる信号強度とし,R sinθ cos2βで表す。ここで,Rは小
数で表示される反射率であり,θは,マークと未記録部との間の偏光のカー回転角度,及びβは,開口部
全体で平均した反射ビームのだ(楕)円率である。性能指数の極性は,24.3.2で規定する記録磁界方向に
おいて,Fe リッチのFe-Tb合金記録層に記録したとき,マークに対しては負となるように定義する。この
場合,カー回転の方向は,入射ビームからみて反時計回りとなる。
性能指数の値の極性及び大きさは,制御データのバイト10及びバイト11で規定し(附属書E参照), 次
のとおりとする。
0.002 5<|F|<0.005 0
性能指数の実効値Fmの測定は,附属書Gに従って行う。Fmは,公称値の12 %以内とする。
25.2 光磁気信号の非対称性
光磁気信号の非対称性(アンバランス)は,ディスクの複屈折などによって光磁気信号にオフセットを
生じる現象をいい,d.c.アンバランス及びa.c.アンバランスの二つを規定する。測定は,セクタのデータフ
ィールドで,2Tパターンを使用して行い,チャネル2からの信号の中心線の変動振幅とチャネル2の信号
振幅との比から求め,d.c.アンバランス及びa.c.アンバランスはそれぞれ次のフィルタを通した後測定する。
)
ル
後の信号振幅(チャネ
ハイパスフィルタ
)
ャネル
中心線の変動振幅(チ
ローパスフィルタ後の
=
アンバランス
2
1
2
d.c.
)
ル
後の信号振幅(チャネ
ハイパスフィルタ
)
変動振幅(チャネル
後の中心線の
ハイパスフィルタ
アンバランス=
2
1
2
s
2
a.c.
d.c.アンバランスは最大で4.0とする。
a.c.アンバランスは図23で示すとおり,ハイパスフィルタ2のロールオフ周波数の関数とする。
1 kHz≦ロールオフ周波数≦100 kHz
a.c.アンバランス≦10(log(5/(1.2×ロールオフ周波数)))
63
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図23−信号のa.c.アンバランス
ここに, 各フィルタは次の特性をもつ。
ハイパスフィルタ1: 50 kHzで−3 dBのロールオフ及びチャネルク
ロック周波数の1/2でカットオフをもつ三次
バターワースフィルタ
ハイパスフィルタ2: オクターブ当たり−6 dBの減衰
ローパスフィルタ: 1 kHzで−3 dBのロールオフ
測定に当たっては,ゲート,サンプルホールドなどの技術によってヘッダの影響を除去した上で行わな
ければならない。
隣接するバンドのエンボスヘッダから光磁気信号への漏込み信号は,上記a.c.アンバランスと同様の方
法で測定し,同じ規格とする。
26 記録特性
26.1 分解能
ILは,チャネル2(9.3参照)で,24.3で規定する条件下で記録される8Tマーク及び8Tスペースから得
られる信号のピークからピークまでの値とし,RLL(1,7)符号が各ゾーンに許容する最長間隔であり,24.2
で規定する条件下で再生する。
IHは,チャネル2で,24.3で規定する条件下で記録される2Tマーク及び2Tスペースから得られる信号
のピークからピークまでの値とし,RLL(1,7)符号が各ゾーンに±0.1 MHzで許容する最短間隔であり,
24.2で規定する条件下で再生する。
分解能IH / IL (図24参照)は,あらゆるセクタ内で,0.50以上とする。この変化の範囲は,トラック全
体で0.20以下とする。
1
0.1
10
100
10.00
1.00
0.10
0.01
周波数(kHz)
ア
ン
バ
ラ
ン
ス
64
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図24−IL及びIHの定義
26.2 狭帯域信号対雑音比(NBSNR)
狭帯域信号対雑音比(NBSNR)は,規定パターンの雑音レベルに対する信号レベルの比とし,30 kHz
の帯域幅で測定する。次のとおりNBSNRを決定する。
− RLL(1,7)符号が各ゾーンで許容する最高周波数f0±0.1 MHzで,2Tマーク/2Tスペースの繰返し信
号を,連続したセクタに記録する。記録条件は,24.3で規定のとおりとする。
− 9.5及び24.2で規定する条件のチャネル2を用いて記録フィールドを再生し,帯域幅30 kHzのスペク
トラムアナライザを使用する。図25で示すとおり,周波数f0で信号振幅及び雑音を測定する。測定値
は,ヘッダフィールドの影響を除去し,記録フィールドだけの値となるように補正する。
狭帯域信号対雑音比を次に示す。
N
S
NBSNR
10
log
20×
=
ここに,
NBSNR: 狭帯域信号対雑音比
S: 信号レベル
N: 雑音レベル
狭帯域信号対雑音比は,記録磁界の全ての許容値に対して,記録ゾーンのあらゆるセクタの全トラック
で45 dBより大きくなければならない。
図25−信号レベル及び雑音レベル
I
L
I
H
信号レベル
雑音レベル
振幅
f0
周波数
65
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
26.3 クロストーク比
クロストーク比の定義及び測定手順は,フィジカルトラックを基準にする。これらのフィジカルトラッ
クは,一つ以上のロジカルトラックで構成されるため(箇条13参照),測定するバンドごとに,測定する
ロジカルトラックの数を調整しなければならない。
26.3.1 書換形トラックの試験方法
書換形トラックの場合,クロストークの測定は,書換形ゾーンで,(n−2),(n−1),n,(n+1)及び(n
+2)として指定する五つの隣接する未記録フィジカルトラックで行う。
これらのトラックの各セクタの記録フィールドを消去する。
トラックnのセクタの記録フィールドで,各ゾーンの周波数f1±0.1 MHzで,2Tマーク/2Tスペースの
繰返し信号を記録する。記録条件は,24.3で規定のとおりとする。
9.5及び24.2で規定の条件下で,トラック(n−1),n及び(n+1)のセクタのデータフィールドを再生
する。
トラックnからトラック(n−1)及びトラックnからトラック(n+1)へのクロストークは,−35 dB
未満でなければならない。
26.4 ジッタ
24.3.3のTIAのデータからジッタを得る。TIAで2Tマーク(L2)/6 Tスペース(L6)の波形,及び6T
スペース(L6)/2 Tマーク(L2)の波形の,前縁から前縁までの時間の長さ,及びマークの後縁から後縁
までの時間の長さを測定する。測定は,各半径位置で,複数のトラック上の105個のサンプルを用いて行
う。
メディアによるジッタの値は,半径24 mm,32 mm及び41.5 mmに対して,1チャネルビットの周期T
の15 %未満でなければならない。
26.5 メディア熱相互作用
メディア製造者は,次の公式を用いて,制御ゾーンに記録するメディア熱相互作用の値を測定する。公
式は,24.3.3からのL2,L4及びL6の測定データを使用する。
最初に,半径32 mmで測定する実効チャネルクロック周期Tを計算する。
18
2
T
6
4
2
L
L
L
×
+
+
=
目的とする半径32 mmに記録されていることを,このTで確認する。
次の公式を用いて,熱相互作用エラーEthを計算し,記録する。
%
100
T
T
2
2
4
th
×
×
−
−
=
L
L
E
Ethの値は,チャネルクロック周期Tの27 %未満でなければならない。
27 消去パワーの決定
メディア製造者は,この手順を用いて,制御ゾーンに記録する消去パワーを決定する。消去パワーは,
隣接するトラックを消去することなく,現在のトラックを消去するのに十分な一定の連続パワーレベルと
する。
消去パワーの測定のための条件は,メディア温度が25 ℃±1 ℃,記録層の磁界強度の値が,試験回転
周波数で,25 000 A/m±5 %とする。
手順を次に示す。
66
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 十分に高い消去パワーを用いて,ユーザゾーンの四つの隣接するトラックn,n+1,n+2及びn+3
を消去する。24.3.1で規定する条件下で,トラックn+1上に2Tマーク/2Tスペースの繰返し信号を,
トラックn+2上に4Tマーク/4Tスペースの繰返し信号を記録する。トラックn+1を消去し,スペ
クトラムアナライザを用いて,n+1及びn+2の両トラックの信号振幅を測定する。
− この一連の試験を低い消去パワーから開始し,0.5 mWずつ消去パワーを増して試験を繰り返す。消去
パワーの関数として,トラックn+1及びn+2の信号振幅を曲線で表す。制御ゾーンに記録する消去
パワーは,トラックn+2の信号振幅が3 dB落ちる消去パワーとトラックn+1の信号振幅が最初にメ
ディア特有の雑音レベルまで到達するパワーとの中間の値とする。
第6章 ユーザデータの特性
28 試験方法
箇条29及び箇条30では,ディスク上のユーザデータの適合性を検査するための一連の測定方法を記載
する。これは,エンボスデータ及びユーザ記録データの両方について行う。データは任意でよい。ユーザ
記録データの記録については,駆動装置及び環境を問わない。基準駆動装置で再生試験を実行する。
箇条20〜箇条27が欠陥を無視するのに対して,箇条29及び箇条30では,それらを再生信号の不可避
な劣化とみなす。欠陥の重大性は,次で定義する再生チャネルの誤り検出回路及び誤り訂正回路で,発生
するエラーを訂正できるかどうかによって決定する。箇条29及び箇条30の要件は,データ交換に必要と
されるデータの最低品質を定義する。
28.1 測定環境
8.1.2で定義する使用環境条件の許容範囲にあるカートリッジにおいて,箇条29及び箇条30で定義する
全ての信号は,その規定の範囲内になければならない。測定の前に,ディスク製造者の取扱説明書に従っ
て,光ディスクの入射面の汚れを取り除くことを推奨する。
28.2 基準駆動装置
箇条29及び箇条30で規定する全ての信号は,基準駆動装置の指定のチャネルで測定する。これらの試
験の目的のために,測定装置は,次の特性をもつ。
28.2.1 光学系
光ビームは,9.2 a)〜9.2 f)で規定する特性をもつ。ディスクは,9.5で規定の回転とする。
28.2.2 再生条件
ヘッダ及びエンボスデータの再生に使用する,ディスク入射面上に投じる光パワーは,20.2.2の規定に
よるものとし,ユーザ記録データの再生については24.2.2の規定によらなければならない。ユーザ記録デ
ータの再生に使用する再生磁界は,24.2.3の規定による。
28.2.3 再生増幅器
チャネル1及びチャネル2の再生増幅器は,9.3の規定によらなければならない。
28.2.4 マークの品質
チャネル1及びチャネル2の再生増幅器からの信号は,附属書Hで定義するとおり,エッジ検出器を用
いて,アナログからバイナリに変換される。チャネル1及びチャネル2の出力信号は,等化回路を使わず,
ローパスフィルタを通し,しきい(閾)値が0.25〜0.75となるコンパレータへ入力される。マーク及びス
ペースの2T,3T,…..,7T,8Tの長さと,理想的な値とのずれ量が最小になるようにしきい(閾)値を調
整する。コンパレータからの出力信号は,エッジ検出器でバイナリ信号に変換される(附属書I参照)。
この章のジッタは,前縁から前縁までの時間間隔及び後縁から後縁までの時間間隔を,別々に測定した
67
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
時間間隔の標準偏差として定義する。この場合,欠陥によるデータは除き,セクタのマーク及びスペース
のエッジ検出器からの出力信号に関しては,TIAを使用する。そのため,この測定のためのサンプルは,
セクタのマーク及びスペースの数によって制限される。ジッタは,チャネルビット時間Tのパーセントと
して表現する。
チャネル1のコンバータは,箇条22及び箇条23で規定のとおりの振幅をもつエンボスマークからのア
ナログ信号に対して,正しく動作しなければならない。
チャネル2のコンバータは,箇条25及び箇条26で規定のとおりの振幅をもつユーザ記録マークからの
アナログ信号に対して,正しく動作しなければならない。
28.2.5 チャネルビットクロック
アナログバイナリコンバータからの信号は,バイナリ信号の前縁及び/又は後縁に対して有効間口0.70T
のチャネルビット窓を提供するチャネルビットクロックにロックされる。チャネルビットクロックは,前
縁〜前縁,前縁〜後縁,後縁〜前縁及び後縁〜後縁とチャネルビットクロックとのずれの累積値が最小に
なるように調整する。
28.2.6 バイナリデジタルコンバータ
箇条15及び箇条16で規定するセクタフォーマット及び記録符号に基づいて,バイナリデジタルコンバ
ータでバイナリ信号をデータバイトへ正しく変換する。
28.2.7 誤り訂正
データバイトの誤り訂正は,D.3の定義に基づいて,誤り検出方式及び誤り訂正方式によって実行する。
28.2.8 トラッキング
測定中の光ビームのフォーカシング及びトラッキングは,20.2.4で規定する。
29 セクタの最低品質
この箇条では,そのセクタに含まれるデータの交換に必須となるセクタのヘッダ及び記録フィールドの
最低品質を規定する。28.2で規定する基準駆動装置で測定する。
1バイト内にビットの設定の間違いが一つ以上あるとき,ECC及び/又はCRC回路が検出するとおり,
バイトエラーが生じる(セクタ交替のガイドラインについては,附属書T参照。)。
29.1 ヘッダ
29.1.1 セクタマーク
セクタマークの五つの長いマークのうち,少なくとも三つについては,そのタイミングは15.2で規定の
とおりとし,信号は22.1で規定する振幅をもつ。
29.1.2 IDフィールド
チャネル1で再生されるヘッダの二つのIDフィールドのうち,少なくとも一つには,CRCで検出され
るようなバイトエラーがあってはならない。
29.2 ユーザ記録データ
29.2.1 記録フィールド
セクタの記録マークは,プリフォーマットヘッダの末尾から,240チャネルビット±6チャネルビットの
位置から開始し,セクタの終了前の336チャネルビット±156チャネルビットの位置で終了する。
29.2.2 バイトエラー
チャネル2で再生するユーザ記録データは,28.2.7で定義する誤り訂正によって訂正できないバイトエ
ラーを含んではならない。
68
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
29.2.3 ジッタ
チャネル2で再生するセクタのユーザ記録マークには,メディアによるジッタがあり,それは1チャネ
ルビットの時間周期Tの15 %未満とする。
30 データ交換要件
データ交換のためのディスクは,次の要件を満たす。
30.1 トラッキング
光ビームの焦点は,意図なくトラックを飛んではならない。
30.2 ユーザ記録データ
29.1及び29.2の規定を満たさない書換形ゾーンで記録されたセクタは,箇条19で定義のとおり,欠陥
管理の規則に従って代替されなければならない。
30.3 ディスクの品質
ディスクの品質は,代替セクタ数に反映される(箇条19参照)。
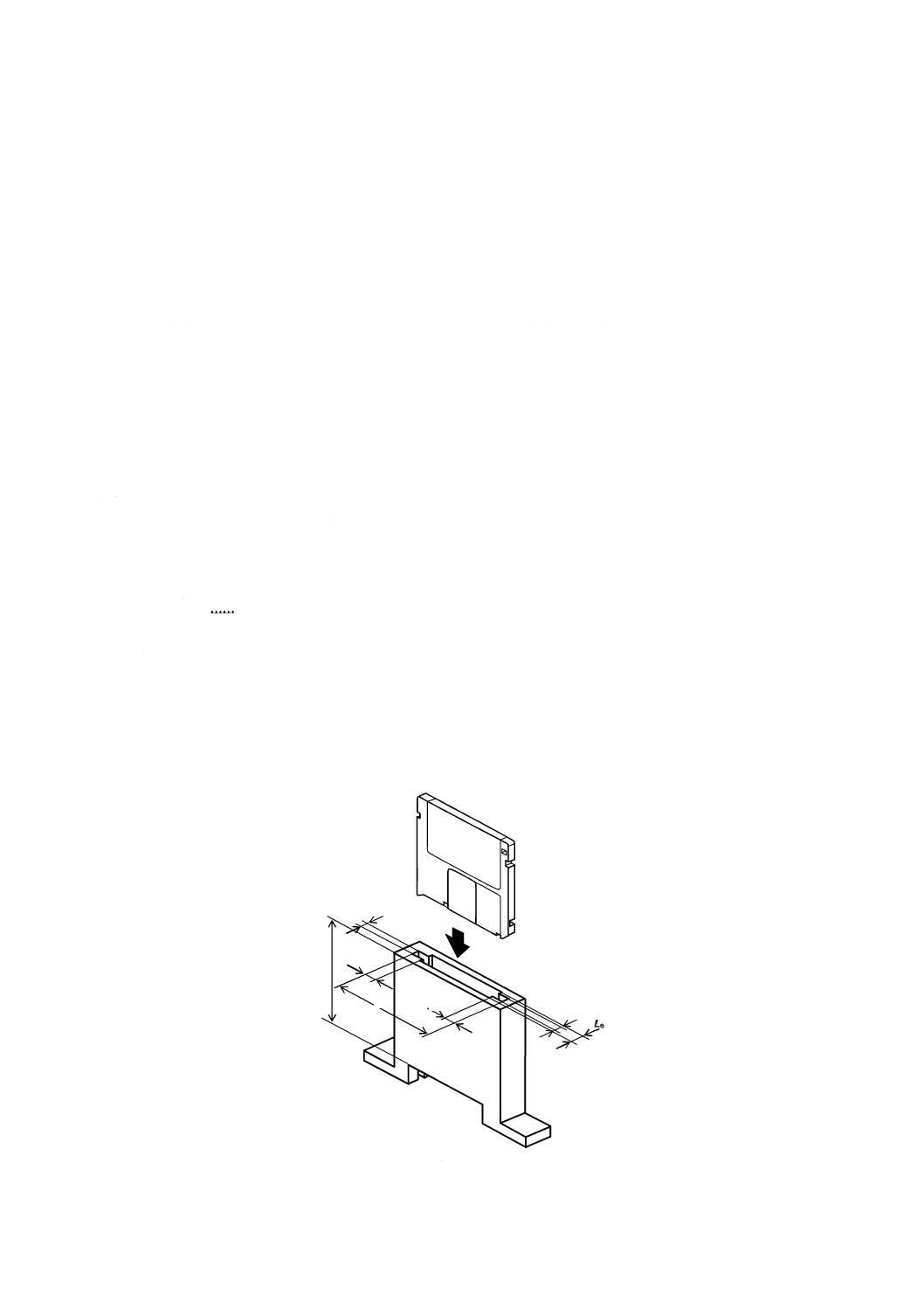
69
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
エッジのひずみ(歪)量確認方法
この附属書は,エッジのひずみ(歪)量確認方法について規定する。
A.1 ひずみ(歪)量確認方法
ひずみ(歪)試験は,ケースに容認できないエッジのひずみ(歪)及び隆起がないかどうかを検査する。
引力以外の規定の力を与え,計器の挿入口にカートリッジを垂直に通過させることによって試験を行う。
A.2 基準器
基準器はクロムめっきの炭素鋼など適切な材料で製作し,内面を磨いて,ピークからピークまでが5 μm
となるように表面処理を行う。
A.3 寸法
寸法は,次による(図A.1参照)。
La≧96.0 mm
Lb=91.0±0.1 mm
Lc=8.6
0.1
0
+ mm
Ld=6.30±0.01 mm
Le≧6.80 mm
A.4 カートリッジの挿入
カートリッジを基準器に垂直に挿入するとき,最大0.8 Nの垂直下力Fiをカートリッジ上端の中央に加
えたとき,カートリッジは基準器を通過しなければならない。
Ld Leee
Lc
Lb
La
Lc
Ld
F
図A.1−ひずみ(歪)量基準器
i
70
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
カートリッジの可とう(撓)性確認方法
この附属書は,カートリッジの可とう(撓)性確認方法について規定する。
B.1
目的
カートリッジの可とう(撓)性確認は,カートリッジの四つの基準面を平面に押し付けることによって,
ケースの平面度及び柔軟性を検査する。
B.2
基準面の定義
四つの基準面S1,S2,S3及びS4の位置は,10.3.4及び図4で定義する。
B.3
試験計器の構成
試験計器は,四つの面S1,S2,S3及びS4にそれぞれ対応するように四つの支柱P1,P2,P3及びP4を平
板上に固定した構成とする(図B.1参照)。寸法は次による(図B.2参照)。
支柱P1及びP2
Da=6.50±0.01 mm
Db=3.50
0
0.02
−
mm
Ha=1.0±0.1 mm
Hb≦2.0 mm
なお,支柱P1及びP2の上部領域(Hb−Ha)は面取りをする。
支柱P3及びP4
Dc=5.50±0.01 mm
組立て後,四つの支柱の上部環状面は,0.01 mm離れた二つの水平面の間に存在しなければならない。
B.4
カートリッジの装着
可とう(撓)性確認装置を水平に設置し,カートリッジの基準面が支柱の上に載るようにカートリッジ
を置く。垂直下向き方向に0.4 Nの荷重F0を,カートリッジの4か所の支柱と対向する位置にそれぞれ加
える。
B.5
要件
B.4の条件下で,S1〜S4の4か所の面のうちの3か所の面は,個々の支柱の環状面に接していなければ
ならず,残りの面とその支柱の環状面との隙間は0.1 mm以下でなければならない。
71
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.1−可とう(撓)性確認装置
Z
P3,4
Db
Ha
a Hb
Dc
Da
P1,2
図B.2−支柱の詳細図
F0
P1
P2
P3
P4
F0
F0
F0
P3, P4
P1, P2
72
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(規定)
IDフィールドのCRC
この附属書は,IDフィールド用のCRCについて規定する。
CRC の16ビットは,IDフィールドの最初の3バイトにわたって計算される。生成多項式は,次によ
る。
1
)
(
5
12
16
+
+
+
=
x
x
x
x
G
残差多項式は,次による。
)
(
mod
)
(
16
7
0
23
8
x
G
x
x
b
x
b
x
R
i
i
i
i
i
i
i
i
+
=
∑
∑
=
=
=
=
ここに,
bi: 最初の三つのバイトのビット
¯bi: 逆ビット
b23: 最初のバイトの最高位ビット
CRCの16ビットCkは,次によって定義する。
∑
=
=
=
15
0
C
)
(
k
k
k
kx
x
R
ここに,C15はIDフィールドの4番目のバイトの最高位ビットとして記録する。
73
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(規定)
インタリーブ,CRC,ECC及びデータフィールドの再同期化
この附属書は,インタリーブ,CRC,ECC及びデータフィールドの再同期化について規定する。
D.1 インタリーブ
D.1.1 2 048バイトセクタのためのインタリーブ
ディスク上へ記録するバイトの表記は,次のとおりとする。
Dn ユーザデータバイトとする。
Ck CRCチェックバイトとする。
Es,t ECCチェックバイトとする。
Fm 未定義バイト(FF)とする。
これらのバイトは,ディスク上に記録する順序で,シーケンスAnで番号付けされる。この順序は,それ
らをコントローラに入力するときの順序と同じである。nの値によって,これらの要素は,次となる。
1≦n≦2 048の場合: An=Dn
2 049≦n≦2 056の場合: An=Fm
2 057≦n≦2 060の場合: An=Ck
2 061≦n≦2 380の場合: An=Es,t
ここに, k=n−2 056
s=[(n−2 061) mod 20]+1
1
20
061
2
int
+
−
n
t=
表記int[x]は,x以下の最大整数を示す。
Anの最初の三つの部分は,それらを103行及び20列の二次元マトリックスBijにマップすることによっ
て,20通りにインタリーブされる。したがって,次となる。
1≦n≦2 060の場合:Bij=An
ここに,
−
−
20
1
int
102
n
i=
j=(n−1)mod 20
D.1.2 512バイトセクタのためのインタリーブ
512バイトセクタについては,バイトのシーケンスをAʼnで示し,その他の記法はD.1.1で規定するとお
りとする。
1≦n≦512の場合:Aʼn=Dn
513≦n≦516の場合:Aʼn=Fm
517≦n≦520の場合:Aʼn=Ck
521≦n≦600の場合:Aʼn=Es,t
ここに, k=n−516
s=[(n−521) mod 5]+1
74
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
5
521
int
+
−
n
t=
Aʼnの最初の三つの部分は,それらを103行及び5列の二次元マトリックスBʼijにマップすることによっ
て,5通りにインタリーブされる。したがって,次となる。
1≦n≦520の場合:Bʼij=Aʼn
ここに,
−
−
5
1
int
103
n
i=
j=(n−1) mod 5
D.2 CRC
D.2.1 概要
CRC及びECCは,次の原始多項式に基づくガロアフィールドにわたって計算される。
Gp(x)=x8+x5+x3+x2+1
CRCバイトのための生成多項式は,次による。
∏
=
=
+
139
136
c
)
(
)
(
i
i
iα
x
x
G
=
ここに, 要素αi=(βi)88であり,βは,Gp(x)の原始根である。バイトのn番目の
ビットの値は,βのn乗の項の係数とし,0≦n≦7とする。
D.2.2 2 048バイトセクタのためのCRC
CRCの四つのチェックバイトは,ユーザデータ及び8バイトの未規定バイトによって算出する。
情報多項式を次に示す。
∑
∑∑
=
=
=
=
=
=
+
15
0
0
,0
102
1
19
0
)
(
j
j
j
i
i
j
j
i
ij
c
x
B
x
B
x
I
=
CRCの四つのチェックバイトCkの内容は,残差多項式によって定義される。
Rc(x)=Ic(x)x4modGc(x)
∑
=
=
−
4
1
4
C
)
(
k
k
k
k
c
x
x
R
=
最後の方程式は,多項式の係数の位置を規定する。
D.2.3 512バイトセクタのためのCRC
CRCの四つのチェックバイトは,ユーザデータ及び8バイトの未規定バイトによって算出する。
情報多項式を次に示す。
∑
∑∑
=
=
=
=
=
=
+
15
0
0
,0
102
1
19
0
)
(
j
j
j
i
i
i
ij
j
j
c
x
B
x
B
x
I
=
CRCの四つのチェックバイトの内容は,多項式Iʼc(x)を用いてD.2.2に規定するとおりに計算する。
D.3 ECC
原始多項式Gp(x)並びに,要素αi及びβは,D.2.1に規定する。ECCのチェックバイトに対する生成多項
式を,次に示す。
75
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
∏
=
=
+
135
120
)
(
)
(
i
i
i
E
x
x
G
α
=
この多項式は,自己相反多項式である。この特性を用いて,ハードウェアのサイズを減じることができ
る。ECCレジスタの初期設定は,全て0とする。計算済みチェックバイトのビットの変換後,それらをチ
ャネルビットに符号化する。
D.3.1 2 048バイトセクタのためのECC
ECCの320チェックバイトは,ユーザバイト,8バイトの未規定バイト及びCRCバイトにわたって計算
される。対応する20個の情報多項式は,次による。
∑
=
=
102
0
,
)
(
i
i
i
j
i
Ej
x
B
x
I
=
ここに, 0≦j≦19とする。
各多項式IEj(x)に対する16チェックバイトEs,tの内容は,次の残差多項式によって定義する。
)
(
mod
)
(
)
(
16
x
G
x
x
IE
x
R
E
j
Ej
=
t
t
t
t
j
Ej
x
E
x
R
−
=
=
+
∑
16
16
1
,1
)
(=
最後の方程式は,多項式の係数の保存先を規定する。
D.3.2 512バイトセクタのためのECC
ECCの80チェックバイトは,ユーザバイト,4バイトの未規定バイト及びCRCバイトにわたって計算
される。対応する20個の情報多項式は,次による。
∑
=
=
103
0
,
)
(
i
i
i
j
i
Ej
x
B
x
I
=
ここに, 0≦j≦4とする。
各多項式IEj(x)に対する16チェックバイトの計算は,D.3.1で規定するとおりに実行する。
D.4 再同期バイト
再同期バイト(附属書F参照)は,データフィールドに挿入され,同期外れを回避し,ユーザデータで
の誤りの伝ぱ(播)を制限する。再同期バイトは連続した番号を付け,次に示す二つのうちのいずれかの
チャネルビットパターンとする。
0X0 100 000 001 000 000 100 00Y
0X0 100 000 001 000 000 101 00Y
ここに, X及びYは,これに先立つデータパターンとこれに続くデータパター
ンとに基づき,0又は1に設定する。
2 048バイトセクタの時,フィールドRSnは,バイトA60nとA60n+1との間に挿入される。この場合,1≦n
≦39とする。
512バイトセクタの時,フィールドRSnは,バイトA20nとA20n+1との間に挿入される。この場合,1≦n
≦29とする。
D.5 データフィールドの記録順序
データフィールドのデータは,同期バイトに続き,Anの順に従って,D.4で規定のとおりに再同期バイ
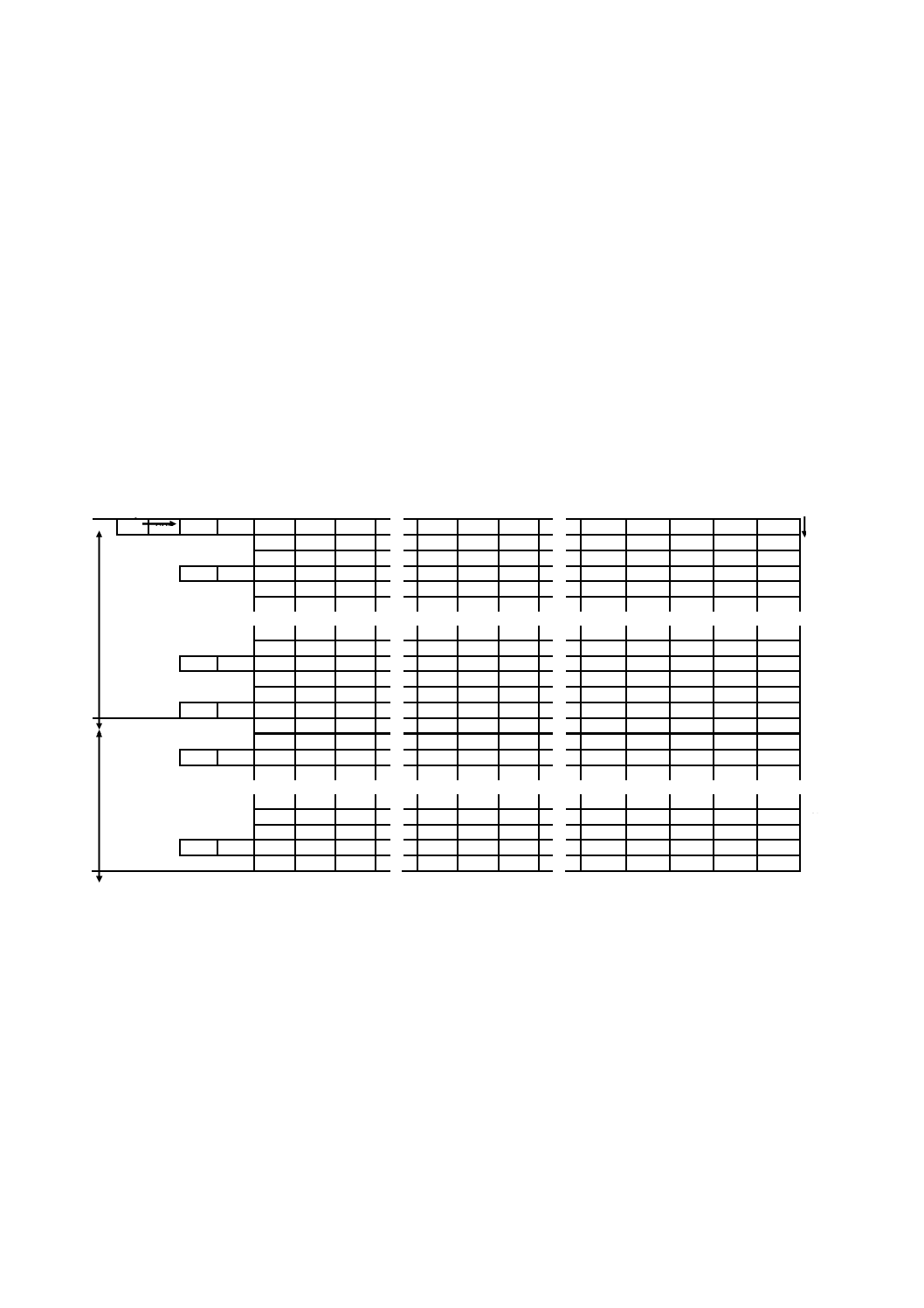
76
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
トを挿入して,ディスク上に記録する。
図D.1は,行列形式で,これらの要素の配置を示す。記録の順序は,左から右へ,上から下へとする。
SB
同期バイトを表す
D
ユーザバイトを表す
RS
再同期バイトを表す
C
CRCのためのチェックバイトを表す
E
ECCのためのチェックバイトを表す
Fm
未定義バイト(FF)を設定
2 048バイトセクタ(図D.1)については,最初の103行は,ユーザデータ,8個の未定義バイト及びCRC
チェックバイトを含む。次の16行はECCチェックバイトだけを含む。
512バイトセクタ(図D.2)については,最初の104行は,ユーザデータ,4個の未定義バイト及びCRC
チェックバイトを含む。次の16行はECCチェックバイトだけを含む。
行番号i
列番号j
0
1
2
6
7
8
15
16
17
18
19
SB1
SB2
SB3
SB4
D1
D2
D3
D7
D8
D9
D16
D17
D18
D19
D20
102
D21
D22
D23
D27
D28
D29
D36
D37
D38
D39
D40
101
D41
D42
D43
D47
D48
D49
D56
D57
D58
D59
D60
100
RS1
RS1
D61
D62
D63
D67
D68
D69
D76
D77
D78
D79
D80
99
D81
D82
D83
D87
D88
D89
D96
D97
D98
D99
D100
98
D1961
D1962
D1963
D1967
D1968
D1969
D1976
D1977
D1978
D1979
D1980
4
RS33
RS33
D1981
D1982
D1983
D1987
D1988
D1989
D1996
D1997
D1998
D1999
D2000
3
D2001
D2002
D2003
D2007
D2008
D2009
D2016
D2017
D2018
D2019
D2020
2
D2021
D2022
D2023
D2027
D2028
D2029
D2036
D2037
D2038
D2039
D2040
1
RS34
RS34
D2041
D2042
D2043
D2047
D2048
(FF)
(FF)
C1
C2
C3
C4
0
E1,1
E2,1
E3,1
E7,1
E8,1
E9,1
E16,1
E17,1
E18,1
E19,1
E20,1
-1
E1,2
E2,2
E3,2
E7,2
E8,2
E9,2
E16,2
E17,2
E18,2
E19,2
E20,2
-2
RS35
RS35
E1,3
E2,3
E3,3
E7,3
E8,3
E9,3
E16,3
E17,3
E18,3
E19,3
E20,3
-3
E1,13
E2,13
E3,13
E7,13
E8,13
E9,13
E16,13
E17,13
E18,13
E19,13
E20,13
-13
E1,14
E2,14
E3,14
E7,14
E8,14
E9,14
E16,14
E17,14
E18,14
E19,14
E20,14
-14
RS39
RS39
E1,15
E2,15
E3,15
E7,15
E8,15
E9,15
E16,15
E17,15
E18,15
E19,15
E20,15
-15
E1,16
E2,16
E3,16
E7,16
E8,16
E9,16
E16,16
E17,16
E18,16
E19,16
E20,16
-16
図D.1−2 048バイトセクタ,20バイト折り返しのECCにおけるデータフィールドの構成
10
3
行
16
行
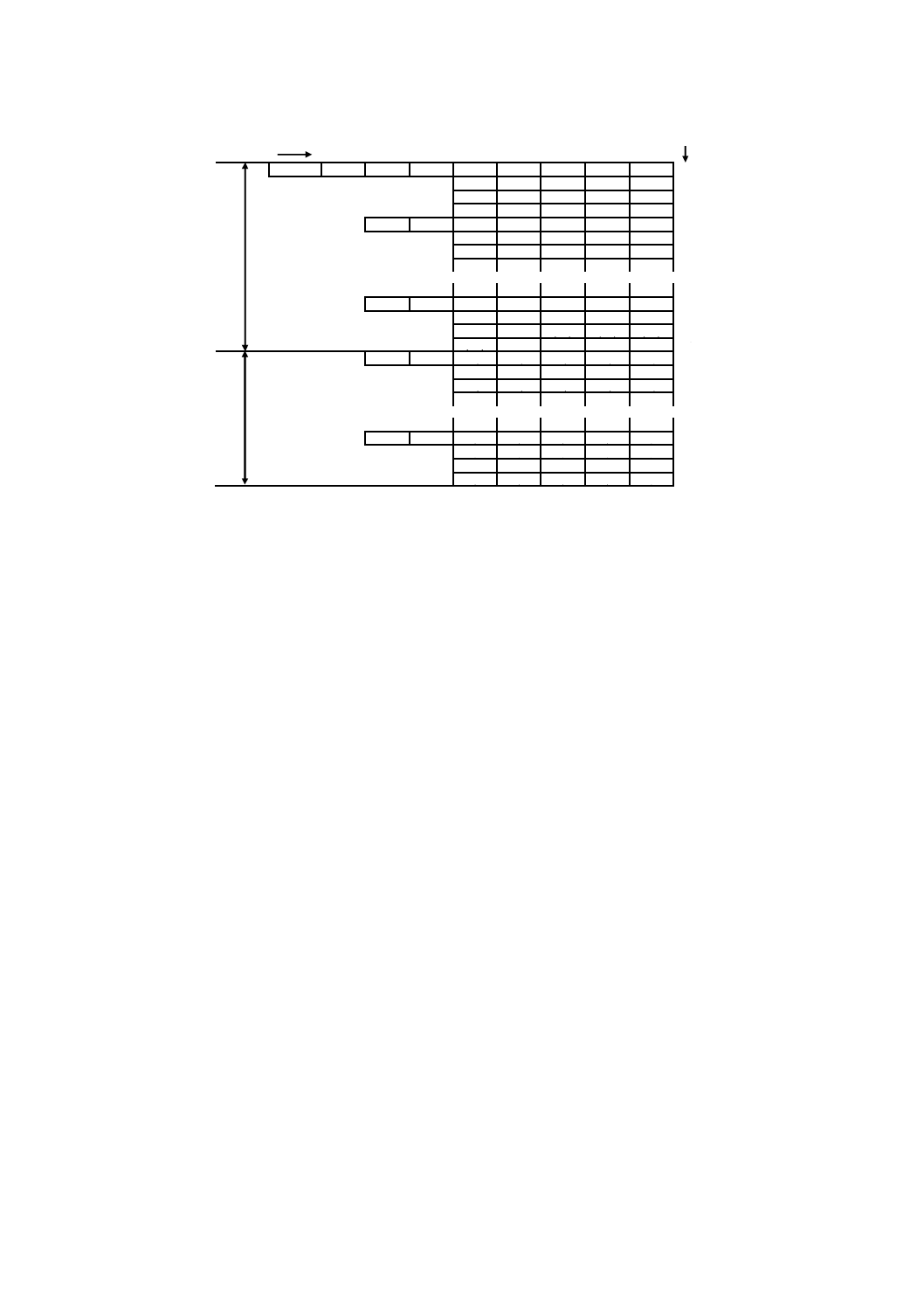
77
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
行番号i
列番号j
0
1
2
3
4
SB1
SB2
SB3
SB4
D1
D2
D3
D4
D5
103
D6
D7
D8
D9
D10
102
D11
D12
D13
D14
D15
101
D16
D17
D18
D19
D20
100
RS1
RS1
D21
D22
D23
D24
D25
99
D26
D27
D28
D29
D30
98
D31
D32
D33
D34
D35
97
RS25
RS25
D501
D502
D503
D504
D505
3
D506
D507
D508
D509
D510
2
D511
D512
(FF)
(FF)
(FF)
1
(FF)
C1
C2
C3
C4
0
RS26
RS26
E1,1
E2,1
E3,1
E4,1
E5,1
-1
E1,2
E2,2
E3,2
E4,2
E5,2
-2
E1,3
E2,3
E3,3
E4,3
E5,3
-3
RS29
RS29
E1,13
E2,13
E3,13
E4,13
E5,13
-13
E1,14
E2,14
E3,14
E4,14
E5,14
-14
E1,15
E2,15
E3,15
E4,15
E5,15
-15
E1,16
E2,16
E3,16
E4,16
E5,16
-16
図D.2−512バイトセクタ,5バイト折り返しのECCにおけるデータフィールドの構成
10
4
行
16
行
78
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(規定)
制御ゾーンの内容
この附属書は,制御ゾーンの内容について規定する。
E.1
メディア特性データ
バイト0:フォーマット記述子1
0110 0010とし,連続複合サーボトラッキング,ロジカルZCAV回転記録モード,(1,7)RLLマークエッ
ジ変調を示す。
バイト1:フォーマット記述子2
0010 0011とし,2 048バイトセクタに適用される最小距離16で20インタリーブのリードソロモン符号
を表す。
バイト2:ロジカルトラック当たりのセクタ数
0001 0001とし,ロジカルトラック当たり17セクタを表す。
バイト3:反射率
公称波長68 nmで測定したディスクの反射率Rとし,次の数値を記録する。
n=100R
バイト4:オンランド記録又はイングルーブ記録
1100 0000とし,オンランド及びイングルーブ記録を表す。
バイト5:予備
(FF)とする。
バイト6:最大再生パワー
制御ゾーンのバイト21〜23に規定の最小の値を記録する。これは,制御ゾーンの再生する最大再生パワ
ーPr(mW)とし,次のnを記録する。
n=20Pr
ここに, nは26よりも大きくなければならない。
バイト7:ディスクの種類
0010 0010とし,データ再生に磁界を適用する必要がある書換形ディスクを表す。
他の設定は,将来の予備とし,禁止する(附属書R参照)。
バイト8,9:データゾーンの最後のトラック
0111 1110及び1101 0111とし,データゾーンの最後のトラックのトラック番号(32 471)のMSB及び
LSBを表す。
バイト10:性能指数の極性
0000 0001とし,極性が負であることを表す。
バイト11:性能指数の大きさ
性能指数(F)の大きさとし,次のnの値を記録する。
n=10 000F
バイト12:トラックピッチ
79
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
トラックピッチtp(μm)とし,次のnの値を記録する。
n=100tp
(43)はトラックピッチ0.67 μmを表す。
バイト13:予備
(FF)とする。
バイト14〜17:未規定
これらのバイトは,ODC製造者が使用してもよい。これらは互換性では無視する。
E.2
記録制御データ
バイト18〜45は,波長L1=665 nm,反射率R1及び回転周波数N1=50 Hzに対する条件を規定する。
Nの各値に対して,4Tマークに対する,内周,中周及び外周の半径での記録パワーが与えられる。バイ
ト18〜45で規定する全ての値は,11.5の要件,箇条24及び箇条25を満たすような値とする。
バイト18:波長
駆動装置の波長L1(nm)を規定し,次のnを記録する。
1
5
1L
n=
このバイトは,n=133を設定する。
バイト19:反射率
波長L1での反射率R1を規定し,次のnを記録する。
n=100R1
nの値は,バイト3と同じ値とする。
バイト20:回転周波数
ディスクの回転周波数N1(Hz)を規定し,次のnを記録する。
n=N1
このバイトは,n=50を設定する。
バイト21〜23:情報ゾーンに対する最大再生パワー
条件L1及びN1での情報ゾーンの,半径24 mm,32 mm及び41.5 mmでの最大再生パワーPr(mW)を規
定し,次のnを記録する。
n=20Pr
ここに, n≦150
バイト24:再生磁界の極性
1111 1110とし,N極からS極方向の再生磁界を入射面から記録層に向かって印加することを示す。
バイト25:再生磁界の大きさ
再生磁界Hr(A/m)を表し,次のnを記録する。
r
000
1
1
H
n=
バイト26〜30:予備
(FF)とする。
バイト31〜33:記録パワー
それぞれ半径24 mm,32 mm及び41.5 mmでの記録パワーPw(mW)を規定し,次のnを記録する。
80
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
n=5Pw
バイト34:記録磁界の極性
1111 1110とし,N極からS極方向の記録磁界を入射面から記録層に向かって印加することを示す。
バイト35:記録磁界の大きさ
記録磁界Hw(A/m)を表し,次のnを記録する。
w
000
1
1
H
n=
バイト36〜40:予備
(FF)とする。
バイト41〜43:消去パワー
それぞれ半径24 mm,32 mm及び41.5 mmでの消去パワーPe(mW)を規定し,次のnを記録する。
n=5Pe
バイト44:消去磁界の極性
0000 0001とし,N極からS極方向の消去磁界を記録層から入射面に向かって印加することを示す。
バイト45:消去磁界の大きさ
消去磁界He(A/m)を表し,次のnを記録する。
e
000
1
1
H
n=
バイト46〜379:予備
(FF)とする。
E.3
システム制御データ
バイト380〜387:予備
(FF)とする。
バイト388〜389:最初のデータバンドのロジカルトラック番号
0000 1101及び1101 1110とし,それぞれ,最初のデータバンドのロジカルトラック番号,3 550のMSB,
LSBを表す。
バイト390:バンド数
0000 1100とし,バンド数12を表す。
バイト391:予備
(FF)とする。
バイト392〜393:データバンド当たりのフィジカルトラック数
0000 0100及び1011 0111に設定し,それぞれ,データバンドごとのフィジカルトラック数,1 207のMSB,
LSBを表す。
バイト394〜395:最後のデータバンドのフィジカルトラック数
0000 0010及び1110 1100とし,それぞれ,最後のデータバンドのフィジカルトラック数,748のMSB,
LSBを表す。
バイト396〜479:予備
(FF)とする。
バイト480〜511
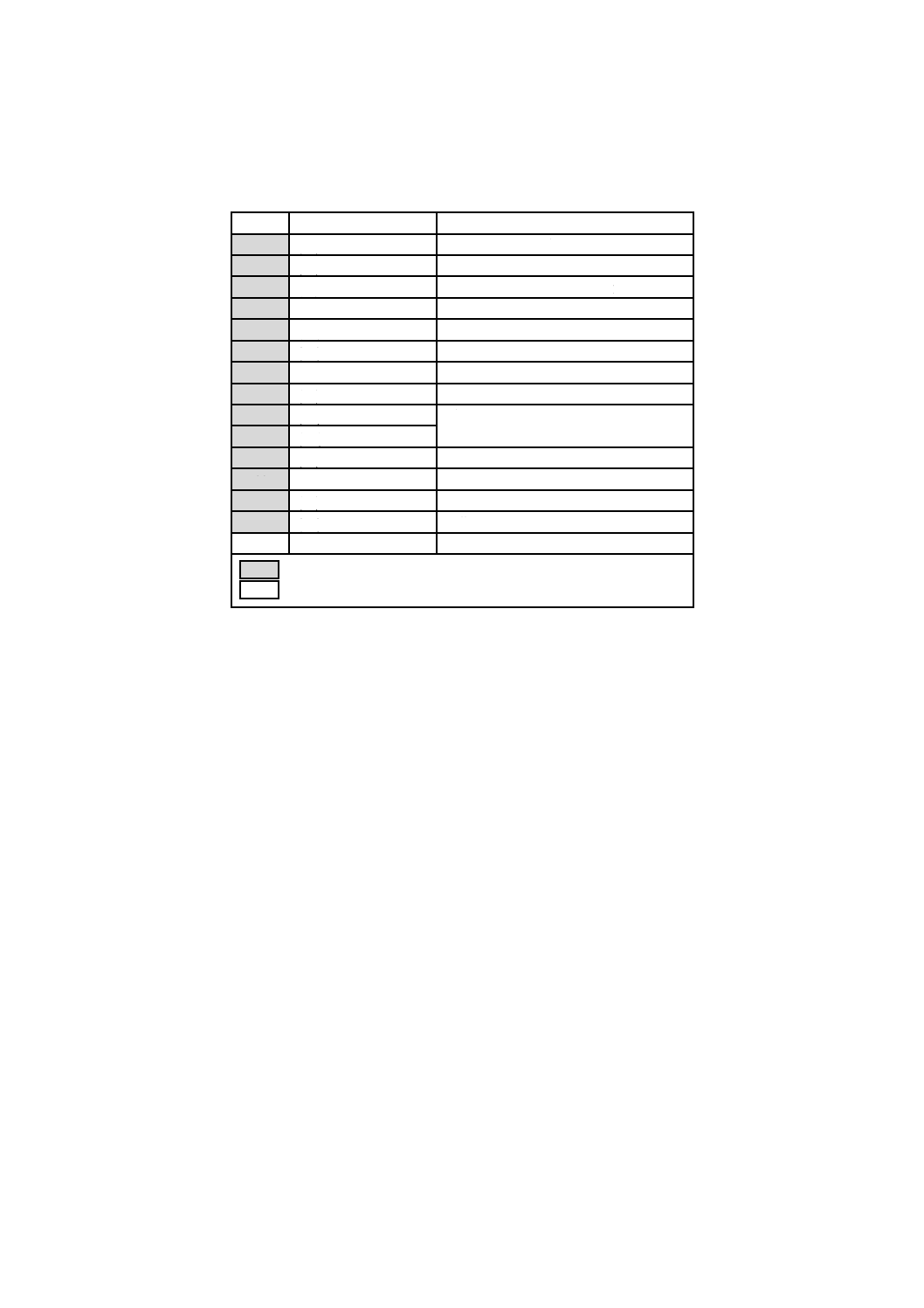
81
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
これらのバイトの内容は,未規定とする。これらは互換性では無視する。
表E.1−メディア特性データ
バイト 2 048バイト/セクタ
内容
0
(62)
フォーマット記述子1
1
(23)
フォーマット記述子2
2
(11)
トラック当たりのセクタ数
3
N=100 R
反射率
4
(C0)
オンランド記録及びイングルーブ記録
5
(FF)
予備
6
N=20 Pr
最大再生パワー
7
(22)
メディアの種類
8
(7E)
データゾーンの最終トラック番号
9
(D7)
10
(01)
性能指数の極性
11
N=10 000 F
性能指数
12
(43)
トラックピッチ
13
(FF)
予備
14〜17 Xx
未規定
必す(須)事項
未規定
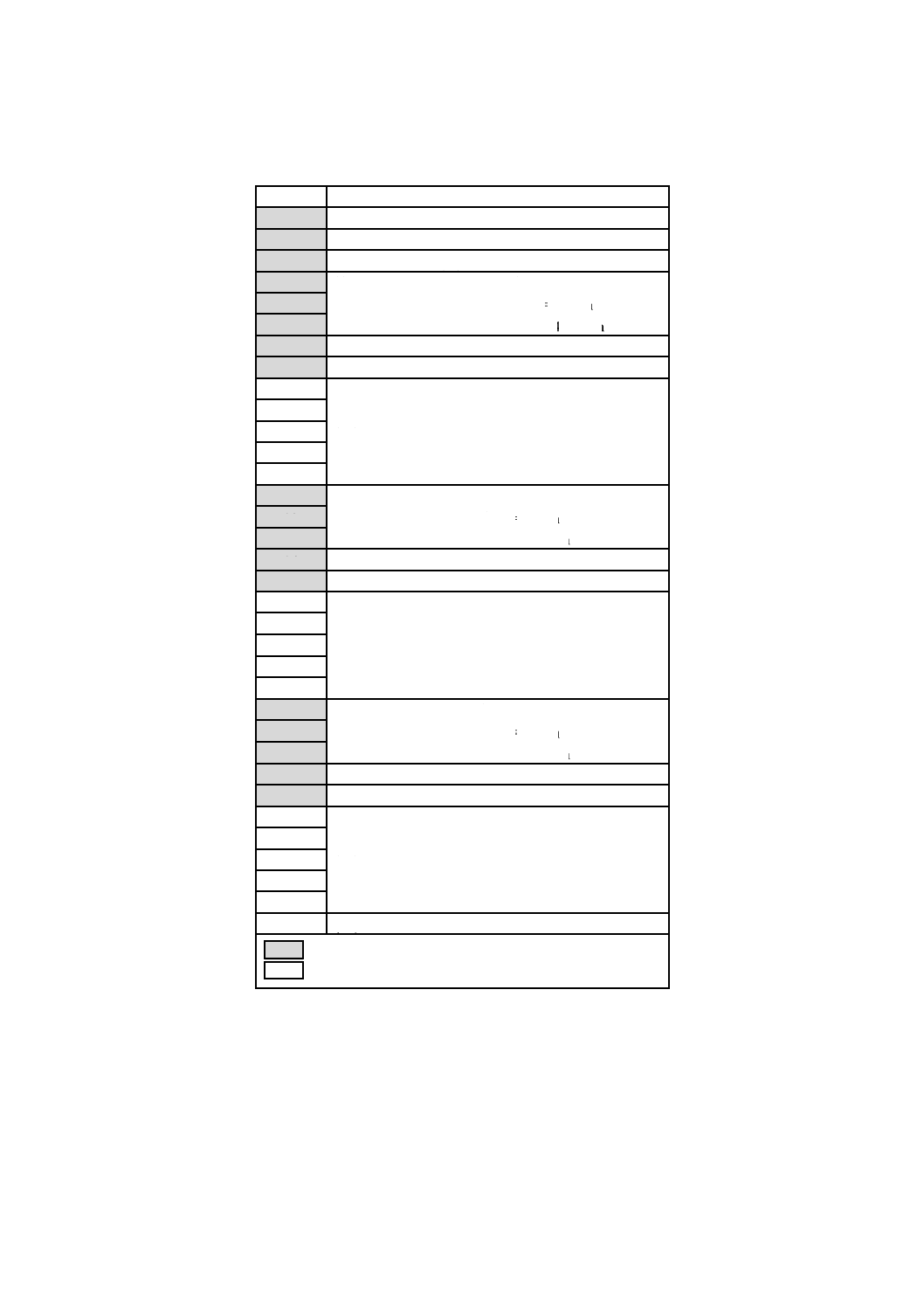
82
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表E.2−記録制御データ
バイト
内容
18
波長:n=1/5L1
19
反射率:n=100R1
20
回転周波数:n=(N1)
21
最大再生パワー:n=20Pr 半径r=24 mm
22
半径r=32 mm
23
半径r=41.5 mm
24
再生磁界の極性
25
最小再生磁界:n=1/1 000 Hr
26
27
28
(FF)
29
30
31
記録パワー:n=5Pw 半径r=24 mm
32
半径r=32 mm
33
半径r=41.5 mm
34
記録磁界の極性
35
最小記録磁界:n=1/1 000Hw
36
37
38
(FF)
39
40
41
消去パワー:n=5Pe 半径r=24 mm
42
半径r=32 mm
43
半径r=41.5 mm
44
消去磁界の極性
45
最小消去磁界:n=1/1 000He
46
47
48
(FF)
49
50
51〜379
(FF)
必須事項
設定:(FF)
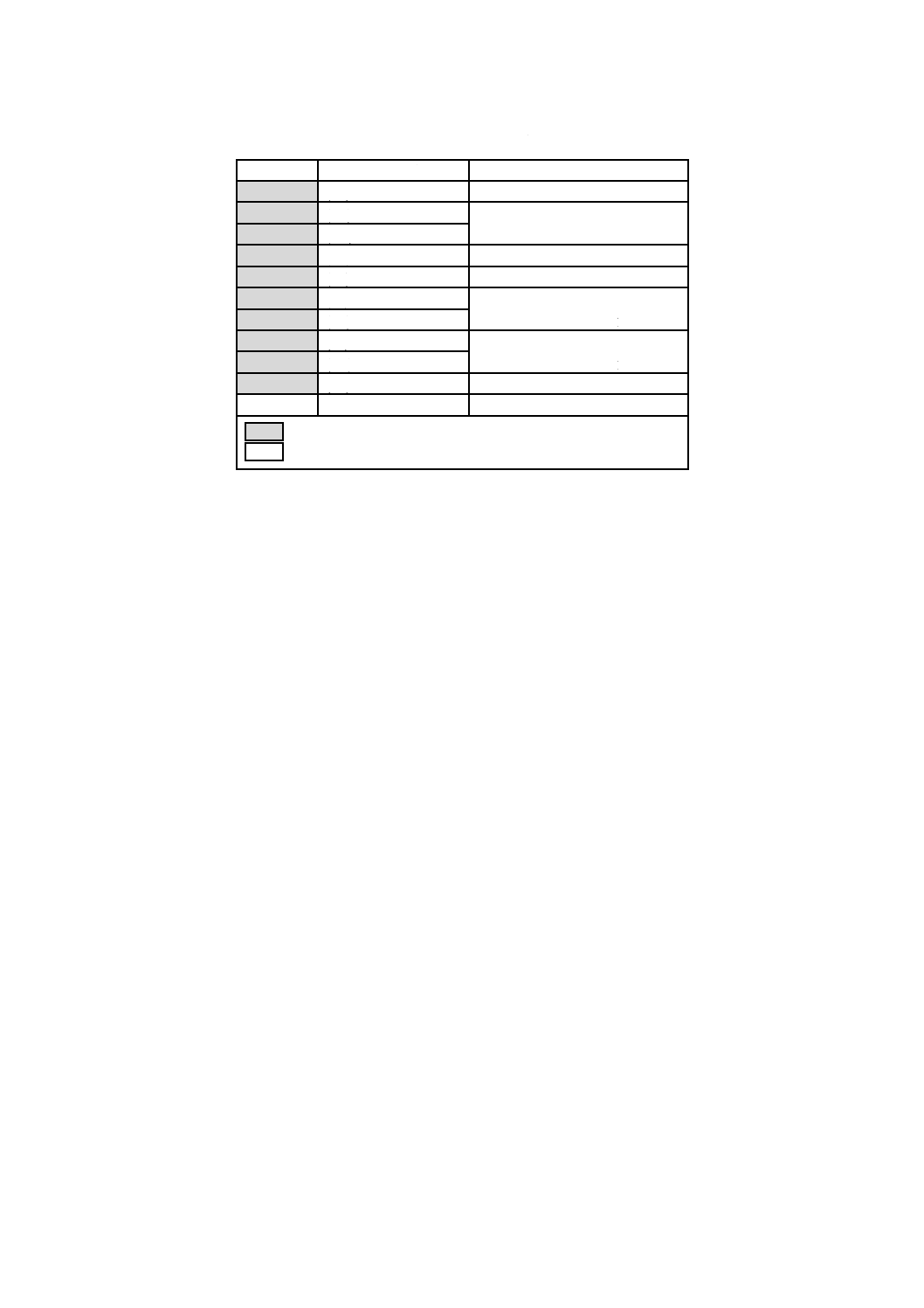
83
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表E.3−システム制御データ
バイト
2 048バイト/セクタ
内容
380〜387
(FF)
予備
388
(0D)
最初のデータバンドのロジカル
389
(DE)
トラック数
390
(0C)
バンド数
391
(FF)
予備
392
(04)
データバンド当たりの
393
(B7)
フィジカルトラック数
394
(02)
最後のデータバンド当たりの
395
(EC)
フィジカルトラック数
396〜479
(FF)
予備
480〜511
Xx
未規定
必須事項
未規定
84
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書F
(規定)
再同期パターンの決定
この附属書は,再同期パターンの決定について規定する。
DSV(デジタル総計値)を,次の記述で使用する。他の頭文字は,PLL(位相同期ループ),PPM(パル
ス位置変調)及びPWM(パルス幅変調)を含む。
F.1
再同期パターンの条件
再同期パターンは,次の特性をもち,その要求機能を満たす。
a) 再同期パターンは,0ビットが7個連続し,その後1ビットにRLL(1,7)変調符号では発生しない6
個の0ビットが続く不規則なチャネルビットパターンとする。
b) 二重PLLを使用するときに,前縁又は後縁のいずれか一つだけを用いて,再同期パターンの不規則性
を検出することができる。
c) 再同期パターンの中の1という数字は,セクタのデータフィールドのデータパターンの直流レベルの
変動を最小化するために,奇数から偶数に,又は偶数から奇数に変更することができる。
d) 再同期パターンの長さは,2バイトとする。
F.2
再同期パターン
直流レベルの変動を最小化するために,次に示す二つの再同期パターンのうち一つを選択する。
選択基準をF.5に示す。
再同期1 0x0 100000001000000100 00y
再同期2 0x0 100000001000000101 00y
ここに, x=0又は1
y=0又は1
データ1 再同期領域 データ2
再同期パターン
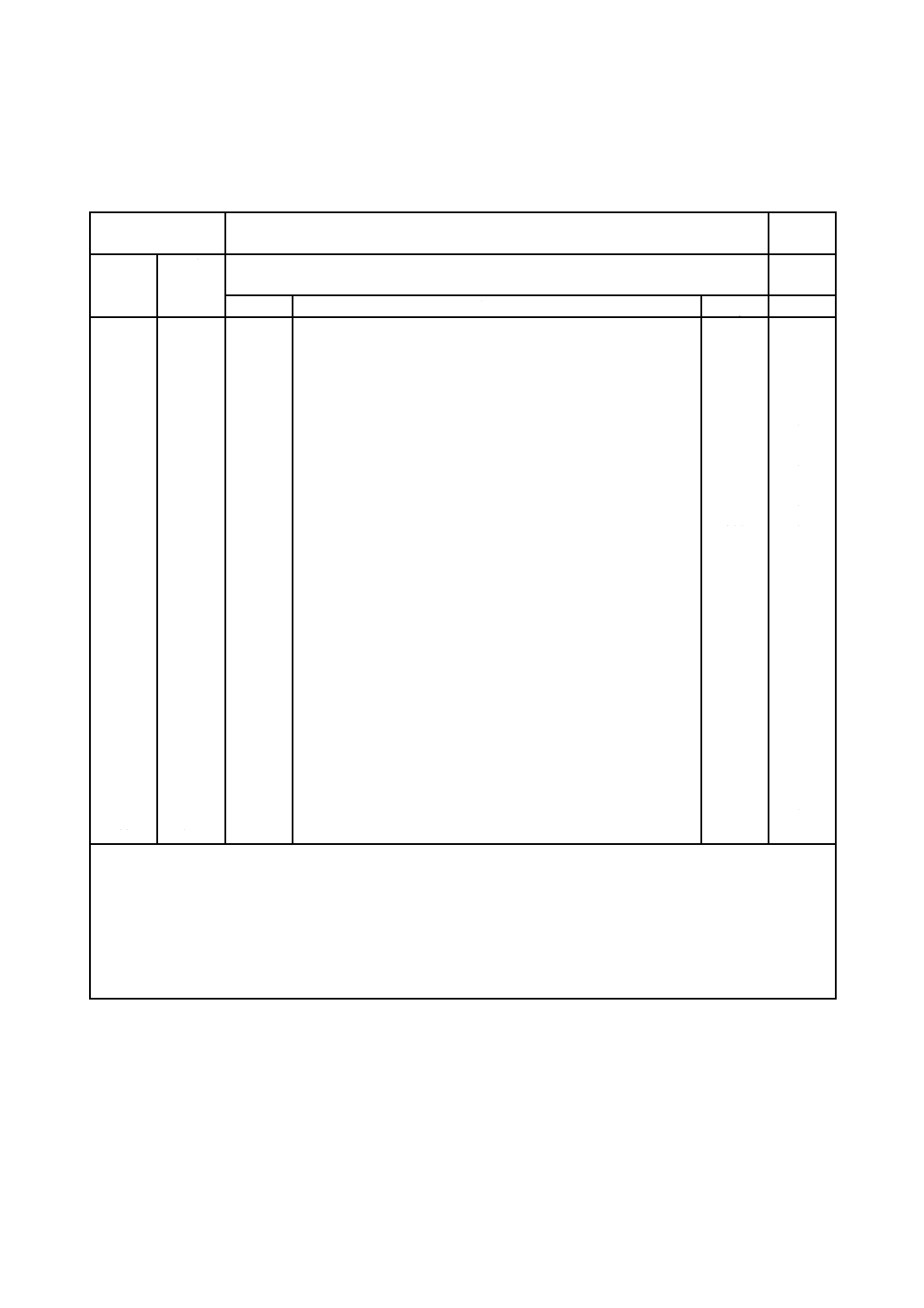
85
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
F.3
再同期パターンの生成アルゴリズム
表F.1−再同期パターンの生成アルゴリズム
前の
データ1
再同期領域
次のデ
ータ2
データ
ビット
チャネル
ビット
00
仮定データビット
01
データ
ビット
x1x2
0x0
再同期パターン
z
00y
x3x4
00
0 001
010
100
000
001
000
000
100
001
0x
100
000
1x
101
001
0x
101
000
1x
00
1 001
010
100
000
001
000
000
100
001
0x
100
000
1x
101
001
0x
101
000
1x
01
0 001
010
100
000
001
000
000
100
001
0x
100
000
1x
101
001
0x
101
000
1x
01
1 010
000
100
000
001
000
000
100
001
0x
100
000
1x
101
001
0x
101
000
1x
10
0 101
010
100
000
001
000
000
100
001
0x
100
000
1x
101
001
0x
101
000
1x
10
1---
発 生しない
11
0 010
000
100
000
001
000
000
100
001
0x
100
000
1x
101
001
0x
101
000
1x
11
1---
発 生しない
注記1 次の情報ビットが00であると仮定して,x1及びx2を符号化する。
注記2 これらの情報ビットの値は,符号化用の仮定値とする。
注記3 このチャネルビットは,不規則パターンを生成するために,符号化後に変更される。
注記4 再同期領域の最後の3ビットの値は,次によって決定する。
1) 前のチャネルビットを0と仮定する。
2) 二つの情報ビットを01と仮定する。
3) データ2情報ビットx3の状態は,表3の(1,7)符号化による。
F.4
直流レベルの最小化
直流レベルの変動を最小化するために,再同期パターン1又は再同期パターン2のいずれを選択するか
の基準は,データ領域のチャネルビット及び再同期領域の0x0,00yに基づく。
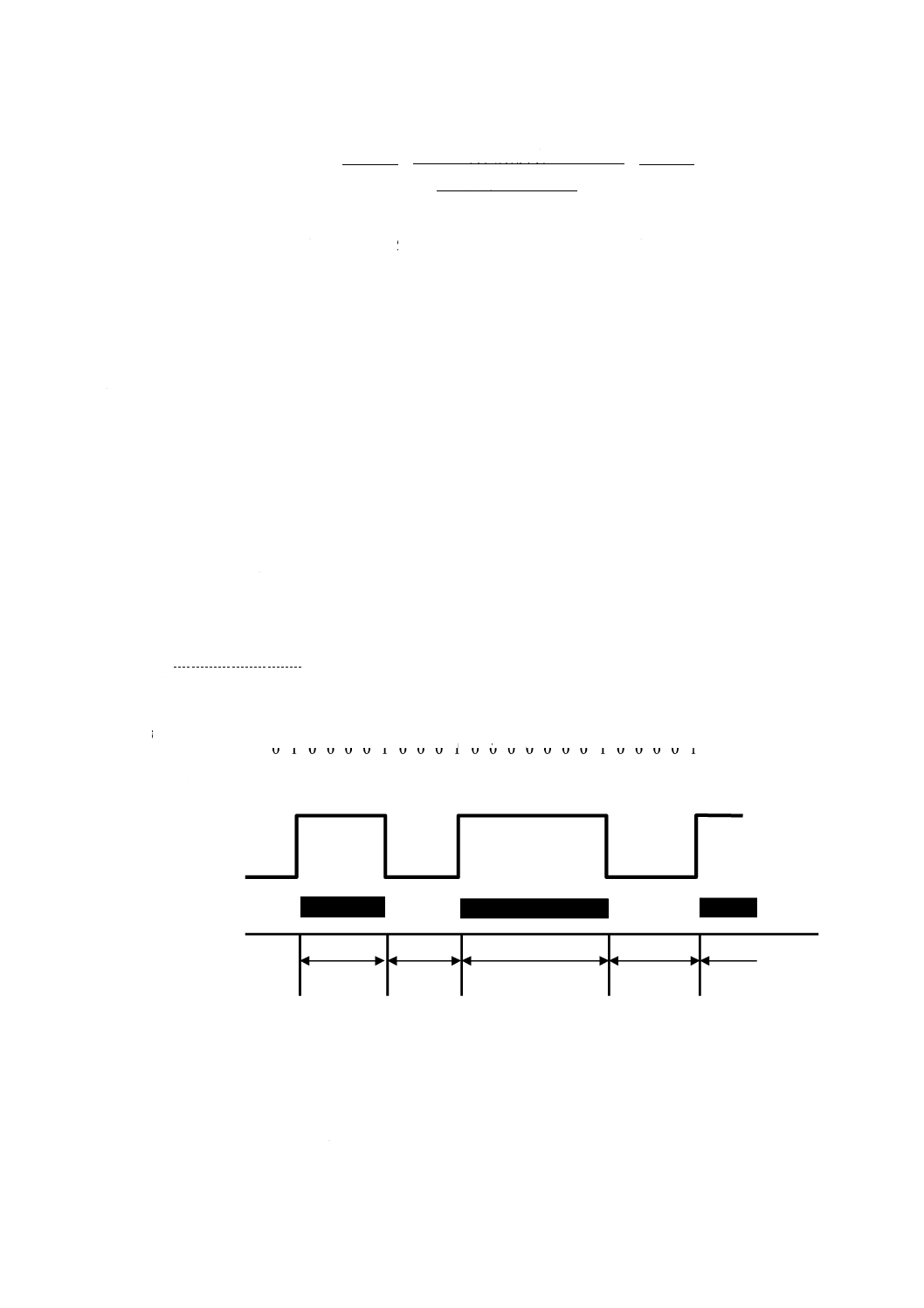
86
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
100000001000000100
データブロック 0x0(再同期パターン1)00y データブロック
100000001000000101
(再同期パターン2)
ここに, x=0又は1
y=0又は1
F.5で記述する手順に従って,再同期パターン1又は再同期パターン2のいずれを選択するかを決定す
る。
F.5
再同期パターンの決定
使用する再同期パターンを次の手順で決定する。
a) 処理を簡単にするために,PPMデータで記述するチャネルビットをPWMデータに変換する。
例えば,PPMデータが次とする。
…0010100010010…
この場合,PWMデータは,次となる。
…0011000011100…
注記 対応国際規格には記載がないが,次のPWMデータとなることがある。
…1100111100011…
DSV計算は,“0”=−1,“1”=+1など,PWMデータによって定義する(図F.1a参照)。
図F.1a−ブロックDSVmと再同期DSVmとの計算例
DSVmの計算は,次による。
DSVm=(+5−4+8−5…)
b) 再同期領域を二つの部分(RS||INV)に分割する。この場合,両部分とも次のように連結する。
PPMデータで,RS=0x010000000100000010
PPMデータで,INV=000y(INV1)又は100y(INV2)
+5
−4
+8
−5
ディスク上の
記録マーク
PWM データ
0 1 1 1 1 1 0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 0 0 1
(PPMデータ)
(1, 7)チャネルビット 0 1 0 0 0 0 1 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 1
データ 再同期領域 データ
再同期パターン
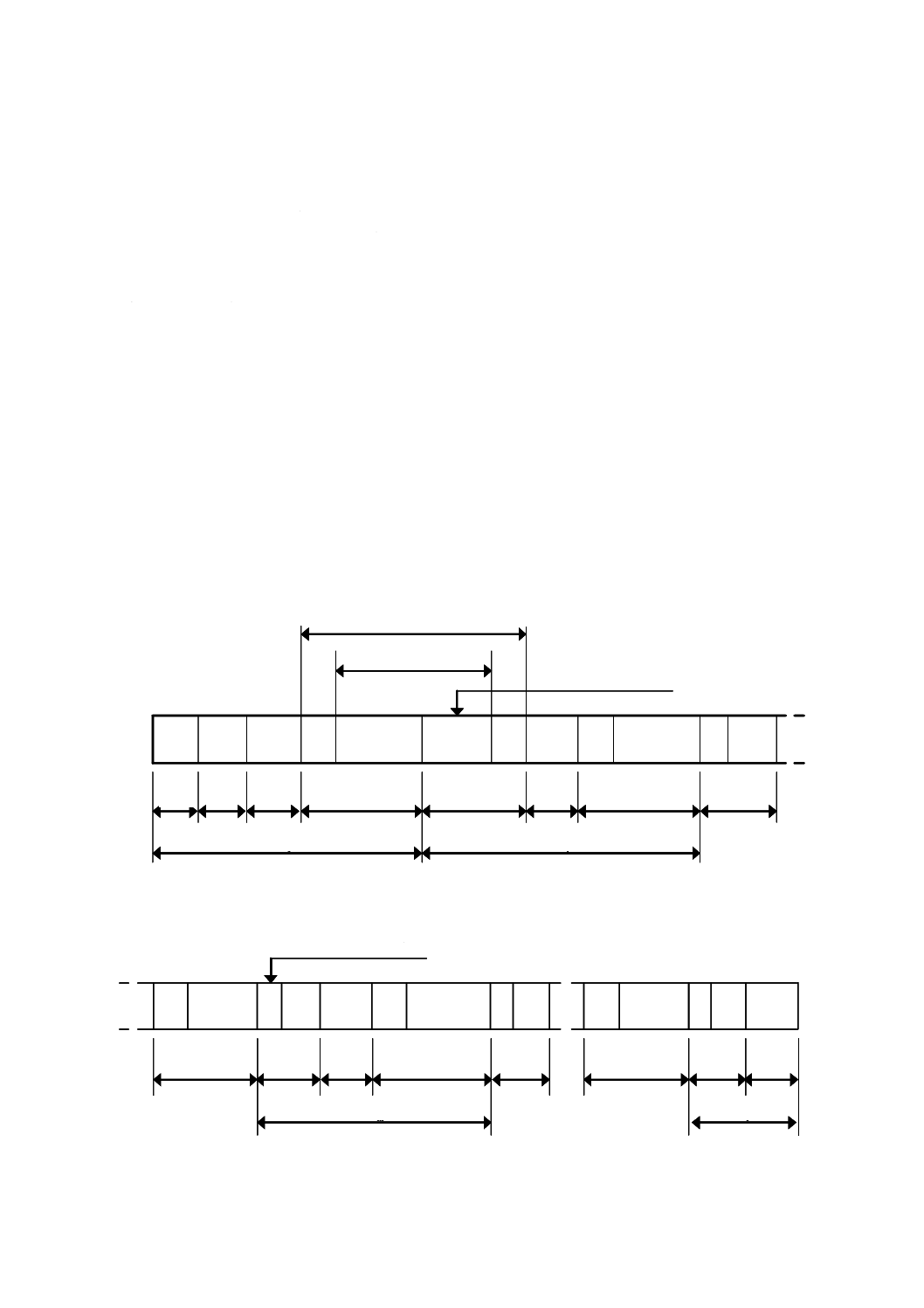
87
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) ユーザデータフィールドを次のように連結する。
VFO3||SYNC||B0||RS1||INV1又はINV2||B1||RS2….
…||INV1又はINV2||Bm||RSm+1||… …||INV1又はINV2||BN
ここに,
m=1〜N
N=39(図F.1b参照)
d) PPMデータストリームである項(z)が,(z)項でデータに先行するPWMデータの最後のPWMの状
態に基づき,結果としてPWM DSV総計となるように,DSV(z)関数を定義する。
e) 次のアルゴリズムを用いて,ステップmでINV1又はINV2を選択する。
P0=DSV(VFO3||SYNC||B0||RS1)
Pm=Pm−1+DSV(INV1||Bm||RSm+1)又は
Pm=Pm−1+DSV(INV2||Bm||RS)
INV1又はINV2を選択して,|Pm|を最小化する。
PN=PN−1+DSV(INV1||BN)又は
PN=PN−1+DSV(INV2||BN)
INV1又はINV2を選択して,|PN|を最小化する。
m=1からNまでこの手順を繰り返す。この場合,N=39とする。|Pm|が再同期パターン1でも
再同期パターン2でも同じである場合は,再同期パターン1を選択しなければならない。
再同期領域
直流レベル変動ビット
0x0
00y
0x0
00y
0x0
00y
Resync
39
Data 39
Resync(m+1)
Data m
Resyncm
RSm
INV 1 or
INV 2
Bm
Pm
RSm+1
INV 1 or
INV 2
RS
INV 1 or
INV 2
B39
P1
直流レベル変動ビット
再同期パターン
Resync1
00y
0x0
00y
0x0
Sync
Data 0
VFO3
VFO3
Sync
B0
RS1
RS 2
B 1
INV 1 or INV 2
INV 1 or
INV 2
P0
P1
Resync2
Data 1
再同期領域
直流レベル変動ビット
0x0
00y
0x0
00y
0x0
00y
Resync
39
Data 39
Resync(m+1)
Data m
Resyncm
RSm
INV 1 or
INV 2
Bm
Pm
RSm+1
INV 1 or
INV 2
RS
INV 1 or
INV 2
B39
P1
直流レベル変動ビット
再同期パターン
Resync1
00y
0x0
00y
0x0
Sync
Data 0
VFO3
VFO3
Sync
B0
RS1
RS 2
B 1
INV 1 or INV 2
INV 1 or
INV 2
P0
P1
Resync2
Data 1
図F.1b−再同期バイトの例
3
3
88
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書G
(規定)
性能指数の測定
この附属書は,性能指数の測定について規定する。
G.1
性能指数について
性能指数は,低い周波数で記録したマークの再生信号振幅によって測定する。
図1で示す,箇条9で規定する光学系を使用した性能指数の測定では,光学系の位相差を含む。そのた
め,反射率,カー回転角及びだ(楕)円率を測定し,光学系の位相差を校正することが必要である。ただ
し,低保磁力のメディアを使用する場合だけ,この校正が精度良くできる。
G.2
測定用光学系の校正
測定用光学系の校正は,次のとおりとする。低保磁力の記録層をもつ複屈折率が無視できるほど小さい
ガラスディスクを用いて,反射率(R),カー回転角(θ)及びだ(楕)円率βを測定する。性能指数FLを,
次の式によって算出する。
FL=R sinθ cos2β
次に,同じディスクを用いて低周波数の信号を記録し,チャネル2の再生信号振幅VLを測定することに
よって,光学系自身の位相差の校正を行う。記録された磁区は,その領域で光学系のMTFが1となるよ
うに,実質的に集光スポットよりも大きくする。これは,50 Hzで回転するディスクに対して,100 kHzよ
り低い周波数の長い磁区のパターンが隣接するトラックでマークが半径方向に整列し,かつ,重なり合う
ように連続する数トラックにわたり記録されていることを意味する。
G.3
性能指数の算出
保磁力の大きさによらず,ディスクの性能指数Fは,校正された駆動装置で低周波数の信号を記録し,
チャネル2の再生信号の振幅Vを測定し,次の式で算出する。
L
LV
V
F
F=
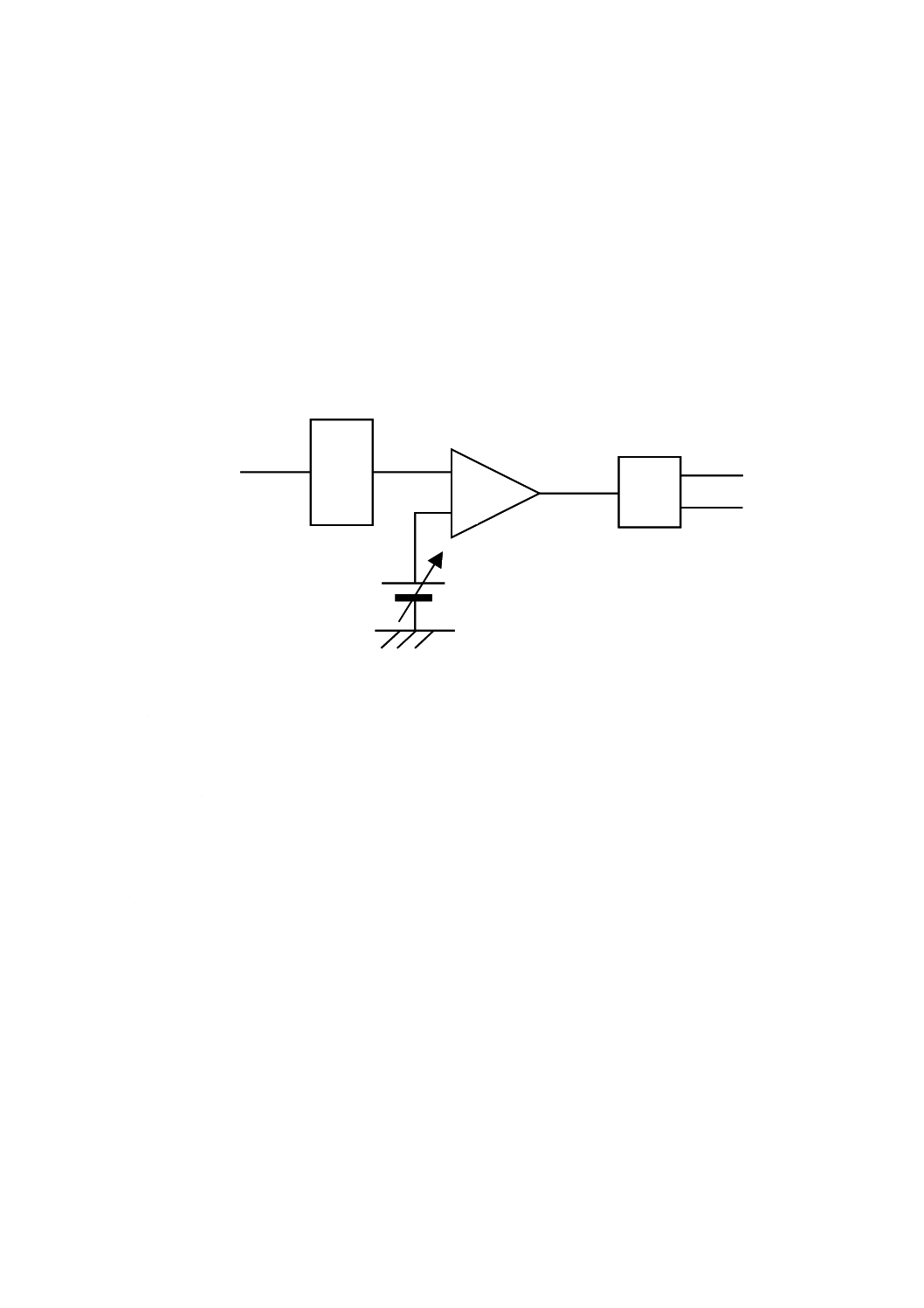
89
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書H
(規定)
NBSNR(狭帯域信号対雑音比)及び
ジッタを測定するための再生チャネル
この附属書は,NBSNR(狭帯域信号対雑音比)及びジッタを測定するための再生チャネルについて規定
する。
NBSNR及びジッタは,次の再生チャネルを用いて測定する。
フィルタ
チャネル1
又は
チャネル2
比較器
+
−
エッジ検出器
前縁
後縁
フィルタ
チャネル1
又は
チャネル2
比較器
+
−
エッジ検出器
前縁
後縁
図H.1−再生チャネル
入力信号:
エンボスマーク用のチャネル1
ユーザ記録マーク用のチャネル2
フィルタ仕様:
a) イコライザ:MOの信号評価に使用しない
エンボスマークの信号評価に使用する
b) フィルタタイプ:五次のベッセルフィルタ
c) ローパスフィルタ:カットオフ周波数=試験中の帯域で2Tの連続信号の周波数の2倍
H.1 しきい(閾)値フォロア
このトラッキングしきい(閾)値フォロア(又は同等のもの)は,データ検出過程で,ベースラインレ
ベルを設定するために必要である。これは,メディアの反射率及び記録感度の局所的変動並びに記録デー
タパターンで生じる直流成分の変動を補正するために用いる。
コンパレータ
しきい(閾)値
調整用
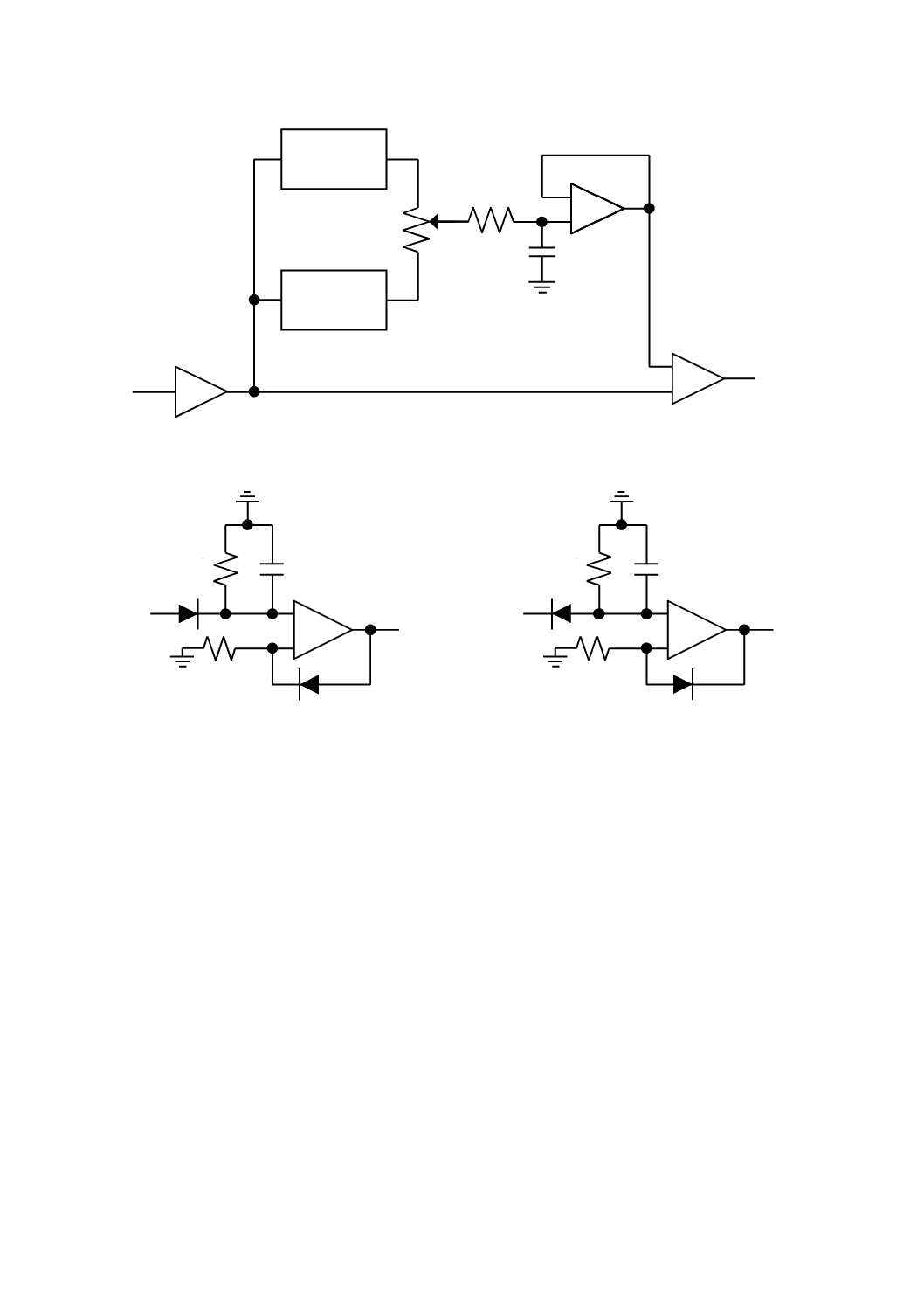
90
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図H.2a−トラッキングしきい(閾)値ブロックダイアグラム
上側エンベロープフォロアの例
(半波整流器)
下側エンベロープフォロアの例
(半波整流器)
図H.2b−ダイオードを用いたエンベロープフォロア
図H.2−しきい(閾)値フォロア
H.2 ジッタ測定手順
前縁から前縁,又は後縁から後縁までのジッタは,次の手順で測定する。
a) VFOの2Tマーク及び2Tスペースが正確に2チャネルビット時間Tの長さになるように,検出器回
路のしきい(閾)値レベルを設定する。
b) しきい(閾)値レベルを保ち,信号のエッジを検出する。
c) タイムインターバルアナライザを使用して,前縁から前縁又は後縁から後縁までの時間を測定する。
d) 欠陥領域からのデータを除いて,105個のデータ(時間間隔)を取得する。
e) 前縁から前縁,又は後縁から後縁までのデータの平均値Lnを計算する。
f)
測定した平均値Lnと,対応する前縁から前縁,又は後縁から後縁までの(すなわちTのn倍)の理想
値との差を計算し,その中の最大値をStとしてとる。
g) ジッタ分布の標準偏差Jtを計算する。すなわち,前縁から前縁までのデータ又は後縁から後縁までの
データと,各々に対応する平均値Lnとの差の標準偏差Jtを計算する(図H.3参照)。
前縁から前縁までの標準偏差Jt及び後縁から後縁までの標準偏差Jtは,別々に測定しなければならない。
入力
100 kΩ
1200 pF
100 kΩ
出力
入力
100 kΩ
1200 pF
100 kΩ
出力
入力バッファ
上側
エンベロープ
フォロア
50 kHz
ローパス
フィルタ
10 kΩ
コンパレータ
出力
入力
下側
エンベロープ
フォロア
91
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
個々の数値は,最悪でも規定を満たすことが望ましい。
ヘッダ信号の評価の場合,しきい(閾)値レベルはVFO1を使用して設定し,標準偏差Jtは,AM〜PA
のデータを使用して測定する。
エンボスデータ信号の評価の場合,しきい(閾)値レベルは,VFO3を使用して設定し,ユーザデータ領
域の同期フィールド及びデータフィールドのデータを使用して測定する。この場合,ユーザデータ領域は,
ユーザデータ,CRC及び再同期パターンからの全てのデータを使用して測定する。
図H.3−ジッタの測定分布
T(チャネルクロック周期)
理想時間(nT)
nTマーク又はnTスペースの
ジッタ分散の中間値
標準偏差=Jt
時間
事象
92
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書I
(規定)
記録メディアの互換のための実装独立マーク品質決定(IIMQD)
この附属書は,記録メディアの互換のための実装独立マーク品質決定について規定する。
I.1
試験パターン
IIMQDオフセット試験は,7個のマーク及び7個のスペース,すなわち,2Tから8Tまでの各ランレン
グスの一つのマーク及び一つのスペースで構成される,二つの特別なパターンを用いる。この試験は,駆
動装置のメディア互換性のため,適切な長さのマークを形成する能力を検査する。
次の手順を用いて,記録メディア互換性のためのIIMQDを決定する。
駆動装置を用いて,トラックを消去し,次の試験パターンの一つの繰返しデータを,半径24 mm,32 mm
及び41.5 mmで,数トラック上に記録する。個々の試験を各々のパターンに対して実施する。
パターンNo.1:
2T 2T 3T 3T 4T 4T 5T 5T 6T 6T 7T 7T 8T 8T
M
S
M
S
M
S
M
S
M
S
M
S
M
S
パターンNo.2:
2T 2T 3T 3T 4T 4T 5T 5T 6T 6T 7T 7T 8T 8T
S
M
S
M
S
M
S
M
S
M
S
M
S
M
ここに,Mは,マークを,Sは,スペースを表す。
I.2
検出方法
24.2.4で規定した検出方法のほかに,次のイコライザを用いて,データ信号を再生し検出する。この試
験では,しきい(閾)値TVを変更して,パラメタ変化によるマークのエッジ変動を補正してもよい。
Eq(ω)=1−2Acos(ω2T)
ここに, A=0.1
ω=2πf
Tは,読み取っているゾーンのチャネルクロック周期
このイコライザは,ディスクスピードが3 000 rpmのとき,半径24 mm,32 mm及び41.5 mmのそれぞ
れについて表2で規定するクロック周期をもち,タップ遅延が39.4 nsでタップ係数が−A,0,1,0,−A
及び0,−A,1,−A,0である5個のタップ付きディレイラインフィルタで実装できる。
タイムインターバルアナライザを使用して,記録トラックからの検出信号を2通りの方法で測定する。
a) 前縁から後縁(マーク)の長さの平均値
b) 後縁から前縁(スペース)の長さの平均値
93
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書J
(規定)
空気清浄度クラス 100 000
この附属書は,空気清浄度クラス100 000について規定する。
空気清浄度の分類は,単位体積当たりに存在する規定サイズを超える粒子の最大許容数,及び統計上の
平均粒子径分布に基づく。
J.1
定義
0.5 μm以上の粒径の粒子数は,1 m3当たり3.5×106個以下とする。
統計上の平均粒子径分布を図J.1に示す。クラス100 000とは,サイズ0.5 μm以上の粒子の許容数は,
1 m3当たり3.5×106個であるが,サイズ5.0 μm以上の粒子の許容数は,1 m3当たり2.5×104個に過ぎない
ことを意味する。
局所的な又は一時的なばらつきから,1回の測定では分布がこの曲線から逸脱することがある。サンプ
リングの数が多いときを除き,1 m3当たりの粒子数が3.5×105個未満である場合,データに信頼性がない。
J.2
試験方法
0.5〜5.0 μmの粒子に対し,光散乱の原理による装置を用いる。一定環境の空気を既知の流速でサンプリ
ングする。サンプル空気中に含まれる粒子は,装置の光学槽の光量検出領域を通過させる。個々の粒子に
よる光散乱は,光パルスを電流パルスに変換するフォトダイオードによって受光する。電気系は,パルス
の高さと粒子径を関連させ,パルス数を数える。
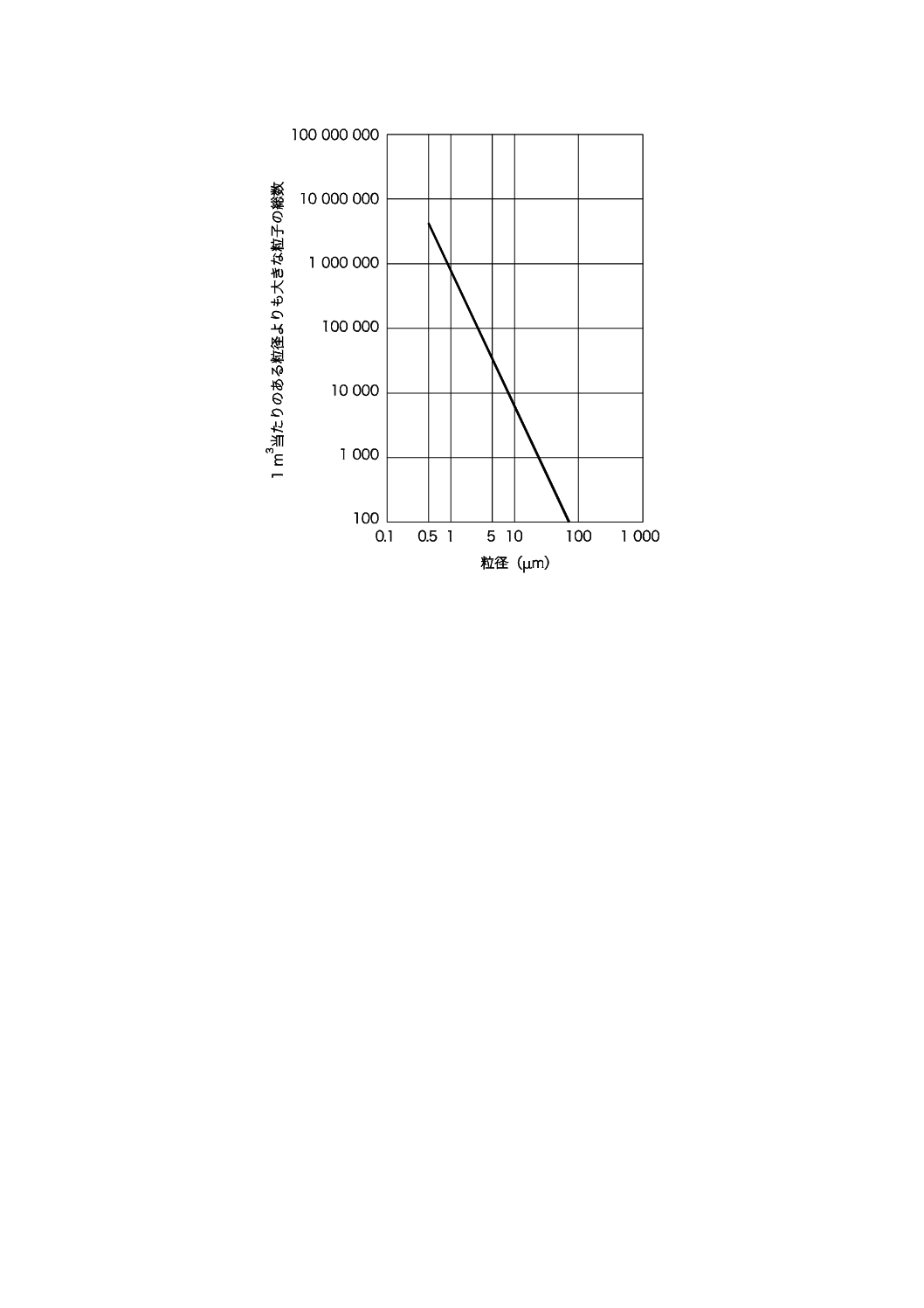
94
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図J.1−平均粒子径分布
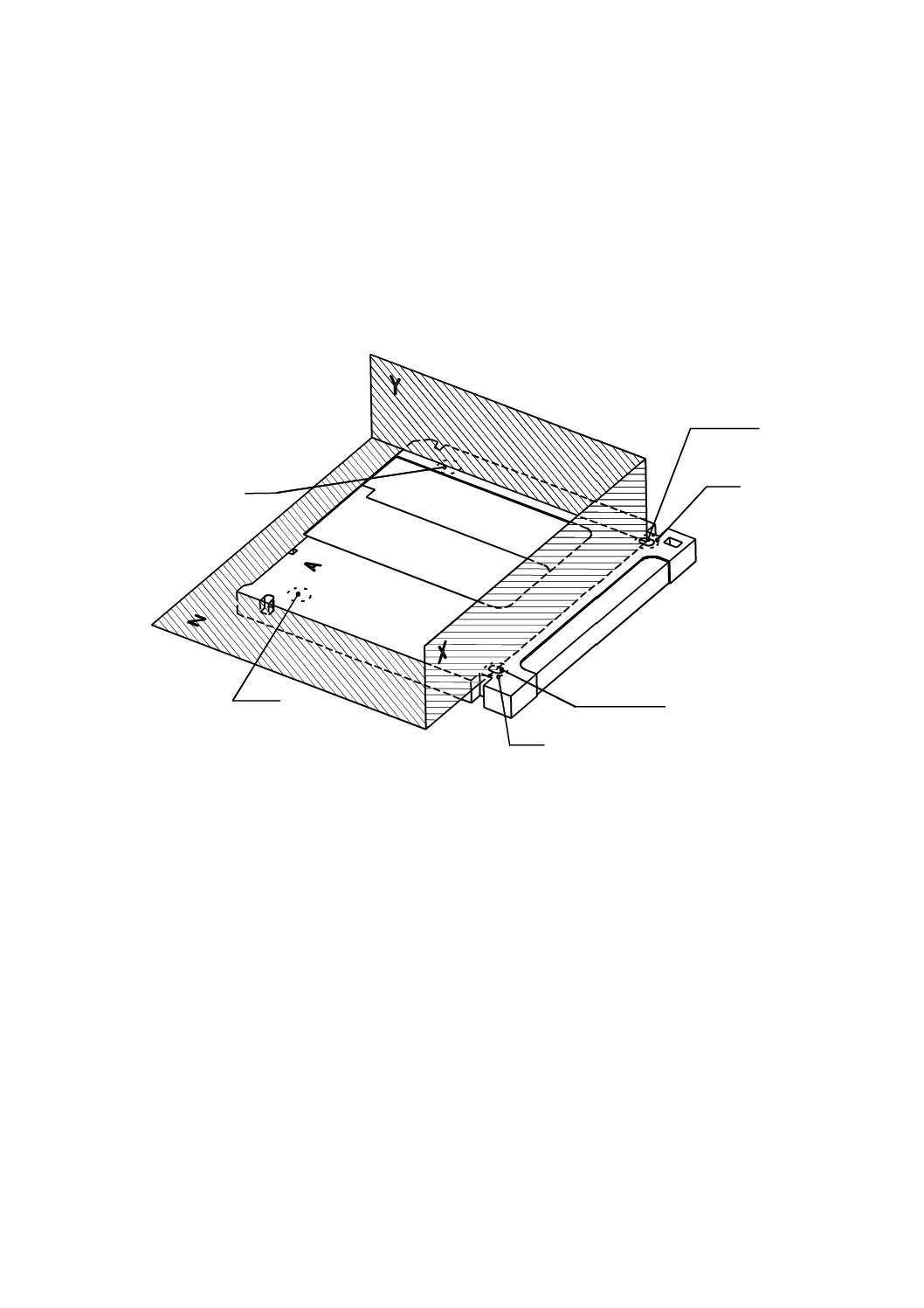
95
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書K
(規定)
基準面に関連するカートリッジの位置
この附属書は,基準面に関連するカートリッジの位置について規定する。
10.2に規定の基準面に関連するカートリッジの位置は,図K.1による。
図K.1−カートリッジ位置
S4
S2
アライメント孔
位置決め孔
S1
S3
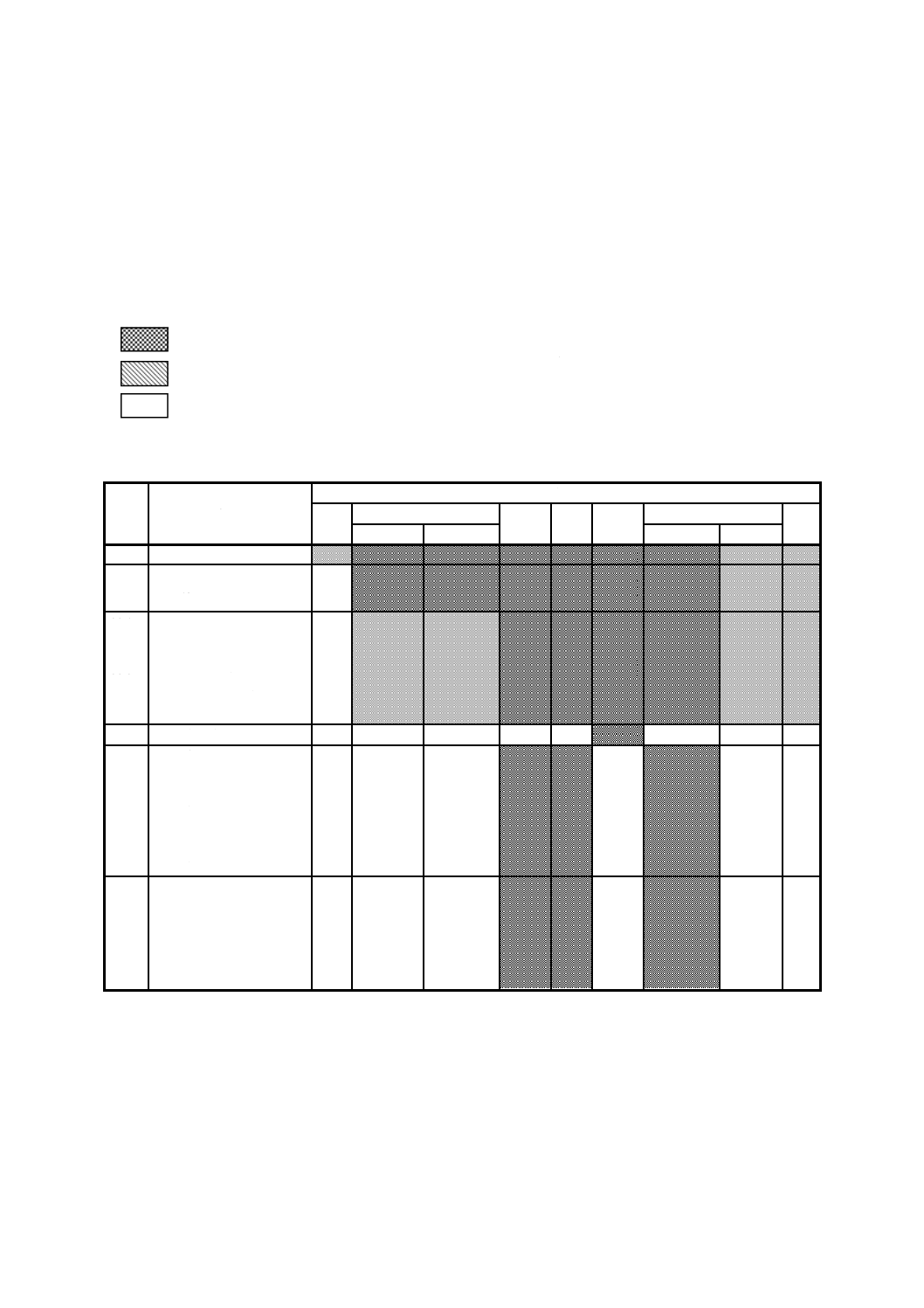
96
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書L
(規定)
信号特性が緩和できるゾーン
この附属書は,信号特性が緩和できるゾーンについて規定する。
表L.1は,この規格の本体に規定の信号特性が必須であるゾーンか緩和できるゾーンかの区別を示す。
信号特性が規定範囲内であることを必須とするゾーンを表す。
仕様範囲が下限値の80 %から上限値の120 %に拡張できるゾーンを表す。均一性は,±12 %から±20 %
に拡張できる。
規定を適用しないゾーンを表す。
表L .1−各ゾーンの信号の規定
箇条
信号
ゾーン
バッ
ファ
試験ゾーン
データ
ゾーン
バッ
ファ
制御
ゾーン
試験ゾーン
バッ
ファ
製造者用
駆動装置用
駆動装置用 製造者用
11.5.5 反射率
21.1
21.1
DPP(第一項)
DPP(第二項)
22.1
22.2
22.3
22.4
セクタマーク
VFO1,VFO2
アドレスマーク,
IDフィールド
及びポストアンブル
ジッタ
23
エンボスデータ
24.2.2
24.2.3
24.3.1
24.3.2
24.3.4
24.4.1
24.4.2
再生パワー
再生磁界
記録パワー
記録磁界
媒体感度
消去パワー
消去磁界
25.1
25.2
26.1
26.2
26.3
26.4
性能指数
光磁気信号のアンバランス
分解能
狭帯域信号対雑音比
クロストーク
ジッタ
97
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書M
(規定)
ハブの吸着力の測定方法
この附属書は,ハブの吸着力の測定方法について規定する。
M.1 目的
この試験は,ハブの磁性材料の磁気特性を決定することを目的とする。
M.2 試験装置
試験装置(図M.1参照)は,スペーサ,磁石,バックヨーク及び中心軸で構成する。試験装置の寸法は
次による。
Dd=7.0±0.1 mm
De=14.0±0.1 mm
最大でDf=13.0 mm
mm
9.3
00.1
g
−
=
D
Hc=0.40±0.01 mm
Hd=1.00±0.05 mm(通常,M.4の要件を満たすように調整される。)
M.3 試験装置の材料
試験装置の材料は,次による。
磁石 :適切な磁性材料 通常,Sm-Co
バックヨーク :適切な磁性材料
スペーサ :非磁性材料又は空隙
中心軸 :非磁性材料
M.4 バックヨーク付き磁石の特性
磁極の数 :4(通常)
最大エネルギー積(BHmax):175±16 kJ/m3(通常)
バックヨークに関する磁石の特性は,次の寸法の純ニッケル板(図M.2参照)を使用し,磁石面からの
空間がHc=0.4 mmとなる点でのこの板の吸着力が3.3±0.2 Nとなるように調整する。
Dh=6.0±0.1 mm
Di=15.0±0.1 mm
He=1.00±0.05 mm
M.5 試験温度条件
試験温度の条件は,8.1.1に規定のとおりとする。
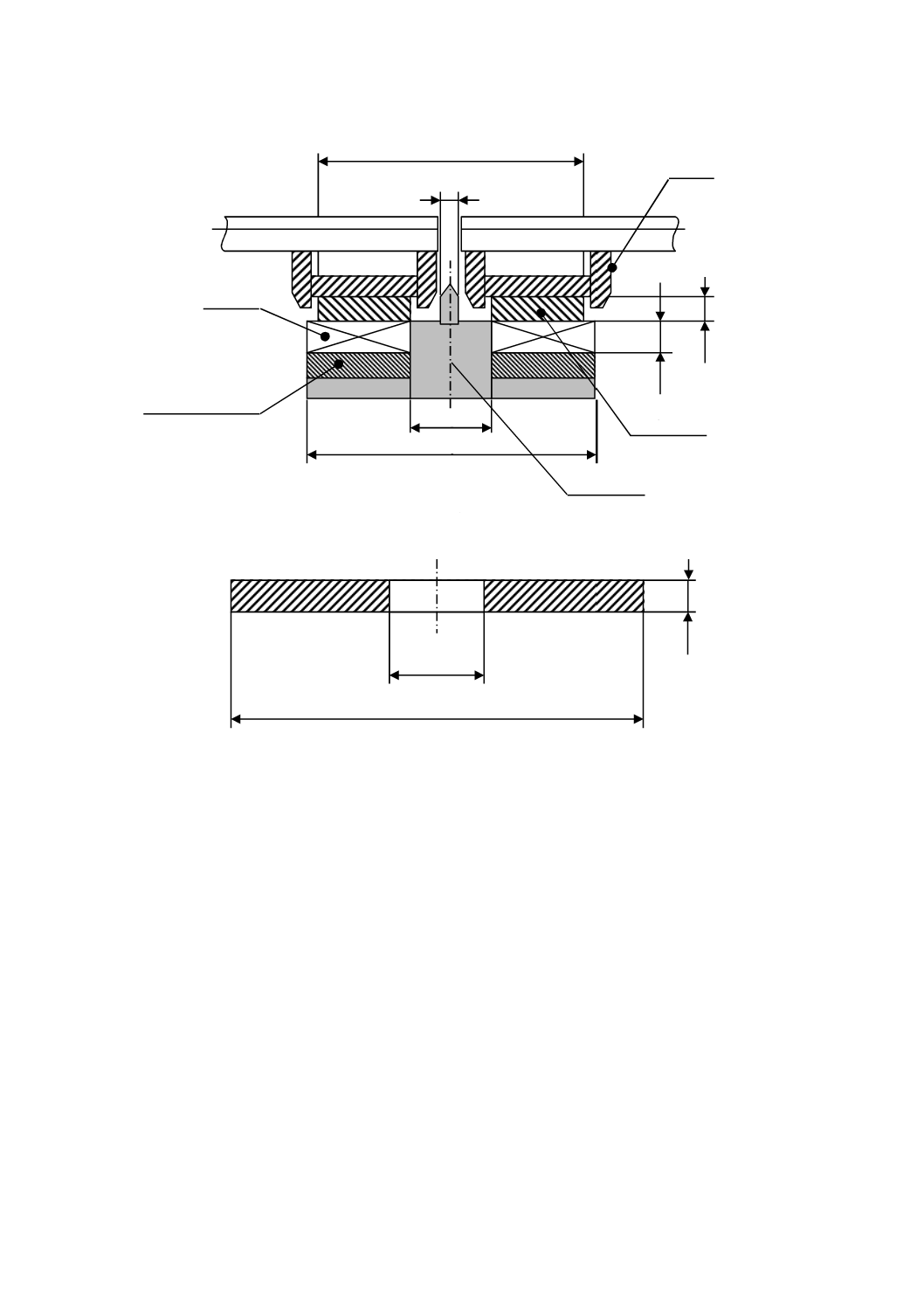
98
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図M.1−ハブ吸着力の測定
図M.2−測定装置の校正板
Dh
D i
H
e
スペーサ
ヨーク
磁石
Df
Dg
H
d
H
c
Dd
De
ハブ
中心軸
バックヨーク
99
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書N
(参考)
トラックの振れ量の測定方法
トラックの規定位置からの振れ量は,トラッキングサーボを掛けて駆動装置上で測定する。測定に用い
る基準サーボの強度は,駆動装置のサーボの強度を超えてはならない。サーボの強度の差は,駆動装置の
余裕度を示す。トラックの振れ量は,基準サーボを印加した状態で測定するトラックと光ビーム焦点間と
のずれ量であるトラッキングエラー量となる。
トラックの振れ量の測定方法は,光軸方向のトラック振れ量及び半径方向のトラック振れ量のどちらに
も適用する。
N.1
許容値との関係
トラックの振れ量は,トラッキングサーボモータに要する加速度,及びトラッキングエラーの測定によ
る。加速度及びトラッキングエラーとの関係を周波数の関数として図N.1に示す。
emax
log(xmax)
log(f)
emax
log(xmax)
log(f)
図N.1−単一周波数,正弦波状振れ量の許容値
低周波数領域での許容振幅(xmax)は,式(N.1)によって算出する。
2
max
max
)
π
2(f
a
x
=
········································································ (N.1)
ここに,
аmax: サーボモータの最大加速度
高周波数領域での許容振幅(xmax)は,式(N.2)によって算出する。
xmax=emax ·············································································· (N.2)
ここに,
еmax: 最大許容エラー量
二つの周波数領域の合成は,N.3による。
100
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
N.2 基準サーボ
トラックの振れ量の許容値は,基準サーボに対するトラック振れ量の許容値と等しい。基準サーボは,
所定の伝達関数をもち,図N.1に示したように,振幅(xmax)の単一の正弦波状のトラック振れ量を最大
許容エラー量(еmax)に圧縮する。
基準サーボの開ループ伝達関数(Hs)は,式(N.3)によって算出する。
0
0
2
0
s
1
1
1
)
(
ω
ω
ω
ω
ω
ω
ω
c
i
c
i
i
c
i
H
+
+
=
·························································· (N.3)
ここに,
Hs: 開ループ伝達関数
0
0
π
2
π
2
1
f
f
i
=
=
=
ω
ω
−
f0: 開ループ伝達関数上で,ゲインが0 dBとなる周波数
c: サーボのクロスオーバー周波数(f1 及びf2 )を与える定
数
f1=f0 / c
f2=f0 × c
基準サーボによるトラック振れ量(x)のエラー量(e)への圧縮は,式(N.4)によって算出する。
s
1
1
H
x
e
+
=
············································································ (N.4)
ここに,
x: トラックの振れ量
e: エラー量
Hs: 開ループ伝達関数
0 dBとなる周波数ω0は,式(N.5)によって算出する。
max
max
0
e
c
a
=
ω
··········································································· (N.5)
このとき,ω0より低い周波数のトラックの振れは,最大許容エラー量(еmax)に圧縮される。また,ω0
より高い周波数のトラックの振れは,圧縮されない。図N.1に示す許容振幅(xmax)は,式(N.6)によって
算出する。
xmax=emax |1+Hs| ····································································· (N.6)
この基準サーボのモータに要求される最大加速度は,式(N.7)によって算出する。
amax(motor)=emaxω2|1+Hs| ························································· (N.7)
ここに, amax(motor): 基準サーボのモータに要求される最大加速度
f<f0 / cとなる低周波数領域での最大加速度は,式(N.8)によって算出する。
c
e
a
a
max
2
0
max
max
)
track
(
)
motor
(
ω
=
=
··········································· (N.8)
ここに,11.4.6及び11.4.8の低周波数領域で基準サーボのω0計算にamax(motor)を用いてもよい。
N.3 トラックの振れの許容量
トラックの振れは,所定の周波数で回転しているディスクに対し,基準サーボでトラッキングを行った
とき,7.2 μs以上にわたって,エラー量(еmax)を超えてはならない。
軸方向及び半径方向の基準サーボの開ループ伝達関数は,50 Hz〜170 kHzの帯域で,公称値からの相違
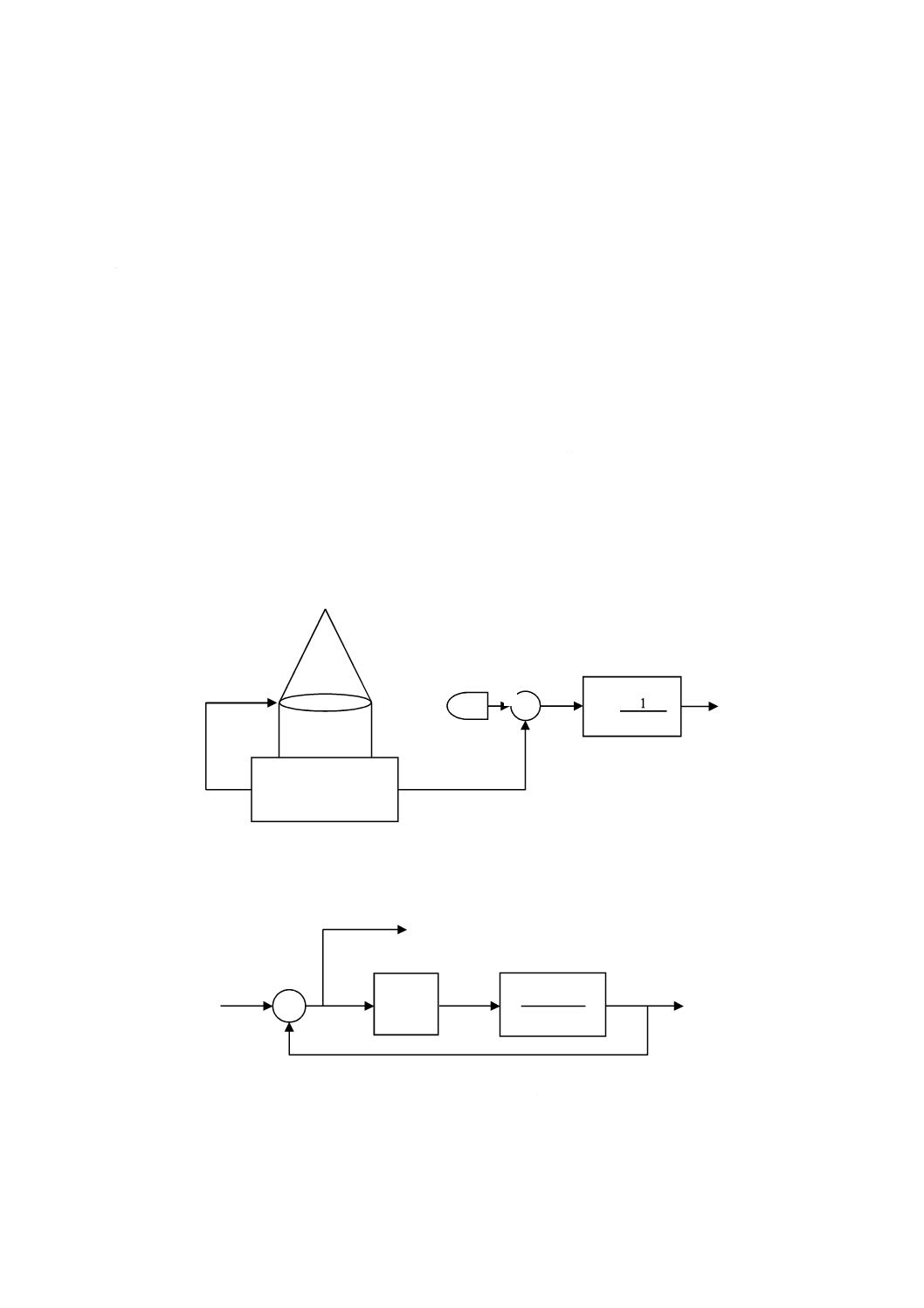
101
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
が±20 %の範囲を超えない精度の|1+H|を用い,式(N.3)によって求める。定数cは,3とする。0 dB周
波数ω0/(2π)は,20.2.4,11.4.6及び11.4.8の軸方向及び半径方向のаmax及びеmaxを用いて,式(N.5)によっ
て求める。
N.4 測定方法
軸方向又は半径方向の測定システムとして,3種類の方法を示す(図N.2,図N.3及び図N.4参照)。図
中,Haは駆動装置の実際のトラッキングサーボの開ループ伝達関数を,Hsは式(N.3)によって求める基準サ
ーボの伝達関数を,x及びyはトラックの位置及び光ビームの焦点の半径方向の位置を,еsは基準サーボを
経た後のエラー量を示す。
最適な測定方法は,Ha及びHsの特性に依存する。板ばね方式サーボモータでは,低周波数及び高周波
数に分けて二系統の測定回路を用いると,良い測定結果が得られる。測定方法のうち,図N.2の方法は,
低周波数の測定系に用い,図N.3及び図N.4の方法は,高周波数の測定系に用いる。二つの測定系の出力
信号を,逆特性の交差形フィルタ(reversed cross-filter)を用いて加算し,必要なエラー量を求める。低周
波数の測定では,サーボモータにヒステリシスがないときには,サーボモータの加速度の測定としてサー
ボモータに流れる電流を利用してもよい。このとき,電流は,サーボモータの伝達関数によって校正する。
式(N.4)に等しい伝達関数e/a=e/(xω2)をもつフィルタによって,サーボモータに流れる電流をエラー量に変
換する。
図N.2−基準サーボによって圧縮されたトラック位置信号にフィルタを
印加してesを得るようにした基準サーボ方法
図N.3−実際のサーボの伝達関数を変換することによって
esを得るようにした基準サーボ方法
Ha
x
+
−
es
y
Hs
Ha
es
位置センサ
サーボ
+
y +
x
ea
フィルタ 1
1+Hs
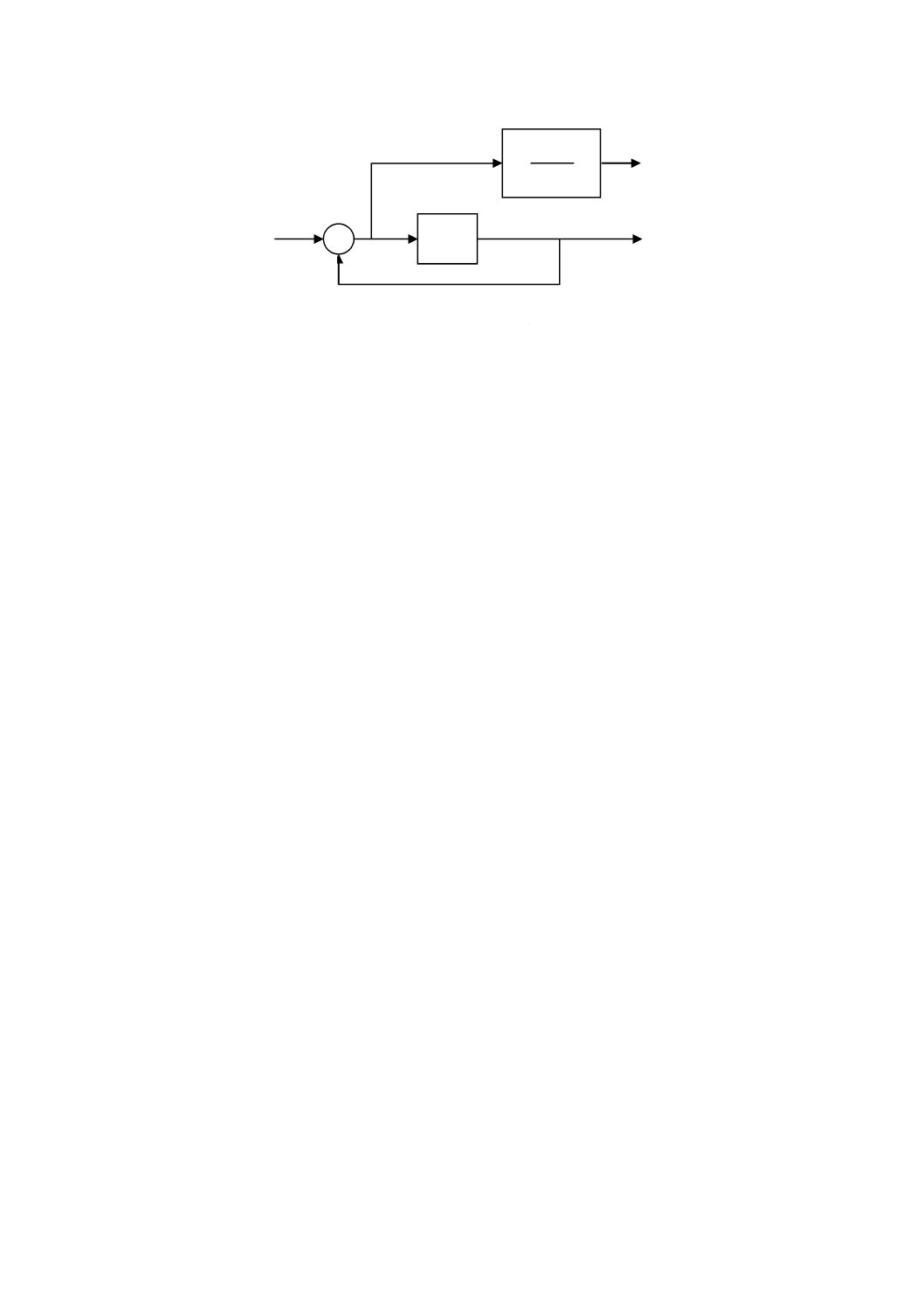
102
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図N.4−実際のサーボのエラー信号を変換することによって
esを得るようにした基準サーボ方法
Ha
x
+
−
ea
es
y
1+Ha
1+Hs
103
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書O
(参考)
使用環境条件の導出方法
この附属書は,8.1.2の使用環境条件の導出方法について,その背景を示す。
O.1 標準環境条件
ODCの使用環境条件は,幾つかの例外を除いて,JIS C 60721-3-3:1997,環境条件の分類 環境パラメー
タとその厳しさのグループ別分類 屋内固定使用の条件[IEC 60721-3-3: 1996に対応(IDT)]の分類3K3
の値を基本とする。分類3K3は,室内での装置を設置する環境を定義し,次による。
“通常の居住空間,すなわち,居間,大勢が使用する場所(劇場,レストランなど),オフィス,店,電
気部品の組立及び製造の場所,電気通信センタ,貴重品及び精密機器の保管室”
O.2 温度上昇の考え方
分類3K3は,室内の環境だけを定義しているが,この規格のカートリッジの使用環境条件は,システム
及び駆動装置の温度上昇についても考慮する。駆動装置に取り付けたカートリッジは,室内温度より高い
温度になる。使用環境条件は,この温度過昇を20 ℃までと仮定する。
O.3 絶対湿度
絶対湿度(空気中の水分量g/m3)の導入は,温度上昇を考えるときに有用となる。駆動装置の中で温度
上昇があったとき,絶対湿度は実質的に一定であるにもかかわらず相対湿度は,下がる。そのため,使用
環境条件に温度上昇分の余裕をもたせると,温度の上限だけでなく,相対湿度の下限に影響を与える。こ
れらの関係を,カートリッジの使用環境条件の空気線図(相対湿度対温度図,図O.1参照)に示す。
絶対湿度を制限すると,次の二つの使用環境条件が排除できる。
a) カートリッジの性能及び寿命に悪影響を及ぼす高温及び高相対湿度の組合せ
b) 世界中のオフィス環境でほとんど起こらない低温及び低相対湿度の組合せ
O.4 JIS C 60721-3-3の分類3K3との違い
O.2に示す温度上昇に関する変更を除くと,次のパラメタが分類3K3の基本値と異なる。
− 大気圧
分類3K3の下限気圧70 kPaを60 kPaまで拡張する。カートリッジは,本質的に気圧に敏感でなく,
70 kPaの規定は,一部の市場を排除する可能性がある。
− 絶対湿度
空調があるオフィス環境以外で使用する携帯用装置を考慮し,分類3K3の上限の25 g/m3を30 g/ m3
に引き上げる。
− 温度
カートリッジの周囲温度(駆動装置内の温度上昇を含む。)の上限は,55 ℃とする(分類3K3は+
20 ℃で60 ℃になる。)。この規格によるカートリッジに対し,上限55 ℃は,それ以上では動作(保
存と同様)が安全でないという物理的な上限を考慮している。
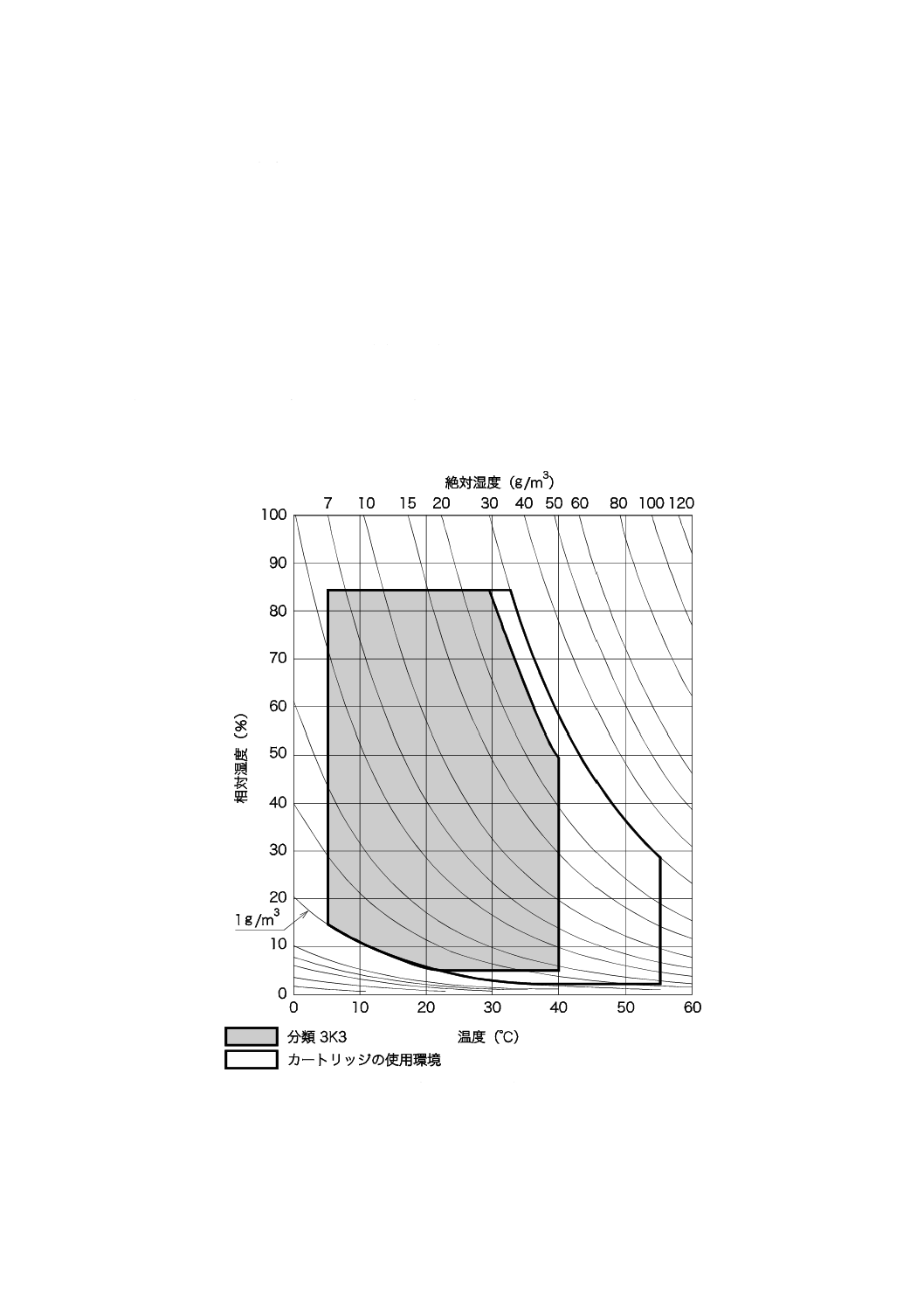
104
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
これは,装置設計者が,室温が分類3K3の上限の40 ℃になったとき,駆動装置内部を十分に冷却
してもよいことを意味する。
− その他
温度及び相対湿度の変化率は,分類3K3に従っていない。
O.5 湿球温度規定
絶対湿度による仕様値の代わりに,既発行のカートリッジの規格は,他のデジタル記録メディアと同様
に,高温及び高相対湿度の厳しすぎる組合せを排除するために次のパラメタの規定をした。
湿球温度 (単位:℃)
異なった仕様の比較を容易にするために,図O.2及び表O.1に,カートリッジの使用環境,測定環境及
び保存環境に対する湿球温度を示す。湿球温度は,大気圧でわずかに変化するため,図表は,101.3 kPaの
標準圧で有効となる。
図O.1−分類3K3及びカートリッジ使用環境の空気線図
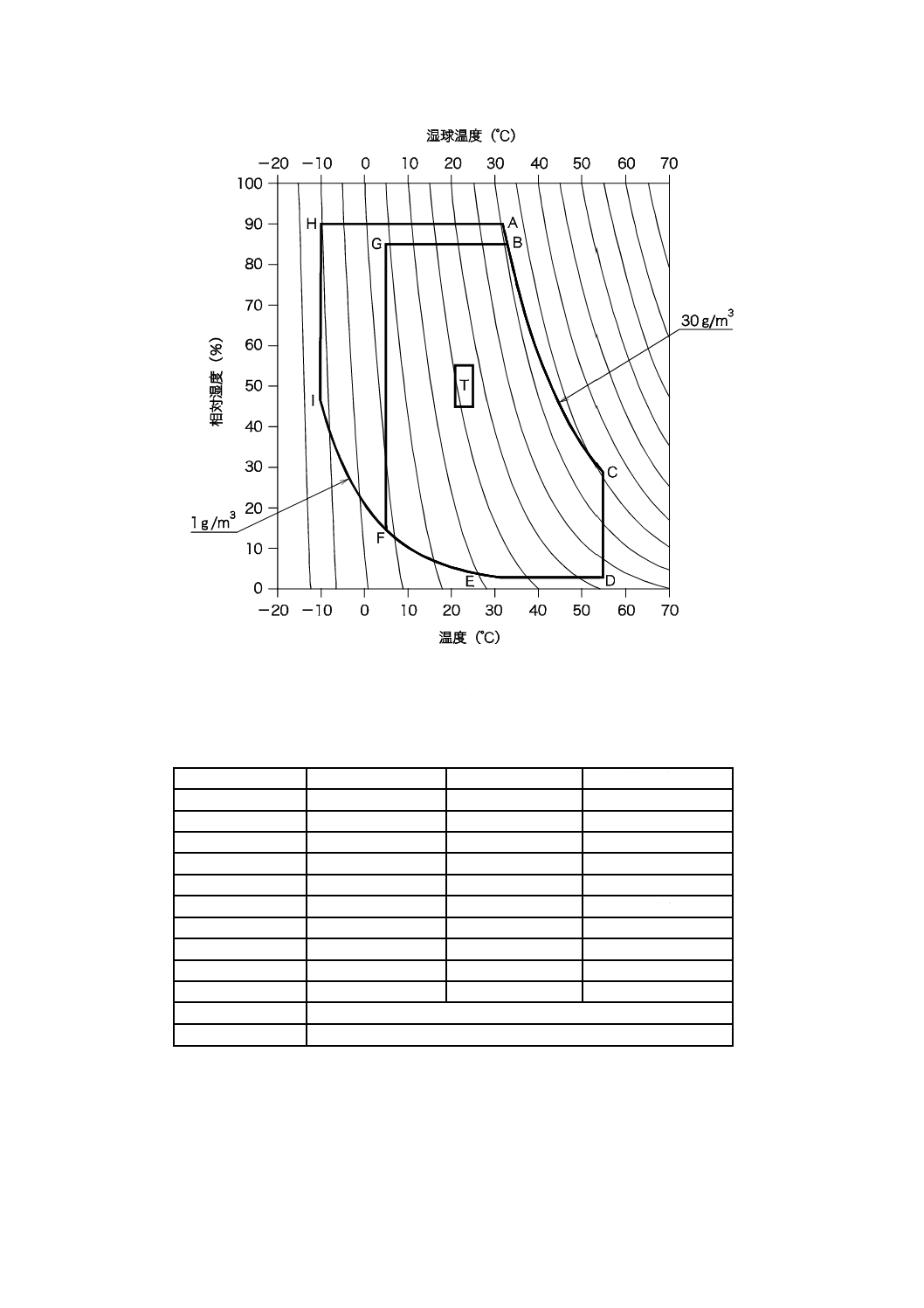
105
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 A点からI点及びT領域は,表O.1による。
図O.2−使用環境及び保存環境の湿球温度
表O.1−主なポイントの位置
気温 ℃
相対湿度 %
全体温度 ℃
A
31.7
90.0
30.3
B
32.8
85.0
30.6
C
55.0
28.8
35.5
D
55.0
3.0
22.2
E
31.7
3.0
12.1
F
5.0
14.6
−1.4
G
5.0
85.0
3.9
H
−10.0
90.0
−10.3
I
−10.0
46.8
−11.6
測定環境(T)
23.0±2.0
50.0±5.0
−
保存環境
A-B-C-D-E-F-I-Hで定める。
使用環境
B-C-D-E-F-Gで定める。
106
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書P
(参考)
輸送
P.1
概要
輸送は,世界中の広範囲の温湿度変化の下,異なる期間,様々な輸送方法によって行われるため,輸送
条件及び包装条件を一般的に規定することは困難である。
P.2
包装
包装の形式は,受渡当事者間の協定によるか,P.2.1及びP.2.2を考慮する。
P.2.1
温度及び湿度
輸送の見積期間よりも長期の条件に耐えるように,包装方法を考慮する。
P.2.2
衝撃及び振動
a) カートリッジの形状を損ねる機械的な荷重に耐える包装とする。
b) カートリッジの落下に耐える包装とする。
c) カートリッジは,緩衝材を入れた硬い箱に包装する。
d) 最終的な箱は,汚れ及び湿気を防ぎ輸送できる構造と清浄な内装とを具備する。
107
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書Q
(参考)
オフィス環境
Q.1 空気清浄度
カートリッジは,駆動装置の内外のじんあい(塵埃)の影響に対しかなりの耐力をもつ構造となってい
る。そのために,じんあい(塵埃)の量を十分低く維持するような特別の注意は必要としないが,機械工
場,建築現場など,じんあい(塵埃)の多い場所での使用は避け,通常のオフィス環境で使用するのが望
ましい。
オフィス環境とは,個人が何の保護もなしに,一時的な苦痛及び永久的な不快感を伴わずに一日中働け
る環境をいう。
Q.2 動作の影響
最高動作温度(55 ℃)及び最大許容バイアス磁界(36 000 A/m)が与えられた状態で,1本のトラック
に再生パワーが長期間照射される場合,メディア上のマークの品質が低下する場合がある。1本のトラッ
クに再生パワーが長期間照射される場合とは,駆動装置にメディアがロードされたままであり,駆動装置
が準備完了状態で,更に一つの特定トラック上でジャンプバックモードにある場合である。メディア製造
者は,駆動装置製造者の再生パワー管理方法と同様に,ユーザゾーンで許容される最大再生パワーの値を,
データを損なうリスクを最小にするように設定する必要がある。
108
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書R
(参考)
現在及び将来の規格で実装される値
この規格は,この規格に適合する光カートリッジを識別するバイトの値を規定する。他のタイプのODC
が将来開発されることを期待し,次の値を他のカートリッジに用いることを推奨する。
R.1 制御トラックのバイト0
ビット6〜4の設定の意味は,次による。
000 角速度一定方式(CAV)
001 線速度一定方式(CLV)
010 ゾーン化された角速度一定方式(ZCAV)
011 ゾーン化された線速度一定方式(ZCLV)
110 ロジカルZCAV
R.2 制御トラックのバイト7
次のビットパターンの意味は,次による。
0000 0000 再生専用カートリッジ(ROM)
0001 0000 不可逆記録を用いる追記形カートリッジ
0001 0001 MO記録を用いる追記形カートリッジ
0010 0000 MO記録を用いる書換形カートリッジ
0010 0010 データ再生に磁界を必要とするMO記録を用いる書換形カートリッジ
0110 0000 DOW記録を用いる書換形カートリッジ
0011 0000 相変化記録を用いる書換形カートリッジ
1001 0000 追記形カートリッジのパーシャルROM
1010 0000 MOのパーシャルROM
1110 0000 部分的にエンボスをもつダイレクトオーバーライト
1011 0000 相変化のパーシャルROM
109
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書S
(参考)
基板の垂直複屈折の測定
駆動装置の性能が良好であるためには,複屈折の平均値及び屈折率だ(楕)円体を検査しなければなら
ない。基板成形処理を適切に制御するため,面内複屈折(IPB)及び垂直複屈折(VB)の両方を高精度で
決定する必要がある。この附属書では,両面に薄膜が形成されていない基板及び薄膜が形成された基板に
適用できる,記録メディアの垂直複屈折を,簡易かつ非接触で測定する方法について記載する。
IPB及びVBは,角度可変形分光エリプソメータ(VASE)を用い,解析的なフィッティング手法によっ
て測定できる。VASEは,少なくとも三つの入射角に対して,直交偏光状態間の位相遅延を測定するよう
設定される。
基板が比較的薄い(1.2 mm)ため,基板の表面反射光と,複屈折による位相シフトを受けるMO層から
の反射光との二つがほとんど重なってしまう。不要な表面反射光を排除するため,薄く(<0.5 mm)硬い,
細長い小さな遮光板を用いる。遮光板は,入射光の反射する位置に,記録メディアにほぼ近接するように
設置される。この遮光板の位置を調整し,反射点での反射信号が最大になるようにする。この状態で,表
面反射光が遮断され,内面(薄膜面)からの底部反射光だけが偏光検出器を通過できる(図S.1参照)。遮
光板を入射光源に近づけすぎた場合には,主光束が遮られ,信号が低下する。反射点から遠ざけすぎた場
合には,両方の反射光が遮られ,再び信号が低下する。このアプローチは,不要な表面反射光を除去する
ための,屈折率整合流体及び光学部品を使用する確立された技術に基づいている。透明基板の場合,VASE
を直進モードに設定し,透過測定することによって可能であり,接触は必要ない。
上記それぞれの場合において,また,両面透明コートされた記録メディアに対して,位相遅延は入射角
の関数として表される。一般に3角度での測定が,VBを確定するために最低限必要である。主光軸がデ
ィスクの円柱座標軸方向に向いている(これはほとんど一般的なケースである)ディスクでは,入射角の
関数としての位相遅延を記録メディアの屈折率(Nr,NΦ,Nz)に関連付ける次の式が成り立つ。位相遅延
データを次に示す非線形解析式にフィッティングさせ,屈折率が決まる。
−
−
−
=
∆
Φ
)
(
sin
)
(
sin
2
2
r
z
2
2
r
θ
θ
N
N
N
N
d
ここに,
Δ: 大気中の入射角θの関数として表される位相遅延量
d: ディスクの厚さ(通常1.2 mm)
複屈折は,次の屈折率間の差となる。
面内:
Φ
r
in
N
N
N
−
=
∆
垂直:
z
Φ
r
vert
)
(5.0
N
N
N
N
−
+
=
∆
無単位の複屈折は,ΔNin又はΔNvertを基板の厚さdで乗じることによって,長さの単位で表すことがで
きる。この場合,複屈折は,位相遅延量(nm)として表される。
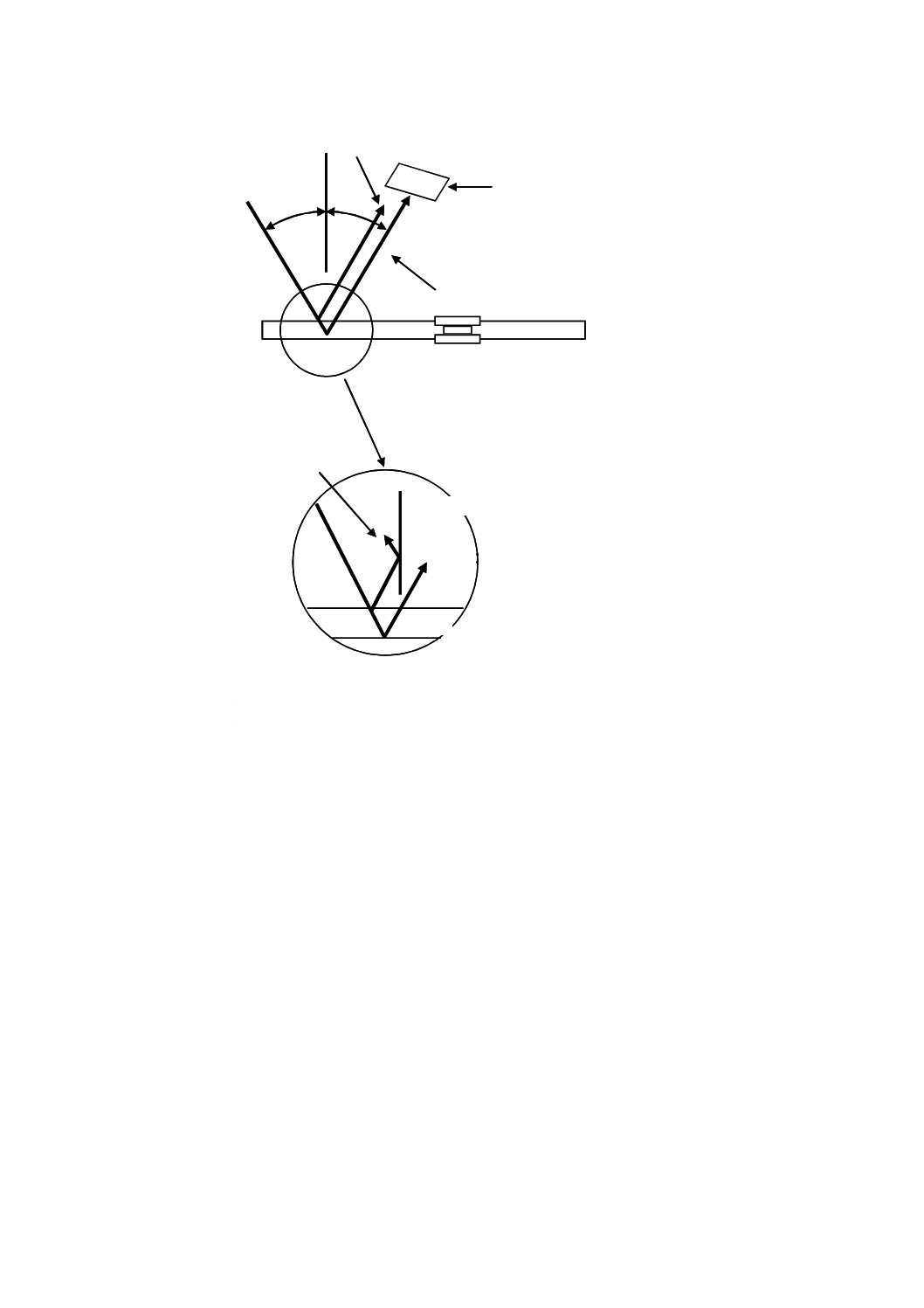
110
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(b)
不要反射光
光ブロック
プローブ光
ディスク
(a)
プローブ光
ディスク
検出器
不要反射光
(b)
不要反射光
光ブロック
プローブ光
ディスク
(a)
プローブ光
ディスク
検出器
不要反射光
a) 不要反射光の発生
b) 非接触光ブロック法による不要反射光の除去
図S.1−基板の垂直複屈折の測定方法
a)
b)
111
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書T
(参考)
交替セクタを使用するときのガイドライン
次に示す欠陥セクタを最大値まで(箇条19参照)の交替セクタに置き換えることができる。
a) 一つのセクタ内からIDが読み取れない。
b) 一つのセクタ内の二つのIDのうち,一つだけが読み取れ,先行するセクタと矛盾する。
c) 一つのセクタ内で,80バイトを超える長さの一つの欠陥が検出される。
d) 一つのセクタ内で,欠陥バイトの総数が,80バイトを超えるか,又はセクタの一つのECCインタリ
ーブで4バイトを超える。
112
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書U
(参考)
メディアの感度評価のためのレーザパワー校正方法
U.1 試験条件の変化
24.3.4で規定するメディアの感度の測定に当たっては,メディアの感度Cの値が基準駆動装置に許容さ
れる各種条件に影響されるため,メディア評価装置のレーザパワーを注意深く校正する必要がある。磁性
層のレーザスポットプロファイルは,9.2で規定する基準駆動装置に許容される光学的条件で変わる。記録
パワー感度の観点からの,基準駆動装置に許容される最良条件及び最悪条件を表U.1に示す。最悪条件の
温度のピークは,最良条件の温度のピークから21 %低くなると見積もられる。そのため,メディアの感度
Cは,注意深く評価する必要がある。
表U.1−標準駆動装置に許容される最良及び最悪条件
最良条件
最悪条件
波長(λ)
675 nm
695 nm
λ/NA
1.227 μm
1.263 μm
D/W
0.8
0.9
光ヘッドの波面収差
0
0.033 λrms
ディスクのチルト
0
4.8 mrad(半径方向)
ディスクの厚さ変動
0
50 μm
U.2 パワーの校正
評価装置のレーザパワーの校正は,次の手順で行う。正確な校正には,高速フロントパワーモニタを使
用する。
ステップ1
パワーメータによって高速フロントパワーモニタを校正する(図U.1)。
・ 校正は,直流パワーメータを用いて,直流レーザ操作で行うことができる。
・ 記録パルスの波形観測には,高速(>100 MHz)フロントパワーモニタを用いる。
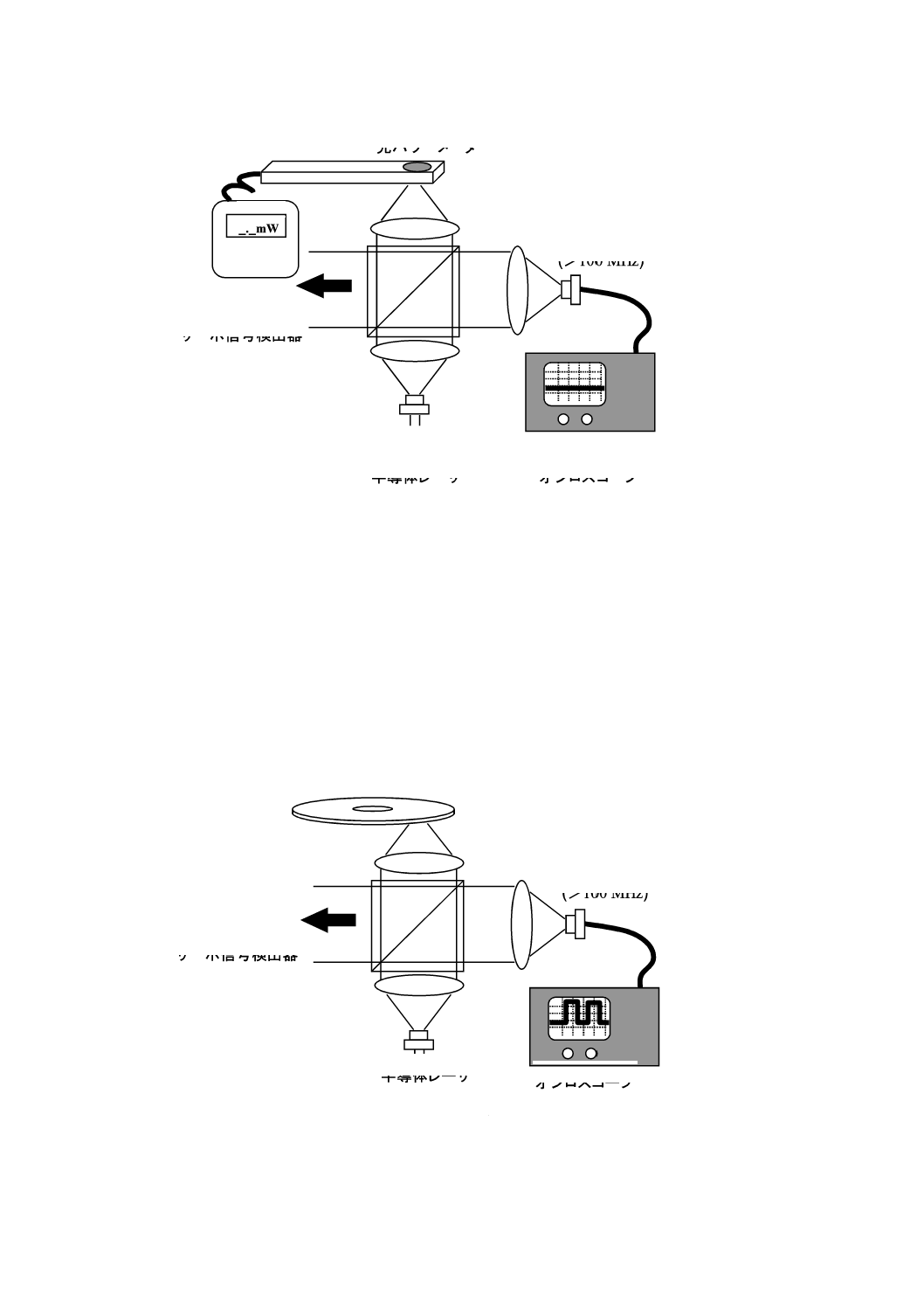
113
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図U.1−フロントパワーモニタの校正
ステップ2
記録パルスの形状を直接観測する(図U.2)。
・ 集光状態でのパルスパワーは,半導体レーザの戻り光の影響によって,非集光状態でのパルスパ
ワーとは異なる。
・ 実際の測定条件では,パルスパワー,パルス幅及びアシストパワーレベルを注意深く観測する。
・ 2Tマークの孤立パルス及び4Tマークの補助パルスが同一波形であり,4Tマークの二つの記録パ
ルスの立上がり及び立下がりが補助パルスと同一であるかどうかを確認する。同一でない場合は,
C及びEthの測定誤差が大きくなる。
図U.2−パルス強度及びパルス幅の測定
オシロスコープ
半導体レーザ
MO信号及び
サーボ信号検出器
高速フロントパワーモニタ
(>100 MHz)
オシロスコープ
半導体レーザ
高速フロントパワーモニタ
(>100 MHz)
MO信号及び
サーボ信号検出器
̲.̲mW
光パワーメータ
114
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ステップ3
適切なフィルタを用いて,記録パルスパワー及びパルス幅を測定する。
・カットオフ周波数80 MHzで,(ガウシアン)ローパスフィルタによってリンギングを除去するこ
とができる(図U.3a)。
・パルスエネルギーを正確に測定するため,高速フロントパワーモニタを利用できない場合は,平
均パワーレベル測定を推奨する(図U.3b)。
測定に関する備考
・ アシストパワーレベル
アシストパワーレベルPaの測定における誤りが,Cの測定値の重大な誤りを招くことになるた
め,Paの測定は注意深く(±0.05 mWの精度で)行う。
・ ディスクの温度
ディスクの温度は,25 ℃±1 ℃に保つ。評価装置が密閉している場合,内部温度が上昇する場
合がある。
・ 迷光
光ヘッド内の迷光が対物レンズに入射し,迷光のスポットを形成することもある。光ビームス
ポットにおける温度上昇が小さくても,対物レンズを通した光パワーの測定値は大きい場合があ
る。
・ 光部品(特に対物レンズ)の汚れ
光がちり(塵)などで吸収される場合,対物レンズを通過後の光パワーは減少する。これはパ
ワーメータで測定することができるため,混乱は生じない。光を散乱させる場合は,対物レンズ
を通過した全ての光パワーが,メディアの温度上昇に対して有効なわけではない。定期的に清掃
を行う必要がある。
・ ビームスポットの大きさ
記録メディアの感度の測定の前に,評価装置のビームプロファイルを光ナイフエッジ法で検査
するのが望ましい。測定したスポットの直径が,基準駆動装置の最良の直径である1.08 μmから
かけ離れていない場合,ディスクの傾斜などの上記の条件を注意深く調整するのが望ましい。
図U.3a−ローパスフィルタによるリンギングの除去
図U.3−平均パワーレベルからパルスパワーを正確に決定する方法
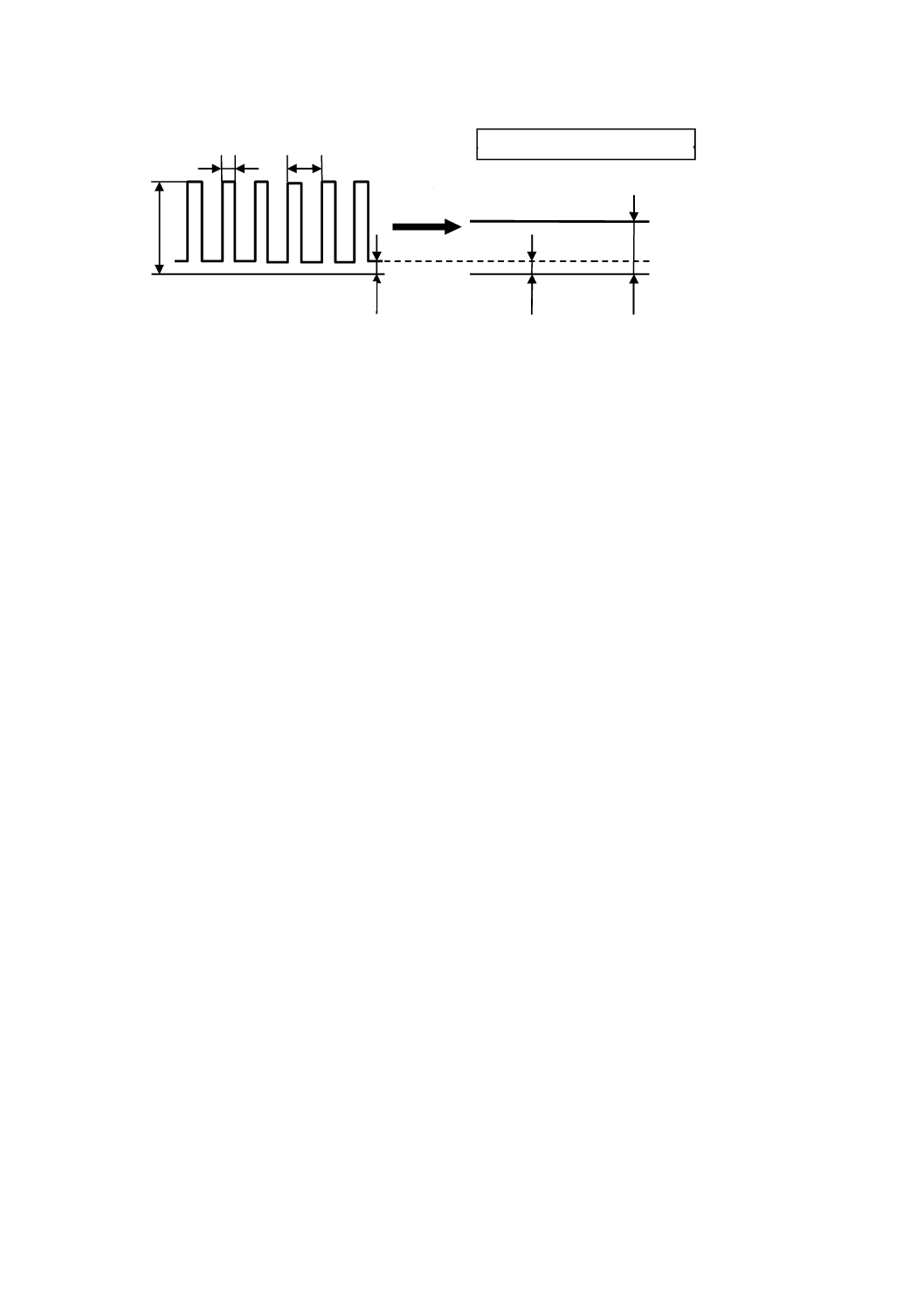
115
X 6270:2011 (ISO/IEC 22533:2005)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図U.3b−平均パワーレベルからのパルスパワー決定
図U.3−平均パワーレベルからパルスパワーを正確に決定する方法(続き)
P
a
Tp
1周期
P
w
P
b
ローパスフィルタ
(~100 kHz)
平均パワーレベル
P
b
Pw=(Pa−Pb)×(1周期)/Tp + Pb