X 6233:2017 (ISO/IEC 30193:2016)
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 適合性···························································································································· 2
2.1 光ディスク ··················································································································· 2
2.2 製造システム ················································································································ 2
2.3 情報受領システム ·········································································································· 2
2.4 互換性表示 ··················································································································· 2
3 引用規格························································································································· 2
4 用語及び定義 ··················································································································· 3
5 慣例及び表記法 ················································································································ 7
5.1 用語 ···························································································································· 7
5.2 数値表示 ······················································································································ 8
5.3 整数計算法 ··················································································································· 9
5.4 英語名称 ······················································································································ 9
6 略語······························································································································ 10
7 ディスクの概要 ··············································································································· 12
8 一般要求事項 ·················································································································· 13
8.1 環境条件 ····················································································································· 13
8.2 安全性 ························································································································ 15
8.3 難燃性 ························································································································ 15
9 基準ドライブ ·················································································································· 15
9.1 一般 ··························································································································· 15
9.2 測定条件 ····················································································································· 15
9.3 光学システム ··············································································································· 15
9.4 光ビーム ····················································································································· 16
9.5 高周波(HF)読取りチャネル ························································································· 17
9.6 半径方向のプッシュプル(PP)読取りチャネル ·································································· 17
9.7 ディスクのクランプ ······································································································ 17
9.8 ディスクの回転及び測定速度 ·························································································· 18
9.9 正規化サーボ伝達関数 ··································································································· 18
9.10 軸方向トラッキングの測定速度及び基準サーボ ································································· 19
9.11 半径方向トラッキングの測定速度及び基準サーボ ······························································ 20
10 寸法特性 ······················································································································ 21
10.1 一般 ·························································································································· 21
10.2 ディスクの基準面及び基準軸 ························································································· 22
X 6233:2017 (ISO/IEC 30193:2016) 目次
(2)
ページ
10.3 全体寸法 ···················································································································· 23
10.4 第1遷移領域 ·············································································································· 23
10.5 保護リング ················································································································· 24
10.6 クランプゾーン ··········································································································· 24
10.7 第2遷移領域 ·············································································································· 24
10.8 情報領域 ···················································································································· 24
10.9 リム領域 ···················································································································· 26
11 機械的特性 ··················································································································· 27
11.1 質量 ·························································································································· 27
11.2 慣性モーメント ··········································································································· 27
11.3 ダイナミックインバランス ···························································································· 27
11.4 軸方向の振れ量 ··········································································································· 27
11.5 半径方向の振れ量 ········································································································ 27
11.6 カバー層の耐久性 ········································································································ 28
12 情報領域の光学的特性 ···································································································· 28
12.1 一般 ·························································································································· 28
12.2 透過積層(TS)の屈折率 ······························································································ 28
12.3 透過積層(TS)の厚さ ································································································· 28
12.4 3層ディスクのスペーサ層の目標厚さの例 ········································································ 29
12.5 記録層の反射率 ··········································································································· 31
12.6 複屈折 ······················································································································· 31
12.7 角度偏差 ···················································································································· 32
13 データフォーマット ······································································································· 32
13.1 一般 ·························································································································· 32
13.2 データフレーム ··········································································································· 35
13.3 エラー検出符号(EDC) ······························································································· 35
13.4 スクランブルドデータフレーム ······················································································ 35
13.5 データブロック ··········································································································· 36
13.6 LDCブロック ············································································································· 37
13.7 LDC符号語 ················································································································ 38
13.8 LDCクラスタ ············································································································· 38
13.9 アドレス及びコントロールデータ ··················································································· 41
13.10 アクセスブロック ······································································································ 48
13.11 BISブロック ············································································································· 48
13.12 BIS符号語 ················································································································ 48
13.13 BISクラスタ ············································································································· 49
13.14 ECCクラスタ ··········································································································· 52
13.15 記録フレーム ············································································································ 53
13.16 物理クラスタ ············································································································ 54
X 6233:2017 (ISO/IEC 30193:2016) 目次
(3)
ページ
13.17 記録データのための17PP変調 ····················································································· 54
13.18 変調及びNRZI変換 ··································································································· 56
14 物理データの配置及びリンキング ····················································································· 57
14.1 一般 ·························································································································· 57
14.2 記録ユニットブロック(RUB) ······················································································ 57
14.3 ウォブルアドレスに対してのデータの位置 ······································································· 60
15 トラックフォーマット ···································································································· 62
15.1 一般 ·························································································································· 62
15.2 トラックの形 ·············································································································· 62
15.3 トラックパス ·············································································································· 64
15.4 トラックピッチ ··········································································································· 64
15.5 HFMグルーブのトラック構成 ······················································································· 65
15.6 ウォブルグルーブのトラック構造 ··················································································· 71
15.7 ADIP情報 ·················································································································· 73
15.8 ADIP予備フレームのディスク情報 ················································································· 80
16 情報ゾーンの概要 ········································································································· 123
16.1 一般 ························································································································· 123
16.2 情報ゾーンのフォーマット ··························································································· 124
17 情報ゾーンの書換領域の構成 ·························································································· 124
18 内側ゾーン ·················································································································· 128
18.1 一般 ························································································································· 128
18.2 不変情報・制御データ(PIC)ゾーン ············································································· 132
18.3 内側ゾーンの書換領域 ································································································· 135
19 データゾーン ··············································································································· 138
20 外側ゾーン ·················································································································· 138
20.1 一般 ························································································································· 138
20.2 INFO 3のバッファ3 ··································································································· 139
20.3 INFO 3のDMA 3 ······································································································· 139
20.4 INFO 3のコントロールデータ3 ···················································································· 139
20.5 回転バッファ ············································································································· 140
20.6 INFO 4のDMA 4 ······································································································· 140
20.7 INFO 4のコントロールデータ4 ···················································································· 140
20.8 INFO 4のバッファ4 ··································································································· 140
20.9 DCZ 0のテストゾーン,DCZ 1のテストゾーン及びDCZ 2のテストゾーン ··························· 140
20.10 保護ゾーン3 ············································································································ 140
21 物理アクセス制御クラスタ ····························································································· 140
21.1 一般 ························································································································· 140
21.2 PACゾーンの構成 ······································································································ 140
21.3 PACクラスタの一般構成 ····························································································· 141
X 6233:2017 (ISO/IEC 30193:2016) 目次
(4)
ページ
21.4 主PACクラスタ(必須)····························································································· 145
21.5 ディスク記録保護PACクラスタ(任意) ········································································ 148
21.6 IS1 PAC及びIS2 PACクラスタ ····················································································· 152
22 ディスク管理 ··············································································································· 153
22.1 一般 ························································································································· 153
22.2 ディスク管理構造(DMS) ·························································································· 154
23 論理セクタ番号(LSN)の割当て ···················································································· 163
24 グルーブ領域の特性 ······································································································ 164
25 グルーブ領域の試験方法 ································································································ 164
25.1 一般 ························································································································· 164
25.2 環境条件 ··················································································································· 164
25.3 基準ドライブ ············································································································· 164
25.4 信号の規定 ················································································································ 165
26 HFMグルーブの信号 ···································································································· 166
26.1 プッシュプルの極性 ···································································································· 166
26.2 プッシュプル信号 ······································································································· 166
26.3 ウォブル信号 ············································································································· 166
26.4 HFM信号のジッタ ····································································································· 166
27 ウォブルグルーブからの信号 ·························································································· 166
27.1 位相深さ ··················································································································· 166
27.2 プッシュプル信号 ······································································································· 166
27.3 ウォブル信号 ············································································································· 167
28 記録層の特性 ··············································································································· 168
29 記録層の試験方法 ········································································································· 168
29.1 一般 ························································································································· 168
29.2 環境条件 ··················································································································· 168
29.3 基準ドライブ ············································································································· 168
29.4 記録条件 ··················································································································· 169
29.5 信号の規定 ················································································································ 170
30 記録領域からの信号 ······································································································ 170
30.1 HF信号 ···················································································································· 170
30.2 変調振幅 ··················································································································· 170
30.3 反射率−変調度積 ······································································································· 171
30.4 非対称性 ··················································································································· 172
30.5 i-MLSE····················································································································· 172
30.6 クロス消去@DOW(n)XE ······························································································· 172
30.7 読取耐久性 ················································································································ 172
31 局所欠陥 ····················································································································· 173
32 使用者データの特性 ······································································································ 173
X 6233:2017 (ISO/IEC 30193:2016) 目次
(5)
ページ
33 使用者データの測定方法 ································································································ 173
33.1 一般 ························································································································· 173
33.2 環境条件 ··················································································································· 174
33.3 基準ドライブ ············································································································· 174
33.4 信号の定義 ················································································································ 174
34 記録情報の下限品質 ······································································································ 175
34.1 一般 ························································································································· 175
34.2 ランダムシンボルエラー率 ··························································································· 175
34.3 最大バーストエラー ···································································································· 175
34.4 使用者記録データ ······································································································· 175
35 BCA ··························································································································· 175
附属書A(規定)多層の場合の透過積層の厚さ ········································································ 177
附属書B(規定)反射率の測定 ····························································································· 179
附属書C(規定)カバー層のきず耐久性の測定 ········································································ 183
附属書D(規定)カバー層の汚れはつ(撥)油性の測定 ···························································· 185
附属書E(規定)ウォブル振幅の測定····················································································· 188
附属書F(規定)試験のための記録パルス波形 ········································································· 192
附属書G(規定)ディスクの最適パワー制御(OPC)方法 ························································· 200
附属書H(規定)i-MLSE[統合化最ゆう(尤)法系列エラー推定]測定のHF信号の前処理 ············ 203
附属書I(規定)測定方法 ···································································································· 214
附属書J(参考)複屈折の測定 ······························································································ 225
附属書K(参考)カバー層及びスペーサ層の厚さの測定 ···························································· 227
附属書L(参考)カバー層の衝突耐久性の測定 ········································································· 230
附属書M(参考)グルーブ偏移及びウォブル振幅 ····································································· 232
附属書N(参考)L-SEATエッジシフトを用いた記録パルス調整のガイドライン ···························· 234
参考文献 ··························································································································· 241
X 6233:2017 (ISO/IEC 30193:2016) 目次
(6)
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般財団法人光産業技術振興協会(OITDA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格に従うことは,次の者の有する特許権等の使用に該当するおそれがあるので,留意する。
− 氏名:日立コンシューマエレクトロニクス株式会社 知財管理本部
− 住所:〒244−0817 神奈川県横浜市戸塚区吉田町292番地
− 氏名:パナソニック株式会社 知的財産センター
− 住所:〒540−6207 大阪府大阪市中央区城見2丁目1−61 OBPパナソニックタワー
− 氏名:パイオニア株式会社 知的財産部
− 住所:〒212−0031 神奈川県川崎市幸区新小倉1−1
− 氏名:ソニー株式会社 知的財産センター
− 住所:〒108−0075 東京都港区港南1−7−1
上記の特許権等の権利者は,非差別的かつ合理的な条件でいかなる者に対しても当該特許権等の実施の
許諾等をする意思のあることを表明している。ただし,この規格に関連する他の特許権等の権利者に対し
ては,同様の条件でその実施が許諾されることを条件としている。
この規格に従うことが,必ずしも,特許権の無償公開を意味するものではないことに注意する必要があ
る。
この規格の一部が,上記に示す以外の特許権等に抵触する可能性がある。経済産業大臣及び日本工業標
準調査会は,このような特許権等に関わる確認について,責任はもたない。
なお,ここで“特許権等”とは,特許権,出願公開後の特許出願又は実用新案権をいう。
日本工業規格 JIS
X 6233:2017
(ISO/IEC 30193:2016)
情報の交換及び蓄積用のデジタル記録媒体−
120 mm 3層(100ギガバイト/ディスク)
BD書換形ディスク
Information technology-
Digitally recorded media for information interchange and storage-
120 mm Triple Layer (100.0 Gbytes per disk) BD Rewritable disk
序文
100社以上が参加するブルーレイディスクアソシエーション(BDA)で作成された,ブルーレイディス
クTMの物理フォーマットをベースに,四つの記録形ディスクのISO/IEC物理規格が作成された。この規
格は,2016年に第2版として発行されたISO/IEC 30193を基に,技術的内容及び構成を変更することなく
作成した日本工業規格である。
BDレコーダブルディスクにビデオの記録再生を行うためには,この国際規格以外にBDMV,BDAVな
どBDAで規定したフォーマットが必要となる。これらのBDA規定の応用関連フォーマット,ファイルシ
ステムフォーマット又は著作権保護フォーマットは,ディスク,情報生成システム,及び情報受領システ
ムに必要である。更に詳細なBDフォーマットに関する情報が必要な場合は,http://www.blu-raydisc.infoを
参照。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,記録容量100ギガバイト(GB)の120 mm書換形光ディスクの機械的特性,物理的特性及
び光学的特性を規定するとともに,そのディスクを用いての情報交換を可能にする記録及び未記録の信号
品質,データのフォーマット及び記録方法について規定する。使用者データは,可逆的方法によって何回
でも記録,読取り及び上書きをすることができる。このディスクを,BD書換形ディスクと称する。
この規格は,次の項目について規定する。
− 一つのタイプ
− 適合条件
− このディスクの使用環境及び保存環境
− データ処理システム間の機械的互換性のためのディスクの機械的特性及び物理的特性
− トラック及びセクタの物理的配置を含むディスク上の情報フォーマット
− エラー訂正符号及び使用した符号化方法
− データ処理システムがディスクからデータの読取りを可能にする,ディスクに記録した信号の特性
2
X 6233:2017 (ISO/IEC 30193:2016)
この規格は,ディスクドライブ間のディスクの互換性を与える。ボリューム及びファイル構造の規格と
ともに,データ処理システム間の完全なデータ互換性を与える。
注記1 この規格では,GBは,109バイトとしている。
注記2 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO/IEC 30193:2016,Information technology−Digitally recorded media for information
interchange and storage−120 mm Triple Layer (100,0 Gbytes per disk) BD Rewritable disk
(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
ことを示す。
2
適合性
2.1
光ディスク
この規格への適合の主張には,製造対象のディスクのタイプを明示する。光ディスクは,製造対象のデ
ィスクのタイプの全ての要求事項に適合する場合に,この規格に適合する。
2.2
製造システム
製造システムは,製造する光ディスクが2.1に適合する場合に,この規格に適合する。
2.3
情報受領システム
情報受領システムは,2.1に適合するタイプの光ディスクを取り扱うことができる場合は,この規格に適
合する。
2.4
互換性表示
製造システム及び情報受領システムがこの規格に適合するというためには,他のサポートする規格の一
覧の表示を含むものとする。この表示は,規格の番号,サポートする光ディスクのタイプ,並びに読取り
だけをサポートするのか,又は記録及び読取り両方をサポートするのかを明示する。
3
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS C 6950-1 情報技術機器−安全性−第1部:一般要求事項
注記 対応国際規格:IEC 60950-1,Information technology equipment−Safety−Part 1: General
requirements
JIS C 60068-2-2 環境試験方法−電気・電子−第2-2部:高温(耐熱性)試験方法(試験記号:B)
注記 対応国際規格:IEC 60068-2-2,Environmental testing−Part 2-2: Tests−Test B: Dry heat
JIS C 60068-2-30 環境試験方法−電気・電子−第2-30部:温湿度サイクル(12+12時間サイクル)
試験方法(試験記号:Db)
注記 対応国際規格:IEC 60068-2-30,Environmental testing−Part 2-30: Tests−Test Db: Damp heat,
cyclic (12 h + 12 h cycle)
JIS K 7204 プラスチック−摩耗輪による摩耗試験方法
注記 対応国際規格:ISO 9352,Plastics−Determination of resistance to wear by abrasive wheels
JIS X 0201 7ビット及び8ビットの情報交換用符号化文字集合
3
X 6233:2017 (ISO/IEC 30193:2016)
注記 対応国際規格:ISO/IEC 646,Information technology−ISO 7-bit coded character set for
information interchange
JIS Z 8901:2006 試験用粉体及び試験用粒子
4
用語及び定義
この規格で用いる主な用語及び定義は,次による。
4.1
アプリケーション(Application)
ビデオ応用のような,著作権保護及び欠陥管理システムのためのディスク上の領域を要求する,BD(4.2)
用に規定した応用。
4.2
BD
約0.1 mmの厚さのカバー層(4.4)及び約1.1 mmの厚さの基板(4.38)をもち,NA=0.85のレンズ及
び波長405 nmのレーザダイオードを用いる光学ピックアップユニットでディスク上にデータを読み書き
するディスク。
注記 ディスクに記録する使用者データは,17PP変調及びLDC+BIS符号でフォーマットされる。
4.3
チャネルビット(Channel bit)
ディスク上の,ピット(4.24)又はマーク(4.18)を使いスペースとの組合せで,2値の“0”又は“1”
を表す要素。
4.4
カバー層(Cover Layer)
ディスクの入射面に一番近い記録層(4.29)を覆う,精密に制御した光学特性をもつ透明な層。
4.5
データゾーンn(Data Zone n)
Ln層(4.17)にある内側ゾーンと外側ゾーンとの間の領域。
4.6
欠陥クラスタ(Defective Cluster)
信頼できない又は訂正できないとして欠陥リストに登録された,使用者データ領域(4.42)中のクラス
タ。
4.7
デジタル総計値,DSV(Digital-Sum Value,DSV)
“1”に設定したチャネルビットに10進数の数値“+1”を,“0”に設定したチャネルビット(4.3)に
10進数の“−1”を割り当てることによって,ビット列から得られた算術和。
4.8
ディスク基準面(Disk reference plane)
その上でディスクのクランプゾーンがクランプされる,理想スピンドルの完全に平らな環状表面で規定
する,回転軸に対して垂直な面。
4.9
エンボスHFM領域(Embossed HFM Area)
4
X 6233:2017 (ISO/IEC 30193:2016)
ディスクの製造中に,HFMグルーブ(4.13)によって情報が保存されたディスク領域。
4.10
入射面(Entrance surface)
光ビームが最初に入射するディスクの表面。
4.11
消去グルーブ(Erased Groove)
トラック(4.39)にOPCアルゴリズムで決めたPE0の消去パワーレベルだけを使い照射することによっ
て消去した空のグルーブ(4.12)。
4.12
グルーブ(Groove)
記録層(4.29)に連なるディスクの溝状構造。
注記 グルーブは,3層ディスクの場合は,一つは基板(4.38)に,他はスペーサ層(4.36)又はカバ
ー層(4.4)に形成できる(図1参照)。グルーブは,トラック(4.39)の位置決めをするために
用いられる。通常,グルーブは,構造体の中にくぼみ又は突起の形をとることがある。グルー
ブがランド(4.16)よりも入射面(4.10)に近い場合(図53参照),記録方法は,“オングルー
ブ記録”と呼ばれる。グルーブがランド(4.16)よりも入射面(4.10)に対して遠い場合,記録
方法は,“イングルーブ記録”と呼ばれる。BD書換形システムでは,次の3種類のグルーブが
ある。
− アドレスをもつ記録領域中のウォブルグルーブ
− 不変制御情報データをもつエンボスHFM領域のHFMグルーブ
− BCAゾーンの無変調の直線グルーブ
4.13
高周波変調グルーブ,HFMグルーブ[HFM (High-Frequency Modulated) Groove]
比較的高い帯域幅の信号で,半径方向に変調されたグルーブ(4.12)。
注記 HFMグルーブは,転写記録する情報のための十分な容量及び転送スピードのデータチャネルを
作っている。
4.14
情報領域(Information Area)
情報を記録できるディスク上の領域。
4.15
情報ゾーン(Information Zone)
情報領域(4.14)で,記録された部分。
4.16
ランド(Land)
連続して渦巻くグルーブ(4.12)の間の記録層(4.29)の表面。
4.17
Ln層(Layer Ln)
数字nで識別される記録層(4.29)。
注記 L(n+1)層は,Ln層よりも入射面に近い。
5
X 6233:2017 (ISO/IEC 30193:2016)
4.18
マーク(Marks)
光学読取りシステムで感知できる結晶化した記録膜中の非晶質領域の形をとることもある記録層(4.29)
の構造。
注記 マーク及びスペース(4.37)のパタンは,ディスク上のデータを表している。
4.19
測定速度(Measurement Velocity)
ディスクを読取中に測定する線速度。
注記 測定速度nxは,基準速度xのn倍を意味している。
4.20
変調ビット(Modulation bit)
通信チャネルで伝送するため又は蓄積システムに蓄積するために,より適するようにデータを変形した
形。
4.21
NRZ又はNRZI変換[NRZ (Non-Return-to-Zero)/NRZI (Non-Return-to-Zero Inverting) conversion]
変調ビットストリームを物理信号に変換する方法。
4.22
埋込み(Padding)
ホストコンピュータが,32セクタから構成される64Kサイズのクラスタに満たないデータを転送してき
て,そのクラスタをデータで満たす必要がある場合に不足のセクタを全て00hのデータで満たす,ドライ
ブの処理方法。
4.23
相変化(Phase Change)
記録層(4.29)の領域に,レーザ光線を照射して加熱し結晶状態から非晶質状態へ変化させる,及びそ
の逆の変化をさせる物理的効果。
4.24
ピット(Pits)
光学読取りシステムで感知できるランド(4.16)表面の,くぼみ又は突起の形をとり得る記録層(4.29)
の構造。
注記 ピット(4.24)及びスペース(4.37)のパタンは,ディスク上のデータを表している。
4.25
偏光(Polarization)
光ビームの電場ベクトルの方向
注記 偏光面は,電場ベクトル及びビームの伝ぱ方向を含む面である。
4.26
プリ記録領域(Pre-recorded Area)
ディスクの転写成形工程が終わった後に通常の記録方法によってディスク製造業者又は供給者が情報を
記録したディスク上の領域。
4.27
保護コート(Protective Coating)
6
X 6233:2017 (ISO/IEC 30193:2016)
きず,その他の危害から保護する機能をもつカバー層(4.4)の上に任意で追加する層。
4.28
読取変更記録(Read-Modify-Write)
クラスタ中の,一つ以上32未満のセクタを書き換えなければならない場合に,32セクタから構成され
る,64Kクラスタの内容を全て読み取り,関係するセクタを置き換えてクラスタ全体を記録して戻す,ド
ライブの工程。
4.29
記録層(Recording Layer)
製造中及び/又は使用中に,その上又は中にデータが記録される,特定の材料の積層膜から構成される,
ディスクの部分。
4.30
記録速度(Recording Velocity)
ディスクを記録する線速度。
注記 記録速度nxは,基準速度x(4.31)のn倍を意味している。
4.31
基準速度(Reference Velocity)
チャネルビットレートが66.000 Mbit/sとなる線速度。
注記 基準速度nxは,基準速度xのn倍を意味している。
4.32
リザーブ(値)(Reserved)
この規格で使用しない予備の値。
注記 将来の規格でこの値は,使用可能となる。
4.33
リザーブ(領域)(Reserved)
使用を規定しないで,互換性は無視し,値はゼロにセットする予備領域。
注記 将来の規格でこの領域の使用を規定し値を設定できる。
4.34
書換領域(Rewritable Area)
製造中及び/又は使用中に,相変化の効果を用いてマーク(4.18)及びスペース(4.37)によって情報が
記録できるディスクの領域。
4.35
セクタ(Sector)
情報ゾーン(4.15)中のアドレスでアクセスできる,最小サイズのトラック(4.39)のデータ部分。
4.36
スペーサ層(Spacer Layer)
二つの記録層(4.29)を分離する,精密に光学特性を制御した透明層。
4.37
スペース(Spaces)
HF信号の流れの接線方向に,ピット(4.24)又はマーク(4.18)の間を分ける領域。
注記 ピット(4.24)又はマーク(4.18)及びスペース(4.37)のパタンは,ディスクのデータを表し
7
X 6233:2017 (ISO/IEC 30193:2016)
ている。
4.38
基板(Substrate)
記録層(4.29)を機械的に支持する,透明又は不透明の層。
4.39
トラック(Track)
グルーブ(4.12)で構成する連続らせんの360°回転分。
4.40
トラックピッチ(Track Pitch)
半径方向に測定した隣接トラック(4.39)のグルーブ(4.12)の中心線間距離。
4.41
透過積層(Transmission Stack)
ディスクの入射面(4.10)と注目する記録層(4.29)との間の全部の層を一つとみた層。
注記 言い換えると,特定の記録層(4.29)の透過積層は,その記録層(4.29)にアクセスする場合,
光ビームが通過する全ての層で構成される。
4.42
使用者データ領域(User-Data Area)
ディスク上の全てのデータゾーンを集めたもので,使用者データが記録できるクラスタだけで構成する
もの。
4.43
バージングルーブ(Virgin Groove)
記録も消去もされたことがないディスク上の未使用グルーブ(4.12)。
4.44
ウォブルグルーブ(Wobbled Groove)
平均した中心線から周期的正弦波で偏移するグルーブ(4.12)。
注記 正弦波偏移を変調することによって,ウォブルはディスクのアドレス情報及び一般的情報を供
給している。
4.45
ゾーン(Zone)
ディスクの環状領域。
5
慣例及び表記法
5.1
用語
5.1.1
末尾の表現
この規格では次に示す語は,特別の意味をもつ。
− …(し)てもよい。:
任意の動作又は機能を示す。
− 任意:
実施してもよい又はしなくてもよい機能を示す。実施する場合は,
その機能は規定したとおりにする。
− …(し)なければならない。: 必須の動作又は機能でこの規定に適合するためには実施しなければ
…する。
ならないことを示す。
8
X 6233:2017 (ISO/IEC 30193:2016)
…とする。
…による。
注記 shallで書かれた要求事項文は,例えば,“〜する”という能動形で翻訳される。一方,be+
過去分詞,be+現在分詞(現在進行形)又は動詞で書かれた説明文を能動文として“〜する”
の能動形で翻訳すると,要求事項を示した文と説明文とを区別できなくなるという課題が生
じる。そのために,この規格では,次の表現としている。
− shall:〜(と)するなどの能動形の表現としている。
− be+過去分詞は,受動形の表現とし,be+現在分詞(現在進行形)又は動詞は,“〜となっ
ている”などの状況説明の表現としている。
− …することが望ましい。:
任意の動作又は機能を示すが,その実施が強く望まれる。
5.1.2
グループのレベル
上位階層のグループを作ることができる形に集められたデータが再配置される。この動作が何回も繰り
返される。グループの階層を明確にするために,この規格では次の階層を使用している。
− フレーム(Frame):最下層のグループ。通常フレームは,複数バイトの情報をもつ。
− ブロック(Block):第2順位のグループ。通常ブロックは,幾つかのフレームで構成する。
− クラスタ(Cluster):最上位順位のグループ。クラスタは,幾つかのブロックで構成する。
− フラグメント(Fragment)応用に適用できるレベルのグループ。相応量のデータが(固定した個数の)
連続するクラスタに割り付けられる。
5.2
数値表示
測定値xmeasuredは,対応する規定されている値xの最下位桁に丸めておいてからxと比べてもよい。
例
− 規格が
01
.0
02
.0
26
.1
+−
=
x
(公称値=1.26で,正の許容誤差が+0.01,かつ,負の許容誤差が−0.02)
の場合,次の範囲の測定値が,この規格を満たす。
1.235≦xmeasured<1.275
注記 この規格において,正又は負の許容誤差がゼロとなる場合についても,同様の考え方とし,ゼ
ロは,小数点以下の有効数字を示す表記としている。
− 規格がx≦0.3の場合,次の測定値が,この規格を満たす(0.30<xmeasured<0.35の測定値に対
し丸めを適用しxmeasured=0.3となる。)。
xmeasured<0.3
− 規格がx<0.3の場合,
− 次の測定値が,この規格を満たす(丸めは必要ない。)。
xmeasured=0.299
− 次に示す測定値は,この規格を満たさない。
xmeasured=0.3
規定されている値が“最大x単位”又は“最小x単位”と示されている場合は,この規定されている値
との比較に先立って測定値を丸めてはならない。この方法で決めた測定値は,xの値そのものが規定した
限度値を逸脱してはならない。
例
− 規格が最大0.3 mmの場合,
− 測定値0.300 mmは,この規格を満たす。
9
X 6233:2017 (ISO/IEC 30193:2016)
− 測定値0.301 mmは,この規格を満たさない。
− 規格が最小3 dBの場合,
− 測定値3.00 dBは,この規格を満たす。
− 測定値2.99 dBは,この規格を満たさない。
10進数は,0〜9の数字で表す。小数点は,“.”である。大きな数値は,空白を入れて群で分けることが
できる。
16進数は,括弧でくくるか又は最後に小文字の“h”を付けた0〜9のアラビア数字及びA〜Fのアルフ
ァベットで表される。16進数中の文字xは,任意の0〜9又はA〜Fを表す。
2進数及びビットパタンは,左側を最上位ビットとする“0”及び“1”の一連で表される。2進数中の文
字xは,“0”又は“1”のいずれかで表される。
2進数の負の数値は,2の補数で表される。
nビットのビットパタンで,ビットb(n−1)は最上位ビット(msb)とし,ビットb0は最下位ビット(lsb)
とする。ビットb(n−1)を最初に記録する。
ビットパタン中で連続して中断のないm個の“0”は,[0m]で表記できる。
ビットの設定は,“0”及び“1”で示す。
バイトで構成するデータフィールドで,バイト0とする最上位バイト(MSB)を最初に記録し,最下位
バイト(LSB)を最後に記録する。
8nビットのフィールドで,ビットb(8n−1)は最上位ビットとし,ビットb0は最下位ビットとする。ビット
b(8n−1)を最初に記録する。
ニブルで構成するデータフィールドで,ニブル0とする最上位ニブルを最初に記録し,最下位ニブルを
最後に記録する。
4nビットのフィールドで,ビットb(4n−1)は最上位ビット(msb)とし,ビットb0は最下位ビット(lsb)
とする。ビットb(4n−1)を最初に記録する。
値の範囲はx〜yで表され,このときx及びyはその範囲に含まれる。
一連の整数は,i .. jで表される。それは,i及びjを含むiとjとの間の全ての数値を含む(例えば,k=
0 ..7)。変化幅の大きさが1ではない場合は,i,(i+変化幅) .. jと表される(例えば,変化幅が3の場合に
k=1,4 .. 16となる。)。
一群の要素は,Param m .. n又はPm .. Pnで表される。その群は,m及びnを含むmとnとの間の添字を
もつ全ての要素を含む(例えば,バイト16 .. 31,ビット7 .. 4,Add0 .. Add256)。
xがyにほぼ等しい場合,
y
x≈と表される。
5.3
整数計算法
div(n,d)は,nをdで除した商を表す。
mod(n,d)は,nをdで除した余りを表し,次の式となる。
mod(n,d)=n−d×div(n,d)
例 div(+11,+3)=+3 div(−11,+3)=−3 div(+11,−3)=−3 div(−11,−3)=+3
mod(+11,+3)=+2 mod(−11,+3)=−2 mod(+11,−3)=+2 mod(−11,−3)=−2
5.4
英語名称
特定のものを示す英語名称,例えば,特定のトラック,フィールドなどの英語名称は,頭文字に大文字
が当てられる。この規格のために明示的に意味を規定した英語名称も,大文字が当てられる。
10
X 6233:2017 (ISO/IEC 30193:2016)
6
略語
ac:
交流(alternating current)
ADIP:
プリグルーブのアドレス(Address In Pre-Groove)
APC:
自動パワー制御(Automatic Power Control)
AU:
アドレスユニット(Address Unit)
AUN:
アドレスユニット番号(Address-Unit Number)
BCA:
バーストカッティング領域(Burst-Cutting Area)
BIS:
バースト検出サブコード(Burst-Indicating Subcode)
BPF:
帯域通過フィルタ(Band-Pass Filter)
CAV:
角速度一定(方式)(Constant Angular Velocity)
cbs:
チャネルビット(channel bits)
CNR:
キャリアノイズ比(Carrier-to-Noise Ratio)
dc:
直流(direct current)
DCZ:
ドライブ校正ゾーン(Drive-Calibration Zone)
DDS:
ディスク定義構造(Disk-Definition Structure)
DFL:
欠陥リスト(Defect List)
DI:
ディスク情報(Disk Information)
DL:
2層(Dual Layer)
DMA:
ディスク管理領域(Disk-Management Area)
DMS:
ディスク管理構造(Disk-Management Structure)
DOW:
直接上書き記録(Direct OverWrite)
DOW(n): n回上書き記録(the n-th Overwrite)
DOW(0): 初期記録(the initial recording)
DSV:
デジタル総計値(Digital-Sum Value)
DWP:
ディスク記録保護(Disk Write Protect)
EB:
緊急制動(Emergency Brake)
ECC:
エラー訂正符号(Error-Correction Code)
EDC:
エラー検出符号(Error-Detection Code)
EQ:
波形等価器(Equalizer)
FAA:
(データゾーンの)先頭ADIPアドレス[First ADIP Address (of Data Zone)]
FS:
フレーム同期(Frame Sync)
FWHM: 半値幅(Full Width at Half Maximum)
HF:
高周波(High Frequency)
HFM:
高周波変調の(High-Frequency Modulated)
HMW:
高調波変調波(Harmonic-Modulated Wave)
HPF:
高域通過フィルタ(High-Pass Filter)
HTL:
高反射率から低反射率(High-To-Low)
LAA:
(データゾーンの)最終ADIPアドレス[Last ADIP Address (of Data Zone)]
LDC:
長距離符号(Long-Distance Code)
LPF:
低域通過フィルタ(Low-Pass Filter)
11
X 6233:2017 (ISO/IEC 30193:2016)
LSB:
最下位バイト(Least-Significant Byte)
lsb:
最下位ビット(least significant bit)
LSN:
論理セクタ番号(Logical-Sector Number)
MM:
MSKマーク(MSK Mark)
MSB:
最上位バイト(Most-Significant Byte)
ms:
ミリ秒(millisecond)
msb:
最上位ビット(most-significant bit)
MSK:
最小シフトキー(Minimum-Shift Keying)
MW:
単一周波数ウォブル(Monotone Wobble)
NA:
開口数(Numerical Aperture)
NHWS: 正規化HFMウォブル信号(Normalized HFM-Wobble Signal)
NRD:
再配置されない欠陥(Non-Re-allocatable Defect)
NRZ:
NRZ(Non-Return-to-Zero)
NRZI:
NRZI(Non-Return-to-Zero Inverting)
ns:
ナノ秒(nanosecond)
NWL:
公称ウォブル長(Nominal Wobble Length)
NWS:
正規化ウォブル信号(Normalized Wobble Signal)
OPU:
光ピックアップユニット(Optical Pick-up Unit)
PAA:
物理ADIPアドレス(Physical ADIP Address)
PAC:
物理アクセス制御(Physical-Access Control)
PBA:
推定記録不可領域(Possibly Bad Area)
PIC:
不変情報・制御データ(Permanent Information and Control data)
PLL:
位相同期ループ(Phase-Lock Loop)
PoA:
ポストアンブル(Post-amble)
PP:
プッシュプル(Push-Pull)
pp:
両ピーク(peak-to-peak)
PrA:
プリアンブル(Pre-amble)
ps:
ピコ秒(picosecond)
PSN:
物理セクタ番号(Physical-Sector Number)
RH:
相対湿度(Relative Humidity)
RMTR: 最小反転ラン長繰返し(Repeated Minimum-Transition Run-length)
R-M-W: 読取変更記録(Read-Modify-Write)
RS:
リードソロモン(符号)[Reed-Solomon(code)]
RT:
相対厚さ(Relative Thickness)
RUB:
記録ユニットブロック(Recording-Unit Block)
RхIn:
反射率×In解像度(Reflectivity × In Resolution)
RхM:
反射率×変調度(Reflectivity × Modulation)
SER:
シンボルエラー率(Symbol Error Rate)
SHD:
2次高調波ひずみ(Second-Harmonic Distortion)
SHL:
2次高調波レベル(Second-Harmonic Level)
12
X 6233:2017 (ISO/IEC 30193:2016)
SL:
単層(Single Layer)
SNR:
信号ノイズ比(Signal-to-Noise Ratio)
SPS:
記録開始位置移動(Start-Position Shift)
STW:
のこぎり波ウォブル(Saw-Tooth Wobble)
Sync:
同期(Synchronization)
TL:
3層(Triple Layer)
TP:
トラックピッチ(Track Pitch)
TS:
透過積層(Transmission Stack)
Vref:
基準速度(Reference Velocity)
wbs:
ウォブル(wobbles)
WP:
記録保護(Write Protect)
7
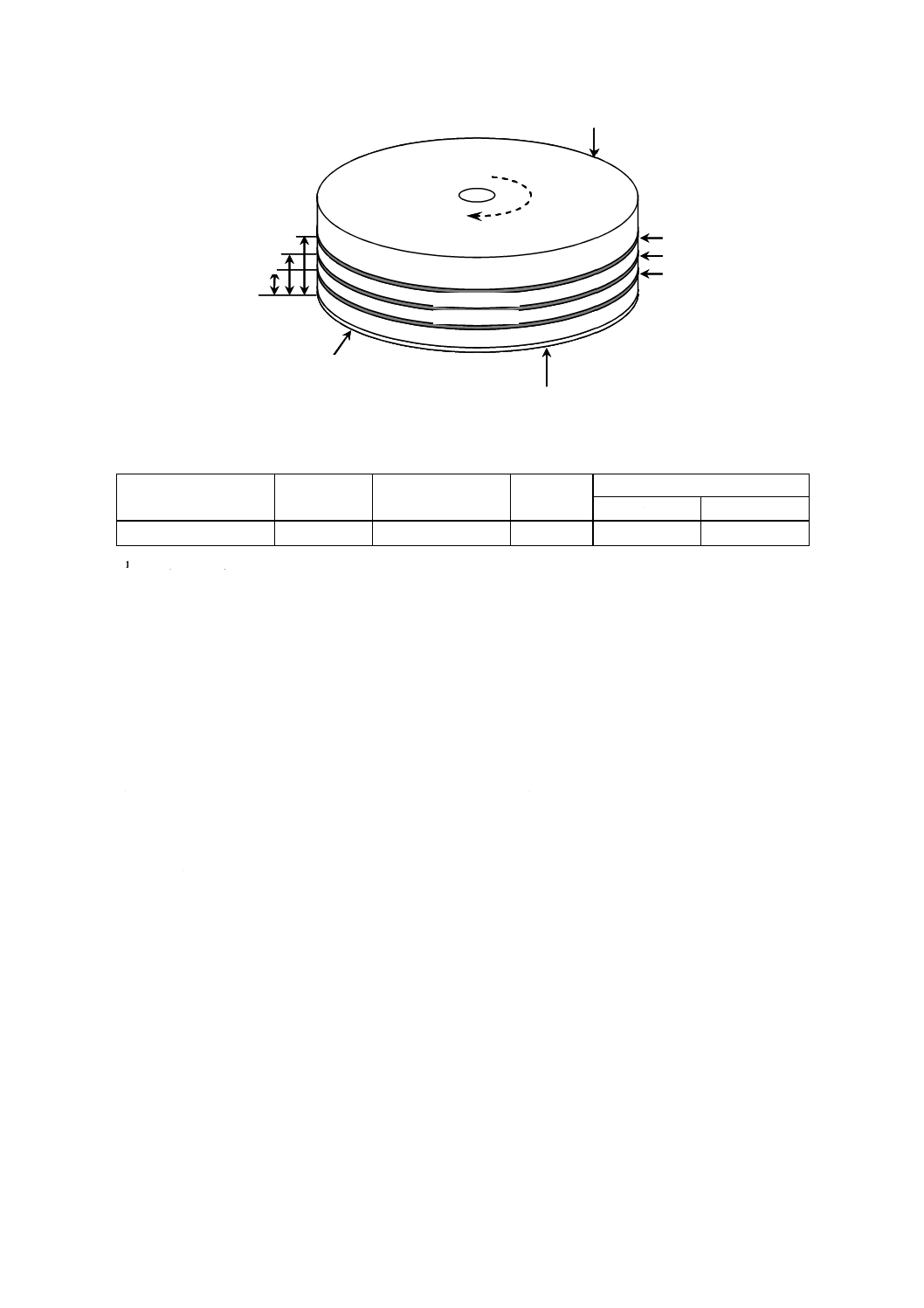
ディスクの概要
この規格の主題であるディスクは,公称厚さ約1.1 mmの基板で構成される。クランプは,クランプゾ
ーンで行われる。
記録層は,幾つかの層で構成される。三つの記録層は,基板からの順番で厚さが各々約25.0 μm及び18.0
μmの二つの透明なスペーサ層で分離している。この記録層の上に,光学特性を精密に規定した約57.0 μm
の透明なカバー層が設けられる(図1参照)。
ディスクの記録層は,相変化記録技術を用いることができる。記録した非晶質のマークは,未記録層の
結晶スペースよりも低い反射率になる。
この規格は,そのようなディスクの一つのタイプを規定する。このタイプは,タイプTLで,容量は,
100.0 GBである。
きずへの耐久性を高めるために,カバー層は,ハードコートを任意に追加できる。
データは,ディスクに高パワーの集光した光ビームを用いて,記録材料の非晶質状態と結晶状態との間
の相変化効果によって,結晶化した記録層の中に非晶質マークとして記録及び上書きができる。
データは,低パワーの集光した光ビームによって,非晶質状態及び結晶状態の反射率の違いを用いて読
み取ることができる。
どの記録層がアクセスされたかによって,光ビームは,透明なカバー層を通過するか,又は透明なカバ
ー層,半透明の記録層及び透明なスペーサ層を通過する。
参照のために,ある記録層にアクセスする場合,光ビームが通過する全ての層をその記録層に対する透
過積層という。
データは,グルーブ上に記録される。アドレスで変調されたグルーブのウォブルは,記録中の回転速度
制御及び位置出しのためのシステムに使うことができる。
13
X 6233:2017 (ISO/IEC 30193:2016)
カバー層
基板
回転方向
(保護コート)
スペーサ層1
スペーサ層2
透過積層0
透過積層1
光ビーム入射面
記録層L0
記録層L1
記録層L2
上面
透過積層2
カバー層
基板
回転方向
(保護コート)
スペーサ層1
スペーサ層2
透過積層0
透過積層1
光ビーム入射面
記録層L0
記録層L1
記録層L2
上面
透過積層2
図1−3層BD書換形ディスクの概略図
図2に,記録速度の要求事項を示す。
記録速度
ディスクタイプ゚
マーク極性
プッシュプル極性
層タイプ
1x
2x
タイプTL
HTL
オングルーブ
TL
-
m
m: 必須とする。
- : この規格では許されない。
L0層,L1層及びL2層のグルーブ極性は,全てオングルーブとする。
図2−ディスクタイプの記録速度要求事項
8
一般要求事項
8.1
環境条件
8.1.1
試験環境条件
8.1.1.1
一般
ディスクがこの規格に適合するかどうかの試験を行う間,ディスクは,次の試験環境条件下に置く。試
験環境条件は,ディスク近傍の環境条件で,次による。
− 温度:
(23±2) ℃
− 相対湿度: 45 %〜55 %
− 大気圧: 86 kPa〜106 kPa
ディスクに結露があってはならない。ディスクは,測定前に十分な時間この環境下に置いておく。
8.1.1.2
動作環境の急激変化の試験条件
幾つかのパラメタは,動作環境条件の変化に影響を受けやすい。次の二つの条件の試験を行う。ディス
クは,いずれの場合も,新しい環境条件に順応する間においても,規格の要求する事項を満たす。
a) 温度を一定に保ちながら相対湿度を急変化させる。
相対湿度=90 %,温度=25 ℃ → 相対湿度=45 %,温度=25 ℃[図3のa)参照]。
b) 絶対湿度を一定(約10.4 g/m3)に保ちながら温度を急変化させる。
温度=25 ℃,相対湿度=45 % → 温度=55 ℃,相対湿度=10 %[図3のb)参照]。
14
X 6233:2017 (ISO/IEC 30193:2016)
8.1.2
動作環境条件
この規格に適合するディスクは,動作環境条件で規定する環境条件の範囲でデータ交換ができる。動作
環境条件は,ディスク近傍の環境条件で,次による。
− 温度:
5 ℃〜55 ℃
− 相対湿度: 3 %〜90 %
− 絶対湿度: 0.5 g/m3〜30 g/m3
− 大気圧:
60 kPa〜106 kPa
ディスクに結露があってはならない。ディスクが上記の環境条件から外れる条件にさらされていた場合
は,使用前に少なくとも2時間以上動作環境条件下で慣らす。
-40
-20
0
20
40
60
80
100
温度℃
100
80
60
40
20
0
絶対湿度g/m3
0.1
0.5
1
10
100
30
b)
a)
相
対
湿
度
%
図3−動作環境条件
8.1.3
保存環境条件
8.1.3.1
一般
保存環境条件は,ディスクの近傍の環境条件で,次による。
− 温度:
−10 ℃〜55 ℃
− 相対湿度:
5 %〜90 %
− 絶対湿度:
1 g/m3〜30 g/m3
− 大気圧:
60 kPa〜106 kPa
15
X 6233:2017 (ISO/IEC 30193:2016)
− 温度変化:
最大15 ℃/h
− 相対湿度変化: 最大10 %/h
8.1.3.2
気象保存条件
ディスクの環境での安定度を検査するために,次の環境条件にディスクを置く。
− JIS C 60068-2-2による高温(耐熱性)試験方法(試験記号:B)
温度(T)=55 ℃,相対湿度(RH)=50 %で96時間
− JIS C 60068-2-30による温湿度サイクル試験方法(試験記号:Db)
上限温度=40 ℃,下限温度=25 ℃,RH=95 %,サイクル時間=(12+12)時間,6サイクル
これらの環境条件にディスクをさらした後で,測定の前に24時間又は48時間の回復時間を置くことが
望ましい。
8.1.4
輸送
8.1.4.1
一般
輸送は,広い範囲の温度及び湿度の変動,異なる所要時間,多くの輸送手段並びに世界のあらゆる地域
で行われているため,輸送又はこん包の必須条件を規定することは不可能である。
8.1.4.2
包装
8.1.4.2.1
一般
包装の形は,送り手と受け手との間で合意をとることが望ましい。合意がない場合は,送り手の責任で
ある。次の細分箇条に示す障害を考慮することが望ましい。
8.1.4.2.2
温度及び湿度
緩衝材及び包装は,見込んだ輸送期間中保存条件を維持するように設計することが望ましい。
8.1.4.2.3
負荷及び振動の衝撃
a) ディスクの変形を起こすような機械的負荷は避ける。
b) ディスクの落下は避ける。
c) 衝撃を吸収する材料をもつ硬い箱に,ディスクを収納することが望ましい。
d) 外箱は,中がきれいで,汚れ及び湿度の侵入を防ぐ密閉構造をもつことが望ましい。
8.2
安全性
ディスクは,意図する取扱い方法で使われる,又は情報システムの中で予測される範囲内で使用される
場合には,JIS C 6950-1の要求事項を満たす。
8.3
難燃性
ディスクは,JIS C 6950-1に規定するHB材料又はそれ以上の難燃性区分の材料で作る。
9
基準ドライブ
9.1
一般
この規定の適合確認のための光学測定及び電気信号測定には,基準ドライブを用いる。この基準ドライ
ブの重要部品は,この箇条で規定する。
9.2
測定条件
ほかに規定しない限り,ディスクは,8.1.1で規定した試験環境条件下で測定する。
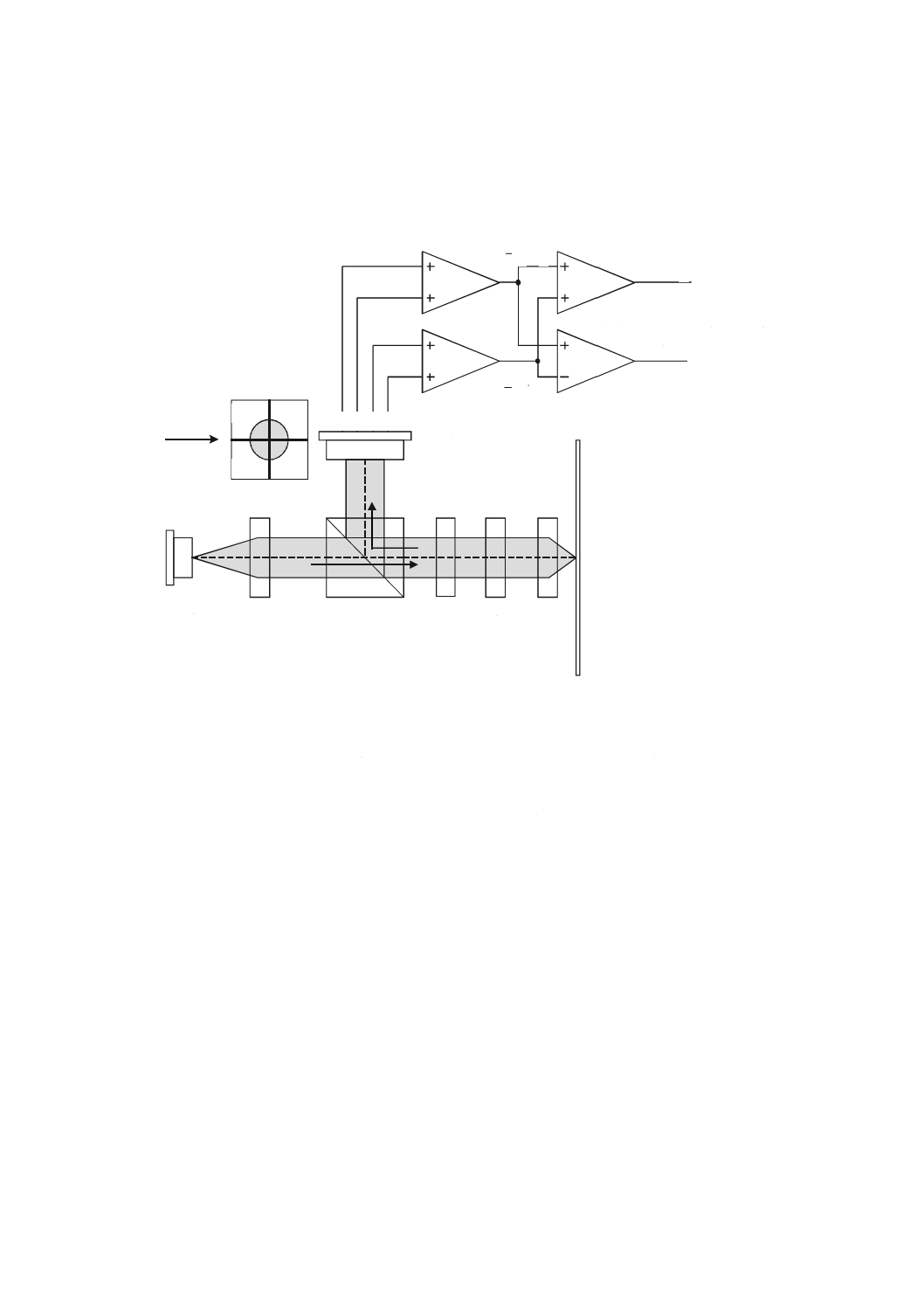
9.3
光学システム
規定した記録及び読取りのパラメタの測定に用いる基準ドライブの光学システムの基本構成を図4に示
16
X 6233:2017 (ISO/IEC 30193:2016)
す。性能が図4の構成と同じ場合,異なる部品及び部品の異なる配置は許容される。
光学システムは,測定を行う半径で光ビームが集光する記録層に対して,集光した光ビームが垂直にな
るように配置する。
光学システムは,測定精度に影響が出ないようにディスク入射面で反射した光の検出光を最小にする。
レーザ
ダイオード
コリメータ
レンズ
偏光
ビームスプリッタ
1/4
波長板
対物
レンズ
球面収差
補正
ディスク
4分割
フォトディテクタ
Ia
Ib
Id
Ic
トラック接線方向
高周波信号読取りチャネル
半径方向プッシュプル読取りチャネル
IaIbIcId
I = I + I
1
a
b
I + I
1 2
I −I
1
2
I = I + I
2 c d
図4−基準ドライブの光学システム
レーザダイオードから来る入射光と光ディスクで反射しフォトディテクタに行く反射光とを分離するた
めに,偏光ビームスプリッタ及び1/4波長板を用いる。偏光ビームスプリッタを透過する光ビームは,100:1
以上のPS強度比にする。
光ビームは,測定を行う半径で光ビームが集光する記録層の透過積層の厚さに対して,集光した光ビー
ムの収差(SA)が最小になるように調整する。
多層ディスクの一つの層の測定中に他層から反射された光が影響を与える可能性がある。この影響に対
処するために,フォトディテクタの寸法を制限する。ディテクタの縦横の長さは,M×5 μmよりも小さく
する。
ここに,Mは,ディスクから4分割フォトディテクタ近傍の共役面までの光学拡大率である。
しかしながら,タイプTLディスクでは,フォトディテクタの縦横の長さをM×5 μm未満にしても影響
が無視できない。したがって,測定した反射率は,B.4に示す方法によって補正する。
9.4
光ビーム
データの記録及び読取りに用いる集光した光ビームの特性は,次による。
− レーザビームの波長(λ):
(405±5) nm
− 偏光:
円偏光
− 開口数(NA):
0.85±0.01
− 最大強度に対する対物レンズの瞳の縁での光強度:
17
X 6233:2017 (ISO/IEC 30193:2016)
− 接線方向:
(60±5) %
− 半径方向:
(65±5) %
− 記録層での最大波面収差(チルト及び球面収差補正後):
0.033×λ rms
− 次の式で定義するレーザダイオードの最大相対ノイズ強度: −125 dB/Hz
×
dc
m
log
10
P
P
ここに,
Pm: 交流光パワー密度/Hz
Pdc: 直流光パワー
− 正規化ディテクタサイズ:
S / M2≦25 μm2
ここに,
S: 4分割フォトディテクタの全面積
− ディスク試験読取りパワー(平均):
− L0層及びL1層:
(1.44±0.10) mW
− L2層:
(1.00±0.10) mW
− 記録パワー及びパルスの形:
29.4.2及び附属書F参照
9.5
高周波(HF)読取りチャネル
HF読取りチャネルによって,使用者データを読み取ることができる信号が供給される。この信号は,4
分割フォトディテクタの電流の総和(Ia+Ib+Ic+Id)で生成される。これらの電流は,相変化効果による
マークとスペースとの反射率の違いによって使用者が記録した情報を使って変調される。
フォトディテクタを含むHF読取りチャネルは,直流から44 MHzまでの周波数範囲で直流利得に対し
て±1.0 dB以内で平たんな振幅特性とする。群遅延変動は,6 MHz〜44 MHzの周波数範囲で最大1.5 ns pp
とする。
i-MLSE測定における信号処理部,ビタビ復号器,PLLなどの特性は,附属書Hに規定する。
9.6
半径方向のプッシュプル(PP)読取りチャネル
半径方向のPP読取りチャネルによって,光ビームの半径方向のトラッキング制御用のトラッキングエ
ラー信号が供給される。また,グルーブで変調された情報を読み取るウォブル信号が供給される。
半径方向のトラッキングエラーは,対物レンズ瞳の出口の半分ともう半分との光量の差に関連した信号
[(Ia+Ib)−(Ic+Id)]として生成される。
半径方向のPP読取りチャネル内のフォトディテクタを含む読取増幅器は,直流から16 MHzまでの周波
数範囲で直流利得に対して± 1.0 dB以内で平たんな振幅特性とする。
9.7
ディスクのクランプ
ディスクは,パラメタの測定中にクランプゾーン(10.6参照)のほぼ全域を覆う二つの同心円環の間で
クランプする。上部のクランプ領域は,下部のクランプ領域と同じ内径及び外径とする(図5参照)。
クランプは,dinとdoutとの間とし,次による。
din=(23.5±0.5) mm
dout=(32.5±0.5) mm
全クランプ力は,F1とし,次による。
F1=2.0 N±0.5 N
このクランプ力と,ディスクの中心孔の縁にテーパコーンによって加わるチャック力F2との間で生じる
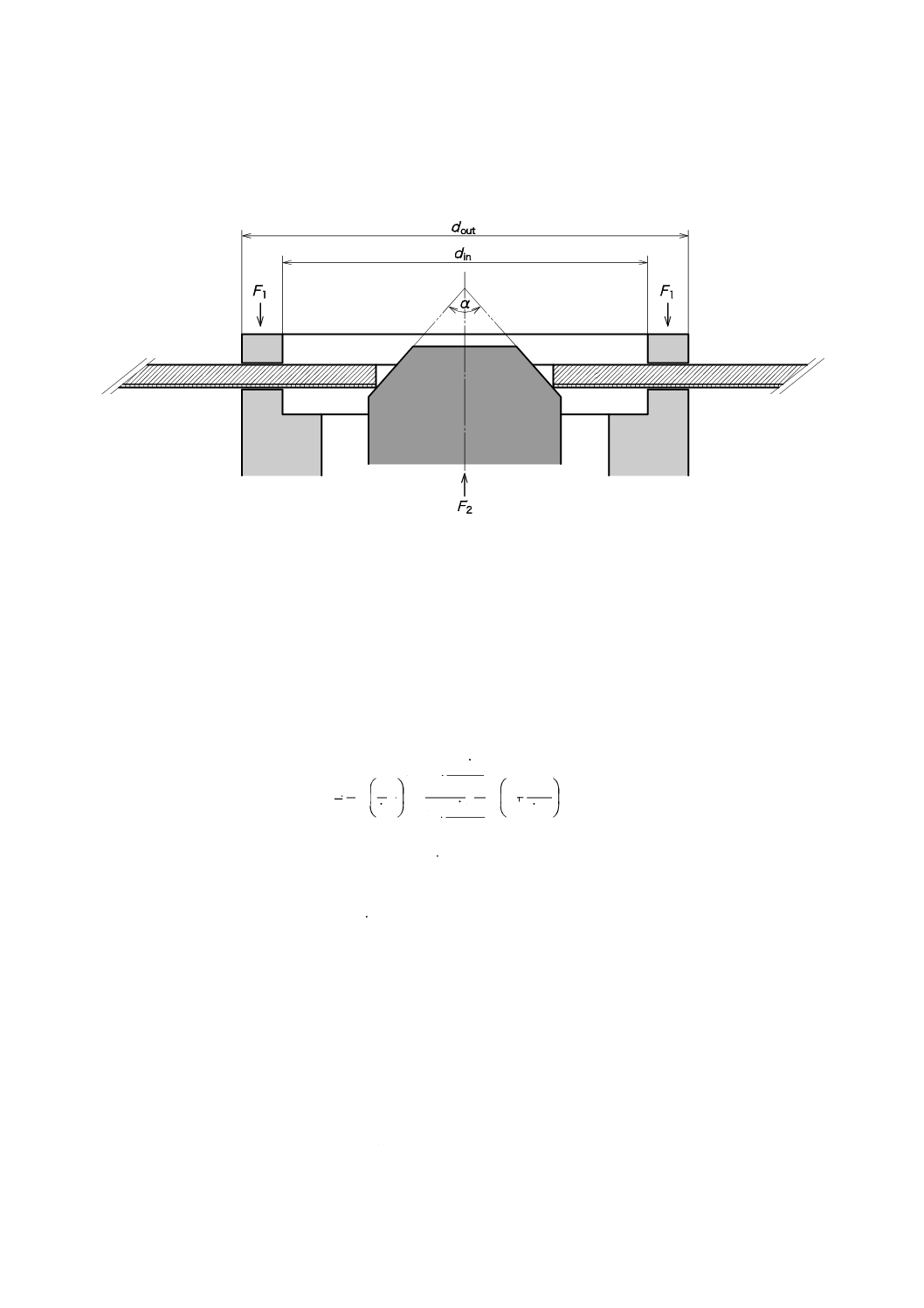
18
X 6233:2017 (ISO/IEC 30193:2016)
力のモーメントによるディスクの反りを防ぐために,F2は,0.5 Nを超えてはならない(図5参照)。
ディスクの中心位置決めに用いるテーパコーンの頂角αは,次による。
α=40.0°±0.5°
図5−測定のクランプ条件
9.8
ディスクの回転及び測定速度
ディスクの回転方向は,対物レンズから見て反時計方向とする。
全ての規定は,特に指定がない限り基準速度の2倍に等しい接線方向の読取速度に基づいている。この
速度は,一定線速度7.375 m/sに相当している。
9.9
正規化サーボ伝達関数
軸方向及び半径方向のトラッキングのサーボシステムを規定するために,関数HN(iω)が用いられる。
それは,基準サーボの開ループ伝達関数Hの公称値を規定し,次による。
()
K
ω
ω
ω
ω
ω
ω
ω
ω
ω
H
+
×
×
+
×
+
×
×
=
i
1
3
i
1
i
3
1
i
3
1
i
int
0
0
2
0
N
ここに,
ω: 2π×f
ω0: 2π×f0
ωint: 2π×fint
i: i2=−1
K: 積分の次数
f0は,開ループ伝達関数の0 dB交差周波数である。
サーボの位相進み遅れ回路の交差周波数は,次による。
− 進み交差周波数:f1=f0 / 3
− 遅れ交差周波数:f2=f0×3
式の中の[1+ωint/(iω)]の項は,積分関数を表している。そのような積分関数及び同等の関数は,特にディ
スクの回転周波数及びその高次周波数による偏移による低域成分を更に低減するために使用される。
また,fintは,積分関数の3 dB交差周波数である。
19
X 6233:2017 (ISO/IEC 30193:2016)
もう一つの重要な周波数は,fxであり,その周波数では,振幅が最大許容残留トラッキングエラーemax
と等しい正弦波偏移が,最大加速度期待値αmaxに合致している。この周波数は,次による。
max
max
π
2
1
e
α
fx=
ディスクのトラッキングエラー信号は,幾分大きい変動があるため,各基準サーボループに入力するト
ラッキングエラー信号は,規定した帯域幅を保証するために決めた値に調整する(結果として全体のルー
プゲインを校正することになる。)。
9.10 軸方向トラッキングの測定速度及び基準サーボ
9.10.1 一般
軸方向残留エラーの測定速度は,記録速度の半分の3.688 m/sとする。
9.10.2 軸方向トラッキングの基準サーボ
軸方向のトラッキング基準サーボの開ループ伝達関数H(f)について│1+H(f)│は,図6に示す影を付けた
領域内で示される。
100
80
40
20
0
77.0
97.0
利得(dB)
1
10
100
1 10
×
3
10 10
×
3
100 10
×
3
周波数(Hz)
36
54.6
52.9
図6−軸方向のトラッキングサーボ特性
│1+H(f)│の境界を決めるために使うHN(f)の0 dB交差周波数f0(9.9参照)は,次による。
kHz
2.3
10
55
0.6
25
.1
3
π
2
1
3
π
2
1
9
max
max
0
=
×
×
×
=
×
×
=
−
e
α
m
f
ここに, αmax: 局所的な外乱による最大加速度の期待値。ここでは,αmax=6.0
m/s2とする。
m: サーボマージンとしての係数。ここでは,m=1.25とする。
emax: m×αmaxによるトラッキングエラー。ここでは,emax=55 nmと
する。
積分は1次積分(K=1)とし,交差周波数は,次による。
20
X 6233:2017 (ISO/IEC 30193:2016)
fint=100 Hz
│1+H(f)│の境界は,次のa)〜c)による。
a) 100 Hz〜10 kHzの帯域で
)
(
1
1.1
)
(
1
)
(
1
9.0
N
N
f
H
f
H
f
H
+
×
+
+
×
≦
≦
b) 36 Hz〜100 Hzの帯域で
78
.4
int
int
N
N
)
(
1
1.1
)
(
1
)
(
1
9.0
×
+
×
+
+
×
f
f
f
H
f
H
f
H
≦
≦
c) 36 Hzまでの帯域で
dB
97.0
)
(
1
dB
77.0
≦
≦
f
H
+
周波数fxは,次による。
kHz
6.1
10
55
0.6
π
2
1
π
2
1
9
max
max
x
≈
×
=
=
−
e
α
f
9.11 半径方向トラッキングの測定速度及び基準サーボ
9.11.1 一般
半径方向の残留エラーの測定速度は,記録速度の半分の3.688 m/sとする。
9.11.2 半径方向のトラッキング基準サーボ
半径方向のトラッキング基準サーボの開ループ伝達関数H(f)について│1+H(f)│は,図7に示す影を付け
た領域内で示される。
100
80
40
20
0
79.0
99.0
利得(dB)
1
10
100
1 10
×
3
10 10
×
3
100 10
×
3
周波数(Hz)
36
56.6
54.9
図7−半径方向のトラッキングサーボ特性
│1+H(f)│の境界を決めるために使うHN(f)の0 dB交差周波数f0(9.9参照)は,次による。
21
X 6233:2017 (ISO/IEC 30193:2016)
kHz
6.3
10
16
2.2
25
.1
3
π
2
1
3
π
2
1
9
max
max
0
=
×
×
×
=
×
×
=
−
e
α
m
f
ここに, αmax: 局所的な外乱による最大加速度の期待値。ここでは,αmax=2.2
m/s2とする。
m: サーボマージンとしての係数。ここでは,m=1.25とする。
emax: m×αmaxによるトラッキングエラー。ここでは,emax=16 nmと
する。
積分の3 dB交差周波数fintは,次による。
fint=100 Hz
│1+H(f)│の境界は,次のa)〜c)による。
a) 100 Hz〜10 kHzの帯域で
)
(
1
1.1
)
(
1
)
(
1
9.0
N
N
f
H
f
H
f
H
+
×
+
+
×
≦
≦
b) 36 Hz〜100 Hzの帯域で
78
.4
int
int
N
N
)
(
1
1.1
)
(
1
)
(
1
9.0
×
+
×
+
+
×
f
f
f
H
f
H
f
H
≦
≦
c) 36 Hzまでの帯域で
dB
99.0
)
(
1
dB
79.0
≦
≦
f
H
+
周波数fxは,次による。
kHz
8.1
10
16
2.2
π
2
1
π
2
1
9
max
max
x
≈
×
=
=
−
e
α
f
10 寸法特性
10.1 一般
寸法特性は,ディスクの互換性及び適合をとる上で必須とみなされるパラメタについて規定する。設計
の自由度があるところは,規定した要素の基本特性だけ示す。図8にまとめて,寸法要求事項を示してい
る。ディスクの各部分について,中心孔〜外周リムを規定している。
図8−ディスク寸法の全体概要
22
X 6233:2017 (ISO/IEC 30193:2016)
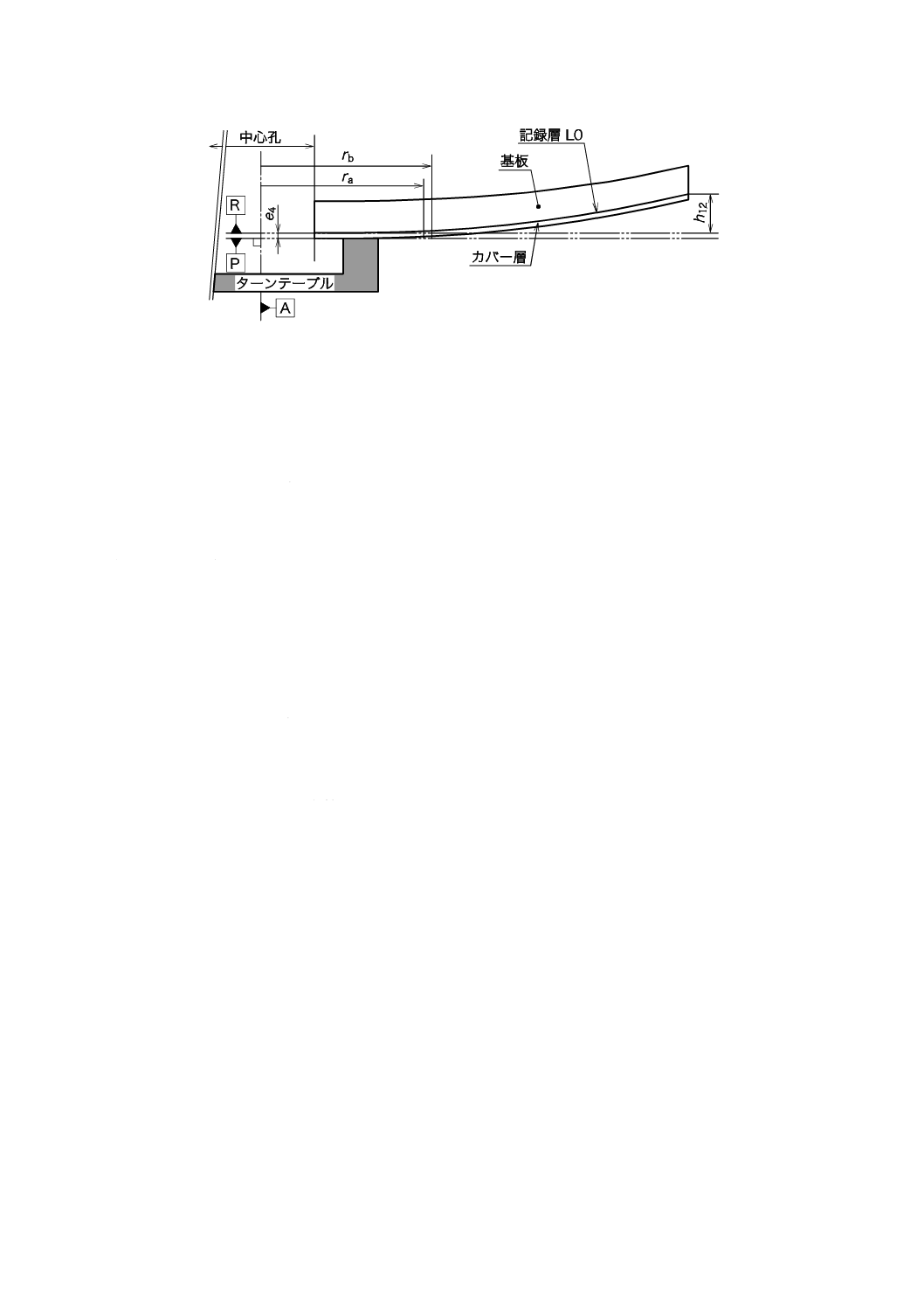
10.2 ディスクの基準面及び基準軸
(ディスクの基準面については,図9及び図10も参照)
ディスク基準面Pは,ディスクの読取面側のクランプゾーン表面(10.6参照)で決まる平面である。
ディスク基準面Qは,ディスクの基板側のクランプゾーン表面で決まる平面である。
基準軸Aは,ディスク基準面Pに垂直で中心孔の中心を通る軸である。
ディスク基準面Rは,ディスク基準面Pに平行な平面である。ディスク基準面Rは,ディスク基準面P
よりもディスクの内側にe4の距離とし(図9及び図10参照),次による。
e4=(100±25) μm
ディスク基準面Rは,L0層の半径raと半径rbとの間の平均位置で記録層L0(記録層L0は,3層ディス
クの最も奥の記録層である。)と交差し,次による。
ra=23 mm
rb=24 mm
図9−ディスク寸法の詳細
23
X 6233:2017 (ISO/IEC 30193:2016)
図10−ディスク基準面P及びR並びに記録層L0の詳細
10.3 全体寸法
ディスクの外径はd1とし(図8参照),次による。
d1=(120.0±0.3) mm
中心孔の直径はd2とし(図8参照),次による。
d2=
10
.0
00
.0
00
.
15
+
mm
読取面側の中心孔のエッジに,ばりがあってはならない。
読取面側の中心孔のエッジは,ディスクの中心位置決めの基準であり,丸めるか面取りをする。丸めの
半径はreとし,次による。
最大re=0.1 mm
面取りの高さは,第1遷移領域の下面よりも上に最大0.1 mmとする。丸め又は面取りの高さは,ディ
スク基準面Pからh1とし(詳細は図9参照),次による。
最大h1=0.25 mm
ディスクの最大厚さは,ディスク入射面から突き出す最も高い構造物とディスクの上面から突き出す最
も高い構造物との間の基準軸Aの方向の距離で規定する。
カバー層,保護コート及びレーベル印刷を含むディスクの最大厚さは,ディスクのいずれの半径位置で
もe1(図9参照)とし,次による。
e1=1.40 mm
ディスクの情報領域の最小厚さはe2とし,次による。
e2=0.90 mm
クランプゾーンの外側でディスクの上面はディスク基準面Qよりも内側にh2入ってもよいとし,次によ
る。
最大h2=0.4 mm
クランプゾーンの外側でディスクの上面はディスク基準面Qよりも外側にh3出てもよいとし(図9参照),
次による。
最大h3=0.1 mm
10.4 第1遷移領域
クランプゾーンの内側(d<d6)の領域では,ディスク表面はディスク基準面P及びQに対してそれぞ
れh5,h4内側に入ってもよいとし,次による。
最大h5=0.20 mm
最大h4=0.12 mm
24
X 6233:2017 (ISO/IEC 30193:2016)
このディスク表面はディスク基準面P及びQの外側にそれぞれh7,h6平たんでない部分及びばりがあっ
てもよいとし,次による(図8及び図9参照)。
最大h7=0.05 mm
最大h6=0.05 mm
10.5 保護リング
ディスクの内側の領域に任意に設けるリング状の突出部は,ディスクを置く表面及びディスクが置かれ
る表面が全面で接触するのを防ぐことができる。そのようなリングを設けることによって,ディスクの読
取面がきず付くのを減らすことができる。
保護リングを設ける場合,その位置は直径d3と直径d5との間とし,次による。
d3=17.5 mm
d5=21.0 mm
d3と直径d4との間で保護リングの高さはクランプ表面の上にh8とし,次による。
d4=20.5 mm
最大h8=0.12 mm
d4とd5との間で保護リングの高さは,緩やかに周辺の表面の高さまで減少する(図9参照)。
10.6 クランプゾーン
ディスククランプゾーンの内径はd6とし,次による。
d6≦23.0 mm
ディスククランプゾーンの外径はd7(図8参照)とし,次による。
d7≧33.0 mm
ディスククランプゾーン内のディスク厚さはe3(図9参照)とし,次による。
e3=
10
.0
05
.0
20
.1
+−
mm
ディスククランプゾーン内(d6<d<d7)でディスクの両面は,最大0.1 mm以内の平たんとする。
ディスククランプゾーン内(d6<d<d7)でディスクの両面は,最大0.1 mm以内の平行とする。
10.7 第2遷移領域
第2遷移領域は,クランプゾーンと情報領域との間でd7<d<d9の領域である(図8参照)。
この領域でディスクの読取側の表面はディスク基準面Pよりもh9内側に入ってもよく,次による。
最大h9=0.12 mm
この表面は,情報領域の入射面に対してh10外側に出てもよく(図9参照),次による。
最大h10=0.01 mm
この領域でディスクの上面はディスク基準面Qよりもh11外側に出てもよく,次による。
最大h11=0.2 mm
h16は,この領域のディスク上面から情報領域上面への段差である。l1は,傾斜部の開始半径と終了半径
との間の距離である。h16が0.2 mmよりも大きい場合は,図9に示すとおり,情報領域上面への下降の傾
斜はなだらかとし,かつ,l1は,次による。
l1>1.8 mm
第2遷移領域から情報領域の上面へ下がる段差がある場合は,その段差は,直径d8以内でなくなるとし,
次による。
d8=40.0 mm
10.8 情報領域
25
X 6233:2017 (ISO/IEC 30193:2016)
10.8.1 一般
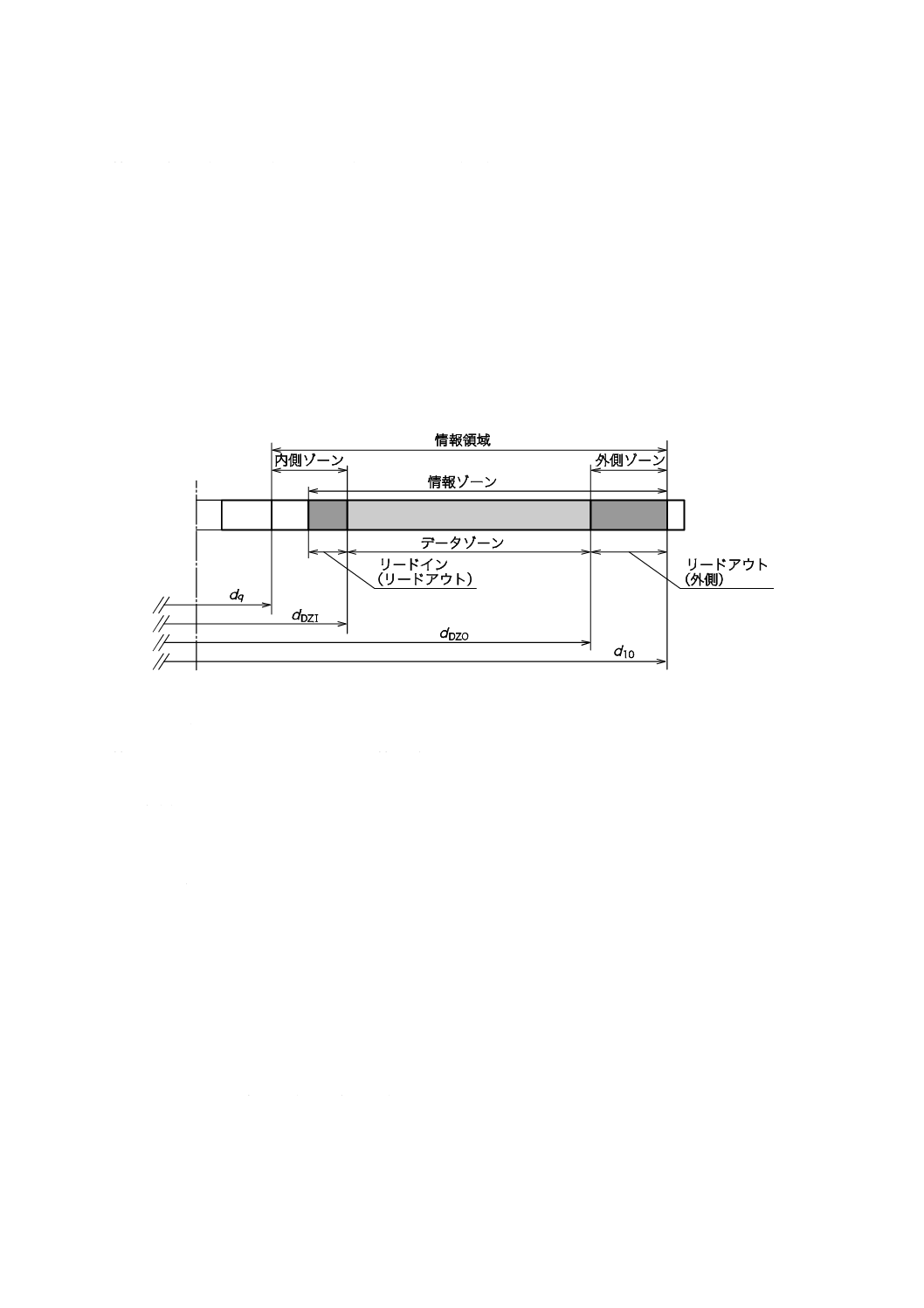
情報領域は直径d9〜直径d10とし(図9及び図11参照),次による。
d9=42 mm
d10=117 mm
各記録層上で,データ領域は,内径dDZIと外径dDZOとの間とする。全ての記録層のデータ領域は,同じ
記録容量をもつ。
記録層Lnの内径dDZIはdDZIn,記録層Lnの外径dDZOはdDZOnとし,次による。
dDZIn=
0.0
2.0
0.
48
−
mm
dDZOn≦116.2 mm
d9とdDZIとの間の領域を内側ゾーンと呼び,dDZOとd10との間の領域を外側ゾーンと呼ぶ(図11参照)。
情報領域のディスクの全体厚さは,10.3に規定したとおりである。
図11−情報領域の区分
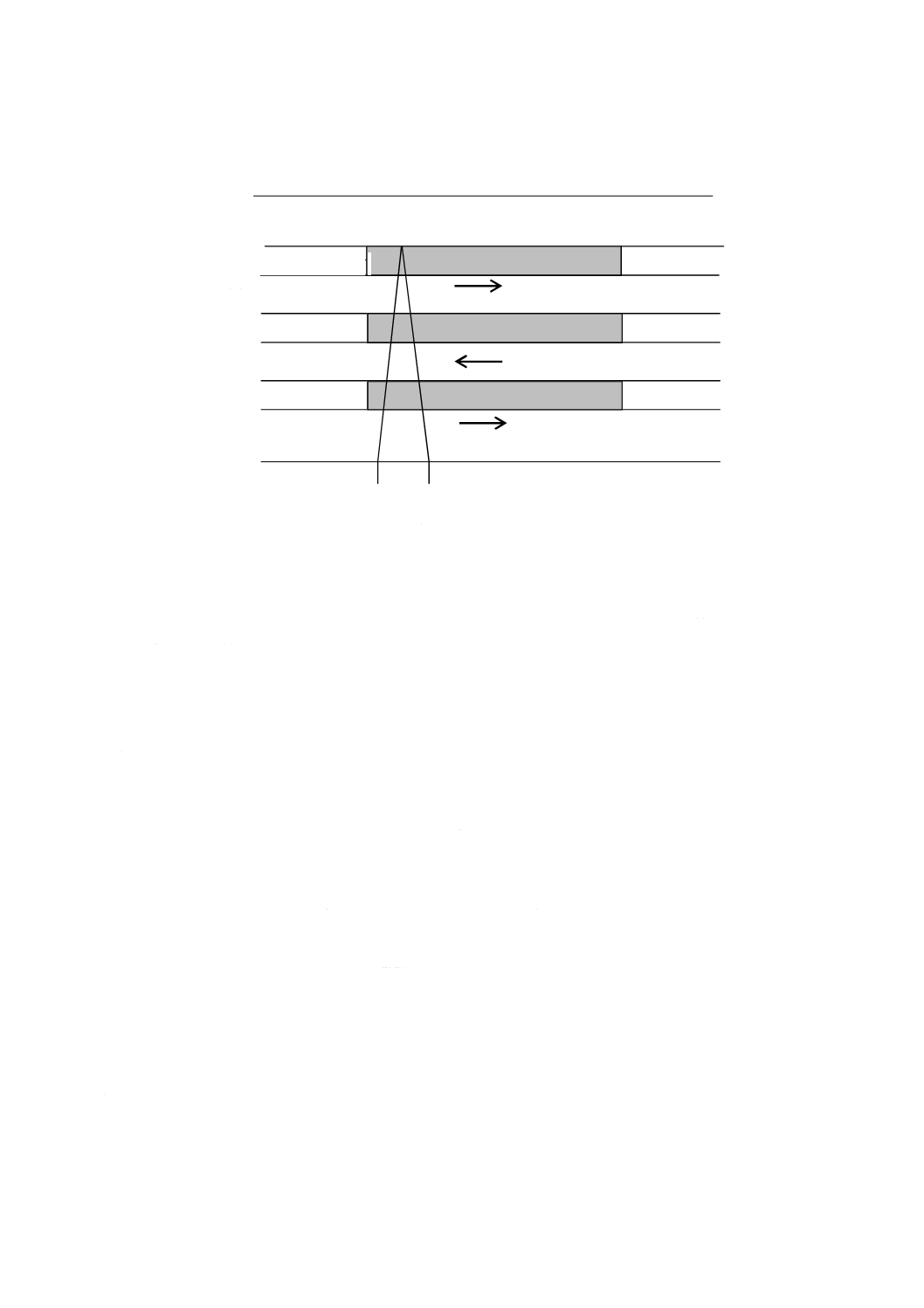
10.8.2 3層ディスクの情報ゾーンの区分
情報領域は,三つの記録層に分かれた情報ゾーンを記録するために使用される。
情報ゾーンは,次の主部分に区分される(図12参照)。
− 記録層L0
− リードインゾーン(内側ゾーン0の部分)
− データゾーン0
− 外側ゾーン0
− 記録層L1
− 外側ゾーン1
− データゾーン1
− 内側ゾーン1
− 記録層L2
− 内側ゾーン2
− データゾーン2
− リードアウトゾーン(外側ゾーン2)
L0層のらせんグルーブは,ディスクの内側から外側に向かって進む。
26
X 6233:2017 (ISO/IEC 30193:2016)
L1層のらせんグルーブは,ディスクの外側から内側に向かって進む。
L2層のらせんグルーブは,ディスクの内側から外側に向かって進む。
記録層L0
記録層L1
記録層L2
スペーサ層
スペーサ層
データゾン0
データゾーン1
データゾーン2
らせん方向
らせん方向
らせん方向
リードインゾーン
外側ゾーン0
外側ゾーン1
リードアウトゾーン
内側ゾーン1
内側ゾーン2
ディスク内周
ディスク外周
光ビーム
スペーサ層
スペーサ層
カバー層
データゾン0
データゾーン1
データゾーン
らせん方向
らせん方向
らせん方向
外側ゾーン0
外側ゾーン1
リードアウトゾーン
ディスク内周
ディスク外周
光ビーム
データゾーン0
データゾーン1
データゾーン2
らせん方向
らせん方向
らせん方向
基板
外側ゾーン0
外側ゾーン1
リードアウトゾーン
ディスク内周
ディスク外周
光ビーム
図12−3層ディスクの情報領域の細分
リードインゾーンは直径44.0 mmと44.4 mmとの間の領域で始まり,データゾーン0の先頭の直径dDZI0
で終了する。
外側ゾーン0はデータゾーン0の最後の直径dDZO0で始まり,最小で直径117 mmで終了する。
外側ゾーン1は最小で直径117 mmで始まり,データゾーン1の始まりの直径dDZO1で終了する。
内側ゾーン1はデータゾーン1の最後の直径dDZI1で始まり,データゾーン1の始まりの直径dDZO1で終
了する。
内側ゾーン2は直径44.0 mmと直径44.4 mmとの間の領域で始まり,データゾーン2の始まりの直径dDZI2
で終了する。
リードアウトゾーンはデータゾーン2の終わりの直径dDZO2で始まり,最小で直径117 mmで終了する。
10.9 リム領域
リム領域は,情報領域の外の領域でd10で始まりディスクの外径まで広がっている(図8参照)。
リム領域の最初の0.5 mmでは読取面側のディスク表面は,情報領域の入射面よりも外側に出てはなら
ない。
残りのリム領域で読取面側のディスク表面は,情報領域の入射面よりもh13を超えて外側に出てはなら
ないとし,次による。
最大h13=0.05 mm
リム領域で読取面側のディスク表面は情報領域の入射面よりもh14内側に入ってもよいとし(図9参照),
次による。
最大h14=0.12 mm
リム領域でディスクの上面は情報領域の上面よりもh15を超えて外側に出てはならないとし(図9参照),
次による。
最大h15=0.05 mm
27
X 6233:2017 (ISO/IEC 30193:2016)
11 機械的特性
11.1 質量
ディスクの質量mは,次による。
12 g≦m≦17 g
11.2 慣性モーメント
ディスクの慣性モーメントは,0.032 g·m2以下とする。
11.3 ダイナミックインバランス
ディスクのダイナミックインバランスは,2.5 g·mm以下とする。
11.4 軸方向の振れ量
11.4.1 一般
軸方向のトラッキング基準サーボをもつ光学システムで,記録速度の半分の速度で回転して測定する場
合(全ての容量で),各記録層とディスク基準面R(図9及び図10参照)との間の基準軸Aの方向の距離
は,ディスク全体でh12とし,次による。
最大h12=0.3 mm
1トラック内(1回転内)で,ディスク基準軸Aの方向の各記録層の平均位置からの偏移は,最大0.1 mm
とする。
基準サーボの積分機能のために(9.10参照)この成分は十分に抑制され,11.4.1及び11.4.2に規定する
残留トラッキングエラーは,主として局所外乱に起因している。
11.4.2 軸方向残留トラッキングエラー
9.10.2で規定した軸方向のトラッキング基準サーボを使って3層ディスクの任意の層を1×Vref(基準速
度)3.688 m/sで回転させ,(0.70±0.10) mWの読取りパワーで測定した場合,1.6 kHz(=fx,9.10.2参照)
より低い周波数での各記録層の軸方向の残留トラッキングエラーは最大45 nmとする(光ビームの焦点が
記録層の上に来るように動かすために対物レンズの移動が必要である。)。1×Vrefでの読取耐久性の劣化を
避けるために,残留エラーを短時間で測定することが望ましい。
ほこり,きずなどの局所欠陥による軸方向の残留トラッキングエラーのスパイクは除く。
測定フィルタは,次の特性をもつバターワース低域通過フィルタとする。
f−3dB=1.6 kHz,傾斜−60 dB/decade
これは,1.6 kHz未満の周波数で基準軸A方向の記録層の局所加速度の最大値は6.0 m/s2を超えないこと
を意味する。
軸方向のトラッキング基準サーボを使い,20 msの積分時間で測定した1.6 kHz〜10 kHzの周波数帯域で
の残留エラー信号のノイズ実効値は最大32 nmとする。測定フィルタは,次の特性をもつバターワース帯
域通過フィルタとする。
f−3dB=1.6 kHz,傾斜+60 dB/decadeから,f−3dB=10 kHz,傾斜−60 dB/decadeまで
11.5 半径方向の振れ量
11.5.1 一般
ディスクの外周エッジの振れ量は,最大0.3 mm ppとする。
各記録層のトラックの半径方向の振れ量(偏芯及び真円からのずれを含む。)は,ディスクを記録速度の
半分の速度で回転させ半径方向トラッキング基準サーボをもつ光学システムで測定する。
半径方向の振れ量は,最大75 μm ppとする。
基準サーボの積分機能のために(9.11参照)この回転成分は十分に抑圧され,11.5.2に規定する残留ト
28
X 6233:2017 (ISO/IEC 30193:2016)
ラッキングエラーは,主として局所外乱に起因している。
残留トラッキングエラーは,図4に示す半径方向のPP読取りチャネル(I1−I2)信号を測定及び半径方
向の制御用の両方に供給することによって判定する。
11.5.2 半径方向の残留トラッキングエラー
9.11.2で規定した半径方向のトラッキング基準サーボを使って,3層ディスクの任意の層を1×Vrefの
3.688 m/sで回転させ(0.70±0.10) mWの読取りパワーで測定した場合,1.8 kHz(=fx,9.11.2参照)より低
い周波数での各記録層の半径方向の残留トラッキングエラーは最大13 nmとする。1×Vrefでの読取耐久性
の劣化を避けるために,残留エラーを短時間で測定することが望ましい。
ほこり,きずなどの局所欠陥による半径方向の残留トラッキングエラーのスパイクは除く。
測定フィルタは,次の特性をもつバターワース低域通過フィルタとする。
f−3dB=1.8 kHz,傾斜−60 dB/decade
これは,1.8 kHz未満の周波数で半径方向の記録層の局所加速度の最大値は2.2 m/s2を超えないことを意
味している。
半径方向のトラッキング基準サーボを使い,20 msの積分時間で測定した1.8 kHz〜10 kHzの周波数帯域
での残留エラー信号のノイズ実効値は最大9.2 nmとする。測定フィルタは,次の特性をもつバターワース
帯域通過フィルタとする。
f−3dB=1.8 kHz,傾斜+60 dB/decadeから,f−3dB=10 kHz,傾斜−60 dB/decadeまで
11.6 カバー層の耐久性
11.6.1 カバー層の衝突耐久性
ディスクの読取面に対物レンズが衝突する場合に,過度にディスクが損傷するのを防ぐために,ディス
ク表面は最低限の衝突耐久性をもつことが望ましい。この衝突耐久性は,附属書Lに規定する測定方法で
測定できる。
11.6.2 カバー層のきず耐久性
過度にきずが付かないように,ディスク表面は最低限の硬さをもつ。きず耐久性は,附属書Cに規定す
る測定方法で測定する。
11.6.3 カバー層による指紋はつ(撥)油性
過度の汚れを防ぐため,ディスク表面はできるだけ汚れをはじくことが望ましい。汚れのはじき具合は,
附属書Dに規定する測定方法で測定する。
12 情報領域の光学的特性
12.1 一般
ディスクの情報領域内で,次の要求事項を満たす。
これらの透過積層(TS)の規格は,記録層の上の全ての関連する層(例えば,積層膜の場合は接着層,
TS0の場合はスペーサ層及び全てのLn層の半透明記録層,カバー層及び保護コート付きの場合保護コー
ト層など。)を含んでいる。
12.2 透過積層(TS)の屈折率
TS全体を形成する層が異なる屈折率をもっている場合は,附属書Aに規定した方法に従う。ディスク
のカバー層及びスペーサ層の屈折率nは,次による。
1.45≦n≦1.70
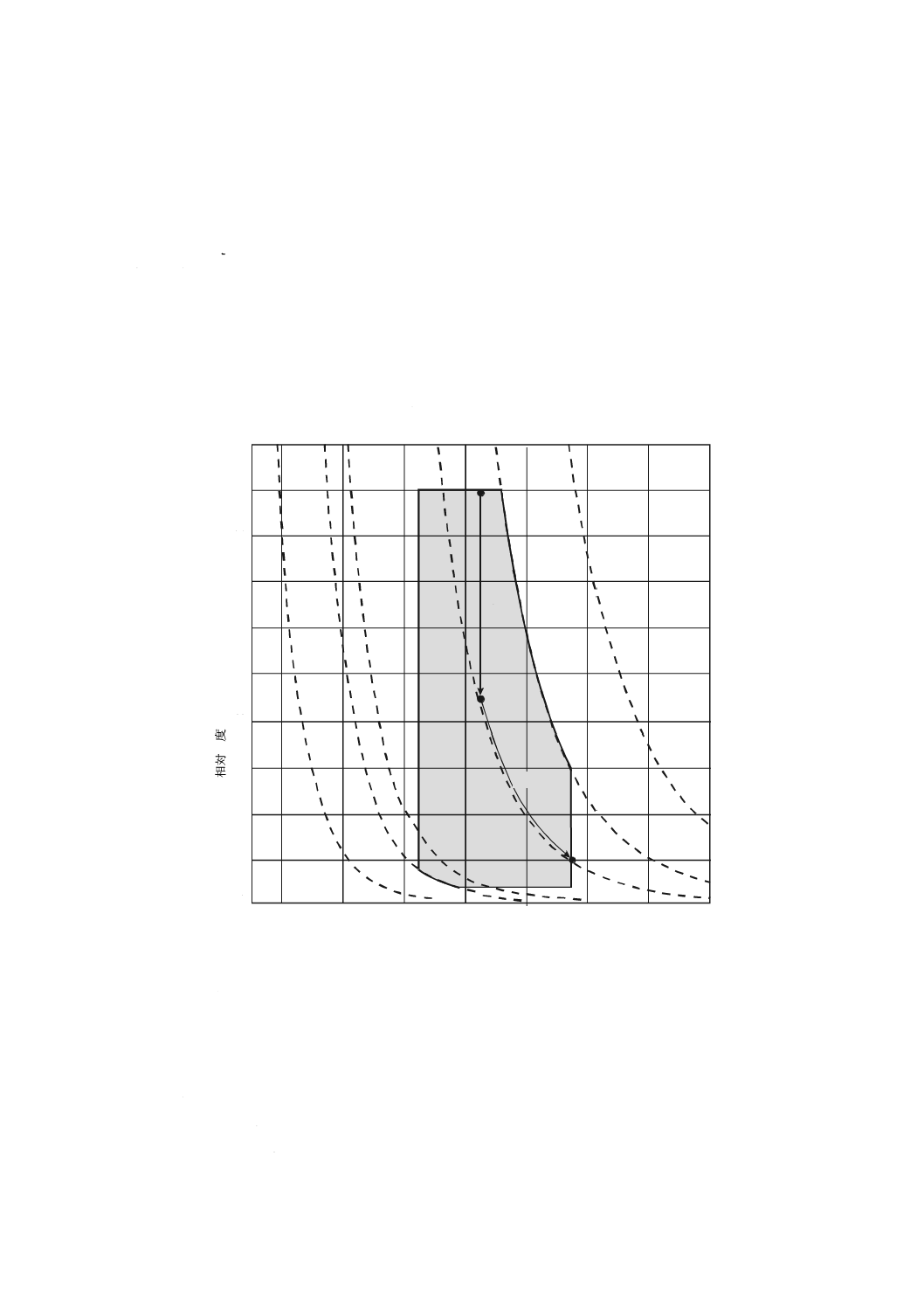
12.3 透過積層(TS)の厚さ
29
X 6233:2017 (ISO/IEC 30193:2016)
半径raと半径rbとの間の平均厚さは,関連するディスクの透過積層(TS0,TS1又はTS2)の基準厚さ
という(10.2及び図10参照)。
ディスク全面で測定したTS0,TS1及びTS2の厚さは,次の八つの要求事項を満たす。
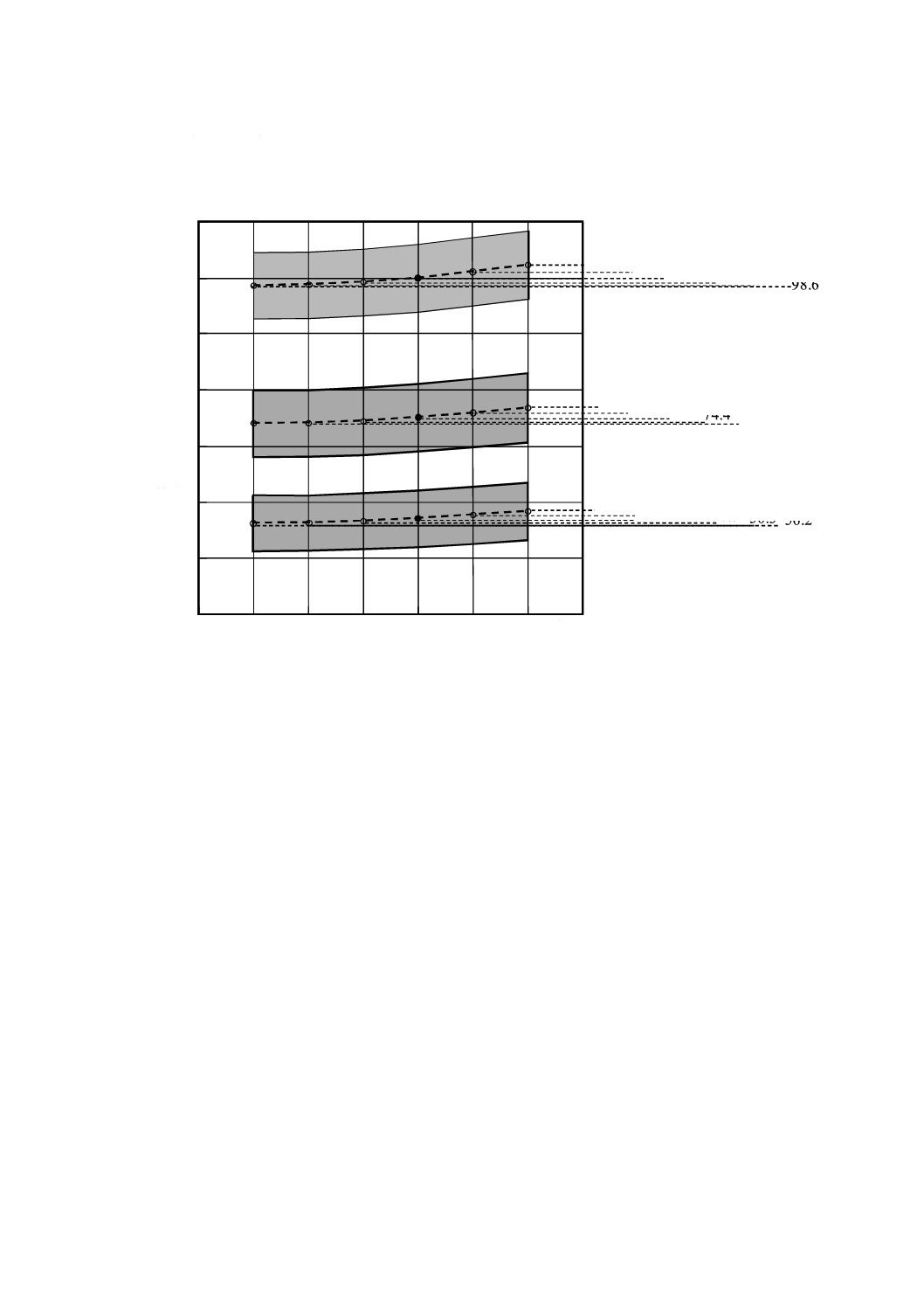
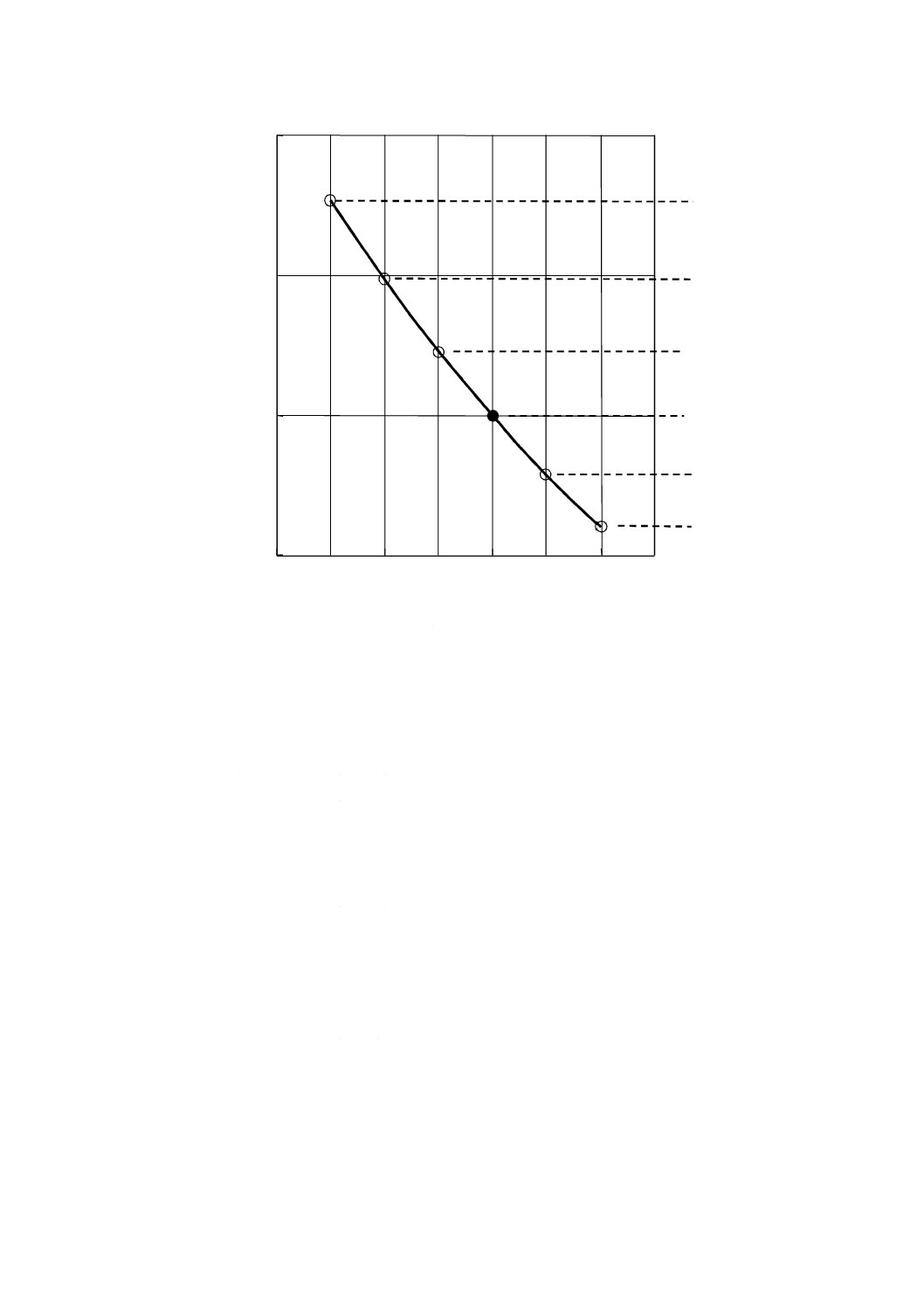
要求事項a)〜c)に関連して図13では,曲線は,等価な球面収差となる厚さを示す。屈折率1.60に対す
る任意の屈折率nの厚さの比は,近似関数g(n)で表される。
g(n)=−1.111 1×n3+5.814 3×n2−9.880 8×n+6.476 0
図14は,実際の厚さを要求事項f)の有効厚さに変換する係数を示す。実際の厚さは,その物理的な値を
意味する。有効厚さは,屈折率を1.60と仮定した場合の仮想的な値を意味する。
任意の屈折率の実際の厚さは,標準の屈折率1.60の有効厚さに変換される。実際の厚さ及び有効厚さの
デフォーカスの値は,同じである。この細分箇条では,デフォーカスは,各々の厚さ及び屈折率をもった
透明な材料を光が透過する場合のフォーカス位置の動きと規定する。
係数の関数f(n)は,tan(θr)/tan(θ0)に等しい。ここに,θ0及びθrは,各々屈折率が1.60の場合及び任意の
屈折率nの場合の透過積層中の収束角度である。関数f(n)は,近似的に次の式で表される。
f(n)=−1.088 0×n3+6.102 7×n2−12.042×n+9.100 7
a) 屈折率で決まるTS0(L0層の上の全ての層)の厚さは,図13の最上部の網掛け領域内とする[屈折
率がnの場合の厚さは94.0×g(n) μm〜106.0×g(n) μmとし,図中太い破線は公称厚さを屈折率の関数
として示す。]。
b) 屈折率で決まるTS1(L1層の上の全ての層)の厚さは,図13の中央の網掛け領域内とする[屈折率
がnの場合の厚さは69.0×g(n) μm〜81.0×g(n) μmとし,図中太い破線は公称厚さを屈折率の関数とし
て示す。]。
c) 屈折率で決まるTS2(L2層の上の全ての層)の厚さは,図13の最下部の網掛け領域内とする[屈折
率がnの場合の厚さは52.0×g(n) μm〜62.0×g(n) μmとし,図中太い破線は公称厚さを屈折率の関数と
して示す。]。
d) L0層及びL1層に挟まれたスペーサ層1の厚さS1は,20.0 μm〜30.0 μmとする。
e) L1層及びL2層に挟まれたスペーサ層2の厚さS2は,13.0 μm〜23.0 μmとする。
f)
厚さの差は,次の要求事項を満たす。
C−(S1+S2)≧1.0 μm
S1−S2≧1.0 μm
C,S1,S2は,実際の厚さに図14に示す係数f(n)を乗じて有効厚さに変換する。
ここに, TS2の厚さ: カバー層の厚さ(C)に等しい
n: 屈折率
g) TS0及びTS1の厚さの各々の基準厚さからの偏差ΔDの最大値は,次による。
│ΔD│≦2.5 μm
h) TS2の厚さの基準厚さからの偏差ΔDの最大値は,次による。
│ΔD│≦2.0 μm
12.4 3層ディスクのスペーサ層の目標厚さの例
ディスクの量産では,厚さの簡単な目標値が使いやすい。
次の三つの要求事項を満たすことが推奨されるが,その場合には12.3のa)〜f)の要求事項は,屈折率1.60
に対して常に満たされる。
a) スペーサ層1の厚さS1は,(25.0±2.0) μmを満たすことが望ましい。
30
X 6233:2017 (ISO/IEC 30193:2016)
b) スペーサ層2の厚さS2は,(18.0±2.0) μmを満たすことが望ましい。
c) TS2の厚さCは,(57.0±2.0) μmを満たすことが望ましい。
透過積層の屈折率
102.3
76.7
58.3
100.099.298.798.6
75.875.074.4
57.657.056.556.356.2
40.0
50.0
60.0
70.0
80.0
90.0
100.0
110.0
TS2
TS1
TS0
74.074.0
1.40
1.50
1.60
1.70
1.45
1.55
1.65
1.75
101.1
透
過
積
層
の
厚
さ
(µ
m
)
図13−屈折率の関数としての透過積層の厚さ
31
X 6233:2017 (ISO/IEC 30193:2016)
スペーサ層の屈折率
1.154
1.097
1.046
1.000
0.959
0.921
0.9
1.0
1.1
1.2
1.40
1.50
1.60
1.70
1.45
1.55
1.65
1.75
f(
n
)
図14−屈折率1.60の厚さ及び任意の屈折率nにおける有効厚さの比
12.5 記録層の反射率
カバー層の透過を含む情報ゾーンの記録層の反射率は,他の記録層の状態(未記録か記録されているか
又は部分記録か)によらず,附属書Bの測定条件の下で,次による。
− 未記録のバージングルーブ:
− L0層及びL1層:
1.5 %≦Rg−v≦4.0 %
− L2層:
2.2 %≦Rg−v≦4.0 %
− 未記録の消去グルーブ:
− L0層及びL1層:
1.4 %≦Rg−v≦4.0 %
− L2層:
2.0 %≦Rg−v≦4.0 %
− ディスクの各場所: 0.75×Rg−v<Rg−e<1.25×Rg−v
− 記録済みグルーブの最初の10DOWサイクル:
− L0層及びL1層:
1.4 %≦R8H≦4.0 %
− L2層:
2.0 %≦R8H≦4.0 %
− ディスクの各場所: 0.75×Rg−v<R8H<1.25×Rg−v
記録マークは,未記録層よりも低い反射率とする。
12.6 複屈折
32
X 6233:2017 (ISO/IEC 30193:2016)
透過積層のディスク面方向の複屈折(附属書J参照)は,次による。
Δn//≦1.5×10−4
透過積層のディスク面に対して垂直方向の複屈折(附属書J参照)は,次による。
Δn┴≦1.2×10−3
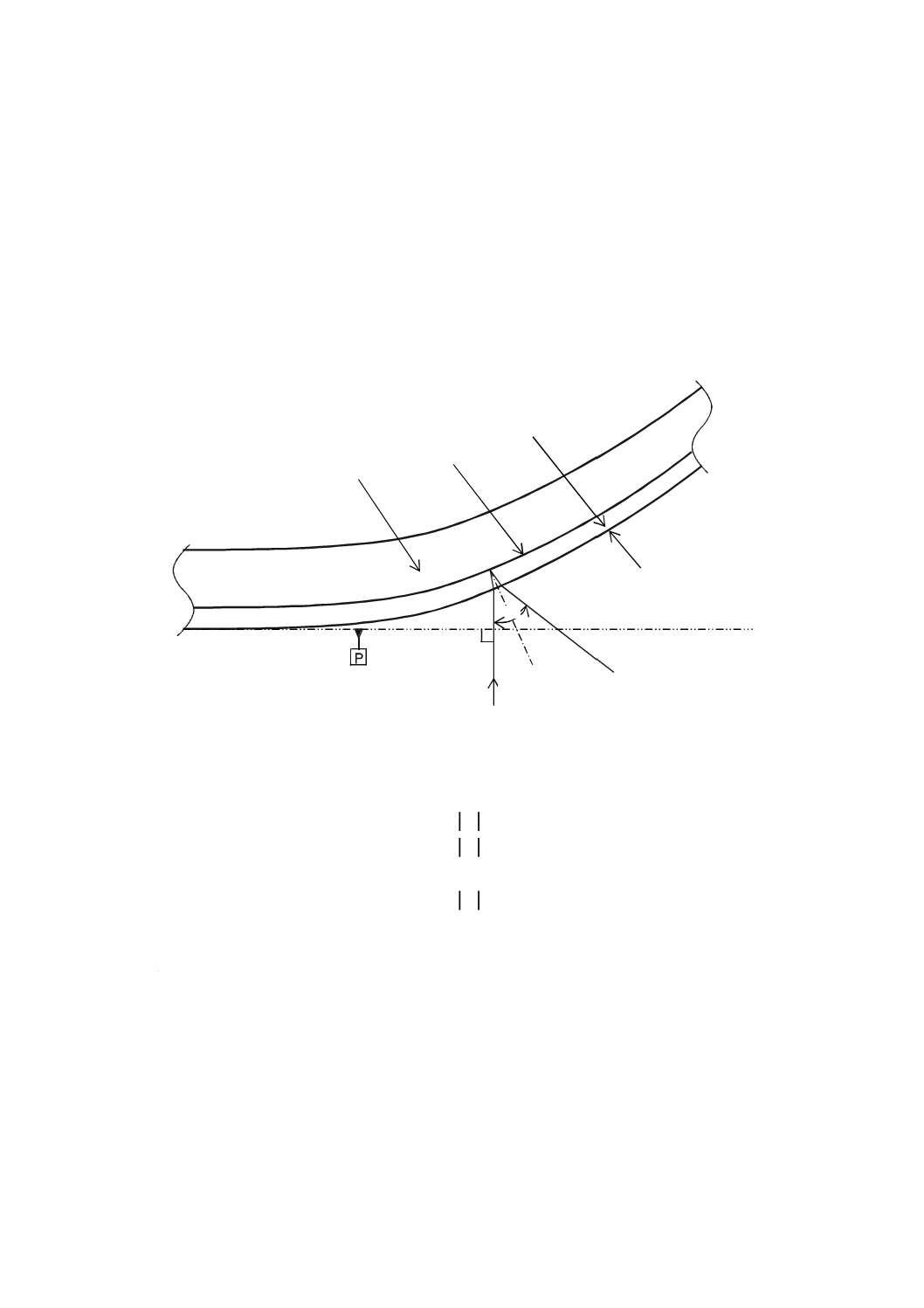
12.7 角度偏差
角度偏差は,ディスクの基準面Pに垂直な入射平行光と反射光との間の角度αである。入射光の直径は,
0.3 mm〜1.0 mmの範囲とする。角度偏差αは,入射面のゆがみ並びにカバー層及び/又はスペーサ層の非
平行を含んでいる(図15参照)。
カバー層
基板
記録層
読取り面
反射光
a
入射光
図15−角度偏差の規定
角度偏差αの要求事項は,次による。
− 半径方向
− 8.1.1に規定する通常の試験環境条件: 最大│α│=0.60°
− 8.1.1に規定する急激変化の試験条件: 最大│α│=0.70°
− 接線方向
− 8.1.1に規定する通常の試験環境条件: 最大│α│=0.30°
13 データフォーマット
13.1 一般
情報源(ホストコンピュータ又は応用)から受け取ったデータは,使用者データフレームと呼ばれ,デ
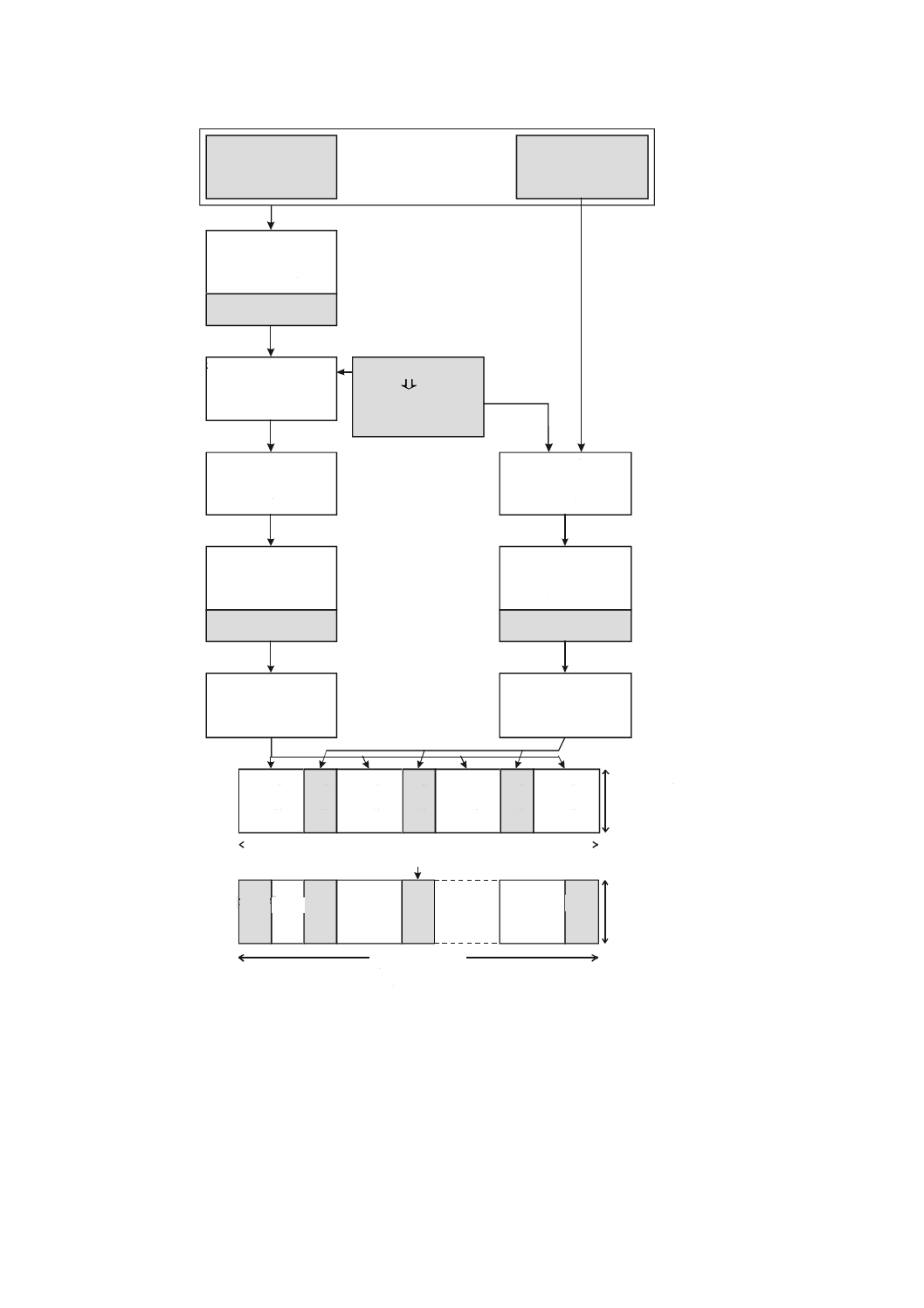
ィスクに記録する前に幾つかのステップを踏んで,次のとおりにフォーマットされる(図16参照)。
33
X 6233:2017 (ISO/IEC 30193:2016)
32 フレーム
使用者データ
x 2 048バイト
32 セクタ
データブロック
304 列
216 行
アクセスブロック
24 列
30
行
LDC ブロック
304 列
216 行データ
32 行パリティ
使用者コントロールデータ
32 ユニット
x18 バイト
物理セクタ番号
アドレスユニット番号
16アドレス
x9 バイト
24 列
30 行データ
32 行パリティ
BIS ブロック
BIS クラスタ
3 列
496 行
LDC クラスタ
152 列
496 行
物理クラスタ
ECC クラスタ
(155 列)
(
1 288 データビット)
1 932 チャネルビット
LDC
38 列
BIS
1 列
LDC
38 列
BIS
1 列
LDC
38 列
BIS
1 列
LDC
38 列
496 行は、各31行の
16 アドレスユニットに
分割する。
フレーム
同期
20
データ
25
直流
制御
1
直流
制御
1
直流
制御
1
データ
45
データ
45
496
記録フレーム
32 フレーム
データフレーム
x(2 048バイトデータ
+4 バイトEDC)
32 フレーム
スクランブルドデータフレーム
x2 052バイト
図16−エンコードプロセスの図
− 使用者データは,データフレーム,スクランブルドデータフレーム,データブロック,LDCブロック
及びLDCクラスタと,順番に変換される。
− BD書換形システムで追加するアドレス及びコントロールデータは,アクセスブロック,BISブロック
及びBISクラスタと,順番に変換される。
− LDCクラスタ及びBISクラスタは,多重化され16アドレスユニットに分割されるECCクラスタとな
34
X 6233:2017 (ISO/IEC 30193:2016)
り,変調されて496記録フレームから構成される物理クラスタとなる。
BD書換形ディスクのデータは,2 048バイトの使用者データから構成される32個のデータフレームを
もつクラスタと呼ぶ64Kのパーティションに記録される。このクラスタは,二つのエラー訂正の仕組みで
保護されている。
− 第1に,(248,216,33)リードソロモン(RS)符号語で構成する長距離(LDC)エラー訂正符号で保護
される。この符号は,十分なパリティ及びインターリーブ長をもち効率がよく,ランダムエラー及び
バーストエラーの両方を訂正できる。
− 第2に,データは,(62,30,33)RS符号語で構成する,強力なバースト検出サブコード(BIS)と多重
化される。このBIS符号は,場所を特定するためのアドレス及び使用者データに付随したコントロー
ル情報をもっている。また,LDCが効率的に消失訂正できるように,長いバーストエラーを示すため
に使うことができる。
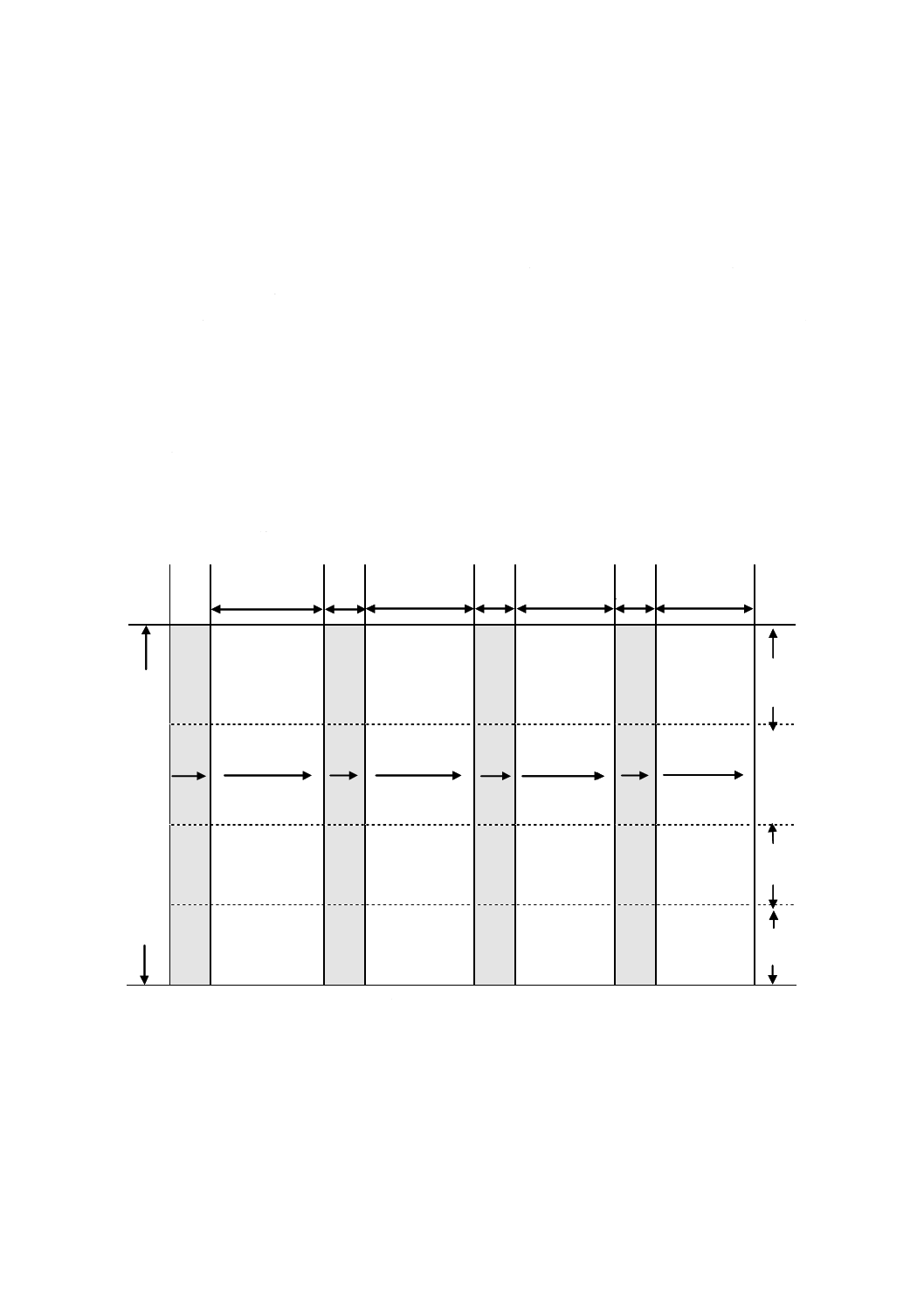
これらの二つの符号の組合せはLDC+BIS符号と呼ばれる(図17参照)。
全てのデータは,図17に示す配列に構成される。この配列は,行から行へと水平方向に読まれ,直流制
御ビットを追加し,変調し,同期パタンを追加してディスク上に記録される。
エラー訂正符号は,ディスク上のバーストエラーを原理的にうまく分割する垂直方向に適用される。さ
らに,LDC符号は対角線方向にインターリーブされている。
同期
38
バイト
1
バイト
38
バイト
1
バイト
38
バイト
1
バイト
38
バイト
D0........D37
B0
D38......D75
B1
D76....D113
B2
D114...D151
D152…. D189
B3
D190...........
アドレス
ユニット0
31
行
496
行
ディスク上の
データの流れ
:
:
:
アドレス
ユニット14
31
行
アドレス
ユニット15
....... D75 391
31
行
同期
38
バイト
1
バイト
38
バイト
1
バイト
38
バイト
1
バイト
38
バイト
D0........D37
B0
D38......D75
B1
D76....D113
B2
D114...D151
D152…. D189
B3
D190...........
アドレス
ユニット0
31
行
496
行
ディスク上の
データの流れ
:
:
:
アドレス
ユニット14
31
行
アドレス
ユニット15
....... D75 391
31
行
図17−ディスク上の物理クラスタの図
アドレスユニット,物理セクタ及び論理セクタは,次による。
− アドレスユニット
ディスク上の所定の位置へ光ピックアップの位置決めをするために,物理クラスタは,それぞれが
31の連続する行から構成される16個のアドレスユニットに細分される。アドレスユニット番号
(AUN)を記録データに埋め込むことによって,迅速な位置決めができる。
35
X 6233:2017 (ISO/IEC 30193:2016)
− 物理セクタ
コントロールデータが附属したデータフレームは,セクタと呼ばれる。ディスク全体(内側ゾーン
及び外側ゾーンを含む。)の全ての物理クラスタ内の全てのセクタは,物理セクタと呼ばれる。全ての
物理セクタは,物理セクタ番号(PSN)と呼ぶ仮想番号をもっている。このPSNは,ディスク上に記
録されないがAUNと同期している。
− 論理セクタ
ホストコンピュータ又は応用から供給される使用者データを保存するために,全ての物理セクタが
利用できるわけではない。内側ゾーン及び外側ゾーンは除かれる。残りのセクタは,使用者データ保
存に利用でき,論理セクタと呼ばれる。
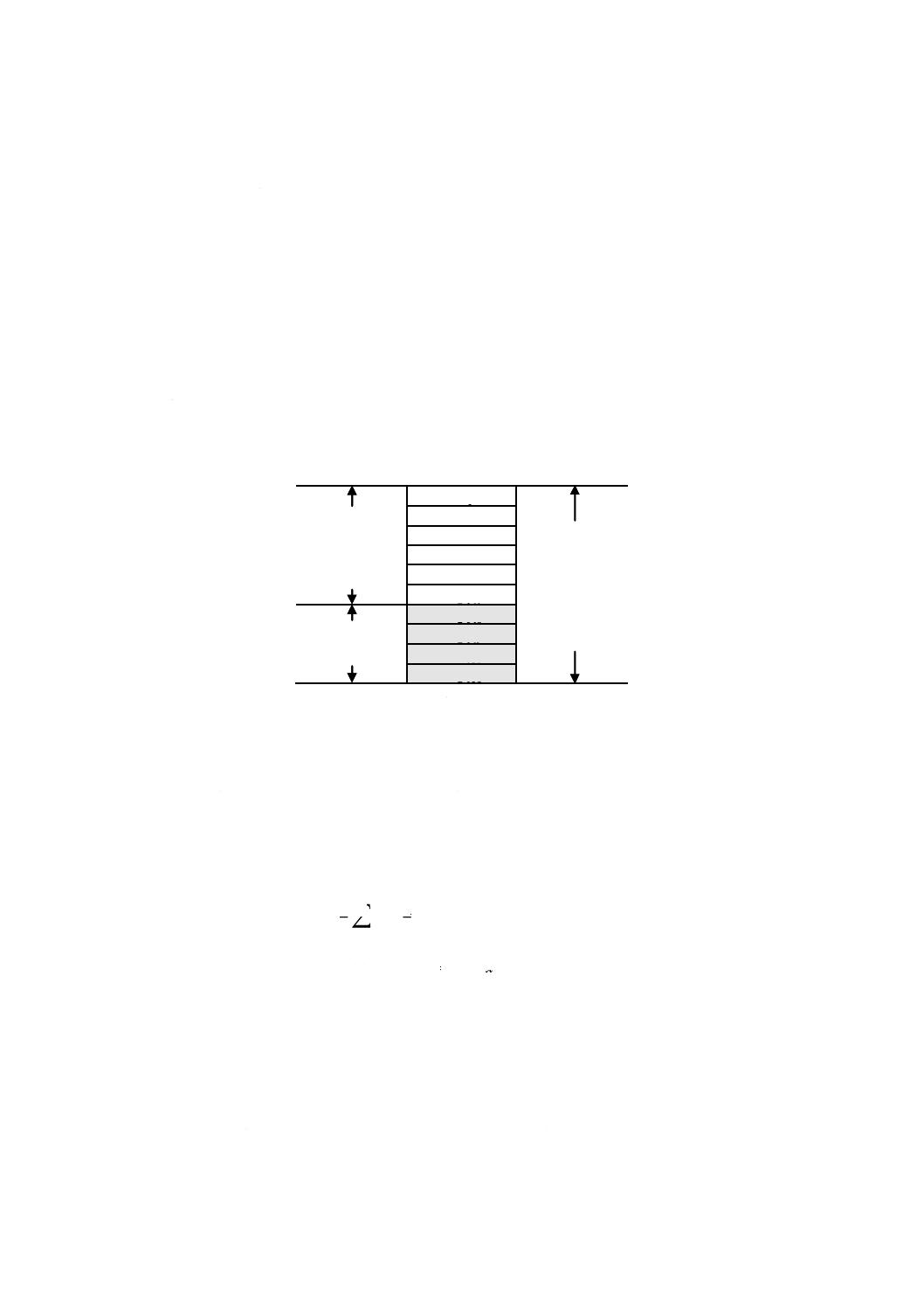
13.2 データフレーム
一つのデータフレームは,2 048バイトの使用者データ及び4バイトのエラー検出符号(EDC)の2 052
バイトで構成される。2 048バイトの使用者データバイトはud0〜ud2 047として,また,4バイトのEDCは
ed2 048〜ed2 051として識別される(図18参照)。
ud0
:
2048
:
使用者データ
:
バイト
:
2052
ud2047
バイト
ed2048
4
ed2049
EDCバイト
ed2050
ed2051
ud0
:
2048
:
使用者データ
:
バイト
:
2052
ud2047
バイト
ed2048
4
ed2049
EDCバイト
ed2050
ed2051
図18−データフレーム
13.3 エラー検出符号(EDC)
4バイトのフィールドed2 048〜ed2 051は,2 048バイトの使用者データ全体に対し算出されたエラー検出符
号を収納する。データフレームを,最初の使用者データバイト(ud0)の最上位ビットから始まり最後の
EDCバイト(ed2 051)の最下位ビットで終わる一つのビットフィールドとして考えると,msbはb16 415でlsb
はb0となる。
EDCの各ビットbiは,i=0〜31に対して,次のとおりに示される。
)
(
mod
)
(
b
)
(
0
31
x
G
x
I
x
x
EDC
i
i
i
=
=∑
=
ここに, I(x):
∑
=
=
32
415
16
b
)
(
i
i
ix
x
I
G(x): G(x)=x32+x31+x4+1
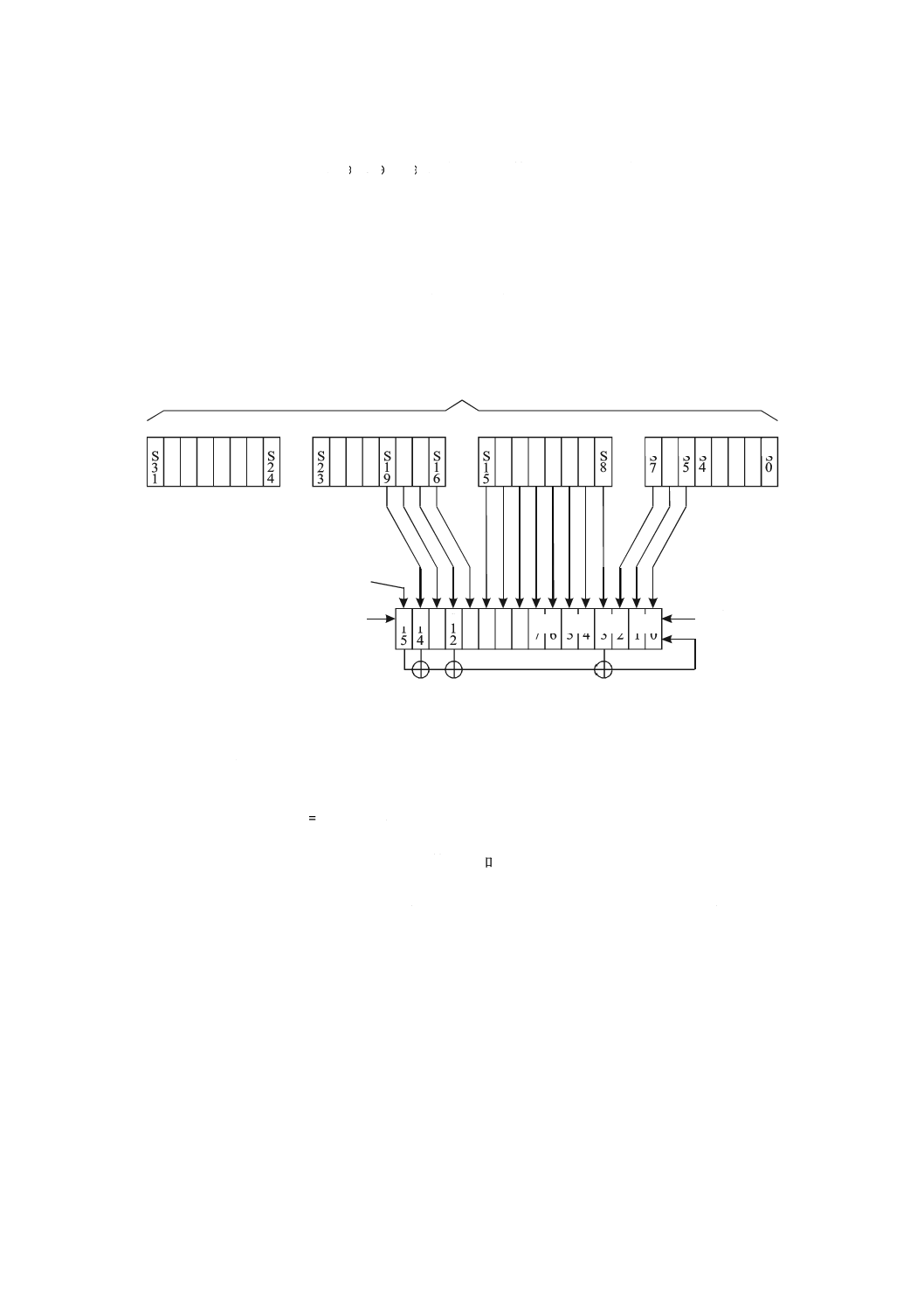
13.4 スクランブルドデータフレーム
使用者データ及びEDCの2 052バイトから構成される各データフレームは,図19に規定する回路の出
力でスクランブルする。この図でビットs7 (msb)〜s0 (lsb)は,各8ビットシフトごとのスクランブルバイト
を表す。
回路の心臓部は,線形帰還シフトレジスタ(LFSR)で,次の多項式によっている。
φ(x)=x16+x15+x13+x4+1
36
X 6233:2017 (ISO/IEC 30193:2016)
ここで,s0〜s15:16ビットシフトレジスタを構成している。各シフトクロックでsnの中身はsn+1(n=
0...14)にシフトし,一方,s0は
3
12
14
15
s
s
s
s
⊕
⊕
⊕
(⊕は排他的論理和を表す。)にセットされる。
各データフレームのスクランブル手順の最初で,s0〜s15のシフトレジスタは,データフレームに付随す
る(仮想)PSN(箇条17参照)から生成する値にプリセットする。16ビットのプリセット値は,次に示
す方法で作成する。
− s15は,“1”にセットする。
− s14〜s0は,PSNのPS19〜PS5にセットする(図19参照)。
同じプリセット値を,同一クラスタ内の全32データフレームに用いる。
最上位バイト
“1”
最下位バイト
PS31
PS23
PS15
PS7
PS24
PS16
PS19
PS8
PS0
PS5PS4
s15s14
s12
s7s6s5s4s3s2s1s0
PSN
パラレル
入力
シフトクロック
図19−スクランブル回路
プリセット値を読み込んだ後,s7〜s0は,スクランブルバイトS0として取り出される。さらに,8ビッ
トシフトを2 051回繰り返し,続きの2 051バイトは,s7〜s0からスクランブルバイトS1〜S2 051として取り
出される。データフレームの2 052バイトのud/edkは,スクランブルバイトdkとなり,次による。
k
k
k
S
⊕
ud/ed
d=
ここに,
k: 0〜2 051
⊕: 排他的論理和
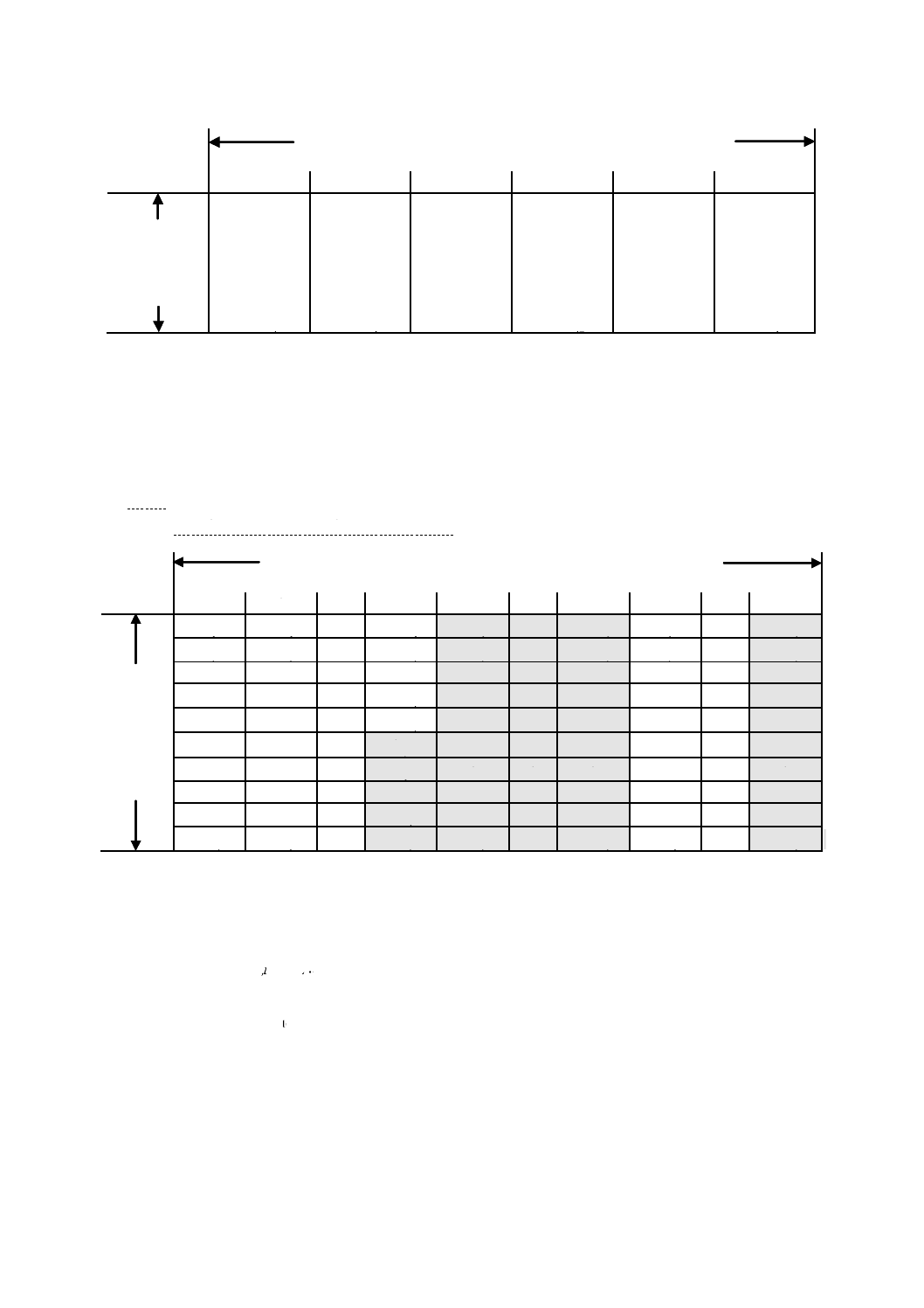
13.5 データブロック
次のステップで,32個のスクランブルドデータフレーム(Fは,0〜31)は,一塊のデータに統合され
る(図20参照)。
37
X 6233:2017 (ISO/IEC 30193:2016)
32 フレーム
0
1
:
F
:
31
d0,0
d0,1
:
d0,F
:
d0,31
d1,0
d1,1
:
d1,F
:
d1,31
2052
:
:
:
:
:
バイト
:
:
:
:
:
d2050,0
d2050,1
:
d2050,F
:
d2050,31
d2051,0
d2051,1
:
d2051,F
:
d2051,31
32 フレーム
0
1
:
F
:
31
d0,0
d0,1
:
d0,F
:
d0,31
d1,0
d1,1
:
d1,F
:
d1,31
2052
:
:
:
:
:
バイト
:
:
:
:
:
d2050,0
d2050,1
:
d2050,F
:
d2050,31
d2051,0
d2051,1
:
d2051,F
:
d2051,31
図20−32スクランブルドデータフレーム
これらのデータは,各スクランブルドデータフレームを図21に示すとおり9,5列に分けることによって,
216行×304列の配列に再配置される。この新しい配列は,データブロックと呼ばれる。全ての偶数スクラ
ンブルドデータフレームは,列を半分下がったところで終わり,全ての奇数スクランブルドデータフレー
ムは,列を半分下がったところから始まることに注意することが望ましい。
注記 この規格において,行列の2次元の位置を示す添字(例えば,d109,1)では,対応国際規格と同
じ半角カンマを用いた表記としている。
304 列
0
1
:
9
10
:
18
19
303
d0,0
d216,0
:
d1944,0
d108,1
:
d1836,1
d0,2
:
d1836,31
d1,0
d217,0
:
d1945,0
d109,1
:
d1837,1
d1,2
:
d1837,31
:
:
:
:
:
:
:
:
:
:
:
:
:
d2050,0
:
:
:
:
:
:
216
:
:
:
d2051,0
:
:
:
:
:
:
行
:
:
:
d0,1
:
:
:
:
:
:
:
:
:
d1,1
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
d106,1
:
:
:
:
:
:
d215,0
d431,0
:
d107,1
d323,1
:
d2051,1
d215,2
:
d2051,31
304 列
0
1
:
9
10
:
18
19
303
d0,0
d216,0
:
d1944,0
d108,1
:
d1836,1
d0,2
:
d1836,31
d1,0
d217,0
:
d1945,0
d109,1
:
d1837,1
d1,2
:
d1837,31
:
:
:
:
:
:
:
:
:
:
:
:
:
d2050,0
:
:
:
:
:
:
216
:
:
:
d2051,0
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
d2050,0
:
:
:
:
:
:
216
:
:
:
d2051,0
:
:
:
:
:
:
行
:
:
:
d0,1
:
:
:
:
:
:
:
:
:
d1,1
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
行
:
:
:
d0,1
:
:
:
:
:
:
:
:
:
d1,1
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
d106,1
:
:
:
:
:
:
d215,0
d431,0
:
d107,1
d323,1
:
d2051,1
d215,2
:
d2051,31
図21−32スクランブルドデータフレームからのデータブロックの構成
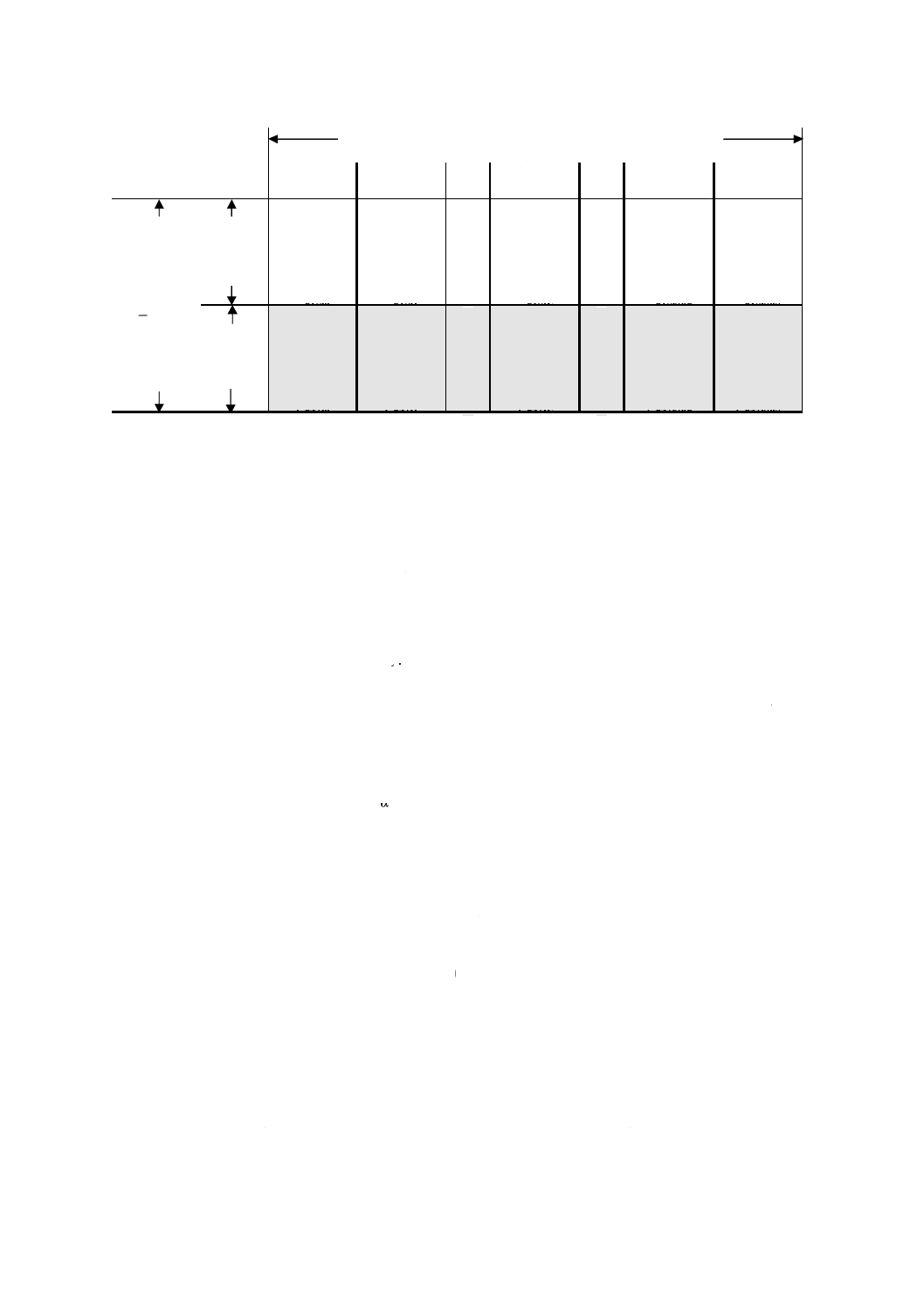
13.6 LDCブロック
データブロックの各列のバイトは,図22に示すとおり各行の先頭から,Lが符号語番号(=列番号:0
〜303)を表すとしてe0,L e1,L .. ei,L..〜e215,L という番号に付け直される。
LDCブロックは,各列を,(248,216,33)長距離RS符号に従って32パリティバイトで拡張して完成され
る。パリティバイトは,p216,L p217,L ... pj,L〜p247,Lと番号が付けられる。
38
X 6233:2017 (ISO/IEC 30193:2016)
304 列
符号語
0
符号語
1
:
符号語
L
:
符号語
302
符号語
303
1 LDC
符号語
216
データ行
e0,0
e1,0
e2,0
:
:
e215,0
e0,1
e1,1
:
:
:
e215,1
:
:
:
:
:
:
e0,L
e1,L
:
:
:
e215,L
:
:
:
:
:
:
e0,302
e1,302
:
:
:
e215,302
e0,303
e1,303
:
:
:
e215,303
= 248
バイト
32
パリティ行
p216,0
:
:
:
:
p247,0
p216,1
:
:
:
:
p247,1
:
:
:
:
:
:
p216,L
:
:
:
:
p247,L
:
:
:
:
:
:
p216,302
:
:
:
:
p247,302
p216,303
:
:
:
:
p247,303
図22−データバイトの再番号割当て及びパリティ追加によるLDCブロックの構成
13.7 LDC符号語
長距離RS符号は,GF(28)の有限体上で規定する。有限体GF(28)の非ゼロ要素は,原始根αによって生
成される。ここに,αは次の原始多項式p(x)の根である。
p(x)=x8+x4+x3+x2+1
GF(28)のシンボルは,(α7, α6, α5,..,α2, α, 1)を元とする元多項式の表現を用いてバイト(8ビットのグルー
プ)で表される。したがって,根αは次で表される。
α=00000010
ベクトルIdc=(e0,L .. ei,L .. e215,L .. p216,L .. pj,L .. p247,L)で表す各LDC符号語は,216の情報バイト及び32のパ
リティバイトをもつGF(28)上のRS符号である。そのような符号語は,247次の多項式Idc(x)で表すことが
できる(幾つかの係数はゼロの可能性がある。)。ここに,最高次はベクトルの情報部分(e0,L .. など)に
相当し,最低次はベクトルのパリティ部分(p216,L ..など)に相当する。
Idc(x)は,LDC符号語の生成多項式g(x)の倍数である。生成多項式は,次による。
(
)
∏
=
−
=
31
0
)
(
i
iα
x
x
g
LDCは組織符号で,216の情報バイトは,変わることなく各符号語の最高次に現れる。Idc符号のパリテ
ィチェック行列HLDCは,全てのLDC符号語Idcに対して,次による。
HLDC×IdcT=0
パリティチェック行列HLDCの第2行hLDC2は,生成多項式g(x)のゼロαに相当し,エラーの場所の特定
に用いる符号の位置を規定する。このパリティチェック行列HLDCの第2行hLDC2は,次による。
(
)1
,
,
..
,
2
246
247
LDC2
α
α
α
α
h
=
13.8 LDCクラスタ
13.8.1 一般
LDC符号語を生成した後,LDCブロックは,二つのステップでインターリーブが行われLDCクラスタ
となる。
13.8.2 インターリーブの第1のステップ
第1のインターリーブのステップで,高さ248の304列は152列×496行の新しい配列に再構築される。
各新しい列は,LDCブロックの各偶数列及び次の奇数列を組み合わせることによって作られる。新しい
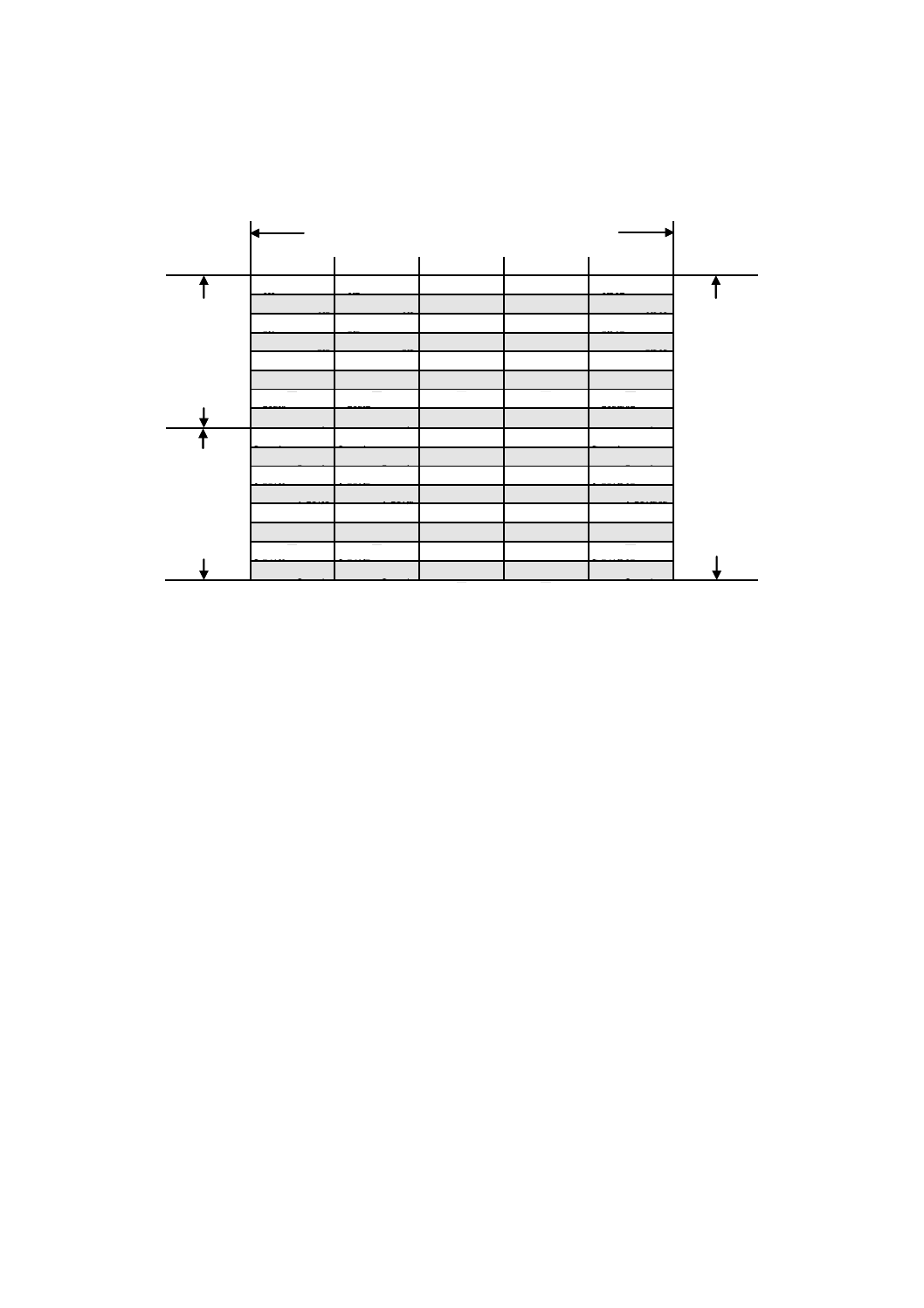
39
X 6233:2017 (ISO/IEC 30193:2016)
列は,図23に示すとおりLDCブロックの偶数列の最初のバイトを取り込み,次にLDCブロックの奇数列
の最初のバイトを取り込み,次にLDCブロックの偶数列の2番目のバイトを取り込み,その後奇数列の2
番目のバイトを取り込む,という形を続けることで埋められる。
152 列
0
1
151
e0,0
e0,2
:
:
e0,302
e0,1
e0,3
:
:
e0,303
432
e1,0
e1,2
:
:
e1,302
データ行
e1,1
e1,3
:
:
e1,303
:
:
:
:
:
:
:
:
:
:
e215,0
e215,2
:
:
e215,302
e215,1
e215,3
:
:
e215,303
496
p216,0
p216,2
:
:
p216,302
行
p216,1
p216,3
:
:
p216,303
64
p217,0
p217,2
:
:
p217,302
パリティ行
p217,1
p217,3
:
:
p217,303
:
:
:
:
:
:
:
:
:
:
p247,0
p247,2
:
:
p247,302
p247,1
p247,3
:
:
p247,303
152 列
0
1
151
e0,0
e0,2
:
:
e0,302
e0,1
e0,3
:
:
e0,303
432
e1,0
e1,2
:
:
e1,302
データ行
e1,1
e1,3
:
:
e1,303
:
:
:
:
:
:
:
:
:
:
e215,0
e215,2
:
:
e215,302
e215,1
e215,3
:
:
e215,303
496
p216,0
p216,2
:
:
p216,302
行
p216,1
p216,3
:
:
p216,303
64
p217,0
p217,2
:
:
p217,302
パリティ行
p217,1
p217,3
:
:
p217,303
:
:
:
:
:
:
:
:
:
:
p247,0
p247,2
:
:
p247,302
p247,1
p247,3
:
:
p247,303
図23−インターリーブの第1のステップ
13.8.3 インターリーブの第2のステップ
エラー伝ぱの影響を低減しバーストエラーの訂正能力を更に良くするために,追加のインターリーブが
行われる。
第1のインターリーブのステップによって生成されたLDCブロックの全ての行は,mod(k×3 152)バイ
ト左にシフトする。
ここで,0≦行番号≦495,かつ,k=div(行番号,2)である。
シフトによって左からはみ出したバイトは,配列の右側から再投入される(図24参照)。
この工程の後にバイトは,全ての行にわたって水平方向に番号が付け直され,図17に示すとおりD0〜
D75 391となる。
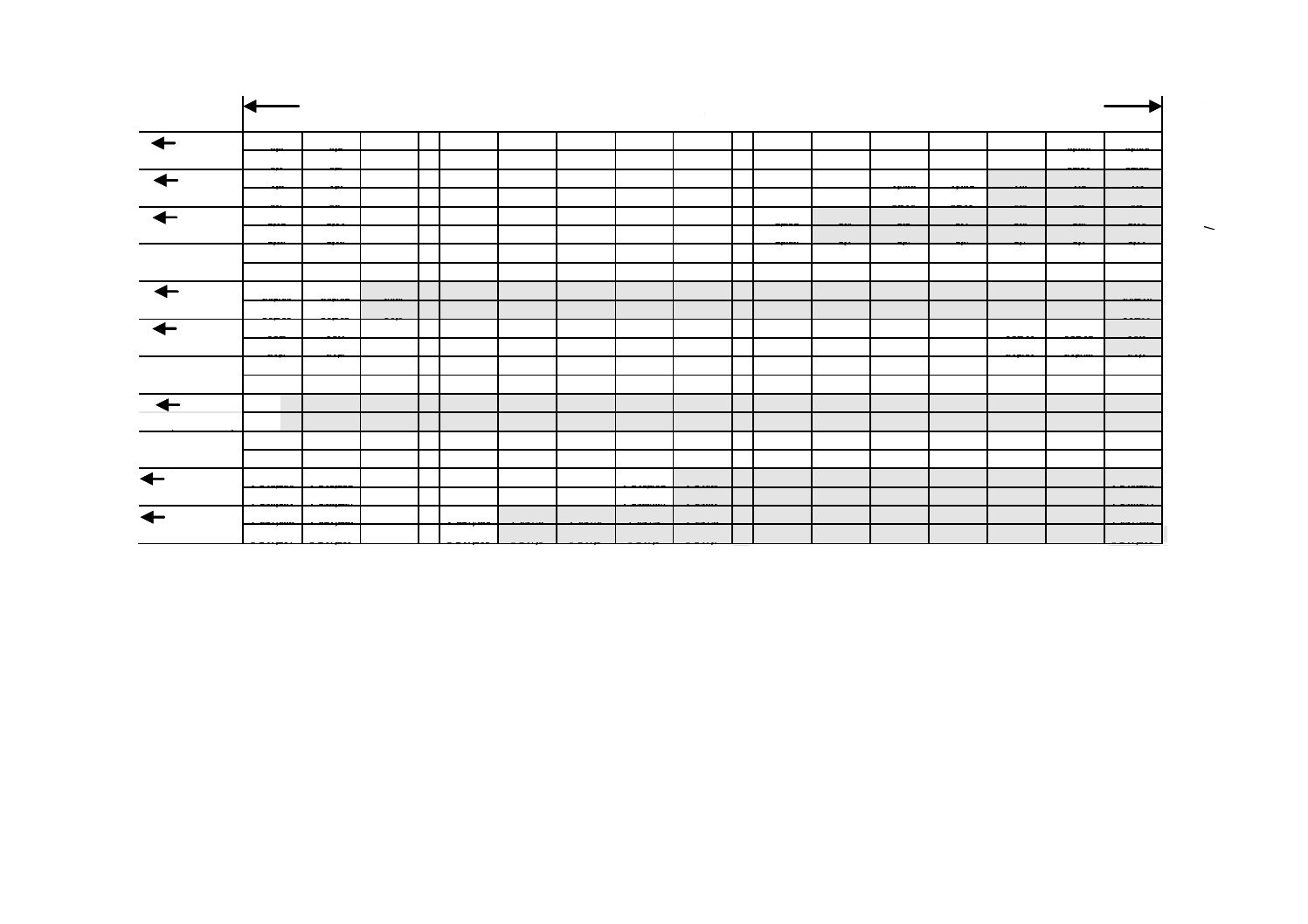
152
バイト
シフト
e0,0
e0,2
...
...
e0,300
e0,302
0
e0,1
e0,3
...
...
e0,301
e0,303
シフト
e1,6
e1,8
...
...
e1,300
e1,302
e1,0
e1,2
e1,4
3
e1,7
e1,9
...
...
e1,301
e1,303
e1,1
e1,3
e1,5
シフト
e2,12
e2,14
...
...
e2,302
e2,0
e2,2
e2,4
e2,6
e2,8
e2,10
6
e2,13
e2,15
...
...
e2,303
e2,1
e2,3
e2,5
e2,7
e2,9
e2,11
...
...
...
...
...
...
...
...
シフト
e50,300
e50,302
e50,0
...
...
e50,298
150
e50,301
e50,303
e50,1
...
...
e50,299
シフト
e51,2
e51,4
...
...
e51,300
e51,302
e51,0
1
e51,3
e51,5
...
...
e51,301
e51,303
e51,1
...
...
...
...
...
...
...
...
シフト
...
...
...
...
mod(k×3,152)
...
...
...
...
...
...
...
...
...
...
...
...
シフト130
p246,260
p246,262
...
p246,302
p246,0
...
p246,258
p246,261
p246,263
...
p246,303
p246,1
...
p246,259
シフト133
p247,266
p247,268
...
p247,302
p247,0
p247,2
p247,4
p247,6
...
p247,264
p247,267
p247,269
...
p247,303
p247,1
p247,3
p247,5
p247,7
...
p247,265
152
バイト
シフト
e0,0
e0,2
...
...
e0,300
e0,302
0
e0,1
e0,3
...
...
e0,301
e0,303
シフト
e1,6
e1,8
...
...
e1,300
e1,302
e1,0
e1,2
e1,4
3
e1,7
e1,9
...
...
e1,301
e1,303
e1,1
e1,3
e1,5
シフト
e2,12
e2,14
...
...
e2,302
e2,0
e2,2
e2,4
e2,6
e2,8
e2,10
6
e2,13
e2,15
...
...
e2,303
e2,1
e2,3
e2,5
e2,7
e2,9
e2,11
...
e2,302
e2,0
e2,2
e2,4
e2,6
e2,8
e2,10
6
e2,13
e2,15
...
...
e2,303
e2,1
e2,3
e2,5
e2,7
e2,9
e2,11
...
...
...
...
...
...
...
...
シフト
e50,300
e50,302
e50,0
...
...
e50,298
150
e50,301
e50,303
e50,1
...
...
e50,299
...
e50,298
150
e50,301
e50,303
e50,1
...
...
e50,299
シフト
e51,2
e51,4
...
...
e51,300
e51,302
e51,0
1
e51,3
e51,5
...
...
e51,301
e51,303
e51,1
...
...
...
...
...
...
...
...
シフト
...
...
...
...
mod(k×3,152)
...
...
...
...
...
...
...
...
...
...
...
...
シフト130
p246,260
p246,262
...
p246,302
p246,0
...
p246,258
p246,261
p246,263
...
p246,303
p246,1
...
p246,259
シフト133
p247,266
p247,268
...
p247,302
p247,0
p247,2
p247,4
p247,6
...
p247,264
p247,267
p247,269
...
p247,303
p247,1
p247,3
p247,5
p247,7
...
p247,265
p247,268
...
p247,302
p247,0
p247,2
p247,4
p247,6
...
p247,264
p247,267
p247,269
...
p247,303
p247,1
p247,3
p247,5
p247,7
...
p247,265
図24−LDCクラスタ
2
X
6
2
3
3
:
2
0
1
7
(I
S
O
/IE
C
3
0
1
9
3
:
2
0
1
6
)
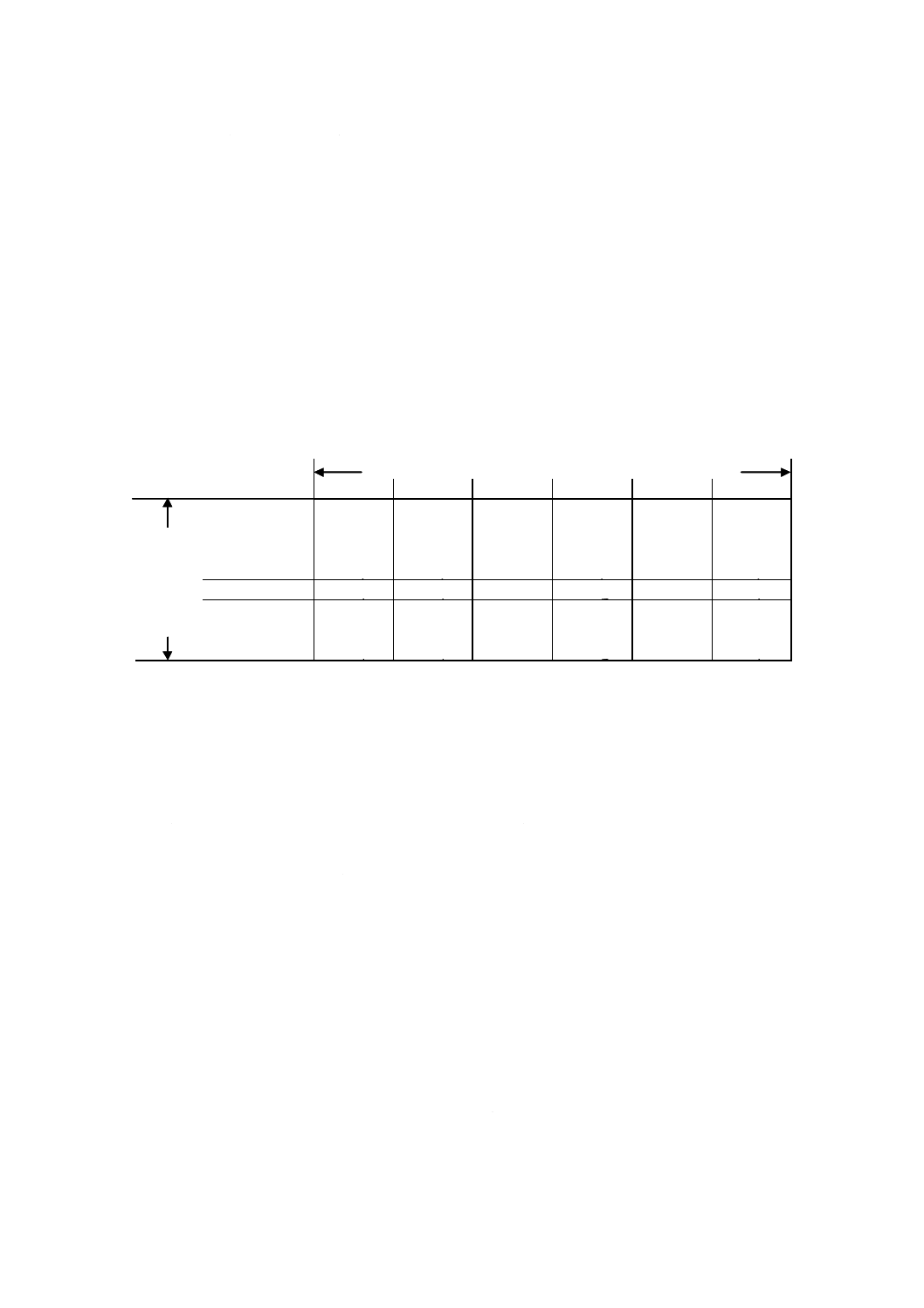
41
X 6233:2017 (ISO/IEC 30193:2016)
13.9 アドレス及びコントロールデータ
13.9.1 一般
ディスク上のデータにアクセスするために,アドレス及びコントロールデータが含まれている。
13.9.2 アドレスユニット
13.9.2.1 一般
光ヘッドを目的のトラックに位置決めするために,64Kの物理クラスタを16のアドレスユニットに更に
分割することによる高速アドレスの仕組みが組み込まれている。各アドレスユニットは,迅速に位置決め
できるように,BIS符号語(13.11参照)の中にアドレスをもっている(図25参照)。
各アドレスフィールドは9バイトで,次のとおりに構成される。
− アドレスユニット番号4バイト(箇条17参照)
− フラグビット1バイト
− エラー訂正4バイト
16 アドレス
0
1
:
S
:
15
AF0,0
AF0,1
:
AF0,S
:
AF0,15
アドレス-
AF1,0
AF1,1
:
:
:
AF1,15
ユニット番号
:
:
:
:
:
:
9
AF3,0
AF3,1
:
AF3,S
:
AF3,15
バイト
フラグビット
AF4,0
AF4,1
:
AF4,S
:
AF4,15
AF5,0
AF5,1
:
AF5,S
:
AF5,15
パリティ
:
:
:
:
:
:
AF8,0
AF8,1
:
AF8,S
:
AF8,15
16 アドレス
0
1
:
S
:
15
AF0,0
AF0,1
:
AF0,S
:
AF0,15
アドレス-
AF1,0
AF1,1
:
:
:
AF1,15
ユニット番号
:
:
:
:
:
:
9
AF3,0
AF3,1
:
AF3,S
:
AF3,15
バイト
フラグビット
AF4,0
AF4,1
:
AF4,S
:
AF4,15
AF5,0
AF5,1
:
AF5,S
:
AF5,15
パリティ
:
:
:
:
:
:
AF8,0
AF8,1
:
AF8,S
:
AF8,15
図25−16アドレスフィールド
13.9.2.2 アドレスフィールドのバイト割付け
アドレスフィールドを規定する前に,アドレスユニット番号,フラグビット及びパリティビットで構成
する主アドレスフィールドを,次に規定する。
PAF0,S=次に示すビット順を変えたアドレスユニット番号の最上位バイト
(AU31, AU30, AU29, AU28, AU24, AU27, AU26, AU25)
PAF1,S=アドレスユニット番号の第2上位バイト
PAF2,S=アドレスユニット番号の第3上位バイト
PAF3,S=アドレスユニット番号の最下位バイト
PAF4,S=フラグビットで,これらのビットは,クラスタ中の個々のデータフレームの状態を示すため,
又はアドレスのような他の情報を収納するために使用できる。これらのフラグビットの幾つかの
基本的な割当ては,13.9.2.4に規定する。使用しないフラグビットは,“0”にセットする。
PAF5,S〜PAF8,S=主アドレスフィールドで,(9,5,5)RS符号を構成するためのパリティバイト
このRS符号は,GF(28)の有限体上で規定される。有限体GF(28)の非ゼロ要素は,原始根αによって生
成される。ここに,αは,次の原始多項式p(x)の根である。
p(x)=x8+x4+x3+x2+1
GF(28)のシンボルは,(α7,α6,α5,...,α2,α,1)を元とする元多項式の表現を用いて,バイト(8ビットのグル
ープ)で表される。したがって,根αは次で表される。
α=00000010
42
X 6233:2017 (ISO/IEC 30193:2016)
ベクトルpafc=(PAF0,S .. PAFi,S ... PAF8,S)で表す各主アドレスフィールド符号語は,四つのパリティバイト
及び五つの情報バイトをもつGF(28)上のRS符号である。そのような符号語は,8次の多項式pafc(x)で表
すことができる(幾つかの係数はゼロの可能性がある。)。ここに,最高次はベクトルの情報部分(PAF0,S ...
など)に相当し,最低次はベクトルのパリティ部分(PAF5,S .. など)に相当する。
pafc(x)は,主アドレスフィールド符号語の生成多項式g(x)の倍数である。生成多項式は,次による。
(
)
∏
=
−
=
3
0
)
(
i
iα
x
x
g
主アドレスフィールド符号語は組織符号で,五つの情報バイトは変わることなく各符号語の最高次に現
れる。pafc符号のパリティチェック行列HPAFCは,全ての主アドレスフィールド符号語pafcに対して,次
による。
HPAFC×pafcT=0
パリティチェック行列HPAFCの第2行hPAFC2は生成多項式g(x)のゼロαに相当し,エラーの場所の特定に
用いる符号の位置を規定する。このパリティチェック行列HPAFCの第2行hPAFC2は,次による。
(
)1
,
,
..
,
2
7
8
PAFC2
α
α
α
α
h
=
アドレスフィールドは,次に示すとおり部分的に主アドレスフィールドを反転して規定する。
AF0,S=PAF0,S
AF1,S=PAF1,S
AF2,S=PAF2,Sの全ビット反転
AF3,S=PAF3,Sの全ビット反転
AF4,S=PAF4,S
AF5,S=PAF5,Sの全ビット反転
AF6,S=PAF6,Sの全ビット反転
AF7,S=PAF7,S
AF8,S=PAF8,S
13.9.2.3 アドレスユニット番号
物理クラスタのBIS列に記録する16個のアドレスフィールドは,それぞれ4バイトのアドレスユニッ
ト番号(AUN)をもっている。
アドレスユニット番号は,図26に規定するとおりに,PSNから生成する。
アドレスユニット番号は,PSNと同期をとるために,各連続したアドレスユニット間で二つずつ増加し
ている(箇条17参照)。
各物理クラスタの最初のアドレスユニット番号は,32の倍数である。
データゾーン0の最初のアドレスユニット番号は,00 10 00 00h(10進数で1 048 576)となる。
データゾーン1の最後のアドレスユニット番号は,03 EF FF FEh(10進数で66 060 286)となる。
データゾーン2の最初のアドレスユニット番号は,04 10 00 00h(10進数で68 157 440)となる。
アドレスユニット番号のビット設定は,次による。
− AU31 .. AU5は,PSNからPS31 .. PS5を複製する。
− AU4 .. AU1は,物理クラスタ内で0〜15をカウントする。
− AU0は,リザーブ(領域)とする。
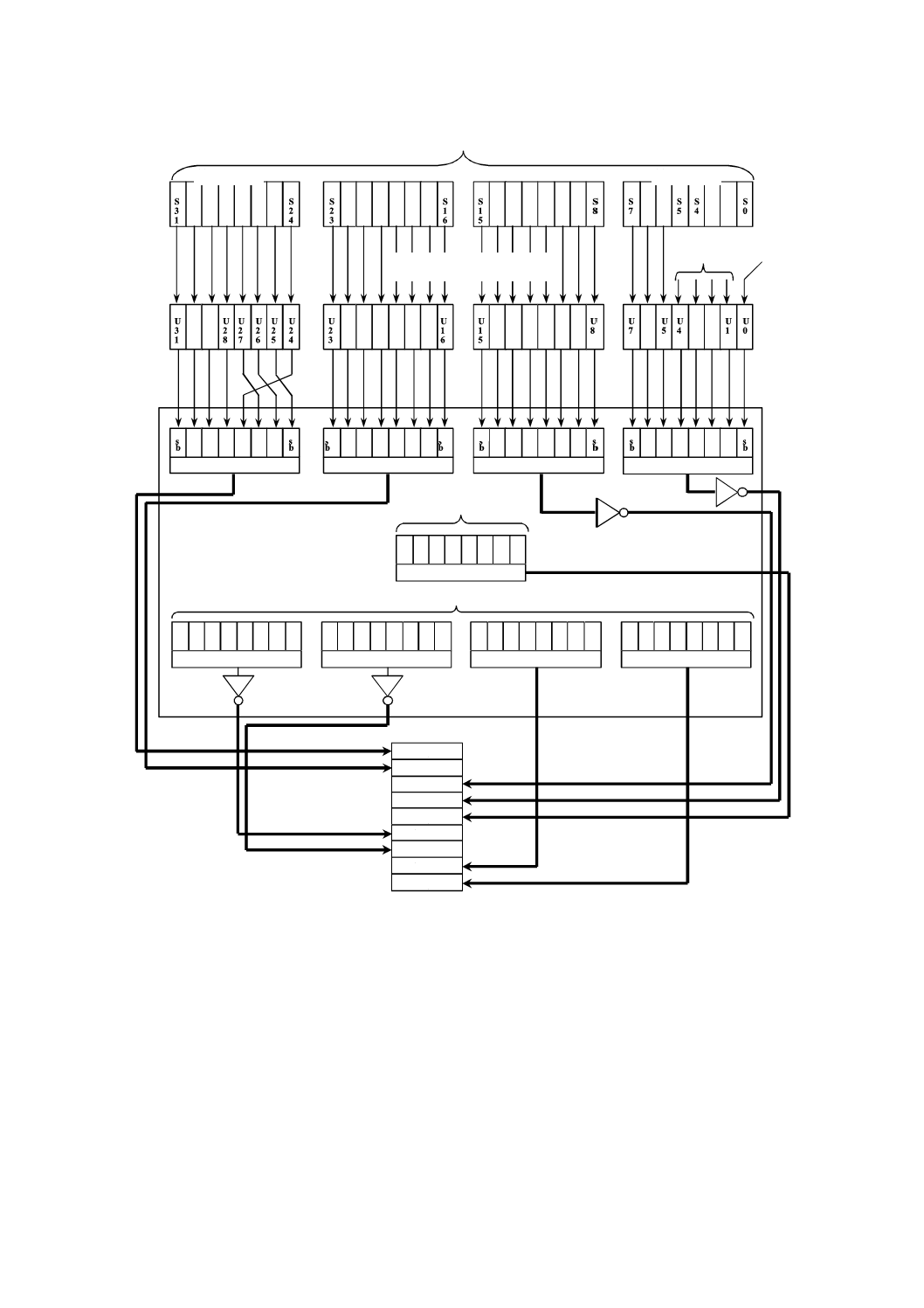
43
X 6233:2017 (ISO/IEC 30193:2016)
最上位バイト
クラスタ内
カウント
“0”
フラグビット
パリティバイト
主アドレスフィールド
アドレスフィールド
PSN
PS0
PS4
PS5
PS7
PS8
PS15
PS16
PS23
PS24
PS31
AU0
AU5 AU4
AU1
AU7
AU8
AU15
AU16
AU23
AU31
AU28 AU27
AU26 AU25
AU24
msb
lsb
msb
msb
lsb
lsb
msb
lsb
PAF0,S
PAF1,S
PAF2,S
PAF3,S
PAF4,S
PAF8,S
PAF7,S
PAF6,S
PAF5,S
AF0,S
AF1,S
AF3,S
AF4,S
AF5,S
AF6,S
AF7,S
AF8,S
AF2,S
アドレスユニット番号
最下位バイト
図26−PSNからAUN,主アドレスフィールド,アドレスフィールドの生成
44
X 6233:2017 (ISO/IEC 30193:2016)
13.9.2.4 フラグビットの割付け
ビット
バイト
AF4,S
b7
b6
b5
b4
b3
b2
b1
b0
AF4,0
Sa0,1
Sa1,1
Sa0,0
Sa1,0
IdT7
Rd15
Rsv
Rsv
AF4,1
Sa2,1
Sa3,1
Sa2,0
Sa3,0
IdT6
Rd14
Rsv
Rsv
AF4,2
Sa4,1
Sa5,1
Sa4,0
Sa5,0
IdT5
Rd13
Rsv
Rsv
AF4,3
Sa6,1
Sa7,1
Sa6,0
Sa7,0
IdT4
Rd12
Rsv
Rsv
AF4,4
Sa8,1
Sa9,1
Sa8,0
Sa9,0
IdT3
Rd11
Rsv
Rsv
AF4,5
Sa10,1
Sa11,1
Sa10,0
Sa11,0
IdT2
Rd10
Rsv
Rsv
AF4,6
Sa12,1
Sa13,1
Sa12,0
Sa13,0
IdT1
Rd9
Rsv
Rsv
AF4,7
Sa14,1
Sa15,1
Sa14,0
Sa15,0
IdT0
Rd8
Rsv
Rsv
AF4,8
Sa16,1
Sa17,1
Sa16,0
Sa17,0
Rsv
Rd7
Rsv
Rsv
AF4,9
Sa18,1
Sa19,1
Sa18,0
Sa19,0
Rsv
Rd6
Rsv
Rsv
AF4,10
Sa20,1
Sa21,1
Sa20,0
Sa21,0
Rsv
Rd5
Rsv
Rsv
AF4,11
Sa22,1
Sa23,1
Sa22,0
Sa23,0
Rsv
Rd4
Rsv
Rsv
AF4,12
Sa24,1
Sa25,1
Sa24,0
Sa25,0
Rsv
Rd3
Rsv
Rsv
AF4,13
Sa26,1
Sa27,1
Sa26,0
Sa27,0
Rsv
Rd2
Rsv
Rsv
AF4,14
Sa28,1
Sa29,1
Sa28,0
Sa29,0
Rsv
Rd1
Rsv
Rsv
AF4,15
Sa30,1
Sa31,1
Sa30,0
Sa31,0
Rsv
Rd0
Rsv
Rsv
Rsvは,アプリケーションで規定する場合を除いてリザーブ(領域)とする。
図27−16アドレスフィールドからのフラグビット
状態ビットSai,j(0≦i≦31,0≦j≦1):各クラスタは,32データフレームを含み16のアドレスユニット
しかないため,そのような各アドレスユニットは二つのデータフレームに対応したフラグビットをもつ
(図27参照)。
連続したフラグバイトAF4,Sのb7及びb5ビットは,それぞれデータフレーム2Sの状態ビットSa2S,1及び
Sa2S,0を規定する。
連続したフラグバイトAF4,Sのb6及びb4ビットは,それぞれデータフレーム2S+1の状態ビットSa2S+1,1
及びSa2S+1,0を規定する。
全フラグバイトAF4,Sのb3〜b0ビットは,アプリケーションに規定する場合を除いてリザーブ(領域)
とする。
RID̲TagビットIdTi:連続したフラグバイトAF4,0〜AF4,7のb3ビットは,このアドレスユニットを含む
クラスタを記録したレコーダのRID̲Tagの値を表す(21.4参照)。msbは,IdT7とする(図27参照)。
連続したフラグバイトAF4,8〜AF4,15のb3ビットは,リザーブ(領域)とする。
記録日付ビットRdi:連続したフラグバイトAF4,Sのb2ビットは,このアドレスユニットをもつクラスタ
が次のフォーマットで記録された場合,日付を表す(図27参照)。
45
X 6233:2017 (ISO/IEC 30193:2016)
− Rd15〜Rd9:この7ビットは,実際の年数から2 000を引いたものを,Rd15をmsbとする正の2進数で
表す。
− Rd8〜Rd5:この4ビットは,実際の月数を,Rd8をmsbとする正の2進数で表す。
− Rd4〜Rd0:この5ビットは,その月の実際の日数を,Rd4をmsbとする正の2進数で表す。
ドライブがこのフィールドを正しく設定できない場合は,Rdiの全てのビットは“0”に設定する。
13.9.2.5 状態ビットSai, jの使用方法
クラスタの中の個別のデータフレームの状態を示すために,状態ビットの組合せSai,1/Sai,0が用いられる。
次のセッティングで規定する。
− Sai,1/Sai,0=00:データフレームは,通常の使用者データを含む。
− Sai,1/Sai,0=01:データフレームは,読取変更記録(RMW)中に破棄することが許される特別な使用者
データを含む。
− Sai,1/Sai,0=11:データフレームは,ディスクに記録する前にクラスタを完結させるために,ドライブ
によって挿入した埋込みデータを含む。
− 他の設定:アプリケーションに規定する場合を除いてリザーブ(値)とする。
使用者データ領域で,ストリーミングモードで記録されたクラスタでは全ての状態ビットSai,1/Sai,0は,
01に設定することが望ましい。
さらに,ディスクに記録する前にクラスタを完結させるために,ドライブによってデータを挿入したデ
ータフレーム(埋込み)に対して,状態ビットSai,1/Sai,0は11に設定する。
データフレームiのデータがホストコンピュータから供給される他の全ての場合は,状態ビットSai,1/Sai,0
は00に設定する。
その結果,データフレームiの内容は,次のとおりに処理する。
− Sai,1/Sai,0が00に設定された場合は,データフレームiの内容は,R-M-W動作中に保存する。
− Sai,1/Sai,0が01又は11に設定された場合は,データフレームiの内容は,R-M-W動作中に破棄しても
よい。Sai,1/Sai,0ビットの幾つかに信頼性に疑義がある場合は,関連するデータフレームiの内容は,
R-M-W動作中に保存する(Sai,1/Sai,0は,00の値と考える。)。
注記 Sai,1及びSai,0の2ビットの組合せを,Sai,1/Sai,0と表記している。
13.9.3 使用者コントロールデータ
使用者データにアクセスするために,各使用者データフレームに特別なコントロールデータを付加する
ことができる。これらの追加バイトは,アプリケーションに関連した情報をもつことができる。使用者コ
ントロールデータユニットを伴う使用者データフレームは,セクタと呼ばれる。各使用者コントロールデ
ータユニットは,18バイトで構成される(図28参照)。
46
X 6233:2017 (ISO/IEC 30193:2016)
32 ユニット
0
1
:
S
:
31
UC0,0
UC0,1
:
UC0,S
:
UC0,31
UC1,0
UC1,1
:
:
:
UC1,31
18 バイト
:
:
:
:
:
:
:
:
:
:
:
:
UC17,0
UC17,1
:
UC17,S
:
UC17,31
32 ユニット
0
1
:
S
:
31
UC0,0
UC0,1
:
UC0,S
:
UC0,31
UC1,0
UC1,1
:
:
:
UC1,31
18 バイト
:
:
:
:
:
:
:
:
:
:
:
:
UC17,0
UC17,1
:
UC17,S
:
UC17,31
図28−使用者コントロールデータユニット
13.9.4 使用者コントロールデータのビット又はバイト設定
使用者コントロールデータバイトは,アプリケーションに依存している。これらの設定をアプリケーシ
ョンに規定する場合を除いて,これらのバイトは,00hに設定する。
24列
6行
物理
アドレス
AF0,0
AF1,0
AF2,0
AF0,7
AF1,7
AF2,7
AF0,6
AF1,6
AF2,6
AF0,5
:
:
AF0,1
AF1,1
AF2,1
30
行
AF0,8
AF1,8
AF2,8
AF0,15
:
:
AF0,14
:
:
AF0,13
:
:
AF0,9
AF1,9
AF2,9
AF4,1
AF5,1
AF3,1
AF4,0
AF5,0
AF3,0
AF4,7
AF5,7
AF3,7
AF4,6
:
:
AF4,2
AF5,2
AF3,2
AF4,9
:
:
AF4,8
AF5,8
AF3,8
AF4,15
:
:
AF4,14
:
:
AF4,10
AF5,10
AF3,10
AF8,2
AF6,2
AF7,2
AF8,1
AF6,1
AF7,1
AF8,0
AF6,0
AF7,0
AF8,7
:
:
AF8,3
AF6,3
AF7,3
AF8,10
:
:
AF8,9
:
:
AF8,8
AF6,8
AF7,8
AF8,15
:
:
AF8,11
AF6,11
AF7,11
24行
使用者
コントロール
データ
UC0,0
UC6,1
UC12,2
UC0,4
:
:
:
:
:
:
:
:
:
:
UC12,30
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
UC17,2
:
:
:
:
:
:
:
:
:
:
:
UC17,30
:
:
UC0,3
:
:
:
:
:
:
:
:
:
:
:
UC0,31
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
UC17,1
:
:
:
:
:
:
:
:
:
:
:
:
:
:
UC0,2
:
:
:
:
:
:
:
:
:
:
:
UC0,30
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
UC17,0
:
:
UC17,4
:
:
:
:
:
:
:
:
:
:
:
UC0,1
:
:
UC0,5
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
UC5,1
UC11,2
UC17,3
:
:
:
:
:
:
:
:
:
:
UC11,30
UC17,31
図29−アクセスブロックの構成
(16アドレスフィールド及び32使用者コントロールデータユニットから)
2
X
6
2
3
3
:
2
0
1
7
(I
S
O
/IE
C
3
0
1
9
3
:
2
0
1
6
)
48
X 6233:2017 (ISO/IEC 30193:2016)
13.10
アクセスブロック
アドレスフィールド及び使用者コントロールデータユニットのデータは30行×24列の配列に配置され,
アクセスブロックと呼ばれる。
アドレスフィールドを迅速に位置決めする必要があるため,これらのアクセスフィールドのデータは,
特別なプリインターリーブの方法で配置される。
各16アドレスの9バイト(図25参照)は,3バイトの3グループにまとめられる。
各アドレス0〜7の3グループのバイトはアドレス0から始まり,各続きのアドレスは3ポジション左に
循環的にシフトする位置に,アクセスブロックの第1,第3及び第5の行の対角方向に配置される(図29
参照)。
各アドレス8〜15の3グループのバイトは,アドレス8から始まり,各続きのアドレスは,3ポジショ
ン左に循環的にシフトする位置に,アクセスブロックの第2,第4及び第6の行の対角方向に配置される。
第3及び第4行の各バイトグループ内では,バイトは,左方向に循環的に1バイトシフトされる。
第5及び第6行の各バイトグループ内では,バイトは,左方向に循環的に2バイトシフトされる。
数式で表すと,このアクセスブロックへのアドレスバイトAFx,yの配置は,次に示す式で表すことができ
る。
− 行r=2×div(x,3)+div(y,8)
− 列c=3×mod{[div(x,3)+16−y],8}+mod{[x−div(x,3)],3}
使用者コントロールデータユニットは列方向に配置され,各使用者コントロールデータは,1列の3/4
だけを埋めることになる(3列に4使用者コントロールデータユニットが入る。図29参照)。
13.11
BISブロック
アクセスブロックの各列のバイトは,Cが符号語番号を表す場合(=0〜23の列番号),図30に示すと
おり各列の先頭からb0,C b1,C .. bi,C ..〜b29,Cというように番号が付け直される。
BISブロックは,各列に対し,(62,30,33)RS符号による32個のパリティバイトを追加拡張して,完成と
なる。パリティバイトは,pb30,C pb31,C .. pbj,C .. pb61,Cと番号が付けられる。
24 列
符号語
0
符号語
1
:
符号語
C
:
符号語
22
符号語
23
1BIS
符号語
30
情報バイト
b0,0
b1,0
:
:
:
b29,0
b0,1
b1,1
:
:
:
b29,1
:
:
:
:
:
:
b0,C
b1,C
:
bN,C
:
b29,C
:
:
:
:
:
:
:
:
:
:
:
:
b0,23
b1,23
:
:
:
b29,23
= 62 バイト
32
パリティバイト
pb30,0
:
:
:
pb61,0
pb30,1
:
:
:
pb61,1
:
:
:
:
:
pb30,C
:
:
:
pb61,C
:
:
:
:
:
:
:
:
:
:
pb30,23
:
:
:
pb61,23
図30−データバイトの再番号割当て及びパリティ追加によるBISブロック構成
13.12
BIS符号語
BIS RS符号は,GF(28)の有限体上で規定される。有限体GF(28)の非ゼロ要素は,原始根αによって生成
49
X 6233:2017 (ISO/IEC 30193:2016)
される。ここに,αは,次の原始多項式p(x)の根である。
p(x)=x8+x4+x3+x2+1
GF(28)のシンボルは,(α7, α6, α5, ..., α2, α, 1)を元とする元多項式の表現を用いてバイト(8ビットのグル
ープ)で表される。したがって,根αは次で表される。
α=00000010
ベクトルbis=(b0,C .. bi,C .. b29,C pb30,C .. pbj,C .. pb61,C)で表す各BIS符号語は,32個のパリティバイト及び
30個の情報バイトをもつGF(28)上のリードソロモン符号である。そのような符号語は,61次の多項式bis(x)
で表すことができる(幾つかの係数はゼロの可能性がある。)。ここに,最高次はベクトルの情報部分(b0,C ...
など)に相当し,最低次はベクトルのパリティ部分(b30,C .. など)に相当する。
bis(x)は,BIS符号語の生成多項式g(x)の倍数である。生成多項式は,次による。
(
)
∏
=
−
=
31
0
)
(
i
iα
x
x
g
BIS符号語は,組織符号で30個の情報バイトは変わることなく各符号語の最高次に現れる。bis符号の
パリティチェック行列HBISは,全てのBIS符号語bisに対して,次による。
HBIS×bisT=0
パリティチェック行列HBISの第2行hBIS 2は,生成多項式g(x)のゼロαに相当し,エラーの場所の特定に
使用する符号の位置を規定する。このパリティチェック行列HBISの第2行hBIS 2は,次による。
(
)1,
,
..
,
2
60
61
2
BIS
α
α
α
α
h
=
13.13
BISクラスタ
BIS符号語生成の後BISブロックは,インターリーブされ496行×3列の配列に配置される。この新し
くフォーマットした配列は,BISクラスタと呼ばれる。
BISクラスタは,図17に示すとおりアドレスユニットによって更に分割される。ユニットは,u=0〜15
の番号が付けられ,そのユニット内では,行がr=0〜30及び列がe=0〜2に番号が付けられる(図31参
照)。
BISのインターリーブ方法の要点は,次のようである(図30,図31,図32及び図33中の例を参照)。
− BISブロックの各行は,3バイトの8グループに分けられる。これらの3バイトのグループは,それ
ぞれBISクラスタの一行に配置される。
− BISブロックの偶数行は,ユニット0〜7に配置され,BISブロックの奇数行は,ユニット8〜15に配
置される。
− BISブロックの偶数行からの3バイトのグループは,ユニット0〜7の同じ行に配置される。ここに,
ユニットは,(番号に従って)逆順で使用される。
− BISブロックの各連続する行の最初の3バイトグループは,前の行で使用された開始ユニットよりも
一つ大きい番号のユニットに配置する。
− BISブロックのN=0の行は,ユニット:0,7,6,5,..,2,1のr=0の行に配置される。
− BISブロックのN=2の行は,ユニット:1,0,7,6,..,3,2のr=1の行に配置される。
− BISブロックのN=4の行は,ユニット:2,1,0,7,..,4,3のr=2の行に配置される。
− このようにこのプロセスは,r=30の行のユニット6,5,4,3,..,0,7に配置されるN=60の行
まで繰り返される。
− ここに,各ユニットの中で各行rは,循環的に右側に位置をmod(r,3)だけシフトされる。r=0の行は,
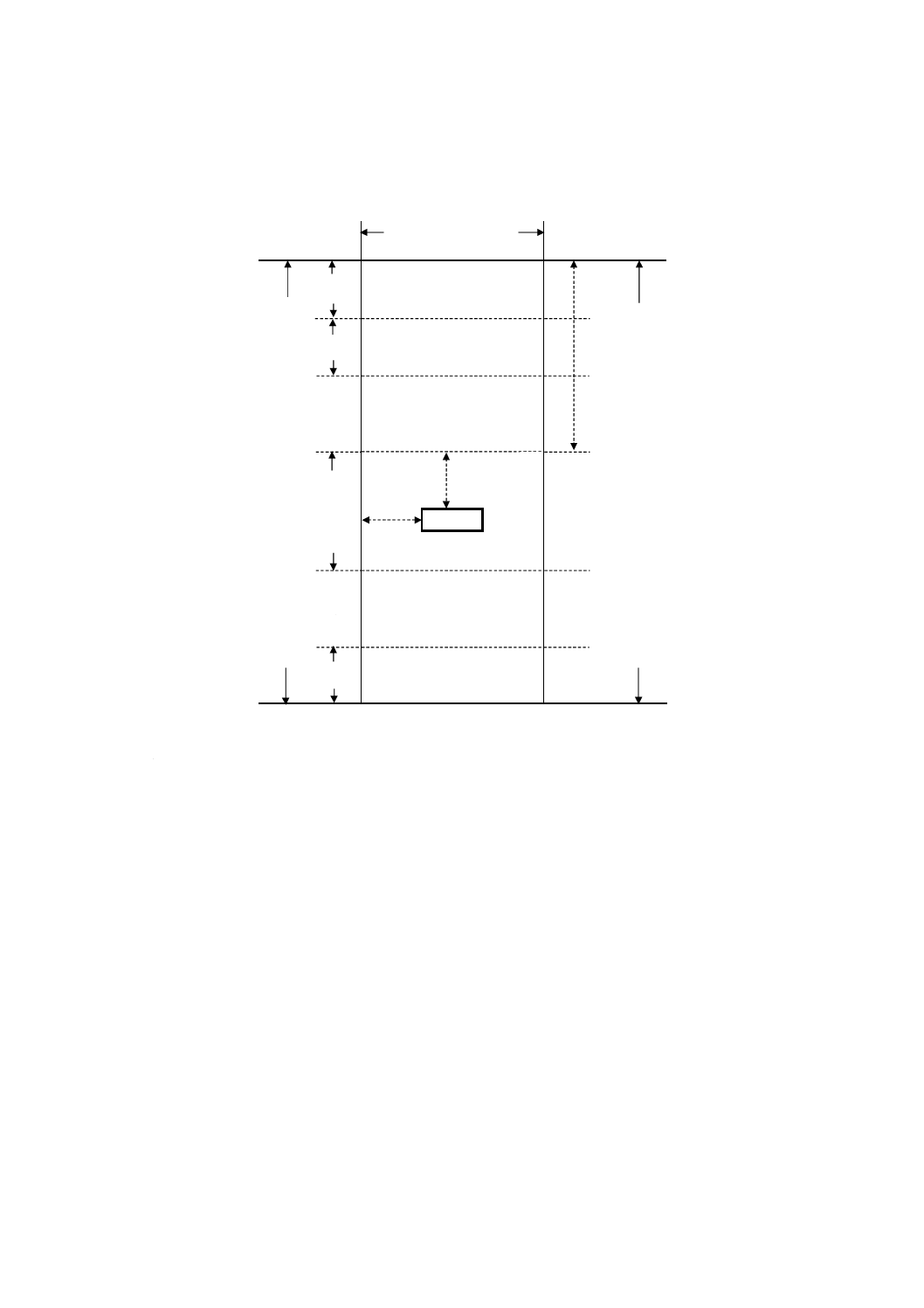
50
X 6233:2017 (ISO/IEC 30193:2016)
シフトされない。r=1の行は,1シフトされる。r=2の行は,2シフトされる。r=3の行は,シフト
されない。r=4の行は,1シフトされる。
− BISブロックの奇数行についても同様の方法が行われるが,ユニット8〜15が使用される。
3列
B0
B1
B2
31
:
:
:
B90
B91
B92
B93
B94
B95
31
:
:
:
:
:
:
:
:
u
496
16
行
31
e
r
ユニット
行
Bm
:
:
31
B1 487
図31−BISクラスタ
BISブロックからBISクラスタへのバイトbN,C又はpbN,C(図30参照)の配置は,数式で表すと,次の
式で表すことができる。
− ユニット: u=mod{[div(N,2)+8 − div(C,3)],8}+8×mod(N,2)
− その行:
r=div(N,2)
− その列:
e=mod{[C+div(N,2)],3}
物理クラスタとしてディスクに記録されるBmに付与される連続番号(図17参照)であるバイト番号m
は,次による。
m=(u×31+r)×3+e
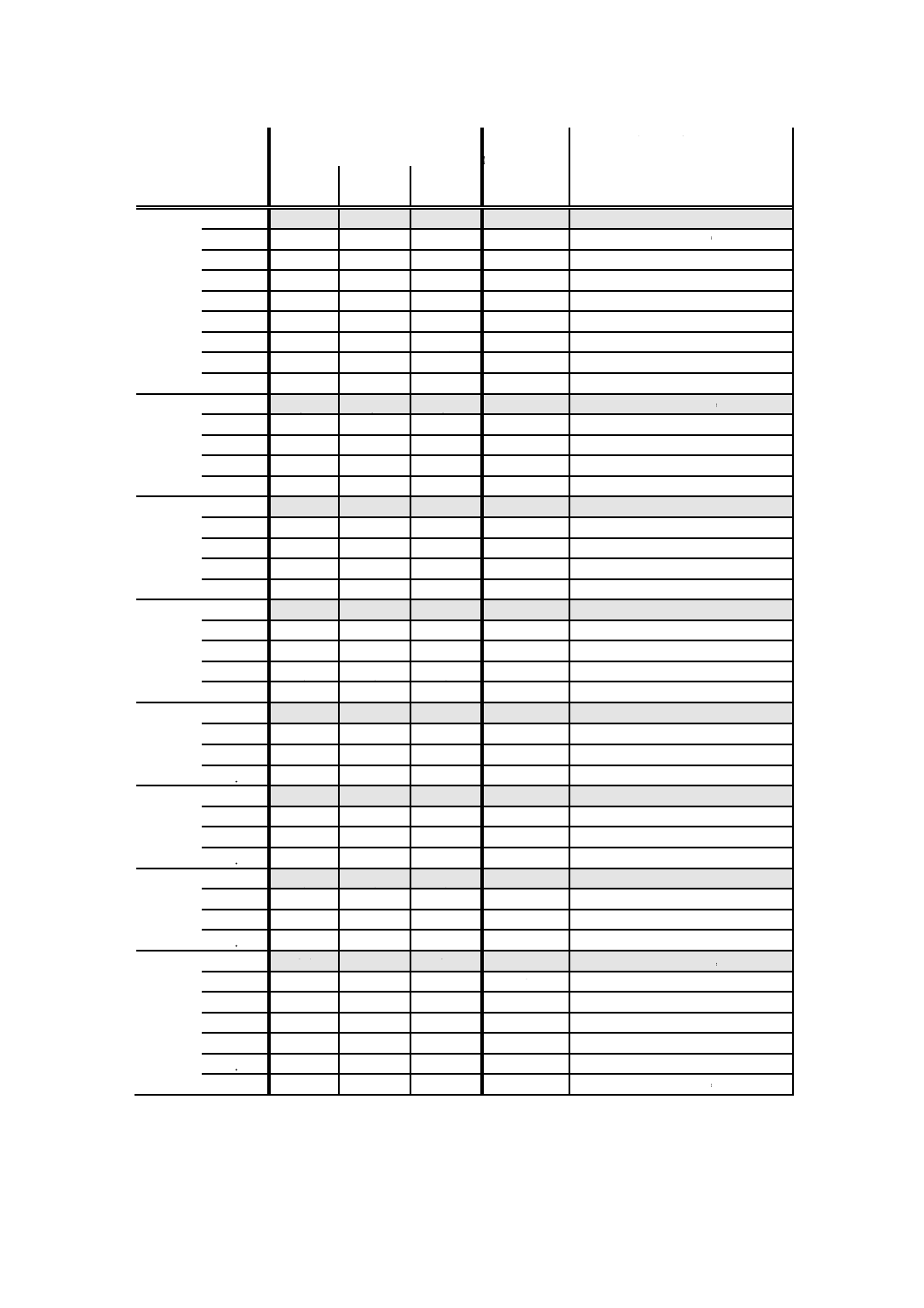
51
X 6233:2017 (ISO/IEC 30193:2016)
BISブロックのバイト番号N,C
右シフト
(= mod(r, 3))
上方向に挿入
ユニット
u
行r
0
列e
1
2
0
0
0,0
0,1
0,2
0
開始ブロック行
N= 0
1
2,5
2,3
2,4
1
↑
継続ブロック
N= 2
2
4,7
4,8
4,6
2
3
6,9
6,10
6,11
0
:
7
14,23
14,21
14,22
1
8
16,1
16,2
16,0
2
開始ブロック行
N= 16
:
30
60,18
60,19
60,20
0
1
0
0,21
0,22
0,23
0
終了ブロック行
N= 0
1
2,2
2,0
2,1
1
開始ブロック行
N= 2
2
4,4
4,5
4,3
2
3
6,6
6,7
6,8
0
:
2
0
0,18
0,19
0,20
0
1
2,23
2,21
2,22
1
終了ブロック行
N= 2
2
4,1
4,2
4,0
2
開始ブロック行
N= 4
3
6,3
6,4
6,5
0
:
3
0
0,15
0,16
0,17
0
1
2,20
2,18
2,19
1
2
4,22
4,23
4,21
2
3
6,0
6,1
6,2
0
開始ブロック行
N= 6
:
4
0
0,12
0,13
0,14
0
1
2,17
2,15
2,16
1
2
:
5
0
0,9
0,10
0,11
0
1
2,14
2,12
2,13
1
2
:
6
0
0,6
0,7
0,8
0
1
2,11
2,9
2,10
1
2
4,13
4,14
4,12
2
:
7
0
0,3
0,4
0,5
0
↑継続ブロック行
N= 0
1
2,8
2,6
2,7
1
↑継続ブロック行N= 2
2
4,10
4,11
4,9
2
:
7
14,2
14,0
14,1
1
開始ブロック行
N= 14
:
30
60,21
60,22
60,23
0
終了ブロック行
N= 60
図32−BISバイトを最初の8ユニットに配置する例(部分)
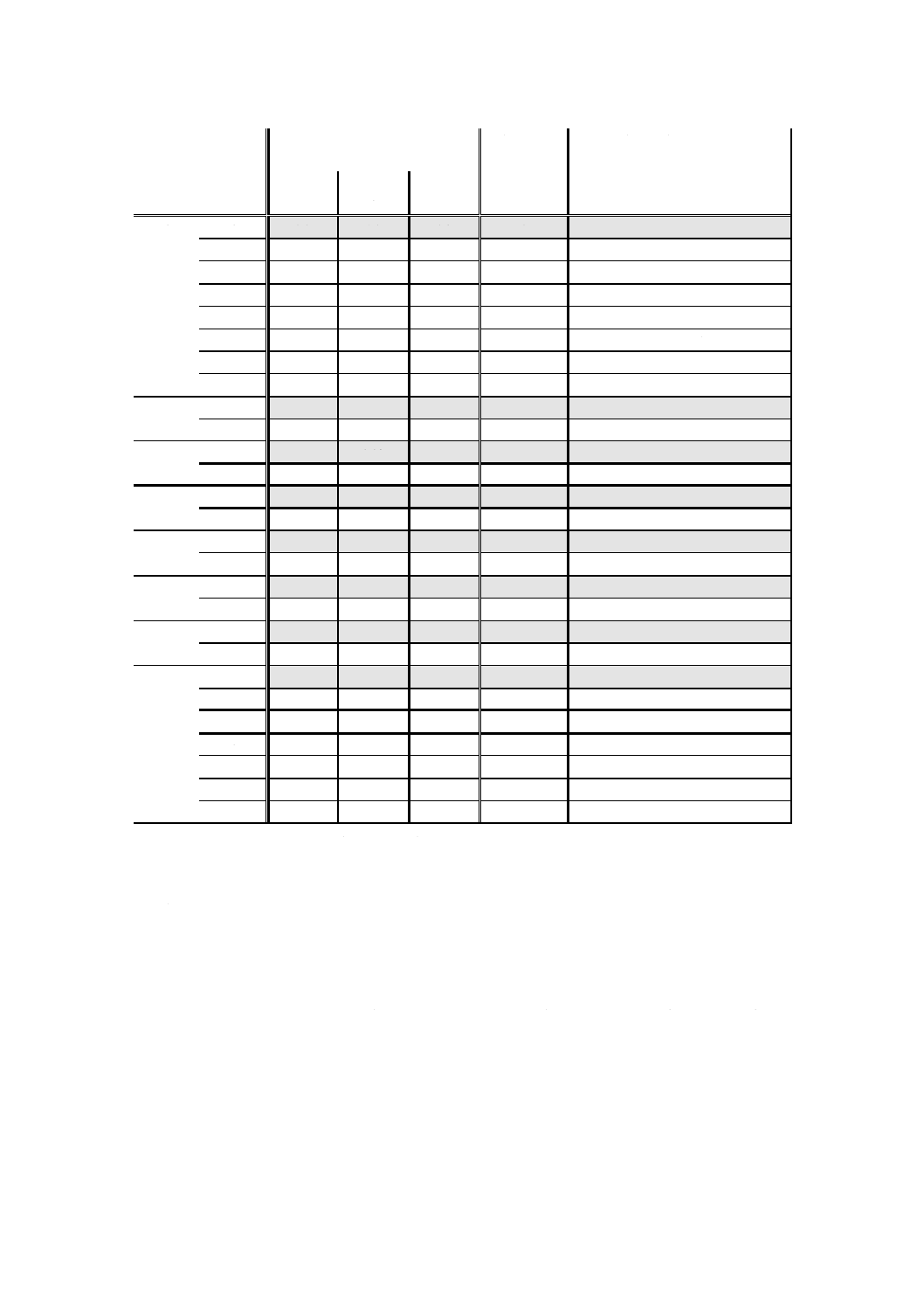
52
X 6233:2017 (ISO/IEC 30193:2016)
BISブロックからのバイト番号N,C
右シフト
(= mod(r,3))
上方向へ挿入
ユニットu
行r
0
列e
1
2
8
0
1,0
1,1
1,2
0
開始ブロック行
N= 1
1
3,5
3,3
3,4
1
2
5,7
5,8
5,6
2
3
7,9
7,10
7,11
0
:
8
17,1
17,2
17,0
2
開始ブロック行
N= 17
:
30
61,18
61,19
61,20
9
0
1,21
1,22
1,23
終了ブロック行
N= 1
10
0
1,18
1,19
1,20
11
0
1,15
1,16
1,17
12
0
1,12
1,13
1,14
13
0
1,9
1,10
1,11
14
0
1,6
1,7
1,8
15
0
1,3
1,4
1,5
0
↑継続ブロック行N= 1
1
3,8
3,6
3,7
1
2
5,10
5,11
5,9
2
:
7
15,2
15,0
15,1
1
開始ブロック行
N= 15
:
30
61,21
61,22
61,23
0
終了ブロック行
N= 61
図33−BISバイトを最後の8ユニットへ配置する例(部分)
結論は,次による。
− BISブロックの全ての情報バイトは,各アドレスユニットの最初の15行の中に見つかる。
− BISブロックの全てのパリティバイトは,各アドレスユニットの最後の16行の中に見つかる。
− 各アドレスフィールドは,各アドレスユニットの最初の3行に見つかる(図34参照)。
13.14
ECCクラスタ
LDCクラスタ及びBISクラスタを構成の後,LDCクラスタは,各38列の四つのグループに分割される。
この4グループの間に3列のBISクラスタから1列ずつが挿入される。BISクラスタ及びLDCクラスタを
多重した後に図34のECCクラスタになる。
53
X 6233:2017 (ISO/IEC 30193:2016)
LDC
38
列
BIS
1
列
LDC
38
列
BIS
1
列
LDC
38
列
BIS
1
列
LDC
38
列
AF0,0
AF1,0
AF2,0
AF3,0
AF4,0
AF5,0
AF6,0
AF7,0
AF8,0
アドレス
UCu,v
:
:
ユニット0
:
:
:
AF0,1
AF1,1
AF2,1
496
AF3,1
AF4,1
AF5,1
行
AF6,1
AF7,1
AF8,1
アドレス
UCx,y
:
:
ユニット1
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
:
図34−BISクラスタ及びLDCクラスタを多重した後のECCクラスタ
13.15
記録フレーム
各ECCクラスタの行は,規定の場所にフレーム同期ビット及び直流制御ビットを加えて記録フレームに
変換される。
このために,各ECCクラスタの各行155バイトから形成される一連の1 240データビットは,25データ
ビットの1グループ及び45データビットの27グループに分けられ(図35参照),バイトの最上位ビット
が最初に処理される。
最初の25データビットのグループは,特別な30変調チャネルビット列であるフレーム同期を挿入する
ための20データビット位置分が拡張される。
次に,各45データビットのグループは,直流制御ブロックを構成する1ビットの位置を足して完成とな
る。
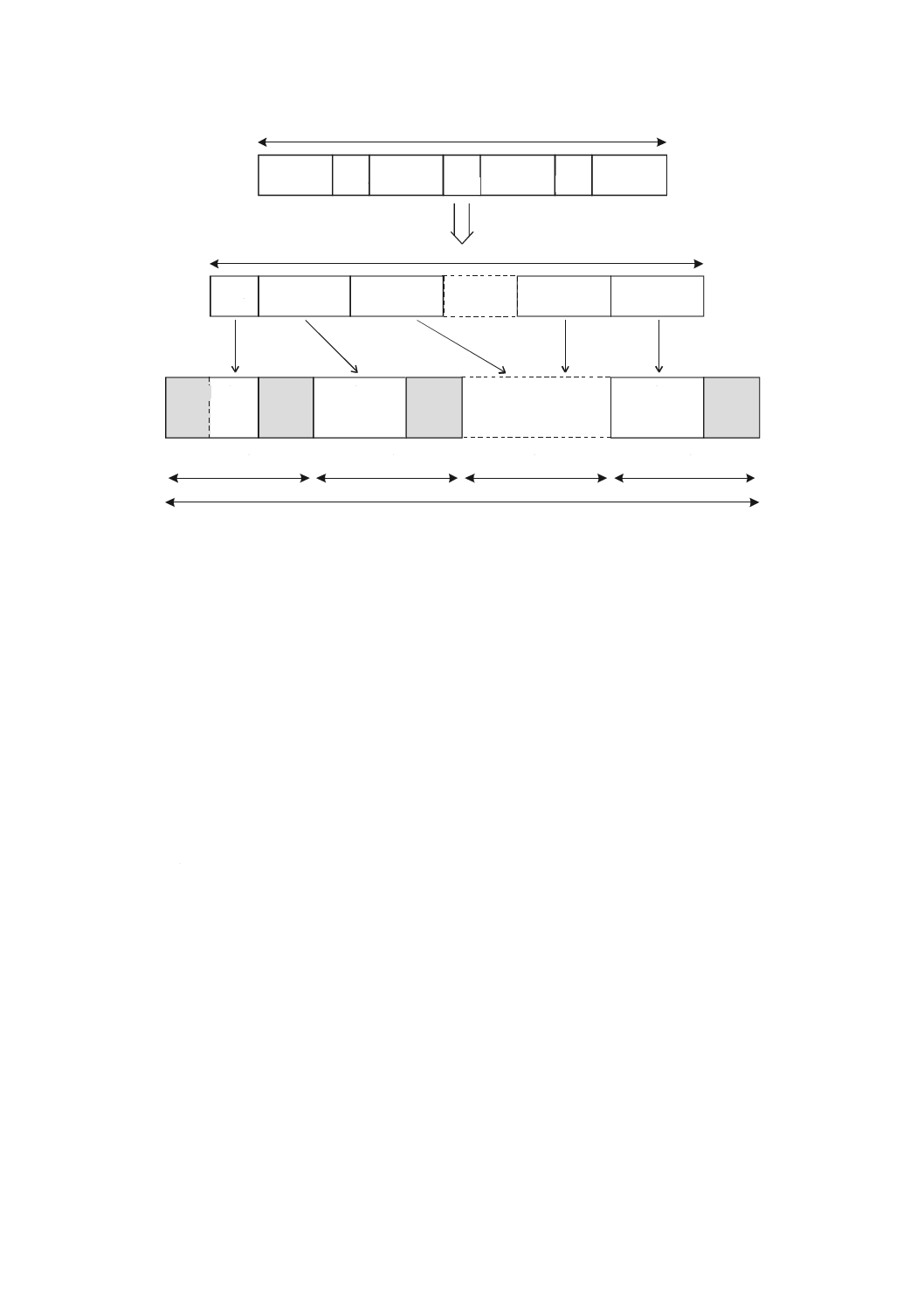
54
X 6233:2017 (ISO/IEC 30193:2016)
38
バイト
38
バイト
38
バイト
38
バイト
1
バイト
1
バイト
1
バイト
データ
25
データ
45
データ
45
フレーム
同期
20
直流
制御
1
直流
制御
1
直流
制御
1
25
ビット
45
ビット
45
ビット
45
ビット
45
ビット
155バイト
1240ビット
1288ビット
46ビット
46ビット
46ビット
直流制御ブロック#0
直流制御ブロック#1
直流制御ブロック#2..26
直流制御ブロック#27
25
46ビット
×
図35−記録フレームの生成
13.16
物理クラスタ
記録フレームに変換されたECCクラスタの496行は,物理クラスタと呼ばれる。
13.17
記録データのための17PP変調
13.17.1
一般
フレーム同期以外の記録フレームの全てのビットは,17PP変調符号則に従い変調ビットに変換される。
この17PP変調符号は,ラン長が2T以上かつ8T以下のRLL(1,7)符号で幾つかの特徴がある。
PPは,パリティ保存及びRMTR禁止を意味しており,次を意味する。
− パリティ保存
− データビット列の“1”の数が偶数の場合は,変調ビット列の“1”の数も偶数である。
− データビット列の“1”の数が奇数の場合は,変調ビット列の“1”の数も奇数である。
この性質によって,記録信号の低周波成分を効率よく制御することが簡単になる(13.17.3参照)。
− RMTR禁止
− 連続する最小ラン長(2T)の数は,6に制限される。
最小ラン長は信号振幅が小さいため,この措置によって読取性能が改善される。
13.17.2
ビット変換規則
図36の表は,データビットを変調ビットに変換する規則を規定している。データビットは左から右へ(最
上位ビットが最初で図35参照)処理する。記録フレームの最後に残ったビットは,終端ビット用の表に
従って変換する。
表の“1”は,記録信号の反転を表している。変調ビット列は,NRZIチャネルビット列に変換された後
に(13.18参照)ディスクに記録される。
55
X 6233:2017 (ISO/IEC 30193:2016)
データビット
変調ビット
00 00 00 00
010 100 100 100
00 00 10 00
000 100 100 100
00 00 00
010 100 000
00 00 01
010 100 100
00 00 10
000 100 000
00 00 11
000 100 100
00 01
000 100
00 10
010 000
00 11
010 100
01
010
10
001
11
000
101
前の変調ビットがxx1の場合
前の変調ビットがxx0の場合
置き換える
データビットパターン
置き換える
変調ビット
置換えの条件
11 01 11
001 000 000
次の変調ビットが010の場合
終端の
データビット
終端の
変調ビット
00 00
010 100
00
000
図36−17PP変調符号変換表
13.17.3
直流制御方法
変調ビット列の“1”は記録信号の反転を意味するため,奇数の変調ビット“1”を制御して変調ビット
列に追加すれば,この信号の極性を反転することができる。17PP変調符号のパリティ保存の特徴から,単
にデータビット列に追加ビットを挿入し,反転が必要な場合は“1”に設定することでこれは可能となる。
前の直流制御ブロックの最後の直流制御ビットを“0”又は“1”に設定することによって,各直流制御
ブロックの後で記録信号の積算したDSVが最小になるようにする(図35参照)。
13.17.4
フレーム同期
物理クラスタは,16アドレスユニットで構成され,各アドレスユニットは31の記録フレームから構成
される(図17及び図35参照)。
変調された記録フレームは,30チャネルビットから構成されるフレーム同期で始まる。
フレーム同期の主部は,17PPの変調法則に従わない24ビットパタン(ラン長9Tが2回)で構成される。
最後の6ビットは,七つの異なるフレーム同期パタンを識別する記号を規定する。6ビットのフレーム
同期IDのための記号は,変調の反転間隔が2以上となるように選択されている。
フレーム同期の前の最後のデータビットが終端表(図36参照)に従って符号化されている場合は,フレ
ーム同期#の最初の変調ビットは“1”であり,そうでない場合は,“0”である(図37参照)。
フレーム同期パタンは,変調ビットによって規定される。表の“1”は,記録信号の反転を表している。
ディスクに記録する前に,フレーム同期符号はNRZIチャネルビット列に変換される(13.18参照)。
56
X 6233:2017 (ISO/IEC 30193:2016)
同期番号
24-bit 同期主部
6-bit 同期ID
FS0
#01 010 000 000 010 000 000 010
000 001
FS1
#01 010 000 000 010 000 000 010
010 010
FS2
#01 010 000 000 010 000 000 010
101 000
FS3
#01 010 000 000 010 000 000 010
100 001
FS4
#01 010 000 000 010 000 000 010
000 100
FS5
#01 010 000 000 010 000 000 010
001 001
FS6
#01 010 000 000 010 000 000 010
010 000
図37−30ビットフレーム同期符号
七つの異なるフレーム同期では,31の記録フレームを識別するためには不十分なので,各フレームは自
分自身のフレーム同期と前の記録フレームのいずれかのフレーム同期との組合せで識別される。これらの
組合せ配置によって,前のフレーム同期がたとえ1,2又は3フレームにわたって欠落したとしても,その
記録フレームは,自分のフレーム同期及び最後にあったフレーム同期から識別できる(図38参照)。
記録フレームn−4
記録フレームnは,下記のフレーム同期IDの組合わせで識別できる。:
記録フレームn + 記録フレームn −1
記録フレームn+ 記録フレームn−2
記録フレームn+ 記録フレームn−3
記録フレームn+ 記録フレームn−4
記録フレームn−3記録フレームn−2記録フレームn−1
記録フレームn
図38−記録フレームの識別
各アドレスユニットの最初の記録フレームは,特別なフレーム同期:FS0をもっている。
他のフレーム同期の配置は,図39による。
フレーム番号
フレーム同期
フレーム番号
フレーム同期
0
FS0
1
FS1
16
FS5
2
FS2
17
FS3
3
FS3
18
FS2
4
FS3
19
FS2
5
FS1
20
FS5
6
FS4
21
FS6
7
FS1
22
FS5
8
FS5
23
FS1
9
FS5
24
FS1
10
FS4
25
FS6
11
FS3
26
FS2
12
FS4
27
FS6
13
FS6
28
FS4
14
FS6
29
FS4
15
FS3
30
FS2
フレーム番号
フレーム同期
フレーム番号
フレーム同期
0
FS0
1
FS1
16
FS5
2
FS2
17
FS3
3
FS3
18
FS2
4
FS3
19
FS2
5
FS1
20
FS5
6
FS4
21
FS6
7
FS1
22
FS5
8
FS5
23
FS1
9
FS5
24
FS1
10
FS4
25
FS6
11
FS3
26
FS2
12
FS4
27
FS6
13
FS6
28
FS4
14
FS6
29
FS4
15
FS3
30
FS2
FS1
22
FS5
8
FS5
23
FS1
9
FS5
24
FS1
10
FS4
25
FS6
11
FS3
26
FS2
12
FS4
27
FS6
13
FS6
28
FS4
14
FS6
29
FS4
15
FS3
30
FS2
図39−記録フレームのフレーム同期符号の配置
13.18
変調及びNRZI変換
ディスクに記録する前にデータビットは,変調ビットに変換され,それは,図40に示す方法によって最
後にNRZIチャネルビットに変換される。
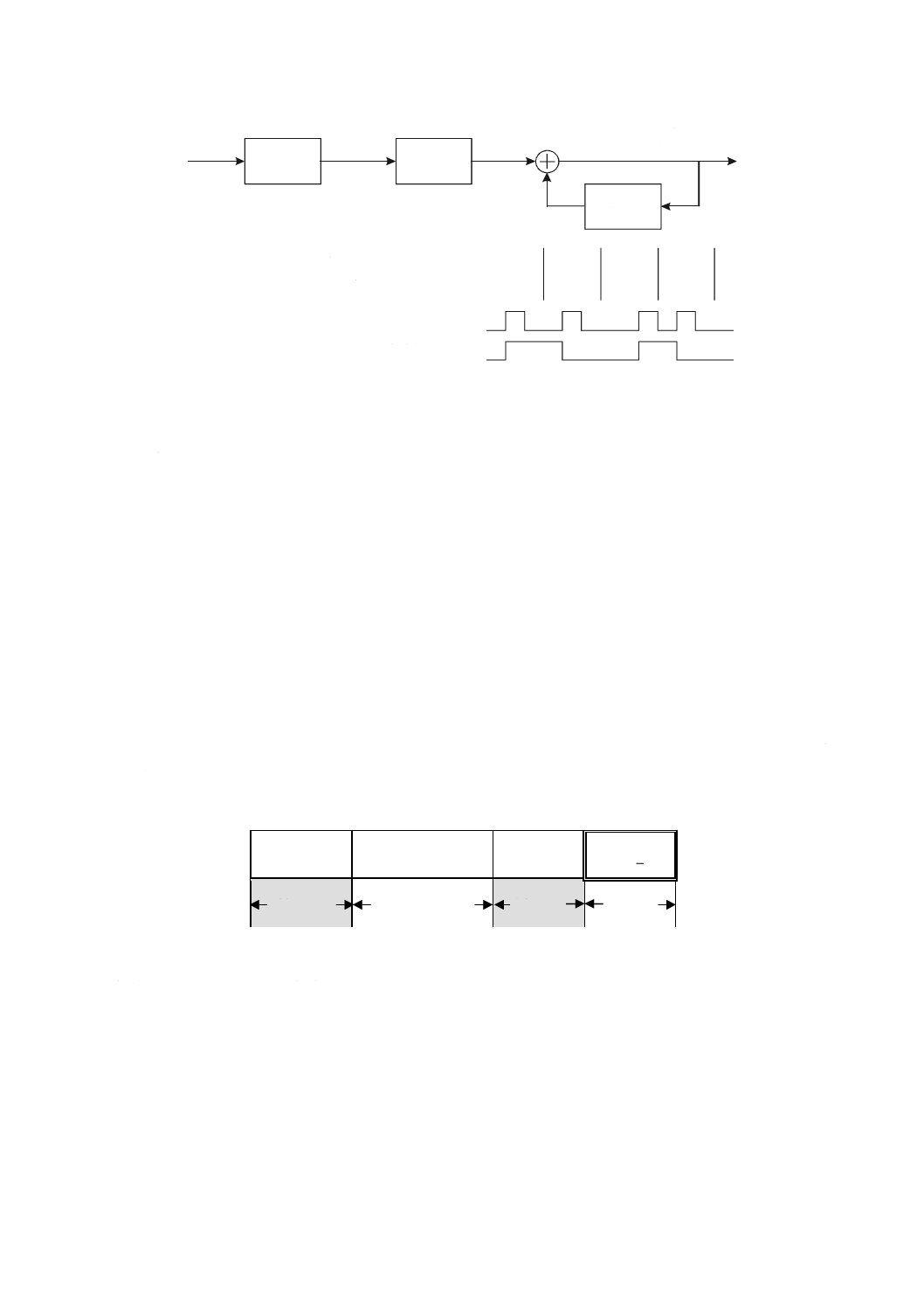
57
X 6233:2017 (ISO/IEC 30193:2016)
変調ビット
データ
ビット
NRZ
変換
変調器
排他的論理和
1T
遅延
NRZI変換された
チャネルビット
T=1チャネルクロック周期
データビットパターンの例 :
01
01
10
01
-
変調ビットパターン
:
010 010
001
010 0
NRZ変換信号
:
NRZI変換信号
:
図40−変調及びNRZI変換
14 物理データの配置及びリンキング
14.1 一般
記録の単位は,データランインが手前にデータランアウトが後に配置される物理クラスタで構成する記
録ユニットブロック(RUB)である。ランイン及びランアウトによって,完全にランダムな記録又は上書
きを行うための十分なバッファが確保される。
記録ユニットブロックは,一つずつ又は幾つかのRUBの連続(記録列)で記録できる。
ディスクの書換領域で,チャネルビットレートがウォブル周波数に同期している場合は,ウォブルの周
期は69チャネルビットとする。これは,変調された1 932チャネルビット(=1 288データビット)の記
録フレームは,正確に28ウォブル周期になることを意味している。この同期状態は,標準の状態とみなさ
れる。
14.2 記録ユニットブロック(RUB)
14.2.1 一般
各RUBは,2 760 cbs(公称40ウォブル周期)のデータランイン,496×1 932 cbs(公称496×28ウォブ
ル周期)の物理クラスタ,及び1 104 cbs(公称16ウォブル周期)のデータランアウトから構成される(図
41参照)。
ランイン
物理クラスタ
ランアウト
ガード̲3
40 wbs
496×28 wbs
16 wbs
8 wbs
図41−単一記録の記録ユニットブロックの構成
各単一記録したRUB又は各連続記録した列のRUBは,図42に示すとおり,いかなる二つのRUB間に
もギャップ(未記録領域)ができないことを確実にするため,ガード̲3フィールドで終端する。
そのようなガード̲3フィールドは,540 cbs(公称≈ 8ウォブル周期)によって構成する。
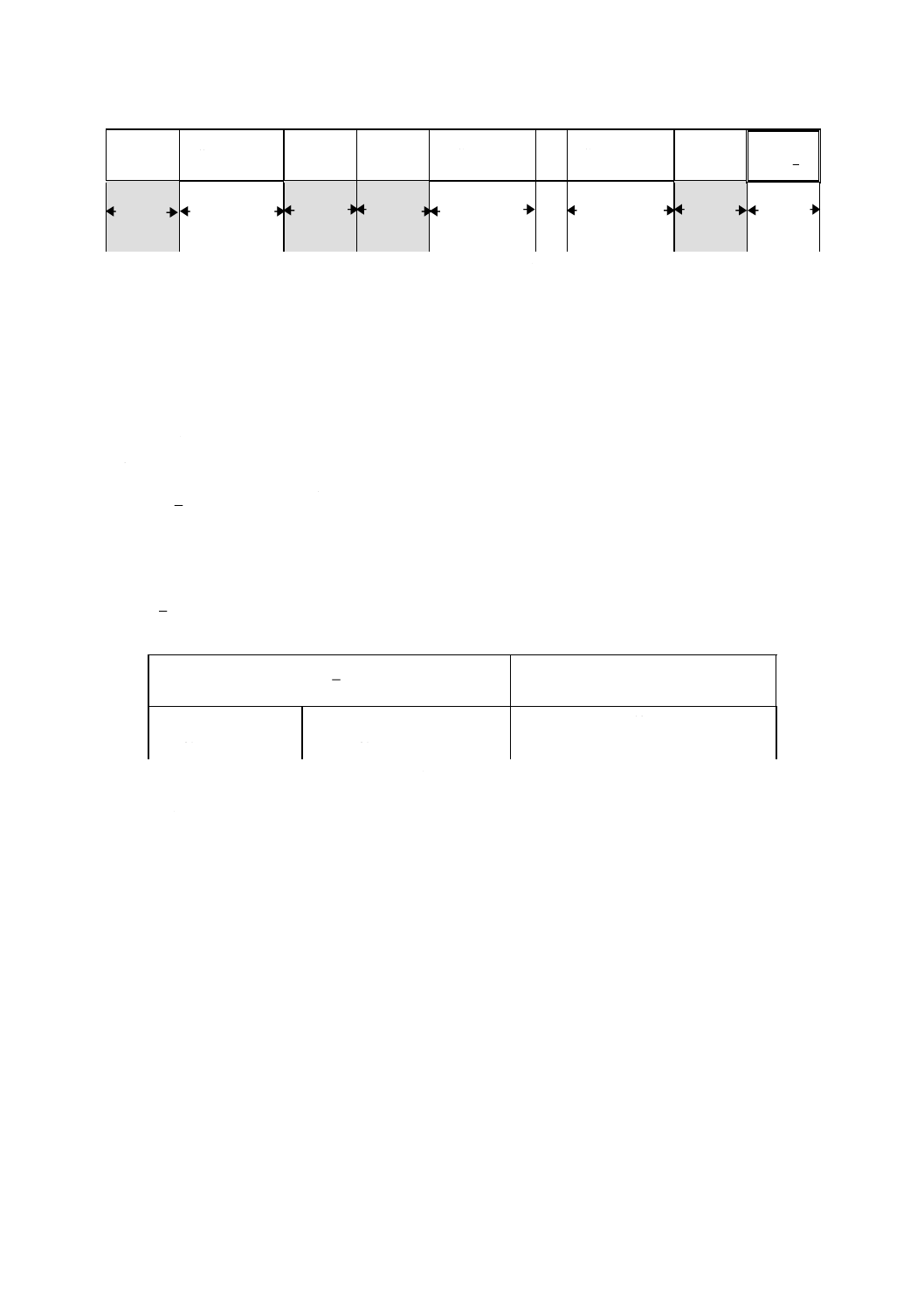
58
X 6233:2017 (ISO/IEC 30193:2016)
ランイン
物理クラスタ
ランアウト
ランイン
物理クラスタ
:
物理クラスタ
ランアウト
ガード゙̲3
40 wbs
496×28 wbs
16 wbs
40 wbs
496×28 wbs
:
496×28 wbs
16 wbs
8 wbs
図42−連続記録の記録ユニットブロックの構成
上記の選択に加えて,最大約±2ウォブルのSPS(14.3.2参照)及び約±0.5ウォブルの開始位置精度に
よって,ランダム記録又は上書きの重なりは3〜13ウォブルの間となり,データランインの重ならない最
短長は約27ウォブル(最小≈ 1記録フレーム)となる。
14.2.2 データランイン
14.2.2.1 一般
データランインは,次に示す部分から構成されている。
− ガード̲1:
1 080チャネルビット
− PrA(プリアンブル):
1 680チャネルビット
PrAフィールドは,(PLLロックと同期のための)信号処理用のランイン用である。
ガード̲1フィールドは,記録動作の開始を決める位置がばらつくため及びSPSのために前回記録箇所と
重なることに対処するためのフィールドである(図43参照)。
ガード̲1
1080 cbs
プリアンブル
1680 cbs
任意のAPC
≈ 5 ウォブル
ビットパタンの繰返し
≈ 11ウォブル
公称値
≈ 24ウォブル
図43−データランインの構成
14.2.2.2 ガード̲1フィールドの内容
ガード̲1フィールドは,1 080チャネルビットの長さである。
変調ビットで表す内容は,01[04]1[04]1[02]1[02]1[06]1[05]を36回繰り返すパタンである。これらのパタン
は,5T/5T/3T/3T/7T/7Tが繰り返されるものとなり電子回路を再度安定させるために適している。
14.2.2.3 自動パワー制御(APC)
記録動作の開始でのガード̲1フィールドの最初の5ウォブルは,自動パワー制御を行うために使用でき
る。そのようなAPCのために使う変調ビットパタンは,記録機の製造業者が自由に選ぶことができ,14.2.2.2
で規定した繰返しパタンと異なっていてもよい。
14.2.2.4 PrAフィールドの内容
PrAフィールドは,1 680チャネルビットの長さである。
PrAフィールドの内容は,図44による。
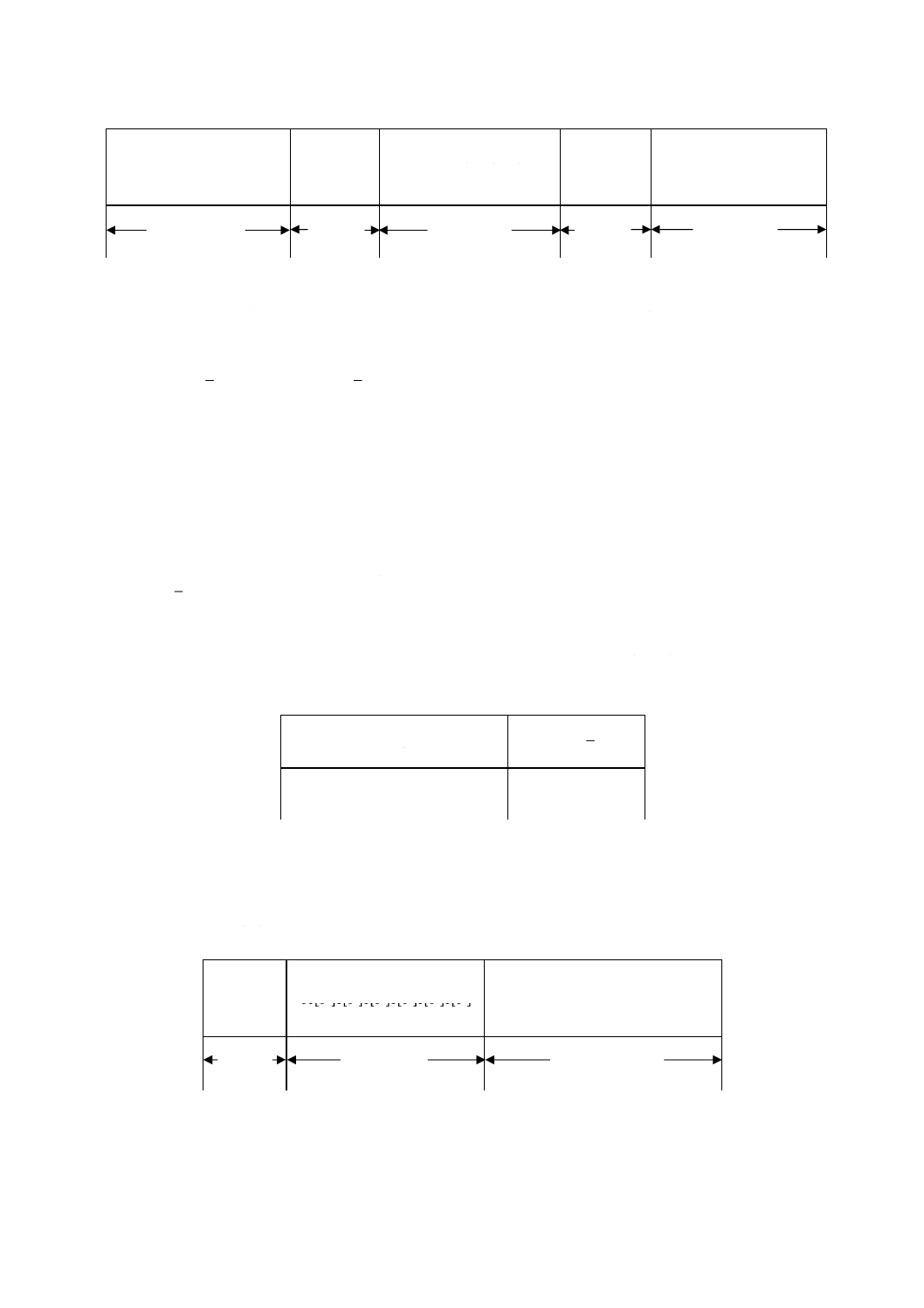
59
X 6233:2017 (ISO/IEC 30193:2016)
を52回繰り返す
01[04]1[04]1[02]1[02]1[06]1[05]
同期̲1
同期̲2
01[02]1[02]1[06]1[05]
1560cbs
30cbs
40cbs
30cbs
20 cbs
01[04]1[04]1[02]1[02]1[06]1
[06]1[04]1[03]
図44−PrAフィールドの構成
一般に,PrAの後の最初のフレーム同期がFS(N)(N=0..6,13.17.4参照)の場合は,同期̲1はFS{mod[(N
+4),7]}とし,同期̲2は,FS{mod[(N+6),7]}とする。
これは,同期̲1はFS4とし,同期̲2はFS6とすることを意味する(PrAの後の最初のフレーム同期は
FS0である。)。
各同期̲1,同期̲2及びPrAの後の,最初のフレーム同期の先頭のビットは直流制御に使用できる(#=
“0”又は“1”,図37参照)。
14.2.3 データランアウト
14.2.3.1 一般
データランアウトは,図45に示すとおり,次に示す部分から構成されている。
− PoA(ポストアンブル): 564チャネルビット
− ガード̲2:
540チャネルビット
PoAフィールドは,信号処理のランアウト用である。
ガード̲2フィールドは,SPSに起因するもの,及び記録動作の開始位置決定がばらつくことに起因する
ものによる重なりに対処するためのフィールドである。
PoA
564 cbs
ガード̲2
540 cbs
公称値
≈ 8 ウォブル
公称値
≈ 8 ウォブル
図45−データランアウトの構成
14.2.3.2 PoAフィールドの内容
PoAフィールドは,564チャネルビットの長さである。
PoAフィールドの内容は,図46による。
同期̲3
01[08]1[08]1[08]1[08]1[08]1[07]
を16回繰り返す
01[04]1[04]1[02]1[02]1[06]1[05]
30 cbs
54 cbs
480 cbs
図46−PoAフィールドの構成
一般に,PoAの前の使用者データがフレーム番号nで終わる場合は,フレーム番号n+1に相当するも
60
X 6233:2017 (ISO/IEC 30193:2016)
のとして同期̲3を選ぶこととする(13.17.4を参照)。
これは,同期̲3をFS0とすることを意味する。
同期̲3パタンの最初のビットは,13.17.4の規定に従って使用する。
同期̲3の後の9T/9T/9T/9T/9T/9Tパタンは,“使用者データ停止”の指示として使うことができる。
14.2.3.3 ガード̲2フィールドの内容
ガード̲2フィールドは,540チャネルビットの長さである。
変調ビットで表す内容は,01[04]1[04]1[02]1[02]1[06]1[05]を18回繰り返すパタンである。
14.2.4 ガード̲3フィールド
14.2.4.1 一般
ガード̲3
540 cbs
ビットパターンの繰返し
≈ 3 ウォブル
任意のAPC
≈ 5ウォブル
図47−ガード̲3フィールドの構成
ガード̲3フィールドは,540チャネルビットの長さである(図47参照)。
変調ビットで表す内容は,01[04]1[04]1[02]1[02]1[06]1[05]を18回繰り返すパタンである。
14.2.4.2 自動パワー制御(APC)
記録動作の最後にあるガード̲3フィールドの最後の5ウォブルは,自動パワー制御を行うために使用で
きる。そのようなAPC動作のために使う変調ビットパタンは,記録機器の製造業者が自由に選ぶことがで
き,14.2.4.1で規定した繰返しパタンと異なっていてもよい。
14.3 ウォブルアドレスに対してのデータの位置
14.3.1 一般
単一のRUB及び連続する複数のRUBを記録する場合の公称記録開始位置は,PAAがAA1,AA0=00
であるADIP語の同期̲3ユニットと最初のデータ̲xユニットとの間の基準ユニットにある,NWL25ウォ
ブルの中央である(15.7参照)。
記録開始位置は,±34 cbsよりも良い精度で決める。
14.3.2 記録開始位置移動(SPS)
ディスクの過度の疲弊を避けるため,各記録動作(一つ又は複数のRUB)の記録開始位置は,記録開始
位置移動と呼ぶ方法で公称開始位置からランダムなチャネルビット数だけ(−128 cbs≦SPS≦+127 cbs)
移動する(図48参照)。
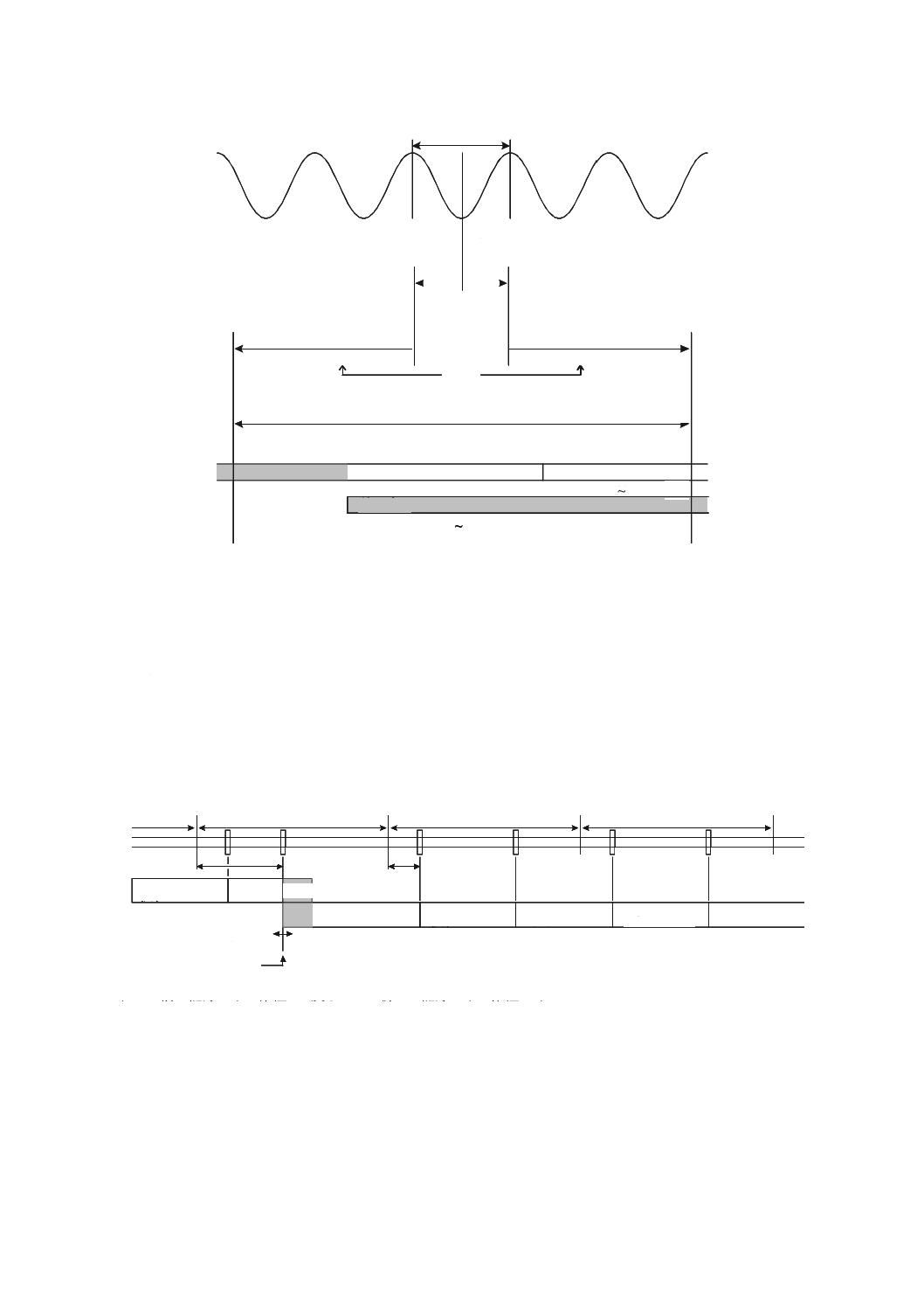
61
X 6233:2017 (ISO/IEC 30193:2016)
NWL 25
開始位置
+34
cbs
‒34
cbs
+127 cbs
‒128 cbs
SPS
記録開始位置の範囲
ランアウト
ランイン
Run-in
SPS + 不正確性
+ 58 cbs
SPS +
‒80 cbs
重ね書きの例
+2,33 wbs
‒2,35 wbs
~~
NWL 25
公称
+34
cbs
‒34
cbs
変動範囲
+127 cbs
‒128 cbs
SPS
SPS
cbs
SPS + 不正確性
‒80 cbs
+2,33 wbs
‒2,35 wbs
~~
~~
ランイン
図48−データ記録の公称開始位置
次に示す一連の図は,新たに記録するRUBが前に記録したRUBとどのように重なるかを示す例である
(図49,図50及び図51参照)。
新しいRUBの記録の開始で,新たに記録するRUBのランインは,前に記録したRUB(既に記録されて
いた場合)のランアウト又はガード̲3の一部を重ね書きする。
新たに記録するRUBの終わりで,新たに記録するRUBのランアウト又はガード̲3は,次に続くRUB
(既に記録されている場合)のランインの部分を重ね書きする。
全ての場合で,ランダムアクセス中に電子回路が再同期をかけるために十分なランイン及びランアウト
が残る。
Run-out
ランイン
NWL 9
NWL 25
NWL 9
NWL 37
NWL 37
記録公称開始位置
(±34 cbs)
+127 cbs
‒128 cbs
25.5 wbs
9.5 wbs
SPS
Guard̲3
クラスタk-1
記録フレーム496
クラスタk
記録フレーム1
ランアウト
NWL 9
NWL 25
NWL 9
NWL 37
NWL 37
第1データ̲xユニット
同期̲3ユニット
±34 cbs)
≤+127 cbs
≥‒128 cbs
wbs
wbs
SPS
ガード̲3
基準ユニット
第2データ̲xユニット
クラスタk
記録フレーム2
クラスタk
記録フレーム3
Run-out
ランイン
NWL 9
NWL 25
NWL 9
NWL 37
NWL 37
記録公称開始位置
(±34 cbs)
+127 cbs
‒128 cbs
25.5 wbs
9.5 wbs
SPS
Guard̲3
クラスタk-1
記録フレーム496
クラスタk
記録フレーム1
ランアウト
NWL 9
NWL 25
NWL 9
NWL 37
NWL 37
第1データ̲xユニット
同期̲3ユニット
±34 cbs)
≤+127 cbs
≥‒128 cbs
wbs
wbs
SPS
ガード̲3
基準ユニット
第2データ̲xユニット
クラスタk
記録フレーム2
クラスタk
記録フレーム3
(SPS+前の記録の不正確性=0及びSPS+新しい記録の不正確性=0)
図49−データ記録の公称開始位置の例
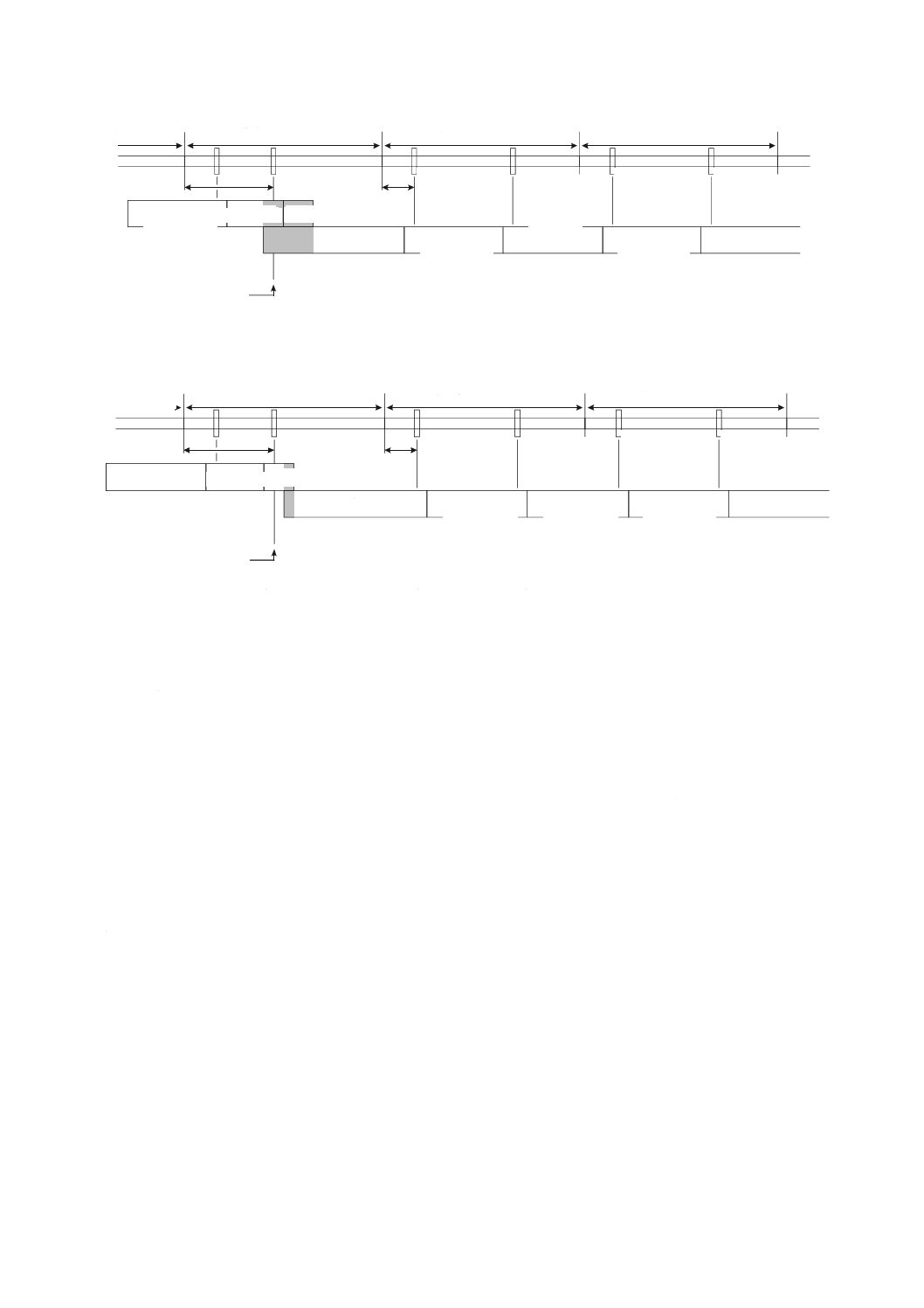
62
X 6233:2017 (ISO/IEC 30193:2016)
Cluster k-1
Rec.Frame496
Run-out
Run-in
NWL 9
NWL 25
NWL 9
NWL 37
NWL 37
Reference Unit
1stData̲xUnit
2ndData̲xUnit
Sync̲3 Unit
nominal start position
for writing
25,5 wbs
9,5 wbs
Guard̲3
NWL 9
NWL 25
NWL 9
NWL 37
NWL 37
25.5 wbs
9.5 wbs
同期̲3ユニット
基準ユニット
第1データ̲xユニット
第2データ̲xユニット
ランアウトガード̲3
クラスタk-1
記録フレーム496
記録公称開始位置
ランイン
クラスタk
記録フレーム1
クラスタk
記録フレーム2
クラスタk
記録フレーム3
Cluster k-1
Rec.Frame496
Run-out
Run-in
NWL 9
NWL 25
NWL 9
NWL 37
NWL 37
Reference Unit
1stData̲xUnit
2ndData̲xUnit
Sync̲3 Unit
nominal start position
for writing
25,5 wbs
9,5 wbs
Guard̲3
NWL 9
NWL 25
NWL 9
NWL 37
NWL 37
25.5 wbs
9.5 wbs
同期̲3ユニット
基準ユニット
第1データ̲xユニット
第2データ̲xユニット
ランアウトガード̲3
クラスタk-1
記録フレーム496
記録公称開始位置
ランイン
クラスタk
記録フレーム1
クラスタk
記録フレーム2
クラスタk
記録フレーム3
(SPS+前の記録の不正確性=+161及びSPS+新しい記録の不正確性=−162)
図50−重なりが最大となるデータ記録の例
Run-in
NWL 9
NWL 25
NWL 9
NWL 37
NWL 37
Reference Unit
1stData̲xUnit
2ndData̲xUnit
Sync̲3 Unit
25,5 wbs
9,5 wbs
Guard̲3
NWL 9
NWL 25
NWL 9
NWL 37
NWL 37
25.5 wbs
9.5 wbs
同期̲3ユニット
基準ユニット
第1データ̲xユニット
第2データ̲xユニット
クラスタk-1
記録フレーム496
ランアウトガード̲3
記録公称開始位置
ランイン
クラスタk
記録フレーム1
クラスタk
記録フレーム2
クラスタk
記録フレーム3
Run-in
NWL 9
NWL 25
NWL 9
NWL 37
NWL 37
Reference Unit
1stData̲xUnit
2ndData̲xUnit
Sync̲3 Unit
25,5 wbs
9,5 wbs
Guard̲3
NWL 9
NWL 25
NWL 9
NWL 37
NWL 37
25.5 wbs
9.5 wbs
同期̲3ユニット
基準ユニット
第1データ̲xユニット
第2データ̲xユニット
クラスタk-1
記録フレーム496
ランアウトガード̲3
記録公称開始位置
ランイン
クラスタk
記録フレーム1
クラスタk
記録フレーム2
クラスタk
記録フレーム3
(SPS+前の記録の不正確性=−162及びSPS+新しい記録の不正確性=+161)
図51−重なりが最小となるデータ記録の例
15 トラックフォーマット
15.1 一般
トラックは,連続らせんの360°1回転分で形成される。
各記録層は,ほぼ同じ場所に同じ基本トラックをもつ(図52参照)。
15.2 トラックの形
半径r1と半径r3との間のゾーンは,BCAに使用するために確保されており(箇条35参照),r1及びr3
は,次による。
r1=21.0 mm
r3=22.2 mm
このゾーンに,1本のらせんのグルーブで形成されるトラックを置き,その内側半径は
mm
0.
21
0.0
1.0
−
とす
る。
L0層でBCAゾーンとエンボスHFM領域との間での直線グルーブからHFMグルーブへの移行は,半径
r2とr3との間とし(図52参照),r2は,次による。
r2=22.0 mm
この移行で,らせんグルーブは中断しない。
L0層では半径21 mmとエンボスHFM領域でHFMグルーブのエンコードが開始する点との間,他の層
では半径21 mmとウォブルグルーブが終了する点との間,BCAゾーンのグルーブトラックは(変調のな
い)直線グルーブとする(箇条18参照)。
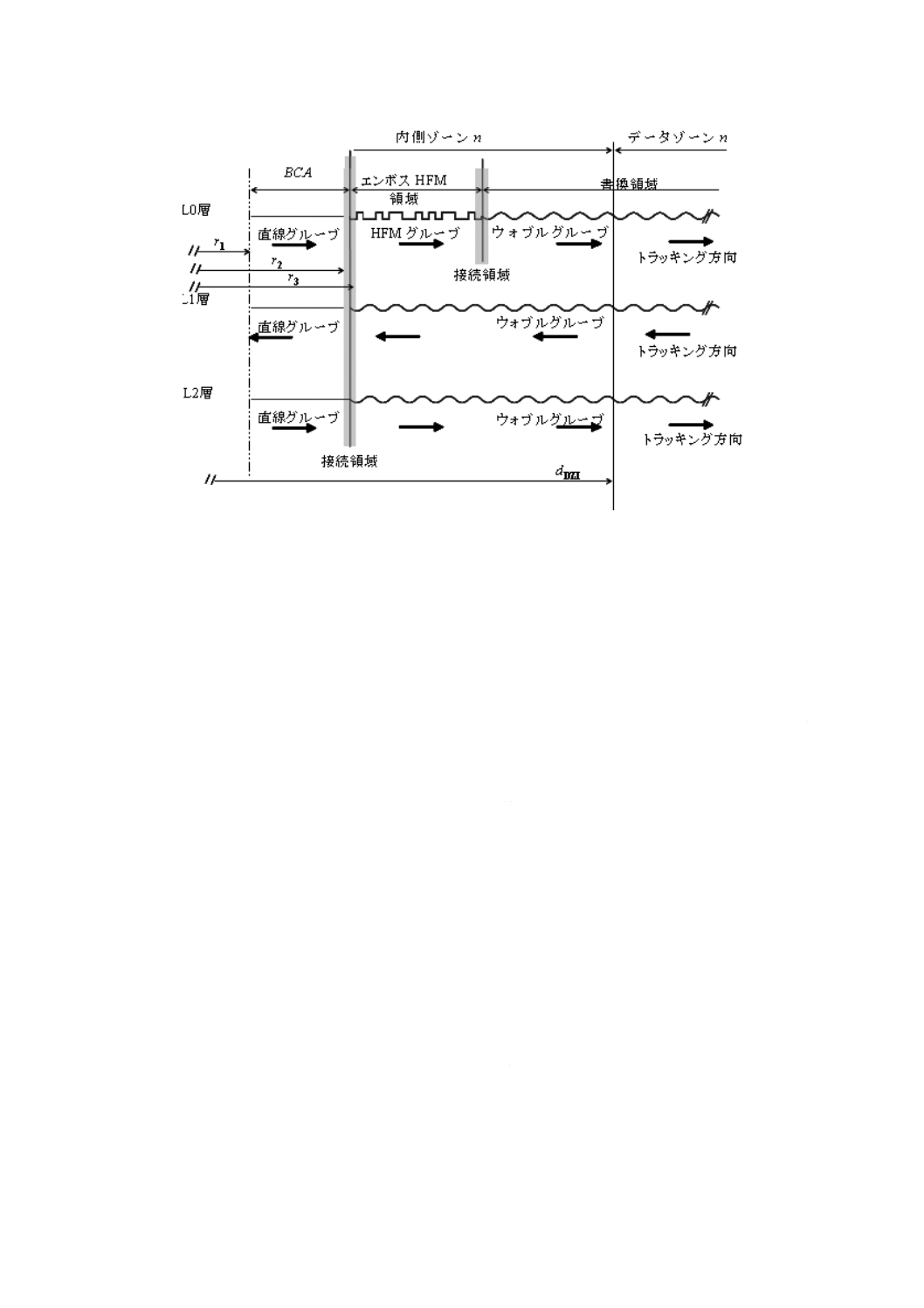
63
X 6233:2017 (ISO/IEC 30193:2016)
図52−異なるグルーブタイプの接続領域
L0層のエンボスHFM領域では(箇条17参照),BCAゾーンの直線グルーブから中断することなく続く
1本のらせんグルーブでトラックが形成される。
エンボスHFM領域のグルーブトラックは,比較的高い周波数で公称中心線の周りで半径方向に偏移し,
それによって,転写情報を保存するための高ビットレートかつ高容量のデータチャネル(HFMグルーブ)
を供給する。
各トラックの形は,箇条26の要求事項で決められる。
書換領域では(箇条16参照),トラックは,L0層ではエンボスHFM領域の最後から,L2層では直線グ
ルーブの最後から開始する,1本のらせんグルーブで形成される。L1層で,トラックは,エンボスHFM
グルーブ領域のグルーブの始めで終了する1本のらせんで形成される。
書換領域のグルーブは,主として単一正弦波で公称中心線の周りで半径方向に偏移し,ウォブルグルー
ブと呼ばれる。その正弦波偏移は,幾つかのサイクルを規定の場所で違うパタンに置き換える形で変調さ
れる。
ウォブルは,ディスクのスピード制御及びドライブの記録クロックの同期に使うことができ,変調され
た部分はプリグルーブ中のアドレス又はADIPというアドレス情報(15.7参照)を表している。各トラッ
クの形は,箇条27に規定する要求事項で決められる。
注記 この規格では,“プリグルーブ”という用語は規定していないが,“ADIP”は,“プリグルーブ
中のアドレス”の頭字語として光ディスクの規格では広く使用されている。“プリグルーブ”の
意味は,この規格の“グルーブ”と同じ意味である。
エンボスHFM領域と書換領域との間の接続部分では,らせんグルーブは中断しない。HFMグルーブと
ウォブルグルーブのADIP情報との間では,トラックの接線方向に最大1 mmの長さのグルーブだけの場
所(変調がない状態)が許されている。
グルーブ形状は,次による。
− 各層では,“オングルーブ記録”だけが許容される。
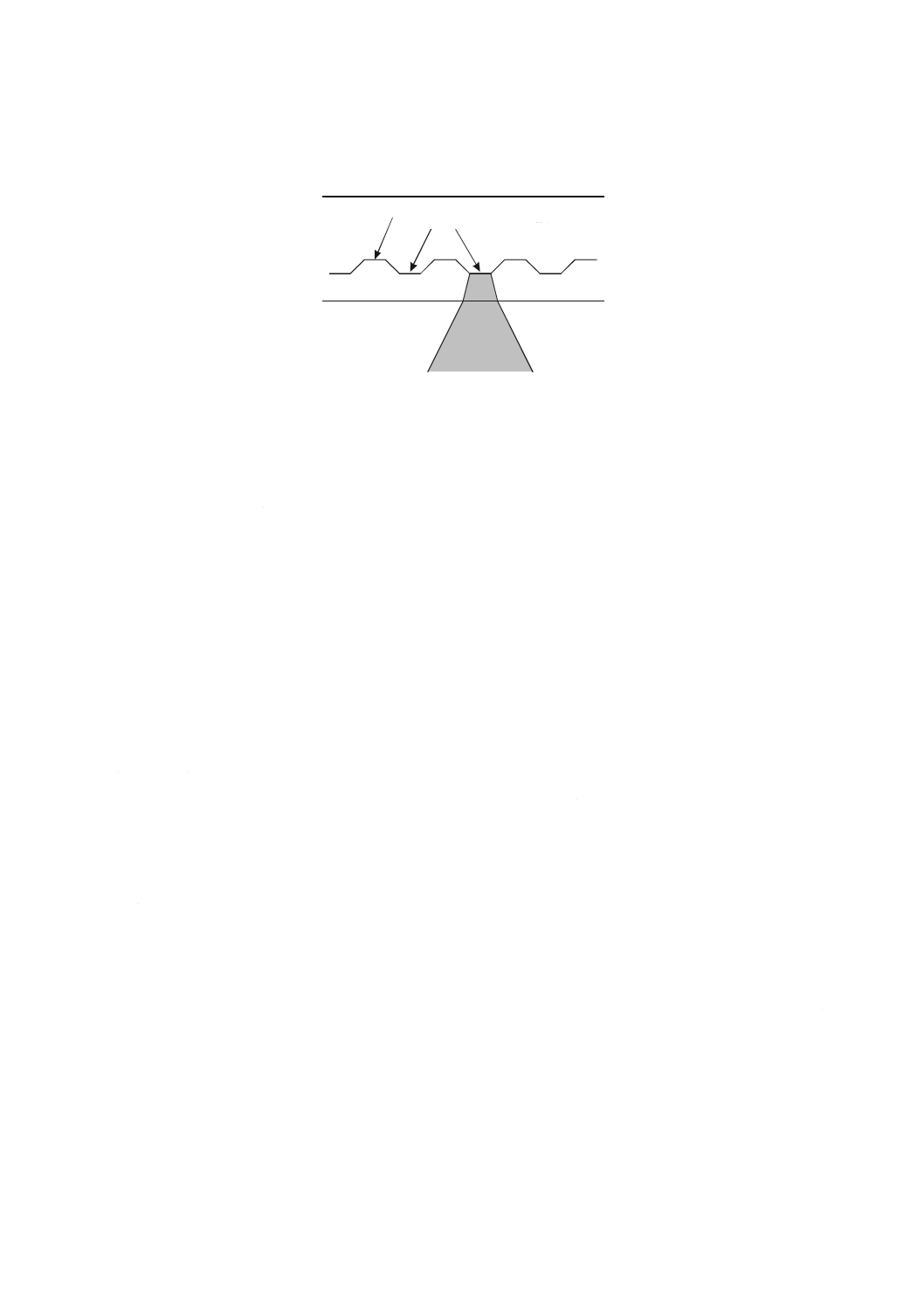
64
X 6233:2017 (ISO/IEC 30193:2016)
− “オングルーブ記録”では,グルーブは,ランドよりも入射面に近くする形状が使用される。グルー
ブ形状の概要を,図53に示す。
透過積層
基板
グルーブ
ランド
“オングルーブ記録”
読取りビーム
図53−グルーブ形状の概要(ディスクの半径方向の断面)
15.3 トラックパス
偶数番号をもつ層では,ディスクが9.8に従って回転する場合,らせんはディスクの内周側からディス
クの外周側に向かって進む。
奇数番号をもつ層では,ディスクが9.8に従って回転する場合,らせんはディスクの外周側からディス
クの内周側に向かって進む。
偶数番号nをもつ層では,トラックは,内側ゾーンnの開始位置で始まり,外側ゾーンnの終端で終わ
り,情報ゾーンで連続にする。奇数番号nをもつ層では,トラックは,外側ゾーンnの開始位置で始まり,
内側ゾーンnの終端で終わり,情報ゾーンで連続にする(図12参照)。
15.4 トラックピッチ
15.4.1 BCAゾーンのトラックピッチ
BCAゾーンのトラックピッチ(TP)は,半径方向に測定した隣り合うトラックのグルーブの平均中心線
間の距離である。
トラックピッチは,(2.0±0.1) μmとする。
r2とr3との間の領域では,トラックピッチは,L0層では2.0 μmから0.35 μmのエンボスHFM領域のト
ラックピッチへ移行し,その他の層ではウォブルグルーブ領域のトラックピッチ0.32 μmへ移行する。
15.4.2 エンボスHFM領域のトラックピッチ
エンボスHFM領域のトラックピッチは,半径方向に測定した隣り合うトラックのHFMグルーブの平均
中心線間の距離である。
トラックピッチは,(0.350±0.010) μmとする。
エンボスHFM領域全体で平均したトラックピッチは,(0.350±0.003) μmとする。
15.4.3 書換領域のトラックピッチ
書換領域のトラックピッチは,半径方向に測定した隣り合うトラックのウォブルグルーブの平均中心線
間の距離である。
トラックピッチは,(0.320±0.010) μmとする。
書換領域全体で平均したトラックピッチは,(0.320±0.003) μmとする。
15.4.4 エンボスHFM領域と書換領域との間のトラックピッチ
トラックピッチ0.35 μmから0.32 μm(L0層)への移行は,そのトラックを保護ゾーン2の中に完全に
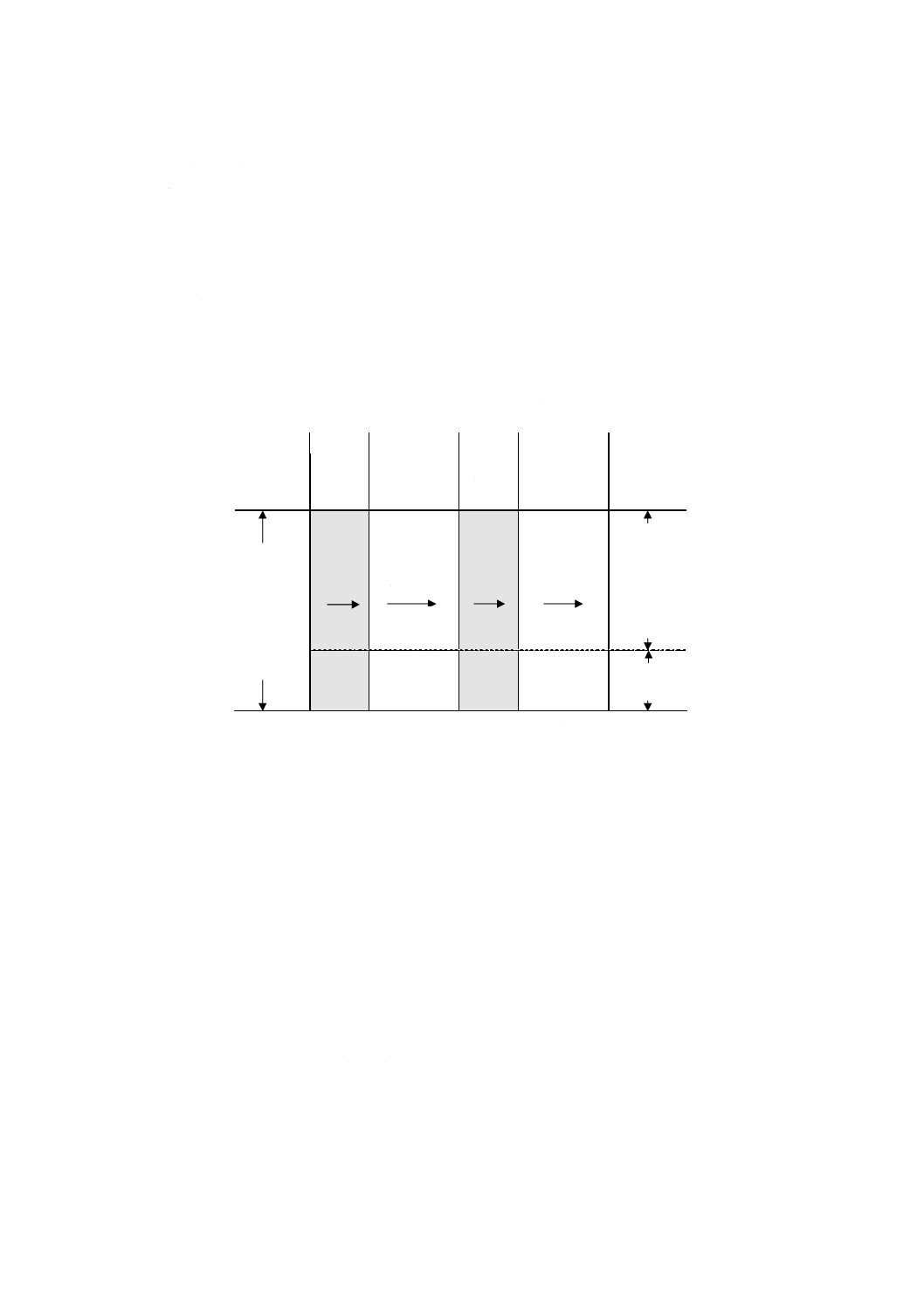
65
X 6233:2017 (ISO/IEC 30193:2016)
収めることとし,最大100トラック(回転)の間に実現する(図81参照)。
15.5 HFMグルーブのトラック構成
15.5.1 一般
15.5では,データのエンコードフォーマットだけを規定する。場所及び内容は,箇条18及び18.2で規
定される。
HFMグルーブのデータは,PICクラスタという4Kパーティションで記録される。そのような,各PIC
クラスタは,各2 048バイトのデータの二つのデータフレームを含んでいる。このデータを保護するエラ
ー訂正のメカニズム及びパーティション全体をフォーマットする方法は,箇条13に規定したものと十分に
似ている。
図54に示すとおり,LDC+BIS符号の組合せの一部が使用される。
関連するプロセスの段階及び応用符号化の詳細な規定は,箇条13の規定を参照できる。
同期
1バイト
10 バイト
1 バイト
9 バイト
D0......... D9
B0
D10....... D18
D19..... D28
B1
D29............
:
:
248 行
ディスク上の
データ列方向
:
:
216 データ
:
:
B247
.... D4 711
32 パリティ
図54−ディスク上の4K PICクラスタの図示
15.5.2 データフォーマット
15.5.2.1 データフレーム
各データフレームは,13.2及び他の細分箇条に規定したとおり4バイトのエラー検出符号(EDC)を追
加して拡張される。
15.5.2.2 スクランブルドデータフレーム
EDCを追加した各データフレームは,13.4に規定した方法によってスクランブルされる。スクランブラ
ーのプリセットには,PS19 .. PS5の代わりにAUN15 .. AUN1(15.5.3.2及び13.9.2.2参照)を使用する。
15.5.2.3 データブロック
各2スクランブルドデータフレームは,13.5に規定した図21に示される216行×19列の配列に配置さ
れる(0〜18列だけ使用。)。
15.5.2.4 LDCブロック
次に,エラー訂正パリティの32行は,(L=0 .. 18)の19列しかないという違いはあるものの13.6及び
他の細分箇条に規定された方法によって追加される。この結果,248行×19列の配列ができる。
15.5.2.5 インターリーブ
インターリーブの方法は,13.8及び他の細分箇条に規定したものと異なる。13.8.3に規定した第2のイ
ンターリーブステップだけが適用される。各連続した行は,左に1バイト以上シフトされる。シフト(shift)
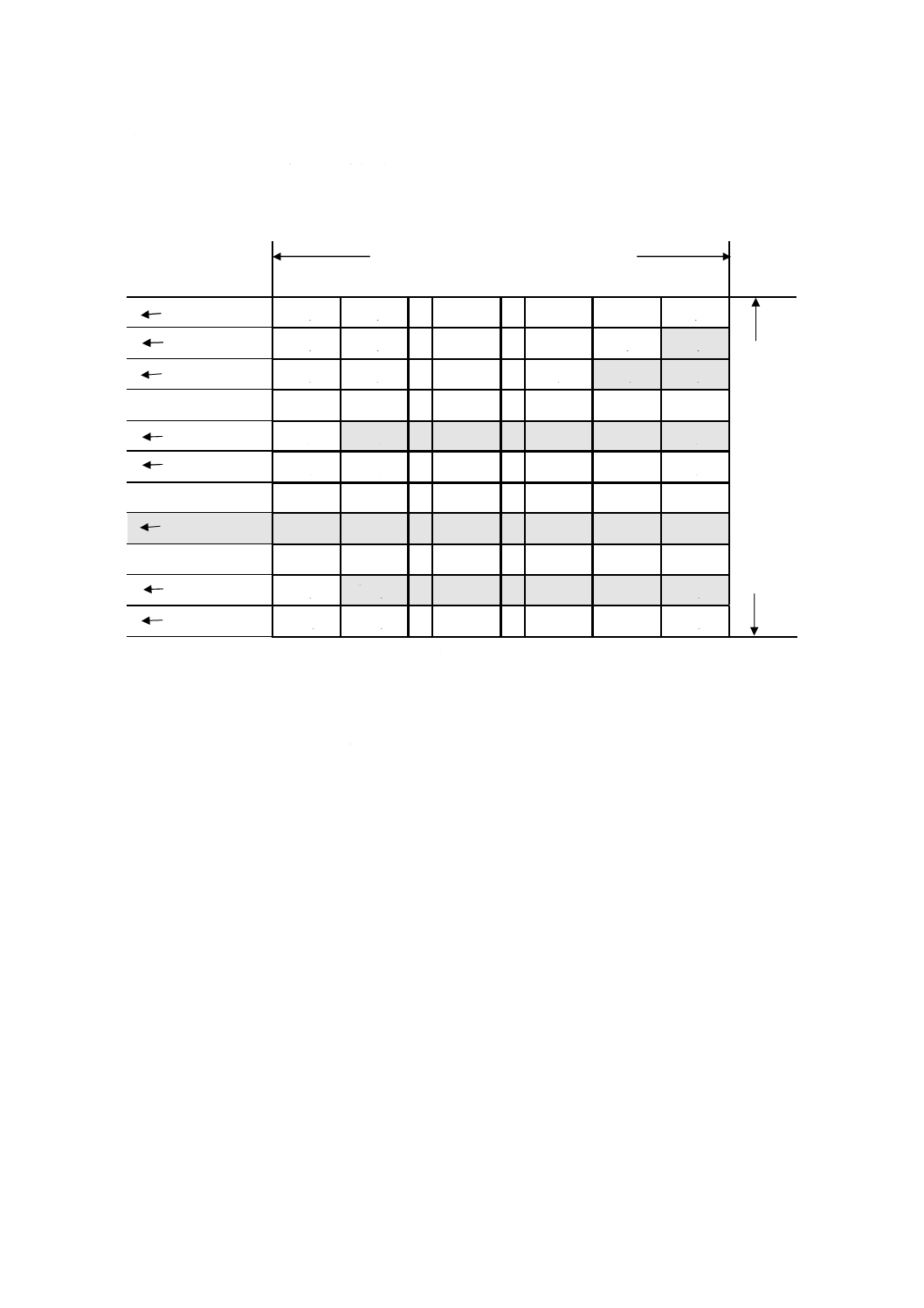
66
X 6233:2017 (ISO/IEC 30193:2016)
は,次による。
shift=mod(k,19)
ここに,
k: 行番号 0≦k≦247
左側からはみ出したバイトは,列の右側から再投入される(図55参照)。
19 バイト
シフト0
e0,0
e0,1
...
...
e0,18
シフト1
e1,1
e1,2
...
...
e1,18
e1,0
シフト2
e2,2
e2,3
...
...
e2,18
e2,0
e2,1
...
...
...
...
シフト18
e18,18
e18,0
...
...
e18,17
248
シフト0
e19,0
e19,1
...
...
e19,18
行
...
...
...
...
シフトmod(k,19)
...
...
...
...
...
...
...
...
p246,18
p246,0
...
...
p246,17
p247,0
p247,1
...
...
p247,18
シフト18
シフト0
図55−PIC LDCブロックのインターリーブ
この工程の後,バイトは,全ての行を通して番号を水平方向に振り直し,図54に示すとおりD0 .. D4 711
となっている。
15.5.3 アドレス及びコントロールデータ
15.5.3.1 一般
書換領域のフォーマットと異なり,BISブロックは四つのBIS符号から成り,各9バイトの八つのアド
レスが18行に,各24バイトの二つの使用者コントロールデータが12行に入っている(図56参照)。
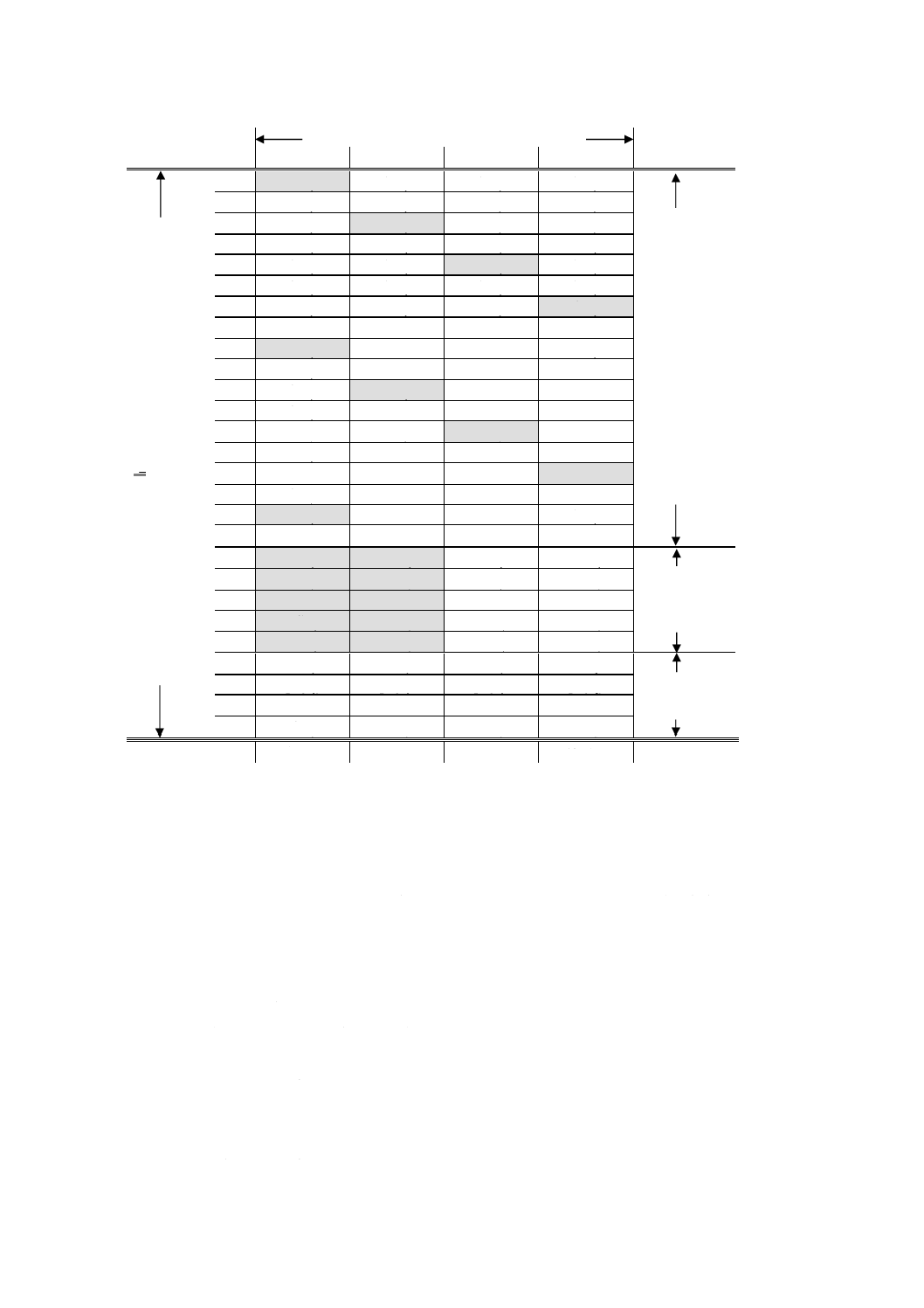
67
X 6233:2017 (ISO/IEC 30193:2016)
4 列
0
1
2
3
0
AF0,0
AF0,3
AF0,2
AF0,1
1
AF0,4
AF0,7
AF0,6
AF0,5
2
AF1,1
AF1,0
AF1,3
AF1,2
3
AF1,5
AF1,4
AF1,7
AF1,6
4
AF2,2
AF2,1
AF2,0
AF2,3
5
AF2,6
AF2,5
AF2,4
AF2,7
6
AF3,3
AF3,2
AF3,1
AF3,0
7
AF3,7
AF3,6
AF3,5
AF3,4
8
AF4,0
:
:
AF4,1
18 行
9
AF4,4
:
:
:
アドレス
10
AF5,1
AF5,0
:
:
11
AF5,5
:
:
:
12
AF6,2
AF6,1
AF6,0
:
1 BIS符号
13
AF6,6
:
:
:
= 62 バイト
14
AF7,3
:
AF7,1
AF7,0
15
AF7,7
:
:
:
16
AF8,0
:
:
AF8,1
17
AF8,4
AF8,7
AF8,6
AF8,5
18
UC0,0
UC12,0
UC0,1
UC12,1
19
UC1,0
UC13,0
UC1,1
UC13,1
12 行
:
:
:
:
:
使用者コントロールデータ
28
UC10,0
UC22,0
UC10,1
UC22,1
29
UC11,0
UC23,0
UC11,1
UC23,1
30
pb30,0
pb30,1
pb30,2
pb30,3
31
pb31,0
pb31,1
pb31,2
pb31,3
32 行
:
:
:
:
:
パリティ
61
pb61,0
pb61,1
pb61,2
pb61,3
符号語0
符号語1
符号語2
符号語3
図56−PIC BISブロック
15.5.3.2 アドレスフィールド
各64Kのクラスタの1/16(=4Kバイト)が一つのアドレスユニット番号で識別される(13.9.2及び他の
細分箇条参照),ディスクの記録領域と同じように,各4KのPICクラスタはアドレスユニット番号で識別
する。これらのアドレスユニット番号は,連続した4KのPICクラスタ間で二つずつ増やす。
各PICのBISブロックは,同じアドレスを8回繰り返し(S=0 .. 7),繰返し回数を識別するフラグビッ
トが使われる。
アドレスフィールドは,主アドレスフィールドから派生している(13.9.2及び他の細分箇条参照)。
AF0,S=PAF0,S(S=0 .. 7に対して全て同じ。)
AF1,S=PAF1,S(S=0 .. 7に対して全て同じ。)
AF2,S=PAF2,Sの全ビット反転(S=0 .. 7に対して全て同じ。)
AF3,S=PAF3,Sの全ビット反転(S=0 .. 7に対して全て同じ。)
AF4,S=PAF4,S(フラグビットであり,b7〜b3はリザーブ(領域)とし,b2〜b0はSの2値の値に設定する。)
AF5,S=PAF5,Sの全ビット反転
AF6,S=PAF6,Sの全ビット反転
68
X 6233:2017 (ISO/IEC 30193:2016)
AF7,S=PAF7,S
AF8,S=PAF8,S
PAF5,S .. PAF8,S=アドレスフィールド上で構成する(9,5,5)RS符号のパリティバイト
主アドレスフィールドのパリティバイトPAF5,S .. PAF8,Sは,13.9.2で規定したとおりに計算する。
八つのアドレスは,PICのBISブロックに特殊なプリインターリーブの方法で配列される。
アドレス0〜3のバイトは偶数行の対角線上に配置され,アドレス0のバイト0は行列0,0から開始し,
続きの各アドレスは循環しながら一つ左の位置にシフトされる(図56参照)。
アドレス4〜7のバイトは奇数行の対角線上に配置され,アドレス4のバイト0は行列1,0から開始し,
続きの各アドレスは循環しながら一つ左の位置にシフトされる。
数式で表すと,このPICのBISクラスタへのバイトAFx, yの配列は,次の式で表すことができる。
− 行r:r=2×x+div(y,4)
− 列c:c=mod[(x+8 − y),4]
15.5.3.3 使用者コントロールデータ
各24バイトにて構成される,二つの使用者コントロールデータユニットがある。最初の使用者コントロ
ールデータユニットのバイト0〜11はPICのBISブロックの0列18〜29行に配置し,バイト12〜23は1
列18〜29行に配置する。同様に,第2の使用者コントロールデータユニットのバイト0〜11はPICのBIS
ブロックの2列に,バイト12〜23は3列に配置する(図56参照)。
両方の使用者コントロールデータは,全てリザーブ(領域)とする。
15.5.3.4 BIS符号語
PICのBISブロックは,4列(c=0 .. 3)しかないという違いはあるものの,13.11及び13.12に規定する
方法によって32行のパリティ(図56参照)を追加して完成となる。その結果,62行×4列の配列ができ
る。
15.5.3.5 BISクラスタ
最後に,BIS符号の配列は,図54に示すとおりPICクラスタに挿入可能な248バイトの1列に再配置さ
れる。
バイトB0〜B123は,行列0,0から開始して,循環しながらBISブロックの偶数行を対角線上を続けて複
製して埋められる(図57参照)。
バイトB124〜B247は,行列1,0から開始して,循環しながらBISブロックの奇数行を対角線上を続けて複
製して埋められる。
数式で表すと,PICのBISブロックからPICのBISクラスタへのバイトの配置は,次の式で表すことが
できる。
− バイトbr, c:行r列cのBISブロックのバイト
− バイトBi:BISクラスタの列のi番目のバイト
− 行r:r=mod(2×i,62)+div(i,124)
− 列c:c=mod(i,4)
逆に,iは,r及びcを用いて次の式で表すことができる。
i=124×mod(r,2)+div(r,2)+31×mod{[4−c+div(r,2)],4}
インターリーブの結果,1列248バイトのBISクラスタは,それぞれが,9アドレスバイト,6使用者コ
ントロールデータバイト及び16パリティバイトの順で構成する,31バイトの8グループに分かれる。ア
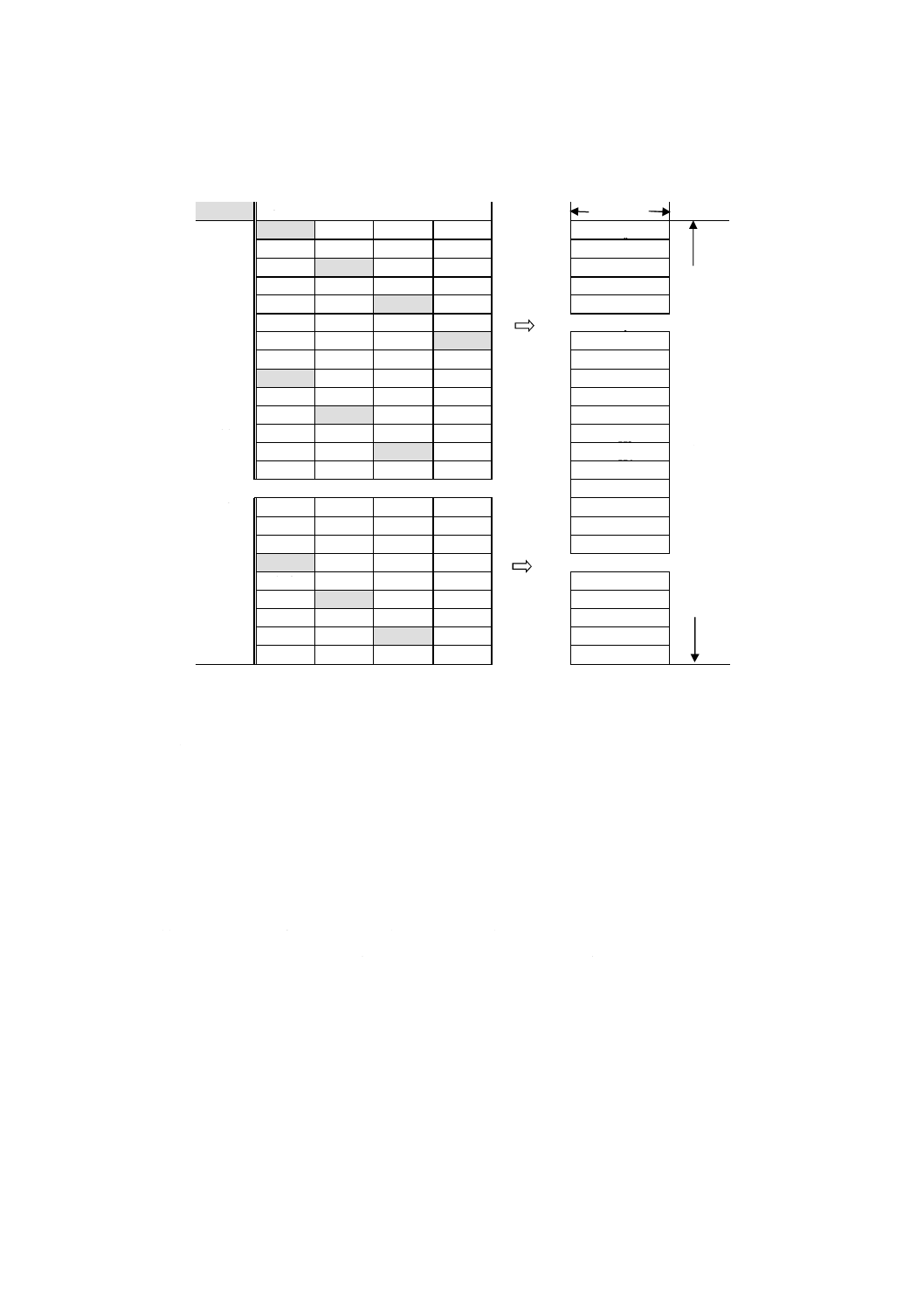
69
X 6233:2017 (ISO/IEC 30193:2016)
ドレスバイトは,プリインターリーブのおかげで直接アクセスするために適切な順番で表れる。
BIS ブロック
BIS クラスタ
i
c= 0
1
2
3
1 バイト
r= 0
0
93
62
31
B0
1
124
217
186
155
:
2
32
1
94
63
:
3
156
125
218
187
:
4
33
2
95
:
5
157
126
219
Bi
6
34
3
:
7
158
127
:
8
4
35
:
9
128
159
:
10
5
:
11
129
B123
248
12
6
B124
行
13
130
:
:
:
:
:
:
:
53
243
:
54
120
27
:
55
244
:
56
28
121
:
57
152
245
:
58
60
29
122
:
59
184
153
246
:
60
92
61
30
123
:
61
216
185
154
247
B247
図57−PIC BISクラスタを構成するための読取順
15.5.4 記録フレーム
15.5.4.1 一般
次の工程で,19列のインターリーブされたLDCブロックは1列のBISクラスタと合わせて,図54に規
定したとおりに拡張して1列の同期パタンが追加される。
21列×248行の配列の各行は,PIC記録フレームと呼ばれる。
15.5.4.2 変調
各PIC記録フレームの168ビットは,同期パタンのビットを除きバイフェーズ変調によって変調ビット
に変換される。この変調方式では,ビット“0”はビットセルの最初の反転で表され,ビット“1”はビッ
トセルの最初及び中央の反転で表される(図58の例参照)。
変調ビットは,図58に示すとおりディスク上にグルーブの平均中心線からの偏移として記録される。各
セルの長さは,Tを書換領域のチャネルビット長とする場合36Tとする。
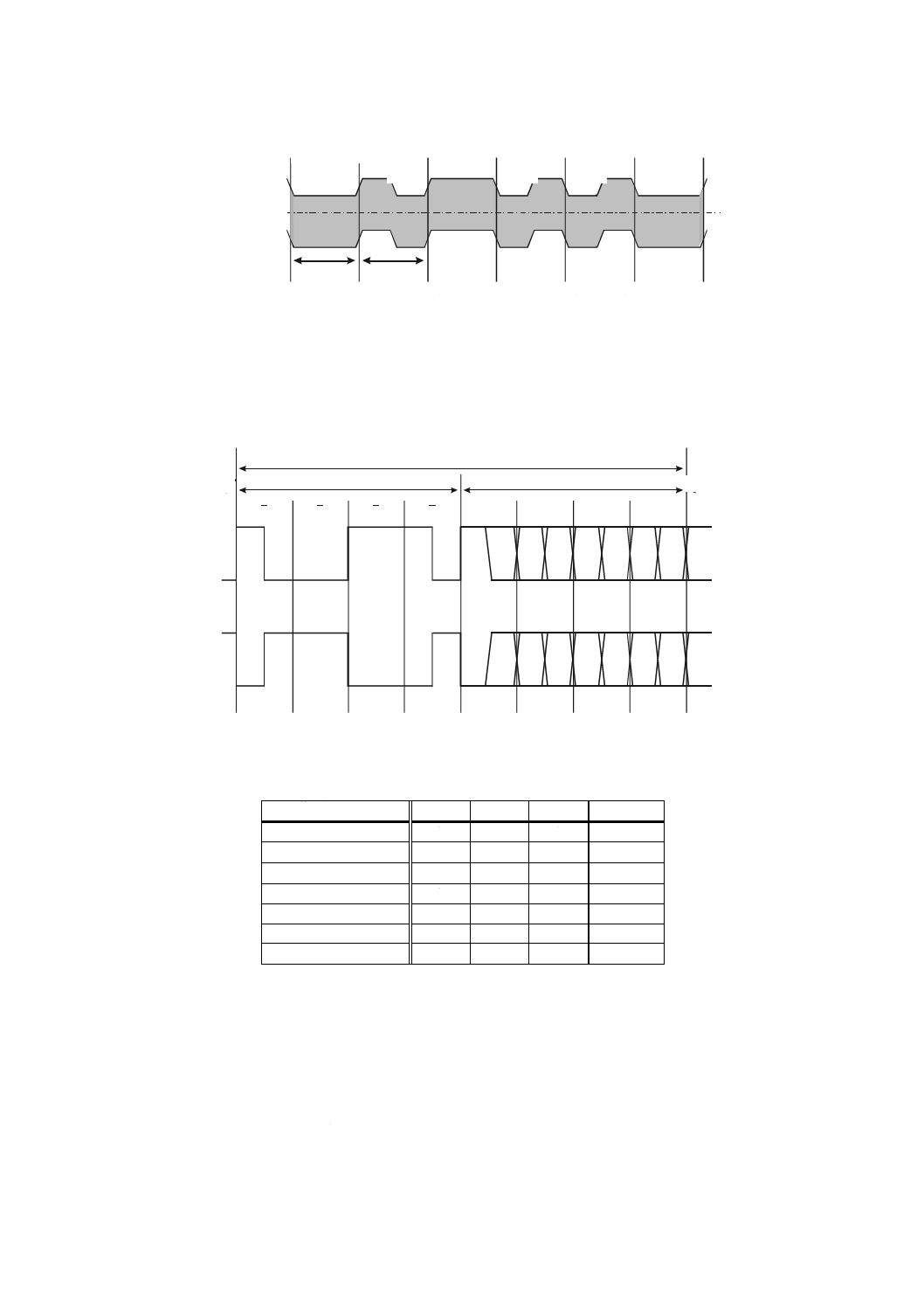
70
X 6233:2017 (ISO/IEC 30193:2016)
0
1
0
1
1
0
36 T
36 T
グルーブ中心
の平均
データ列の例
図58−バイフェーズ変調されたHFMグルーブ
15.5.4.3 フレーム同期
各記録フレームは,8データビット相当の同期パタンで始まる。最初の4ビットは,通常のバイフェー
ズエンコード規則を破る特別のパタンの4ビットセルで置き換えられる(図59参照:最初の位相による
二通りの可能性のあるパタン。)。
1
1
1
1
0
0
0
0
1
1
0
0
0
0
1
1
1
1
1
1
1
1
1
1
1
1
同期主部
同期識別子
ID0
ID1
ID2
パリティ
データ
データ
x
x
x
x
x
x
x
x
同期パターン
図59−バイフェーズ同期パタン
7種類の同期パタンがID0 .. ID2及びパリティビットの終わりの4ビットで識別される(図60参照)。
同期番号
ID0
ID1
ID2
パリティ
FS0
0
0
0
0
FS1
0
0
1
1
FS2
0
1
0
1
FS3
0
1
1
0
FS4
1
0
0
1
FS5
1
0
1
0
FS6
1
1
0
0
図60−同期の識別
PICのBIS列によって,248行のPICクラスタは,31記録フレームの8グループに分けることができ,
各記録フレームのグループは,それぞれの最初の9行にアドレスがある(15.5.3.5参照)。
そのような連続した31記録フレームの各グループは,特別な同期パタンの配列で識別される(13.17.4
も参照)。各グループの最初の記録フレームは,特別な同期パタンFS0をもっている。
他の同期パタンは,図61に規定するとおりに配置される。
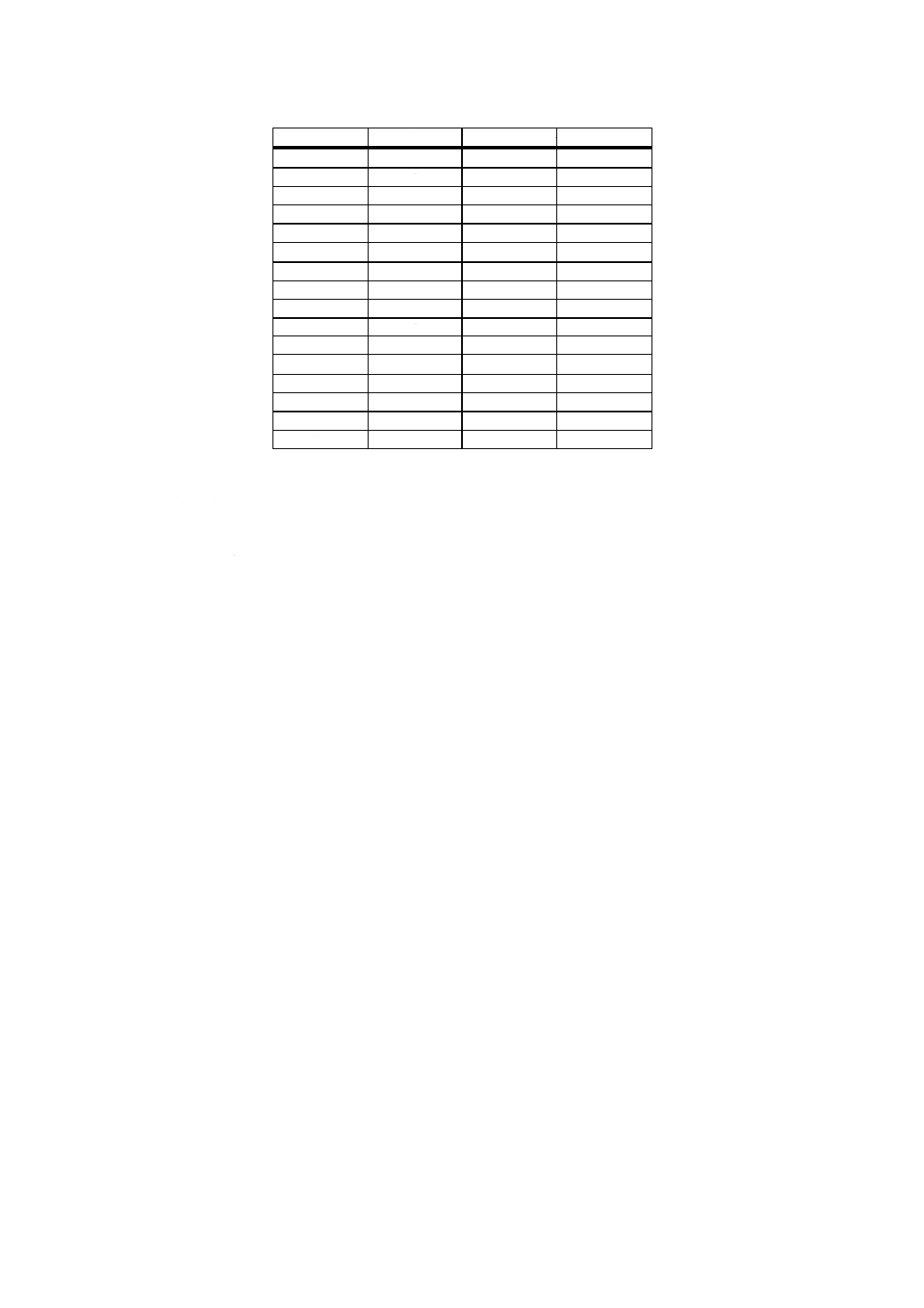
71
X 6233:2017 (ISO/IEC 30193:2016)
フレーム番号
同期番号
0
FS0
1
FS1
16
FS5
2
FS2
17
FS3
3
FS3
18
FS2
4
FS3
19
FS2
5
FS1
20
FS5
6
FS4
21
FS6
7
FS1
22
FS5
8
FS5
23
FS1
9
FS5
24
FS1
10
FS4
25
FS6
11
FS3
26
FS2
12
FS4
27
FS6
13
FS6
28
FS4
14
FS6
29
FS4
15
FS3
30
FS2
フレーム番号
同期番号
図61−PIC記録フレームへの同期パタンの配置
15.6 ウォブルグルーブのトラック構造
15.6.1 一般
トラックのウォブルは,おおよそ平均センターラインからの正弦波偏移である。
公称ウォブル長NWL(69チャネルビットと等価)は,使用者データ容量33.4 GB/層のディスクで書換
領域全体で平均した場合に,3.855 3 μm±0.005 μmとする。
これは,基準速度の2倍の場合の基本周波数fwobに相当し,次による。
fwob=1 913.043 kHz
15.6.2 ウォブルの変調
15.6.2.1 一般
ウォブルの基本形は,コサイン波:cos(2π×fwob×t)である。この基本形のウォブルは,“単一周波数ウォ
ブル”(MW)と呼ばれる。
ウォブルのうち幾つかが変調され,二つの変調方法を併用する。
− 第1の変調方法:“MSK-cos”(最小シフトキー−コサイン変形)と呼ばれる。
− 第2の変調方法:“HMW”(高調波変調波)と呼ばれる。
外側ゾーンの保護ゾーン3領域(箇条17及び20.10参照)では,グルーブはHMWでは変調せず,MSK-cos
だけで変調する。
両方の変調方法は,15.7に規定するとおりにADIP情報を表す。
15.6.2.2 MSK-cos変調
MSK-cos変調は,三つの連続した単一周波数ウォブルを一つのMSKマーク(MM)で置き換えること
によって行われる。
MSKマークは,図62に示すとおり次に示すウォブルパタンをもった3公称ウォブル長NWLで構成さ
れる。
− 最初のNWLは,周波数=1.5×fwobのコサインウォブルでMSKマークを開始する。
− 第2番目のNWLは,周波数=fwobのコサインウォブルが続く。
− 第3番目のNWLは,周波数=1.5×fwobのコサインウォブルでMSKマークを終端する。
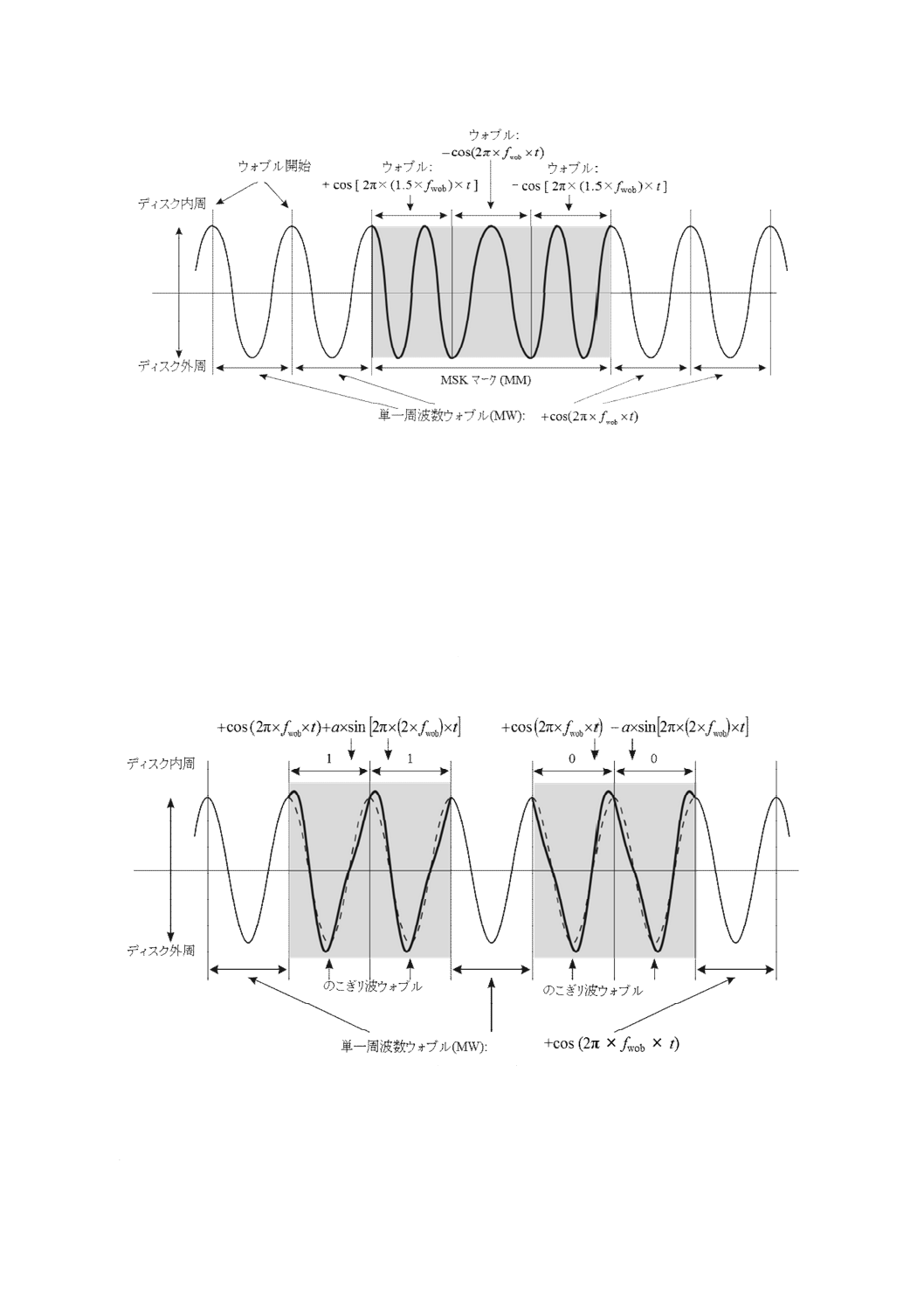
72
X 6233:2017 (ISO/IEC 30193:2016)
図62−MSKマークの規定
15.6.2.3 HMW変調
HMW変調は,連続した単一周波数を同数ののこぎり波ウォブル(STW)に置き換えることによって行
われる。一つののこぎり波ウォブルは,基本コサイン波に2倍の周波数のサイン波を組み合わせることで
形成され,次の式で表される。
cos(2π×fwob×t)±a×sin[2π×(2×fwob)×t]
ここに,
a: 0.25
そのような基本周波数のコサイン波及びある量の2次高調波の組合せは,1次近似ではのこぎり波を表
している。“+”又は“−”の符号は,左又は右の傾斜を作り出し,“+”記号はビット“1”を表すために,
“−”記号は,ビット“0”を表すために用いられる(図63参照)。
図63−のこぎり波ウォブルの規定
15.6.3 ウォブル極性
プッシュプルの極性(26.1参照)が負の場合,ウォブルグルーブの最初のウォブル偏移はディスクの外
周方向とする。
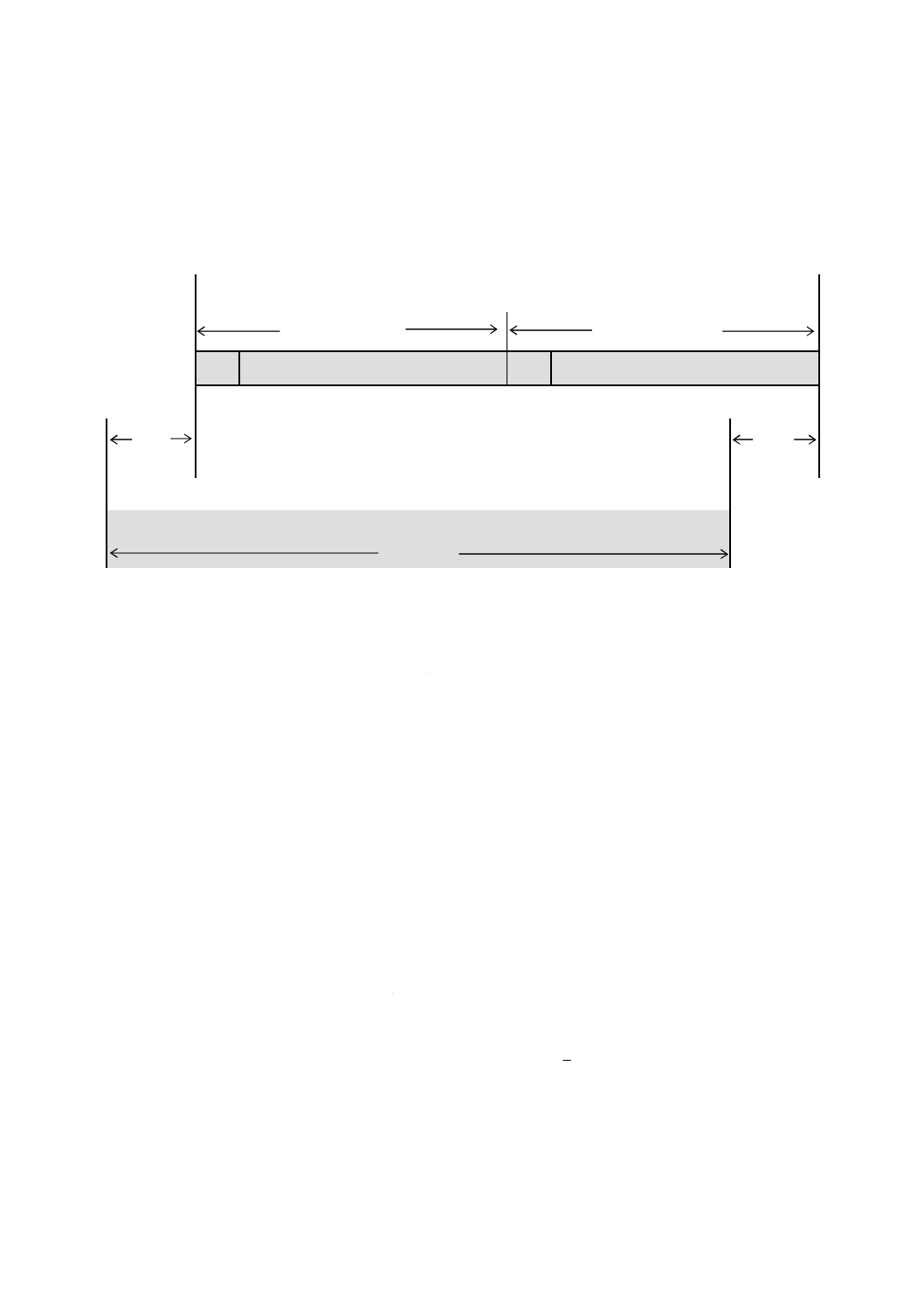
73
X 6233:2017 (ISO/IEC 30193:2016)
15.7 ADIP情報
15.7.1 一般
ディスクに記録するデータは,ADIPアドレスに同期する。ADIPアドレスは,ウォブル中に変調されて
入っているADIPシンボルから得られる(図68参照)。したがって,56 NWLは,2記録フレームに相当す
る(13.15参照)。そのような56 NWLのグループは,ADIPユニットと呼ばれる(図64参照)。
2 記録フレーム
1 932 チャネルビット
1 932 チャネルビット
同期
データ
同期
データ
9.5
ウォブル
9.5
ウォブル
1ADIPユニット
56 NWLs
≈
≈
図64−ADIPの一般構造
15.7.2 ADIPユニットタイプ
ADIPユニットの56 NWLの中で,隣り合うMM間の長さを個別の距離にするようにMMを挿入するこ
とによって,異なるタイプのADIPユニットを作ることができる。
データビットを表すADIPユニットは,追加でSTWで変調される。
さらに,基準のSTWが規定される。各タイプのADIPユニットは,MMで始まる。
次のタイプのADIPユニットを規定する(図65参照)。
− 単一周波数ユニット:1MM,続いて53 MWの構成
− 基準ユニット:1MM,続いて15 MW,37 STW及び1MWの構成
− 同期̲0ユニット:1MM,続いて13 MW,1MM,7 MW,1MM及び27 MWの構成
− 同期̲1ユニット:1MM,続いて15 MW,1MM,7 MW,1MM及び25 MWの構成
− 同期̲2ユニット:1MM,続いて17 MW,1MM,7 MW,1MM及び23 MWの構成
− 同期̲3ユニット:1MM,続いて19 MW,1MM,7 MW,1MM及び21 MWの構成
− データ̲xユニット:xは“1”又は“0”を表す。
− データ̲1ユニット:1MM,続いて9 MW,1MM,3 MW,37 STW及び1MWの構成
− データ̲0ユニット:1MM,続いて11 MW,1MM,1 MW,37 STW及び1MWの構成
四つの同期ユニットは同期をとるために使用され,一方,データ̲1ユニットはビット値“1”を表すた
めに使用され,データ̲0ユニットはビット値“0”を表すために使用される。
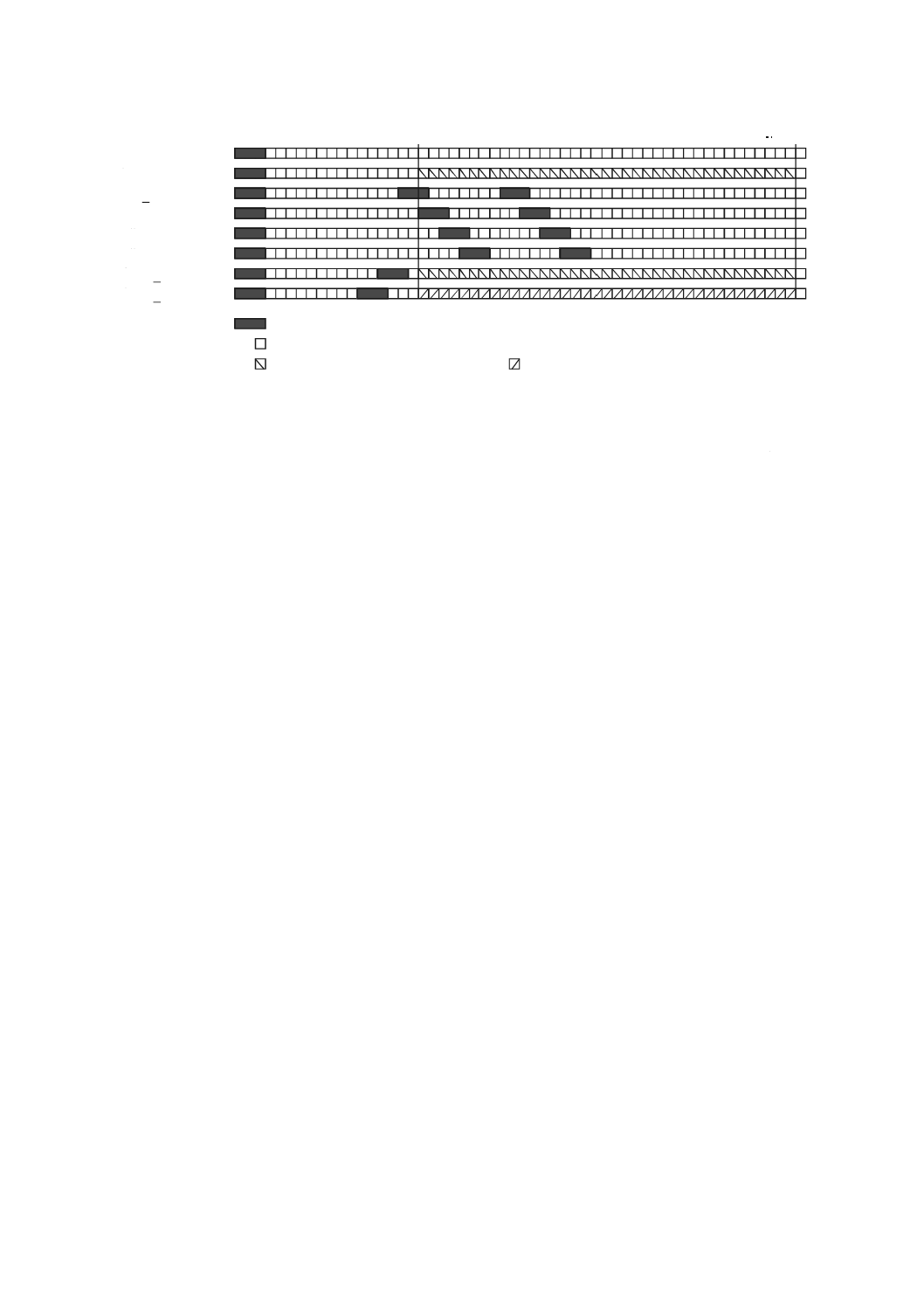
74
X 6233:2017 (ISO/IEC 30193:2016)
基準ユニット
単一周波数ユニット
同期̲0ユニット
同期̲1ユニット
同期̲2ユニット
同期̲3ユニット
データ̲0ユニット
データ̲1ユニット
NWL 番号
0
18
55
3
.... ..
..
..
単一周波数ウォブル
MSK マーク
“0”を表す、のこぎり波ウォブル
“1”を表す、のこぎり波ウォブル
図65−ADIPユニットタイプ
15.7.3 ADIPワード構造
83 ADIPユニットは,まとめて一つのADIPワードとなる。これは,3 ADIPワードが一つの記録ユニッ
トブロック(RUB)に等価な3×83×2=498記録フレームに相当することを意味する(14.2参照)。
各ADIPワードは,図66に示すとおり構成する。
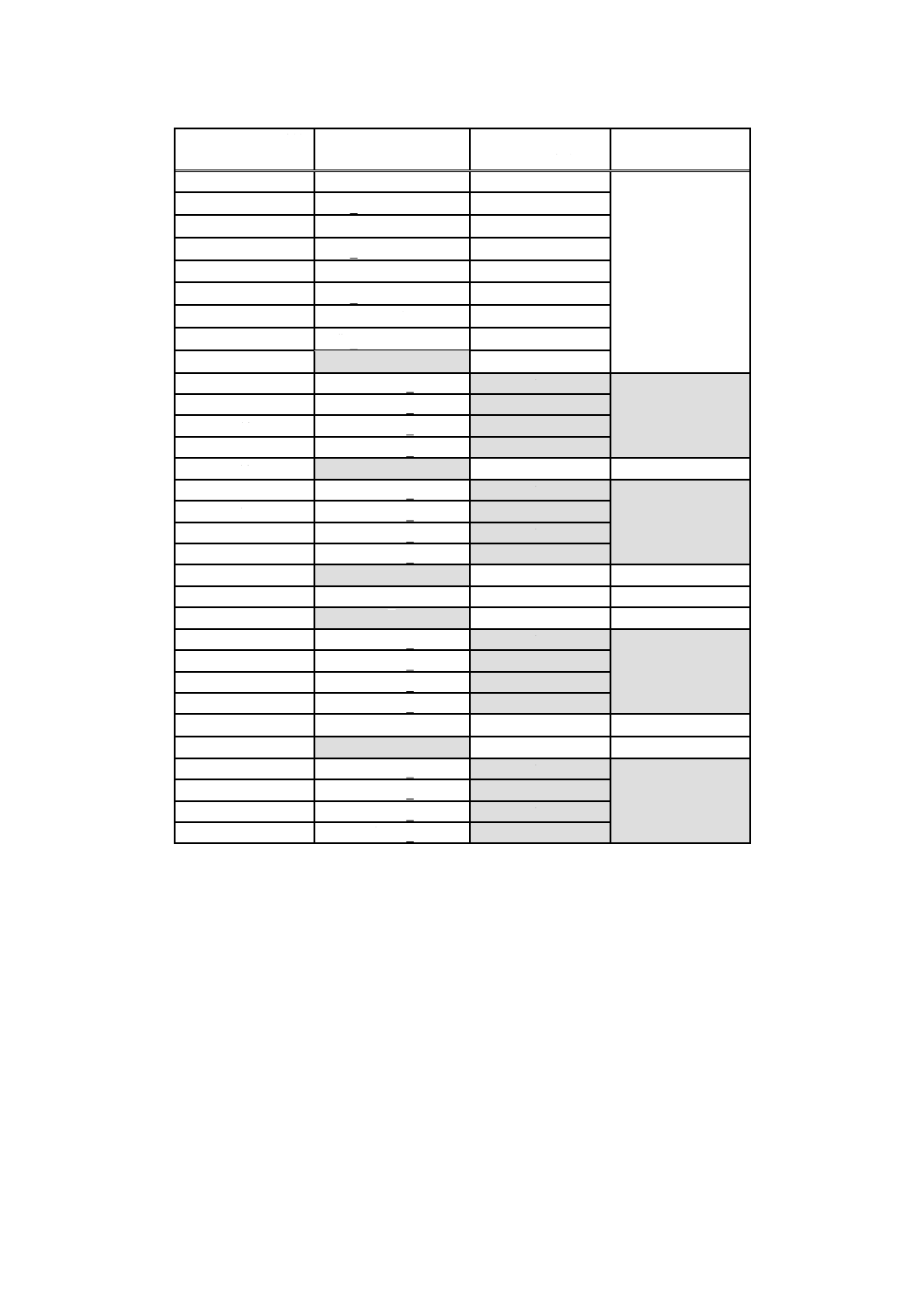
75
X 6233:2017 (ISO/IEC 30193:2016)
ADIPユニット番号
ADIPユニットタイプ
ADIPニブル
ビット番号
ADIP符号
ニブル番号
0
単一周波数
−
−
1
同期̲0
−
2
単一周波数
−
3
同期̲1
−
4
単一周波数
−
5
同期̲2
−
6
単一周波数
−
7
同期̲3
−
8
基準
−
9
データ̲x
b3
c0
10
データ̲x
b2
11
データ̲x
b1
12
データ̲x
b0
13
基準
−
−
14
データ̲x
b3
c1
15
データ̲x
b2
16
データ̲x
b1
17
データ̲x
b0
18
基準
−
−
:
:
:
:
8+i×5
基準
−
−
9+i×5
データ̲x
b3
ci
10+i×5
データ̲x
b2
11+i×5
データ̲x
b1
12+i×5
データ̲x
b0
:
:
:
:
78
基準
−
−
79
データ̲x
b3
c14
80
データ̲x
b2
81
データ̲x
b1
82
データ̲x
b0
図66−ADIPワード構造
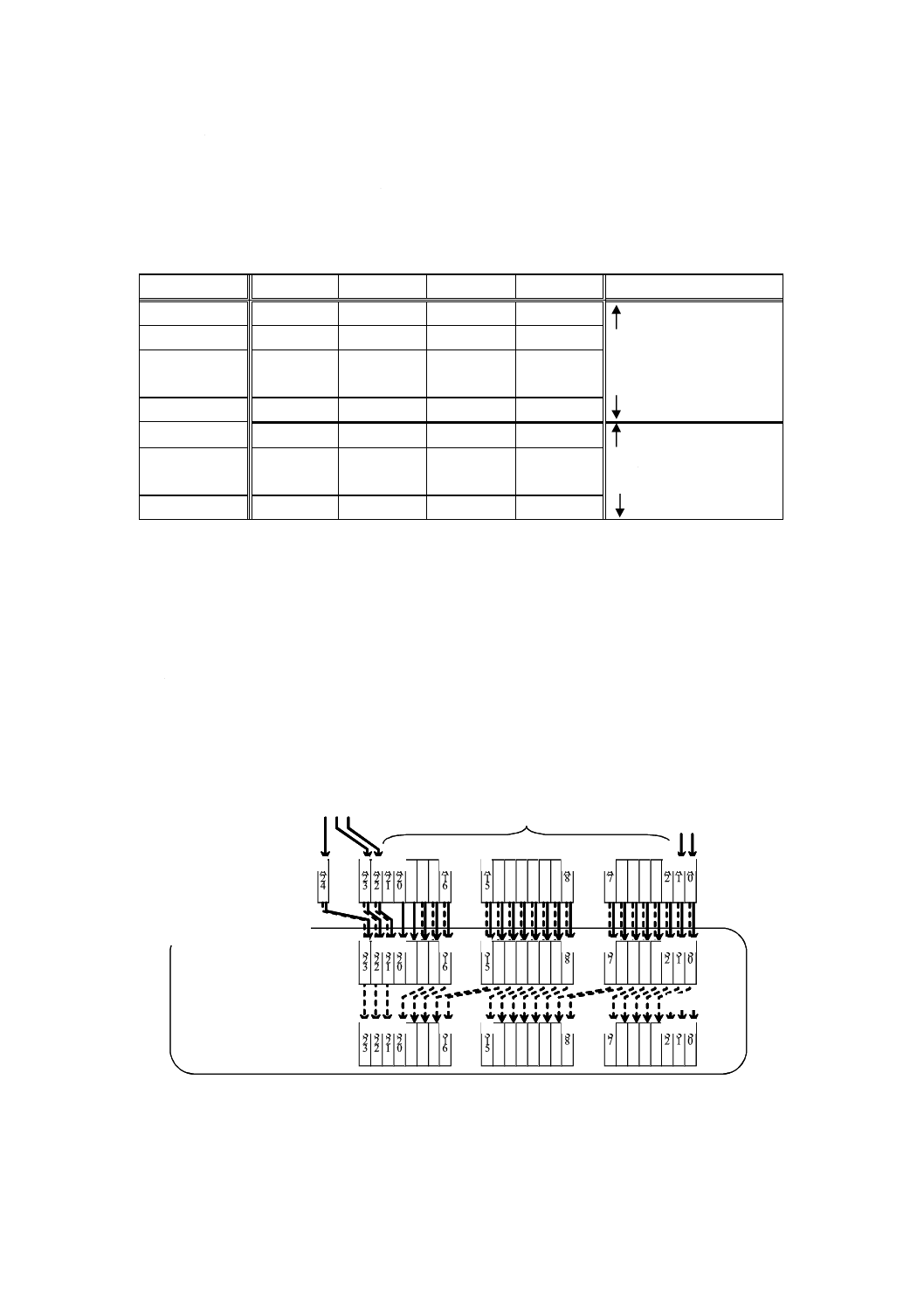
76
X 6233:2017 (ISO/IEC 30193:2016)
15.7.4 ADIPデータ構造
15.7.4.1 一般
各ADIPワードは全部で60ビットを含み,非組織リードソロモン(RS)エラー訂正符号によって符号
語を形成している。この符号語は,36の情報ビットで構成される。エンコード前に,36の情報ビットは,
図67の配列によって規定するn0〜n8の九つの4ビットニブルに整列される。
b3
b2
b1
b0
n0
AS23
AS22
AS21
AS20
n1
AS19
AS18
:
:
6
ADIP
:
:
:
:
:
シンボル
n5
AS3
:
:
AS0
n6
AX11
:
:
:
:
:
:
:
:
3
ニブル
予備データ
n8
AX3
:
:
AX0
ニブル
ニブル
図67−ADIP情報構造
n0〜n8のニブルは,エラー訂正システムによって,c0〜c14のニブルにコード変換される(15.7.5参照)。
このエラー訂正システムは非組織符号であり,情報ビット列のビットとADIPユニット内の符号ビット
との間には単純な直接の関係はない。
15.7.4.2 ADIP情報ビットの割当て
ADIPデータに入れる情報は,次による。
− AS23 .. AS0:これらの24ビットは,物理ADIPシンボル(PAS)を入れる。AS23はmsbで,AS0は
lsbとする。これらのシンボルは,物理ADIPアドレス(PAA)から,次のとおりに変換する(図68
及び図69参照)。
最上位バイト
最下位バイト
AA7
AA2AA1AA0
00, 01, 10
に連続して設定
AA15
AA8
AA23AA22AA21AA20
AA16
AA24
物理ADIPアドレス
AS7
AS2AS1AS0
AS15
AS8
AS23AS22AS21AS20
AS16
物理ADIPシンボル
“11”に設定
AS7
AS2AS1AS0
AS15
AS8
AS23AS22AS21AS20
AS16
もしAA22 =AA21なら
もしAA22≠AA21なら
層番号に設定
連続番号
最上位バイト
最下位バイト
AA7
AA2AA1AA0
00, 01, 10
に連続して設定
AA15
AA8
AA23AA22AA21AA20
AA16
AA24
物理ADIPアドレス
AS7
AS2AS1AS0
AS15
AS8
AS23AS22AS21AS20
AS16
物理ADIPシンボル
“11”に設定
AS7
AS2AS1AS0
AS15
AS8
AS23AS22AS21AS20
AS16
AA22 =AA21の場合
AA22≠AA21
層番号に設定
連続番号
の場合
図68−PAA及びPASの間の関係
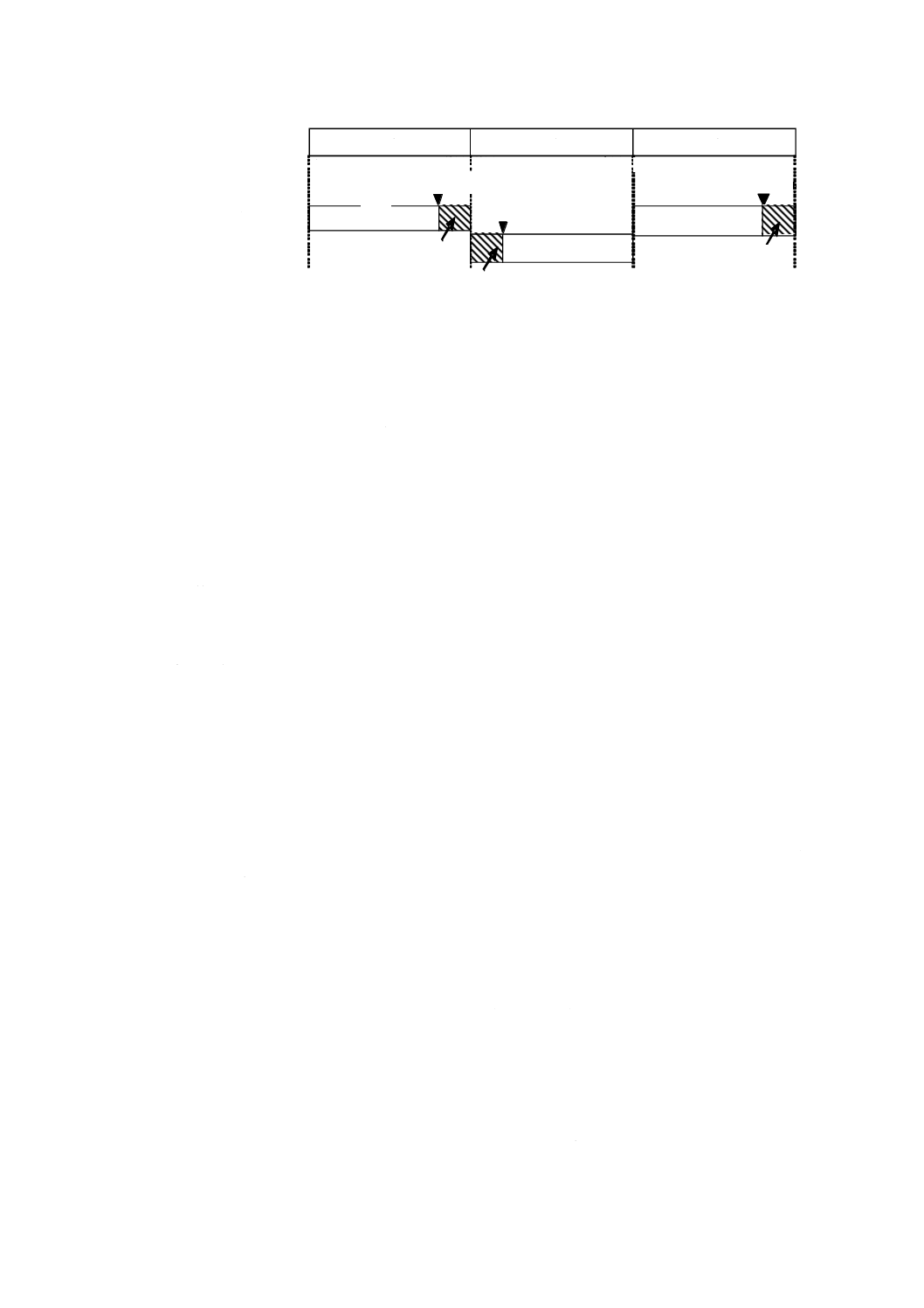
77
X 6233:2017 (ISO/IEC 30193:2016)
外周
内周
内周
外周
外周
内周
層構造
物理ADIPアドレス(PAA)中の
[AA22,AA21]
L0
L1
L2
[0,0]
[0,1]
PAA=05FFFFEh
[1,1]
[0,0]
[0,1]
PAA=0A00000h
PAA=0200000h
[1,0]
図69−AA22及びAA21の組合せ
− AA24 .. AA0:これらの25ビットは,物理ADIPアドレス(PAA)を入れる。AA24はmsbで,AA0
はlsbとする。これらのシンボルは,三つの部分の構成とする。
− AA24 .. AA22:この3ビットは,層番号とし,L0層,L1層,及びL2層でそれぞれ,000,001及び
010に設定する。他の設定は,リザーブ(値)とする。
− AA21 .. AA2:この20ビットは,三つの連続するADIPワードごとに一つ増加する連続番号を入れ
るRUBに同期する(14.2参照)。
− AA1,AA0:この2ビットは,1RUBに相当する三つの連続するADIPワードの中で,00,01及び
10と連続して設定する。11の設定は使用しない。
L0層の情報ゾーンの最初のアドレスは,データゾーンの最初のアドレスであるPAA 0 02 00 00hが半径
mm
0.
24
0.0
1.0
−
の位置とする。
L0層のデータゾーンの最終ADIPアドレス(LAA)は,半径58.1 mm未満となる位置とする。
L1層のデータゾーンの先頭ADIPアドレス(FAA)は,半径58.1 mm未満となる位置とする。
L1層のデータゾーンの最終ADIPアドレス(0 7D FF FEh)は,半径
mm
0.
24
0.0
1.0
−
の位置とする。
L2層のデータゾーンの先頭ADIPアドレス(0 82 00 00h)は,半径
mm
0.
24
0.0
1.0
−
の位置とする。
L2層のデータゾーンの最終ADIPアドレス(LAA+0 80 00 00h)は,半径58.1 mm未満となる位置とす
る。
− AX11 .. AX0:この12ビットは,ディスクの予備情報が入っている。
− ディスクのデータゾーン及び外側ゾーンでは,予備ビットは,“0”に設定する。
− ディスクの内側ゾーンで,予備ビットは,次のとおりに使用する。
− 96の連続したADIPワード(32 RUB相当)のAX11 .. AX0は,一つの144バイトのADIP予備フ
レームを構成する。
− 各ADIP予備フレームの最初のビットは,128の倍数のPAA(PAA=x xxxx xxxx xxxx xxxx
x000 0000)をもつADIPワードの位置に置く。
− 144バイトの内容は,15.7に規定する。
15.7.4.3 L0層〜L2層の物理ADIPアドレスの関係
L0層〜L2層のPAAは,決まった関係とする。L0層(又はL2層)のPAAとL1層のPAAとは同じ半
径にある(各々の内側ゾーンからADIPワードの数が同じ距離にある。)が,それらはAA21〜AA2が反転
したビットをもつ。L0層及びL2層の同じ半径にあるPAAは,同じAA21〜AA2のビットとする(図70
参照)。
このようにすることによって,L1層のPAAは,トラッキング方向であるディスクの外周部から内周部
に向かって増加することになる。同時に,PAA1のAA21〜AA2を反転したアドレスビットは,L0層(又
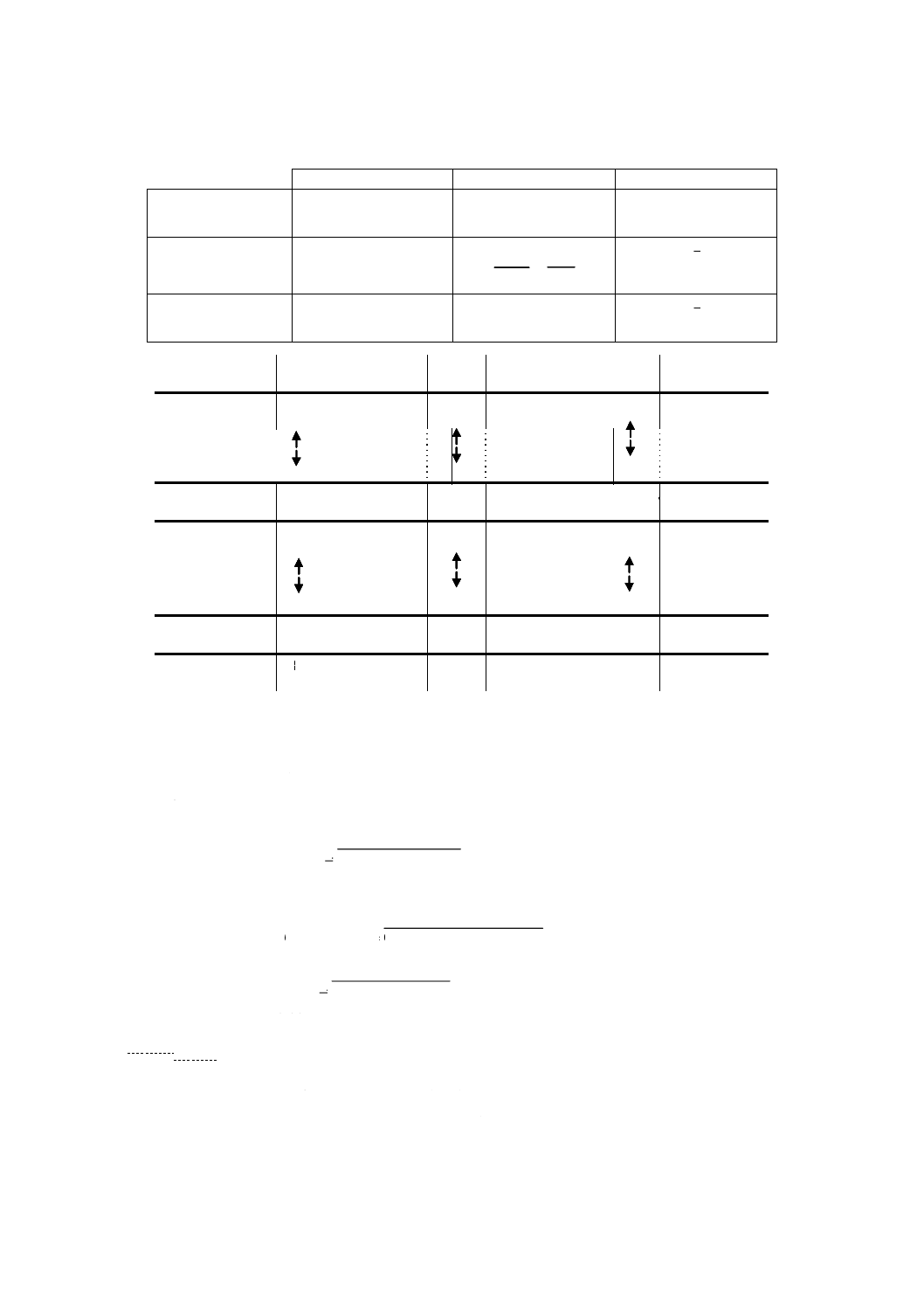
78
X 6233:2017 (ISO/IEC 30193:2016)
は2層)の同じ半径の相当する反転しないアドレスビットと同じ関係となる。
層番号
連続番号l
内部-RUB 番号
L0層のPAA0
AA24..AA22= 000
AA21 .. AA2
AA1,AA0 = 00,01,10
内周から外周へ
L1層のPAA1
AA24..AA22= 001
AA1,AA0 = 00,01,10
外周から内周へ
L2層のPAA2
AA24..AA22= 010
AA21 .. AA2
AA1,AA0 = 00,01,10
内周から外周へ
AA21..AA2
L0層
最初のアドレス
最終アドレス
0 02 00 00h.....
PAA0
..... LAA
内側ゾーン
外側ゾーン
L1層
最終アドレス
最初のアドレス
0 7D FF FEh.....
PAA1
..... FAA
内側ゾーン
外側ゾーン
L2層
最初のアドレス
最終アドレス
0 820000h.....
PAA2
..... LAA + 0 80 00 00h
層番号
連続番号l
内部-RUB 番号
L0層のPAA0
AA24..AA22= 000
AA21 .. AA2
AA1,AA0 = 00,01,10
内周から外周へ
L1層のPAA1
AA24..AA22= 001
AA1,AA0 = 00,01,10
外周から内周へ
L2層のPAA2
AA24..AA22= 010
AA21 .. AA2
AA1,AA0 = 00,01,10
内周から外周へ
AA21..AA2
層番号
連続番号l
内部-RUB 番号
L0層のPAA0
AA24..AA22= 000
AA21 .. AA2
AA1,AA0 = 00,01,10
内周から外周へ
L1層のPAA1
AA24..AA22= 001
AA1,AA0 = 00,01,10
外周から内周へ
L2層のPAA2
AA24..AA22= 010
AA21 .. AA2
AA1,AA0 = 00,01,10
内周から外周へ
AA21..AA2
L0層
最初のアドレス
最終アドレス
0 02 00 00h.....
PAA0
..... LAA
内側ゾーン
外側ゾーン
L1層
最終アドレス
最初のアドレス
0 7D FF FEh.....
PAA1
..... FAA
内側ゾーン
外側ゾーン
L2層
最初のアドレス
最終アドレス
0 820000h.....
PAA2
..... LAA + 0 80 00 00h
L0層
最初のアドレス
最終アドレス
0 02 00 00h.....
PAA0
..... LAA
内側ゾーン
外側ゾーン
L1層
最終アドレス
最初のアドレス
0 7D FF FEh.....
PAA1
..... FAA
内側ゾーン
外側ゾーン
L2層
最初のアドレス
最終アドレス
0 820000h.....
PAA2
..... LAA + 0 80 00 00h
図70−L0層,L1層及びL2層間のPAAの関係の図示
数学的には,次のとおりに説明できる。
PAA0に1 80 00 01hを加算した後に全ての25ビットを反転することによって,L1層の対応するアドレ
スPAA1となる。
数式で表すと,次になる。
01h
00
0
18
PAA
PAA
0
1
+
=
(1の加算は内部のRUB番号の順番を修正し,一方,1 80 00 00hの加算は正しい層番号に配慮している。)
このようにして,データゾーン1の最終ADIPアドレスは,次のとおりに生成される。
01h
00
0
18
00h
00
02
0
FEh
FF
7D
0
+
=
データゾーン1の先頭ADIPアドレスは,次のとおりに生成される。
01h
00
0
18
LAA
FAA
+
=
PAA2は,PAA0に0 80 00 00hを加えることによって,生成される。
注記
LAAは,LAAの各ビットの“1”及び“0”を反転したものを表している。
15.7.5 ADIPエラー訂正
エラー訂正システムは,ニブルベースであり,有限体GF(24)で規定される(15,9,7)非組織RS符号である。
符号の全ニブル数は15で,符号は9情報ニブルから計算され,この符号の最小距離は7である。
有限体GF(24)の非ゼロ要素は,原始根αによって生成される。ここに,αは,次の原始多項式p(x)の根
79
X 6233:2017 (ISO/IEC 30193:2016)
である。
p(x)=x4+x+1
GF(24)のシンボルは,多項式表現の(α3,α2,α,1)を元とするニブル(4ビットのグループ)の多項式で表
される。したがって,根αは次の式で表される。
α=0010
ベクトル(c0 c1 .. c13 c14)で表す符号語は,情報シンボルn0〜n8から,次の式によって計算できる。
)
(
n
)
(
n
c
)
(
p
8
)
(
7
0
14
0
14
x
g
x
g
x
x
C
i
i
i
i
i
i
×
+
×
=
×
=
∑
∑
=
=
−
ここに,gp(x)は,親生成多項式で,次による。
(
)
∏
=
−
=
13
0
p
)
(
i
iα
x
x
g
g(i) (x)は,各シンボルni (i=0 .. 7)に対する,特別生成多項式である。
g(i) (x)は,親生成多項式gp(x)からgp(x)のゼロのうちの1個のziを除き,その結果をg(i)(zi)=1となるよう
に正規化することで生成される。
除くべきゼロziは,次による。
zi=αi+6
生成多項式は,次によって計算される。
i
i
i
β
x
g
x
g
)
(
~
)
(
)
(
)
(
=
ここに,
i
p
i
z
x
x
g
x
g
−
=
)
(
)
(
~
)
(
及び
[]
i
i
i
z
g
β
)
(~
=
ディスクに記録する前に,ニブルc0,c1,c2,c3,c7,及びc12の全てのビットを反転する。
留意事項1 符号は非組織符号であるために,通常のRS復号で訂正した後に,符号語のシンボルか
ら情報シンボルを生成するために追加の計算が必要となる。
注記 留意事項は,規格をシステムに実装する場合の注意事項を示したものである。
n0〜n7の情報シンボルは,訂正した符号語C(x)に情報シンボルのゼロを代入することによって生成され
る。すなわち,次のとおりにシンドロームを計算する。
j
i
j
j
i
i
i
α
c
α
C
S
×
+
=
−
+
+
×
=
=
=
∑
)6
(
14
0
14
6
6
)
(
n
n8は,組織シンボルでC(x)からc0を複製することによって,直接生成することができる。
留意事項2 各情報シンボルniは,親生成多項式gp(x)のゼロに相当する。図71は,各情報シンボル
に対応したゼロ要素を示している(n8は,対応するゼロ要素はないことに注意されたい。)。
80
X 6233:2017 (ISO/IEC 30193:2016)
シンボル
相当するゼロ要素
(x ‒α0)
(x ‒α1)
(x‒α2)
(x‒α3)
(x‒α4)
(x ‒α5)
n0
(x‒α6)
n1
(x‒α7)
n2
(x‒α8)
n3
(x‒α9)
n4
(x‒α10)
n5
(x ‒α11)
n6
(x ‒α12)
n7
(x ‒α13)
図71−各情報ビットに対応したゼロ要素
情報シンボルが既知で,それに対応したゼロが(x−α0) .. (x−α5) .. に相当する既存の一連のゼロを拡張す
る場合は,ハミング距離は増える。例えば,n0が既知の場合は,ハミング距離はd=8となる。n0及びn1
が共に既知の場合は,ハミング距離はd=9となる。
すなわち,情報シンボルの事前情報によってハミング距離を増やすことができる。ADIPのアドレスは,
直線的に増加するため,このような事前情報となっている。
この現象は,復号結果の信頼性の追加確認に使用できる。
15.8 ADIP予備フレームのディスク情報
15.8.1 一般
96の連続したADIPワード予備フィールドの情報ニブルは,バイト単位のフレームにまとめられ,幾つ
かのディスクパラメタをもっている。図72に従って,ニブルはバイトに再配置される。幾つかのディス
ク情報(DI)予備フレームは,DIブロックにグループ化できる。全てのディスク情報ブロック(DIブロ
ック)は,同じ内容とする。
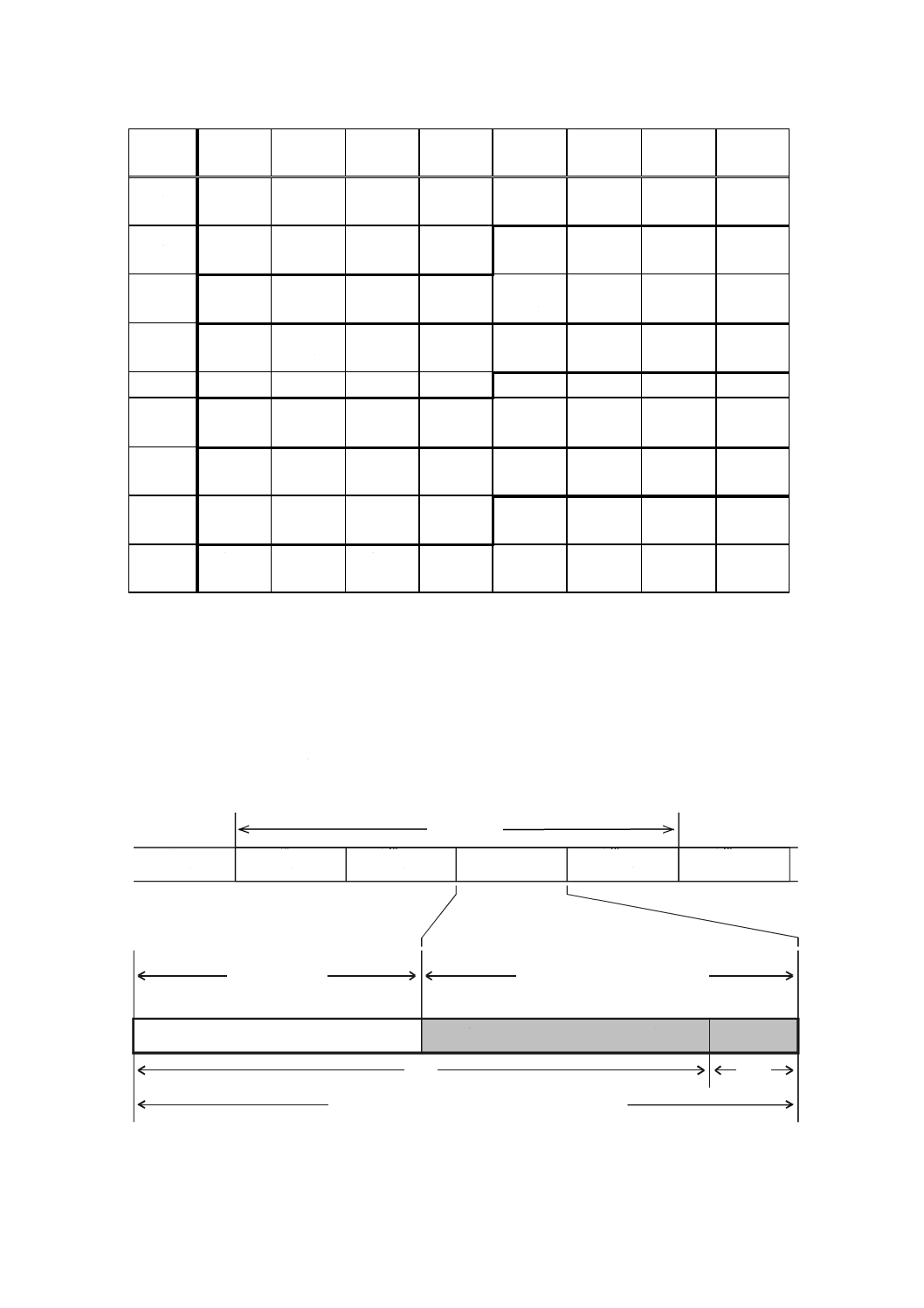
81
X 6233:2017 (ISO/IEC 30193:2016)
バイト
番号
b7
b6
b5
b4
b3
b2
b1
b0
0
AX11
ワード1
AX10
AX9
AX8
AX7
AX6
AX5
AX4
1
AX3
AX2
AX1
AX11
AX10
AX9
AX8
2
AX7
AX6
AX5
AX4
AX3
AX2
AX1
AX0
3
AX11
AX10
AX9
AX8
AX7
AX6
AX5
AX4
:
:
141
AX11
AX10
AX9
AX8
AX7
AX6
AX5
AX4
142
AX3
AX2
AX1
AX0
AX11
AX10
AX9
AX8
143
AX7
AX6
AX5
AX4
AX3
AX2
AX1
AX0
ワード1
ワード1
ワード1
ワード1
ワード1
ワード1
ワード1
ワード1
ワード1
ワード1
AX0
ワード1
ワード95
ワード2
ワード2
ワード2
ワード2
ワード2
ワード2
ワード2
ワード2
ワード2
ワード2
ワード2
ワード2
ワード3
ワード3
ワード3
ワード3
ワード3
ワード3
ワード3
ワード3
ワード95
ワード95
ワード95
ワード95ワード95
ワード95
ワード95
ワード95ワード95
ワード95
ワード95
ワード96
ワード96
ワード96
ワード96
ワード96
ワード96
ワード96
ワード96
ワード96
ワード96
ワード96
ワード96
図72−ADIP予備フレームバイトの順番
15.8.2 ディスク情報予備フレームのエラー保護
DI予備フレームは,13.7の長距離RS符号によって保護される。そのような長距離符号は248バイトで
構成されるため,104のダミーバイト(ディスク上に記録しない。)は,DI予備フレームの長距離符号語
を完成するために追加される(図73参照)。13.7のバイトe0,L .. e103,Lはダミーバイトを表し(全てFFhに
設定される。),バイトe104,L .. e215,Lはディスク情報バイトを表し,バイトp216,L .. p247,Lはパリティバイトを
表す。
各DI予備フレームに追加する104 バイト
96 ADIP ワード
12 ビット=144 バイト
×
FFh
ディスク情報ユニット(112 バイト)
パリティ
216
32
長距離エラー訂正符号
ダミーバイト:
ディスクの1 DI 予備フレーム:
0
0
1
N-1
DI 予備フレーム
N-1
....
DI ブロック
DI 予備フレーム
DI 予備フレーム
DI 予備フレーム
DI 予備フレーム
図73−ディスク情報構造及びエラー訂正フォーマット
82
X 6233:2017 (ISO/IEC 30193:2016)
15.8.3 ディスク情報データ構造
15.8.3.1 一般
DIブロックは,複数の144バイトのDI予備フレーム(図73参照)で構成できる。必要な場合は,最大
31個まで,DI予備フレームを追加して使うことができる。各記録層は,同じDI予備フレームで構成する
同じDIブロックをもつ。
DI予備フレーム列は,内側ゾーンで繰り返し,DI予備フレーム0は,L0層ではPAA 01 B8 00hから開
始し,L1層ではPAA 0 7E 00 00hから開始し,L2層ではPAA 0 81 B8 00hから開始する。
L0層の保護ゾーン2の開始PAA〜PAA 0 01 B7 FEh(図81参照),PAA 0 7E 48 00h〜L1層の保護ゾーン
1の最終PAA(図82参照),及びL2層の保護ゾーン1の開始PAA〜PAA 0 81 B7 FEh(図83参照)は,予
備ビットを“0”に設定するか,又はDI予備フレームを含むことができる(それによって,上記アドレス
で規定したDI予備フレーム0からDI予備フレームが連続でつながる。)。
各DI予備フレームのディスク情報112バイトは,ディスク情報(DI)ユニットと呼ばれる。各DIユニ
ットは,DIユニットヘッダを構成する8バイトで開始する(15.8.3.2参照)。
DIユニットは,異なる記録ストラテジなどの違ったパラメタセットを収納できる。内容が異なる定義の
DIユニットを区別するために,DIユニット特有の識別子が必要である。
DIユニットヘッダのバイト2のDIフォーマット番号は,この目的に用いる。このバイトで,256タイ
プの違う内容のDIユニットが識別できる。
一つのセットのパラメタ群が一つのDIユニットに収まらない場合は,連続した複数のDIユニットに収
納する。この場合,バイト6のビットb7は,次のDIユニットが一連の続きであることを示す。
記録ストラテジに関するDIユニットの使用方法は,15.8.3.6に示される。この規格の将来の拡張では,
例えば,より高速の記録線速度及び新しい記録ストラテジを規定するために,追加のDI予備フレームが
必要になる可能性がある。新しいDI予備フレームが追加される場合に,既存のものが適切の場合は継続
して使用し,そのような方法で,既存のドライブとのバックワード互換を容易に保つことができる。各ド
ライブは,ディスクにある全てのDI予備フレームを検査し,DIフォーマット番号(バイト2)及び示さ
れる記録速度(バイト28及び29)に基づき,サポートするものだけを使うことが望ましい(15.8.3も参
照)。
15.8.3.2 DIユニットの一般規定
各DIユニットは,図74に示すとおりヘッダ,本体及びフッタで構成する。
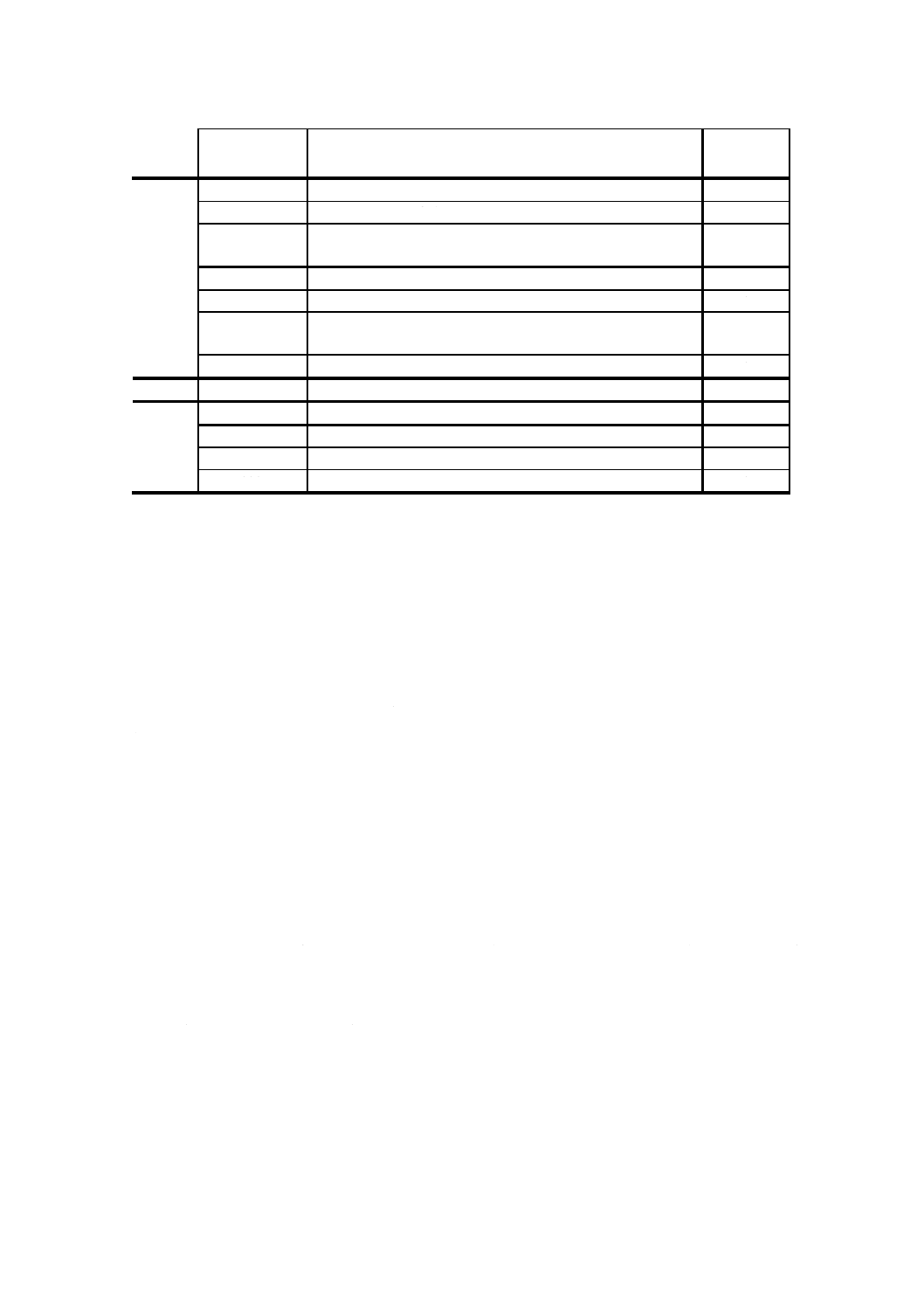
83
X 6233:2017 (ISO/IEC 30193:2016)
バイト番号
内容
バイト数
0〜1
ディスク情報識別子
2
2
DIフォーマット番号
1
3
各DIブロックのDI予備フレーム数(5ビット)
このDIユニットを適用する層数(3ビット)
1
4
リザーブ(領域)
1
5
DIブロック内のDIユニット連続番号
1
6
継続フラグ(1ビット)
このDI ユニットで使用中のDIバイト数(7ビット)
1
ヘッダ
7
リザーブ(領域)
1
本体
8 〜99
DIユニットの内容
92
100 〜105
ディスク製造業者識別子
6
106 〜108
メディアタイプ識別子
3
109 〜110
タイムスタンプ
2
フッタ
111
製造改正番号
1
図74−DIユニットの通常フォーマット
バイト0〜1:
ディスク情報識別子
この2バイトは,文字“DI”を表す,44 49hに設定する。
バイト2:
DIフォーマット番号
このバイトで,DIユニット又はDIユニットセットの内容を識別する(バイト6の
規定参照)。
BCAコード付きのディスクは,このバイトのmsbを,“0”に設定する。
BCAコードなしのディスクは,このバイトのmsbを,“1”に設定する。
注記 DIフォーマット番号は,DIユニットの内容だけを規定し,バイト11に規定するクラス番号及
びバージョン番号とは関係ない。
この規格は,将来,高速記録,高密度記録などの新しい機能が許されるように拡張される可
能性がある。その場合,新しいディスクと古いドライブとの間のバックワード互換の問題をで
きるだけ防ぐために,クラス番号及びバージョン番号が導入されている。
クラス番号は,新しい規定によってBD層が,既存のドライブで全く記録も読取りもしない
ほうがよい場合(例えば,ディスク又はドライブの破損を防ぐため。),番号が上げられる。
既存のクラスとの読取互換が確認できれば,新しいクラス番号は不要である。
クラス番号の更新を必要としない(読取互換が維持される。)で記録互換ができない場合の,
拡張又は変更の新規格の場合は,バージョン番号が上げられる。
そのようなBD層は上のバージョン番号であるが,前に定義したDIユニットの記録ストラテ
ジに従って記録できる場合は,そのDIユニットを保持できる。
結果,ドライブは,既知のDIフォーマット番号をもつDIユニットを常に確認することが望
ましい。そのような場合,記録ストラテジに絡む記録パラメタ(記録速度,記録パワー,必要
なタイミングなど)を確認でき,それらがドライブの能力の範囲内の場合は,ドライブはその
ディスクに記録することが望ましい。
上記のように,クラス番号及びバージョン番号を使うことによって,ディスク及びドライブ
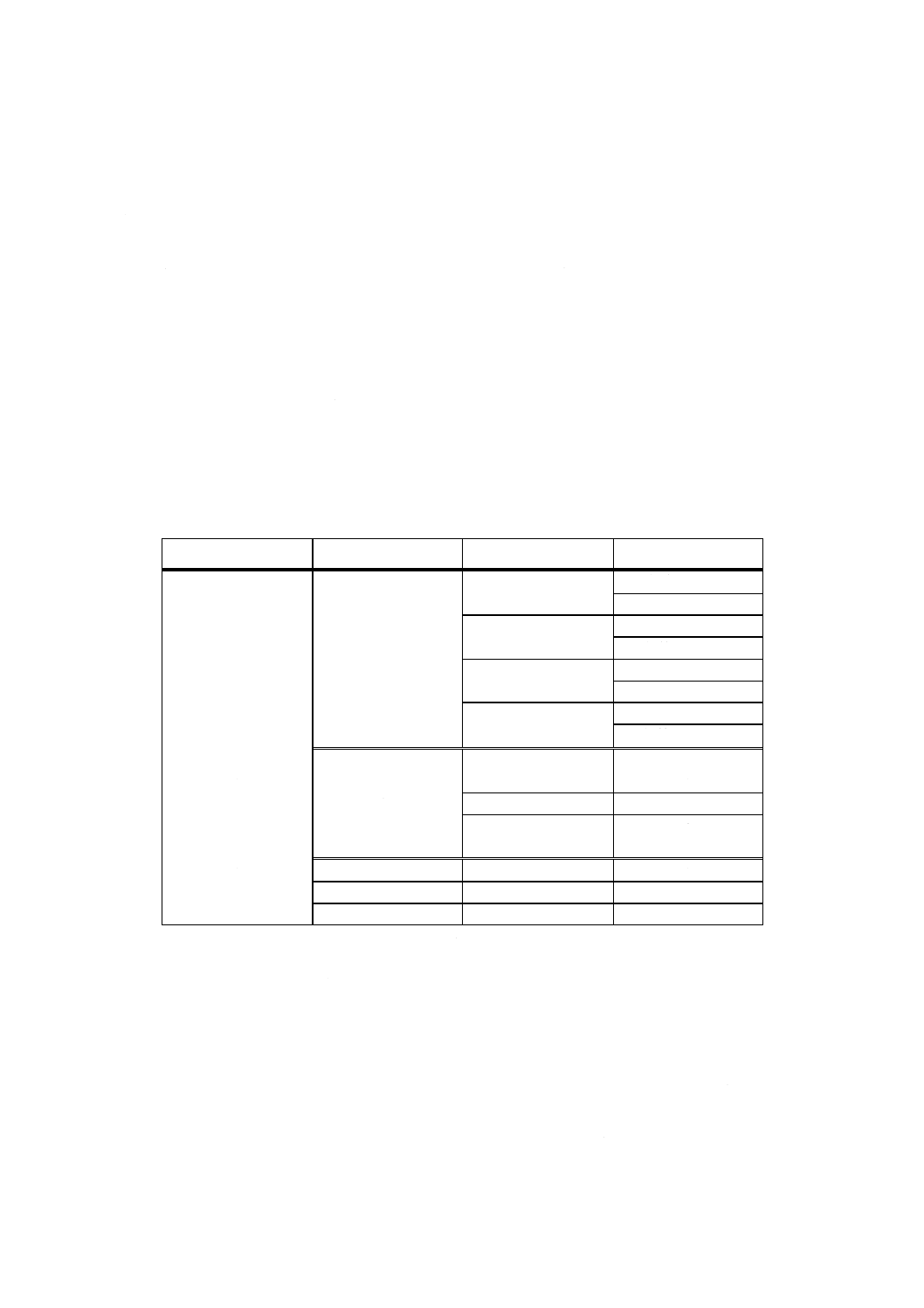
84
X 6233:2017 (ISO/IEC 30193:2016)
の想定される破損を防ぎながら,将来のディスクのバックワード互換が最大限確保できる。
各層のタイプ(バイト8〜10で規定。)には,独立したDIフォーマット番号がある。DIフォ
ーマット番号は,DIユニットに規定される記録ストラテジの指標でもある。
バイト3:
各DIブロックのDI予備フレーム数及びこのDIユニット適用の層数
ビットb7〜b3: この5ビットは,各DIブロックのDI予備フレーム数Nを規定する(1≦N≦31)。
ビットb2〜b0: この3ビットは,このDIユニットの規定を適用する記録層の数を規定する。
バイト4:
リザーブ(領域)
このバイトは,00hに設定する。
バイト5:
DIブロック内のDIユニットの連続番号
このバイトは,DIブロック内のDIユニットの連続番号を規定する。
実際のDIブロックの,実際のDIユニット番号n(0≦n≦N−1)に設定する。
DIユニットは,序列を付けて並べる(図75参照)。第1優先は公称記録速度の増加
順(バイト28及び29),第2優先は同じ公称記録速度内のDIユニット列で,層番
号(バイト3)増加順,第3優先は記録ストラテジの推奨順(DIフォーマット番号
によって識別されるが,DIフォーマット番号の連番順でなくてもよい。)。
連続番号
記録速度
層番号
記録ストラテジ(WS)
0
推奨WS
1
0
代替WS
:
推奨WS
k‒1
1
代替WS
k
推奨WS
:
:
代替WS
:
推奨WS
2k‒1
v1
k‒1
代替WS
2k
:
0
最も推奨するWS
:
:
:
:
:
:
v2>v1
k‒1
:
最後に推奨するWS
:
v3>v2
0
:
:
:
:
:
N‒1
等
等
:
図75−DIブロック順の例
バイト6:
継続フラグ及びこのDIユニットで使用されているDIバイト数
ビットb7:
このビットは,このDIユニット内のパラメタセットが次のDIユニットへも継続す
るのか,又は次のDIユニットで新しいパラメタセットが始まるのかを規定する。
次のDIユニットで新しいパラメタセットが始まる場合は,“0”に設定する。
このDIユニットのパラメタセットが次のDIユニットに継続する場合は,“1”に設
定する(図76参照)。
ビットb6〜b0: この7ビットは,フッタ直前の最後の未使用[リザーブ(領域)]バイトまでの実際
のDIユニット中で用いているバイト数を示す(例えば,図77参照)。
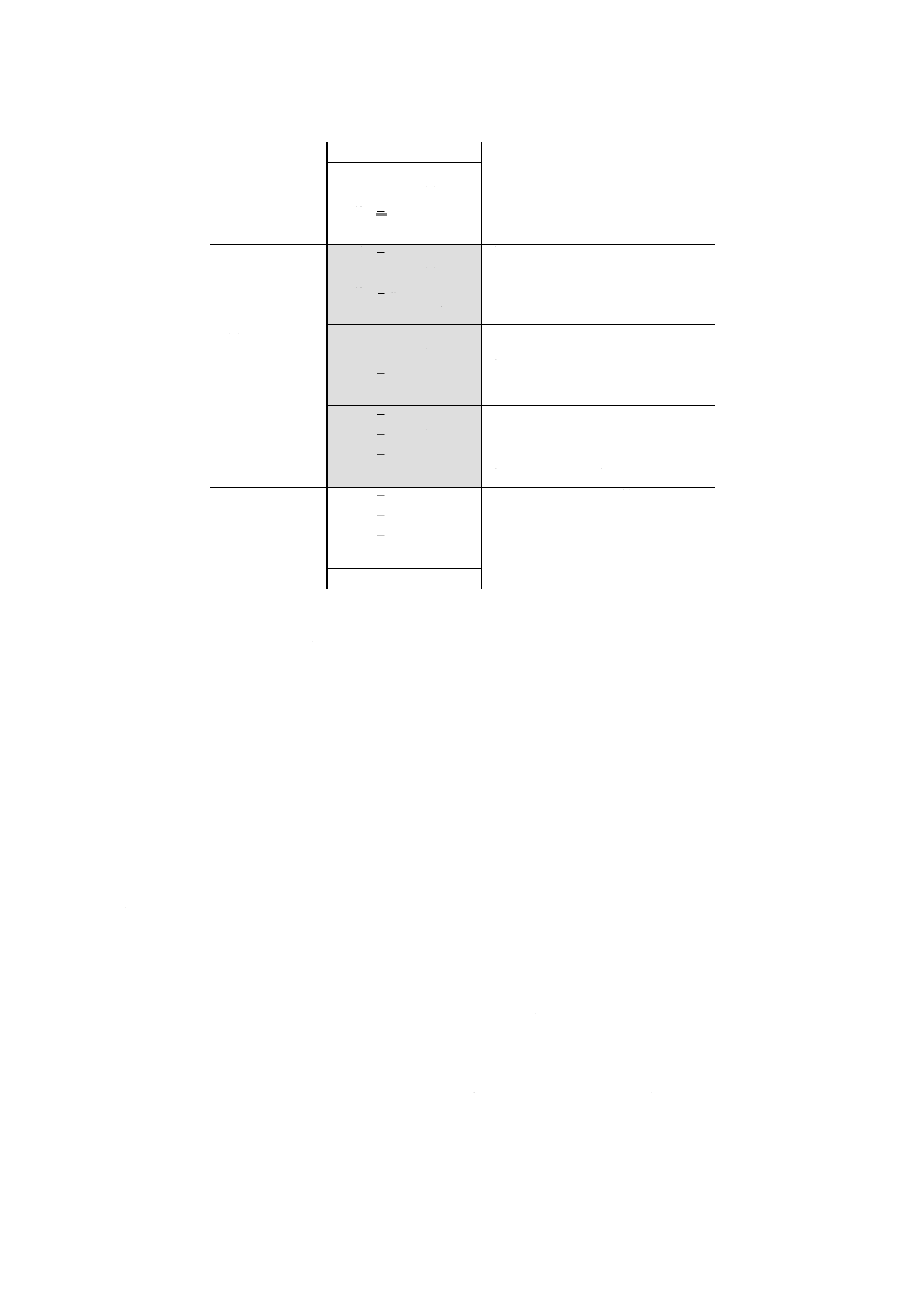
85
X 6233:2017 (ISO/IEC 30193:2016)
:
バイト2 = ..
バイト3 = N / L0層
バイト5 = n‒1
先行するパラメタセットの終了
バイト2 = x
バイト3 = N/ L1層
バイト5 = n
今のパラメタセットの開始
:
:
:
バイト2 = x
バイト3 = N/ L1層
バイト5 = n+1
:
今のパラメタセット継続
:
L1層の3DIユニット
にまたがる
パラメタセット
バイト2 = x
バイト3 = N/ L1層
バイト5 = n+2
:
:
:
今のパラメタセット終了
バイト2 = ..
バイト3 = N/ L0層
バイト5 = n+3
次のパラメタセットの開始
:
バイト6,ビットb7= 0
バイト6,ビットb7= 0
バイト6,ビットb7= 1
バイト6,ビットb7= 1
バイト6,ビットb7= ..
図76−DIユニット拡張の例
バイト7:
リザーブ(領域)
バイト8〜99:
DIユニット内容
この92バイトは,DIユニットの一般的なディスクパラメタ,読取り,記録パワー,
記録ストラテジパラメタなどの,特定の内容を含む。
バイト100〜105: ディスク製造業者識別子
この6バイトのフォーマット及び内容は,関係者間の合意が必要であり,合意がな
い場合は,これらのバイトは,00hに設定する。
バイト106〜108: メディアタイプ識別子
この3バイトのフォーマット及び内容は,関係者間の合意が必要であり,合意がな
い場合は,これらのバイトは,00hに設定する。
バイト109〜110: タイムスタンプ
この2バイトは,このディスクが転写されたマスターディスクの製造日に関する情
報を与える。同じディスク製造業者識別子及び同じメディアタイプ識別子をもつ全
てのディスクは,タイムスタンプにかかわらず同じ記録特性をもつ(軽微な違いだ
け許され,タイムスタンプは記録機には無関係とする。)。
バイト109のビットb7〜b0+バイト110のビットb7〜b4は,製造年を表す12ビット
2進数の一つの領域とする。
バイト110のビットb3〜b0は,製造月を表す4ビット2進数とする。
タイムスタンプが使われない場合は,両方のバイトは,00hに設定する。
バイト111:
製造改正番号
86
X 6233:2017 (ISO/IEC 30193:2016)
このバイトは,製造改正番号を2進数で識別する。同じディスク製造業者識別子及
び同じメディアタイプ識別子をもつ全てのディスクは,製造改正番号にかかわらず
同じ記録特性をもつ(軽微な違いだけ許され,製造改正番号は,記録機には無関係
とする。)。
このバイトの内容は,ディスク製造業者が自由に設定できる。この規格では,この
バイトのフォーマット及び内容は規定しない。互換性を確保するためには無視する。
15.8.3.3 DIフォーマット4(拡張N−1記録ストラテジ)の規定
フォーマット4のDIユニットの主部の内容は,図77に示すとおり規定する。
87
X 6233:2017 (ISO/IEC 30193:2016)
12
DI ユニットフッタ
100 〜111
1
リザーブ(領域)
99
0.5
リザーブ(領域)
98 (lsb 4ビット)
8.5
∆dTE:消去レベルのオフセット開始時間.
90〜97 及び98
(msb 4ビット)
4.5
∆TLP:最後のパルスのオフセット継続時間.
85 (lsb 4ビット)
及び86 〜89
4.5
∆dTLP:最後のパルスのオフセット開始時間
81 〜84 及び85
(msb 4ビット)
7.5
∆Ttop:最初の記録パルスのオフセット継続時間
73 (lsb4ビット)及
び74 〜80
8.5
∆dTtop:最初の記録パルスのオフセット開始時間.
65 〜72及び73
(msb4ビット)
1
リザーブ(領域)
64
5
dTE:消去レベルの開始時間.
59 〜63
3
TLP:最後のパルスの継続時間.
56 〜58
3
dTLP:最後の記録パルスの開始時間
53 〜55
5
Ttop:最初の記録パルスの継続時間
48 〜52
5
dTtop:最初の記録パルスの開始時間
43 〜47
1
TMP:記録マルチパルスの継続時間
42
9
記録パワー設定
33 〜41
1
リザーブ(領域)
32
1
公称記録速度の最大高周波重じょう(畳)読取りパワー
31
1
公称記録速度の最大直流読取りパワー
30
2
記録速度
28 〜29
1
リザーブ(領域)
27
8
データゾーンの配置
19 〜26
2
リザーブ(領域)
17 〜18
1
BCA記述子
16
1
記録マーク極性フラグビット
15
1
プッシュプル極性フラグビット
14
1
チャネルビット長
13
1
BD構造
12
1
ディスクサイズ,クラス及びバージョン
11
3
BD層タイプ識別子
8 〜10
8
DIユニットヘッダ
0 〜7
バイト数
内容
バイト番号
図77−DIフォーマット4のディスク情報内容
バイト0〜1:
ディスク情報識別子
15.8.3.2参照。
バイト2:
DIフォーマット番号
公称記録速度の最大高周波重畳読取りパワー
88
X 6233:2017 (ISO/IEC 30193:2016)
このバイトは,BCAコード付きのディスクでは,04hに設定する。
このバイトは,BCAコードなしのディスクでは,84hに設定する。
バイト3:
各DIブロックのDI予備フレーム数及びこのDIユニット適用の層数
15.8.3.2参照。
バイト4:
リザーブ(領域)
15.8.3.2参照。
バイト5:
DIブロック内のDIユニットの連続番号
15.8.3.2参照。
バイト6:
継続フラグ及びこのDIユニット使用のDIバイト数
このバイトは,このDIユニットの最初の99バイトを使用し,次のDIユニットに
継続がないことを示す63hに設定する。残りのDIユニット主部(DIユニットフッ
タのバイトを除く。)のバイトは使用せず,00hに設定する。
バイト7:
リザーブ(領域)
15.8.3.2参照。
バイト8〜10:
BD層タイプ識別子
この3バイトは,DIユニットが適用されるBD層のタイプを識別し,各書換層で
“BDW”の文字を示す42 44 57hに設定する。
バイト11:
ディスクサイズ,クラス及びバージョン
ビットb7〜b6: この2ビットは,ディスクのサイズを規定する。120 mmディスクを示す00に設定
する。
ビットb5〜b4: この2ビットは,クラス番号を規定する。クラス番号は,同じ層タイプで異なる基
本特性をもつBD層を識別する。
この規格に適合したBD層は,これらのビットを01に設定する。
ドライブが,ある特定のクラスの層を認識できない場合は,その層のデータゾーン
にアクセスしないことが望ましい(読取りも記録も行わない。)。
ビットb3〜b0: この4ビットは,バージョン番号を規定する。この規格に適合した層であることを
示す0011に設定する。
バイト12:
BD構造
ビットb7〜b4: この4ビットは,ディスク上のBDの記録可能層及び記録済み層の層数の全層数を
規定する。記録層が三つであることを示す0011に設定する。
ビットb3〜b0: この4ビットは,このDIユニットを適用するBDの記録可能層又は記録済み層の層
のタイプを規定する。
ビットb3〜b0は,書換形記録層を示す0100に設定する。
注記 記録済み層は,(半透明)反射層から構成される再生専用ディスクの層である。
バイト13:
チャネルビット長
ビットb7〜b4: この4ビットは,0000に設定する。
ビットb3〜b0: この4ビットは,メインデータのチャネルビット長を規定し,全てのBD記録層で
同じとする。
次の設定とする。
0000:リザーブ(領域)
89
X 6233:2017 (ISO/IEC 30193:2016)
0101:チャネルビット長が55.87 nm(33.4 GB/層)であることを示す
他の設定は,リザーブ(値)とする。
バイト14:
プッシュプル極性フラグビット
ビットbi:
各ビットbiは,記録層Liのプッシュプル信号の極性を規定し,次による(26.1参照)。
次の設定とする。
“0”:記録層Liのプッシュプル極性が正
“1”:記録層Liのプッシュプル極性が負
存在しない記録層に対して,biは,“0”に設定する。
この規格では,このバイトは,00hに設定する。
バイト15:
記録マーク極性フラグビット
ビットbi:
各ビットbiは,記録層Liの記録マークの極性を規定し,次による。
“0”:記録マークの反射率が未記録層よりも低い層タイプ(HTLディスク)
“1”:記録マークの反射率が未記録層よりも高い層タイプ
存在しない記録層に対して,biは,“0”に設定する。
この規格では,このバイトは,00hに設定する。
バイト16:
BCA記述子
ビットb7〜b4: この4ビットは,リザーブ(領域)とする。
ビットb3〜b0: この4ビットは,ディスク上のBCAコードの有無を示す。
次の設定とする。
0000:BCAコードなし
0001:BCAコード付き
他の設定は,リザーブ(値)とする。
バイト17〜18:
リザーブ(領域)
これらのバイトは,00hに設定する。
バイト19〜26:
データゾーンの配置
バイト19〜22: これらのバイトは,関係する層のデータゾーンの最初の物理ADIPを規定する。
L0層に関連する各DIユニットで,これらのバイトは,データゾーン0の最初のPAA
がPAA 131 072であることを示す00 02 00 00hに設定する。
L1層に関連する各DIユニットで,これらのバイトはFAAの値に設定し,33.4 GB/
層のディスクでは00 5E EC 80hとする。これは,データゾーン1の最初のPAAが,
33.4 GB/層のディスクではPAA 6 220 928であることを示す。
L2層に関連するDIユニットでは,これらのバイトは,データゾーン2の最初のPAA
としてPAA 8 519 680を示す00 82 00 00hに設定する。
バイト23〜26: これらのバイトは,関連する層のデータゾーンの最後の物理ADIPを規定する。
L0層に関連する各DIユニットで,LAAの値に設定し,33.4 GB/層のディスクでは
00 21 13 7Ehとする。これは,データゾーン0の最後のPAAが,使用者データ容量
33.4 GB/層のディスクではPAA 2 167 678であることを示す。L1層に関連する各DI
ユニットで,これらのバイトは,データゾーン1の最後のPAAがPAA 8 257 534で
あることを示す00 7D FF FEhに設定する。
L2層に関連する各DIユニットでは,これらのバイトは,LAA+00 80 00 00hの値に
90
X 6233:2017 (ISO/IEC 30193:2016)
設定し,使用者データ容量33.4 GB/層のディスクでは00 A1 13 7Ehとする。これは,
データゾーン2の最後のPAAが,使用者データ容量33.4 GB/層のディスクではPAA
10 556 286であることを示す。
バイト27:
リザーブ(領域)
このバイトは,00hに設定する。
バイト28〜29:
記録速度
これらのバイトは,公称記録速度を規定する。それは,このDIユニットに2バイト
の2進数(バイト28がMSB)で規定するパラメタを用いて使用される。
公称記録速度を数値nとして規定し,次による。
n=100×Vnorm
nは,次による。
公称記録速度が7.38 m/s:02 E2h
バイト30:
公称記録速度の最大直流読取りパワー
最大読取りパワーは,記録信号が劣化することなく少なくとも106回連続読取りが
できるディスクの入射面上の最大光パワーとして規定する(30.7参照)。
この細分箇条での最大読取りパワーは,30.7で規定する読取りパワー以上にする。
規定値として,30.7に規定したパワーを用いる。
このバイトは,このDIユニットのバイト28〜29で規定する公称記録速度に等しい
読取速度の場合の最大直流読取りパワーPrを規定する。このバイトの10進表記は,
次に示す数値nの式とする。ここに,Prの単位はミリワットである。
n=100×Pr
注記 規定された最低速度よりも遅い速度で読み取る場合は,ディスク上の記録の耐久性を保証する
ために,読取りパワーを下げることが必要になる可能性がある。
バイト31:
公称記録速度の最大高周波重畳読取りパワー
最大読取りパワーは,記録信号が劣化することなく少なくとも106回連続読取りが
できるディスクの入射面上の最大光パワーとして規定する(30.7参照)。
この細分箇条での最大読取りパワーは,30.7で規定する読取りパワー以上にする。
規定値として,30.7に規定したパワーを用いる。
このバイトは,このDIユニットのバイト28〜29で規定する公称記録速度に等しい
読取速度の場合の最大高周波重畳読取りパワーPrを規定する。このバイトの10進表
記は,次に示す数値nによる。ここに,Prの単位はミリワットである。
n=100×Pr
注記 このDIユニットで規定された公称速度よりも遅い速度で読み取る場合は,ディスク上の記録
の耐久性を保証するために,読取りパワーを下げることが必要になる可能性がある。
バイト32:
リザーブ(領域)
これらのバイトは,00hに設定する。
バイト33〜41:
記録パワー設定
バイト33〜34: PIND:PINDは,OPCで,Ptargetを決めるための開始値として使用できる(附属書G参
照)。
これらのバイトは,Ptargetを示唆する値PINDをミリワットの単位で規定し,次に示す
91
X 6233:2017 (ISO/IEC 30193:2016)
数値nによる。
n=20×PIND
バイト33のビットb7がmsbで,バイト34のビットb0がlsbである。
バイト35:
mIND:mINDは,OPCで,Ptargetを決めるための開始値として使用できる(附属書G
参照)。
このバイトは,メディア製造業者によって決められるPINDでの変調度を規定し,次
に示す数値nによる。
n=200×mIND
バイト36:
ρ:このバイトは,OPCアルゴリズム(附属書G参照)で使われる記録パワーに乗
ずる係数ρを規定し,次に示す数値nによる。
n=100×ρ
バイト37:
εBW:このバイトは,OPCアルゴリズム(附属書G参照)で使われる記録バイアス
パワーと記録ピークパワーとの比εBWを規定し,次に示す数値nによる。
n=200×εBW
バイト38:
εc:このバイトは,OPCアルゴリズム(附属書G参照)で使われる冷却パワーと記
録ピークパワーとの比εcを規定し,次に示す数値nによる。
n=200×εc
バイト39:
εE:このバイトは,OPCアルゴリズム(附属書G参照)で使われる消去パワーと記
録ピークパワーとの比εEを規定し,次に示す数値nによる。
n=200×εE
バイト40:
κ:このバイトは,OPC(附属書G参照)で使われるターゲット値κを規定し,次
に示す数値nによる。
n=20×κ
バイト41:
このバイトは,リザーブ(領域)とする。
バイト42:
TMP:記録マルチパルスの継続時間
このバイトは,マークを記録するための拡張N−1記録ストラテジのマルチパルス
列の2番目で高レベルのパルスの継続時間を規定する(附属書F参照)。
このバイトの最初の5ビット(ビットb7〜b3)は,可変部分を実際のチャネルビッ
トクロック周期の分数として規定し,次に示す正の2進数pによる。
W
MP
32TT
p
×
=
(0≦p≦30)
このバイトの最後の3ビット(ビットb2〜b0)は,リザーブ(領域)とする。
バイト43〜63のバイトで,dTtop,Ttop,dTLP,TLP及びdTEの基準位置又は基準継続時間を規定する。基
準位置は,各記録パルスの立上がりエッジの位置を意味する(図F.1参照)継続時間に関しても,基準点
に関しては,同様に規定する。
バイト43〜47:
dTtop:最初の記録パルスの開始時間
これらのバイトの最初の6ビット(ビットb7〜b2)は,5T以上のスペースに続くラ
ン長2T,3T,4T及び5T以上のマークを記録する,拡張N−1記録ストラテジのマ
ルチパルス列の最初の記録パルスの開始時間を規定する(正の値は進みで負の値は
遅れを示す。附属書F参照)。
92
X 6233:2017 (ISO/IEC 30193:2016)
最初のパルスの開始時間dTtopは,実際のチャネルビットクロック周期の分数として
次に示す符号付き2の補数aで表される。
W
top
32
T
dT
a
×
=
(−28≦a≦30)
このバイトの最後の2ビット(ビットb1及びb0)は,リザーブ(領域)とする。
バイト43:
このバイトは,2Tスペースが後に続くラン長2Tマークを記録するパルスの開始時
間を,データパルスの最初のチャネルビットの立下がりエッジに対して規定する(正
の値は進み,負の値は遅れを示す。附属書F参照)。
バイト44:
このバイトは,3T以上のスペースが後に続くラン長2Tマークを記録するパルスの
開始時間を,データパルスの最初のチャネルビットの立下がりエッジに対して規定
する(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト45:
このバイトは,ラン長3Tマークを記録するマルチパルス列の最初のパルスの開始
時間を,データパルスの最初のチャネルビットの立下がりエッジに対して規定する
(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト46:
このバイトは,ラン長4Tマークを記録するマルチパルス列の最初のパルスの開始
時間を,データパルスの最初のチャネルビットの立下がりエッジに対して規定する
(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト47:
このバイトは,ラン長5T以上のマークを記録するマルチパルス列の最初のパルス
の開始時間を,データパルスの最初のチャネルビットの立下がりエッジに対して規
定する(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト48〜52:
Ttop:最初の記録パルスの継続時間
これらのバイトの最初の6ビット(ビットb7〜b2)は,5T以上のスペースに続くラ
ン長2T,3T,4T及び5T以上のマークを記録する,拡張N−1記録ストラテジのマ
ルチパルス列の最初の記録パルスの継続時間を規定する(附属書F参照)。
これらのバイトは,実際のチャネルビットクロック周期の分数を規定し,次の式で
正の2進数bによる。
W
top
32TT
b
×
=
(0≦b≦60)
これらのバイトの最後の2ビット(ビットb1及びb0)は,リザーブ(領域)とする。
バイト48:
このバイトは,後に2Tスペースが続くラン長2Tマークを記録するパルスの継続時
間を規定する(附属書F参照)。
バイト49:
このバイトは,後に3T以上のスペースが続くラン長2Tマークを記録するパルスの
継続時間を規定する(附属書F参照)。
バイト50:
このバイトは,ラン長3Tマークを記録するマルチパルス列の最初のパルスの継続
時間を規定する(附属書F参照)。
バイト51:
このバイトは,ラン長4Tマークを記録するマルチパルス列の最初のパルスの継続
時間を規定する(附属書F参照)。
バイト52:
このバイトは,ラン長5T以上のマークを記録するマルチパルス列の最初のパルス
の継続時間を規定する(附属書F参照)。
バイト53〜55:
dTLP:最後の記録パルスの開始時間
93
X 6233:2017 (ISO/IEC 30193:2016)
これらのバイトの最初の6ビット(ビットb7〜b2)は,5T以上のスペースが後に続
くラン長3T,4T及び5T以上のマークを記録する,拡張N−1記録ストラテジのマ
ルチパルス列の最後の記録パルスの開始時間を規定する(正の値は進み,負の値は
遅れを示す。附属書F参照)。
最後のパルスの開始時間dTLPは,実際のチャネルビットクロック周期の分数として,
次に示す符号付き2の補数cで表される。
W
LP
32
T
dT
c
×
=
(−30≦c≦30)
これらのバイトの最後の2ビット(ビットb1及びb0)は,リザーブ(領域)とする。
バイト53:
このバイトは,データパルスの最後のチャネルビットの立上がりエッジに対する,
ラン長3Tマークを記録するマルチパルス列の最後のパルスの開始時間を規定する
(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト54:
このバイトは,データパルスの最後のチャネルビットの立上がりエッジに対する,
ラン長4Tマークを記録するマルチパルス列の最後のパルスの開始時間を規定する
(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト55:
このバイトは,データパルスの最後のチャネルビットの立上がりエッジに対する,
ラン長5T以上のマークを記録するマルチパルス列の最後のパルスの開始時間を規
定する(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト56〜58:
TLP:最後のパルスの継続時間
これらのバイトの最初の5ビット(ビットb7〜b3)は,5T以上のスペースが後に続
くラン長3T,4T及び5T以上のマークを記録する,拡張N−1記録ストラテジのマ
ルチパルス列の最後の記録パルスの長さを規定する(附属書F参照)。
これらのバイトは,実際のチャネルビットクロック周期の分数を規定し,次の正の
2進数dによる。
W
LP
32TT
d
×
=
(0≦d≦30)
これらのバイトの最後の3ビット(ビットb2〜b0)は,リザーブ(領域)とする。
バイト56:
このバイトは,ラン長3Tマークを記録するマルチパルス列の最後のパルスの継続
時間を規定する(附属書F参照)。
バイト57:
このバイトは,ラン長4Tマークを記録するマルチパルス列の最後のパルスの継続
時間を規定する(附属書F参照)。
バイト58:
このバイトは,ラン長5T以上のマークを記録するマルチパルス列の最後のパルス
の継続時間を規定する(附属書F参照)。
バイト59〜63:
dTE:消去レベルの開始時間
これらのバイトの最初の7ビット(ビットb7〜b1)は,後に5T以上のスペースが続
くラン長2T,3T,4T及び5T以上のマークを記録する,拡張N−1記録ストラテジ
の消去レベルの開始時間を規定する(正の値は進み,負の値は遅れを示す。附属書
F参照)。
消去レベルの開始時間dTEは,実際のチャネルビットクロック周期の分数として,
次に示す符号付きの2の補数eで表される。
94
X 6233:2017 (ISO/IEC 30193:2016)
W
S
32TdT
e
×
=
(−48≦e≦30)
これらのバイトの最後のビット(b0)は,リザーブ(領域)とする。
バイト59:
このバイトは,2Tスペースが先行するラン長2Tマークを記録する消去レベルの開
始時間を規定する。
バイト60:
このバイトは,3T以上のスペースが先行するラン長2Tマークを記録する消去レベ
ルの開始時間を規定する。
バイト61:
このバイトは,ラン長3Tマークを記録するマルチパルス列の消去レベルの開始時
間を規定する。
バイト62:
このバイトは,ラン長4Tマークを記録するマルチパルス列の消去レベルの開始時
間を規定する。
バイト63:
このバイトは,ラン長5T以上のマークを記録するマルチパルス列の消去レベルの
開始時間を規定する。
バイト64:
リザーブ(領域)
このバイトは,00hとする。
バイト65〜98のバイトでは,バイト43〜63に規定した基準位置又は基準継続時間に対するオフセット
としてΔを規定する。オフセットは,基準位置に対しての時間差を意味する。継続時間に対しても,オフ
セットは同様に規定する(図F.1参照)。
バイト65〜72及び73(msb 4ビット):ΔdTtop:最初の記録パルスのオフセット開始時間
これらのバイトは,2T,3T又は4Tのスペースが先行するラン長2T,3T,4T及び
5T以上のマークを記録する,拡張N−1記録ストラテジのマルチパルス列の最初の
立上がりエッジのオフセットを規定する(附属書F参照)。
最初のパルスのオフセット開始時間ΔdTtopは,実際のチャネルビットクロック周期
の分数として,次に示す符号付き2の補数fで表される。
バイト65及び66では,次による。
W
top
Δ
32
T
dT
f
×
=
(−28≦f≦30)
バイト67〜72及び73(msb 4ビット)では,次による。
W
top
Δ
32
T
dT
f
×
=
(−8≦f≦7)
注記
マーク
続きのスペース
前のスペース
2S
3S
4S
≥5S
a
2M
2S
≥3S
3M
dTtop
4M
≥5M
f
≧3S
≧5M
≧5S
マーク
続きのスペース
前のスペース
2S
3S
4S
≥5S
a
2M
2S
≥3S
3M
dTtop
4M
≥5M
f
≧3S
≧5M
≧5S
この表は,記録する各マークの前後のスペースによる,dTtopの値の影響を示している。
“a”で示す領域は,基準値にあった部分で,“f”で示す部分は,オフセット値を含んでいる。

95
X 6233:2017 (ISO/IEC 30193:2016)
このパタンの領域は,“f”で示し,オフセット値を含んでいる。
このパタンの領域は,“a”で示し,基準値を含んでいる。
“i=f+a”の値は,−28≦i≦30を満たしている(F.2参照)。
バイト65:
このバイトの最初の6ビット(ビットb7〜b2)は,2Tスペースが先行した後に2T
スペースが続く,ラン長2Tのマークを記録するパルスのオフセット開始時間を規
定する。このバイトを適用する場合,基準位置は,バイト43に規定している(5T
以上のスペースが先行し2Tスペースが後に続くラン長2T記録マークのdTtop)。
このバイトの最後の2ビット(ビットb1及びb0)は,リザーブ(領域)とする。
バイト66:
このバイトの最初の6ビット(ビットb7〜b2)は,2Tスペースが先行した後に3T
以上のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット開始時
間を規定する。このバイトを適用する場合,基準位置は,バイト44に規定している
(5T以上のスペースが先行し3T以上のスペースが後に続く2T記録マークのdTtop)。
このバイトの最後の2ビット(ビットb1及びb0)は,リザーブ(領域)とする。
バイト67:
このバイトの最初の4ビット(ビットb7〜b4)は,2Tスペースに続くラン長3Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を規定する。
このバイトのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト45に規
定している(5T以上のスペースが先行する3TマークのdTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,2Tスペースに続くラン長4Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を規定する。
このバイトのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト46に規
定している(5T以上のスペースが先行する4TマークのdTtop)。
バイト68:
このバイトの最初の4ビット(ビットb7〜b4)は,2Tスペースに続くラン長5T以
上のマークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を規
定する。
このバイトのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト47に規
定している(5T以上のスペースが先行する5T以上マークのdTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,3Tスペースが先行した後に2T
スペースが続く,ラン長2Tのマークを記録するパルスのオフセット開始時間を規
定する。
このバイトのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト43に規
定している(5T以上のスペースが先行し2Tスペースが後に続く2TマークのdTtop)。
バイト69:
このバイトの最初の4ビット(ビットb7〜b4)は,3Tスペースが先行した後に3T
以上のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット開始時
間を規定する。
このバイトのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト44に規
定している(5T以上のスペースが先行し3T以上のスペースが後に続く2Tマークの
dTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,3Tスペースに続くラン長3Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を規定する。
このバイトのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト45に規
f
a
96
X 6233:2017 (ISO/IEC 30193:2016)
定している(5T以上のスペースが先行する3TマークのdTtop)。
バイト70:
このバイトの最初の4ビット(ビットb7〜b4)は,3Tスペースに続くラン長4Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を規定する。
このバイトのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト46に規
定している(5T以上のスペースが先行する4TマークのdTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,3Tスペースに続くラン長5T以
上のマークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を規
定する。
このバイトのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト47に規
定している(5T以上のスペースが先行する5T以上マークのdTtop)。
バイト71:
このバイトの最初の4ビット(ビットb7〜b4)は,4Tスペースが先行した後に2T
スペースが続く,ラン長2Tのマークを記録するパルスのオフセット開始時間を規
定する。
このバイトのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト43に規
定している(5T以上のスペースが先行し2Tのスペースが後に続く2TマークのdTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,4Tスペースが先行した後に3T
以上のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット開始時
間を規定する。
このバイトのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト44に規
定している(5T以上のスペースが先行し3T以上スペースが後に続く2Tマークの
dTtop)。
バイト72:
このバイトの最初の4ビット(ビットb7〜b4)は,4Tスペースに続くラン長3Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を規定する。
このバイトのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト45に規
定している(5Tのスペースが先行する3TマークのdTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,4Tスペースに続くラン長4Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を規定する。
このバイトのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト46に規
定している(5T以上のスペースが先行する4TマークのdTtop)。
バイト73(msb 4ビット):このバイトの最初の4ビット(ビットb7〜b4)は,4Tスペースに続くラ
ン長5T以上のマークを記録する,マルチパルス列の最初のパルスのオフセット開
始時間を規定する。このバイトのビット(ビットb7〜b4)を適用する場合,基準位
置は,バイト47に規定している(5T以上のスペースが先行する5T以上のマークの
dTtop)。
バイト73(lsb 4ビット)及び74〜80:ΔTtop:最初の記録パルスのオフセット継続時間
これらのバイトは,2T,3T又は4Tのスペースが先行するラン長2T,3T,4T及び
5T以上のマークを記録する,拡張N−1記録ストラテジのマルチパルス列の最初の
パルスのオフセット継続時間を規定する(附属書F参照)。
これらのバイトは,実際のチャネルビットクロック周期の分数として規定し,次に
示す符号付き2の補数gによる。
97
X 6233:2017 (ISO/IEC 30193:2016)
W
top
Δ
32
T
T
g
×
=
(−8≦g≦7)
注記
マーク
続きのスペース
前のスペース
2S
3S
4S
≥5S
Ttop
4M
≥5M
g
b
2M
2S
≥3S
3M
≧3S
≧5M
≧5S
マーク
続きのスペース
前のスペース
2S
3S
4S
≥5S
Ttop
4M
≥5M
g
b
2M
2S
≥3S
3M
≧3S
≧5M
≧5S
この表は,記録される各マークの前後のスペースによる,Ttopの値の影響を示している。
“b”で示す領域は,基準値にあった部分で,“g”で示す部分は,オフセット値を含んでいる。
このパタンの領域は,“g”で示し,オフセット値を含んでいる。
このパタンの領域は,“b”で示し,基準値を含んでいる。
“j=g+b”の値は,0≦j≦60を満たしている(F.2参照)。
バイト73(lsb 4ビット):このバイトの最後の4ビット(ビットb3〜b0)は,2Tスペースが先行した
後に2Tのスペースが続く,ラン長2Tのマークを記録するパルスのオフセット継続
時間を規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,
基準継続時間は,バイト48に規定している(5T以上のスペースが先行し2Tスペー
スが後に続く2T記録マークのTtop)。
バイト74:
このバイトの最初の4ビット(ビットb7〜b4)は,2Tスペースが先行した後に3T
以上のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット継続時
間を規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,
基準継続時間は,バイト49に規定している(5T以上のスペースが先行し3T以上の
スペースが後に続く2T記録マークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,2Tスペースに続くラン長3Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を規定する
(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準継続時間
は,バイト50に規定している(5T以上のスペースが先行する3TマークのTtop)。
バイト75:
このバイトの最初の4ビット(ビットb7〜b4)は,2Tスペースに続くラン長4Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を規定する
(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準継続時間
は,バイト51に規定している(5T以上のスペースが先行する4TマークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,2Tスペースに続くラン長5T以
上のマークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を規
定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準継
続時間は,バイト52に規定している(5T以上のスペースが先行する5T以上マーク
のTtop)。
バイト76:
このバイトの最初の4ビット(ビットb7〜b4)は,3Tスペースが先行した後に2T
のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準
g
b
98
X 6233:2017 (ISO/IEC 30193:2016)
継続時間は,バイト48に規定している(5T以上のスペースが先行し2Tスペースが
後に続く2T記録マークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,3Tスペースが先行した後に3T
以上のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット継続時
間を規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,
基準継続時間は,バイト49に規定している(5T以上のスペースが先行し3T以上の
スペースが後に続く2T記録マークのTtop)。
バイト77:
このバイトの最初の4ビット(ビットb7〜b4)は,3Tスペースに続くラン長3Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を規定する
(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準継続時間
は,バイト50に規定している(5T以上のスペースが先行する3TマークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,3Tスペースに続くラン長4Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を規定する
(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準継続時間
は,バイト51に規定している(5T以上のスペースが先行する4TマークのTtop)。
バイト78:
このバイトの最初の4ビット(ビットb7〜b4)は,3Tスペースに続くラン長5T以
上のマークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を規
定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準継
続時間は,バイト52に規定している(5T以上のスペースが先行する5T以上のマー
クのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,4Tスペースが先行した後に2T
のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準
継続時間は,バイト48に規定している(5T以上のスペースが先行し2Tスペースが
後に続く2T記録マークのTtop)。
バイト79:
このバイトの最初の4ビット(ビットb7〜b4)は,4Tスペースが先行した後に3T
以上のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット継続時
間を規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,
基準継続時間は,バイト49に規定している(5T以上のスペースが先行し3T以上の
スペースが後に続く2T記録マークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,4Tスペースに続くラン長3Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を規定する
(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準継続時間
は,バイト50に規定している(5T以上のスペースが先行する3TマークのTtop)。
バイト80:
このバイトの最初の4ビット(ビットb7〜b4)は,4Tスペースに続くラン長4T記
録マークパルスの,マルチパルス列の最初のパルスのオフセット継続時間を規定す
る(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準継続時
間は,バイト51に規定している(5T以上のスペースが先行する4TマークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,4Tスペースに続くラン長5T以
上のマークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を規
99
X 6233:2017 (ISO/IEC 30193:2016)
定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準継
続時間は,バイト52に規定している(5T以上のスペースが先行する5T以上のマー
クのTtop)。
バイト81〜84及び85(msb 4ビット):ΔdTLP:最後のパルスのオフセット開始時間
これらのバイトは,2T,3T又は4Tスペースが後に続くラン長3T,4T及び5T以上
のマークを記録する,拡張N−1記録ストラテジのマルチパルス列の最後の記録パ
ルスのオフセット開始時間(附属書F参照)を規定する。
最後のパルスのオフセット開始時間ΔdTLPは,実際のチャネルビットクロック周期
の分数として,次に示す符号付き2の補数hで表される。
W
LP
Δ
32
T
dT
h
×
=
(−8≦h≦7)
注記
マーク
2S
3S
4S
≧5S
h
c
dTLP
3M
4M
≧5M
続きのスペース
この表は,記録される各マークの前後のスペースによる,dTLPの値の影響を示している。
“c”で示す領域は,基準値にあった部分で,“h”で示す部分は,オフセット値を含んでいる。
このパタンの領域は,“h”で示し,オフセットを含んでいる。
このパタンの領域は,“c”で示し,基準値を示している。
“r=h+c”は,−30≦r≦30を満たしている(F.2参照)。
バイト81:
このバイトの最初の4ビット(ビットb7〜b4)は,後に2Tスペースが続くラン長
3Tマークを記録する,マルチパルス列の最後のパルスのオフセット開始時間を規定
する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準位置
は,バイト53に規定している(5T以上のスペースが後に続く3TマークのdTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に2Tスペースが続くラン長
4Tマークを記録する,マルチパルス列の最後のパルスのオフセット開始時間を規定
する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準位置
は,バイト54に規定している(5T以上のスペースが後に続く4TマークのdTLP)。
バイト82:
このバイトの最初の4ビット(ビットb7〜b4)は,後に2Tスペースが続くラン長
5T以上のマークを記録する,マルチパルス列の最後のパルスのオフセット開始時間
を規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基
準位置は,バイト55に規定している(5T以上のスペースが後に続く,5T以上のマ
ークのdTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に3Tスペースが続くラン長
3Tマークを記録する,マルチパルス列の最後のパルスのオフセット開始時間を規定
する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準位置
は,バイト53に規定している(5T以上のスペースが後に続く3TマークのdTLP)。
h
c
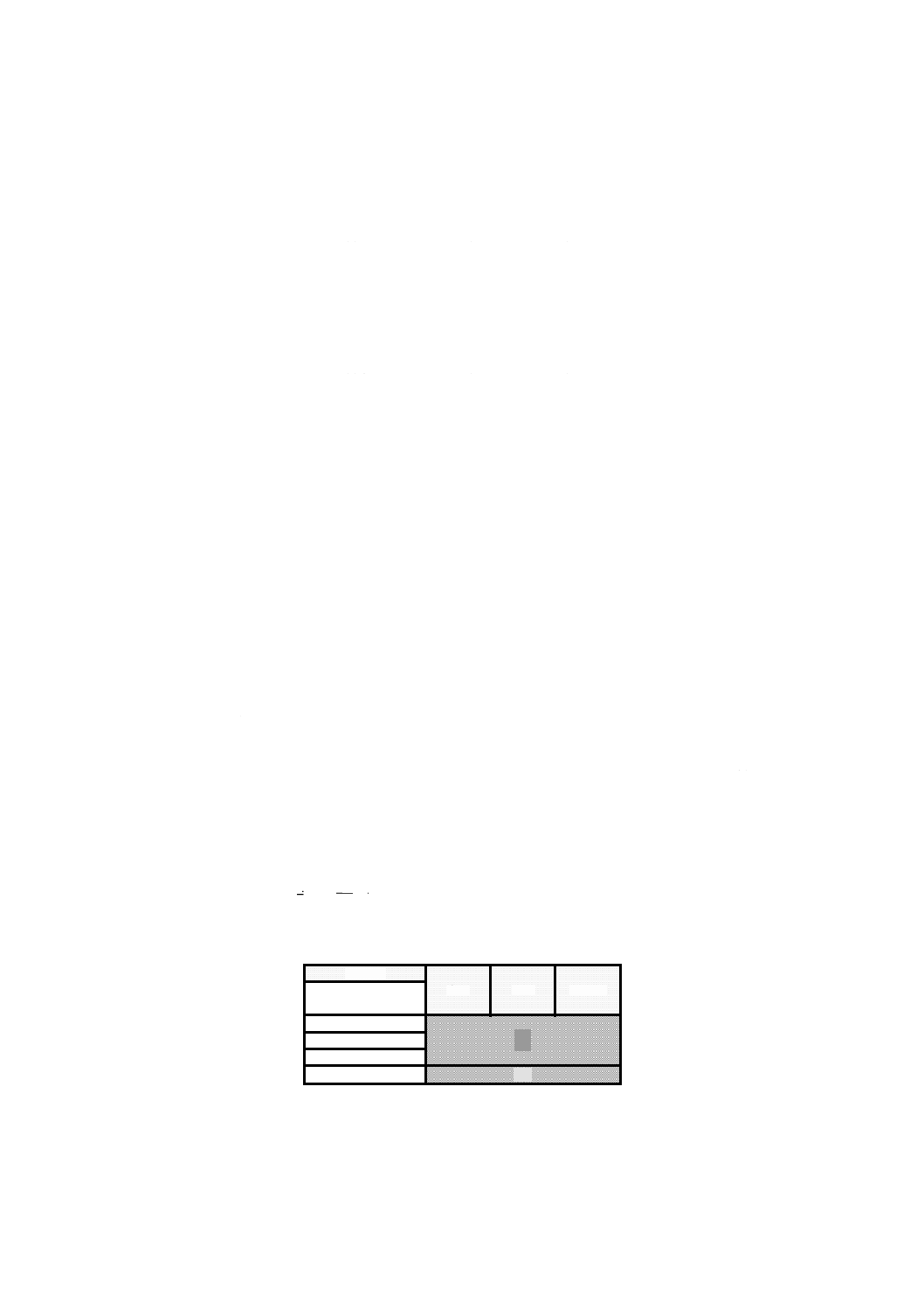
100
X 6233:2017 (ISO/IEC 30193:2016)
バイト83:
このバイトの最初の4ビット(ビットb7〜b4)は,後に3Tスペースが続くラン長
4Tマークを記録する,マルチパルス列の最後のパルスのオフセット開始時間を規定
する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準位置
は,バイト54に規定している(5T以上のスペースが後に続く4TマークのdTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に3Tスペースが続くラン長
5T以上のマークを記録する,マルチパルス列の最後のパルスのオフセット開始時間
を規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基
準位置は,バイト55に規定している(5T以上のスペースが後に続く5T以上のマー
クのdTLP)。
バイト84:
このバイトの最初の4ビット(ビットb7〜b4)は,後に4Tスペースが続くラン長
3Tマークを記録する,マルチパルス列の最後のパルスのオフセット開始時間を規定
する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準位置
は,バイト53に規定している(5T以上のスペースが後に続く3TマークのdTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に4Tスペースが続くラン長
4Tマークを記録する,マルチパルス列の最後のパルスのオフセット開始時間を規定
する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準位置
は,バイト54に規定している(5T以上のスペースが後に続く4TマークのdTLP)。
バイト85(msb 4ビット):このバイトの最後の4ビット(ビットb3〜b0)は,後に4Tスペースが続
くラン長5T以上のマークを記録する,マルチパルス列の最後のパルスのオフセッ
ト開始時間を規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用す
る場合,基準位置は,バイト55に規定している(5T以上のスペースが後に続く5T
以上のマークのdTLP)。
バイト85(lsb 4ビット)及び86〜89:ΔTLP:最後のパルスのオフセット継続時間
これらのバイトは,2T,3T又は4Tスペースが後に続くラン長3T,4T及び5T以上
のマークを記録する,拡張N−1記録ストラテジのマルチパルス列の最後の記録パ
ルスのオフセット継続時間を規定する(附属書F参照)。
このバイトは,実際のチャネルビットクロック周期の分数として,次に示す符号付
き2の補数vで表される。
W
LP
Δ
32
T
T
v
×
=
(−8≦v≦7)
注記
マーク
2S
3S
4S
≧5S
v
d
TLP
3M
4M
≧5M
続きのスペース
この表は,記録される各マークの前後のスペースによる,TLPの値の影響を示している。
“d”で示す領域は,基準値にあった部分で,“v”で示す部分は,オフセット値を含んでいる。

101
X 6233:2017 (ISO/IEC 30193:2016)
このパタンの領域は,“v”で示し,オフセットを含んでいる。
このパタンの領域は,“d”で示し,基準値を含んでいる。
“s=v+d”の値は,0≦s≦30を満たしている(F.2参照)。
バイト85(lsb 4ビット):このバイトの最初の4ビット(ビットb7〜b4)は,後に2Tスペースが続く
ラン長3Tマークを記録する,マルチパルス列の最後のパルスのオフセット継続時
間を規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,
基準継続時間は,バイト56に規定している(5T以上のスペースが後に続く3Tマー
クのTLP)。
バイト86:
このバイトの最初の4ビット(ビットb7〜b4)は,後に2Tスペースが続くラン長
4Tマークを記録する,マルチパルス列の最後のパルスのオフセット継続時間を規定
する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準継続
時間は,バイト57に規定している(5T以上のスペースが後に続く4TマークのTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に2Tスペースが続くラン長
5T以上のマークを記録する,マルチパルス列の最後のパルスのオフセット継続時間
を規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基
準継続時間は,バイト58に規定している(5T以上のスペースが後に続く5T以上の
マークのTLP)。
バイト87:
このバイトの最初の4ビット(ビットb7〜b4)は,後に3Tスペースが続くラン長
3Tマークを記録する,マルチパルス列の最後のパルスのオフセット継続時間を規定
する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準継続
時間は,バイト56に規定している(5T以上のスペースが後に続く3TマークのTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に3Tスペースが続くラン長
4Tマークを記録する,マルチパルス列の最後のパルスのオフセット継続時間を規定
する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準継続
時間は,バイト57に規定している(5T以上のスペースが後に続く4TマークのTLP)。
バイト88:
このバイトの最初の4ビット(ビットb7〜b4)は,後に3Tスペースが続くラン長
5T以上のマークを記録する,マルチパルス列の最後のパルスのオフセット継続時間
を規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基
準継続時間は,バイト58に規定している(5T以上のスペースが後に続く5T以上の
マークのTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に4Tスペースが続くラン長
3Tマークを記録する,マルチパルス列の最後のパルスのオフセット継続時間を規定
する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準継続
時間は,バイト56に規定している(5T以上のスペースが後に続く3TマークのTLP)。
バイト89:
このバイトの最初の4ビット(ビットb7〜b4)は,後に4Tスペースが続くラン長
4Tマークを記録する,マルチパルス列の最後のパルスのオフセット継続時間を規定
する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準継続
時間は,バイト57に規定している(5T以上のスペースが後に続く4TマークのTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に4Tスペースが続くラン長
5T以上のマークを記録する,マルチパルス列の最後のパルスのオフセット継続時間
v
d
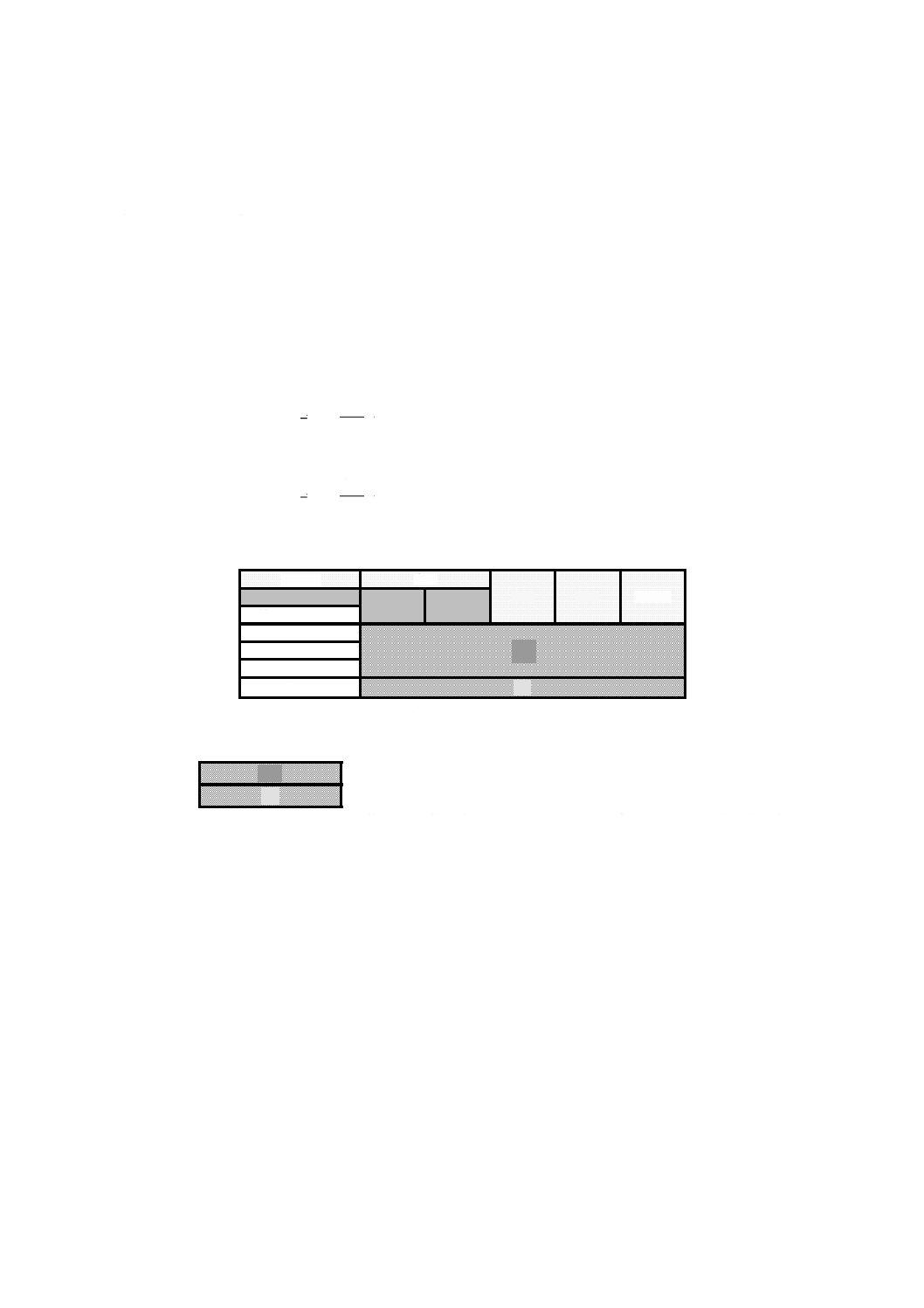
102
X 6233:2017 (ISO/IEC 30193:2016)
を規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基
準継続時間は,バイト58に規定している(5T以上のスペースが後に続く5T以上の
マークのTLP)。
バイト90〜97及び98(msb 4ビット):ΔdTE:消去レベルのオフセット開始時間
これらのバイトは,2T,3T又は4Tスペースが後に続くラン長3T,4T及び5T以上
のマークを記録する,拡張N−1記録ストラテジの消去レベルのオフセット開始時
間を規定する(正の値は進みで負の値は遅れ。附属書F参照)。
消去レベルのオフセット開始時間ΔdTSは,実際のチャネルビットクロック周期の分
数として,次に示す符号付き2の補数wで表される。
バイト90及び91では,次による。
W
S
Δ
32
T
dT
w
×
=
(−24≦w≦15)
バイト92〜97及び98(msb 4ビット)では,次による。
W
S
Δ
32
T
dT
w
×
=
(−8≦w≦7)
注記
マーク
前のスペース
続きのスペース
2S
3S
4S
≧5S
w
e
dTE
2M
3M
4M
≧5M
2S
≧3S
この表は,記録される各マークの前後のスペースによる,dTEの値の影響を示している。
“e”で示す領域は,基準値にあった部分で,“w”で示す部分は,オフセット値を含んでいる。
このパタンの領域は,“w”で示し,オフセット値を含んでいる。
このパタンの領域は,“e”で示し,基準値を含んでいる。
“u=w+e”の値は,−48≦u≦30を満たしている(F.2参照)。
バイト90:
このバイトの最初の6ビット(ビットb7〜b2)は,2Tスペースが先行した後に2T
スペースが続く,ラン長2Tのマークを記録する消去レベルのオフセット開始時間
を規定する。このバイトを適用する場合,基準位置は,バイト59に規定している(2T
スペースが先行し5T以上のスペースが後に続く2T記録マークのdTE)。
このバイトの最後の2ビット(ビットb1〜b0)は,リザーブ(領域)とする。
バイト91:
このバイトの最初の6ビット(ビットb7〜b2)は,3T以上のスペースが先行した後
に2Tスペースが続く,ラン長2Tのマークを記録する消去レベルのオフセット開始
時間を規定する。このバイトを適用する場合,基準位置は,バイト60に規定してい
る(3T以上のスペースが先行し5T以上のスペースが後に続く2T記録マークのdTE)。
このバイトの最後の2ビット(ビットb1〜b0)は,リザーブ(領域)とする。
バイト92:
このバイトの最初の4ビット(ビットb7〜b4)は,後に2Tスペースが続くラン長
3Tマークを記録する,マルチパルス列の消去レベルのオフセット開始時間を規定す
る。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト61に規
w
e
103
X 6233:2017 (ISO/IEC 30193:2016)
定している(5T以上のスペースが後に続く3TマークのdTE)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に2Tスペースが続くラン長
4Tマークを記録する,マルチパルス列の最後の消去レベルのオフセット開始時間を
規定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト
62に規定している(5T以上のスペースが後に続く4TマークのdTE)。
バイト93:
このバイトの最初の4ビット(ビットb7〜b4)は,後に2Tスペースが続くラン長
5T以上のマークを記録する,マルチパルス列の消去レベルのオフセット開始時間を
規定する。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト
63に規定している(5T以上のスペースが後に続く5T以上のマークのdTE)。
このバイトの最後の4ビット(ビットb3〜b0)は,2Tスペースが先行した後に3T
スペースが続く,ラン長2Tのマークを記録する消去レベルのオフセット開始時間
を規定する。これらのビット(ビットb3〜b0)を適用するとき,基準位置は,バイ
ト59に規定している(2Tスペースが先行し5T以上のスペースが後に続く2Tマー
クのdTE)。
バイト94:
このバイトの最初の4ビット(ビットb7〜b4)は,3T以上のスペースが先行した後
に3Tスペースが続く,ラン長2Tのマークを記録する消去レベルのオフセット開始
時間を規定する。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,
バイト60に規定している(3T以上のスペースが先行し5T以上のスペースが後に続
く2T記録マークのdTE)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に3Tスペースが続くラン長
3Tマークを記録する,マルチパルス列の消去レベルのオフセット開始時間を規定す
る。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト61に規
定している(5T以上のスペースが後に続く3TマークのdTE)。
バイト95:
このバイトの最初の4ビット(ビットb7〜b4)は,後に3Tスペースが続くラン長
4Tマークを記録する,マルチパルス列の消去レベルのオフセット開始時間を規定す
る。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト62に規
定している(5T以上のスペースが後に続く4TマークのdTE)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に3Tスペースが続くラン長
5T以上のマークを記録する,マルチパルス列の消去レベルのオフセット開始オフ時
間を規定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バ
イト63に規定している(5T以上のスペースが後に続く 5T以上のマークのdTE)。
バイト96:
このバイトの最初の4ビット(ビットb7〜b4)は,2Tスペースが先行した後に4T
スペースが続く,ラン長2Tのマークを記録する消去レベルのオフセット開始時間
を規定する。これらのビット(ビットb7〜b4)を適用するとき,基準位置は,バイ
ト59に規定している(2Tスペースが先行し5T以上のスペースが後に続く2T記録
マークのdTE)。
このバイトの最後の4ビット(ビットb3〜b0)は,3T以上のスペースが先行した後
に4Tスペースが続く,ラン長2Tのマークを記録する消去レベルのオフセット開始
時間を規定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,
バイト60に規定している(3T以上のスペースが先行し5T以上のスペースが後に続
104
X 6233:2017 (ISO/IEC 30193:2016)
く2T記録マークのdTE)。
バイト97:
このバイトの最初の4ビット(ビットb7〜b4)は,後に4Tスペースが続くラン長
3Tマークを記録する,マルチパルス列の消去レベルのオフセット開始時間を規定す
る。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト61に規
定している(5T以上のスペースが後に続く3TマークのdTE)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に4Tスペースが続くラン長
4Tマークを記録する,マルチパルス列の消去レベルのオフセット開始時間を規定す
る。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト62に規
定している(5T以上のスペースが後に続く4TマークのdTE)。
バイト98(msb 4ビット):このバイトの最初の4ビット(ビットb7〜b4)は,後に4Tスペースが続
くラン長5T以上のマークを記録する,マルチパルス列の消去レベルのオフセット
開始時間を規定する。これらのビット(ビットb7〜b4)を適用する場合,基準位置
は,バイト63に規定している(5T以上のスペースが後に続く5T以上のマークの
dTE)。
バイト98(lsb 4ビット):リザーブ(領域)
これらのビットは,0000とする。
バイト99:
リザーブ(領域)
このバイトは,00hとする。
バイト100〜111: DIユニットフッタ
15.8.3.2参照。
15.8.3.4 DIフォーマット5(拡張N/2記録ストラテジ)の規定
フォーマット5によるDIユニットの主部の内容は,図78に示すとおり規定する。
105
X 6233:2017 (ISO/IEC 30193:2016)
12
DI ユニットフッタ
100 〜111
6
リザーブ(領域)
94〜99
0.5
リザーブ(領域)
93(lsb4ビット)
8.5
∆dTE:消去レベルのオフセット開始時間
85〜92 及び93
(msb4ビット)
3
∆TLP:最後のパルスのオフセット継続時間
82 〜84
3
∆dTLP:最後のパルスのオフセット開始時間
79 〜81
7.5
∆Ttop:最初の記録パルスのオフセット継続時間
71 (lsb4ビット)及び
72 〜78
8.5
∆dTtop:最初の記録パルスのオフセット開始時間
63 〜70及び71
(msb4ビット)
1
リザーブ(領域)
62
5
dTE:消去レベルの開始時間
57 〜61
2
TLP:最後のパルスの継続時間
55 〜56
2
dTLP:最後の記録パルスの開始時間
53 〜54
5
Ttop:最初の記録パルスの継続時間
48 〜52
5
dTtop:最初の記録パルスの開始時間
43 〜47
1
TMP:記録マルチパルスの継続時間
42
9
記録パワー設定
33 〜41
1
リザーブ(領域)
32
1
公称記録速度の最大高周波重じょう(畳)読取りパワー
31
1
公称記録速度の最大直流読取りパワー
30
2
記録速度
28 〜29
1
リザーブ(領域)
27
8
データゾーンの配置
19 〜26
2
リザーブ(領域)
17 〜18
1
BCA記述子
16
1
記録マーク極性フラグビット
15
1
プッシュプル極性フラグビット
14
1
チャネルビット長
13
1
BD構造
12
1
ディスクサイズ,クラス及びバージョン
11
3
BD層タイプ識別子
8 〜10
8
DIユニットヘッダ
0 〜7
バイト数
内容
バイト番号
図78−DIフォーマット5のディスク情報の内容
バイト0〜1:
ディスク情報識別子
15.8.3.2参照。
バイト2:
DIフォーマット番号
公称記録速度の最大高周波重畳読取りパワー
106
X 6233:2017 (ISO/IEC 30193:2016)
このバイトは,BCAコード付きのディスクでは,05hに設定する。
このバイトは,BCAコードなしのディスクでは,85hに設定する。
バイト3:
各DIブロックのDI予備フレーム数及びこのDIユニット適用の層数
15.8.3.2参照。
バイト4:
リザーブ(領域)
15.8.3.2参照。
バイト5:
DIブロック内のDIユニットの連続番号
15.8.3.2参照。
バイト6:
継続フラグ及びこのDIユニット使用のDIバイト数
このバイトは,このDIユニットの最初の94バイトを使用し,次のDIユニットに
継続がないことを示す5Ehに設定する。残りのDIユニット主部(DIユニットフッ
タのバイトを除く。)のバイトは使用せず,00hに設定する。
バイト7:
リザーブ(領域)
15.8.3.2参照。
バイト8〜10:
BD層タイプ識別子
この3バイトは,DIユニットが適用されるBD層のタイプを識別し,各書換層で
“BDW”の文字を示す42 44 57hに設定する。
バイト11:
ディスクサイズ,クラス及びバージョン
ビットb7〜b6: この2ビットは,ディスクのサイズを規定する。120 mmディスクを示す00に設定
する。
ビットb5〜b4: この2ビットは,クラス番号を規定する。クラス番号は,同じ層タイプで異なる基
本特性をもつBD層を識別する。
この規格に適合したBD層は,このビットを01に設定する。
ドライブが,ある特定のクラスの層を認識できない場合は,その層のデータゾーン
にアクセスことが望ましい(読取りも記録も行わない。)。
ビットb3〜b0: この4ビットは,バージョン番号を規定する。この規格に適合した層であることを
示す0011に設定する。
バイト12:
BD構造
ビットb7〜b4: この4ビットは,ディスク上のBDの記録可能層及び記録済み層の層数の全層数を
規定する。記録層が三つであることを示す0011に設定する。
ビットb3〜b0: この4ビットは,このDIユニットを適用するBDの記録可能層又は記録済み層の層
のタイプを規定する。
ビットb3〜b0は,書換形記録層を示す0100に設定する。
バイト13:
チャネルビット長
ビットb7〜b4: この4ビットは,0000に設定する。
ビットb3〜b0: この4ビットは,メインデータのチャネルビット長を規定し,全てのBD記録層で
同じとする。
次の設定とする。
0000:リザーブ(領域)
0101:チャネルビット長が55.87 nm(33.4 GB/層)であることを示す
107
X 6233:2017 (ISO/IEC 30193:2016)
他の設定は,リザーブ(値)とする。
バイト14:
プッシュプル極性フラグビット
ビットbi:
各ビットbiは,記録層Liのプッシュプル信号の極性を規定し,次による(26.1参照)。
次の設定とする。
“0”:記録層Liのプッシュプル極性が正
“1”:記録層Liのプッシュプル極性が負
存在しない記録層に対して,biは,“0”に設定する。
この規格では,このバイトは,00hに設定する。
バイト15:
記録マーク極性フラグビット
ビットbi:
各ビットbiは,記録層Liの記録マークの極性を規定し,次による。
“0”:記録マークの反射率が未記録層よりも低い層タイプ(HTLディスク)
“1”:記録マークの反射率が未記録層よりも高い層タイプ
存在しない記録層に対して,biは,“0”に設定する。
この規格では,このバイトは,00hに設定する。
バイト16:
BCA記述子
ビットb7〜b4: この4ビットは,リザーブ(領域)とする。
ビットb3〜b0: この4ビットは,ディスク上のBCAコードの有無を示す。
次の設定とする。
0000:BCAコードなし
0001:BCAコード付き
他の設定は,リザーブ(値)とする。
バイト17〜18:
リザーブ(領域)
これらのバイトは,00hに設定する。
バイト19〜26:
データゾーンの配置
バイト19〜22: これらのバイトは,関係する層のデータゾーンの最初の物理ADIPを規定する。
L0層に関連する各DIユニットで,これらのバイトは,データゾーン0の最初のPAA
がPAA 131 072であることを示す00 02 00 00hに設定する。
L1層に関連する各DIユニットで,これらのバイトはFAAの値に設定し,33.4 GB/
層のディスクでは,00 5E EC 80hとする。これは,データゾーン1の最初のPAAが,
33.4 GB/層のディスクではPAA 6 220 928FAAであることを示す。
L2層に関連するDIユニットでは,これらのバイトは,データゾーン2の最初のPAA
としてPAA 8 519 680を示す00 82 00 00hに設定する。
バイト23〜26: これらのバイトは,関連する層のデータゾーンの最後の物理ADIPを規定する。
L0層に関連する各DIユニットでLAAの値に設定し,33.4 GB/層のディスクでは00
21 13 7Ehとする。これは,データゾーン0の最後のPAAが使用者データ容量33.4 GB/
層のディスクではPAA 2 167 678であることを示す。L1層に関連する各DIユニット
で,これらのバイトはデータゾーン1の最後のPAAがPAA 8 257 534であることを
示す00 7D FF FEhに設定する。
L2層に関連する各DIユニットでは,これらのバイトはLAA+00 80 00 00hの値に
設定し,使用者データ容量33.4 GB/層のディスクでは00 A1 13 7Ehとする。これは,
108
X 6233:2017 (ISO/IEC 30193:2016)
データゾーン2の最後のPAAが,使用者データ容量33.4 GB/層のディスクではPAA
10 556 286であることを示す。
バイト27:
リザーブ(領域)
このバイトは,00hに設定する。
バイト28〜29:
記録速度
これらのバイトは,公称記録速度を規定する。それは,このDIユニットで規定する
2バイトの2進数(バイト28がMSB)で規定するパラメタを用いて使用される。
公称記録速度を数値nとして規定し,次による。
n=100×Vnorm
nは,次による。
公称記録速度が7.38 m/s:02 E2h
バイト30:
公称記録速度の最大直流読取りパワー
最大読取りパワーは,記録信号が劣化することなく少なくとも106回連続読取りが
できるディスクの入射面上の最大光パワーとして規定する(30.7参照)。
この細分箇条での最大読取りパワーは,30.7で規定する読取りパワー以上にする。
規定値として,30.7に規定したパワーを用いる。
このバイトは,このDIユニットのバイト28〜29で規定する公称記録速度に等しい
読取速度の場合の最大直流読取りパワーPrを規定する。このバイトの10進表記は,
次に示す数値nの式とする。ここに,Prの単位はミリワットである。
n=100×Pr
注記 このDIユニットに規定された公称速度よりも遅い速度で読み取る場合は,ディスク上の記録
の耐久性を保証するために,読取りパワーを下げることが必要になる可能性がある。
バイト31:
公称記録速度の最大高周波重畳読取りパワー
最大読取りパワーは,記録信号が劣化することなく少なくとも106回連続読取りが
できるディスクの入射面上の最大光パワーとして規定する(30.7参照)。
この細分箇条での最大読取りパワーは,30.7で規定する読取りパワー以上にする。
規定値として,30.7に規定したパワーを用いる。
このバイトは,このDIユニットのバイト28〜29で規定する公称記録速度に等しい
読取速度の場合の最大高周波重畳読取りパワーPrを規定する。このバイトの10進表
記は,次に示す数値nによる。ここに,Prの単位はミリワットである。
n=100×Pr
注記 このDIユニットに規定された公称速度よりも遅い速度で読み取る場合は,ディスク上の記録
の耐久性を保証するために,読取りパワーを下げることが必要になる可能性がある。
バイト32:
リザーブ(領域)
これらのバイトは,00hに設定する。
バイト33〜41:
記録パワー設定
バイト33〜34: PIND:PINDは,OPCで,Ptargetを決めるための開始値として使用できる(附属書G参
照)。
これらのバイトは,Ptargetを示唆する値PINDをミリワットの単位で規定し,次に示す
数値nによる。
109
X 6233:2017 (ISO/IEC 30193:2016)
n=20×PIND
バイト33のビットb7がmsbで,バイト34のビットb0がlsbである。
バイト35:
mIND:mINDは,OPCで,Ptargetを決めるための開始値として使用できる(附属書G
参照)。
このバイトは,メディア製造業者によって決められるPINDでの変調度を規定し,次
に示す数値nによる。
n=200×mIND
バイト36:
ρ:このバイトは,OPCアルゴリズム(附属書G参照)で使われる記録パワーに乗
ずる係数ρを規定し,次に示す数値nによる。
n=100×ρ
バイト37:
εBW:このバイトは,OPCアルゴリズム(附属書G参照)で使われる記録バイアス
パワーと記録ピークパワーとの比εBWを規定し,次に示す数値nによる。
n=200×εBW
バイト38:
εc:このバイトは,OPCアルゴリズム(附属書G参照)で使われる冷却パワーと記
録ピークパワーとの比εcを規定し,次に示す数値nによる。
n=200×εc
バイト39:
εE:このバイトは,OPCアルゴリズム(附属書G参照)で使われる消去パワーと記
録ピークパワーとの比εEを規定し,次に示す数値nによる。
n=200×εE
バイト40:
κ:このバイトは,OPC(附属書G参照)で使われるターゲット値κを規定し,次
に示す数値nによる。
n=20×κ
バイト41:
このバイトは,リザーブ(領域)とする。
バイト42:
TMP:記録マルチパルスの継続時間
このバイトは,マークを記録するための拡張N/2記録ストラテジのマルチパルス列
の2番目とそれに続くパルスとの継続時間を規定する(附属書F参照)。
このバイトの最初の6ビット(ビットb7〜b2)は,可変部分を実際のチャネルビッ
トクロック周期の分数として,次に示す正の2進数pによる。
W
MP
32TT
p
×
=
(0≦p≦62)
このバイトの最後の2ビット(ビットb1〜b0)は,リザーブ(領域)とする。
バイト43〜61のバイトで,dTtop,Ttop,dTLP,TLP及びdTEの,基準位置又は基準継続時間を規定する。
基準位置は,各記録パルスの立上がりエッジの位置を意味する(図F.3参照)継続時間に関しても,基
準に関しては同様に規定する。
バイト43〜47:
dTtop:最初の記録パルスの開始時間
これらのバイトの最初の6ビット(ビットb7〜b2)は,5T以上のスペースに続くラ
ン長2T,3T,[4T,6T,8T]及び[5T,7T,9T]マークを記録する,拡張N/2記録スト
ラテジのマルチパルス列の最初のパルスの開始時間を規定する(正の値は進み,負
の値は遅れ。附属書F参照)。
最初のパルスの開始時間dTtopは,実際のチャネルビットクロック周期の分数として,
110
X 6233:2017 (ISO/IEC 30193:2016)
次に示す符号付き2の補数aで表される。
W
top
32
T
dT
a
×
=
(−32≦a≦30)
このバイトの最後の2ビット(ビットb1及びb0)は,リザーブ(領域)とする。
バイト43:
このバイトは,2Tスペースが後に続くラン長2Tマークを記録するパルスの開始時
間を,データパルスの最初のチャネルビットの立下がりエッジに対して規定する(正
の値は進み,負の値は遅れを示す。附属書F参照)。
バイト44:
このバイトは,3T以上のスペースが後に続くラン長2Tマークを記録するパルスの
開始時間を,データパルスの最初のチャネルビットの立下がりエッジに対して規定
する(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト45:
このバイトは,ラン長3Tマークを記録するマルチパルス列の最初のパルスの開始
時間を,データパルスの最初のチャネルビットの立下がりエッジに対して規定する
(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト46:
このバイトは,ラン長[4T,6T,8T]マークを記録するマルチパルス列の最初のパル
スの開始時間を,データパルスの最初のチャネルビットの立下がりエッジに対して
規定する(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト47:
このバイトは,ラン長[5T,7T,9T]マークを記録するマルチパルス列の最初のパル
スの開始時間を,データパルスの最初のチャネルビットの立下がりエッジに対して
規定する(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト48〜52:
Ttop:最初の記録パルスの継続時間
これらのバイト最初の7ビット(ビットb7〜b1)は,5T以上のスペースに続くラン
長2T,3T,[4T,6T,8T]及び[5T,7T,9T]マークを記録する,拡張N/2記録ストラ
テジのマルチパルス列の最初のパルスの継続時間を規定する(附属書F参照)。
これらのバイトは,実際のチャネルビットクロック周期の分数として規定し,次に
示す正の2進数bによる。
W
top
32TT
b
×
=
(0≦b≦92)
これらのバイトの最後のビット(ビットb0)は,リザーブ(領域)とする。
バイト48:
このバイトは,後に2Tスペースが続くラン長2Tマークを記録するパルスの継続時
間を規定する(附属書F参照)。
バイト49:
このバイトは,後に3T以上のスペースが続くラン長2Tマークを記録するパルスの
継続時間を規定する(附属書F参照)。
バイト50:
このバイトは,ラン長3Tマークを記録する,マルチパルス列の最初のパルスの継
続時間を規定する(附属書F参照)。
バイト51:
このバイトは,ラン長[4T,6T,8T]マークを記録する,マルチパルス列の最初のパ
ルスの継続時間を規定する(附属書F参照)。
バイト52:
このバイトは,ラン長[5T,7T,9T]マークを記録する,マルチパルス列の最初のパ
ルスの継続時間を規定する(附属書F参照)。
バイト53〜54:
dTLP:最後の記録パルスの開始時間
これらのバイトの最初の6ビット(ビットb7〜b2)は,5T以上のスペースが後に続
111
X 6233:2017 (ISO/IEC 30193:2016)
くラン長[4T,6T,8T]及び[5T,7T,9T]マークを記録する,拡張N/2記録ストラテ
ジのマルチパルス列の最後のパルスの開始時間を規定する(正の値は進み,負の値
は遅れを示す。附属書F参照)。
最後のパルスの開始時間dTLPは,実際のチャネルビットクロック周期の分数として
規定し,次に示す符号付き2の補数cによる。
W
LP
32
T
dT
c
×
=
(−30≦c≦30)
このバイトの最後の2ビット(ビットb1〜b0)は,リザーブ(領域)とする。
バイト53:
このバイトは,ラン長[4T,6T,8T]マークを記録するマルチパルス列の最後のパル
スの開始時間を,データパルスの最後のチャネルビットの立上がりエッジに対して
規定する(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト54:
このバイトは,ラン長[5T,7T,9T]マークを記録するマルチパルス列の最後のパル
スの開始時間を,データパルスの最後のチャネルビットの立上がりエッジに対して
規定する(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト55〜56:
TLP:最後のパルスの継続時間
これらのバイト最初の6ビット(ビットb7〜b2)は,5T以上のスペースが後に続く
ラン長[4T,6T,8T]及び[5T,7T,9T]マークを記録する,拡張N/2記録ストラテジ
のマルチパルス列の最後のパルスの継続時間を規定する(附属書F参照)。
これらのバイトは,実際のチャネルビットクロック周期の分数として規定し,次に
示す正の2進数dによる。
W
LP
32TT
d
×
=
(0≦d≦62)
これらのバイトの最後の2ビット(ビットb1〜b0)は,リザーブ(領域)とする。
バイト55:
このバイトは,ラン長[4T,6T,8T]のマークを記録するマルチパルス列の最後のパ
ルスの継続時間を規定する(附属書F参照)。
バイト56:
このバイトは,ラン長[5T,7T,9T]のマークを記録するマルチパルス列の最後のパ
ルスの継続時間を規定する(附属書F参照)。
バイト57〜61:
dTE:消去レベルの開始時間
これらのバイトの最初の7ビット(ビットb7〜b1)は,後に5 T以上のスペースが
続くラン長2T,3T,[4T,6T,8T]及び[5T,7T,9T]のマークを記録する,拡張N/2
記録ストラテジの消去レベルの開始時間を規定する(正の値は進み,負の値は遅れ
を示す。附属書F参照)。
消去レベルの開始時間dTEは,実際のチャネルビットクロック周期の分数として,
次に示す符号付きの2の補数eで表される。
W
E
32
T
dT
e
×
=
(−62≦e≦30)
このバイトの最後のビット(b0)は,リザーブ(領域)とする。
バイト57:
このバイトは,2Tスペースが先行するラン長2Tのマークを記録する消去レベルの
開始時間を,データパルスの最後のチャネルビットの立下がりエッジに対して規定
する(正の値は進み,負の値は遅れを示す。附属書F参照)。
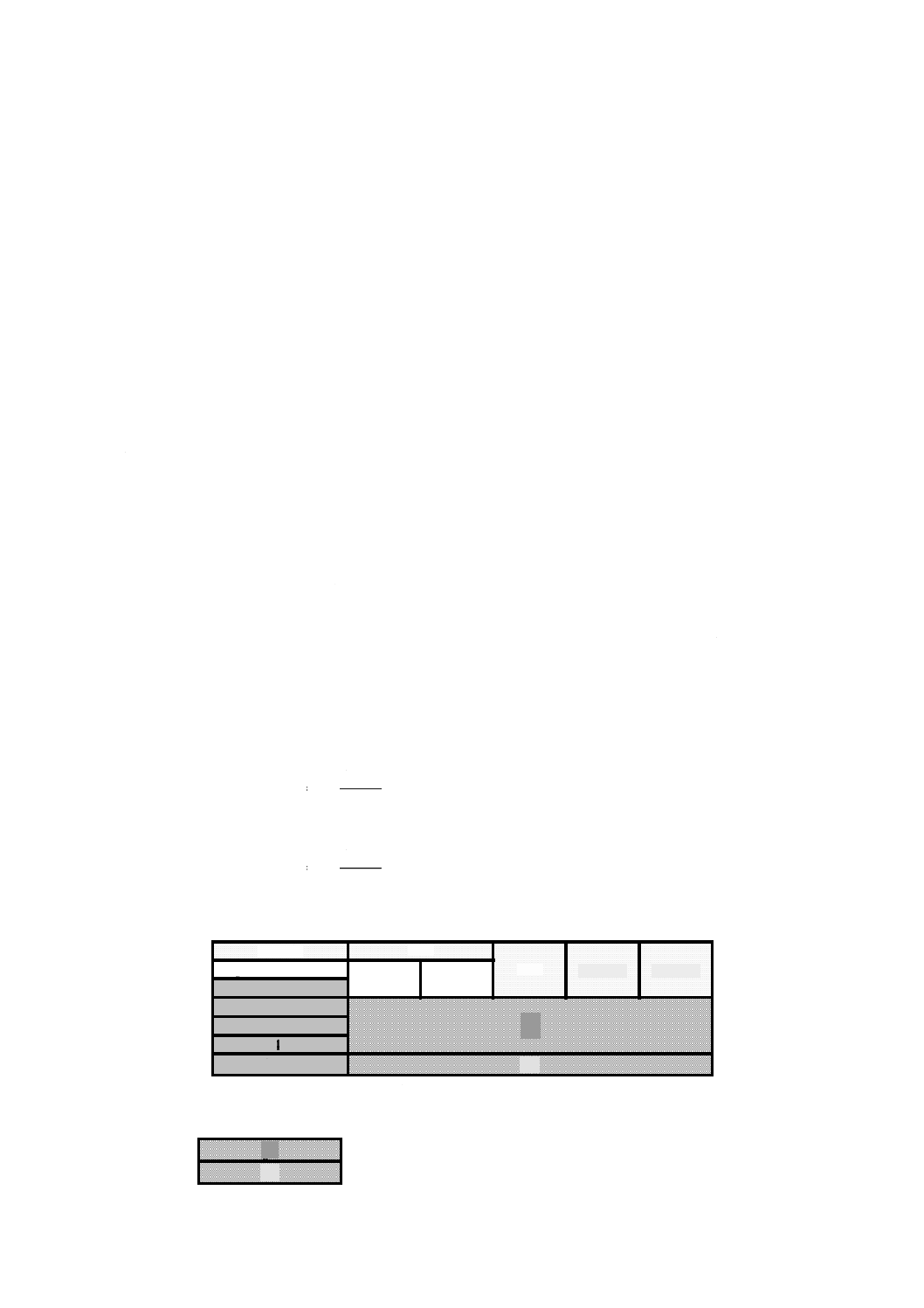
112
X 6233:2017 (ISO/IEC 30193:2016)
バイト58:
このバイトは,3T以上のスペースが先行するラン長2Tのマークを記録する消去レ
ベルの開始時間を,データパルスの最後のチャネルビットの立下がりエッジに対し
て規定する(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト59:
このバイトは,ラン長3Tのマークを記録する消去レベルの開始時間を,データパ
ルスの最後のチャネルビットの立下がりエッジに対して規定する(正の値は進み,
負の値は遅れを示す。附属書F参照)。
バイト60:
このバイトは,ラン長[4T,6T,8T]マークを記録するマルチパルス列の消去レベル
の開始時間を,データパルスの最後のチャネルビットの立下がりエッジに対して規
定する(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト61:
このバイトは,ラン長[5T,7T,9T]マークを記録するマルチパルス列の消去レベル
の開始時間を,データパルスの最後のチャネルビットの立下がりエッジに対して規
定する(正の値は進み,負の値は遅れを示す。附属書F参照)。
バイト62:
リザーブ(領域)
このバイトは,00hに設定する。
バイト63〜93のバイトでは,バイト43〜61に規定した,基準位置又は基準継続時間に対するオフセッ
トとしてΔを規定する。オフセットは,基準位置に対しての時間差を意味する。継続時間に対しても,オ
フセットは同様に規定する(図F.3参照)。
バイト63〜70及び71(msb 4ビット):ΔdTtop:最初の記録パルスのオフセット開始時間
これらのバイトは,2T,3T又は4Tのスペースが先行するラン長2T,3T,[4T,6T,
8T]及び[5T,7T,9T]のマークを記録する,拡張N/2記録ストラテジのマルチパルス
列の最初のパルスの立上がりエッジのオフセットを規定する(附属書F参照)。
立上がりパルスのオフセット開始時間ΔdTtopは,実際のチャネルビットクロック周
期の分数として,次に示す符号付き2の補数fで表される。
バイト63〜64では,次による。
W
top
Δ
32
T
dT
f
×
=
(−32≦f≦30)
バイト65〜70及び71(msb 4ビット)では,次による。
W
top
Δ
32
T
dT
f
×
=
(−8≦f≦7)
注記
マーク
続きのスペース
前のスペース
2S
3S
4S
≧5S
f
a
dTtop
2M
3M
4,6,8M
5,7,9M
2S
≧3S
この表は,記録する各マークの前後のスペースによる,dTtopの値の影響を示している。
“a”で示す領域は,基準値にあった部分で,“f”で示す部分は,オフセット値を含んでいる。
このパタンの領域は,“f”で示し,オフセット値を含んでいる。
このパタンの領域は,“a”で示し,基準値を含んでいる。
f
a
113
X 6233:2017 (ISO/IEC 30193:2016)
“i=f+a”の値は,−28≦i≦30を満たしている(F.3参照)。
バイト63:
このバイトの最初の6ビット(ビットb7〜b2)は,2Tスペースが先行した後に2T
スペースが続く,ラン長2Tのマークを記録するパルスのオフセット開始時間を規
定する。このバイトを適用する場合,基準位置は,バイト43に規定している(5T
以上のスペースが先行し2Tスペースが後に続く2TマークのdTtop)。
このバイトの最後の2ビット(ビットb1〜b0)は,リザーブ(領域)とする。
バイト64:
このバイトの最初の6ビット(ビットb7〜b2)は,2Tスペースが先行した後に3T
以上のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット開始時
間を規定する。このバイトを適用する場合,基準位置は,バイト44に規定している
(5T以上のスペースが先行し3T以上のスペースが後に続く2TマークのdTtop)。
このバイトの最後の2ビット(ビットb1及びb0)は,リザーブ(領域)とする。
バイト65:
このバイトの最初の4ビット(ビットb7〜b4)は,2Tスペースに続くラン長3Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を規定する。
これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト45に規定し
ている(5T以上のスペースが先行する3TマークのdTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,2Tスペースに続くラン長[4T,
6T,8T]マークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を
規定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト
46に規定している(5T以上のスペースが先行する[4T,6T,8T]マークのdTtop)。
バイト66:
このバイトの最初の4ビット(ビットb7〜b4)は,2Tスペースに続くラン長[5T,
7T,9T]マークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を
規定する。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト
47に規定している(5T以上のスペースが先行する[5T,7T,9T]マークのdTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,3Tスペースが先行した後に2T
スペースが続く,ラン長2Tのマークを記録するパルスのオフセット開始時間を規
定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト43
に規定している(5T以上のスペースが先行し2Tスペースが後に続く2Tマークの
dTtop)。
バイト67:
このバイトの最初の4ビット(ビットb7〜b4)は,3Tスペースが先行した後に3T
以上のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット開始時
間を規定する。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バ
イト44に規定している(5T以上のスペースが先行し3T以上のスペースが後に続く
2TマークのdTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,3Tスペースに続くラン長3Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を規定する。
これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト45に規定し
ている(5T以上のスペースが先行する3TマークのdTtop)。
バイト68:
このバイトの最初の4ビット(ビットb7〜b4)は,3Tスペースに続くラン長4Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を規定する。
これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト46に規定し
114
X 6233:2017 (ISO/IEC 30193:2016)
ている(5T以上のスペースが先行する[4T,6T,8T]マークのdTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,3Tスペースに続くラン長[5T,
7T,9T]マークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を
規定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト
47に規定している(5T以上のスペースが先行する[5T,7T,9T]マークのdTtop)。
バイト69:
このバイトの最初の4ビット(ビットb7〜b4)は,4Tスペースが先行した後に2T
スペースが続く,ラン長2Tのマークを記録するパルスのオフセット開始時間を規
定する。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト43
に規定している(5T以上のスペースが先行し2Tのスペースが後に続く2Tマークの
dTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,4Tスペースが先行した後に3T
以上のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット開始時
間を規定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バ
イト44に規定している(5T以上のスペースが先行し3T以上のスペースが後に続く
2TマークのdTtop)。
バイト70:
このバイトの最初の4ビット(ビットb7〜b4)は,4Tスペースに続くラン長3Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を規定する。
これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト45に規定し
ている(5T以上のスペースが先行し3TマークのdTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,4Tスペースに続くラン長[4T,
6T,8T]マークを記録する,マルチパルス列の最初のパルスのオフセット開始時間を
規定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト
46に規定している(5T以上のスペースが先行する[4T,6T,8T]マークのdTtop)。
バイト71(msb 4ビット):このバイトの最初の4ビット(ビットb7〜b4)は,4Tスペースに続くラ
ン長[5T,7T,9T]マークを記録する,マルチパルス列の最初のパルスのオフセット
開始時間を規定する。これらのビット(ビットb7〜b4)を適用する場合,基準位置
は,バイト47に規定している(5T以上のスペースが先行する[5T,7T,9T]マーク
のdTtop)。
バイト71(lsb 4ビット)及び72〜78:ΔTtop:最初の記録パルスのオフセット継続時間
これらのバイトは,2T,3T又は4Tのスペースが先行するラン長2T,3T,[4T,6T,
8T]及び[5T,7T,9T]マークを記録する,拡張N/2記録ストラテジのマルチパルス列
の最初のパルスのオフセット継続時間を規定する(附属書F参照)。
これらのバイトは,実際のチャネルビットクロック周期の分数として規定し,次に
示す符号付き2の補数gによる。
W
top
Δ
32
T
T
g
×
=
(−8≦g≦7)
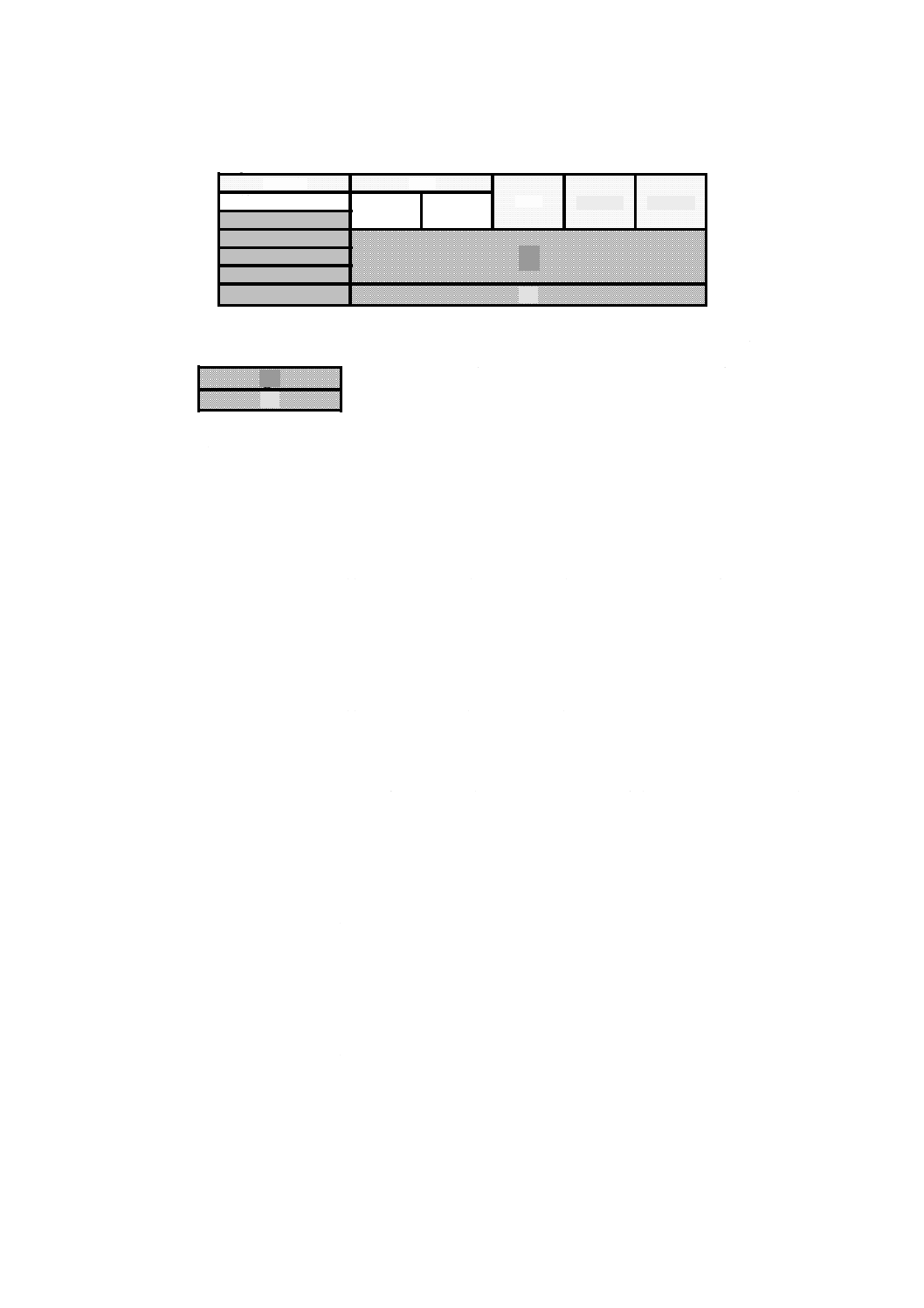
115
X 6233:2017 (ISO/IEC 30193:2016)
注記
マーク
続きのスペース
前のスペース
2S
3S
4S
≧5S
g
b
Ttop
2M
3M
4,6,8M
5,7,9M
2S
≧3S
この表は,記録される各マークの前後のスペースによる,Ttopの値の影響を示している。
“b”で示す領域は,基準値にあった部分で,“g”で示す部分は,オフセット値を含んでいる。
このパタンの領域は,“g”で示し,オフセット値を含んでいる。
このパタンの領域は,“b”で示し,基準値を含んでいる。
“j=g+b”の値は,0≦j≦92を満たしている(F.3参照)。
バイト71(lsb 4ビット):このバイトの最後の4ビット(ビットb3〜b0)は,2Tスペースが先行した
後に2Tのスペースが続く,ラン長2Tのマークを記録するパルスのオフセット継続
時間を規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,
基準継続時間は,バイト48に規定している(5T以上のスペースが先行し2Tスペー
スが後に続く2T記録マークのTtop)。
バイト72:
このバイトの最初の4ビット(ビットb7〜b4)は,2Tスペースが先行した後に3T
以上のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット継続時
間を規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,
基準継続時間は,バイト49に規定している(5T以上のスペースが先行し3T以上の
スペースが後に続く2T記録マークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,2Tスペースに続くラン長3Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を規定する
(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準継続時間
は,バイト50に規定している(5T以上のスペースが先行する3TマークのTtop)。
バイト73:
このバイトの最初の4ビット(ビットb7〜b4)は,2Tスペースに続くラン長[4T,
6T,8T]マークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準
継続時間は,バイト51に規定している(5T以上のスペースが先行する[4T,6T,8T]
マークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,2Tスペースに続くラン長[5T,
7T,9T]マークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準
継続時間は,バイト52に規定している(5T以上のスペースが先行する[5T,7T,9T]
マークのTtop)。
バイト74:
このバイトの最初の4ビット(ビットb7〜b4)は,3Tスペースが先行した後に2T
のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準
継続時間は,バイト48に規定している(5T以上のスペースが先行し2Tスペースが
g
b
116
X 6233:2017 (ISO/IEC 30193:2016)
後に続く2T記録マークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,3Tスペースが先行した後に3T
以上のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット継続時
間を規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,
基準継続時間は,バイト49に規定している(5T以上のスペースが先行し3T以上の
スペースが後に続く2T記録マークのTtop)。
バイト75:
このバイトの最初の4ビット(ビットb7〜b4)は,3Tスペースに続くラン長3Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を規定する
(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準継続時間
は,バイト50に規定している(5T以上のスペースが先行する3TマークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,3Tスペースに続くラン長[4T,
6T,8T]マークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準
継続時間は,バイト51に規定している(5T以上のスペースが先行する[4T,6T,8T]
マークのTtop)。
バイト76:
このバイトの最初の4ビット(ビットb7〜b4)は,3Tスペースに続くラン長[5T,
7T,9T]マークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準
継続時間は,バイト52に規定している(5T以上のスペースが先行する[5T,7T,9T]
マークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,4Tスペースが先行した後に2T
のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準
継続時間は,バイト48に規定している(5T以上のスペースが先行し2Tスペースが
後に続く,2T記録マークのTtop)。
バイト77:
このバイトの最初の4ビット(ビットb7〜b4)は,4Tスペースが先行した後に3T
以上のスペースが続く,ラン長2Tのマークを記録するパルスのオフセット継続時
間を規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,
基準継続時間は,バイト49に規定している(5T以上のスペースが先行し3T以上の
スペースが後に続く,2T記録マークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,4Tスペースに続くラン長3Tマ
ークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を規定する
(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準継続時間
は,バイト50に規定している(5T以上のスペースが先行する3TマークのTtop)。
バイト78:
このバイトの最初の4ビット(ビットb7〜b4)は,4Tスペースに続くラン長[4T,
6T,8T]マークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準
継続時間は,バイト51に規定している(5T以上のスペースが先行する[4T,6T,8T]
マークのTtop)。
このバイトの最後の4ビット(ビットb3〜b0)は,4Tスペースに続くラン長[5T,
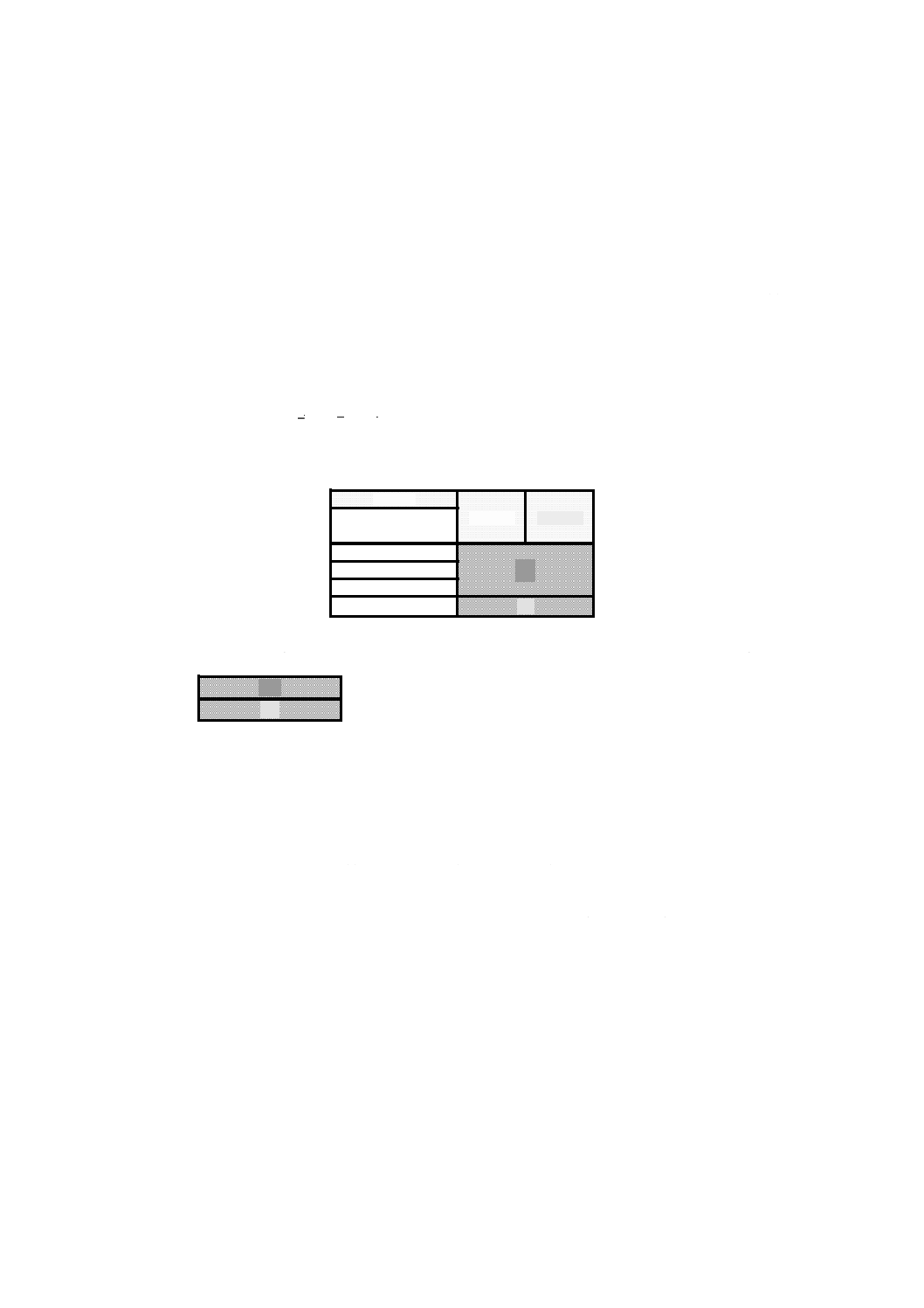
117
X 6233:2017 (ISO/IEC 30193:2016)
7T,9T]マークを記録する,マルチパルス列の最初のパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準
継続時間は,バイト52に規定している(5T以上のスペースが先行する[5T,7T,9T]
マークのTtop)。
バイト79〜81:
ΔdTLP:最後のパルスのオフセット開始時間
これらのバイトは,2T,3T又は4Tスペースが後に続くラン長[4T,6T,8T]及び[5T,
7T,9T]のマークを記録する,拡張N/2記録ストラテジのマルチパルス列の最後のパ
ルスのオフセット開始時間を規定する。
最後のパルスのオフセット開始時間ΔdTLPは,実際のチャネルビットクロック周期
の分数として,次に示す符号付き2の補数hで表される。
W
LP
Δ
32
T
dT
h
×
=
(−8≦h≦7)
注記
マーク
2S
3S
4S
≧5S
h
c
dTLP
4,6,8M
5,7,9M
続きのスペース
この表は,記録される各マークの前後のスペースによる,dTLPの値の影響を示している。
“c”で示す領域は,基準値にあった部分で,“h”で示す部分は,オフセット値を含んでいる。
このパタンの領域は,“h”で示し,オフセットを含んでいる。
このパタンの領域は,“c”で示し,基準値を示している。
“r=h+c”は,−30≦r≦30を満たしている(F.3参照)。
バイト79:
このバイトの最初の4ビット(ビットb7〜b4)は,後に2Tスペースが続くラン長[4T,
6T,8T]マークを記録する,マルチパルス列の最後のパルスのオフセット開始時間を
規定する。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト
53に規定している(5T以上のスペースが後に続く[4T,6T,8T]マークのdTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に2Tスペースが続くラン長[5T,
7T,9T]マークを記録する,マルチパルス列の最後のパルスのオフセット開始時間を
規定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト
54に規定している(5T以上のスペースが後に続く[5T,7T,9T]マークのdTLP)。
バイト80:
このバイトの最初の4ビット(ビットb7〜b4)は,後に3Tスペースが続くラン長[4T,
6T,8T]マークを記録する,マルチパルス列の最後のパルスのオフセット開始時間を
規定する。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト
53に規定している(5T以上のスペースが後に続く[4T,6T,8T]マークのdTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に3Tスペースが続くラン長[5T,
7T,9T]マークを記録する,マルチパルス列の最後のパルスのオフセット開始時間を
規定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト
54に規定している(5T以上のスペースが後に続く[5T,7T,9T]マークのdTLP)。
h
c
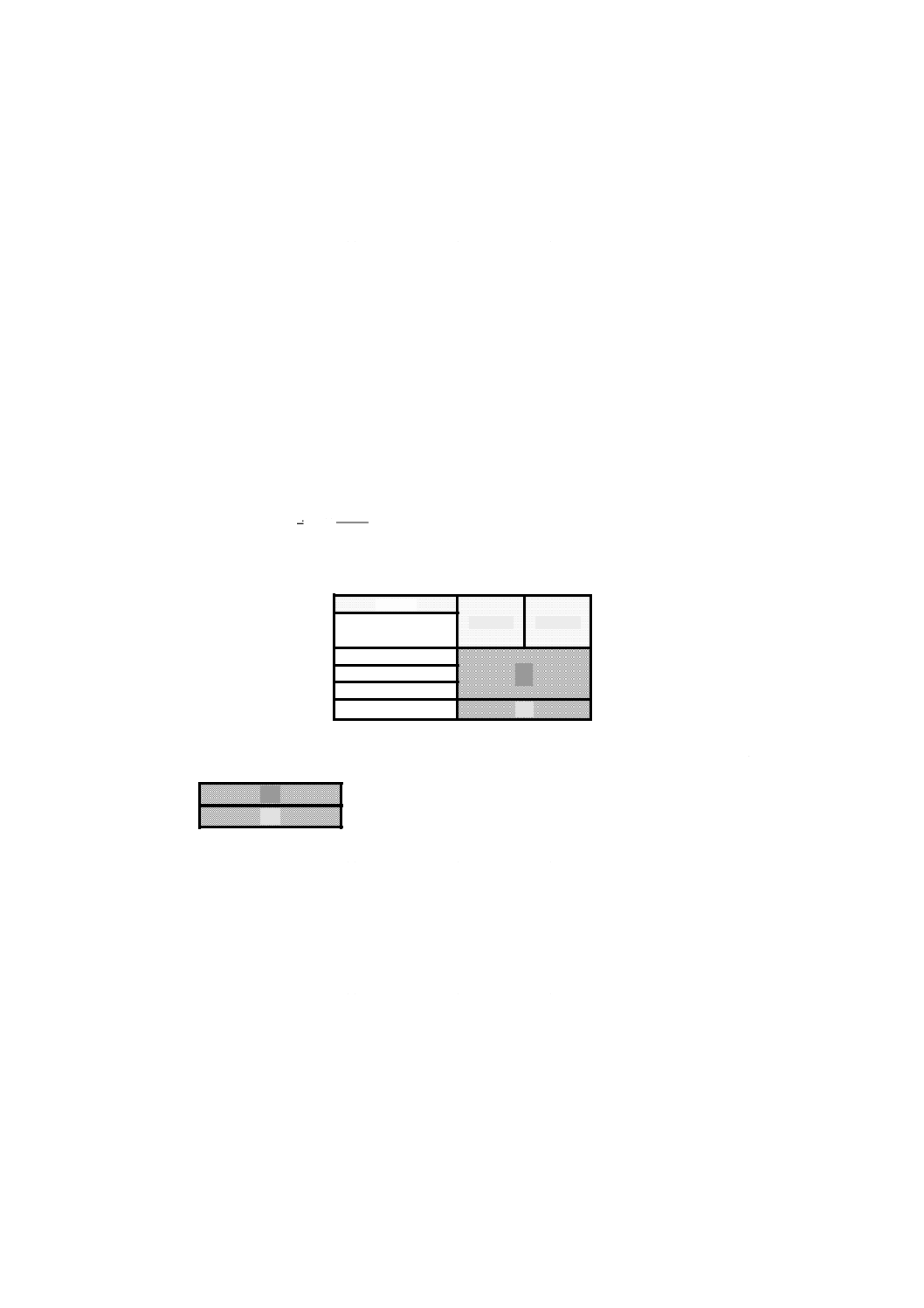
118
X 6233:2017 (ISO/IEC 30193:2016)
バイト81:
このバイトの最初の4ビット(ビットb7〜b4)は,後に4Tスペースが続くラン長[4T,
6T,8T]マークを記録する,マルチパルス列の最後のパルスのオフセット開始時間を
規定する。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイト
53に規定している(5T以上のスペースが後に続く[4T,6T,8T]マークのdTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に4Tスペースが続くラン長[5T,
7T,9T]マークを記録する,マルチパルス列の最後のパルスのオフセット開始時間を
規定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バイト
54に規定している(5T以上のスペースが後に続く[5T,7T,9T]マークのdTLP)。
バイト82〜84:
ΔTLP:最後のパルスのオフセット継続時間
これらのバイトは,2T,3T又は4Tスペースが後に続く,ラン長[4T,6T,8T]及び
[5T,7T,9T]のマークを記録する,拡張N/2記録ストラテジのマルチパルス列の最
後のパルスのオフセット継続時間を規定する(附属書F参照)。
これらのバイトは,実際のチャネルビットクロック周期の分数として規定し,次に
示す符号付き2の補数vによる。
W
LP
Δ
32
T
T
v
×
=
(−8≦v≦7)
注記
マーク
2S
3S
4S
≧5S
v
d
TLP
4,6,8M
5,7,9M
続きのスペース
この表は,記録される各マークの前後のスペースによる,TLPの値の影響を示している。
“d”で示す領域は,基準値にあった部分で,“v”で示す部分は,オフセット値を含んでいる。
このパタンの領域は,“v”で示し,オフセットを含んでいる。
このパタンの領域は,“d”で示し,基準値を含んでいる。
“s=v+d”の値は,0≦s≦62を満たしている(F.3参照)。
バイト82:
このバイトの最初の4ビット(ビットb7〜b4)は,後に2Tスペースが続くラン長[4T,
6T,8T]マークを記録する,マルチパルス列の最後のパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準
継続時間は,バイト55に規定している(5T以上のスペースが後に続く[4T,6T,8T]
マークのTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に2Tスペースが続くラン長[5T,
7T,9T]マークを記録する,マルチパルス列の最後のパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準
継続時間は,バイト56に規定している(5T以上のスペースが後に続く[5T,7T,9T]
マークのTLP)。
バイト83:
このバイトの最初の4ビット(ビットb7〜b4)は,後に3Tスペースが続くラン長[4T,
6T,8T]マークを記録する,マルチパルス列の最後のパルスのオフセット継続時間を
v
d
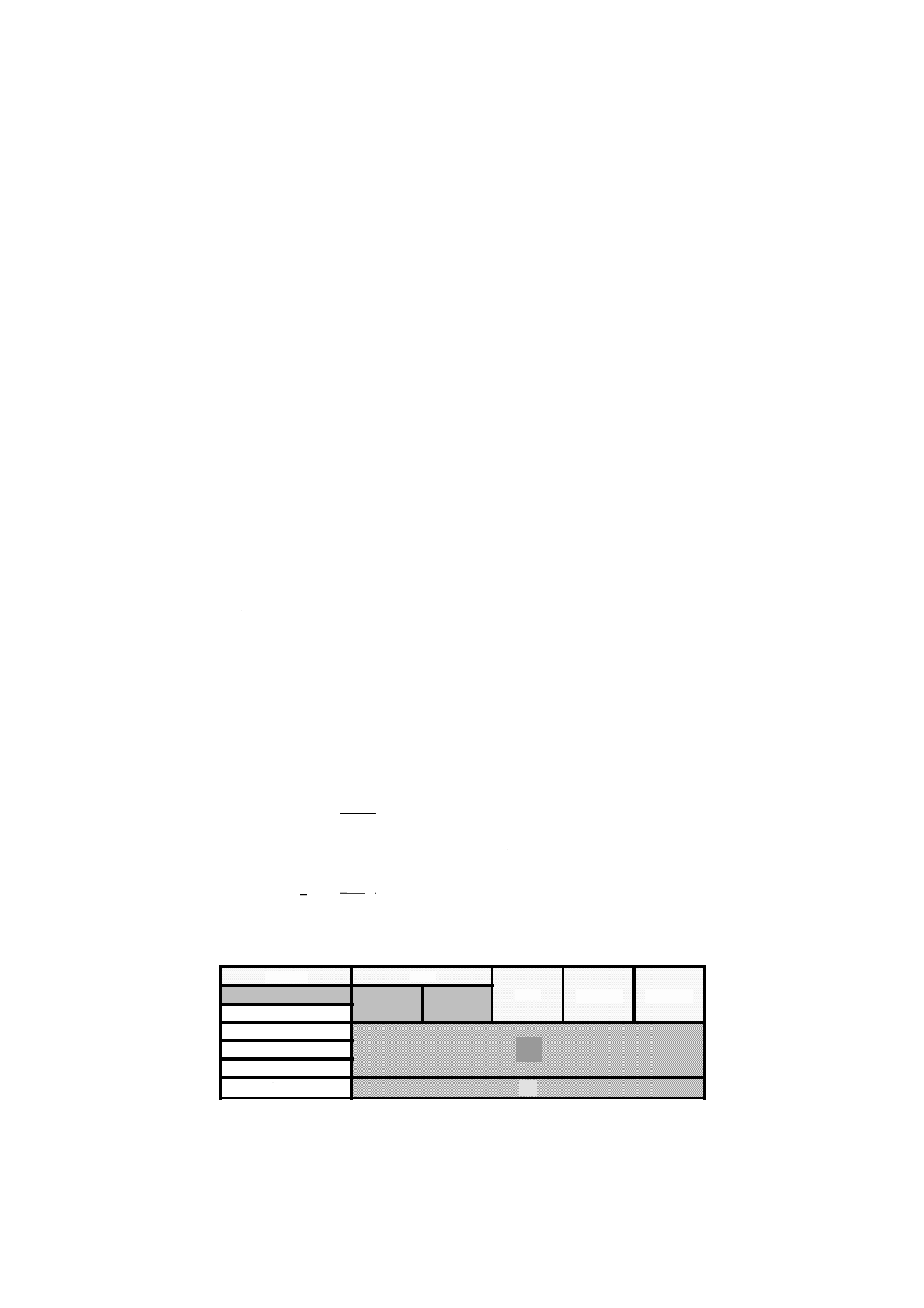
119
X 6233:2017 (ISO/IEC 30193:2016)
規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準
継続時間は,バイト55に規定している(5T以上のスペースが後に続く[4T,6T,8T]
マークのTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に3Tスペースが続くラン長[5T,
7T,9T]マークを記録する,マルチパルス列の最後のパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準
継続時間は,バイト56に規定している(5T以上のスペースが後に続く[5T,7T,9T]
マークのTLP)。
バイト84:
このバイトの最初の4ビット(ビットb7〜b4)は,後に4Tスペースが続くラン長[4T,
6T,8T]マークを記録する,マルチパルス列の最後のパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb7〜b4)を適用する場合,基準
継続時間は,バイト55に規定している(5T以上のスペースが後に続く[4T,6T,8T]
マークのTLP)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に4Tスペースが続くラン長[5T,
7T,9T]マークを記録する,マルチパルス列の最後のパルスのオフセット継続時間を
規定する(附属書F参照)。これらのビット(ビットb3〜b0)を適用する場合,基準
継続時間は,バイト56に規定している(5T以上のスペースが後に続く[5T,7T,9T]
マークのTLP)。
バイト85〜92及び93(msb 4ビット):ΔdTE:消去レベルのオフセット開始時間
これらのバイトは,2T,3T又は4Tスペースが後に続くラン長2T,3T,4T及び5T
以上のマークを記録する,拡張N/2記録ストラテジの消去レベルのオフセット開始
時間を規定する(正の値は進み,負の値は遅れを示す。附属書F参照)。
消去レベルのオフセット開始時間ΔdTEは,実際のチャネルビットクロック周期の分
数として,次に示す符号付き2の補数wで表される。
バイト85及び86では,次による。
W
E
Δ
32
T
dT
w
×
=
(−24≦w≦15)
バイト87〜92及び93(msb 4ビット)では,次による。
W
E
Δ
32
T
dT
w
×
=
(−8≦w≦7)
注記
マーク
前のスペース
続きのスペース
2S
3S
4S
≧5S
w
e
dTE
2M
3M
4,6,8M
5,7,9M
2S
≧3S
この表は,記録される各マークの前後のスペースによる,dTEの値の影響を示している。
“e”で示す領域は,基準値にあった部分で,“w”で示す部分は,オフセット値を含んでいる。

120
X 6233:2017 (ISO/IEC 30193:2016)
このパタンの領域は,“w”で示し,オフセット値を含んでいる。
このパタンの領域は,“e”で示し,基準値を含んでいる。
“u=w+e”の値は,−62≦u≦30)を満たしている(F.3参照)。
バイト85:
このバイトの最初の6ビット(ビットb7〜b2)は,2Tスペースが先行した後に2T
スペースが続く,ラン長2Tのマークを記録する消去レベルのオフセット開始時間
を規定する。このバイトを適用する場合,基準位置は,バイト57に規定している(2T
スペースが先行し5T以上のスペースが後に続く2TマークのdTE)。
このバイトの最後の2ビット(ビットb1〜b0)は,リザーブ(領域)とする。
バイト86:
このバイトの最初の6ビット(ビットb7〜b2)は,3T以上のスペースが先行した後
に2Tスペースが続く,ラン長2Tのマークを記録する消去レベルのオフセット開始
時間を規定する。このバイトを適用する場合,基準位置は,バイト58に規定してい
る(3T以上のスペースが先行し5T以上のスペースが後に続く2TマークのdTE)。
このバイトの最後の2ビット(ビットb1〜b0)は,リザーブ(領域)とする。
バイト87:
このバイトの最初の4ビット(ビットb7〜b4)は,後に2Tスペースが続くラン長
3Tマークを記録する,拡張N/2記録ストラテジのマルチパルス列の消去レベルのオ
フセット開始時間を規定する。これらのビット(ビットb7〜b4)を適用する場合,
基準位置は,バイト59に規定している(5T以上のスペースが後に続く3Tマークの
dTE)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に2Tスペースが続くラン長[4T,
6T,8T]マークを記録する,拡張N/2記録ストラテジのマルチパルス列の消去レベル
のオフセットを規定する。これらのビット(ビットb3〜b0)を適用する場合,基準
位置は,バイト60に規定している(5T以上のスペースが後に続く[4T,6T,8T]マ
ークのdTE)。
バイト88:
このバイトの最初の4ビット(ビットb7〜b4)は,後に2Tスペースが続くラン長[5T,
7T,9T]のマークを記録する,拡張N/2記録ストラテジのマルチパルス列の消去レベ
ルのオフセットを規定する。これらのビット(ビットb7〜b4)を適用する場合,基
準位置は,バイト61に規定している(2Tのスペースが後に続く[5T,7T,9T]マー
クのdTE)。
このバイトの最後の4ビット(ビットb3〜b0)は,2Tスペースが先行した後に3T
スペースが続く,ラン長2Tのマークを記録する消去レベルのオフセット開始時間
を規定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,バイ
ト57に規定している(2Tスペースが先行し5T以上のスペースが後に続く2Tマー
クのdTE)。
バイト89:
このバイトの最初の4ビット(ビットb7〜b4)は,3T以上のスペースが先行した後
に3Tスペースが続く,ラン長2Tのマークを記録する消去レベルのオフセット開始
時間を規定する。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,
バイト58に規定している(3T以上のスペースが先行し5T以上のスペースが後に続
く2T記録マークのdTE)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に3Tスペースが続くラン長
3Tマークを記録する,拡張N/2記録ストラテジのマルチパルス列の消去レベルのオ
w
e
121
X 6233:2017 (ISO/IEC 30193:2016)
フセット開始時間を規定する。このビット(ビットb3〜b0)を適用する場合,基準
位置は,バイト59に規定している(5T以上のスペースが後に続く3TマークのdTE)。
バイト90:
このバイトの最初の4ビット(ビットb7〜b4)は,後に3Tスペースが続くラン長[4T,
6T,8T]マークを記録する,拡張N/2記録ストラテジのマルチパルス列の消去レベル
のオフセットを規定する。これらのビット(ビットb7〜b4)を適用する場合,基準
位置は,バイト60に規定している(5T以上のスペースが後に続く[4T,6T,8T]マ
ークのdTE)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に3Tスペースが続くラン長[5T,
7T,9T]のマークを記録する,拡張N/2記録ストラテジのマルチパルス列の消去レベ
ルのオフセットを規定する。これらのビット(ビットb3〜b0)を適用する場合,基
準位置は,バイト61に規定している(5T以上のスペースが後に続く[5T,7T,9T]
マークのdTE)。
バイト91:
このバイトの最初の4ビット(ビットb7〜b4)は,2Tスペースが先行した後に4T
スペースが続く,ラン長2Tのマークを記録する消去レベルのオフセット開始時間
を規定する。これらのビット(ビットb7〜b4)を適用する場合,基準位置は,バイ
ト57に規定している(2Tスペースが先行し5T以上のスペースが後に続く2Tマー
クのdTE)。
このバイトの最後の4ビット(ビットb3〜b0)は,3T以上のスペースが先行した後
に4Tスペースが続く,ラン長2Tのマークを記録する消去レベルのオフセット開始
時間を規定する。これらのビット(ビットb3〜b0)を適用する場合,基準位置は,
バイト58に規定している(3T以上のスペースが先行し5T以上のスペースが後に続
く2TマークのdTE)。
バイト92:
このバイトの最初の4ビット(ビットb7〜b4)は,後に4Tスペースが続くラン長
3Tマークを記録する,拡張N/2記録ストラテジのマルチパルス列の消去レベルのオ
フセットを規定する。このビット(ビットb7〜b4)を適用する場合,基準位置は,
バイト59に規定している(5T以上のスペースが後に続く3TマークのdTE)。
このバイトの最後の4ビット(ビットb3〜b0)は,後に4Tスペースが続くラン長[4T,
6T,8T]マークを記録する,拡張N/2記録ストラテジのマルチパルス列の消去レベル
のオフセットを規定する。これらのビット(ビットb3〜b0)を適用する場合,基準
位置は,バイト60に規定している(5T以上のスペースが後に続く[4T,6T,8T]マ
ークのdTE)。
バイト93(msb 4ビット):このバイトの最初の4ビット(ビットb7〜b4)は,後に4Tスペースが続
くラン長[5T,7T,9T]のマークを記録する,拡張N/2記録ストラテジのマルチパル
ス列の消去レベルのオフセットを規定する。これらのビット(ビットb7〜b4)を適
用する場合,基準位置は,バイト61に規定している(5T以上のスペースが後に続
く[5T,7T,9T]マークのdTE)。
バイト93(lsb 4ビット):リザーブ(領域)
これらのビットは,0000とする。
バイト94〜99:
リザーブ(領域)
これらのバイトは,00hとする。
122
X 6233:2017 (ISO/IEC 30193:2016)
バイト100〜111: DIユニットフッタ
15.8.3.2参照。
15.8.3.5 記録ストラテジの要求事項
この規格によるディスクは,図79に示すとおり各記録層に対し少なくとも一つのDIユニットをもつ。
代替記録ストラテジのパラメタセットをもつ追加のDIユニットは,使いたい順番によって追加してもよ
い(図79参照)。
15.8.3.3によるDIユニット
(DI フォーマット4,
拡張N-1記録ストラテジ゙)
15.8.3.4によるDIユニット
(DI フォーマット5,
拡張N/2記録ストラテジ)
2x記録速度用
任意a)
任意a)
注a) 少なくともこの二つのストラテジのいずれかは備えている。
図79−記録ストラテジタイプの要求事項
15.8.3.6 DIユニットの使用方法
DIフォーマット番号(バイト2)で識別される,複数のDIユニットの概念を使うことによって,BDの
システムはバックワード互換を最善の方法で確保しながら,3又はそれ以上の記録層に対して異なる記録
速度でディスクを(将来に)容易に使うことができる。
一般的に,異なる記録速度でそれぞれ異なる記録ストラテジ(異なるパラメタセット)が必要になる可
能性があり,さらに,記録ストラテジは応用した技術に依存する可能性がある。
なお,各記録層は,記録パラメタの異なる値の組合せが必要になる可能性がある。
バイト3は,15.8.3.2の規定によって設定される。
バイト5は,15.8.3.2の規定によって使用される。
2x記録速度を規定する全てのDIユニットで,バイト28及び29は,公称記録速度が7.38 m/sを示す02 E2h
に設定する。
そのような設定の例を,図80に示す。
123
X 6233:2017 (ISO/IEC 30193:2016)
-
拡張N-1及びN/2 記録ストラテジを備える2x(TL)ディスク
バイト2: DI-フォーマット番号
4
バイト3: DI/L#の#
6/0
バイト4: ---
00h
バイト5: 連番#
0
バイト6のmsb:
0
バイト28 〜29: 速度
2x
バイト42 〜98:WS
拡張̲N-1
バイト2: DI-フォーマット番号
5
バイト3: DI/L#の
6/0
バイト4: ---
00h
バイト5: 連番#
1
バイト6のmsb:
0
バイト28 〜29: 速度
2x
バイト42 〜93:WS
拡張̲N/2
バイト2: DI-フォーマット番号
4
バイト3: DI/L#の#
6/1
バイト4: ---
00h
バイト5: 連番#
2
バイト6のmsb
0
バイト28 〜29: 速度
2x
バイト42 〜98:WS
拡張̲N-1
バイト2: DI-フォーマット番号
5
バイト3: DI/L#の#
6/1
バイト4: ---
00h
バイト5: 連番#
3
バイト6のmsb:
0
バイト28 〜29: 速度
2x
バイト42 〜93:WS
拡張̲N/2
バイト2: DI-フォーマット番号
4
バイト3: DI/L#の#
6/2
バイト4: ---
00h
バイト5: 連番#
4
バイト6のmsb:
0
バイト28 〜29: 速度
2x
バイト42 〜98:WS
拡張̲N-1
バイト2: DI-フォーマット番号
5
バイト3: DI/L#の#
6/2
バイト4: ---
00h
バイト5: 連番#
5
バイトのmsb:
0
バイト28 〜29: 速度
2x
バイト42 〜93:WS
拡張̲N/2
繰返し
図80−一連のDIの例
16 情報ゾーンの概要
16.1 一般
情報ゾーンは,データ交換に関する全てのディスク上の情報を含み,d9〜d10の情報領域の中に位置して
いる(10.8.1及び図11参照)。
内側ゾーン0の内周部(保護ゾーン1+PIC)は,ディスクに関する転写情報をもつことができるHFM
グルーブをもつ。内側ゾーン0の他の部分,他の内側ゾーン,データゾーン及び外側ゾーンは,ウォブル
124
X 6233:2017 (ISO/IEC 30193:2016)
グルーブ上に情報を相変化効果を用いて記録することができる書換領域を構成している。
16.2 情報ゾーンのフォーマット
情報ゾーンは,L0層のリードインゾーン(内側ゾーン0の一部),データゾーン0及び外側ゾーン0,
L1層の外側ゾーン1,データゾーン1及び内側ゾーン1,並びにL2層の内側ゾーン2,データゾーン2及
びリードアウトゾーンの九つの部分に分けられる(図81,図82及び図83参照)。
データゾーン0,データゾーン1及びデータゾーン2は,使用者データの記録に当てられる。リードイ
ンゾーンは,転写及び記録による制御情報並びにディスク及びドライブのテスト領域を含んでいる。内側
ゾーン1,内側ゾーン2,外側ゾーン0,外側ゾーン1及び外側ゾーン2は,個々の層への円滑な導入又は
終了を可能にするとともに,制御情報ももっている。
17 情報ゾーンの書換領域の構成
情報ゾーンの記録領域は,内側ゾーン,データゾーン及び外側ゾーンの部分から構成されている。図81,
図82及び図83に示す開始半径は,各ゾーンの最初又は最後のグルーブトラックの中心の公称値である。
図に示す物理ADIPアドレス(PAA)は,各ゾーンのグルーブトラックの開始又は終了アドレスである。
ゾーン当たりの記録できる物理クラスタ(RUB)数も示している。
125
X 6233:2017 (ISO/IEC 30193:2016)
L0層
記載事項
公称
開始半径
(mm)
ゾーンの最初の
PAA
:
物理
クラスタ数
第1遷移領域
終了半径11.5 mm
クランプゾーン
開始半径11.5 mm
終了半径16.5 mm
第2遷移領域
開始半径16.5 mm
終了半径21.0 mm
開始半径
21.0 mm
“幅広ピッチ”
グルーブ
BCA
22.2
---
---
エンボス
HFM
(HFM
グルーブ゙)
PIC
22.510
(最初のAUN =
00 0C 04 80h
:
最後のAUN =
00 0C 19 BEh)
2 720
(×4 KB)
リードイン
23.068
0 01 83 38h
:
0 01 87 E6h
300
ゾーン
(内側ゾーン0
の一部)
INFO 2
23.468
0 01 B8 00h
:
0 01 BB FEh
256
OPC 0
23.498
0 01 BC 00h
:
0 01 DB FEh
2 048
情報領域
23.736
0 01 DC 00h
:
0 01 FB FEh
2 048
書換え
INFO 1
23.971
0 01 FC 00h
:
0 01 FF FEh
256
(ウォブル
24.000
0 02 00 00h
グルーブ)
データ
ゾーン0
:
:
LAA
509 152
INFO 3/4
58.000
LAA + 2h
:
:
LAA + 4 98h
294
DCZ 0
58.014
LAA + 4 9Ah
:
LAA + 10 78h
760
情報ゾーン
トラッキング方向
外側ゾーン0
58.050
LAA + 10 7Ah
:
---
終了半径58.5 mm
リム領域
開始半径58.5 mm
ゾーンの最後の
PAA
保護ゾーン1
保護ゾーン2
保護ゾーン3
0 01 87 E8h
0 01 B7 FEh
3 078
バッファ
23.107
リザーブ
(領域)
:
図81−L0層の情報ゾーンの構成
126
X 6233:2017 (ISO/IEC 30193:2016)
L1層
記載事項
公称
終了半径
(mm)
ゾーンの最後の
PAA
:
物理
クラスタ数
終了半径
21.0 mm
“幅広ピッチ”
グルーブ
ウォブル
グルーブ
22.2
:
0 7E C5 B8h
---
バッファゾーン
22.510
0 7E C5 B6h
:
0 7E 85 98h
4 104
OPC 1
23.004
0 7E 85 96h
:
0 7E 65 98h
2 048
23.246
0 7E 65 96h
:
0 7E 48 00h
1 894
内側ゾーン1 INFO 2
23.468
0 7E 47 FEh
:
0 7E 44 00h
256
23.498
0 7E 43 FEh
:
4 096
情報領域
0 7E 04 00h
書換え
INFO 1
23.971
0 7E 03 FEh
:
0 7E 00 00h
256
(ウォブル
24.000
0 7D FF FEh
グルーブ)
データ
ゾーン1
:
:
FAA a)
509 152
INFO 3/4
58.000
FAA ‒2h
:
FAA ‒498h
294
DCZ 1
58.014
FAA ‒49Ah
:
FAA ‒1078h
760
トラッキング方向
情報ゾーン
外側
ゾーン1
58.050
FAA ‒107Ah
:
---
開始半径58.5 mm
ゾーンの最初の
PAA
保護ゾーン1
保護ゾーン3
リザーブ
(領域)
リザーブ
(領域)
注a)
01h
00
80
1
LAA
FAA
+
=
(15.7.4.3参照)
図82−L1層の情報ゾーンの構成
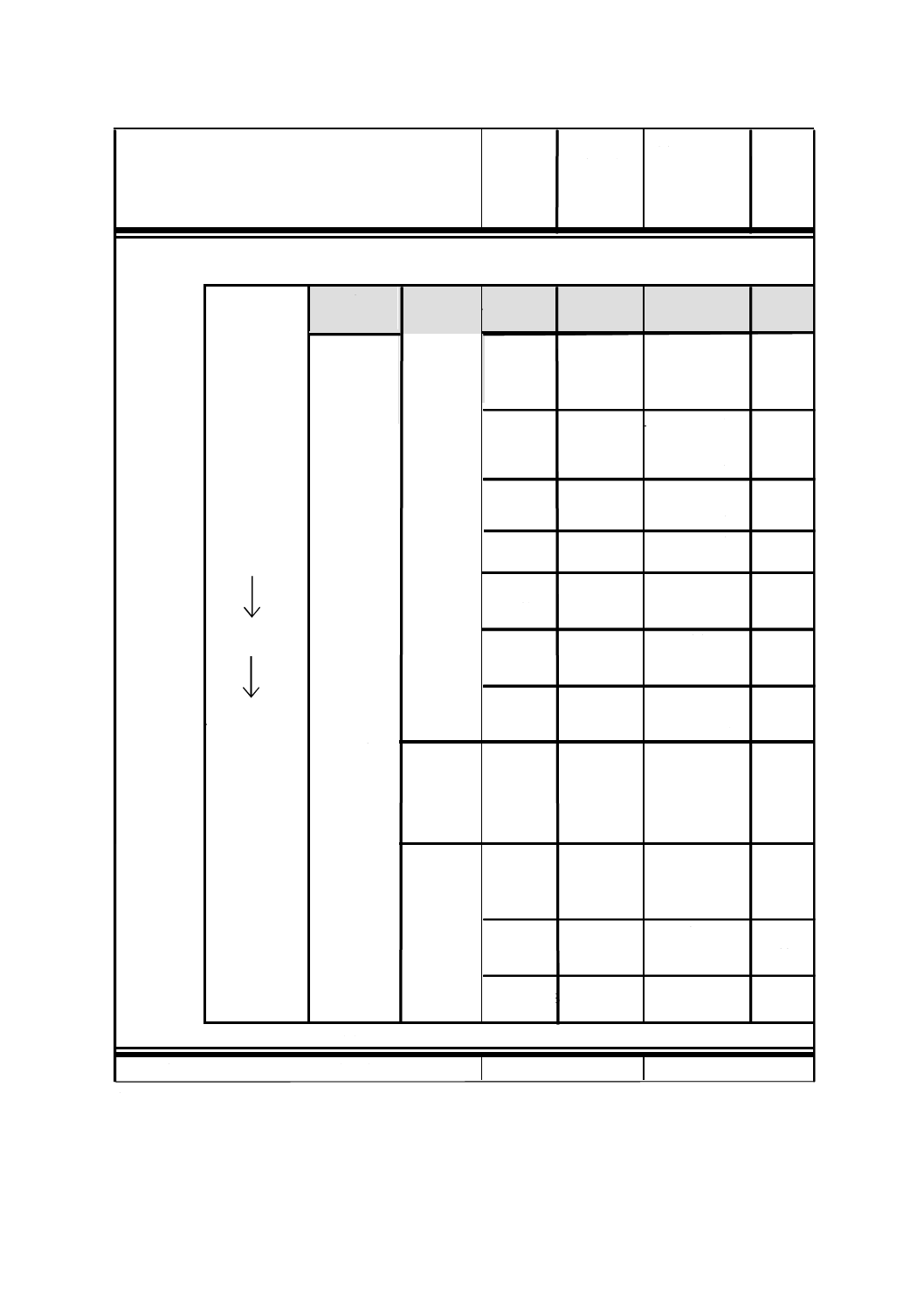
127
X 6233:2017 (ISO/IEC 30193:2016)
リザーブ
(領域)
リザーブ
(領域)
開始半径
21.0 mm
“幅広ピッチ”
グルーブ
22.2
---
---
バッファ
22.510
0813A48h
:
081 3D66h
200
22.535
0 81 3D 68h
:
0 81 5D 66h
2 048
内側ゾーン2
INFO2
22.973
0 81 76 68h
:
0 81 7A 66h
256
23.004
0 81 7A 68h
:
0 81 9A 66h
2048
情報領域
バッファ
23.246
0 81 9A 68h
:
0 81 FB FEh
6246
書換え
INFO1
23.971
0 81 FC 00h
:
0 81 FF FEh
256
( ウォブル
24.000
0 82 00 00h
グルーブ)
データ
ゾーン2
:
:
LAA 2a)
509152
INFO 3/4
58.000
LAA 2 + 2h
:
:
LAA2 + 498h
294
DCZ2
58.014
LAA2 + 49Ah
:
LAA2 + 1078h
760
情報ゾーン
トラッキング゙方向
リードアウト
ゾーン
(外側
ゾーン2)
58.050
LAA2 + 107Ah
:
---
終了半径58.5 mm
リム領域
開始半径58.5 mm
L2層
記載事項
公称
開始半径
(mm)
ゾーンの最初の
PAA
:
物理
クラスタ数
ゾーの最後の
PAA
保護ゾーン1
OPC 2
保護ゾーン3
0 81 5D 68h
0 81 76 66h
1 600
22.782
ウォブル
グルーブ
:
注a) LAA2=LAA+0 08 00 00h(15.7.4.3参照)
図83−L2層の情報ゾーンの構成
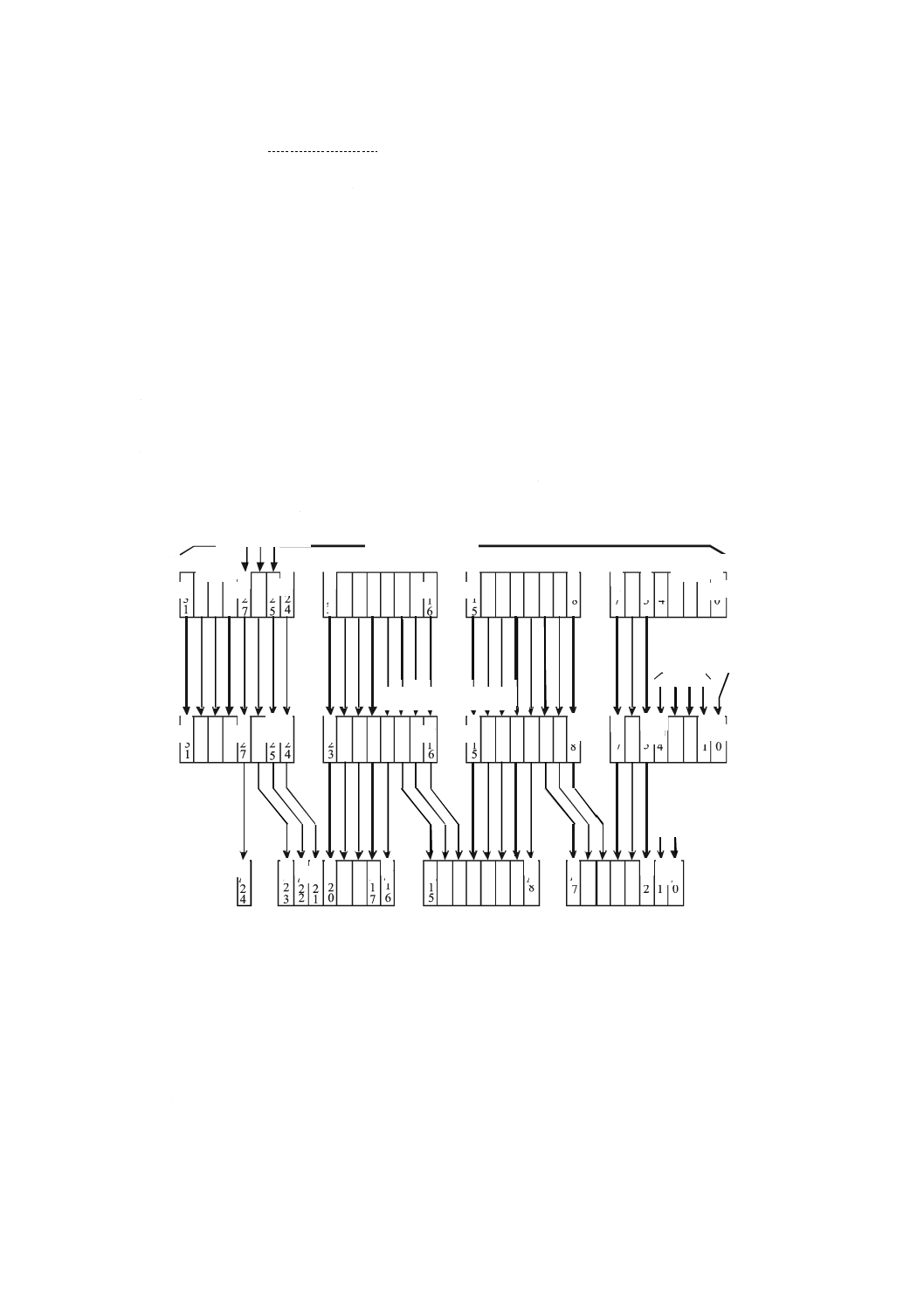
128
X 6233:2017 (ISO/IEC 30193:2016)
物理セクタの番号付けは,次による。
− 各クラスタは32物理セクタをもち,各物理セクタは2Kデータバイトをもつ。ディスクに記録したデ
ータには各物理セクタの番号は含まれないが,各物理セクタは,(仮の)物理セクタ番号(PSN)と関
連付けられる。
− PSNは,関連する記録層のトラッキング方向に続く物理セクタで一つずつ増加する。
− 各物理クラスタの最初の物理セクタのPSNは,32の倍数である。
− PSNのPS31〜PS28のビットは,リザーブ(領域)とする。
− PSNのPS27〜PS25のビットは,層番号を設定する。
− データゾーン0の最初のPSNは,00 10 00 00hである。
− データゾーン0の最後のPSNは,8×LAA+15で,01 08 9B FFhである。
− データゾーン1の最初のPSNは,8×FAAで,02 F7 64 00hである。
− データゾーン1の最後のPSNは,03 EF FF FFhである。
− データゾーン2の最初のPSNは,04 10 00 00hである。
− データゾーン2の最後のPSNは,8×LAA2+15で,05 08 9B FFhである。
MSB
”0”
LSB
AU31
PS31
PS27
PS25
AU8
PS8
AU0
PS0
AU1
AU23
PS23
AU24
PS24
AU25
AU27
AU15
PS15
AU7
PS7
AU5
PS5
AU4
PS4
AU16
PS16
Physical-Sector Number
in Cluster
count
AA23
AA21AA20
AA0
AA1
AA2
AA15
AA16
AA17
AA7
AA8
Address Unit Number
set to
00, 01, 10
consecutively
set to
layer number
AA24
AA22
MSB
”0”
LSB
AU31
PS31
PS27
PS25
AU8
PS8
AU0
AA2
AA15
AA16
AA17
AA7
AA8
Address Unit Number
set to
00, 01, 10
consecutively
set to
Layer number
AA24
AA22
MSB
”0”
LSB
AU31
PS31
PS27
PS25
AU8
PS8
AU0
PS0
AU1
AU23
P
23
AU24
PS24
AU25
AU27
AU
AA22
最上位バイト
“0”
最下位バイト
AU31
S31
PS27
PS25
AU8
PS8
AU0
PS0
AU1
AU23
PS23
AU24
PS24
AU25
AU27
AU15
PS15
AU7
PS7
AU5
PS5
AU4
PS4
AU16
PS16
PSN
物理ADIPアドレス
クラスタ内
カウント
AA23
AA21AA20
AA0
AA1
AA2
AA15
AA16
AA17
AA7
AA8
連続で
00, 01, 10に設定
層番号に設定
AA24
AA22
P
アドレスユニット番号
図84−PSNから派生する物理ADIPアドレス
これらのPSNは,ECCクラスタのBIS列に記録するアドレスユニット番号に変換される(13.9.2.3参照)。
図84に規定するとおりに,物理ADIPアドレスは,PSN及びAUNから派生する。このPAAによって,
データを記録しなければならないディスクの場所が識別される。
18 内側ゾーン
18.1 一般
L0層の情報ゾーンの最内ゾーンは,リードインゾーン(内側ゾーン0の一部)と呼ばれる。L1層及び
129
X 6233:2017 (ISO/IEC 30193:2016)
L2層では,内側ゾーン1及び内側ゾーン2と呼ばれる。
内側ゾーン0(リードインゾーンの部分)は,エンボスHFM領域及び書換領域を含んでいる。内側ゾー
ン1,及び内側ゾーン2(リードアウトゾーン部分)は,エンボスウォブル部分及び書換領域を含む(図
85,図86,及び図87参照)。
L0層のエンボスHFM領域で,全てのグルーブは,15.5及び他の細分箇条に規定するフォーマットでエ
ンコードする。
L0層でエンコードは,最初のクラスタのAUNを00 0B F8 E2hとし,半径
0.0
1.0
2.
22
−mmで開始する。
アドレスは,15.5.3.2に規定するとおりに連続で増加させ,PICゾーンの最外半径の最後の4Kクラスタ
で,AUN=00 0C 19 BEhで終了する。
内側ゾーン0の保護ゾーン1では,データフレームの内容は全て00hに設定するか,又はPICゾーンの
内容と同じにするかのいずれかにできる。
保護ゾーン1は,PICゾーンがBCAコードで上書きされないように保護のためにある。
不変情報・制御データ(PIC)ゾーンは,ディスクの一般情報及び種々の他の情報を,エンボスHFMグ
ルーブに保存できる。
記録領域及びウォブルグルーブ領域(L1層,L2層の保護ゾーン1)では,全てのグルーブを15.6の規
定によってウォブルする。
各内側ゾーンの書換領域は,OPC(最適パワー制御)を実行するため,及びディスク管理情報,制御情
報などの,ディスクに関する特有な情報を保存するために使用される。ドライブがその特有な情報を保存
するために使用可能なゾーンも確保されている。
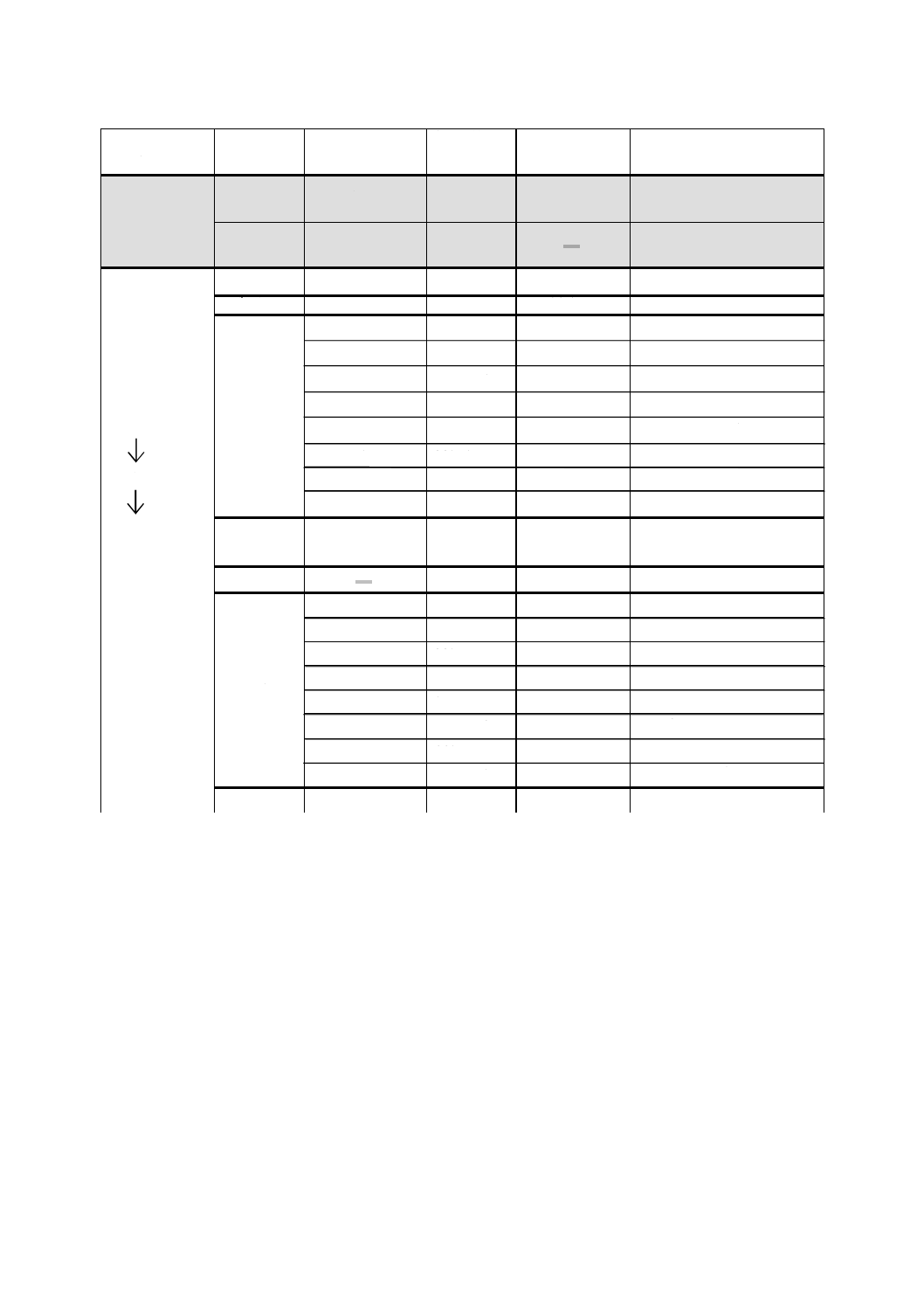
130
X 6233:2017 (ISO/IEC 30193:2016)
リードイン
ゾーン
記載事項
ゾーンの最初の
PAA
物理クラスタ数
目的
---
---
---
エンボス
HFM
PIC
---
---
不変情報・制御データゾーン
---
0 01 83 38h
300
---
リザーブ(領域)8
0 01 B8 00h
32
将来の拡張
リザーブ(領域)7
0 01 B8 80h
32
リザーブ(領域)6
0 01 B9 00h
32
リザーブ(領域)5
0 01 B9 80h
32
PAC 2
0 01 BA 00h
32
物理アクセス制御
DMA 2
0 01 BA 80h
32
ディスク管理
書換え
コントロールデータ2
0 01 BB 00h
32
データ情報
INFO 2
バッファ2
0 01 BB 80h
32
---
トラッキング方向
テストゾーン
0 01 BC 00h
2 048
OPCテスト
OPC 0
リザーブ(領域)
---
0 01 DC 00h
2048
バッファ1
0 01 FC 00h
32
ドライブ゙領域
0 01 FC 80h
32
ドライブ特有の情報
0 01 FD 00h
32
0 01 FD 80h
32
0 01 FE 00h
32
DMA 1
0 01 FE 80h
32
ディスク管理
コントロールデータ1
0 01 FF 00h
32
データ情報
INFO 1
PAC 1
0 01 FF 80h
32
物理アクセス制御
(データゾーン0)
0 02 00 00h
保護ゾーン1
保護ゾーン2
リザーブ(領域)3
リザーブ(領域)2
リザーブ(領域)1
将来の拡張
将来の拡張
将来の拡張
バッファ
---
0 01 87 E8h
3 078
---
将来の拡張
---
将来の拡張
将来の拡張
将来の拡張
図85−リードインゾーン
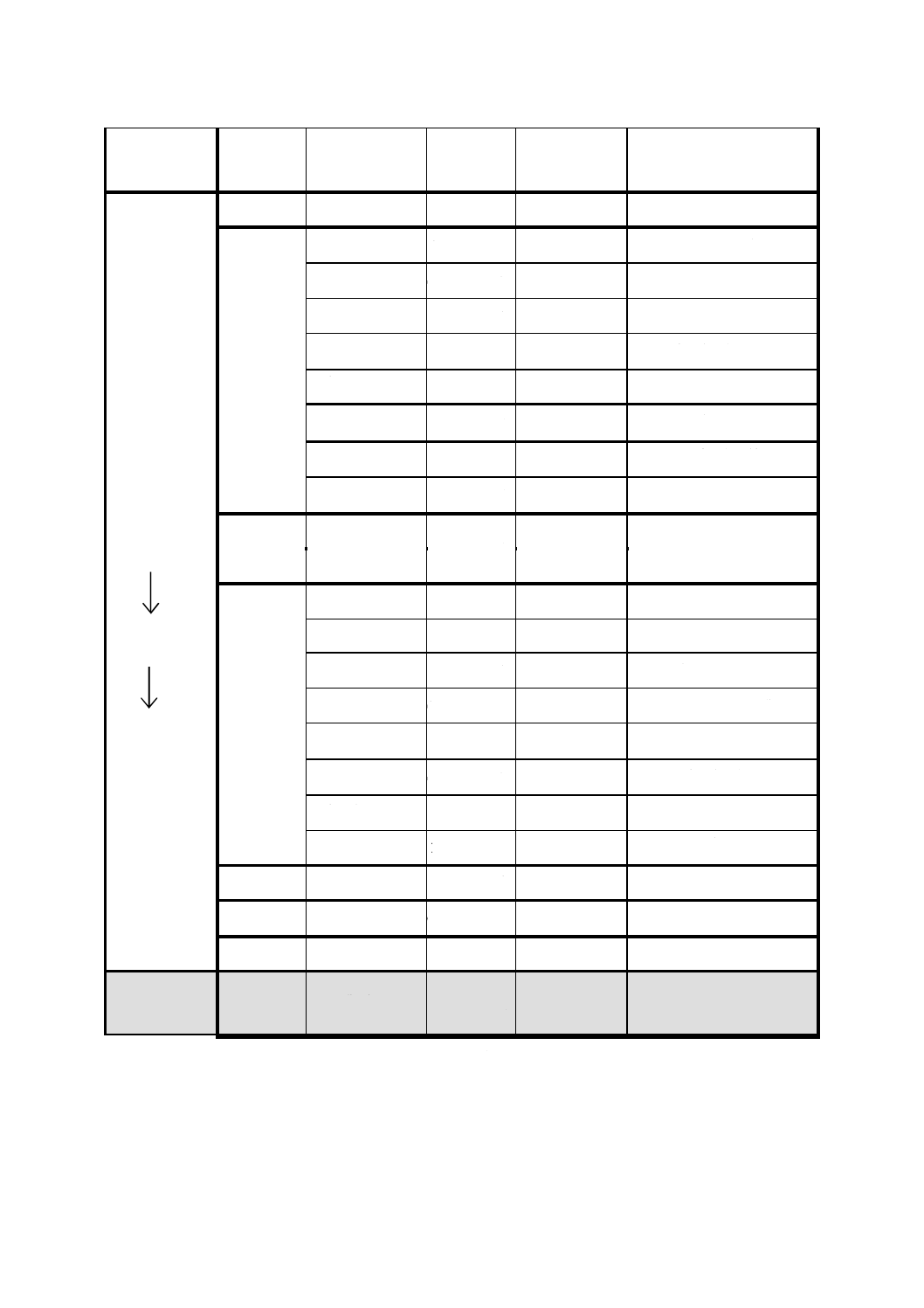
131
X 6233:2017 (ISO/IEC 30193:2016)
書換え
コントロールデータ20 7E 44 80h
32
データ情報
DMA 2
0 7E 45 00h
32
ディスク管理
PAC 2
0 7E 45 80h
32
物理アクセス制御
リザーブ(領域)50 7E 46 00h
32
将来の拡張
リザーブ(領域)60 7E 46 80h
32
リザーブ(領域)70 7E 47 00h
32
トラッキング方向
INFO2
リザーブ(領域)80 7E 47 80h
32
内側
ゾーン1
記載事項
ゾーンの最初
のPAA
物理クラスタ数
目的
(データゾーン1)
PAC1
0 7E 00 00h
32
物理アクセス制御
コントロールデータ10 7E 00 80h
32
データ情報
DMA 1
0 7E 01 00h
32
ディスク管理
リザーブ(領域)10 7E 01 80h
32
0 7E 02 00h
32
0 7E 02 80h
32
0 7E 03 00h
32
INFO1
バッファ1
0 7E 03 80h
32
リザーブ(領域)
---
0 7E 04 00h
4 096
将来の拡張
バッファ2
0 7E 44 00h
32
---
リザーブ(領域)
---
0 7E 48 00h
1894
OPC1
テストゾーン0 7E 65 98h
2048
OPC テスト
バッファ
---
0 7E 85 98h
4104
---
ウォブル
グルーブ
保護ゾーン1
---
---
リザーブ(領域)2
リザーブ(領域)3
ドライブ領域
将来の拡張
将来の拡張
将来の拡張
ドライブ特有の情報
将来の拡張
0 7E C5 B8h
将来の拡張
将来の拡張
将来の拡張
---
図86−内側ゾーン1
132
X 6233:2017 (ISO/IEC 30193:2016)
(データゾーン2)0 82 00 00h
内側
ゾーン2
記載事項
ゾーンの最初
のPAA
物理クラスタ数
目的
ウォブル
グルーブ
保護ゾーン1
---
---
---
バッファ
---
0 81 3A 48h
200
---
テストゾーン
0 81 3D 68h
2 048
OPC テスト
OPC 2
リザーブ(領域)
---
0 81 5D 68h
1 600
将来の拡張
リザーブ(領域)8
0 81 76 68h
32
リザーブ(領域)7
0 81 76 E8h
32
リザーブ(領域)6
0 81 77 68h
32
リザーブ(領域)5
0 81 77 E8h
32
リザーブ(領域)
0 81 78 68h
32
DMA 2
0 81 78 E8h
32
ディスク管理
書換
コントロールデータ2
0 81 79 68h
32
データ情報
INFO 2
バッファ2
0 81 79 E8h
32
---
トラッキング
方向
リザーブ(領域)
---
0 81 7A 68h
2 048
将来の拡張
バッファ
---
0 81 9A 68h
6 246
---
バッファ1
0 81 FC 00h
32
ドライブ領域
0 81 FC 80h
32
ドライブ特有の情報
0 81 FD 00h
32
0 81 FD 80h
32
0 81 FE 00h
32
DMA 1
0 81 FE 80h
32
ディスク管理
コントロールデータ1
0 81 FF 00h
32
データ情報
INFO 1
リザーブ(領域)
0 81 FF 80h
32
将来の拡張
将来の拡張
将来の拡張
将来の拡張
将来の拡張
将来の拡張
---
将来の拡張
将来の拡張
将来の拡張
リザーブ(領域)3
リザーブ(領域)2
リザーブ(領域)1
図87−内側ゾーン2
18.2 不変情報・制御データ(PIC)ゾーン
18.2.1 一般
不変情報・制御データ(PIC)ゾーンは,ディスク情報などの種々の目的のためのデータをもつエンボ
スHFM領域である。特にPICが供給されない場合は,全ての使用者データを(スクランブルする前の),
00hに設定する。
18.2.2 PICゾーンの内容
PICゾーンは,PIC情報フラグメントを5回繰り返して構成する。ここに,各PICフラグメントは,544
のPICクラスタから構成されている(全体では2 720で,図88参照)。PICクラスタは,15.5の規定に従
ってフォーマットする。
PIC情報フラグメントは,L0層の各AUN,00 0C 04 80h,00 0C 08 C0h,00 0C 0D 00h,00 0C 11 40h及
び00 0C 15 80hで開始する。
133
X 6233:2017 (ISO/IEC 30193:2016)
PIC情報フラグメント番号
PICクラスタ番号
L0層のAUN
0
00 0C 04 80h
1
00 0C 04 82h
IF0
2
00 0C 04 84h
:
:
543
00 0C 08 BEh
0
00 0C 08 C0h
IF1
:
:
543
00 0C 0CFEh
0
00 0C 0D 00h
IF2
:
:
543
00 0C 11 3Eh
0
00 0C 11 40h
IF3
:
:
543
00 0C 15 7Eh
0
00 0C 15 80h
IF4
:
:
543
00 0C 19 BEh
図88−PICゾーン
各情報フラグメントの最初のPICクラスタは,ADIP予備フレームにあるディスク情報ブロックの複製
をもつ(15.8.3及び図89参照)。ディスク情報予備フレームの最初の112バイトだけを含む(32パリティ
バイトは,除く。)。32 DIユニット以下の場合は,3 584バイトまでの残りのバイトは,00hに設定する。
各PIC情報フラグメントの最初のPICクラスタの最後の512バイトは,緊急制動(EB)データセットを
もつ(18.2.3及び図89参照)。
PIC クラスタ中の
バイト位置
内容
バイト数
0 〜111
DI ユニット0
112
112 〜223
DI ユニット1
112
:
:
112×28
3360 〜3471
DI ユニット30
112
3472 〜3583
リザーブ(領域)
112
3584 〜4095
EB データセット
512
図89−各情報フラグメントの最初のPICクラスタ
全ての他のPICクラスタは,アプリケーションに規定する場合を除いてリザーブ(領域)とする。
134
X 6233:2017 (ISO/IEC 30193:2016)
18.2.3 緊急制動
保護措置として,破壊的な誤動作を防ぐために,特別の取扱いを必要とするディスクを特定のモデルの
ドライブが認識するために使うことができるように,データセットを規定する。
このデータセットは,緊急制動(EB)データと呼ばれる。
EBデータは,各情報フラグメントの最初のPICクラスタの3 584バイト〜4 095バイトに規定する。EB
データは,EBヘッダ,EBデータフィールド及びEBフッタで構成される。EBデータフィールドは,例え
ば,ディスク又はドライブの破損を防ぐためというような,特定のドライブがディスクを扱うために,特
定の動作を要求するという合意がある場合に限り関係するディスク製造業者及びドライブ製造業者の相互
に導入する。最大で62個のEBデータフィールドを用意してもよい。緊急制動データは,図90に示すと
おり実装する。
バイト番号
機能
記載事項
バイト数
3584 〜3585
識別子
2
3586
バージョン
1
3587
リザーブ(領域)
1
3588
リスト長
1
3589 〜3591
EB
ヘッダ
リザーブ(領域)
3
3592 〜3593
ドライブ゙製造業者ID
-
2
3594 〜3595
ドライブモデル
2
3596 〜3597
ファームウェアバージョン
2
3598 〜3599
EB
データフィールド
1
ドライブアクション
2
:
:
:
:
:
:
:
:
(3584+i×8) 〜(3584+i ×8) + 1
2
(3584+i ×8) + 2 〜(3584+i ×8) + 3
2
(3584+i ×8) + 4 〜(3584+i ×8) + 5
2
(3584+i ×8) + 6 〜(3584+i ×8) + 7
EB
i
(1 ≦i≦N)
2
:
:
:
:
:
:
:
:
(3584+N×8) 〜(3584+N×8) + 1
2
(3584+N×8) + 2 〜(3584+N×8) + 3
2
(3584+N×8) + 4 〜(3584+N×8) + 5
2
(3584+N×8) + 6 〜(3584+N×8) + 7
EB
N
(N≦62)
2
[3584+(N+1)×8]
〜[3584+(N+1)×8] + 7
EB フッタ
終端子
8
[3584+(N+2) ×8] 〜4095
未使用
リザーブ(領域)
512 ‒(N+2) ×8
データフィールド
データフィールド
ドライブ゙製造業者ID
ドライブ゙製造業者ID
ドライブモデル
ドライブモデル
ファームウェアバージョン
ファームウェアバージョン
ドライブアクション
ドライブアクション
図90−緊急制動データの規定
バイト3 584〜3 585:EB識別子
これらのバイトは,“EB”の文字を表す,45 42hに設定する。
バイト3 586:EBバージョン
135
X 6233:2017 (ISO/IEC 30193:2016)
このバイトは,EBフォーマットのバージョン1を表す,01hに設定する。
バイト3 587:リザーブ(領域)
このバイトは,00hに設定する。
バイト3 588:長さNのEBリスト
このバイトは,EBデータフィールドの数を設定する。
EBデータフィールドがない場合は,このバイトは,00hに設定する。
バイト3 589〜3 591:リザーブ(領域)
これらのバイトは,00 00 00hに設定する。
バイト(3 584+i×8)〜(3 584+i×8)+1 (1≦i≦N):ドライブ製造業者ID
これらの2バイトのフォーマット及び内容は,データ交換する受渡当事者間で合意が必要で,合意
がなければこれらのバイトは,00hに設定する。
バイト(3 584+i×8)+2〜(3 584+i×8)+3 (1≦i≦N):ドライブモデル番号
これらの2バイトは,ドライブのモデル番号を表し,ドライブ製造業者が規定する。この規格は,
これらのバイトの規定をしていない。互換性を確保するためには無視する。
バイト(3 584+i×8)+4〜(3 584+i×8)+5 (1≦i≦N):ドライブファームウェアバージョン
これらの2バイトは,ドライブのファームウェアバージョンを表し,ドライブ製造業者が規定する。
この規格は,これらのバイトの規定をしていない。互換性を確保するためには無視する。
バイト(3 584+i×8)+6〜(3 584+i×8)+7 (1≦i≦N):ドライブ製造業者動作
これらの2バイトは,ドライブモデルが,ディスクを扱うために行う動作を表す。ドライブの製造
業者が規定する。この規格は,これらのバイトの規定をしていない。互換性を確保するためには無視
する。
バイト[3 584+(N+1)×8]〜[3 584+(N+1)×8]+7 (0≦N≦62):EB終端子
これらのバイトは,EBデータの最後を示すために,FF FF FF FF FF FF FF FFhに設定する。
バイト[3 584+(N+2)×8]〜4 095 (0≦N≦62):リザーブ(領域)
これらのバイトは,リザーブ(領域)とする。
18.3 内側ゾーンの書換領域
18.3.1 保護ゾーン2
このゾーンは300物理クラスタから構成され,L0層のPAA 0 01 83 38hから始まり,エンボスHFM領域
から記録領域への移行のバッファゾーンとしている(15.4.4参照)。
18.3.2 バッファ
このゾーンは,L0層ではPAA 0 01 87 E8hで始まる3 078物理クラスタをもち,L1層ではPAA0 7E 85 98h
で始まる4 104物理クラスタをもち,L2層ではPAA 0 81 3A 48hで始まる200物理クラスタ及びPAA0 81 9A
68hで始まる6 246物理クラスタをもち,未記録のままとする。
18.3.3 INFO 2のリザーブ(領域)8
このゾーンは32物理クラスタから構成され,L0層のPAA 01 B8 00h,L1層のPAA 0 7E 47 80h,及びL2
層のPAA0 81 76 68hから始まり,アプリケーションに依存している。
BCA符号付きのディスクでは,アプリケーションに規定する場合を除いて,このゾーンは未記録のまま
とする。
BCA符号なしのディスクでは,出荷前にこのゾーンは,全て00hを記録する。
136
X 6233:2017 (ISO/IEC 30193:2016)
18.3.4 INFO 2のリザーブ(領域)7
このゾーンは32物理クラスタから構成され,L0層のPAA 0 01 B9 80h,L1層のPAA 0 7E 47 00h及びL2
層のPAA 0 81 76 E8hから始まり未記録のままとする。
18.3.5 INFO 2のリザーブ(領域)6
このゾーンは32物理クラスタから構成され,L0層のPAA 01 B9 00h,L1層のPAA 0 7E 46 80h及びL2
層のPAA0 81 77 68hから始まり未記録のままとする。
18.3.6 INFO 2のリザーブ(領域)5
このゾーンは32物理クラスタから構成され,L0層のPAA0 01 B9 80h,L1層のPAA0 7E 46 00h及びL2
層のPAA081 77 E8hから始まりアプリケーションに依存している。
BCA符号付きのディスクでは,アプリケーションに規定する場合を除いて,このゾーンは未記録のまま
にする。
BCA符号なしのディスクでは,出荷前にこのゾーンは,全て00hを記録する。
18.3.7 INFO 2のPAC 2
このゾーンは32物理クラスタから構成され,L0層のPAA 0 01 BA 00h及びL1層のPAA0 7E 45 80hから
始まり,物理アクセス制御(PAC)クラスタを保存するために使用される(21.2参照)。このゾーンの未使
用のクラスタは未記録のままとする。
18.3.8 INFO 2のリザーブ(領域)
このゾーンは32物理クラスタから構成され,L2層のPAA 0 81 78 68hから始まり未記録のままとする。
18.3.9 INFO 2のDMA 2
このゾーンは32物理クラスタから構成され,L0層のPAA 0 01 BA 80h,L1層のPAA0 7E 45 00h及びL2
層のPAA0 81 79 68hから始まり,ディスク管理システムが用いる(22.2参照)。このゾーンの未使用のク
ラスタは,全て00hとするか又は未記録のままとする。
18.3.10
INFO 2のコントロールデータ2
このゾーンは32物理クラスタから構成され,L0層のPAA 0 01 BB 00h,L1層のPAA0 7E 44 80h及びL1
層のPAA0 81 79 68hから始まり制御情報が保存される。このゾーンの未使用のクラスタは,全て00hとす
る。
18.3.11
INFO 2のバッファ2
このゾーンは32物理クラスタから構成され,L0層のPAA 0 01 BB 80h,L1層のPAA0 7E 44 00h及びL2
層のPAA0 81 79 E8hから始まり未記録のままとする。
18.3.12
OPC 0のテストゾーン
テストゾーンは2 048物理クラスタから構成され,L0層のPAA 0 01 BC 00h,L1層のPAA 0 7E 65 98h及
びL2層のPAA0 81 3D 68hから始まりテスト及び/又はOPCのために予約されている。
この領域を用いた後,用いたトラックは,最適な消去パワーだけで照射して,消去するか,又はそのク
ラスタを最適記録パワーを用いて任意の使用者データで上書きする。
18.3.13
リザーブ(領域)
このゾーンは,L0層ではPAA 01 DC 00hから始まる2 048クラスタ,L1層ではPAA0 7E 04 00hから始
まる4 096物理クラスタ及びPAA0 7E 48 00hから始まる1 894物理クラスタ並びにL2層ではPAA 0 81 5D
68hから始まる1 600物理クラスタ及びPAA0 81 7A 68hから始まる2 048物理クラスタから構成され,未
記録のままとする。
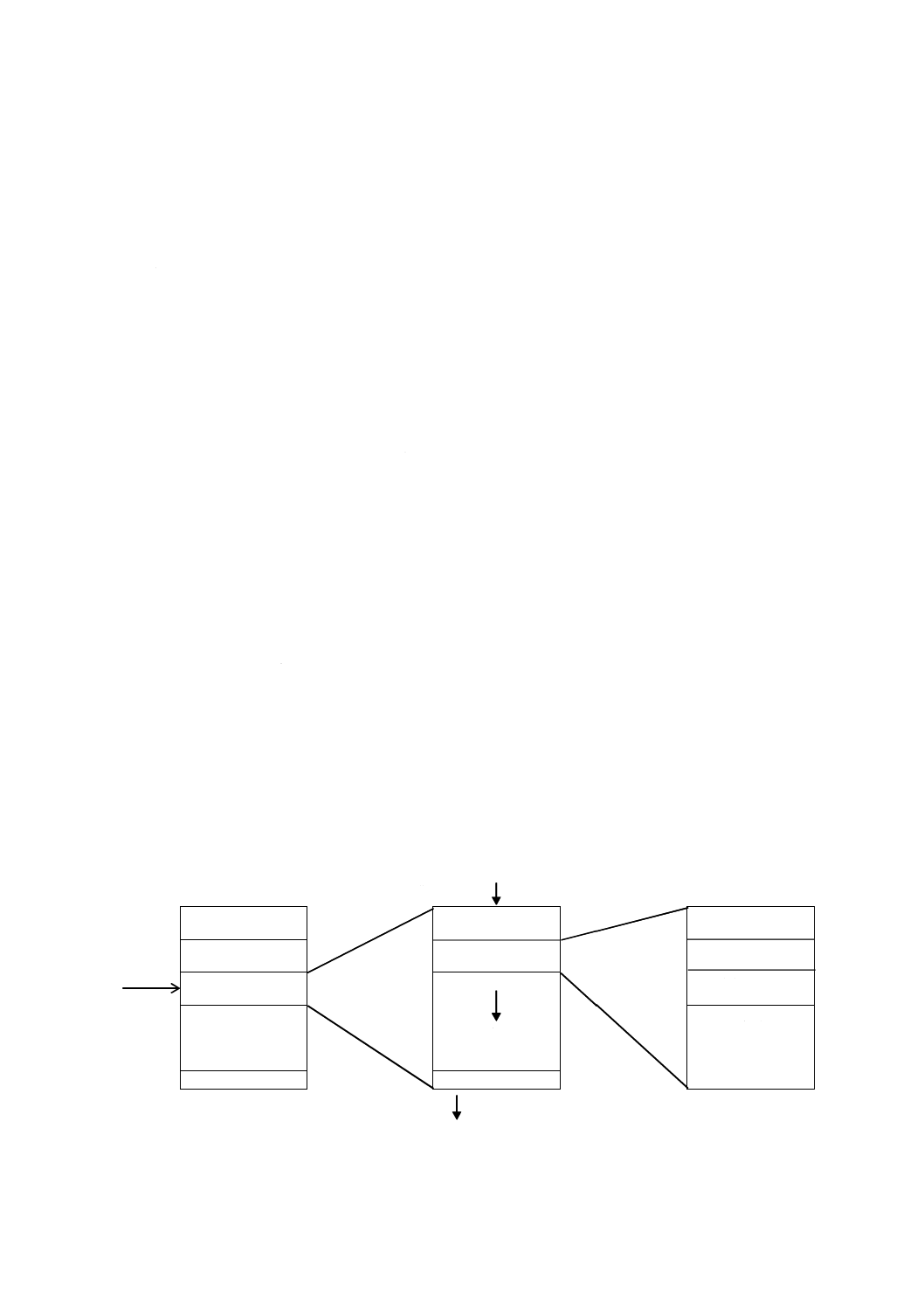
137
X 6233:2017 (ISO/IEC 30193:2016)
18.3.14
INFO1のバッファ1
このゾーンは32物理クラスタから構成され,L0層のPAA 0 01 FC 00h,L1層のPAA0 7E 03 80h及びL2
層のPAA0 81 FC 00hから始まり,未記録のままとする。
18.3.15
INFO 1のドライブ領域(任意)
18.3.15.1
一般
このゾーンは32物理クラスタから構成され,L0層のPAA 01 FC 80h,L1層のPAA0 7E 03 00h及びL2
層のPAA0 81 FC 80hから始まり,その使用は,任意である。このゾーンは,ドライブがドライブ特有の情
報を保存するために使用でき,その情報を作ったドライブに限定して使用される。ドライブがその情報を
位置決めできるように,次のフォーマットを用いる。このゾーンのクラスタは,互換性を確保するために
は無視する。
18.3.15.2
ドライブ特有の情報のフォーマット
各ドライブ特有の情報は,一つの2Kデータフレーム中に収める。データフレームの最初の128バイト
に,次に示すフォーマットによって当該のデータフレームを作ったドライブの署名を収納する。
− JIS X 0201の文字セットによる文字で表す,製造業者名用の48バイト
− JIS X 0201の文字セットによる文字で表す,追加の識別用の48バイト
− ドライブ特有の連続番号用の32バイト
残りのデータフレームの1 920バイトは規定されず,各ドライブの設計者が自由に選べる。
この任意の領域を用いる最新の32ドライブのドライブ特有の情報を,新しく記録する物理クラスタに保
存する。新しいドライブがこのドライブ特有の情報を新しい物理クラスタに書き始めるごとに,最後に記
録された物理クラスタのデータフレーム31に位置する最も古いドライブ特有の情報は削除され,最後に記
録された物理クラスタのデータフレーム0〜30の内容は,新しい物理クラスタのデータフレーム1〜31に
複製され,新しい情報はデータフレーム0に記録される(図91参照)。
耐性向上のため,ドライブ特有情報を含む物理クラスタは,ディスクに2回記録される。
ドライブ特有の情報を記録するために,PAA 0 01 FC 80h及びPAA0 01 FC 84hから始まる二つの物理ク
ラスタを初めに用いる。両方の物理クラスタの信頼性がなくなった場合,ドライブ領域の次の二つの物理
クラスタがドライブ特有情報を保存するために使用できる。高速で効率的なドライブ領域のアクセスのた
めに,DMA領域のDDSにドライブ領域の最初の有効な物理クラスタのアドレスポインタを含む。
ドライブ領域
“シフトイン”
物理クラスタ
データフレーム
損傷
ドライブ
i
製造業者名
損傷
ドライブ
i-1
1つの2K
セクタ
追加 ID
有効ドライブ情報
32×2K
セクタ
特有連続番号
複製ドライブ情報
予備
:
:
各アップデートで
シフト
ドライブ
i-31
ドライブ特有
の情報を
自由な
フォーマットで
“シフトアウト”
アドレス
ポインタ
(DDS中)
図91−ドライブ領域のフォーマット(例)
138
X 6233:2017 (ISO/IEC 30193:2016)
18.3.16
INFO 1のリザーブ(領域)3
このゾーンは32物理クラスタから構成され,L0層のPAA0 01 FD 00h,L1層のPAA0 7E 02 80h及びL2
層のPAA0 81 FD 00hから始まり,未記録のままとする。
18.3.17
INFO 1のリザーブ(領域)2
このゾーンは32物理クラスタから構成され,L0層のPAA0 01 FD 80h,L1層のPAA0 7E 02 00h及びL2
層のPAA0 81 FD 80hから始まり,未記録のままとする。
18.3.18
INFO 1のリザーブ(領域)1
このゾーンは32物理クラスタから構成され,L0層のPAA0 01 FE 00h,層のPAA0 7E 01 80h及びL2層
のPAA0 81 FE 00hから始まり,未記録のままとする。
18.3.19
INFO 1のDMA 1
このゾーンは32物理クラスタから構成され,L0層のPAA0 01 FE 80h,L1層のPAA0 7E 01 00h及びL2
層のPAA0 81 FE 80hから始まり,ディスク管理システムに用いられる(22.2参照)。このゾーンの未使用
のクラスタは,全て00hとするか又は未記録のままとする。
18.3.20
INFO 1のコントロールデータ1
このゾーンは32物理クラスタから構成され,L0層のPAA0 01 FF 00h,L1層のPAA0 7E 00 80h及びL2
層のPAA0 81 FF 00hから始まり,制御情報を保存するために用いられる。未使用のクラスタは,全て00h
とする。
18.3.21
INFO 1のPAC 1
このゾーンは32物理クラスタから構成され,L0層のPAA0 01 FF 80h及びL1層のPAA0 7E 00 00hから
始まり,物理アクセス制御(PAC)クラスタを保存するために用いられる(21.2参照)。このゾーンの未使
用のクラスタは,00hとするか又は未記録のままとする。
18.3.22
INFO 1のリザーブ(領域)
このゾーンは32物理クラスタから構成され,L2層のPAA 0 81 FF 80hから始まり,未記録のままとする。
19 データゾーン
データゾーンは,総計1 527 456クラスタの使用者データを収納できる。
20 外側ゾーン
20.1 一般
外側ゾーン0及び外側ゾーン1は,L0層のデータゾーンからL1層のデータゾーンへの遷移領域として
機能している。外側ゾーン2は,リードアウトゾーンとしての機能をもっている(図92及び図93参照)。
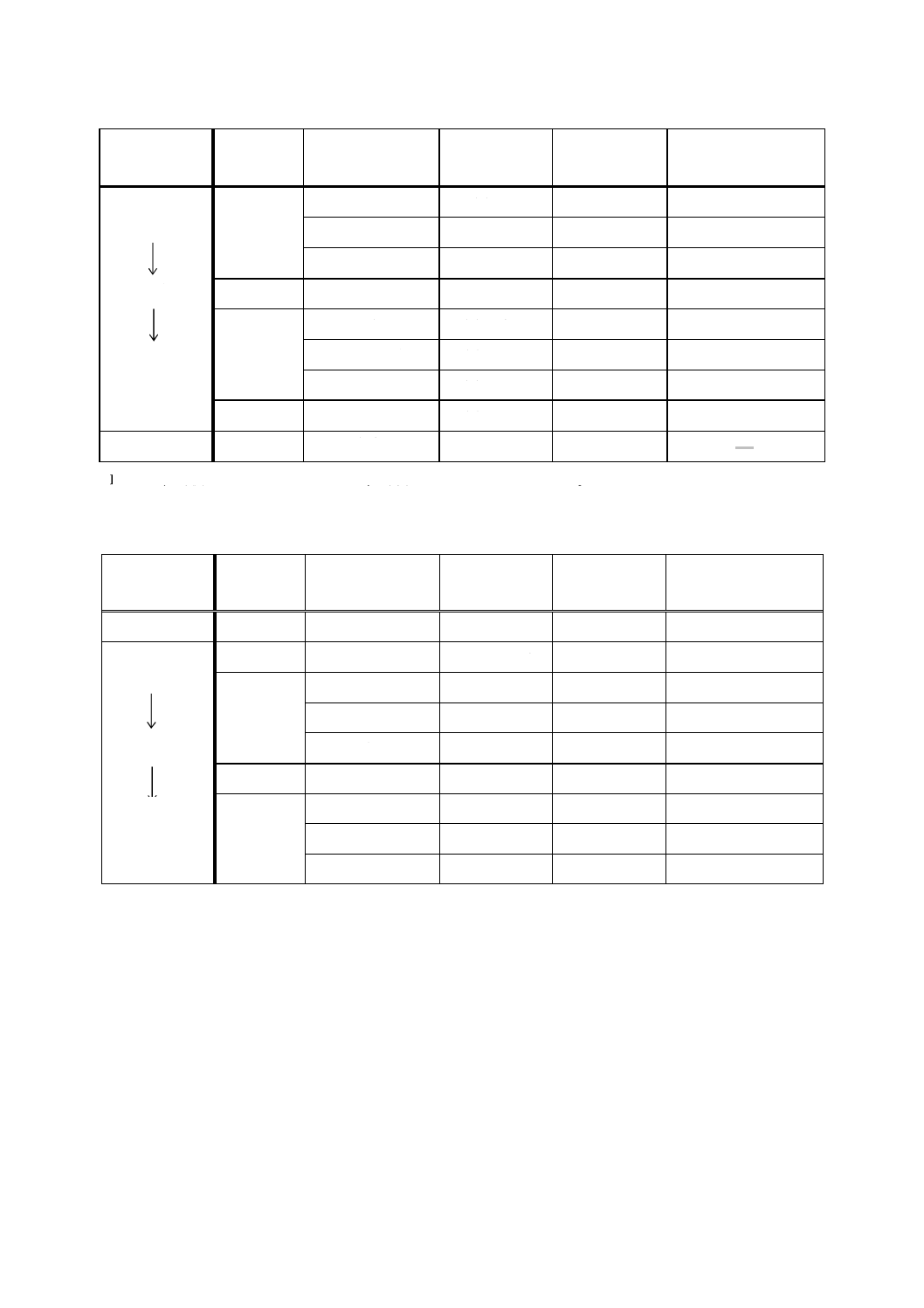
139
X 6233:2017 (ISO/IEC 30193:2016)
外側
ゾーン0 / 2
記載事項
ゾーンの最初の
PAA
物理クラスタ数
目的
バッファ3
LAAn+ 2h
32
---
INFO 3
DMA 3
LAAn+ 82h
32
ディスク管理
コントロールデータ3
LAAn+ 1 02h
32
データ情報
---
回転バッファ
LAAn+ 1 82h
102
---
DMA 4
LAAn+ 3 1Ah
32
INFO 4
コントロールデータ4
LAAn+ 3 9Ah
32
バッファ4
LAAn+ 4 1Ah
32
---
書換
トラッキング方向
DCZ 0/2
テストゾーン
LAAn+ 4 9Ah
760
ドライブ校正
---
保護ゾーン3
LAAn+10 7Ah
---
---
ディスク管理
データ情報
LAAnは,外側ゾーン0ではLAAであり,外側ゾーン2ではLAA2である。
図92−外側ゾーン0又は2(リードアウトゾーン)
外側
ゾーン1
記載事項
ゾーンの最初の
PAA
物理クラスタ「数
目的
---
保護ゾーン3
---
---
DCZ1
テストゾーン
FAA−10 78h
760
ドライブ゙校正
バッファ4
FAA−4 98h
32
---
コントロールデータ4
FAA−4 18h
32
データ情報
INFO 4
DMA 4
FAA−3 96h
32
ディスク管理
---
回転バッファ
FAA−3 18h
102
---
コントロールデータ3
FAA−1 80h
32
DMA 3
FAA−1 00h
32
書換
トラッキング方向
INFO 3
バッファ3
FAA−
80h
32
---
データ情報
ディスク管理
---
図93−外側ゾーン1
20.2 INFO 3のバッファ3
このゾーンは32物理クラスタから構成され,未記録のままとする。
20.3 INFO 3のDMA 3
このゾーンは32物理クラスタから構成され,ディスク管理システムに用いられる(22.2参照)。このゾ
ーンの未使用クラスタは,全て00hとするか又は未記録のままとする。
20.4 INFO 3のコントロールデータ3
このゾーンは32物理クラスタから構成され,制御情報を保存するために用いられる。未使用のクラスタ
は,全て00hとする。
140
X 6233:2017 (ISO/IEC 30193:2016)
20.5 回転バッファ
このゾーンは102物理クラスタから構成され,未記録のままとする。
20.6 INFO 4のDMA 4
このゾーンは32物理クラスタから構成され,ディスク管理システムに用いられる(22.2参照)。このゾ
ーンの未使用クラスタは,全て00hとするか又は未記録のままとする。
20.7 INFO 4のコントロールデータ4
このゾーンは32物理クラスタから構成され,制御情報を保存するために用いられる。このゾーンの未使
用のクラスタは,全て00hとする。
20.8 INFO 4のバッファ4
このゾーンは32物理クラスタから構成され,未記録のままとする。
20.9 DCZ 0のテストゾーン,DCZ 1のテストゾーン及びDCZ 2のテストゾーン
これらのテストゾーンは760物理クラスタから構成され,ドライブ校正のために予約されている。
20.10 保護ゾーン3
このゾーンは,未記録のグルーブをもっている。
このゾーンのグルーブの全てのADIPユニットは,MSK-cosだけで変調し,HMWでは変調しない(15.6.2
参照)。
21 物理アクセス制御クラスタ
21.1 一般
物理アクセス制御(PAC)クラスタは,情報交換をする関係者間の追加情報を交換するためにディスク
上に構造を用意している。PACクラスタはINFO 1のPAC 1ゾーンに記録する,そしてバックアップ複製
はINFO 2のPAC 2ゾーンに記録する。全てのPACクラスタは,PACヘッダを構成する最初の384バイト
のデータに関しては同一のフォーマットとする。
将来,特別な応用又は機能について新しいPACを規定できる。
新しいPACを導入する日付以前に設計されたドライブは,一般に,その新PACを解釈できないため,
そのようなPACをいわゆる“未知PAC”として取り扱う。PACのヘッダに規定される,標準の“未知PAC
ルール”に従うことによって,互換問題及び特別な応用のデータが不本意に破壊されることを可能な限り
避けることができる。
新PACの導入日以降に設計されたドライブは,新PACに関連した特定の応用又は機能が解釈できると
仮定できる。そのようなドライブは,“未知PACルール”を無視することができ,PACの“PAC特別情報”
フィールドに規定する規則を応用できる。そのような“既知PAC”に対し“PAC特別情報”フィールドに
規定する場合を除き物理的なアクセス制限はない。
注記 互換性を確保するために,次の状態となっている。
− ゾーン配置の観点から,PAC 1及びPAC 2はL0層及びL1層だけに配置され,L2層の該当
ゾーンは予備となっている。
− PACの内容の観点から,この予備のゾーンには,追加の未知PACルールはなく,この予備
のゾーンはPAC制御の対象外である。
21.2 PACゾーンの構成
L0層及びL1層のINFO 1のPAC 1ゾーンは一つの64クラスタの領域を構成し,PACの保存に使え,L0
層及びL1層のINFO 2のPAC 2ゾーンはもう一つの64クラスタの領域を構成し,PACの保存に使える。
141
X 6233:2017 (ISO/IEC 30193:2016)
各PACクラスタは,常に各PACクラスタの二つの複製が記録されるように,INFO 1のPAC 1及びINFO
2のPAC 2の両方のゾーンに記録する。PACは,最初にINFO 1のPAC 1ゾーンを更新し,次に,INFO 2
のPAC 2ゾーンに複製する。これによって,起こり得るパワーダウンによる失敗への対処が容易になる。
INFO 2のPAC 2に記録するPACクラスタのPAC更新カウントは,INFO 1のPAC 1に記録したPACクラ
スタのPAC更新カウントと同じにする。
PACクラスタが記録中に欠陥と分かった場合は,欠陥クラスタをスキップし,DDS(図94参照)に無
効であることを示す。そのようなPACは,次の使えるクラスタに記録することが望ましい。
INFO 1のPAC 1ゾーン及びINFO 2のPAC 2ゾーン両方の全ての位置の状態は,次に示す2ビットのパ
タンでDDSに示す(22.2.2参照)。
b(n+1),bn
PAC位置の内容
00
未記録
(層がない場合も使用)
01
再使用に使用できる。a)
10
無効なPACを含む。a)
11
有効なPACを含む。
注a) DDSで示される状態01又は10のPACクラスタは,重ね書きは許容されるが,ドライブの外に転送
することが許されない(未知のPACルールのビットb0及びビットb1の設定とは独立に設定する。)。
図94−PACの場所の状態
21.3 PACクラスタの一般構成
PACクラスタの使用者データは,図95に従ってフォーマットする。最初の384バイトは,PACヘッダ
を構成している。
142
X 6233:2017 (ISO/IEC 30193:2016)
データフレーム
データフレーム中
のバイト位置
内容
バイト数
0
0〜2
PAC̲ID
3
0
3
PAC フォーマット
1
0
4〜7
PAC更新カウント
4
0
8〜11
未知PACルール
4
0
12
未知PAC ディスク全体フラグ
1
0
13〜14
リザーブ(領域)
2
0
15
セグメント数
1
0
16〜23
セグメント̲0
8
0
24〜31
セグメント̲1
8
0
32〜263
:
29 ×8
0
264〜271
セグメント̲31
8
0
272〜383
リザーブ(領域)
112
0
384
既知PACディスク全体フラグ
1
0
385〜387
リザーブ(領域)
3
0
388〜2 047
PAC特別情報
1660
1
0〜2 047
2048
:
:
:
:
30
0〜2 047
2048
31
0〜2 047
リザーブ(領域)
2048
PAC特別情報
PAC特別情報
図95−PACクラスタの一般構成
PAC̲IDは,PACクラスタの特別なタイプを識別する。
− 00 00 00h設定の場合は,PACクラスタは未使用である。
− その後に続く,INFO1のPAC 1ゾーン又はINFO2のPAC 2ゾーンの全てのPACクラスタのPAC̲ID
は,00 00 00hに設定するか又はその後に続くPACクラスタの場所は未記録とする。
− 50 52 4Dh設定の場合は,PACクラスタは,21.4に規定する主PACである。
− 44 57 50h設定の場合は,PACクラスタは,21.5に規定するDWP PACである。
− 49 53 31h設定の場合は,PACクラスタは,21.6に規定するIS1 PACである。
− 49 53 32h設定の場合は,PACクラスタは,21.6に規定するIS2 PACである。
− FF FF FFh設定の場合は,PACクラスタは未使用である。
PACは,以前に使用され現在は再利用できる状態である。
他のPAC̲IDの値は,将来のこの規格で設定できる。
INFO 1のPAC 1ゾーン又はINFO 2のPAC 2ゾーンに追加される新しい各PACは,これらのゾーンで使
える最初のクラスタ(DDSで状態00又は01で示される。図94参照)に記録する。
PACフォーマットフィールドは,特定のPACのバージョン番号を示す。
PAC更新カウントは,現在のPACが更新された回数の総数を規定する。このフィールドは,最初のフ
ォーマット動作の間だけ,00 00 00 00hに設定し,そして,現在のPACを書き換えるごとに一つ増やす。
未知PACルールは,PACの内容及び使用法が分からない(例えば,PAC̲IDが既知の値に設定されてい
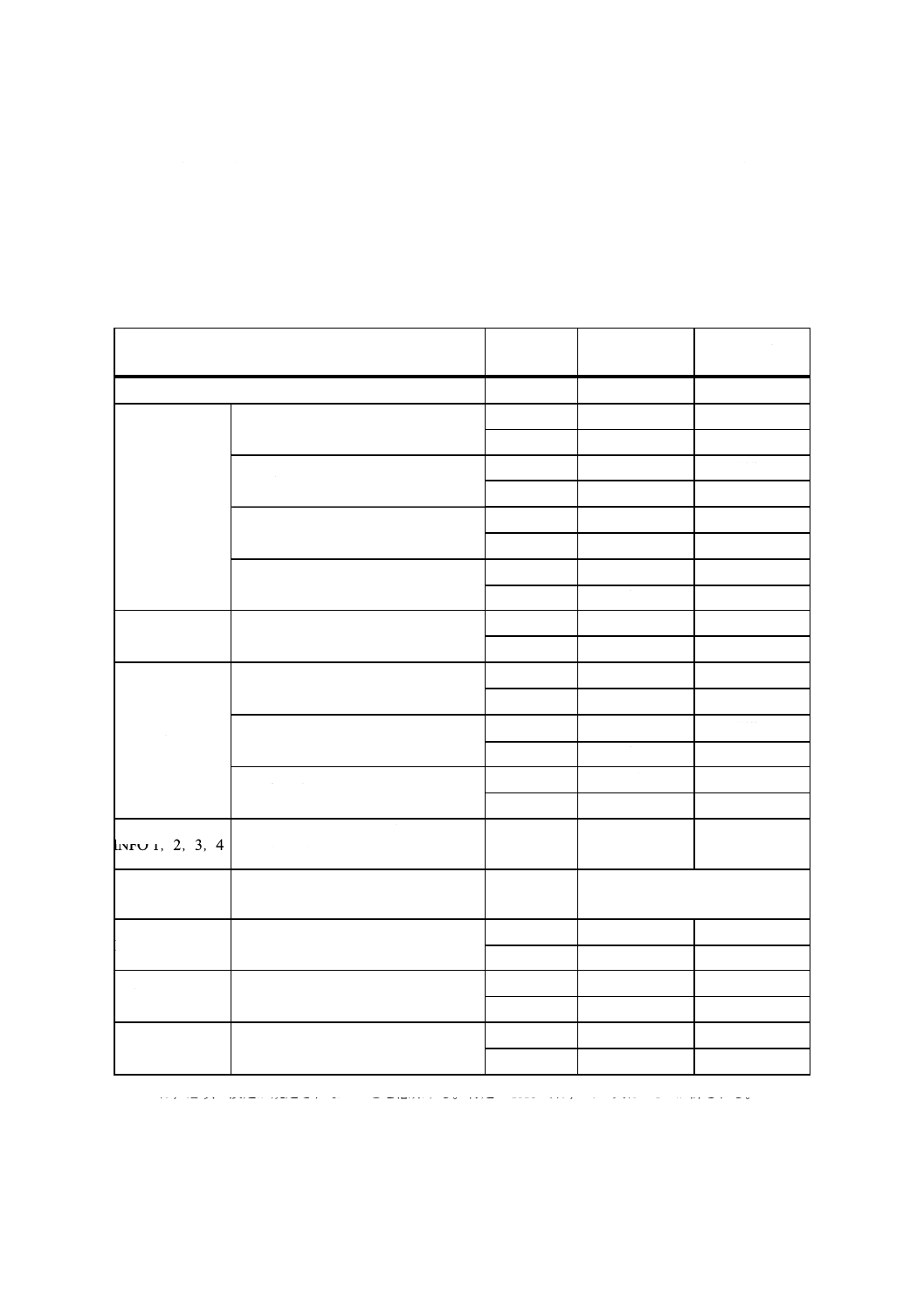
143
X 6233:2017 (ISO/IEC 30193:2016)
ないなど。)場合の,要求する動作を規定する。これらのバイトは,32の個別ビットから構成されるフィ
ールドを構成する(ビットb31は,バイト8のmsbとし,ビットb0はバイト11のlsbとする。)。関係する
領域(図96参照)の中のいずれのクラスタに対しても(PACが未知の場合),次に規定する動作をする。
使用者データ領域の規定した動作は,セグメントが規定されている場合は規定したセグメント内だけで行
い,セグメントが規定されていない場合は使用者データ領域全体のいずれのクラスタに対しても行う。
ドライブがディスク上の複数の既知のPACを見つけた場合は,未知PACルールのOR(論理和)をとっ
た動作をする(すなわち,PACの一つがある動作を排除した場合は,他のPACの同じ規則は,意味がない。)。
領域
ビット
制タイプ
必須設定
リザーブ(領域)8
リザーブ(領域)7
リザーブ(領域)6
リザーブ(領域)5
ドライブ領域
コントロールデータゾーン
使用者データ領域/セグメント
PAC クラスタ
b31〜b24
00000000
b23
記録
-
b22
読取り
-
b21
記録
“1”
b20
読取り
-
b19
記録
“1”
b18
読取り
-
b17
記録
-
INFO 2
b16
読取り
-
b15
記録
“0”
INFO 1
b14
読取り
“0”
b13
記録
“1”
b12
読取り
-
b11
記録
“1”
b10
読取り
-
b9
記録
“1”
INFO 1
b8
読取り
-
INFO 1,2,3,4DMA ゾーン(DDSを含まない。
22.2参照。)
b7
記録
-
b6
アプリケーションに規定する
場合を除きリザーブ(領域)
b5
記録
-
INFO 1,2,3,4
b4
読取り
-
b3
記録
-
データゾーン
b2
読取り
-
b1
記録
-
INFO 1&2
b0
読取り
-
リザーブ(領域)1
リザーブ(領域)3
リザーブ(領域)2
リザーブ(領域)
“-”は,必須の設定が規定されないことを意味する。特定のPACでは,“0”又は“1”が許される。
図96−未知PACルールの一般的なビット設定
PACクラスタ以外の全てのゾーン又は領域で,ビットは,次の意味をもっている。
制御タイプ
144
X 6233:2017 (ISO/IEC 30193:2016)
− 制御タイプ=記録
− 設定が“0”の場合は,関連するゾーン又は領域の記録を許すことを示している。
− 設定が“1”の場合は,関連するゾーン又は領域の記録を許さないことを示している。
− 制御タイプ=読取り
− 設定が“0”の場合は,関連するゾーン又は領域の読取りを許すことを示している。
− 設定が“1”の場合は,関連するゾーン又は領域の読取りを許さないことを示している。
(“読取りを許さない”とは,関連する領域のクラスタのデータ内容のドライブの外への転送又は使
用者への開示を許さないことを意味している。)
PACクラスタでは,ビットは,次の意味をもっている。
− 制御タイプ=記録
− 設定が“0”の場合は,現在のPACクラスタの書換又はDDSの状態ビットの変更を許すことを示し
ている。
− 設定が“1”の場合は,現在のPACクラスタの書換及びDDSの状態ビットの変更を許さないことを
示している。
− 制御タイプ=読取り
− 設定が“0”の場合は,現在のクラスタの内容を読み取り,ドライブの外への転送を許すことを示し
ている。
− 設定が“1”の場合は,最初のデータフレームの最初の384バイト以外は現在のPACクラスタのド
ライブの外への転送を許さないで,クラスタの内容を転送する前にPACヘッダ以外の全てのバイト
を00hに設定するように強制されることを示している。
未知PACのディスク全体フラグバイトは,ディスク全体をカバーする未知PACルールを規定している。
− ビットb7〜b1:これらのビットは,リザーブ(領域)とする。
− ビットb0:再初期化
− 設定が“0”の場合は,ディスク全体に対する他の記録保護の仕組みによって阻止される場合を除き,
再初期化を許す。
− 設定が“1”の場合は,PACがドライブにとって未知である場合は再初期化は許さない。
セグメント数は,現在のPACで規定しているセグメントの総数N(0≦N≦32)を規定する。
さらに,ディスクの全てのPACで規定するセグメントの総数は,32を超えない。
∑PAC
32
PAC
全ての
≦
のセグメント数
i
セグメント̲iフィールドは,セグメントと呼ばれるクラスタが連続した領域の,開始及び終了アドレス
を規定する。セグメントは,セグメント̲0からセグメント̲(N−1) (N≦32)までに割り当てる。
一つのPAC中に規定するセグメントは,重なることなく,アドレスの昇順に保存する。セグメントは,
クラスタ境界だけで開始及び終了する。iがN以上の場合に,全てのセグメント̲iフィールドは,00hに設
定する。
− セグメント̲iフィールドの最初の4バイトは,使う場合には,セグメントに所属する最初のクラスタ
の最初のPSNを入れる。
145
X 6233:2017 (ISO/IEC 30193:2016)
− そして,最後の4バイトは,セグメントに属する最後のクラスタの最後のPSNを入れる。
これらのセグメントは,未知PACルールだけに適用する。異なるPAC間でセグメントが重なる場合に
は,ドライブは,重なった領域で関連した未知PACルールに対してORを適用する。
既知PACのディスク全体フラグバイトは,ドライブがPACを解釈できる場合のディスク全体の規則を
規定する。
− ビットb7〜b1:これらのビットは,リザーブ(領域)とする。
− ビットb0:再初期化
− 設定が“0”の場合は,ディスク全体にする他の記録保護の仕組みによって阻止される場合を除き,
再初期化を許す。
− 設定が“1”の場合は,再初期化は許さない。
PAC特別情報のフィールドは,現在のPACに特有の情報をもっている。
21.4 主PACクラスタ(必須)
主PACクラスタは,ディスクが最初に記録された日付及びディスクの個々のクラスタを記録した各レコ
ーダを示すための情報を供給するために,各ディスクに含む。主PACの構成は,図97に示すとおりフォ
ーマットする。
146
X 6233:2017 (ISO/IEC 30193:2016)
データフレーム
データフレーム中の
バイト位置
内容
バイト数
PAC フォーマット
PACカウント更新
未知PAC ルール
未知のPACのディスク全体フラグ
リザーブ(領域)
セグメント数
セグメント̲0
セグメント̲1
セグメント̲31
リザーブ(領域)
既知のPAC全体ディスクフラグ
リザーブ(領域)
0
0~ 2
PAC̲ID
3
0
3
1
0
4~ 7
4
0
8~ 11
4
0
12
1
0
13~ 14
2
0
15
1
0
16~ 23
8
0
24~ 31
8
0
32~ 263
:
29×8
0
264~ 271
8
0
272~ 383
112
0
384
1
0
385~ 387
3
0
388~ 389
2
0
390~ 393
4
0
394
-
1
0
395~ 511
117
0
512~ 639
128
0
640~ 767
128
0
768~ 895
128
:
:
:
:
0
1 920~ 2 047
:
128
1
0~ 127
128
:
:
:
:
15
1920~ 2 047
128
16
0~ 2 047
2048
:
:
:
:
31
0~ 2 047
2048
レコーダID入力欄数
再初期化RIDタグ#
初期記録の年/月/日
リザーブ(領域)
RIDタグ01hのレコーダID
RIDタグ02hのレコーダID
RIDタグ03hのレコーダID
RIDタグxxhのレコーダID
RIDタグFChのレコーダID
リザーブ(領域)
リザーブ(領域)
図97−主PACクラスタの構成
PAC̲IDは,文字“PRM”を表す,50 52 4Dhに設定する。
PACフォーマットフィールドは,この主PACバージョンが0であることを示す00hに設定する。
PAC更新カウントは,現在のPACが更新された回数の総数を規定する。このフィールドは,最初のフ
ォーマット動作の間だけ,00 00 00 00hに設定する,そして,現在のPACを書き換えるごとに一つ増やす。
未知PACルールは,図98に示すとおり設定する。
147
X 6233:2017 (ISO/IEC 30193:2016)
領域
ビット
制御タイプ
必須設定
b31〜b24 リザーブ(領域)0000 0000
b23
記録
“0”
リザーブ(領域)8
b22
読取り
“0”
b21
記録
“1”
リザーブ(領域)7
b20
読取り
“0”
b19
記録
“1”
リザーブ(領域)6
b18
読取り
“0”
b17
記録
“0”
INFO 2
リザーブ(領域)5
b16
読取り
“0”
b15
記録
“0”
INFO 1
ドライブ領域
b14
読取り
“0”
b13
記録
“1”
リザーブ(領域)3
b12
読取り
“0”
b11
記録
“1”
リザーブ(領域)2
b10
読取り
“0”
b9
記録
“1”
INFO 1
リザーブ(領域)1
b8
読取り
“0”
INFO 1,2,3,4
DMA ゾーン(DDS含まず
22.2参照)
b7
記録
“0”
b6
アプリケーションに規定する
場合を除きリザーブ(領域)
b5
記録
“0”
INFO 1,2,3,4
コントロールデータゾーン
b4
読取り
“0”
b3
記録
“0”
データゾーン 使用者データ領域のセグメント
b2
読取り
“0”
b1
記録
“0”
INFO 1&2
PAC クラスタ
b0
読取り
“0”
図98−主PACの未知PACルールのビット設定
未知PACのディスク全体フラグバイトは,このPACがドライブにとって未知であり,初期化を阻止す
る他の仕組みがない場合は,ディスクの再初期化を許すことを示す00hに設定する。
セグメント数は,00hに設定する。
セグメント̲iフィールドは,00hに設定する。
既知PACのディスク全体フラグバイトは,このPACをドライブが解釈でき初期化を阻止する他の仕組
みがない場合は,ディスクの再初期化を許すことを示す00hに設定する。
レコーダID入力欄数フィールドは,データフレーム0のバイト512〜2 047及びデータフレーム1〜15
のバイト0〜2 047に収納される,128バイトのレコーダIDの数(252以下)を規定する。使える場所の最
大の数は,252である(RID̲TAG xxhのレコーダIDの規定も参照)。
初期記録の年/月/日フィールドは,ディスクに一番最初の記録がされた年(BCD4桁),月(BCD2桁)
及び日(BCD2桁)を規定する。ドライブが,このフィールドを正しく設定できない場合は,00hに設定
148
X 6233:2017 (ISO/IEC 30193:2016)
する。
再初期化RIDタグ#は,最後にディスクをフォーマット(又は再フォーマット)したレコーダのレコー
ダIDタグ番号を規定する。
RID̲Tag xxhのレコーダIDフィールドは,ディスクに記録をした全てのレコーダの128バイトのドラ
イブ署名(最大252まで)を入れる。そのような,ドライブ署名は,次のフォーマットによって記入する
(18.3.15.1参照)。
− JIS X 0201文字セットによって表す,製造業者名用の48バイト
− JIS X 0201文字セットによって表す,追加の識別用の48バイト
− ドライブ特有の連続番号用の,32バイト
レコーダは,ディスクに最初に記録する場合にリストにレコーダIDを追加する。複製の入力欄はなく
新しい入力は,リストの最後に追加する。各入力の相対位置が各特定のレコーダに割り当てるRID̲Tag(図
97参照)の値を決めるため,このリストの並び順の変更又は他の方法による変更はしない。全ての使うこ
とができるレコーダIDフィールドを使った後に,PACにレコーダIDを登録できないレコーダは,RID̲Tag
の値としてFFhを使う。
特定のレコーダに割り当てたRID̲Tagの値は,クラスタがそのレコーダに記録されたことを示すために,
13.9.2.3の規定に従ってアドレスユニットに記録する。
21.5 ディスク記録保護PACクラスタ(任意)
ディスク記録保護(DWP)PACクラスタは任意で,ディスクを意図しない記録動作又は権限のない人に
よる記録動作から保護するために使用できる。後者の用途には,パスワードを入れることができる。ディ
スクに有効なDWP PACクラスタがある場合,そのPACを理解する製品は,WP制御ビットで指示される
規則に従い,理解できない場合は未知PACルールに従う。DWP PACクラスタの構成は,図99に示すとお
りフォーマットする。
149
X 6233:2017 (ISO/IEC 30193:2016)
データフレーム
データフレーム
中のバイト位置
内容
バイト数
0
0~ 2
PAC̲ID
3
0
3
PAC フォーマット
1
0
4~ 7
PAC-更新カウント
4
0
8~ 11
未知-PACルール
4
0
12
未知PAC 全体ディスクフラグ゙
1
0
13~ 14
リザーブ(領域)
2
0
15
セグメント数
1
0
16~ 23
セグメント̲0
8
0
24~ 31
セグメント̲1
8
0
32~ 263
:
29 ×8
0
264~ 271
セグメント̲31
8
0
272~ 383
リザーブ(領域)
112
0
384
既知PAC 全体ディスクフラグ
1
0
385~ 387
リザーブ(領域)
3
0
388
WP制御バイト
1
0
389~ 395
リザーブ(領域)
7
0
396~ 427
WPパスワード゙
32
0
428~ 2 047
リザーブ(領域)
1620
1
0~ 2 047
リザーブ(領域)
2048
:
:
:
:
31
0~ 2 047
リザーブ(領域)
2048
図99−DWP PACクラスタの構成
PAC̲IDは,文字“DWP”を表す,44 57 50hに設定する。
PACフォーマットフィールドは,DWP PACバージョン0を表す,00hに設定する。
PAC更新カウントは,現在のPACが更新された回数の総数を規定する。このフィールドは,最初のフ
ォーマット動作の間だけ00 00 00 00hに設定し,そして,現在のPACを書き換えるごとに一つ増やす。
未知PACルールは,図100に示すとおり設定する。
150
X 6233:2017 (ISO/IEC 30193:2016)
領域
ビット
制御タイプ
必須設定
b31〜b24
リザーブ(領域)
0000 0000
b23
記録
“0”
リザーブ(領域)8
b22
読取り
“0”
b21
記録
“1”
リザーブ(領域)7
b20
読取り
“0”
b19
記録
“1”
リザーブ(領域)6
b18
読取り
“0”
b17
記録
“0”
INFO 2
リザーブ(領域)5
b16
読取り
“0”
b15
記録
“0”
INFO 1
ドライブ領域
b14
読取り
“0”
b13
記録
“1”
リザーブ(領域)3
b12
読取り
“0”
b11
記録
“1”
リザーブ(領域)2
b10
読取り
“0”
b9
記録
“1”
INFO 1
リザーブ(領域)1
b8
読取り
“0”
INFO 1,2,3,4DMA ゾーン(DDS含まず
22.2参照)
b7
記録
“0”又は“1”
b6
アプリケーションに規定する場合
を除きリザーブ(領域)
b5
記録
“0”又は“1”
INFO 1,2,3,4コントロールデータゾーン
b4
読取り
“0”
b3
記録
“0”又は“1”
データゾーン
使用者データ領域のセグメント
b2
読取り
“0”
b1
記録
“1”
INFO 1&2
PAC クラスタ
b0
読取り
“1”
図100−DWP PACの未知PACルールのビット設定
WP制御バイトのビットb0が“0”に設定(WPオフ)の場合,ビットb7,b6,b5及びb3は“0”に設定
し,WP制御バイトのビットb0が“1”に設定(WPオン)の場合,ビットb7,b6,b5及びb3は“1”に設
定する。
未知PACのディスク全体フラグバイトは,このPACがドライブにとって未知の場合は,ディスクの再
初期化を許さないことを示す01hに設定する。
セグメント数は,00hに設定する。
セグメント̲iフィールドは,00hに設定する。
既知PACのディスク全体フラグバイトは,このPACをドライブが解釈でき,初期化を阻止する他の仕
組みがない場合は,ディスクの再初期化を許すことを示す00hに設定する。
WP制御バイトは,許容される動作及び要求される動作を,規定する(図101参照)。
− ビットb7〜b3:これらの5ビットは予備とする。
− ビットb2:このビットは,パスワードあり又はなしWP(PWP)を示す。
− “0”設定の場合は,パスワードの検査不要。
151
X 6233:2017 (ISO/IEC 30193:2016)
− “1”設定の場合は,記録保護がスイッチオンであることを示すために,ビットb0が“1”に設定さ
れている場合はホストコンピュータから供給されたパスワードが,ディスクにあるパスワードと一
致する場合だけホストコンピュータ起因の記録を許容する。
− ビットb1:このビットは,記録保護の方法を示す。
− “0”設定の場合は,このビットは,仮想WPを示す。図101規定の要求動作を実施後,ディスクの
記録保護の設定を変更することなくホストコンピュータ起因の記録動作を行う。
− “1”設定の場合は,このビットは,物理WPを示す。図101規定の要求動作を実施後記録保護がス
イッチオフとなったことを示すために,ビットb0を“0”に設定後にホストコンピュータ起因の記
録動作だけを行う。
− ビットb0:このビットは,WPオン又はオフを示す。
− “0”設定の場合は,記録保護がスイッチオフ(WPオフ)となっていることを示し,ホストコンピ
ュータ起因の記録動作は何ら制限なく許容される。
− “1”設定の場合は,記録保護がスイッチオン(WPオン)であることを示し,全てのホストコンピ
ュータ起因の記録動作はドライブによって阻止することを意味し,ホストコンピュータ起因の記録
動作は図101規定の要求動作を実施後だけ許可される。
記録保護がスイッチオンの場合は,ディスクの再初期化は許さない。
WP制御バイトは,図101規定の要求動作実施後だけ変更する。
WPパスワードは,JIS X 0201文字セットの32文字までで構成できる。未使用の後に続くバイトは,00h
に設定する。WPパスワードは,ドライブの外に決して出してはならない。
WPパスワードフィールドの全てのバイトが00h設定の場合は,WPパスワード機能は動作しておらず
WP制御バイトのビットb2は,“0”に設定する。
WPパスワードフィールドのバイトが全てFFh設定の場合は,ディスクは永久に記録保護となり,以降
のホストコンピュータ起因の記録動作は許さない。WP制御バイトのビットb2,b1及びb0は,111に設定
する。
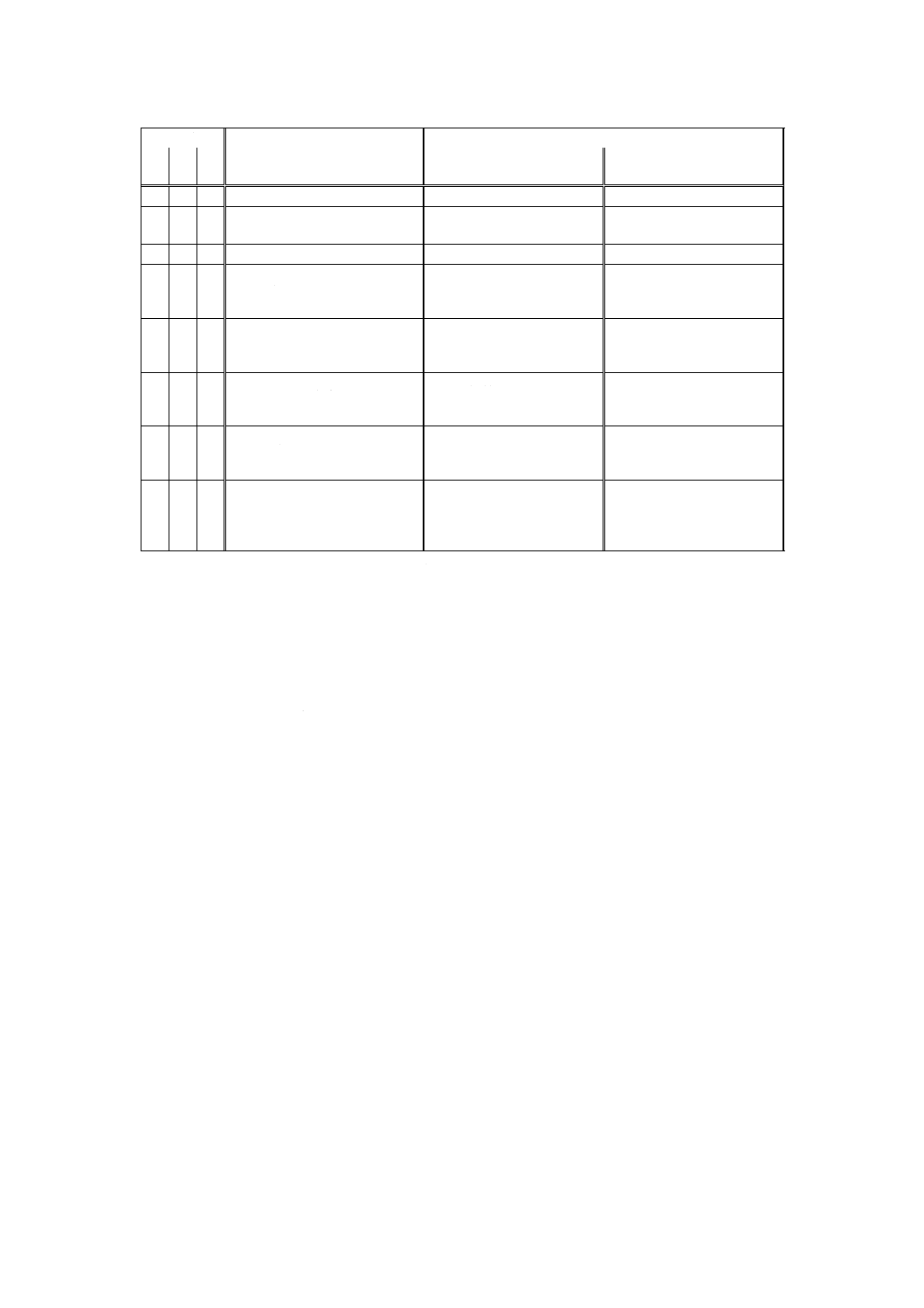
152
X 6233:2017 (ISO/IEC 30193:2016)
WP 制御
状態
行動
b2
b1
b0
記録データに対して
WP制御ビット又は
パスワード変更
0
0
0
PWD無し/ 仮想/ WP オフ
許可
許可
0
0
1
PWD無し/ 仮想/ WP オン
ホスト確認後許可
ホスト確認後許可
0
1
0
PWD無し/物理/ WP オフ
許可
許可
0
1
1
PWD無し/ 物理/ WP オン
ホスト確認後許可し
WPオフに変更
ホスト確認後許可
1
0
0
PWD有り/ 仮想/ WPオフ
許可
ホスト供給のパスワード
確認後許可
1
0
1
PWD有り/ 仮想/ WP オン
1
1
0
PWD有り/ 物理/ WP オフ
許可
1
1
1
PWD有り/ 仮想/ WP オン
ホスト供給のパスワード
確認後許可
ホスト供給のパスワード
確認後許可
ホスト供給のパスワード
確認後許可
ホスト供給のパスワード
確認後許可
ホスト供給のパスワード
確認後許可しWPオフに
変更
WP 制御
状態
行動
b2
b1
b0
記録データに対して
WP制御ビット又は
パスワード変更
0
0
0
PWD無し/ 仮想/ WP オフ
許可
許可
0
0
1
PWD無し/ 仮想/ WP オン
ホスト確認後許可
ホスト確認後許可
0
1
0
PWD無し/物理/ WP オフ
許可
許可
0
1
1
PWD無し/ 物理/ WP オン
ホスト確認後許可し
WPオフに変更
ホスト確認後許可
1
0
0
PWD有り/ 仮想/ WPオフ
許可
ホスト供給のパスワード
確認後許可
1
0
1
PWD有り/ 仮想/ WP オン
1
1
0
PWD有り/ 物理/ WP オフ
許可
1
1
1
PWD有り/ 仮想/ WP オン
ホスト供給のパスワード
確認後許可
ホスト供給のパスワード
確認後許可
ホスト供給のパスワード
確認後許可
ホスト供給のパスワード
確認後許可
ホスト供給のパスワード
確認後許可しWPオフに
変更
図101−記録制御ビット規定の状態及び許容動作
21.6 IS1 PAC及びIS2 PACクラスタ
IS1 PAC及びIS2 PACは,未記録ディスクに記録してもよい。BCA符号が未記録ディスクに記録されて
いない場合には,ディスクの出荷前に,IS1 PAC及びIS2 PAC構造をINFO 1のPAC 1及びINFO 2のPAC
2に記録する。未記録ディスクにBCAコードが記録されている場合は,IS1及びIS2構造を記録しない。
IS1 PAC及びIS2 PACの構成は,図102に示すとおりにフォーマットする。
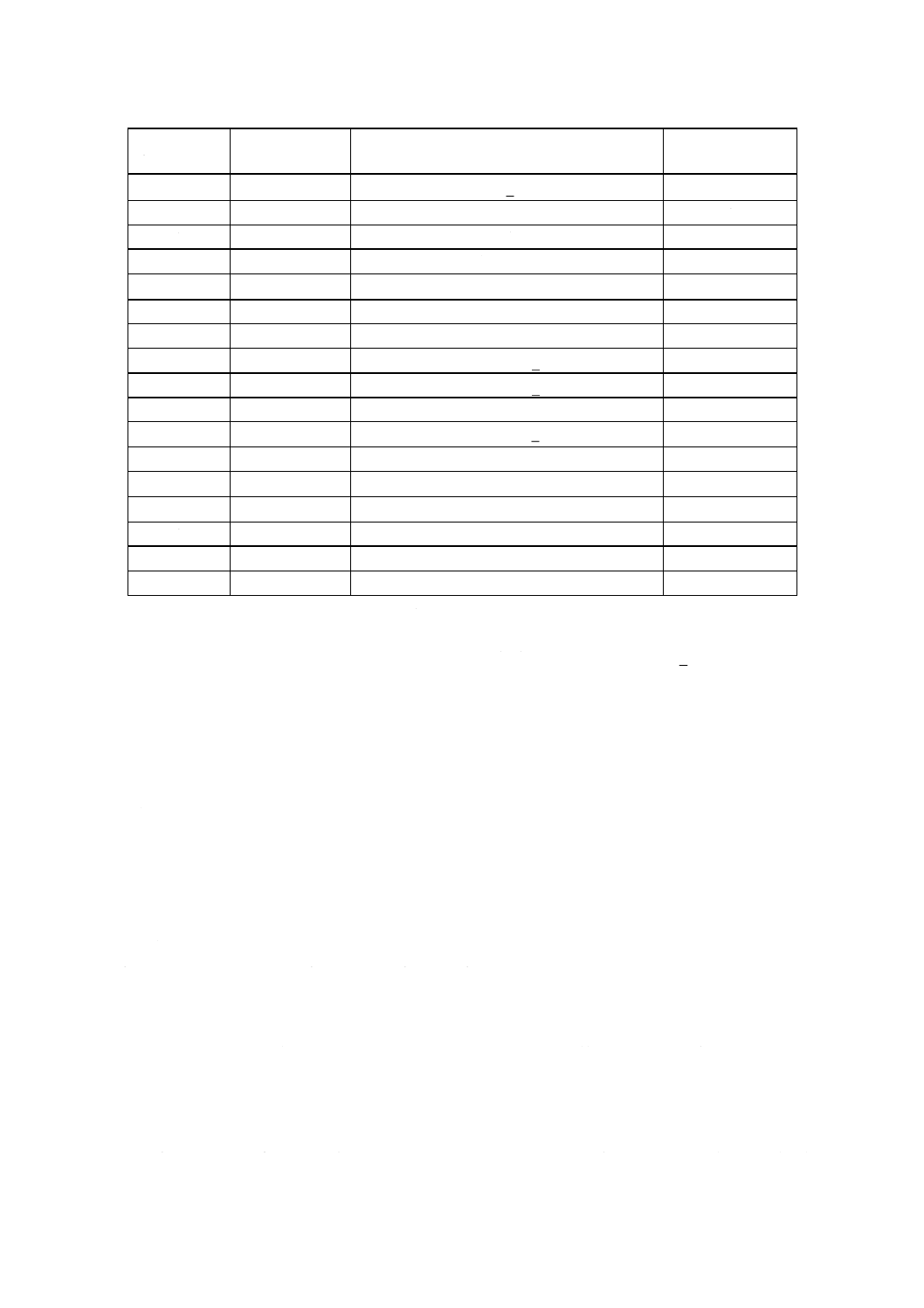
153
X 6233:2017 (ISO/IEC 30193:2016)
データフレーム
データフレーム中
のバイト位置
内容
バイト数
0
0〜2
PAC̲ID
3
0
3
PAC フォーマット
1
0
4〜7
PAC更新カウント
4
0
8〜11
未知PAC ルール
4
0
12
未知PACディスク全体フラグ
1
0
13〜14
リザーブ(領域)
2
0
15
セグメント数
1
0
16〜23
セグメント̲0
8
0
24〜31
セグメント̲1
8
0
32〜263
:
29 ×8
0
264〜271
セグメント̲31
8
0
272〜383
リザーブ(領域)
112
0
384
既知PACディスク全体フラグ
1
0
385〜2 047
1663
1
0〜2 047
2048
:
:
:
:
31
0〜2 047
2048
リザーブ(領域)
リザーブ(領域)
リザーブ(領域)
図102−IS1 PAC及びIS2 PACクラスタの一般的な構成
PAC̲IDは,IS1 PACに対しては,文字“IS1”を表す49 53 31hに設定する。PAC̲IDは,IS2 PACに対
しては,文字“IS2”を表す49 53 32hに設定する。
PACフォーマットフィールドは,両方のPACを共に,バージョン0を示す00hに設定する。
PAC更新カウントは,両方のPACを共に00 00 00 00hに設定する。
未知PACルールは,IS1 PACに対しては00 AA 2A 00h,IS2 PACに対しては00 AA 2A CBhに設定する。
未知PACディスク全体フラグバイトは,IS1 PAC1に対しては01h,IS2 PACに対しては00hに設定する。
セグメント数は,両方のPACを共に00hに設定する。
セグメント̲iフィールドは,両方のPACを共に00hに設定する。
既知PACディスク全体フラグバイトは,両方のPACを共に01hに設定する。
22 ディスク管理
22.1 一般
ディスク管理は,欠陥管理データを含むデータをディスクに記録する方法を,規定及び制御する。欠陥
管理は,損傷又は汚れによってディスク上の欠陥になるか又は信頼できなくなる可能性がある領域に関連
する問題を解決するために使用される。
アプリケーション及び/又は適応ファイルシステムによって,欠陥管理は,ドライブ又はファイルシス
テムによって取り扱うことができる。
欠陥の場所に元々記録しようとしたデータは,ファイルシステムによって決められた代替えの場所に記
録される。
この規格のこのバージョンの欠陥リストでは,次の二つのタイプの欠陥を区別できる(22.2.3.3参照)。
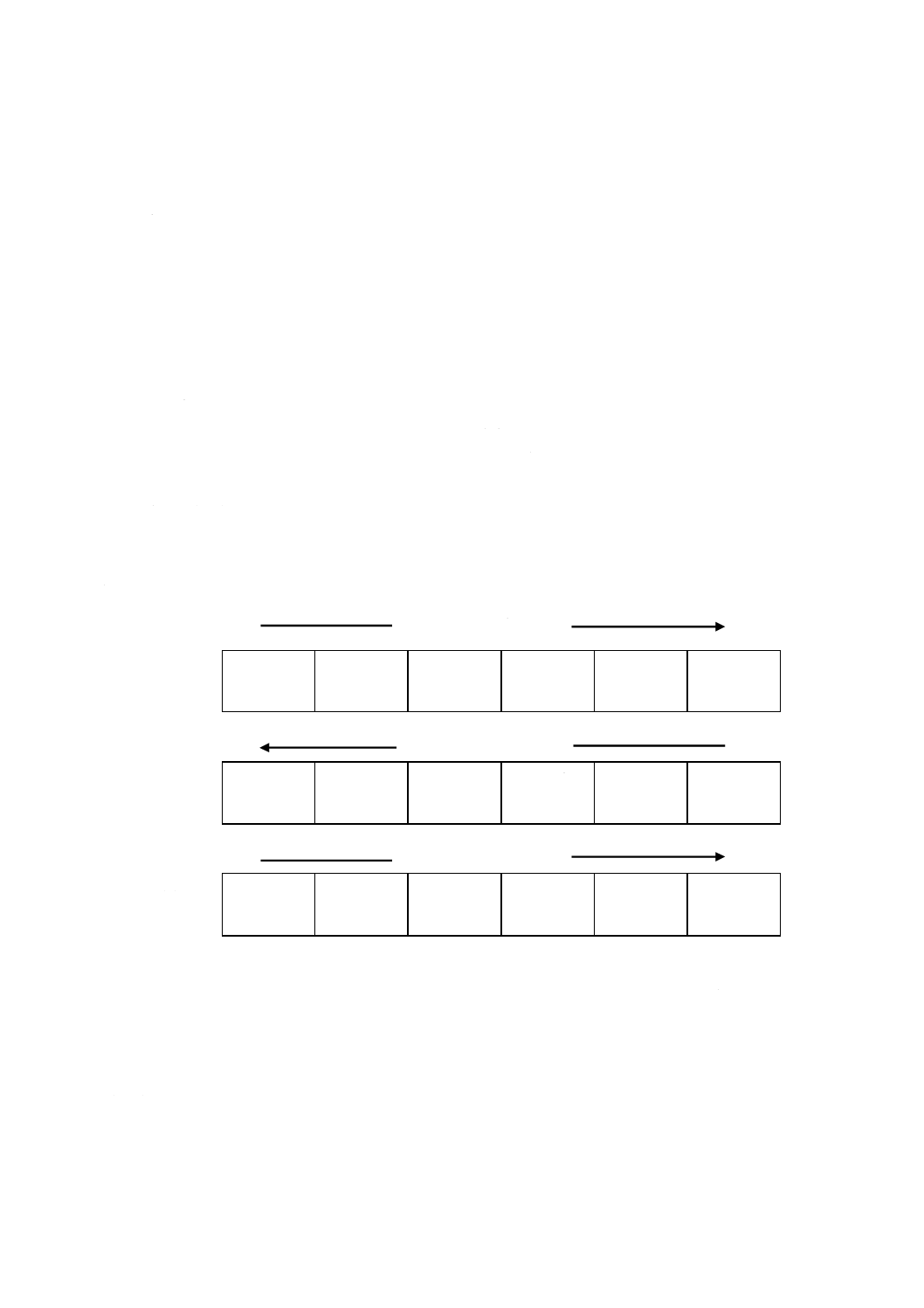
154
X 6233:2017 (ISO/IEC 30193:2016)
− 再配置不可欠陥という意味のNRDと呼ばれる欠陥
− だめな可能性のある領域を意味する,PBAと呼ばれる信頼性のないディスク上の領域。データを再配
置するために,そのようなPBAを用いる前にその領域の信頼性を検査することが望ましい。
22.2 ディスク管理構造(DMS)
22.2.1 一般
ディスク管理構造は,ディスク定義構造(DDS)及び欠陥リスト(DFL)で構成される。ディスク定義
構造は,1クラスタで構成し,堅ろう(牢)性を確保するために4回繰り返して記録する。欠陥リストは,
連続した8クラスタで構成する。
ディスクをレコーダから取り出す場合はいつでも,DMSはその場合のディスクの状態を正しく反映する。
内側ゾーン及び外側ゾーンのDMAゾーンに記録する全ての四つのDMSは,欠陥リストの最初のPSN
(22.2.2のデータフレーム0のバイト24参照)を除き,同じ情報をもつ。DMAゾーンは,想定されるパ
ワーダウンによる失敗に対処しやすくするために,DMA 1,DMA 2,DMA 3,DMA 4の順番で更新する。
そのような更新の後に,全てのDDS更新カウント(22.2.2のデータフレーム0のバイト4参照)は同じに
し,全てのDFL更新カウント(22.2.3.1のクラスタ0のデータフレーム0のバイト4及び22.2.3.2の欠陥
リスト終端子参照)は,同じにする。
DMS
DMA領域は,図103に示すとおり,三つの記録層にまたがって分けられる連続した96クラスタで構成
される。
トラッキング方向
L0層
クラスタ
1
クラスタ
2
クラスタ
3
...
クラスタ
31
クラスタ
32
トラッキング方向
L1層
クラスタ
64
クラスタ
63
...
クラスタ
35
クラスタ
34
クラスタ
33
トラッキング方向
L2層
クラスタ
65
クラスタ
66
クラスタ
67
...
クラスタ
95
クラスタ
96
図103−DMAゾーンのクラスタ
各DMAゾーンの最初の4クラスタに,常にDDSを記録する。次の4クラスタは,リザーブ(領域)と
される。
DFLは,最初は各DMAゾーンのクラスタ9〜16に記録される。DMAゾーンのDFLの8クラスタが一
つでも信頼できなくなったら,いつでもDFL全体はDMAゾーンの次の8クラスタに移される(図104参
照)。有効なDFLの位置は,DDSに示される。
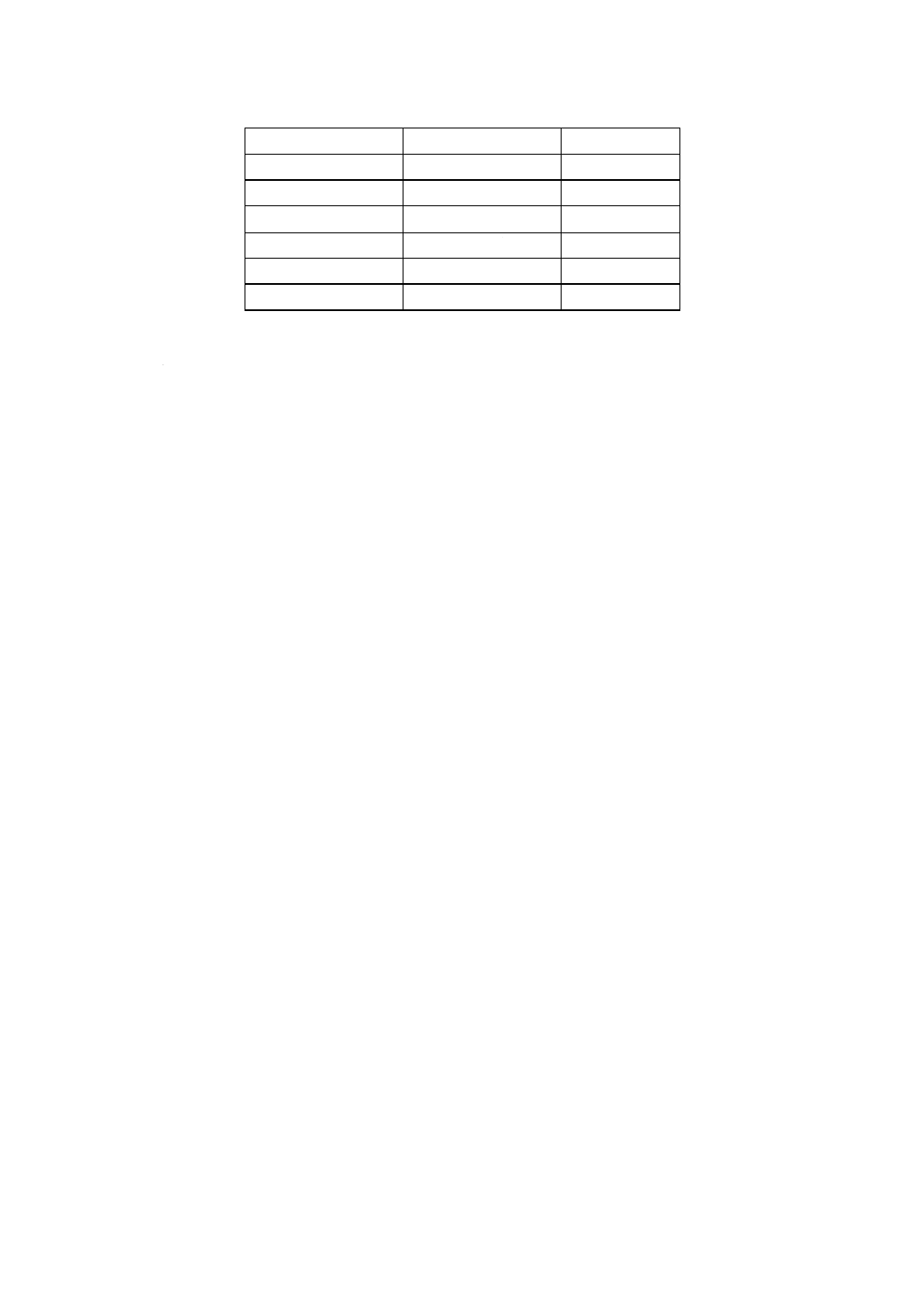
155
X 6233:2017 (ISO/IEC 30193:2016)
クラスタ1 ~ 4
DDS (4 回繰り返し)
クラスタ5 ~ 8
リザーブ(領域)
クラスタ9 ~16
DFLの1番目の位置
損傷DFL
クラスタ17 ~24
有効DFL
クラスタ25 ~32
空
:
:
:
クラスタ89 ~96
空
DFLの2番目の位置
DFLの3番目の位置
DFLの11番目の位置
図104−DMAゾーンの例
22.2.2 ディスク定義構造(DDS)
DDSは,ディスク管理に関わるディスクの状態及びフォーマットを規定する。DDSのフォーマットを,
図105に規定する。
156
X 6233:2017 (ISO/IEC 30193:2016)
データフレームデータフレーム中の
バイト位置
内容
バイト数
0
0〜1
DDS 識別子
2
0
2
DDS フォーマット
1
0
3
リザーブ(領域)
1
0
4〜7
DDS-更新カウント
4
0
8〜15
リザーブ(領域)
8
0
16〜19
ドライブ領域の最初のPSN
4
0
20〜23
リザーブ(領域)
4
0
24〜27
欠陥リストの最初のPSN
4
0
28〜31
リザーブ(領域)
4
0
32〜35
使用者データ領域のLSN0の位置
4
0
36〜39
使用者データ領域の最後のPSN
4
0
40〜43
アプリケーションに規定する場合を除きリザーブ(領域)
0
52
フラグA
1
0
53
リザーブ(領域)
1
0
54
1
0
55
リザーブ(領域)
1
0
56〜59
4
0
60〜63
リザーブ(領域)
4
0
64〜71
L0層のINFO1/PAC1位置の状態ビット
8
0
72〜79
8
80〜87
8
88〜95
8
0
96〜2047
1952
1
0〜2047
リザーブ(領域)
2048
:
:
:
:
31
0〜2047
リザーブ(領域)
2048
リザーブ(領域)
L0層のINFO2/PAC2位置の状態ビット
L1層のINFO1/PAC1位置の状態ビット
L1層のINFO2/PAC2位置の状態ビット
44〜47
48〜51
00
44
4
アプリケーションに規定する場合を除きリザーブ(領域)
アプリケーションに規定する場合を除きリザーブ(領域)
図105−DDSのフォーマット
DDS識別子は,文字“DS”を表す,44 53hに設定する。
DDSフォーマットフィールドは,DDSを識別する,00hに設定する。
DDS更新カウントは,DDSが何回更新したのかの総数を規定する。このフィールドは,最初のフォーマ
ット動作の間だけ00 00 00 00hに設定し,そしてDDSを書き換えるごとに一つ増やす。
ドライブ領域の最初のPSNフィールドは,ドライブ特有情報フレームをもつクラスタ対の最初のクラス
タのPSNを規定する。
ドライブ領域が未記録の場合は,このフィールドは00 00 00 00hに設定する。
欠陥リストの最初のPSNフィールドは,この特別なDDSを含むDMAゾーンの欠陥リストの最初のPSN
を規定する。
使用者データ領域のLSN 0の場所フィールドは,リードインゾーンの後の最初のクラスタの最初の使用
LSN
157
X 6233:2017 (ISO/IEC 30193:2016)
者データフレームのPSNを規定する。このフィールドは,アプリケーションに規定する場合を除いて00 10
00 00hに設定する。
使用者データ領域の最後のLSNフィールドは,使用者データ保存に使用できる最後のセクタの論理セク
タ番号(LSN;箇条23参照)を規定し,アプリケーションに規定する場合を除いて02 E9 D3 FFhに設定
する。
8ビットフラグAフィールドは,3層ディスクの状態を規定する。ビットb7及びb6はリザーブ(領域)
とする。ビットb5,b4,b3,b2,b1及びb0は,アプリケーションに規定する場合を除いて“1”に設定する。
L0層のINFO 1のPAC 1の場所の状態ビットフィールドは,L0層のINFO 1のPAC 1ゾーンの32クラ
スタ全ての記録状態を規定する(図106参照)。ビットの組合せは,21.2の規定に従って設定する。
バイト位置
ビット
INFO1のPAC1 位置のPAA
64
b7b6
0 01 FF 80h
64
b5b4
0 01 FF 84h
64
b3b2
0 01 FF 88h
64
b1b0
0 01 FF 8Ch
65
b7b6
0 01 FF 90h
:
:
:
:
:
:
70
b1b0
0 01 FF ECh
71
b7b6
0 01 FF F0h
71
b5b4
0 01 FF F4h
71
b3b2
0 01 FF F8h
71
b1b0
0 01 FF FCh
図106−L0層の状態ビット及び関連するINFO 1のPAC 1アドレス位置
L0層のINFO 2のPAC 2の場所の状態ビットフィールドは,L0層のINFO 2のPAC 2ゾーンの32クラ
スタ全ての記録状態を規定する(図107参照)。ビットの組合せは,21.2の規定に従って設定する。
バイト位置
ビット
INFO2のPAC2 位置のPAA
72
b7b6
0 01 BA 00h
72
b5b4
0 01 BA 04h
72
b3b2
0 01 BA 08h
72
b1b0
0 01 BA 0Ch
73
b7b6
0 01 BA 10h
:
:
:
:
:
:
78
b1b0
0 01 BA 6Ch
79
b7b6
0 01 BA 70h
79
b5b4
0 01 BA 74h
79
b3b2
0 01 BA 78h
79
b1b0
0 01 BA 7Ch
図107−L0層の状態ビット及び関連するINFO 2のPAC 2アドレス位置
L1層のINFO 1のPAC 1の場所の状態ビットフィールドは,L1層のINFO 1のPAC 1ゾーンの32クラ
158
X 6233:2017 (ISO/IEC 30193:2016)
スタ全ての記録状態を規定する(図108参照)。ビットの組合せは,21.2の規定に従って設定する。
バイト位置
ビット
INFO1のPAC1 位置のPAA
80
b7b6
0 7E 00 00h
80
b5b4
0 7E 00 04h
80
b3b2
0 7E 00 08h
80
b1b0
0 7E 00 0Ch
81
b7b6
0 7E 00 10h
:
:
:
:
:
:
86
b1b0
0 7E 00 6Ch
87
b7b6
0 7E 00 70h
87
b5b4
0 7E 00 74h
87
b3b2
0 7E 00 78h
87
b1b0
0 7E 00 7Ch
図108−L1層の状態ビット及び関連するINFO 1のPAC 1アドレス位置
L1層のINFO 2のPAC 2の場所の状態ビットフィールドは,L1層のINFO 2のPAC 2ゾーンの32クラ
スタ全ての記録状態を規定する(図109参照)。ビットの組合せは,21.2の規定に従って設定する。
バイト位置
ビット
INFO2のPAC2 位置のPAA
88
b7b6
0 7E 45 80h
88
b5b4
0 7E 45 84h
88
b3b2
0 7E 45 88h
88
b1b0
0 7E 45 8Ch
89
b7b6
0 7E 45 90h
:
:
:
:
:
:
94
b1b0
0 7E 45 ECh
95
b7b6
0 7E 45 F0h
95
b5b4
0 7E 45 F4h
95
b3b2
0 7E 45 F8h
95
b1b0
0 7E 45 FCh
図109−L1層の状態ビット及び関連するINFO 2のPAC 2アドレス位置
22.2.3 欠陥リスト(DFL)
DFLを構成する最初の8クラスタは,欠陥リストヘッダ及びそれに続く欠陥のリストをもっている。欠
陥のリストは,欠陥リスト終端子で終了する。
DFLは,図110に示すとおり構成する。
159
X 6233:2017 (ISO/IEC 30193:2016)
クラスタ番号/
データフレーム
データフレーム中の
開始バイト位置
内容
バイト数
0 / 0
0
欠陥リストヘッダ゙
128
0 / 0
:
0 / 31
128
欠陥のリスト
65408
1 / 0
:
1 / 31
0
65536
:
K/ 0
:
:
0
n×8
:
n×8
欠陥リスト終端子
8
:
:
K/ 31
(n+ 1)×8
00hに設定
..
欠陥のリスト
欠陥のリスト
K=7とする。
図110−DFLのフォーマット
欠陥リストヘッダ(DLH)は,欠陥リストを識別し,欠陥リスト構成に関する情報をもっている(22.2.3.1
参照)。
欠陥のリストは,ディスク使用中に欠陥と決まったクラスタのリストをもっている(22.2.3.2参照)。
欠陥リスト終端子は,欠陥のリストを閉じ,実際の欠陥のリストの最後の入力の直後に記録する。欠陥
リスト終端子は,欠陥のリストの入力数によってDFLを構成する8クラスタのどこにでも置ける。欠陥リ
スト終端子の後のバイトは,00hに設定する。
22.2.3.1 欠陥リストヘッダ(DLH)
DLHのフォーマットは,図111に規定する。
DFL識別子は,文字“DL”を表す44 4Chに設定する。
DFLフォーマットフィールドは,DFLを識別する00hに設定する。
DFL更新カウントは,欠陥リストの更新動作の総数と規定する。このフィールドは,最初のフォーマッ
ト動作の間だけ00 00 00 00hに設定し,DFLを再記録するごとに一つ増やす。
DFL入力数は,DFLの総入力数を示しN̲DFLで表す。アプリケーションに規定する場合を除いて,N̲DFL
はNRDの数+PBAの数であり,次による。
N̲DFL≦65 519
160
X 6233:2017 (ISO/IEC 30193:2016)
クラスタ番号/
データフレーム
データフレーム中の
バイト位置
内容
バイト数
0 / 0
0 〜1
DFL識別子
2
0 / 0
2
DFL フォーマット
1
0 / 0
3
リザーブ(領域)
1
0 / 0
4 〜7
DFL-更新カウント
4
0 / 0
8 〜11
リザーブ(領域)
4
0 / 0
12 〜15
DFL入力欄の数(N̲DFL)
4
0 / 0
16 〜19
アプリケーションに規定する場合を除き
リザーブ(領域)
4
0 / 0
20 〜23
NRD入力欄の数
4
0 / 0
24 〜27
4
0 / 0
28 〜31
PBA 入力欄の数
4
0 / 0
32 〜35
4
0 / 0
36 〜63
リザーブ(領域)
28
0 / 0
64 〜67
4
0 / 0
68 〜71
4
0 / 0
72 〜75
4
0 / 0
76 〜79
4
0 / 0
80 〜83
4
0 / 0
84 〜87
4
0 / 0
88 〜127
リザーブ(領域)
40
アプリケーションに規定する場合を除き
リザーブ(領域)
アプリケーションに規定する場合を除き
リザーブ(領域)
アプリケーションに規定する場合を除き
リザーブ(領域)
アプリケーションに規定する場合を除き
リザーブ(領域)
アプリケーションに規定する場合を除き
リザーブ(領域)
アプリケーションに規定する場合を除き
リザーブ(領域)
アプリケーションに規定する場合を除き
リザーブ(領域)
アプリケーションに規定する場合を除き
リザーブ(領域)
図111−DLHのフォーマット
NRD入力数は,DFL中のNRD入力総数と規定する。NRD入力数は,ディスク使用中に変えることが
できる変数である。
PBA入力数は,DFL中のPBA入力総数と規定する。PBA入力数は,ディスク使用中に変えることがで
きる変数である。
22.2.3.2 欠陥のリスト
欠陥のリストのフォーマットを,図112に示す。
DFLは,フォーマットの後及び入力が追加,削除又は変更されるごとに(状態又はアドレスが変更。),
更新する。
DFL入力は,22.2.3.3の規定によってフォーマットする。DFL入力は8バイトで構成され,データフレ
ーム及びクラスタの境界であっても,連続でつないで記録される。
欠陥リスト終端子(DFL終端子)は,次の二つの4バイトで構成する。
161
X 6233:2017 (ISO/IEC 30193:2016)
− 最初の4バイトは,FF FF FF FFhに設定する。
− 2番目の4バイトは,DFLのヘッダ中のDFL更新カウントと同じにする(パワーダウンによる失敗時
の欠陥リストの,有効性の検証に使用できる。)。
クラスタ数/
データフレーム
データフレーム中の開始バイト位置
内容
バイト数
0 / 0
128
DFL入力0
8
0 / 0
136
DFL入力1
8
:
:
…
..
0 / 0
i×8+128
DFL入力i
8
:
:
…
..
0 / 0
2 032
DFL入力238
8
0 / 0
2 040
DFL入力239
8
0 / 1
0
DFL入力240
8
0 / 1
8
DFL入力241
8
:
:
…
..
0 / 1
2 040
DFL入力495
8
:
:
…
..
0 / n
0
DFL入力n×256−16
8
:
:
…
..
:
:
…
..
0 / 31
2 040
DFL入力8 175
8
:
m / 0
0
DFL入力m×8 192−16
8
:
:
…
..
m / 0
j×8
DFL入力m×8 192−16+j
8
:
:
…
..
m / 0
2 040
DFL入力m×8 192−16+255
8
m / 1
0
DFL入力m×8 192−16+256
8
:
:
…
..
m / 1
2 040
DFL入力m×8 192−16+511
8
:
:
…
..
m / n
0
DFL入力m×8 192+n×256−16
8
:
:
…
..
:
:
…
..
m / 31
2 040
DFL入力m×8 192+8 191−16
8
:
:
:
…
..
K / n(K ≥ m)
[(N̲DFL−1)×8+128−n×2 048−K×65 536]
DFL入力(N̲DFL−1)
8
K / n
[N̲DFL×8+128−n×2 048−K×65 536]
DFL終端子
8
K / n
[(N̲DFL+1)×8+128−n×2 048−K×65 536]
00h設定
..
K / (n+1)to K / 31
0
00h設定
2 048
K=7とする。
図112−欠陥のリストのフォーマット
22.2.3.3 DFL入力
各DFL入力は,図113に示すとおりフォーマットする。DFL入力のバイトは,msbが先頭の64ビット
162
X 6233:2017 (ISO/IEC 30193:2016)
列に変換される。
欠陥のリストは,各入力がmsbを無視した(常に“0”と仮定。)一つの64ビットの正の整数であるか
のように,昇順で並べ替える。すなわち,最初に状態1を使って並べ替え,状態1の中で,欠陥クラスタ
の最初のPSNを使って並べ替え,欠陥クラスタの最初のPSNの中で状態2を使って並べ替え,状態2の
中で続きのクラスタス数を使って並べ替える。
バイト0 のビット7..4
DFL入力iの
バイト0 のビット3..0 &バイト1 〜3
DFL入力iの
バイト4 のビット7..4バイト4 のビット3..0 &バイト5 〜7
b63
..
b60
b59
..
b32
b31
..
b28
b27
..
b0
状態1
欠陥クラスタ最初のPSN
状態2
続きのクラスタ数
DFL入力iの
DFL入力iの
図113−DFL入力フォーマット
欠陥クラスタ最初のPSNは,示されるクラスタの,最初の物理セクタを示す。PSNの下位28ビットだ
けをb59 .. b32に保存する(上位4ビットは破棄する。)。各欠陥クラスタは,欠陥のリストに一回だけ出現
する。
続きのクラスタ数フィールドは,状態1フィールドが0100に設定された場合(図114参照),だめな可
能性のある領域でカバーされる,続きのクラスタス数を示す(0 00 00 00hの値は,信頼できないクラスタ
の数が未知なことを示す。)。状態1フィールドが0100に設定されない場合は,このフィールドは,アプリ
ケーションに規定する場合を除いて,リザーブ(領域)とする。
状態1フィールドは,図114に示すとおり,入力の状態を示す。
欠陥クラスタの最初のPSNは,エラーが発生した事象に関連
した最初のクラスタの最初の物理セクタのアドレスを示す。
状態1
状態2
タイプ
規定
0001
0000
NRD
欠陥のある位置を示す。
0100
0000
又は
0100
PBA
他の設定
アプリケーション
に規定する場合
を除き
リザーブ(領域)
---
欠陥である可能性が有り検査の必要なディスク上の位置を
示す。
PBAは,いかなるNRD 位置も含まない。
図114−DFL入力の状態1の規定
状態2フィールドは,図115に示すとおり,入力の状態を示す。
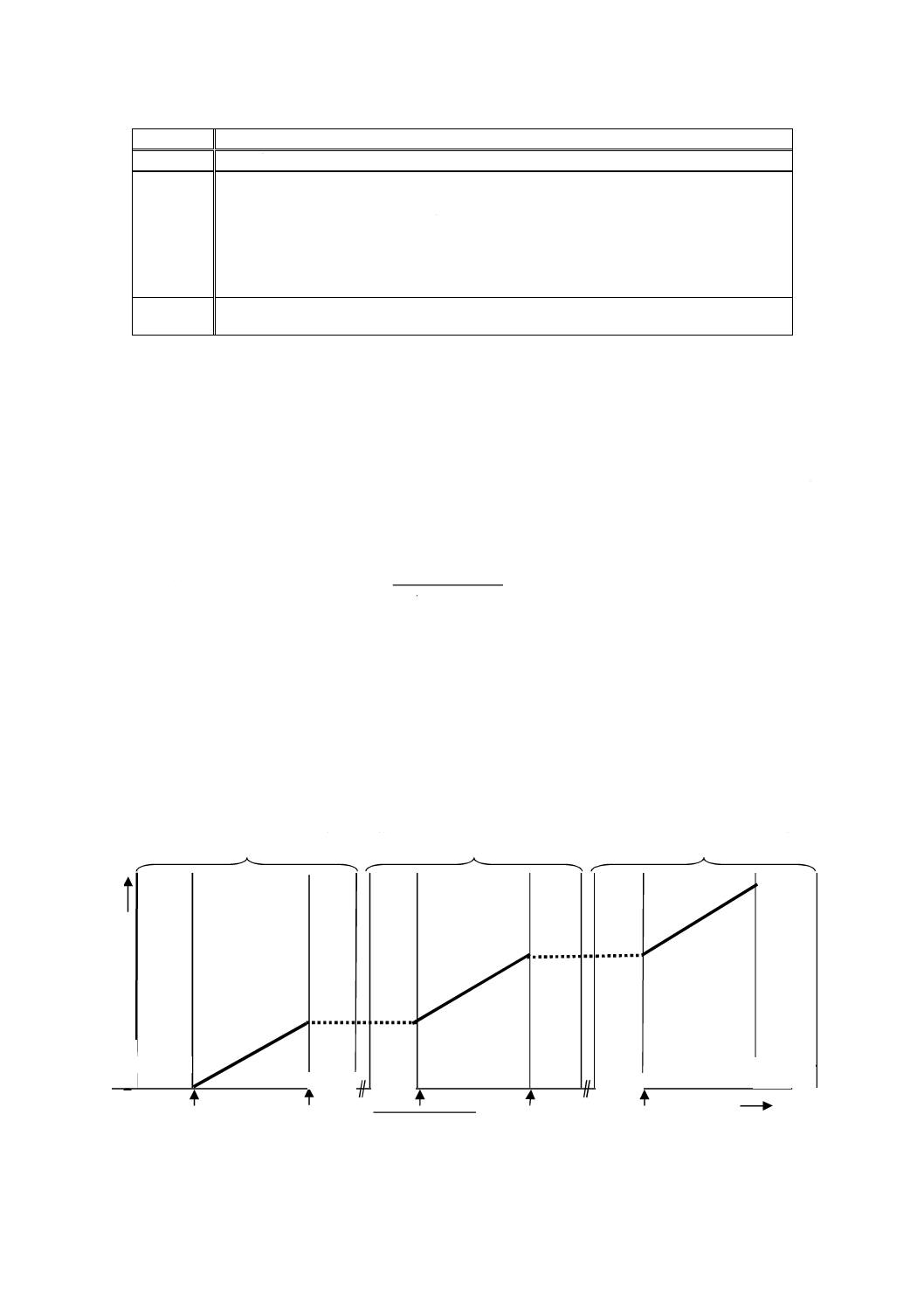
163
X 6233:2017 (ISO/IEC 30193:2016)
状態2
規定
0000
このデフォルトの設定は,次の設定がどれも有効でないときに使用する。
0100
(アプリケーションに規定する場合を除き,状態1 = 0100の組み合わせだけで有効となる。)
クラスタは,いかなる適切な使用者データももっていない。リードモディファイライト
の際に、そのようなクラスタの中身は捨てることができる(関連するSai ,1,Sai,0の
状態ビットは,新しい位置で11に設定できる。)。
PBAでカバーされたクラスタが有効な場合,使用者データをもっていたら,そのような
PBAの状態2は,0000に設定する。
他の
設定
アプリケーションに規定する場合を除き,リザーブ(領域)とする。
図115−DFL入力の状態2の規定
23 論理セクタ番号(LSN)の割当て
使用者データを保存するために使用できる全てのクラスタに対しては,連続する使用者データフレーム
ごとにLSN 0から始まって一つずつ増加する論理セクタ番号が連続で割り当てられる(図116参照)。
LSN 0は,(PSN=00 10 00 00hにおいて)リードインゾーンの後の最初のクラスタの最初の使用者デー
タフレームに割り当てられる。
L0層の最後のLSNは(PSN=8×LAA+15=Xにおいて)8×LAA+15−00 10 00 00hに等しく,外側ゾ
ーン0の前の最後のクラスタの最後の使用者データフレームに割り当てられる。
L1層の最初のLSNは(PSN=8×FAA=
00h
00
00
FC
+
X
において)L0層の最後のLSNよりも一つ大き
くし,外側ゾーン1の後の最初のクラスタの最初の使用者データフレームに割り当てられる。
L1層の最後のLSNは(PSN=03 EF FF FFhにおいて)16×LAA+31−00 20 00 00hに等しく,内側ゾー
ン1の前の最後のクラスタの最後の使用者データフレームに割り当てられる。
L2層の最初のLSNは(PSN=04 10 00 00hにおいて)L1層の最後のLSNよりも一つ大きくし,内側ゾ
ーン2の後の最初のクラスタの最初の使用者データフレームに割り当てられる。
L2層の最後のLSNは(PSN=04 00 00 00h+8×LAA+15=X+04 00 00 00hにおいて)24×LAA+47−
00 30 00 00hに等しく,外側ゾーン2の前の最後のクラスタの最後の使用者データフレームに割り当てら
れる。
リードイン
ゾーン
外側
ゾーン0
外側
ゾーン1
内側
ゾーン1
内側
ゾーン2
リードアウト
ゾーン
L0層
L1層
L2層
内周
外周
外周
内周
内周
外周
00 10 00 00h
X
X+ FC 00 00 00h
03 EF FF FFh
04 10 00 00h
0
0
0
0
0
0
0
0
h
使用者
データ
領域
L
S
N
使用者
データ
領域
使用者
データ
領域
PSN
図116−論理セクタ番号の割当て
164
X 6233:2017 (ISO/IEC 30193:2016)
24 グルーブ領域の特性
この規格では,次の二つのタイプの信号を区別している。
− ディスクのグルーブ構造を再生した信号
− 使用者が記録した,マークを再生した信号
箇条25〜箇条27は,グルーブ構造を再生した信号を定義し規定する(グルーブのフォーマットは,箇
条15に規定されている。)。
箇条25〜箇条27の全ての要求事項を,他の層の記録状態(未記録,記録又は部分記録)に関係なく,
公称半径22.4 mmのエンボスHFM領域(PICゾーンの開始又は終了)の内径と外側ゾーンの半径+20 μm
(dDZO/2+20 μm)との間で,全ての層で満たす。要求事項は,外周ゾーンの残りの領域でも満たすことが
望ましい。
25 グルーブ領域の試験方法
25.1 一般
試験は,書換領域で行う。試験に必要な記録及び読取りの動作は同じ基準ドライブで行う。
信号の測定をする場合,ほこり,きずなどの局所欠陥の影響は除外される。局所欠陥は,トラッキング
エラー及び訂正不能データの原因となる可能性がある(箇条33参照)。
25.2 環境条件
ディスクが8.1.1に規定した許容される環境条件外の場合を除き,全ての信号は規定する範囲内とする。
25.3 基準ドライブ
25.3.1 一般
全ての信号は,基準ドライブの適したチャネルで箇条9及び附属書Hの規定に従って測定する。
25.3.2 読取りパワー
読取りパワーは,ディスクの入射面に照射する光パワーである。プッシュプル信号測定の場合以外の読
取りパワーは,L0層及びL1層では(1.44±0.10) mW,そして,L2層では(1.00±0.10) mWとする。プッシ
ュプル信号測定のための読取りパワーは,(0.70±0.10) mWとする。
25.3.3 読取りチャネル
ドライブは,9.5及び9.6に規定する,二つの読取りチャネルをもつ。HF読取りチャネルからのHF信
号は,波形等化しない。
プッシュプル信号の測定には,半径方向PP読取りチャネルに,次の特性をもつ1次のLPFを通す。
f−3dB=30 kHz
ウォブル信号の測定には,半径方向PP読取りチャネルに,次の特性をもつ1次のLPFを通す。
f−3dB=16 MHz
25.3.4 トラッキング要求事項
信号の測定の間に,光ビームの焦点と記録層との間の軸方向のトラッキングエラーは最大55 nmとし,
光ビームの焦点とトラック中心との間の半径方向のトラッキングエラーは最大16 nmとする。
大きな軸方向の原因となる局所欠陥は,附属書Iの規定によって考慮する。
25.3.5 走査速度
プッシュプル信号測定の場合以外の実際のディスクの回転速度は,平均チャネルビットレートが132.000
Mbit/sとなるか又は平均ウォブル周波数が1 913.043 kHzとなる速度とする。
プッシュプル信号測定の場合の,実際のディスクの回転速度は,平均チャネルビットレートが66.000
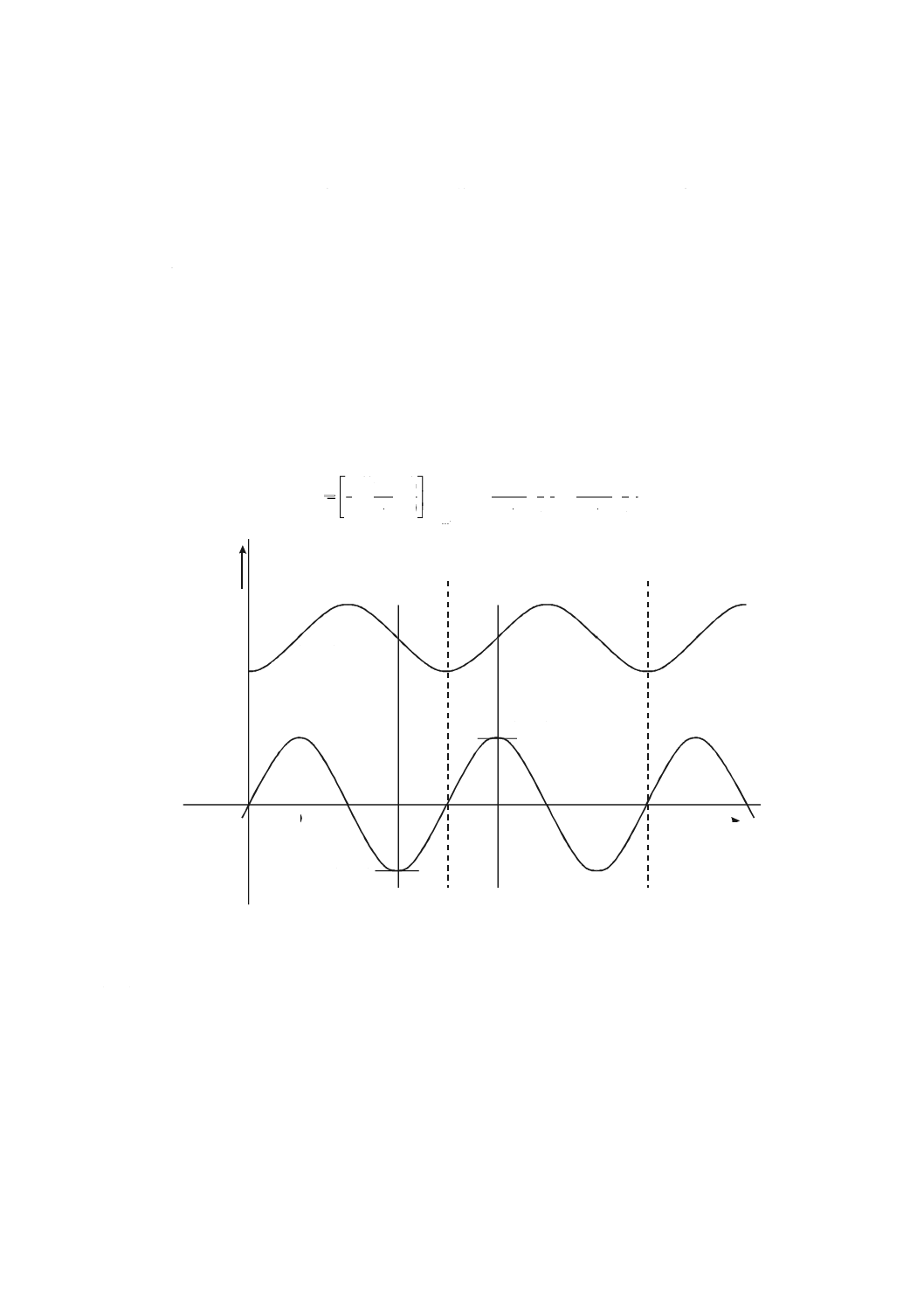
165
X 6233:2017 (ISO/IEC 30193:2016)
Mbit/sとなるか又は平均ウォブル周波数が956.522 kHzとなる速度とする。
25.4 信号の規定
全ての信号の振幅は,フォトディテクタの電流と線形関係にあり,したがって,ディテクタに当たる光
パワーと線形関係にある。
幾つかの信号は,未記録のグルーブ領域の全ディテクタ電流で正規化される。
この全ディテクタ電流は,次による。
IG=(I1+I2)groove
プッシュプル信号は,次による。
− プッシュプル信号は,光ビームの焦点がトラックを横切る場合の低域通過フィルタを通した半径方向
PP読取りチャネルの正弦波状差信号(I1−I2)(図4参照)である。プッシュプル信号は,ドライブの半
径方向の,トラッキング動作に使用できる(図117参照)。
− 通常,差信号(I1−I2)は,低域通過フィルタを通した全ディテクタ電流(I1+I2)で正規化される。この実
時間の正規化プッシュプル信号の両ピーク値は,次による。
()
()
()
()
(
)
(
)
(
)
(
)
1
1
2
2
at
2
1
at
2
1
at
2
1
at
2
1
peak
peak
2
1
2
1
norm
t
t
t
t
I
I
I
I
I
I
I
I
t
I
t
I
t
I
t
I
PP
+
−
−
+
−
≡
+
−
=
−
オントラック
オントラック
半径方向位置
(時間)
(I-I)
差信号
1 2
(I-I)
1 2 min
(I-I)
1 2 max
(I+ I)
和信号
1 2
ディテクタ
電流
(mA)
0
t1
t2
図117−プッシュプル信号の規定
実時間上の,正規化プッシュプル信号(PPnorm)は,フォトディテクタの大きさが25 μm2に換算する(I.9
参照)。
ウォブル信号は,次による。
− ウォブル信号IWppは,光ビームの焦点が25.3.4に従ってトラックを追いかける場合の半径方向PP読
取りチャネルの正弦波状差信号(I1−I2)(図4参照)の両ピーク値である。測定方法については,附属
書M及び附属書Eも参照。
− ウォブル信号は,プッシュプル信号の両ピーク値(I1−I2)ppで正規化し(正規化ウォブル信号:NWS),
166
X 6233:2017 (ISO/IEC 30193:2016)
次による。
(
)pp
2
1
Wpp
I
I
I
NWS
−
=
26 HFMグルーブの信号
26.1 プッシュプルの極性
プッシュプル信号の極性は,信号が次のピット又はグルーブ構造から検出したプッシュプル信号の極性
と同じ場合,正極性という。
− “オングルーブ記録”(15.2参照)
− グルーブの単一経路の位相深さが90°未満の場合
規定した場合と極性が反対の場合,負極性という。
ディスクの各記録層のプッシュプル信号の極性は,ディスク情報に示す(15.8.3参照)
26.2 プッシュプル信号
実時間の正規化プッシュプル信号の両ピーク値(PPnorm,HFM)convは,エンボスHFM領域で,次による。
0.26≦(PPnorm,HFM)conv≦0.52
26.3 ウォブル信号
正規化HFMウォブル信号(NHWS)は,グルーブトラックの平均中心線からの偏移量を表している。隣
接トラックのウォブルとの干渉によって,HFMウォブル信号の振幅は変動している(ウォブルビートと呼
ばれる。)。
HFMウォブル信号がウォブルビートによって,最小の振幅を示す場所では,NHWSは次による。
0.30≦NHWSmin≦0.60
HFMウォブル信号がウォブルビートによって,最大の振幅を示す場所では,NHWSは次による。
NHWSmax≦3×NHWSmin
注記 エンボスHFM領域で検出するHFMウォブル信号の形は書換領域のウォブル信号と非常に違う
ため,附属書Eに規定した測定方法はこれらのHFMウォブル信号を測定することに適さない。
26.4 HFM信号のジッタ
HFMグルーブからのウォブル信号を2値化したものは,PICゾーンのエンボスHFM情報を表している。
この2値信号の前エッジ及び後エッジのジッタは,別々に,PLLクロックを基準に測定する。
前エッジ及び後エッジ両方のジッタは,4.5 %以下とする。
ジッタは,次に示す条件で測定する。
− ac結合(高域通過フィルタ):1次のフィルタで,f−3dB=20 kHz
− 波形等化なし
− 18Tクロック周期で正規化する(15.5.4.2参照)。
27 ウォブルグルーブからの信号
27.1 位相深さ
グルーブの単一経路位相深さは,90°を超えない。
27.2 プッシュプル信号
正規化プッシュプル信号(PPnorm)convの実時間の両ピーク値は,次に示す要求事項を各層で満たす。
167
X 6233:2017 (ISO/IEC 30193:2016)
− 未記録領域(全ての隣接トラックが未記録。)で,次による。
0.21≦(PPnorm,unrec)conv≦0.45
− 未記録領域の150トラック内でのプッシュプル信号の最大変動量は,次による。
(
)
(
)
(
)
(
)
0.18
min
unrec
norm,
max
unrec
norm,
min
unrec
norm,
max
unrec
norm,
≦
PP
PP
PP
PP
+
−
− 一つの層内での未記録領域のプッシュプル信号の最大変動量は,次による。
(
)
(
)
(
)
(
)
0.25
min
unrec
norm,
max
unrec
norm,
min
unrec
norm,
max
unrec
norm,
≦
PP
PP
PP
PP
+
−
− 記録済み領域(隣接トラック全て記録済み。)で,次による。
0.21≦(PPnorm,rec)conv≦0.45
− 一つの層内での記録済み領域及び未記録領域の平均プッシュプル信号の比は,次による。
1.25
0.75
unrec
norm,
rec
norm,
≦
≦PP
PP
27.3 ウォブル信号
27.3.1 一般
正規化ウォブル信号(NWS)は,グルーブトラックの平均中心線からの偏移量を表している。平均のト
ラック中心線からの,ウォブルグルーブトラックの実際の中心の偏移量は,附属書Mに従って計算できる。
27.3.2 NWSの測定
隣接トラックとのウォブルの干渉によって,ウォブル信号振幅は,変動している(ウォブルビートと呼
ばれる。)。ウォブル信号は,未記録領域で,らせんグルーブを連続トラッキングしながら測定する。測定
方法は,附属書Eに規定している。
ウォブル信号が,最小の振幅を示す場所では(MSKマークの影響を除く。),正規化ウォブル信号は,次
による。
0.20≦NWSmin≦0.55
ウォブル信号が,ウォブルビートによって最大の振幅を示す場所では,正規化ウォブル信号は,次によ
る。
NWSmax≦3×NWSmin
27.3.3 ウォブルCNRの測定
15.8.3に規定した,ディスクの最小及び最大の速度の場合の記録後のウォブル信号の狭帯域SNR(又は
CNR)は,ウォブル信号が最小の振幅を示す場所で29 dBを超える。
キャリアは1 913.043 kHzで測定し,ノイズレベルは1 MHzで測定する(附属書E参照)。
27.3.4 ウォブルの高調波ひずみの測定
HMW変調の最低限の品質を保証するために,HMW変調の2次高調波の大きさに比べて,ウォブル信
号の2次高調波ひずみは十分小さくする。
2次高調波レベル(SHL)及び2次高調波ひずみ(SHD)は,ディスクの2か所で,ウォブルの基本波の
大きさ及び2次高調波の大きさを測定することによって決める。この両方の大きさは,データゾーン及び
保護ゾーン3で測定する。
局所のウォブル基本周波数レベルで正規化したSHD及びSHLの比は,次のいずれかによる。
− 半径方向のチルトなしで SHD/SHL<−12 dB
− 半径方向のチルト±0.70°以内で SHD/SHL<−6 dB
168
X 6233:2017 (ISO/IEC 30193:2016)
測定は,スペクトラムアナライザを用いる(附属書E参照)。
28 記録層の特性
この規格では,次に示す二つのタイプの信号を区別している。
− グルーブ構造を再生した信号
− 使用者が記録したマークを再生した信号
箇条28〜箇条31は,データを記録するために用いる記録層の相変化記録特性を評価する,一連の試験
を規定する。
箇条28〜箇条31の全ての要求事項は,他の記録層の状態(記録,未記録又は部分記録かどうか)にか
かわらず,書換領域の内径(INFOのOPCゾーンの開始又は終了)で公称半径23.2 mmと外部ゾーンの内
径+20 μm(dDZO/2+20 μm)との間で,全ての層で満たす。要求事項は,外部ゾーンの残りの領域でも満
たすことが望ましい。
29 記録層の試験方法
29.1 一般
試験は,書換領域で行う。試験に必要な記録及び読取りの動作は同じ基準ドライブで行う。
信号を測定する場合,ほこり,きずなどの局所欠陥の影響は除かれる。局所欠陥は,トラッキングエラ
ー及び訂正不能データの原因となる可能性がある(箇条33参照)。
29.2 環境条件
ディスクが8.1.1に規定した許容環境条件内にある場合,全ての信号は,規定する範囲内とする。
29.3 基準ドライブ
29.3.1 一般
全ての信号は,基準ドライブの適したチャネルで,箇条9及び附属書Hの規定に従い測定する。
29.3.2 読取りパワー
読取りパワーは,ディスクの入射面に照射し情報を読み取るためだけに用いる光パワーである。プッシ
ュプル信号測定の場合以外の読取りパワーは,L0層及びL1層では(1.44±0.10) mW,そしてL2層では(1.00
±0.10) mWとする。
29.3.3 読取りチャネル
ドライブは,9.5及び9.6に規定する二つの読取りチャネルをもつ。HF読取りチャネルからのHF信号
は,i-MLSE測定以外は波形等化しない(附属書H参照)。
29.3.4 トラッキング要求事項
信号の記録中及び読取り中に,光ビームの焦点と記録層との間の軸方向のトラッキングエラーは最大55
nm,光ビームの焦点とトラック中心との間の半径方向のトラッキングエラーは最大16 nmとする。
大きな軸方向トラッキングエラーを起こす局所欠陥の扱いは,附属書Iの規定に従う。
29.3.5 走査速度
記録の試験は,ディスクにあるDIユニットに規定した速度で行う(15.8.3参照)。
読取りの間,実際のディスクの回転速度は,平均チャネルビットレートが132.000 Mbit/sとなるか又は
平均ウォブル周波数が1 913.043 kHzとなる速度とする。

169
X 6233:2017 (ISO/IEC 30193:2016)
29.4 記録条件
29.4.1 記録パルス波形
マーク及びスペースは,レーザをパルス状に照射することによってディスク上に記録される。レーザパ
ワーは,附属書Fの記録パルス波形のうちの一つによって変調される。NRZIの2T〜9Tのラン長は,マル
チパルス列の記録及び消去パルスを適用して記録される。
記録パワー又は消去パワーは,次に示す四つのレベルがあり,ディスクの入射面に照射される。
− 記録ピークパワーPW
− バイアス記録パワーPBW
− 冷却パワーPC
− 消去パワーPE
マークは記録ピークパワーPWで形成され,スペースは消去パワーPEで形成される。
PW,PBW,PC及びPEの値は,附属書Gに従って最適化する。
試験の実際のパワーPW,PBW,PC及びPEは,最適値の± 5 %以内とする。ここに,PBW,PC及びPEは,
ディスク情報に規定した比例係数εに従ってPWに比例する(15.8.3.3及び15.8.3.4参照)。
29.4.2 記録パワー
最適化された記録パワーPWO,PBWO,PCO及びPEOは,図118に示す条件を満たす
速
度
ディスクタイプ
3層
パワー(mW)
最小
最大
PWO(mW)
8.0
28.0
PBWO(mW)
0.10
16.8
PEO(mW)
0.60
16.8
2x
PCO(mW)
0.10
16.8
図118−3層ディスクの記録パワーの要求事項
図118に示した条件に追加して,記録パワーは,次による。
PWO>PEO≧PCO及びPWO≧PBWO
29.4.3 平均パワー
平均化した記録パワー(PAVE)は,14.0 mW以下とする。
29.4.4 i-MLSE測定の記録条件
i-MLSE[統合化最ゆう(尤)法系列エラー推定]測定は,ディスクの書換領域の(m−2),(m−1),m,
(m+1),(m+2)で示される任意の5隣接トラックグループで行う。
5トラックは,29.4.1で規定したPWOに等しい記録パワーPWでランダムデータが記録される。n回上書
きの後のi-MLSE[i-MLSE@DOW(n)]を測定するためには,5トラック全てにPWOに等しい記録パワーPW
でランダムデータがn回上書きされる。
29.4.5 クロス消去測定の記録条件
クロス消去の測定は,ディスクの書換領域の(m−2),(m−1),m,(m+1),(m+2)で示される任意の隣接
した5トラックのグループで行う。
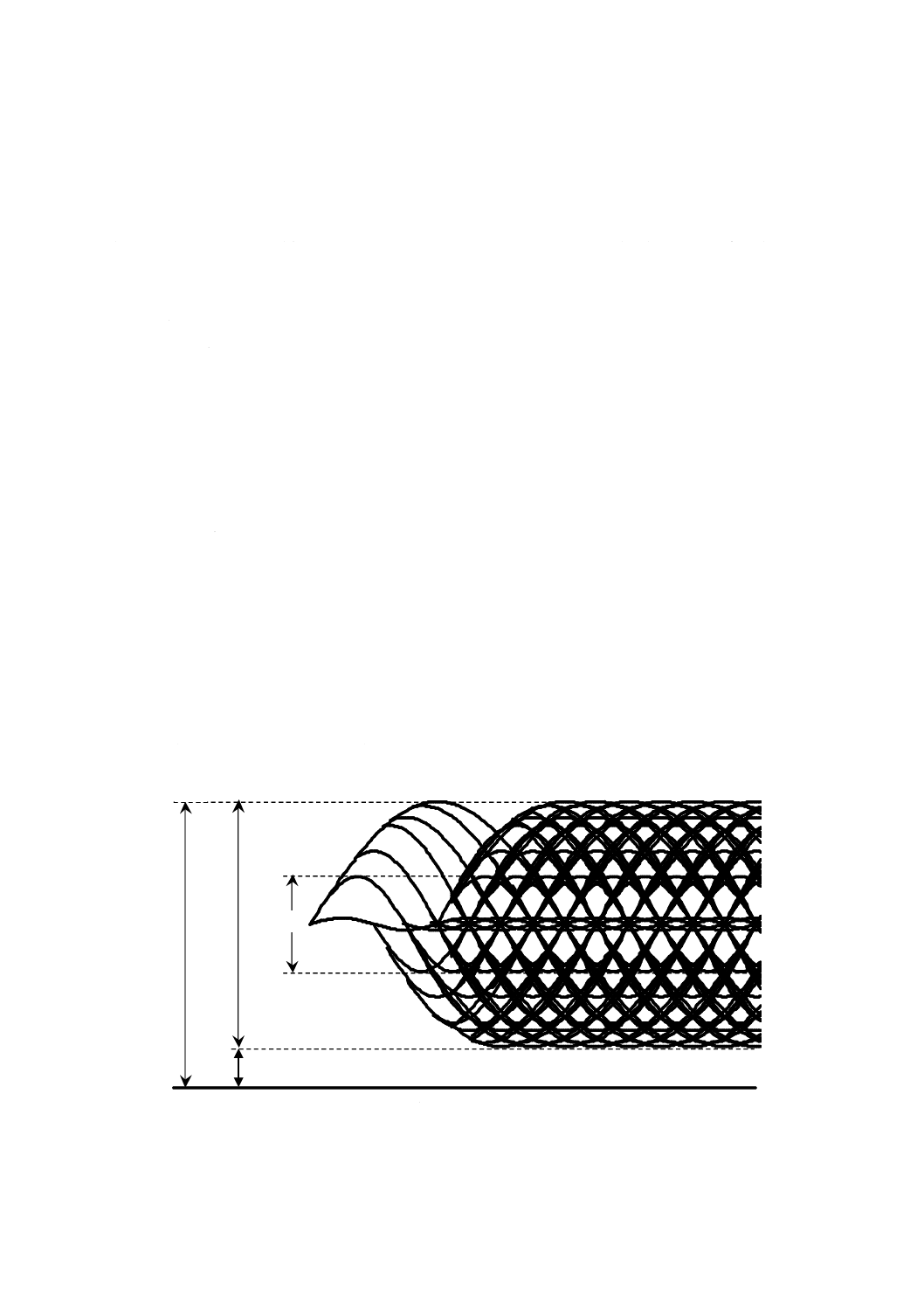
170
X 6233:2017 (ISO/IEC 30193:2016)
測定の最初に5トラックは,ランダムデータが29.4.1に規定したとおりPWOに等しい記録パワーPWで
10回繰り返して記録される。その後,必要なパラメタの初期値が測定される。この初期条件を,DOW(0)XE
条件と規定する。
n回上書き後のクロス消去(クロス消去@DOW(n)XEを測定するために,(m−1)及び(m+1)トラックは,
記録パワーPW=1.1×PWO(全てのパワーレベルは,PWに比例する。29.4.1参照)でn回上書きされる。
29.5 信号の規定
全ての信号振幅は,フォトディテクタの電流に線形比例している。したがって,ディテクタに当たる光
パワーに線形比例している。
i-MLSEは,次による。
i-MLSEは,17PP変調符号を用いたPR(1,2,2,2,1)ML再生システムの信号の品質の指標である。それは,
PR(1,2,2,2,1) ML再生信号での特定パタンの誤り確率に相関のある標準偏差(σ)で定義される(附属書H
参照)。
30 記録領域からの信号
30.1 HF信号
4分割フォトディテクタの電流の総和によって,HF信号が得られる。これらの電流は,記録層の情報を
表すマーク及びスペースの異なる反射率によって変調される(図119参照)。
30.2 変調振幅
変調振幅I8ppは,最大のマーク及びスペースによって生成されるHF信号の両ピーク値である。ピーク値
I8Hは,HF信号を交流結合する前のHF信号のピーク値である。
変調振幅I3ppは,2番目に小さいマーク及びスペースによって生成される,HF信号の両ピーク値である。
0レベルは,ディスクが挿入されていない場合の測定デバイスの信号レベルである。
注記 同期パタンでは,実際にラン長9Tが生じる。しかし,この9Tはめったに現れないため,HF
信号の両ピークへの影響は無視できる。
0 LEVEL
I8H
I8pp
I3pp
I8pp
I8H=Itop
I3pp
I8L
0 レベル
I3pp
I8pp
I8L
I8H=Itop
図119−マーク及びスペースからのHF信号の図示
I3ppは比較的小さい信号なので,その振幅はランダムHF信号から確実な値を得られない。したがって,
171
X 6233:2017 (ISO/IEC 30193:2016)
I3pp / I8ppの測定には,ある場所に連続した3Tのマーク及びスペースだけを記録し,またある場所に連続し
た8Tのマーク及びスペースだけを記録することが望ましい。これで信号は,適した測定装置を用いれば
正確に測定できる。
このBDレコーダブルシステムの規格では,変調信号(I8pp / I8H)は,フォトディテクタの大きさが25 μm2
相当の値に換算する(I.6参照)。
変調信号は,次による。
− (I8pp / I8H)conv≧0.40
− I3pp / I8pp≧0.040
変調信号の変動は,次による。
− 連続記録した一つの層内: (I8Hmax−I8Hmin) / I8Hmax≦0.33
− 連続記録した1回転内:
(I8Hmax−I8Hmin) / I8Hmax≦0.15
実際の各層の変調信号(I8Ha)の比は,連続記録された状態で,次による。
−0.25≦(I8Ha,Lj−I8Ha,Lk) / (I8Ha,Lj+I8Ha,Lk)≦+0.25
ここに,I8Ha,Lj及びI8Ha,Lkは,同じ場所で半径方向及び接線方向の両方向に測定され,j及びkの範囲は,
次による。
j=1, 2 k=0, 1 j>k
各層の反射率の比は,連続記録された状態で,次による。
DOW(0): −0.33≦(R8H,Lj−R8H,Lk) / (R8H,Lj+R8H,Lk)≦+0.33
ここに,R8H,Lj及びR8H,Lkは,同じ場所で半径方向及び接線方向の両方向に測定され,次による。
I8Ha=R8H×読取りパワー
ただし,j及びkの範囲は,次による。
j=1, 2 k=0, 1 j>k
30.3 反射率−変調度積
I8変調度(正規化したI8pp変調振幅に等しい。)を乗じたディスクの反射率を,次の式で表す(附属書B
参照)。
conv
8H
8pp
H
8
×
=
×
I
I
R
M
R
このR×Mは,次による。
− L0層及びL1層:
0.006 4≦R×M≦0.019
− L2層:
0.009 1≦R×M≦0.027
I3変調度(正規化したI3pp変調振幅に等しい。)を乗じたディスクの反射率を,次による。
conv
8H
3pp
8H
3
×
=
×
I
I
R
I
R
このR×I3は,次による。
− L0層及びL1層:
R×I3≧0.000 48
− L2層:
R×I3≧0.000 68
172
X 6233:2017 (ISO/IEC 30193:2016)
30.4 非対称性
HF信号の非対称性は,復号した信号及び波形等化をしないHF信号の組合せを用いた平均レベル測定で
行う(I.7参照)。
HF信号の非対称性は,次による。
−0.10≦非対称性≦+0.15
30.5 i-MLSE
i-MLSEを測定するトラックは,29.4.4の規定に従って記録する。
i-MLSEは,記録された5トラックの中心のトラックmで2×Vrefで測定する。
i-MLSEは,トラックmをn回上書き後(0≦n≦10)のトラックmで,次による。
− L0層の場合
附属書Hに規定した回路を用い,11.0 %以下とする。
− L1層の場合
附属書Hに規定した回路を用い,11.5 %以下とする。
− L2層の場合
附属書Hに規定した回路を用い,12.0 %以下とする。
30.6 クロス消去@DOW(n)XE
クロス消去を測定するトラックは,29.4.4の規定に従って記録する。トラック(m−1)及び(m+1)を
n回上書き後(0≦n≦100),トラックmの変調度は,次による。
0.90
)
/
(
DOW(0)
)
/
(
)
(
DOW
8H
8pp
XE
8H
pp
8
XE
≧
の
の
I
I
I
I
n
n回上書き後,i-MLSEは,次による。
− L0層の場合
附属書Hに規定した回路を用い測定した場合,11.5 %以下とする。
− L1層の場合
附属書Hに規定した回路を用い測定した場合,12.0 %以下とする。
− L2層の場合
附属書Hに規定した回路を用い測定した場合,12.5 %以下とする。
30.7 読取耐久性
直流読取りパワー及び高周波重畳読取りパワーで,L0層及びL1層は基準読取速度の2倍にて1.44 mW
で,L2層は基準読取速度の2倍にて1.00 mWで,一つのトラックを連続して106回まで読み取る。
ディスクは,その後,動作環境で全ての規定に適合する。
DIバイト30及びバイト31(15.8.3.3及び15.8.3.4参照)によって,より高い直流読取りパワー及びより
高い高周波重畳読取りパワーを規定する場合は,そのパワーを適用する。
高周波重畳は,次によることが望ましい(図120参照)。
− 重畳周波数(=1/THF-laser):
(400±40) MHz
− ピークパワー及び平均パワーの比:
2.0±0.2
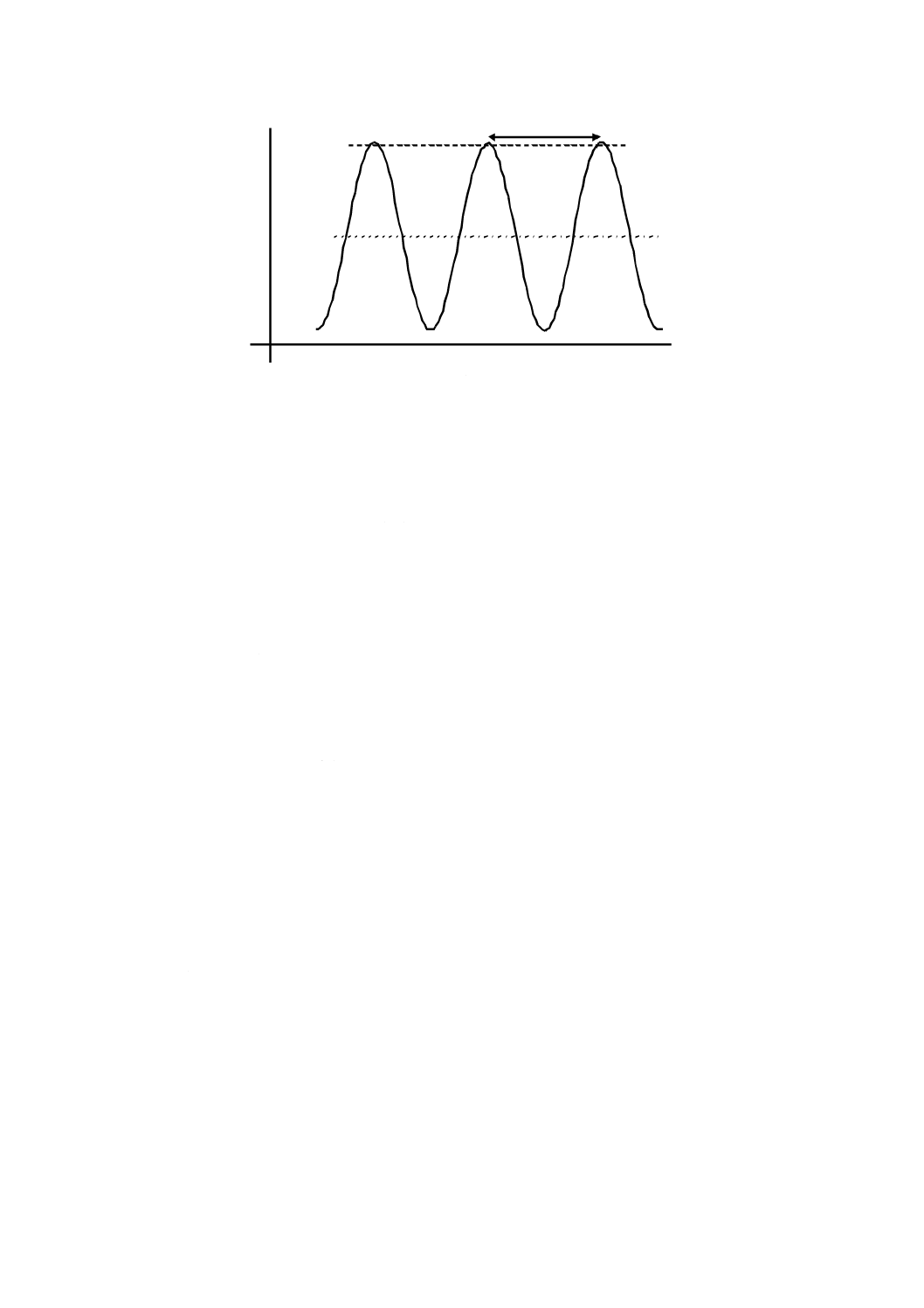
173
X 6233:2017 (ISO/IEC 30193:2016)
平均
光
強
度
ピーク
時間
THF-laser
図120−高周波重畳されたレーザダイオードの光パルス波形の図
追加で,SER(34.2参照)は,いずれのLDCブロックでも4.2×10−3未満とする[317カウント未満と
等価(=4.2×10−3×75 392バイト)]。
注記 記録した信号が劣化するのを防ぐためには,ドライブの直流読取りパワー及び高周波重畳読取
りパワーを,DIバイト30及び31に規定された基準速度の2倍の速度におけるパワーの値を超
えないようにすることを強く推奨する。
31 局所欠陥
“気泡”及び“黒点”(透過積層中に入ったほこり,記録層のピンホールなどの欠陥)といった,記録層
上又は透過積層中の欠陥は,いかなる意図しないトラックジャンプ及び訂正不能エラーも引き起こしては
ならない(33.4及び箇条34も参照)。
そのような欠陥の大きさは,次による。
− 気泡:
直径<100 μm
− 複屈折を伴う黒点:
直径<150 μm
− 複屈折を伴わない黒点: 直径<150 μm
32 使用者データの特性
箇条32〜箇条34は,この規格にディスク上の使用者データが適合するかどうかを測定する一連の測定
方法を規定する。一連の測定は,使用者が記録したデータの読みやすさを確認している。データは,任意
と仮定している。
使用者が記録したデータは,任意の動作環境,速度,及びドライブで記録されていてもよい。
33 使用者データの測定方法
33.1 一般
箇条32〜箇条34規定の読取試験は,基準ドライブで行う。
箇条24〜箇条30は局所欠陥を考慮しなかったが,箇条32〜箇条34は局所欠陥を,読取信号の避けられ
ない劣化として含んでいる。欠陥の程度は,次に示す読取りチャネルのエラー検出及びエラー訂正回路の
エラー訂正能力によって決められる。箇条32〜箇条34の要求事項は,データ交換のためのデータ品質の
下限を規定する。
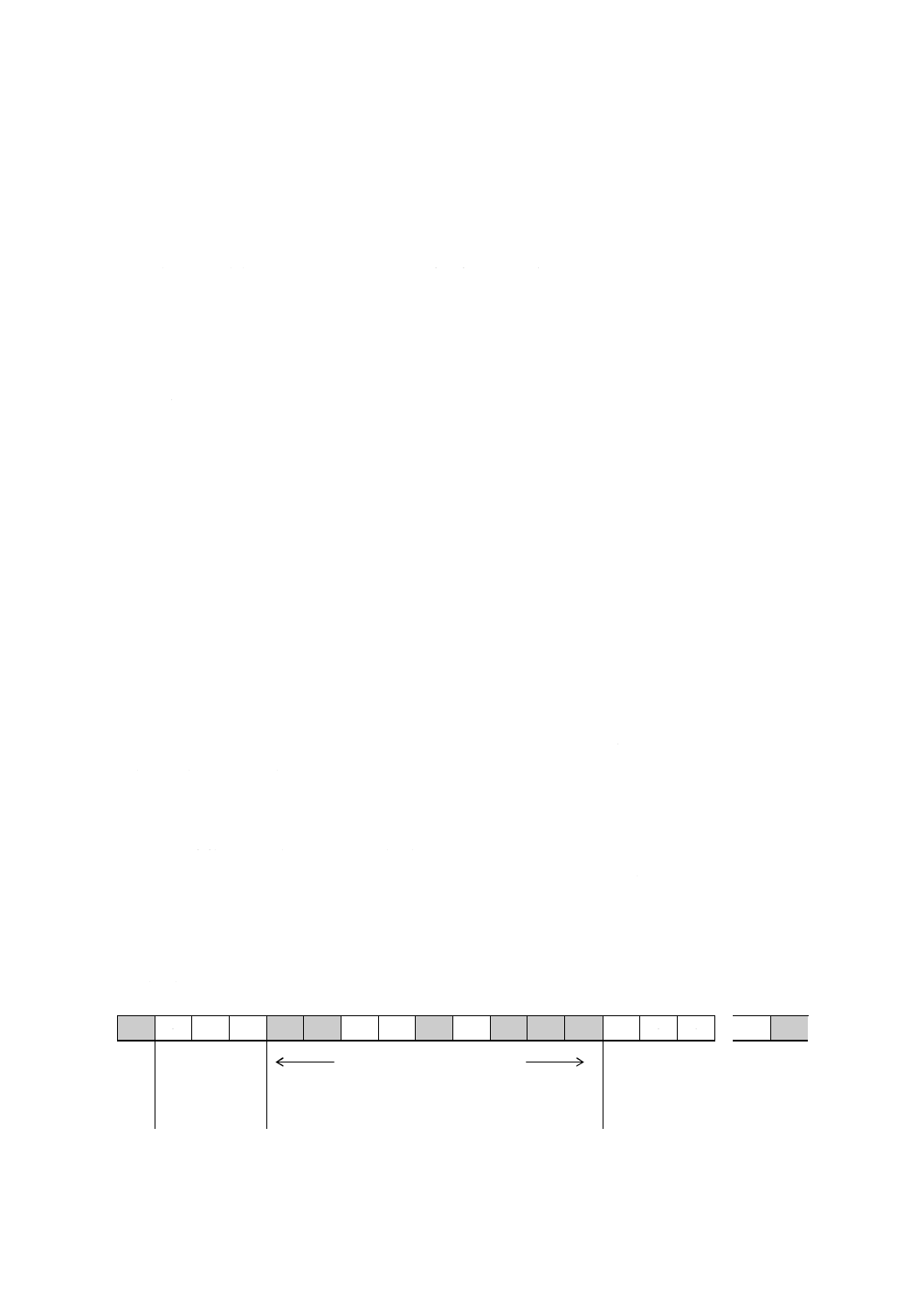
174
X 6233:2017 (ISO/IEC 30193:2016)
33.2 環境条件
ディスクが8.1.1に規定した許容される環境条件にない場合を除き,全ての信号は,規定した範囲内にあ
る。
33.3 基準ドライブ
33.3.1 一般
全ての信号は,箇条9に規定した基準ドライブの適したチャネルで測定する。
33.3.2 読取りパワー
読取りパワーは,ディスクの入射面に照射する光パワーである。読取りパワーは,L0層及びL1層では
(1.44±0.10) mWとし,L2層では(1.00±0.10) mWとする。
33.3.3 読取りチャネル
ドライブは,9.5及び9.6に規定する二つの読取りチャネルをもつ。HF読取りチャネルからのHF信号
は波形等化はせず,データ信号処理の前にフィルタを通す。ディスクの品質測定では,HF信号の前処理
の特性は,i-MLSE測定のために附属書Hに規定したものと同じ特性にする。
33.3.4 エラー訂正
データバイトのエラーの訂正は,箇条13の規定に基づいたエラー検出訂正システムで行う。
33.3.5 トラッキング要求事項
信号の測定中に,光ビームの焦点と記録層との間の軸方向のトラッキングエラーは最大55 nmとし,光
ビームの焦点とトラック中心との間の半径方向のトラッキングエラーは最大16 nmとする。
33.3.6 走査速度
実際のディスクの回転速度は,平均チャネルビットレートが132.000 Mbit/sとなるか又は平均ウォブル
周波数が1 913.043 kHzとなる速度とする。
33.4 信号の定義
バイトエラーは,次による。
バイトエラーは,バイト中の1ビット又はそれ以上のビットが誤った場合に発生し,関連するエラー検
出回路及び/又は訂正回路によって検出される。
バーストエラーは,次による。
− バーストエラーは,任意の二つのエラーバイトの間に三つ以上の正しいバイトがない場合の,一連の
バイトで定義される(13.1及び13.8参照)。
− バーストエラー長は,少なくとも3バイト長以上の正しいバイトでその前のエラーバイトから分離さ
れた最初のエラーバイトから数え始め,次のエラーバイトの先頭から少なくとも3バイト長以上の正
しいバイトで分離される最後のエラーバイトまでを数えた,総バイト数で定義する。
− バースト中のエラーバイト数は,実際のバースト中で正しくないバイト数で定義される(図121の例
を参照)。
x
c
c
c
x
x
c
c
x
c
x
x
x
c
c
c
...
c
x
バースト長は,9 バイト
バースト中のエラーバイト数は,6
c = 正しいバイト,x = エラーバイト
図121−バーストエラーの例
175
X 6233:2017 (ISO/IEC 30193:2016)
シンボルエラー率は,次による。
N LDCブロックで平均をとったシンボルエラー率(SER)は,選択したLDCブロックの全てのエラーバ
イトの総和を,そのLDCブロックの全バイト数で除したもので定義され,次による。
392
75
1
a,
×
∑
=
N
E
N
i
i
ここに, Ea,i: LDCブロックi中のエラーバイト数
N: LDCブロック数
ランダムシンボルエラー率は,次による。
ランダムシンボルエラー率は,シンボルエラー率でバースト長40バイト以上のバーストエラー中のエラ
ーバイトをSERの式の分子,分母両方から除いた式で定義され,次による。
(
)
∑
∑
=
=
−
×
−
N
i
i
N
i
i
i
E
N
E
E
1
b,
1
b,
a,
392
75
ここに, Ea,i: LDCブロックiの全エラーバイト数
Eb,i: LDCブロックiで40バイト以上のバーストエラー中の全ての
エラーバイト数
N: LDCブロック数
34 記録情報の下限品質
34.1 一般
ディスクの品質を確認する場合に,SER及びバーストエラーを決めるために選んだ領域に任意の使用者
データを10回上書きする。
34.2 ランダムシンボルエラー率
10回上書き後のランダムSERは,いかなる連続した10 000 LDCブロックで平均化しても,次を満たす。
ランダムSER<2.0×10−4
34.3 最大バーストエラー
各記録ユニットブロックで,40バイト以上のバーストエラー個数及びバーストの長さの総和は,次によ
る。
− バーストエラー個数:
八つ未満
− バーストの長さの総和: 600バイト以下
34.4 使用者記録データ
HF読取りチャネルで読み取る記録ユニットブロック(RUB)の中の使用者記録データは,箇条13に規
定したエラー訂正システムで訂正不能となるバイトがあってはならない。
35 BCA
r1とr3との間のゾーンは,バーストカッティング領域(BCA)に使うために予約している(15.2及び図
52参照)。
176
X 6233:2017 (ISO/IEC 30193:2016)
BCA領域は,製造工程が終わった後にディスクに情報を追加するために用いる。
BCA符号は,書換形ディスクの場合,高パワーレーザシステム又は初期化器によって記録できる。
BCA符号の全ての情報は,全ての同心円上で全く同じ情報であり,内容は半径方向に整列しており,CAV
モードで記録する(図122参照)。
BCA符号は,L0層の半径
mm
3.
21
0
3.0
−
と
mm
0.
22
2.0
0
+
との間に記録する(BCA符号は,保護ゾーン1の一
部と重なってもよい。)。
BCA符号は,L0層に記録するが,L0層にBCA符号を記録する影響が他の層に見えてもよい。
BCA符号は,円周方向に配置した低反射率のストライプの連続で記録する。各ストライプは,BCA領
域の半径方向の幅最大限に伸ばす。
BCA符号の情報は,L0層の半径21.3 mmと22.0 mmとの間の任意の半径位置でドライブで読むことが
できる。
BCA符号を記録するかどうかは,アプリケーションによって決められる。アプリケーションに規定する
場合を除いて,BCA符号はBCA領域に記録しない。BCA符号のフォーマット及び内容は,関連団体の合
意によって定義をしている。
バーストカッティング領域
BCA符号
バーストカッティング領域
BCA符号
図122−BCAの図示
177
X 6233:2017 (ISO/IEC 30193:2016)
附属書A
(規定)
多層の場合の透過積層の厚さ
A.1 一般
透過積層全体がk層の構成の場合,個々の層の厚さを決めるために,この附属書の方法を用いる。
− d1 .. dk:層1..kの厚さ
− n1 .. nk:層1..kの屈折率
− D(n):屈折率nの場合の,図13の3層ディスクの公称厚さ。図中の曲線は,球面収差が同じになる厚
さを示している。
D(n)は,箇条12の関数gを用いて,次の式で表すことができる。
D(n)=D(1.6)×g(n)
層kの厚さdkは,次の式と等しくなることが望ましい。
−
×
=
∑
−
=
1
1
)
(
1
)
(
k
i
i
i
k
k
n
D
d
n
D
d
A.2 カバー層及びスペーサ層の全ての層の屈折率ni
カバー層及びスペーサ層の各層の屈折率niは,次による。
1.45≦ni≦1.70
A.3 透過積層の厚さばらつき
透過積層jの相対厚さは,次による。
()
∑
=
=
k
i
i
i
j
n
D
d
RT
1
ディスク全体で測定する,全透過積層の相対厚さRTは,次による。
a) TS0の相対厚さRT0: 94.0≦100×RT0≦106.0
b) TS1の相対厚さRT1: 69.0≦75.0×RT1≦81.0
c) TS2の相対厚さRT2: 52.0≦57.0×RT2≦62.0
注記 記録層の厚さは,大変薄く,厚さの計算では無視できる。
A.4 スペーサ層厚さのばらつき
スペーサ層jの有効厚さは,次による。
)
(
1
i
k
i
i
j
n
f
d
ES
×
=∑
=
ここに, ES1: スペーサ層1の有効厚さ
ES2: スペーサ層2の有効厚さ
ESc: TS2又はカバー層の有効厚さ
関数f(n)は,箇条12に規定されており,図14に示している。有効厚さは,屈折率が1.60と仮定した場
178
X 6233:2017 (ISO/IEC 30193:2016)
合の仮想的な値を意味する。
任意の屈折率での実際の厚さ(附属書Kに示す方法で測定できる。)は,標準的な屈折率1.60の有効厚
さに変換される。実際の厚さ及び有効厚さの両方で,デフォーカス値は同じである。ここに,デフォーカ
スは,各厚さ及び各屈折率をもつ透明媒体を通過する,光のフォーカス位置の動きと規定する。
有効厚さは,次による。
ESc−(ES1+ES2)≧1.0 μm
ES1−ES2≧1.0 μm
A.5 厚さの計算例
屈折率がn1=1.52であり公称厚さ55.0 μmのカバーシートが,L2層をもつ基板に屈折率がn2=1.58の接
着シートで付けられていると仮定する。この場合,屈折率が1.52及び1.58のカバー層の公称厚さは,次の
とおりに計算される。
D(1.52)=D(1.6)×g(1.52)=56.35 μm
D(1.58)=D(1.6)×g(1.58)=56.81 μm
ここに,
D(1.6)=57.0 μm,g(1.52)=0.988 6及びg(1.58)=0.996 6(12.3参照)。
接着シートの公称厚さd2は,次のとおりに計算される。
μm
36
.1
35
.
56
55
1
81
.
56
2
=
−
×
=
d
そして,カバー層の有効厚さ(ESc:カバーシート+接着シート)は,次のとおりに計算される。
ESc=55×1.075 7+1.36×1.017 7=60.55 μm
ここに,
f(1.52)=1.075 7及びf (1.58)=1.017 7(箇条12参照)
結果は,屈折率nが小さくなれば有効厚さEScは大きくなることを示している。したがって,ESc−(ES1
+ES2)≧1.0 μmの要求事項の観点から,カバー層の屈折率(nc)はスペーサ層の屈折率(ns1,ns2,ns3)よ
りも小さいのがよい。そして,ES1−ES2≧1.0 μmの要求事項の観点から,次の条件が望ましい。
nS2>nS1>nc
179
X 6233:2017 (ISO/IEC 30193:2016)
附属書B
(規定)
反射率の測定
B.1
一般
ディスクの反射率は,幾つかの方法で測定できる。二つの一般的な方法を,次に示す。
− 平行光測定法
− 収束光測定法
ディスクの反射率は,既知の反射率の基準ディスクを使うことによって収束光測定法で測定される。一
方で,基準ディスクの反射率は平行光測定法で校正される。
収束光測定法で反射率を測定する場合,ディスクの反射層から帰ってきた光(Rm)だけが,フォトディ
テクタに当たる。ディスク表面での反射光及びディスク内部の付随した折返し反射光は,大部分は,フォ
トディテクタの外に出る。平行光測定法では,全体反射(R//)だけが測定でき,反射層からの主反射を決
めるためには計算が必要となる。
B.2
校正方法
例えば,0.1 mmのガラスのカバー層で金の反射ミラーをもつような,複屈折の影響がない良い基準ディ
スクを選ぶ。図B.1に示すとおり,基準ディスクは平行光測定法で測定する。
I
入射ビーム
B
R
ディテクタへ
//
Rint
Rm
Rs
r
R
図B.1−反射率校正
この図で,次の式を適用する。
R =記録層の反射率(透過積層内の折返し反射光を含む。)
r =表面反射率
Rref =収束光によって測定した反射率(Rm / IBで規定。)
IB =入射ビーム
Rs =入射面の反射率による反射
180
X 6233:2017 (ISO/IEC 30193:2016)
Rm =記録層の反射率による主反射
Rint =入射面と記録層との間の,内部反射による反射
R// =測定値(Rs+Rm+Rint)
入射面の反射率は,次による。
2
1
1
+
−
=nn
r
ここに,
n: カバー層の屈折率
記録層の反射率による主反射によって,次の式が導かれる。
−
×
−
−
×
−
=
=
B
//
B
//
2
B
m
ref
2
1
)
1(
I
R
r
r
I
R
r
I
R
R
ここに,
Rm: 次の式による主反射
Rm=R//−Rs−Rint
基準ディスクは,基準ドライブで測定する。収束光で測定し,基準ディスクで得られるディテクタの全
電流(4分割の総和=Itotal)によって,上に規定したRmが計算される。
これで,装置は校正され,収束光反射率は,入射面の反射とは関係なく記録層及び透過積層の折返し反
射光の反射率に比例することになる。
B.3
測定方法
未記録のバージン書換領域の反射率は,次の測定による。
基準ドライブを使った反射率測定法は,次による。
a) 校正した反射率Rrefをもつ基準ディスクからの反射光による,全ディテクタ電流(I1+I2)refを測定する。
b) 測定するグルーブ及びグルーブの両側の隣接する2トラックが記録されていない,調査対象のディス
クのグルーブトラックからの反射光による全ディテクタ電流(I1+I2)Gを測定する。
c) 未記録ディスクの,記録領域のグルーブトラックの反射率Rg−vは,次による。
(
)
(
)
ref
ref
2
1
G
2
1
v
g
R
I
I
I
I
R
×
+
+
=
−
未記録の消去書換領域の反射率は,次の測定による。
基準ドライブを使った反射率測定法は,次による。
a) 校正した反射率Rrefをもつ基準ディスクからの反射光による,全ディテクタ電流(I1+I2)refを測定する。
b) 測定するグルーブ及びグルーブの両側の隣接する2トラックが消去済みの,調査対象のディスクのグ
ルーブトラックからの反射光による,全ディテクタ電流(I1+I2)Gを測定する。これらのトラックの消
去は,OPCアルゴリズム(附属書G参照)で決めたPEパワーだけを使ってトラックに照射する。
c) 未記録消去ディスクの書換領域の,グルーブトラックの反射率Rg−eは,次による。
(
)
(
)
ref
ref
2
1
G
2
1
e
g
R
I
I
I
I
R
×
+
+
=
−
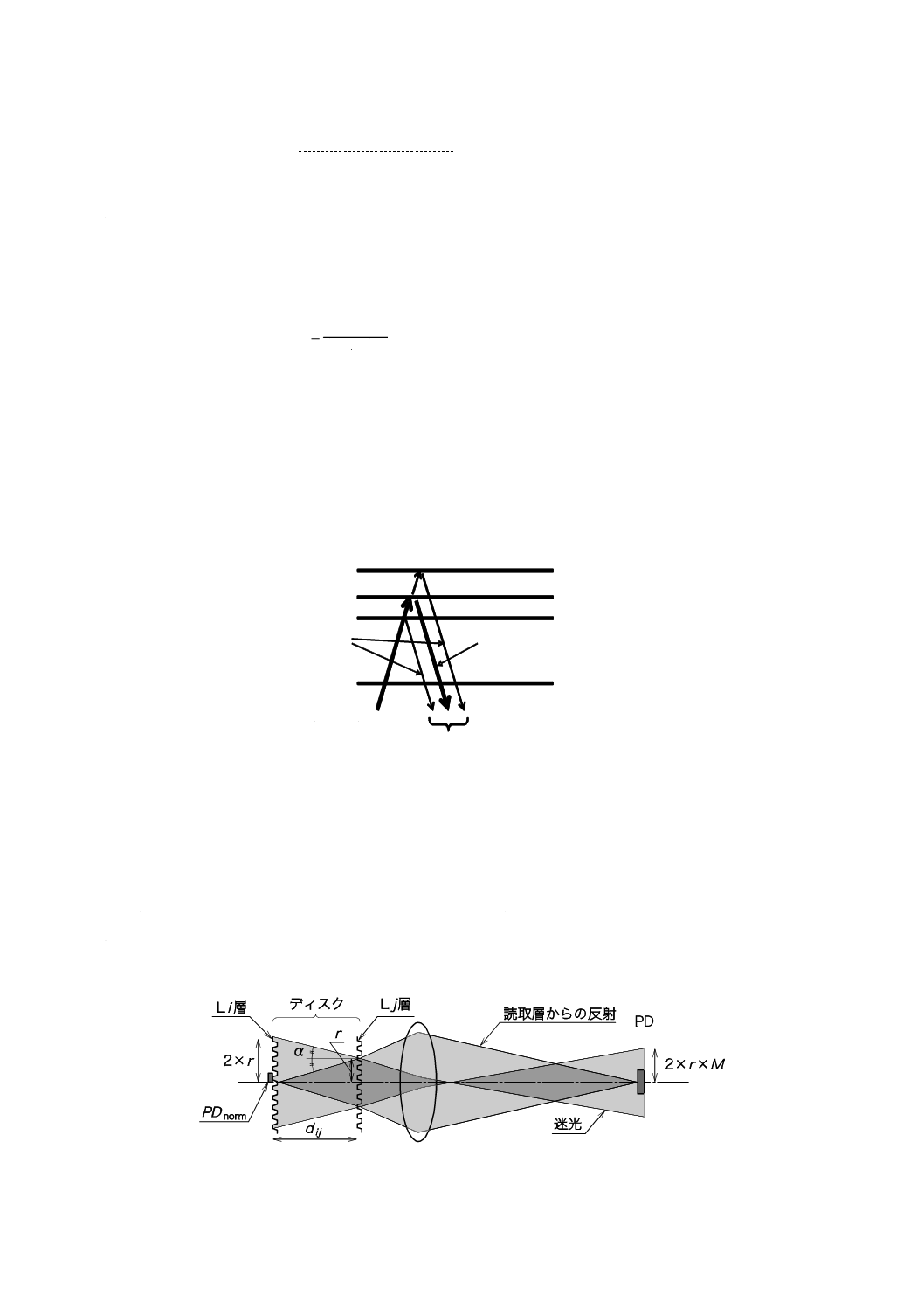
181
X 6233:2017 (ISO/IEC 30193:2016)
記録済み書換領域の反射率は,次の測定による。
基準ドライブを使った反射率測定法は,次による。
a) 校正した反射率Rrefをもつ基準ディスクからの反射光による,全ディテクタ電流(I1+I2)refを測定する。
b) 調査対象のディスクのエリアの中の記録済みトラックで,測定するグルーブの両側のトラックが2本
以上記録済みになっているトラックからのI8Hを測定する。トラックの記録は,OPCアルゴリズム(附
属書G参照)の規定による,最適パワーで行う。
c) 記録領域のグルーブトラックの,記録済みディスクの反射率R8Hは,次による。
(
)
ref
ref
2
1
8H
8H
R
I
I
I
R
×
+
=
留意事項 記録層で反射率を測定する場合に,測定部分に該当する他の層全てを未記録とすることを
注意する。
B.4
測定した反射率から迷光の影響を補正する方法
B.3規定の方法で測定した反射率は,他の層から反射してくる迷光によって影響されている(図B.2参
照)。したがって,測定した反射率は,影響を少なくするように補正する。以降,B.3に規定する測定方法
適用の反射率は観測反射率と参照し,次に示す方法で補正した反射率は補正反射率と参照する。
読取面からの反射
L0層
L1層
L2層
観測反射率
迷光
L1層集光入射光
ディスク表面
図B.2−他の層からの迷光の影響
読取層の観測反射率は,次に示す方法で補正できる。
次の条件を仮定する。
a) 多重反射は,無視できる。
b) 観測光は,読取層からの反射及び他の全ての層からの迷光の和である。
c) ディテクタ表面での,位相のそろった光の干渉効果は無視する。
d) 迷光のディテクタ上に投影した光強度は,均一とする。したがって,単一の迷光のディテクタ出力は,
迷光のスポット及びフォトディテクタの面積比に比例する。
図B.3−迷光の光線追跡
182
X 6233:2017 (ISO/IEC 30193:2016)
図B.3において,各記号の意味は,次による。
− i:
読取層の層番号
− j:
他の層の層番号
− n:
透過積層の屈折率
− α:
ディスク内部での入射光の角度で,sinα=NA/n
− dij:
Li層とLj層との間の物理的距離
− r:
他の層のスポット半径で,r=dijtanα
− PDnorm: 読取層に投影した場合の,ディテクタの大きさ(9.4参照)
− M:
光学システムの光学拡大率
図B.3に示すとおり,光線の位置関係から読取層Liに投影した迷光のスポット半径は2×rである。
Lj層からの迷光スポット及びディテクタの両方が読取層に投影されたものの面積比は,次のとおりに導
出される。
2
norm
2
norm
)
tan
π(2
)
π(2
α
d
PD
r
PD
A
ij
ij
×
×
=
×
=
観測光は,読取層からの反射及びその他の全ての層からの迷光の和である。したがって,読取層Liの観
測光は,次の式で表される。
[
]
)3,2
(
0
=
×
+
=
∑
≠=
N
A
R
R
S
ij
N
i
jj
j
i
i
ここに,
Si: 迷光の影響を含んだLi層の観測反射率(Rm,g−v,Rm,g−e,Rm,8H)
Ri: Li層の補正反射率(Rg−v,Rg−e,R8H)
N: ディスクの記録層の数(3層ディスクは2)
Rg−vを求める数式は,ベクトル及び行列表示を用い,次による。
Sg−v=A·Rg−v
ここに, Sg−v: 未記録バージン層での観測反射率ベクトル
Rg−v: 未記録バージン層での補正反射率ベクトル
A: 面積比行列
その結果,補正反射率ベクトルRg−vは,次の式で導出される。
Rg−v=A−1·Sg−v
未記録消去層の補正反射率(Rg−e)は,次の式で表すことができる。
[
]
)3,2
(
0
v,
g
e,
g
e,
g
=
×
−
=
∑
≠=
−
−
−
N
A
R
S
R
ij
N
i
jj
j
i
i
ここに, Sg−e: 未記録消去層Liの観測反射率
記録済み層の補正反射率(R8H)は,次の式で表される。
[
]
)3,2
(
0
v,
g
8H,
8H,
=
−
=
∑
≠=
−
N
A
R
S
R
ij
N
i
jj
j
i
i
ここに, S8H: 記録層Liの観測反射率
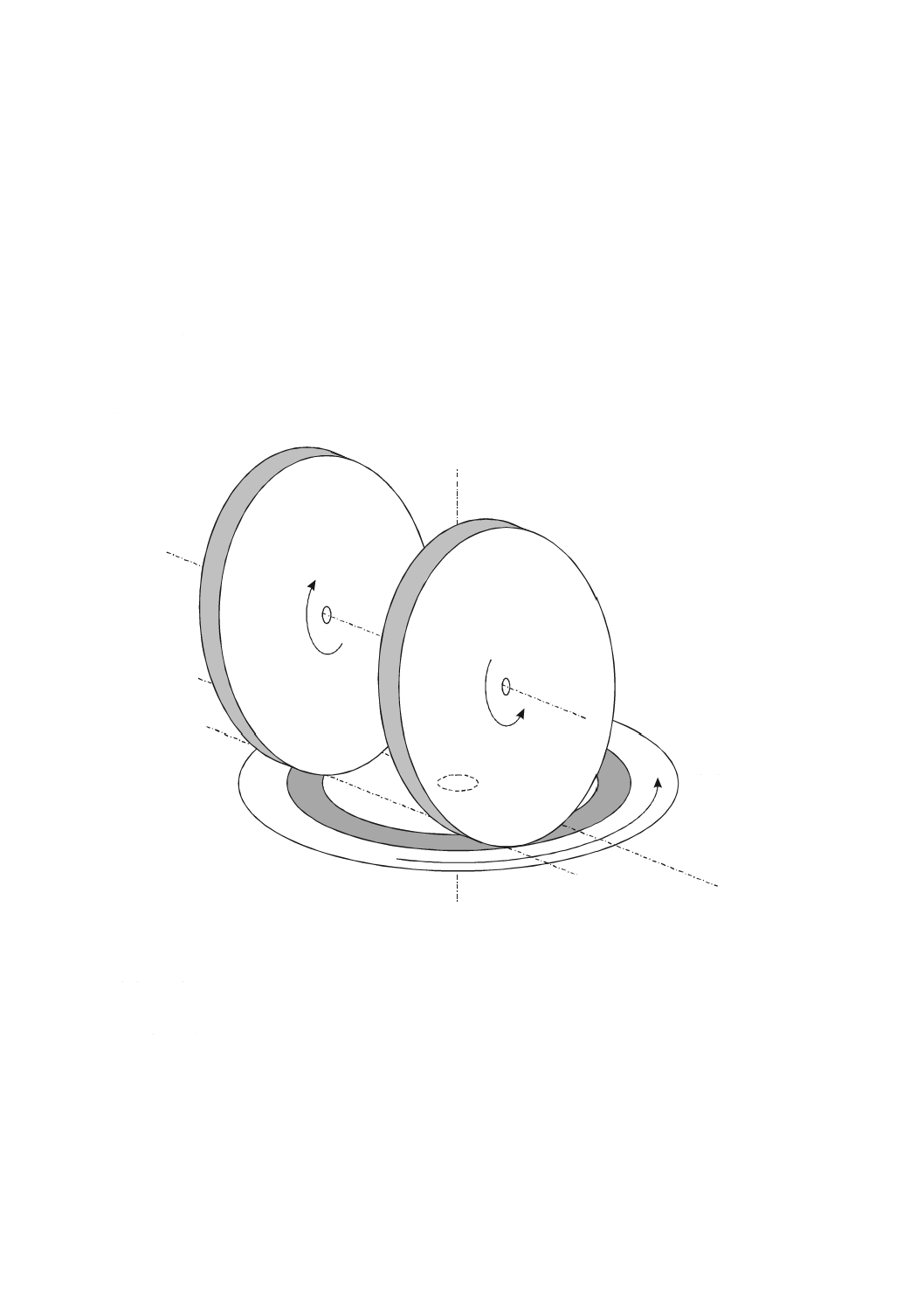
183
X 6233:2017 (ISO/IEC 30193:2016)
附属書C
(規定)
カバー層のきず耐久性の測定
C.1 一般
ディスクの入射面は,十分なきず耐久性をもつ。保護コートをして改善してもよい。
C.2 テーバ摩耗試験
“テーバ摩耗”と呼ばれる試験は,ディスクの入射面のきず耐久性が十分かどうか検証する。
摩耗素材に覆われた2本の輪が,規格値の負荷をかけて試験を受けるディスクに載せられる(図C.1参
照)。
ディスクの回転軸
輪の回転
回転方向
ディスクの
ディスクの中心を
通る線
輪の回転軸の投影
図C.1−標準的な摩耗試験の構成
試験条件は,次による。
試験の構成は,JIS K 7204に従い,次に詳細を示す。
− 輪のタイプ:
CS10F
− 各輪への負荷値:
2.5 N
− 回転回数:
5
− 摩耗試験は,試験に必要な記録を行う前に実施する。
試験後の結果は,次による。
附属書Hに規定するi-MLSEをL0層で測定した場合,値は14 %以下とする。
184
X 6233:2017 (ISO/IEC 30193:2016)
摩耗輪の取扱いは,次による。
摩耗輪の取扱いは,ASTM D1044 [1]の規定に従うことが望ましい。
テーバ摩耗試験を行う前に,毎回両方の摩耗輪はST-11研磨石で表面を研磨することが望ましく,次に
よる。
− 新しい輪は,100回研磨する。
− 前に用いた輪は,25回研磨する。
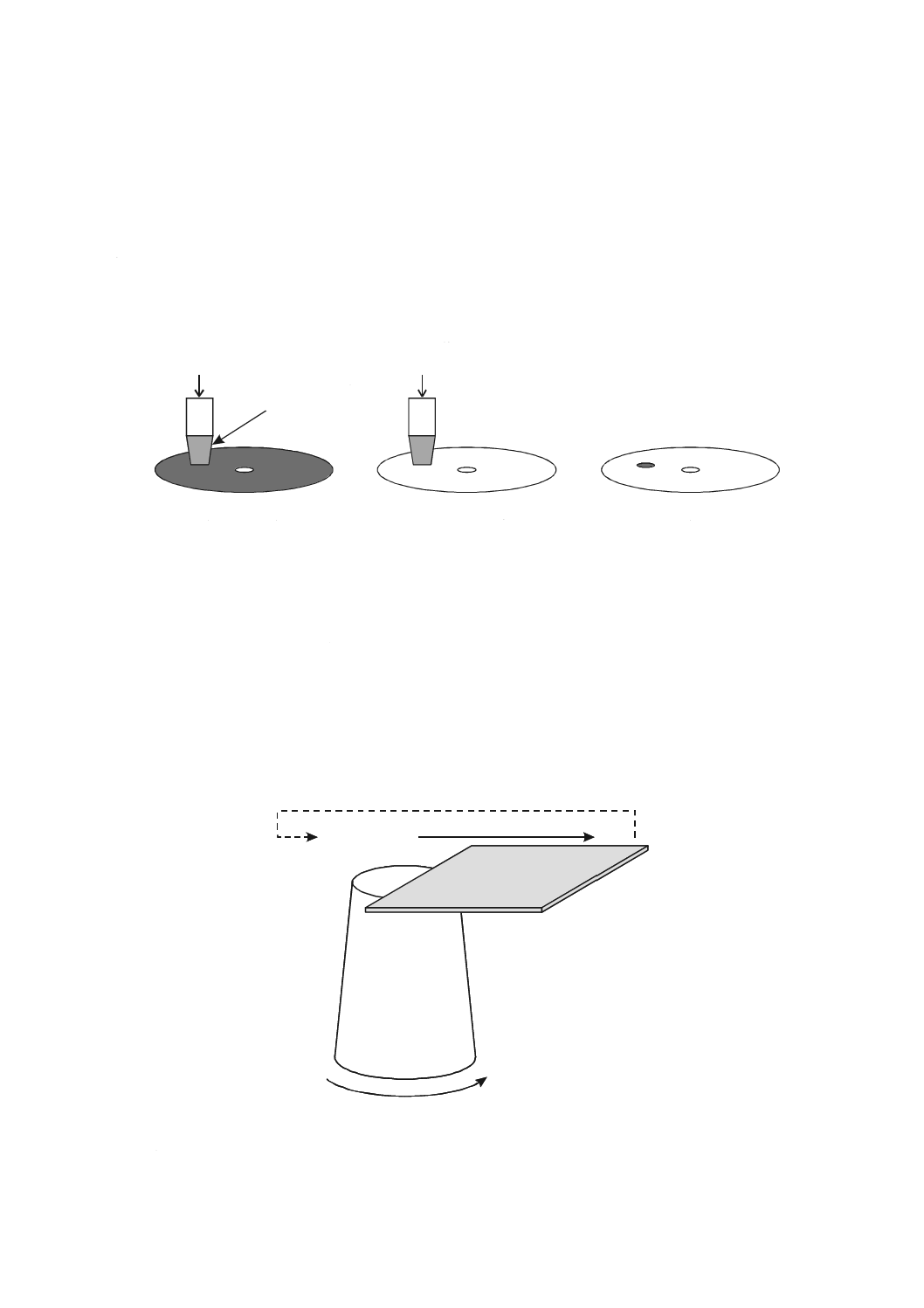
185
X 6233:2017 (ISO/IEC 30193:2016)
附属書D
(規定)
カバー層の汚れはつ(撥)油性の測定
D.1 一般
この附属書は,ディスクの指紋に対する感度を決めるために,人工の指紋(AFP)をディスクに付ける
方法を規定する。図D.1は,基本的な方法を示している。
シリコンゴムスタンプ
4.9Nで10秒
4.9 Nで10秒
インクパッド
スタンプにインクを付ける
テストされるディスクに
スタンピング
テストされるディスク
AFP付き
図D.1−ディスクへのAFPの付着
AFP付着後,AFPを付けた領域の各物理クラスタのランダムSER(33.4参照)は,AFPを通して記録し
再生してL0層を測定した場合4.2×10−3未満とする。各物理クラスタで,40バイト長以上のバーストエラ
ー数は,8未満及びバースト長の総和は800バイト以下とする。
D.2 スタンプの規格
シリコンゴムスタンプは,次による(図D.2参照)。
− 寸法:スタンプの形状: φ16 mm×φ12 mm×高さ20 mm
− スタンプ柱の固さ:
A60
図D.2−スタンプの形及び準備
ランダムなきずがあるスタンプを作るために,#240番のサンドペーパで磨く。
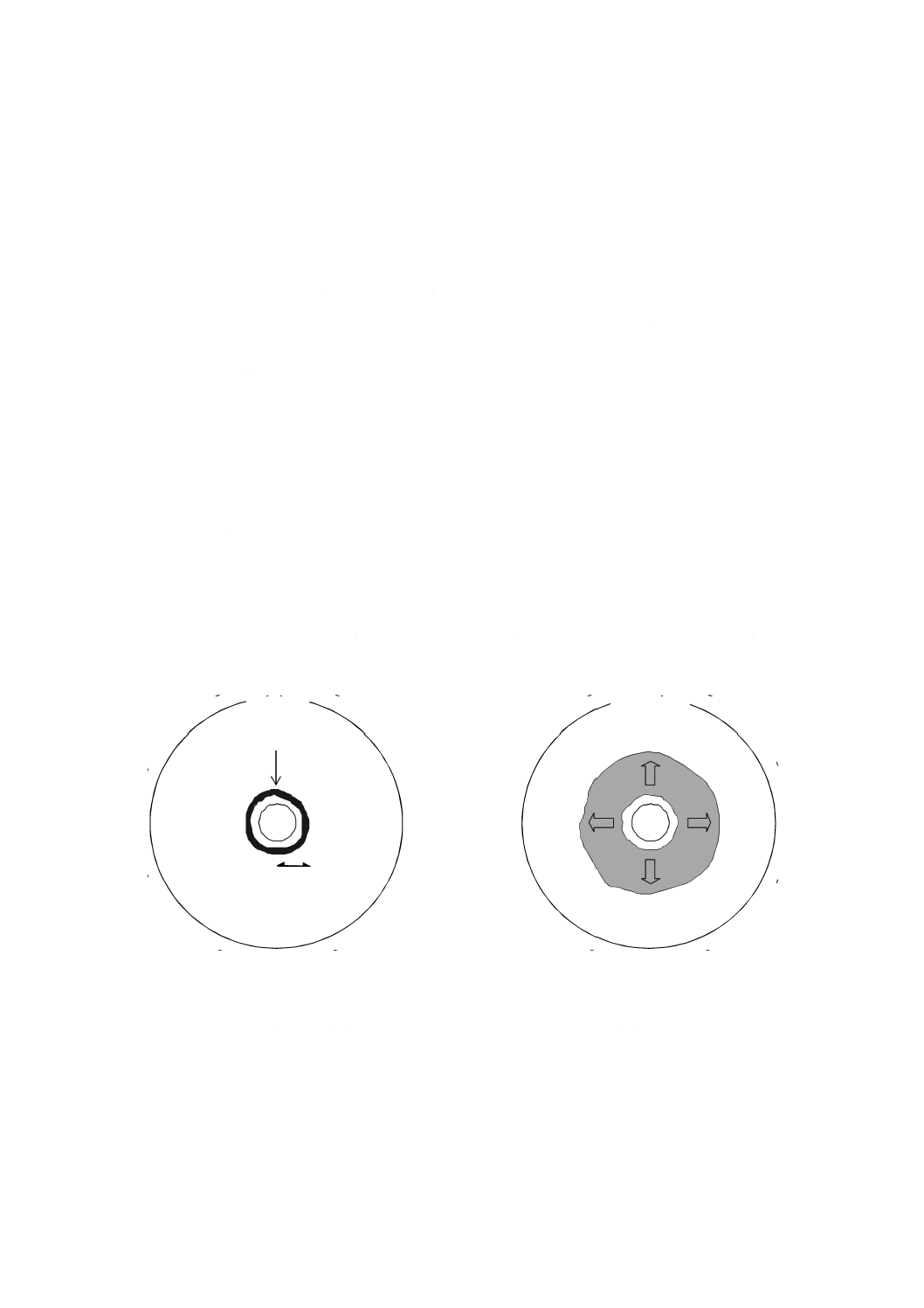
186
X 6233:2017 (ISO/IEC 30193:2016)
サンドペーパは,ゆっくり一方向に10回〜20回の間動かす。サンドペーパに加える力は4.9 Nと9.8 N
との間とする。
スタンプを,任意の角度回転させ前記の方法を繰り返す。
回転及び研磨は,少なくとも30回は繰り返す。
D.3 インクの準備
AFPを付けるインクは,次の成分によって構成する。
− M:メトキシプロパノール(M)。正確には,1−メトキシ2−プロパノール
− T:トリオレイン(T)。純度は,少なくとも60 %とする。
− D:標準ほこり(D)。JIS Z 8901の規定に従い,試験用粉体1の11種(関東ローム)を選ぶ。さらに,
詳細の情報は,一般社団法人日本粉体工業技術協会(http://www.appie.or.jp/)で入手する。
インクのクリーニング用としては,エタノールを用いる。
M,T及びDの成分は,質量比240:20:8で合成する。混ぜたものは,プラスチックの棒を使い手で少
なくとも15秒間かき混ぜる。
D.4 インクパッドの準備
スタンプに決まった量のインクが付くように,インクは,インクパッドの上にスピンコートされる。こ
こに,インクパッドは,ピット及びグルーブのパタンのないポリカーボネートの成形基板とする。インク
をディスクに付ける前に,基板は,例えば,超音波振動などで少なくとも30秒間十分にゆする。
基板を,スピナ上で60回毎分で回転しながら,10秒間以内に少なくとも2 mlのインク液を概略12 mm
の半径位置に垂らす(図D.3参照)。
solution
put on
substrate
spreading
the solution
by spinnig
radius
12 mm
基板に付けた
溶剤
回転による
溶剤の広がり
12 mm
半径
図D.3−インクパッドスピンコート
ディスクにインクを付けた後,回転速度100回毎分で1秒間回す。そして,回転速度を5秒間の間に直
線的に5 000回毎分に上げ,その速度で1秒間維持する(図D.4参照)。回転降下時間は問題とならない。
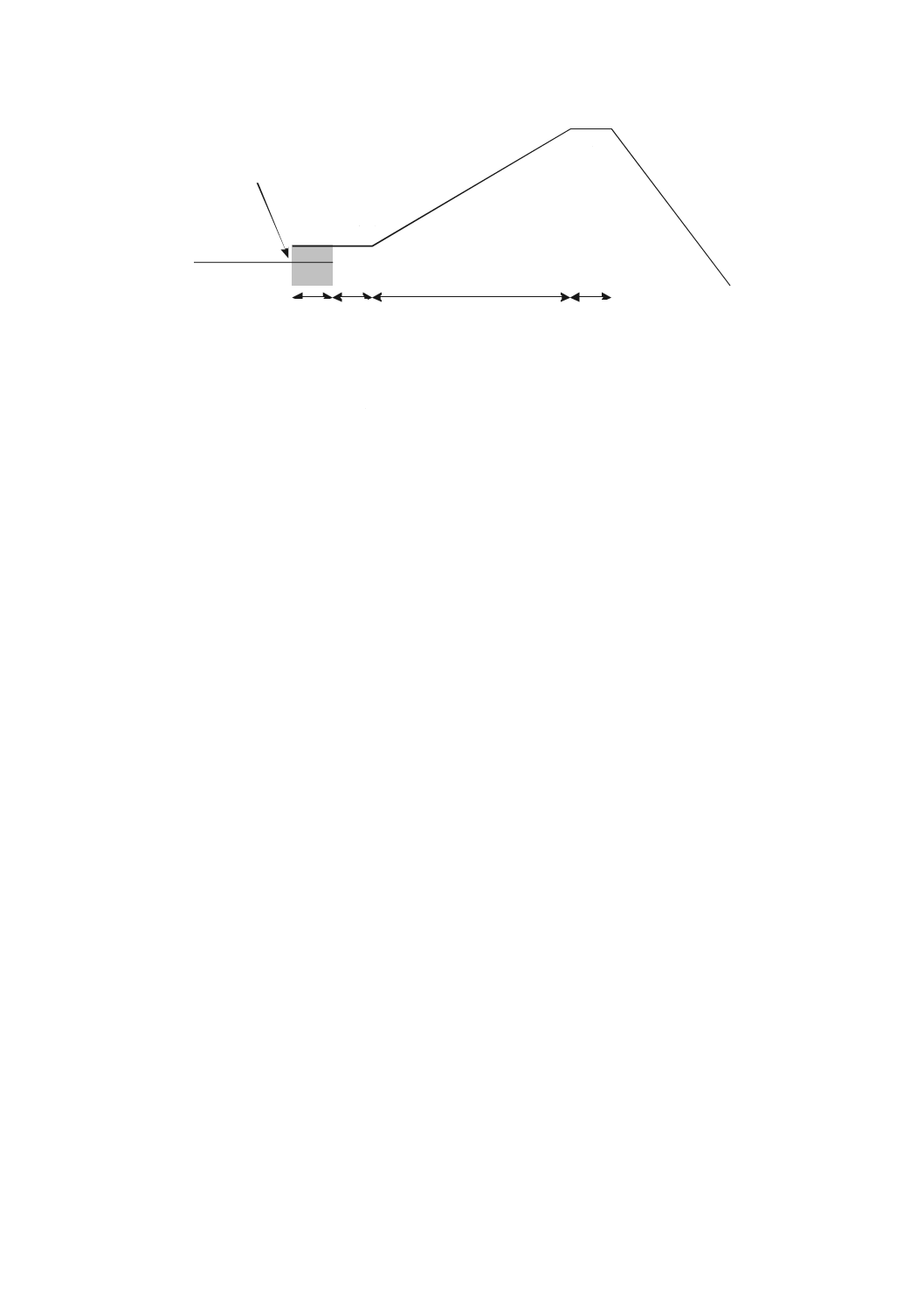
187
X 6233:2017 (ISO/IEC 30193:2016)
60回毎分
100
5 000
1秒
1秒
5秒
0.1秒~1秒
<100
インク溶剤を
注ぐ
回毎分
回毎分
回毎分
図D.4−インクパッドスピンコートの速度プロファイル
D.5 インクパッド及びスタンプの使用
スタンプにインクを付けるのは,半径30 mm辺りがよい。
スタンプは,ベンコットのような糸くずの出ないティシュできれいにできる。
スタンプは,最初に,エチルアルコールでぬらしたティシュできれいにし,その後,乾いたティシュで
拭き取ることができる。
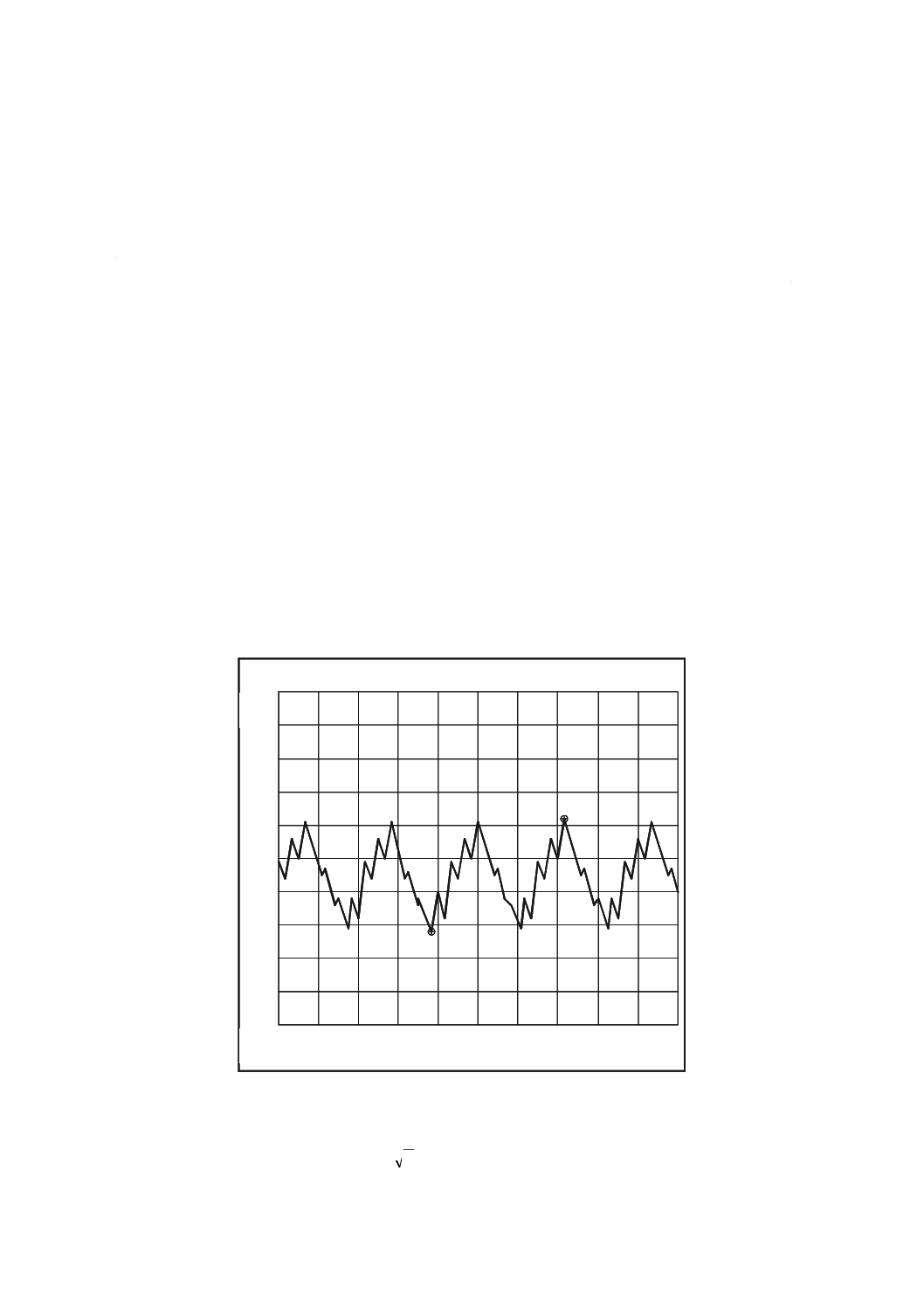
188
X 6233:2017 (ISO/IEC 30193:2016)
附属書E
(規定)
ウォブル振幅の測定
E.1
測定方法
ウォブル信号及びプッシュプル信号は,測定前にフィルタを通す。ウォブル信号は16 MHzの低域通過
フィルタを通し,プッシュプル信号は30 kHzの低域通過フィルタを通す。
グルーブの変調及びウォブルビートのために,ウォブル信号を普通のオシロスコープを使って十分正確
に求めることは非常に難しい。したがって,ウォブル信号をスペクトラムアナライザを使って測定する方
法(らせんグルーブを連続トラッキングしながら)の手順を,次に示す。
a) ステップ1:正規化していないウォブル信号の測定 25.3.4のトラッキング要求事項の下でプッシュ
プル信号を次の設定で測定する。
− 中心周波数:
1 913.043 kHz
− スパン:
ゼロスパン
− 分解能帯域幅:
30 kHz
− ビデオ帯域幅:
100 Hz
− 掃引時間:
ウォブル信号の幾つかのビートを見ることができるように選ぶ。
この条件下で,スペクトラムアナライザは,時間に対しての入力信号の実効値を示す(図E.1参照)。
Mkr1
Mkr2
Ref -32 dBV
Log
2 dB/
Mkr1 533 ms-39.6dBV
Mkr2 367 ms-46.4dBV
中心1 913.043kHz
分解能帯域幅30 kHz
スパン0 Hz
ビデオ帯域幅100 Hz
Atten0 dB
Mkr1
Mkr2
Ref -32 dBV
Log
2 dB/
Mkr1 533 ms-39.6dBV
Mkr2 367 ms-46.4dBV
中心1 913.043kHz
分解能帯域幅30 kHz
スパン0 Hz
ビデオ帯域幅100 Hz
Atten0 dB
図E.1−ウォブル信号を示すスペクトラムアナライザの例
マーカMkr2での信号レベルは,最小ウォブル信号WSminのdBV値を表している。スペクトラムア
ナライザは,実効値を測定するため
2
2×
の係数を乗じて,測定値を電圧の両ピーク値に変換する(例
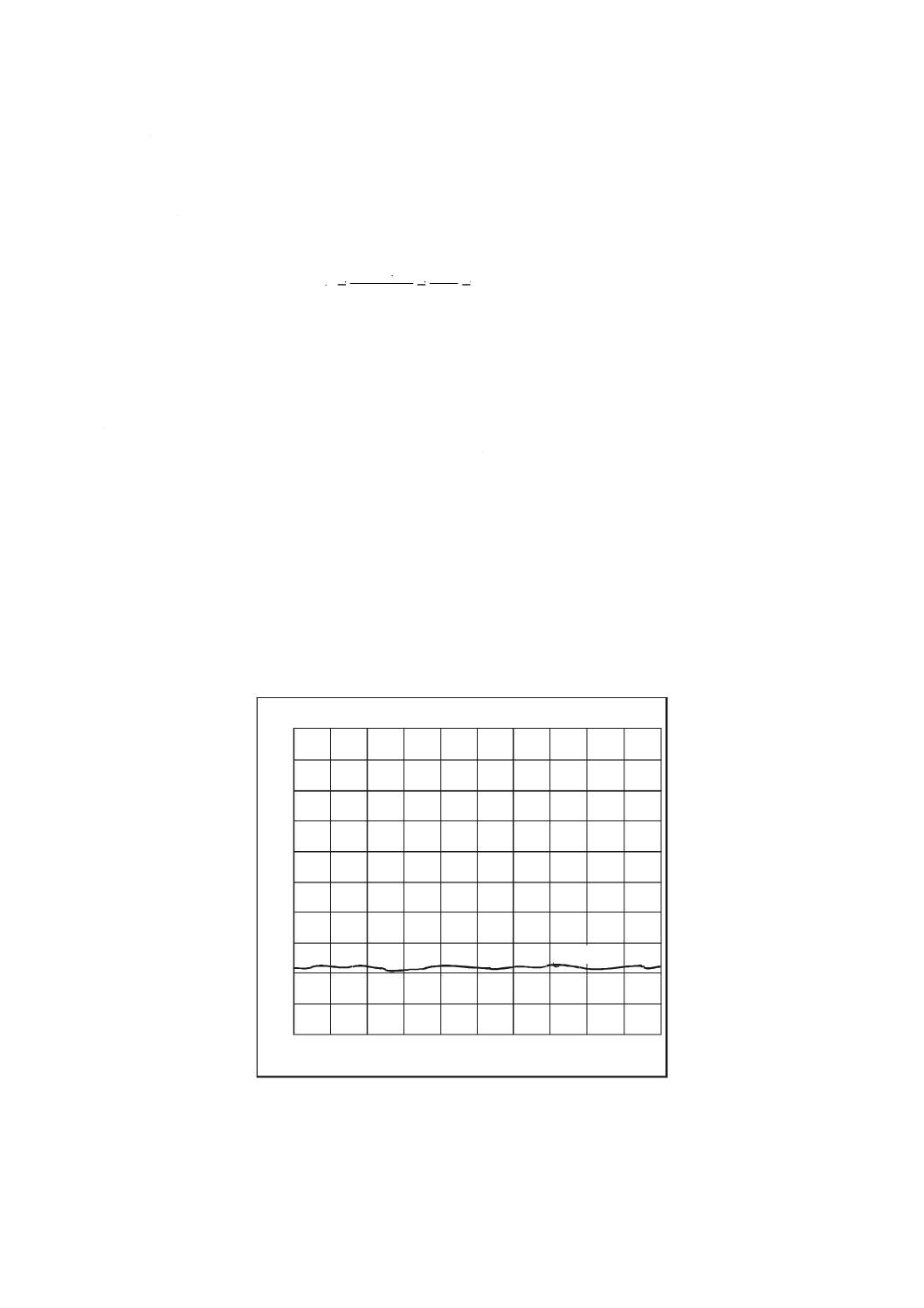
189
X 6233:2017 (ISO/IEC 30193:2016)
の中の−46.4 dBVは,13.5 mVppに相当する。)。
b) ステップ2:正規化していないプッシュプル信号の測定 次に,トラッキングサーボオフのプッシュ
プル信号(I1−I2)ppを測定する(25.4参照)。
この例では,30 mVppであったとする。
c) ステップ3:正規化ウォブル信号(NWS)の計算
(
)
45
.0
30
5.
13
pp
2
1
min
min
=
=
−
=
I
I
WS
NWS
d) ステップ4:ウォブルビートの決定 マーカMkr1の信号レベルは,最大ウォブル信号WSmaxのdBV
値を表す。
ウォブルビートは,次による。
WSmax−WSmin=6.8 dB又はNWSmax=2.2×NWSmin
e) ステップ5:ウォブル信号のキャリアノイズ比の測定 25.3.4のトラッキング要求事項の下で,プッ
シュプル信号を次の設定でスペクトラムアナライザを使って測定する。
− 中心周波数:
1 MHz
− スパン:
ゼロスパン
− 分解能帯域幅:
30 kHz
− ビデオ帯域幅:
10 Hz
− 掃引時間:
ウォブル信号の幾つかのビートを見ることができるように選ぶ。
これらの条件下でスペクトラムアナライザは,時間に対しての1 MHzの帯域幅のノイズ信号の実効値を
示す(図E.2参照)。
Mkr1
Ref -60 dBV
Log
2 dB/
Mkr1 1.27秒-75,4 dBV
中心1.0 MHz
分解能帯域幅30 kHz
スパン0 Hz
掃引時間1.767 秒
ビデオ帯域幅10 Hz
Atten 0 dB
図E.2−ノイズ信号を示すスペクトラムアナライザの例
マーカMkr1の信号レベルは,ノイズ信号の信号レベルをdBV値で表している。
ウォブルCNRは,このように簡単に計算でき,次による。
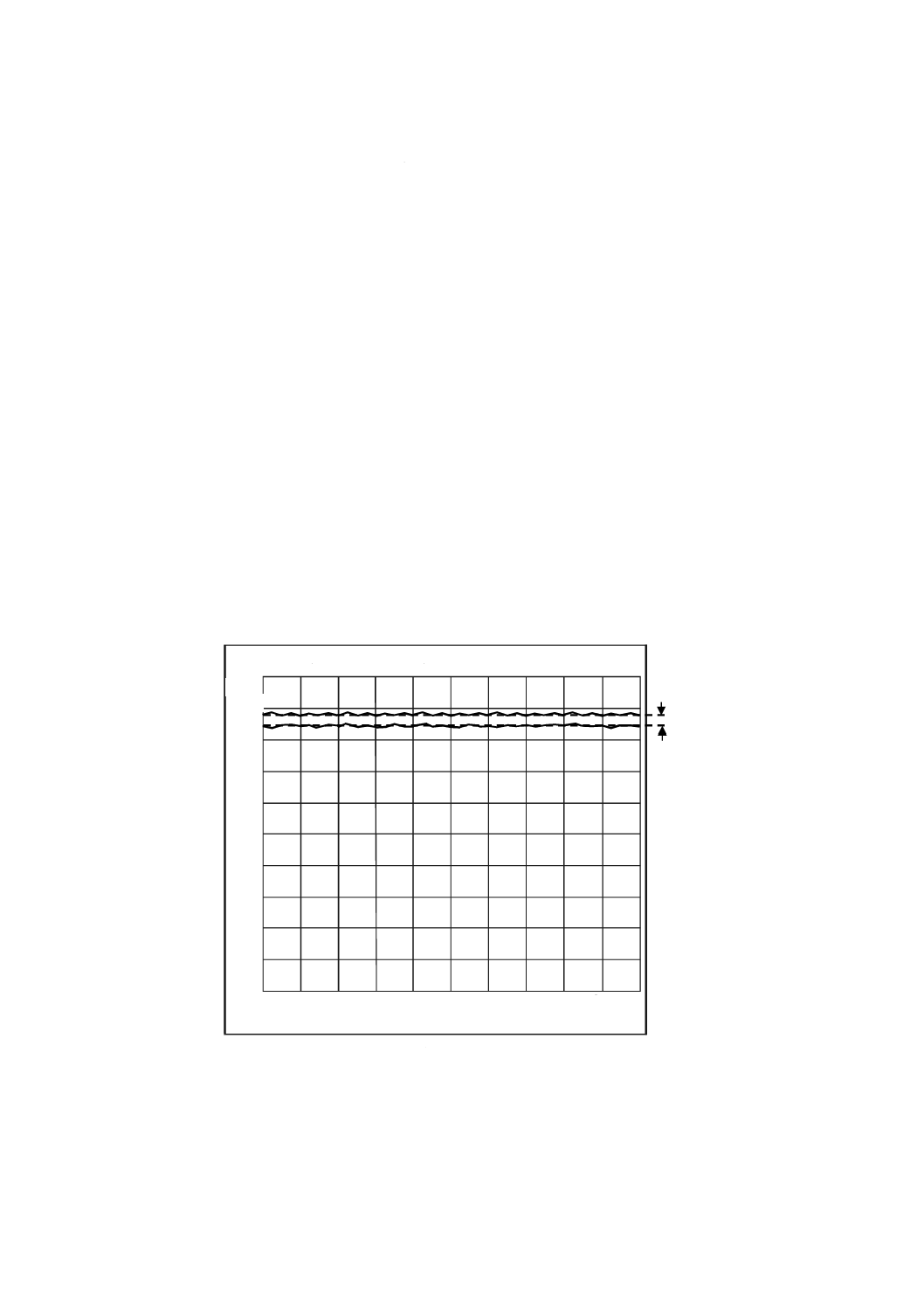
190
X 6233:2017 (ISO/IEC 30193:2016)
WSmin−ノイズレベル=−46.4+75.4=29 dB(例の値の場合)
f)
ステップ6:SHD/SHLの測定 この測定は,27.3.4に従って行う。
25.3.4のトラッキングの要求事項の下で,プッシュプル信号を次の設定でスペクトラムアナライザ
を用いて測定する。
基本波レベルの測定は,次の設定とする。
− 中心周波数:
1 913.043 kHz
− スパン:
ゼロスパン
− 分解能帯域幅:
10 kHz
− ビデオ帯域幅:
1 Hz
− 掃引時間:
約5秒
2次高調波レベルの測定は,次の設定とする。
− 中心周波数:
3 826.086 kHz
− スパン:
ゼロスパン
− 分解能帯域幅:
10 kHz
− ビデオ帯域幅:
1 Hz
− 掃引時間:
約5秒
これらの条件下でスペクトラムアナライザは,時間に対してのデータゾーン及び保護ゾーン3の基
本波レベルの実効値を示す(図E.3参照)。
Ref-10dBm
Log
10dB/
A-viewB-view
中心1913.043kHz
分解能帯域幅10kHz
スパン0Hz
掃引時間5秒
ビデオ帯域幅1Hz
Atten10dB
3dB
FPZ3
FDZ
図E.3−ウォブル基本波レベル測定の例
図E.3で下側の軌跡は,データゾーンの任意の書換領域で測定したFDZで示す基本波レベルを表す。
図E.3で上側の軌跡は,保護ゾーン3で測定したFPZ3で示す基本波レベルを表す。
FDZ及びFPZ3の値は,FDZ及びFPZ3の軌跡の平均値で決められる。
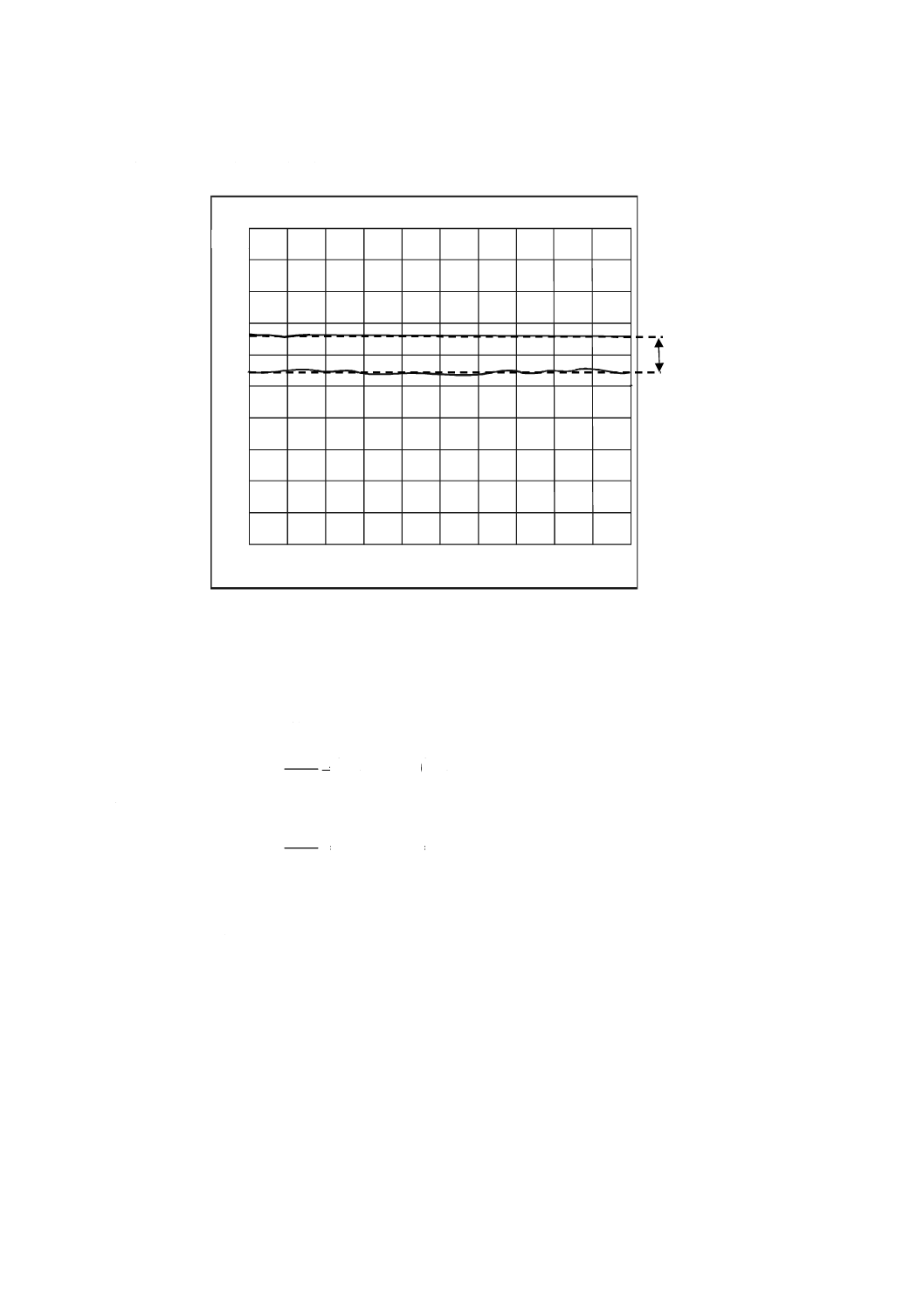
191
X 6233:2017 (ISO/IEC 30193:2016)
同様に,スペクトラムアナライザは,時間に対してのデータゾーン及び保護ゾーン3の2次高調波レベ
ルの実効値を示す(図E.4参照)。
-10.9dB
Ref-10dBm
Log
10dB/
A-viewB-view
中心1913kHz
分解能帯域幅10kHz
スパン0Hz
掃引時間5秒
ビデオ帯域幅1Hz
Atten10dB
SDZ
SPZ3
図E.4−2次高調波レベルの測定例
図E.4で上側の軌跡は,データゾーンの任意の書換領域のSDZで示す2次高調波レベルを表す。
図E.4で下側の軌跡は,保護ゾーン3の任意の記録領域のSPZ3で示す2次高調波レベルを表す。
SDZ及びSPZ3の値は,SDZ及びSPZ3の軌跡の平均値で決められる。
SHD/SHLは,次の式で計算される。
(
)(
)
DZ
PZ3
DZ
PZ3
F
F
S
S
SHL
SHD
−
−
−
=
例では,
dB
9.
13
)3(
)9.
10
(
−
=
−
−
=
SHL
SHD
E.2
フィルタの校正
ノイズ測定の分解能帯域幅フィルタの形は,理想的には方形である。そのようなフィルタは,実現でき
ないため,実際のスペクトラムアナライザのフィルタは測定値に影響を与える。ノイズの真の実効値を決
めるために,補正係数を適用することが望ましい。そのような補正係数は,通常,測定器の製造業者から
与えられ,実際のフィルタの形及びタイプに依存する。
192
X 6233:2017 (ISO/IEC 30193:2016)
附属書F
(規定)
試験のための記録パルス波形
F.1
記録パルス波形概要
この規格では,次に示す二つのタイプの記録ストラテジを規定する。
a) 拡張N−1記録ストラテジ(図F.1参照)
b) 拡張N/2記録ストラテジ(図F.3参照)
これらの記録ストラテジの規定で,Nは,チャネルクロック周期(T)の単位で表す,NRZIデータパル
スのラン長を表す。
F.2
拡張N−1記録ストラテジ
NRZIデータ及びチャネルクロックから得られる記録パルスの波形例を,図F.1に示す。波形は,NRZI
信号の高レベルを保存するマークを記録する記録パルス列で構成している。これらの記録パルス列は,
NRZI信号の低レベルを保存するスペースを記録する(実際は消去)固定の消去レベル(PE)につながっ
ている。NRZI信号の,高レベルから低レベルへの遷移でパルス列及び消去レベルは,“冷却レベル”(PC)
と呼ばれるレベルでつなげられる。
記録パルス列は,次による。
最初の記録パルスは,幅がTtopであり,最後のパルス(Nが3以上の場合)は幅がTLPであり,その間の
記録パルス(Nが4以上の場合)は幅がTMPである。マーク長Nの最初のパルスは,NRZIパルスの1T後
に対してdTtopの位置で開始し,各その後に続く記録パルスは最後の記録パルスを除いてNRZIパルス開始
後2T,3T .. (n−1)Tで開始する。マーク長Nに対する最後の記録パルスは,NRZIパルスの終端よりも1T
前に対してdTLPの位置で開始する。
前の及び/又は後に続くスペースの長さに応じて,(Ttop)の幅及び最初の記録パルスの開始位置(dTtop)
を熱バランスを最適にするように適応的に変えることができる。また,後に続くスペースの長さに応じて,
最後の記録パルスの幅(TLP)及び開始位置(dTLP)を熱バランスを最適にするように適応的に変えること
ができる。
記録パルスは,パワーレベルPWをもち,一方,これらのパルスの間のバイアスパワーはPBWとする。
最初の記録パルスに先立つパワーレベルはPEとする。最後の記録パルスと消去レベルとの間のパワーレベ
ルはPCとする。
消去レベルは,次による。
消去レベルPEは,NRZIパルスの終端に対してdTEの位置で開始し,次の最初の記録パルスまで続く。
後に続く及び/又は前のスペースの長さに応じて,消去レベルの開始時間(dTE)は,熱バランスを最適に
するように適応的に変えることができる。
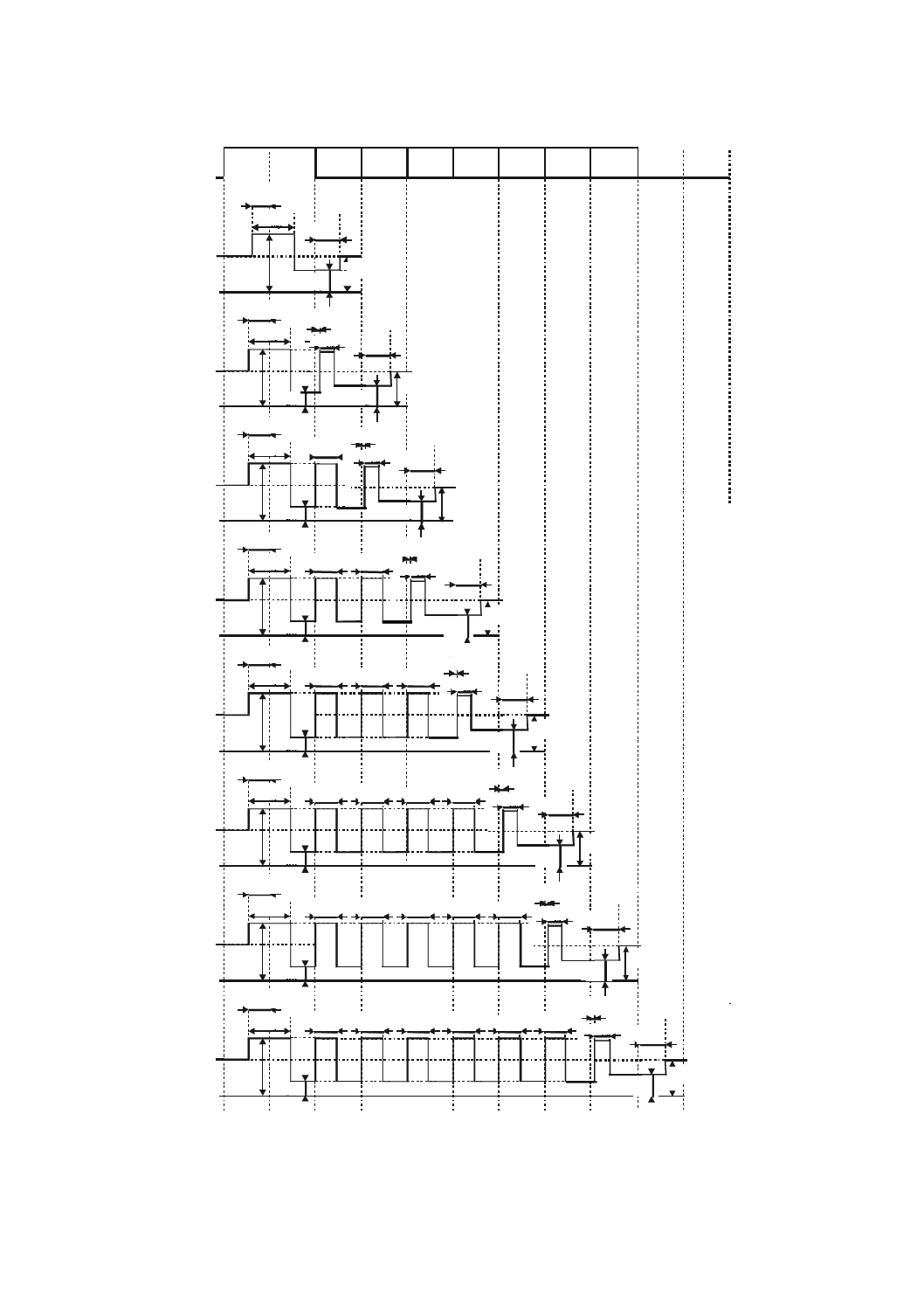
193
X 6233:2017 (ISO/IEC 30193:2016)
3T
4T
5T
NRZI チャネルビット
2T
3T
4T
5T
6T
7T
8T
9T
2T
6T
7T
0
PW
dTtop
Ttop
PW
dTtop
Ttop
0
0
PW
dTtop
Ttop
0
PW
dTtop
Ttop
0
PW
dTtop
Ttop
PE
dTE
PBW
PBW
TMP
TMP
TMP
TMP
0
PW
dTtop
Ttop
TMP
TMP
TMP
TMP
TMP
TMP
8T
0
PW
dTtop
Ttop
TMP
TMP
TMP
TMP
TMP
9T
0
PW
dTtop
Ttop
TMP
TMP
TMP
TMP
TMP
TMP
PC
PBW
PBW
PBW
PBW
PBW
PE
dTE
TLP
PC
dTLP
PE
dTE
TLP
PC
dTLP
PE
dTE
TLP
PC
dTLP
PE
dTE
TLP
PC
dTLP
PE
dTE
TLP
PC
dTLP
PE
dTE
TLP
PC
dTLP
PE
dTE
TLP
PC
dTLP
図F.1−拡張N−1記録ストラテジの記録パルス波形
194
X 6233:2017 (ISO/IEC 30193:2016)
パルス幅は,次による。
パルス幅は,実際のチャネルクロックTW(TW/32の整数倍)に関連している。
全ての許容された記録速度で許容されるパルス幅時間は,次に示す値で構成する(正の値は,図F.1の
dTtopで示すとおり進みであり,負の値はdTEで示すとおり遅れである。)。
dTtop=i×(TW/32)
ここに,
i: −28,−27,..,−1,0,1,2,..,29又は30
(dTtopは,2T,3T,4T若しくは5T以上のマーク,及び/又
は先行する2T,3T,4T若しくは5T以上のスペースに依存し
てもよい。さらに,2TマークだけdTtopは,後に続く2T又は
3T以上のスペースにも依存してもよい。)
Ttop=j×(TW/32)
ここに,
j: 0,1,2,..,59又は60
(Ttopは,2T,3T,4T若しくは5T以上のマーク,及び/又は
先行する2T,3T,4T若しくは5T以上のスペースに依存して
もよい。さらに,2TマークだけTtopは,後に続く2T又は3T
以上のスペースにも依存してもよい。)
TMP=p×(TW/32)
ここに,
p: 0,1,2,..,29又は30
TLP=s×(TW/32)
ここに,
s: 0,1,2,..,29又は30
(TLPは,3T,4T若しくは5T以上のマーク,及び/又は後に
続く2T,3T,4T若しくは5 Tは以上のスペースに依存しても
よい。)
dTLP=r×(TW/32)
ここに,
r: −30,−29,..,−1,0,1,2,..,29又は30
(dTLPは,3T,4T若しくは5T以上のマーク,及び/又は後
に続く2T,3T,4T若しくは5T以上のスペースに依存しても
よい。)
dTE=u×(TW/32)
ここに,
u: −48,−47,..,−1,0,1,2,..,29又は30
(dTEは,2T,3T,4T若しくは5T以上のマーク,及び/又は
後に続く2T,3T,4T若しくは5T以上のスペースに依存して
もよい。さらに,2TマークだけdTEは,後に続く2T又は3T
以上のスペースにも依存してもよい。)
各パワーレベルPW,PBW,PC及びPEの継続時間は,ギャップなしという例外があるが,2.0 ns以上とす
る。対応するディスクのディスク情報の,記録ストラテジパラメタによって,存在すると考えられる異な
るマーク長の先行するスペース及び後に続くスペースの全ての組合せで,この条件を守る。
パルス幅の制限例は,次に示すとおりとなる。
− Ttop,TMP及びTLPの継続時間については,j,p及びsの最小値は,9となる。
− トップパルスとマルチパルスの間,マルチパルスとマルチパルスとの間,又はマルチパルスと最後の
パルスとの間については,j−i+r(3T),j−i(4T以上),p及びp+rの最大値は,23となる。
− トップパルスと消去パルスとの間については,j−i+u (2T)は,23以下又は32に等しい。
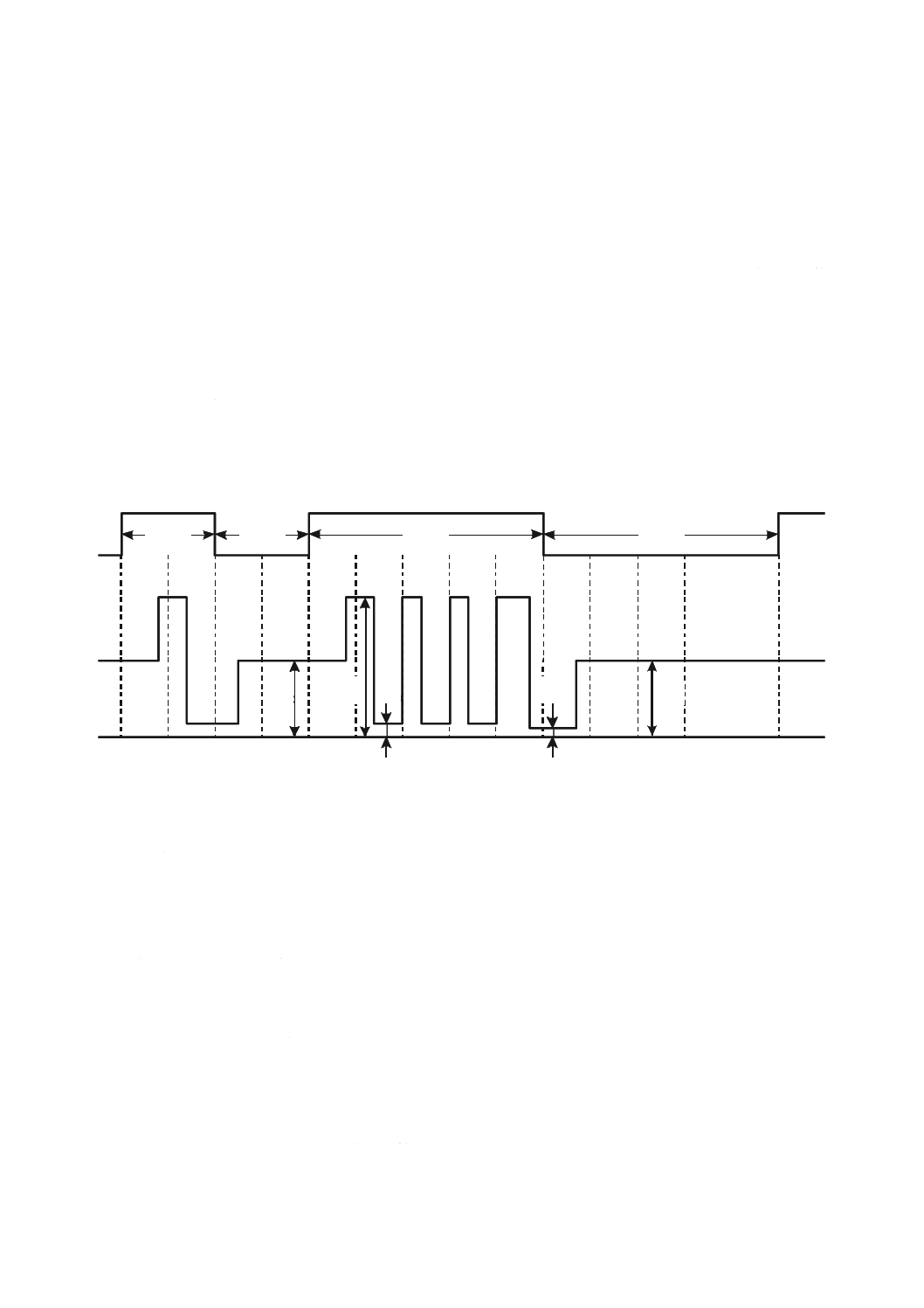
195
X 6233:2017 (ISO/IEC 30193:2016)
− 最後のパルスと消去パルスとの間については,s+u−r(3T,4T及び5T以上)は,23以下又は32に等
しい。
− そのラン長のマークでは,冷却パルスがないことを意味するj−i+u=32(2T)又はs+u−r=32(3T,4T
及び5T以上)の場合,この数式は,同じラン長のマークの前のスペース及び後のスペースの全ての組
合せに適用する。
− 全てのパラメタは,マーク,マークの前のスペース,及びマークの後に続くスペースの組合せで計算
される。
図F.4に規定するとおりに,パルス幅の精度は,±0.2 nsよりも小さい。
図F.4に規定する,立上がり時間及び立下がり時間は,1.2 nsを超えない。
パラメタは,ディスクに依存し最適値は,15.8.3に示すとおりである。PW,PBW,PC及びPEの値は,OPC
アルゴリズムに従って決定される(附属書G参照)。
例 図F.2に最小マーク及び最小スペース並びに5Tマーク及び5Tスペースの記録パルス波形の例を
示す。
2 T
2
T
5 T
5 T
PE
PW
PB
PC
PE
2 T
マーク
2
T
スペース
5 T
マーク
5 T
スペース
NRZI データ
PE
PW
PB
PC
PE
図F.2−拡張N−1記録ストラテジ記録信号の例
F.3
拡張N/2記録ストラテジ
NRZIデータ及びチャネルクロックによって得られた記録パルス波形の例を,図F.3に示す。それは,記
録マルチパルス列で構成し,NRZI信号の高レベルを保存するマークを記録する。これらのパルス列は,
NRZI信号の低レベルを保存するスペースを記録する(又は実際は消去),固定の消去レベル(PE)につな
がる。NRZI信号の高レベルから低レベルへの遷移で,パルス列及び消去レベルは,“冷却レベル”(PC)
と呼ばれるレベルでつなげられる。
記録パルス列は,次による。
最初の記録パルスは幅Ttopであり,最後の記録パルス(Nが4以上の場合)は幅TLPであり,その間の記
録パルス(Nが6以上の場合)は幅TMPである。
マーク長Nの最初の記録パルスは,NRZIパルスの開始位置よりも1T後の位置から相対的にdTtopの時
間で開始し,それに続く各記録パルスは,偶数ラン長(N=4,6又は8)の場合,NRZIパルスの開始から
3T,5T,.. (n−1)T後で開始し,奇数ラン長(N=5,7又は9)の場合最後の記録パルスを除きNRZIパル
スの開始から3.5T,5.5T .. (n−1.5)T後で開始する。
196
X 6233:2017 (ISO/IEC 30193:2016)
先行する及び/又は後に続くスペースの長さによって,最初の記録パルスの幅(Ttop)及び開始位置(dTtop)
は,最適な熱バランスになるように変えることができる。また,後に続くスペースの長さによって,最後
の記録パルスの幅(TLP)及び開始位置(dTLP)は,最適な熱バランスになるように変えることができる。
記録パルスは,パワーレベルPWとし,これらのパルスの間のバイアスパワーはPBWとする。最初の記
録パルスの前のパワーレベルはPEとする。最後の記録パルスと消去レベルとの間のパワーレベルはPCと
する。
消去レベルは,次による。
消去レベルPEは,NRZIパルスの終わりから相対的にdTEの時間で始まり,次に来る最初の記録パルス
まで継続する。
パルス幅は,次による。
パルス幅は,実際のチャネルクロックTW(TW/32の整数倍)に関連している。
全ての許容された記録速度で許容されるパルス幅時間は,次に示す値で構成する(負の値は,図F.3で
示すとおり遅れである。)。
dTtop=i×(TW/32)
ここに,
i: −32,−31,..,−1,0,1,2,..,29又は30
(dTtopは,2T,3T,[4T,6T,8T]若しくは[5T,7T,9T]マー
ク,及び/又は先行する2T,3T,4T若しくは5T以上のスペ
ースに依存してもよい。さらに,2Tマークだけは,dTtopは,
後に続く2T又は3T以上のスペースにも,依存してもよい。)
注記 記録ストラテジの表記において,4T以上の偶数パルスのいずれか又は4T以上の奇数パルスの
いずれかに対して,同様の記録ストラテジを適用する場合に,奇数及び偶数のパルスセットを
[4T,6T,8T],[5T,7T,9T]のように[ ]で囲う表記をしている。
Ttop=j×(TW/32)
ここに,
j: 0,1,2,..,91又は92
0≦j≦i+62
(Ttopは,2T,3T,[4T,6T,8T]若しくは[5T,7T,9T]マーク
長,及び/又は前にくる2T,3T,4T若しくは5T以上のスペ
ースに依存してもよい。さらに,2Tマークだけは,Ttopは,後
に続く2T又は3T以上のスペースにも依存してもよい。)
TMP=p×(TW/32)
ここに,
p: 0,1,2,..,61又は62
dTLP=r×(TW/32)
ここに,
r: −30,−29,..,−1,0,1,2,..,29又は30
(dTLPは,[4T,6T,8T]若しくは[5T,7T,9T]マーク,及び
/又は後に続く2T,3T,4T若しくは5T以上のスペースに依
存してもよい。)
TLP=s×(TW/32)
ここに,
s: 0,1,2,..,61又は62
(TLPは,[4T,6T,8T]若しくは[5T,7T,9T]マーク,及び/
又は後に続く2T,3T,4T若しくは5T以上のスペースに依存
してもよい。)
dTE=u×(TW/32)
197
X 6233:2017 (ISO/IEC 30193:2016)
ここに,
u: −62,−61,..,−1,0,1,2,..,29又は30
(dTEは,2T,3T,[4T,6T,8T]若しくは[5T,7T,9T]マーク,
及び/又は後に続く2T,3T,4T若しくは5T以上のスペース
に依存してもよい。さらに,2Tマークだけは,dTEは,前の
2T又は3T以上のスペースにも依存してもよい。)
各パワーレベルPW,PBW,PC及びPEは,継続時間はギャップなしという例外があるが,2.0 ns以上とす
る。対応するディスクのディスク情報の記録ストラテジパラメタによって,存在すると考えられる異なる
マーク長の先行するスペース及び後に続くスペースの全ての組合せで,この条件を守る。
パルス幅の制限例は,次に示すとおりとなる。
− Ttop,TMP及びTLPの継続時間については,j,p及びsの最小値は,9となる
− トップパルスとマルチパルスとの間,マルチパルスとマルチパルスとの間,又はマルチパルスと最後
のパルスとの間については,j−i+r(4T及び5T),j−i(6T及び8T),p及びp+r(6T及び8T)の最大値
は55となる。j−i(7T及び9T)の最大値は,71とし,p+r(7T及び9T)の最大値は,39となる。
− トップパルスと消去パルスとの間については,j−i+u(2T)は,23以下又は32に等しい。
− 最後のパルスと消去パルスとの間については,s+u−r(4T,6T及び8T)は,23以下又は32に等しく,
j−i+u (3T)及びs+u−r(5T,7T及び9T)は,55以下又は64に等しい。
− そのラン長のマークでは,冷却パルスがないことを意味するj+i−u=32(2T),s+u−r=32(4T,6T及
び8T),j−i+u=64(3T)又はs+u−r=32(5T,7T及び9T)の場合,この数式は,同じラン長のマーク
の前のスペース及び後のスペースの全ての組合せに適用される。
− 全てのパラメタは,マーク,マークの前のスペース,及びマークの後に続くスペースの組合せで計算
される。
図F.4に規定するとおりに,パルス幅の精度は,±0.2 nsよりも小さい。
図F.4に規定する,立上がり時間及び立下がり時間は,1.2 nsを超えない。
パラメタは,ディスクに依存し,最適値は,15.8.3.4に示すとおりである。PW,PBW,PC及びPEの値は,
OPCアルゴリズムに従って決定される(附属書G参照)。
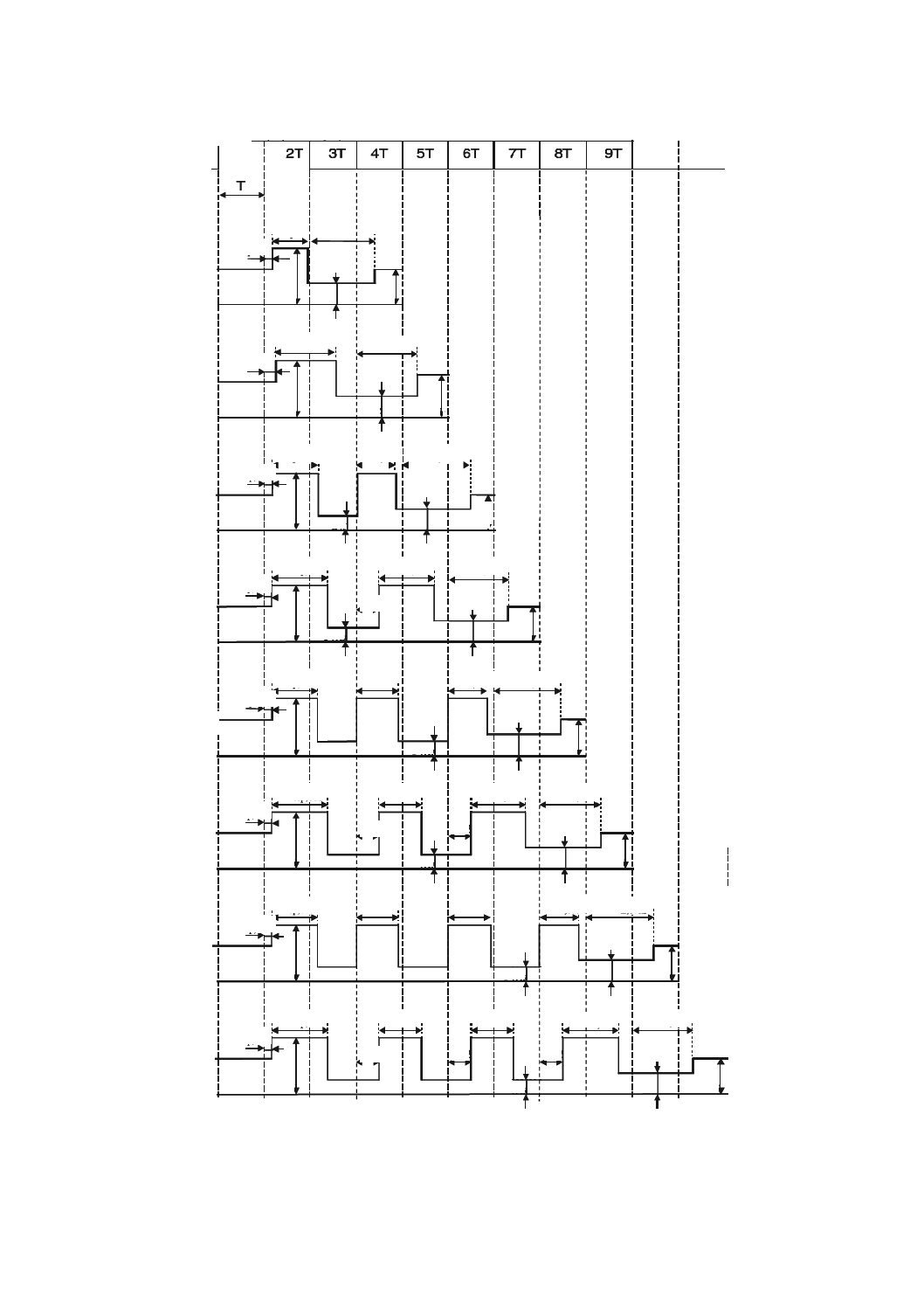
198
X 6233:2017 (ISO/IEC 30193:2016)
PBW
PBW
TLP,even
TLP,even
TLP,even
9T
0
PW
PBW
PE
5T
0
PW
PE
dTtop,odd
dTtop,odd
dTtop,odd
0
6T
TMP
PW
PE
7T
0
PW
PBW
PE
8T
0
TMP
PW
PBW
PE
4T
0
PW
PBW
PE
dTtop,even
dTtop,even
dTtop,even
3T
0
PW
PC
PE
Ttop3T
dTtop3T
dTE3T
PE
Ttop2T
PC
2T
0
PW
dTE2T
dTtop2T
T/2
T/2
T/2
T/2
T/2
T/2
TLP,odd
TLP,odd
TLP,odd
TMP
TMP
TMP
dTE,odd
dTE,odd
dTE,odd
TMP
PC
PC
PC
PC
PC
PC
dTE,even
dTE,even
dTE,even
Ttop,odd
Ttop,odd
Ttop,odd
Ttop,even
Ttop,even
Ttop,even
NRZI チャネルビット
PBW
PBW
PBW
PBW
TLP,even
TLP,even
TLP,even
9T
0
PW
PBW
PE
5T
0
PW
PE
dTtop,odd
dTtop,odd
dTtop,odd
0
6T
TMP
PW
PE
7T
0
PW
PBW
PE
8T
0
TMP
PW
PBW
PE
4T
0
PW
PBW
PE
dTtop,even
dTtop,even
dTtop,even
3T
0
PW
PC
PE
Ttop3T
dTtop3T
dTE3T
PE
Ttop2T
PC
2T
0
PW
dTE2T
dTtop2T
T/2
T/2
T/2
T/2
T/2
T/2
TLP,odd
TLP,odd
TLP,odd
TMP
TMP
TMP
dTE,odd
dTE,odd
dTE,odd
TMP
PC
PC
PC
PC
PC
PC
dTE,even
dTE,even
dTE,even
Ttop,odd
Ttop,odd
Ttop,odd
Ttop,even
Ttop,even
Ttop,even
図F.3−拡張N/2記録ストラテジの記録パルス波形
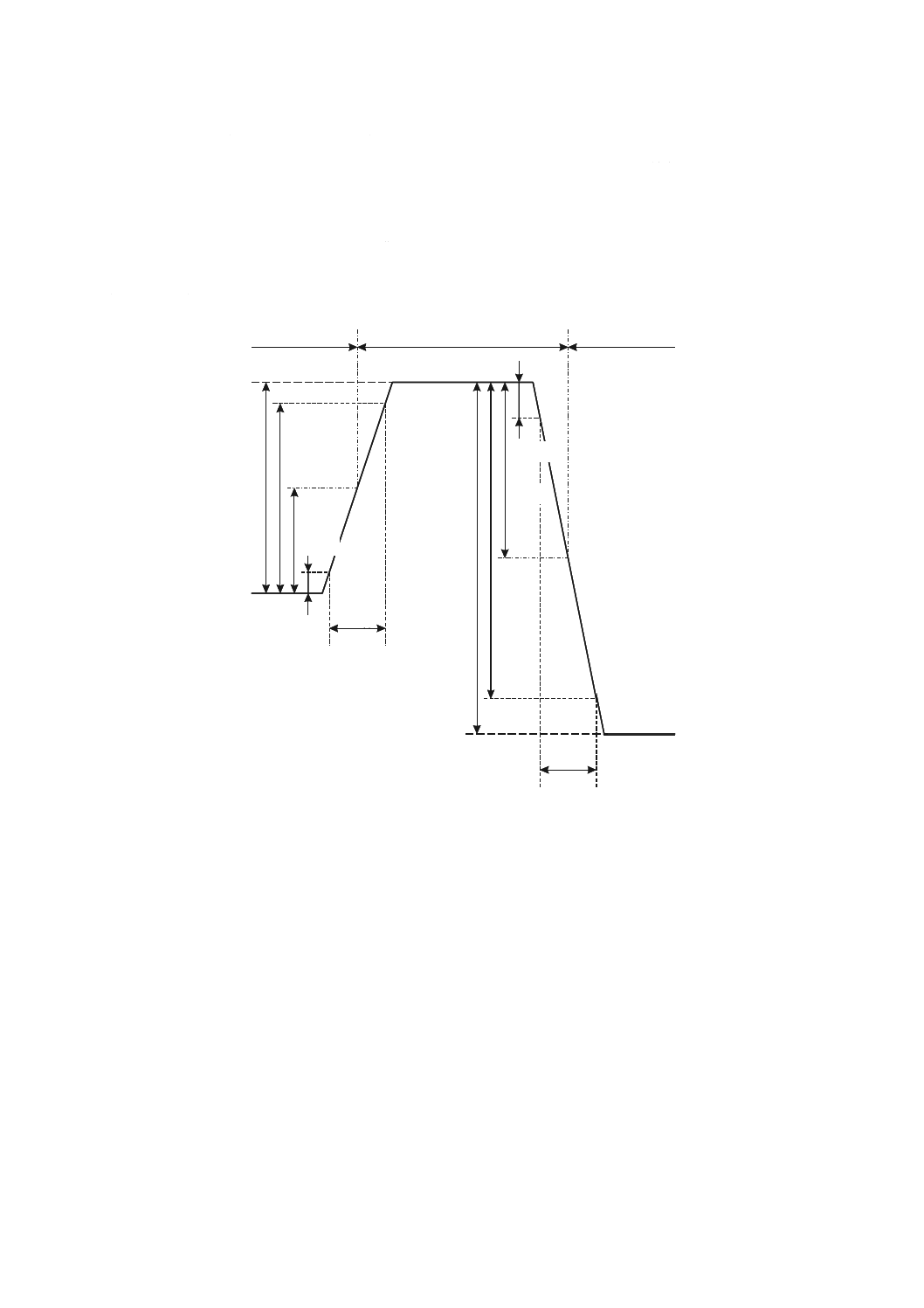
199
X 6233:2017 (ISO/IEC 30193:2016)
F.4
パルス幅並びに立上がり時間及び立下がり時間の規定
全ての立上がり時間及び立下がり時間は,実際の記録パワーの変化の10 %に等価なレベルから90 %に
等価なレベルにかかる時間,又はその逆の時間で規定する。
立上がり時間Trise及び立下がり時間Tfallを,図F.4に規定する。
いかなるオーバーシュートも,10 %未満とする。
パルスの持続時間及びパルス間のスペースは,関連するパワー変化の50 %と等価のレベルで測定する
(図F.4参照)。
P1
P2
0.9P1
0.9P2
0.5P1
0.5P2
0.1P1
0.1P2
Twidth1
Twidth2
Twidth3
Trise
Tfall
P1
P2
0.9P1
0.9P2
0.5P1
0.5P2
0.1P1
0.1P2
Twidth1
Twidth2
Twidth3
Trise
Tfall
図F.4−立上がり時間及び立下がり時間
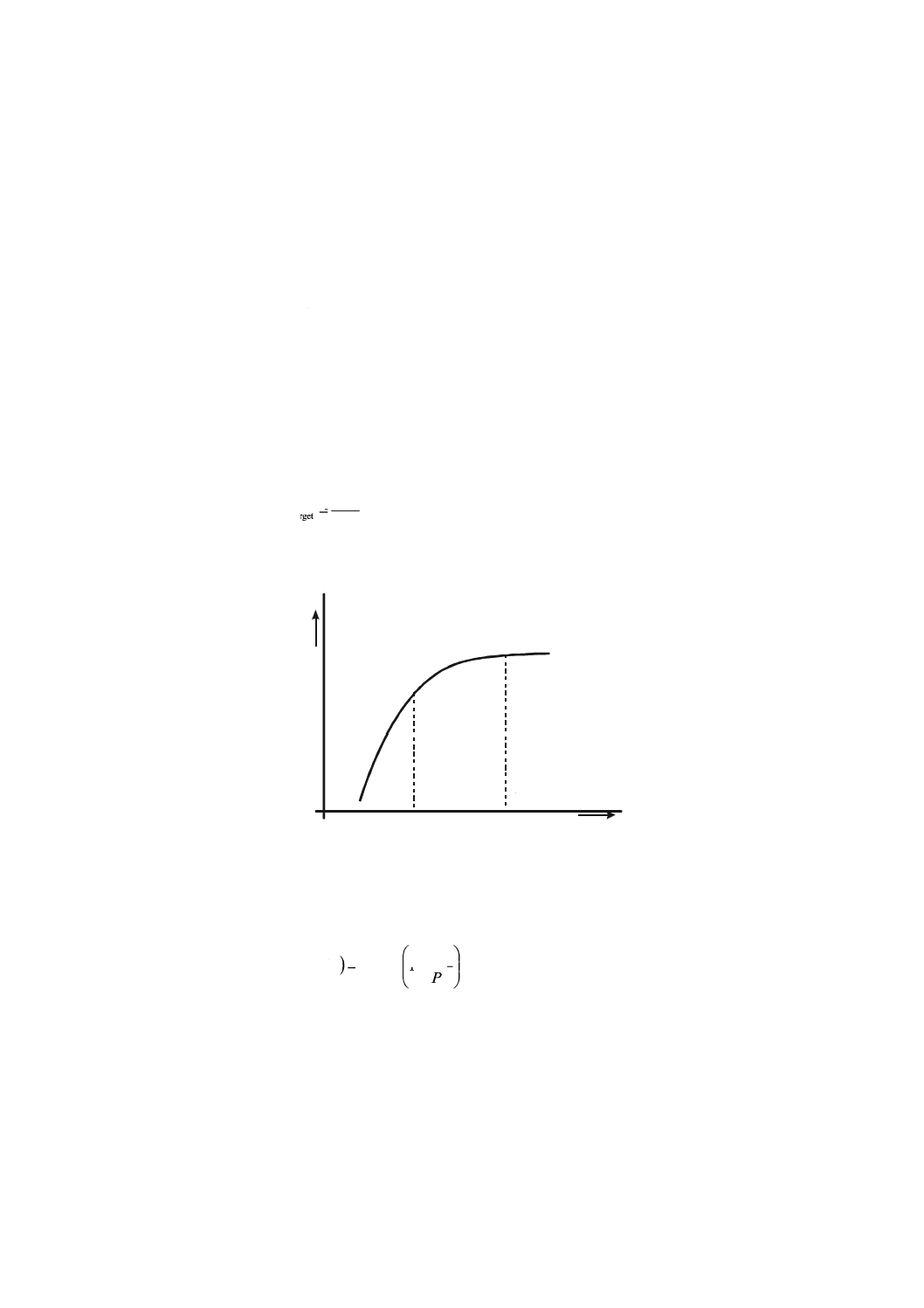
200
X 6233:2017 (ISO/IEC 30193:2016)
附属書G
(規定)
ディスクの最適パワー制御(OPC)方法
G.1
一般
この附属書では,最適パワーPWO,PBWO,PCO及びPEO(附属書F参照)並びにディスク情報(15.8.3.3,
15.8.3.4及び15.8.3.5参照)に含む関連するパラメタκ,PIND,mIND,ρ,εBW,εC及びεEについて規定する。
G.2
記録パワーに対する変調度の関数の数学的モデル
HF信号の変調度は,m=I8pp / I8Hで規定し,mconvは,HF信号の変調度を補正したもの(I.6参照)であ
る。記録パワーに対する変調度のカーブmconv(PW)は,図G.1に示すような形となる。感度の高いOPCのた
めに,変調度の測定は変調度が飽和するレベルの前のパワー範囲で行う。
この目的のために,次に示すPtargetを規定する。
ρ
P
P
WO
target=
ここに,
ρ: PtargetからPWOを求めるための乗算係数
ρ≧1.15
mconv
P
P
target
WO
P
P
×
=
ρ
記録パワーPW
図G.1−記録パワーに対する変調度の関数
ランダムな測定エラー及びノイズの影響を最小にするために,記録パワーに対する変調度のカーブは,
次に示す関数で近似する。
()
−
×
=
W
thr
max
W
conv
1PP
m
P
m
ここに, mmax: 最大補正変調度(飽和レベル)
Pthr: しきい値パワー
この(簡単にした)モデルで,関数f(PW)=PW×mconv(PW)は直線となり,次の式で表される。
PW×mconv(PW)=mmax×(PW−Pthr)
Ptarget
PWO
PWO=Ptarget×ρ
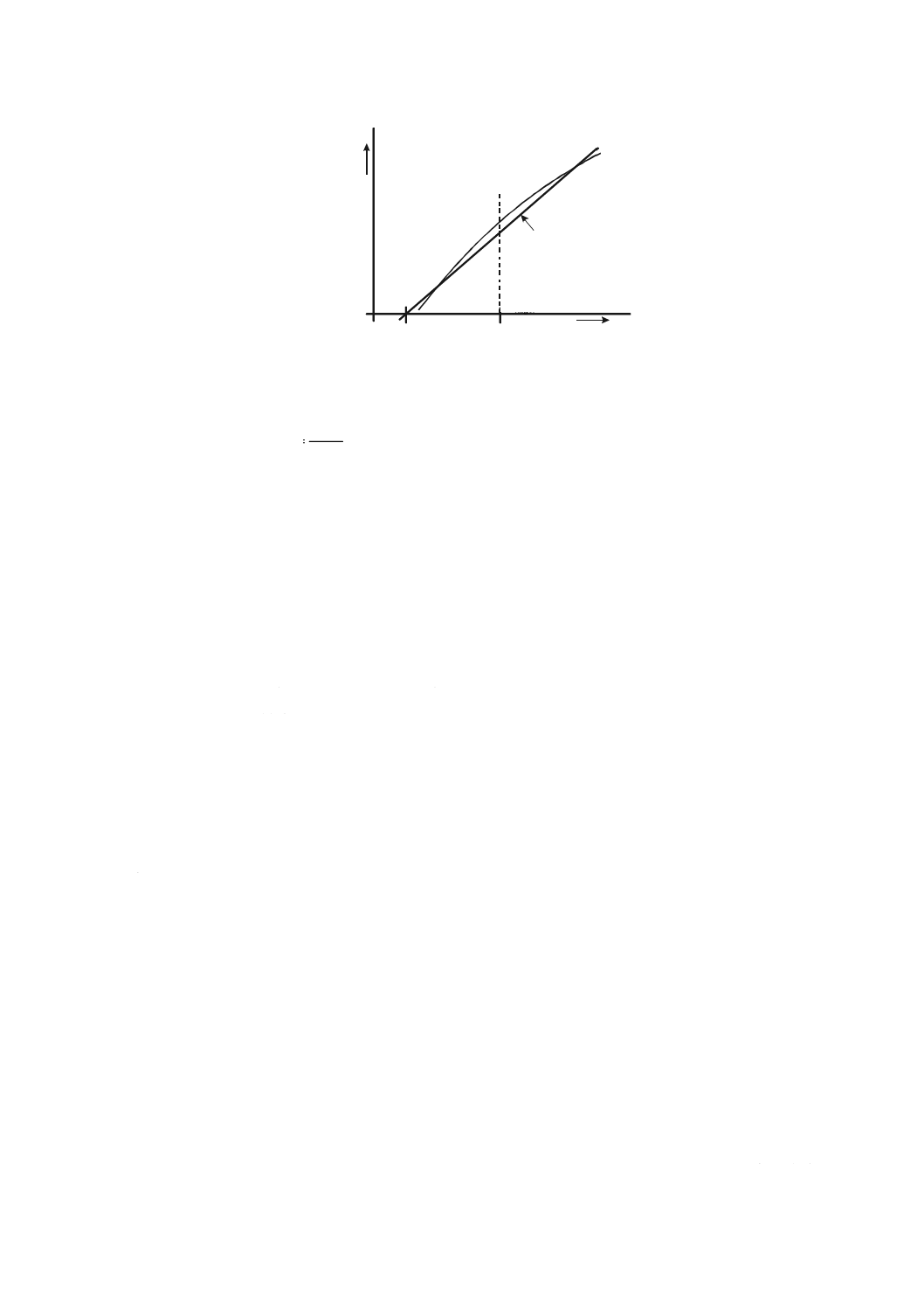
201
X 6233:2017 (ISO/IEC 30193:2016)
Pthr
Ptarget
Ptarget= P
κ×thr
記録パワーPW
直線近似
Pw×mconv(Pw)
図G.2−変調度に記録パワー乗じたもの 対 記録パワーの関数
κの値は,Ptarget及びPthrの比で規定し,次による。
thr
target
P
P
κ=
PWO,PBWO,PCO及びPEO,並びにその関係を決めるために必要なパラメタを,次に示す定義並びに図
G.1及び図G.2に示す。
− mIND:
ディスク情報に,PINDの場合の変調度として示す。
− κ:
変調度カーブの中で,OPCを行うべきポイントを示すPW及びPthrのターゲット比
− PIND:
ディスク情報中に示すPtargetの推定値
− Ptarget=κ×Pthr:
κにおける実際の記録ピークパワー
− ρ:
PtargetからPWOを求めるための乗算係数
− PWO=ρ×Ptarget: 最適記録ピークパワーPWO
− εBW:
記録バイアスパワーと記録ピークパワーとの比
− PBWO=εBW×PWO: 最適記録バイアスパワーPBWO
− εC:
冷却パワーと記録ピークパワーとの比
− PCO=εC×PWO:
最適冷却パワーPCO
− εE:
消去パワーと記録ピークパワーとの比
− PEO=εE×PWO:
最適消去パワーPEO
直線近似方法は,次による。
PBW=εBW×ρ×PIND(PSO<PBWO,PBW=εBW×PWiの場合),PS=εS×PWi,PM=εM×PWi及びPC=εC×ρ×
PINDを使って,異なる記録パワーPWiでランダムデータを試験記録することによって,それに伴う補正変調
度=miが求められる。
PW×mconv(PW)=mmax×(PW−Pthr)の直線を,幾つかのポイント(PWi,mi×PWi)に当てはめることによっ
て,これらのポイントに対応するmmax及びPthrを簡単に決めることができる(モデルの正確度の限界から
mmaxは,1よりも大となる可能性があることを認識しておくことが望ましい。)。
G.3
ディスクのOPCパラメタを決める方法
メディア製造業者は,最初に,ディスクの最適パワーPWO,PBWO,PCO及びPEOを決めなければならない。
これは,幾つかのPW,PBW,PC及びPEの条件で試験記録をし,箇条30に従って記録パラメタの結果を測
定することによってできる。記録及び測定は,箇条9に適合した基準ドライブを使用しT=23 ℃で行う。
202
X 6233:2017 (ISO/IEC 30193:2016)
最適記録パラメタとなるPW=PWO,PBW=PBWO,PC=PCO及びPE=PEOの組合せを選んだ後に,εBW=PBWO
/ PWO,εC=PCO / PWO及びεE=PEO / PWOの比が決められる。
次のステップでは,内側ゾーンのADIP予備フレームの中のディスク情報に規定する他のパラメタ(κ,
PIND,mIND及びρ)を決める。メディア製造業者は,ターゲット記録パワーの推定指示値PINDを選び,こ
のPINDでの変調度mINDを測定する。乗算係数は,ρ=PWO / PINDとする。
κの値を決める方法は,次による。
PBW=PBWO,PC=PCO,PE=εE×PWiを使って,0.9×PIND〜1.1×PINDの範囲で異なる記録パワーPWiでラン
ダムデータを記録した後に,その結果の変調度miを測定する。記録及び変調度miの測定の両方を,基準
ドライブを使いT=23 ℃で行う。
次に,G.2に従って,得られた測定ポイントに対して直線近似を行い,それによってPthrが決まり,κが
次のとおりに計算できる。
thr
IND
P
P
κ=
留意事項1 必ずしも全ての記録パラメタは独立には最適化できないであろうことから,製造業者の
ディスクに対しての記録パラメタの最適値の組合せを決めることは,製造業者に任せる。
留意事項2 変調度の測定は,値が小さい場合には幾分か不正確になるため,記録パワーの範囲(す
なわちPIND)は,一番低いパワーでの変調度が30 %を超えるように選ぶことが望ましい。
さらに,変調度及び記録パワーの測定は,変調度が飽和レベルよりも十分に下のレベル
で行うことが望ましい。
留意事項3 上記の方法によって,κの値を決める前に,測定に用いるトラックはPEOパワーだけを
使用して1回照射することによって消去する。
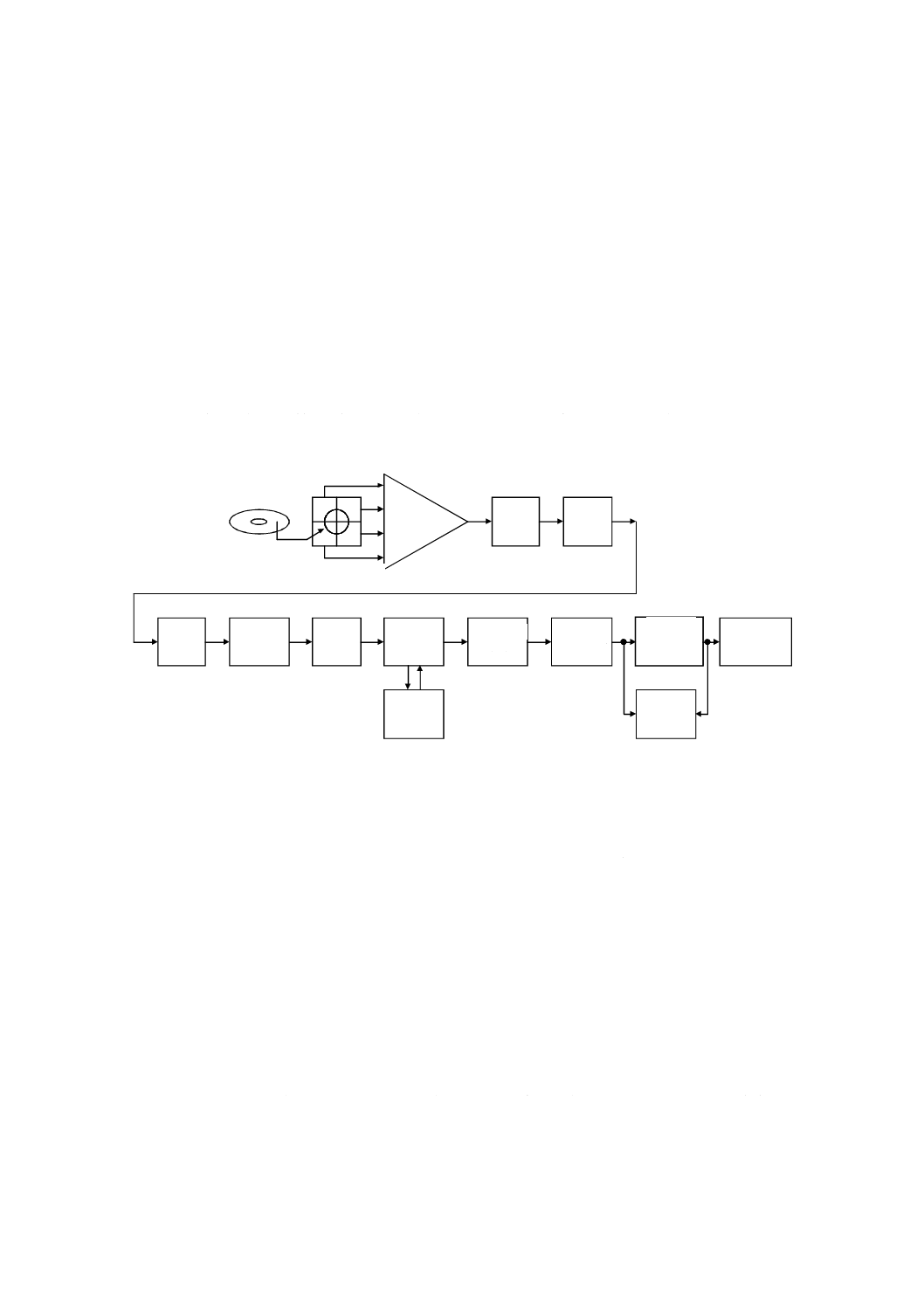
203
X 6233:2017 (ISO/IEC 30193:2016)
附属書H
(規定)
i-MLSE[統合化最ゆう(尤)法系列エラー推定]測定のHF信号の前処理
H.1 一般
BD多層ディスクシステムのデータ復号に,パーシャルレスポンス信号処理技術を用いたため,パーシ
ャルレスポンスの適用に対しての新しい信号品質の評価方法を採用する。この附属書は,i-MLSE[統合化
最ゆう(尤)法系列エラー推定]と呼ばれる新しい方法を規定する。
H.2 i-MLSE測定システムの実装一般
図H.1の回路は,信号品質を評価する基準信号処理ユニットの実装例を示す。信号処理ユニットは,2
×Vrefでの動作を仮定している。
Viterbi
decoder
Viterbi
decoder
プリアンプʼ
HPF
LPF
A/D
補間器
デジタル
イコライザ
(PR)
PLL
適応形
イコライザ
ビタビ
復号器
i-MLSE
検出器
17PP
復調器
4分割フォトディテクタ
オフセット
キャンセラ
AGC
図H.1−基準信号処理ユニットの実装例
H.3 アナログフィルタ(HPF,LPF)の規定
HF読取りチャネルからのHF信号は,最初の信号処理ブロックに,図H.1に示す高域通過フィルタ(HPF)
によって交流結合される。2倍速(2x)動作の場合に,高域通過フィルタは遮断周波数(−3 dB)が20 kHz
の1次のアナログフィルタとする。
低域通過フィルタ(LPF)は,折返しひずみを防ぐためにナイキスト周波数以上の周波数成分を除く。
遮断周波数(−3 dB)は,40 MHzと60 MHzとの間とする。100 MHzよりも高い周波数の抑圧は,−30
dBよりも小さくする。
H.4 A/D変換器の規定
少なくとも8ビット以上の分解能のA/D変換器を用いて,チャネルクロック周波数よりも高い固定周波
数で,HF信号を標本化する。A/Dで標本化された信号の実効分解能は,i-MLSEの正確度のために7ビッ
ト以上とする。標本化した信号振幅は,AGC回路によって一定に制御される。A/Dの標本化速度は,チャ
ネルクロック周波数の105 %と110 %との間であることが望ましく,A/D変換器の標本化周波数は,次の
式(H.1)で規定する。
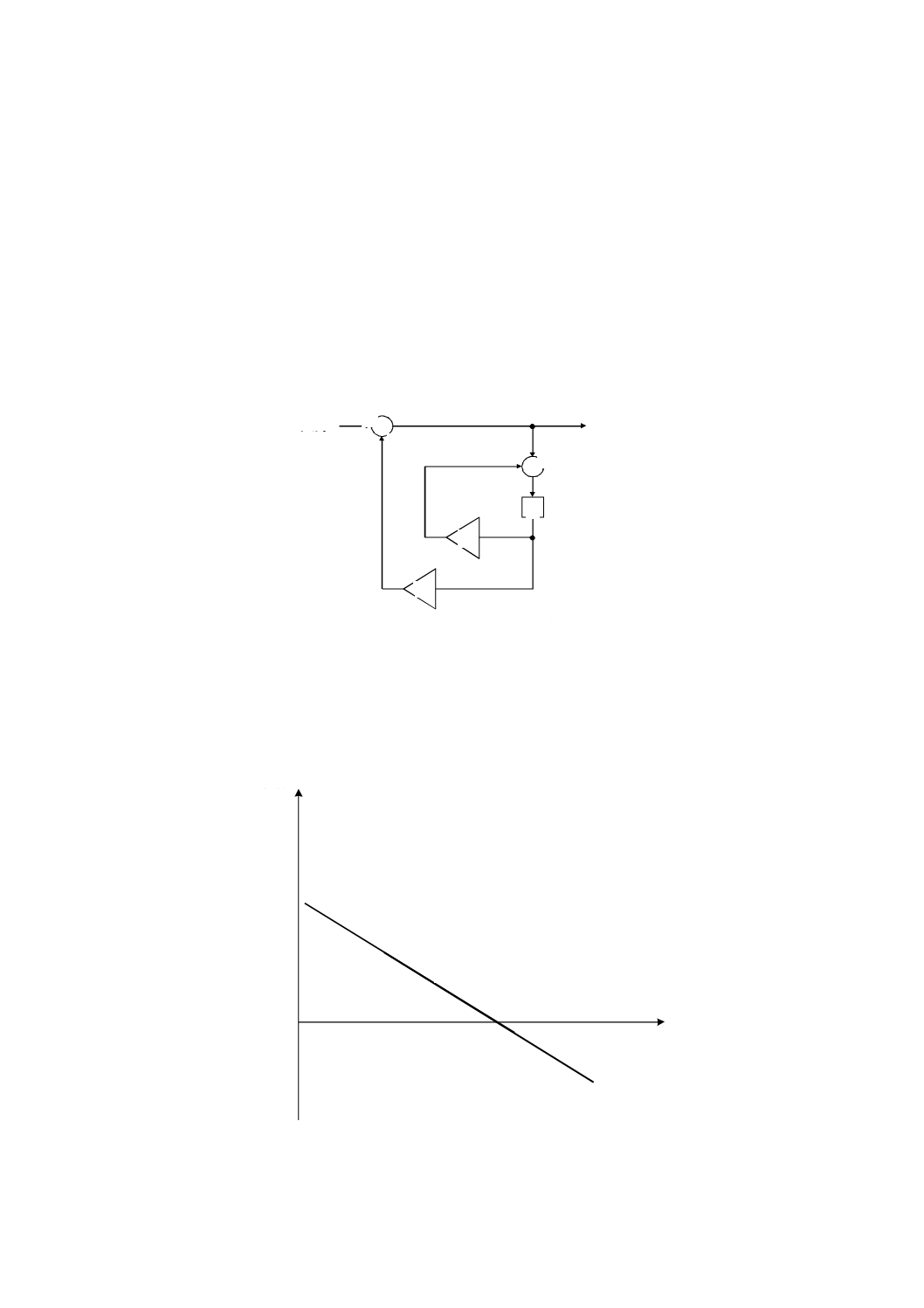
204
X 6233:2017 (ISO/IEC 30193:2016)
fs=(1+r)×fch ········································································· (H.1)
ここに,
fs: A/D変換器の標本化周波数
r: オーバーサンプリングレート
fch: チャネルクロック周波数
次に標本化周波数の例を示す。
r=6.06 %及びfch=132 MHzの場合,fs=140 MHz
H.5 オフセットキャンセラの規定
オフセットキャンセラは,A/D変換器の後に実装される。目的は,標本化した信号のエネルギー中心に
信号処理システムのゼロレベルを合わせることにある。図H.2は,デジタルオフセットキャンセラのブロ
ック図を示す。オフセットキャンセラの0 dB交差周波数は1.4 kHzとする(k1=1.0,k2=2.0−14)。
+
+
+
+
D
+
-
1
k2
Input
Output
入力
出力
D
k1
k2
+
+
‒
+
+
図H.2−オフセットキャンセラのブロック図
H.6 自動利得制御(AGC)の規定
自動利得制御(AGC)は,オフセットキャンセラの後に実装される。AGCの目的は,ディスクの回転に
伴う信号エンベロープの変動を抑えることにある。AGCの開ループ伝達関数は,図H.3による。AGCの0
dB交差周波数は1.0 kHzとする。
0dB
Gain
(dB)
1
-20dB/decade
Frequency
(kHz)
利得
(dB)
0dB
‒20dB/decade
1
周波数
(kHz)
図H.3−AGCの開ループ伝達関数の図
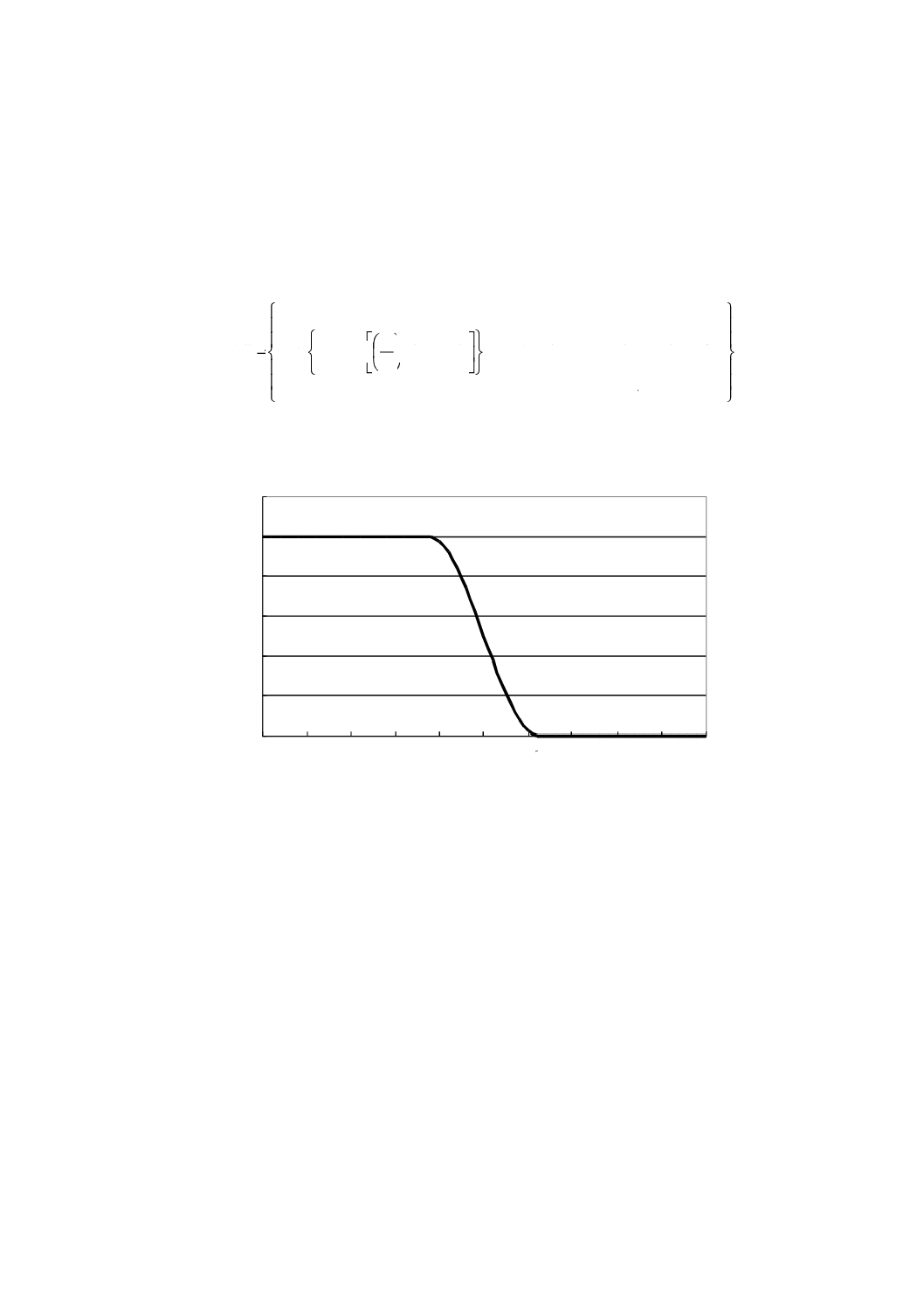
205
X 6233:2017 (ISO/IEC 30193:2016)
H.7 補間器の規定
補間器は,AGCの後に実装する。補間器の目的は,標本化した信号をPLLブロックからの再標本化情
報を用いて再標本化することにある。補間器の位相分解能は十分小さくする。補間器の位相調整可能範囲
は,標本化周期1/fsよりも広くする。補間器は,HF信号帯域で平たんな特性をもつ補間フィルタで実装し
てもよい。事前に決めたタップ長及び位相分解能の補間器のタップ係数は,周波数特性の逆フーリエ変換
で計算される。式(H.2)は,あるタップ係数の設計例の,周波数特性を示す。
(
)
+
>
+
≤
≤
−
−
−
×
−
<
=
)2/
5.0
(,
0.0
)2/
5.0
2/
5.0(,
5.0
π
sin
0.1
5.0
)2/
5.0
(,
0.1
)
(F
s
s
s
s
s
R
f
f
R
f
f
R
f
f
f
R
R
f
f
f
··· (H.2)
図H.4は,補間器のタップ係数の設計として推奨するR=0.25fsの周波数特性例を示す。
Low Pass Filter Response (R=0.25fs)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Normalized Frequency
A
m
p
li
tu
d
e
[A
rb
.u
n
it
]
低域通過フィルタ応答(R = 0.25fs )
振
幅
[任
意
の
単
位.
]
正規化周波数
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.0
0.2
0.4
0.6
0.8
1.0
1.2
図H.4−R=0.25fsの周波数特性例
H.8 位相同期ループの規定
位相同期ループ(PLL)は,チャネルクロックを回復するために実装される。開ループ伝達関数を,図
H.5に示す。
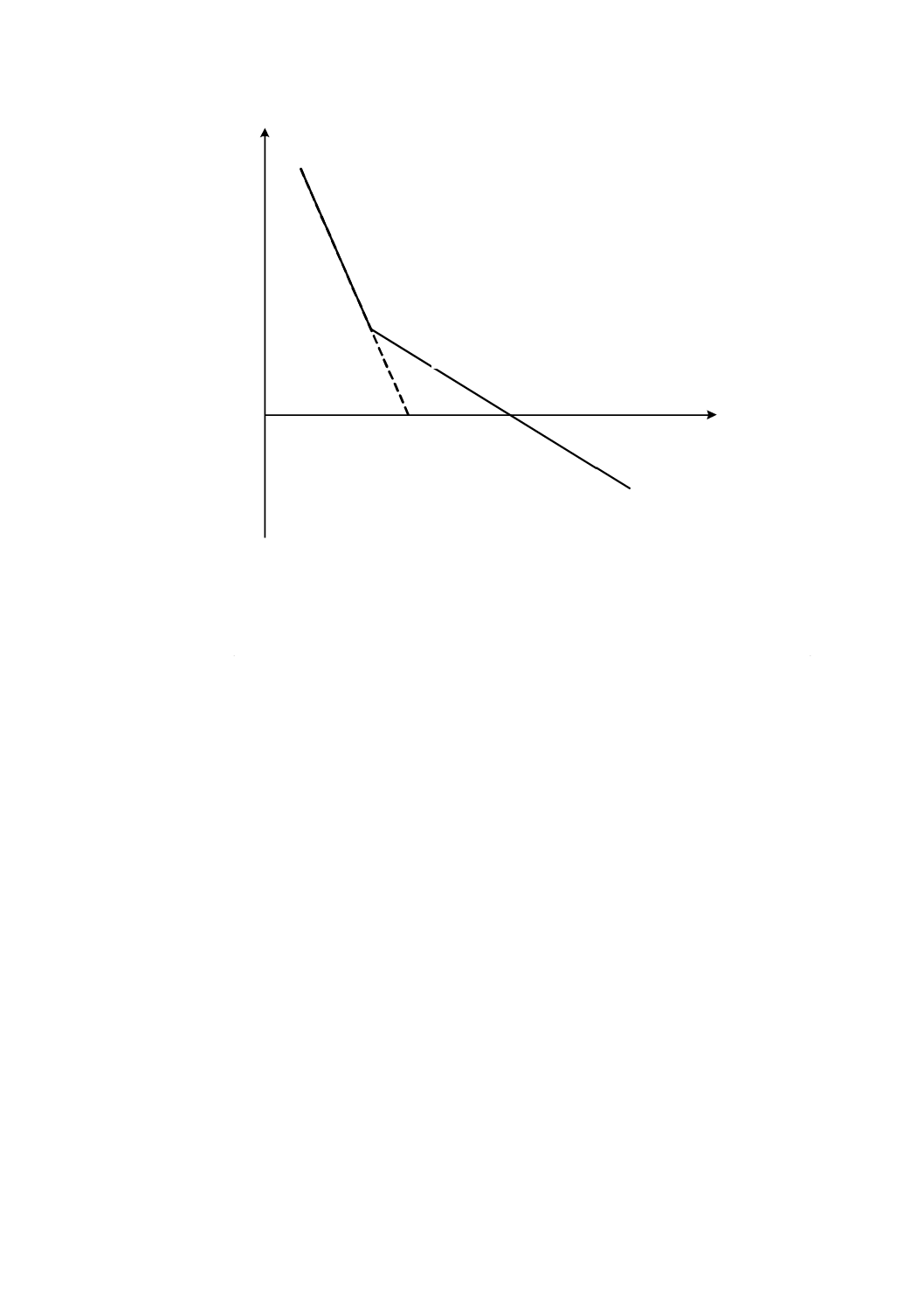
206
X 6233:2017 (ISO/IEC 30193:2016)
0dB
Gain
(dB)
16
64
-40dB/decade
-20dB/decade
Frequency
(kHz)
利得
(dB)
0dB
‒40dB/decade
‒
20dB/decade
16
64
周波数
(kHz)
図H.5−PLLの開ループ伝達関数の図示
H.9 デジタル波形等化器の規定
デジタル波形等化器は,補間器の後に実装される。デジタル波形等化器は,13タップの係数をもつFIR
フィルタである。デジタル波形等化器の目的は,適応形波形等化器の収束を安定化することにある。デジ
タル波形等化器の係数は,次による(図H.6参照)。
番号
係数
0
‒0.201 2
1
0.448 3
2
0.195 4
3
‒0.641 2
4
‒0.587 6
5
0.605 7
6
1.361 3
7
0.605 7
8
‒0.587 6
9
‒0.641 2
10
0.195 4
11
0.448 3
12
‒0.201 2
図H.6−デジタル波形等化器の係数
H.10 適応形波形等化器の規定
13タップをもつ適応形波形等化器が,デジタル波形等化器の後に実装される。適応形波形等化器のタッ
プ係数は,最小二乗平均(LMS)アルゴリズム又は符号付き誤差LMSアルゴリズムで更新することが望
ましい。
207
X 6233:2017 (ISO/IEC 30193:2016)
LMSアルゴリズムのタップ係数更新の式を,式(H.3)に示す。
h(n+1)=h(n)+μ×e(n)×u(n) ···················································· (H.3)
ここに, h(n): タップ係数ベクトル
e(n): 推定誤差
u(n): 入力信号ベクトル
μ: 利得パラメタ
推定誤差e(n)は,適応形等化器出力と目標信号間との間の差分である。PR(1,2,2,2,1)の目標信号は,ビタ
ビ復号器の出力を用いて生成される。式(H.3)の場合,利得係数μは3.8×10−6(2−18)に設定する。
信号処理回路は,符号付誤差LMSアルゴリズムを用いることによって乗算器が省略できるため,簡単
にできる。この場合,利得パラメタμは1.2×10−7(2−23)に設定し,計数更新の式は,次に示すものとなる。
h(n+1)=h(n)+μ×sign[e(n)]×u(n)
ここに,
[
]
<
−
=
>
+
=
.0
)
(
,1
,0
)
(
,0
,0
)
(
,1
)
(
sign
n
en
n
e
n
e
n
e
H.11 ビタビ復号器の規定
ビタビ復号器は,適応形等化器のため及び信号評価のために実装される。ビタビ復号器のPRクラス(パ
ーシャルレスポンスクラス)は,PR(1,2,2,2,1)に設定する。17PP変調を仮定したPR(1,2,2,2,1)の状態遷移表
を,図H.7に示す。ビタビ復号器のパスメモリ長は,正確な復号を仮定して40ステップよりも長くする。
ビタビ復号器の出力は,PR(1,2,2,2,1)の符号間干渉(ISI)及び2値データを畳み込むことによって適応形
波形等化器の目標信号を生成すること,並びにi-MLSEのパタンの検出に,使用される。
0000
1000
0001
1001
1100
0110
1110
0111
1111
0011
1/8
0/0
1/7
0/6
0/7
0/1
1/1
1/2
0/5
1/5
0/3
1/3
1/4
1/4
0/4
0/4
0/0
0/1
1/1
1/2
0/3
1/4
1/4
0/4
0/4
1/5
0/5
0/6
0/7
1/8
1/7
0/6
1/3
0000
0001
0011
0111
1111
1110
1100
1000
1001
0011
0110
1100
図H.7−PR(1,2,2,2,1)状態遷移図
H.12 i-MLSE[統合化最ゆう(尤)法系列エラー推定]の定義
H.12.1 一般
i-MLSEは,17PP変調符号を用いたPR(1,2,2,2,1)ML[ゆう(尤)度最大]再生システムの信号の品質指
標である。それは,PR(1,2,2,2,1)MLの再生信号の特定パタンの誤り確率に相関をもつ標準偏差(σ)で規
定する。
この値は,従来のジッタと同様の方法で用いることができ,SERとも良い相関がある。
H.12.2 i-MLSE検出ユニットの実装一般
i-MLSE検出ユニットの例を,図H.8に示す。i-MLSEは,ビタビ復号器の入力信号及び出力(2値化デ

208
X 6233:2017 (ISO/IEC 30193:2016)
ータ)から計算される。パタン検出器は,ビタビ復号器の2値データに何らかのエラーを起こす可能性が
ある特定パタンを検出する。それぞれ,二乗ユークリッド距離が12又は14で全パタン数が54あるこれら
のパタンは,3種類(グループ14,グループ12A,グループ12B)にクラス分けされる。メトリック差分
計算器は,図H.9の中の対応するグループの読取信号の信頼性を計算している。図H.9の中のグループ(グ
ループ14,グループ12A,グループ12B)の各推定エラー率は,ビットエラー率推定器によってメトリッ
ク差分の標準偏差から計算される。この方法で,メトリック差分は,各グループの標準偏差の計算に使用
される。各グループのエラー率は,各パタンに特有のエラー数及び生起確率の積で得られる。全体のエラ
ー率は,三つのパタンのエラー率の和で推定され,i-MLSEはエラー率及び標準偏差の関係から計算され
る。
Signal after
equalizing(S)
Binary data
Viterbi
decoder
Pattern 1
detector
i-MLSE calculator
Metric Difference
calculator (
MD1)
Pattern 2
detector
Metric Difference
calculator (
MD2)
Pattern 3
detector
Metric Difference
calculator (
MD3)
Judge
0≧MD1
Judge
0≧MD2
Judge
0≧MD3
Counter
(N1)
Accumulator
(S1)
Counter
(JN1)
Accumulator
(JS1)
Counter
(N2)
Accumulator
(S2)
Counter
(JN2)
Accumulator
(JS2)
Counter
(N3)
Accumulator
(S3)
Counter
(JN3)
Accumulator
(JS3)
1 bit error
rate
estimation
2 bit error
rate
estimation
3 bit error
rate
estimation
+
Total σ
calculator
i-MLSE
パターン1
検出器
i-MLSE 計算器
メトリック差分
計算器
MD1)
パターン2
検出器
メトリック差分
計算器(
MD2)
パターン3
検出器
メトリック差分
計算器
MD3)
判定
0≧MD1
判定
0≧MD2
判定
0≧MD3
カウンタ
(N1)
積算器
(S1)
カウンタ
(JN1)
積算器
(JS1)
カウンタ
(N2)
積算器
(S2)
カウンタ
(JN2)
積算器
(JS2)
カウンタ
(N3)
積算器
(S3)
カウンタ
(JN3)
積算器
(JS3)
1 ビットエラー
率推定
2 ビットエラー
率推定
+
i-MLSE
信号(S)
波形等化後の
復号器
ビタビ
2値データ
+
3 ビットエラー
率推定
統合σ
計算器
図H.8−i-MLSEの構成図
H.12.3 パタン検出器
評価パタン(パタン検出器によって検出される。)を,図H.9に示す。
ここに,記号xは,2値の“0”又は“1”であり,xは,xの反転である。
各グループで,x=1とx=0との間の二乗ユークリッド距離は異なる。グループ14の二乗ユークリッド
距離は14であり,このパタンは1ビットシフトエラーに相当する。グループ12Aの二乗ユークリッド距
離は12であり,このパタンは単一2T信号の1ビットシフトエラーに相当する。グループ12Bの二乗ユー
クリッド距離は12であり,このパタンは連続2T信号の1ビットシフトエラーに相当する。
209
X 6233:2017 (ISO/IEC 30193:2016)
グループ14
グループ12 A
グループ12 B
1
0,0,0,0,x,1,1,0,0
1
0,0,0,0,x,1,x̲,0,0,0,0
1
0,0,0,0,x,1,x̲,0,x,1,1,0,0
2
0,0,0,0,x,1,1,1,0
2
0,0,0,0,x,1,x̲,0,0,0,1
2
0,0,0,0,x,1,x̲,0,x,1,1,1,0
3
0,0,0,0,x,1,1,1,1
3
0,0,0,0,x,1,x̲,0,0,1,1
3
0,0,0,0,x,1,x̲,0,x,1,1,1,1
4
0,0,1,1,x,0,0,0,0
4
0,0,1,1,x,0,x̲,1,1,0,0
4
0,0,1,1,x,0,x̲,1,x,0,0,0,0
5
0,0,1,1,x,0,0,0,1
5
0,0,1,1,x,0,x̲,1,1,1,0
5
0,0,1,1,x,0,x̲,1,x,0,0,0,1
6
0,0,1,1,x,0,0,1,1
6
0,0,1,1,x,0,x̲,1,1,1,1
6
0,0,1,1,x,0,x̲,1,x,0,0,1,1
7
0,1,1,1,x,0,0,0,0
7
0,1,1,1,x,0,x̲,1,1,0,0
7
0,1,1,1,x,0,x̲,1,x,0,0,0,0
8
0,1,1,1,x,0,0,0,1
8
0,1,1,1,x,0,x̲,1,1,1,0
8
0,1,1,1,x,0,x̲,1,x,0,0,0,1
9
0,1,1,1,x,0,0,1,1
9
0,1,1,1,x,0,x̲,1,1,1,1
9
0,1,1,1,x,0,x̲,1,x,0,0,1,1
10
1,0,0,0,x,1,1,0,0
10
1,0,0,0,x,1,x̲,0,0,0,0
10
1,0,0,0,x,1,x̲,0,x,1,1,0,0
11
1,0,0,0,x,1,1,1,0
11
1,0,0,0,x,1,x
̲
,0,0,0,1
11
1,0,0,0,x,1,x
̲
,0,x,1,1,1,0
12
1,0,0,0,x,1,1,1,1
12
1,0,0,0,x,1,x̲,0,0,1,1
12
1,0,0,0,x,1,x̲,0,x,1,1,1,1
13
1,1,0,0,x,1,1,0,0
13
1,1,0,0,x,1,x̲,0,0,0,0
13
1,1,0,0,x,1,x̲,0,x,1,1,0,0
14
1,1,0,0,x,1,1,1,0
14
1,1,0,0,x,1,x̲,0,0,0,1
14
1,1,0,0,x,1,x̲,0,x,1,1,1,0
15
1,1,0,0,x,1,1,1,1
15
1,1,0,0,x,1,x̲,0,0,1,1
15
1,1,0,0,x,1,x̲,0,x,1,1,1,1
16
1,1,1,1,x,0,0,0,0
16
1,1,1,1,x,0,x̲,1,1,0,0
16
1,1,1,1,x,0,x̲,1,x,0,0,0,0
17
1,1,1,1,x,0,0,0,1
17
1,1,1,1,x,0,x̲,1,1,1,0
17
1,1,1,1,x,0,x̲,1,x,0,0,0,1
18
1,1,1,1,x,0,0,1,1
18
1,1,1,1,x,0,x̲,1,1,1,1
18
1,1,1,1,x,0,x̲,1,x,0,0,1,1
図H.9−グループ14,12A及び12Bの評価パタン
H.12.4 メトリック差分計算器
メトリック差分計算器は,ビタビ入力信号S及び二つの状態遷移経路(PA,PB)の違いであるMD(メ
トリック差分)の計算を行う。MDの一般式は,式(H.4)で規定する。
(
)
(
)
x
y
i
i
y
i
i
i
i
x
E
S
P
S
P
MD
−
−
−
−
=∑
∑
=
=
=
=
0
0
2
Bi
2
Ai
·································· (H.4)
ここに,
Ex: 二つのパタンPAとPBとの間の,二乗ユークリッド距離
Exは,式(H.5)で規定する。
2
B
y
0
A
)
(
i
i
i
i
x
P
P
E
−
=∑==
······························································· (H.5)
ここに, (x,y): グループ14は,(1,4),グループ12Aは,(2,6),グループ
12Bは,(3,8)
例えば,グループ14-1の移行をトレリス図に示す(図H.10参照)。状態遷移のパタン(図H.10の2点
鎖線)は,状態遷移が(0,0,0,0)⇒(0,0,0,0)⇒(0,0,0,1)⇒(0,0,1,1)⇒(0,1,1,
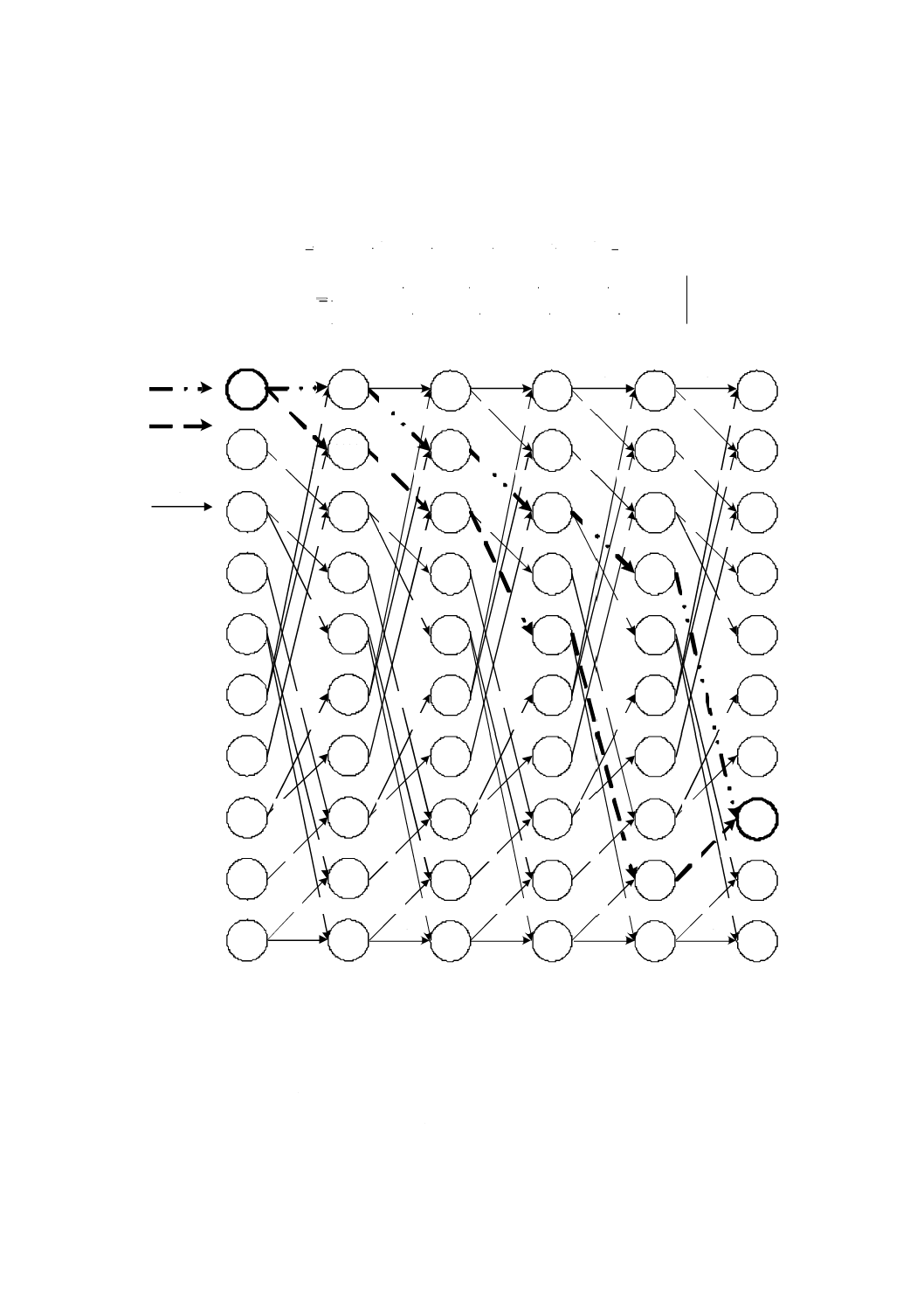
210
X 6233:2017 (ISO/IEC 30193:2016)
0)⇒(1,1,0,0)及び状態遷移が(0,1,3,4,4)に相当する信号レベル(PA)を示している。他の
状態遷移候補のパタン(図H.10の破線)は,状態遷移が(0,0,0,0)⇒(0,0,0,1)⇒(0,0,1,
1)⇒(0,1,1,1)⇒(1,1,1,0)⇒(1,1,0,0)及び状態遷移が(1,3,5,6,5)に相当する信
号レベルを示している。グループ14-1の例では,Ex及びMDxは,次のとおりに計算される。
14
)5
4(
)6
4(
)5
3(
)3
1(
)1
0(
2
2
2
2
2
=
−
+
−
+
−
+
−
+
−
=
x
E
{
}
{
}14
)
5(
)
6(
)
5(
)
3(
)
1(
)
4(
)
4(
)
3(
)
1(
)
0(
2
4
2
3
2
2
2
1
2
0
2
4
2
3
2
2
2
1
2
0
−
−
+
−
+
−
+
−
+
−
−
−
+
−
+
−
+
−
+
−
=
S
S
S
S
S
S
S
S
S
S
MDx
0000
0001
0011
0110
0111
1000
1001
1100
1110
1111
k-5
0000
0001
0011
0110
0111
1000
1001
1100
1110
1111
0/0
1/1
1/3
0/4
0/5
0/4
0/6
1/7
0/1
1/2
1/4
1/4
0/3
0/5
1/8
0/7
k-4
0000
0001
0011
0110
0111
1000
1001
1100
1110
1111
0/0
1/1
1/3
0/4
0/5
0/4
0/6
1/7
0/1
1/2
1/4
1/4
0/3
0/5
1/8
0/7
k-3
0000
0001
0011
0110
0111
1000
1001
1100
1110
1111
0/0
1/1
1/3
0/4
0/5
0/4
0/6
1/7
0/1
1/2
1/4
1/4
0/3
0/5
1/8
0/7
k-2
0000
0001
0011
0110
0111
1000
1001
1100
1110
1111
0/0
1/1
1/3
0/4
0/5
0/4
0/6
1/7
0/1
1/2
1/4
1/4
0/3
0/5
1/8
0/7
k-1
0000
0001
0011
0110
0111
1000
1001
1100
1110
1111
0/0
1/1
1/3
0/4
0/5
0/4
0/6
1/7
0/1
1/2
1/4
1/4
0/3
0/5
1/8
0/7
k
入力
データ/信号
レベル
Pa
Pb
図H.10−PR(1,2,2,2,1)MLのトレリス図
H.12.5 エラー率推定
図H.9のパタングループが検出されたら,次の式を計算する。
∑
=
=
x
N
i
i
x
MD
S
1
さらに,MDiが0以下の場合は,次の式を計算する。
211
X 6233:2017 (ISO/IEC 30193:2016)
)0
(
1
≤
=∑
=
i
JN
i
i
x
MD
MD
JS
x
ここに,
i: MDiのサンプル番号を示す変数
Sxは,図H.9のMDiを足し合わせた値である。Nxは,MDiの数である。JSxは,MDiが0以下の場合の
MDiを足し合わせたものである。JNxは,JSxの数であり,σxは,次のとおりに規定する。
π
2
2
×
×
×
+
×
=
x
x
x
x
x
x
x
x
JN
E
N
S
E
N
JS
a
x
x
x
x
E
N
S
b
×
=
)
(
)
(
2
x
x
x
x
b
Q
a
b
P
σ
+
×
=
ここに, P及びQ: bxの関数
P及びQの代表的な値を,図H.11に示す。P及びQの正確な値は,この表から補間して求める。
212
X 6233:2017 (ISO/IEC 30193:2016)
bx
P(bx)
Q(bx)
bx
P(bx)
Q(bx)
bx
P(bx)
Q(bx)
‒0.300
0.647 0
0.097 5
‒0.100
0.511 6
0.021 3
0.100
0.418 6
0.017 4
‒0.295
0.637 4
0.095 8
‒0,095
0.512 0
0.019 5
0.105
0.414 0
0.018 8
‒0.290
0.628 3
0.094 0
‒0.090
0.512 5
0.017 7
0.110
0.409 6
0.020 1
‒0.285
0,619 5
0.092 3
‒0.085
0.512 9
0.016 0
0.115
0.405 2
0.021 5
‒0.280
0.611 2
0.090 5
‒0.080
0.513 3
0.014 3
0.120
0.400 9
0.022 8
‒0.275
0.603 4
0.088 7
‒0.075
0.513 6
0.012 7
0.125
0.396 7
0.024 1
‒0.270
0,595 9
0.086 9
‒0.070
0.513 8
0.011 2
0.130
0.392 6
0.025 4
‒0.265
0.588 7
0.085 2
‒0,065
0.514 0
0.009 7
0.135
0.388 7
0.026 7
‒0.260
0.582 0
0.083 4
‒0.060
0.514 0
0.008 4
0.140
0.384 9
0.027 9
‒0.255
0,575 6
0.081 6
‒0.055
0.513 9
0.007 1
0.145
0.381 2
0.029 1
‒0.250
0.569 6
0.079 8
‒0,050
0.513 6
0.005 9
0.150
0.377 7
0.030 3
‒0.245
0.563 9
0.077 9
‒0.045
0.513 2
0.004 8
0.155
0.374 3
0.031 5
‒0.240
0,558 6
0.076 1
‒0.040
0.512 6
0.003 8
0.160
0.371 1
0.032 6
‒0.235
0.553 5
0.074 3
‒0.035
0.511 8
0.002 9
0.165
0.368 1
0.033 8
‒0.230
0.548 8
0.072 4
‒0.030
0.510 8
0.002 1
0.170
0.365 2
0.034 8
‒0.225
0,544 5
0.070 5
‒0.025
0.509 6
0.001 5
0.175
0.362 4
0.035 9
‒0.220
0.540 4
0.068 6
‒0.020
0.508 1
0.001 0
0.180
0.359 9
0.036 9
‒0.215
0.536 6
0.066 8
‒0.015
0.506 4
0.000 5
0.185
0.357 5
0.037 9
‒0.210
0.533 1
0.064 8
‒0.010
0.504 5
0.000 2
0.190
0.355 3
0.038 8
‒0.205
0.529 9
0.062 9
‒0.005
0.502 4
0.000 1
0.195
0.353 2
0.039 8
‒0.200
0.527 0
0.061 0
0.000
0.500 0
0.000 0
0.200
0.351 3
0.040 7
‒0.195
0.524 3
0.059 0
0.005
0.497 4
0.000 1
0.205
0.349 6
0.041 5
‒0.190
0.521 9
0.057 1
0.010
0.494 5
0.000 2
0.210
0.348 1
0.042 3
‒0.185
0.519 8
0.055 1
0.015
0.491 5
0.000 5
0.215
0.346 7
0.043 1
‒0.180
0.517 9
0.053 1
0.020
0.488 2
0.000 9
0.220
0.345 5
0.043 9
‒0.175
0.516 2
0.051 1
0.025
0.484 7
0.001 4
0.225
0.344 5
0.044 6
‒0.170
0.514 8
0.049 1
0.030
0.481 0
0.002 0
0.230
0.343 6
0.045 3
‒0.165
0.513 5
0.047 1
0.035
0.477 2
0.002 7
0.235
0.342 9
0.046 0
‒0.160
0.512 5
0.045 1
0.040
0.473 2
0.003 5
0.240
0.342 3
0.046 6
‒0.155
0.511 7
0.043 1
0.045
0.469 0
0.004 4
0.245
0.342 0
0.047 3
‒0.150
0.511 0
0.041 0
0.050
0.464 7
0.005 3
0.250
0.341 7
0.047 9
‒0.145
0.510 5
0.039 0
0.055
0.460 3
0.006 3
0.255
0.341 7
0.048 4
‒0.140
0.510 2
0.037 0
0.060
0.455 8
0.007 4
0.260
0.341 8
0,049 0
‒0.135
0.510 0
0.035 0
0.065
0.451 2
0.008 5
0.265
0.342 1
0.049 5
‒0.130
0.510 0
0.033 0
0.070
0.446 6
0.009 7
0.270
0.342 5
0.050 0
‒0.125
0.510 0
0.031 0
0.075
0.441 9
0.010 9
0.275
0.343 1
0.050 4
‒0.120
0.510 2
0.029 0
0.080
0.437 2
0.012 2
0.280
0.343 8
0.050 9
‒0.115
0.510 5
0.027 0
0.085
0.432 5
0.013 5
0.285
0.344 7
0.051 3
‒0.110
0.510 8
0.025 1
0.090
0.427 8
0.014 8
0.290
0.345 8
0.051 7
‒0.105
0.511 2
0.023 2
0.095
0.423 2
0.016 1
0.295
0.347 0
0.052 1
0.300
0.348 4
0.052 5
図H.11−σ/2計算の近似表
各グループのエラー確率は,次の式で求められる。
dz
e
π
2
1
erf
2
2
2
1
x
σ
x
x
x
σ
−
−
∞
−∫
=
H.12.6 i-MLSEの計算
推定エラー率(EbER)は,次による。
3
3
2
1
3
2
3
2
1
2
1
3
2
1
1
erf
3
erf
2
erf
1
×
+
+
×
+
×
+
+
×
+
×
+
+
×
=
N
N
N
N
N
N
N
N
N
N
N
N
EbER
i-MLSEは,EbERから式(H.6)及び式(H.7)によって計算する。
213
X 6233:2017 (ISO/IEC 30193:2016)
σ=E−1(EbER) ········································································· (H.6)
i-MLSE=σ/2 ·········································································· (H.7)
ここに,
=∫−∞
−
1
2
-
dz
e
π
2
1
)
(
2
2
σ
x
σ
σ
E
i-MLSEは,1又はそれ以上のクラスタのチャネルで測定される。
214
X 6233:2017 (ISO/IEC 30193:2016)
附属書I
(規定)
測定方法
I.1
一般
ディスクの品質を検証するために,この規格に多くの規定がされている。BD書換形ディスクの品質を
決めるために,必要な測定の再現性を最大化するために,この附属書に幾つかの測定方法を規定する。
I.2
基準ドライブの初期調整
BDレコーダブルディスクの評価の前に,基準ドライブを調整する。
幾つかの項目を調整する。
初期調整は,ディスクの各測定場所で行う。
調整順は,次による。
a) 球面収差
b) フォーカスオフセット
c) 半径方向の傾き
d) 接線方向の傾き
e) トラッキングサーボ利得(AGCがない場合だけ適用する。)
f)
フォーカスサーボ利得
g) トラッキングオフセット
上記のa)〜g)の調整の準備として,未記録ディスクに30.5及び30.6の規定に従ってランダムデータを
11回記録する(i-MLSE及びクロス消去の各々に対しての準備として)。そして,基準ドライブの初期設定
条件で,a)〜c)の調整をI8ppが最大になるまで繰り返す。
次に,記録ディスクを2x基準速度(Vref)で読み取り,i-MLSEが最小になるようにa)〜g)の調整を繰り
返す。i-MLSEは,トラックジャンプの領域を除き,1クラスタ以上の期間で測定する。
調整手順を,規定した順番で,i-MLSEの測定結果が前回よりも良くなることが0.1 %未満となるまで繰
り返す。
I.3
i-MLSE測定
i-MLSE測定を行うために,測定条件(附属書H参照)を満たす。
i-MLSEは,1クラスタ以上の期間を平均化する。
i-MLSE測定を行うために,次の方法を順番に行うことが望ましい。
a) 基準ドライブを,1トラックジャンプモード(ドライブは,フォーカス及びトラッキングサーボがか
かり1回転後にアクチュエータが1トラックジャンプバックする。)にする。
b) タイムインタバルアナライザ(TIA)を準備する。TIAの測定窓幅TW=8 msを,トラックジャンプ領
域を除いた1回転に設定する。
c) i-MLSEは,29.5の規定に従って信号を供給して測定することが望ましい。
d) i-MLSEの測定を行う。
215
X 6233:2017 (ISO/IEC 30193:2016)
I.4
変調振幅測定
変調振幅測定を行うためには,測定条件(30.2参照)を満たす。
I.5
I3pp / I8ppの解像度の測定(参考)
解像度の測定は,30.2の規定によって行う。I3ppは,スペクトラムアナライザを使って測定する。I8ppは,
デジタルストレージオシロスコープ(DSO)を使って測定する。スペクトラムアナライザ及びDSOは,同
じHF基準ドライブの出力を測定しケーブル終端を用いる。
次の測定方法を順番に行う。
a) 基準ドライブを1トラックジャンプモード(ドライブは,フォーカス及びトラッキングサーボがかか
り1回転後にアクチュエータが1トラックジャンプバックする。)にする。
b) I3pp及びI8ppの測定条件
− スペクトラムアナライザの設定
− 中心周波数:
22.0 MHz(2×Vrefの3T)
− スパン:
500 kHz
− 分解能帯域幅(RBW): 30 kHz
− ビデオ帯域幅(VBW): 10 Hz
− 掃引時間(SWT):
約5秒
− ディスク信号
− 信号:
I3単一周波数信号,I8単一周波数信号
− トラック:
1トラック
− 測定方法
− I3ppは,単一周波数信号を,スペクトラムアナライザを使って測定する(図I.1参照)。
− I8ppは,単一周波数信号を,デジタルストレージオシロスコープを使って測定する。
216
X 6233:2017 (ISO/IEC 30193:2016)
中心周波数22.0MHz
スパン500kHz
50kHz/
Ref
47dBmV
Att
30dB
30kHz
10Hz
A
SGL
-50
-40
-30
-20
-10
0
10
20
30
40
1
Marker1[T1]
11.21dBmV
22.000000000MHz
分解能帯域幅
ビデオ帯域幅
掃引時間5秒
図I.1−スペクトラムアナライザを用いたI3変調度の測定例
スペクトラムアナライザで得られる,I3ppの単位はdBmVであり,一方,I8ppはmVの値が得られる。そ
こで,I3pp / I8ppは,次のとおりに計算される。
(
)
(
)
pp
8pp
20
dBmV
8pp
3pp
mV
10
2
2
/
3pp
I
I
I
I
×
=
I.6
I8pp / I8H及びI3pp / I8pp変調度の測定方法
I8pp / I8H及びI3pp / I8H変調度の測定は,29.3.3に規定した条件を適用して行う。
I8pp / I8H及びI3pp / I8Hの測定は,次の方法を順番に行う。
a) 基準ドライブを,1トラックジャンプモード(ドライブは,フォーカス及びトラッキングサーボがか
かり1回転後にアクチュエータが1トラックジャンプバックする。)にする。
b) スライサによって2値化したHFデータ信号は,デジタルストレージオシロスコープ(DSO)のトリ
ガ信号として用いる。
c) I8L,I8H,I3L及びI3Hの値を,DSO又はアナログオシロスコープで測定する。
d) DSOを使う場合,各波形は周内に均等に分散している1 000回分を平均化する。
e) I8pp / I8H及びI3pp / I8Hの値は,次による。
8H
8L
8H
8H
8pp/
I
I
I
I
I
−
=
8H
3L
3H
8H
3pp/
I
I
I
I
I
−
=
f) I8Hの測定値は,迷光の影響を受けるため(B.4参照),上記で測定したI8pp / I8H及びI3pp / I8Hの値は,
光学システムの正規化したディテクタの大きさに依存する。測定したI8pp / I8H及びI3pp / I8Hの値は,正
217
X 6233:2017 (ISO/IEC 30193:2016)
規化ディテクタの大きさが25 μm2に換算する。換算した値(I8pp / I8H)conv及び(I3pp / I8H)convは,測定値(I8pp
/ I8H)meas及び(I3pp / I8H)measを用いて,次による。
[
]
+
×
=
∑
≠=
−
N
i
jj
ij
i
i
i
i
i
α
d
PD
R
R
S
I
I
I
I
0
2
normc
v
g
8H
8H
meas,
8H
8pp
conv,
8H
8pp
)
tan
2(
π
[
]
+
×
=
∑
≠
=
−
N
i
jj
ij
i
i
i
i
i
α
d
PD
R
R
S
I
I
I
I
0
2
normc
v
g
8H
8H
meas,
8H
3pp
conv,
8H
3pp
)
tan
2(
π
ここに,
PDnormc: 25 μm2の正規化ディテクタの
大きさ(9.4参照)
i,j,S8Hi,Rg−vi,R8Hi,dij,N及びα: B.4に規定している。
留意事項 記録層の変調度測定を行う場合には,該当する部分の全ての他の層は未記録であり,上述
した補正には未記録グルーブの反射率の値を用いるように気を付ける。
I.7
非対称性の測定
I.7.1
一般
非対称性の測定は,測定条件(29.3.3参照)を満たす。非対称性の測定には,次に示す方法を行う。
復号データ
レベル
計算ブロック
2T関連レベル
8T 関連レベル
非対称性
計算ブロック
非対称性値
波形等化前HF信号
復号データ
レベル
計算ブロック
2T関連レベル
8T 関連レベル
非対称性
計算ブロック
非対称性値
波形等化前HF信号
図I.2−上位ブロック構成
非対称性の評価は,2T信号レベル及び8T信号レベルに基づいて行う。図I.2は,レベル計算ブロック
及び非対称性計算ブロックで構成する,非対称性評価の上位ブロック構成を示している。2Tレベル及び
8Tレベルの値は,HF信号(波形等化前の信号)及び2値信号(2値信号は,ビタビ復号器にて検出され
る。)の入力に従って,レベル計算ブロックにて平均方法で計算し出力する。その後で,非対称性の値は,
非対称性計算ブロックで,2Tレベル及び8Tレベルの値に従って計算し出力する。
I.7.2
サンプリング方法
チャネルクロックでサンプルした信号で非対称性の計算を実現するためには,2種類の方法がある。一
つ(ケース1)は,ゼロクロスポイントの位相を含む信号を用いる。他の方法(ケース2)は,ゼロクロス
ポイントを除いた信号を用いる(図I.3参照)。各方法は,非対称に関連した適切なレベルを得るために異
なる構造をもっている。
ケース1では,2Tレベルは2値信号の1001及び0110のタイミングで直接検出されるサンプルレベル
D2s及びD2mの平均である。
ケース2では,2Tレベルは2値信号11001,10011,00110,01100のタイミングで検出されるサンプル
レベルD2S1,D2S2,D2m1及びD2m2の平均である。
218
X 6233:2017 (ISO/IEC 30193:2016)
遅延読取り信号
2値信号
1
1
1
0
0
0
0
0
D2s
D2m
1
1
1
選択信号1001のサンプリング位置
選択信号0110のサンプリング位置
2T
2T
3T
3T
ケース1)ゼロクロス点を含む場合
遅延読取り信号
2値信号
1
1
1
0
0
0
0
0
選択信号11001,10011のサンプリング位置
選択信号00110,01100のサンプリング位置
1
1
1
D2s1
D2s2
D2m1
D2m2
2T
2T
3T
3T
ケース2)ゼロクロス点を除いた場合
図I.3−サンプリング方法
I.7.3
レベル計算ブロック(平均方法)
レベル計算ブロックは,2Tレベル値及び8Tレベル値をそれぞれ計算して出力する,2Tレベル計算ブロ
ック及び8Tレベル計算ブロックで構成する。
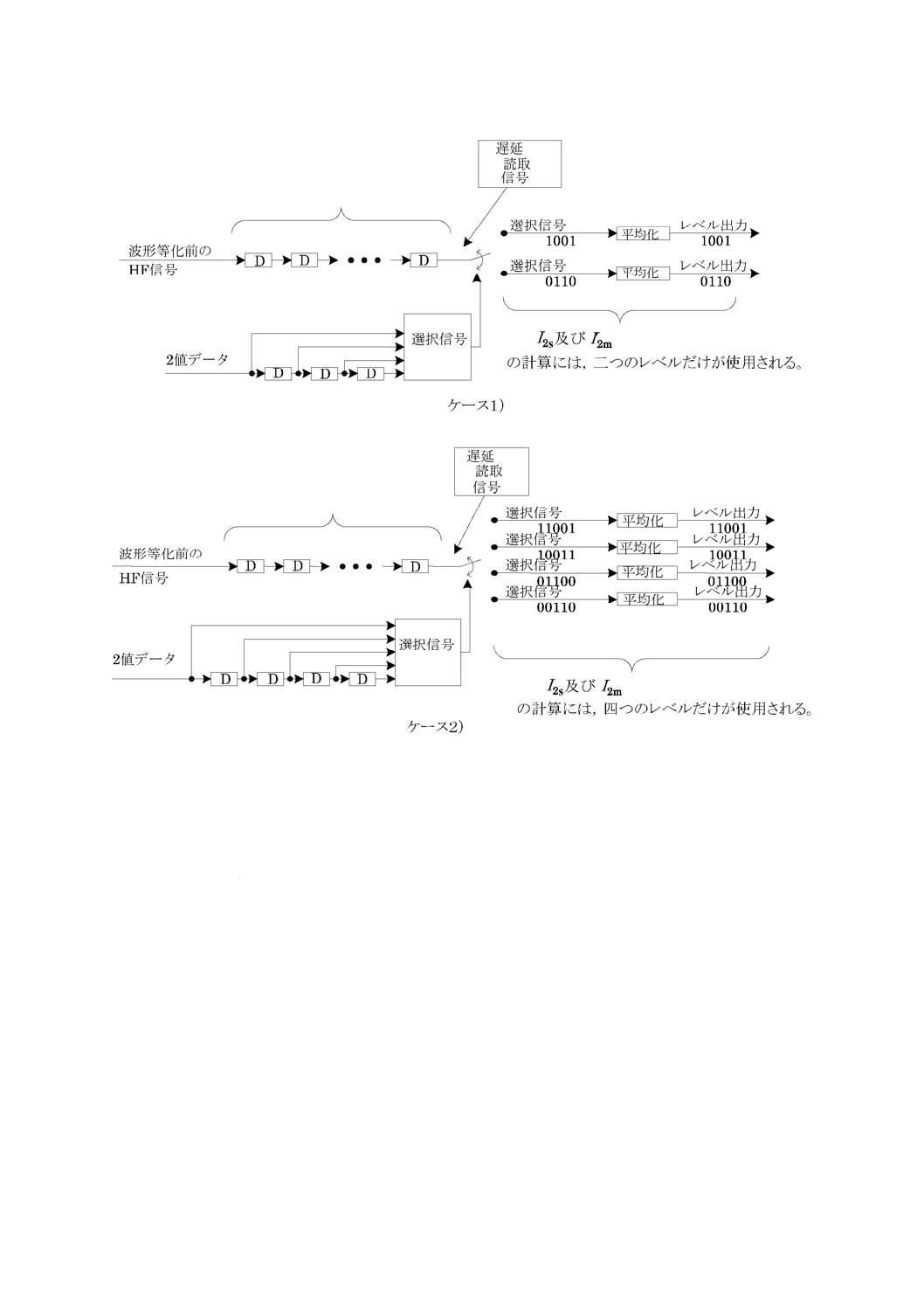
219
X 6233:2017 (ISO/IEC 30193:2016)
図I.4−2Tレベル計算の詳細ブロック
図I.4は,2Tレベル計算の詳細ブロックを示す。
ケース1)
それぞれ“1001”及び“0110”に相当する,平均スペースレベル(I2s=レベル1001)及び平均マークレベル
(I2m=レベル0110)を計算する二つの平均ユニットがある。選択信号が,“1001”及び“0110”のどれか一つの
パタンの場合,遅延したHF信号は選択した平均ユニットに入力される。
ケース2)
それぞれ“11001”,“10011”,“01100”,“00110”に相当する平均スペースレベル[I2s=(レベル11001+レベル10011)/2]
及び平均マークレベル[I2m=(レベル00110+レベル01100)/2]を計算する四つの平均ユニットがある。選択信号が
“11001”,“10011”,“01100”,“00110”のどれか一つのパタンの場合,遅延したHF信号は選択した平均
ユニットに入力される。
平均ブロックは,ディスク回転の変動を抑えるために,入力信号の平均値を計算する。
遅延の数値は合わせる
ことが望ましい。
遅延の数値は合わせる
ことが望ましい。
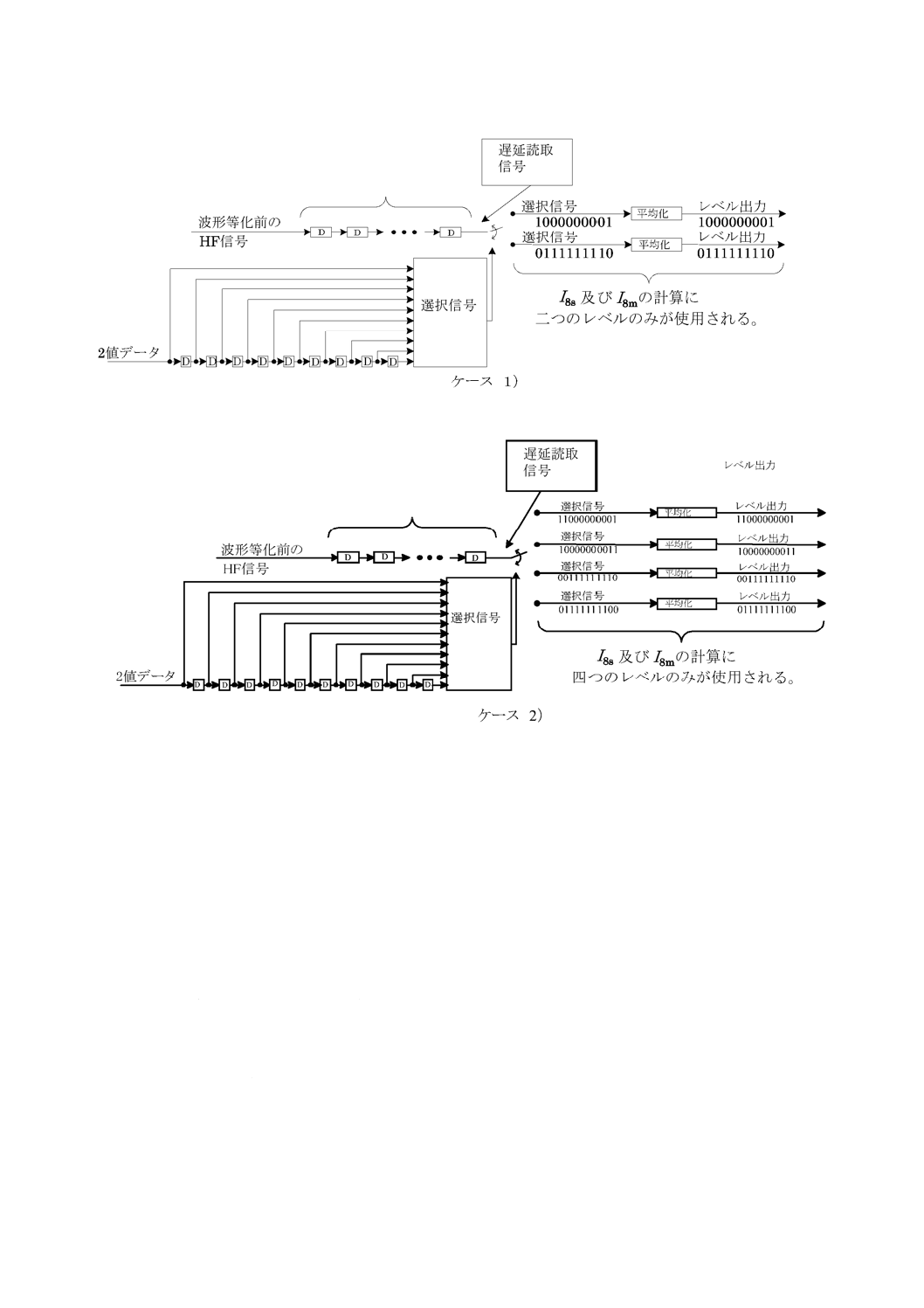
220
X 6233:2017 (ISO/IEC 30193:2016)
図I.5−8Tレベル計算の詳細ブロック
図I.5は,8Tレベル計算の詳細ブロックを示す。
ケース1)
それぞれ“1000000001”及び“0111111110”に相当する,平均スペースレベル(I8s=レベル1000000001)及び平
均マークレベル(I2m=レベル0111111110)を計算する二つの平均ユニットがある。選択信号が“1000000001”及
び“0111111110”のどれか一つのパタンの場合,遅延したHF信号は選択した平均ユニットに入力される。
ケース2)
それぞれ“11000000001”,“10000000011”,“01111111100”,“00111111110”に相当する,平均スペースレ
ベル[I8s=(レベル11000000001+レベル10000000011)/2]及び平均マークレベル[I8m=(レベル00111111110+レベル01111111100)/2]を計算
する四つの平均ユニットがある。選択信号が“11000000001”,“10000000011”,“01111111100”,“00111111110”
のどれか一つのパタンの場合,遅延したHF信号は選択した平均ユニットに入力される。
平均ブロックは,ディスク回転の変動を抑えるために,入力信号の平均値を計算する。
I.7.4
非対称性の計算
非対称性の値は,2Tレベル及び8Tレベル値を用いて,次による。
遅延数は,同じに
することが望ましい。
遅延数は,同じに
することが望ましい。
221
X 6233:2017 (ISO/IEC 30193:2016)
−
−
+
=
8m
8s
8m
8s
2T
2
I
I
I
I
レベル
平均
非対称性
)
(ケース
レベル
レベル
レベル
平均
1
2
0110
1001
2T
+
=
)
(ケース
レベル
レベル
レベル
レベル
レベル
平均
2
4
00110
01100
10011
11001
2T
+
+
+
=
)
(ケース
レベル
レベル
1
2
0111111110
1000000001
2
8m
8
+
=
+I
Is
)
(ケース
レ
レベル
ベル
レベル
レベル
2
4
0
0111111110
0
0011111111
1
1000000001
1
1100000000
2
8m
8
+
+
+
=
+I
Is
)
(ケース
レベル
レベル
1
0111111110
1000000001
8m
8s
−
=
−I
I
)
(ケース
レベル
レベル
レベル
レベル
2
2
0
0111111110
0
0011111111
2
1
1000000001
1
1100000000
8m
8s
+
−
+
=
−I
I
I.8
光反射率の測定
I.8.1
一般
光反射率の測定は,測定条件(附属書B参照)を満たす。
I.8.2
光反射率の測定方法
記録領域の反射率
基準ドライブを用いて反射率を測定する方法の一つを,次に示す。
a) 校正した反射率Rref(B.2参照)をもつ基準ディスクからの全ディテクタ電流(I1+I2)refを測定する。
b) ディスクの評価を行う領域の,記録したトラックでI8Hを測定する。
c) 記録領域のトラックの記録ディスクの反射率R8Hは,次による。
(
)
ref
ref
2
1
8H
8H
R
I
I
I
R
×
+
=
d) B.4に規定した方法を使用して,補正反射率を計算する。
留意事項 記録層で反射率を測定する場合に,測定部分に該当する他の層全て未記録とするよう注
意する。
I.9
トラッキングエラー信号測定(PPnorm測定方法)
PPnormの測定は,25.3.3及び25.4に規定した信号を使って行う。
PPnorm信号は,ディスク1回転中にDSOでサンプリングされる。測定は,図I.6の測定領域として示し
た場所で測定する。
PPnorm信号は,ディスク1回転中少なくとも15波は出現するようにする。
基準ドライブの調整は,フォーカスオフセット及び球面収差の調整(記録トラックのI8ppの振幅が最大
になるようにする。)の後に,PPnorm,recを測定する。
222
X 6233:2017 (ISO/IEC 30193:2016)
次のステップとして,PPnorm,rec測定で得られたのと同じフォーカスオフセット及び球面収差の設定条件
で未記録トラックでPPnorm,unrecを測定する。
PPnormの値の測定は,次の方法を順番に用いることが望ましい。
a) 基準ドライブを,半径方向トラッキングオープンモード(フォーカスサーボオンで,半径方向サーボ
オフ。)にする。
b) DSOのトリガに,1回転パルス(PPR)を使い,1回転分のPPnorm信号を表示する。
c) 10トラック連続のPPnorm振幅を決める(例えば,図I.6の測定領域1)。
d) 得られた10個の値の平均をとる。
e) c)で測定した場所の反対側(トリガをディスク1回転の半分遅らせる。)に位置する,10トラック連
続のPPnorm振幅を決める(例えば,図I.6に示す測定領域2)。
f)
得られた10個の値の平均をとる。
g) d)及びf)の二つの値の平均をとる。
h) b)で得られたPPnorm信号の,最大値及び最小値を決める。
i)
上記で測定したPPnormは,光学システムの正規化したディテクタの大きさに依存する(B.4参照)。
PPnorm測定値は,正規化ディテクタの大きさが25 μm2の値に換算することが望ましい。換算した値
(PPnorm)convは,測定値(PPnorm)measを使って,次による。
(
)
(
)
(
)
[
]
+
×
=
∑
≠
=
−
−
−
N
i
j
j
ij
i
i
i
i
i
α
d
PD
R
R
S
PP
PP
0
2
normc
v
g
v
g
v
g
meas,
unrec
norm,
conv,
unrec
norm,
tan
2
π
(
)
(
)
(
)
[
]
+
×
=
∑
≠=
−
−
N
i
jj
ij
i
i
i
i
i
α
d
PD
R
R
S
PP
PP
0
2
normc
v
g
v
g
8H
meas,
rec
norm,
conv,
rec
norm,
tan
2
π
ここに,
PDnormc: 25 μm2の正規化ディテクタの
大きさ(9.4参照)
i,j,S8Hi,Rg−vi,R8Hi,dij,N及びα: B.4に規定している。
留意事項 記録層のPPnorm測定を行う場合には,該当する部分の全ての他の層は未記録であり,上述
した換算には,未記録グルーブの反射率の値を用いるように気を付ける。
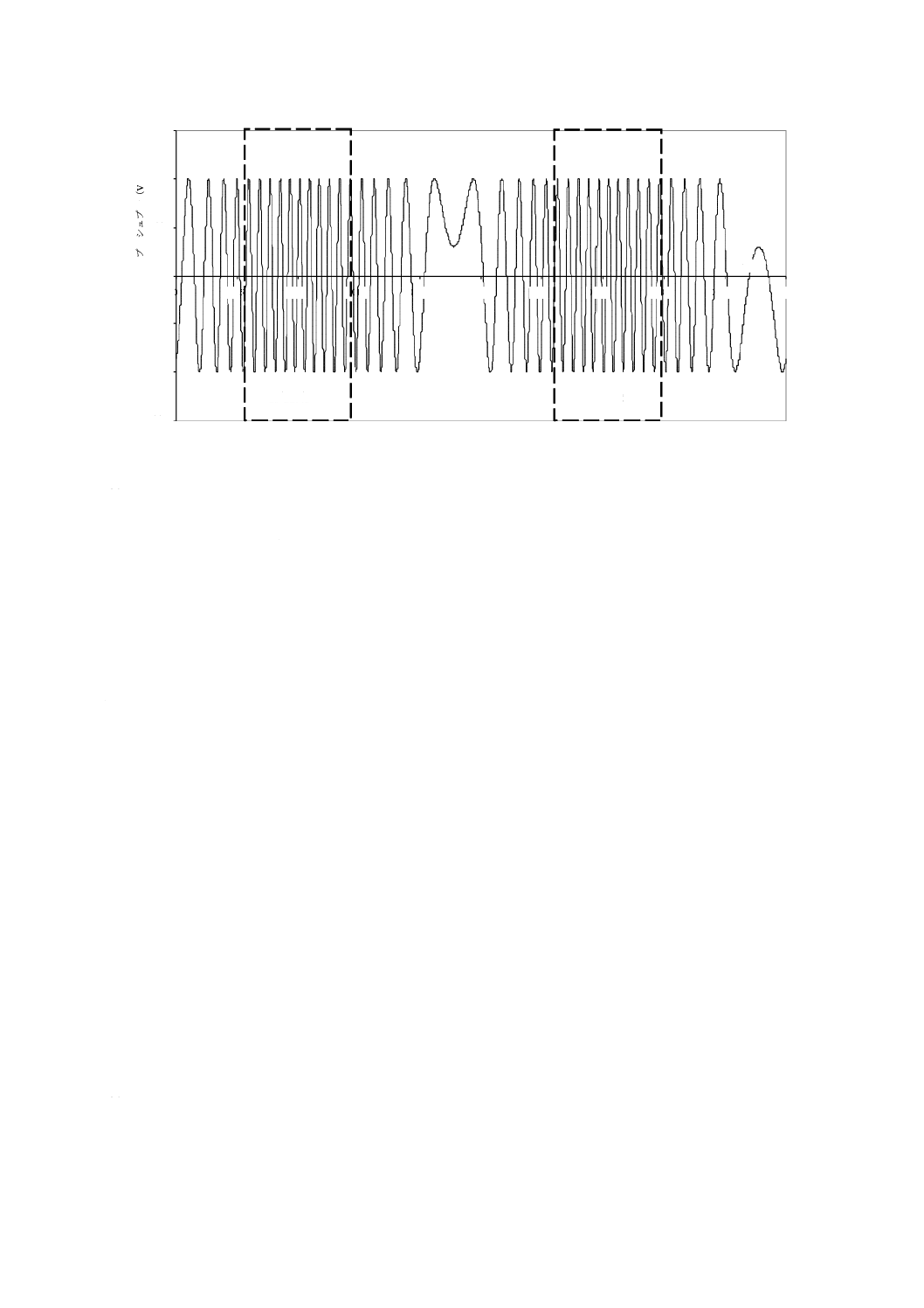
223
X 6233:2017 (ISO/IEC 30193:2016)
-30
-20
-10
0
10
20
30
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
t (秒)
測定領域 2
測定領域 1
プ
ッ
シ
ュ
プ
ル
(
V
)
図I.6−PP測定領域の指示
I.10 軸方向トラッキングの残留エラー測定方法
軸方向トラッキングの残留エラー測定は,11.4.1に規定したフィルタを通したフォーカスエラー信号を
使って行う。測定を行う前に,信号にスパイクがあるかどうか検査をする。スパイクがあり規格値の上限
を超える場合は,欠陥部の測定を避けるために,信号を見ながらスパイクがなくなるまで半径方向に測定
位置を動かす。
次に示す方法を,軸方向の残留エラー値測定に順番に用いることが望ましい。
a) 基準ドライブを,1トラックジャンプモード(ドライブは,フォーカス及びトラッキングサーボがか
かり1回転後にアクチュエータが1トラックジャンプバックする。)にする。
b) 9.10に規定したとおりに,軸方向のトラッキング基準サーボの軸方向サーボ特性を調整する。
c) 11.4に規定した特性のフィルタを準備する。
d) 次の手順で,ピーク値を測定する。
− フィルタをLPFとし,カットオフ周波数を,次のとおりに設定する。
− 1x測定速度で,1.6 kHz
− トラックジャンプ領域を除き,1回転にわたってピーク値を測定する。この測定を10回繰り返す。
得られた10個の値を平均化する。
e) ノイズの実効値を,次に示す方法で測定する。
− フィルタをBPFとし,カットオフ周波数を,次のとおりに設定する。
− 1x測定速度で,1.6 kHz & 10 kHz
− 1回転分のエラー信号波形を表示する。
− ノイズの実効値を,トラックジャンプ領域を除き,DSOの機能(1x測定速度では,積分時間を20 ms
とする。)を使って測定する。
注記 この値は,他の測定器でも測定できる。
I.11 半径方向トラッキング残留エラーの測定方法
半径方向トラッキングの残留エラー測定は,11.5に規定したフィルタを通した半径方向エラー信号を使
って行う。測定を行う前に,信号にスパイクがあるかどうか検査をする。スパイクがあり規格値の上限を
224
X 6233:2017 (ISO/IEC 30193:2016)
超える場合は,欠陥部の測定を避けるために,信号を見ながらスパイクがなくなるまで半径方向に測定位
置を動かす。
次に示す方法を,半径方向の残留エラー値測定に,順番に用いることが望ましい。
a) 基準ドライブを,1トラックジャンプモード(ドライブは,フォーカス及びトラッキングサーボがか
かり1回転後に,アクチュエータが,1トラックジャンプバックする。)にする。
b) 9.11に規定したとおりに,半径方向のトラッキング基準サーボの半径方向サーボ特性を調整する。
c) 11.5に規定した特性のフィルタを準備する。
d) 次の手順で,ピーク値を測定する。
− フィルタをLPF とし,カットオフ周波数を,次のとおりに設定する。
1x測定速度では,1.8 kHz
− トラックジャンプ領域を除き,1回転にわたってピーク値を測定する。この測定を10回繰り返す。
得られた10個の値を平均化する。
e) ノイズの実効値を,次に示す方法で測定する。
− フィルタをBPFとし,カットオフ周波数を,次のとおりに設定する。
1x測定速度では,1.8 kHz & 10 kHz
− 1回転分のエラー信号波形を表示する。
− ノイズの実効値を,トラックジャンプ領域を除きDSOの機能(積分時間は,1x測定速度では20 ms
とする。)を使って測定する。
注記 この値は,他の測定器でも測定できる。
I.12 ランダムSER測定
測定条件は,33.4に規定されている。
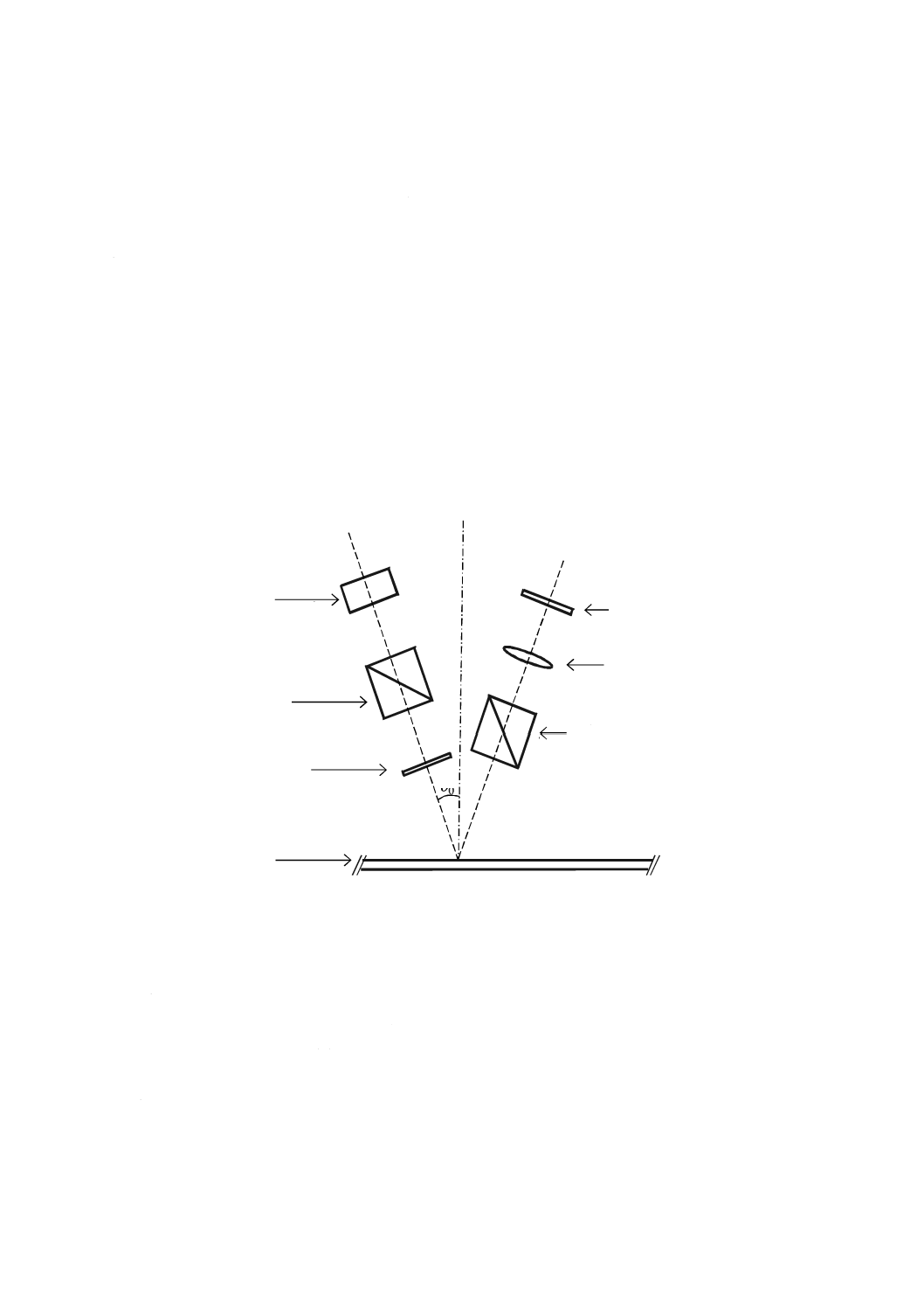
225
X 6233:2017 (ISO/IEC 30193:2016)
附属書J
(参考)
複屈折の測定
J.1
測定の原理
複屈折の測定には,偏光平行光が使用される。位相遅延は,反射光の偏光のだ円率を見ることによって,
測定される。
この規格では,複屈折を測定する特定の装置の指定はしないが,図J.1に例示する装置は,この測定に
適している。
入力するレーザ光の二つの偏光の方位は,既知であると仮定する。
透過積層中でのレーザ光の入射角は,θとする。この角度は,空気中でのレーザ光の入射角θ0と,次の
関係式で表される。
n×sin(θ)=sin(θ0)
ここに,
n: 平均の(面方向の)屈折率
ディスク
1/4 波長板
偏光子
レーザ
回転アナライザ
コリメータレンズ
フォトディテクタ
0θ
図J.1−複屈折を測定する装置の例
J.2
測定条件
上記に規定した複屈折の測定は,次の条件で測定される。
− 測定モード:
反射で透過積層を通過するダブルパス
− レーザビームの波長(λ): 405 nm±10 nm
− ビーム半径(FWHM):
1.0 mm±0.2 mm
− 入射角θ0:
25°〜60°
− ディスク設置方向:
水平方向
− 温度及び相対湿度:
8.1.1の規定による
226
X 6233:2017 (ISO/IEC 30193:2016)
J.3
測定方法の例
次に示す方法によって,複屈折がディスクの透過積層の中では均一であるという仮定のもとに,平面方
向複屈折Δn//及び垂直方向複屈折Δn⊥を明確に決めることができる。さらに,複屈折Δn//及びΔn⊥の絶対値
は,1よりも十分小さいと仮定する。
a) アナライザを,入力光のs偏光軸又はp偏光軸に平行に合わせる。1/4波長板を通過した光が,直線偏
光となるように合わせる。
b) ディスクを,表面に垂直な軸の周りに,アナライザを通過した光が最小又は最大となるように回転す
る。
c) この位置から,ディスクを45°回す。1/4波長板を45°回す。
d) アナライザ通過光が,再び最小又は最大となるように回転する。アナライザの回転角の変化幅Δφを,
記録する(ラジアンで)。最小の通過Tmin及び最大の通過Tmaxを記録する。
e) 位相遅れRを得るために,次の式を計算する。
+
−
×
=
min
max
min
max
arcsin
π
4
T
T
T
T
λ
R
f)
次の二つの式の中で,Rの値をΔφ及びθと組み合わせ,Δn//及びΔn⊥の値を得る。
(
)φ
d
R
n
Δ
2
cos
Δ//
×
×
=
()()
(
)
φ
θ
θ
d
R
n
Δ
2
sin
sin
cos
Δ
2
×
×
×
=
⊥
ここに,
d: 透過積層の厚さ
入射角は,平行方向及び垂直方向の両方の複屈折が正確に測定できるように選ぶことが望ましい。適し
た値は,Δn及びΔn⊥の比による。
J.4
測定結果の互換性
J.2の測定条件を基にしている場合は,他の種々の測定方法が可能であり使ってもよい。測定結果の互換
性を保証するために,次に示す影響を考慮することが望ましい。
反射光の解析の際,カバー層の表面による反射光を考慮に入れる。
表面による反射光の直接の影響を別にしても,表面の反射光及び記録層の反射光の干渉に起因する全反
射光の変動が起こる可能性がある。この反射光の変動が顕著なのは,ディスクのカバー層が非常に正確に
平たんであり,かつ,光源のコヒーレンスが高い場合だけである。
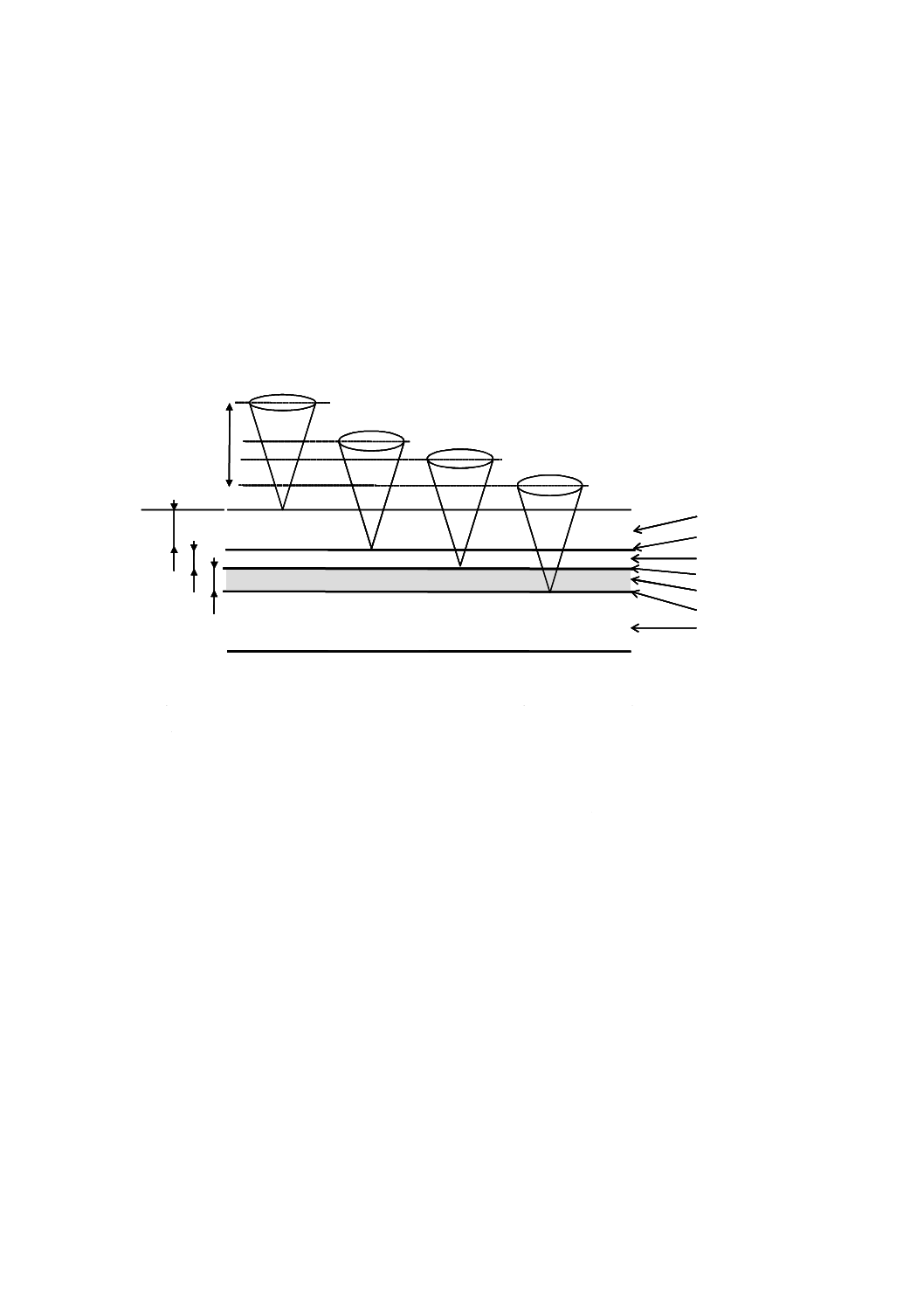
227
X 6233:2017 (ISO/IEC 30193:2016)
附属書K
(参考)
カバー層及びスペーサ層の厚さの測定
K.1 フォーカス方法
この箇条では,3層ディスクを使った,フォーカス方法の例を説明する。
レーザ光は,対物レンズによってカバー層の表面から各記録層へと順番に焦点を合わす。カバー層及び
スペーサ層の厚さは,レンズの動きを測定することによって決めることができる。図K.1は,この方法で
ディスクの測定をする例を図示している。
基板
L0層
スペーサ層1
L1層
スペーサ層2
L2層
カバー層
d1
d2
d3
基板
L0層
スペーサ層1
L1層
スペーサ層2
L2層
カバー層
d1
d2
d3
図K.1−カバー層及びスペーサ層の厚さの測定例
上記規定した,カバー層及び二つのスペーサ層の厚さの測定は,次に示す条件で行うことが望ましい。
− レーザビームの波長:
405 nm±5 nm
− 試験環境:
8.1.1の規定による
測定器によって,レンズの移動距離が各層の厚さd1,d2及びd3に変換できる。
この測定では,フォーカスシステムの引込み範囲の幅はスペーサ層の厚さよりも,十分短くすることが
望ましい。
K.2 干渉計方法
この箇条では,4層ディスクを使った干渉計方法の例を説明する。
この方法では,波長の変化可能な光源が使用される。反射光の強度は,次のパラメタ:厚さ,屈折率及
び波長によって変わる。
反射光の干渉パタンを測定した,標準的な例を図K.2に示す。
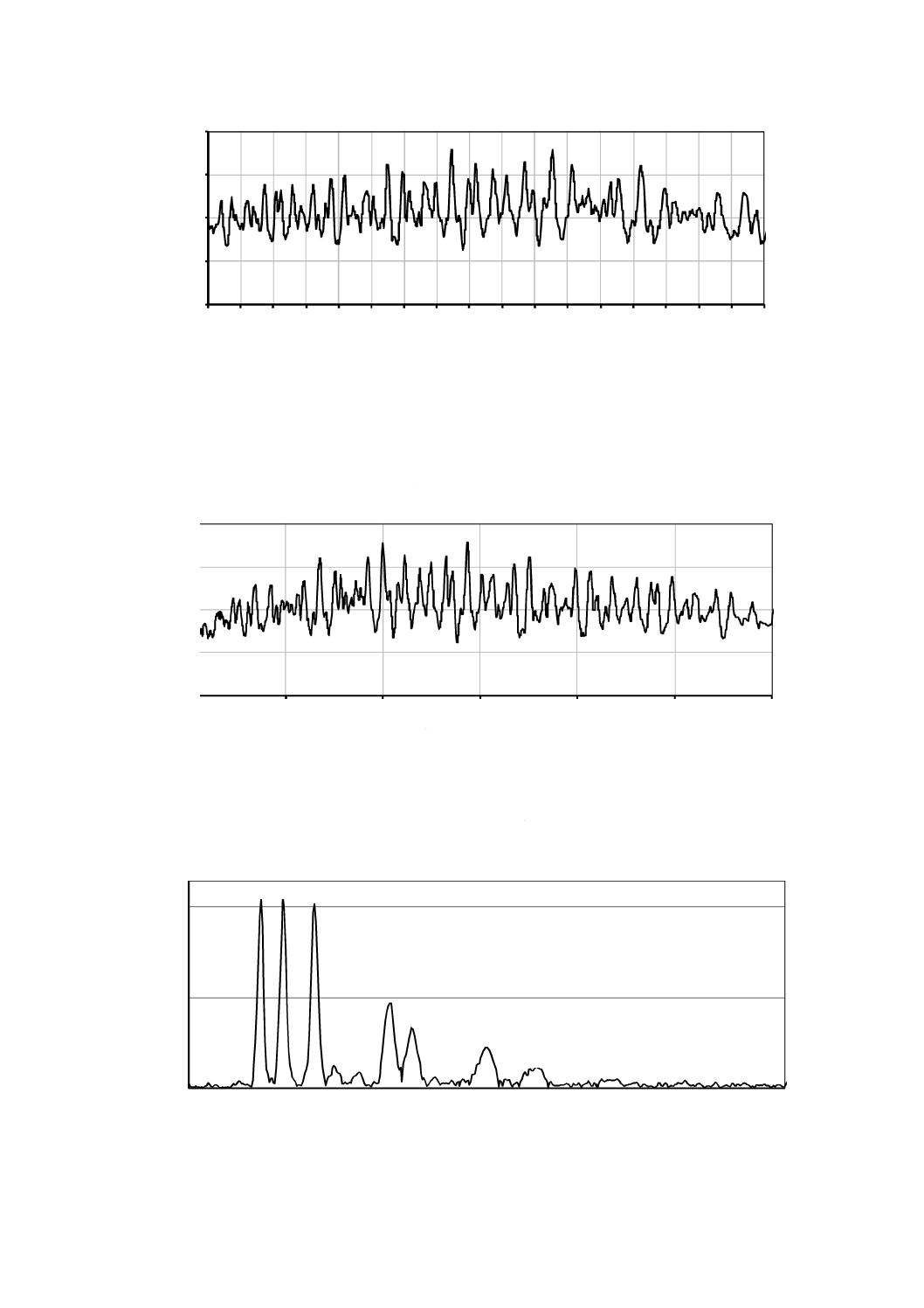
228
X 6233:2017 (ISO/IEC 30193:2016)
0
100
200
300
400
560
580
600
620
640
660
680
700
720
740
760
780
800
820
840
860
880
900
In
te
n
s
ity
(
a
rb
.)
Wavelength , λ (nm)
波長,λ(nm)
F
F
T
強
度
(
ar
b
.)
反
射
光
強
度
(
単
位
は
任
意
)
図K.2−反射光強度の例
この波形から開始し,層の厚さは高速フーリエ変換(FFT)の手法を使って得ることができる。しかし,
屈折率は,波長の関数であるため,FFTで次に示す方法を行うことが望ましい。
最初に,波長空間は,波長の逆数及び波長依存の屈折率の積に変換される。この変換した結果の波形を,
図K.3に示す。ここに,横軸は,n(λ)/2λに変換されている。
0
100
200
300
400
0.80
0.90
1.00
1.10
1.20
1.30
1.40
In
te
n
s
it
y
(
a
rb
.)
n(l) / 2l(x106m-1)
F
F
T
強
度
(
ar
b
.)
n(λ)/2λ(×106m-1)
反
射
光
強
度
(
単
位
は
任
意
)
図K.3−反射光強度の例
FFT法を使い,この変換した波形は,図K.4に示すとおり厚さの空間の干渉空間へ変換できる。横軸は,
干渉距離の値を示している。d1,d2,d3及びd4の位置は光強度がピークになる場所で,それぞれ,スペー
サ層3,スペーサ層1,スペーサ層2及びカバー層の厚さを示している。
0
3,500
7,000
0
10
20
30
40
50
60
70
80
90
FF
T
In
te
n
c
it
y
(
a
rb
.)
Thickness [µm]
100
50
d3
d2
d1
d2+d3
d1+d2
D1~d3
d4
F
F
T
強
度
(
ar
b
.)
干渉距離,d(μm)
d4
d3d1
d2
d1+ d2+ d3
d2+ d3
d1+ d2
反
射
光
強
度
(
単
位
は
任
意
)
図K.4−反射光強度のFFTの例
229
X 6233:2017 (ISO/IEC 30193:2016)
それによって,スペーサ層1の厚さ=d1,スペーサ層2の厚さ=d2,スペーサ層3の厚さ=d3かつカバ
ー層の厚さ=d4となる。
注記 スペーサ層の厚さを得るために,スペーサ層の屈折率n1(λ),n2(λ)及びn3(λ)を用いる必要があり,
カバー層の厚さを得るために,カバー層の屈折率n4(λ)を用いる必要がある。
この方法は,層の厚さが薄めの場合,特にフォーカス方法で二つの層の表面の区別が難しい場合に,正
確に厚さを測定することに向いている。
230
X 6233:2017 (ISO/IEC 30193:2016)
附属書L
(参考)
カバー層の衝突耐久性の測定
L.1
一般
BD書換形ディスクシステム構成は,次の特徴がある。
− ディスクに入射するレーザのスポットサイズは,以前の光記録システムのものよりも小さい。
− レンズの自由作動距離(FWD)は,前の光記録システムのものよりも短い。
L.2
ドライブの推奨
L.1の両方の結果から,光学ピックアップユニットの先端とディスクとの機械的接触の危険性及び実際
に衝突することが増えた。そこで,ドライブは,ディスクに衝突した後でもSER(33.4参照)が許容限度
内にあるような,レンズ及びディスクを保護する十分な手段をもつことが望ましい。そこで,バンパ(例
えば,衝撃ダンパ)を,OPUの先端に付けることが推奨される。このバンパは,円柱状の形でもよく,ポ
リマ,ポリオキシメチレン(POM)のようなポリマ化合物で作ることができる。
L.3
カバー層の衝突耐久性の測定
さらに,ディスクの入射面は,十分な衝突耐久性をもつことが望ましい。衝突耐久性は,保護コートに
よって改善してもよい。
次に示す試験は,ディスクの入射面の衝突耐久性が十分かどうか検証する。
球面形状のピン(図L.1参照)が,ディスクに対しピンを当てることができる機械装置の先端に装着さ
れる。ピンは,回転するディスクを規定の衝撃で打つ。
R
図L.1−標準的ピン形状
試験開始前は,次のとおりに確認する。
ディスクに,任意のデータを記録する。半径24.5 mmから25.5 mmまでの全てのデータエラーが,箇条
31及び34.1の規定を満たすことを検証する。
バンパ及びディスク入射面が,きれいであることを確認する。
試験条件は,次による。
− ピンの材料:
ポリオキシメチレン(POM;自然グレード,成形ピース)
− ピンの半径:
先端:球形で半径R=1.0 mm
− 表面の最大粗さ:
0.1 μm(山から谷まで)
− 可動部質量(ピン及びピン保持部):(0.5±0.1)グラム
231
X 6233:2017 (ISO/IEC 30193:2016)
− 衝突直前速度:
(0.20±0.05) m/s
− ディスクの線速度:
5.0 m/s
− テスト領域半径:
(25.0±0.2) mm
− 衝突回数:
1回
− 環境:
8.1.1に規定した全ての動作条件
試験の後の結果は,次による。
ディスクの関係した領域で生じたエラーは,いずれのLDCブロックのSER(33.4参照)も4.2×10−3未
満を満たすことが望ましい。
232
X 6233:2017 (ISO/IEC 30193:2016)
附属書M
(参考)
グルーブ偏移及びウォブル振幅
M.1 正規化ウォブル信号及びウォブル振幅の関係
nm単位のウォブル振幅を直接測定することは簡単にはできない。しかし,正規化ウォブル信号から求
めることができる。このように求めた誘導の近似式を,次に示す。
ウォブル信号のピーク値IWは,次のとおりに表すことができる。
×
×
×
=
p
Wp
π
2
sin
T
a
A
I
ここに,
a: nm単位のウォブル振幅
Tp: 半径方向エラー信号のトラックピッチ
A: 半径方向エラー信号のピーク値
図M.1に,パラメタa,Tp,A及びIWpが示される。トラックの平均中心は,“O”点にとられる。トラ
ックは,トラックの平均中心から実際のトラック中心までピーク編移“a”(ウォブル振幅)となる。正規
化ウォブル信号は,それらを用いて,次による。
(
)
×
×
=
×
×
=
−
p
Wp
pp
2
1
Wpp
π
2
sin
2
2
T
a
A
I
I
I
I
ここに, (I1−I2)pp=2×A
ウォブル信号IWは,ウォブル振幅aだけではなくトラックピッチTpにも依存する。
正規化によって,グルーブ構造及びスポット形状並びに光学収差要因を除く。
M.2 正規化ウォブル信号の許容値
M.1の正規化ウォブル信号の式によって,27.3の許容値は,与えられたトラックピッチTp=0.32 μmで
のnm単位のウォブル振幅に変換できる。
− 下限: 0.20は,10 nmに相当する。
− 上限: 0.55は,30 nmに相当する。
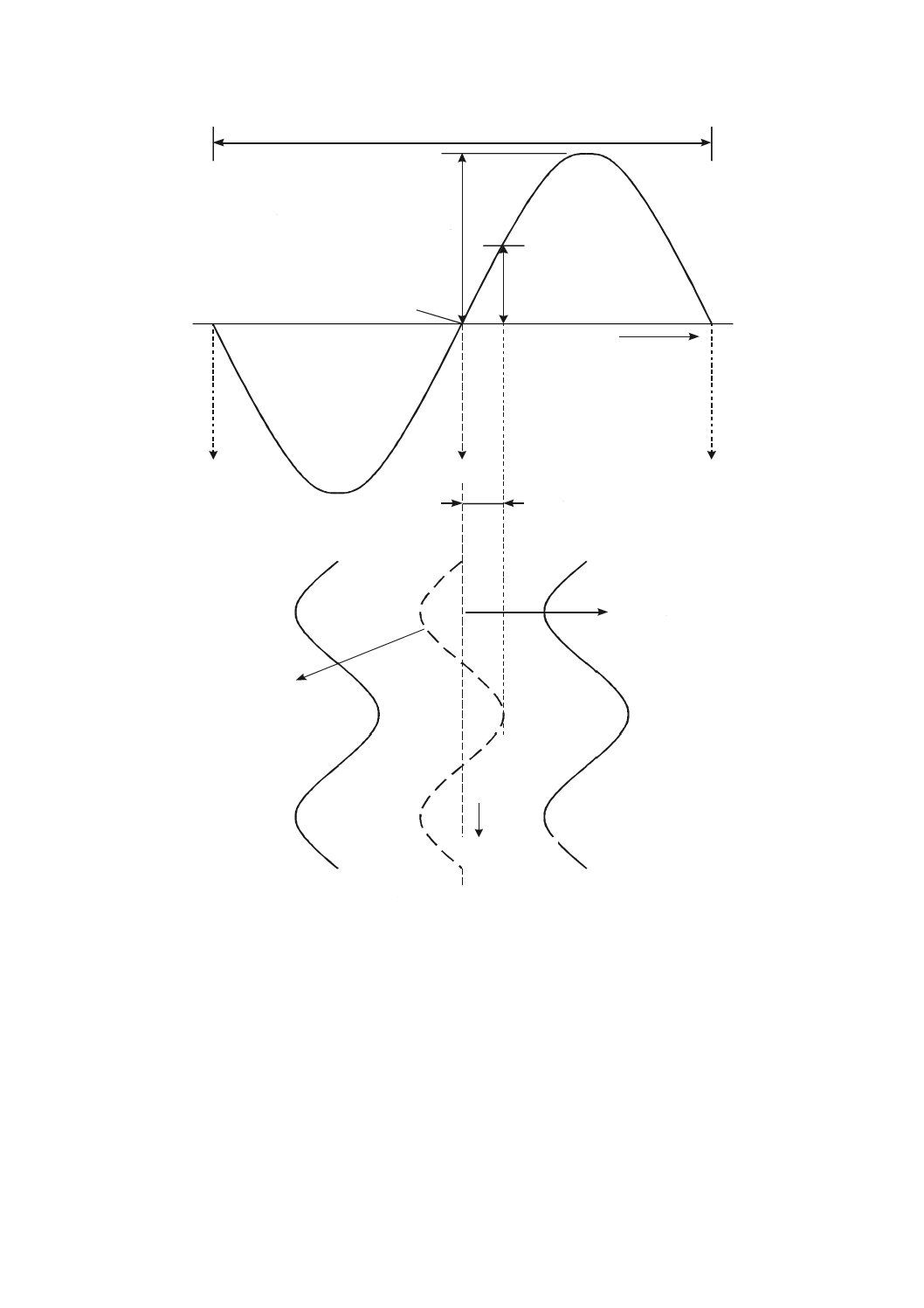
233
X 6233:2017 (ISO/IEC 30193:2016)
O
A
Tp
IWp
ランド
グルーブ
ランド
半径方向
a
平均の
トラック中心
実際の
トラック中心
ウォブル振幅
接線方向
半径方向
エラー信号
図M.1−グルーブ上のウォブル信号生成
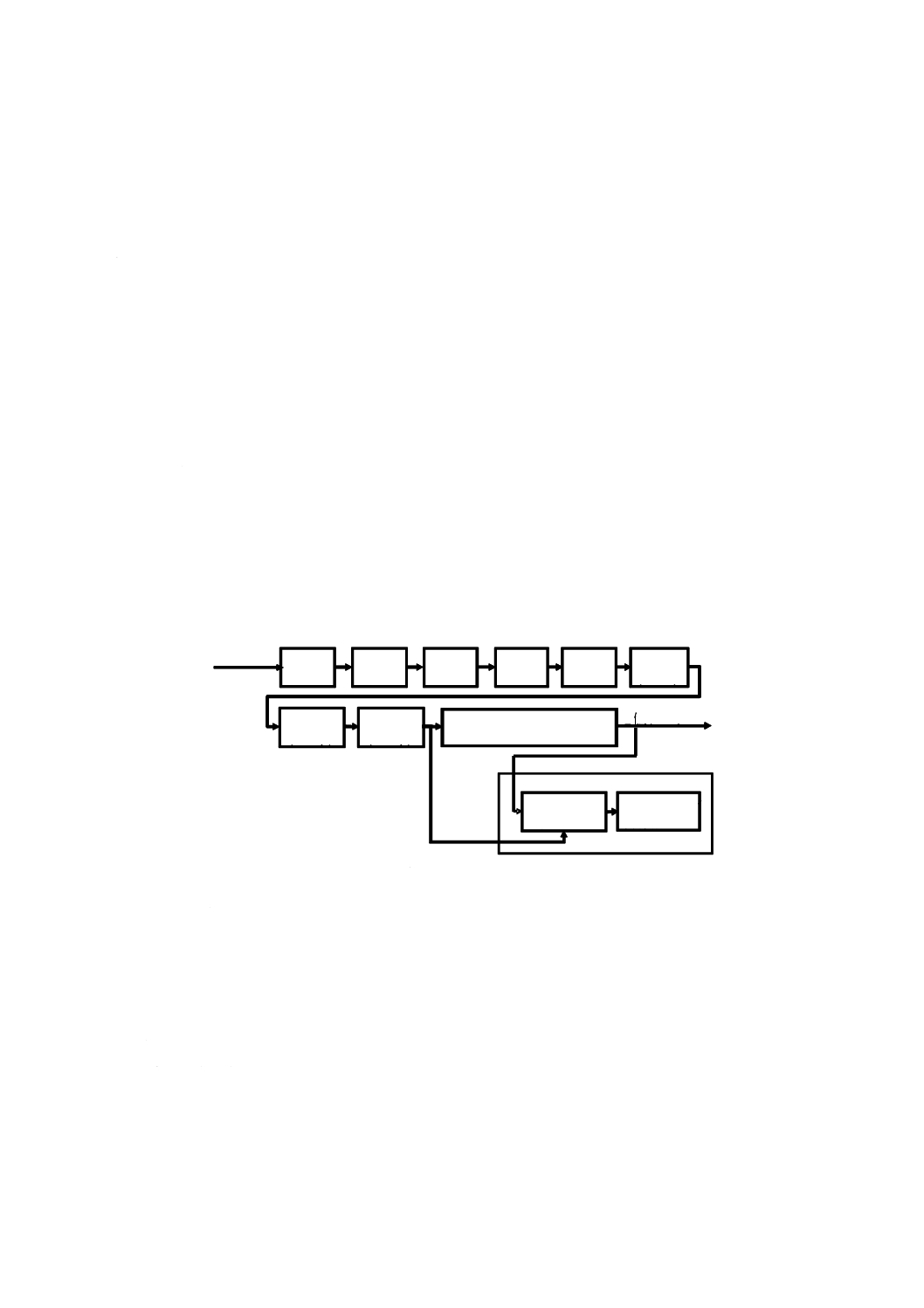
234
X 6233:2017 (ISO/IEC 30193:2016)
附属書N
(参考)
L-SEATエッジシフトを用いた記録パルス調整のガイドライン
N.1 一般
多層BDシステムの読取りシステムは,附属書H規定の,適応形波形等化器を用いたPR(1,2,2,2,1)ML
チャネルを用いている。しかしながら,適応形波形等化器は,その位相特性のためにエッジシフトが観測
される影響を与える可能性がある。そこで,適応形波形等化器の動作に影響を受けないでエッジシフトを
検出できる手段があることが望ましい。この参考附属書は,高い線記録密度のシステムに対して適切なエ
ッジシフト検出手段及び記録パルスの調整方法を供給することによって,互換性を改善することを意図し
ている。
N.2 エッジシフト検出システムの実装一般
N.2.1 エッジシフト評価ユニット
エッジシフト検出のシステム(L-SEAT:適応形ターゲットのラン長制限列誤差)のブロック構成を,図
N.1に示す。信号処理ユニットは2×Vrefで動作すると仮定している。システムの構成は,エッジシフト評
価機能だけ追加したため,i-MLSEの評価システムと大変よく似ている。
入力信号の極性は,交流結合HF信号と同じにすることが望ましい。
LPF
HPF
A/D
直流
補正
LMS
(13tap)
PLL
(補間)
拡張
エッジシフト
エッジパターン
分類表
L-SEAT
pre-EQ
(13tap)
2値データ
読取
波形
AGC
PR(1,2,2,2,1)ML
図N.1−エッジシフト評価ユニットの実装例
N.2.2 アナログフィルタ(HPF,LPF)
H.3参照。
N.2.3 AD変換器
H.4参照。
N.2.4 オフセットキャンセラ
H.5参照。
N.2.5 自動利得制御(AGC)
H.6参照。
N.2.6 補間器
H.7参照。
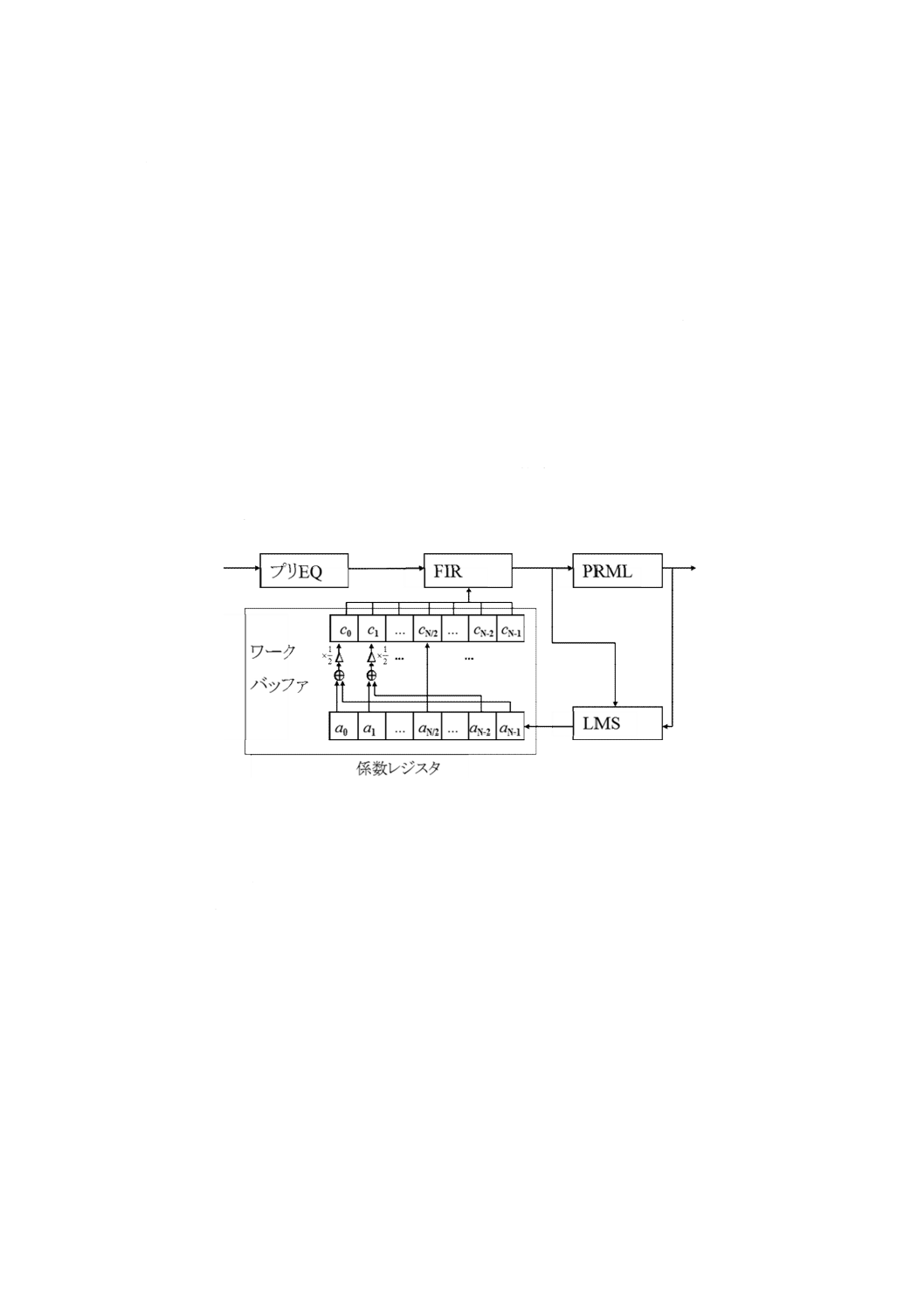
235
X 6233:2017 (ISO/IEC 30193:2016)
N.2.7 PLL
H.8参照。
N.2.8 デジタル波形等化器
H.9参照。
N.2.9 適応形波形等化器
適応形波形等化器の構造及び適応動作は,基本的にi-MLSE評価器に用いたものと同じであり,したが
って,詳細は,H.10を参照することが望ましい。しかし,適応形波形等化器の一般的な特性は,入力信号
にあるエッジシフトを小さくするように位相特性を適応的に変える。したがって,線形な位相特性をもつ
対称なタップ係数のFIR適応形波形等化器を用いることが望ましい。そのような波形等化器の構成を,図
N.2に示す。タップ係数は,中心タップ(a6)に配置した,二つのタップ係数の値を単に平均することで
対称化でき,通常のLMSアルゴリズムを使って評価される。それは,次による。
cn=(an+a12−n) / 2
ここに,
an: LMSアルゴリズムで得られるタップ係数
cn: 対称化したタップ係数
タップ係数anは,i-MLSEのH.10規定の適応形波形等化器と同じように更新される。タップ係数の更新
アルゴリズムに,通常のLMSアルゴリズム又は符号付LMSアルゴリズムのいずれを使用してもよい。
図N.2−タップ係数対称化
N.2.10 ビタビ復号器
H.11参照。
N.2.11 L-SEAT評価ブロック
L-SEAT評価ブロックは,拡張エッジシフト検出器及びエッジパタン分類器で構成している。拡張エッ
ジシフト検出器は,次のN.3.2に示す規定による拡張エッジシフトを評価している。エッジパタン分類器
は,検出したエッジシフトを関連する記録ストラテジの表によって分類している。詳細は,次の箇条に説
明する。
N.3 L-SEATのHF信号処理
N.3.1 一般
L-SEATは,HF信号からエッジシフトを解析する手段である。それは,記録パルスを調整することによ
って,ディスク上のマークのエッジシフトを小さくしドライブ間の互換性を良くすることを可能とする。
L-SEATは,PR(1,2,2,2,1)MLチャネル及びラン長制限された17PP変調で処理される信号に適した解析を目
236
X 6233:2017 (ISO/IEC 30193:2016)
的としている。
N.3.2 L-SEATの規定
W及びTを,それぞれ,ビタビ復号器の入力波形及びビタビ復号器出力から得た目標波形とする。検討
中のエッジの一つがWとTとの間にあると仮定する。復号したビット列から,検討中のエッジを1ビッ
ト右(左)にシフトして得られるビット列は,右(左)目標ビット列と呼ばれる。ここに,光スポットの
移動方向は右と規定する。右(左)目標ビット列は,ラン長制限を満たさなければならない。また,エッ
ジシフトエラーの場合,それらと復号したビット列との間のハミング距離は単一でなければならず,マー
ク又はスペースのシフトエラーの場合は2でなければならない。したがって,右又は左の片方の目標ビッ
ト列は,片方しかない場合の可能性がある。R及びLを,右又は左の目標ビット列から得られる目標波形
とする。
左及び右の等価エッジシフトは,次の式(N.1)及び式(N.2)による。
−
−
=
L)
(T,
W)
(T,
W)
(L,
1
2
1
ED
ED
ED
xL
··············································· (N.1)
−
−
=
R)
(T,
W)
(T,
W)
(R,
1
2
1
ED
ED
ED
xR
·············································· (N.2)
ここに, ED(A,B): 波形A及びBの,二乗ユークリッド距離
検討中のエッジシフトは,拡張エッジシフトDと呼ばれる。Dは,左及び右のシフトビット列が両方存
在する場合,式(N.3)で規定する。左シフトビット列だけ存在する場合,式(N.4)で規定する。右シフトビッ
ト列だけ存在する場合,式(N.5)による。
2
xL
xR
D
−
=
·········································································· (N.3)
xL
D−
=
··············································································· (N.4)
xR
D +
=
··············································································· (N.5)
光スポットの移動方向
+
マーク
‒
エッジシフトの方向
‒
+
光スポットの移動方向
+
マーク
‒
エッジシフトの方向
‒
+
図N.3−エッジシフトの符号の規定
マークエッジシフトの符号は,立上がり又は立下がりであっても,光スポットの移動方向と同じ方向の
場合は正と規定することに注意する(図N.3参照)。
Nを試験したエッジの総数,Dnをn番目のエッジの拡張エッジシフトとして,拡張エッジシフトの統計
平均Δを式(N.6)で規定する。このΔは,等価エッジシフトとみなすことができ,L-SEATエッジシフトと
呼ばれる。
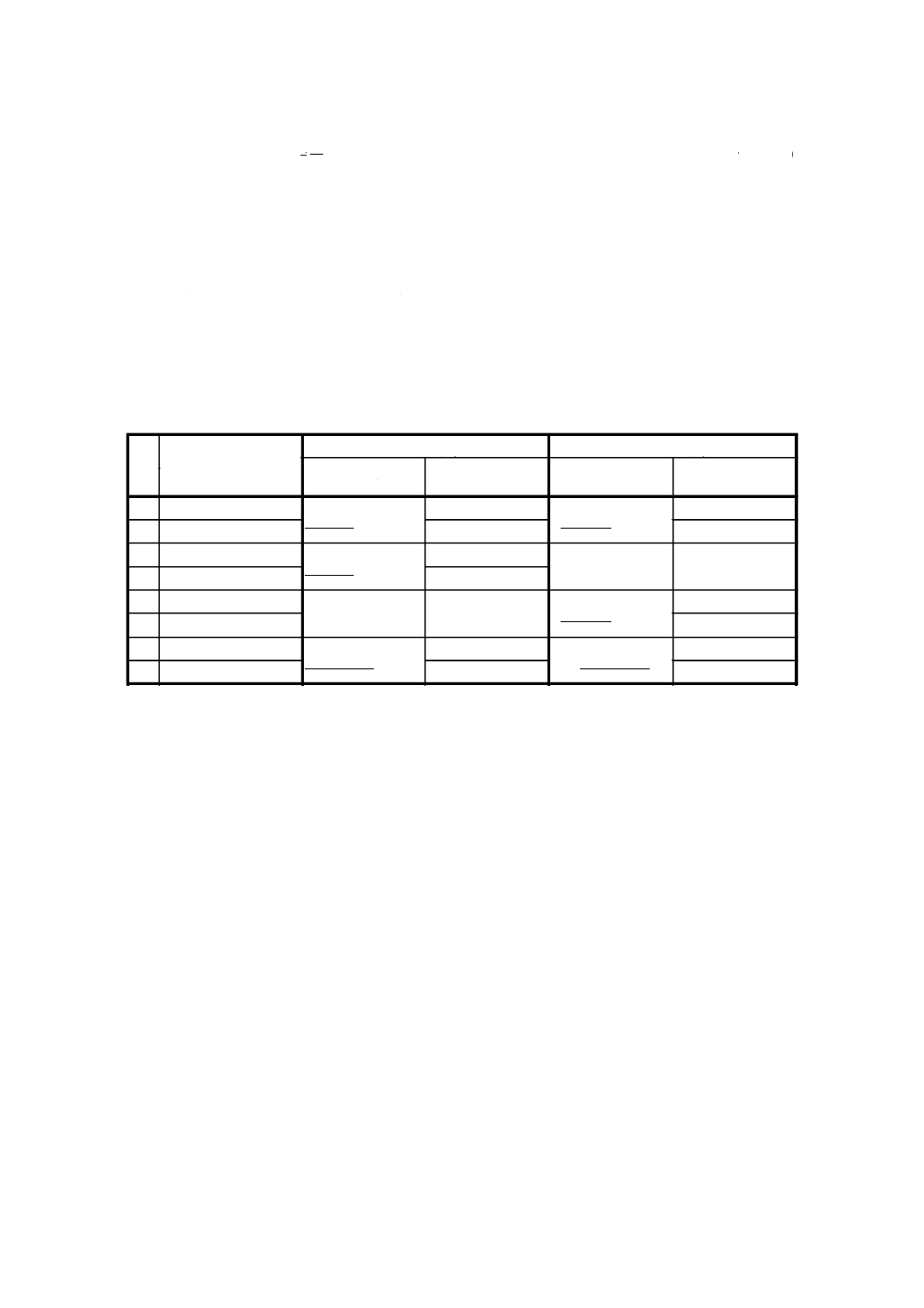
237
X 6233:2017 (ISO/IEC 30193:2016)
∑
=
=
N
n
n
D
N
Δ
1
1
········································································· (N.6)
N.3.3 エッジ検出ビットパタン
L-SEATエッジシフトは,記録ストラテジの表に応じて得ることが望ましい。検出したL-SEATエッジシ
フトは識別され,記録ストラテジ表の場所に応じて分配される。これは,エッジを識別する識別ビット列
と呼ばれるビット列とのビットパタン整合によって行うことが望ましい。エッジ識別ビット列は,識別ビ
ット列と呼ばれる主部分と付加部分とで構成される。八つのエッジ識別ビット列を,図N.4に示すとおり
規定する。
ここに,検討中のエッジは,No.1〜No.6では右から数えて3番目のビットで,No.7及びNo.8は5番目
のビットである。
以降,“1”は,識別ビット列又はエッジ識別列の中でマークを示し,“0”はスペースを示す。
番号
識別ビットアレイ
L-ターゲット
R-ターゲット
XOR マスクビット
アレイ
i-MLSEパターン
グループ番号
XORマスクビット
アレイ
i-MLSE パターン
グループ番号
1
000111
001000
14-2
000100
14-1
2
111000
14-4
14-3
3
000110
001000
14-2
-
-
4
111001
14-4
5
100111
-
-
000100
14-3
6
011000
14-1
7
1110011000
0010100000
12A-4
0000010100
12A-3
8
0001100111
12A-2
12A-1
番号
識別ビットアレイ
L-ターゲット
R-ターゲット
XOR マスクビット
アレイ
i-MLSEパターン
グループ番号
XORマスクビット
アレイ
i-MLSE パターン
グループ番号
1
000111
001000
14-2
000100
14-1
2
111000
14-4
14-3
3
000110
001000
14-2
-
-
4
111001
14-4
5
100111
-
-
000100
14-3
6
011000
14-1
7
1110011000
0010100000
12A-4
0000010100
12A-3
8
0001100111
12A-2
12A-1
図N.4−識別ビット列及び相当するL/R目標XORマスクビット列
エッジは,ビタビ復号器出力から識別ビット列を探すことによって見つけることができる。図N.4に上
げた,各識別ビット列に相当する左(右)目標ビット列は,復号したビット列と左(右)目標XORマス
クビット列との間でビットごとのXORをとり,そしてXORマスクビット列の下線を引いた部分の5ビッ
ト又は7ビットを取り出すことによって得られる。その結果の左(右)目標ビット列は,図N.5に示す再
グループ化したi-MLSE評価パタンの主要部分として現れる。
i-MLSE評価パタンは,三つのグループに分類され,各グループは,共通ビットパタン及びエッジ(マ
ーク又はスペース)シフト方向に注目して四つに再グループ化できる。そこで,図N.5に示すとおり12
のグループに分類される。
ここに,XXは,“00”,“10”,又は“11”を表し,YYは,“00”,“01”又は“11”を表す。
238
X 6233:2017 (ISO/IEC 30193:2016)
グループ番号
パターンA
パターンB
シフト
タイプ
14
1
XX00011XX
XX00111XX
左
前エッジ
2
XX00111XX
XX00011XX
右
3
YY11100YY
YY11000YY
左
後エッジ
4
YY11000YY
YY11100YY
右
12A
1
XX0001100YY
XX0011000YY
左
2T-マーク
2
XX0011000YY
XX0001100YY
右
3
YY1110011XX
YY1100111XX
左
2T-スペース
4
YY1100111XX
YY1110011XX
右
12B
1
XX000110011XX
XX001100111XX
左
連続
2T
2
XX001100111XX
XX000110011XX
右
3
YY111001100YY
YY110011000YY
左
連続
2T
4
YY110011000YY
YY111001100YY
右
グループ番号
パターンA
パターンB
シフト
タイプ
14
1
XX00011XX
XX00111XX
左
前エッジ
2
XX00111XX
XX00011XX
右
3
YY11100YY
YY11000YY
左
後エッジ
4
YY11000YY
YY11100YY
右
12A
1
XX0001100YY
XX0011000YY
左
2T-マーク
2
XX0011000YY
XX0001100YY
右
3
YY1110011XX
YY1100111XX
左
2T-スペース
4
YY1100111XX
YY1110011XX
右
12B
1
XX000110011XX
XX001100111XX
左
連続
2T
2
XX001100111XX
XX000110011XX
右
3
YY111001100YY
YY110011000YY
左
連続
2T
4
YY110011000YY
YY111001100YY
右
図N.5−再グループ化されたi-MLSE評価パタン
評価した,拡張エッジシフトの値は,記録ストラテジ表に応じて分類の必要があるため,識別したエッ
ジはエッジ識別ビット列を用いて更に分類することが望ましい。図N.6に,エッジ識別ビット列又は拡張
N−1記録ストラテジ用の記録パルス評価表の例を示す。図N.6中に上げた番号は,図N.4に上げた識別ビ
ット列の番号を参照している。識別ビット列番号の下に記載したビット列は,エッジに特有のエッジ識別
ビット列である。エッジ識別ビット列の下線部分は,識別ビット列を示している。
記録マーク
続きスペース
前スペース
2S
-
7
1110011000
5
1001110
5
10011110
5
10011111
3S
3
100011001
3
100011000
1
10001110
1
100011110
1
100011111
4S
3
1000011001
3
1000011000
1
100001110
1
1000011110
1
1000011111
≥5S
3
0000011001
3
0000011000
1
000001110
1
0000011110
1
0000011111
3M
2S
≥3S
2M
4M
≥5M
記録マーク
続きスペース
前スペース
2S
-
6
100110001
6
1001100001
6
1001100000
≥3S
8
0001100111
6
000110001
6
0001100001
6
0001100000
2M
4S
≥5S
2S
3S
続きスペース
2S
4
0111001
4
01111001
4
11111001
3S
2
01110001
2
011110001
2
111110001
4S
2
011100001
2
0111100001
2
1111100001
≥5S
2
011100000
2
0111100000
2
1111100000
≥5M
3M
4M
記録マーク
Ttop/ dTtop
dTS
TLP/ dTLP/ dTS
記録マーク
続きスペース
前スペース
2S
-
7
1110011000
5
1001110
5
10011110
5
10011111
3S
3
100011001
3
100011000
1
10001110
1
100011110
1
100011111
4S
3
1000011001
3
1000011000
1
100001110
1
1000011110
1
1000011111
≥5S
3
0000011001
3
0000011000
1
000001110
1
0000011110
1
0000011111
3M
2S
≥3S
2M
4M
≥5M
記録マーク
続きスペース
前スペース
2S
-
7
1110011000
5
1001110
5
10011110
5
10011111
3S
3
100011001
3
100011000
1
10001110
1
100011110
1
100011111
4S
3
1000011001
3
1000011000
1
100001110
1
1000011110
1
1000011111
≥5S
3
0000011001
3
0000011000
1
000001110
1
0000011110
1
0000011111
3M
2S
≥3S
2M
4M
≥5M
記録マーク
続きスペース
前スペース
2S
-
6
100110001
6
1001100001
6
1001100000
≥3S
8
0001100111
6
000110001
6
0001100001
6
0001100000
2M
4S
≥5S
2S
3S
記録マーク
続きスペース
前スペース
2S
-
6
100110001
6
1001100001
6
1001100000
≥3S
8
0001100111
6
000110001
6
0001100001
6
0001100000
2M
4S
≥5S
2S
3S
続きスペース
2S
4
0111001
4
01111001
4
11111001
3S
2
01110001
2
011110001
2
111110001
4S
2
011100001
2
0111100001
2
1111100001
≥5S
2
011100000
2
0111100000
2
1111100000
≥5M
3M
4M
記録マーク
続きスペース
2S
4
0111001
4
01111001
4
11111001
3S
2
01110001
2
011110001
2
111110001
4S
2
011100001
2
0111100001
2
1111100001
≥5S
2
011100000
2
0111100000
2
1111100000
≥5M
3M
4M
記録マーク
Ttop/ dTtop
dTS
TLP/ dTLP/ dTS
図N.6−拡張N−1記録ストラテジの記録パルス評価
N.4 L-SEAT評価ブロックの実装一般
L-SEAT評価ブロックの例を図N.7に示す。識別ビット列検出器は,ビタビ復号器の出力の中の識別ビ
ット列を探す。識別ビット列は,識別ビット列検出器に内蔵することが望ましい。識別ビット列検出器が
識別ビット列の一つを見つけたら,図N.4に上げた相当するXORマスクビット列を用いた左又は右目標
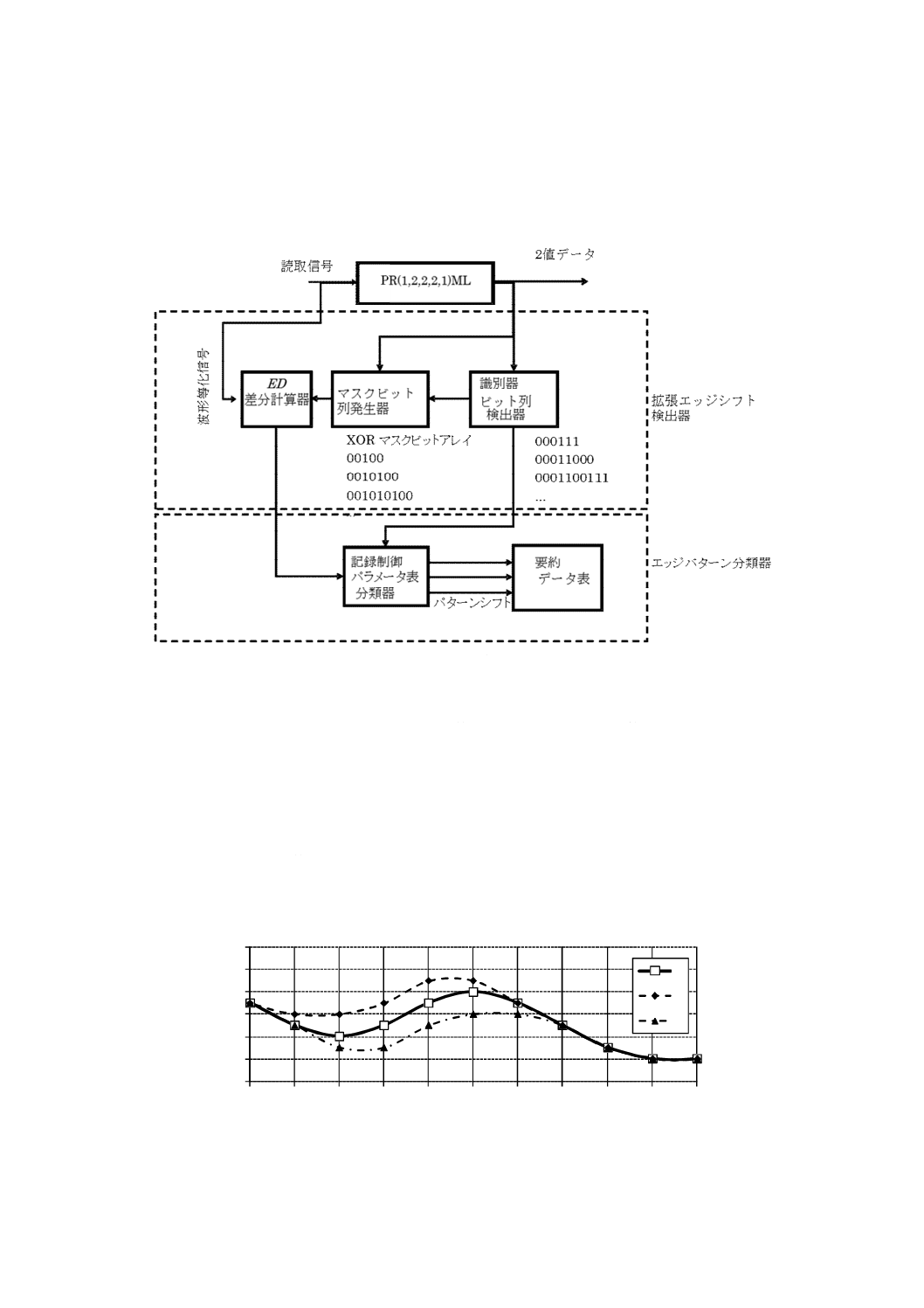
239
X 6233:2017 (ISO/IEC 30193:2016)
ビット列の生成をマスクビット列発生器に要求し,その結果として右及び左の目標波形が得られる。そし
て,ユークリッド差分計算器は適応形波形等化器の出力波形W及び復号ビット列によって得られる目標波
形T,左目標波形L及び右目標波形R,それぞれの間の二乗ユークリッド距離を評価する。そして,拡張
エッジシフトが,式(N.1)〜式(N.3)[又は式(N.4)若しくは式(N.5)]に従って評価される。
図N.7−L-SEAT評価ブロック実装の例
図N.4の,XORマスクビット列の下線部分は,XORマスクビット列及びその対応部分を用いて生成さ
れる波形間の二乗ユークリッド距離を得るための加算範囲を示している。計算に用いる波形の長さ及び範
囲は,識別ビット列のタイプ及び目標方向によって異なる。
図N.8に,ED評価の加算範囲の例を説明する。ここに,識別ビット列No.1“000111”は開始時間t=0
に存在し,その波形はTで示される。左及び右目標波形は,Tから生成されそれぞれ,L(破線)及びR
(一点鎖線)で示される。LがTと異なる区間はt=0〜4で,一方,Rに対してはt=1〜5である。xL及
びxRに対するED(T,W)の加算範囲は,それぞれ,ED(T,L)及びED(T,R)に合っていることが望ましい。
記録制御パラメタ表分類器は,図N.6に上げたエッジ識別ビット列を用いて得られた拡張エッジシフト
値を分類し,それを統計平均してその結果,L-SEATエッジシフト値が得られる。
-6
-4
-2
0
2
4
6
-1
0
1
2
3
4
5
6
7
8
9
t
T
L
R
t
図N.8−ED(T,L)及びED(T,R)の加算範囲
240
X 6233:2017 (ISO/IEC 30193:2016)
N.5 一般的な記録パルス調整方法
図N.6に,拡張N−1記録ストラテジの場合の記録パルス評価表が示されている。拡張N/2記録ストラ
テジの記録パルス評価表も同様に得ることが望ましい。
記録パルスパラメタとして,エッジシフト検出に加えて,マーク長及び位置の検出を用いてもよい。マ
ーク長及びマーク位置は,それぞれ,式(N.7)及び式(N.8)による。
マーク長=ΔTE−ΔLE ······························································ (N.7)
マーク位置=(ΔLE+ΔTE)/2 ······················································· (N.8)
ここに, ΔTE及びΔLE: 検討中のマークの,立上がりエッジ及び立下がりエ
ッジの,L-SEATエッジシフト
マーク長及びマーク位置は,立上がりエッジ制御パラメタを変え,同時に立下がりエッジに対しては同
じ又は逆方向とする制御をしてもよい。
記録パルスパラメタは,記録パルスパラメタを繰り返して更新してL-SEATエッジシフト評価を行い,
各記録パルス評価表のL-SEATエッジシフト値を小さくすることで決めることが望ましい(図N.9参照)。
上記方法を行った後に,i-MLSEが,規格を満たしていることを確認することが望ましい。
留意事項1 基準ドライブは,事前にI.2に従って調整することが望ましい。基準ドライブの接線方
向の傾き調整の場合には,適応形波形等化器は非対称係数モードに設定することを確認
することが望ましい。
留意事項2 原理的には,記録パルスのシフト方向に記録マークのエッジもシフトするが,dTtop又は
dTLPを変える場合,反対方向にシフトすることがある。
留意事項3 L-SEATエッジシフト値は,先行スペース,記録マーク及び続きのスペースが全て2Tの
場合は検出できない。該当する記録パルスパラメタは,全ての他のパラメタがL-SEAT
エッジシフト値に基づいて決められた後にi-MLSEの値を見て調整できる。
241
X 6233:2017 (ISO/IEC 30193:2016)
開始
L-SEATシフト
最小?
記録及び読取り
終了
L-SEATシフト評価
パルスパラメータ更新
No
Yes
基準ドライブの初期調整
図N.9−記録パルス調整のフローチャート
参考文献
[1] ASTM D1044:2005,Standard Test Method for Resistance of Transparent Plastic to Surface Abrasion.
American Society for Testing and Materials