2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
X 5708-1991
(ISO/IEC 9072-1 : 1989)
遠隔操作−第1部
モデル,記法及びサービス定義
Information processing systems−Text communication−
Remote Operations−Part 1 : Model, notation and
service definition
日本工業規格としてのまえがき
この規格は,1989年に第1版として発行されたISO/IEC 9072-1 (Information processing systems−Text
communication−Remote Operations−Part 1 : Model, notation and service definition) を基に,技術的な内容及び
規格票の様式を変更することなく作成した日本工業規格である。
なお,この規格で点線の下線を施してある“参考”は,原国際規格にはない事項である。
0. 序文 この規格は,遠隔操作サービス要素 (ROSE) が提供する記法及びサービスを規定する。ROSE
は,分散した開放型システム環境において相互動作する応用を支援する応用サービス要素の一つである。
この規格は,多くの応用が共通に使用する一連の応用サービス要素を定義する規格の一つである。
この規格は,分散した応用エンティティ間の相互動作を遠隔操作としてモデル化し,相互動作を遠隔操
作記法を用いて定義する。ROSEは,一方の応用エンティティが遠隔操作を要求し,他方の応用エンティ
ティがその実行を試みて結果を報告するという相互動作のための遠隔操作を提供する。
1. 適用範囲 この規格は,対話型応用に対して提供されるサービスを定義するための遠隔操作(以下,
ROという。)記法を規定する。この規格は,遠隔操作サービス要素(以下,ROSEという。)が提供するサ
ービスを規定する。この規格は,次に示すサービス及びプロトコルを使用してROSEサービスを提供する。
この規格についての適合性に関する要件は,規定しない。
(1) ROSEプロトコル(JIS X 5709参照)
(2) アソシエーション制御サービス要素(以下,ACSEという。)サービス(JIS X 5701参照)
(3) ACSEプロトコル(JIS X 5702参照)
(4) プレゼンテーションサービス(JIS X 5601参照)
(5) 任意選択として高信頼転送サービス要素(以下,RTSEという。)サービス(ISO/IEC 9066-1参照)
(6) 任意選択としてRTSEプロトコル(ISO/IEC 9066-2参照)
2. 引用規格 この規格で引用する規格を,次に示す。これらの規格がこの規格の本文中で引用された場
合には,この規格の規定の一部とみなす。
(1) ISO 7498 : 1984 Information processing systems−Open Systems Interconnection−Basic Reference Model
2
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
備考 JIS X 5003(開放型システム間相互接続の基本参照モデル)−1987が,この国際規格と技術的
に一致している。
(2) ISO/TR 8509 : 1987 Information processing systems−Open Systems Interconnection−Service conventions
備考 JIS X 5201(開放型システム間相互接続−基本コネクション型セションサービス定義)−1991
の参考(開放型システム間相互接続のサービス記法)が,この国際規格と技術的に一致してい
る。
(3) ISO 8649 : 1988 Information processing systems−Open Systems Interconnection−Service definition for the
Association Control Service Element
備考 JIS X 5701(開放型システム間相互接続−アソシエーション制御サービス要素のサービス定義)
−1991が,この国際規格と一致している。
(4) ISO 8650 : 1988 Information processing systems−Open Systems Interconnection−Protocol specification for
the Association Control Service Element
備考 JIS X 5702(開放型システム間相互接続−アソシエーション制御サービス要素のプロトコル仕
様)−1991が,この国際規格と一致している。
(5) ISO 8822 : 1988 Information processing systems−Open Systems Interconnection−Connection oriented
presentation service definition
備考 JIS X 5601(開放型システム間相互接続−コネクション型プレゼンテーションサービス定義)
−1991がこの国際規格と一致している。
(6) ISO 8824 : 1987 Information processing systems−Open Systems Interconnection−Specification of Abstract
Syntax Notation One (ASN.1)
備考 この国際規格に対応する規格として,JIS X 5603[開放型システム間相互接続の抽象構文記法1
(ASN.1) 仕様]−1990が制定されている。JIS X 5603は,この国際規格に対して日本語が使用
できるように拡張されている。
(7) ISO 8825 : 1987 Information processing systems−Open Systems Interconnection−Specification of basic
encoding rules for Abstract Syntax Notation One (ASN.1)
備考 JIS X 5604[開放型システム間相互接続の抽象構文記法1 (ASN.1) の基本符号化規則仕様]−
1990が,この国際規格と一致している。
(8) ISO/IEC 9066-1 : 1989 Information processing systems−Text communication−Reliable Transfer−Part 1 :
Model and service defintion
(9) ISO/IEC 9066-2 : 1989 Information processing systems−Text communication−Reliable Transfer−Part 2 :
Protocol specification
(10) ISO/IEC 9072-2 : 1989 Information processing systems−Text communication−Remote Operations−Part
2 : Protocol specification
備考 JIS X 5709(遠隔操作−第2部 プロトコル仕様)−1991が,この国際規格と一致している。
3. 用語の定義
3.1
基本参照モデルで定義した用語 この規格は,JIS X 5003で定義した次の用語を使用する。
(a) 応用層 (Application Layer)
(b) 応用プロセス (application-process)
(c) 応用エンティティ (application-entity)
3
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(d) 応用サービス要素 (application-service-element)
(e) 応用プロトコルデータ単位 (application-protocol-data-unit)
(f) 応用プロトコル制御情報 (application-protocol-control-information)
(g) プレゼンテーション層 (Presentation Layer)
(h) プレゼンテーションサービス (presentation-service)
(i) プレゼンテーションコネクション (presentation-connection)
(j) セションサービス (session-service)
(k) セションコネクション (session-connection)
(l) 転送構文 (transfer syntax)
(m) 利用者要素 (user-element)
3.2
サービス記法で定義した用語 この規格は,JIS X 5201の参考で定義した次の用語を使用する。
(a) サービス提供者 (service-provider)
(b) サービス利用者 (service-user)
(c) 確認型サービス (confirmed service)
(d) 非確認型サービス (non-confirmed service)
(e) 提供者起動型サービス (provider-initiated service)
(f) サービスプリミティブ,プリミティブ (service-primitive, primitive)
(g) 要求,要求プリミティブ (request, request primitive)
(h) 指示,指示プリミティブ (indication, indication primitive)
(i) 応答,応答プリミティブ (response, response primitive)
(j) 確認,確認プリミティブ (confirm, confirm primitive)
3.3
プレゼンテーションサービスで定義した用語 この規格は,JIS X 5601で定義した次の用語を使用
する。
(a) 抽象構文 (abstract syntax)
(b) 抽象構文名 (abstract syntax name)
(c) 転送構文名 (transfer syntax name)
(d) プレゼンテーションコンテキスト (presentation context)
3.4
アソシエーション制御サービスで定義した用語 この規格は,JIS X 5701で定義した次の用語を使
用する。
(a) 応用アソシエーション,アソシエーション (application-association, association)
(b) 応用コンテキスト (application context)
(c) アソシエーション制御サービス要素 (Association Control Service Element)
3.5
高信頼転送サービスで定義した用語 この規格は,ISO/IEC 9066-1で定義した次の用語を使用する。
(a) 高信頼転送サービス要素 (Reliable Transfer Service Element)
3.6
この規格で定義する用語 この規格で定義する用語は,次のとおりとする。
3.6.1
アソシエーション起動側応用エンティティ,アソシエーション起動側
(association-initiating-application-entity, association-initiator) 応用アソシエーションを起動する応用エンテ
ィティ。
4
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.6.2
アソシエーション応答側応用エンティティ,アソシエーション応答側
(association-responding-application-entity, association-responder) 他の応用エンティティによる応用アソシエ
ーションの起動に対して応答する応用エンティティ。
3.6.3
起動側応用エンティティ,起動者 (invoking-application-entity, invoker) 遠隔操作を起動する応用
エンティティ。
3.6.4
実行側応用エンティティ,実行者 (performing-application-entity, performer) 他の応用エンティティ
によって起動された遠隔操作を実行する応用エンティティ。
3.6.5
要求者 (requester) ROSEサービスの要求プリミティブを発行する応用エンティティ。
3.6.6
受諾者 (acceptor) ROSEサービスの指示プリミティブを受信する応用エンティティ。
3.6.7
連結操作 (linked-operations) 一つの親操作及び一つ以上の子操作からなる一連の操作。
3.6.8
親操作 (parent-operation) 親操作の起動者が起動し,親操作の実行者が実行する操作。この操作
の実行中に,親操作の実行者は,親操作の起動者が実行する連結された子操作を起動できる。
3.6.9
子操作 (child-operation) 親操作の実行時に,その実行者が関連して起動する操作。この操作は,
親操作の起動側が実行する。
3.6.10 遠隔操作 (Remote Operations) この用語は,次の二つの意味に用いる。
(1) 応用エンティティ間の対話型通信の仕様を規定する概念及び記法。これには,遠隔操作サービス要素
及び使用する応用サービス要素のサービスプリミティブと記法との対応付けを含む。
(2) 結合操作,結合解放操作及び操作の集合。
3.6.11 RO記法 (RO-notation) この規格で定義する遠隔操作の仕様記述のために用いる記法。
3.6.12 ACSE利用者 (ACSE-user) ACSEに対してRO記法の結合操作及び結合解放操作を対応付ける応
用機能。
3.6.13 遠隔操作サービス要素 (Remote Operation Service Element) この規格で定義する応用サービス要
素。
3.6.14 ROSE提供者 (ROSE-provider) ROSEサービスの提供者。
3.6.15 ROSE利用者 (ROSE-user) ROSEに対してRO記法の操作及び誤りを対応付ける応用機能。
3.6.16 RTSE利用者 (RTSE-user) RTSEに対してRO記法の結合及び結合解放操作を対応付ける応用機
能。
3.6.17 操作インタフェース (operation-interface) 応用エンティティ内における利用者要素と応用サービ
ス要素との間のインタフェース。これは,利用者要素が使用できる応用サービス要素サービスの集合(遠
隔操作)としてRO記法を用いて定義する。
4. 略語 この規格で用いる略語は,次による。
AE
応用エンティティ (application-entity)
ACSE
アソシエーション制御サービス要素 (Association Control Service Element)
ASE
応用サービス要素 (application-service-element)
APDU
応用プロトコルデータ単位 (application-protocol-data-unit)
OSI
開放型システム間相互接続 (Open Systems Interconnection)
RO(又はROS)
遠隔操作 (Remote Operations)
ROSE
遠隔操作サービス要素 (Remote Operations Service Element)
RT(又はRTS)
高信頼転送 (Reliable Transfer)
5
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
RTSE
高信頼転送サービス要素 (Reliable Transfer Service Element)
5. サービス記法 この規格で使用するサービス記法は,JIS X 5201の参考による。10.に各ROSEのサー
ビスプリミティブのパラメタの一覧表を示す。更に,各プリミティブについて,各パラメタの有無を記述
する。
また,表中の“ (=) ”は,パラメタの値がその左側の欄に示したもので使用した値と同一であること
を示す。
6. 遠隔操作モデル OSI環境では,プレゼンテーションサービスを用いた一組のAE間の通信として応
用プロセス間の通信を表現する。AE間の通信は,本質的に対話型とする。一般に,一方のAEが特定の操
作の実行を要求し,他方のAEがその操作の実行を試みてその結果を返送する。ここでは,対話型応用を
実現するための手段として,遠隔操作の概念を示す。
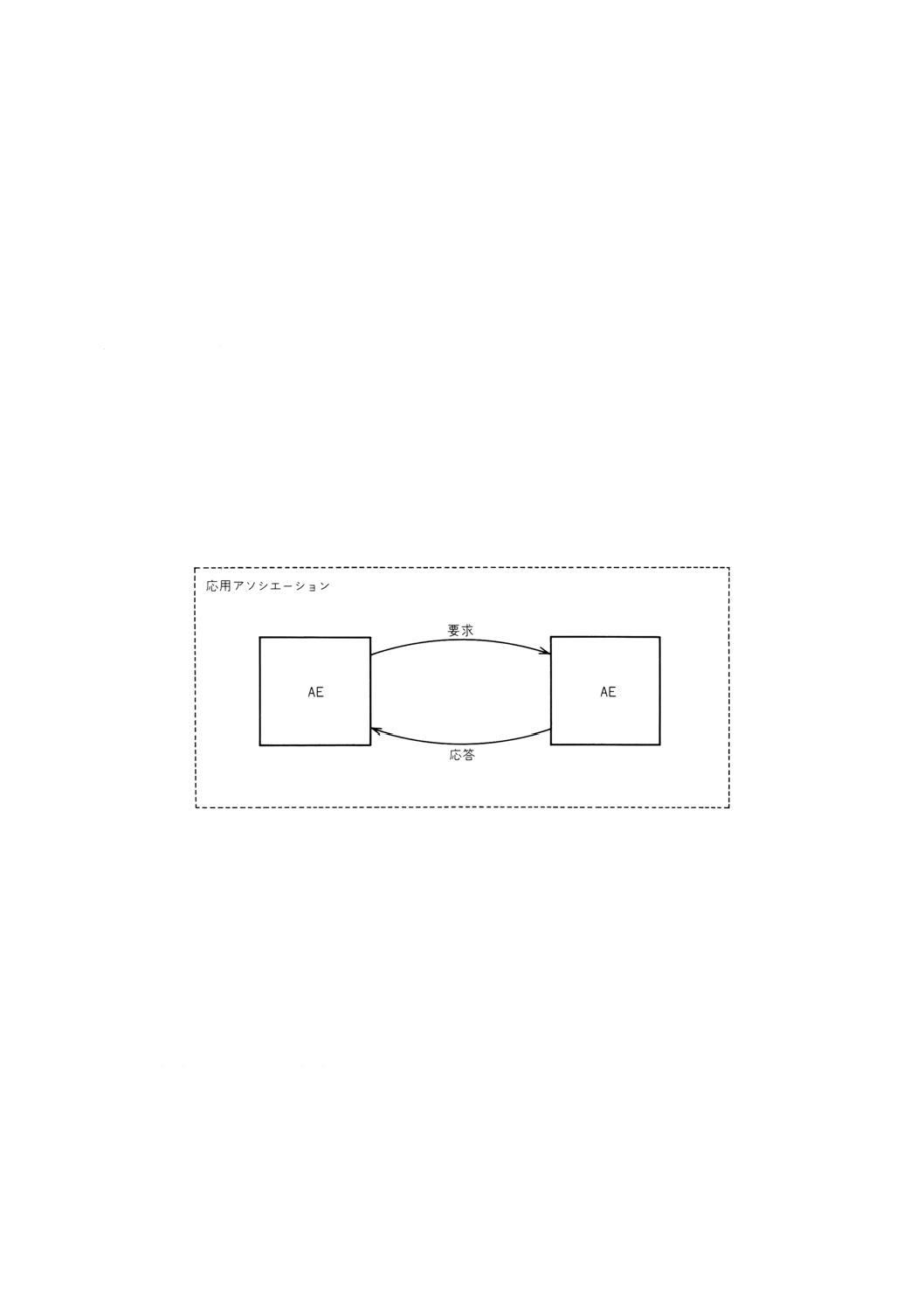
一般的に一つの操作は,一つの要求及びそれに対する一つの応答で構成される。操作は,応用アソシエ
ーションのコンテキスト内で実行される。
遠隔操作のモデルを図1に示す。
図1 遠隔操作モデル
一方のAE(起動者)が起動した操作を,他方のAE(実行者)が実行する。操作は,操作の実行者が結
果の返送を要求されているかどうかによって,次のとおり分類する。
(1) 成功又は失敗のいずれの場合にも応答する。操作が成功したときは結果応答を返送し,操作が失敗し
たときは誤り応答を返送する。
(2) 失敗の場合だけ応答する。操作が成功したときは結果応答を返送せず,操作が失敗したときは誤り応
答を返送する。
(3) 成功の場合だけ応答する。操作が成功したときは結果応答を返送し,操作が失敗したときは誤り応答
を返送しない。
(4) 何も応答しない。操作が成功してもしなくても,結果応答も誤り応答も返送しない
また,操作は,次の二つの操作モードに分類する。
(1) 同期型 起動者は,実行者からの応答を受け取った後に初めて別の操作を起動できる。
(2) 非同期型 起動者は,実行者からの応答を受け取らなくても別の操作を起動できる
操作クラスを次のとおり定義する。
6
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(1) 操作クラス1 同期型とする。成功の場合は結果応答を返送し,失敗の場合は誤り応答を返送する。
(2) 操作クラス2 非同期型とする。成功の場合は結果応答を返送し,失敗の場合は誤り応答を返送する。
(3) 操作クラス3 非同期型とする。失敗の場合だけ誤り応答を返送する。
(4) 操作クラス4 非同期型とする。成功の場合だけ結果応答を返送する。
(5) 操作クラス5 非同期型とする。何も返送しない。
各操作の操作クラスは,AE間での合意(例えば,各応用プロトコルの規格における合意)を必要とす
る。
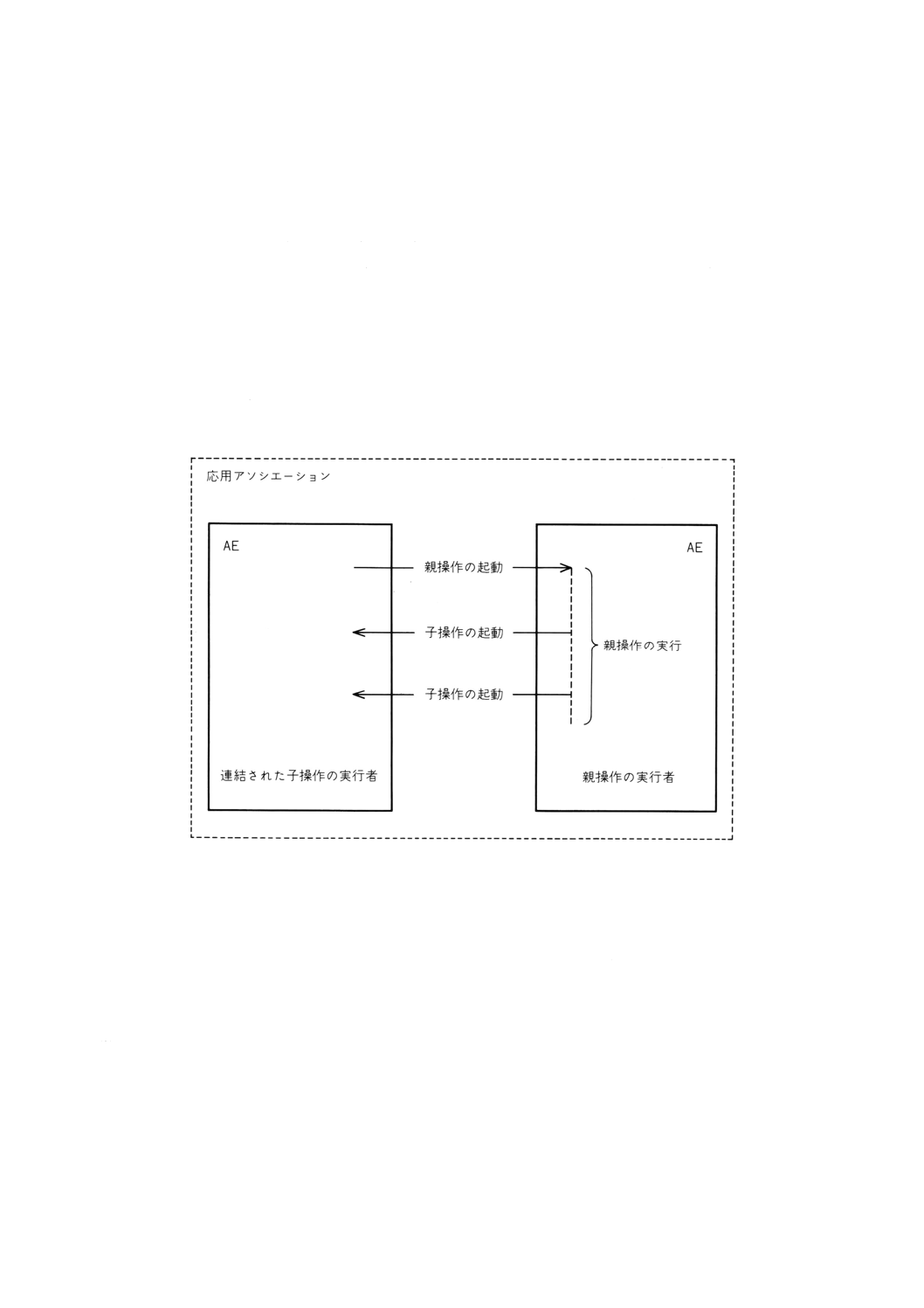
操作は,一つの親操作及び一つ以上の子操作からなる連結操作にまとめることができる。この場合,親
操作の実行者は,親操作の実行の間に子操作を全く起動しなくてもよいし,一つ以上起動してもよい。親
操作の起動者が子操作の実行者となる。子操作は,再帰的に考えれば,別の連結操作の親操作であっても
よい。この概念のモデルを図2に示す。
図2 連結操作
応用アソシエーションは,一組のAE間の関係を定義する。これは,プレゼンテーションサービスを使
用して応用プロトコル制御情報を交換することによって確立される。 応用アソシエーションを起動する
AEをアソシエーション起動側AE又はアソシエーション起動側と呼ぶ。 別のAEからの応用アソシエー
ションの起動に対して応答するAEをアソシエーション応答側AE又はアソシエーション応答側と呼ぶ。
アソシエーション起動側AEだけが,確立された応用アソシエーションを解放できる。
応用アソシエーションは,どのAEが操作を起動できるかによって次のとおり分類する。
(1) アソシエーションクラス1 アソシエーション起動側AEだけが操作を起動できる。
(2) アソシエーションクラス2 アソシエーション応答側AEだけが操作を起動できる。
(3) アソシエーションクラス3 アソシエーション起動側AE及びアソシエーション応答側AEの両方が操
作を起動できる。
連結操作を使用する場合は,アソシエーションクラス3でなければならない。
アソシエーションクラスは,AE間での合意(例えば,各応用プロトコルの規格における合意)を必要
7
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
とする。
AEの機能は,一つの利用者要素とASEの集合とからなる。ASEは,それ自体がより基本的なASEの集
合でもよい。AE間の相互動作は,AEが使用するASEによって定まる。
応用コンテキストは,AEを構成するASEの集合と一つの利用者要素との組合せによって定まる。
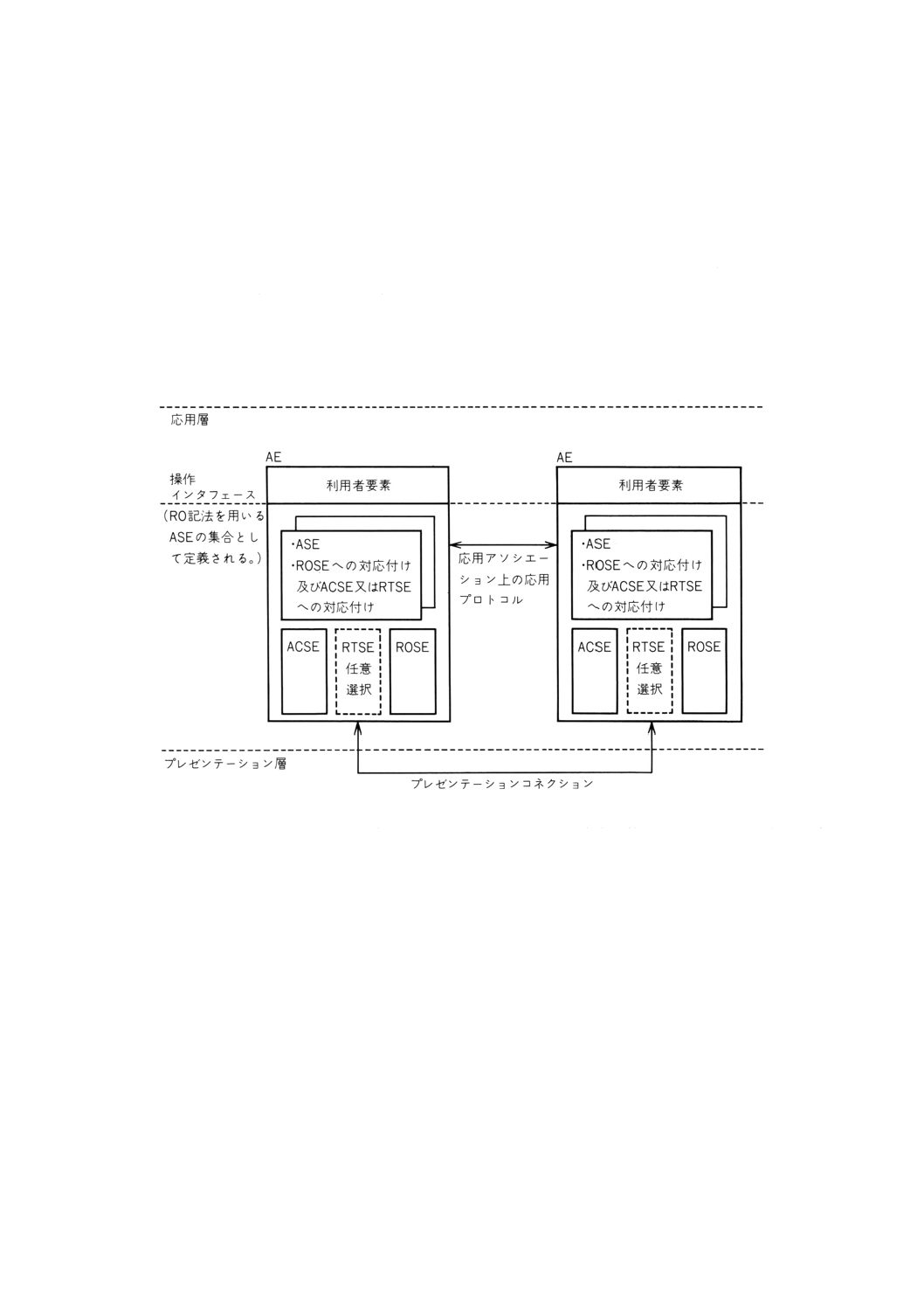
ROSEを含む応用コンテキストの例を図3に示す。この図は,AEが対称であることを示すものではない。
対話型のAEは,一般に非対称とする。すなわち,一方のAEだけが操作を起動できる場合及び両方のAE
が操作を起動できる場合がある。更に,各AEが起動できる操作が異なってもよい。どちらのAEが操作
を起動できるか及びAEがどの操作を起動できるかについての規則は,RO記法を用いて各応用プロトコル
の規格で定義する。その規則が応用コンテキストを決定する。
図3 遠隔操作を含む応用コンテキストのモデル
操作インタフェースでAEの利用者要素が使用できるASEの集合をRO記法を用いて定義する。RO記
法は,JIS X 5603で定義されたマクロの概念に基づいている。ASEの集合の複雑さは,応用に依存し,遠
隔操作の概念には依存しない。
遠隔操作は,応用をOSI通信サービスから独立させる手段を提供する。RO記法は,既存のオブジェク
ト指向型プログラムの原理に基づいているので,遠隔操作を応用の実行環境に適用する自動ツールを開発
できる。
利用者要素が使用できるASEは,応用アソシエーションを使用して通信しなければならない。応用アソ
シエーションの制御(確立,解放及び異常中断)は,JIS X 5701で定義されたACSE又はそのACSE及び
ISO/IEC 9066-1で定義されたRTSEを用いて実行する。応用アソシエーション上の通信は,ROSEが実行
する。
応用の機能は,利用者要素が使用できる操作をACSEサービス又はRTSEサービスのいずれか及びROSE
サービスに対応付ける。この対応付けは,この規格で定義する。操作をACSEサービス,RTSEサービス
及びROSEサービスに対応付ける機能をそれぞれACSE利用者,RTSE利用者及びROSE利用者と呼ぶ。
応用コンテキストがRTSEを含む場合,利用者要素が使用できる操作を対応付ける機能は,RTSE利用
8
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
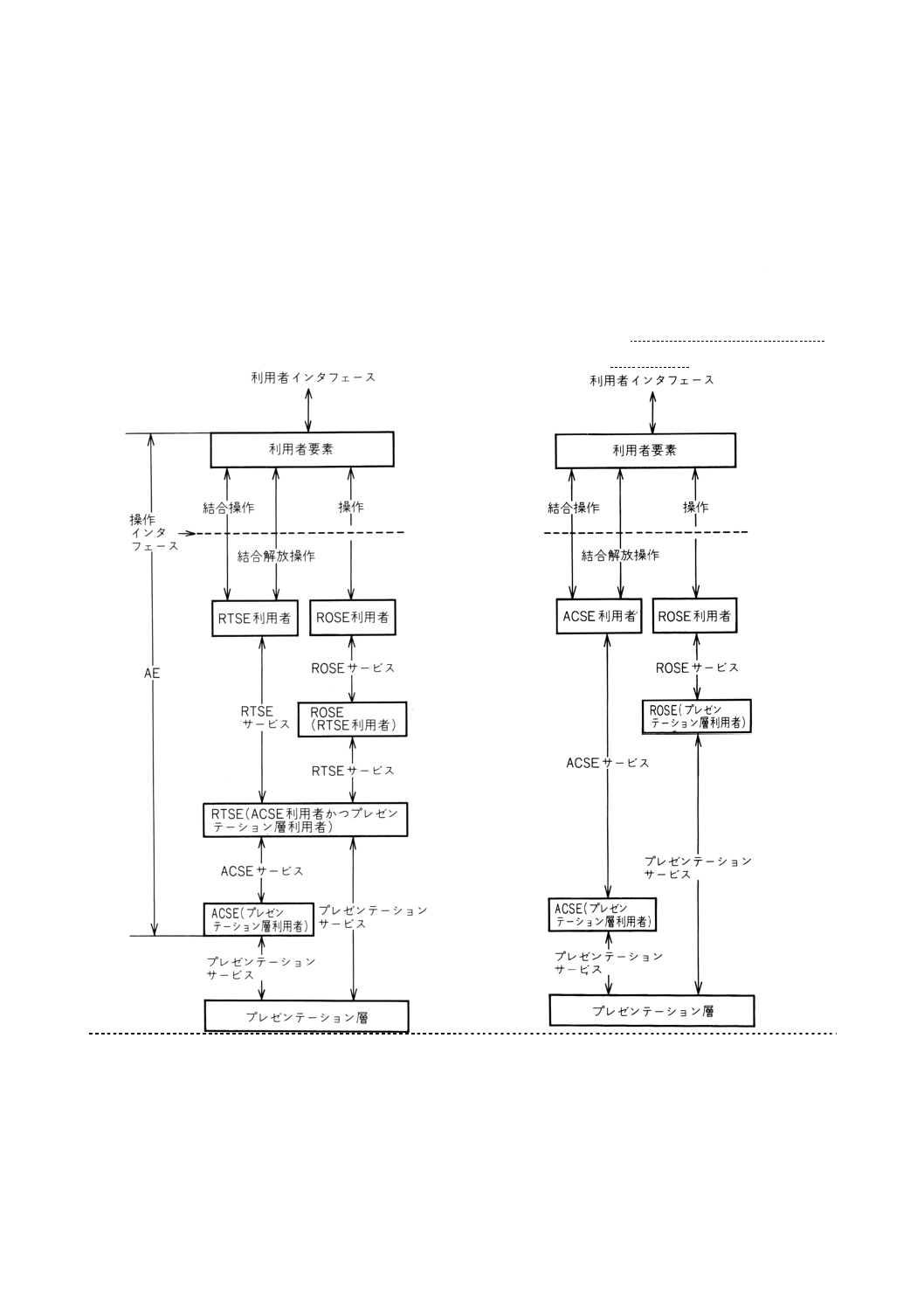
者かつROSE利用者とする。この場合,ROSEはRTSE利用者とし,RTSEはACSE利用者,かつ,プレゼ
ンテーションサービス利用者とし,ACSEはプレゼンテーションサービス利用者とする。
参考 この関係を附属書C(参考)図1に示す。
応用コンテキストがRTSEを含まない場合,利用者要素が使用できる操作を対応付ける機能は,ACSE
利用者,かつ,ROSE利用者とする。この場合,ROSEはプレゼンテーションサービス利用者とし,ACSE
はプレゼンテーションサービス利用者とする。
参考 この関係を附属書C(参考)図2に示す。
7. 記法及びサービスの概要
7.1
記法の概要 この規格は,応用コンテキストを規定するためのRO記法を定義し,更に遠隔操作に
関連するプレゼンテーションコンテキストの抽象構文構成要素を定義する。
応用コンテキストの機能は,操作インタフェースを構成する遠隔操作及び誤り(否定応答)によって利
用者要素に提供される。
操作インタフェースは,次の種類の遠隔操作からなる。
(a) 応用アソシエーションを確立するための結合操作
(b) 操作の集合及び各操作ごとの誤り(否定応答)状況一覧
(c) 応用アソシエーションを解放するための結合解放操作
次のマクロをJIS X 5603で規定した抽象構文記法を使用して定義する。
(a) BINDマクロ
(b) UNBINDマクロ
(c) OPERATIONマクロ
(d) ERRORマクロ
これらのマクロは,遠隔操作及び誤りに対して,型記法及び値記法の両方を提供する。
BINDマクロの型記法によって,応用アソシエーション確立の段階で交換される結合操作の型及び利用
者データ値(存在する場合)の型を記述する。BINDマクロの値記法によって,応用アソシエーション確
立の段階で交換される利用者データ値(存在する場合)を記述する。UNBINDマクロの型記法によって,
応用アソシエーション解放の段階で交換される結合解放操作の型及び利用者データ値(存在する場合)の
型を記述する。UNBINDマクロの値記法によって,応用アソシエーション解放の段階で交換される利用者
データ値(存在する場合)を記述する。
OPERATIONマクロの型記法によって,要求及び肯定応答において交換される操作及び利用者データの
型を記述する。更に,この型記法によって,否定応答状況一覧を記述する。操作が親操作の場合は,この
型記法によって,連結された子操作一覧を記述する。OPERATIONマクロの値記法によって,操作の識別
子を記述する。
ERRORマクロの型記法によって,否定応答状況において交換される利用者データの型を記述する。
ERRORマクロの値記法によって,誤りの識別子を記述する。
ASE及び応用コンテキストの記法を規定するマクロは,附属書Aで定義する。
7.2
サービスの概要 この規格は,次のROSEサービスを定義する。
(a) RO-INVOKEサービス
(b) RO-RESULTサービス
(c) RO-ERRORサービス
9
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(d) RO-REJECT-Uサービス
(e) RO-REJECT-Pサービス
起動側AEは,RO-INVOKEサービスによって,実行側AEに操作の実行を要求できる。
実行側AEは,RO-RESULTサービスによって,実行が成功した操作の肯定応答を起動側AEに返送でき
る。
実行側AEは,RO-ERRORサービスによって,実行が不成功に終わった操作の否定応答を起動側AEに
返送できる。
ROSE利用者が問題点を検出した場合,問題点を検出したAEは,RO-REJECT-Uサービスによって,他
方のAEの要求又は応答を拒否できる。
ROSE提供者は,検出した問題点をRO-REJECT-Pサービスによって,ROSE利用者に通知できる。
7.3
記法とサービスとの対応付け RO記法のOPERATIONマクロ及びERRORマクロをROSEサービス
に対応付ける機能をROSE利用者と呼ぶ。BINDマクロ及びUNBINDマクロをACSEサービス又はRTSE
サービスに対応付ける機能を,それぞれACSE利用者又はRTSE利用者と呼ぶ。
ACSE,RTSE及びROSEのサービスに対するRO記法の対応付けは,11.で規定する。したがって,プロ
トコル仕様にRO記法を使用する規格は,サービスとの対応付けを規定しなくてもよい。
8. ROSEと他のASE及び下位層サービスとの関係
8.1
他の応用サービス要素 ROSEは,対話型の情報処理業務の機能を他のASEとともに実現すること
を目的とする。したがって,多くの応用コンテキストがROSEを必要とする。
応用コンテキストに含まれるROSE及び他のASEは,プレゼンテーションサービスの機能を協調して使
用しなければならない。
ROSEは,ACSEが制御する応用アソシエーションを必要とする。
応用コンテキストは,RTSEを含んでもよい。
ROSE利用者プロトコル仕様は,RO記法を用いて一つ以上の抽象構文を定義し,各抽象構文ごとに,オ
ブジェクト識別子型の一意な抽象構文名を与える。
名前付き抽象構文が操作及び誤りを記述する場合,その名前付き抽象構文は,JIS X 5709で規定した
ROSE APDUを含む。操作及び誤りに対して複数の名前付き抽象構文を定義する場合,それぞれの名前付
き抽象構文は,ROSE APDUを含む。
名前付き抽象構文が結合操作を記述する場合,その名前付き抽象構文は,BINDマクロの値記法が記述
するAPDUを含む。応用コンテキストがRTSEを含む場合,結合操作に対するAPDUは,ISO/IEC 9066-2
で規定したRTSE APDUとの間で一つの名前付き抽象構文を共有する。
名前付き抽象構文が結合解放操作を記述する場合,その名前付き抽象構文は,UNBINDマクロの値記法
が記述するAPDUを含む。
結合操作,結合解放操作,操作及び誤りの記述から生成されるAPDU及びRTSE APDUは,一つの名前
付き抽象構文を共有できる。
8.2
プレゼンテーションサービス RTSE及びROSEを含む応用コンテキストを定義する場合,ROSEサ
ービスは,プレゼンテーションサービスを使用しない。
ROSEを含むがRTSEは含まない応用コンテキストを定義する場合,ROSEサービスは,プレゼンテーシ
ョンサービスのP-DATAサービス及び全二重機能単位を使用する。ROSEサービスは,これら以外のプレ
ゼンテーションサービスを使用しないし,使用の制約もしない。
10
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
転送構文(プレゼンテーション層が折衝する。)に関連する名前付き抽象構文は,プレゼンテーションコ
ンテキストを構成する。
JIS X 5604で規定されたオブジェクト識別子値{iso-ccitt共通 asnl (1) 基本符号化 (1)}は,転送構文名
として使用できる。この場合,ROSE利用者プロトコル仕様では,転送構文の名前付け及び指定の必要が
ない。
9. 遠隔操作記法
9.1
概要 この規格では,次の記法を用いる。
(a) JIS X 5603で規定されたデータ構文記法及びマクロ記法
(b) 9.2〜9.5で規定する遠隔操作マクロ
結合操作は,オブジェクトの結合(応用アソシエーションの確立)の開始を定義する。結合が完了する
と,操作を起動できる。結合解放操作は,オブジェクトの結合の解放を定義する。
対話型プロトコルは,遠隔操作及び誤りのデータ型を用いて規定する。ここでは,それらの型を定義し,
特定の遠隔操作及び通知可能な誤りの記法を定義する。記法は,JIS X 5603で規定するマクロ機能によっ
て定義する。このマクロ定義によって,多様な実行環境への対応付けの一般的な記述が可能になる。
結合操作,結合解放操作,操作及び誤りを記述するマクロを,図4に示す。
9.2
結合操作の記述 応用アソシエーション確立要求は結合操作の引数である単一データ値を指定して
もよい。結合操作は,成功(正常)若しくは失敗(例外)にかかわらずその結果を報告するか,失敗の場
合だけ結果を報告するか又はいずれの場合も結果を報告しないかのいずれかとする。肯定応答は,結合操
作の結果である単一データ値を指定してもよい。否定応答は,結合操作の結合誤りである単一データ値を
指定してもよい。
結合操作の型記法 (TYPE NOTATION) は,キーワードBINDの後に,任意選択で,キーワード
ARGUMENT,結合操作の引数の型及び操作結果の報告の性質を記述する。更に,任意選択で引数の型に
参照名を割り当てることができる。結合操作に成功した操作結果を報告する場合は,キーワードRESULT,
結果の型及び任意選択で割り当てた参照名を記述する。結合操作に失敗した操作結果を報告する場合は,
キーワードBIND-ERROR,それが報告する誤りの型及び任意選択で割り当てた参照名を記述する。
結合操作の値記法 (VALUE NOTATION) は,引数値,結果値又は誤り値とする。引数値の値記法は,キ
ーワードARGUMENTの後に,引数型の値を記述する。結果値の値記法は,キーワードRESULTの後に,
結果型の値を記述する。誤り値の値記法は,キーワードERRORの後に,誤り型の値を記述する。
9.3
結合解放操作の記述 応用アソシエーション解放要求に結合解放操作の引数である単一データ値を
指定してもよい。結合解放操作は,成功(正常)若しくは失敗(例外)にかかわらずその結果を報告する
もの,失敗の場合だけ結果を報告するもの又はいずれの場合も結果を報告しないもののいずれかとする。
応答には,結合解放操作の結果である単一データ値又は結合解放操作の結合解放誤りである単一データ値
を指定してもよい。
結合解放操作の型記法 (TYPE NOTATION) は,キーワードUNBINDの後に,任意選択で,キーワード
ARGUMENT,結合解放操作の引数の型,割り当てた参照名及び操作結果の報告の性質を記述する。結合
解放操作に成功した操作結果を報告する場合は,キーワードRESULT,結果の型及び任意選択で割り当て
た参照名を記述する。結合解放操作に失敗した操作結果を報告する場合は,キーワードUNBIND-ERROR,
それが報告する誤り情報の型及び任意選択で割り当てた参照名を記述する。
結合解放操作の値記法 (VALUE NOTATION) は,引数値,結果値又は誤り値とする。引数値の値記法は,
11
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
キーワードARGUMENTの後に,引数型の値を記述する。結果値の値記法は,キーワードRESULTの後に,
結果型の値を記述する。誤り値の値記法は,キーワードERRORの後に,誤りの型の値を記述する。
12
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
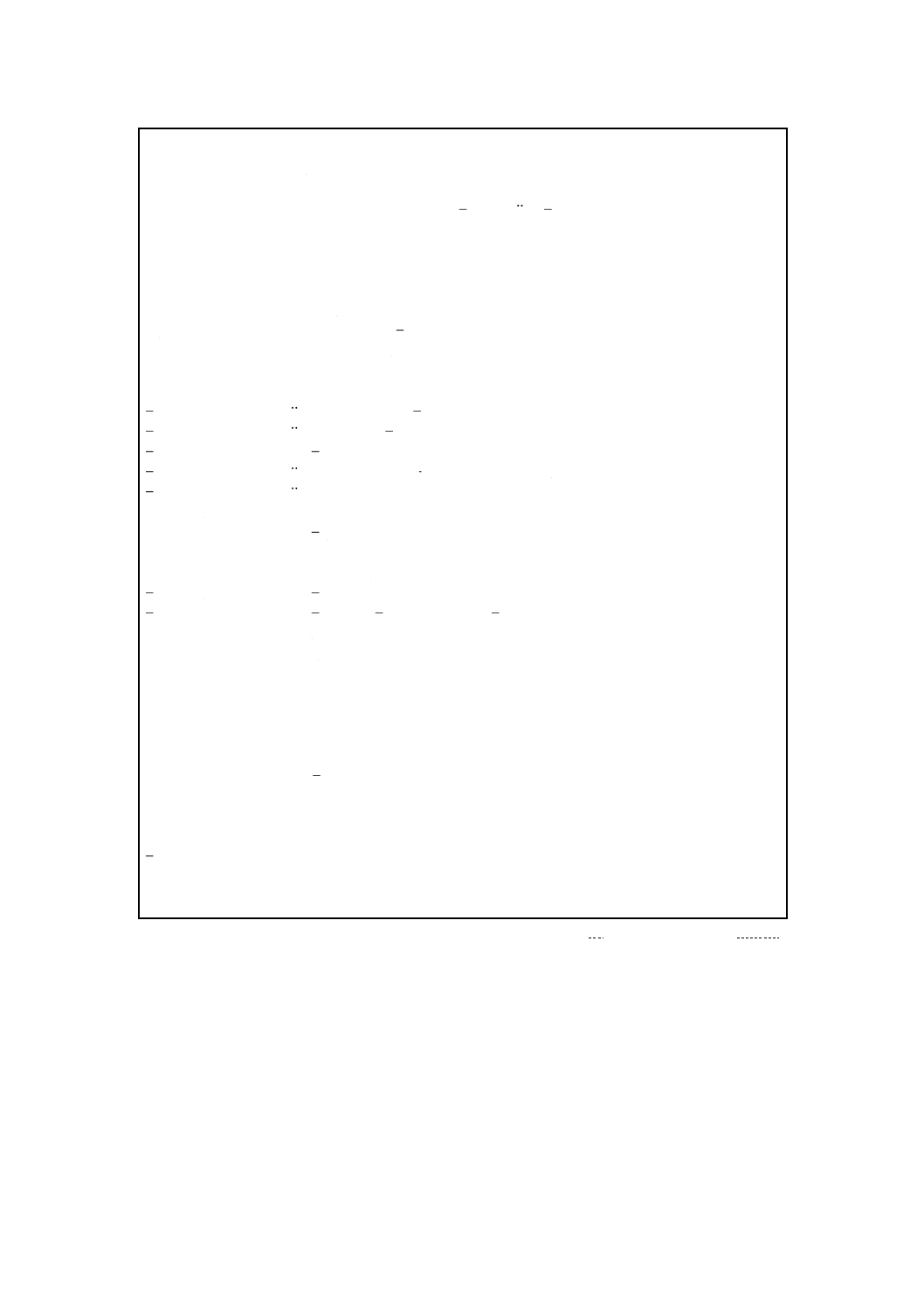
図4 遠隔操作データ型の形式定義
̲遠隔操作記法 {iso-ccitt共通 遠隔操作 (4) 記法 (0)}
DEFINITIONS::=
BEGIN
EXPORTS BIND, UNBIND, OPERATION, ERROR;
--結合操作のマクロ定義
BIND MACRO::=
BEGIN
TYPE NOTATION
::=̲引数 ̲結果 ̲誤り
VALUE NOTATION
::=̲引数−値 | ̲結果−値 | ̲誤り−値
̲引数
::=空 | "ARGUMENT" ̲名前 type(̲引数型)
--̲引数型を割り当てる。̲引数型は,ASN.1の型で記述されている。
̲結果
::=空 | "RESULT" ̲名前 type(̲結果型)
--̲結果型を割り当てる。̲結果型は,ASN.1の型で記述されている。
̲誤り
::=空 | "BIND-ERROR" ̲名前 type(̲誤り型)
--̲誤り型を割り当てる。̲誤り型は,ASN.1の型で記述されている。
̲名前
::=空 | 識別子
̲引数−値
::=空 | "ARGUMENT" value(̲引数値 ̲引数型)
--変数”̲引数値”に値を代入する。̲引数値は,̲引数型の値である。
< VALUE [16] EXPLICIT ̲引数型 ::= ̲引数値 >
--最終値を明示的にタグ付き型として返す。
̲結果−値
::=空 | "RESULT" value(̲結果値 ̲結果型)
--変数”̲結果値”に値を代入する。̲結果値は,̲結果型の値である。
< VALUE [17] EXPLICIT ̲結果型 ::= ̲結果値 >
--最終値を明示的にタグ付き型として返す。
̲誤り−値
::=空 | "ERROR" value(̲誤り値 ̲誤り型)
--変数”̲誤り値”に値を代入する。̲誤り値は,̲誤り型の値である。
< VALUE [18] EXPLICIT ̲誤り型 ::= ̲誤り値 >
--最終値を明示的にタグ付き型として返す。
END
--結合解放操作のマクロ定義
UNBIND MACRO::=
BEGIN
TYPE NOTATION
::=̲引数 ̲結果 ̲誤り
VALUE NOTATION
::=̲引数−値 | ̲結果−値 | ̲誤り−値
̲引数
::=空 | "ARGUMENT" ̲名前 type(̲引数型)
--̲引数型を割り当てる。̲引数型は,ASN.1の型で記述されている。
̲結果
::=空 | "RESULT" ̲名前 type(̲結果型)
--̲結果型を割り当てる。̲結果型は,ASN.1の型で記述されている。
̲誤り
::=空 | "UNBIND-ERROR" ̲名前 type(̲誤り型)
--̲誤り型を割り当てる。̲誤り型は,ASN.1の型で記述されている。
̲名前
::=空 | 識別子
̲引数−値
::=空 | "ARGUMENT" value(̲引数値 ̲引数型)
--変数”̲引数値”に値を代入する。̲引数値は,̲引数型の値である。
< VALUE [19] EXPLICIT ̲引数型 ::= ̲引数値 >
--最終値を明示的にタグ付き型として返す。
̲結果−値
::=空 | "RESULT" value(̲結果値 ̲結果型)
--変数”̲結果値”に値を代入する。̲結果値は,̲結果型の値である。
< VALUE [20] EXPLICIT ̲結果型 ::= ̲結果値 >
--最終値を明示的にタグ付き型として返す。
--遠隔操作記法続く
13
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
--遠隔操作記法続き
̲誤り−値
::=空 | "ERROR" value(̲誤り値 ̲誤り型)
--変数”̲誤り値”に値を代入する。̲誤り値は,̲誤り型の値である。
< VALUE [21] EXPLICIT ̲誤り型 ::= ̲誤り値 >
--最終値を明示的にタグ付き型として返す。
END
--操作のマクロ定義
OPERATION MACRO::=
BEGIN
TYPE NOTATION
::=̲引数 ̲結果 ̲誤り群 ̲連結操作
VALUE NOTATION
::=value (VALUE CHOICE {
局所値 INTEGER,
大域値 OBJECT IDENTIFIER })
̲引数
::= "ARGUMENT" ̲名前付き型 | 空
̲結果
::= "RESULT" ̲結果型 | 空
̲結果型
::=̲名前付き型 | 空
̲誤り群
::= "ERRORS" " {" ̲誤り名 "}" | 空
̲連結操作
::= "LINKED" " {" ̲連結操作名 "} " | 空
̲誤り名
::=̲誤り一覧 | 空
̲誤り一覧
::=̲誤り | ̲誤り一覧 "," ̲誤り
̲誤り
::=value (ERROR) --誤り値を参照する。
| type --誤り値が指定されていなければ誤り型を参照する。
̲連結操作名
::=̲操作一覧 | 空
̲操作一覧
::=̲操作 | ̲操作一覧 "," ̲操作
̲操作
::=value (OPERATION) --操作値を参照する。
| type --操作値が指定されていなければ操作型を参照する。
̲名前付き型
::=識別子 type |type
END
--操作誤りのマクロ定義
ERROR MACRO::=
BEGIN
TYPE NOTATION
::=̲パラメタ
VALUE NOTATION
::=value (VALUE CHOICE {
局所値 INTEGER,
大域値 OBJECT IDENTIFIER })
̲パラメタ
::= "PARAMETER" ̲名前付き型|空
̲名前付き型
::=識別子 type | type
END
END
--遠隔操作記法終わり
参考 ASN.1では,文字の列に意味があるので,例えば “Arg-value” と “Argument-value” とを区
別するために,それぞれ“̲引数値”と“̲引数−値”と表記した。
9.4
操作の記述 操作型のデータ値は,一方の開放型システムのROSE利用者が,他方の開放型システ
ムの同位利用者に実行を要求する操作の識別子を表す。この要求には,操作の引数である単一データ値を
指定してもよい。操作は,成功(正常)若しくは失敗(例外)にかかわらずその結果を報告するか,失敗
の場合だけ結果を報告するか又はいずれの場合も結果を報告しないかのいずれかとする。成功の報告は,
操作の結果である単一データ値を指定してもよい。失敗の報告は,検出した例外条件を識別する。
操作の型記法 (TYPE NOTATION) は,キーワードOPERATIONの後に,任意選択で,キーワード
ARGUMENT,操作の引数の型,参照名及び操作結果の報告の性質を記述する。操作に成功した操作結果
を報告する場合は,キーワードRESULT,結果の型及び任意選択で割り当てた参照名を記述する。操作に
14
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
失敗した操作結果を報告する場合は,キーワードERRORS,及び誤り値の参照名又は誤りの型を記述する。
操作が一連の連結操作の親操作である場合,キーワードLINKED,及び連結された子操作の値又は子操作
の型を記述する。操作は,誤り値又は子操作値を参照するほうがよい。ただし,他の箇所で値が定義され
ているならば,型を参照しなければならない(9.6参照)。
操作の値記法 (TYPE NOTATION) は,操作の識別子を記述する。一つの抽象構文の中で一意の識別子(局
所値)で十分な場合,識別子は整数型とする。幾つかの抽象構文の中で使われる操作を一意に識別するた
めの識別子(大域値)が必要な場合,識別子は,オブジェクト識別子型とする。
子操作又は誤りが局所値で識別される場合,特定の操作で参照された子操作及び誤りは,それらを参照
する操作と同じ単一名前付き抽象構文を使用しなければならない(8.1参照)。大域値の使用は,制限しな
い。
9.5
誤りの記述 誤り型のデータ値は,一方の開放型システムのROSE利用者が,他方の開放型システ
ムの同位のROSE利用者に報告する例外条件の識別子を表す。例外条件の識別子は,以前に要求した操作
の例外結果とする。この報告に誤りのパラメタである単一データ値を指定してもよい。
誤りの型記法 (TYPE NOTATION) は,キーワードERRORの後に,任意選択でキーワードPARAMETER,
誤りの型及び任意選択で割り当てた参照名を記述する。
誤りの値記法 (VALUE NOTATION) は,誤り識別子を記述する。一つの抽象構文の中で一意の識別子(局
所値)で十分である場合,識別子は整数型とする。幾つかの抽象構文の中で使われる操作を一意に識別す
るための識別子(大域値)が必要な場合,識別子は,オブジェクト識別子型とする。
9.6
操作,誤りのエキスポート及びインポート 操作値及び誤り値は,名前付き抽象構文の中で一意で
なければならない。操作及び誤りを幾つかのASN.1モジュールで記述し,特定の抽象構文を記述するモジ
ュールにインポートする場合,次の規則のいずれかを適用する。ただし,異なる名前付き抽象構文では,
重複する局所値を使用してもよい。
(a) 局所値を使用してエキスポートする場合,インポートモジュールの設計者が一意性を保証しなけれ
ばならない。
(b) モジュールは,操作型及び誤り型を記述してエキスポートできる。操作値及び誤り値は,その型を
インポートするモジュールが割り当てる。この場合,それぞれの操作型又は誤り型に単一値を割り
当てる。
(c) 大域値を割り当ててエキスポートする場合,一意性が保たれる。
10. サービス定義 ROSEサービスを表1に示す。
表1 ROSEサービス
サービス
型
RO-INVOKE
非確認型
RO-RESULT
非確認型
RO-ERROR
非確認型
RO-REJECT-U
非確認型
RO-REJECT-P
提供者起動型
ROSEサービスでは,使用している名前付き抽象構文の識別を必要とする。しかし,どのように識別す
るかは,ここでは規定しない。
10.1 RO-INVOKEサービス RO-INVOKEサービスは,ROSE利用者(起動者)が,他のROSE利用者(実
行者)の実行する操作を起動するために使用する。このサービスは,非確認型サービスとする。
15
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
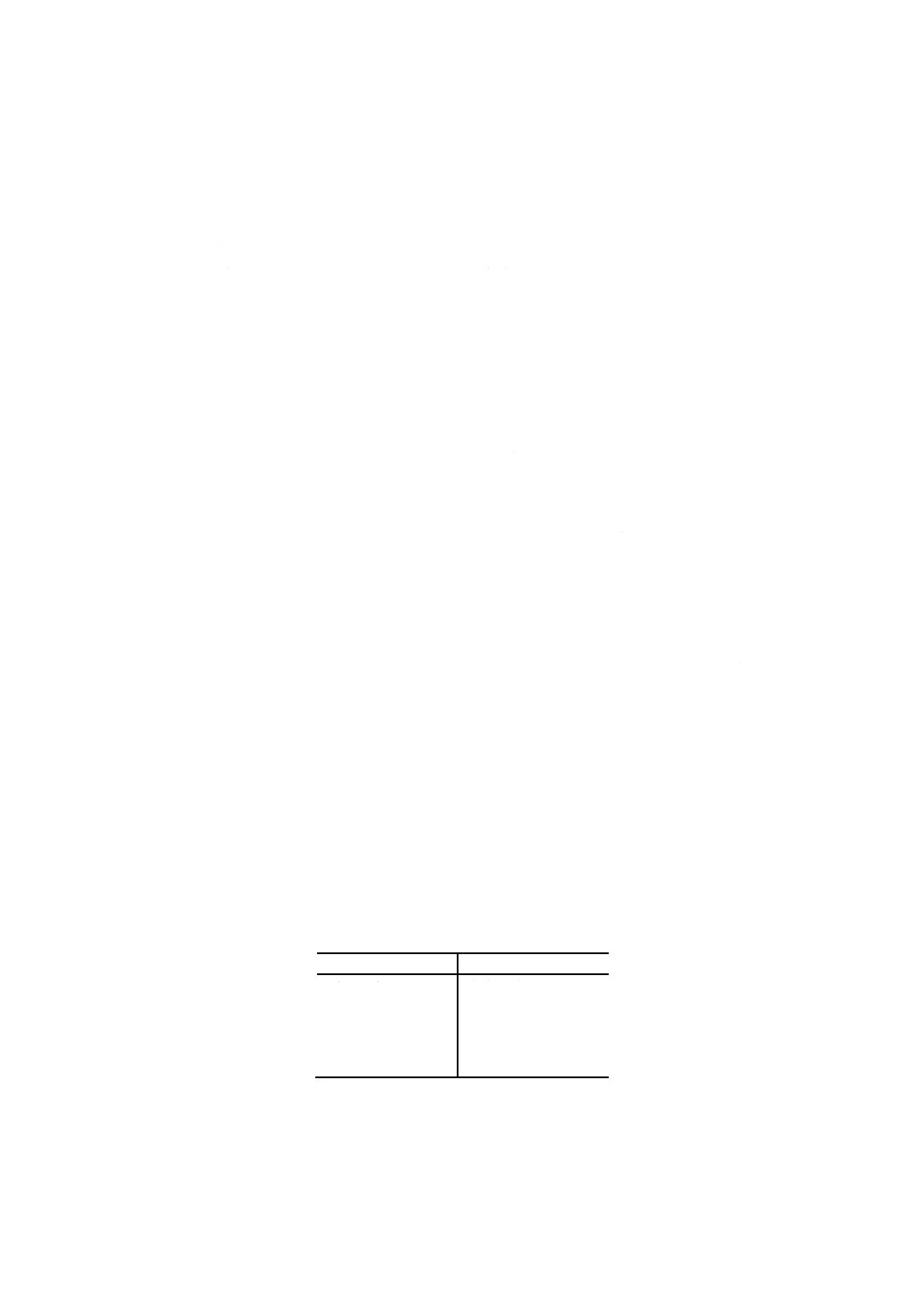
関連するサービス構造は,図5で示すように,二つのサービスプリミティブからなる。
図5 RO-INVOKEサービスプリミティブ
10.1.1 RO-INVOKEパラメタ 表2にRO−INVOKEサービスのパラメタを示す。
表2 RO-INVOKEパラメタ
パラメタ名
要求
指示
操作値
必す
必す (=)
操作クラス
利用者選択
引数
利用者選択
条件付き (=)
起動ID
必す
必す (=)
連結ID
利用者選択
条件付き (=)
優先度
利用者選択
10.1.1.1 操作値 このパラメタは,起動する操作の識別子とする。この値は,ROSE利用者間で合意した
ものでなければならない。このパラメタは,サービス要求者が提供する。
10.1.1.2 操作クラス このパラメタは,同期式応答又は非同期式応答のいずれを期待するか及び期待する
応答の性質(結果,誤り,結果及び誤り,又は応答なし)を指定する(6.参照)。このパラメタは,サービ
ス要求者が提供する。このパラメタは,送信権管理を最適化するためにだけ使用する(JIS X 5709の8.1.1
参照)。
10.1.1.3 引数 このパラメタは,起動する操作の引数とする。この型は,ROSE利用者間で合意したもの
でなければならない。このパラメタは,サービス要求者が提供する。
10.1.1.4 起動ID このパラメタは,RO-INVOKEサービス要素を識別し,対応する応答(RO-RESULT,
RO-ERROR,RO-REJECT-U及びRO-REJECT-Pのサービス)又は連結された子操作の起動(RO-INVOKE
サービス)と関係付けるために使用する。このパラメタは,サービス要求者が提供する。
このパラメタは,非同期操作進行中のサービス要求を識別する。サービス要求に割り当てた起動ID値
は,期待する応答又は連結された子操作の起動を受け取っていない場合,両使用してはならない。その他
の場合,要求者は,起動ID値を再使用してもよい。
RO-INVOKE指示を受け取ったROSE利用者は,この規則に違反する起動ID値は重複であると見なす。
したがって,ROSE利用者は,起動操作を実行せず,二重起動を拒否する。
操作クラスの3,4又は5を使用する場合は,サービス要求者は,適度な時間が経過した後又は応答が他
の方法(例えば,処理完了問合せ操作)で返された場合,その起動ID値を再使用してもよい。
応用コンテキストによっては,同位のROSE利用者は,起動ID値を相互に通知してもよい。この場合
16
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
は,起動IDパラメタをJIS X 5709の9.で規定した遠隔操作の抽象構文を定義するモジュールによってエ
キスポートする。
10.1.1.5 連結ID このパラメタは,起動された操作が子操作の場合に存在し,対応する親操作の起動を識
別する。このパラメタは,サービス要求者が提供する。この値は,親操作のRO-INVOKE指示プリミティ
ブの起動IDパラメタ値とする。
10.1.1.6 優先度 このパラメタは,AE間で交換する他のAPDUに対するAPDU送信の優先度とする。値
が小さいほど,優先度は高い。同一の優先度をもつ複数のAPDUが送信待ちの場合は,“先入れ先出し”
で送信する。
備考1. 優先度パラメタは,APDUの送信に優先度を付ける両方向交互のアソシエーションの場合に
効果をもつ。このパラメタは,いつAPDUの送信権を要求するかの決定に使用してもよい。
両方向同時のアソシエーションの場合には,実装に依存する効果をもたせてもよい。
2. 応答(RO-RESULT,RO-ERROR及びRO-REJECT-Uのサービス)の優先度は,通常,対応す
る起動よりも高く(小さい値)なければならない。
10.2 RO-RESULTサービス RO-RESULTサービスは,操作が成功した場合に,ROSE利用者が対応する
RO-INVOKE指示に対して応答するために使用する。このサービスは,非確認型サービスとする。
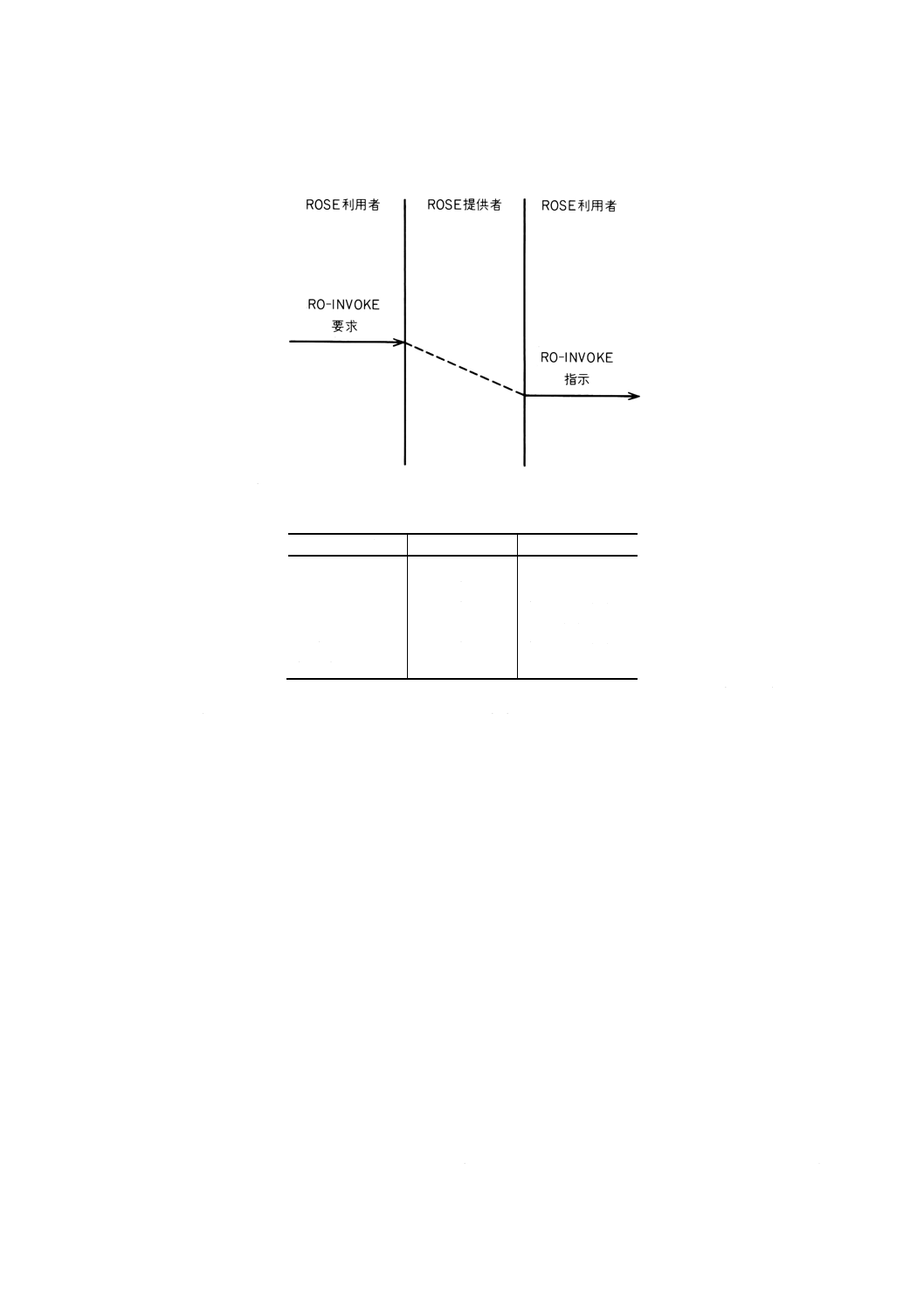
関連するサービス構造は,図6で示すように,二つのサービスプリミティブからなる。
図6 RO-RESULTサービスプリミティブ
10.2.1 RO-RESULTパラメタ 表3にRO-RESULTサービスのパラメタを示す
表3 RO-RESULTパラメタ
パラメタ名
要求
指示
操作値
利用者選択
条件付き (=)
結果
利用者選択
条件付き (=)
起動ID
必す
必す (=)
優先度
利用者選択
10.2.1.1 操作値 このパラメタは,起動され成功した操作の識別子とする。このパラメタは,サービス要
求者が提供する。この値は,対応するRO-INVOKE指示プリミティブの操作値とする。このパラメタは,
結果パラメタが存在する場合にだけ設定する。
10.2.1.2 結果 このパラメタは,起動され成功した操作の結果とする。この型は,ROSE利用者間で合意
したものでなければならない。このパラメタは,サービス要求者が提供する。
17
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.2.1.3 起動ID このパラメタは,対応する起動を識別する(10.1.1.4参照)。このパラメタは,サービス
要求者が提供する。この値は,対応するRO-INVOKE指示プリミティブの起動ID値とする。
10.2.1.4 優先度 このパラメタは,対応するAPDU転送の優先度を定義する(10.1.1.6参照)。
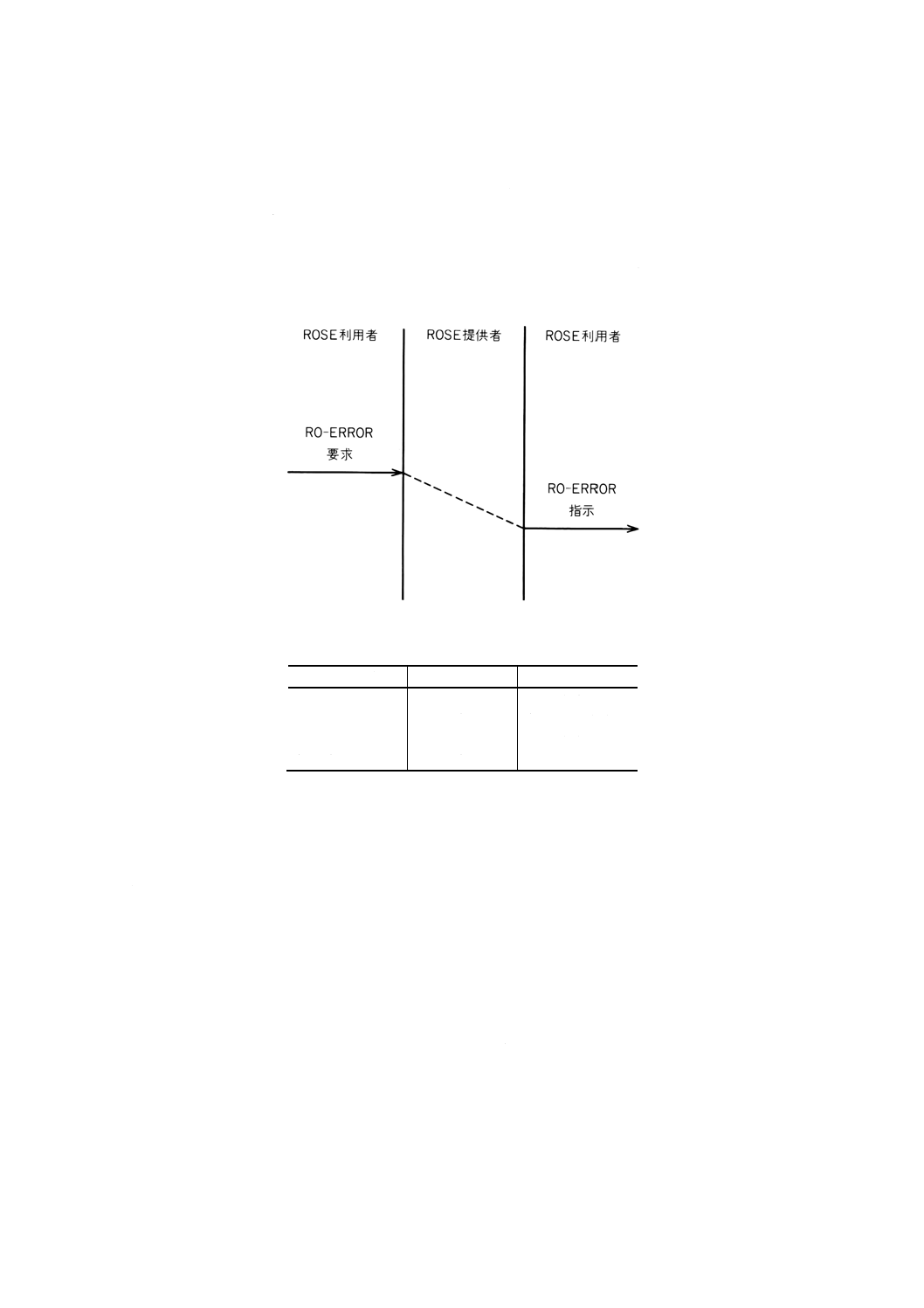
10.3 RO-ERRORサービス RO-ERRORサービスは,操作が失敗した場合に,ROSE利用者が対応する
RO-INVOKE指示に応答するために使用する。このサービスは,非確認型サービスとする。
関連するサービス構造は,図7で示すように,二つのサービスプリミティブからなる。
図7 RO-ERRORサービスプリミティブ
10.3.1 RO-ERRORパラメタ 表4にRO-ERRORサービスのパラメタを示す。
表4 RO-ERRORパラメタ
パラメタ名
要求
指示
誤り値
必す
必す (=)
誤りパラメタ
利用者選択
条件付き (=)
起動ID
必す
必す (=)
優先度
利用者選択
10.3.1.1 誤り値 このパラメタは,操作の実行中に発生した誤りを識別する。この値はROSE利用者間で
合意したものでなければならない。このパラメタは,サービス要求者が提供する。
10.3.1.2 誤りパラメタ このパラメタは,誤りについての付加情報を提供する。このパラメタを使用する
場合,この型は,ROSE利用者間で合意したものでなければならない。このパラメタは,サービス要求者
が提供する。
10.3.1.3 起動ID このパラメタは,対応する起動を識別する(10.1.1.4参照)。このパラメタは,サービス
要求者が提供する。この値は,対応するRO-INVOKE指示プリミティブの起動ID値とする。
10.3.1.4 優先度 このパラメタは,対応するAPDU転送の優先度を定義する(10.1.1.6参照)。
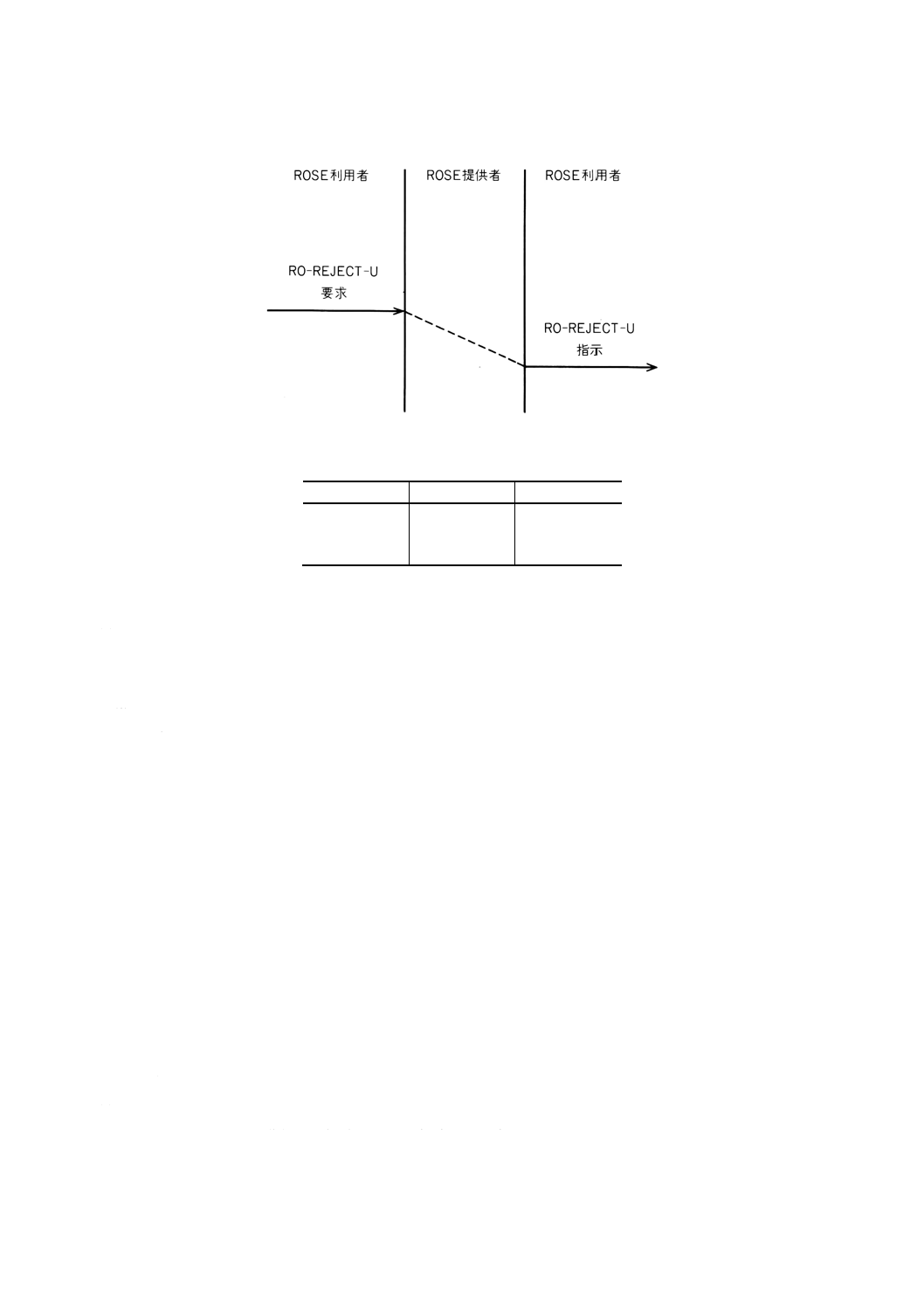
10.4 RO-REJECT-Uサービス RO-REJECT-Uサービスは,ROSE利用者が問題を検知したときに,他の
ROSE利用者からの要求(RO-INVOKE指示)を拒否するために使用する。ROSE利用者が他のROSE利用
者からの応答(RO-RESULT指示及びRO-ERROR指示)を拒否するためにこれを使用してもよい。応用コ
ンテキストによっては,ROSE利用者は他ASEの順序規則に違反しないように,RO-REJECT-Uサービス
を応答拒否するために使用しなくてもよい。このサービスは,非確認型サービスとする。
関連するサービス構造は,図8で示すように,二つのサービスプリミティブからなる。
18
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図8 RO-REJECT-Uサービスプリミティブ
10.4.1 RO-REJECT-Uパラメタ 表5にRO-REJECT-Uサービスのパラメタを示す。
表5 RO-REJECT-Uパラメタ
パラメタ名
要求
指示
拒否理由
必す
必す (=)
起動ID
必す
必す (=)
優先度
利用者選択
10.4.1.1 拒否理由 このパラメタは,次に示す拒否理由を指定する。このパラメタは,サービス要求者が
提供する。
(a) 起動上の問題 RO-INVOKE指示プリミティブに対する利用者拒否は,次のいずれかの値とする。
(1)
二重起動 起動IDパラメタが10.1.1.4の割当て規則に違反していることを示す。
(2)
認識不能操作 操作がROSE利用者間で合意したものでないことを示す。
(3)
引数型誤り 操作引数の型がROSE利用者間で合意したものでないことを示す。
(4)
資源限界 操作実行側ROSE利用者が,資源限界のために起動された操作を実行できないことを
示す。
(5)
起動側解放中 アソシエーション起動側が,応用アソシエーションの解放中のため,起動された
操作を実行できないことを示す。
(6)
認識不能連結ID 進行中の操作の中に,指定された連結IDと同じ起動IDをもつ操作がないこと
を示す。
(7)
予期しない連結応答 起動された操作(連結IDによって参照したもの)が親操作でないことを示
す。
(8)
予期しない子操作 起動された子操作が,起動された親操作(連結IDによって参照したもの)の
許可したものでないことを示す。
(b) 結果応答上の問題 RO-RESULT指示プリミティブに対する利用者拒否は,次のいずれかの値とする。
(1)
認識不能起動 進行中の操作の中に,指定された起動IDをもつものがないことを示す。
(2)
予期しない結果応答 起動した操作が結果を報告しないことを示す。
(3)
結果型誤り 結果パラメタの型がROSE利用者間で合意したものでないことを示す。
(c) 誤り応答上の問題 RO-ERROR指示プリミティブに対する利用者拒否は,次のいずれかの値とする。
(1)
認識不能起動 進行中の操作の中に,指定された起動IDをもつものがないことを示す。
(2)
予期しない誤り応答 起動した操作が誤りを報告しないことを示す。
19
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(3)
認識不能誤り 報告された誤りがROSE利用者間で合意したものでないことを示す。
(4)
予期しない誤り 報告された誤りが,起動された操作に対して該当しない報告であることを示す。
(5)
パラメタ型誤り 誤りパラメタの型がROSE利用者間で合意したものでないことを示す。
10.4.1.2 起動ID このパラメタは,対応する起動を識別する(10.1.1.4参照)。このパラメタは,サービス
要求者が提供する。この値は,拒否するRO-INVOKE及びRO-RESULTの指示プリミティブ又はRO-ERROR
指示プリミティブの起動ID値とする。
10.4.1.3 優先度 このパラメタは,対応するAPDU転送の優先度を定義する(10.1.1.6参照)。
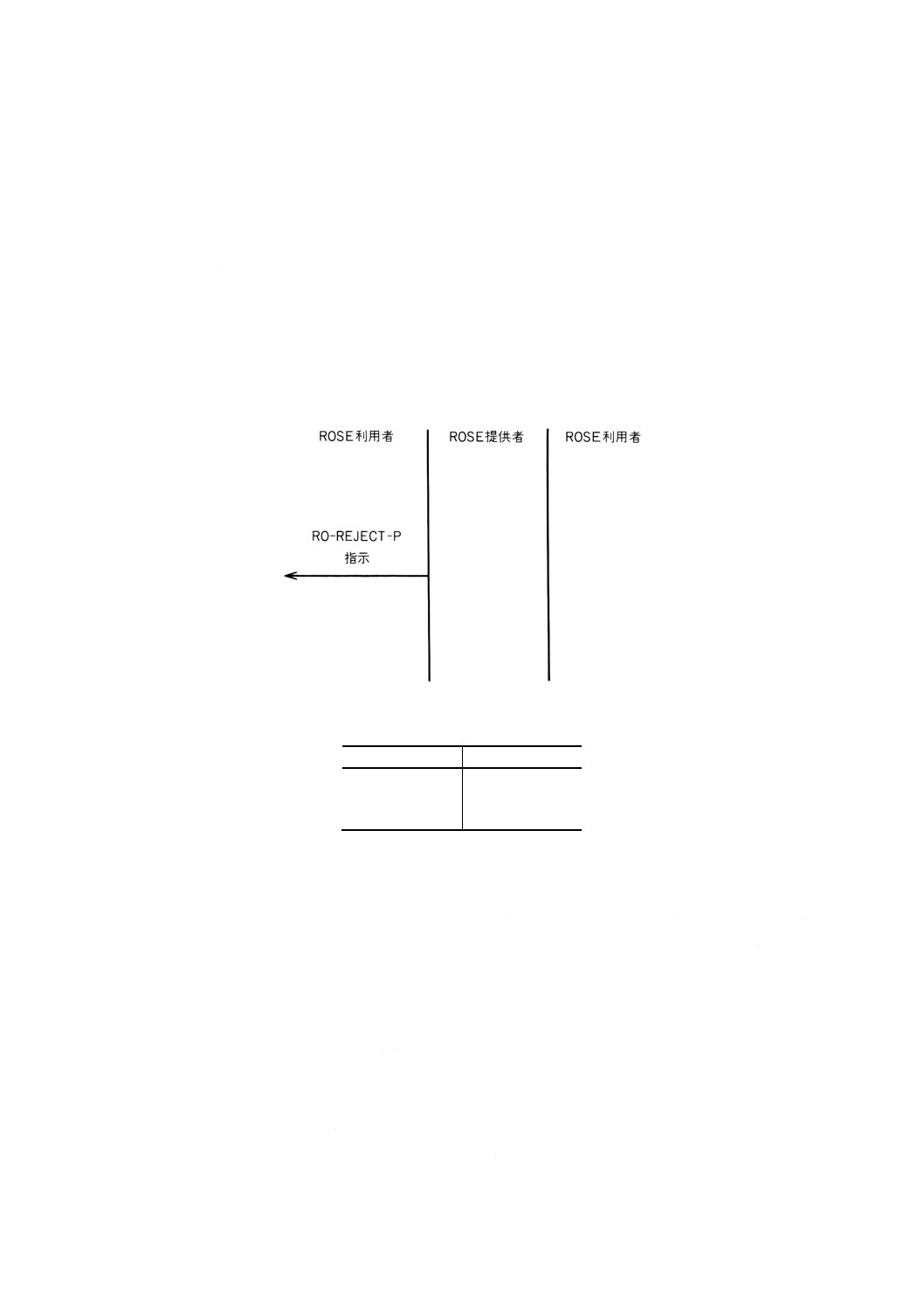
10.5 RO-REJECT-Pサービス RO-REJECT-Pサービスは,ROSE利用者に,ROSE提供者が検知した問
題を知らせるために使用する。このサービスは,提供者起動型サービスとする。
関連するサービス構造は,図9で示すように,一つのサービスプリミティブからなる。
図9 RO-REJECT-Pサービスプリミティブ
10.5.1 RO-REJECTPパラメタ 表6にRO-REJECT-Pサービスのパラメタを示す。
表6 RO-REJECT-Pパラメタ
パラメタ名
指示
起動ID
提供者選択
返送パラメタ
提供者選択
拒否理由
提供者選択
10.5.1.1 起動ID このパラメタは,対応する起動を識別する(10.1.1.4参照)。このパラメタは,ROSE提
供者が提供する。この値は,拒否したRO-INVOKE,RO-RESULT,RO-ERROR及びRO-REJECT-Uの要求
プリミティブの起動ID値とする。起動IDが得られない場合,このパラメタは,省略する。
10.5.1.2 返送パラメタ このパラメタは,ROSE提供者が対応するAPDUを転送できない場合,
RO-INVOKE,RO-RESULT,RO-ERROR又はRO-REJECT-Uの要求プリミティブのパラメタを含む。この
パラメタ及び拒否理由パラメタの両方を指定することはできない。
10.5.1.3 拒否理由 このパラメタは,次に示す拒否の理由を指定する。このパラメタは,ROSE提供者が
提供する。このパラメタ及び返送パラメタの両方を指定することはできない。
(d) 一般的な問題 APDUに対する提供者拒否は,次のいずれかの値とする。
(1)
認識不能APDU 型識別子によって示されるAPDUの型が,JIS X 5709で定義する四つの型のい
ずれでもないことを示す。
(2)
型誤りAPDU APDU構造がJIS X 5709に適合しないことを示す。
(3)
構造不正APDU APDUの構造がJIS X 5603及びJIS X 5604で規定する記法及び符号化に適合し
20
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ないことを示す。
11. 記法のサービスへの対応付け
11.1 応用コンテキスト及び操作 ここでは,9.で定義したマクロ記法によって応用コンテキストを記述す
る方法を示す。
この記法による応用コンテキストの記述は,次の操作及び誤りからなる。
(a) BINDマクロによって記述する結合操作
(b) UNBINDマクロによって記述する結合解放操作
(c) OPERATIONマクロによって記述する操作の集合
(d) 操作と関連し,ERRORマクロによって記述する誤りの集合
利用者要素は,遠隔操作(結合操作,結合解放操作及び操作の集合)を起動できる。
アソシエーション起動側の利用者要素は,結合操作を起動することによって応用アソシエーションを確
立する。応用アソシエーションが確立されると,利用者要素は,操作を起動できる。アソシエーション起
動側の利用者要素は,応用アソシエーションを解放したい場合,結合解放操作を起動する。
11.2 遠隔操作とACSEサービス,RTSEサービス及びROSEサービスとの対応付け 結合操作及び結合
解放操作は,ACSEサービス又はRTSEサービスに対応付ける。
また,操作は,ROSEサービスに対応付ける。
11.2.1 ACSEサービスへの対応付け 結合操作はA-ASSOCIATEサービスに,結合解放操作はA-RELEASE
サービスにそれぞれ対応付ける。
11.2.1.1 結合操作の対応付け 結合操作は,A-ASSOCIATEサービスに対応付ける。
11.2.1.1.1 結合操作の起動 結合操作の起動は,A-ASSOCIATE要求及びA-ASSOCIATE指示のサービスプ
リミティブに対応付ける。
結合操作の引数値は,これらのサービスプリミティブの利用者情報パラメタに対応付ける。
11.2.1.1.2 結合操作の応答 結合操作の応答は,A-ASSOCIATE応答及びA-ASSOCIATE確認のサービスプ
リミティブに対応付ける。
結合操作が成功した場合,これらのサービスプリミティブの結果パラメタは“受諾”とし,結合操作の
結果値はこれらのサービスプリミティブの利用者情報パラメタに対応付ける。
結合操作が失敗した場合,これらのサービスプリミティブの結果パラメタは“拒否(永久)”とし,結合
操作の誤り値はこれらのサービスプリミティブの利用者情報パラメタに対応付ける。
11.2.1.2 結合解放操作の対応付け 結合解放操作は,A-RELEASEサービスに対応付ける。
11.2.1.2.1 結合解放操作の起動 結合解放操作の起動は,A-RELEASE要求及びA-RELEASE指示のサービ
スプリミティブに対応付ける。
結合解放操作の引数値は,これらのサービスプリミティブの利用者情報パラメタに対応付ける。これら
のサービスプリミティブの理由パラメタの値は,“正常”とする。
11.2.1.2.2 結合解放操作の応答 結合解放操作の応答は,A-RELEASE応答及びA-RELEASE確認のサービ
スプリミティブに対応付ける。
結合解放操作が成功した場合,これらのサービスプリミティブの理由パラメタ値は“正常”とし,結合
解放操作の結果値はこれらのサービスプリミティブの利用者情報パラメタに対応付ける。サービスプリミ
ティブの結果パラメタは,“肯定”とする。
結合解放操作が失敗した場合,これらのサービスプリミティブの理由パラメタ値は“未完了”とし,結
21
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
合解放操作の誤り値はこれらのサービスプリミティブの利用者情報パラメタに対応付ける。これらのサー
ビスプリミティブの結果パラメタは,“肯定”とする。
11.2.2 RTSEサービスヘの対応付け 結合操作はRT-OPENサービスに,結合解放操作はRT-CLOSEサー
ビスに対応付ける。
11.2.2.1 結合操作の対応付け 結合操作は,RT-OPENサービスに対応付ける。
11.2.2.1.1 結合操作の起動 結合操作の起動は,RT-OPEN要求及びRT-OPEN指示のサービスプリミティ
ブに対応付ける。
結合操作の引数値は,これらのサービスプリミティブの利用者データパラメタに対応付ける。会話モー
ドパラメタ値は,“両方向交互”とする。
11.2.2.1.2 結合操作の応答 結合操作の応答は,RT-OPEN応答及びRT-OPEN確認のサービスプリミティ
ブに対応付ける。
結合操作が成功した場合,これらのサービスプリミティブの結果パラメタは,“受諾”とし,結合操作の
結果値はこれらのサービスプリミティブの利用者データパラメタに対応付ける。
結合操作が失敗した場合,これらのサービスプリミティブの結果パラメタは“拒否(永久)”とし,結合
操作の誤り値はこれらのサービスプリミティブの利用者データパラメタに対応付ける。
11.2.2.2 結合解放操作の対応付け 結合解放操作は,RT-CLOSEサービスに対応付ける。
11.2.2.2.1 結合解放操作の起動 結合解放操作の起動は,RT-CLOSE要求及びRT-CLOSE指示のサービス
プリミティブに対応付ける。
結合解放操作の引数値は,これらのサービスプリミティブの利用者データパラメタに対応付ける。サー
ビスプリミティブの理由パラメタ値は,“正常”とする。
11.2.2.2.2 結合解放操作の応答 結合解放操作の応答は,RT-CLOSE応答及びRT-CLOSE確認のサービス
プリミティブに対応付ける。
結合解放操作が成功した場合,これらのサービスプリミティブの理由パラメタ値は“正常”とし,結合
解放操作の結果値はこれらのサービスプリミティブの利用者データパラメタに対応付ける。
結合解放操作が失敗した場合,これらのサービスプリミティブの理由パラメタ値は“未完了”とし,結
合解放操作の誤り値はこれらのサービスプリミティブの利用者データパラメタに対応付ける。
11.2.3 ROSEサービスへの対応付け 操作は,ROSEサービスに対応付ける。
11.2.3.1 操作の起動 操作の起動は,RO-INVOKEサービスに対応付ける。
操作の値は,このサービスの操作値パラメタに対応付ける。OPERATIONマクロのARGUMENTの名前
付き型の値は,このサービスの引数パラメタに対応付ける。
11.2.3.2 操作の応答 操作が成功した場合,応答は,RO-RESULTサービスに対応付ける。OPERATION
マクロのRESULTの名前付き型の値は,サービスの結果パラメタに対応付ける。
操作が失敗した場合,応答は,RO-ERRORサービスに対応付ける。この場合,OPERATIONマクロの
ERRORSの誤り一覧中の一つを適用してもよい。適用した誤りの値は,このサービスの誤り値パラメタに
対応付ける。適用した誤りに対応するERRORマクロのPARAMETERの名前付き型の値は,このサービス
のパラメタの誤りパラメタに対応付ける。
12. 順序制御に関する情報 ここでは,遠隔操作間の相互動作及びACSEサービスとROSEサービスとの
相互動作について規定する。
12.1 遠隔操作の順序制御に関する情報
22
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12.1.1 結合操作
12.1.1.1 使用上の制限 結合操作は,確立された応用アソシエーション上では使用しない。結合操作が成
功すると,応用アソシエーションが確立する。
12.1.1.2 破壊される遠隔操作 結合操作は,どの遠隔操作も破壊しない。
12.1.1.3 破壊する遠隔操作 結合操作を破壊する遠隔操作はない。
12.1.1.4 衝突 両側のAE内の利用者要素が同時に互いに結合操作を起動した場合,衝突が発生する。こ
の場合,二つの独立した応用アソシエーションが確立する。
12.1.2 結合解放操作
12.1.2.1 使用上の制限 結合解放操作は,確立された応用アソシエーション上だけで使用する。結合操作
を起動した利用者要素だけが,この操作を使用する。操作クラスが1又は2の操作の応答待ち状態でない
場合にだけ,この操作を使用する。
結合解放操作が成功するか否かにかかわらず,応用アソシエーションを解放する。
12.1.2.2 破壊される遠隔操作 結合解放操作は,アソシエーションクラスが1で,かつ,操作クラスが1
又は2の場合,遠隔操作を破壊しない。
その他の場合には,結合解放操作は,操作を破壊することがある。操作クラスが3〜5又はアソシエーシ
ョンクラスが2〜3の場合の応用コンテキストは,破壊を受け入れるか又は破壊を回避する操作を提供する
かのいずれかとする。
12.1.2.3 破壊する遠隔操作 結合解放操作を破壊する遠隔操作はない。
12.1.2.4 衝突 アソシエーション起動側だけが応用アソシエーションを解放するため,衝突は発生しない。
12.1.3 操作
12.1.3.1 使用上の制限 確立された応用アソシエーション上だけで,操作を使用する。
12.1.3.2 破壊される遠隔操作 操作は,どの遠隔操作も破壊しない。
12.1.3.3 破壊する遠隔操作 結合解放操作は,操作を破壊することがある(12.1.2.2参照)。
12.1.3.4 衝突 操作の衝突は,発生しない。
12.1.4 順序制御に関する詳細情報 操作インタフェースでは,破壊するサービスは,認識できない。しか
し,サービスは,操作を破壊することがある(12.2参照)。
A-ABORT,A-P-ABORT,RT-U-ABORT及びRT-P-ABORTのサービスは,結合操作及び結合解放操作を
破壊する。
A-ABORT,A-P-ABORT,RT-U-ABORT,RT-P-ABORT,RO-REJECT-U及びRO-REJECT-Pのサービスは,
操作を破壊する。
結合解放操作が操作を破壊することがあるため,A-RELEASEサービスも,操作を破壊することがある。
12.2に示す破壊されるサービスでは,破壊される操作は,特に示さない。
すべての遠隔操作はサービスに対応付けることができ,破壊する遠隔操作(結合解放操作)はA−
RELEASEサービスによって表現できるため,破壊する遠隔操作(結合解放操作)は,12.2に示す破壊す
るサービスの中では特に示さない。
12.2 サービスの順序制御に関する情報
12.2.1 ACSEサービス ACSEサービスの順序制御に関する情報は,JIS X 5701によるほか,次のとおり
とする。
23
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12.2.1.1 破壊されるROSEサービス JIS X 5701に規定した破壊されるサービスに加え,A-ABORTサー
ビス及びA-P-ABORTサービスは,RO-REJECT-Pサービスを除くすべてのROSEサービスを破壊する。
A-RELEASEサービスは,RO-REJECT-Pサービスを除くすべてのROSEサービスを破壊することがある
(12.2.3.6参照)。
12.2.1.2 破壊するROSEサービス ACSEサービスを破壊するROSEサービスはない。
12.2.2 RTSEサービス RTSEサービスの順序制御に関する情報は,ISO 9066-1によるほか,次のとおり
とする。
12.2.2.1 破壊されるROSEサービス ISO 9066-1で規定した破壊されるサービスのほかに,RT-U-ABORT,
RT-P-ABORT及び否定的RT-TRANSFER確認のサービスは,RO-REJECT-Pサービスを除くすべてのROSE
サービスを破壊する。
12.2.2.2 破壊するROSEサービス RTSEサービスを破壊するROSEサービスはない。
12.2.3 ROSEサービス ここでは,ROSEサービス間の相互動作を規定する。ACSEサービスとの相互動
作は12.2.1で規定し,RTSEサービスとの相互動作は12.2.2で規定する。
12.2.3.1 RO-INVOKEサービス
12.2.3.1.1 サービスの型 RO-INVOKEサービスは,非確認型サービスとする。
12.2.3.1.2 使用上の制限 RO-INVOKEサービスは,確立された応用アソシエーション上だけで使用する。
12.2.3.1.3 破壊されるサービス RO-INVOKEサービスは,どのサービスも破壊しない
12.2.3.1.4 破壊するサービス RO-REJECT-Pサービスは,RO-INVOKEサービスを破壊する。
12.2.3.1.5 衝突 RO-INVOKEサービスの衝突は,発生しない。
12.2.3.2 RO-RESULTサービス
12.2.3.2.1 サービスの型 RO-RESULTサービスは,非確認型サービスとする。
12.2.3.2.2 使用上の制限 RO-RESULTサービスは,確立された応用アソシエーション上だけで使用し,
RO-INVOKEサービスに対する応答として使用する。
12.2.3.2.3 破壊されるサービス RO-RESULTサービスは,どのサービスも破壊しない
12.2.3.2.4 破壊するサービス RO-REJECT-Pサービスは,RO-RESULTサービスを破壊する。
12.2.3.2.5 衝突 RO-RESULTサービスの衝突は,発生しない。
12.2.3.3 RO-ERRORサービス
12.2.3.3.1 サービスの型 RO-ERRORサービスは,非確認型サービスとする。
12.2.3.3.2 使用上の制限 RO-ERRORサービスは,確立された応用アソシエーション上だけで使用し,
RO-INVOKEサービスに対する応答として使用する。
12.2.3.3.3 破壊されるサービス RO-ERRORサービスは,どのサービスも破壊しない。
12.2.3.3.4 破壊するサービス RO-REJECT-Pサービスは,RO-ERRORサービスを破壊する。
12.2.3.3.5 衝突 RO-ERRORサービスの衝突は,発生しない。
12.2.3.4 RO-REJECT-Uサービス
12.2.3.4.1 サービスの型 RO-REJECT-Uサービスは,非確認型サービスとする。
12.2.3.4.2 使用上の制限 RO-REJECT-Uサービスは,確立された応用アソシエーション上だけで使用し,
RO-INVOKE, RO-RESULT及びRO-ERRORのサービスに対する応答として使用する。
12.2.3.4.3 破壊されるサービス RO-REJECT-Uサービスは,どのサービスも破壊しない。
12.2.3.4.4 破壊するサービス RO-REJECT-Pサービスは,RO-REJECT-Uサービスを破壊する。
12.2.3.4.5 衝突 RO-REJECT-Uサービスの衝突は,発生しない。
24
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12.2.3.5 RO-REJECT-Pサービス
12.2.3.5.1 サービスの型 RO-REJECT-Pサービスは,提供者起動型サービスとする。
12.2.3.5.2 使用上の制限 使用上の制限はない。
12.2.3.5.3 破壊されるサービス RO-REJECT-Pサービスは,他のすべてのROSEサービスを破壊する。
12.2.3.5.4 破壊するサービス RO-REJECT-Pサービスを破壊するサービスはない。
12.2.3.5.5 衝突 ACSEサービス又はRTSEサービスが応用アソシエーションを中断又は解放する場合,
実行中のRO-REJECT-Pサービスをサービス利用者に返送パラメタとともに通知するか否かは,実装上の
事項とする。
12.2.3.6 順序制御に関する追加情報 アソシエーションクラスが1で,かつ,操作クラスが1又は2の場
合,結合解放操作をA-RELEASEサービスへ対応付けて,結合解放操作の使用を制限(12.1.2.1参照)する
ことによって,ROSEサービスの破壊を防止できる。
アソシエーションクラスが2〜3又は操作クラスが3〜5の場合,A-RELEASEサービスは,ROSEサービ
スを破壊することがある。この場合,応用コンテキストの設計者は,この破壊を受け入れるか又は応用ア
ソシエーションの解放に備える手段(例えば,操作)を提供しなければならない。
25
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A(規定) ASE及び応用コンテキストの仕様を規定する記法
この附属書は,ASE及び応用コンテキストの仕様を規定するRO記法を規定する。RO記法を使用して,
応用コンテキストの結合操作及び結合解放操作の仕様を記述できる。更に,RO記法は,幾つかのASE
(ROSE利用者ASE)の操作型及び誤り型を記述するためにも使用できる。
この附属書は,ASE及び応用コンテキストの仕様を規定する二つのマクロを定義する。これらのマクロ
の形式記述を附属書A図1に示す。
A.1 ASE この記法によって,ASEを一意に識別できる。
ASEがROSE利用者の場合,この記法は,ASEの特性に関する仕様も規定する。操作型及び誤り型を使
って,ROSE利用者ASEの操作インタフェース及びプロトコルが記述できる。
ASEが使用するプロトコルは,次のいずれかとする。
(a) 対称
(b) 非対称
ASEが使用するプロトコルが対称の場合,両側のASE利用者は,同一の操作型を起動できる。
ASEが使用するプロトコルが非対称の場合,一方のASE利用者(この附属書では,供給側と呼ぶ。)が,
情報処理機能を提供し,これを同位ASE利用者(この附属書では,消費側と呼ぶ。)が使用する。この場
合,操作型は,次のいずれか又は両方とする。
(a) 消費側が起動する。
(b) 供給側が起動する。
参考 “供給側”及び“消費側”という用語は,多くの場合感覚的に割り当てる。例えば,通常,フ
ァイルシステムを供給側,その利用者を消費側と考えることができる。しかし,厳密には,こ
の用語の割当ての基準は,明確でない。
ASEが連結操作を使用する場合,操作型を子操作として起動する。子操作の起動者は,連結された親操
作の実行者とする。子操作としてだけ起動する操作型は,ASEの記述に含めてはならない。これは,親操
作の型記述の操作一覧に記述する。
操作が報告する誤り型は,ASEの記述には含めない。これは,操作の型記述の誤り一覧に記述する。
ROSE利用者ASEの形式記述は,子操作としてだけ起動する操作以外の操作及びこの操作の起動が許さ
れる利用者要素を規定する。
A.1.1 ASEの記述 APPLICATION-SERVICE-ELEMENTマクロ(附属書A図1参照)が規定する形式記述
を使用すると,ASEが記述できる。
APPLICATION-SERVICE-ELEMENTマクロの型記法によって,ASEが記述できる。
APPLICATION-SERVICE-ELEMENTマクロの値記法によって,ASEの一意の識別子が記述できる。
ASE型の記法は,キーワードAPPLICATION-SERVICE-ELEMENT及び任意選択でその後に続く操作
の記述とする。
ASEが使用するプロトコルが対称な場合,キーワードOPERATIONS及び操作の参照名を記述する。
ASEが使用するプロトコルが非対称な場合,キーワードCONSUMER INVOKES及び消費側が起動する
操作の参照名並びに/又はキーワードSUPPLIER INVOKES及び供給側が起動する操作の参照名を記述
26
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
する。
附属書A図1 ASE及び応用コンテキストのデータ型の形式定義
̲遠隔操作記法拡張 {iso-ccitt共通 遠隔操作 (4) 記法拡張 (2)}
DEFINITIONS::=
BEGIN
EXPORTS APPLICATION-SERVICE-ELEMENT, APPLICATION-CONTEXT, aCSE;
IMPORTS OPERATION, BIND, UNBIND FROM ̲遠隔操作記法
{iso-ccitt共通 遠隔操作 (4) 記法 (0)};
--ASEのマクロ定義
APPLICATION-SERVICE-ELEMENT MACRO::=
BEGIN
TYPE NOTATION
::=̲対称Ase | ̲消費側起動 ̲供給側起動 | 空
VALUE NOTATION
::=value (VALUE OBJECT IDENTIFIER)
̲対称Ase
::= "OPERATIONS" " {" ̲操作一覧 "} "
̲消費側起動
::= "CONSUMER INVOKES" " {" ̲操作一覧 "} " | 空
̲供給側起動
::= "SUPPLIER INVOKES" " {" ̲操作一覧 "} " |空
̲操作一覧
::=̲操作 | ̲操作一覧 ", " ̲操作
̲操作
::=value (OPERATION)
END
aCSE APPLICATION-SERVCE-ELEMENT::={iso-ccitt共通 遠隔操作 (4) aseID-ACSE (4)}
--応用コンテキストのマクロ定義
APPLICATION-CONTEXT MACRO::=
BEGIN
TYPE NOTATION
::=̲非RO要素 ̲結合動作 ̲RO要素 ̲抽象構文群
VALUE NOTATION
::=value (VALUE OBJECT IDENTIFIER)
̲非RO要素
::= "APPLICATION SERVCE ELEMENTS" " {" ̲Ase一覧 "} "
̲結合動作
::= "BIND" type --結合操作型を参照。
"UNBIND" type --結合解放操作型を参照。
̲RO要素
::= "REMOTE OPERATIONS" " {" ̲AseID "} " --ROSEを識別。
̲対称Ase ̲非対称Ase | 空
̲対称Ase
::= "OPERATIONS OF" " {" ̲Ase一覧 "} " | 空
̲非対称Ase
::=̲起動側消費側 ̲応答側消費側
̲起動側消費側
::= "INITIATOR CONSUMER OF" " {" ̲Ase一覧 "} " | 空
̲応答側消費側
::= "RESPONDER CONSUMER OF" " {" ̲Ase一覧 "} " | 空
̲抽象構文群
::= "ABSTRACT SYNTAXES" " {" ̲抽象構文一覧 "} "
̲Ase一覧
::=̲AseID | ̲Ase一覧 ", " ̲AseID
̲AseID
::=value (APPLICATION-SERVCE-ELEMENT)
̲抽象構文一覧
::=̲抽象構文 | ̲抽象構文一覧 ", " ̲抽象構文
̲抽象構文
::=value (OBJECT IDENTIFIER) --抽象構文の識別。
END
END --遠隔操作記法拡張終わり
A.2 応用コンテキスト この附属書では,応用コンテキストは,次のものを明示的に識別し,一つ以上の
識別された抽象構文を使用する。
(a) 結合操作
(b) 結合解放操作
(c) ASEの集合
ASEの集合は,次のASEを含む。
27
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(a) RO記法を使用していないASE(すなわち,ACSE,任意選択のRTSE及び任意選択の他のASE)
(b) 任意選択のROSE及び任意選択のROSE利用者ASE
応用コンテキストが非対称プロトコルを使用するROSE利用者ASEを含む場合,この記法によって,ア
ソシエーション起動側又はアソシエーション応答側のいずれをこのASEの消費側とするかが記述できる。
応用コンテキストの形式記述は,結合操作,結合解放操作,ASE及び抽象構文の識別を可能にする。
A.2.1 応用コンテキストの記述 APPLICATION-CONTEXTマクロが規定する形式記述を使用する場合,応
用コンテキストが記述できる(附属書A図1参照)。
APPLICATION-CONTEXTマクロの型記法によって,応用コンテキストが記述できる。
APPLICATION-CONTEXTマクロの値記法によって,応用コンテキストの一意の識別子が記述できる。
応用コンテキスト型の記法は,次の順に記述する。すなわち,キーワードAPPLICATION-CONTEXT
の後に,キーワードAPPLICATION SERVICE ELEMENTS及びRO記法を使用していないASEの参照名,
キーワードBIND及び結合操作型の参照名,キーワードUNBIND及び結合解放操作型の参照名,操作を使
用しているASEの記述(任意選択)並びにキーワードABSTRACT SYNTAXES及び抽象構文の参照名を
この順に記述する。
応用コンテキストがROSE利用者ASEを含む場合,キーワードREMOTE OPERATIONS及びROSEの
参照名の後に,対称プロトコルをもつASEの記述及び/又は非対称プロトコルをもつASEの記述の順に
記述する。対称プロトコルをもつASEは,キーワードOPERATIONS OF及びASEの参照名を記述する。
非対称プロトコルをもつASEは,キーワードINITIATOR CONSUMER OF及びアソシエーション起動側
が消費側であるASEの参照名並びに/又はキーワードRESPONDER CONSUMER OF及びアソシエーシ
ョン応答側が消費側であるASEの参照名を記述する。
A.2.2 記法のサービスへの対応付け APPLICATION-CONTEXTマクロが記述する応用コンテキスト識別
子及び抽象構文名の一覧は,応用コンテキストがRTSEを含む場合はRTSEのRT-OPENサービスに対応付
けし,RTSEを含まない場合はACSEのA-ASSOCIATEサービスに対応付ける。
応用コンテキスト値は,RT-OPENサービス又はA-ASSOCIATEサービスの応用コンテキスト名パラメタ
に対応付ける。
抽象構文名は,RT-OPENサービス又はA-ASSOCIATEサービスのプレゼンテーションコンテキスト定義
一覧パラメタ及びプレゼンテーションコンテキスト定義結果一覧に対応付ける。
28
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B(参考) ROSEを使用した応用プロトコルの設計者への指針
この附属書は,ROSEを使用した応用プロトコルの設計者への例及び指針を示す。
B.1 操作及び誤りの例 ここでは,操作及び誤りの定義の例を示す。
B.1.1 操作クラス ここでは,操作クラス1〜5の操作の定義の例を示す。
(1) 操作クラスの1又は2の操作 操作“操作例12”は,成功(型“̲結果型12”の結果)又は失敗(誤
りの“誤り例1”又は“誤り例2”)を報告する。操作“操作例12”の引数は,型“̲引数型12”の引
数である。操作“操作例12”の値は,1である。
例 操作クラスの1又は2の操作(成功又は失敗を必ず通知する。)
操作例12 OPERATION
ARGUMENT
̲引数型12
RESULT
̲結果型12
ERRORS
{誤り例1,誤り例2}
::=1
(2) 操作クラス3の操作 操作“操作例3”は,失敗(誤り“誤り例1”)だけを報告する。操作“操作例
3”の引数は,型“̲引数型3”の引数である。操作“操作例3”の値は,2である。
例 操作クラス3の操作(失敗だけを通知する。)
操作例3 OPERATION
ARGUMENT
̲引数型3
ERRORS
{誤り例1}
::=2
(3) 操作クラス4の操作 操作“操作例4”は,成功(型“̲結果型4”の結果)だけを報告する。操作“操
作例4”の引数は,型“̲引数型4”の引数である。操作“操作例4”の値は,3である。
例 操作クラス4の操作(成功だけを通知する。)
操作例4 OPERATION
ARGUMENT
̲引数型4
RESULT
̲結果型4
::=3
(4) 操作クラス5の操作 操作“操作例51”及び“操作例52”は,結果を報告しない。操作“操作例51”
の引数は,型“̲引数型4”の引数である。操作“操作例52”は,引数をもたない。操作“操作例51”
の値は4であり,操作“操作例52”の値は5である。
例 操作クラス5の操作(通知なし)
操作例51 OPERATION
ARGUMENT
̲引数型4
::=4
操作例52 OPERATION
::=5
29
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.1.2 連結操作 ここでは,親操作“親操作例12”並びに子操作の“操作例51”及び“操作例52”からな
る一組の連結操作の定義の例を示す。
例
親操作例12 OPERATION
ARGUMENT ̲引数型12
RESULT
̲結果型12
ERRORS
{誤り例1,誤り例2}
LINKED
{操作例51,操作例52}
::=6
B.1.3 誤り ここでは,誤りの定義の例を示す。誤りの“誤り例1”及び“誤り例2”は,失敗を報告する。
誤り“誤り例1”のパラメタは,型“̲パラメタ型1”である。誤り“誤り例2”は,パラメタをもたない。
誤り“誤り例1”の値は1であり,誤り“誤り例2”の値は2である。
例
誤り例1 ERROR
PARAMETER ̲パラメタ型1
::=1
誤り例2 ERROR
::=2
B.2 結合操作及び結合解放操作の例 ここでは,結合操作及び結合解放操作の定義の例を示す。
B.2.1 結合操作 応用アソシエーションを確立するために,結合操作を使用する。
応用アソシエーションを確立するための結合操作“̲結合例1”の要求は,型“̲結合引数型1”の引数を
もつ。応用アソシエーション確立の肯定応答は,型“̲結合結果型1”の結果で通知する。応用アソシエー
ション確立の否定応答は,型“̲結合誤り型1”の結合誤りで通知する。
例1.
̲結合例1::=BIND
ARGUMENT
̲結合引数型1
RESULT
̲結合結果型1
BIND-ERROR
̲結合誤り型1
応用アソシエーションを確立するための結合操作“̲結合例2”の要求には,型“̲結合引数型1”の引数
をもつ。応用アソシエーション確立の肯定応答は,通知しない。応用アソシエーション確立の否定応答は,
型“̲結合誤り型1”の結合誤りで通知する。
例2.
̲結合例2::=BIND
ARGUMENT
̲結合引数型1
BIND-ERROR
̲結合誤り型1
結合操作の引数,結果及び結合誤りは,任意選択である。応用アソシエーションを確立するための結合
操作“̲結合例3”の要求は引数をもたず,応用アソシエーション確立の応答は通知しない。
例3.
̲結合例3::=BIND
30
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.2.2 結合解放操作 応用アソシエーションを解放するために,結合解放操作を使用する。
応用アソシエーションを解放するための結合解放操作“̲結合解放例1”の要求には,型“̲結合解放引
数型1”の引数をもつ。応用アソシエーション解放の応答は,型“̲結合解放結果型1”の結果又は型“̲
結合解放誤り型1”の結合解放誤りで通知する。
例1.
̲結合解放例1::=UNBIND
ARGUMENT
̲結合解放引数型1
RESULT
̲結合解放結果型1
UNBIND-ERROR
̲結合解放誤り型1
応用アソシエーションを解放するための結合解放操作“̲結合解放例2”の要求は,型“̲結合解放引数
型1”の引数をもつ。応用アソシエーション解放の応答は,任意選択で型“̲結合解放誤り型1”の結合解
放誤りで通知する。
例2.
̲結合解放例2::=UNBIND
ARGUMENT
̲結合解放引数型1
UNBIND-ERROR
̲結合解放誤り型1
結合解放操作の引数,結果及び結合解放誤りは,任意選択である。応用アソシエーションを解放するた
めの結合解放操作“̲結合解放例3”の要求は,引数をもたず,応用アソシエーション解放の応答は通知し
ない。
例3.
̲結合解放例3::=UNBIND
B.3 操作及び誤りのエキスポート及びインポート ここでは,操作及び誤りをエキスポート及びインポー
トする方法の例を示す。
例1.は,エキスポートする方法を示す。“操作10”及び“誤り10”は,局所値をもつ。“̲操作型A”及
び“̲誤り型A”は,型であり,インポートする側のモジュールの中で特定の値を指定しなければならない。
“操作11”及び“誤り11”は,一意に識別できる値をもつ。
例1.
̲エキスポートモジュール{オブジェクト識別子1}DEFINITIONS::=
BEGIN
EXPORTS 操作10,̲操作型A,操作11,
誤り10,̲誤り型A,誤り11;
IMPORTS OPERATION, ERROR, BIND, UNBIND
FROM 遠隔操作記法{iso-ccitt共通 遠隔操作 (4) 記法 (0)};
操作10 OPERATION
ARGUMENT ̲引数型10
RESULT ̲結果型10
ERRORS {誤り10}
::=10
̲操作型A ::=
31
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
OPERATION
ARGUMENT ̲引数型A
RESULT ̲結果型A
操作11 OPERATION
ARGUMENT ̲引数型11
RESULT ̲結果型11
ERRORS {誤り11}
::={オブジェクト識別子2構成要素11}
誤り10 ERROR
PARAMETER ̲パラメタ型10
::=10
̲誤り型A ::=
ERROR
PARAMETER ̲パラメタ型A
誤り11 ERROR
PARAMETER ̲パラメタ型11
::={オブジェクト識別子2構成要素12}
END
例2.は,操作及び誤りをインポートする方法を示す。“操作10”及び“誤り10”は,エキスポートする
側のモジュールの中で定義された局所値をもつ。インポートする側のモジュールの設計者は,抽象構文の
中のそれらの値の一意性を保証しなければならない。操作“操作13”は型“̲操作型A”の操作であり,
これに値13を割り当てる。誤り“誤り13”は型“̲誤り型A”の誤りであり,これに値13を割り当てる。
“操作11”及び“誤り11”は,エキスポートする側のモジュールの中で一意に識別できる値をもつ。
例2.
̲インポートモジュール{オブジェクト識別子3}DEFINITIONS::=
BEGIN
IMPORTS 操作10,̲操作型A,操作11,
誤り10,̲誤り型A,誤り11
FROM ̲エキスポートモジュール{オブジェクト識別子1};
操作13 ̲操作型A::=13
誤り13 ̲誤り型A::=13
END
B.4 ASEの定義 ここでは,ASEの定義方法の例を示す。ここで示す例は,B.1の例で定義した操作及び
誤りを参照する。
ASE“要素1”は,操作の“操作例12”及び“操作例3”並びに誤りの“誤り例1”及び“誤り例2”を
使用する。操作の定義は,間接的に誤りを含む。ASE“要素1”は,対称である。すなわち,両方の利用
者要素が操作の“操作例12”及び“操作例3”を起動できる。
例1.
要素1
APPLICATION-SERVICE-ELEMENT
32
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
OPERATIONS{操作例12,操作例3}
::={要素1のオブジェクト識別子}
ASE“要素2”は,操作の“操作例3”及び“操作例4”並びに誤り“誤り例1”を使用する。ASE“要
素2”は,非対称である。すなわち,消費側の利用者要素だけが操作の“操作例3”及び“操作例4”を起
動できる。
例2.
要素2
APPLICATION-SERVICE-ELEMENT
CONSUMER INVOKES{操作例3,操作例4}
::={要素2のオブジェクト識別子}
ASE“要素3”は,操作の“操作例12”及び“操作例51”並びに誤りの“誤り例1”及び“誤り例2”
を使用する。ASE“要素3”は,非対称である。すなわち,供給側の利用者要素だけが操作の“操作例12”
及び“操作例51”を起動できる。
例3.
要素3
APPLICATION-SERVICE-ELEMENT
SUPPLIER INVOKES{操作例12,操作例51}
::={要素3のオブジェクト識別子}
ASE”要素4”は,操作の“親操作例12”,“操作例51”及び“操作例52”並びに誤りの“誤り例1”及
び“誤り例2”を使用する。親操作“親操作例12”の定義は,間接的に子操作の“操作例51”及び“操作
例52”を含む。ASE“要素4”は,非対称である。すなわち,消費側の利用者要素だけが親操作“親操作
例12”を起動でき,供給側の利用者要素だけが子操作の“操作例51”及び“操作例52”を親操作“親操
作例12”の実行中に起動できる。
例4.
要素4
APPLICATION-SERVICE-ELEMENT
CONSUMER INVOKES{親操作例12}
::={要素4のオブジェクト識別子}
ASE“要素5”は,ASE“要素4”と同じ操作及び誤りを使用するが,供給側の利用者要素が子操作とし
て又は連結操作の範囲外で(子操作としてではなく)“操作例52”を起動できることだけが異なる。
例5.
要素5
APPLICATION-SERVICE-ELEMENT
CONSUMER INVOKES{親操作例12}
SUPPLIER INVOKES{操作例52}
::={要素5のオブジェクト識別子}
B.5 応用コンテキストの定義 ここでは,幾つかのアソシエーションクラスに対して応用コンテキストの
定義方法の例を示す。ここで示す例は,B.4の例で定義したASE並びにB.2の例で定義した結合操作及び
結合解放操作を参照する。
応用コンテキスト“コンテキスト1”は,ASEのACSE,RTSE,ROSE及び“要素2”,結合操作“̲結
合例1”並びに結合解放操作“̲結合解放例3”を使用する。アソシエーション起動側は,操作の“操作例
3”及び“操作例4”を起動できる。アソシエーション応答側は,操作を起動できない(アソシエーション
クラス1)。
33
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例1.
コンテキスト1 APPLICATION-CONTEXT
APPLICATION SERVICE ELEMENTS
{aCSE, rTSE}
BIND
̲結合例1
UNBIND
̲結合解放例3
REMOTE OPERATIONS
{rOSE}
INITIATOR CONSUMER OF
{要素2}
ABSTRACT SYNTAXES
{{iso-ccitt共通 アソシエーション制御 (2) 抽象構文 (1) apdus (0) 版1 (1)},
抽象構文1のオブジェクト識別子}
::={コンテキスト1のオブジェクト識別子}
応用コンテキスト“コンテキスト2”は,ASEのACSE,ROSE,“要素2”及び“要素3”,結合操作,“̲
結合例1”並びに結合解放操作“̲結合解放例3”を使用する。アソシエーション応答側は,操作の“操作
例3”,“操作例4”,“操作例12”及び“操作例51”を起動できる。アソシエーション起動側は,操作を起
動できない(アソシエーションクラス2)。
例2.
コンテキスト2 APPLICATION-CONTEXT
APPLICATION SERVICE ELEMENTS
{aCSE}
BIND
̲結合例1
UNBIND
̲結合解放例3
REMOTE OPERATIONS
{rOSE}
INITIATOR CONSUMER OF
{要素3}
RESPONDER CONSUMER OF
{要素2}
ABSTRACT SYNTAXES
{{iso-ccitt共通 アソシエーション制御 (2) 抽象構文 (1) apdus (0) 版1 (1)},
抽象構文2のオブジェクト識別子}
::={コンテキスト2のオブジェクト識別子}
応用コンテキスト“コンテキスト3”は,ASEのACSE,RTSE,ROSE及び“要素2”,結合操作“̲結
合例1”並びに結合解放操作“̲結合解放例3”を使用する。アソシエーション応答側は,操作の“操作例
3”及び“操作例4”を起動できる。アソシエーション起動側は,操作を起動できない(アソシエーション
クラス2)。
例3.
コンテキスト3 APPLICATION-CONTEXT
APPLICATION SERVICE ELEMENTS
{aCSE, rTSE}
BIND
̲結合例1
UNBIND
̲結合解放例3
REMOTE OPERATIONS
{rOSE}
RESPONDER CONSUMER OF
{要素2}
ABSTRACT SYNTAXES
{抽象構文3のオブジェクト識別子}
::={コンテキスト3のオブジェクト識別子}
34
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
応用コンテキスト“コンテキスト4”は,ASEのACSE,ROSE及び“要素1”,結合操作“̲結合例3”
並びに結合解放操作“̲結合解放例3”を使用する。応用コンテキスト“コンテキスト4”は,対称である。
すなわち,アソシエーションの起動側及び応答側の両方が操作の“操作例12”及び“操作例3”を起動で
きる(アソシエーションクラス3)。
例4.
コンテキスト4 APPLICATION-CONTEXT
APPLICATION SERVICE ELEMENTS
{aCSE}
BIND
̲結合例3
UNBIND
̲結合解放例3
REMOTE OPERATIONS
{rOSE}
OPERATIONS OF
{要素1}
ABSTRACT SYNTAXES
{抽象構文4のオブジェクト識別子}
::={コンテキスト4のオブジェクト識別子}
例3及び例4は,それぞれ一つの名前付き抽象構文を仮定している。
B.6 応用アソシエーションの解放規則
B.6.1 概要 本体では,操作が報告する結果に基づき五つの操作クラスを規定し,更に操作を起動する側
がアソシエーション起動側か,アソシエーション応答側か,又はその両方かに基づき三つのアソシエーシ
ョンクラスを規定した。ここでは,応用アソシエーションの正しい解放を保証するための規則及びこの応
用アソシエーション上で起動する操作クラスを定義する。
B.6.2 目的 ここで定義する規則は,次の二つのいずれかを実現することを目的とする。
(a) ただ1回実行する目的 AEが起動した操作を,正確に1回だけ実行する。
(b) 高々1回実行する目的 (a)が達成不可能な場合,起動した操作を1回実行するか又は全く実行しない。
B.6.3 規則の定義 次の一般規則は,すべての場合に適用する。
G1:実行者は,操作が起動されたアソシエーションと同一のアソシエーションを使って,その実行し
た操作の結果又は誤りを報告しなければならない。
G2:アソシエーション起動側は,自らが起動したすべての操作を確認するまで,応用アソシエーショ
ンを解放してはならない。
次の特殊規則は,B.6.4の(a)及び(b)の場合に適用する。
S1:起動者は,複数のアソシエーションを使用して操作を起動する場合でも,RO-INVOKEサービス
を実行するごとに異なる起動IDを提供しなければならない(起動を再実行する場合は,この限りで
はない。)。これによって実行者は,重複を防止して“高々1回実行する目的”を達成することができ
る。
S2:実行者がRO-INVOKEサービス中に重複した起動IDを受信した場合,拒否理由を二重起動とし
て,RO-REJECT-Uサービスを実行しなければならない。これは,“ただ1回実行する目的”の達成に
役立つ。
S3:アソシエーション起動側は,応用アソシエーションを解放する場合,実行が完了していないすべ
ての起動を拒否しなければならない。
S4:アソシエーション起動側は,応用アソシエーションを解放する場合,実行が完了したすべての起
動に対して応答を返さなければならない。
35
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.6.4 規則の適用 一般規則は,常に適用する。特殊規則は,次に示すアソシエーションクラスの応用ア
ソシエーション及び操作クラスの操作(そのアソシエーションを使って起動する操作)に適用する。
(a) アソシエーションクラス1の応用アソシエーション 操作クラスの1及び2の操作に対しては,特殊
規則は,適用しない。操作クラスの3,4及び5の操作に対しては,特殊規則のS1及びS2を適用す
る。
(b) アソシエーションクラスの2及び3の応用アソシエーション 操作クラスの1及び2の操作に対して
は,特殊規則のS3及びS4を適用する。すなわち,アソシエーション起動側がアソシエーションを解
放した後は,アソシエーション応答側が発行したすべての起動は,消滅する。更に拒否の応答も,消
滅する。操作クラスの3,4及び5の操作に対しては,特殊規則のS1,S2,S3及びS4を適用する。
操作クラスの1又は2の操作を使用するプロトコルでは,起動者がRO-INVOKEサービスに与える起動
IDの値の制約は,アソシエーションが確立している間は重複してはならないことだけである。
AEは,アソシエーションの確立時にプレゼンテーションアドレスを交換し,そのプレゼンテーション
アドレスに対して起動IDを一定の間,整数値として単調増加させることによって,起動IDを一つの起動
者に対して,使用する応用アソシエーションで重複しないようにする。
操作クラスの3,4又は5の操作を正確に1回だけ実行することを保障する場合は,AEは,同一の起動
IDをもつ操作が2回以上起動されたとき,拒否理由として二重起動を使用しなければならない。その他の
場合は,“高々1回実行する目的”だけが達成できる。この場合,通常,起動者は,非確認型の操作が実行
されたか否かは,問題としない。
B.6.5 注意 操作クラスの1又は2の操作は,正確に1回だけ実行する。
非確認型又は条件付き確認型の操作の有用性は,応用プログラムに依存する。プロトコル設計者は,特
別な要求がない限り,操作クラスの1又は2の操作だけを定義することが望ましい。
36
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C(参考) 応用コンテキストモデル
この附属書は,利用者要素,RO操作,各種ASE(ACSE利用者,RTSE利用者,ROSE利用者,ACSE,
RTSE及びROSE),各種サービス(ACSEサービス,RTSEサービス,ROSEサービス及びプレゼンテーシ
ョンサービス)及びプレゼンテーション層の関連を参考として示したものである。
附属書C(参考)図1 ROSE及びRTSEを含む応
用コンテキストモデル
附属書C(参考)図2 ROSEを含む応用コンテキ
ストモデル
37
X 5708-1991 (ISO/IEC 9072-1 : 1989)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
OSI遠隔操作JIS原案作成委員会 構成表(敬称略,順不同)
氏名
所属
(委員長)
西 村 卓 美
日本電信電話株式会社ネットワーク高度化推進本部
(幹事)
馬 渡 恭三郎
シャープ株式会社技術本部情報技術開発センター
(幹事)
茂 木 一 明
日本電気株式会社基本ソフトウェア開発本部
方式開発部
粟 屋 英 司
三菱電機株式会社コンピュータ製作所
コンピュータ方式統轄部
井 上 雅 喜
株式会社日立製作所ソフトウェア開発本部
第2DC設計部
篠 塚 誠
沖電気工業株式会社コンピュータシステム開発本部
ソフトウェア開発第2部
末 永 敏 昭
日本ユニシス株式会社システムプロダクト本部
通信システム2部
西 本 一 志
松下電器産業株式会社情報通信関西研究所
吉 江 信 夫
住友電気工業株式会社情報電子研究所
沖 野 英 明
工業技術院標準部
吹 訳 正 憲
通商産業省機械情報産業局
(協力者)
大 越 冬 彦
三菱電機株式会社コンピュータ製作所
(協力者)
白 川 美 佳
沖電気工業株式会社コンピュータシステム開発本部
ソフトウェア開発第2部
(協力者)
寺 島 理江子
松下電器産業株式会社情報通信関西研究所
(事務局)
宇 野 喜 博
財団法人日本規格協会情報技術標準化研究センター
情報部会規格調整専門委員会WG3 構成表(敬称略,順不同)
氏名
所属
(主査)
徳 永 英 二
日本アイ・ビー・エム株式会社標準推進担当
森 宗 正
日本ユニシス株式会社研究開発部
佐 藤 健
日本INSソフトウェア株式会社ネットワーク技術本部
高 畠 丈 夫
富士通株式会社技術管理本部