W 0141:2019
(1)
目 次
ページ
1 適用範囲························································································································· 1
2 分類······························································································································· 1
3 用語及び定義 ··················································································································· 1
W 0141:2019
(2)
まえがき
この規格は,産業標準化法第12条第1項の規定に基づき,一般社団法人日本産業用無人航空機工業会
(JUAV)及び一般財団法人日本規格協会(JSA)から,産業標準原案を添えて日本産業規格を制定すべき
との申出があり,日本産業標準調査会の審議を経て,経済産業大臣が制定した日本産業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本産業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
注記 工業標準化法に基づき行われた申出,日本工業標準調査会の審議等の手続は,不正競争防止法
等の一部を改正する法律附則第9条により,産業標準化法第12条第1項の申出,日本産業標準
調査会の審議等の手続を経たものとみなされる。
日本産業規格 JIS
W 0141:2019
無人航空機−用語
Unmanned aircraft-Vocabulary
1
適用範囲
この規格は,無人航空機に関する主な用語及び定義について規定する。
2
分類
無人航空機に関する用語の分類は,次による。
a) 種類
b) システムを構成する部分
c) システムの設計・機能・性能基準
d) システムの運用
3
用語及び定義
用語及び定義は,次による。
なお,参考として対応英語を示す。
注記1 一つの用語が幾つかの概念を示す場合,同じ行の( )内に対象分野を細字で示す。
注記2 航空法では,“質量”の意味で“重量”という用語が用いられているため,この規格でも同様
に“重量”を用いている。
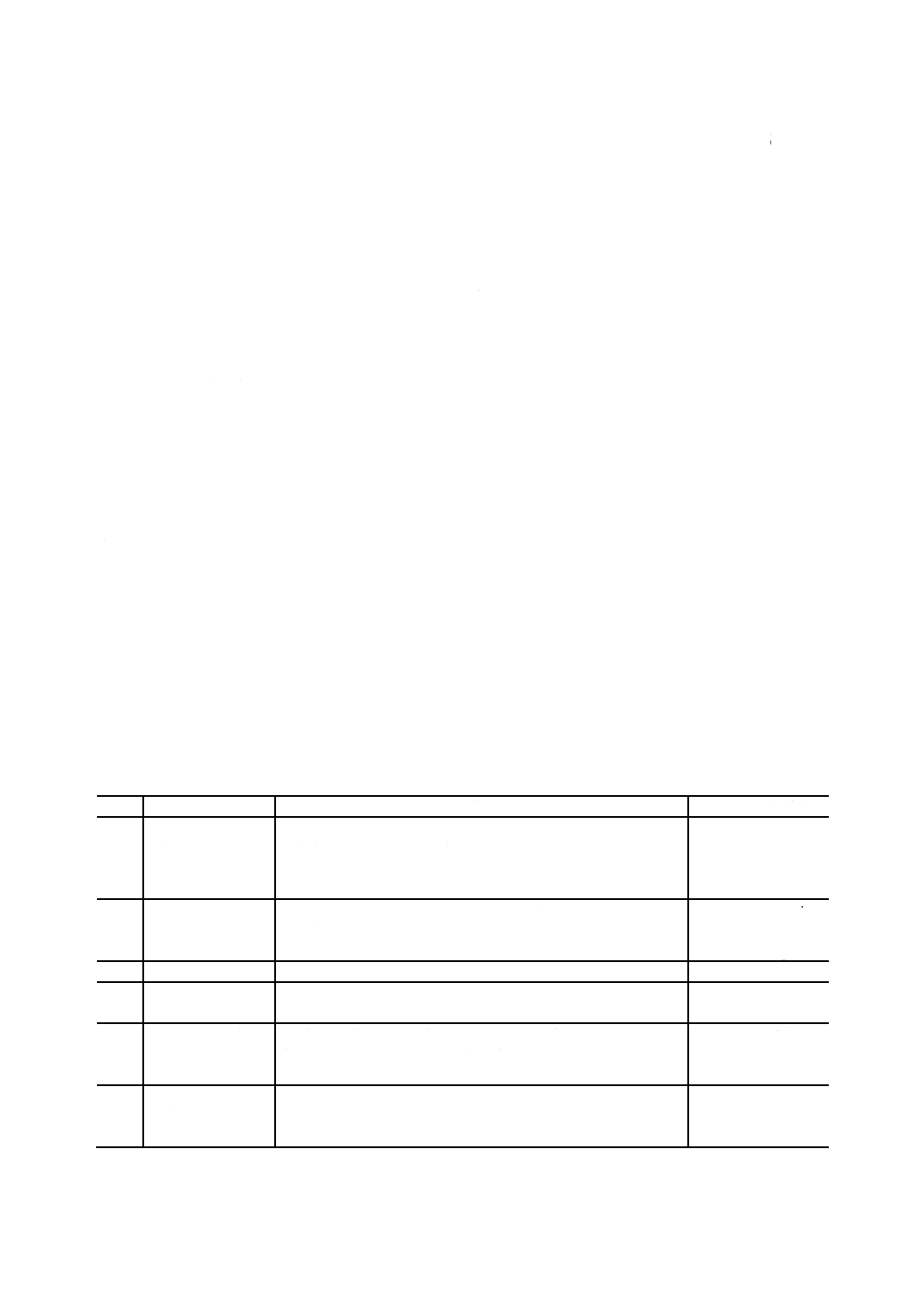
a) 種類
番号
用語
定義
対応英語(参考)
1001
無人航空機,
UAV
航空の用に供することができる飛行機,回転翼航空機,滑空機,
飛行船などであって,構造上人が乗ることができないもののう
ち,遠隔操作又は自動操縦によって飛行させることができるも
の。
unmanned aircraft,
unmanned aerial
vehicle
1011
固定翼無人航空機
固定した翼面をもち,その翼面に生じる揚力によって飛行する
無人航空機。
unmanned fixed wing
aircraft,
unmanned aeroplane
1021
回転翼無人航空機
飛行中の揚力を回転翼から得る無人航空機。
unmanned rotorcraft
1031
無人ヘリコプタ
ほぼ垂直な軸周りに回転する二つ以下の回転翼によって,主な
揚力及び推進力を得る回転翼無人航空機。
unmanned helicopter
1041
マルチロータ無人
航空機
ほぼ垂直な軸周りに回転する三つ以上の回転翼によって,主な
揚力及び推進力を得る回転翼無人航空機。マルチロータ又はマ
ルチコプタともいう。
unmanned multi-rotor
aircraft
1051
無人航空機システ
ム,
UAS
無人航空機及びその飛行に必要な地上局,C2リンクなどのシス
テムの総称。
unmanned aircraft
system
2
W 0141:2019
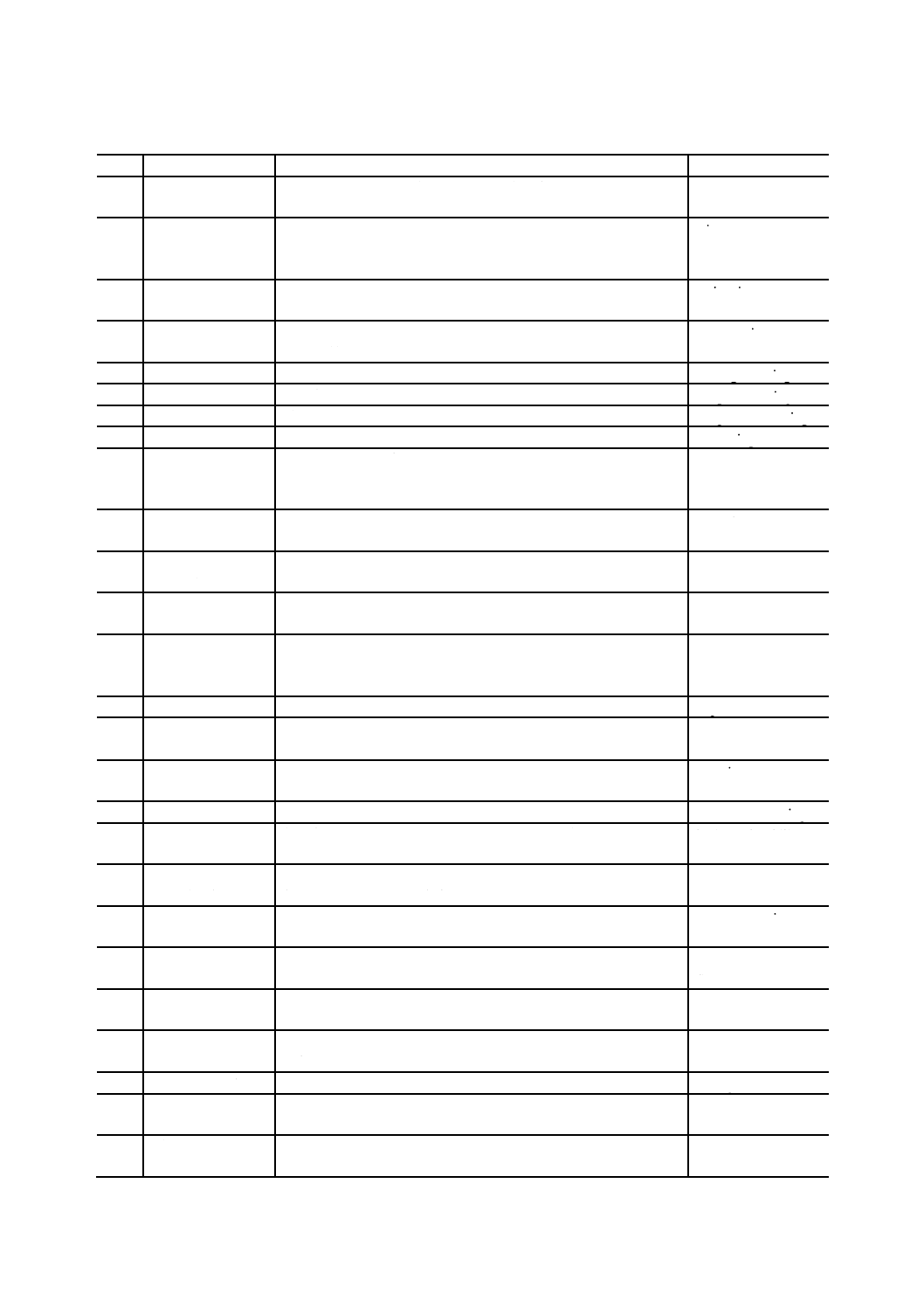
b) システムを構成する部分
番号
用語
定義
対応英語(参考)
2001
機体
主翼,胴体,尾翼,着陸装置など,無人航空機を構成する構造
部分。
airframe
2011
翼
無人航空機が空気中でその重量を支持するために必要とする空
気力学的な力(揚力)を発生するもの。
wing,
airfoil,
aerofoil
2021
主翼
固定翼無人航空機の重量を支持するための揚力の大部分を発生
する翼。
main wing
2031
テーパ翼
翼の付け根から翼端に向かって,直線的に翼弦長が小さくなっ
ている翼。
tapered wing
2041
く形翼
平面形が長方形[く(矩)形]の翼。
rectangular wings
2051
後退翼
後退角をもつ翼。
swept-back wing
2061
前進翼
前進角をもつ翼。
swept forward wing
2071
三角翼
平面形が三角形であり,比較的小さい縦横比の翼。
delta wing
2081
ウィングレット
主翼の翼端にほぼ垂直に取り付けられ,これによって得られる
翼端渦の減殺と推力成分との効果を利用して,誘導抗力の減少
及び有効揚力の増加を図るための小翼片。
winglet
2091
操縦だ面
無人航空機の姿勢及び飛行方向を制御するために用いる可動翼
面。空力だ(舵)面又はだ面ともいう。
control surface
2101
補助翼,
エルロン
操だによって,無人航空機の前後軸周りに回転運動(横揺れ)
を起こさせるため,主翼の後縁に取り付ける可動翼面。
aileron
2111
エレボン
無尾翼機の後縁に取り付けられた昇降だ(舵)と補助翼との二
つの働きを併せもつように設計された操縦だ面。
elevon
2121
フラップ
主翼の後縁又は前縁に取り付けられ,翼面積若しくは翼の反り
又はそれらの両方を増して,主として最大揚力係数を大きくす
る働きをもつ装置。高揚力装置の一種である。
flap
2131
フラッペロン
フラップと補助翼との機能を兼ね備えた可動翼面。
flaperon
2141
スポイラ
主翼上面に取り付けられ,これを気流中に出すことによって気
流を乱し,揚力を減殺すると同時に,抗力を増加させる装置。
spoiler
2151
尾翼
無人航空機の釣合い,安定及び操縦を受けもつために,無人航
空機の尾部に取り付けられた翼の総称。
tail wing
2161
水平尾翼
縦の釣合い,安定及び操縦を受けもつ尾翼。
horizontal tail wing
2171
水平安定板
無人航空機の縦の安定のための水平尾翼の前部の固定した部
分。トリムのために可動のものもある。
horizontal stabilizer
2181
昇降だ,
エレベータ
操だによって無人航空機の左右軸周りの回転運動(縦揺れ)を
起こさせるため,水平安定板の後部に取り付けられた可動翼面。
elevator
2191
垂直尾翼
方向の安定と操縦とを受けもつ尾翼。通常,機体の対称面に又
は対称面に平行に取り付けられる。
vertical tail wing
2201
垂直安定板
無人航空機の方向の安定のための垂直尾翼の前部の固定した部
分。
vertical stabilizer,
fin
2211
方向だ,
ラダー
操だによって航空機の上下軸周りの回転運動(かた揺れ)を起
こさせるため,垂直安定板の後部に取り付けられた可動翼面。
rudder
2221
胴体
搭載物及びその無人航空機の主要な装備を収容する無人航空機
の部分。
fuselage
2231
フェアリング
空気抵抗を減らすため,形状を整える覆い。
fairing
2241
フィレット
気流の干渉による抵抗の増加を防ぐための,構造の結合部の覆
い。
fillet
2251
ボルテックスジェ
ネレータ
境界層の剝がれを防止するため,機体表面に,気流に対して適
切な角度で並べて取り付けた小片。
vortex generator
3
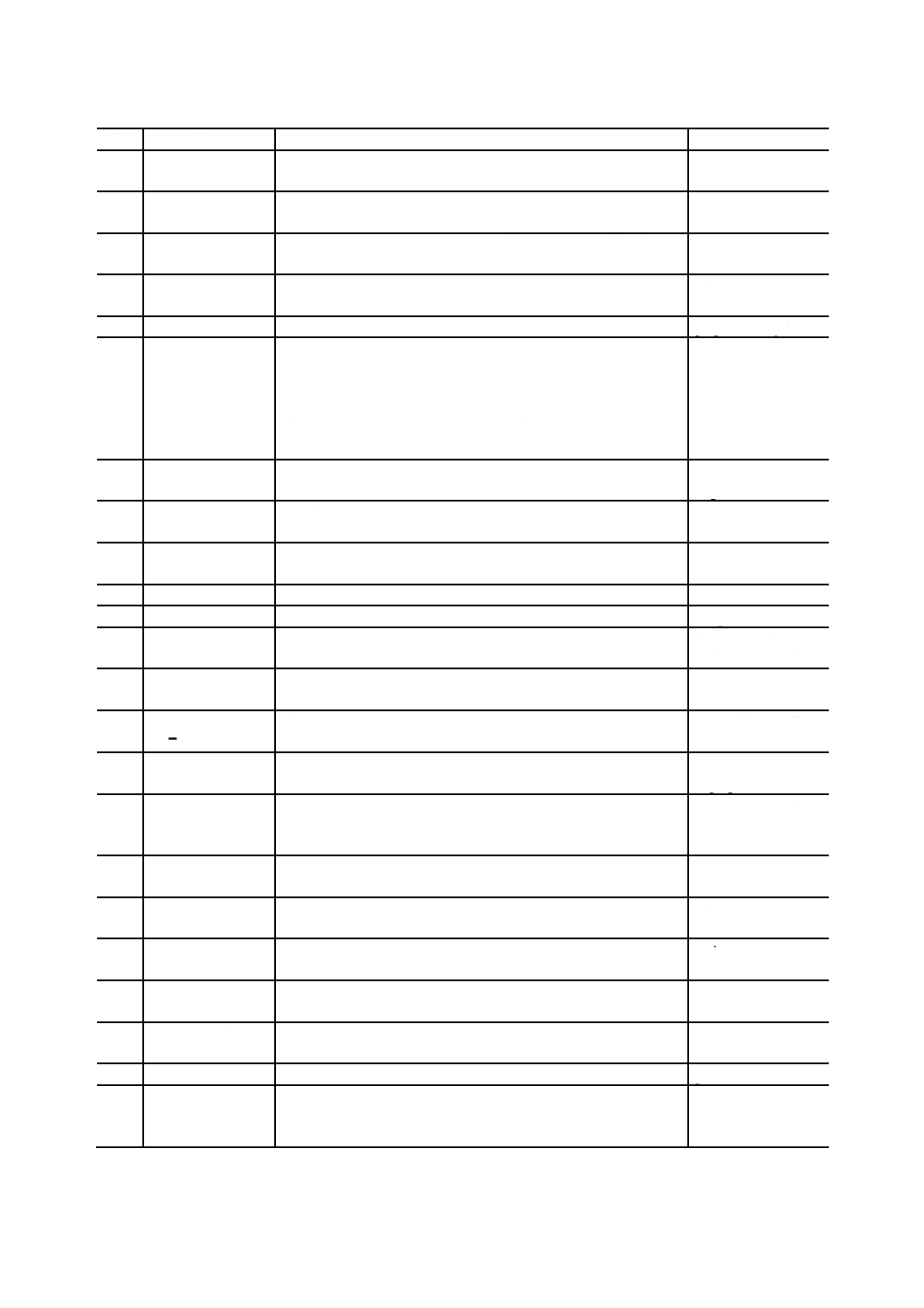
W 0141:2019
番号
用語
定義
対応英語(参考)
2261
パイロン
動力装置,回転翼,機外搭載物などを支持するために,無人航
空機の胴体,翼などから突き出ている構造物。
pylon
2271
カウリング
エンジン,放熱器,モータなどを覆って抵抗を減らし,若しく
は保護し,又は内部の気流を整えるための覆い。
cowling
2281
テールブーム
尾翼又は尾部を,主翼,胴などに結合するために後方に突き出
ている構造物。
tail boom
2291
サーボ機構
物体の位置,方位,姿勢などを制御量として,目標値に追従す
るように自動で作動する機構。
servo mechanism
2301
プロポ
スティックなどを用いて機体を操作するための装置。
proportional system
2311
降着装置,
着陸装置
無人航空機を地上又は水上で支持し,離着陸又は離着水のとき
に用いる装置の総称。
注記1 車輪式,フロート式,そり式,スキー式などの降着装置
がある。
注記2 水上ではないところで用いる降着装置を,一般に着陸装
置という。
landing gear,
skid
2321
引込脚
飛行中,翼,胴体などに引き込める形式の着陸装置。
retractable landing
gear
2331
フロート
無人航空機を水上で支持し,離着水時に使用する舟形又は円筒
状の降着装置。
float
2341
動力装置
発動機又はモータ本体及びその附属装置の一切を含めたものの
総称。
power source
2351
スロットル
動力装置の推進力を調整する操作又はそのためのレバー。
throttle lever
2361
カタパルト
無人航空機の離陸を補助する射出装置。
catapult
2371
JATO,
RATO
ジェット又はロケットの推力によって離陸を補助する装置。
jet assisted take off,
rocket assisted take off
2381
プロペラ
翼形断面をもつ羽根を動力装置によって回転させて,推力を得
る装置。
propeller
2391
固定ピッチプロペ
ラ
ブレードのピッチ角が一定であるプロペラ。
fixed pitch propeller
2401
可変ピッチプロペ
ラ
ブレードのピッチ角を変えられるプロペラ。
variable pitch
propeller
2411
可変ピッチ機構
可変ピッチプロペラのピッチ角を変更するために,無人航空機
の機体側に設ける制御装置,サーボ機構,リンク装置などの総
称。
variable pitch system
2421
プロペラガード
プロペラ及びロータが第三者及び物件に直接接触することを防
止する構造。
propeller guard
2431
回転翼,
ロータ
翼形断面をもつ羽根を回転させて,揚力を得たり,方向の操縦
をしたりすることなどに用いる装置。
rotor
2441
メインロータ
無人ヘリコプタにおいて,主として揚力を得るために用いられ
る回転翼。
main rotor
2451
同軸反転翼
同一回転軸上に配置され,互いに逆方向に回転する回転翼。
coaxial contra rotor,
coaxial inverted rotor
2461
テールロータ
無人ヘリコプタにおいて,尾部に取り付けられ,メインロータ
のトルクの平衡,方向の操縦などに用いられる回転翼。
tail rotor
2471
パラシュート
傘体などの空気の抵抗によって,機体を減速させる装置。
parachute
2481
フライトコンピュ
ータ,
FCC
飛行制御する搭載コンピュータ。
Flight Control
Computer
4
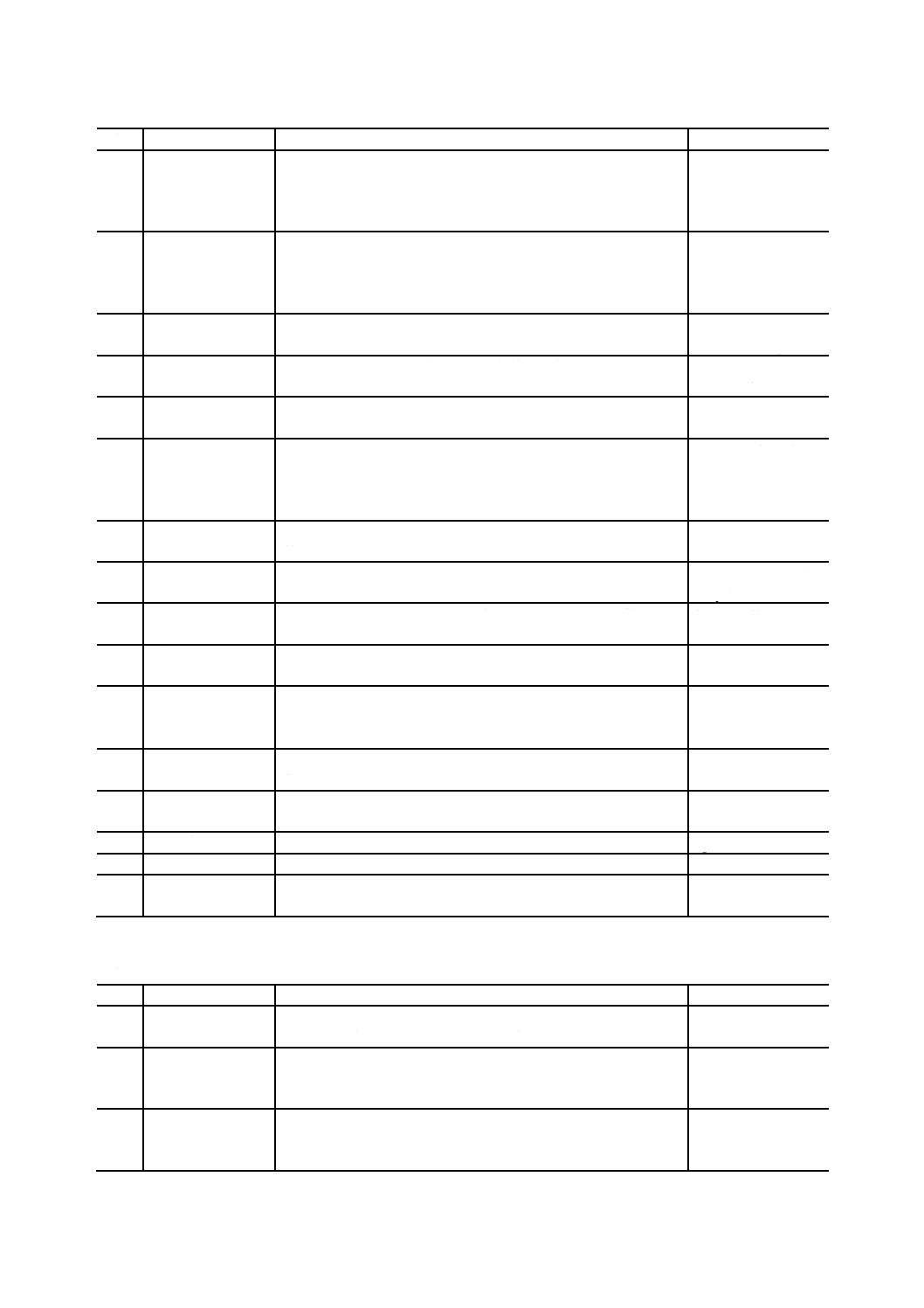
W 0141:2019
番号
用語
定義
対応英語(参考)
2491
フライトコントロ
ーラ,
FC
無人航空機の機体全体の制御統括及び飛行制御を担う装置。ま
た,フライトログの保存及び地上局とのデータのやりとりも行
い,ジャイロ及び加速度のIMUも定義上,フライトコントロー
ラに含む場合がある。
Flight Controller,
FC
2501
IMU
6軸の角速度及び加速度の検出を行い,角度及び速度を演算する
装置。IMUには6軸(XYZ各軸の角速度及び角加速度)の検出
を行うほか,地磁気センサによる方位検出,気圧計センサによ
る高度検出機能などを併せてもつものもある。
inertial measurement
unit
2511
AHRS
姿勢及び方位を演算するシステム。
Attitude Heading
Reference System
2521
ESC
モータのスピード(回転数)を電気的に制御する装置。モータ
コントローラともいう。
electronic speed
controller
2531
フライトデータレ
コーダ
飛行中のデータを記録しておく装置。事故発生時にその原因調
査をするための飛行諸元を記録できる機能をもつ。
flight data recorder
2541
ADS-B
機体がGPS受信機などを用いて自ら測位した位置情報を自動的
に放送する機能。放送する機器(方法)別に3種類の方式があ
るが,一般的には,大型機用の1090ESを使用するものと,小型
機用のUATを使用するものとがある。
automatic dependent
surveillance-
broadcast
2551
衝突防止灯
航空機からの視認をできるだけ容易にするため,衝突防止を目
的に装備する灯火。
anti-collision light
2561
BMS
2次電池の寿命及び充放電の管理,異常検知などを行う管理シス
テム。
battery management
system
2571
バッテリセル
電池の構成単位。一般的に無人航空機のバッテリは,複数のバ
ッテリセルを接続したバッテリパックで使用される。
battery cell
2581
バッテリパック
バッテリセルを直並列に複数個を電気的に接続し,パッケージ
したもの。
packed battery
2591
バッテリモジュー
ル
バッテリセル又はバッテリパックにBMSを組み込み,バッテリ
セル及びバッテリパックの寿命及び充放電の管理,異常検知な
どを行うバッテリ管理機能を内蔵したバッテリ。
battery module
2601
地上局
地上から無人航空機の操縦を行う装置。ただし,プロポは含ま
ない。
GCS,
RPS
2611
C2リンク
無人航空機と地上局との間で,無人航空機の操縦のために,使
用される無線通信。
command & control
link
2621
アップリンク
地上局から無人航空機への直接的又は間接的な無線通信。
uplink
2631
ダウンリンク
無人航空機から地上局への直接的又は間接的な無線通信。
downlink
2641
ペイロードリンク
ペイロードの機材と地上局とを結ぶために,C2リンクとは別に
設定される無線通信。
payload link
c) システムの設計・機能・性能基準
1) 設計
番号
用語
定義
対応英語(参考)
3001
型式
その構造,外形,機能,性能などの違いによって,ほかと区別
される無人航空機の独自の型又はモデル。
type
3011
改造
無人航空機の飛行又は操縦に影響を与える,機体又は操縦シス
テムの部位・部品について,加工(ソフトウェアの書き換えを
含む。),追加,削除又はそれらの組合せによる仕様の変更。
modification
3021
運用限界
最高速度,最高到達高度,飛行可能風速,最大搭載可能重量,
電波到達距離,最大使用可能時間など,無人航空機の飛行可能
限界。
operating limitation
5
W 0141:2019
番号
用語
定義
対応英語(参考)
3031
運用条件
飛行高度,気象条件,機体の状況,飛行経路など無人航空機を
飛行させるための条件。
condition of operation
3041
縦揺れ,
ピッチング
機体の左右軸周りの回転運動。
pitching
3051
(機体)ピッチ角
水平姿勢を基準として測った機体前後の姿勢角。
(aircraft) pitch angle
3061
(ブレード)ピッ
チ角
ロータ・ハブの基準面とブレードのコード・ラインとのなす角。 (blade) pitch angle
3071
コレクティブピッ
チ
ロータブレードの迎え角を同時に変化させる動作又は機能。
collective pitch
3081
サイクリックピッ
チ
ロータブレードの迎え角を回転に伴い周期的に変化させる動作
又は機能。
cyclic pitch
3091
かた揺れ,
かたゆれ,
ヨーイング
機体の上下軸周りの回転運動。
yawing
3101
ヨー角
機体の上下軸周りの回転角。
yaw angle
3111
横揺れ,
ローリング
機体の前後軸周りの回転運動。
rolling
3121
ロール角
水平姿勢を基準として測った左右の姿勢角。
roll angle
3131
バンク角
機体が横揺れ(ローリング)したときに,機体の左右軸と地面
とがなす角。
bank angle
3141
迎え角
翼の進行方向と翼弦とのなす角。
angle of attack
3151
トリム
無人航空機の対気姿勢角を希望する値に保持し,そのときの操
だ力をゼロとする釣合い状態。無人航空機の対気姿勢角を希望
する値に保持することだけをトリムという場合もある。
trim
3161
抗力
流れの中に置かれた物体に働く全合力の,一様な流れの方向の
成分。
drag
3171
抗力係数
抗力をその物体に関係した特有な面積と流れの動圧との積で除
したもの。
drag coefficient
3181
揚力
流れの中に置かれた物体に働く全合力の,一様な流れに直角な
方向の成分。
lift
3191
揚力係数
揚力をその物体に関係した特有な面積と流れの動圧との積で除
したもの。
lift coefficient
3201
揚抗比,
L/D
同じ迎え角における揚力係数の抗力係数に対する比。
lift to drag ratio
3211
テーパ比
翼根弦長に対する翼端弦長の比。
taper ratio
3221
失速
翼の揚力が迎え角の増大とともに増し,ある迎え角に達すると
翼上面の気流に剝離を生じ,揚力が急減する現象。
stall
3231
失速速度
失速状態に突入する直前の速度。
stalling speed
3241
乱流
流体部分が細かい渦を含み,不規則に混合しながら流れている
状態。
turbulent flow
3251
上昇
高度を次第に増す飛行。
climb
3261
上昇率
無人航空機が上昇する場合の垂直方向の速度。
rate of climb
3271
降下
高度を次第に減じる飛行。
descent
3281
降下率
無人航空機が降下する場合の垂直方向の速度。
rate of descent
3291
垂直離着陸,
VTOL
垂直に離陸及び着陸を行う飛行。
vertical takeoff and
landing
3301
水平飛行
一定海抜高度を保つ飛行。
level flight
3311
旋回
水平面内で飛行方向を変える運動。
turn
3321
ホバリング
回転翼無人航空機などが空中で停止飛行する状態。
hovering
6
W 0141:2019
番号
用語
定義
対応英語(参考)
3331
静圧
流れに平行な物体面に垂直に働く圧力。
static pressure
3341
動圧
流体がもっている単位体積当たりの運動エネルギー。
dynamic pressure
3351
総圧,
全圧
流れが等エントロピー的(断熱可逆的)によどんだ場合の圧力。
非圧縮流れの場合は,静圧と動圧との和に等しい。
total pressure
3361
静安定
釣合い状態からじょう乱を受けたときに生じる力又はモーメン
トによって,無人航空機が元の釣合い状態に戻るかどうかの傾
向。
static stability
3371
動安定
釣合い状態からじょう乱を受けたときに生じる力又はモーメン
トによって,無人航空機が時間の経過によってどのような挙動
を示すかの性質。
dynamic stability
3381
縦安定
対称面内の運動に関する安定。
longitudinal stability
3391
方向安定
かた揺れ,横滑り又はこれらの組合せを含む運動に関する安定。 directional stability
3401
KV値
電圧1 V当たりのモータの回転数を示す値。
KV value
3411
マルチパス
無線通信において,発信源が同じである電波が建物,地形など
の影響によって複数の経路を経て受信側に届く状態。
multipath radio
propagation
2) 機能
番号
用語
定義
対応英語(参考)
4001
遠隔操作
プロポなどの操縦装置を活用し,空中での上昇,ホバリング,
水平飛行,下降などの操作を行うこと。
manual control
4011
手動操縦
人が遠隔の場所から実時間で無人航空機の飛行を制御するこ
と。
manual control
4021
姿勢アシスト
手動操縦時に姿勢を安定に自動制御する補助機能。
attitude assist
4031
自動操縦
飛行中における無人航空機の姿勢の変化又は設定された飛行条
件に応じて,組み込まれたプログラムによってロータ,操だ面
などを自動的に作動して,無人航空機の運動(方向,高度,速
度など),姿勢などを制御すること,又はその機能。
automatic control
4041
自動帰還
機体の不具合発生又は操縦者の指示によって,自動的に発着点
に帰還飛行する機能。
automated return to
base,
automated return to
home
4051
自律飛行
飛行中に遭遇するあらゆる状況に対し,地上からの指示によら
ずに,安全を確保した自動動作を継続し得る飛行。
autonomous flight,
autonomous operation
4061
ウェイポイント,
経路点
飛行前又は飛行中に入力され,通過順と通過位置とが決められ
た目標地点。
waypoint
4071
ウェイポイント制
御
ウェイポイントに沿って,自動で飛行するように定められた機
能。
waypoint control
4081
ガイダンス,
誘導
現在位置から指定された目標までの所望の移動経路の決定。
guidance
4091
ナビゲーション,
航法
計画された飛行位置,方向などを正しく航行する方法。
navigation
4101
ファースト・パー
ソン・ビュー,
FPV
機体に搭載したカメラからの視点。その視点によって操縦する
ことをいう場合もある。
first person view
4111
飛行中断
第三者へのリスクを最小限に抑えるために飛行を終了するよう
に設計された動作。
intentional flight
termination
4121
回収
無人航空機の着地又は着水動作。
recovery
4131
衝突回避
衝突又はその他の飛行を阻害する要因を検知し,回避を含む適
切な行動をとる能力。
collision avoidance,
detect and avoid
7
W 0141:2019
番号
用語
定義
対応英語(参考)
4141
非協調式衝突回避
他機からの情報に基づかないで動作する衝突回避。
non-cooperative
detect and avoid
4151
協調式衝突回避
他機からの情報に基づいて動作する衝突回避。
cooperative detect
and avoid
4161
ジオ・フェンス機
能,
ジオ・アウェアネ
ス機能
無人航空機の飛行範囲を制限する機能。
geofence,
geo-awareness
4171
三次元測位
飛行する空間内で水平方向及び垂直方向の位置の計測。
three-dimensional
positioning
4181
自己位置推定
飛行する空間内で水平方向及び垂直方向の自己位置の推定。
self-localization
4191
フライトモニタ
飛行中の無人航空機の状況を監視する機能,又はそのための機
材。
flight monitor
3) 性能基準
番号
用語
定義
対応英語(参考)
5001
耐久性
与えられた使用及び保全条件で,限界に到達するまで,仕様を
満足できる無人航空機の性能。
durability
5011
堅ろう(牢)性
機体にかかる荷重に対する耐性。
robustness
5021
飛行性
安定性,操縦性などを考慮した飛行の特性。
flying qualities
5031
耐風性能,
飛行可能風速
所定の経路を維持した飛行又は定位ホバリング可能な最悪な風
向での最大の風速。
wind limitation
5041
航続距離
無人航空機がその搭載燃料又は搭載バッテリ若しくはその両方
によって飛行を持続できる距離。
range
5051
航続時間,
最大使用可能時間
無人航空機がその搭載燃料又は搭載バッテリ若しくはその両方
によって飛行を持続できる時間。
endurance
5061
最大速度,
最高速度
連続最大出力又は連続最大スラスト時の定常水平飛行速度。
maximum speed
5071
絶対上昇限度
標準大気内で無人航空機が連続最大出力状態で水平飛行を維持
できる最大高度。
absolute ceiling
5081
ホバリング上昇限
度
回転翼無人航空機などがホバリングできる最大高度。
hovering ceiling
5091
機体重量,
空虚重量
機体,航法装置など飛行に必要な,搭載燃料及び飛行のために
必要なバッテリ重量を含まない機材の重量。
empty weight
5101
バッテリ搭載重量
電動無人航空機において機体重量と飛行のために必要なバッテ
リ重量との和。
battery installed
weight
5111
総重量
機体重量,搭載燃料及び飛行のために必要なバッテリ重量並び
にペイロード重量の総和。
gross weight
5121
最大離陸重量
無人航空機の機種ごとに定められた,その機種が離陸すること
ができる総重量の最大値。
maximum take-off
weight
5131
有効搭載量
最大離陸重量から機体重量を差し引いた燃料及びバッテリ,任
務機材,貨物又はペイロードに割り当てることができる重量。
useful load,
useful payload weight
5141
ペイロード
飛行に関係しない任務機材及び輸送の対象となる貨物。
payload
5151
飛行高度
無人航空機が飛行する高度。一般的に対地高度又は海抜高度の
いずれかで表す。
flight altitude
5161
飛行時間
無人航空機が離陸してからの経過時間。
flight time,
TOF,
time of flight
8
W 0141:2019
番号
用語
定義
対応英語(参考)
5171
飛行速度
無人航空機が飛行する速度。対気速度又は対地速度のいずれか
で表す。
flying speed
5181
対地速度
飛行中の無人航空機と地表面との相対的な水平飛行速度。
ground speed
5191
巡航速度
巡航飛行時の速度。
cruising speed
5201
着陸距離
無人航空機が着陸に際し,所定高度の点から接地し,完全に停
止するのに要する水平距離。
landing distance
5211
離陸距離
無人航空機が離陸に際し,静止出発点から加速を行い,所定の
高度に達するまでに要する水平距離。
take-off distance
d) システムの運用
番号
用語
定義
対応英語(参考)
6001
飛行計画
無人航空機の飛行日時,飛行経路,飛行高度,機体数及び機体
諸元の飛行内容に関するデータ。
flight plan
6011
運用,
運航
無人航空機を飛行させる行為全般。
operation
6021
無人航空機運航管
理,
UTM
無人航空機の運航を管理するための地上の体系。
unmanned aircraft
traffic management
6031
通信途絶,
電波断絶
無人航空機と地上装置との間の通信が不通となり,地上装置か
ら無人航空機の操作・操縦ができないこと。
lost C2 link
6041
電波見通し
無人航空機と地上局との間で,直接的な電波通信が確立できる
こと。
radio line of sight
6051
目視内飛行,
VLOS
無人航空機の操縦者が自分の目によって,無人航空機の位置及
び姿勢並びに地上及び水上の人及び物件の安全が損なわれるお
それがないことを把握できる状態で飛行させること。
visual line of sight
6061
目視外飛行,
BVLOS
目視内飛行でない飛行。
beyond visual line of
sight
6071
無人航空機運航者
単一又は複数の無人航空機の運航を行う者又は団体。無人航空
機運用者ともいう。
UAS operator
6081
無人航空機操縦者
無人航空機を手動操縦する者,又は自動操縦において,無人航
空機の飛行状況を把握し,必要に応じて,飛行を変更させる指
示を行う者。
UAS pilot,
remote pilot
6091
操縦切替
複数の地上装置の間で,無人航空機の操縦を切り替えること。
handover
6101
隔離空域
特定の無人航空機の運用が占有できる空域。
segregated airspace
6111
無人地帯
無人航空機の運用に関与する者も含めて,人が存在しない地帯。 no person area
6121
第三者無人地帯
第三者が存在しない地帯。
no third party area
参考文献
[1] JIS W 0106 航空用語(航空機一般)