T 9203:2016
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 3
4 種類及び記号 ··················································································································· 5
5 各部の名称 ······················································································································ 5
6 リスクマネジメントによる設計 ··························································································· 5
7 性能······························································································································· 6
7.1 電動車椅子の性能 ·········································································································· 6
8 構造······························································································································· 8
8.1 身体支持部 ··················································································································· 8
8.2 駆動部 ························································································································· 8
8.3 制御部 ························································································································· 8
8.4 充電部 ························································································································· 8
8.5 ブレーキ ······················································································································ 9
8.6 ねじ ···························································································································· 9
8.7 附属品 ························································································································· 9
8.8 動力及び制御システム ···································································································· 9
9 寸法及び角度 ·················································································································· 12
10 外観 ···························································································································· 15
11 試験条件 ······················································································································ 15
12 試験方法 ······················································································································ 16
12.1 機能試験 ···················································································································· 16
12.2 強度試験 ···················································································································· 27
12.3 耐衝撃性試験 ·············································································································· 34
12.4 耐久性試験 ················································································································· 37
12.5 耐水性能試験 ·············································································································· 41
12.6 制動用ブレーキに関する試験方法 ··················································································· 43
13 検査方法 ······················································································································ 43
13.1 形式検査 ···················································································································· 43
13.2 製品検査 ···················································································································· 43
14 製品の呼び方 ················································································································ 44
15 表示 ···························································································································· 44
16 取扱説明書 ··················································································································· 44
附属書A(規定)荷重負荷パッド及び試験用おもり ··································································· 46
T 9203:2016 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
附属書B(規定)走行耐久性試験装置及び落下試験装置の構成 ····················································· 49
附属書C(規定)評価要件 ···································································································· 50
附属書D(規定)動的安定性 ································································································· 51
附属書E(規定)テストダミー ······························································································ 65
附属書F(規定)ダミーの車椅子への拘束方法 ·········································································· 74
附属書G(規定)テストブロック ··························································································· 76
附属書H(規定)車椅子の設定 ······························································································ 78
附属書JA(規定)電動車椅子形式分類 ···················································································· 84
附属書JB(規定)電動車椅子の各部の名称 ·············································································· 86
附属書JC(規定)電動車椅子諸元表 ······················································································· 88
附属書JD(参考)ハザードリスト ·························································································· 89
附属書JE(参考)JISと対応国際規格との対比表 ······································································ 91
T 9203:2016
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づき,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本
工業規格である。これによって,JIS T 9203:2010は改正され,この規格に置き換えられた。
なお,平成29年10月19日までの間は,工業標準化法第19条第1項等の関係条項の規定に基づくJIS
マーク表示認証において,JIS T 9203:2010によることができる。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
T 9203:2016
電動車椅子
Electric wheelchairs
序文
この規格は,1977年に制定され,その後5回の改正を経て今日に至っている。前回の改正は2010年に
行われたが,その後のリクライニング機構及びティルト機構を装備した自操用座位変換形電動車椅子の増
加に伴い,座位変換形に対応するために改正した。2014年に第3版として発行されたISO 7176-1,2001
年に第2版として発行されたISO 7176-2,2012年に第3版として発行されたISO 7176-3,2008年に第3
版として発行されたISO 7176-4,2001年に第2版として発行されたISO 7176-6,2014年に第2版として
発行されたISO 7176-8,2008年に第2版として発行されたISO 7176-10,2012年に第2版として発行され
たISO 7176-11,1989年に第1版として発行されたISO 7176-13,2008年に第2版として発行されたISO
7176-14,1996年に第1版として発行されたISO 7176-15,2014年に第2版として発行されたISO 7176-22,
2007年に第1版として発行されたISO 7176-26を翻訳し,技術的内容を変更して作成した日本工業規格で
ある。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JEに示す。
1
適用範囲
この規格は,電動車椅子の最高速度が6 km/h以下のうち,電動車椅子形式分類(附属書JA参照)の自
操用標準形電動車椅子(以下,標準形という。),自操用簡易形電動車椅子(以下,簡易形という。)並びに
リクライニング機構(図JA.1参照)及びティルト機構(図JA.3参照)を装備した自操用座位変換形電動
車椅子(以下,座位変換形という。)について規定する。ただし,自操用座位変換形電動車椅子のうち昇降
機構,旋回機構,スタンドアップ機構のもの及びハンドル形電動車椅子は除く。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 7176-1:2014,Wheelchairs−Part 1: Determination of static stability
ISO 7176-2:2001,Wheelchairs−Part 2: Determination of dynamic stability of electric wheelchairs
ISO 7176-3:2012,Wheelchairs−Part 3: Determination of effectiveness of brakes
ISO 7176-4:2008,Wheelchairs−Part 4: Energy consumption of electric wheelchairs and scooters for
determination of theoretical distance range
ISO 7176-6:2001,Wheelchairs−Part 6: Determination of maximum speed, acceleration and
deceleration of electric wheelchairs
ISO 7176-8:2014,Wheelchairs−Part 8: Requirements and test methods for static, impact and fatigue
strengths
ISO 7176-10:2008,Wheelchairs−Part 10: Determination of obstacle-climbing ability of electrically
2
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
powered wheelchairs
ISO 7176-11:2012,Wheelchairs−Part 11: Test dummies
ISO 7176-13:1989,Wheelchairs−Part 13: Determination of coefficient of friction of test surfaces
ISO 7176-14:2008,Wheelchairs−Part 14: Power and control systems for electrically powered
wheelchairs and scooters−Requirements and test methods
ISO 7176-15:1996,Wheelchairs−Part 15: Requirements for information disclosure, documentation and
labelling
ISO 7176-22:2014,Wheelchairs−Part 22: Set-up procedures
ISO 7176-26:2007,Wheelchairs−Part 26: Vocabulary(全体評価:MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0205-1 一般用メートルねじ−第1部:基準山形
JIS B 0205-2 一般用メートルねじ−第2部:全体系
JIS B 0205-3 一般用メートルねじ−第3部:ねじ部品用に選択したサイズ
JIS B 0205-4 一般用メートルねじ−第4部:基準寸法
JIS B 0209-1 一般用メートルねじ−公差−第1部:原則及び基礎データ
JIS B 0209-2 一般用メートルねじ−公差−第2部:一般用おねじ及びめねじの許容限界寸法−中(は
めあい区分)
JIS B 0209-3 一般用メートルねじ−公差−第3部:構造体用ねじの寸法許容差
JIS B 0209-4 一般用メートルねじ−公差−第4部:めっき後に公差位置H又はGにねじ立てをした
めねじと組み合わせる溶融亜鉛めっき付きおねじの許容限界寸法
JIS B 0209-5 一般用メートルねじ−公差−第5部:めっき前に公差位置hの最大寸法をもつ溶融亜鉛
めっき付きおねじと組み合わせるめねじの許容限界寸法
JIS C 0920 電気機械器具の外郭による保護等級(IPコード)
注記 対応国際規格:IEC 60529:2001,Degrees of protection provided by enclosures (IP Code)(IDT)
JIS D 0203 自動車部品の耐湿及び耐水試験方法
JIS D 5500 自動車用ランプ類
JIS D 9452 自転車−リフレックスリフレクタ
JIS K 7222 発泡プラスチック及びゴム−見掛け密度の求め方
JIS T 0102 福祉関連機器用語[支援機器部門]
JIS Z 8401 数値の丸め方
JIS Z 9117 再帰性反射材
ISO 2439,Flexible cellular polymeric materials−Determination of hardness (indentation technique)
ISO 7176-7,Wheelchairs−Part 7: Measurement of seating and wheel dimensions
3
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS T 0102によるほか,次による。
3.1
身体支持部(body support system)
使用者の身体にじかに接しており,身体を支えるもの。シート,バックサポート,アームサポート,フ
ット・レッグサポート,その他の附属品からなる。
3.2
駆動部(driving system)
駆動モータ,減速機及びバッテリからなる部分。
3.3
制御部(controller)
操作ボックス及びコントローラからなる部分。
3.4
充電部
バッテリを充電するもの。車載式及び別置式がある。
3.5
車輪(wheels)
駆動輪及びキャスタ又は操だ(舵)輪からなる部分。
3.6
フレーム(frame)
電動車椅子の各部分を支持及び結合するもの。
3.7
ブレーキ(braking system)
車輪に制動力を加えるもの。手動ブレーキ及び自動ブレーキがある。
3.8
自操用室内形電動車椅子
室内専用での走行を目的とした電動車椅子。
3.9
低速用
最高速度4.5 km/h以下の電動車椅子。
3.10
中速用
最高速度6.0 km/h以下の電動車椅子。
3.11
予備走行
試験前に暖機走行として行われる約1.5 kmの走行。
3.12
走行可能状態にある電動車椅子
電源及びクラッチが入っており,操作レバーを操作するだけで走行することができる状態にある電動車
椅子。
4
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.13
完全な転倒(full tip)
制止装置又は試験に関わる試験要員によって支えられなければ,電動車椅子が完全に傾斜し最初の定位
置から少なくとも90°又はそれ以上となる状態。
3.14
駐車用ブレーキ(parking brake)
電動車椅子を停止させておくためのブレーキ。
3.15
最高出力状態
操作レバーをその電動車椅子の最大出力を発生できる位置に維持している状態。
3.16
使用者(user,occupant)
電動車椅子に乗車する人。
3.17
介助者(assistant)
電動車椅子を介助操作する人。
3.18
使用者最大体重(maximum occupant mass)
製造業者が示す電動車椅子に乗ることができる使用者の最大体重(積載物を含む。)。
3.19
トレーリングポジション(trailing position)
電動車椅子が前方直進状態にあるときのキャスタ輪の位置のことをいい,キャスタ輪が進行方向に対し
てキャスタ旋回軸の真後ろにある状態。
3.20
バッテリパック
一つ以上のバッテリを収容する脱着可能なバッテリケース。
3.21
バッテリセット
電源供給可能状態に接続されたバッテリ。
3.22
リクライニング機構
バックサポート角度が変換でき,バックサポートの傾斜を工具を使わずに調整できる機構。
3.23
ティルト機構
シートとバックサポートとの角度が固定されたまま,シート及びバックサポートの傾斜を一体的に工具
を使わずに調整できる機構。
3.24
ティルト・リクライニング機構
バックサポート角度及びシート角度が変換でき,バックサポート及びシートの傾斜をそれぞれ工具を使
わずに調整できる機構。
5
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.25
座位変換機構操作部
リクライニング機構,ティルト機構又はティルト・リクライニング機構を,使用者及び介助者が操作す
るためのレバー,ボタンなど。
3.26
操作方式
リクライニング機構,ティルト機構又はティルト・リクライニング機構を操作する工学的な方法。電動
アクチュエータ,メカニカルロック方式及びガスダンパー方式がある。
3.27
座位変換形
リクライニング機構,ティルト機構,昇降機構などの座位変換を可能とする形式。ただし,昇降機構,
旋回機構及びスタンドアップ機構は,この規格の対象ではない。
3.28
標準状態
表6に示す状態をいう。
3.29
基準線
試験する車椅子を直線的に走行させるときに走行すると期待する軌跡。
3.30
エレベーティング機構
脚部の機構について,シートとフット・レッグサポートとの角度が調整できる機構(挙上式ともいう。)。
4
種類及び記号
電動車椅子の種類は,形式(附属書JA参照)及び速度によって区分する。
a) 形式
1) 標準形
2) 座位変換形
3) 簡易形
b) 速度による分類
1) 低速用(LS)
2) 中速用(MS)
5
各部の名称
電動車椅子の各部の名称は,附属書JBによる。
6
リスクマネジメントによる設計
リスクマネジメントによる設計は,次の事項について実施し,実施手順及び結果は,製造事業者及び販
売事業者によって文書化し維持しなければならない。また,関連するハザードリストとして附属書JDに
記載した事項についても,リスクマネジメントによる設計を行うことが望ましい。
a) 乗降時に誤って操作レバーに触れるなど操作に関する事項
6
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 電源スイッチのオン状態を確認するなど,動作状態に関する情報の提供などに関する事項
c) 人間工学的配慮事項の例は,次による。
1) 身体寸法 座った状態で操作が可能な操作機器の配置など
2) 姿勢 安定した座位の確保など
3) 聴力 警報音の特性,光による警告など
4) 視力 表示文字の大きさ及び色,音による警告など
5) 身体の動作 走行操作,ハンドル操作など
6) 操作中の不測の事態 使用者が意識を失うなど
7
性能
7.1
電動車椅子の性能
電動車椅子の性能は,次による。
a) 電動車椅子の機能,強度,耐衝撃性,耐久性及び耐水性は,12.1,12.2,12.3,12.4及び12.5の試験を
行ったとき,表1の規定に適合しなければならない。
b) 簡易形のブレーキ性能は,12.6の試験を行ったとき,表2の規定に適合しなければならない。
表1−機能,強度,耐衝撃性,耐久性及び耐水性
項目
性能
標準
形
座位
変換
形
簡易
形
試験方
法(箇条
番号)
機能
最高速度
LS(低速用)
4.5 km/h以下
○
○
○
12.1.1
MS(中速用)
6.0 km/h以下
登坂性能
10°の斜面を直進で登ること及び発
進ができなければならない。ただし,
簡易形は7°で行う。
○
○
○
12.1.2
降坂性能
10°の斜面において最高速度(実測
値)の115 %以内でなければならな
い。ただし,簡易形は7°で行う。
○
○
○
12.1.3
制動性能
平たん路では1.5 m以内で停止でき
なければならない。降坂では,10°
の斜面において3 m以内で停止,基
準線からの変位量は0.5 m以内でな
ければならない。簡易形は7°で行
う。ただし,自動ブレーキ未装着の
ものについては実施しない。
○
○
○
12.1.4
傾斜停止力
10°の斜面で静止できなければなら
ない。ただし,簡易形は7°で行う。
○
○
○
12.1.5
静的安定性
上向き,下向き20°及び側方15°の
傾斜に対して安全でなければならな
い。ただし,簡易形は全ての方向に
対して10°で行う。最も不安定な状
態について標準状態と同様な試験を
実施し情報を開示する。
○
−
○
12.1.6.1
−
○
−
12.1.6.2
7
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−機能,強度,耐衝撃性,耐久性及び耐水性(続き)
項目
性能
標準
形
座位
変換
形
簡易
形
試験方
法(箇条
番号)
機能
段差乗越
前進又は後退によって,助走なしで
25 mm及び助走ありで40 mmの段差
乗越ができなければならない。ただ
し,簡易形は助走なしで12 mmだけ
で行う。
○
○
○
12.1.7
溝踏破走行性
幅100 mm,深さ100 mmの溝を踏破
できなければならない。
○
○
○
12.1.8
坂道走行性
6°の斜面におけるS字走路を逸脱及
び異常なく登降できなければならな
い。
○
○
○
12.1.9
斜面直進走行性
3°の斜面において幅1.2 mの走路を
逸脱してはならない。
○
○
○
12.1.10
回転性能
標準形及び簡易形は幅0.9 m,座位変
換形は幅1.2 mの直角路を曲がれな
ければならない。
○
○
○
12.1.11
強制停止
車体,駆動システム,電気回路など
に異常があってはならない。
○
○
○
12.1.12
連続走行距離
表示された連続走行距離以上でなけ
ればならない。
○
○
○
12.1.13
駆動輪・主輪の振れ
縦・横振れとも2 mm以下でなければ
ならない。
−
−
○
12.1.14
ハンドリムの振れ
縦振れ5 mm以下及び横振れ3 mm以
下でなければならない。
−
−
○
12.1.15
動的安定性
附属書Dによって実施し情報開示す
る。
○
○
○
12.1.16
放電後のバッテリに対する安
全性
前後方向から1 m以上逸脱した走行
をしてはならない。また,駆動モー
タ以外のモータは,意図しない動き
があってはならない。
○
○
○
12.1.17
強度
垂直静荷重
附属書Cの評価要件を満たさなけれ
ばならない。
○
○
○
12.2.1
アームサポート下方耐荷重
○
○
○
12.2.2
アームサポート上方耐荷重
○
○
○
12.2.3
フットサポート上方耐荷重
○
○
○
12.2.4
ティッピングレバー耐荷重
○
○
○
12.2.5
手押しハンドル上方耐荷重
○
○
○
12.2.6
バックサポート部の耐荷重
−
○
−
12.2.7
グリップ耐離脱性
○
○
○
12.2.8
耐衝
撃性
バックサポート斜め耐衝撃性
附属書Cの評価要件を満たさなけれ
ばならない。
○
○
○
12.3.1
フットサポート耐
衝撃性
前方
○
○
○
12.3.2
側方
○
○
○
ハンドリム耐衝撃性
−
−
○
12.3.3
キャスタ耐衝撃性
○
○
○
12.3.4
シート耐衝撃
〇
○
〇
12.3.5
8
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−機能,強度,耐衝撃性,耐久性及び耐水性(続き)
項目
性能
標準
形
座位
変換
形
簡易
形
試験方
法(箇条
番号)
耐久
性
駐車用ブレーキの耐久性試験
附属書Cの評価要件を満たさなけれ
ばならない。
−
−
○
12.4.1
走行耐久性
○
−
○
12.4.2.1
−
○
−
12.4.2.2
落下耐久性
○
−
○
12.4.3.1
−
○
−
12.4.3.2
キャスタアップ繰返し
−
−
○
12.4.4
耐水性
試験後,最高速度,平たん路制動性
能に適合し,車体,駆動部,電気回
路などに異常があってはならない。
○
○
○
12.5
表2−ブレーキに関する性能
項目
性能
適用試験
項目
強度
異常があってはならない。
12.6.1
8
構造
8.1
身体支持部
身体支持部は,次による。
a) シート,バックサポート,アームサポート及びフット・レッグサポートは,使用者の身体を確実に支
持できなければならない。
b) 調節機能及び着脱機能のあるシート,バックサポート,アームサポート及びフット・レッグサポート
は,使用中外れず,調整,取付け及び取外しは容易でなければならない。
c) リクライニング機構,リフト機構及びティルト機構は容易に作動し,任意の角度及び位置で完全に固
定でき,使用者の身体を確実に支持できなければならない。
d) シートベルトを装備している電動車椅子は,使用者の身体を確実に固定でき,シートベルトの着脱は
容易でなければならない。
8.2
駆動部
駆動部は,次による。
a) 速度,操だ(舵)の制御は,手又は身体の一部で容易に操作できなければならない。
b) 手押し移動が容易にできなければならない。
8.3
制御部
制御部は,次による。
a) ジョイスティック方式の操作ボックスは,左右いずれにも取付けができなければならない。
b) 速度は,最高速度まで任意に調節できなければならない。
c) 電気回路には,適切な保護回路を設けなければならない。
d) 発進及び停止時に,使用者に強い衝撃を与えてはならない。
8.4
充電部
充電部は,次による。
9
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 使用者の見やすい場所にバッテリ残量表示装置を設ける。
b) 電気回路には,適切な保護回路を設ける。
c) 充電中には,走行できてはならない。
8.5
ブレーキ
ブレーキは,次による。
a) 自動ブレーキを装備する。ただし,簡易形については任意とするが,自動ブレーキを装備しない簡易
形については,操作が容易で左右両輪を確実に制御できる駐車ブレーキをもたなければならない。
b) ブレーキの操作は容易で,車輪を確実に制動できなければならない。
c) 電源を切ったとき,自動的に制動がかかる機能をもつものとする。ただし,簡易形で自動ブレーキの
ないものを除く。
8.6
ねじ
電動車椅子各部の取付けに用いるねじは,通常,JIS B 0205-1〜JIS B 0205-4及びJIS B 0209-1〜JIS B
0209-5に規定する一般用メートルねじを用いることが望ましい。
8.7
附属品
附属品として,次の装置を装備してもよい。
a) 反射器 反射器は,JIS D 9452又はJIS D 5500の反射性能をもち,最大2個の総面積2 000 mm2以上
の赤色系反射板を後面に装備する。また,JIS Z 9117の反射性能をもち,面積1 000 mm2以上の白色
系反射板を前面及び側面に装備する。又はこれと同等以上のものとする。
b) 警報器 警報器は,警報器の正面前方から2 m離れた位置で,67 dB以上の音量がなければならない。
c) ヘッドサポート
8.8
動力及び制御システム
8.8.1
バッテリ
バッテリは,電動車椅子製造事業者の指定による。
8.8.2
バッテリに接続される電線の色及びマーク
バッテリの(+)端子に接続される動力用の電線は赤色とし“+”記号で恒久的に表示し,バッテリの
(−)端子に接続される電線は赤以外の色とし,“−”記号で恒久的に表示する。バッテリの(+)端子に
接続される電線であっても動力用以外は,赤以外の色でなければならない。
8.8.3
絶縁
電動車椅子のフレームは,目的をもったインピーダンス回路による場合を除き,バッテリセット,又は
電動車椅子の電気系のその他の部品に接続してはならない。直流インピーダンスでは10 kΩ以上,回路電
流では5 mA以下でなければならない。
8.8.4
ヒューズ
使用者又は介助者が扱うヒューズの交換は,工具を必要とせず交換時に活線状態のリード線及び端子が
他の電気部品に接触してはならない。
8.8.5
コネクタの交換性
使用者又は介助者が着脱するコネクタは,製造事業者が意図しない接続ができないようにし,次による。
a) 正しい組合せだけが許される形状
b) プラグへの電線の長さは,正しい組み付けのときだけ合致する。正しい組み付けは,単に色分けだけ
であってはならない。
8.8.6
非絶縁電気部品からの保護
10
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
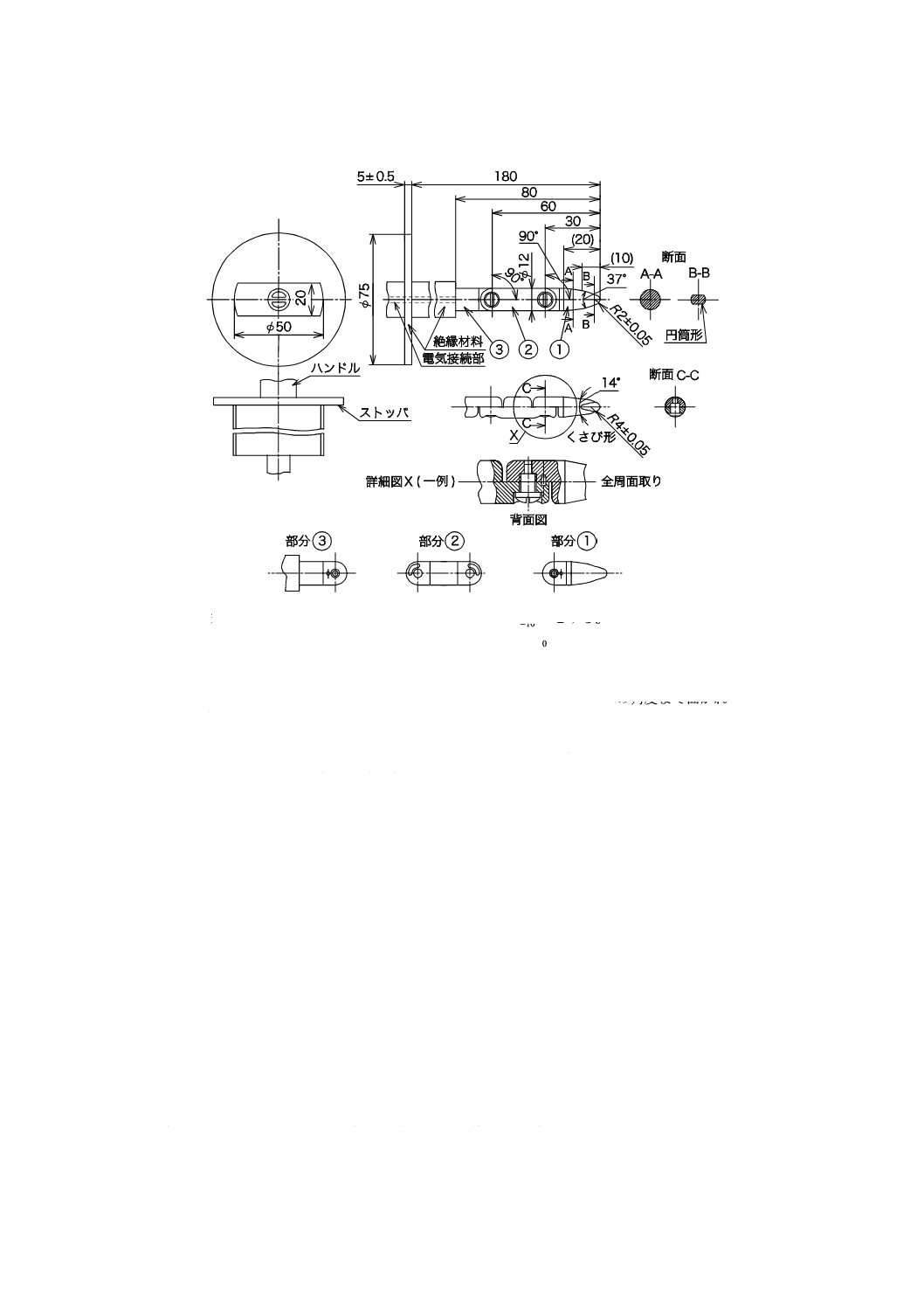
標準関節なしテストフィンガ(図1参照)を30±1 Nであらゆる方向から全ての隙間に当てる。テスト
フィンガが隙間に入った場合に,全ての位置で,標準関節付きテストフィンガ(図2参照)の関節を曲げ
たり,伸ばしたりし,非絶縁部品に接触するかどうか調べる。10 kΩ以上の直流インピーダンスをもつ回
路によって保護されるものを除き,非絶縁部品にテストフィンガが接触してはならない。
単位 mm
図1−標準関節なしテストフィンガ
11
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
規定の許容差以外の寸法許容差:角度の許容差は100
−°とする。
直線寸法については,25 mm以下の場合は許容差を
06
.00
−
mm,25 mmを超える場合
は許容差を±0.2 mmとする。
①,②,③の部分の材料は金属(例えば,熱処理した鋼)
このフィンガの二つの接合部は,一つの同じ方向にだけ90
0
10
+°の角度まで曲がれ
ばよい。
ピン及び溝の使用は,曲げ角度を90°に制限する手段の一つである。したがって,
この部分の詳細図には,寸法及び許容差を示していない。実際の設計に当たっては,
0〜+10°の許容差内で曲げ角度90°を確保する。
図2−標準関節付きテストフィンガ
8.8.7
短絡保護
バッテリの短絡保護装置は,バッテリパックのできるだけ近くにあるものとする。短絡保護装置は,自
動リセットタイプとしてはならない。
8.8.8
バッテリの逆接続
バッテリセットの接続を逆にした場合には,ヒューズが切れる以外にコントローラ又は駆動系の部品及
び充電器に損傷を生じてはならない。もし,逆接続した場合でも製造事業者の仕様どおりに作動し,制御
不能又は望ましくない動作をしてはならない。回路保護装置をリセット又は交換して,バッテリセットを
正規の接続にした後は,走行可能でなければならない。
8.8.9
コントローラの過電圧保護
公称電圧の1.33±0.05倍の電圧源をバッテリの代わりに接続して動作させ,コントローラが故障又は制
御不能に陥ってはならない。また,停止を除く電動車椅子の異常な動き又はヒューズ切れ以外のコントロ
ーラの損傷があってはならない。
12
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.8.10
充電器の電圧設定
電圧設定は,工具の使用,キーエントリーの組合せなどによって行えるようにしなければならない。
なお,自動調整機能をもつものには適用しない。
8.8.11
充電特性の設定
充電特性の設定は,工具の使用,キーエントリーの組合せなどによって変更できるようにしなければな
らない。
なお,自動調整機能をもつものには適用しない。
8.8.12
充電時間
100 %放電から8時間充電し,0.2 C(A)で放電し4時間で終止電圧に達しないことを確認する。環境温
度を18〜25 ℃の室温とする。
注記 0.2 Cは,5時間率容量の20 %。
8.8.13
充電用端子の耐熱性
電動車椅子に充電用端子がある場合,80±3 ℃の環境下に1時間放置した後でも,充電用端子は,初期
性能を満たし,各部に緩み,破損,外れ,使用上支障のある変形及びその他の異常が生じてはならない。
8.8.14
充電用端子の開閉
充電器を車載していない電動車椅子において,電動車椅子側の充電用端子と充電器側の充電用端子との
端子間の開閉(脱着)を最大電流で10回行っても初期性能を満たし,短絡,接点の溶着その他電気的又は
機械的な異常が生じてはならない。
8.8.15
充電器の遅延動作性
バッテリ充電器とバッテリセットとの間にタイミング機能をもつ電流検出手段を接続し,充電を開始し
てから,充電電流が流れ始めるまでに0.5秒以上保持しなければならない。
可燃ガスを発生するバッテリ用の充電器については,充電器のスイッチを入れた後,バッテリセットが
接続されて充電が始まるまでに,0.5秒以上の遅れがなければならない。
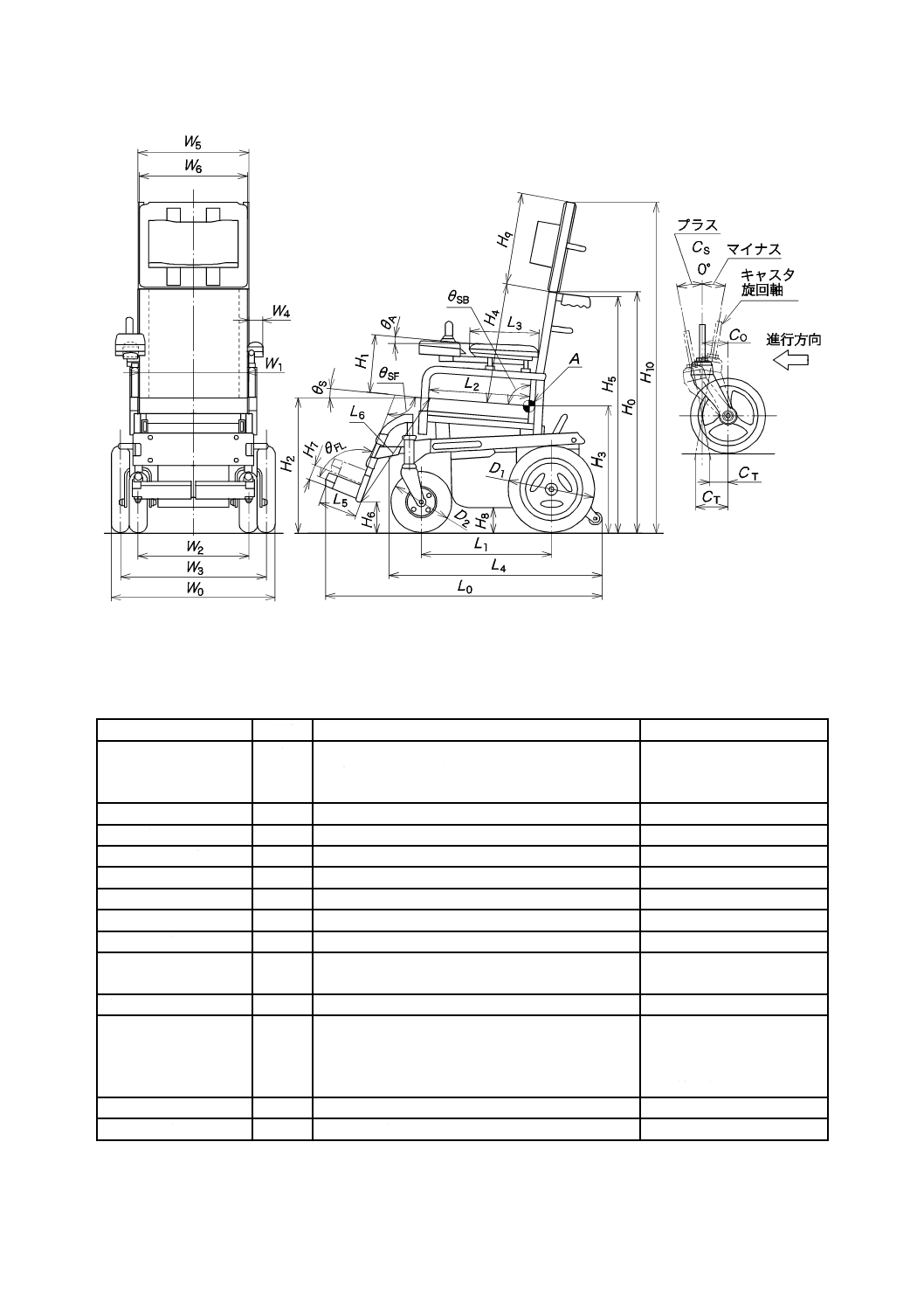
9
寸法及び角度
電動車椅子の寸法及び角度は,調節機能のあるものについては,表6の電動車椅子の標準状態又は最も
近い状態で行い,表3,表4及び図3による。ただし,寸法は,特に必要があればこの限りではない。
なお,シート形状が平面でなく,人体に合わせて曲面で構成されている場合の寸法基準点A(表4参照)
は,製造事業者の設計上定めた基準点による。
表3−最大寸法
単位 mm
区分
最大寸法a)
全長(L0)
1 200
全幅(W0)
700
全高(H0)b)
1 200
注a) リクライニング機構(図JA.1参照),リフト機構(図JA.2参
照)及びティルト機構(図JA.3参照)を装備する電動車椅子
は,標準状態の寸法とする。
b) ヘッドサポート取外し時。ただし,バックミラーをもつ場合,
その高さは1 090 mmとする。
13
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
正面図
側面図
キャスタの詳細図
図3−自操用標準形
表4−電動車椅子の寸法及び角度の名称及び定義
用語
記号
用語の意味
参考
寸法基準点
A
電動車椅子寸法の基準となる点で,バックサポー
ト前面又はその延長面とシート上面又はその延長
面との交点をいう。
−
全幅
W0
使用時における電動車椅子の左右外側の最大寸法
−
シート幅
W1
使用時におけるシートの最大幅
−
トレッド(前輪)
W2
左右タイヤと路面との接触面の中心間距離
−
トレッド(後輪)
W3
左右タイヤと路面との接触面の中心間距離
−
アームサポート幅
W4
アームサポートの幅
−
アームサポート間隔
W5
左右のアームサポート間の内側寸法
−
バックサポート幅
W6
使用時におけるバックサポートの最大幅
−
折りたたみ全幅
W7
折りたたみ時における電動車椅子の左右外側の最
大寸法
手動車椅子(JIS T 9201)の
図3を参照。
全長
L0
使用時における電動車椅子の前後方向の最大寸法
−
ホイールベース
L1
前後車輪軸間の水平距離。前輪がキャスタの場合
はトレーリングポジションとする。
室内形など四輪以上の車輪
がある場合は前輪の接地点
と最後部の駆動輪又は主輪
との接地点。
シート奥行き
L2
寸法基準点からシート先端までの距離
−
アームサポート長
L3
アームサポートの長さ
−
14
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表4−電動車椅子の寸法及び角度の名称及び定義(続き)
用語
記号
用語の意味
参考
フレーム長
L4
フット・レッグサポート取外し後の前後方向の最
大寸法
−
フットサポート長
L5
フットサポート前後方向の最大長さ
−
フットサポート・シー
ト間距離
L6
フットサポート上面からシート取付けフレーム上
におけるシート前端上面までの最短距離
−
折りたたみ全長
L7
折りたたみ時における電動車椅子の前後方向の最
大寸法
手動車椅子(JIS T 9201)の
図3を参照。
全高
H0
使用時における床から電動車椅子の最高点までの
垂直距離
−
アームサポート高
H1
寸法基準点とアームサポート上面又は,その延長
線上との垂直距離
−
前座高
H2
床からシート前端上面最高点までの垂直距離
−
後座高
H3
床から寸法基準点までの垂直距離
−
バックサポート高
H4
寸法基準点からバックサポート上端までの距離
−
手押しハンドル高
H5
床から手押しハンドル後端の上端までの垂直距離
−
フット・レッグサポー
ト高
H6
床からフット・レッグサポート最下端までの垂直
距離
−
フットサポート調整範
囲
H7
フットサポートの高さ調整範囲
−
最低地上高
H8
床から最下部までの高さ
転倒防止装置は含めない。
ヘッドサポート高
H9
バックサポート最上部からヘッドサポート最上部
までの高さ
−
ヘッドサポートを含ん
だ全高
H10
床からヘッドサポート最上部までの高さ
−
折りたたみ全高
HH
折りたたみ時における床から電動車椅子の最高点
までの垂直距離
手動車椅子(JIS T 9201)の
図3を参照。
駆動輪(主輪)径
D1
駆動輪又は主輪の最大直径(インチでもよい。)
室内形など四輪以上の車輪
がある場合は最も大きい駆
動輪又は主輪。
キャスタ径
D2
キャスタ輪の最大直径(インチでもよい。)
−
シート角度
θS
水平面に対するシート上面の角度
−
シートとバックサポー
トとの角度
θSB
シート取付けフレーム上におけるシート面とバッ
クサポート取付けフレーム上におけるバックサポ
ート面との内角。
−
バックサポート角度
θB
鉛直線とバックサポートとの角度
−
シートとフットサポー
トとの角度
θSF
シートとレッグサポートとの成す角度
−
アームサポート角度
θA
水平面に対するアームサポート面の角度
−
キャスタ角
θCS
キャスタ軸の鉛直線に対する前後方向の角度(後
方へ傾いた状態が−,その反対が+)
−
フットサポートとレッ
グサポートとの角度
θFL
フットサポートとレッグサポートとの成す角度
−
キャスタトレール
CT
キャスタ軸の延長線が地面に接する点とキャスタ
輪の接地点との距離
−
キャスタオフセット
CO
キャスタ軸が垂直のときのキャスタ軸中心とキャ
スタ輪の車軸中心との水平距離
−
15
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10
外観
外観は,次のとおりとし,使用者及び介助者の安全性を損なってはならない。
a) 仕上げは良好で,各部に変形,亀裂,溶接不良などがなく,人体に触れる部分並びに人体に触れるお
それのある部分には,ばり,かえり及び鋭い突起があってはならない。
b) 人体に触れる部分及び人体に触れるおそれのある部分で,高温になりやけどをする可能性がある場合
には,やけどを防ぐための処置をしなければならない。
c) 表面処理などをしている面には,素地の露出,剝がれ,さびなどの不良があってはならない。
d) 表面処理などをしていない面には,さび,割れなどの不良があってはならない。
11
試験条件
試験条件は,次による。
a) 試験時の温度は,特に指定のない限り,20±15 ℃とし試験実施時の温度及び湿度を記録する。
b) 試験に用いる試験路面は,平たんでなければならない。
なお,試験路面の摩擦係数は附属書Gに規定する0.75〜1.00になるようにする。
c) 12.1の機能試験は,図E.1〜図E.11に示すテストダミー(以下,ダミーという。)を使用するか又は
乗員が乗って行う。使用者最大体重は,表5に規定する。乗員の場合は,調整用砂袋など及び着衣を
含めた質量とし,砂袋などをシート上に左右均等に搭載する。また,乗員は電動車椅子のシート中央
に座り,バックサポート基準面に添った姿勢とし,足はフットサポートの中央に載せ試験を実施する。
なお,おもりの質量配分を,表E.1に示す。
表5−電動車椅子の使用者最大体重
単位 kg
使用者最大体重
ダミー質量又は乗員体重
25以下
25
25を超え
50以下
50
50を超え
75以下
75
75を超え 100以下
100
d) 試験に用いるバッテリは,定格の75 %以上充電したものを用いる。ただし,12.1.17の試験は除く。
e) 空気入りタイヤの空気圧は,製造事業者の指定値に調整する。空気圧の範囲が定められている場合は,
その最高値に調整する。
f)
調節機能のある電動車椅子は,表6の標準状態で試験を行う。調節機能はあるが,表6の標準状態に
調節できない電動車椅子は,できる限りそれに近い不安定な状態とする。静的安定性試験(12.1.6)及
び動的安定性試験(12.1.16)は,調整範囲の中で表7の最も不安定な状態でも試験を行う。ただし,
調節機能のない電動車椅子は,この限りではない。
16
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表6−電動車椅子の標準状態
区分
標準状態a)
フット・レッグサポート高
H6
床面から50 mm
シート角度
θS
4°
シートバックサポート角度
θSB
100°
フットサポートとレッグサポートとの角度 θFL
90°
注a) 図3参照。
表7−電動車椅子の最も不安定な状態
電動車椅子部品の調整
最も不安定な状態
後方安定性
前方安定性
側方安定性
シート位置(垂直)
高い
高い
高い
バックサポート角度(リクライニング)
後方
前方
直立
シート角度(傾斜)
後方
前方
直立
g) 試験は必要に応じて,予備走行した後に行う。
h) ワイヤーの遊びは,製造事業者の指定値とする。
i)
規定のない項目は,最も不利な条件で試験を実施する。ただし,調整機能のない電動車椅子はこの限
りではない。
12
試験方法
12.1
機能試験
12.1.1
最高速度試験
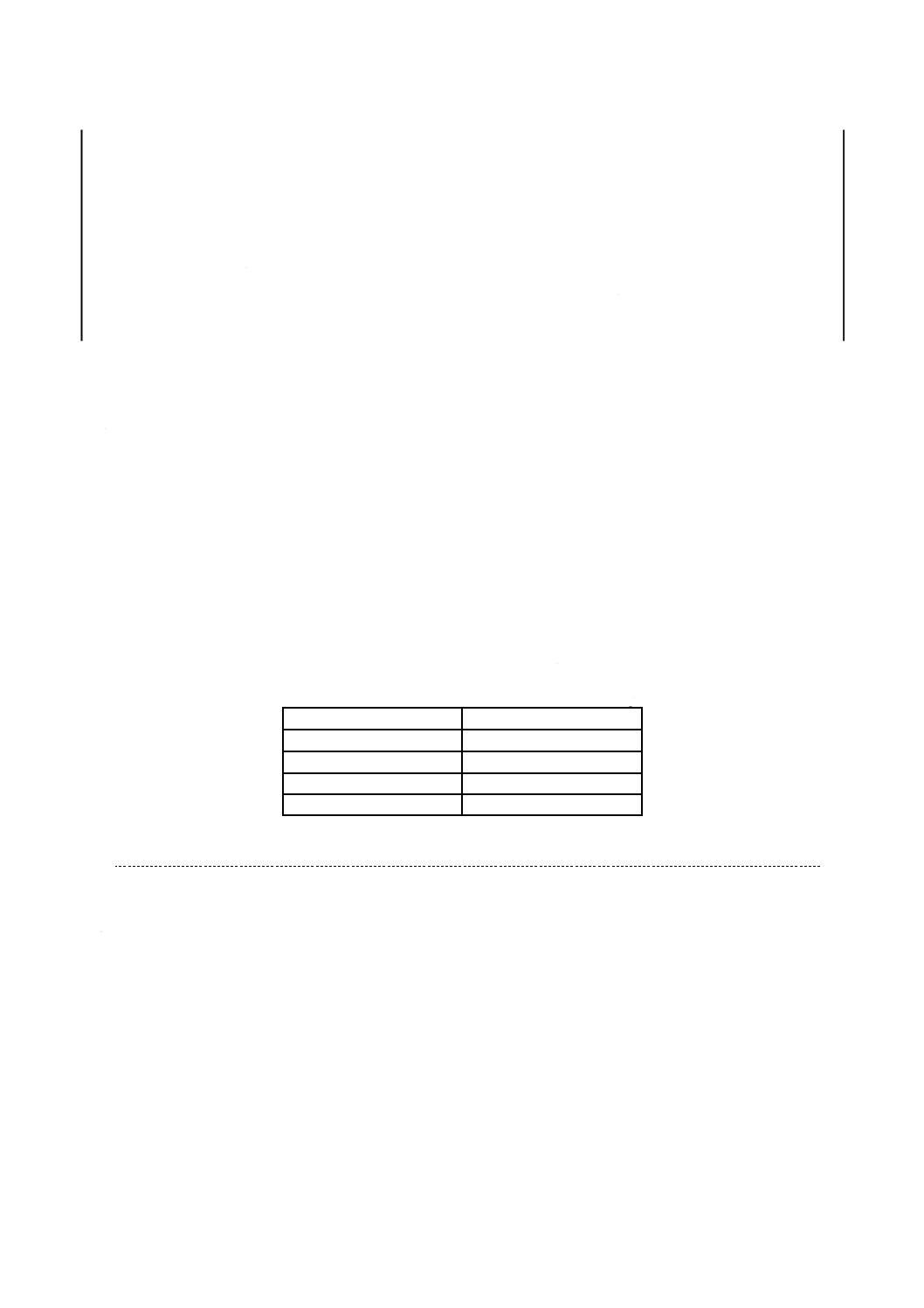
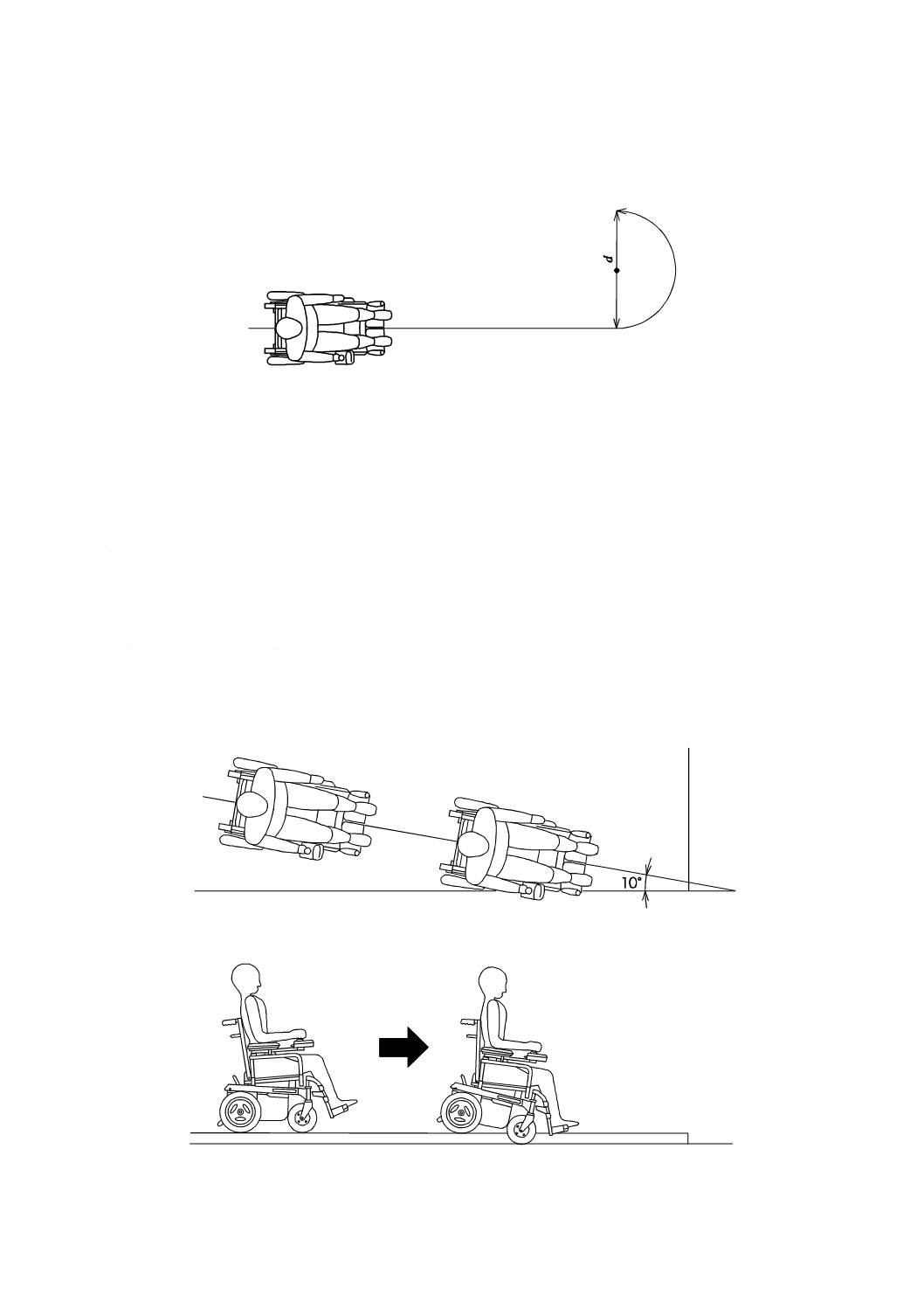
最高速度試験は,試験前に予備走行を行い,図4に規定するように,次の手順で最高速度(V)を算出
する。
図4−最高速度試験
a) 前進で走行可能状態にある電動車椅子が走行中心直線上を走行し,助走区間で最高速度にする。
b) 前進で助走区間での最高速度を維持したまま,測定区間(10 m)を走行する。
c) 測定区間(10 m)の所要時間を小数点以下2桁までストップウォッチなどで測定する。
d) 同一測定区間を2往復測定して平均所要時間(T)を求める。
e) 最高速度(V)は,次の式によって小数点以下2桁まで算出し,JIS Z 8401によって小数点以下1桁に
17
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
丸める。
T
V
36
=
ここに,
V: 最高速度(km/h)
T: 平均所要時間(s)
f)
e) の手順で求められた値を前進時の最高速度(V)とする。
g) 後退時の最高速度(V)の求め方は,a)〜f) の手順を後退によって行い,前進時と同様にe) の式によ
って求める。
12.1.2
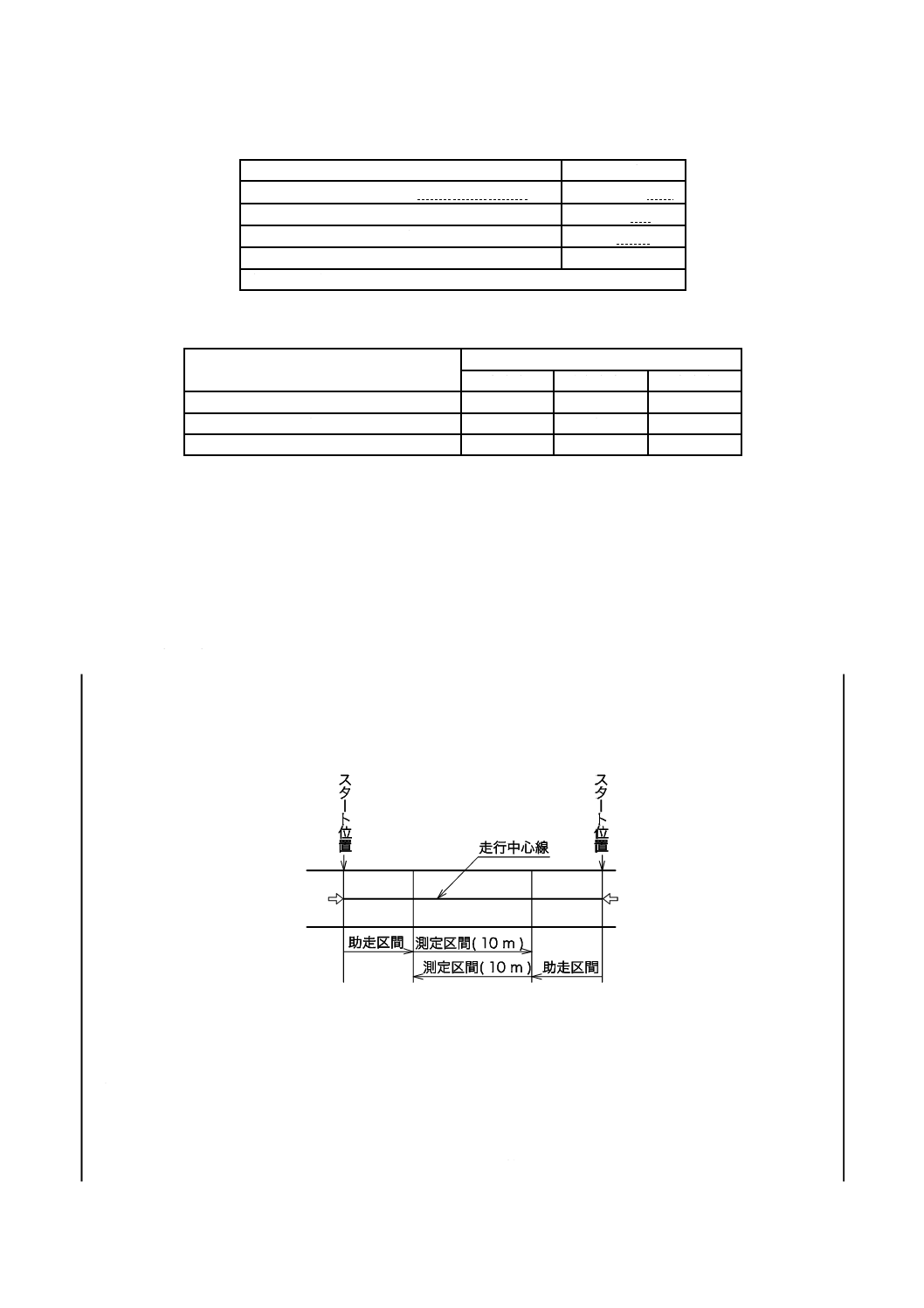
登坂性能試験
図5に規定するように,走行可能状態にある電動車椅子を傾斜角度10°の斜面において,長さ5 mの登
坂区間で,停止状態から前進でスタートして登坂走行を行う。登坂走行中に停止又は電気回路などの安全
装置が作動して停止した場合及び発進時に完全な転倒状態になった場合は,登坂できないものとみなす。
簡易形は7°の傾斜角度で行う。ただし,走行速度は規定しない。
図5−登坂性能試験
12.1.3
降坂性能試験
図6に規定するように,走行可能状態にある電動車椅子を傾斜角度10°の斜面において,長さ5 mの降
坂区間で,停止状態から最高出力状態で前進する。4 mの助走区間を走行し1 mの計測区間における平均
速度を求める。
なお,試験は3回繰り返し3回の平均速度を求める。簡易形は7°の傾斜角度で行う。
図6−降坂性能試験
12.1.4
制動性能試験
走行可能状態にある電動車椅子の操作レバーを初期状態に戻すことによって,自動ブレーキが作動し制
18
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
動をかける試験で,次による。
なお,自動ブレーキ以外のブレーキは使用しない。
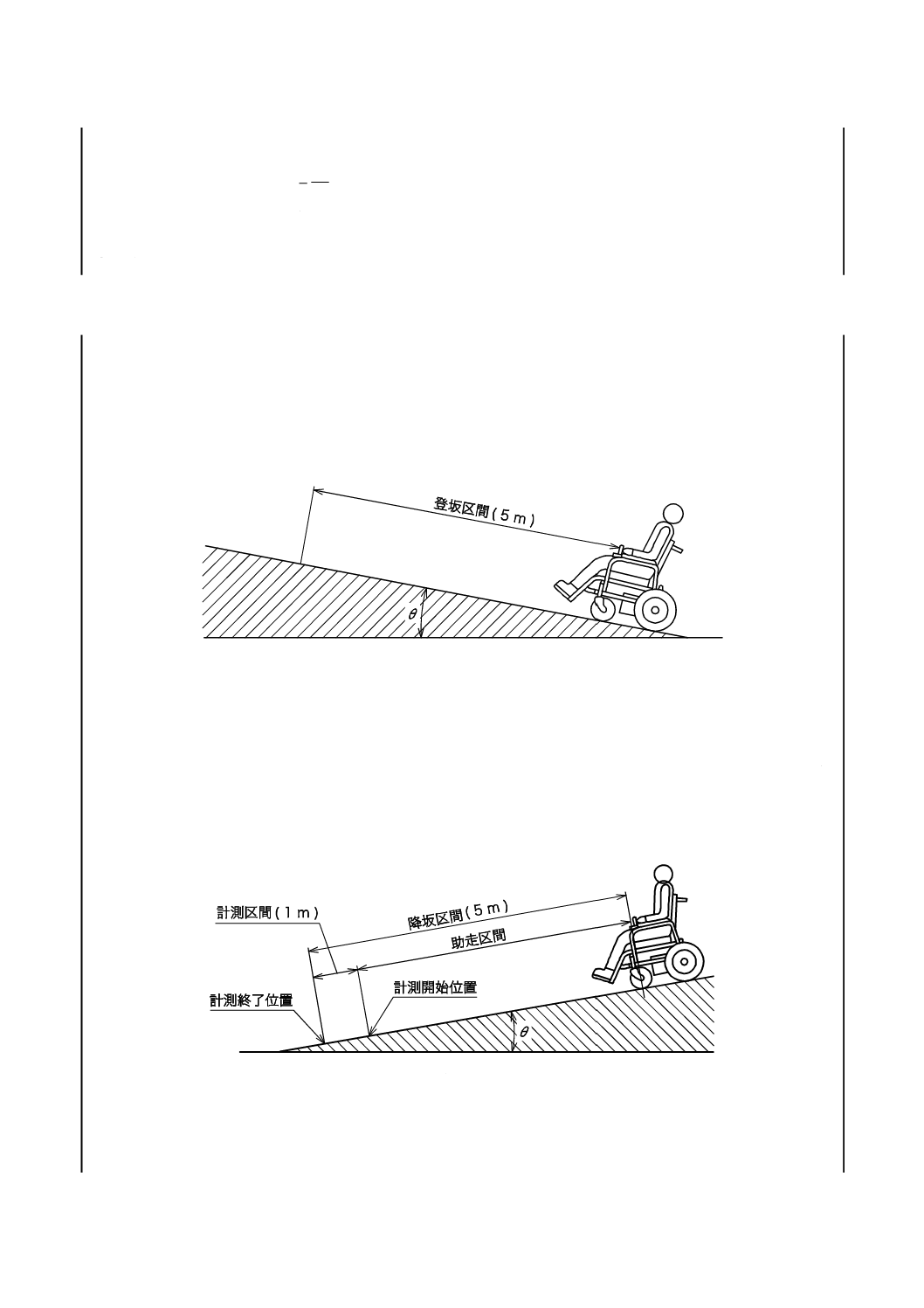
a) 平たん路制動試験 図7に規定するように,水平な路面に長さ5 mの走行区間を設け,前進で最高出
力状態によって走行区間を走行後,制動をかけて停止したときの停止距離及び変位量1) を測定する。
注1) 変位量は,スタート位置における車輪通過点と,停止位置における車輪接地点の最大変位量
とする。
図7−平たん路制動試験
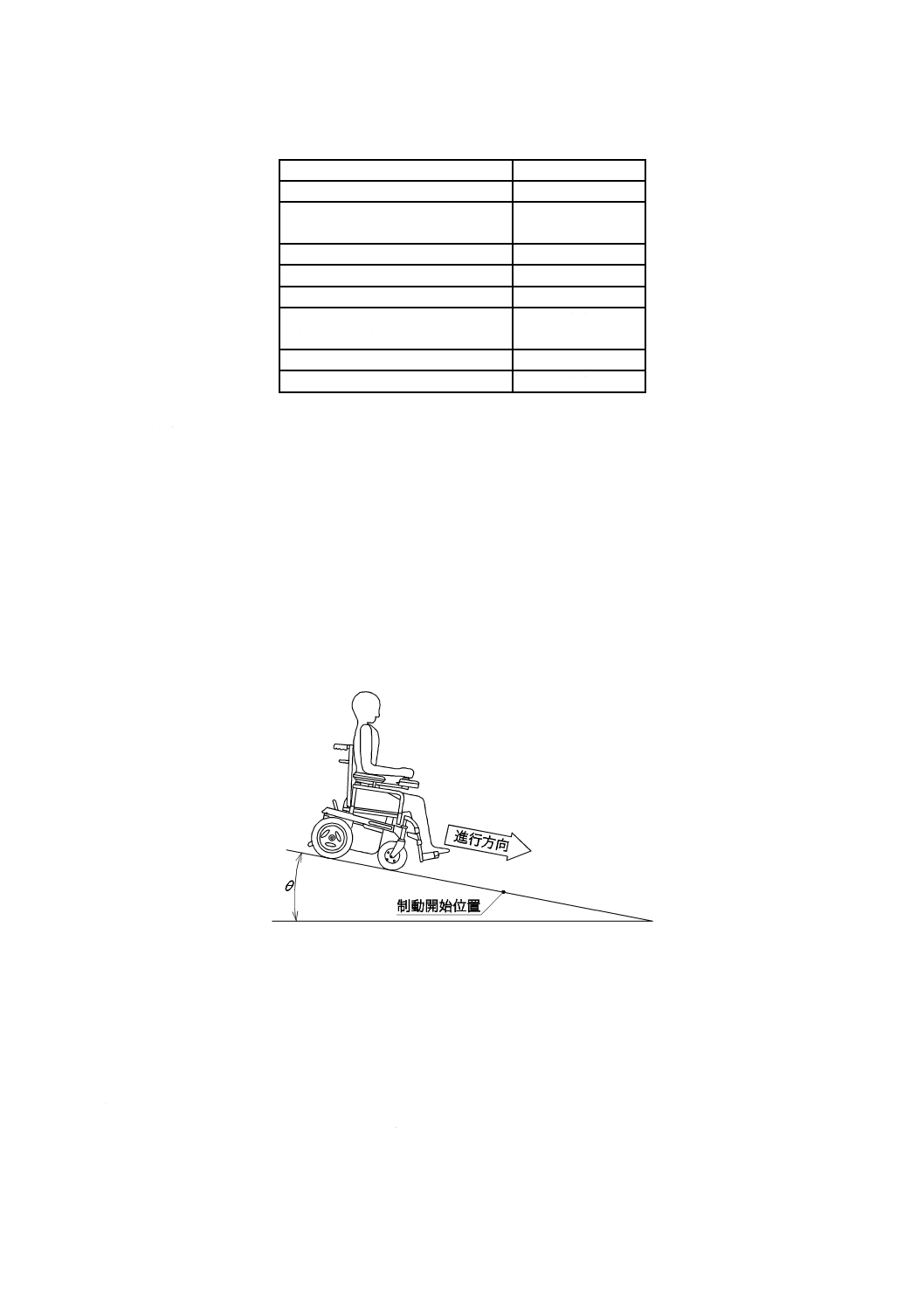
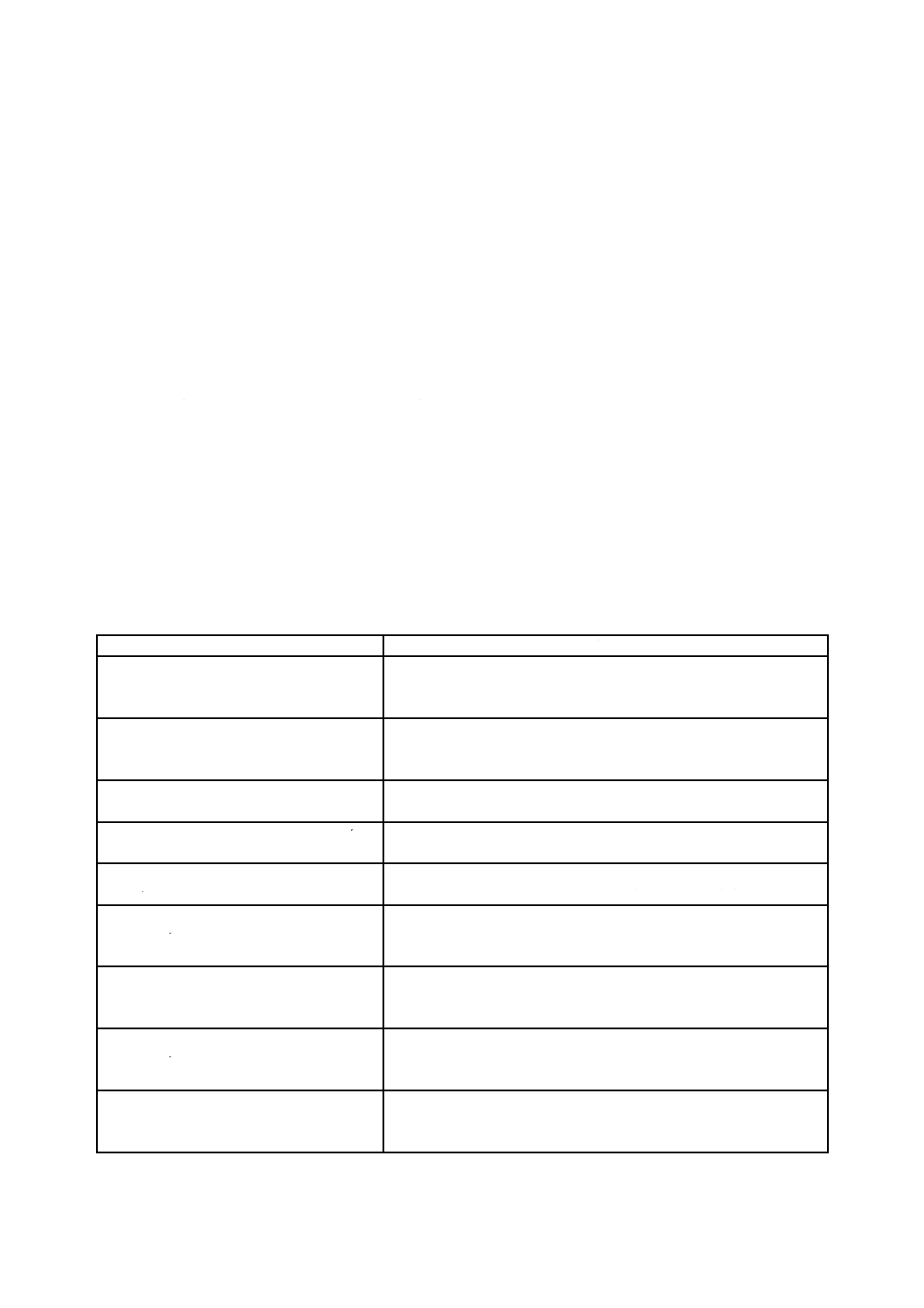
b) 降坂制動試験 図8に規定するように,傾斜角度10°の路面において電動車椅子を停止状態から最高
出力状態で前進させ,2 m通過後に制動をかけて停止したときの停止距離及び変位量1) を測定する。
簡易形は7°の傾斜角度で行う。また,自動ブレーキが装着されていない簡易形の場合は除外する。
図8−降坂制動試験
19
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
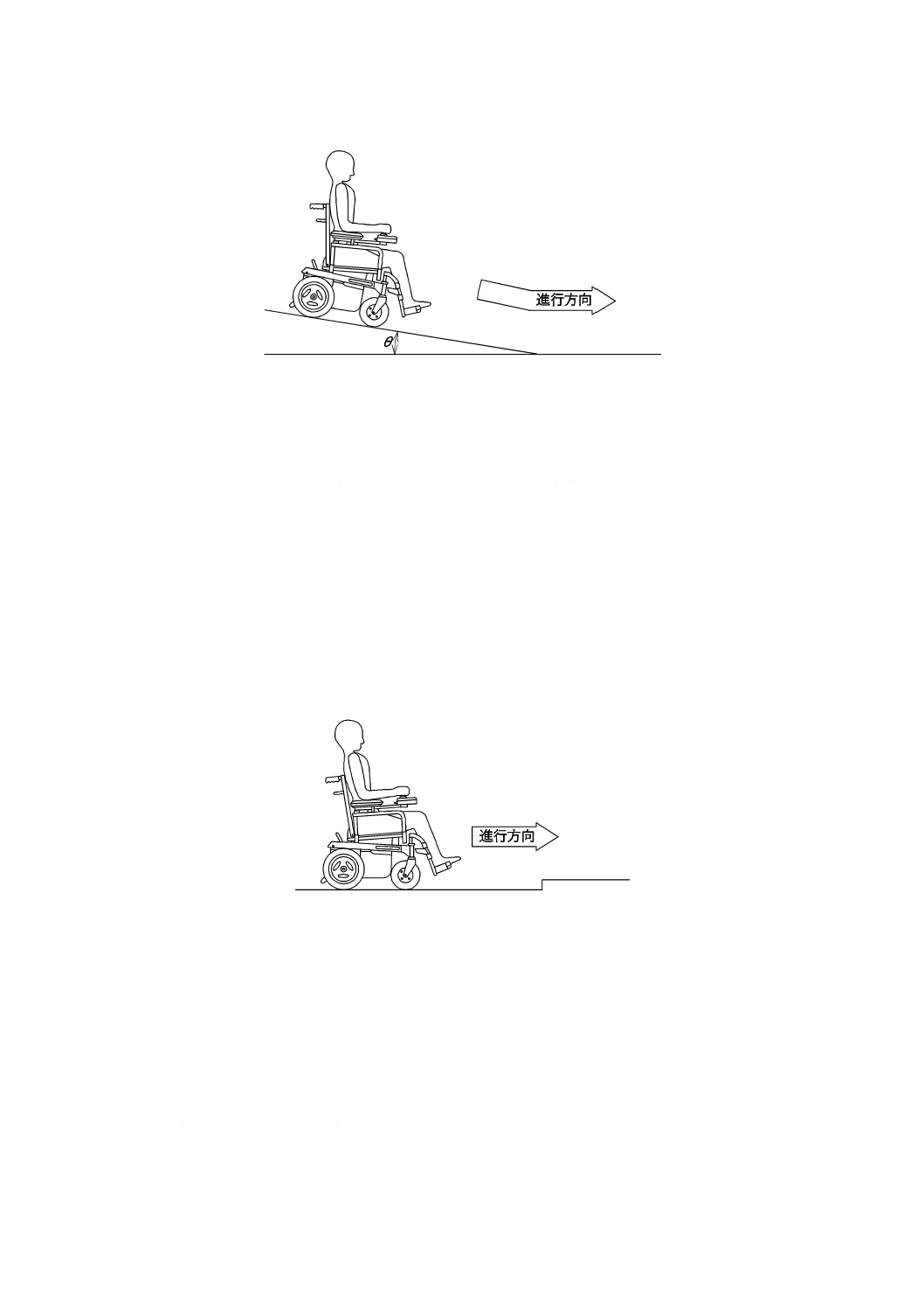
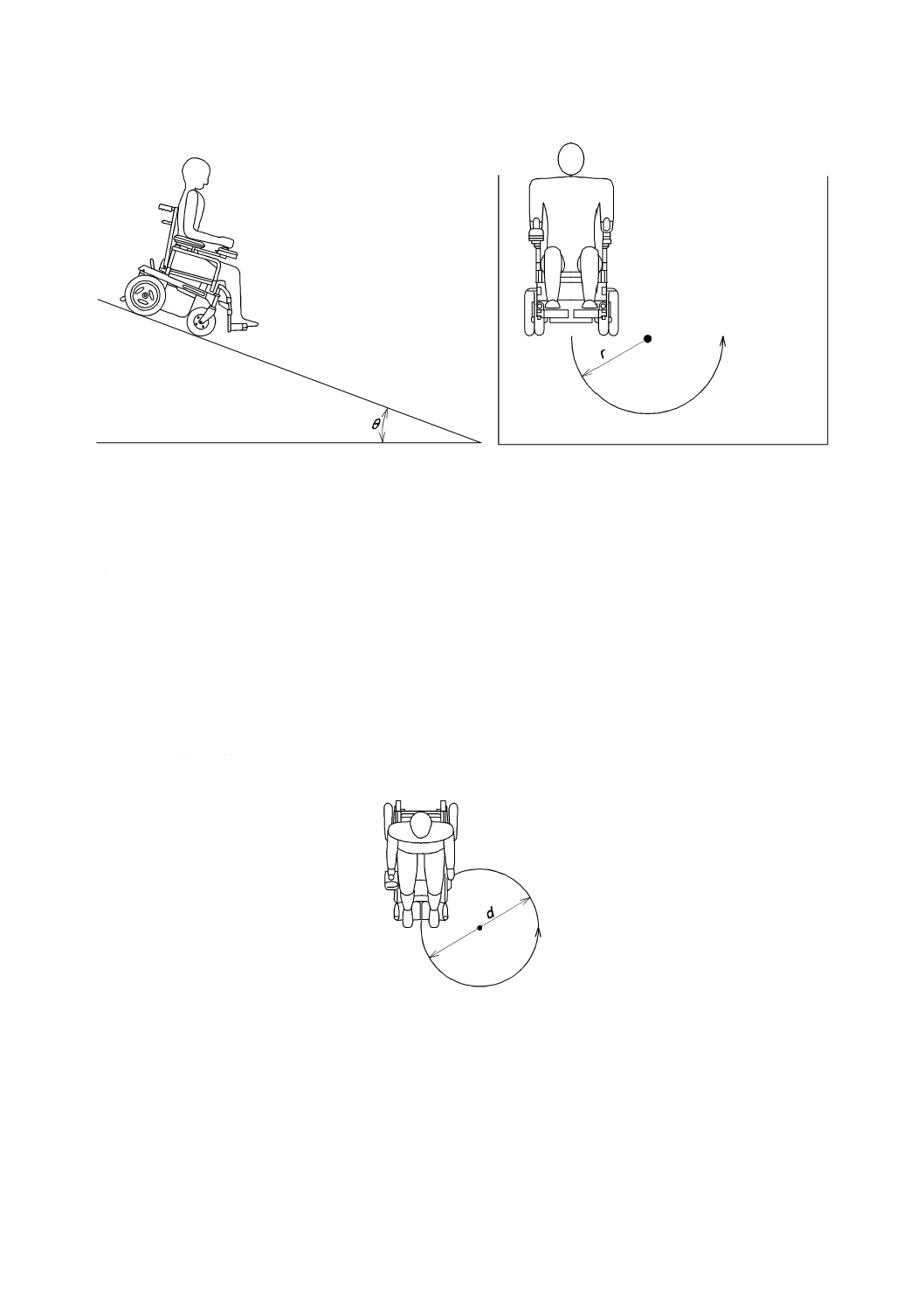
12.1.5
傾斜停止力試験
図9及び図10に規定するように,電動車椅子を傾斜角度10°の斜面上で,斜面に対して上向き及び下
向きにし,自動ブレーキによって制動をかけた状態で置き,1分間静止し続けることができるかどうかを
調べる。簡易形は7°の傾斜角度で行う。
走行可能状態にある電動車椅子の操作レバーを初期状態にし,自動ブレーキ以外のブレーキは使用しな
い。また,自動ブレーキが装着されていない簡易形の場合は駐車ブレーキを作動させて行う。
図9−傾斜停止力試験(上向き)
図10−傾斜停止力試験(下向き)
12.1.6
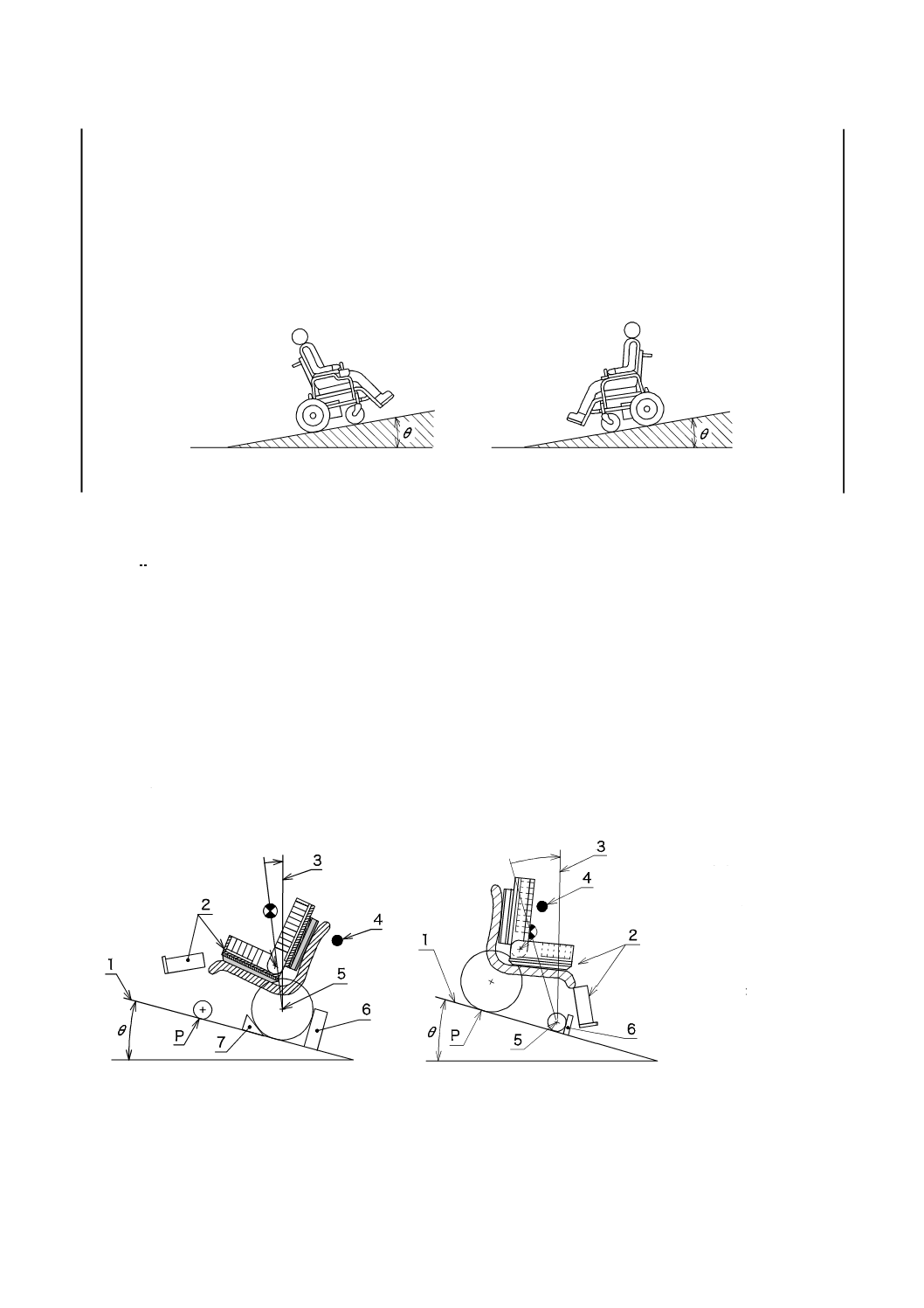
静的安定性試験
12.1.6.1 標準形の静的安定性試験
傾斜面に対して電動車椅子を上向き(後方安定性),下向き(前方安定性)及び側方(側方安定性)で行
い,電動車椅子の山側車輪2輪が,傾斜面から離れる状況を次によって調べる。
なお,側方試験では,電動車椅子が転倒するときの電動車椅子の回転軸が傾斜面の回転軸に対して平行
±3°になるように電動車椅子を置く。
a) 電動車椅子で車輪がロックできない場合には,図11及び図12に規定するように,電動車椅子の電源
スイッチを切り,車輪のロックなしの状態で傾斜台に置いて上向き及び下向きの傾斜角度を測定する。
次に,電動車椅子を,表7に示すように調整可能で最も不安定な位置に設定して同様の試験を行い,
それぞれの結果を,表8によって開示する。
注記 試験中に車椅子が転倒してしまわないため,転倒止めなどにより危険を回避する。
1:試験平面
2:ダミー
3:鉛直線
4:転倒止め
5:回転軸
6:ガイド
7:くさび
P:平面とタイヤの接点
θ:傾斜面の角度
(上向き:車輪ロックなし)
(下向き:車輪ロックなし)
図11−静的安定性試験
図12−静的安定性試験
20
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
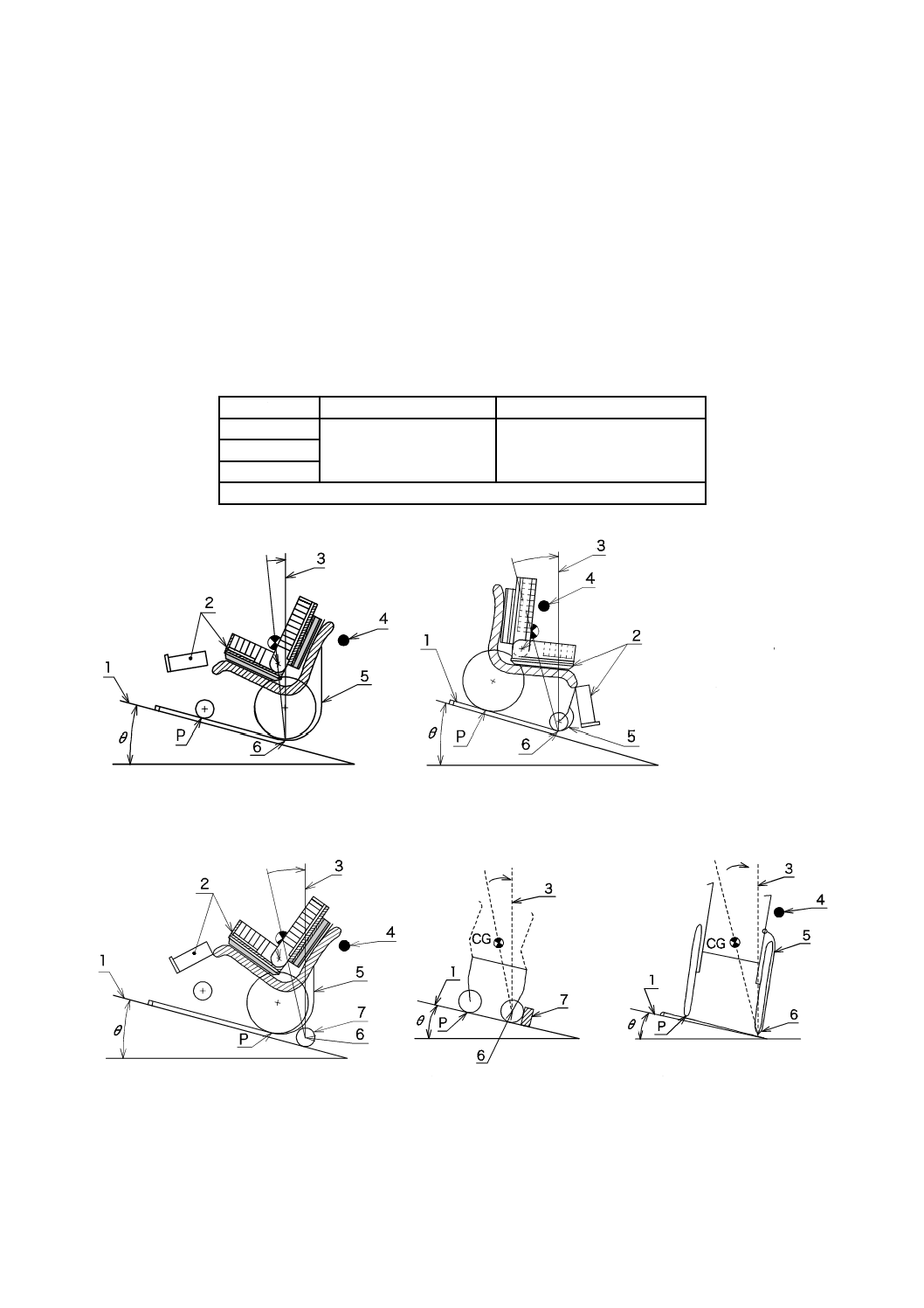
b) 電動車椅子で車輪がロックできる場合には,図13〜図16に規定するように電源スイッチを切り,試
験平面上において電動車椅子が滑らないようにストラップなどを取り付け,上向き,下向き及び側方
における安定性を調べる。
なお,規定値は標準形は上向き,下向きが20°及び側方が15°とし,簡易形は上向き,下向き,側
方とも10°の傾斜角度で行う。次に,電動車椅子を,表7に示すように調整可能で最も不安定な位置
に設定して最大傾斜角度を求める。この結果は,表8によって開示する。転倒防止装置を備えた電動
車椅子の場合の最大傾斜角度は,電動車椅子を支える装置(車輪)が転倒防止装置だけとなった場合
の角度をいう。
表8−静的安定性試験の開示項目
項目
車輪ロックなしの場合
車輪ロックありの場合
後方安定性
標準状態と最も不安定な
状態との最大角度
最も不安定な状態の最大角度
前方安定性
側方安定性
最大角度は,既定値を上限とする。
1:試験平面
2:ダミー
3:鉛直線
4:転倒止め
5:ストラップ
6:回転軸
7:ガイド
P:平面とタイヤの接点
θ:傾斜面の角度
(上向き:車輪ロックあり)
(下向き:車輪ロックあり)
図13−静的安定性試験
図14−静的安定性試験
前輪側(ロックなし)
後輪側(ロックあり)
図15−静的安定性試験(転倒防止装置付き)
図16−静的安定性試験(側方)
21
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
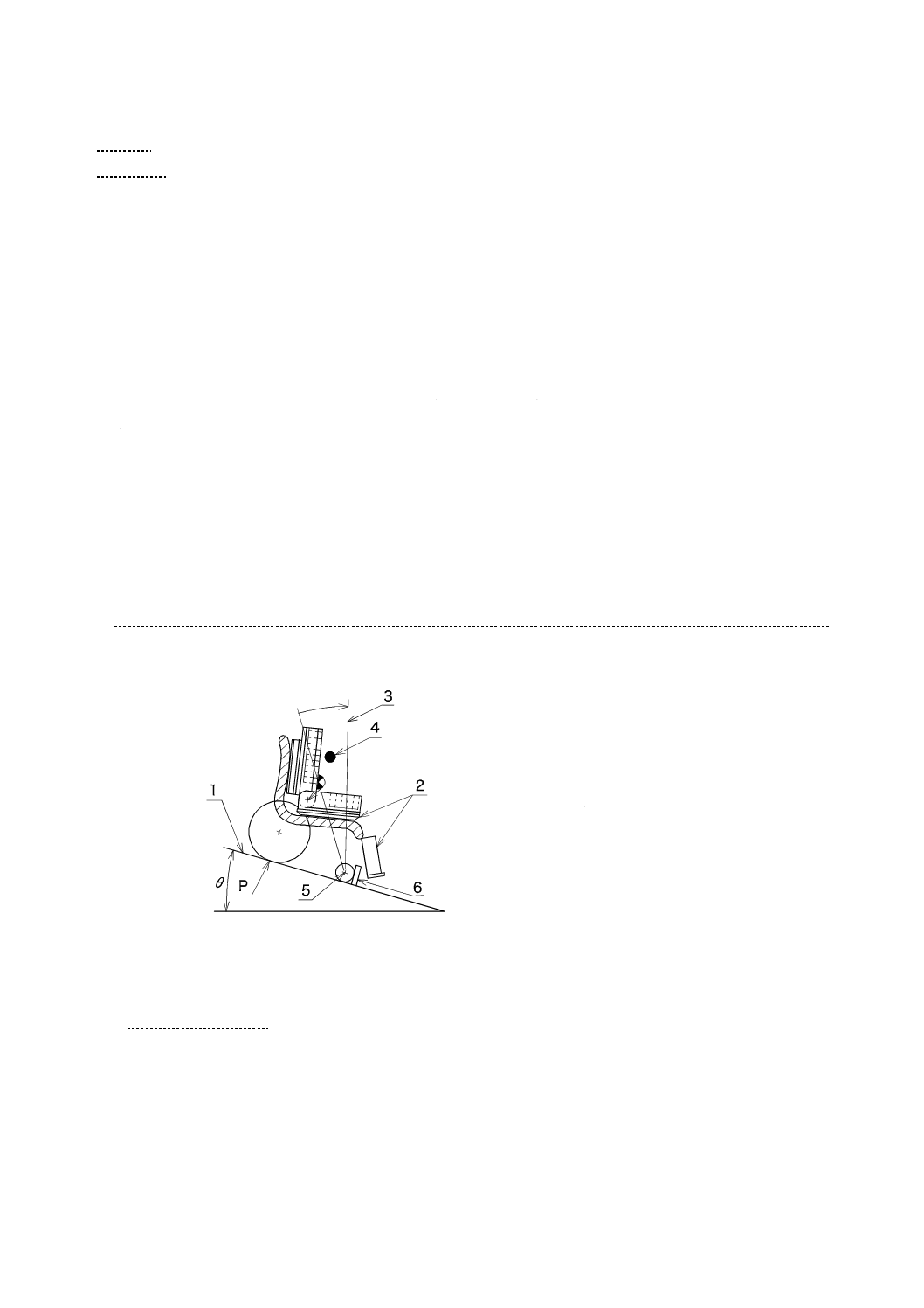
12.1.6.2 座位変換形の静的安定性試験
12.1.6.2.1 試験条件
試験条件は,次による。
ダミーは,試験品の使用者最大体重に対応した附属書Eに規定するダミーとする。
a) 座位変換形の静的安定性試験のバックサポートとシートは,次の状態で試験する。
1) 標準状態
2) シートとバックサポートとの角度が160°の状態(リクライニング機能付き車椅子)
角度が160°にならない製品では,その製品の最大のリクライニング状態とする。
3) 最大ティルト状態(ティルト機能付き車椅子)
4) バックサポートが水平で,最大ティルトの状態(ティルト・リクライニング機能付き車椅子)
なお,バックサポートが水平にならない製品では,その製品の最大のリクライニング状態とする。
5) ダミーは,バックサポートと並行になるように置く。
b) 座位変換形の静的安定性試験のフット・レッグサポートは,標準状態及び最大エレベーティング状態
の2条件とする。
12.1.6.2.2 試験方法
次の試験を行い,傾斜角を前方20°,後方20°及び側方15°にしたとき(前方,後方,側方とも),山
側の車輪が浮上するかしないか調べる。角度は角度計(デジタル角度計など)で測定する。
ただし,簡易形の場合は全方向とも10°とする。
a) 前方安定性試験 図17に示すように,傾斜面に対して試験品を下向きにし,試験品の回転軸が傾斜面
の回転軸に対して平行±3°になるように試験品を置く。
1:試験平面
2:ダミー
3:鉛直線
4:転倒止め
5:ストラップ
6:ガイド
P:平面とタイヤの接点
θ:傾斜面の角度
図17−前方安定性試験
b) 後方安定性試験 図18に示すように,傾斜面に対して試験品を上向きにし,前方安定性試験と同様に
して試験品を置く。
22
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1:試験平面
2:ダミー
3:鉛直線
4:転倒止め
5:ストラップ
6:ガイド
7:くさび
P:平面とタイヤの接点
θ:傾斜面の角度
図18−後方安定性試験
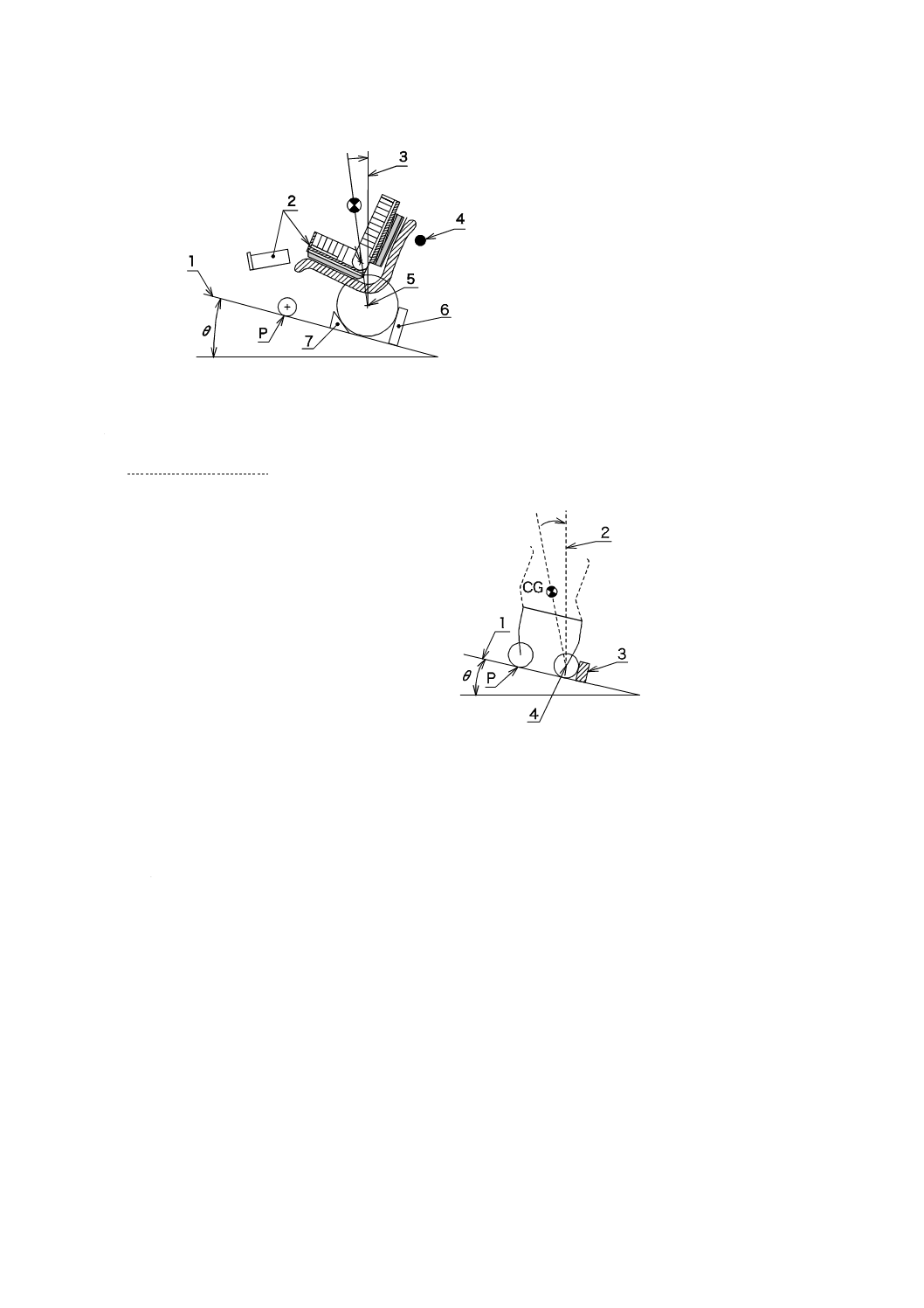
c) 側方安定性試験 図19に示すように,傾斜面に対して試験品を横向きにし,前方安定性試験と同様に
して試験品を置く。
1:試験平面
2:鉛直線
3:落下止め
4:回転軸
P:平面とタイヤの接点
θ:傾斜面の角度
図19−側方安定性試験
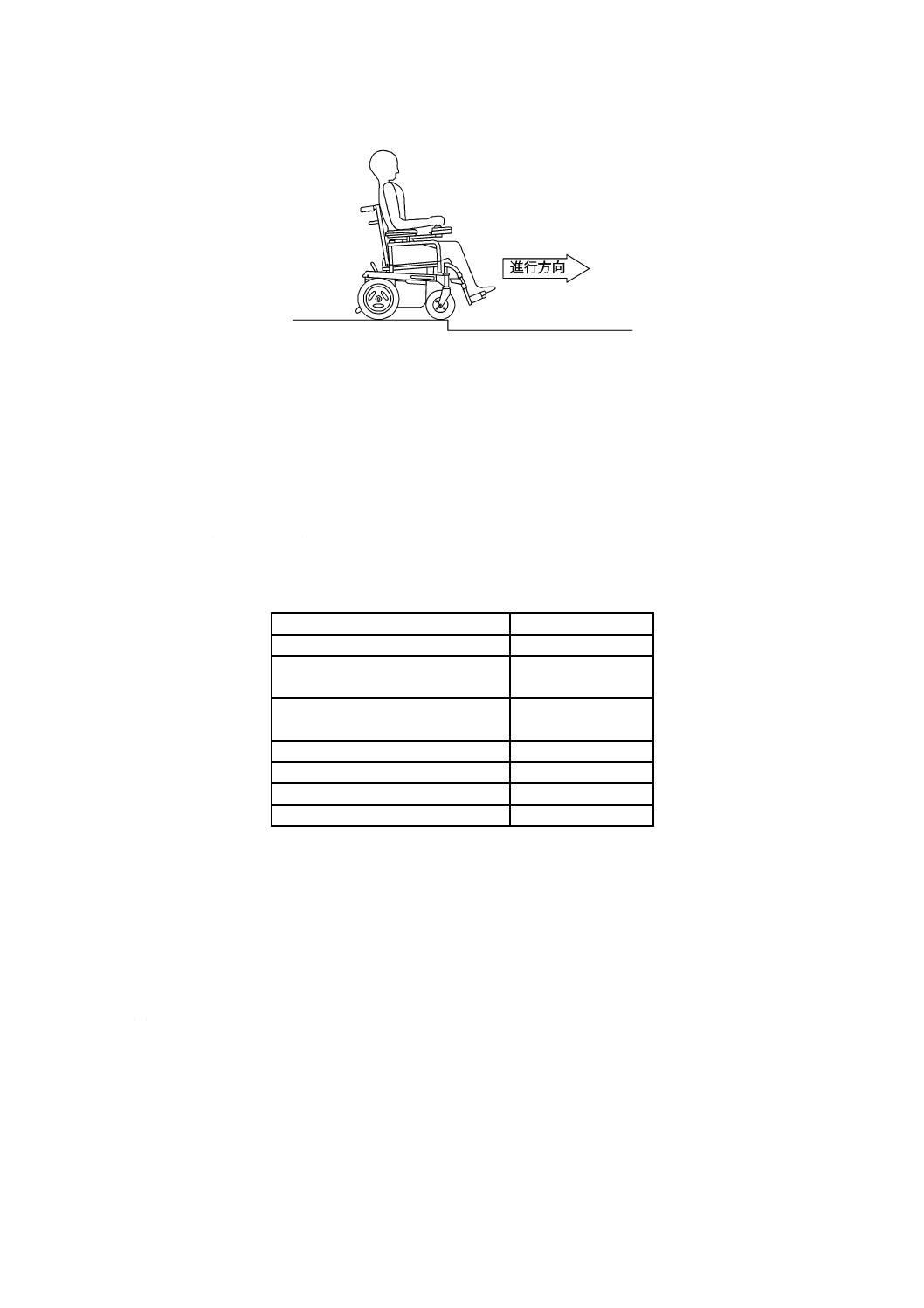
12.1.7
段差乗越試験
図20に規定するように段差を設け,走行可能状態にある電動車椅子が前進又は後退して乗り越えるかど
うかを調べる。試験は,段差面に車輪が接触した状態から(助走なし)及び車輪と段差とが接触する点か
ら水平方向に距離50 cm離れた地点から最高出力で助走した速度(助走あり)で実施する。簡易形は助走
なしの試験だけとし,段差高さ12 mmとする。ただし,走行速度は規定しない。
座位変換形の段差乗越試験のバックサポート,シート及びフットサポートは,標準状態とする。
23
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
h: 12 mm(簡易形だけ。助走なし)
25 mm(助走なし)
40 mm(助走あり)
L>L0
W>2W0
L0: 電動車椅子の全長
W0: 電動車椅子の全幅
r: 3 mm R面取り
図20−段差乗越試験
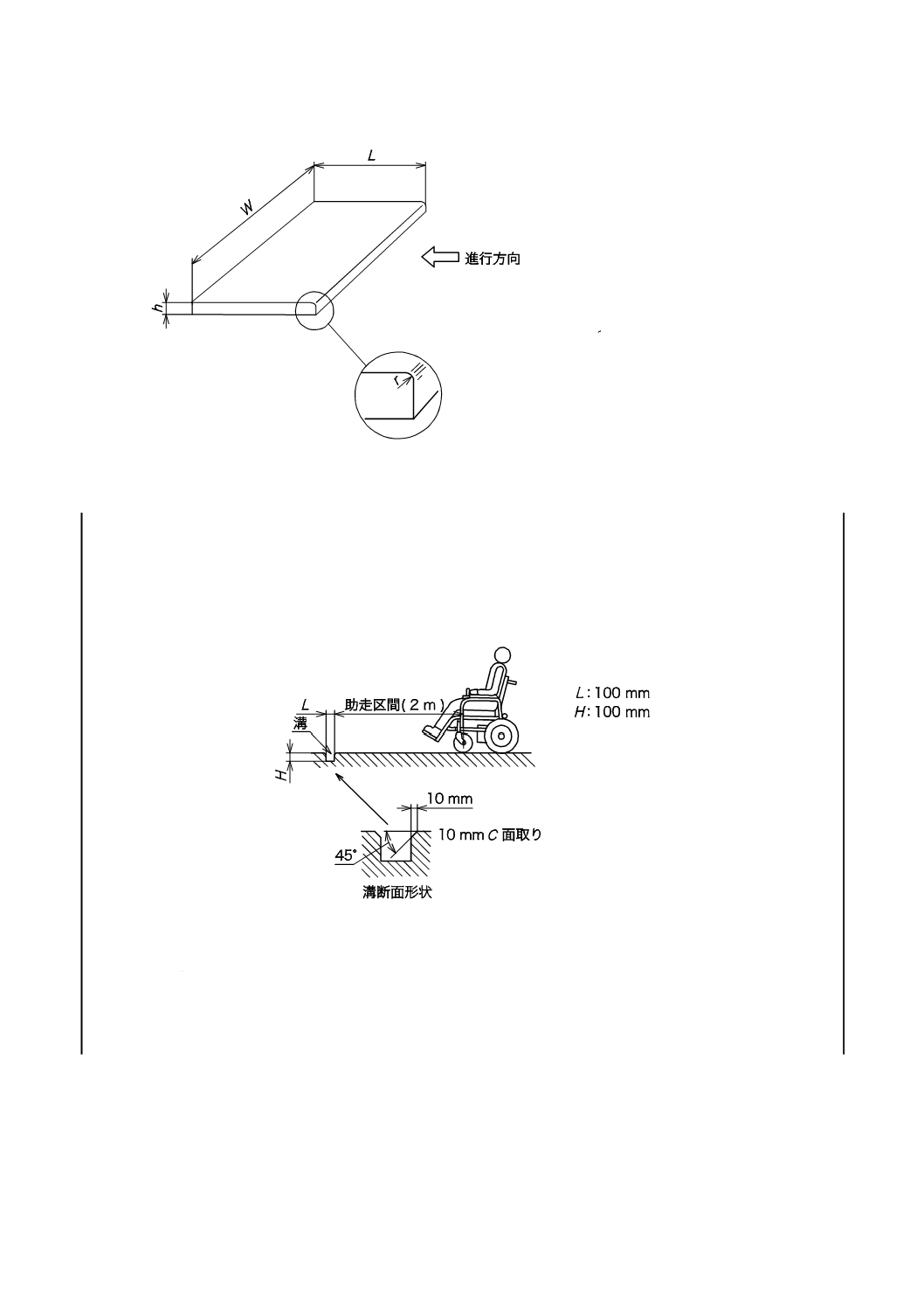
12.1.8
溝踏破走行性試験
図21に規定するように,走行可能状態にある電動車椅子を10 mm C面取り,幅100 mm,深さ100 mm
の溝の前方2 mに停止させ,溝に対し前進で直角に最高出力で進入し,溝を乗り越えるかどうかを調べる。
座位変換形の溝踏破走行性試験のバックサポート,シート及びフットサポートは,標準状態とする。
図21−溝踏破走行性試験
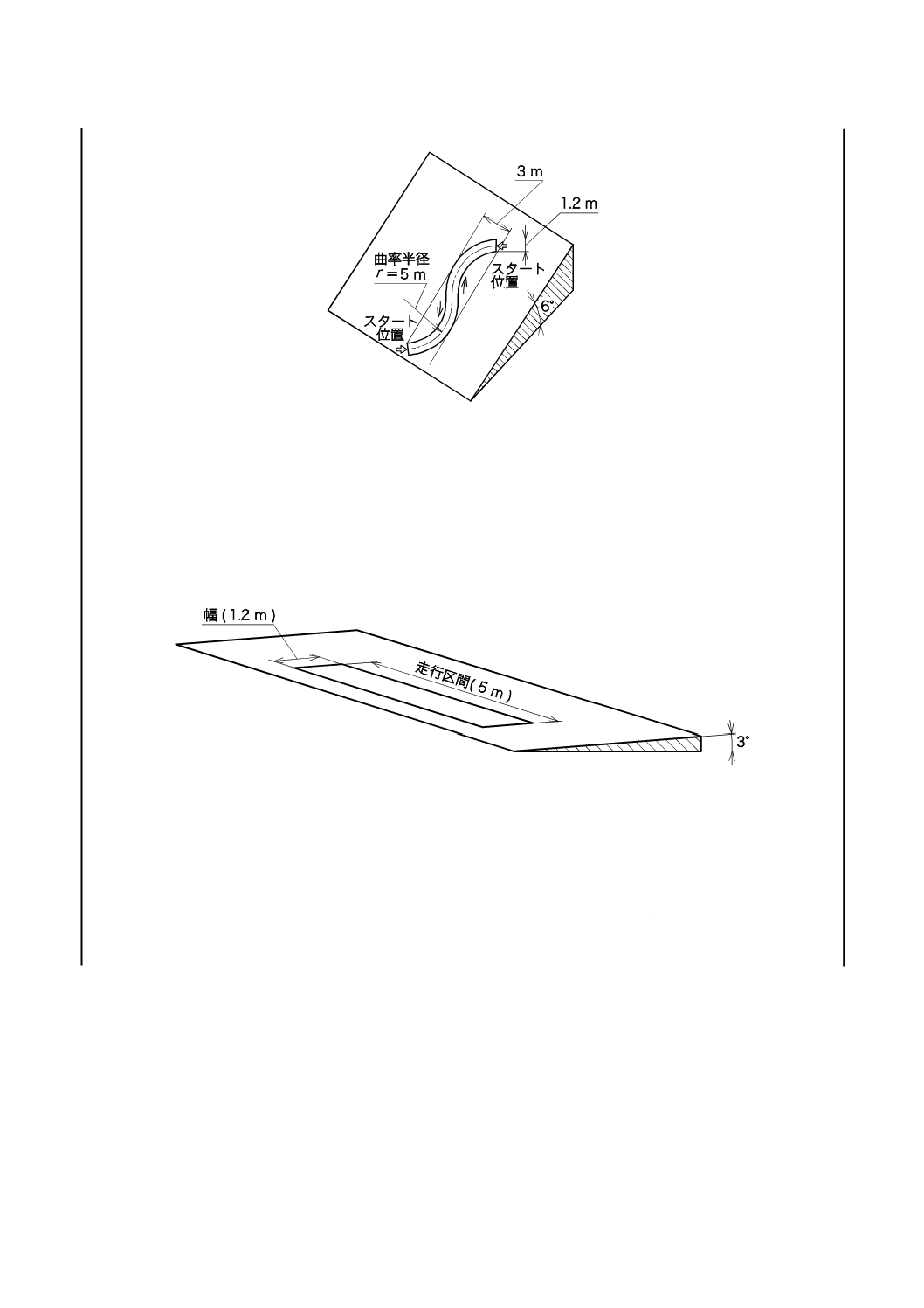
12.1.9
坂道走行性試験
図22に規定するように,傾斜角度6°の斜面に幅1.2 mのS字路を設け,走行可能状態にある電動車椅
子を前進最高出力状態で登坂及び降坂走行を行う。
24
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図22−坂道走行性試験
12.1.10 斜面直進走行性試験
図23に規定するように,傾斜角度3°の斜面に等高線に平行な幅1.2 m,長さ5 mの走路を設け,走行
可能状態にある電動車椅子を前進で最高出力状態によって往復走行する。座位変換形の斜面直進走行性試
験のバックサポート,シート及びフットサポートは,標準状態とする。
図23−斜面直進走行性試験
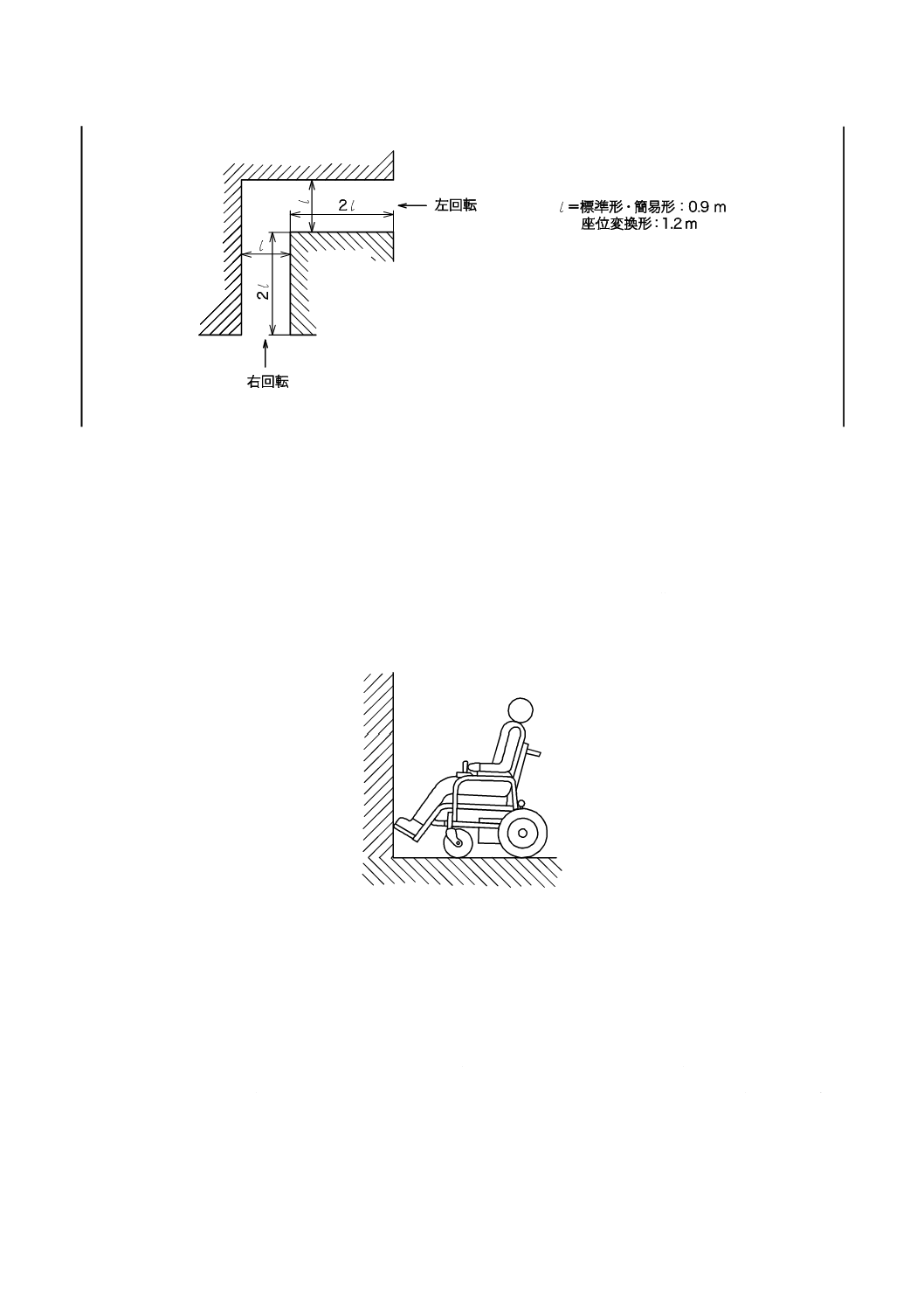
12.1.11 回転性能試験
高さ1.5 mのついたてで囲んだ,図24に規定するような直角路を設け,走行可能状態にある電動車椅子
を直角路の前で停止させてから,前進で切り返しは行わずに直角路を往復走行する。このとき,電動車椅
子が,ついたてに触れてはならない。ただし,走行速度は規定しない。座位変換形の回転性能試験のバッ
クサポート,シート及びフットサポートは,標準状態とする。
25
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図24−回転性能試験
12.1.12 強制停止試験
図25に規定するように,走行可能状態にある電動車椅子を前向きで壁に当てて,前進方向に最高出力状
態で押し付け3分間継続する。ただし,試験中に車輪が空転しないように拘束する。また,試験開始時の
温度は20±2 ℃とし,開始後,15秒間は回路保護装置が作動せずにモータ巻線に電流が流れなければなら
ない。ヒューズ切れで電動車椅子が動かなくなることがなく,リセット可能な回路保護装置は損傷なしに
連続5回以上の操作が可能でなければならない。また,その他の駆動系の部品に損傷があってはならない。
座位変換形の強制停止試験のバックサポート,シート及びフットサポートは,標準状態とする。
図25−強制停止試験
12.1.13 連続走行距離試験
電源を切っている電動車椅子を18〜25 ℃の環境下に8時間以上放置する。次に,18〜25 ℃の環境下で
前進最高速度によって予備走行した後,同一環境下で5分以内に走行可能状態の電動車椅子を最高出力状
態で前進させ,消費電流及び最高速度を測定する。その後,連続走行距離を式(1)によって算出する。容量
の小さいバッテリは,予備走行後予備バッテリと交換してもよい。また,試験開始前に必要に応じてバッ
テリの充電と放電とを繰り返す活性化をしてもよい。ただし,予備バッテリについても試験前と同一温度
条件下に8時間以上置く[別の方法として,周長50 m以上100 m以下の走路を時計回りに10周し,更に,
反時計回りに10周したときの消費電流を測定し,式(2)によって走行距離を求めてもよい。]。ただし,ど
26
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の試験方法に基づいて実施したかを走行距離の後に記載する。
座位変換形の連続走行距離試験のバックサポート,シート及びフットサポートは,標準状態とする。
I
VC
S=
··················································································· (1)
ここに,
S: 連続走行距離(km)
V: 最高速度(km/h)
I: 平たん路最高速度・走行時消費電流(A)
C: 5時間放電バッテリ容量(Ah)
track
bat
test
000
1
E
E
D
R
×
×
=
········································································ (2)
ここに,
R: 理論的連続走行距離(km)
Dtest: 試験走路の20倍の長さ(m)
Etrack: 20周の試験で消費された電気エネルギー(Wh)
Ebat: C5×VNOM
C5: 5時間放電バッテリ容量(Ah)
VNOM: バッテリの定格電圧(V)
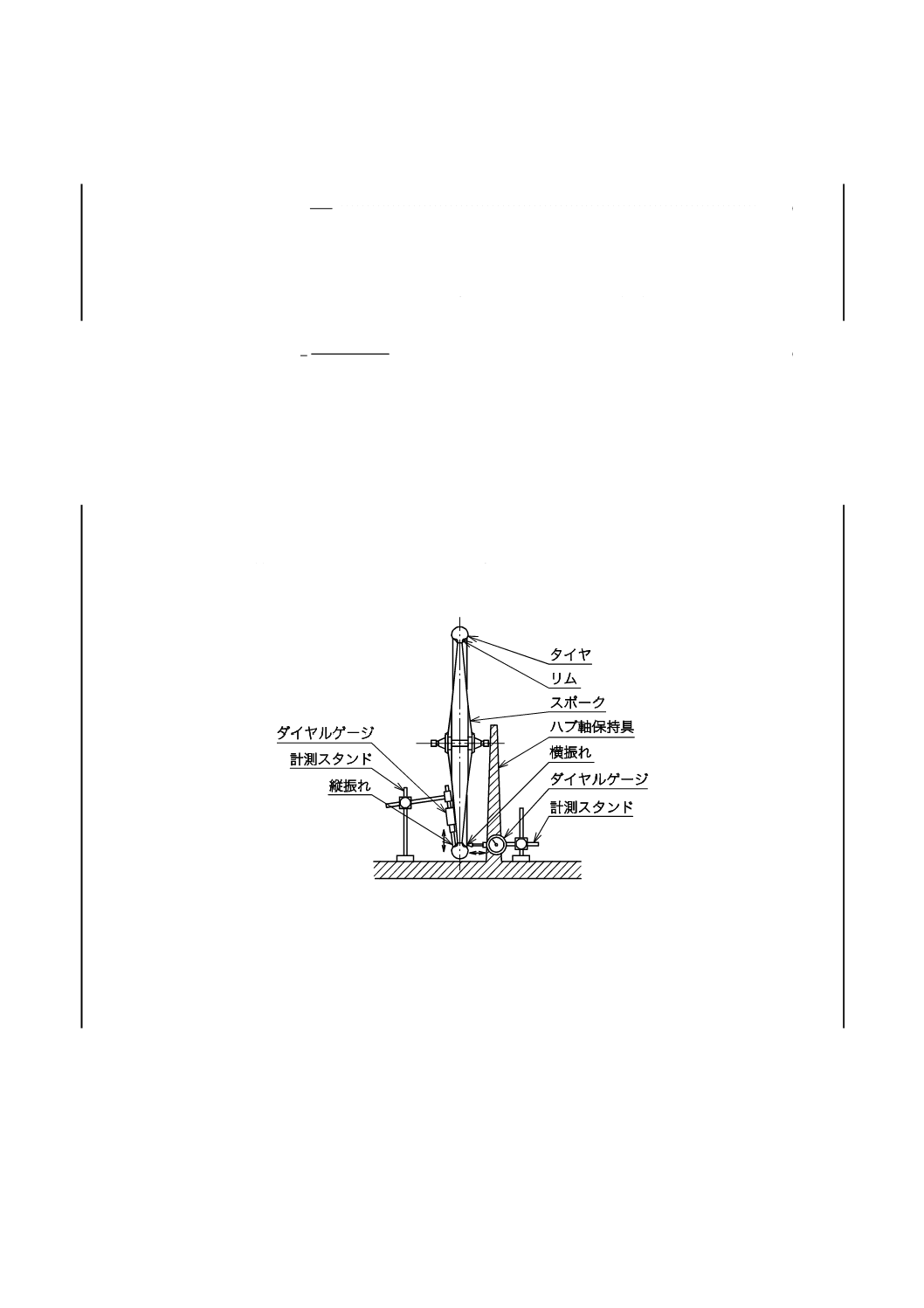
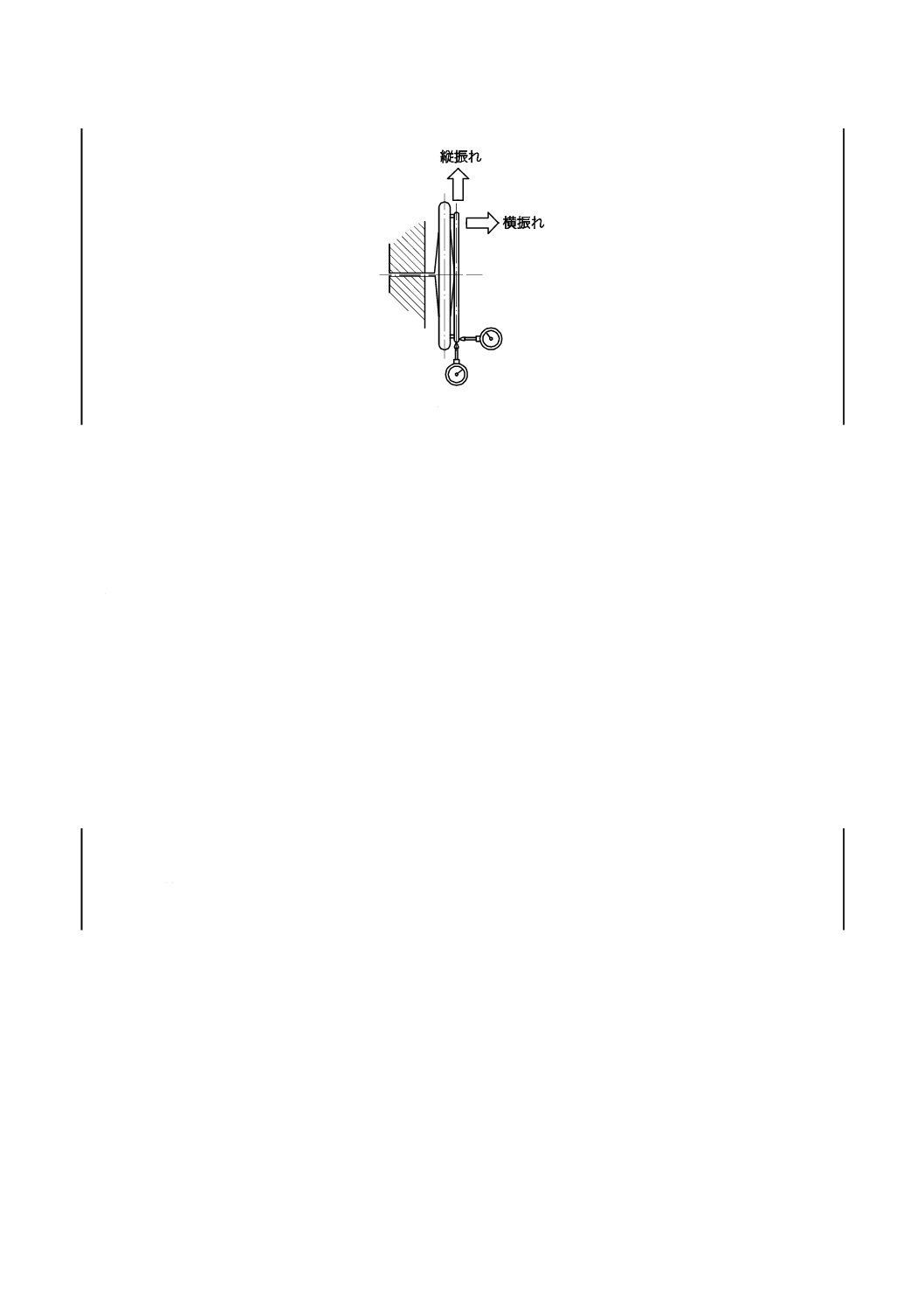
12.1.14 駆動輪・主輪の振れ試験
簡易形の車軸の縦振れ及び横振れは,ハブ軸を固定し車輪を1回転したとき,リム面で測定したダイヤ
ルゲージの指針が動く最大幅で表し,図26によって測定する。
図26−駆動輪・主輪の振れ試験の例
12.1.15 ハンドリムの振れ試験
図27に規定するように,簡易形はハンドリムを組み付けた駆動輪のハブ軸をしっかり固定し,駆動輪を
回転させてハンドリムの縦及び横の振れをダイヤルゲージを用いて測定する。
27
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図27−ハンドリムの振れ試験の例
12.1.16 動的安定性試験
附属書Dによって試験を実施し,試験データは情報開示する。
12.1.17 放電後のバッテリに対する安全性試験
放電後のバッテリに対する安全性は,電動車椅子製造事業者が規定する最小容量のバッテリを取り付け,
次による。ただし,走行速度は規定しない。
a) 終止電圧付近まで放電したバッテリによって水平面に対して5°の上り勾配を前後進させ,自動停止
するまで走行させる。
b) 前後方向から逸脱した距離を測定する。また,駆動モータ以外のモータは,意図しない動きがないか
確認する。
c) b) の試験終了後,終止電圧付近まで充電したバッテリによって水平面に対して5°の下り勾配を前後
進させ,自動停止するまで走行させる。
d) 前後方向から逸脱した距離を測定する。また,駆動モータ以外のモータは,意図しない動きがないか
確認する。
12.2
強度試験
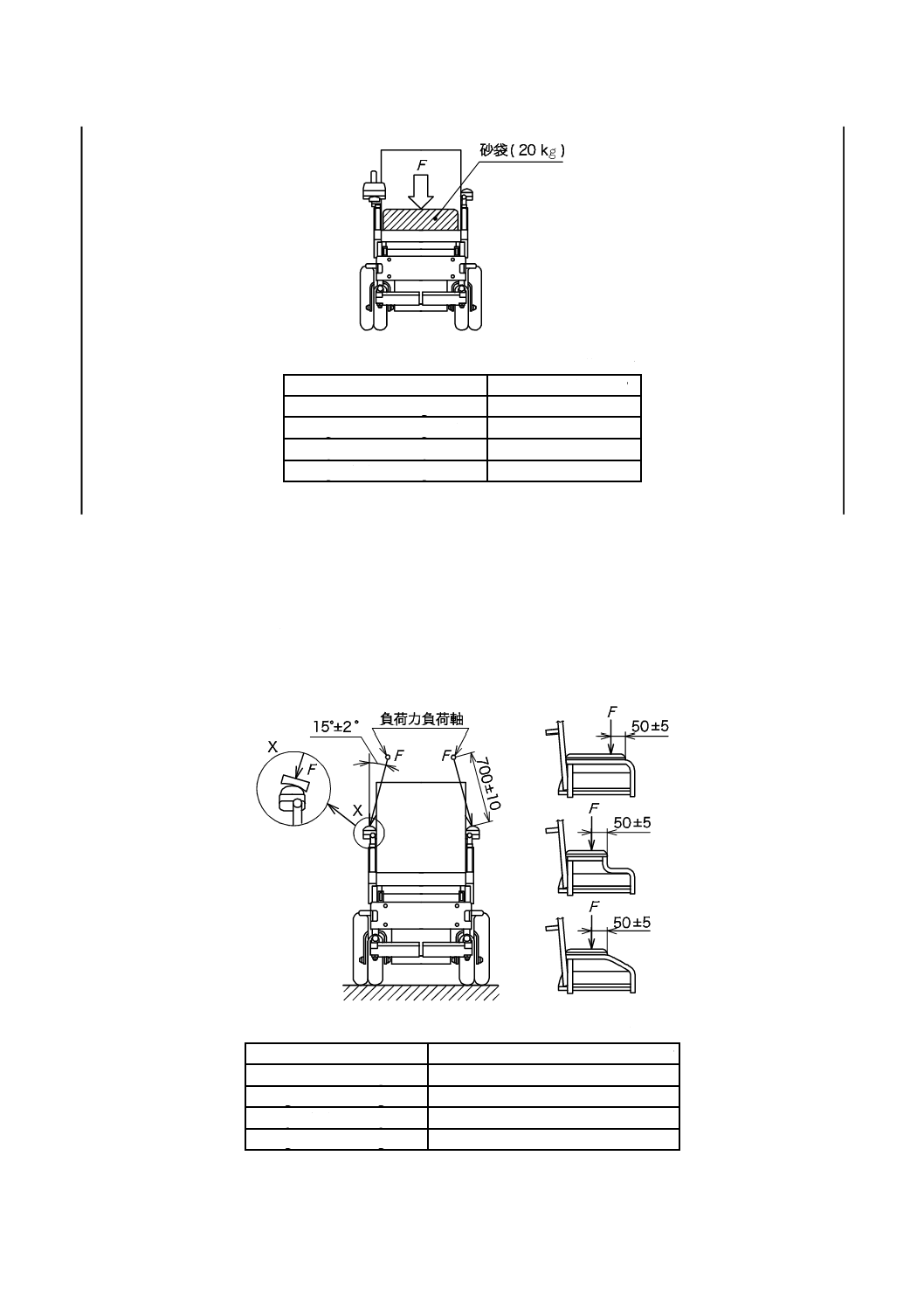
12.2.1
垂直静荷重試験
図28に規定するように,電動車椅子を水平な試験平面上に置き,電源を切っている電動車椅子のシート
の中心に質量20 kg,300 mm×300 mmの大きさの砂袋などを置き,その上から中心部へ図28のシート荷
重負荷力を10分間加えた後,附属書Cによって評価要件を確認する。
28
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 N
使用者最大体重
シート荷重負荷力F
25 kg以下
600±18
25 kgを超え
50 kg以下
1 200±36
50 kgを超え
75 kg以下
1 800±54
75 kgを超え 100 kg以下
2 400±72
図28−垂直静荷重試験
12.2.2
アームサポート下方耐荷重試験
図29に規定するように,電動車椅子を水平な試験平面上に置き,使用状態にある電動車椅子に対し,両
アームサポート共先端から50 mmの位置で,同時に上方15±2°の角度から,図29に示す荷重負荷力を,
荷重負荷パッド[図A.1 a) 及びb)]によって5〜10秒間加えた後,附属書Cによって評価要件を確認す
る。
単位 N
使用者最大体重
片方へのアームサポート荷重負荷力F
25 kg以下
190± 6
25 kgを超え 50 kg以下
380±11
50 kgを超え 75 kg以下
570±17
75 kgを超え 100 kg以下
760±23
図29−アームサポート下方耐荷重試験
29
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
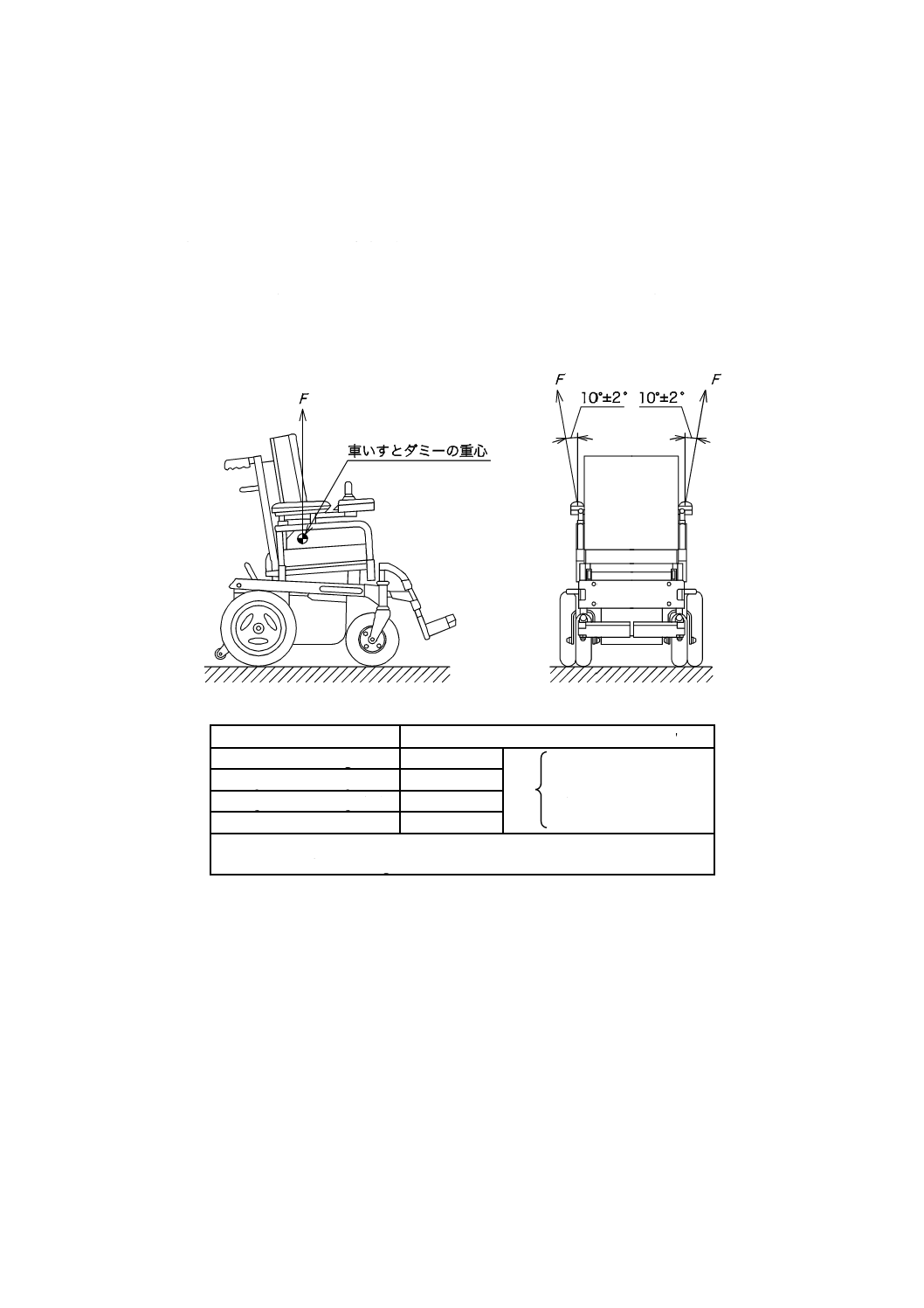
12.2.3
アームサポート上方耐荷重試験
図30に規定するように,電動車椅子を水平な試験平面上に置き,ダミーを載せた電動車椅子が試験中動
かないように上方からダミーを固定し,片側のアームサポートに対し,上方側面方向10±2°の角度の方
向に,図30に示す荷重負荷力で5〜10秒間加えた後,附属書Cによって評価要件を確認する。もう一方
のアームサポートに対しても,同じ試験を行う。
なお,荷重負荷力は,電動車椅子とダミーとによる前後方向の重心位置におけるアームサポート部に50
mm幅のベルトなどを装着して加える。アームサポートが取外し式及び跳ね上げ式で,ロック機構のない
ものは除外する。
単位 N
使用者最大体重
片方へのアームサポート荷重負荷力F
25 kg以下
335±10
5(Md+Mw)
又は最大
1 000 N以下で
大きい方
25 kgを超え 50 kg以下
520±16
50 kgを超え 75 kg以下
710±21
75 kgを超え 100 kg以下
895±27
Md=ダミー質量:kg
Mw=電動車椅子質量:kg
図30−アームサポート上方耐荷重試験
12.2.4
フットサポート上方耐荷重試験
ダミーを載せた電動車椅子を水平な試験平面上に置き,試験中動かないように上方からダミーを固定し,
荷重負荷パッド(図A.1),又は50 mm幅のベルトなどを介して,図31の荷重負荷力を各荷重点にゆっく
り加え,5〜10秒間保持した後,附属書Cによって評価要件を確認する。フット・レッグサポートが取外
し式で,ロック機構のないものは除外する。
30
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 N
使用者最大体重
フットサポート上方向負荷力F
各側部(ツーピース)
中心部(ワンピース)
25 kg以下
165± 5
3.7(Md+Mw)
330±10
7.4(Md+Mw)
25 kgを超え 50 kg以下
260± 8
又は最大
520±16
又は最大
50 kgを超え 75 kg以下
350±10
1 000 N以下で
700±20
2 000 N以下で
75 kgを超え 100 kg以下
440±13
大きい方
880±26
大きい方
Md=ダミー質量:kg
Mw=電動車椅子質量:kg
図31−フットサポート上方耐荷重試験
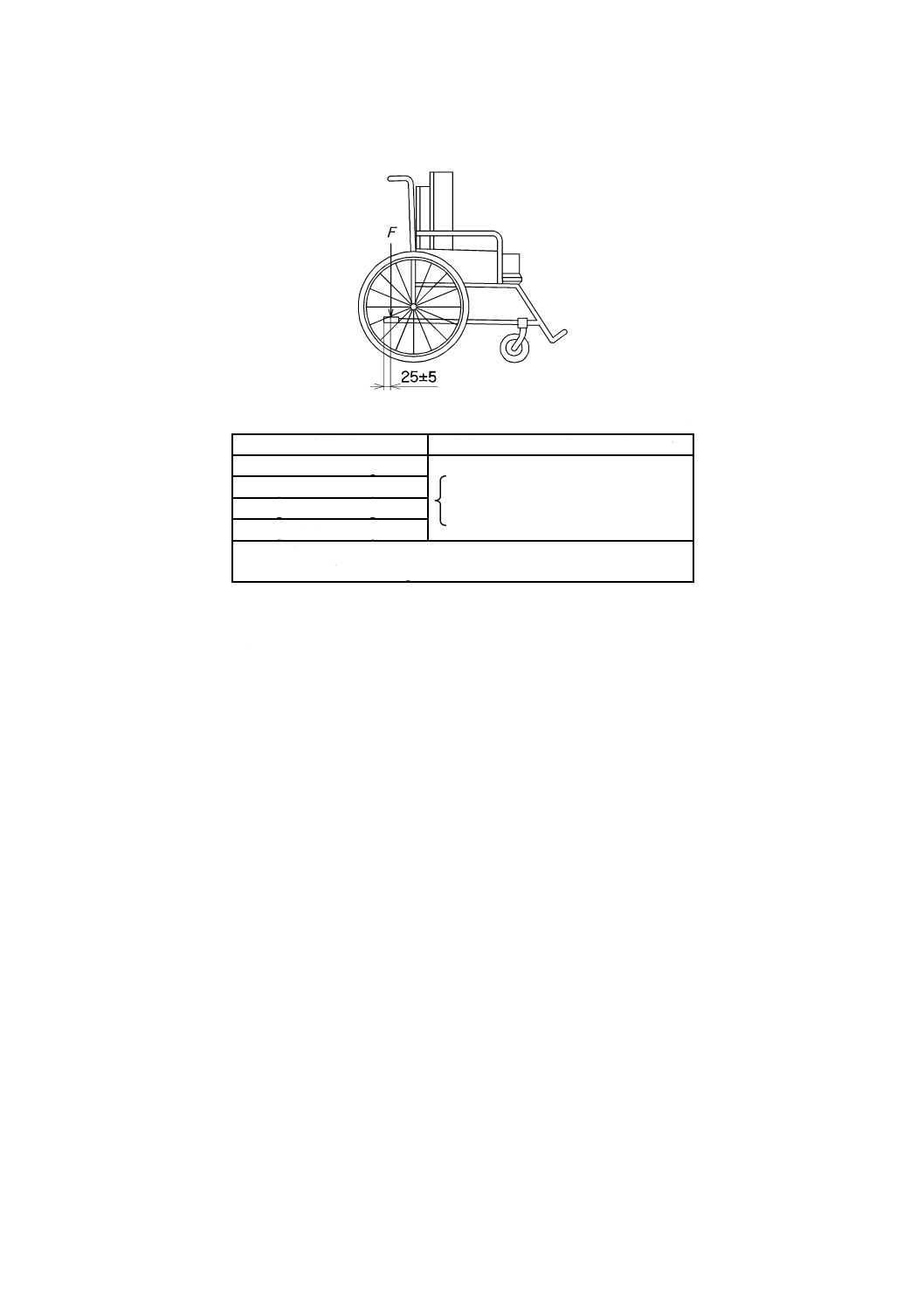
12.2.5
ティッピングレバー耐荷重試験
図32に規定するように,ダミーを載せた電動車椅子を水平な試験平面上に置き,試験中動かないように
上方からダミーを固定し,図32に規定する荷重負荷力を,片方のティッピングレバーの端部から25±5 mm
の位置に荷重負荷パッド(図A.1)を装着し,ティッピングレバーに対し垂直方向へ5〜10秒間加えた後,
附属書Cによって評価要件を確認する。もう一方に対しても同じ試験を行う。
31
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
単位 N
使用者最大体重
片方のティッピングレバー負荷力F
25 kg以下
F=13(Md+Mw)
最大で1 000±30
25 kgを超え 50 kg以下
50 kgを超え 75 kg以下
75 kgを超え 100 kg以下
Md=ダミー質量:kg
Mw=電動車椅子質量:kg
図32−ティッピングレバー耐荷重試験
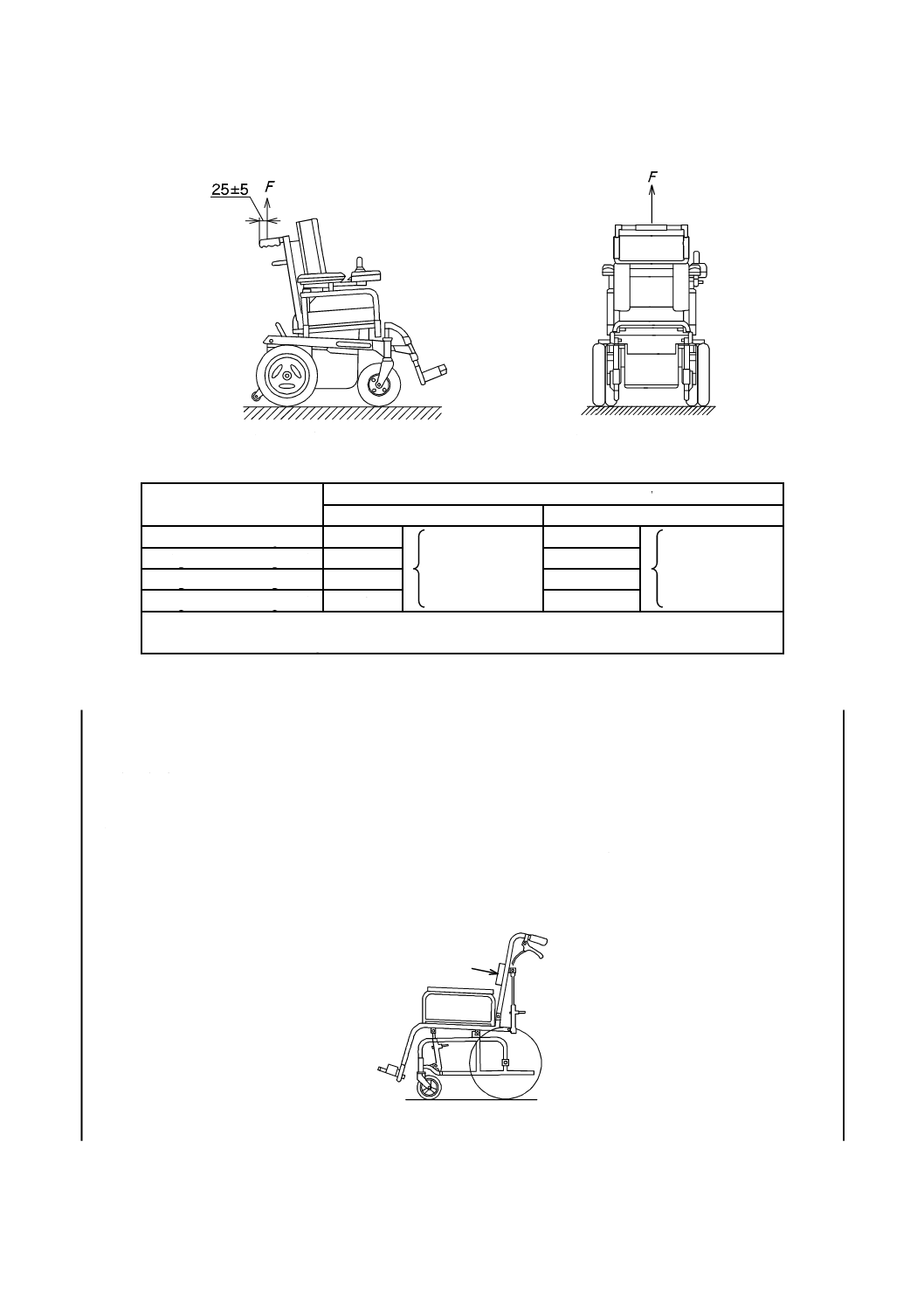
12.2.6
手押しハンドル上方耐荷重試験
図33に規定するように,ダミーを載せた電動車椅子を水平な試験平面上に置き,試験中動かないように
上方からダミーを固定し,50 mm幅のベルトなどの中心を,左右それぞれグリップ端から25±5 mmの位
置に装着し,両方の手押しハンドルを同時に上方に引き上げ,図33に示す荷重負荷力を5〜10秒間加え
た後,附属書Cによって評価要件を確認する。
なお,手押しハンドルが左右に分かれていないバー式手押しハンドルは,その中央で倍の力を負荷する。
32
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
a) シングル手押しハンドル
b) バー式手押しハンドル
単位 N
使用者最大体重
手押しハンドル上方向負荷力F
各シングル手押しハンドル
バー式手押しハンドル中央
25 kg以下
330±10
5(Md+Mw)
660±20
10(Md+Mw)
25 kgを超え 50 kg以下
520±16
又は最大
1 040±32
又は最大
50 kgを超え 75 kg以下
700±20
1 000 N以下で
1 400±42
2 000 N以下で
75 kgを超え 100 kg以下
880±26
大きい方
1 760±52
大きい方
Md=ダミー質量:kg
Mw=電動車椅子質量:kg
図33−手押しハンドル上方耐荷重試験
12.2.7
座位変換形のバックサポート部の耐荷重試験
12.2.7.1 試験条件
試験条件は,次による。
a) シート,バックサポート角度は,最も不利な状態で試験する。
b) 負荷部位は,バックサポートの中央に負荷する。
c) 負荷力は,製造者の特定する使用者体重50 kg,75 kg及び100 kgを基本とする。
d) ダミーは,試験品の使用者最大体重に対応した附属書Eに規定するダミーとする。
図34−バックサポート耐荷重試験(標準状態)
33
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12.2.7.2 試験方法
試験方法は,次による。
a) 試験品を定盤上に置き,図34に示すように試験品が試験中動かないように設定する。
b) バックサポートの中央において,図35で示す加圧子によって,使用者体重に相当する500 N,750 N
又は1 000 Nの負荷をバックサポート面に垂直に10回加える。
1) バックサポートが分割形の場合は,ダミーの大たい(腿)部を載せた車椅子のバックサポート上端
から下方30 mm±10 mmの中心線に負荷を加える。
2) バックサポートが一体形の場合は,ダミーの大たい(腿)部を載せた車椅子の座面から上方550 mm
±10 mmの中心線に負荷を加える。
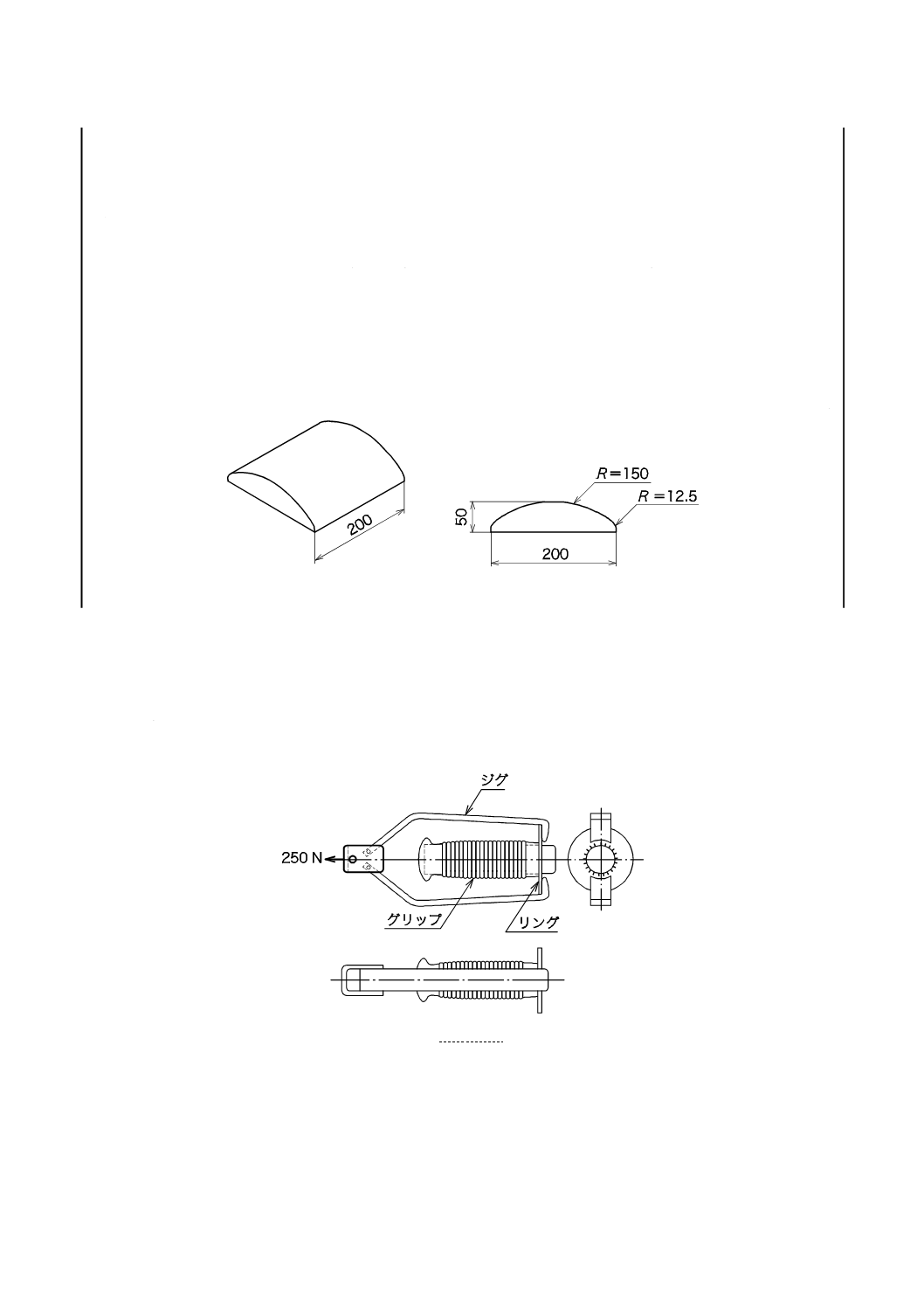
単位 mm
図35−加圧子
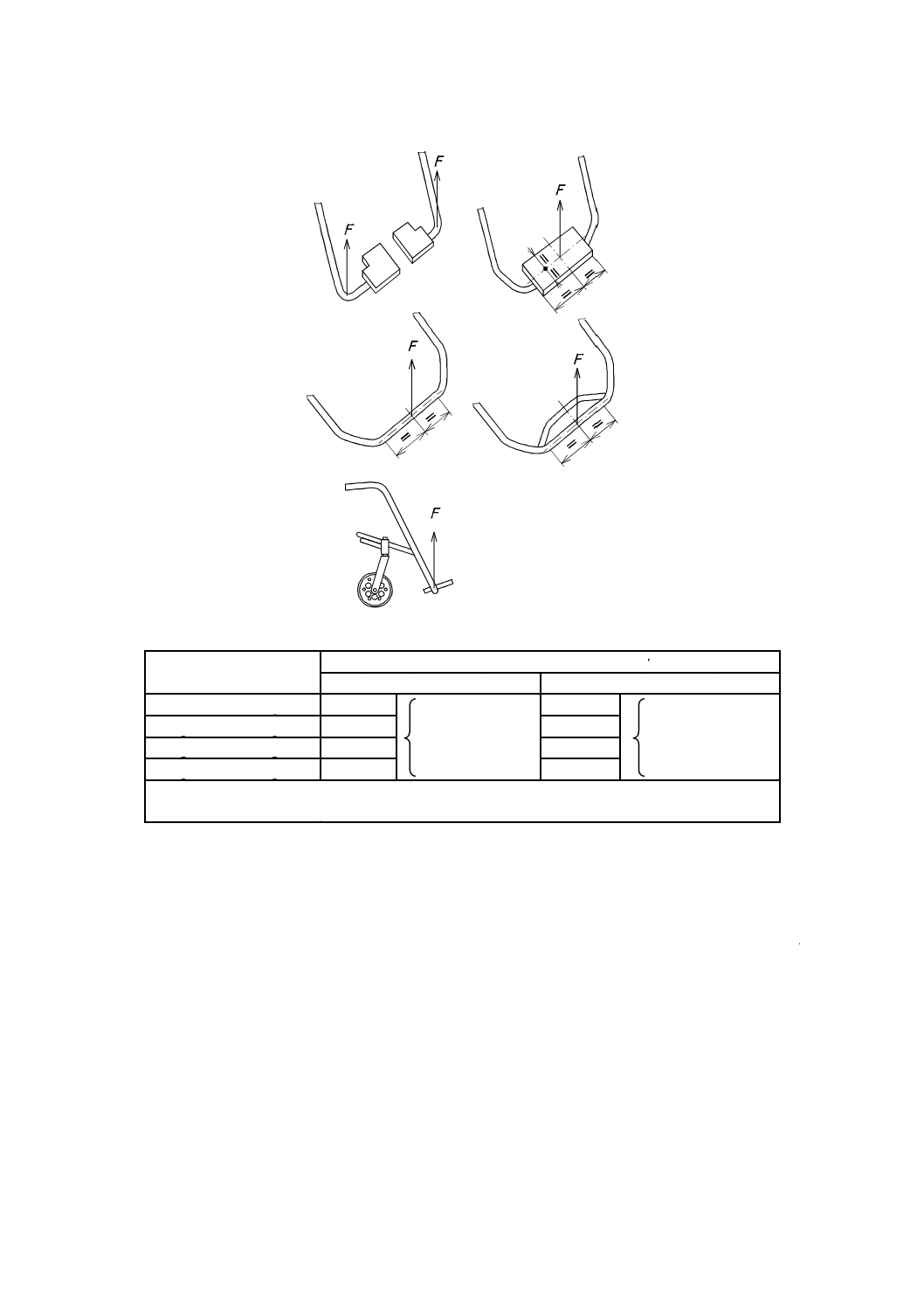
12.2.8
グリップ耐離脱性試験
グリップ耐離脱性試験は,次による。
図36に示す方法からグリップへの負荷方法を選び,グリップを図36の力で10秒間引っ張り,抜けない
ことを確認する。
a) リング法
図36−グリップ耐離脱性試験
34
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 分割管法
c) 組ひも法
図36−グリップ耐離脱性試験(続き)
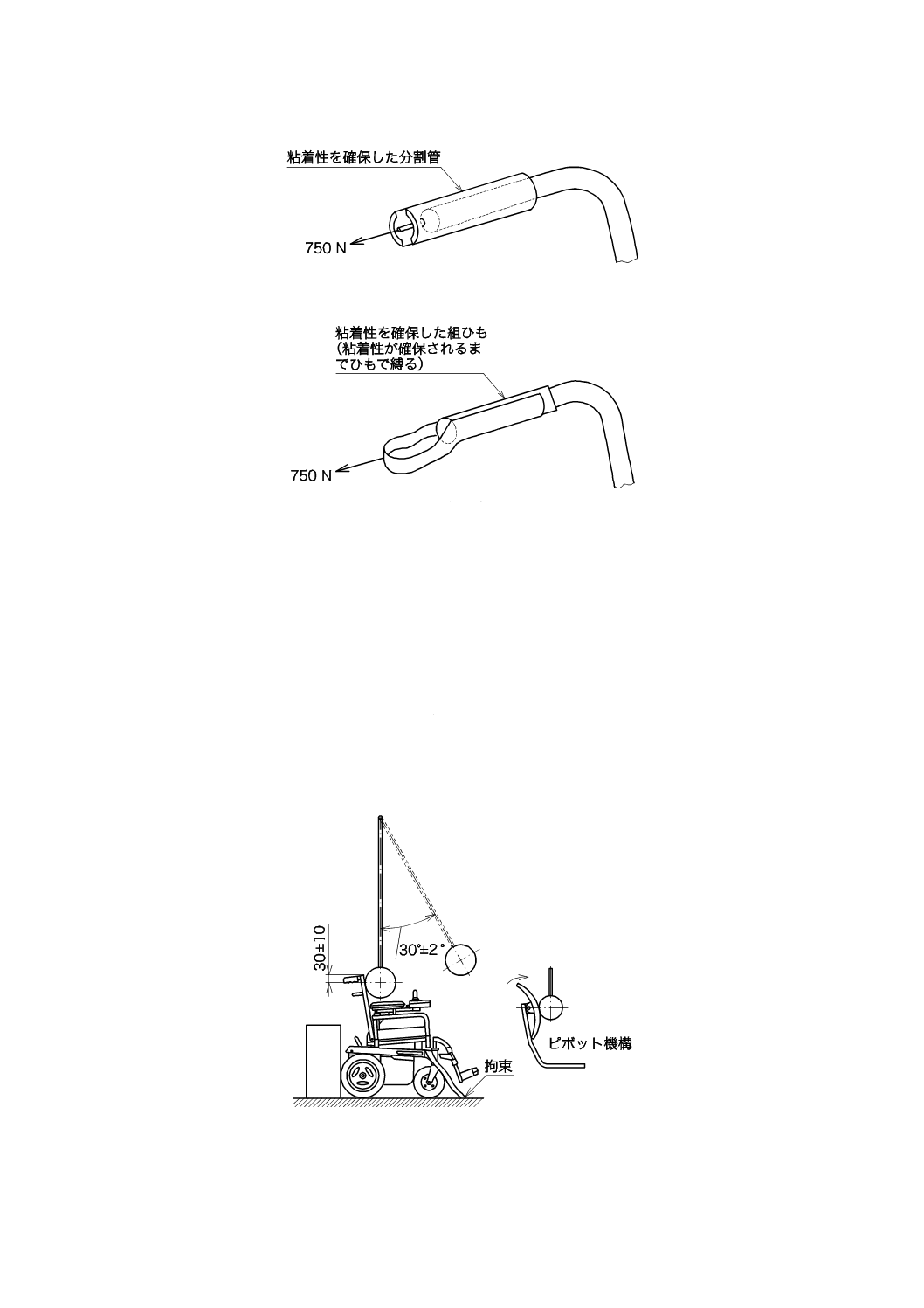
12.3
耐衝撃性試験
12.3.1
バックサポート斜め耐衝撃性試験
図37に規定するように,水平な試験平面上にダミーの大たい(腿)部を載せた電動車椅子を置き,バッ
クサポート上端から下方30±10 mmの中心線上に,質量25 kgのおもり[図A.2 a) 又はb)]を30±2°の
衝突角度で衝突させる。2回衝突させた後,附属書Cによって評価要件を確認する。ピボット機構のバッ
クサポートの場合は,バックサポート軸の水平線上におもりの重心を衝突させるようにする。
なお,この試験はバックサポート高320 mm以上の電動車椅子に適用する。
単位 mm
図37−バックサポート斜め耐衝撃性試験
35
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12.3.2
フットサポート耐衝撃性試験
水平な試験平面上にダミーを載せブレーキを開放した電動車椅子を置き,図38に規定するように側方,
前方のそれぞれにおいて,質量10 kgのおもり[図A.3 a)]を,式(3)で求めた衝突角度θからフットサポ
ートに衝突させ,附属書Cによって評価要件を確認する。
分離形フットサポートの場合は片側だけで2方向(側方,前方)を,一体形のフットサポートは同じフ
ットサポート側で2方向(側方,前方)を,各方向1回ずつの衝撃試験を実施する。側方衝撃試験で,フ
ットサポートの位置が動いた場合には,初期位置に戻す。
(
)377
/
1
cos
w
dM
M+
−
=
θ
···························································· (3)
ここに,
θ: 衝突角度(°)
Md: ダミー質量(kg)
Mw: 電動車椅子質量(kg)
図38−フットサポート耐衝撃性試験
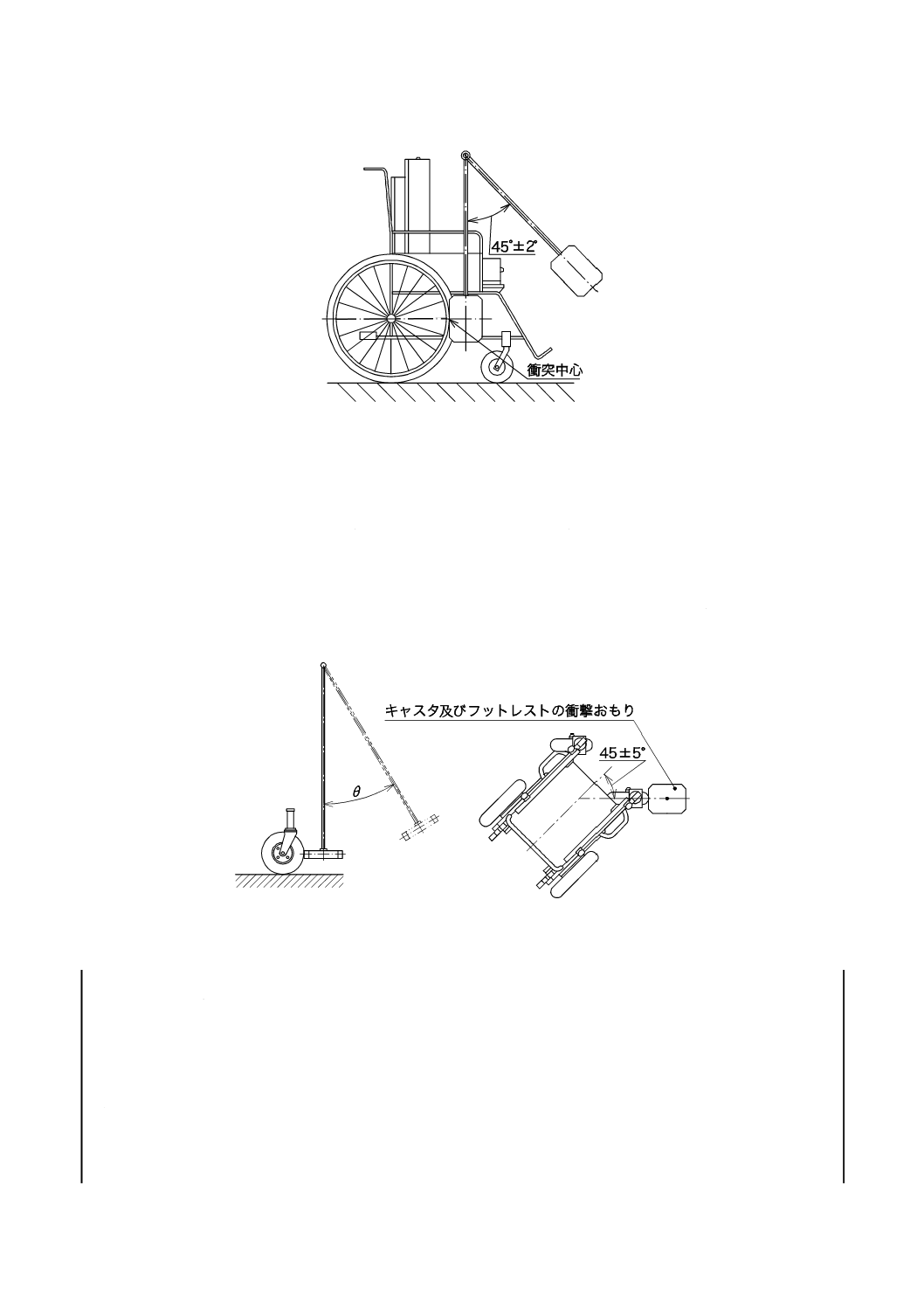
12.3.3
ハンドリム耐衝撃性試験
図39に規定するように水平な試験平面上にダミーを載せ,ブレーキ及びクラッチを開放した電動車椅子
を置き,質量10 kgのおもり[図A.3 b)]を,45±2°の角度から片方のハンドリムに2回衝突させ,附属
書Cによって評価要件を確認する。
なお,衝突位置は,駆動輪車軸と同じ高さでハンドリムのリムへの取付け箇所金具間の中間点とする。
ハンドリムに継ぎ目がある場合は,継ぎ目部に2回衝突させる。ハンドリムが車輪と一体の場合は,車輪
及びハンドリムを2回の衝撃の間に90±5°回転させ衝突させる。簡易形だけに適用する。
36
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図39−ハンドリム耐衝撃性試験
12.3.4
キャスタ耐衝撃性試験
キャスタが装着された電動車椅子では,図40に規定するように,水平な試験平面上にダミーを載せブレ
ーキ及びクラッチを開放した電動車椅子を置き,キャスタを電動車椅子の縦軸に対し45±5°の状態にし,
質量10 kgのおもり[図A.3 c)]を,12.3.2の式(3)で求めた衝突角度θからキャスタ車輪に1回衝突させ,
附属書Cによって評価要件を確認する。
なお,衝突位置は,キャスタ車軸の水平線上±5 mmの高さとする。ハンドル形には適用しない。
図40−キャスタ耐衝撃性試験
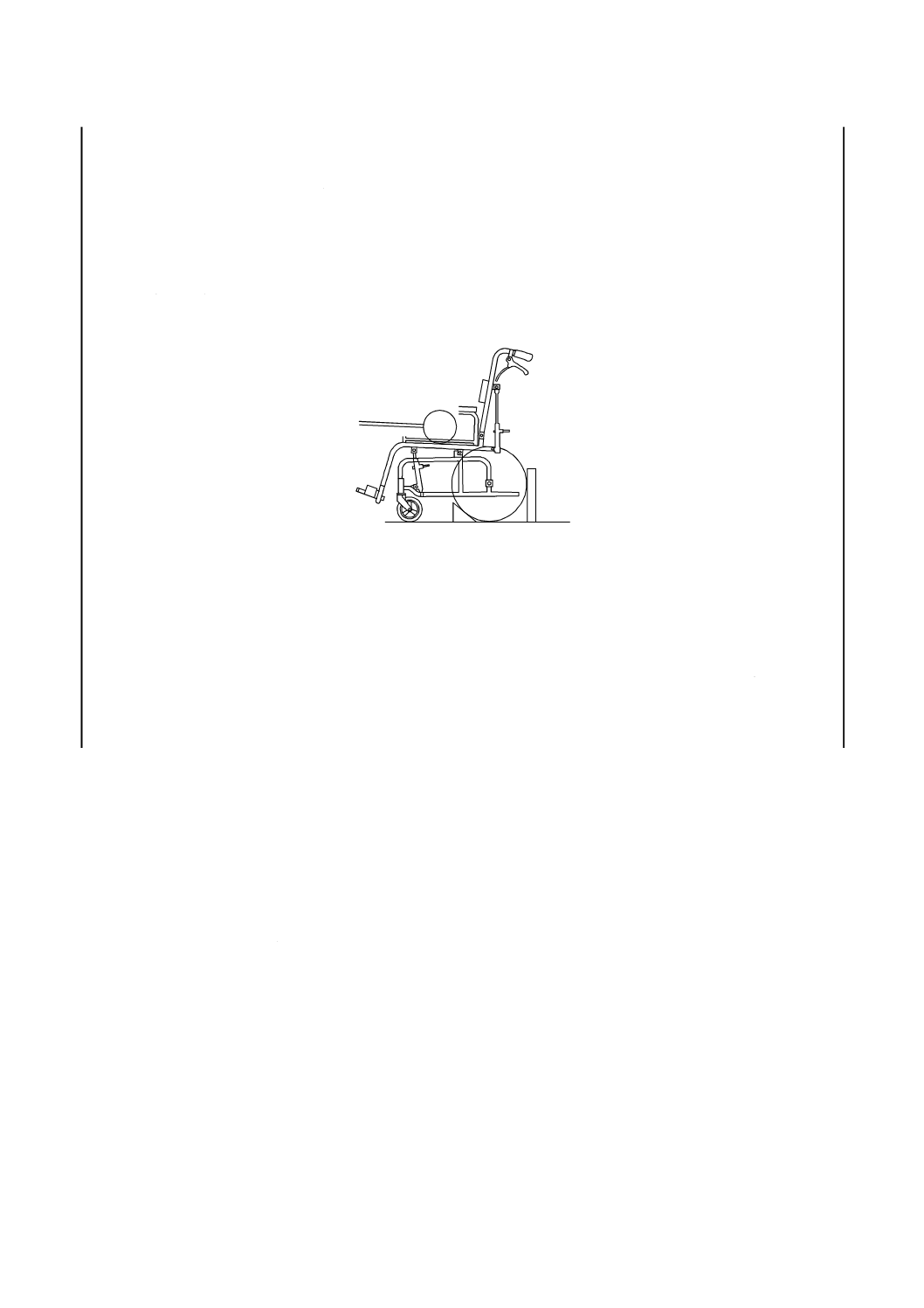
12.3.5
シート耐衝撃性試験
12.3.5.1 試験条件
試験条件は,次による。
a) 衝撃部位はシート中央部とする。
b) 衝撃用おもりは25 kgとし,衝撃面に対しては垂直な力を加える。
c) 座位変換形のティルト機構をもつものは,シートの角度調整が最小ティルトのストッパに当たってか
ら5°起こした状態にて試験する。
d) c) 以外は,標準状態にて試験する。
37
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12.3.5.2 試験方法
試験方法は,次による。
a) ティルト機構のある電動車椅子では,試験品をティルト状態にし,図41に示すようにシート上面に対
し垂直に衝撃力が加わるようにキャスタは固定せず,後輪を固定し衝撃に対して自由な状態にしてお
く。
b) シート部への衝撃は,シート中央部でシート面から180 mmの位置まで25 kg±0.1 kgのおもりを引き
上げ10回自由落下させ,衝撃を加える。
図41−シート耐衝撃性試験
12.4
耐久性試験
12.4.1
駐車用ブレーキの耐久性試験
自動ブレーキを装備せず駐車用ブレーキをもつ電動車椅子については,左右いずれか一方の駐車用ブレ
ーキについて,0.5 Hzを超えない周波数で,ブレーキをかけてから外す一連の操作を,60 000回繰り返し,
附属書Cによって評価要件を確認する。
なお,ブレーキの操作は,車輪を少し回転させてから次の操作を行う。簡易形だけに適用する。
12.4.2
走行耐久性試験
12.4.2.1 標準形の走行耐久性試験
標準形の走行耐久性試験は,次による。
a) 予備電流の測定 走行可能状態にある電動車椅子を,平たんな路面上で予備走行した後,1.0±0.1 m/s
の速度で走行させたときの電動車椅子のバッテリ電流値を予備電流値とする。
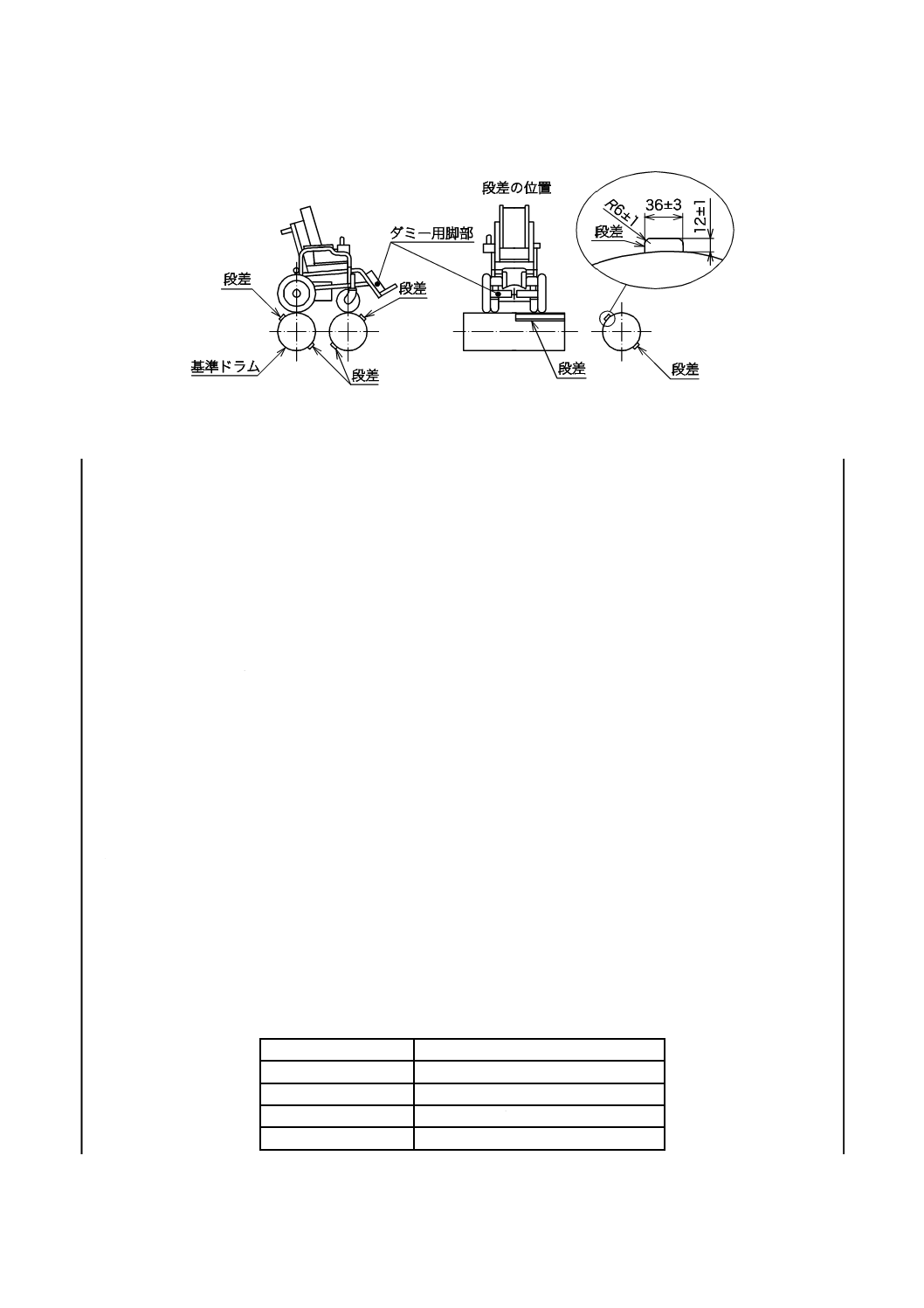
b) 走行耐久性試験 図42に規定するように,箇条11 c) で規定するダミーを載せた走行可能状態にある
電動車椅子を,各々の車輪がドラム1回転中に1回段差を乗り越えるように位置決めをする。段差を
取り除いて,電動車椅子自体の駆動システムによって基準ドラムを回転させ,基準ドラムの周速度を
1.0±0.1 m/sにして電動車椅子のバッテリ電流値がa) で測定した予備電流値の±5 %になるように基
準ドラムの回転抵抗を調整する。次に,段差を取り付けて200 000回試験し,附属書Cによって評価
要件を確認する。試験装置の構成は附属書B,試験装置の準備,ダミーの拘束方法などについては附
属書Fによる。また,電動車椅子の駆動電源は,外部電源を用いてもよい。
38
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
図42−走行耐久性試験
12.4.2.2 座位変換形の走行耐久性試験
12.4.2.2.1 試験条件
標準状態と最も不利な状態の2通りで試験を行う。
a) ティルト機構の付いた電動車椅子のシート角度は,シートの角度調整部分が最小ティルトのストッパ
に当たってから5°±1°起こした状態にて試験する。角度は,角度計(デジタル角度計など)を使用
して測定する。
b) ダミーは,試験品の使用者最大体重に対応した附属書Eに規定するダミーとする。
c) フットサポートにエレベーティング機構があるものについては,エレベーティング機構が試験中に動
かないように固定する。
d) メカロック等が試験中に縮む場合は,調整してもよい。
12.4.2.2.2 試験方法
試験方法は,次による。
a) 附属書Bに規定する試験装置に,ダミーを載せた車椅子を横方向の動きは50 mm以内,垂直方向の動
きは制限しないように,更に,各々の車輪がドラム1回転中に1回段差を乗り越えるように位置決め
する。
b) 基準ドラムの周速度が電動車椅子は1.0±0.1 m/s,簡易電動の場合は0.7±0.07 m/sになるように設定
し,10万回まで回転させる。
c) 目視,触感などによって,使用できないような問題の発生を確認し,発生時の回転回数を記録する。
10万回まで行って問題ない場合は,引き続き試験を継続する。
d) 表9に基づいて,相当する区分記号を定め,記録する。
表9−走行耐久性の区分
区分記号
回転回数
R20
200 000回以上
R15
150 000回以上200 000回未満
R10
100 000回以上150 000回未満
R5
50 000回以上100 000回未満
39
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12.4.3
落下耐久性試験
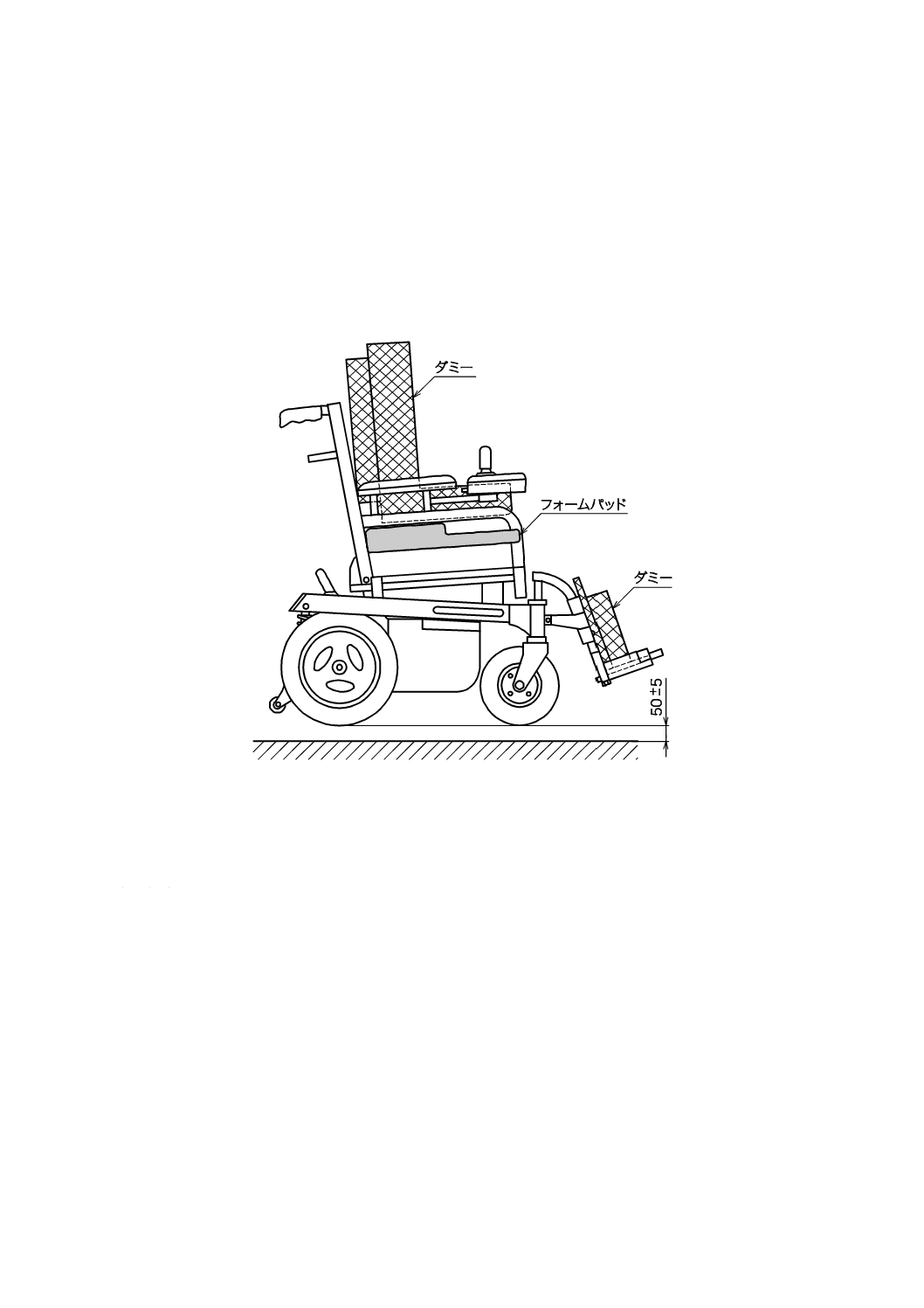
ダミーを載せた電動車椅子を,図43に示すように段差落下試験装置の硬い平面に対して50±5 mmの高
さから6 666回自由落下させ,目視,触感などによって附属書Cによって評価要件を確認する。
なお,ダミー下部にフォームパッドを敷き,ダミーを載せた電動車椅子の水平な動きは制限し,自由落
下は制限しない(ベルト保持が推奨)。キャスタが進行方向に対し±45°以下での自由な動きとなるように
する。試験装置の構成は,附属書Bに示す。
単位 mm
図43−落下性能試験
12.4.3.1 標準形の落下耐久性試験
12.4.3.1.1 試験条件
試験条件は,次による。
a) シート角度は,標準状態と最も不安定な状態の2通りで試験する。
b) ダミーは,試験品の使用者最大体重に対応した附属書Eに規定するダミーとする。
12.4.3.1.2 試験方法
試験方法は,次による。
a) ダミーを載せた車椅子を,図43に示すように段差落下試験装置の硬い平面に対して50 mm±5 mmの
高さから6 666回自由落下させる。
b) 目視,触感などによって,使用できないような問題の発生を確認し,発生時の落下回数を記録する。
c) 表10に基づいて,相当する区分記号を定め,記録する。
40
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表10−車椅子落下耐久性試験の区分
区分
回数
D6
6 666回以上
D3
3 333回以上6 666回未満
12.4.3.2 座位変換形の落下耐久性試験
12.4.3.2.1 試験条件
試験条件は,次による。
a) ティルト機構をもつ車椅子のシート角度は,シートの角度調整部分が最小ティルトのストッパに当た
ってから5°起こした状態で試験する。角度は,角度計(デジタル角度計など)を使用して測定する。
b) ダミーは,使用者最大体重に対応した附属書Eに示すダミーとする。
12.4.3.2.2 試験方法
試験方法は,次による。
a) ダミーを載せた車椅子を,図43に示すように段差落下試験装置の硬い平面に対して50±5 mmの高さ
から6 666回自由落下させる。
b) 目視,触感などによって,使用できないような問題の発生を確認し,発生時の落下回数を記録する。
c) 表10に基づいて,相当する区分記号を定め,記録する。
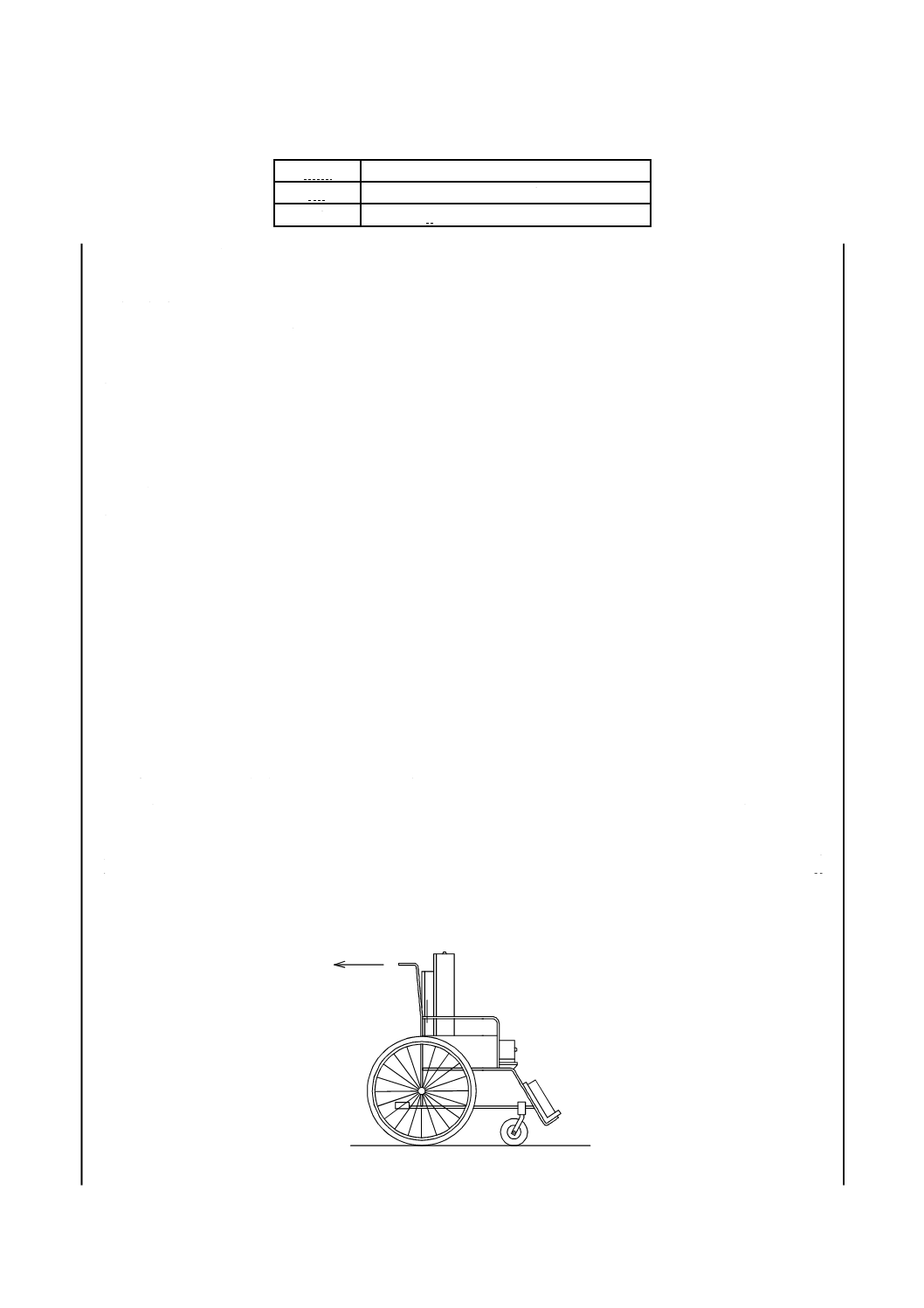
12.4.4
キャスタアップ繰返し試験
この試験は,簡易形電動車椅子に適用する。
12.4.4.1 試験条件
試験条件は,次による。
a) シート角度は,標準状態で試験する。
b) ダミーは,使用者最大体重に対応した附属書Eに規定するダミーとする。
12.4.4.2 試験方法
試験方法は,次による。
a) ダミーの大たい(腿)部をシート中央に載せる。
b) 車椅子の車輪は試験面に接触させておき,車軸の回転方向の動きを制限せず,かつ,車椅子自体は前
後左右に動かないように,試験面に固定をする。固定の方法としてストッパー等を用いてもよい。
c) 図44に示すように,手押しハンドルのグリップ中央を,試験面に対し水平方向に,キャスタが50100
−
mm浮上する負荷力を1分間に10回(+0 −2)の速度で20 000回加え,目視,触感などによって
附属書Cに適合しているか確認する。
図44−キャスタアップ繰返し試験
41
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
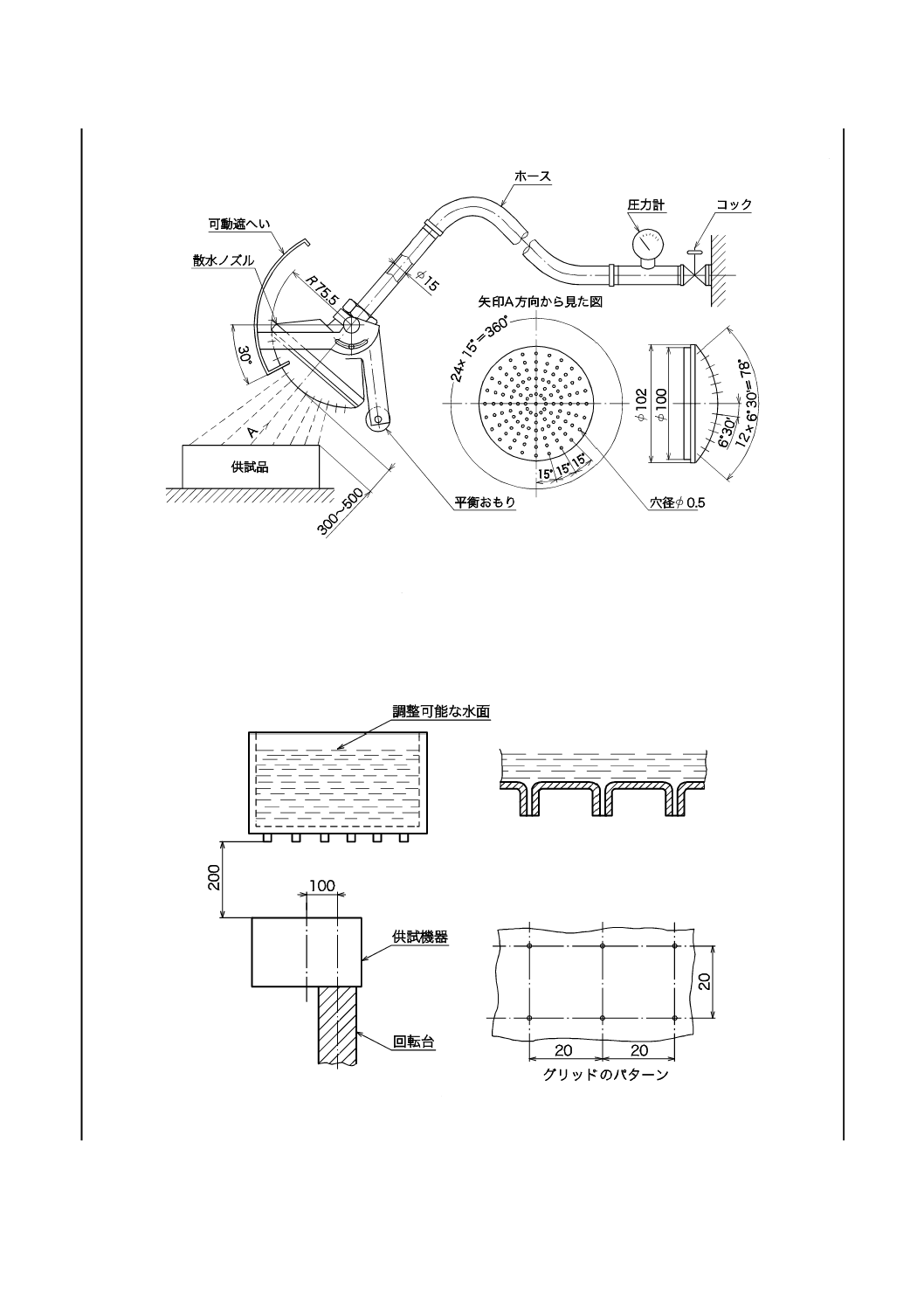
12.5 耐水性能試験
JIS C 0920のIPX3に基づいて試験を行う。また,この試験の代わりに,耐水性を要求するユニットに
対して,電動車椅子装着と同等な状態で,JIS D 0203のS1の試験を行ってもよい。
IPX3の場合,散水は図45 a) に規定するように散水ノズルで行い,電動車椅子の前後・左右方向におい
て垂直に対し±60°の位置から10 L/分±5 %を最低5分ずつ散水する。IPX1は別置式充電器に関して実施
し,図45 b) に規定するように滴水試験装置で105.0
+
mm/分で10分間行う。
注記 IPXとはIPコードといい,防水・防じんに関する保護規格。かつては,JIS保護等級といった。
なお,この場合供試品は回転台の上に置く。
試験後は,最高速度及び制動性能のうち平たん路制動性能について適合し,車体,駆動部,電気回路に
異常がないか確認する。
42
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
121個のφ0.5の穴: 中心に1個
二つの内円に30°ピッチで12穴
四つの外円に15°ピッチで24穴
可動シールド: アルミニウム製
じょうろノズル: 黄銅製
a) IPX3
b) IPX1
図45−耐水性能試験
43
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12.6
制動用ブレーキに関する試験方法
制動用ブレーキが装着された簡易形電動車椅子については,次の試験を行う。
12.6.1
強度試験
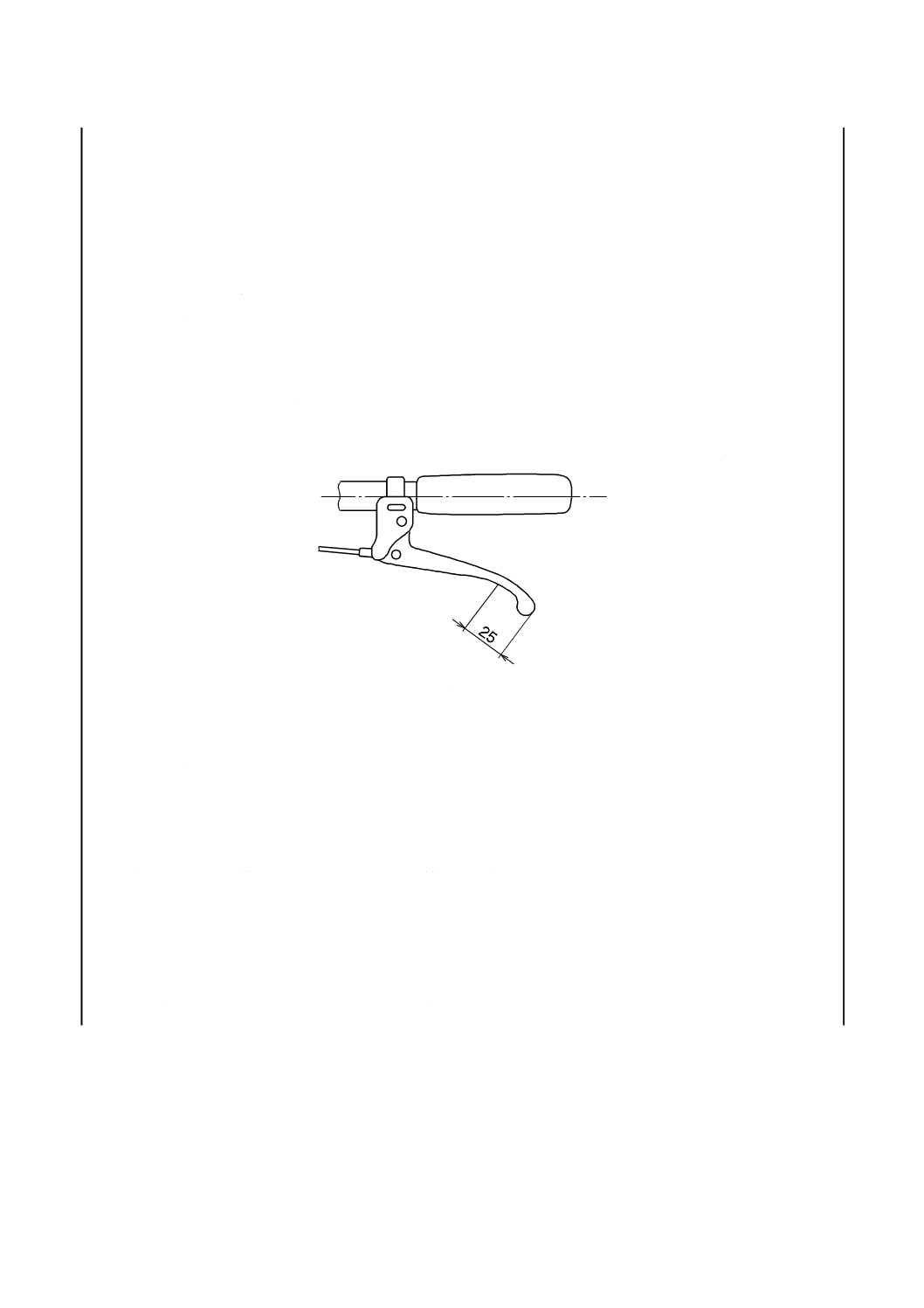
強度試験は,次による。
なお,ワイヤーの遊びは製造事業者の指定値による。
a) ブレーキが装着された車椅子のブレーキ系統の正しい調整を確認する。
b) 図46のようにブレーキレバー端から25 mmの位置に,ブレーキレバー作動面内でブレーキレバー動
作の接線方向に450 Nの力を加えるか,又はブレーキレバーがグリップ(グリップがない場合には,
手押しハンドル)に接触するまで力を加える。
c) ブレーキ系統及びその構成部品の異常の有無を調べる。
d) 左右いずれかの制動用ブレーキレバーにb) からc) までを10回繰り返す。
単位 mm
図46−ブレーキ強度
13
検査方法
13.1
形式検査
形式検査は,新規の設計,製造に関わる電動車椅子が,設計どおりの品質特性及びこの規格を満足して
いるかどうかを判定するための検査で,箇条7〜箇条10,箇条14,箇条15及び箇条16について実施し,
全てに適合しなければならない。ただし,形式検査は,箇条7の試験においては同一の形式であれば,検
査対象とする電動車椅子はそれぞれ別の電動車椅子で実施してもよい。
13.2
製品検査
製品検査は,既に形式検査に合格したものと同じ設計,製造に関わる電動車椅子の受渡しにおいて,当
初の設計どおりの品質特性及びこの規格を満足しているかどうかを判定するための検査で,表11の必要と
認められる項目について実施し,適合しなければならない。
なお,製品検査は,抜取検査方式によって実施してもよい。
44
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表11−製品検査項目
項目
内容
性能
箇条7の表1の最高速度及び制動性能(平たん路だけ)
構造
8.1 b) 及びc)
8.3 b) 及びd)
8.4 c)
8.5 b) 及びc)
寸法
箇条9の表4(特に必要性がある場合は,表4の寸法だけ
でなくてもよい。)
外観
箇条10 a)〜d)
14
製品の呼び方
製品の呼び方は,附属書JAによる。
15
表示
電動車椅子には,容易に消えない方法で次の事項を表示する。また,容易に認識できる大きな文字で,
見やすい箇所に表示する。
a) 規格番号又は規格名称
b) 種類(形式及び速度)
例 標準形MS
c) 製造年月又はその略号
d) 製造事業者名,販売業者名,又は輸入業者名若しくはそれらの略号
e) 製造番号
f)
定格電圧
g) バッテリの形式名
h) 使用者最大体重(積載物も含む。)
16
取扱説明書
電動車椅子には,次に示す趣旨の取扱説明書を添付する。ただし,その製品に該当しない事項は省略し
てもよい。また,使用者及び介助者を含めた一般消費者が容易に認識できる大きな文字で明示する。
なお,a) は取扱説明書の表紙などの見やすい箇所に示し,必要な項目については,安全警告標識(
)
を併記するなどして,より認知しやすいものとする。
a) 取扱説明書を必ず読み,読み終った後,保管する。
b) 介助者がいる場合には,介助者も取扱説明書をよく読み,使用上の注意などについて認知し,電動車
椅子を使用する。
c) 運転(操縦)方法
d) 交通法規及び交通マナーの順守
e) 製品の位置付け(法的位置付け,製品の特性,目的外使用の禁止など)
f)
本体表示(ラベル)の説明
g) 各部の名称及び働き(図で示す。)
h) 各部,部品及び附属品の操作方法,使用方法及び注意
45
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
i)
保守点検方法及び使用前の注意(運転前点検の方法,点検項目,定期点検の方法,広い場所での練習
など)
j)
走行上の注意及び走行性能限界(自動ブレーキの取扱いなどの操作・運転に関する注意,段差乗越性
能,登降坂性能など)
k) 場所,路面,天候などに関する走行上の注意
l)
緊急時の対処方法
m) 充電方法
n) バッテリ取扱上の注意
o) 改造の禁止
p) 保管方法(保管によくない環境の明示など)
q) 不調時の対応方法
r) 外観図
s)
諸元表(附属書JC参照)
t)
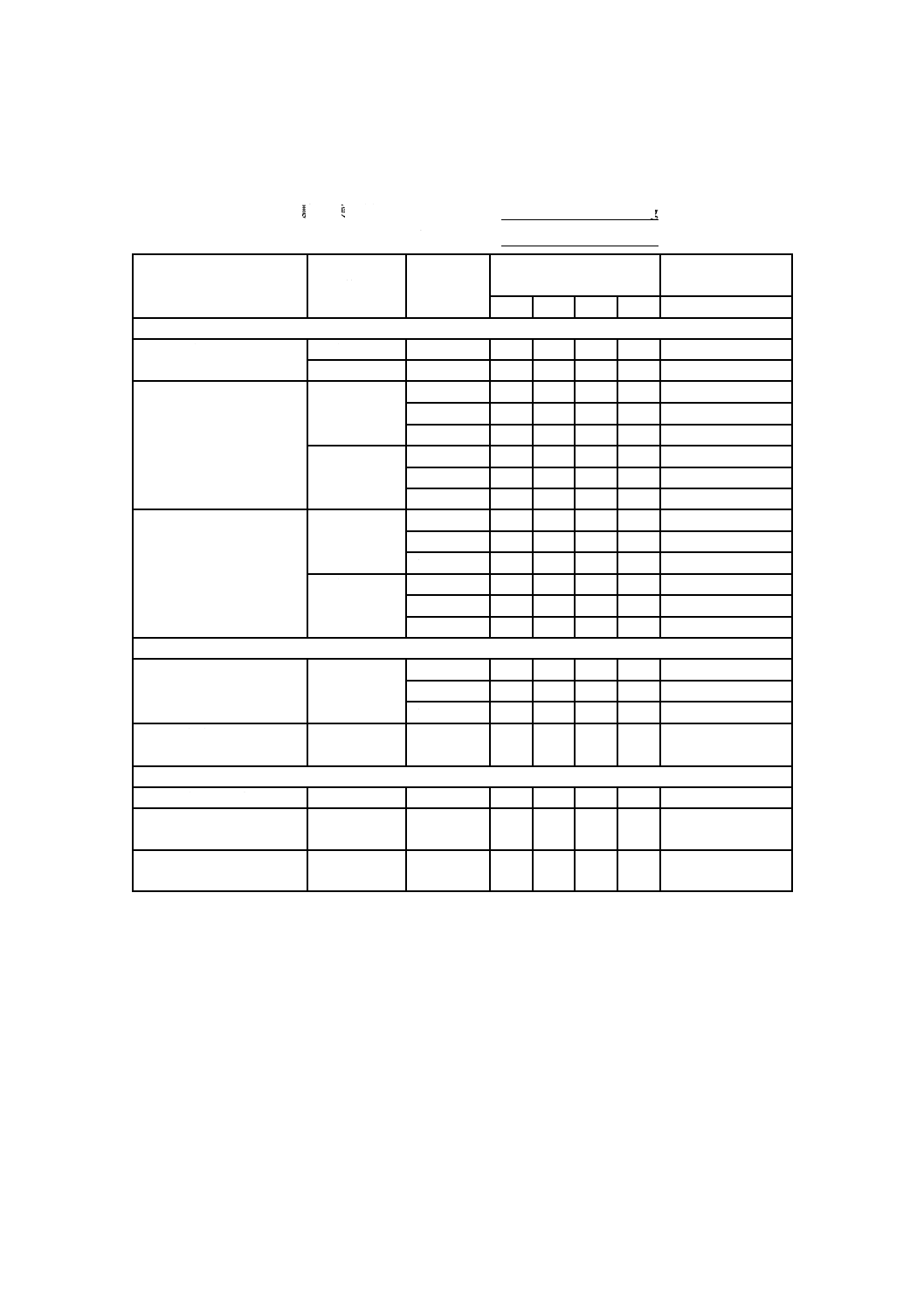
静的安定性試験結果(表8参照)
u) 動的安定性試験結果[座位は標準状態,及び最も不安定な状態での結果(表D.4参照)]及び試験条件
(ダミーの質量又は乗員の体重,転倒防止装置及び縁石乗り上げ装置の有無)。
動的安定性試験結果の参考例として表12に示す。
表12−動的安定性試験結果(参考)
評価項目
座位の状態
標準状態
最も不安定な状態
斜面上での後方に対する動的安定性(最大傾斜角度)
10°
10°
斜面上での前方に対する動的安定性(最大傾斜角度)
10°
10°
斜面上での側方に対する動的安定性(最大傾斜角度)
10°
10°
円旋回での側方に対する動的安定性(最小半径)
1 m
2 m
急激な円旋回での側方に対する動的安定性(適合性)
適合
不適合
前向き段差の乗り上げ時における後方の動的安定性
(最大段差高)
50 mm
25 mm
前向き段差乗り上げ時における前方の動的安定性(最
大段差高)
50 mm
25 mm
前向き段差降り時における前方の動的安定性
(最大段差高)
50 mm
25 mm
斜め段差降り時における側方の動的安定性
(最大段差高)
50 mm
25 mm
試験条件:転倒防止装置あり,搭乗者体重は75 kg。
v) 点検,修理記録様式
w) 製造事業者,販売業者又は輸入業者の連絡先
x) 保証の明細
46
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
荷重負荷パッド及び試験用おもり
A.1 耐荷重性試験用負荷パッド
耐荷重性試験で使用する負荷パッドを,図A.1のa) 及びb) に示す。
単位 mm
a) 凹形円筒荷重負荷パッド
b) 凸形円筒荷重負荷パッド
図A.1−荷重負荷パッド
47
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
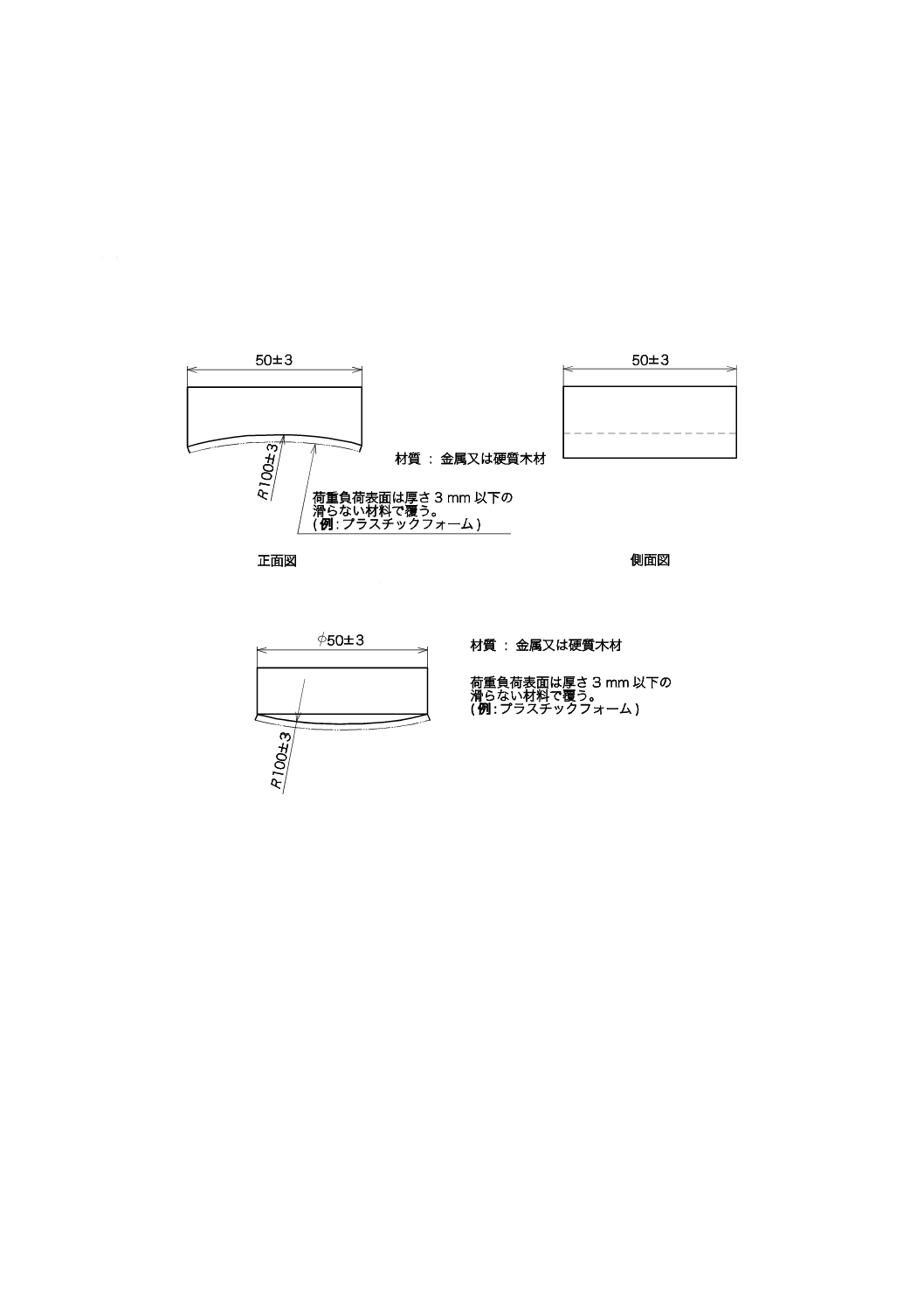
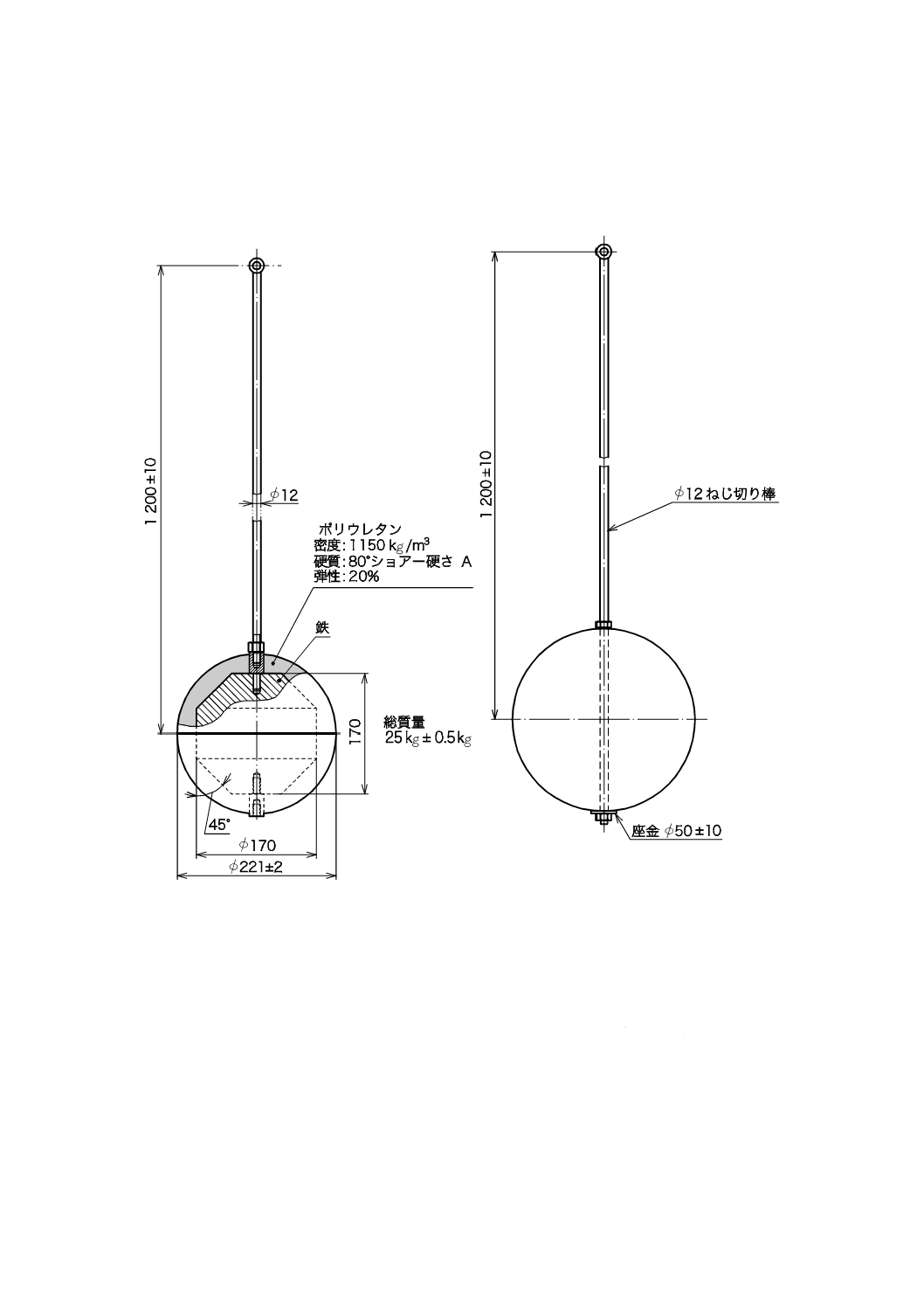
A.2 バックサポート斜め耐衝撃性試験用おもり
12.3.1で使用するおもりを,図A.2のa) 及びb) に示す。
単位 mm
正規フットボールサイズ5(サッカーボール)
φ3.5±1 mm径の鉛玉及び高密度発泡材
密度
75±15 kg/m3−JIS K 7222
硬度
325±60 N−ISO 2439
総質量 25±0.5 kg
真円度 20 mm
a) ポリウレタン仕様
b) サッカーボール仕様
図A.2−バックサポート斜め耐衝撃性試験用おもり
48
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
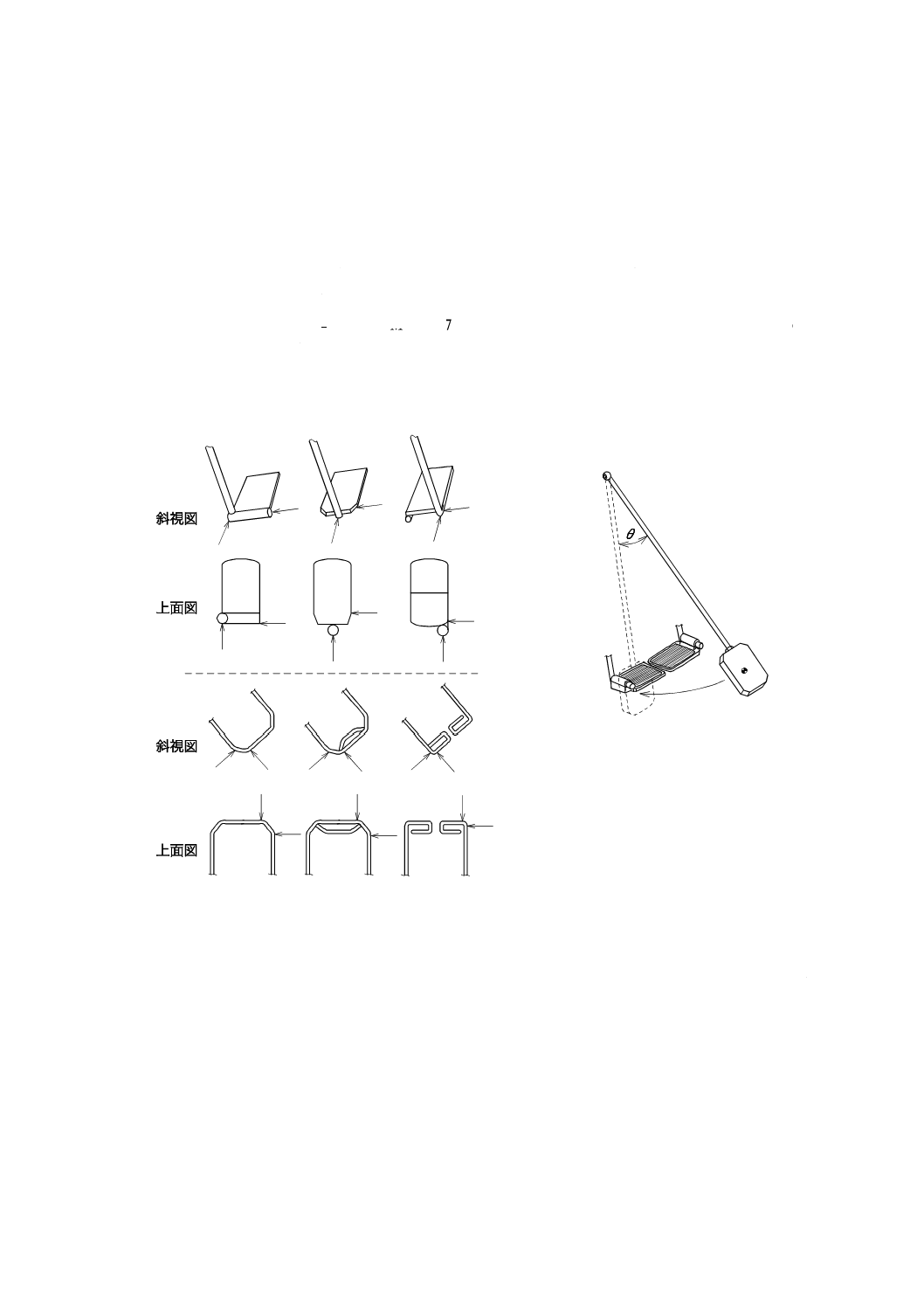
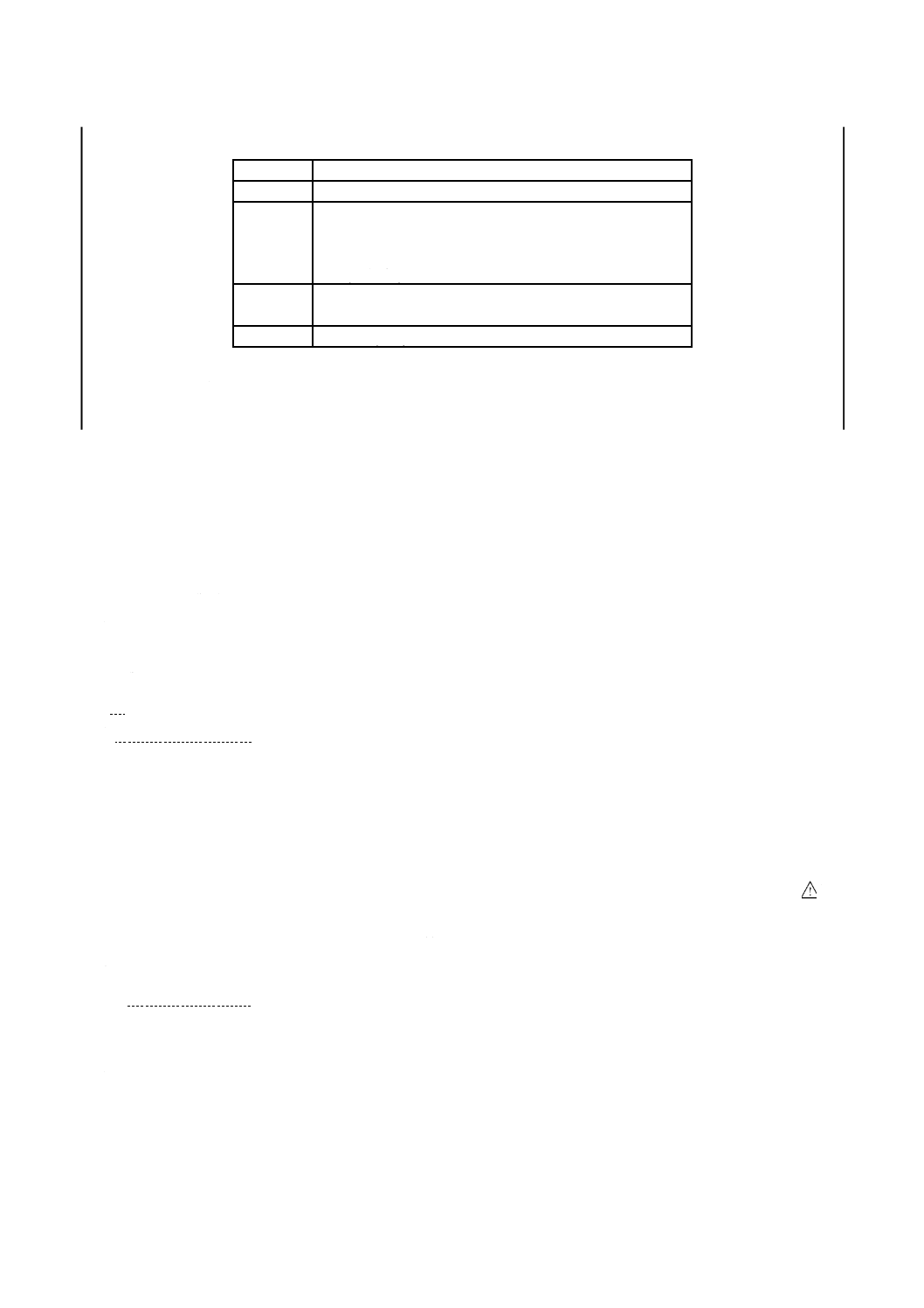
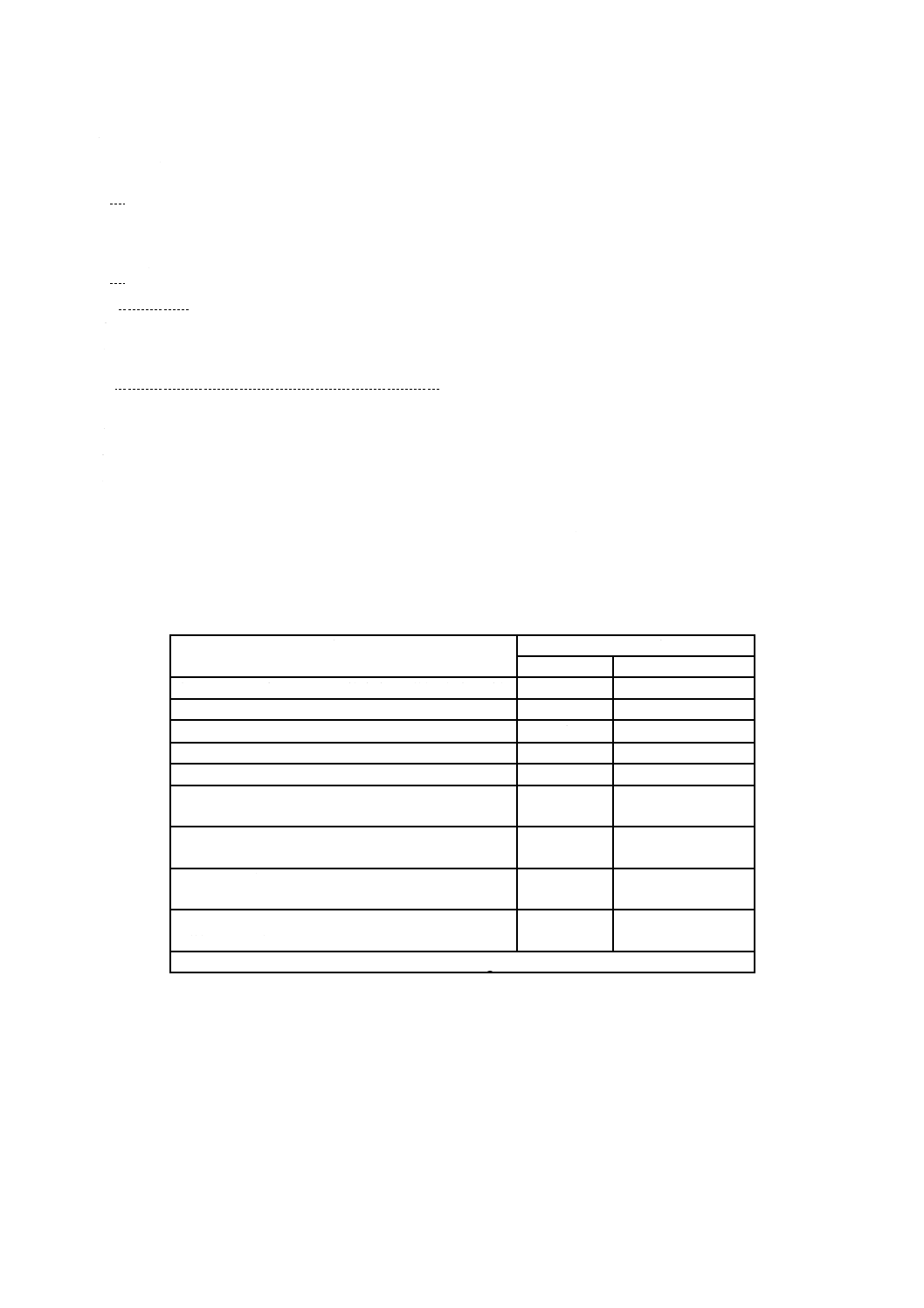
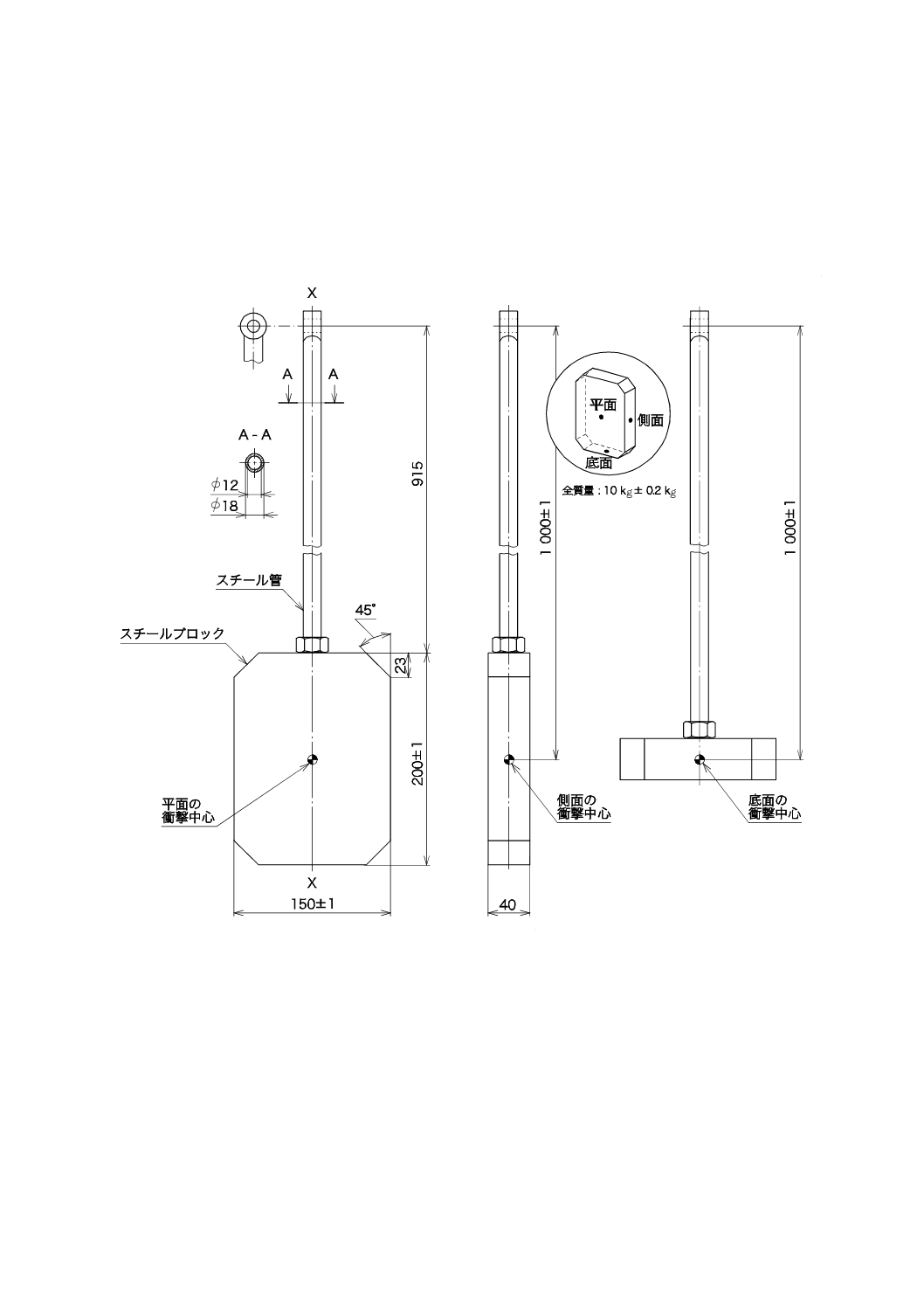
A.3 フットサポート,ハンドリム及びキャスタ耐衝撃性試験用おもり
12.3.2,12.3.3及び12.3.4で使用するおもりを,図A.3のa),b) 及びc) に示す。フットサポート耐衝撃
性試験はおもりの正面の衝撃中心で,ハンドリム耐衝撃性試験はおもりを90°回転させ側面の衝撃中心で,
キャスタ耐衝撃性試験はおもりの正面が水平になるようにして底面の衝撃中心で試験を行う。
単位 mm
a) フットサポート用
b) ハンドリム用
c) キャスタ用
図A.3−耐衝撃性試験用おもり
49
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
走行耐久性試験装置及び落下試験装置の構成
B.1
走行耐久性試験装置の構成
12.4.2で使用する試験装置の構成は,次による。
a) 電動車椅子のトレッドより少なくとも100 mm幅の広い,ドラム径が直径250±25 mmの金属製の水
平で平行な二つの円筒形のドラムで構成する。ドラム間の距離は,試験する電動車椅子のホイールベ
ースと同一寸法に調整する。
b) 図42に示すように,各々のドラムは二つの段差を備えている。
c) 基準ドラム上に電動車椅子の駆動輪を据え付ける。そして,前輪をもう一方のドラムに据え付ける。
d) 電動車椅子の拘束は,後輪の車軸又はできる限り後輪の車軸に近い電動車椅子のフレームで行う。
注記1 拘束部は,各々の端部にボールジョイントが付いた金属棒から構成されるものが望まし
い。
e) 横方向の動きは,±50 mmとし,垂直方向の動きは,制限しないようにする。
注記2 横方向の動きの制限は,帯状の布ひもで行うことが望ましい。
f)
±0.01 m/sの精度で,基準ドラムの周速度を測定する。
g) 基準ドラムの回転数を計測する。
h) 電動車椅子自体の駆動システムによって基準ドラムを駆動する。
i)
基準ドラムの周速度は,1.0±0.1 m/s,他のドラムは基準ドラムより2〜7 %の範囲で回転を速くする。
j)
基準ドラムの回転抵抗は,電動車椅子のモータによって導かれる電流が12.4.2.1 b) で示す制限範囲内
で,基準ドラムの速度設定値が持続されるように調整する。
注記3 通常,電動車椅子の正確なモータ電流値が得られるように駆動する必要がある。
B.2
電動車椅子落下試験装置の構成
12.4.3で使用する試験装置の構成は,次による。
a) 硬い水平面に50±5 mmの高さから電動車椅子を落下させることができる。
b) 電動車椅子の車輪の負荷がいつでも同じ場所にかからないように回転させる。
c) 落下する前に電動車椅子を確実に静止させる。
d) 落下回数を記録する。
50
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(規定)
評価要件
C.1 評価要件
試験後,電動車椅子は各部に破損,外れ及び使用上支障のある変形がなく,次に示す全ての要件を満た
さなければならない。
a) 構成要素は,折れ又は目視で確認できるクラックがあってはならない。
b) ナット,ボルト,ねじ,ロックピン,調整可能な部品及び同様の構成部品は,試験前に一度締め付け,
調整又は再適合してもよいが,これらは試験中に外れてはならない。ただし,2ピースタイプのフッ
トサポートの耐衝撃試験はこの限りではない。
c) 取外し,折りたたみ及び全ての調整部分は,製造事業者の仕様どおり操作できなければならない。
d) グリップは外れてはならない。
e) 調整できる部位は,b) で認められたもの以外,最初の位置からずれてはならない。
51
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(規定)
動的安定性
D.1 試験負荷
D.1.1 概要
試験は,ダミー又は乗員のいずれかで行う。
D.1.2 ダミー
ダミーは,次による。
a) 適切な位置にダミーが固定できるように電動車椅子を附属書Hによって設定する。
b) 電動車椅子を遠隔操作によって試験ができるようにダミーを設定する。
D.1.3 人間による試験要員
試験要員によって試験を行う場合は,ダミーと同等の総質量±2 kgで,各部の質量分布が同等となるよ
うに,電動車椅子又は人におもりを加える。この試験では,試験要員が,けがなどの危険を回避するため
の適切な安全策をとらなければならない。試験要員は,意識的,無意識的にかかわらず,電動車椅子を安
定させようとする体の動きを,試験中は最小限にしなければならない。
D.2 バッテリ
電動車椅子には,製造事業者が指定したバッテリを装備しなければならない。ただし,補水式バッテリ
では,試験中に液がこぼれて危険な場合があるため,同等の質量に最も近いゲル又はシールドバッテリに
置き換えてもよい。
D.3 試験手順
電動車椅子の動的安定性は,表D.5に示す方法で採点する。試験は,どの項目から実施してもよい。
試験における安全上の理由から,それぞれの試験は事前に遅い速度での試験を行い,最大速度での試験
ができるようにする。電動車椅子の試験をビデオによって記録した場合には,スロー及び静止による再生
で電動車椅子の安定性に関する観察又は採点に役立たせることができる。
D.4 電動車椅子の後方に対する動的安定性
D.4.1 電動車椅子の準備
表D.1に示すように調整及び調節可能な電動車椅子は,後方転倒に関する最も不安定な後輪位置,フレ
ームへのキャスタ装着位置,シート位置,バックサポート位置,バックサポート角度,シート角度及びシ
ートとフットサポートとの角度を設定する。
なお,座位変換形電動車椅子のシート角度及びバックサポート角度は,標準状態及び製造事業者が指定
する走行可能な自走時最大角度の2条件で行う。
52
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表D.1−後方安定性
電動車椅子部品の調整
最も不安定な位置
後輪位置(前後)
前方
フレームへのキャスタ装着位置
(前後)
後方
シート位置(前後)
後方
シート位置(垂直)
高い
バックサポート角度
(リクライン)
後方
シート角度(傾斜)
後方
バックサポート位置(前後)
後方
シートとフットサポートとの角度
最小
D.4.2 前進スタート
この試験は,電動車椅子が水平面上,及び上り勾配で電動車椅子が動き始める場合の安定性を確認する
ために行い,次による。
a) 電動車椅子を水平な試験平面上に置く。
b) 静止した状態から,前方へ最大加速するように操作レバーを操作する。
c) 電動車椅子の動的安定性を観察し,表D.5によって採点する。
d) 図D.1に示すように3°,6°及び10°の傾斜路でも,電動車椅子を斜面上方に向けて走行させ,b) 及
びc) を繰り返す。
図D.1−前進スタート
D.4.3 前進走行時の停止
この試験は,電動車椅子が水平面上及び上り勾配で最高速度で前進走行し,急停止したときの安定性を
確認するために行い,次による。
a) 水平な試験平面上で電動車椅子を最高速度で前進走行させる。
b) 操作レバーを手放すことによって急減速させる。
c) 電動車椅子の動的安定性を観察し,表D.5によって採点する。
d) a) を行った後,電動車椅子の電源を切ることによって急な減速をさせ,c) を繰り返す。
e) a) を行った後,操作レバーを反対方向に素早く操作し,急な減速をさせ,c) を繰り返す。
f)
a)〜e) の3方法によって得られた結果の最も低い得点及びその結果が得られた減速方法を記録する。
g) 図D.2に示すように3°,6°及び10°の傾斜路でも前進での登坂をし,a)〜f) を繰り返す。
53
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図D.2−前進走行時の停止
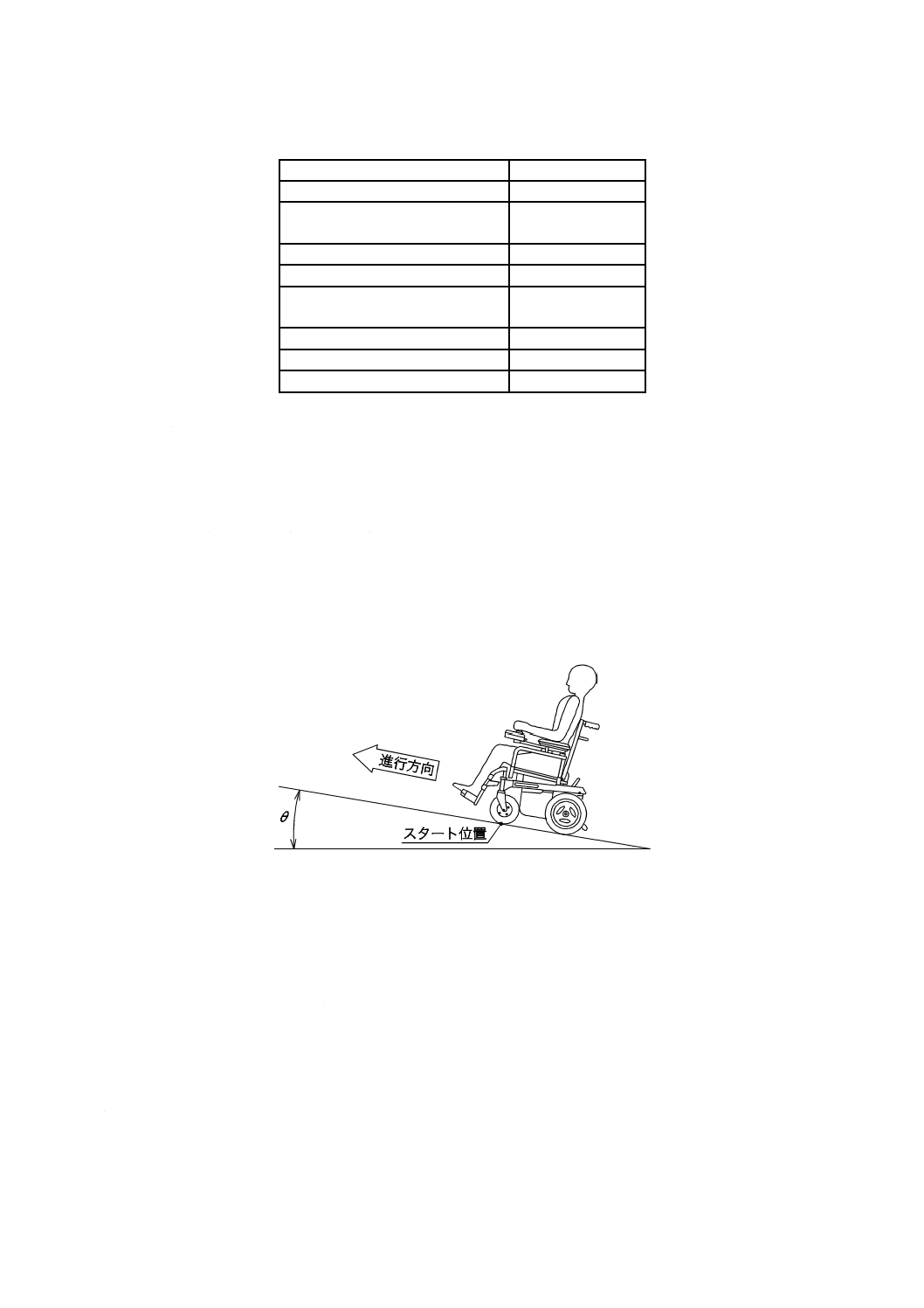
D.4.4 後退走行時の制動
この試験は,電動車椅子が水平面上及び下り勾配で最高速度で後退走行し,急停止したときの安定性を
確認するために行い,次による。
a) 水平な試験平面上で,電動車椅子を最高速度で後方へ走行させる。
b) 操作レバーを手放すことによって急に減速させる。
c) 電動車椅子の動的安定性を観察し,表D.5によって採点する。
d) a) を行った後,電動車椅子の電源を切ることによって急な減速をさせ,c) を繰り返す。
e) a) を行った後,操作レバーを反対方向に素早く操作し急な減速をさせ,c) を繰り返す。
f)
a)〜e) の3方法から得られた結果の最も低い得点及びその結果が得られた減速方法を記録する。
g) 図D.3に示すように3°,6°及び10°の傾斜路でも後退させ,a)〜f) を繰り返す。
図D.3−後退走行時の制動
D.4.5 静止状態からの前方への段差乗り上げ走行
段差乗り上げ走行試験は,次による。
a) 図D.4に示すように水平な試験平面上で,キャスタ車輪がトレーリングポジションになるようにし,
前輪を12 mmの段差に接触させる。
b) 操作レバーによって前進速度を最高速度にし,段差を上がれるように操作する。
c) 電動車椅子の動的安定性を観察し,表D.5によって採点する。
d) a) を行った後,25 mm及び50 mmの段差高さでc) を繰り返す。
54
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
e) 製造事業者が電動車椅子の乗り上げ限界高さの試験をする場合には,25 mmの間隔でa)〜c) を繰り返
し,電動車椅子が得点2又はそれ以上の得点で段差乗り上げができなくなるまで段差高さを増やして
いく。各々の高さで,表D.5による電動車椅子の状況を採点する。
図D.4−前方への段差乗り上げ
D.4.6 静止状態からの後方への段差降り走行
段差降り走行試験は,次による。
a) 図D.5に示すように水平な試験平面上で,後輪を12 mmの段差端に置く。
b) 操作レバーによって後退速度を最低速度にし,段差を降りる。
c) 電動車椅子の動的安定性を観察し,表D.5によって採点する。
d) a) を行った後,25 mm及び50 mmの段差高さでc) を繰り返す。
e) 製造事業者が電動車椅子の乗り降り限界高さの試験をする場合,25 mmの間でa)〜c) を繰り返し,電
動車椅子が得点2又はそれ以上の得点で段差降りができなくなるまで段差高さを増やしていく。各々
の高さで,表D.5による電動車椅子の状況を採点する。
図D.5−後方への段差降り
D.5 電動車椅子の前方に対する動的安定性
D.5.1 電動車椅子の準備
表D.2に示すように調整及び調節可能な電動車椅子は,前方転倒に関する最も不安定な後輪位置,フレ
ームへのキャスタ装着位置,シート位置,バックサポート位置,バックサポート角度,シート角度及びシ
ートとフットサポートとの角度に設定する。
なお,座位変換形電動車椅子のシート角度及びバックサポート角度は,標準状態及び製造事業者が指定
する走行可能な自走時最大角度の2条件で行う。
55
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表D.2−前方安定性
電動車椅子部品の調整
最も不安定な位置
後輪位置(前後)
前方
フレームへのキャスタ装着位置
(前後)
後方
シート位置(前後)
前方
シート位置(垂直)
高い
バックサポート位置(前後)
前方
バックサポート角度
(リクライン)
直立
シート角度(傾斜)
直立
シートとフットサポートとの角度
最大
D.5.2 前進走行時の制動
前進走行時の制動試験は,次による。
a) 水平な試験平面上で電動車椅子を最高速度で前進方向へ走行させる。
b) 操作レバーを手放すことによって急に減速させる。
c) 電動車椅子の動的安定性を観察し,表D.5によって採点する。
d) a) を行った後,電動車椅子の電源を切ることによって急な減速をさせ,c) を繰り返す。
e) a) を行った後,操作レバーを反対方向に素早く操作し急な減速をさせ,c) を繰り返す。
f)
a)〜e) の3方法で得られた結果の最も低い得点及びその結果が得られた減速方法を記録する。
g) 図D.6に示すように,3°,6°及び10°の傾斜でも前進下降し,a)〜f) を繰り返す。
図D.6−前進走行時の制動
D.5.3 傾斜面から水平面への走行
傾斜面から水平面への走行試験は,次による。
a) 図D.7に示すように,電動車椅子を3°の傾斜面によって最高速度で前進下降させ,水平な試験平面
上まで電動車椅子を走行させる。
b) 斜面から水平面における移行部での電動車椅子の動的安定性を観察し,表D.5によって採点する。
c) 6°及び10°の傾斜でもa) 及びb) を繰り返す。
56
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図D.7−傾斜面から水平面への走行
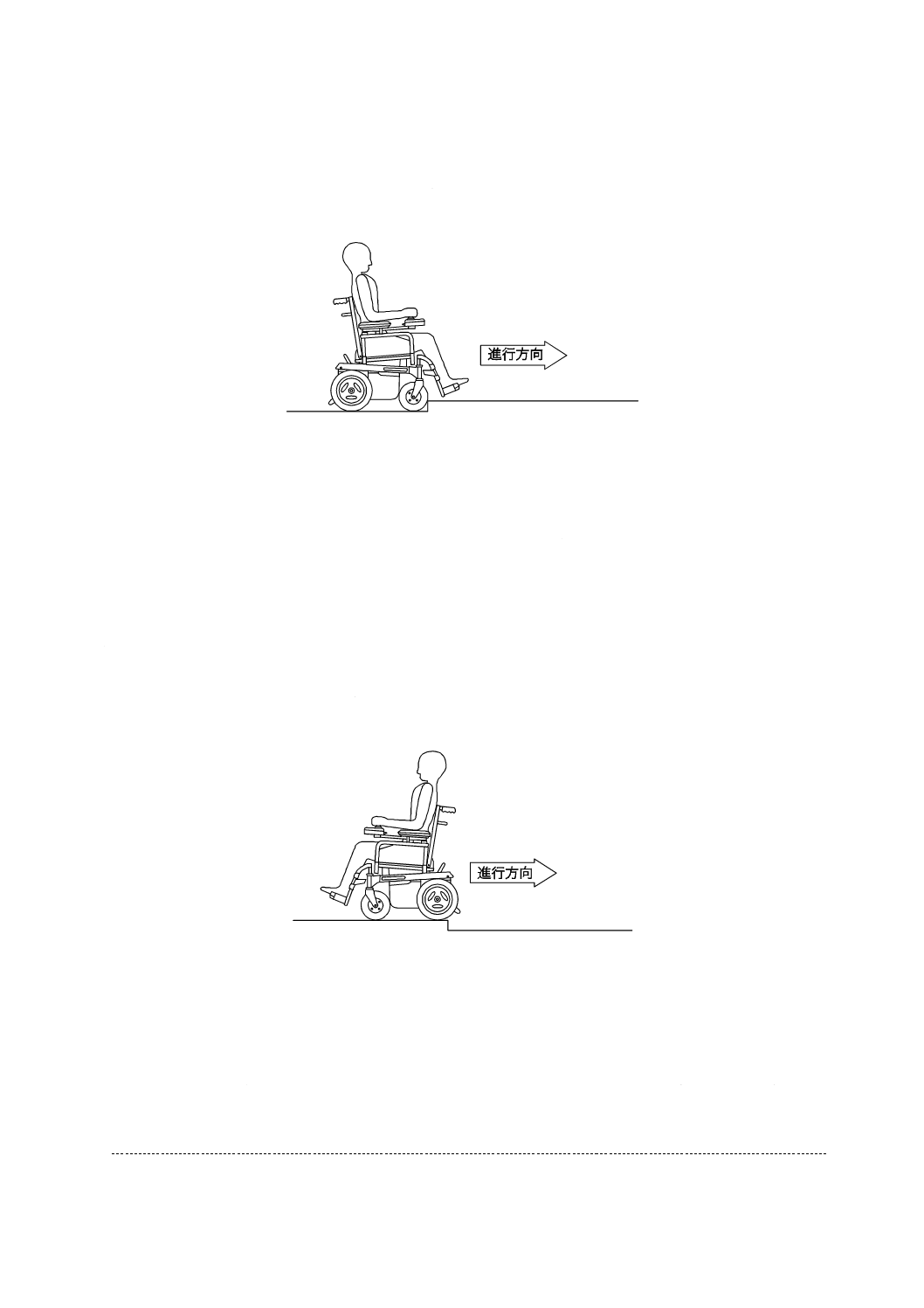
D.5.4 最高速度での段差乗り上げ走行
最高速度での段差乗り上げ走行試験は,次による。
a) 図D.8に示すように,電動車椅子を水平な試験平面上で最高速度で走行させる。
b) 電動車椅子は水平な試験平面上で12 mmの段差に対し,90±5°の進入角度によって前進で乗り上げ
るように走行させる。
c) 電動車椅子の動的安定性を観察し,表D.5によって採点する。
d) 25 mm及び50 mmの段差高さでも,a)〜c) を繰り返す。
e) 製造事業者が電動車椅子の乗り越え限界高さの試験をする場合,25 mmの間隔でa)〜c) を繰り返し,
電動車椅子が得点2又はそれ以上の得点で段差降りができなくなるまで段差高さを増やしていく。
各々の高さで,表D.5による電動車椅子の状況を採点する。
図D.8−最高速度での段差乗り上げ走行
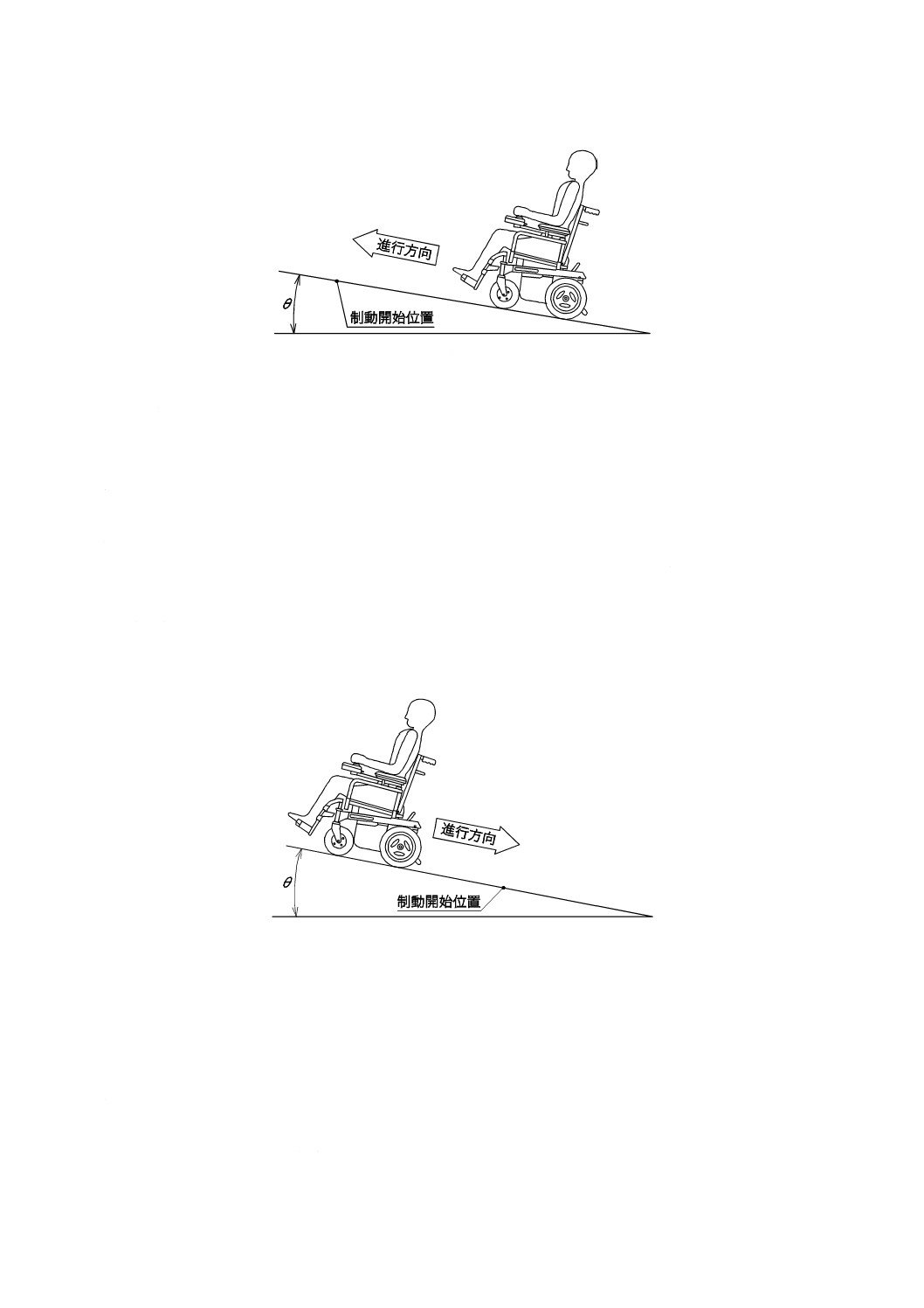
D.5.5 静止状態からの前方への段差降り走行
この試験では,電動車椅子が前方で段差をゆっくり降りるときの安定性を確認するために行い,次によ
る。
a) 図D.9に示すように電動車椅子を水平な試験平面上に置き,前輪が段差の端にくるようにする。
b) 操作レバーによって前進速度を最低速度にし,12 mmの段差に対して90±5°の進入角度で降りるよ
うに走行させる。
c) 電動車椅子の動的安定性を観察し,表D.5によって採点する。
d) 25 mm及び50 mmの段差高さでも,a)〜c) を繰り返す。
57
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図D.9−静止状態からの段差降り走行
D.6 電動車椅子の側方に対する動的安定牲
D.6.1 電動車椅子の準備
表D.3に示すように,調整及び調整可能な電動車椅子は,側方転倒に関する最も不安定な後輪位置,フ
レームへのキャスタ装着位置,シート位置,シート角度及びバックサポート角度に設定する。
なお,座位変換形電動車椅子のシート角度及びバックサポート角度は,標準状態及び製造事業者が指定
する走行可能な自走時最大角度の2条件で行う。
表D.3−側方安定性
電動車椅子部品の調整
最も不安定な位置
後輪位置(キャンバー)
狭い左右間隔
フレームへのキャスタ装着位置
(前後)
後方
フレームへのキャスタ装着位置
(内外)
内側
シート位置(前後)
前方
シート位置(垂直)
高い
シート角度(傾斜)
直立
バックサポート角度(リクライン)
直立
D.6.2 斜面上での旋回
斜面上での旋回は,次による。
a) 電動車椅子を水平な試験平面上に置く。
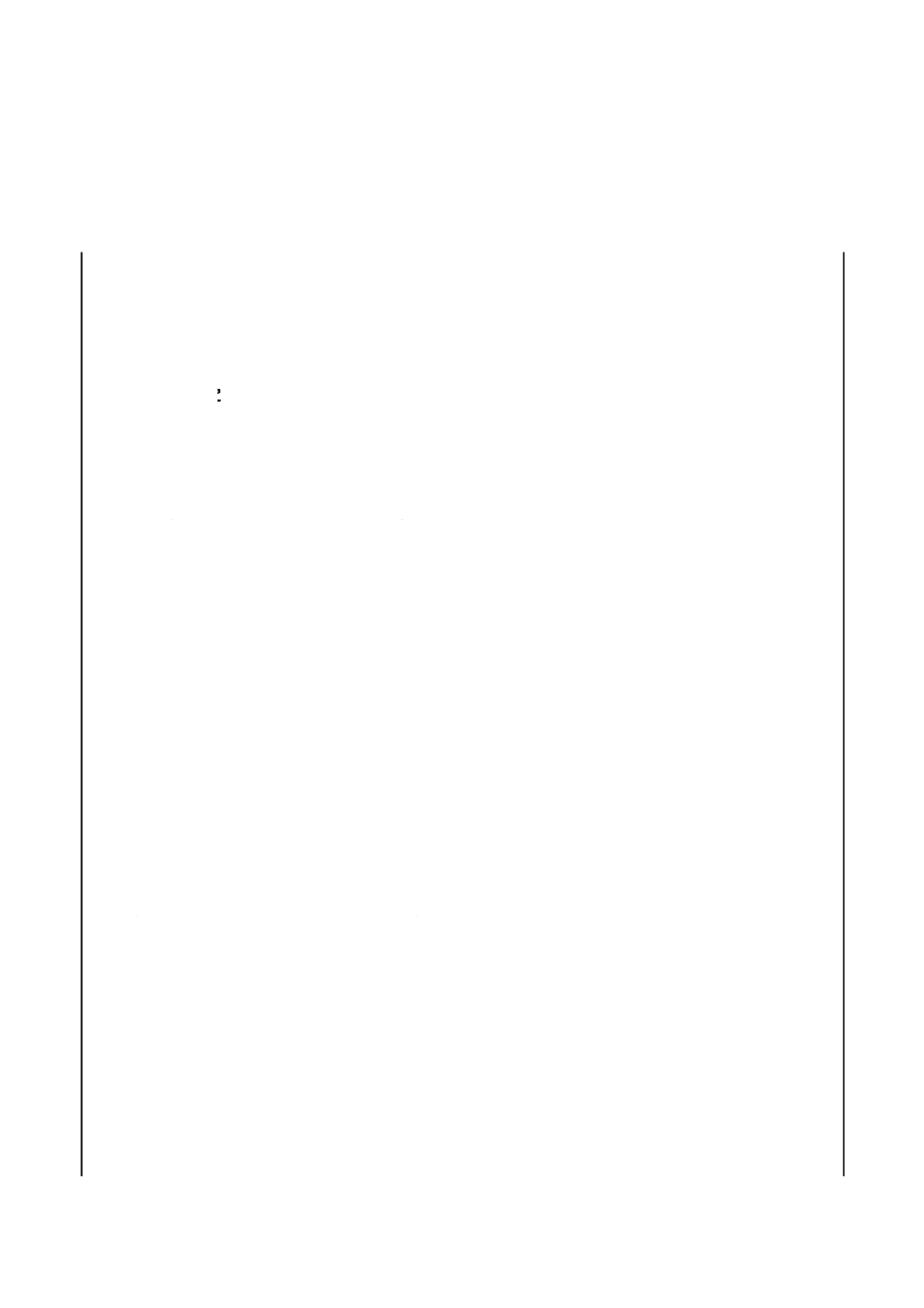
b) 電動車椅子を静止状態から,最高速度で最小回転半径方向へ左旋回させる。直接操だによる電動車椅
子の場合には,ステアリングが最小回転半径になるようにする。
c) 電動車椅子の動的安定性を観察し,表D.5によって採点する。
d) 右旋回においてもa)〜c) を繰り返し,左旋回との結果から低い得点について記録する。
e) 図D.10に示すように3°,6°及び10°のテスト斜面でも,b)〜d) を繰り返す。
58
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図D.10−斜面上での旋回
D.6.3 最高速度での円旋回
最高速度での円旋回は,次による。
a) 図D.11に示すように,電動車椅子を水平な試験平面上で前進方向に最高速度で走行させる。
b) 円の半径を小さくしながら,電動車椅子を最高速度で旋回させ,動的安定性を確認し,表D.5によっ
て採点する。
c) 電動車椅子が得点2又はそれ以上で走行可能な最高速度のときにおける最小の直径を,100 mm単位
で測定する。
なお,直径は前輪の中央が描く円の直径を測定する。
d) 反対方向での旋回も,a)〜c) で繰り返す。
e) 電動車椅子の旋回によって得られた円の直径を記録する。
図D.11−最高速度での円旋回
D.6.4 最高速度での急旋回
最高速度での急旋回は,次による。
a) 図D.12に示すように電動車椅子を水平な試験平面上で,前進方向に最高速度で直進走行させる。
b) 最小回転半径で90°の旋回をするように操作レバーを操作する。
c) 電動車椅子の動的安定性を観察し,表D.5によって採点する。
59
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d) 反対方向の旋回でもa)〜c) を繰り返す。
e) 電動車椅子の旋回によって得られた小さい旋回半径における直径を記録する。
図D.12−最高速度での急旋回
D.6.5 片側車輪での段差降り
片側車輪での段差降りは,次による。
a) 図D.13に示すように,12 mmの段差端において電動車椅子が最低速度で片側車輪が電動車椅子の中
心線に対して,10±2°の進入角度で段差から降りるようにして走行させる。
b) 電動車椅子の動的安定性を観察し,表D.5によって採点する。
c) 段差を降りる電動車椅子の反対側車輪においても,a) 及びb) を繰り返す。
d) 反対側車輪との試験結果から,低い方の得点を記録する。
e) 25 mm及び50 mmの段差高さでもa)〜d) を繰り返す。
f)
製造事業者が電動車椅子の乗り降り限界高さでの試験をする場合は,25 mmの間隔でa)〜c) を繰り返
し,電動車椅子が得点2又はそれ以上の得点で段差降りができなくなるまで段差高さを増やしていく。
各々の高さで,表D.5による電動車椅子の状況を採点する。
図D.13−片側車輪での段差降り
60
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
D.7 試験報告
試験報告には,次の項目を記載しなければならない。
a) 規格番号又は規格名称
b) 試験機関の名称及び所在地
c) 電動車椅子製造事業者の名称及び所在地
d) 試験報告書の発行日
e) 電動車椅子の形式及び製造番号
f)
使用したダミーの大きさ及び質量,又は人によって試験を行った場合には,乗員の体重
g) 附属書Hに規定する装備及び調整による電動車椅子のセットアップの詳細
h) 試験中の電動車椅子装備の写真
i)
電動車椅子に転倒防止装置,縁石乗り上げ装置が認められているか,こうした装置の装着又は非装着
で電動車椅子を試験したか
j)
操作レバーの詳細(直接操だの場合はその詳細)
k) D.4.2〜D.6.5までの試験結果は,表D.6及び表D.7によってこれらの結果を記録する。
D.8 開示
次の表D.4の項目における結果は,製造事業者の仕様書で発表しなければならない。
表D.4−評価項目の内容
評価項目
内容
斜面上での後方に対する動的安定性:X °
X °は,D.4.2,D.4.3及びD.4.4の試験で,電動車椅子が表D.5によ
る得点で2又はそれ以上の得点を達成した最大傾斜角度(0°,3°,
6°及び10°)である。
斜面上での前方に対する動的安定性:X °
X °は,D.5.2及びD.5.3の試験で,電動車椅子が表D.5による得点で
2又はそれ以上の得点を達成した最大傾斜角度(0°,3°,6°及び
10°)である。
斜面上での側方に対する動的安定性:X °
X °は,D.6.2の試験で,電動車椅子が得点で2又はより大きい得点
を達成したときの最大傾斜角度(0°,3°,6°及び10°)である。
円旋回での側方に対する動的安定性:X m
X mは,D.6.3の試験で,電動車椅子が得点で2又はより大きい得点
を達成したときの最小直径である。
急激な円旋回での側方に対する動的安定
性:X
Xは,D.6.4の試験で,電動車椅子が得点で2又はより大きい得点を
達成したかどうかの質問に対して“適合”又は“不適合”を示す。
前向き段差乗り上げ時における後方の動的
安定性:X mm
X mmは,D.4.5の試験で,電動車椅子が得点で2又はより大きい得点
を達成した最大段差高さ(12 mm,25 mm,50 mm又は製造事業者が
規定する場合のより高い段差)である。
後向き段差降り時における後方の動的安定
性:X mm
X mmは,D.4.6の試験で,電動車椅子が得点で2又はより大きい得点
を達成した最大段差高さ(12 mm,25 mm,50 mm又は製造事業者が
規定する場合のより高い段差)である。
前向き段差乗り上げ時における前方の動的
安定性:X mm
X mmは,D.5.4の試験で,電動車椅子が得点で2又はより大きい得点
を達成した最大段差高さ(12 mm,25 mm,50 mm又は製造事業者が
規定する場合のより高い段差)の値である。
前向き段差降り時における前方の動的安定
性:X mm
X mmは,D.5.5の試験で,電動車椅子が得点で2又はより大きい得点
を達成した最大段差高さ(12 mm,25 mm,50 mm又は製造事業者が
規定する場合のより高い段差)である。
61
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表D.4−評価項目の内容(続き)
評価項目
内容
斜め段差降り時における側方の動的安定
性:X mm
X mmは,D.6.5の試験で,電動車椅子が得点で2又はより大きい得点
を達する路面における最大段差高さ(12 mm,25 mm,50 mm又は製
造事業者が規定する場合のより高い段差)である。
表D.5−電動車椅子の安定性採点方法
電動車椅子の
状況
観察された動的状況
得点
傾かない
不安定な側の車輪が,少なくとも一つ試験平面上に残
る。
3
一時的な傾き
不安定な側の全ての車輪が接触を失い,試験面上に戻
る。転倒防止装置は試験面に接触しない。
2
転倒防止装置
で支える
不安定な側の全ての車輪がもち上がり,電動車椅子の転
倒防止装置が試験面に接触する。電動車椅子は転倒防止
装置上に乗ったままになる。
1
完全な転倒
制止装置又は試験に関わる試験要員によって支えられ
なかった場合,電動車椅子は完全に傾斜する(最初の定
位置から試験要員によって支えられなくても,90°又は
それ以上の傾斜)。
0
表D.6−試験報告書の書式
記号
制動方式
R
操作装置から手を放す。
P
電源を切ることによる緊急制動
A
操作装置による逆転命令の適用
注記 停止に関する試験では,不安定性の要因
となる上記の制動方式を記録する。
− 作動中に起きる横滑りの発生について記録する。
− 試験が実施できなかったときには“×”を記録するとともに,理由を記録する。得点0は走行不能な
傾斜角度,段差高さ,スピードを示しており,試験が実施でき走行不能を確認したときは,得点0を
記録すべきである。
− 動的安定性試験データ(データ表:その2)段差高さ“X”については,段差走行時における高さを示
す。
− 動的安定性に関する得点は,表D.5の結果が各々の試験にもたらされる。
− N/Aは適用しなかった項目を示す。
62
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表D.7−推奨する書式の例
動的安定性試験(データ表:その1−A 標準状態)
試 験 乗 員 :質量 kg
ドライバー又はISOダミー区別:
試験項目
転倒防止
装置
制動方式
安定性得点傾斜角度
(°)
備考
0
3
6
10
後方に対する動的安定性
D.4.2 前進スタート
装着
装着なし
D.4.3 前進走行時の停止
装着
R
P
A
装着なし
R
P
A
D.4.4 後退走行時の制動
装着
R
P
A
装着なし
R
P
A
前方に対する動的安定性
D.5.2 前進走行時の制動
N/A
R
P
A
D.5.3 傾斜面から水平面
への走行
N/A
N/A
N/A
側方に対する動的安定性
D.6.2 斜面での旋回
N/A
N/A
N/A
D.6.3 最高速度での円旋
回
N/A
N/A
m
N/A
N/A
N/A
D.6.4 最高速度での急旋
回
N/A
N/A
m
N/A
N/A
N/A
注記 N/Aは関連のない項目。
63
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表D.7−推奨する書式の例(続き)
動的安定性試験(データ表:その1−B 最も不安定な状態)
試 験 乗 員 :質量 kg
ドライバー又はISOダミー区別:
試験項目
転倒防止
装置
制動方式
安定性得点傾斜角度
(°)
備考
0
3
6
10
後方に対する動的安定性
D.4.2 前進スタート
装着
装着なし
D.4.3 前進走行時の停止
装着
R
P
A
装着なし
R
P
A
D.4.4 後退走行時の制動
装着
R
P
A
装着なし
R
P
A
前方に対する動的安定性
D.5.2 前進走行時の制動
N/A
R
P
A
D.5.3 傾斜面から水平面
への走行
N/A
N/A
N/A
側方に対する動的安定性
D.6.2 斜面での旋回
N/A
N/A
N/A
D.6.3 最高速度での円旋
回
N/A
N/A
m
N/A
N/A
N/A
D.6.4 最高速度での急旋
回
N/A
N/A
m
N/A
N/A
N/A
64
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
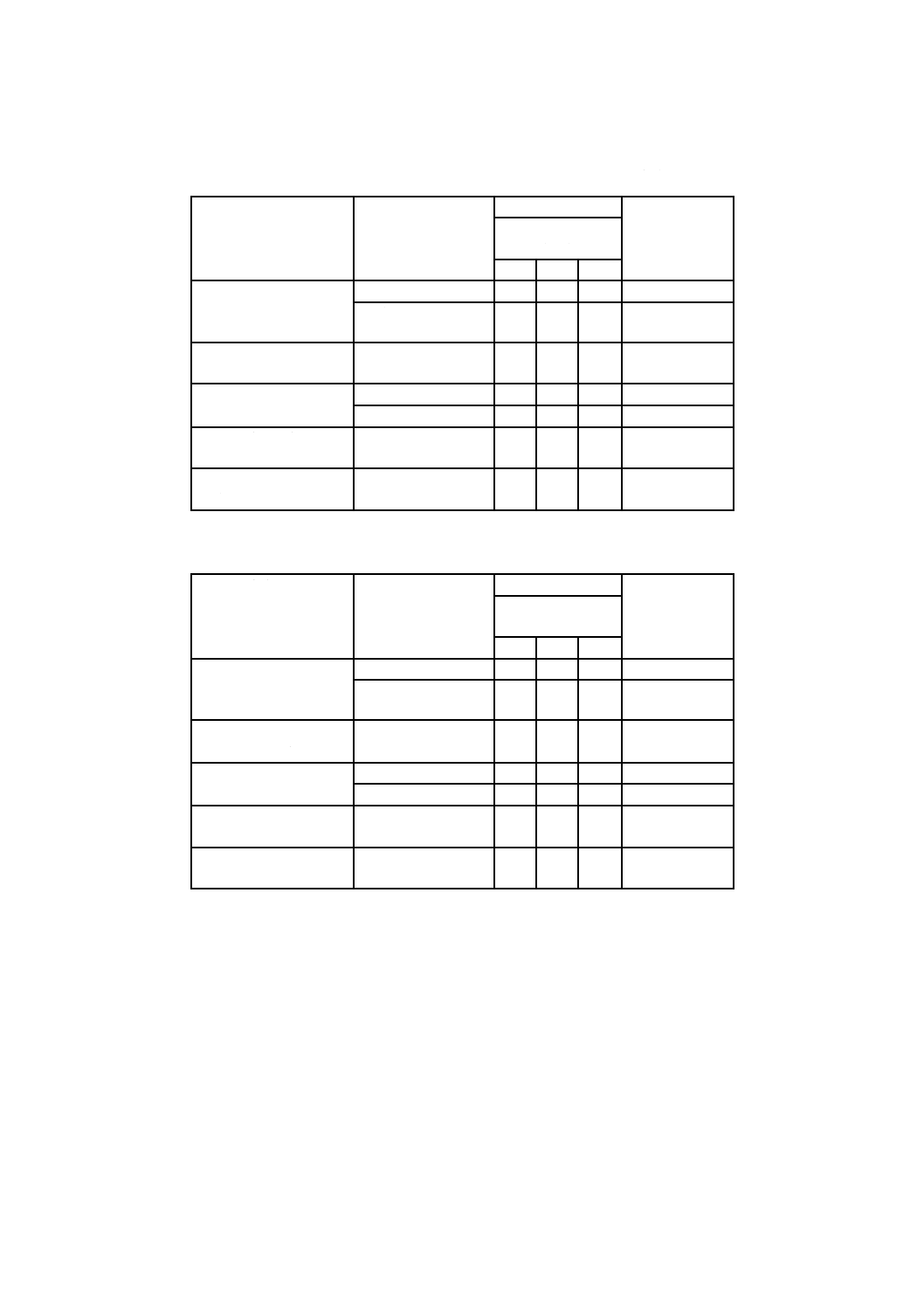
表D.7−推奨する書式の例(続き)
動的安定性試験(データ表:その2−A 標準状態)
試験項目
縁石乗り上げ装置
安定性得点
備考
段差高さ
(mm)
12
25
50
D.4.5 静止状態からの
前方への段差乗り上げ
走行
装着
装着なし
D.4.6 静止状態からの
後方への段差降り走行
N/A
D.5.4 最高速度での段
差乗り上げ走行
装着
装着なし
D.5.5 静止状態からの
前方への段差降り走行
N/A
D.6.5 片側車輪での段
差降り
N/A
動的安定性試験(データ表:その2−B 最も不安定な状態)
試験項目
縁石乗り上げ装置
安定性得点
備考
段差高さ
(mm)
12
25
50
D.4.5 静止状態からの
前方への段差乗り上げ
走行
装着
装着なし
D.4.6 静止状態からの
後方への段差降り走行
N/A
D.5.4 最高速度での段
差乗り上げ走行
装着
装着なし
D.5.5 静止状態からの
前方への段差降り走行
N/A
D.6.5 片側車輪での段
差降り
N/A
65
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(規定)
テストダミー
E.1
おもり
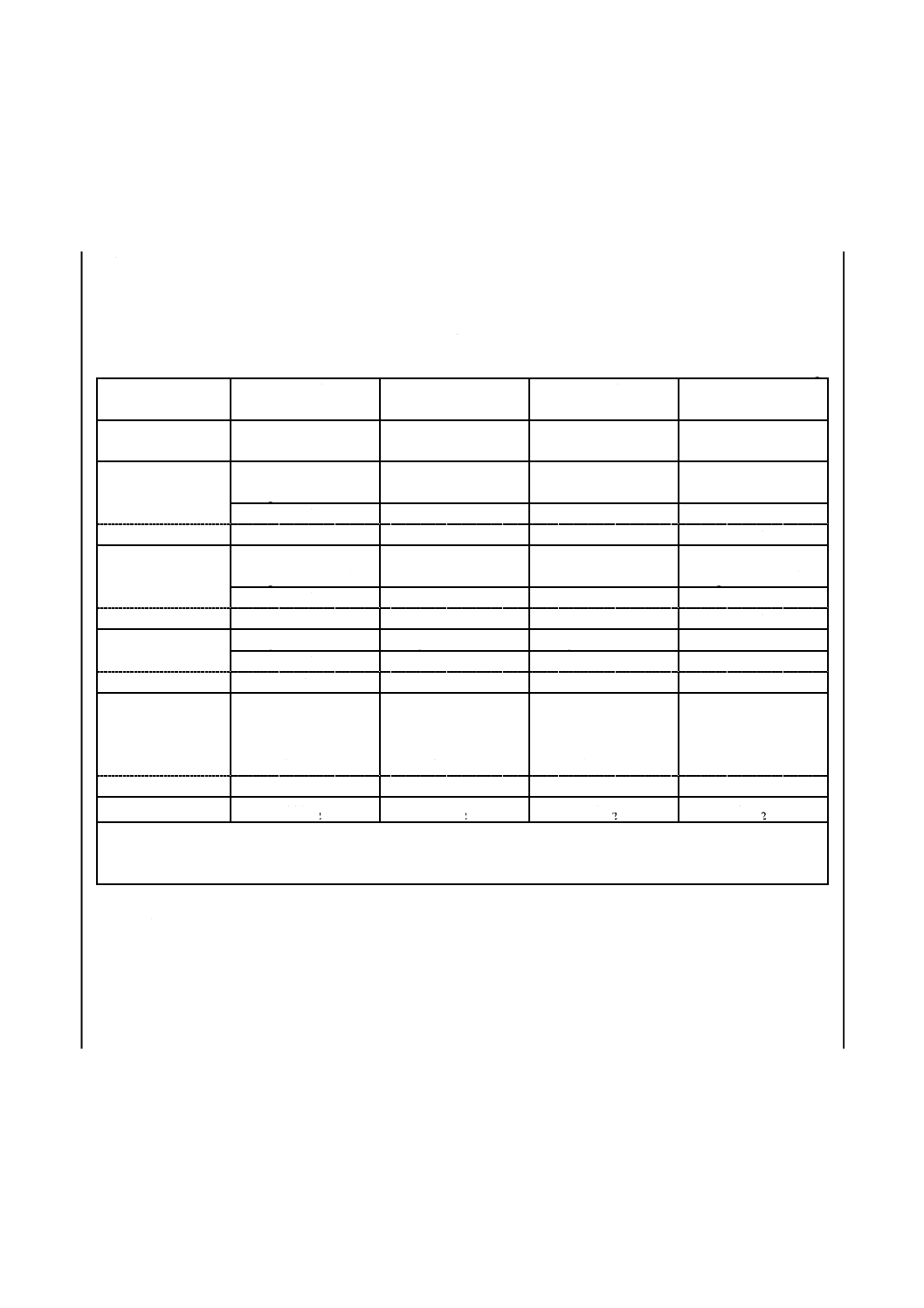
おもりの質量配分は,表E.1による。
表E.1−ダミーの種類
単位 kg
適応電動車椅子の
種類
100 kg用
75 kg用
50 kg用
25 kg用
対応するダミーの
呼び質量
100
75
50
25
胴部
6 kgのおもり9個
3 kgのおもり1個
6 kgのおもり7個
6 kgのおもり4個
6 kgのおもり2個
4 a)
4 a)
4 a)
1.5 a)
小計
61±3
46±3
28±3
13.5±2
大たい(腿)部
6 kgのおもり4個
3 kgのおもり1個
6 kgのおもり3個
6 kgのおもり2個
6 kgのおもり1個
3 kgのおもり1個
4 a)
4 a)
4 a)
1.5 a)
小計
31±3
22±3
16±3
10.5±2
脚部(一体形)
6 kgのおもり1個
6 kgのおもり1個
6 kgのおもり1個
−
1 a)
1 a)
1 a)
−
小計
7±1
7±1
7±1
−
脚部(分離形)
3.5±0.5 kgの
おもり2個
75 mm×150 mm×40
mmが適切である。
3.5±0.5 kgの
おもり2個
75 mm×150 mm×40
mmが適切である。
3.5±0.5 kgの
おもり2個
75 mm×150 mm×40
mmが適切である。
−
小計
7±1
7±1
7±1
−
全質量
100
25
−
+
75
25
−
+
50
25
−
+
25
25
−
+
注a) ダミー各部のおもり以外の質量。
なお,材料は問わず,おもり以外の質量が4 kgと異なる場合は,おもりの個数と固定位置とを調整し,質
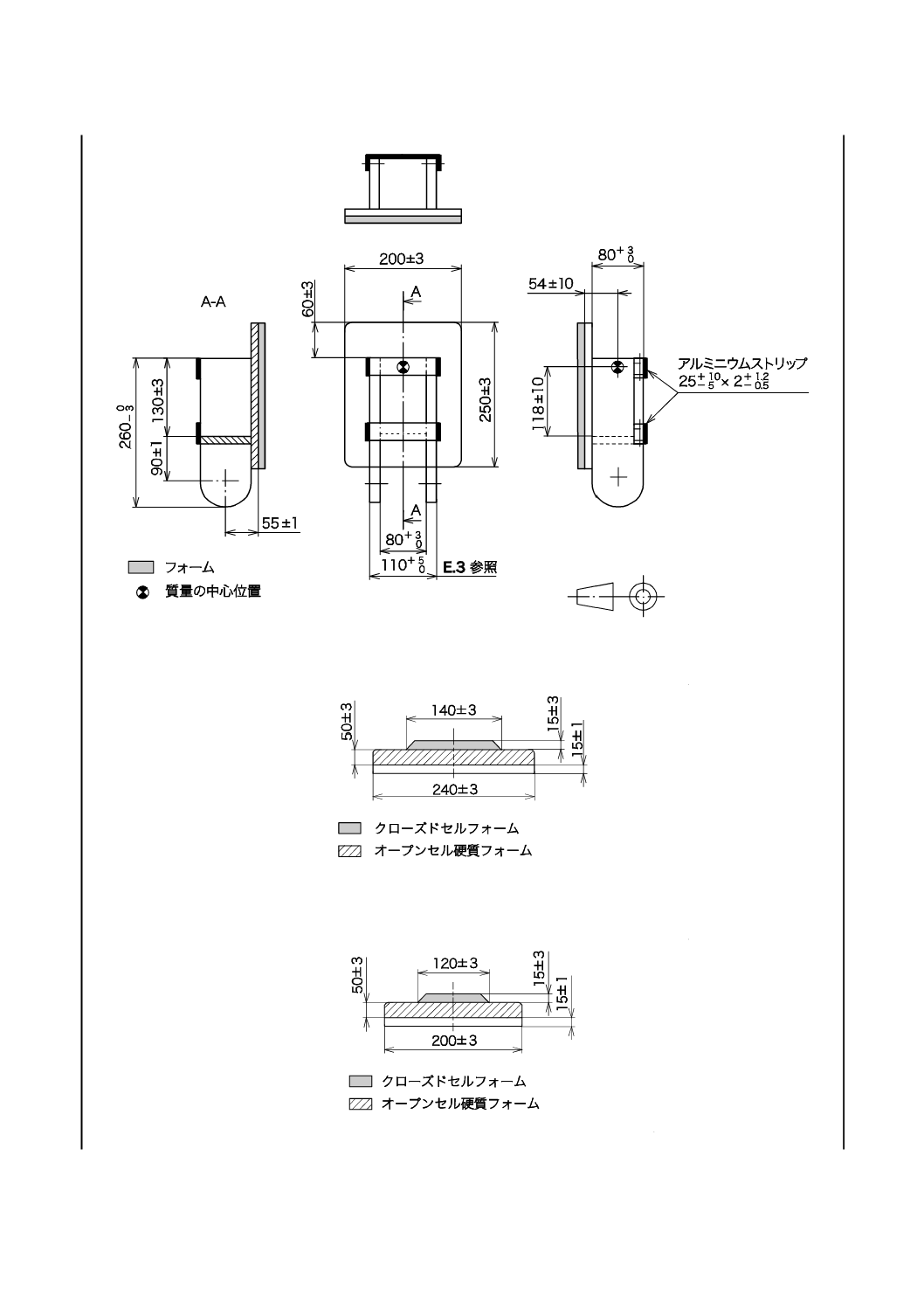
量の中心は,図E.2に規定する位置とする。
E.2
ダミーの構造
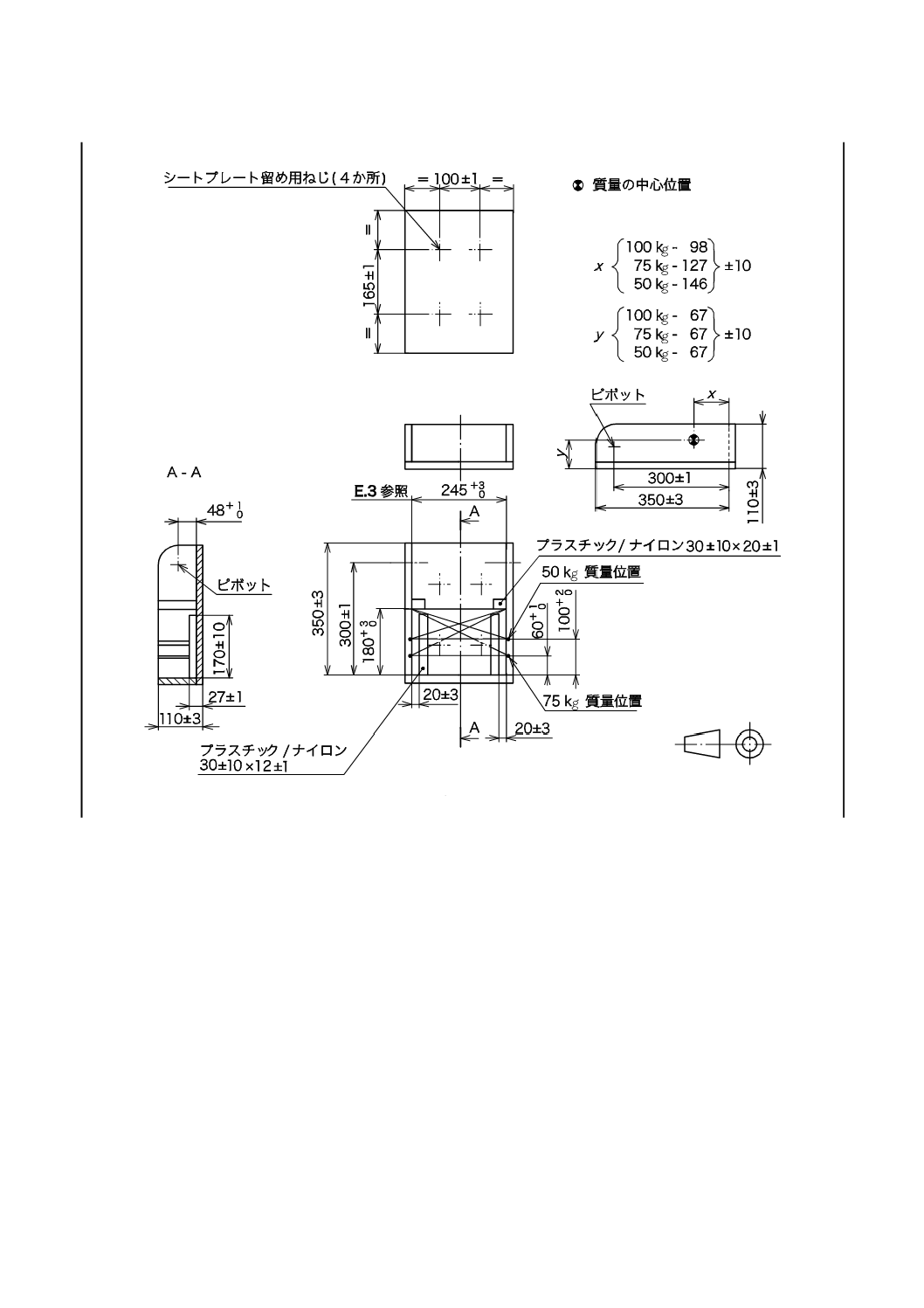
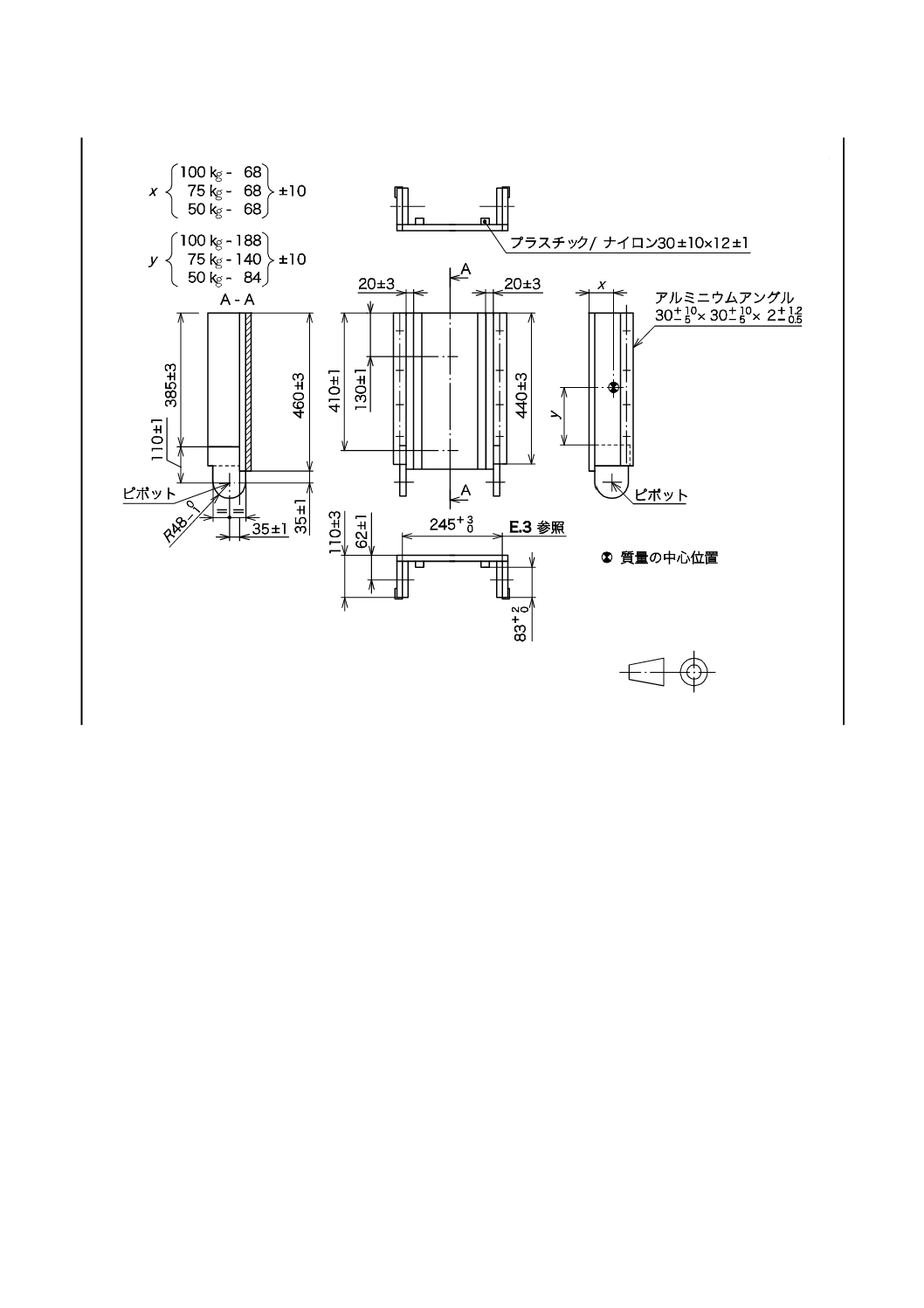
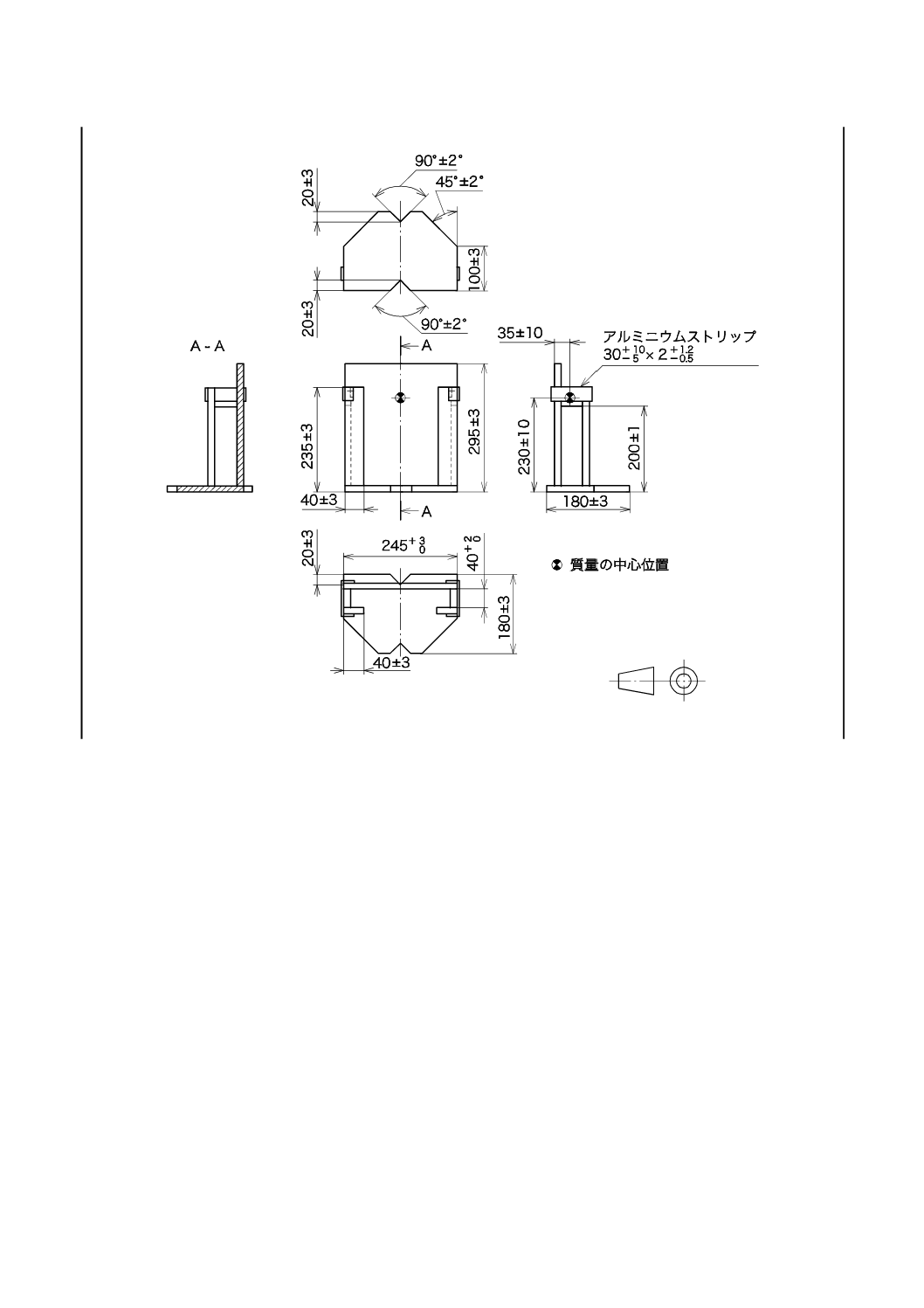
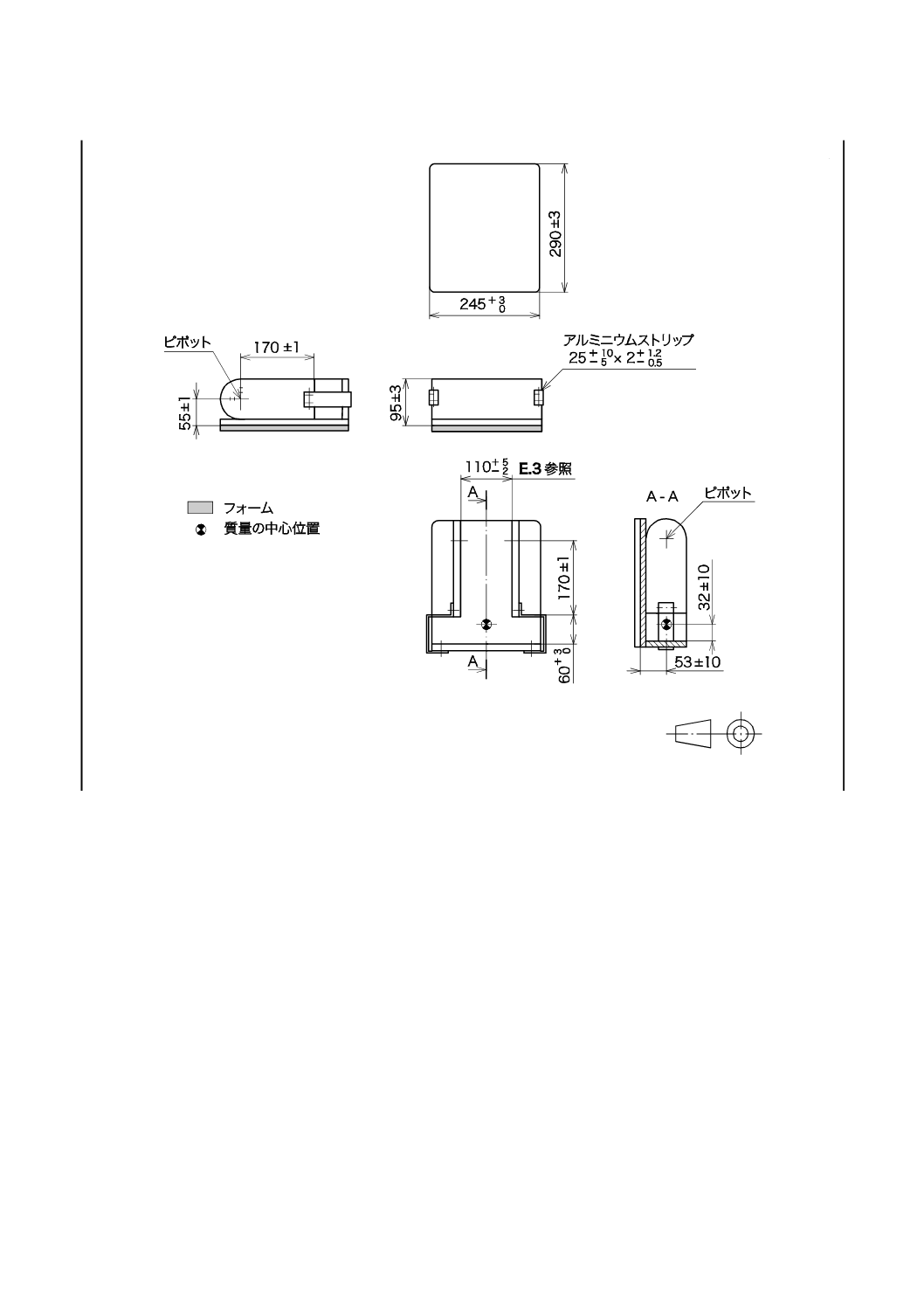
ダミーの構造は,表E.1及び図E.1〜図E.11による。
E.3
重なりの調整
背部と座部との重なりの調整は,背部から行う(図E.2及び図E.3参照)。
66
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
図E.1−100 kg,75 kg及び50 kg用ダミー
67
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
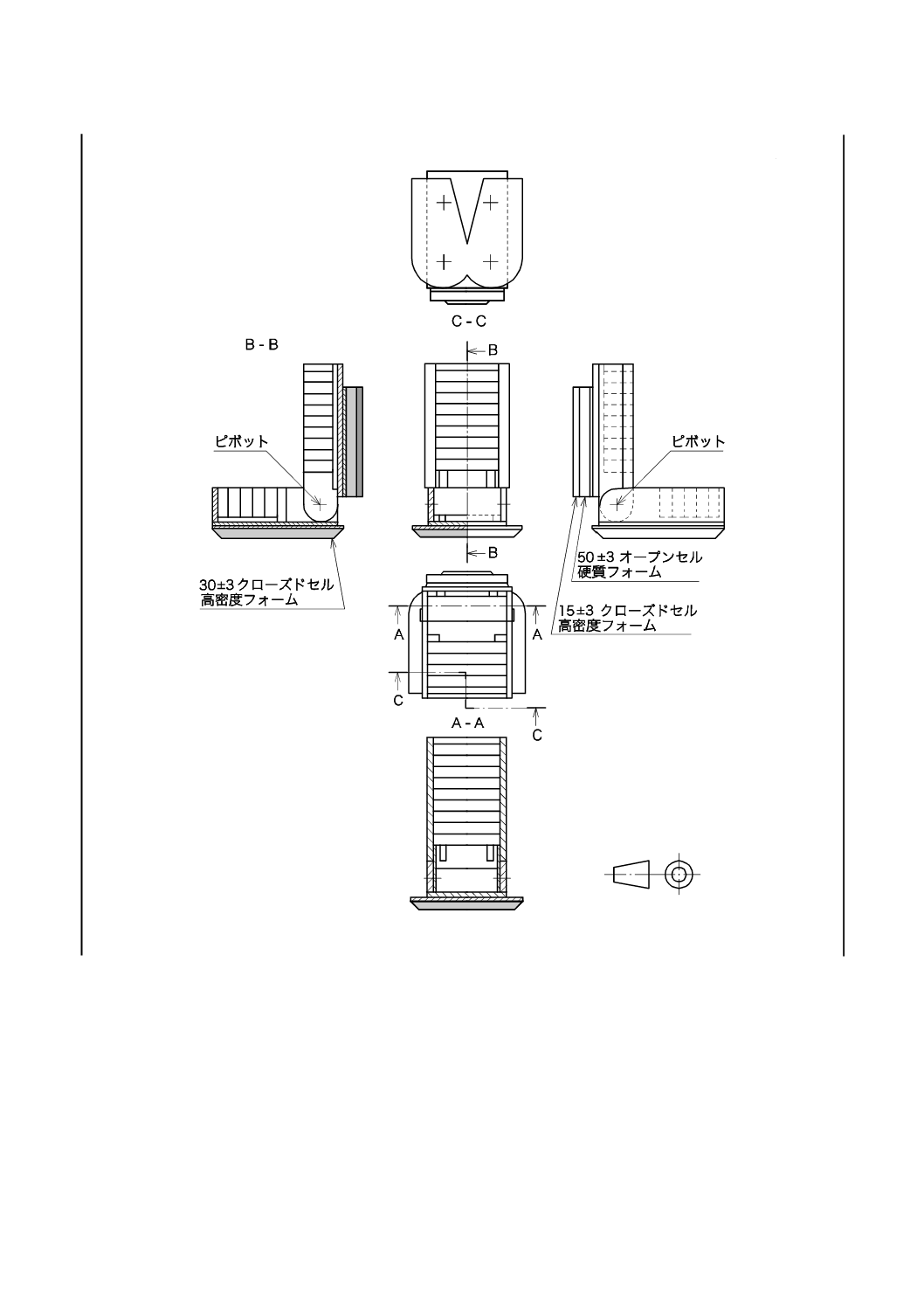
単位 mm
図E.2−100 kg,75 kg及び50 kg用ダミー大たい(腿)部
68
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
図E.3−100 kg,75 kg及び50 kg用ダミー胴部
69
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
図E.4−100 kg,75 kg及び50 kg用ダミー脚部
70
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
図E.5−25 kg用ダミー大たい(腿)部
71
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
図E.6−25 kg用ダミー胴部
単位 mm
図E.7−100 kg及び75 kg用ダミーバックプレート(長さ380±3 mm)
単位 mm
図E.8−50 kg用ダミーバックプレート(長さ380±3 mm)
72
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
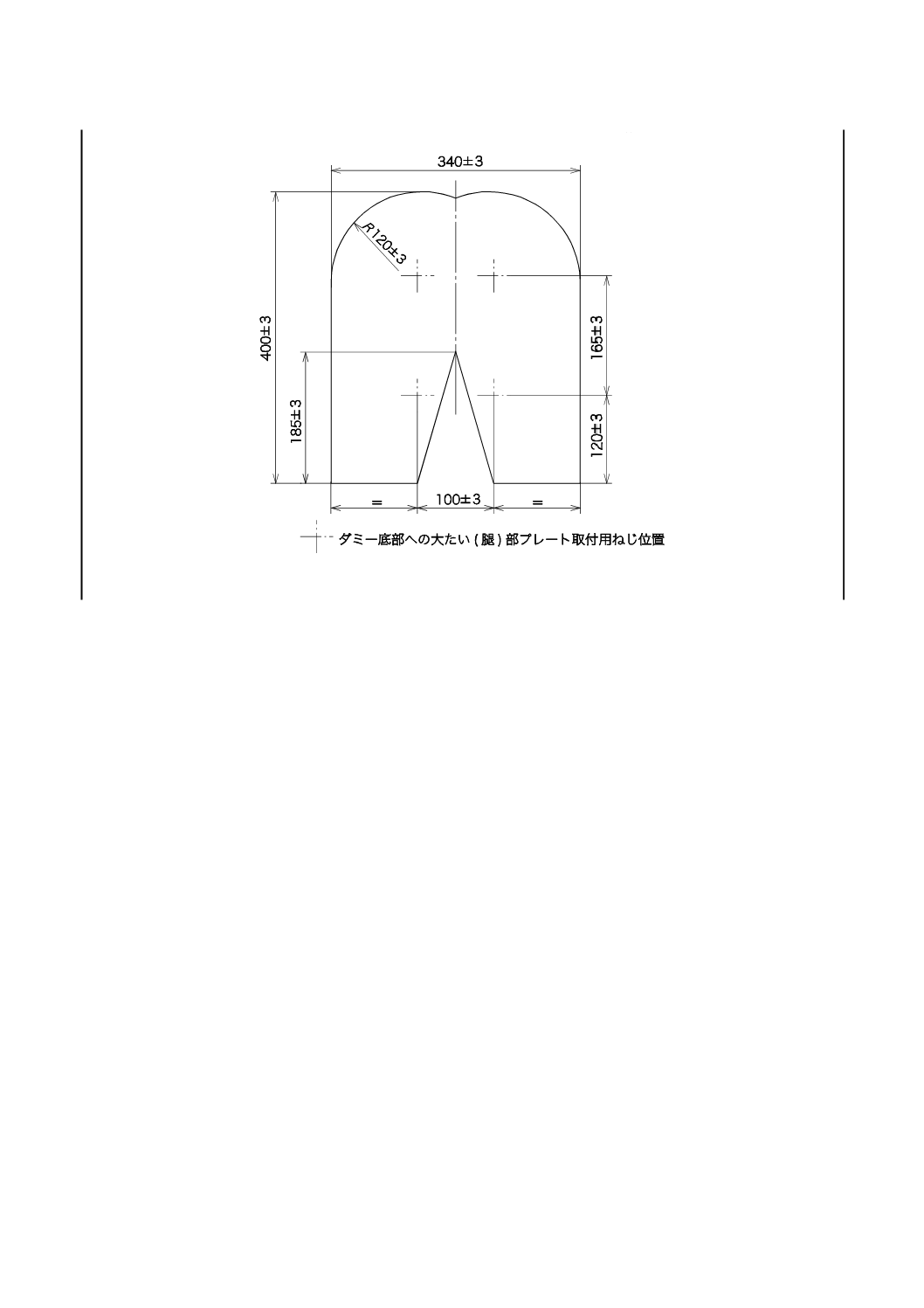
単位 mm
図E.9−100 kg用ダミー大たい(腿)部プレート
73
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
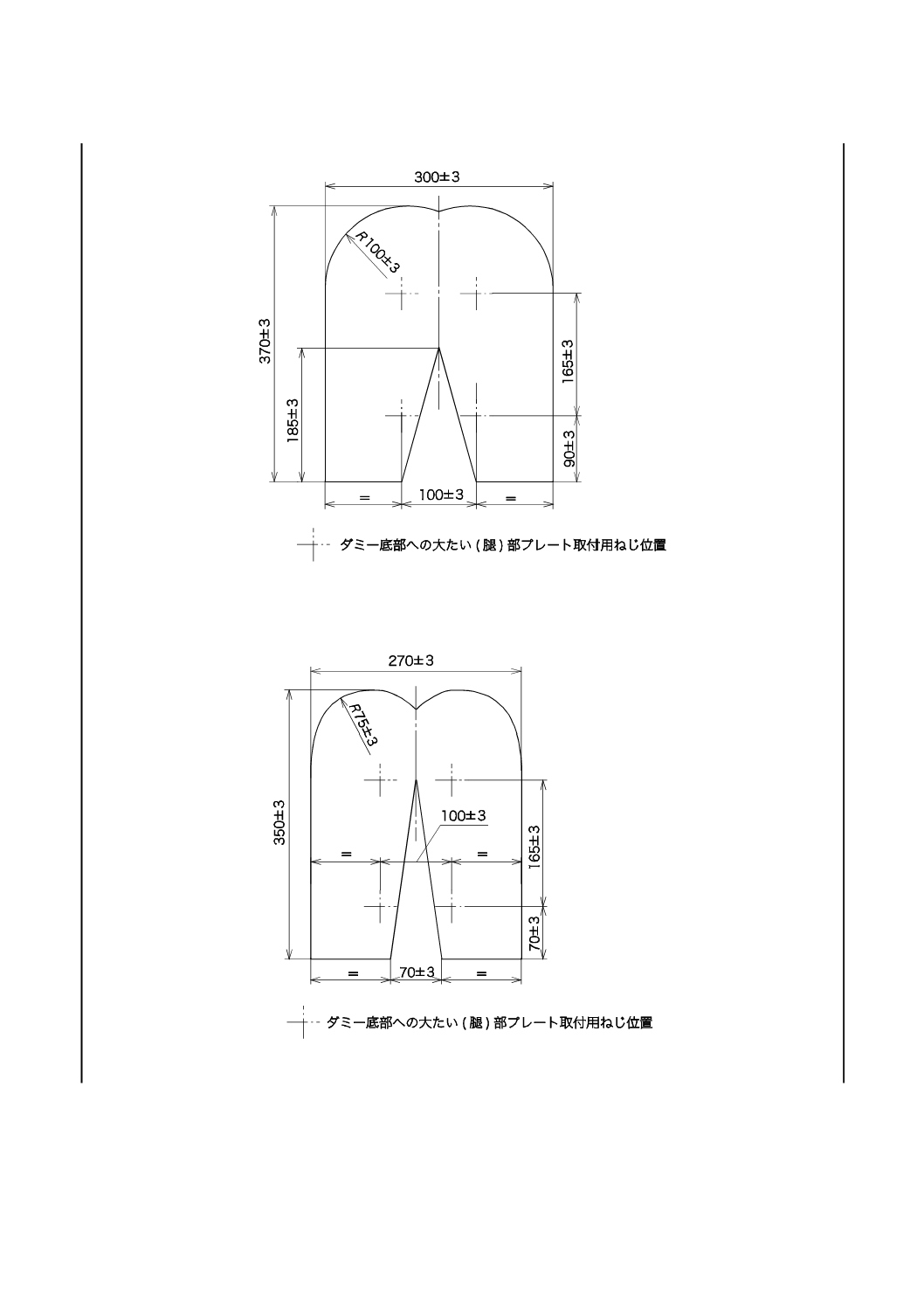
単位 mm
図E.10−75 kg用ダミー大たい(腿)部プレート
単位 mm
図E.11−50 kg用ダミー大たい(腿)部プレート
74
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書F
(規定)
ダミーの車椅子への拘束方法
F.1
電動車椅子の調整
電動車椅子の調整は,次による。
a) 調整機構をもつ車椅子については調整する。車椅子のタイヤ空気圧については製造業者の規定値又は
当該JIS標準値とし,タイヤバルブは工場出荷時に装着されたものを使用して原則,外圧(注入圧力)
調整し,試験中の圧力調整は行わない。
b) 製造事業者が内圧で設計している場合は,内圧調整も認めるが,その旨試験記録等に明記する。
なお,タイヤバルブについては,工場出荷時に装着されたものを使用する。
F.2
試験機への取付け
試験機への取付けは,次による。
a) 車椅子駆動輪ハブ軸の固定ナットを,走行耐久性試験機への車椅子取付け用ジグと,左右とも交換す
る。その後,平たん(坦)な路面上においてホイールベースを計測する。
b) 車椅子シートの中央に使用者最大体重に適応する尻型に交換し,おもりを調整したダミーを載せる。
この時,胴部は車椅子のバックサポートに対して平行になるように調整する。
c) 座面に毛布などは敷かない。
d) 背もたれの寸法としてバックサポートパイプ外寸の計測をする。拘束前の測定結果と拘束後の同寸法
との差は10 mm以内とする。
e) 試験中に前方へ移動して落下しないように,ダミー胴部は拘束用ベルトを巻き付け設定する。ダミー
胴部での前後方向への動きに対しては自由度をもたせるため,帯状のゴム(又は布)と指定ばねを組
み合わせた拘束用ベルトを用いる。
f)
ダミー胴部の拘束用ベルトはバックサポート高さの三分の一の場所に巻き付け,位置が振動によって
ずれないように対策してもよい。
なお,拘束位置に背折れ金具があれば,直上で拘束してもよい。
g) 拘束用ベルトは帯状のゴム(又は布)と指定ばねとを組み合わせ,2〜5 N/mmの弾性体とする。
h) 指定ばねは,次の規格品とする。
1) 種類:引張りばね
2) ばね定数:3.92 N/mm
注記1 これに該当するばねに,ミスミ社製のもの(品番:AWT16-150)があるが,これと同等
のものであれば他の製品でもよい。
i)
ダミー大たい(腿)部が前後に移動して落下しないように,シートベルト(荷締めベルト等)をダミ
ー大たい(腿)部前端とバックサポート間に巻き付ける。
j)
ダミー脚部は左右フットプレートには,あらかじめフットプレート取付けパイプの中央及びフットプ
レート外端間の中央の2か所に穴をあけ,フットプレートへ均等な荷重配分になるようにおもりを取
付ける。
k) 走行耐久試験機への車椅子取付け用ジグを,試験装置側アーム端部にあるボールジョイントに挿入し,
75
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
抜け防止用ボルトを締め付け,車椅子が試験機上に固定されたことを確認する。
なお,ボールジョイントを取り付けたアームは水平な状態になるように試験機側の高さを調整する。
l)
横ずれ防止用ボールジョイントは金属製を標準とし,上下及び左右方向への動きの自由度を妨げる構
造であってはならない。
m) 走行耐久性試験機のドラム間距離調整を行い,ドラム固定ボルトを締め付け,ドラムの設定を完了さ
せる。
n) キャスタが試験中に45°以上回転しないように,振れ止めジグを使用してもよい。
o) 試験品の直進性が劣るものについては,ボールジョイントが装着されたアームのボールジョイント位
置を前後調整し対応する。試験品が緊急時等左右方向へ移動しないようにするため,左右それぞれの
フロントパイプと試験機側柱とをベルトによって保持させる。
p) フロントパイプがない構造のものは,フレーム構造に影響を与えないようにベルトを設置する。
注記2 ベルトは,車椅子の直進性を補助しないものとする。
F.3
試験の開始
試験の開始は,次による。
a) 走行耐久性試験を開始する。
b) 規定回数までの試験は連続運転を原則とし,車輪のぶれ調整などの状態を維持するため又は異常状態
を確認するための一時的な停止は妨げない。停止までの回数も連続運転回数に含め,走行中は,随時
フレーム等の変形,破損等の状況を目視によって適宜確認する。
なお,試験中には空気圧の調整は行わないこととする。
c) やむを得ず休止する場合には,ダミーをつり上げるなどによって車椅子へのダメージを考慮する。
76
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書G
(規定)
テストブロック
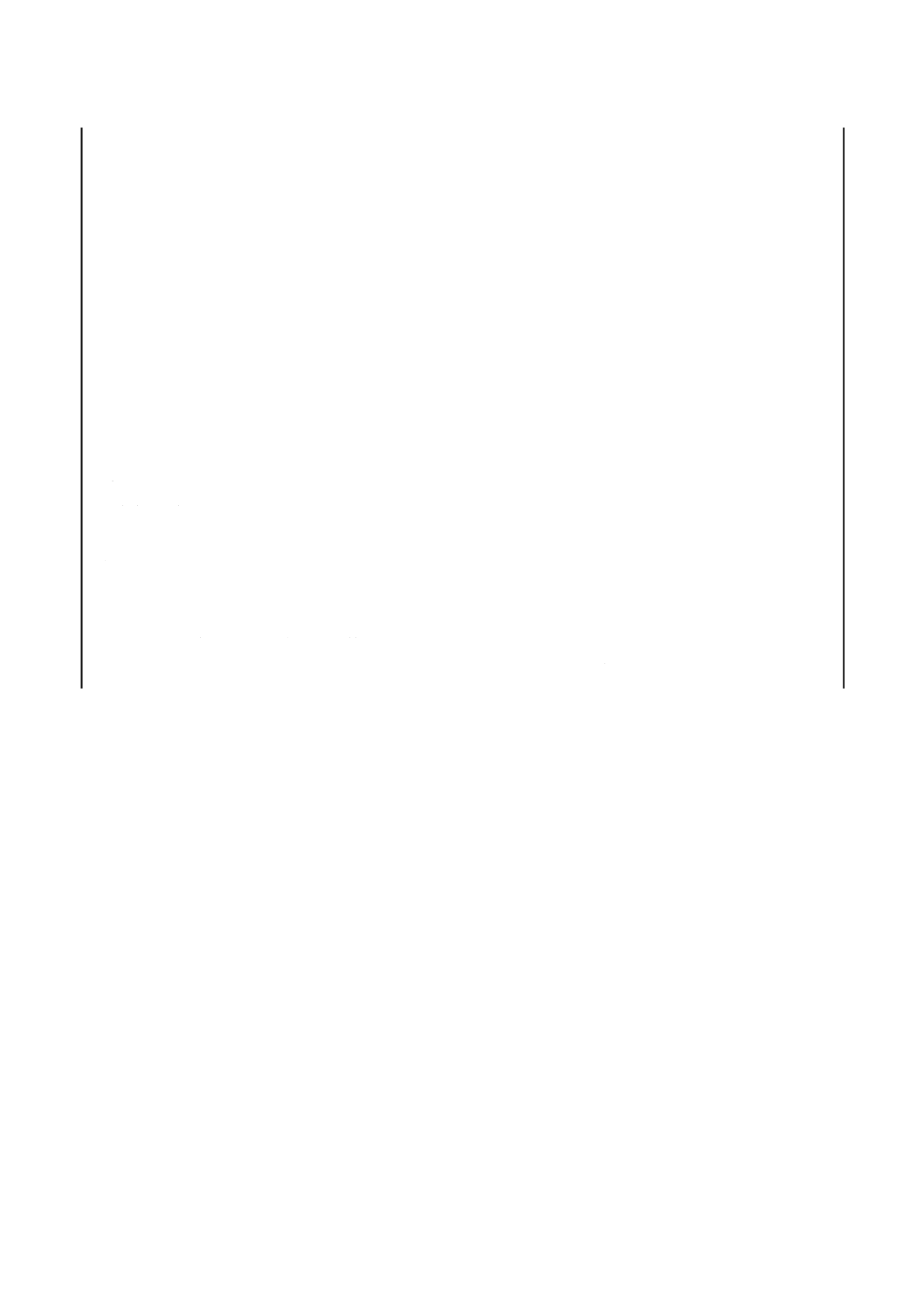
G.1
テストブロックの寸法
テストブロックは,鉄などの金属製とし,ワイヤを介して取り付けるためのリング及びテストラバーか
らなる。テストブロック,リング及びテストラバーの合計質量は,(5±0.05) kgとする。寸法は,図G.1に
よる。寸法公差を±2 mmとする。
単位 mm
図G.1−テストブロックの寸法
G.2
テストラバーの硬さ
テストラバーの材質は,天然ゴム(NR)又はスチレンブタジエンゴム(SBR)とし,硬さは,55±5と
する。
注記 硬さは,JIS K 6253-3に規定するタイプAデュロメータにおける硬さとする。
77
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.3
摩擦試験の方法
摩擦試験の方法は,次による。
a) 試験に先立ち,テストラバーの表面を#120の紙やすりで軽く磨く。
b) 表面を乾いた布又はブラシによって拭く。ただし,薬剤などを使ってはならない。
c) 被試験面を代表する三つの領域を選ぶ。
d) 被試験面を水平にする。
e) 選んだ3か所に対し,テストブロックを手動又は機器によって200 mmの区間を約10秒で引っ張る。
f)
テストブロックを引いたときの力をフォースゲージによって測定する。
g) 三つの領域の測定結果を平均し,F1とする。
h) 次に引っ張る方向を逆にし,同じ試験を繰り返し測定結果を平均し,F2とする。
i)
摩擦係数μを次により求める。
(
)
g
m
F
F
2/
2
1+
=
μ
ここに,
m: テストブロック及びテストラバーの質量(kg)
g: 重力加速度(9.81 m/s2)
j)
被試験面が水平であれば,|F1−F2|<0.1*(F1+F2) が成り立たなければならない。
78
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書H
(規定)
車椅子の設定
H.1 装置
装置は,次による。
a) 直線寸法の測定 20 000 mmまでの測定は,±1 mmの精度とする。
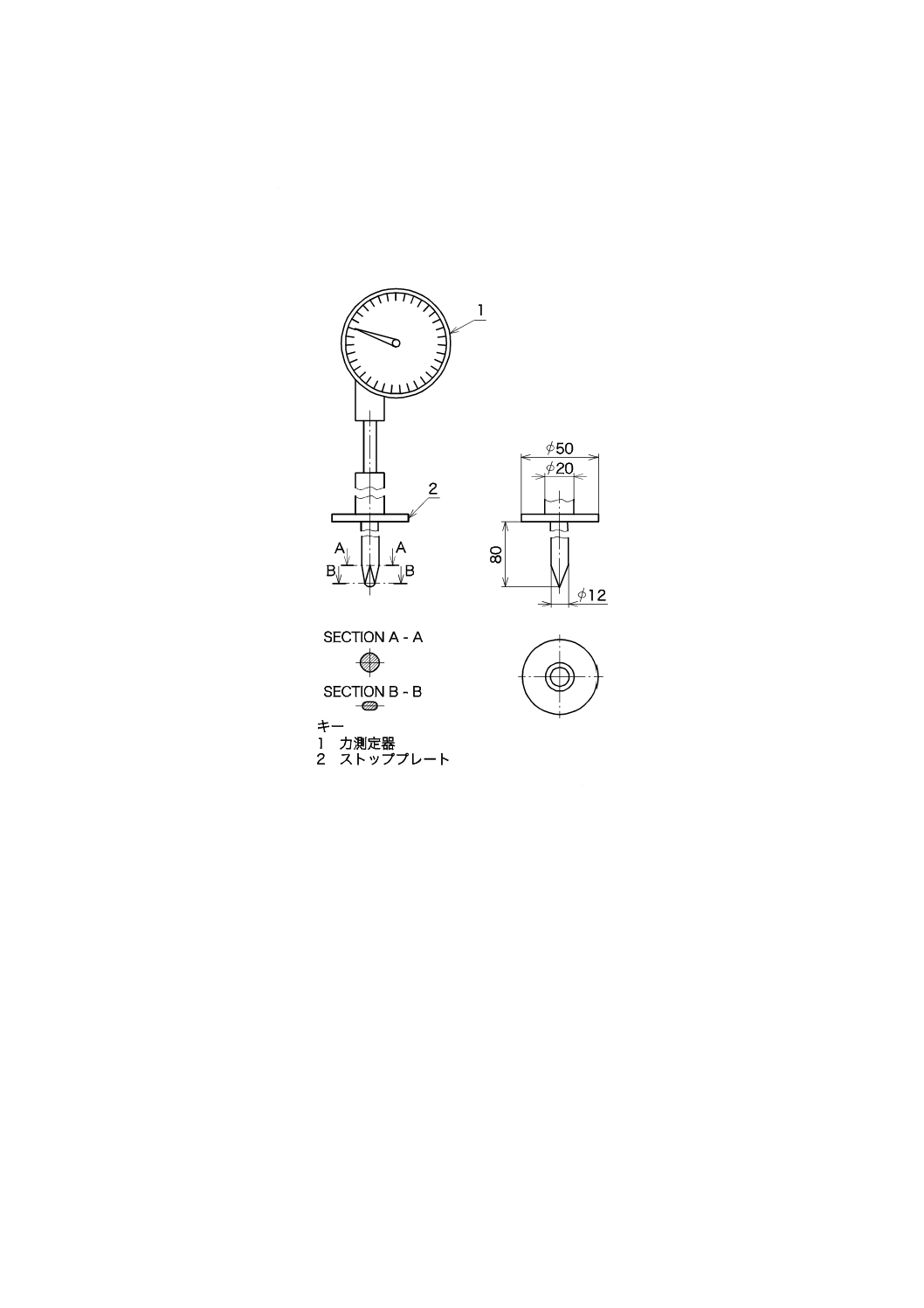
b) 表面角度の測定 互いの表面,垂直線又は水平線に関連する方法は,±0.2 %の精度とする。
c) 力の測定 25 Nと250 Nとの間における力を測定する方法は,±5 %の精度とする。
d) トルクの測定 2 N・mと100 N・mとの間におけるトルクを測定する方法は,±10 %の精度とする。
e) タイヤの空気充塡 ±0.2 barの精度で10 barまで空気入りタイヤを充塡する。
f)
試験平面 試験中に車椅子を置く十分な大きさの平面又は5 mm離れた二つの仮想平面間に全範囲が
入る平面。
g) 車椅子が動くのを防ぐ手段 座面測定基準とするためにシートに荷重を負荷するISO 7176-7で規定
するダミー(RLG)を置くときに,車椅子を動かなくする手段。
H.2 車椅子の準備
車椅子の準備は,次による。
a) 適切なアームサポート,ヘッドサポート,レッグサポート及びフットサポートを取り付ける。締め付
けられていない又は一般使用の車椅子において必用部品ではないルーズクッション,革帯などは取り
除く。
b) 製造事業者によって推奨された大きさ及び型式のバッテリを取り付ける。バッテリは標準容量の少な
くとも75 %まで充電する。
注記 液状タイプバッテリを装備した車椅子の場合,試験において,こぼれに関するリスクがあり
危険である。このような場合には,バッテリは同等の質量に近づけるようにおもりを追加し
て,ゲル状又はシールドバッテリに交換する。
H.3 車椅子の調整一般
H.3.1 空気入りタイヤ
車椅子が空気入りタイヤをもつならば,車椅子製造事業者によって推奨される圧力の空気をタイヤに入
れる。車椅子製造事業者によって推奨空気圧が指定されていないならば,タイヤ製造事業者によって推奨
される最大空気圧を入れる。
H.3.2 位置決め
車椅子を試験平面上に置く。キャスタを前向きのトレーリングポジションにする。
H.3.3 駐車ブレーキ
車輪を調節することにより,ブレーキゴムが接触面に当たらないことがある。ブレーキが調節可能であ
り,調整に関する製造事業者の指示がない場合には,ブレーキが戻された位置においてブレーキゴムと接
触面間の距離を測定し,この距離を記録する。
注記 この距離は,ブレーキを最終調整で設定し直すときに使用する。
79
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.4 位置決め
駆動に関して,製造事業者の指定によって調整部品の位置決めをする。
H.5 調節
H.5.1 一般
製造事業者が,推奨する設定をもたない調整部品に関しては,次の指示によって調整部品を設定する。
H.4で行った位置決めを変更しないでH.5.2〜H.5.10によって調整部品を設定する。製造事業者が記述する,
車椅子の通常操作を妨げる調整はしない。
注記1 車椅子の部品を調整するときに,ある部分が他の部分を変更させる調整であることに気付く。
例えば,車輪の位置を変更することで,シート角度が変更するかもしれない。こうした相互
作用を補正するため,幾つかの部分を再調整する必要があるかもしれない。
注記2 この手順では,質量51 kgのRLG(ISO 7176-7参照)を使用する。サスペンション又は車輪
とシートのように圧縮する部分をもつ車椅子について,重量が重い使用者用であるときには,
その調整が影響を受ける。このような状況では,H.6 b) の再調整が必要となるかもしれない。
H.5.2 駆動車輪
H.5.2.1 駆動車輪軸位置:水平
駆動車輪の位置を水平に調整することができるならば,中間位置に対し±3 mmに設定するか,又は中
間位置の規定がないときは,中間設定位置よりはホイールベースを長くできる位置の最も近くに設定する。
H.5.2.2 駆動車輪軸位置:垂直
駆動車輪の位置を垂直に調整することができるならば,中間位置に対し±3 mmに設定するか,又は中
間位置の規定がないときは,中間位置よりは下の最も近い位置に設定する。
H.5.2.3 駆動車輪キャンバ
駆動車輪キャンバが調整できるならば,垂直位置とマイナスキャンバの最大位置との間における中間位
置,又は中間位置の規定がないときは,キャンバ角度が大きくなる中間位置の近くに設定する。
あらかじめ決められたキャンバの角度範囲がないならば,2°±1°のマイナスキャンバに車輪を設定す
る。不可能ならば,それよりも大きい角度に設定する。図H.1参照。
1:垂直線
2:マイナスキャンバ角度
図H.1−マイナスキャンバ角度
80
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.5.2.4 駆動車輪トラック幅
駆動車輪間におけるトラック幅調整が可能ならば,中間位置に幅を設定する。中間位置の規定がないと
きは,中間位置よりも長く,最も中間位置に近い位置に車輪トラック幅を設定する。
この車輪の調整の結果によって,車椅子の他の部分が接触するならば(例えば,アームサポート),車輪
の自由な回転を十分に保障するように車輪のトラック幅を増やす。
H.5.3 キャスタ
H.5.3.1 キャスタステムハウジングの位置:水平
キャスタステムハウジング(図H.2参照)の位置が水平に調整することができるならば,中間位置に対
し±3 mmに設定するか,又は中間位置の規定がないときは,ホイールベースが中間位置より下の最も近
い位置に設定する。
H.5.3.2 キャスタステムハウジングの位置:垂直
キャスタステムハウジングの位置が垂直に調整することができるならば,中間位置に対し±3 mmに設
定するか,又は中間位置の規定がないときは,最も近い位置が中間位置より下になるように設定する。
H.5.3.3 キャスタ車輪軸位置:垂直
キャスタ車輪の位置が支持装置の高さに関して調整できるならば,中間位置に対し±3 mmに設定する
か,又は中間位置の規定がないときは,キャスタステム受けと車輪との間の距離が長くなる,中間位置に
最も近い位置に設定する。
他のキャスタ車輪の垂直設定が,別のキャスタ直径を使うためだけならば,他のキャスタ車輪の垂直設
定は使用しない。
H.5.3.4 キャスタ車輪トラック幅
キャスタ間のトラック幅が調整できるならば,前向きのトレーリング位置にあるキャスタでの幅の中間
点に設定する。中間点の規定がないときは,トラック幅より広いところで最も中間点に近いところに設定
する。
H.5.3.5 キャスタステム角度,前後平面
キャスタステム角度を前後平面内で調整するものならば,01
+°の公差で垂直に,又はそれが不可能であ
れば,プラス方向(図H.2参照)で垂直に最も近い位置に設定する。
H.5.3.6 キャスタステム角度,側面
キャスタステム角度が側面内で調整するものならば,01
+°の公差で垂直に,又はそれが不可能であれば,
前向きの方向(図H.2参照)で垂直に最も近い位置に設定する。
81
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1:キャスタステム角度(前後)
2:キャスタステム角度(側方)
3:垂直線
4:キャスタステム
5:キャスタステムハウジング
6:キャスタサポート
7:キャスタ車軸
8:前進方向
a) キャスタステム構成(前後平面)
b) キャスタ車輪構成(側面)
図H.2−キャスタ構成
H.5.4 シートとバックサポート
H.5.4.1 RLGの位置
ISO 7176-7に従って,車椅子上にRLGを置く。
H.5.4.2 シート奥行き
シート奥行きが調整をするものならば,シート奥行き(ISO 7176-7 dimension 2)を中間位置に設定する。
中間位置がないならば,シート奥行きより長く最も近い位置に設定する。
H.5.4.3 バックサポート高さ
バックサポート高さ(ISO 7176-7 dimension 7)が調整するものならば,中間高さ位置に,又は中間高さ
位置がないならば,より高いバックサポート高さで,中間位置に最も近い位置に設定する。
H.5.4.4 シート高さ
シートがフレームに対して高さを調整するものならば,製造事業者が指定する通常駆動高さの最も高い
位置にシートを設定する。
H.5.5 シート角度
H.5.5.1 シート角度が調整式の場合
シート角度が車椅子のフレームに対して調整式であるならば,ISO 7176-7 dimension 1によって測定した
シート角度を03
+°の公差で8°に設定する。この角度への調整が可能でなければ,より大きい角度で,そ
の角度に最も近い角度に設定する。また,この角度に調整することが不可能ならば,8°に最も近い角度に
設定する。この調整では,H.5.3.2を優先する。
H.5.5.2 シート角度が固定式の場合
シートが車椅子のフレームに対して固定式であるならば,又はシートをH.5.5.1に従って調整したとき
ISO 7176-7で測定したシート角度を03
+°の公差で調整できなければ,03
+°の公差で8°のシート角度にな
るように駆動輪を設定する。この角度に調整できなければ,より大きい角度でその角度に最も近い角度に
設定する。また,この角度に調整することが不可能であれば,8°に最も近い角度に設定する。この調整で
は,H.5.3.2を優先する。
H.5.5.3 調整ができない場合
82
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ISO 7176-7で測定したシート角度をH.5.5.1又はH.5.5.2に従って03
+°の公差で8°に調整しようとした
とき,調整ができなければ,キャスタ車輪を,シート角度が03
+°の公差で8°になるように調整する。こ
の角度への調整ができないならば,より大きい角度で,その角度に最も近い角度に設定する。また,この
角度に調整することが不可能であれば,8°に最も近い角度に設定する。この調整ではH.5.3.2及びH.5.3.3
を優先するが,これらの設定がキャスタ車輪の直径に関してだけのものであるならば,キャスタ車輪の垂
直方向での設定をしない。
H.5.6 バックサポート角度
バックサポート角度が調整できるならば,ISO 7176-7(dimension 6)で測定したバックサポート角度を
03
+°の公差で10°になるように設定する。この角度に調整できなければ,その角度より大きい角度で最も
近い角度に設定する。または,この角度の調整が不可能であれば,10°に最も近い角度に設定する。
H.5.7 レッグ−シート間角度
レッグ−シート間角度が調整可能であれば,ISO 7176-7(dimension 15)で測定したレッグ−シート間角
度を可能な限り90°に近いところで,90°以下にならないように設定する。
H.5.8 フットサポート
H.5.8.1 フットサポート角度
フットサポート−レッグ角度が調整可能であれば,ISO 7176-7(dimension 14)で測定したフットサポー
ト−レッグ角度を90°以上で可能な限り90°に近く設定する。
H.5.8.2 フットサポート隙間
フットサポート間隔が調整可能であれば,ISO 7176-7(dimension 12)で測定したフットサポート間隔を
可能な限り試験平面の上50 mmに近いところで,50 mm以下にならないように設定する。
フットサポートは,キャスタの旋回を妨げるならば,レッグ−シート間角度H.5.7をキャスタが自由に
旋回することができる最小の角度で再調整する。
H.5.9 制御装置
H.5.9.1 取付け台
制御装置を取り付けることができる電動車椅子に関しては,取付け可能な違う位置の中間位置に設定す
る。中間での設定ができないところでは,アームレストから遠い中間位置に取り付ける。
H.5.9.2 電気的な設定
制御装置を製造事業者の推奨する設定にする。推奨する設定がなければ,最高速度になるように設定す
る。
H.5.9.3 他の電動制御装置
工具を必要としない及びH.5.4〜H.5.8を調整するために前もって変更しない全ての電動制御装置は,製
造事業者の推奨する位置に設定する。
製造業者の推奨する位置がない制御装置は,中間位置に設定する。
H.5.10 他の部品
車椅子の他の機械的な調整部品は,全て中間位置に設定する。中間位置がないならば,中間位置より長
く,最も近くて,高くそして,もっとも幅が広い位置に設定する。
注記 一般的な調整部品は,ヘッドレスト,アームレストである。
83
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.6 最終調整
H.5の設定が完了したなら,次のリストによって与えられた優先順位で最終調整を行う。
ただし,製造事業者の指示に矛盾してはならない。
a) 駆動車輪位置,シート角度を変更することなしに,バックサポート角度をできるだけ+10°に近づけ
調整する。この角度に調整できないならば,これより大きく,この数値に最も近い角度に調整する。
この角度も不可能ならば,+10°に最も近い角度にする。
b) キャスタステム角度,駆動車輪位置を変更することなしに,シート角度をできるだけ+8°に近づけ調
整する。この角度に調整できないならば,これより大きく,この数値に最も近い角度に調整する。ま
た,この角度も不可能ならば,+8°に最も近い角度にする。
c) 公差01
+°の垂直軸で,キャスタステム角度を調整する。また,これができないならば,垂直軸に対し
てマイナスの方向に最も近づける。キャスタステムの側方へのずれは認めない。
d) 駐車ブレーキが調整式であるならば,製造事業者が指定する方法で駐車ブレーキを調整する。駐車ブ
レーキが調整式で,ブレーキ調整に関して製造事業者の指示がなければ,H.3.3の寸法でブレーキを
調整する。
H.7 最終確認
H.2〜H.6の手順が完了した後,調整中に動かされた全ての留め具は,製造事業者の推奨位置において締
める。製造事業者による指示がなければ,表H.1を参考に設定する。
表H.1−最大トルクの設定
留め具
寸法
mm
最大トルク
N・m
ノブ/ハンドホイールの直径
30未満
30以上50未満
50以上
2.0
3.5
7.0
レバーの長さ
50以下
50を超える
5
8
ボルトとナットの口部の幅
10
17
19
24
10
17
25
55
六角穴付きボルトの幅
5
6
7
12
84
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(規定)
電動車椅子形式分類
JA.1 電動車椅子形式分類
電動車椅子の形式分類は,主としてその外観及び用途によって,次のように分類する。
JA.2 電動車椅子形式分類の定義
JA.2.1 自操用
使用者自らが操作して使用することを主目的とした電動車椅子で,次のように分類する。
a) 自操用標準形 自操用電動車椅子で,前2輪,後2輪の四輪で構成したもので,駆動方式は限定しな
い。身体支持部のうち,シート,バックサポート及びフット・レッグサポートは,任意に角度が変え
られない機構で,主に操作方式はジョイスティック方式とする。
なお,パワーステアリング機構を装備したものも含む(JIS T 0102の番号12 23参照)。
b) 自操用ハンドル形 操だ(舵)を直接ハンドル操作によって使用する自操用電動車椅子。3輪又は4
輪で構成したもの(JIS T 0102の番号12 23 03参照)。
c) 自操用座位変換形 座位の位置又は姿勢変換を主目的としている自操用電動車椅子。姿勢変換のため
のリクライニング機構(図JA.1),リフト機構(図JA.2),スタンドアップ機構及びティルト機構(図
JA.3)を装備している。ただし,単純な座の旋回だけのものは含まない(JIS T 0102の番号12 23 05
及び12 23 07参照)。ただし,リフト機構及びスタンドアップ機構はこの規格の適用範囲から除く。
d) 自操用室内形 室内の使用を主目的とした,自操用の電動車椅子。特別な座位保持装置は装備しない。
標準形
ハンドル形
座位変換形
室内形
簡易形
特殊形
標準形
簡易形
電動車椅子
特殊形
介助用
自操用
(この規格で適用する電動車椅子。ただし,リク
ライニング機構及びティルト機構を装備してい
るものに限る。昇降機構,旋回機構及びスタンド
アップ機構をもつ車椅子は座位変換形であるが,
この規格の対象からは除く。)
(この規格で適用する電動車椅子。)
(この規格で適用する電動車椅子。)
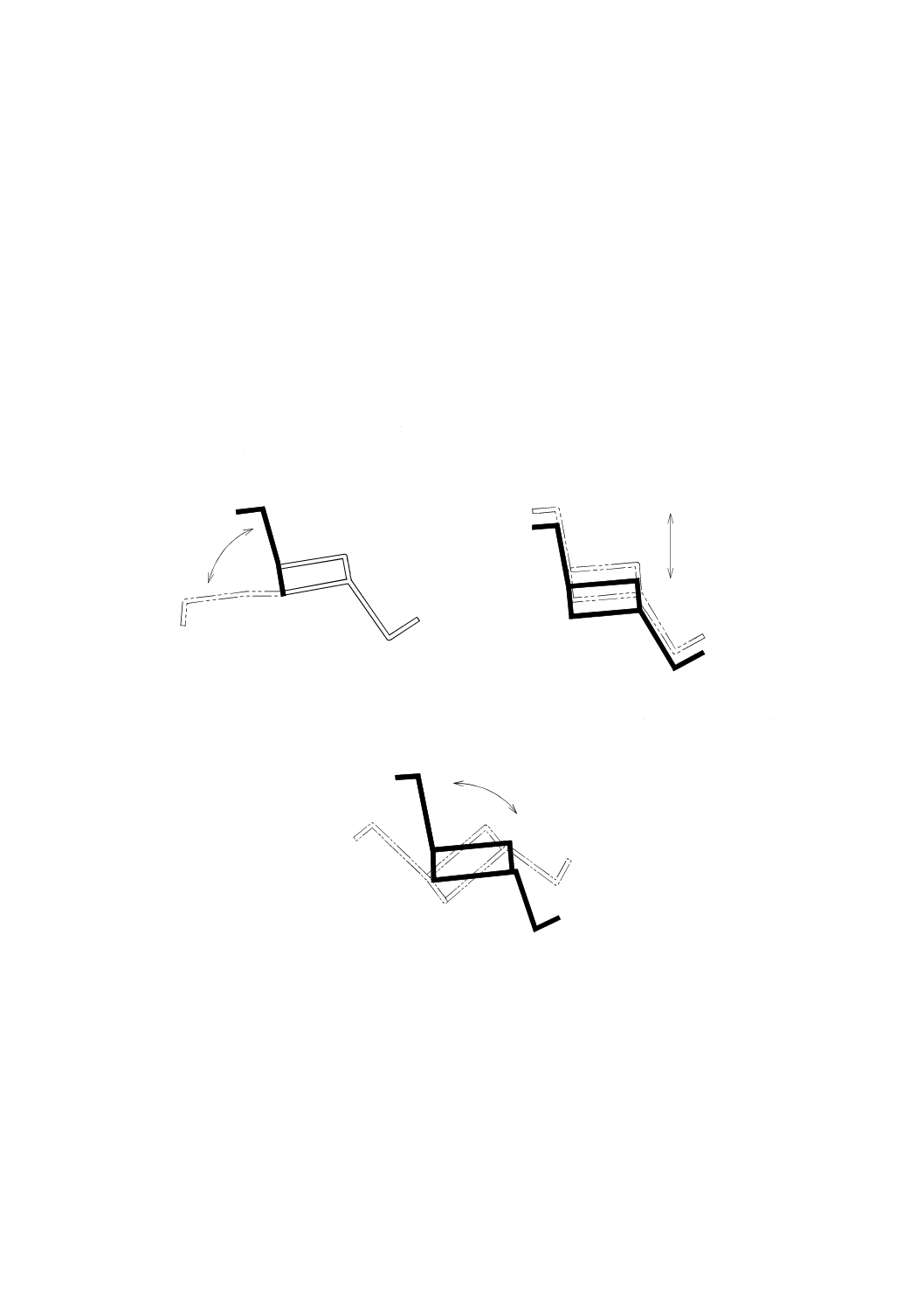
85
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
また,姿勢変換機能は付かず,車輪数,各部の調節機構は限定しない。
e) 自操用簡易形 手動車椅子に電動駆動装置又は制御装置を取り付けた簡便な電動車椅子で,使用者が
操作して使用するもの(JIS T 0102の番号12 23 08参照)。
f)
自操用特殊形 特殊な駆動方式又は特別な用途の自操用電動車椅子。自操用標準形,自操用ハンドル
形,自操用座位変換形,自操用室内形及び自操用簡易形以外の自操用電動車椅子の全てを含む。
JA.2.2
介助用
使用者自らは操作せず,介助者によって操作することを主目的とした電動車椅子で,次のように分類す
る。
a) 介助用標準形 3輪又は4輪構成の電動車椅子で,介助者が操作して使用するもの。座位変換機構操
作部は,後部に取り付けられている。ただし,操作方式は限定しない。
b) 介助用簡易形 手動車椅子に電動駆動装置又は制御装置を取り付けた簡便な電動車椅子で,介助者が
操作して使用するもの(JIS T 0102の番号12 23 15参照)。
c) 介助用特殊形 介助用標準形及び介助用簡易形以外の全ての介助用電動車椅子。
図JA.1−リクライニング機構
図JA.2−リフト機構
(ただし,この規格のリフト機構は適用外)
図JA.3−ティルト機構
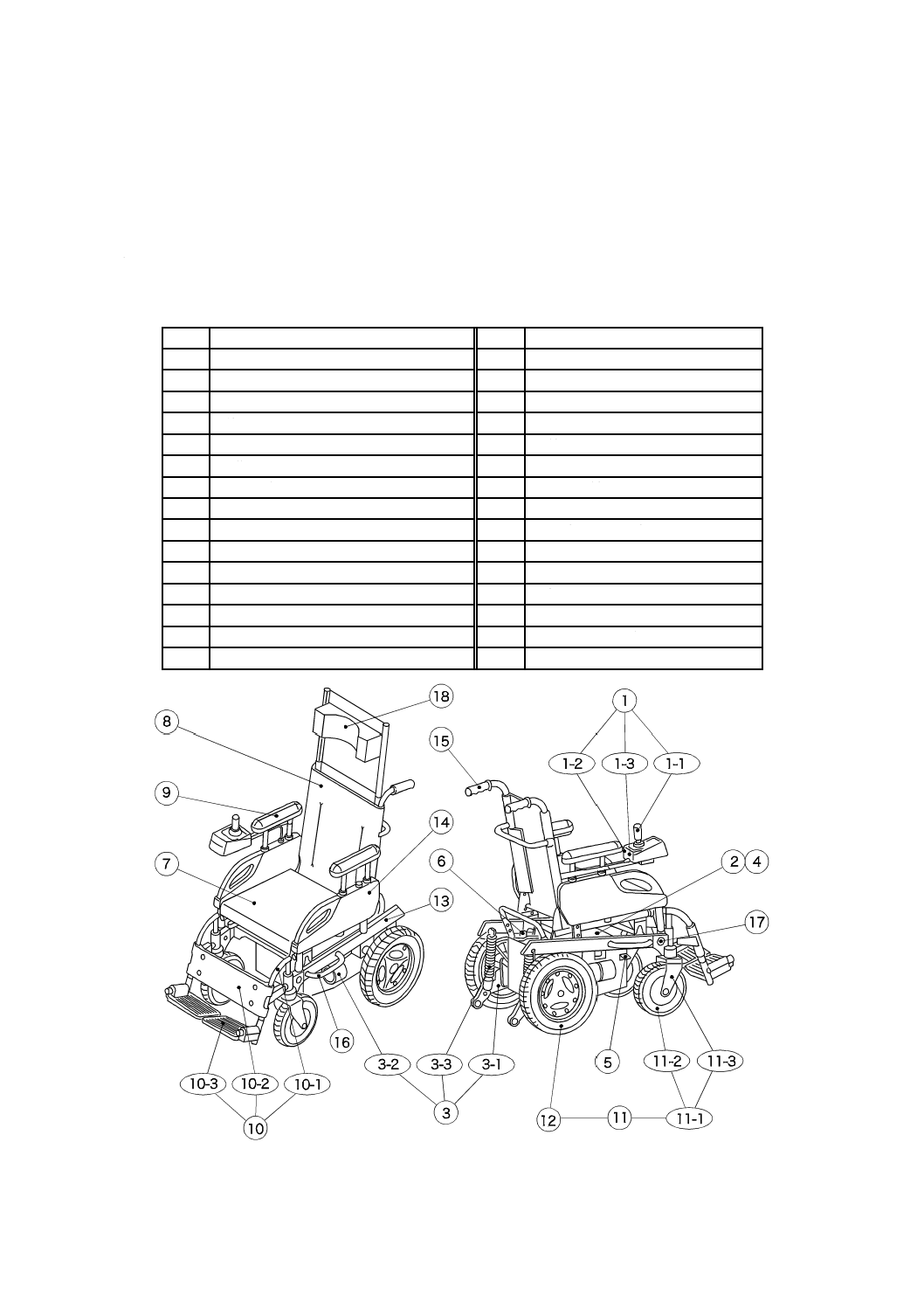
86
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JB
(規定)
電動車椅子の各部の名称
JB.1 電動車椅子名称
電動車椅子の主な各部の名称は,図JB.1及び図JB.2による。
番号
名称
番号
名称
1
操作ボックス(ジョイスティック方式) 10
フット・レッグサポート
1-1
操作レバー
10-1
フット・レッグサポートフレーム
1-2
速度切替スイッチ
10-2
レッグサポート
1-3
電源スイッチ
10-3
フットサポート
2
コントローラ
11
車輪
3
駆動モータ
11-1
キャスタ(又は前輪)
3-1
ギヤーボックス
11-2
キャスタ輪
3-2
モータ
11-3
キャスタホーク
3-3
クラッチレバー
12
駆動輪(又は後輪)
4
充電器
13
フレーム
5
電源プラグ
14
サイドガード
6
バッテリ
15
手押しハンドル
7
シート
16
持上げ取っ手
8
バックサポート
17
リフレクタ(反射器)[附属品]
9
アームサポート
18
ヘッドサポート[附属品]
図JB.1−自操用標準形
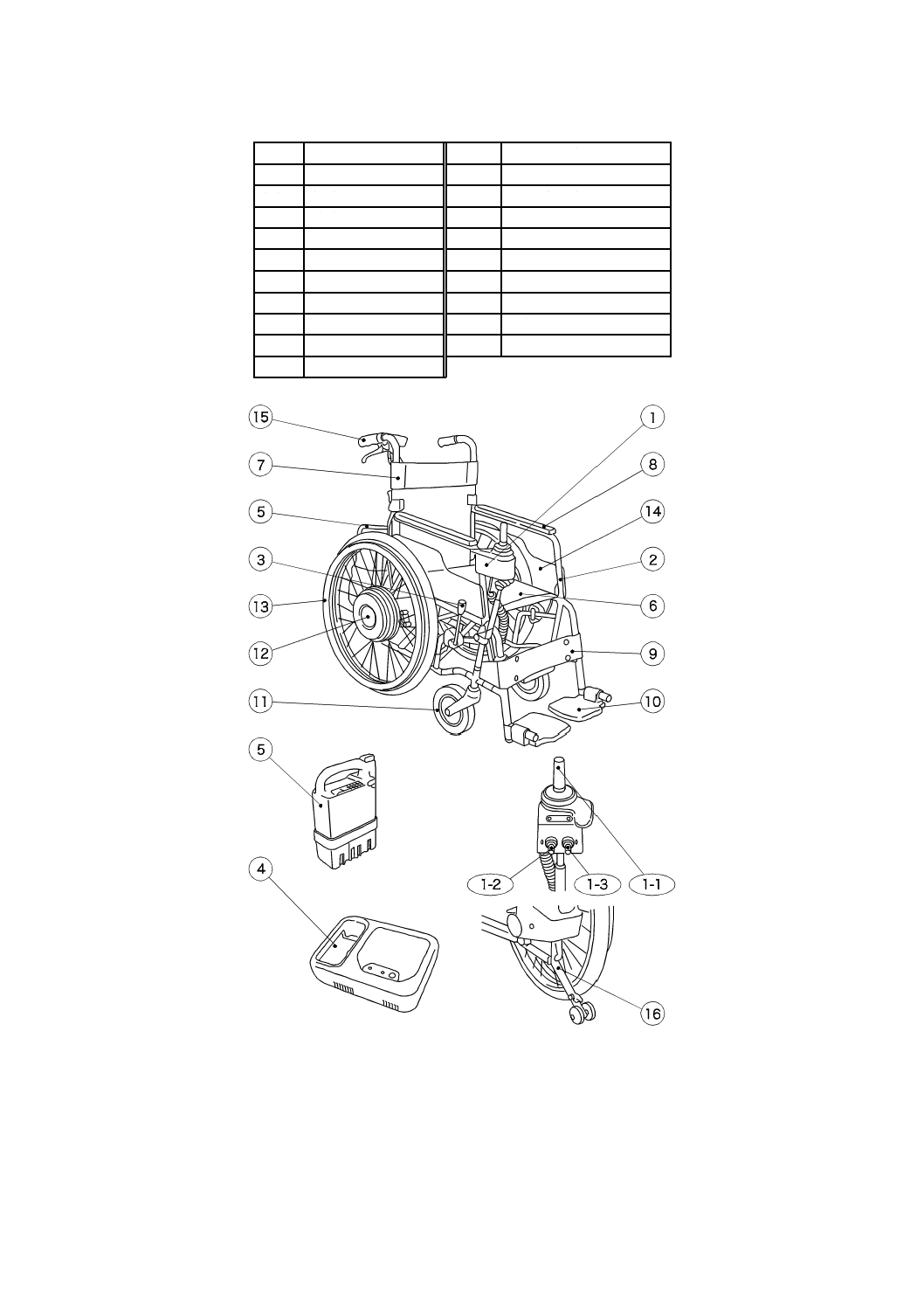
87
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
名称
番号
名称
1
操作ボックス
8
アームサポート
1-1
操作レバー
9
レッグサポート
1-2
速度切替スイッチ
10
フットサポート
1-3
電源スイッチ
11
キャスタ(又は前輪)
2
フレーム
12
駆動輪(又は後輪)
3
駐車用ブレーキ
13
ハンドリム
4
充電器
14
サイドガード
5
バッテリ
15
手押しハンドル
6
シート
16
転倒防止装置
7
バックサポート
図JB.2−自操用簡易形
88
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JC
(規定)
電動車椅子諸元表
JC.1 電動車椅子諸元表
電動車椅子諸元表は,少なくとも表JC.1に示す項目を記載し,使用者及び介助者を含めた一般消費者に
とって分かりやすい内容とする。
表JC.1−電動車椅子の諸元a)
項目
内容
製造事業者の形式
製造する個々の電動車椅子を識別する目的で,ローマ字,数字などを組み合わ
せて表示する。
製品の呼び方
附属書JAによる電動車椅子の形式を記入。
寸法(全長×全幅×全高) 単位はmmとし,小数点第1位を四捨五入して記入。
質量(バッテリ含む。)
単位はkgとし,小数点第1位を四捨五入して記入。
駆動モータ(30分定格出力) 走行用モータの公称電圧,30分定格出力,1台分の個数を記入。
バッテリ
バッテリの形式。電圧,5時間率容量及び1台分の個数を記入。
充電器
充電方法などを記入。
前輪
車輪サイズ,プライ数などを記入。
後輪
車輪サイズ,プライ数などを記入。
駆動方式
駆動方法などを記入。
制動方式
制動方法などを記入。
操だ(舵)方式
操だ(舵)方法などを記入。
制御方式
制御方法などを記入。
シート構造及び寸法
シートの構造,シート幅(W1),シート奥行き(L2)及びバックサポート高(H4)
の寸法を記入。
最高速度
前進
最高速度試験の試験法及び速度を記入。切替スイッチがある場合には,それぞ
れの最高速度を記入。
後進
最高速度試験の試験法及び速度を記入。切替スイッチがある場合には,それぞ
れの最高速度を記入。
実用登降坂角度
製造事業者推奨値を記入(箇条7でいう登坂性能とは異なる。)。
連続走行距離
連続走行距離測定試験の連続走行距離を記入。
最小回転半径
電動車椅子を停止せず360°旋回走行させたとき,電動車椅子構造物の最も外
側の軌跡が描く最も小さな半径を記入。
段差乗越高さ
段差乗越試験と同様の方法で,乗り越えられる最大の高さを記入。
溝乗越幅
溝踏破走行性試験と同様の方法で,溝を通常通行できる最大幅を記入。
使用者最大体重(積載物も
含む。)
利用可能な使用者最大体重を記入。
注a) 数値の丸め方は,特に規定のない場合は,JIS Z 8401による。
89
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JD
(参考)
ハザードリスト
JD.1 電動車椅子に関連して起こる可能性があるハザード及び関連する要因の例
電動車椅子に関連して起こる可能性があるハザード及び関連する要因に関しては,JIS T 14971のハザー
ドリストを参考に,そのリストを示す。ただし,全てを網羅しているわけではなく,ハザードを特定する
手助けとなるものである。
JD.1.1 エネルギーのハザード及び関連する要因
次を含む。
a) 電気
b) 機械的な力
c) 電離放射線
d) 非電離放射線
e) 可動部分(手足及び指の挟み込み)
f)
意図しない動き
g) 懸垂物体
h) 人を支える装置の故障
JD.1.2 生物学的ハザード及び関連する要因
次を含む。
a) 生物的汚染
b) 非生体適合性
c) 不適切な化合物(化学組成)
d) アレルギー誘発性
e) 衛生上の安全を維持できない
JD.1.3 環境的なハザード及び関連する要因
次を含む。
a) 電磁場
b) 電磁干渉の感受性
c) 電磁干渉のエミッション
d) 電力の不適切な供給
e) 指定された環境条件外での保管又は操作
f)
併用を意図した他の機器との不適合性
g) 偶発的な機械的損害
h) 廃棄物及び/又は福祉用具の廃棄による汚染
JD.1.4 エネルギー及び物体の不正出力によるハザード
次を含む。
a) 電気
b) 圧力
90
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JD.1.5 福祉用具の使用に関連するハザード及び関連する要因
次を含む。
a) 不適切なラベリング
b) 不適切な操作説明,例えば,
1) 使用前点検の不適切な仕様
2) 複雑すぎる操作説明
3) サービス及び保守の不適切な仕様
c) 合理的に予見できる誤使用
d) 消耗品,附属品,その他の福祉用具との不適合性
e) 鋭い角又は先端
f)
介助者,子供などが手足及び指を挟み込む機構の存在
JD.1.6 不適切,不十分又は複雑すぎるユーザインタフェース(マン−マシンコミュニケーション)
次を含む。
a) うっかりミス,過失及び誤り(精神的又は肉体的)
b) 複雑な又は混乱する制御システム
c) 曖昧又は不明瞭な福祉用具の状態
d) 設定,測定又はその他情報の曖昧若しくは不明瞭な表示
e) 不十分な視認性,可聴性,感触性
f)
動作に対する制御器,又は実際の状態に対する表示情報の分かりにくい配置
g) 既存の装置と比べ問題を引き起こしやすいモード又は配置
JD.1.7 機械的故障,保守及び老朽化によってもたらされるハザード及び関連する要因
次を含む。
a) 保守後の機能点検を含めた保守仕様の欠如又は不適切さ
b) 不適切な保守
c) 福祉用具の寿命が適切に決められていない
d) 電気的及び/又は機械的な完全性の喪失
e) 不適切なこん包(汚染及び/又は劣化)
f)
反復使用による機能の劣化
参考文献 JIS K 6253-3 加硫ゴム及び熱可塑性ゴム−硬さの求め方−第3部:デュロメータ硬さ
JIS T 9201 手動車椅子
JIS T 9208 ハンドル形電動車椅子
JIS T 14971 医療機器−リスクマネジメントの医療機器への適用
91
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JE
(参考)
JISと対応国際規格との対比表
JIS T 9203:2016 電動車椅子
対応国際規格の番号及び英文名称は,この表の注記3による。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範囲 座位変換形含む製
品規格
ISO
7176
一部を除き試験方法を
規定。
追加
JISは要求性能を含む製品規格とし
た。
製品規格はISOにないのでJISを
制定した。試験方法は可能な限り
ISO規格に準拠する。
3 用語及び
定義
座位変換関係を中
心に追加
ISO
7176-26
用語及び定義
追加
座位変換の機構関係を追加した。
現在ISOへ提案中
4 種類及び
記号
速度による区分を
した。
−
−
−
追加
実質的に差異はない。
5 各部の名
称
標準形及び簡易形
ISO
7176-26
変更
図を用いて説明した。
差異はない。
6 リスクマ
ネジメント
による設計
リスクマネジメン
トによる設計を規
定。
−
−
−
追加
JISは,この規格の中で品質管理と
そのリスクの軽減を目指す。
安全確保の必要上,規定。
7 性能
要求性能を規定
−
−
−
追加
製品JISとするため要求値を規定
した。
JISマーク貼付に必要
8 構造
8.1〜8.3
身体支持部,駆動部
及び制御部の構造
について規定。
−
−
−
追加
製品JISとするため要求値を規定
した。
JISマーク貼付に必要
8.5
ブレーキ
ISO
7176-14
8.12.1
ブレーキの性能
変更
ISO規格は単一故障状態を規定。
実質的に差異はない。
8.6,8.7
ねじ,附属品
−
−
−
追加
ISO規格が規定しない充電器の構
造を規定。
安全確保の必要上,規定。
8.8.1
8.8.7
バッテリ
ISO
7176-14
6.2
14.1.3
電圧を規定
変更
JISは製造事業者の指定品とし,短
絡保護装置の位置を規定した。
実質的に差異はない。
6
T
9
2
0
3
:
2
0
1
6
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
92
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
8.8.10〜
8.8.15
充電器の構造を規
定
−
−
−
追加
ISO規格が規定しない充電器の構
造を規定。
安全確保の必要上,規定。
9 寸法及び
角度
測定箇所及び主要
寸法最大値を規定
ISO
7176-26
4
用語及び定義
追加
JISは,ISO規格が定義する寸法の
うち,全長,全幅及び全高の値を規
定。
JISは,設計及びカタログ上で必
要となる寸法項目に限定して値を
規定。ISO規格は寸法の測定方法
を規定している。
10 外観
外装の状態を規定
−
−
−
追加
−
安全確保の必要上,規定。
11 試験条
件
a) 特に指定のない
限り,温度は,20±
15 ℃で実施。
ISO
7176-14
6.3
温度は,20±5 ℃で実
施。
変更
−
JISは,試験室の温度を必要最小
限に緩和した。
d) 充電量
e) タイヤの空気圧
−
−
−
追加
JISは電池の充電量及びタイヤの空
気圧を規定した。
実質的に差異はない。
f) 調節機能のある
ものの標準状態
ISO
7176-22
6.2.3
シート角度,バックサポ
ート角度,及びシート角
度を規定。
追加
変更
セットアップ基準としてISO規格
は体重区分によってレベル区分を
行っているが,JISは単一レベルを
使用。
JISは安全確保に必要なため,追
加。
g) 予備走行
−
−
−
追加
JISは必要に応じ予備走行を実施。 実質的に差異はない。
12.1.1 最高
速度試験
10 mの同一測定区
間を2往復し,平均
所要時間から最高
速度を求める。
ISO
7176-6
6
1.5 kmの予備走行後,平
たん路,3°及び6°の
斜面において5分以内
に最高速度を3回測定
し,平均値を求める。
変更
JISは平たん路の試験とした。
道路交通法の規定の趣旨に合わせ
た試験とした。
12.1.2
登坂性能試験
−
−
−
追加
−
安全確保の必要上,規定。
12.1.3
降坂性能試験
−
−
−
追加
−
安全確保の必要上,規定。
12.1.4
制動性能試験
ISO
7176-3
7.3
緊急ブレーキなどの試
験を規定。
変更
JISは正常操作の自動ブレーキだけ
の試験を採用。
安全確保の必要上,規定。
12.1.5
傾斜停止力試験
−
−
−
追加
−
安全確保の必要上,規定。
12.1.6
静的安定性試験
ISO
7176-1
11
転倒防止装置について,
静的安定性試験を規定。
変更
JISは転倒防止装置を装備した状態
で試験。座位変換を追加。
安全上実質的に差異はない。
12.1.8
溝踏破走行性試験
−
−
−
追加
−
安全確保の必要上,規定。
6
T
9
2
0
3
:
2
0
1
6
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
93
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
12.1.9
坂道走行性試験
−
−
−
追加
−
安全確保の必要上,規定。
12.1.10
斜面直進走行性試
験
−
−
−
追加
−
安全確保の必要上,規定。
12.1.11
回転性能試験
−
−
−
追加
−
安全確保の必要上,規定。
12.1.13
連続走行距離試験
ISO
7176-4
5.1
試験トラックの大きさ
を長方形の1辺を50 m
から100 mと規定。
変更
JISは走路を規定しない試験又は周
長を50 m以上100 m以下の走路に
よる試験とした。
我が国では,ISO規格に準じた試
験走路を確保することが難しい。
ISO規格に準じた走路以外でも,
試験条件を満足させることが可能
なため。
12.1.14
駆動輪・主軸の振れ
試験
−
−
−
追加
−
安全確保の必要上,規定。
12.1.15
ハンドリムの振れ
試験
−
−
−
追加
−
安全確保の必要上,規定。
12.2.1
シートへの垂直静
荷重試験
−
−
−
追加
−
安全確保の必要上,規定。
12.2.2
12.2.3
アームサポート荷
重試験
ISO
7176-8
8.4
8.8
アームサポート耐荷重
試験
変更
ISO規格は荷重を表示体重から計
算式で求め,最大を125 kgまで規
定。
JISは上方耐荷重を規定しない。
実質的に差異はない。
12.2.4
フットサポートの
上方耐荷重試験
ISO
7176-8
8.9
フットサポートの上方
耐荷重
12.2.5
ティッピングレバ
ー耐荷重試験
ISO
7176-8
8.6
ティッピングレバー
12.2.6
手押しハンドルの
耐荷重試験
ISO
7176-8
8.10
手押しハンドルの耐荷
重
12.2.7
バックサポート耐
荷重試験
−
−
−
追加
JISは座位変換形の耐荷重を規定。 安全確保の必要上,規定。
12.2.8
グリップ耐離脱性
試験
ISO
7176-8
8.7
ハンドグリップ
変更
リング法を追加した。
実質的に差異はない。
12.3.5
シート耐衝撃性試
験
−
−
−
追加
JISは座位変換形の耐荷重を規定。 安全確保の必要上,規定。
6
T
9
2
0
3
:
2
0
1
6
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
94
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
12.4.1
駐車ブレーキ耐久
性試験
−
−
−
追加
JISは座位変換形の耐荷重を規定。 安全確保の必要上,規定。
12.4.2.2
走行耐久性試験
ISO
7176-8
10.3
マルチドラム試験
追加
JISは座位変換形の試験を追加
ISOへ提案中
12.4.3.2
落下耐久性試験
ISO
7176-8
10.4
落下試験
12.4.4
キャスタアップ
−
−
−
12.5
耐水性能試験IPX3
を規定。
ISO
7176-14
13.1
IPX4を規定
変更
ISOは雨の中で使う場合の規定だ
が,JISはIPX3によって試験。
JISは,使用上安全性を確保する
ため,別置式充電器について独自
の試験方法を規定。
12.6
制動用ブレーキの
試験
−
−
−
追加
−
安全確保の必要上,規定。
13.1
形式検査
−
−
−
追加
−
安全確保の必要上,規定。
13.2
製品検査
−
−
−
追加
−
安全確保の必要上,規定。
15 表示
規格番号,種類,定
格電圧,バッテリの
形式名
ISO
7176-15
8
表示項目を規定
変更
JISは,利用者の利便性のため,種
類,バッテリの形式名を記載。
実質的に同じ。
16 取扱説
明書
運転方法,交通マナ
ーの順守,各部の名
称及び働き,緊急時
の対処方法など
ISO
7176-15
7
仕様書,特徴,用途,保
証,修理及びサービス,
並びにサービス・ユーザ
マニュアル。ユーザマニ
ュアルの内容について
詳しく規定。
変更
内容に,大きな差異はない。
JISに規定の内容は,長年採用さ
れている内容であり,利用者の希
望に沿った内容となっている。
附属書B
(規定)
走行耐久性試験装
置及び落下性能試
験装置の構成
ISO
7176-8
5.8
10.3
JISとほぼ同じ。
変更
ISO規格は2ドラム以上の装置を規
定し,6輪車椅子の試験に対応。
車輪数が4輪以下ではISO規格と
同じ。
附属書D
(規定)
動的安定性
ISO
7176-2
JISとほぼ同じ。
変更
JISは座位変換形の試験を追加
ISOへ提案中
6
T
9
2
0
3
:
2
0
1
6
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
95
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
附属書E
(規定)
おもりの質量配分
及びテストダミー
ISO
7176-11
5.1
JISとほぼ同じ。
変更
ISO規格は下肢がピボットによっ
て大たい(腿)部と接続,全体の重
心位置指定,使用者最大体重100 kg
以上を規定。ISOは使用者最大体重
から計算式によって荷重負荷を算
出。
実質的に大きな差はないため,実
績のあるダミーを継続使用する。
市場の環境を整備し,ISO規格の
取込みを進める。
附属書F
(規定)
ダミーの拘束
ISO
7176-8
10.3
マルチドラム試験
変更
ISOはダミーの重心位置を規定し
ているがJISは固定方法を詳細に
規定。
実質的に差異はない。
附属書G
(規定)
テスト路面の摩擦
係数
ISO
7176-13
テスト路面の摩擦係数
変更
ISOが規定する硬さのゴムが入手
不可能なため一般的ゴムを使用。
実質的に差異はない。
附属書H
(規定)
車椅子の設定
ISO
7176-22
6
耐久試験の車椅子の準
備
変更
ISOは基準設定グループを区分し
ているがJISは単一の設定を行う。
実質的に差異はない。
附属書JA
(規定)
車椅子の形式分類
を規定
−
−
ISOに規定なし
追加
−
国内流通事情に合わせた。
附属書JB
(規定)
車椅子各部の名
称・種類及びそれら
の図を規定
ISO
7176-26
JISに同じ
変更
JISは,ISO規格より詳細に規定し
ている。
JISでは使用者の便宜を図るため,
詳細に規定した。
附属書JC
(規定)
車椅子諸元表
−
−
−
追加
JISは,ISO規格より詳細に規定し
ている。
国内流通事情に合わせた。
附属書JD
(参考)
ハザードリスト
−
−
−
追加
JISは,ISO規格より詳細に規定し
ている。
参考として追加。
JISと国際規格との対応の程度の全体評価:(ISO 7176-1:2014,ISO 7176-2:2001,ISO 7176-3:2012,ISO 7176-4:2008,ISO 7176-6:2001,ISO 7176-8:2014,ISO 7176-10:2008,
ISO 7176-11:2012,ISO 7176-13:1989,ISO 7176-14:2008,ISO 7176-15:1996,ISO 7176-22:2014,ISO 7176-26:2007,MOD)
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
6
T
9
2
0
3
:
2
0
1
6
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
96
T 9203:2016
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記3 この規格の対応国際規格は,次による。
ISO 7176-1:2014,Wheelchairs−Part 1: Determination of static stability
ISO 7176-2:2001,Wheelchairs−Part 2: Determination of dynamic stability of electric wheelchairs
ISO 7176-3:2012,Wheelchairs−Part 3: Determination of effectiveness of brakes
ISO 7176-4:2008,Wheelchairs−Part 4: Energy consumption of electric wheelchairs and scooters for determination of theoretical distance range
ISO 7176-6:2001,Wheelchairs−Part 6: Determination of maximum speed, acceleration and deceleration of electric wheelchairs
ISO 7176-8:2014,Wheelchairs−Part 8: Requirements and test methods for static, impact and fatigue strengths
ISO 7176-10:2008,Wheelchairs−Part 10: Determination of obstacle-climbing ability of electrically powered wheelchairs
ISO 7176-11:2012,Wheelchairs−Part 11: Test dummies
ISO 7176-13:1989,Wheelchairs−Part 13: Determination of coefficient of friction of test surfaces
ISO 7176-14:2008,Wheelchairs−Part 14: Power and control systems for electrically powered wheelchairs and scooters−Requirements and test methods
ISO 7176-15:1996,Wheelchairs−Part 15: Requirements for information disclosure, documentation and labelling
ISO 7176-22:2014,Wheelchairs−Part 22: Set-up procedures
ISO 7176-26:2007,Wheelchairs−Part 26: Vocabulary
6
T
9
2
0
3
:
2
0
1
6
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。