T 80601-2-60:2014 (IEC 80601-2-60:2012)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
201.1 適用範囲,目的及び関連規格 ························································································ 1
201.1.1 適用範囲 ················································································································· 1
201.1.2 目的 ······················································································································· 2
201.1.3 副通則 ···················································································································· 2
201.1.4 個別規格 ················································································································· 2
201.2 引用規格 ··················································································································· 3
201.3 用語及び定義 ············································································································· 3
201.4 一般要求事項 ············································································································· 4
201.4.3 基本性能 ················································································································· 4
201.5 ME機器の試験に対する一般要求事項 ············································································· 5
201.5.3 周囲温度,湿度及び気圧 ···························································································· 5
201.6 ME機器及びMEシステムの分類 ··················································································· 5
201.6.2 電撃に対する保護 ····································································································· 5
201.7 ME機器の標識,表示及び文書 ······················································································ 5
201.7.9 附属文書 ················································································································· 5
201.8 ME機器の電気的ハザードに関する保護 ·········································································· 6
201.8.7 漏れ電流及び患者測定電流 ························································································· 6
201.8.9 *沿面距離及び空間距離 ······························································································ 6
201.8.11 電源部,部品及び配置 ······························································································ 9
201.9 ME機器及びMEシステムの機械的ハザードに関する保護 ·················································· 9
201.10 不要又は過度の放射のハザードに関する保護 ································································· 10
201.10.4 レーザ及び発光ダイオード(LED) ··········································································· 10
201.11 過度の温度及び他のハザードに関する保護 ···································································· 11
201.12 制御及び計器の精度並びに危険な出力に対する保護 ························································ 14
201.13 危険状態及び故障状態 ······························································································· 14
201.13.1 特定の危険状態 ······································································································ 14
201.13.2 単一故障状態 ········································································································· 15
201.14 プログラマブル電気医用システム(PEMS) ·································································· 15
201.15 ME機器の構造 ········································································································ 15
201.16 MEシステム ··········································································································· 15
201.17 ME機器及びMEシステムの電磁両立性 ······································································· 15
201.101 コードレスの手持形制御器及び足踏み制御器 ································································ 15
附属書 ······························································································································· 15
附属書AA(参考)個別指針及び根拠 ······················································································ 16
T 80601-2-60:2014 (IEC 80601-2-60:2012) 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
参考文献 ···························································································································· 25
附属書JAA(参考)定義した用語の五十音順索引 ······································································ 26
附属書JBB(参考)この規格で使われている略語 ······································································ 28
T 80601-2-60:2014 (IEC 80601-2-60:2012)
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,日本歯科器械工業協同組合(JDMMA),公
益社団法人日本歯科医師会(JDA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日
本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,厚生労働大臣及び経済産業
大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
T 80601-2-60:2014
(IEC 80601-2-60:2012)
医用電気機器−第2-60部:歯科器械の基礎安全及び
基本性能に関する個別要求事項
Medical electrical equipment-Part 2-60: Particular requirements for the
basic safety and essential performance of dental equipment
序文
この個別規格は,2012年に第1版として発行されたIEC 80601-2-60を基に,技術的内容及び構成を変更
することなく作成した日本工業規格である。
この規格は,通則規格であるJIS T 0601-1:2012(医用電気機器−第1部:基礎安全及び基本性能に関す
る一般要求事項)(以下,通則という。)及び関連する副通則規格(以下,副通則という。)と併読する規格
である。
この規格の箇条などの番号は,通則に対応している。また,本文中の“置換え”,“追加”及び“修正”
の意味は,201.1.4を参照する。また,附属書AAに論理的根拠を示している箇条,細別箇条及び定義につ
いては,題名の先頭にアスタリスク(*)を付した。さらに,この個別規格で使用し,“定義した用語の五
十音順索引”は附属書JAAに,及び“この規格で使われている略語”は附属書JBBに示す。
なお,この規格で側線又は点線の下線を施してある参考事項は,対応国際規格にはない事項である。
201.1
適用範囲,目的及び関連規格
次を除き,通則の箇条1を適用する。
201.1.1
適用範囲
置換え
この個別規格は,歯科器械(歯科用制御装置,歯科患者用いす,歯科用ハンドピース,歯科用照明器な
ど)の基礎安全及び基本性能について規定する。ただし,アマルガム練和器(アマルガメータ),滅菌器
及び歯科用X線機器を除く。
箇条又は細分箇条が,ME機器又はMEシステムのいずれか一方だけに適用することを意図している場
合,項目名及び内容はそのように扱われる。それ以外の場合,箇条又は細分箇条は,ME機器及びMEシ
ステムの両方に適用する。
この個別規格の適用範囲における,ME機器又はMEシステムの意図した生理学的機能における避けら
れないハザードは,通則の7.2.13及び8.4.1を除き,この個別規格の個別要求事項によって取り扱わない。
注記1 通則の4.2参照
注記2 この個別規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 80601-2-60:2012,Medical electrical equipment−Part 2-60:Particular requirements for the basic
safety and essential performance of dental equipment(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
2
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ことを示す。
201.1.2
目的
置換え
この個別規格の目的は,歯科器械(201.3.202で定義)の基礎安全及び基本性能を確立することである。
201.1.3
副通則
追加
この個別規格は,通則の箇条2及びこの個別規格の201.2で記す適用可能な副通則を引用する。
JIS T 0601-1-3,IEC 60601-1-9 1)及びIEC 60601-1-10 2)は適用しない。それ以外のJIS T 0601-1規格群の
副通則は適用する。
注1) IEC 60601-1-9:2007,Medical electrical equipment−Part 1-9: General requirements for basic safety and
essential performance−Collateral Standard: Requirements for environmentally conscious design
2) IEC 60601-1-10:2007,Medical electrical equipment−Part 1-10: General requirements for basic safety
and essential performance−Collateral Standard: Requirements for the development of physiologic
closed-loop controllers
201.1.4
個別規格
置換え
JIS T 0601規格群では,個別規格は,対象とするME機器に適する通則及び副通則に含まれる要求事項
を修正,置換え又は削除してもよく,他の基礎安全及び基本性能を追加してもよい。
個別規格の要求事項は,通則に優先する。
簡略化のため,JIS T 0601-1は,この規格の中で通則として引用する。副通則は,規格番号で引用する。
この個別規格の箇条及び細分箇条の番号は,通則の番号に接頭語“201”を付与する(例えば,この個別
規格の201.1は,通則の箇条1の内容を扱う。)。また,副通則の場合には,接頭語“20x”を付与する。こ
こで“x”は,副通則の規格番号の最後の数字である(例えば,この個別規格の202.4が副通則IEC 60601-1-2
の箇条4を,203.4は副通則JIS T 0601-1-3の箇条4の内容を扱う。)。通則及び副通則の箇条の変更は,次
の用語を用いて規定する。
“置換え”は,通則又は適用する副通則の箇条又は細分箇条を,この個別規格の規定に全て置き換える
ことを意味する。
“追加”は,通則又は適用する副通則の該当する要求事項に,この個別規格の規定を追加することを意
味する。
“修正”は,通則又は適用する副通則の箇条又は細分箇条を,この個別規格の規定に修正することを意
味する。
通則に追加する細分箇条,図又は表は,201.101から始まる番号を付ける。ただし,通則の箇条3では
3.1〜3.139の細分箇条番号で定義している。この個別規格では201.3.201から始まる細分箇条番号で定義す
る。追加した附属書は,附属書AA,附属書BBなどと記載し,追加する細別はaa),bb) などと記載する。
各副通則に追加する細分箇条,図又は表は,“20x”から始まる番号を付ける。ここで“x”は副通則の規
格番号の最後の数字である。例えば,202はJIS T 0601-1-2,203はJIS T 0601-1-3を示す。
“この規格”という用語は,通則,適用する副通則及びこの個別規格を包含する。
この個別規格に対応する箇条又は細分箇条がない場合,関連していない場合があっても,通則又は適用
可能な副通則の箇条若しくは細分箇条を変更せずに適用する。関連する可能性があっても,通則又は適用
可能な副通則の箇条又は細分箇条の一部を適用しない場合には,この個別規格にそれを適用しないことを
3
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記載する。
201.2
引用規格
次に掲げる規格は,この個別規格に引用されることによって,この個別規格の規定の一部を構成する。
これらの引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追
補を含む。)は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
注記 参考文献は,巻末に記載している。
次を除き,通則の箇条2を適用する。
置換え
JIS C 6802 レーザ製品の安全基準
注記 対応国際規格:IEC 60825-1,Safety of laser products−Part 1: Equipment classification and
requirements(IDT)
追加
JIS C 4540-1:2010 電磁式エレメンタリ リレー−第1部:一般要求事項
注記 対応国際規格:IEC 61810-1:2008,Electromechanical elementary relays−Part 1: General
requirements(IDT)
JIS C 7550 ランプ及びランプシステムの光生物学的安全性
注記 対応国際規格:IEC 62471,Photobiological safety of lamps and lamp systems(MOD)
JIS C 60664-4:2009 低圧系統内機器の絶縁協調−第4部:高周波電圧ストレスの考慮
注記 対応国際規格:IEC 60664-4:2005,Insulation coordination for equipment within low-voltage
systems−Part 4: Consideration of high-frequency voltage stress(IDT)
JIS T 5907 歯科用ハンドピース−ストレート及びギアードアングルハンドピース
注記 対応国際規格:ISO 7785-2,Dental handpieces−Part 2: Straight and geared angle handpieces
(MOD)
ISO 1942,Dentistry−Vocabulary
IEC 60601-2-2:2009,Medical electrical equipment−Part 2-2: Particular requirements for the basic safety and
essential performance of high frequency surgical equipment and high frequency surgical accessories
IEC 60601-2-22:2007,Medical electrical equipment−Part 2-22: Particular requirements for basic safety and
essential performance of surgical, cosmetic, therapeutic and diagnostic laser equipment
IEC 60601-2-57:2011,Medical electrical equipment−Part 2-57: Particular requirements for the basic safety
and essential performance of non-laser light source equipment intended for therapeutic, diagnostic,
monitoring and cosmetic/aesthetic use
IEC 61180-1,High-voltage test techniques for low voltage equipment−Part 1: Definitions, test and procedure
requirements
IEC 61180-2,High-voltage test techniques for low-voltage equipment−Part 2: Test equipment
201.3
用語及び定義
この個別規格で用いる主な用語及び定義は,通則,ISO 1942及びIEC 60601-2-2:2009によるほか,次に
よる。
注記 この個別規格で使用し,定義した用語の索引を附属書JAAに示す。
4
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
追加
201.3.201
歯科用電気モータ(DENTAL ELECTRICAL MOTOR)
歯科用制御装置によって電気的に駆動する歯科用ハンドピースの手で保持する部分。
201.3.202
歯科器械(DENTAL EQUIPMENT)
歯科用ハンドピース,歯科用制御装置,歯科患者用いす,歯科用照明器などを任意に組み合わせたME
機器。
注記 対応国際規格は,歯科用器具である歯科用ハンドピースも対象とするため,“DENTAL
EQUIPMENT”の訳を“歯科器械”とした。
201.3.203
歯科用ハンドピース(DENTAL HANDPIECE)
歯科用制御装置に接続され,患者の歯科診療に使用する手持ちの器具。
201.3.204
歯科用照明器(DENTAL OPERATING LIGHT)
照明器具と1個以上のランプからなる口くう(腔)を照らすために操作者が使うように設計した器械。
201.3.205
歯科患者用いす(DENTAL PATIENT CHAIR)
歯科診療のために患者の位置決めと身体を支持するように設計し,移動域を備えた器械。
201.3.206
歯科用制御装置(DENTAL UNIT)
電力及び/又は様々な液体又は様々な気体を幾つかの歯科用ハンドピース及び/又は機器に供給する
装置。
注記 歯科用制御装置は,通常,使いやすく配置したハンドピースホルダ及び制御装置であり,内部
で結合した歯科器械のサブユニット(電力などを供給する装置)及び歯科用の機能ユニットを
備えた器具(歯科用ハンドピースなど)で構成されている。
201.3.207
歯科用ハンドピースの操作者側の部分(OPERATOR SIDE OF DENTAL HANDPIECE)
歯科用ハンドピースの一部で,正常な使用において,操作者が手で保持するように設計した部分。
201.3.208
歯科用ハンドピースの患者側の部分(PATIENT SIDE OF DENTAL HANDPIECE)
歯科用ハンドピースの一部で,患者の口くう(腔)に導入するように設計した部分。全ての歯科用ハン
ドピースの先端から80 mmまでの部分は,装着部として取り扱う。
201.4
一般要求事項
次を除き,通則の箇条4を適用する。
201.4.3
基本性能
追加
歯科器械は,基本性能をもたない。
注記 ただし,通則に従って基本性能をリスクマネジメントによって確認することが必要である。
5
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
201.5
ME機器の試験に対する一般要求事項
次を除き,通則の箇条5を適用する。
201.5.3
周囲温度,湿度及び気圧
修正
a) ME機器は,5.7に従って正常な使用における試験のための準備を行った後,技術解説(7.9.3.1参照)
で示した環境条件の範囲内で,かつ,環境温度が10〜35 ℃の範囲において,試験を行う。
201.6
ME機器及びMEシステムの分類
次を除き,通則の箇条6を適用する。
201.6.2
電撃に対する保護
置換え
外部電源から電力を供給するME機器は,クラスIのME機器又はクラスIIのME機器(通則の7.2.6
参照)に分類しなければならない。他のME機器は,内部電源ME機器に分類しなければならない。
電源(商用)への接続手段をもつ内部電源ME機器は,電源(商用)へ接続した場合,クラスIのME
機器又はクラスIIのME機器の要求事項に適合し,接続しない場合は,内部電源ME機器の要求事項に
適合しなければならない。
水回路を通じて接続する歯科器械の装着部は,B形装着部として考慮しなければならない。
201.7
ME機器の標識,表示及び文書
次を除き,通則の箇条7を適用する。
201.7.2.10 装着部
追加
歯科器械は,装着部を一つしか保有していない場合,又は全ての装着部が同程度の電撃保護をもつ場合
は,歯科器械の外部に適切な記号を1か所表示すればよい。
201.7.2.11 *作動モード
追加
歯科用電気モータには,作動モードの表示は不要である。
歯科用ハンドピースには,リスクアセスメントを通じて作動モードの表示を施さないことのリスクが受
容できることの確証があれば,作動モードの表示は不要である。
レーザ発生装置を組み込んだ,又はレーザ発生装置に接続される歯科用ハンドピースは,IEC 60601-2-22
の関連要求事項を満たさなければならない。
201.7.9
附属文書
201.7.9.2
取扱説明書
追加
201.7.9.2.101
*取扱説明書
歯科用電気モータには,デューティサイクル情報の説明は不要である。
歯科用ハンドピースには,リスクアセスメントを通じてデューティサイクル情報の説明を行わないこと
のリスクが受容できることの確証があれば,デューティサイクル情報の説明は不要である。
レーザ発生装置を組み込んだ,又はレーザ発生装置に接続される歯科用ハンドピースは,IEC 60601-2-22
の関連要求事項を満たさなければならない。
6
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
201.8
ME機器の電気的ハザードに関する保護
次を除き,通則の箇条8を適用する。
201.8.5.2
患者接続部の分離
追加
201.8.5.2.101
*単一の装着部を構成する複数の装着部
歯科器械において,歯科用ハンドピース(組み合わせたものを含む。)は,一つの装着部の多重機能及
び/又は一つの装着部の複数の患者接続部とみなす。
同時に複数の装着部が適用される場合において危険状態が生じない場合に限り,一つの装着部を構成す
る複数の装着部の組合せは,差し支えない。
201.8.7
漏れ電流及び患者測定電流
201.8.7.1
*一般要求事項
追加
aa) 装着部内部の水管路又は複数結合部内部の水管路は,管路の幾何学的寸法及び水の抵抗値に基づき,
電気的抵抗として考慮する。この手法が使用される場合,製造販売業者は,液体の最大導電率を,取
扱説明書及び技術解説(例えば,設置説明書)の中で示さなければならない。
201.8.8.3
*耐電圧
追加
二次回路の固体絶縁に対する201.8.9.1.12に従った耐電圧試験には,表201.101で規定した試験電圧で試
験を行わなければならない。
表201.101−201.8.9.1.12に基づく二次回路の固体絶縁の試験電圧
ピーク動作電圧
(U)
交流試験電圧の実効値
一つのMOPP
二つのMOPP
≦71
500
500
ピーク動作電圧が表201.101の値よりも高い場合は,通則に従わなければならない。
201.8.9
*沿面距離及び空間距離
沿面距離及び空間距離は,通則の8.9を変更なく適用するか,又は次の変更を加えて適用する。
201.8.9.1
数値
201.8.9.1.2
IEC 60950-1に適合する沿面距離及び空間距離(MOOPに適用)
通則の細分箇条は,適用しない。
201.8.9.1.3
ガラス,うんも(雲母),セラミック及び類似材料の表面を横切る沿面距離(MOOPに適用)
二次回路には,通則の細分箇条は適用しない。
201.8.9.1.4
最小沿面距離(MOOPに適用)
二次回路には,通則の細分箇条は適用しない。
201.8.9.1.5
標高に対するME機器の定格(MOOP及びMOPPに適用)
追加
二次回路には,JIS C 60664-1:2009の表A.2(標高補正係数)を適用する。
201.8.9.1.6
補間(MOOP及びMOPPに適用)
二次回路には,通則の細分箇条は適用しない。
7
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
201.8.9.1.7
材料グループの分類(MOOPに適用)
二次回路には,通則の細分箇条は適用しない。
201.8.9.1.8
汚損度の分類(MOOPに適用)
二次回路には,JIS C 60664-1:2009の4.6.2を適用する。
201.8.9.1.9
過電圧カテゴリの分類(MOOPに適用)
通則の細分箇条は,適用しない。
201.8.9.1.10 電源部の空間距離(MOOPに適用)
置換え
通則の表13及び表14を適用する。
300 V未満の定格電源電圧で作動する電源部の場合,必要な空間距離は,表13の実効値又は直流の定格
電源電圧に対する次の列で示した数値でなければならない。
・ 150 V<公称電源電圧≦300 V(電源過渡電圧2 500 V),又は,
・ 300 V<公称電源電圧≦600 V(電源過渡電圧4 000 V)
さらに,表14の次のピーク動作電圧に対する追加の空間距離を加えなければならない。
・ 実効値150 V又は直流210 V<公称電源電圧≦実効値300 V又は直流420 V
201.8.9.1.11 電源(商用)の過電圧(MOOPに適用)
置換え
この個別規格では,JIS C 60664-1:2009の過電圧カテゴリIIを適用する。
201.8.9.1.12 二次回路(MOOPに適用)
置換え
電源(商用)と二次回路との間の分離に関して,通則の表12に従って二つの患者保護手段(MOPP)を
適用する。
電源(商用)と装着部との間の分離に関して,通則の表12に従って二つの患者保護手段(MOPP)を適
用する。
二次回路内において,歯科器械の装着部内部及び装着部間を分離するための空間距離及び沿面距離は,
次を適用する。
a) JIS C 60664-1:2009で規定する30 kHzまでの定格周波数をもつ場合は,次による。
歯科用制御装置及び歯科用照明器の電源供給回路は,4 kVのインパルス電圧に耐えなければならな
い。
表F.2−過渡過電圧に耐える空間距離
・ ケースAの不平等電界中において,汚損度レベル2,最大インパルス耐電圧1.0 kVの列を適用する。
・ 最大インパルス耐電圧1.0 kVを超える電圧については,通則の表12を適用する。
最大1 kVの過渡的インパルス電圧は,次の試験によって確認しなければならない。
一次回路(電源)に4 kV,1.2/50 μs波形の試験電圧を印加したとき,二次回路に1 kV以上の電圧
が発生していないことを確認する。波形は,IEC 61180-1に準じなければならない。発生器は,IEC
61180-2(内部抵抗2 Ω)を適用しなければならない。
表F.7a−定常電圧,短時間過電圧又は反復ピーク電圧に耐える空間距離の規定値
・ ケースAの不平等電界中において,最大2 kVの電圧(ピーク電圧)を適用する。
・ 最大2 kVの電圧(ピーク電圧)を超える電圧については,通則の表12を適用する。
二次回路の一時的な電圧は,考慮しない。
8
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表F.4−トラッキングによる障害を回避するための沿面距離
・ 汚損度レベル2において,最大2 kVの電圧(実効値)を適用する。
・ 最大2 kVの電圧(実効値)を超える電圧については,通則の表12を適用する。
表F.4のプリント配線材料の列の値は適用しない。
b) JIS C 60664-4:2009で規定される30 kHzを超え10 MHzまでの定格周波数をもつ場合は,次による。
4.4.3(不平等電界条件に対する空間距離の規定値の決定)及び箇条8(非正弦波電圧)と関連付け
て表1(不平等電界条件に対する大気圧での気中空間距離の最小値)から空間距離を導き出す。
5.2(沿面距離の規定値の決定)及び箇条8(非正弦波電圧)と関連付けて表2(異なる周波数範囲
に対する沿面距離の最小値)から沿面距離を導き出す。
注記1 JIS C 60664規格群の用語及び定義を適用する。
冷却用ファンを装備し,高度の汚損度が予想できる場合は,汚損度3を適用しなければならない。
注記2 適切なエアフィルタは,汚損度を2へ減少させる場合もある。
いずれの場合においても,JIS C 60664-1:2009の表F.2,表F.7a及び表F.4,並びにJIS C 60664-4:2009
の表1及び表2の値の最大値を選択しなければならない。
したがって,30 kHzを超え10 MHzまでの定格周波数に関しては,JIS C 60664-1:2009の表F.2,F.4
及びF.7a,並びにJIS C 60664-4:2009の表1及び表2の値を確認しなければならない。JIS C
60664-1:2009及びJIS C 60664-4:2009の最大値を選択しなければならない。
基礎絶縁における最小の空間距離及び沿面距離は,0.2 mmである。
空間距離及び沿面距離が最小値であるため,製造及び部品公差の検討要因となる。
空間距離及び沿面距離は,JIS C 60664規格群の規定に従って決定しなければならない。表に示す数
値は,基礎絶縁又は補強絶縁である。
一つのMOPP(患者保護手段)は,一つの基礎絶縁を構成する空間距離及び沿面距離に相当する。
二つのMOPP(患者保護手段)は,次に相当する。
・ 基礎絶縁を構成する沿面距離及び補強絶縁を構成する沿面距離の合計である二重絶縁
・ 基礎絶縁を構成する沿面距離の2倍である強化絶縁
・ 基礎絶縁を構成する空間距離及び補強絶縁を構成する空間距離の合計である二重絶縁
・ 基礎絶縁及び補強絶縁を個別に試験できない場合,二重絶縁及び基礎絶縁を構成する空間距離に対
して要求される耐電圧の160 %に耐えるため,表F.1又は表F.7aで規定した寸法である強化絶縁。
JIS C 60664-1:2009の表F.1及び表F.7aのうちから大きな値を適用する。
c) 50 V ACまでの電圧分離に適用するリレーの空間距離及び沿面距離
1) 汚損度2の場合
50 V AC以下の電圧を分離するリレー接点の空間距離は,0.2 mm(基礎絶縁)又は0.4 mm(二重
絶縁)とする。沿面距離は,JIS C 60664-1:2009の表F.4を適用する。
開接点の耐電圧は,500 Vである。
2) 汚損度3の場合
50 V AC以下の電圧を分離するリレー接点の空間距離は,0.8 mm(基礎絶縁)又は1.6 mm(二重
絶縁)とする。また,密封形リレーは,JIS C 4540-1:2010の分類RT IIIによる空間距離は,0.2 mm
(基礎絶縁)又は0.4 mm(二重絶縁)とする。沿面距離は,JIS C 60664-1:2009の表F.4を適用す
る。
開接点での耐電圧は,500 Vである。
9
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
201.8.9.1.13 ピーク1 400 V又は直流1 400 Vを超えるピーク動作電圧(MOOPに適用)
通則の細分箇条は,適用しない。
201.8.9.1.14
二つの操作者保護手段の最小沿面距離(MOOPに適用)
二次回路には,通則の細分箇条を適用しない。
201.8.9.1.15 耐除細動形装着部の沿面距離及び空間距離
通則の細分箇条を適用する。
201.8.9.2
適用
b)
追加
汚損度3の場合は,JIS C 60664-1:2009の6.2を追加適用する。
201.8.9.4
沿面距離及び空間距離の測定
追加
汚損度3の場合は,JIS C 60664-1:2009の6.2を追加適用する。
201.8.10.4 コード付き手持形制御器及びコード付き足踏み制御器
201.8.10.4.101 *足踏み制御器(Footswitch)
歯科器械に組み込んだ電気手術器(電気メス)に対して,次の全ての条件を満たす場合には,IEC
60601-2-2:2009の201.8.10.4.101.4を適用しない。
− 電気手術器(電気メス)の定格出力が50 Wを超えない。
− 電気手術器(電気メス)のアクティブ電極が稼動することを防ぐためにハンドピースホルダ内に収納
されている間は,アクティブ電極が稼動することを防ぎ,かつ,
− 取扱説明書で電気手術器(電気メス)が手術室での使用が禁止されているもの。
注記 IEC 60601-2-2:2009の201.8.10.4.101.4は,足踏み制御器に関する10 Nの最小作動力を規定し
ている。
201.8.11 電源部,部品及び配置
201.8.11.5 *電源ヒューズ及び過電流開放器
追加
位相線及び中性線にヒューズをもつ機器は,歯科用制御装置(従属装置,組込形装置)に組み込んでも
よいが,それらの機器は,永久設置した歯科器械の電源ヒューズの後に接続しなければならない。そのよ
うな組込機器の電源電圧に,サービス要員が工具を用いずに接触できてはならない。
201.9
ME機器及びMEシステムの機械的ハザードに関する保護
次を除き,通則の箇条9を適用する。
201.9.8.2
*(引張り強さの)安全率
追加
材料の引張り強さの定量化が可能かつ既知であれば,表201.102を適用する。
10
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表201.102−安全率の決定
状態
最小の安全率a)
番号
機構の部分
破断時の伸び
1
摩耗によって損傷を受けない支持機構の部分
破断時の伸びが5 %以上の金属材料b)
2.5
2
摩耗によって損傷を受けない支持機構の部分
破断時の伸びが5 %未満の金属材料b)
4
3
摩耗によって損傷を受けc),機械的保護装置がな
い支持機構の部分
破断時の伸びが5 %以上の金属材料b)
5
4
摩耗によって損傷を受けc),機械的保護装置がな
い支持機構の部分
破断時の伸びが5 %未満の金属材料b)
8
5
摩耗によって損傷を受けc),機械的保護装置(又
は多重支持機構の主要システム)をもつ支持機構
の部分
破断時の伸びが5 %以上の金属材料b)
2.5
6
摩耗によって損傷を受けc),機械的保護装置(又
は多重支持機構の主要システム)をもつ支持機構
の部分
破断時の伸びが5 %未満の金属材料b)
4
7
機械的保護装置(又は多重支持機構の予備システ
ム)
2.5
注a) 安全率は,通則の15.3.7で定義した条件(すなわち,環境の影響,摩耗,腐食,材料疲労又は経時変化によ
る有害な影響)を考慮することを意図している。
b) 非金属材料の場合には,個別規格で適切な安全率を規定することができる(附属書Aの9.8の根拠を参照)。
c) 摩耗によって損傷すると考えられる部品には,チェーン,ケーブル(ワイヤーロープ),ベルト,ジャッキね
じのナット,ばね,空気圧又は油圧ホース,空気圧又は油圧ピストンのガスケット又はリングを含んでいる。
201.9.8.3.2
人の荷重による静的な力
追加
表201.103の歯科患者用いすの患者質量の質量分布を適用する。
表201.103−質量分布
歯科患者用いすによって支持される患者部位
質量分布
kg
頭けい部
10
体幹上部,上腕
45
体幹下部,大たい(腿),前腕及び手
55
下たい(腿),足
25
合計
135
質量が135 kgを超える場合の質量分布は,表201.103の値に比例して分布しなければならない。
試験時には,歯科患者用いすは,製造販売業者の情報に従って,最も不利な状態に位置する。
201.10 不要又は過度の放射のハザードに関する保護
次を除き,通則の箇条10を適用する。
201.10.4 レーザ及び発光ダイオード(LED)
置換え
レーザに関しては,JIS C 6802又はIEC 60601-2-22の関連する要求事項を適用する。
発光ダイオード(LED)に関しては,JIS C 7550又はIEC 60601-2-57の関連する要求事項を適用する。
(試験)
11
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
適合性は,JIS C 6802,JIS C 7550,IEC 60601-2-22及びIEC 60601-2-57の関連する手順による。
201.11 過度の温度及び他のハザードに関する保護
次を除き,通則の箇条11を適用する。
201.11.1.1 *正常な使用時の最高温度
修正
歯科用ハンドピースは,通則の表23に代えて表201.104を適用する。
表201.104−歯科用ハンドピースの最高許容温度
ME機器及びその部分
通則における最高許容温度
℃
状態
金属及び液体
ガラス,磁器,
ガラス状材料
成形材料,プラス
チック,ゴム,木
歯科用ハンドピースの操作者側の部分a)
56
66
71
正常状態
歯科用ハンドピースの操作者側の部分a)
56
66
71
単一故障状態
歯科用ハンドピースの操作者側の部分
65
80
80
合理的に予見
できる誤使用
注a) 操作者の反応時間によって,通則の表23の2行目を選択。
周囲温度に関しては,201.5.3を参照。
正常状態及び単一故障状態における歯科用ハンドピースの操作者側の部分の最大温度上昇率は,5 ℃/
秒を超えてはならない。
201.11.1.2.2 *患者に熱を与えることを意図しない装着部
置換え
正常状態及び単一故障状態の歯科用ハンドピースの患者側の部分に関しては,通則の表24の制限を適
用しなけれなばならない。装着部の表面温度が43 ℃を超える場合は,最高温度を取扱説明書に記載し,
患者体表面の状態及び特性(年齢,性別,体格など),投与中の薬物又は体表面にかかる圧力のような特
性などについての医学的影響を特定し,リスクマネジメントファイルに文書化する。43 ℃以下の場合は
文書化する必要はない。
追加
201.11.1.2.2.101
空気及び水を利用した多機能形の歯科用ハンドピース
空気及び水を利用した多機能形の歯科用ハンドピースにおいては,水及び/又は空気の温度によって患
者及び操作者に受容できないリスクを与えてはならない。
(試験)
適合性は,リスクマネジメントファイルの調査によって確認する。
201.11.1.3 *測定
追加
aa) 歯科用電気モータ
1) 次の条件下での測定
外部空気供給による追加の冷却を行わない状態で,歯科用電気モータを通常使用位置に固定する。
歯科用電気モータの電源は,製造販売業者のモータ制御回路によって電力を供給しなければなら
ない。
12
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記101 電源及びモータ制御回路は,多くの場合,その歯科用電気モータ専用のものである。
(試験)
適合性は,次によって確認する。
− 測定(無負荷時)
動作条件
・ 冷却空気あり(製造販売業者の取扱説明書に従う。)
・ 噴霧空気なし
・ 噴霧水なし
・ ライト点灯(ライトを装備している場合)
歯科用電気モータは,歯科用ハンドピースを装着しないで,かつ,無負荷状態で,最大定格回転
数で3分間作動させる。最も高温の部位における測定温度が,表201.104に規定している正常状態
の行に示した許容値以下であることを確認する。
注記102 この測定は,JIS T 5909に規定している測定と同じである。
− 測定(負荷時)
動作条件
・ 冷却空気あり(製造販売業者の取扱説明書に従う。)
・ 噴霧空気なし
・ 噴霧水なし
・ ライト点灯(ライトを装備している場合)
・ JIS T 5907で規定する減速比1:1,軸の直径2.35 mmのストレートの歯科用ハンドピースを装
着
製造販売業者の取扱説明書に従って歯科用ハンドピースに潤滑油を注油する。歯科用ハンドピー
スは,余分な潤滑油を取り除くために,無負荷で5分間作動させ,その後,試験装置全体を周囲温
度まで冷却する。歯科用ハンドピースによる負荷は,P=1.8 Wを超えてはならない。
歯科用電気モータに7.5 Wの負荷をかけた状態で,最大定格回転数の75 %で30秒間作動させた
後9分間休ませる。これを4サイクル繰り返した後で最も高温の部位における測定温度が表201.104
に規定した正常状態の行に示した許容値以下であることを確認する。
注記103 負荷は,適切なファンであってよい。負荷用ファンによって歯科用電気モータの冷却
を避けるため,ファンとモータとの間に,遮断壁を設ける。
2) 合理的に予見できる誤使用下での測定
外部空気供給による追加の冷却を行わない状態で,歯科用電気モータを通常使用位置に固定する。
歯科用電気モータの電源は,製造販売業者のモータ制御回路によって電力を供給しなければなら
ない。
注記104 電源及びモータ制御回路は多くの場合,その歯科用電気モータ専用のものである。
(試験)
適合性は,次によって確認する。
・ 冷却空気あり(製造販売業者の取扱説明書に従う。)
・ 噴霧空気なし
・ 噴霧水なし
・ ライト点灯(ライトを装備している場合)
13
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
取扱説明書の記載に従って歯科用ハンドピースに潤滑油を注油する。歯科用ハンドピースは,余
分な潤滑油を取り除くために,無負荷で5分間作動させ,その後,試験装置全体を周囲温度まで冷
却する。歯科用ハンドピースによる負荷は,P=1.8 Wを超えてはならない。歯科用電気モータを,
7.5 Wの負荷をかけた状態で最大定格回転数の75 %で30分間作動させる。30分後,最も高温の部
位における測定温度が表201.104に規定した合理的に予見できる誤使用の行に示した許容値以下で
あることを確認する。
注記105 負荷は,適切なファンであってよい。負荷用ファンによって歯科用電気モータの冷却
を避けるため,ファンとモータとの間に,遮断壁を設ける。
3) 最大温度上昇の測定(冷却空気,噴霧空気及び噴霧水なし)
外部空気供給による追加の冷却を行わない状態で歯科用電気モータを通常使用位置に固定する。
歯科用電気モータの電源は,製造販売業者のモータ制御回路によって電力を供給しなければなら
ない。
注記106 電源及びモータ制御回路は,多くの場合,その歯科用電気モータ専用のものである。
(試験)
適合性は,次によって確認する。
・ 冷却空気なし
・ 噴霧空気なし
・ 噴霧水なし
・ ライト点灯(ライトを装備している場合)
取扱説明書の記載に従って歯科用ハンドピースに潤滑油を注油する。歯科用ハンドピースは,余
分な潤滑油を取り除くために,冷却空気を用いて,無負荷状態で5分間作動させる。その後,試験
装置全体を周囲温度まで冷却する。歯科用ハンドピースによる負荷は,P=1.8 Wを超えてはならな
い。歯科用電気モータを,冷却空気なしの状態で,16 Wの負荷をかけ,最大定格回転数の75 %で
作動させる。
指数関数グラフ(温度上昇曲線)が最高温度に達したと判断できるまで,連続的に温度を測定す
る。温度上昇は,201.11.1.1に規定した数値以下であることを確認する。
4) モータが組み込まれている歯科用ハンドピースの場合も,製造販売業者は,同等の試験条件を適用
しなければならない。
bb) 電気駆動する歯科用ハンドピースは,次の測定方法を適用する。
注記107 例として,歯科用口くう(腔)内カメラ,重合用光照射器,超音波スケーラがある。
1) 正常な使用下での測定
外部空気供給による追加の冷却を行わない状態で歯科用ハンドピースを通常使用位置に固定する。
歯科用ハンドピースの電源は,製造販売業者の電源装置から電力を供給しなければならない。
注記108 電源は,多くの場合,その歯科用ハンドピース専用のものである。
(試験)
適合性の確認は,次による。
・ 取扱説明書の記載に従って,かつ,最も不利な条件で歯科用ハンドピースを操作する。最も高温
の部位における測定温度が,表201.104の正常状態の行に示した許容値以下であることを確認す
る。
2) 合理的に予見できる誤使用下での測定
14
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
リスクマネジメントプロセスを通じ,意図する使用を考慮した上で,温度に関わる合理的に予見
できる誤使用を含めなければならない。予想最高温度は,表201.104に示した許容値を超えてはな
らない。
(試験)
適合性は,次によって確認する(該当する場合)。
外部空気供給による追加の冷却を行わない状態で,歯科用ハンドピースを通常使用位置に固定す
る。
歯科用ハンドピースの電源は,製造販売業者の供給する電源装置から電力を供給しなければなら
ない。
注記109 電源装置は,多くの場合その歯科用ハンドピース専用のものである。
リスクアセスメントの結果を考慮した上で測定する。最も高温の部位における測定温度が,表
201.104の合理的に予見できる誤使用の行に示した許容値以下であることを確認する。
3) 最大温度上昇率の測定
リスクマネジメントプロセスを通じ,意図する使用を考慮した上で,最大温度上昇率を特定しな
ければならない。
温度上昇率は,201.11.1.1に規定する数値を超えてはならない。
(試験)
適合性は,次によって確認する(該当する場合)。
外部空気供給による追加の冷却を行わない状態で,歯科用ハンドピースを通常使用位置に固定す
る。
歯科用ハンドピースの電源は,製造販売業者の電源装置から電力を供給しなければならない。
注記110
電源は,多くの場合,その歯科用ハンドピース専用のものである。
リスクアセスメントの結果を考慮した上で測定する。試験全体を通して連続的に温度を測定する。
温度上昇率は,201.11.1.1に規定する数値以下であることを確認する。
201.12 制御及び計器の精度並びに危険な出力に対する保護
通則の箇条12を適用する。
201.13 危険状態及び故障状態
次を除き,通則の箇条13を適用する。
201.13.1 特定の危険状態
201.13.1.1 一般
追加
歯科用ハンドピースの単一故障状態は,使用状況によって異なる場合があり,個々の単一故障状態は,
4.7で規定したリスクアセスメントによって特定できる。検討項目として,温度,回転数,ストローク速
度,トルク,放射,騒音及び振動がある。
注記 JIS T 14971では,放射として,電離放射線,非電離放射線,及び紫外線,可視光線又は赤外線
を例示している。
201.13.1.2 放出,外装の変形又は最高温度の超過
修正[3番目の−(ダッシュ)]
15
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 201.11.1.3に従って測定した結果,歯科用ハンドピースの温度が表201.104で示した許容値を超える。
201.13.2 単一故障状態
201.13.2.7 *危険状態になる可能性がある冷却の障害
追加
歯科用電気モータには,通則の13.2.7を適用しない。
201.13.2.10
モータ駆動のME機器の追加試験
追加[a)に追加]
次については5秒間
− 歯科用電気モータ
201.13.2.13
過負荷
201.13.2.13.3
モータをもつME機器
歯科用電気モータには,通則の13.2.13.3を適用しない。
201.14 プログラマブル電気医用システム(PEMS)
通則の箇条14を適用する。
201.15 ME機器の構造
次を除き,通則の箇条15を適用する。
201.15.4.7 コード付き手持形制御器及び足踏み制御器
追加
要求事項は,コードレスの足踏み制御器にも適用する。
201.16 MEシステム
通則の箇条16を適用する。
201.17 ME機器及びMEシステムの電磁両立性
通則の箇条17を適用する。
追加
201.101
コードレスの手持形制御器及び足踏み制御器
安全性に関わる場合,コードレスの手持形制御器及び足踏み制御器は,対応する歯科器械を明確に割り
当てなければならない。
(試験)
適合性は,関連文書の調査及び,必要ならば関連する試験によって確認する。
附属書
通則の附属書を適用する。
16
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書AA
(参考)
個別指針及び根拠
AA.1
個別の箇条及び細分箇条の根拠
次は,この個別規格の特定の箇条についての根拠である。箇条及び細分箇条は,この個別規格の本文中
の箇条及び細分箇条と一致している。
注記 次の箇条又は細分箇条番号に付した“†”印(ダガーマーク)は,対応する要求事項に対する
根拠であることを示し,かつ,要求事項の文章でないことを容易に識別できるようにしたもの
である。
201.7.2.11† 作動モード
デューティサイクルの表示は,歯科用制御装置及び歯科用ハンドピースの基礎安全を高めるものではな
い。
201.7.9.2.101† 取扱説明書
デューティサイクルの表示は,歯科用制御装置及び歯科用ハンドピースの基礎安全を高めるものではな
い。
201.8.5.2.101† 単一の装着部を構成する複数の装着部
単一電源から電力を供給する複数の歯科用ハンドピースは,複数の機能(及び接続)をもつ単一の装着
部と判断してもよい。
単一の装着部を構成する複数の装着部の組合せは,複数の装着部を同時に使用するときに危険状態が発
生しない場合だけ許容される。
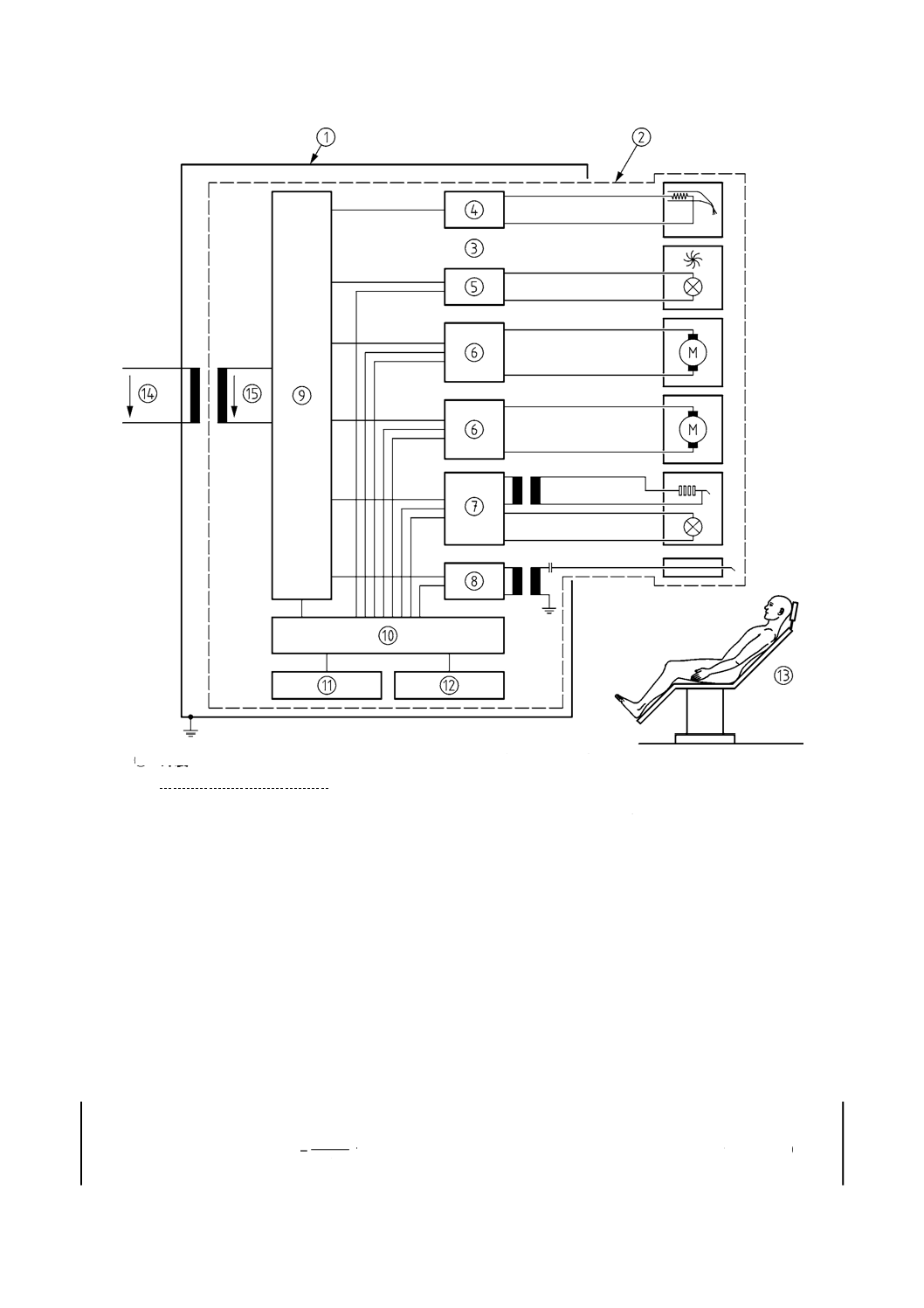
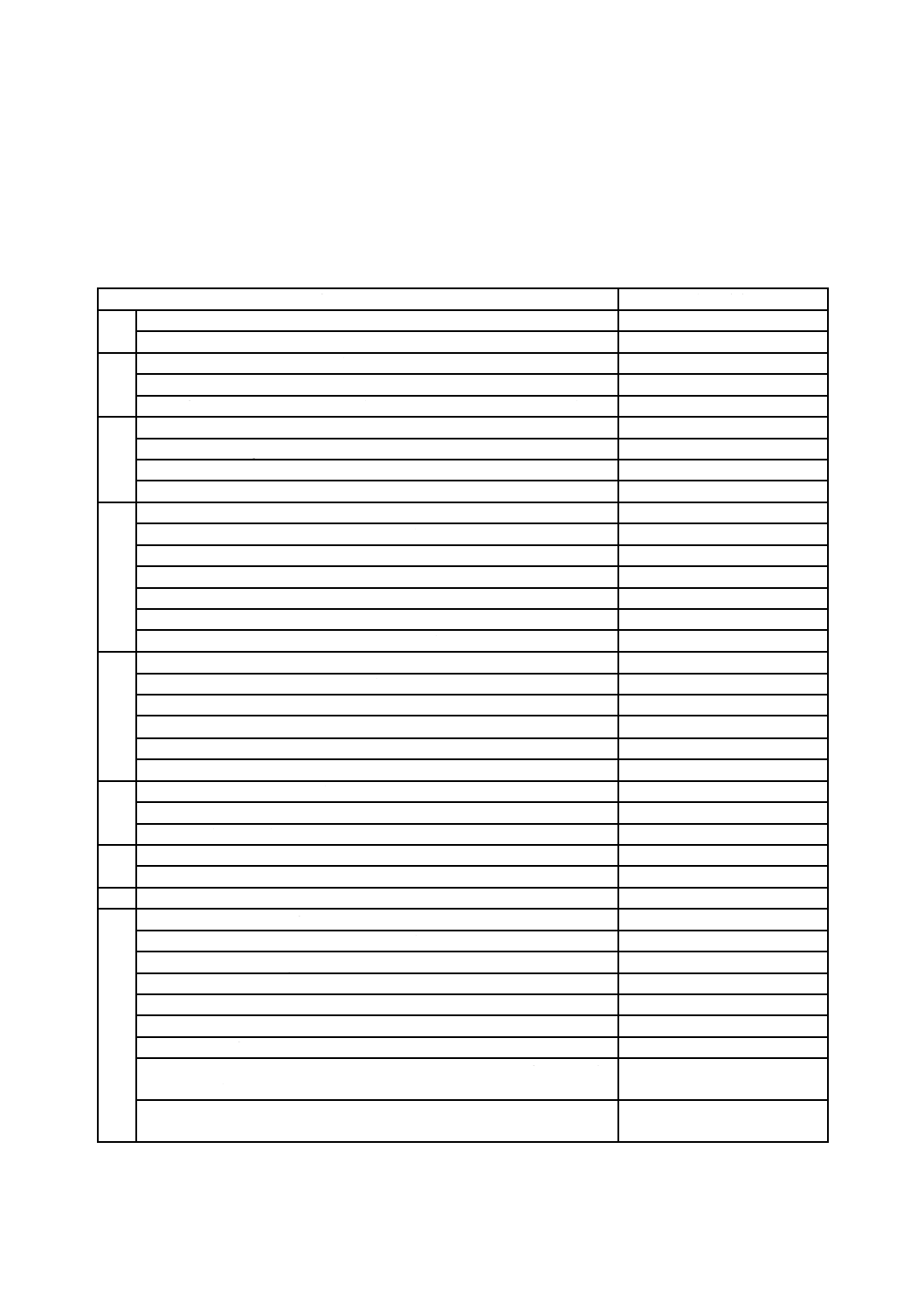
歯科患者用いすを含む歯科用制御装置で構成された歯科器械の具体例を図AA.1に示す。この例におい
て,まず歯科患者用いすが一つの装着部となる。歯科用制御装置の一部としての他の装着部は,互いに分
離できない複数の機能(歯科用ハンドピース)からなる。製造販売業者は,器械(及びその接続部)は別々
の装着部となること,又は器械は単一の装着部となるために組み合わせられることを定義してもよい。
例えば,他の器械から分離された歯科用口くう(腔)内カメラは,単一の装着部である一方,他の器械
は別の装着部の異なる機能である。
二つのモータ(二つの装着部)が,追加手段なしで単一の装着部となる場合は,危険状態が生じる例と
して図AA.3(整流子形歯科用電気モータの絶縁上の問題)を参照する(201.8.9の根拠を参照)。
17
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
① 外装
② 制御回路及びハンドピース
③ 専用電源回路
④ 多機能ハンドピース制御回路
⑤ エアタービン制御回路
⑥ 歯科用電気モータ制御回路
⑦ スケーラ制御回路
⑧ 電気手術器(電気メス)制御回路
⑨ 電源,分配回路
⑩ 制御部
⑪ ユーザインタフェース
⑫ 手持形制御器又は足踏み制御器
⑬ 歯科患者用いす
⑭ 電源(一次側)
⑮ 電源(二次側)
図AA.1−歯科器械の装着部の構成例
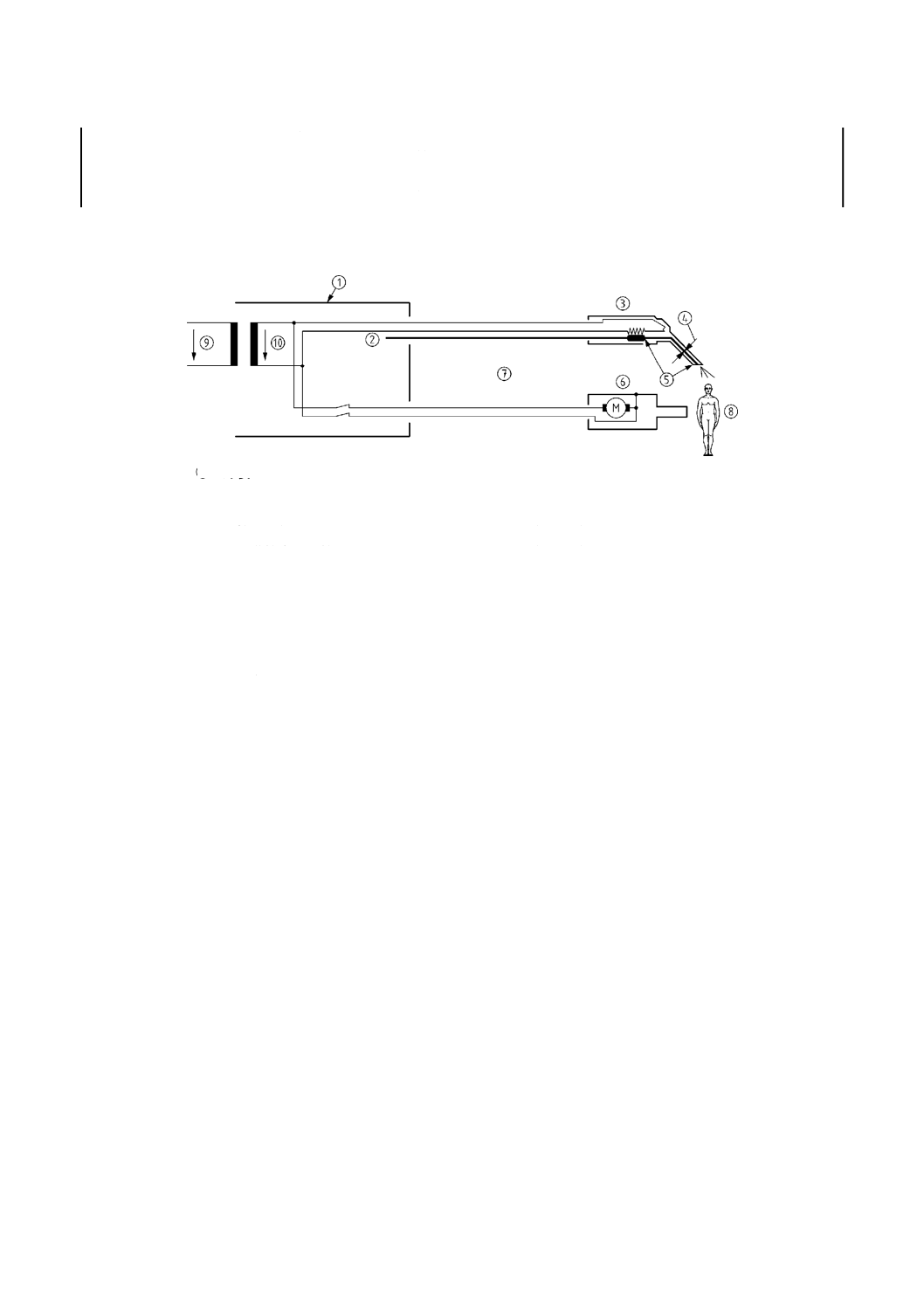
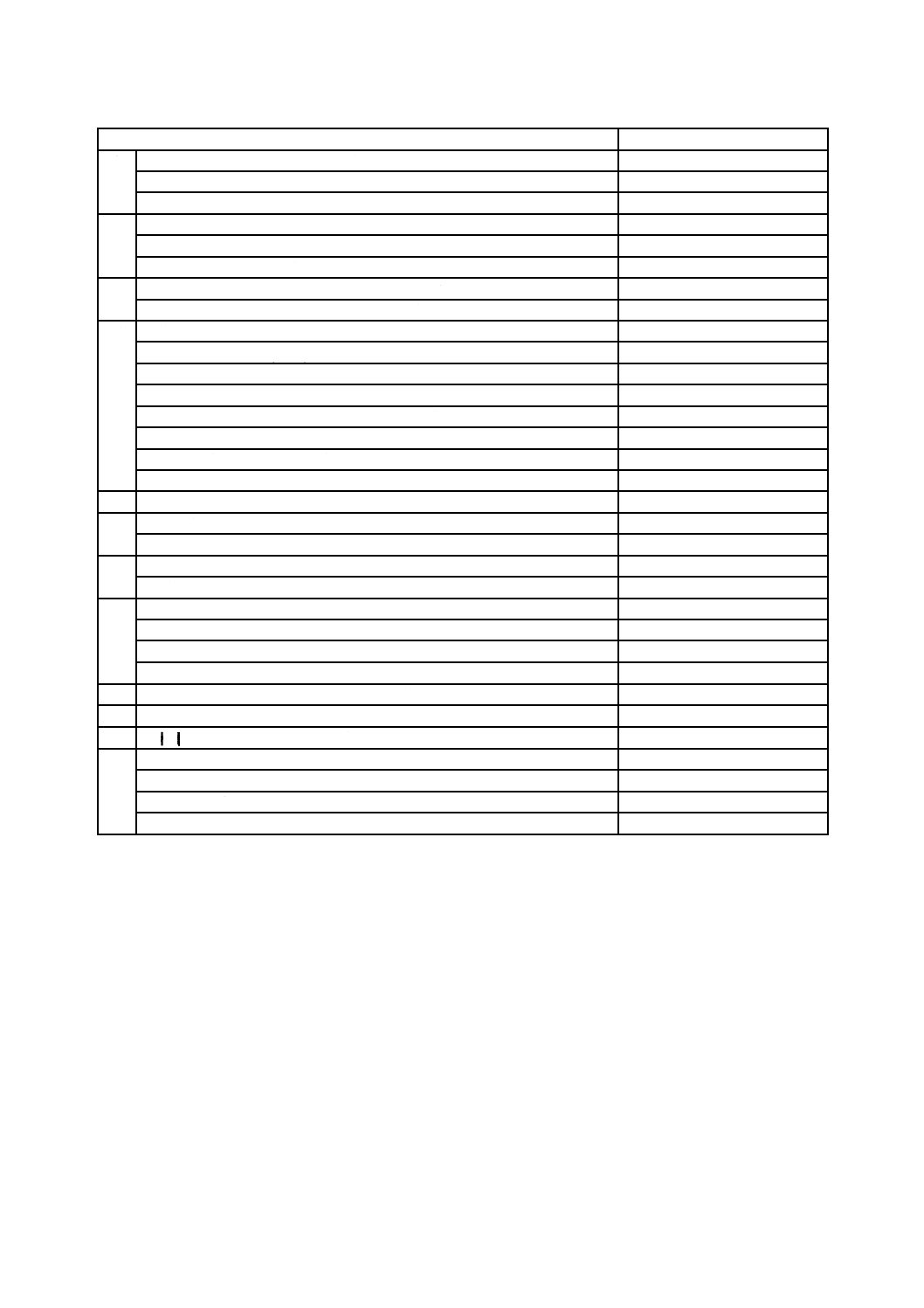
201.8.7.1† 一般要求事項
例 多機能ハンドピースにおいて,水からヒータを分離することは多くの場合困難である。しかし,
適切な幾何学的寸法を把握することによって,水管自身は,ヒータを患者から分離することもで
きる。長さ5 cm,直径1 mmの水管の抵抗(R)は,318 kΩである(飲用水の最大導電率をK=
2 000 μS/cmと仮定する。)。
注記1 水管の抵抗(R)は,式(AA.1)で求めることができる。
K
S
l
R
×
=
··········································································· (AA.1)
18
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに,
R: 水管の抵抗(Ω)
S: 水管の断面積(mm2)
K: 最大導電率(μS/cm)
l: 水管の長さ(cm)
30 Vのヒータに対して,結果として生じる患者漏れ電流は94 μAである。
注記2 この構造は,長年にわたって歯科診療台で安全に使われている。
① 外装
② 注水口
③ 多機能ハンドピース
④ 水管の直径
⑤ 非電導管内の水管の長さ
⑥ 患者保護手段をもたないモータ
⑦ 水管の抵抗は保護抵抗としてもよい
⑧ 患者
⑨ 電源(一次側)
⑩ 電源(二次側)
図AA.2−漏れ電流の計算
201.8.8.3† 耐電圧
JIS T 0601-1:1999によって500 Vを適用する。
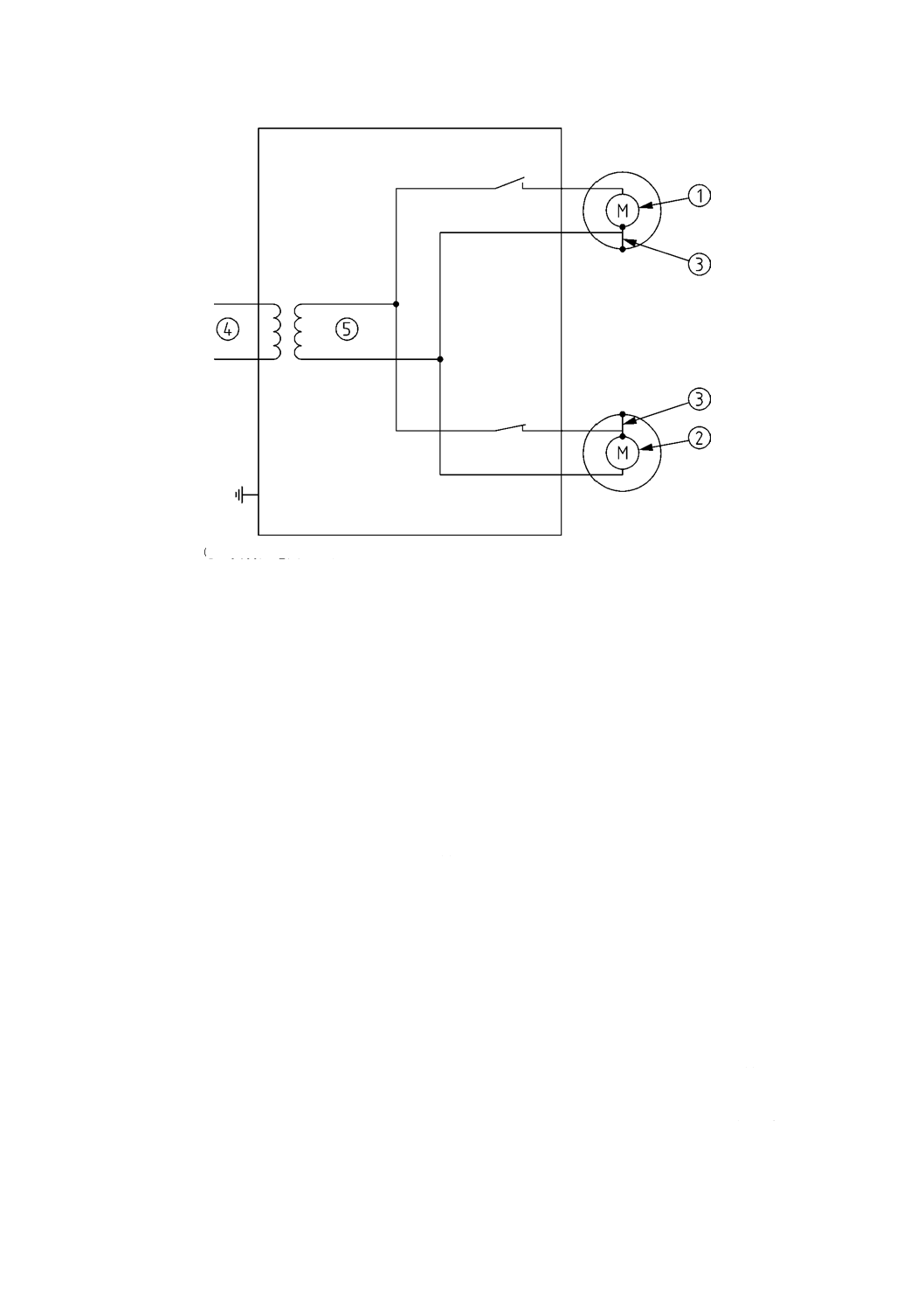
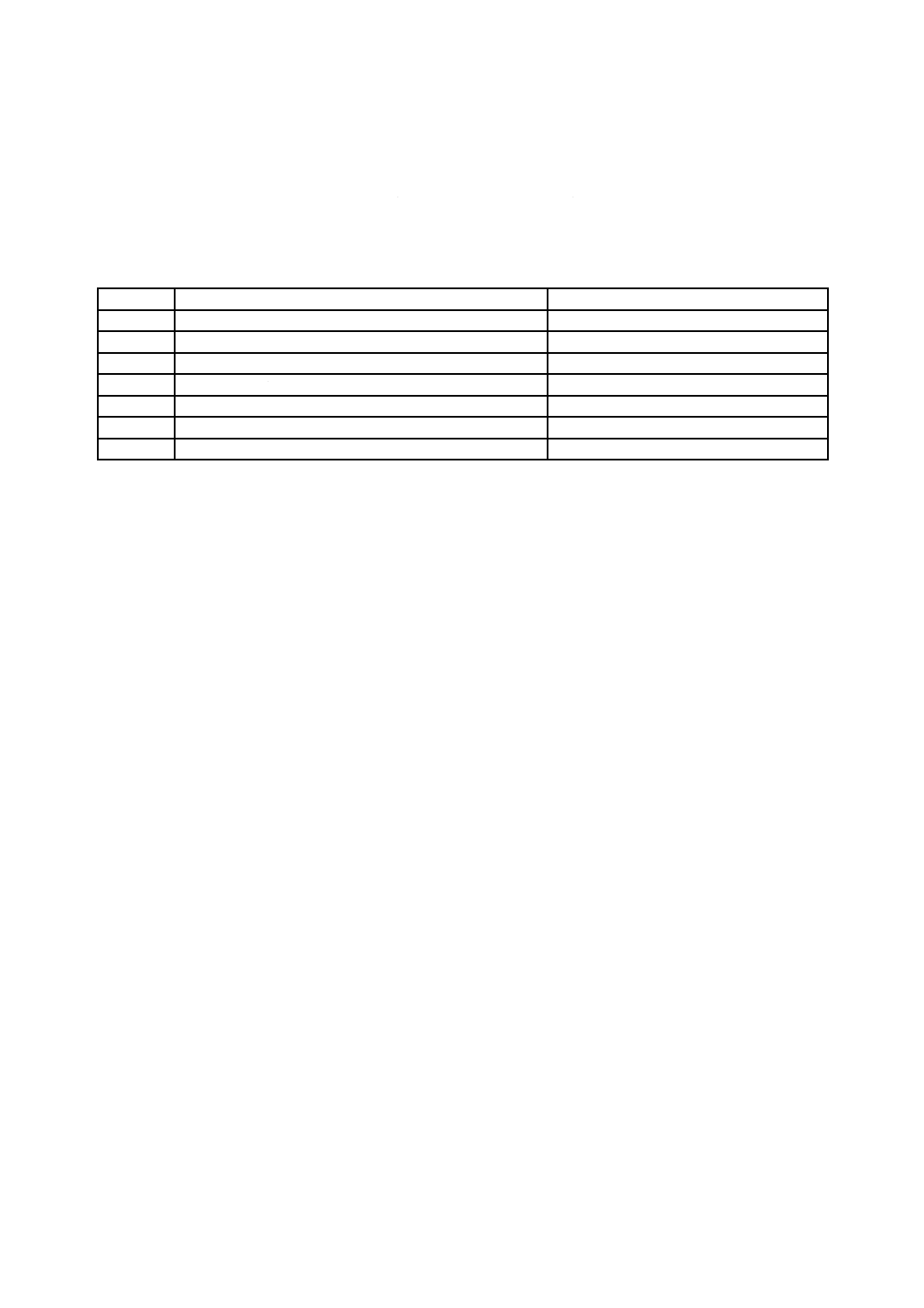
201.8.9† 沿面距離及び空間距離
歯科用電気モータは小形であるために,通則で定められている絶縁条件の要求事項を満たすことは困難
である。カーボンブラシを使用する整流子形歯科用電気モータの場合,カーボンダストの蓄積が絶縁性の
低下を早める場合がある。
歯科用制御装置が共通の電源から供給される二つの歯科用電気モータをもつ場合において,それぞれの
歯科用電気モータは,それぞれ異なる極性の電源がハウジングを経由して外装に接続されるかもしれない。
上記の例で,歯科用電気モータ①がアース(接地)されている間に,歯科用電気モータ②が患者に使用さ
れているならば,操作者,助手などを経て,直接的又は間接的に電源電圧は,患者にかけられる。
このような構造は許容されない。また,追加分離手段が必要である(例えば,リレーを経由して接続す
る。)。
19
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
① 歯科用電気モータ1
② 歯科用電気モータ2
③ 歯科用電気モータ(正常状態:単一故障状態ではない。)における通則の8.7で規
定した許容値を超える漏れ電流が生じる部分及びケーシング間の絶縁不良
④ 電源(一次側)
⑤ 電源(二次側),例えば24 V
図AA.3−整流子形歯科用電気モータの絶縁上の問題
歯科器械の電源回路における重大な過電圧は,二次回路に存在しない。
この事実(測定によって実証される場合もある。)に基づいてJIS C 60664規格群は,沿面距離及び空間
距離をある特定のパラメータ(例えば,汚損度,過電圧,トラッキング指数など)に基づく,より小さな
沿面距離及び空間距離として定めている。幾つかの他の規格では,これらの沿面距離及び空間距離を長年
にわたり問題なく使用している。
電源からの分離については,通則の要求事項も併用する。
− 絶縁についての概要及び理論的な根拠
絶縁についてこの規格は,JIS C 60664-1:2009,JIS C 60664-4:2009及びJIS C 4540-1:2010の要求と関連
している。
この規格は,次の要求事項を言及している。
1) 電源と二次回路との分離については,通則を適用する。
2) 電源と装着部との分離については,通則による二つの患者保護手段が必要である。
それゆえに,電源と二次回路との間の絶縁及び電源と装着部との間の絶縁は,通則に基づく。
この規格は,二次回路及び装着部において,JIS C 60664-1:2009及びJIS C 60664-4:2009の最大2 kVの
行で指定している空間距離及び沿面距離まで許容する。
必要条件としては,4 kVの過渡的な過電圧は,二次回路において1 kV以下であることが保証されてい
なければならない(JIS C 60664-1:2009の表F.1参照)。4 kVの試験電圧は,安全上の理由から決定されて
20
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
いる。
給電系統a), c)の公称電圧
交流又は直流公称
電圧から配電される
充電線の対地電圧
V
定格インパルス電圧b)
過電圧カテゴリd)
三相
V
単相
V
I
V
II
V
III
V
IV
V
50
330
500
800
1 500
100 e)
500
800
1500
2 500
100
100-200
150 e)
800
1500
2500
4 000
200
230/400
300
1500
2500
4000
6 000
600
2500
4000
6000
8 000
1000
4000
6000
8000
12 000
注記1 IEC 60038には,日本の公称電源電圧が含まれていないため,給電系統の公称電圧として,日本の公
称電圧を例示した。また,IEC 60038の引用を削除した。
注記2
a) は,既存の異なる低圧系統電源及びその公称電圧への適用は,JIS C 60664-1:2009の附属書Bを参
照。
注記3
b) は,これらの定格インパルス電圧をもつ機器は,JIS C 60364-4-44に準拠する設備で使用すること
ができる。
注記4
c) は,“/”のマークは,三相4線式配電方式を示す。小さい値は,充電線と中性線との間,大きい値
は,充電線間電圧である。一つの値しか示していない場合は,三相3線式配電方式を示し,線間値を
示す。
注記5
d) は,過電圧カテゴリの説明は,JIS C 60664-1:2009の4.3.3.2.2を参照。
注記6
e) は,日本では,単相系統の公称電圧は,100 V又は100-200 Vを示す。しかし,電圧に対する定格イ
ンパルス電圧の値は,150 Vの充電線の対地電圧に適用する欄で示す(JIS C 60664-1:2009の附属書B
参照)。
注記 上記表の点線下線の部分は,JIS C 60664-1:2009の表F.1(低圧系統電源から直接給電される
機器のための定格インパルス電圧)の内容を記載している。
JIS C 60664-1:2009によれば一時的な電圧は,二次回路において発生しない。
この規格は,空間距離及び沿面距離を求めるための表から得られる最大値を適用することを要求し
ている(201.8.9.1.12を参照。“いずれの場合においても,JIS C 60664-1:2009の表F.2,表F.7a及び表
F.4,並びにJIS C 60664-4:2009の表1及び表2の値の最大値を選択しなければならない。”“30 kHzを
超え10 MHzまでの定格周波数に関しては,JIS C 60664-1:2009の表F.2,表F.4及び表F.7a,並びに
JIS C 60664-4:2009の表1及び表2の値を確認しなければならない。JIS C 60664-1:2009及びJIS C
60664-4:2009の最大値を選択しなければならない。”)。
この規格は,更に,次の事項を要求する。
・ 空間距離及び沿面距離の最小値は,基礎絶縁のため0.2 mmとなる。
・ それらが最小値となるように,空間距離及び沿面距離を保証するための製造上及び組立上の公差を
考慮しなければならない。
・ 一つのMOPP(患者保護手段)は,一つの基礎絶縁を構成する空間距離及び沿面距離に相当する。
・ 二つのMOPP(患者保護手段)は,次に相当する。
− 基礎絶縁を構成する沿面距離及び補強絶縁を構成する沿面距離の合計である二重絶縁
− 基礎絶縁を構成する沿面距離の2倍である強化絶縁
− 基礎絶縁を構成する空間距離及び補強絶縁を構成する空間距離の合計である二重絶縁
− 基礎絶縁及び補強絶縁を個別に試験できない場合,二重絶縁のための空間距離に対する基礎絶縁
21
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
に要求される耐電圧の160 %に耐えるJIS C 60664-1:2009の表F.1又は表F.7aで規定した寸法で
ある強化絶縁。JIS C 60664-1:2009の表F.1及び表F.7aのうちから大きな値を適用する。
・ 沿面距離及び空間距離は,JIS C 60664規格群の規定に基づいて決定する必要がある。表から得られ
る値は,基礎絶縁である。
この規格は,歯科器械の設計手法を規定するものではない。しかし,要求事項を反映するために絶
縁を示した図及び安全上の概念は必要であり,単一故障を考慮することを要求している。浮いた装着
部は,安全上の理由から設計に求められる場合もあるが,水のラインを通ってつながる歯科器械の装
着部は,B形装着部として扱う。
この規格では,測定と適切な手段を通じて1 kVの過渡過電圧を保証することを前提に,電源部から
の分離として関連する過渡過電圧がないことが想定されることを背景として,二次回路及び装着部と
で,より小さな空間距離及び沿面距離を使用するようにしている。
50 V ACまでの電圧を分離するために用いられるリレーについては,次の事項を定めている。
a) 50 V ACまでの電圧を分離するために用いられるリレーに対する空間距離及び沿面距離
1) 汚損度2の場合
スイッチ接点が50 V ACまでの電圧を分離するリレーについては,空間距離は,0.2 mm(基礎絶
縁)又は0.4 mm(二重絶縁)である。沿面距離は,JIS C 60664-1:2009の表F.4を適用する。
接点開放時の接点間に対する試験電圧は,500 Vである。
2) 汚損度3の場合
スイッチ接点が50 V ACまでの電圧を分離するリレーについては,空間距離は,0.8 mm(基礎絶
縁)又は1.6 mm(二重絶縁)である。若しくは,空間距離が0.2 mm(基礎絶縁)又は0.4 mm(二
重絶縁)の場合は,JIS C 4540-1:2010の分類RT IIIに従った密封形リレーを代わりに使わなければ
ならない。沿面距離は,JIS C 60664-1:2009の表F.4を適用する。
接点開放時の接点間に対する試験電圧は,500 Vである。
1)に関して,0.2 mmは,過渡的な過電圧に対する空間距離であり,定常状態における電圧,一時的な過
電圧又は繰り返し発生するピーク電圧に耐えるため,より大きな空間距離が要求される(JIS C
60664-1:2009の表F.7a)。
2)に関して,0.8 mmは,過渡的な過電圧に対する空間距離であり,定常状態における電圧,一時的な過
電圧又は繰り返し発生するピーク電圧に耐えるため,より大きな空間距離が要求される(JIS C
60664-1:2009の表F.7a)。
201.8.10.4.101† 足踏み制御器
IEC 60601-2-2[電気手術器(電気メス)に対する規格]によれば,10 Nの最小操作力が意図しないスイ
ッチ操作を防止するために要求されている(201.8.10.4.101)。電気手術器(電気メス)のハンドピースは,
操作者の作業範囲のどこにでも置くことができ,足踏み制御器だけで起動されるため,このことは独立形
の電気手術器(電気メス)に有用である。歯科用制御装置においては,次のことから更に安全である。
− ハンドピースの特別なホルダ
− ハンドピースがホルダに置かれている間の,高周波発生器の作動停止
− 50 W以下の比較的低出力な高周波出力
201.8.11.5† 電源ヒューズ及び過電流開放器
永久設置形ではない装置(従属機器,組込形機器)には,同じ値の二つのヒューズを,一つは電源装置
22
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の位相線に,もう一つは中性線に取付け可能となる場合もある。それらが永久設置形の歯科用制御装置の
電源ヒューズの後段に接続されるならば,このような装置は永久設置形の歯科用制御装置に組み込まれる
場合もある。
例
− マルチメディアモニタにおける電源装置
− 独立したアマルガム分離器
201.9.8.2† (引張り強さの)安全率
歯科器械においては,力学的及び機械的な特性は知られている。そのため,通則の表21 A列の(引張り
強さの)安全率が選択されてきた。長年にわたりJIS T 0601-1:1999の(引張り強さの)安全率を適用した
製品設計を通じて蓄積された経験によって機械的強度を証明した。通則の表21 A列の値の適用は,それぞ
れの状態において,JIS T 0601-1:1999と同程度である。
201.11.1.1† 正常な使用時の最高温度
最高温度上昇は,EN 563:1994+AC:1994+A1:1999から導かれる。
201.11.1.2.2† 患者に熱を与えることを意図しない装着部
装着部は,歯科診療中に患者へ短時間接触する小さな領域でしかない。この診療においては,ハザード
はない。このことについては,ISO 13732-1に規定されている。
201.11.1.3† 測定
aa) 1)
歯の処置に必要な電力は,一般的に,歯1本当たり10 Wである。
この10 Wは,次のように導かれる。
1) 検証1
− 歯科診療中の歯科用電気モータの典型的な消費電流は,約0.8 Aである。
− 24 Vの電圧での電力は,約19.2 Wである。
− 歯科用電気モータの消費電力は,約8 Wである。
− 歯科用ハンドピースの消費電力は,約6.5 Wである。
− 全体の消費電力は,約14.5 Wとなる。
− このことから,歯1本当たりの歯の処置に必要な電力は,約5 W(約19.2 W−約14.5 W)となる。
2) 検証2
− 無負荷状態の歯科用ハンドピースの消費電流は,約0.5 Aである。
− それゆえ,歯1本当たりに歯の処置に必要な電流は,約0.3 A(約0.8 A−約0.5 A)となる。
− 24 Vで40 000回転/分において,歯の処置に必要な電力は,約7.2 Wとなる。
− さらに,歯科診療での測定では,回転速度を減少させた時の診療においては,歯科用電気モータ
の電流の減少という結果を示した。したがって,40 000回転/分における10 Wを歯の処置に必
要な電力と定義することは,定常的な歯科用電気モータの電流からも安全を見込んだ数値である
と想定される。これは最大定格回転速度における10 Wの負荷試験,又は,回転速度が電圧(M
×ω/U〜I)によって制御したときのほぼ安定的な歯科用電気モータ電流を伴う減速した定格回
転速度及び低下させた電力での試験を導く。後者の試験では,回転速度が確実に意図した回転速
度に到達するという優位性をもっており(その制御機能は上限値において作動しない),同様に,
温度上昇は大部分が歯科用電気モータの電流によって生じるという事実によって裏付けられる。
さらに,効率は,異なる可能性がある。
23
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
上記の5 W及び7.2 Wという値を考慮して,7.5 Wという値が試験のために選択された。
3) 作動時間
− 1診療台につき患者数は,約20人/日である。
− 歯科医師の労働時間は,約10時間/日である。
− 患者の平均診療時間は,約30分/人である。
− 歯科用電気モータの作動時間は,約10分/日である。したがって,患者に対する歯科用電気モー
タの作動時間は約30秒/人となる。
(作動時間は,一般的な診療時間を集計したものである。通則の表23の3行目に示す10秒と
は関連していない。)
30秒間作動させた後9分間休ませる試験において,一般的な使用では,許容温度を超えないことが確認
されている。さらに,厳しいデューティサイクルで使用した場合は,歯科用ハンドピースの操作者側の部
分の温度は過度となる可能性があるが,この場合,操作者は,使用を中止することができる。
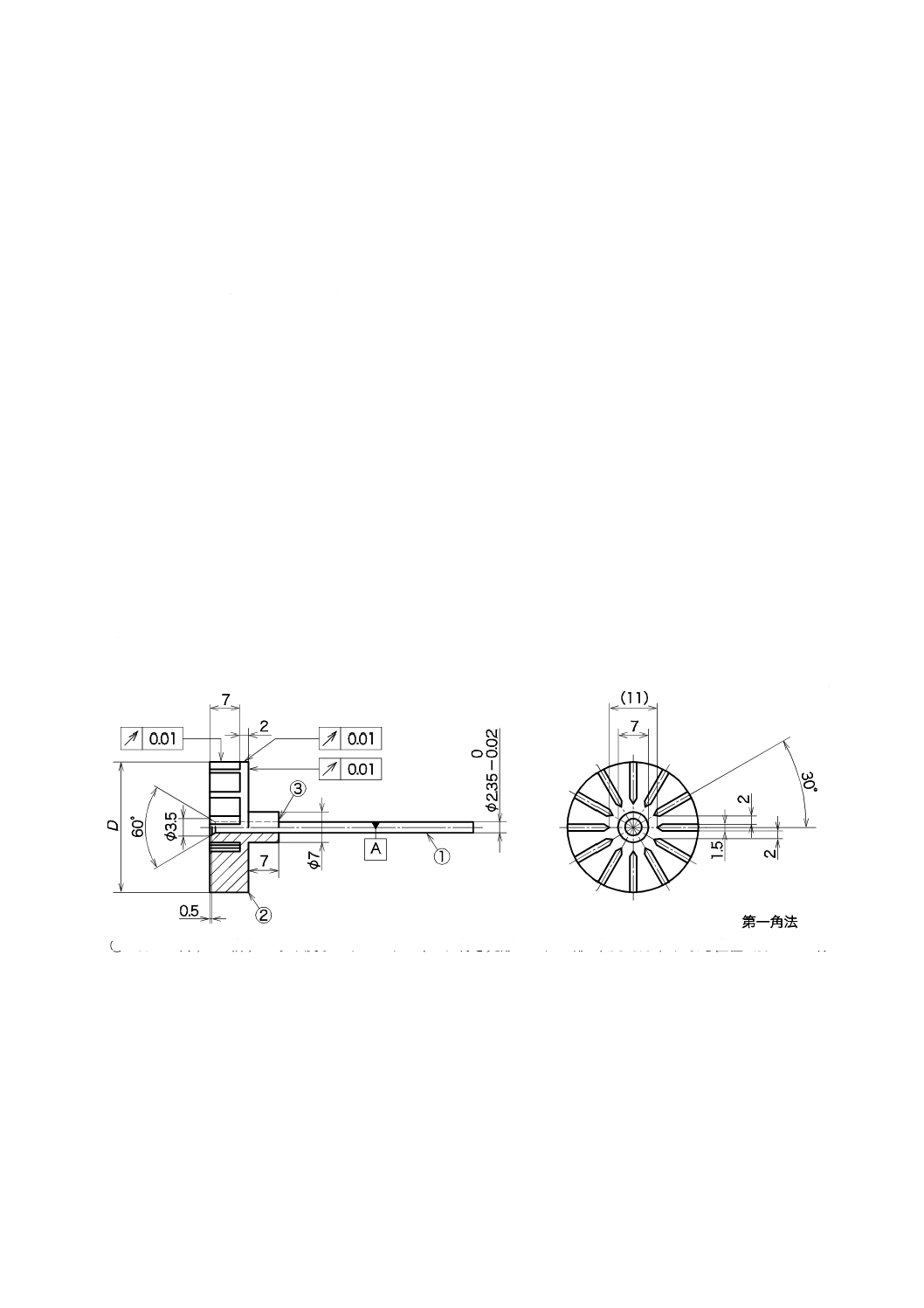
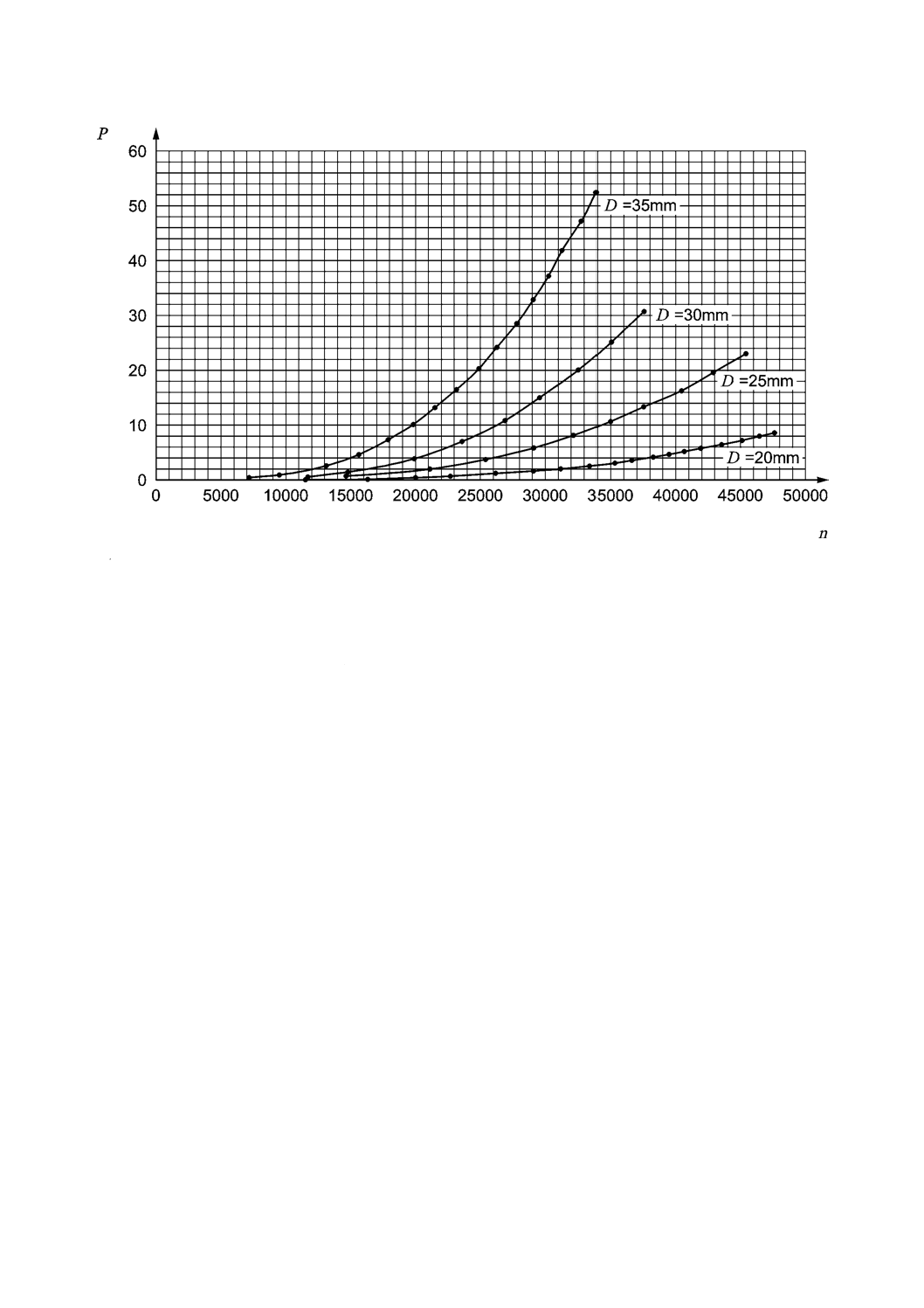
aa) 3) 温度上昇の最大定格
負荷用ファンの構造を図AA.4に示す。負荷用ファンによる荷重線図を図AA.5に示す。
負荷用ファンによる30秒間,16 Wの負荷は,歯科診療中におけるエネルギーよりも更に大きなエネル
ギーであると考えられる。
この試験は,操作者に対する熱的なハザードを回避するために,操作者が歯科用電気モータを含む歯科
用ハンドピースをハンガに戻すのに要する時間を決めることを意図している。
負荷における例:
単位 mm
① 60°の円すい(錐)ヘッド及びストレートシャンク付き丸形パンチD形(ISO 6752)による直径2.35 mmの特
別なサイズの軸
② アルミニウム製ファン
③ 間隙のない結合
図AA.4−負荷用ファンの構造
24
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
P:消費電力(W)
n:回転数(回転/分)
D:アルミニウム製ファンの直径
図AA.5−負荷用ファンの荷重(負荷)線図
201.13.2.7† 危険状態になる可能性がある冷却の障害
歯科用電気モータは,操作者の手で保持する。冷却損失は,操作者が反応するに十分な時間的余裕があ
る程度に,緩やかな温度上昇を生じる。
25
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] JIS T 5702:2009 歯科用ユニット−水及びエアーの供給
注記 対応国際規格:ISO 7494-2:2003,Dentistry−Dental units−Part 2: Water and air supply(IDT)
[2] JIS T 5909 歯科用ハンドピース−歯科用低電圧モータ(マイクロモータ)
[3] ISO 6752,Tools for pressing−Round punches with 60 degrees conical head and straight shank
[4] ISO 13732-1:2006,Ergonomics of the thermal environment−Methods for the assessment of human responses
to contact with surfaces−Part 1: Hot surfaces
[5] ISO 17664:2004,Sterilization of medical devices−Information to be provided by the manufacturer for the
processing of resterilizable medical devices
[6] ISO 21530:2004,Dentistry−Materials used for dental equipment surfaces−Determination of resistance to
chemical disinfectants
[7] IEC 61810-7:2006,Electromechanical elementary relays−Part 7: Test and measurement procedures
[8] EN 563:1994+AC:1994+A1:1999,Safety of machinery−Temperatures of touchable surfaces−Ergonomics
data to establish temperature limit values for hot surfaces
26
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JAA
(参考)
定義した用語の五十音順索引
この規格で定義した用語を五十音順に,次に示す。
定義した用語
細分箇条
あ
アクティブ電極(ACTIVE ELECTRODE)
IEC 60601-2-2:2009,201.3.203
安全率(TENSILE SAFETY FACTOR)
JIS T 0601-1:2012,3.121
い
意図する使用(INTENDED USE)
JIS T 0601-1:2012,3.44
医用電気機器,ME機器(MEDICAL ELECTRICAL EQUIPMENT)
JIS T 0601-1:2012,3.63
医用電気システム,MEシステム(MEDICAL ELECTRICAL SYSTEM)
JIS T 0601-1:2012,3.64
え
永久設置形(PERMANENTLY INSTALLED)
JIS T 0601-1:2012,3.84
ME機器(ME EQUIPMENT)
JIS T 0601-1:2012,3.63
MEシステム(ME SYSTEM)
JIS T 0601-1:2012,3.64
沿面距離(CREEPAGE DISTANCE)
JIS T 0601-1:2012,3.19
か
外装(ENCLOSURE)
JIS T 0601-1:2012,3.26
過電流開放器(OVER-CURRENT RELEASE)
JIS T 0601-1:2012,3.74
患者(PATIENT)
JIS T 0601-1:2012,3.76
患者接続部(PATIENT CONNECTION)
JIS T 0601-1:2012,3.78
患者測定電流(PATIENT AUXILIARY CURRENT)
JIS T 0601-1:2012,3.77
患者保護手段,MOPP(MEANS OF PATIENT PROTECTION)
JIS T 0601-1:2012,3.59
患者漏れ電流(PATIENT LEAKAGE CURRENT)
JIS T 0601-1:2012,3.80
き
機械的保護装置(MECHANICAL PROTECTIVE DEVICE)
JIS T 0601-1:2012,3.62
危険状態(HAZARDOUS SITUATION)
JIS T 0601-1:2012,3.40
基礎安全(BASIC SAFETY)
JIS T 0601-1:2012,3.10
基礎絶縁(BASIC INSULATION)
JIS T 0601-1:2012,3.9
基本性能(ESSENTIAL PERFORMANCE)
JIS T 0601-1:2012,3.27
強化絶縁(REINFORCED INSULATION)
JIS T 0601-1:2012,3.99
く
空間距離(AIR CLEARANCE)
JIS T 0601-1:2012,3.5
クラスI(CLASS I)
JIS T 0601-1:2012,3.13
クラスII(CLASS II)
JIS T 0601-1:2012,3.14
こ
工具(TOOL)
JIS T 0601-1:2012,3.127
公称(NOMINAL)
JIS T 0601-1:2012,3.69
さ
サービス要員(SERVICE PERSONNEL)
JIS T 0601-1:2012,3.113
し
CF形装着部(TYPE CF APPLIED PART)
JIS T 0601-1:2012,3.134
歯科患者用いす(DENTAL PATIENT CHAIR)
201.3.205
歯科器械(DENTAL EQUIPMENT)
201.3.202
歯科用照明器(DENTAL OPERATING LIGHT)
201.3.204
歯科用制御装置(DENTAL UNIT)
201.3.206
歯科用電気モータ(DENTAL ELECTRICAL MOTOR)
201.3.201
歯科用ハンドピース(DENTAL HANDPIECE)
201.3.203
歯科用ハンドピースの患者側の部分(PATIENT SIDE OF DENTAL
HANDPIECE)
201.3.208
歯科用ハンドピースの操作者側の部分(OPERATOR SIDE OF DENTAL
HANDPIECE)
201.3.207
27
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
定義した用語
細分箇条
せ
正常状態(NORMAL CONDITION)
JIS T 0601-1:2012,3.70
正常な使用(NORMAL USE)
JIS T 0601-1:2012,3.71
製造販売業者(MANUFACTURER)
JIS T 0601-1:2012,3.55
そ
操作者(OPERATOR)
JIS T 0601-1:2012,3.73
操作者保護手段,MOOP(MEANS OF OPERATOR PROTECTION)
JIS T 0601-1:2012,3.58
装着部(APPLIED PART)
JIS T 0601-1:2012,3.8
た
耐除細動形装着部(DEFIBRILLATION-PROOF APPLIED PART)
JIS T 0601-1:2012,3.20
単一故障状態(SINGLE FAULT CONDITION)
JIS T 0601-1:2012,3.116
て
定格出力(RATED OUTPUT POWER)
IEC 60601-2-2:2009,201.3.230
定格(値)[RATED (value)]
JIS T 0601-1:2012,3.97
手持形(HAND-HELD)
JIS T 0601-1:2012,3.37
電気手術器(電気メス)(HF SURGICAL EQUIPMENT)
IEC 60601-2-2:2009,201.3.203
電源過渡電圧(MAINS TRANSIENT VOLTAGE)
JIS T 0601-1:2012,3.53
電源(商用)(SUPPLY MAINS)
JIS T 0601-1:2012,3.120
電源電圧(MAINS VOLTAGE)
JIS T 0601-1:2012,3.54
電源部(MAINS PART)
JIS T 0601-1:2012,3.49
な
内部電源(の)(INTERNALLY POWERED)
JIS T 0601-1:2012,3.46
に
二次回路(SECONDARY CIRCUIT)
JIS T 0601-1:2012,3.110
二重絶縁(DOUBLE INSULATION)
JIS T 0601-1:2012,3.23
は
PEMS(PROGRAMMABLE ELECTRICAL MEDICAL SYSTEM)
JIS T 0601-1:2012,3.90
ハザード(HAZARD)
JIS T 0601-1:2012,3.39
ひ
B形装着部(TYPE B APPLIED PART)
JIS T 0601-1:2012,3.132
ピーク動作電圧(PEAK WORKING VOLTAGE)
JIS T 0601-1:2012,3.81
(引張り強さの)安全率(TENSILE SAFETY FACTOR)
JIS T 0601-1:2012,3.121
引張り強さ(TENSILE STRENGTH)
JIS T 0601-1:2012,3.122
ふ
附属文書(ACCOMPANYING DOCUMENT)
JIS T 0601-1:2012,3.4
ほ
補強絶縁(SUPPLEMENTARY INSULATION)
JIS T 0601-1:2012,3.119
も
漏れ電流(LEAKAGE CURRENT)
JIS T 0601-1:2012,3.47
り
リスク(RISK)
JIS T 0601-1:2012,3.102
リスクアセスメント(RISK ASSESSMENT)
JIS T 0601-1:2012,3.104
リスクマネジメント(RISK MANAGEMENT)
JIS T 0601-1:2012,3.107
リスクマネジメントファイル(RISK MANAGEMENT FILE)
JIS T 0601-1:2012,3.108
28
T 80601-2-60:2014 (IEC 80601-2-60:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JBB
(参考)
この規格で使われている略語
略語に対する英語及び用語を,次に示す。
略語
英語
用語
LED
LIGHT EMITTING DIODE
発光ダイオード
ME
MEDICAL ELECTRICAL
医用電気
MOOP
MEANS OF OPERATOR PROTECTION
操作者保護手段
MOPP
MEANS OF PATIENT PROTECTION
患者保護手段
NC
NORMAL CONDITION
正常状態
PEMS
PROGRAMMABLE ELECTRICAL MEDICAL SYSTEM
プログラマブル電気医用システム
SFC
SINGLE FAULT CONDITION
単一故障状態