K 7244-4 : 1999 (ISO 6721-4 : 1994)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づいて,日本工業標準調査会の審議を経て,通商産業大臣が制定した日
本工業規格である。これによってJIS K 7198 : 1991は廃止され,この規格に置き換えられる。
JIS K 7244は,規格名称を“プラスチック−動的機械特性の試験方法”とし,次の各部によって構成さ
れる。
第1部:通則
(Part 1 : General principles)
第2部:ねじり振子法
(Part 2 : Torsion-pendulum method)
第3部:曲げ振動−共振曲線法
(Part 3 : Flexural vibration−Resonance-curve method)
第4部:引張振動−非共振法
(Part 4 : Tensile vibration−Non-resonance method)
第5部:曲げ振動−非共振法
(Part 5 : Flexural vibration−Non-resonance method)
第6部:せん断振動−非共振法
(Part 6 : Shear vibration−Non-resonance method)
第7部:ねじり振動−非共振法
(作成予定)
(Part 7 : Torsional vibration−Non-resonance method)
第8部:縦せん断振動−波動伝ぱ法
(作成予定)
(Part 8 : Longitudinal and shear vibration−Wave-propagation method)
第9部:引張振動−音波パルス伝ぱ法
(作成予定)
(Part 9 : Tensile vibration−Sonic-pulse propagation method)
第10部:平行円板形レオメータによる複素せん断粘度
(作成予定)
(Part 10 : Complex shear viscosity using a parallel-plate oscillatory rheometer)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
K 7244-4 : 1999
(ISO 6721-4 : 1994)
プラスチック−動的機械特性の
試験方法
−第4部:引張振動−非共振法
Plastics−Determination of dynamic
mechanical properties−
Part 4 : Tensile vibration−Non-resonance method
序文 この規格は,ISO 6721-4 : 1994, Plastics−Determination of dynamic mechanical properties−Part 4 :
Tensile vibration−Non-resonance methodを翻訳し,技術的内容及び規格票の様式を変更することなく作成し
た日本工業規格である。
なお,この規格で下線(点線)を施してある箇所は,原国際規格にはない事項である。
1. 適用範囲
この規格は,主に周波数0.01Hz〜100Hzの範囲でポリマーの引張複素弾性率E*の各成分を測定する非共
振強制振動法について規定する。この方法は,0.01GPa〜5GPa1)の範囲の動的貯蔵弾性率の測定に適してい
る。この範囲外の弾性率の測定では,他の変形モードで高精度に測定ができる[すなわち,E'<0.01GPa
ではせん断モード-JIS K 7244-6 (ISO 6721-6 : 1994),E'>5GPaでは曲げモード-JIS K 7244-5 (ISO 6721-5 :
1994) による。]。
この方法は0.1より大きい損失係数2)の測定に特に適しており,ガラス−ゴム領域[JIS K 7244-1-1996
(ISO 6721-1 : 1994) の9.4参照。]内の温度と周波数による動的特性の変化を測定するのに使用できる。周
波数と温度両方の広い範囲で測定されたデータを利用することで,異なった温度でのより広げた周波数範
囲の動的特性を予測する周波数−温度換算則を使ってのマスタープロットが可能となる。
参考1)
市販される高性能な引張モードの弾性率測定装置では5GPaを超え10GPaぐらいまで測定可
能である。
2)
高精度な力検出器と変位検出器を用いた測定装置では,損失係数は0.1より小さい0.01ぐら
いまで測定可能である。
2. 引用規格
次の規格は,この規格に引用されることによって,この規定の一部を構成する。この規格の発行の時点
では,引用規格はここに示す発行年の版の規格が有効であるが,すべての規格は改正されることがあるの
で,この規格の使用者は,引用規格の最新版を適用できるかどうか検討することが望ましい。
ISO 6721-1 : 1994 Plastics−Determination of dynamic mechanical properties−Part 1 : General principles.
2
K 7244-4 : 1999 (ISO 6721-4 : 1994)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
備考 JIS K 7244-1(プラスチック−動的機械特性の試験方法−第一部:通則)が,この国際規格
に一致している。
ISO 6721-3 : 1994 Plastics−Determination of dynamic mechanical properties−Part 3 : Flexural vibration−
Resonance-curve method
備考 JIS K 7244-3が,この国際規格に一致するものとなる予定である。
3. 定義
この規格 [JIS K 7244-4-1996 (ISO 6721-4 : 1994)] で用いる用語の定義は,JIS K 7244-1-1996 (ISO
6721-1 : 1994) の3.が使用される。
4. 原理
試験片を固定した場合又は自由状態での長さ方向の振動モードでの基本共振周波数(10.2.1参照)より
十分低い周波数の正弦的な引張力か変位を試験片に加える。試験片に加えた力と変位サイクルの振幅と両
者間の位相角が測定される。複素引張弾性率の貯蔵成分と損失成分,そして損失係数は10.に示された式か
ら計算する。
5. 試験装置
5.1
負荷機構
装置の必要条件は,正弦的な引張力又は変位を加えた試験片から力と変位サイクルの振幅とそれらの間
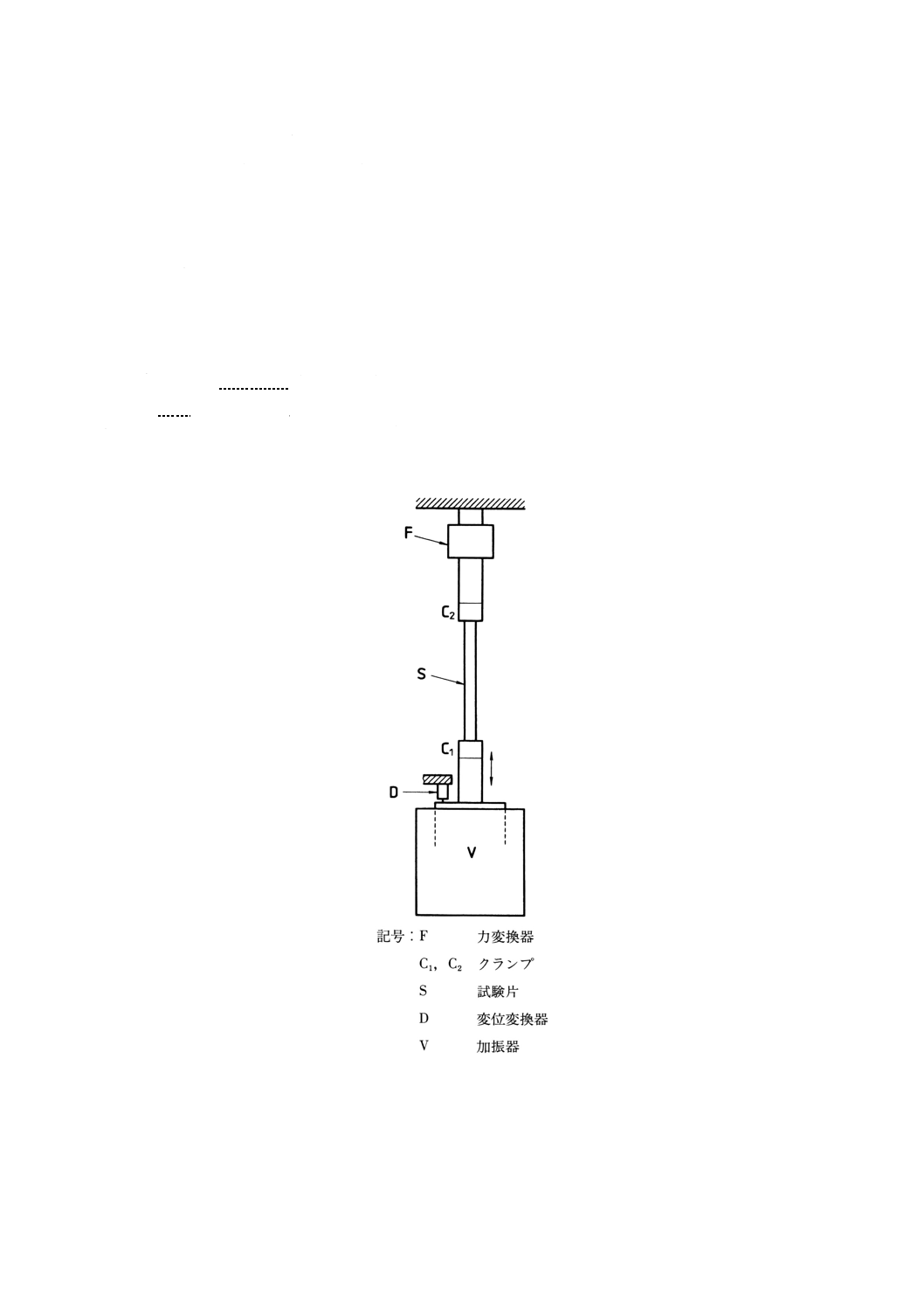
の位相角の測定を可能にすることである。装置にはいろいろな設計が可能であり,図1に適切な形式の概
略図を示す。正弦的な力は加振器Vによって加振され,クランプC1によって試験片Sの一端に加えられ
る。振動板の変位の振幅と周波数は可変であり,変換器Dによって検出される。VとC1の間の機構は,
試験片より十分剛性があり,試験片が恒温槽内に入れられる場合は,熱伝導も低くなければならない。
備考1. 負荷機構部の構成が,試料よりはるかに剛性があるものでも,留め金及びボルトで締め付け
ると,装置コンプライアンスは大きくなる。この場合には,10.2.3で規定するコンプライアン
スの補正を適用する必要がある。
試験片の他端の,第二クランプC2は,剛直なフレームによって支えられた力変換器Fに取り付けられて
いる。C2とFの間の構成も十分剛性があり,低熱伝導となっていなければならない。
5.1.1
クランプ
クランプは,引張力及び変形を加えたとき試験片の滑りが起きない十分な力で押さえ,低温でも力を保
持しなければならない。力変換器とクランプの軸心のずれは,試験片に力を加えるときに力変換器に横成
分の力を生じさせる。試験片と負荷機構部の軸心の調整は,変換器で検出される横成分力が縦成分の引張
力の1%以下にしなければならない。試験片の厚さに関係なく負荷機構の軸が試験片軸と一直線になるよ
う,自動的に心合わせが行えるクランプの設計が推奨される。
長さ補正(10.2.4参照)を行うときは,クランプ間隔として定義される試料片の長さの違った値での剛
性の測定が必要となる。これはクランプ間の距離を短くしたとき,試験片がクランプの中に入り込めるよ
うに,クランプの台部の中心に穴があいていればこれらの測定は一つの試料で行える。
5.1.2
変換器
この規格で述べる変換器は,加えられた力,変位はそれらの値の比を時間の関数として測定可能なデバ
イスを意味する。力と長さを測定する変換器の校正は,国家標準につながるトレーサビリティが保証され
3
K 7244-4 : 1999 (ISO 6721-4 : 1994)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ていなければならない。動的特性を測定するために,校正は試験片に働く最小の力と変位のサイクル振幅
の±2%の精度とする。
5.2
データ処理装置
データ処理装置は,力と変位サイクルの正弦振幅を±1%の精度で,それらの間の位相角を0.1°の精度
で,周波数を±10%の精度で記録できるものとする。
5.3
温度測定とコントロール
JIS K 7244-1-1996 (ISO 6721-1 : 1994) の5.3及び5.5による。
5.4
測定試料片寸法
JIS K 7244-1-1996 (ISO 6721-1 : 1994) の5.6による。
6. 試験片
JIS K 7244-1-1996 (ISO 6721-1 : 1994) の6.による。
6.1
形状と寸法
荷重の伝達を容易にするために,長方形断面の試験片が推奨される。試験片の幅と厚さは,試験片の長
さ方向に沿って,最大と最小の差が平均値の3%以上あってはならない。測定結果に高い精度が要求され
る場合,動的引張ひずみの決定の際の十分な精度を達成するために,クランプ間距離が約100mm又はそ
れ以上になるような試験片の長さが推奨される3)。
クランプ間の試験片の長さは試験片の幅の6倍以上であることもまた推奨される。これは,試験片のご
くわずかな横方向の自由な収縮を制限するクランプの影響を無視するためである。
注3)
高精度な力と長さの変換器を使用し,かつ,負荷機構のコンプライアンスを小さくすれば,ク
ランプ端の影響の十分な剛性をもつ試料の場合,20mm程度のクランプ間距離でも十分な精度
を達成できる。
断面の寸法は,それほど重要ではない。ポリマーがガラス状態のときの試験条件としては,十分な精度
で測定できる程度の引張変位を加振機が印加できるようにするために,断面積を十分に小さく選ぶ必要が
ある。一方,ポリマーがゴム状態を示しているときには,力の測定において十分な精度を達成するために
より広い断面積が必要となる。
備考2. 射出成形によって作製された異なる厚さの試験片では,それぞれの試験片でポリマーの構造
に差違が生じるので動的特性に差がでる。
6.2
作製
JIS K 7244-1-1996 (ISO 6721-1 : 1994) の6.による。
7. 試験片の数
JIS K 7244-1-1996 (ISO 6721-1 : 1994) の7.による。
8. 状態調節
JIS K 7244-1-1996 (ISO 6721-1 : 1994) の8.による。
9. 手順
9.1
試験環境
JIS K 7244-1-1996 (ISO 6721-1 : 1994) の9.1による。
4
K 7244-4 : 1999 (ISO 6721-4 : 1994)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.2
試験片の断面積測定
JIS K 7244-1-1996 (ISO 6721-1 : 1994) の9.2による。
9.3
試験片の装着
すべての試験状態の下で滑りを防ぐために,クランプに締付け圧を加え,しっかりと装着する。もし,
測定結果が締付け圧に依存するような場合は,なるべくすべての測定に,特に試験片長さの補正を行って
いる場合に,一定の締付け圧が使われるべきである(10.2.4参照)。
備考3. もし,測定結果が締付け圧に依存するような場合は,試験片の締付け面積がおそらく小さす
ぎるからである。クランプの締付け面を大きくするか,又は幅広い試験片にすることで,こ
の問題は解決する。
9.4
温度依存性の測定
JIS K 7244-1-1996 (ISO 6721-1 : 1994) の9.4による。
9.5
試験の実施
試験片に付加された動的荷重の圧縮方向の力による座屈を防ぐため,十分な静的引張力を加えなければ
ならない。変換器によって測定可能な力と変位の振幅が,5.1.2に規定するような精度が得られるように,
動的荷重が加えられる。
備考4. もし,引張ひずみが線形挙動の限界を超える場合,得られる動的特性は,加えられたひずみ
の大きさに依存する。この限界はポリマーの構造,温度によって変化し,概して,ガラス状
態のプラスチックでは,0.2%ひずみの領域にこの限界がある。
力と変位の信号の振幅,その間の位相差,それらの周波数,そして試験温度が記録されるものとする。
測定において周波数及び温度が変更される場合には,次のことが推奨される。最初に最も低温で一定温度
に保ち,周波数を増加させながら測定する。それから次の高い温度に保ち,その周波数範囲の測定が繰り
返される[JIS K 7244-1-1996 (ISO 6721-1 : 1996) の9.4参照]。
ポリマーが中程度,又は高い損失を示すような(例えば,ガラス−ゴム転移領域)試験状態では,ポリ
マーによって散逸されたエネルギーが,動的性質においてかなりな変化を与えるような,ポリマーの温度
を上昇させる可能性がある。ひずみの振幅と周波数の増加に伴い,温度は急激に上昇する。もし,データ
処理装置が,最初の数周期以内で,変換器から出力される信号を解析する能力があれば,温度の上昇の影
響も極小化できる。試験片の温度が引き続き上昇する場合,継続して行う同一条件の測定であっても時間
とともに変化する。そして,そのような観測結果があれば,結果の表示や説明において,注意を促すこと
が必要である。
10. 結果の表示
10.1 記号
La
クランプ間の試験片の長さ (m)
l
長さの補正項 (m)
b
試験片の幅 (m)
d
試験片の厚さ (m)
f
測定周波数 (Hz)
SA
動的変位の振幅測定値 (m)
∆FA
動的力の振幅測定値 (N)
δEa,δE
力/変位サイクル間の測定位相差,補正位相差 (°)
5
K 7244-4 : 1999 (ISO 6721-4 : 1994)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ka,k
試験片の複素剛性の測定値,補正値 (N/m)
E'a,E'
見掛けの引張貯蔵弾性率,補正引張貯蔵弾性率 (Pa)
E"
引張損失弾性率 (Pa)
tanδEa,tanδE
見掛けの引張損失係数,補正引張損失係数
kF
力変換器の剛性 (N/m)
mF
力変換器と試験片間の負荷機構部の質量 (kg)
k∞
クランプがつかみ得る最大の断面積をもつ金属試験片にて測定した剛性(備考5.
による。) (N/m)
この金属試験片は,試験されるポリマー試験片の少なくとも100倍以上の剛性を
もつこと。
備考5. k∞の大きさによって,負荷機構部の剛性の概算値が求められる。この負荷機構部とは,試験
片と直列に接続したばねに相当する。この値から装置コンプライアンス補正が推論できる
(10.2.3参照)。
10.2 引張貯蔵弾性率,E'の計算
引張貯蔵弾性率E'aの概算値は,(1)式で求まる。
Ea
a
a
Ea
a
A
A
a
bd
L
k
bd
L
S
F
E
δ
δ
cos
cos
=
×
∆
=
′
··············································· (1)
10.2.1 試験片共振の回避
(1)式は駆動周波数が,試験片の基本縦共振周波数fsに近くなると無効となる。試験片の基本縦共振周波
数の概算値は,(2)式で求められる。
2/1
2
1
′
=
ρ
a
a
s
E
L
f
········································································ (2)
ここで,ρは密度 (kg/m3)
次に示す周波数では,式(1)での誤差が大きくなる。
2/1
0.02
′ρa
a
E
L
f≧
········································································ (3)
よって,動的特性の算出には,式(3)の周波数より低いものに限定すべきである。
10.2.2 変換器共振の補正
周波数が十分に高い場合は,与えた変形によって力変換器が励起され共振する。共振周波数fFは,式(4)
で求まる。
2/1
2
1
=
F
F
F
m
k
f
π
········································································ (4)
変換器の出力は,次に示す周波数では誤差が大きくなる。
f>0.1fF ···················································································· (5)
力変換器と支持される質量mFの共振周波数fFは,試験片を装着せずにクランプをたたいたときの変換
器出力の固有周波数を記録することによって直接求めることができる。
変換器共振を補正した試験片の剛性は,(6)式によって,より良い概算値を求めることができる。
6
K 7244-4 : 1999 (ISO 6721-4 : 1994)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
−
=
−
=
F
a
F
F
a
f
f
k
k
f
m
k
k
2
2
2
2
1
4
1
π
················································ (6)
力変換器の選定に当たっては,式(4),(5)を用いて,その共振周波数が力測定に対して補正を要さない範
囲のものを選ぶことを推奨する。
10.2.3 装置コンプライアンスの補正
kaが0.02k∞より大きい場合,試験装置のコンプライアンスは無視できない大きさとなり,測定変位は試
験片の変位と大きく異なる。そこで,次の補正をしなくてはならない。
(
)
(
)
Ea
a
a
Ea
a
E
k
k
k
k
k
k
δ
δ
δ
cos
/
2
1
/
cos
cos
∞
∞
−
−
=
························································ (7)
ここでδEは,式(10)で求まる。式(7)で求まるkcosδEは(1)式のkacosδEaの代わりに用い,より正確なE'a
の概算値を求める。
備考6. 変位計がクランプ間距離の変化を測定するように配置されている場合,又は伸び計が試験片
に取り付けられている場合は,コンプライアンス補正は必要ではない。
10.2.4 長さ補正
式(1)の試験片の長さにクランプ間距離の測定値Laを用いる場合は,クランプ内及びクランプ付近の試験
片のゆがみを無視する。有効長さがLa+lとなるようにLaに補正を行い,lとLaとは独立のものであると
仮定すると式(1)から次のようになる。
(
)
Ea
a
bd
l
L
k
E
δ
cos
+
=
′
··································································· (8)
ここでは(7)式を用いて必要箇所に,装置コンプライアンス補正を用いている。長さ補正値lは一連の異
なったクランプ間距離Laでの試験片剛性の測定値kから求めることができる。式(8)を用いて1/ (kcosδEa)
対Laを図式化すると,1/ (kcosδEa) =0の切片よりlを,傾きよりE'を求めることができる。
備考7. l値は,試験片の断面積及び温度によって変化する。l値が動的弾性率の大きな変化の要因と
なる場合は注意する。
8. 動的ひずみが試験片に取り付けた伸び計で測定されるときは,長さ補正の推論は必要ない。
10.3 引張損失係数tanδEの計算
引張損失係数の概算値は,tanδEで表す。
kaが0.02k∞以上の場合,負荷部のコンプライアンスは位相角測定の精度に影響を与える。損失係数は,
次の式で求めることができる。
−
=
∞
Ea
a
Ea
E
k
k
δ
δ
δ
cos
1
tan
tan
······························································ (9)
備考9. 負荷部のコンプライアンス要因がボルト接合部から発生しているようであれば,測定位相角
δEaに摩擦の影響がでることもある。結果的に起こる誤差はka/k∞の割合で大きくなる。この
誤差の要因は,クランプ間距離の変化が測定できるように変位計を設置したり,試験片に伸
び計を取り付けることによって回避できる。
10.4 引張損失弾性率の計算
損失弾性率E"は,(10)式で求める。
E"=E'tanδE ············································································· (10)
7
K 7244-4 : 1999 (ISO 6721-4 : 1994)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.5 温度の関数としてのデータの提供
JIS K 7244-1-1996 (ISO 6721-1 : 1994) の9.4による。
11. 精度
この試験法の精度は,試験室間のデータがないので不明である。精度は,そのデータが得られた時点で,
次の改訂に追加される。
12. 試験報告
試験報告は,次の事項を含むこと。
a) 規格番号:JIS K 7244-4 (ISO 6721-4)。
b)〜m) JIS K 7244-1-1996 (ISO 6721-1 : 1994) の12.による。
n) Sa/Laによって得られる動的ひずみの概算の振幅。
図1
引張非共振強制振動法による動的弾性率
測定のための,適切な装置構成の概要図
8
K 7244-4 : 1999 (ISO 6721-4 : 1994)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS K 7244-4 原案作成委員会 構成表
氏名
所属
本委員会
分科会
(委員長)
中 山 和 郎
工業技術院物質工学工業技術研究所
◎
◎
宮 入 祐 夫
東京医科歯科大学医用器材研究所
○
○
宗 宮 詮
慶応義塾大学理工学部
○
増 田 優
通商産業省基礎産業部
○
岡 林 哲 夫
工業技術院標準部
○
橋 本 繁 晴
財団法人日本規格協会
○
小 林 政治郎
小林技術事務所
○
松 島 哲 夫
松島塑材研究所
○
小 牧 和 夫
通商産業省大阪工業技術研究所
○
阿 部 聰
東京都立工業技術センター有機化学部
○
馬 場 文 明
三菱電機株式会社材料デバイス研究所
○
我 妻 誠
日本電信電話株式会社NTTグループ事業推進本
部
○
○
三 原 観 治
株式会社東洋精機製作所第一技術部
○
増 瀬 英 雄
株式会社島津製作所試験計測事業部
○
斉 藤 英 隆
株式会社エー・アンド・ディ開発技術センター
○
○
川 村 好 宏
三菱樹脂株式会社平塚研究所
○
○
横 山 昭
三井石油化学工業株式会社サン分析センター材
料物性研究所
○
○
田 辺 久 光
三菱化学株式会社四日市総合研究所物性分析研
究所
○
塚 原 浩
旭化成工業株式会社樹脂技術センター
○
田 中 耕 三
三井東圧化学株式会社総合研究所技術研究所
○
金 沢 宏 之
住友化学工業株式会社メタアクリル・光学製品
事業部
○
高 野 忠 夫
財団法人高分子素材センター試験・検査事業部
○
石 田 勝 己
株式会社東洋精機製作所第一技術部
○
市 村 裕
セイコー電子工業株式会社科学機器事業部
○
野 村 亭
レオメトリックス・サイエンティフィク・エフ・
イー株式会社
○
平 山 泰 生
株式会社リガク新事業部開発室
○
桑 田 広 治
株式会社島津製作所試験計測事業部
○
(事務局)
濱 島 俊 行
日本プラスチック工業連盟
○
○
樋 口 秀 臣
財団法人高分子素材センター
○
○