K 6368 : 1999
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づいて,日本工業標準調査会の審議を経て,通商産業大臣が改正した日
本工業規格である。これによってJIS K 6368-1977は改正され,この規格に置き換えられる。
なお,国際規格では一般用Vベルト及び細幅Vベルトについて規定しているが,この規格では,細幅V
ベルトについて規定している。一般用Vベルトについては,JIS K 6323(一般用Vベルト)で規定してい
る。
JIS K 6368 : 1999には,次に示す附属書がある。
附属書1(規定) ベルト伝動−細幅Vベルト−データムシステムによる長さ
附属書2(参考) 細幅Vベルトの使い方
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
K 6368 : 1999
細幅Vベルト
Narrow V belts for power transmission
序文 この規格は,従来,日本工業規格で規定していた細幅Vベルトについては本体に規定し,これに対
応するISO 4184 : 1992, Belt drives−Classical and narrow V-belts−Lengths in datum systemに規定されている
項目については,技術的内容を変更することなく翻訳し,附属書1として作成した日本工業規格である。
1. 適用範囲 この規格は,動力伝動に用いるエンドレス状の細幅Vベルト(以下,ベルトという。)に
ついて規定する。ただし,自動車用Vベルトを除く。
なお,附属書1は,ベルトのデータムシステムによる長さについて規定したものであり,本体の各規定
要求事項は,当面附属書1には適用しない。
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。
これらの規格は,その最新版を適用する。
JIS B 1855 細幅Vプーリ
JIS Z 8401 数値の丸め方
3. 定義 この規格で用いる主な用語の定義は,次による。
a) 有効周長さ ベルトを2個の長さ測定用プーリに巻き掛け,所定の力を加えたとき,プーリの有効直
径の円周上を通るベルトの一周の長さ。
b) プーリの有効直径 JIS B 1855の4.2(溝部の形状及び寸法)に示す直径 (de) 。
4. 種類 ベルトは,その断面寸法によって,次の3種類とする。
3V, 5V, 8V
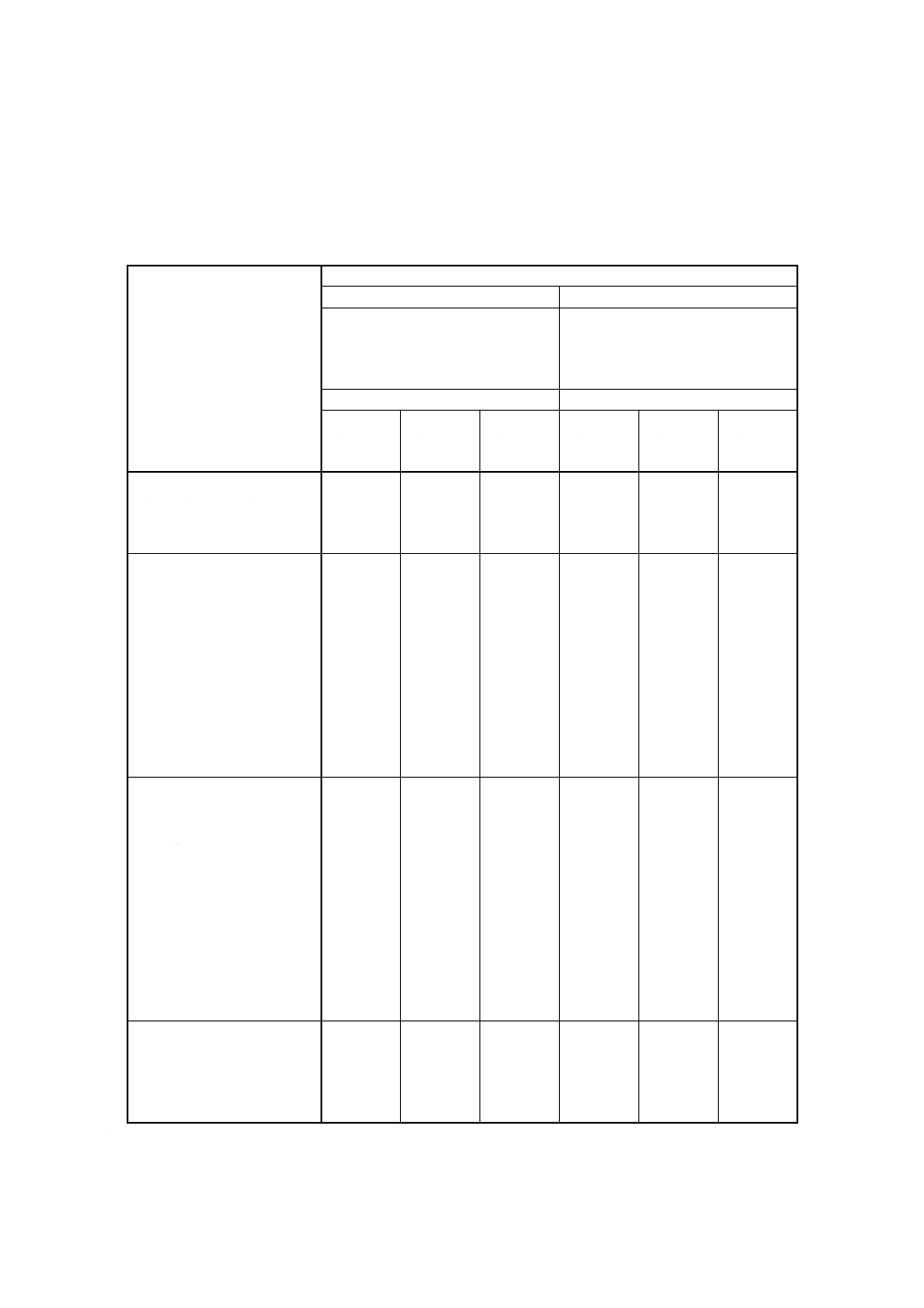
5. 性能 性能は,10.2によって引張試験を行ったとき,1本当たりの引張強さ及び伸びが,表1を満足
しなければならない。
表1 引張特性
項目
種類
適用箇条
3V
5V
8V
1本当たりの引張強さ kN
2.3以上
5.4以上
12.7以上
10.2
伸び(1)
%
4以下
注(1) 表5に示す力における伸び。
2
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6. 構造 ベルトの構造は,9.の材料を用い,心線を含む台形断面の周囲にゴムを塗布した布で覆ったも
の,又はゴムと心線を含む台形断面の上下面若しくは上面にゴムを塗布した布を重ね合わせたものとする。
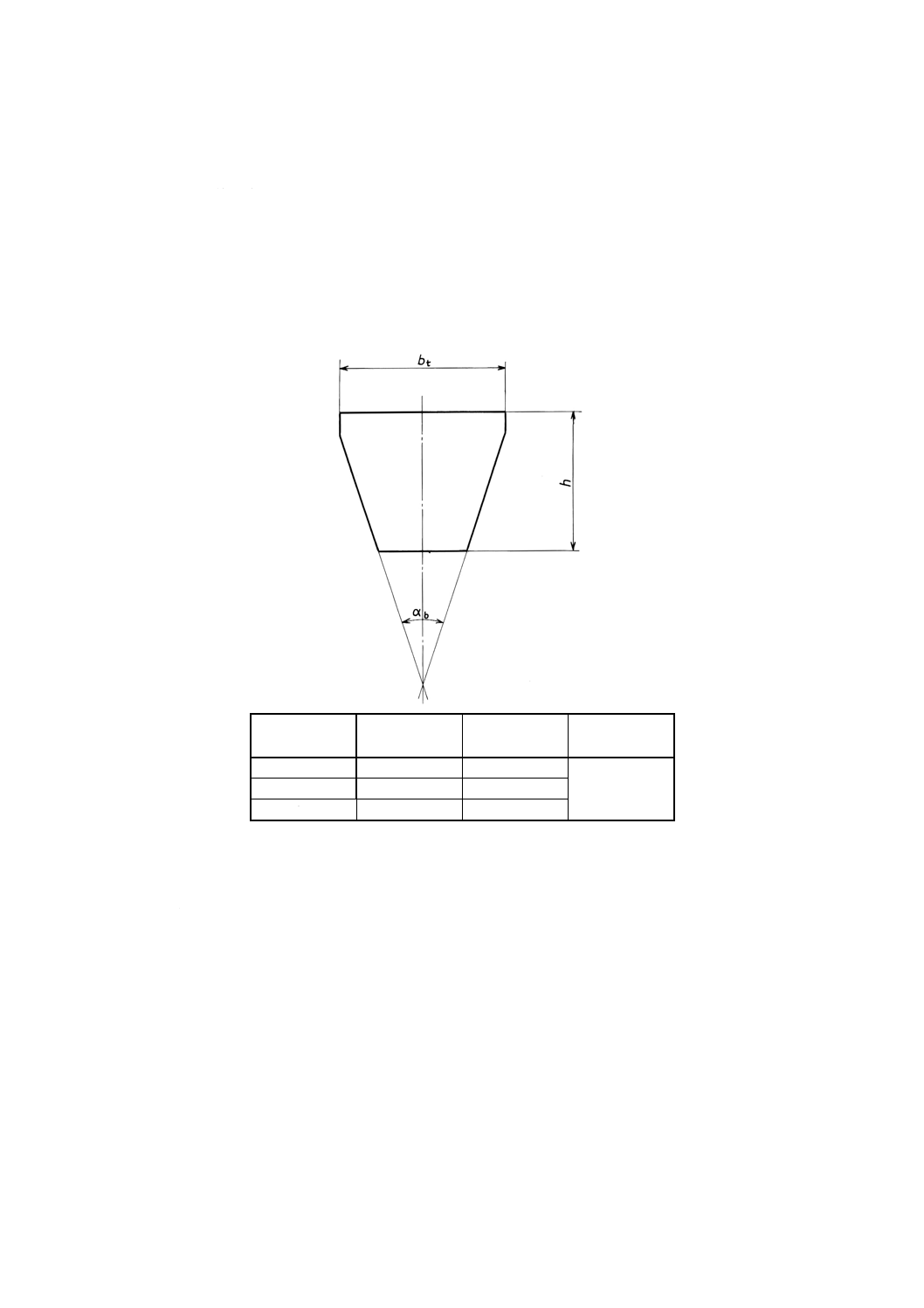
7. 形状及び寸法
7.1
断面形状及び寸法 ベルトの断面形状は,左右対称の台形で,基準寸法は,表2のとおりとし,JIS
B 1855の4.2に規定するV溝形状に適合しなければならない。
表2 断面形状及び基準寸法
種類
bt
mm
h
mm
αb
度
3V
9.5
8.0
40
5V
16.0
13.5
8V
25.5
23.0
7.2
長さ ベルトの長さは,10.1によって測定し,ベルトの有効周長さで表す。
なお,ベルトの呼び番号と有効周長さの関係を,表3に示す。
有効周長さとその許容差及び一組内の長さの差(2)は,表3を満足しなければならない。
注(2) 多本掛けで使用される一組内のベルトの有効周長さの差。
3
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表3 有効周長さとその許容差及び一組内の長さの差
単位mm
ベルトの
呼び番号
有効周長さ
許容差
一組内の
長さの差
(最大)
ベルトの
呼び番号
有効周長さ
許容差
一組内の
長さの差
(最大)
3V
5V
8V
3V
5V
8V
250
635
−
±8
3.0
1 060
2 692
2 692
2 692
±15
7.5
265
673
1 120
2 845
2 845
2 845
280
711
1 180
2 997
2 997
2 997
300
762
1 250
3 175
3 175
3 175
315
800
1 320
3 353
3 353
3 353
335
851
4.0
1 400
3 556
3 556
3 556
355
902
1 500
−
3 810
3 810
±20
10.0
375
953
1 600
4 064
4 064
400
1 016
1 700
4 318
4 318
425
1 080
1 800
4 572
4 572
450
1 143
1 900
4 826
4 826
475
1 207
2 000
5 080
5 080
500
1 270
1 270
2 120
5 385
5 385
530
1 346
1 346
−
±10
5.0
2 240
5 690
5 690
560
1 422
1 422
2 360
5 994
5 994
600
1 524
1 524
2 500
6 350
6 350
630
1 600
1 600
2 650
6 731
6 731
670
1 702
1 702
2 800
7 112
7 112
710
1 803
1 803
3 000
7 620
7 620
750
1 905
1 905
3 150
−
8 001
8 001
±25
12.5
800
2 032
2 032
3 350
8 509
8 509
850
2 159
2 159
±13
6.5
3 550
9 017
9 017
900
2 286
2 286
3 750
9 525
950
2 413
2 413
4 000
10 160
1 000
2 540
2 540
2 540
4 250
−
−
10 795
±30
15.0
4 500
11 430
4 750
12 065
5 000
12 700
8. 外観 ベルトの外観は,目視によって確認できる使用上支障となる,ねじれ,きずなどの欠点がない
ものでなければならない。
9. 材料
9.1
ゴム ゴムは,使用目的に適合するように配合されたものを用いる。
9.2
布 布は,綿,合成繊維,その他使用目的に適合したものを用いる。
9.3
心線 心線は,合成繊維,その他使用目的に適合したものを用いる。
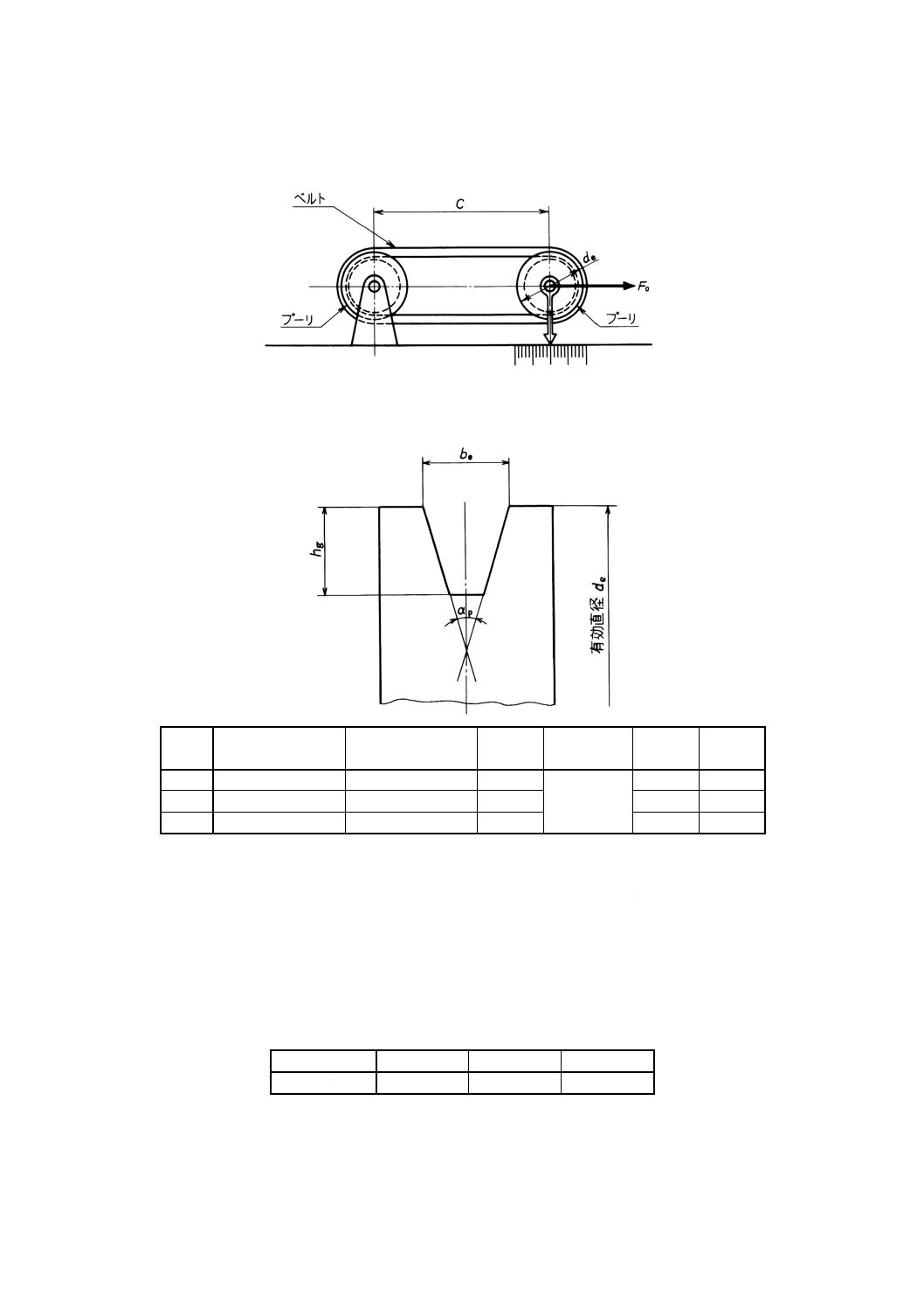
10. 測定及び試験方法
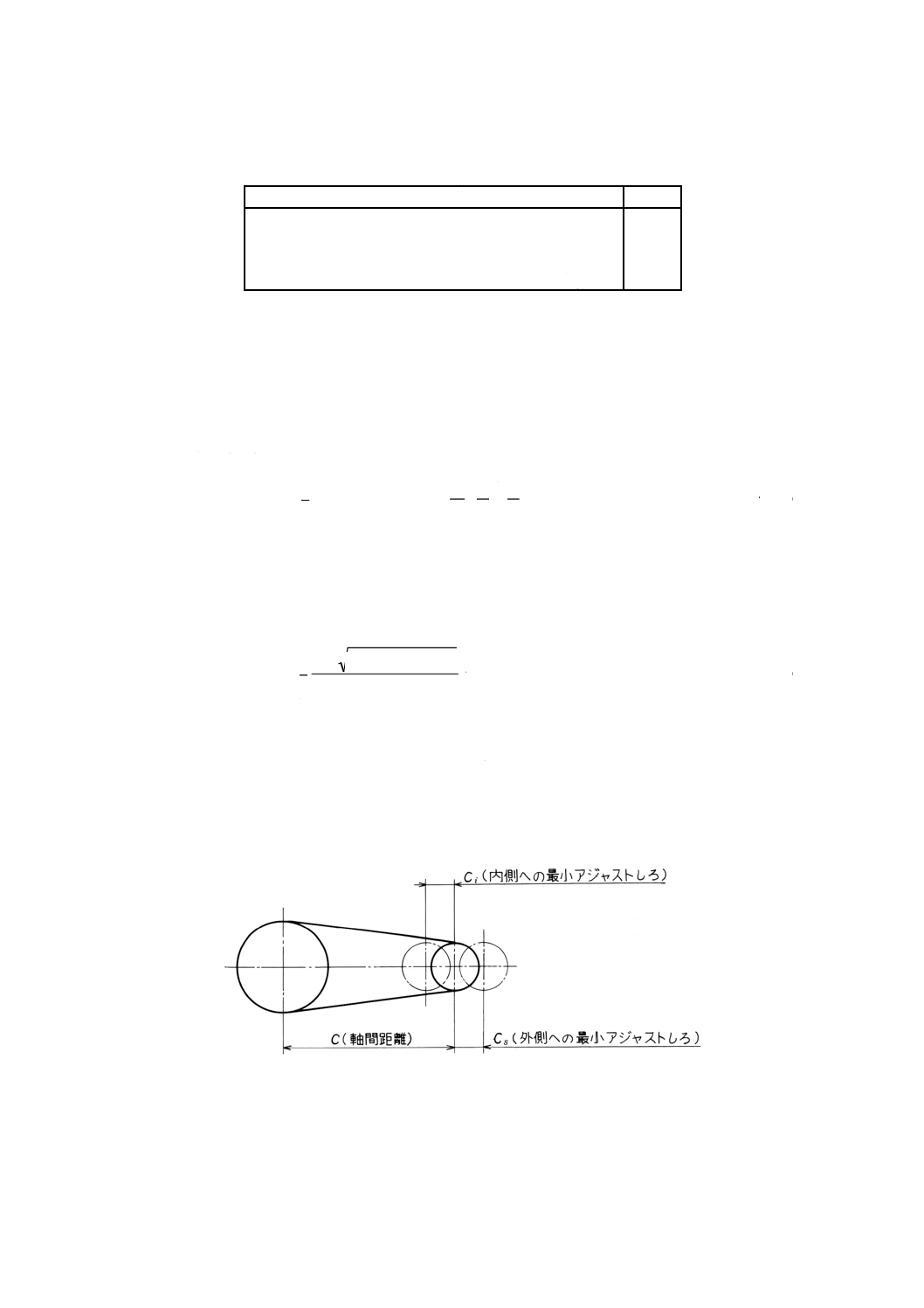
10.1 長さの測定 ベルトの有効周長さは,図1に示す装置を用いて測定する。
表4に示す長さ測定用プーリ2個にベルトを掛け,これに表4に示す力F0を加えた後,ベルトを少なく
とも2周以上回した後,プーリの軸間距離を測定し,ベルトの有効周長さは,次の式(1)によって算出する。
K
C
Le
+
=2
············································································· (1)
4
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに, Le: ベルトの有効周長さ (mm)
C: 軸間距離 (mm)
K: 定数 (mm) (表4参照)
図1 長さ測定装置の一例
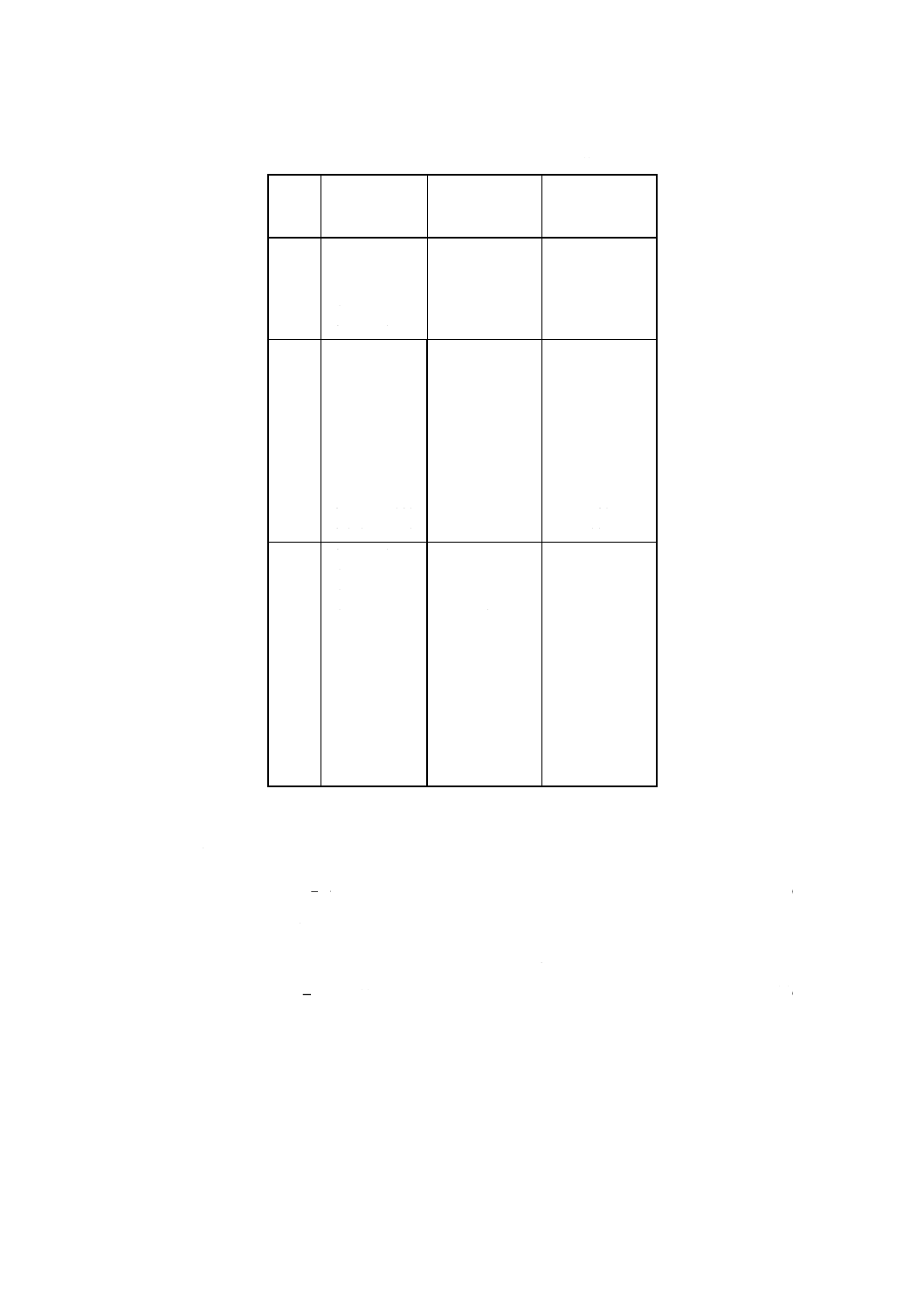
表4 長さ測定用プーリ
種類
be
mm
de
mm
hg
(最小)
αp
(°)
F0
(N)
K
mm
3V
8.90±0.03
97.08±0.03
9.0
38±0.17
440
305
5V
15.20±0.03
202.13±0.03
15.0
980
635
8V
25.40±0.03
404.25±0.03
25.0
2 210
1 270
10.2 引張試験 ベルトの引張試験は,1本の試料から長さ250mm以上の試験片を3個(3)採り,温度25℃
±5℃で引張試験機を用いて表5の測定時に加える力を加えたときの伸び,及び最大引張強さを測定する。
この場合,引張速度は規格値の1けた下の位まで求めてJIS Z 8401によって丸める。
伸びの試験は,標線間距離を100mmとして行う。
つかみは,試験片を完全につかめる構造のものを使用しなければならない。
なお,種類5V及び8Vについては,つかみ部分のゴムをはぎ取って試験してもよい。
注(3) 3個採れない場合には2個とし,そのことを記録しなければならない。
表5 測定時に加える力
種類
3V
5V
8V
力 kN
0.8
2.0
5.0
11. 製品の呼び方 製品の呼び方は,名称,種類及び呼び番号の順で呼ぶ。
5
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例
12. 表示 ベルトには,次の事項を表示しなければならない。
a) 種類
b) 呼び番号(4)
c) 製造業者名又はその略号
d) 製造年月又はその略号
注(4) 必要があれば,呼び番号に対する一組内の長さの差を表す略号を表示する。
6
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書1(規定) ベルト伝動−細幅Vベルト−
データムシステムによる長さ
Belt drives−Narrow V-belts−Lengths in datum system
序文 この附属書は,規格本体に規定する細幅Vベルトに対応するISO 4184 : 1992, Belt drives−Classical
and narrow V-belts−Lengths in datum systemから,NarrowV-belts(細幅Vベルト)に関する部分を翻訳した
ものである。
なお,この附属書で,点線の下線を施してある“参考”は,原国際規格にはない事項である。
1. 適用範囲 この附属書は,次の断面形状をもつ細幅Vベルトに関し,次の項目について適用する。
SPZ(データム幅 8.5mmの溝部の形状をもつプーリ用)
SPA(データム幅 11mmの溝部の形状をもつプーリ用)
SPB(データム幅 14mmの溝部の形状をもつプーリ用)
SPC(データム幅 19mmの溝部の形状をもつプーリ用)
− 推奨データム長さ
− データム長さの許容差
− 軸間距離変動
− データム長さ及び軸間距離変動の測定条件
なお,細幅Vベルト(以下,Vベルトという。)は,一般用Vベルト専用に設計されたプーリに使用す
ることはできない。
参考 データム幅とは,ISO 4183の表1, 図1及びJIS B 1855(細幅Vプーリ)の附属書表3で示さ
れるWdをいう。
2. 引用規格 次に掲げる規格は,この附属書に引用されることによって,この規格の規定の一部を構成
する。発行の時点では,表示された版が有効である。すべての規格は,改正されるものであり,この附属
書に基づいて同意した関係者は,次に列挙する規格の最新版を適用する可能性を調べるようすすめる。
ISO 3 : 1973 Preferred numbers−Series of preferred numbers
ISO 1081 : 1980 Drives using V-belts and grooved pulleys−Termino1ogy
ISO 4183 : 1989 Belts drives−Classical and narrow V-belts−Grooved pulleys (system based on datum
width)
参考 JIS B 1855の附属書が,この国際規格の対応部分に関し同等である。
ISO 9608 : 1988 V-belts−Uniformity of belts−Centre distance variation−Specifications and test method
3. 定義 この附属書に用いるVベルト伝動(ベルト及び溝付きプーリ)に関する用語及び記号の定義は,
ISO 1081による。
7
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4. データム長さLd
4.1
基準データム長さとは,7.1に規定する条件,力のもとで測定したデータム長さをいう。
4.2
Vベルトの基準データム長さの標準値Ldは,mm単位で表し,ISO 3に規定する任意のR20標準数
から選択され,その値を附属書1表1に示す。
附属書1表1 Vベルトの基準データム長さ
単位mm
基準データム
長さ
Ld
種類
基準データム
長さ
Ld
種類
SPZ
SPA
SPB
SPC
SPZ
SPA
SPB
SPC
630
+
3 150
+
+
+
+
710
+
3 550
+
+
+
+
800
+
+
4 000
+
+
+
900
+
+
4 500
+
+
+
1 000
+
+
5 000
+
+
1 120
+
+
5 600
+
+
1 250
+
+
+
6 300
+
+
1 400
+
+
+
7 100
+
+
1 600
+
+
+
8 000
+
+
1 800
+
+
+
9 000
+
2 000
+
+
+
+
10 000
+
2 250
+
+
+
+
11 200
+
2 500
+
+
+
+
12 500
+
2 800
+
+
+
+
5. データム長さの許容差
5.1
製造時の許容差 Vベルトの長さの製造時の許容差を,附属書1表2に示す。この許容差は,約±
0.01Lである。ここに,Lは,ISO 3に規定されているR10による標準数であり,mmで表されたデータム
長さと同じか又はこれをわずかに超える標準数である。
附属書1表2 Vベルトの長さの製造時の許容差
単位mm
基準データム長さ Ld
許容差
基準データム長さ Ld
許容差
500を超え
630以下
± 6
2 500を超え 3 150以下
± 32
630を超え
800以下
± 8
3 150を超え 4 000以下
± 40
800を超え 1 000以下
±10
4 000を超え 5 000以下
± 50
1 000を超え 1 250以下
±13
5 000を超え 6 300以下
± 63
1 250を超え 1 600以下
±16
6 300を超え 8 000以下
± 80
1 600を超え 2 000以下
±20
8 000を超え 10 000以下
±100
2 000を超え 2 500以下
±25
10 000を超え 12 500以下
±125
5.2
多本掛けで用いられる一組内の長さの許容差 多本掛けで用いられる一組内の長さの許容差は,附
属書1表3による。
8
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書1表3 一組内の長さの許容差
単位mm
基準データム長さ Ld
一組内の長さの最大許容差
1 250以下
2
1 250を超え
2 000以下
2
2 000を超え
3 150以下
4
3 150を超え
5 000以下
6
5 000を超え
8 000以下
10
8 000を超え 12 500以下
16
12 500を超えるもの
−
6. 軸間距離の変動 軸間距離の変動の許容値は,附属書1表4による。
附属書1表4 軸間距離の変動の許容値
単位mm
データム長さ
ベルトの上幅
25以下
25を超えるもの
1 000以下
1.2
1.8
1 000を超え 2 000以下
1.6
2.2
2 000を超え 5 000以下
2.0
3.4
5 000を超えるもの
2.5
3.4
参考 許容値とは,7.1の式(1)に示されるEmaxとEminの
差をいう。
7. 測定方法
7.1
長さの測定 データム長さの測定は,ISO 4183による主要寸法及び附属書1表5に示すデータム円
周長さCdをもつ二つの同一プーリに,ベルトを巻き付けて行う。二つのプーリは,長さ測定装置の平行
な水平軸に取り付けなければならない。移動可能なプーリに附属書1表5に示す力を加える。次に,プー
リを回転させ,ベルトが1〜3周し,プーリ溝になじませた後,二つのプーリの軸間距離を測定する。
ベルトのデータム長さLdは,次の式(1)によって算出する。
d
d
C
E
E
L
+
+
=
min
max
·································································· (1)
ここに,
E: プーリの軸間距離 (mm)
Cd: プーリのデータム円周長さ (mm)
附属書1表5 測定条件
種類
測定用プーリのデータム
円周長さ Cd (mm)
測定時の力
(N)
SPZ
300
360
SPA
450
560
SPB
600
900
SPC
1 000
1 500
7.2
軸間距離の変動の測定方法 軸間距離の変動は,ISO 9608に従って測定する。
8. 呼び方及び表示
8.1
呼び方 Vベルトの呼び方は,次の項目による。
− 種類(1.適用範囲に示すアルファベット3文字による。)
− データム長さ(附属書1表1による。)
9
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例 種類SPA,データム長さ1 250mmのベルトは,次のように呼ぶ。
SPA 1 250
8.2
表示 この附属書に適合するように製造されたVベルトには,適切な呼び方をベルトの外側の非伝
動面に明りょうで容易に消えないように表示しなければならない。
10
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2(参考) 細幅Vベルトの使い方
序文 この附属書は,細幅Vベルト(以下,ベルトという。)を使用する伝動装置を適正,かつ,経済的
に設計するため及び適切に使用するための参考であり,規定の一部ではない。
なお,プーリについては,JIS B 1855-1991(細幅Vプーリ)の本体による。
1. ベルトの選定 使用するベルトの種類の選定,有効周長さ(以下,長さという。)及び本数の決定は,
次の手順によって行うことが望ましい。
a) ベルトの種類の選定 設計動力及び小プーリの回転速度によって選定する。
b) ベルトの長さの決定 設計当初の軸間距離に基づいて算出したベルト長さ,及び本体の表3に規定さ
れているベルト長さによって決定する。
c) ベルトの本数の決定 1本当たりのベルトの伝動容量及び補正伝動容量を算出し,設計動力と使用条
件とからベルトの本数を決定する。
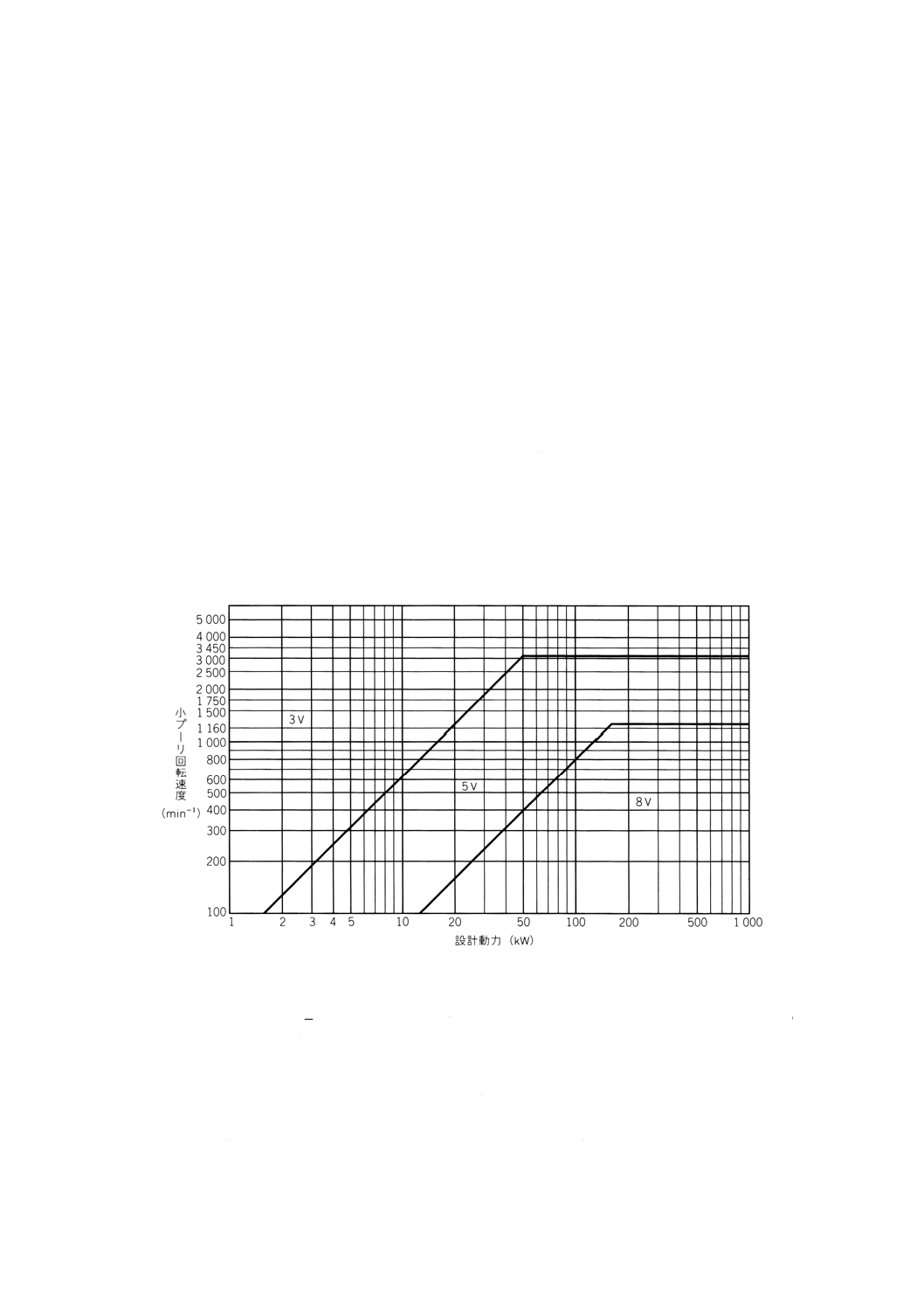
2. ベルトの種類の選定 ベルトの種類の選定は,次に示す設計動力及び小プーリの回転速度によって,
附属書2図1から選定する。もし,2種類の境界線近くになった場合には,両方のベルトについて検討し,
適正なベルトを選ぶ。
附属書2図1
2.1
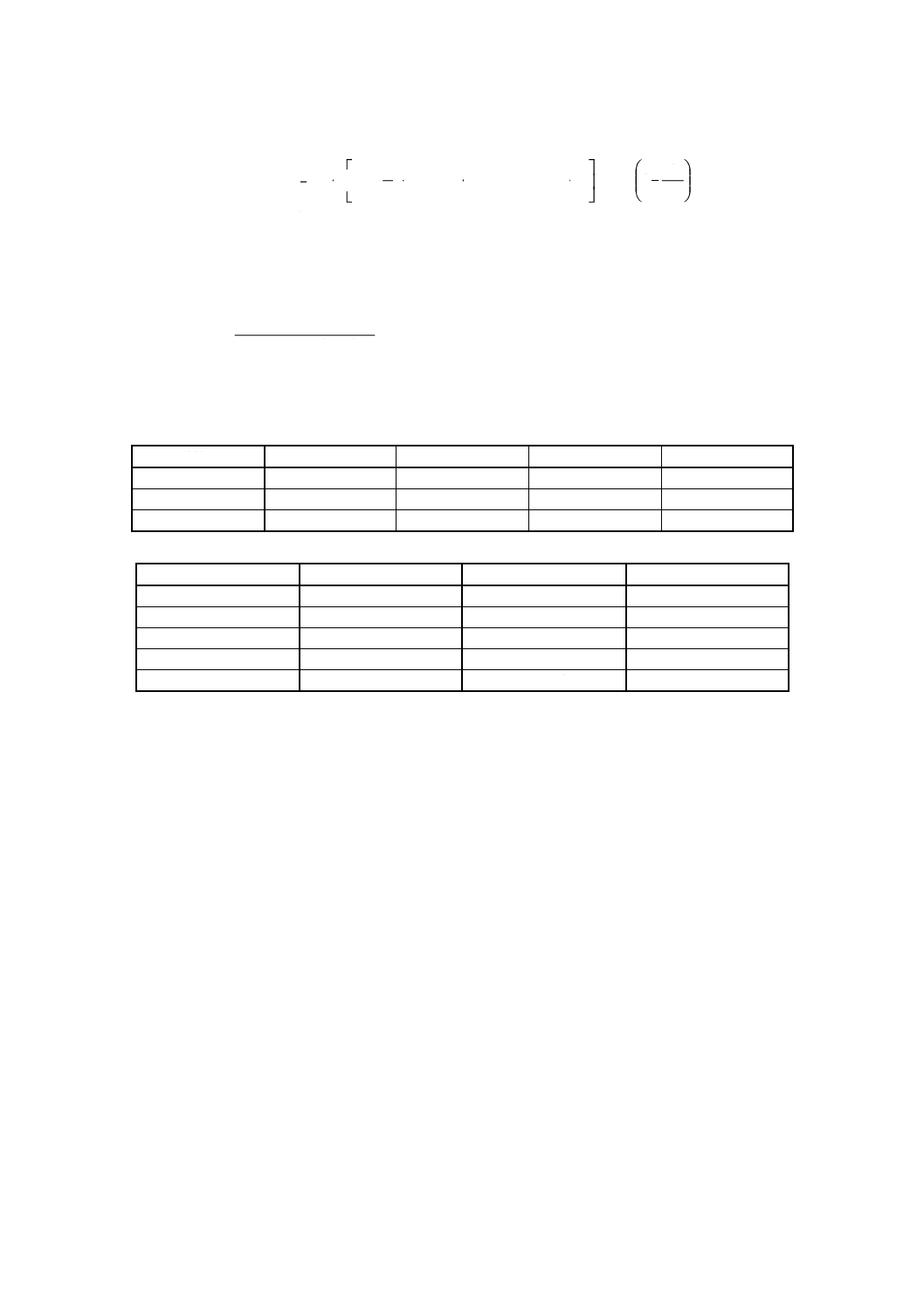
設計動力 設計動力は,次の式(1)によって算出する。
)
(
0
e
i
N
d
K
K
K
P
P
+
+
×
=
······························································ (1)
ここに,
Pd: 設計動力 (kW)
PN: 負荷動力 (kW)
Ko: 負荷補正係数
Ki: アイドラ補正係数
Ke: 環境補正係数
2.2
補正係数 補正係数は,使用する種々の条件に対し負荷動力を補正するために用い,次の3種類に
よる。
11
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 負荷補正係数 負荷補正係数は,原動機及び使用機械の負荷変動の大きさによって定め,附属書2表
1 (1) に示す。
注(1) 附属書2表1に使用機械の一例を示した。これ以外の使用機械については,附属書2表1を参考に
して負荷補正係数を決める。
附属書2表1 ベルトを使用する機械の一例及び負荷補正係数K。
ベルトを使用する機械の一例
原動機
最大出力が定格の300%以下のもの。
最大出力が定格の300%を超えるもの。
交流電動機(標準電動機,同期電動機)
直流電動機(分巻)
2気筒以上のエンジン
特殊電動機(高トルク)
直流電動機(直巻)
単気筒エンジン,ラインシャフト又は
クラッチによる運転
運転時間
運転時間
断続使用
1日,3〜5
時間使用
普通使用
1日,8〜10
時間使用
連続使用
1日,16〜24
時間使用
断続使用
1日,3〜5
時間使用
普通使用
1日,8〜10
時間使用
連続使用
1日,16〜24
時間使用
かくはん機(流体)
送風機(7.5kW以下)
遠心ポンプ,遠心圧縮機
軽荷重用コンベヤ
1.0
1.1
1.2
1.1
1.2
1.3
ベルトコンベヤ(砂,穀物)
粉練り機
送風機(7.5kWを超えるもの)
発電機
ラインシャフト
大形洗濯機
工作機械
パンチ,プレス,せん断機
印刷機械
回転ポンプ
回転,振動ふるい
1.1
1.2
1.3
1.2
1.3
1.4
バケットエレベータ
励磁機
往復圧縮機
コンベヤ
(バケット,スクリュー)
ハンマーミル
製紙用ミル,ビータ
ピストンポンプ
ルーツブロア
粉砕機
木工機械
繊維機械
1.2
1.3
1.4
1.4
1.5
1.6
クラッシャ
ミル(ボール,ロッド)
ホイスト
ゴム加工機
(ロール,カレンダー,押出機)
1.3
1.4
1.5
1.5
1.6
1.8
b) アイドラ補正係数 アイドラ補正係数は,アイドラを用いる場合の取付位置によって定め,附属書2
表2に示す。
12
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
なお,取付位置が複数になる場合は,各々の係数を加算する。
附属書2表2 アイドラ補正係数Ki
アイドラの位置
係数
ベルトの緩み側で,ベルトの内側から使用する場合
0
ベルトの緩み側で,ベルトの外側から使用する場合
0.1
ベルトの張り側で,ベルトの内側から使用する場合
0.1
ベルトの張り側で,ベルトの外側から使用する場合(2)
0.2
注(2) 通常の使用形態でないので,使用上は好ましくない。
c) 環境補正係数 環境補正係数は,始動停止の回数が多い場合,保守点検が容易にできない場合,粉じ
ん,熱,油類,水などが付着する場合には,各々の条件に対して0.2を加算する。
3. ベルトの長さの決定
3.1
ベルトの長さの選定 ベルトの長さは,次の式(2)(3)によって設計当初の軸間距離Cʼ (mm) に対応す
るベルトの長さL' (mm) を算出し,この長さに近いベルトを本体の表3から選定する。
C
d
D
d
D
C
L
e
e
e
e
′
+
+
+
+′
=
′
4
)
(
)
(
57
.1
2
2
··············································· (2)
ここに, De: 大プーリの有効直径 (mm)
de: 小プーリの有効直径 (mm)
注(3) 近似式である。
3.2
軸間距離及び最小アジャストしろ
3.2.1
軸間距離 選定したベルトの長さL (mm) に対応する軸間距離は,次の式(3)(3)によって算出する。
4
)
(2
2
2
e
ed
D
B
B
C
−
−
+
=
··························································· (3)
ここに,
C: ベルト長さに対する軸間距離 (mm)
De: 大プーリの有効直径 (mm)
de: 小プーリの有効直径 (mm)
B: L−1.57 (De+de) (mm)
3.2.2
最小アジャストしろ 最小アジャストしろは,ベルトの取付け及び張りしろを考慮し,附属書2
表3から求める。
附属書2表3 最小アジャストしろ
13
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
種類
ベルトの
呼び番号
内側への最小
アジャストしろ
Ci
外側への最小
アジャストしろ
CS
3V
250〜 475
15
25
500〜 710
20
35
750〜1 060
20
40
1 120〜1 250
20
50
1 320, 1 400
20
60
5V
500〜 710
25
35
750〜1 060
25
40
1 120〜1 250
25
50
1 320〜1 700
25
60
1 800〜2 000
25
65
2 120, 2 240
35
75
2 360,
−
35
80
2 500, 2 650
35
85
2 800, 3 000
35
90
3 150, 3 550
35
105
8V
1 000, 1 060
40
40
1 120〜1 250
40
50
1 320〜1 700
40
60
1 800〜2 000
50
65
2 120, 2 240
50
75
2 360, −
50
80
2 500, 2 650
50
85
2 800, 3 000
50
90
3 150, −
50
105
3 350, 3 550
55
105
3 750, −
55
115
4 000〜5 000
55
140
4. ベルトの本数の決定 多本掛けの場合のベルト本数は,次の式(4)によって計算するこの場合,小数点
以下は切り上げる。
c
d
P
P
Z=
··················································································· (4)
ここに,
Z: ベルトの本数
Pd: 設計動力 (kW)
Pc: ベルト1本当たりの補正伝動容量 (kW)
θ
K
K
P
P
L
c
×
×
=
········································································ (5)
ここに,
P: ベルト1本当たりの伝動容量 (kW) [式(6)による。]
KL: 長さ補正係数(附属書2表9参照)
Kθ: 接触角補正係数(附属書2表10参照)
4.1
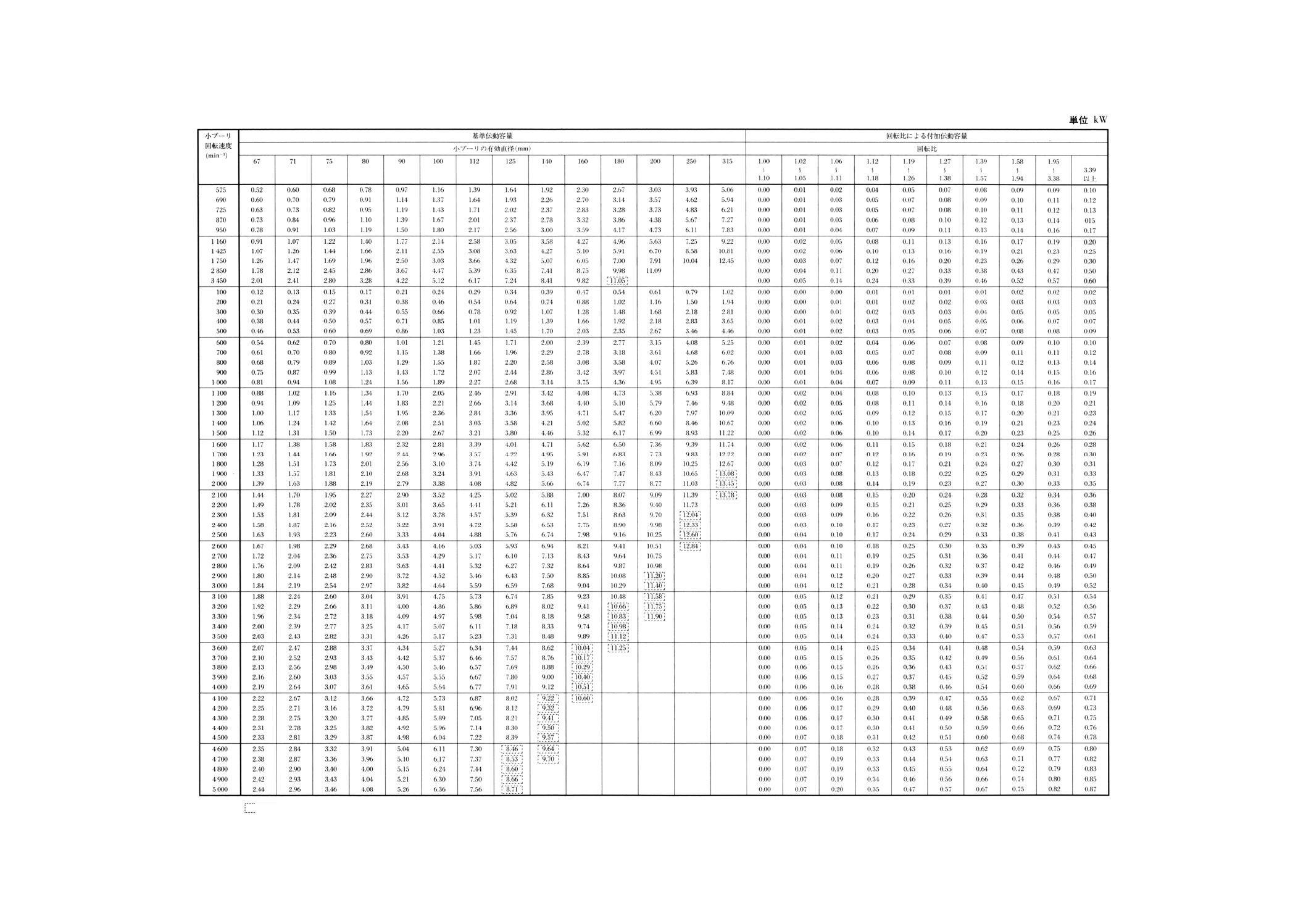
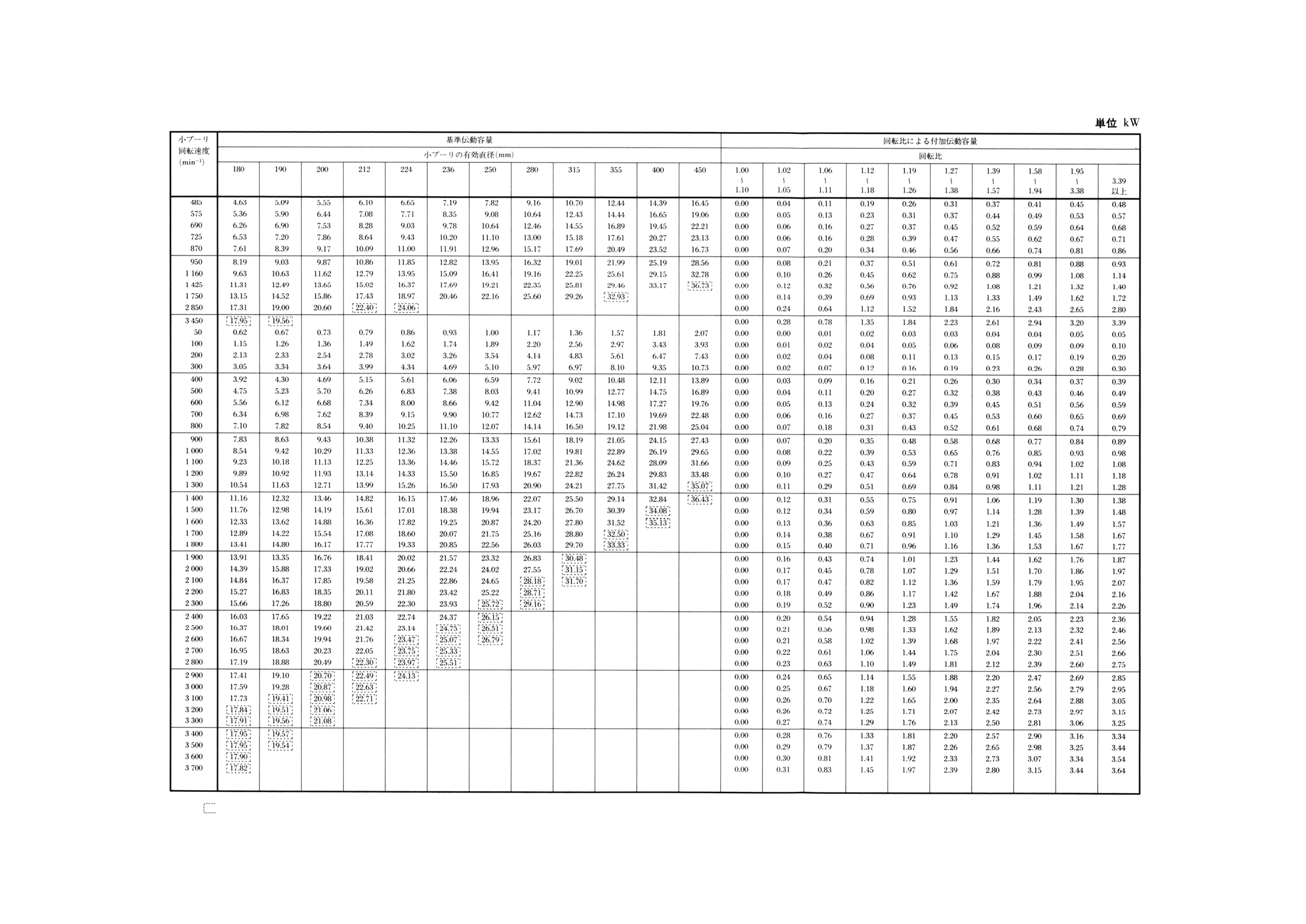
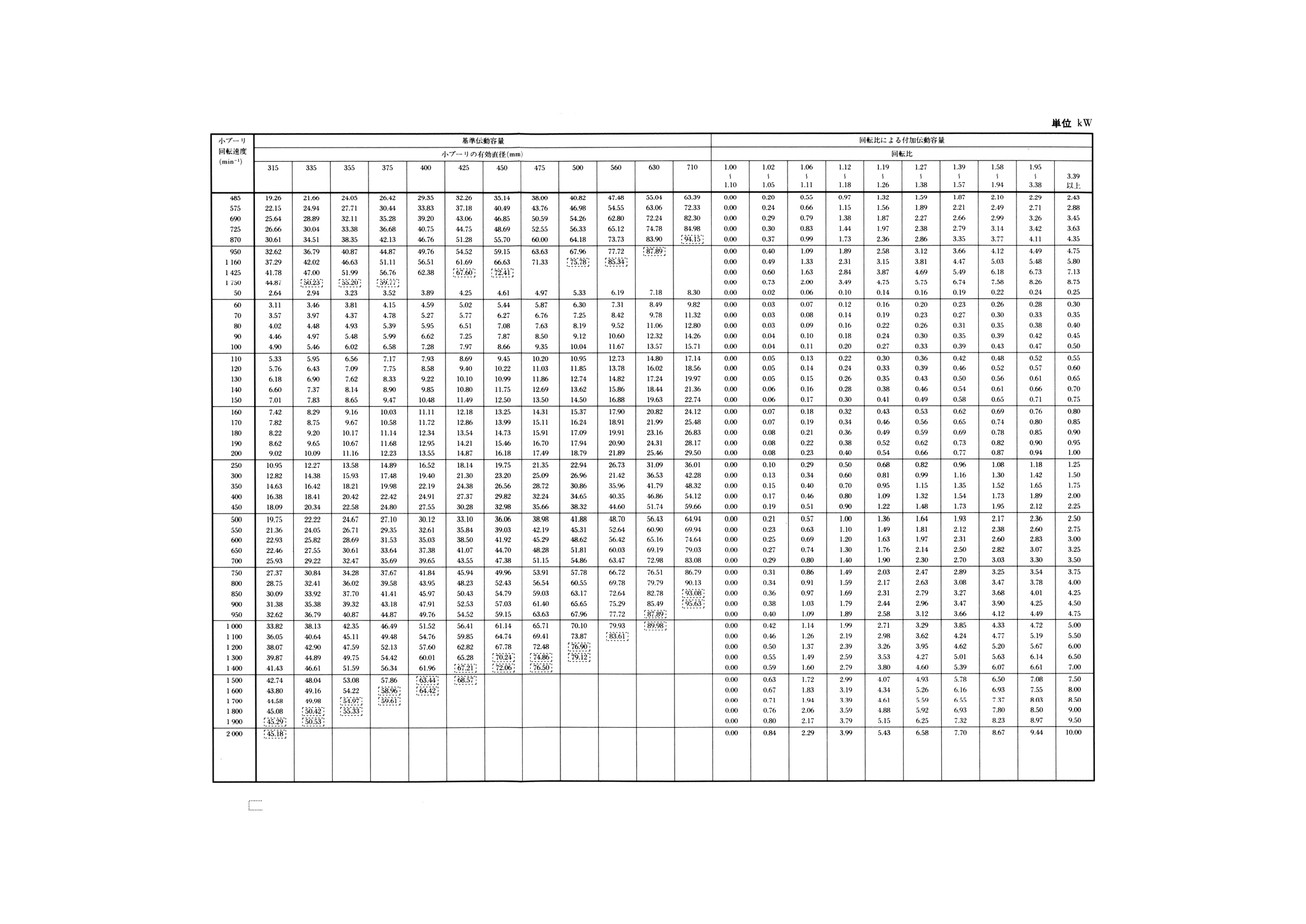
ベルトの伝動 容量ベルト1本当たりの伝動容量は,基準伝動容量に回転比(4)による付加伝動容量
を加えたものであり,次の式(6)によって算出するベルトの基準伝動容量とは,基準長さのベルト(3)で接触
角θ(附属書2図2参照)が180度のときの伝動容量をいう。
なお,小プーリの有効直径と回転速度とに対する基準伝動容量及び回転比による付加伝動容量を附属書
14
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2表6〜附属書2表8に示す。
−
+
−
−
−
=
r
m
m
m
m
K
n
C
n
d
C
n
d
C
d
C
C
n
d
P
1
1
)
log(
)
(
2
4
2
3
2
1
··············· (6)
ここに,
P: ベルト1本当たりの伝動容量 (kW)
dm: 小プーリ基準直径(6)(mm)
n: 小プーリ回転速度 (min-1)
C1, C2, C3, C4: 定数(附属書2表4参照)
Kr: 回転比による補正係数(附属書2表5参照)
注(4)
小プーリの基準直径
大プーリの基準直径
回転比=
(5) 基準長さのベルトとは,長さ補正係数(附属書2表9参照)が1.00のベルトをいう。
(6) 基準直径とは,JIS B 1855の4.2(溝部の形状及び寸法)のdmをいう。
附属書2表4 定数
種類
C1
C2
C3
C4
3V
6.262 4×10-5
1.533 1×10-3
9.881 4×10-18
5.590 4×10-6
5V
1.804 5×10-4
8.678 9×10-3
3.020 8×10-17
1.570 5×10-5
8V
4.851 0×10-4
4.412 9×10-2
8.269 2×10-17
4.110 3×10-5
附属書2表5 回転比による補正係数K.
回転比
Kr
回転比
Kr
1.00〜1.01
1.000 0
1.27〜1.38
1.080 5
1.02〜1.05
1.009 6
1.39〜1.57
1.095 6
1.06〜1.11
1.026 6
1.58〜1.94
1.108 9
1.12〜1.18
1.047 3
1.95〜3.38
1.119 8
1.19〜1.26
1.065 5
3.39以上
1.127 8
15
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2表6 細幅Vベルト3Vの伝動容量
備考1. のものは,プーリ外周部速度が30 (m/s) 以上になるので,炭素鋼又は鋳鋼のプーリを使用する。
2. この参考表に記載している小プーリ回転速度を超えた使用の場合は,ベルトメーカと相談することが望ましい。
16
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2表7 細幅Vベルト5Vの伝動容量
備考1. のものは,プーリ外周部速度が30 (m/s) 以上になるので,炭素鋼又は鋳鋼のプーリを使用する。
2. この参考表に記載している小プーリ回転速度を超えた使用の場合は,ベルトメーカと相談することが望ましい。
17
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2表8 細幅Vベルト8Vの伝動容量
備考1. のものは,プーリ外周部速度が30 (m/s) 以上になるので,炭素鋼又は鋳鋼のプーリを使用する。
2. この参考表に記載している小プーリ回転速度を超えた使用の場合は,ベルトメーカと相談することが望ましい。
18
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2
ベルトの補正伝動容量 ベルトの補正伝動容量Pcは,式(5)によって算出し,その補正係数は,次に
よる。
a) 長さ補正係数 長さ補正係数は,ベルトの呼び番号及び種類に応じて附属書2表9から選定する。
附属書2表9 長さ補正係数KL
ベルトの
呼び番号
種類
ベルトの
呼び番号
種類
3V
5V
8V
3V
5V
8V
250
0.83
−
−
1 400
1.15
1.02
0.92
265
0.84
1 500
1.03
0.93
280
0.85
1 600
1.04
0.94
300
0.86
1 700
1.05
0.94
315
0.87
1 800
1.06
0.95
335
0.88
−
−
1 900
−
1.07
0.96
355
0.89
2 000
1.08
0.97
375
0.90
2 120
1.09
0.98
400
0.92
2 240
1.09
0.98
425
0.93
2 360
1.10
0.99
450
0.94
−
2 500
−
1.11
1.00
475
0.95
2 650
1.12
1.01
500
0.96
0.85
2 800
1.13
1.02
530
0.97
0.86
3 000
1.14
1.03
560
0.98
0.87
3 150
1.15
1.03
600
0.99
0.88
−
3 350
−
1.16
1.04
630
1.00
0.89
3 550
1.17
1.05
670
1.01
0.90
3 750
1.06
710
1.02
0.91
4 000
1.07
750
1.03
0.92
4 250
1.08
800
1.04
0.93
4 500
−
−
1.09
850
1.06
0.94
4 750
1.09
900
1.07
0.95
5 000
1.10
950
1.08
0.96
1 000
1.09
0.96
0.87
1 060
1.10
0.97
0.88
1 120
1.11
0.98
0.88
1 180
1.12
0.99
0.89
1 250
1.13
1.00
0.90
1 320
1.14
1.01
0.91
b) 接触角補正係数 接触角補正係数は,小プーリ側について附属書2表10から選定する。
なお,ベルトの接触角 (θ) は,次の式(7)によって算出する。附属書2表10に
C
d
D
e
e−と接触角 (θ) 及
び接触角補正係数 (Kθ) との関係を示す。
C
d
D
e
e
2
sin
2
180
1
−
−
°
=
−
θ
··························································· (7)
ここに,
De: 大プーリの有効直径 (mm)
de: 小プーリの有効直径 (mm)
C: 軸間距離 (mm)
19
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2表10 接触角補正係数Kθ
C
d
D
e
e−
小プーリ側での
接触角θ (°)
接触角補正係数
Kθ
C
d
D
e
e−
小プーリ側での
接触角θ (°)
接触角補正係数
Kθ
0.00
180
1.00
0.80
133
0.87
0.10
174
0.99
0.90
127
0.85
0.20
169
0.97
1.00
120
0.82
0.30
163
0.96
1.10
113
0.80
0.40
157
0.94
1.20
106
0.77
0.50
151
0.93
1.30
99
0.73
0.60
145
0.91
1.40
91
0.70
0.70
139
0.89
1.50
83
0.65
5. ベルト及びプーリの使用上の注意
5.1
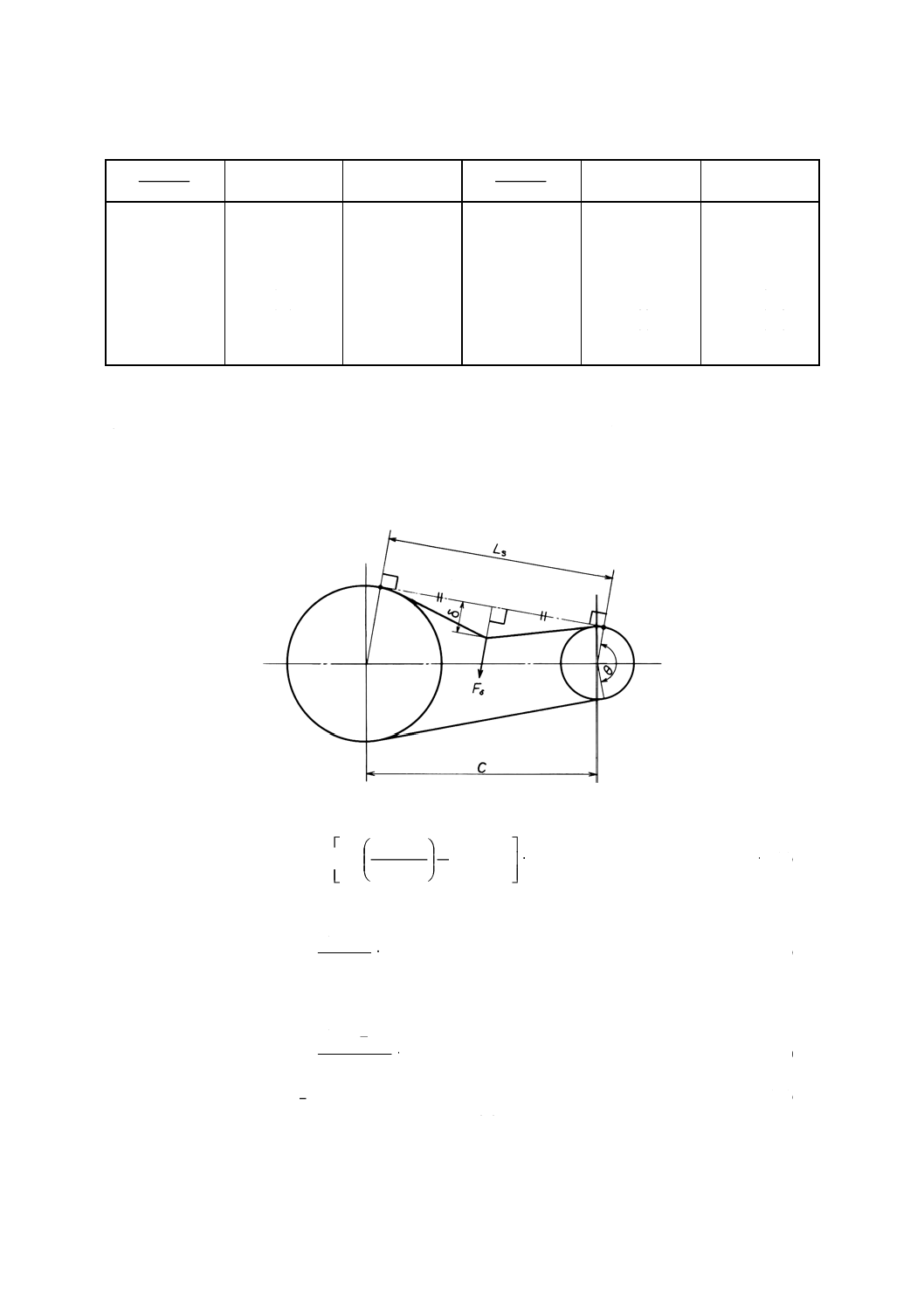
ベルトの張り方 ベルト伝動に必要な初張力は,次の式(8)によって算出し,附属書2図2に示す方
法によってベルトを張る。すなわち,ベルトのスパン長さLsの中央部分をFδの力で押さえたとき,ベルト
のたわみが,δになるように調節する。Fδは,次の式(9)又は式(10)によって,δは次の式(11)によってそれぞ
れ算出する。
附属書2図2 ベルトの張り方
+
−
=
2
0
5.2
500
9.0
υ
υ
θ
θ
m
Z
P
K
K
T
d
················································ (8)
多本掛けのとき
16
0
Y
AT
F
+
=
δ
············································································ (9)
1本掛けのとき
16
0
Y
L
L
AT
F
s
+
=
δ
······································································ (10)
s
L
016
.0
=
δ
·············································································(11)
ここに,
T0: 初張力 (N)
Pd: 設計動力 (kW)
m: ベルト単位長さ当たりの質量(kg/m)(附属書2表11参照)
20
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
v: ベルトの速度 (m/s)
Z: ベルトの本数
Kθ: 接触角補正係数
Fδ: スパンLsの中央におけるたわみδに必要な力 (N)
L: ベルトの長さ (mm)
A: 定数(附属書2表12参照)
Y: 定数(附属書2表11参照)
δ: たわみ (mm)
Ls: スパン長さ (mm)
4
)
(
2
2
e
e
s
d
D
C
L
−
−
=
C: 軸間距離 (mm)
De: 大プーリの有効直径 (mm)
de: 小プーリの有効直径 (mm)
附属書2表11 ベルト単位長さ当たりの質量と定数Y
種類
m (kg/m)
Y
3V
0.08
20
5V
0.20
39
8V
0.50
98
附属書2表12 定数A
新しいベルトの場合
張り調整の場合
1.5
1.3
5.2
軸荷重 静軸荷重は,次の式(12),動軸荷重は,次の式(13)によって算出する。
なお,軸部の強度計算には,式(12)及び式(13)によって算出した値以上を用いなければならない。
静軸荷重の求め方
Z
T
A
Fr =
2
sin
2
0
θ
································································· (12)
動軸荷重の求め方
2
sin
102
)
5.2(
8.9
θ
υ
θ
θ
d
i
P
K
K
F
−
=
···················································· (13)
ここに,
Fr: 静軸荷重 (N)
Ar: 1.5(附属書2表12の定数Aの新しいベルトの場合の値)
T0: 初張力 (N) [式 (8) 参照]
θ: 小プーリの接触角 (°)
Z: ベルトの本数
Fi: 動軸荷重 (N)
Kθ: 接触角補正係数(附属書2表10参照)
Pd: 設計動力 (kW)
v: ベルトの速度 (m/S)
21
K 6368 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS K 6368 改正原案作成委員会 構成表
氏名
所属
(委員会)
寺 田 利 邦
早稲田大学専門学校
(幹事)
○ 松 永 善 治
ユニッタ株式会社
細 川 幹 夫
通商産業省基礎産業局
岡 林 哲 夫
工業技術院標準部
加 山 英 男
財団法人日本規格協会
小 山 富 夫
大阪工業大学
鈴 木 守
社団法人日本ゴム協会
○ 秋 葉 光 雄
財団法人化学品検査協会
渡 邉 修 次
株式会社本田技術研究所
針 江 博 史
株式会社富士電機総合研究所
大 沼 亮 三
株式会社荏原総合研究所
田 仁 哲
社団法人日本工作機械工業会
金 田 光 夫
鍋屋工業株式会社
○ 川 嶋 正 彦
三ツ星ベルト株式会社
○ 谷 和 義
バンドー化学株式会社
○ 大津留 武 光
ニッタ株式会社
○ 藤 原 透
株式会社椿本チエイン
○ 味 岡 智
ゴムベルト工業会
(事務局)
○ 黒 田 博 一
ゴムベルト工業会
備考 ○印は,分科会委員を兼ねる。