F 9605:2006
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,財団法人日本船舶標準協会(JMSA)から,工
業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,国土
交通大臣が制定した日本工業規格である。
制定に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,ISO 22090-1:2002,Ships and marine
technology−Transmitting heading devices (THDs)−Part 1: Gyro-compasses,ISO 22090-2:2004,Ships and marine
technology−Transmitting heading devices (THDs)−Part 2: Geomagnetic principles及びISO 22090-3:2004,Ships
and marine technology−Transmitting heading devices (THDs)−Part 3: GNSS principlesを基礎として用いた。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。国土交通大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に係る確認について,責任は
もたない。
JIS F 9605には,次に示す附属書がある。
附属書(参考)JISと対応する国際規格との対比表
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 1
2. 引用規格 ························································································································ 2
3. 定義 ······························································································································ 3
4. 性能要件 ························································································································ 4
4.1 ジャイロ原理 ················································································································ 4
4.2 地磁気原理 ··················································································································· 5
4.3 GNSS原理 ···················································································································· 5
5. 精度 ······························································································································ 6
5.1 ジャイロ原理 ················································································································ 6
5.2 地磁気原理 ··················································································································· 7
5.3 GNSS原理 ···················································································································· 8
6. 試験方法及び試験結果要件 ································································································ 8
6.1 ジャイロ原理 ················································································································ 8
6.2 地磁気原理 ·················································································································· 12
6.3 GNSS原理 ··················································································································· 13
7. 表示及び識別 ················································································································· 15
7.1 コンパス安全距離 ········································································································· 15
7.2 表示及び識別 ··············································································································· 15
附属書(参考)JISと対応する国際規格との対比表 ···································································· 17
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
F 9605:2006
船舶及び海洋技術−真船首方位信号伝達装置
Ships and marine technology−Transmitting heading devices (THDs)
序文 この規格は,2002年に第1版として発行されたISO 22090-1:2002,Ships and marine technology−
Transmitting heading devices (THDs)−Part 1: Gyro-compasses,2004年に第1版として発行されたISO
22090-2:2004,Ships and marine technology−Transmitting heading devices (THDs)−Part 2: Geomagnetic principles
及び2004年に第1版として発行されたISO 22090-3:2004,Ships and marine technology−Transmitting heading
devices (THDs)−Part 3: GNSS principlesを翻訳し,3部に分かれている一つのISO規格を一本化し,技術的
表現を組み替え,一つの規格として統合・作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,原国際規格を変更している事項である。変更の一覧
表をその説明を付けて,附属書(参考)に示す。
1. 適用範囲 この規格は,SOLAS条約1974年(改正)第Ⅴ章で要求される真船首方位信号伝達装置と
してのジャイロ原理,地磁気原理,GNSS原理に対する原理ごとの構造,性能及び試験方法について規定
する。
なお,真船首方位信号伝達装置の性能基準であるIMO決議MSC.116 (73) の勧告から抜粋したすべての
必要条件は,斜体で示す。
真船首方位信号伝達装置は,真船首方位に関する情報を提供する電子装置である。
THD装置は,JIS F 0812に関連付けられるIMO決議A.694 (17) に規定される一般要件と,使用されるセ
ンサ部の関連規格に加えて,次の最小要件を満足しなければならない。
適用するセンサ部に対して,IMO性能基準が特別に地理的運用範囲を規定しない場合は,THDは次の範
囲で運用される。
a) 最大旋回角速度20°/秒。
b) 最低,南緯70° 〜北緯70° まで。
この規格の要件を満足するTHDは,SOLAS条約第Ⅴ章に規定される船首方位情報として使用すること
ができる。
さらに,このTHD性能基準は,船首方位情報を供給する適切な装置の搭載要件として,HSC Code,
Chapter 13で規定される動的性能要件を満足しなければならない。
備考1. この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO 22090-1:2002,Ships and marine technology−Transmitting heading devices (THDs)−Part 1:
Gyro-compasses (MOD)
ISO 22090-2:2004,Ships and marine technology−Transmitting heading devices (THDs)−Part 2:
2
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Geomagnetic principles (MOD)
ISO 22090-3:2004,Ships and marine technology−Transmitting heading devices (THDs)−Part 3:
GNSS principles (MOD)
2. ジャイロ原理の場合 船速30 kn以上70 kn以下の船舶は,IMO決議A.821 (19) の要求に従
わなければならない。
3. 地磁気原理の場合 ピックアップセンサをもつ標準磁気コンパスを,この地磁気原理方式の
センサ部として用いることができる。ただし,THDがHSC以外に搭載される場合の旋回誤
差はISO 2269の2.2.7.4の規定による。
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版(追補を含む。)を適用する。
なお,(*1)はジャイロ原理,(*2)は地磁気原理,(*3)はGNSS原理で引用。
JIS F 8081 船用電気設備及び電子機器−電磁両立性(*1)(*2)(*3)
備考 IEC 60533,Electrical and electronic installations in ships−Electromagnetic compatibilityが,この
規格と一致している。
JIS F 0812 船舶の航海と無線通信機器及びシステム−一般要求事項−試験方法及び試験結果要件
(*2)(*3)
備考 IEC 60945:2002,Maritime navigation and radiocommunication equipment and systems−General
requirements−Methods of testing and required test resultsが,この規格と一致している。
JIS F 9101 船用磁気コンパス(*2)
備考 ISO 449:1997,Ships and marine technology−Magnetic compasses, binnacles and azimuth reading
devices−Class Aからの引用事項は,この規格の該当事項と同等である。
JIS F 9102 船舶及び海洋技術−船用電子磁気コンパス(*2)
備考 ISO 11606:2000,Ships and marine technology−Marine electromagnetic compassesが,この規格
と一致している。
ISO 694 Ships and marine technology−Positioning of magnetic compasses in ships(*1)(*3)
ISO 2269 Shipbuilding−Class A magnetic compasses, azimuth reading devices and binnacles−Tests and
certification(*2)
IEC 61162 (all parts) Maritime navigation and radiocommunication equipment and systems−Digital
interfaces(*2)(*3)
IEC 61162-1 Maritime navigation and radiocommunication equipment and systems−Digital interfaces−Part
1: Single talker and multiple listeners(*1)
IEC 61162-2 Maritime navigation and radiocommunication equipment and systems−Digital interfaces−Part
2: Single talker and multiple listeners, high-speed transmission(*1)
IMO決議A.424 (XI) Performance standards for gyro-compasses(*1)(*2)(*3)
IMO決議A.694 (17) General requirements for shipborne radio equipment forming part of the global maritime
distress and safety system(GMDSS)and for electronic navigational aids(*1)(*3)
IMO決議A.813 (19) General requirements for electromagnetic compatiblity(EMC)for all electrical and
electronic ship's equipment(*1)(*3)
IMO決議A.821 (19) Performance standards for gyro-compasses for high-speed craft(*1)(*2)(*3)
3
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
HSC Code,chapter 13(*2)(*3)
3. 定義 この規格で用いる主な用語の定義は,次による。
備考 (*1)はジャイロ原理,(*2)は地磁気原理,(*3)はGNSS原理で用いる。
3.1
地磁気原理(geomagnetic principle)(*2) THDが,その方位を示す特性を地磁気に依存する原理の
もの。地球磁界を直接検出する方式を電子磁気コンパス方式のTHDといい,標準磁気コンパスから磁界
を検出する方式を磁気コンパス方式のTHDという。
3.2
ジャイロコンパス(gyro-compass)(*1) 船首方位センサとしてのジャイロコンパスと関連した船
首方位伝達システムの両方のすべてを含む装置。
3.3
船首方位(heading)(*1)(*2)(*3) THD機能に入力されるあらゆる船首方位。
備考 水平面上に船の船首尾線を鉛直(垂直)に投影させた方位で定義される。真北,磁北又はコン
パス北と比較して測られるときは,それぞれ真方位,磁気方位,コンパス方位と定義される。
そして,通常はコンパスカードの周りに,北から始めて時計回りの方角で3けた(桁)の数字
で表現される。
3.4
センサ部(sensing part)(*1)(*2)(*3) 伝達部に接続されるあらゆる船首情報又は,方位源情報を
検出する感知機能(例えば,GNSSアンテナ)。
3.5
伝達部(transmitting part)(*1)(*2)(*3) センサ部から船首方位情報を受け,要求される精度の信
号に変換する装置。
3.6
真船首方位(true heading)(*1)(*2)(*3) 真北(000°)〜360° まで,時計回りに測り,真子午線
を通る鉛直面と船首尾線を通る鉛直面とがなす水平角。
3.7
伝達と分解度誤差(transmission and resolution error)(*1)(*2) この情報を受信装置に伝達する系
に起因する誤差。
備考 このような系には,情報値をコード化する限界能力があり得る。例えば,ステップ出力(1/6)°
の分解度。この誤差は,THD内部とその情報をコード化する出力にも起因する。
3.8
静的誤差(static error)(*1)(*2)(*3) システムの作動中に値が変化しない静的状態で,いずれか
の理由で生じる誤差であり,この誤差は静的な状態の下で測定されなければならない。
備考1. ジャイロ原理の場合,この誤差は3.17で定義するものと同じ。
2. GNSS原理の場合,静的誤差は個々のコース偏差の統計的な平均(すなわち,RMS)からな
る。
3.9
動的誤差(dynamic error)(*1)(*2)(*3) 振動,ローリング,ピッチング又は1軸方向の加速度な
どシステム上で動的な影響によって生じる誤差。
備考 この誤差は,通常環境の影響及びシステムのパラメータに関係する振幅と周期をもつ。
ジャイロ原理の場合,この誤差は3.18で定義するものと同じ。
3.10 追従誤差(follow-up error)(*1)(*2)(*3) 検出した値とシステムの出力端で利用可能な対応する
情報との差。
例えば,この誤差は,旋回中の船の実際の船首方位とシステムの出力端において利用可能な情報との差
である。
備考 追従誤差は,システムが静止しているときは現れない。
3.11 磁気コンパス(magnetic compass)(*2) 磁北を求め,永久的にその方位を保持するように設計され
た機器。
4
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.12 磁気センサ(magnetic sensor)(*2) 磁気コンパスのあるなしにかかわらず,船首方位情報に関し
て磁場を検出して,プロセッサに情報を出力する磁気センサ部。
3.13 処理部(processor)(*2) 自差を調整することによって,伝達部のための磁気船首方位情報を得る
装置。
3.14 静定時間(settling time)
(*3) THDが,完全に有効な衛星アルマナックの状態で電源を入れてから,
6.3.3で規定する精度で船首方位信号を出力できるまでの時間。
3.15 静定(settled)(*1) コンパスを水平に固定された台上に設置した状態で,30分間隔で読み取られ
た3回の読取値が0.7° の範囲内にあるときの安定した状態。
備考 静定時間は,最初の方位誤差で起動した時刻から静定した3回目の読取値までの経過時間であ
る。
3.16 静止点船首方位(settle point heading)(*1) 3.15によって,コンパスが静定した後,20分間隔で読
み取られた10回の指示値の平均値。
3.17 静止点誤差(settle point error)(*1) 静止点船首方位と真方位との差。3.8及び3.16参照。
3.18 誤差(error)(*1) 観測値と3.16で定義した静止点船首方位との差。3.9参照。
3.19 緯度誤差(latitude error)(*1) ある種のジャイロコンパスに存在し,その大きさと符号がその地の
緯度によって変わる誤差。
3.20 速度誤差(speed error)(*1) 大きさと符号が船の速度,針路及びその地の緯度によって,変わる
ジャイロコンパスに存在する誤差。
3.21 マスターコンパス(master compass)(*1) 伝達部又はその他の航行援助装置に船首方位情報を供給
する主コンパス。
3.22 動揺試験台(scorsby table)(*1)(*3) プラットフォームを独立して3軸に動揺をさせる試験装置。
船の動揺をシミュレートするために使用される。
3.23 隅点方向運動(intercardical motion)(*1) 船の完全な動きに代わって,動的シミュレーション試験
で動揺中の誤差試験を行う際の運動。
3.24 GNSS原理(GNSS principles,Global Navigation Satellite System principles)(*3) GNSS信号のRF
搬送波位相の測定によって船首方位を決定するTHDの原理。
4. 性能要件
4.1
ジャイロ原理
4.1.1
機能性 この規格では,ジャイロコンパスはTHDの機能として規定される。
THDは,方位信号を生成し,他の装置のために適切な信号を出力する。
3.4で定義するいかなるセンサ部も装置に含まれてもよい。
あらゆる修正装置又はパラメータは,不注意な操作に対して保護されていなければならない。
電子的修正のため,手作業入力で設定可能な値は適切な手段によって表示されなければならない。
装置は4.1.2〜4.1.8に示される必要条件に従わなければならない。
4.1.2
連続作動 装置は,6.1.10に規定する振動,湿度,温度及び電源変動の条件下で連続して作動しな
ければならない。
4.1.3
情報 センサを除くすべての表示及びすべての船首方位出力は真船首方位を指示しなければなら
ない。
表示は,(1/10)° が読み取れるように表示しなければならない。
5
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.1.4
船首尾線マーク コンパスは,設置を容易にするために,船の船首尾線マークを付けなければなら
ない。
4.1.5
速度誤差修正 速度及び緯度による誤差を,修正するための手段を備えなければならない。
自動速度修正のためには,承認された正しい速度供給源を用いなければならない。
4.1.6
船首方位情報 THDは,真船首方位情報を他の航法装置に供給できるものとする。
船首方位情報は,5. で定義する精度の出力を供給しなければならない。
少なくとも一つの出力は,関連する国際船用インタフェース規格として適切なIEC 61162-1及びIEC
61162-2に適合しなければならない。
4.1.7
状態表示 ジャイロコンパスの使用可能状態を表示しなければならない。
4.1.8
警報信号 次の状態の警報を備えなければならない。
− THDの故障。
− 電源喪失。
警報出力は,すべての警報状態において提供されるものとする。
4.2
地磁気原理
4.2.1
機能性 THDの地磁気原理は,磁界の水平成分を検知する。また,他の装置のために,船の真船
首方位信号を生成する。
磁気コンパスを利用するセンサの一つの方式で,コンパスの性能及び必要条件は,JIS F 9101の船用磁
気コンパスを参照する。他のセンサの方式は,JIS F 9102の船用電子磁気コンパスに記述する性能要件を
満足しなければならない。
4.2.2
情報
4.2.2.1 センサを除くすべての表示及びすべての船首方位出力は,真船首方位を指示しなければならない。
4.2.2.2
電子的補正のため,手作業で設定可能な値は,適切な手段によって表示可能でなければならない。
4.2.3
船首尾線マーク ビナクル又はセンサ装置の収納ケースの底部には,設置を容易にするために船
首尾線マークを刻まなければならない。装置は,船首尾線上に設置されなければならない。磁気コンパス
方式のTHDでは,コンパスカードの中心と船首指標を通る鉛直面とに対して±0.5° 以内としなければなら
ない。
4.2.4
船首方位情報 THDは,真船首方位情報を他の航法装置に供給できるものとする。
少なくとも一つの出力は,関連する国際船用インタフェース規格として適切なIEC 61162シリーズに適
合しなければならない。
4.2.5
電線 直流電源用及びユニット間の接続用の電線は,船首情報に対して認められるいかなる誤差も
引き起こしてはならない。
4.2.6
ハウジングの無磁性 磁気センサ装置のハウジングは,無磁性でなければならない。
4.2.7
警報信号 次の状態の警報を備えなければならない。
− THDの故障。
− 電源喪失。
警報出力は,すべての警報状態において提供されるものとする。
4.3
GNSS原理
4.3.1
機能性 THDは船首方位信号を受けて,他の装置のために適切な出力を生成する電子装置である。
いかなるセンサ部も装置に含まれてもよい。
あらゆる補正装置又はパラメータは,不注意な操作に対して保護されていなければならない。電子的補
6
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
正のため,手作業で設定可能な値は,適切な手段によって表示可能でなければならない。
4.3.2
連続動作 装置は,6.3.8に規定する振動,湿度,温度及び電源変動の条件下で連続して動作しな
ければならない。
4.3.3
情報表示 センサを除くすべての表示及びすべての船首方位出力は,真方位を指示しなければなら
ない。
4.3.4
方位出力整合 THDは,船首尾線に対して検知方位との整合の手段をもたなければならない。
4.3.5
GNSS信号の短い中断の補償 少なくとも60秒間のGNSS信号の中断があっても,5.3.2及び5.3.3
で定義する船首方位精度を維持するように補償しなければならない。
4.3.6
静定時間 静定時間は,静的な条件下で,完全に有効な衛星アルマナックの状態で10分以下とし
なければならない。
4.3.7
船首方位情報 THDは,船首方位を少なくとも50 msに1回更新しなければならない。
少なくとも一つの出力は,関連する国際船用インタフェース規格として適切なIEC 61162シリーズに適
合しなければならない。
4.3.8
警報 次の状態の警報を備えなければならない。
− THDの故障。
− 電源喪失。
− GNSS連続信号が60秒を超えて遮断。
警報出力は,すべての警報状態において提供されるものとする。
5. 精度 THDは,可能な限りIMO決議A.424 (XI) 又はIMO決議A.821 (19) で規定する海象条件の下に,
装置の出力端で,少なくとも次の精度に適合しなければならない。
5.1
ジャイロ原理
5.1.1
伝達データ精度 分解度誤差を含め,伝達誤差は±0.2° 未満でなければならない。
5.1.2
静的状態下での精度
5.1.2.1
静的状態下での静定時間 コンパスは,製造業者の指示書に従って起動してから6時間以内に静
定しなければならない。
5.1.2.2
静的誤差(静止点誤差)
5.1.2.2.1
船首方位において3.8(3.17)で定義した静的誤差(静止点誤差)は±1° ×緯度のセカント(secant
latitude)未満で,船首方位指示値と平均値との差のRMS値は0.35° ×緯度のセカント(secant latitude)未
満でなければならない。
5.1.2.2.2
ある運転時と他の運転時の静止点誤差の再現性は,±0.35° ×緯度のセカント(secant latitude)
以内としなければならない。
5.1.3
運航状態下での精度
5.1.3.1
運航状態下での静定時間 コンパスは,船が周期6〜15秒,最大角5°,最大水平加速度0.22 m/s2
の単弦運動の横揺れ及び縦揺れをしている状態で,製造業者の指示書に従って起動してから6時間以内に
静定しなければならない。
5.1.3.2
動的誤差 動的誤差は,±1.5° ×緯度のセカント(secant latitude)未満でなければならない。
動的誤差の振幅が±0.5° を超える場合は,誤差の周波数は0.033 Hz未満,同じく周期は30秒以上でなけ
ればならない。
7
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.1.3.3
運航状態下での性能 北緯又は南緯70° までの緯度において,その船が航行する10° の緯度範囲
で,
− 30 knの速度と針路の影響を修正した後,残存する定常状態での誤差は,±0.35° ×緯度のセカント
(secant latitude)を超えてはならない。
− 30 knの速度の急変による最大誤差は,最小に抑えられ,かつ,±3° を超えてはならない。水平加速
度は,2.0 m/s2を超えてはならない。
− 30 knまでの速度で最大旋回20°/秒での急激な180° 変針による誤差は,±4.5° を超えてはならない。
水平加速度は2.0 m/s2を超えてはならない。
5.1.3.4
追従誤差 旋回レート別の追従誤差は,次による。
− 旋回レート10°/秒までで,±0.5° 未満。
− 旋回レート10°/秒から20°/秒までの間で,±1.5° 未満でなければならない。
5.2
地磁気原理
5.2.1
伝達データの精度 伝達誤差は,分解能による誤差を含み,±0.2° 未満でなければならない。
5.2.2
静的誤差(静止点誤差) 静的誤差は,±1.0°(95 %)未満でなければならない。
5.2.3
動的誤差 動的誤差の振幅は,±1.5°(95 %)未満でなければならない。
動的誤差の振幅が±0.5° を超える場合は,誤差の周波数は0.033 Hz以下,周期は30秒以上でなければな
らない。
5.2.4
追従誤差 旋回速度における追従誤差は,次による。
− 旋回レート10°/秒までで,±0.5° 未満。
− 旋回レート10°/秒から20°/秒までの間で,±1.5° 未満でなければならない。
5.2.5
システムに要求される静定時間 磁気コンパス方式のセンサにおいて,方位システムはもとの方位
に静定しなければならない。
カードの北を静止点から90° 片寄せて放し,その瞬間から最初の静止点の1° 以内に戻る時間は,温度
20±3 ℃において,
H
/
600
57
秒以下としなければならない。ここに,Hは試験を行う場所の磁束密度の
水平成分であって,マイクロテスラ(μT)で与えられる。
5.2.6
磁気偏差による磁気船首方位の改正 真船首方位を得るため,磁気偏差による磁気船首方位の改正
は0.5° の誤差以内としなければならない。磁気偏差を改正する際の入力は,自動又は手動のいずれかとし
なければならない。
電子補正に使用する値は,適切な手段によって表示し,保存しなければならない。また,電源を入れた
とき,その値は自動的に回復しなければならない。
5.2.7
自差修正後の残存自差 係数A,B,C及びDの修正は,各自差の残存自差が±1° 未満にすること
ができなければならない。
5.2.7.1
ベアリングによる確認 ビナクルには,船体の永久磁気の水平分力が原因の自差を修正するため
の装置を備えなければならない。装置は,±3° までの係数Aを,少なくとも(720/H)° までの係数B,C
を,7° までの係数Dを,及び船体磁気の鉛直成分を±75 μTまで修正することができなければならない。
Hは5.2.5で定義されている。
5.2.7.2
磁界による確認 電子磁気コンパス方式のTHDにおいて,残存自差の各係数は次の式によって
得られるものとする。
'
2
180
n
n
n
B
S
N−
×
=πο
,
'
2
180
n
n
n
C
E
W−
×
=πο
,
8
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
'
4
)
(
)
(
180
n
n
n
n
n
D
E
W
S
N
+
−
+
×
=πο
ここで,N
n,
E
n,S
n,W
nは,船首方位がそれぞれN,E,S,Wであるときの船の北方磁界である。
'nは
N
n,
E
n,
S
n,W
nの平均値である。
係数Aは,電子磁気コンパス方式のTHDでは,無視できる程度に小さい。
補償装置は,予期しない変更に対して保護されていなければならない。
5.2.8
船上の垂直軟鉄による自差修正手段 船内垂直軟鉄による自差を修正する手段が備えられていな
ければならない。
5.2.9
修正装置の保護 すべての修正装置又はパラメータは,不注意な操作に対して保護されていなけれ
ばならない。
5.2.10 更新周期 装置は少なくとも50 msに一回,新しい方位に更新されなければならない。
5.3
GNSS原理
5.3.1
伝送データの精度 分解能誤差を含め,伝達誤差は±0.2° 未満でなければならない。
5.3.2
静的誤差 いかなる方位に対しても3.8で定義される静的誤差(静止点誤差)1.0°(95 %)以内で
なければならない。
5.3.3
動的誤差 6.3.5 a),6.3.5 b),4.3.5の状態において,3.9で定義される動的誤差は1.5°(95 %)以
内でなければならない。
5.3.4
追従誤差 3.10で定義される,旋回レート別の追従誤差は,次による。
− 旋回レート10°/秒までで,±0.5° 未満。
− 旋回レート10°/秒から20°/秒までの間で,±1.5° 未満でなければならない。
6. 試験方法及び試験結果要件
6.1
ジャイロ原理
6.1.1
一般 ジャイロコンパスにレピータコンパスが附属している場合には,少なくとも1個のレピータ
コンパスは作動させて,環境試験の間常にマスターコンパスと整合させておかなければならない。他のレ
ピータコンパスの出力は,それぞれ製造業者から供給された通常の負荷又は通常の負荷の代わりになる適
切なインピーダンスに結合しておかなければならない。
その他のレピータコンパスには,この試験は適用しない。
THD装置は,センサ部を接続して精度を試験する。センサ部が伝達部に含まれるよう設計されたものは,
装置全体で試験されなければならない。
6.1.2
静定時間試験 マスターコンパスを固定された水平台上に設置した後,公称値の電源を給電し,製
造業者の指示書に従って,初期船首方位誤差(東側に)を30° 以上与えた状態から起動させなければなら
ない。
静定時間(3.15参照)は,5.1.2.1の規定を満足しなければならない。
6.1.3
静的誤差(静止点誤差)試験 マスターコンパスが3.15で定義されたように静定したとき,静的
誤差(3.8参照)は5.1.2.2.1に規定された要件に適合しなければならない。
6.1.4
静止点船首方位の再現性試験 マスターコンパスを初期船首方位誤差(東側に)を30° 以上与えた
状態から製造業者の指示書に従って起動させ,静定させなければならない。
静止点船首方位を3.16の規定によって決定した後,マスターコンパスをいったん12時間以上7日以下
の間停止させ,初期船首方位誤差(西側に)を30° 以上与えた状態から起動させ,静止点船首方位を測定
9
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
する。
次に,マスターコンパスを12時間以上7日以下の間停止させ,再び初期船首方位誤差(東側に)を30°
以上与えた状態から起動させて,静止点船首方位を測定する。
こうして得られた静止点船首方位の三つの値の中の,任意の二つの値が0.35° ×緯度のセカント(secant
latitude)を超えてはならない。
備考 この試験が6.1.3の試験に続いて行われる場合には,6.1.3で得た“静止点船首方位の値”をこ
の再現性試験で要求される最初の値として使用することができる。ただし,2番目の“静止点
船首方位の値”が,12時間以上7日以下の間停止させた後の値であることが条件である。
6.1.5
動揺試験台上における静定時間 マスターコンパスは,動揺試験台上に設置される場合,その船首
尾線が動揺試験台の一つの動揺軸と平行になるように設置しなければならない。この動揺軸をロール(roll)
軸と定める。第1の軸と水平面内で直角なもう一つの動揺軸は,ピッチ(pitch)軸と定める。
動揺試験台に次に示す単弦の動揺運動を与えながら,製造業者の指示書に従ってコンパスを起動させる。
− ロール(roll)軸方向:最大振幅5±1°,周期15±1秒。
− ピッチ(pitch)軸方向:最大振幅5±1°,周期6±1秒。
3.15で定義した静定時間が5.1.3.1に規定する要件に適合しなければならない。
備考 静定の状態を決定するTHDの読みは,動揺試験台の動揺を停止させて実質的に水平のとき,
動揺試験台の運動を再開する前に,あまり遅れがないように読み取ってもよい。
6.1.6
動揺試験台上試験 マスターコンパスは,固定した実質的に水平であって,ロール(roll)軸が南
北に対して±1° 以内にある状態の動揺試験台上で静定させられなければならない。
コンパスの船首尾線は動揺試験台のロール(roll)軸に対して±1° 以内に向けられていなければならな
い。
次に示す実質的な単弦の運動を,動揺試験台の3軸に同時に25分間加えなければならない。
− ロール(roll)軸方向:最大振幅20±2°,周期10±1秒。
− ピッチ(pitch)軸方向:最大振幅10±2°,周期6±1秒。
− ヨー(yaw)軸方向:最大振幅5±1°,周期15±1秒。
25分経過後,動揺試験台の運動を止めて台を元の位置に戻し,直ちにTHDの船首方位を記録する。
この試験は,動揺試験台のロール(roll)軸を45±1°,90±1° 及び315±1° に向けて繰り返す。これら
の各方位において,コンパスの静止点船首方位が台の運動を開始する前に測定しなければならない。また,
運動直前の静止点船首方位と運動終了後の船首方位との間に指示値の変化がある場合,すべて運動による
誤差として記録されなければならない。
この4回の各試験において,運動による誤差は,±1.5° ×緯度のセカント(secant latitude)未満でなけ
ればならない。
この試験中に加えられる水平加速度は,1 m/s2を超えてはならない。
6.1.7
隅点方向運動試験 マスターコンパスを,水平面内の運動成分の最大加速度が1.0±0.1 m/s2である
ような単弦運動を起こすことができる装置に固定しなければならない。この装置の水平面内における運動
の方向は,隅点方向に対して±3° としなければならない。
上記のように設置して,マスターコンパスを静定(3.15参照)させ,その静止点船首方位を装置が安定
な水平状態のもとで測定する(3.16参照)。次に装置に先に述べたような最大加速度1.0±0.1 m/s2をもった
周期3秒以上の運動を2時間加える。この運動中に記録したTHDの船首方位と運動前の静止点船首方位
との差は,すべて運動によるものと考えられる。
10
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この差は,±1.5° ×緯度のセカント(secant latitude)を超えてはならない。
備考 運動中に記録したTHDの船首方位は,加えられた運動の周期と等しいか又はそれより高い周
期における変調分はすべて無視されなければならない。
6.1.8
出力精度試験
6.1.8.1
水平な回転台上のマスターコンパスを10°/秒以下の速さで回転させ,少なくとも5° ごとにTHD
の出力と回転台の角度を読み取る。
最大追従誤差は,5.1.3.4で規定される要件に適合しなければならない。
6.1.8.2
水平な回転台上のマスターコンパスを20°/秒以下の速さで回転させ,少なくとも5° ごとにTHD
の出力と回転台の角度を読み取る。
最大追従誤差は,5.1.3.4で規定される要件に適合しなければならない。
6.1.9
速度誤差修正試験 マスターコンパスを水平で安定した基台の上に設置し,コンパスの船首尾線を
南北方向に向けた状態で,マスターコンパスを静定させ,静止点船首方位を記録する。
30 knの速度信号をジャイロコンパスに与え,静定させる。
こうして得た静止点船首方位と最初に記録した値との差は,0.35° ×緯度のセカント(secant latitude)以
内で試験場所の緯度に関して理論的に計算した値と一致しなければならない。
6.1.10 一般必要条件試験
6.1.10.1 一般 一般必要条件試験において,加えるべき特定の環境状態でないときに得られた静止点船首
方位を基準値として,静止点の変動を測定する。
6.1.10.2 電圧変動試験 電源電圧を公称値の10 %高い電圧にして3時間加え,その間THDの船首方位を
20分間隔で記録する。次に,電源電圧を10 %低い電圧にして3時間加え,同様に20分間隔でTHD船首
方位を記録する。
記録した船首方位はすべて,初めの基準値から1.5° ×緯度のセカント(secant latitude)以下でなければ
ならない。
6.1.10.3 周波数変動試験 電源周波数を公称周波数の5 %高い周波数にして3時間加え,その間THDの
船首方位を20分間隔で記録する。次に,電源周波数を公称周波数の5 %低い周波数にして3時間加え,
同様に20分間隔でTHD船首方位を記録する。
記録した船首方位はすべて,初めの基準値から1.5° ×緯度のセカント(secant latitude)以下でなければ
ならない。
6.1.10.4 振動試験
6.1.10.4.1 マスターコンパスの振動試験 この試験の間,マスターコンパスの基線は,子午線に対して+
30° ±1° の方向としなければならない。
マスターコンパスに,次に示す振動を加える。振動方向を,次のように3種類変えて試験を行う。
a) 子午線に対して+30±1° の方向で水平方向の振動。
b) 子午線に対して−60±1° の方向で水平方向の振動。
c) 鉛直方向の振動。
いずれの場合にも,コンパスをまず静定させ,次に最低周波数の振動を適切な振幅を保持しながら25
分間加える。この後,周波数及び振幅を表1に示す値に変えて25分間加える。この手順を全部の周波数範
囲が終わるまで続ける。
11
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
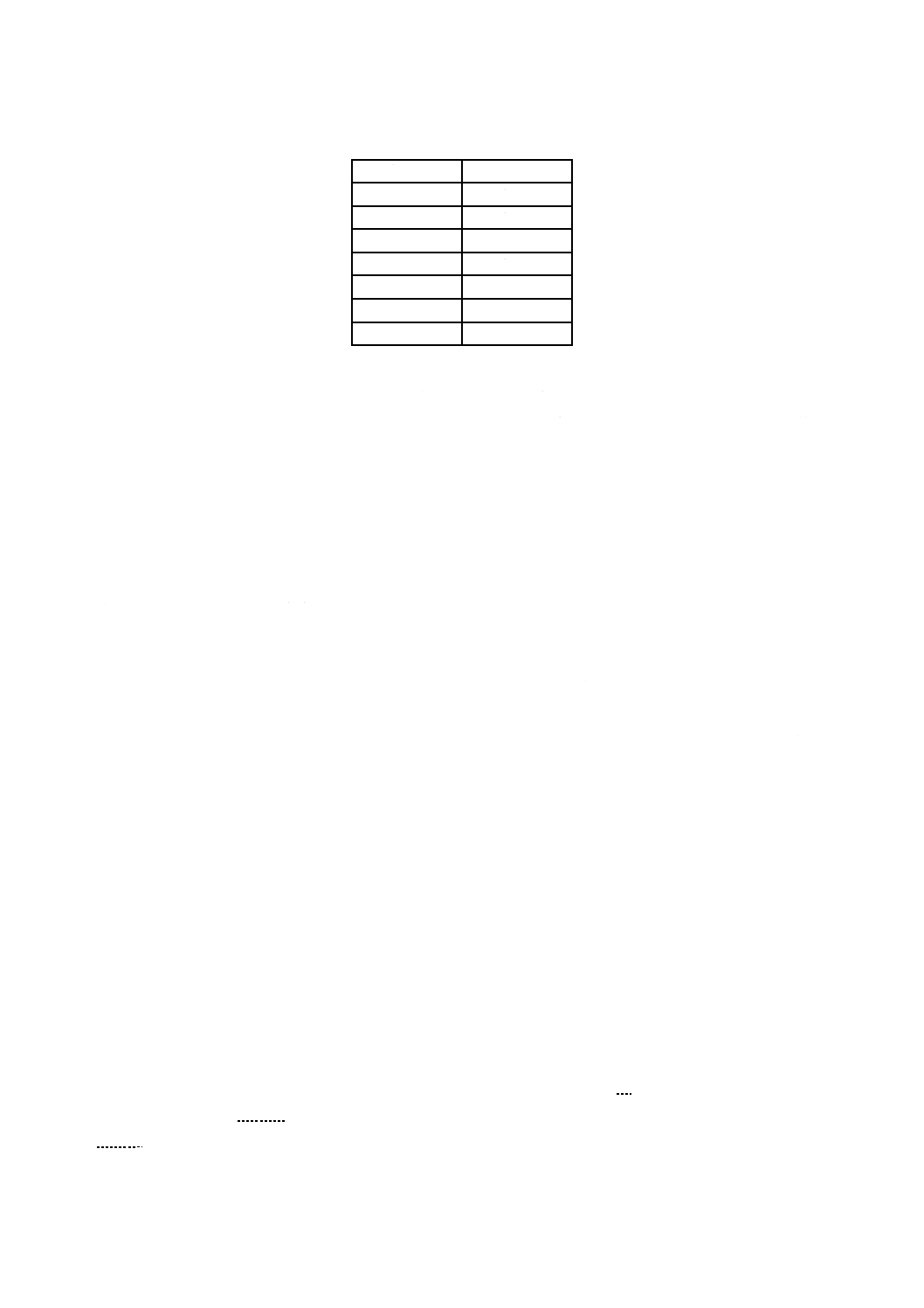
表 1 周波数及び振幅
周波数 Hz
振幅 mm
5
±0.71
7
±0.71
10
±0.71
14
±0.63
20
±0.31
28
±0.16
40
±0.08
船首方位の指示値を各試験時間の終わりに記録し,記録された船首方位と基準の静止点船首方位との差
はすべて1.5° ×緯度のセカント(secant latitude)以下でなければならない。
備考 振動装置に起因する電磁界によって,装置の性能に及ぼす悪影響を減少又は無効にする対策が
講じられてもよい。
6.1.10.4.2 マスターコンパス以外のコンパス装置の振動試験 この装置は,構成要素として何らかの緩衝
装置を完備した状態で,振動台上に正常の支持方法で固定する。次に,マスターコンパスに正常の電気的
構成で接続する。マスターコンパスを製造業者の指示書に従って起動させ,静止点船首方位を測定し記録
する。
振動台上に設置した装置に25分間以上かけて,次に示す範囲の全周波数で鉛直振動を加える。
a) 周波数が5〜13.2 Hzで振幅が1.0 mm。
b) 周波数が13.2〜40 Hzで最大加速度が0.7×9.8 m/s2。
このすべての手順は,その装置を水平方向の互いに直角な二つの方向で振動させて反復する。
この一連の試験のいずれの場合にあっても,電気的又は機械的な損傷が生じてはならない。
指示された船首方位は,各試験時間の終わりに記録される。
この記録された船首方位の基準の静止点船首方位との差は,1.5° ×緯度のセカント(secant latitude)以
下でなければならない。
6.1.10.5 温度試験 コンパス装置を常温の恒温槽内に置き,起動して静定させる。静止点船首方位を読み
取り記録する。次に,恒温槽内の温度を45±2 ℃まで上げて3時間保持し,この後THDの船首方位の指
示を記録する。その後,恒温槽の温度を0±2 ℃にして3時間保持し,この後THDの船首方位の指示値を
記録する。記録したいずれの船首方位指示値も,基準の静止点船首方位との差が,1.5° ×緯度のセカント
(secant latitude)以下でなければならない。
備考 恒温槽内の温度を変える場合,その変化の早さは1時間当り45 ℃を超えてはならない。
6.1.10.6 高湿高温試験 コンパス装置を常温及び常湿の恒温槽内に置き,起動し静定させる。静止点船首
方位を読み取り記録する。次に,3±0.5時間かけて恒温槽内の温度及び相対湿度を,それぞれ40±2 ℃及
び93±3 %まで徐々に上げ,その状態を3±0.5時間保持する。
試験終了時のTHDの船首方位の指示値と基準の静止点船首方位との差は,1.5° ×緯度のセカント(secant
latitude)以下でなければならない。
6.1.11 電磁干渉試験 電磁的干渉及びイミュニティに関して,装置はJIS F 0812に関連付けられるIMO
決議A.694 (17) 及びJIS F 8081に関連付けられるIMO決議A.813 (19) に適合しなければならない。
6.1.12 故障試験 4.1.8で要求される可視可聴警報は,次の試験手順によって試験しなければならない。
− 誤動作試験:製造業者によるセルフチェック機能を使用する。
12
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 主電源故障時:主電源をオフにする。
どのような状態でも警報を出力することを確認する。
6.2
地磁気原理
6.2.1
一般 型式試験は,関連する機器が市場に出る前に実施しなければならない。型式試験としては,
新しい装置だけが認められる。
THDは,精度の関係でセンサ部が接続された状態で試験しなければならない。
センサ部が伝達部に含まれる形で設計されている場合,あわせて試験しなければならない。
この規格に特に規定していない場合,すべての試験はJIS F 0812の要件に従って実施しなければならな
い。
静的磁場での試験は,認可された検査室で実施しなければならない。
証明書の複製は,要求に応じて発行しなければならない。
それらは“複製”であると明らかに表示しなければならない。
THDは,センサ部を接続した状態で精度を試験しなければならない。センサ部が伝達部に含まれる形で
設計されている場合,試験は,すべての装置で実施しなければならない。
6.2.2
伝達誤差試験 回転試験台の上で,出力が000.0を示すまでTHDの方位を調節し,スタンドを10°
ゆっくり回転する。伝達部の出力の読みは5.2.1の条件を満足しなければならない。
6.2.3
船首尾マークの試験 磁気コンパス方式のTHDにおいて試験は,鉛直線を使用し,コンパスをビ
ナクル内に取り付け,回転試験台上で実施してもよい。電子磁気コンパス方式のTHDにおいては,試験
は目視検査又は電気式測定によって確かめなければならない。試験結果は,4.2.3で規定する要件を満足し
なければならない。
6.2.4
船首方位情報試験 6.2.5.1の静的誤差試験と同様に試験を実施し,出力船首方位の読み値を確認す
る。
試験結果は,4.2.4の要件を満足しなければならない。
6.2.5
静的誤差試験
6.2.5.1
磁気コンパス方式のTHD 静的誤差は,ピックアップセンサを除いたコンパスに適用される。
THDのピックアップセンサは,カード方位への影響がどのような方位においても1.0° を超えないよう
に取り付けなければならない。
試験は,コンパス試験台の上で実施しなければならない。
回転軸を通る見通しの鉛直面をあらかじめ磁気子午線に合わせ,コンパスカードの回転中心を試験台の
回転軸に持ってきた後,静的誤差は,テレスコープ又は他の適切な手段によってカードの目盛で読むこと
ができる。
この測定は,少なくとも四方の船首方位で行わなければならない。静的誤差は,±1.0°(95 %)以内で
なければならない。
6.2.5.2
電子磁気コンパス方式のTHD センサハウジングの船首尾線を試験台の中心と北を向くゼロ線
を通る線へ運んだ後,静的誤差は回転角と出力方位とを比較することによって読むことができる。
この測定は,少なくとも四方の船首方位で行わなければならない。
試験結果は,5.2.2の要件を満足しなければならない。
6.2.6
追従誤差試験 試験台に磁気センサを設置し,20°/秒の速度で台を回転する。
出力方位の読みは,5.2.4で規定する要件を満足しなければならない。
13
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.2.7
静定時間試験 カードがある場合は,90° 偏向してそこで少なくとも10秒間保持し,次に解除す
る。最終的に磁気子午線の1° 以内に戻るのに必要な時間は,5.2.5で要求される値を超えてはならない。
そして反対側で繰り返し,平均する。
6.2.8
磁気偏差による磁気船首方位を改正するための試験 表示器の上に磁気船首方位を示した後,2又
は3の磁気偏差の値を手動又は自動でシステムに入力したとき,表示されたすべての真方位は,5.2.6の要
件の精度内でなければならない。
船位決定装置を含むシステムで,システムを磁場が乱されない位置に移動した後に,その中心から船首
尾マークの方向が,真方位の判明している遠方物標と一致するように回転しなければならない。
真船首方位は,5.2.6の要件の精度内で一致しなければならない。
6.2.9
自差修正能力試験 センサ部は,試験台の上に置き,北又は南に合わせる。
指北装置の近くに合理的に均等な磁界を作るため,十分離れて外部磁力を加え,(720/H)° の自差が得ら
れるようにする。この自差は,磁石によって修正される。
試験結果の自差は,5.2.7.1の要求値を超えてはならない。
この試験は,東及び/又は西にも向けて繰り返し行わなければならない。係数Dの自差の量は,コンパ
スビナクルを試験台に置き,四隅点針路に向け,修正具の付け外しによって,確認することができる。電
子磁気コンパス方式のセンサでは,5.2.7.1に規定する修正されるべき係数Dの最大値は,四隅点針路にお
いて,係数Dの補正スイッチを入・切することによって測定する。
試験結果は,5.2.7.1の要求を満足しなければならない。
6.2.10 垂直軟鉄による自差修正の試験 フリンダースバー装置がTHDに提供されるとき,それらは目視
によって確認しなければならない。
6.2.11 動的精度 試験台にセンサ部を固定し,動的試験は,次の最大振幅及び周期で実施しなければなら
ない。また,船首方位を記録しなければならない。
− ロール(roll)軸方向:最大振幅20±2°,周期10±1秒。
− ピッチ(pitch)軸方向:最大振幅10±2°,周期6±1秒。
− ヨー(yaw)軸方向:最大振幅5±1°,周期15±1秒。
5分間の継続試験の終わりにおいて記録された方位の平均は,元の方位の±1.5° 以内でなければならな
い。試験結果は,5.2.3の要件を満足しなければならない。
6.2.12 更新周期試験 方位の出力周期を観測し,それが50 msに1回であることを確認しなければならな
い。
6.2.13 電磁干渉試験 電磁的干渉及びイミュニティに関して,装置はJIS F 0812に関連付けられるIMO
決議A.694 (17) 及びJIS F 8081に関連付けられるIMO決議A.813 (19) に適合しなければならない。
6.2.14 故障試験 4.2.7で要求される可視可聴警報は,次の試験手順によって試験しなければならない。
− 誤動作試験:製造業者によるセルフチェック機能を使用する。
− 主電源故障時:主電源をオフにする。
どのような状態でも警報を出力することを確認する。
6.3
GNSS原理
6.3.1
一般 THDは,センサ部を接続し精度を試験しなければならない。センサ部が伝達部に含まれる
ように設計されたものは,装置全体で試験しなければならない。製造業者は,明確に伝達誤差の構造を記
載しなければならない。
14
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.3.2
試験条件
6.3.2.1
周囲条件における試験 周囲温度及び相対湿度でのすべての試験は,JIS F 0812で定義される通
常条件下の要件に従って実施し,水平面内精度低下率(HDOP)≦4,[又は位置精度低下率(PDOP)≦6]
及び少なくとも五つの衛星が視界にあることとする。
6.3.2.2
静的試験場 センサ部を,水平線上の5° 以上の位置から天頂まで衛星信号を遮断することのな
いテーブルの上に設置する。テーブルは,水平に000±1° の方向に合わせ,テーブルの真方位は0.1° 以内
の精度であらかじめ測定したものとする。設置方法は,製造業者の指示に従う。
製造業者によって指定される最大ケーブル長が試験の間,使用されるものとする。
すべての静的試験は,実際のGNSS信号を利用するものとする。
6.3.2.3
動的試験場 装置を,水平線上の5° 以上の位置から天頂まで衛星信号を遮断することのない動
揺試験台の上に設置する。動的試験は,実際のGNSS信号を利用するものとする。
6.3.3
静定時間試験 1分ごとに記録される出力方位のRMSが1.5°(95 %)以内でなければならない。
各RMSは,少なくとも1 200の測定値によって計算しなければならない。
静的試験場で既知の方位にTHDを取り付けるものとする。
3.14で規定する時間を記録する。4.3.6で規定する要件を満足しなければならない。
6.3.4
静的誤差試験 THDは,6.3.2.2で規定する静的試験場で静定しているものとする。
測定方位は,少なくとも1時間以上は記録されなければならない。
1 000個のデータの分布は,1°(95 %)以内でなければならない。
45° ±5° のステップでテーブル方位を変え,この試験を繰り返すものとする。
6.3.5
動的試験 動的試験は,次の方法のいずれかで行う。いずれも試験は少なくとも5分以上行わなけ
ればならない。
a) 動揺試験機による方法 THDは,テーブルが固定された6.3.2.3で規定する動的試験場に取り付けら
れ,通常水平とそのロール(roll)軸は±1° 以内で南北方向に整合されていることとする。
THDは,テーブルのロール(roll)軸の±1° 以内の精度で合わせなければならない。
次の最大振幅及び周期をテーブルの3軸方向に同時に5分間加える。
− ロール(roll)軸方向:最大振幅20±2°,周期10±1秒。
− ピッチ(pitch)軸方向:最大振幅10±2°,周期6±1秒。
− ヨー(yaw)軸方向:最大振幅5±1°,周期15±1秒。
この間装置の出力方位を記録する。
テーブルの基準方位と出力の差は±1.5°(95 %)以内でなければならない。
取付けは,製造業者の装備要領の許容する最大の動揺中心からの距離で実施しなければならない。
b) 走行試験 装置を,0.2° 以上の動的精度をもつ方位基準装置をもった走行体(自動車又は船舶)に設
置する。走行中,次に定める運動をすべて行う。
1) 速力25〜30 knで1 nm以上。
2) 速力10〜20 knで90° 右回転を1回。
3) 速力10〜20 knで90° 左回転を1回。
4) 速力0〜30 knまでを10秒以内で加速。
5) 速力30〜0 knまでを10秒以内で減速。
走行中,装置の方位出力と方位基準装置の出力とを同時に記録する。装置の方位出力と方位基準装
置の出力との差は,±1.5° 以内でなければならない。
15
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.3.6
方位追従試験 装置を,静的試験場所に設置する。装置が静定した後,台を毎秒10° 以下の旋回速
度で回転させ,少なくとも5° ごとに旋回台の角度と装置の出力方位との差を計測する。最大追従誤差は,
5.3.4で規定する要件を満足しなければならない。
装置を,静的試験場所に設置する。装置が静定した後,台を毎秒20° 以下の旋回速度で回転させ,少な
くとも5° ごとに旋回台の角度と装置の出力方位との差を計測する。最大追従誤差は,5.3.4で規定する要
件を満足しなければならない。
6.3.7
バックアップ試験 6.3.5及び6.3.6で規定する動的試験の間,次のとおりTHDの出力を試験する。
− 10分間GNSS+バックアップセンサ。
そのとき,センサ部を60秒間完全に遮へいする。
− 1分間は,バックアップセンサだけ(GNSSは適用範囲)。
試験の始めと終わりとの出力の差は,4.3.5の要求を満足しなければならない。
6.3.8
環境試験 この規格に特に規定していない場合,すべての試験は,JIS F 0812の要件に従って実施
しなければならない。製造業者は,THDシステムの各機器について,JIS F 0812で定義する防護形又は暴
露形かを決定しなければならない。
6.3.8.1 静的状態でのバックアップ試験 装置が静定した後,センサ部で衛星信号が受信できないように,
60秒間完全に遮へいする。遮へいの開始及び終了時に遅れることのないように方位出力を記録する。
6.3.8.2
伝達部の温度(高温)試験中の機能試験 伝達部を試験室に置き,静的な場所に取り付けられた
センサ部からの信号線を接続する。
試験中,JIS F 0812の要件に従い,6.3.8.1で規定するバックアップ試験は,伝達部の出力で実施しなけ
ればならない。
6.3.8.3
伝達部の振動試験中の機能試験 伝達部を振動テーブルに置き,静的試験場に取り付けられたセ
ンサ部からの信号線を接続する。試験中,JIS F 0812の要件に従い,6.3.8.1で規定するバックアップ試験
は,伝達部の出力で実施しなければならない。
6.3.9
電磁干渉試験 電磁的干渉及びイミュニティに関して,装置はJIS F 0812に関連付けられるIMO
決議A.694 (17) 及びJIS F 8081に関連付けられるIMO決議A.813 (19) に適合しなければならない。
6.3.10 方位情報試験 装置は,少なくとも50 msに1回以上新しい方位に更新しなければならない。
6.3.11 故障試験 4.3.8で要求される可視可聴警報は,次の試験手順によって試験しなければならない。
− 誤動作試験:製造業者によるセルフチェック機能を使用する。
− 主電源故障:主電源をオフにする。
− 6.3.8の試験の間,60秒以上衛星信号を遮断する。
どのような状態でも警報を出力することを確認する。
7. 表示及び識別
(*1)はジャイロ原理,(*2)は地磁気原理,(*3)はGNSS原理に対応する。
7.1
コンパス安全距離(*1,*3) 装置の各ユニットは,基準及び操だ用磁気コンパスから離すべき安全
距離を表示しなければならない。この安全距離は,ISO 694及びJIS F 0812に従って測定された値としな
ければならない。
7.2
表示及び識別(*1,*2,*3) 装置の各ユニットは,次のとおり表示しなければならない。
− 製造業者名。
− 供試装置の型番,又はモデルの識別。
16
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− ユニットのシリアル番号。
− 製造年(製造年がシリアル番号から確認できる場合必要ない)。
THDユニット上のマークの存在は,目視検査において確認しなければならない。
17
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
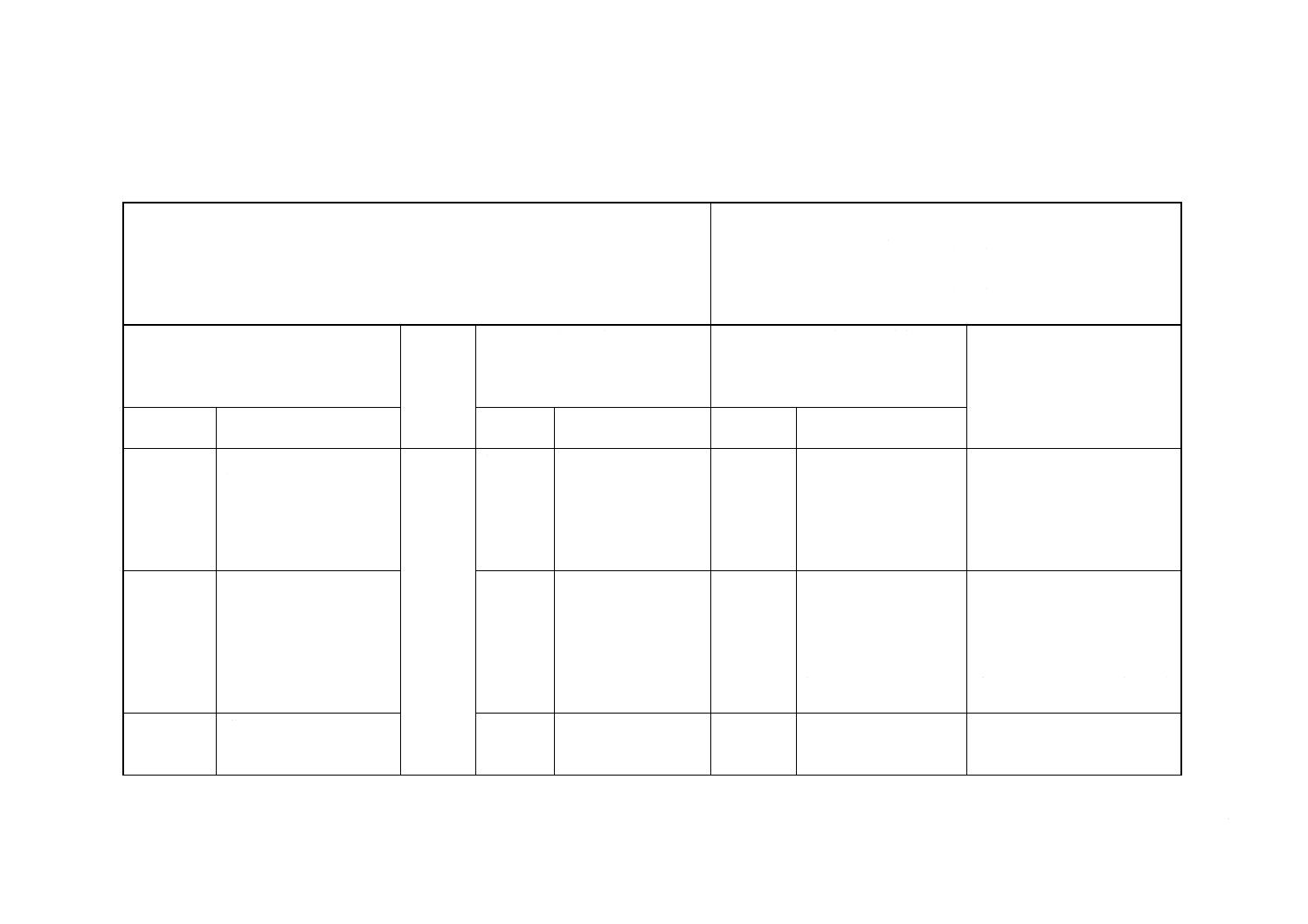
附属書(参考)JISと対応する国際規格との対比表
JIS F 9605:2006 船舶及び海洋技術−真船首方位信号伝達装置
ISO 22090-1:2002 船舶及び海洋技術−真船首方位信号伝達装置−第1
部:ジャイロコンパス方式
ISO 22090-2:2004 船舶及び海洋技術−真船首方位信号伝達装置−第2
部:地磁気方式
ISO 22090-3:2004 船舶及び海洋技術−真船首方位信号伝達装置−第3
部:GNSS方式
(Ⅰ) JISの規定
(Ⅱ) 国際
規格番号
(Ⅲ) 国際規格の規定
(Ⅳ) JISと国際規格との技術的差異の
項目ごとの評価及びその内容
表示箇所:本体
表示方法:点線の下線
(Ⅴ) JISと国際規格との技術的
差異の理由及び今後の対策
項目
番号
内容
項目
番号
内容
項目ごとの
評価
技術的差異の内容
1. 適用範囲
ISO 22090-1〜-3の1.適用
範囲を一本化。
ISO
22090-1
ISO
22090-2
ISO
22090-3
1
JISに同じ。
IDT
−
−
2. 引用規格
ISO 22090-1〜-3の2.引用
規格を一本化。
2
JIS F 8081の引用はし
ていない。その他は
JISに同じ。
MOD/追加
引用規格であるIMO決
議A.813 (19) の技術要
件,試験方法及び要求さ
れる試験結果について規
定するJIS F 8081を追
加。
これらの対応国際規格は日本が
提案・作成したものだが,この
JISの作成に当たり,左記の抜
けが判明した。
対応国際規格の次回定期見直し
時又はそれよりも早い時期に改
正提案を行う。
3. 定義
ISO 22090-1〜-3の3.定義
を一本化。
3
地磁気原理(3.1)を除
きその他は,JISに同
じ。
MOD/追加
−
−
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
F
9
6
0
5
:
2
0
0
6
18
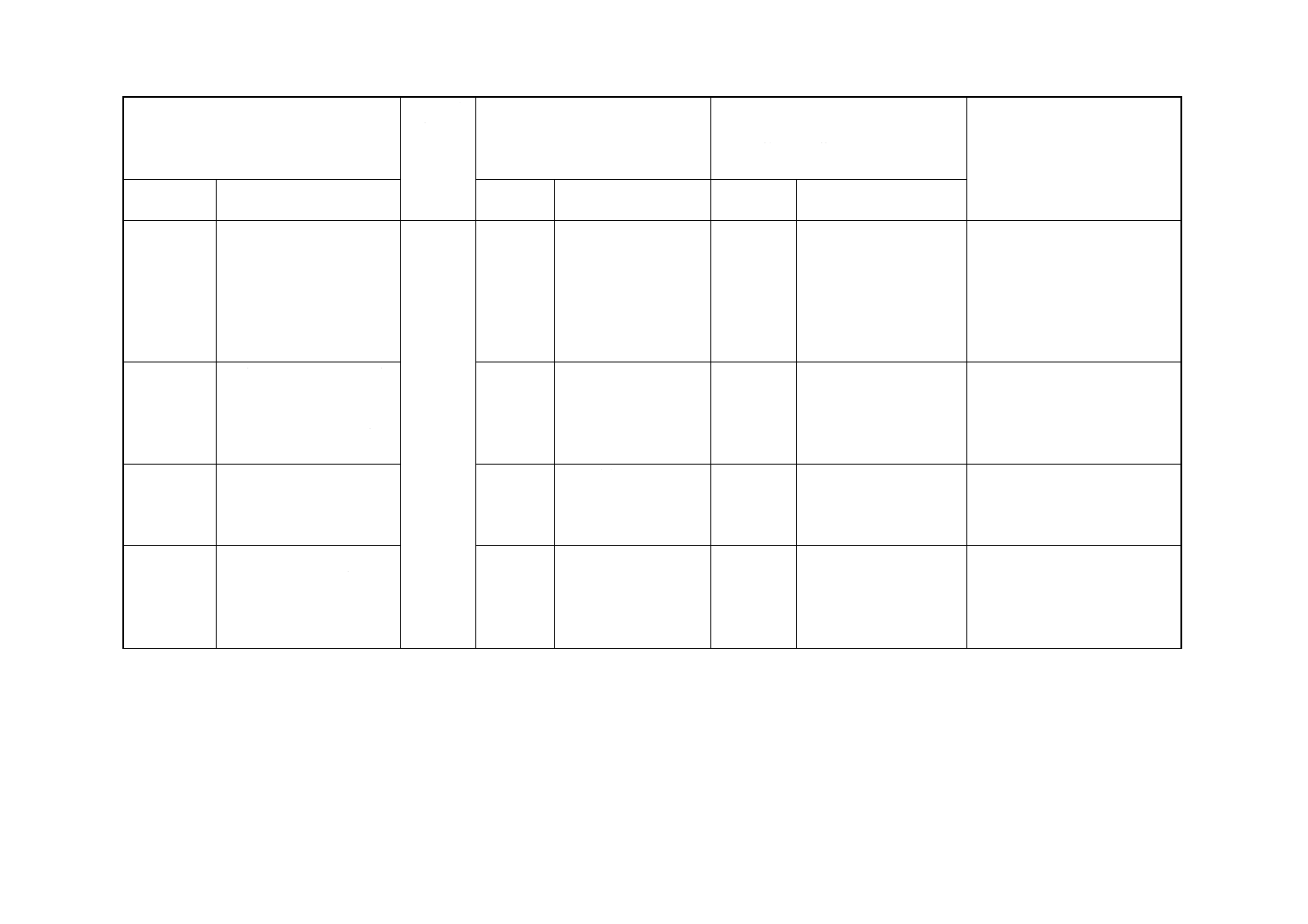
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(Ⅰ) JISの規定
(Ⅱ) 国際
規格番号
(Ⅲ) 国際規格の規定
(Ⅳ) JISと国際規格との技術的差異の
項目ごとの評価及びその内容
表示箇所:本体
表示方法:点線の下線
(Ⅴ) JISと国際規格との技術的
差異の理由及び今後の対策
項目
番号
内容
項目
番号
内容
項目ごとの
評価
技術的差異の内容
3.1
地磁気原理
ISO
22090-1
ISO
22090-2
ISO
22090-3
ISO
22090-2の
3.1
地磁気原理
MOD/追加
電子磁気コンパス方式の
THD並びに磁気コンパ
ス方式のTHDの定義を
追加。
これらの対応国際規格は日本が
提案・作成したものだが,この
JISの作成に当たり,左記の抜
けが判明した。
対応国際規格の次回定期見直し
時又はそれよりも早い時期に改
正提案を行う。
4. 性能要件
4.1にISO 22090-1,4.2に
ISO 22090-2,4.3にISO
22090-3の4. 性能要件を規
定し,ISO 22090-1〜-3を一
本化。
4
JISに同じ。
IDT
−
−
5. 精度
5.1にISO 22090-1,5.2に
ISO 22090-2,5.3にISO
22090-3の5. 精度を規定し,
ISO 22090-1〜-3を一本化。
5
JISに同じ。
IDT
−
−
6. 試験方法
及び試験結
果要件
6.1にISO 22090-1,6.2に
ISO 22090-2,6.3にISO
22090-3の6. 試験方法及び
試験結果要件を規定し,
ISO 22090-1〜-3を一本化。
6
故障試験(6.1.12)及び
電磁干渉試験(6.1.11,
6.2.13及び6.3.9)を除
きその他はJISに同
じ。
MOD/追加
−
−
2
F
9
6
0
5
:
2
0
0
6
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
19
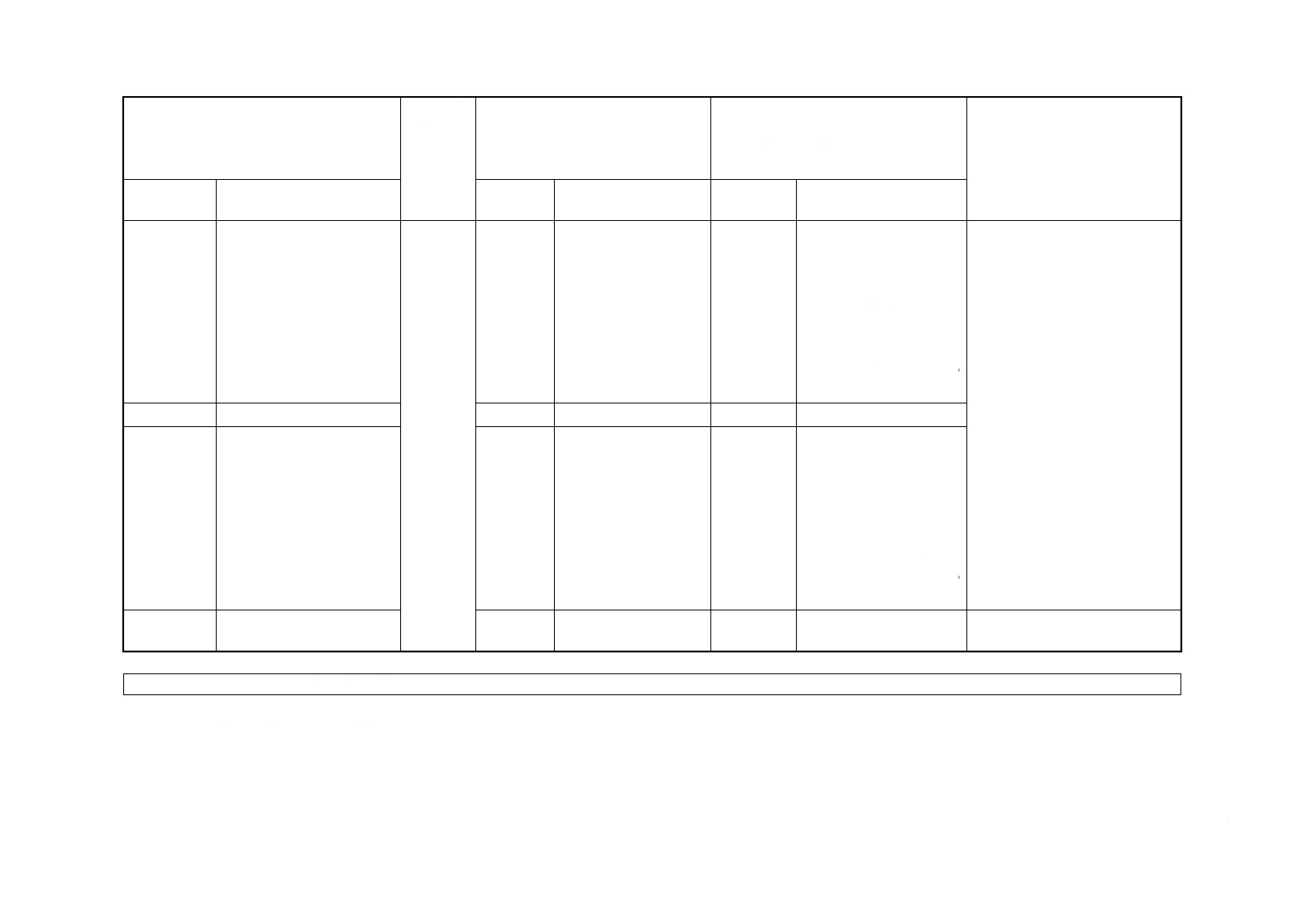
F 9605:2006
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(Ⅰ) JISの規定
(Ⅱ) 国際
規格番号
(Ⅲ) 国際規格の規定
(Ⅳ) JISと国際規格との技術的差異の
項目ごとの評価及びその内容
表示箇所:本体
表示方法:点線の下線
(Ⅴ) JISと国際規格との技術的
差異の理由及び今後の対策
項目
番号
内容
項目
番号
内容
項目ごとの
評価
技術的差異の内容
6.1.11
電磁干渉試験
ISO
22090-1
ISO
22090-2
ISO
22090-3
ISO
22090-1の
6.11
電磁干渉試験
MOD/追加
IMO決議A.813 (19) の
技術要件,試験方法及び
要求される試験結果につ
いて規定するJIS F 8081
及びIMO決議A.694 (17)
の技術要件,試験方法及
び要求される試験結果に
ついて規定するJIS F
0812の引用を追加。
これらの対応国際規格は日本が
提案・作成したものだが,この
JISの作成に当たり,左記の抜
けが判明した。
対応国際規格の次回定期見直し
時又はそれよりも早い時期に改
正提案を行う。
6.1.12
故障試験
−
−
MOD/追加
左記試験の追加。
6.3.9
電磁干渉試験
ISO
22090-3の
6.9
電磁干渉試験
MOD/追加
IMO決議A.813 (19) の
技術要件,試験方法及び
要求される試験結果につ
いて規定するJIS F 8081
及びIMO決議A.694 (17)
の技術要件,試験方法及
び要求される試験結果に
ついて規定するJIS F
0812の引用を追加。
7. 表示及び
識別
ISO 22090-1〜-3の7.表示
及び識別を一本化。
7
JISに同じ。
IDT
−
−
JISと国際規格との対応の程度の全体評価:MOD
備考1. 項目ごとの評価欄の記号の意味は,次のとおりである。
― IDT……………… 技術的差異がない。
― MOD/追加……… 国際規格にない規定項目又は規定内容を追加している。
2. JISと国際規格との対応の程度の全体評価欄の記号の意味は,次のとおりである。
― MOD…………… 国際規格を修正している。
2
F
9
6
0
5
:
2
0
0
6
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。