F 9604:2003 (ISO 11674:2000)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,財団法人日本船舶標準協会 (JMSA) から,
工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,国
土交通大臣が制定した日本工業規格である。
制定に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,ISO 11674:2000,Ships and marine
technology−Heading control systemsを基礎として用いた。
JIS F 9604には,次に示す附属書がある。
附属書A(規定) 船体運動シミュレータ
附属書B(参考) この規格とIMO決議との対応する要件
F 9604:2003 (ISO 11674:2000)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··················································································· 1
1. 適用範囲 ············································································ 1
2. 引用規格 ············································································ 1
3. 定義 ················································································ 1
3.1 調整器 ············································································· 1
3.2 自動操だ(舵) ····································································· 1
3.3 自動操だ(舵)装置 ································································· 2
3.4 切替器 ············································································· 2
3.5 微分だ(舵)角調整(当てかじ調整) ·················································· 2
3.6 船首方位 ··········································································· 2
3.7 船首方位信号処理器 ································································· 2
3.8 積分だ(舵)角調整 ································································· 2
3.9 手動操だ(舵) ····································································· 2
3.10 操作器 ············································································ 2
3.11 設定針路 ·········································································· 2
3.12 比例だ(舵)角調整 ································································ 2
3.13 旋回半径制御 ······································································ 2
3.14 回頭角速度制御 ···································································· 2
3.15 天候調整 ·········································································· 2
4. 性能 ················································································ 2
4.1 一般 ··············································································· 2
4.2 構成品 ············································································· 2
4.3 機能要件 ··········································································· 3
4.4 安全策 ············································································· 5
5. 型式試験 ············································································ 5
5.1 試験及び要求結果 ··································································· 5
5.2 磁気コンパス安全距離試験 ···························································· 6
5.3 電磁適合性 [EMC] 及び環境試験 ······················································ 6
5.4 自動操だ(舵)から手動操だ(舵)への切替え ··········································· 6
5.5 制御特性 ··········································································· 6
6. 表示及び識別 ········································································ 7
7. 情報 ················································································ 7
附属書A(規定)船体運動シミュレータ ····················································· 8
附属書B(参考)この規格とIMO決議との対応する要件 ······································ 10
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
F 9604:2003
(ISO 11674:2000)
船舶及び海洋技術−船首方位制御装置
Ships and marine technology−Heading control systems
序文 この規格は,2000年に発行されたISO 11674:2000,Ships and marine technology−Heading control
systemsを翻訳し,技術的内容及び規格票の様式を変更することなく作成した日本工業規格である。
1. 適用範囲 この規格は,船舶に搭載する船首方位制御装置の構造,性能,検査及び試験について規定
する。
船首方位情報を得て,船の操縦性に関連した限度以内で最小限のかじ取り機動作によって設定針路を保
持する船首方位制御装置に適用する。
船首方位制御装置は,船首方位のドリフト調整をする航路制御装置と組み合わせて動作させてもよい。
回頭を行うための回頭角速度制御又は旋回半径制御を設けてもよい。
備考1. IMO決議[MSC.64(67) 附属書3で改正された決議A.342(IX) 及びA694 (17)]の勧告から引
用したすべての要件は,イタリック体で印刷している。
2. この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO 11674:2000,Ships and marine technology−Heading control systems (IDT)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格のうちで,発行年を付記してあるものは,記載の年の版だけがこの規格の規定を構
成するものであって,その後の改正版・追補には適用しない。発行年を付記していない引用規格は,その
最新版(追補を含む。)を適用する。
ISO 694:2000 Ships and marine technology−Positioning of magnetic compasses in ships
IEC 60945:1996 Maritime navigation and radiocommunication equipment and systems−General
requirements−Methods of testing and required test results
IEC 61162 Maritime navigation and radiocommunication equipment and systems−Digital interfaces
3. 定義 この規格で用いる主な用語の定義は,次による。
3.1
調整器 (adjustment control) 比例だ(舵)角調整,微分だ(舵)角調整,積分だ(舵)角調整及び天
候調整を含む自動操だ(舵)装置の特性を変更する装置。
備考 用語“微分だ(舵)角調整”は,慣習的に“当てかじ調整”とも呼ぶ。
3.2
自動操だ(舵) (automatic steering) ジャイロコンパス又は磁気コンパスなどから得られた船首方位
情報を処理し,船を自動的に設定針路に保持するためにかじ取り機を制御する手段。
2
F 9604:2003 (ISO 11674:2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.3
自動操だ(舵)装置 (automatic-steering device) 自動操だ(舵)を行うための装置。
3.4
切替器 (change-over device) 自動操だ(舵)から手動操だ(舵)又はその反対に切り替えるための
装置。
3.5
微分だ(舵)角調整(当てかじ調整)(derivative rudder adjustment) だ(舵)角指令の一つの調整で
あって,船の回頭角速度を制御するためのもの。
3.6
船首方位 (heading) 船首が実際に指す水平面上の方位。
備考 船首方位は基準の方位からの度数で,通常は真北の000°から右回りに360°まで表現する。
3.7
船首方位信号処理器 (heading-signal processor) 船首方位制御装置で使用できるようにジャイロコン
パス,磁気コンパスなどで検出された船首方位信号を処理するためのユニット。
3.8
積分だ(舵)角調整 (integral rudder adjustment) だ(舵)角指令の一つであって,設定針路及び船首
方位の偏差の積分値に比例した制御をするための調整。
3.9
手動操だ(舵) (manual steering) 手動でかじ取り機を制御する手段。
例 だ輪を使用する手段。
3.10 操作器 (operational device) 船首方位制御装置を操作するために使用するスイッチ,キー,ノブなど
をいう。
3.11 設定針路 (preset heading) 船首を向けようとする水平面上の方位。
備考 設定針路は北(真北又は磁北)に対する方位角で,000°から右回りに360°まで表現する。
3.12 比例だ(舵)角調整 (proportional rudder adjustment) だ(舵)角指令の一つであって,設定針路と船
首方位の偏差の瞬時値に比例した制御をするための調整。
3.13 旋回半径制御 (turning-radius control) あらかじめ設定された旋回半径で船を回頭させるために回頭
角速度を制御する手段。
3.14 回頭角速度制御 (turn-rate control) あらかじめ設定された回頭角速度で船を回頭させるためにかじ
を制御する手段。
3.15 天候調整 (weather adjustment) 波,うねり及び風によるヨーイングに対する不必要なかじ動作を最
小限にするための調整。
4. 性能
4.1
一般
4.1.1
船首方位制御装置は,種々の船速,天候及び積み荷状態における船の異なる船体運動特性に手動又は
自動で適応させる能力をもち,一般環境及び通常操船状態において信頼ある動作を行わなければならない。
4.1.2
船首方位制御装置は,IEC 60945の規定による環境要件を満足しなければならない。
4.2
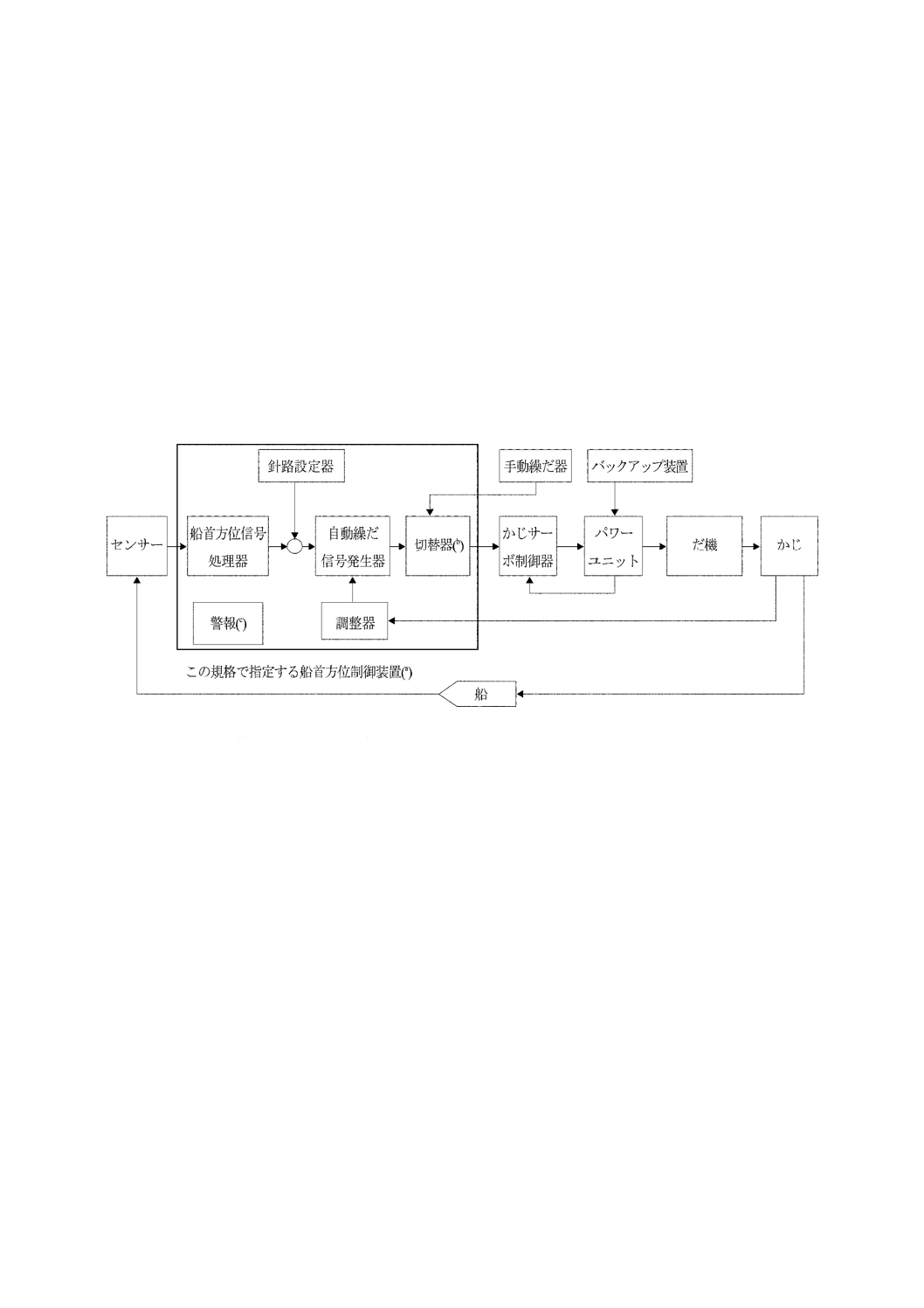
構成品 船首方位制御装置は,最低限,次の構成品をもたなければならない(図1参照)。
a) 船首方位信号処理器(船首方位表示器を含む)
b) 針路を設定するための操作器
c) 調整を行うための操作器
d) 自動操だ(舵)信号発生器
e) 操だ(舵)モード切替器(表示器付き)船首方位制御装置に組み込まれている必要はない。
f)
この規格の要求による警報信号設備
g) 使用中の操だ(舵)モード及び船首方位信号源の表示器
3
F 9604:2003 (ISO 11674:2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.3
機能要件
4.3.1
自動操だ(舵)から手動操だ(舵)又はその反対への切り替え
4.3.1.1 自動操だ(舵)から手動操だ(舵)又はその反対への切り替えは,いかなるだ(舵)角位置でも
可能であり,1回の手動操作で3秒以内に行わなければならない。
4.3.1.2 自動操だ(舵)から手動操だ(舵)への切り替えは,船首方位制御装置の故障を含め,いかなる
条件下でも可能でなければならない。
4.3.1.3 手動操だ(舵)から自動操だ(舵)へ切り替えられるとき,新たに設定針路が入力されない場合
は,そのときの船首方位が設定針路とならなければならない。
4.3.1.4 当直船員が容易に操作できる位置に一動作で可能な切替器がなければならない。
4.3.1.5 動作中の操だ(舵)モードを示す適切な表示器がなければならない。その表示器は,切替器に近
接して設けなければならない。
注(a) 太枠内は,この規格に書かれている船首方位制御装置の構成部分を示す。
(b) 切替器は,船首方位制御装置に組み込まれているとは限らない。
(c) 警報表示器は,外部のユニットでもよい。
図 1 代表的な船首方位制御装置のブロック図
4.3.2
調整器を含めた操作器
4.3.2.1
すべての操作器は容易に調整でき,通常操作される場所から容易に判別できなければならない。
通常操作する必要のない調整器及び操作器は,容易に触れることができないようにしなければならない。
4.3.2.2
操作器の数は,容易,かつ,安全に操作が行える数でなければならない。調整器及び操作器は,
不注意な操作を防ぐように設計し,配置しなければならない。それらの機能,配置及び大きさは,容易で
迅速,かつ,効果的な操作ができなければならない。
4.3.2.3
常に調整器,操作器及び表示器を判別できる適切な照明を,装置内又は船内に設けなければなら
ない。航海の妨げとなり得る照明を加減する手段を設けなければならない。
4.3.2.4
自動調整の機能が組み込まれている場合を除き,天候及び船の操だ(舵)特性の影響を調節する
適切な調整器及び操作器を,船首方位制御装置に設けなければならない。
4.3.2.5
船首方位制御装置は,針路設定器を右回りに回すか又は右側に倒すと設定針路が右げん側に変更
され,針路設定器を左回りに回すか又は左側に倒すと設定針路が左げん側に変更されるように設計しなけ
ればならない。
4
F 9604:2003 (ISO 11674:2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
通常の船首方位の変更は,一つの針路設定器の調整で行い,針路設定器は意図しない船首方位の変更を
避ける設計及び構造でなければならない。
4.3.2.6
船首方位を変更するとき,設定針路調整の右又は左回り方向は,船の回頭方向を決めるものでな
ければならない。
4.3.2.7
遠隔制御場所がある場合,遠隔制御場所へ操だ(舵)権を移すための設備及び無条件に操だ(舵)
権を戻すための設備を主制御場所に設けなければならない。
4.3.2.8
針路設定器を除き,他の調整器及び操作器の動作は,船の船首方位に大きく影響を与えてはなら
ない。
4.3.2.9
遠隔制御場所に追加する調整器及び操作器は,この規格の規定によらなければならない。
4.3.3
だ(舵)角制限 自動操だ(舵)時の調整可能なだ(舵)角制限を行う手段を装置内に設けなけれ
ばならない。また,だ(舵)角制限に達するような信号が発令されたとき又はだ(舵)角制限の値に達し
たときに表示する手段がなければならない。方向を制御するその他の手段が使用されている場合は,この
項の要求を適用しなければならない。
4.3.4
ヨーイング 通常のヨーイングによる不必要なかじ作動を防ぐ手段がなければならない。
4.3.5
船首方位表示の精度 船首方位表示がある場合は,船首方位センサーが示す方位より0.5°以上の
差があってはならない。
4.3.6
設定針路 設定針路の変更は,乗組員が意志をもって行う場合以外はできてはならない。
4.3.7
設定回頭角速度 船首方位制御装置に設定回頭角速度による回頭を行う機能をもつ場合,回頭角速
度が一定となったときの精度は,通常の積荷状態及び平水状態で操船を妨げない広さと深さの海域におい
て,設定値の±10 %又は±3度/分のいずれか大きい方を超えてはならない。
備考 天候,海象,操船性能によっては,最大だ(舵)角で操だ(舵)してもあらかじめ設定された
回頭角速度で回頭できない場合がある。
4.3.8
設定旋回半径 船首方位制御装置に設定旋回半径による回頭を行う機能をもつ場合,回頭が一定と
なったときの精度は,4.3.7のデータを使用して計算しなければならない。
備考 天候,海象,操船性能によっては最大だ(舵)角で操だ(舵)しても,あらかじめ設定された
旋回半径で回頭できない場合がある。
4.3.9
オーバシュートの制限 船首方位制御装置は,大きなオーバシュートなしで設定針路に変針するた
めの当かじ調整又は同等の機能を設けなければならない。
4.3.10 供給電源
4.3.10.1 船首方位制御装置は,IEC 60945に規定された各種供給電源で正常な動作を行わなければならな
い。
4.3.10.2 装置に一つ以上の電源が供給される場合は,迅速に他の供給電源に切り替えができなければなら
ない。その切替器は,装置に内蔵する必要はない。供給電源が切り替わる間,現在の船首方位を保持する
手段を備えていなければならない。
4.3.11 警報及び警報表示設備
4.3.11.1 一般 警報及び警報表示設備を操船位置に近接して設け,容易に近づくことができなければなら
ない。
4.3.11.2 電源の喪失と低下 船首方位制御装置又はヘディング・モニター[船首方位監視装置]への供給
電源の,装置の安全作動に影響する喪失又は低下を知らせるための可視可聴警報を設けなければならない。
ただし,可聴警報は確認の後消すことができる。警報及び警報表示設備は,船首方位制御装置に組み込ま
5
F 9604:2003 (ISO 11674:2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
れていなくてもよい。
4.3.11.3 システム故障 船首方位制御装置のいかなる故障をも知らせるための可視可聴警報を設けなけ
ればならない。ただし,可聴警報は確認の後消すことができる。
備考 この項で使われている “船首方位制御装置” の範囲を図1に示す。
4.3.11.4 オフ・ヘディング警報 船首方位が設定針路からの設定限度を超えたとき,可視可聴のオフ・ヘ
ディング警報を設けなければならない。ただし,可聴警報は確認の後消すことができる。設定範囲は最低
でも5°〜15°に設定できなければならない。
備考1. オフ・ヘディングは,船が設定針路から外れてしまった状況である。
2. この項目中の “設定限度” は,警報を発する値を意味する。
4.3.11.5 ヘディング・モニター[船首方位監視装置] 二つの独立したコンパスの搭載を要求される船で
は,それぞれの独立した船首方位情報源からの船首方位情報を監視するためのヘディング・モニターを設
けなければならない。ヘディング・モニターは,船首方位制御装置の一部として組み込まれている必要は
ない。使用中の船首方位情報が他方の情報源からの船首方位情報に対して設定限度を超えた場合に発する
可視可聴警報を設けなければならない。ただし,可聴警報は確認の後消すことができる。設定範囲は最低
でも5°〜15°に設定できなければならない。
備考 この項目中の“設定限度”は,警報を発する値を意味する。
4.3.11.6 船首方位情報源の表示 使用中の船首方位情報源を明確に表示するための手段を設けなければ
ならない。
4.3.11.7 センサー・ステータス 船首方位制御装置は,制御に使用している外部センサーの入力がなくな
ったときの警報表示を設けなければならない。また,その外部センサーの入力データが制御に使用されて
いる場合,そのデータの信頼性が落ちたことを示す情報によってセンサーが警報を発したときは,センサ
ーが警報機能をもっていても船首方位制御装置でも警報を繰り返さなければならない。
4.3.12 変換誤差 船首方位制御装置に供給される船首方位データは,使用しているコンパスの船首方位か
ら0.5°以上の差があってはならない。
4.3.13 船首方位の安定性 外乱がない状態での船首方位の安定性は,設定針路と船首方位の差の平均値で
表し,その平均値は±1°以内,かつ,最大値は±1.5°以内でなければならない。
4.3.14 磁気コンパスへの影響 磁気センサーによる磁気コンパスへの影響は,そのセンサーが駆動され使
用されている場合は0.5°を超えてはならない。このことは,船首方位制御装置の電源がON又はOFFに
かかわらず,すべての船首方位において満足しなければならない。
4.3.15 インタフェース
4.3.15.1 船首方位制御装置は,適切な船首方位情報源と接続しなければならない。
4.3.15.2 船首方位制御装置は,旋回半径制御を使用できる場合又は制御パラメータが自動的に船速に適合
する機能がある場合,適切な船速情報源と接続しなければならない。
4.3.15.3 船首方位制御装置が他の航海機器とデジタルシリアル通信を行う能力をもつ場合,インタフェー
スはできる限り国際通信規格であるIEC 61162に適合しなければならない。
4.4
安全策 船首方位制御装置のすべての安全策については,IEC 60945によらなければならない。
5. 型式試験
5.1
試験及び要求結果 試験は,5.2〜5.5の順序で行わなければならない。試験は,附属書Aを参照し
船体運動シミュレータで行う。
6
F 9604:2003 (ISO 11674:2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.2
磁気コンパス安全距離試験 磁気コンパスの安全距離の決定は,ISO 694の要求によって行わなけれ
ばならない。システムの全部分及びそれらの相互接続について考慮しなければならない。
5.3
電磁適合性 [EMC] 及び環境試験 電磁適合性及び環境試験は,IEC 60945によって行わなければな
らない。
5.4
自動操だ(舵)から手動操だ(舵)への切替え 自動操だ(舵)から手動操だ(舵)へ切り替える
試験は,次のように行わなければならない。
a) 自動操だ(舵)中に操だ(舵)輪でだ(舵)角指令0°にする。
b) だ(舵)角制限を最大値に設定し,設定針路を最大だ(舵)角をとるように設定する。
c) 自動操だ(舵)から手動操だ(舵)に切り替える。
d) モード切替操作を完了してからかじ中央指令が与えられるまでの時間を計測する。この時間は,4.3.1.1
の要件による。
5.5
制御特性
5.5.1
一般 次の試験は,船体運動シミュレータを使用して行わなければならない。附属書Aに示した
シミュレータは,この試験を行うための基準シミュレータである。
5.5.2
船首方位信号変換精度 シミュレータの船首方位を八つの方位に設定し,船首方位制御装置が示す
船首方位と比較する。この計測を右及び左回りについてそれぞれ2回ずつ行わなければならない。要求は,
4.3.12の要件による。
5.5.3
200°変針
5.5.3.1
この試験は,附属書Aに明記された船体運動シミュレータを使用し,
v
L/ = 30,自動変針,回
頭角速度制御なし又は旋回半径制御なしの条件で行わなければならない。4.3.2.6によって,針路設定器で
200°の針路変更を行う。右又は左に回頭させ,次の点検をしなければならない。
a) 針路設定器を右回りにすると右回頭が行われ,左回りにすると左回頭が行われる(いずれの場合も船
首方位が変わる方向は,針路設定器の回転方向による)。
b) 船首方位の変更が行われた後に,だ(舵)角制限機能が動作する。
5.5.3.2
この試験は,附属書Aに明記した船体運動シミュレータを使用し,
v
L/= 30でだ(舵)角制限値
が最大の条件で行わなければならない。針路設定器を右又は左に回し,200°の針路変更をしなければなら
ない。5.5.3.1 a) の要件及び回頭角速度又は旋回半径については,4.3.7及び4.3.8の要件を満足しなければ
ならない。
次の計算式で得た回頭角速度での回頭を確認するため,設定旋回半径試験を行う。
r
ν
π
ι
ψ
×
=180
&&
ここに, ι
ψ&&:設定回頭角速度(度/秒)
r:設定旋回半径 (m)
ν:船速(m/秒)
この試験は,設定旋回半径又は設定回頭角速度の最大値,中間値及び最低値で,それぞれの方向に各1
回ずつ,合計6回行わなければならない。
備考1. 水平加速度aは,1.0 m/s2を超えない。
2. この試験では回頭角速度又は旋回半径は,水平加速度が1.0 m/s2を超えないように選択する。
5.5.4
船首方位の安定性 この試験は,附属書Aに明記された船体運動シミュレータを使用し,
v
L/=30
で行わなければならない。船首方位制御装置の電源を入れ10分後に,4.3.13の要件によっていることを10
7
F 9604:2003 (ISO 11674:2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
分間計測して確認しなければならない。
5.5.5
オーバーシュート この試験は,附属書Aに明記した船体運動シミュレータを使用してLv
/
= 30
で行わなければならない。設定針路を右及び左に船首方位から20°変更する。オーバーシュートは,2°
を超えてはならない。
6. 表示及び識別 船首方位制御装置の各ユニットには,次の表示がなければならない。
− 製造業者名
− 型式試験を行った装置の形式番号又は形式
− ユニットのシリアル番号
− 磁気コンパス安全距離(船橋に設置するユニットについて)
7. 情報 正確な操作及び保守を可能にする適切な情報が与えられていなければならない。その情報は,
次による。
a) 故障診断及び修理が部品レベルまでできるように設計されている装置である場合,完全な回路図,部
品配置図及び部品一覧表の情報及び
b) 故障診断及び修理が部品レベルまでできない合成モジュールをもった装置である場合,欠陥モジュー
ルを特定,識別及び交換するための十分な情報。それ以外のモジュール及びモジュールの構成品でな
い個別部品については上記a) の要件に適合しなければならない。
c) 船首方位制御装置が回頭角速度又は旋回半径の機能をもつ場合,天候,海面状態,船速,積荷,ドラ
フト及びトリムなどの特定状態で設定値に達しないことがあるかもしれないことの記述をしなければ
ならない。さらに,不正確な船速入力は,不正確な旋回半径制御となることも記述しなければならな
い。
8
F 9604:2003 (ISO 11674:2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A(規定)船体運動シミュレータ
次の内容は,船体運動シミュレータの基準である。船体運動モデルは,次の式で示したK−Tモデルで
ある。
1
+
=TSK
δ
ψ&
ここに, ψ&:船の回頭角速度(度/秒)
δ:実だ(舵)角(度)
K:船の旋回能力定数(1/秒)
T:船の時定数(秒)
S:ラプラス演算子
K及びTは,K′及びT ′から次のように変換する。
v
L
K
K
/
'
=
v
L
T
T
×
='
ここに, K′:船の無次元の旋回性指数:K′ = 1
T ′:船の無次元の針路保持性指数:T ′ = 1
L:船首方位制御装置を装備する船の長さ (m)
v:船首方位制御装置を装備する船の速度(m/秒)
表A.1に
v
L/の例を示す。
表A.1 L/vの例
船種
Lpp
V (Kt)
V (m/s)
Lv
/
コンテナ船
230
22.0
11.31
20.3
コンテナ船
273
23.0
11.82
23.1
バルク船
259
14.0
7.20
36.0
LPG船
212
16.0
8.22
25.8
VLCC
308
15.4
7.92
38.9
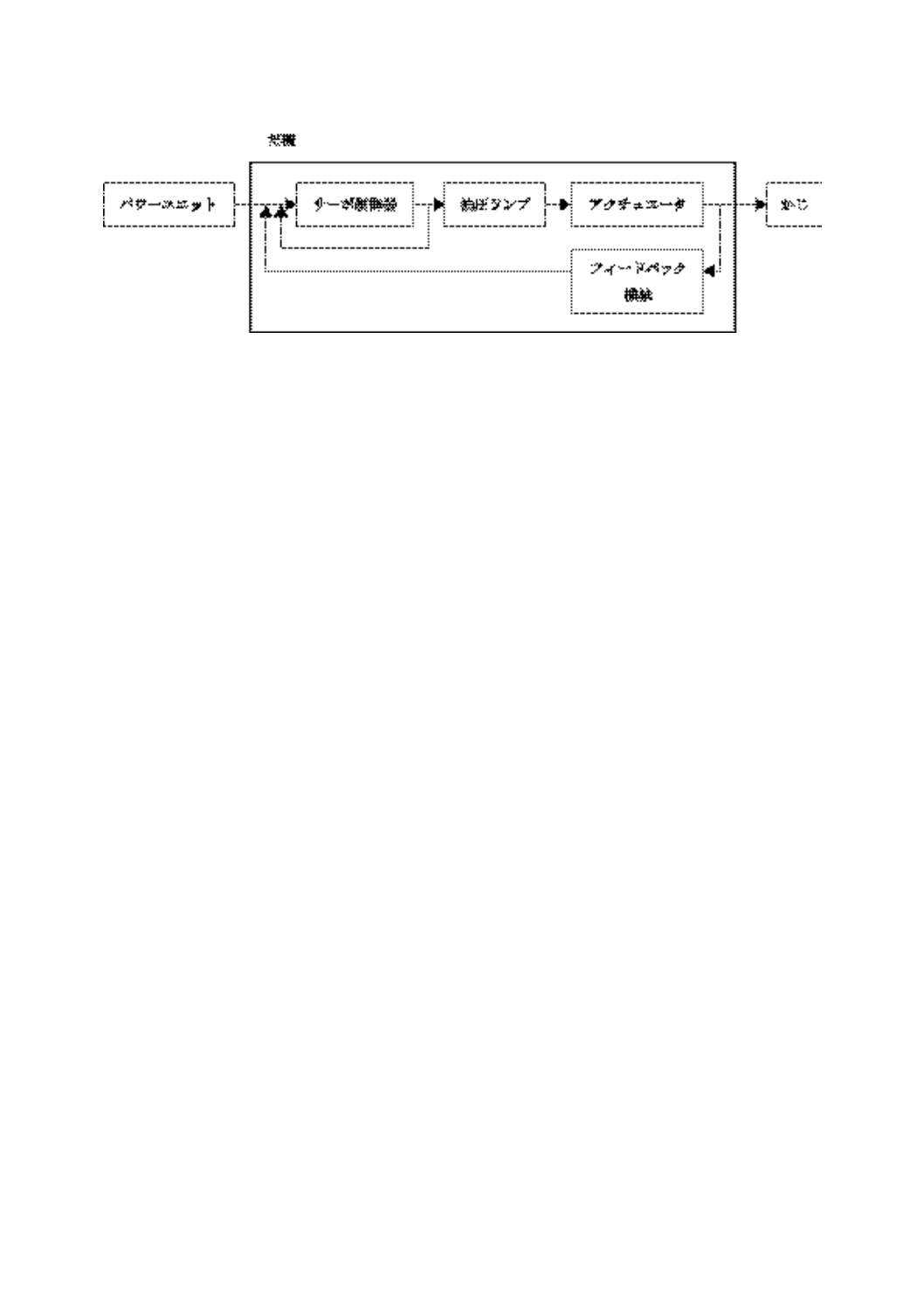
だ機モデルは,次の式に基づく。
1
1
*
+
=
S
TE
δ
δ
ここに, δ:実だ(舵)角(度)
*
δ:指令だ(舵)角(度)
E
T:だ機の時定数(秒)
S:ラプラス演算子
この場合,かじが動く率(
dt
d/
δ
)は3度/秒以下で,E
Tは2.5秒でなければならない。
方位の分解能とだ機モデル感度は,次によらなければならない。
− 方位の解像度 :0.1° 以下
− だ機モデル感度:0.2° 以下
だ機のブロック図を図 A.1に示す。
9
F 9604:2003 (ISO 11674:2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.1 だ機のブロック図
10
F 9604:2003 (ISO 11674:2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B(参考)この規格とIMO決議との対応する要件
この規格の項目
IMO 決議文[MSC.64(67) 附属書3で
改正された決議A.342(IX),船首方位
制御装置の一般要件及びA.694(17)]の
項目
1
4.1.1
4.3.1.1
4.3.1.2
4.3.1.3
4.3.1.4
4.3.1.5
4.3.2.1
4.3.2.2
4.3.2.3
4.3.2.4
4.3.2.5
4.3.2.7
4.3.2.8
4.3.2.9
4.3.3
4.3.4
4.3.6
4.3.9
4.3.10.2
4.3.11.2
4.3.11.4
4.3.11.5
4.3.11.6
3.11.7
4.3.15.1
4.3.15.2
4.3.15.3
6
7.a)
7.b)
MSC 64(67) annex 3, 2.1, 2.2 and 2.3
MSC 64(67) annex 3, 3.1
MSC 64(67) annex 3, 4.1
MSC 64(67) annex 3, 4.2
MSC 64(67) annex 3, 4.3
MSC 64(67) annex 3, 4.4
MSC 64(67) annex 3, 4.5
A.694(17) 3.2
MSC 64(67) annex 3, 7.1
A.694(17) 3.3
MSC 64(67) annex 3, 7.2
MSC 64(67) annex 3, 7.3
MSC 64(67) annex 3, 7.4
MSC 64(67) annex 3, 7.5
MSC 64(67) annex 3, 7.6
MSC 64(67) annex 3, 3.3
MSC 64(67) annex 3, 3.4
MSC 64(67) annex 3, 3.5
MSC 64(67) annex 3, 3.6
A. 694(17) 4.3
MSC 64(67) annex 3, 6.1
MSC 64(67) annex 3, 6.2
MSC 64(67) annex 3, 6.3
MSC 64(67) annex 3, 6.4
MSC 64(67) annex 3, 6.5
MSC 64(67) annex 3, 8.1
MSC 64(67) annex 3, 8.2
MSC 64(67) annex 3, 8.3
A. 694(17) 9
A. 694(17) 8.3.1
A. 694(17) 8.3.2
11
F 9604:2003 (ISO 11674:2000)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1]
ISO 2412:1982, Shipbuilding−Colours of indicator lights
[2]
ISO 8468:1990, Shipʼs bridge layout and associated equipment−Requirements and guidelines
[3]
IEC 60092-204:1987, Electrical installations in ships−Part 204: System design−Electric and
electrohydraulic steering gear.
[4]
IMO Resolution A.210(VII), Recommendation on steering gear for large ships.
[5]
IMO Resolution A.694(17):1991, General requirements for shipborne radio equipment forming part of the
global maritime distress and safety system (GMDSS) and for electronic navigational aids.
[6]
IMO Resolution MSC.64(67), annex 3:1997, Amendment to Resolution A.342(IX), Performance standards
for heading control systems
[7]
SOLAS 1974, Chapter II-1, Regulations 29 and 30
[8]
SOLAS 1981, Chapter V, Regulation 19