F 9012:2002
(1)
著作権法により無断での複製,転載等は禁止されております。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,財団法人日本船舶標準協会 (JMSA) から,
工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,国
土交通大臣が制定した日本工業規格である。
JIS F 9012には,次に示す附属書がある。
附属書(参考) 参考文献
F 9012:2002
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 1
2. 引用規格 ························································································································ 1
3. 定義 ······························································································································ 1
4. 一般要件 ························································································································ 2
4.1 一般 ···························································································································· 2
4.2 安全設計 ······················································································································ 2
4.3 電源 ···························································································································· 3
5. 機能要件 ························································································································ 3
5.1 操船制御機能 ················································································································ 3
5.2 情報表示 ······················································································································ 3
5.3 監視 ···························································································································· 3
5.4 操作 ···························································································································· 4
5.5 警報 ···························································································································· 4
5.6 バックアップ機能 ·········································································································· 4
5.7 インターフェイス ·········································································································· 4
6. 環境試験 ························································································································ 4
7. 性能要件 ························································································································ 5
7.1 計算書 ························································································································· 5
7.2 海上試験 ······················································································································ 5
8. 表示 ······························································································································ 5
附属書(参考) 参考文献 ······································································································· 7
解説 ··································································································································· 9
1
F 9012:2002
著作権法により無断での複製,転載等は禁止されております。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
F 9012:2002
離着桟操船援助システム
Shipʼs berthing control system
序文 この規格は,離桟,着桟操船を最小限の人員で安全に行えることを目的に,操船にかかわる情報と
操船操作とを統合し,離着桟操船の効率化と安全性に寄与するシステムについて規定する。
1. 適用範囲 この規格は,離着桟操船援助システムを設計する場合の一般的事項について規定する。
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版(追補を含む。)を適用する。
JIS C 0508-1 電気・電子・プログラマブル電子安全関連系の機能安全―第1部:一般要求事項
JIS C 0508-2 電気・電子・プログラマブル電子安全関連系の機能安全―第2部:電気・電子・プログ
ラマブル電子安全関連系に対する要求事項
JIS C 0508-3 電気・電子・プログラマブル電子安全関連系の機能安全―第3部:ソフトウェア要求
事項
JIS C 0508-4 電気・電子・プログラマブル電子安全関連系の機能安全―第4部:用語の定義及び略
語
JIS C 0508-5 電気・電子・プログラマブル電子安全関連系の機能安全―第5部:安全度水準決定方
法の事例
JIS C 0508-6 電気・電子・プログラマブル電子安全関連系の機能安全―第6部:第2部及び第3
部の適用指針
JIS C 0508-7 電気・電子・プログラマブル電子安全関連系の機能安全―第7部:技術及び手法の
概観
JIS F 9002 統合ブリッジシステム−設計指針
JIS Z 8530 人間工学−インタラクティブシステムの人間中心設計プロセス
ISO 9001 Quality management systems−Requirements
ISO/IEC Guide 51 Safety aspects−Guidelines for the inclusion in standards
IEC 61162-1 Maritime navigation and radiocommunication equipment and systems−Digital interfaces−Part
1: Single talker and multiple listeners
IEC 60945 Maritime navigation and radiocommunication equipment and systems−General requirements−
Methods of testing and required test results
IMO MSC/Circ. 891 Guidelines for the on-board use and application of computers
3. 定義 この規格で用いる主な用語の定義は,次による。
a) 離着桟操船援助システム 離桟,着桟操船を最小限の人員で安全に行えることを目的に,操船にかか
2
F 9012:2002
著作権法により無断での複製,転載等は禁止されております。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
わる情報と操船操作とを統合し,離着桟操船の効率化と安全性に寄与するシステムをいう。
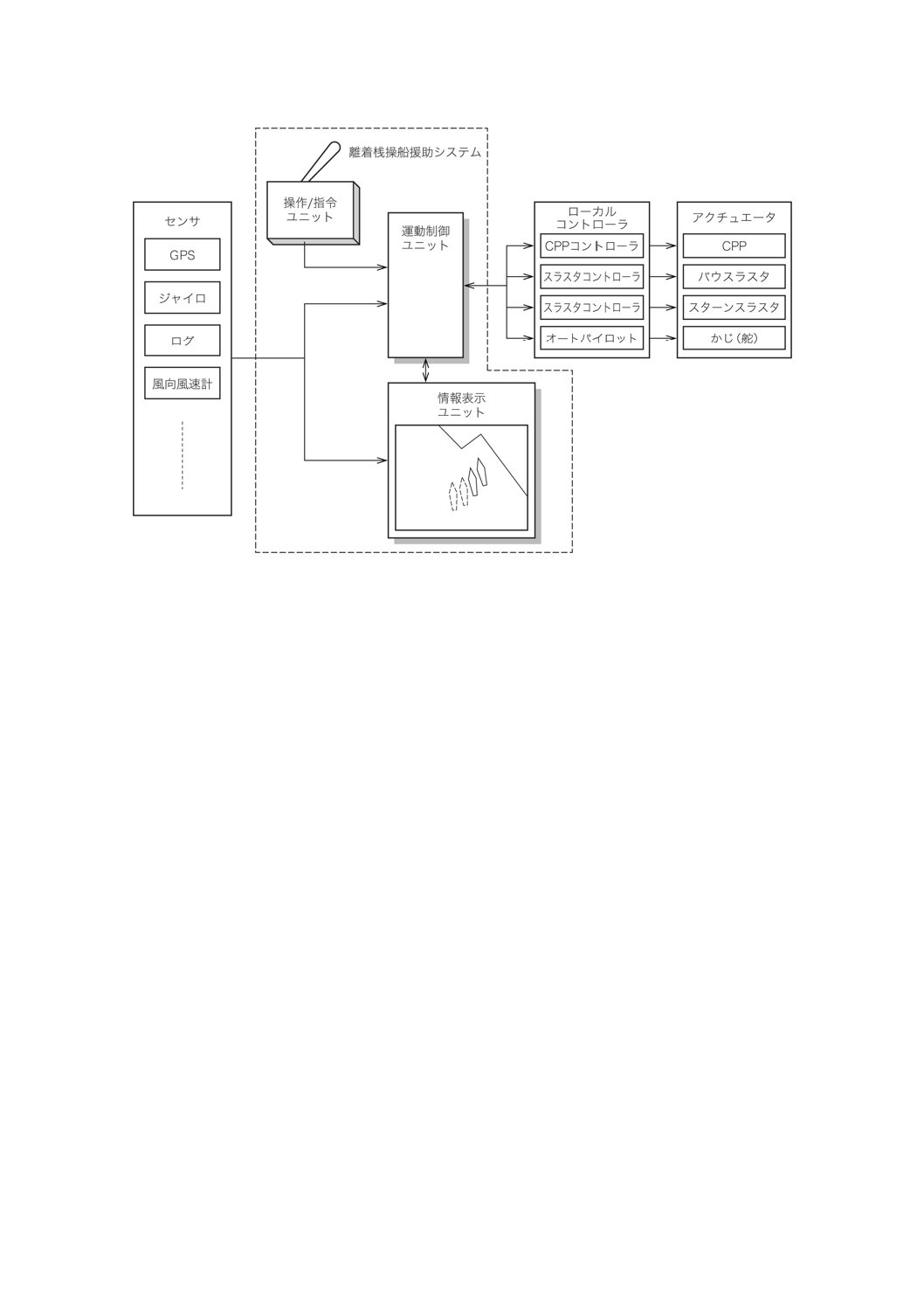
離着桟操船援助システムの構成例を,付図1に示す。
b) 離着桟操船 船舶を離桟又は着桟させるための操船。この規格では岸壁又は桟橋から船長の3倍程度
の範囲の操船を想定する。ただし,着桟時は綱取りができるまでの操船をいう。
c) 離着桟操船場所 離着桟操船を行うために,操船に必要な情報が表示され,かつ,プロペラ,バウス
ラスタ,かじなどの制御装置への指令が行える場所。
d) 必す(須)機能 船体の運動を制御するために最低限必要な船体の前後左右方向の推進力及び旋回力を
操作する機能。
e) 操船モード 離着桟操船援助システムの操船制御方式。この規格では,操船指令をコンピュータが自
動演算し,その演算結果に基づいてプロペラ,バウスラスタ,かじなどのアクチュエータを駆動させ
る方式を連動モード,個々のアクチュエータを独立に操作する方式を個別モードと呼ぶ。また,連動
モードを自動モード,個別モードを手動モードとも呼ぶ。
f)
スタンバイ状態 離着桟操船援助システムを使用するための条件がすべて整っており,いつでも離着
桟操船援助システムによる操船制御に切り替えられる状態。
g) アクチュエータ 船体に推力を与えたり,また,その推力の方向及び大きさを変えることができる装
置。プロペラ,スラスタ,かじなどがある。
h) 応答遅れ 指令を変える操作を行ってからアクチュエータがその指令値に達するまでの時間遅れ。
4. 一般要件
4.1
一般
a) システムは,次の条件を満たすものでなければならない。
b) 離着桟操船援助システムは,操船に必要なアクチュエータへの操作を一人で行うことができ,かつ,
自船の状況及び周囲の状況が操作場所で把握できるように設計されたシステムとする。
c) 離着桟操船援助システムに接続される機器について,その性能基準がIMOで規定されている場合,
接続する機器は,その性能基準を満足しなければならない。
d) マン・マシーン・インターフェイスは,JIS F 9002の附属書3[マン・マシン・インターフェイス(標
準化へのガイドライン)]によって設計されていなければならない。
e) 離着桟操船援助システムは,JIS Z 8530を考慮して設計することが望ましい。
f)
離着桟操船援助システムを理解し,十分な性能が発揮できるような手段(取扱説明書,ビデオ,講習
会など)が用意されていなければならない。できればシミュレータによる訓練を行うことが望ましい。
g) 設計,製造及びサービスの品質マネジメントシステムは,ISO 9001の審査登録制度の登録証を取得し
たものが行うことが望ましい。
4.2
安全設計 安全設計は,次による。
a) ISO/IEC Guide 51,JIS C 0508-1〜-7,MSC/Circ. 891などに基づき安全設計を実施し,文書化する。
備考 安全設計については,ISO/IEC Guide 51,JIS C 0508-1〜-7及びMSC/Circ. 891に規定されて
いる方法に限定されるものではなく,他の方法によって文書化してもよい。
b) このシステムの操船にかかわる機能の一部が故障した場合には,その機能を代替する手段(バックア
ップ)が十分考慮された設計が行われていなければならない。
備考 バックアップ機能は,必ずしも離着桟操船援助システムに含まれる必要はなく,他のシステム
でバックアップされてもよい。ただし,その場合には,バックアップ手段に容易に切り替えら
3
F 9012:2002
著作権法により無断での複製,転載等は禁止されております。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
れなければならない。
4.3
電源 電源は,次による。
a) このシステムの電源断からの復旧時,離着桟操船場所を離れることなく,このシステムを使用できな
ければならない。
b) このシステムには可視可聴の電源喪失警報を設けなければならない。
5. 機能要件
5.1
操船制御機能 操船制御機能は,次による。
a) 船体の前後,左右,斜め移動及び旋回制御が可能でなければならない。
b) 自動制御機能をもつ場合は載貨状態の変化などによる船体の特性変化又は気象の変化に対し,自動又
は手動の調整機能をもたなければならない。
喫水変化が満載喫水の25 %以下の船舶に搭載する場合には,載貨状態の変化に対する調整機能を省
略することができる。
c) 複数のアクチュエータを連動して推力指令を与えるように設計されたシステムでは,それぞれのアク
チュエータの応答遅れを考慮した設計でなければならない。
5.2
情報表示 情報表示は,次による。
5.2.1
操船モードの表示 離着桟操船援助システムの状態を表す次の情報は,離着桟操船場所に常時表示
する。
−操船モード(例えば,自動/手動)/スタンバイ状態
−作動状態(正常/異常)
5.2.2
操船情報 操船表示は,次による。
a) 離着桟操船場所から使用しているアクチュエータの作動状況が確認できなければならない。離着桟操
船援助システムで操船中は,アクチュエータへの指令値と実際の応答値とが表示されることが望まし
い。
例 −だ(舵)角
−プロペラ翼角(FPPの場合はプロペラ回転数及び回転方向)
−スラスタ翼角
b) 囲われたブリッジ内で操船する場合には,離着桟操船場所から風向/風速の情報が確認できる。
c) 暴露タイプのウイングで使用される表示器は,直射日光が当たらない措置が行われていなければなら
ない。又は直接日光が当たっても視認できる表示素子を用いる。また,LEDを用いる場合は,2.5 mcd
以上の素子を使用する。
d) 輝度調整が可能でなければならない。ただし,警報発生時の警報表示は,輝度調整を無効とする。
5.3
監視 離着桟操船場所で,次の状態が監視できなければならない。
a) アクチュエータの状態監視 アクチュエータが正常に作動していることが確認できる手段をもたなけ
ればならない。
b) 船体運動に関する自動制御に使用しているセンサの状態監視は,次による。
1) 船体運動に関する自動制御に使用しているセンサが正常に作動していることが確認できる手段をも
たなければならない。
2) 船体運動に関する自動制御に使用しているセンサに異常が発生した場合には,警報を発し,各アク
チュエータが安全側に働く処置が行われていなければならない。
4
F 9012:2002
著作権法により無断での複製,転載等は禁止されております。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.4
操作 操作は,次による。
a) 操作レバーなどで船舶の移動方向を指令する場合には,操作の方向及び想定する船舶の移動方向又は
指令推力の方向がほぼ一致しなければならない。ポータブルタイプの操作器の場合は,操作の方向と
船体の相対方向とが分かるよう,船形表示を行う。
なお,方向がほぼ一致するとは,±20 °以内を意味する。これを外れる可能性のある場合は,その
条件を取扱説明書に明記する。
b) 操作つまみなどで船舶の旋回方向を指令する場合は,操作の方向と船舶の旋回方向とが一致しなけれ
ばならない。
c) 船体運動に関する自動制御に使用するセンサに異常がある場合は,警報を発し,自動モードに切り替
えることができないようにする。
d) 離着桟操船援助システムをスタンバイ状態に設定する操作は1か所で行えなければならない。
なお,1か所で操作できるとは,半径80 cm以内に必要な操作器がすべて配置されていることを意
味する。
e) 離着桟操船援助システムのスタンバイ状態から作動状態への切替えは,1回の操作で行えなければな
らない。
f)
離着桟操船援助システムへの切替えは,スタンバイ状態で,かつ,アクチュエータ及びその制御装置
が正常なときだけ切替可能でなければならない。ただし,アクチュエータ又はその制御装置に異常が
あっても切り替える場合は,必ず操船者に機器に異常があることを知らせ,確認動作を求める。
g) 離着桟操船援助システムから他の装置への切替えは,1回の操作で行えなければならない。また,離
着桟操船援助システムの故障を含むいかなる場合にも可能でなければならない。
5.5
警報 警報は,次による。
a) 警報は可視可聴警報で,かつ,操船場所から確認できなければならない。ただし,主電源からの供給
がない場合には,電源警報以外は可聴警報だけでもよい。
b) 電源喪失及び電源電圧低下警報が可能でなければならない。
c) 離着桟操船援助システムの異常を検出し,その警報が可能でなければならない。
d) アクチュエータの異常警報が可能でなければならない。
e) 自動制御に使用しているセンサの異常警報が可能でなければならない。
f)
暴露タイプのウイングにおける可聴警報は,1 m離れた位置でその音圧が75 dB以上で,かつ,85 dB
を超えてはならない。
5.6
バックアップ機能 バックアップ機能は,次による。
a) 離着桟操船援助システムが故障した場合にもその操船場所に必す(須)機能が独立で操作できる機能
をもたなければならない。
b) 切替操作も含め10秒以内に,他の離着桟操船場所で操船が可能であれば,a)の要件を省略することが
できる。
5.7
インターフェイス インターフェイスは,次による。
a) ディジタル信号接続は,IEC 61162-1による。
b) アナログ信号接続の場合には,断線検出が可能でなければならない。
6. 環境試験 IEC 60945による。
5
F 9012:2002
著作権法により無断での複製,転載等は禁止されております。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7. 性能要件 性能要件は,次による。
7.1
計算書 表1の条件下で最大横移動速度を計算で求め,文書化する。
なお,停止状態から最大横移動速度に達するまでの時系列を示すのが望ましい。
表1 シミュレーション条件
載貨状態
移動方向
風 向
風 速
その他
ケース1
軽貨
90°
−
0 m/s
船首方位:0°
潮流 :なし
波 :なし
ケース2
軽貨
90°
90°
10〜15 m/s(1)
ケース3
満載
90°
−
0 m/s
ケース4
満載
90°
90°
10〜15 m/s(1)
注(1) 10〜15 m/sの任意の風速でシミュレーションを行う。
7.2
海上試験 海上運転において,次の試験を実施する。
なお,試験はできるだけ潮流のない海域で実施するのが望ましい。また,可能であれば載荷状態は,満
載及び軽貨の両状態で実施する。
a) Leeway試験 船舶をほぼ停船状態にし,相対風向が90°となる方位に船首を保持する。この状態で
船首方位だけ一定に保持し,船体が風,潮流に流される状況を計測する。
b) 横移動試験 船舶をほぼ停船状態にし,相対風向が90°となる方位に船首を保持する。離着桟操船援
助システムによって右横移動最大指令を発する。横移動速度が最大に達したら試験を終了する。右横
移動試験終了後,再び船舶をほぼ停船状態にし,相対風向が90°となる方位に船首を保持する。離着
桟操船援助システムによって左横移動最大指令を発する。最大横移動速度に達したら試験を終了する。
c) 計測項目 a)及びb)の試験時,少なくとも次のデータを連続計測する。
1) 自船位置 測定精度は5 m以下。
2) 船首方位 測定精度は1°以下。
3) 対地速度 測定精度は0.1 kn以下。船首尾方向と左右方向を計測する。
4) 風向風速 相対データを計測する。
5) 離着桟操船援助システムの指令値
6) 各アクチュエータの状態量
なお,可能であれば,対水速度を記録する。
対水速度:測定精度は0.1 kn以下。船首尾及び左右方向。
d) 試験結果の掲示 試験結果をブリッジに掲示する。
8. 表示 離着桟操船援助システムの見やすいところに,次の事項を表示する。
a) 名称及び形式
b) 製造業者名又はその略号
c) 製造番号
d) 製造年月日又はその略号
6
F 9012:2002
著作権法により無断での複製,転載等は禁止されております。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付図1 離着桟操船援助システム構成例
7
F 9012:2002
著作権法により無断での複製,転載等は禁止されております。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書(参考) 参考文献
序文 この附属書(参考)は,規定の一部ではない。
IMO Resolution A. 224 (VII) : 1971 Performance standards for echo-sounding equipment[IMO Resolution
MSC. 74 (69) : 1998 ‒ annex 4参照]
IMO Resolution A. 342 (IX) : 1975 Recommendation on performance standards for automatic pilots[IMO
Resolution MSC. 64 (67) ‒ annex 3参照]
IMO Resolution A. 382 (X) : 1977 Magnetic compasses carriage and performance standards
IMO Resolution A. 424 (XI) : 1979 Performance standards for gyro-compasses
IMO Resolution A. 478 (XII) : 1981 Performance standards for devices to indicate speed and distance[IMO
Resolution A. 824 (19) 参照]
IMO Resolution A. 819 (19) : 1995 Performance standards for shipborne global positioning system (GPS)
receiver equipment
IMO Resolution A. 821 (19) : 1995 Performance standards for gyro-compasses for high-speed craft
IMO Resolution A. 824 (19) : 1995 Performance standards for devices to indicate speed and distance
IMO Resolution MSC. 53 (66) : 1996 Performance standards for shipborne GLONASS receiver equipment
IMO Resolution MSC. 64 (67) : 1996 Adoption of new and amended performance standards
Annex 2 : Performance standards for shipborne DGPS and DGLONASS maritime radio beacon receiver
equipment
Annex 3 : Amendments to resolution A. 342 : 1975 Performance standards for automatic pilots
ISO 449 : 1997 Ships and marine technology−Magnetic compasses, binnacles and azimuth reading devices−
Class A
ISO 613 : 2000 Ships and marine technology−Magnetic compasses, binnacles and azimuth reading devices−
Class B
ISO 8728 : 1997 Ships and marine technology−Marine gyro-compasses
8
F 9012:2002
著作権法により無断での複製,転載等は禁止されております。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ISO 9875 : 1996 Ships and marine technology−Marine echo-sounding equipment
ISO 11606 : 2000 Ships and marine technology−Marine electromagnetic compasses
IEC 61023 : 1990 Marine speed and distance measuring equipment−Operational and performance requirements
−Methods of testing and required test results
IEC 61108-1 : 1996 Maritime navigation and radiocommunication equipment and systems−Global navigation
satellite systems (GNSS)−Part 1 : Global positioning system (GPS)−Receiver equipment−Performance
standards, methods of testing and required test results
IEC 61108-2 : 1998 Maritime navigation and radiocommunication equipment and systems−Global navigation
satellite systems (GNSS)−Part 2: Global navigation satellite system (GLONASS)−Receiver equipment−
Performance standards, methods of testing and required test results
JIS F 8079 : 1989 船用電気設備 第204部 システム設計−電動及び電動油圧操だ装置(IDT IEC
60092-204:1987)
JIS F 9101 : 1998 船用磁気コンパス(MOD ISO 449 : 1997,613 : 96)
JIS F 9401 : 1996 造船−船用音響測深装置(MOD ISO 9875 : 1991)
JIS F 9602 : 1992 船用ジャイロコンパス(NEQ ISO 8728 : 1987)