F 8076:2005 (IEC 60092-504:2001)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,財団法人日本船舶
標準協会(JMSA)から,工業標準原案を具して日本工業規格を改正すべきとの申出があり,日本工業標準調
査会の審議を経て,国土交通大臣が改正した日本工業規格である。
これによって,JIS F 8076:1997は改正され,この規格に置き換えられる。
改正に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,IEC 60092-504:2001,Electrical
installations in ships−Part 504: Special features−Control and instrumentationを基礎として用いた。
F 8076:2005 (IEC 60092-504:2001) 目次
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 1
2. 引用規格 ························································································································ 1
3. 定義 ······························································································································ 3
4. 一般要求事項 ·················································································································· 4
4.1 ディペンダビリティ ······································································································· 4
4.2 安全性 ························································································································· 4
4.3 分離 ···························································································································· 4
4.4 性能 ···························································································································· 5
4.5 有用性(使いやすさ) ···································································································· 5
4.6 統合 ···························································································································· 5
4.7 開発活動 ······················································································································ 5
5. 環境形式試験パラメータ ··································································································· 5
6. 設計 ····························································································································· 10
6.1 環境及び電源条件 ········································································································· 10
6.2 回路設計 ····················································································································· 10
6.3 相互作用 ····················································································································· 10
6.4 電気的分割 ·················································································································· 11
6.5 信号レベル ·················································································································· 11
6.6 電源 ··························································································································· 11
7. 構造及び材質 ················································································································· 11
7.1 調整 ··························································································································· 11
7.2 近づきやすさ ··············································································································· 11
7.3 交換 ··························································································································· 11
7.4 非互換性 ····················································································································· 11
7.5 冷却 ··························································································································· 11
7.6 コネクタに対する機械的負荷··························································································· 12
7.7 キャビネットの機械的特徴······························································································ 12
7.8 衝撃吸収装置及び振動吸収装置························································································ 12
7.9 内部配線 ····················································································································· 12
7.10 ケーブルの接続 ··········································································································· 12
8. 装備及び操作性 ·············································································································· 12
8.1 一般 ··························································································································· 12
8.2 センサ ························································································································ 13
8.3 情報の表示 ·················································································································· 13
F 8076:2005 (IEC 60092-504:2001) 目次
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
8.4 制御 ··························································································································· 13
8.5 警報システム ··············································································································· 14
9. 特殊設備 ······················································································································· 14
9.1 火災防止制御設備 ········································································································· 14
9.2 機関警報装置 ··············································································································· 18
9.3 電源供給に関する自動制御設備························································································ 20
9.4 電動機駆動補機用自動始動装置························································································ 22
9.5 機械制御装置 ··············································································································· 23
9.6 機械保護(安全)システム······························································································ 24
9.7 船首戸,内部戸,船側外板戸及び船尾戸 ············································································ 25
9.8 水密動力戸 ·················································································································· 26
9.9 旅客船における船内放送システム····················································································· 28
10. コンピュータ利用システム······························································································ 29
10.1 一般 ·························································································································· 29
10.2 システムの安全性 ········································································································ 29
10.3 システム構成 ·············································································································· 29
10.4 システム統合 ·············································································································· 29
10.5 電源 ·························································································································· 30
10.6 データ通信リンク ········································································································ 30
10.7 ユーザインタフェース ·································································································· 30
10.8 警報,制御及び安全機能 ······························································································· 31
10.9 ソフトウェア ·············································································································· 32
10.10 試験 ························································································································ 33
10.11 文書化······················································································································ 33
11. 定期的に無人状態におかれる又は削除された人員当直による機関区域に対する追加要件 ············· 35
11.1 序文 ·························································································································· 35
11.2 一般要件 ···················································································································· 35
11.3 火災予防 ···················································································································· 35
11.4 浸水に対する保護 ········································································································ 35
11.5 推進機関の制御 ··········································································································· 36
11.6 警報システム ·············································································································· 36
11.7 保護(安全)システム ·································································································· 36
11.8 機関,ボイラ及び電気設備に対する特別要件 ···································································· 36
12. 試運転及び試験 ············································································································ 37
12.1 完成設備試験 ·············································································································· 37
12.2 作動試験 ···················································································································· 37
13. 文書化 ························································································································ 37
13.1 機器の説明 ················································································································· 37
13.2 回路図 ······················································································································· 37
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
F 8076:2005
(IEC 60092-504:2001)
船用電気設備−
第504部:個別規定−制御及び計装
Electrical installations in ships−
Part 504:Special features−Control and instrumentation
序文 この規格は,2001年に第3版として発行されたIEC 60092-504:2001,Electrical installations in ships
−Part 504: Special features−Control and instrumentationを翻訳し,技術的内容及び規格票の様式を変更する
ことなく作成した日本工業規格である。
IEC 60092(JIS F船用電気設備)シリーズは,航洋船のすべての用途における電気エネルギーの発電,
蓄電,配電及び利用に関する電気機器の設計,選択,装備,保守及び使用に対する安全確保を意図した国
際規格(国内規格)の一系列を構成している。また,この規格は,できるだけ現行規則を取り入れて調和
を取り,可能なところでは,IMO(国際海事機関)要求の解釈を行う規定となっており,かつ,将来制定
される可能性がある法規の手引書ともなり,船主,造船所並びに関係機関及び製造業者並びにその関係機
関が採用する業務記述書の役目も果たしている。
この規格は,現行の機器及びプラクティスを基本にしているが,新技術又は改良技術の進展をすべての
場合において妨げるものではない。
1. 適用範囲 この規格は,船に用いる制御,監視,警報及び保護システムに使用する電気,電子及びプ
ログラマブル装置に適用する。
備考 この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
IEC 60092-504:2001,Electrical installations in ships−Part 504: Special features−Control and
instrumentation (IDT)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版(追補を含む。)を適用する。
JIS F 8007 船用電気機器−外被の保護等級及び検査通則
備考 IEC 60529,Degrees of protection provided by enclosures (IP Code)からの引用事項は,この規格
の該当事項と同等である。
JIS F 8061 船用電気設備−第101部:定義及び一般要求事項
備考 IEC 60092-101,Electrical installations in ships−Part 101: Definitions and general requirementsが,
この規格と一致している。
JIS F 8062 船用電気設備 第201部 システム設計−一般
2
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
備考 IEC 60092-201,Electrical installations in ships−Part 201: System design−Generalが,この規格
と一致している。
JIS F 8063 船用電気設備 第202部 システム設計−保護
備考 IEC 60092-202,Electrical installations in ships−Part 202: System design−Protectionが,この規
格と一致している。
JIS F 8065 船用電気設備−第302部:低圧配電盤及び制御盤
備考 IEC 60092-302,Electrical installations in ships−Part 302: Low-voltage switchgear and controlgear
assembliesが,この規格と一致している。
JIS F 8072 船用電気設備 第401部 装備基準及び完成試験
備考 IEC 60092-401,Electrical installations in ships−Part 401: Installation and test of completed
installationが,この規格と一致している。
JIS F 8073 船用電気設備 第501部 個別規定−電気推進設備
備考 IEC 60092-501,Electrical installations in ships−Part 501: Special features−Electric propulsion
plantが,この規格と一致している。
JIS F 8074 船用電気設備−第502部:タンカー−個別規定
備考 IEC 60092-502,Electrical installations in ships−Part 502: Tankers−Special featuresが,この規格
と一致している。
JIS F 8079 船用電気設備 第204部 システム設計−電動及び電動油圧操だ装置
備考 IEC 60092-204,Electrical installations in ships−Part 204: System design−Electric and electro-
hydraulic steering gearが,この規格と一致している。
IEC 60050(全パート)International Electrotechnical Vocabulary (IEV)
IEC 60068-2-1 Environmental testing−Part 2: Tests−Tests A: Cold
IEC 60068-2-2 Environmental testing−Part 2: Tests−Tests B: Dry heat
IEC 60068-2-6 Environmental testing−Part 2: Tests−Tests Fc: Vibration (sinusoidal)
IEC 60068-2-30 Environmental testing−Part 2: Tests−Tests Db and guidance : Damp heat,cyclic (12+12
hour cycle)
IEC 60068-2-52 Environmental testing−Part 2: Tests−Tests Kb: Salt mist,cyclic (sodium chloride solution)
IEC 60092(全パート) Electrical installations in ships
IEC 60092-375 Electrical installations in ships. Shipboard telecommunication cables and radio-frequency
cables. General instrumentation, control and communication cables
IEC 60092-376 Electrical installations in ships−Part 376: Shipboard multicore cables for control circuits
IEC 60447 Man-machine interface(MMI)−Actuating principles
IEC 60533 Electric and electronic installations in ships−Electromagnetic compatibility
IEC 60945 Maritime navigation and radiocommunication equipment and systems−General requirements−
Methods of testing and required test results
IEC 61000-4-2 Electromagnetic compatibility (EMC)−Part 4: Testing and measurement techniques−Section
2: Electrostatic discharge immunity test. Basic EMC Publication
IEC 61000-4-3 Electromagnetic compatibility (EMC)−Part 4: Testing and measurement techniques−Section
3: Radiated,radio-frequency, electromagnetic field immunity test
IEC 61000-4-4 Electromagnetic compatibility (EMC)−Part 4: Testing and measurement techniques−Section
3
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4: Electrical fast transient/burst immunity test. Basic EMC Publication
IEC 61000-4-5 Electromagnetic compatibility (EMC)−Part 4: Testing and measurement techniques−Section
5: Surge immunity test
IEC 61000-4-6 Electromagnetic compatibility (EMC)−Part 4: Testing and measurement techniques−Section
6: Immunity to conducted disturbances,induced by radio-frequency fields
IEC 61000-4-11 Electromagnetic compatibility (EMC)−Part 4: Testing and measurement techniques−
Section 11: Voltage dips,short interruptions and voltage variations immunity tests
CISPR 16-1 Specification for radio disturbance and immunity measuring apparatus and methods−Part 1:
Radio disturbance and immunity measuring apparatus
CISPR 16-2 Specification for radio disturbance and immunity measuring apparatus and methods−Part 2:
Methods of measurement of disturbances and immunity
IMO A.830(19) Code on Alarms and Indicators (*1)
IMO決議A813(19)
IMO MSC/Circ.808
注*1 その他のIMO参照文書は,規格の中で引用されている。
3. 定義 この規格で用いる主な用語の定義は,次による。一般的な用語及びこの規格で定義する以外の
特定の用語の定義については,IEC 60050(IEV)及び他の引用文書を参照。
3.1
正確さ (accuracy) 真の値に対する計測値の近さの特性を示す程度。
3.2
警報機能 (alarm functions) 注意を必要とする状況が生じた場合に,可視及び可聴手段で関係の要員
に警告する機能。
3.3
アベイラビリティ (availability) 必要な外部条件が規定されているものとして,規定の時間内に規定
の条件の下で要求される機能を達成する能力。
3.4
集中制御 (centralized control) 一つの集中制御場所から制御するシステムのすべてのオペレーショ
ンを行う制御。
3.5
コンピュータ利用システム (computer-based system) 決められた機能を自動的に実行するために必
要な周辺機器及びソフトウェアが相互に接続された,二組以上のプログラムできる電子装置で構成するシ
ステム。
備考 次のプログラムできる装置が,コンピュータシステムを構成する:メインフレーム,ミニコン
ピュータ,マイクロプロセッサを用いたコンピュータ,プログラマブルロジックコントローラ。
3.6
制御機能 (control functions) 機器及びシステムの動きを調整する機能。
3.7
制御位置(制御場所) [control position (control station)] 機械,装置,プロセス又は機械及び装置の
集合体の動きを操作員が制御できる制御装置の一群。
備考 制御位置は一般に,適切な監視システムによって,オペレータに対し望ましい状態の達成を確
かめさせることができる。
3.8
ディペンダビリティ (dependability) 定義された操作及び環境条件の下で,規定の性能が達成できる
システムの範囲。
3.9
重要設備 (essential services) 推進,操だ,船及び乗組員の安全に必要な機能。
3.10 フェイルセイフ (fail-to-safe) システムの構成要素が故障又は異常の場合,システムの出力をあらか
じめ定めた安全状態側へ自動的に調節する原理。
4
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
備考 安全状態は,適用によって,船の安全を優先するために決められる。一般には,例えば,推進
/操縦プラントの主要な構成要素及び補助要素に対して最も危険が少ない状態にするのがよい。
3.11 機能 (function) 他の基本動作(システム機能)と関連して,システムにタスクを達成させるために,
システムによって実行される基本動作。
3.12 表示機能 (indication functions) 関係の要員に,機器又はシステムの状態を可視及び/又は可聴の手
段で伝達する機能。
3.13 完全性 (integrity) 規定したすべての条件の下で決められた時間内に,所要の機能を満足に果たすた
めのシステムの能力。
3.14 機関制御室 (machinery control room) 主要機器及び重要補機に対する集中制御及び計測・監視機器
が,適切な通信手段とともに設備された部屋又は区域。
3.15 保全性 (maintainability) 規定の条件及び決められた手順と手段で保守が行われたとき,所要の機能
を実行することができる状態まで,維持又は回復させるための,与えられた使用条件下での能力。
3.16 監視機能 (monitoring functions) 表示及び記録の目的で機器並びにシステムからデータを収集する
機能。
3.17 保護機能 (protection functions) 障害発生の場合に,機器又はシステムへの損傷を防止する機能。
3.18 信頼性 (reliability) 限定された時間の中で,かつ,規定の条件の下で,要求された機能を果たす能
力。
3.19 安全機能 (safety functions) 人に対する危害又は危険を防止する機能。
3.20 ソフトウェア (software) コンピュータシステムの動作にかかわる,プログラム,手順及び関連する
文書であって,アプリケーション(ユーザ)プログラム,ミドルウェアプログラム及びオペレーティング
システム(ファームウェア)を含む。
3.21 システム (system) 特定の機能又は組み合わされた機能を成し遂げるために体系化された構成要素
の集合。
3.22 有用性(使いやすさ) (usability) 指定したユーザが,規定した使用状況においてシステムを使用し
た場合,有効性,効率及び満足度の点で規定の目標に達するための程度。
4. 一般要求事項
4.1
ディペンダビリティ システムは,ユーザ,タスク及び適用に対して適切なものでなければならな
い。
システムの完全性は,有効性,信頼性及び保全性等の要素に関する機能が維持されるために適切なもの
でなければならない。
4.2
安全性 システムは,正常動作及び異常状態の両方の状態において,人間又は環境に対する危害の
リスクを当該公的機関が承認するレベルまで減少を図った設計にしなければならない。機能はフェイルセ
イフ原理に基づいて設計しなければならない。
4.3
分離 システムは,一つの構成部分又はサブシステムの故障が他のシステム,サブシステム若しく
は構成要素に過度に影響を与えず,かつ,できるだけ検知しやすい設計にしなければならない。
保護(安全)機能は,制御及び監視(警報)機能から独立したものとする。実行可能な限り,制御と監
視(警報)機能も互いに独立したものとする。
スタンバイシステム又は他の冗長系は,機能的に独立したものとするのが望ましい。
5
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.4
性能 システムは動作中,必要な場合には異常状態においても規定のレベルの性能を維持しなけれ
ばならない。
再現性及び精度は,意図した用途に対して十分なものであり,かつ,期待した寿命及び正常な使用期間
中においては,規定した値を維持しなければならない。
システムは,すべての動作範囲にわたって安定なものでなければならない。
4.5
有用性(使いやすさ) システムは,すべての意図された動作条件の下では,容易に使用可能で,
効果的,かつ,効率的に操作を支援するものでなければならない。
誤操作に対する十分な安全保護装置を,備えなければならない。
4.6
統合 人間の安全が,正しいシステムの操作又は故障に直接依存している場合には,システムは,
それらが機能を補完しあっている場合を除き,他のすべてのシステムと統合するべきではなく,また,依
存しあうべきではない。
安全がシステムの操作又は故障に間接的に結びついている場合には,統合化されたシステムの完全性は
当該公的機関の承認を得ることが必要である。
4.7
開発活動 基本設計から最終完成までの開発段階においてとられた活動及びその後の使用段階にお
けるすべての変更を系統的に計画し,組み立てられ,かつ,適正に管理されなければならない。これらの
活動を実行する責任者は,そのことに適任でなければならない。
活動,範囲,責任及び能力については,文書化しなければならない。
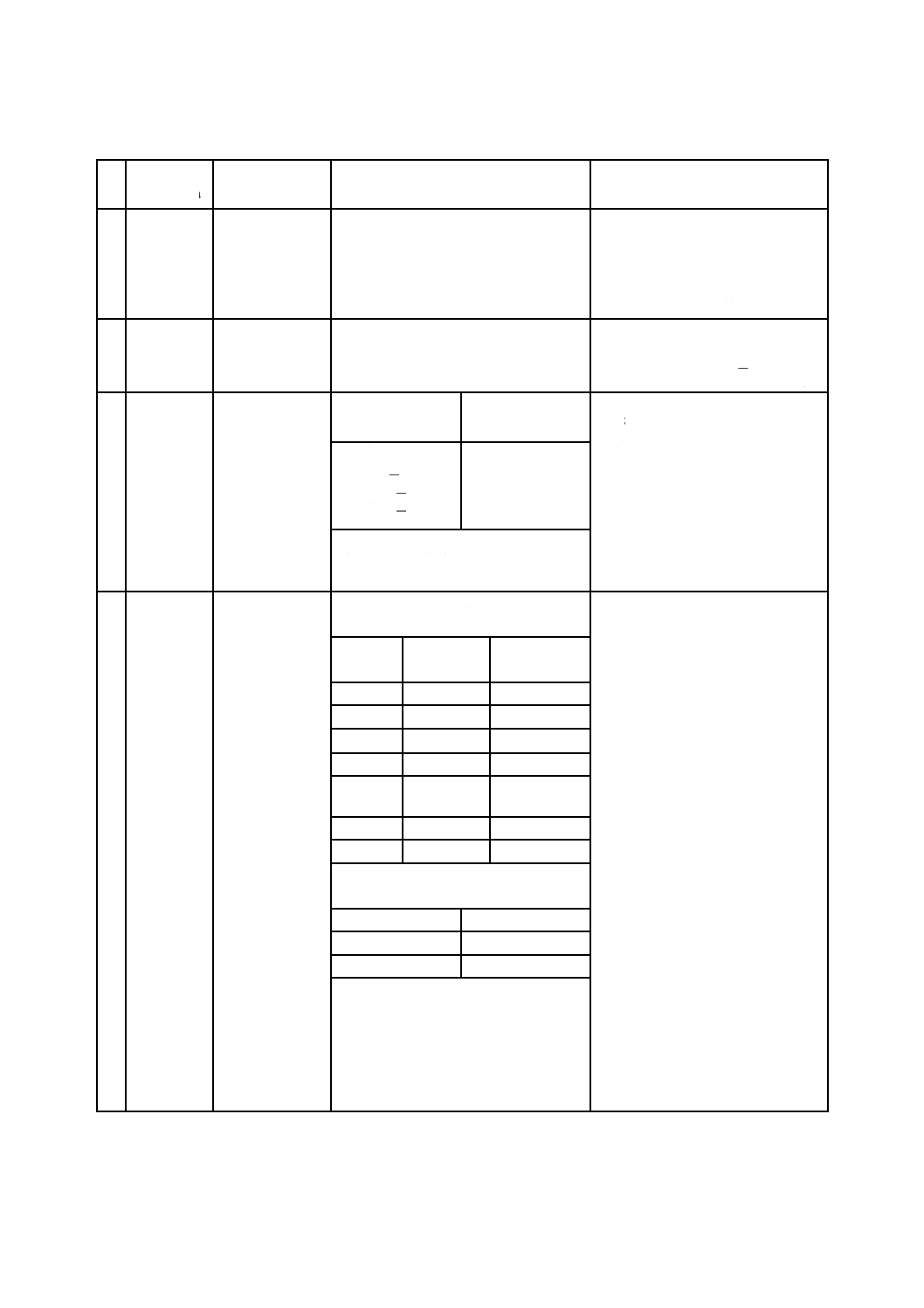
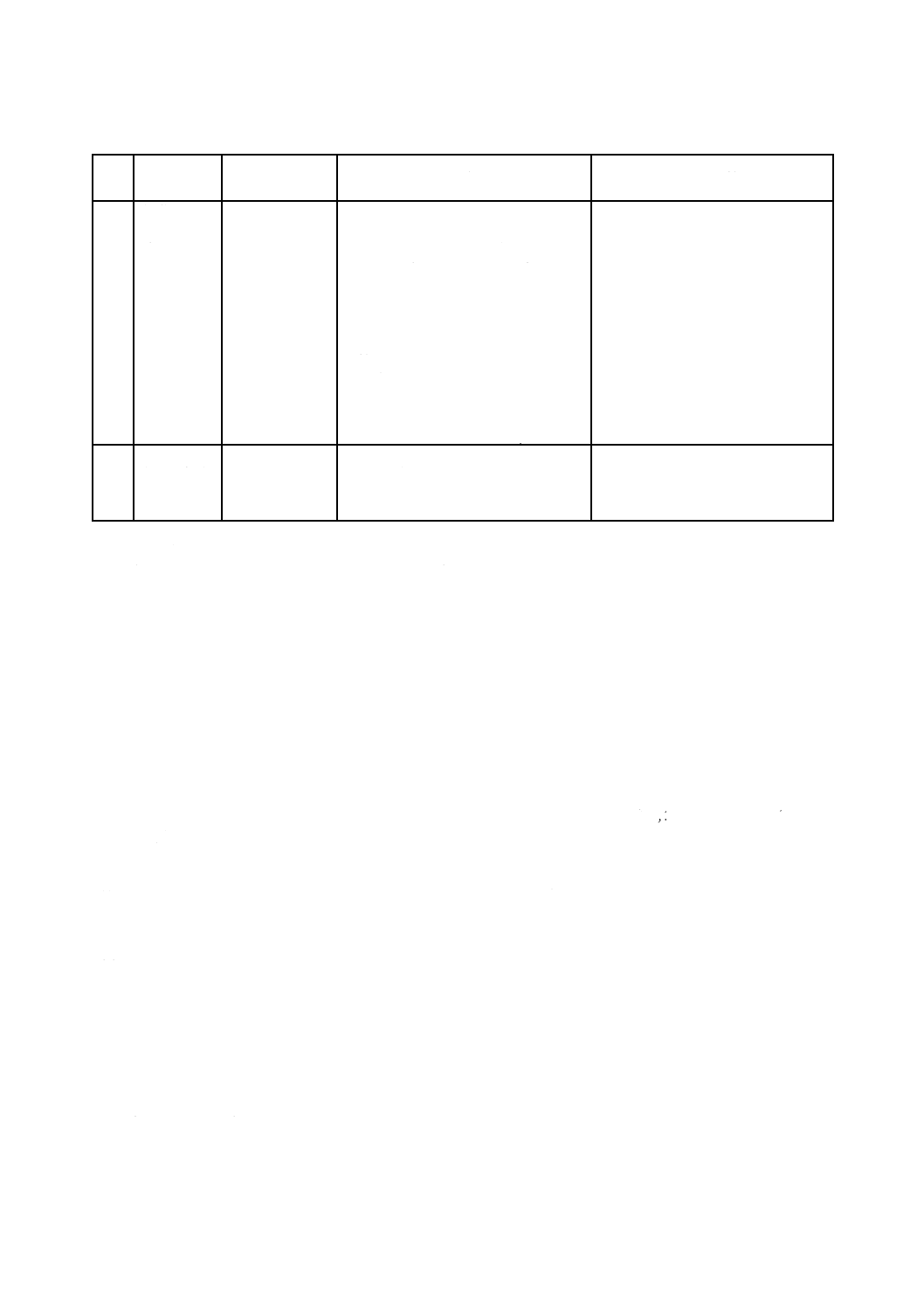
5. 環境形式試験パラメータ 機器又はシステムが形式試験を受ける場合には,表1の規定による試験手
順と試験条件を適用しなければならない。
備考 IMO 決議 A.813(19) に適合するにはすべての船内電気・電子機器は,関連する電磁両立性の
規格に基づいて試験することが要求される。
6
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表 1 形式試験,試験方法及び試験条件
試験
*a
試験方法の
基準
試験条件
その他の情報
1
目視検査
次の事項に関する機器の検査
・図面及び設計データと一致して
いる。
・適用できるIEC規格に適合して
いる。
・工作及び組立の品質。
2
機器の仕様
に基づく機
能試験
標準大気条件:
・温度: 25 ℃ ± 10 ℃
・相対湿度: 60 % ± 30 %
・気圧: 90 kPa ± 10 kPa
3
耐電圧試験
定格絶縁電圧
Un(V)
交流試験電圧
(V)
・試験電圧の周波数:50 Hz又は60
Hz
・独立した回路は,回路相互間で試
験する。
・相互に接続された回路は,すべて
大地との間で試験する。
・接点は開いた状態の接触点の両側
で試験する。
・損傷を受けるおそれがある電子部
品のプリント回路は,試験の間取
り外してよい。
Un ≦ 65
66 < Un ≦ 250
251 < Un ≦ 500
501 < Un ≦ 690
2×Un + 500
1 500
2 000
2 500
試験電圧の印加時間:1分間
4a 電源変動試
験
IEC 61000-4-11
交流
・組合せごとに試験する。
組合せの
番号
電圧変動
(整定時)%
周波数変動
(整定時)%
1
+6
+5
2
+6
−5
3
−10
−5
4
−10
+5
過渡電圧
(1.5秒間)
過渡周波数
(5秒間)
5
+20
+10
6
−20
−10
直流
電圧変動許容値
±10 %
電圧脈動
5 %
電圧リップル
10 %
蓄電池電源:
充電中の蓄電池に接続している機器
は,+30〜−25 %まで,又は充電装置か
らのリップル電圧を含む充放電特性に
よって,定めた値。
充電中の蓄電池に接続していない機器
は,+20〜−25 %までの値。
7
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
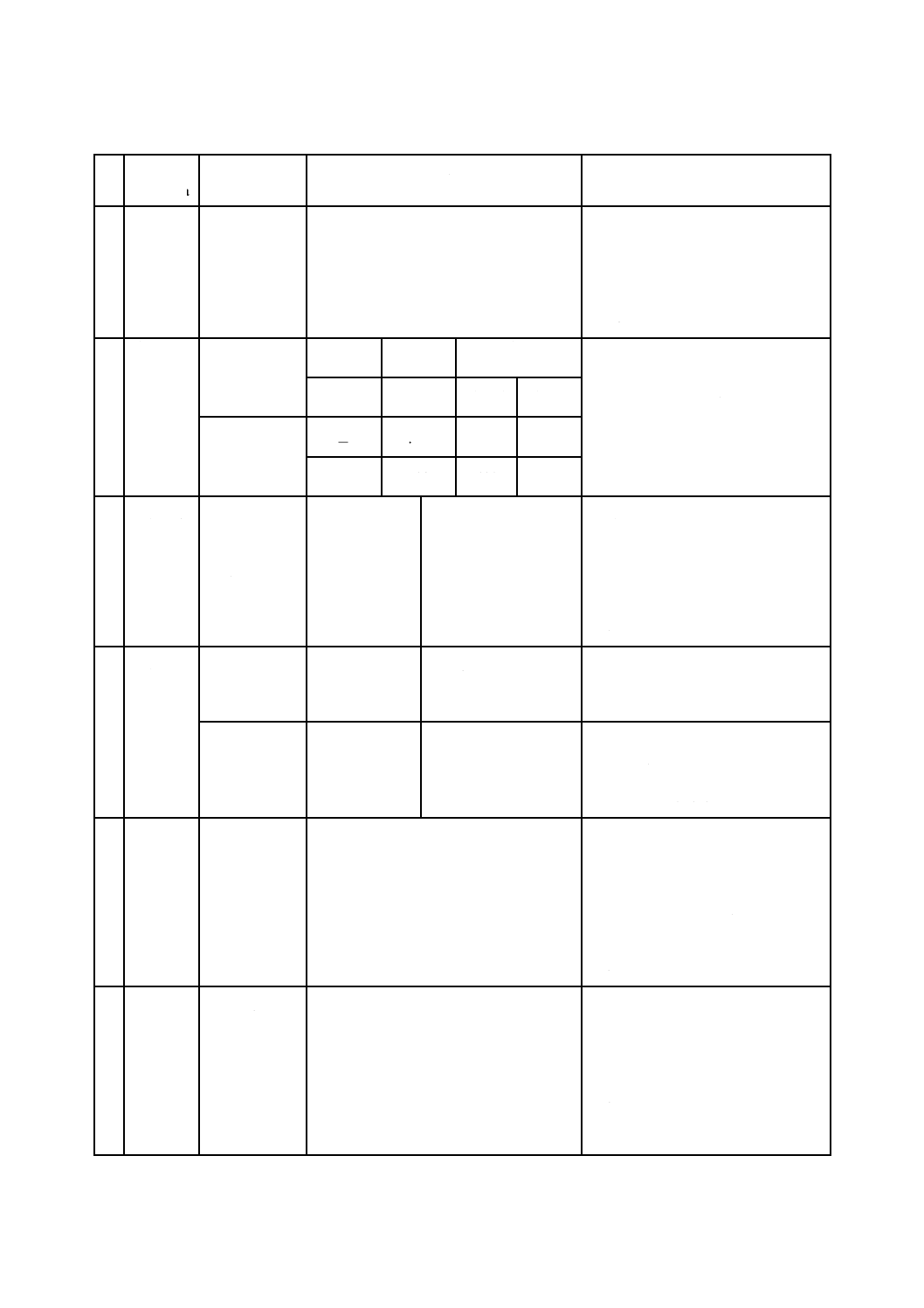
表 1 形式試験,試験方法及び試験条件(続き)
試験
*a
試験方法の
基準
試験条件
その他の情報
4b 電源喪失
試験
IEC 61000-4-11
5分間に3回の遮断。
遮断時間 30秒。
次の点を確認:
・電源喪失及び電源復旧時に機器が規
定の動作をする。
・適用できる場合においては,プログ
ラマブル電子システムに保持され
たプログラム又はデータが損なわ
れない。
5
絶縁抵抗
試験
*b
定格電圧
(V)
試験電圧
(V)
最小絶縁抵抗
(MΩ)
・全回路と大地間:可能な場合,電源
端子について行う。
・抵抗値は,耐電圧試験,温湿度試験,
低温試験及び塩水噴霧試験の前後
に計測する。
試験前
試験後
Un ≦ 65
2×Un
min. 24
10
1
Un > 65
500
100
10
6
温度変化
を伴う低
温試験
*c
IEC 60068-2-1
熱放散をしな
い機器の試験
Ab
IEC 60068-2-1
熱放散をする
機器の試験 Ad
+5 ℃± 3 ℃,
2 時間
−25 ℃± 3 ℃,
2 時間
・絶縁抵抗の初期測定(試験5参
照)
・動作試験中を除き,供試条件で機器
は動作状態にしない。
・試験温度で最後の1時間に行う動作
試験。
・復旧後の絶縁抵抗測定及び動作試
験。
7
温度変化
を伴う乾
燥高温試
験
*d
IEC 60068-2-2
熱放散をしな
い機器の試験
Bb
55 ℃± 2 ℃,
16 時間
70 ℃± 2 ℃,
2 時間
・供試条件で機器は動作状態。
・試験温度で最後の1時間に行う動作
試験。
・復旧後の動作試験。
IEC 60068-2-2
熱放散をする
機器の試験
Bd
55 ℃± 2 ℃,
16 時間
70 ℃± 2 ℃,
2 時間
・冷却装置がある場合にはそれを動作
し,供試条件で機器は動作状態。
・試験温度で最後の1時間に行う動作
試験。
・復旧後の動作試験。
8
温湿度試
験,繰返
し
(12時間
+12時間
サイク
ル)
*j
IEC 60068-2-30
試験 Db
温度:55 ℃
湿度:95 %
時間:2サイクル
(12時間+12時間)
・試験前の絶縁抵抗測定。
・機能試験中を除き,最初のサイクル
で機器は動作状態にし,2回目のサ
イクルでは電源を切る。
・試験温度での初めのサイクルの最初
の2時間及び試験温度でのサイクル
の最後の2時間に行う機能試験。
・標準大気条件に回復。
・絶縁抵抗測定及び性能試験。
9
塩水噴霧
試験
*e
IEC 60068-2-52
試験 Kb
各噴霧後の保管期間を含めた7日間周期
の4回の噴霧。
・初期絶縁抵抗測定及び初期機能試
験。
・機器は,試験中通常の姿勢。
・供試条件で機器は動作状態にしな
い。
・各噴霧周期の7日目に行う動作試
験。
・復旧後の4時間〜6時間の間に行
う絶縁抵抗測定及び性能試験。
8
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
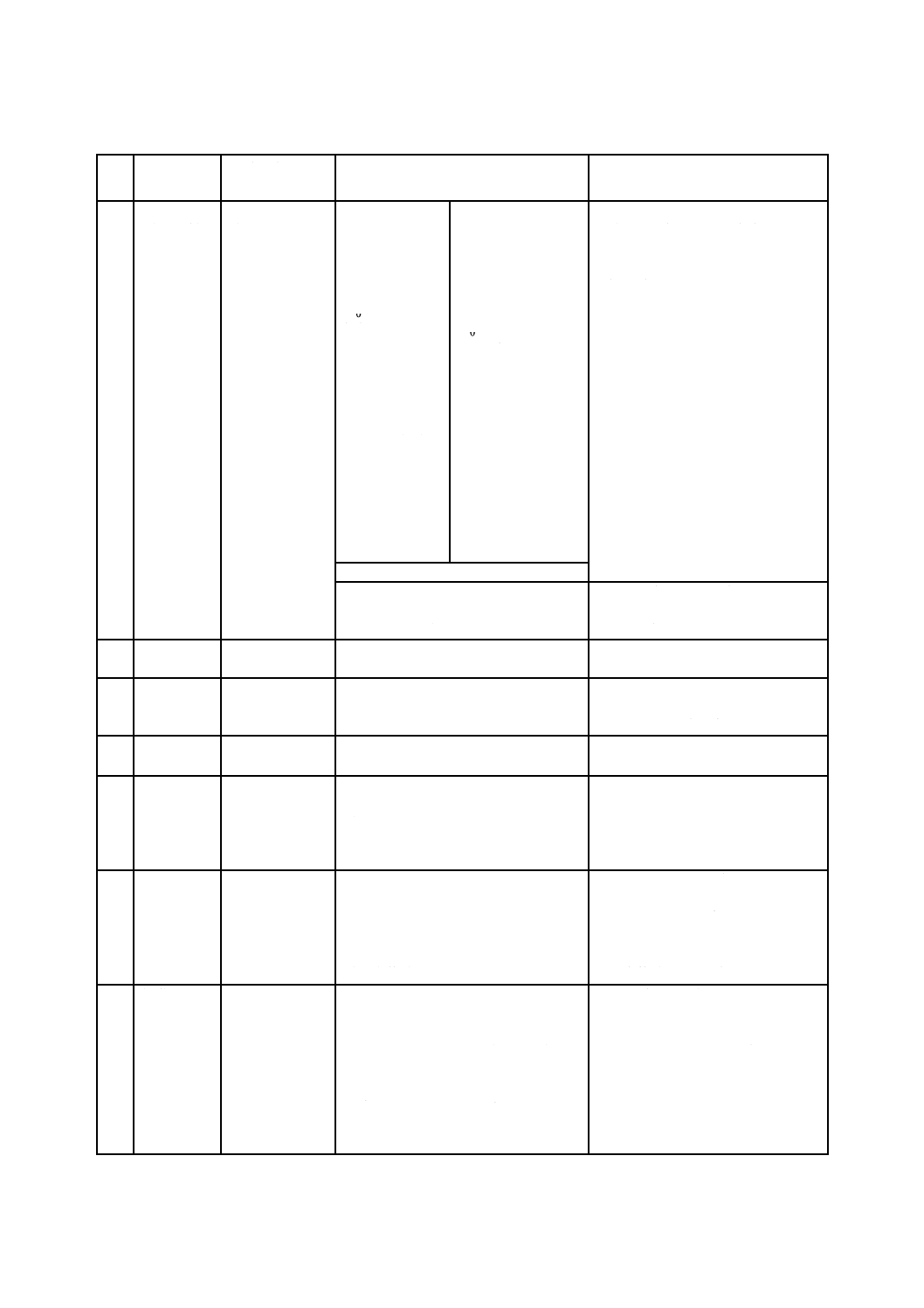
表 1 形式試験,試験方法及び試験条件(続き)
試験 *a
試験方法の
基準
試験条件
その他の情報
10
振動試験
(正弦波)
IEC 60068-2-6
試験 Fc
一般適用:
2+3
0〜13.2 Hz
振幅 ±1 mm
13.2〜100 Hz
加速度 ±0.7 g
耐久時間:
・増幅定数Q≧
2が記録され
た共振周波数
ごとに;
・共振周波数が
記録されない
場合には30
Hz
操だ機械室又は同
様の場所に装備さ
れた往復動機械に
取り付けられた機
器:
2+3
0〜25 Hz
振幅 ±1.6 mm
25〜100 Hz
加速度 ±4 g
耐久時間:
・増幅定数Q≧2が
記録された共振
周波数ごとに;
・共振周波数が記録
されない場合に
は30 Hz
・振動試験中,動作状態を実証する
・試験は3軸直交面で実施する。
・Qが5を超えないことが望まし
い。
・掃引試験において,互いに接近し
た数箇所の共振点が検出された場
合は試験時間を120分とする。
90分
40〜2 000 Hz
加速度 ±10 g
耐久時間 90分
・過酷な条件にだけ適用,例えば,
ディーゼル機関の排気マニホール
ドの上部。
11a 傾斜試験,
静的 *a,*i
22.5°
・各方向。
・機器は動作状態。
11b 傾斜試験,
動的
22.5°
0.1 Hz
・各方向。
・機器は動作状態。
・15分以上の試験時間。
12
外被の保護
JIS F 8007
装備位置によって変わる。
・最小要件については,JIS F 8062
の表5を参照。
13
静電放電試
験
IEC 61000-4-2
接触放電:6 kV
気中放電:8 kV
単一放電の間隔:1秒
パルスの数:極性当り10
厳しさ基準のレベル3による。
・人間が器具に触れたときに発生す
る静電放電。
・試験は操作員が通常手の届く点及
び面に限定。
・動作基準 B,*f 参照。
14
電磁界試験
IEC 61000-4-3
周波数範囲:80 MHz〜2 GHz
変調:1 000 Hzにおいて80 %振幅変調。
電界強度:10 V/m
周波数掃引率:≦1.5×10-3 けた/秒
(又は,1 %/3秒)
厳しさ基準のレベル3による。
・各種送信機から発射される電磁界
・機器の試験に際し,変調周波数
1 000 Hzの入力信号を必要とする
場合には変調周波数400 Hzを選ん
でもよい。
・動作基準 A,*g 参照。
15
伝導性低周
波試験
IEC 60533
交流:
周波数範囲:定格周波数の第200高調
波;試験電圧(実効値):第15高調波
まで給電。電圧の10 %,第100〜第200
高調波までは給電電圧の1 %,最大2 W
直流:
周波数範囲:50 Hz〜10 kHz;
試験電圧(実効値):供給電圧の10 %,
最大2 W。
・例えば,電子負荷によって発生す
る電源系統のひずみ及び高調波結
合。
・IEC 60945による試験方法。
・動作基準 A,*g 参照。
9
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
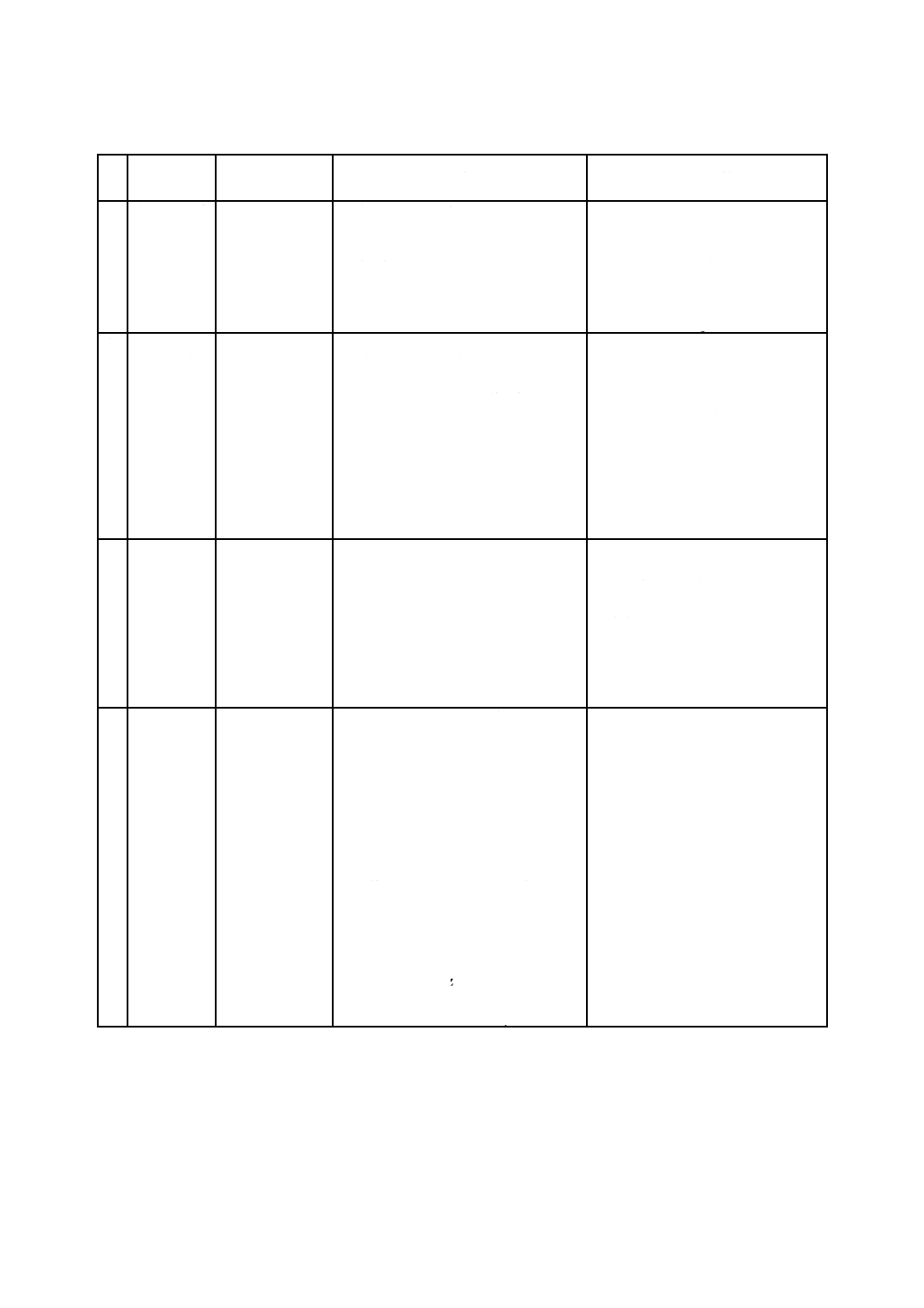
表 1 形式試験,試験方法及び試験条件(続き)
試験
*a
試験方法の
基準
試験条件
その他の情報
16 伝導性無線
周波試験
IEC 61000-4-6
周波数範囲:150 kHz〜80 MHz
振幅:3 V 実効値 *h
変調:1 000 Hzにおいて80 %振幅変調
周波数掃引率:≦1.5 x 10-3 けた/秒
(又は1 %/3秒)
厳しさ基準のレベル2による。
・接続線を通して試料の中に生じる
高周波結合による電磁界。
・機器の試験に際し,変調周波数
1 000 Hzの入力信号を必要とする
場合には変調周波数400 Hzを選ん
でもよい。
・動作基準 A,*g参照。
17 ファースト
トランジェ
ント・バー
スト試験
IEC 61000-4-4
単一パルスの立ち上がり時間:5 ns
(10 %と90 %間)
パルス幅:50 ns(50 %値)
振幅(ピーク):2 kV,電源端子におい
てライン対ライン;
1 kV,I/Oデータ制御及び信号回路の
ライン対大地間;
パルス時間(バースト周期):300 ms;
バースト長:15 ms;
極性当りの持続時間:5分
厳しさ基準のレベル3による。
・電気的開閉を行った場合に発生す
るアーク。
・供試品の外部配線同様,電源に発
生する干渉結果。
・動作基準 B,*f 参照。
18 スロートラ
ンジェン
ト・サージ
試験
IEC 61000-4-5
立ち上がり時間:1.2 μ秒(10 %と90 %
間)
パルス幅:50 μ秒(50 %値)
振幅(ピーク):1 kV,ライン/大地;
0.5 kV,ライン/ライン
反復割合:≧1 パルス/分
パルス数:極性ごとに5
適用:連続
厳しさ基準のレベル2による。
・例えば,大容量誘導負荷の入切で
生じる障害。
・動力線と信号線が同一である機器
に対しては左記規格の図10による
試験手順。
・動作基準 B,*f 参照。
19 放射性エミ
ッション試
験
CISPR 16-1
CISPR 16-2
船橋及び甲板区画に取り付けられる機
器に対して
周波数範囲: 限界:
0.15〜0.3 MHz 80〜52 dBμV/m
0.3〜30 MHz 52〜34 dBμV/m
30〜2 000 MHz 54 dBμV/m
ただし,
156〜165 MHz 24 dBμV/m
一般的な動力配電区画に取り付けられ
る機器に対して
周波数範囲: 限界:
0.15〜30 MHz 80〜50 dBμV/m
30〜100 MHz 60〜54 dBμV/m
100〜2 000 MHz 54 dBμV/m
ただし,
156〜165 MHz 24 dBμV/m
・左記規格に従った試験手順。ただ
し,機器とアンテナ間の距離は3
m。
10
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表 1 形式試験,試験方法及び試験条件(続き)
試験
*a
試験方法の
基準
試験条件
その他の情報
20
伝導性エミ
ッション試
験
CISPR 16-1
CISPR 16-2
船橋及び甲板区画に取り付けられる機
器に対して
周波数範囲: 限界:
10〜150 kHz 96〜50 dBμV
150〜350 kHz 60〜50 dBμV
350 kHz〜30 MHz 50 dBμV
一般的な動力配電区画に取り付けられ
る機器に対して
周波数範囲: 限界:
10〜150 kHz 120〜69 dBμV
0.15〜0.5 MHz 79 dBμV
0.5〜30 MHz 73 dBμV
21
難燃性試験
(ケーブル)
JIS F 8061
火炎の放射:
・5回,各15秒
各火炎放射の間隔:
・15秒
・供試品の燃焼部分又は焼損部分は
長さで60 mmを超えてはならな
い。
*a 静的傾斜試験は可動部分をもった機器には要求しない。
*b 絶縁抵抗試験は,温湿度試験,低温試験及び塩水噴霧試験の試験前及び試験後に実施する。
*c 耐候保護のない場所又は低温場所に取り付けられる機器に対しては,試験は−25 ℃で実施する。
*d 70 ℃での乾燥高温試験は高温に耐えることをみるために実施する。例えば,コンソール,きょう(筐)体の中
に取り付けられる機器に対するものである。
*e 塩水噴霧試験は,耐候保護のない区画,例えばばく(曝)露甲板に取り付けられる機器に対して実施される。
*f 動作基準B:供試装置(EUT)は試験終了後,所要の動作を継続する。製造業者が発行した技術仕様書に規定して
いる性能の低下又は機能の喪失は,許されない。ただし,試験中,自己回復性がある機能及び性能の低下又は喪
失は,実際の動作状態及び蓄積したデータに変化がなければ,許される。
回復時間は,重要機能を維持するために必要な点を考慮して,継続されている安全動作と相反しないものとな
る。
*g 動作基準A:供試装置(EUT)は,試験中及び試験終了後も所要の動作を継続する。製造業者が発行した技術仕様
書に規定している性能の低下又は機能の喪失は,許されない。
*h 船橋及び甲板区画に取り付けられる機器に対しては,IEC 60945で規定する周波数2 ; 3 ; 4 ; 6.2 ; 8.2 ; 12.6 ; 16.5 ;
18.8 ; 22 ; 25 MHzにおける試験レベルは10 V(実効値)に増加する。
*i 液化ガス及び化学物質を運搬する船においては,非常電源は最大横傾斜30°までの船の浸水においても動作する
ことが要求される。
*j この試験は,空調設備のない空間に取り付けられる機器に対して実施する。
6. 設計
6.1
環境及び電源条件 機器は,JIS F 8061の附属書Bに規定する制限値を適切に勘案したうえで,予
期可能な環境と電源条件の下で満足に作動する設計にしなければならない。
6.2
回路設計 回路は,効果的な試験,校正,保守及び修理ができる設計にしなければならない。修理
は,ユニット又はカードの取替えによって行われるのがよい。場合によっては,機器の正常動作を確認す
るためのシミュレーション回路又は同様の方法を設けるのが望ましい。
6.3
相互作用 システムは,異常によって他のシステムが果たしているすべての機能に影響を及ぼさな
い配慮をしなければならない。
11
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.4
電気的分割 回路の設計は,船内主電源のすべての点において直接接続があってはならない。例え
ば,給電には絶縁変圧器を使用しなければならない。機能上の理由から接地している場合を除ききょう(筐)
体は回路の一部としてはならない。
大規模なシステムは分割され,各セクションへの給電は電気的に分離するか又は個別に保護することが
推奨される。
制御回路は,信号回路及び表示回路から分離され,表示回路における異常が機器又は装置の作動を損な
わないものでなければならない。その逆も同様である。
6.5
信号レベル 信号レベルは,十分高く保ち,接触面腐食の影響及びノイズ混入に打ち勝つものでな
ければならない。
変換器及び増幅器は,相互にできるだけ接近して配置しなければならない。
遮へい及び信号基準システムの接地に対しては,特別の注意を払わなければならない。
制御及び計装ケーブルへの干渉を防止するために,適切なぎ装手段を採らなければならない。すなわち,
− 遮へい付き/又は対よりケーブルの採用
− 平衡入力増幅器の使用
− 信号ケーブルと他のケーブルとの分離
6.6
電源
6.6.1 独立給電 必要な場合には,冗長電源は独立したものとし,システムには選択的に給電しなければ
ならない。
6.6.2 容量 予備電源は,安全状態が得られるまで,システムの正常動作を確保する十分な容量をもたな
ければならない。
6.6.3 保護 それぞれの回路は,短絡と過負荷に対し,個別に保護しなければならない。
7. 構造及び材質
7.1
調整 必要に応じて,機器は,簡単に調整が行えるための配慮がなされていなければならない。設
定値は容易に識別でき,かつ,環境の影響などによる変動を防ぐ適切な手段を講じなければならない。
7.2
近づきやすさ 修理及び保守の際,交換部品に容易に近づける配慮がなされていなければならない。
実行可能な限り,機器は,電圧,温度,又は危険な作業条件を与える他の要因の影響を受けないもので
なければならない。
7.3
交換 交換できる各組立部品は,交換が簡単であり,また,容易,かつ,安全に扱える構造としな
ければならない。
7.4
非互換性 すべての交換可能な部品は,できるだけ,誤った接続をされないための,また,誤った
交換ができないための配慮がなされていなければならない。これが実際的でない場合には,交換部品は関
連する接続装置とともに明確に識別できるものでなければならない。
7.5
冷却 装置は,できるだけ,強制冷却媒体に頼らないものとしなければならない。
必要な場合,冷却面には沈着物がたい(堆)積するのを防ぐ考慮を払わなければならない。
重要設備に対して強制冷却を必要とする場合には,冷却媒体の代替供給を設けなければならない。冷却
系統の異常に対しては,警報を発しなければならない。
重要でない機器に対しては,温度上昇による機器の損傷を防ぐための,適切な手段を設けなければなら
ない。
備考 機関区域内の強制通風されるキャビネットについては,汚染物質のたい(堆)積によって,絶
12
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
縁物の破損を防止する特別の考慮が必要である。
7.6
コネクタに対する機械的負荷 プラグ,ソケットが接続された状態で使用されている場合の電気的
接触部は,たとえユニットを引き出したり取り替えたりする場合でも,十分な接触圧力を維持するために
必要な圧力以外の機械的負荷がかからないものでなければならない。
プラグイン形のトレイ,プリント基板及びその他の多心コネクタは,衝撃,振動などの機械的負荷によ
る脱落を防ぐための固着装置を設けなければならない。
7.7
キャビネットの機械的特徴 キャビネットは,簡単な機械的構造としなければならない。すべての
ナット及びボルトの結合には緩み止めを施さなければならない。
7.8
衝撃吸収装置及び振動吸収装置 耐衝撃又は耐振動取付けが用いられている場合には,キャビネッ
トと架台との間には十分なすき間を設け,動きの自由が十分に保たれるための配慮をしなければならない。
耐衝撃又は耐振動取付けを直列に設ける方法は,避けなければならない。リード線が衝撃及び振動吸収性
能を損なわないものでなければならない。
7.9
内部配線 内部配線に使用するケーブル及び絶縁導体は,通常少なくとも難燃性でなければならな
い。油圧作動油又はその他の油が入っている機器に近接する配線の場合には,絶縁はその油に耐性のある
ものか,又はその油から適切に遮へいを行わなければならない。
ケーブル及び絶縁導体が,振動による機械的な損傷を受けないための特別な注意が必要である。
7.10 ケーブルの接続 発信器も含めて制御機器の端子台は,ケーブルが満足に,できれば各導体が個々
の端子に接続できる十分な空間が取れる構造としなければならない。すべての端子は明りょうに識別でき,
かつ,ケーブルの遮へいを接続する適切な手段を講じなければならない。
8. 装備及び操作性
8.1
一般
8.1.1 配置 制御場所は,操作員の利便性及び正確で安全な操作を考えて,人間工学的に配置しなければ
ならない。
特に複雑な配置のものについては,区域又はグループの識別について考慮しなければならない。
例えば,表示部と制御部の間に十分な空間をとるなどの考慮を払わなければならない。
備考 船橋エリアの機器は,該当する航海及び通信機器に対するIECの要求(IEC 60945参照)に適
合しなければならない。
8.1.2 適合性 指示計器及び制御機器の配置は,一連の論理手順に従ったものでなければならない。
実行可能な限り,操作の動きとそれに対する指示計器の動きには一貫性をもたせなければならない。
8.1.3 ラベリング 操作パネル,サブパネル,指示計器,制御ハンドル,警報,信号ランプ,記録計器な
どはそれぞれ意味の分かる明白な銘板によって,明りょう,かつ,系統的に識別できるものでなければな
らない。
8.1.4 銘板 銘板は,恒久的に,かつ,制御と計装に関連して矛盾のない場所に取り付け,また,耐久性
のある材料で明りょう,かつ,消えにくい文字としなければならない。
8.1.5 表示色 運転状態の区別をするための表示色は,容易に見分けができ,かつ,認識できるものでな
ければならない。
備考 IMO A.830(E),警報及び表示器に関するコード,1995年を参照。
13
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.1.6 照明 計器及び制御機器は,操作が行われるときの周囲の明るさの状態にかかわらず,明りょうに
読取り及び操作ができるように照明されなければならない。だだし,不快な陰及びまぶしさがあってはな
らない。周囲の照明が表示灯の視認を困難にする場合には,適切なシェードを取り付けなければならない。
船橋区画に取り付ける機器に対しては,どの光源からの光も航海に支障を与えない手段を講じなければな
らない。
外部(例えば,船橋ウイング)に取り付けられた機器に対しては,昼光及び暗やみ(闇)の両方で操作
できるための,適切な照明がなければならない。
8.1.7 流体の漏れに対する保護 電気機器は,流体の漏れに対して電気機器を保護するための有効な手段
が設けられている場合を除き,流体を使用する機器又は水,油若しくは蒸気の配管と同じパネル又はキャ
ビネット内に取り付けてはならない。
圧力流体,水,油又は蒸気の配管が制御盤に近接するのは,避けなければならない。
8.1.8 結露保護 実行可能な限り,外被内の結露を避ける考慮を払わなければならない。
8.1.9 外部電線及び配線 外部電線及び配線は,該当するIEC 60092シリーズ規格による。
備考 IEC 60092-375,IEC 60092-376 を参照。
上記の規格に規定されたものより小さなサイズの電線,及び配線の機械的強度及び絶縁性能
には,特別な考慮を払わなければならない。
8.2
センサ
8.2.1 センサの位置 すべてのセンサは,その出力がパラメータの実際の指標を示す取付けをしなければ
ならない。
センサは,通常の解放及び保守を実施する間,損傷を受ける危険が最小になる場所に取り付けなければ
ならない。
8.2.2 温度センサ 温度センサは,適切な材料でできたポケット内に取り付けなければならない。接続部
は試験のために引き出せる配慮をしなければならない。
8.2.3 圧力センサ 作動媒体の衝撃及び大きな脈動にさらされる圧力センサは緩衝容器で保護しなければ
ならない。
8.2.4 外被 センサの外被と端子箱は,予想される取付け場所及びケーブルの種類に対して適切に保護し
なければならない。
8.2.5 試験及び校正 通常の動作中には試験することができないセンサに対しては,試験及び校正ができ
る設備を設けなければならない。
8.3
情報の表示 情報は,明確に,矛盾なく,かつ,あいまいさのない形で表示しなければならない。
8.4
制御
8.4.1 遠隔制御
8.4.1.1 情報の連続性 遠隔制御場所においては,ユーザは自己の指令の結果に関する連続した情報を受
け取ることができなければならない。
8.4.1.2 制御の独立性 制御を2か所以上の場所から行う場合には,1か所の制御機器のすべての故障が他
の場所からの制御機能に影響を与えてはならない。
8.4.1.3 制御の排他性 プロセスが幾つかの場所から制御される場合には,いかなるときにもプロセスの
制御は,ただ1か所の場所だけが当たるものでなければならない。
14
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.4.1.4 制御の切換え 実際の制御は,切換先の指令場所の確認が行われる前に切り換えられてはならな
い。ただし,指令場所が直接視認でき,かつ,声が届く範囲の十分近接した位置関係である場合,その必
要はない。制御の切換えには可聴予告警報を発しなければならない。
8.4.1.5 主指令場所 操作上,安全上又は当該公的機関によって,要求される指定された主たる指令場所
がある場合には,この場所は確認なしに制御権をとることができる。
8.4.1.6 安全確保 一つの場所から他の場所への制御の切換中には,プロセスパラメータの重要な更新は
避けなければならない。
8.4.1.7 状態表示 二者択一の指令場所のそれぞれにおいては,一方の場所に制御権がある場合にその旨
を表示しなければならない。
8.4.1.8 インタロック ユーザの誤操作の結果が,重要機能の損傷又は喪失に至る可能性がある場合には,
制御システムの要素には安全なインタロックを施さなければならない。
8.4.2 マンマシンインタフェース マンマシンインタフェースは,IEC 60447に従って設計しなければな
らない。
8.5
警報システム 警報システムに使われる可視可聴信号及び表示は,IMO A.830(19),警報及び表示器
に関するコード,1995年の該当する要件に適合しなければならない。
9. 特殊設備
9.1
火災防止制御設備
9.1.1 序文 この条項は,船内の火災に対する安全のために設けられた,電気式火災防止制御設備に関す
るものである。
備考 海上人命安全条約(SOLAS)の第Ⅱ-2章にある項目で,この項に含まれていない項目が幾つかあ
る。
9.1.2 一般
9.1.2.1 適用 この火災防止制御設備には,次のものを含む。
− 無人の機関区域,居住区域などに用いる自動火災探知警報システム
− 通風機及び燃料ポンプの遠隔停止装置,消火ポンプの遠隔始動装置などの消火用制御装置
9.1.2.2 設計及び試験 火災防止機器及びシステムは,必要に応じて,この規格の6.及び5.のそれぞれの
条項に従って,適切に設計し,試験しなければならない。
9.1.2.3 表示 可視可聴信号及び表示はIMO A.830(19),警報及び表示器に関するコード,1995年の該当
する要件に適合しなければならない。
9.1.3 固定式火災探知警報システム
9.1.3.1 探知器
9.1.3.1.1 探知器は,熱,煙又は燃焼によるその他の生成物,炎若しくはこれらの要素の組合せによって作
動しなければならない。感度がこれらの探知器よりも劣らないならば,初期火災を探知する別の要素で作
動する探知器を考慮してもよい。炎探知器は,煙探知器又は熱探知器に追加する形だけに使用することが
できる。
9.1.3.1.2 9.1.3.4.5の規定によって要求する煙探知器は,煙濃度の1 m当たりの減光率が12.5 %を超える前
に作動し,2 %以下では作動しないことを証明しなければならない。他の場所に設置される煙探知器は探
知器が鈍感又は過敏になるのを避ける考慮をしたうえで,当該公的機関が認める感応限度以内で作動しな
ければならない。
15
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.1.3.1.3 熱探知器は,毎分1 ℃を超えない割合で温度を上昇したとき,78 ℃を超える前に作動し,54 ℃
以下では作動しないことを証明しなければならない。温度上昇率がこれより高い場合には,探知器は,探
知器が鈍感又は過敏になるのを避ける考慮をしたうえで,当該公的機関が認める温度限度範囲内で作動し
なければならない。
9.1.3.1.4 乾燥室及び通常は高温の周囲温度をもつ同様の区域においては,熱探知器の許容する作動温度は,
当該公的機関の裁量によって,天井の最高温度に30 ℃を加えたものとすることができる。
9.1.3.1.5 火災探知器に感度を調整できる手段が設けてある場合には,設定ポイントが固定でき,かつ,容
易に識別できるための配慮をしなければならない。
9.1.3.1.6 すべての探知器は,正しい作動を試験することができ,かつ,すべての部品を交換することなく
正常監視状態に戻すことのできる形式のものでなければならない。
9.1.3.2 電源
9.1.3.2.1 手動操作の発信器をもつすべての固定式火災探知警報システムは,作動時の状態にかかわらず直
ちに作動できるものでなければならない。火災探知警報システムの作動に使用する電気設備の電源は二系
統以上とし,そのうち一系統は当該公的機関が認める非常電源でなければならない。
9.1.3.2.2 固定式火災探知警報システムが装備されているが,SOLASの要求でない場合,二系統の電源か
ら給電し,そのうち一系統は主電源とは独立した補助電源としなければならない。
補助電源が蓄電池である場合には,充電することなく少なくとも6時間,火災警報及び火災探知システ
ムに給電できる十分な容量をもつものでなければならない。この放電の間,系統電圧は,定常電圧の88 %
以上を保つものでなければならない。
充電中,蓄電池の電圧は定格電圧から12 %を超える電圧になってはならない。
給電は,この目的に限った独立した給電用電線によって行わなければならない。この給電用電線は火
災探知システムのパネル内に又は隣接して設けられた自動切換スイッチに接続しなければならない。
9.1.3.3 システムの要件
9.1.3.3.1 システムの作動に必要な電源及び電気回路は,電源喪失及び少なくとも次の状態に対する自己監
視機能をもつ設計としなければならない。
− 探知ループの断線
− (探知ループの)短絡
− 非接地系統の絶縁不良
異常状態が発生した場合には,制御盤において可視可聴信号を発し,この信号は火災信号と明りょう
に区別できるものでなければならない。
9.1.3.3.2 各探知ループを試験する設備を設けなければならない。探知器又はループが切り離されたときに
はそのことを示す表示器を設けなければならない。
9.1.3.3.3 探知器が同時に作動しても,システムの作動が損なわれてはならない。
9.1.3.3.4 必要な場合,例えば,機関区域において,その場所に応じて探知器の応答感度を調節する手段を
設けなければならない。
9.1.3.3.5 探知器及び手動操作の発信器は,複数の系統にグループ化しなければならない。探知器又は手動
操作の発信器が作動した場合には,制御盤及び表示盤で可視可聴の火災信号を発しなければならない。表
示盤は,探知器又は手動操作の発信器が作動した系統を表示するものでなければならない。発生した信号
は,制御盤上で確認できるまで保持しなければならない。作動区域の全体のリセットは,探知器が設定値
内にある場合にだけ可能でなければならない。どの探知器が作動しているか制御盤上で識別できない場合
16
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
には,各探知器に視覚表示器を設けなければならない。この信号は確認されるまで保持しなければならな
い。探知器の表示は,それが制御盤上にない限り,通常は施錠した部屋の外側に設けなければならない。
備考1.系統とは,表示盤内に登録されている火災探知器及び手動操作の発信器のグループをいう。
2.ループとは,様々な系統の探知器を接続し,かつ,制御盤に接続された電気回路をいう。
9.1.3.3.6 システムによって監視される区域及び系統の位置に関する明確な情報を,各表示盤上又は近接し
た場所に表示しなければならない。
9.1.3.3.7 探知器が,ある種の作業,例えば溶接,荷役などによって作動するおそれがある区域では,探知
器を一時的に作動不能にすることができる。この場合,表示盤上にこの旨を表示しなければならない。そ
の時間は,実行可能な限り,その区域が占有する時間を考慮して決めなければならない。あらかじめ決め
られた時間が経過した後,探知器は自動的に作動状態に戻るものでなければならない。ただし,その前に
リセットした場合はこの限りでない。
9.1.3.3.8 信号が2分以内に確認できなかった場合には,乗組員居住区域と業務区域,制御場所及びSOLAS
によるA類機関区域の全域にわたって,可聴警報を発しなければならない。この警報発生装置は,探知シ
ステムの一部とする必要はない。
9.1.3.3.9 個々の探知器を遠隔で認識する手段が設けられていない火災探知システムにあっては,居住区域,
業務区域及び制御場所内の二層以上の甲板にわたる系統は,閉囲された階段に設けられる系統を除いて,
認められない。火災の発火源を特定する時間の遅れを避けるために,個々の系統に含まれる閉囲された場
所の数は,当該公的機関によって決められた数に制限する。すべての系統において,50か所を超える閉囲
した場所を含むことは認められない。ただし,探知システムが離れた位置から個別に特定できる火災探知
器(遠隔個別認識探知器)をもつ場合には,系統は数層の甲板にわたることができ,幾つもの閉囲した場
所にもわたることができる。
一つの系統が二層以上の甲板にわたってはならず,また,50か所以上の閉囲された場所を保護してはな
らない,という要件は,遠隔個別認識探知器をもつシステムの採用によって適合するものとみなされる。
この場合,ループは分離装置によって幾つかの系統に分割され,かつ,それぞれの系統は前述の規定で要
求される数に限定しなければならない。
9.1.3.3.10 旅客船において,離れた位置から個別に探知器を特定できない火災探知システムの場合には,
探知器のいずれの系統も船の両げん(舷),二層以上の甲板及び二区画以上の主垂直区画にわたって設けて
はならない。ただし,当該公的機関が火災に対する船の保護を減ずることにならないと認めるときには,
探知器の一つの系統を船の両げん(舷)及び二層以上の甲板に設けることができる。遠隔個別認識探知器
を設備した旅客船においては,探知器の一つの系統は二区画以上の主垂直区画に設けることは認められな
いが,船の両げん(舷)及び二層以上の甲板にわたって設けることは認められる。
9.1.3.3.11 一つの系統を船の両げん(舷)の区域に設けてはならず,また,二層以上の甲板にも設けては
ならない,という9.1.3.3.10の規定による旅客船に対する要件は,遠隔個別認識探知器をもつシステムの採
用をすることによって適合するものとみなされる。この場合,ループは,分離装置によって幾つかの系統
に分割され,それぞれの系統は船の片げん(舷)だけを保護するものでなければならない。
9.1.3.3.12 一つの系統を,二区画以上の主垂直区画に設けてはならない,という9.1.3.3.10の規定による旅
客船に対する要件は,遠隔個別認識探知器をもつシステムの採用によって,適合するものだけに適用する。
この場合,一つのループは,一つの主垂直区画に限定しなければならない。
9.1.3.3.13 制御場所,業務区域及び居住区域にわたる火災探知器の系統には,SOLASのA類機関区域を
含めてはならない。
17
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.1.3.3.14 制御場所,業務区域及び居住区域にわたる一つのループにA類機関区域を含めてはならない,
という9.1.3.3.13の規定による要件は,遠隔個別認識探知器をもつ火災探知システムの採用によって適合す
るものとみなされる。
9.1.3.3.15 火災位置識別機能を備える火災探知システムは,次の事項を確保するための措置をとらなけれ
ばならない。
− 一つのループが1か所の火災により2か所以上の点で損傷を受けない。
− 故障(電気的,電子的,情報伝達上)の際,システムの初期設定の状態を回復させるためのすべて
の措置がとれる。
− 最初に発せられる火災警報が,その他の探知器が続いて火災警報を発することを妨げない。
9.1.3.3.16 システムは,一つのループが1か所の火災で2か所以上の点で損傷を受けない配慮をしなけれ
ばならない,という9.1.3.3.15の要件は,データハイウエイが1個の探知器で保護する区域を二度通らない
というループ配置をすることで適合するものとみなされる。
9.1.3.3.17 システムは,ループに生じたいかなる障害もループ全体を無効にしない配慮をしなければなら
ない,という9.1.3.3.15の要件は,ループにおける障害が,システムの一つの系統より小さく,かつ,各探
知器を遠隔から認識する手段をもたないループの一部を無効にさせるだけである,という場合に適合する
ものとみなされる。
9.1.3.3.18 火災探知警報システムは,制御盤で防火戸の閉鎖及び類似の機能の操作が認められる場合を除
くほか,他の目的に使用してはならない。
9.1.3.3.19 火災探知警報システムの機能は,適切な温度の熱気を発生する装置,煙若しくは適切な密度及
び大きさをもつ煙霧粒子を発生する装置,又は探知器が感応する設計がなされている初期火災に関連した
その他の現象を生じる装置によって,設備時及びその後において定期的に試験しなければならない。
備考 コンピュータ利用システムの場合には,追加の規定が必要である点に注意を要する(10.参照)。
9.1.3.4 設置要件
9.1.3.4.1 制御盤は,航海船橋又は主火災制御場所に配置しなければならない。
9.1.3.4.2 表示盤は,少なくとも,探知器又は手動操作の発信器が作動した系統を表示しなければならない。
少なくとも一つの表示盤は,船の航行中又は停泊中,常時,責任者が容易に近づけるところに配置しなけ
ればならない。ただし,船が就航状態にない場合を除く。制御盤が主火災制御場所に配置されている場合
には,一つの表示盤を航海船橋に配置しなければならない。
9.1.3.4.3 探知器は,最高の性能を発揮することができるところに配置しなければならない。火災を迅速に
探知し警報するために,十分な個数と十分な探知範囲の形式の探知器を配置しなければならない。ビーム
及び通風ダクト近くの場所又は空気の流れが探知器の性能に不利な影響を及ぼす可能性のある場所,並び
に衝撃及び物理的損傷が起こりやすい場所は避けなければならない。 垂直空間に取り付けられる探知器は,
少なくとも隔壁から0.5 m離さなければならない。
電離箱の原理に基づいて作動する(イオン式)煙探知器は,人身の保護に関する適用可能な規定によっ
て,取り付けなければならない。
9.1.3.4.4 手動操作の発信器を,居住区域,業務区域及び制御場所の全域に設けなければならない。各出口
には,1個の手動操作の発信器を取り付けなければならない。手動操作の発信器は各甲板の通路に,通路
のいずれの場所からも20 mを超えない距離で容易に近づける場所に取り付けなければならない。
9.1.3.4.5 煙探知器を,居住区域内のすべての階段,通路及び避難経路に取り付けなければならない。排気
通風ダクト内の特殊目的用煙探知器の取付けについて考慮しなければならない。
18
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.1.3.4.6 9.1.3.4.5に規定する場所以外の場所の保護のために,固定式火災探知警報システムを要求する場
合には,9.1.3.1.1を満足する少なくとも1個の探知器を取り付けなければならない。
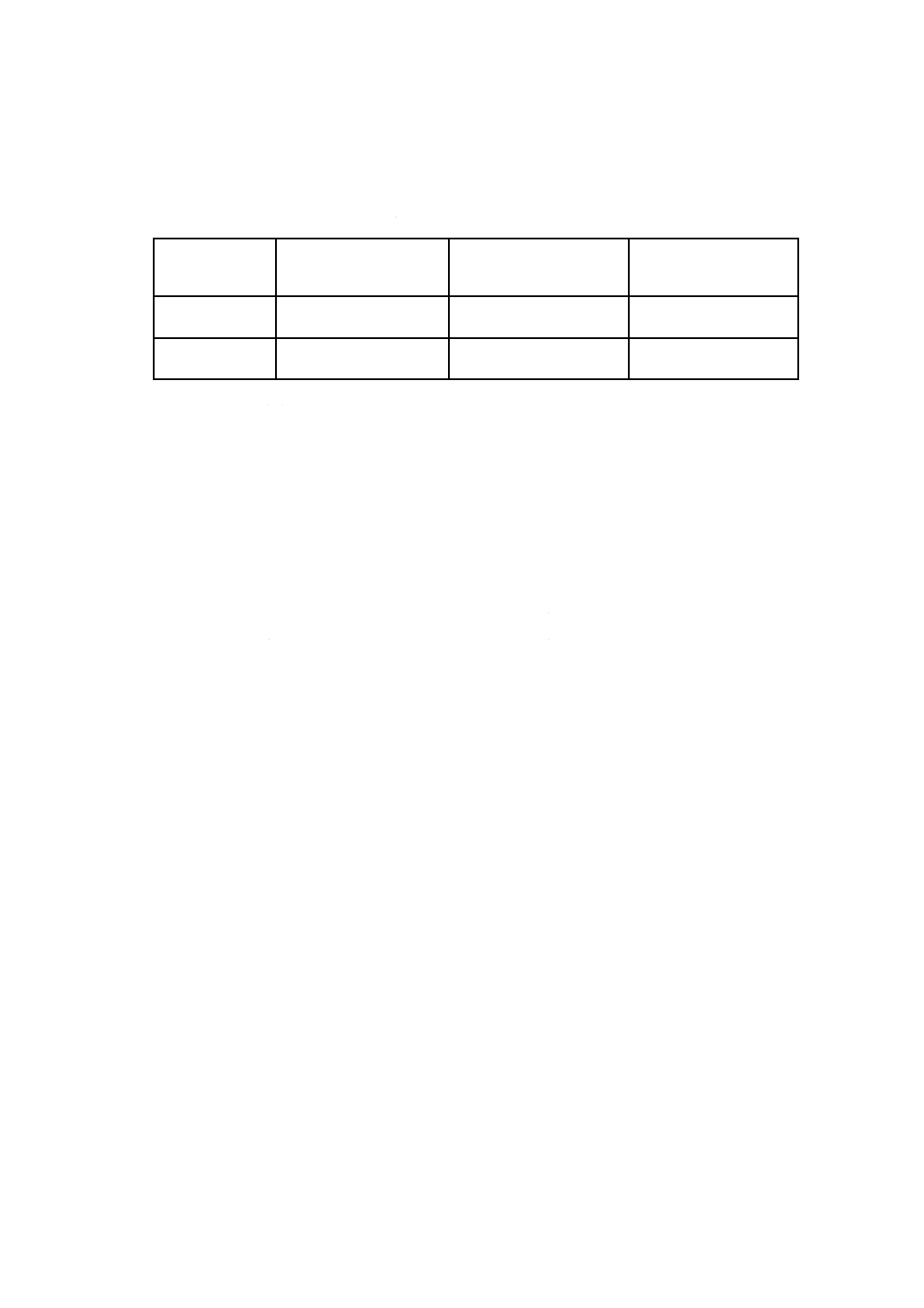
9.1.3.4.7 探知器間の最大範囲は,表2による。
表 2 探知器間の最大距離
探知器の形式
各探知器について認めら
れる最大の床面積
m2
各探知器について認めら
れる中心間の最大距離
m
各探知器について認めら
れる隔壁からの最大距離
m
熱探知器
37
9
4.5
煙探知器
74
11
5.5
備考 当該公的機関は,探知器の性能を論証する試験データに基づいて表2とは異なる範囲の要求又
は許可を与えることがある。
9.1.3.4.8 システムの一部をなす電気配線は,調理室,SOLASによるA類機関区域,及びその他の火災の
危険性の高い閉囲された場所を避けて敷設しなければならない。ただし,これらの場所に火災探知又は火
災警報の装置を設ける必要がある場合,又は適切な電源に接続する必要がある場合は,この限りでない。
9.1.3.5 取扱説明書及び予備品 試験及び保守に関する,適切な取扱説明書及び予備品を備えなければな
らない。
9.1.4 消火用遠隔制御設備
9.1.4.1 遠隔停止回路の分割
9.1.4.1.1 貨物区域,機関区域及び居住区域の通風機は,同一の遠隔停止回路に接続してはならない。
9.1.4.1.2 重要設備用の遠隔停止回路とそれらの予備機に対する遠隔停止回路は,電気的に分離しなければ
ならない。
9.1.4.2 遠隔停止回路のリセット 手動で操作された遠隔停止回路は,手動でリセットされるまで保持さ
れなければならない。リセット後,電動機が自動再始動する可能性がある場合には,このことを遠隔停止
場所に表示しなければならない。
9.1.4.3 消火ポンプの運転表示 消火ポンプの遠隔始動装置が設けられている場所には,運転表示を設け
なければならない。
9.2
機関警報装置
9.2.1 序文 この条項は,船内機関システムの異常状態を警報するために設けられる機関警報装置に関す
るものである。
9.2.2 一般 警報装置には,次の目的をもたなければならない。
− 乗組員の注意を異常状態に向けるため
− 異常状態の本質と場所を特定する手助けのため
− 効果的で,適切な,できれば予防的な操作を行うことができるものにするため
− 警報の確認と正常状態への復帰を確認するため
9.2.3 警報に対する要求
9.2.3.1 レピータ警報盤 レピータ警報盤が要求される場合には,その盤にも可視可聴両方の信号を備え
なければならない。これらの信号は機関警報装置に接続されている警報のすべてに対し,又は警報のグル
ープの一つに対し,共通のものであってもよい。
19
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.2.3.2 ラベリング 集中制御場所においては,例えば,“潤滑油圧力低下”のように,異常状態のそれぞ
れの警報について明確に表示しなければならない。遠隔グループ警報盤においては,表示は,一般的な異
常状態を示すだけでもよい。
9.2.3.3 確認 警報は,異常の内容が確認されるまで継続しなければならない。また,個々の警報の可視
表示は異常が復旧するまで保持し,復旧と同時に,警報システムは自動的に正常作動状態にリセットでき
なければならない。
警報状態の確認は,可視表示を変える形で,例えば,点滅を連続点灯に変えるなどの方法によって表示
し,また,関連する機関区域又はその機関区域に関連する集中制御場所からだけ確認可能でなければなら
ない。レピータ警報盤における可聴警報の停止が,集中制御場所における元の警報の自動的な確認になっ
てはならない。
9.2.3.4 休止 警報チャンネルの休止は明りょうに表示しなければならない。重要補機に対しては,異常
によって表示がないまま警報を休止することがないよう,休止チャンネルを監視するか,二重化しなけれ
ばならない。
9.2.4 情報の表示
9.2.4.1 グループ配置 同じ優先順位のグループ内にある可視警報表示は,すべて,同じ色は同じ意味を
もたせ,かつ,論理的グループごとにまとめて配置しなければならない。
9.2.4.2 判読の容易性 警報の文字,文章又は記号は,警報確認位置から明りょうに視認できるものでな
ければならない。
9.2.4.3 共通可聴警報 可聴警報信号が他の目的,例えば,テレグラフ又は電話にも共用される場合には,
関連するシステムを表示する発光指示盤が附属したものでなければならない。この場合,IMO A.830(19),
警報及び表示器に関するコード,1995年の関連する要求を満足する必要がある。
9.2.4.4 警報の差別化 発生中の警報が他の新たな異常表示を妨げてはならない。
9.2.4.5 第一故障(原因)表示 複雑な機関設備用警報システムでは,最初の故障を表示する手段を考慮
しなければならない。
9.2.5 電源装置
9.2.5.1 予備電源 警報装置には,予備電源設備を考慮しなければならない。
9.2.5.2 電源喪失警報 警報装置の電源が喪失した場合には,可視可聴警報信号を発しなければならない。
9.2.6 設計
9.2.6.1 機能の分離 警報装置は,実行可能な限りそのセンサも含め,制御システムから分離しなければ
ならない。
9.2.6.2 監視機器 警報装置は計測値をアナログ量で読み取れる計器又はデータロガー,若しくは警報デ
ータプリンタなどを備えた監視機器と組み合わせてよい。
9.2.6.3 時間遅れ 必要がある場合には,警報チャンネルには適切な時間遅れをもたせなければならない。
過渡圧力変動に対して保護されている圧力システムでの圧力変動といった過渡現象,センサ接点のチャ
タリング又は他のシステムからの電磁障害によって警報装置が作動してはならない。すべての液面警報に
は,船の動揺の周期に関連した時間遅れをもたせなければならない。
9.2.6.4 閉ループ 検出器ループの破損によっても警報が発生するように,正常時閉ループとなる回路を
使用しなければならない。閉ループでなく開ループ回路を用いる場合には,センサ回路の異常を監視しな
ければならない。
20
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.2.6.5 接地事故 警報センサ回路における接地事故は,警報を発生させる原因となるか又は別の手段で
表示されるか,それができない場合には警報表示を妨げないものとしなければならない。
9.2.6.6 故障の相互独立性 一つの警報チャンネルで特に外部入出力回路における故障が,実行可能な限
り,他の警報チャンネルの正常な作動に影響を与えてはならない。
9.2.6.7 可聴警報の独立性 ランプ又はランプホルダ内での短絡を含む警報表示ランプにおける異常が可
聴警報の作動に影響を与えてはならない。
9.2.6.8 システムの完全性 実行可能な限り,可聴及び視覚装置を含めた電気警報回路の正常な機能を調
べる試験設備を設けなければならない。
9.3
電源供給に関する自動制御設備
9.3.1 序文 この条項は発電機の自動制御装置に関するもので,電源の確保を目的としている。
9.3.2 一般 発電装置用自動制御システムには,次の事項を含めてよい。
− 発電装置の自動始動
− 無電圧母線への自動接続
− 自動並行運転及び負荷分担
− 発電装置の自動遮断
− 非重要負荷の自動切り離し
− 余剰電力の自動解析
9.3.3 自動始動
9.3.3.1 始動信号の発令 自動始動の信号は,例えば,次の状態で発令する。
− 無電圧(ブラックアウト)
− 一定時間の電圧低下
− 一定時間の周波数低下
− 予期される周波数低下又は運転発電装置の予期される停止
− 過負荷(機械的,電気的,又はその両方)
− 需要電力の増加
− 大電力消費機器,例えば,サイドスラスタモータへの始動信号
− 運転発電装置の故障
− 排ガスボイラの圧力低下
− 遠隔手動操作
9.3.3.2 信号の遅延 不要な始動を避けるために,例えば,電動機の大始動電流のような許容できる過渡
状態に起因する信号によって,発電装置を自動始動してはならない。
9.3.3.3 始動信号の転送 2台以上の発電装置に自動始動装置が設けられている場合には,始動失敗時,次
の発電装置に始動信号を自動的に転送するシーケンスを設けるか,又は手動操作用の選択スイッチの装備
を考慮しなければならない。
9.3.3.4 始動前の状態 始動空気,燃料,冷却水などに関連して,適切な始動条件及び運転条件が常に確
立しているということを明確にする手段を講じなければならない。
9.3.3.5 スタンバイ表示 スタンバイ表示は,制御盤のほか,人身の保護のために個々の機械の近くにも
配置しなければならない。
21
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.3.3.6 始動インタロック 保守及び修理を安全に行うために,各発電装置には不注意な始動を防ぐイン
タロックを設けなければならない。その場合,発電装置は自動始動が無効であるという注意表示を設けな
ければならない。
9.3.3.7 始動表示及び始動制限
9.3.3.7.1 発電装置の自動始動及び運転を,表示しなければならない。
9.3.3.7.2 始動失敗時,始動試行の回数及び時間を,制限しなければならない。
9.3.3.7.3 発電装置が始動失敗した場合には,可視可聴警報信号を発しなければならない。
9.3.4 無電圧母線への自動接続
9.3.4.1 ブラックアウト時の接続 母線に発電機遮断器を投入する場合には,発電機電圧が十分に高い値
であることが確実でなければならない。初期負荷が発電機の能力を超えないように,負荷の再投入を制限
するか,順次投入するか,又はその両方を行うことを考慮しなければならない。
9.3.4.2 非同時投入 2台以上の発電機遮断器が同時に投入するのを避けなければならない。
9.3.4.3 不当な投入 始動信号検出エレメントの異常,例えば,低電圧リレーの誤作動の場合に,発電機
遮断器が自動投入しないための手段を備えなければならない。
9.3.4.4 短絡 短絡事故の後,スタンバイ発電機の遮断器が事故母線に投入されないための考慮をしなけ
ればならない。この機能のために,手動リセットを設けなければならない。発電機遮断器は,短絡回路に
は1回を超えて投入を試みてはならない。
9.3.4.5 運転発電装置の切離し 運転発電機を直接トリップさせない一定時間の電圧低下又は周波数低下
によるスタンバイ発電装置の始動後は,負荷引継ぎの準備ができ次第,できるだけ早く,異常となった発
電装置を切り離すことができなければならない。
9.3.5 自動負荷管理
9.3.5.1 必要条件 自動並行運転を行うために,有効な自動同期及び遮断器自動投入を確実にすることが
必要である。
備考 大容量負荷投入による急速な周波数変動の可能性に注意する。これが予期できる場合には高速
投入遮断器,同期リアクタ又は同様な方法の採用を考慮するのがよい。
並行運転を行う発電機には,逆電力トリップ装置を設けなければならない。
自動負荷分担機能が設けられている場合には,その機能にかかわるすべてのシステムの異常も主電源喪
失の原因となってはならない。
9.3.6 自動緊急停止
9.3.6.1 緊急停止の開始 発電装置に損傷を引き起こす可能性がある故障,例えば,過速度又は潤滑油圧
力低下の場合には,発電装置を自動的に切り離し緊急停止しなければならない。
9.3.6.2 予知警報 不要な緊急停止を避けるために,危険状態になる前に手動操作による予防措置をとる
ことができるよう,別途,可視可聴警報信号を発することを考慮しなければならない。
9.3.6.3 負荷減少による切離し 負荷の減少によって,自動的に発電機を切り離すシステムでは,切り離
しには時間遅れをもたせなければならない。
9.3.6.4 発電装置のク−ルダウン 必要な,又は望ましい場合には,高負荷から無負荷への急変による熱
的機械的影響を平滑化するために停止シーケンスを組み込むことが認められる。
9.3.6.5 緊急停止の表示 事故によって発電装置が自動緊急停止した場合は,可視可聴警報信号を発しな
ければならない。
9.3.6.6 再始動の防止 事故による自動停止後の発電装置の自動再始動は,防止しなければならない。
22
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.3.6.7 動力源 自動緊急停止機能をもつシステムへの動力は,独立した動力源から供給しなければなら
ない。動力が喪失した場合には,可視可聴警報表示を考慮しなければならない。主電源を維持するために
補助動力が必要な場合には,例えば,電子ガバナーへの電源は,少なくとも2系統の独立した補助電源を
備えなければならない。発電機保護装置は他の発電機に対するものと別の仕切られたキュービクルに取り
付けなければならない。
9.3.7 非重要負荷の自動切離し
9.3.7.1 切離しの原因 重要負荷への給電を確保するために,次の場合に,非重要負荷を自動的に切り離
すシステムの装備を考慮しなければならない。
− 通常,1台の発電装置が電力供給を担っている状態で,人為的又は自動的に端を発して更なる負荷
が自動的に投入され,負荷の合計が発電機の定格容量を超える可能性がある場合。
− 複数の発電機が並行運転で電力供給を担っている状態で,運転発電機の1台が事故の際に,負荷の
合計が残りの発電機の合計容量を超える場合。
9.3.7.2 設計条件 発電機が過負荷の場合に非重要負荷をトリップする保護システムを設計する際には,
定格値から離れた力率をもつ負荷,エンジンの効率の低下などについて適切な考慮を払わなければならな
い。給電を確保するために,そのような場合には,例えば,発電機の電流リレーに加えて低周波数リレー
を設けるなどの配慮が必要である。
9.4
電動機駆動補機用自動始動装置
9.4.1 序文 この条項は,潤滑油ポンプ,冷却水ポンプなどの電動機駆動補機の自動化装置に関するもの
である。
9.4.2 一般 電動機駆動補機用自動始動装置に使用するすべての機器は,できるだけ,JIS F 8063及びJIS
F 8065によらなければならない。
9.4.3 自動順次始動
9.4.3.1 過負荷の防止 電動機の自動再始動を行う制御器には,必要ならば,ブラックアウト発生後の電
源復旧時又は復旧の間,発電装置の過負荷を防止するために,自動順次始動システムを設けなければなら
ない。
9.4.3.2 始動遅延 順次始動システムを設けている場合には,かじ取機及び潤滑油ポンプといった,船又
は推進機関に必要不可欠な補機の始動に対する時間遅れはできるだけ小さいものとしなければならない。
9.4.3.3 インタロックシステム 電動機の定格が,電動機の自動始動前に2台以上の発電装置を給電母線
に接続する必要がある定格の場合には,インタロックシステムを設けなければならない。
9.4.4 スタンバイ補機用始動装置
9.4.4.1 始動信号 スタンバイ補機に対する始動信号は,制御される媒体,電気系統,又はその両方から,
その用途にふさわしいものから取らなければならない。
− 例えば,スタンバイ潤滑油ポンプ電動機に対する始動信号は,システム設計に応じて,潤滑油圧力,
流量,重力タンクの液位からとるべきで,運転潤滑油ポンプ電動機の制御器だけからとるべきでは
ない。
9.4.4.2 スタンバイ表示 電動機駆動補機がスタンバイ状態に選択されていることは,その電源の準備状
況と併せて,機側制御場所及び集中制御場所がある場合,その場所にスタンバイ表示をしなければならな
い。
9.4.4.3 始動の表示 スタンバイ補機の自動始動は可視可聴警報信号を発しなければならない。
23
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.4.5 制御電圧 船内機器に取り付けてある圧力センサのような検出素子又は類似の装置を含む制御回路
の電圧は,直流,交流とも250 Vを超えてはならない。
9.4.6 手動制御 一つの電動機の制御器における異常又は運転中若しくはスタンバイ電動機に対する自動
切換システムにおける異常が,2台以上の電動機の手動操作を無効にしてはならない。
9.5
機械制御装置
9.5.1 序文 この条項は,船の推進と安全に重要な機械の制御に関するものである。
備考 かじ取機の制御及び計装はJIS F 8079に電気推進プラントは JIS F 8073に,要件が規定されて
いる。
9.5.2 一般要件 船の推進,制御及び安全に重要な主機及び補機は独立するか,又は一つのシステムにお
ける故障が他のシステムの性能を低下させないための配慮をして設計しなければならない。
9.5.3 制御の切換え 機械及び関連機器の制御は,いかなるときにも1か所の制御場所からだけ可能でな
ければならない。制御場所間の切換えは制御を受け取る側の確認をもって有効になるものとしなければな
らない。システムにはインタロック又は他の適切な手段を設けて,制御の切換えが有効に行われるものと
しなければならない(9.5.5.1参照)。
備考 制御場所が直接視認でき,かつ,声が届く範囲の十分近接した位置関係である場合には,当該
公的機関はこの要件を免除することができる。
9.5.4 船橋からの推進機関の遠隔制御
9.5.4.1 適用 航海船橋からの推進機関の遠隔制御が行われる場合には,次の内容を取り入れなければなら
ない。
9.5.4.2 制御パラメータ プロペラの回転数,推力方向,及び適用可能なときは翼角は,操船時も含めて
すべての航行状態において,航海船橋から十分に制御できなければならない。
9.5.4.3 制御装置 制御は,個々のプロペラに対応した唯一の制御装置によって実行し,必要な場合には,
推進機関の過負荷を防ぐ手段を含めて,すべての関連した機能が自動的に実行されるものとしなければな
らない。
複数のプロペラが同時に作動する設計となっている場合には,1個の制御装置で制御してもよい。
9.5.4.4 非常停止 主推進機関には,航海船橋制御システムとは独立した非常停止装置を航海船橋に設け
なければならない。
備考 推進原動機が電気設備用の動力も供給する場合には,例えば,クラッチを使用することで,プ
ロペラから動力を取り出せる可能性が十分ある。
9.5.4.5 指令表示 航海船橋からの推進機関への指令は,操縦台に及び機関制御室を設置している場合に
は主機関制御室にも表示しなければならない。
備考 推進機関の機側制御場所は,操縦台と同等のものと考えてよい。
9.5.4.6 制御の切換え 推進機関の遠隔制御は,いかなるときにも1か所からだけ可能であるものとしな
ければならない。それらの場所では,制御位置を相互に接続することが許される。
航海船橋と機関室との間の制御の切換えは主機関区域,又は主機関制御室において可能でなければなら
ない。
一つの制御位置から他の位置へ切り換えるとき,制御中の回転数,推力方向又は翼角といったパラメー
タが著しく変動してはならない。
制御の切換えは,制御を受け取る側の確認なくして実行に入ってはならない。
24
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.5.4.7 機側制御 推進機関及び船の推進と安全に不可欠なすべての機械は,遠隔制御システムのすべて
の部分に故障があった場合にも,機側から制御できなければならない。
補機も,船の推進と安全に不可欠である関連した機械のある場所で又は近くで制御できなければならな
い。
9.5.4.8 故障警報 遠隔制御システムが故障の場合には,可視可聴警報を発しなければならない。実行不
可能でなければ,あらかじめ設定されたプロペラ回転数,推力方向,及び適用可能であれば,翼角は機側
操縦に入るまで保持しなければならない。
9.5.4.9 始動阻止 推進機関の遠隔制御システムで自動始動を行う設計となっている場合には,機関制御
室又は機側からの始動を可能にするだけの十分な始動空気圧を残すために,自動連続試行の回数を制限し,
かつ,始動空気圧のあらかじめ設定された低圧値で始動を阻止することを考慮しなければならない。
9.5.5 機械の遠隔制御の表示器
9.5.5.1 制御場所の表示 各操作場所には,どの場所で機械を制御しているかを示す表示器を設けなけれ
ばならない。
9.5.5.2 運転表示 遠隔操作が設けられている場合には,各操作場所に運転表示,又は同様の装置を設け
なければならない。
9.5.5.3 パラメータ表示 航海船橋,主機関制御室及び操縦台には,次の表示を設けなければならない。
− 固定ピッチプロペラの場合の,プロペラ回転数及び回転方向。
− 可変ピッチプロペラの場合の,プロペラ回転数及び翼角。
9.5.6 手動オーバライド 一般に,自動始動,自動運転及び自動制御システムには,自動制御を手動でオ
ーバライドする手段を設けなければならない。これらのシステムのすべての部分の故障は,手動オーバラ
イドの使用を妨げてはならない。
9.6
機械保護(安全)システム
9.6.1 序文 この条項は,運転中の機械のパラメータが設定値を超えた場合に,すべての場合において,
適切な動作を起こすことを要求する機器に関するものである。
備考 機械保護のためのコンピュータ利用安全システムは,追加要件及び他の設備を必要とする場合
があることに注意する(10.参照)。
9.6.2 一般要件
9.6.2.1 動作原理 保護装置は,機械又はボイラ運転中に緊急な危険を伴う異常が生じた場合に,プラン
トのその部分を遮断するか又は負荷を低減するなどの自動保護動作を開始し,可視可聴警報を発するもの
でなければならない。
備考 自動保護(安全)は,例えば,次の場合に要求する。
a) 往復動内燃機関
− 機関及び/又は減速歯車の致命的潤滑油喪失
− 過速度
b) 蒸気タービン及びガスタービン
− タービン及び/又は減速歯車の致命的潤滑油喪失
− 過速度
c) 蒸気発生装置
− 水位の過度の低下
− 水位の過度の上昇
25
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 燃焼空気の停止
− 失火
9.6.2.2 推進システム 推進システムの緊急停止は,致命的な損傷,完全な破壊又は爆発を伴う場合に限
定しなければならない。
9.6.2.3 故障形態 保護(安全)システムは,実行可能な限り,このシステム内のただ1か所の故障の場
合には可視可聴警報を発するだけで,推進力の全喪失には至らない配慮を講じた設計をしなければならな
い。
9.6.2.4 オーバライド装置 主推進機関のオーバライド装置が設けられている場合には,不注意な操作が
行われないものとしなければならない。オーバライドが作動していることを示すために,少なくとも視認
手段を設けなければならない。これは,機関士の注意を喚起する可視可聴警報が望ましい。
保護装置の自動リセット又は自動オーバライドの設備は望ましくなく,設備するべきではない。例外的
に,かつ,ある種の適用に不可欠な場合には,試行回数は制限しなければならない。
9.6.2.5 給電 保護装置は,保護装置への通常電源からの給電が喪失した場合には予備の電源(例えば,
蓄電池)から自動的に給電しなければならない。保護装置への通常電源喪失は可視可聴警報によって,表
示しなければならない。予備電源は,保護装置に少なくとも30分間給電できる能力をもたなければならな
い。
備考 適用によって,安全状態を確保するために,又は当該公的機関が要求する場合,更に大きな容
量が必要となることがある。
9.6.2.6 始動及び停止 対象とする機械を発停する通常の処理を行った当然の結果として,設定点からの
過剰な逸脱が生じた場合に意図しない保護機能が作動するのを防止するために,保護回路を切り離すこと
ができる考慮を払わなければならない。このように考慮された場合には,対象とする機械が意図的に停止
されている場合に限って保護回路が無効になるものでなければならない。
9.7
船首戸,内部戸,船側外板戸及び船尾戸
9.7.1 適用 この要件は,“ロールオン・ロールオフ”(Ro-Ro)旅客船に適用する。
9.7.2 遠隔制御 遠隔制御を備える場合には,8.4の要件を適用しなければならない。
9.7.3 表示器システム 次の状態を示す個別の表示器を各戸に取り付けなければならない。
− 戸の完全閉鎖
− 戸の完全ロック(すべての固定装置が閉鎖位置にある)
各戸は個別に表示しなければならない。
これらの表示は,船橋と操作盤の両方に設けなければならない。
9.7.4 モードの選択 船橋のパネルには“出入港/航海”のモード選択機能を備え,航海モードにおいて,
いずれかの戸が完全閉鎖でなく又は完全ロックでもない場合には,可視可聴警報を発するための配慮をし
なければならない。
備考 当該公的機関が認めた場合には,手動切換スイッチでよい。
9.7.5 フェイルセイフ 表示器及び警報システムは,フェイルセイフ原理に基づいて設計しなければなら
ない。システム内の事故の場合,実際にはそうでないのに,いずれの戸も完全に閉鎖されている,又は完
全にロックされているというような不正な表示があってはならない。
備考 システムの一部に2か所以上の不良の可能性がある場合には,最も可能性のある事故の方に優
先権を与えなければならない。
26
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.7.6 試験 表示,例えば,ランプテスト及び可聴警報の両方に対するテスト装置を航海船橋パネルに設
けなければならない。
9.7.7 独立性 警報及び表示器システムは,戸制御システムからは独立していなければならない。
これらのシステムに対する給電は個別に保護し,バックアップ又は確実な電源,例えば,無停電電源
装置(UPS)を備えなければならない。
すべての電源の故障は,航海船橋において可聴警報を発しなければならない。
9.7.8 表示 表示は,すべての予期される照明条件の下でも,効果的,かつ,連続的に行わなければなら
ない。
9.7.9 センサ 表示器システムのセンサは水,氷結及び機械的損傷から保護しなければならない。
9.7.10 テレビジョン監視 ロールオン・ロールオフ貨物区域の浸水に至る可能性がある外板戸の漏水監視
を行うために,航海船橋にテレビジョン監視装置を設けなければならない。
船首戸に対しては,内部戸及び船首戸と内部戸との間の区域の両方を監視しなければならない。
監視される物体の照明及び対比色について,特別の考慮を払わなければならない。また,特殊分類区域
及びロールオン・ロールオフ貨物区域の監視にも特別な考慮を払わなければならない。
9.7.11 漏水検知 特殊分類区域及びロールオン・ロールオフ貨物区域の浸水につながる,すべての戸から
の漏水を検知する漏水検知警報を設けなければならない。
船首戸に対しては,内部戸からの漏れを検知しなければならない。
航海船橋と機関制御室に,可聴警報を発しなければならない。
9.7.12 排水警報 船首戸とランプの間,及び内部戸が取り付けられている場合には,ランプと内部戸の間
の区域には排水システムを設けなければならない。
9.7.11の区域において,水位が自動車甲板上0.5 mを超えた場合には,9.7.11の要件に加えて,別個の
可視可聴警報を航海船橋に発しなければならない。
9.7.13 制御場所 自動車甲板への出入りに使う船首戸及び内部戸に対するすべての閉鎖装置及びロック
装置の遠隔制御は,乾げん(舷)甲板より上方の位置から行わなければならない。
9.8
水密動力戸
9.8.1 表示 すべての水密動力滑り戸に対して,各戸が開か閉のいずれであるかを,すべての遠隔操作場
所に,すなわち,航海船橋及び隔壁甲板より上部で手動操作が行われる場合には,その場所に表示しなけ
ればならない。
9.8.2 警報 各滑り戸には,その区域で他の警報と区別できる可聴警報を設けなければならない。
この警報は,戸が遠隔操作で動力によって,閉鎖するときに鳴り,戸が動き始める前に5秒から10秒間
鳴らなければならない。
警報は,戸が完全に閉鎖するまで鳴り続けなければならない。
備考 当該公的機関は,旅客区域及び周囲の騒音が高い場所においては,可聴警報器に加えて断続的
な可視信号を戸に備えることを要求することができる。
9.8.3 閉鎖速度 滑り戸は,動力によってほぼ一定の速度で閉鎖しなければならない。船が直立状態にあ
る場合において戸が動き始めてから完全に閉鎖するまでの時間は,すべての場合において,20秒以上40
秒以下でなければならない。
9.8.4 電源 滑り戸に必要な電力は,非常配電盤から直接に,又は隔壁甲板上に設置された専用分電盤か
ら給電しなければならない。
関連する制御装置,表示器及び警報装置の回路についても同様とする。
27
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
更に,主電源又は非常電源が故障した場合には,これらは臨時の非常電源から給電しなければならない。
臨時の非常電源は,15度の逆傾斜に対して戸を少なくとも3回,例えば,閉−開−閉と操作するための
十分な容量をもたなければならない。
9.8.5 専用回路 電気的に操作されるそれぞれの滑り戸は,戸を開閉することができる専用の電動機と関
連する回路をもたなければならない。
これらの回路における一つの故障が,手動操作を妨げてはならない。
9.8.6 機器の設置場所 水密戸のための電気設備及び電気機器は,実行可能な限り,隔壁甲板の上方並び
に危険区域及び危険な場所の外に設置しなければならない(JIS F 8074参照)。
9.8.7 外被 やむを得ず隔壁甲板の下方に設置される電気機器の外被は,次に規定する水の浸入に対する
適切な保護を施さなければならない。
a) 電動機,関連回路及び制御機器;少なくともIPX7で保護する;
b) 戸の位置表示器及び関連回路機器;IPX8で保護する;
c) 戸の開閉警報信号;IPX6で保護する。
IPX8に適合する保護を施した外被の水圧試験は,浸水中にその機器の設置場所に生じる圧力で36時間
行い,当該圧力を基準としなければならない。
備考 その他の電気機器の囲いのための設備は,当該公的機関が同等の保護が確保されることを認め
ることを条件に,設けることができる。
9.8.8 浸水 隔壁甲板の下方に位置する電気設備への水の浸入が,実行可能な限り戸を開けさせる原因と
ならないための措置をとらなければならない。
9.8.9 独立回路 電動力装置,制御装置,表示器及び警報装置の回路は,一つの戸の回路における故障が
他の戸の故障の原因とならないための保護をしなければならない。
9.8.10 警報回路の故障 戸の警報装置又は表示器回路における短絡及びその他の故障が,動力によるその
戸の操作を妨げないものでなければならない。
9.8.11 制御回路の故障 滑り戸の動力操作装置又は制御装置の一つの故障が,閉鎖した滑り戸を開ける原
因とならないものでなければならない。
9.8.12 電源監視 電源は,9.8.5で要求するそれぞれの電動機のできる限り近い電気回路の一点で連続的
に監視しなければならない。電源が喪失した場合には,航海船橋の中央操作盤に可視可聴警報を発しなけ
ればならない。
9.8.13 モード選択 航海船橋の中央操作盤には,二つの制御方式をもつ“主モード”スイッチを備えなけ
ればならない。一つの制御方式は“機側制御”モードで,すべての戸が機側であけることができ,かつ,
使用後自動閉鎖によらず機側で閉鎖することができる。もう一つの制御方式は“戸閉鎖”モードで,開い
ているすべての戸が自動的に閉鎖しなければならない。“戸閉鎖”モードでは,戸は機側であけることがで
きるが,機側制御の機構を解除することによって当該戸は自動的に再閉鎖されなければならない。“主モー
ド”スイッチは,通常,“機側制御”モードに位置しておかなければならない。“戸閉鎖”モードは非常時
又は試験の目的でだけ使用しなければならない。“主モード”スイッチの信頼性には,特別な考慮を払わな
ければならない。
9.8.14 航海船橋での表示 航海船橋の中央操作盤には,各戸の位置を示すダイアグラムを備え,それぞれ
の戸が開か閉のいずれであるかを示す可視表示器を設けなければならない。表示は,予期可能なすべての
照明条件の下で,効果的,かつ,連続的に行わなければならない。
赤色灯は戸の完全開を示し,緑色灯は戸の完全閉鎖を示すものでなければならない。
28
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
戸が遠隔閉鎖されるときには,赤色灯が点滅して途中位置にあることを表示しなければならない。
表示回路は,それぞれの戸の制御回路からは独立したものとしなければならない。
9.8.15 遠隔開放 すべての戸は,中央操作盤から遠隔操作によって戸を開けることができるものであって
はならない。
9.9
旅客船における船内放送システム
備考 旅客船の船内放送システムに対する性能基準に関する勧告である,IMO MSC/Circ.808, 1997
を参照。
9.9.1 聴き取りやすさ 船内放送システムは,すべての区域で,周辺の騒音に打ち勝って明りょうに聴き
取れるものでなければならない。
9.9.2 オーバライド オーバライド機能を設け,船内のすべての他の場所からのシステムによる放送に割
り込むことができ,また,スピーカのスイッチが切られていたり,音量が下げられている場合にも有効に
機能するものでなければならない。
この機能は,資格のない者が使用するのを,例えば,かぎ又はパスワードによって防止するものでなけ
ればならない。
この機能は航海船橋,及び非常の際に近づくことができる他の制御場所で使用できるものでなければな
らない。これらの非常制御場所の数と位置は当該公的機関の承認を必要とする。
9.9.3 操作 簡単な操作によって,すべての拡声器に対し,又は限定した数の拡声器,例えば,乗組員及
び作業場所へ,一斉にメッセージを放送できるものでなければならない。
9.9.4 非常放送 少なくとも2か所から非常放送を行える設備を設けなければならない。
このうちの一つの場所は割込機能をもち,それ以外の場所で動作を取ることなく簡単な操作で放送がで
きるものでなければならない。
9.9.5 音量調節 システムは,音量レベルを調節できる設備をもたなければならない。
9.9.6 最低音量レベル システムは,次の最低音量レベルを出力できなければならない。
a) 室内では75 dB(A)で,会話妨害レベルよりは少なくとも20 dB(A)大。
b) 室外では80 dB(A)で,会話妨害レベルよりは少なくとも15 dB(A)大。
9.9.7 干渉 システムは,反響又は他の干渉を防ぐことができるものでなくてはならない。
9.9.8 故障許容 システムは,ただ一つの事故が全体システムを不能にさせることを避けるために複数の
増幅器を備え,分散配置しなければならない。
9.9.9 保護 それぞれの拡声器は短絡事故に対して個別に保護しなければならない。
9.9.10 火災区画 各火災区画のすべての区域には,全長にわたって十分に離された少なくとも2系統の独
立したループと,2個の分離した独立の増幅器を設けなければならない。
9.9.11 分離 公室,通路,階段,及び制御場所の拡声器は,複数の増幅器で作動するものでなければなら
ない。
ケーブルは分離した電路で敷設するか,耐火ケーブルを用いなければならない。
9.9.12 電源 装置は,主電源,非常電源及び臨時の非常電源から給電しなければならない。
9.9.13 ケーブル敷設 実行可能な限り,ケーブル及び配線は調理室,洗濯室,A類機関区域とそのケーシ
ング及びその他の火災の危険の高い区域から離して敷設しなければならない。
できる限り,すべてのケーブルは,近接した区域の火災による隔壁の熱による損傷を受けない敷設とし
なければならない。
ケーブル及び配線は,少なくとも難燃性でなければならない。
29
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10. コンピュータ利用システム
10.1 一般
10.1.1 範囲 この条項は,この規格の他の項に含まれる要件に追加するコンピュータ利用システムの要件
について規定する。
10.1.2 性能 コンピュータ利用システムは,非常時を含むすべての使用状態で,安全で安定した,しかも
再現性のある方法で適用されるように,システムに対する機能を提供しなければならない。応答時間は,
通常時の作動状態と異常時の作動状態の両方を考慮して,すべての機能に対して適切なものでなければな
らない。
10.2 システムの安全性
10.2.1 操作上の安全性 コンピュータ利用システムは,次の点を考慮して安全操作が行えるものでなけれ
ばならない。
− 人に対する危険性
− 環境に対する影響
− 機器に対する損傷
− 使いやすさ
− コンピュータを利用しない装置及びシステムにおける操作性など
10.2.2 フェイルセイフ コンピュータ利用システムに故障が生じた場合,処理は適切なレベルの安全性を
提供するあらかじめ決められた条件へ自動的に復帰するものでなければならない。故障が起こった場合は,
可視可聴警報を発しなければならない。
故障後の立上げ又は再起動においては,コンピュータ利用システムは適切なレベルの安全性を提供する
あらかじめ決められた状態へ復帰するものでなければならない。
10.2.3 重要設備 重要設備がコンピュータ利用システムに依存している場合には,目的を果たすうえで適
切,かつ,相違した手段による第二の独立の方法が有効でなければならない。
備考 ある種の用途においては人間の介入が認められる。
10.3 システム構成
10.3.1 安全確保(セキュリティ) コンピュータ利用システムには,機能に対する不正な侵入,構成,プ
ログラム又はデータの不正な改変を防止するための効果的な物理的及び/又は論理的考慮を払わなければ
ならない。
10.3.2 機能の割付け プロセスの機能は,ユーザ,タスク及び環境に調和したうえで,コンピュータ利用
システムに割り付けなければならない。
10.3.3 モジュール化 ハードウェア及びソフトウェアは,モジュール化した階層設計とし,そのことによ
って,すべてのシステム故障における影響も最小化し,試験と保守とを容易なものにしなければならない。
10.3.4 機器の選定 コンピュータ機器は,プロセスの過程における安全操作と矛盾のない選定としなけれ
ばならない。ハードウェアは6.の規定による条件に耐える適切なものでなければならない。
10.4 システム統合
10.4.1 有効な操作 統合システムにおける操作は,個々のスタンドアロン機器又はシステムにおける操作
と同等に有効なものでなければならない。
10.4.2 統合システムの故障 統合システムの一部における故障が他の部分の機能性に影響を与えてはな
らない。ただし,それらの機能が,障害部分に直接関与している場合を除く。
30
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.4.3 多機能表示及び制御 多機能表示及び制御は冗長性を備え,互換性のあるものでなければならない。
制御場所のユニット数は,連続稼動を要求するすべての機能を考慮して,いずれか1台のユニットが作動
しなくなった状態でもすべての機能を確保することのできる十分なものでなければならない。
10.5 電源
10.5.1 監視 電源の状態は監視,かつ,表示され,重要設備に対しては異常状態の場合に警報を発しなけ
ればならない。
10.5.2 データの保護 システム内に保持したプログラム及びデータは,電源喪失による破壊から保護しな
ければならない。
10.5.3 プロセスの状態 電源故障の場合に,プロセスが不安定で危険状態にならないよう保護しなければ
ならない。
10.6 データ通信リンク
備考 この項はローカルエリアネットワーク,計測用ネットワーク及び通信媒体を共有するその他の
手段を包含する。
10.6.1 ノード異常 ノード異常が,データ通信リンクの残りの部分に影響を与えてはならない。
10.6.2 初期化 データ通信リンクは,電源投入の際に,自動的に初期化されなければならない。電源が切
断された後,通信リンクは,手動操作の介入なしに正常動作に復帰しなければならない。
10.6.3 データ待ち時間 データ通信リンクの特性は,すべての情報が適切な時間で伝送され過負荷が発生
しないことが確実なものでなければならない。
備考 ブリッジ及びその他の装置を使用して非重要負荷を主要プロセスネットワークから分離するこ
とによって,過負荷を避けなければならない。音声通信及びビデオ信号は,この要求を満足す
ればネットワークを共有してもよい。
10.6.4 障害検出 データ通信リンクは自己監視とし,リンク自体及びリンクに接続されたノード上のデー
タ通信障害を検知するものでなければならない。検出された障害は,警報を発しなければならない。
10.6.5 ネットワーク管理 ネットワークに対しては,自己監視機能は専用のネットワーク管理ユニットに
おける重要な機能として実行されるか,又はネットワークに接続された適切なデバイスにおける二次機能
として実行されてよい。重要な機能に対しては,関連するデータは受信ノードにおけるエラー確認及びレ
ンジ確認(範囲検査)を受けるものでなければならない。
10.6.6 冗長性 二つ以上の重要な機能が同じデータ通信リンクを用いる場合,データの送受信時,エラー
発生時のデータの完全性を確保するために,このリンクには冗長性を備え,リンクの状態を常に監視しな
ければならない。
10.6.7 経路 冗長性のあるデータ通信リンクを必要とする場合には,それらはできるだけ離して配置し,
両方のネットワークに対する損傷の危険を最小限化するための配慮をしなければならない。
10.6.8 自動切換え 冗長性のあるデータ通信リンクを必要とする場合には,リンク間の切換えは自動的に
行われなければならない。
10.6.9 相互独立性 相互に連接したデータ通信リンクは互いに独立でなければならない。 共通部分のす
べての故障が許容できない性能低下を起こしてはならない。
10.7 ユーザインタフェース
10.7.1 一般
10.7.1.1 操作 ユーザインタフェースは,次の点で,システムの操作を安全,かつ,効果的にすることが
確実なものでなければならない。
31
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 必要な情報を与える;
− ユーザの行動に十分な余裕を与える;
− 不必要なストレスを与えない;
− ユーザの能力に見合った作業負荷を与える;
備考 操作員の介入,アクセス制御,安全確保(セキュリティ)及び人間工学に考慮しなければなら
ない。
10.7.1.2 構成 システムは,監視及び制御が同時に行える構成でなければならない。
10.7.2 入力装置
10.7.2.1 不注意操作 入力装置,例えば,キーボード,トラックボール,マウス,タッチスクリーンなど
は,不注意な操作を避ける設計及び配置にしなければならない。
10.7.2.2 既定機能 入力装置は,あらかじめ明白に規定された機能をもち,すべての条件下の使用に対し
て信頼性があり,安全な操作ができるものでなければならない。与えられた入力命令の明白な確認が行わ
れなければならない。
10.7.2.3 専用機能 入力装置には,頻繁に繰り返される入力命令及び迅速な実行を有効にするために専用
機能キーを設けなければならない。
10.7.2.4 複数機能 キーに複数の機能を割り当てる場合には,指定された機能のどちらかが選択されてい
るかを見分けることができるものでなければならない。
10.7.2.5 重要設備 重要機能に対する入力装置は,要求に応じて有効になる方式(on demand)としなければ
ならない。
10.7.2.6 表示器の視野 入力装置は,オペレータが関連した表示器を明りょうに見ることができる配置に
しなければならない。
10.7.2.7 配置 入力装置は,論理的な方法で,かつ,機能をグループ化して配置しなければならない。
10.7.2.8 動作の確認 ユーザが,動作に対するポジティブな確認を行える手段が備わっていなければなら
ない。
10.7.3 出力装置
10.7.3.1 配置 出力装置,例えば,モニタ,ミミックパネルなどは,ユーザが実際の操作場所から明りょ
うに視認できる配置にしなければならない。
10.7.3.2 表示 表示する情報は,予期するすべての照明条件の下でも明りょうに読み取れるものでなけれ
ばならない。
10.7.3.3 コンピュータ対話
10.7.3.3.1 ユーザの手引 コンピュータ対話は,タスクを通じてユーザを手引するものでなければならな
い。
10.7.3.3.2 警告 制御条件の変更,メモリ内のデータ,プログラムの更新などを可能にする機能を使用す
るときには,明白な警告を発しなければならない。
10.7.3.3.3 自己記述性 すべてのメニュー及び表示は,自己記述性でなければならない。
10.7.3.3.4 重要情報の更新 重要情報の更新は,対話の間も阻止してはならない。
10.8 警報,制御及び安全機能
10.8.1 一般 警報,制御及び安全機能は,それぞれの機能が互いに独立した構成でなければならない。
10.8.2 警報機能
32
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.8.2.1 表示 警報は,システムのどの操作モードにおいても他の情報に優先して視覚的及び聴覚的に表
示しなければならない。それらは他の情報から明りょうに識別できるものでなければならない。
10.8.2.2 確認 警報の確認は,警報に対応する専用の場所に限り可能でなければならない。確認されてい
ない警報は容易に区別できるものでなければならない。
10.8.2.3 重要機能 重要機能に対する警報メッセージは,表示器に表示されているすべての他の情報より
も優先するものでなければならない。
10.8.2.4 発生順位付け 警報は発生順に表示され,履歴が分かるものでなければならない。
10.8.2.5 色識別 警報メッセージがカラーモニタ上に表示される場合には,警報状態は本来の色が失われ
た場合でも確実に識別できるものでなければならない。
10.8.3 制御機能
10.8.3.1 重要機能 重要機能の制御は,常に一つの制御場所からだけ有効でなければならない。又は矛盾
する制御命令をインタロック及び/又は警告の手段によって防止しなければならない。
10.8.3.2 制御中の場所 制御中の場所を示す表示は,それぞれの制御場所で行わなければならない。
10.8.3.3 制御の切換え 一つの場所から他の場所への制御権の切換えは,円滑に,かつ,処理を中断する
ことなく達成しなければならない。
10.8.4 安全機能 重要機能に対するコンピュータ利用システムにおいては,システム障害の際,プロセス
の特性又は操作員の反応時間により人間が介在する余地がない場合,操作上の安全性を確保するようシス
テムが自動的に介入するものでなければならない。
10.9 ソフトウェア
10.9.1 一般
10.9.1.1 手続の利用 ソフトウェアライフサイクルの全段階にわたって,系統的な手続を実行しなければ
ならない。
ソフトウェアライフサイクルには,仕様書,品質計画,開発,検証,具体化,妥当性の確認,受入れ,
インストール及び後に続く修正が含まれる。
プログラム内容及びデータの修正は,バージョンの変更と同様,文書化しなければならない。
10.9.1.2 手続の文書化 10.9.1.1に従って講じられた処置は,文書化したうえで実施し,かつ,これらの
処置の実行は追跡可能でなければならない。
10.9.2 構成
10.9.2.1 支援(サポート)機能 重要な機能を,計算,シミュレーション又は意志決定支援モジュールの
支援なしに維持することができる場合,そのアプリケーションソフトウェアは,これらのモジュールの障
害が基本的な機能の喪失を招かない設計にしなければならない。
10.9.2.2 基本ソフトウェア オペレーティングシステム,又は他の多機能をもつアプリケーションソフト
ウェアを支えるソフトウェア,例えば,ミドルウェア又はファームウェアは,次のことが可能でなければ
ならない。
− 割り当てられた優先順位の下で幾つかのモジュールを走らせる。
− 個々のモジュールの実行における障害を検出する。
− 異常モジュールの識別,これによって少なくとも同等又は上位の優先順位にあるモジュールの動作
を確実に維持する。
33
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.9.2.3 タスクの優先順位付け 前項に規定したオペレーティングシステムの下でタスクを割り当てら
れた個々のアプリケーションソフトウェアモジュールは,2個以上の機能に関係した作業を行うべきでは
ない。提供される機能に適する優先順位をタスクに割り当てなければならない。
10.9.2.4 分離 ハードウェア,例えば,入出力装置,通信リンク,記憶装置などが,故障の影響を最小限
化することを図った構成となっている場合,関係するソフトウェアは別のコンピュータタスクへ分離し,
同程度の独立性を確保しなければならない。
10.10 試験
10.10.1 一般 すべての試験は,文書化しなければならない。
これらの文書作成は,試験方法,要求する試験結果及び組み込まれたシステム又は連接したシステムで
他の供給者が実施した試験を含む試験結果の記述を含む。
10.10.2 ハードウェア ハードウェアは5.の規定によって試験しなければならない。
10.10.3 ソフトウェア
10.10.3.1 モジュールの試験 ソフトウェアモジュールは,対応するハードウェアにインストールする前
に試験しなければならない。
10.10.3.2 設置前試験 アプリケーションソフトウェアは,船内にインストールする前に十分に試験しな
ければならない。
10.10.4 システム試験
10.10.4.1 完成システム 試験は,承認されたテストプログラムに従って,実際のハードウェア構成品,
ソフトウェアモジュール及びアプリケーションソフトウェアで構築されたシステムの上で詳細に実施しな
ければならない。
10.10.4.2 機能テスト システム試験及び目視検査では,システムが機能仕様書を満足することを検証し
なければならない。
10.10.4.3 障害シミュレーション 障害はできるだけ現実的にシミュレーションされなければならない。
警報及び安全限界は,監視するパラメータの規定値を超過することで確認するのが望ましい。
10.10.4.4 動作条件 システムが,通常な動作及び異常な動作条件の下で所要の機能を果たすことを検証
しなければならない。
10.10.4.5 統合システム 統合システムは,それ以前に正しい機能性が発揮されたことを検証する試験を
しなければならない。
10.10.4.6 船内試験 係留運転及び海上運転では,相互接続されたすべてのシステムが所要の機能を発揮
する能力を検証しなければならない。
10.11 文書化
10.11.1 一般
10.11.1.1 明りょう性 すべての文書化は,明確であいまいさのない方法で関連するすべての情報を与え
るものでなければならない。
10.11.1.2 記号及び略語の使用 使用する記号及び略語は,説明するか又は適切な国際規格若しくはコー
ドを引用しなければならない。
10.11.2 ハードウェア 次のとおり文書化を行わなければならない。
a) システムのブロックダイアグラム,これは個々の構成品,入出力装置及び相互接続の配列を示す。
b) 結線系統図
c) 入出力装置の詳細
34
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d) 電源の詳細
10.11.3 システムの機能的な記述 文書化は,この規格の関連する規定を満足していることを検証するた
めに行わなければならない。例えば,
− システム仕様書
− 機器の正常操作及び不正操作に対するシステム性能
− 正常操作及び不正操作モードに対する取扱説明
− 制御の切換え
− 冗長モード又は復帰モード
− 試験設備
− 障害検知及び障害特定設備(自動及び手動)
− データ保全
− アクセス規制
− ユーザの注意を必要とする特記事項
更に,文書化には手続に関係した次の事項も必要である。
− 起動(スタートアップ)
− 機能の復旧
− 保守及び定期試験
− データバックアップ
− ソフトウェアの再読込み及びシステム再立上げ
− 障害箇所の特定及び修復
10.11.4 ソフトウェア
10.11.4.1 品質計画 ソフトウェアライフサイクルの実行に関する計画には,構成管理を含め,関連する
手続,責任及びシステムの文書化を引用したものを示さなければならない。
10.11.4.2 記述 ソフトウェアは,すべてにわたって記述しなければならない。例えば,
− 各ハードウェアユニットにインストールされた基本ソフトウェアの記述
− ネットワークのノードにインストールされた通信ソフトウェアの記述
− アプリケーションソフトウェアの記述(プログラムリストではない)
− システムの立上げ及びプロセス機器の構成に対するツール
10.11.4.3 アプリケーションソフトウェア アプリケーションソフトウェアの記述には,例えば,次の事
項を含まなければならない。
− 他のシステムへの依存を含み,機能を維持するために動作させなければならない,システムモジュ
ールの情報
− 機能を理解するに十分なレベルでの各モジュールの詳細
− 各機能を維持するために動作させなければならないソフトウェアモジュール間の関係
− ソフトウェアモジュール間のデータ及び制御の流れ
− ソフトウェアの構成,優先付けの構成を含む
− 冗長システムにおける切換構造
10.11.4.4 範囲及び限界 予期される機器の警報及び安全機能に対する動作範囲及び限界の詳細を示さな
ければならない。
10.11.5 ユーザインタフェース
35
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.11.5.1 文書化された設計 制御場所の設計と配置は,動作原理を判断するに十分なレベルで,例えば,
各ユーザの入出力装置の図面,寸法,絵などを含み,詳細に示さなければならない。
10.11.5.2 画面を介しての対話 画面を介してのコンピュータとの対話の詳細は,次の事項を含めて作成
しなければならない。
− 各入力装置に割り当てられた機能の記述
− 個々の画面の詳細,例えば,説明図,カラー写真,など
− メニュー操作の記述
10.11.6 試験プログラム 試験プログラムは10.10に従い,作成しなければならない。
11. 定期的に無人状態におかれる又は削除された人員当直による機関区域に対する追加要件
11.1 序文 この条項は,定期的に無人となる機関区域をもつ船の船上における追加要件に関するもので
ある。
備考 当直人員の削減に関しては,次の項の適用は当該公的機関の決定による。
11.2 一般要件 設備は,操船時を含むすべての航海状態において,機関区域に人員が配置される船と同
等の安全性を確保するものでなければならない。
11.3 火災予防 次の場所の火災を初期の段階で探知し,かつ,警報を発する手段を設けなければならな
い。
− ボイラ燃焼空気供給ケーシング及び煙路
− 推進機関の掃気室。ただし,特別の場合において当該公的機関が必要ないと認めるときはこの限り
でない
11.3.1 オイルミストの監視 出力2 250 kW以上の内燃機関又はシリンダの内径が300 mmを超える内燃
機関には,クランク室のオイルミスト検出装置,機関軸受温度監視装置又はこれと同等の装置を設けなけ
ればならない。
11.3.2 火災探知及び警報 9.1による火災探知警報システムを,機関区域に装備しなければならない。
11.3.3 探知器の場所 火災探知システムは,機関区域のすべての場所において,予想される周囲温度の範
囲で要求する機関の通常の作動状態の下で,かつ,通風の変動の下で,火災の発生を迅速に探知し得るこ
とを図った設計とし,探知器を配置しなければならない。
熱探知器だけによる火災探知システムは認められない。ただし,高さが制限されている場所及び熱探知
器の使用が特に適切である場所に設置する場合を除く。
火災探知警報システムは,航海船橋上において及び責任ある機関士が聴き取り,かつ,視認することの
できる十分な場所において,火災表示以外の他のシステム警報と視覚及び聴覚において識別し得る可視可
聴警報を発しなければならない。航海船橋が無人の状態である場合には,警報は,乗組員の責任者が当直
している場所に発しなければならない。
火災探知システムは,その取付後,種々の機関の作動状態及び通風状態の下で試験しなければならない。
11.4 浸水に対する保護
11.4.1 ビルジウェル監視 定期的に無人の状態に置かれる機関区域のビルジウェルは,船の通常の縦傾斜
及び横傾斜角度で液体の貯留量が検知される方法で監視しなければならない。
少なくとも2個の液位センサを各機関区域に取り付け,これらが作動したときは個別の警報を発しなけ
ればならない。
監視装置は,どの区画で異常が生じたかを示すものでなければならない。
36
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
11.4.2 自動ビルジ排出 ビルジポンプが自動的に始動することができるものである場合には,液体の流入
がポンプの能力を超えているとき,又はポンプが通常予想される頻度よりも高い頻度で作動しているとき
には,表示するための手段を設けなければならない。
自動制御されるビルジポンプを設ける場合には,油による汚染の防止に関する要件に対し特別の注意を
払わなければならない。
11.5 推進機関の制御 船橋からの推進機関の遠隔制御を設けなければならない(9.5参照)。
11.6 警報システム
11.6.1 機関故障の表示 機関警報は9.2を満足し,注意を必要とするすべての故障を表示しなければなら
ない。
11.6.2 可視及び可聴警報 警報システムは,機関区域及び設置されていれば機関制御室に,可視可聴警報
を発しなければならない。
それぞれの個別警報は,適切な場所に視覚的に表示しなければならない。
11.6.3 公室 警報システムは,機関士公室,及び選択スイッチを介して少なくとも機関士居室の一つに接
続しなければならない。
11.6.4 航海船橋 警報システムは,当直士官の行動又は注意を必要とするすべての状態について,航海船
橋において可視可聴警報を発しなければならない(特に,推進機関の自動減速又は緊急停止の場合)。
11.6.5 警報不履行 実行可能な限り,警報システムの故障は警報を発しなければならない。
11.6.6 機関士呼出し 警報が限られた時間内に警報場所で確認できない場合には,機関士全体呼出し装置
を作動しなければならない。
11.6.7 電源
11.6.7.1 予備電源 警報システムには連続的に給電し,かつ,通常電源が喪失した場合には,自動的に予
備電源に切り換わらなければならない。
備考 電源切換えは給電に瞬断があってもよい。すなわち,無停電電源を強制するものではない。
11.6.7.2 故障警報 警報システムの通常電源が故障した場合には,可視可聴警報を発しなければならない。
11.7 保護(安全)システム
11.7.1 自動緊急停止 人命に対し急激に危険な状態となる機関又はボイラの運転にかかわる重大な故障
の場合に,プラントの故障部分を自動的に緊急停止し,かつ,可視可聴警報を発する安全装置を設けなけ
ればならない。
11.7.2 システム設計 機関保護(安全)システムは,9.6によって設計しなければならない。
11.8 機関,ボイラ及び電気設備に対する特別要件
11.8.1 電源 主電源は,9.3の要件を満足しなければならない。
11.8.2 負荷の優先遮断 通常1台の発電機によって給電することができる場合には,船の推進及び操だの
ために必要な負荷への給電及び船の安全のための給電を連続的に行うために,適切な負荷優先遮断装置を
設けなければならない。運転中の発電機が停止の場合には,重要補機を自動的に再始動(必要なら,順次
始動を含む)し,船の推進及び操だ並びに船の安全を確保するために十分な容量をもつ予備発電機を自動
始動し,主配電盤に自動接続する設備を備えなければならない。
備考 当該公的機関は,1 600総トン未満の船について実行不可能と認める場合には,この要件を免除
することができる。
11.8.3 給電の連続性 通常2台以上の発電機の並行運転によって,給電する場合には,発電機の1台が停
止した場合に,船の推進及び操だ並びに船の安全を確保するために,残りの発電機が過負荷になることな
37
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
く運転の継続を確実にする装置,例えば,負荷の優先遮断装置を備えなければならない。
11.8.4 自動切換え 船の推進のために不可欠な補機に対して予備機が要求される場合には,自動切換装置
を設けなければならない。
11.8.5 自動制御及び警報システム
11.8.5.1 主推進 制御システムは,必要な自動化設備を用いて,主推進機関及び補機の運転に要求される
機能を確保することができるものでなければならない。
11.8.5.2 自動切換え 予備機への自動切換えが行われた場合には,可視可聴警報を発しなければならない。
11.8.5.3 重要パラメータの監視 すべての重要な圧力,温度,液位及び他の重要パラメータに対しては,
11.6を満足する警報システムを設けなければならない。
11.8.5.4 集中警報システム 警報を表示し,かつ,必要な警報盤及び計器を配置した集中制御場所を設け
なければならない。
11.8.6 始動空気
11.8.6.1 圧力規制 主推進機関として内燃機関を用いる場合には,必要とする始動空気圧を保持するため
の手段を講じなければならない。
11.8.6.2 圧力低下警報 始動空気の圧力が低下したことを示す可視可聴警報を航海船橋及び機関区域に
設け,かつ,警報の設定値は主機を更に始動させ得るレベルでなければならない。航海船橋での表示は,
可逆主機関の場合にだけ要求される。
12. 試運転及び試験
12.1 完成設備試験 試験は,電気式制御,監視及び警報システムが正しく取り付けられ,使用開始前に
正常な作動状態にあるということを実証するために実施しなければならない。試験は,実行可能な限り,
実際的に行い,シミュレーションは避けなければならない。
設置完了後,規範的な試験プログラムに従い,制御機器全体の試験を実施しなければならない。
12.2 作動試験 最初の作動試験は,個々の制御システムの作動能力を調整し記録するために行い,これ
には,関連するアクチュエータ,変換器,指示計器及び記録計器,調節器,警報及びその他の制御機器を
含めなければならない。これらには,手動と自動,機側制御及び遠隔制御のすべての状態における運転並
びにその間の切換えの操作も含めなければならない。記録は適切に文書化しなければならない。
実行可能な限り,係留運転及び海上運転中に,すべての制御システムが満足に作動することを試験しな
ければならない(JIS F 8072参照)。
13. 文書化
13.1 機器の説明 各制御装置について,製造業者は,作動原理,技術的仕様,装備要領,始動及び試運
転手順,故障発見手順,保守及び修理に関する十分な情報を,必要な試験設備及び交換可能部品の一覧表
とともに引き渡さなければならない。
システム全体の内容が把握できる,十分な情報を入手できるものでなくてはならない。
13.2 回路図 耐久性のある材料に描いた回路図を,個々の制御装置ごとに,対象機器の中若しくはその
近くに目立つ方法で表示するか又は制御システムハンドブックに含めなければならない。
コンピュータ利用システムについては,10.11参照。
すべての設定値を記載した適切に文書化したものを用意しなければならない。
38
F 8076:2005 (IEC 60092-504:2001)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。