E 6102:2015
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 2
3 用語及び定義 ··················································································································· 2
4 使用条件 ························································································································· 4
5 特性······························································································································· 4
5.1 情報交換 ······················································································································ 4
5.2 基準巻線温度 ················································································································ 4
5.3 規定特性 ······················································································································ 4
5.4 決定特性 ······················································································································ 4
5.5 効率特性 ······················································································································ 5
5.6 主電動機特性 ················································································································ 5
5.7 補助電動機特性 ············································································································· 5
6 表示······························································································································· 5
6.1 銘板 ···························································································································· 5
6.2 端子及びリード線の表示 ································································································· 6
7 試験······························································································································· 6
7.1 試験の種別 ··················································································································· 6
7.2 試験項目 ······················································································································ 7
8 形式試験 ························································································································· 8
8.0A 試験電源 ···················································································································· 8
8.1 温度上昇試験 ················································································································ 8
8.2 特性試験及び裕度 ·········································································································· 9
8.3 高速試験 ····················································································································· 11
8.4 振動測定 ····················································································································· 11
9 受渡試験 ························································································································ 12
9.1 一般 ··························································································································· 12
9.2 短時間温度上昇運転 ······································································································ 12
9.3 特性試験及び裕度 ········································································································· 12
9.4 高速試験 ····················································································································· 13
9.5 耐電圧試験 ·················································································································· 13
9.6 振動測定(釣合い良さ試験)··························································································· 14
10 調査試験 ······················································································································ 14
10.1 一般 ·························································································································· 14
10.2 騒音測定 ···················································································································· 14
E 6102:2015 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
附属書A(規定)温度測定 ···································································································· 15
附属書B(規定)主電動機の動力伝達損失の協定値 ···································································· 17
附属書C(参考)騒音測定及び限度 ························································································ 18
附属書D(規定)運転路線の電車線電圧 ·················································································· 27
附属書E(規定)使用者及び製造業者の協定事項 ······································································· 28
附属書JA(参考)日本で実施されている調査試験 ····································································· 30
参考文献 ···························································································································· 33
附属書JB(参考)JISと対応国際規格との対比表 ······································································ 35
E 6102:2015
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般社団法人日本
鉄道車輌工業会(JARI)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規
格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,国土交通大臣が改正した日本工業規
格である。これによって,JIS E 6102:2004は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。国土交通大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
E 6102:2015
鉄道車両−交流主電動機
Rolling stock-AC traction motors
序文
この規格は,2010年に第3版として発行されたIEC 60349-2を基とし,日本の実情に即して,対応国際
規格にはない規定事項の追加などのため,技術的内容を変更して作成した日本工業規格である。
したがって,試験方法については,種別1にIEC 60349-2を,種別2に日本の実情に即した内容を規定
し,いずれかを選択できるようにした。
さらに,対応国際規格では規定されていないが,日本の受渡当事者間で必要と認めた場合に実施する調
査試験の内容を,附属書JAに示す。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格には規定されていない,又は
変更している事項である。変更の一覧表にその説明を付けて,附属書JBに示す。
1
適用範囲
この規格は,電気駆動式鉄道車両の電力変換装置によって給電される交流主電動機(以下,主電動機と
いう。)について規定する。
この規格の目的は,試験によって主電動機の性能を確認し,その規定された負荷に対する性能を評価し,
かつ,他の主電動機との比較評価基準を確立することである。
この規格は,動力をもった車両にけん(牽)引される付随車に搭載する電動機にも適用できる。
この規格で規定する箇条は,鉱山の機関車などの特殊用途の車両の電動機にも適用できる。ただし,防
爆,その他の特殊仕様の電動機には,この規格は適用しない。
この規格は,フロントガラスの窓ふき器用電動機のような小形電動機には適用しない。
この規格が適用される電動機の電気的入力は,電力変換装置から供給される。
規格作成の時点では,次の組合せだけが主回路システムとして用いられているが,これ以外の組合せが
将来採用された場合にも,この規格を適用してもよい。
− 電圧形電力変換装置から給電される非同期主電動機(以下,誘導主電動機という。)
− 電流形電力変換装置から給電される誘導主電動機
− 電流形電力変換装置から給電される同期主電動機
IEC 60034の規格群を適用する産業用電動機は,電源となる電力変換装置の動作が車両用の要求に適合
する場合は,補助電動機として使用してもよい。
この規格の対象となる電動機は,次による。
a) 主電動機 鉄道車両,トロリーバスなどを駆動する電動機。
b) IEC 60034の規格群の対象とならない圧縮機,ファン,発電機などの補機を駆動する電動機。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
2
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
IEC 60349-2:2010,Electric traction−Rotating electrical machines for rail and road vehicles−Part 2:
Electronic converter-fed alternating current motors(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 8330 送風機の試験及び検査方法
JIS C 4003 電気絶縁−熱的耐久性評価及び呼び方
注記 対応国際規格:IEC 60085,Electrical insulation−Thermal evaluation and designation(MOD)
IEC 60034-1,Rotating electrical machines−Part 1: Rating and performance
IEC 60034-8,Rotating electrical machines−Part 8: Terminal markings and direction of rotation
IEC 60034-14,Rotating electrical machines−Part 14: Mechanical vibration of certain machines with shaft
heights 56 mm and higher−Measurement, evaluation and limits of the vibration severity
IEC 62498-1,Railway applications−Environmental conditions for equipment−Part 1: Equipment on board
rolling stock
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
主電動機の定格(rating of a motor)
主電動機の動作状態を表す電気量及び機械量の組合せ。持続時間及び一連の動作順序とともに,製造業
者によって提示され,受渡当事者間で協定する。
3.2
連続定格(continuous rating)
8.1に規定する条件の下に,主電動機が連続的に運転して,表2に示す温度上昇限度を超えることなく,
しかも,この規格で要求する全ての該当条件を満たして運転できる機械的出力。
注記 複数の連続定格を設定してもよい。
3.3
短時間定格(例 1時間)[short-time rating(for example,one hour)]
8.1に規定する条件の下に,主電動機を試験台上で冷状態から規定の時間運転し,主電動機が表2に示す
温度上昇限度を超えることなく,しかも,この規格で要求する全ての該当条件を満たして運転できる機械
的出力。
3.4
短時間過負荷定格(short-time overload rating)
8.1.6に規定する試験を開始して,主電動機が表3に示す温度上昇限度を超えることなく運転できる機械
的出力。
注記 短時間過負荷定格は,連続定格以下の比較的長い運転時間の後に,連続定格を超える過負荷状
態が,ごく短時間運転される主電動機の性能決定に用いている。この定格は,主として機関車
3
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
用に適用されている。
なお,都市内輸送,又はそれに似た短時間運転の繰返しに用いる主電動機へのこの用語の適
用は適切ではない。
3.5
間欠負荷定格(intermittent duty rating)
間欠負荷で運転される主電動機が,表2に示す温度上昇限度をいかなる時点でも超えることなく運転で
きる,断続的な運転サイクルで与えられる機械的出力。
3.6
保証定格(guaranteed rating)
製造業者が試験のために設定する定格。主電動機の場合,通常は連続定格とするが,受渡当事者間の協
定によって短時間定格又は間欠負荷定格としてもよい。補助電動機の場合,特に指定がなければ連続定格
とする。
3.7
代用定格(rating under commercial frequency)
受渡当事者間の協定によって商用周波数電源で試験を行う場合の運転条件として定めた定格。
3.8
定格電圧(rated voltage)
主電動機を保証定格で運転するときに,供給される線間電圧の基本波の実効値。
注記 電車線から直接又は間接的に給電される主電動機の定格電圧は,附属書Dに定義されている電
車線の公称電圧の下で,定格電流が流れているときに主電動機に加えることができる最高電圧
(過渡変動を除く。)である。
3.9
最高電圧(maximum voltage)
運転中に,主電動機に供給される最も高い線間電圧の基本波成分の実効値。
3.10
繰返しピーク電圧(repetitive peak voltage)
電力変換装置の出力電圧波形のピーク値。電車線電圧の過渡変動,その他の予測できない要因で生じる
不規則な過渡ピーク値を除く。
3.11
最大電流(maximum current)
5.3で定義する規定特性に示される最大電流。
3.12
最高使用回転速度(maximum working speed)
製造業者が指定した電動機の最高回転速度。
注記1 主電動機を搭載している車両の性能が規定されている場合,この回転速度は,鉄車輪の最小
摩耗直径,又はゴムタイヤの最小踏面直径の場合の車両の最高運転速度に対応する回転速度
を下回らない。
注記2 補助電動機でこの速度を指定する場合,特殊な用途に対しては,運転中に発生し得る最も好
ましくない電圧,周波数,負荷などの条件を考慮する。
4
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4
使用条件
使用者が特に定める場合を除き,使用条件は,次による。
a) 標高 IEC 62498-1のクラスA3(1 200 m以下)とする。
b) 温度 日陰でIEC 62498-1のクラスT4(−10 ℃〜40 ℃)とする。
上記のいずれか一方,又は両方の限界を超えて運転する主電動機の場合は,受渡当事者間の協定によっ
て環境条件を設定してもよい。詳細は,IEC 60034-1による。
さらに,使用者は,主電動機がさらされる使用環境,例えば,じんあい(塵埃),湿度,温度,雪,振動・
衝撃条件などを製造業者に知らせなければならない。
5
特性
5.1
情報交換
主電動機の設計者及び電力変換装置の設計者は,相互の連携に特に注意を払う必要がある。1台の電力
変換装置によって並列給電される主電動機の定格では,車輪直径の差及び電動機特性の差,並びに高粘着
運転時の軸重移動による負荷分担を考慮する。製造業者は,使用者に車輪直径の最大許容差を伝えなけれ
ばならない。
主電動機の設計者及び電力変換装置の設計者は,これらを組み合わせた主回路システムが,この規格の
要求事項を満たすように,技術的に必要な全ての事項について協調を図る。このため,主電動機の設計者
は,主電動機と電力変換装置との間の相互作用を十分に評価するために必要な全ての情報を,電力変換装
置の設計者に提供する。電力変換装置の設計者も,また,次の情報を主電動機の設計者に提供する。すな
わち,き電システムの最高電圧値及び最低電圧値での運転を含む全領域にわたる特性について,例えば,
電力変換装置の出力電圧波形(繰返しピーク電圧を含む。),電流,基本周波数,高調波及び電力の特性に
ついて示す。この情報交換を記録した資料は,主電動機及び電力変換装置の必須条件として仕様書に含め
る。
注記1 詳細情報は,JIS E 5008の5.3.1.1[主電動機と変換装置(インバータ)との間のインタフェ
ース]を参照する。
注記2 主電動機及び電力変換装置の間の配線長及び主電動機端子電圧のピーク値について考慮す
る。
注記3 電力変換装置の出力電圧波形及びその主電動機への影響については,IEC 60034-17を参照す
る。
5.2
基準巻線温度
主電動機の耐熱クラスとは無関係に,基準巻線温度は150 ℃とする。この基準温度を特性曲線に注記す
る。ただし,旧JIS E 6102:2004以前に基準巻線温度115 ℃で決定した仕様の主電動機の繰返し発注品の
場合は,基準巻線温度を115 ℃としてもよい。
5.3
規定特性
一般に,主電動機の仕様書には,この規格の関係箇条に示す特性曲線を含める。これらの特性曲線は,
“規定特性”と定義し,各変化量の設計上の限界までプロットする。受渡当事者間の協定がない限り,こ
れらの特性は,附属書Dに規定する公称電圧における性能を示し,主電動機が発注される前に製造業者が
使用者に提供する。
5.4
決定特性
決定特性は,8.2.1に従って実施した形式試験の結果から求めた特性値で,8.2.2の裕度を満たさなければ
5
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ならない。事前に受渡当事者間の協定がない限り,同一使用者又は同一用途に対して以前に製造された主
電動機と電磁気的に等価な主電動機との決定特性は,以前に製造された主電動機と同一とする。その場合
は,特性の承認は受渡試験の結果だけによる。
5.5
効率特性
効率特性は,電力変換装置からの給電に含まれる高調波の損失を考慮する。同期電動機の励磁用電力は,
損失に含める。別に考慮する場合(例えば,補助負荷として),その旨を特性曲線に明示する。
5.6
主電動機特性
主電動機の規定特性及び決定特性は,電力変換装置給電時の特性である。また,これらの特性では,主
電動機の全使用領域にわたって回転速度の関数として,主電動機の線間電圧,電流,周波数,平均トルク
及び効率を示す。誘導電動機の特性ではすべりを示し,また,同期電動機の特性では励磁電流を示す。電
圧曲線は,基本波成分の実効値を示す。電流曲線は,基本波成分の実効値及び全実効値を示す。ブレーキ
モードで使用される主電動機については,主電動機の回転速度に応じたトルク入力及び電気出力を示す同
様の特性を求める。
注記1 主電動機の設計者と電力変換装置の設計者との間での情報交換の必要性については,5.1を参
照する。
歯数比,車輪直径及び動力伝達損失が明示されていれば,特性曲線は主電動機のトルク及び回転速度の
代わりに動輪周引張力及び車両速度を示してもよい。動力伝達損失に協定値を用いる場合は,附属書Bに
よる。
注記2 並列給電される主電動機において,車輪直径の差及び車軸間の軸重移動が及ぼす影響を考慮
する必要性については5.1を参照する。
5.7
補助電動機特性
補助電動機の規定特性及び決定特性は,電力変換装置給電時の特性である。これらの特性では,その電
動機の全使用領域における各運転周波数に対し,電動機の出力の関数として,電動機の線間電圧,電流,
回転速度及び平均トルクを示す。連続可変周波数で運転する電動機の特性は,最大周波数及び最小周波数
だけプロットしてもよい。誘導電動機の特性はすべりを示し,また,同期電動機の特性では励磁電流を示
す。電圧曲線は,基本波成分の実効値を示す。電流曲線は,基本波成分の実効値及び全実効値を示す。こ
れらの特性では,給電高調波成分から生じる付加的損失及び保証定格における効率を明示する。
補助電動機の特性については,出力の代わりに回転速度の関数として特性曲線を作成してもよい。
注記 主電動機の設計者と電力変換装置の設計者との間での情報交換の必要性については,5.1を参照
する。
6
表示
6.1
銘板
主電動機には,次の項目を含む銘板を取り付ける。
a) 製造業者名
b) 形式
c) 製造番号
d) 製造年
さらに,各主電動機の固定子及び回転子の両方に製造番号を刻印し,また,単一回転方向で設計した主
電動機の場合には,回転方向を明示する。
6
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
主電動機の製造番号及び回転方向は,その主電動機を車両に取り付けた状態で読みやすいように明示す
る。
6.2
端子及びリード線の表示
端子及びリード線の表示は,受渡当事者間の協定による。協定によらない場合,IEC 60034-8の規定に
よる。
7
試験
7.1
試験の種別
7.1.1
一般
試験の種類は,次による。
a) 形式試験
b) 受渡試験
c) 調査試験
注記 JIS E 5011-1及びJIS E 5011-2に基づいた組合せ試験を更に実施する場合,重複を避けるため
に,形式試験又は調査試験は,組合せ試験と同じ試験台で実施することが望ましい。
7.1.2
形式試験
7.1.2.1
一般
形式試験は,新形式の主電動機の定格,特性及び性能を確認するための試験である。形式試験の試験方
法は,箇条8による。この試験は,新設計の主電動機の1台について行い,受渡当事者間の協定がない限
り,その主電動機は,最初に製造された10台中の任意の1台とする。
既存の主電動機と同等の設計で製造場所及び/又は製造方法が変更となっている場合,7.1.2.4を参照す
る。
製造業者は,試験開始前に,この規格に基づく試験仕様書を使用者に提供する。
製造業者は,形式試験終了後,試験成績書を使用者に提出する。
7.1.2.2
電力変換装置給電による形式試験
各主電動機が個別の電力変換装置によって給電される場合,車両運転時に使用される電力変換装置を使
って形式試験を行うのが望ましいが,代わりに,車両の電力変換装置からの給電と電圧波形及び高調波が
同等とみなされる電源を使ってもよい。1台の電力変換装置から並列に数台の主電動機が給電される場合,
形式試験は,車両運転時に使用される電力変換装置の電圧波形及び高調波が同等とみなされる電源によっ
て1台の主電動機で行う。使用者の要求があれば,製造業者は試験時及び運転時に給電される電圧波形及
び高調波の類似性を示し,また,電源の差による主電動機性能上の影響を示す。受渡当事者間の協定がな
い限り,電力変換装置の電気出力特性が変わった場合,形式試験を再度実施する。
7.1.2.3
正弦波電源による形式試験
正弦波電源による形式試験は,主電動機特性の参考値を提供するための試験である。この試験には,受
渡当事者間の協定によって定められた定格における温度上昇試験を含む。製造業者は,電圧,周波数,ト
ルク,通風条件及び試験時間を決定する。ただし,試験時間は少なくとも1時間以上とし,実使用と比べ
て過酷とならない運転条件とする。試験条件は,同一設計品における後続の試験においても,そのまま維
持する。温度上昇試験方法は,8.1による。
7.1.2.4
繰返し形式試験
次の全ての条件を満足する場合には,その主電動機は形式試験の一部を省略してもよい。
7
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 受渡当事者間の協定がある場合。
b) 正弦波電源による形式試験(7.1.2.3参照)の結果がある場合。
c) 受渡試験の結果が以前に製造した同一仕様の主電動機の裕度内にある場合。
d) 出力特性が同じで電磁的設計も同じ主電動機に対して,同等又はそれを上回る定格で,実施された形
式試験証明書を製造業者が提出する場合。
繰返し形式試験は,繰返し発注品がある場合,及び製造方法及び/又は製造場所を変更した場合につい
て適用する。
7.1.3
受渡試験
受渡試験は,主電動機が正しく組み立てられ,適正な耐電圧試験に耐え,かつ,電気的及び機械的に健
全に動作することを実証するために行う試験である。受渡試験の試験方法は,箇条9による。受渡試験は,
全主電動機について行う。ただし,発注以前に受渡当事者間の協定があれば,それに代わる試験手法を適
用してもよい(例えば,厳密な品質管理手法の下に大量生産される電動機の場合)。その場合,例えば,次
のいずれかの方法を選択してもよい。ただし,9.5に示す耐電圧試験は全数実施する。
a) 全主電動機で実施する受渡試験項目の削減
b) 受渡試験の全項目を実施する主電動機台数を製作台数に応じて設定
7.1.4
調査試験
調査試験は,付加情報を得るために実施する任意の試験である。調査試験は,電動機の発注以前に受渡
当事者間の協定がある場合にだけ実施する。ただし,これらの試験結果は電動機の受取条件とはしない。
7.2
試験項目
試験は,次に示す種別1を適用する。ただし,三相かご形誘導主電動機の場合は,受渡当事者間の協定
によって種別2を適用してもよい。
a) 種別1 試験項目は,表1による。
表1−種別1の適用試験項目
試験項目
該当細分箇条
誘導電動機
同期電動機
形式試験
受渡試験a)
形式試験
受渡試験a)
温度上昇試験
○ 8.1
−
○ 8.1
−
短時間温度上昇試験/短時
間温度上昇運転
○ 7.1.2.3
○ 9.1 b)
−
○ 9.2 / 9.1 b)
特性試験
○ 8.2
○ 9.3.2
○ 8.2
○ 9.3.3
高速試験
○ 8.3
○ 9.4 b)
○ 8.3
○ 9.4
耐電圧試験
−
○ 9.5
−
○ 9.5
振動測定
○ 8.4
○ 9.6 b)
○ 8.4
○ 9.6 b)
騒音測定
○ b)
附属書C
−
○ b)
附属書C
−
注a) 形式試験を実施した主電動機を含めて全ての主電動機は,受渡試験を実施する。
b) 試験の要否は,受渡当事者間で決定する。
8
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 種別2 試験項目を,表1Aに示す。
表1A−種別2の適用試験項目
試験項目
試験の種類
該当細分箇条
形式試験
受渡試験
調査試験
特
性
試
験
一次巻線抵抗測定
○
○
−
8.2.1 b) 1)
無負荷試験
○
○
−
8.2.1 b) 2)
拘束試験
定格周波数
○
○
−
8.2.1 b) 3.1)
低周波数
○
−
−
8.2.1 b) 3.2)
特性の算出
○
−
−
8.2.1 b) 4)
温度上昇試験a)
○
−
−
8.1
耐電圧試験
○
○
−
9.5
高速試験a)
○
○
−
8.3,9.4
振動測定a)
○
○
−
8.4,9.6
騒音測定
−
−
○
10.2
注a) 温度上昇試験,高速試験及び振動測定には,種別2としての独自の設定はないが,使用者の便を考慮
し表1と同じ項目を記載している。
8
形式試験
8.0A
試験電源
誘導主電動機の形式試験に用いる電源は,次の種別1又は種別2のいずれかによって行う。ただし,同
期主電動機は種別1による。
a) 種別1 車両の電力変換装置出力と同等波形の電源。
b) 種別2 正弦波又は方形波の,定格又は代用定格の電圧及び周波数の電源。
8.1
温度上昇試験
8.1.1
一般
温度上昇試験は,主電動機の保証定格において行う。定格機械出力は,主電動機の軸において直接又は
間接的に測定してもよい。また,定格条件は定格機械出力とはせず,決定特性に示された主電動機に給電
される電圧,電流及び周波数としてもよい。連続定格試験の場合は,負荷増大又は冷却風の低減によって
飽和温度に達するまでの時間を短縮してもよい。その場合,定格条件を最低2時間維持するか,又は飽和
温度に達したことを適切な方法によって証明する。
飽和温度は,試験の最終1時間の温度の変化が,2 K未満となる状態とする。
8.1.2
温度上昇試験中の通風
主電動機は,車両のダクト及びフィルタを含めて,温度上昇に影響する全ての部品を現車と同様に配置
した通風状態又は等価な状態で試験する。強制通風による冷却の場合,静圧及び風量は主電動機の入気口
で測定し,この静圧及び風量の関係を示す表を作成する。一般的に車両の移動に起因する冷却は,考慮し
ないが,特殊な場合,例えば,全閉形主電動機のようにこの冷却が特に重要な場合は,受渡当事者間の協
定で試験条件を取り決めてもよい。強制通風主電動機の場合には,その通風量をJIS B 8330で規定する試
験装置を用いて測定してもよい。
8.1.3
温度測定
温度は,附属書Aに基づいて測定する。
8.1.4
結果の判定
9
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.4で規定した“冷却開始時点”での巻線及びスリップリングの温度上昇は,表2に示す値を超えては
ならない。
8.1.5
温度上昇限度
絶縁システムの耐熱クラスは,JIS C 4003の規定による。表2は,主電動機に用いている絶縁処理され
た巻線及びその他の部品に対して,冷却風の温度から上昇した温度の許容限度を示す。同一主電動機の異
なる部位で耐熱クラスが異なる場合の温度上昇限度は,該当部位の耐熱クラスの値を適用する。
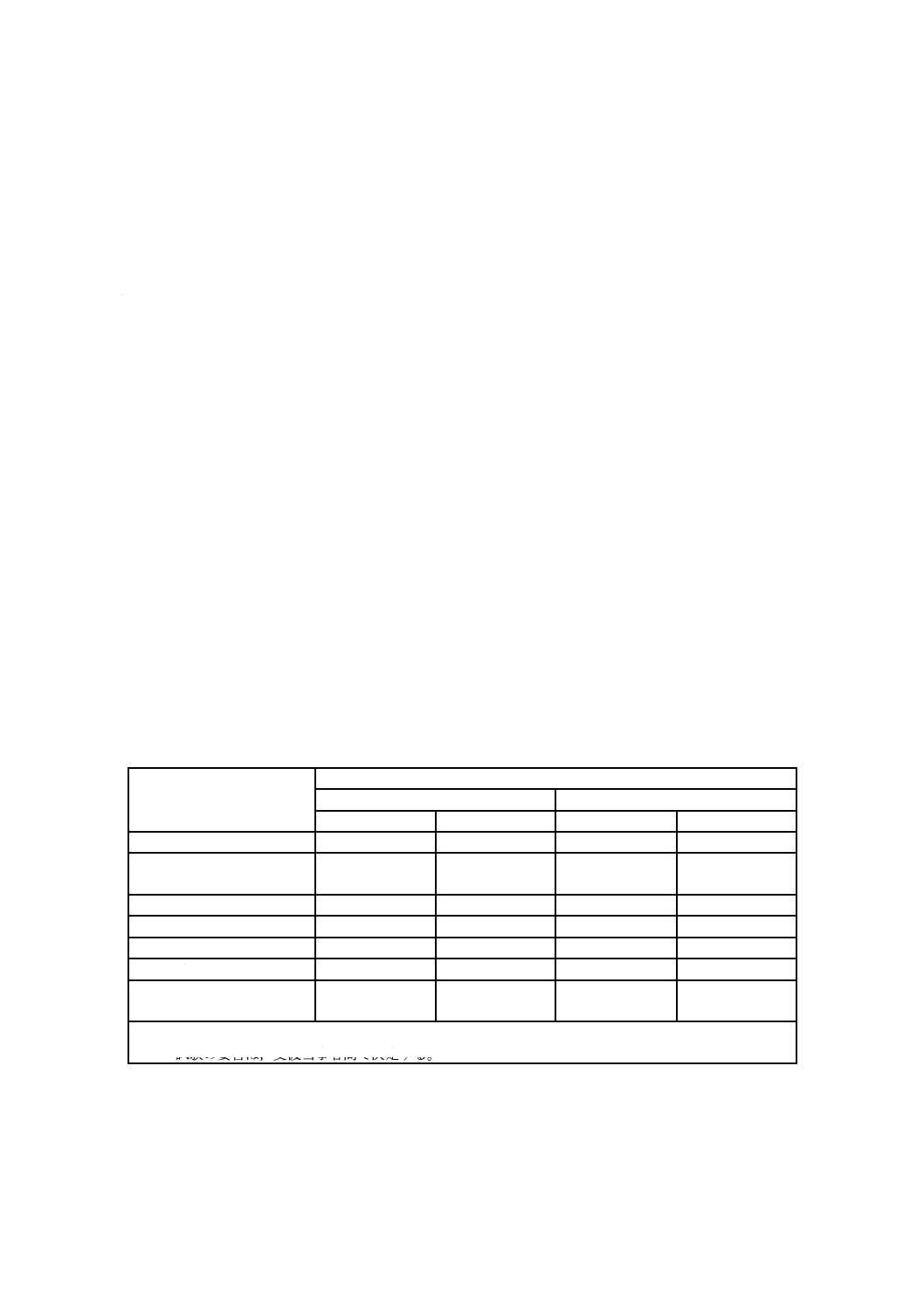
表2−連続定格及び短時間定格における温度上昇限度
単位 K
部位
測定方法
絶縁システムの耐熱クラス
130(B)
155(F)
180(H)
200
220
250
固定子巻線
同期主電動機の回転界磁巻線
抵抗法
130
155
180
200
220
250
スリップリング
電気温度計
120
120
120
120
120
120
誘導電動機のかご形回転子
及びダンパ巻線
電気温度計
全ての巻線及びその他の部位の温度上昇は,危険にするほど高く
しない。
全閉形主電動機に対しては,表2の温度上昇限度を10 K引き上げる。
主電動機がエンジン及びその他の熱源に直接又は間接的にさらされる場合,表2に定める値を下回る温
度上昇限度を受渡当事者間の協定によって決定できる。
8.1.6
短時間過負荷温度上昇試験
短時間過負荷定格が規定されている場合には,次に示す試験を1回以上行う。直前に実施する温度上昇
試験終了後,冷却特性を継続してプロットし,最も高い巻線温度が表3の試験開始時に示す温度まで冷却
した時点で,短時間過負荷温度上昇試験を開始する。受渡当事者間で規定した時間を運転後,8.1.3に基づ
いて温度上昇値を測定し,表3の最終時に示す温度上昇値に対し±20 Kの範囲内であることを確認する。
測定した温度上昇値が,表3の最終時に示す温度上昇値に対し±20 Kの範囲を超える場合には,電流又は
運転時間を設定し直して再度試験を実施する。
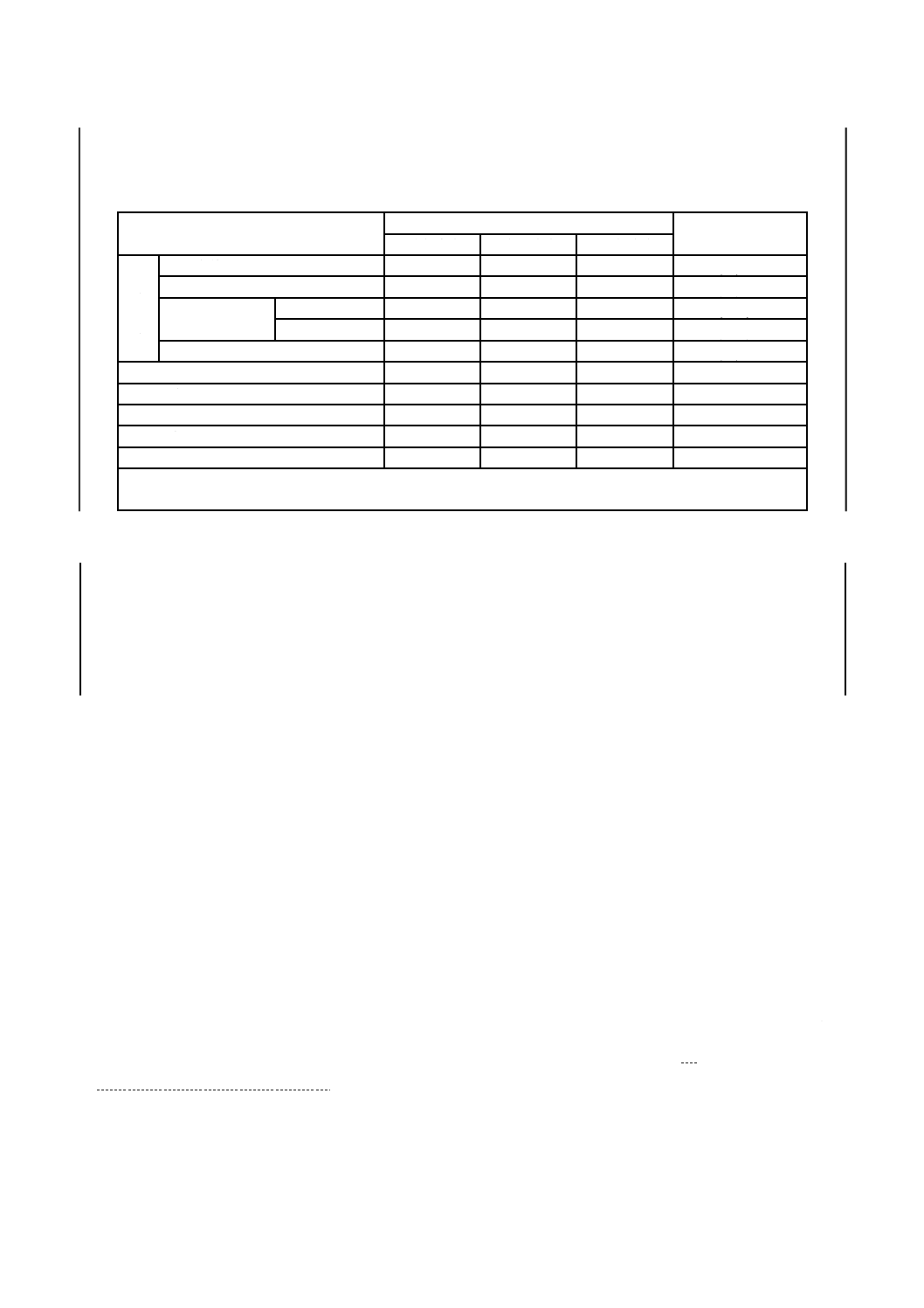
表3−短時間過負荷定格における温度上昇値
単位 K
部位
絶縁システムの耐熱クラス
130(B)
155(F)
180(H)
200
220
250
固定子巻線
試験開始時
85
100
120
130
140
155
同期主電動機の回転界磁巻線
最終時
130
155
180
200
220
250
全閉形主電動機の場合は,上記の最終時の温度上昇値に10 Kを加える。
受渡当事者間の協定があれば,試験開始時の温度にするために別の方法を用いてもよい。
受渡当事者間の協定があれば,主電動機のその他の部位(例えば,回転子,ダンパ巻線,軸受など)の
温度を測定してもよい。
8.2
特性試験及び裕度
8.2.1
特性試験
特性試験は,次の種別1又は種別2のいずれかによる。

10
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 種別1 規定特性を確認する試験は,主電動機への電気的入力及びその主電動機からの機械的出力を
測定することによって行う。出力は,直接測定するか,又は供試主電動機に駆動される効率が既知の
電気機械の出力を測定して算出してもよい。代わりに,受渡当事者間の協定によって,試験される主
電動機の出力又は入力のいずれかを損失分離法で推定してもよい。負荷試験は,基準巻線温度付近で
行い,その試験結果の値は,補正が必要ならば基準巻線温度での値に補正する。試験の測定点数は,
主電動機の決定特性をプロットするのに十分な回数を行う。電力変換装置ヘの電気入力は,受渡当事
者間の協定による方法によって測定するが,その試験結果は電動機の受取条件とはしない。主電動機
への電気入力は,主電動機の製造業者と電力変換装置の製造業者とで協定のうえ,規定特性の値を変
更してもよいが,主電動機及び電力変換装置が保証定格で運転されたときに,全ての部分の温度上昇
がそれぞれの限度内であり,かつ,主電動機の損失が8.2.2に規定する裕度の範囲内であることを条件
とする。同期主電動機の規定の励磁電流も同様に変更してもよい。
試験は,片側回転方向だけで行う。主電動機の複雑な入力波形を測定する計測器は,規定の公差に
基づき十分な精度に校正ができ,電流,電圧及び電力を表示するものを使用する。
b) 種別2 誘導主電動機の特性試験は,次による。この試験は,三相かご形誘導主電動機に限定し,か
つ,受渡当事者間の協定がある場合に適用できる。
1) 一次巻線抵抗測定 一次巻線の抵抗は,任意の周囲温度において誘導主電動機の各端子間で測定し
た抵抗値を式(1)によって換算する。
t
R
r
+
×
=
235
385
2
1
1
········································································· (1)
ここに,
r1: 150 ℃における一次巻線の一相当たりの抵抗(Ω)
R1: 各端子間で測定した一次巻線抵抗の平均値(Ω)
t: 抵抗測定時の周囲温度(℃)
なお,電圧降下法でR1を測定する場合の測定電流は,連続定格電流の10〜20 %とする。
2) 無負荷試験 無負荷試験は,端子間電圧が互いに平衡している三相電源を用い,定格周波数又は代
用定格周波数において,定格電圧又は代用定格電圧で無負荷運転し,入力が一定になるまで連続運
転した後,誘導主電動機を指定された通風状態とし,一次電流,力率及び入力を測定する。
3) 拘束試験 拘束試験は,次による。低周波数の拘束試験及び特性の算出は,最初の4台について実
施し,その4台の特性の平均値を標準値とする。
3.1) 定格周波数拘束試験 回転子を拘束し,定格周波数又は代用定格周波数において,定格電流又は
代用定格電流とほぼ同じ電流を流し,直ちに一次端子電圧,電流,力率及び入力を測定する。
3.2) 低周波数拘束試験 定格周波数又は代用定格周波数の1/2の周波数において,3.1) と同じ試験方
法で行う。
4) 特性の算出 一次巻線の抵抗測定,無負荷試験及び拘束試験の結果から,定格周波数又は代用定格
周波数における誘導主電動機の定数を算出し,定格周波数又は代用定格周波数における特性を算出
する。特性の算出方法は,円線図法又は等価回路法による。特性の算出は最初の4台について実施
し,その平均値を標準値とする。
8.2.2
裕度
8.2.2.1
主電動機
裕度は,次の種別1又は種別2のいずれかによる。
a) 種別1 最大トルクが出力される回転速度から最高回転速度の90 %の速度までの間で,規定特性の電
11
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
気入力による決定トルクは,規定値の95 %以上とする。保証定格点における主電動機の損失は,規定
特性から求められる値に対して15 %以上超過してはならない。
b) 種別2 特性の算出[8.2.1 b) 4) 参照]で算出される保証定格における効率及び力率の決定特性は,次
の下限値以上とする。
1) 効率
50 kW以下の誘導機
ηl=η−0.15×(100−η)
50 kWを超える誘導機
ηl=η−0.10×(100−η)
ここに,
ηl: 保証定格における効率の下限値(%)
η: 保証定格における効率の規定特性(%)
2) 力率
(1/6)×(100−pf) < 2である場合
pfl=pf−2
2 ≦ (1/6)×(100−pf) ≦ 6である場合 pfl=pf−(1/6)×(100−pf)
6 < (1/6)×(100−pf) である場合
pfl=pf−6
ここに,
pfl: 保証定格における力率の下限値(%)
pf: 保証定格における力率の規定特性(%)
正弦波電源形式試験(7.1.2.3参照)での温度上昇は,基の形式試験結果に対し±12 %又は±15 Kでなけ
ればならない。
8.2.2.2
補助電動機
保証定格点におけるトルクの決定値は,規定値以上とする。また,保証定格点における電流は,規定値
以下であり,更に規定の起動トルクを発生させる電流は,5.1に従い電力変換装置の製造業者が規定した値
を超えてはならない。
8.3
高速試験
高速試験は,電力変換装置によって給電される全ての形式の主電動機に対して行う。電動機は,高温時
に,3.12で定義した最高使用回転速度の1.2倍で2分間行う。代わりに,回転子を定格での試験終了時と
同一温度上昇値まで上げることを条件として,回転子を固定子に組み込む前に試験してもよい。いずれの
場合も,試験の前後で回転子部の変形がないことを確認する。受渡当時者間の協定によって,かご形誘導
主電動機の場合は,試験開始時の温度を常温としてもよい。
8.4
振動測定
振動測定は,形式試験として行う。主電動機が歯車装置と一体形の場合は,歯車装置を取り外すか,歯
車装置箱を仮設のエンドブラケットに取り替えなければならない。主電動機は取付器具を使わずに試験台
の上に設置してもよい。主電動機の回転速度が3 600 min−1以下での振動速度は3.5 mm/s以下でなければ
ならない。3 600 min−1を超える速度に関しては,振動速度は5.25 mm/s未満でなければならない。
軸受で固定されていない主電動機の場合は,軸方向の振動速度の測定は除外できる。
追加情報は,IEC 60034-14による。
可変速形の電動機では,全動作領域の中で何点かの速度で測定しなければならない。
試験架台の共振現象によって限度値を超える振動速度が発生する場合,共振速度が測定を行う回転速度
と一致せず,かつ,振動速度の水準が限度内であれば,共振を無視してもよい。共振現象が測定を行う回
転速度で発生した場合,別の試験台によって再試験する。
注記 外部から発生する振動が装置に及ぼす影響は,この規格の適用範囲ではない(JIS E 4031参照)。
12
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9
受渡試験
9.1
一般
誘導主電動機の受渡試験は,次の種別1又は種別2のいずれかによって行う。ただし,同期主電動機は
種別1による。また,この種別1及び種別2は,次の9.3及び9.5に示す種別1及び種別2に対応した試
験条件で行う。
a) 種別1 受渡試験は,商用周波数又は運転中に使用する周波数の正弦波電源を用いて,片側回転方向
で行う。正弦波と異なる波形を使用する場合,受渡当事者間で協定しなければならない。各々の試験
(例えば,無負荷試験及び回転子拘束試験)で使用する周波数は同じでなくてもよいが,一度設定し
た周波数は変更しない。測定点に対する決定値は,形式試験を受けた1台を含んだ4台の主電動機の
平均値とする。温度変化の影響を減らすために,試験は全ての主電動機に対して,同じ順序で行う。
効率測定は不要であり,また,ブレーキモードでの試験も不要である。同一形式の主電動機内の一貫
性を確認するために,正弦波電源による温度上昇形式試験(7.1.2.3参照)をランダムに,又は受渡当
事者間の協定による間隔で実施してもよい。裕度は8.2.2による。高速試験及び振動測定には,電力変
換装置の電源を用いてもよい。
b) 種別2 正弦波又は方形波の,定格又は代用定格の電圧及び周波数による試験である。試験は,受渡
当事者間の協定がある場合に,三相かご形誘導主電動機に限定して適用する。
9.2
短時間温度上昇運転
この試験は,巻線形回転子の主電動機だけに適用する。正弦波電源による形式試験(7.1.2.3及び9.1参
照)を実施した主電動機を除き,各々の主電動機は,試験終了時に少なくとも150 ℃以上の固定子巻線温
度になるように短時間運転を行う。温度の確認は最初の2台の主電動機に対する測定によって行う。もし,
条件を変更する場合は,温度確認を繰り返し行う。温度確認が2台の主電動機で検証できれば,それ以降,
温度を測定する必要はない。
9.3
特性試験及び裕度
9.3.1
一般
特性試験及び裕度は,次の種別1又は種別2のいずれかによる。
a) 種別1 9.3.2又は9.3.3による。
b) 種別2 8.2.1 b) による。
9.3.2
誘導主電動機
誘導主電動機の試験は,次による。
a) 決定特性で示された速度の10〜100 %の任意の点において,主電動機に最大磁束を生じるような電圧
での無負荷試験を行い,その電流は,9.1 a) にて確定した決定値に対し,±10 %とする。
b) 回転子を拘束した状態で,ほぼ保証定格電流を流すような電圧を主電動機に印加する。この電圧は,
最初の主電動機において確定し,以後の全ての試験に適用する。その場合の電流は,9.1 a) にて確定
した決定値に対し±5 %とする。
9.3.3
同期主電動機
同期主電動機の試験は,次による。
a) 決定特性上において主電動機内に発生する最大磁束に相当する開回路電圧を生じるように励磁された
発電機として同期主電動機を運転し,その励磁電流が,9.1 a) で確定した決定値に対し±15 %とする。
b) 保証定格電流になるように励磁電流を調節する短絡回路で同期主電動機を運転したとき,その励磁電
流が,9.1 a) にて確定した決定値に対し±5 %とする。
13
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.4
高速試験
受渡試験の高速試験は,基本的には巻線形回転子主電動機についてだけ実施する。ただし,この試験の
かご形誘導主電動機への実施は,受渡当事者間の協定による。高速試験を実施する主電動機は,3.12で定
義した最高使用回転速度の1.2倍で,高温時に2分間運転する。その後,9.5に規定する耐電圧試験に合格
しなければならない。ただし,かご形誘導主電動機の場合は,常温で実施してもよい。
注記 受渡試験の高速試験を行う場合には,無負荷高速回転による転がり軸受の損傷を防止するため
の注意が必要である(例えば,最高使用回転速度を下回らない範囲での試験回転速度の低減)。
9.5
耐電圧試験
耐電圧試験は,次の種別1又は種別2のいずれかによる。
a) 種別1 この試験は,誘導主電動機及び同期主電動機に適用し,一般的には正弦波形に近い波形で,
周波数帯域25〜100 Hzの交流を用いて行う。ただし,発注前に受渡当事者間の協定があれば,直流で
試験を行ってもよい。試験電圧は,各回路の巻線とフレームとの間に,その他の全ての回路の巻線を
フレームに接続した状態で順次加える。通常の状態にある新規製造の主電動機に対してだけ電圧低減
をせずに耐電圧試験を実施する。この試験は,前記の受渡試験終了直後の高温時の主電動機に対して
実施する。試験電圧は表4に示す電圧のうち,最高値を選択して行う。また,電圧は試験電圧の1/3
以下の値から開始して,昇圧する。試験電圧に達したとき,1分間維持する。
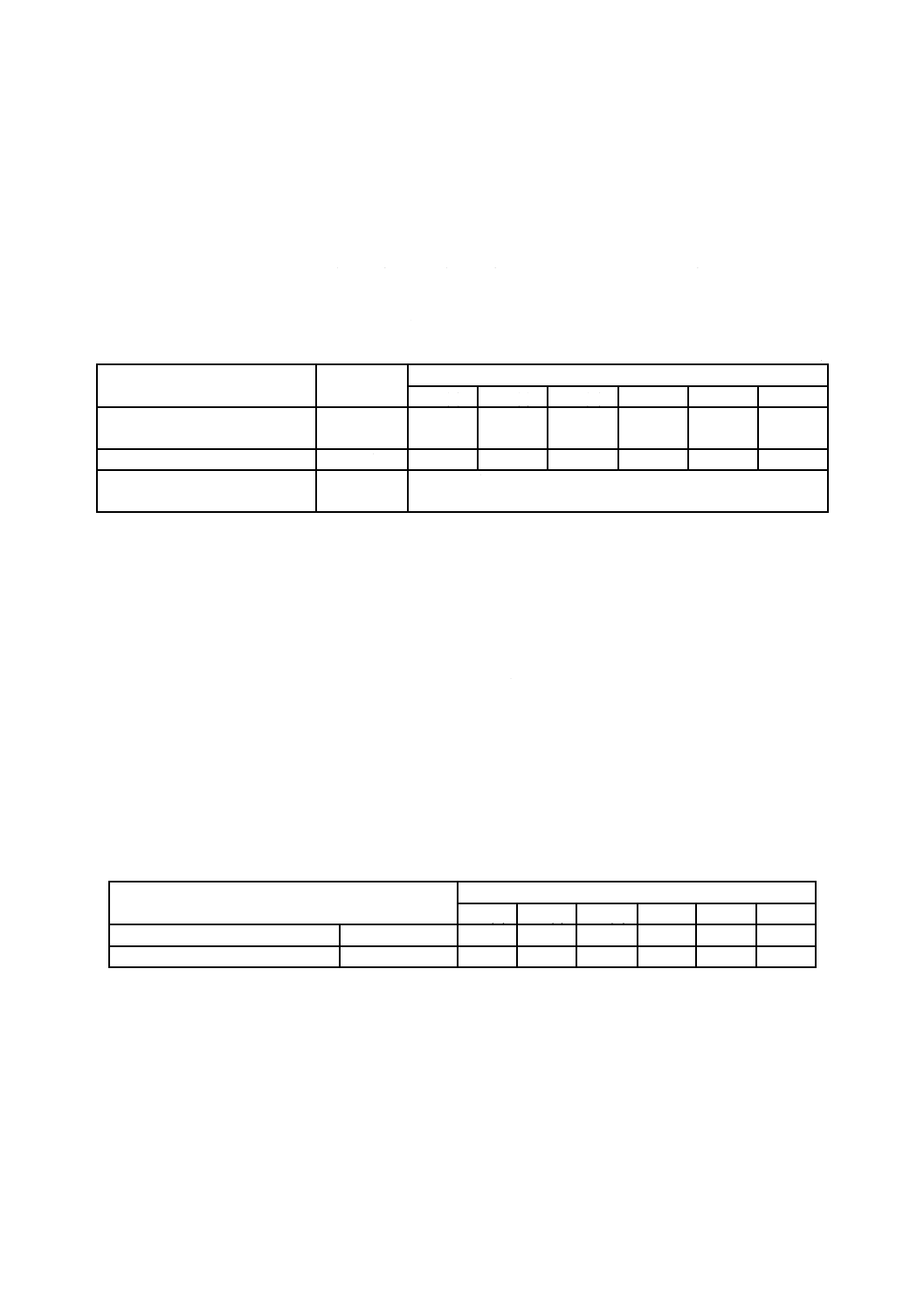
表4−耐電圧の試験電圧(種別1)
単位 V
グループ
巻線
試験電圧
1
グループ2以外の全ての
巻線
交流試験
2×Udc+1 000
又は
2×Urp /2+1 000
又は
Urpb /2+1 000
直流試験
3.4×Udc+1 700
又は
2.4×Urp+1 700
又は
1.2×Urpb+1 700
2
同期主電動機の励磁巻線
交流10Ue:交流最低1 500 V〜交流最高3 500 V
直流17Ue:直流最低2 550 V〜直流最高5 950 V
注記 試験電圧を表す記号は,次のとおりである。
Udc :電車線が最高電圧で,主電動機を運転した場合,直流中間回路に印加さ
れる対地最高平均電圧。
Urp :電車線が最高電圧で,主電動機を運転した場合,電動機の巻線に印加さ
れる対地最高繰返しピーク電圧(繰返しピーク電圧は3.10に規定)。
Urpb :主電動機がブレーキ中に,巻線に現れる対地最高繰返しピーク電圧。
Ue :励磁電圧の最高平均値。
直流中間回路及び主電動機巻線のどの点も接地されていない場合は,Udc,Urp及びUeの値はこれらの回
路のどこかが接地した場合に現れる可能性のある対地最高電圧とする。
繰り返して試験を行う場合の電圧低減については,受渡当事者間で協定する。
注記1 電力変換装置(JIS E 5008参照)を試験するために使用する値は,主電動機を試験するため
14
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
に使用する値以下とする。
注記2 この細分箇条は,主電動機の試験について定義する。巻線の絶縁システムの評価については,
IEC 60034-18-41を参照する。
b) 種別2 この試験は,受渡当事者間の協定がある場合,三相かご形誘導主電動機に限定して適用でき,
商用周波数の正弦波を用いて,次によって行う。
1) 耐電圧試験に先立って絶縁抵抗を測定し,その値が適切であることを確認する。
2) 全ての試験終了後,誘導主電動機のリード線端子を全部接続し,これと接地部との間に,3) に示す
商用周波数の試験電圧を1分間印加し,異常の有無を調べる。印加は,まず試験電圧の1/3以下の
電圧を加え,それから試験電圧まで,電圧計を読むことができる範囲内で,できるだけ速やかに電
圧を上昇させ,試験電圧値に達した後,1分間その値を維持する。
3) 試験電圧の実効値は,表4Aによる。
表4A−耐電圧の試験電圧(種別2)
単位 V
誘導主電動機の種類
試験電圧
注記
外部から電力の供給
を受ける場合
2.25×U+2 000
U: 直流の場合は,電車線の標準電圧と
し,交流の場合は,電車線が標準電
圧であるときに誘導主電動機にか
かる最高電圧とする。
外部から電力の供給
を受けない場合
2×U+1 000
U: 車両システムによって決まる最高
電圧とする。
システムが接地系の場合,最高電圧は対地最高電圧とする。
9.6
振動測定(釣合い良さ試験)
主電動機が試験台上に据え付けられたとき,回転子の釣合い良さの基準が達成されており,その実使用
の回転速度の範囲内で円滑に回転することを実証する。歯車装置と一体形の主電動機の場合,当該歯車装
置を付けて試験する。受渡当事者間の協定があれば,振動が起こる可能性が予測される場合,8.4で規定し
た試験を,それぞれの主電動機について行ってもよい。
10
調査試験
10.1 一般
この試験は,任意試験の項目であり,受渡当事者間の協定によって適用し,その試験結果は主電動機の
受取条件とはしない。
10.2 騒音測定
誘導主電動機を定格電圧及び定格周波数,又は代用定格電圧及び代用定格周波数で無負荷運転し,騒音
レベルを測定する。定格電圧又は代用定格電圧での無負荷運転が困難な場合の電圧低減は,受渡当事者間
で協定する。また,測定位置は,図C.1及び図C.2の基準測定点による。
15
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
温度測定
A.1 電動機部品の温度
固定子巻線,同期主電動機の界磁巻線などの絶縁巻線の温度は,抵抗法によって測定し,かご形回転子,
ダンパ巻線及びスリップリングの温度は,電気式温度計法によって測定する。両測定方法は,次に示す。
試験中の冷却風温度が10〜40 ℃の範囲であれば,測定した温度上昇を補正しなくてもよい。
もし,形式試験中の冷却風温度がこの範囲外の場合には,測定した温度上昇の補正について受渡当事者
間で協定してもよい。
短時間温度上昇試験を開始する前に,巻線の温度が冷却風温度と比べて4 K以内であることを温度計又
は抵抗測定によって確認する。巻線の温度上昇を計算する場合には,そうした±4 Kの初期温度差を,計
算結果が高い場合は減じて,低い場合は加えて補正する。
a) 抵抗法 抵抗法では,巻線の温度上昇は,試験中の巻線抵抗の増加値で決定する。
銅巻線の場合,試験終了時の温度上昇は,次の式によって決定する。
(
)(
)
a
1
1
2
a
235
235
t
t
R
R
t
t2
+
−
+
−=
ここに,
t2−ta: 温度上昇(K)
t1: 巻線の初期温度(℃)
R1: 温度t1における巻線抵抗(Ω)
t2: 試験終了時の巻線温度(℃)
R2: 試験終了時の巻線抵抗(Ω)
ta: 試験終了時の冷却風温度(℃)
注記 銅以外の材料については,上記の式中の値235を,その材料の0 ℃における抵抗温度係数に置
き換える。
b) 電気式温度計法 この方法では,主電動機の停止直後に関係部品の測定可能な最高温度部分にて,電
気式温度計で温度を測定する。
A.2 冷却風の温度
全閉形主電動機に対しては,主電動機から1〜2 mの間隔で主電動機の周囲に4個以上の温度計を配置
して,冷却風温度を測定する。
それ以外の場合は全て,冷却風温度は主電動機への取入口において測定し,取入箇所が2か所以上ある
場合は,冷却風を各箇所で測定した値の平均値とする。
主電動機に入る冷却風及び周囲温度を測定する場合,真の温度が記録されるように,温度計をふく(輻)
射熱及び隙間風のような空気の流れから防護する。冷却風温度の変化による誤差を回避するために,変化
を最低限に抑えるために必要な措置をとる。
試験終了時の冷却風温度は,連続定格試験の最後の1時間又は短時間試験の全試験時間に対して,約15
分間の間隔で測定を行い,これらの平均値とする。
A.3 抵抗値の測定
16
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.3.1 冷時の初期抵抗値
冷時の初期抵抗値の測定は,試験後の高温時の測定と同じ計器を用いて行うが,各試験の始めに測定を
繰り返す必要はない。巻線温度は,抵抗を測定したときの温度計による巻線表面温度とし,そのときの周
囲温度と4 K以上の差があってはならない。
A.3.2 高温時の抵抗値
高温時の抵抗は,試験を終了し,主電動機を停止した後速やかに測定する。測定は,電圧電流計法(電
圧−電流法),ブリッジ法,その他の適切な手段で行うことができるが,初期温度の測定方法と同一の方法
を用いる。
電圧電流計法による場合は,電流自体が温度上昇に影響しない範囲で,必要な精度を得られる十分に大
きな電流とする(通常,この精度を保つには,定格電流の10 %を超えない値がよい。)。
A.4 主電動機の停止及び冷却開始時点
試験の終了時に,主電動機を迅速に停止させる。
試験中の主電動機には通電しないブレーキの方法が望ましい。その場合の冷却開始時点は,主回路をブ
レーキの直前に開路し,同時に各冷却風を止めた時点とする。
この方法が実施困難であれば,主電動機が迅速に停止し,しかも負荷電流がブレーキ中にほぼ一定の状
態で通電されるような方法を採用してもよい。その冷却開始時点は,負荷電流が試験値の80 %に低下した
時点とし,この時点で冷却風を止める。
A.5 高温時の抵抗測定並びに冷却及び加熱曲線の外挿
各巻線の抵抗測定は,冷却開始後45秒間以内に開始し,少なくとも5分間維持する。
各巻線の抵抗測定の間隔は,最初の3分間は20秒間を超えず,以後は30秒間を超えないものとする。
試験終了後45秒間以内に停止することが困難な大形電動機に対しては,特殊なブレーキ装置の設置と2
分間を超えない時間延長について,受渡当事者間で協定する。
これらの測定値から計算した温度上昇は,温度を対数目盛,時間を線形目盛とした時間の関数としてプ
ロットする。このようにして得られた曲線を冷却開始時点まで外挿し,試験終了時点の温度上昇値を求め
る。
17
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
主電動機の動力伝達損失の協定値
B.1
主電動機の動力伝達損失の協定値
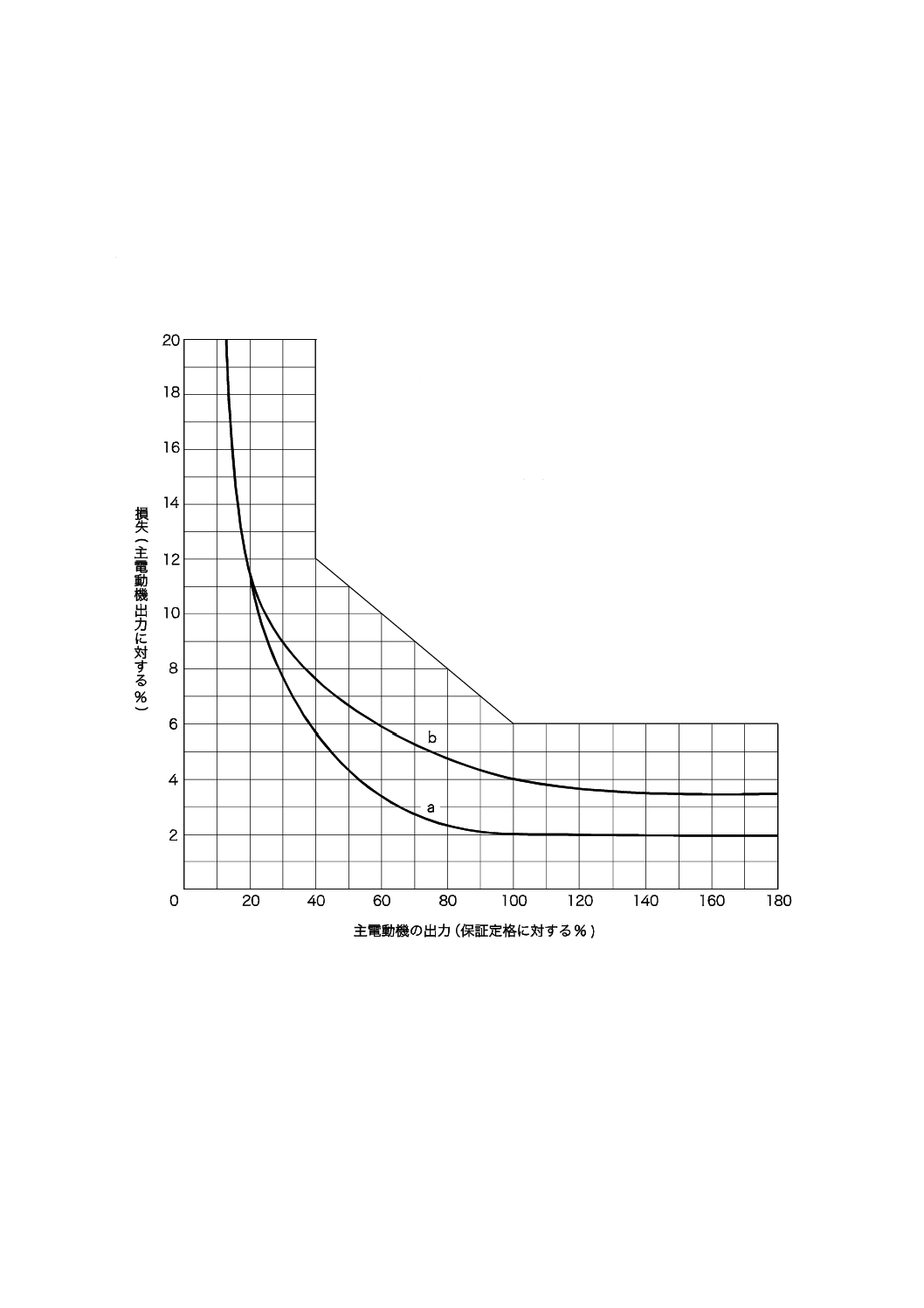
主電動機の動力伝達損失の協定値が効率計算に含まれている場合,それらの協定値は,図B.1に従う。
図B.1−主電動機の動力伝達損失の協定値
曲線a:平行カルダン軸の一組の歯車における減速段ごとの損失。
曲線b:直角カルダン軸の一組の歯車における減速段ごとの損失。
両曲線には懸架装置又は歯車箱の軸受損失が含まれている。
注記 これらの協定損失は,特別な指定条件がない場合の車両性
能の計算に用いる。これらの値は,回転機類又は歯車装置
の受取り又は拒絶の基準ではない。
18
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
騒音測定及び限度
C.1 騒音測定
騒音測定が必要な場合,使用者がその測定を指定し,注文の主電動機のうちから1台について,次のよ
うに実施する。ただし,使用者が受け入れれば,以前に製造された同等の主電動機について,この附属書
の試験方法に基づいて試験された記録によって,騒音測定の要件を満たしているとみなしてもよい。
a) 主電動機によって発生する音圧レベルの測定及び音響パワーレベルの計算は,C.1 c) の代替方法のい
ずれかが適用されない限り,C.5及びC.6に従って行わなければならない。
b) 最大音響パワーレベル及び純音の補正は,C.7及びC.8に示す。
c) 音響パワーレベルを決定するために,JIS Z 8732,JIS Z 8733,JIS Z 8734,JIS Z 8736-1,JIS Z 8736-2,
ISO 3743-1又はISO 3743-2のいずれかを用いてもよい。
d) JIS Z 8733で要求される環境条件を満たすことができない場合,特に,ISO 3746又はISO 3747で指
定された,シンプルだが精度の低い方法を使用することができる。ただし,測定の不正確さに対する
補正をISO 3746又はISO 3747に従って施さない場合には,表C.1の補正値を2 dB増加させて適用す
る。
e) 定格負荷条件の下で試験をする場合,JIS Z 8736-1又はJIS Z 8736-2の方法が望ましい。しかし,負
荷機及び補助装置が音響的に隔離されたり,又は試験環境外に配置されている場合,他の方法を用い
てもよい。
C.2 用語及び定義
この附属書で用いる主な用語及び定義は,次による。
C.2.1
音圧レベル(sound pressure level)
次の式で表す音圧レベル。
0
10
p
log
20
p
p
L=
ここに,
Lp: 音圧レベル(dB)
p: 測定した音圧(μPa)
p0: pと同じように表した基準音圧(μPa)
p0=20 μPa
C.2.2
騒音レベル(sound level)
JIS C 1509-1に準拠する騒音計から読み取った騒音レベル。
C.2.3
騒音スペクトル(noise spectrum)
周波数範囲で表した音圧レベル分布を示すスペクトル。スペクトルは,使用した分析装置のバンド幅特
性に左右される。
19
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
C.2.4
帯域音圧レベル(band pressure level)
指定された周波数帯域に対し,その帯域内に含まれる騒音エネルギーに対応する実効音圧レベル。
C.2.5
音響パワーレベル(sound power level)
次式で表す音響パワーレベル。
0
10
w
log
10
W
W
L=
ここに,
Lw: 音響パワーレベル(dB)
W: 測定した音響パワー(pW)
W0: Wと同じように表した基準音響パワー(pW)
W0=1(pW)
C.2.6
規定の測定位置(precribed path)
測定位置及び測定点は,この附属書の図に示した位置。
C.2.7
等価半球(equivalent hemisphere)
rSと表し,測定位置及び測定点を想定した電動機を取り巻く仮定半球。
C.3 試験条件
C.3.1 電動機の状態
主電動機から,その取付部へ伝ぱ(播)する振動又は試験室のほかの場所への振動は,試験室の音圧レ
ベルに影響を与えることがあるため,例えば,適切に設計した弾性支持装置の上に主電動機を取り付けて,
そのような影響が最小になるようにする。
主電動機は全てのカバーも所定位置に取り付けた完備品とするが,その他の装置とは一切結合しない。
主電動機は,本来組み合わせるべき歯車装置なしで試験する。別置きの送風機で送風する強制通風主電動
機は,その正規の冷却風量で試験するが,送風機自体の騒音が測定結果に影響しないよう配置する。
C.3.2 運転条件
主電動機は,定格速度で無負荷運転するか,又は可変速式であれば,運転上の最高速度で無負荷運転を
行う。複数の特定速度で運転するように設計されている主電動機は,その各々の速度で試験する。両方向
に回転できる主電動機は,両回転方向で試験する。
C.3.3 暗騒音
各測定値は暗騒音,すなわち,測定点における試験中の主電動機以外のあらゆる騒音の影響を補正する。
暗騒音には,試験装置の騒音も含む。
主電動機が試験中でないとき,試験中のときと同じ測定点で,それぞれのオクターブバンドごとに暗騒
音を測定する。
騒音の測定は,測定値と暗騒音との差が,少なくとも10 dB以上となる条件にて行われなければならな
い。暗騒音との差が10 dB未満の場合は,表C.1の補正を適用する。
20
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表C.1−暗騒音の補正
単位 dB
電動機騒音と暗騒音との差
測定した値から差し引かれるデシベル値
3
4〜5
6〜9
3
2
1
3 dBの補正を適用するときは,括弧内に補正したレベルを記録することが望ましい。
一般的に,暗騒音との差が3 dB未満である場合は,測定値に信頼性がないため測定する意味がない。
C.4 測定器
C.4.1 等級
騒音計は,JIS C 1509-1に規定するクラス1(精密騒音計相当)に準拠するものを使用することが望まし
い。ただし,JIS C 1509-1に規定するクラス2(普通騒音計相当)を使用してもよい。騒音分析に使用さ
れるフィルタは,JIS C 1514に規定する“クラス1”とするのがよい。
C.4.2 測定装置の校正
可聴周波数の全帯域特性のチェック及び必要な調整は,騒音測定直前に行い,測定終了後に再チェック
する。さらに,検定試験室における詳細な校正は,最低2年ごとに1回実施するのがよい。
C.4.3 測定器及び観察者の位置
反響が原因となる測定誤差を減らすために,マイク位置は,測定増幅器,又はフィルタからは0.3 m以
上,観察者からは1 m以上の距離をおく。
電動機の騒音に指向性がある場合,若干反響のある場所で測定した結果は,概略値の騒音測定とみなす
のがよい。
C.5 測定方法
C.5.1 方法
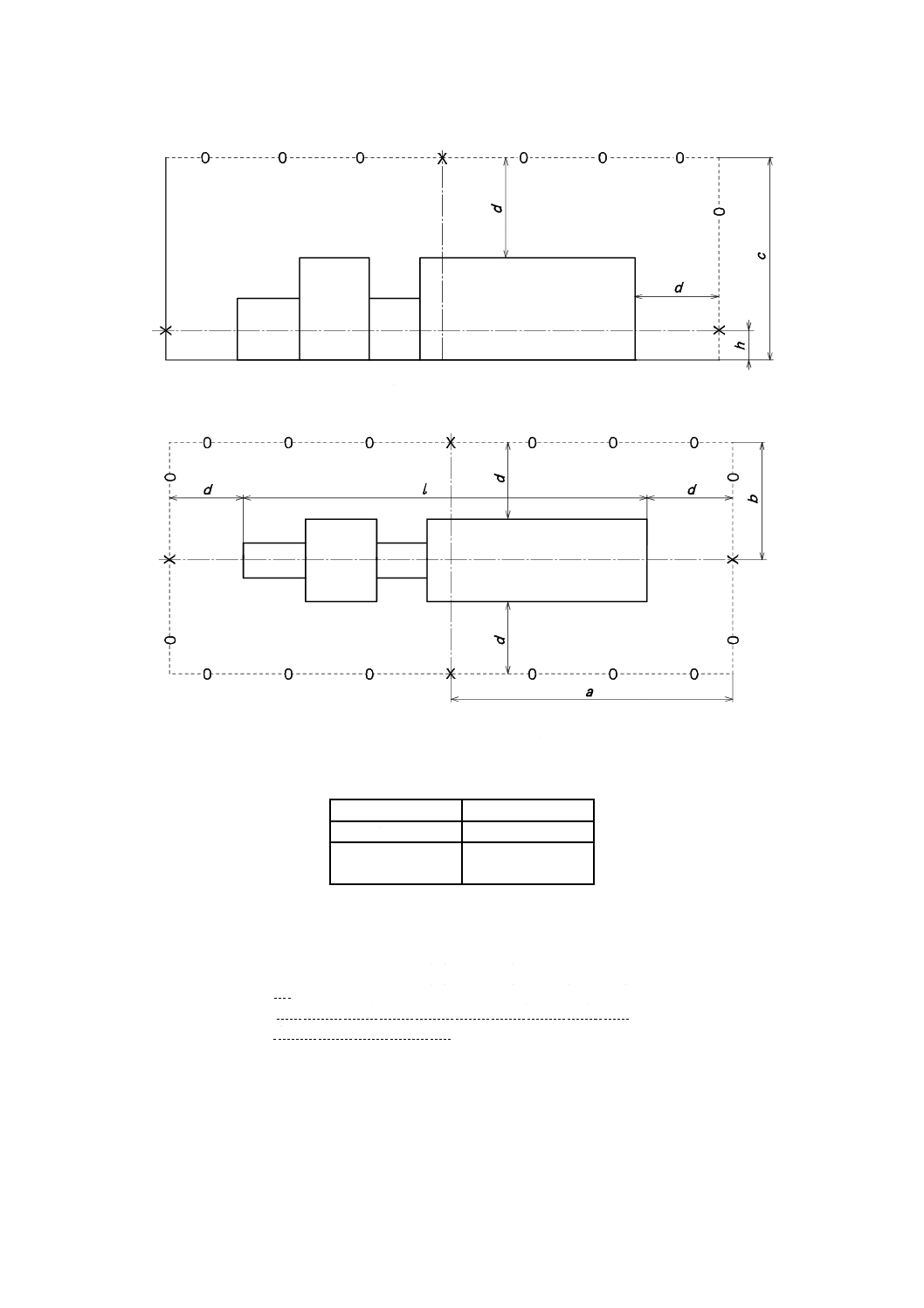
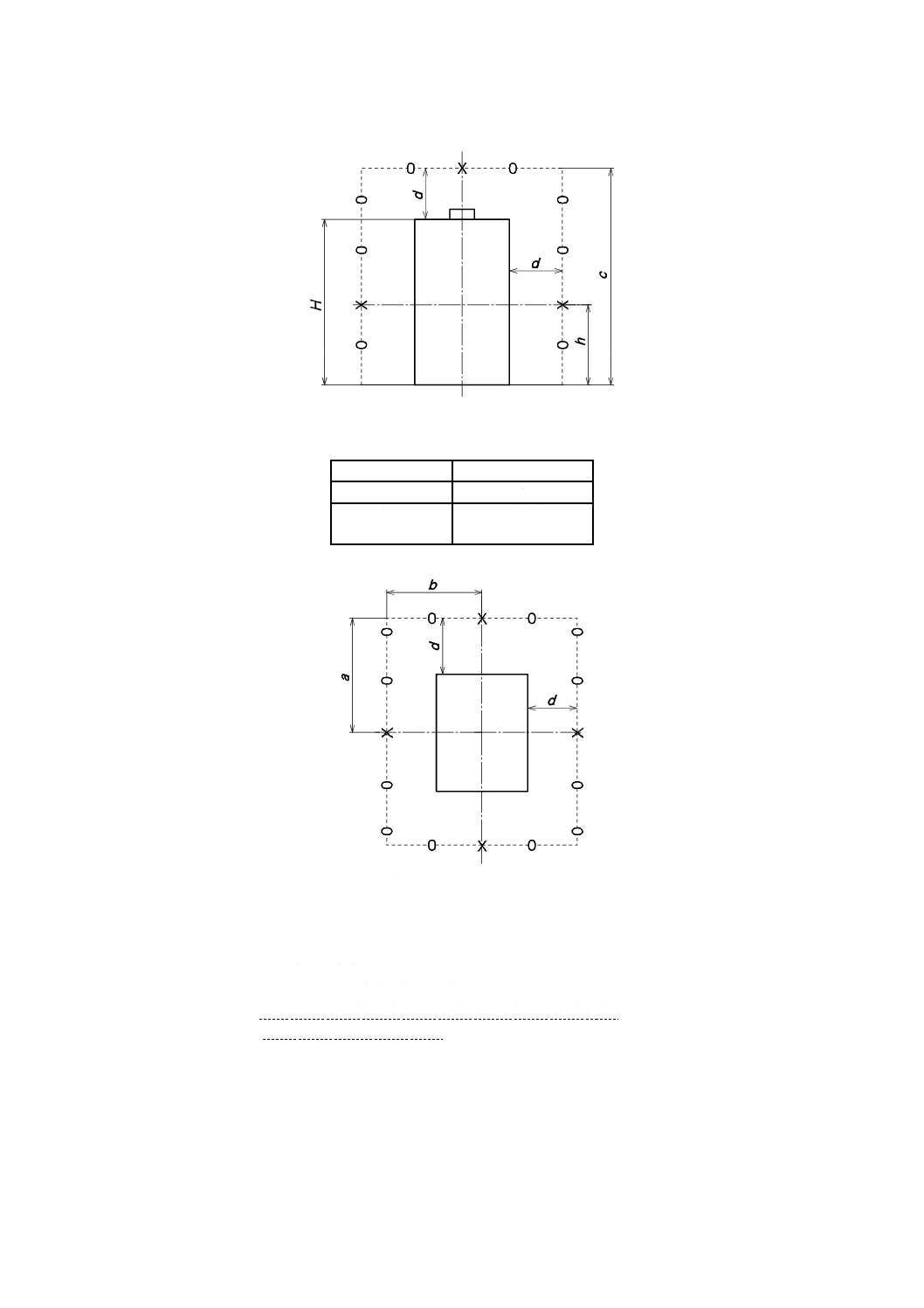
あらゆる種類の電動機の騒音測定は,図C.1又は図C.2に示した規定の測定位置で行う。
電動機の最大長さ寸法lが0.25 m以上(ただし,軸部は除く。)ある電動機の測定位置は,電動機表面
から1 mの位置に置く。
lが0.25 m未満の場合は,電動機表面からの距離dは,4l〜1 mとするが,0.25 mより小さくしてはなら
ない。
横軸形電動機の場合,規定の測定位置hは,床面と平行な軸中心高さ又は地上から0.25 mのいずれか高
い方の位置とする(図C.1参照)。
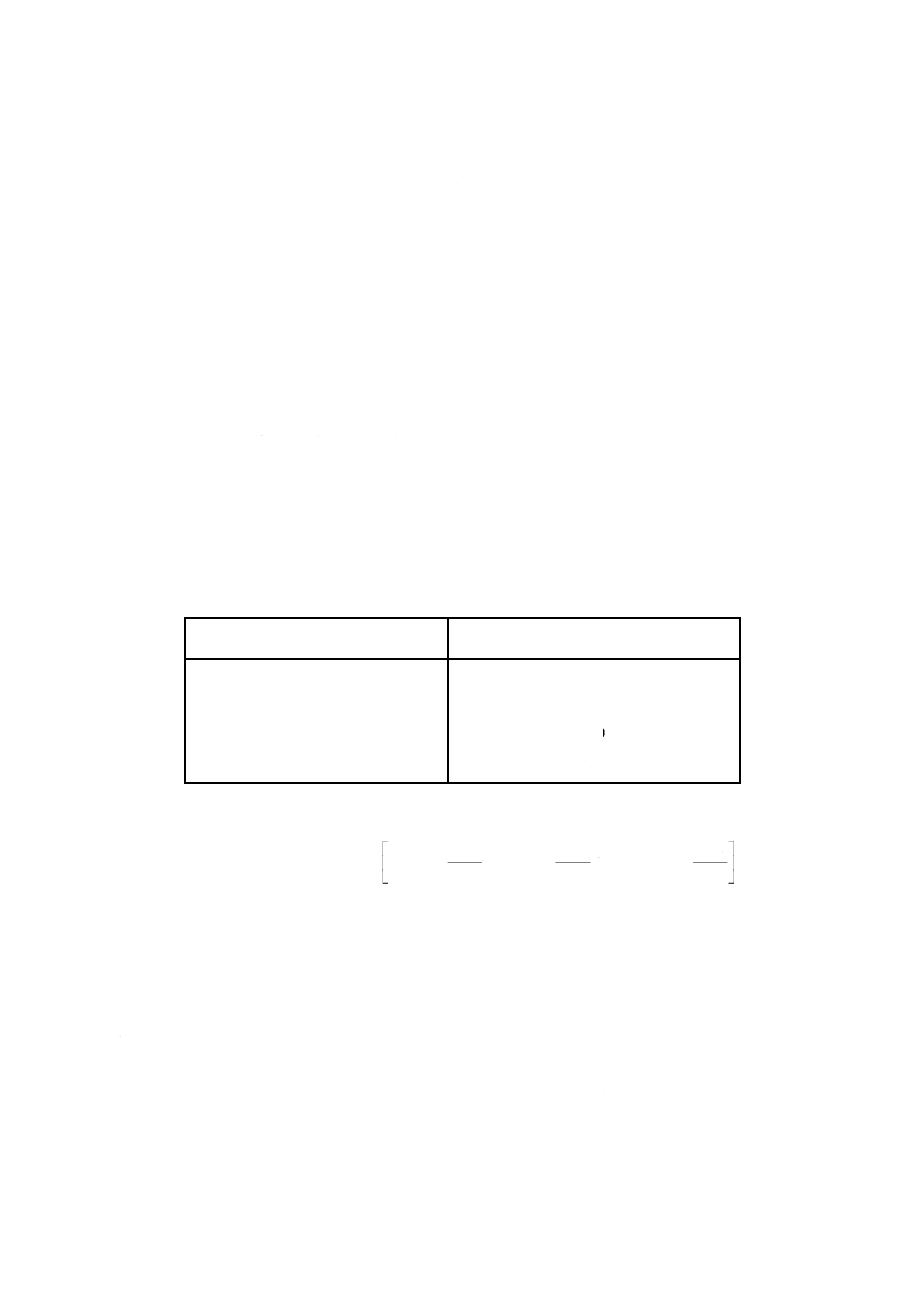
縦軸形電動機の場合,規定の測定位置hは,電動機高さHの1/2の高さの床面に平行な面位置とする。
ただし,0.25 mよりも低くしない(図C.2参照)。
どの電動機の場合にも,垂直面にある規定の測定位置は,軸中心を通る面である。
C.5.2 測定位置
規定の測定位置は,図C.1及び図C.2に示す。その中にある5点の基準測定点及びその点から1 mごと
の各点を測定位置とする。
C.5.3 決定すべき物理量
21
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
C.5.1の測定位置から,それぞれの測定点で,次の物理量を決める。
a) dB(A)で表す騒音レベル
b) 平たん特性に設定した騒音計又は平たん特性に設定できない場合は,Cスケール補正にセットした騒
音計の125 Hz〜4 000 Hzのオクターブバンドの音圧レベル。
22
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 縦断面上の測定位置
b) 横断面上の測定位置
(床面からの高さhの位置)
単位 m
l
d
≧0.25
1
<0.25
4l≦d≦1
d>0.25
h: 軸心高さ,又は0.25 mのいずれか高い方
X: 基準測定点
0: その他の測定点(基準測定点から1 mピッチの測定点)
a,b: 主電動機中心から測定点までの距離
c: 主電動機中心から測定点までの距離にhを加えた距離
l: 主電動機の最大長さ寸法(ただし,軸端部は除く。)
d: 主電動機表面からの距離
図C.1−横軸形主電動機の測定位置及び測定点
23
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 縦断面上の測定位置
単位 m
H
d
≧0.25
1
<0.25
4H≦d≦1
d>0.25
b) 横断面上の測定位置
(床面からの高さhの位置)
h: H/2又は,0.25 mのいずれか高い方
X: 基準測定点
0: その他の測定点(基準測定点から1 mピッチの測定点)
H: 主電動機の最大高さ寸法(ただし,軸端部は除く。)
d: 主電動機表面からの距離
図C.2−縦軸形主電動機の測定位置及び測定点
24
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
C.6 計算
C.6.1 測定値の補正
各測定点における測定結果は,暗騒音の影響を補正する。暗騒音とは試験を行う電動機の騒音以外の騒
音で,試験装置の騒音も含めた騒音である(C.3.3参照)。
C.6.2 平均レベル計算
次の式に従い,全ての測定位置における測定結果から(C.6.1による補正後),平均騒音レベル及び帯域
平均音圧レベルを計算する。
+
+
+
=
10
log
anti
10
log
anti
10
log
anti
1
log
10
)
(p
10
)2(p
10
)1(p
10
10
p(M)
n
L
L
L
n
L
Λ
(dB)
ここに,
Lp(M): 平均騒音レベル(A)(又は帯域平均音圧レベル)(dB)
Lp(1): 最初の位置における騒音レベル(A)(又は平均帯域音圧
レベル)(dB)
Lp(n): n番目の位置における騒音レベル(A)(又は帯域音圧レ
ベル)(dB)
n: 測定位置番号
(参考
10
)1(
p
)1(
p
10
10
10
log
anti
L
L
=
)
各測定位置における測定結果に5 dB以上の差がないとき,測定読み値の単純な算術平均は,上記の式で
計算した値に対して,0.7 dBを超えない。
C.6.3 等価半球の半径及び領域の計算
基準半径での平均レベル計算では,図C.1及び図C.2にある測定位置に沿った測定は,等価半球の半径
で行ったものとみなしてもよい。
(
)
5.0
2
+
=
c
b
a
rS
ここに,
rS: 等価半球の半径(m)
a,b,cは,図C.1及び図C.2で示してあるとおりである。
この等価半球領域は,次の式によって計算できる。
S=π a (b+c)(m2)
注記 規定した半径rSをもつ等価半球領域は,測定路位置に示された表面領域より少し小さい。
C.6.4 概算によるオクターブバンド音響パワーレベル計算
測定した平均音圧レベルに関し,試験室の影響を考慮してオクターブバンド平均音圧レベルから,オク
ターブバンド音響パワーレベルを推定することができる。
音響パワーWrが既知の,点音源とみなせるほどの,小形の広帯域基準音源(ある種の空力学的騒音源は,
適さない。)を使用して,この影響を確定することができる。
注記 試験する主電動機が小形で,広帯域騒音特性をもつならば,基準音源として扱うことができる。
まず,基準音源の(オクターブバンド内の)音響パワーWrを,C.5.1の方法によって,確定する。そし
て,若干反響のある試験室において,試験対象の主電動機を基準音源に置き換え,試験対象の主電動機と
同じ測定点の測定から推定したオクターブバンド平均音圧レベルを算出する。
次の式によって,試験対象の主電動機のオクターブバンド音響パワーレベルを確定することができる。
0
Mr
10
0
M
10
0
r
10
0
10
log
20
log
20
log
10
log
10
p
p
p
p
W
W
W
W
−
+
=
25
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
又は Lw=LW(r)+Lp(M)−Lp(Mr)
ここに,
Lw: 試験対象の主電動機のオクターブバンド音響パワーレベ
ル(dB)
Lw(r): 基準音源の規定のオクターブバンド音響パワーレベル
(dB)
Lp(M): 試験対象の主電動機の測定したオクターブバンド平均音
圧レベル(dB)
Lp(Mr): 基準音源のオクターブバンド平均音圧レベル(dB)
C.6.5 Aスケール騒音レベルの計算
C.6.4に従って得たオクターブバンド音響パワーレベルから,音圧レベルの代わりに音響パワーレベルを
読み取り,C.6.7の方法に従い概略のAスケール騒音レベルを計算する。
C.6.6 オクターブバンド概算平均音圧レベルの計算
C.6.4に従って計算したオクターブバンド音響パワーレベルから18 dBを減じることによって,基準半径
3 mにおけるオクターブバンド自由場平均音圧レベルを推定できる。
C.6.7 Aスケール平均騒音レベル計算
C.6.6のオクターブバンド音圧レベルから,次によって基準半径3 m点のAスケール平均騒音レベルを
計算する。
a) C.6.6のオクターブバンド音圧レベルには,表C.2の補正を適用する。
表C.2−オクターブバンド音圧レベルの補正
オクターブバンド中心周波数
Hz
補正
dB
125
250
500
1 000
2 000
4 000
−16
−9
−3
0
+1
+1
b) 次の式によって,これらのオクターブバンド加重音圧レベルを合計する。
+
+
+
=
10
log
anti
10
log
anti
10
log
anti
log
10
)
06
(p
10
)
02
(p
10
)
01
(p
10
10
)
M
(
A
L
L
L
L
Λ
ここに,
LA(M): Aスケール平均騒音レベル(dB)
Lp(01): 最初のオクターブバンド加重音圧レベル(dB)
Lp(06): 6番目のオクターブバンド加重音圧レベル(dB)
C.7 純音の補正
純音の存否を確定するために,最高音圧レベルの測定点において,FFT分析を用いて周波数走査を行う。
中心が250 Hz〜4 000 Hzの範囲内のどの1オクターブバンドにも,一つ以上の純音の存在が認められた
ときは,その音を中心とする1/3オクターブバンドの音圧レベルLpが隣接する二つの1/3オクターブバン
ドのレベルLp−1,Lp+1の平均より5 dB以上高い場合に限って,純音が存在するとみなされる。このような
場合,測定から求めた音響パワーレベルは,表C.3の補正で加算させなければならない。1オクターブバ
ンド以上の範囲に純音が複数存在する場合は,個々のdB補正のうち,最大のものを加算する。
26
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
1
p
1
p
p
+
−+
−
=
∆
L
L
L
L
表C.3−純音の補正
平均以上のデシベル
補正
dB
5<ΔL≦6
6<ΔL≦8
8<ΔL≦10
ΔL>10
3
4
5
6
注記 ΔLは,純音が含まれる1/3オクターブバンドと,隣接する二つの1/3オク
ターブバンドの平均との差
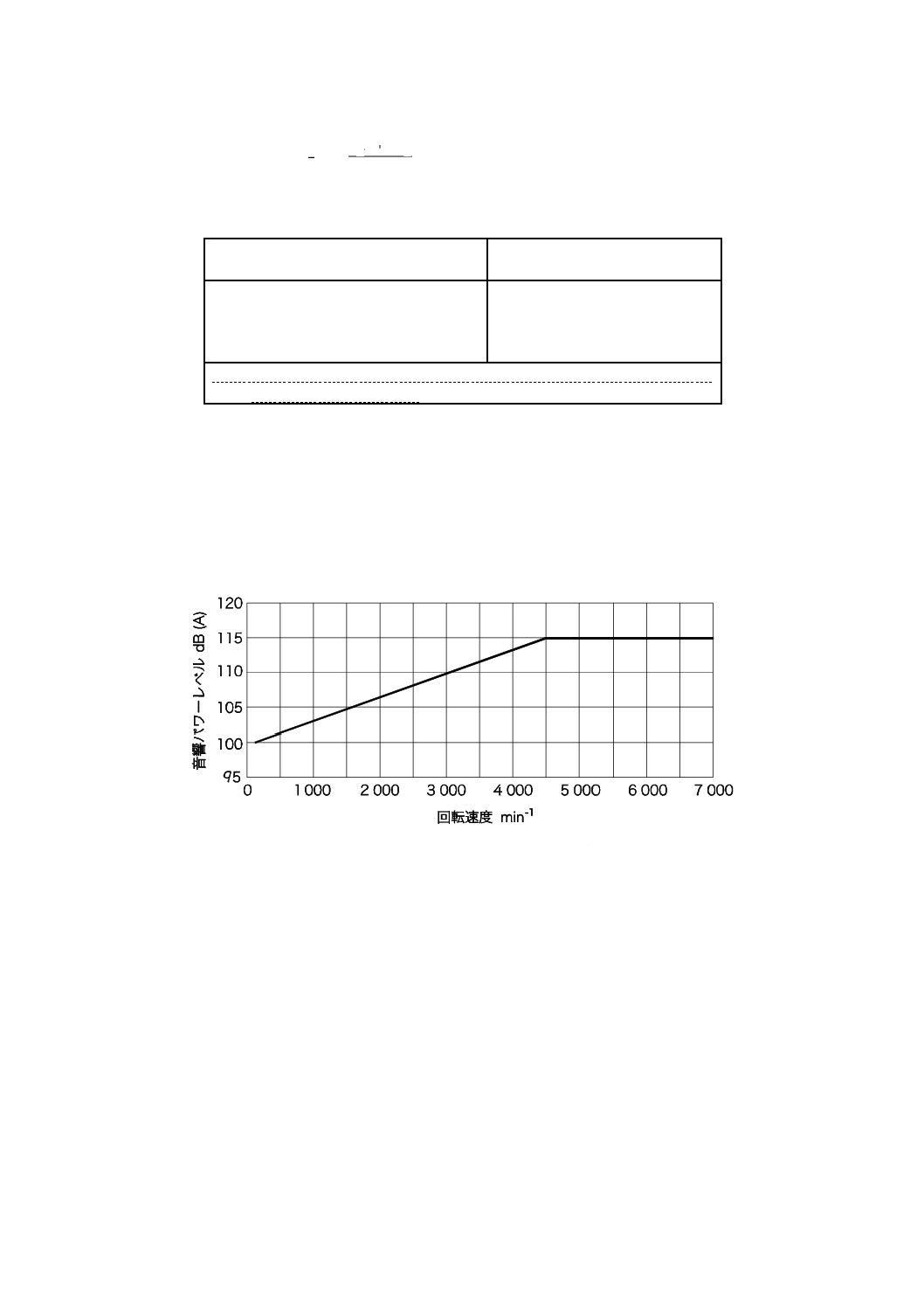
C.8 騒音限度
主電動機に推奨される最大音響パワーレベルは,純音に対する何らかの補正を含めて,図C.3に従う。
その他の形式の補助電動機の場合は,IEC 60034-9に規定された値とする。
推奨される限度は,通常の設計及び製造規格に基づく主電動機で達成可能な値である。それよりも低い
値の要求に対しては,主電動機の質量増と防音構造の複雑さとが増すことになる。
図C.3−主電動機から放射される空中騒音に対する平均音響パワーレベルの限度
27
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(規定)
運転路線の電車線電圧
D.1 一般
電車線の公称電圧,最低電圧及び最高電圧は,使用者が指定する。
公称電圧は,主電動機の定格及び特性の基礎であり,また,車両性能を計算するための基礎である。ま
た,公称電圧以外の電圧における性能は,本質的に変わるものであり,性能変化を減らすように制御して
もよいが,広範な電車線電圧の変動範囲にわたって一定性能を保持することは一般に望ましくない。
補助電動機は,規定の補助電源の出力電圧変動範囲内のいかなる電圧に対しても十分な性能を保ち,車
両の運転ができるものとするが,最低電圧における運転時間に制限を設けてもよい。
28
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(規定)
使用者及び製造業者の協定事項
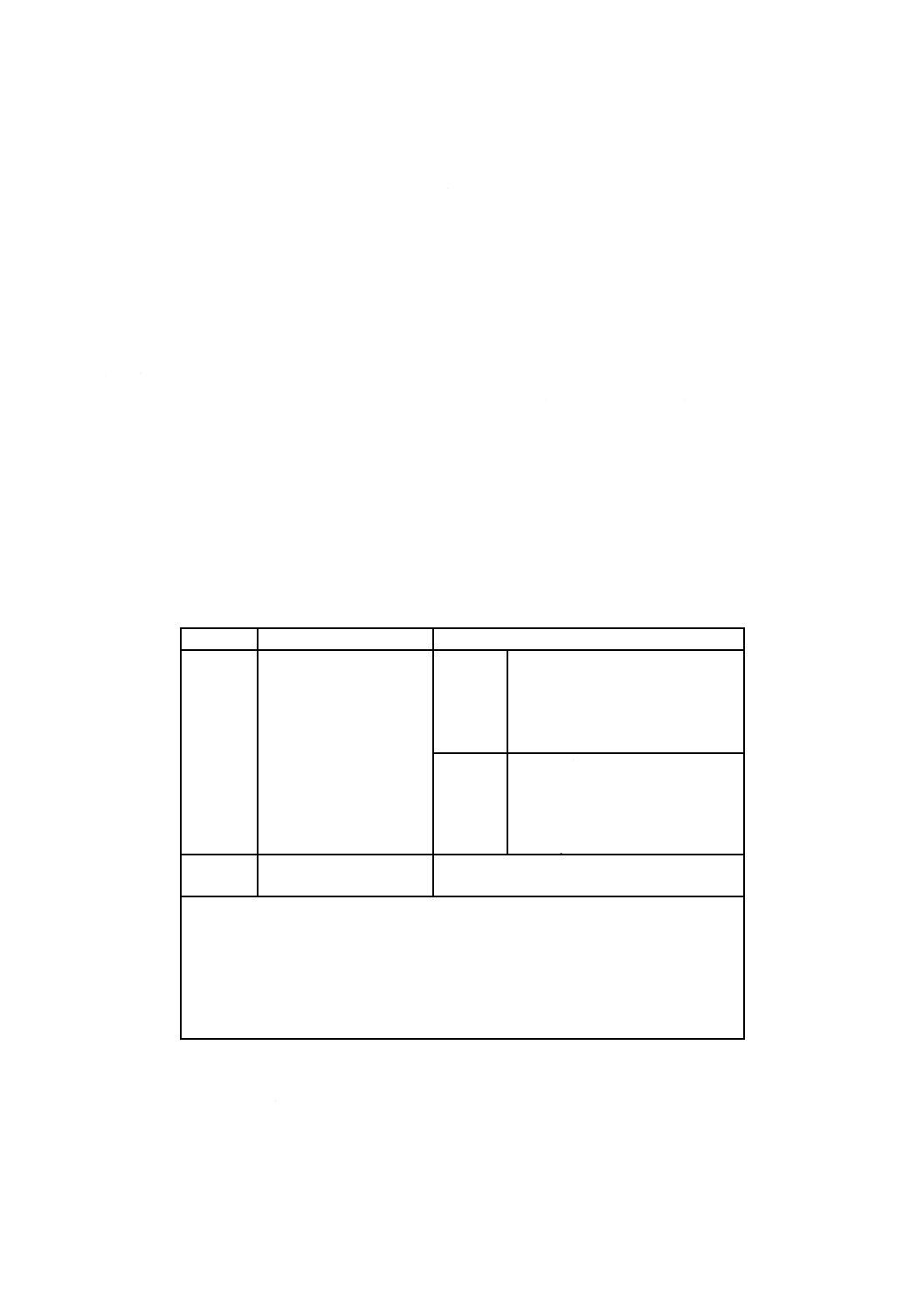
E.1
製造業者との協定が必要な使用者の特別な要求事項
関連する項目
内容
箇条4
特別な(例外的な)環境条件
5.3
規定特性の供給電圧
7.1.2.2
試験時と実使用時との電源の類似性
7.1.4
調査試験
8.1.6
短時間過負荷温度上昇試験
附属書C
騒音測定及び限度
附属書D
運転路線の電車線電圧
E.2
使用者との協定が必要な製造業者の特別な要求事項
関連する項目
内容
5.4
実績ある特性と異なる決定特性
7.1.1
試験の重複
7.1.2.1
形式試験の試験仕様書及び試験成績書
7.1.2.4
形式試験の免除又は試験項目の一部を省略
7.1.3
受渡試験の代替方式の手順
8.1.2
特別な外部冷却方式の取決め
8.1.6
短時間過負荷温度上昇試験方法の代替方式及び追加温度測定(使用者が実施を規定して
いる場合)
A.5
特別なブレーキ装置の設置及び最初の抵抗測定を開始する時間の延長
E.3
使用者と製造業者との間で協定しておくべき,その他の特別な要求事項
関連する項目
内容
6.2
IEC 60034-8によらない端子及びリード線の表記
9.1
使用する電圧波形
9.1
正弦波電源による温度上昇形式試験の追加
9.4
受渡試験としての高速試験
9.5
直流電圧による耐電圧試験
9.6
形式試験と同等の振動測定
7.2
適用する試験項目
箇条8.0A
適用する試験電源
8.1.5
この規格で規定する温度上昇限度を下回る温度上昇限度の設定
8.2
特性試験及び裕度
8.3
試験開始時の温度を常温で実施する高速試験
29
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.1 b)
種別2の適用
9.3.1 b)
種別2の適用
9.5 b)
種別2の適用
箇条10
調査試験の実施
30
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
日本で実施されている調査試験
JA.1
一般
この附属書は,対応国際規格では規定されていないが,旧JIS E 6102:1999に規定されていて,受渡当事
者間で必要と認めた場合に行う調査試験の参考情報として示す。
JA.2
負荷試験
誘導主電動機に負荷を接続し,定格電圧及び定格周波数,又は代用定格電圧及び代用定格周波数で運転
し,負荷電流を変化させたときの入力,一次電流及びすべりを測定する。
JA.3
損失特性測定
JA.3.1
無負荷損失特性
無負荷損失特性は,次による。
a) 機械損 機械損の測定方法は,定格電圧及び定格周波数,又は代用定格電圧及び代用定格周波数で無
負荷運転し,入力が一定になった後,機械損が分離できる程度まで電圧を下げ,数点における電圧,
電流及び入力を測定する。
b) 鉄損 無負荷試験の結果によって,入力から無負荷電流による一次抵抗損及び機械損を減じた値を鉄
損とする。鉄損は,式(JA.1)によって算出する。
m
1
2
0
0
1
2
3
W
R
I
W
W
−
−
=
······························································ (JA.1)
ここに,
W1: 鉄損(W)
W0: 無負荷時の入力(W)
I0: 無負荷電流(A)
R1: 各端子間において測定した一次巻線抵抗の平均値(Ω)
Wm: 機械損(W)
c) 無負荷損失特性 a) 及びb) の測定結果と入力電圧との関係を示す曲線を描く。
JA.3.2
負荷損失特性
負荷損失特性は,次による。
a) 一次抵抗損 一次巻線の抵抗損は,式(JA.2)によって算出する。
W1=3I12 r1 ·········································································· (JA.2)
ここに,
W1: 一次抵抗損(W)
I1: 一次電流(A)
r1: 基準巻線温度に換算した一次一相の抵抗(Ω)
b) 二次抵抗損 二次抵抗損は,無負荷試験及び負荷試験の結果から,式(JA.3)によって算出する。
W2=S×[W−3I12 r1−(W0−3I02 r1)] ············································ (JA.3)
ここに,
W2: 二次抵抗損(W)
S: すべり
W: 負荷時の入力(W)
c) 漂遊負荷損 漂遊負荷損を考慮する場合は,式(JA.4)によって算出する。
31
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
r
2
005
.0
P
P
G=
········································································· (JA.4)
ここに,
G: 漂遊負荷損(W)
P: 出力 (1−S) [W−3I12 r1−(W0−3I02 r1)](W)
Pr: 定格出力(W)
JA.4
特殊温度上昇試験
JA.4.1
過負荷温度上昇試験
誘導主電動機を指定された通風状態にし,各部の温度と周囲温度との差が5 K以内の冷状態から,定格
電圧及び定格周波数,又は代用定格電圧及び代用定格周波数で受渡当事者間で定める数種の過負荷電流で,
いずれかの部分が受渡当事者で定める温度上昇限度に達するまで,連続運転して温度上昇を求め,負荷電
流,温度上昇及び運転時間との関係を示す曲線を描き,過負荷温度上昇特性を求める。
JA.4.2
通風量変化温度上昇試験
誘導主電動機に定格電圧及び定格周波数,又は代用定格電圧及び代用定格周波数を加え,受渡当事者間
で定める数種の通風量で,負荷電流を受渡当事者間で定める電流として,各部の温度がほぼ一定となるま
で運転して温度上昇を求め,通風量と温度上昇との関係を示す曲線を描き,通風量変化温度上昇特性を求
める。
JA.5
通風特性試験
JA.5.1
自己通風主電動機の場合
自己通風誘導主電動機の場合は,次による。
a) 誘導主電動機を無負荷で運転し,受渡当事者間で定める数種類の回転速度で通風量を測定し,回転速
度と通風量との関係を示す曲線を描き,風量特性を求める。
b) 誘導主電動機の通風取入口に風道及び絞り装置を設け,主電動機を無負荷で,受渡当事者間で定める
数種類の回転速度で運転し,各回転速度で絞りを変えた場合の通風量及び主電動機通風取入口の静圧
を測定し,回転速度をパラメータとした通風量と静圧との関係を示す曲線を描き,風量−静圧特性を
求める。
JA.5.2
強制通風主電動機の場合
誘導主電動機の通風取入口に風道及び送風機を設け,誘導主電動機を無負荷で静止状態から最高使用回
転速度までの範囲の受渡当事者間で定める数種類の回転速度で運転し,各回転速度で通風量を変えた場合
の誘導主電動機の静圧を測定し,回転速度をパラメータとした通風量と静圧との関係を示す曲線を描き,
風量−静圧特性を求める。
JA.5.3
測定方法
静圧及び通風量の測定は,指定された試験装置を用い,JIS B 8330によって測定する。
JA.6
誘電正接測定
9.5 b) に規定する耐電圧試験の試験電圧値の約20 %〜50 %の交流電圧を加え,巻線の誘電正接を測定し,
印加電圧と誘電正接との関係を求める。
JA.7
軸電圧測定
32
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
誘導主電動機を定格電圧及び定格周波数,又は代用定格電圧及び代用定格周波数で無負荷運転し,回転
子の両軸端間に発生する軸電圧を測定する。
33
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
JIS C 1509-1 電気音響−サウンドレベルメータ(騒音計)−第1部:仕様
注記 対応国際規格:IEC 61672-1,Electroacoustics−Sound level meters−Part 1: Specifications(IDT)
JIS C 1509-2 電気音響−サウンドレベルメータ(騒音計)−第2部:型式評価試験
注記 対応国際規格:IEC 61672-2,Electroacoustics−Sound level meters−Part 2: Pattern evaluation tests
(IDT)
JIS C 1514 オクターブ及び1/Nオクターブバンドフィルタ
注記 対応国際規格:IEC 61260,Electroacoustics−Octave-band and fractional-octave-band filters(IDT)
JIS C 4034-5 回転電気機械−第5部:外被構造による保護方式の分類
注記 対応国際規格:IEC 60034-5,Rotating electrical machines−Part 5: Degrees of protection provided by
the integral design of rotating electrical machines (IP code)−Classification(IDT)
JIS C 4210 一般用低圧三相かご形誘導電動機
JIS E 4001 鉄道車両−用語
JIS E 4031 鉄道車両用品−振動及び衝撃試験方法
注記 対応国際規格:IEC 61373,Railway applications−Rolling stock equipment−Shock and vibration tests
(MOD)
JIS E 5008:2009 鉄道車両−電力変換装置
注記 対応国際規格:IEC 61287-1,Railway applications−Power converters installed on board rolling stock
−Part 1: Characteristics and test methods(MOD)
JIS E 5011-1 鉄道車両−電力変換装置及び交流電動機の組合せ試験−第1部:インバータ方式
注記 対応国際規格:IEC 61377-1,Railway applications−Rolling stock−Part 1: Combined testing of
inverter-fed alternating current motors and their control system(MOD)
JIS E 5011-2 鉄道車両−電力変換装置及び交流電動機の組合せ試験−第2部:コンバータ・インバータ
方式(中間直流リンクあり)
注記 対応国際規格:IEC 61377-3,Railway applications−Rolling stock−Part 3: Combined testing of
alternating current motors, fed by an indirect convertor, and their control system(MOD)
JIS Z 8732 音響−音圧法による騒音源の音響パワーレベルの測定方法−無響室及び半無響室における
精密測定方法
注記 対応国際規格:ISO/DIS 3745:2000,Acoustics−Determination of sound power levels of noise sources
using sound pressure−Precision methods for anechoic and hemi-anechoic rooms(IDT)
JIS Z 8733 音響−音圧法による騒音源の音響パワーレベルの測定方法−反射面上の準自由音場におけ
る実用測定方法
注記 対応国際規格:ISO 3744,Acoustics−Determination of sound power levels and sound energy levels of
noise sources using sound pressure−Engineering methods for an essentially free field over a reflecting
plane(MOD)
JIS Z 8734 音響−音圧法による騒音源の音響パワーレベルの測定方法−残響室における精密測定方法
注記 対応国際規格:ISO 3741,Acoustics−Determination of sound power levels of noise sources using
sound pressure−Precision methods for reverberation test rooms(IDT)
34
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS Z 8736-1 音響−音響インテンシティによる騒音源の音響パワーレベルの測定方法−第1部:離散点
による測定
注記 対応国際規格:ISO 9614-1,Acoustics−Determination of sound power levels of noise sources using
sound intensity−Part 1: Measurement at discrete points(IDT)
JIS Z 8736-2 音響−音響インテンシティによる騒音源の音響パワーレベルの測定方法−第2部:スキャ
ニングによる測定
注記 対応国際規格:ISO 9614-2,Acoustics−Determination of sound power levels of noise sources using
sound intensity−Part 2: Measurement by scanning(IDT)
IEC 60034-2-1,Rotating electrical machines−Part 2-1: Standard methods for determining losses and efficiency
from tests (excluding machines for traction vehicles)
IEC 60034-5,Rotating electrical machines−Part 5: Degrees of protection provided by the integral design of
rotating electrical machines (IP code)−Classification
IEC 60034-9,Rotating electrical machines−Part 9: Noise limits
IEC 60034-17,Rotating electrical machines−Part 17: Cage induction motors when fed from converters−
Application guide
IEC 60034-18-41,Rotating electrical machines−Part 18-41: Qualification and type tests for Type I electrical
insulation systems used in rotating electrical machines fed from voltage converters
IEC 60850,Railway applications−Supply voltages of traction systems
ISO 3743-1,Acoustics−Determination of sound power levels of noise sources−Engineering methods for small,
movable sources in reverberant fields−Part 1: Comparison method for hard-walled test rooms
ISO 3743-2,Acoustics−Determination of sound power levels of noise sources using sound pressure−
Engineering methods for small, movable sources in reverberant fields−Part 2: Methods for special
reverberation test rooms
ISO 3746,Acoustics−Determination of sound power levels of noise sources using sound pressure−Survey
method using an enveloping measurement surface over a reflecting plane
ISO 3747,Acoustics−Determination of sound power levels and sound energy levels of noise sources using sound
pressure−Engineering/survey methods for use in situ in a reverberant environment
35
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JB
(参考)
JISと対応国際規格との対比表
JIS E 6102:2015 鉄道車両−交流主電動機
IEC 60349-2:2010 Electric traction−Rotating electrical machines for rail and road
vehicles−Part 2: Electronic converter-fed alternating current motors
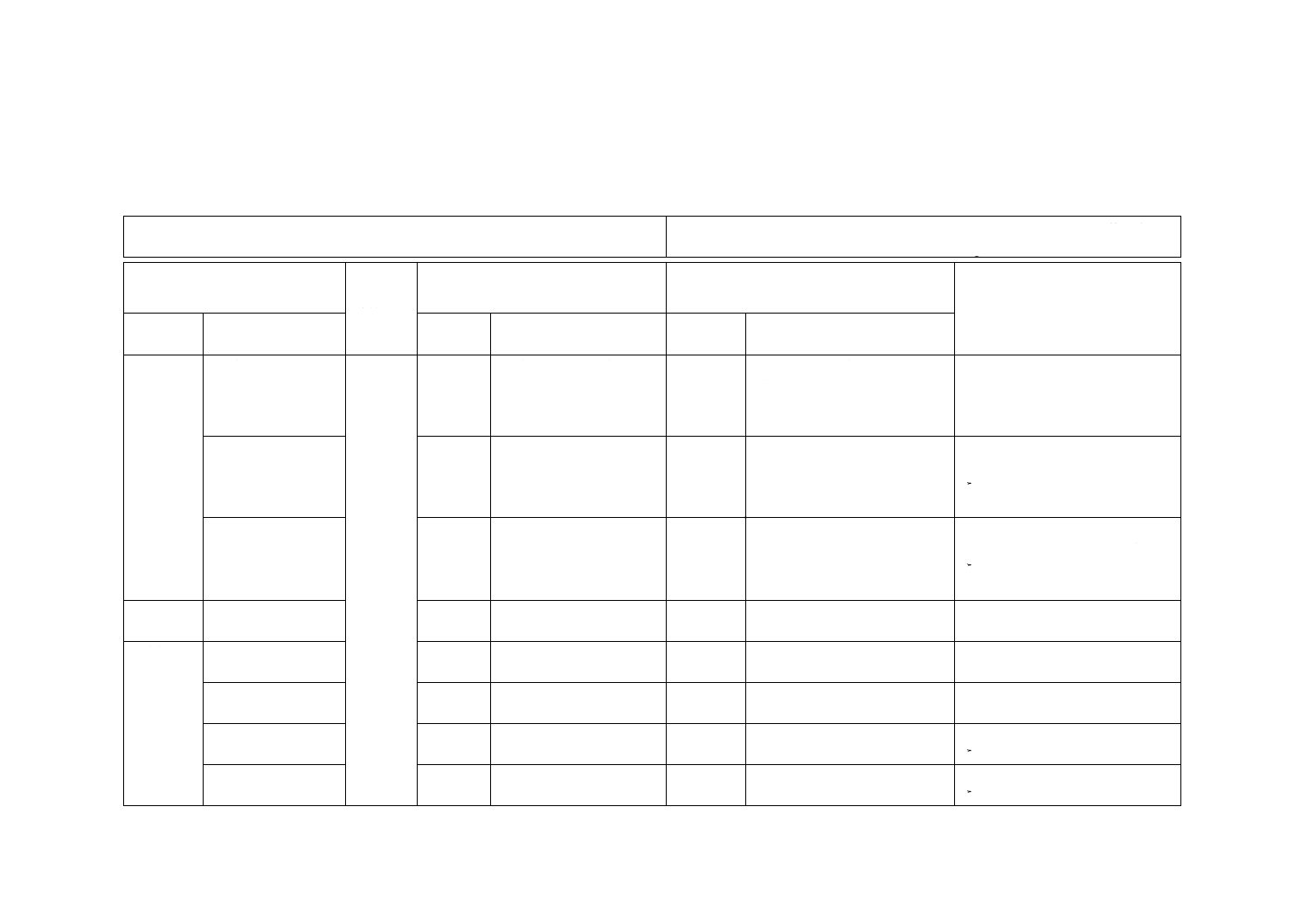
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範
囲
鉄道車両用交流主
電動機(インバータ
駆動)について規
定。
1
鉄道車両用及び道路車両
用交流主電動機(インバ
ータ駆動)について規定。
削除
適用範囲を鉄道車両用に限り,
道路車両用は削除した。
JISの前置き要素に従ったため。
IECへの改正提案はしない。
1
主電動機及び電力変換装
置の双方の設計者間にお
ける連携を図る。
削除
主電動機と電力変換装置との
連携についての規定は,適用範
囲でなく,5.1情報交換で扱う
ようにした。
適切な規格構成にする。
IEC規格見直しの際,提案を行
う。
適用範囲の規定内
容
1
JISにほぼ同じ
変更
対応国際規格の注記1〜注記5
は,適用範囲に関係する内容で
あり,“注記”を外して規定文
に取り入れた。
適用範囲を明確にした。
IEC規格見直しの際,提案を行
う。
2 引用規
格
3 用語及
び定義
3.1 主電動機の定格
3.1
定格値は製造業者が指定
した値。
変更
定格値は製造業者が示し,受渡
当事者で協定する。
日本の実情に合わせた。
IECへの改正提案は行わない。
3.2
定格における電気量及び
機械量の数値
削除
本体で使用されていない。
IEC規格見直しの際,提案を行
う。
3.9
主電動機の保証定格
削除
本体で使用されていない。
IEC規格見直しの際,提案を行
う。
3.10
補助電動機の保証定格
削除
本体で使用されていない。
IEC規格見直しの際,提案を行
う。
3
5
E
6
1
0
2
:
2
0
1
5
36
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
3 用語及
び定義
(続き)
3.7 代用定格として
商用周波数電源を
用いる場合を追加
−
−
追加
受渡試験に代替電源方式の規
定を追加した。
日本の試験事情による。
IECへの改正提案は行わない。
3.12 最高使用回転
速度
3.16.1
主電動機の最高使用回転
数
変更
本体で使用されていないため,
注記に変更した。
IEC規格見直しの際,提案を行
う。
3.16.2
補助電動機の最高使用回
転数
変更
本体で使用されていないため,
注記に変更した。
IEC規格見直しの際,提案を行
う。
4 使用条
件
標高,温度
4
標高はIEC 62498-1のク
ラスA3,温度はIEC
62498-1のクラスT1
追加
変更
具体的数値を記載し,温度クラ
スを国内気候の標準であるク
ラスT4に変更した。
日本の環境条件による。
IECへの改正提案は行わない。
温度
4 b)
使用者は…特別に厳しい
使用環境…を製造業者に
知らせなければならな
い。
変更
特別に厳しい,との条件を除外
した。
日本の実情に合わせた。
IECへの改正提案は行わない。
5 特性
5.1 情報交換
1
JISにほぼ同じ
変更
箇条1の情報交換に関する規
定内容を5.1に移した。
IEC規格見直しの際,提案を行
う。
5.2 基準巻線温度
5.2
基準巻線温度は150 ℃と
する。
追加
基準巻線温度は繰返し発注品
の場合,過渡的に115 ℃の使
用も認める。
日本の試験事情による。
IECへの改正提案は行わない。
7 試験
7.1.1 一般
1
組合せ試験を更に実施す
る場合,形式試験又は調
査試験は,組合せ試験と
同じ試験台で実施するこ
とが望ましい。
変更
組合せ試験を実施する場合の
推奨事項は,箇条1から7.1.1
へ移した。
IEC規格見直しの際,提案を行
う。
7.2 試験項目
7.2
−
選択
三相かご形誘導主電動機のた
めに,種別2の試験項目を追加
した。
日本の試験事情による。
IECへの改正提案は行わない。
8 形式試
験
8.0A 試験電源
−
選択
誘導主電動機を考慮して代替
電源方法に正弦波及び方形波
による試験を追加した。
日本の試験事情による。
3
6
E
6
1
0
2
:
2
0
1
5
37
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
8 形式試
験(続き)
8.1.2 温度上昇試験
中の通風
8.1.2
−
選択
通風条件をJIS B 8330による
ことも認める。
現車とみなすことが困難な場合
があるためであり,IEC規格見直
しの際,提案を行う。
8.2.1 特性試験
8.2.1
1種類の試験方法を規定
している。
選択
種別2に三相かご形誘導主電
動機に限定した特性試験の規
定を追加した。
日本の試験事情による。
IECへの改正提案は行わない。
8.2.2.1 主電動機の
裕度
8.2.2.1
1種類の試験方法を規定
している。
選択
種別2に効率及び力率の決定
特性の規定を追加した。
日本の実情に合わせた。
IECへの改正提案は行わない。
8.2.2.1 正弦波電源
形式試験の温度上
昇は,基の形式試験
の結果に対して±
12 %又は±15 Kと
する。
8.2.2.1
温度上昇の裕度は,基の
形式試験結果の±8 %又
は±10 K。
変更
裕度を±12 %又は±15 Kとし
た。
日本の実情に合わせた。
IECへの改正提案は行わない。
8.3 高速試験
8.3
高速試験は高温状態で行
う。
追加
かご形誘導主電動機の場合,試
験開始時の温度条件に,常温で
の条件を追加した。
WTO/TBT協定の例外事項に該当
するため,IECへの改正提案は行
わない。
9 受渡試
験
9.1 一般
高速試験及び振動
測定は,インバータ
電源の使用も認め
る。
9.1
電源は正弦波電源を用い
る。
追加
JISはインバータ電源の使用も
認めることとした。
商用周波数以外の正弦波電源の
準備が困難なため。
IEC規格見直しの際,提案を行
う。
9.1 一般
試験方法に三相か
ご形誘導主電動機
を対象とした種別2
を追加した。
9.1
試験方法は1種類だけ。
選択
種別2に正弦波及び方形波の,
定格又は代用定格の電圧及び
周波数の電源を用いた試験を
追加した。
日本の試験事情による。
IECへの改正提案は行わない。
9.3 特性試験及び裕
度
試験条件を2種類に
した。
9.3
試験条件は1種類だけ。
選択
種別2による特性試験を追加
した。
日本の実情に合わせた。
IECへの改正提案は行わない。
3
7
E
6
1
0
2
:
2
0
1
5
38
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
9 受渡試
験(続き)
9.4 高速試験
かご形誘導主電動
機は常温での試験
を認めることとし
た。
9.4
高温状態で試験する。
追加
かご形誘導主電動機は,高温で
試験する技術的意義がないの
で,常温で試験することを追加
した。
日本の実情に合わせた。
IEC規格見直しの際,提案を行
う。
9.5 耐電圧試験
種別2を設け,三相
かご形誘導主電動
機の耐電圧試験の
規定を追加した。
9.5
三相かご形誘導主電動機
に言及していない。
追加
三相かご形誘導主電動機のた
めの耐電圧試験の規定を追加
した。
日本の実情に合わせた。
IEC規格の見直しの際,提案を行
う。
10 調査試
験
10.1 一般
調査試験の結果は,
受取条件とはしな
い。
−
−
追加
調査試験の内容を追加した。
日本の実情に合わせた。
10.2 騒音測定
定格電圧及び定格
周波数,又は代用定
格電圧及び代用定
格周波数で無負荷
運転し,騒音レベル
を測定する。
−
−
追加
騒音測定を追加した。
日本の実情に合わせた。
附属書C
(参考)
騒音測定
及び限度
Annex C
附属書E
(規定)
使用者及
び製造業
者の協定
事項
“E.3 使用者と製造
業者との間で協定
しておくべき,その
他の特別な要求事
項”を追加した。
Annex E
−
追加
受渡当事者間で協定しておく
べき,その他の特別な要求事項
を追加した。
日本の実情に合わせた要求事項
を追加した。
IECへの改正提案はしない。
3
8
E
6
1
0
2
:
2
0
1
5
39
E 6102:2015
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
附属書JA
(参考)
日本で実
施されて
いる調査
試験
−
−
JISと国際規格との対応の程度の全体評価:IEC 60349-2:2010,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除……………… 国際規格の規定項目又は規定内容を削除している。
− 追加……………… 国際規格にない規定項目又は規定内容を追加している。
− 変更……………… 国際規格の規定内容を変更している。
− 選択……………… 国際規格の規定内容とは異なる規定内容を追加し,それらのいずれかを選択するとしている。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD…………… 国際規格を修正している。
3
9
E
6
1
0
2
:
2
0
1
5