E 4071-1:2019
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 2
2 引用規格························································································································· 3
3 用語,定義及び略語 ·········································································································· 4
3.1 用語及び定義 ················································································································ 4
3.2 略語 ···························································································································· 7
4 ハイブリッドシステムの電源構成 ························································································ 8
4.1 一般 ···························································································································· 8
4.2 適用例 ························································································································ 11
4.3 シリーズハイブリッドシステムの性能··············································································· 16
5 環境条件························································································································ 20
5.1 一般 ··························································································································· 20
5.2 標高 ··························································································································· 20
5.3 温度 ··························································································································· 20
6 機能及びシステム要求事項 ································································································ 21
6.1 機械的要求事項 ············································································································ 21
6.2 制御上の要求事項 ········································································································· 21
6.3 電気的要求事項 ············································································································ 21
6.4 開放要求事項 ··············································································································· 21
6.5 縮退モード ·················································································································· 22
6.6 安全上の要求事項 ········································································································· 22
6.7 寿命に対する要求事項 ··································································································· 22
6.8 ハイブリッド車両の騒音に関する追加要求事項 ··································································· 22
7 試験の種類 ····················································································································· 22
7.1 一般 ··························································································································· 22
7.2 形式試験 ····················································································································· 23
7.3 任意試験 ····················································································································· 23
7.4 受渡試験 ····················································································································· 23
7.5 試験の種類 ·················································································································· 23
7.6 合否判定基準 ··············································································································· 25
8 組合せ試験 ····················································································································· 25
8.1 一般 ··························································································································· 25
8.2 試験条件 ····················································································································· 25
8.3 ESS制御 ····················································································································· 25
8.4 出力トルク ·················································································································· 26
E 4071-1:2019
(2)
ページ
8.5 システムシーケンス試験 ································································································ 26
8.6 エネルギー効率及びエネルギー消費量··············································································· 27
8.7 ESSによる車両の運用持続時間試験 ················································································· 28
8.8 環境試験 ····················································································································· 29
8.9 短絡保護試験 ··············································································································· 29
8.10 ESU耐久試験 ············································································································· 29
9 車両試験························································································································ 30
9.1 一般 ··························································································································· 30
9.2 ESS開放試験 ··············································································································· 30
9.3 車両シーケンス試験 ······································································································ 30
9.4 駆動システムの消費エネルギー測定·················································································· 30
9.5 燃料消費及び排気ガス排出量の算定(エンジン又は燃料電池の場合) ····································· 31
9.6 補助回路の消費電力量測定 ····························································································· 31
9.7 ESSによる車両の運用持続時間試験 ················································································· 31
9.8 騒音測定 ····················································································································· 31
附属書A(参考)電池及びコンデンサの充電状態(SOC)及びエネルギー状態(SOE)···················· 32
附属書B(参考)エネルギー関連の用語及び定義 ······································································· 36
附属書C(参考)この規格に適用できる火災防護の法令及び規則·················································· 42
附属書D(参考)使用者と製造業者との協定を必要とする細分箇条の一覧 ······································ 43
参考文献 ···························································································································· 45
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 47
E 4071-1:2019
(3)
まえがき
この規格は,産業標準化法第12条第1項の規定に基づき,一般社団法人日本鉄道車輌工業会(JARI)
及び一般財団法人日本規格協会(JSA)から,産業標準原案を添えて日本産業規格を制定すべきとの申出
があり,日本産業標準調査会の審議を経て,国土交通大臣が制定した日本産業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。国土交通大臣及び日本産業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
注記 工業標準化法に基づき行われた申出,日本工業標準調査会の審議等の手続は,不正競争防止法
等の一部を改正する法律附則第9条により,産業標準化法第12条第1項の申出,日本産業標準
調査会の審議等の手続を経たものとみなされる。
日本産業規格 JIS
E 4071-1:2019
鉄道車両−車上エネルギー貯蔵システム−
第1部:シリーズハイブリッドシステム
Railway applications-Rolling stock-Power supply with onboard
energy storage system-Part 1: Series hybrid system
序文
この規格は,2016年に第1版として発行されたIEC 62864-1を基とし,日本の実情を反映させるために
技術的内容を変更して作成した日本産業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JAに示す。
化石燃料由来のエネルギーの枯渇が懸念され,温室効果ガス(例 二酸化炭素,窒素酸化物,粒子状物
質など)の排出を低減する要求によって,エネルギーの効率的な利用のニーズが増している。鉄道は本来
エネルギー効率のよい輸送システムであるが,これらの要求事項に適することが望まれている。省エネル
ギーに加えてピーク電力の削減,電圧の安定化,及び景観保存地域で集電を行わないで走行したり,車上
又は地上の電源システムの故障時に次駅まで安全に走行できる能力を可能にする必要がある。これらの点
に対応するために,鉄道車両用ハイブリッドシステムが登場した。ハイブリッドシステムはエネルギー貯
蔵システムを備え,回生エネルギーを有効に利用できる。ハイブリッドシステムはエンジン又は主電源,
補助電源,駆動及びブレーキシステム,エネルギー貯蔵システムなどの間の電力の流れを能動的に制御し
てエネルギー効率を改善することが望まれている。
ハイブリッドシステムを導入する目的には,次のものがある。
・ エネルギー消費量低減
・ 車両性能の改善
・ 車上エネルギー貯蔵システムによる走行能力の提供
・ 環境影響の低減
この規格の目的は,(電気的に接続される)シリーズハイブリッドシステムの基本構成及びエネルギーの
有効利用を検証する試験を確立し,鉄道事業者及び製造業者にハイブリッドシステムを製造し評価する指
針を提供することである。
ハイブリッドシステムに関連する規格の階層(技術的構成概観)を図1に示す。ただし,図1の規格が
全てではない。
2
E 4071-1:2019
図1−JIS E 4071-1に関連する規格の階層(技術的構成概観)
この規格では,ハイブリッドシステムを次の四つの階層とする。
a) 車両/システムインタフェース(レベル1)
b) システム及びインタフェース(レベル2)
c) コンポーネント(レベル3)
d) サブコンポーネント(レベル4)
詳細は,7.1に記載する。
例えば,サブコンポーネント(レベル4)は,セル,モジュールなど(バッテリの場合,部品はJIS C 8715-1
で規定されている。)である。
1
適用範囲
この規格は,(電気的に接続された)エネルギー貯蔵システムを車上に搭載したシリーズハイブリッドシ
ステムに適用する(以下,シリーズハイブリッドシステムという。)。
シリーズハイブリッドシステムは,車上のエネルギー貯蔵システム(ESS)を含む二つ以上の電源で構
成され,電力変換装置と電動機とを組合せエネルギー管理を行い,次の特徴をもつものである。
レベル2:システム及びインタフェース
技術的構成概観
JIS E 4041
鉄道車両−完成車両の試験通則
JIS E 5011
鉄道車両−主回路システムの組合せ試験
JIS E 5008
鉄道車両−電力変換装置
IEC 60349(シリーズ)
Electric traction−Rotating electrical machines for rail and
road vehicles
(電気けん引−鉄道及び道路車両用回転機)
IEC 62928
Railway applications−Rolling stock−
Onboard lithium-ion traction batteries
(鉄道車両部品−けん引用リチウムイオン電池)
JIS E 5012-3
鉄道車両−電力用コンデンサ−
第3部:電気二重層キャパシタ
JIS E 4071-1
鉄道車両−車上エネルギー貯蔵システム−
第1部:シリーズハイブリッドシステム
レベル3:コンポーネント
レベル4:サブコンポーネント
レベル1:車両/システムインタフェース
3
E 4071-1:2019
・ エネルギー及び燃料効率を改善し,加速特性を改善,走行距離を増長し,回生電力を含む電源の出力
と容量とが限られている場合に主電源(PPS)に加えてESSを用いて主電源が故障の場合の運転継続
を行うなど,制約の緩和をする。
・ 燃料消費を低減し,排気ガスなどの排出を低減する(例えば,二酸化炭素,窒素酸化物,粒子状物質
など)。
・ 環境影響を低減する(例えば,景観への悪影響,騒音など)。
拡張的に,車上にほかのPPSをもたずESSだけを搭載する車両もこの規格で考慮する。
この規格は,次のシリーズハイブリッドシステムの基本的要求事項,特性,機能及び試験方法について
規定する。
・ 主電源,エネルギー貯蔵システム及び電力変換装置間の電力の流れを制御するエネルギー管理
・ エネルギー消費量,エネルギー効率及び回生エネルギー
・ エネルギー貯蔵システムによる車両特性
・ 組合せ試験方法
・ 完成車両の工場(静止)及び現地(走行)試験方法
注記1 この規格で電力変換装置は,一つ以上の電力変換装置(例 整流器,インバータ,チョッパ
など)から構成する機器の組合せである。
次の電源とのインタフェースも含んでいる。
・ 外部の電源
・ 車上エネルギー貯蔵システム(単独の場合を含む。)
・ 燃料電池,ディーゼル発電機
・ その他の電源
インバータと電動機との組合せとしてこの規格では,電圧形インバータで給電される誘導電動機又は同
期電動機に適用する。
電源並びにインバータ及び電動機の組合せは上記に限定せず,将来のシステムにも適用できる。
この規格は,電気的に接続されたシステム(シリーズハイブリッド)を適用範囲とし,駆動力を機械的
に伝達するシステム(パラレルハイブリッド)は含まない。
注記2 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 62864-1:2016,Railway applications−Rolling stock−Power supply with onboard energy
storage system−Part 1: Series hybrid system(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS C 0920 電気機械器具の外郭による保護等級(IPコード)
注記 対応国際規格:IEC 60529,Degrees of protection provided by enclosures (IP Code)(IDT)
JIS E 4001 鉄道車両−用語
JIS E 4031 鉄道車両用品−振動及び衝撃試験方法
4
E 4071-1:2019
注記 対応国際規格:IEC 61373,Railway applications−Rolling stock equipment−Shock and vibration
tests(MOD)
JIS E 4041 鉄道車両−完成車両の試験通則
注記 対応国際規格:IEC 61133:2016,Railway applications−Rolling stock−Testing of rolling stock on
completion of construction and before entry into service(MOD)
JIS E 5008 鉄道車両−電力変換装置
注記 対応国際規格:IEC 61287-1,Railway applications−Power converters installed on board rolling
stock−Part 1: Characteristics and test methods(MOD)
JIS E 5011 鉄道車両−主回路システムの組合せ試験
注記 対応国際規格:IEC 61377:2016,Railway applications−Rolling stock−Combined test method for
traction systems(MOD)
JIS E 5012-3 鉄道車両−電力用コンデンサ−第3部:電気二重層キャパシタ
注記 対応国際規格:IEC 61881-3,Railway applications−Rolling stock equipment−Capacitors for
power electronics−Part 3: Electric double-layer capacitors(MOD)
JIS E 5051 鉄道車両−電気的危険性に関する防護通則
注記 対応国際規格:IEC 61991,Railway applications−Rolling stock−Protective provisions against
electrical hazards(MOD)
JIS E 6102 鉄道車両−交流主電動機
注記 対応国際規格:IEC 60349-2,Electric traction−Rotating electrical machines for rail and road
vehicles−Part 2: Electronic converter-fed alternating current motors(MOD)
JIS E 6103 鉄道車両−永久磁石同期機
注記 対応国際規格:IEC 60349-4,Electric traction−Rotating electrical machines for rail and road
vehicles−Part 4: Permanent magnet synchronous electrical machines connected to an electronic
converter(MOD)
IEC 62262,Degrees of protection provided by enclosures for electrical equipment against external mechanical
impacts (IK code)
IEC 62498-1:2010,Railway applications−Environmental conditions for equipment−Part 1: Equipment on
board rolling stock
3
用語,定義及び略語
この規格で用いる主な用語,定義及び略語は,JIS E 4001によるほか,次による。
3.1
用語及び定義
3.1.1
ハイブリッド(hybrid)
ある特定の目的のために二つ以上の異質のものを組み合わせたシステム。
注記 鉄道車両用として動力源を複数用いる方法と,電源を複数用いる方法とがある。
3.1.2
パラレルハイブリッド(parallel hybrid)
複数の動力源を車輪の駆動に使用するシステム。
注記 エンジンからの駆動力とモータからの駆動力とがトランスミッションを介して車輪に伝達され
5
E 4071-1:2019
る。
3.1.3
シリーズハイブリッド(series hybrid)
複数の電源からの電力を用いて協調動作を行い,電力変換装置を通じて推進用モータに供給するシステ
ム。
注記 車輪はモータの駆動力だけで駆動される。
3.1.4
ハイブリッドシステム車両(hybrid vehicle)
車上にエネルギー貯蔵システムを搭載してエネルギーを貯蔵する手段を設け,貯蔵エネルギーと発電装
置又は架線からの電力とを使用して駆動される車両。
3.1.5
(シリーズハイブリッドの)サブシステム[subsystem(of a series hybrid system)]
シリーズハイブリッドシステムの構成品。
例 主電源,エネルギー貯蔵システム,主回路装置
3.1.6
(シリーズハイブリッドの)コンポーネント[component(of a series hybrid system)]
サブシステム(3.1.5参照)の構成品。
例 電力変換装置,モータ,ディーゼル発電機,エネルギー貯蔵ユニット
3.1.7
(シリーズハイブリッドの)サブコンポーネント[subcomponent(of a series hybrid system)]
コンポーネント(3.1.6参照)の構成品。
例 リチウム二次電池,電気二重層キャパシタ
3.1.8
消費エネルギー(energy consumption)
規定の運転(期間,距離,速度など)における,車両全体での総消費エネルギー。
注記 電気エネルギーの場合は,消費電力量という。
3.1.9
エネルギー消費原単位(specific energy consumption)
単位距離及び単位質量に対する消費エネルギー。
注記1 消費電力量を距離,車両質量,車両数,乗車人数,座席数などで除した値。単位記号は,
kWh/(t·km),kWh/(car·km),kWh/(person·km) 又はkWh/(seat·km),ほかを用いる。
注記2 車上の電源装置,例えば,ディーゼル発電機,燃料電池を用いる場合は,単位記号は燃料の
種類によってl/(t·km),l/(car·km),l/(person·km) 又はl/(seat·km) を用いてもよい。
3.1.10
電源(power source)
主回路機器,及び/又は補助電源装置,及び/又はエネルギー貯蔵システムに電力変換装置を経由して
電力を供給する装置。
注記 発電装置用の電力変換装置(燃料電池のチョッパなど)及びエネルギー貯蔵ユニット,又はシ
ステム用の電力変換装置(エネルギー貯蔵システム用チョッパなど)は電源に含めるが,駆動
用の電力変換装置及び補助電源用の電力変換装置は電源には含まない。
6
E 4071-1:2019
3.1.11
主電源,PPS(primary power source)
車上に貯蔵した燃料を消費して又は外部電源のエネルギーを取り込んで,電気エネルギーをシリーズハ
イブリッドシステムのほかのサブシステムに供給することを主目的とするサブシステム。
3.1.12
主回路装置,TE(traction equipment)
電気エネルギーの供給を受け,車両を駆動するけん引力を出力することを主目的とするシリーズハイブ
リッドシステムのサブシステム(主電動機及び制御装置)。
3.1.13
充電状態,SOC(state of charge)
ほかの関連規格で示されるように通常満充電に対する百分率で表した放電可能な残容量。
注記 SOCの実際の定義は,選択する技術に依存する。SOCは,電池に適用できる(附属書A参照)。
3.1.14
エネルギー状態,SOE(state of energy)
ほかの関連規格で示されるように通常満充電に対する百分率で表した放電可能な残エネルギー。
注記 SOEの実際の定義は選択する技術に依存する。SOEは電池とコンデンサの両方に適用できる(附
属書A参照)。
3.1.15
寿命末期,EOL(end of life)
エネルギー貯蔵ユニット(ESU)が使用者と製造業者とが最初に協定した要求機能又は運転パターンを
実行できなくなった時点。
3.1.16
寿命初期,BOL(beginning of life)
ESUが製造業者の出荷時の最低性能として十分に使用可能な定格容量,又は定格エネルギーを保持して
いる時点。
3.1.17
容量の定義
注記 附属書A参照。
3.1.17.1
容量(capacity)
ESUから取り出せる電荷。
注記1 電池の場合,電荷は,通常,アンペアアワー(Ah)で表す。
注記2 コンデンサの場合,電荷は,通常,クーロン(C)で表す。
注記3 静電容量は単位ファラッド(F)で測定し,電荷(C)を電圧(U)で除した値で,電池の容
量とは異なる。
3.1.17.2
理論容量(theoretical capacity)
損失なしで使用可能な最大容量。
3.1.17.3
定格容量(rated capacity)
7
E 4071-1:2019
関連規格に示す“定格”条件で測定する使用可能な容量。
注記 IEC 62928参照。
3.1.17.4
使用可能容量(usable capacity)
用途に従って放電し得る容量。
3.1.18
エネルギーの定義
注記 附属書A参照。
3.1.18.1
理論エネルギー(theoretical energy)
損失なしでESUに蓄えられる使用可能な最大エネルギー。
3.1.18.2
定格エネルギー(rated energy)
関連規格に示す“定格”条件で測定する使用可能なエネルギー。
注記 定格エネルギー貯蔵容量の実際の定義は,選択する貯蔵技術に依存する。
3.1.18.3
使用可能エネルギー(usable energy)
用途に従って放電し得るエネルギー。
3.1.19
運転パターン(operational pattern)
使用者及び/又は製造業者が定義する補助負荷を含む負荷サイクル,補助負荷,エネルギーの安全マー
ジン,縮退運転モードなどの運転要求。
3.1.20
エネルギー貯蔵ユニット,ESU(energy storage unit)
電池,電気二重層キャパシタ,フライホイールなどのエネルギー貯蔵技術で構成する実際の機器。
注記 機器については関連規格参照。
3.1.21
電池(battery)
この規格では,主に駆動用に使用するESU。
注記 この規格は補助回路電池を含まない(IEC 62973-1参照)。
3.1.22
エネルギー貯蔵システム,ESS(energy storage system)
一つ以上のESU及び電力変換装置,制御装置及びモニタシステム,リアクトル,保護装置,冷却システ
ムなどの直流リンクに接続されるほかの機器で構成する実際のシステム。
3.2
略語
APS
補助電源装置(Auxiliary power supply)
AUX
補助回路機器(Auxiliaries)
BOL
寿命初期(Beginning of life)
EDLC
電気二重層キャパシタ(Electric double-layer capacitor)
EOL
寿命末期(End of life)
8
E 4071-1:2019
ESU
エネルギー貯蔵ユニット(Energy storage unit)
ESS
エネルギー貯蔵システム(Energy storage system)
PPS
主電源(Primary power source)
SOC
充電状態(State of charge)
SOE
エネルギー状態(State of energy)
4
ハイブリッドシステムの電源構成
4.1
一般
4.1.1
概観
この規格で適用するシリーズハイブリッドシステムは,種々の電源構成を取り得る。箇条4に数例を挙
げて可能な構成の概要を示す。しかし,これらの例は最終システムを制約するものではない。
4.1.2
システム構成の要求事項
箇条1に示すようにシリーズハイブリッドシステムは,一つのESSを含む二つ以上の電源と主たる負荷
となる主回路装置とで構成する。システムは,主回路装置が回生ブレーキ時に発生する電力を完全,又は
一部吸収できない場合に,ブレーキ抵抗器のような従たる負荷を設ける場合もある。これらのシステムは
電気的に接続され,電力を相互に交換可能とする。主回路装置に加えてシリーズハイブリッドシステムは,
一つ以上の補助電源装置(APS)を設ける場合がある。しかし,APSとシリーズハイブリッドシステムの
ほかのサブシステムとは電気的に接続される場合,非電気的に接続される場合,又は接続がない場合,す
なわち,APSが主回路から独立している場合がある。APSを主回路に接続する場合は,エネルギー消費に
重大な影響があるので,補助負荷を考慮しなければならない。
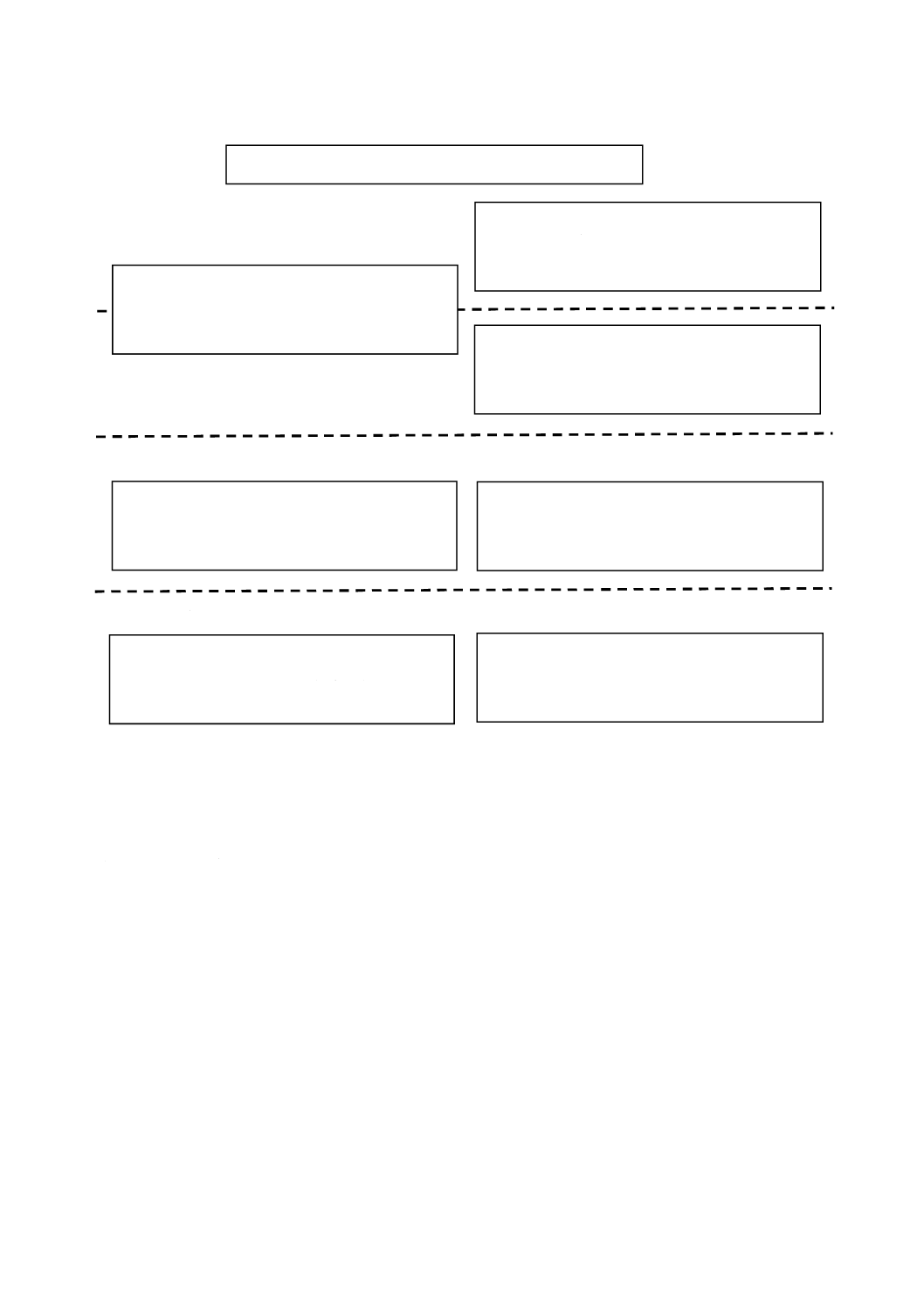
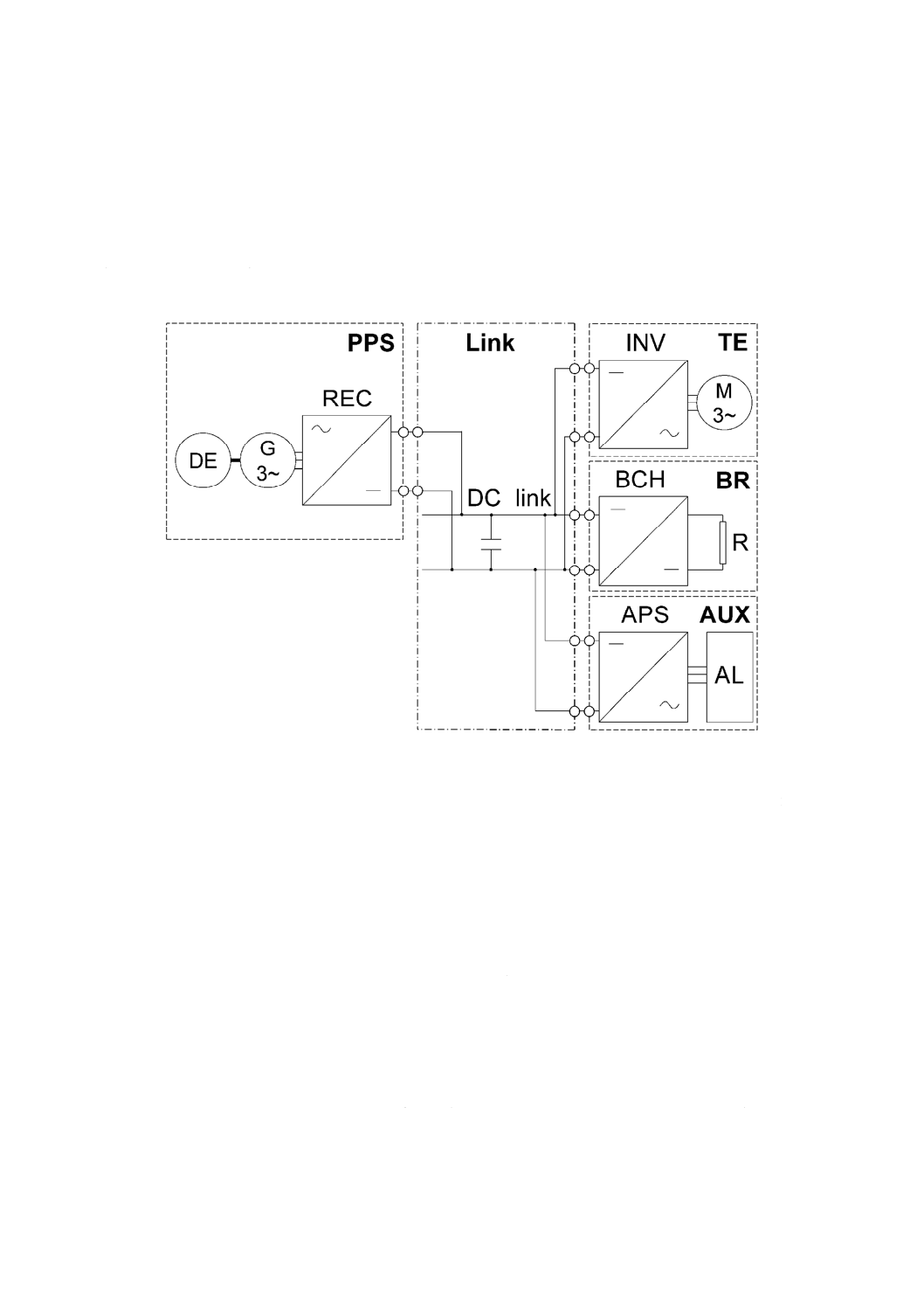
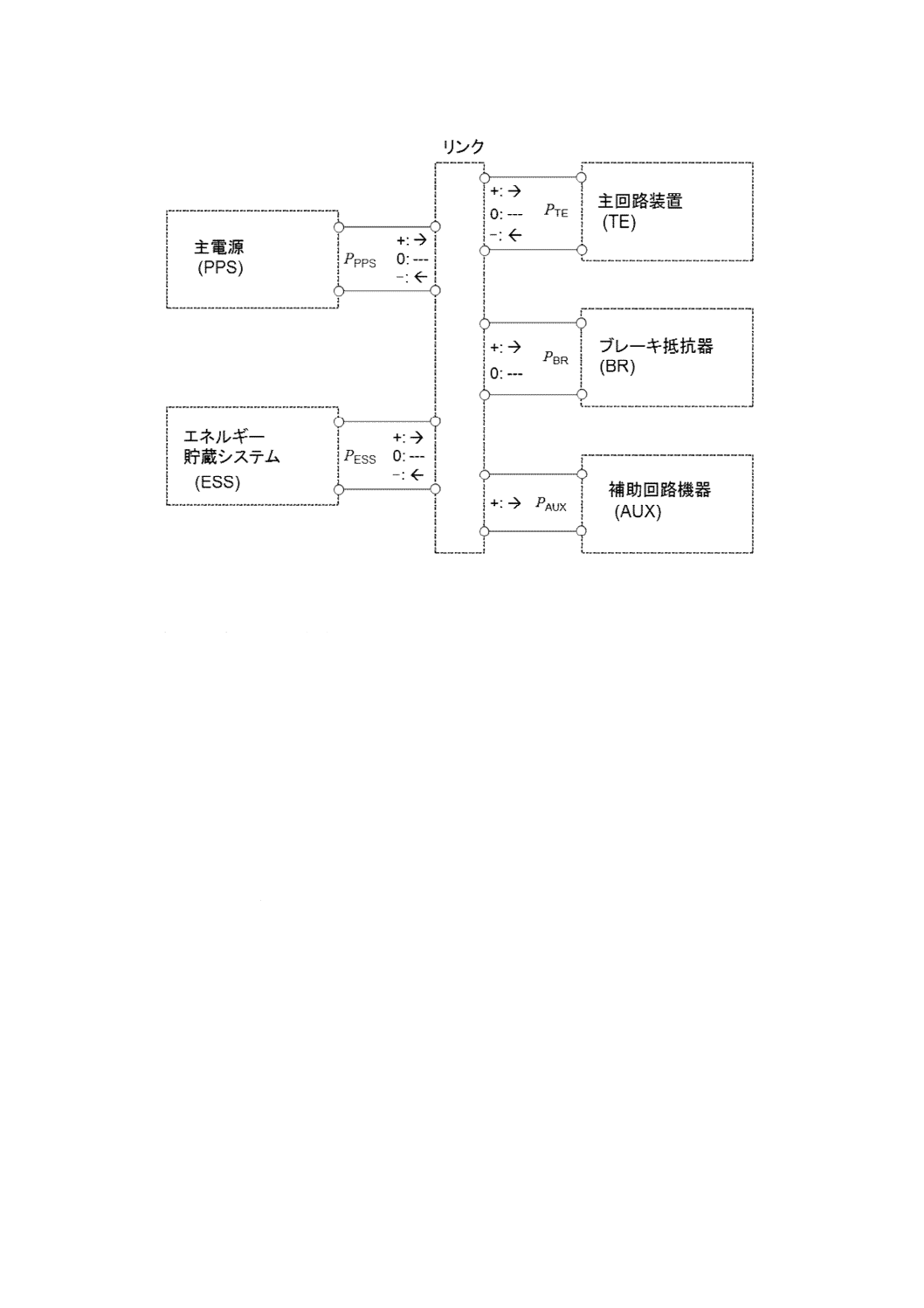
図2は五つのサブシステム,つまり主電源(PPS),エネルギー貯蔵システム(ESS),主回路装置(TE),
補助回路機器(AUX)(APS及びその補助負荷)及び従たる負荷としてのブレーキ抵抗器(BR)がある場
合の,シリーズハイブリッドシステムのブロック図の例である。図2でブロック間のリンクは,この主な
サブシステム間での電力の受渡しを示す。
図2に示すようにPPSの可能な構成は,次のようになるが,これに限るものではない。
・ ディーゼル発電機と電力変換装置との組合せ
・ 燃料電池及び電力変換装置
・ 直流架線
・ 交流架線及び電力変換装置
図2に示すようにESSとして使用可能な貯蔵技術は,次のようになるが,これに限るものではない。
・ リチウム二次電池
・ ニッケル水素電池
・ 電気二重層キャパシタ(EDLC)
・ フライホイール
図2に示すように主回路装置として使用可能な構成は,次のようになるが,これに限るものではない。
・ 四象限チョッパ装置及び直流主電動機
・ 電圧形インバータ及び誘導主電動機
・ 電圧形インバータ及び永久磁石同期電動機
注記 箇条4の負荷という用語は,図2においてリンクブロックから受電するサブシステムを表す。
これらのサブシステムは,常に一般的な意味合いでの負荷とみなされる訳ではない。例えば,
9
E 4071-1:2019
主回路装置は,車両を加速するためにけん引力を発生し,ときには車両の電力源とみなされる。
DE
ディーゼルエンジン
PPPS
主電源(PPS)の電力
PTE
主回路装置(TE)の電力
PESS
エネルギー貯蔵システム(ESS)の電力
PBR
ブレーキ抵抗器(BR)の電力
PAUX
補助回路機器(AUX)の電力
注記 上記の表示記号は,4.1.3参照。
図2−シリーズハイブリッドシステムのブロック図
4.1.3
シリーズハイブリッドシステムの主な運転モード
図2においてリンクブロック及び五つの主なサブシステムの電力の流れは,次のとおりである。
a) PPPSで示すPPSとリンクブロック間
b) PESSで示すESSとリンクブロック間
c) PTEで示すリンクブロックと主回路装置間
d) PBRで示すリンクブロックとブレーキ抵抗器間
e) PAUXで示すリンクブロックと補助回路機器(AUX)間
この機器間で,
・ a),b) 及びc) は双方向で,PPPS,PESS及びPTEは,正負両方の値を取り得る。
・ d) は一方向で,PBRは負にはならないが,ゼロは取り得る。
・ e) も一方向であるが,d) と異なりPAUXは,常に正で作動中はゼロにならない。
図2でこれらの値の符号(+,0及び−)及びその電力の流れの方向は,次のとおりである。例えば,
PPS又はESSから電力を得てハイブリッド車両が加速するときなど,電源サブシステムからリンクブロッ
クへの電力の流れ及びリンクブロックから,負荷サブシステムへの電力の流れの方向を正と定義している。
(AUX)
10
E 4071-1:2019
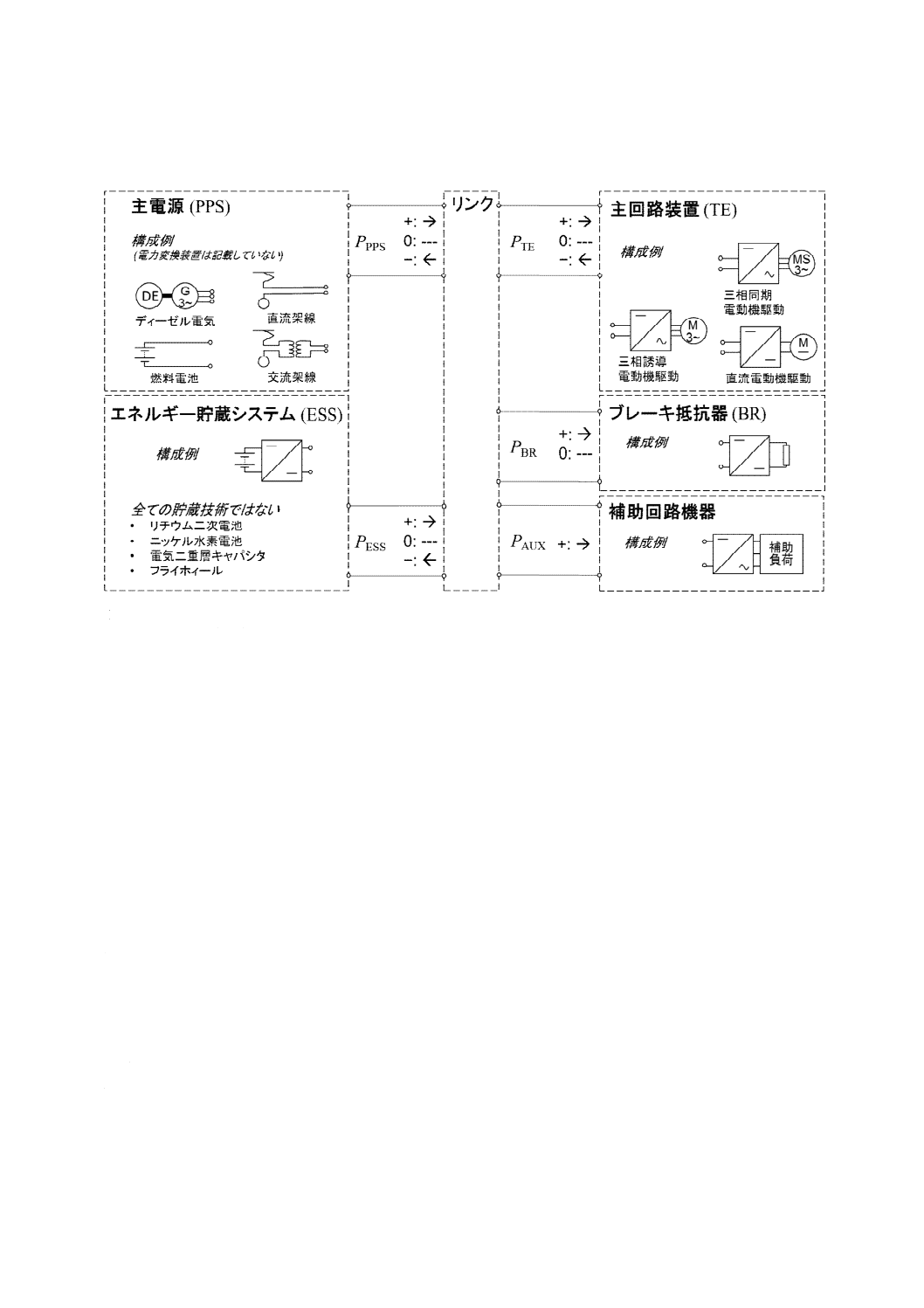
この表記を用い,表1のようにこの値の符号によって主な運転モードを分類することができる。
表1のモードで,モードII(純粋主電源モード)は,主回路装置で必要な全電力をPPSが供給するモー
ドで,この箇条で示すシステム構成例の全てで使用できる。同様にモードXIII(アイドリングモード)は,
主回路装置が必要とする電力がゼロの場合に補助回路機器で必要な全電力をPPSが供給するモードで,こ
の箇条で示すシステム構成例の全てで使用できる。モードXIV(ESSだけでの惰行モード)もまた,PPS
が供給する電力と主回路装置とが必要とする電力が共にゼロの場合に補助回路機器が必要な全電力をESS
が供給するモードである。モードX(回生ブレーキからESS及び主電源への給電モード),XI(回生ブレ
ーキからESSだけへの給電モード)及びXII(ブレーキ時の補助充電モード)をESSの充電だけに用い,
XIV(ESSだけでの惰行モード)をESSの放電に用いるエネルギー管理方式とするシリーズハイブリッド
システムもある。
表1−シリーズハイブリッドシステムの主な運転モード
モード
PPPS
PESS
PTE
PAUX
PBR
摘要
図4
図5
図6
図7
I
+
−
+
+
0
力行時の補助充電
Y
Y
Y
N
II
+
0
+
+
0
純粋主電源
Y
Y
Y
Y
III
+
+
+
+
0
パワーアシスト
Y
Y
Y
Y
IV
0
+
+
+
0
ESSだけでの走行
Y
Y
Y
N
V
−
+
+
+
0
ESSから主回路及び
電力網
R
N
Y
N
VI
+
−
0
+
0
主電源によるESS
充電
Y
Y
Y
N
VII
−
+
0
+
0
ESSから電力網
R
N
Y
N
VIII
−
+
−
+
0
ESS及び回生ブレー
キから電力網
R
N
Y
N
IX
−
0
−
+
0
純粋回生ブレーキ
Y
N
Y
Y
X
−
−
−
+
0
回生ブレーキから
ESS及び主電源
Y
N
Y
Y
XI
0
−
−
+
0
回生ブレーキから
ESS
Y
Y
Y
N
XII
+
−
−
+
0
ブレーキ時の補助
充電
Y
Y
Y
N
XIII
+
0
0
+
0
アイドリング
Y
Y
Y
Y
XIV
0
+
0
+
0
ESSだけでの惰行
Y
Y
Y
N
XV
−
−
−
+
+
ESS充電と主電源回
生とを伴う発電ブ
レーキ
Y
N
Y
Y
XVI
−
0
−
+
+
主電源回生を伴う
発電ブレーキ
Y
N
Y
Y
XVII
0
−
−
+
+
ESS充電を伴う発電
ブレーキ
Y
Y
Y
N
XVIII
0
0
−
+
+
純粋発電ブレーキ
Y
Y
Y
Y
Y:このモードは,図の構成に適用できる。
N:このモードは,図の構成に適用できない。
R:このモードは,まれに図の構成に適用できる。
11
E 4071-1:2019
4.1.4
シリーズハイブリッドシステムの典型的な構成
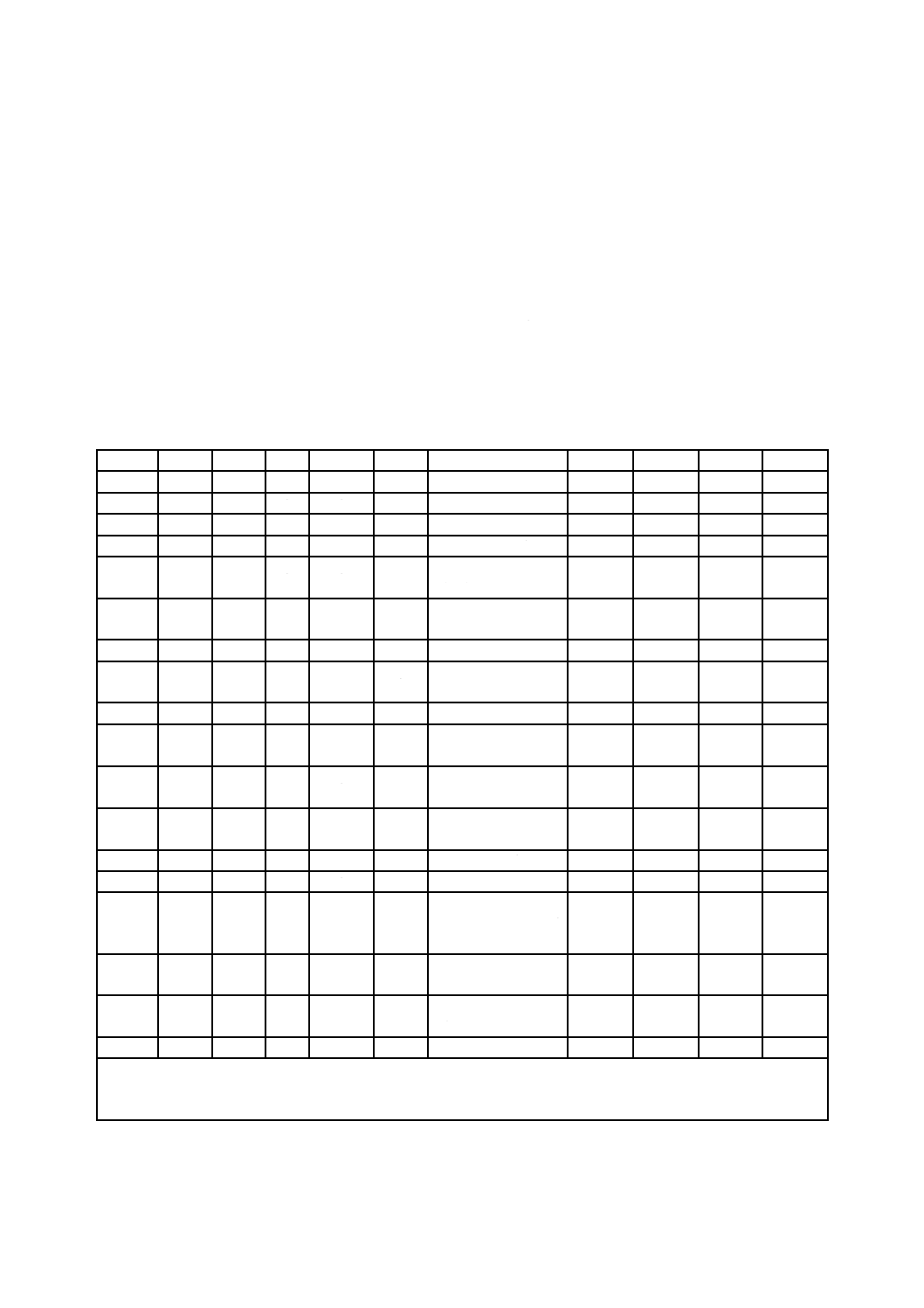
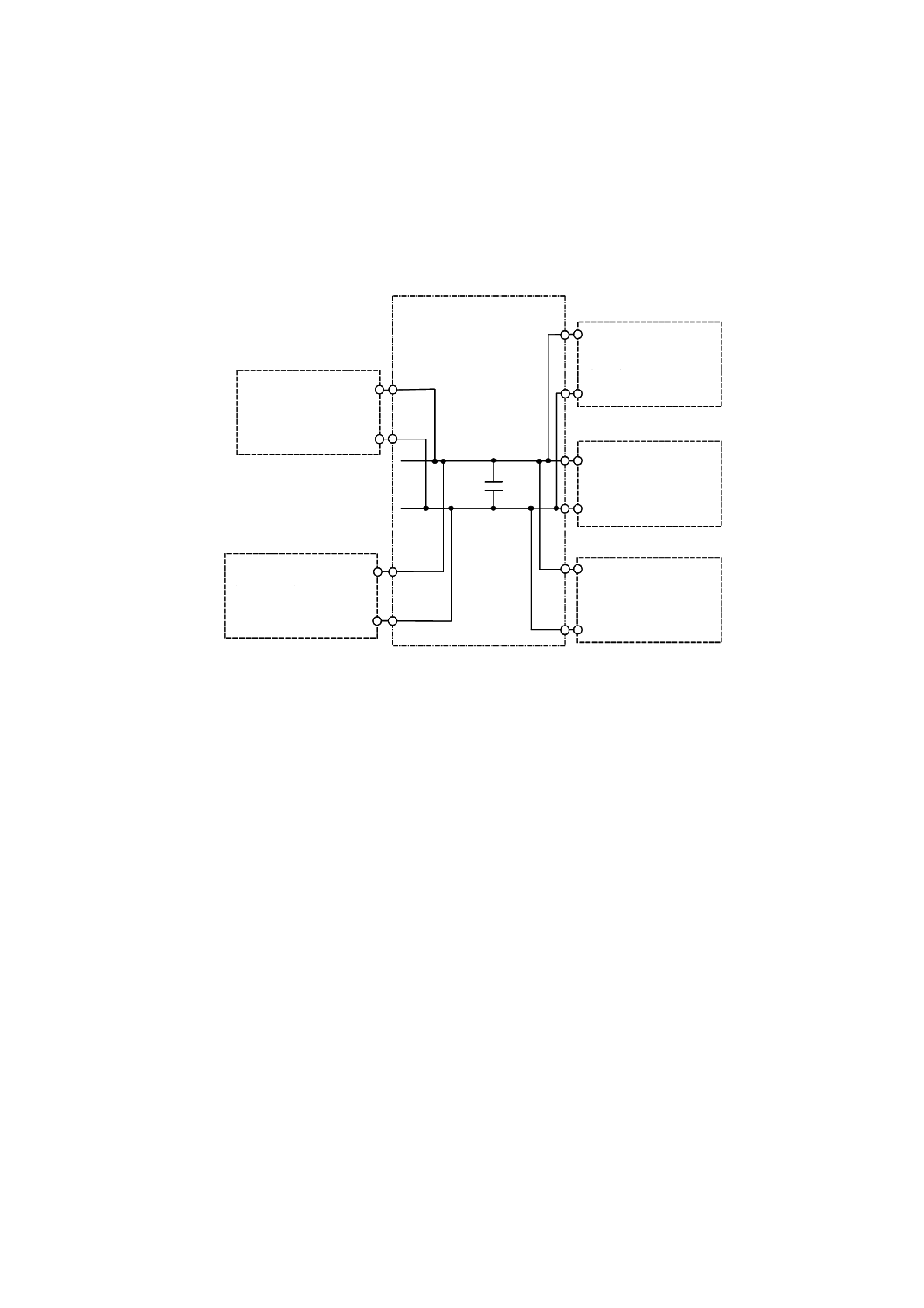
図3はシリーズハイブリッドシステムで最も一般的なブロック図を示す。この図では五つの主なサブシ
ステム,つまりPPS,ESS,主回路装置,補助回路機器及びブレーキ抵抗器が全て共通の直流リンクに接
続されている。4.2.1,4.2.2及び4.2.3の構成例は,図3と同じ構造である。
しかし,図3とは異なるほかの構成もあり得る。その一例を,4.2.4に示す。
図3−全ての主回路サブシステムが共通の直流リンクに接続されている
シリーズハイブリッドシステムの構成例
4.2
適用例
4.2.1
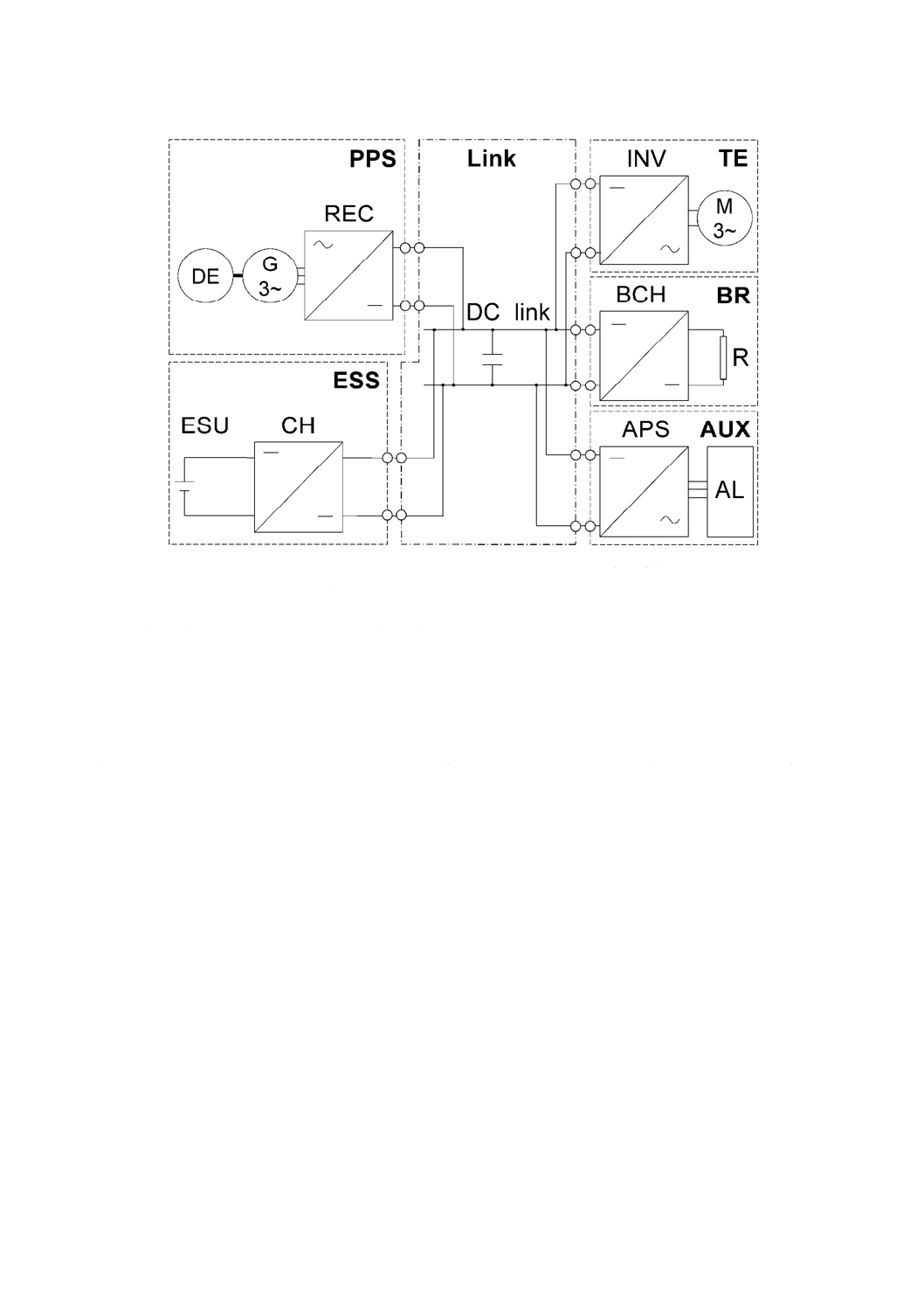
電気式ディーゼル車
電気式ディーゼル車の駆動システムにESSが組み込まれている構成例を,図4に示す。
補助回路機器
(AUX)
主回路装置
(TE)
リンク
直流リンク
主電源
(PPS)
エネルギー貯蔵
システム
(ESS)
ブレーキ
抵抗器
(BR)
12
E 4071-1:2019
PPS 主電源
BR ブレーキ抵抗器
DE ディーゼルエンジン
CH (ESS用)チョッパ装置
R
抵抗器
ESS
エネルギー貯蔵システム
AUX 補助回路機器
REC 整流器
INV (TE用)インバータ装置
APS 補助電源装置
TE
主回路装置
ESU エネルギー貯蔵ユニット
BCH (BR用)ブレーキチョッパ装置
AL
補助負荷
図4−電気式ディーゼル車のシリーズハイブリッドシステム
ESSは回生ブレーキエネルギーで充電される(表1のモードXI),又は必要があれば小負荷若しくは無
負荷時(表1のモードI又はVI)に充電される。蓄積されたエネルギーはハイブリッド車の次の加速時に
再利用される(表1のモードIII又はIV)か,又は特定用途としてエネルギー管理の戦略で決定する。停
車中に補助負荷への給電にESSの蓄積エネルギーを使用して,エンジンを自動的に停止させ(アイドリン
グストップ)て,燃料消費及び騒音を低減することができる。
回生ブレーキ電力がESSの最大充電電力より大きい場合,エンジンブレーキ若しくは排気ブレーキ(表
1のモードIX又はX),又はブレーキ抵抗器(表1のモードXV,XVI,XVII又はXVIII)で超過した電力
を消費することができる。
この構成で表1のモードV,VII及びVIIIは,異なる用途で比較的まれな運転状況となる。モードVで
ESSは,主回路装置及び補助負荷で必要な電力を供給しながら,ディーゼルエンジン及び発電機はESSか
らエネルギーを消費するため受電する。モードVIIでESSは補助負荷で必要な電力を供給しながら,ディ
ーゼルエンジン及び発電機はESSからエネルギーを消費するため受電する。モードVIIIで主回路装置は,
回生電力を発生しながら,ESSは同時に放電し,ディーゼルエンジン及び発電機はESS及び主回路装置か
らエネルギーを消費するため受電する。
4.2.2
燃料電池車両
燃料電池車両の駆動システムにESSが組み込まれている構成例を,図5に示す。そのエネルギー管理の
戦略は4.2.1の電気式ディーゼル車と同等である。しかし,燃料電池は,一般に電力を吸収できないので
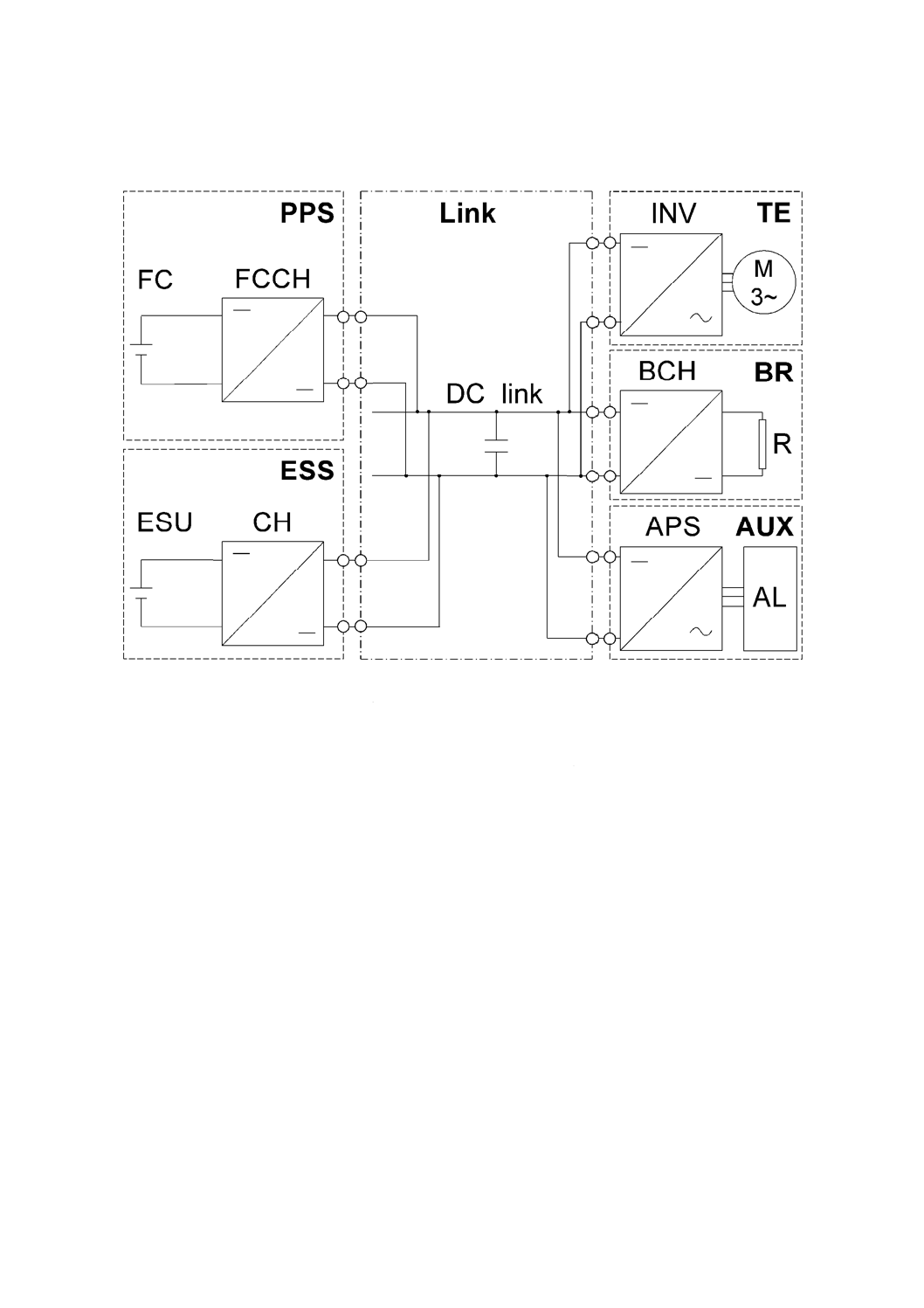
13
E 4071-1:2019
表1のモードV,VIIからX,XV及びXVIは適用できない。
PPS 主電源
BR ブレーキ抵抗器
FC
燃料電池
CH (ESS用)チョッパ装置
R
抵抗器
ESS
エネルギー貯蔵システム
AUX
補助回路機器
FCCH 燃料電池用チョッパ装置
INV
(TE用)インバータ装置
APS
補助電源装置
TE
主回路装置
ESU エネルギー貯蔵ユニット
BCH (BR用)ブレーキチョッパ装置
AL
補助負荷
図5−燃料電池車両のシリーズハイブリッドシステム
4.2.3
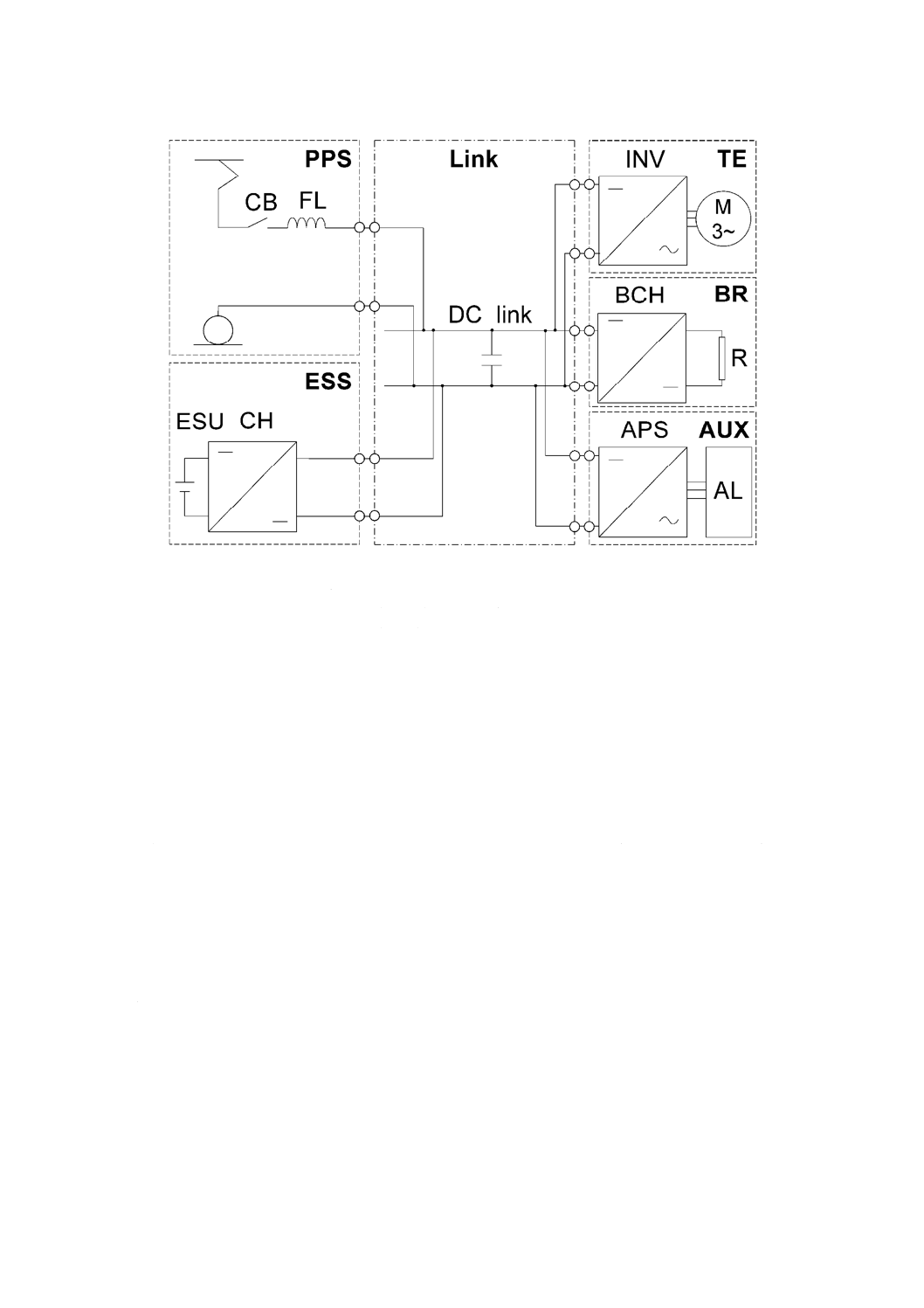
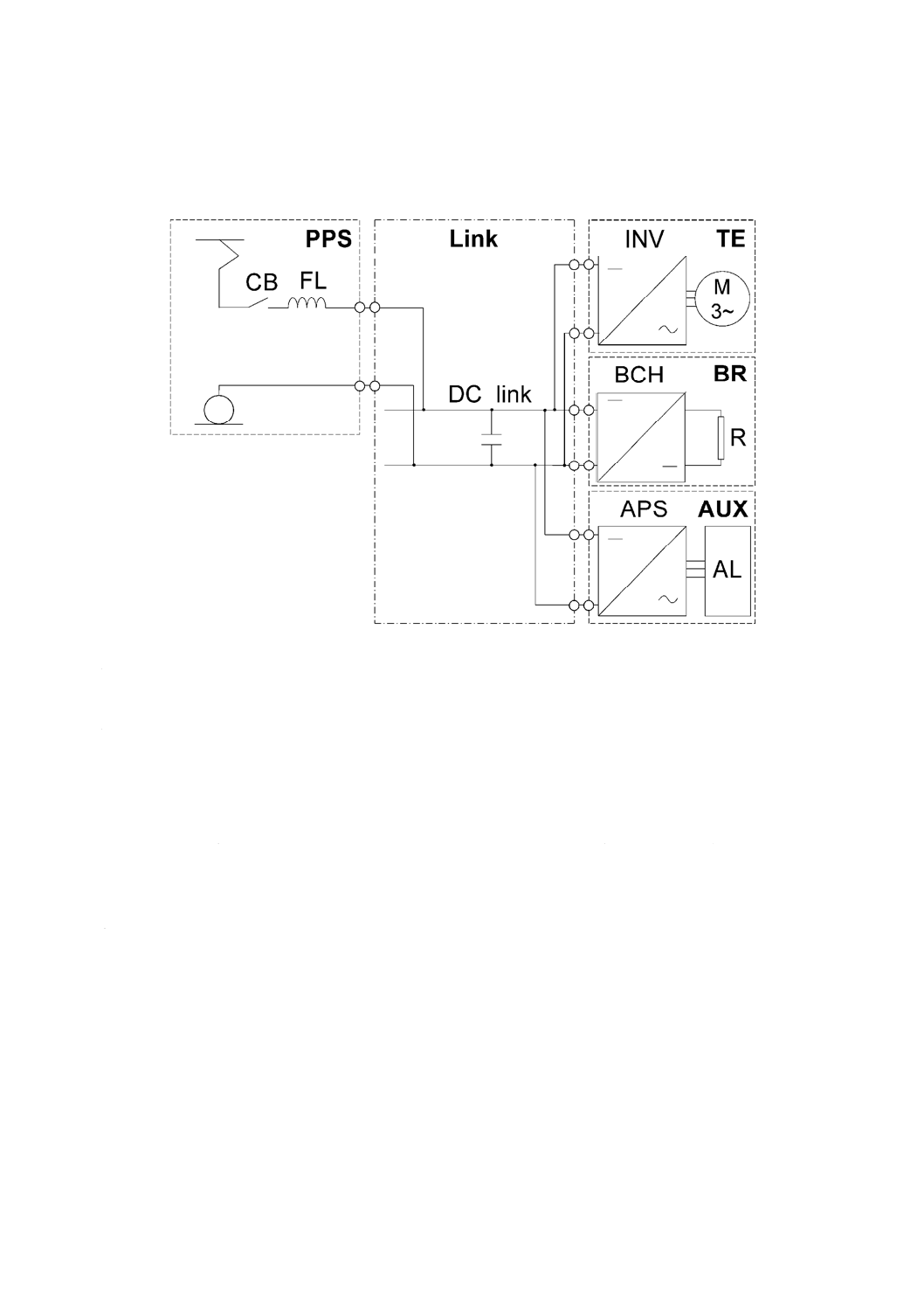
直流電気車:ESS並列接続
直流電気車でESSが並列接続された構成例を,図6に示す。
14
E 4071-1:2019
PPS
主電源
BR
ブレーキ抵抗器
ESU エネルギー貯蔵ユニット
FL
フィルタリアクトル
R
抵抗器
ESS
エネルギー貯蔵システム
AUX 補助回路機器
CH
(ESS用)チョッパ装置
INV (TE用)インバータ装置
APS 補助電源装置
TE
主回路装置
CB
遮断器
BCH (BR用)ブレーキチョッパ装置
AL
補助負荷
図6−エネルギー貯蔵システムを並列接続する電気車のシリーズハイブリッドシステム
ESSは,ブレーキ(表1のモードX,XI又はXII)及び必要に応じてその他の運転モード(加速,惰行
など)(表1のモードI又はVI)の両方で充電できる。地上側が回生エネルギーを十分に受け取れない場
合も,モードX又はXIを用いることで回生ブレーキを使用することができる。地上側が十分に回生電力
を受け取ることができれば,主回路装置の全電力は地上側に返還される(表1のモードIX)。ブレーキ中
の主回路装置の回生電力がESSの充電電力と地上側で受け取れる電力との合計値より大きい場合,過剰電
力は,ブレーキ抵抗器で消費することができる(表1のモードXV,XVI,XVII又はXVIII)。
同様にESSは,加速時(表1のモードIII,IV又はV)及び必要に応じてその他の運転モード(ブレー
キ,惰行など)(表1のモードVII又はVIII)の両方で蓄積エネルギーを放電できる。モードIII又はIVを
用いることで主回路装置で消費する電力を減少することなく,つまり加速性能に影響せずに,加速時の地
上側から車両への入力電力を低減できる。
架線電圧の安定又は自動運転などの全体のシステム効率を最大にするか,所期の性能特性を保つために,
十分に設計された戦略を基に運転モードを選択することが望ましい。システムの電力の流れ及びESSの
SOCは,常に監視し制御することが望ましい。
このシステムは図6のPPSブロックに適宜電力変換装置又は変圧器を追加することで,交流き電を含む
複電源で運転する鉄道車両に容易に拡張できる。また,直流電気車のPPSブロックにチョッパ装置を設け,
ESSブロックのチョッパ装置を遮断器に置き換える例もある。
15
E 4071-1:2019
4.2.4
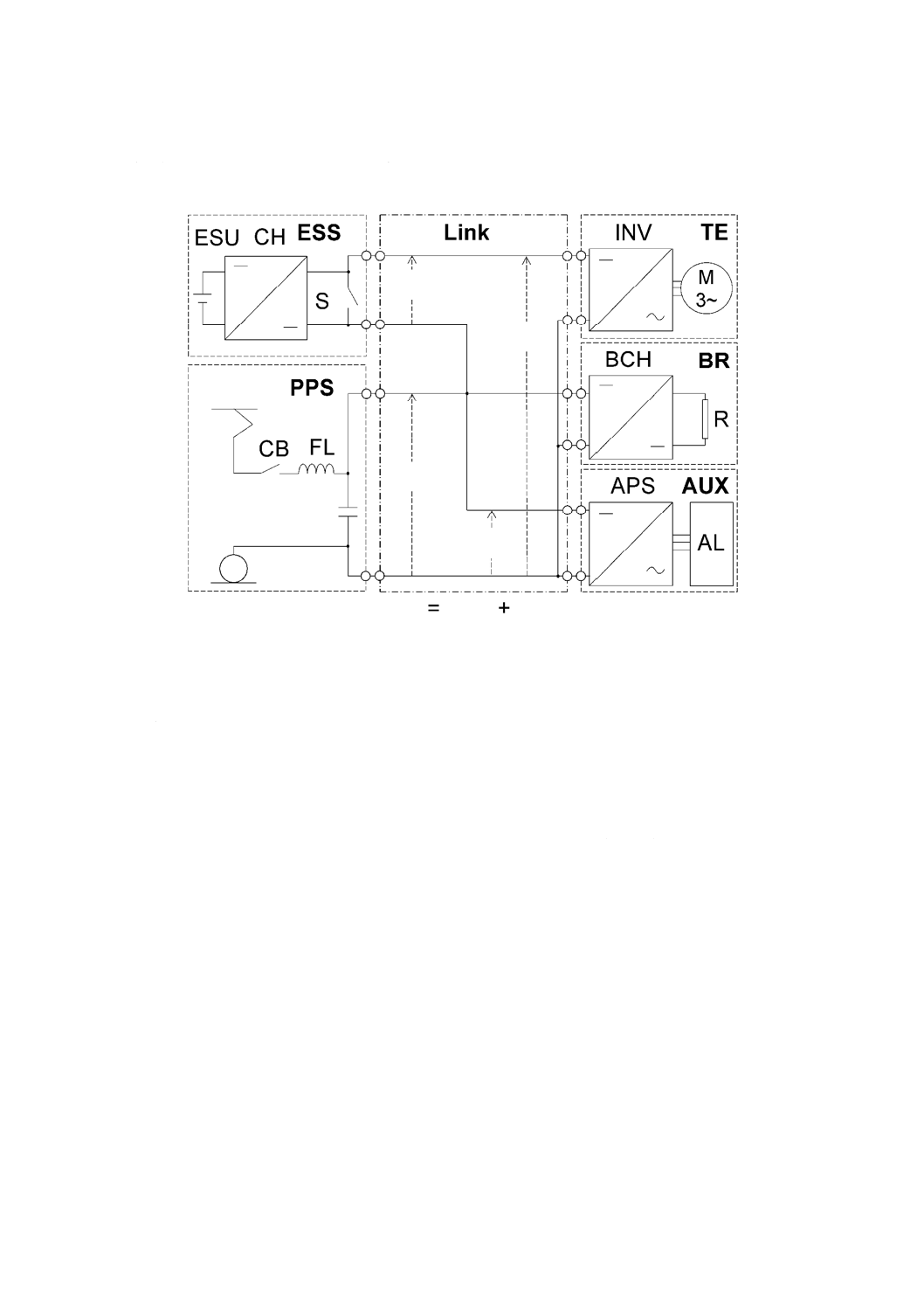
直流電気車:ESS直列接続
直流電気車でESSが直列接続された構成例を,図7に示す。
PPS
主電源
BR
ブレーキ抵抗器
ESU エネルギー貯蔵ユニット
FL
フィルタリアクトル
R
抵抗器
ESS
エネルギー貯蔵システム
AUX 補助回路機器
CH
(ESS用)チョッパ装置
INV (TE用)インバータ装置
APS 補助電源装置
TE
主回路装置
CB
遮断器
BCH (BR用)ブレーキチョッパ装置
AL
補助負荷
S
ESSバイパススイッチ
UPPS 主電源電圧,架線電圧
UESS ESS出力電圧
UTE
主回路装置出力電圧
図7−エネルギー貯蔵システムを直列接続する電気車のシリーズハイブリッドシステム
図4,図5及び図6の例と異なり,図7の構成は,主なサブシステムが接続される共通の直流リンクが
なく,図3と同じ構成とはみなせない。しかし,図2のようなブロック構成となる。
この構成ではESSは直流架線に直列に接続され,主回路インバータの入力電圧UESSはESS電圧UESSと
架線電圧UPPSとの和となる。この構成ではUTEはUPPSより大きくなり,主回路装置は地上側に返還するハ
イブリッド車の回生電力を増加させることなく,主回路インバータの出力電流も増やすことなく,より大
きな電力を扱うことができる。それゆえブレーキ中に電動機電圧を高めることで,回生ブレーキの範囲を
高速側に広げることができる。
UESSを負でないと仮定し,ESSはブレーキ中(表1のモードX及びXV)だけで充電でき,ESSに貯蔵
したエネルギーは,加速時(表1のモードIII)でだけ放電する。表1のモードI,IV,VからVIII,XI,
XII,XIV及びXVIIは適用できない。
UESS
UTE
UPPS
UPPS
UPPS
UTE
UESS
16
E 4071-1:2019
4.3
シリーズハイブリッドシステムの性能
4.3.1
効率改善
シリーズハイブリッドシステムは,回生ブレーキを利用することで非ハイブリッドシステムより高効率
に設計できる。
例えば,図8に示す電気式ディーゼルシステムは,回生ブレーキを利用できない。図4のようにESSを
追加することで回生ブレーキが可能となる。
PPS
主電源
BR
ブレーキ抵抗器
DE
ディーゼルエンジン
BCH (BR用)ブレーキチョッパ装置
AL
補助負荷
TE
主回路装置
AUX 補助回路機器
REC 整流器
R
抵抗器
INV (TE用)インバータ装置
APS 補助電源装置
図8−(ESSのない)電気式ディーゼル車の駆動システム
車上ESSは,架線が給電する電車の回生ブレーキの利用率を向上させることができる。図9に示す車上
ESSのないシステムでは,地上側がハイブリッド車の回生電力を受け取ることができない場合,回生ブレ
ーキを使用することができない。図6に示すようにESSを追加すれば車上ESSが主回路装置の回生電力を
吸収することで,回生ブレーキが使用できるようになる。
回生ブレーキに加えシリーズハイブリッドシステムは,PPSをより効率的運転条件で利用することでハ
イブリッドでないシステムより高効率に設計できる。
例えば,ディーゼルエンジン及び発電機は,ある動作点(例えば,エンジン速度,パワー)で最高効率
となる。しかし,図8に示す従来の電気式ディーゼルシステムでは,エンジン発電機は,最適動作点以外
での出力を余儀なくされる。図4に示すようにESSを追加することでエンジン発電機は,最高効率点のま
ま制御できる。
17
E 4071-1:2019
上記のように色々な構成モードを取り得る。エネルギーに関する定義によって適切に評価することが重
要である。これらの考え方を,附属書Bに示す。
PPS
主電源
AUX 補助回路機器
CB
遮断器
BCH (BR用)ブレーキチョッパ装置
AL
補助負荷
TE
主回路装置
FL
フィルタリアクトル
R
抵抗器
BR
ブレーキ抵抗器
INV (TE用)インバータ装置
APS 補助電源装置
図9−(ESSのない)直流電気車の駆動システム
4.3.2
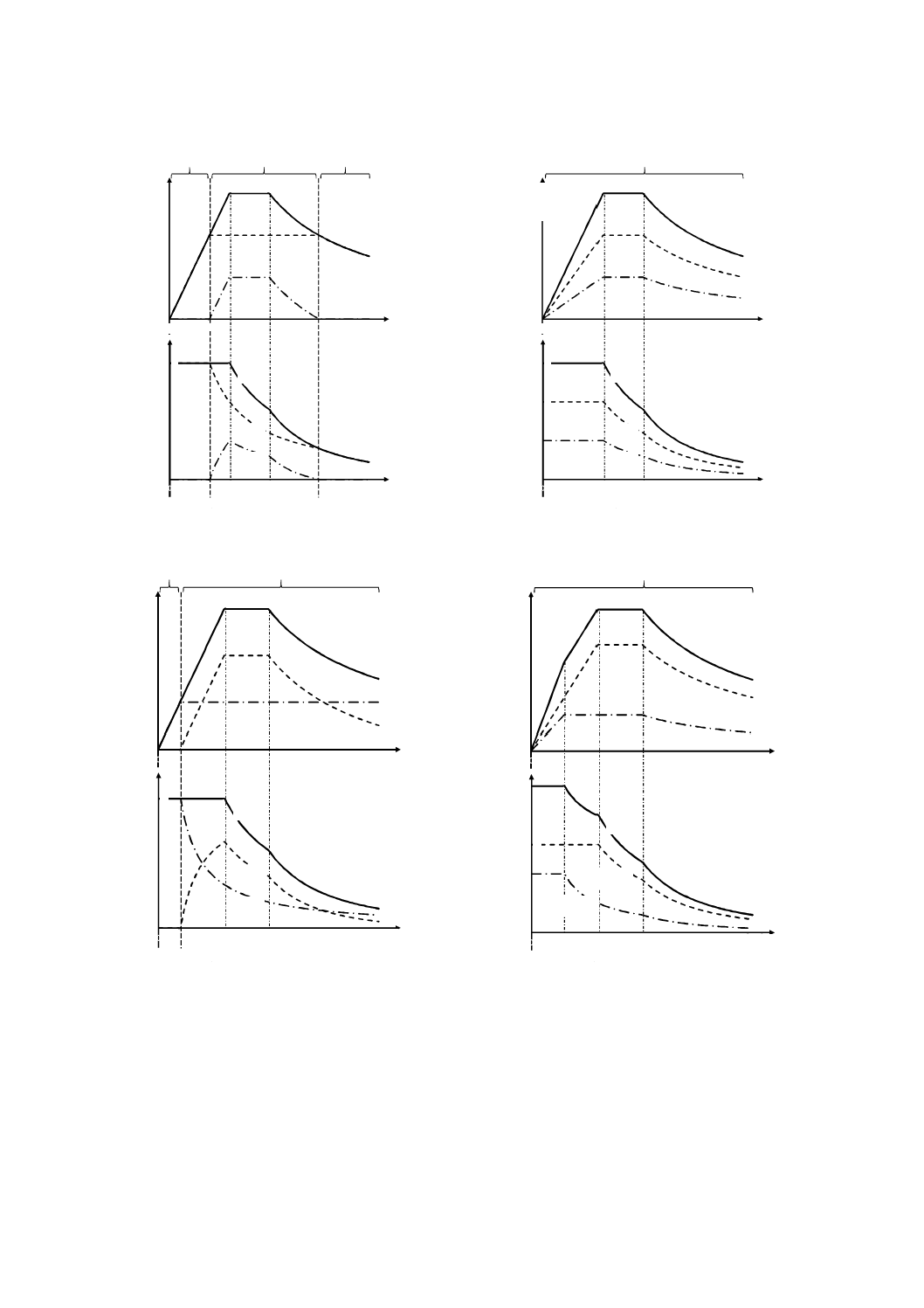
力行性能のアシスト
シリーズハイブリッドシステムのPPSの利用できる電力が限られる場合,ESSは主回路装置に供給する
電力を補足するように使われ,全車両の力行性能をアシストする。
図10は,どのようにアシストするかを示している。図では次のことを仮定している。
・ PBRは0
・ PAUXは無視できるほど小さい
・ PTE=PPPS+PESS
ここでPPPS,PESS,PTE,PBR及びPAUXは,図2のように定義する。
図10 a) に示す例では,低速領域(表1のモードII)で主回路装置に必要な全ての電力(けん引電力)
をPPSが供給する。速度の高い領域で電力がPPSの上限値を超えた場合,ESSがけん引電力を補足しハイ
ブリッド車両の引張力を増強する(表1のモードIII)。
次の点に注意することが望ましい。
・ ESSに十分なエネルギーが残っている場合だけアシスト可能である。それゆえ,有効なシステムとな
るように良好なエネルギー管理システムが必要である。
18
E 4071-1:2019
・ 多くの異なるアシスト制御方式が,様々な目的で考案されている。図10 b) から図10 d) は可能な例
を示している。いずれも異なる方式を示している。図10 b) の場合では,PPSからの電力とESSから
の電力との比を一定にしている。図10 c) の場合ESSがPPSに対し優先し低速領域では全電力を供給
するので,図10 a) と対照的である。そして,図10 d) の場合,他の場合ではPTEは固定であるのに
対し,PTEがPPPS及びPESSに依存する。表1のモードの選択も異なる。
上記のように色々な構成及びモードを取り得る。エネルギーに関する定義によって適切に評価すること
が重要である。詳細を,附属書Bに示す。
力行性能だけでなく,電気ブレーキ性能も同様にアシストできる。
19
E 4071-1:2019
-5
0
5
10
15
20
25
30
35
40
45
0
20
40
60
80
100
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0
20
40
60
80
100
-5
0
5
10
15
20
25
30
35
40
45
0
20
40
60
80
100
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0
20
40
60
80
100
モード
II
モード
III
モード
II
電
力
引
張
力
速度
速度
PESS
PPPS
PTE
TTE
TPPS
TESS
-5
0
5
10
15
20
25
30
35
40
45
0
20
40
60
80
100
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0
20
40
60
80
100
モード
III
電
力
引
張
力
速度
速度
PESS
PPPS
PTE
TTE
TPPS
TESS
a) PPSがESSに優先
b) 比例方式
-5
0
5
10
15
20
25
30
35
40
45
0
20
40
60
80
100
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0
20
40
60
80
100
モード
IV
モード
III
電
力
引
張
力
速度
速度
PESS
PPPS
PTE
TTE
TPPS
TESS
-5
0
5
10
15
20
25
30
35
40
45
0
20
40
60
80
100
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
0
20
40
60
80
100
モード
III
電
力
引
張
力
速度
速度
PESS
PPPS
PTE
TTE
TPPS
TESS
c) ESSがPPSに優先
d) 電力組合せ方式
PPPS
主電源(PPS)の電力
PTE
主回路装置(TE)の電力
TPPS
TTEのうちPPSの供給による部分
TTE
引張力TESS+TPPS=TTE
PESS
エネルギー貯蔵システム(ESS)の電力
TESS
TTEのうちESSの供給による部分
注記1 これらの例でESS電源の挙動はある速度領域で一定と仮定しているが,ESS技術によって異なる挙動を取り
得る。
注記2 これらの例では,ESSのSOC及び/又はSOEは運転パターンに必要な電力を十分供給できると仮定している。
注記3 ESSによる電源の挙動は,ある速度領域内で一定と仮定している。
図10−車上ESSによる力行性能アシスト
20
E 4071-1:2019
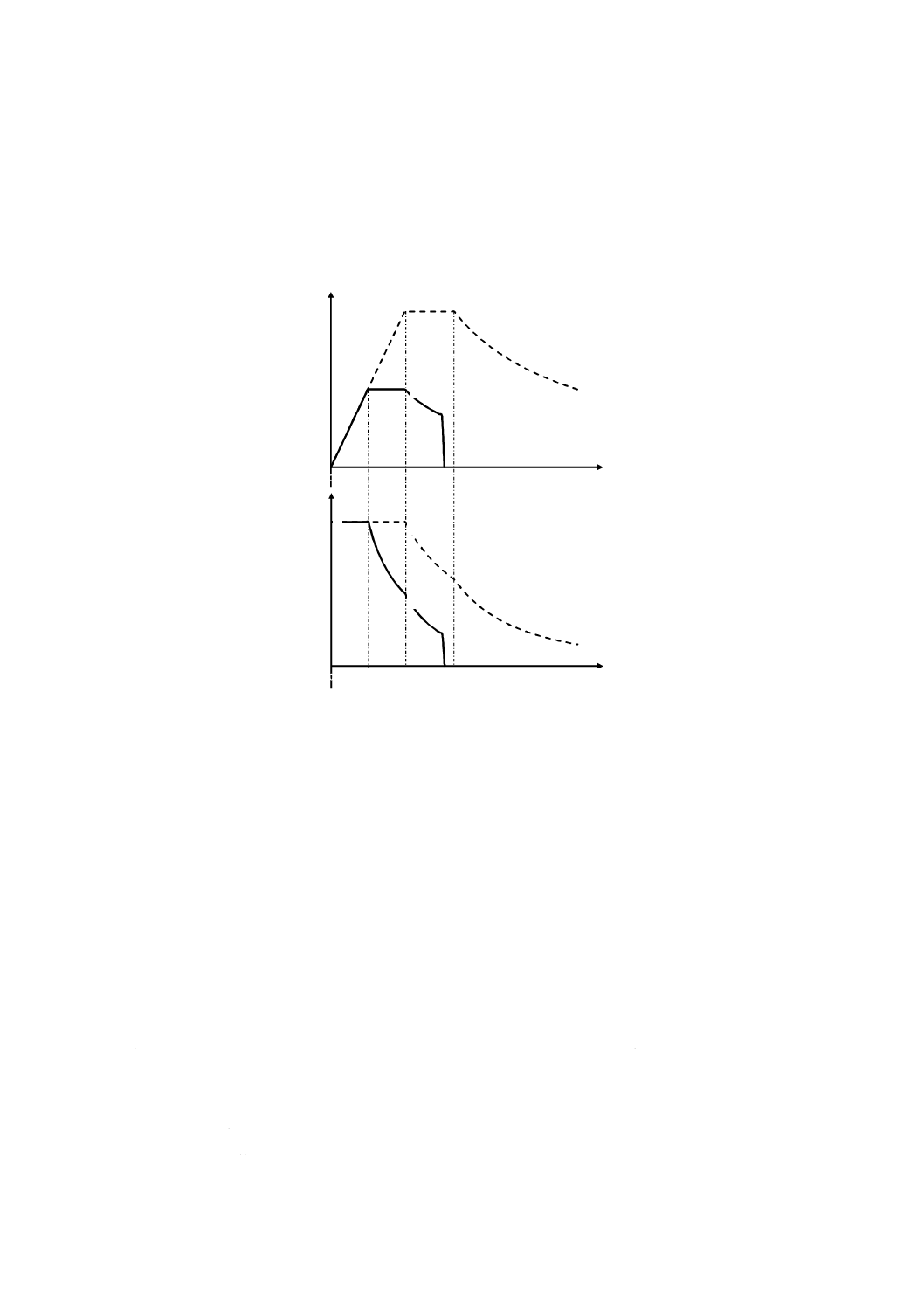
4.3.3
縮退モード運転
シリーズハイブリッドシステムで車両は,PPSの機能が故障した場合にも走行できるように設計するこ
とができる。図11の例では,PPSが故障すればハイブリッド車が走行を続けられるようにESSが電力を
出力する(PESS及びTESS各々を示す。)。しかし一般に,ESSで利用できるエネルギー及び電力は限られる
ので,最大電力及び最大速度は,縮退運転では制限される。
-5
0
5
10
15
20
25
30
35
40
45
0
20
40
60
80
100
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0
20
40
60
80
100
電
力
引
張
力
速度
速度
PESS
PPPS
TPPS
TESS
PPPS
主電源(PPS)の電力
TPPS TTEのうちPPSの供給による部分
PESS エネルギー貯蔵システム(ESS)の電力
TESS TTEのうちESSの供給による部分
図11−車上ESSによる縮退モードの性能
5
環境条件
5.1
一般
使用条件は,使用者が等級を指定する場合を除いて,IEC 62498-1:2010に従う。使用者は仕様書に考慮
する等級を明記する。明示のない場合は,A1,T1などの添え字1の等級とする。
その他の条件が適用される場合,適用可能であれば,JIS C 60721-3-5から選択する。
注記 この規格で使用者と製造業者との協定を必要とする細分箇条の一覧を,附属書Dに示す。
5.2
標高
機器が仕様書で規定されたとおりの性能を出すことのできる標高の等級は,別の規定がない限り,IEC
62498-1:2010の表1の等級A3による。
注記 標高は,特に,空気圧力に関係し,その結果,冷却システム及び絶縁に影響する。
5.3
温度
車両,ハイブリッドシステム及び機器が仕様書で規定されたとおりの性能を出すことのできる周囲温度
の等級は,別の規定がない限り,IEC 62498-1:2010の表2の等級T4による。
製造業者が寿命計算をする場合,使用者は,製造業者が規定する鉄道車両の周囲温度を決定するために
21
E 4071-1:2019
必要な情報を提供する。提供されない場合,IEC 62498-1:2010の表3の基準温度TR1を適用する。
基準温度は,寿命期間中に気候温度が材料に及ぼす劣化と同等の効果がある定常温度と考える。
注記 温度による劣化は,温度の指数関数で進行する(例えば,絶縁材料についてはJIS C 2143-5な
どを参照)。基準温度は,通常,年平均気温よりも高い。
標高の等級としてIEC 62498-1:2010の表1のAXを規定した場合,使用者は,標高幅(例えば,0 m〜1 000
m及び1 000 m〜2 000 m)ごとの標高及び気温との依存性の情報を提供する。
ハイブリッドシステム機器に予熱又は予冷却が必要な場合は,受渡当事者間で協定する。
6
機能及びシステム要求事項
6.1
機械的要求事項
6.1.1
機械ストレス
6.1.1.1
振動及び衝撃
ハイブリッドシステムは,設計で規定した取付位置に固定支持されている場合(取付部分に使用する防
振支持を含む。),JIS E 4031で規定する振動及び衝撃に耐える必要がある。
6.1.1.2
ほかの加速度
次の要求内容については,受渡当事者間で協定する。協定がない場合,JIS E 4031による。
a) 鉄道車両が曲線区間を通過中又は曲線区間上で停車しているとき,鉄道車両の垂直軸に対し直角に作
用する正味の左右方向の許容加速度成分。
b) 補助回路機器を含むハイブリッドシステムが,仕様書で規定された性能を連続して動作できる左右方
向及び前後方向の加速度。
6.1.2
外部の機械的影響に対する保護
侵入に対する防護等級は,直接接触及び実装状況に対する要求事項を満足するようにJIS C 0920に従っ
て規定する。
6.2
制御上の要求事項
ハイブリッドシステムは最低限次の機能をもたなければならない。
・ パワーフロー制御
・ エネルギー及びパワーフローの監視
・ ESU状態の監視
6.3
電気的要求事項
6.3.1
外部充放電機能
必要があればハイブリッドシステムは,外部充放電機能を備えなければならない。外部充放電機能の仕
様書は,受渡当事者間の協定による。
6.3.2
エネルギー貯蔵システムだけでの運転
PPS,つまりディーゼル発電機,架線,第三軌条などからの電力が利用できない場合,必要があれば,
ESSは,使用者の指定する主回路性能及び補助負荷で運転できなければならない。
6.4
開放要求事項
ハイブリッドシステムの各ESUは,故障又は保守目的で安全に開放又は切り離す手段を設けなければな
らない。
ハイブリッドシステムの各電源は,他のサブシステムから電源を安全に切り離す開放装置を設けなけれ
ばならない。
22
E 4071-1:2019
6.5
縮退モード
なにをもって縮退モードとするかは使用者が規定し,受渡当事者間で協定する。一部又は全ての個別電
源(例えば,ESU/ESS,ディーセルエンジン,燃料電池,外部電源)が故障した場合,残りの電源が縮
退モードの要求事項を満たさなければならない。
6.6
安全上の要求事項
6.6.1
電気的危険性に対する防護
電気的危険性に対する防護は,JIS E 5051に従って運転手,保守要員及び乗客について考慮する。
6.6.2
火災挙動及び防護
燃料,ESUその他の火災防護対策は,使用者が規定する。規定がない場合は,附属書C参照。
6.6.3
その他の要因に対する防護
ESUについて外部からの機械的衝撃に対する防護は,IEC 62262に従って施す。
ESUからの影響,例えば,爆発,ガスの発散及び/又は放出などから,環境,運転手,保守要員及び乗
客を防護する処置を考慮する。
6.6.4
短絡保護
ESSは,適切な短絡保護を設けなければならない。
使用者は,ハイブリッドシステムの一部に短絡保護を備えるか否かを仕様書に規定する。
試験は,8.9によって実施する。
6.7
寿命に対する要求事項
ESUの寿命の算定を考慮することが望ましい。部品供給業者が提供するデータを使用できる。寿命モデ
ル構築においては運転パターンを考慮する。ESU寿命モデルの構築及び寿命算定は用途に依存し,必要に
応じ部品供給業者又はESU供給業者とシステム供給業者及び使用者との間で協定する。
寿命末期(EOL)の定義として次の例がある。
a) 部品に注目した場合(特に,EDLCの場合) 時間経過は静電容量を低下させ内部抵抗を増大させる。
そのため,使用者と製造業者とは“静電容量が初期静電容量に対しあるパーセントʻXʼより低下す
るか,又は内部抵抗が初期抵抗値のʻYʼ倍となったときをEOLとする。”と協定することができる。
ʻXʼ,ʻYʼ又はほかの値は,プロジェクトによって使用者と製造業者とで協定することが望ましい。
b) 運転パターンに注目した場合 運転パターンをシステムインテグレータ又は使用者が提供することが
望ましい。ESU供給業者及び/又はシステムインテグレータはこのパターンに従って寿命を推定する。
6.8
ハイブリッド車両の騒音に関する追加要求事項
測定方法は,JIS E 4041参照。
特定の騒音に関する要求事項がある場合,騒音の発生(の規定値)は使用者と製造業者との協定によっ
て定める。
7
試験の種類
7.1
一般
試験は,次の三つの種類に分類される。
a) 形式試験
b) 任意試験
c) 受渡試験
システムの個別機器の受渡試験は,関連する規格に従って実施する。幾つかの最低限の受渡試験を次に
23
E 4071-1:2019
規定する。
試験レベルを次に分類する。
・ 車両/システムインタフェース試験(レベル1) 一体で動作する論理インタフェース(補助回路機
器,車両全体の制御装置,地上設備及び信号設備などとの)及びハードウェアのインタフェース(電
線など)
例 ハイブリッドシステムの制御装置,補助回路機器及び車両全体の制御装置のインタフェース。
・ システム及びインタフェース試験(レベル2) 車両と主回路(駆動)との物理的及び制御上のイン
タフェース
例 ESU/ESS,直流中間リンク,主回路装置,ブレーキ抵抗器及びPPS並びにハイブリッドシス
テム制御装置(各装置の制御装置を兼ねるか,専用の制御装置を設けるか)とのインタフェー
ス。
・ コンポーネント試験(レベル3) 図2に示すESU,電力変換装置,電動機など
・ サブコンポーネント試験(レベル4) ESU内のリチウム二次電池,EDLCなど
7.5及び表2参照。
7.2
形式試験
新しいシステムでは定格,特性及び性能を検証するため各新設計箇所に関係するレベル2及びレベル1
で形式試験を実施する。サブコンポーネント,コンポーネント,システム及び/又は車両の供給業者は,
供給範囲に応じた適切なレベルの形式試験を実施する責任を負う。レベル3及びレベル4は,関連する部
品の規格に従って事前に実施する。
システムに対する形式試験後に組み合わせたシステム内の機器の設計,又は製造過程に変更が生じた場
合,組み合わせたシステムへの変更の影響を評価する。形式試験を再実施するか又は一部の形式試験を実
施するかの判断は,使用者と製造業者とで協定する。製造業者が同等システムに対する全試験項目を網羅
した形式試験報告書をあらかじめ準備できる場合,形式試験は,使用者と製造業者との協定によって省略
することができる。
(実測で検証済の)信頼できるモデルによるシミュレーション結果で試験の代替とすることができる。
これは使用者と製造業者との協定によって決定する。
7.3
任意試験
任意試験はハイブリッドシステムの追加情報を得るために実施することができる。任意試験は必須では
なく,使用者と製造業者との協定によって,必要とした場合に限り実施する。使用者と製造業者との特別
な協定がなければ,試験結果はシステムの合否判定基準として扱わない。
7.4
受渡試験
受渡試験はシステム又は車両が正しく組み立てられ,全ての部品,システム及び/又は車両機能が適切
で安全に動作することを検証する。受渡試験は全ての部品,システム及び/又は車両に対し全ての試験項
目について製造業者が実施する。ただし,製造業者と使用者との協定があれば,製造業者及び使用者は,
協定によって代替の試験手順を採用してもよい。その結果同時に発注された製品に対し受渡試験項目を減
らし,ランダムに選んだ部品,システム及び/又は車両にだけ全ての受渡試験項目を行う方法によっても
よい。
受渡当事者間の協定に基づく受渡試験は,仕様書に規定された場合だけ実施する。
7.5
試験の種類
試験の種類は,表2による。
24
E 4071-1:2019
試験は,部品試験,組合せ試験及び車両試験に分類される。
使用者からの特別な要求事項は,使用者と製造業者との間で協定する。
表2に挙げる試験の位置付けは,使用者と製造業者との間で審議し協定することができる。
表2−試験一覧表
試験項目
試験の位置付け
試験の種別
レベルa)
箇条/細分箇条
試験台での組合せ試験
ESS充放電制御機能
B
T
2
8.3.1
外部充放電試験
B
O
2
8.3.2
開放試験
C又はB
T
2,3
8.3.3
縮退モード試験
B
O
2
8.3.4
SOC/SOE試験
B
O
2
8.3.5
最大トルクでの加減速試験
B
T
2
8.4.1
エネルギー貯蔵システムだけでの出力トルク試験
B
T
2
8.4.2
システムシーケンス試験
−
−
−
8.5
a) システム起動
B
T
2
−
b) 力行運転(保護条件による電力制限を含む。)
B
T
2
−
c) 回生試験(保護条件による電力制限も含む。)
B
T
2
−
d) 1台以上のESS及び/又はESUの開放
B
T
2
−
e) 1台以上のESS及び/又はESUの再接続
B
T
2
−
f) 1台以上のPPSの開放
B
T
2
−
g) 1台以上のPPSの再接続
B
T
2
−
h) システムシャットダウン
B
T
2
−
i)
冗長性及び縮退モード
B
T
2
−
エネルギー効率及びエネルギー消費量測定
B
O
2
8.6.2
燃料消費量の算定
B
O
2
8.6.3.1
排気ガス排出レベルの算定
B
O
2
8.6.3.2
ESSの運用持続時間の測定
B
O
1
8.7.2
低温運転試験
B又はC
O
2又は3
8.8.2
高温運転試験
B又はC
O
2又は3
8.8.3
短絡保護試験
B又はC
O
2又は3
8.9
ESU耐久試験
C
O
4
8.10
車両レベル
ESS開放試験
V
R
1
9.2
車両シーケンス試験
−
−
−
9.3
j)
システム起動
V
R
1
−
k) 力行運転
V
R
1
−
l)
回生ブレーキ運転
V
R
1
−
m) 1台以上のESS及び/又はESUの開放
V
R
1
−
n) 1台以上のESS及び/又はESUの再接続
V
R
1
−
o) 1台以上のPPSの開放
V
R
1
−
p) 1台以上のPPSの再接続
V
R
1
−
q) システムシャットダウン
V
R
1
−
r) 冗長性及び縮退モード
V
R
1
−
駆動システムの消費エネルギー測定
V
O
1
9.4
燃料消費の算定
V
O
1
9.5.1
排気ガス排出レベルの算定
V
O
1
9.5.2
25
E 4071-1:2019
表2−試験一覧表(続き)
試験項目
試験の位置付け
試験の種別
レベルa)
箇条/細分箇条
補助回路の消費電力量測定
V
O
1
9.6
ESSによる車両の運用持続時間試験
V
O
1
9.7
騒音測定
V
O
1
9.8
注記1 表中の“任意”形式試験は,使用者と製造業者との協定によって実施することが望ましい。“任意”形式試
験と任意試験は,同じ試験の種類ではない。
注記2 試験の位置付けの略号は,次のとおりである。
C:部品試験
B:組合せ試験
V:車両
注記3 試験の種別の略号は,次のとおりである。
T:形式試験
O:任意試験
R:受渡試験
注a) レベルについては7.1参照。
7.6
合否判定基準
箇条8及び箇条9に規定のない合否判定基準は,次による。
・ 機能に関しては,システムが規定どおり正常に動作することを検証する。
・ 性能又は特性試験に関しては,性能又は特性が仕様書に適合することを検証する。仕様書は使用者と
製造業者との協定で定める。
8
組合せ試験
8.1
一般
箇条8に規定する以外の試験項目は,JIS E 5008,JIS E 5011,JIS E 6102及びJIS E 6103参照。
8.2
試験条件
試験条件は,JIS E 5011による。
8.3
ESS制御
8.3.1
ESS充放電制御機能
ESSの定格電力での充放電は,使用者と製造業者との間で協定された要求事項に従って実施する。例え
ば,PPS,ESS及び電力変換装置のパワーフローを監視し,適切に制御していることを検証する。
8.3.2
外部充放電試験
外部充放電機能が備わっている場合は,指定された充放電の速さで時間,電流及び電圧を測定する。初
期温度及び冷却条件は使用者と製造業者との間の協定で定める。しかし,充電の下限及び上限は,定電流
及び/又は定電圧の充放電が可能な範囲内に設定する。
8.3.3
開放試験
どの電源が故障した場合でも,損傷又は安全を損なうことなく故障した装置を開放できなければならな
い。例えば,保守用に設置している手動開放機構をもつ場合は,試験を実施しなければならない。
8.3.4
縮退モード試験
縮退モードが規定されている場合は,例えば,ESU/ESS,ディーゼルエンジン,燃料電池又は外部電
源などの電源の一部又は全部が開放された状態で,どの部品も恒久的な損傷又は安全を損なうことなく車
両が運転できなければならない。
26
E 4071-1:2019
縮退モード特有の使用範囲は,使用者と製造業者との間の協定で定める。
8.3.5
SOC/SOE試験
ESSのSOC又はSOEは最初に設定する。SOC又はSOEの変化は,あらかじめ定められた運転パターン
全域にわたり時間とエネルギーとを測定することで常時監視しなければならない。これは電荷又はエネル
ギーの収支積算を適切に行い,通常運転終了時に,算出されたSOC又はSOEを初期時と同じ状態に戻す
(例えば,エンジン出力によって)ためである。
繰返し運転パターンが必要な場合は,各運転パターン終了後にSOC又はSOEを運転前と同じ状態とす
るよう後処理を行うことが望ましい。後処理は,例えば,外部又は内部電源,架線,第三軌条などの,ESS
単体での充放電で行ってもよい。
この試験の合否判定基準は,使用者と製造業者との間で協定する。
8.4
出力トルク
8.4.1
最大トルクでの加減速試験
シリーズハイブリッドシステムのトルク特性は,設計どおりであることを検証する。各電源(PPS又は
ESS)の分担を測定することが望ましい。
測定は,JIS E 5011の箇条7(トルク特性試験)に従って実施する。
試験は,主電動機の熱時に力行及び電気ブレーキにおいて,最大ノッチで全速度領域にわたり徐々に速
度を上昇及び低下させて実施する。このときシステムの異常な停止があってはならない。速度変化率は,
各用途及びシステムに適切に設定することが望ましい。
最大力行又はブレーキ指令を与えたとき,シリーズハイブリッドシステムは,自動的にESSの状態に関
係なく,出力可能な電力を供給しなければならない。
ESS及び/又はPPSからの電力又はエネルギー制限によって,最大性能が利用できなくてもよい。
ESSによってアシスト又は制限された特性を測定する。
8.4.2
エネルギー貯蔵システムだけでの出力トルク試験
エネルギー貯蔵システムだけでの運転が必要な場合は,PPSを開放しエネルギー貯蔵システムからのエ
ネルギーでの規定のトルクを出力する。
8.5
システムシーケンス試験
システムシーケンス試験の目的は,運転パターンと関係なく,組み合わせた装置が規定の運転順序で動
作することを確認する。次の運転順序を確認する。
a) システム起動 制御電源を投入しシステムの起動に必要な動作が行われる。
b) 力行運転(保護条件による電力制限を含む。) 力行指令を投入し主回路が力行回路を構成し,起動
を開始する。規定の速度範囲の複数の引張指令で試験する(JIS E 5011の箇条7参照)。
c) 回生試験(保護条件による電力制限も含む。) ブレーキ指令を投入し主回路がブレーキ回路を構成
し,ブレーキを開始する。規定の速度範囲の複数のブレーキ指令で試験する(JIS E 5011の箇条7参
照)。
d) 1台以上のESS及び/又はESUの開放 1台以上のESS及び/又はESUを開放する。このシーケン
スは規定の条件で実施する。ESS/ESU又は電力変換装置が作動中にこのシーケンスを行う場合は,
ESS/ESU又は電力変換装置が開放前に安全に停止する(8.3.3参照)。
e) 1台以上のESS及び/又はESUの再接続 手順d) で開放したESS及び/又はESUが,再接続でき
る。このシーケンスは規定の条件で実施する。再接続後にESS/ESU又は電力変換装置は規定どおり
正常に動作する。
27
E 4071-1:2019
f)
1台以上のPPSの開放 1台以上のPPSを開放する。このシーケンスは規定の条件で実施する。電力
変換装置が作動中にこのシーケンスを行う場合は,電力変換装置が開放前に安全に停止する(8.3.3参
照)。
g) 1台以上のPPSの再接続 手順f) で開放したPPSが,再接続できる。このシーケンスは規定の条件
で実施する。再接続後にPPSは規定どおり正常に動作する。
h) システムシャットダウン 運転終了後に主回路,制御回路ほかを順序遮断することでシステムを停止
できる。
i)
冗長性及び縮退モード 冗長性及び縮退モードの試験は,規定どおりに実行する(8.3.4参照)。
異常動作(例えば,過電圧,過電流,意図しないシステム遮断など)が発生しない。
8.6
エネルギー効率及びエネルギー消費量
8.6.1
一般
システムは等価負荷と組み合わせて運転し,JIS E 5011の8.3(ルートプロファイルによる電力消費量)
に従った測定を実施する。負荷条件は設備の制約によって実際と異なってもよい。
試験は定常状態,例えば,電力変換装置,電動機,ESSなどが熱的平衡状態になった後に実施する。(実
測で検証済の)信頼できるモデルによるシミュレーション結果で試験の代替とすることができる。これは
使用者と製造業者との協定によって決定する。
測定手順は,JIS E 5011参照。JIS E 5011に示す合否判定基準は,ESSのエネルギー消費量は含まれて
いない。ESSを含むエネルギー消費量の合否判定基準は,使用者と製造業者とで協定しなければならない。
製造業者は附属書Bに示す,例えば,PPS(燃料消費を含む。),ESSなどの装置に適切な精度をもつ測定
機器を選択する責任がある。
この規格は試験台で行う測定,並びに工場内及び線路上での完成車両試験に適用する。営業運転用の車
上エネルギー測定システムと異なる,仮設の測定装置を使用してもよい。
使用者と製造業者との協定によって,IEC 62888を営業運転の車上エネルギー測定の方法及び誤差の定
義の規定に適用,使用してもよい。例えば,IEC 62888-2に規定するように電圧計,電流形及び電力計の
エネルギー測定装置の精度の計算に二乗和平方根を用いることができる。
8.6.2
エネルギー効率及びエネルギー消費量測定
8.6.2.1
一般
規定の運転(間隔,距離,速度など)で,エネルギー効率及びエネルギー消費量を測定する。
エネルギー効率及びエネルギー消費量を算定するために,規定の運転で図2の全てのサブシステムの電
圧及び電流を同時に測定しパワーを時間積分する。必要があれば使用者と製造業者との協定で,サブシス
テム内の幾つかの部品(に注目し)を測定してもよい。
8.6.2.2
準備
規定の運転を開始する前のESSのエネルギーレベルを決定する。
8.6.2.3
測定機器
測定機器の精度は,JIS E 5011の6.4(測定精度及び許容差)に適合する。
8.6.2.4
測定位置
端子及び配線の損失を最小限とする測定方法で行う。測定位置を次に示す。
a) PPS 電源の出力端子で測定する。直流又は交流電力の電流及び電圧センサーは,PPSのエネルギー
消費量を決定するために使用できる。必要によって流量計も軽油又はガス燃料消費量測定に使用でき
る。
28
E 4071-1:2019
b) ESS ESSの出力端子で測定する。
c) 主回路装置 入力端子で測定する。
d) ブレーキ抵抗器 ブレーキ抵抗器の入力端子で測定する。
e) 補助回路機器(AUX) 補助回路の主な電力が補助電源装置から供給される場合は,補助電源装置の
入力端子で測定する。
f)
サブシステムの部品 必要があれば,例えば,電力変換装置,交流き電のPPS用変圧器など,サブシ
ステムの部品の効率を算定するために,使用者と製造業者との協定によって部品の測定を実施しても
よい。
8.6.2.5
測定
力行及び回生ブレーキのエネルギー測定するために,規定の運転を規定回数繰り返す。
試験後にESSの貯蔵エネルギー及び初期レベルとの相違を測定し,算出する。
初期と各運転パターン(負荷サイクルで)の終わり又は全繰返しサイクルの終わりにSOC/SOEを運転
前と同じ状態とする後処理を行うことが望ましい。後処理は,例えば,外部若しくは内部電源又は架線に
よる,ESS単体での充放電で行ってもよい。
試験の運転パターン及び負荷条件は,使用者と製造業者とで協定する。
8.6.2.6
性能を満足するために必要なシステムのエネルギー消費量計算
試験の最後に,電源から供給されたエネルギーからESSに試験中に新たに貯蔵されたエネルギーを差し
引いてシステムのエネルギー消費量を計算する。システムのエネルギー消費量は,主回路装置,ブレーキ
抵抗器及び補助回路機器の消費量を含む。
ESSの電荷又はエネルギーに差異がある(ΔSOC/ΔSOE)場合,電荷又はエネルギーの差異をエネルギ
ー消費量に換算することで差異を調整することができる。
8.6.2.7
該当特定運転パターンのエネルギー消費量計算
8.6.2.5で測定したエネルギー消費量を基に,走行距離と負荷とから該当運転パターンでの消費量を計算
する。
8.6.3
燃料消費及び排気ガス排出量の算定(エンジン又は燃料電池の場合)
8.6.3.1
燃料消費の算定
規定の運転パターン及び負荷条件での燃料消費を測定し,又は計算する。試験の運転パターン及び負荷
条件は,使用者と製造業者とで協定する。
使用者と製造業者との協定によって,燃料消費は,燃料タンクで測定する実燃料消費又は事前に定置試
験で得られたエンジンの運転状況ごとの燃料消費データを基にしたこの試験時のエンジンの運転状況から
換算した値のいずれかで決定する。
8.6.3.2
排気ガス排出レベルの算定
排気ガスの排出量を測定し,又は計算する。その成分を分析する。
使用者と製造業者との協定によって,排気ガス排出量は,実測定又は事前に定置試験で得られたエンジ
ン運転状況ごとのガス排出量データを基にしたこの試験でのエンジンの運転状況から換算した値のいずれ
かで決定する。
8.7
ESSによる車両の運用持続時間試験
8.7.1
一般
この試験は,ESSが要求される運転でエネルギーを供給できる性能があるかを検証する。
(実測で検証済の)信頼できるモデルによるシミュレーション結果で試験の代替とすることができる。
29
E 4071-1:2019
例えば,試験設備の制約などが理由となる。これは使用者と製造業者との協定によって決定する。
8.7.2
ESSの運用持続時間の測定
PPSを開放し,ESSからの電力を用いて規定の運転(持続時間,距離,速度など)ができる。
PPSを開放し,ESSだけを使用して運転持続時間を確認する。
8.8
環境試験
8.8.1
一般
システムは指定の温度(低温及び高温)で動作しなければならない。この試験は,主にESUに焦点を当
てる。
既存の同様のシステムの部品レベル試験又は信頼性試験結果を,使用者と製造業者との協定によって使
用できる。
8.8.2
低温運転試験
規定の温度等級の下限温度(例えば,IEC 62498-1:2010の表2のT1で周囲温度−25 ℃)で運転を開始
した後,ESUが規定の運転パターン起動を供給できる状態になるまでの時間を測定する。加温,冷却など
によってESUの温度は平衡状態であることを考慮する。
使用者と製造業者との協定によって部分的なサブシステム試験を行ってもよい。
試験設備の制約がある場合,試験方法は使用者と製造業者との協定で定める。
8.8.3
高温運転試験
ESUの上限温度(例えば,IEC 62498-1:2010の表2のT1で機器箱内温度50 ℃)で,規定の運転パター
ンを測定する。加温,冷却などによってESUの温度は平衡状態であることを考慮する。
使用者と製造業者との協定によって部分的なサブシステム試験を行ってもよい。
試験設備の制約がある場合,試験方法は使用者と製造業者との協定で定める。
注記 例えば,試験を規定の最大周囲温度で行わない場合,温度測定結果(10 ℃と40 ℃との間で)
を直線補外するか,又は温度シミュレーションモデル(例えば,内部抵抗の変化を考慮するな
ど)を用いて最大運転温度に補正する。
8.9
短絡保護試験
製造業者と使用者との協定による適切な方法によってESSの規定箇所を短絡する。
オフ状態で故障条件を作成してからシステムを起動させて試験を行ってもよい。
短絡したときに,ESSが使用者と製造業者とで協定したハイブリッドシステムの保護の考え方の規定ど
おりに動作する。
試験設備が損傷する可能性によって制約がある場合は,試験方法を製造業者と使用者との協定で定める。
8.10
ESU耐久試験
耐久試験は,サブコンポーネントレベル関連規格に従って実施する。
・ EDLCの耐久サイクル試験は,JIS E 5012-3に従って実施する。
・ リチウム二次電池の耐久サイクル試験は,IEC 62928で規定する。
(実測で検証済の)信頼できるモデルによる耐久性シミュレーション結果で試験の代替とすることがで
きる。例えば,特に,営業運転の負荷サイクル試験などが該当する。これは使用者と製造業者との協定に
よって決定する。
30
E 4071-1:2019
9
車両試験
9.1
一般
ハイブリッド車両の完成車両試験を,次に示す。
次に規定のない試験項目は,JIS E 4041参照。
例えば,試験設備の制約がある場合,(実測で検証済みの)信頼できるモデルによるシミュレーション結
果で試験の代替とすることができる。これは,使用者と製造業者との協定によって適用することができる。
9.2
ESS開放試験
ESSは緊急時又は故障時に自動又は手動によって,即座かつ安全に開放されなければならない。例えば,
保守用に開放手段を備えている場合,手動及び/又は自動で開放することを試験する。
注記 この試験は車両シーケンス試験の一部で実施する。
9.3
車両シーケンス試験
車両シーケンス試験の目的は,完成車両が規定の運転順序で動作することを確認する。次の運転順序を
確認する。
a) システム起動 制御電源を投入し,車両の起動に必要な動作が行われる。
b) 力行運転 力行指令が投入され,力行回路が構成されることで,起動を開始する。規定の速度範囲で,
複数の引張力指令[電力アシスト(図10参照)及び/又は電力制限(図11参照)の機能をもつ場合,
それらを含む。]で試験する{JIS E 4041の9.2[力行性能(速度・引張力特性)]参照}。
c) 回生ブレーキ運転 ブレーキ指令が投入され,ブレーキ回路が構成されることで,ブレーキを開始す
る。規定の速度範囲で,複数のブレーキ指令[電力アシスト(図10参照)及び/又は電力制限(図
11参照)の機能をもつ場合,それらを含む。]で試験する[JIS E 4041の9.4(ブレーキ試験)参照]。
d) 1台以上のESS及び/又はESUの開放 1台以上のESS及び/又はESUを開放する。このシーケン
スは,規定の条件で実施する。ESS/ESU又は電力変換装置が作動中にこのシーケンスを行う場合は,
ESS/ESU又は電力変換装置が開放前に安全に停止しなければならない(9.2参照)。
e) 1台以上のESS及び/又はESUの再接続 手順d) で開放したESS及び/又はESUが,再接続でき
る。このシーケンスは,規定の条件で実施する。故障が除かれるか故障した部品/システムが安全に
開放していれば,再接続後にESS/ESU又は電力変換装置は規定どおり正常に動作する。
f)
1台以上のPPSの開放 1台以上のPPSを開放する。このシーケンスは,規定の条件で実施する。電
力変換装置が作動中にこのシーケンスを行う場合は,電力変換装置が開放前に安全に停止する。
g) 1台以上のPPSの再接続 手順f) で開放したPPSが,再接続できる。このシーケンスは,規定の条
件で実施する。故障が除かれるか故障した部品/システムが安全に開放していれば,再接続後に車両
は規定どおり正常に動作する。
h) システムシャットダウン 主回路,制御回路などのスイッチ切順序に従って,指令によって車両シス
テムを停止できる。
i)
冗長性及び縮退モード 冗長性及び縮退モードが,規定どおり行うことができる。
異常動作(例 過電圧,過電流,意図しないシステム遮断など)がみられない。
9.4
駆動システムの消費エネルギー測定
使用者が規定する区間,運転パターン及び負荷条件で消費エネルギーを測定する。運転パターンと負荷
条件は使用者と製造業者との協定で定める。
測定方法は,8.6.2参照。
注記 測定結果の評価に開始及び終了位置の標高を考慮する。
31
E 4071-1:2019
9.5
燃料消費及び排気ガス排出量の算定(エンジン又は燃料電池の場合)
9.5.1
燃料消費の算定
燃料消費の算定は,8.6.3.1参照。
9.5.2
排気ガス排出レベルの算定
排気ガス排出レベルの算定は,8.6.3.2参照。
9.6
補助回路の消費電力量測定
エネルギーの主消費部分として補助回路機器(例えば,空調)がハイブリッドシステムの運転に影響が
大きいので,補助回路の消費電力量を測定する。
補助電源装置が補助回路の全電力を供給する場合は,補助電源装置の入力端子で測定する。
補助電源装置の負荷以外の回路がある場合は,各回路ごとに消費エネルギーを測定する。
9.7
ESSによる車両の運用持続時間試験
ESSの運転時間の算定は,8.7.2参照。
9.8
騒音測定
走行時及び停車時の騒音を測定する。
騒音の測定は,JIS E 4041の9.17[騒音試験(任意の試験)]参照。
ハイブリッドシステムに特別なエンジンと冷却器の間欠運転とを考慮し,例えば,ある条件におけるデ
ィーゼルエンジン又は冷却器のような,PPSを構成する機器の起動/停止の組合せで騒音を測定する。
必要があれば使用者と製造業者との協定によって,部品試験又は試験台の試験で部品又はサブシステム
について実施する。
32
E 4071-1:2019
附属書A
(参考)
電池及びコンデンサの充電状態(SOC)及びエネルギー状態(SOE)
A.1 容量及びエネルギー内容
A.1.1 一般
この規格では容量とエネルギーとを理論,定格及び使用可能の三つの区分で定義する。この附属書の主
な目的は,採用する電池技術の電池及び/又はコンデンサのESUに適用する定義又は関係を詳述し,明ら
かにすることである。
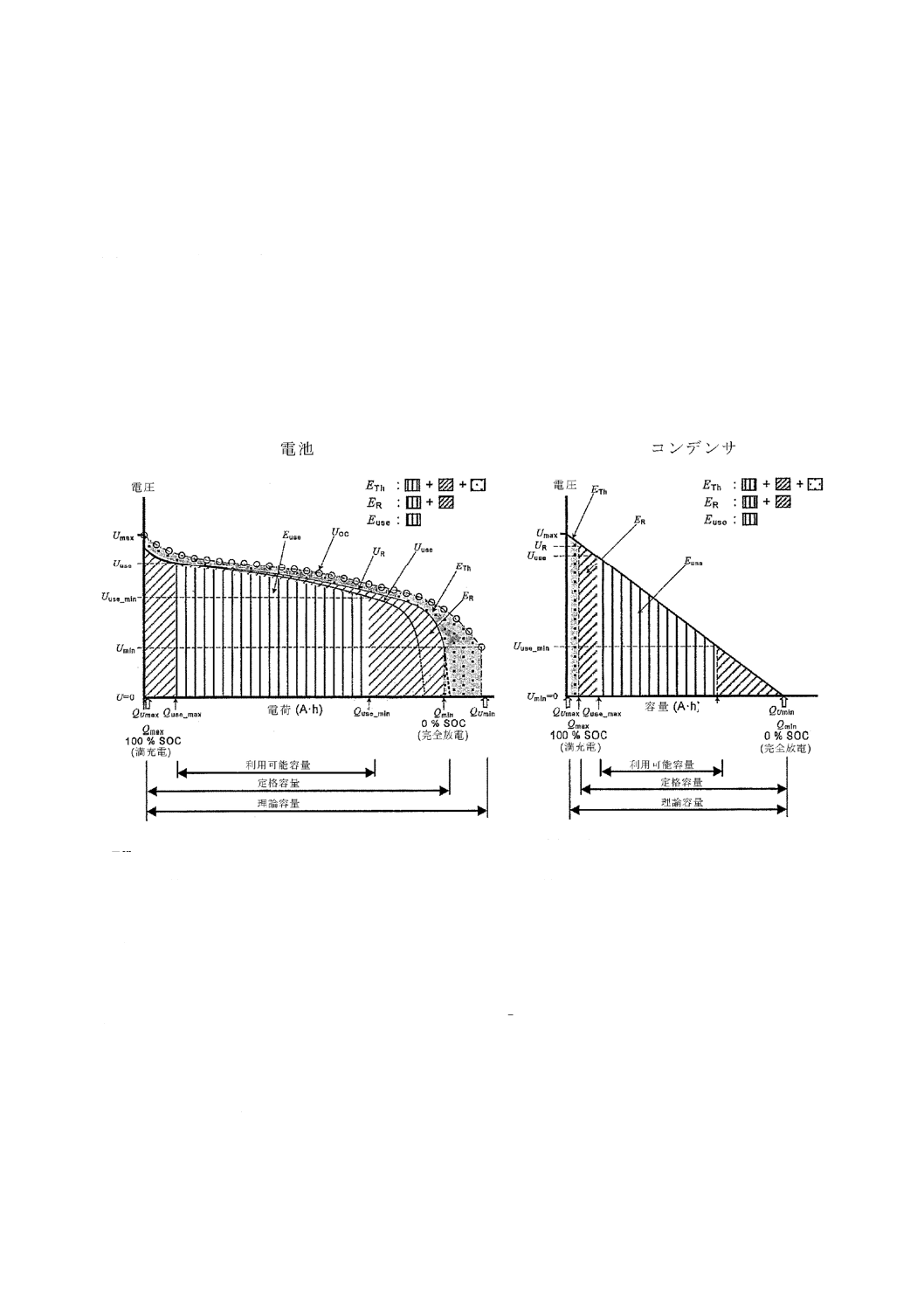
例えば,図A.1は,コンデンサ及び電池が蓄える容量及びエネルギーの各定義の相違を示している。
ETh
理論エネルギー
Euse
使用可能エネルギー
Qmax
最大電荷
QUmax
最大電圧での電荷
Quse̲max 最大使用可能電荷
U
電圧
UR
定格電圧
Umin
最小電圧
Uuse
最大使用可能電圧
ER
定格エネルギー
Qmin
最小電荷
QUmin
最小電圧での電荷
Quse̲min 最小使用可能電荷
UOC
開回路電圧
Umax
最大電圧
Uuse̲min 最小使用可能電圧
注記 電池では,微少電流に対し使用可能エネルギーは定格エネルギーと同等となる。
図A.1−容量及びエネルギー内容の相違
A.1.2 理論エネルギー
理論エネルギーEThの定義は,3.1.18.1による。(例えば,ジュール熱又はオーム熱の損失なしでエネルギ
ー貯蔵機器から放電可能な)微少放電電流でESUに貯蔵する最大エネルギー量である。
Quse̲min
33
E 4071-1:2019
コンデンサの理論エネルギーは,最大電圧に基づき式(A.1)となる。
2
max
Th
2
1CU
E=
······································································ (A.1)
ここに,
ETh: 理論エネルギー
C: 静電容量
Umax: 最大電圧
注記 (EDLCの)静電容量の測定は,JIS E 5012-3参照。
コンデンサでは全電荷を電極間から取り除く又は放電可能で,対応する理論上最低電圧はゼロである。
つまりUmin=0。
A.1.3 定格エネルギー
定格エネルギーERの定義は,3.1.18.2による。“定格”条件でESUから放電可能なエネルギー量である。
電池の定格エネルギーは,放電試験の定電流と測定電圧との積の積分である(例 C5率)。
例えば,リチウム二次電池の定格エネルギーはIEC 62928の結果及びJIS C 8715-1参照。
コンデンサの定格エネルギーは,実用的には定格電圧を基に,式(A.2)となる。
2
R
R
2
1CU
E=
········································································· (A.2)
ここに,
ER: 定格エネルギー
C: 静電容量
UR: 定格電圧
注記 EDLCの定格エネルギーERは,等価直列抵抗ESRの損失のため完全には得られない。
A.1.4 使用可能エネルギー
使用可能エネルギーEuseの定義は,3.1.18.3による。あらかじめ規定されたSOC又は電圧の制限範囲内
において放電可能なエネルギーのうち使用可能な部分である。最大及び最小限度値は,通常,使用者と製
造業者とによって設定する。
例えば,機器の制約による電力,電流又は最大及び最小電圧を定めてもよい。
電池の使用可能エネルギーは,使用者と製造業者とで最初に協定した負荷サイクルの制約なく,使用可
能なエネルギーである。
コンデンサの使用可能エネルギーは,式(A.3)のように事実上,最高使用可能電圧におけるエネルギーと
最小使用可能電圧におけるエネルギーの差である。
2
use̲min
2
use
use
2
1
2
1
CU
CU
E
−
=
······················································ (A.3)
ここに,
Euse: 使用可能エネルギー
C: 静電容量
Uuse: 最大使用可能電圧
Uuse̲min: 最小使用可能電圧
注記 EDLCの使用可能エネルギーEuseは,等価直列抵抗ESRの損失のため完全には得られない。
A.2 SOC及びSOEの内容
A.2.1 一般
容量及びエネルギーについて幾つかの定義があるため,充電状態(SOC)及びエネルギー状態(SOE)
34
E 4071-1:2019
を容量及びエネルギーの内容の組合せとして次に定義する。
目的及び用途によって使用者が適宜定義を選択する。
一般にSOCは定義に基づいて使用可能な最大量(例 理論,定格又は使用可能)に対するESUに残存
する容量との比率である。SOCは,通常(0.0〜1.0の)小数又はパーセント(%)で表す。1.0又は100 %
のSOCの値は満充電状態を表し,0.0又は0 %は完全放電状態を表す。SOEはESUの使用可能なエネルギ
ーの比率で,小数又はパーセントで表す。
A.2.2 理論目的
理論目的としては,式(A.4)及び式(A.5)の定義が適切である。
Th
ng
Th̲remaini
Th
CH
CH
SOC =
······························································· (A.4)
Th
ng
Th̲remaini
Th
E
E
SOE =
································································· (A.5)
ここに,
CHTh: 理論容量(Ah)
CHTh̲remaining: 残存理論容量(Ah)
ETh: 理論エネルギー(Wh)
ETh̲remaining: 残存理論エネルギー(Wh)
A.2.3 一般目的
一般目的としては,式(A.6)及び式(A.7)の定義が適切である。
R
g
R̲remainin
CH
CH
SOC=
·································································· (A.6)
R
g
R̲remainin
E
E
SOE=
···································································· (A.7)
ここに,
CHR: 定格容量(Ah)
CHR̲remaining: 残存定格容量(Ah)
ER: 定格エネルギー(Wh)
ER̲remaining: 残存定格エネルギー(Wh)
A.2.4 実用目的
実用目的としては,式(A.8)及び式(A.9)の定義が適切である。
use
ing
use̲remain
Ef
CH
CH
SOC =
······························································ (A.8)
use
ing
use̲remain
Ef
E
E
SOE =
································································· (A.9)
ここに,
CHuse: 使用可能容量(Ah)
CHuse̲remaining: 残存使用可能容量(Ah)
Euse: 使用可能エネルギー(Wh)
Euse̲remaining: 残存使用可能エネルギー(Wh)
A.2.5 使用可能な係数
使用可能な係数としては,寿命初期(BOL)及び寿命末期(EOL)の両方に適用できる,式(A.10)及び
式(A.11)の定義が適切である。
R
use
SOC
CH
CH
COU
=
···································································(A.10)
35
E 4071-1:2019
R
use
SOE
E
E
COU
=
······································································ (A.11)
ここに,
CHR: 定格容量(Ah)
CHuse: 使用可能容量(Ah)
ER: 定格エネルギー(Wh)
Euse: 使用可能エネルギー(Wh)
注記 異なる容量又はエネルギーのほかの組合せの比率も,必要によって使用できる。
(A.2.2〜A.2.4の比は同じ条件で比較したもの。A.2.5は条件の異なるものの比較。)
Th
R
SOC̲R̲Th
CH
CH
COU
=
·······························································(A.12)
Th
R
SOE̲R̲Th
E
E
COU
=
·································································(A.13)
Th
use
SOC̲use̲Th
CH
CH
COU
=
·····························································(A.14)
Th
use
SOE̲use̲Th
E
E
COU
=
·······························································(A.15)
36
E 4071-1:2019
附属書B
(参考)
エネルギー関連の用語及び定義
B.1
一般
この附属書はエネルギー関連の定義,用語及び詳細計算方法について記載する。
同じ“回生率”という用語に様々な定義が,広く用いられていることに留意することが望ましい。例え
ば,図9に示す構成(架線で給電される非ハイブリッド車両)の回生性能は,集電装置(例えば,パンタ
グラフ又は集電舟)を通じた車両と給電線間の送電電力の計測によることが一般的である。しかし,この
ことは,主回路装置が回生電力を発生していても,回生電力が補助負荷へ供給する電力より小さい場合の
給電線から車両へのパワーフローが正になることもあることを意味する。
それゆえ,図9に示すPPSサブシステムでの損失が無視できる場合でも,供給,回生及び消費電力,回
生率並びにほかの多くの車両の性能指標が,次に定義する主回路装置の指標と大きく異なることがあり得
る。
また,個々の回路構成によって,エネルギー関連の性能指標の適切な解釈は,大きく異なることに留意
することが望ましい。例えば,図6の構成では,PPSへの回生エネルギーは,基本的に電力網に戻され再
利用される。しかし,図4では,エンジン又は排気ブレーキによって消費され,再利用されないのだから,
別の解釈が望まれる。
それゆえ,エネルギー効率の性能指標は,明確に定義しシステムの構成によって適切に扱われることが
望ましい。
B.2
回生指標の用語及び定義
B.2.1
電源サブシステム(power source subsystem)
シリーズハイブリッドシステムの構成品のうち,主な動作がシステムのほかの構成品に電力を供給する
動作であるもの。
注記 ESSは,状況によって電源と電力吸収要素との両方とみなすことができる。
B.2.2
電力吸収サブシステム(power sink subsystem)
シリーズハイブリッドシステムの構成品のうち,主な動作がシステムのほかの構成品から電力を受けて,
指定の目的を完遂するため,それを消費する動作であるもの。
注記 B.2.1の注記参照。
B.2.3
供給エネルギー(supplied energy)
<シリーズハイブリッドシステムの電源サブシステム> 規定の運転パターンにおいて電源サブシステ
ムからシステムのほかの構成品に給電されるエネルギー量。
<シリーズハイブリッドシステムの電力吸収サブシステム> 規定の運転パターンにおいてシステムの
ほかの構成品から電力吸収サブシステムに給電されるエネルギー量。
<架線車両> 規定の運転パターンにおいて架線から車両に給電されるエネルギー量。
37
E 4071-1:2019
B.2.4
回生エネルギー(regenerated energy)
<シリーズハイブリッドシステムの電源サブシステム> 規定の運転パターンにおいてシステムのほかの
構成品から電源サブシステムに給電されるエネルギー量。
<シリーズハイブリッドシステムの電力吸収サブシステム> 規定の運転パターンにおいて電力吸収サ
ブシステムからシステムのほかの構成品に給電されるエネルギー量。
<架線車両> 規定の運転パターンにおいて車両から架線に給電されるエネルギー量。
B.2.5
消費エネルギー(consumed energy)
供給エネルギーから回生エネルギーを減じて得られるエネルギー量。
B.2.6
回生率(regenerative efficiency)
供給エネルギーに対する回生エネルギーの比率。
B.3
シリーズハイブリッドシステムのエネルギー関連性能指標
B.3.1 一般
シリーズハイブリッドシステムのエネルギー効率を評価する場合,最も重要な指標は3.1.8に定義したよ
うに消費エネルギーである。
供給エネルギー,回生エネルギー及び/又は消費エネルギー(シリーズハイブリッドシステムの各サブ
システム及び/又はシステム全体について),回生率(主回路装置及び/又はシリーズハイブリッドシステ
ム全体について)などのようなほかの性能指標も使用できるし,適切と思われる場面では考慮されること
が望ましい。
この附属書で定義する性能指標の可能な目的は,シリーズハイブリッドシステムの各サブシステムの省
エネルギーの寄与を調査することを含むが,これに限定されるものではない。
B.3.2 測定位置
この附属書に記載する性能指標の計算には,シリーズハイブリッドシステムのリンクブロックとサブシ
ステムとのパワーフローを測定する必要がある。図B.1の構成例でパワーフローは,PPPS,PESS,PTE,PBR
及びPAUXで表す。
注記 図B.1のリンクブロックには損失があるが一般に小さく,この附属書では無視する。
38
E 4071-1:2019
PPPS
主電源の電力(PPS)
PTE
主回路装置の電力(TE)
PESS
エネルギー貯蔵システムの電力(ESS)
PBR
ブレーキ抵抗器の電力(BR)
PAUX 補助回路機器の電力(AUX)
図B.1−シリーズハイブリッドシステムのブロック図
これに加え次の項目を測定する必要がある。
・ 架線から給電される車両は,集電装置から車両に取り込む電力
・ 燃料又はガスを消費するPPSから給電される車両は,流量計による燃料又はガス消費量
8.6.2.4に示すように,図B.1に示す各サブシステムとリンクブロックとの接続端子で測定する。
B.3.3 主電源の等級
この附属書における記載の便宜上,ハイブリッドシステムのPPSを次の二つの等級に分類する。
・ クラス0:次のいずれかの主電源
− 回生電力を吸収できない電源
− 回生電力を吸収し消費できるが,返還されたエネルギーを再利用できない電源
・ クラス1:回生電力を吸収し,返還されたエネルギーを再利用できる主電源
箇条4に示す例から,ディーゼル電気PPS及び燃料電池PPSはクラス0に分類され,架線PPSはクラス
1に分類される。
B.3.4 消費エネルギー
B.3.4.1 主回路装置の消費エネルギー
図B.1の主回路装置に供給,回生及び消費されるエネルギーは,式(B.1)〜式(B.3)で表すことができる。
39
E 4071-1:2019
()
(
)
∫
=
=
E
S
0,
max
TE
TE
S,
T
T
t
dt
t
P
E
··························································· (B.1)
()
(
)
∫
=
−
=
E
S
0,
max
TE
TE
R,
T
T
t
dt
t
P
E
························································ (B.2)
TE
R,
TE
S,
TE
C,
E
E
E
−
=
································································· (B.3)
ここでES,TE,ER,TE及びEC,TEは主回路装置に供給,回生及び消費されるエネルギーで,tは時間,PTE(t)
は図B.1におけるPTEの時刻tにおける値,TS及びTEは評価条件として与えられた運転パターンの最初と
最後の時間で,max(a, b) はa>bの場合aでそれ以外はbに等しい。シリーズハイブリッドシステム又は
全体として他のシリーズハイブリッドシステム(特に,架線給電されるシリーズハイブリッドシステム)
の他のサブシステムの供給,回生及び消費されるエネルギーも同様に定義することができる。
B.3.4.2 集電装置でのエネルギー消費量
(ハイブリッドシステム以外の車両を含む)架線から給電される鉄道車両の集電装置(例えば,接触線
が架空線の場合はパンタグラフ)での供給及び返還エネルギー並びに消費されるエネルギーは,式(B.4)〜
式(B.6)で表すことができる。
()
(
)
∫
=
=
E
S
0,
max
CC
CC
S,
T
T
t
dt
t
P
E
·························································· (B.4)
()
(
)
∫
=
−
=
E
S
0,
max
CC
CC
R,
T
T
t
dt
t
P
E
························································ (B.5)
CC
R,
CC
S,
CC
C,
E
E
E
−
=
································································· (B.6)
ここでt,TS,TE及びmax(a, b) はB.3.4.1と同じ,ES,CC,ER,CC及びEC,CCは集電装置での供給,回生及び
消費されるエネルギーで,PCC(t) は時間tの集電装置での入力電力である(PCC<0の場合,電力は車両か
ら架線の方向に流れる)。
主回路装置に供給される電力PTEの符号(+,0又は−)及びPCCの符号は,ハイブリッド車両でない場
合も含め,必ずしも一致しないことに注意することが望ましい。
この評価において,車載ESSがある場合,そのSOC及び/又はSOEは8.6.2.5で規定したように時刻t
=TS及びt=TEでの値が等しくなければならない。
B.3.4.3 ハイブリッドシステムの消費エネルギー
ハイブリッドシステムの主電源の供給及び返還エネルギーは,式(B.7)〜式(B.9)で表すことができる。
()
(
)
∫
=
=
E
S
0,
max
PPS
PPS
S,
T
T
t
dt
t
P
E
························································· (B.7)
()
(
)
∫
=
−
=
E
S
0,
max
PPS
PPS
R,
T
T
t
dt
t
P
E
······················································· (B.8)
PPS
R,
PPS
S,
PPS
C,
E
E
E
−
=
······························································· (B.9)
40
E 4071-1:2019
ここでt,TS,TE及びmax(a, b) はB.3.4.1と同じ,ES,PPS,ER,PPS及びEC,PPSは主電源での供給,回生及び
消費されるエネルギーで,PPPS(t) は図B.1のPPPSの時刻tにおける値である。
この評価において,車載ESSがある場合,そのSOC及び/又はSOEは8.6.2.5で規定したように時刻t
=TS及びt=TEでの値が等しくなければならない。
PPSがB.3.3の定義によるクラス1の場合,ハイブリッドシステムの消費エネルギーは,式(B.9)に示す
EC,PPSに等しい。
PPSがB.3.3の定義によるクラス0の場合,ハイブリッドシステムの消費エネルギーは,式(B.7)に示す
ES,PPSに等しい。
B.3.4.4 ESSの損失
ESSを電力吸収サブシステムと考えると,そこで供給,回生及び消費されるエネルギーは,式(B.10)〜
式(B.12)で表すことができる。
()
(
)
∫
=
−
=
E
S
0,
max
ESS
ESS
S,
T
T
t
dt
t
P
E
······················································ (B.10)
()
(
)
∫
=
=
E
S
0,
max
ESS
ESS
R,
T
T
t
dt
t
P
E
························································ (B.11)
ESS
R,
ESS
S,
ESS
C,
E
E
E
−
=
······························································ (B.12)
ここでt,TS,TE及びmax(a, b) はB.3.4.1と同じ,ES,ESS,ER,ESS及びEC,ESSはESSでの供給,回生及び消
費されるエネルギーで,PESS(t) は図B.1のPESSの時刻tにおける値である。ここで定義するEC,ESSは与え
られた運転パターンでのESSの損失を示す。
この評価において,車載ESSのSOC及び/又はSOEは8.6.2.5で規定したように時刻t=TS及びt=TE
における値が等しくなければならない。
B.3.5 回生率
B.3.5.1 一般
全体としてハイブリッドシステムの回生率の適切な定義は,ハイブリッドシステムの構成に依存する。
回生率は運転パターンに依存し,例えば,車両が下り坂を下っているときは,100 %を超えることがあ
る。
B.3.5.2 主回路装置の回生率
主回路装置の回生率RETE(%)は,式(B.13)で表すことができる。
100
TE
S,
TE
R,
TE
×
=EE
RE
································································· (B.13)
ここでES,TE及びER,TEはB.3.4.1の定義と同じ。
B.3.5.3 架線給電車両の回生率
(ハイブリッド車両でない場合も含む)架線給電車両の回生率RECC(%)は,式(B.14)で表すことがで
きる。
100
CC
S,
CC
R,
CC
×
=EE
RE
································································· (B.14)
ここでES,CC及びER,CCはB.3.4.2の定義と同じ。
41
E 4071-1:2019
同じ運転パターンで走行する(車上ECCがある車両)ハイブリッド車両のRECCは,(車上ECCのない
車両)ハイブリッド車両でない場合より一般的に小さいことに注意することが望ましい。
注記 この評価で車上ESSの場合,SOC及び/又はSOEは,上記と均衡していると考える。
B.3.5.4 ハイブリッドシステムの回生率
回生率の一般的な定義は,B.3.3で定義するPPSクラスの考え方を用いて,次で与えられる。
クラス1のPPSで給電されるハイブリッドシステムの回生率RE1(%)は,式(B.15)で与えられる。
100
TE
S,
BR
S,
TE
R,
1
×
−
=
E
E
E
RE
·························································· (B.15)
ここでES,TE及びER,TEはB.3.4.1の定義と同じで,ES,BRは,式(B.16)で表すことができる。
()
∫
=
=
E
S
BR
BR
S,
T
T
t
dt
t
P
E
·································································· (B.16)
クラス0のPPSで給電されるハイブリッドシステムの回生率RE0(%)は,式(B.17)で与えられる。
100
TE
S,
BR
S,
PPS
R,
TE
R,
0
×
−
−
=
E
E
E
E
RE
················································ (B.17)
ここでES,TE及びER,TEはB.3.4.1の定義と同じで,ES,BRは式(B.16)で表され,ER,PPSはB.3.4.3で表される。
注記 この評価で車上ESSの場合,SOC及び/又はSOEは,上記と均衡していると考える。
42
E 4071-1:2019
附属書C
(参考)
この規格に適用できる火災防護の法令及び規則
C.1 一般
何か国かの火災防護の法令及び規則を,次に示す。
この項目は単に情報である。
C.2 中国
GB 6771-2000,Regulations relating to fire preventive and fighting measures for electric locomotives
C.3 欧州
EN 45545,Railway applications−Fire protection on railway vehicles
C.4 日本
国土交通省の鉄道に関する技術上の基準を定める省令
第8章 車両
第5節 車両の火災対策等,第83条(車両の火災対策)及び第85条(停車時の装置の機能)
第6節 動力車を操縦する係員が単独で乗務する列車等の車両設備,第86条(動力車を操縦する係
員が単独で乗務する列車等の車両設備)
第10章 運転
第2節 列車の運転,第108条(列車の危難防止)
C.5 ロシア
VNPB-03,Passenger Cars. Fire Safety Requirements, GOST
C.6 米国
NFPA 130,Standard for Fixed Guideway Transit and Passenger Rail Systems
43
E 4071-1:2019
附属書D
(参考)
使用者と製造業者との協定を必要とする細分箇条の一覧
この規格で使用者と製造業者との間の協定を必要とする項目を,表D.1に示す。
この規格は,試験を四つのレベルで規定している。レベルによって使用者は購入者と読み替えてもよい。
表D.1−使用者と製造業者との協定を必要とする細分箇条の一覧
細分箇条
題名
協定する内容
5.3
温度
予熱又は予冷却の要求事項
6.1.1.2
ほかの加速度
・ 鉄道車両の垂直軸に対し直角に作用する正味の左右方向
の許容加速度成分
・ 仕様書で規定された性能を連続して動作できる左右方向
及び前後方向の加速度
6.3.1
外部充放電機能
外部充放電機能の仕様書
6.5
縮退モード
縮退モードの要求事項
6.7
寿命に対する要求事項
・ ESU寿命モデル
・ 寿命末期(EOL)の定義及びパラメータ
6.8
ハイブリッド車両の騒音に関する追
加要求事項
特定の騒音に関する要求事項(規定値)
7.2
形式試験
・ 変更影響の評価のため,形式試験を再実施するか又は一部
の形式試験を実施するかの判断
・ 形式試験の省略
・ シミュレーション結果での試験の代替
7.3
任意試験
・ 任意試験の要否
・ 試験結果のシステム合否判定への適用の有無
7.4
受渡試験
・ 代替の試験手順の採用の有無
7.5
試験の種類
・ 特別な要求事項
・ 表2の試験の位置付け
7.6
合否判定基準
仕様書
8.3.1
ESS充放電制御機能
ESSの定格電力での充放電の要求事項
8.3.2
外部充放電試験
初期温度及び冷却条件
8.3.4
縮退モード試験
縮退モード特有の使用範囲
8.3.5
SOC/SOE試験
合否判定基準
8.6.1
一般
・ シミュレーション結果の適用
・ ESSを含むエネルギー消費量の合否判定基準
・ IEC 62888の適用の有無
8.6.2.1
一般
サブシステム内の幾つかの部品の測定の要否
8.6.2.4
測定位置
部品の測定の要否
8.6.2.5
測定
試験の運転パターン及び負荷条件
8.6.3.1
燃料消費の算定
・ 試験の運転パターン及び負荷条件
・ 燃料消費に,燃料タンクで測定する実燃料消費,又は事前
に定置試験で得られた燃料消費データを基にしたエンジ
ンの運転状況で得られるデータの換算の,いずれを使うか
の選択
44
E 4071-1:2019
表D.1−使用者と製造業者との協定を必要とする細分箇条の一覧(続き)
細分箇条
題名
協定する内容
8.6.3.2
排気ガス排出レベルの算定
排気ガス排出量に,実測定又は事前に定置試験で得られたガス
排出量データを基にしたエンジンの運転状況で得られるデー
タの換算の,いずれを使うかの選択
8.7.1
一般
シミュレーション結果適用の可否
8.8.1
一般
既存の同様のシステムの部品レベル試験又は信頼性試験結果
適用の可否
8.8.2
低温運転試験
・ 部分的なサブシステム試験の要否
・ 試験設備の制約がある場合の試験方法
8.8.3
高温運転試験
・ 部分的なサブシステム試験の要否
・ 試験設備の制約がある場合の試験方法
8.9
短絡保護試験
・ ESSの規定箇所を短絡する方法
・ 保護の考え方
・ 試験設備の制約がある場合の試験方法
8.10
ESU耐久試験
耐久性シミュレーション結果適用の可否
9.1
一般
シミュレーション結果適用の可否
9.4
駆動システムの消費エネルギー測定
運転パターン及び負荷条件
9.8
騒音測定
部品試験又は試験台の試験で部品又はサブシステムでの騒音
測定の要否
45
E 4071-1:2019
参考文献
JIS C 2143-5 電気絶縁材料−熱的耐久性−第5部:相対熱的耐久性指数(RTE)の求め方
注記 対応国際規格:IEC 60216-5,Electrical insulating materials−Thermal endurance properties−Part 5:
Determination of relative thermal endurance index (RTE) of an insulating material(IDT)
JIS C 60721-3-5 環境条件の分類−第3-5部:環境パラメータとその厳しさのグループ別分類−車載
機器の条件
注記 対応国際規格:IEC 60721-3-5,Classification of environmental conditions−Part 3: Classification of
groups of environmental parameters and their severities−Section 5: Ground vehicle installations
(IDT)
JIS C 8715-1 産業用リチウム二次電池の単電池及び電池システム−第1部:性能要求事項
注記 対応国際規格:IEC 62620,Secondary cells and batteries containing alkaline or other non-acid
electrolytes−Secondary lithium cells and batteries for use in industrial applications(MOD)
JIS C 8715-2 産業用リチウム二次電池の単電池及び電池システム−第2部:安全性要求事項
JIS E 5004-1 鉄道車両−電気品−第1部:一般使用条件及び一般規則
注記 対応国際規格:IEC 60077-1,Railway applications−Electric equipment for rolling stock−Part 1:
General service conditions and general rules(MOD)
JIS E 5006 鉄道車両−電子機器
注記 対応国際規格:IEC 60571,Railway applications−Electronic equipment used on rolling stock
(MOD)
JIS E 5007 鉄道車両−変圧器及びリアクトル
注記 対応国際規格:IEC 60310,Railway applications−Traction transformers and inductors on board
rolling stock(MOD)
IEC 60076-10,Power transformers−Part 10: Determination of sound levels
IEC 60254-1:2005,Lead-acid traction batteries−Part 1: General requirements and methods of tests
IEC 60254-2:2008,Lead-acid traction batteries−Part 2: Dimensions of cells and terminals and marking of
polarity on cells
IEC 60349-1,Electric traction−Rotating electrical machines for rail and road vehicles−Part 1: Machines other
than electronic converter-fed alternating current motors
IEC/TS 60349-3,Electric traction−Rotating electrical machines for rail and road vehicles−Part 3:
Determination of the total losses of converter-fed alternating current motors by summation of the
component losses
IEC 60850,Railway applications−Supply voltages of traction systems
IEC 62236-3-1,Railway applications−Electromagnetic compatibility−Part 3-1: Rolling stock−Train and
complete vehicle
IEC 62236-3-2,Railway applications−Electromagnetic compatibility−Part 3-2: Rolling stock−Apparatus
IEC 62278,Railway applications−Specification and demonstration of reliability, availability, maintainability
and safety (RAMS)
IEC 62497-1,Railway applications−Insulation coordination−Part 1: Basic requirements−Clearances and
46
E 4071-1:2019
creepage distances for all electrical and electronic equipment
IEC 62619,Secondary cells and batteries containing alkaline or other non-acid electrolytes−Safety
requirements for secondary lithium cells and batteries, for use in industrial applications
IEC 62888 (series)/CD,Railway applications−Energy measurement on board trains
IEC 62888-2,Railway applications−Energy measurement on board trains−Part 2: Energy measurement
IEC 62928,Railway applications−Rolling stock−Onboard lithium-ion traction batteries
IEC 62973 (series),Railway applications−Rolling stock−Batteries for auxiliary power supply systems
ISO 6469-3:2001,Electric road vehicles−Safety specifications−Part 3: Protection of persons against electric
hazards
ISO 12405-4,Electrically propelled road vehicles−Test specification for lithium-ion traction battery packs and
systems−Part 4: Performance testing
注記 原国際規格では,ISO 12405-1:2011を記載しているが,ISO 12405-1は廃止され,ISO 12405-4
に置き換わった。
ISO 23274-1,Hybrid-electric road vehicles−Exhaust emissions and fuel consumption measurements−Part 1:
Non-externally chargeable vehicles
注記 原国際規格では,ISO 23274:2007を記載しているが,ISO 23274は廃止され,ISO 23274-1に
置き換わった。
ISO 23828:2013,Fuel cell road vehicles−Energy consumption measurement−Vehicles fuelled with
compressed hydrogen
EN 1986-2:2001,Electrically propelled road vehicles−Measurement of energy performances−Part 2: Thermal
electric hybrid vehicles
EN 45545 (series),Railway applications−Fire protection on railway vehicles
EN 50547:2013,Railway applications−Batteries for auxiliary power supply systems
CLC/TS 50591:2013,Specification and verification of energy consumption for railway rolling stock
47
E 4071-1:2019
附属書JA
(参考)
JISと対応国際規格との対比表
JIS E 4071-1:2019 鉄道車両−車上エネルギー貯蔵システム−第1部:シリーズ
ハイブリッドシステム
IEC 62864-1:2016,Railway applications−Rolling stock−Power supply with onboard
energy storage system−Part 1: Series hybrid system
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
3 用語,定
義及び略語
3 用語,定義及び略語
の引用規格
3
IEC 60050-811を引用
変更
JISではJIS E 4001を引用
日本の実情に合わせ鉄道車両の用
語を引用規格とした。
3.1.3 シリーズハイブ
リッド
3.1.3
JISとほぼ同じ
削除
JISではシリーズハイブリッド
(series hybrid)の前に記載のハイ
ブリッド(hybrid)という用語を削
除した。
3.1.2のパラレルハイブリッドと
整合させた。
5 環境条件 5.1 一般
5.1
JISとほぼ同じ
追加
JISでは“A1,T1”などを追加した。 内容を理解しやすくするために追
加した。
5.2 標高
5.2
JISとほぼ同じ
追加
日本の実情に合わせ等級A3に限っ
た。
日本における一般的環境条件に基
づくものでありIECには提案しな
い。
5.3 温度
5.3
JISとほぼ同じ
追加
日本の実情に合わせ等級T4に限っ
た。
日本における一般的環境条件に基
づくものでありIECには提案しな
い。
7 試験の種
類
7.1 一般
7.1
JISとほぼ同じ
追加
JISでは,Location及びlevelが表2
での記載と異なるので整合をとれ
る表現に改めた。
次回IEC改訂時に,IEC規格への
反映を提案する。
5
E
4
0
7
1
-1
:
2
0
1
9
48
E 4071-1:2019
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
8 組合せ試
験
8.3.2 外部充放電試験
8.3.2
JISとほぼ同じ
追加
対応国際規格では外部充電試験と
なっているが,機能要求である電気
要求6.3.1に,外部充放電機能とあ
り,充電及び放電とも試験する必要
があると考え試験の表題は充放電
試験とした(表2にも修正箇所あ
り)。
対応国際規格では充電方法として
constant-currentだけ規定している
が,constant-voltageでの充放電も一
般的であるので,対応国際規格の
constant-current chargingの部分を定
電流及び/又は定電圧の充放電に
置き換えた。
次回IEC改訂時に,IEC規格への
反映を提案する。
8.6.1 一般
二乗和平方根
8.6.1
二乗平均
変更
対応国際規格の“root mean square”
が“square-root of sum of squares”の
誤記と考えられるので,JISでは訂
正した。
次回IEC改訂時に,IEC規格への
反映を提案する。
JISと国際規格との対応の程度の全体評価:IEC 62864-1:2016,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
5
E
4
0
7
1
-1
:
2
0
1
9