2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 6803-1994
無人搬送車−設計通則
General rules on the design of
automatic guided vehicles
1. 適用範囲 この規格は,無人搬送車(無人けん引車及び無人フォークリフトを含む。)を設計する際の
条件,構造、安全,性能などについて規定する。
備考 この規格の引用規格を,次に示す。
JIS D 6801 無人搬送車システム−用語
JIS D 6802 無人搬送車システム−安全通則
JIS D 6805 無人搬送車−特性・機能試験方法
2. 用語の定義 この規格で用いる主な用語の定義は,JIS D 6801によるほか,次による。
すえ切り 無人搬送車を停止状態に保ったまま,ステアリング軸を回転させること。
3. 設計条件
3.1
使用条件 使用条件は,次の項目について明確にする。
(1) 積載物の仕様 積載物の仕様は,特に次の項目に注意する。
(a) 無人搬送車に搭載する積載物の質量は,許容荷重を超えてはならない。
(b) 積載物の荷重偏心量は,本体機能上問題がない範囲とする。
(c) 積載物の最大寸法は,荷ずれも考慮して,8.(標準仕様書の様式)に記載する寸法を超えてはなら
ない。
(d) 荷崩れしやすい積載物については,包装状態を改良するなどの対策を講じる必要がある。
(2) 1日当たりの稼働時間
(3) 地上制御盤における電源電圧の許容値
3.2
設置条件
3.2.1
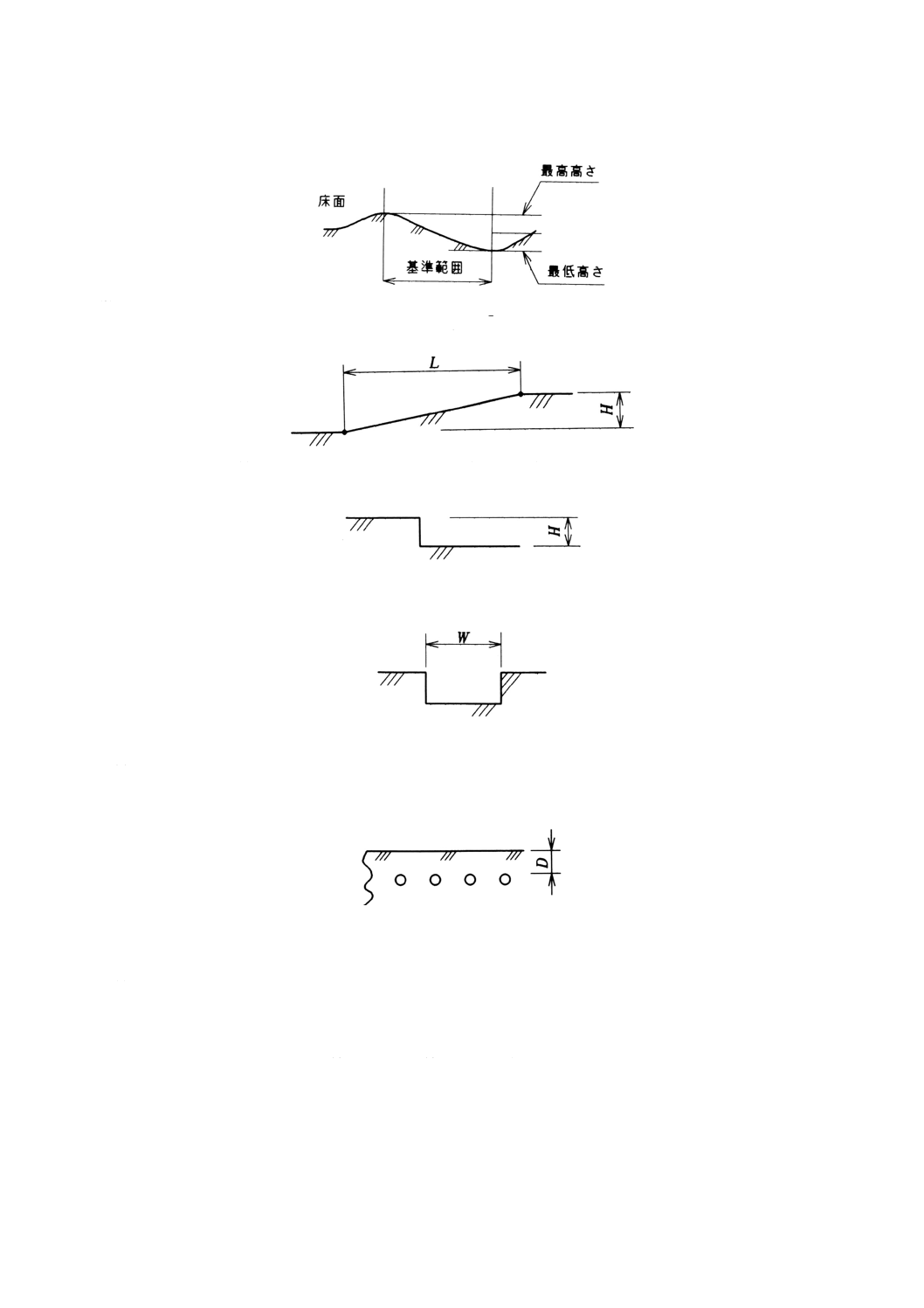
床面 床面は,次の項目について精度,寸法を明確にする。
(1) うねり うねりは,走行路のうねり最大許容値以下であること。うねりは,基準範囲の最高高さと最
低高さとの差であり,車両特性によって異なる(図1参照)。
2
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1 走行路精度
(2) 路面こう配 路面こう配は,路面の最大許容こう配HL以下であること(図2参照)。
図2 路面こう配
(3) 段差 段差は,最大許容段差H以下であること(図3参照)。
図3 段差
(4) 溝幅 溝幅は,最大許容幅W以下であること(図4参照)。
図4 溝幅
(5) 床構造 床構造は,次による。
(a) 原則としてコンクリート構造とし,配筋上端と床面の間隔Dを明確にする(図5参照)。
図5 床構造
(b) 配管・自動扉下の金属は,誘導方式によっては問題が発生するので,使用者と製造業者の両者で確
認すること。
(c) 配筋位置は,金属磁性物混合剤の場合,誘導方式によっては問題が発生するので,十分注意するこ
と。
(d) 光学誘導式は,この項(床構造)の影響を受けない。
(e) 耐床荷重 耐床荷重は,車輪配置及び車輪荷重又は単位面積当たりの荷重 (kg/m2) を明確にする。
(f) 表面仕上げ 表面仕上げは,コンクリート,エポキシ樹脂,Pタイル,アスファルト,木製タイル,
スティールファイバーなどがあるが,耐荷重・スリップ・摩耗・誘導性能を考慮して検討すること。
3.2.2
環境 環境は,次による。
(1) 使用場所 屋内・屋外のいずれか
3
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(2) 周囲温度 結露,凍結の有無
(3) 湿度
(4) 雰囲気 雰囲気中の粉じん・腐食性ガスの有無
(5) 静電気 床面材質は,静電気を逃がしやすくするため,放電しやすい材質とする。
(6) ノイズ 電磁波,外乱光,超音波,静電気などのノイズがある場合は,事前に影響を使用者と製造業
者との両者で確認すること。
3.3
施工条件 施工条件は,次による。
(1) 施工範囲について,使用者と製造業者との両者で,施工範囲を明確にすること。
(2) 標準施工条件は,8.(1)(一般仕様書の様式)に示す。
4. 構成・構造 無人搬送車は,基本的に走行駆動部・ステアリング部・本体フレーム部・制御部・バッ
テリ・安全装置・移載装置(移載装置付きの場合)によって構成する。各機器の詳細を次に規定する。安
全装置は,5.(安全設計)で規定する。
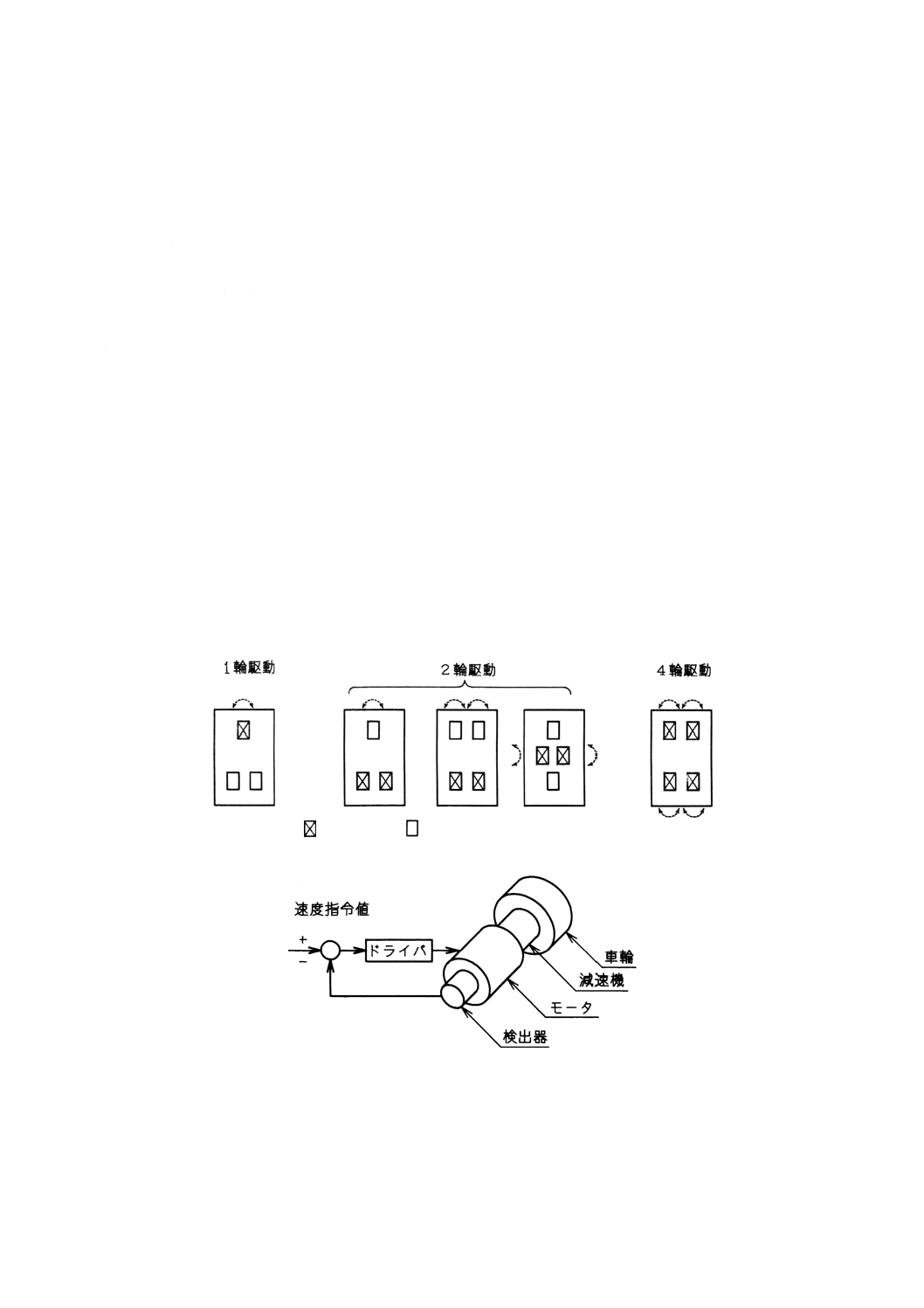
(1) 走行駆動部 車輪,モータ,ブレーキ,ドライバ,速度検出器(エンコーダなど),ギアなどから成る。
図6に代表的な駆動方式の例,図7に走行駆動装置の構成を示す。設計に当たっては,適した駆動方
式を選定するとともに許容荷重内での定格速度走行に支障がないようにトルク,車輪の回転数,車輪
と走行路間の接地圧などを考慮すること。
また,ブレーキは,手動時だけ有効な開放スイッチを備え,電源遮断時は制動力が働くタイプとす
る。
図6 駆動方式(代表例)
備考 ここに,
は駆動車輪,
は従動固定輪を示す。
図7 走行駆動装置
(2) ステアリング部
(a) ステアリング装置 許容荷重負荷時でのステアリング機能に支障がないように設計すること。特に,
停止時のすえ切り機能をもつ場合は,注意すること。
図8に代表的なステアリング方式を示すので,使用条件に適した方式を選定すること。
4
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
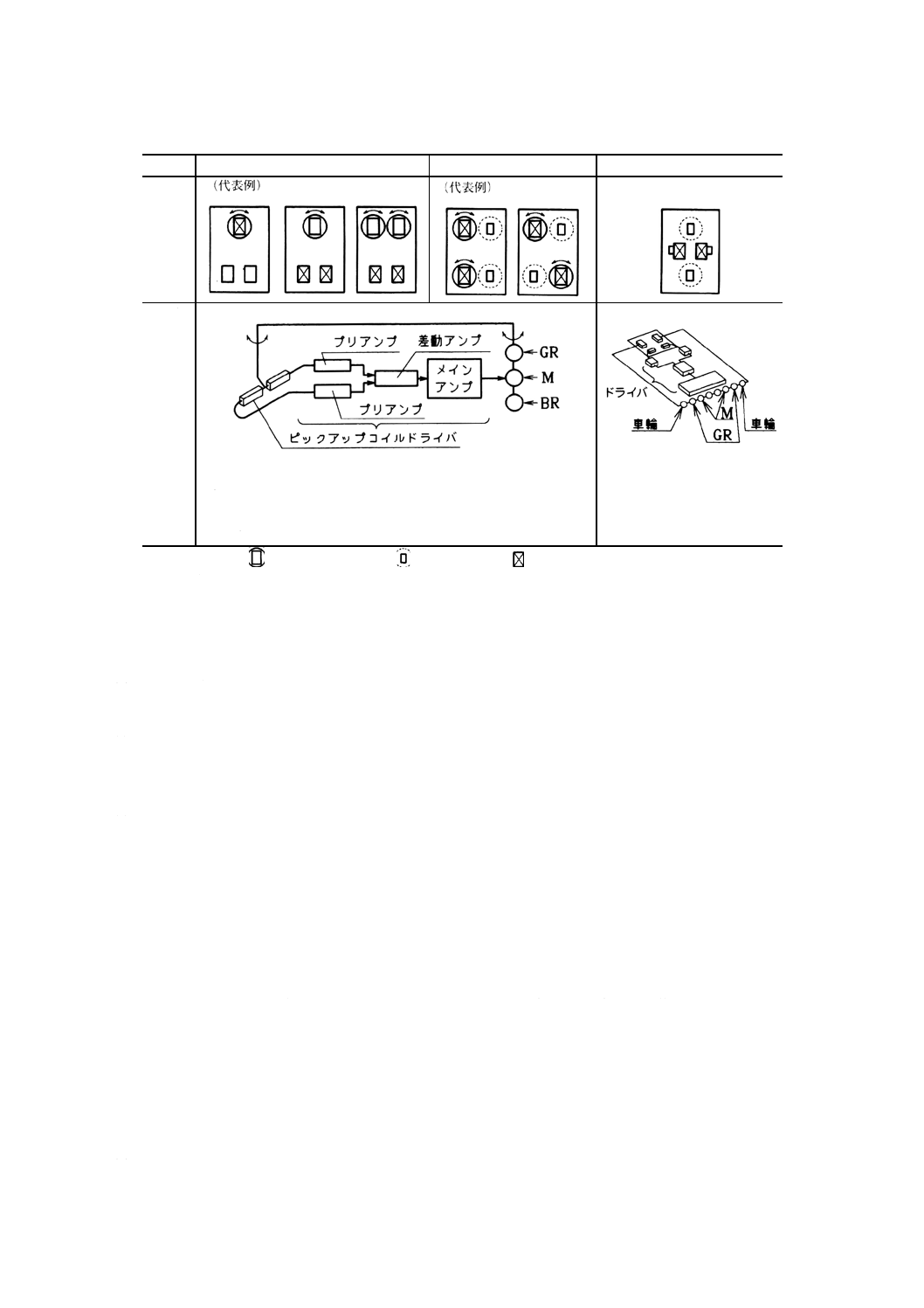
図8 ステアリング装置
前輪ステアリング方式
独立ステアリング方式
2輪速度差方式
略図
構造
ステアリング機構はモータ (M),ブレーキ (BR),ドライバ,
ギア (GR),角度検出器(エンコーダ,ポテンショなど),連結
装置,ステアリング軸,ピックアップコイルなどから構成され
ている。
ピックアップコイルとその
電圧差から走行モータへの
速度指令を得るドライバか
ら構成されている。
備考 ここに,
はステアリング輪,
はキャスタ輪,
は走行駆動輪を示す。
(b) 誘導用検出器 走行路表面仕上げ,表面状況など周囲環境に応じて採用する検出器のタイプを決定
すること。
(3) 本体フレーム部
(a) 本体フレーム 通常運用時,ねじれ・ひずみは,機能上障害が発生しないよう最小限とすること。
(b) 本体カバー 危険部分のない形状とする必要がある。
また,障害物との衝突時,機能障害が発生しないよう,堅ろうな構造とすること。
(c) 上面板 自動移載装置を装備していない場合は,搬送物を直接上面板に載せるため必要に応じ滑り
止めなどの荷ずれ防止装置を考慮すること。
(4) 制御部
(a) 制御装置 走行時の振動による損傷がないように,また,通常運用時容易に短絡などによる機能障
害が発生しないよう考慮すること。
(b) 操作パネル オペレータが誤って操作することがないよう,また,見やすく,操作しやすい構造と
すること。
(5) バッテリ 必要稼働時間・充電方法に応じて,その容量・個数・タイプを決定するとともに,通常運
用時に短絡による危険がないよう設計すること。
(6) 安全装置
(a) 障害物接触バンパ 無人搬送車が人又は物と衝突した場合でも,障害・損傷を与えない構造とする
こと。
(b) 接近検出装置 作動範囲と車体幅及び車体高さとの関係を明確にすること。対象物の色・材質によ
って検出距離が変化することがあるので,考慮の上この装置のタイプを選定すること。
(c) 自動運転表示灯 周囲の人に無人搬送車の接近が十分視認できるようその取付装置,サイズなどを
考慮すること。
(d) 非常停止ボタン 非常時に,とっさに操作できる形状・取付位置とし,赤色とすること。
5
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
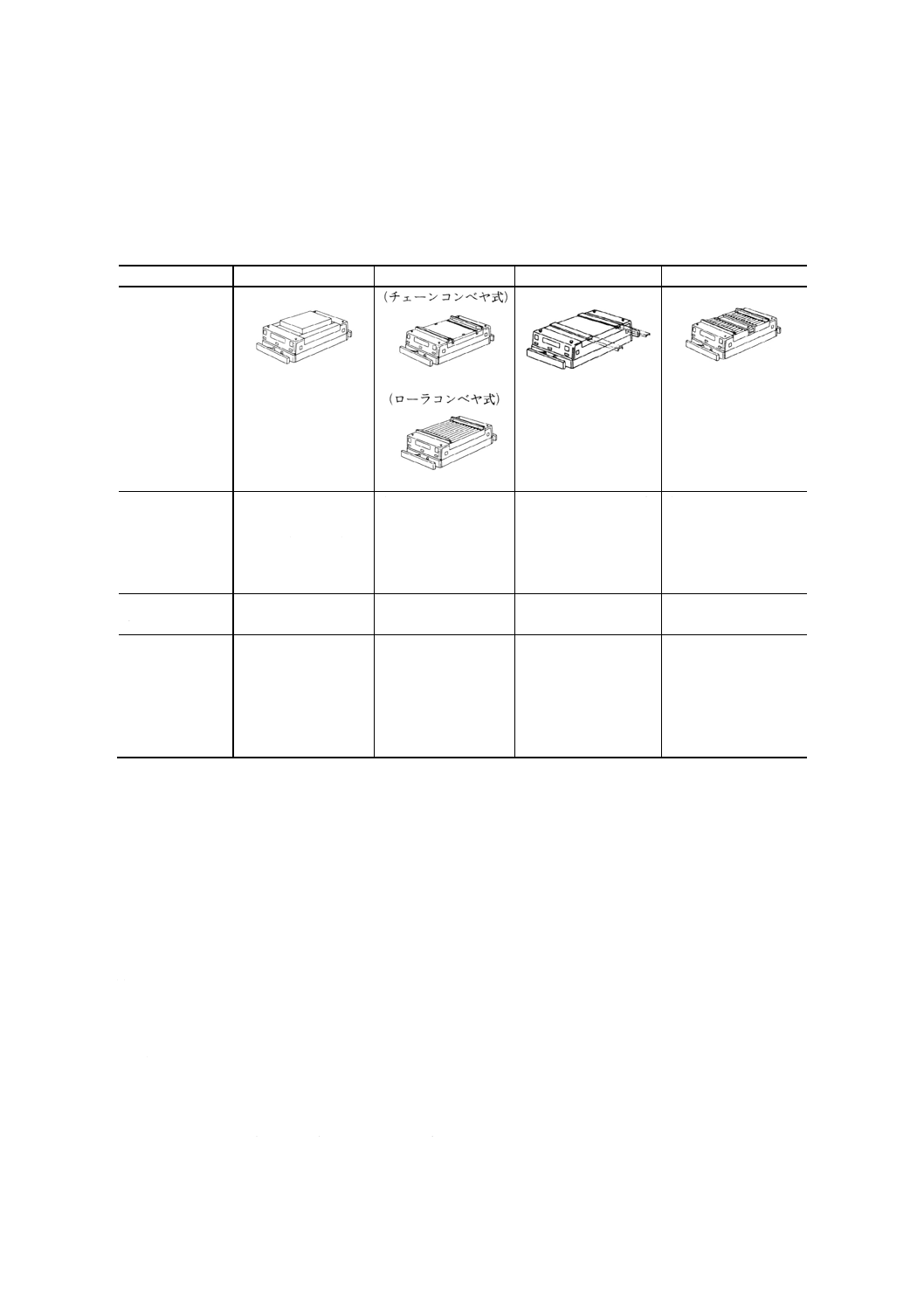
(7) 移載装置 図9に代表的な移載装置の例を示す。地上側移載装置間との移載時,停止精度による位置
ずれを吸収できる構造とする必要がある。
なお,搬送物の性状によって荷ずれ防止装置,ローラコンベヤ式ではローラ取付ピッチ,リフトア
ップ式ではパレットのたわみなど特に配慮すること。
図9 移載装置
リフトアップ式
コンベヤ式
スライドフォーク式
プッシュプル式
方式の外観
方法
リフティング装置
を上昇して荷取り
し,下降して荷卸し
する。
無人搬送車とステ
ーションのコンベ
ヤを駆動して荷重
を水平方向に移載
する。
フォークで荷重を支
持しながら水平移載
する。
無人搬送車とステー
ションのフリーロー
ラで荷重を支持しな
がら,つめの水平力
で荷重を移載する。
対応ステーショ
ン
固定ステーション
駆動コンベヤステ
ーション
固定ステーション
フリーローラステー
ション
構造
油圧式が多い。モー
タ,ポンプ,タンク,
ソレノイドバルブ,
シリンダ,配管など
からなる。
モータ,減速機,ス
プロケット,チェー
ン/ローラ/ベル
トなどからなる。
モータ,減速機,ス
プロケット,チェー
ン,シャトルフォー
クなどからなる。
モータ,減速機,ス
プロケット,チェー
ン,つめ付きバー,
つめの上下機構,フ
リーローラなどから
なる。
(8) 材料 (1)〜(7)の各機器に使用する材料は,リサイクルを考慮して選択することが望ましい。
5. 安全設計 無人搬送車の安全設計において考慮しなければならない事項は,次による。
なお,詳細にわたる安全上の規定,システム全体についての安全規定については,JIS D 6802による。
(1) 無人搬送車の構造及び機能
(a) 無人搬送車の本体の外面は,危険部分のない形状とする。
(b) 高速を含む複数の速度をもつ無人搬送車では,安全を確保するために,決められた場所及び必要な
場合には徐行できる速度を備えること。
(c) 無人搬送車には,制動機構,安全警報,安全表示,障害物検出機能,手動運転機能,非常停止装置
及び安全監視の検出装置を備えるものとする。
(2) 移載動作の安全確保 移載動作の安全確保は,次による。
(a) 無人搬送車の移載装置は,移載が安全確実に行えるよう地上側移載装置とのインタロック機能を備
える。
(b) 移載異常が発生したときは,その原因が除去されるまで停止状態を維持する構造とする。
(c) 必要に応じて積載物と移載面との滑りを防止する。
(3) 障害物検出機能 無人搬送車には,作業者及び周囲に接触しても危害を与えないように次の装置・機
6
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
能を装備する。
(a) 障害物接触バンパ
(b) 接近検出装置(障害物接触バンパだけで安全に停止することが困難な速度の場合)
(c) 無人搬送車相互の追突及び衝突(合流,すれ違い,進入)を防止するための車上・地上機能
(4) 非常時の停止装置及び安全監視の検出装置 無人搬送車には非常時に停止させるため及び安全監視の
ために,次の装置及び機能を備える。
(a) 非常停止ボタン
(b) 障害物接触バンパ
(c) 脱線検出
(d) オーバスピード検出
また,非常停止の原因が除去されるまで停止状態を維持し,再起動作操作がない限り動かない構造とす
る。電磁誘導式などでは地上側の電源が遮断された場合には,無人搬送車が直ちに運転を停止できる構造
であること。
6. 性能 無人搬送車の広義の性能は,次による。具体的内容は,8.(2)(本体仕様書の様式)に示す。
なお,特性・機能試験方法については,JIS D 6805による。
(1) 走行性能
(a) 走行速度 走行速度は,サイクルタイムを形成する重要な要素であり,その選定には注意を要する。
(b) 停止精度 正常停止時,前後方向の停止精度が自動移載方式の場合に重要で,地上側移載装置の設
計にもこの数値を考慮すること。
(c) 最小回転半径 コーナー部での無人搬送車走行に必要なスペースの決定要素となる。
(2) 本体性能
(a) 自重 自重の大きい場合は,人による移動・取扱いが難しいためメンテナンス性には配慮が必要で
ある。
(b) 車体寸法 車体寸法は,本体の外寸・ホイールベース・トレッド・移載高さで示され,搬送物の寸
法,走行通路幅などの条件に合った寸法を選択する必要がある。
(c) バッテリ バッテリは,必要な稼働時間に走行可能となるよう,容量を決定する。
7. 表示 無人搬送車には,本体の見やすい位置に,次の項目を表示した仕様銘板を取り付ける。
(1) 形式
(2) 自重
(3) 許容荷重
(4) 定格速度
(5) 製造年月又はその略号
(6) 製造番号
(7) 製造業者名又はその略号
8. 標準仕様書の様式 無人搬送車及び付帯設備の計画・導入に際しては,次の各仕様書にしたがって使
用者及び製造業者で仕様を確定する。
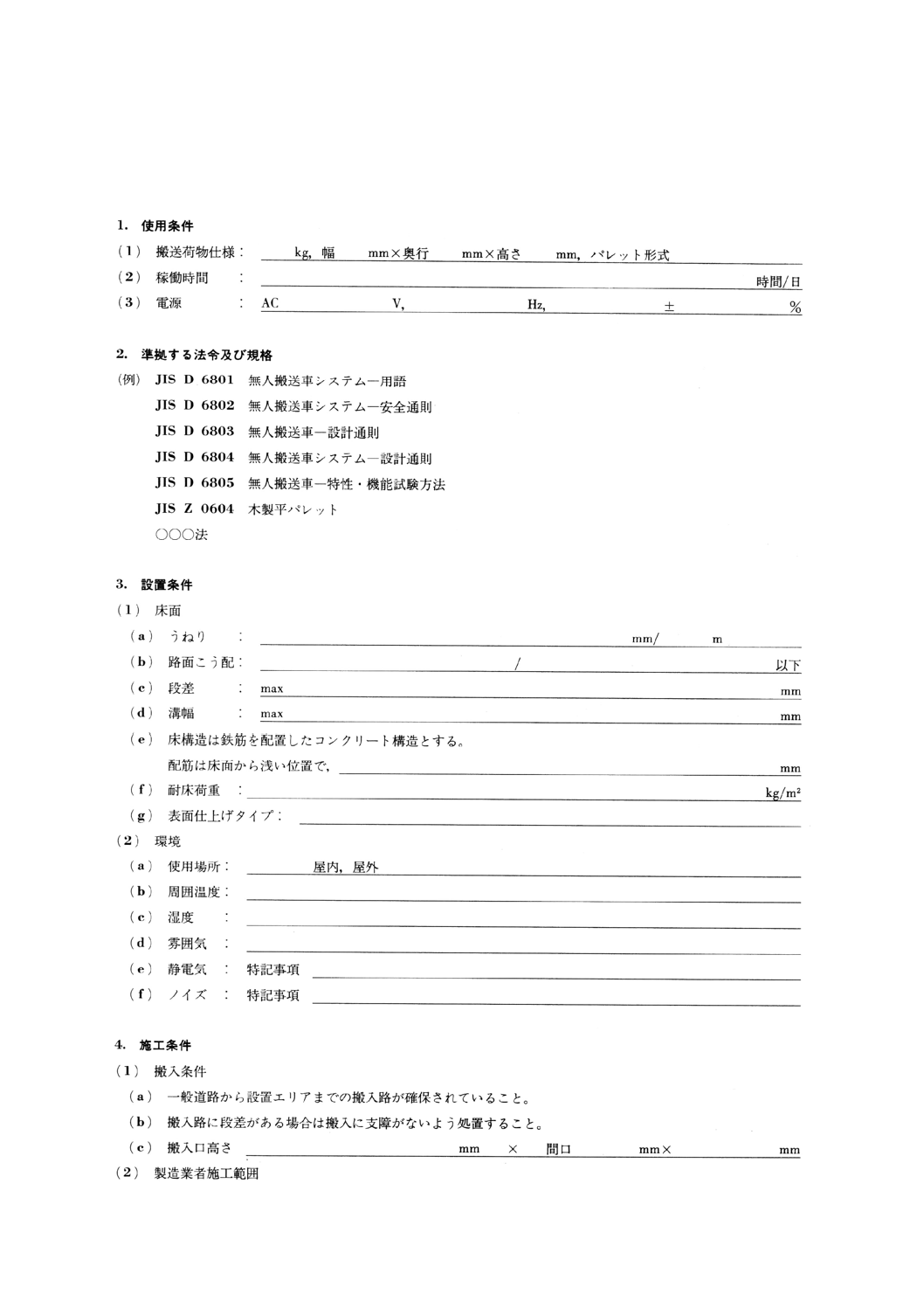
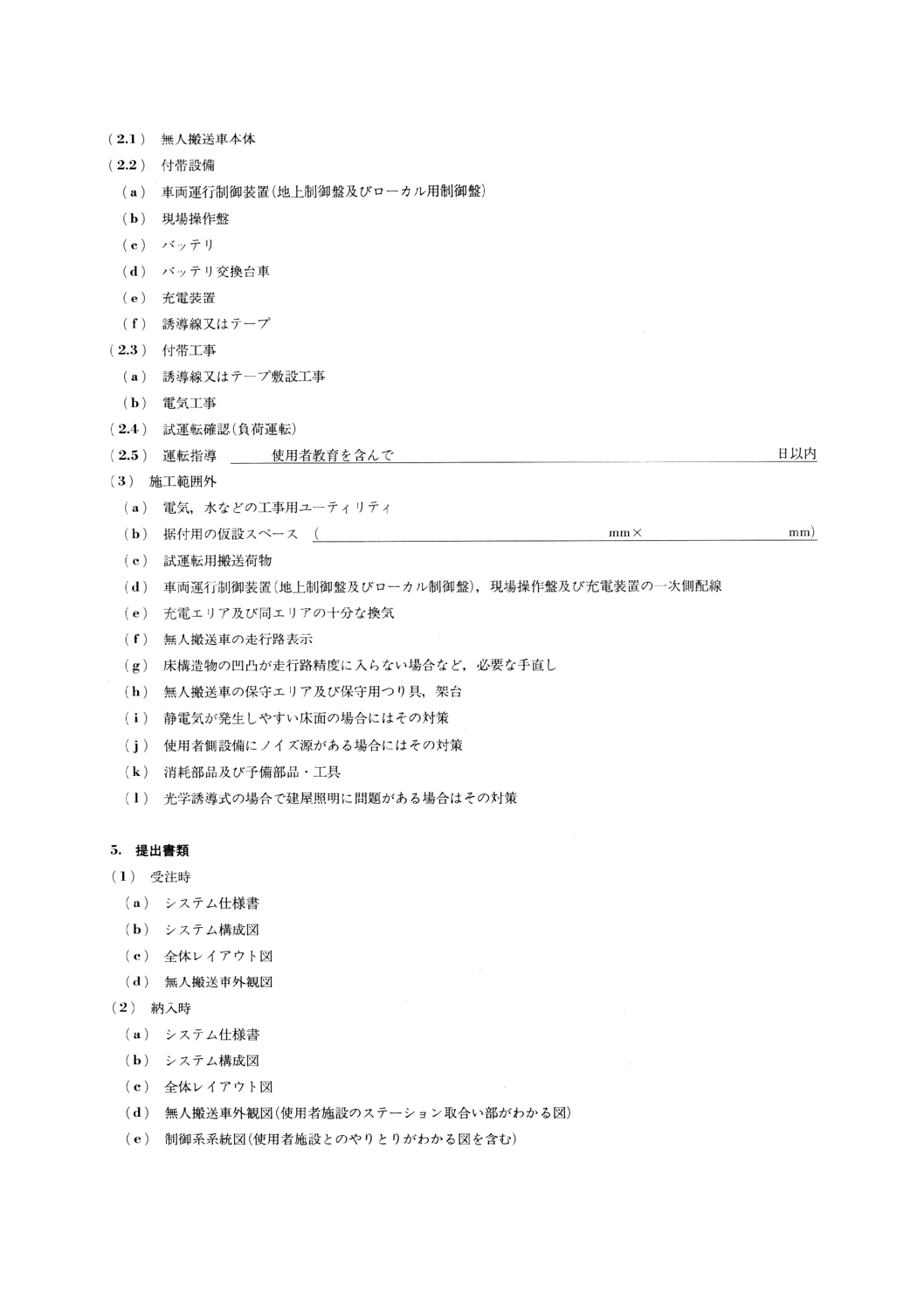
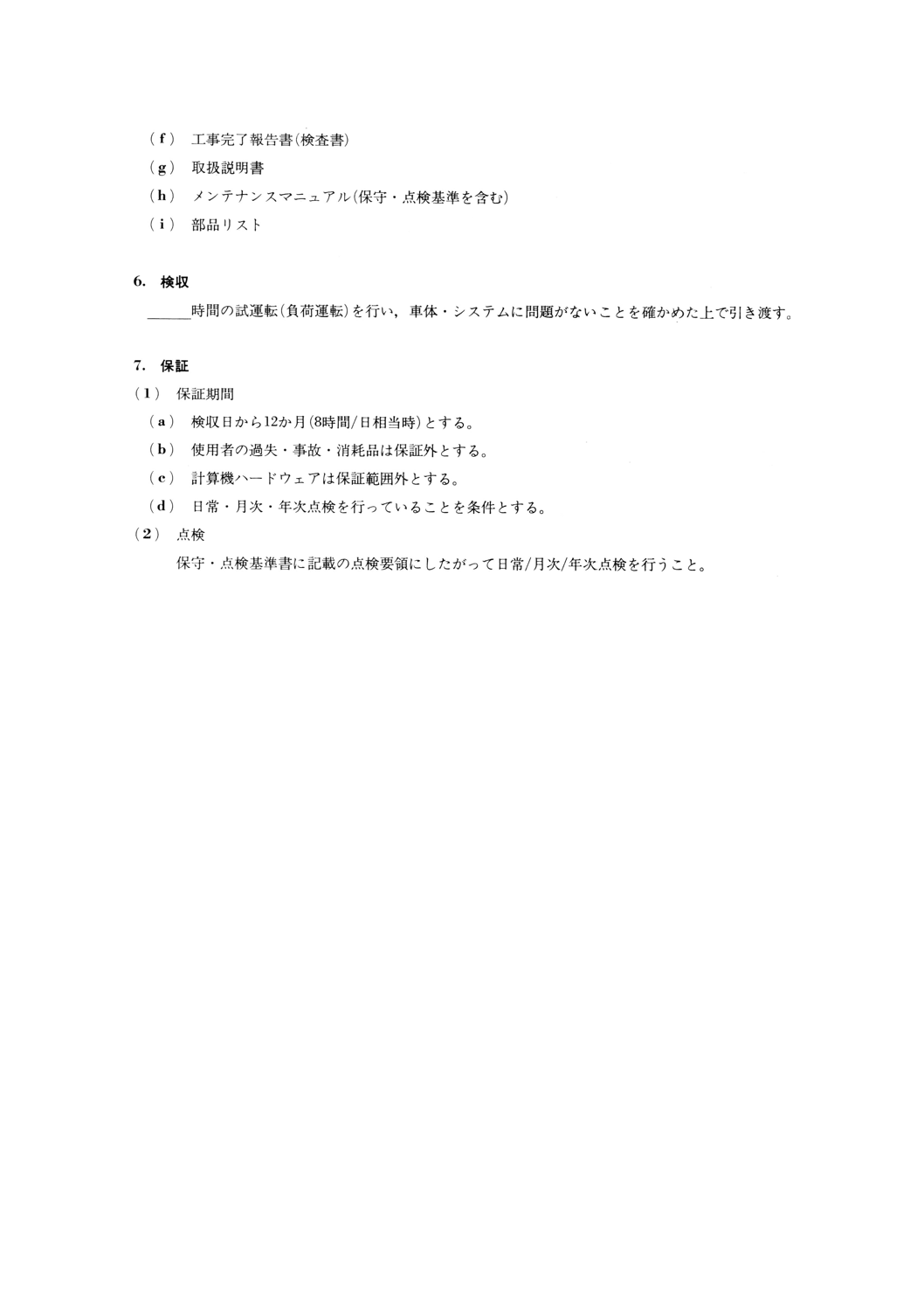
(1) 一般仕様書の様式 付表1(一般仕様書)の様式による。
7
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
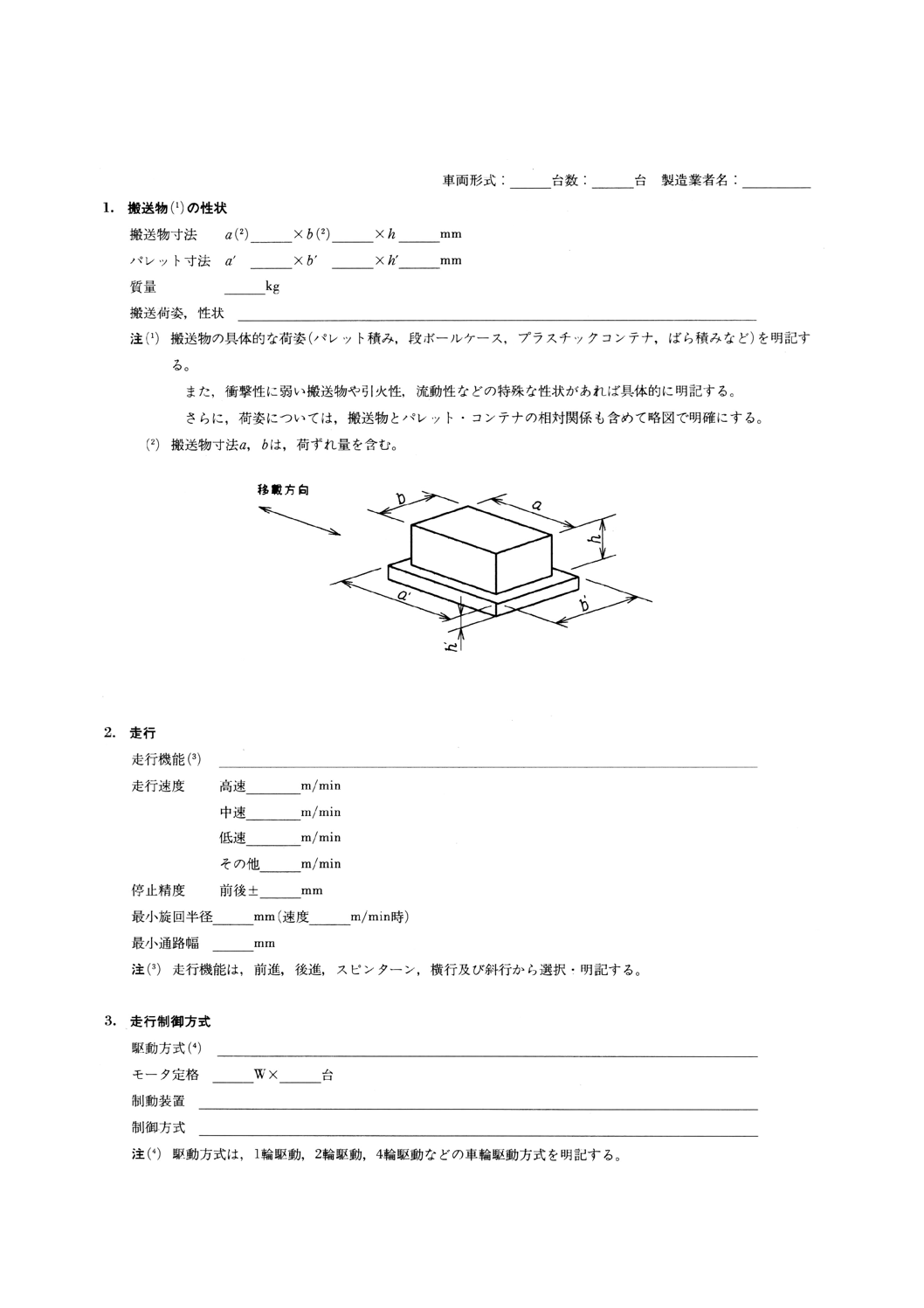
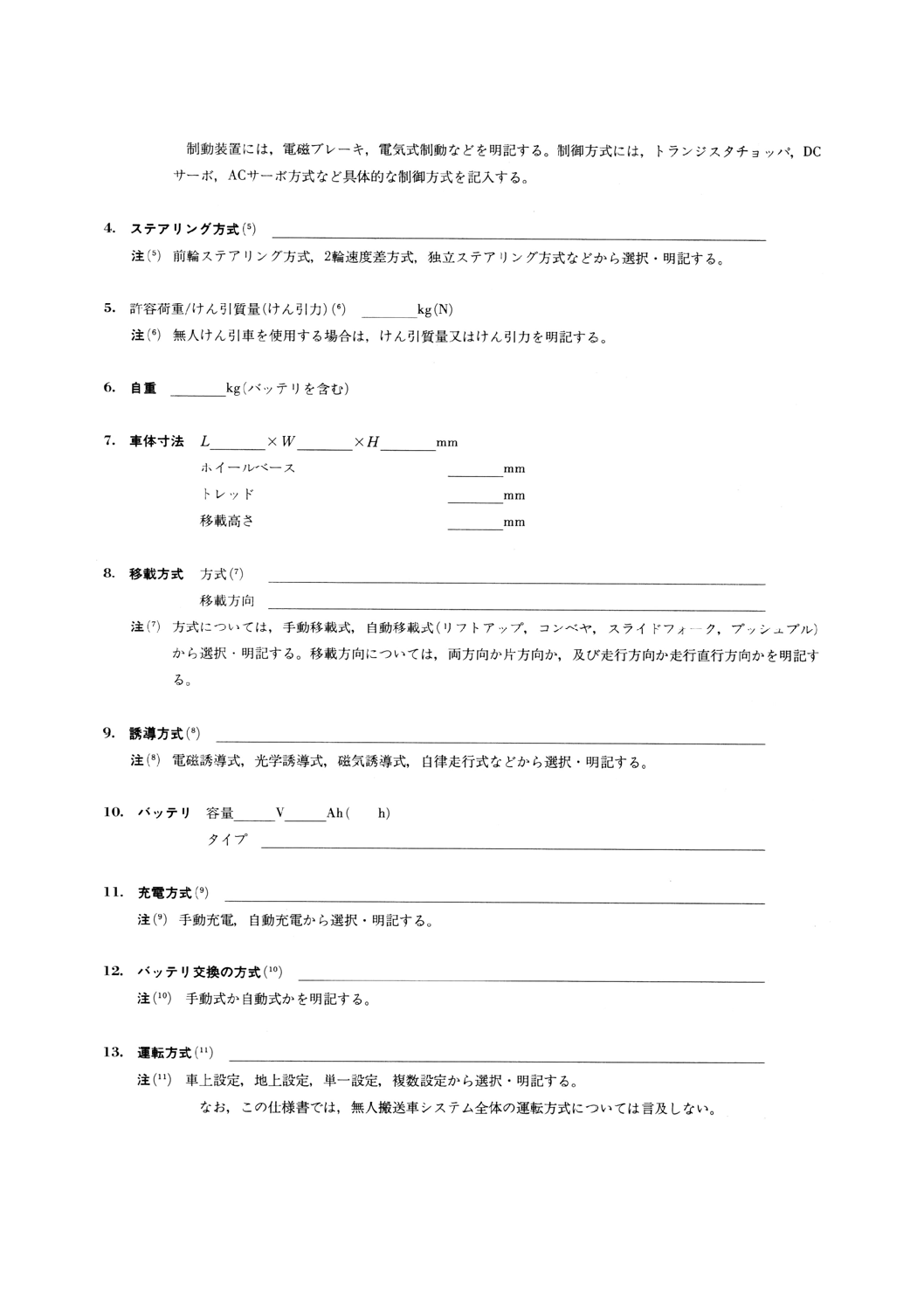
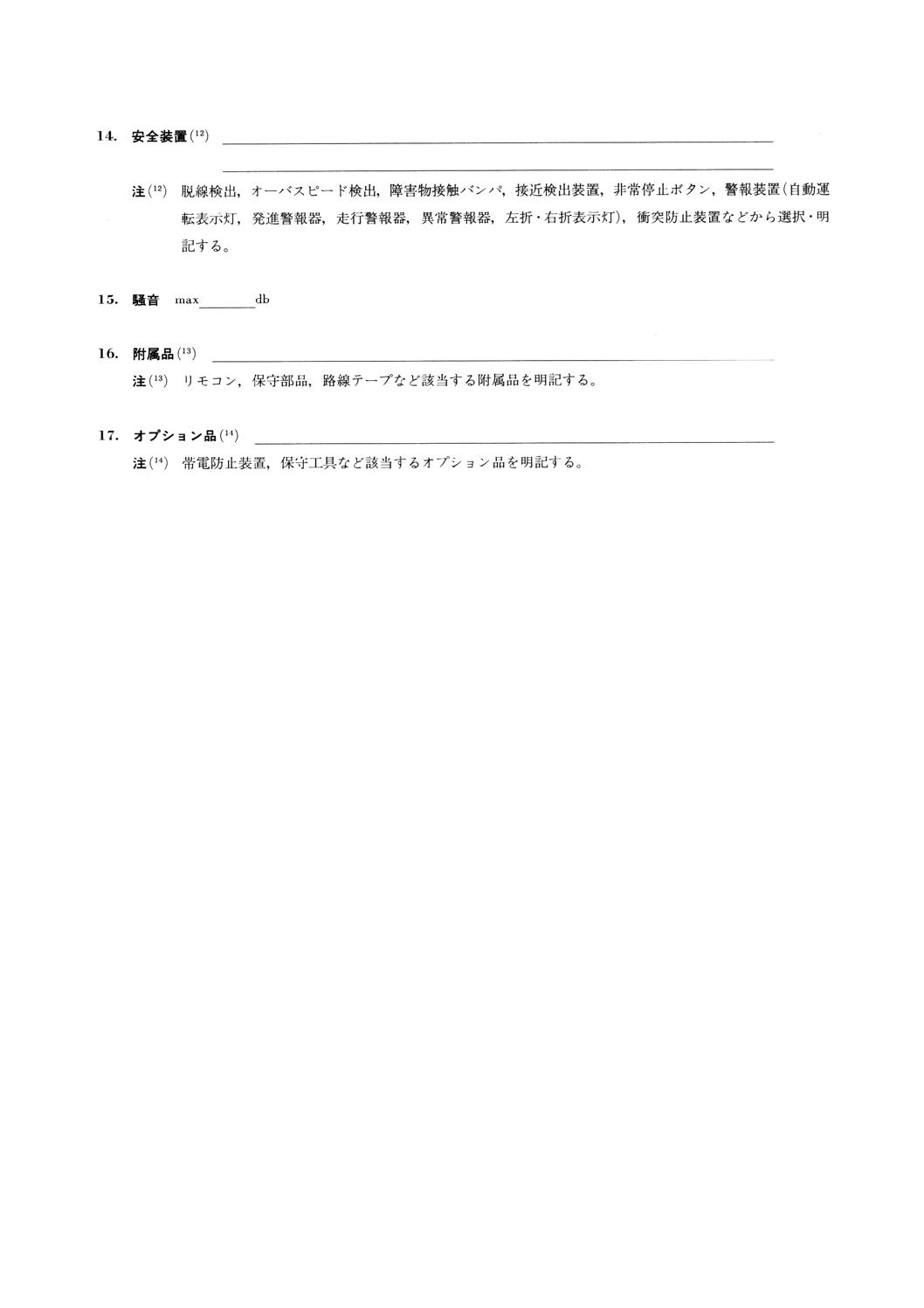
(2) 本体仕様書の様式 付表2(本体仕様書)の様式による。
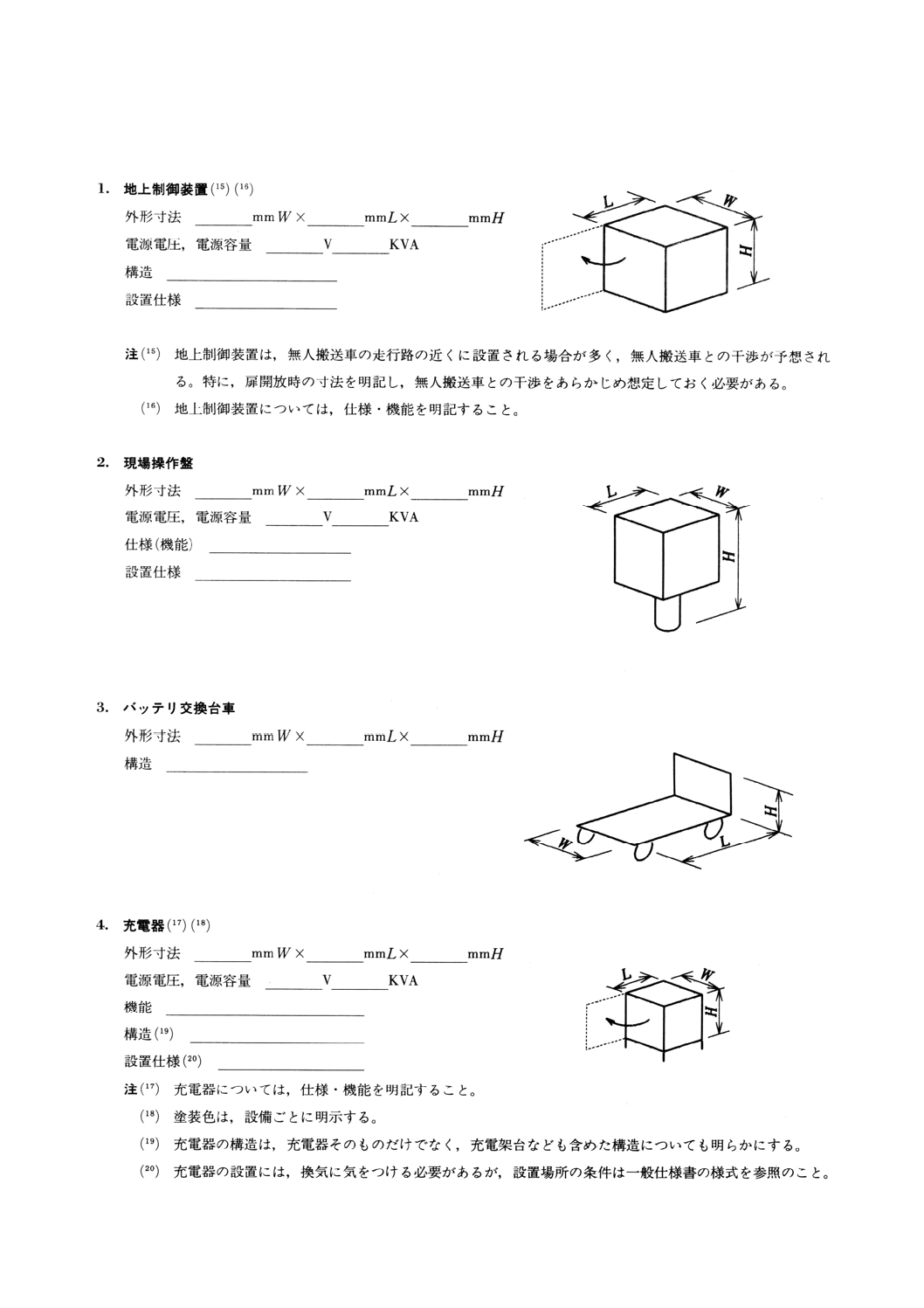
(3) 付帯設備仕様書の様式 付表3(付帯設備仕様書)の様式による。
付表1 一般仕様書
8
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付表2 本体仕様書
11
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
12
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
13
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付表3 付帯設備仕様書
14
D 6803-1994
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
原案作成委員会 構成表
氏名
所属
(委員長)
高 橋 輝 男
早稲田大学システム科学研究所
○ 若 松 茂 三
工業技術院標準部
林 洋 和
通商産業省機械情報産業局
大 関 親
労働省労働基準局
粂 川 壯 一
労働省産業安全研究所
高 木 隆 雄
中央労働災害防止協会
坂 口 昂
前,花王株式会社
大 槻 文 宏
キリンビール株式会社
高 木 道 郎
株式会社講談社
新 美 雅 文
株式会社日立製作所
柳 田 俊 明
富士通株式会社
甲斐田 正 昭
株式会社ブリヂストン
○ 寺 田 克
社団法人日本産業車両協会
○ 中 村 明 徳
株式会社ダイフク
○ 高 橋 育 之
小松フォークリフト株式会社
○ 宮 坂 孝 夫
東洋運搬機株式会社
○ 新 野 賢 一
トヨタ自動車株式会社
○ 小 野 益 美
日立機電工業株式会社
○ 近 堂 実
村田機械株式会社
(事務局)
○ 岩 橋 俊 彦
社団法人日本産業車両協会
備考 ○印は分科会委員を兼ねる
(上記以外の分科会委員)
氏名
所属
仁 木 將 雄
石川島播磨重工業株式会社
柳 町 九二彌
株式会社カナツー
中 島 修
川崎重工株式会社
坪 川 正 勝
株式会社キトー
坂 部 正 宣
コレック株式会社
富 田 忠
神鋼電機株式会社
村 上 清 孝
住友重機械工業株式会社
上 山 巧
株式会社椿本チエイン
高 丸 陽 司
株式会社東芝
梅 原 茂
株式会社豊田自動織機製作所
川 崎 博
日産自動車株式会社
住 田 晋 輔
日本車輌製造株式会社
林 博
日本たばこ産業株式会社
古 川 善 彦
日本輸送機株式会社
中 村 雄 有
富士電機株式会社
大 竹 悟
松下電器産業株式会社
小 林 慶 信
株式会社マツダヒューテック
中 村 喜 信
株式会社三井三池製作所
杉 野 光
株式会社メイキコウ