D 6011-6:2013
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 試験条件························································································································· 2
4.1 全般事項 ······················································································································ 2
4.2 傾斜床上のフォークリフトの位置······················································································ 2
4.3 安定度試験の揚高 ·········································································································· 3
5 安定度の検証 ··················································································································· 3
附属書JA(参考)JISと対応国際規格との対比表 ······································································· 8
D 6011-6:2013
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人日本産業車両協会(JIVA)及び一
般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,
日本工業標準調査会の審議を経て,厚生労働大臣及び経済産業大臣が制定した日本工業規格である。
これによって,JIS D 6011:1999は廃止され,その一部を分割して制定したこの規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の
特許出願及び実用新案権に関わる確認について,責任はもたない。
JIS D 6011の規格群には,次に示す部編成がある。
JIS D 6011-1 第1部:一般
JIS D 6011-2 第2部:カウンタバランスフォークリフトトラック
JIS D 6011-3 第3部:リーチフォークリフトトラック及びストラドルフォークリフトトラック
JIS D 6011-4 第4部:パレットスタッキングトラック,プラットフォームスタッキングトラック及び
運転者の位置がリフト高さ1 200 mmまで上昇するオーダピッキングトラック
JIS D 6011-5 第5部:サイドフォークリフトトラック
JIS D 6011-6 第6部:運転者の位置が1 200 mmを超えて上昇するオーダピッキングトラック
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 6011-6:2013
フォークリフトトラック−
安定度及び安定度の検証−
第6部:運転者の位置が1 200 mmを超えて
上昇するオーダピッキングトラック
Fork lift trucks-Stability and verification of stability-
Part 6: Order-picking trucks with operator position elevating above 1 200 mm
序文
この規格は,2009年に第1版として発行されたISO 22915-21を基に,国内の実情に合わせるために技
術的内容を変更して作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格にはない事項である。変更の一覧表に
その説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,産業車両の安定度を検証するための基本的な試験方法及び要求事項を規定するJIS D
6011-1を基に,運転者の位置が1 200 mmを超えて上昇することが可能なオーダピッキングトラック(以
下,産業車両の総称を,フォークリフトという。)の安定度の検証方法について規定する。この規格は,通
常の運転状態で,フォーク,プラットフォーム及び一体形アタッチメントを装着したフォークリフトに適
用できる。ただし,横方向にシフト可能な荷台,又は前後方向の車両中心面の外で旋回可能な荷台を装着
したフォークリフトには適用できない。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 22915-21:2009,Industrial trucks−Verification of stability−Part 21: Order-picking trucks with
operator position elevating above 1 200 mm(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS D 6011-1 フォークリフトトラック−安定度及び安定度の検証−第1部:一般
注記 対応国際規格:ISO 22915-1:2008,Industrial trucks−Verification of stability−Part 1: General
(MOD)
2
D 6011-6:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS D 6201 フォークリフトトラック−用語
注記 対応国際規格:ISO 5053:1987,Powered industrial trucks−Terminology(MOD)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS D 6011-1及びJIS D 6201によるほか,次による。
3.1
通常の運転状態(normal operating conditions)
屋内における,平たんかつ強固な路面でのフォークリフトの走行に相当する運転状態。
注記 この定義は,JIS D 6011-1で定義する“通常の運転状態”とは異なる。
3.2
誘導操だ(舵)(guided steering)
運転者によって直接制御されない機械的操だ(舵)(例えば,ガイドレール式)又は非機械操だ(舵)(例
えば,誘導式,レーザセンサ又は赤外線式)のいずれかの方法。あらかじめ定められた直線路上を走行中
のフォークリフトの操だ(舵)に使用される。
3.3
制限操だ(舵)(restricted steering)
フォークリフトの操だ(舵)が運転者によって制御され,操だ(舵)角が前進方向又は後進方向から±
10°以上にならないように制限された操だ(舵)方法。
3.4
自由操だ(舵)(unrestricted steering)
操だ(舵)角の制限なしで,運転者によって制御される操だ(舵)方法。
4
試験条件
4.1
全般事項
安定度を検証するための基本的な試験方法及び要求事項は,JIS D 6011-1の箇条4(安定度の検証)によ
る。
なお,各試験は,表1の試験1〜試験5による(図2〜図23参照)。
4.2
傾斜床上のフォークリフトの位置
4.2.1
荷重車軸及びかじ取り車軸
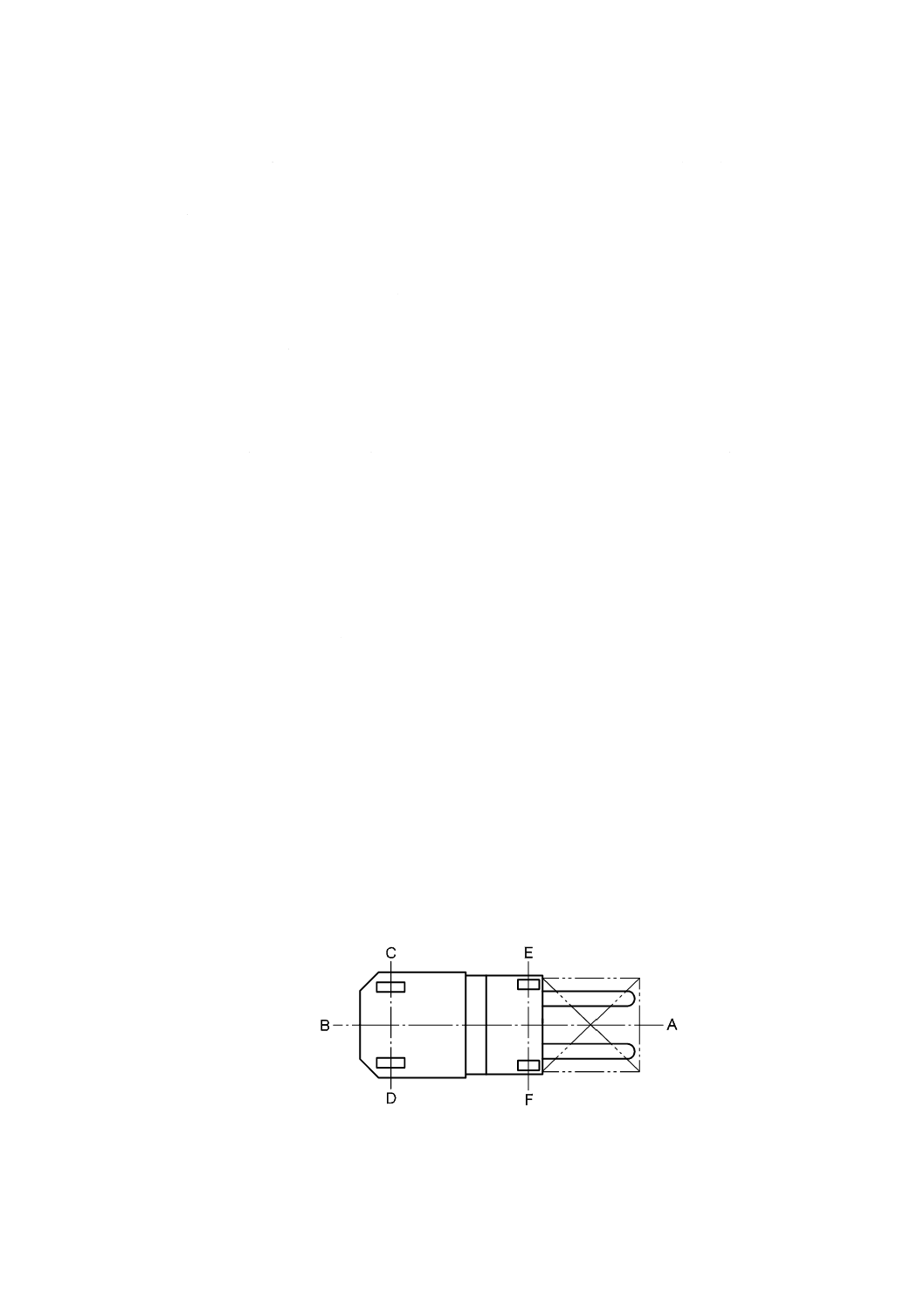
荷重車軸及びかじ取り車軸は,図1による。
A−B :前後方向の車両中心面
C−D :かじ取り車軸
E−F :荷重車軸
図1−荷重車軸及びかじ取り車軸
3
D 6011-6:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
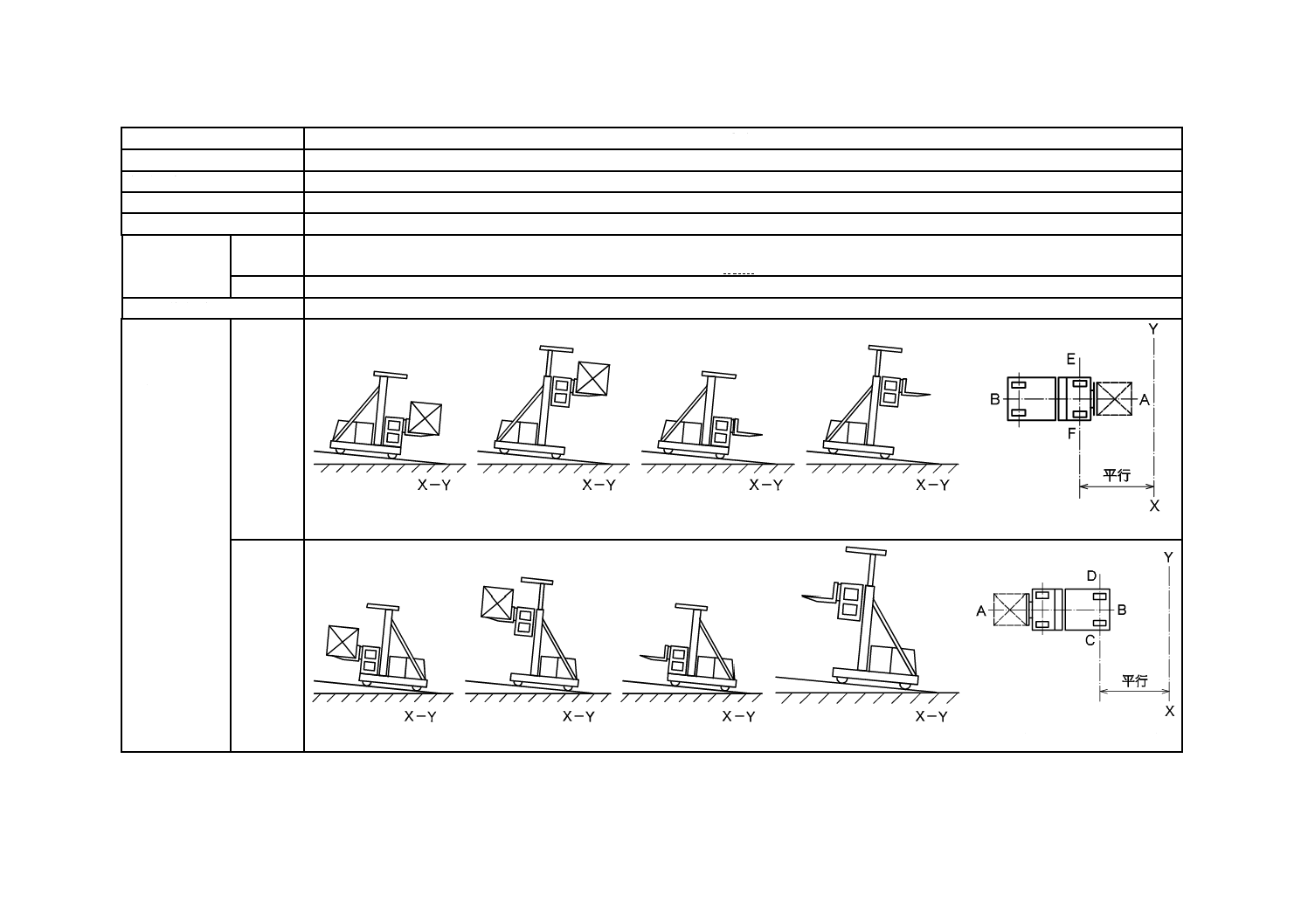
4.2.2
前後安定度(試験1)
荷重車軸E−F及びかじ取り車軸C−Dが傾斜床の傾斜軸X−Yに平行になるように,フォークリフトを
傾斜床に配置する(図6及び図11参照)。
4.2.3
左右安定度(試験2〜試験5)
試験2〜試験5のフォークリフトの位置は,次による。
a) 安定度軸M−Nが傾斜床の傾斜軸X−Yに平行になるように,フォークリフトを傾斜床に配置する(図
16〜図23参照)。
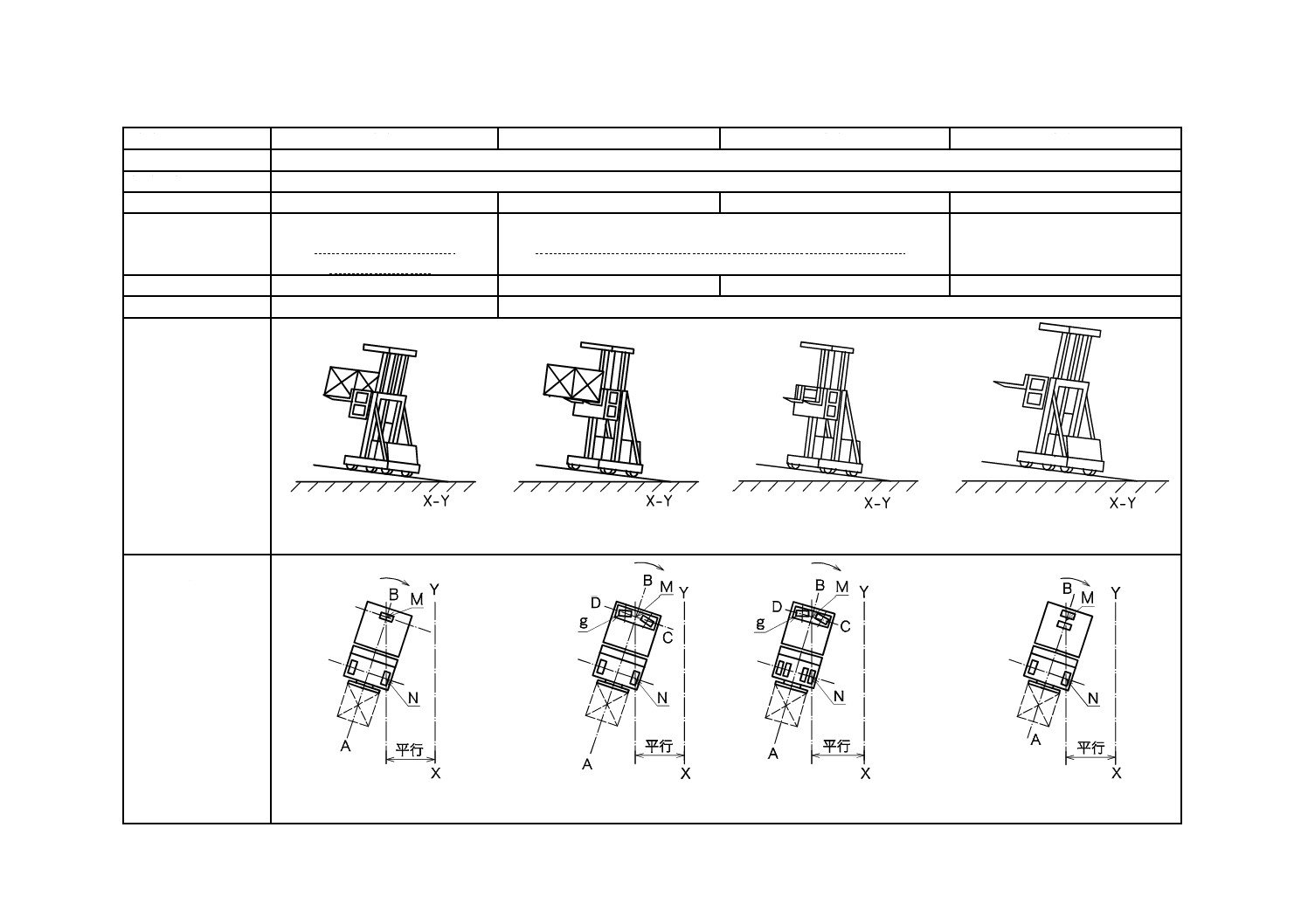
b) 傾斜床上のフォークリフトの位置の基点となる点Mは,車軸及び車輪の構造によって次のように決め
る。
1) 単輪の操だ(舵)輪をもつフォークリフトでは,点Mは操だ(舵)輪の中心点を傾斜床上へ垂直に
投影した点とする(図16参照)。
2) 前後方向の車両中心面A−B上で結合されたかじ取り車軸C−Dをもつフォークリフトでは,点M
はかじ取り車軸C−Dと前後方向の車両中心面A−Bとの交点を傾斜床上へ垂直に投影した点とす
る(図17及び図18参照)。
3) 複輪の操だ(舵)輪をもつフォークリフトでは,点Mは操だ(舵)輪の車軸の中心線と前後方向の
車両中心面A−Bとの交点を傾斜床上へ垂直に投影した点とする(図19参照)。
4) 複数のキャスタ輪(スプリングなし)をもつフォークリフトでは,点Mはキャスタ輪の車軸が前後
方向の車両中心面により近い位置にある状態で,キャスタ輪の中心点を傾斜床上へ垂直に投影した
点とする(図20参照)。
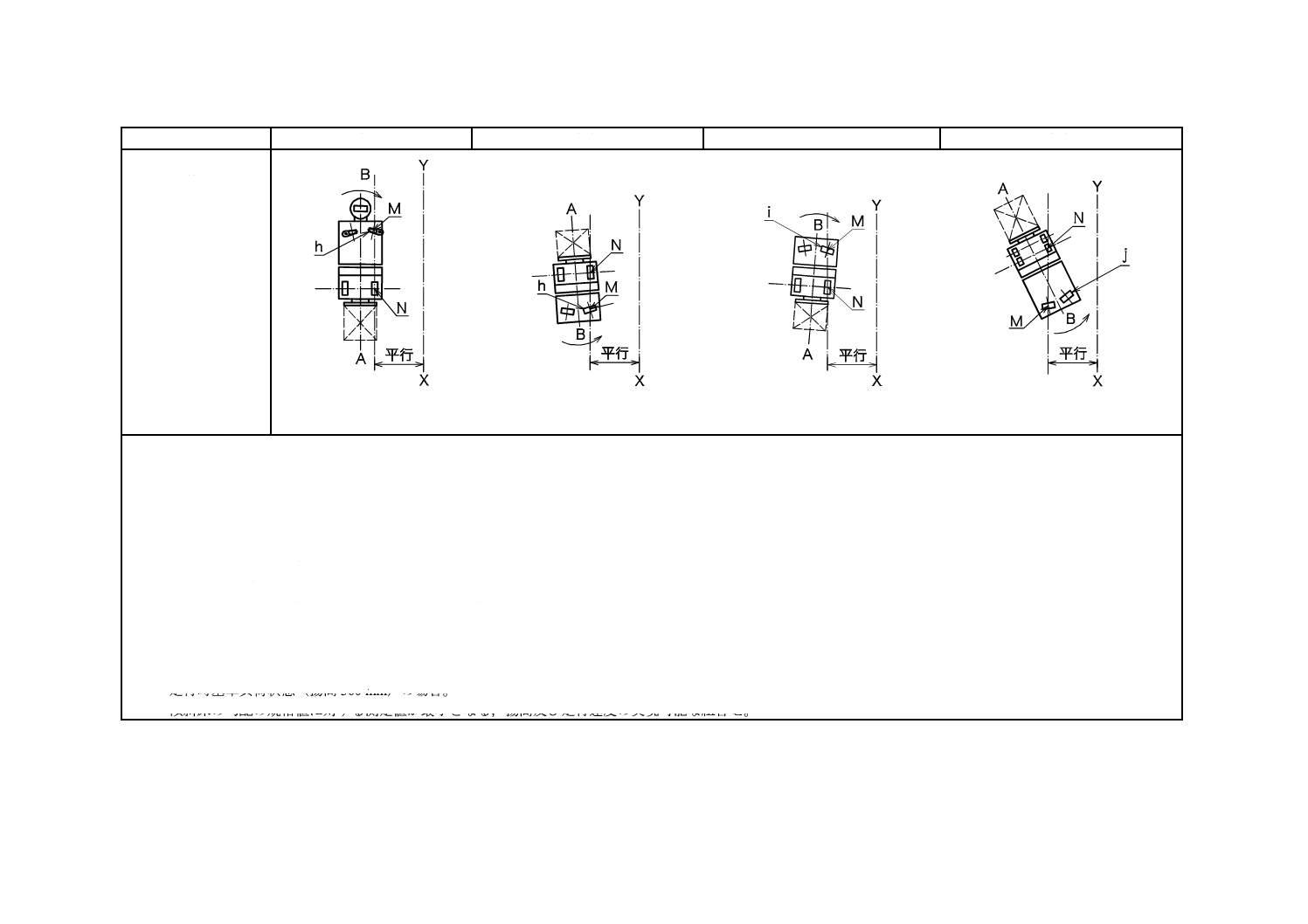
5) キャスタ輪(スプリングなし)又は車輪(スプリングなし)及び操だ(舵)輪をもつフォークリフ
トでは,次による。
5.1) キャスタ輪又は車輪側で試験を行う場合では,点Mはキャスタ輪の車軸が前後方向の車両中心面
により近い位置にある状態で,キャスタ輪又は車輪の中心点を傾斜床上へ垂直に投影した点とす
る(図21参照)。
5.2) 操(だ)舵輪側で試験を行う場合では,点Mは駆動輪の中心点を傾斜床上へ垂直に投影した点と
する(図22参照)。
6) スプリング付きキャスタ輪又はスプリング付き車輪をもつフォークリフトでは,点Mは操だ(舵)
輪の中心点を傾斜床上へ垂直に投影した点とする(図23参照)。
c) 点Nは傾斜床の表面と,荷重車軸の車輪のうち,傾斜軸X−Yに最も近い車輪との接触面の中心点と
する。
d) 傾斜軸X−Yに対する左右安定度は,フォークリフトの左側又は右側で相違する場合があるため,安
定度軸M−Nは安定度を悪くする側を採用し試験する。
4.3
安定度試験の揚高
試験揚高は,傾斜床面からフォーク上面までの距離とする。
5
安定度の検証
傾斜床上のフォークリフトが転倒することなく,表1の試験項目の要求事項を満足すれば,そのフォー
クリフトは安定度があるとみなす。
注記 安定度については,この規格の規定のほかに労働安全衛生法第42条の規定に基づくフォークリ
フト構造規格(昭和47年労働省告示第89号)(以下,フォークリフト構造規格という。)があ
4
D 6011-6:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
り,その規定内容は,“安全関係構造規格の施行について”の通達(昭和47年10月16日基発
第671号)で補足されている。
フォークリフト構造規格及びその関係通達の規定を,JIS D 6011-1の附属書JA(安定度に関
する追加規定)に示す。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−フォークリフトの安定度の検証方法
試験の種類
試験1
安定度試験の方向
前後
操作状態
積付け姿勢/走行姿勢
荷の状態
負荷/無負荷
フォークの高さ
最高速時最大揚高/各制限速時最大揚高/停止時最大揚高a)
傾斜床の勾配
荷が先導
(4+1.24v)%
18 %b)
荷が追従
(8+1.24v)%
操だ(舵)方法
誘導操だ(舵)/制限操だ(舵)/自由操だ(舵)
傾斜床上のフ
ォークリフト
の配置状態及
び位置
荷が先導
図2
図3
図4
図5
図6(図2〜図5の平面図)
荷が追従
図7
図8
図9
図10
図11(図7〜図10の平面図)
4
D
6
0
11
-6
:
2
0
1
3
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−フォークリフトの安定度の検証方法(続き)
試験の種類
試験2
試験3
試験4
試験5
安定度試験の方向
左右
操作状態
積付け姿勢/走行姿勢
荷の状態
負荷/無負荷
負荷
無負荷
負荷/無負荷
フォークの高さ
最高速時最大揚高/
各制限速時最大揚高/
停止時最大揚高a)
1 200 mmを超える揚高での,
最高速時最大揚高/各制限速時最大揚高/停止時最大揚高c)
1 200 mmまでの揚高
傾斜床の勾配
6 %
(6+1.24v)%
(6+2.48v)%
(15+1.1v)%
操だ(舵)方法
誘導操だ(舵)/制限操だ(舵)
自由操だ(舵)
傾斜床上のフォーク
リフトの配置状態
図12
(試験2,3及び5の場合)
図13
(試験2,3及び5の場合)
図14
(試験2,4及び5の場合)
図15
(試験2,4及び5の場合)
傾斜床上のフォーク
リフトの位置
図16
(試験2〜試験5の場合)
図17
(試験2〜試験5の場合)
図18
(試験2〜試験5の場合)
図19
(試験2〜試験5の場合)
4
D
6
0
11
-6
:
2
0
1
3
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−フォークリフトの安定度の検証方法(続き)
試験の種類
試験2
試験3
試験4
試験5
傾斜床上のフォーク
リフトの位置
図20
(試験2〜試験5の場合)
図21
(試験2〜試験5の場合)
図22
(試験2〜試験5の場合)
図23
(試験2〜試験5の場合)
注記 勾配の計算式及び図の記号は,次の意味をもつ。
− v:各揚高でのフォークリフトの最高速度(km/h)
− X−Y:傾斜床の傾斜軸
− M−N:フォークリフトの安定度軸
− A−B:前後方向の車両中心面
− C−D:かじ取り車軸
− E−F:荷重車軸
− g:後輪取付部
− h:キャスタ輪(スプリングなし)又は車輪(スプリングなし)
− i:操だ(舵)輪
− j:キャスタ輪(スプリング付き)又は車輪(スプリング付き)
注a) 傾斜床の勾配の規格値に対する測定値が最小となる,揚高,荷重及び走行速度の実現可能な組合せ。
b) 走行時基準負荷状態(揚高300 mm)の場合。
c) 傾斜床の勾配の規格値に対する測定値が最小となる,揚高及び走行速度の実現可能な組合せ。
4
D
6
0
11
-6
:
2
0
1
3
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
JISと対応国際規格との対比表
JIS D 6011-6:2013 フォークリフトトラック−安定度及び安定度の検証−第6部:
運転者の位置が1 200 mmを超えて上昇するオーダピッキングトラック
ISO 22915-21:2009 Industrial trucks−Verification of stability−Part 21:
Order-picking trucks with operator position elevating above 1 200 mm
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
4 試験条
件
4.1 全般事項
4.2
JISとほぼ同じ
追加
フォークリフト構造規格と整合
を図るため表1に試験1の傾斜
床の勾配18 %を追加した。
国内の実情であるため。ISOへの
改定提案はしない。
4.1 全般事項
試験1〜試験4のフォ
ークの高さを規定
4.2
JISとほぼ同じ
変更
表1の項目に相当した内容に変
更した。
条件を明確にしたものであり実
質上の技術的差異はない。
4.2.3 左右安定度(試
験2〜試験5)
4.2.3
JISとほぼ同じ
追加
ISO規格では左右で安定度が異
なる場合の規定がないため,JIS
D 6011-1に準拠してd)を追加し
た。
条件を明確にしたものであり実
質上の技術的差異はない。
JISと国際規格との対応の程度の全体評価:ISO 22915-21:2009,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 追加……………… 国際規格にない規定項目又は規定内容を追加している。
− 変更……………… 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD…………… 国際規格を修正している。
4
D
6
0
11
-6
:
2
0
1
3