2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 6003-1995
ショベルローダ
Shovel loaders
1. 適用範囲 この規格は,最大荷重3t以下のショベルローダについて規定する。
備考 この規格の中で { } を付けて示してある単位及び記号は,従来単位によるものであって規格
値である。
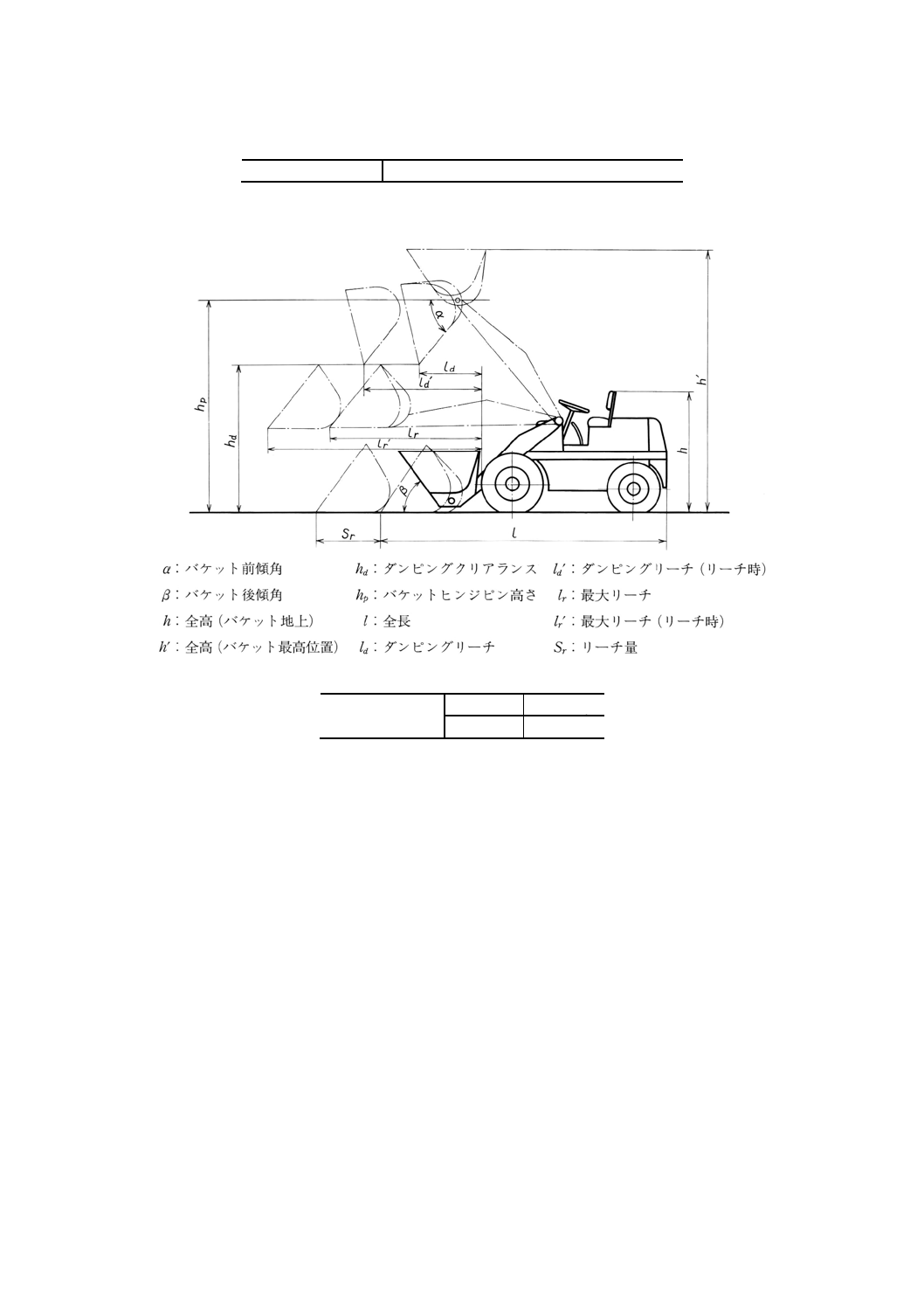
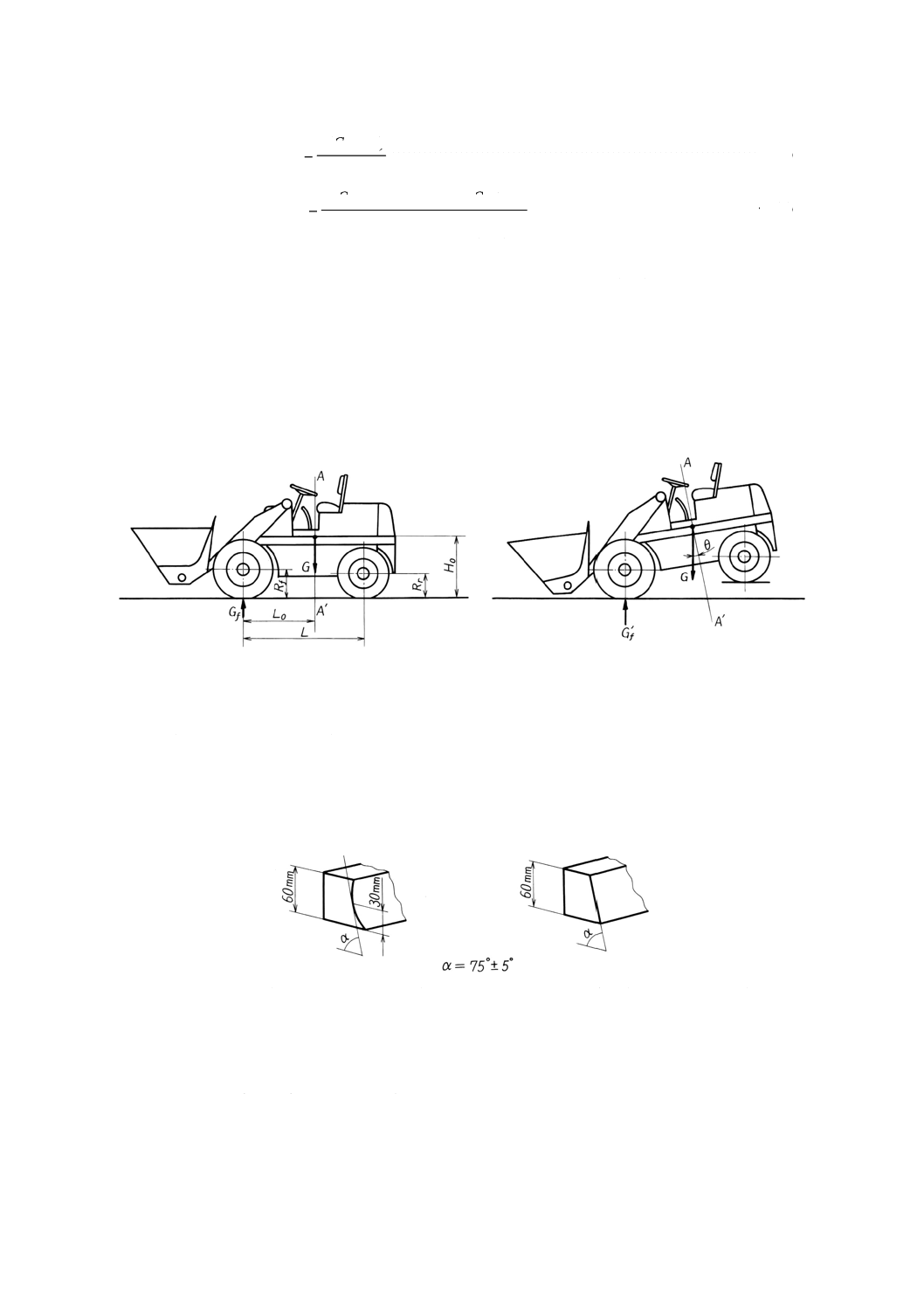
2. 用語の定義 この規格で用いる主な用語の定義は,次による(図1参照)。
なお,参考のために対応英語を括弧で示す。
(1) ショベルローダ (shovel loader) 車体前方に備えたバケットをリフトアームによって上下させて,ば
ら物荷役を行う車輪式産業車両。
(2) 最大荷重 (maximum load) バケットの規定重心位置に積載して安全に作業ができる最大の荷重。た
だし,リーチ機構をもつものではバケット繰込み時の値をいう。ここに,バケットの規定重心位置と
は,バケット容量を算出するときに積載する一定の形状の荷重の重心位置をいう。
(3) 無負荷状態 (unloaded condition) 車両が燃料,冷却水,潤滑油,作動油などを積載して稼働に必要な
整備をし,荷重を積載しない状態。
なお,運転者は,乗車しない状態とする。
(4) 基準無負荷状態 (unloaded standard condition) 荷重を積載しないでバケットを最後傾し,バケットの
最低部を車両の最低地上高まで上昇した状態。ただし,リーチ機構をもつものではバケットを繰り込
んだ状態とする。
なお,運転者は,乗車しない状態とする。
(5) 基準負荷状態 (loaded standard condition) バケットの規定重心位置に最大荷重を積載してバケットを
最後傾し,バケットの最低部を車両の最低地上高まで上昇した状態。ただし,リーチ機構をもつもの
ではバケットを繰り込んだ状態とする。
なお,運転者は,乗車しない状態とする。
(6) バケット容量 (backet capacity) バケットにすくい込みできるこう配1 : 2の山積容量(附属書参照)。
(7) バケット後傾角 (tilt back angle) バケット底面を地上水平位置から最後傾したときのバケットの底
面と水平面とのなす角。
(8) バケット前傾角(ダンプ角) (dumping angle) バケットを最高に上げ,最前傾したときのバケット
の底面と水平面とのなす角。
(9) バケットヒンジピン高さ (backet pivot height) バケットを最高に上げた場合のヒンジピン中心の地
上高。
(10) ダンピングクリアランス(45°前傾及び最大前傾) (dumping clearance) バケットを最高に上げ,45°
前傾及び最前傾したときのバケット先端の地上高。
2
D 6003-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(11) 車体最前部 (front end) ショベルローダの車体においてブームなどの荷役装置を除き,タイヤを含む
車体最前の部位。
(12) ダンピングリーチ(45°前傾及び最大前傾) (dumping reach) バケットを最高に上げ,45°前傾及
び最前傾したときのバケット先端の車体最前部からの水平距離。
(13) 最大リーチ (maximum reach) バケットを水平にしたときのバケット先端の車体最前部からの水平
距離の最大値。
(14) リーチ量 (reach stroke) バケットを地上水平位置から車体を動かすことなく繰り出すことができる
水平距離の最大値。
(15) 上昇時間 (lifting time) バケットの規定重心位置に最大荷重を積載し,バケットを最後傾状態で最低
位置から最高位置まで上昇するのに要する最小の時間。
(16) 下降時間 (lowering time) 荷重を積載しないバケットを,最後傾状態で最高位置から最低位置まで下
降するのに要する最小の時間。
(17) バケット前傾時間(ダンプ時間) (backet dumping time) 荷重を積載しないバケットを最高位置に置
いて,最後傾位置から最前傾位置まで移動するのに要する最小の時間。
(18) 全長 (overall length) バケットの底面を地上水平位置にした状態において,バケット先端から車体後
端までの長さの最小値。ただし,リーチ機構をもつものではバケットを繰り込んだ状態とする。
(19) 車体幅 (overall width without backet) バケットを除いた車体の最大幅。
(20) バケット幅 (backet width) バケットの外側最大幅。
(21) 全高 (overall height) 無負荷状態において地面から車両の最上端までの高さ。
3. 種類
3.1
動力源形式による分類 動力源形式による分類は,表1のとおりとする。
表1
種類
記号
ガソリン式ショベルローダ
SG
ディーゼル式ショベルローダ
SD
3.2
最大荷重の種類 最大荷重は,原則として表2の7種類とする。
表2
最大荷重W (t)
記号
0.5
5
0.7
7
1
10
1.5
15
2
20
2.5
25
3
30
4. 構造及び機能
4.1
寸法
4.1.1
バケット容量 バケット容量は,原則として表3のとおりとする。
3
D 6003-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表3
バケット容量Vr (m2)
0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.2 1.5
4.1.2
バケット傾斜角 バケット傾斜角は,表4のとおりとする(図1参照)。
図1
表4
バケット傾斜角(度) 前傾角 α
後傾角 β
45以上
50以上
4.2
機能
4.2.1
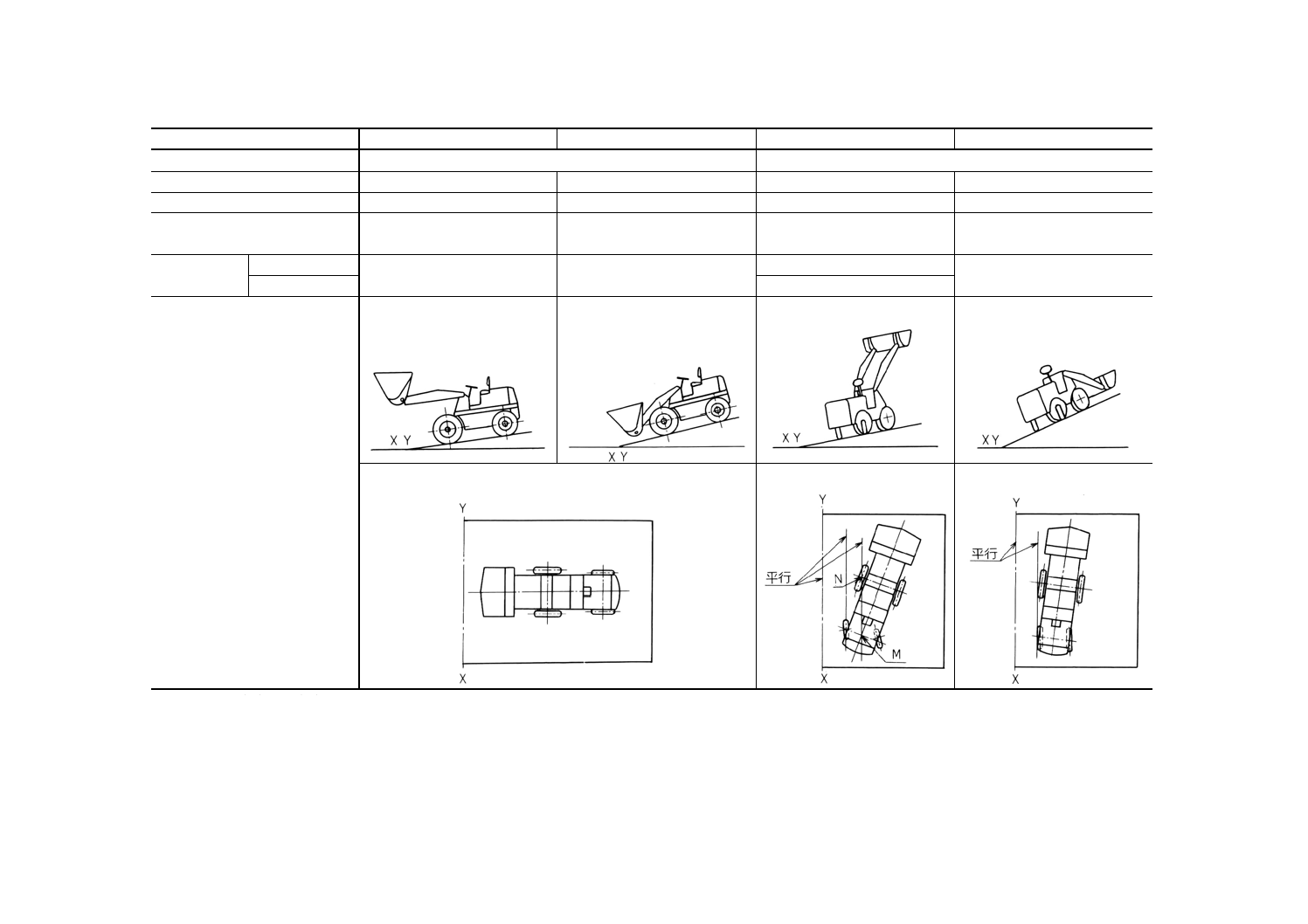
ショベルローダの安定度 ショベルローダの安定度は,前後及び横安定度について定め,それぞれ
表5に示すこう配の床上において転倒してはならない。
4
D
6
0
0
3
-1
9
9
5
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表5 ショベルローダの安定度試験
試験番号
1
2
3
4
安定度の項目
前後
横
状態
最大リーチ
走行
積込
走行
荷重
負荷
負荷
負荷
無負荷
バケットの高さ
−
バケット最低部が車両の最低地
上高に同じ
最高
バケット最低部が車両の最低地
上高に同じ
傾斜床のこう配 最大荷重2t未満
15%
30%
15%
60%
最大荷重2t以上
20%
傾斜床上のショベルローダの位置
図2
図3
図4
図5
図6
図7
図8
備考 X−Y:傾斜床の傾斜値
M−N:ショベルローダの横安定度値
N点 :前輪が復輪の場合,N点は外側車輪の接地点とする。
5
D 6003-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2.2
ブレーキ装置車輪 車輪ブレーキは,平たんな乾いた舗装路面で,表6に示す距離で停止する能力
をもたなければならない。
また,駐車ブレーキは,表7に示すこう配の乾いた舗装路面で駐車するのに十分な能力をもたなければ
ならない。
表6
車の状態
指定初速度v0 (km/h)
距離s (m)
基準無負荷状態
20(1)
5 以内
基準負荷状態
10
2.5以内
注(1) 最高速度20km/h未満のものは,その最高速度。
表7
車の状態
こう配
基準無負荷状態
20%
基準負荷状態
15%
5. 試験方法
5.1
試験条件 試験を行うショベルローダは,燃料,冷却水,潤滑油,作動油などは規定の全量を積載
し,予備品,工具は積載しないものとし,タイヤの空気圧は規定の圧力とする。
5.2
定置試験
5.2.1
寸法測定 無負荷状態で次の各項目について測定する。
(1) 全長
(2) 車体幅
(3) バケット幅
(4) 全高(バケット地上時h及びバケット最高位置h')
(5) 軸距
(6) 輪距(前輪及び後輪)
(7) 最低地上高
(8) バケットヒンジピン高さ
(9) ダンピングクリアランス(45°前傾及び最大前傾)
(10) ダンピングリーチ(45°前傾及び最大前傾)
(11) 最大リーチ
(12) リーチ量
(13) バケット後傾角
(14) バケット前傾角
(15) バケット容量
5.2.2
質量及び重心位置測定 基準無負荷状態及び基準負荷状態における車両総質量及び前後輪荷重を
測定する。
また,重心高さは基準無負荷状態において,ショベルローダ前傾時の傾斜角の変化による前輪荷重の変
化を測定し算出する。
重心位置の算出は,次の式による(図9参照)。
6
D 6003-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G
G
G
L
L
f)
(
0
−
=
········································································· (1)
r
f
r
f
f
f
R
G
G
R
R
G
G
L
H
+
−
+
−
=
θ
θ
tan
tan
)
(
)
(
'
'
0
········································ (2)
ここに,
H0: 重心高さ (mm)
L: 軸距 (mm)
L0: 重心の前車軸からの水平距離 (mm)
Rf: 基準無負荷状態における前輪有効半径 (mm)
Rr: 基準無負荷状態における後輪有効半径 (mm)
G: 無負荷状態における車両質量 (kg)
Gf: 前輪荷重(ショベルローダの前傾角0のとき) (kg)
Gf': 前輪荷重(ショベルローダの前傾角θ°のとき) (kg)
θ: ショベルローダの前傾角(傾けられる最大角付近)(度)
図9
5.2.3
安定度試験 安定度の試験は,傾斜試験機を用いて,前後安定度及び横安定度について,次の4
方法の試験を行う(表5参照)。
この場合,駐車ブレーキを掛け,運転者は乗らずに試験を行う。
また,車輪のスリップを防ぐために,床との摩擦係数を増加させるテープや塗料などは用いてもよいが,
車輪止めを使ってはならない。ただし,試験4.についてはスリップを防止するために図10に示す車輪止め
を用いる。
図10
試験1. 水平にした傾斜試験機の上に,基準負荷状態のショベルローダの前車軸を装置の傾斜軸と平行
に置き,この状態でバケットヒンジピン中心から車体最前部までの水平距離が最大になる位置
までバケットを上げ,床を規定のこう配まで傾ける。
試験2. 水平にした傾斜試験機の上に,基準負荷状態のショベルローダの前車軸を装置の傾斜軸と平行
に置き,床を規定のこう配まで傾ける。
試験3. 水平にした傾斜試験機の上に,基準負荷状態のショベルローダを載せ,前輪の接地点中心と後
車軸中心を結ぶ線の傾斜床への投影を傾斜床装置の傾斜軸と平行に置き,この状態からバケッ
7
D 6003-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
トを最高に上げ,床を規定のこう配まで傾ける。この場合,傾斜軸側かじ取り車輪は,傾斜軸
と平行とする。
試験4. 水平にした傾斜試験機の上に,基準無負荷状態のショベルローダを載せ,右側又は左側を前後
車輪の外側面を傾斜試験機の車輪止めに接して,床を規定のこう配まで傾ける。この場合,傾
斜軸側かじ取り車輪は傾斜軸と平行とする。
5.3
走行試験 特に規定する場合を除き,平たんな乾いた舗装路面で,基準無負荷状態及び基準負荷状
態で運転者が乗車した状態において行う。
(1) 最高速度試験 測定区間は50m,助走距離は任意とし,前進方向について往復行い,その平均を取る。
なお,50m区間の中央25m点までの走行所要時間も測定し,最高速度に達していることを確かめる。
最高速度の算出は,次の式による。
t
v
180
=
··················································································· (3)
ここに, υ: 最高速度 (km/h)
t: 50m区間の走行所要速度 (s)
(2) ブレーキ試験 前進方向について行うものとし,初速度測定区間を基準無負荷状態では速度20±
2km/h(最高速度20km/h未満のものはその最高速度)で走行させ,基準負荷状態では速度10±1km/h
で走行させた後,合図によって加速ペダルを離し,クラッチを切り(トルクコンバータ付きのものは
変速機を中立にして),足ブレーキで急制動を行い,合図したときの車両の位置から停止した位置まで
の停止距離を測定し,併せて車体と車輪の状況を観察する。ブレーキを掛けるため,ブレーキペダル
に足を掛ける操作によって路面に目印を付ける装置を用いた場合は,目印から停止した位置までの距
離を測定する。この距離を制動距離という。
初速度の測定は,基準無負荷状態では制動開始前50m区間の走行時間を,基準負荷状態では制動開
始前20m区間の走行時間を測定して求め,停止距離又は制動距離は,次の式で補正する。
2
'0
0
'
=
v
v
s
s
·············································································· (4)
ここに,
s: 補正停止距離又は補正制動距離 (m)
s': 測定停止距離又は測定制動距離 (m)
υ0: 指定初速度 (km/h)
υ0': 測定初速度 (km/h)
また,制動距離を測定し,次の式によって平均減速度及びブレーキ効率を算出する。
s
v
b
9.
25
20
0=
················································································ (5)
8.9
0
b
e=
···················································································· (6)
ここに, b0: 平均減速度 (m/s2)
e: ブレーキ効率
(3) 走行抵抗試験 走行抵抗試験は,次の2方法とする。ただし,(a)を優先的に,必要に応じて(b)を選ぶ。
(a) 惰行時間を測定する。
(b) 停止するまでの距離を測定する。
前進往復方向について行い,その平均を取るものとし,惰行開始点に達するまで15±1km/h(最高
8
D 6003-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
速度15km/h未満のものは,その最高速度)の初速度で走行し,惰行区間の開始点においてクラッチ
を切り,変速機を中立位置として惰行を開始し,(a)では,惰行開始点から10m地点及び20m地点ま
での走行時間を測定し,(b)では,停止するまでの距離を測定する。
初速度の測定は,惰行開始前,20m区間の走行時間の平均時間を測定して求める。惰行時間からの
平均減速度及び走行抵抗係数の算出は,次の式による。
−
−
=
1
2
1
2
1
1
1
20
t
t
t
t
b
···································································· (7)
8.9
1
1
b
f=
··················································································· (8)
ここに, b1: 平均減速度[(a)の方法による] (m/s2)
f1: 走行抵抗係数[(a)の方法による]
t1: 惰行区間10mの惰行時間 (s)
t2: 惰行区間20mの惰行時間 (s)
停止距離からの平均減速度及び走行抵抗係数の算出は,次の式による。
2
2
"0
2
9.
25s
v
b=
·············································································· (9)
8.9
2
2
b
f=
················································································ (10)
ここに,
b2: 平均減速度[(b)の方法による] (m/s2)
f2: 走行抵抗係数[(b)の方法による]
s2: 停止距離 (m)
υ0": 測定初速度 (km/h)
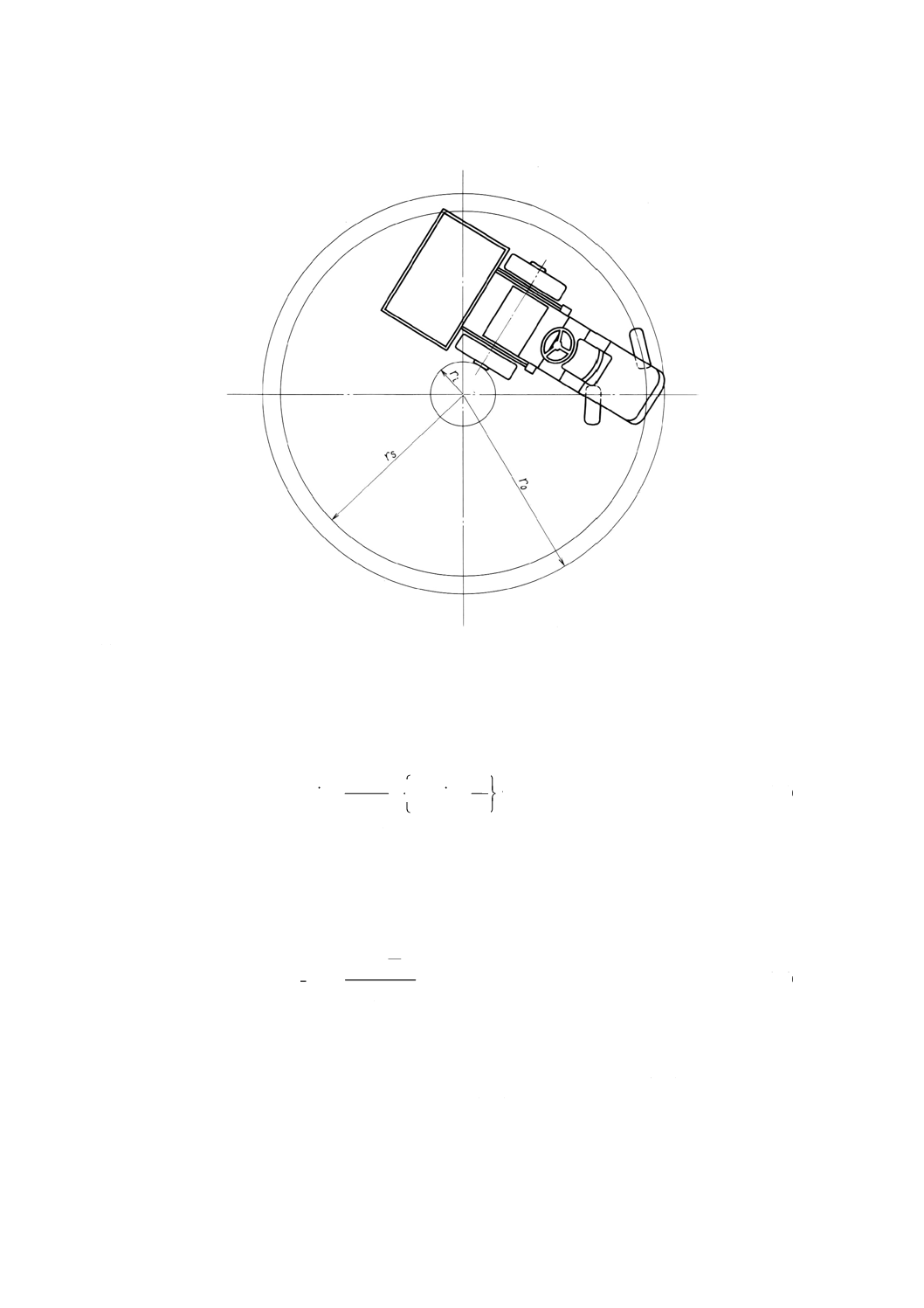
(4) 最小旋回半径試験 前進方向の左右旋回時について行い,最大かじ取り角最低速度において,最外輪
中心,車体最外部及び車体内部の旋回半径rs,r0,riを測定する。この場合基準無負荷状態とする(図
11参照)。
9
D 6003-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図11
(5) けん引試験 被けん引力を円滑に制御できる被けん引車と試験車との間にけん引力計を挿入して前進
最低速度段で行う。試験は,被けん引車の負荷を徐々に増加して,トルクコンバータのストール,タ
イヤのスリップ又は原動機停止に至るけん引力の限界を求める。ただし,最大けん引力は,バケット
に最大荷重又はこれに近い荷重を積載した状態で行い,3秒間以上ほぼ安定して持続できる値とする。
なお,試験の結果から相当登坂角は,次の式によって求めることができる。
=
×
=
−
−
'
'
sin
8.9
'
sin
1
1
G
F
G
F
ψ
ψ
·················································· (11)
ここに,
ψ: 相当登坂角(度)
F: けん引力 (N)
{F': けん引力 (kgf)}
G': ショベルローダの試験時総質量 (kg)
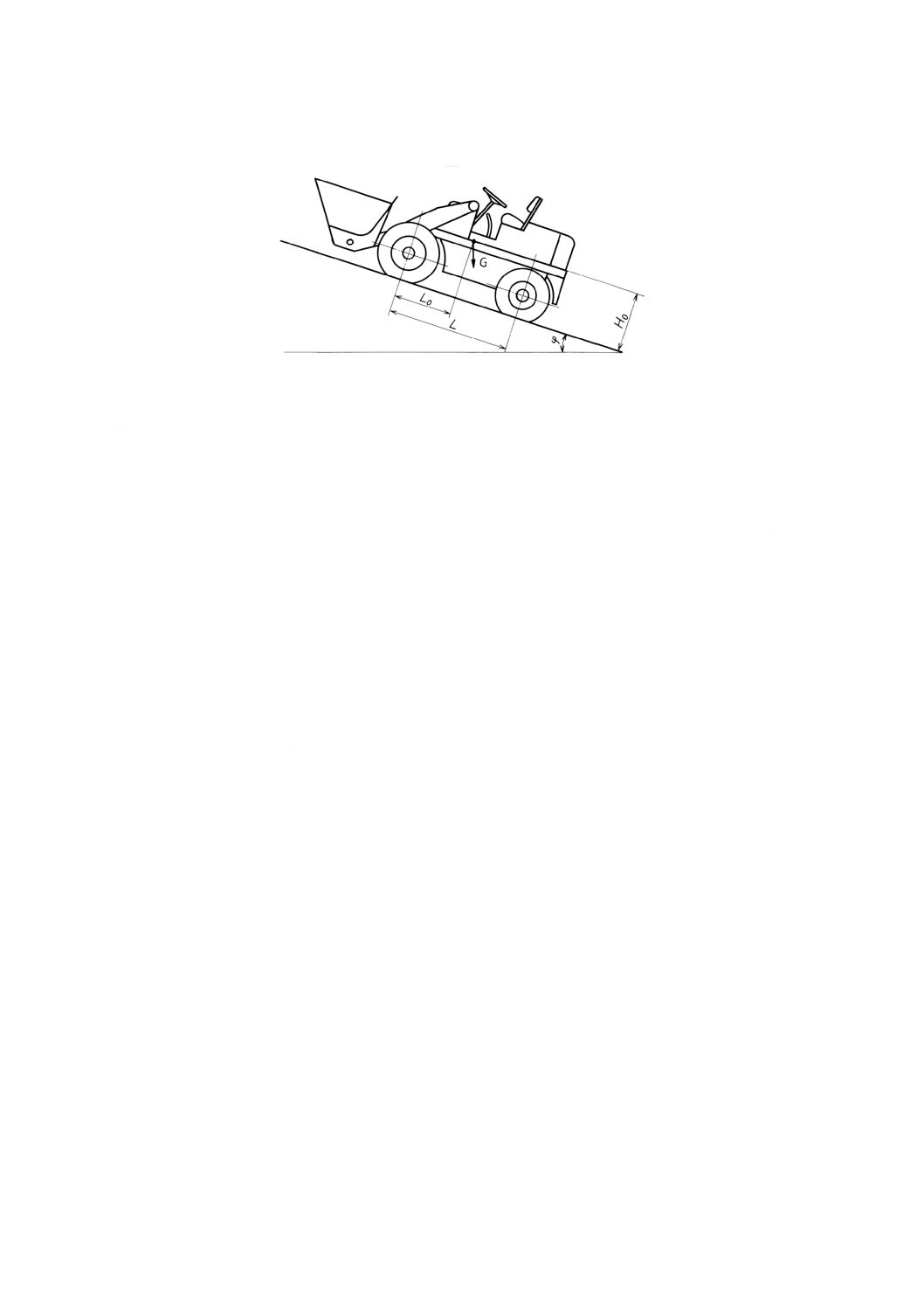
また,無負荷時の登坂スリップ限界角は,次の式によって求めることができる(図12参照)。
μ
μ
ϕ
L
H
f
L
L
L
+
−
=
−
0
0
1
tan
································································· (12)
ここに,
ϕ: 無負荷時登坂スリップ限界角(度)
L: 軸距 (mm)
L0: 重心の前車軸中心からの水平距離 (mm)
H0: 重心高さ (mm)
μ: 駆動輪摩擦係数
f: 走行抵抗係数(走行抵抗試験で求めたf1又はf2)
10
D 6003-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図12
5.4
荷役試験 荷役試験は,次の各項目について行う。この場合,作動油の温度は約40℃とする。
(1) 昇降試験
(a) 上昇試験 上昇時間を測定する。
また,この場合におけるバケットヒンジピン中心の垂直移動距離を測定し,その値を上昇時間で
除したものを上昇速度とする。
(b) 下降試験 下降速度を測定する。
また,この場合におけるバケットヒンジピン中心の垂直移動距離を測定し,その値を下降時間で
除したものを下降速度とする。
(2) バケット前傾試験 バケット前傾時間(ダンプ時間)を測定する。
6. 呼び方及び表示
6.1
呼び方 ショベルローダの呼び方は,種類及び最大荷重による。ただし,製造業者における改造,
新形などによる種別を表示する場合は,適当な記号を付加することができる。
例 ガソリン式ショベルローダ最大荷重1t又はSG10
6.2
表示 ショベルローダには,次の項目を表示した銘板を付ける。
(1) 種類
(3) 製造業者名
(2) 最大荷重
(4) 製造番号
11
D 6003-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
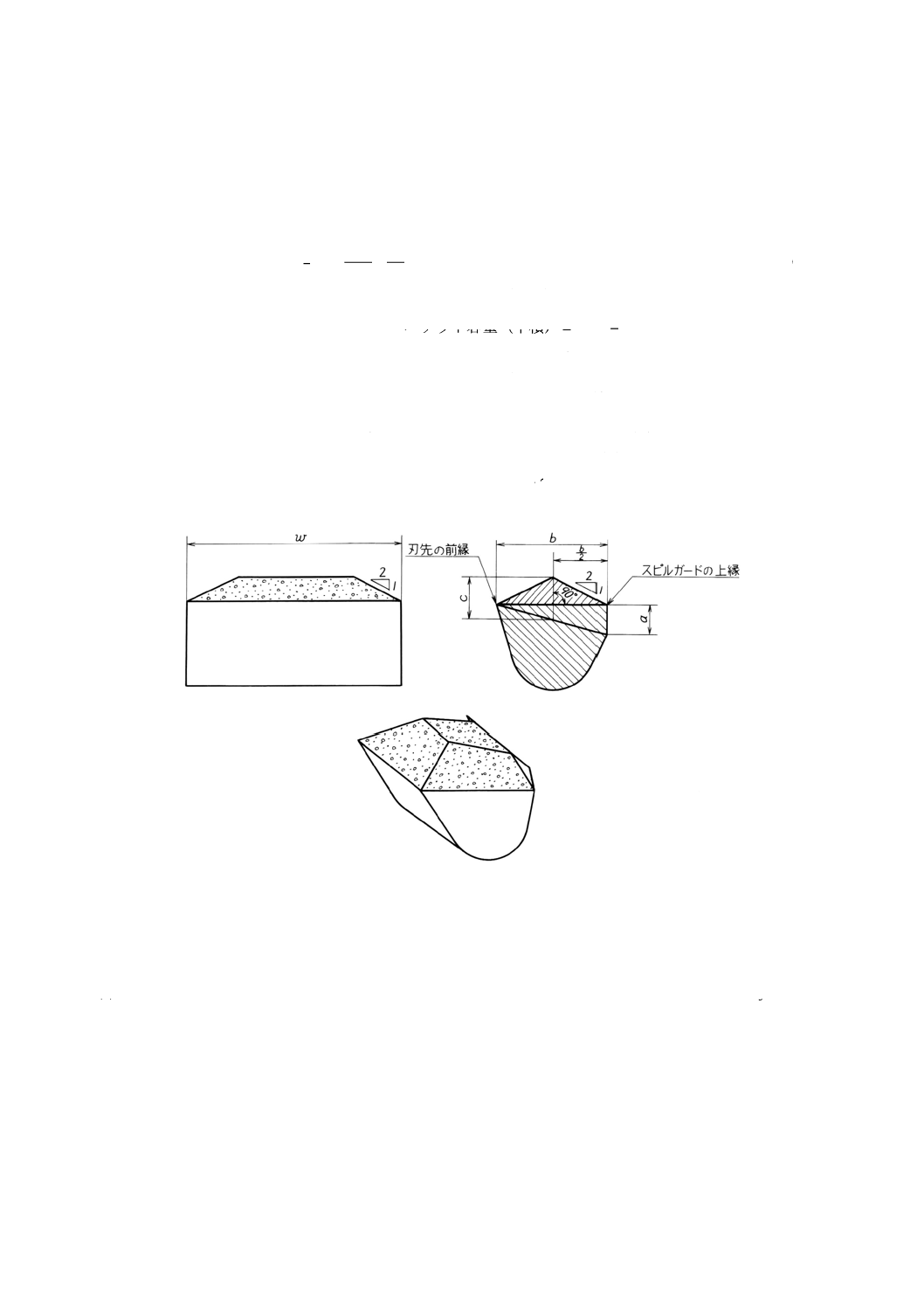
附属書 バケット容量計算式
バケット容量は,バケットの幾何学的形状から,次の計算式を用いて算出する。
)
(
6
8
2
2
c
a
b
w
b
V
V
s
r
+
−
+
=
····························································· (1)
ここに,
Vr: バケット容量(山積) (m3)
Vs: バケット容量(平積)
b
a
Aw
2
3
2
−
=
(m3)………………(2)
A: バケット中央における横断面積 (m2)
w: バケット内側幅 (m)
a: バケット中央における平積線に垂直なスピルガード高さ
(m)
b: バケット中央における開口寸法 (m)
c: 平積線に垂直な図示の寸法 (m)
(1) バケットは,附属書図1の状態に置き,山積のこう配は1 : 2とする。
附属書図1
(2) 容量は,立方メートル (m3) で表し,その数値は,小数点以下第1位までとする。
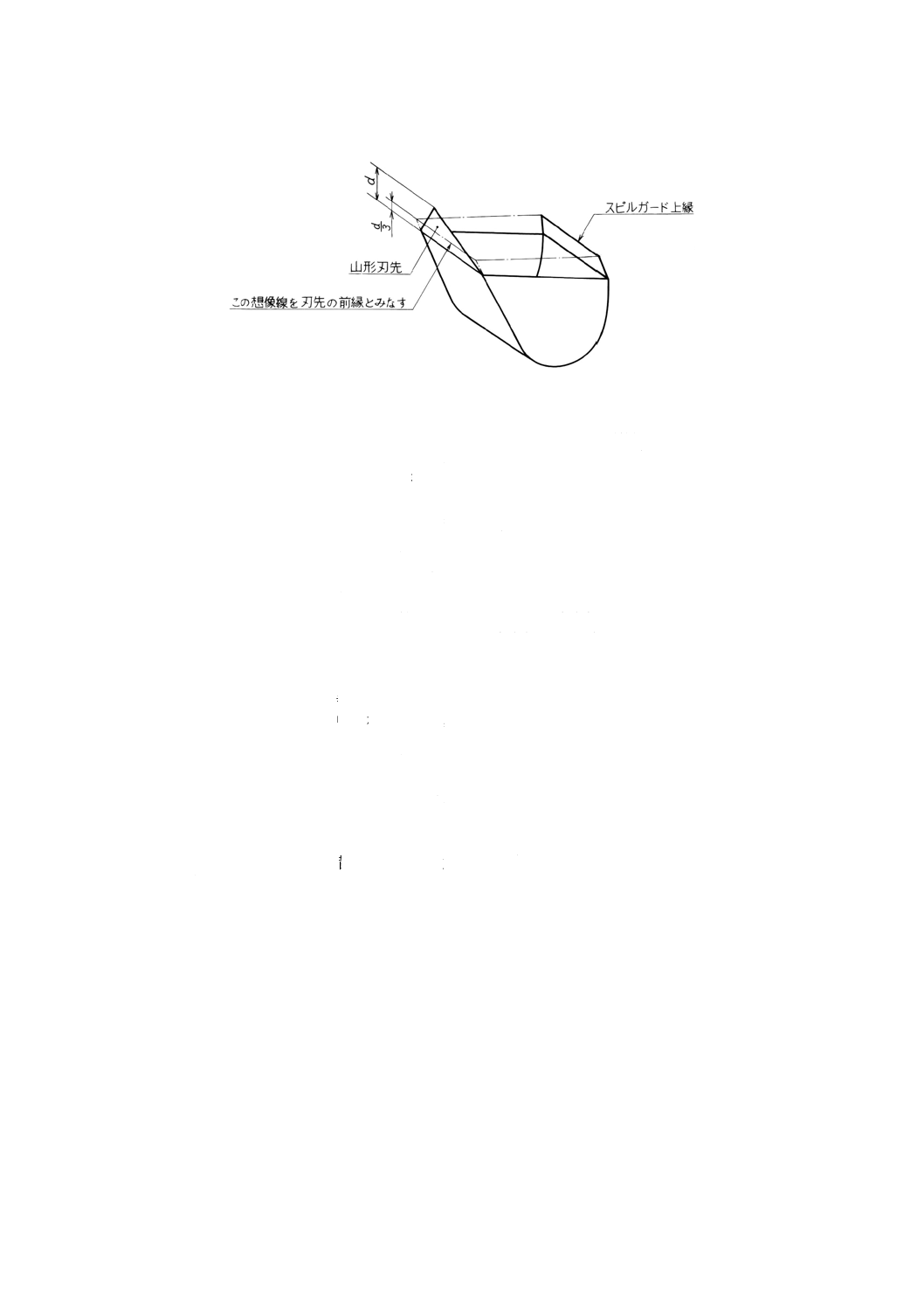
(3) この計算式は,バケット本体に垂直で互いに平行した側面をもち,バケット刃先の前縁がスピルガー
ドに平行な場合に限り適用できるもので,不規則な形状のバケットには適用してはならない。
また,つめ付刃先のつめは,バケット容量に影響しないものとする。
(4) 山形刃先付きのバケットにおいては,附属書図2に示すように,刃先の三角形の高さdの31を通り,
三角形の底辺に平行な直線を刃先の前縁とみなして,附属書図1に示す方法を適用するものとする。
12
D 6003-1995
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書図2
JIS D 6003ショベルローダ原案作成委員会 構成表
氏名
所属
(委員長)
梁 瀬 仁
社団法人日本パレット協会
林 洋 和
通商産業省機械情報産業局
山 村 修 蔵
工業技術院標準部
露 木 保
労働省労働基準局
中 島 恒 夫
運輸省自動車交通局
遠 藤 健 児
武蔵工業大学
中 西 忠 雄
防衛庁装備局
角 田 和 幸
陸上貨物運送事業労働災害防止協会
筒 井 善 次
日本通運株式会社
宮 崎 保 男
株式会社日立物流
渡 辺 秀 治
港湾貨物運送事業労働災害防止協会
大 西 義 昭
社団法人建設荷役車両安全技術協会
○ 寺 田 克
社団法人日本産業車両協会
(分科会委員長)
○ 中 村 誠
小松フォークリフト株式会社
○ 宮 田 克 弥
株式会社豊田自動織機製作所
○ 木 場 純 武
日産自動車株式会社
○ 石 井 泰 之
三菱重工業株式会社
○ 田 中 登
住友エール株式会社
○ 小 城 晴 彦
神鋼電機株式会社
○ 浦 部 澄 夫
東洋運搬機株式会社
○ 菅 勲
日本輸送機株式会社
(事務局)
岩 橋 俊 彦
社団法人日本産業車両協会
備考 ○印は,分科会委員も兼ねる。