D 1301 : 2001
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づいて,日本工業標準調査会の審議を経て,経済産業大臣が制定した日
本工業規格である。
制定に当たっては,日本工業規格と国際規格との整合を図るため,ISO/DIS 8714 : 2000, Electric road
vehicles−Reference energy consumption and range−Test procedures for passenger cars and light commercial
vehiclesを基礎として用いた。
この規格には,次に示す附属書がある。
附属書(参考) JISと対応する国際規格との対比表
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 1301 : 2001
電気自動車−一充電走行距離及び
交流充電電力量消費率試験方法
Electric vehicle―Measurement for
driving range and energy consumption
序文 この規格は,ISO/DIS 8714 : 2000, Electric road vehicles−Reference energy consumption and range−Test
procedures for passenger cars and light commercial vehiclesを翻訳し,技術的内容を変更して作成した日本工業
規格である。
なお,この規格で点線の下線を施してある箇所は,原国際規格を変更している事項である。変更の一覧表
をその説明を付けて附属書1に示す。
1. 適用範囲 この規格は,車載電池(以下,“主電池”という。)だけを動力源とする車両総質量が3 500kg
以下の電気自動車(自動二輪車及び原動機付自転車で原動機に電動機を用いたものを除く。)の一充電走行
距離及び交流充電電力量消費率を求める試験方法について規定する。
備考 この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO/DIS 8714 : 2000, Electric road vehicles−Reference energy consumption and range−Test
procedures for passenger cars and light commercial vehicles (MOD)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版(追補を含む。)を適用する。
JIS C 1211 電力量計(単独計器)
JIS D 1010 自動車走行試験方法通則
JIS D 1012 自動車−燃料消費率試験方法
3. 試験自動車及び主電池 試験自動車及び主電池は,次に掲げる状態とする。
a) 主電池は,自動車製造業者指定の電池を用い,適正に管理されたものでなければならない。
b) 主電池が搭載された状態で300km以上走行されていなければならない。また,慣らし走行距離は,付
表5に記録する。
c) 自動車製造業者の仕様に基づき,あらかじめ点検・整備されていなければならない。
d) 試験自動車の質量は,JIS D 1010に規定する空車状態の自動車に2人の人員(人員1人の質量は,55kg
とする。)が乗車し,又は110kgの物品が積載された質量(以下,“試験自動車質量”という。)でなけ
2
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ればならない。
e) 試験路において走行抵抗を測定するときの試験自動車質量の誤差範囲は,試験自動車質量の±50kgで
なければならない。
f)
電動機を収めているフードは,閉じていなければならない。
g) タイヤの空気圧は,自動車仕様書に記載された空気圧でなければならない。
なお,空気圧は,試験自動車が走行前(冷間)に水平面で静止している状態で測定する。ただし,
シャシダイナモメータに設置する際,シャシダイナモメータのローラの直径が500mm未満の場合に
は,試験自動車が平たん舗装路面を走行しているときの状態に近似するようにタイヤの空気圧を自動
車仕様書記載値の1.5倍を限度として調整することができる。
h) ホイールトルクメータを装着した駆動軸については,トレッドの誤差範囲が自動車点検仕様値の±
10%であり,トーイン及びキャンバは自動車点検仕様値でなければならない。
i)
一充電走行距離及び交流充電電力量消費率の測定に影響を与えるおそれのある部品以外は,正規の部
品でなくてもよい。
j)
搭載されたすべてのエネルギー貯蔵装置(電気,油圧,空気圧など)は,走行目的以外の装置であっ
ても,自動車製造業者の指定する範囲で動作させなければならない。
4. 試験機器の精度・校正 シャシダイナモメータ及び試験用機器は,当該機器の製作者の定める取扱い
要領に基づいて点検・整備され,校正されたもので,次の精度をもっていなければならない。
a) 温度計の精度は,±1℃とする。
b) 気圧計の精度は,±0.1kPaとする。
c) 風速計の精度は,±1m/sとする。
d) 速度計の精度は,±0.5km/hとする。
e) シャシダイナモメータの距離計の精度は±0.1%とする。
f)
惰行時間の測定装置の精度は,±0.1sとする。
g) 交流積算電力量計の精度は,JIS C 1211に規定される±2%の計測器,又はこれと同等以上の精度とす
る。
h) ホイールトルクメータの精度は,フルスケールの±2%とする。
5. 試験室 試験室内の温度は,25℃±5℃とする。
なお,温度測定位置は,送風装置付近とし,温度は,8.に規定する一充電走行距離試験の開始前及び終
了後に測定する。
6. 試験自動車の設置
6.1
等価慣性質量の設定 シャシダイナモメータに設定する等価慣性質量は,表1の左欄に掲げる試験
自動車質量に応じ,それぞれ同表右欄に掲げる等価慣性質量の標準値でなければならない。ただし,同表
右欄の等価慣性質量の標準値が設定できないときは,当該標準値と当該標準値にその10%を加えた値の範
囲内で等価慣性質量を設定することができる。
3
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
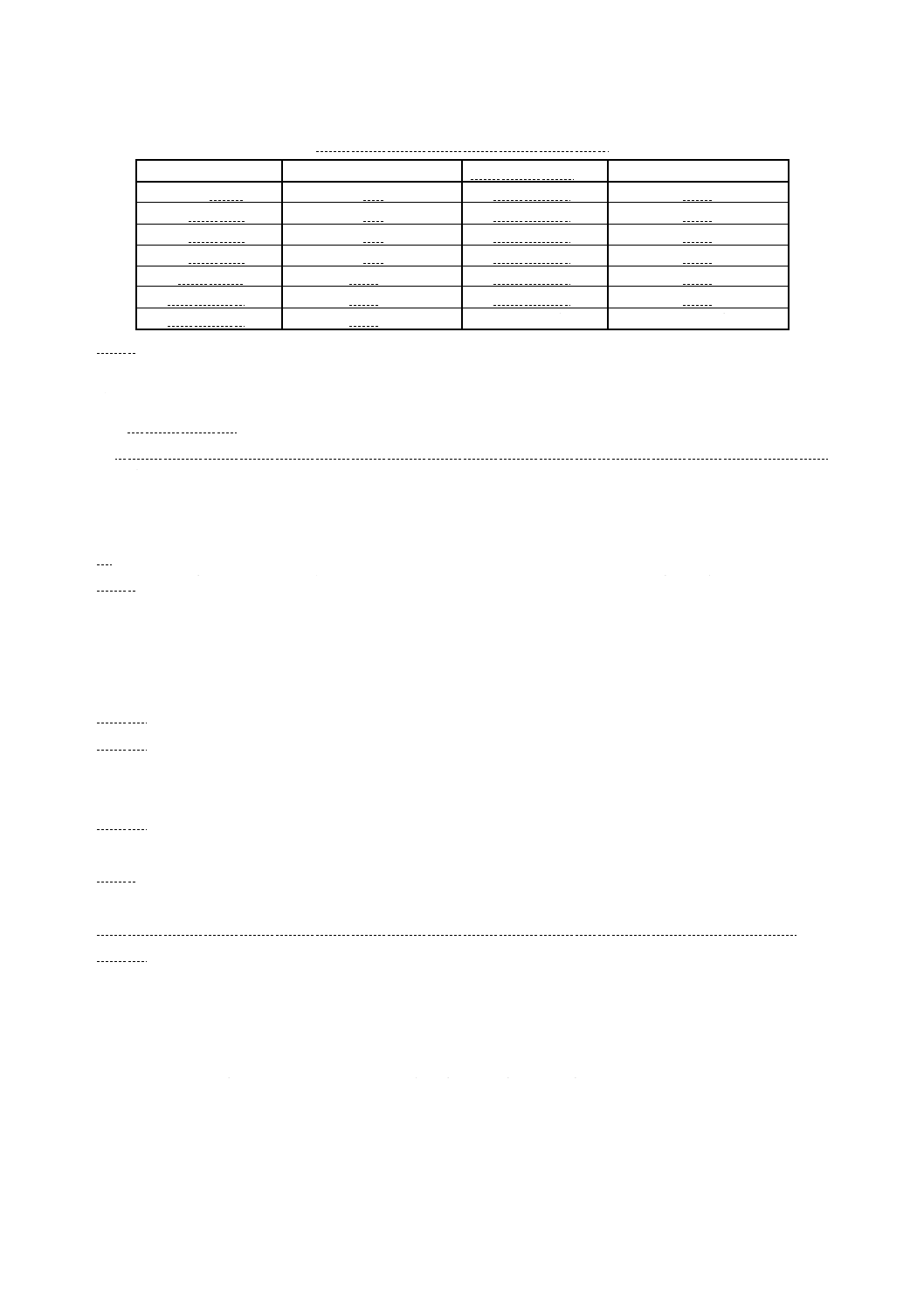
表1 試験自動車の等価慣性質量の標準値
試験自動車質量 (kg) 等価慣性質量の標準値 (kg) 試験自動車質量 (kg) 等価慣性質量の標準値 (kg)
〜562
500
1 626〜1 875
1 750
563〜687
625
1 876〜2 125
2 000
688〜812
750
2 126〜2 375
2 250
813〜937
875
2 376〜2 625
2 500
938〜1 125
1 000
2 626〜2 875
2 750
1 126〜1 375
1 250
2 876〜3 250
3 000
1 376〜1 625
1 500
以下500kgとび
以下500kgとび
6.2
試験自動車の設置 試験自動車をシャシダイナモメータに設置する際には,次の点に留意しなけれ
ばならない。
a) 試験自動車の質量は,人員1人が乗車した状態とする。この場合,その質量は,試験自動車質量であ
る必要はない。
b) 試験自動車の駆動車輪のタイヤから,水,砂利などのスリップの原因となるようなもの及び危険物を
除去しておく。
c) 試験自動車は,運転中の動揺などが少ないように設置する。
7. 負荷設定
7.1
シャシダイナモメータの負荷は,平たん舗装路を運行する状態において当該試験自動車が受ける走
行抵抗を再現するように設定する。この場合,試験自動車及びシャシダイナモメータは,十分に暖機され
た状態とする。
なお,負荷設定に用いる手法は,7.2に掲げる惰行法又は7.3に掲げるホイールトルク法とし,7.2及び
7.3に掲げる走行抵抗の測定に使用する試験路は,次による。
7.1.1
試験路は,乾燥した直線平たん舗装路とし,不連続な防風板などがあってはならない。
7.1.2
試験路における走行抵抗測定時の大気状態は,大気圧,気温及び風の状態が観察できる設備を設け
る。大気圧及び気温は,走行抵抗測定の開始時及び終了時の平均値を求めるものとし,風速は試験路に平
行な風速成分及び試験路に垂直な風速成分が,随時観察又は記録できなければならない。
7.1.3
試験路における走行抵抗測定時の風の状態は,試験路に平行な風速成分が平均5m/s以下,垂直な
風速成分が平均2m/s以下であるとする。
7.2
惰行法 惰行法とは,試験自動車の惰行走行において,減速に要した時間(以下,“惰行時間”とい
う。)を測定し,その惰行時間から当該試験自動車の目標走行抵抗を算出し,かつ,同等の走行抵抗をシャ
シダイナモメータに設置した試験自動車に加える負荷設定方法であり,次の方法によって実施する。
7.2.1
試験路における走行抵抗の測定
a) 走行抵抗の測定を行う速度(以下,“指定速度”という。)は,20km/h,30km/h,40km/h,50km/h,60km/h
及び70km/hとする。
b) 走行抵抗の測定は,試験自動車を指定速度+5km/hを超える速度から変速位置を中立にして惰行させ,
指定速度+5km/hから指定速度−5km/hに至るまでの時間(以下,“惰行時間”という。)を0.1秒間以
下のけたで測定することによって行う。惰行時間の測定中は,ブレーキ操作及びハンドル操作は行わ
ないものとし,クラッチはつないだままとする。
なお,変速位置を中立にできない車両は,電気的制動を作動させない状態で惰行させる。
c) 各指定速度における惰行時間の測定は,往路3回及び復路3回行うものとし,その平均値(以下,“平
4
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
均惰行時間”という。)を求めるものとする。
なお,往路ごと又は復路ごとの惰行時間は,それぞれの最大値と最小値との比が1.1以下とし,1.1
以下でない場合には再測定とする。
7.2.2
目標走行抵抗の算出
a) 各指定速度における走行抵抗は,次の式によって算出する。
t
W
W
F
36
.0
4
+
=
ここに,
F: 各指定速度における走行抵抗 (N)
W: 試験自動車の質量(走行抵抗測定時) (kg)
W4: 試験自動車の回転部分の相当慣性質量 (kg)
(通常は,諸元表に記載された車両質量の3.5%とする。
なお,実測又は計算で求めてもよい。)
t: 各指定速度における平均惰行時間 (s)
b) a)で求めた各指定速度における走行抵抗をもとに,最小2乗法によって走行抵抗を速度の2乗の関数
として次のように表す。
F=a+bV2
(
)2
2
2
∑
∑
∑∑
∑∑
−
−
=
i
i
i
i
i
i
i
K
K
n
F
K
K
F
K
a
(
)2
2
∑
∑
∑
∑∑
−
−
=
i
i
i
i
i
i
K
K
n
F
K
F
K
n
b
K=V2
ここに, F: 走行抵抗 (N)
a: 転がり抵抗に相当する値 (N)
b: 空気抵抗係数に相当する値 [N/ (km/h)2]
V: 速度 (km/h)
c) b)で求めた各係数について,次の式によって標準大気圧状態への補正を行い,これを目標走行抵抗と
する。
F0=a0+b0V2
a0= (a−bv2) [1+0.008 64 (Te−20)]
P
T
b
b
)
273
(
346
.0
e
0
+
=
ここに, F0: 目標走行抵抗 (N)
v: 試験路に平行な風速成分の平均値 (km/h)
a0: 標準状態における転がり抵抗に相当する値 (N)
b0: 標準状態における空気抵抗係数に相当する値 [N/ (km/h)2]
V: 速度 (km/h)
Te: 試験路における平均気温 (℃)
P: 試験路における平均大気圧 (kPa)
5
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.2.3
シャシダイナモメータにおける負荷設定 試験自動車をシャシダイナモメータに設定し,試験自動
車の駆動系の摩擦抵抗とシャシダイナモメータの摩擦抵抗の和(以下,“総摩擦損失”という。)を求め,
シャシダイナモメータの制動力が目標走行抵抗と総摩擦損失との差に相当する値となるようシャシダイナ
モメータを調整する。
なお,多点設定方式のシャシダイナモメータにおける0km/hの制動力の状態は,10km/hの場合と同じ状
態とする。
7.2.4
設定された負荷の検証 設定された負荷(以下,“設定走行抵抗”という。)が目標走行抵抗に相当
する値であることを次の方法によって検証する。
a) 検証を行う速度(以下,“検証速度”という。)は,シャシダイナモメータの種類に応じて,次による。
1) 多点設定方式の場合には,10km/h,20km/h,30km/h,40km/h,50km/h,60km/h及び70km/hとする。
2) 係数設定方式の場合には,20km/h,40km/h及びも60km/hとする。
3) 1点設定方式の場合には,60km/hとする。
b) 試験自動車を検証速度+5km/hを超える速度から変速位置を中立にして惰行させ,検証速度+5km/h
から検証速度−5km/hに至るまでの惰行時間を0.1秒間以下のけたで測定する。惰行中は,ブレーキ
操作は行わないものとし,クラッチはつないだままとする。変速位置を中立にできない車両は,電気
的制動を作動させない状態で惰行させる。
なお,惰行時間の測定は,各検証速度について2回行い,その平均値を求める。
c) b)で求めた惰行時間の平均値からシャシダイナモメータの設定走行抵抗を,次の式によって算出する。
c
W
t
W
W
F
36
.0
2
1
c
+
=
ここに,
Fc: 設定走行抵抗 (N)
W1w: 等価慣性質量 (kg)
W2: 試験自動車の駆動系の回転部分の相当慣性質量 (kg)
(諸元表に記載された車両質量の1.8%とする。
なお,実測又は計算で求めてもよい。)
tc: 惰行時間の平均 (s)
d) 各検証速度における設定走行抵抗と当該速度における目標走行抵抗との差は,当該目標走行抵抗の±
5%でなければならない。
7.3
ホイールトルク法 ホイールトルク法とは,ホイールトルクメータを装着した試験自動車を定速走
行させ,駆動輪に加わるホイールトルクから当該車両の走行トルク値を算出し,かつ,同等の走行トルク
をシャシダイナモメータに設定した試験自動車に加える負荷設定方法であり,次の方法によって実施する。
7.3.1
ホイールトルクメータの調整など
a) ホイールトルクメータは,試験自動車の左右の駆動輪に装着する。
b) 試験路において走行抵抗を測定するときに使用するホイールトルクメータ及びシャシダイナモメータ
上で負荷設定するときに使用するホイールトルクメータは,同一のものとする。
c) 試験自動車に装着されたホイールトルクメータは,試験路における走行抵抗測定の直前及びシャシダ
イナモメータの負荷設定を行う直前にゼロ調整及びスパン調整を行う。
7.3.2
試験路における走行抵抗の測定
a) 指定速度は,20km/h,30km/h,40km/h,50km/h,60km/h及び70km/hとする。
b) 各指定速度において,試験自動車が定常走行している状態で,試験自動車の速度及び左右のホイール
6
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
トルクの和を同時に0.25秒以下のサンプリング周期で5秒間以上測定する。
c) 測定中の試験自動車の速度の平均値(以下,“測定車速”という。)及び測定中の走行トルク(この場
合,“左右のホイールトルクの和の平均値”をいう。)を求める。
d) 試験自動車の速度は,測定開始時におけるものと測定終了時におけるものとの差が0.5km/h以下で,
測定中の最大値と最小値との差が指定速度の5%以下でなければならない。また,測定車速と指定車
速との差は,±2km/hでなければならない。
e) 左右のホイールトルクの和は,測定中の最大値と最小値との差が最大値の5%以下でなければならな
い。
f)
各指定速度における測定車速及び走行トルクの測定は,往路1回及び復路1回行う。
7.3.3
目標走行抵抗の算出
a) 7.3.2で求めた各指定速度における走行トルクをもとに,最小2乗法によって走行トルクを速度の2乗
の関数として次のように表す。
なお,Tiについては往路及び復路における走行トルクをそれぞれ代入するものとし,Kiについては
往路及び復路における測定車速をそれぞれ2乗して代入する。
T=c+dV2
(
)2
2
2
∑
∑
∑∑
∑∑
−
−
=
i
i
i
i
i
i
i
K
K
n
T
K
K
T
K
a
(
)2
2
∑
∑
∑
∑∑
−
−
=
i
i
i
i
i
i
K
K
n
T
K
T
K
n
d
K=V2
ここに, T: 走行トルク (N・m)
c: 転がり抵抗に相当する値 (N・m)
d: 空気抵抗係数に相当する値 [N・m/ (km/h)2]
V: 速度 (km/h)
b) a)で求めた各係数について,次の式によって標準大気圧状態への補正を行い,これを目標走行抵抗に
相当するもの(以下,“目標トルク”という。)とする。
T0=c0+d0V2
)]
20
(
64
008
.0
1
)[
(
e
2
0
−
+
−
=
T
d
c
c
υ
P
T
d
d
)
273
(
346
.0
e
0
+
=
ここに, Tc: 目標トルク (N・m)
v: 試験路に平行な風速成分の平均値 (km/h)
c0: 標準状態における転がり抵抗に相当する値 (N・m)
V: 速度 (km/h)
d0: 標準状態における空気抵抗係数に相当する値 [N・m/ (km/h)2]
Te: 試験路における平均気温 (℃)
Pc: 試験路における平均大気圧 (kPa)
7
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.3.4
シャシダイナモメータにおける負荷設定 試験自動車をシャシダイナモメータに設置し,左右のホ
イールトルクの和が目標トルクに相当する値となるようにシャシダイナモメータを調整する。
なお,多点設定方式のシャシダイナモメータにおける0km/hの制動力の状態は,10km/hの場合と同じ状
態とする。
7.3.5
設定された負荷の検証 設定された負荷が目標トルクに相当する値であることを次の方法によっ
て検証する。
a) 検証速度は,シャシダイナモメータの種類に応じて,次による。
1) 多点設定方式の場合には,10km/h,20km/h,30km/h,40km/h,50km/h,60km/h及び70km/hとする。
2) 係数設定方式の場合には,20km/h,40km/h及び60km/hとする。
3) 1点設定方式の場合には,60km/hとする。
b) 各検証速度で試験自動車が定常走行している状態において,試験自動車の速度及び左右のホイールト
ルクの和を同時に0.25秒以下のサンプリング周期で5秒間以上測定する。
c) 測定中の試験自動車の速度の平均値(以下,“検証実車速”という。)及び測定中の左右のホイールト
ルクの和の平均値(以下,“設定トルク”という。)を求める。
d) 試験自動車の速度は,測定開始時におけるものと測定終了時におけるものとの差が0.5km/h以下で,
測定中の最大値と最小値との差が検証速度の5%以下であり,検証実車速と検証速度との差は±1km/h
でなければならない。
e) 左右のホイールトルクの和は,測定中の最大値と最小値との差が最大値の5%以下でなければならな
い。
f)
各検証速度における設定トルクと当該速度における目標トルクとの差は,当該目標トルクの±5%でな
ければならない。
8. 一充電走行距離及び交流充電電力量消費率の測定 一充電走行距離は,8.1に規定する方法で主電池
の充電を実施した後,4時間以内にシャシダイナモメータ上の試験自動車を8.2に規定する方法で運転し,
8.3に規定する方法によって求める。交流充電電力量消費率は,一充電走行距離試験後,2時間以内に再充
電のためのプラグの接続を行い,8.4に規定する方法によって求める。試験走行中は,送風機などによって
実際の走行状態と同等になるように試験自動車を冷却する。
8.1
試験自動車の主電池の充電 試験自動車の主電池の充電は,気温5℃〜32℃の環境下で試験前に自動
車製造業者指定の充電器及び充電方法によって完全充電状態とし,充電終了後4時間以内に走行試験を開
始する。
8.2
試験自動車の走行試験方法
8.2.1
走行試験は,シャシダイナモメータを十分暖機したうえで開始する。
8.2.2
試験自動車は,暖機せずに試験を開始し,試験自動車の動力源は主電池とし,キースイッチオンで
常時発生する電気負荷だけを作動させる。また,電気的制動システムを装着している車両については,通
常の作動状態で試験を開始する。
8.2.3
試験自動車は,付表1に規定する10モードを3サイクル運転し,付表2に規定する15モードを1
サイクル運転(以下,“10・15モード走行パターン”という。)することを繰り返す。
8
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
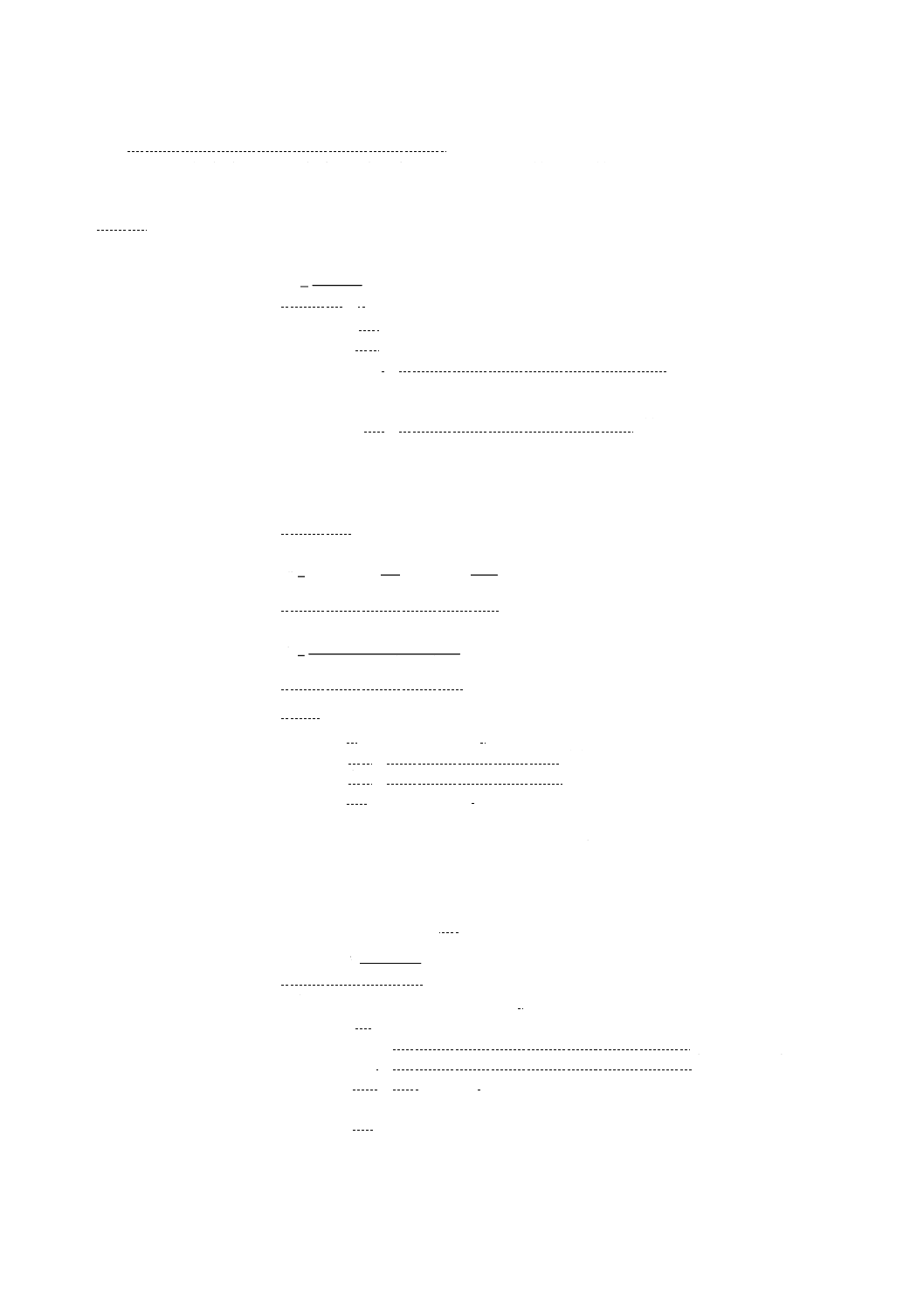
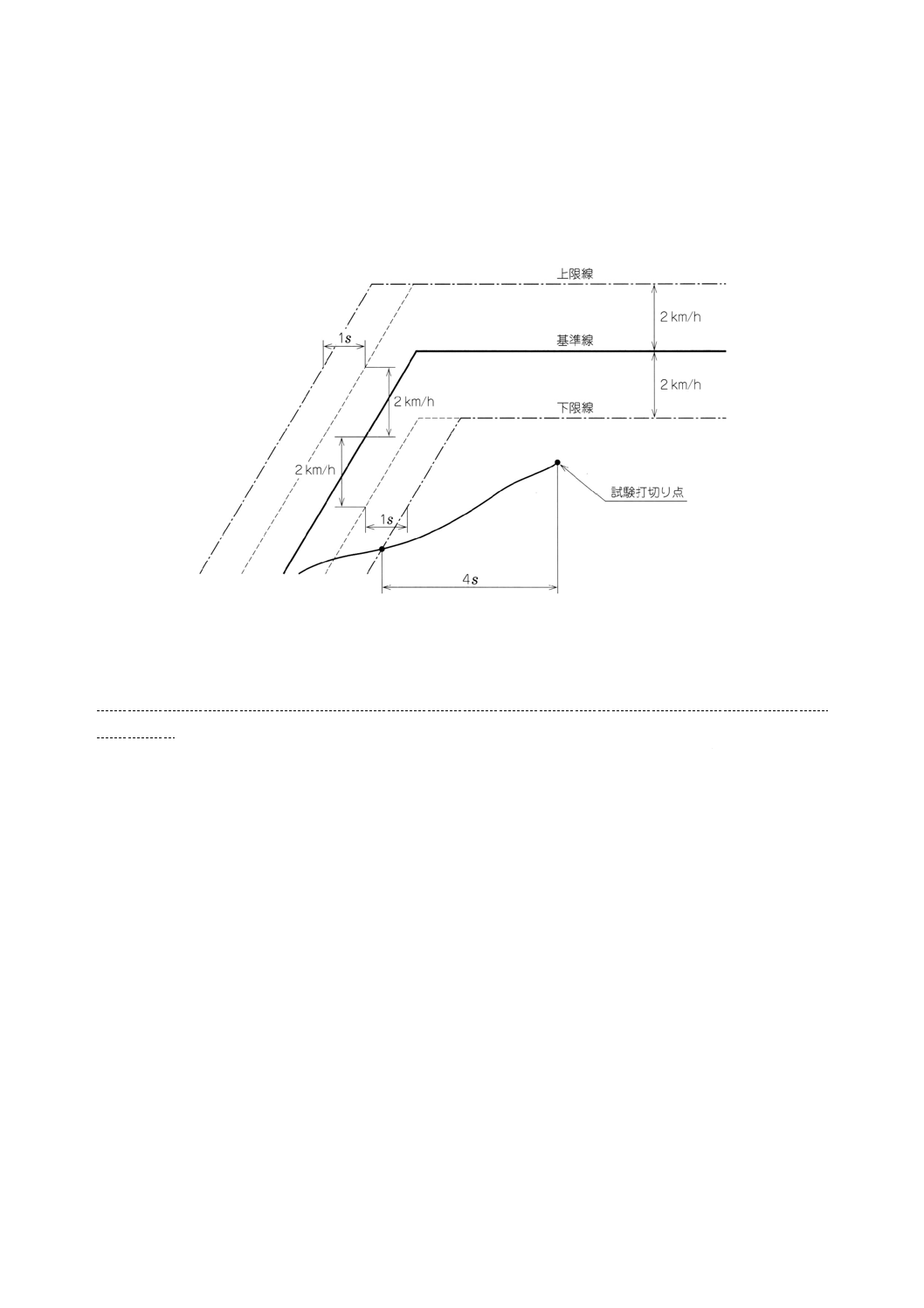
8.2.4
試験自動車を運転する場合の速度及び時間の許容誤差については,図1に示すように10・15モード
走行パターン基準線から車速±2km/h,時間±1sで得られる限界線内とする。ただし,限界線を超えても4
秒間未満に許容値内に復帰する失敗が10・15モード走行パターンの1サイクルについて1回あっても試験
は有効とする。
なお,試験中の失敗回数は,付表5の試験成績表に記入する。
図1 試験許容範囲及び試験打切り条件
8.2.5
走行試験中でも30分以上の走行ごとに3分間以内のドライバー交代時間,休息,又は試験機器の
調整のための試験中断を認める。ただし,試験中断の累積時間は,最大15分間以内でなければならない。
8.2.6
付表1及び付表2に規定するそれぞれの運転状態における変速操作は,円滑及び迅速に行うほか,
次による。
a) 手動変速機(動力伝達系統にトルクコンバータが付いていない,かつ,変速段の切換えを手動で行う
変速機。)を備えた自動車の場合
1) 運転状態における変速段は,付表1及び付表2に規定するそれぞれの状態を基本とする。ただし,
試験自動車の変速特性及び原動機の回転速度によって,当該自動車の変速段を適宜に選択し規定す
ることができる。また,5段変速機を備えた自動車であって,変速機のLowを通常使用しないもの
にあっては,2ndから発進することができる。
2) 試験自動車の運転中に当該試験自動車の主電池の電圧低下などによって,原動機の実用最高回転速
度又は出力の低下が認められる場合には,その際に使用していた変速段を変更することができる。
3) モード走行パターンのアイドリング運転モードでは,変速機の変速位置を中立とし,アクセルペダ
ルは操作していない状態とする。
なお,車両停止時にモータも停止状態となる自動車は,変速位置を通常の発進位置とし,アクセ
ルペダルは操作していない状態としてもよい。
4) アイドリング運転モードでは,変速機の変速位置を中立とし,アクセルペダルは操作していない状
態とした試験自動車がアイドリング運転モードから加速運転モードに移るときは,その5秒間前に
変速位置を通常の発進位置とする。
5) 減速運転においては,付表1に規定する20→0km/hに至る運転の際には途中の10km/h,40→0km/h
9
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
に至る運転の際には途中の20km/hにおいて,また,付表2に規定する70→0km/hに至る運転の際
には途中の30km/hにおいて,それぞれクラッチを断つ。
なお,車両停止時にモータも停止状態となる自動車は,クラッチを断たなくてもよい。
b) 自動変速機(変速段の切換えが自動的に行われる変速機。)を備えた自動車は,変速位置をドライブ位
置とし,変速操作は行わない。
c) その他の変速機を備えた自動車は,当該自動車の走行特性を考慮して定められた変速操作による。
8.2.7
回生制動力をもつ車両については,それを使用することができる。
8.2.8
試験自動車のモードサイクル運転の打切りは,自動車製造業者によって車両に備えられた主電池残
存容量警報装置などによって,車両停止指示が出された場合,又はモード走行パターン基準線から車速±
2km/h,時間±1sで得られる限界線を超えた状態が4秒間以上継続した場合とする。
8.2.9
モードサイクル運転の打切り時は,速やかにブレーキをかけ,車両を停止させる。
8.3
一充電走行距離の測定方法 8.2の運転方法によって,10・15モード走行サイクル運転を打切りまで
繰り返す。試験運転打切りとなり,車両が停止した時点での走行距離をシャシダイナモメータの距離計か
ら読み取り,これを一充電走行距離D (km) とする。
8.4
交流充電電力量消費率の測定方法 8.2の運転方法による一充電走行距離試験終了後2時間以内に,
充電電源に接続し,自動車製造業者指定の充電器及び方法によって主電池を完全充電状態まで回復させ,
これに要した交流電源(充電器への交流電源入力側)電力量を求めるが,充電電源に接続してから充電完
了までの時間は24時間を上限とする。このときに用いる交流電力量計は,4.に規定する精度をもつ計器の
場合,配電盤に設置されている電力量計測器でもよい。
8.4.1
交流充電電力量消費率の算出 交流充電電力量消費率は,次の式によって算出する。
D
E
C
000
1
×
=
ここに, C: 交流充電電力量消費率 (Wh/km)
E: 交流充電電力量 (kWh)
D: 一充電走行距離 (km)
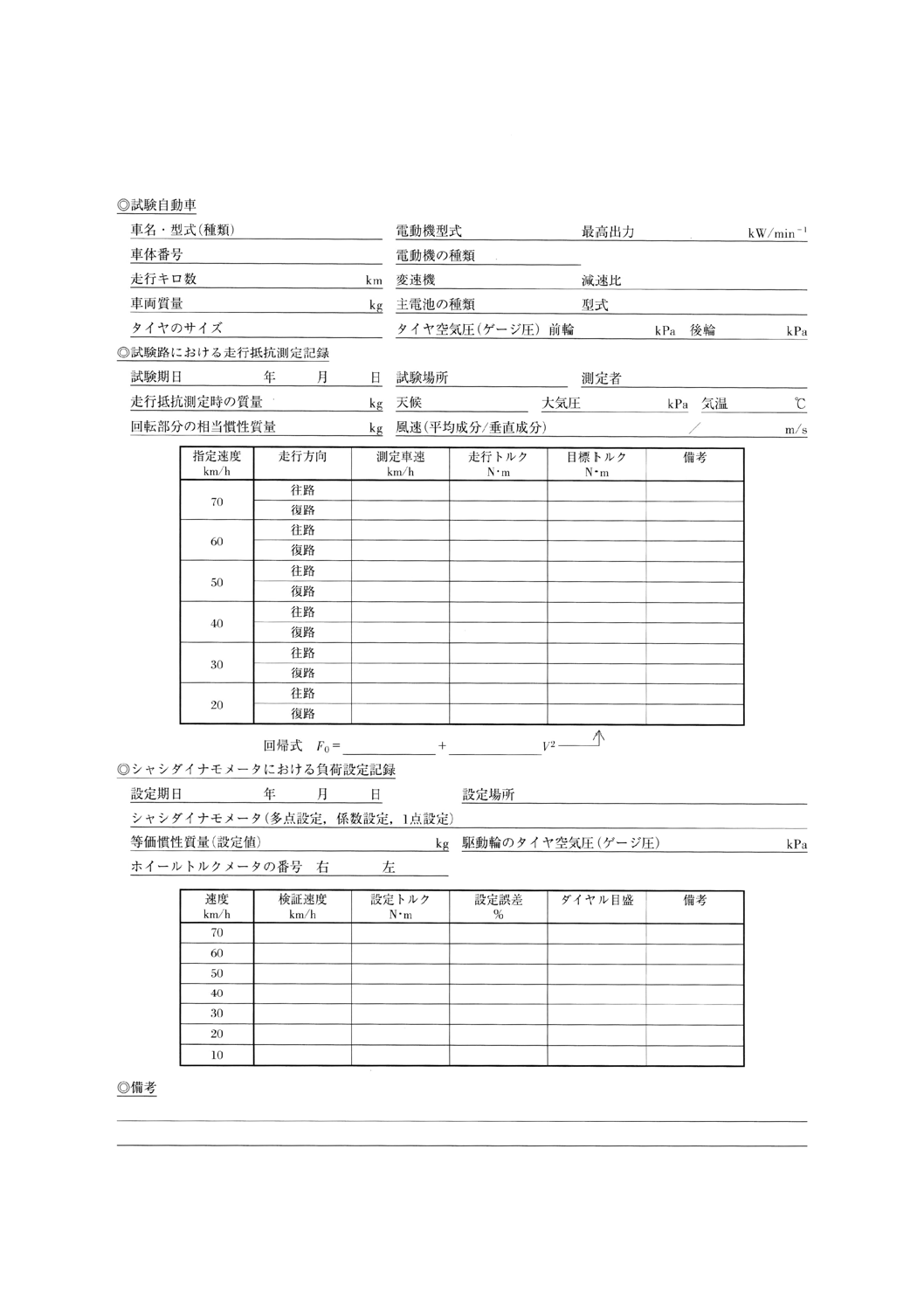
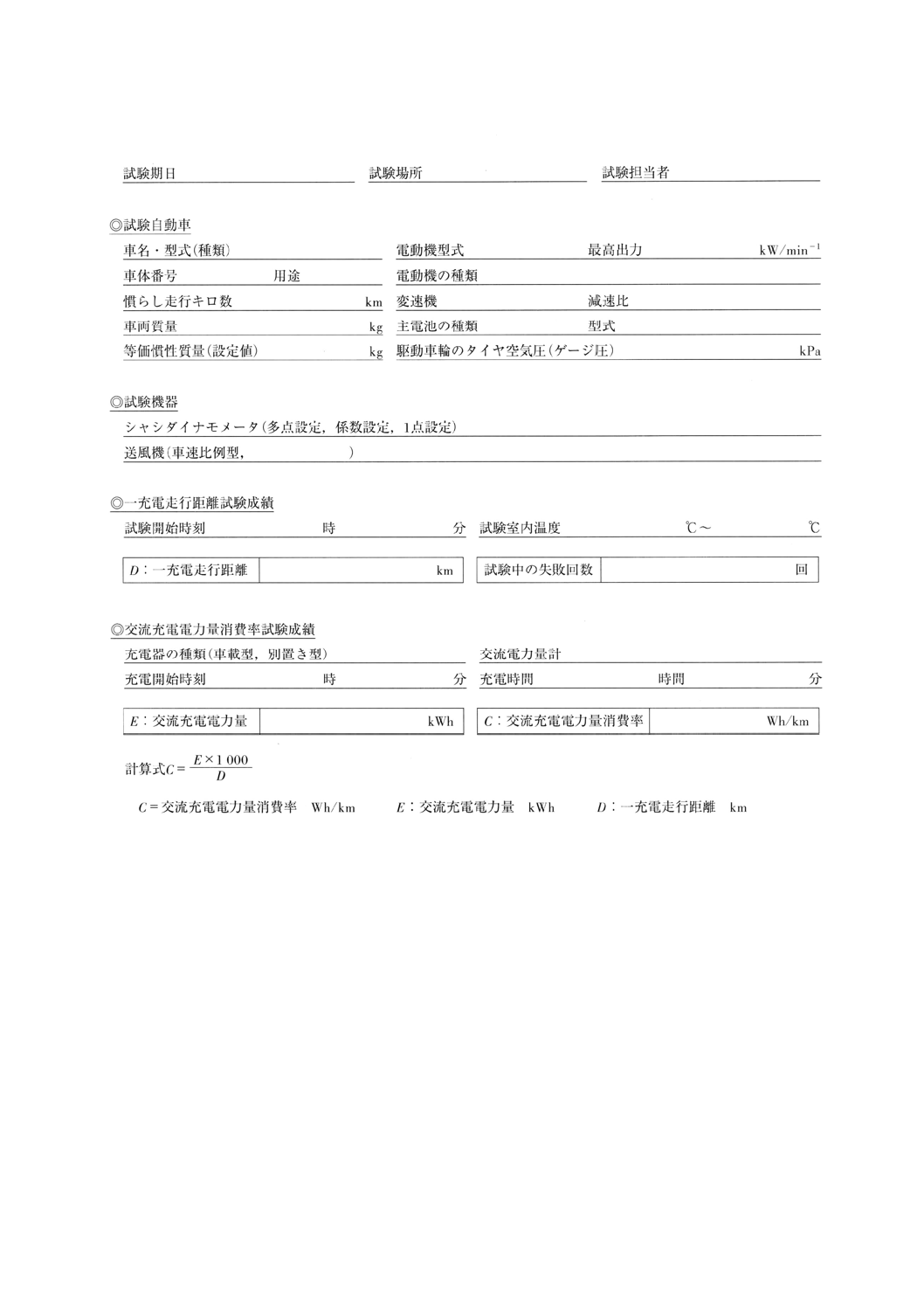
9. 試験成績
a) 試験の負荷設定記録は付表3又は付表4に,試験成績は付表5に記載する。
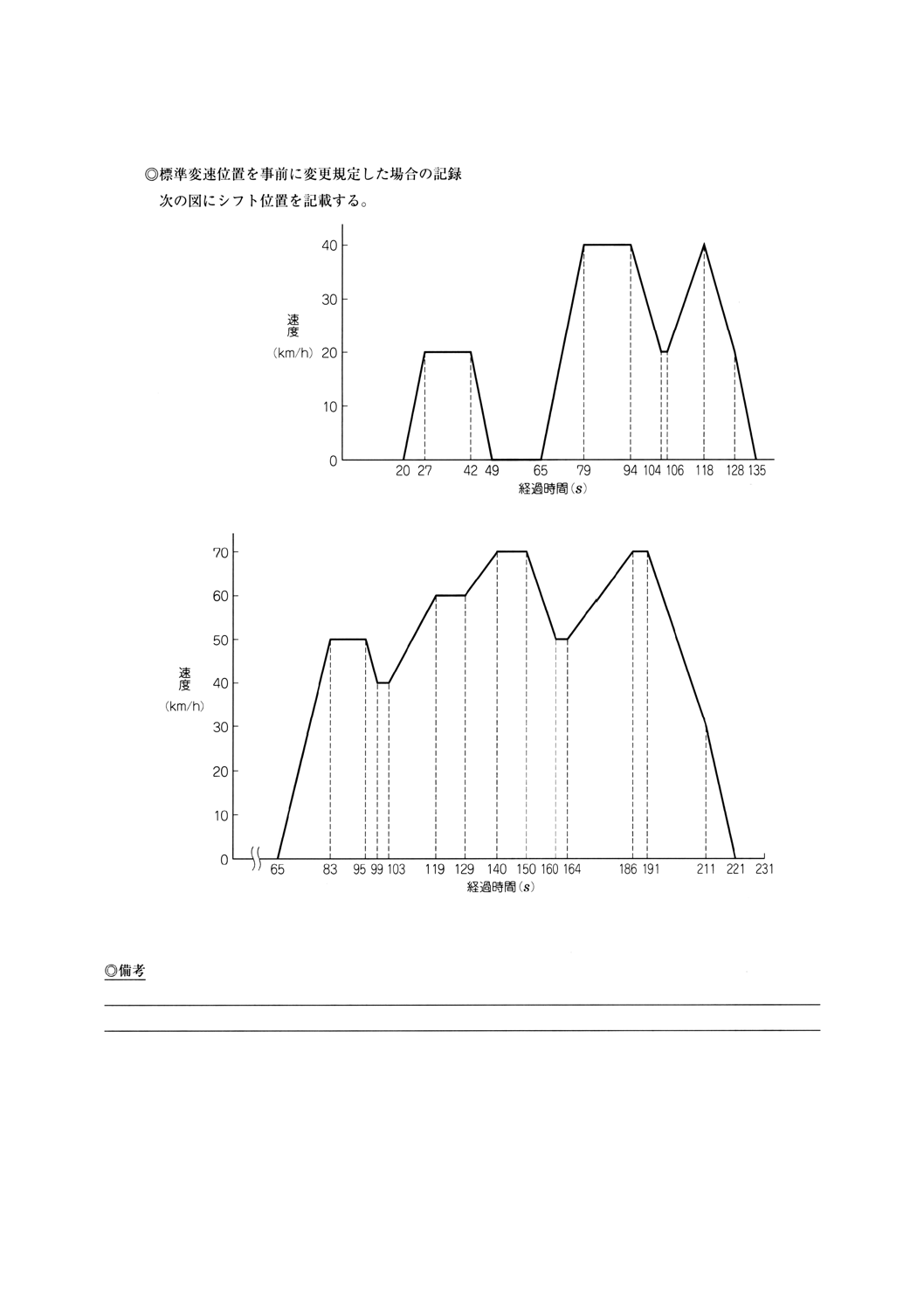
b) 8.2.6 a)1)による措置を講じたときは,その内容を付表5の標準変速位置を事前に変更規定した場合の
記録欄に記載する。
c) 一充電走行距離は,kmの単位とし,小数点第1位を四捨五入し,整数値まで求める。
d) 交流充電電力量は,kWhの単位とし,小数点第2位を四捨五入し,小数点第1位まで求める。
e) 交流充電電力量消費率は,Wh/kmの単位とし,小数点第2位を四捨五入し,小数点第1位まで求める。
10
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
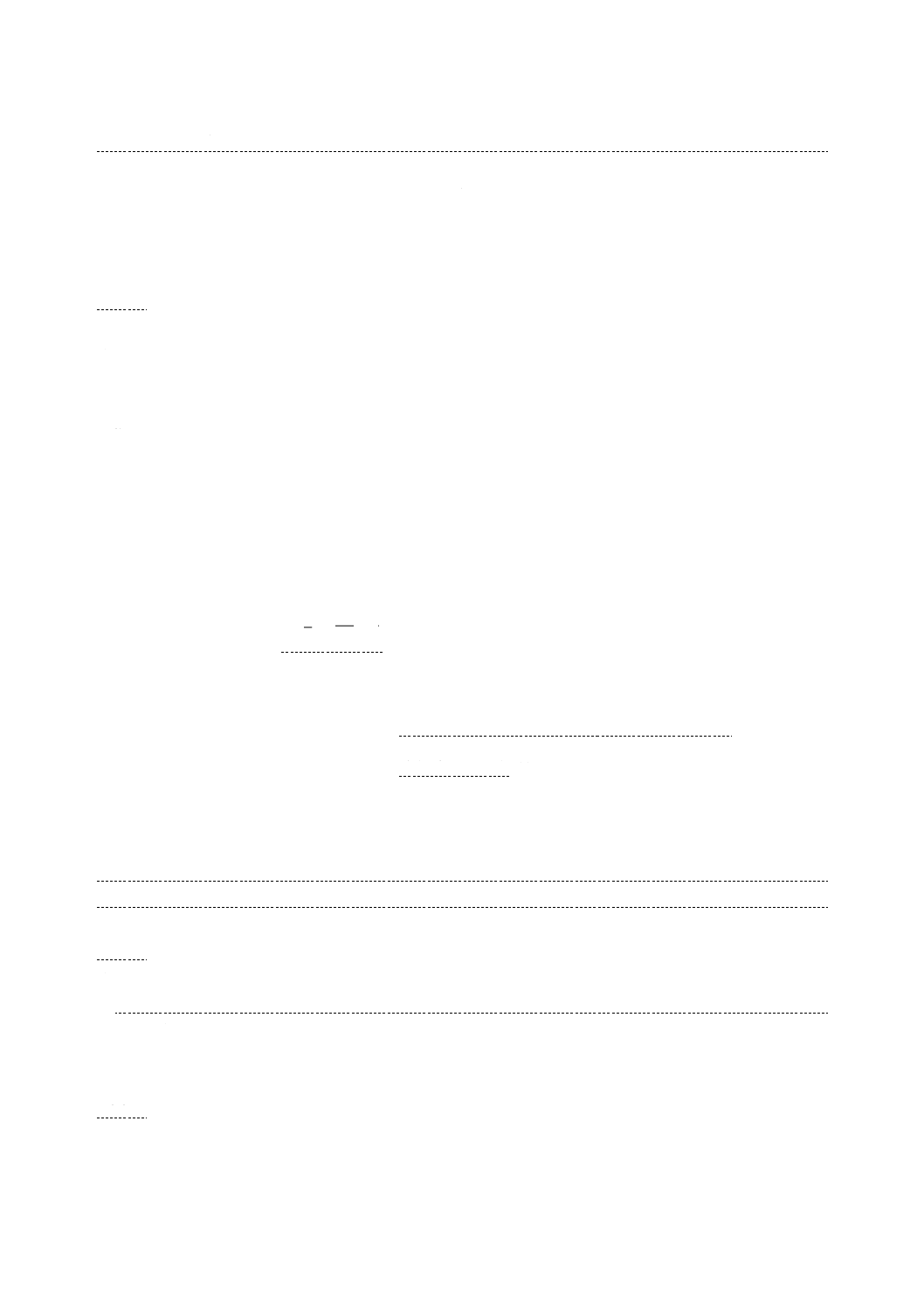
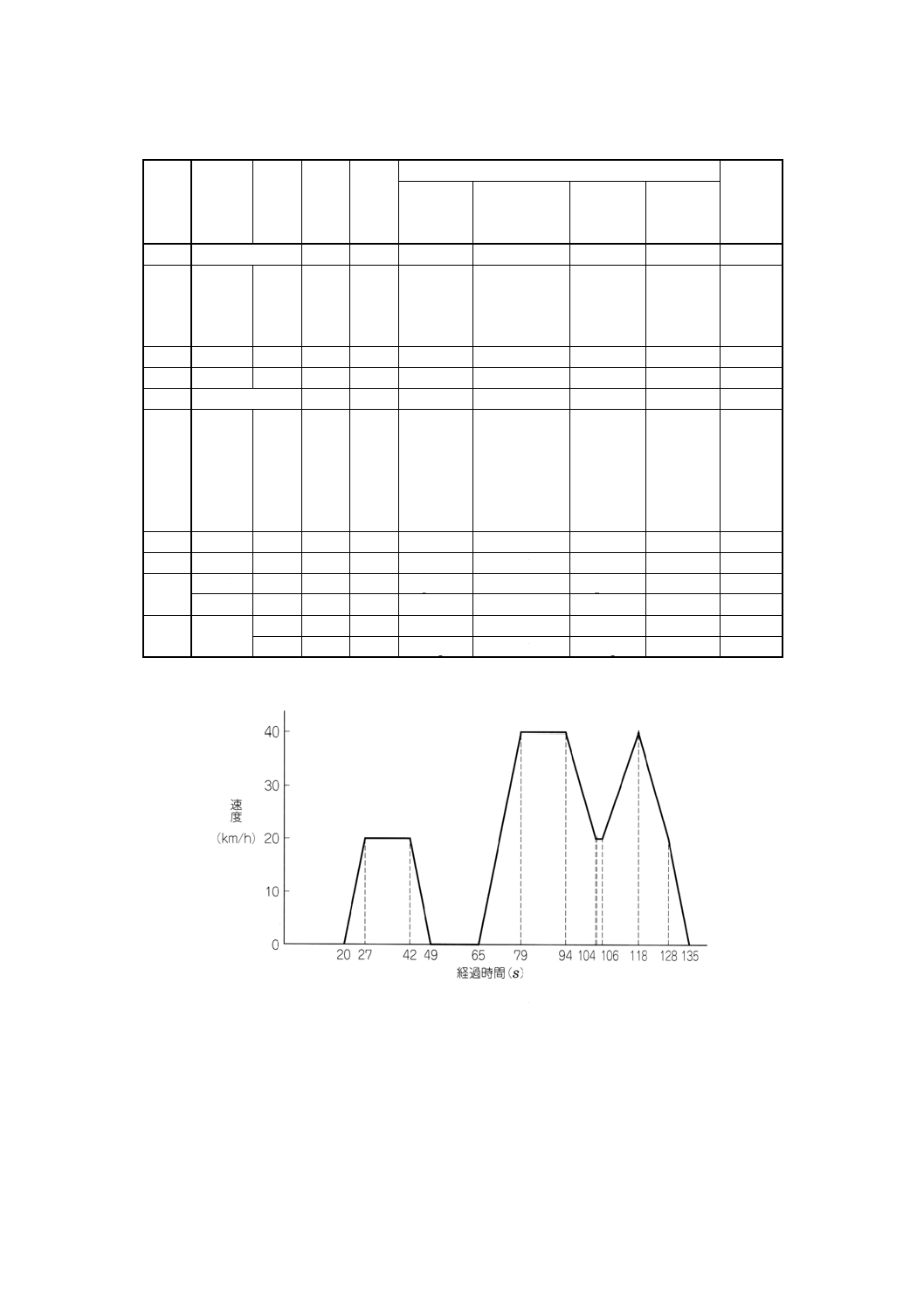
付表1 10モード走行パターン
運転
モード
運転状態 速度
運転
時間
累積
時間
標準変速位置
加速度又
は減速度
3段変速機 (3+0D) 変速
機
4段変速機 5段変速機
km/h
s
s
m/s2
1
アイドリング
20
20
−
−
−
−
−
2
加速
0→20
7
27
(0→20)
(0→20)
(0→15)
(0→15)
0.78
Low
Low
Low
Low
(15→20)
(15→20)
2nd
2nd
3
定速
20
15
42
2nd
2nd
2nd
2nd
−
4
減速
20→0
7
49
2nd
2nd
2nd
2nd
0.78
5
アイドリング
16
65
−
−
−
−
−
6
加速
0→40
14
79
(0→20)
(0→20)
(0→15)
(0→15)
0.78
Low
Low
Low
Low
(20→40)
(20→40)
(15→30)
(15→30)
2nd
2nd
2nd
2nd
(30→40)
(30→40)
3rd
3rd
7
定速
40
15
94
Top
3rd
Top
4th
−
8
減速
40→20
10
104
Top
3rd
Top
4th
0.59
9
定速
20
2
106
Top→2nd
3rd→2nd
Top→3rd
4th→3rd
−
加速
20→40
12
118
2nd
2nd
3rd
3rd
0.49
10
減速
40→20
10
128
Top
3rd
Top
4th
0.59
20→0
7
135
Top
3rd
Top
4th
0.78
備考 標準変速位置の括弧内の数字は,それぞれの変速位置に対応する速度を示す。加速度又は減速
度は,参考値とする。
参考図1 10モード
11
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
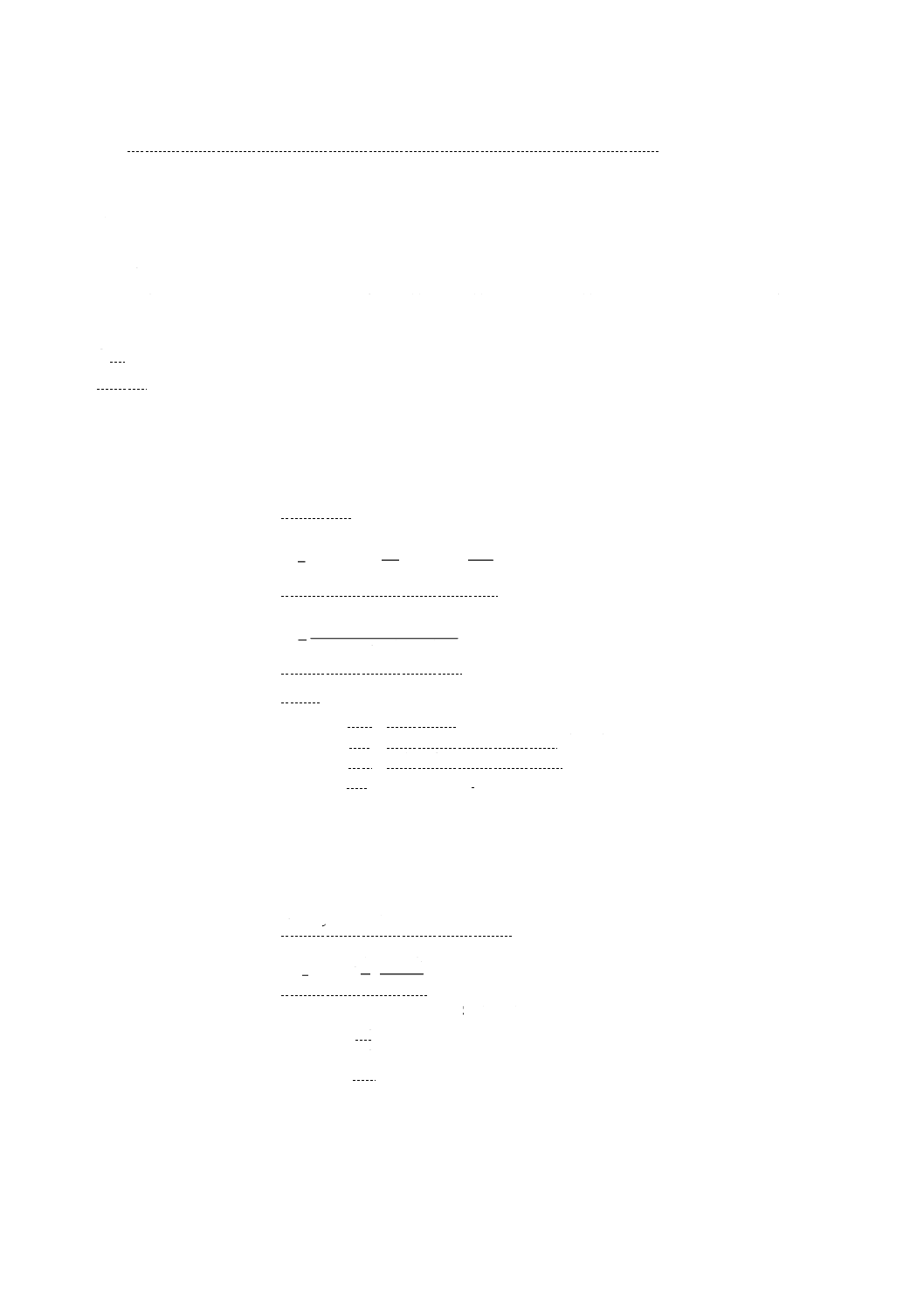
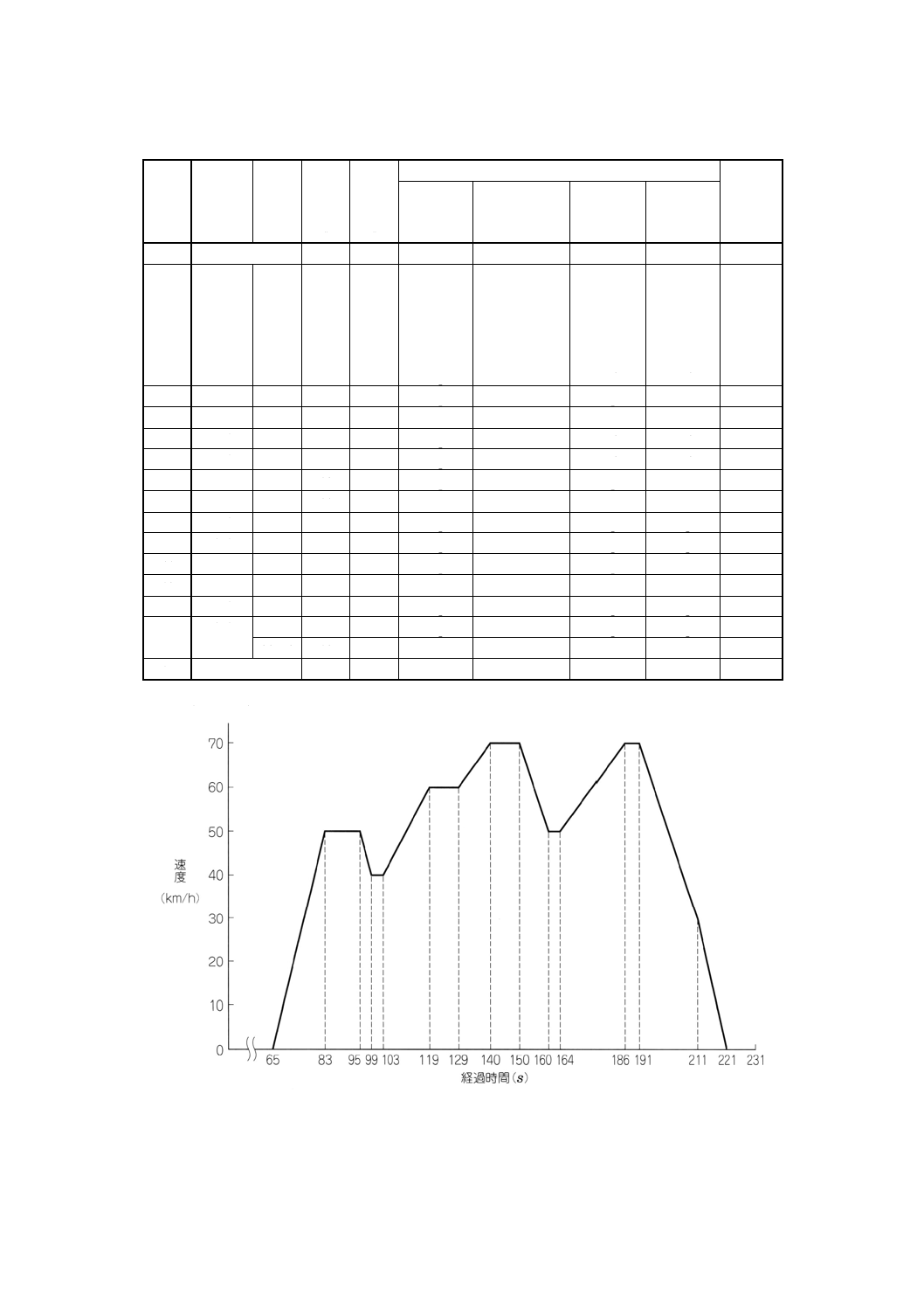
付表2 15モード走行パターン
運転
モード
運転状態 速度
運転
時間
累積
時間
標準変速位置
加速度又
は減速度
3段変速機 (3+0D) 変速
機
4段変速機 5段変速機
km/h
s
s
m/s2
1
アイドリング
65
65
−
−
−
−
−
2
加速
0→50
18
83
(0→20)
(0→20)
(0→15)
(0→15)
0.78
Low
Low
Low
Low
(20→40)
(20→40)
(15→35)
(15→35)
2nd
2nd
2nd
2nd
(40→50)
(40→50)
(35→50)
(35→50)
Top
3rd
3rd
3rd
3
定速
50
12
95
Top
3rd
Top
4th
−
4
減速
50→40
4
99
Top
3rd
Top
4th
0.69
5
定速
40
4
103
Top
3rd
3rd
3rd
−
6
加速
40→60
16
119
Top
3rd
3rd
3rd
0.39
7
定速
60
10
129
Top
3rd
Top
4th
−
8
加速
60→70
11
140
Top
3rd
Top
4th
0.29
9
定速
70
10
150
Top
0D
Top
Top
−
10
減速
70→50
10
160
Top
0D
Top
Top
0.59
11
定速
50
4
164
Top
3rd
Top
4th
−
12
加速
50→70
22
186
Top
3rd
Top
4th
0.29
13
定速
70
5
191
Top
0D
Top
Top
−
14
減速
70→30
20
211
Top
0D
Top
Top
0.59
30→0
10
221
−
−
−
−
0.88
15
アイドリング
10
231
−
−
−
−
−
備考 標準変速位置の括弧内の数字は,それぞれの変速位置に対応する速度を示す。加速度又は減速
度は,参考値とする。
参考図2 15モード
12
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
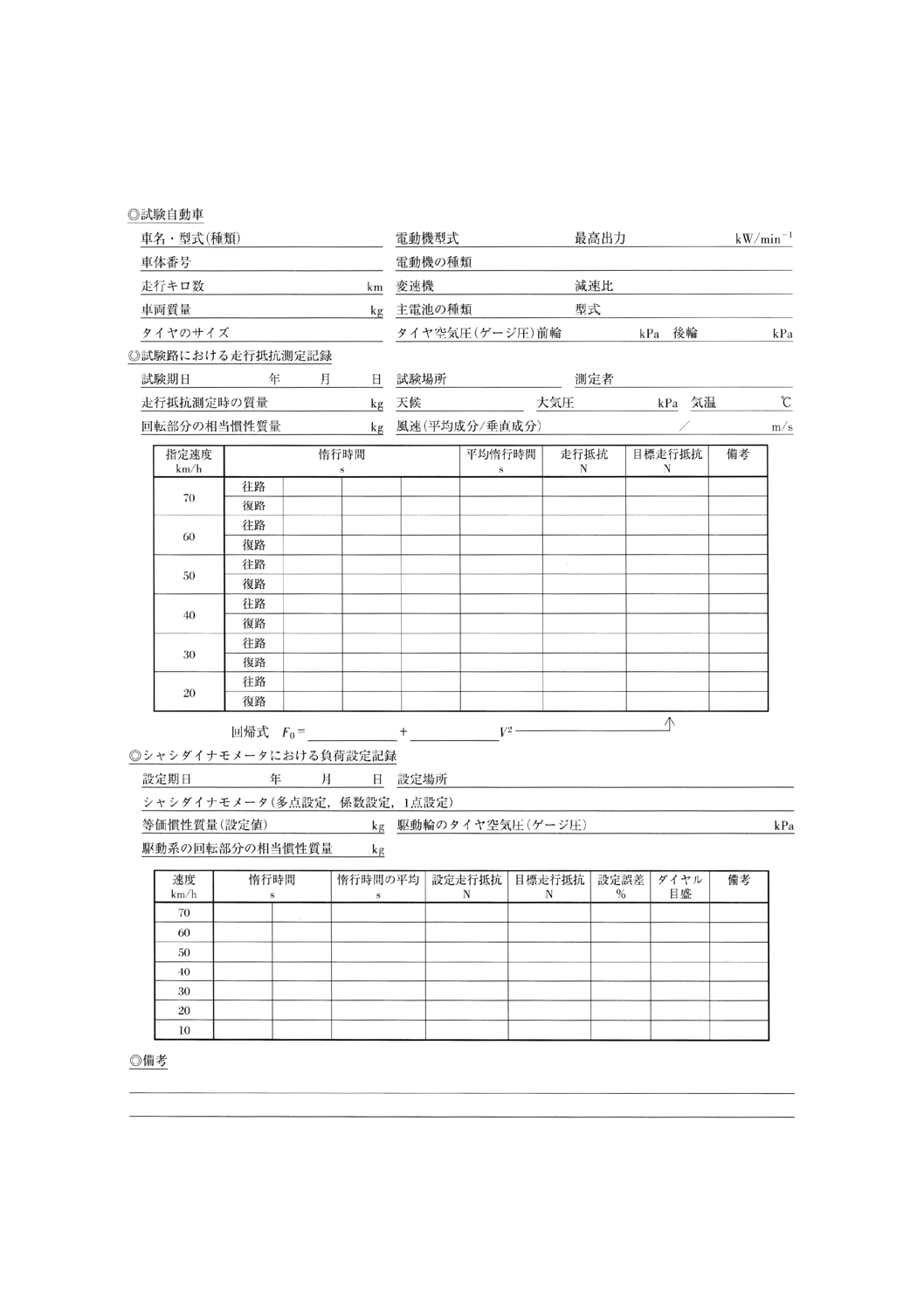
付表3 電気自動車−一充電走行距離及び交流充電電力量消費率試験
電気自動車負荷設定記録(惰行法)
13
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付表4 電気自動車−一充電走行距離及び交流充電電力量消費率試験
電気自動車負荷設定記録(ホイールトルク法)
14
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付表5 電気自動車−一充電走行距離及び交流充電電力量消費率試験成績
15
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付表5 電気自動車−一充電走行距離及び交流充電電力量消費率試験成績(続き)
参考図3 10モード
参考図4 15モード
1
6
D
1
3
0
1
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書(参考) JISと対応する国際規格との対比表
JIS D 1301 : 2001 電気自動車−一充電走行距離及び交流充電電力量消費率試験方法
ISO/DIS 8714 : 2000 路上走行電気自動車−乗用車及び小型貨物自動車−交流充電
電力量消費率及び一充電走行距離の試験手順
(I)JISの規定
(II)国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の項目ごと
の評価及びその内容
表示箇所:本体,附属書
表示方法:点線の下線
(V)JISと国際規格との技術的差異
の理由及び今後の対策
項目
番号
内容
項目
番号
内容
項目ごとの
評価
技術的差異の内容
1.適用
範囲
車両総質量が3 500kg以下の電
気自動車(自動二輪車及び原動
機付自転車で原動機に電動機を
用いたものを除く。)
ISO/DIS
8714
1.
車両総質量が3 500kg以下,
最高速度70km/h以上の乗用
電気自動車及び貨物電気自動
車
MOD/変
更
/削除
JISは最高速度70km/h以上の規定
を削除。自動二輪車及び原動機付
自転車の適用を除外した。
日本の10・15モードは最高速度が
70km/hであることから最高速度
については特に規定しなかった。
10・15モード走行に適さない車両
については適用を除外した。
2.引用
規格
JIS C 1211
2.
IEC 60687
MOD/変
更
電力量計の精度はJISのほうが許
容範囲が大きい。
IEC 60687に準拠。
JIS D 1010
ISO 1176
MOD/変
更
JISの空車質量とほぼ同等。
JIS D 1012
ISO 10521
等価慣性質量の区分の規定な
し。
MOD/追
加
ISOの規定はJISの規定に含まれ
る。
ISO 10521に準拠。(負荷設定方法
は各国の内燃機関車両の燃料消費
率試験方法に準拠するISO会議で
の合意に基づくため。)
3.試験
自動車
及び主
電池
b)慣らし走行距離は,主電池が
搭載された状態で300km以上走
行
7.3.1
JISと同じ
IDT
−
d)試験自動車の質量は空車状態
の自動車に2人の人員(人員1
人の質量は,55kg)が乗車,又
は110kgの物品を積載
3.2
空車質量+追加質量
IDT
−
e)試験路における試験自動車質
量の誤差範囲
g)タイヤの空気圧は仕様書の空
気圧又はシャシダイナモメータ
のローラ径が500mm未満の場
合は1.5倍まで調整可
7.3.1
規定なし
タイヤの空気圧は自動車製造
業者の規定値
MOD/追
加
MOD/変
更
JISは試験路における試験自動車
質量の誤差範囲を規定。
JISはシャシダイナモメータのロ
ーラ径が500mm未満の場合のタ
イヤの空気圧を追加規定。
実試験上,妥当と考えられる内燃
機関車両のTRIASに準拠。
内燃機関車両のJISと整合を図る
ためJIS D 1012に準拠。
1
7
D
1
3
0
1
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS D 1301 : 2001 電気自動車−一充電走行距離及び交流充電電力量消費率試験方法
ISO/DIS 8714 : 2000 路上走行電気自動車−乗用車及び小型貨物自動車−交流充電
電力量消費率及び一充電走行距離の試験手順
(I)JISの規定
(II)国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の項目ごと
の評価及びその内容
表示箇所:本体,附属書
表示方法:点線の下線
(V)JISと国際規格との技術的差異
の理由及び今後の対策
項目
番号
内容
項目
番号
内容
項目ごとの
評価
技術的差異の内容
3.試験
自動車
及び主
電池
h)ホイールトルクメータを装着
した駆動軸のトレッドの誤差範
囲
規定なし
MOD/追
加
JISはホイールトルクメータを装
着した駆動軸のトレッドの誤差範
囲を規定。
実試験上,妥当と考えられる内燃
機関車両のTRIASに準拠。
(潤滑油)規定なし
粘度は自動車製造業者の規定
値
MOD/削
除
内燃機関車両には規定がなく規定
しない。
4.試験
機器の
精度・
校正
a)温度計:±1℃
7.2
時間:±0.1s
MOD/変
更
/追加
速度計及び電力量計の精度はJIS
のほうが許容範囲が大きい。
速度計の精度は内燃機関車両の
JISと整合を図るためJIS D 1012
に準拠。電力量計の精度は国内で
一般的に入手しやすい電力量計を
配慮し,JIS C 1211に準拠。ISO
に規定のない試験機器の精度は内
燃機関車両のJISなどと整合を図
るためJIS D 1012などに準拠。
b)気圧計:±0.1kPa
距離:±0.1%
c)風速計:±1m/s
温度:±1K
d)速度計:±0.5km/h
速度:±0.1%
e)シャシダイナモメータの距離
計:±0.1%
質量:±0.5%
エネルギー (Wh):IEC
60687
Class0.2sによる±0.5%
f)惰行時間の測定装置:±0.1s
g)交流積算電力量計:±2%
h)ホイールトルクメータ:±2%
6.試験
自動車
の設置
6.1等価慣性質量の設定
等価慣性質量の区分の規定な
し。
MOD/追
加
JIS D 1012に準じた等価慣性質量
の区分を規定。
JIS D 1012に準拠(等価慣性質量
は各国の内燃機関車両の燃料消費
率試験方法に準拠するISO会議で
の合意に基づくため。)。
6.2試験自動車の設置
規定なし
MOD/追
加
試験自動車の設置について規定。 実試験上,妥当と考えられる内燃
機関車両のTRIASに準拠。
7.負荷
設定
7.1負荷設定方法
7.4.3
負荷設定方法はISO 10521に
よる。
MOD/変
更
ISOの規定はJISの規定に含まれ
る。
JIS D 1012に準拠(負荷設定方法
は各国の内燃機関車両の燃料消費
率試験方法に準拠するISO会議で
の合意に基づくため。)。
1
8
D
1
3
0
1
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS D 1301 : 2001 電気自動車−一充電走行距離及び交流充電電力量消費率試験方法
ISO/DIS 8714 : 2000 路上走行電気自動車−乗用車及び小型貨物自動車−交流充電
電力量消費率及び一充電走行距離の試験手順
(I)JISの規定
(II)国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の項目ごと
の評価及びその内容
表示箇所:本体,附属書
表示方法:点線の下線
(V)JISと国際規格との技術的差異
の理由及び今後の対策
項目
番号
内容
項目
番号
内容
項目ごとの
評価
技術的差異の内容
7.2惰行法
7.4.3
ISO 10521による惰行法にて
決定
MOD/変
更
ISOの規定はJISの規定に含まれ
る。
JIS D 1012に準拠(惰行法による
負荷設定方法は各国の内燃機関車
両の燃料消費率試験方法に準拠す
るISO会議での合意に基づくた
め。)。
7.3ホイールトルク法
7.4.3
ISO 10521によるホイールト
ルク法にて決定
MOD/変
更
ISOの規定はJISの規定に含まれ
る。
JIS D 1012に準拠(ホイールトル
ク法による負荷設定方法は各国の
内燃機関車両の燃料消費率試験方
法に準拠するISO会議での合意に
基づくため。)。
8.一充
電走行
距離及
び交流
充電電
力量消
費率の
測定
8.1 主電池の充電
7.4.3
JISと同じ
IDT
−
8.2.3 走行パターンは10・15モ
ードを規定
Annex
C
日本の10,15モードを規定
IDT
−
8.2.4 走行試験中の公差外れの
許容範囲
5
JISと同じ
lDT
−
8.2.5 走行試験の中断
7.4.3
JISと同じ
IDT
−
8.2.6 変速操作
変速操作の規定なし。
MOD/追
加
JISは標準変速位置を規定。
再現性を考慮し,JIS D 1012に準
拠。
8.2.8 試験の打切り条件
6
JISと同じ
IDT
8.2.9 試験の打切り
7.4.3
JISと同じ
IDT
−
8.3 一充電走行距離の測定方法
シャシダイナモメータの距
離計から読み取る
7.4.3
JISと同じ
lDT
−
8.4 交流充電電力量の測定方法
8.4.1 交流充電電力量消費率の
算出
7.4.4
7.4.5
JISと同じ
JISと同じ
IDT
lDT
−
−
1
9
D
1
3
0
1
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS D 1301 : 2001 電気自動車−一充電走行距離及び交流充電電力量消費率試験方法
ISO/DIS 8714 : 2000 路上走行電気自動車−乗用車及び小型貨物自動車−交流充電
電力量消費率及び一充電走行距離の試験手順
(I)JISの規定
(II)国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の項目ごと
の評価及びその内容
表示箇所:本体,附属書
表示方法:点線の下線
(V)JISと国際規格との技術的差異
の理由及び今後の対策
項目
番号
内容
項目
番号
内容
項目ごとの
評価
技術的差異の内容
JISと国際規格との対応の程度の全体評価:MOD
備考1.
項目ごとの評価欄の記号の意味は,次のとおりである。
― IDT ………………技術的差異がない。
― MOD/削除………国際規格の規定項目又は規定内容を削除している。
― MOD/追加………国際規格にない規定項目又は規定内容を追加している。
― MOD/変更………国際規格の規定内容を変更している。
2. JISと国際規格との対応の程度の全体評価欄の記号の意味は,次のとおりである。
― MOD………………国際規格を修正している。
20
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
財団法人日本電動車両協会標準化部会 構成表
氏名
所属
(部会長)
石 谷 久
東京大学
(副部会長)
清 水 健 一
工業技術院機械技術研究所
(副部会長)
関 森 俊 幸
トヨタ自動車株式会社(電池分科会長)
(副部会長)
須賀井 直 哉
東京電力株式会社
(委員)
田 中 邦 典
通商産業省自動車課
穐 山 貞 治
工業技術院標準部
石 丸 尋 士
社団法人自動車技術会
小 林 正 次
いすゞ自動車株式会社
稲 垣 真
スズキ株式会社
宮 崎 俊 一
ダイハツ工業株式会社
田 原 雅 彦
日産自動車株式会社(インフラ分科会長)
早 川 直 人
日産ディーゼル工業株式会社
小 池 哲 夫
日野自動車工業株式会社
佐 藤 信 夫
富士重工業株式会社
藤 原 孝 善
本田技術工業株式会社
板 井 幸 彦
株式会社本田技術研究所(EV車両分科会長)
前 本 敏 文
マツダ株式会社
吉 田 裕 明
三菱自動車工業株式会社
鈴 木 正 人
ヤマハ発動機株式会社
橋 詰 正 三
関西電力株式会社
山 崎 清 美
九州電力株式会社
内 田 昭 司
株式会社日立製作所
森 川 正 美
株式会社デンソー
中 島 明
株式会社明電舎
藪 本 俊 昭
古川電池株式会社
高 田 寛 治
松下電池工業株式会社
纐 纈 嘉 孝
株式会社豊田自動織機製作所
佐 野 隆
日本輸送機株式会社
成 田 隆 平
ビステオンアジアパシフィック株式会社
伊 原 文 明
富士通電装株式会社
(オブザーバ)
柵 木 明 夫
工業技術院標準部
(事務局)
広 瀬 久 士
財団法人日本電動車両協会
高 橋 孝 三
財団法人日本電動車両協会
伊 藤 重 行
財団法人日本電動車両協会
21
D 1301 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
財団法人日本電動車両協会標準化部会EV車両分科会 構成表
氏名
所属
(分科会長)
板 井 幸 彦
株式会社本田技術研究所
(副分科会長)
宮 崎 俊 一
ダイハツ工業株式会社
(副分科会長)
中 島 明
株式会社明電舎
(委員)
清 水 健 一
工業技術院機械技術研究所
蕪 山 義 智
いすゞ自動車株式会社
大 橋 邦 彦
スズキ株式会社
渡 辺 勝 則
トヨタ自動車株式会社
阿 部 達 夫
日産自動車株式会社
長谷川 悟
富士重工業株式会社
梅 垣 康 治
マツダ株式会社
武 田 信 章
三菱自動車工業株式会社
武 智 裕 章
ヤマハ発動機株式会社
丸 山 雅 明
中部電力株式会社
片 田 寛
株式会社日立製作所
加 藤 敏 一
株式会社デンソー
藪 本 俊 昭
古川電池株式会社
成 田 隆 平
ビステオンアジアパシフィック株式会社
伊 藤 文 明
富士通電装株式会社
佐 野 一 昭
住友電気工業株式会社
(関係者)
桜 井 雅 基
矢崎部品株式会社
(事務局)
広 瀬 久 士
財団法人日本電動車両協会
高 橋 孝 三
財団法人日本電動車両協会
伊 藤 重 行
財団法人日本電動車両協会