D 1036:2003
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人 自動車技
術会 (JSAE)/財団法人 日本規格協会 (JSA) から,工業標準原案を具して日本工業規格を改正すべきとの
申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS D 1036:1994は改正され,この規格に置き換えられる。
改正に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,ISO 11486:1993,Two-wheeled
motorcycles―Fuel consumption measurements―Chassis dynamometer setting by coastdown methodを基礎として
用いた。
JIS D 1036には,次に示す附属書がある。
附属書(参考) JISと対応する国際規格との対比表
D 1036:2003
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 1
2. 引用規格 ························································································································ 1
3. 定義 ······························································································································ 1
3.1 走行抵抗 (running resistance) (F) ························································································· 1
3.2 基準速度 (reference speed) (V0) ··························································································· 1
3.3 指定速度 (specified speed) (Vi)···························································································· 2
3.4 整備質量 (motorcycle kerb mass) (Mk) ··················································································· 2
3.5 基準質量 (motorcycle reference mass) (M) ·············································································· 2
4. 試験二輪車,ダイナモ及び計器類 ······················································································· 2
5. 測定値の精度及び測定機器の性能 ······················································································· 2
6. 路上試験の一般要件 ········································································································· 2
6.1 試験路 ························································································································· 2
6.2 気象条件 ······················································································································ 2
6.3 試験二輪車 ··················································································································· 3
6.4 惰行試験時のライダ及びライダの乗車姿勢 ·········································································· 3
7. 走行抵抗の測定 ··············································································································· 3
7.1 一般要件 ······················································································································ 4
7.2 惰行時間法 ··················································································································· 4
7.3 減速度法 ······················································································································ 7
8. シャシダイナモメータへの走行抵抗の設定方法 ····································································· 8
8.1 試験準備 ······················································································································ 8
8.2 ダイナモへの慣性質量の設定方法 ······················································································ 9
8.3 目標惰行時間の算出 ······································································································· 9
8.4 ダイナモ制動力の設定 ···································································································· 9
8.5 走行抵抗設定の記録 ······································································································ 10
9. 等価慣性質量による簡易設定法 ························································································· 10
9.1 テーブル法による走行抵抗の設定 ····················································································· 11
9.2 テーブル法で設定した走行抵抗の検証 ··············································································· 12
9.3 走行抵抗設定の記録 ······································································································ 13
附属書(参考) JISと対応する国際規格との対比表 ·································································· 18
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 1036:2003
二輪自動車−惰行試験による
シャシダイナモメータへの走行抵抗の設定方法
Motorcycles and mopeds―Road load setting on chassis dynamometer by
coastdown method
序文 この規格は,1993年に第1版として発行されたISO 11486 : 1993,Two-wheeled motorcycles―Fuel
consumption measurements―Chassis dynamometer setting by coastdown methodを翻訳し,技術的内容を変更し
て作成した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,原国際規格を変更している事項である。変
更の一覧表をその説明を付けて,附属書(参考)に示す。
1. 適用範囲 この規格は,JIS D 0109で定義する,二輪自動車(以下,二輪車という。)の走行抵抗の測
定方法及びその値を用いてシャシダイナモメータ(以下,ダイナモという。)への負荷の設定方法について
規定する。
備考 この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide21に基づき,IDT(一致している),MOD(修
正している),NEQ(同等でない)とする。
ISO 11486 : 1993, Two-wheeled motorcycles―Fuel consumption measurements―Chassis dynamometer
setting by coastdown method (MOD)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版(追補を含む。)を適用する。
JIS D 0109 二輪自動車用語
備考 備考 ISO 3833:1977, Road vehicles ‒ Types ‒ Terms and definitionsからの引用事項は,この規格
の該当事項と同等である。
JIS Z 8401 数値の丸め方
3. 定義 この規格で用いる主な用語の定義は,JIS D 0109によるほか,次による。
3.1
走行抵抗 (running resistance) (F) 二輪車が試験路を走行する際に受ける抵抗。
備考 走行抵抗は,転がり抵抗及び空気抵抗からなる。惰行試験で測定する場合は,二輪車の車輪と
同時に回転する動力伝達部分等の摩擦力も転がり抵抗に含まれる。
3.2
基準速度 (reference speed) (V0) ダイナモへ走行抵抗を設定する際に用いる二輪車の走行速度。その
値は,ダイナモタイプと試験内容によって決定する。
参考 一点設定タイプ等のダイナモへの基準速度の設定使用例としてはECE(国連欧州経済委員会)
2
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の法規では50 km/h,また,EPA(米国環境保護局)の法規では65 km/hとなる。
3.3 指定速度 (specified speed) (Vi) 試験路上で走行抵抗を測定するために指定された二輪車の走行速度。
3.4
整備質量 (motorcycle kerb mass) (Mk) 走行に必要な点検及び整備を行い,燃料を指定容量の90 %
以上充てんした状態の二輪車の質量。通常,標準装備(工具,キャリア,風防,保護装置など)を含む。
3.5
基準質量 (motorcycle reference mass) (M) 二輪車の整備質量に法定の乗員質量を加算した質量。
4. 試験二輪車,ダイナモ及び計器類 この試験に用いる二輪車(以下,試験二輪車という。),ダイナモ
及び計器類の仕様は,走行抵抗測定方法又はダイナモへの走行抵抗設定方法によって付表1.1,付表1.2,
付表1.3又は付表2から選択し,ここで指定される項目を付表中に記録する。
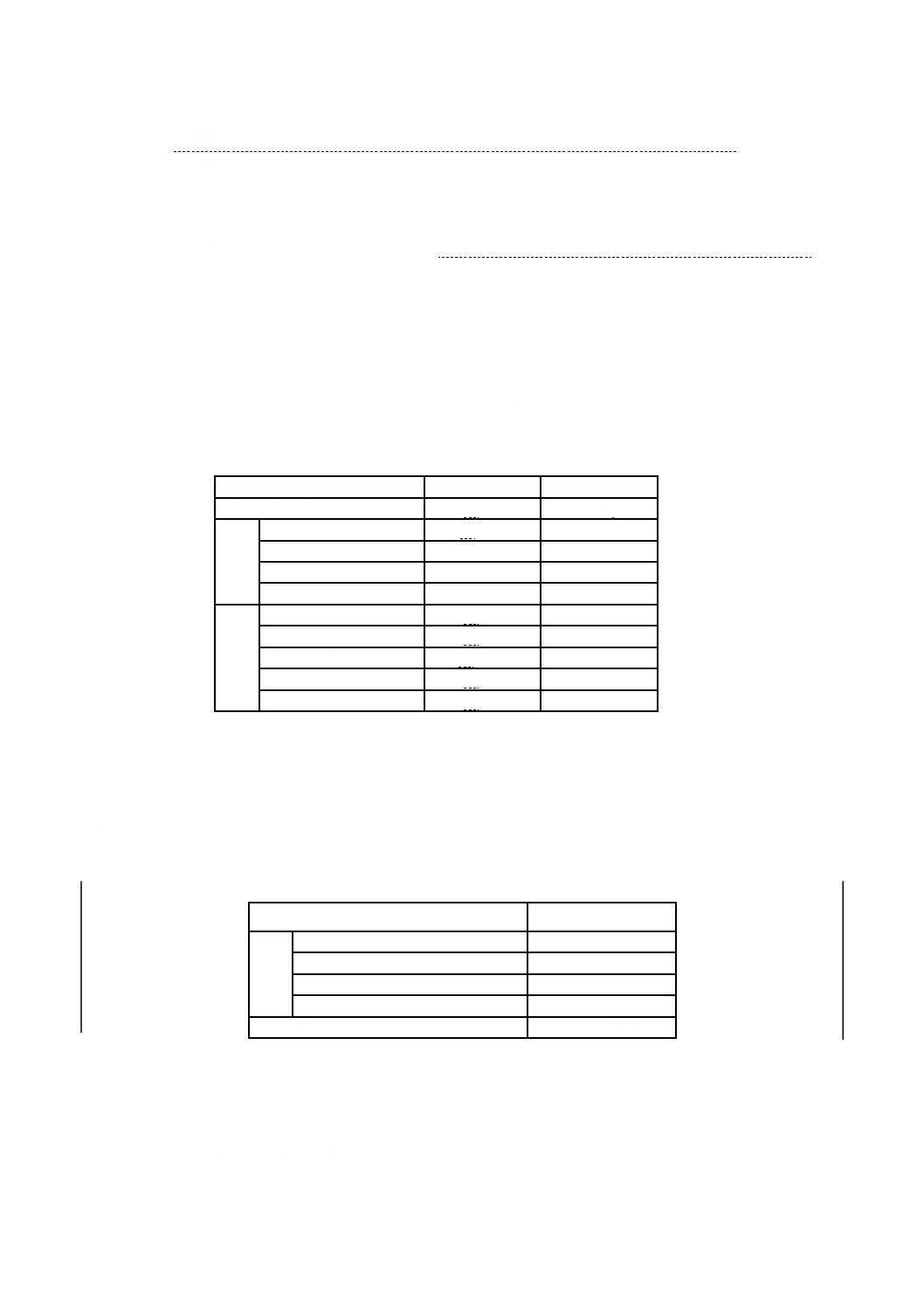
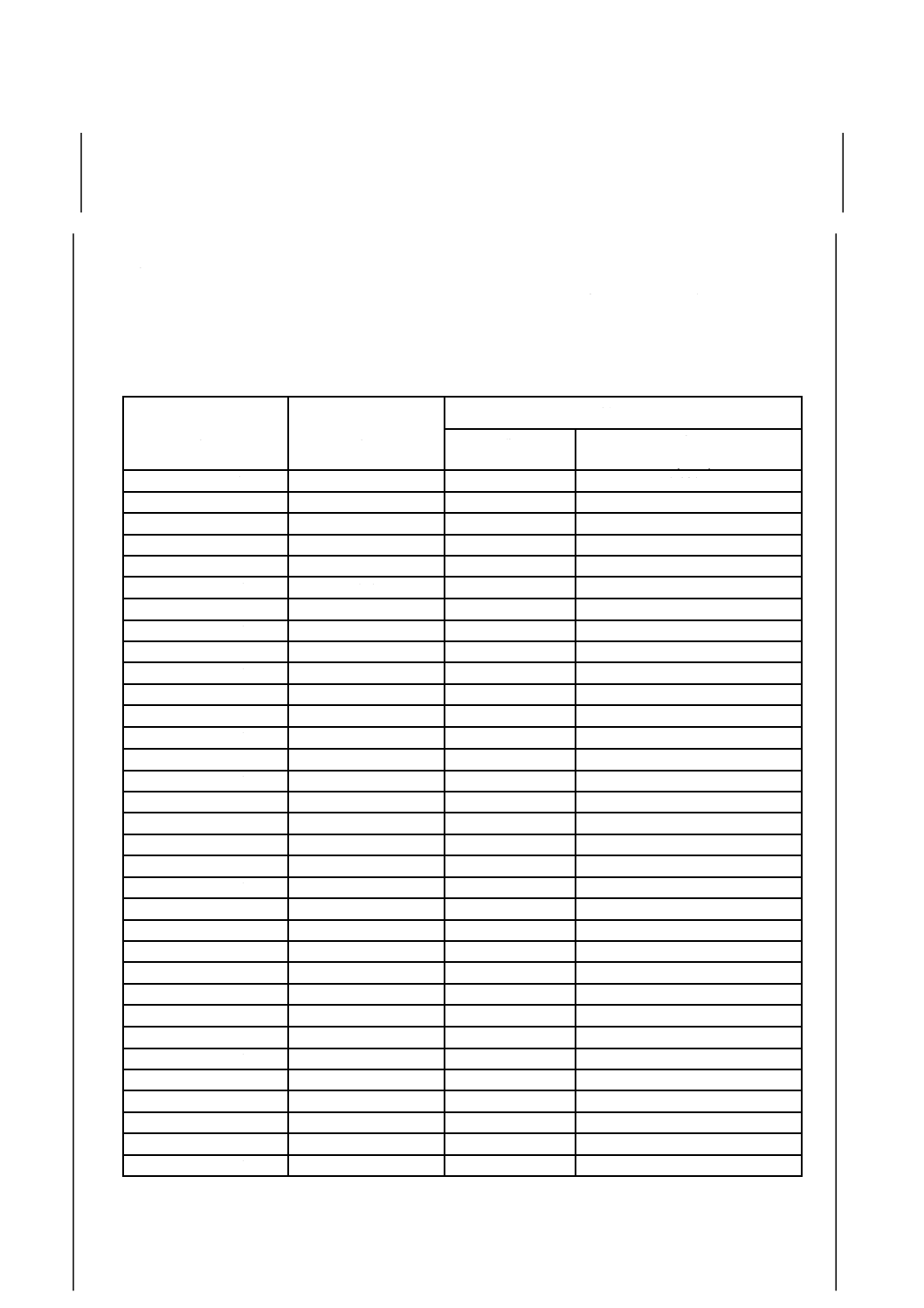
5. 測定値の精度及び測定機器の性能 走行抵抗測定又はダイナモへの走行抵抗設定に用いる機器及び測
定値の精度は,表1による。
表 1 測定値の精度及び測定機器の性能
測定項目
精 度
分解能
試験二輪車の質量
±1 %
1.4 kg
気象 風速
±10 %
0.1 m/s
風向き
−
5°
気温
−
2 K
気圧
−
0.2 kPa
走行
抵抗
速度
±1 %
0.45 km/h
惰行速度の間隔
±1 %
0.10 km/h
惰行時の時間
±0.5 %
0.01 s
惰行時の減速度
±1 %
0.002 6 m/s2
走行抵抗値
±2 %
−
6. 路上試験の一般要件
6.1
試験路 試験路は,両方向に走ることができ,不連続な防風板などがない平たんで直線の乾燥路と
する。その全長は,助走区間と測定区間とを加え,停止するのに十分な長さとする。測定区間の路面の傾
斜は,2 m以上離れたどの2点間でも0.5 %以下とする。
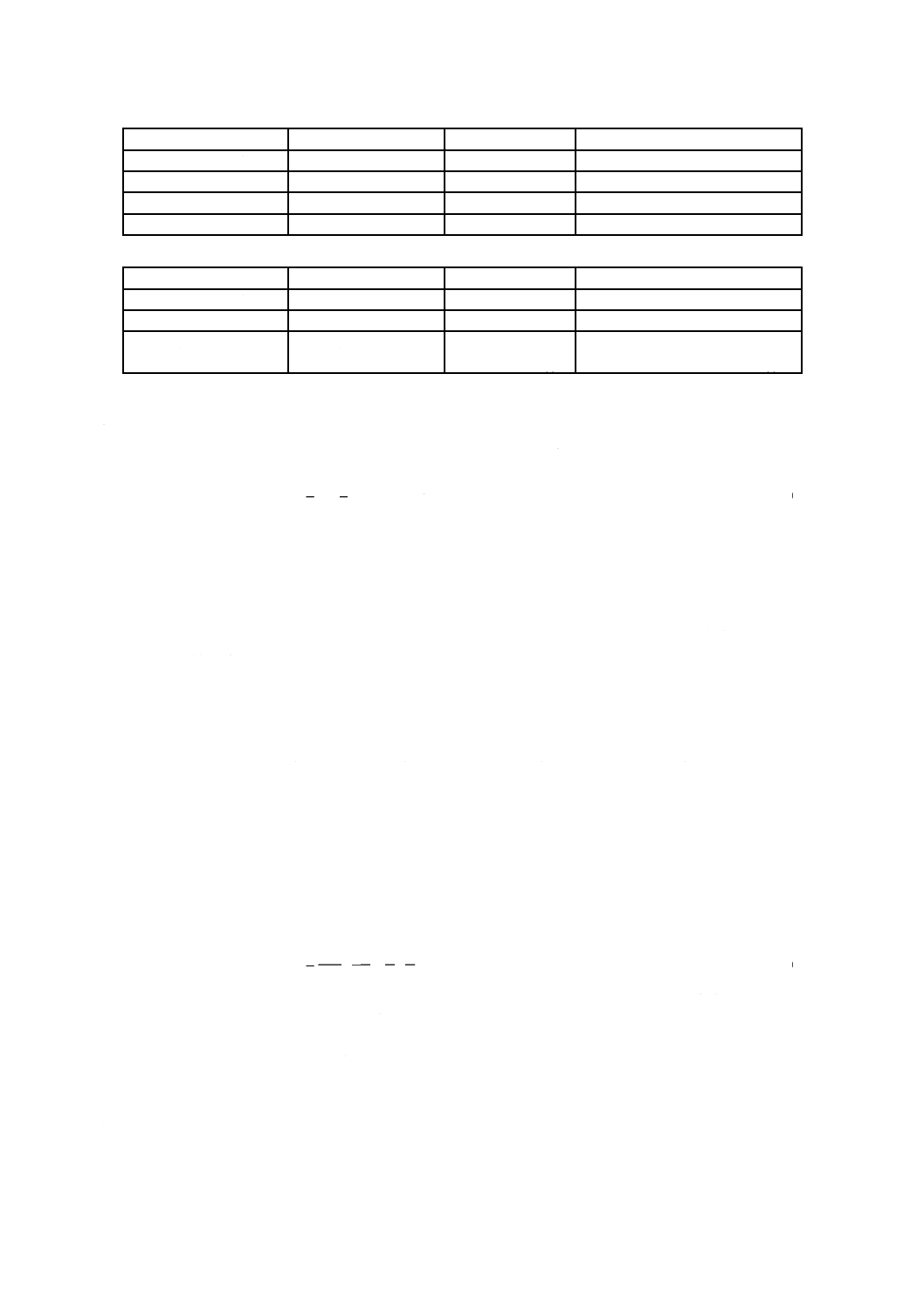
6.2
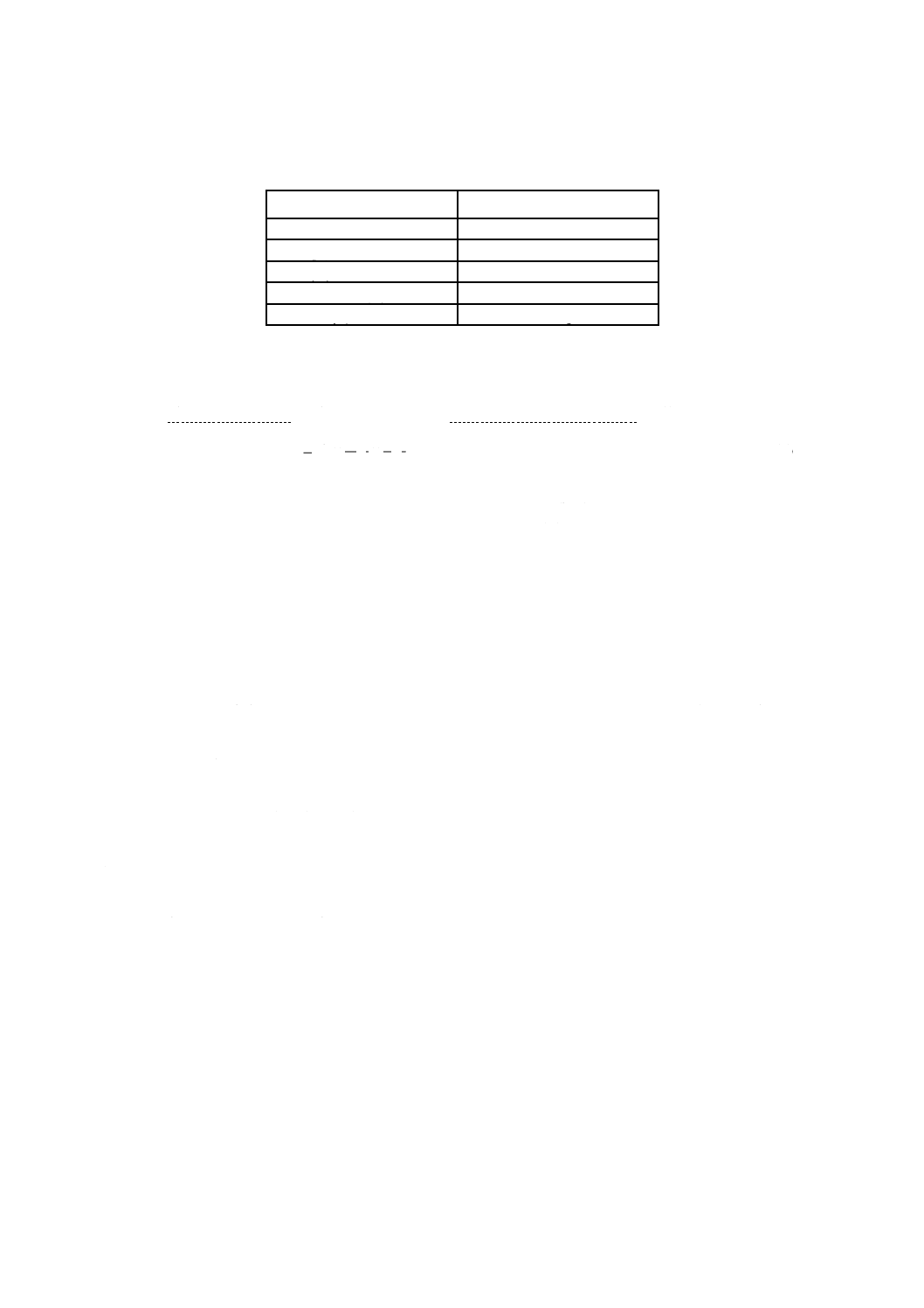
気象条件 走行抵抗の測定中の気象条件は,表2による。
表 2 走行抵抗測定時の気象条件
項 目
基準値
風
最大風速
3 m/s 以下
瞬間最大風速
5 m/s 以下
試験路に平行方向の平均風速
3 m/s 以下
試験路に垂直方向の平均風速
2 m/s 以下
相対湿度
95 % 以下
風の状態は,随時,観察又は記録する。気圧及び気温は,走行抵抗測定の開始時及び終了時の平均値を
求める。これら測定値は,付表1.1に記録する。
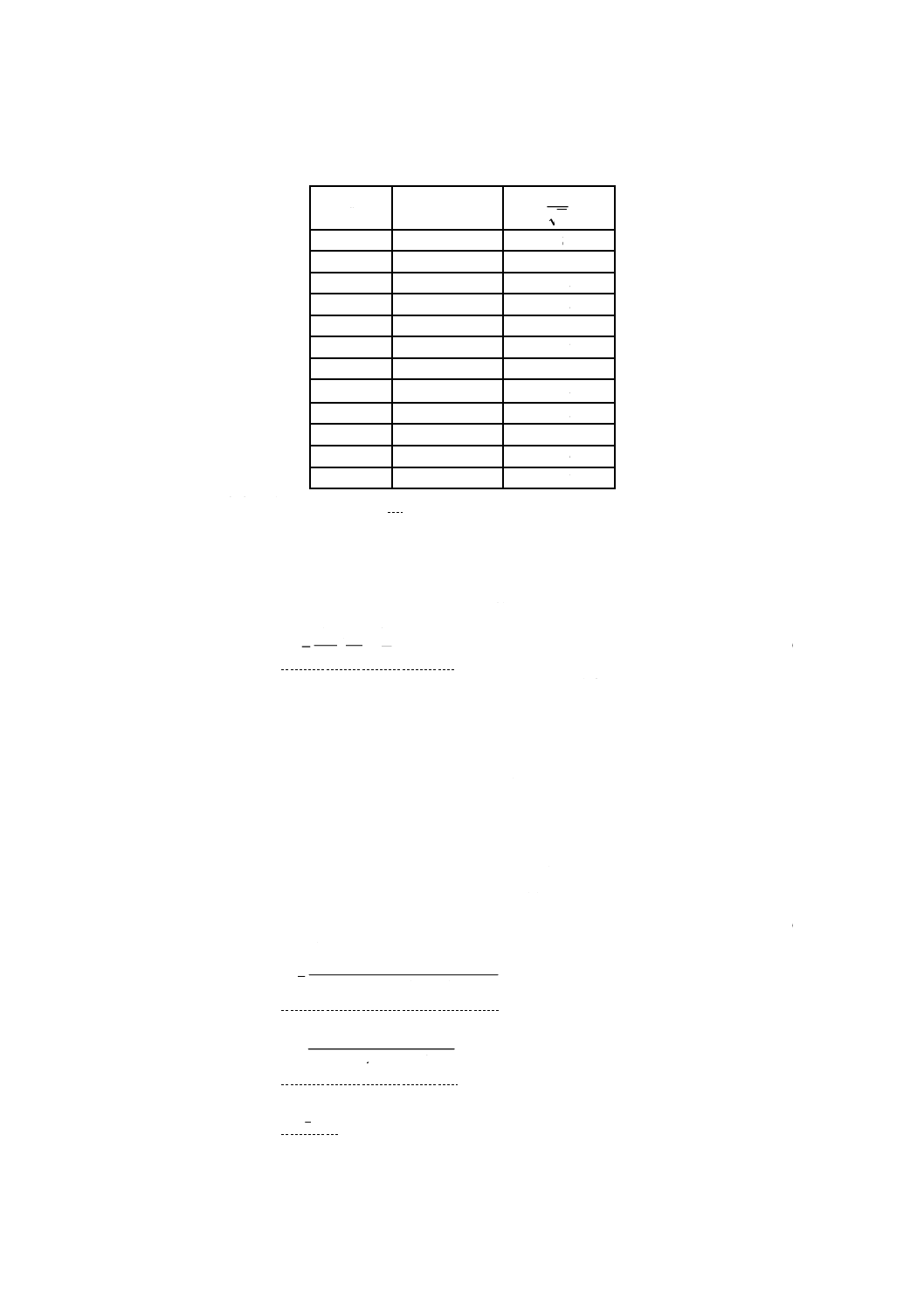
なお,気象条件の標準状態は,表3とする。この標準値は,走行抵抗測定値の標準状態への換算に用い,
その詳細は7.2.3 c),7.3.3 c) に規定する。
3
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表 3 気象の標準状態
項 目
標 準 値
風速
0 m/s
気圧 (p0)
100 kPa
気温 (T0)
293 K
相対空気密度 (d0)
0.919 7
空気質量(ρ0)
1,189 kg/m3
式 (1) によって計算する試験時の相対空気密度と,標準状態の空気密度との差は,±7.5 %以内であるこ
とが望ましい。
参考 気温で278〜308 K,気圧では91〜104 kPaを満たしていれば±7.5 %の範囲となる。
e
o
e
o
o
e
p
T
d
d
p
T
=
×
×
····································································· (1)
ここに, de: 試験時の相対空気密度
pe: 試験路における平均大気圧 (kPa)
Te: 試験路における平均気温 (K)
6.3
試験二輪車 試験二輪車は,次による。
6.3.1
点検,整備及び慣らし運転 法定及び二輪車製造業者が指定する方法による。
なお,法定テストを対象に実施する場合の整備状況などの記録は,法定の必要事項を付表1.1,付表1.2,
付表1.3又は付表2の備考欄に記載する。
参考 点検及び整備の方法,使用する燃料,潤滑油の性状などに関する情報は,法定及び二輪車製造
業者が指定している。
6.3.2
測定機器 速度計,時間計,記録計などは,可能な限り小形で軽量なものを装着し,車輪への荷重
配分の影響及び空気抵抗の増加を最小にする。
6.3.3
質量の記録 試験二輪車の整備質量,乗員(以下,ライダという。)質量及び測定機器の積載質量
を測定し,総和と個々の値を付表1.1に記録する。
6.4
惰行試験時のライダ及びライダの乗車姿勢
6.4.1
ライダ
a) ライダは,体に合った保護具(つなぎ,ヘルメット,ブーツ,手袋など)を着用する。
b) ライダの身長は,保護具を含み1.75±0.05 mとする。
c) ライダの質量は,保護具を含み75±5 kgとする。
6.4.2
乗車姿勢
a) ライダは,シートに正しく座り,フットレスト上に足を置く。
b) 両手はハンドルバーを握り,腕を軽く曲げた状態で普通に伸ばしておく。
c) ライダは,測定中a) 及びb) の乗車姿勢を維持し,試験二輪車を正しくコントロールする。
d) ライダの乗車状態は,必要によって,付表1.1の備考欄へ記録するか,又は写真を添付する。
7. 走行抵抗の測定 走行抵抗の測定は,試験路で試験二輪車を惰行させたときの惰行時間から走行抵抗
を求める方法(以下,惰行時間法という。)又は減速度から走行抵抗を求める方法(以下,減速度法という。)
による。
4
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.1
一般要件
7.1.1
指定速度の選定 走行抵抗を測定する指定速度 (Vi) は,基準速度 (V0) を含め,120 km/hから10
km/hの間で,可能なかぎり均等に分割した4点以上の速度が望ましい。
最高速度が120 km/h以下の試験二輪車は,当該車両の最高速度付近の速度から惰行させ,惰行時間の測
定可能な一番高い速度を高速側の指定速度とする。
7.1.2
惰行時間測定開始速度 (VU) 及び終了速度 (VL) 惰行時間の測定開始速度及び測定終了速度は,次
のいずれかによる。
a) 全指定速度において
u
i
5 km/h
V
V
=
+
L
i
5 km/h
V
V
=
−
とする。
ただし,計測精度を要求される場合は必要に応じ
u
i10 km/h
V
V
=
+
L
i10 km/h
V
V
=
−
とする。
b) 全指定速度において
u
i
i
0.1
V
V
V
=
+
L
i
i
0.1
V
V
V
=
−
とする。
7.1.3
惰行開始速度 惰行開始速度は,Vu+5 km/h以上とする。
7.1.4
惰行走行の条件 惰行走行の条件は,次による。
a) テスト直前の試験二輪車は,十分な暖機運転を行う。その後,試験二輪車を加速し,惰行開始速度を
維持する。
b) 惰行走行は,変速機を中立又はクラッチを切った状態とする。この状態にできない自動変速機を備え
た試験二輪車は,走行の安全性を確認したうえ,けん引などによって走行速度を指定速度以上とした
後,試験二輪車だけを惰行させる。
c) 惰行時間の測定中は,ブレーキ及びハンドル操作は行わない。
7.2
惰行時間法
7.2.1
惰行時間の測定 各指定速度 (Vi) に対応する惰行時間測定開始速度 (VU) から惰行時間測定終了
速度 (VL) にいたる経過時間を,次の手順によって測定する。
a) 往路と復路を連続して測定する。
b) 複数の指定速度を連続して測定する場合には,常に同じ惰行開始速度から測定する。
c) 測定回数 (n) は,選択するデータ処理方法によって異なる。
7.2.2
データ処理 各指定速度において収集したデータから,次のa),又はb) の方法のいずれかを選択
し,惰行時間 (ΔTi) を求める。
a) 惰行時間の最大値及び最小値を用いる方法 この方法では,各指定速度において往復路それぞれ3回
以上の測定を行い,その中から3データを選択する。これらのデータは,各指定速度において式 (2) 及
び式 (3) を満たす必要がある。満たさない場合は,満たすまで測定を繰り返す。
a max
a min
/
1.1
t
t
∆
∆
≦ ····································································· (2)
ここに, Δta max: 往路で測定した惰行時間の最大値 (s)
5
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Δta min: 往路で測定した惰行時間の最小値 (s)
b max
b min
/
1.1
t
t
∆
∆
≦ ···································································· (3)
ここに, Δtb max: 復路で測定した惰行時間の最大値 (s)
Δtb min: 復路で測定した惰行時間の最小値 (s)
各指定速度 (Vi) における惰行時間 (ΔTi) は,式 (4) で算出し,JIS Z 8401によって小数点以下2
けたに丸める。
ai
bi
i
2
T
T
T
∆
∆
∆
+
=
······································································ (4)
ここに, ΔTi: 各指定速度における惰行時間 (s)
ΔTai: 各指定速度における往路3回の平均惰行時間 (s)
ΔTbi: 各指定速度における復路3回の平均惰行時間 (s)
b) 統計精度を用いる方法 ここでの測定回数は,少なくとも4回とする。各指定速度 (Vi) における惰行
時間 (ΔTi) は,式 (5) で算出し,JIS Z 8401によって小数点以下2けたに丸める。
i
ij
1
1
n
j
T
t
n
∆
∆
=
=∑
·········································································· (5)
ai
bi
i
2
t
t
t
∆
∆
∆
+
=
ここに, ΔTi: 各指定速度における惰行時間 (s)
Δti: 各指定速度における1往復の平均惰行時間 (s)
Δtai: 各指定速度における往路で測定した惰行時間 (s)
Δtbi: 各指定速度における復路で測定した惰行時間 (s)
式 (5) で求めた各指定速度の惰行時間 (ΔTi) を用い,式 (6) によって統計精度 (P) を算出し,そ
の値が3 %以下になるまで測定を繰り返す。
i
100
ts
P
T
n
∆
=
×
········································································· (6)
ここに, ΔTi: 各指定速度における惰行時間 (s)
t: 表4に示す係数
s: 標準偏差
n: 測定回数
(
)2
ij
i
1
1
n
j
t
T
s
n
∆
∆
=
−
=
−
∑
6
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表 4 係数
n
t
n
t
4
3.2
1.6
5
2.8
1.25
6
2.6
1.06
7
2.5
0.94
8
2.4
0.85
9
2.3
0.77
10
2.3
0.73
11
2.2
0.66
12
2.2
0.64
13
2.2
0.61
14
2.2
0.59
15
2.2
0.57
c) 記録 各指定速度の惰行時間は,JIS Z 8401によって小数点以下2けたに丸め,付表1.1に記録する。
7.2.3
目標走行抵抗の算出 試験二輪車のダイナモへ設定するための目標走行抵抗は,次による。
a) 各指定速度での走行抵抗の算出 実走行による目標走行抵抗は,7.2.1で測定したデータを用いて惰行
時間を算出したあと,表3で規定した標準大気状態に修正する。
各指定速度での走行抵抗 (Fi) は,式 (7) によって算出する。
c
2
i
U
L
i
(
)(
)
3.6
M
M
F
V
V
T
∆
+
=
−
×
···························································· (7)
ここに, Fi: 各指定速度における走行抵抗 (N)
Mc: 走行抵抗測定時のライダ質量及び測定機器を含む,試験二
輪車の総質量 (kg)
M2: 試験二輪車前後輪の回転部分相当慣性質量
(通常,二輪車製造業者が指定した当該車両質量の7.0 %
とする。実測又は計算で求めてもよい。)(kg)
ΔTi: 各指定速度における惰行時間 (s)
VU: 惰行時間測定開始速度 (km/h)
VL: 惰行時間測定終了速度 (km/h)
b) 走行抵抗回帰曲線の求め方 係数方式の走行抵抗は,7.2.2 a) で求めた各指定速度の走行抵抗データ
を用いて最小二乗法によって速度の関数として求め,式 (8) として表す。
2
FabV
=+
·············································································· (8)
(
)
(
)
2
i
i
ii
i
2
2i
i
K
F
K
KF
a
n
K
K
−
=
−
∑∑
∑∑
∑
∑
(
)
i
i i
i
i
2
2
i
n
KF
K
F
b
n
K
K
−
=
−
∑
∑∑
∑
∑
2
i
i
K
V
=
ここに, F: 走行抵抗 (N)
7
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a: ころがり抵抗に相当する値 (N)
b: 空気抵抗係数に相当する値 [N/(km/h)2]
V: 速度 (km/h)
n: 測定回数
Fi: 各指定速度における走行抵抗 (N)
Ki: 各指定速度の2乗 [(km/h)2]
Vi: 指定速度 (km/h)
c) 標準大気状態への補正 目標走行抵抗は,式 (8) で求めた各係数を式 (9) によって標準大気状態へ補
正する。ここで求めた各指定速度の目標走行抵抗は,小数点以下1けたに丸める。
2
0
0
*
F
a
bV
=
+
·········································································· (9)
2
0
0
e
0
(
)[1
(
)]
a
abv
KTT
=
−
+
−
e
0
0
0
e
T
p
b
bT
p
=
×
×
ここに, F*: 目標走行抵抗値 (N)
a0: 標準状態におけるころがり抵抗に相当する値 (N)
b0: 標準状態における空気抵抗係数に相当する値 [N/(km/h)2]
T0: 標準状態における気温 (K)
p0: 標準状態における大気圧 (kPa)
v: 試験路に平行な風速成分の平均値 (km/h)
Te: 試験路における平均気温 (K)
pe: 試験路における平均大気圧 (kPa)
K0: 転がり抵抗の温度修正係数
(通常は,0.006を使用し,実測又はタイヤ製造業者の指定
値によってもよい。)
7.3
減速度法 減速度法は,車速と時間の関係から減速度を算出し,走行抵抗を求める方法である。
7.3.1
減速度の測定 車速と時間を,次の手順によって測定する。
a) 往路と復路とを連続して計測し,その減速度の平均値を1回の測定値とする。
b) 複数の指定速度を連続して測定する場合には,常に同じ惰行開始速度から開始する。
c) 測定回数 (n) は,少なくとも4回とする。
7.3.2
データ処理 各指定速度において収集したデータの処理は,次による。
a) 惰行試験時の車速の時間変化は,式 (10) で表す。この回帰式に,測定したデータ群を適合させA0,
A1,A2,A3 の係数を決定する。
2
3
0
1
2
3
()
Vt
A
AtAt
At
=
+
+
+
························································· (10)
ここに,
V(t): 試験二輪車の車速 (m/s)
t: 測定を開始してからの経過時間 (s)
A0,A1,A2,
A3:
係数
したがって,時間 (tj) で速度 (Vj) になるときの減速度 (γj) は,式 (11) で求められる。
2
j
1
2j
3j
2
3
A
At
At
γ=
+
+
·································································(11)
b) 各指定速度 (Vi ) における減速度 (Γi) は,式 (12) で計算し,JIS Z 8401によって小数点以下2けた
に丸める。
i
ij
1
1
n
j
n
Γ
γ
=
=∑
··········································································· (12)
8
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ai
bi
i
2
γ
γ
γ
+
=
ここに, Γi: 各指定速度における減速度 (m/s2)
γi: 各指定速度における1往復の減速度の平均値 (m/s2)
γai: 各指定速度における往路の減速度 (m/s2)
γbi: 各指定速度における復路の減速度 (m/s2)
式 (12) で求めた各指定速度の減速度 (Γi) を用い,式 (13) によって統計精度 (P) を算出し,その
値が2 %以下になるまで測定を繰り返す。
i
100
ts
P
n
Γ
=
×
·········································································· (13)
ここに, t: 表4で示される係数
s: 標準偏差
n: 測定回数
(
)2
ij
i
1
1
n
j
t
T
s
n
∆
∆
=
−
=
−
∑
c) 記録 各指定速度の平均減速度は,JIS Z 8401によって丸め,付表 1.1に記録する。
7.3.3
目標走行抵抗の算出
a) 各指定速度での走行抵抗の算出 各指定速度での走行抵抗は,式 (14) によって算出する。
i
c
2
i
(
)
F
M
M
Γ
=
+
··································································· (14)
ここに, Fi: 各指定速度における走行抵抗 (N)
Mc: 走行抵抗測定時のライダ質量及び測定機器を含む,試験二
輪車の総質量 (kg)
M2: 試験二輪車前後輪の回転部分相当慣性質量 (kg)
(通常は,二輪車製造業者が指定した当該車両質量の
7.0 %とする。実測又は計算で求めてもよい。)
Γi: 各指定速度における減速度 (m/s2)
b) 走行抵抗回帰曲線の求め方 走行抵抗回帰曲線の求め方は,7.2.3 b) による。
c) 標準大気状態への補正 標準大気状態への補正は,7.2.3 c) による。
8. シャシダイナモメータへの走行抵抗の設定方法 ダイナモへの走行抵抗の設定は,7.2.3又は7.3.3で
得られた目標走行抵抗とするためにダイナモの負荷制御装置を調整する方法を用いる。
8.1
試験準備
a) 使用する機器などへの要求事項
1) 速度及び時間の測定機器の精度は,5.による。
2) ダイナモのローラは,清潔で乾燥し,タイヤがスリップする要因があってはならない。
b) 試験二輪車の準備
1) タイヤは,駆動車輪のタイヤから水,砂利などスリップする要因となるようなもの及び危険物を除
去する。空気圧は,走行前(冷間)に水平面で静止している状態で測定したとき,二輪車製造業者
が指定した値に調整するか又は,試験二輪車が平たん舗装路面を走行している状態と近似するよう
に調整する。
9
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2) 試験二輪車は十分に暖機した状態とする。
c) ダイナモの準備
1) ダイナモは,十分に暖機した状態とする。
2) 試験二輪車の設置は,ライダ1名が乗車した状態とし,試験二輪車を運転中の動揺などが少なくな
るようにする。
8.2
ダイナモへの慣性質量の設定方法 ダイナモへ設定する慣性質量 (IM) は,次による。
a) 基準質量と前輪回転部慣性質量 (Mfront) の合計慣性質量 (Ma) を付加する。
このときの車輪回転部の慣性質量は,前輪の回転部慣性を実測又は計算によって求めるか,試験二
輪車の基準質量の3.0 %で算出する。
b) これら合計質量がダイナモの等価慣性質量に設定できない場合は,これら合計質量に重い側で一番近
くに設定ができる慣性質量とする。
8.3
目標惰行時間の算出 ダイナモに設定する慣性質量 (IM) を合計慣性質量 (Ma) と等しく設定でき
ない場合は,標準状態に修正された走行抵抗曲線から得られる目標走行抵抗 (F*) と,ダイナモに設定す
る走行抵抗とが同じでなければならないことから,目標惰行時間 (ΔTE) は式 (15) で算出する。
U
L
E
a
rear
M
*
1(
)
3.6
VV
T
M
M
k
F
∆
−
=
+
×
················································ (15)
rear
M
a
rear
IMM
k
M
M
+
=
+
ここに, F *: 目標走行抵抗値 (N)
ΔTE: 目標惰行時間 (s)
kM: 慣性質量の比
Ma: ダイナモに設定する試験二輪車の慣性質量 (kg) (Ma=Mk
+Mrid+Mfront)
Mk: 試験二輪車の整備質量 (kg)
Mrid: ライダ質量 (kg)
Mfront: 試験二輪車の前輪の回転部慣性質量 (kg)
(通常は,二輪車製造業者が指定した当該車両質量の
3.0 %とする。実測又は計算で求めてもよい。)
Mrear: 試験二輪車の後輪の回転部慣性質量 (kg)
(通常は,二輪車製造業者が指定した当該車両質量の
4.0 %とする。実測又は計算で求めてもよい。)
IM: ダイナモに設定する慣性質量 (kg)
VU: 惰行時間測定開始速度 (km/h)
VL: 惰行時間測定終了速度 (km/h)
8.4
ダイナモ制動力の設定
8.4.1
ダイナモ制動力 走行抵抗としてのダイナモ制動力の設定は,ダイナモへ試験二輪車を設置し,
7.1.4に従ってダイナモでテストを行う速度の最高速度以上から惰行させ,目標走行抵抗となるようにダイ
ナモ負荷制御装置を調整する。
なお,ダイナモ制動力は,式 (16) で求める。
*
f
pau
F
F
F
=
+
········································································· (16)
ここに,
F*: 目標走行抵抗値 (N)
Ff: 試験二輪車駆動系の抵抗を含むダイナモ駆動力系摩擦
抵抗 (N)
10
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Fpau: ダイナモ制動力 (N)
8.4.2
ダイナモへ設定した負荷の検証
a) 惰行時間の測定 試験二輪車をダイナモに設置した状態でテストを行う。ダイナモと二輪車を走行モ
ードの最高速度以上から惰行させ,指定速度又は基準速度において惰行時間を測定する。ここで,試
験二輪車の変速機及びクラッチは試験路で惰行測定時と同じ状態とする。
これらの測定は,繰り返し3回以上行い,その平均値を求めてJIS Z 8401によって小数点以下2け
たに丸める。
b) 設定走行抵抗の算出 ダイナモへの設定走行抵抗 (FC) は,8.3で求めた各惰行時間の平均値を用い,
式 (17) 又は式 (18) によって求め,JIS Z 8401によって小数点以下1けたに丸める。
(
)
U
L
C
rear
C
1
3.6
V
V
F
IMM
t
∆
−
=
+
······················································ (17)
ここに, FC: 指定速度又は基準速度における設定走行抵抗 (N)
IM: ダイナモに設定した慣性質量 (kg)
Mrear: 試験二輪車の駆動車輪回転部分の相当慣性質量。(kg)
(通常,二輪車製造業者が指定した当該車両質量の4.0 %
とする。実測又は計算で求めてもよい。)
ΔtC: 惰行時間の平均値 (s)
VU: 惰行時間測定開始速度 (km/h)
VL: 惰行時間測定終了速度 (km/h)
C
rear
C
(
)
F
IMM
Γ
=
+
······························································· (18)
ここに, FC: 指定速度又は基準速度における走行抵抗 (N)
IM: ダイナモに設定した慣性質量 (kg)
Mrear: 試験二輪車の駆動車輪回転部分の相当慣性質量 (kg)
(通常は,二輪車製造業者が指定した当該車両質量の
4.0 %とする。実測又は計算で求めてもよい。)
ΓC: 指定速度又は基準速度における減速度の平均値 (m/s2)
c) 目標走行抵抗との誤差算出 設定走行抵抗は,基準速度 (V0) における目標走行抵抗との差を比較し,
設定の良否を判定する。必要に応じ,各指定速度 (Vi) についても同様に比較し判定する。
1) 設定誤差 (ε) は,式 (19) にて算出する。
*
C
*
100
F
F
F
ε
−
=
×
···································································· (19)
2) 設定走行抵抗の良否は,1) で算出した値が表5の許容値内にあることによって判定する。
表 5 設定走行抵抗の良否判定
基準速度(V0)
km/h
設定誤差(ε)の許容値
%
≧50
≦ 2
50>V0≧30
≦ 3
<30
≦10
8.5
走行抵抗設定の記録 ダイナモに設定した走行抵抗値は,付表 1.3へ記録する。また,参考として,
設定走行抵抗と目標走行抵抗を比較したグラフを作成し,付表 1.3に添付することが望ましい。
11
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9. 等価慣性質量による簡易設定法 この方法は,路上の惰行試験で求めた走行抵抗による設定方法の代
替とできる,簡易走行抵抗設定法(以下,テーブル法という。)である。テーブル法は,それぞれの二輪車
固有の特性に関係なく,等価慣性質量に対応する規定の走行抵抗を設定するものである。
9.1
テーブル法による走行抵抗の設定
a) ダイナモに走行抵抗を設定するにあたっての試験準備は8.1による。
b) 表 6に記載された試験二輪車の基準質量[整備質量 (Mk) とライダ質量 (Mrid) の合計]に対応する等
価慣性質量 (IMT) に対して決められた転がり抵抗係数 (aT) 及び空気抵抗係数 (bT) を使用して走行
抵抗を設定する。
表 6 走行抵抗テーブル値
基準質量 Mk+Mrid
kg
等価慣性質量 IMT
kg
係 数
aT
N
bT
N/(km/h)2
95<Mk+Mrid≦105
100
8.8
0.021 5
105<Mk+Mrid≦115
110
9.7
0.021 7
115<Mk+Mrid≦125
120
10.6
0.021 8
125<Mk+Mrid≦135
130
11.4
0.022 0
135<Mk+Mrid≦145
140
12.3
0.022 1
145<Mk+Mrid≦155
150
13.2
0.022 3
155<Mk+Mrid≦165
160
14.1
0.022 4
165<Mk+Mrid≦175
170
15.0
0.022 6
175<Mk+Mrid≦185
180
15.8
0.022 7
185<Mk+Mrid≦195
190
16.7
0.022 9
195<Mk+Mrid≦205
200
17.6
0.023 0
205<Mk+Mrid≦215
210
18.5
0.023 2
215<Mk+Mrid≦225
220
19.4
0.023 3
225<Mk+Mrid≦235
230
20.2
0.023 5
235<Mk+Mrid≦245
240
21.1
0.023 6
245<Mk+Mrid≦255
250
22.0
0.023 8
255<Mk+Mrid≦265
260
22.9
0.023 9
265<Mk+Mrid≦275
270
23.8
0.024 1
275<Mk+Mrid≦285
280
24.6
0.024 2
285<Mk+Mrid≦295
290
25.5
0.024 4
295<Mk+Mrid≦305
300
26.4
0.024 5
305<Mk+Mrid≦315
310
27.3
0.024 7
315<Mk+Mrid≦325
320
28.2
0.024 8
325<Mk+Mrid≦335
330
29.0
0.025 0
335<Mk+Mrid≦345
340
29.9
0.025 1
345<Mk+Mrid≦355
350
30.8
0.025 3
355<Mk+Mrid≦365
360
31.7
0.025 4
365<Mk+Mrid≦375
370
32.6
0.025 6
375<Mk+Mrid≦385
380
33.4
0.025 7
385<Mk+Mrid≦395
390
34.3
0.025 9
395<Mk+Mrid≦405
400
35.2
0.026 0
405<Mk+Mrid≦415
410
36.1
0.026 2
415<Mk+Mrid≦425
420
37.0
0.026 3
12
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
425<Mk+Mrid≦435
430
37.8
0.026 5
435<Mk+Mrid≦445
440
38.7
0.026 6
445<Mk+Mrid≦455
450
39.6
0.026 8
455<Mk+Mrid≦465
460
40.5
0.026 9
465<Mk+Mrid≦475
470
41.4
0.027 1
表 6 走行抵抗テーブル値(続き)
475<Mk+Mrid≦485
480
42.2
0.027 2
485<Mk+Mrid≦495
490
43.1
0.027 4
495<Mk+Mrid≦505
500
44.0
0.027 5
以下,10 kgとび
以下,10 kgとび
以下,
aT=0.088IMT(1)
以下,
bT=0.000 015 IMT+0.020 0(2)
注(1) 算出した値は,JIS Z 8401によって小数点以下1けたに丸める。
(2) 算出した値は,JIS Z 8401によって小数点以下4けたに丸める。
c) 走行抵抗 (FT) は,標準大気状態へ補正する必要はないので,そのまま目標走行抵抗 (F*) となる。し
たがって,ダイナモに設定する走行抵抗 (FE) は,式 (20) となる。
2
E
T
T
TT
F
F
a
bV
=
=
+
································································· (20)
ここに, FE: ダイナモに設定する走行抵抗 (N)
FT: テーブル値から求められる走行抵抗 (N)
aT: 転がり抵抗のテーブル値 (N)
bT: 空気抵抗係数のテーブル値 [N/(km/h)2]
VT: 指定速度 (km/h)
d) テーブル法における指定速度 (VT) とは走行抵抗を検証する速度を示し,基準速度 (V0) を含め,試験
モードの最高速から10 km/hの車速ポイントの間で,可能なかぎり均等に分割した4点以上の速度と
する。ただし,ダイナモタイプによって,複数の車速ポイントでの設定ができない場合は,基準速度
だけとする。
9.2
テーブル法で設定した走行抵抗の検証
a) 惰行時間の測定 テーブル法の場合,ダイナモ上で試験二輪車を走行させず,ダイナモだけで行わな
ければならない。ダイナモを走行モードの最高速度以上から惰行させ,指定速度又は基準速度におい
て惰行時間を測定する。
これらの測定は,繰り返し3回以上行い,その平均値を求めてJIS Z 8401によって小数点以下2け
たに丸める。
b) 設定走行抵抗の算出 ダイナモへの設定走行抵抗 (FC) は,a) で求めた各惰行時間の平均値(ΔtT)
を用い,式 (21) によって求め,JIS Z 8401によって小数点以下1けたに丸める。
T
U
L
C
T
(
)
3.6
IMV
V
F
t
∆
−
=
································································· (21)
ここに, FC: 指定速度 (VT) 又は基準速度 (V0) における設定走行抵
抗 (N)
IMT: ダイナモに設定した慣性質量 (kg)
ΔtT: 惰行時間の平均値 (s)
VU: 惰行時間測定開始速度 (km/h)
VL: 惰行時間測定終了速度 (km/h)
c) 目標走行抵抗との誤差算出 ダイナモに設定した走行抵抗は,設定後,ただちに惰行試験によって検
証を行う。検証に当たっても,ダイナモ上で試験二輪車を走行させず,ダイナモだけで行わなければ
13
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ならない。
設定走行抵抗は,各指定速度 (VT) 又は基準速度 (V0) における目標走行抵抗との差を比較し,設定
の良否を判定する。
1) 設定誤差 (ε) は,式 (22) によって算出する。
C
T
T
100
F
F
F
ε
−
=
×
··································································· (22)
2) 設定走行抵抗の良否は,式 (22) で算出した値が表7の許容値内にあることによって判定する。
表 7 設定走行抵抗の良否判定
速度(VT又はV0)
km/h
設定誤差(ε)の許容値
%
≧50
≦ 2
≧30−50
≦ 3
<30
≦10
9.3
走行抵抗設定の記録 ダイナモに設定した走行抵抗値は,付表2へ記録する。また,参考として,
設定走行抵抗と目標走行抵抗を比較したグラフを作成し,付表2に添付することが望ましい。
14
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付表 1.1 二輪自動車−走行抵抗測定記録
試験二輪車
車名・型式(類別):
車体番号:
最高速度:
km/h
既往走行距離:
km
タイヤサイズ:前輪 後輪
整備質量 (Mk):
kg
タイヤ空気圧:前輪 kPa,後輪
kPa
試験路における走行抵抗測定記録
測定期日:
年 月 日
測定場所:
測定者:
印
試験二輪車質量 (M):
kg
天候: 大気圧: kPa 気温:
℃
ライダ質量:
kg
風速(平行成分/垂直成分): /
m/s
計測器質量:
kg
路面状況
ライダ身長:
m
回転部分の相当慣性質量 (M2)[整備質量に対する割合]: kg[
%]
基準速度 (V0):
km/h
惰行タイム計測器の諸元
製造者名:
型式: 分解能(速度/時間): km/h/
s
センサ取付け位置:
指定速度
Vi (km/h)
惰行時間Δtai,Δtbi (s)
[減速度γai,γbi (m/s2)]
平均値ΔTi
(s)
[Γi (m/s2)]
統計精度
P (%)
走行抵抗
Fi (N)
目標走行抵抗
F*(N)
備考
n=1
n=2
n=3
n=4
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
回帰式 F*= + V2
備考
15
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付表 1.2 二輪自動車−走行抵抗測定記録
指定速度
Vi (km/h)
惰行時間Δtai,Δtbi (s)
[減速度γai,γbi (m/s2)]
n=
n=
n=
n=
n=
n=
n=
n=
n=
n=
n=
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
16
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付表 1.3 二輪自動車−シャシダイナモメータにおける負荷設定記録(惰行法)
試験二輪車
車名・型式(類別):
車体番号:
最高速度:
km/h
既往走行距離:
km
タイヤサイズ:前輪 後輪
整備質量 (Mk):
kg
タイヤ空気圧:前輪 kPa,後輪
kPa
基準質量 (M):
kg
前輪回転部分の相当慣性質量 (Mfront)[整備質量に対する割合]: kg[
%]
後輪回転部分の相当慣性質量 (Mrear)[整備質量に対する割合]: kg[
%]等価
慣性質量 (Ma): kg
シャシダイナモメータにおける負荷設定記録
設定期日:
年 月 日
設定場所:
設定等価慣性質量 (IM):
kg
駆動車輪のタイヤ空気圧:
kPa
基準速度 (V0):
km/h
シャシダイナモメータ諸元
製造者名:
型式:
動力吸収方式:(DC/DY ,EC/DY,水 ,空気
)
慣性補償方式:(機械式,電気式 ) 慣性補償ピッチ :
kg
走行抵抗設定方式:(1点設定,多点設定,係数設定,デジタル式多点設定,デジタル式係数設定)
分解能(速度):
km/h
分解能(時間):
s
指定速度
Vi (km/h)
惰行時間 (s) [減速度 (m/s2)]
走行抵抗 (N)
設定誤差
ε(%)
備考
1回目
2回目
3回目
平均値ΔtC (ΓC)
設定FC
目標F *
回帰式 F * = + V 2
備考
17
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付表 2 二輪自動車−シャシダイナモメータにおける負荷設定記録(テーブル法)
試験二輪車
車名・型式(類別):
車体番号:
最高速度:
km/h
既往走行距離:
km
タイヤサイズ:前輪 後輪
整備質量 (Mk):
kg
タイヤ空気圧:前輪 kPa,後輪
kPa
基準質量 (M):
kg
シャシダイナモメータにおける負荷設定記録
設定期日:
年 月 日
設定場所:
設定等価慣性質量 (IMT):
kg
基準速度 (V0):
km/h
シャシダイナモメータ諸元
製造者名:
型式:
動力吸収方式:(DC/DY,EC/DY,水,空気
)
慣性補償方式:(機械式,電気式 ) 慣性補償ピッチ:
kg
走行抵抗設定方式:(1点設定,多点設定,係数設定,デジタル式多点設定,デジタル式係数設定)
分解能(速度):
km/h
分解能(時間):
s
指定速度
VT (km/h)
惰行時間 (s)[減速度 (m/s2)]
走行抵抗 (N)
設定誤差
ε(%)
備考
1回目
2回目
3回目
平均値ΔtT
設定FC
目標F T
回帰式 F T= + V 2
備考
18
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書(参考) JISと対応する国際規格との対比表
この附属書(参考)は,本体に関連する事柄を補足するもので,規定の一部ではない。
JIS D 1036 : 2002 二輪自動車−惰行試験によるシャシダイナモメータへの走行抵抗の
設定方法
国際規格ISO 11486: 1993 二輪自動車−燃費測定−惰行法によるシャシダ
イナモメータの設定方法
(Ⅰ)JISの規定
(Ⅱ)
国際規
格番号
(Ⅲ)国際規格の規定
(Ⅳ)JISと国際規格との技術的差
異の項目ごとの評価及びその内容
表示箇所:本体,附属書
表示方法:点線の下線又は実線
の側線
(Ⅴ)JISと国際規格との技術的差異の
理由及び今後の対策
項目番号
内 容
項目番号
内 容
項目ごと
の評価
技術的差異の内容
1.適用範囲
二輪自動車の走行抵抗の測
定方法及びシャシダイナモ
メータへの負荷の設定方法
を規定。
ISO
11486
1.
台上燃費測定試験の
ための、走行抵抗の測
定方法及びシャシダ
イナモメータへの負
荷の設定方法を規定。
MOD
/削除
JISでは、台上燃費測
定試験のためと限定
していない。
この規格で規定する走行抵抗の設定
は、燃費測定試験に限らず使用できる
ため、これに限定しない。国際規格に
修正提案をする予定。
2.引用規格
JIS Z 8401
2.
規定なし
MOD/
追加
JISでは,JIS Z 8401
を引用。
国際規格には、数値の丸め方がない。
今後機会をみて提案の予定。
3.定義
3.1〜3.5の用語を定義する
ほか、JIS D 0109を引用。
3.
3.1〜3.5の用語を定義 MOD/
追加
JISでは,補足的にJIS
D 0109を引用。
JISでは、使用者の理解を助ける目的で
補足的な追加引用を行った。
3.1走行抵抗の定義。
3.1
JISと同等であるが,
構成成分についての
説明がない。
MOD
/変更
JISでは,補足説明と
して備考を設けた。
−
3.2 基準速度の定義。
3.2
最高速度分類によっ
て規定される燃料消
費試験での走行速度
と定義。
MOD
/変更
JISでは,ダイナモタ
イプと試験内容によ
って決定すると定義。
参考として,法規で定
める速度を記載。
ISOの基準速度は主として水動力計を
使ったダイナモの走行抵抗を検証する
ために設けられたものであるが,現在,
日本では当該タイプのダイナモは旧式
となり非主流となっている。このため,
具体値は明記せず簡易な表現に変更し
た。国際規格に修正提案をする予定。
1
8
D
1
0
3
6
:
2
0
0
3
19
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(Ⅰ)JISの規定
(Ⅱ)
国際
規格
番号
(Ⅲ)国際規格の規定
(Ⅳ)JISと国際規格との技術的差
異の項目ごとの評価及びその内容
表示箇所:本体,附属書
表示方法:点線の下線又は実線の
側線
(Ⅴ)JISと国際規格との技術的差異の
理由及び今後の対策
項目番号
内 容
項目番号
内 容
項目ごと
の評価
技術的差異の内容
3.定義
3.3 指定速度の定義
ISO
11486
3.3
JISと同等
IDT
−
−
3.4 整備質量の定義
3.4
JISと同等
IDT
−
−
3.5 基準質量の定義
3.5
整備質量+75 kg。
MOD
/変更
JISは、整備質量+法
定の乗員質量。
日本の現行法規では、乗員質量は55 kg
となっているため,定義として直ちに
ISOを採用することができないが,整
備質量+法定乗員質量とすることによ
って,将来の法規改正にも対応できる
表現とした。
4.試験用二
輪車,ダイ
ナモ及び
計器類
試験に用いる二輪車,ダイナ
モ及び計器の仕様の記録
4.
JISと同等
IDT
−
−
5.測定機器
及び測定
値の精度
測定機器及び測定値の精度
を規定
・試験二輪車の質量
・気象
・走行抵抗
5.
数値はJISと同じであ
るが,測定値精度の公
差が+のみ。
MOD
/変更
JISの測定値精度の公
差は±。また,JISで
は見やすくするため,
規格値を表の形にま
とめた。
明らかにミスプリントと考えられるた
め,見やすくするための表の作成を含
めて、国際規格に修正提案をする予定。
6路上試験
6.1試験路の要件を規定
6.1
JISと同等
IDT
−
−
6.2気象条件及び標準状態を
それぞれ表2及び表3で規
定。
6.2
気象条件及び標準状
態を箇条書きで規定。
気象条件では,気温も
規定。
また,試験時と標準状
態の空気密度の差は,
7.5%を超えてはなら
ないと規定。
MOD
/削除
JISでは気象条件の気
温を規定していない。
試験時と標準状態の
空気密度の差は,7.5%
以内が望ましいと規
定。
気温は日本の気象条件(特に308Kの高
温側)に合致していないため,削除し
た。このため,試験時の気温によって
は,空気密度において標準状態と7.5%
を超える差異を生ずる場合もあるた
め,空気密度の差は推奨事項とし,参
考として 7.5%以内となる気温及び気
圧の範囲を示した。
1
9
D
1
0
3
6
:
2
0
0
3
20
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(Ⅰ)JISの規定
(Ⅱ)
国際
規格
番号
(Ⅲ)国際規格の規定
(Ⅳ)JISと国際規格との技術的差
異の項目ごとの評価及びその内容
表示箇所:本体,附属書
表示方法:点線の下線又は実線の
側線
(Ⅴ)JISと国際規格との技術的差異の
理由及び今後の対策
項目番号
内 容
項目番号
内 容
項目ごと
の評価
技術的差異の内容
6路上試験
6.3試験二輪車の準備につい
て,6.3.1〜6.3.3.の3箇条で
規定。
ISO
11486
6.7
試験二輪車の準備に
ついて,6.7.1〜6.7.8の
8箇条に分けて規定。
MOD
/変更
編集上の修正であり,
技術的差異はない。
わかりやすくするための,記述の整理。
6.4ライダおよびライダの乗
車姿勢について,6.4.1〜
6.4.2の2箇条において、箇
条書きで規定。
6.8
ライダおよびライダ
の乗車姿勢について,
6.8.1〜6.8.3の2箇条
において、箇条書きで
規定。
MOD
/変更
編集上の修正であり,
技術的差異はない。
わかりやすくするための,記述の整理。
7.走行抵抗
の測定
7.1一般要
件
基準速度に関して規定な
し。
6.3
基準速度の具体的数
値を最高速度分類に
従って,表1で規定。
MOD
/削除
JISでは規定がない。
ISOと異なった定義としているため、
ISOのように数値で規定することはで
きない。3.2項の修正と合わせ、国際規
格に削除を提案する予定。
7.1.1指定速度の選定
6.4
指定速度の具体的数
値を最高速度分類に
従って,表2で規定。
MOD
/変更
JISでは具体的値は明
記なし。
3.2基準速度において,最高速度分類に
よる区分をやめたことに合わせ,基準
速度を包含する指定速度の規定におい
ても具体的数値を規定することができ
ない。3.2項の修正及びISOの6.3項の
削除と合わせ、国際規格に提案予定。
7.1.2惰行時間測定開始速度
及び終了速度
6.6
惰行時間測定開始及
び終了速度は指定速
度±10 %。
また、各基準速度及び
指定速度による具体
的数値を表4で規定。
MOD
/選択
±5 km/h,±10 km/h
または±10 %から選
択。
また,JISでは具体的
値は明記なし。
JIS D 1044及び日本の法規では±5
km/hとなっているため,ISOが規定す
る±10 %と併記した。
さらに,より厳しい精度を要求される
場合を考慮し,±10 km/hも併記した。
基準速度及び指定速度を数値規定しな
いことに合わせ,これら速度の具体的
数値規定も削除した。
国際規格に提案する予定。
2
0
D
1
0
3
6
:
2
0
0
3
21
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(Ⅰ)JISの規定
(Ⅱ)
国際
規格
番号
(Ⅲ)国際規格の規定
(Ⅳ)JISと国際規格との技術的差
異の項目ごとの評価及びその内容
表示箇所:本体,附属書
表示方法:点線の下線又は実線の
側線
(Ⅴ)JISと国際規格との技術的差異の
理由及び今後の対策
項目番号
内 容
項目番号
内 容
項目ごと
の評価
技術的差異の内容
7.1一般要
件
7.1.3惰行開始速度
ISO
11486
6.5
惰行開始速度の具体
的数値を各基準速度
によって,表3で規定。
MOD
/変更
惰行開始速度は,惰行
時間測定開始速度+5
km/h以上とする。
惰行開始速度のプラスマージンを,基
準速度によって変更する必要がない。
国際規格に提案する予定。
7.1.4惰行走行の条件
6.9.1.1〜
6.9.1.3
JISと同等。
IDT
−
−
7.2惰行時
間法
7.2.1惰行時間の測定
6.9.1.4
6.9.1.5
6.9.1.8
6.9.1.9
惰行時間の測定手順
を4箇条に分けて規
定。
MOD
/変更
JISでは,同等の内容
を7.2.1項にまとめて
規定。
−
7.2.2データ処理
6.91.6
6.9.1.7
データ処理は統計精
度を用いる方法のみ
規定
MOD
/選択
MOD
/追加
JISではデータ処理は
a)最大最小値を用いる
方法,又はb)統計精度
を用いる方法から選
択。
また,JISではc)で記
録の方法を規定。
データ処理はJIS D 1044では惰行時間
の最大最小値を用いる方法が指定さ
れ,ISO 11486は統計精度を用いる方法
が指定されているため,併記した。
7.2.3目標走行抵抗の算出
a)各指定速度での走行抵抗
の算出
7.1.1
JISと同等。
MOD
/変更
JISと同等であるが,
走行抵抗算出式にお
いて使用する記号が
異なっている。
−
7.2.3目標走行抵抗の算出
b)走行抵抗回帰曲線の求め
方
7.2
走行抵抗式に使用さ
れている転がり抵抗
及び空気抵抗係数を
求める式がない。
MOD
/追加
転がり抵抗及び空気
抵抗係数を求める式
が追加されている。
わかりやすくするための追加であり、
国際規格に提案予定。
2
1
D
1
0
3
6
:
2
0
0
3
22
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(Ⅰ)JISの規定
(Ⅱ)
国際
規格
番号
(Ⅲ)国際規格の規定
(Ⅳ)JISと国際規格との技術的差
異の項目ごとの評価及びその内容
表示箇所:本体,附属書
表示方法:点線の下線又は実線の
側線
(Ⅴ)JISと国際規格との技術的差異の
理由及び今後の対策
項目番号
内 容
項目番号
内 容
項目ごと
の評価
技術的差異の内容
7.2惰行時
間法
7.2.3目標走行抵抗の算出
c)標準大気状態への補正
ISO
11486
7.1.3
7.2
標準大気状態への補
正に風の影響は無視
MOD
/変更
標準大気状態への補
正には風の影響を追
加。
国際規格では風の影響を無視する代わ
りにデータ処理(統計精度)で測定精
度を向上し風の影響を排除している、
実機による試験では統計精度2%以下
は惰行時間のばらつきにより成立しな
いことが判明した、このため統計精度
を3%に変更し風の影響も考慮する方
式とした。国際規格に提案予定。
7.3減速度
法
7.3.1減速度の測定
6.9.2.1
6.9.2.2
減速度の測定手順を
2箇条に分けて規定。
MOD
/変更
JISでは同等の内容を
7.3.1項にまとめて規
定。
−
7.3.2データ処理
a)係数の決定方法
6.9.2.3
6.9.2.4
JISと同等。
IDT
−
−
7.3.2データ処理
b)減速度の決定方法
6.9.2.5〜
6.9.2.7
JISと同等。
MOD
/変更
MOD
/追加
ISOと同等であるが,
平均減速度算出式に
おいて使用する記号
が異なっている。
また、明確化のため
に,統計精度算出式を
明示した。
また,JISではc)で記
録の方法を規定。
−
7.3.3目標走行抵抗の算出
a)各指定速度での走行抵抗
の算出
7.1.2
JISと同等。
MOD
/変更
ISOと同等であるが,
走行抵抗算出式にお
いて使用する記号が
異なっている。
−
2
2
D
1
0
3
6
:
2
0
0
3
23
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(Ⅰ)JISの規定
(Ⅱ)
国際
規格
番号
(Ⅲ)国際規格の規定
(Ⅳ)JISと国際規格との技術的差
異の項目ごとの評価及びその内容
表示箇所:本体,附属書
表示方法:点線の下線又は実線の
側線
(Ⅴ)JISと国際規格との技術的差異の
理由及び今後の対策
項目番号
内 容
項目番号
内 容
項目ごと
の評価
技術的差異の内容
7.3減速度
法
7.3.3データ処理
b)走行抵抗回帰曲線の求め
方
ISO
11486
7.2
7.2.3b)を参照。
MOD
/追加
7.2.3b)を参照。
7.2.3b)を参照。
7.3.3データ処理
c)標準大気状態への補正
7.1.3
7.2
7.2.3c)を参照。
MOD
/変更
7.2.3b)を参照。
7.2.3b)を参照。
−
規定なし。
7.3
1点設定の場合の、標
準大気状態への補正
式を規定。
MOD
/削除
JISでは規定していな
い。
JISの7.2.3c)(ISOでは7.2)の規定で
包含しているため,不要。国際規格に
削除を提案する予定。
−
規定なし。
7.4
基準速度に対する目
標走行抵抗の設定。
MOD
/削除
JISでは規定していな
い。
JISでは,基準速度の定義が異なるた
め。(3.定義参照。)
8.シャシダ
イナモメー
タへの走行
抵抗の設定
方法
8.1試験準備
a)使用する機器の要求事項
8.1.1
8.1.2
JISと同じ。
IDT
−
−
8.1試験準備
b)試験二輪車の準備
8.4
8.5
JISと同じ。
IDT
−
−
8.1試験準備
c)ダイナモの準備
8.3
ダイナモの暖機につ
いてのみ規定。
MOD
/追加
試験二輪車の設置に
ついて追加規定して
いる。
わかりやすくするための追加規定。
8.2ダイナモへの慣性質量の
設定方法
8.2.1
等価慣性質量は実際
の質量に最も近い値
を選択。
MOD
/変更
JISは等価慣性質量は
実際の質量に最も近
い重い側の値を選択
燃費測定ではシャシダイナモが持つ等
価慣性設定値を最大限細かく使える記
述とした。国際規格への提案を検討。
8.3目標惰行時間の算出
8.2.2
JISと同等。
MOD
/変更
ISOと同等であるが,
わかりやすくするた
めに,目標惰行時間の
算出式を整理した。
−
2
3
D
1
0
3
6
:
2
0
0
3
24
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(Ⅰ)JISの規定
(Ⅱ)
国際
規格
番号
(Ⅲ)国際規格の規定
(Ⅳ)JISと国際規格との技術的差
異の項目ごとの評価及びその内容
表示箇所:本体,附属書
表示方法:点線の下線又は実線の
側線
(Ⅴ)JISと国際規格との技術的差異の
理由及び今後の対策
項目番号
内 容
項目番号
内 容
項目ごと
の評価
技術的差異の内容
8.シャシダ
イナモメー
タへの走行
抵抗の設定
方法
8.4.ダイナモ制動力の設定
ISO
11486
8.6
8.7
JISと同等。
ただし,合計摩擦損失
の測定方法の記述が
ある
MOD
/変更
合計摩擦損失の測定
方法の記述を削除。
また、全体の記述を整
理統合し,わかりやす
くした。
シャシダイナモにより摩擦損失測定プ
ロセスが異なり,ダイナモメーカのシ
ステムに依存する部分であるため,記
述は不要とした。国際規格へは対応し
ない。
8.5走行抵抗設定の記録
−
規定なし。
MOD
/追加
シャシダイナモメー
タへの負荷設定記録
を追加
JISの必要性により追加したもので国
際規格へは対応しない。
9.等価慣性
質量による
簡易設定法
9.1テーブル法による走行抵
抗の設定
9.2テーブル法で設定した走
行抵抗の検証
9.3走行抵抗設定の記録
−
規定なし。
MOD
/追加
全面改訂及び走行抵
抗式の追加。
また、ISOの8.1.3の表
6で規定されている等
価慣性質量は、JIS の
9.1に組み込まれたが,
全範囲にわらり基準
質量の幅を10kgに統
一するととももに,
ISOではカバーされて
いない515kgを超える
基準重量の車両の等
価慣性質量を明確化
した。
ISO 11486では規定なしであるが,簡便
な設定方法,ベルコン車の危険回避と
してテーブル法を追加した。
ただし,ISO 7860等の既存のテーブル
値と実機のずれがあることが判明した
ため,テーブル値の改訂も実施した。
国際規格に修正提案をする予定。
2
4
D
1
0
3
6
:
2
0
0
3
25
D 1036:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(Ⅰ)JISの規定
(Ⅱ)
国際
規格
番号
(Ⅲ)国際規格の規定
(Ⅳ)JISと国際規格との技術的差
異の項目ごとの評価及びその内容
表示箇所:本体,附属書
表示方法:点線の下線又は実線の
側線
(Ⅴ)JISと国際規格との技術的差異の
理由及び今後の対策
項目番号
内 容
項目番号
内 容
項目ごと
の評価
技術的差異の内容
付表
1-1走行抵抗測定記録
1-2シャシダイナモメータにお
ける負荷設定記録(惰行法)
2-1シャシダイナモメータにお
ける負荷設定記録(テーブル方
式)
Annex A
Annex B
測定する二輪自動車
の記録のみ。
シャシダイナモ及び
計測機器の記録のみ。
MOD
/変更
走行抵抗の測定,負荷
設定(惰行法),負荷
設定(テーブル方式)
で付表を分類。
気象条件,惰行デー
タ,走行抵抗式,ダイ
ナモ設定データの記
録追加。
気象条件,データの記録を追加し,惰
行測定から負荷設定まで流れで分類し
た。JISの必要性により追加したもので
国際規格へは対応しない。
JISと国際規格との対応の程度の全体評価:MOD
備考1. 項目ごとの評価欄の記号の意味は,次のとおりである。
― IDT……………… 技術的差異がない。
― MOD/削除……… 国際規格の規定項目又は規定内容を削除している。
― MOD/追加……… 国際規格にない規定項目又は規定内容を追加している。
― MOD/変更……… 国際規格の規定内容を変更している。
― MOD/選択……… 国際規格の規定内容と別の選択肢がある。
2.
JISと国際規格との対応の程度の全体評価欄の記号の意味は,次のとおりである。
― IDT……………… 国際規格と一致している。
― MOD…………… 国際規格を修正している。
― NEQ…………… 技術的内容及び構成において,国際規格と同等でない。
2
5
D
1
0
3
6
:
2
0
0
3