D 1012:2005
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人自動車技
術会(JSAE)/財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を改正すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS D 1012:1997は改正され,この規格に置き換えられる。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会
は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新
案登録出願にかかわる確認について,責任はもたない。
JIS D 1012には,次に示す附属書がある。
附属書1(参考)実路における燃費試験方法
附属書2(参考)車載風向風速計方式の走行抵抗測定方法
附属書3(参考)直接回帰法の計算式
附属書4(参考)シャシダイナモメータで測定した転がり抵抗の補正方法
附属書5(規定)シャシダイナモメータ試験における走行抵抗の計算方法
附属書6(規定)シャシダイナモメータの設定負荷調整方法
附属書7(参考)ホイールトルク法から惰行法への目標走行抵抗置換方法
附属書8(参考)燃料流量計取付要領
附属書9(規定)ガソリン及び軽油の水素炭素原子数比及び酸素炭素原子数比の簡易算出方法
附属書10(参考)米国及び欧州の燃費算出方法
附属書11(参考)日本の10・15モード走行方法
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
1. 一般事項 ························································································································ 1
1.1 適用範囲 ······················································································································ 1
1.2 引用規格 ······················································································································ 1
1.3 定義 ···························································································································· 1
2. 走行抵抗測定方法 ············································································································ 2
2.1 要求測定精度の許容差 ···································································································· 2
2.2 路上での走行抵抗測定 ···································································································· 2
2.3 ベンチ法による走行抵抗測定 ·························································································· 10
3. シャシダイナモメータの走行抵抗設定方法 ·········································································· 12
3.1 要求測定精度の許容差 ··································································································· 12
3.2 試験準備 ····················································································································· 12
3.3 負荷の設定 ·················································································································· 12
3.4 走行抵抗測定及び負荷設定の記録····················································································· 15
4. 燃費試験方法 ················································································································· 15
4.1 試験準備 ····················································································································· 15
4.2 車両及び燃費測定機器の接続方法····················································································· 16
4.3 試験方法 ····················································································································· 16
4.4 燃費の算出 ·················································································································· 19
附属書1(参考)実路における燃費試験方法 ············································································· 25
附属書2(参考)車載風向風速計方式の走行抵抗測定方法 ··························································· 29
附属書3(参考)直接回帰法の計算式 ······················································································ 31
附属書4(参考)シャシダイナモメータで測定した転がり抵抗の補正方法 ······································ 33
附属書5(規定)シャシダイナモメータ試験における走行抵抗の計算方法 ······································ 37
附属書6(規定)シャシダイナモメータの設定負荷調整方法 ························································ 39
附属書7(参考)ホイールトルク法から惰行法への目標走行抵抗置換方法 ······································ 41
附属書8(参考)燃料流量計取付要領 ······················································································ 42
附属書9(規定)ガソリン及び軽油の水素炭素原子数比及び 酸素炭素原子数比の簡易算出方法 ·········· 43
附属書10(参考)米国及び欧州の燃費算出方法 ········································································· 44
附属書11(参考)日本の10・15モード走行方法 ······································································· 46
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 1012:2005
自動車−燃料消費率試験方法
Automobiles-Rate of fuel consumption test methods
1. 一般事項
1. あああ
1.1
適用範囲 この規格は,車両質量3 500 kg以下の自動車のシャシダイナモメータ上での燃料消費率
(以下,燃費という。)試験方法について規定する。実路における燃費試験方法については,附属書1(参
考)に示す。ただし,二輪車には適用しない。
1.2
引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成
する。これらの引用規格は,その最新版(追補を含む。)を適用する。
JIS D 0102 自動車用語―自動車の寸法,質量,荷重及び性能
JIS D 1030 自動車―排気ガス中の一酸化炭素,二酸化炭素,全炭化水素及び窒素酸化物の測定方法
JIS K 2202 自動車ガソリン
JIS K 2204 軽油
JIS K 2240 液化石油ガス(LPガス)
JIS K 2249 原油及び石油製品―密度試験方法及び密度・質量・容量換算表
JIS K 2254 石油製品―蒸留試験方法
JIS K 2255 石油製品―ガソリン―鉛分試験方法
JIS K 2258 原油及び燃料油―蒸気圧試験方法―リード法
JIS K 2261 石油製品−自動車ガソリン及び航空燃料油−実在ガム試験方法−噴射蒸発法
JIS K 2265 原油及び石油製品―引火点試験方法
JIS K 2280 石油製品―燃料油―オクタン価及びセタン価試験方法並びにセタン指数算出方法
JIS K 2283 原油及び石油製品―動粘度試験方法及び粘度指数算出方法
JIS K 2536 石油製品−成分試験方法
JIS K 2541 原油及び石油製品―硫黄分試験方法
1.3
定義 この規格で用いる主な用語の定義は,JIS D 0102によるほか,次による。
a) 走行抵抗力 惰行法又はベンチ法で求められる,エンジン以外の摩擦損失を含む走行抵抗。
b) 走行負荷トルク 駆動輪に装着されたホイールトルクメータで測定される,トルクメータ後流側の駆
動系損失も含む走行時の抵抗トルク。
c) 走行抵抗 前述のa)及びb)で規定するものの総称。
d) 空気抵抗 車両が空気の中を進むことによって受ける抵抗。走行抵抗を車速の2次の式で表す場合に,
車速の2次項がこれに当たる。
e) 転がり抵抗 駆動系,車軸及びタイヤが回転することによって生じる抵抗。走行抵抗を車速の2次式
で表す場合に,車速の1次項及び定数項がこれに当たる。
f)
基準車速 シャシダイナモメータで設定走行抵抗の再現度を検証する車速。
2
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
g) 測定点車速 走行抵抗を測定する車速。基準車速と一致させることが望ましい。
h) 標準大気条件 走行抵抗を換算するための標準状態。次の値とする。
1) 気温 T0 = 20 ℃
2) 大気圧 P0 = 100 kPa
3) 大気密度 ρ0 = 1.189 kg/m3
4) 風速 0 m/s(無風)
i)
大気測定固定局 試験路脇にあって,試験中の最も代表的な風向及び風速が測定される地点に設定さ
れた風向・風速測定装置。
j)
ローラ表面換算力 シャシダイナモメータで測定されたトルクをローラ半径で除して,ローラ表面の
接線方向の力に換算したもの。
k) シャシダイナモメータ設定負荷 シャシダイナモメータに付加される走行抵抗。
l)
回帰走行抵抗 複数測定点の走行抵抗データを用いて最小二乗法により2次回帰された式から計算さ
れる走行抵抗。
m) 係数設定式シャシダイナモメータ 走行抵抗を表す関数の係数をもって設定する方式のシャシダイナ
モメータ。
n) 多点設定式シャシダイナモメータ 走行抵抗を複数の車速点の走行抵抗力をもって設定する方式のシ
ャシダイナモメータ。
2. 走行抵抗測定方法
2. あああ
2.1
要求測定精度の許容差 試験における測定精度の許容差は次のとおりとし,各試験項目を測定する
機器は,当該機器の製造業者の定める取扱要領に基づいて整備・校正されたものでなければならない。
a) 車速 :±0.5 km/h又は±1 %のいずれか大きい値
b) 時間 :±20 ms又は±0.1 %のいずれか大きい値
c) ホイールトルク :±3 N・m又は±0.5 %のいずれか大きい値
d) 風速 :±0.3 m/s
e) 風向 :±3°
f)
気温 :±1 ℃
g) 大気圧 :±0.3 kPa
h) 車両質量 :±10 kg
i)
タイヤ空気圧 :±5 kPa
j)
空気抗力係数と前面投影面積の積(SCd) :±2 %
k) シャシダイナモメータローラ速度 :±0.5 km/h又は±1 %のいずれか大きい値
l)
シャシダイナモメータローラ表面換算力 :±10 N又はフルスケールの±0.1 %のいずれか大きい値
2.2
路上での走行抵抗測定
2.2.1
路上試験における要求事項
2.2.1.1
試験時大気条件
2.2.1.1.1
風速 大気測定固定局において測定される平均風速は5 m/s以下とし,横風成分は3 m/s以下と
する。
3
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.2.1.1.2
気温 1〜35 ℃とする。
2.2.1.2
試験路条件 試験路は直線とし,表面は平坦,かつ,乾燥した舗装路面で,路面粗さは通常の路
面を代表したものでなければならない。路面こう(勾)配は,進行方向には±1 %とし,また,3 m離れ
た任意の2点間のこう配は,進行方向のこう配に対して±0.5 %とする。また,横方向のこう配は1.5 %
以下とする。
2.2.2
試験準備
2.2.2.1
車両の準備
2.2.2.1.1
車両の状態 車両及びタイヤは,試験目的に応じた慣らし走行を事前に行う。ただし,タイヤ
の溝の深さは新品の50 %以上とする。特別の理由がない限り,試験車は製造業者の定める正常な状態と
する。すなわち,タイヤ空気圧,ホイールアライメント,車高,駆動系及びホイールベアリングの潤滑,
ブレーキ引きずりなどの調整を適正に行う。路上試験の間は,車両のエンジンフード,窓,空調システム,
前照灯などのカバーは閉じる。空調スイッチはオフ状態とする。車両質量は,運転者,測定機器を含めて,
試験目的に応じた状態に調整する。
2.2.2.1.2
タイヤ空気圧の調整 試験路とタイヤ空気圧調整場所との気温差が5 ℃以内の場合には,指定
空気圧に設定する。気温差が5 ℃を超える場合には,次の方法を採る。
a) タイヤ空気圧を指定空気圧より10 %程度高い空気圧に設定して,4時間以上ソーク(soak)する。
b) 試験直前に,ソーク場所においてタイヤ空気圧を指定空気圧まで下げて合わせる。その際,空気圧調
整場所及び試験路の気温をもとに,次の空気圧分を付加して合わせる。
)
(
8.0
amb
soak
t
T
T
P
−
×
=
ここに,
Pt:タイヤ空気圧の付加量 (kPa)
Tsoak:車両が保管された空気調整を行う場所の気温 (℃)
Tamb:試験路の気温 (℃)
2.2.2.1.3
測定機器の装着 すべての測定機器,特に車両の外側に装着される物については,車両の動き
への影響が最小になるように装着する。
2.2.2.1.4
車両の暖機 試験に先立ち,最も高い基準車速以下の車速で適切な暖機走行を行う。通常は,
代表的な車速(例えば,10・15モード試験を目的とした場合には,60 km/h。)で30分間程度走行する。
2.2.3
惰行による走行抵抗測定 惰行による走行抵抗式の求め方は,多点回帰法及び直接回帰法による。
参考 このほか,車載風向風速計を用いて測定した相対風向風速データ及び惰行時の車速データを同
時に数学的に処理して走行抵抗を補正する方法があり,これについては附属書2(参考)に示
す。
2.2.3.1
多点回帰法
2.2.3.1.1
測定点車速の選定 走行抵抗曲線を車速の関数として求めるために,最小4点の走行抵抗測定
点車速を選択する。測定点車速の最大値と最小値は,シャシダイナモメータ上で走行抵抗値を検証すると
きのすべての基準車速を内包するように選ぶ。測定点車速の間隔は,10 km/hとする。また,最低の測定
車速は,20 km/h以上とする。
4
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.2.3.1.2
車両の惰行 暖機走行後,必要に応じて車両を最も速い測定点車速で1分間運転する。その後,
測定開始車速(Vj+∆V)より5 km/h高い車速まで加速し,速やかに惰行を開始する。各測定点車速Vjに対応
させて,(Vj+∆V)から(Vj−∆V)までの経過時間を測定する。∆Vは基本的に5 km/hとするが,Vjが60 km/h
以上では10 km/hとしてもよい。惰行中の変速機はニュートラルとし,エンジンはアイドリング状態とす
る。手動変速機付き車両においては,クラッチはつないでおく。ステアリングホイールは極力操作せず,
また,ブレーキを踏んではならない。惰行開始時の車速,車両状態が同様であるように注意しつつ,往復
方向で惰行試験を繰り返す。惰行試験は,最高測定点から最低測定点まで中断なく行われることが望まし
いが,困難な場合には分割して行ってもよい。ただし,この場合は,分割点での車両状態は極力変化しな
いように注意する。
2.2.3.1.3
試験精度の検定 試験は往復3回以上行い,試験精度pが次の基準を満足するまで繰り返す。
3
100
j
≤
∆
×
=
T
n
ts
p
ここに,
p:試験精度 (%)
n:測定対の繰り返し回数
∆Tj:車速Vjにおける平均惰行時間であり,次の式で与えられる。
i
n
i
T
n
T
j
1
j
1∑
=
∆
=
∆
ここに,∆Tjiはj番目の測定点車速Vjにおけるi回目の惰行
時間対の調和平均であり,次の式で与えられる。
i
i
i
T
T
T
jb
ja
j
/1
/1
2
∆
+
∆
=
∆
ここに,∆Tjai及び∆Tjbiは車速Vjにおけるi回目の往復各方向
の惰行時間 (s)
s:次の式で与えられる標準偏差
∑
=
∆
−
∆
−
=
n
i
i
T
T
n
s
1
2
j
j
)
(
1
1
t:表1で与えられる係数
表 1 測定対の繰り返し回数nに対するt及び
n
t/
n
t
n
t/
3
4.3
2.48
4
3.2
1.60
5
2.8
1.25
6
2.6
1.06
7
2.5
0.94
8
2.4
0.85
9
2.3
0.77
10
2.3
0.73
11
2.2
0.66
12
2.2
0.64
13
2.2
0.61
14
2.2
0.59
15
2.2
0.57
5
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.2.3.1.4
走行抵抗の決定 車速Vjにおける走行抵抗は,次の式で求める。
(
)
j
r
j
2
6.3
1
T
V
m
m
F
∆
∆
×
×
+
×
−
=
ここに,
Fj: 走行抵抗 (N)
m: 試験時車両質量 (kg)
m: 車両の駆動系の回転部分相当慣性質量 (kg)
通常は,空車質量の3 %とする。
∆V: 惰行時間を測定する車速区間の半分 (km/h)
走行抵抗は,各測定点でのデータ対(Vj,Fj)を用いて次の2次式に回帰される。
2
2
1
0
V
f
V
f
f
F
+
+
=
ここに,
F:走行抵抗 (N)
f0:走行抵抗の定数項 (N)
f1:走行抵抗のVの1次項の係数 [N/(km/h)]
f1は,f1Vが各測定点車速でFの3 %未満であれば0として
もよい。この場合,係数f0,f2を再計算しなければならない。
f2:走行抵抗のVの2次項の係数 [N/(km/h)2]
V:車速 (km/h)
2.2.3.2
直接回帰法 測定開始点から終了点までの経過時間に対する車速のデータすべてを用いて一括
回帰する方法であり,次の手順によって走行抵抗曲線の式を求める。
車速を最小二乗法によって,次のようなtanの関数に回帰させる。
D
C
B
A
V
+
+
=
)
(
tan
t
求める走行抵抗曲線を,次の式で求める。
2
2
1
0
V
f
V
f
f
F
+
+
=
)
(
)
(
)
(
6.3
1
2
2
r
0
D
A
A
B
m
m
f
+
×
×
+
×
−
=
A
BD
m
m
f
×
×
+
×
=
2
)
(
6.3
1
r
1
A
B
m
m
f
×
+
×
−
=
)
(
6.3
1
r
2
参考 f0,f1及びf2がA,B及びDを用いて上の式の形に表される理由を,附属書3(参考)に示す。
2.2.4
ホイールトルクメータによる走行抵抗測定
2.2.4.1
測定機器の装着 ホイールトルクメータを車両の駆動輪に装着する。ホイールトルクメータは,
走行抵抗試験直前にゼロ調整及びスパン調整を行う。
2.2.4.2
測定点車速の選定 2.2.3.1.1に準じる。
2.2.4.3
試験 試験は,各測定点車速で安定した後に,車速及び各輪の走行負荷トルクを測定する。測定
は,5秒間以上継続して行う。データサンプリング周波数は,4 Hz以上が望ましい。試験中の平均車速に
対する許容車速幅は,表2による。
6
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表 2 許容車速幅
測定時間
s
許容車速幅
km/h
5以上10未満
±0.2
10以上15未満
±0.4
15以上20未満
±0.6
20以上25未満
±0.8
25以上30未満
±1.0
30以上
±1.2
2.2.4.4
平均車速及び平均走行負荷トルクの算出 平均車速及び平均走行負荷トルクは,次の式によって
求める。
∑
=
=
k
i
i
V
k
V
1
j
jm
1
∑
=
−
=
k
i
iC
C
k
C
1
js
j
jm
1
ここに,
Vjm:j番目の測定点における平均車速 (km/h)
k:データセット数
Vji:j番目の測定点車速におけるi回目の車速 (km/h)
Cjm:j番目の平均走行負荷トルク (N・m)
Cji:j番目の測定点車速におけるi回目の往復平均走行負荷トル
ク (N・m)
Cjs:車速のドリフトの補正項。Cjsは平均走行負荷トルクの±
5 %でなくてはならないが,αjが±0.005 m/s2の場合は,無
視してもよい。Cjsは,次の式で表される。
j
j
r
js
)
(
r
m
m
C
α
+
=
ここに,m:試験時車両質量 (kg)
mr:回転部分相当慣性質量 (kg)
通常は空車質量の3 %とする。
rj:j番目のタイヤ半径 (m)
次の式によって求める。
N
V
r
π
2
6.3
1
jm
j
×
=
ここに,N:駆動輪回転周波数 (s-1)
αj:平均加速度 (m/s2)。次の式によって求める。
∑
∑
∑
∑∑
=
=
=
=
=
−
−
×
=
k
i
k
i
i
i
k
i
k
i
k
i
i
i
i
i
t
t
k
V
t
V
t
k
1
1
2
2
1
1
1
j
j
j
)
(
6.3
1
α
ここに,ti:i回目のデータ測定時間 (s)
2.2.4.5
試験精度の検定 試験は往復各3回以上行い,試験精度pが次の基準を満足するまで繰り返す。
3
100
j
≤
×
=
C
k
ts
p
ここに,
P:試験精度 (%)
k:データセット数
j
C:車速Vjにおける平均走行負荷トルク。次の式によって求める。
7
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
∑
=
=
k
i
i
C
k
C
1
,
jm
j
1
ここに,Cjm,iは車速Vjにおけるi回目の往復各方向の平均走
行負荷トルク。次の式によって求める。
)
(
2
1
,
jmb
,
jma
,
jm
i
i
i
C
C
C
+
×
=
ここに,Cjma,i及びCjmb,iは車速Vjにおけるi回目の往復各方
向の走行負荷トルク (N・m)
s:次の式で与えられる標準偏差
(
)
∑
=
−
−
=
k
i
iC
C
k
s
1
2
j
,
jm
1
1
t:2.2.3.1.3の表1のnをkに置き換えて与えられる係数
2.2.4.6
測定平均車速の精度確認 繰り返しk回のそれぞれの往復平均車速Vjm,iと,k回すべての平均車
速
j
Vとの差は,±2 km/hでなければならない。
jV及びVjm,iは,次の式によって求める。
∑
=
=
k
i
i
V
k
V
1
,
jm
j
1
(
)
i
i
i
V
V
V
,
jmb
,
jma
,
jm
2
1
+
=
ここに,
j
V:k回の平均車速 (km/h)
Vjmb,i, Vjmb,i:車速Vjにおけるi回目の往復各方向の平均車速 (km/h)
2.2.4.7
走行抵抗の決定 往復走行のそれぞれに走行抵抗を車速の2次回帰式で表す。
2
a
2
a
1
a
0
a
V
c
V
c
c
C
+
+
=
2
b
2
b
1
b
0
b
V
c
V
c
c
C
+
+
=
ここに,
Ca,Cb:往復方向それぞれの走行負荷トルク (N・m)
c0a,c0b:往復方向それぞれの定数項 (N・m)
c1a,c1b:往復方向それぞれの1次項の係数 [N・m/(km/h)]
c2a,c2b:往復方向それぞれの2次項の係数 [N・m/(km/h)2]
V:車速 (km/h)
平均の走行抵抗は,次の式によって求める。
2
2
1
0
ave
V
c
V
c
c
C
+
+
=
ここに,
2
)
(
,
2
)
(
,
2
)
(
b
2
a
2
2
b
1
a
1
1
b
0
a
0
0
c
c
c
c
c
c
c
c
c
+
=
+
=
+
=
Cave:往復の平均走行抵抗 (N・m)
c0:往復の平均定数項 (N・m)
c1:往復の1次項の平均係数 [N・m/(km/h)]
c1は,c1Vが各測定点車速でCaveの3 %未満であれば0として
もよい。この場合,係数c0,c2を再計算しなければならない。
c2:往復の2次項の平均係数 [N・m/(km/h)2]
2.2.5
標準大気条件への補正
2.2.5.1
惰行法の場合 標準気温,大気圧及び無風状態への補正は,次の式によって行う。
2.2.5.1.1
一般的な補正法
2
2
2
0
1
1
0
)}
20
(
1{
}
)
{(
*
V
f
K
T
K
V
f
w
f
F
+
−
+
×
+
−
=
ここに,
F*:修正走行抵抗 (N)
f0:定数項 (N)
f1:1次項の係数 [N/(km/h)]
8
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
f2:2次項の係数 [N/(km/h)2]
w1:風補正値(N)。次の式によって求める。
w1=3.62×f2Vw2
ここに,Vwは試験路風速の絶対値の平均値 (m/s)
V:車速 (km/h)
T:試験路の平均気温 (℃)
K0:転がり抵抗の補正係数
K0=8.1×10-3 (℃-1)
K2:空気抵抗補正係数
P
T
K
100
293
273
2
×
+
=
ここに,Pは試験路の平均気圧 (kPa)
2.2.5.1.2
測定点車速幅が狭い場合の補正法 測定点車速幅が50 km/h以下の場合には,通常,次の補正
法による。
a) 2.2.3.1.4のFjデータによって,走行抵抗を次の2項2次式に回帰する。
2
2
0
V
'
f
'
f
'
F
+
=
b) 各項係数の大気補正値を求める。
)}
20
(
1{
)'
'
(
'
0
1
0
0
*
−
+
×
−
=
T
K
w
f
f
'
2
2
2
'*
f
K
f
=
ここに,
f0'*: 2項回帰式での定数項の標準大気補正値 (N)
f2'*: 2項回帰式での2次項の係数の標準大気補正値 [N/(km/h)2]
w1': 2項回帰式での風補正値(N)。次の式によって求める。
w1' =3.62×f2 'Vw2
c) 大気補正後の走行抵抗を,次の式によって求める。
2
2
2
1
0
0
)'
(
)'
(
'*
V
f
f
V
f
f
f
F
∆
+
+
+
∆
+
=
ここに,
F '*:修正走行抵抗 (N)
∆ f0':2項回帰式での定数項の補正による変化量 (N)
'
'*
'
0
0
0
f
f
f
−
=
∆
∆ f2':2項回帰式での2次項係数の補正による変化量
[N/(km/h)2]
'
'*
'
2
2
2
f
f
f
−
=
∆
f0,f1,f2:2.2.3.1.4で定義された走行抵抗の各項係数 (N),
[N/(km/h)],[N/(km/h)2]
2.2.5.2
ホイールトルク法の場合 標準気温,大気圧及び無風状態への補正を,次の式によって行う。
2.2.5.2.1
一般的な補正法
(
)
{
}{
(
)}
2
2
2
0
1
2
0
*
c
20
1
V
K
T
K
V
c
w
c
C
+
−
+
×
+
−
=
ここに,
C*: 修正走行負荷トルク (N・m)
c0: 定数項 (N・m)
c1: 1次項の係数 [N・m/(km/h)]
c2: 2次項の係数 [N・m/(km/h)2]
w2: 風補正値(N)は次の式によって求める。
w2=3.62×c2Vw2
9
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに,Vwは試験路風速の絶対値の平均値(m/s)
T: 試験路の平均気温 (℃)
K0: 転がり抵抗の補正係数
K0=8.1×10-3 (℃-1)
K2: 空気抵抗補正係数
P
T
K
100
293
273
2
×
+
=
ここに,Pは試験路の平均気圧 (kPa)
2.2.5.2.2
測定点車速幅が狭い場合の補正法 測定点車速幅が50 km/h以下の場合には,通常次の補正法
による。
a) 2.2.4.5のCjma,i,Cjmb,i及び2.2.4.6のVjma,i,Vjmb,iデータによって,走行負荷トルクを次の2項2次
式に回帰する。
2
a
2
a0
a
'
'
'
V
c
c
C
+
=
2
b
2
b
0
b
'
'
'
V
c
c
C
+
=
ここに,
Ca',Cb':2項回帰式での往復方向それぞれの走行負荷トルク
(N・m)
c0a',c0b':2項回帰式での往復方向それぞれの定数項 (N・m)
c2a',c2b':2項回帰式での往復方向それぞれの2次項の係数 [N・
m/(km/h)2]
平均の走行抵抗を,次の式によって求める。
2
2
0
ave
'
'
'
V
c
c
C
+
=
ここに,
Cave':2項回帰式での往復の平均走行抵抗 (N・m)
c0':2項回帰式での往復の平均定数項 (N・m)
2
)
(
b
0
a
0
a
0
′
+
′
=
′
c
c
c
c2':2項回帰式での往復の2次項の平均係数 [N・m/(km/h)2]
2
)
(
b
2
a2
2
′
+
′
=
′
c
c
c
b) 各項係数の大気補正値を求める。
)}
20
(
1{
)'
'
(
'
0
2
0
0
*
−
+
×
−
=
T
K
w
c
c
'
2
2
2
'*
c
K
c
=
ここに,
c0'*: 修正走行負荷トルク (N・m)
c2'*: 2項回帰式での2次項の係数の標準大気補正値 [N・m/(km/h)2]
w2': 2項回帰式での風補正値(N)。次の式によって求める。
w2' =3.62×c2'Vw2
c) 大気補正後の走行負荷トルクを,次の式によって求める。
2
2
2
1
0
0
)'
(
)'
(
'*
V
c
c
V
c
c
c
C
∆
+
+
+
∆
+
=
ここに,
C'*:2項回帰式での定数項の標準大気補正値 (N・m)
10
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
∆c0':2項回帰式での定数項の補正による変化量 (N・m)
'
'*
'
0
0
0
c
c
c
−
=
∆
∆c2':2項回帰式での2次項係数の補正による変化量 [N・
m/(km/h)2],
'
'*
'
2
2
2
c
c
c
−
=
∆
c0,c1,c2:2.2.4.7で定義された,走行抵抗の各項係数 (N・m),
[N・m/(km/h)],[N・m/(km/h)2]
2.3
ベンチ法による走行抵抗測定 車両を試験路で走行させることなく,試験室において空気抵抗及び
転がり抵抗を別々に測定し,その和を走行抵抗として決定する。
2.3.1
風洞による空気抵抗測定
2.3.1.1
風洞の要求諸元 風洞の諸元,試験法及び補正法は,実路相当の空気抵抗対応値(以下,SCdと
いう。)を得るのに十分なものでなければならない。
2.3.1.2
試験手順 車両の車高,ホイールアライメントなどを車両製造業者の指定する状態に調整し,空
気の流れが車両の走行方向軸と平行になるように,風洞内に適切に設置する。車両のエンジンフード,窓,
空調システム及び前照灯などのカバーは閉じる。空気の流れへの影響が最小になるように,車両を固定す
る。風洞に定められた試験手順によって送風し,SCdを測定する。試験時の風速は,140 km/hを推奨する
が,80 km/h以上であればよい。
連続する2回の測定で測定値の差が1 %を超えた場合,必要に応じて車両又は風洞の状態を点検・修正
した後,再び2回の測定を連続して行う。連続する2回の測定で,測定値の差が1 %以下となるまでこれ
を繰り返す。2回の測定値差が1 %以下になれば,それらの平均値を採用する。空気抵抗値は,次の式に
よって求める。
2
6.3
1
2
d
0
2
aero
V
SC
F
ρ
×
=
ここに,
Faero:空気抵抗値 (N)
ρ0:標準大気密度 (kg/m3)
S:前面投影面積 (m2)
Cd:空気抵抗係数
V:車速 (km/h)
なお,風洞で測定したSCdは,実路上でのSCdに適切に対応するように,必要に応じて補正を行う。
2.3.2
シャシダイナモメータによる転がり抵抗測定
2.3.2.1
シャシダイナモメータの要求諸元 転がり抵抗を測定するシャシダイナモメータは,シングルロ
ーラ式(四輪駆動の場合は,前後ともシングルローラ)で,かつ,ローラ直径は1.2 m以上でなければな
らない。また,ローラ表面は,平滑なものとする。冷却用の送風機は,開口部ノズル面積が0.4 m2以上で,
かつ,車速に対する風速の精度が±2 km/hのものでなければならない。
2.3.2.2
測定点車速の選定 2.2.3.1.1に準じる。
2.3.2.3
試験手順 試験手順は,次による。転がり抵抗は駆動輪,非駆動輪別々に測定するが,四輪シャ
シダイナモメータの場合には同時に測定してもよい。試験中は,送風機を作動させる。
a) 車両状態を,2.2.2.1.1に示すように調整する。
b) 試験室内温度を20 ℃に調整する。シャシダイナモメータを所定の方法によって暖機し,その後,
シャシダイナモメータの機械損失トルク(ローラ表面換算力)を測定する。
c) 非駆動輪をシャシダイナモメータ上に適切に設置する。非駆動輪をシャシダイナモメータ側から駆動
して,車両のフリクションが安定するまで(30分間程度)最も高い測定点車速において暖機し,暖機
+6
−2
11
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
終了後,速やかに転がり抵抗を測定する。
試験車速を順次に下げて,最低測定点車速まで各測定点車速での転がり抵抗を測定する。再び,車
速を最高測定点車速に上げて,2回目の測定を行う。連続する2回の測定で測定値の差が4 %を超え
た場合,必要に応じて車両又はシャシダイナモメータの状態を点検・修正した後,再び2回の測定を
連続して行う。連続した2回の測定で,すべての測定点車速において,測定値の差が4 %以下となる
までこれを繰り返す。2回の測定値の差が4 %以下になったとき,それらの平均値を採用する。
d) 駆動輪をシャシダイナモメータ上に適切に設置する。車両の変速機を適切なギヤ位置にし,自走によ
って車両のフリクションが安定するまで(30分間程度)最も高い測定点車速において暖機する。暖機
終了後,速やかに転がり抵抗を測定する。
なお,転がり抵抗測定中は,ギヤ位置はニュートラルとし,手動式変速機付き車両の場合にはクラ
ッチを継合させ,エンジンをアイドリング状態とする。
試験車速を順次下げて,最低測定点車速まで各測定点車速での転がり抵抗を測定する。再び,車速
を最高測定点車速に上げて,2回目の測定を行う。連続する2回の測定で測定値の差が4 %を超えた
場合,必要に応じて車両又はシャシダイナモメータの状態を点検・修正した後,再び2回の測定を連
続して行う。連続した2回の測定で,すべての測定点車速において,測定値の差が4 %以下となるま
でこれを繰り返す。2回の測定値差が4 %以下になったとき,それらの平均値を採用する。
e) シャシダイナモメータで測定した転がり抵抗値は,実路上での転がり抵抗値に適切に対応するように,
必要に応じて補正を行う。
参考 シャシダイナモメータで測定した転がり抵抗の実路相当値への補正法の例を附属書4(参考)
に示す。
2.3.2.4
試験結果 各測定点車速での転がり抵抗を,次の式によって求める。
)
(
j
lossr,
j
lossf,
j
r,
j
f,
j
t,
Rr
Rr
Rr
Rr
Rr
+
−
+
=
ここに,
Rrt, j:総転がり抵抗値 (N)
Rrf, j:シャシダイナモメータの損失を含む前輪の転がり抵抗値 (N)
Rrr, j:シャシダイナモメータの損失を含む後輪の転がり抵抗値 (N)
Rrlossf, j:シャシダイナモメータの前軸機械損失 (N)
Rrlossr, j:シャシダイナモメータの後軸機械損失 (N)
備考 表示トルクがシャシダイナモメータの機械損失を補正されている場合には,Rrlossf, j及びRrlossr, j
を0として計算する。
2.3.3
総走行抵抗の計算 ベンチ試験による各車速での総走行抵抗は,次の式によって求める。
jt,
2
j
d
0
2
j
2
6.3
1
Rr
V
SC
F
+
×
=
ρ
ここに,
Fj:総走行抵抗 (N)
ρ0:標準大気密度 (kg/m3)
S:前面投影面積 (m2)
Cd:空気抵抗係数
Vj:車速 (km/h)
走行抵抗曲線の式は,データ対(Vj,Fj)を用いて2次回帰によって求める。
2
2
1
0
V
f
V
f
f
F
+
+
=
12
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3. シャシダイナモメータの走行抵抗設定方法
3. あああ
3.1
要求測定精度の許容差 試験における測定精度は次のとおりとし,各試験項目を測定する機器は,
当該機器の製造業者の定める取扱要領に基づいて整備・校正されたものでなければならない。
a) ローラの速度 :±0.5 km/h又は±1 %のいずれか大きい値。
b) ローラ表面換算:±10 N又はフルスケールの±0.1 %のいずれか大きい値。
c) 時間(惰行時間):±20 ms又は±0.1 %のいずれか大きい値。
d) ホイールトルク:±3 N・m又は±0.5 %のいずれか大きい値。
e) 室温 :±1 ℃
f)
タイヤ空気圧 :±5 kPa
3.2
試験準備
3.2.1
設定パラメータ 次のパラメータを試験の前に決定しておく。
a) 目標走行抵抗
b) 基準車速
3.2.2
試験室の設定
3.2.2.1
ローラ シャシダイナモメータのローラ表面は清浄で乾燥しており,タイヤがスリップを起こさ
ない状態でなければならない。ツインローラタイプのシャシダイナモメータの場合,負荷設定時に2本の
ローラが連結状態か非連結状態かは,その後に実施する燃費試験の条件と同一でなければならない。また,
ローラ速度は負荷吸収装置に連結されているローラ側からとる。
3.2.2.2
室温 室温は,25±5 ℃とする。ただし,試験目的に応じ変更してもよい。
3.2.3
シャシダイナモメータの準備
3.2.3.1
等価慣性質量の設定 シャシダイナモメータの等価慣性質量は,試験車両質量と同等の値に設定
する。
参考 10・15モード試験の等価慣性質量の代表値を,附属書11(参考)付表4に示す。
3.2.3.2
シャシダイナモメータの暖機 シャシダイナモメータは,機械損失が安定するように製造業者の
推奨する方法,又はその他の適切な方法で暖機運転を行う。
3.2.4
車両の準備
3.2.4.1
タイヤ空気圧の調整 タイヤ空気圧は,製造業者の推奨する値に設定する。試験の安全上必要な
場合には,空気圧を最大50 %まで上げてもよい。
3.2.4.2
車両のセット 試験車両は,シャシダイナモメータのローラ上にまっすぐな位置で設置し,かつ,
安全に試験ができるように拘束する。シングルローラの場合,タイヤの接地点はローラの頂点から±25 mm,
又はローラ径の±2 %のいずれか小さい値とする。
3.2.4.3
車両の暖機 車両の暖機中に適切な負荷が試験車両に加えられるように,シャシダイナモメータ
の初期負荷を,3.3.1.1.1又は3.3.2.1.1で規定する方法で設定する。最も高い基準車速以下の車速で適切な
暖機走行を行う。通常は,代表的な車速において30分間程度走行する。
3.3
負荷の設定
3.3.1
惰行法による負荷設定 この方法は,2.2又は2.3に規定している惰行法又はベンチ法によって走
行抵抗を決定した場合に適用する。また,ホイールトルク法で求めた負荷に関して,附属書7(参考)に
示した手法によって置換された走行抵抗についても適用可能とする。
3.3.1.1
シャシダイナモメータの負荷設定
13
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.3.1.1.1
初期負荷設定 係数設定式シャシダイナモメータに対しては,次の式における任意の初期係数
Ad,Bd及びCdを用いて,シャシダイナモメータの負荷を設定する。
2
d
d
d
d
V
C
V
B
A
F
+
+
=
ここに,
Fd: シャシダイナモメータへの設定負荷 (N)
Ad: 初期負荷設定の定数項 (N)
Bd: 初期負荷設定の1次項の係数 [N/(km/h)]
Cd: 初期負荷設定の2次項の係数 [N/(km/h)2]
V: 車速 (km/h)
推奨する初期負荷設定係数をa)及びb)に示す。
a) シングルローラシャシダイナモメータの場合,Ad=0.5×At,Bd=0.2×Bt,Cd=Ct
ツインローラシャシダイナモメータの場合,Ad=0.1×At,Bd=0.2×Bt,Cd=Ct
ここに,At,Bt及びCtは,目標走行抵抗の係数。
b) 同様な型式の車両の負荷設定に使用された経験的なダイナモメータの負荷設定係数(係数設定式)又
は負荷設定値(多点設定式)。
3.3.1.1.2
惰行 2.2.3.1.2で規定する手順によって,惰行試験をシャシダイナモメータ上で実施する。
3.3.1.1.3
検証
3.3.1.1.3.1
目標走行抵抗の算出 それぞれの基準車速Vjに対する目標走行抵抗係数At,Bt及びCtを用い
て,次の式によって求める。
2
j
t
j
t
t
j
t,
V
C
V
B
A
F
+
+
=
ここに,
Ft, j:基準車速Vjにおける目標走行抵抗 (N)
At:目標走行抵抗の定数項 (N)
Bt:目標走行抵抗の1次項の係数 [N/(km/h)]
Ct:目標走行抵抗の2次項の係数 [N/(km/h)2]
Vj:j番目の基準車速 (km/h)
3.3.1.1.3.2
設定誤差の算出 次の式によって,それぞれの基準車速Vjにおける目標走行抵抗Ft,jに対し
て,附属書5(規定)の1.で規定している方法で走行抵抗Fs,jを計算し,誤差εjを求める。
100
jt,
jt,
j
s,
j
×
−
=
F
F
F
ε
ここに,
εj: 走行抵抗設定誤差 (%)
Fs, j: 回帰された走行抵抗。各基準車速における走行抵抗値を2次
回帰させた式に,基準車速を代入して得られた走行抵抗 (N)
Ft, j: 基準車速Vjにおける目標走行抵抗 (N)
備考 附属書5の1.a)で得られるFm,jを,上の式でFs,jの代わりに使うこともできる。
これらの誤差は,連続した2回の惰行試験において,すべての基準車速で,かつ,基準内でなければな
らない。この基準は,燃費試験法などで定められた基準か,基準がない場合には,次の設定誤差基準を用
いる。
Vj ≥ 50 km/h に対して,εj ≤ 3 %
20 km/h < Vj < 50 km/hに対して,εj ≤ 5 %
Vj ≤ 20 km/hに対して,εj ≤ 10 %
いずれかの基準車速において誤差が基準を満たさない場合には,シャシダイナモメータの設定負荷を調
整するため,3.3.1.1.4を行う。
14
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.3.1.1.4
負荷の調整 誤差を最小限に抑えるためにシャシダイナモメータへの設定負荷を調整する。そ
の後再び3.3.1.1.2及び3.3.1.1.3を繰り返す。附属書6(規定)の1.に調整手法の例を示す。
3.3.2
ホイールトルク法による負荷設定 この方法は,2.2.4で規定しているようなホイールトルク法を
利用して走行抵抗を決定する場合に適用する。
3.3.2.1
シャシダイナモメータの負荷設定
3.3.2.1.1
初期負荷設定 係数設定式シャシダイナモメータに対しては,次の式における任意の初期係数
Ad,Bd及びCdを用いて,シャシダイナモメータの負荷を調整する。
2
d
d
d
d
V
C
V
B
A
F
+
+
=
ここに,
Fd: シャシダイナモメータの設定負荷 (N)
Ad: 初期負荷設定の定数項 (N)
Bd: 初期負荷設定の1次項の係数 [N/(km/h)]
Cd: 初期負荷設定の2次項の係数 [N/(km/h)2]
V: 車速 (km/h)
推奨する初期負荷設定係数を,a)及びb)に示す。
a) シングルローラシャシダイナモメータの場合,
'
'
2.0
'
5.0
t
d
t
d
t
d
r
c
C
r
b
B
r
a
A
=
×
=
×
=
,
,
ツインローラシャシダイナモメータの場合,
'
'
2.0
'
1.0
t
d
t
d
t
d
r
c
C
r
b
B
r
a
A
=
×
=
×
=
,
,
ここに,
at:目標走行負荷トルクの定数項 (N・m)
bt:目標走行負荷トルクの1次項の係数 [N・m/(km/h)]
ct:目標走行負荷トルクの2次項の係数 [N・m/(km/h)2]
r':ローラ上での平均タイヤ半径 (m)
附属書5(規定)の2.a)のr'jの平均値。r'jの平均値を求めてい
ない場合には,2.2.4.4で求めたrjの平均値を用いる。
b) 同様な型式の車両の負荷設定に使用した経験的なダイナモメータの負荷設定係数(係数設定式)又は
負荷設定値(多点設定式)を設定する。
3.3.2.1.2
走行負荷トルクの測定 2.2.4.3及び2.2.4.4で規定している手順によって,走行負荷トルクをシ
ャシダイナモメータで測定する。ホイールトルクメータは,走行抵抗の決定のために路上試験で使用した
物と同一の物を用いる。
3.3.2.1.3
検証
3.3.2.1.3.1
目標走行負荷トルクの算出 それぞれの基準車速Vjに対する目標走行負荷トルク係数at,bt
及びctを用いて,次の式によって求める。
2
j
t
j
t
t
j
target,
V
c
V
b
a
C
+
+
=
ここに,
Ctarget, j: j番目の基準車速における目標走行負荷トルク (N・m)
at: 目標走行負荷トルクの定数項 (N・m)
bt: 目標走行負荷トルクの1次項の係数 [N・m/(km/h)]
ct: 目標走行負荷トルクの2次項の係数 [N・m/(km/h)2]
Vj: j番目の基準車速 (km/h)
3.3.2.1.3.2
設定誤差の算出 次の式によって,それぞれの基準車速Vjにおける目標走行負荷トルクCtarget,
jに対して,附属書5(規定)の2.で規定している方法で回帰走行負荷トルクCsim,jを算出し,誤差εjを求
める。
15
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
100
j
target,
j
target,
j
sim,
j
×
−
=
C
C
C
ε
ここに,
εj:測定走行負荷トルク誤差 (%)
Csim, j:回帰された走行負荷トルク。各基準車速における走行負荷
トルク値を2次回帰させた式に,基準車速を代入して得ら
れた走行負荷トルク (N・m)
これらの誤差が,連続した2回のトルク測定試験において,すべての基準車速で基準内でなければなら
ない。この基準は,次の設定誤差基準を用いる。ただし,設定誤差基準が限定されている場合には,その
基準とする。
Vj ≥ 50 km/hに対して,εj ≤ 3 %
20 km/h < Vj < 50 km/hに対して,εj ≤ 5 %
Vj ≤ 20 km/hに対して,εj ≤ 10 %
いずれかの基準車速において,誤差が基準を満たさない場合には,シャシダイナモメータの設定負荷を
調整するため,3.3.2.1.4を行う。
3.3.2.1.4
負荷の調整 誤差を最小限に抑えるためにシャシダイナモメータへの設定負荷を調整する。そ
の後,再び前項3.3.2.1.2及び3.3.2.1.3を繰り返す。附属書6(規定)の2.に調整手法の例を示す。
参考 ホイールトルク法によって設定された走行抵抗を惰行法による設定に置き換える方法を附属書
7(参考)に示す。
3.4
走行抵抗測定及び負荷設定の記録
3.4.1
惰行法による走行抵抗測定及び負荷設定の記録 2.2.3による走行抵抗測定及び3.3.1.1によるシャ
シダイナモメータへの負荷設定は,付表4の様式によって記録する。
3.4.2
ホイールトルク法による走行抵抗測定及び負荷設定の記録 2.2.4による走行抵抗測定及び3.3.2.1
によるシャシダイナモメータへの負荷設定は,付表5の様式によって記録する。
4. 燃費試験方法
4. あああ
4.1
試験準備
4.1.1
試験室の準備
a) 試験室内の温度は,25±5 ℃とする。ただし,試験目的に応じて変更してもよい。
b) カーボンバランス法による場合は,試験室内のCO,THC及びCO2の濃度が安定している状態で試験
を行う。
4.1.2
シャシダイナモメータの準備
4.1.2.1
等価慣性質量の設定 3.2.3.1で設定した等価慣性質量に設定する。
4.1.2.2
シャシダイナモメータの暖機 3.2.3.2に規定する方法で行う。
4.1.2.3
シャシダイナモメータの負荷設定 3.に規定する方法によって得られた負荷を設定する。
4.1.3
車両の準備
4.1.3.1
燃料 車両に使用する燃料は,次による。
a) ガソリン:JIS K 2202相当で,付表1に適合するもの。
b) 軽油 :JIS K 2204相当で,付表2に適合するもの。
16
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) LPガス :JIS K 2240相当で,付表3に適合し,かつ,プロパン+プロピレンが20〜30 mol%,ブタ
ン+ブチレンが70〜80 mol%の組成をもつもの。
4.1.3.2
タイヤ空気圧の調整 タイヤ空気圧は,3.2.4.1で設定した値とする。
4.1.3.3
車両のセット 3.2.4.2で示す方法で行う。
4.1.4
測定機器の精度及び校正 シャシダイナモメータ,排出ガス測定機器などの試験用機器は,当該機
器の製造業者の定める取扱要領に基づいて点検,整備及び校正したものとし,次の精度のものを使用する。
a) 温度計 :±1 ℃
b) 気圧計 :±0.3 kPa
c) 車速計 :±0.5 km/h又は±1 %のいずれか大きい値
d) 分析計の校正ガスを流したときの指示再現性 :±1 %(フルスケール)
e) 定容量採取装置(以下,CVS) :±2 %(測定流量)
f)
燃料流量計 :±1 %(測定燃料流量)
g) 走行距離計 :±1 %(測定走行距離)
h) 排気背圧計 :±10 Pa
4.2
車両及び燃費測定機器の接続方法
4.2.1
カーボンバランス法による場合 カーボンバランス法によって燃費の測定を行う場合には,車両の
排気管にJIS D 1030で規定するCVSの排出ガス採取部を次の要領によって接続する。
a) 接続は,排出ガスの採取及び分析に影響を及ぼすことのないように行う。
b) 接続部は,熱,振動などによって破損又は離脱しないように,かつ,排出ガスが漏れないように確実
に取り付ける。
c) 排気背圧を用いて制御する一酸化炭素などの発散防止装置を備えた車両にあっては,CVSを用いるこ
とがこの装置の作動に影響を及ぼすことのないように,脈動を緩和する対策など適切な措置をとって
もよい。この場合,車両が70±2 km/hの定速で走行している状態での排気管開口部における静圧と排
気管開口部にCVSの排出ガス採取部を接続したときの接続部における静圧との差は,±l00 Paとする。
4.2.2
流量測定法による場合 流量測定法によって燃費の測定を行う場合には,車両の燃料装置に燃料流
量計を次の要領によって取り付ける。
a) 接続は,燃料消費量の測定に影響を及ぼすことのないように行う。特に,燃料リターン回路などを備
えた車両では,その構造,機能などを損わないように配慮する。
b) 接続部は,振動などによって破損又は離脱することのないように,かつ,空気が混入しないように確
実に取り付ける。
参考 燃料流量計の取付要領について,附属書8(参考)に補足説明する。
4.3
試験方法
4.3.1
一般 試験は,シャシダイナモメータ上の車両を4.3.2による方法で運転し,4.3.3による方法で測
定する。試験走行中は,送風機などによって車速相当の風を車両の前面に送風する。
4.3.2
試験車両の運転方法 車両の運転方法は,試験の目的に応じた各種の運転方法による。
参考 10・15モードの場合の運転方法を附属書11(参考)に示す。
4.3.3
測定方法
4.3.3.1
カーボンバランス法による方法
a) 排出ガスの全量をCVSに導入し,排出ガス分析に必要な量(50〜100 L程度)をバッグに採取する。
さらに,軽油を燃料とするディーゼルエンジン車は,排出ガスと希釈空気が十分均一に混合した部位
17
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
で,かつ,熱交換器をもつCVSにあっては熱交換器の上流側からTHC分析用のガスを採取する。
b) 採取した排出ガスは,表3に示す各排出ガス成分に対応した分析計(JIS D 1030による。)によって分
析し,以下の計算式から排出量を算出する。
表 3 排出ガス成分及び分析計
排出ガス成分
分析計
CO,CO2
非分散型赤外線分析計(NDIR)
THC(ガソリン,LPガス)
水素炎イオン化形分析計(FID)
THC(軽油)
加熱式水素炎イオン化形分析計(HFID)
c) 排出ガス成分の排出量についての計算式
COの排出量 (g/km)
COmass=Vmix×COdens×COconc×10-6
THCの排出量 (g/km)
THCmass=Vmix×THCdens×THCconc×10-6
CO2の排出量 (g/km)
CO2mass=Vmix×CO2dens×CO2conc×10-2
1) COdens:気温293.15 K,大気圧101.325 kPaにおけるCO 1 L当たりのグラム数(1.16 g/L)。
2) COconc:COの正味濃度(vol ppm)
希釈された排出ガス中のCO濃度(vol ppm)から希釈空気中のCO濃度(vol ppm)を差し引いた値。
−
−
=
f
d
e
conc
1
1
CO
CO
CO
D
ここに,
COe: 希釈排出ガス中のCO濃度 (vol ppm)
COd: 希釈空気中のCO濃度 (vol ppm)
なお,水蒸気及びCO2などを除去する目的で吸着剤を使用
する場合は,COe及びCOdを次の式によって補正する。
COe=(1−0.01 925CO2e−0.000 232H)COem
ここに,CO2e:希釈排出ガス中のCO2濃度 (vol %)
H:希釈空気の相対湿度 (%)
COem:吸着剤を使用した場合の希釈排出ガス中の
CO2濃度 (vol ppm)
COd=(1−0.000 323H)COdm
ここに,COdm:吸着剤を使用した場合の希釈空気中のCO濃
度 (vol ppm)
Df: 希釈率(CVS内の水分凝縮などによって,8を下回らないこ
とが望ましい。)
4
e
e
2e
OCex
OCex
THCex
THCex
f
10
)
CO
THC
(
CO
100
4
4
2
1
100
−
×
+
+
−
×
+
+
+
=
R
R
R
R
D
ここに,ROCex:希釈空気中の酸素濃度(vol %)
(通常 20.9 %とする。)
RTHCex:排出ガス中のTHCの水素炭素原子数比を
RTHCexとした場合の293.15 K,101.325 kPaに
おけるTHC 1 L当たりの質量は,排出ガスの
成分分析などにより求めた数値がない場合
は,次に示す値を用いてもよい。
18
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ガソリン:1.85
軽油 :1.90
LPガス :2.64
3) THCdens:排出ガス中のTHC密度で,293.15 K,101.325 kPaのTHC 1L当たりのグラム数 (g/L)
15
.
293
15
.
273
4.
22
01
.
12
008
.1
THC
THCex
dens
×
+
×
=
R
4) THCconc:THC正味濃度(vol ppmC)
希釈された排出ガス中のTHC濃度(vol ppmC)から希釈空気中のTHC濃度(vol ppmC)を差し引いた
値を等価炭素濃度で表した値。その値は,プロパンの3倍に相当する。
)
1
1(
THC
THC
THC
f
d
e
conc
D
−
−
=
ここに,
THCe: 希釈排出ガス中のTHC濃度(vol ppmC)
ガソリン又はLPガスを燃料とする自動車の場合は,バッ
グの希釈排出ガスを,FID分析計によって算出する。
軽油を燃料とするディーゼル自動車の場合は,専用サン
プルラインからの希釈排出ガスを,HFID分析計記録の積分
値を用いて次の式によって求める。
0
THC
e
0
THC
e
e
−
=∫t
dt
C
t
ここに,∫e0
THC
tC
dt:テスト中(te−0)のHFID分析記録の積分
値(vol ppmC)
THCd: 希釈空気中のTHC濃度 (vol ppmC)
5) CO2dens:293.15 K,101.325 kPaにおける1 L当たりのグラム数 (1.83 g/L)
6) CO2conc:CO2の正味濃度(vol %)希釈された排出ガス中のCO2濃度(vol %)から希釈空気中のCO2濃
度(vol %)を差し引いた値。
)
1
1(
CO
CO
CO
f
2d
2e
2conc
D
−
−
=
ここに,
CO2e: 希釈排出ガス中のCO2濃度 (vol %)
CO2d: 希釈空気中のCO2濃度 (vol %)
7) Vmix:293.15 K,101.325 kPaにおける1 km走行当たりの希釈排出ガス量であり,次の7.1)又は7.2)
によって求めた値 (L/km)。
7.1) 正置換形ポンプ(PDP)式CVSによる場合
L
T
P
N
V
K
V
1
P
P
e
1
mix
×
×
×
×
=
1
293.15
2.893
101.325
K=
=
ここに,
K1:293.15 K,101.325 Paにおける絶対大気温度を大気圧で除した
値 (K/kPa)
Ve:正置換形ポンプ1回転当たりに吐き出される希釈排出ガスの全
量 (L/回転)。この量は,正置換形ポンプ前後の圧力差によって
変化する。
N:希釈排出ガスをバッグに採取している間の正置換形ポンプの
積算回転数
PP:正置換形ポンプ入口における希釈排出ガスの絶対圧。大気圧か
19
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ら正置換形ポンプに入る混合気の圧力降下を差し引いたもの
(kPa)
TP:正置換形ポンプ入口における希釈排出ガスの平均絶対温度 (K)
L:走行距離 (km)。原則として,実走行距離とする。ただし,走
行距離が規定されている場合は,その走行距離とする。例えば,
10・15モード走行の場合の走行距離は4.165 km。
7.2) 臨界流ベンチュリ(CFV)式CVSによる場合
L
V
V
1
s
mix
×
=
ここに,
Vs:293.15 K,101.325 kPaにおける1テスト当たりの希釈排出ガス
量 (L/テスト)で,次の式によって求める。
dt
t
T
t
P
K
V
t∫
=
e
0
v
v
2
s
)
(
)
(
ここに,K2:ベンチュリ校正係数で,次の式によって求める。
0
0
cal
2
P
T
Q
K
×
=
ここに,Qcal:293.15 K,101.325 kPaにおけるガス流量(ラミ
ナーフローメータなどを用いて実測した流量
を標準状態に換算した値) (L/s)で,次の式によ
って求める。
c
c
c
1
cal
T
P
Q
K
Q
×
=
893
2
325
101
15
293
1
.
.
.
K
=
=
ここに,K1:293.15 K,101.325 kPaにおける絶対大気温
度を大気圧で除した値 (K/kPa)
Qc:実測ガス流量 (L/s)
Tc:実測大気絶対温度 (K)
Pc:実測大気圧 (kPa)
T0:ベンチュリ入口の絶対温度 (K)
P0:ベンチュリ入口の絶対圧 (kPa)
te:1テスト当たりの所要時間 (s)
[原則として,実所要時間とする。ただし,
所要時間が規定されている場合はその所要
時間とする。例えば,10・15モード走行の場
合の所要時間は660s]
Pv(t):ベンチュリ入口における希釈排出ガスの絶対圧 (kPa)
Tv(t):ベンチュリ入口における希釈排出ガスの絶対温度 (K)
t:時間 (s)
L:走行距離 (km)[原則として,実走行距離とする。ただし,走行
距離が規定されている場合は,その走行距離とする。例えば,
10・15モード走行の場合の走行距離は4.165 km]
4.3.3.2
流量測定法による場合
a) 燃料消費量は,燃料タンクなどから車両の原動機に供給され,消費された燃料の流量を,燃料流量計
を用いて積算することによって測定する。それと同時に,測定所要時間及びシャシダイナモメータ回
転数から走行距離を求める。
b) 燃料消費量は,0.1 mLのけたまで測定する。
4.4
燃費の算出 燃費は,次のいずれかの方法によって算出する。
20
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.4.1
カーボンバランス法による場合 4.3.3.1によって求めた排出ガス成分の排出量を用いて,次の式に
よって求める。
2mass
2
CWFCO
mass
CWFTHC
mass
CWFCO
3
CWF
CO
THC
CO
10
×
+
×
+
×
×
×
=
R
R
R
R
D
Fe
ここに,
Fe: 燃費 (km/L)
D: 燃料の密度(15 ℃時) (kg/l)。JIS K 2249又はJIS K 2240
による。
RCWF: 燃料の炭素質量割合
01
.
12
00
.
16
008
.1
01
.
12
OCf
THCf
CWF
+
×
+
×
=
R
R
R
ここに,RTHCf:燃料の水素炭素原子数比。簡易算出法を
附属書9(規定)に示す。
ROCf:燃料の酸素炭素原子数比。簡易算出法を
附属書9(規定)に示す。
RCWFCO: 排出ガス中のCOの炭素質量割合
429
.0
)
O
(
)
C
(
)
C
(
r
r
r
CWFCO
=
+
=
A
A
A
R
ここに,Ar(C)=炭素の原子量[=12.01]
Ar(O)=酸素の原子量[=16.00]
RCWFTHC: 排出ガス中のHCの炭素質量割合
)
C
(
)
H
(
)
C
(
r
r
THCex
r
CWFTHC
A
A
R
A
R
+
×
=
ここに,Ar(H):水素の原子量[=1.008]
RTHCexとして3.3.1のc) 2)で示した代用値を用いた場合に
は,次の値となる。
ガソリン:0.866
軽油 :0.862
LPガス :0.819
2
CWFCO
R
: 排出ガス中のCO2の炭素質量割合
273
.0
2
)
O
(
)
C
(
)
C
(
r
r
r
CWFCO2
=
×
+
=
A
A
A
R
COmass: COの排出量 (g/km)
THCmass: THCの排出量 (g/km)
CO2mass: CO2の排出量 (g/km)
備考 燃費の算出方法は,米国,欧州などでは,計算式が異なる。その方法を参考として附属書10(参
考)に示す。
4.4.2
流量測定法による場合 4.3.3.2によって求めた燃料消費量を用いて,次の式によって求める。
Q
L
Fe=
ここに,
Fe:燃費 (km/L)
L:走行距離 (km)。原則として,実走行距離とする。ただし,
走行距離が規定されている場合は,その走行距離とする。
例えば,10・15モード走行の場合は4.165 km。
Q:燃料消費量 (L)
21
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付表 1 ガソリンの性状表(4.1.3.1参照)
燃料の性状又は物質名
仕様
試験方法
鉛
検出されない
JIS K 2255
硫黄分
0.01質量 %以下
JIS K 2541
ベンゼン
1質量 %以下
JIS K 2536
MTBE
7質量 %以下
JIS K 2536
メチルアルコール
検出されない
JIS K 2536
灯油
4質量 %以下
JIS K 2536
実在ガム
5 mg/100 ml以下
JIS K 2261
オクタン価
89以上
JIS K 2261(リサーチ法)
密度
0.783 g/cm3以下
JIS K 2249
蒸留性状
K(℃)
10 %
343 K(70 ℃)以下
JIS K 2254
50 %
348〜383 K(75〜110 ℃)
90 %
453 K(180 ℃)
終点
493 K(220 ℃)
蒸気圧
44〜78 kPa
JIS K 2258
付表 2 軽油の性状表(4.1.3.1参照)
燃料の性状又は物質名
仕様
試験方法
硫黄分
0.05質量%以下
JIS K 2541
セタン指数
45以上
JIS K 2280
90 %留出温度
623 K(350 ℃)以下
JIS K 2254
引火点
323 K(50 ℃)以上
JIS K 2265
動粘度
2.5 mm2/s以上
JIS K 2283
付表 3 LPガスの性状表(4.1.3.1参照)
燃料の性状又は物質名
仕様
試験方法
組成
エタン+エチレン
−
JIS K 2240
プロパン+プロピレン
50 mol %未満
ブタン+ブチレン
50 mol %以上〜90 mol %未満
ブタジエン
− (1)
硫黄分
0.02質量%以下
蒸気圧(40 ℃)
1.25 MPa以下
密度
0.500 g/cm3〜0.620 g/cm3
銅板腐食(40 ℃,1 h)
1以下
注(1) ブタジエン含有量は,使用目的に対して支障を与えるものであってはならない。
22
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
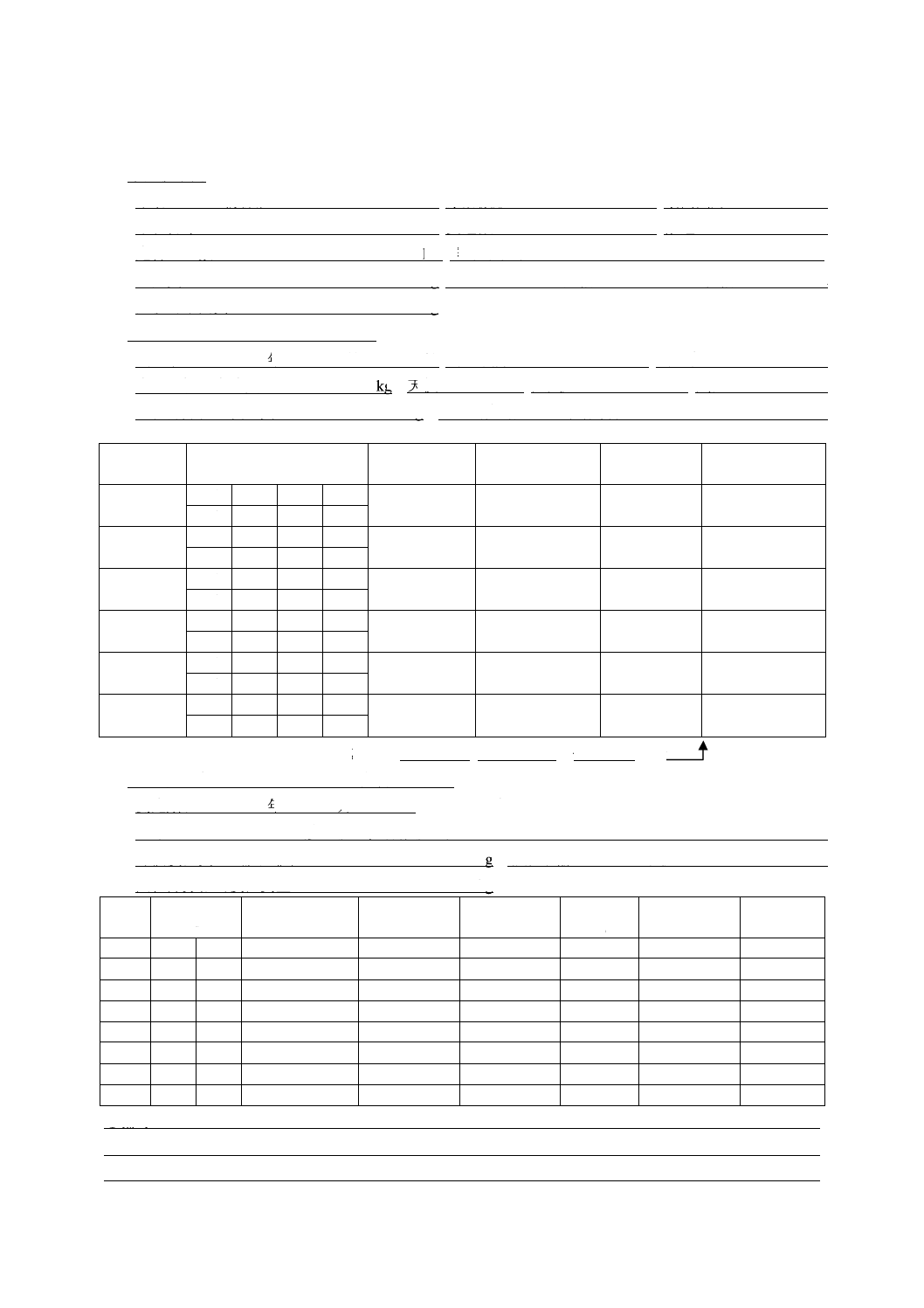
付表 4 走行抵抗測定記録及び負荷設定記録(惰行法)
◎試験車両
車名・型式(類別) 原動機形式 最高出力
車台番号 変速機 減速比
走行キロ数 km タイヤサイズ
車両質量 kg タイヤの空気圧 前輪 kPa 後輪 kPa
試験時車両質量 kg
◎試験路における走行抵抗測定記録
測定期日 年 月 日 測定場所 測定者
走行抵抗測定時質量 kg 天候 大気圧 kPa 気温 ℃
回転部分相当慣性質量 kg 風速(絶対風速/垂直成分) / m/s
指定車速
km/h
惰行時間
s
平均惰行時間
s
走行抵抗
N
目標走行抵抗
N
備考
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
回帰式 F0= + V+ V2
◎シャシダイナモメータにおける負荷設定記録
測定期日 年 月 日 測定場所
シャシダイナモメータ(多点設定,係数設定)
等価慣性質量(設定値) kg 駆動車輪のタイヤ空気圧 kPa
回転部分相当慣性質量 kg
車速
km/h
惰行時間
s
惰行時間の平均
s
設定走行抵抗
N
目標走行抵抗
N
設定誤差
%
ダイヤル目盛
備考
◎備考
23
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
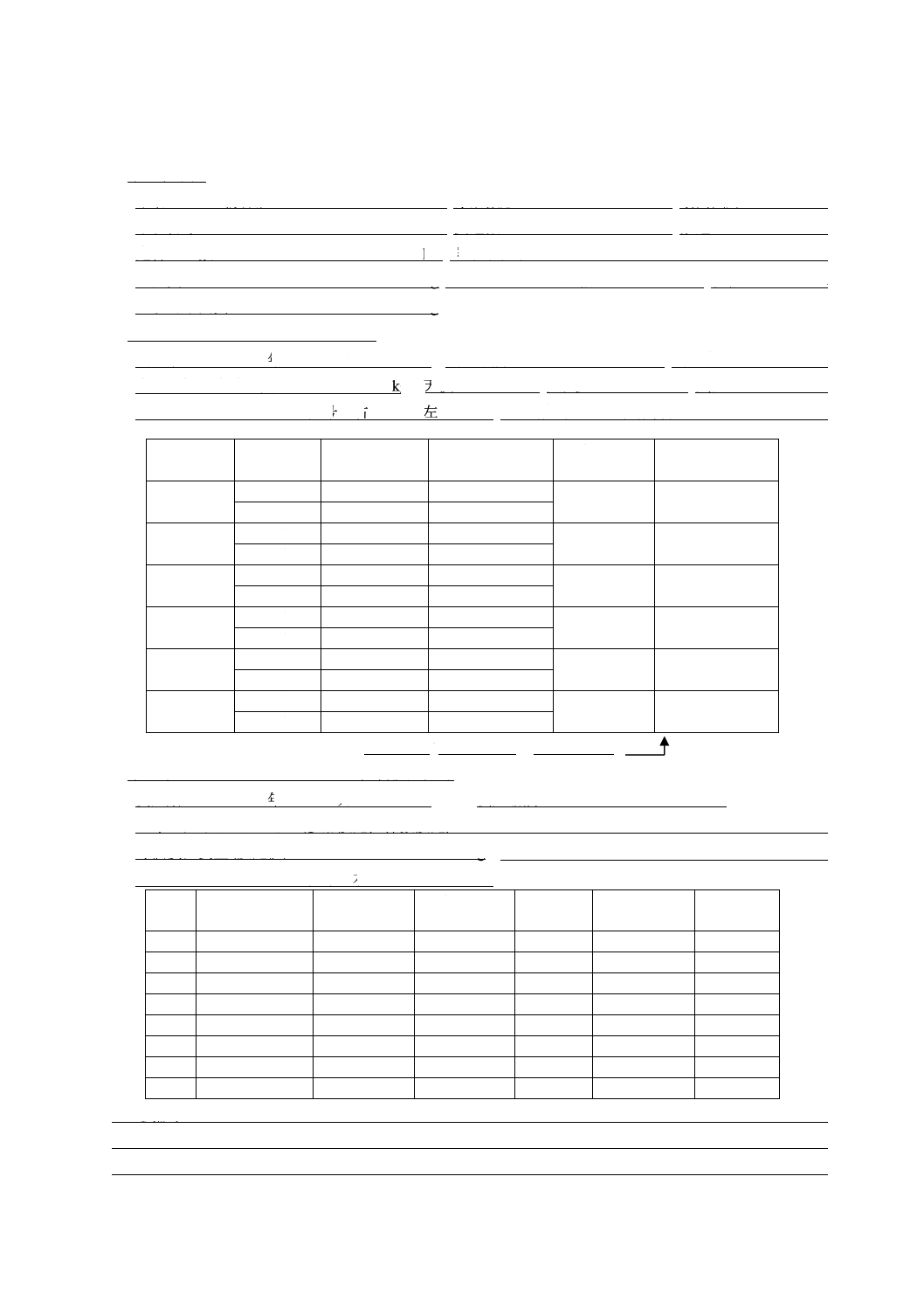
付表 5 走行抵抗測定記録及び負荷設定記録(ホイールトルク法)
◎試験車両
車名・型式(類別) 原動機形式 最高出力
車台番号 変速機 減速比
走行キロ数 km タイヤサイズ
車両質量 kg タイヤの空気圧 前輪 kPa 後輪 kPa
試験時車両質量 kg
◎試験路における走行抵抗測定記録
測定期日 年 月 日 測定場所 測定者
走行抵抗測定時の質量 kg 天候 大気圧 kPa 気温 ℃
ホイールトルクメータの番号 右 左 風速(絶対風速/垂直成分) / m/s
指定車速
km/h
走行方法
測定車速
km/h
走行トルク
N・m
目標トルク
N・m
備考
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
往路
復路
回帰式 T0= + V+ V2
◎シャシダイナモメータにおける負荷設定記録
測定期日 年 月 日 測定場所
シャシダイナモメータ(多点設定,係数設定)
等価慣性質量(設定値) kg 駆動車輪のタイヤ空気圧 kPa
ホイールトルクメータの番号 右 左
車速
km/h
基準実車速
km/h
設定トルク
N・m
目標トルク
N・m
設定誤差
%
ダイヤル目盛
備考
◎備考
25
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書1(参考)実路における燃費試験方法
この附属書は,本体1.に関連する事柄を参考として補足するもので,規定の一部ではない。
1. 実路での試験方法
1.1
一般 この試験方法は,ガソリン及び軽油を燃料とする自動車の,実路での一定車速燃費試験方法
について記載する。燃費の測定は,所定の車速で走行する車両の,所定の時間における燃料消費量を測定
し,燃料単位容積当たりの走行距離を求めることなどによって行う。
1.2
試験条件
1.2.1
試験車両 試験車両の状態は,JIS D 1010による。
1.2.2
試験路 試験路は,次の条件を満たすものが望ましい。
a) 様態は,直線,平たん,水平及び舗装状態でなければならない。
b) 測定路のこう配は,±0.5 %とする。
c) 試験路の全長は,安定した試験車速が得られる助走区間,燃費測定区間(以下,測定区間という。)及
び停止までの距離が確保できる長さとする。
d) c)のうち,測定区間は,燃費測定時の燃料消費量が10 ml以上となるような長さ,又は300 m程度以
上の長さをもつ直線路とする。
1.2.3
気象条件 標準状態とは,気温20 ℃,大気圧100 kPaを示す。また,実路試験時の気象条件とし
ては,次の条件が望ましい。
a) 気温 :5〜35 ℃
b) 大気圧 :91〜104 kPa
c) 大気密度:標準状態に対し,±7.5 %の範囲内
273
273
ρ
ρ
a
0
a
0
a
a
0
a
a
+
+
×
×
=
θ
θ
P
P
ここに,
ρa: 試験時の大気密度 (kg/m3)
ρa0: 標準大気密度[= 1.189](kg/m3)
Pa: 試験時の大気圧 (kPa)
Pa0: 標準大気圧[= 100](kPa)
θa: 試験時の気温 (℃)
θa0: 標準気温[= 20](℃)
d) 相対湿度:95 %以下
e)
風速 :試験路の走行方向に対する平行な成分の平均が3 m/s以下,及び垂直な成分の平均が2 m/s
以下
1.2.4
測定項目の精度 測定項目とその必要精度を次に示す。これらの測定に用いられる機器は,当該機
器の製造業者の定める取扱要領に基づいて点検・整備及び校正されたものとする。ただし,使用時には必
ず検査し,機能の良否・誤差などを確かめておく。
a) 距離 :±1 %(測定距離)
b) 時間 :±0.1 s
c) 車速 :±0.5 km/h
26
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d) 燃料流量 :±1 %(測定流量)
e) 気温 :±1 ℃
f)
大気圧 :±300 Pa
g) 風向 :±3°
h) 風速 :±1 m/s
1.3
試験自動車への燃料流量計などの接続方法 試験自動車への燃料流量計などの接続は,次によって
行う。
1.3.1
燃料流量計
a) 接続は,燃料消費量の測定に影響を及ぼすことのないように行う。特に,燃料リターン回路などを備
えた車両では,その構造・機能などを損なわないように燃料流量計を装着する。また,燃料温度の変
化を少なくするように配慮する。
b) 接続部は,振動などによって破損又は離脱することのないように,かつ,空気が混入しないように確
実に取り付ける。
1.3.2
車速計 車速計を取り付ける場合は,次の点に留意する。
a) 車速計の取付けは,精度が確保できるような方法で行う。
b) 試験車両の走行性能に影響を及ぼさないように取り付ける。
1.4
試験方法
1.4.1
一般 燃料消費量は,試験車両を1.4.2による方法で運転し,1.4.3による方法で測定する。
1.4.2
試験車両の運転方法 試験車両の走行パターンは定速走行とし,運転方法は次による。
a) 試験走行車速及び変速機の変速位置は,試験の目的に応じたものとする。
b) 試験路には,必要な距離ごとに標点を設けて測定区間とする。ただし,他の方法によって走行距離を
測定する場合はこの限りではない。
c) 試験走行は,試験車速に達するまで助走を行い,試験車速に達した後,測定が終了するまでその車速
を保持する。
d) 試験走行は,往路,復路それぞれ複数回行うのが望ましい。
1.4.3
燃料消費量の測定方法 試験車両が試験車速に達し安定した後,燃料流量計によって燃料消費量の
測定を行うと同時に,所要時間及び走行距離を測定する。
1.5
燃費の算出 1.4.3の測定値によって,次の式を用いて燃費を求める。
Q
L
Fe=
ここに,
Fe: 燃費 (km/L)
L: 測定区間の実距離 (km)
Q: 燃料消費量 (L)
1.6
試験成績 試験の測定記録及び成績は,附属書1付表1及び附属書1付表2によって記入する。
27
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
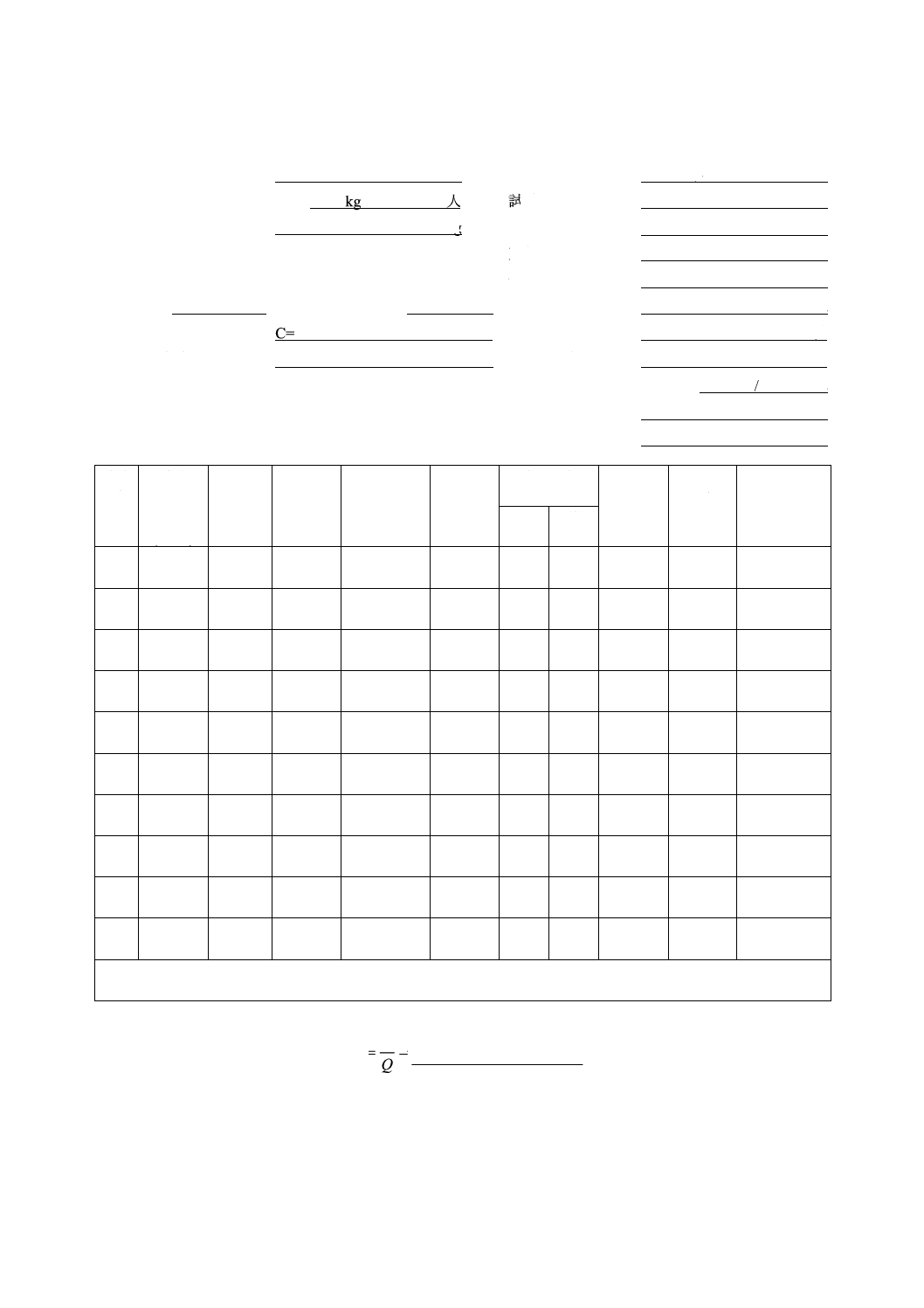
附属書1付表 1 実路での燃費試験測定記録
試験車両 試験期日 年 月 日
積載質量・乗車人員 kg 人 試験場所
試験車両総質量 kg 路面の状況 (種類・乾・湿)
使用燃料 天候
オクタン価,セタン価 気温 ℃
密度 又はセタン指数 大気圧 kPa
距離計補正率 C= 相対湿度 %
使用変速位置 風向・風速 m/s
風速(絶対風速/垂直成分) / m/s
測定者
運転者
試験
回数
試験
指定
車速
(km/h)
走行
向き
冷却液
温度
(℃)
燃料消費量
Q
(L)
所要
時間
(s)
路面標点
実距離
L
(km)
実車速
V
(km/h)
燃費
Fe
(km/L)
初
終
備考
算式
km/L
=
=QL
Fe
燃費
28
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
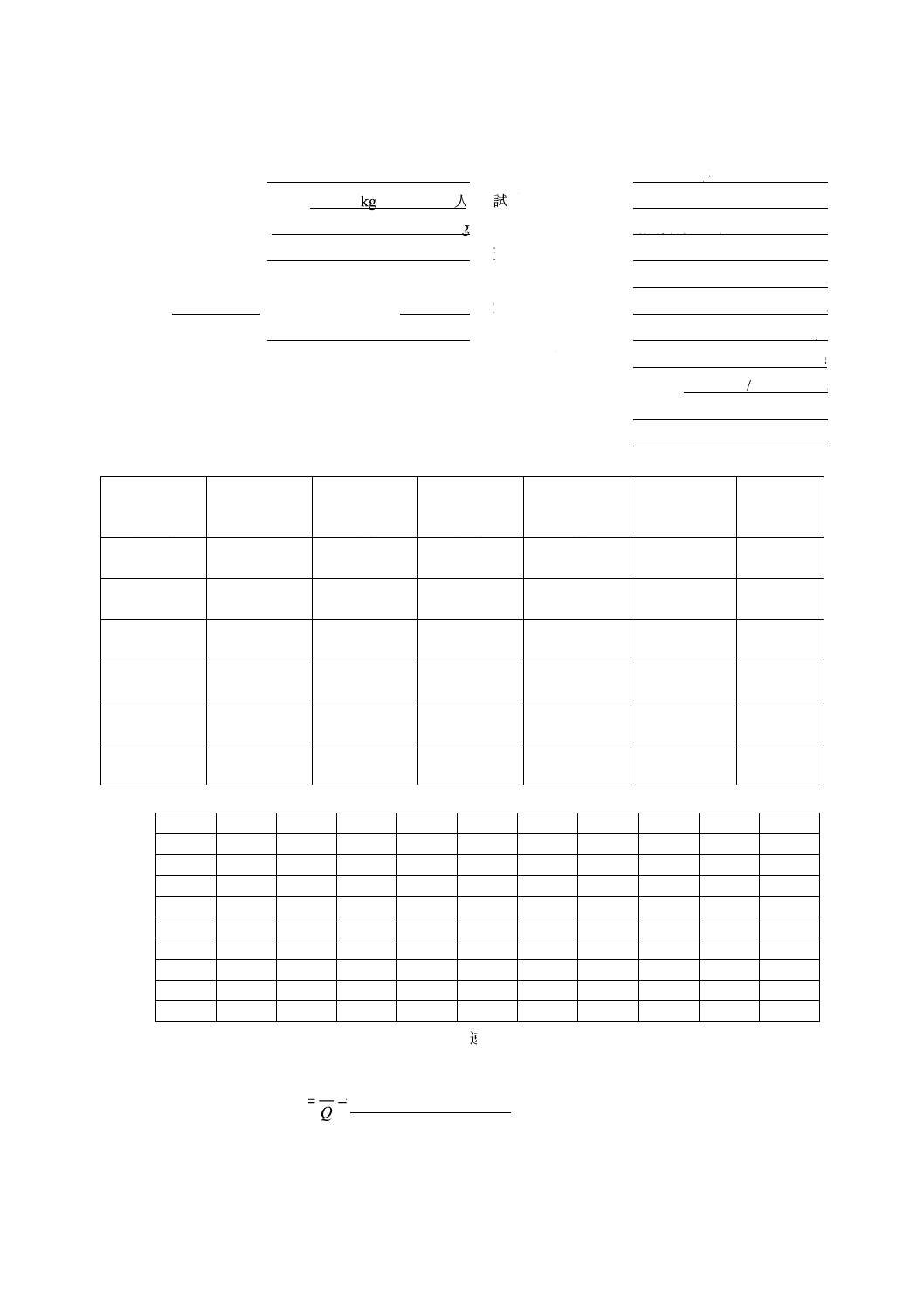
附属書1付表 2 実路での燃費試験成績
試験車両 試験期日 年 月 日
積載質量・乗車人員 kg 人 試験場所
試験車両総質量 kg 路面の状況 (種類・乾・湿)
使用燃料 天候
オクタン価,セタン価 気温 ℃
密度 又はセタン指数 大気圧 kPa
使用変速位置 相対湿度 %
風向・風速 m/s
風速(絶対風速/垂直成分) / m/s
測定者
運転者
試験指定車速
(km/h)
実車速
V
(km/h)
燃料消費量
Q
(L)
走行距離
L
(km)
所要時間
(s)
燃費
Fe
(km/L)
備考
燃費
km/L
実車速 km/h
算式 燃費
km/L
=
=QL
Fe
29
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2(参考)車載風向風速計方式の走行抵抗測定方法
この附属書は,本体2.2.3に関連する事柄を参考として説明するもので,規定の一部ではない。
本体2.2及び2.3による走行抵抗測定方法の代替法として,車両に搭載した風向風速計で測定された相対
風向及び相対風速を用いて惰行時間による走行抵抗を補正する方法が一部実用化されている。ここでは,
その基本的な概念を説明するにとどめる。
1. 試験時の風の条件 試験時の風速は,平均10 m/s以下(瞬間風速は14 m/s以下)とする。
2. 走行抵抗計算の原理 試験中に測定される総走行抵抗は,次の式で表す。
aero
roll
r)
(
6.3
1
F
F
dt
dV
m
m
+
=
×
+
×
−
2
mech
mech
mech
roll
V
c
V
b
a
F
+
+
=
)
(
2
1
4
4
3
3
2
2
1
0
2
r
aero
θ
θ
θ
θ
ρ
a
a
a
a
a
SV
F
+
+
+
+
×
−
=
ここに,
Froll:試験中に測定される転がり抵抗 (N)
Faero:試験中に測定される空気抵抗 (N)
m:試験時車両質量 (kg)
mr:車両の回転部分相当慣性質量(通常,空車質量×0.03とす
る。)(kg)
V:車速 (m/s)
Vr:相対風速 (m/s)
θ:相対風向 (°)
ρ:試験時の空気密度 (kg/m3)
S:前面投影面積 (m2)
惰行中にV,Vr及びθを測定し,重回帰分析などにより係数amech,bmech,cmech,ao,a1,a2,a3及びa4
を求める。
3. 標準大気条件への補正 求める空気抵抗は,進行方向に平行な成分だけのため,θの1次〜4次の項
は省略する。また,無風時には,VrはVと等しくなる。したがって,標準大気条件補正後の走行抵抗は,
次の式で表す。
備考 標準大気条件は,気温20 ℃,大気圧100 kPaとする。
2
2
0
0
2
mech
mech
mech
2
1
)}
20
(
1{
)
(
*
V
K
Sa
T
K
V
c
V
b
a
F
ρ
×
+
−
+
×
+
+
=
ここに,
K0: 転がり抵抗の温度補正係数 (0.008 1)
K2: 空気抵抗の温度補正係数 (T+273)×100/(293×P)
T: 試験時の気温 (℃)
P: 試験時の大気圧 (kPa)
30
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4. データ解析上の注意事項 この方法による試験及びデータ解析に際しては,車載風向風速計の検出値
のキャリブレーションのための収束計算,異常データを省くための相対風速及び相対風向のフィルタリン
グなどの技術が必要である。
31
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書3(参考)直接回帰法の計算式
この附属書は,本体2.2.3.2に関連する事柄を参考として説明するもので,規定の一部ではない。
本体に規定した直接回帰法の式を導いた手順を,参考として次に示す。
はじめに,走行抵抗を式(1)のように表す。これを変形して式(2)を得る。
2
2
1
0
e
6.3
1
V
f
V
f
f
dt
dV
m
+
+
=
−
···················································· (1)
dV
V
f
V
f
f
dt
m
2
2
1
0
e
1
6.3
+
+
=
−
···················································· (2)
ここに,
me:試験時車両質量と車両の回転部分相当慣性質量の和 (kg)
ここで,走行抵抗をtanの式に表すために,式(3)の式に変形する。
F
r
w
V
f
V
f
f
=
+
=
+
+
2
2
2
2
1
0
················································ (3)
ここに, w=pV+q
したがって,式(3)の右辺は,
2
2
2
2
2
2
2
r
q
pqV
V
p
r
w
+
+
×
+
=
+
よって,
2
2
1
0
2
2
,
2
,
f
p
f
pq
f
r
q
=
=
×
=
+
················································ (4)
式(4)より,p,q及びrをf0,f1及びf2を用いて表すと,
2
2
1
2
0
2
1
2
4
4
,
2
,
f
f
f
f
r
f
f
q
f
p
×
−
×
=
×
=
=
よって,
dV
f
dw
f
f
f
f
w
F
f
f
V
f
w
・
・
2
2
2
2
1
2
0
2
2
1
2
,
4
4
,
2
=
×
−
×
+
=
×
+
=
········ (5)
式(5)を式(2)に代入すると,
dw
f
f
f
f
w
f
dt
m
2
2
2
1
2
0
2
2
4
4
1
1
6.3
e
×
−
×
+
=
−
········································ (6)
式(6)の両辺を積分すると,
−
×
×
−
×
×
=
+
−
−
w
f
f
f
f
f
f
f
f
f
C
t
m
・
・
2
1
2
0
2
2
1
2
0
2
2
4
4
tan
4
4
1
6.3
1
1
e
−
×
+
×
−
×
×
=
−
2
1
1
2
0
1
2
2
1
2
0
2
2
4
2
tan
4
4
1
f
f
f
f
V
f
f
f
f
f
f
・
······································ (7)
32
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
式(7)を変形して,
2
1
2
1
2
0
2
2
1
2
0
2
C
t
2
4
6.3
tan
2
4
2
e
f
f
m
f
f
f
f
f
f
f
V
×
−
+
×
−
×
×
−
×
−
×
=
・
・
··················· (8)
式(8)を式(9)と置く。
D
C
B
A
V
+
+
=
)
(
tan
t
···························································· (9)
式(8)及び式(9)の対応よって,
2
1
2
1
2
0
2
2
1
2
0
2
,
2
4
6.3
,
2
4
e
f
f
D
m
f
f
f
B
f
f
f
f
A
×
−
=
×
−
×
×
−
=
×
−
×
=
したがって,係数f0 ,f1及びf2はA,B及びCを用いて,式(10)のように表すことができる。
A
B
m
f
A
BD
m
f
D
A
A
B
m
f
e
e
e
6.3
1
,
2
6.3
1
,)
(
6.3
1
2
1
2
2
0
−
=
×
=
+
−
=
··············· (10)
33
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書4(参考)シャシダイナモメータで測定した転がり抵抗の補正方法
この附属書は,本体2.3.2.3に関連する事柄を参考として説明するもので,規定の一部ではない。
1. 補正の目的 シャシダイナモメータ上で測定された転がり抵抗は,実路とは路面の曲率,表面粗さな
ど様々な条件による差が生じる。したがって,実路面を基準とした抵抗値を求めるために,シャシダイナ
モメータ上で測定された転がり抵抗を実路相当に補正する。
2. 補正の方法
2.1
第1例 この方法は,転がり抵抗からタイヤ転がり抵抗を分離し,タイヤ転がり抵抗分だけを実路
相当に補正するものである。また,この方法は,転がり抵抗補正係数を二つの試験条件における路上での
転がり抵抗の変化量とシャシダイナモメータ上でのタイヤ転がり抵抗の変化量の割合として定義する。
なお,二つの試験条件とは,タイヤ転がり抵抗だけが変化する条件(例えば,タイヤ空気圧,又はウェ
イトなどによって車軸荷重を変えるなどの条件)でなければならない。
2.1.1
転がり抵抗項の表記 路上で測定した走行抵抗を,次のような車速の2次式で表す。
2
2
1
0
V
f
V
f
f
F
+
+
=
ここに,
F: 走行抵抗 (N)
f0: 走行抵抗の定数項 (N)
f1: 走行抵抗の1次項の係数 [N/(km/h)]
f2: 走行抵抗の2次項の係数 [N/(km/h)2]
V: 車速 (km/h)
このうち,定数項と1次項を転がり抵抗とみなす。すなわち,
j
1
0
j
roll,
V
f
f
F
+
=
ここに,
Froll, j:車速Vjでの路上での転がり抵抗 (N)
Vj:j番目の車速 (km/h)
一方,シャシダイナモメータ上での転がり抵抗は,次の式から計算される。
j
rm,
j
fm,
j
rt,
j
ft,
j,3
jt,
)
(
*
Rr
Rr
Rr
Rr
K
Rr
+
+
+
×
=
j
rm,
j
fm,
j
lossr,
j
lossf,
j
rm,
j
fm,
j
r,
j
ft,
j
3,
)}
(
{
Rr
Rr
Rr
Rr
Rr
Rr
Rr
Rr
K
+
+
+
−
−
−
+
×
=
ここに,
Rrt, j*:シャシダイナモメータ上での総転がり抵抗 (N)
K3, j:転がり抵抗補正係数
Rrft, j:前軸タイヤ転がり抵抗 (N)
Rrrt, j:後軸タイヤ転がり抵抗 (N)
Rrfm, j:前軸駆動系機械損失 (N)
Rrrm, j:後軸駆動系機械損失 (N)
Rrlossf, j:シャシダイナモメータの前軸の機械損失 (N)
Rrlossr, j:シャシダイナモメータの後軸の機械損失 (N)
Rrf, j:シャシダイナモメータの機械損失を含む前軸総転がり抵抗
(N)
ここに,
j
loss,
j
fm,
j
ft,
jf,
Rr
Rr
Rr
Rr
+
+
=
34
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Rrr, j:シャシダイナモメータの機械損失を含む後軸総転がり抵抗
(N)
ここに,
j
loss,
j
rm,
j
rt,
j
r,
Rr
Rr
Rr
Rr
+
+
=
2.1.2
路上での転がり抵抗の測定 タイヤ転がり抵抗が変化する二つの試験条件(条件1及び条件2)で
走行抵抗試験を行い,走行抵抗の2次回帰式から車速Vjにおける各条件での転がり抵抗を,次のように表
す。
j
11
01
j
roll1,
V
f
f
F
+
=
j
12
02
j
roll2,
V
f
f
F
+
=
ここに,
Froll1, j: 条件1における路上での転がり抵抗 (N)
f01: 条件1における転がり抵抗定数項 (N)
f11: 条件1における転がり抵抗1次項係数 [N/(km/h)]
Froll2, j: 条件2における路上での転がり抵抗 (N)
f02: 条件2における転がり抵抗定数項 [N/(km/h)]
f12: 条件2における転がり抵抗1次項係数 (N)
2.1.3
シャシダイナモメータ上でのタイヤ転がり抵抗の分離測定 条件1及び条件2について,a)〜i)の
手順で車両の前軸及び後軸の転がり抵抗を測定し,部位ごとの抵抗に分離する。
a) 車両の前輪をシャシダイナモメータ上にセットし,前軸総転がり抵抗(Rrf1,j及びRrf2,j)を測定する。
b) ホイールとドライブシャフト又はアクスルシャフトとの間の結合を外し,シャシダイナモメータ機械
損失を含む前軸タイヤ転がり抵抗(Rrft1,j+Rrloss,j及びRrft2,j+Rrloss,j)を測定する。
c) 手順a)とb)の差から,Rrfm1,j及びRrfm2,jを計算する。
d) 車両をシャシダイナモメータから降ろして,シャシダイナモメータの機械損失Rrloss,jを測定する。
e) 手順a),c)及びd)の測定値からRrft1,j及びRrft2,jを計算する。
f)
車両の後輪をシャシダイナモメータ上にセットし,後軸総転がり抵抗(Rrr1,j及びRrr2,j)を測定する。
g) ホイールとドライブシャフト又はアクスルシャフトとの間の結合を外し,シャシダイナモメータ機械
損失を含む後軸タイヤ転がり抵抗(Rrrt1,j+Rrloss,j及びRrrt2,j+Rrloss,j)を測定する。
h) 手順f)とg)との差から,Rrrm1,j及びRrrm2,jを計算する。
i)
手順f),h)及びd)の測定値からRrrt1,j及びRrrt2,jを計算する。
2.1.4
補正係数の計算 補正係数を,次の式によって計算する。
)
(
)
(
j
rt2,
j
ft2,
j
rt1,
j
ft1,
j
roll2,
j
roll1,
j,3
Rr
Rr
Rr
Rr
F
F
K
+
−
+
−
=
備考 四輪駆動車用シャシダイナモメータを用いる場合,前軸及び後軸の抵抗を同時に測定してもよ
い。
2.2
第2例 この方法は,簡便法として転がり抵抗からタイヤ転がり抵抗を分離せず,シャシダイナモ
メータ上で測定した総転がり抵抗をまとめて実路相当に補正するものである。
2.2.1
転がり抵抗項の表記 路上で測定した走行抵抗は,次のような車速の2次式で表す。
2
2
1
0
V
f
V
f
f
F
+
+
=
ここに,
F:走行抵抗 (N)
f0:走行抵抗の定数項 (N)
f1:走行抵抗の1次項の係数 [N/(km/h)]
F2:走行抵抗の2次項の係数 [N/(km/h)2]
V:車速 (km/h)
35
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
j
1
0
j
roll,
V
f
f
F
+
=
ここに,
Froll, j:車速Vjでの路上での転がり抵抗 (N)
Vj:j番目の車速 (km/h)
一方,シャシダイナモメータ上での転がり抵抗は,次の式で表す。
)}
(
{
j
lossr,
j
lossf,
j
r,
j
f,
j,4
j
t,
*
Rr
Rr
Rr
Rr
K
Rr
+
−
+
×
=
ここに,
Rrt, j*: シャシダイナモメータ上での総転がり抵抗 (N)
K4, j: 転がり抵抗補正係数
Rrf, j: シャシダイナモメータの機械損失を含む前輪転がり抵抗 (N)
Rrrt, j: シャシダイナモメータの機械損失を含む後輪転がり抵抗 (N)
Rrlossf, j: シャシダイナモメータの前軸の機械損失 (N)
Rrlossr, j: シャシダイナモメータの後軸の機械損失 (N)
2.2.2
シャシダイナモメータ上での転がり抵抗の測定
a) 車両の前輪をシャシダイナモメータ上にセットし,転がり抵抗Rrf,j+Rrlossf,jを測定する。
b) 車両の後輪をシャシダイナモメータ上にセットし,転がり抵抗Rrr,j+Rrlossr,jを測定する。
c) 車両をシャシダイナモメータから降ろして,シャシダイナモメータの機械損失Rrlossf,j+Rrlossr,jを測定
する。
d) 手順a)〜c)から,Rrf,j+Rrr,j - (Rrlossf,j+Rrlossr,j)を計算する。
2.2.3
補正係数の計算
jt,
j
roll,
Rr
F
=
したがって,
)}
(
{
)
(
j
lossr,
j
lossf,
j
r,
j
f,
j
1
0
j,4
Rr
Rr
Rr
Rr
V
f
f
K
+
−
+
+
=
2.3
第3例 この方法は,風洞で測定した空気抵抗の実路相当補正法が既知であることを前提として用
いるものである。
2.3.1
転がり抵抗項の表記 路上での転がり抵抗は,次の式で表される。
j
aero
2
2
1
0
j
roll,
)
(
F
V
f
V
f
f
F
−
+
+
=
2
d
0
aero
aero
)21(
V
SC
K
F
ρ
×
×
=
ここに,
Froll, j:路上での転がり抵抗 (N)
V:車速 (km/h)
Faero:風洞で測定された空気抵抗の実路相当補正 (N)
Kaero:風洞で測定された空気抵抗の実路相当補正係数
ρ0:標準大気密度 (kg/m3)
S:前面投影面積 (m2)
Cd:空気抵抗係数
一方,シャシダイナモメータ上での転がり抵抗は,次の式から計算される。
36
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
)}
(
{
j
lossr,
j
lossf,
j
r,
j
f,
j,5
jt,
*
Rr
Rr
Rr
Rr
K
Rr
+
−
+
×
=
ここに,
Rrt, j*: シャシダイナモメータ上での補正後の総転がり抵抗 (N)
K5, j: 転がり抵抗補正係数
2.3.2
シャシダイナモメータ上での転がり抵抗の測定 第2例の2.2.2に準じる。
2.3.3
補正係数の計算
jt,
j
roll,
Rr
F
=
したがって,
)}
(
{
)
(
j
lossr,
j
lossf,
j
r,
j
f,
j
aero
2
2
1
0
j,5
Rr
Rr
Rr
Rr
F
V
f
V
f
f
K
+
−
+
−
+
+
=
37
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書5(規定)シャシダイナモメータ試験における走行抵抗の計算方法
この附属書は,本体3.3.1.1.3.2及び3.3.2.1.3.2に関連する事柄を補足するもので,規定の一部である。
1. 惰行法による走行抵抗の計算方法 惰行法によって走行抵抗を測定する場合,それぞれの基準車速Vj
に対する走行抵抗Fs,jを,次のように計算する。
a) 測定した惰行時間から走行抵抗を,次の式によって計算する。
j
r
d
j
m,
2
)'
(
6.3
1
T
V
m
m
F
∆
∆
×
×
+
×
−
=
ここに, Fm ,j:基準車速Vjにおける,測定した走行抵抗 (N)
md:シャシダイナモメータの等価慣性質量 (kg)
mr':動力計上での惰行中に車輪とともに回転する駆動輪群や車両
部品の相当慣性質量 (kg)。mr 'は,適切な手法によって測定又
は算出することができる。通常は,二輪駆動シャシダイナモ
メータでの試験の場合は空車質量の1.5 %とし,四輪駆動シ
ャシダイナモメータでの試験の場合は空車質量の3 %とし
て,mr 'を見積る。
∆Tj:車速Vjに対応する惰行時間 (s)
b) 次の近似式の係数As,Bs及びCsを,算出したFm,jを用いて最小二乗法によって計算する。
2
s
s
s
s
V
C
V
B
A
F
+
+
=
c) それぞれの基準車速Vjに対する回帰された走行抵抗Fs,jを,算出したAs,Bs及びCsを用いて次の式
によって求める。
2
j
s
j
s
s
j
s,
V
C
V
B
A
F
+
+
=
2. ホイールトルク法による走行抵抗の計算方法 本体2.2.4で規定したようなホイールトルク法で走行
抵抗を測定する場合,それぞれの基準車速Vjに対する走行抵抗Fs,jは,次のように計算する。
a) それぞれの基準車速Vjに対する平均車速Vjm及び平均走行負荷トルクCjmを,次の式によって計算す
る。
∑
=
=
k
i
i
V
k
V
1
j
jm
1
及び,
js
1
j
jm
1
C
C
k
C
k
i
i−
=∑
=
ここに,
Vji:車速Vjにおけるi回目のデータセットの車速 (km/h)
k:データセット数
Cji:車速Vjにおけるi回目のデータセットのトルク (N・m)
Cjs:車速のずれに対する補正項 (N・m)で,次の式で与えられる。
Cjsは補正前の平均トルクの5 %を超えてはないが,αjが±
0.005 m/s2以内の場合は無視してもよい。
j
j
r
d
js
'
)'
(
r
m
m
C
α
+
=
38
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに,
md:附属書5の1.で定義された試験車両の質量(kg)
mr':附属書5の1.で定義された試験車両の回転部分
相当慣性質量 (kg)
r'j:次の公式で得られるタイヤ半径 (m)
N
V
r
π
2
6.3
1
'
jm
j
×
=
ここに,
N:駆動輪の回転周波数 (s-1)
αj:平均加速度 (m/s2)で,次の式によって算出する。
∑
∑
∑
∑∑
=
=
=
=
=
−
−
×
=
k
i
k
i
i
i
k
i
k
i
k
i
i
i
i
i
t
t
k
V
t
V
t
k
1
2
1
2
1
1
1
j
j
j
6.3
1
α
ここに,
ti:i回目のデータセットサンプリング時間 (s)
b) 次の近似式の係数as,bs及びcsを,算出したVjm及びCjm用いて最小二乗法によって計算する。
2
s
s
s
sim
V
c
V
b
a
C
+
+
=
c) それぞれの基準車速Vjに対する回帰された走行負荷トルクを,算出したas,bs及びcsを用いて次の式
によって求める。
2
j
s
j
s
s
j
sim,
V
c
V
b
a
C
+
+
=
39
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書6(規定)シャシダイナモメータの設定負荷調整方法
この附属書は,本体3.3.1.1.4及び3.3.2.1.4に関連する事柄を補足するもので,規定の一部である。
1. 惰行法によるシャシダイナモメータの設定負荷の調整方法 シャシダイナモメータにおける負荷設
定が惰行法によって実施される場合,シャシダイナモメータの設定負荷は,次の式を用いて調整する。
j
adj,
j
d,
j
d,
F
F
F
−
=
j
t
j
s
j
d
F
F
F
,
,
,
+
−
=
(
)(
)(
)
2
j
t
j
t
t
2
j
s
j
s
s
2
j
d
j
d
d
V
C
V
B
A
V
C
V
B
A
V
C
V
B
A
+
+
+
+
+
−
+
+
=
(
)(
)
(
)
2
j
s
t
d
j
s
t
d
s
t
d
V
C
C
C
V
B
B
B
A
A
A
−
+
+
−
+
−
+
+
=
したがって,
m
t
d
d
A
A
A
A
−
+
=
m
t
d
d
B
B
B
B
−
+
=
m
t
d
d
C
C
C
C
−
+
=
ここに,
*
j
d,
F:更新後のシャシダイナモメータ設定負荷 (N)
Fd, j:初期のシャシダイナモメータ設定負荷 (N)
Fad, j:調整設定負荷 (N)
Fs, j:初期設定負荷の条件で回帰された走行抵抗 (N)
Ft, j:目標走行抵抗 (N)
*d
A,*dB,
*
d
C: 更新後のシャシダイナモメータ設定係数
2. ホイールトルク法によるシャシダイナモメータの設定負荷の調整方法 シャシダイナモメータにお
ける負荷設定がホイールトルク法によって実施される場合,シャシダイナモメータの設定負荷は,次の式
を用いて調整する。
'
j
adj,
j
d,
*
j
d,
r
C
F
F
−
=
'
j
target,
j
sim,
j
d,
r
C
C
F
−
−
=
(
)(
)(
)
r
V
c
V
b
a
V
c
V
b
a
V
C
V
B
A
′
+
+
+
+
+
−
+
+
=
2
j
t
j
t
t
2
j
s
j
s
s
2
j
d
j
d
d
2
j
s
t
d
j
s
t
d
s
t
d
'
'
'
V
r
c
c
C
V
r
b
b
B
r
a
a
A
−
+
+
−
+
+
−
+
=
したがって,
'
s
t
d
*
d
r
a
a
A
A
−
+
=
'
s
t
d
*
d
r
b
b
B
B
−
+
=
'
s
t
d
*
d
r
c
c
C
C
−
+
=
40
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに,
*
j
d,
F:更新後のシャシダイナモメータ設定負荷 (N)
Cadj, j:調整設定負荷トルク (N・m)
*
d
A,
*d
B,
*
d
C:更新後のシャシダイナモメータ設定係数
r':ローラ上での平均タイヤ半径 (m)
附属書5の2.a)のr'jの平均値。
41
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書7(参考)ホイールトルク法から惰行法への目標走行抵抗置換方法
この附属書は,本体3.3.1に及び3.3.2.1.4に関連する事項を参考として説明するもので,規定の一部では
ない。
序文 この附属書は,ホイールトルク法で求めた目標負荷トルクをシャシダイナモメータで再現させた後
に,同等の走行抵抗を惰行法によって設定する場合の目標走行抵抗の求め方について記載するものである。
1. 試験準備 本体3.2.2,3.2.3及び3.2.4の手順によって,試験室,シャシダイナモメータ及び車両の準
備を行う。
2. 惰行試験 附属書6で示すFd*を設定負荷とし,本体2.2.3.1.2で規定されている手順によって,惰行
試験をシャシダイナモメータ上で実施する。
3. 目標走行抵抗の決定 附属書5の1.a)及びb)の手順によって,惰行法によって測定された走行抵抗か
ら2次回帰式の各係数を求める。
これらの係数を用いて表される走行抵抗を,惰行法によって走行抵抗を設定する場合の目標走行抵抗と
する。
備考 この方法による設定走行抵抗には,ホイールトルクメータの精度による誤差,及びシャシダイ
ナモメータへの負荷の再現時の誤差が,目標走行抵抗に誤差として含まれることを考慮する必
要がある。
42
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書8(参考)燃料流量計取付要領
この附属書は,本体4.2.2に関連する事項を参考として説明するもので,規定の一部ではない。
序文 この参考は,燃料流量計を車両に取り付ける際に注意すべき事柄を記述するものである。
1. 燃料流量計取付の要領及び注意点 燃料流量計を車両に取り付ける際の要領及び注意すべき事項は,
次による。
a) ガソリンキャブレタ装着車及びディーゼルエンジン車のリターン燃料は,流量計の下流で燃料ポンプ
の上流のフィードパイプに戻す。
b) ガソリン燃料噴射装置装着車の燃料リターンはインジェクタの下流で密閉し,流量計の上流にプレッ
シャレギュレータを取り付け,リターン燃料を燃料タンクに戻す。
c) 通路抵抗の大きな流量計を使用した場合,燃料圧力が低下し十分な燃料流量が得られないことがある。
流量測定時は流量計直後の燃料圧力を測定し,異常な圧力となる場合は補助の燃料ポンプ装着などの
検討が必要である。
d) 質量流量の測定が必要な場合は,流量計入口の燃料温度を測定し,質量流量を計算から求める。
e) 燃料ホース,パイプなどの締め付けは確実に行う。流量計は十分な耐圧性をもったものを使用する。
43
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書9(規定)ガソリン及び軽油の水素炭素原子数比及び
酸素炭素原子数比の簡易算出方法
序文 この附属書は,本体4.4.1に関連する事柄を補足するもので,規定の一部である。
カーボンバランス法によって燃費の測定及び算出を行う場合の,使用燃料の性状表の特性値から水素炭
素原子数比及び酸素炭素原子数比を簡易に算出する方法について規定する。
水素炭素原子数比及び酸素炭素原子数比の簡易算出法は,次の式による。
)
100
100
1(
008
.1
100
01
.
12
OX
H
H
HCf
R
R
R
R
−
−
×
×
=
······················································ (1)
)
100
100
1(
00
.
16
100
01
.
12
OX
H
OX
OCf
R
R
R
R
−
−
×
×
=
······················································ (2)
ここに, RHCf:燃料の水素炭素原子数比
ROCf:燃料の酸素炭素原子数比
RH:燃料中の水素の質量割合 (質量%)
+
+
−
+
−
+
=
θ
θ
θ
m
m
m
H
174
006
.0
953
.1
75
014
.0
974
.7
382
.
10
86
015
.0
193
.9
A
A
D
A
R
ここに,
3
)
(
90
50
10
θ
θ
θ
θ
+
+
=
ここに,θ10:燃料の10 %留出温度 (℃)
θ50:燃料の50 %留出温度 (℃)
θ90:燃料の90 %留出温度 (℃)
Am:MTBE(Methyl Tertiary Butyl Ether)混合燃料中の芳香族の
体積割合 (vol %)
もし,燃料性状表に記載された芳香族の体積割合が,
MTBEを除いた燃料中の芳香族の体積割合となっている
場合には,次の式によってAmを求める。
f
m
m
)
1(
A
B
A
×
−
=
ここに,Bm:MTBE混合燃料中のMTBEの体積割合 (vol %)
Af:MTBEを除いた燃料中の芳香族の体積割合
(vol %)
D:燃料の密度(15 ℃時) (kg/L)
ROX:燃料中の酸素の質量割合 (質量%)
m
OX
15
.
18
B
R
×
=
44
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書10(参考)米国及び欧州の燃費算出方法
この附属書は,本体3.4.1に関連する事柄を補足するもので,規定の一部ではない。
序文 この附属書は,カーボンバランス法による米国及び欧州の燃費を測定及び算出する方法について記
載する。
1. 米国FTP(CFR §600.113-88)の場合
a) ガソリンの場合
]
471
5
)
NHV
6.0
[(
)]
CO
273
.0(
)
CO
429
.0(
)
THC
CWF
[(
CWF
10
174
5
2
4
+
×
×
×
×
+
×
+
×
×
×
×
=
SG
SG
FC
]
C
/
H
[
12
12
CWF
+
=
ここに,
FC:燃費 (mile/gallon)
CO:COの排出量 (g/mile)
THC:THCの排出量 (g/mile)
CO2:CO2の排出量 (g/mile)
SG:燃料の比重
NHV:燃料の低発熱量 (BTU/lb)
[H/C]:燃料の水素炭素原子数比
したがって,分母の第1項は,燃料密度及び燃料の水素炭素原子数比を考慮したカーボンバランス
法である。第2項は,燃料の低発熱量を考慮した補正項であり,発熱量の60 %を反映させていると
いえる。
そこで,1 (gallon)=3.785 (L),1 (mile)=1.609 (km)であるので,FEを求める式に変形すると,
785
.3
609
.1
×
=FC
FE
ここに,
FE: 燃費 (km/L)
b) ディーゼルの場合
2
CO
273
.0
CO
429
.0
THC
866
.0
778
2
×
+
×
+
×
=
FC
ここに,
FC:燃費 (mile/gallon)
CO:CO の排出量 (g/mile)
THC:THC の排出量 (g/mile)
CO2:CO2 の排出量 (g/mile)
したがって,ディーゼルでは,燃料の密度による補正などは行っていない。
2. 欧州(80/1268/EEC)の場合
a) ガソリンの場合
45
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
)
CO
273
.0
CO
429
.0
THC
866
.0(
4
115
.0
2
×
+
×
+
×
×
=
D
F
b) ディーゼルの場合
)
CO
273
.0
CO
429
.0
THC
866
.0(
5
115
.0
2
×
+
×
+
×
×
=
D
F
ここに,
FC:燃費 (L/100 km)
CO:COの排出量 (g/km)
THC:THCの排出量 (g/km)
CO2:CO2の排出量 (g/km)
D:燃料の密度(15 ℃時) (kg/L)
したがって,燃料の密度だけの補正を行っていることになる。
また,ディーゼルにおいても,同様に燃料の密度だけの補正を行っていることになる。
しかしながら,試験燃料として水素炭素原子数比をガソリンは1.85,軽油は1.86の固定値を使用してお
り,その値が算出式に反映されているので,水素炭素原子数比も一部補正しているともいえる。
そこで,ガソリンの燃費FEを (km/L)の単位で表すと,
F
FE
100
=
ここに,
FE:燃費 (km/L)
46
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書11(参考)日本の10・15モード走行方法
序文 この附属書は,本体4.3.2に関連する事柄を補足するもので,規定の一部ではない。
この附属書は,シャシダイナモメータを用いた,日本の10・15モード走行の運転方法を示す。
1. 運転方法の概要 車両は,シャシダイナモメータ上で60±2 km/hの定速で15分間程度暖機した後,
冷却液及び潤滑油の温度測定を行い,更に,5分間程度運転した後,直ちにこの附属書11付表2に掲げる
15モードを1回運転し,引き続きアイドリング運転を24秒行った後,附属書11付表1に掲げる10モー
ドを3回運転し,附属書11付表2に掲げる15モードを1回運転する。そのうち,最初の15モード1回を
除き,アイドリング24秒間,10モード3回及び15モード1回を運転する間における燃費を測定する。
なお,附属書11付表1及び附属書11付表2に掲げる各運転モードの加速度が得られない車両にあって
は,当該運転モードだけアクセルペダル全開による加速度で運転する。
2. 運転車速及び許容誤差 車両の運転車速及び時間の許容誤差については,附属書11付表1及び附属書
11付表2に掲げる運転状態のあらゆる場合で,車速は±2 km/h,時間は±1秒間とする。
なお,アクセルペダルを全開にして附属書11付表1及び附属書11付表2に掲げる加速度が得られない
車両にあっては,この限りではない。
3. 変速方法 附属書11付表1及び附属書11付表2に掲げるそれぞれの運転状態における変速操作は,
円滑,かつ,迅速に行うほか,次による。
3.1
手動変速機の場合 手動変速機(又は動力伝達系統にトルクコンバータをもたず,かつ,変速段の切
換えを手動で行う変速機)を備えた車両の場合
a) アイドリング運転は,変速機の変速位置を中立とし,アクセルペダルは操作していない状態とする。
b) アイドリング運転モードから加速運転モードに移るときは,その5秒前に変速位置を1st(附属書11
付表1及び附属書11付表2に掲げる変速位置を読み替えて適用する車両にあっては,それぞれの変速
位置)とする。
c) 減速運転においては,附属書11付表1に掲げる20→0 km/hに至る運転の際には途中の10 km/hで,
40→0 km/hに至る運転の際には途中の20 km/hにおいてそれぞれクラッチを断つ。附属書11付表2に
おける0→70 km/hの運転の際には,途中の30 km/hにおいてクラッチを断つ。
d) 5段又は6段変速機を備えた車両であって,変速機の1stを通常使用しないものにあっては,2ndから
発進することができる。この場合,5段変速車は,附属書11付表1及び附属書11付表2に掲げる変
速位置について当該変速機の2ndを1stに,3rdを2ndに,4thを3rdに,5thを4thにそれぞれ読み替
えて附属書11付表1及び附属書11付表2に掲げる4段変速機の例によって運転し,また,6段変速
車は附属書11付表1及び附属書11付表2に掲げる変速位置について当該変速機の2ndを1stに,3rd
を2ndに,4thを3rdに,5thを4thに,6thを5thにそれぞれ読み替えて附属書11付表1及び附属書
11付表2に掲げる5段変速機の例によって運転する。
e) 車両の運転中に当該車両の原動機の回転速度が当該車両の最高出力の回転速度を超えることとなった
場合は,その際に使用していた変速段よりも1段上位の変速段を使用することができる。この場合,
47
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
変速操作を行う車速は,当該車両の最高出力時の回転速度に対応する車速とする。
3.2
自動変速機の場合 自動変速機(変速段の切換えが自動的に行われる変速機)を備えた車両の場合
変速位置をドライブ位置とし,変速操作は行わない。
3.3
その他の変速機の場合 そのほかの変速機を備えた車両の場合,当該車両の走行特性を考慮して定
められた変速操作による。
3.4
試験成績の記録 燃費試験成績は附属書11付表3の様式によって記録する。
3.5
等価慣性質量 シャシダイナモメータの等価慣性質量の代表値を附属書11付表4に示す。
附属書11付表 1 10モード走行パターン
運転
モード
運転
状態
車速
(km/h)
運転時間
(s)
累積時間
(s)
標準変速位置
加速度
又は
減速度
m/s2
3段変速機 (3+OD)変速機 4段変速機 5段変速機 6段変速機
1
アイドリング 20
20
−
−
−
−
−
−
2
加速
0-20
7
27
(0-20)
1st
←
(0-15)1st
(15-20)2nd
←
←
0.78
3
定速
20
15
42
2nd
←
←
←
←
−
4
減速
20-0
7
49
2nd
←
←
←
←
0.78
5
アイドリング 16
65
−
−
−
−
−
−
6
加速
0-40
14
79
(0-20)1st
(20-40)2nd
←
(0-15)1st
(15-30)2nd
(30-40)3rd
←
←
0.78
7
定速
40
15
94
3rd
←
4th
←
←
−
8
減速
40-20 10
104
3rd
←
4th
←
←
0.59
9
定速
20
2
106
3rd-2nd
←
4th-3rd
←
←
−
加速
20-40 12
118
2nd
←
3rd
←
←
0.49
10
減速
40-20 10
128
3rd
←
4th
←
←
0.59
20-0
7
135
3rd
←
4th
←
←
0.78
備考 標準変速位置の括弧内の数字は,それぞれの変速位置に対応する車速を示す。
加速度又は減速度は,参考値とする。
0
10
20
30
40
速
度
(k
m
/h
)
経過時間(s)
0
2027
42
49
65
79
94104106118128135
車
速
(km/h)
48
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書11付表 2 15モード走行パターン
運転
モード
運転
状態
車速
(km/h)
運転時間
(s)
累積時間
(s)
標 準 変 速 位 置
加速度
又は
減速度
m/s2
3段変速機 (3+OD)変速機 4段変速機 5段変速機 6段変速機
1
アイドリング 65
65
−
−
−
−
−
−
2
加速
0-50
18
83
(0-20)1st
(20-40)2nd
(40-50)3rd
←
(0-15)1st
(15-35)2nd
(35-50)3rd
←
←
0.78
3
定速
50
12
95
3rd
←
4th
←
←
−
4
減速
50-40 4
99
3rd
←
4th
←
←
0.69
5
定速
40
4
103
3rd
←
3rd
←
←
−
6
加速
40-60 16
119
3rd
←
3rd
←
(40-50)3rd
(50-60)4th
0.39
7
定速
60
10
129
3rd
←
4th
←
5th
−
8
加速
60-70 11
140
3rd
←
4th
←
5th
0.29
9
定速
70
10
150
3rd
OD
4th
5th
6th
−
10
減速
70-50 10
160
3rd
OD
4th
5th
6th
0.59
11
定速
50
4
164
3rd
←
4th
←
5th
−
12
加速
50-70 22
186
3rd
←
4th
←
←
0.29
13
定速
70
5
191
3rd
OD
4th
5th
6th
−
14
減速
70-30 20
211
3rd
OD
4th
5th
6th
0.59
30- 0
10
211
−
−
−
−
−
0.88
15
アイドリング 10
231
−
−
−
−
−
−
備考 標準変速位置の括弧内の数字は,それぞれの変速位置に対応する車速を示す。
加速度又は減速度は,参考値とする。
119
0
10
20
30
40
50
60
70
速
度
(k
m
/h
)
経過時間(s)
65
83
9599103
129
140
150160164
186191
211
221
231
111
車
速
(km/h)
49
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書11付表 3 10・15モード燃費試験成績
試験期日 試験場所 試験担当者
◎試験車両
車名・型式(類別) 原動機型式 最高出力
車台番号 用途 サイクル 気筒 総排気量 L
走行距離 km 変速機 減速比
車両質量 kg 使用燃料 密度 (温度 ℃)
等価慣性質量(設定値) kg 水素炭素比 酸素炭素比
◎試験機器
シャシダイナモメータ(多点設定,係数設定)
送風機(車速比例型 )
◎燃料消費測定機器
排出ガス分析計
CVS(PDP,CFV) (採取量 m3/min)
燃料流量測定器
◎試験成績
運転開始時刻 時 分 冷却水温度 ℃ 潤滑油温度 ℃
試験室内乾球温度 ℃〜 ℃ 希釈率(Df)
試験室内湿球温度 ℃〜 ℃ 希釈排出ガス量(Vmix) L/km
試験室内相対湿度 % 排気管開口部静圧差 Pa(70 km/h)
試験室内大気圧 kPa
排出ガス成分
希釈排出ガス濃度
A
希釈空気濃度
B
A−{B×(1−1/Df)}
排出量
CO
ppm
ppm
ppm
g/km
HC
ppmC
ppmC
ppmC
g/km
CO2
%
%
%
g/km
燃料消費量(流量測定法) L
燃費(カーボンバランス法) km/L 燃費(流量測定法) km/L
◎備考
50
D 1012:2005
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書11付表 4 等価慣性質量(3.2.3.1 参照)
車両質量
kg
等価慣性質量の代表値
kg
〜 562
500
563〜 687
625
688〜 812
750
813〜 937
875
938〜1 125
1 000
1 126〜1 375
1 250
1 376〜1 625
1 500
1 626〜1 875
1 750
1 876〜2 125
2 000
2 126〜2 375
2 250
2 376〜2 625
2 500
2 626〜2 875
2 750
2 876〜3 250
3 000
以下500 kgとび
以下500 kgとび