D 0808:2015 (ISO 22839:2013)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 2
4 記号及び略語 ··················································································································· 6
5 分類······························································································································· 7
5.1 カーブ曲率半径特性によるシステム分類············································································· 7
5.2 制御機能による分類 ······································································································· 8
6 仕様及び要求事項 ············································································································· 9
6.1 最小性能要件 ················································································································ 9
6.2 作動モデル−状態遷移図 ································································································· 9
6.3 性能要件 ····················································································································· 11
7 確認方法························································································································ 18
7.1 試験目標物の仕様 ········································································································· 18
7.2 環境条件 ····················································································································· 19
7.3 検知範囲の試験方法 ······································································································ 19
7.4 システム性能についての試験方法····················································································· 20
7.5 目標識別能力についての試験方法····················································································· 21
附属書A(参考)基礎的考察 ································································································· 24
D 0808:2015 (ISO 22839:2013)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,公益社団法人自動車技術会(JSAE)及び一
般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,
日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 0808:2015
(ISO 22839:2013)
高度道路交通システム−
前方車両衝突軽減システム−
操作,性能及び検証要求事項
Intelligent transport systems-
Forward vehicle collision mitigation systems-
Operation, performance, and verification requirements
序文
この規格は,2013年に第1版として発行されたISO 22839を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
前方車両衝突軽減システム(FVCMS)は,回避が不可能な前方車両との衝突の被害を軽減させ,前方車
両との衝突の可能性を低下させることができる。FVCMSは,前方車両までの距離,前方車両の挙動,当
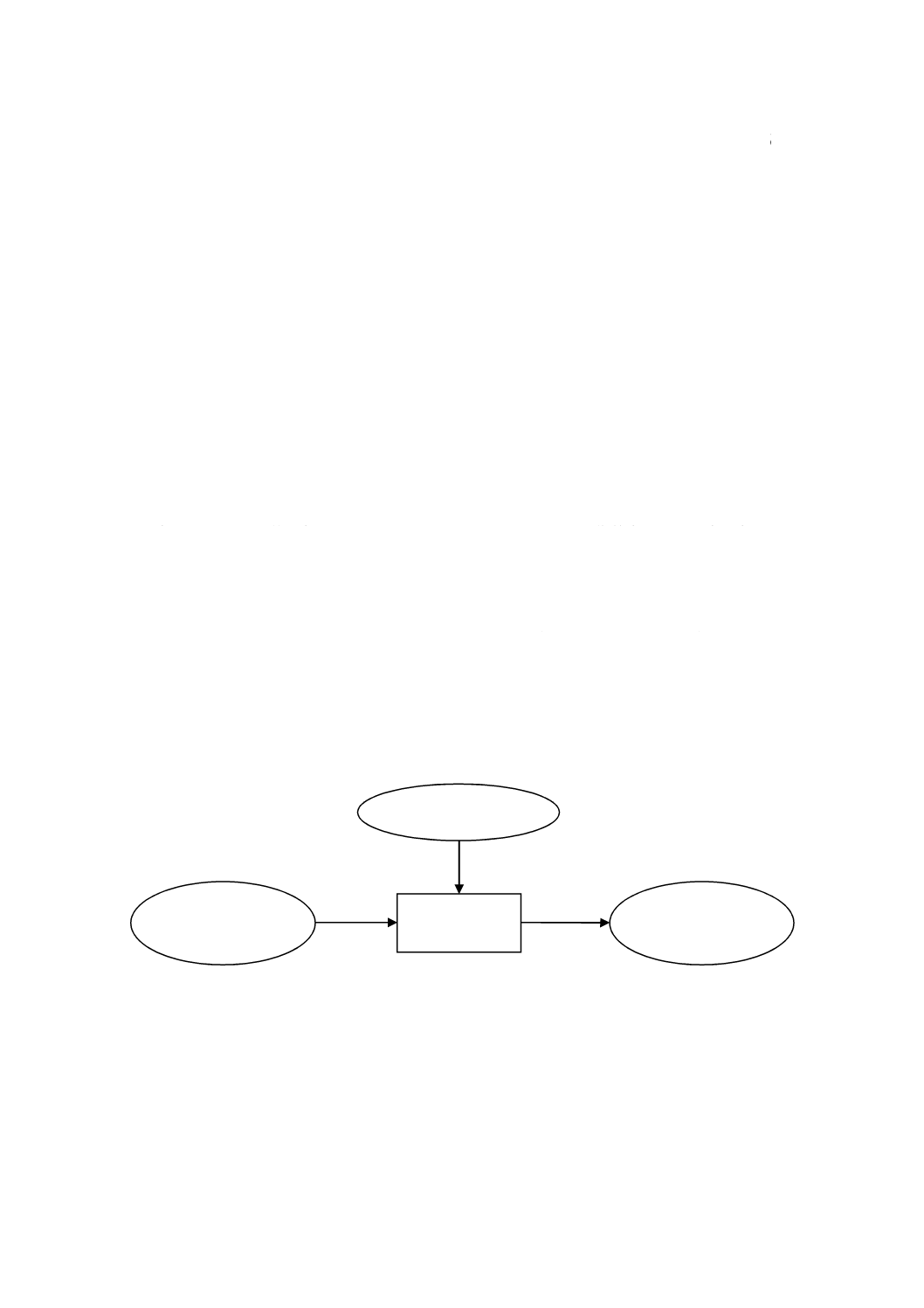
該車両の挙動,運転者の操作及び運転者の行動についての情報を基に衝突の可能性を判断する。図1に
FVCMSの機能要素を示す。FVCMSは前方の車両を検知し,被検知車両との衝突の可能性を推定し,衝突
の可能性が高いと判断した場合には運転者に警報する。さらに,衝突が避けられないと判断した場合,当
該車両のブレーキを作動させて衝突の被害を軽減する。
図1−前方車両衝突軽減システム(FVCMS)の機能要素
1
適用範囲
この規格は,FVCMSに関する,作動概念,最小機能,システム要件,システムインタフェース,試験
方法及び性能要件について規定する。規格の運用については,可能である限りシステム設計者に委ねられ
る。
FVCMSは,衝突警報の後でブレーキを自動的に作動させることによって,衝突エネルギーを低下させ,
車両損害の程度,人身傷害の程度,又は死亡事故の可能性を低下させる。乗員に対する衝撃エネルギーを
前方車両検知
及び挙動判断
当該車両挙動判断
FVCMS
機能制御
運転者への警報
及びブレーキ作動
2
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
低下させることによって,エアバッグ,シートベルト及び他の衝撃エネルギー吸収システムの性能につい
ても補完する。この規格には,衝突回避までは要求性能として規定されていないが,結果的に衝突回避と
なってもよい。
なお,システム性能には限界があり,車両の安全操作についての最終責任は運転者にある。
FVCMSは,単軌道車,二連又は三連トレーラなどを除き,公道及び私道用を目的とする路上走行車に
適用する。FVCMSは,オフロードでの使用を考慮していない。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 22839:2013,Intelligent transport systems−Forward vehicle collision mitigation systems−
Operation, performance, and verification requirements(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS D 0801 高度道路交通システム−アダプティブ・クルーズコントロールシステム(ACC)−性能
要求事項及び試験手順
注記 対応国際規格:ISO 15622,Intelligent transport systems−Adaptive Cruise Control systems−
Performance requirements and test procedures(IDT)
JIS D 0802 高度道路交通システム−前方車両衝突警報システム−性能要求事項及び試験方法
注記 対応国際規格:ISO 15623,Intelligent transport systems−Forward vehicle collision warning
systems−Performance requirements and test procedures(IDT)
JIS D 0807 高度道路交通システム−全車速域アダプティブ・クルーズコントロール(FSRA)システ
ム−性能要求事項及び試験手順
注記 対応国際規格:ISO 22179,Intelligent transport systems−Full speed range adaptive cruise control
(FSRA) systems−Performance requirements and test procedures(IDT)
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
アダプティブ・クルーズコントロール,ACC(adaptive cruise control)
エンジン及び/又はパワートレイン,また,任意でブレーキを制御することによって当該車両が適切な
車間距離で前方車両に追従走行できるようにする従来形クルーズコントロールシステムの発展形。
注記 JIS D 0801参照。
3.2
隣接車線(adjacent lane)
当該車両が走行している車線と1本の車線境界を共有して,当該車両と同じ走行方向をもつ走行車線。
3.3
連結式車両(articulated vehicle)
二つ以上の車輪を備えた複数の車両をジョイントによって接続し,最低一つの車両に推進力を備えた連
3
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
結車両。
3.4
ブレーキ(brakes)
車両の運動に対抗する力を発生させる構成要素。
例 摩擦ブレーキ(相対運動をしている車両の二つの部品の間の摩擦によって力が発生する。),電気
ブレーキ(相対運動しているが相互に接触していない車両の二つの部品の間の電磁作用によって
力が発生する。),流体ブレーキ(相対運動している車両の二つの部品の間に位置する流体の作用
によって力が発生する。),エンジンブレーキ(車輪に伝達されるエンジンの制動作用によって力
が発生する。)。
3.5
制動距離(braking distance)
ブレーキが使用された点から車両が完全停止するところまで車両が走行した距離。
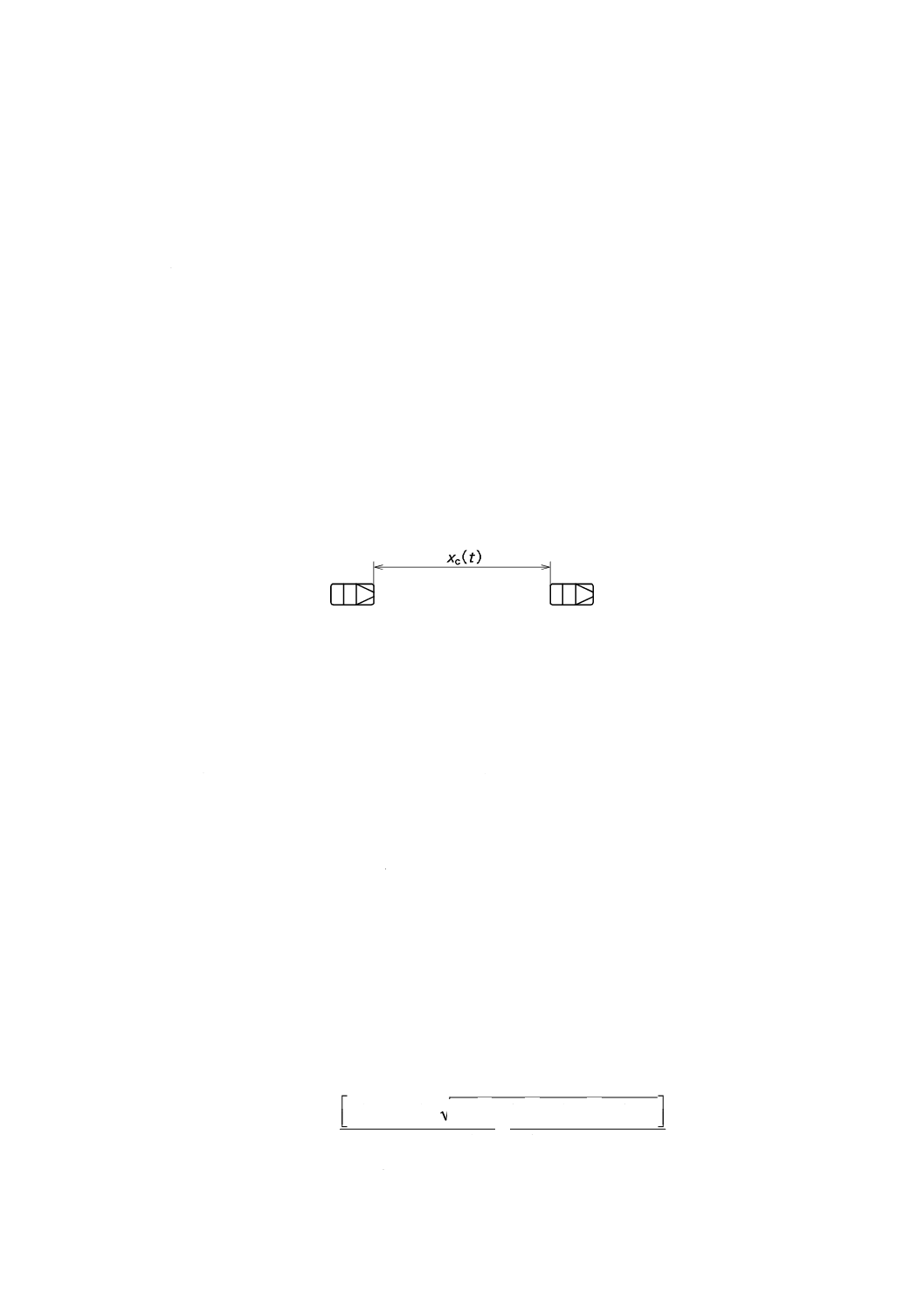
3.6
車間距離,xc(t)(clearance)
目標車両の後尾面から当該車両の先頭面までの距離。
3.7
衝突警報,CW(collision warning)
前方車両との追突の可能性のある場合に,回避又は被害を低減するための緊急行動の必要性を示す警報。
注記 衝突を回避するための緊急操作の必要性を運転者に警告するように警報が発せられる。
3.8
従来形クルーズコントロール(conventional cruise control)
運転者によって設定された車両速度を維持することができるシステム。
3.9
機能作動点,CAP(countermeasure action point)
FVCMSの機能を作動させるタイミング。
3.10
運転者解除(driver disengage)
運転者が,FVCMSを作動又は非作動状態から停止状態へ移行させる操作。
3.11
加速度考慮の衝突までの時間,ETTC(enhanced time to collision)
当該車両と目標車両との間の相対加速度が一定であると想定して,当該車両が目標車両と衝突するまで
に要する時間。次の式によって求められる。
)
(
)
(
2
)
(
)
(
ETTC
SV
TV
c
SV
TV
2
SV
TV
SV
TV
a
a
x
a
a
v
v
v
v
−
×
−
×
−
−
−
−
−
=
ここに,
aTV: 目標車両の加速度
4
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
aSV: 当該車両の加速度
vTV: 目標車両の速度
vSV: 当該車両の速度
xc: 当該車両と目標車両との車間距離
3.12
前方隣接車両(forward adjacent vehicle)
当該車両の隣接車線上で当該車両より前方に位置する車両。
3.13
前方測距センサ(forward ranging sensor)
フロントバンパより前方にある物体までの距離を計測する構成要素。
3.14
前方車両,FV(forward vehicle)
同じ進路を走行しているか又は走行していない場合には,同じ方向に配向されている当該車両の前方に
ある車両。
3.15
前方車両衝突(forward vehicle collision)
当該車両とFVとの衝突。
3.16
前方車両衝突軽減システム,FVCMS(forward vehicle collision mitigation systems)
当該車両と目標車両のリアエンドとの衝突の可能性を予測して,衝突の可能性が非常に高い場合にブレ
ーキを自動的に作動させて当該車両と目標車両とが衝突する際の相対速度を低下させる,この規格の要件
を満たす車両システム。
3.17
前方車両衝突警報システム,FVCWS(forward vehicle collision warning systems)
当該車両の前方進路にある別の車両との衝突可能性が高い場合に,運転者に警告できるシステム。
注記 JIS D 0802参照。
3.18
大型車両(heavy vehicle)
自動車基準調和のための国際フォーラム(WP.29)TRANS/WP.29/1045のカテゴリ1-2又は2に規定され
た単一車両又は連結車両。
3.19
加速度変化率(jerk)
車両の加速度の変化率。
3.20
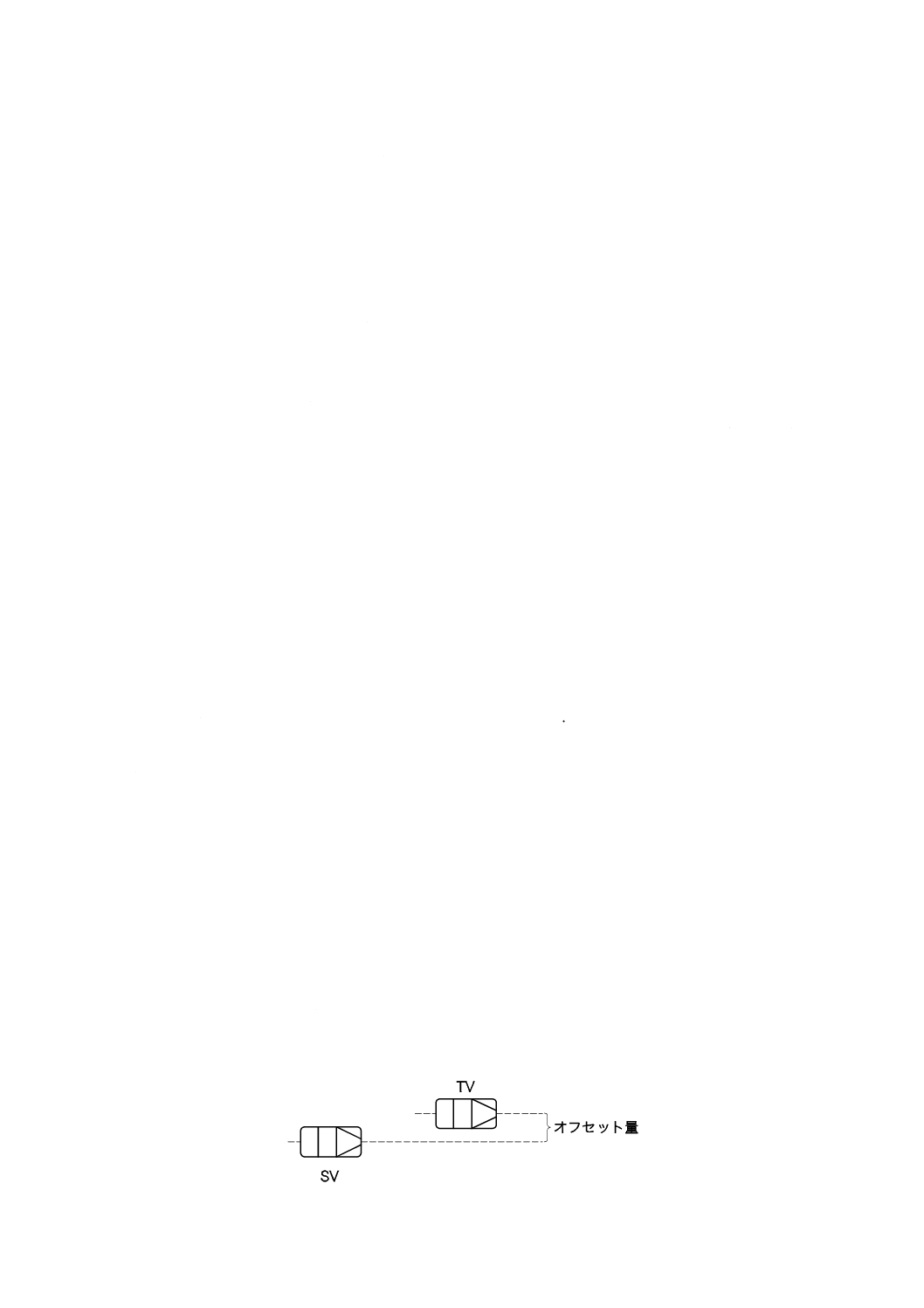
横方向オフセット(lateral offset)
当該車両と目標車両との中心線を基準とした横方向オフセット量。当該車両の横幅に対する割合で表す。
5
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.21
普通車両(light vehicle)
自動車基準調和のための国際フォーラム(WP.29)TRANS/WP.29/1045のカテゴリ1-1に規定された単一
車両又は連結車両。
3.22
被害軽減制動,MB(mitigation braking)
ブレーキを自動的に作動させ相対速度を低減するFVCMSの制御機能の一つ。
3.23
最小作動点,MCAP(minimum countermeasure action point)
衝突が予想される場合に最低限作動しなければならないタイミング。
3.24
最小減速度(minimum FVCMS deceleration)
平たんで乾燥し,汚れていない舗装道路でMBが作動する場合,発生しなければならない減速度。
3.25
最小速度,Vmin(minimum velocity)
FVCMSが作動しなければならない,当該車両の最小速度。
3.26
オーバライド(override)
MB,減速制動又はCWより運転者の操作を優先させること。
3.27
衝突前緊急度パラメータ,PUP(pre-collision urgency parameter)
衝突可能性の緊急度を表すパラメータ。
3.28
追突(rear-end collision)
当該車両のフロントがFVのリアエンドに衝突するFVへの衝突。
3.29
相対速度,vr(t)(relative velocity)
当該車両と目標車両との間の速度差vr(t)。次の式によって求められる。
)
(
)
(
)
(
SV
TV
r
t
v
t
v
t
v
−
=
3.30
要求減速度(required deceleration)
目標車両と接触せずに当該車両の速度が目標車両の速度と一致することによって衝突を防止することが
できる一定の最小減速度。
3.31
単軌道車(single track vehicle)
前進する際に単一の軌跡を地面に残す車両。例えば,二輪車。
注記 単軌道車は,通常,静止時には横安定性が僅かにあるか若しくは全くないが,前進時又は制御
時には安定性が高くなる。
3.32
減速制動,SRB(speed reduction braking)
6
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
比較的小さい減速度で当該車両の速度を低減させるFVCMSの制御機能の一つ。
3.33
当該車両,SV(subject vehicle)
この規格で定義するFVCMSを装備する車両。
3.34
目標車両,TV(target vehicle)
SVの前方を監視するセンサの有効範囲内にある衝突の潜在的危険が想定されるFV。
3.35
車間時間(time gap)
車両速度及び車間距離から計算される値。車間時間=車間距離/車両速度
3.36
衝突までの時間,TTC(time to collision)
次の計算式で求められる,相対速度が一定であると想定してSVがTVと衝突するのに要する時間。
r
c
TTC
v
x
−
=
3.37
トラックトラクタ(truck-tractor)
1台以上の独立した積荷運搬トレーラを制御及び輸送することを主な目的とする,推進力,制御及び乗
員(運転者)収容を行う単一シャシ重量車両。
3.38
ユニットトラック(unit truck)
大型貨物又は他の積載区分を備える,独自の推進力,制御及び乗員(運転者)収容を行う単一シャシ重
量車両。
3.39
警報制動,WB(warning braking)
追突可能性の検出時にブレーキを自動で作動させて運転者に警報を与えるFVCMSの制御機能の一つ。
4
記号及び略語
この規格で用いる主な記号及び略号は,次による。
alateral̲max
試験時の最大横加速度
aTV
TVの加速度
aSV
SVの加速度
ABS
アンチロックブレーキシステム
ACC
アダプティブ・クルーズコントロール
CAP
機能作動点
CTT
試験目標物の反射係数
CW
衝突警報
dTV
TVの減速度
dSV
SVの減速度
dmax
距離を計測できる最大距離
7
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
d1
距離を計測できる最小距離
d2
割込み車両との距離を計測できる最小距離
d0
距離計測はできないが,検知できる最小距離
h
地面からの最高地上検知高さ
h1
地面からの最低地上検知高さ
ESC
横滑り防止装置
ETTC
加速度考慮の衝突までの時間
FV
前方車両
FVCWS
前方車両衝突警報システム
FVCMS
前方車両衝突軽減システム
MB
被害軽減制動
MCAPMB
MBの最小作動点
MCAPSRB
SRBの最小作動点
MCAPCW
衝突警報の最小作動点
PUP
衝突前緊急度パラメータ
RCS
レーダ反射断面積
RSC
ロール安定性制御
SRB
減速制動
SV
当該車両
TTC
衝突までの時間
TV
目標車両
Vmin
FVCMSが作動しなければならないSVの最小速度
vSV(t)
SV速度
vr(t)
SVとTVとの間の相対速度
vTV(t)
目標車両速度
Vcircle̲start
試験開始時の試験車両の速度
注記 対応国際規格では,記号が脱落しているため追加した。
Vmax
FVCMSが作動しなければならないSVの最大速度
WB
警報制動
Wv
SVの車両幅
Wl
車線幅
xc(t)
SVとTVとの間の車間距離
5
分類
FVCMSの分類は,次による。この箇条は要件を規定することを目的としていない。この規格の全ての
要件は,箇条6及び箇条7で規定する。
5.1
カーブ曲率半径特性によるシステム分類
システムは,表1に示すカーブ曲率半径特性に従って分類する。
8
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−システム分類
クラス
カーブ曲率半径特性
I
500 m以上の曲率半径
II
250 m以上の曲率半径
III
125 m以上の曲率半径
クラスIシステムは,半径500 m以上のカーブ上のSV軌跡においてFVを検知する性能をもつものとす
る。
クラスIIシステムは,半径250 m以上のカーブ上のSV軌跡においてFVを検知する性能をもつものと
する。
クラスIIIシステムは,半径125 m以上のカーブ上のSV軌跡においてFVを検知する性能をもつものと
する。
5.2
制御機能による分類
FVCMSは,提供される制御機能に基づいて分類してもよい。分類は,最小の制御機能及び提供され得
る追加制御機能に基づく。各制御機能は,関連の最小作動点(MCAP)をもつ。衝突前緊急度パラメータ
(PUP)がある制御機能のMCAPと少なくとも等しいときに,FVCMSは,その制御機能で作動する。
5.2.1
衝突警報(CW)
CWは,図4に示すFVCMSの作動範囲についてのJIS D 0802の要件を満たす,聴覚,視覚及び触覚の
組合せの手段による警報である。
CWは,SRB又はMBの作動開始までに行うものとする。
5.2.2
減速制動(SRB)
SRBは,SV速度を低下させることを目的とする自動的制動機能である。SRBの作動によって,運転者
は,緊急制動,緊急車線変更又は危険性がないとの判断及びSRBの解除を余裕をもって行うことができる。
これらの運転者操作は,MB作動に至る場合を減らすことができると考えられる。SRBの作動を乗員に知
らせるため,SRB起動の前にはCWを発する。
MBが作動中の場合,SRBは起動しない。
5.2.3
被害軽減制動(MB)
MBは,衝突が不可避であるときに作動する自動的な制動である。PUPがしきい(閾)値MCAPMBに少
なくとも等しい場合にMBを起動する。
MBの作動の結果,軽減制動なしで衝突した場合よりも被害は小さくなる。事故形態によっては,衝突
を自動的に回避することもある。ピーク加速度及び加速変化率は,車両システムの設計及び条件によって,
また,路面状態によって制限される。MBの作動を乗員に知らせるため,MB作動の前にはCW及び任意
でSRBの作動が行われる。
5.2.4
制御機能の組合せ
FVCMSの構成を表2に示す。各横列は別個のシステムタイプを表す。この表で特定されていない組合
せは,この規格の範囲に含まれない。各タイプについて,横列はどの制御機能が必要とされるかを示して
いる。“1”は機能が必要とされることを示し,“0”は機能が含まれなくてもよいことを示す。
9
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2−許容可能なシステム構成
タイプ
MB
SRB
CW
1
0
1
1
2
1
0
1
3
1
1
1
6
仕様及び要求事項
6.1
最小性能要件
SVは,必要なシステム性能要件を満足する少なくとも一つの制御機能を装備しなければならない。全
てのFVCMSは,図4に描かれたFVCMSの作動範囲についてJIS D 0802に従ってCWを提供するものと
する。
6.1.1
普通車両の必要機能
FVCMSを装備する普通車両は,次の機能を備えなければならない。
− FVの存在を検知できる。
− SVと被検知FVとの間の距離及び接近速度を測定できる。
− SV速度を測定できる。
− TVの一部がSVセンサから隠れている場合でも,横方向オフセットが20 %未満であるときに適切に
FVCMSが機能する。
− FVCMS要件に従って運転者への警報ができる。
− 運転者が制動の操作をするしないにかかわらず,ブレーキを作動させ制御できる。
− ブレーキランプを点灯させることができる。
− ヨー特性の安定化及びトラクションコントロールを装備する。必要に応じてESC又はRSCシステム
がABSに組み合わされる。
− タイプ2及びタイプ3のシステムについてMB作動中に少なくともFVCMSの要件に規定された要求
減速度を発生させる。
− タイプ1及びタイプ3のシステムについてSRBの要件に規定された制動を提供する特性をもつ。
− MB又はSRBが開始した後で,運転者が制動操作をした場合,可能な最大車両減速まで減速度の値を
上昇させることを許可する。
6.1.2
大型車両の必要機能
FVCMSを装備する大型車両は,普通車両と同じ機能に次の追加機能を備えなければならない。
− FVCMSは,ジャックナイフ現象(連結式車両が運転席車とトレーラとの間の連結部で運転席車とト
レーラとが“V”状を形成するほど屈曲すること)を招いてはならない。
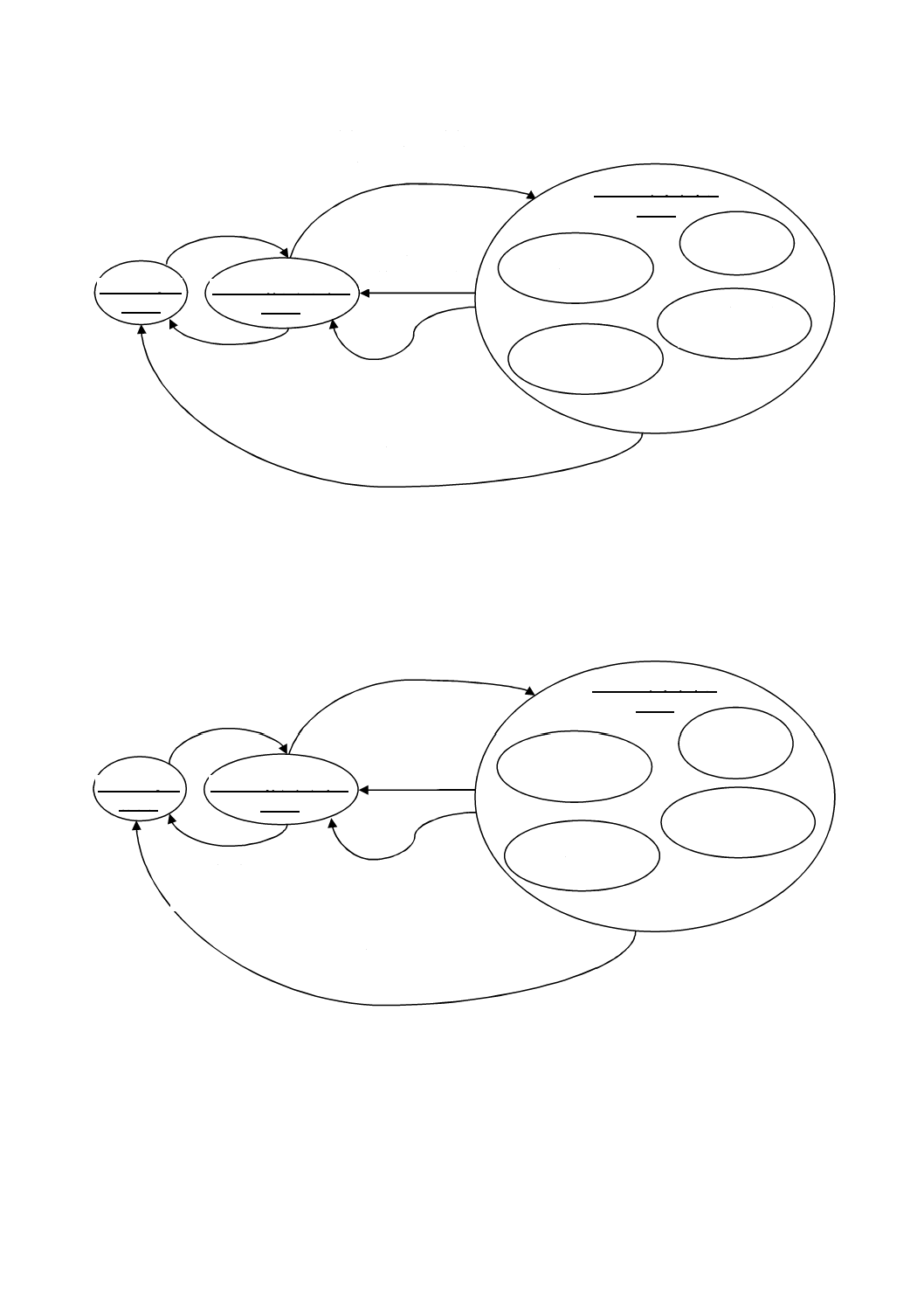
6.2
作動モデル−状態遷移図
FVCMSは,図2の状態遷移図に従って機能しなければならない。状態遷移について次の図以外の機能
については,製造業者に委ねられる。
10
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図2−FVCMS状態遷移図
FVCMSは,任意で図3の状態遷移図に従って機能するものとする。次に図示されていない状態遷移の
実施は,製造業者に委ねられる。
図3−FVCMS状態遷移図(任意の内容を含む)
6.2.1
各状態の機能
この細分箇条は,FVCMSの各状態で実施する機能を定める。
6.2.1.1
FVCMSオフ状態
FVCMSオフ状態では,FVCMSのいずれの被害軽減機能も作動しない。
イグニションオフ,
故障判定中
又は運転者による解除
イグニションオフ,
故障判定中
又は(任意の)運転者
によるシステムオフ
SV速度≧VminかつSV速度≦Vmax
かつギア選択はドライブ又は別の前進ギアであり
故障は検出されていない
FVCMS非アクティブ
6.2.1.2
FVCMSオフ
6.2.1.1
故障の検出
(自動回復可能)
FVCMSアクティブ
6.2.1.3
CW
MB(タイプ2
及び3だけ)
SRB(タイプ1
及び3だけ)
オーバライド
(MBは任意)
イグニションオン
又は(任意の)運転者
によるシステムオン
SV速度<Vmin又はSV速度>Vmax
又はギア選択は前進に使用されない
ギアである
イグニションオフ
又は故障判定中
イグニションオン
イグニションオフ
又は故障判定中
SV速度≧VminかつSV速度≦Vmax
かつギア選択はドライブ又は別の前進ギアであり
故障は検出されていない
FVCMS非アクティブ
6.2.1.2
FVCMSオフ
6.2.1.1
故障の検出
(自動回復可能)
FVCMSアクティブ
6.2.1.3
CW
MB(タイプ2
及び3だけ)
SRB(タイプ1
及び3だけ)
SV速度<Vmin又はSV速度>Vmax
又はギア選択は前進に使用されない
ギアである
オーバライド
(SRBについて)
11
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
なお,SVが運転されているときにFVCMSがオフ状態であってもよい。
SVのエンジンが始動した時点で,FVCMSはFVCMSオフ状態からFVCMS非アクティブ状態に移行し
なければならない。また,運転者が手動でFVCMSをオンにした場合にも(オン/オフスイッチの設定は
製造業者の任意),FVCMSオフ状態からFVCMS非アクティブ状態へ移行しなければならない。
6.2.1.2
FVCMS非アクティブ状態
FVCMS非アクティブ状態では,FVCMSはSVの速度及びギア状態を監視し,FVCMSアクティブ状態
に移行するか否かを判断する。
ギアがドライブなどの前進の選択であり,車両速度がVmin(6.3.3.1.1に規定)以上かつVmax(6.3.3.1.2に
規定)未満である場合には,FVCMSはFVCMS非アクティブ状態からFVCMSアクティブ状態に移行しな
ければならない。イグニションオフになった場合,FVCMSが十分な性能を発揮できないと自己診断機能
が判断した場合,又は運転者が手動でFVCMSをオフした場合(オン/オフスイッチの設定は製造業者の
任意)には,FVCMSはFVCMS非アクティブ状態からFVCMSオフ状態へ移行しなければならない。
注記
点線の下線を施した箇所は,対応国際規格の誤記のため,追記した。
6.2.1.3
FVCMSアクティブ状態
FVCMSアクティブ状態では,被害軽減機能を作動する条件について監視し,条件を満たした時点で被
害軽減機能を作動する又は運転者が運転操作を行った場合にはそのオーバライドを許容するか否か(オー
バライドを許容する機能は製造業者の任意)を判断する。
イグニションオフになった場合,又は運転者が手動でFVCMSをオフした場合(オン/オフスイッチの
設定は製造業者の任意)には,FVCMSはFVCMSアクティブ状態からFVCMSオフ状態へ移行しなければ
ならない。FVCMSアクティブ状態の条件が満足されていない場合には,FVCMSはFVCMSアクティブ状
態からFVCMS非アクティブ状態に移行しなければならない。システム故障が発生する又は被害軽減機能
の作動が不可能である場合において,(システムが自己診断に失敗したなど)運転者の介入を伴わない自動
復帰が可能でなければ,FVCMSはFVCMSオフ状態に移行しなければならない。製造業者が規定する故
障モードに入った場合において,自動復帰(自動復帰機能の設定は製造業者の任意)が可能である場合に
は,いったんFVCMS非アクティブ状態に移行してFVCMSアクティブ状態の全て又は一部の機能を復帰
するとともに,FVCMS非アクティブ状態からFVCMSアクティブ状態へ再び移行してもよい。
なお,これらの故障を運転者に通知する手段は,製造業者が任意に設定することとする。
6.3
性能要件
この細分箇条の要件は,平たんで乾燥し,汚れていない舗装道路での走行に適用する。
6.3.1
TVの類型
FVCMSが機能する対象は,公道及び私道用を目的とした自動車,すなわち二輪車,乗用車,ライトト
ラック,バス,観光バス及び他の大型車両とする。
なお,歩行者,自転車などの小型目標物を対象に含めてもよい。
6.3.2
衝突類型
FVCMSは,いずれのTVの後端部への追突に対しても機能しなければならない。
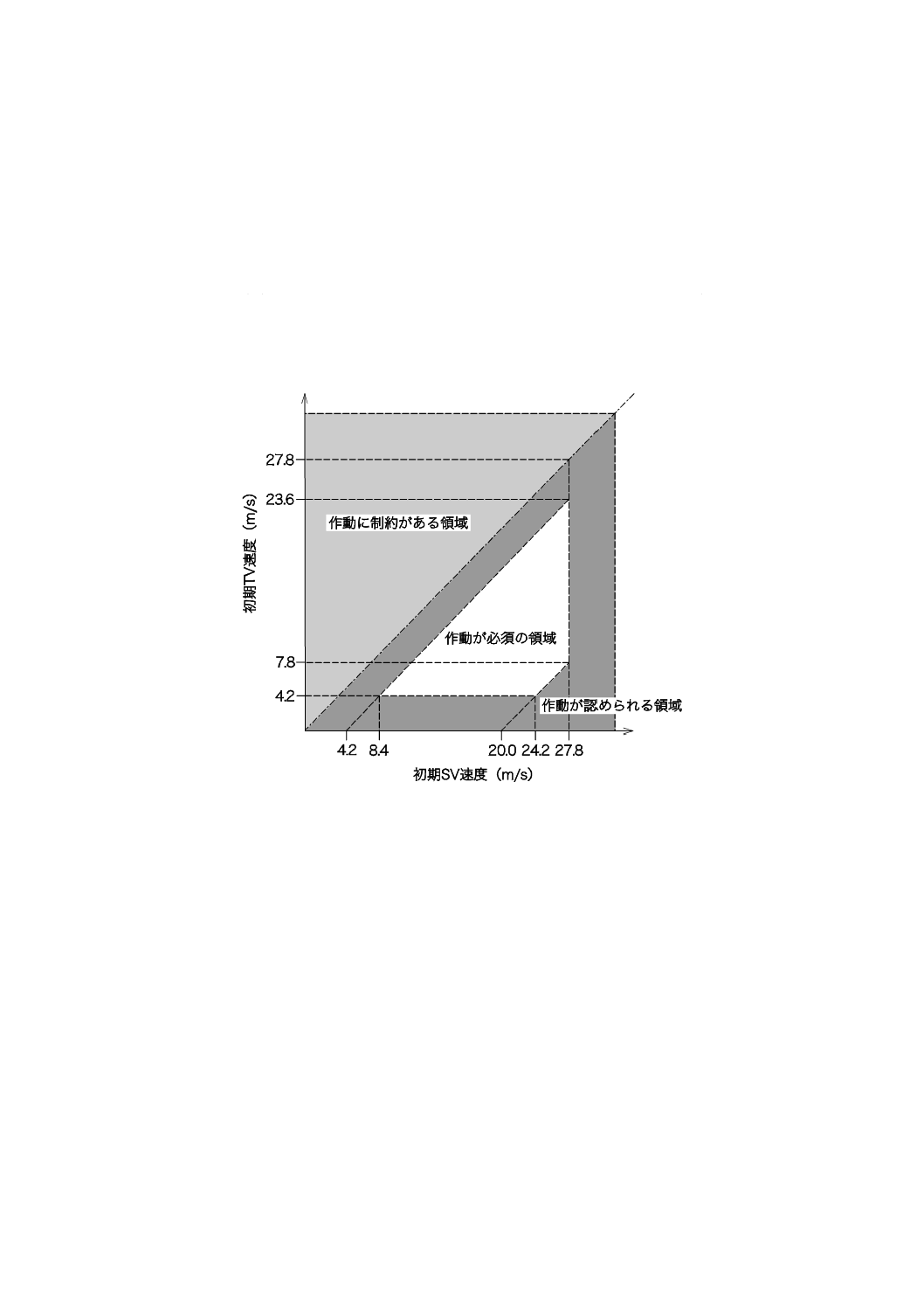
6.3.3
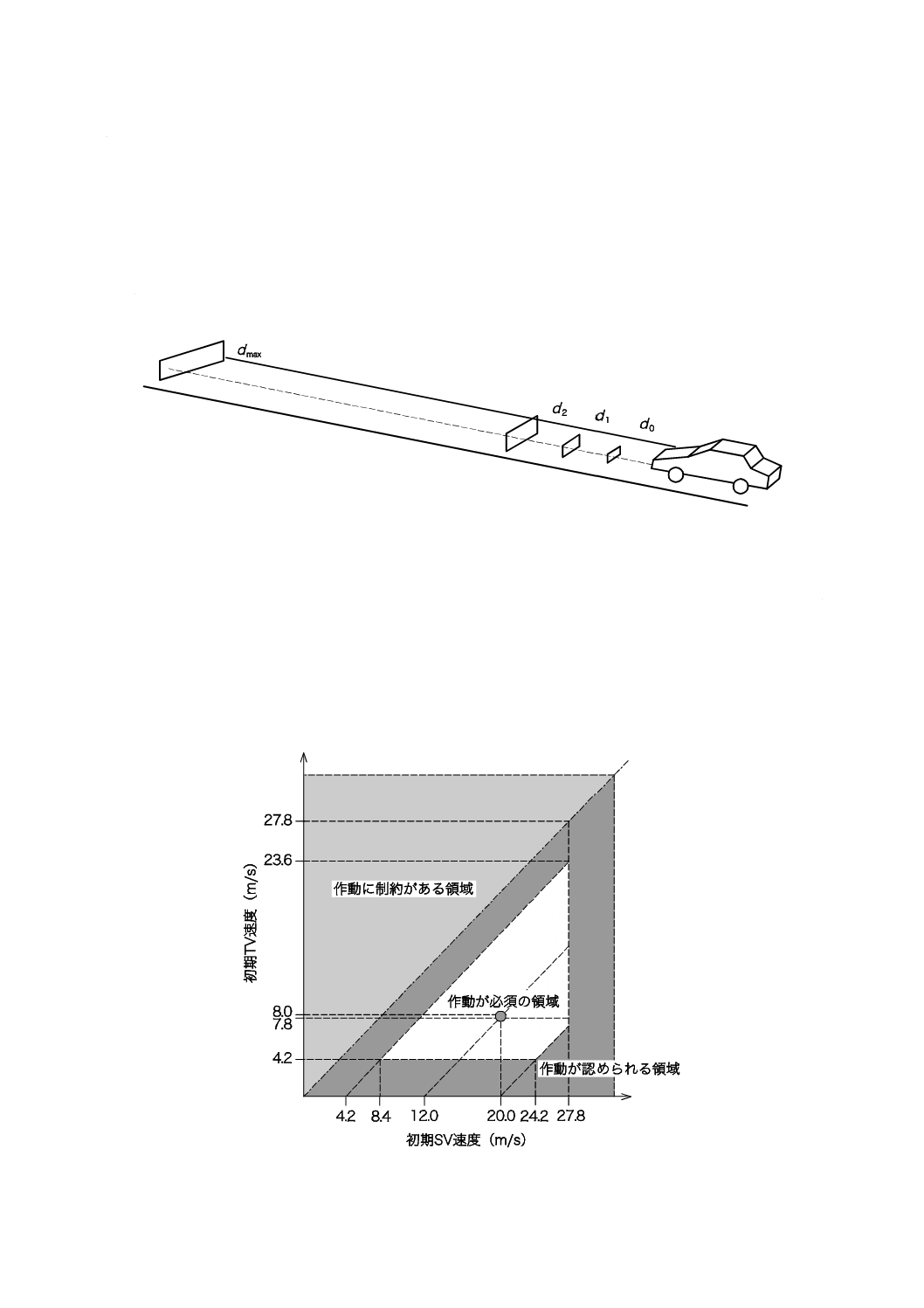
作動速度
被害軽減機能の作動に関するSVの速度及びSVとTVとの相対速度についての要件は,図4によって整
理される。薄い灰色の領域(斜めの一点鎖線より上方)は被害軽減機能の作動に制約(6.3.3.3に規定)が
ある領域を表し,濃い灰色の領域(斜めの一点鎖線及びその下方)は被害軽減機能の作動が認められる領
域,そのうちの白抜きの領域は被害軽減機能の作動が必須の領域を,それぞれ示している。
12
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.3.3.1
SV
FVCMSは,SVの速度がVmin(6.3.3.1.1に規定)とVmax(6.3.3.1.2に規定)との間で作動条件が満たさ
れた場合には,被害軽減機能(MBについては6.3.6.4.1に,SRBについては6.3.6.5.1にそれぞれ規定)を
作動しなければならない。
6.3.3.1.1
SVの最小速度(Vmin)
FVCMSのVminは,8.4 m/s(30 km/h)以下に設定されていなければならない。
FVCMSは,SVの速度がVminよりも低下し,かつ,MB又はSRBが作動中でない場合には,FVCMS非
アクティブ状態に移行するものとする。また,製造業者はVminの値をSVの取扱説明書に明記しなければ
ならない。
図4−FVCMSの作動範囲
6.3.3.1.2
SVの最大速度(Vmax)
FVCMSのVmaxは,27.8 m/s(100 km/h)以上に設定されていなければならない。ただし,SVの最大速
度が27.8 m/sを下回る場合においては,SVの最大速度をVmaxとする。
Vmaxの値が自動車の最大車両速度より低い場合には,製造業者はVmaxの値をSVの取扱説明書に明記し
なければならない。
6.3.3.2
TV
6.3.3.2.1
TVの最小速度
FVCMSが機能するTVの最小速度は,4.2 m/s以下に設定されていなければならない。ただし,FVCMS
がTVを検知する時点でのTVの最小速度については,SVの製造業者によって別途設定されるものとする。
FVCMSは,被害軽減機能が作動しているとき,TVが検知範囲(6.3.4に規定)内にある限りは,TVの速
度が0 m/sに低下するまで被害軽減機能の作動を継続し続けなくてはならない。
6.3.3.2.2
TVの最大速度
FVCMSが被害軽減機能を作動するTVの最大速度は,図4に整合するようなVmaxよりも相対速度の下
13
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
限値(6.3.3.3に規定)分だけ低い速度に設定されていなければならない。
6.3.3.2.3
最大横方向オフセット(横方向の識別)
FVCMSは,SVとの横方向オフセットが左右いずれの方向も20 %以下であるTVに機能しなければなら
ない。
なお,20 %を超える横方向オフセットのTVに機能してもよい。
6.3.3.2.4
最大横方向速度
横方向オフセットがある場合において,SVとTVとの左右方向の相対速度が0.2 m/s未満のときは,
FVCMSは機能しなければならない。
なお,左右方向の相対速度が0.2 m/s以上の状況でFVCMSは,機能してもよい。
6.3.3.3
相対速度
SVがTVと至近距離にあって,その相対速度vr(t)が−4.2 m/s(−15 km/h)と−20 m/s(−72 km/h)との
間の状況である場合,FVCMSは機能しなくてはならない。
なお,製造業者は,相対速度の上限を−20 m/sを超えた値,下限を−4.2 m/sを下回った値に設定し,作
動範囲を拡大してもよい。
TVが減速したことによって,追突を回避するために必要な減速度がMBに要求される最小減速度
(6.3.6.4.2に規定)を超えた場合には,SVは図4の条件付き作動領域であってもMB及びSRBの作動が
許される。ETTCが4秒間より短い場合には,条件付き作動領域であってもSRBの作動が許される。
6.3.4
TVの検知領域
FVCMSアクティブ状態では,FVCMSは常にSVの前方を監視しなくてはならない。前方を監視するた
めのセンサタイプ及び装着箇所は製造業者が任意に設定できる。対応するカーブ曲率半径ごとの検知領域
の幅は,JIS D 0802に規定されている対応するカーブ曲率半径の要件と同等に設定されていなければなら
ない。
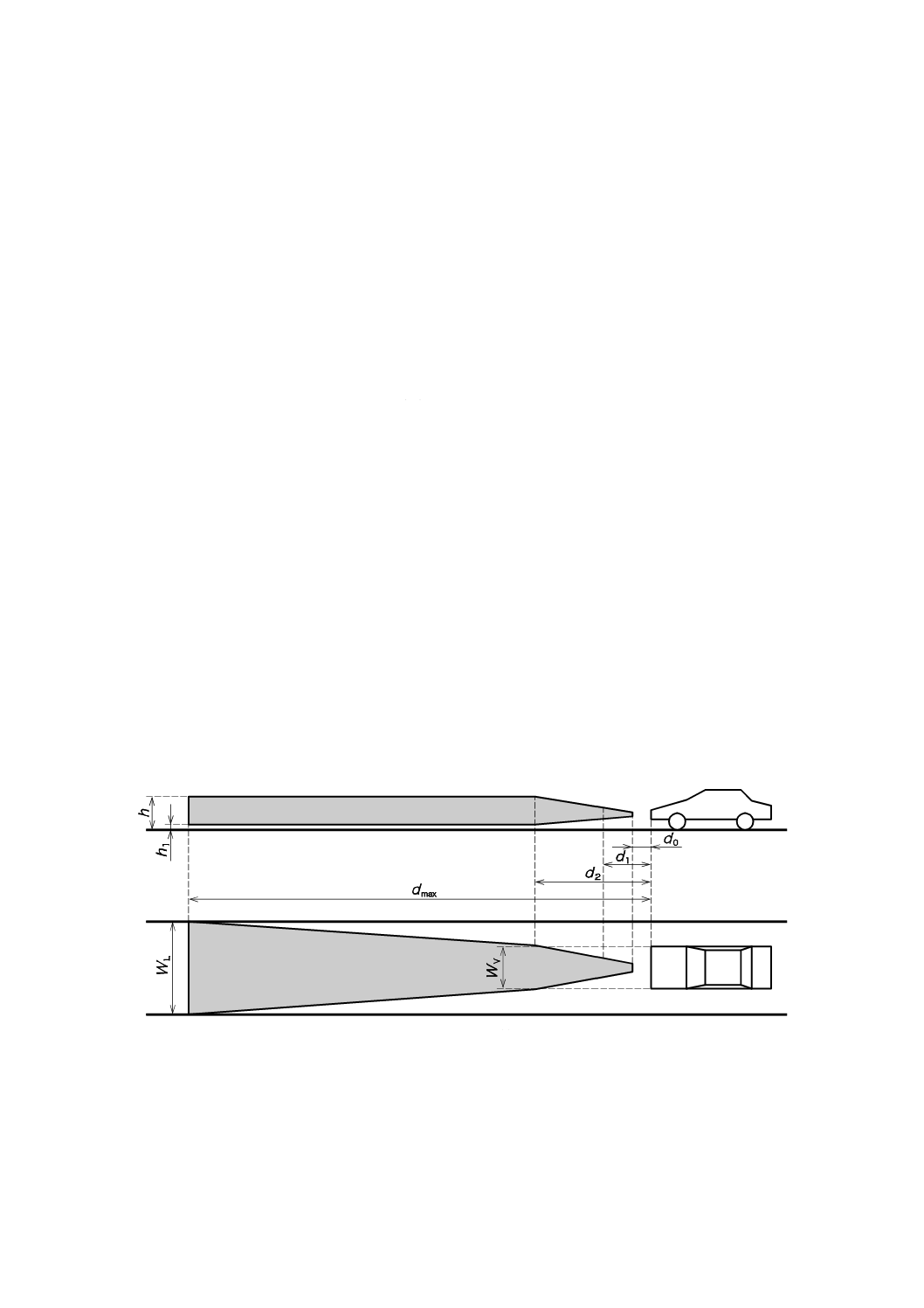
6.3.4.1
最小検知領域
FVCMSは,最小でも図5,表3及び表4に規定されるTVの検知範囲をもっていなくてはならない。
図5−最小検知範囲
14
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.3.4.2
検知距離
表3−検知距離要求事項
距離
計算式又は数値
摘要
dmax
PUP=MCAPCW
システムが距離を計測できる最大距離
d2
クラスI: 10 m以下
クラスII: 7.5 m以下
クラスIII: 5 m以下
側方オフセットが20 %未満のFVとの距離を計測できる最小距離
(クラスはJIS D 0802に規定されたもの)
d1
PUP>=MCAPMB
システムが距離を計測できる最小距離
d0
2 m以下
距離計測はできないが,検知できる最小距離
注記 MCAPCW及びMCAPMBは,製造業者が決定するFVCMSの設計パラメータ。
6.3.4.3
横方向及び高さ方向の検知範囲
表4−横方向及び高さ方向の検知要求事項
距離
最小検知幅
検知高さ
dmax
Wl(車線幅)m
h(最高地上検知高さ)=1.1 m
h1(最低地上検知高さ)=0.2 m
d2
Wv(SVの車両幅)
m
h(最高地上検知高さ)=1.1 m
h1(最低地上検知高さ)=0.2 m
d1
規定なし
規定なし
d0
規定なし
規定なし
6.3.5
TVの識別能力
6.3.5.1
縦方向の識別
2台以上のFVが検知される場合,FVCMSは最も衝突確率が高い車両のPUPの値に基づいて被害軽減機
能を作動させなくてはならない。
6.3.5.2
横方向の識別
SVの走路前方と前方隣接走路との両方に車両が存在する場合,FVCMSはSVの走路前方にある車両に
基づいて被害軽減機能を作動させなくてはならない。
6.3.5.3
頭上方向の識別
FVCMSは,道路面から4.5 mを超える高さにある物に対しては,被害軽減機能を作動させてはならない。
6.3.6
制御要件
6.3.6.1
MB又はSRBの提供
全てのFVCMSは,MB又はSRBの機能を備えていなければならない。
6.3.6.2
衝突警報(CW)の提供
全てのFVCMSは,CWの機能を備えていなければならない。
6.3.6.3
制動灯の制御
FVCMSがMB又はSRBの作動によって自動的に制動を行う場合,SVの制動灯を点灯しなければなら
ない。制動灯は,FVCMSが自動的に制動を始動後350 ms以内に点灯されなければならない。煩わしい制
動灯の点滅を避けるため,FVCMSが作動した制動の終了後,制動灯を適当な時間点灯し続けてもよい。
15
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.3.6.4
MBの要件
FVCMSの被害軽減機能の作動についてのMB機能の最小要件は,次のとおりである。製造業者の裁量
によって,FVCMSはこのMB機能の最小要件を超えた機能を備えてもよい。
6.3.6.4.1
MBの開始
6.3.6.4.1.1
普通車両
SVとTVとのTTC又はETTCが3.0秒間を上回る状況では,FVCMSはMBを作動してはならない。
6.3.6.4.1.2
大型車両
SVとTVとのTTC又はETTCが4.0秒間を上回る状況では,FVCMSはMBを作動してはならない。
6.3.6.4.2
MBの最小減速度
6.3.6.4.2.1
普通車両
普通車両のFVCMSはMBの作動によって,5.0 m/s2(0.51 g)以上の減速度を発生させ,その間にSV
の速度を少なくとも2.0 m/sは低下させなくてはならない。MBとSRBとを組み合わせて備えるFVCMS
(タイプ3)は,SVの速度を少なくとも4.0 m/sは低下させなくてはならない。
6.3.6.4.2.2
大型車両
大型車両のFVCMSはMBの作動によって,3.3 m/s2(0.34 g)以上の減速度を発生させ,その間にSV
の速度を少なくとも1.0 m/sは低下させなくてはならない。
6.3.6.4.3
運転者意思による制動力の上昇
FVCMSがSVの最大性能で制動を行っていない状況において,運転者がFVCMSの被害軽減機能による
制動力を超える制動操作を行った場合には,FVCMSは運転者操作による制動力の上昇を許容しなければ
ならない。
6.3.6.4.4
MBの作動終了
FVCMSは,PUPがMCAPMBより低下した場合には,MBの作動を停止してもよい。SV及びTVの相対
位置又は経路変更によってPUPが急激に変化する場合,製造業者は作動停止の制御にヒステリシスを導入
するなどのチャタリング対策を行ってもよい。
6.3.6.4.5
運転者によるMBへのオーバライド
FVCMSは,製造業者によって規定された手順で,運転者操作によるMBへのオーバライドを許可して
もよい(オーバライド機能の設定は任意)。MBの作動への運転者のオーバライド操作が終了した場合には,
FVCMSはMBの作動を自動復帰させてもよい。
6.3.6.4.6
トラクション低下を伴う制動
MBの作動によって生じる車輪ロックは,ABS又はESCで制御可能なロック発生時間よりも長くてはな
らない。
6.3.6.5
SRBの要件
FVCMSの作動についてのMB機能の最小要件は,次のとおりである。製造業者の裁量によって,FVCMS
はこのMB機能の最小要件を超えた機能を備えてもよい。
6.3.6.5.1
SRBの開始
SVとTVとのTTC又はETTCが4.0秒間を上回る状況では,FVCMSはSRBを作動してはならない。
なお,SRBの作動開始タイミングは,SVの製造業者が決定する。
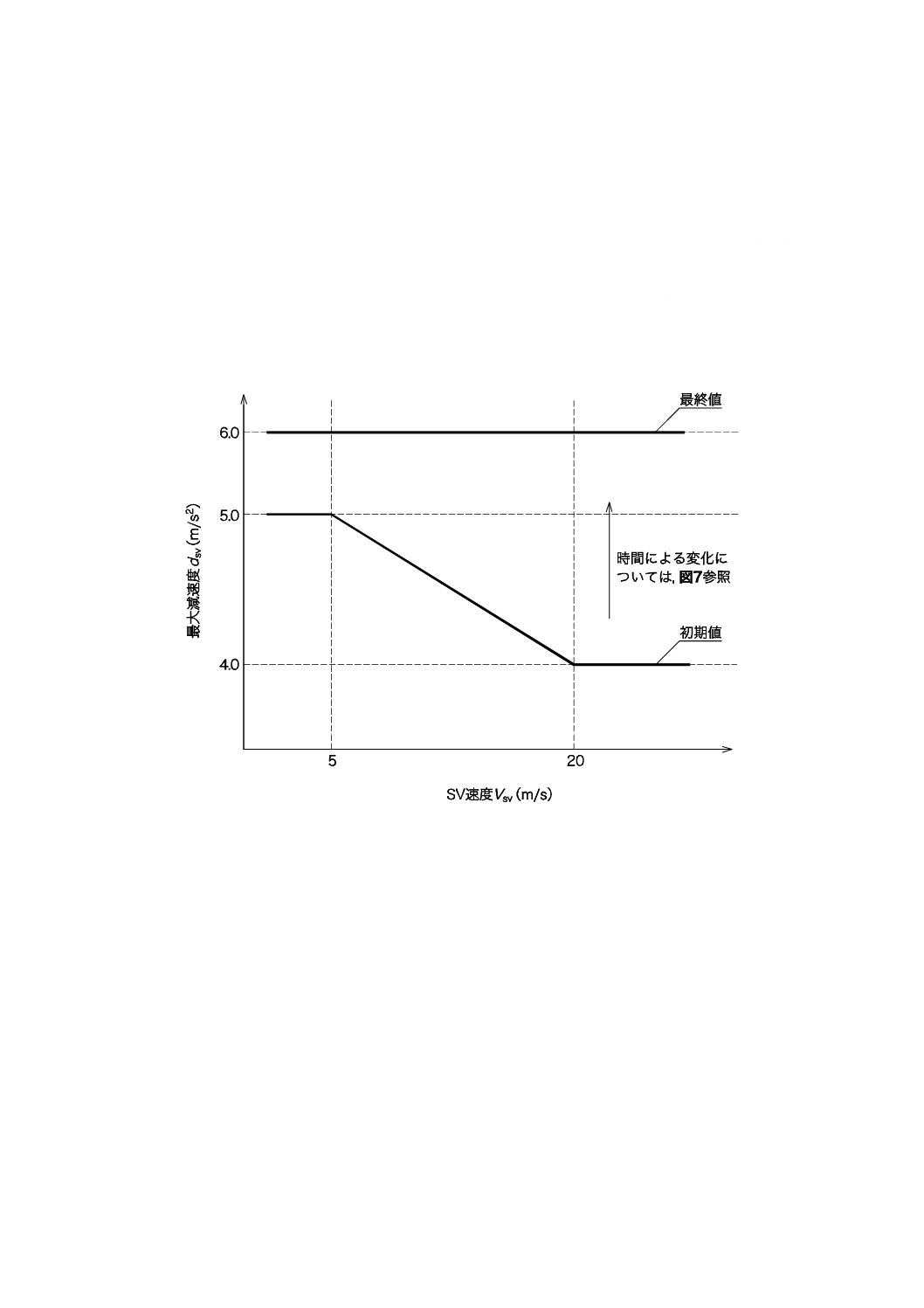
6.3.6.5.2
SRBの最大減速度
5.0 m/sと20 m/sとの間のいかなるSV速度についても,作動時にSRBによって発生される平均減速度
は,dSV=5.33 m/s2−0.067/s・vSV(第一時間帯T̲1̲SRB秒間にわたっての平均)の値を超えないものとする。
16
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
dSVはSVの減速度であり,vSVはSVの速度であり,dSV=−aSVである。
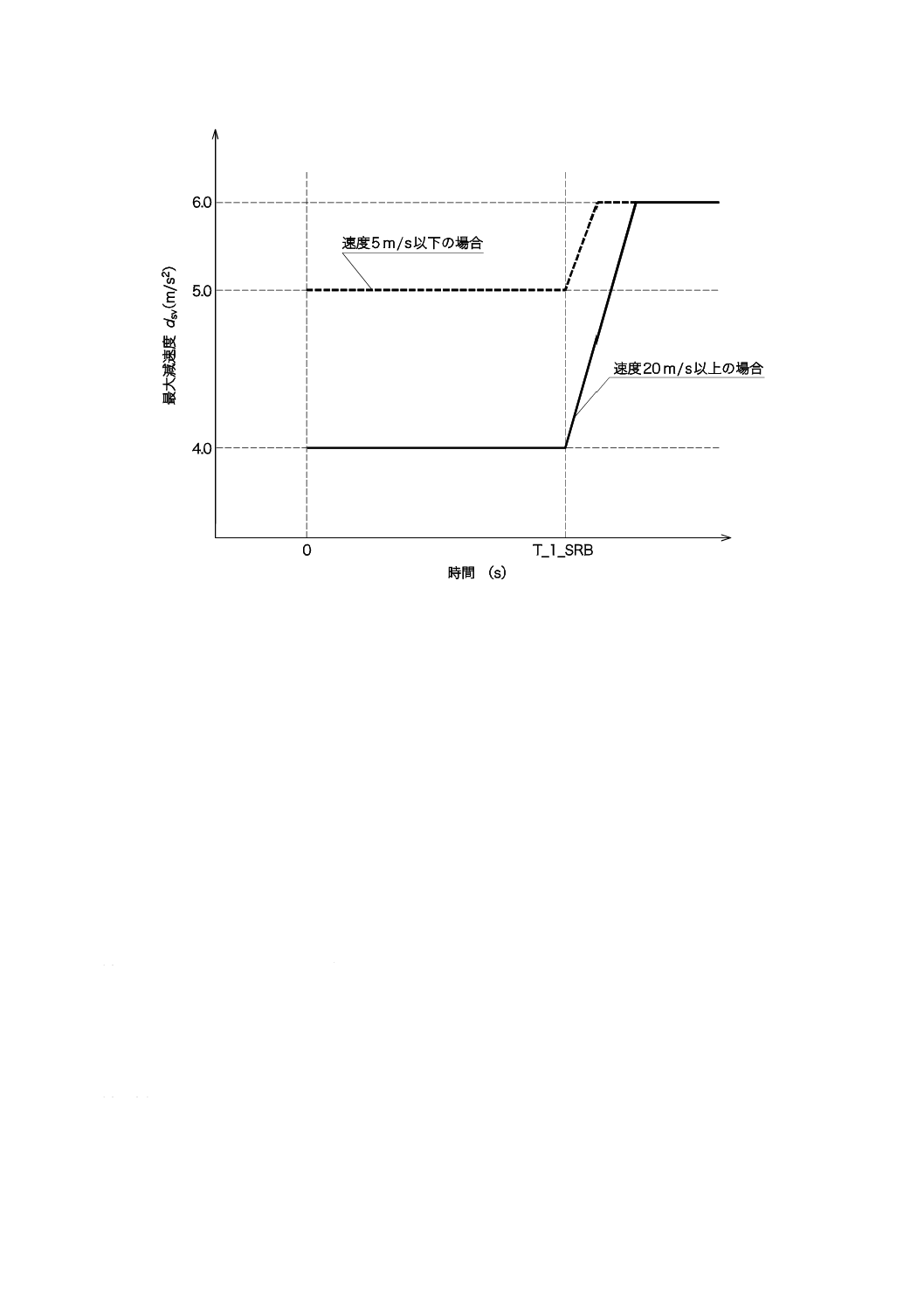
SRBによって発生される平均減速度は,SRBの第一時間帯T̲1̲SRBにおいて,vSV>20 m/sにおいては
4.0 m/s2(第一時間帯T̲1̲SRB秒間にわたって平均化)を超えないこと,又はvSV<5 m/s(図6に図示)に
おいては5.0 m/s2を超えないものとする。
少なくともT̲1̲SRBの時間の後で,SRBの最大許容減速度は6.0 m/s2(1秒間にわたって平均化)まで
連続的に上昇してもよい。T̲1̲SRB>=0.5秒間。
最大減速度を上昇させるSRBの間に達成される平均加速度変化率は,6.0 m/s3(0.5秒間にわたって平均
化)を超えないものとする。
この要件については,図6のSRBの最大減速度を参照。連続的減速度上昇については図7を参照。
図6−SV速度に対するSRBの最大減速度
17
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図7−SRB作動時間に対する最大減速度
6.3.6.5.3
必要とされるSRBの最小効果
SRBだけ(タイプ1)のシステムは,最低でもMB機能の最小要件と同じ程度に速度を低下させるもの
とする。
6.3.6.5.4
SRBによって生じる車両安定性低下
SRBは,アンチロックブレーキ又は車両安定性制御デバイス(ABS/RSC)で制御可能範囲よりも長い時
間の車輪ロックは行わないものとする。
6.3.6.5.5
運転者操作によるSRBのオーバライド
FVCMSは,製造業者によって規定される手法で運転者操作によってSRBを運転者がオーバライドする
ことを許可してもよい。
6.3.6.6
衝突警報
CWは,JIS D 0802と一致する聴覚,視覚及び/又は触覚に訴える手段を組み合わせて使用しなければ
ならない。
6.3.7
運転者のコントロール及びヒューマンインタフェース
6.3.7.1
普通車両
6.3.7.1.1
システムの機能限界情報
運転者は,少なくとも取扱説明書又は同等代替物によってFVCMS作動限界について通知されなければ
ならない。
6.3.7.1.2
運転者によるFVCMSの解除
運転者によって,FVCMSを解除する手段を備えてもよい。
FVCMSアクティブ状態及び/又はFVCMS非アクティブ状態からFVCMSオフ状態へ手動で移行する手
18
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
段をもつシステムについて,運転者はシステム状態を容易に判断可能でなければならない。
6.3.7.1.3
FVCMS故障表示
システム故障は運転者へ通知されなければならない。
6.3.7.2
大型車両
6.3.7.2.1
TV検出情報
大型車両のFVCMSは,TVが検出された情報を運転者に通知してもよい。この早期の運転者への情報の
追加は,大型車両の運転者が経験する長い制動遅延及び長い停止距離を回避するのに役立つと考えられる。
6.3.7.2.2
FVCMSの機能限界情報
運転者は,少なくとも取扱説明書又は同等代替物によってFVCMS作動限界について通知されなければ
ならない。
6.3.7.2.3
運転者によるFVCMSの解除
運転者によるFVCMSを解除する手段を備えてもよい。
FVCMSアクティブ状態及び/又はFVCMS非アクティブ状態からFVCMSオフ状態へ手動で移行する手
段をもつシステムについて,運転者はシステム状態を容易に判断可能でなければならない。
6.3.7.2.4
システム故障表示
システム故障は運転者へ通知されなければならない。
7
確認方法
7.1
試験目標物の仕様
7.1.1
検知性能の仕様
7.1.1.1
光学式レーダ(LIDAR又はLADAR)
7.1.1.1.1
車両型の目標物
試験の目標物は,代表的な乗用車の物理的サイズ,形状及び表面形状をもって,乗用車の反射率を表す
CTT(試験目標物の反射係数)をもつものとする。
7.1.1.1.2
二輪自動車型の目標物
試験の目標物は,代表的な二輪自動車の物理的サイズ,形状及び表面形状をもって,二輪自動車の反射
率を表すCTTをもつものとする。
7.1.1.1.3
頭上方向の目標物
試験の目標物は,一般的に車道の上に位置する代表的な構造物の物理的サイズ,形状及び表面形状をも
って,構造物の反射率を表すCTTをもつものとする。
7.1.1.2
電波式レーダ
7.1.1.2.1
車両型の目標物
試験の目標物は,代表的な乗用車の物理的サイズ,形状及び表面形状をもって,乗用車の反射率を表す
RCS(レーダ反射断面積)をもつものとする。
7.1.1.2.2
二輪自動車型の目標物
試験の目標物は,代表的な二輪自動車の物理的サイズ,形状及び表面形状をもって,二輪自動車の反射
率を表すRCSをもつものとする。
7.1.1.2.3
頭上方向の目標物
試験の目標物は,一般的に車道の上に位置する代表的な構造物の物理的サイズ,形状及び表面形状をも
って,構造物の反射率を表すRCSをもつものとする。
19
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.1.1.3
受動型光学式センサ
7.1.1.3.1
車両型の目標物
試験の目標物は,代表的な乗用車の物理的サイズ,形状及び表面形状をもつものとする。
7.1.1.3.2
二輪自動車型の目標物
試験の目標物は,運転者を含む代表的な二輪自動車の物理的サイズ,形状及び表面形状をもつものとす
る。
7.1.1.3.3
頭上方向の目標物
試験の目標物は,一般的に車道の上に位置する代表的な構造物の物理的サイズ,形状及び表面形状をも
つものとする。
7.1.2
試験目標物の物理的制約
7.1.2.1
光学式レーダ(LIDAR又はLADAR)
CTTは反射器の特性(減衰特性)だけを表す。最小の許容試験目標物は,必要なCTTを備えるコーナ
ー反射器である。同じCTT要件を満たしている場合には,広い反射面をもつ試験物体を使用することが許
容可能である。
7.1.2.2
電波式レーダ
試験目標物の幾何学形状は,JIS D 0802の附属書Dに記載されている。
7.1.2.3
受動型光学式センサ
試験の目標物は,運転者の乗車した二輪自動車及び乗用車の代表的な表面形状をもつものがよい。膨張
可能な目標物が使用される場合には,試験の目標物は表面の変形を制限しなければならない。反射率特性
は量産車に一致するように設定する。
7.2
環境条件
システム機能特性の試験を行う場合の環境条件は,次による。これらの環境条件は,システム性能を評
価するときに網羅的又は限定的であることを意味するものではない。これは,追加的条件での試験を製造
業者が行うことを妨げるものではない。
7.2.1
走行試験路面
試験場所は,平たんで乾燥したアスファルト又はコンクリートの表面とする。試験の時点での当該試験
車両のタイヤと走行路面との間の摩擦係数は,試験対象のシステムの最大制動力を発生できるように十分
に高いものとする。
7.2.2
照度条件
試験の照度条件についての制約はない。試験は昼間の日光条件で行ってもよい。
7.2.3
周囲温度
温度範囲は,−20 ℃〜40 ℃とする。試験は製造業者の自由裁量によってこの温度範囲以外で行っても
よい。
7.2.4
水平方向視程
水平方向視程は,1 kmを上回るものとする。
7.3
検知範囲の試験方法
検知範囲の試験は,動的試験が実際的であるが静的試験を選択できる。試験は次のように行う。図8に
示すように,d0とd1との間の任意の距離に位置する試験目標物をシステムが検知できなければならない。
システムは,図8に示すようにd1とd2との間の任意の距離に位置する試験目標物を検知できるものとす
る。システムは,図8に示すようにd2とdmaxとの両方の距離に位置する試験目標物を検知できるものとす
20
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
る。
センサとECUとが統合されているときなど特殊な測定機器がないと検知範囲が確認できない場合に,製
造業者は特殊な測定機器を使用してこの試験を実施して検査のための試験結果を提供してもよい。付加的
に,この試験は動的試験を許容するので,この試験方法の目的が果たされるように箇条7の別の試験と同
時に実施してもよい。例えば,前に規定された試験目標物仕様を満たす試験車両を試験目標物として使用
してもよい。この試験で規定される様々な距離でのCWが適切に作動することは,検知性能を満足してい
ると考えてもよい。
図8−検知範囲
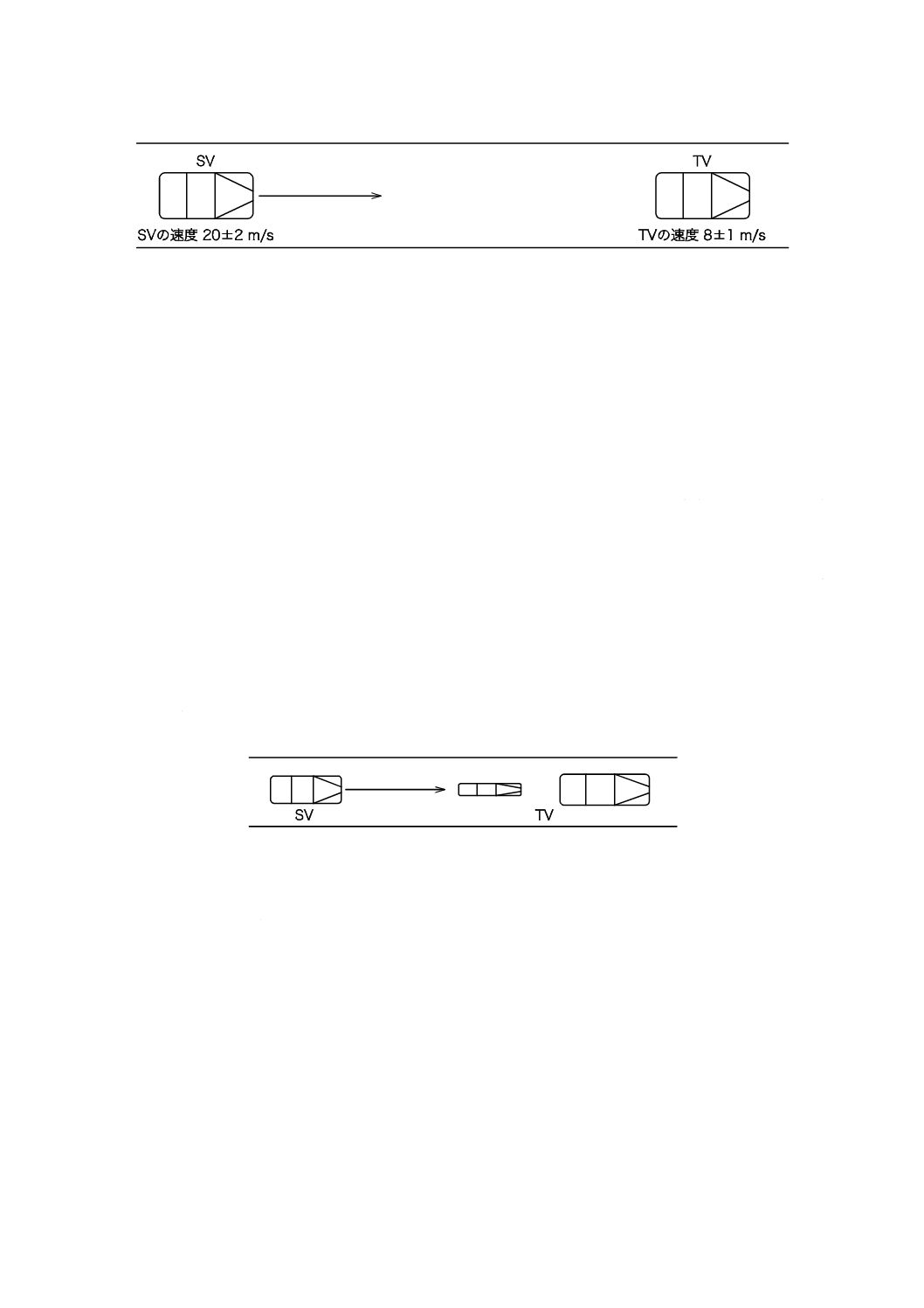
7.4
システム性能についての試験方法
この試験は,TVの代わりに標準反射板を使用してもよい。システム性能評価試験は,−12 m/sの公称
相対速度をもつように,当該試験車両については20±2 m/sの試験走行速度及びTVについては8±1 m/s
の試験走行速度での一つの試験シナリオから成る(図9及び図10参照)。当該試験車両が十分後方からTV
に接近する。衝突が起こる前に,システムがCWを発生させ,要求される減速量に(タイプ2及び3につ
いては,6.3.6.4.2を満足する減速度にも)達したときに,試験が完了する。
図9−性能確認試験時のSV及びTV速度
21
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図10−システム性能確認試験
7.5
目標識別能力についての試験方法
これらの試験は,動いている車両について行うものとする。この細分箇条での各試験の操作手順は,SV
がCWを発したときに終了する。試験では,必要でない警報とならないことも確認される。警報が発せら
れない場合には,必要な操作が完了したときに試験が完了する。製造業者の自由裁量によって,これらの
試験はシステムのSRB又はMB機能性の評価にまで拡張されてもよい。これらの試験の各々は,機能的能
力試験に記載されたSV及びTV速度で実施可能である。
7.5.1
前方縦方向識別試験
検出エリアにある2台のTVは,共に20 m/sの速度で走行する。SVは,20 m/sの速度で2台のTVに追
従走行する。2台のTVの間の車間時間は0.6±0.1秒間であるものとし,2台のTVは,近い方のTVが遠
い方のTVを隠さないように一列に位置する(図11参照)。SVと近い方のTVとの間の車間時間は1.5秒
間を上回ってもよい。システムがCWを発するまで,SVがTVに接近する。その後,SVは,同じ車間時
間(例えば,≧1.5秒間)に達するまで減速してから,再び同じ速度でTVに追従走行する。次に,僅か数
秒間後に,SVがCWを発するのに十分に低い速度まで近い方のTVが減速する。SVがCWを発したとき
に試験は終了する。
警報のトリガ点が,単独で検討された近い方のTVの機能的トリガしきい値に従ったものである場合に,
この試験は合格となる。
図11−前方縦方向の目標物識別能力試験
7.5.2
直線道路側方識別試験
この試験は動的に実施されるものとする。SV及びTVは,20 m/sである同じ速度で,また,警報を生じ
ない車間時間で走行する。SVとTVとの間の車間時間は,1.5秒間を上回ってもよい。FVは,TVと同じ
速度でTVの横を走行する(図12参照)。先行車両の長手方向中心線の間の間隔は3.5±0.25 mである。先
行車両の幅は1.4 m〜2.0 mの間であるものとする。SVとTVとの横方向オフセットは20 %未満であるも
のとする。数秒間後に,FVは,SV及びTVの速度より著しく低い速度まで減速する。FVの通過の間,SV
は警報を発することもMBも開始しない。次に,数秒間後,SVがCWを発するのに十分に低い速度まで
TVを減速させる。SVがCWを発したときに試験は終了する。
22
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図12−直線道路側方目標物識別能力試験
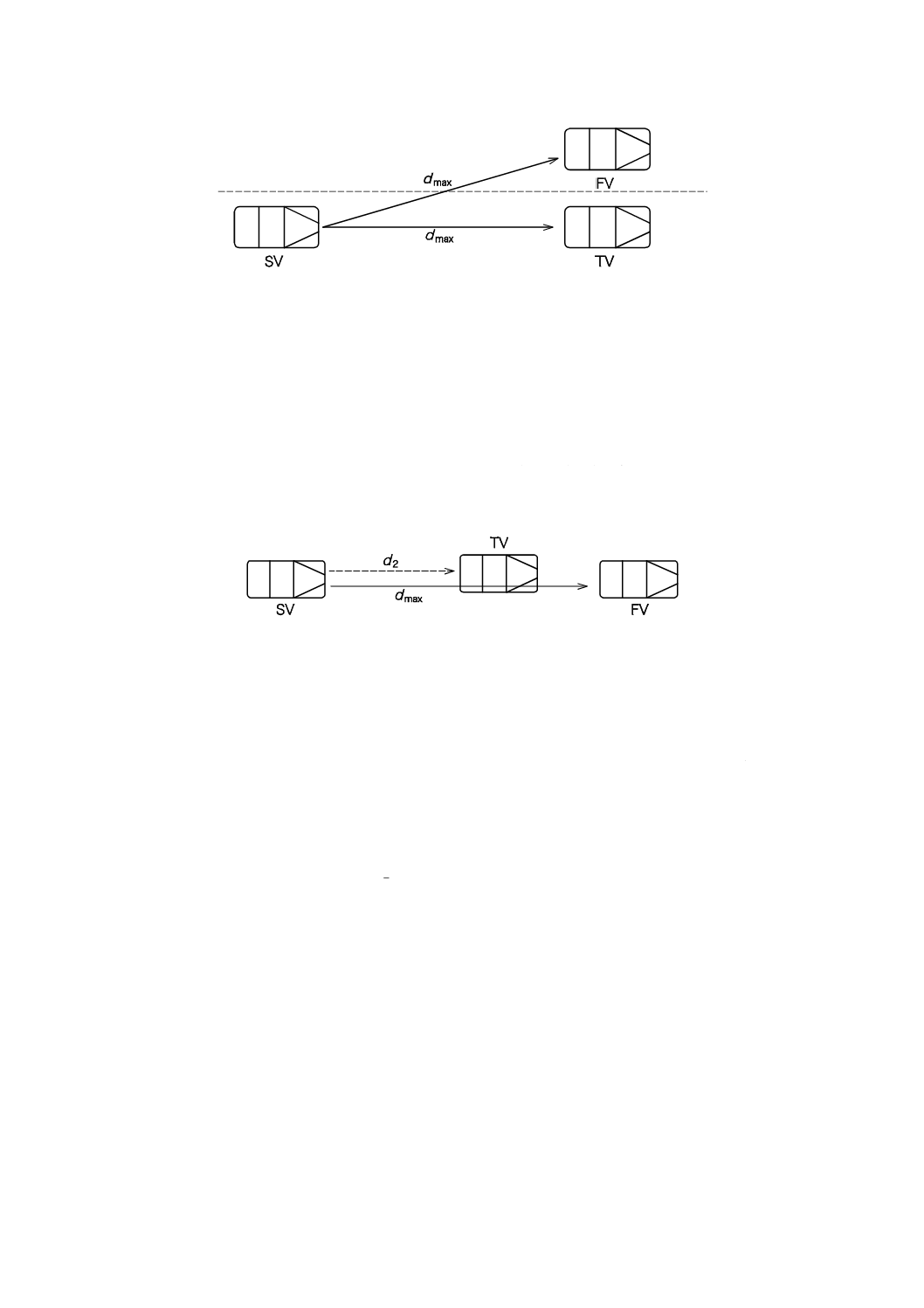
7.5.3
直線道路側方オフセット識別試験
この試験は動的に実施されるものとする。SV及びFVは,20 m/sである同じ速度で,また,警報を生じ
ない車間時間で走行する。SVとTVとの間の車間時間は,1.5秒間を上回ってもよい。TVは,SVからd2
より大きな距離,そして,SV及びFVと同じ速度で,FVの後方を走行する。TV及びFVの幅は1.4 m〜
2.0 mの間であるものとする。SVとFVとの横方向オフセットは20 %未満であるものとする。SVとTV
との横方向オフセットは15 %〜20 %の間であるものとする(図13参照)。数秒間後に,SVがCWを発す
るのに十分に低い速度までTVを減速させる。SVがCWを発したときに試験は終了する。
図13−直線道路側方オフセット目標物識別能力試験
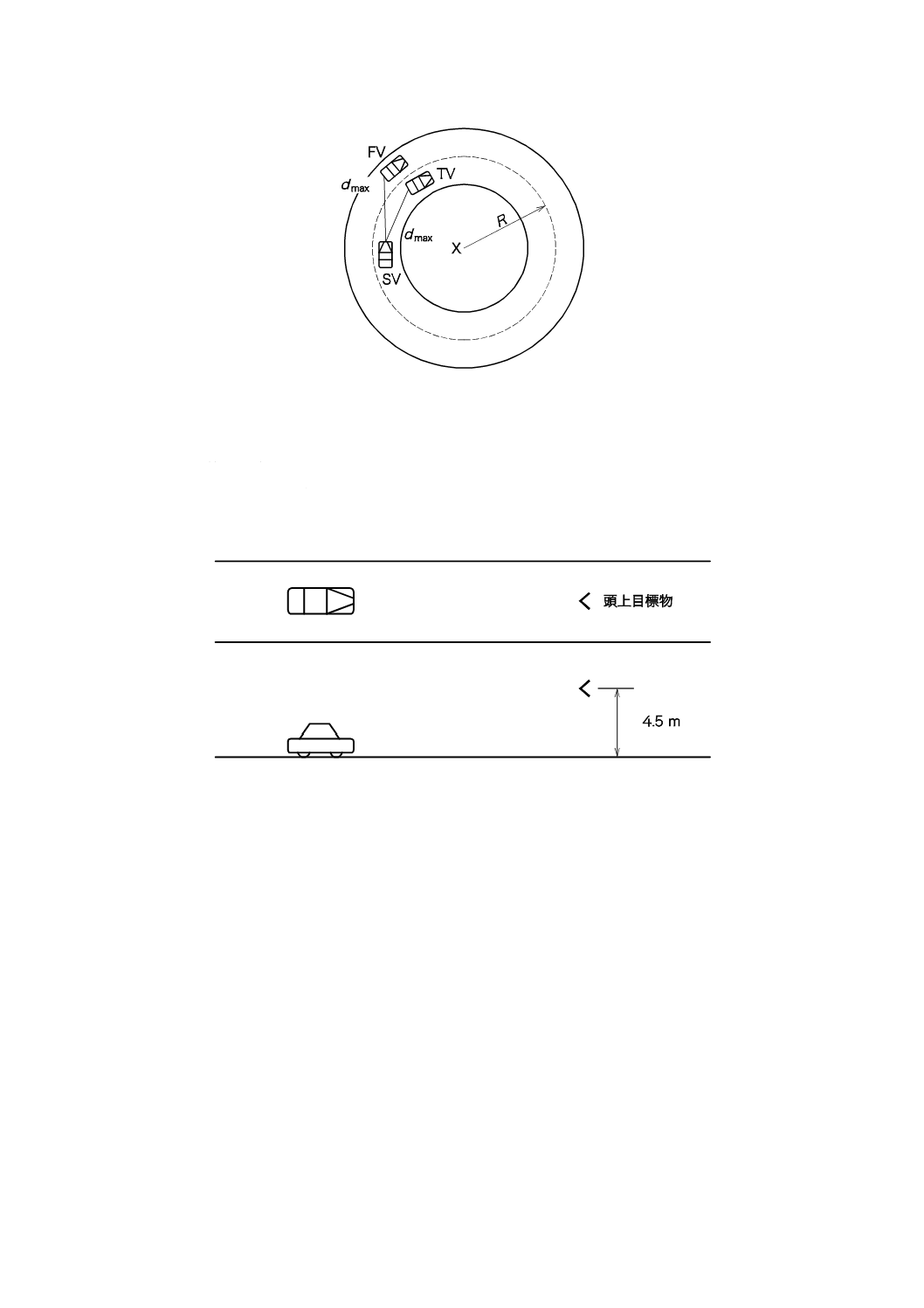
7.5.4
曲線道路側方識別試験
直線道路試験に加えて,次の試験は,クラスIシステムについては500 mの最大半径,クラスIIシステ
ムについては250 mの最大半径,クラスIIIシステムについては125 mの最大半径をもつ円又は円の大部
分で行われるものとする。この試験は動的に実施されるものとする。SV及びTVは,同じ車線において同
じ速度で,また,警報を生じない車間距離で走行する。試験開始時の試験車両の速度は,次のとおりであ
る。
Vcircle̲start=min[(alateral̲max×R)1/2, 20 m/s]±1 m/s
ここに,
alateral̲max: クラスIについては2.0 m/s2,
クラスII及びクラスIIIについては2.3 m/s2
FVは,外側車線のTVの横を走行する(図14参照)。数秒間後にFVは,SV及びTVの速度より著しく
低い速度まで減速する。FVの通過中に,SVは警報を発することもMBも開始しない。数秒間後にSVが
CWを発するのに十分なほど速度が低くなるように,TVは減速を続ける。SVがCWを発したときに試験
は終了する。
23
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図14−曲線道路側方目標物識別能力試験
7.5.5
頭上識別試験
この試験は動的に実施されるものとする。図15に示されているように,誤動作を生じさせる頭上目標物
は,dmaxより大きな距離で車道の上方4.5 mに設置される。SVが頭上目標物に接近する。警報又は制動を
行わずにSVが頭上目標物の下を通過したときに試験は終了する。
図15−頭上目標物識別能力試験
24
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
基礎的考察
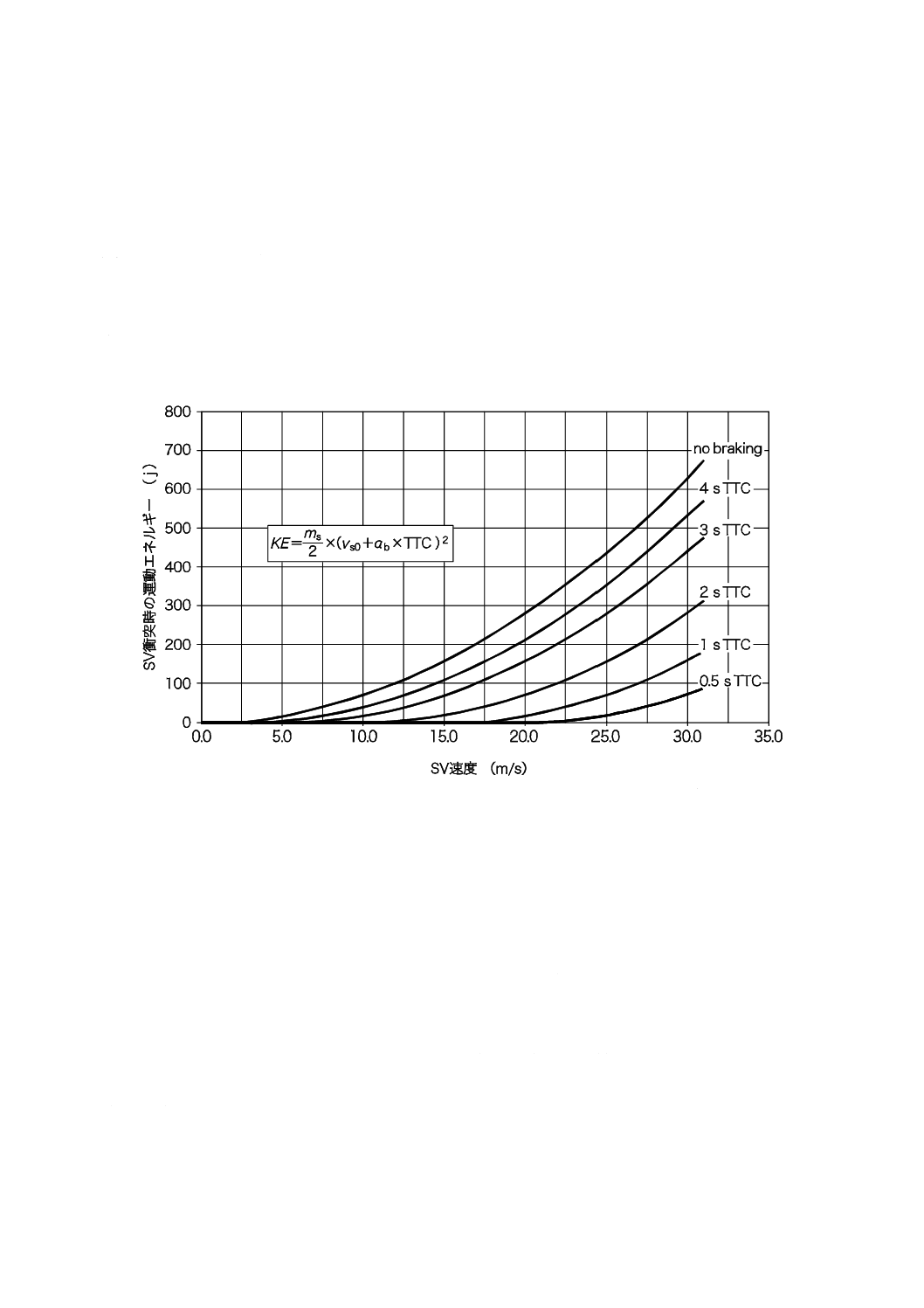
A.1 被害軽減効果及び衝突回避の可能性
幾つかの単純な運動力学的計算から,衝突軽減システムは衝突時の運動エネルギーの量をかなり低下さ
せることが分かっている。SV重量が1 400 kg,自動的な(運転者操作によらない)制動による平均減速度
が0.5 gであると想定し,道路表面及び制動力については本質的に理想的な条件であると仮定した場合の
衝突運動エネルギーの潜在的低下を,次の図A.1に示す。
図A.1−停止車両に対する0.5 g平均減速度制動の場合の衝突エネルギー
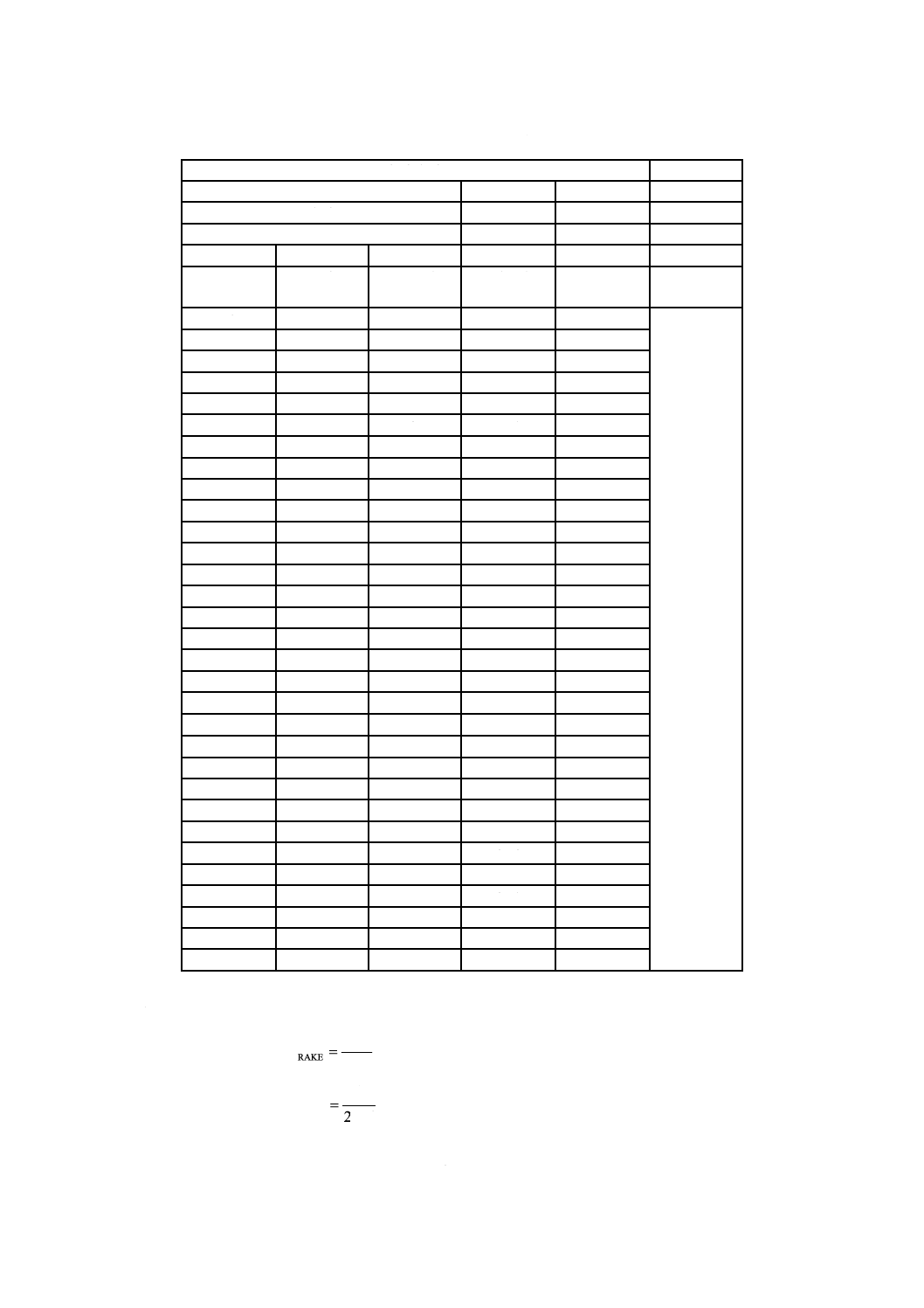
A.2 衝突回避可能な最低相対速度及び必要なセンサ検知性能
表A.1は,SVが30 m/sまでの範囲の相対速度でFVに接近し,2秒間までの間にFVを検出及び解析し,
0.5 gで制動するという前提で調査したものである。検出が始まらなければならない距離(つまり,必要な
有効センサ範囲)を計算する。長い有効範囲をもつセンサは,高速からSVを停止させる可能性がある。
FVは移動中又は静止中を問わない。
60 mの有効最小センサ範囲を想定することによって,16.5 m/s(59 km/h)までの相対速度について制動
が開始可能であることが分かる。
空走時間が1秒間まで減少した場合,60 mセンサの最大相対速度は20 m/s(72 km/h)まで上昇する。
ゼロ空走時間については,最大相対速度は約24.5 m/s(88 km/h)まで上昇する。
最低相対速度特性の要件を明確にするため,Tfreeは1秒間であると想定する。この場合,要件は20 m/s
(72 km/h)である。
25
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.1−衝突回避可能な最低相対速度及び必要なセンサ検知性能
想定条件
自動制動の減速度
A
5
m/s2
空走時間
Tfree
1
s
速度漸増
増分
1
m/s
(m/s)
(s)
(m)
(m)
(m)
相対速度
VREL
制動時間
TBRAKE
制動距離
xBRAKE
空走距離
xFREE
センサ検知
距離
0
0.0
0.0
0.0
0.0
1
0.2
0.1
1.0
1.1
2
0.4
0.4
2.0
2.4
3
0.6
0.9
3.0
3.9
4
0.8
1.6
4.0
5.6
5
1.0
2.5
5.0
7.5
6
1.2
3.6
6.0
9.6
7
1.4
4.9
7.0
11.9
8
1.6
6.4
8.0
14.4
9
1.8
8.1
9.0
17.1
10
2.0
10.0
10.0
20.0
11
2.2
12.1
11.0
23.1
12
2.4
14.4
12.0
26.4
13
2.6
16.9
13.0
29.9
14
2.8
19.6
14.0
33.6
15
3.0
22.5
15.0
37.5
16
3.2
25.6
16.0
41.6
17
3.4
28.9
17.0
45.9
18
3.6
32.4
18.0
50.4
19
3.8
36.1
19.0
55.1
20
4.0
40.0
20.0
60.0
21
4.2
44.1
21.0
65.1
22
4.4
48.4
22.0
70.4
23
4.6
52.9
23.0
75.9
24
4.8
57.6
24.0
81.6
25
5.0
62.5
25.0
87.5
26
5.2
67.6
26.0
93.6
27
5.4
72.9
27.0
99.9
28
5.6
78.4
28.0
106.4
29
5.8
84.1
29.0
113.1
30
6.0
90.0
30.0
120.0
ここに,
A
V
T
REL
BRAKE=
A
V
x
×
=22REL
BRAKE
FREE
REL
FREE
T
V
x
×
=
センサ検知距離
BRAKE
FREE
x
x
+
=
26
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.3 作動速度範囲の最低上限値
全てのFVCMSはVmin〜VmaxのSV速度範囲にて作動するものであり,Vmaxの最小値が27.8 m/s又は100
km/hであることが提案されている。Vmaxの値は,FVCMSが運転者に提供しなければならない最小の作動
速度範囲である。この作動速度範囲は一般の走行速度のかなりの比率を占めなければならず,そのためVmax
は運転速度データの計測値に基づいて決定されなければならない。
車線逸脱衝突警報の市場走行試験プロジェクト(FOT)の一つの成果として,運転速度データが収集さ
れた。このFOTについての情報は,米国NHTSAウェブサイトで入手可能である。市場走行試験は完了し,
データ解析が進められている。この試験では,運転者78名の4週間分の走行データを計測した。走行デー
タ量(概数)は,累積走行距離133 000 km,累積走行時間2 500時間,累積走行回数9 600回に及んだ。
運転操作データ,車両データ,及び走行環境データが,常時に計測された。また,地方道路,生活道路,
主要道,ランプウェイ,高速道路,不明などの道路タイプが記録された。全てのデータが測定されたとい
う点で,このデータセットは非常に貴重である。マイナス面は,ミシガン州南東部に居住する運転者だけ
を対象としていることである。
このデータ解析に基づくと,全ての試験者及び全ての道路タイプを対象にしたときの平均運転速度は65
km/hであり,標準偏差は35 km/hである。このときに1-シグマ境界を考慮すると,運転速度上限値は100
km/hとなる。運転速度データが正規分布とすれば,全ての運転走行データの84 %が100 km/h以下の速度
になる。
これは,Vmaxが少なくとも100 km/hであると提案するための根拠である。
A.4 世界の追突速度分布についての参考データ
A.4.1 米国
米国でのデータは,米国運輸省のJohn A. Volpe National Transportation Systems Research Centerによる報告
書に基づくものである。これは,2003年以降の米国軽量車両データ及び2000年〜2003年の重量車両デー
タに基づいている1)。
この報告書では衝突前の追突車両の速度を示すものとして道路制限速度が使用されている。データベー
スでは,追突車両が速度違反しているケースは,追突事故の少なくとも19 %,そして,高くても60 %で
あることも研究から判明している。そのため,概して実際の追突速度は報告書に記載されている値より若
干高い。米国でのデータでは,80 %を超える追突事故が55 mph(88 km/h)未満の速度で発生しているこ
とに注目すべきである。停車しているFVに対しての追突事故のほぼ10 %が88 km/h〜111 km/hの間の接
近速度で発生する。
米国では,追突事故の80 %が80 km/h以下で発生する。日本では追突事故の80 %が40 km/h以下で発生
する。欧州連合,英国及びカナダでの統計では,各国の追突速度の特徴は日本よりも米国に近いと考えら
れる。これらの傾向は,広範囲な作動速度範囲を実現するFVCMSの必要性を正当化するものである(表
A.2参照)。
27
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
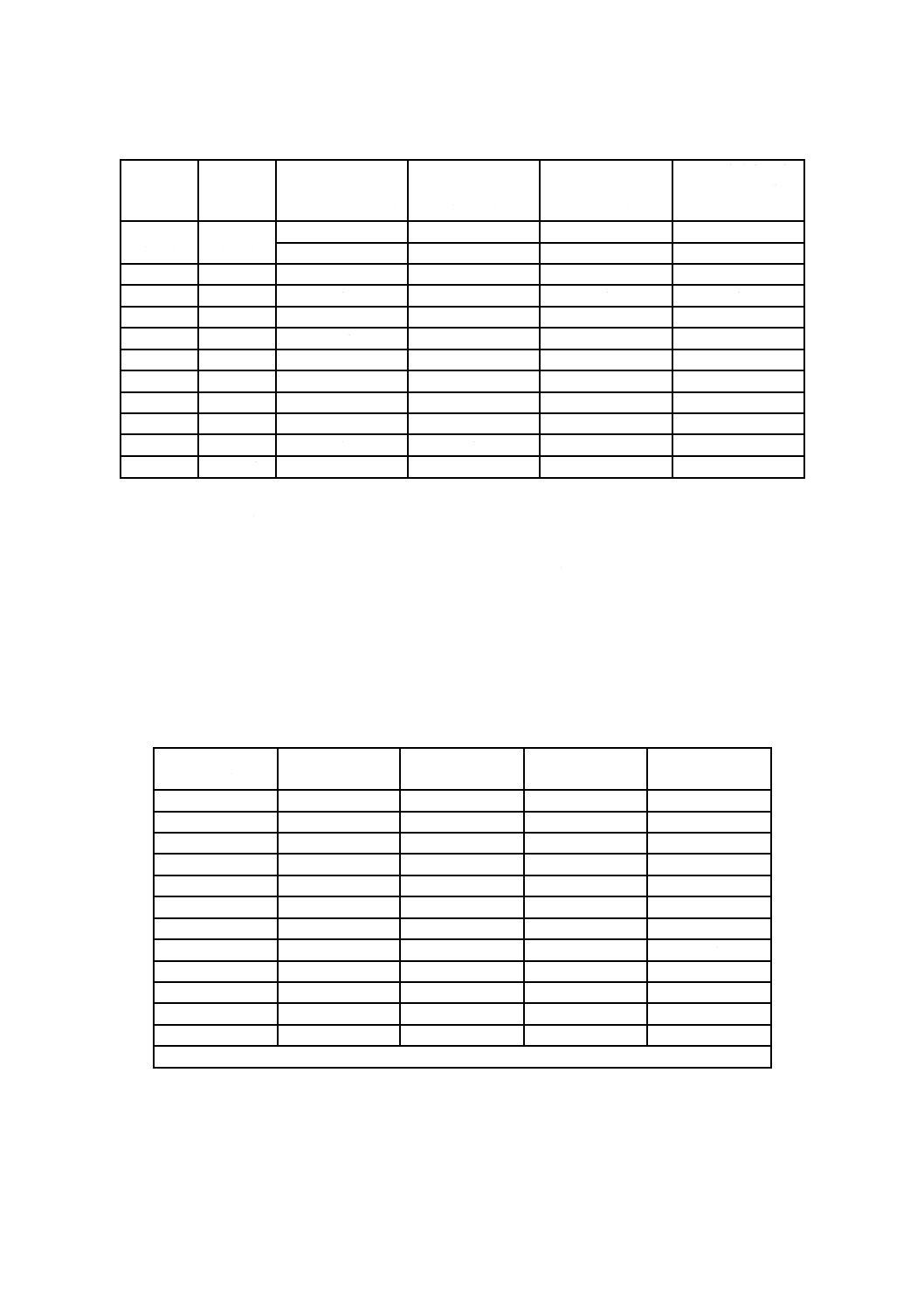
表A.2−普通車両の追突時の速度分布
SVが車線変更,
FVは車線変更先
車線で停止(5.1 %)
SVが低速のFVを
追い越す
(13.5 %)
SVが減速中のFV
を追い越す
(52.9 %)
SVが進路内の停
止先頭車両と遭遇
(24.6 %)
速度
(mph)
速度
(km/h)
制限速度
制限速度
制限速度
制限速度
累積 %
累積 %
累積 %
累積 %
25未満
40未満
8
9
9
8
30
48
17
16
17
17
35
55
42
36
41
43
40
64
53
46
54
56
45
72
74
64
76
77
50
80
80
69
82
81
55
88
88
82
93
91
60
95
91
88
95
93
65
104
97
97
98
99
70以上
111以上
100
100
100
100
注1) Development of Crash Imminent Test Scenarios for Integrated Vehicle-Based Safety Systems (IVBSS).
DOT HS 810 757, April 2007. Wassim G. Najm, John D. Smith, Us Department of Transportation,
Research and Innovative Technology Administration, John A. Volpe National Transportation Systems
Research Center, Cambridge, MA USA.
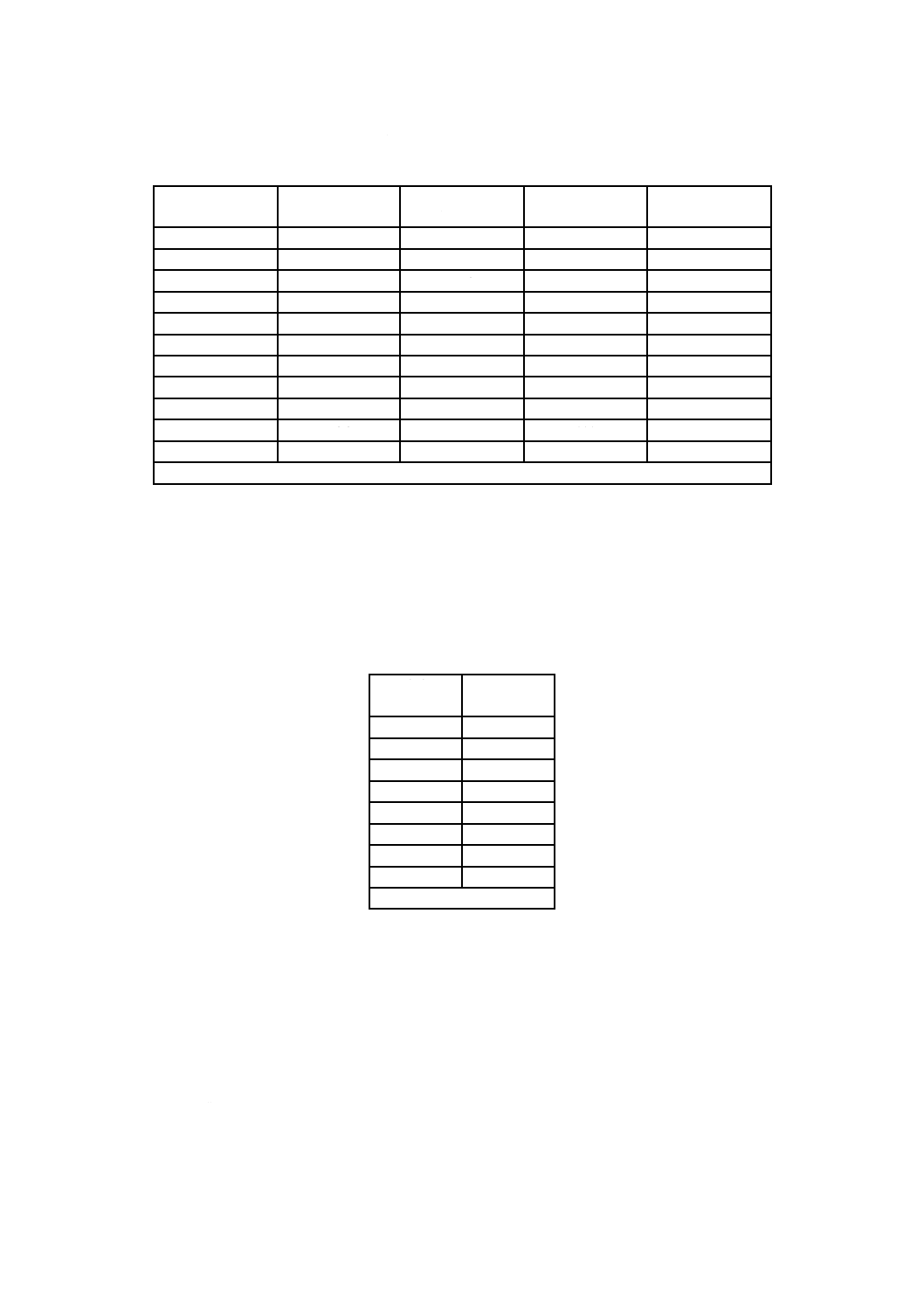
A.4.2 カナダ
制限速度及び衝突の激しさに関する2006年の追突事故データを,表A.3及び表A.4に示す。
表A.3−制限速度及び衝突の激しさに関する追突事故の累積比率
掲示制限速度
(km/h)
死亡事故
死亡以外の
傷害事故
物損事故
全ての事故
10
0
0
0
0
20
0
0
0
0
30
0
4
3
3
40
2
5
4
4
50
15
54
25
32
60
20
69
35
44
70
22
76
37
47
80
33
82
41
51
90
46
86
43
53
100
96
94
47
59
110
100
94
47
59
Unknown
100
100
100
100
Canadian National Collision Database 2006.
28
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.4−制限速度及び衝突の激しさに関する追突事故の累積比率
(制限速度が判明している衝突だけ)
掲示制限速度
(km/h)
死亡事故
死亡以外の
傷害事故
物損事故
全ての事故
10
0
0
0
0
20
0
0
0
0
30
0
4
6
6
40
2
6
9
7
50
15
57
54
55
60
20
74
75
74
70
22
80
80
80
80
33
86
88
87
90
46
91
91
91
100
96
100
100
100
110
100
100
100
100
Canadian National Collision Database 2006.
A.4.3 日本
表A.5は,日本の交通事故総合分析センター(ITARDA)の報告書から抜粋された,ポートランド会議
後に日本から提出されたデータに基づいている。追突時の速度は警察の事故報告書に基づいており,これ
を日本のデータを代表しているとみなしてもよいと考える。
表A.5−日本のITARDA報告書データ
速度
(km/h)
累積
(%)
0
0
10
22
20
42
30
62
40
80
50
93
60
97
70
98
ITARDA Data 2000
A.5 車両分類
The United Nations Economic and Social Council World Forum for Harmonization of Vehicle Regulations
(WP.29)TRANSWP.29/1045では,米国,欧州及びアジアでの車両分類方法が比較されている。この分類
がこの規格で使用されている。この文書の詳細は,次を参照。
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29classification.html
A.6 ETTCの導出
SVとTVとの間の相対加速度が一定であると想定して,ETTCの式が導出される。物体の線形運動力学
を用いて,位置が時間の関数として表される。

29
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(
)dt
t
a
v
dx
t
X
x
c
0
0
0
+
=∫
∫
一定の加速度と想定して,
2
c
0
0
2
1
t
a
t
v
x
x
+
+
=
二次方程式を用いて解くと,
(
)
(
)2
SV
TV
SV
TV
c
2
1
0
t
a
a
t
v
v
x
−
+
−
+
=
−
×
×
−
×
−
−
±
−
−
=
)
(
2
1
2
)
(
2
1
4
)
(
)
(
SV
TV
c
SV
TV
2
SV
TV
SV
TV
a
a
x
a
a
v
v
v
v
t
)
(
)
(
2
)
(
)
(
ETTC
SV
TV
c
SV
TV
2
SV
TV
SV
TV
a
a
x
a
a
v
v
v
v
−
×
−
×
−
−
±
−
−
=
∴
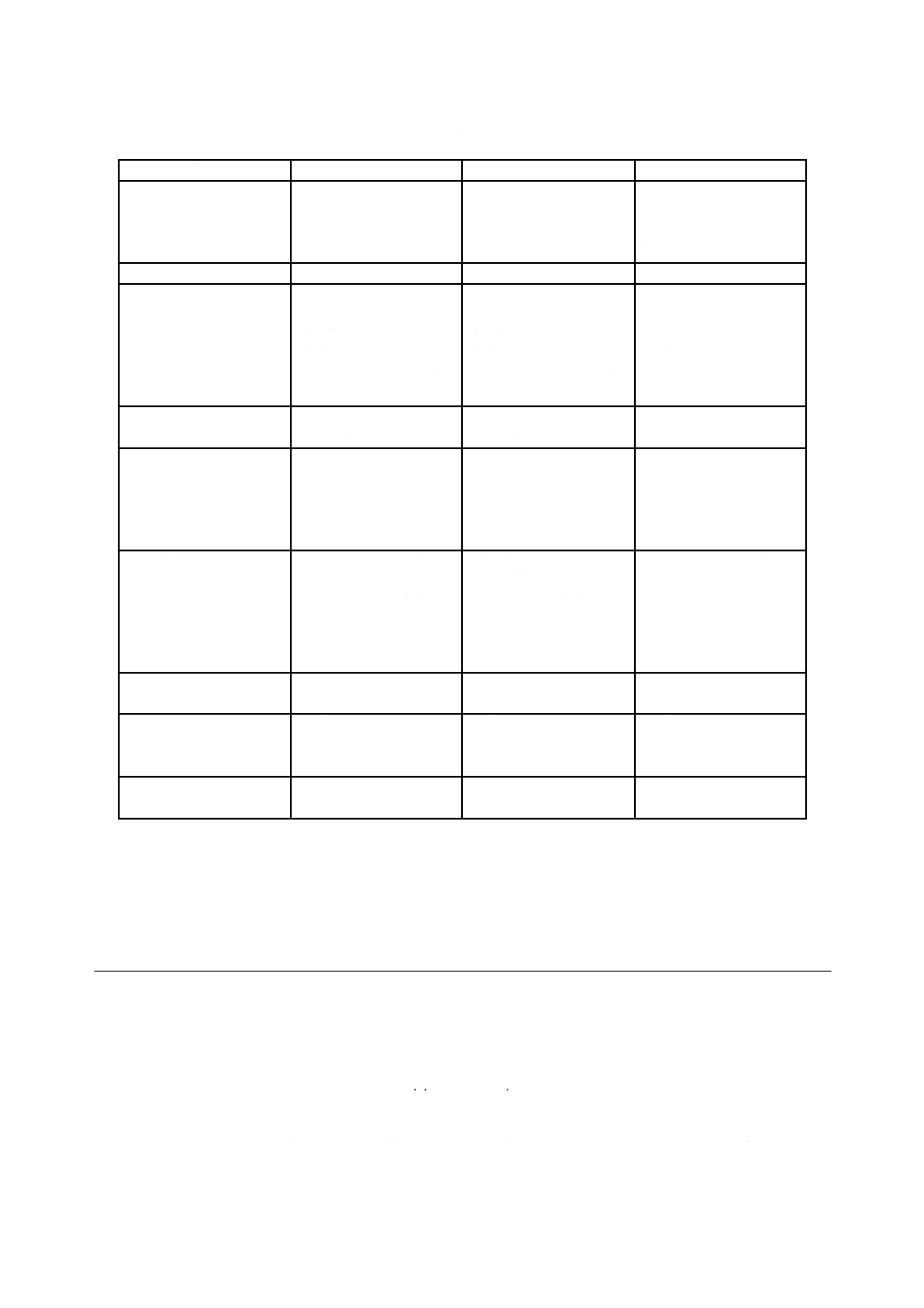
A.7 ACC(JIS D 0801),FSRA(JIS D 0807)及びFVCMSの関係
FVCMSのタイプ2及びタイプ3は,ACCとは機能が異なるため,運転者が混同しないようにするのが
よい。製造業者が両方の機能を統合システムに設けることは,その作動の間に矛盾が見られないため可能
である。ACC制御状態でFVCMSが危険を認識した場合には,制動を開始する前にCWを発する。これは,
ACCはもはや制御できておらず,切迫した高い緊急性があることを運転者に知らせている。表A.6にACC,
FSRA及びFVCMSの間の性能の相違について示す。
30
D 0808:2015 (ISO 22839:2013)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.6−ACC,FSRA及びFVCMSの間の性能の相違
性能特徴
ACC
FSRA
FVCMS
運転者にとっての本質的
な利点
スロットル及びブレーキ
を作動させて速度とFV
までの車間距離を制御す
る
スロットル及びブレーキ
を作動させて速度とFV
までの車間距離を制御す
る
追突のおそれがある場合
にブレーキを作動させて
被害及び傷害の可能性を
低下させる
制動の前の警報
不要
不要
必要
制御開始の基準
運転者操作又は制御オフ
から制御スタンバイへの
自動的移行
速度及びクラッチ位置に
基づく制御アクティブへ
の移行
運転者操作又は制御オフ
から制御スタンバイへの
自動的移行
速度及びクラッチ位置に
基づく制御アクティブへ
の移行
非アクティブへの自動的
移行
速度に基づく制御アクテ
ィブへの移行
減速を行う方法
スロットル制御及びブレ
ーキ制御
スロットル制御及びブレ
ーキ制御
ブレーキ制御
減速のための制動レベル
の制約
最大減速度3.5 m/s2(2秒
間の平均)
最大加速度変化率2.5
m/s3(1秒間の平均)
車両速度に基づく減速の
制限
車両速度に基づく最大加
速度変化率の制限
最大減速度の制約なし
軽量車両の最小減速度要
求値は,5 m/s2
最大加速度変化率の制約
なし
SV運転速度の制限
5 m/s未満では加速でき
ない
7 m/s未満では速度を設
定できない
上限は製造業者によって
設定
運転者権限による停止か
らの加速が可能
7 m/s未満の速度は設定
できない
上限は製造業者によって
設定
4.2 m/s未満での軽減制動
の提供は要求されない
上限は製造業者によって
設定
運転者による減速制動停
止
必要
必要
必要
制動基準に適合しなくな
った場合の減速制動の停
止
必要
必要
必要
減速中のFVが完全停止
するまで追跡
不要
必要
必要
参考文献
[1] ISO 1176,Road vehicles−Masses−Vocabulary and codes
[2] ISO 3833,Road vehicles−Types−Terms and definitions
[3] ISO 6161:1981,Personal eye-protectors−Filters and eye-protectors against laser radiation
[4] ECE Regulation No. 13-H, Uniform provisions concerning the approval of passenger cars with regard to
braking
[5] IEC 60825-1:2001,Safety of laser products−Part 1: Equipment classification, requirements and userʼs guide
(consolidated edition)