D 0807:2011 (ISO 22179:2009)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 2
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 2
4 記号及び単位 ··················································································································· 5
5 種類······························································································································· 5
6 要求事項························································································································· 6
6.1 基本的制御方針 ············································································································· 6
6.2 機能要件 ······················································································································ 6
6.3 基本的運転者インタフェース及び運転者による操作介入機能 ·················································· 9
6.4 作動上の限界 ··············································································································· 10
6.5 制動灯の点灯 ··············································································································· 12
6.6 故障時の動作 ··············································································································· 12
7 性能評価試験方法 ············································································································ 13
7.1 環境条件 ····················································································································· 13
7.2 試験標的規定 ··············································································································· 13
7.3 自動停止能力試験 ········································································································· 14
7.4 目標捕そく距離試験 ······································································································ 15
7.5 目標車両識別試験 ········································································································· 15
7.6 曲線道路対応能力試験 ··································································································· 16
附属書A(規定)技術情報 ···································································································· 19
附属書B(参考)参考文献 ···································································································· 23
D 0807:2011 (ISO 22179:2009)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人自動車技術会(JSAE)及び財団法
人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工
業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 0807:2011
(ISO 22179:2009)
高度道路交通システム−全車速域アダプティブ・
クルーズコントロール(FSRA)システム−
性能要求事項及び試験手順
Intelligent transport systems-Full speed range adaptive cruise control
(FSRA) systems-Performance requirements and test procedures
序文
この規格は,2009年に第1版として発行されたISO 22179を基に,技術的内容及び構成を変更すること
なく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
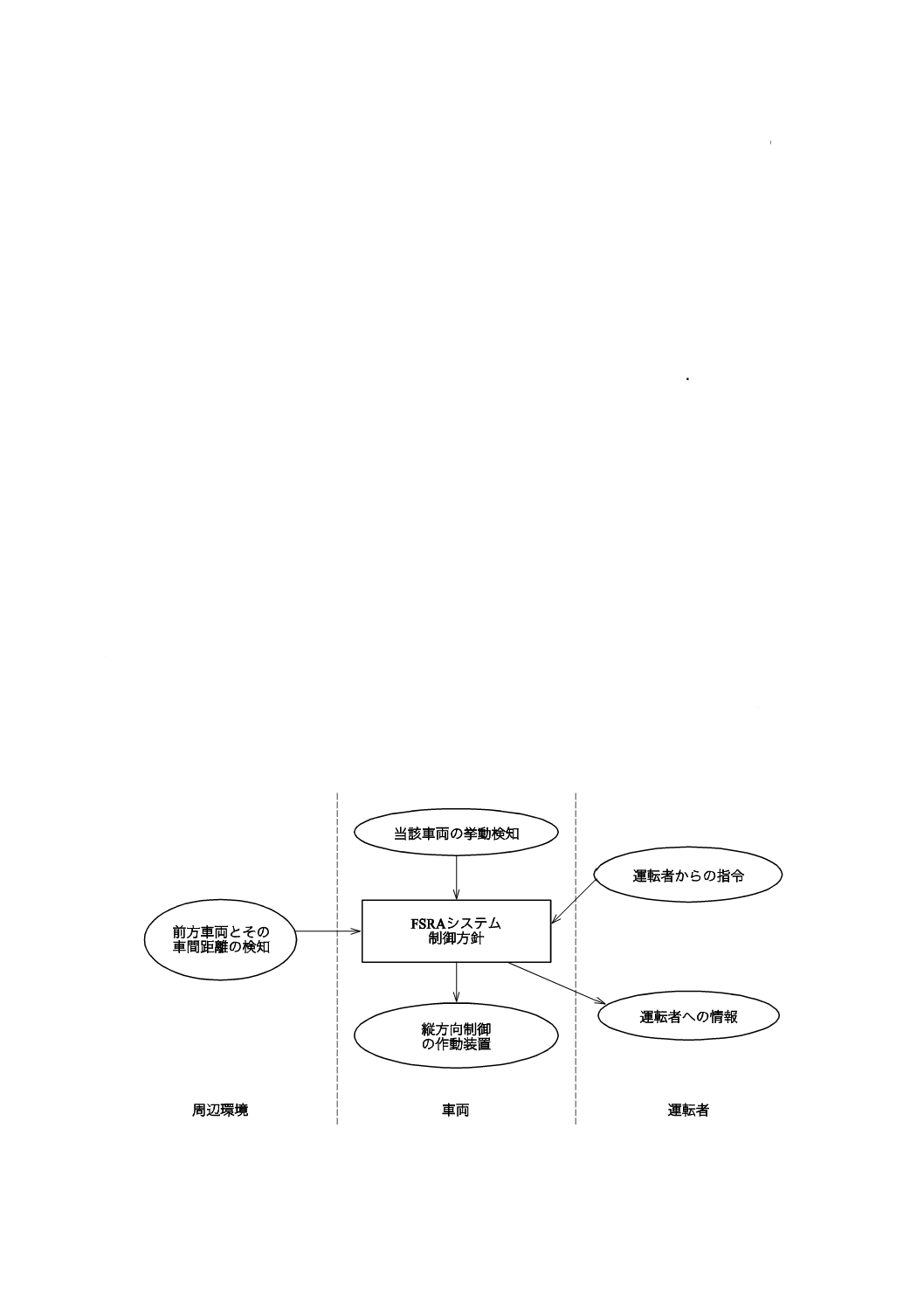
全車速域アダプティブ・クルーズコントロールシステム(以下,FSRAシステムという。)の主な機能は,
次の情報を使用して車両の走行速度を前方車両に適応するよう制御するものである(図1参照)。
a) 前方車両までの車間距離
b) 当該車両(FSRAシステム装着車)の動き
c) 運転者の指示。
これらの取得した情報を基に,制御装置(図1のFSRAシステム制御方針)は作動装置に指令を送り,
縦方向制御を行う。また,制御装置は運転者に状態表示を行う。
図1−FSRAシステムの機能要素
2
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
FSRAシステムの最終目的は,運転者の運転負荷の軽減のために,縦方向車両制御の部分的自動化を行
うことである。
この規格を,FSRAシステムに関連するより詳細な規格,例えば,特定の車両検知及び距離センサに関
する規定,又は更により高度な機能に関する規定を作成するときのシステムレベルの規格として用いるこ
とができる。車両検知,距離センサなどの特定の機能及び性能要件,又は相互協調による機能実現のため
の通信リンクのような特定要求事項の問題は,ここでは考慮しない。
1
適用範囲
この規格は,FSRAシステムに関する,基本的制御方針,機能要件に対する最低要求事項,基本的な運
転者インタフェース,故障診断及び故障時の動作に関する最低要求事項並びに性能試験手順について規定
する。
FSRAシステムは,基本的には連続的に走行できる円滑な交通条件及び渋滞した交通条件下で自動車専
用道路(自動車以外の車両と歩行者の通行が禁止された道路)を走行しているとき,装置を搭載した車両
への縦方向制御の提供を目的とする。FSRAシステムは,停止状態からシステムの設計最高速度までの速
度領域内での運転を支援する。システムは,既に追従している車両の後ろに,制限された減速能力の範囲
で停止を行い,運転者の走行復帰の意思入力があれば再発進することができる。システムは,停止車両又
は低速移動車両への反応は要求されていない(JIS D 0801に規定するアダプティブ・クルーズコントロー
ル・システムと同じ。)。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 22179:2009,Intelligent transport systems−Full speed range adaptive cruise control (FSRA)
systems−Performance requirements and test procedures(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に揚げる規格は,この規格に引用されることによって,この規格の一部を構成する。これらの引用規
格は,その最新版(追補を含む。)を適用する。
JIS D 0032 自動車−操作,計量及び警報装置の識別記号
注記 対応国際規格:ISO 2575,Road vehicles−Symbols for controls, indicators and tell-tales(MOD)
JIS D 0801 自動車−アダプティブ・クルーズコントロール・システム−性能要求事項及び試験手順
注記 対応国際規格:ISO 15622,Transport information and control systems−Adaptive Cruise Control
Systems−Performance requirements and test procedures(IDT)
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
3.1
能動的ブレーキ制御(active brake control)
ブレーキをかける機能。ただし,運転者の操作によらないでブレーキをかける機能で,この規格の中で
は,FSRAシステムで制御することを示す。
3
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2
アダプディブ・クルーズコントロール(adaptive cruise control)
従来型クルーズコントロール・システム(3.5参照)を発展させ,当該車両は,エンジン及び/又はパワ
ートレイン,及び場合によってはブレーキを制御して適切な車間距離で前方車両に追従する。
3.3
ブレーキ(brake)
車両を進ませる動きに抵抗する力を発生させる部品。
例えば,摩擦ブレーキ(相互に相対的な動きをしている車両の2部品間の摩擦で力が発生するとき),電
磁ブレーキ(相互に相対的な動きをしているが接触していない車両の2部品間の電磁作用で力が発生する
とき),液体ブレーキ(相互に相対的な動きをしている車両の2部品間に位置する液体の作用で力が発生し
たとき)及びエンジンブレーキ(車輪に伝達される,人為的に増加させたエンジンのブレーキ作用から発
生した力)であってもよい。
注記 定義は,ECE-R13-Hによる。ただし,このFSRAシステム規格の目的に照らし,変速制御装置
はブレーキとは考えない。
3.4
車間距離(clearance)
前方車両の後端面から当該車両の先端面までの距離。
3.5
従来型クルーズコントロール(conventional cruise control)
運転者がセットした速度に車両の速度を制御する機能をもつシステム。
3.6
前方車両(forward vehicle)
当該車両と同一道路の前方に位置し,同一方向に走行している車両。
3.7
連続的に走行できる円滑な交通(free-flowing traffic)
停車若しくは発進又は緊急ブレーキ状態がなく,大量の車両がスムーズに流れている交通状態。
3.8
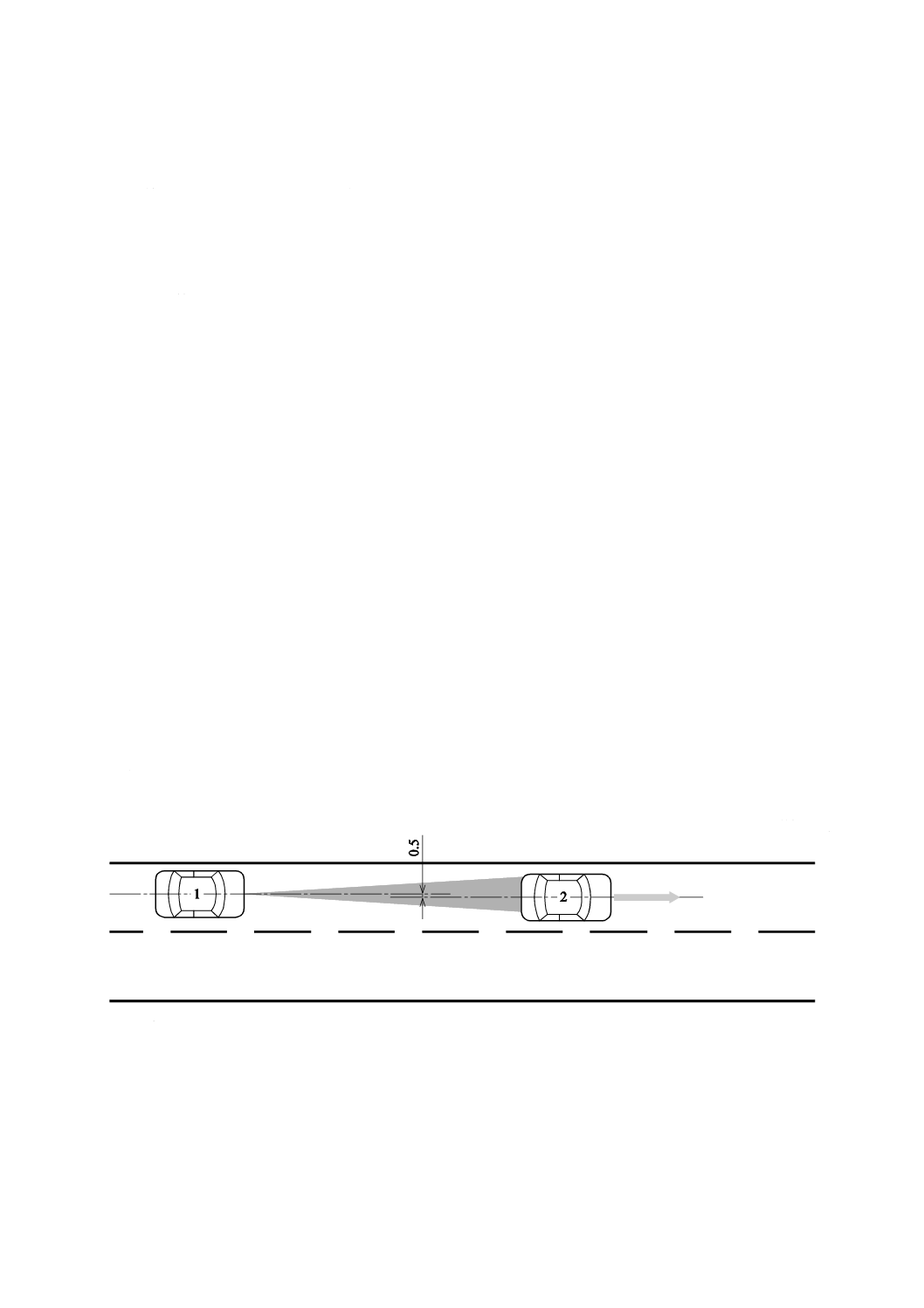
車間時間,τ(time gap)
車両速度v及び車間距離cを用い,cをvで除して算出される値(図2参照)。
c:車間距離(m)
v:車両速度(m/s)
注記 τは,c/vとなる。
図2−車間時間関係図
3.9
設定車速(set speed)
4
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
運転者又はFSRAシステムとは別のある制御システムによって設定された希望する走行速度。FSRA制
御が行われている車両においては,希望最高速度をいう。
3.10
定常状態(steady state)
パラメータの値が,時間,距離などについて変化がない状態。
3.11
当該車両(subject vehicle)
FSRAシステムを備えた,この規格における車両。
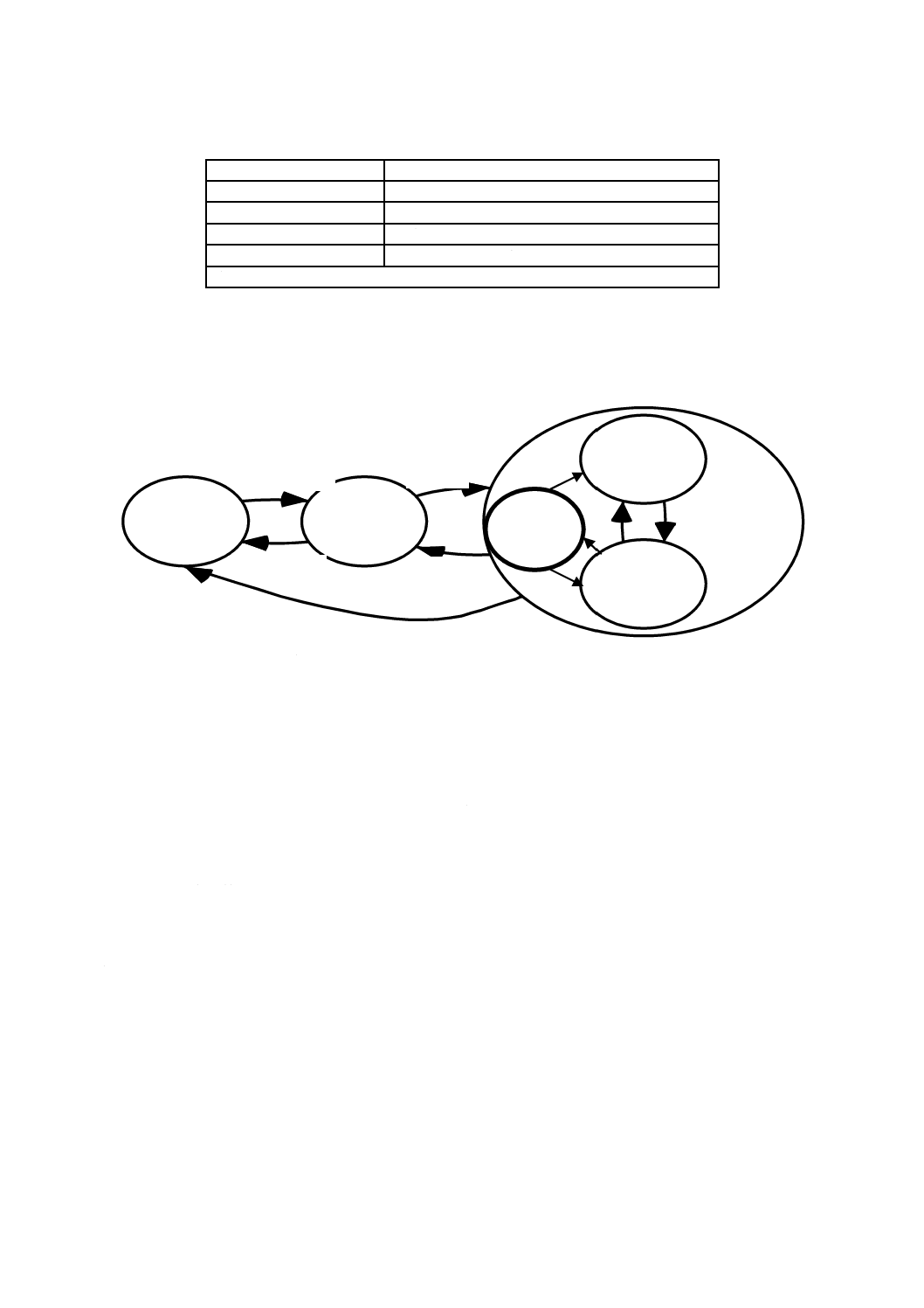
3.12
システムの状態(system states)
この規格では,幾つかに区別するシステムの状態(図3参照)。
3.12.1
FSRA停止状態(FSRA off state)
FSRA作動状態(3.12.3)へ直接に移行ができない状態。
3.12.2
FSRA待機状態(FSRA stand-by state)
運転者による起動待ちで,FSRAシステムによる縦方向制御をしていない状態。
3.12.3
FSRA作動状態(FSRA active state)
FSRAシステムが速度及び/又は車間距離を制御している状態。
3.12.4
FSRA停止保持状態(FSRA hold state)
当該車両停止中にFSRAシステムが有効である状態。
3.12.5
FSRA速度制御状態(FSRA speed control state)
システムが設定速度に従って速度を制御している状態。
3.12.6
FSRA追従制御状態(FSRA following control state)
FSRAシステムが,選択された車間時間に従って目標車両に対する車間距離を制御している状態。
3.13
停止車両(stationary object)
当該車両の前方にあって,停止している車両。
3.14
低速移動車両(slow moving object)
当該車両の前方にあって,当該車両の進行方向に,1.0 m/s又は当該車両速度の10 %の大きい方より低
い速度で移動している車両。
3.15
目標車両(target vehicle)
当該車両が追従走行する車両。
5
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.16
全車速域アダプティブ・クルーズコントロール(full speed range adaptive cruise control)
アダプティブ・クルーズコントロールシステムに対する拡張機能で,エンジン及び/又はパワートレイ
ンの制御並びに停止状態までのブレーキ制御によって,当該車両が適切な車間距離で前方車両に追従する
ことを可能にする機能。
4
記号及び単位
alateral̲max
曲線道路における許容最大横加速度(m/s2)
astopping
自動停止能力試験での目標車両の前後加速度(m/s2)
CTT
赤外線反射器の試験標的の反射係数(m2/sr)
c
車間距離,2台の車両間の距離(m)
cmin
停止保持状態を含む全ての速度域における定常状態での最小車間距離(m)
d0
ここより手前は目標車両の検知を必要としない距離(m)
d1
ここより手前は距離測定及び/又は相対速度の決定を必要としない距離(m)
d2
測定目的用の距離(m)
dmax
直線道路における最大検知距離(m)
LIDAR
光線式の検知及び距離計測装置
R
円の半径,曲線半径(m)
Rmin
最小曲線半径(m)
RCS
レーダ反射断面積(m2)
v
当該車両の対地速度(m/s)
vcircle
所定の横加速度alateral̲maxになる曲線路上の最高速度(m/s)
vcircle̲start
曲線半径Rのカーブに進入するときの車両速度(m/s)
vset̲max
選択可能な最高設定速度(m/s)
vset̲min
選択可能な最低設定速度(m/s)
vstopping
自動停止能力試験での目標車両の速度(m/s)
vvehicle̲end
試験終了時の車両速度(m/s)
vvehicle̲max
最高車両速度(m/s)
vvehicle̲start
試験開始時の車両速度(m/s)
τ
車間時間(s)
τmax
選択可能な最大車間時間(s)
τmax (v)
速度vにおける定常状態での最大車間時間(s)
τmin
選択可能な最小車間時間(s)
5
種類
FSRAシステムの性能クラスは,曲線道路への対応能力によって分類し,表1による。
6
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−FSRA曲線道路対応能力による分類
性能クラス
曲線道路対応能力
I a)
適用しない
II
曲線半径500 m以上
III
曲線半径250 m以上
IV
曲線半径125 m以上
注a) JIS D 0801に規定するアダプティブ・クルーズコントロールに適用する。
6
要求事項
6.1
基本的制御方針
FSRA停止
FSRA待機
FSRA作動
FSRA
速度制御
FSRA
追従制御
作動開始
作動休止
FSRA 停止a)
FSRA 起動a)
FSRA 停止a)
FSRA
停止保持
だ円の中の文は,システムの状態を表す。
注記 手動による遷移とは,スイッチによってFSRA機能を待機状態・停止状態にすることを意味する。故障時は,
自動的にFSRA停止してもよい。
注a) 自己診断の後,手動及び/又は自動で遷移。
図3−FSRAシステムの状態遷移
FSRAシステムは,少なくとも,次の基本的動作(追従制御及び状態遷移)を提供しなければならない。
a) FSRAシステムが作動しているときは,当該車両速度は前方車両との車間距離を維持するか又は設定
速度を維持するか,いずれか低い方で自動的に制御する。両制御モードの切替えは,FSRAシステム
によって自動的に行う。
b) 定常状態における車間距離は,システムが自動調整するか,又は運転者が調整可能であってもよい
(6.3.1参照)。
c) 2台以上の前方車両が存在する場合は,追従すべき車両を自動的に選択する(6.2.3.3参照)。
d) 当該車両が停止した場合,その後3秒間を超えない時間内に,追従制御から停止保持状態に遷移する。
e) FSRA停止保持状態において,当該車両の停止状態を保つため,ブレーキ制御を行う。
6.2
機能要件
6.2.1
制御モード
両制御モード(追従制御又は速度制御)間の遷移は,自動的に行う。
6.2.2
停止又は低速移動の目標車両
システムは,既に追従していて停止しようとしている車両の後方に,制限された減速能力の範囲で停止
FSRA停止a)
FSRA停止a)
FSRA起動a)
7
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
しようとする。FSRAシステムを停止又は低速移動する目標車両に対応するように設計してもよい。停止
又は低速移動する目標車両に対応するよう設計しない場合,少なくとも車両の取扱説明書に記載して運転
者に告知しなければならない。
6.2.3
追従能力
τminは,全ての速度vに対する定常状態での追従制御モード中に選択可能な最小車間時間とする。τminは,
1.0秒以上とする。
cminは,(停止保持状態を含め)全ての速度vに対する定常状態での追従制御モード中に選択可能な最小
車間距離とする。cminは,2.0 m以上とする。
定常状態において,最小車間距離はcmin又は(τmin×v)のいずれか大きい方の値とする。
過渡状態において,車間距離は一時的に最小車間距離未満に接近しても差し支えない。そのような状況
が発生した場合は,システムは車間距離が要求車間距離に戻るように調節しなければならない。
8 m/sを超える速度では,1.5秒から2.2秒までの範囲内の車間時間τを最低限一つ設定できなければな
らない。
最低要求事項として,システムは,vstopping 1) 以下の速度においてastopping 2) で徐々に減速しながら停止す
る車両に対しては,定常状態の追従走行から停止することができなければならない(7.3.3参照)。
注1) vstopping:10 m/s
2) astopping:2.5 m/s2
6.2.3.1
一般
FSRAシステムは次に示す検知範囲,目標車両識別及び曲線道路対応能力をもたなければならない。
6.2.3.2
直線道路における検知範囲(性能クラスII,III及びIV)
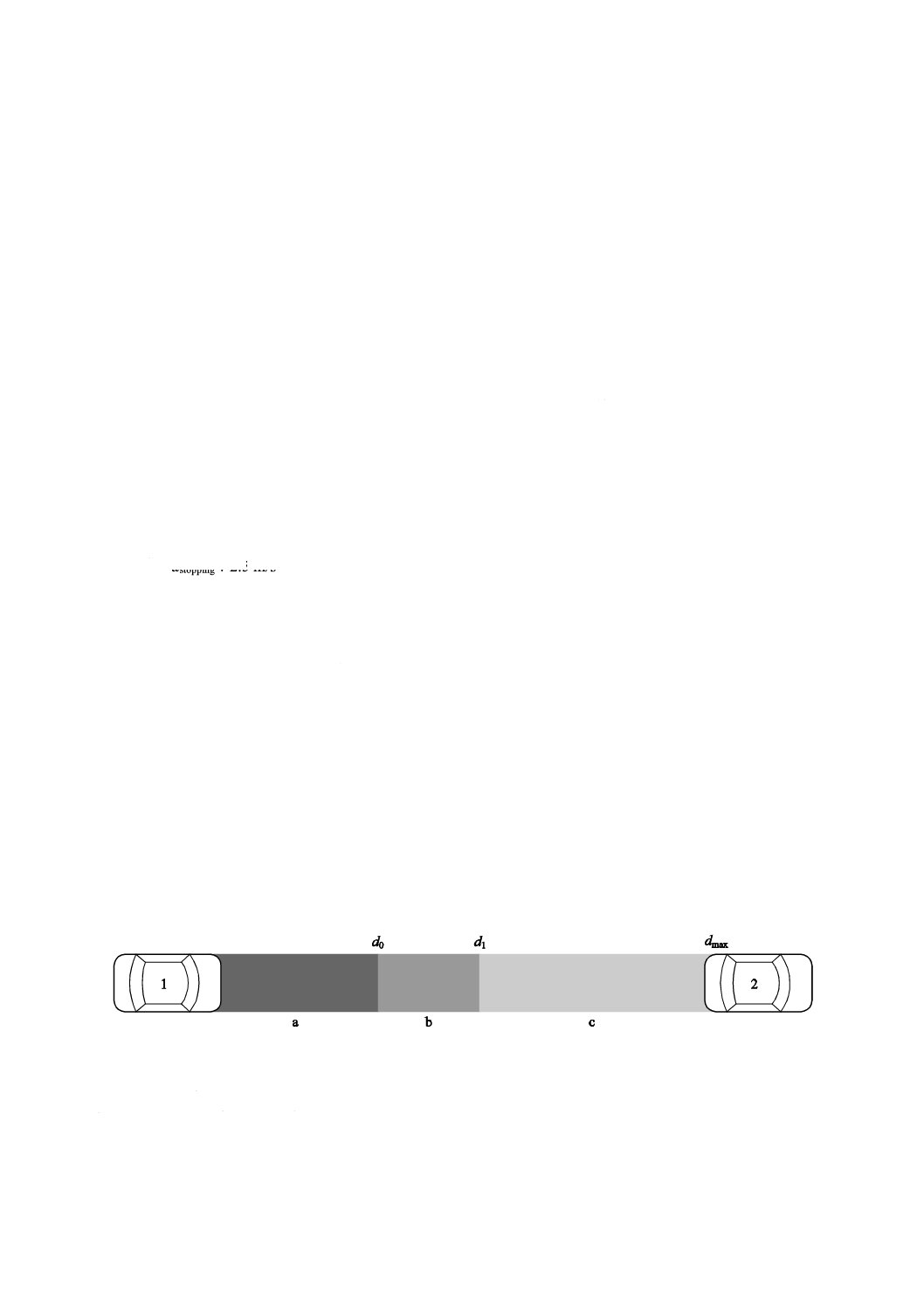
前方車両がd1とdmaxとの間に存在するときは,FSRAシステムは前方車両と当該車両間との車間距離を
測定しなければならない(図4参照)。この範囲内では,当該車両は少なくとも当該車両の横幅の範囲内
にある前方車両を検知しなければならない。dmaxは,次の式による。
dmax=τmax (vset̲max)×vset̲max
前方車両がd0とd1の間にあるときは,FSRAシステムは車両の存在を検知しなければならない。しかし
前方車両までの距離を測定したり,前方車両と当該車両との相対速度を測定する必要はない。
d1=4 m
前方車両がd0未満の距離に存在するときは,FSRAシステムは車両の存在を検知する必要はない。
d0=2 m
1 当該車両
2 前方車両
a 検知不要領域
b 車両の検知が要求される領域
c 距離の決定が要求される領域
図4−検知領域
8
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
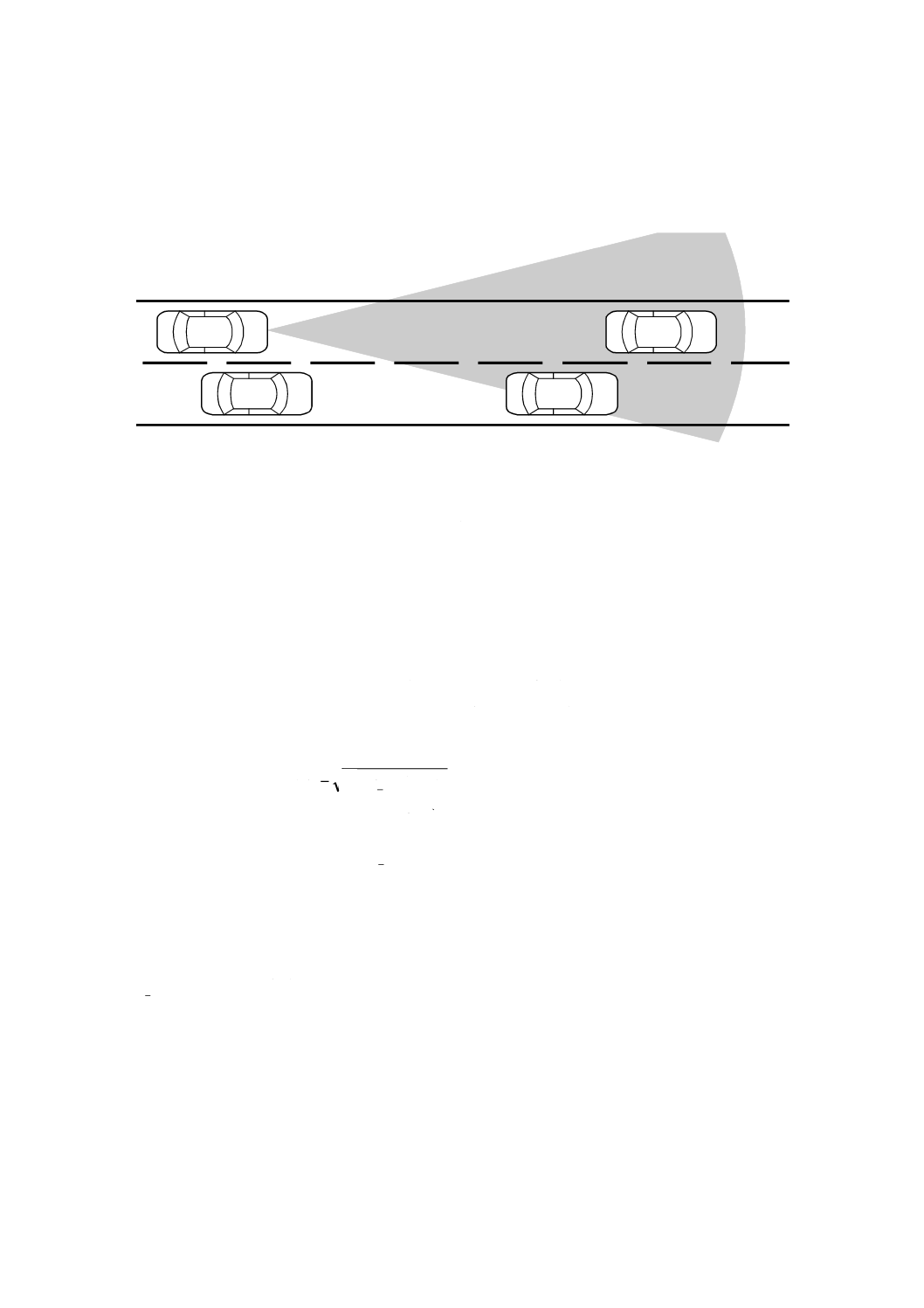
6.2.3.3
目標車両識別
2台以上の前方車両が,直線道路又は一定曲線道路上にあるとき(典型的な使用場面は7.5参照),FSRA
システムは,当該車両の進路上の前方車両を選択しなければならない(図5参照)。
図5−目標車両識別
6.2.3.4
曲線道路対応能力(性能クラスII,III及びIV)
FSRAシステムは,次の道路上で,定常状態の前方車両をτmax (vcircle) の車間時間にて追従できなければ
ならない。
− 直線道路(性能クラスII,III及びIVに適用)
− 曲線半径が500 mまで:Rmin, II=500 m(性能クラスII,III及びIVに適用)
− 曲線半径が250 mまで:Rmin, III=250 m(性能クラスIII及びIVに適用)
− 曲線半径が125 mまで:Rmin, IV=125 m(性能クラスIVに適用)
したがって,このシステムは,前方車両が一定の曲線半径Rminの道路上を一定の速度vcircleで走行してい
れば,定常状態の車間時間τmax (vcircle) で前方車両に追従する能力をもたなければならない。
min
x
lateral̲ma
circle
R
a
v
×
=
ここに,
τmax (v): 速度vで直線を走行中の,定常状態における可能な最大
車間時間。
alateral̲max: 曲線道路におけるFSRAシステムの設計上の横加速度。
使用する数値は,
alateral̲max, II=2.0 m/s2
alateral̲max, III=2.3 m/s2
alateral̲max, IV=2.3 m/s2
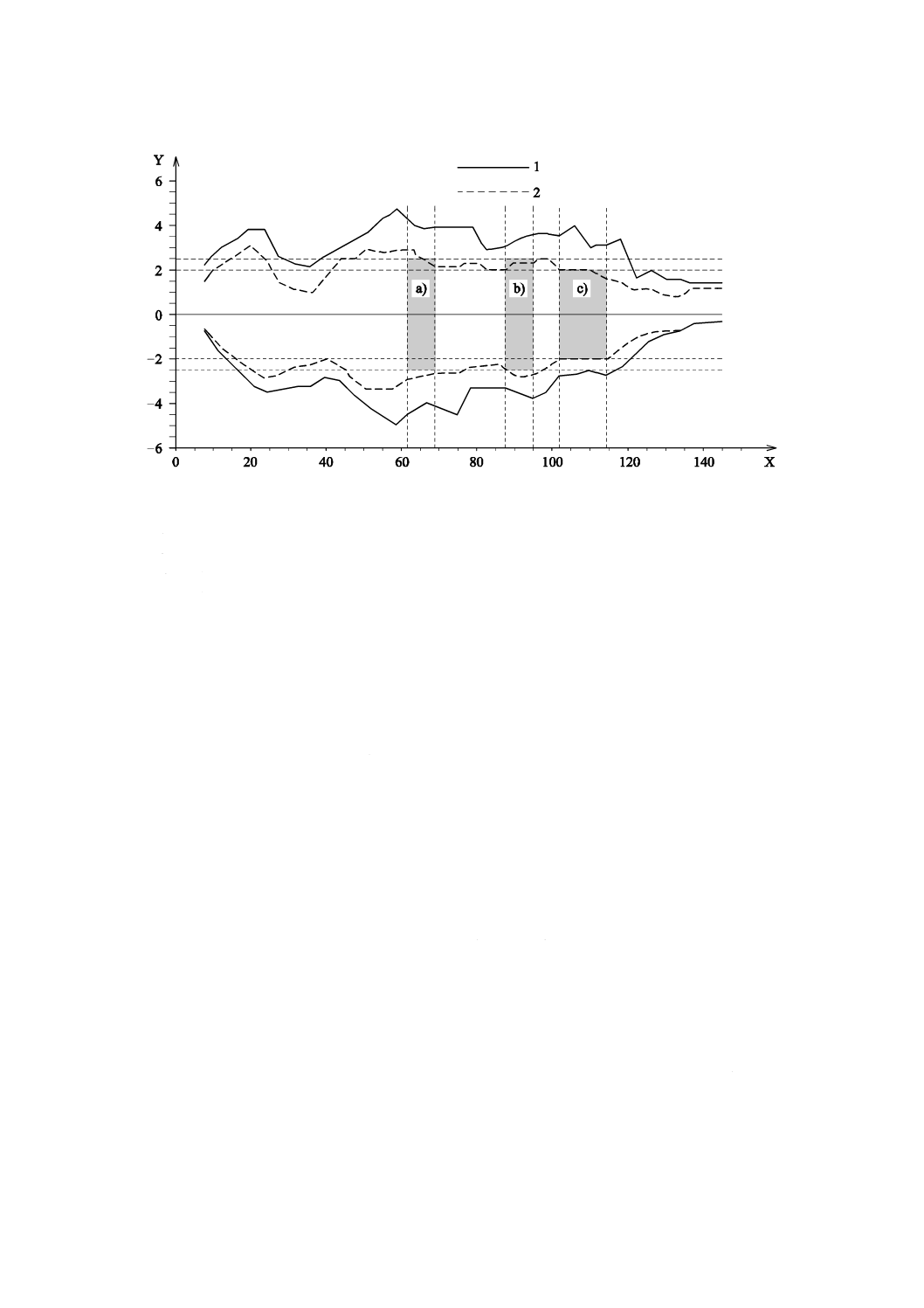
alateral̲maxの数値は,曲線道路における運転者の挙動の平均値(運転者の95 %)から引用。図6及び附属
書Bの[1]を参照。
9
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
X 当該車両速度(km/h)
Y 横加速度(m/s2)
1
最大値
2
95 %ゾーン
a) 性能クラスIV
b) 性能クラスIII
c) 性能クラスII
図6−平均的運転者の横加速度
6.2.4
発進への遷移(運転者の操作による発進)
停止保持状態から追従制御又は車速制御への遷移は,運転者の要求がないときに実施してはならない。
6.3
基本的運転者インタフェース及び運転者による操作介入機能
6.3.1
作動要素及び装置の動作
6.3.1.1 FSRAシステムは,運転者が希望する設定車速を選定できる手段を備えていなければならない。
6.3.1.2 FSRA追従制御及びFSRA速度制御状態で,少なくとも,運転者によって発生されたブレーキ力
要求が,FSRAシステムが発生したブレーキ力より大きいときは,運転者によるブレーキ操作によって
FSRAの機能は作動を休止しなければならない(FSRA待機状態に導く。図3参照)。FSRA停止保持状態
では,運転者によるブレーキ操作でFSRAを作動休止にしなくてもよい。
6.3.1.3 FSRAシステムは,たとえFSRAシステムが自動的にブレーキをかけているときであっても,運
転者のブレーキペダルによる介入3) に対して,一時的なブレーキ力の大幅な減少があってはならない。
注3) 附属書Bの[2]参照。
6.3.1.4 運転者から又はFSRAシステムからの,いずれか大きいほうの出力要求でエンジンの出力操作(例
えば,スロットル操作)を行う。これは,常に運転者にエンジン出力制御の優先権を保証するものである。
運転者からのエンジン出力要求がFSRAシステムからの要求より大きい場合は,直ちにブレーキ力を開
放して,自動ブレーキを解除しなければならない。アクセルペダルによる運転者の介入は,その運転者の
入力に対する反応に著しい遅延を生じてはならない。
6.3.1.5 ブレーキの自動作動で,アンチロック装置(ABS)が許容するよりも長い時間,車輪をロックさ
10
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
せてはならない。これは,ABSシステムの装備を要求しているわけではない。
6.3.1.6 FSRAシステムによる自動出力制御は,トラクション制御が許容するより長時間の過大なタイヤ
スリップを生じさせてはならない。これは,トラクション制御の装備を要求しているわけではない。
6.3.1.7 FSRAシステムは,運転環境(悪天候など)に対応するため,運転者が行う操作なしに自動的に
車間距離を調節してもよい。しかし,その調節した車間距離は,運転者が選定した最小車間距離以下にな
ってはならない。
6.3.1.8 FSRAシステムで,運転者が希望する車間時間を選択できる場合は,選択方法は次のいずれかに
従う。
a) 図3に示すように,FSRA停止状態になった後,最後に選択された車間時間を保持している場合は,
少なくともFSRAシステムが作動を開始すると同時に,その車間時間を明確に運転者に表示しなけれ
ばならない。
b) 図3に示すように,FSRA停止状態になった後,最後に選択された車間時間を保持していないときは,
あらかじめ決められた1.5秒以上の値にセットされなければならない。
6.3.1.9 FSRAシステムのほかに従来型のクルーズコントロールを装備しているときは,FSRAシステムと
従来型のクルーズコントロールとの間で自動的に切替えが行われてはならない。
6.3.1.10 当該車両が停止している状態では,運転者がたとえブレーキペダルを踏んでいる状態でも,シス
テムは運転者の操作によって起動してもよい[任意選択(option)]。
6.3.2
表示要素
FSRAシステムの表示は,次による。
a) 運転者にフィードバックする最低限の情報には,システムが作動状態にあるかないか及び設定車速を
含めなければならない。これらを複合的に表示すること,例えば,FSRAシステムが作動のときにだ
け設定車速を表示することは,許容される。
b) FSRAシステムが故障のために使用できないときは,運転者に告知しなければならない。運転者に告
知するために記号を用いるときは,6.3.3による。
c) FSRAシステムが自動で作動休止するときは,運転者に告知しなければならない。運転者に告知する
ために記号を用いるときは,6.3.3による。
d) 車両がFSRAシステムと従来型クルーズコントロール・システムの双方を装備しているときは,運転
者がどちらのシステムが作動しているかを認知可能でなければならない。
e) FSRAシステムが制御の対象に使用する前方車両を検知していることを意味する“車両検知”の表示
は,この前方車両を制御に使用しているときには表示されなければならない。
6.3.3
表示記号
FSRAシステムの機能及び/又は故障を表示するために記号を用いる場合には,JIS D 0032で規定する
記号を用いなければならない。
6.4
作動上の限界
快適さを保つために,車速が5 m/s以下では,目標車両を見失った場合,又はブレーキ故障以外のシス
テム故障によってFSRAシステムを自動解除する場合において,急激にブレーキを解除してはならない。
最低設定速度は,vset̲min≧7 m/sとする。
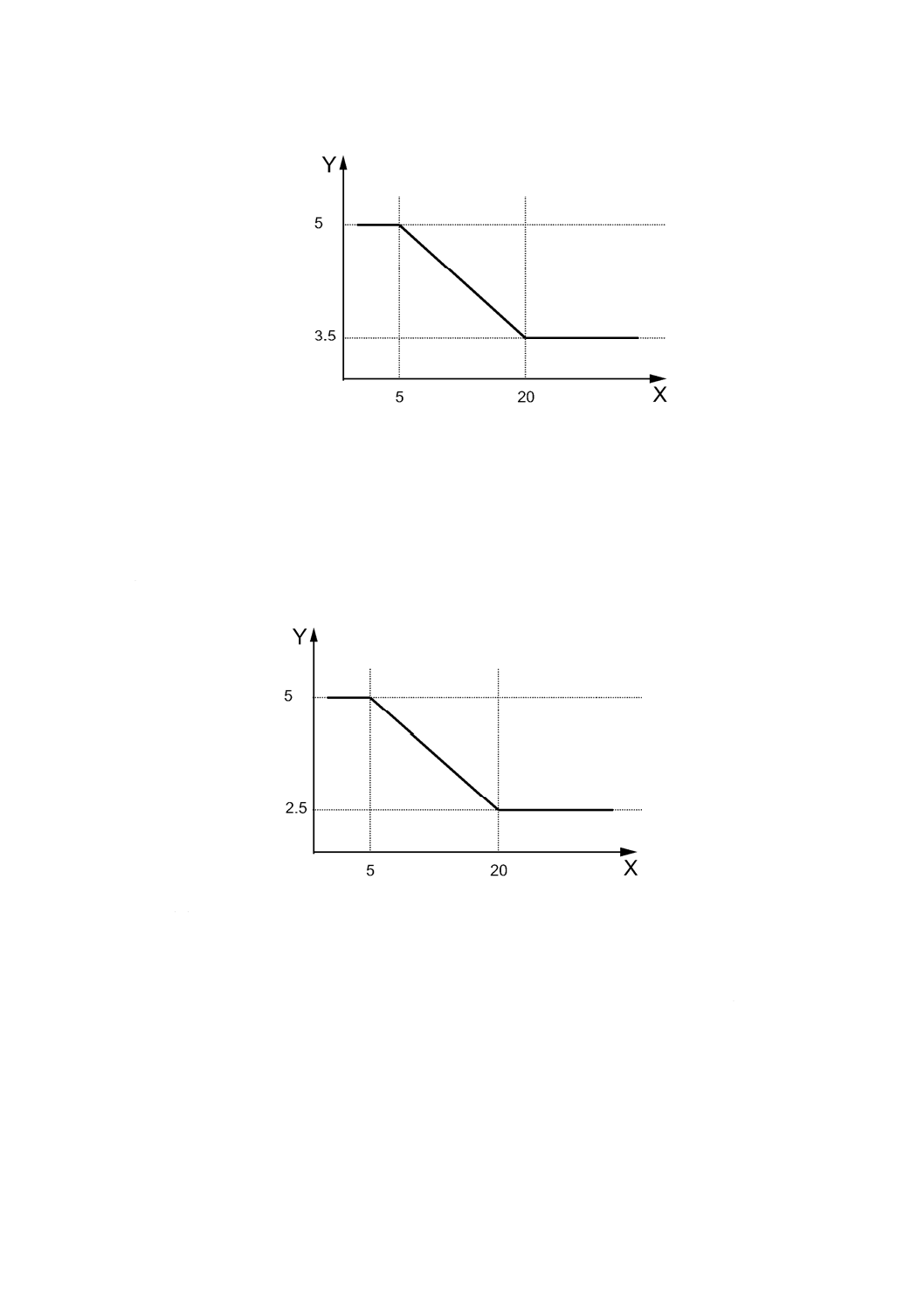
FSRAシステムの自動減速度は,図7のように,車両が20 m/sを超えて走行している場合は3.5 m/s2(2
秒間の平均値)を超えてはならないものとし,5 m/s未満で走行している場合は5 m/s2(2秒間の平均値)
を超えてはならない。
11
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
X 当該車両速度(m/s)
Y 最大減速度(m/s2)
図7−最大減速度
FSRAシステムの自動減速度の変化の平均値(減速度変化率)は,図8のように,車両が20 m/sを超え
て走行している場合は2.5 m/s3(1秒間の平均値)を超えてはならないものとし,5 m/s未満で走行してい
る場合には5 m/s3(1秒間の平均値)を超えてはならない。
X 当該車両速度(m/s)
Y 減速度変化率(m/s3)
図8−最大減速度変化率
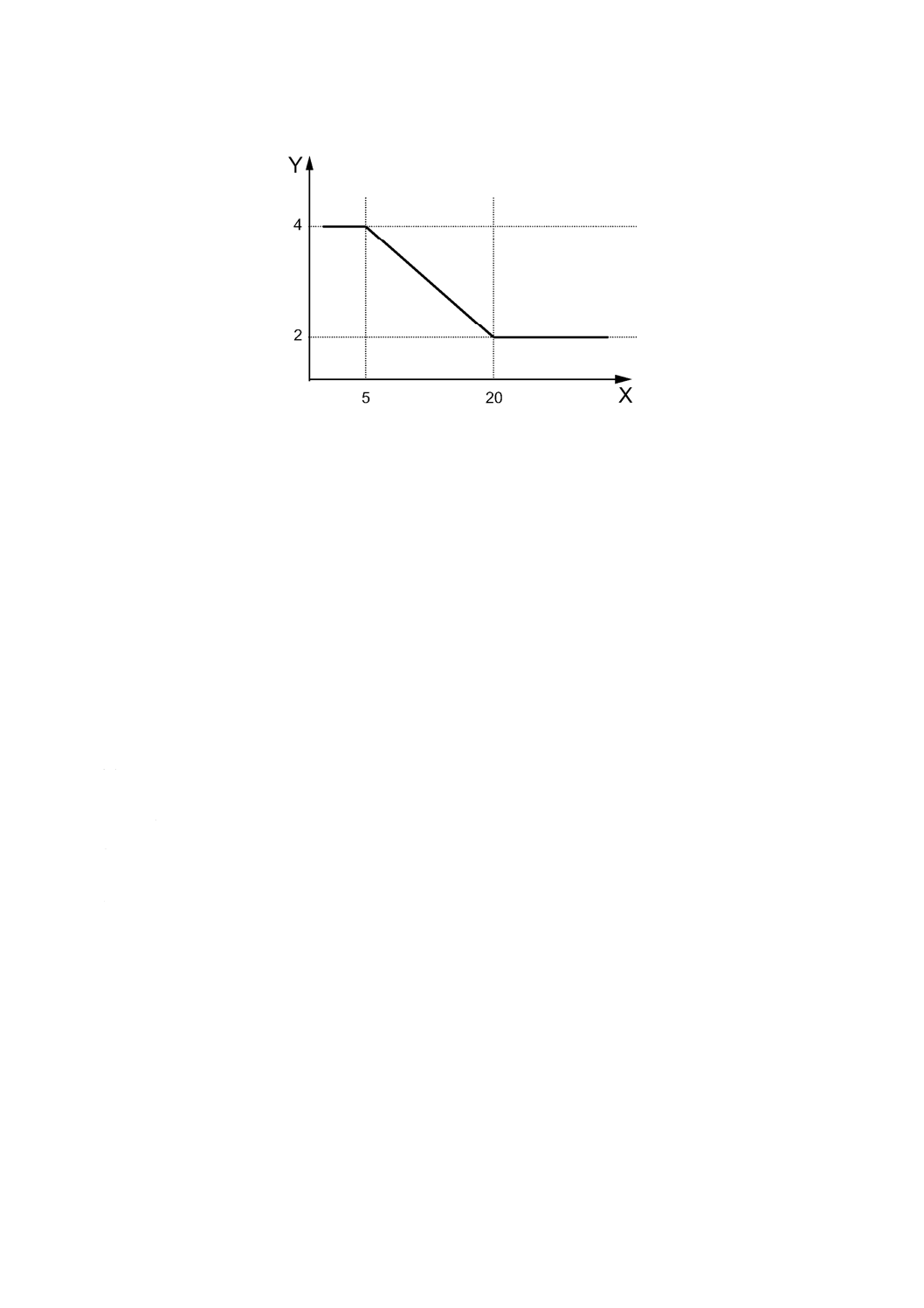
FSRAシステムの自動加速度は,図9のように,車両が20 m/sを超えて走行している場合は2 m/s2(2
秒間の平均値)を超えてはならないものとし,5 m/s未満で走行している場合には4 m/s2(2秒間の平均値)
を超えてはならない。
12
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
X 当該車両速度(m/s)
Y 自動加速度(m/s2)
図9−最大加速度
目標車両がd0以内に接近して検知できなくなった場合,当該車両が停止するか,システムがd1以内の前
方車両を検知するか,運転者がアクセルペダルによってシステムに強制介入するまで,システムは直前の
有効なブレーキ指示を起点とした制御方針を作動させることが望ましい。d0からd1までの範囲内で前方車
両を検知したとき,距離が測定できなければ,システムは自動加速を禁止しなければならない。
6.5
制動灯の点灯
FSRAシステムが自動的に主ブレーキを作動させた場合は,主ブレーキをかけ始めてから350 ms以内に
制動灯が点灯しなければならない。FSRAシステムが他の減速装置を作動させた場合には,制動灯を点灯
させてもよい。煩わしい制動灯の点滅を避けるため,FSRAシステムが作動させたブレーキの終了後,制
動灯は適切な時間,点灯を維持してもよい。
6.6
故障時の動作
FSRAシステムの故障時における動作は,次に従わなければならない。
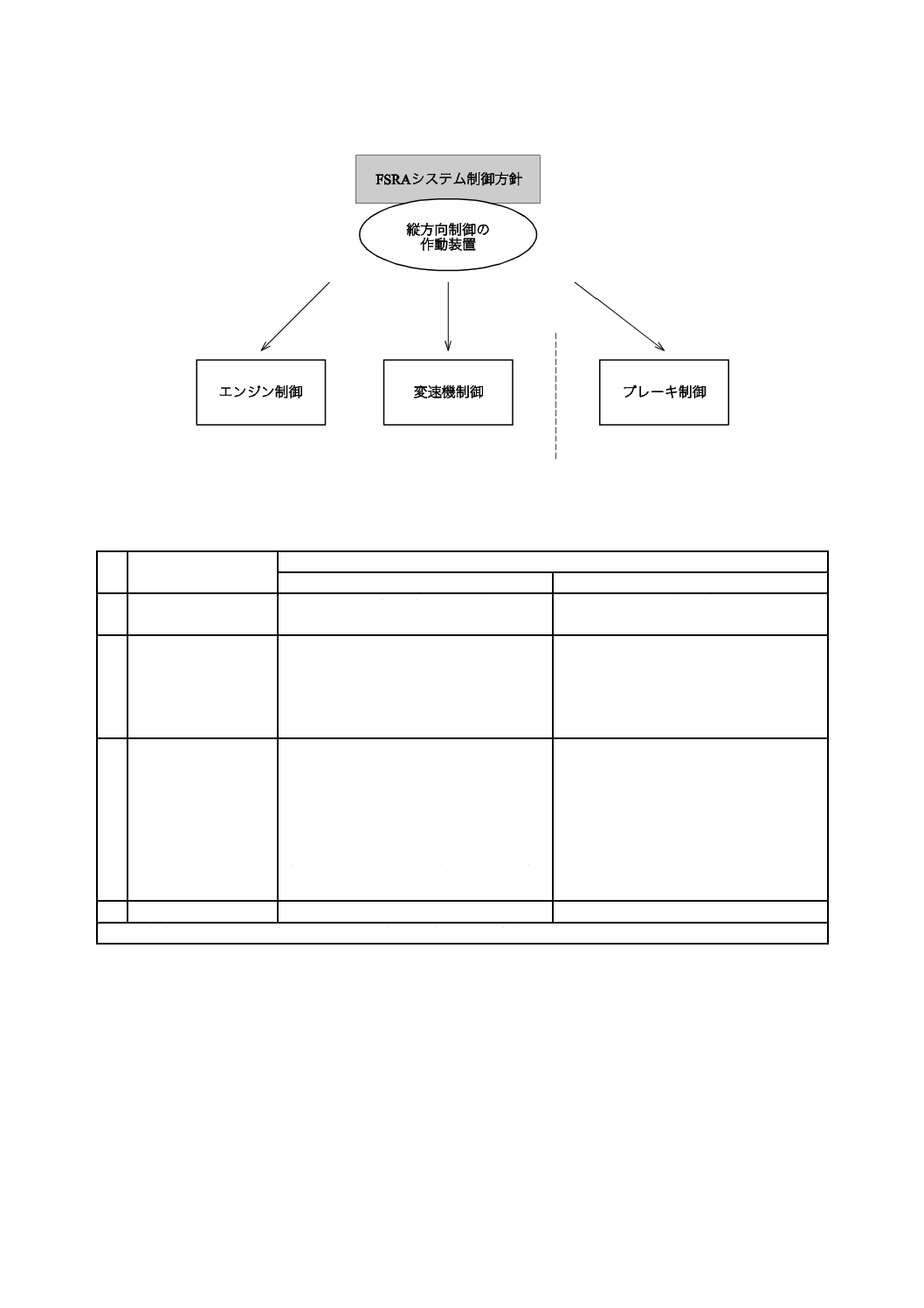
a) サブシステムが故障した場合に必要な動作は,表2による(図10参照)。
b) 表2に記載した故障は,直ちに運転者に告知されなければならない。告知は,システムが遮断される
まで作動状態を維持しなければならない。
c) FSRAシステムの復帰は,イグニションのオン・オフ,FSRAシステムの起動・停止などによって実行
される自己診断が問題なく完了するまで禁止されなければならない。
13
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図10−縦方向制御用の作動装置
表2−FSRAシステムの故障時の動作
サブシステムの故障
箇所
FSRAシステム作動中に故障を発生
ブレーキ制御
エンジン制御
1
エンジン
少なくとも,現在のブレーキ制御を維持す
ることが望ましい。
FSRAエンジン制御を停止する。
2
ブレーキシステムa)
FSRA制御を停止する。ただし,ブレーキ
作動中にブレーキシステムが完全に故障
していない場合は,現在のブレーキ制御を
最後まで実行した後に,システムを完全に
停止してもよい。
FSRAエンジン制御を停止する。
3
車両検知及び距離セ
ンサ
直前の有効なブレーキ指示を起点とした
制御を始動させることが望ましい。ただ
し,この制御においては,急激にブレーキ
を解除してはいけない。運転者がブレーキ
ペダル若しくはアクセルペダル又は
FSRA停止スイッチによって介入した場
合は,直ちにシステムは停止しなければな
らない。
FSRAエンジン制御を停止する。
4
FSRA制御装置
FSRA制御を停止する。
FSRA制御を停止する。
注a) 変速機の制御に機能障害が発生した場合は,ブレーキで減速してもよい。
7
性能評価試験方法
7.1
環境条件
試験の環境条件は,次による。
a) 試験場は平たんで,乾燥した,汚れのないアスファルト又はコンクリート舗装面とする。
b) 外気温度の範囲は−20 ℃〜40 ℃とする。
c) 水平視程は1 km以上とする。
7.2
試験標的規定
試験標的は,現在用いられている技術を対象として規定した。その他の技術を用いる場合,それに対応
14
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
する試験標的を使用する。
7.2.1
赤外線レーザレーダ(LIDAR)
赤外線試験標的は,試験標的の反射係数(CTT)及び投影面積を規定する(A.1参照)。
試験標的は,A及びBの2種類とし,共に最小投影面積は20 cm2の拡散反射器で,次のCTTをもつも
のとする。
− 試験標的AのCTT:2.0 m2/sr±10 %
− 試験標的BのCTT:1.0 m2/sr±10 %
7.2.2
ミリ波レーダ(RADAR)
レーダ試験標的は,レーダ反射断面積(RCS)を規定する(A.2参照)。
試験標的は,A及びBの2種類とし,20 GHzから95 GHzまでの周波数に対して,次のRCSをもつも
のとする。
− 試験標的AのRCS:10 m2
− 試験標的BのRCS:3 m2
大幅に異なる周波数帯については,別途RCSを検討して決定する。
7.3
自動停止能力試験
7.3.1
試験目標車両
目標車両には7.2で規定した試験標的Aを車両の後端に取り付ける。残りの車両露出面は,試験標的以
外が2 m2以下のRCSになるか又は試験標的の20 %以下の反射率になるよう覆う。
7.3.2
初期条件
目標車両は,速度vstoppingで走行する。
目標車両の車幅は,1.4 m〜2.0 mとする。
当該車両は,目標車両の後方を,定常状態にある追従制御モードで走行する。
目標車間時間は,全ての試験を通してτminとする。
当該車両の縦方向中心線の目標車両の縦方向中心線に対する横方向のずれは,0.5 m以下とする(図11
参照)。
単位 m
1 当該車両
2 目標車両
図11−自動停止能力試験開始条件
7.3.3
試験手順
目標車両は,減速度astopping(誤差範囲−0.5 m/s2〜0 m/s2)で停止するまで減速する。
15
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
当該車両が,前方車両の後方でシステムによって停止すれば試験は完了し成功とする。
7.4
目標捕そく距離試験
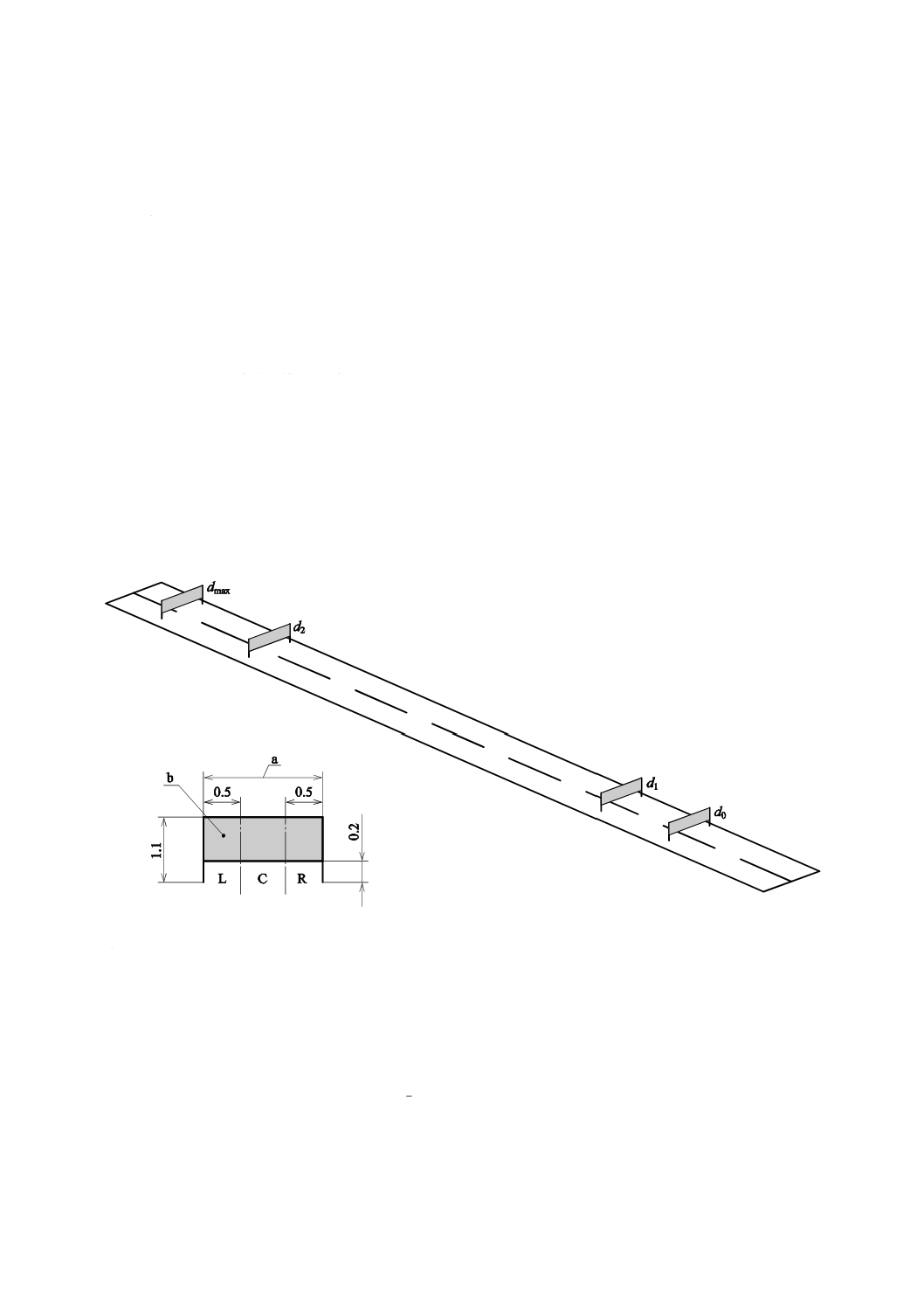
6.2.3.2に規定した検知距離d0,d1,d2及びdmaxを確認する試験手順において,車両基準平面は,地上0.2
mから上で0.9 mまでの高さと,当該車両の幅をもつ長方形とする。検知範囲は,車両の色々な反射場所
を考慮する。また,この検知範囲は乗用車の最低高さによって制限される。車両基準平面は,d1,d2及び
dmaxで縦に三つの領域に分割され,それぞれ幅0.5 mのL及びRの領域を設ける。試験においては,d1,
d2及びdmaxに置いた車両基準平面内にある規定の試験標的を各領域(L,C,R)内の少なくとも1か所で
検知できなければならない。d0だけは,全基準平面内の1点を検知すればよい(図12参照)。
試験に当たっての注意を,次に示す。
− dmaxの位置は,試験標的Aを使用する。
− d0,d1及びd2の位置は,試験標的Bを使用する。
− d2点は,車両前方75 mにある固定測定点である。
− 試験は,当該車両と試験標的が移動している状態で実施することが望ましいが,両者が停止している
状態の試験を選択肢として採用してもよい。
最大所要検知時間は,試験標的の出現後2秒間を超えないほうがよい。
単位 m
a
当該車両の幅
b
車両基準平面
図12−縦方向検知領域
7.5
目標車両識別試験
7.5.1
初期条件
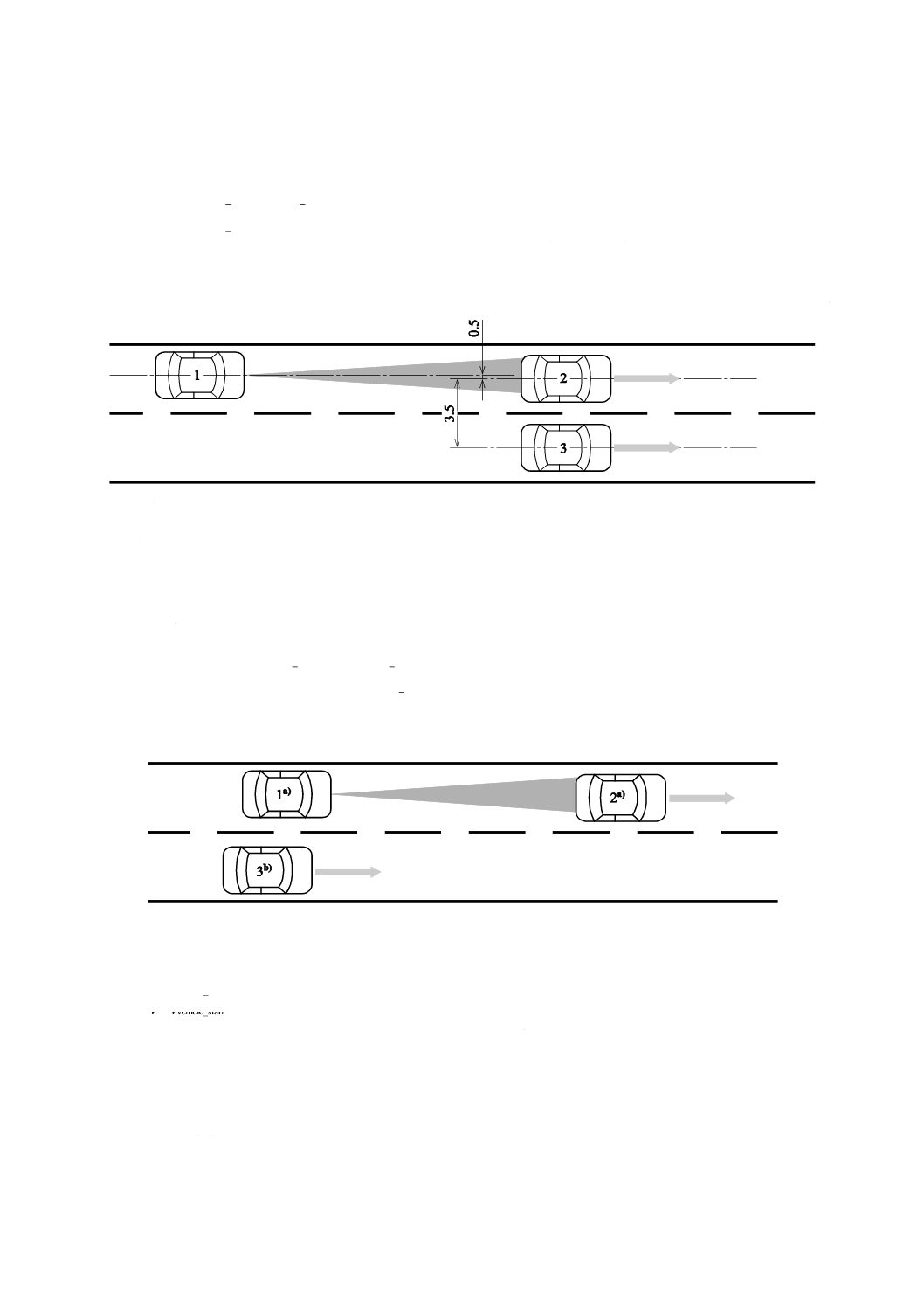
同じ形の前方車両を,2台並んで速度vvehicle̲startで走行させる。2台の前方車両は車幅1.4 m〜2.0 mとし,
両車両の縦方向中心線間隔は,3.5 m±0.25 mとする。
当該車両は,前方車両(2台)のうち1台の後方を,定常状態にある追従制御モードで走行する。当該
車両が追従している前方車両を目標車両と呼称する。車間時間はτmax (vvehicle̲start) で,設定車速はvvehicle̲end
16
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
以上とする。当該車両の縦方向中心線の,目標車両の縦方向中心線に対する横方向のずれは,0.5 m以下
とする(図13参照)。
ここに, vvehicle̲start=vvehicle̲end−3 m/s
vvehicle̲end=27 m/s(約100 km/h)
車両が上記速度vvehicle̲endを出せない場合は,vvehicle̲end=22 m/s(約80 km/h)とする。
単位 m
1 当該車両
2 目標車両
3 前方車両
図13−識別試験開始条件
7.5.2
試験手順
目標車両は,速度をvvehicle̲startからvvehicle̲endまで加速し,FSRA制御を実行している当該車両も,これに
追従する。当該車両が,隣接レーンをvvehicle̲startで走行する前方車両の横を追い抜けば,試験は完了し成功
とする(図14参照)。
1 当該車両
2 目標車両
3 隣接レーンにある前方車両
注a) v=vvehicle̲end
b) v=vvehicle̲start
図14−識別試験終了条件
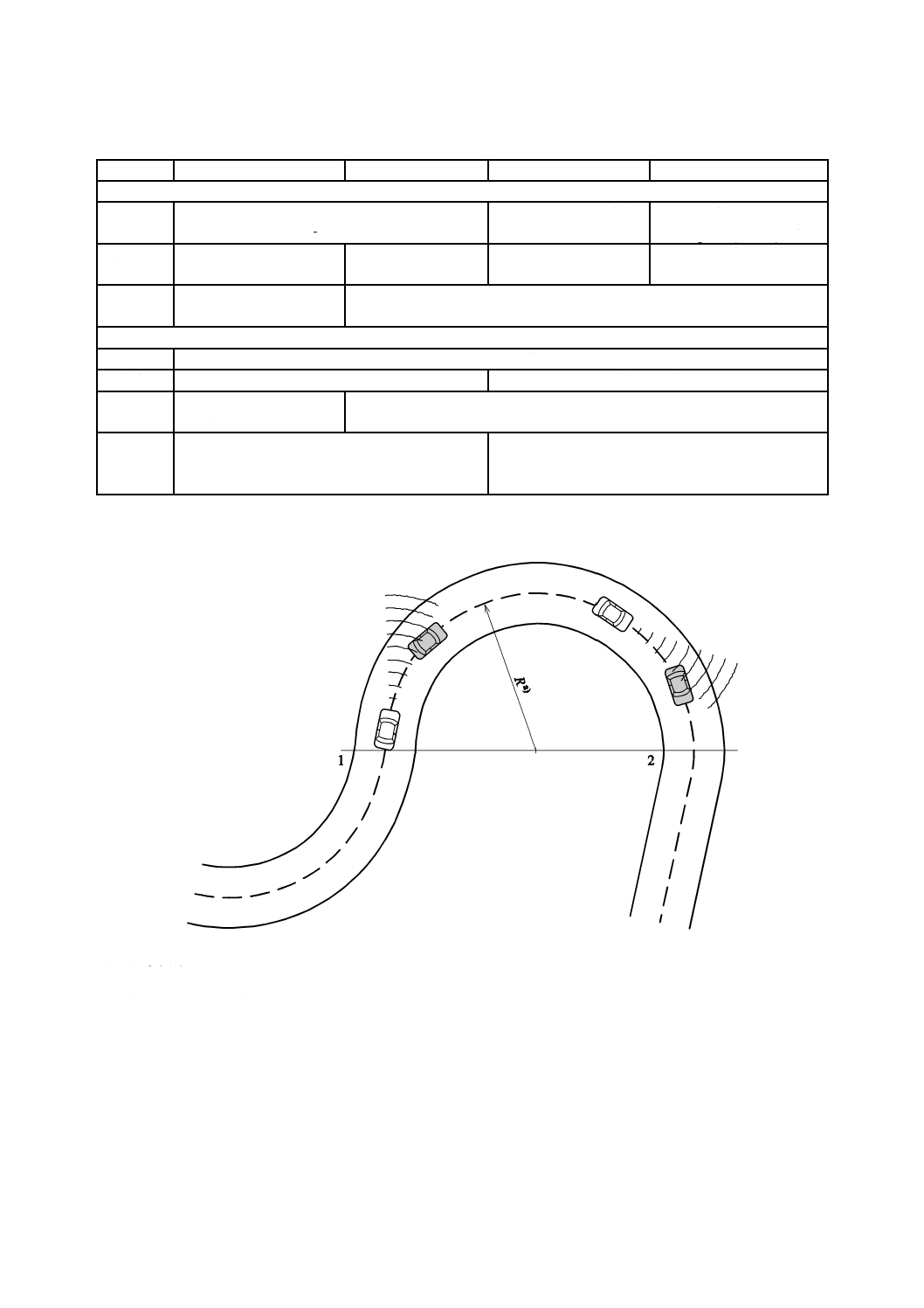
7.6
曲線道路対応能力試験
6.2.3.4に規定の曲線道路の対応能力を評価する試験の方法は,FSRAシステムのセンサの視野と進路の
予測方法とを考慮して決めることが望ましい。
進路の予測方法又は前方検知手段が異なる場合は,異なる運転手順が必要となる。
17
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.6.1
試験場(性能クラスII,III及びIV)
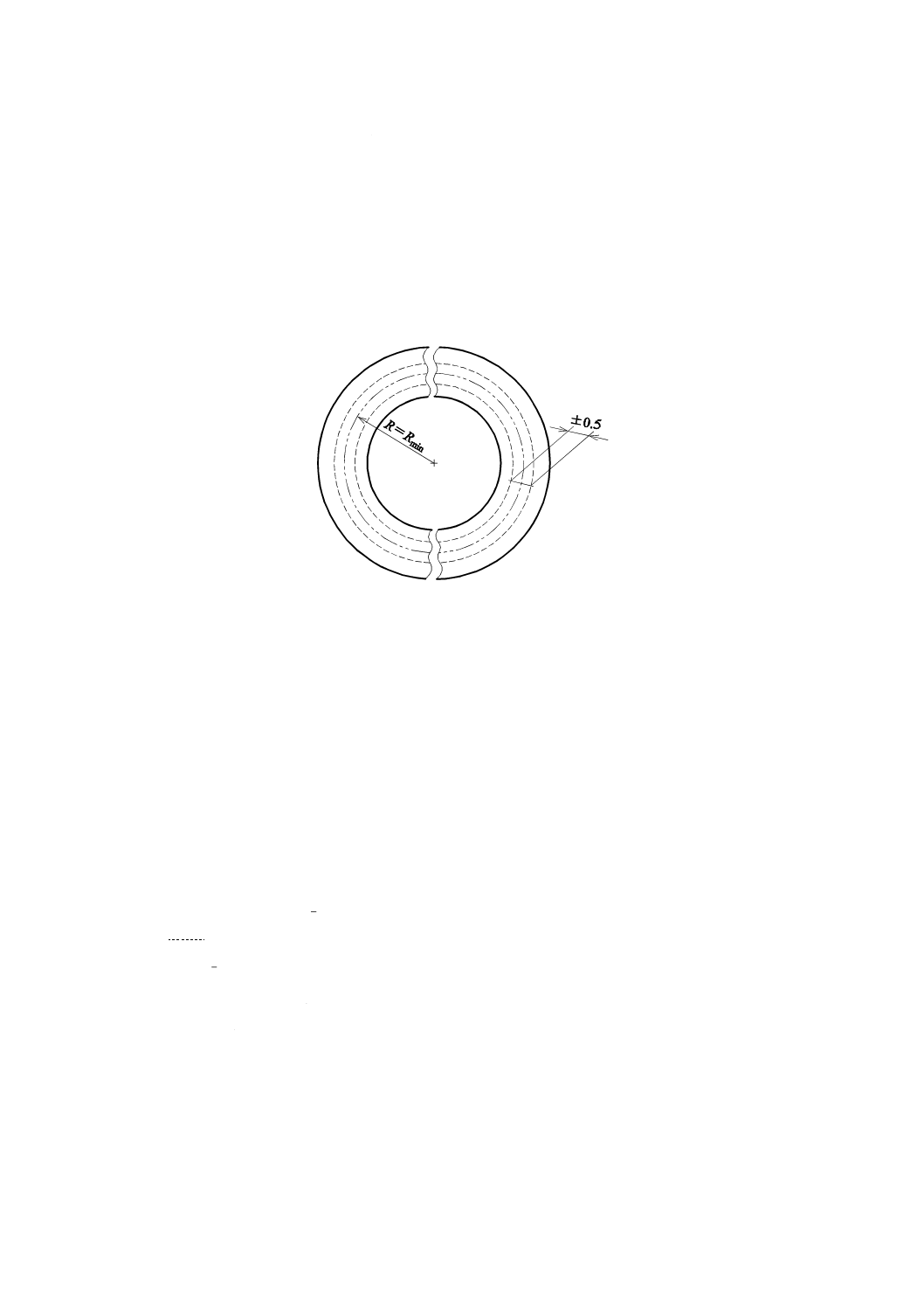
試験路は一定半径の円形路か,又は十分な長さの一定曲率半径の曲線部分をもつ走路の区間とする。試
験路の半径は,Rminの80 %〜100 %であることが望ましい。走路の走行方向は,時計回り及び反時計回り
の両方向とする。車線表示及びガードレールに関して,特段の制限は設けない(図15参照)。
曲線半径Rは,クラスIIシステムの場合500 m,クラスIIIシステムの場合250 m,及びクラスIVでは
125 mとする。
単位 m
図15−試験路の概略
7.6.2
曲線道路対応能力試験用目標車両
目標車両には7.2で規定した試験標的Aを地上0.5 m〜0.7 mの高さで,後端中央に取り付ける。残りの
車両露出面は,試験標的以外の後部表面が2 m2以下のRCSになるか,又は試験標的の20 %以下の反射率
になるように覆う。
7.6.3
運転手順
当該車両を,目標車両と同一の進路(両車両の中心線の横方向のずれ0.5 m以内)を追従制御モードで
追従させる。試験の開始に先立ち,2台の車両は,図16に適合させなければならない。試験の詳細は,表
3及び図16に示す。
開始時の目標車両の速度は,次による。
vcircle̲start=MIN [(alateral̲max×R)1/2, vvehicle̲max]±1 m/s
注記 MIN (a, b) は,aとbの最小値を選択することを意味する。
式の中のalateral̲maxは,試験路の曲線半径Rによって次の値を用いる。
− R=500 mの場合:2.0 m/s2
− R=250 mの場合:2.3 m/s2
− R=125 mの場合:2.3 m/s2
適切なときに目標車両を減速させ,当該車両の反応を観察する。目標車両との距離が減少し,車間時間
がτmaxの2/3未満になる前に,当該車両は減速を開始しなければならない。
18
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表3−曲線道路対応能力試験のための条件
条件
試験前準備
試験開始条件
第1試験動作
第2試験動作
目標車両
速度
vcircle̲start=一定
3.5 m/s±0.5 m/s減速
する。
vcircle=一定
=vcircle̲start−(3.5±1) m/s
時間
10秒以上
開始待ち時間
0秒
2秒
−
曲線半径
7.6.1で規定したR以上。
変化してもよい。
Rは一定(7.6.1参照)
当該車両
速度
FSRAシステムで制御される。
加速度
≦0.5 m/s2
減速度を観察する。
曲線半径
7.6.1で規定したR以上。
変化してもよい。
Rは一定(7.6.1参照)
目標車両
までの車
間時間
τmax (vcircle̲start)±25 %
FSRAシステムで制御される。
車間時間を観察する。
1 試験開始
2 試験終了
当該車両が一定の曲線半径Rの走路に入り,他の試験開始条件を満たしたとき試験を開始する。
当該車両が減速し試験が成功したとき,又は車間時間がτmaxの2/3未満となったとき試験を終了する。
注a) 曲線半径Rは一定
図16−試験路のレイアウト例
19
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
技術情報
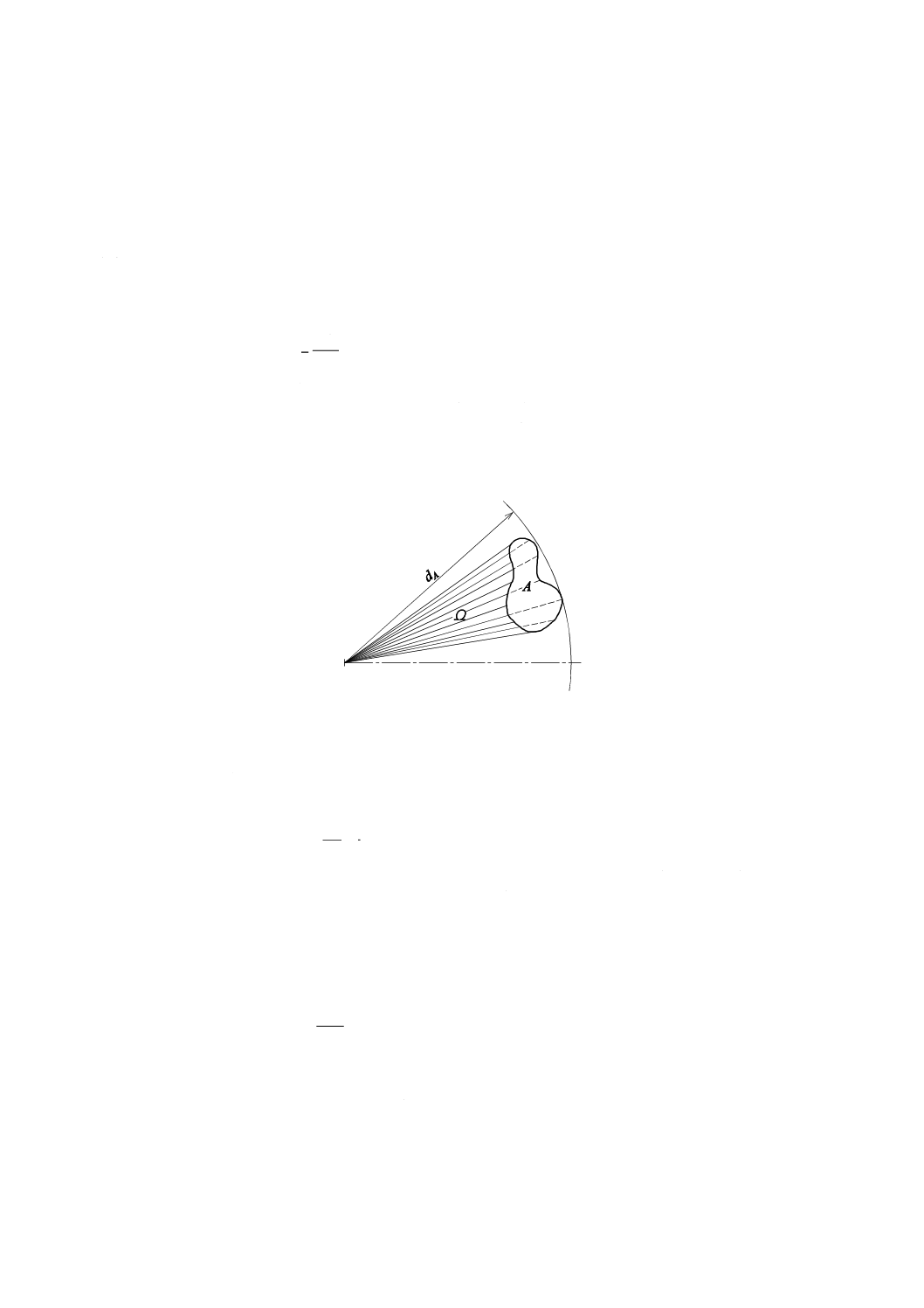
A.1 レーザレーダ用の試験標的の係数
A.1.1 立体角,Ω
立体角Ω は,球面の半径の二乗に対する照射部分の面積の比である(図A.1参照)。
0
2
Ω
d
A
Ω
A
×
=
ここに,
Ω: 立体角(sr)
A: 照射部分の有効面積(m2)
dA: 光源から照射面Aまでの距離(m)
Ω0: 光源の立体角(1sr)
図A.1−立体角
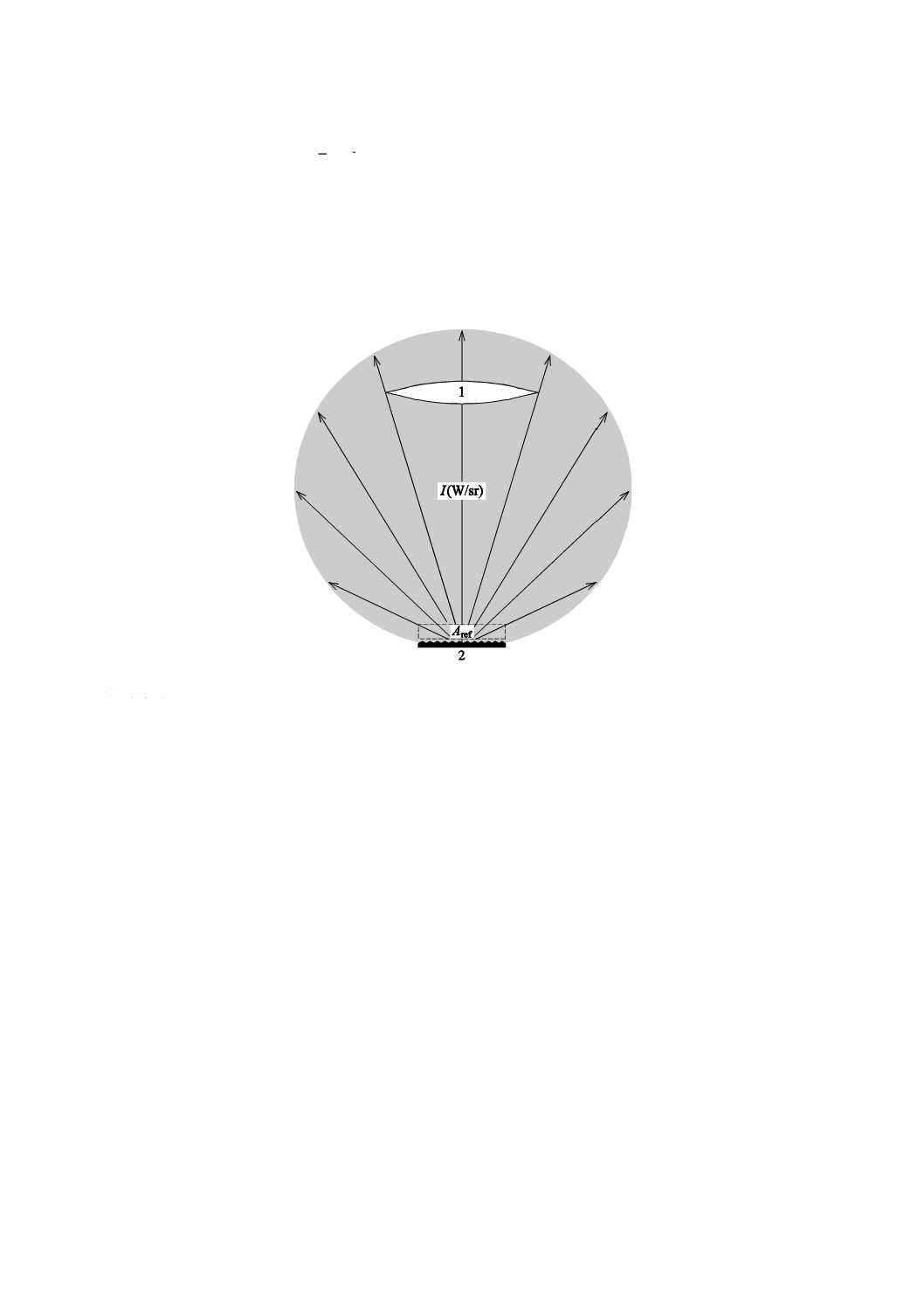
A.1.2 放射強度,I
放射強度Iは,立体角Ω に対する放射源の放射束Φ の比である。
1
ref
ref
dΩ
dΦ
I
=
ここに,
Iref: 受光器面の正面で測定した,反射器から反射した所定
方向の放射強度(W/sr)
Φref: 反射器からの放射束(W)
Ω1: 照射立体角(sr)
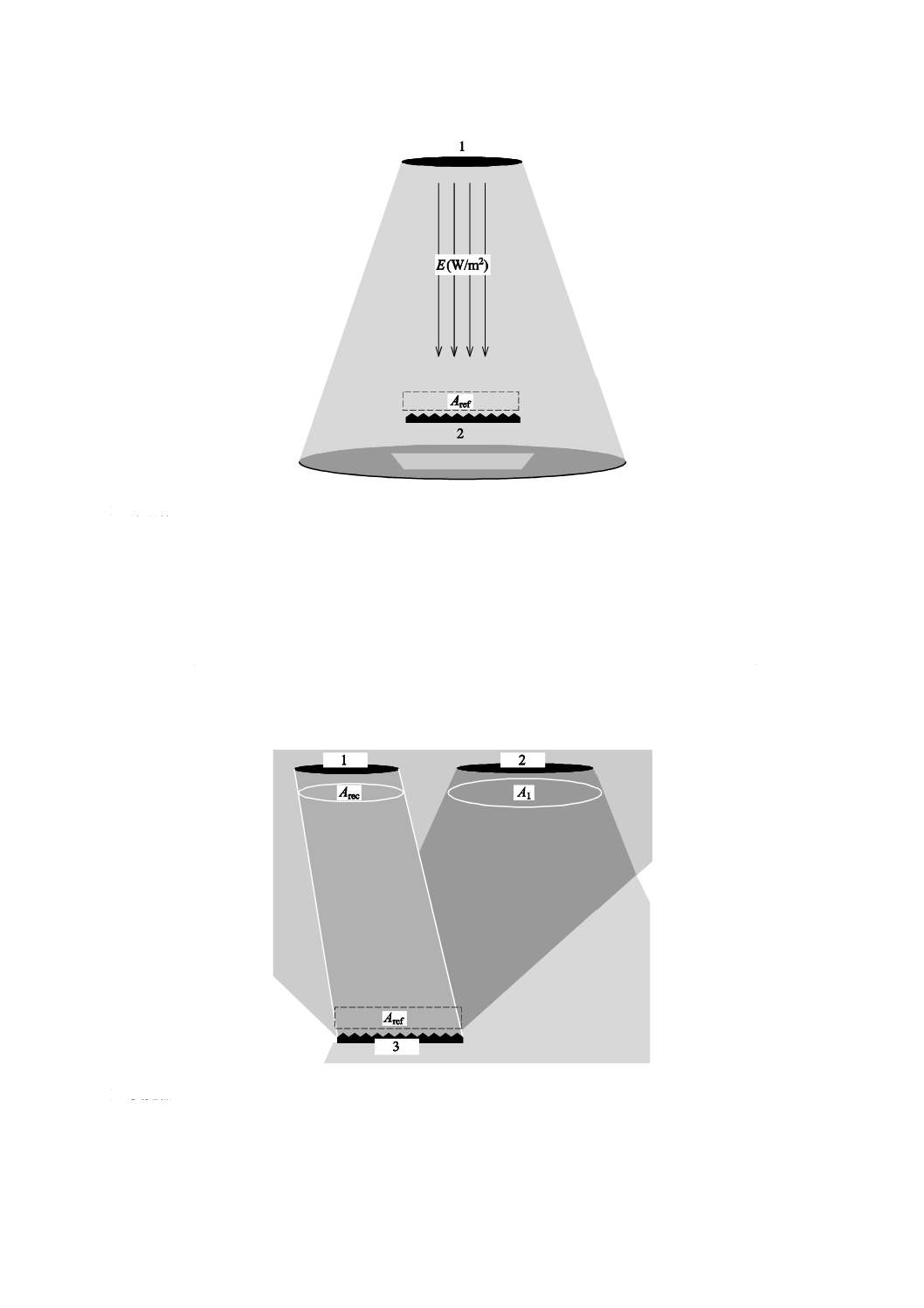
A.1.3 放射照度,Et
放射照度Etは,照射面の面積に対する入射した放射束との比で,照射面での密度である。
t
t
t
dA
dΦ
E=
ここに,
Et: 放射照度(W/m2)
Φt: 入射した放射束(W)
At: 照射面積(m2)
A.1.4 試験標的の反射係数,CTT
試験標的は,後部反射器のない汚れた車両の反射率を模擬した反射器の係数で規定する。
20
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
t
ref
CTT
E
I
=
ここに,
CTT: 試験標的の反射係数(m2/sr)
Iref: 受光器面の正面で測定した,反射器から反射した所定
方向の放射強度(W/sr)
Et: 放射体からの放射照度(W/m2)
規定されたCTTの反射器は,8×10−3 sr以上の反射の広がり角をもたなければならない(図A.2参照)。
1 受光器
2 反射器
図A.2−受光器の配置
CTTは,単に反射器の性能(減衰)を示す。試験方法としては,コーナ反射器(図A.3参照)(表面を
“点”に縮小する。)で十分である。反射器表面の全反射率が規定値を超えないときは,より大きな投影面
積の反射器を使用することも可能である。
21
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1 放射体
2 反射器
図A.3−放射体の配置
A.1.5 反射器の大きさ
反射器の大きさ(図A.4参照)を規定する。経験上から,車両を模擬する場合は,大きさが約1.7 m2の
ランバート反射器を用いるのが最良の方法である。他の方法としては大きさ約20 cm2の三面反射器も利用
可能である。
1 受光器
2 放射体
3 反射器
図A.4−反射器の配置
22
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ランバート反射器は,全エネルギーを球面領域内に反射する(図A.5参照)。
0
0
π
Ω
I
Φ
×
×
=
⊕
ここに,
Φ⊕: 放射束(W)
I0: 放射強度(W/sr)
Ω0: 立体角(sr)
寸法1.7 m2は,小型車両の反射面積に相当する。
1 反射器
図A.5−ランバート反射器
A.2 コーナキューブタイプ試験標的のRCS
試験標的は,RCSで規定する。
− RCSは,10 m2±3 m2。現在使用されている周波数(24,60,77及び90 GHz)に対しては,10 m2あれ
ば,高速道路を走行している全ての車両の95 %が含まれる。大幅に異なる周波数帯域に対しては,研
究開発がなされなければならない。
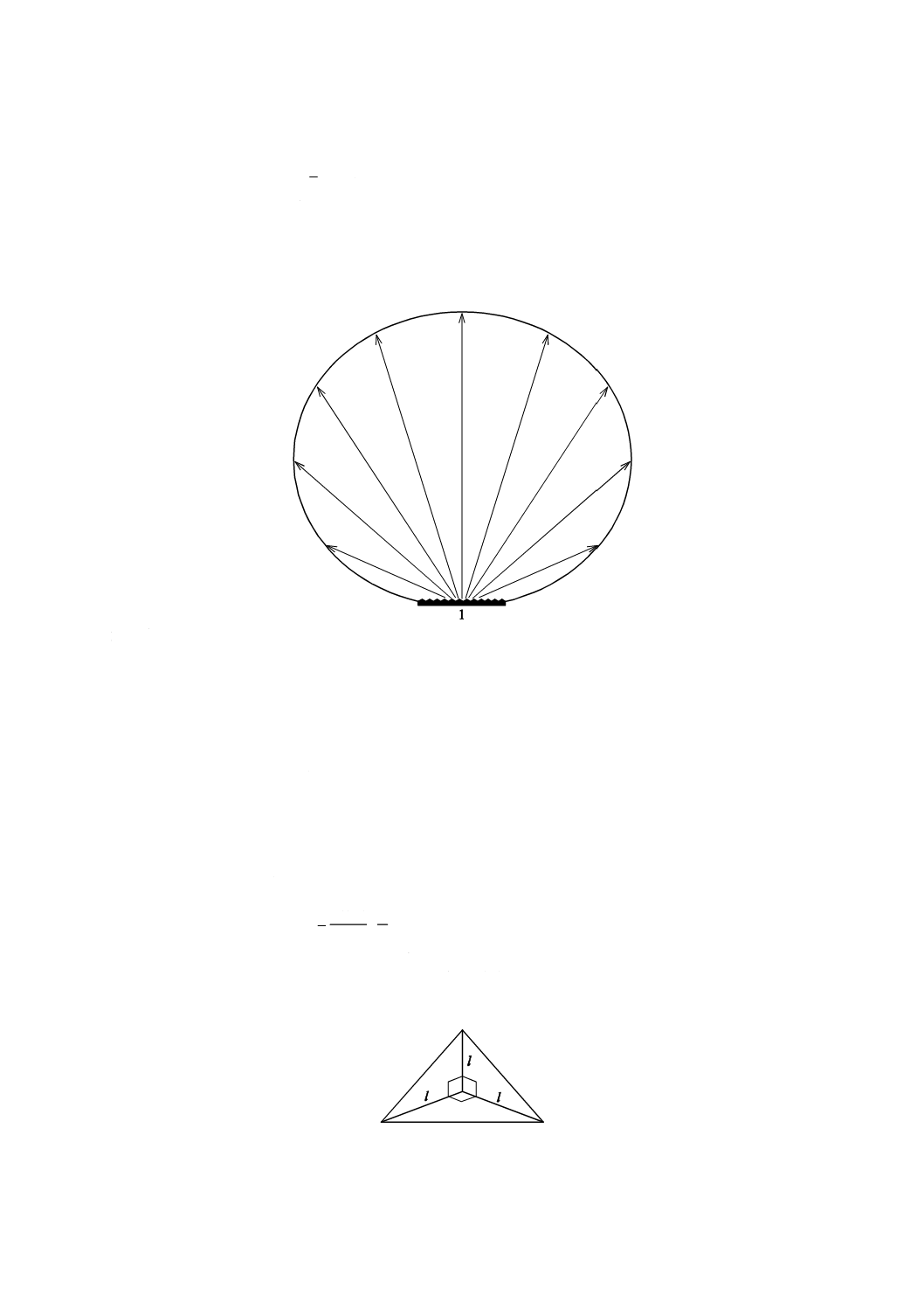
− 試験標的の外観は,図A.6のとおりとする。
− RCSは,次の式で計算する。
2
4
3
π
4
RCS
λ
×
×
×
=
l
ここに,
l: コーナキューブ反射器の短辺の長さ(m)
λ: 波長(m)
図A.6−コーナキューブ反射器
23
D 0807:2011 (ISO 22179:2009)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
参考文献
[1] Mitschke, M., Wallentowitz, H. and Schwartz, E. Vermeiden querdynamisch kritischer Fahrzustände durch
Fahrzustandsüberwachung (“Avoidance of critical driving states in case of lateral acceleration by using driving
state supervision”). VDI Bericht 91/1991
[2] United Nations Economic Commission for Europe, Regulation No.13-H (ECE-R13-H), Uniform provisions
concerning the approval of passenger cars with regard to braking
(http://www.unece.org/trans/main/wp29/wp29regs1-20.html参照)