D 0051 : 2001
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づいて,日本工業標準調査会の審議を経て,経済産業大臣が制定した日
本工業規格である。
制定に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,ISO 8705 : 1991, Mopeds−Measurement
method for location of centre of gravity及びISO 9130 : 1989, Motorcycles−Measurement method for location of
centre of gravityを基礎として用いた。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会
は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新
案登録出願にかかわる確認について,責任はもたない。
JIS D 0051には,次に示す附属書がある。
附属書1(規定) 二輪自動車の重心位置簡易測定方法
附属書2(参考) JISと対応する国際規格との対比表
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
D 0051 : 2001
二輪自動車−重心位置測定方法
Two-wheeled vehicles−Measurement method for
location of centre of gravity
序文 この規格は,1991年に第1版として発行されたISO 8705, Mopeds−Measurement method for location of
centre of gravity及び1989年に第1版として発行されたISO 9130, Motorcycles−Measurement method for
location of centre of gravityを翻訳し,技術的内容を変更して作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,原国際規格を変更している事項である。変更の一覧表
をその説明を付けて,附属書2に示す。
1. 適用範囲 この規格は,二輪自動車(1)(以下,二輪車という。)の重心位置測定方法について規定する。
ただし,側車付二輪自動車には適用しない。
注(1) JIS D 0101による。
備考1. この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide 21に基づき,IDT(一致している),MOD
(修正している),NEQ(同等でない)とする。
ISO 8705 : 1991 Mopeds−Measurement method for location of centre of gravity (MOD)
ISO 9130 : 1989 Motorcycles−Measurement method for location of centre of gravity (MOD)
2. 二輪車の重心位置簡易測定方法を,附属書1に示す。
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版を適用する。
JIS B 7510 精密水準器
JIS B 7512 鋼製巻尺
JIS D 0101 自動車の種類に関する用語
JIS D 4901 車両識別番号 (VIN)
JIS Z 8401 数値の丸め方
3. 定義 この規格で用いる主な用語の定義は,次による。
a) 路面固定座標系 (X,Y,Z) 路面に固定された右手系直交座標系。X軸及びY軸を水平面内にとり,
Z軸は,上向きを正とする。
b) 二輪自動車固定座標系 (x,y,z) 二輪車の重心に原点をおく右手系直交座標系。平たん(坦)な路
面を一定車速で直進している状態で,x軸は,二輪車の縦中心面に平行で,水平前向きを正とする。y
2
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
軸は,二輪車の進行方向に対して,左方向を正とし,z軸は,上向きを正とする。この座標系は,二
輪車とともに並進運動と回転運動を行う。
なお,プラットホームに二輪車を固定した状態を想定して,プラットホームにもこの座標系を適用
する。
4. 測定条件
4.1
二輪車単体の場合 二輪車単体の場合の測定条件は,次による。ただし,測定の目的に応じて条件
を変更した場合には,測定結果記録表にその条件を記載する。
a) 二輪車は,土砂などの付着,変形などがなく,正常に作動できる状態とする。
b) 燃料は,取扱説明書に指定する最大容量とする。
c) 潤滑油及び冷却水は,取扱説明書に指定する量とする。
d) タイヤ空気圧は,取扱説明書に指定する圧力とする。
e) 工具類は,正規の保管位置に装備する。
f)
前後の懸架装置は,静止状態で固定する。
g) 前輪は,x軸方向に向けた状態とする。
4.2
乗員を乗せた状態の場合 乗員を乗せた状態の場合の測定条件は,次による。ただし,測定の目的
に応じて条件を変更した場合には,測定結果記録表にその条件を記載する。
a) 二輪車の測定条件は,3.1による。
b) 乗員には,ダミー(2)又は相当の人間を用いる。
注(2) 49CFRパート572,サブパートBに規定されたもの,又はこれに相当のもの。このダミーの質
量は,73.4kgである。
c) 乗員の位置は,次による。
1) 乗員は,二輪車の縦中心面に合わせる。
2) 乗員をシートの上に座らせて,その両手をハンドルバーの上に置き,両足をフットレストの上に置
く。
3) S点(3)とH点(4)とを結んだ線と,x軸とのなす角度を求め,乗員の姿勢角とする。
注(3) 乗員の胴部と腕部との回転中心を示す点。
(4) 乗員の胴部と大たい(腿)部との回転中心を示す点。
4) 前車軸からH点までのx軸方向の距離を求め,乗員の着座位置とする。
5. 測定機器 重心位置を測定するための測定機器は,次のもの,又はこれと同等以上の機能及び精度を
もつものを用いる。
a) 水準器 JIS B 7510に規定する,0.1mm/m (≒20”) まで測定可能な精密水準器。
b) 鋼製巻尺 JIS B 7512に規定する,長さL (m) において± {0.3+0.1 (L−1)} (mm) の公差をもつ鋼製
巻尺。
c) 角度計 電気的又は機械的方法によって回転角度を測定するもので,0.1°まで測定できるもの。
d) 計量台 測定対象物をはかるのに十分な容量をもち,0.1kgまで測定できるもの。
e) 支点 計量台の上にプラットフォームを載せるときに用いるもの。
f)
プラットホーム できるだけ高剛性で,かつ,軽量のもの。
g) ナイフエッジ ナイフエッジのエッジ部の丸みは,半径1mm以下(5),エッジ角度は90°以下のもの
3
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を推奨する。
注(5) エッジ部の丸みは,鋭利に仕上げたエッジに荷重をかけて丸みをもたせた状態での形状である。
h) おもり プラットホームを傾けるときに用いるもの。
6. 測定手順
6.1
x軸方向の重心位置の測定
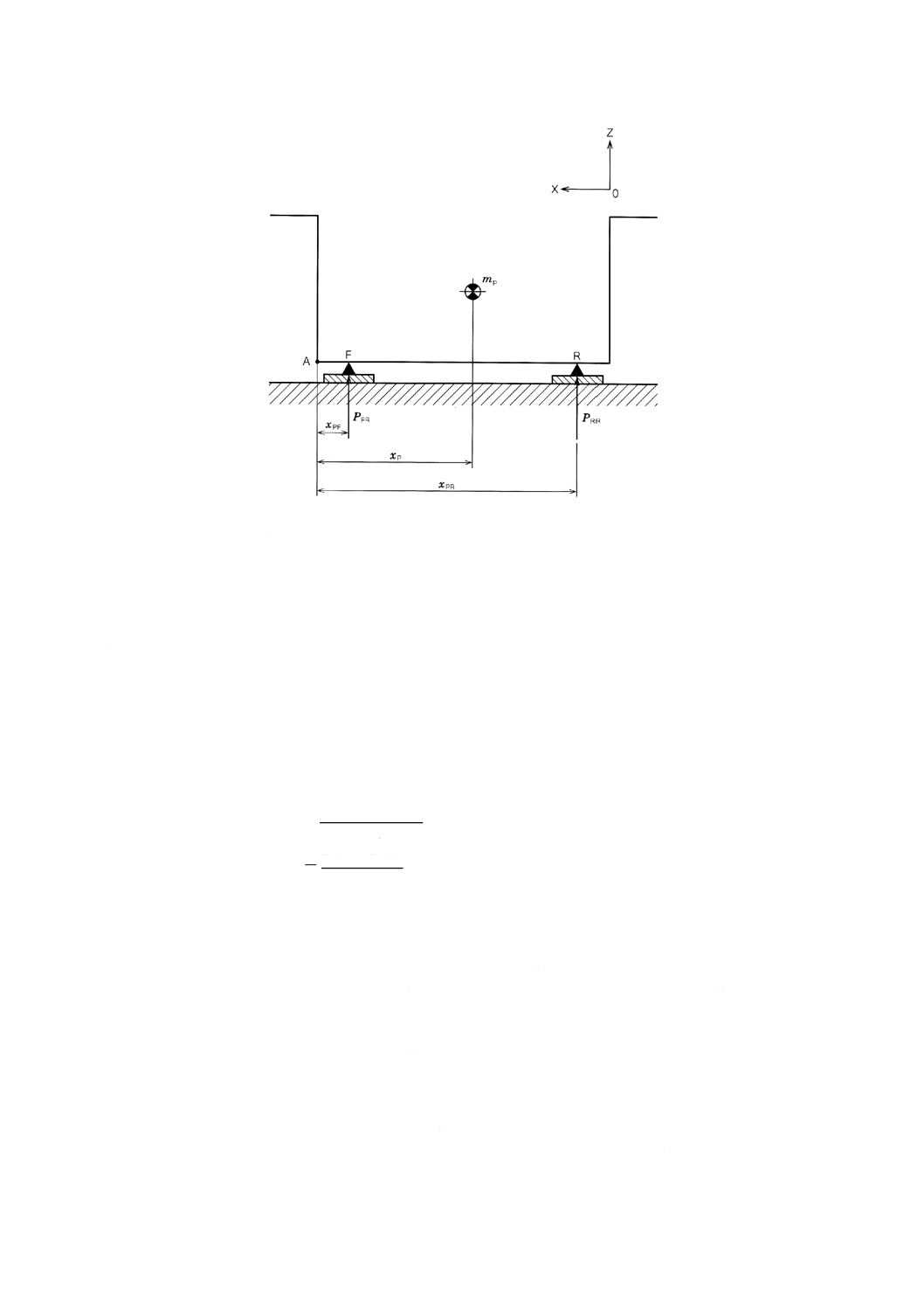
6.1.1 プラットホームだけのx軸方向の重心位置 プラットホームだけのx軸方向の重心位置測定手順は,
次による(図1参照)。
a) 前後の計量台にそれぞれ支点を平行に載せ,その荷重PKF及びPKRを測定する。
b) プラットホームを二つの支点の上に載せる。
c) プラットホームの前端A点から,前側の支点Fまでのx軸方向の距離xPF及び後ろ側の支点Rまでの
x軸方向の距離xPRを測定する。
d) 前後の支点に配分される荷重PFR及びPRRを測定する。
e) プラットホームの前端A点から重心までのx軸方向の距離xPを,次の式によって算出する。
KF
PR
PF
P
P
P
−
=
KR
RP
PR
P
P
P
−
=
PR
PF
PR
PR
PF
PF
p
P
P
P
x
P
x
x
+
+
=
ここに, PPF: 支点Fに配分される,プラットホームによる荷重 (N)
PPR: 支点Rに配分される,プラットホームによる荷重 (N)
PFR: 支点Fに配分される,プラットホームによる荷重と支点に
よる荷重との和 (N)
PRR: 支点Rに配分される,プラットホームによる荷重と支点に
よる荷重との和 (N)
PKF: 支点Fによる荷重 (N)
PKR: 支点Rによる荷重 (N)
xP: プラットホームの前端A点から重心までのx軸方向の距離
(mm)
xPF: プラットホームの前端A点から支点Fまでのx軸方向の距
離 (mm)
xPR: プラットホームの前端A点から支点Rまでのx軸方向の距
離 (mm)
4
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1 x軸方向のプラットホームの重心位置の測定
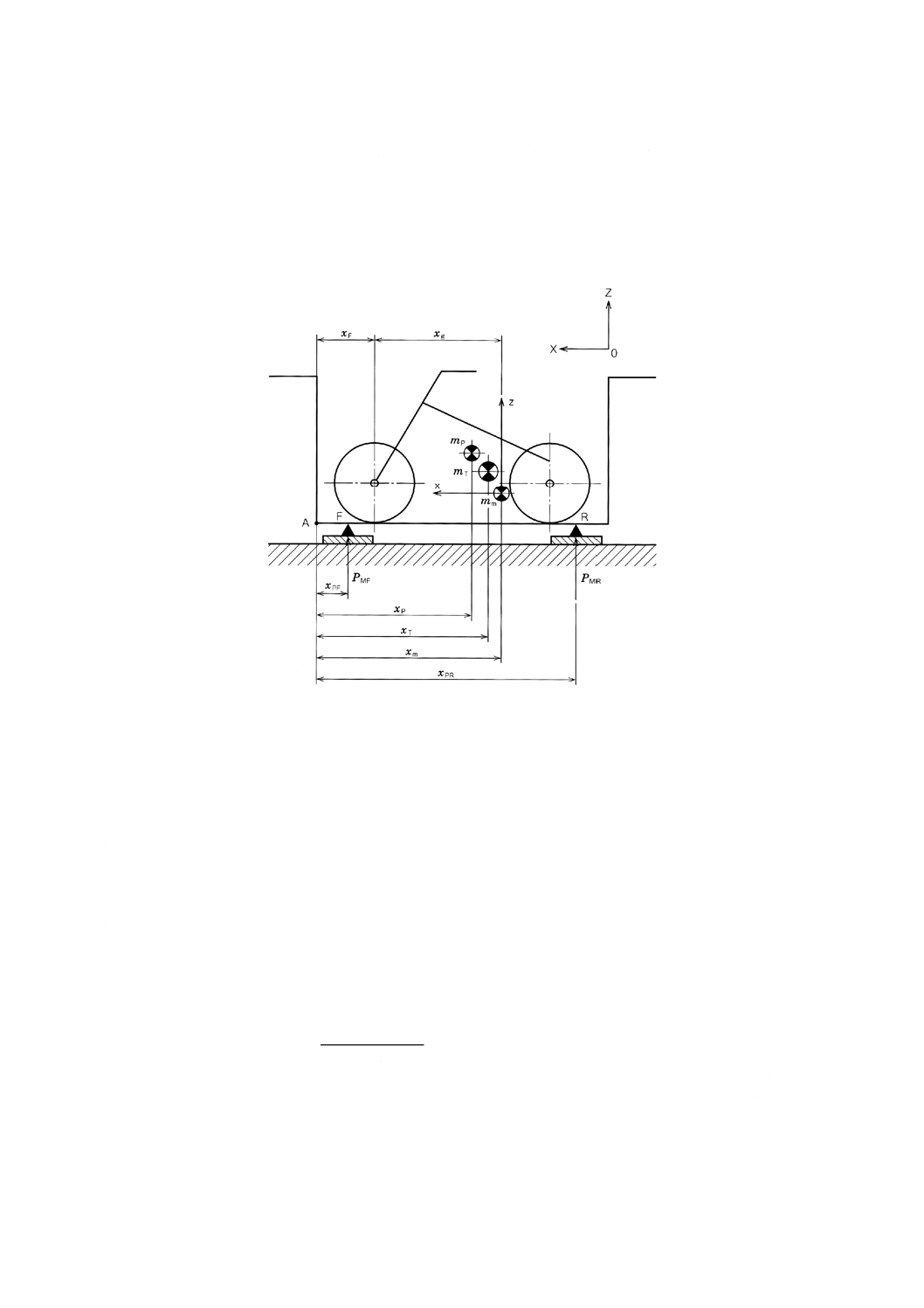
6.1.2
二輪車のx軸方向の重心位置 二輪車(6)のx軸方向の重心位置測定手順は,次による(図2参照)。
注(6) ここでは,二輪車単体の場合と乗員を乗せた場合との両方を兼ねて表す。
a) 二輪車をプラットホーム上に載せ,動かないように固定する。プラットホームに対する二輪車の横方
向傾き角は,0°±0.5°とする。
b) プラットホームの前端A点から,二輪車の前車軸までのx軸方向の距離xFを測定する。
c) 前後の支点に配分される荷重PMF及びPMRを測定する。
d) 二輪車の前車軸から重心位置までのx軸方向の距離xgを,次の式によって算出する。
mm=mT−mP
PTF=PMF−PKF
PTR=PMR−PKR
m
P
P
T
T
m
TR
TF
TR
PR
TF
PF
T
m
m
x
m
x
x
P
P
P
x
P
x
x
−
=
+
+
=
xg=xm−xF
ここに,
mm: 二輪車の質量 (kg)
mT: 二輪車とプラットホームとの合計質量 (kg)
mP: プラットホームの質量 (kg)
PTF: 支点Fに配分される,プラットホーム及び二輪車による荷
重 (N)
PTR: 支点Rに配分される,プラットホーム及び二輪車による荷
重 (N)
PMF: 支点Fに配分される,プラットホーム及び二輪車による荷
重と支点Fによる荷重との和 (N)
PMR: 支点Rに配分される,プラットホーム及び二輪車による荷
重と支点Rによる荷重との和 (N)
xT: プラットホームの前端A点から,二輪車とプラットホーム
5
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
とを合わせた重心までのx軸方向の距離 (mm)
xm: プラットホームの前端A点から二輪車の重心までのx軸方
向の距離 (mm)
xg: 二輪車の前車軸から重心までのx軸方向の距離 (mm)
xF: プラットホームの前端A点から二輪車の前車軸までのx軸
方向の距離 (mm)
図2 x軸方向の二輪車の重心位置の測定
6.2
y軸方向の重心位置の測定
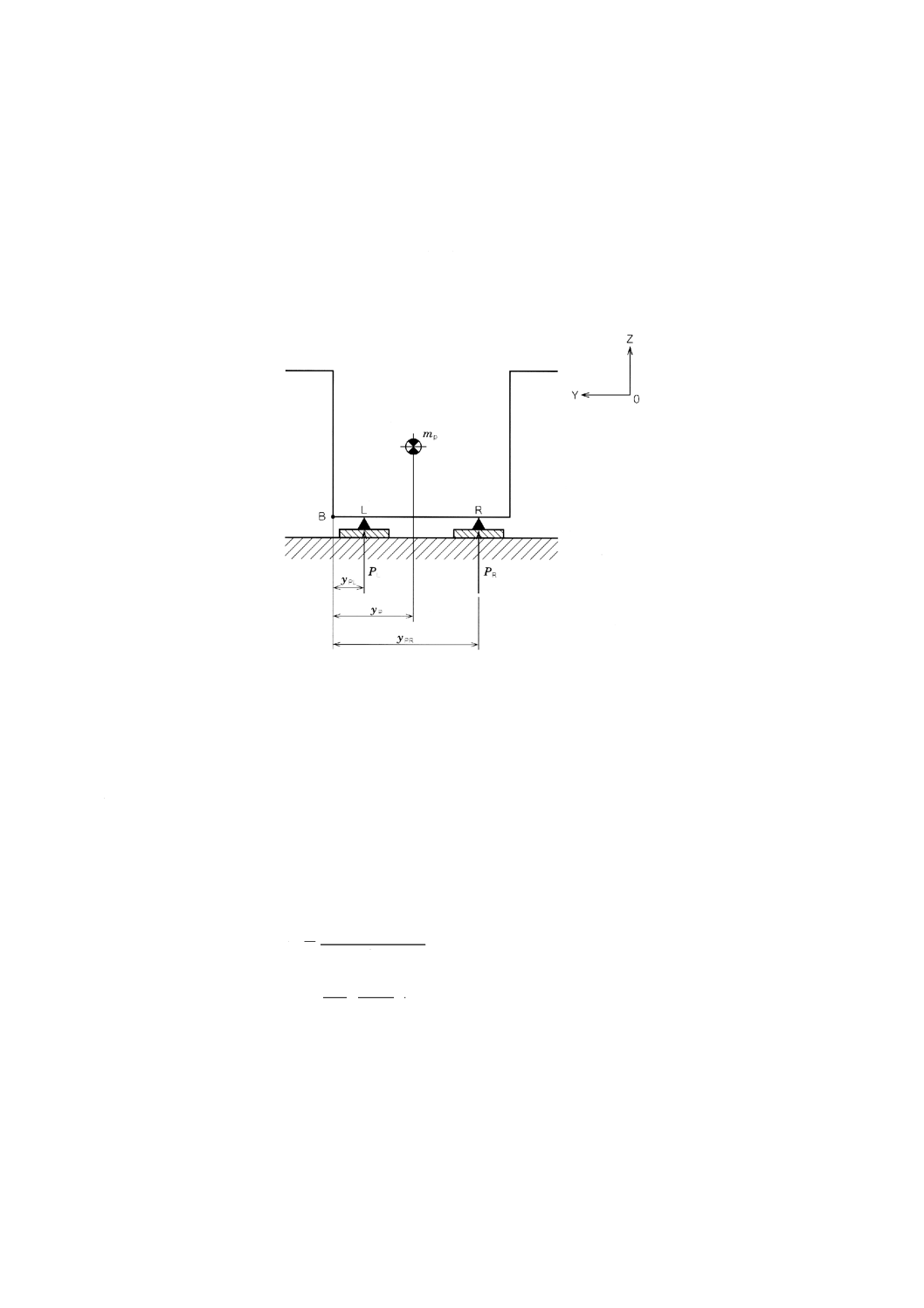
6.2.1 プラットホームだけのy軸方向の重心位置 プラットホームだけのy軸方向の重心位置測定手順は,
次による(図3参照)。
a) 左右の計量台にそれぞれ支点を平行に載せ,その荷重PKL及びPKRを測定する。
b) プラットホームを二つの支点の上に載せる。
c) プラットホームの左端B点から,左側の支点Lまでのy軸方向の距離yPL,及び右側の支点Rまでの
y軸方向の距離yPRを測定する。
d) 左右の支点に配分される荷重PL及びPRを測定する。
e) プラットホームの左端B点から重心までのy軸方向の距離yPを,次の式によって算出する。
PPL=PL−PKL
PPR=PR−PKR
PR
PL
PR
PR
PL
PL
P
P
P
P
y
P
y
y
+
+
=
ここに, PPL: 支点Lに配分される,プラットホームによる荷重 (N)
PPR: 支点Rに配分される,プラットホームによる荷重 (N)
PL: 支点Lに配分される,プラットホームによる荷重と支点に
よる荷重との和 (N)
PR: 支点Rに配分される,プラットホームによる荷重と支点に
6
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
よる荷重との和 (N)
PKL: 支点Lによる荷重 (N)
PKR: 支点Rによる荷重 (N)
yP: プラットホームの左端B点から重心までのy軸方向の距離
(mm)
yPL: プラットホームの左端B点から支点Lまでのy軸方向の距
離 (mm)
yPR: プラットホームの左端B点から支点Rまでのy軸方向の距
離 (mm)
図3 y軸方向のプラットホームの重心位置の測定
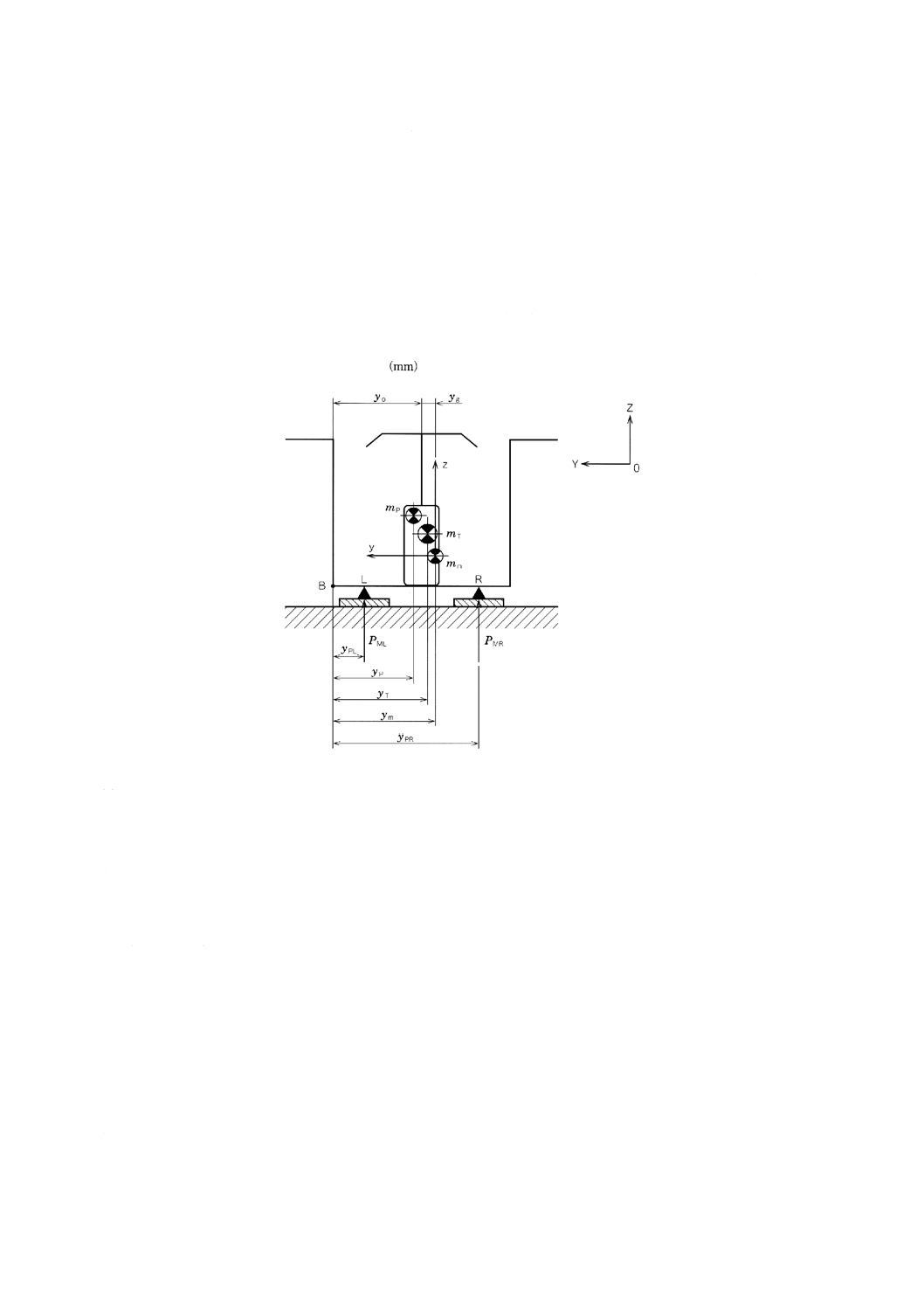
6.2.2
二輪車のy軸方向の重心位置 二輪車(6)のy軸方向の重心位置測定手順は,次による(図4参照)。
a) 二輪車をプラットホーム上に載せ,動かないように固定する。プラットホームに対する二輪車の横方
向傾き角は,0°±0.5°とする。
b) プラットホームの左端B点から,二輪車の縦中心面までのy軸方向の距離yOを測定する。
c) 左右の支点に配分される荷重PML及びPMRを測定する。
d) 二輪車の縦中心面から重心までのy軸方向の距離ygを,次の式によって算出する。
mm=mT−mP
PTL=PML−PKL
PTR=PMR−PKR
TR
TL
TR
PR
TL
PL
T
P
P
P
y
P
y
y
+
+
=
m
P
P
T
T
m
m
m
y
m
y
y
−
=
yg=yO−ym
ここに,
mm: 二輪車の質量 (kg)
mT: 二輪車とプラットホームとの合計質量 (kg)
mP: プラットホームの質量 (kg)
PTL: 支点Lに配分される,プラットホーム及び二輪車による荷
重 (N)
PTR: 支点Rに配分される,プラットホーム及び二輪車による荷
7
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
重 (N)
PML: 支点Lに配分される,プラットホーム及び二輪車による荷
重と支点Lによる荷重との和 (N)
yT: プラットホームの左端B点から,二輪車とプラットホーム
とを合わせた重心までのy軸方向の距離 (mm)
ym: プラットホームの左端B点から二輪車の重心までのy軸方
向の距離 (mm)
yg: 二輪車の縦中心面から重心までのy軸方向の距離 (mm)
yO: プラットホームの左端B点から二輪車の縦中心面までのy
軸方向の距離 (mm)
図4 y軸方向の二輪車の重心位置の測定
6.3
z軸方向の重心位置の測定
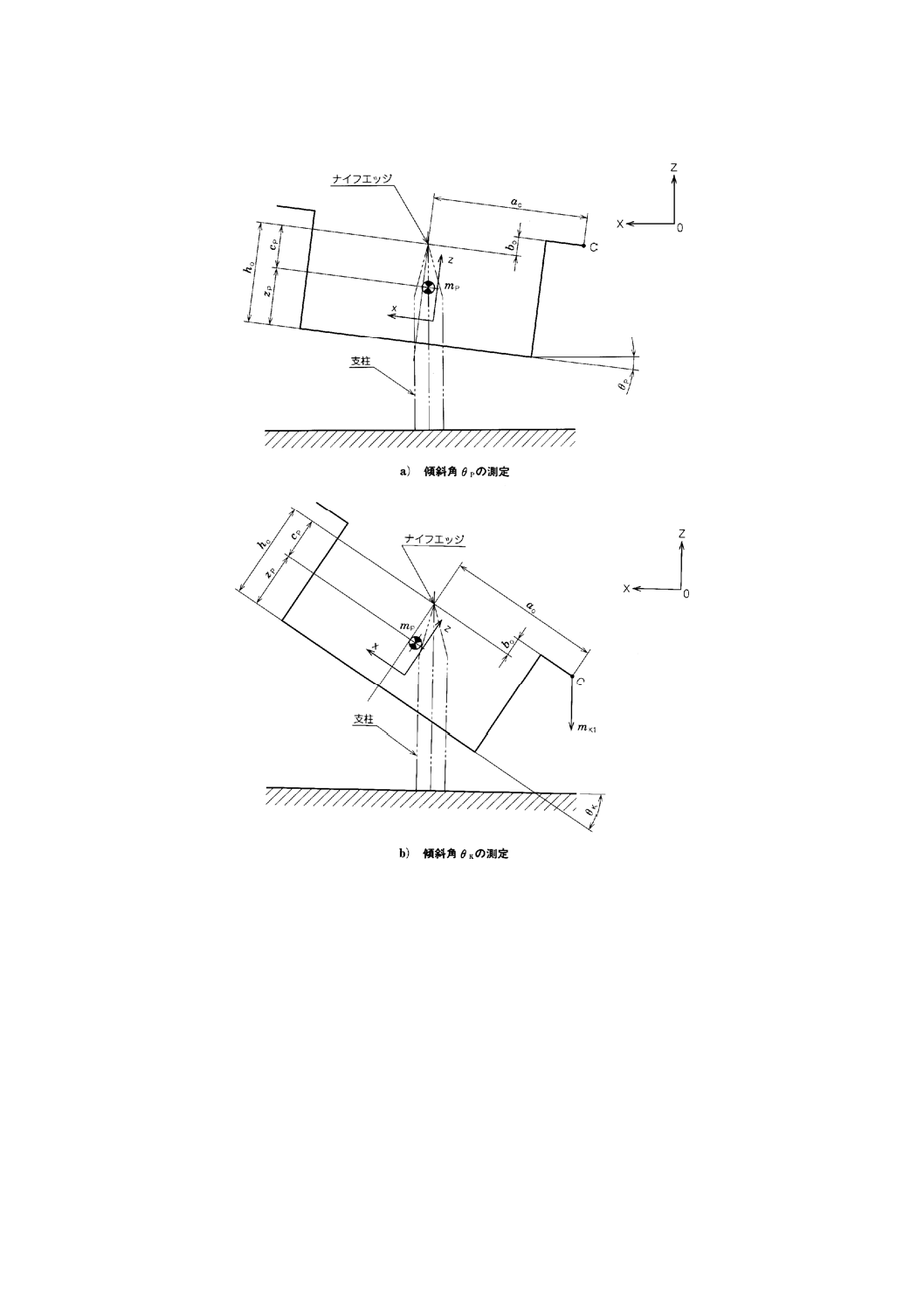
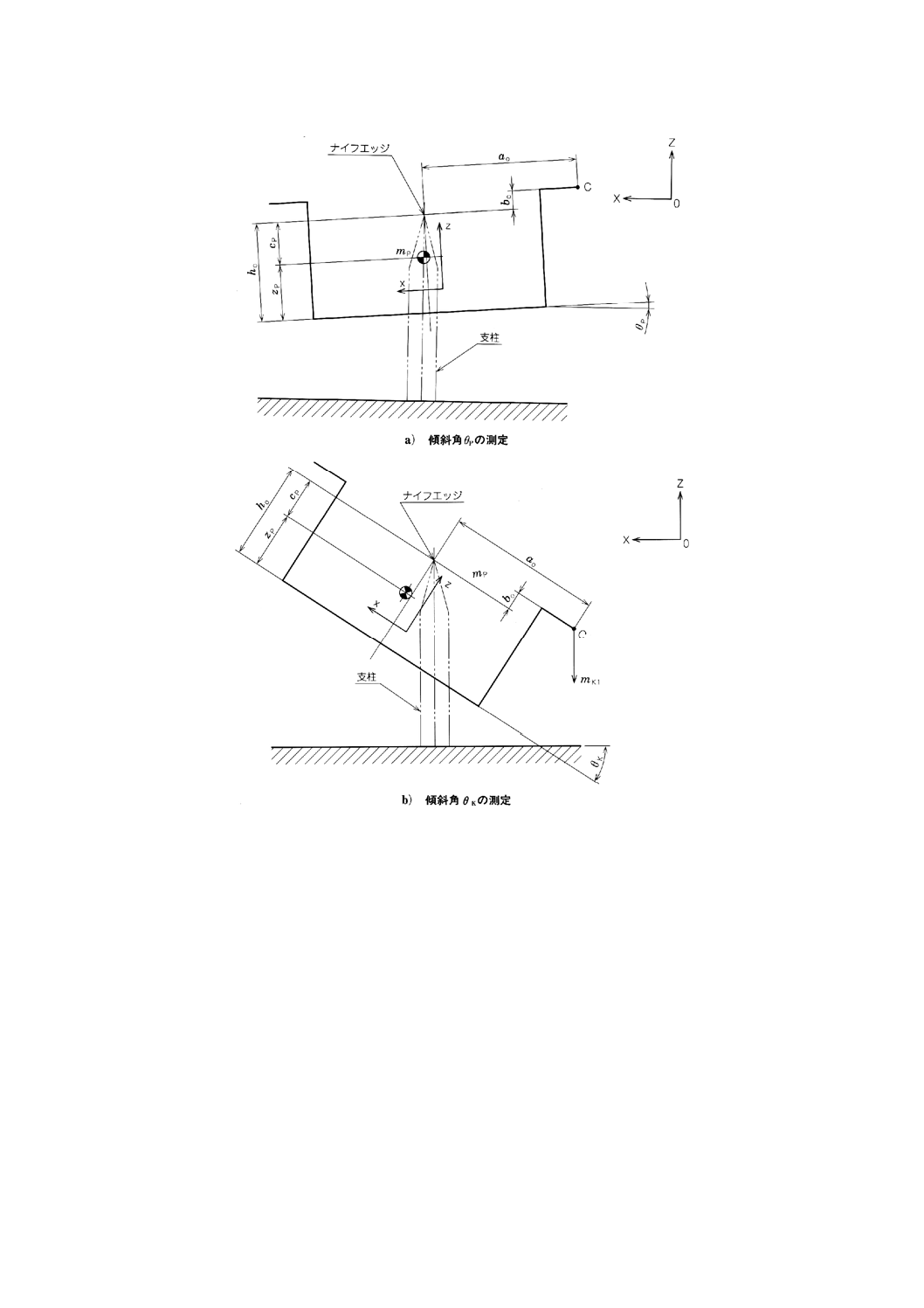
6.3.1 プラットホームだけのz軸方向の重心位置 プラットホームだけのz軸方向の重心位置測定手順は,
次による(図5及び図6参照)。
a) 二輪車を載せるプラットホームの底面(以下,プラットホームの底面という。)からナイフエッジまで
のz軸方向の距離hOを測定する。
b) ナイフエッジから質量mK1のおもりのつり下げ位置C点までのx軸方向の距離aO,及びz軸方向の距
離bOを測定する。
c) プラットホームを支柱上のナイフエッジに載せ,プラットホームの底面と水平面とのなす角θPを測定
する。このときにプラットホームの傾く方向によってe)に示す重心位置の計算式が異なる。
d) プラットホームのC点から質量mK1のおもりをつり下げて,プラットホームのC点側が下がっている
状態にし,プラットホームの底面と水平面とのなす角θKを測定する[図5b)及び図6b)参照]。
なお,z軸方向の重心位置は,傾け角θKが大きくなると値が安定し,測定誤差も小さくなるので,
10°以上傾けることを推奨する。
e) プラットホームの底面から重心までのz軸方向の距離zPを,次の式によって算出する。ただし,式中
の±の符号は,θPを測定したときに,C点側が下がっている状態の場合[図5a)参照]には,負を用
8
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
い,C点側が上がっている状態の場合[図6a)参照]には,正を用いる。
)
tan
(tan
)
tan
(
P
K
P
K
o
o
1
K
P
θ
θ
θ
±
m
b
a
m
c
+
=
zP=hO−cP
ここに,
cP: ナイフエッジからプラットホームの重心までのz軸方向の距
離 (mm)
mK1: プラットホームにつり下げるおもりの質量 (kg)
aO: ナイフエッジからおもりのつり下げ位置C点までのx軸方向
の距離 (mm)
bO: ナイフエッジからおもりのつり下げ位置C点までのz軸方向
の距離 (mm)
θK: プラットホームをナイフエッジに載せ,おもりをつり下げた
ときのプラットホームの底面と水平面とのなす角 (°)。値は絶
対値とする。
mP: プラットホームの質量 (kg)
θP: プラットホームをナイフエッジに載せ,おもりをつり下げな
いときのプラットホームの底面と水平面とのなす角 (°)。値は
絶対値とする。
zP: プラットホームの底面から重心までのz軸方向の距離 (mm)
hO: プラットホームの底面からナイフエッジまでのz軸方向の距
離 (mm)
9
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図5 z軸方向のプラットホームの重心位置の測定
(C点側が下がっている場合)
10
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図6 z軸方向のプラットホームの重心位置の測定
(C点側が上がっている場合)
11
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
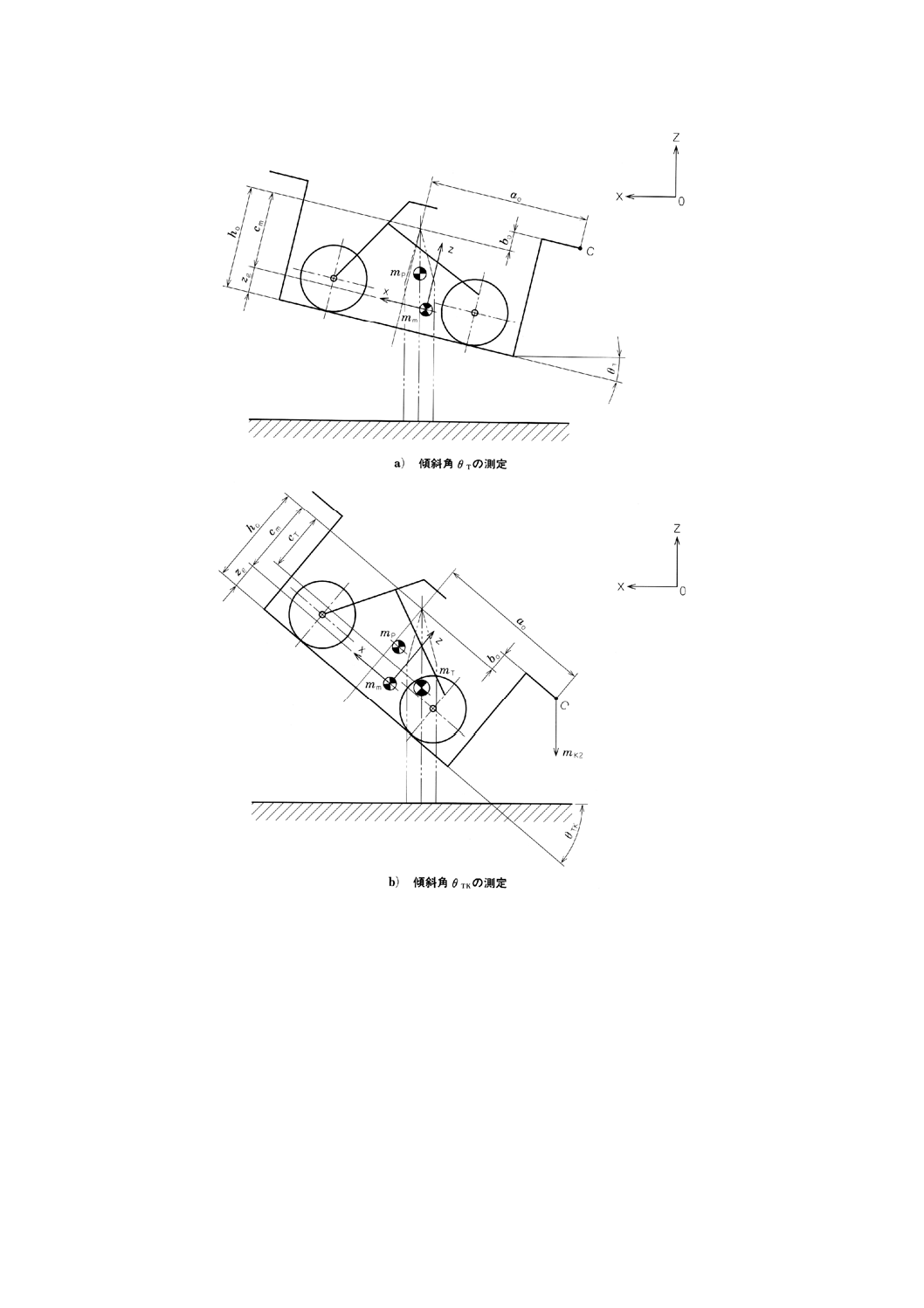
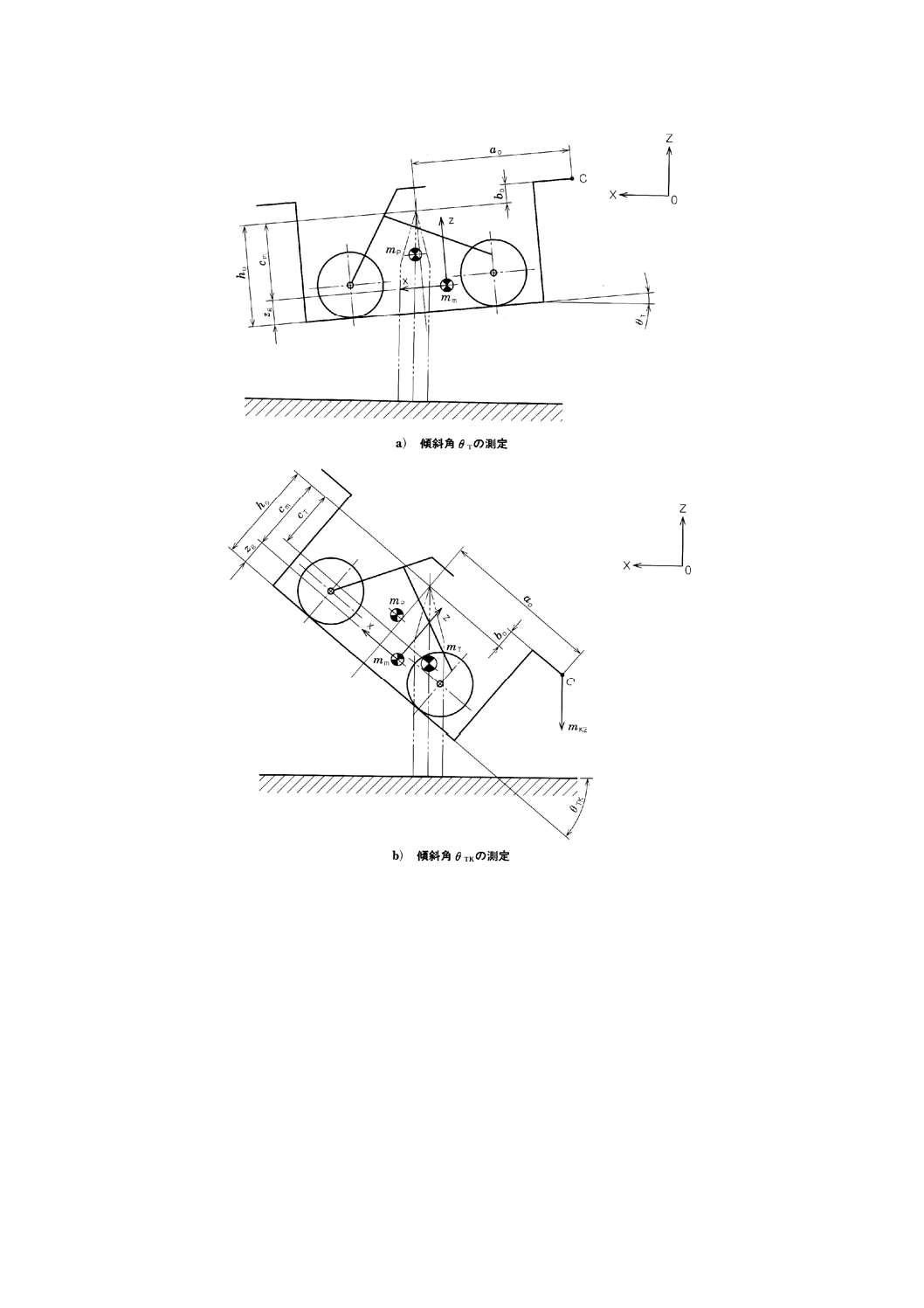
6.3.2
二輪車のz軸方向の重心位置 二輪車(6)のz軸方向の重心位置測定手順は,次による(図7及び図
8参照)。
a) 二輪車をプラットホーム上に載せ,動かないように固定する。プラットホームに対する二輪車の横方
向傾き角は,0°±0.5°とする。
b) プラットホームを支柱上のナイフエッジに載せ,プラットホームの底面と水平面とのなす角θTを測定
する。このとき,プラットホームの傾く方向によってd)に示す重心位置の計算式が異なる。
なお,θTがなるべく小さくなるように,二輪車の固定位置を調整する。
c) プラットホームのC点から質量mK2のおもりをつり下げて,プラットホームの底面と水平面とのなす
角θTKを測定する[図7b)及び図8b)参照]。
なお,z軸方向の重心位置は,傾け角θTKが大きくなると,値が安定し,測定誤差も小さくなるので,
10°以上傾けることを推奨する。
d) 二輪車の前後輪接地水平面から重心までのz軸方向の距離zgを,次の式によって算出する。ただし,
式中の±の符号は,θTを測定したときに,C点側が下がっている状態の場合[図7a)参照]には,負
を用い,C点側が上がっている状態の場合[図8a)参照]には,正を用いる。
mT=mP+mK2+mm
)
tan
)(tan
(
)
tan
(
T
TK
P
TK
o
o
K2
T
θ
θ
θ
±
m
+
+
=
m
m
b
a
m
c
m
P
P
o
K2
T
T
m
m
c
m
b
m
c
m
c
−
+
=
zg=hO−cm
ここに,
mT: プラットホーム,おもり及び二輪車の質量の和 (kg)
mK2: プラットホームにつり下げるおもりの質量 (kg)
mm: 二輪車の質量 (kg)
cT: ナイフエッジからプラットホームと二輪車とを合わせた重
心までのz軸方向の距離 (mm)
θTK: プラットホームをナイフエッジに載せ,おもりをつり下げ
たときのプラットホームの底面と水平面とのなす角 (°)。値
は絶対値とする。
θT: プラットホームをナイフエッジに載せ,おもりをつり下げ
ないときのプラットホームの底面と水平面とのなす角 (°)。
値は絶対値とする。
cm: ナイフエッジから二輪車の重心までのz軸方向の距離
(mm)
zg: 二輪車の前後輪の接地面から重心までのz軸方向の距離
(mm)
12
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図7 z軸方向の二輪車の重心位置の測定
(C点側が下がっている場合)
13
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図8 z軸方向の二輪車の重心位置の測定
(C点側が上がっている場合)
7. 測定結果の記録 測定結果は,付表1に示す様式の重心位置測定結果記録表に記録する。
なお,重心位置の測定結果は,JIS Z 8401によって1mmを最小単位に丸める。
14
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
付表1 重心位置測定結果記録表の様式
重心位置測定結果記録表
製造業者 試験期日 年 月 日
形式名称 試験場所
車台番号(7) 測定者
二輪車の質量 kg
タイヤ空気圧
乗員(11)なし・ダミー・人間
前輪 kPa ダミーの型式
後輪 kPa 質量 kg
懸架装置の設定位置(可変式の場合)
着座位置(12) mm
前
姿勢角
(13) °
後
懸架装置の固定位置
重心位置
前(8)
mm
xg(14)
mm
後(9)
mm
yg(15)
mm
その他記載すべき条件等(10)
zg(16)
mm
注(7) 車台番号の記入は,JIS D 4901による。
(8) ヘッドパイプ中心から地面までの距離。ただし,測定できない場合には,車両
前側のばね上の参考点を記載し,この点から地面までの距離とする。
(9) 後ろ側懸架装置の上側取付ボルト中心から地面までの距離。ただし,測定でき
ない場合には,車両後ろ側のばね上の参考点を記載し,この点から地面までの
距離とする。
(10) 本体4.に記載した条件のうち,追加又は変更した測定条件を記載する。
(11) 表中の,なし,ダミー,人間のうち,該当しないものを抹消する。
(12) 前車軸からH点までのx軸方向の距離。
H点は,乗員の胴部と大たい(腿)部との回転中心を示す点。
(13) S点とH点とを結んだ線と,x軸とのなす角。
S点は,乗員の胴部と腕部との回転中心を示す点。
(14) 前車軸から後方へのx軸方向の距離。
(15) 二輪車の縦中心面から進行方向に対し左方向を正とする。
(16) 前後輪の接地面から上方へのz軸方向の距離。
15
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書1(規定) 二輪自動車の重心位置簡易測定方法
1. 適用範囲 この附属書は,二輪自動車の重心位置測定において,箱型のプラットホームを用いない簡
易測定方法について規定する。
2. 測定手順
2.1
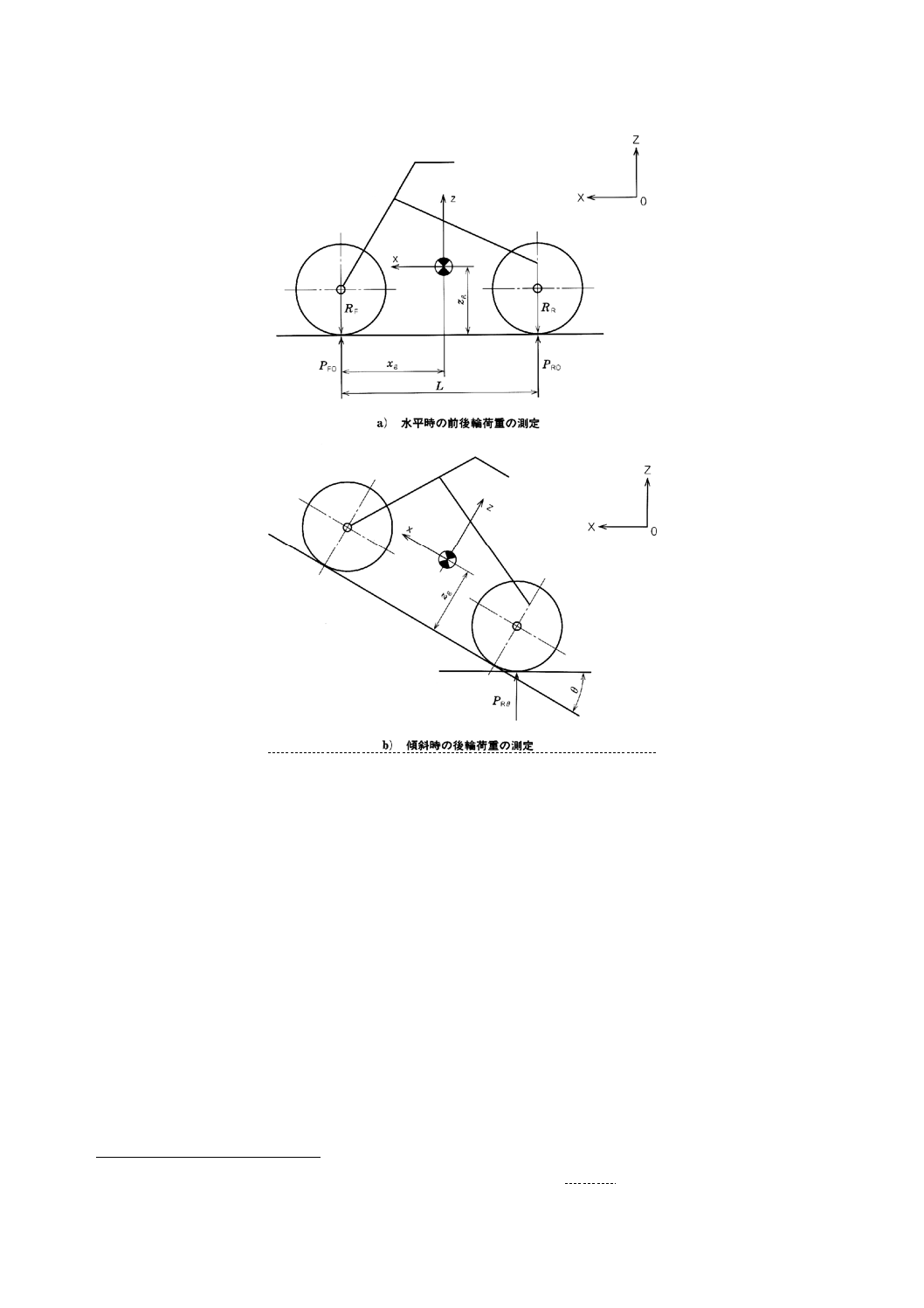
x軸方向の重心位置 x軸方向の重心位置簡易測定手順は,次による(附属書1図1参照)。
a) 前輪半径RF,輪半径RR及び軸距Lを測定する。
b) 二輪自動車の前輪及び後輪をそれぞれ前後の計量台の上に載せ,荷重PFO及びPROを測定する。
c) 前車軸から重心までのx軸方向の距離xgを,次の式によって算出する。
RO
FO
RO
g
P
P
P
L
x
+
・
=
ここに,
xg: 前車軸から重心までのx軸方向の距離 (mm)
L: 軸距 (mm)
PFO: 水平時の前輪荷重 (N)
PRO: 水平時の後輪荷重 (N)
2.2
y軸方向の重心位置 y軸方向の重心位置簡易測定方法は,プラットホームを用いて行う方式(本体
の規定)と同じである。ただし,プラットホームは,適切な平板を用いてもよい。
2.3
z軸方向の重心位置 z軸方向の重心位置簡易測定手順は,次による(附属書1図1参照)。
a) 前輪を持ち上げ,そのときの後輪の荷重PRθ及び傾斜角θを測定する。このときに二輪自動車が側方に
倒れないように固定しておく。
b) 前後輪の接地面から重心までのz軸方向の距離zgを,次の式によって算出する。
F
RO
FO
R
F
R
RO
R
tan
)
(
tan
)
(
)
(
R
P
P
P
R
R
P
P
L
zg
+
+
−
+
−
=
θ
θ
θ
θ
ここに,
zg: 前後輪の接地面から重心までのz軸方向の距離 (mm)
PRθ: 前輪を持ち上げたときの後輪荷重 (N)
θ: 前輪を持ち上げたときの傾斜角 (°)。値は絶対値とする。
RF: 前輪の静的負荷半径 (mm)
RR: 後輪の静的負荷半径 (mm)
16
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書1図1 二輪自動車の重心位置簡易測定方法
関連法規 49CFRパート572,サブパートB (National Highway Traffic Safety Administration)

1
7
D
0
0
5
1
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書2(参考) JISと対応する国際規格との対比表
JIS D 0051:2001 二輪自動車−重心位置測定方法
ISO 8705 : 1991 Mopeds−Measurement method for location of centre of gravity
ISO 9130 : 1989 Motorcycles−Measurement method for location of centre of gravity
(I)JISの規定
(II)国際規格
番号
ISO 8705
ISO 9130
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の項目
ごとの評価及びその内容
表示箇所:本文,附属書
表示方法:点線の下線又は実線の側線
(V)JISと国際規格との技術的差異の理由及
び今後の対策
項目
番号
内容
項目
番号
内容
項目ごとの
評価
技術的差異の内容
1.
適用範囲
1.
Scope
MOD/追加 附属書1簡易測定方法を規定
した。
国内の実状に合わせ,プラットホームをもた
ない者でも測定ができるようにした。
2.
引用規格
JIS B 7510 精密水準器
JIS B 7512 鋼製巻尺
JIS D 0101 自動車の種
類
に関する用語
JIS D 4901 車両識別番
号
(VIN)
JIS Z 8401 数値の丸め
方
2.
Normative references
MOD/追加 規定内容に相当するJISがあ
るものはJISを引用した。
国内規格の参照を容易にした。
2.
引用規格
2.
Normative references
ISO 3779 : 1983, Road
vehicles−Vehicle identi-
fication
number (VIN)−Content
and structure
IDT
1
8
D
0
0
5
1
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)国際規格
番号
ISO 8705
ISO 9130
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の項目
ごとの評価及びその内容
表示箇所:本文,附属書
表示方法:点線の下線又は実線の側線
(V)JISと国際規格との技術的差異の理由及
び今後の対策
項目
番号
内容
項目
番号
内容
項目ごとの
評価
技術的差異の内容
2.
引用規格
2.
Normative references 49
CFR Part 572,
subpart B [Code of
Federal Regulations,
issued by the National
Highway
Traffic Safety
Administration
(NHTSA)]
MOD/変更 引用規格から削除し,本文の
末尾に記載した。
規格ではなく法規であるため引用規格から
除外した。
ISOには,参考とするよう提案する。
3.
定義
3.
Definition of axis
systems
IDT
−
4.
測定条件
4.
Measurement
conditions
IDT
−
5.
測定機器
水準器
鋼製巻尺
5.
Measuring
instruments
MOD/追加 規格内容に相当するJISがあ
るためJISを引用併記した。
国内規格の参照を容易にした。
6.
測定手順
6.
Measuring procedure
IDT
−
7.
測定結果の記録
付表1
7.
Test results
Annex A
MOD/変更 規格内容に相当するJISがあ
るためJISを引用した。
国内規格の参照を容易にした。
附属書1(規定)
MOD/追加 簡易測定方法を規定した。
国内の実状に合わせ,プラットホームをもた
ない者でも測定ができるようにした。
ISOには,採用するよう提案する。
JISと国際規格との対応の程度の全体評価:ISO 8705 : 1991,ISO 9130 : 1989共にMOD
1
9
D
0
0
5
1
:
2
0
0
1
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
備考1. 項目ごとの評価欄の記号の意味は,次のとおりである。
−IDT ·················· 技術的差異がない。
−MOD/追加 ······· 国際規格にない規定項目又は規定内容を追加している。
−MOD/変更 ······· 国際規格の規定内容を変更している。
2. JISと国際規格との対応の程度の全体評価欄の記号の意味は,次のとおりである。
−MOD ················ 国際規格を修正している。
20
D 0051 : 2001
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
社団法人自動車技術会二輪部会二輪重心位置測定法分科会 構成表
氏名
所属
(分科会長)
佐 藤 恭 司
ヤマハ発動機株式会社
(幹事)
飯 尾 博 孝
ヤマハ発動機株式会社
今 泉 博 英
東京大学工学部
根 岸 喜代春
工業技術院標準部
平 井 隆 志
運輸省自動車交通局技術安全部
山 野 敦
スズキ株式会社
黒 岩 修
株式会社本田技術研究所
徳 見 郁 夫
川崎重工業株式会社
小 林 隆
財団法人日本自動車研究所
浅 川 和 仁
社団法人日本自動車工業会
村 岡 良 三
社団法人日本自動車部品工業会
※ 鈴 木 雅 美
ヤマハ発動機株式会社
(事務局)
武 藤 博
社団法人自動車技術会
※印は途中交代の委員