C 9730-2-9:2010
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲及び引用規格 ······································································································· 1
2 用語及び定義 ··················································································································· 2
3 一般要求事項 ··················································································································· 4
4 試験に関する一般注意 ······································································································· 4
5 定格······························································································································· 4
6 分類······························································································································· 4
7 情報······························································································································· 5
8 感電に対する保護 ············································································································· 6
9 保護接地装置 ··················································································································· 6
10 端子及び端末 ················································································································· 6
11 構造要求事項 ················································································································· 6
12 耐湿性及び防じん性 ········································································································ 8
13 耐電圧及び絶縁抵抗 ········································································································ 9
14 温度上昇 ······················································································································· 9
15 製造偏差及びドリフト ····································································································· 9
16 環境によるストレス ······································································································· 10
17 耐久性 ························································································································· 10
18 機械的強度 ··················································································································· 14
19 ねじ山付き部品及び接続部 ······························································································ 15
20 沿面距離,空間距離及び固体絶縁物を通しての距離 ····························································· 15
21 耐熱性,耐火性及び耐トラッキング性 ··············································································· 16
22 耐腐食性 ······················································································································ 16
23 電磁両立性 (EMC) 要求事項−エミッション ······································································ 16
24 部品 ···························································································································· 16
25 通常動作 ······················································································································ 16
26 電磁両立性 (EMC) 要求事項−イミュニティ ······································································ 16
27 異常動作 ······················································································································ 16
28 電子的断路の使用に関する指針 ························································································ 16
附属書 ······························································································································· 17
附属書H(規定)電子制御装置の要求事項 ··············································································· 17
附属書J(規定)サーミスタ使用の制御装置の要求事項 ······························································ 21
附属書AA(参考)最大製造偏差及びドリフト ·········································································· 22
附属書BB(参考)時定数 ····································································································· 23
附属書CC(参考)独立取付形及びインラインコード形制御装置のサイクル数 ································· 26
C 9730-2-9:2010 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
附属書DD(規定)農業用コンファインメント建家で使用する制御装置·········································· 27
附属書EE(参考)この規格の適用範囲内にある温度検出制御装置の適用の指針 ······························ 30
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 44
C 9730-2-9:2010
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づき,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本
工業規格である。これによって,JIS C 9730-2-9:2004は改正され,この規格に置き換えられた。ただし,
この規格の製品は電気用品安全法によって規制されていたり,その規制の対象となる製品の部品として使
用されるものであり,この規格の改正時点においてはJIS C 9730-2-9:2004が規制上の技術基準として採用
されている。改正されたこの規格が,直ちに規制上の技術基準として採用されることを意味するものでは
ないため,この規格を規制対象となる電気用品の適合義務を果たすために使用する場合には,規制上の扱
いに十分注意する必要がある。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権及び出願公開後の実用新案登録出願にかかわる確認について,責
任はもたない。
JIS C 9730の規格群には,次に示す部編成がある。
JIS C 9730-1 第1部:一般要求事項
JIS C 9730-2-2 第2-2部:感熱式モータ保護装置の個別要求事項
JIS C 9730-2-3 第2-3部:蛍光ランプ用安定器の感熱式保護装置の個別要求事項
JIS C 9730-2-4 第2-4部:密閉形及び半密閉形の電動圧縮機用の感熱式モータ保護装置の個別要求事
項
JIS C 9730-2-5 第2-5部:自動電気バーナコントロールシステムの個別要求事項
JIS C 9730-2-6 第2-6部:機械的要求事項を含む自動電気圧力検出制御装置の個別要求事項
JIS C 9730-2-7 第2-7部:タイマ及びタイムスイッチの個別要求事項
JIS C 9730-2-8 第2-8部:電動式ウォーターバルブの個別要求事項
JIS C 9730-2-9 第2-9部:温度検出制御装置の個別要求事項
JIS C 9730-2-10 第2-10部:モータ起動リレーの個別要求事項
JIS C 9730-2-11 第2-11部:エネルギー調整器の個別要求事項
JIS C 9730-2-12 第2-12部:電動式ドアロックの個別要求事項
JIS C 9730-2-13 第2-13部:湿度検出制御装置の個別要求事項
JIS C 9730-2-14 第2-14部:電気アクチュエータの個別要求事項
JIS C 9730-2-15 第2-15部:自動電気式の空気流量,水流量及び水位検出制御装置の個別要求事項
JIS C 9730-2-17 第2-17部:機械的要求事項を含む電動式ガスバルブの個別要求事項
JIS C 9730-2-19 第2-19部:機械的要求事項を含む電動式オイルバルブの個別要求事項
C 9730-2-9:2010 目次
(4)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
白 紙
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 9730-2-9:2010
家庭用及びこれに類する用途の自動電気制御装置−
第2-9部:温度検出制御装置の個別要求事項
Automatic electrical controls for household and similar use−
Part 2-9: Particular requirements for temperature sensing controls
序文
この規格は,2008年に第3版として発行されたIEC 60730-2-9を基に,我が国の実使用条件を考慮し,
技術的内容を変更して作成した日本工業規格であり,JIS C 9730-1:2010と併読する規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JAに示す。
1
適用範囲及び引用規格
適用範囲及び引用規格は,JIS C 9730-1の箇条1によるほか,次による。ただし,1.1及び1.1.2は,こ
の規格による。また,1.1.3は,この規格では適用しない。
1.1
この規格は,暖房,空気調節及びこれに類する用途の電気制御装置を含む,家庭用及びこれに類す
る用途の機器の中若しくはその表面,又はそれと共に使用する自動電気温度検出制御装置に適用する。こ
の機器は,電気,ガス,油,固形燃料,太陽熱エネルギーなど,又はそれらの組合せを使用してもよい。
1.1.1
JIS C 9730-1の1.1.1による。ただし,注記1を,次の二つの注記に置き換える。
注記1 上述の制御装置の例には,ボイラ自動温度調節器,ファン制御装置,温度制限装置及び温度
過昇防止装置を含む。
注記2 この規格を通して,“機器”という用語は,“器具”及び“制御システム”を意味する。
1.1.2
この規格は,また,例えば冷媒の流れ及びガス制御装置のような非電気的出力がついた温度検出制
御装置の電気的安全にも適用する。
1.1.101 この規格は,この規格で規定する単一動作装置 (SOD) に適用する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 60730-2-9:2008,Automatic electrical controls for household and similar use−Part 2-9: Particular
requirements for temperature sensing controls (MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
1.5
引用規格
引用規格は,JIS C 9730-1の1.5によるほか,次による。
JIS C 6691:2009 温度ヒューズ−要求事項及び適用の指針
注記 対応国際規格:IEC 60691:2002,Thermal-links−Requirements and application guide及び
Amendment 1:2006 (MOD)
2
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS C 9730-1:2010 家庭用及びこれに類する用途の自動電気制御装置−第1部:一般要求事項
注記 対応国際規格:IEC 60730-1:1999,Automatic electrical controls for household and similar use−
Part 1: General requirements,Amendment 1:2003及びAmendment 2:2007 (MOD)
JIS C 9730-2-4:2010 家庭用及びこれに類する用途の自動電気制御装置−第2-4部:密閉形及び半密閉
形の電動圧縮機用の感熱式モータ保護装置の個別要求事項
注記 IEC 60730-2-4:2006,Automatic electrical controls for household and similar use−Part 2-4:
Particular requirements for thermal motor protectors for motor-compressors of hermetic and
semi-hermetic type (MOD)
2
用語及び定義
この規格で用いる主な用語及び定義は,JIS C 9730-1の箇条2によるほか,次による。
2.2
目的に関する制御装置のタイプの定義
JIS C 9730-1の2.2によるほか,次による。
2.2.19
動作制御装置 (operating control)
JIS C 9730-1の2.2.19によるほか,次の注記を追加する。
注記 一般的に,自動温度調節器は,動作制御装置である。
2.2.20
保護制御装置 (protective control)
JIS C 9730-1の2.2.20によるほか,次の注記を追加する。
注記 一般的に,温度過昇防止装置は,保護制御装置である。
2.2.101
単一動作装置,SOD (single operation device)
1回だけ動作し,その後,完全な交換を必要とする温度検出素子をもつ制御装置。
2.2.101.1
バイメタル式SOD (bimetallic single operation device)
バイメタル式の温度検出素子をもつSOD。
注記1 バイメタル式SODは,宣言された温度を超えて復帰しない(11.4.103参照)。
注記2 温度ヒューズ(非復帰のもの)の要求事項は,JIS C 6691に含まれる。
2.2.101.2
非バイメタル式SOD (non-bimetallic single operation device)
その動作が制御の他の機能から分離できないもので,かつ,1回だけ動作し,その後,完全又は部分的
な交換を必要とする非バイメタル式検出素子をもつ制御装置の部分。
注記 そのような部分が部分的に試験可能な場合,それらはJIS C 6691の適用範囲にある温度ヒュー
ズとみなす。
2.2.101.2.1
定格動作温度,Tf (rated functioning temperature)
製造業者が宣言した条件で測定したときに,制御装置の導電率の状態に変化が生じる非バイメタル式
SODの検出素子温度。
3
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2.2.101.2.2
保持温度,Tc (holding temperature)
製造業者が宣言した条件で,規定時間内に導電率の状態に変化が生じない非バイメタル式SODの検出素
子の最高温度。
2.2.101.2.3
最高温度限度,Tm (maximum temperature limit)
制御装置の機械的及び電気的特性が変化するまでに,導電率の状態が与えられた時間内に損なうことが
ないと製造業者が宣言した非バイメタル式SODの検出素子温度。
2.2.102
室内自動温度調節器 (room thermostat)
居住に適した空間の温度制御を目的とする独立取付形又は組込形の自動温度調節器。
2.2.103
ファン制御装置 (fan control)
ファン又は送風機の動作を制御する自動温度検出制御装置。
2.2.104
ボイラ自動温度調節器 (boiler thermostat)
ボイラ及び/又は液体の温度を制御する自動温度調節器。
2.2.105
調整形自動温度調節器 (modulating thermostat)
負荷に対する入力を連続的に制御することによって,2個の制限値の間に温度を制御する自動温度調節器。
2.2.106
電圧維持形温度過昇防止装置 (voltage maintained thermal cut-out)
両端に印加する電圧によって,動作状態を維持する温度過昇防止装置。
2.2.107
農業用自動温度調節器 (agricultural thermostat)
農業用コンファインメント建家で使用するための自動温度調節器。
2.3
制御装置の機能に関する定義
JIS C 9730-1の2.3によるほか,次による。
2.3.14 JIS C 9730-1の2.3.14によるほか,次による。
2.3.14.101
時定数 (time factor)
作動量の一定の変化による温度検出制御装置の過渡的応答。
2.5
構造に関する制御装置のタイプの定義
JIS C 9730-1の2.5によるほか,次による。
2.5.101
プッシュ アンド ターン操作 (push-and-turn actuation)
最初に押し,続いてその制御装置の操作部を回転することによって達成する2段階操作。
2.5.102
プル アンド ターン操作 (pull-and-turn actuation)
最初に引っ張り,続いてその制御装置の操作部を回転することによって達成する2段階操作。
4
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3
一般要求事項
一般要求事項は,JIS C 9730-1の箇条3による。
4
試験に関する一般注意
試験に関する一般注意は,JIS C 9730-1の箇条4によるほか,次による。
4.1
試験条件
JIS C 9730-1の4.1によるほか,次による。ただし,4.1.7は,この規格では適用しない。
4.1.101 この規格の試験目的に対して,また,その他の指示がない場合,手動復帰形温度過昇防止装置又
はバイメタル式SODの動作の前兆としての,異常動作中のTmaxを超える周囲温度の逸脱は無視する。
4.1.102 手動復帰形温度過昇防止装置及びバイメタル式SODであって,Tmaxを超える動作値をもつものに
対しては,検出素子における温度は,必要があるとき,試験中に要求されるサイクルを達成するために上
昇させる。
4.2
必要とするサンプル
JIS C 9730-1の4.2によるほか,次による。
4.2.1
JIS C 9730-1の4.2.1によるほか,次による。
箇条15の試験に対して,バイメタル式SODの6個のサンプルを使用する。
注記 箇条17の試験に対して,追加のサンプルが要求される。
5
定格
定格は,JIS C 9730-1の箇条5による。
6
分類
分類は,JIS C 9730-1の箇条6によるほか,次による。
6.4
自動作動の機能による分類
JIS C 9730-1の6.4によるほか,次による。
6.4.3
JIS C 9730-1の6.4.3によるほか,次による。
6.4.3.101 検出作動については,検出素子からの,又は検出素子をスイッチヘッドに接続する部分からの
何らかの漏れの結果として動作値に増加がないもの(タイプ2.N)。
6.4.3.102 17.101に規定する宣言された温度サイクル試験後,動作する作動(タイプ2.P)。
注記 一般に,圧力式温水システムのような,特定用途のための温度過昇防止装置は,タイプ2.P作
動ができるものとして分類される。
6.4.3.103 プッシュ アンド ターン又はプル アンド ターン操作の後に限り始められ,操作部をオフ又は
休止位置に復帰させるのに回転だけが要求される作動(タイプ1.X又は2.X)。
6.4.3.104 プッシュ アンド ターン又はプル アンド ターン操作の後に限り始められる作動(タイプ1.Z
又は2.Z)。
6.4.3.105 電気的負荷条件で復帰できない作動(タイプ1.AK又は2.AK)。
6.4.3.106 農業環境へのばく露を宣言した動作に対する作動(タイプ1.AM又は2.AM)。
6.7 スイッチヘッドの周囲温度限度値による分類
JIS C 9730-1の6.7によるほか,次による。
6.7.101 調理機器の中又は上で使用するための制御装置
5
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.7.102 自己清掃形オーブンの中又は上で使用するための制御装置
6.7.103 食品取扱い設備の中又は上で使用するための制御装置
6.8.3
JIS C 9730-1の6.8.3によるほか,次による。
第1段落を次に置き換える。
インラインコード形制御装置,自立構造形制御装置,独立取付形制御装置又は非電気的エネルギー源を
利用する組立部と一体になっている若しくは組み込まれている制御装置については,次による。
6.15 構造による分類
JIS C 9730-1の6.15によるほか,次による。
6.15.101 液体金属を含む部分をもつ制御装置
7
情報
情報は,JIS C 9730-1の箇条7によるほか,表7.2に次を追加する。
表7.2−製造業者によって宣言された情報,適用箇条及び方法
情報
適用箇条
方法
101
最高検出素子温度(項目105に関するものは除く。)101)
6.7,6.15,14.101
X
102
シース参照あり又はなしの時定数
2.3.14.101,11.101,BB.1.2
X
103
SOD復帰温度(−35 ℃又は0 ℃)
2.2.101,11.4.103
X
104
0 ℃復帰のとき,バイメタル式SODのサイクル数
17.15.1.3.1
X
105
17.16.107の試験のための最高検出素子温度 (Te)
6.7.102,17.16.107
D
106
液体金属を含む部分をもつ制御装置102)
6.15.101,11.1.101,18.102
D
107
引張り強度
11.1.101
X
108
23.101の試験目的に対して,最小電流103)
23.101
D
109
Tmax 1は,制御装置が表14.1の温度を超えない動作条件を連続的に維
持できる可能性がある最高周囲温度である。105)
14.4.3.1
D
110
時間範囲t1は,制御装置が動作した後で,周囲温度をTmax 1より高く
できる最大時間である。105)
14.4.3.1
D
111
手動復帰形温度過昇防止装置又は電圧維持形温度過昇防止装置の自動
復帰が生じない温度限度(−20 ℃以下)
2.2.105,11.4.106,
17.16.104.1,17.16.108
X
112
タイプ2.Pに対する試験方法
17.101
X
113
CISPR14-1の試験目的に対するクリック率N又は分ごとの切替え動作 23
X
114
定格動作温度 (Tf)
2.2.101.2.1,17.15.2
C
115
保持温度 (Tc)
2.2.101.2.2,17.15.2
D
116
最高温度限度 (Tm)
2.2.101.2.3,17.15.2
D
117
農業用自動温度調節器
2.2.107,6.4.3.106,11.4.107,
11.6.3.101,附属書DD
D
JIS C 9730-1の表7.2に次の注を追加する。
注101) この宣言は,液体金属を含む温度検出制御装置にだけ適用する。自己清掃形オーブンの中又は上で使用する
温度検出制御装置に対しては,この宣言は,調理動作のための温度である。
102) [対応国際規格の注102) は,中華人民共和国及びドイツで適用する規定であり,この規格では採用しない。]
103) 最小値が宣言されない場合,試験値は,15 mAとする。
105) 電圧維持形温度過昇防止装置の復帰を許すために,機器を電源から断路しなければならない最小時間に関し
ては,機器製造業者によって情報が前もって与えられることが望ましい。
6
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8
感電に対する保護
感電に対する保護は,JIS C 9730-1の箇条8による。
9
保護接地装置
保護接地装置は,JIS C 9730-1の箇条9による。
10 端子及び端末
端子及び端末は,JIS C 9730-1の箇条10による。
11 構造要求事項
構造要求事項は,JIS C 9730-1の箇条11によるほか,次による。
11.1 材料
JIS C 9730-1の11.1によるほか,次による。
11.1.101 液体金属を含む部品
表7.2の項目106で宣言された制御装置に対しては,水銀 (Hg) を含む部品及びナトリウム (Na),カリ
ウム (K) 又は両方を含む制御装置の部品は,最高検出素子温度 (Te) の1.2倍の温度で,その部品の外周
(フープ)ストレス又はその他のストレスの4倍以上の引張り強度をもつ金属で作らなければならない。
適否は,製造業者の宣言の目視検査及び18.102の試験によって判定する。
11.3 操作及び動作
JIS C 9730-1の11.3によるほか,次による。
11.3.9 引きひも操作制御装置
JIS C 9730-1の11.3.9によるほか,次の注記を追加する。
注記 注記は,タイプ1.X,2.X,1.Z又は2.Zに分類される制御装置には,適用しない。
11.4 作動
JIS C 9730-1の11.4によるほか,次による。
11.4.3 タイプ2作動
JIS C 9730-1の11.4.3によるほか,次による。
11.4.3.101
コンデンサは,温度過昇防止装置の接点にまたがって接続してはならない。
11.4.3.102
温度過昇防止装置を復帰させるために,はんだ付け作業を必要とする構造は許容しない。
11.4.13 タイプ2.K作動
11.4.13.101 タイプ2.K作動は,検出素子における,又はその検出素子とスイッチヘッドとの間の他の部品
における破損が発生したとき,宣言された断路又は開路が宣言された動作値とドリフトとの和を超える前
に発生する設計でなければならない。
適否は,検出素子を破断させることによって判定する。断線は,部分的に事前に切断するか,貫通する
までやすりをかけて達成することができる。
温度検出制御装置を,動作温度の10 K以内の温度に加熱する。その後,温度を1 K/min以下の速度で増
加する。接点は,宣言された動作温度とドリフトとの和を超える前に開路しなければならない。
11.4.13.102 タイプ2.K作動は,次のa),b)又はc)に適合することによって,達成してもよい。
a) 2個の検出素子が相互に独立して動作し,1個のスイッチヘッドを操作させるとき。
b) バイメタル検出素子であって,次の状態のもの
7
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1) 露出した素子を,その両端末でバイメタルの2個以上のスポット溶接で取り付けた状態。
2) 取付け及び使用中に,物理的にバイメタルが損傷するおそれがない構造の制御装置の中にその素子
を配置するか,又は据え付けた状態。
c) 充てんされた液体の逸失によってその制御装置の接点が閉路したままになるか,又は漏えいが,宣言
された最高動作温度を超えて温度の上昇側への移動を引き起こす場合,感温筒及び毛細管中に密閉さ
れた液体の圧力の変化によって操作される温度検出制御装置の感温筒及び毛細管は,次を満足しなけ
ればならない。
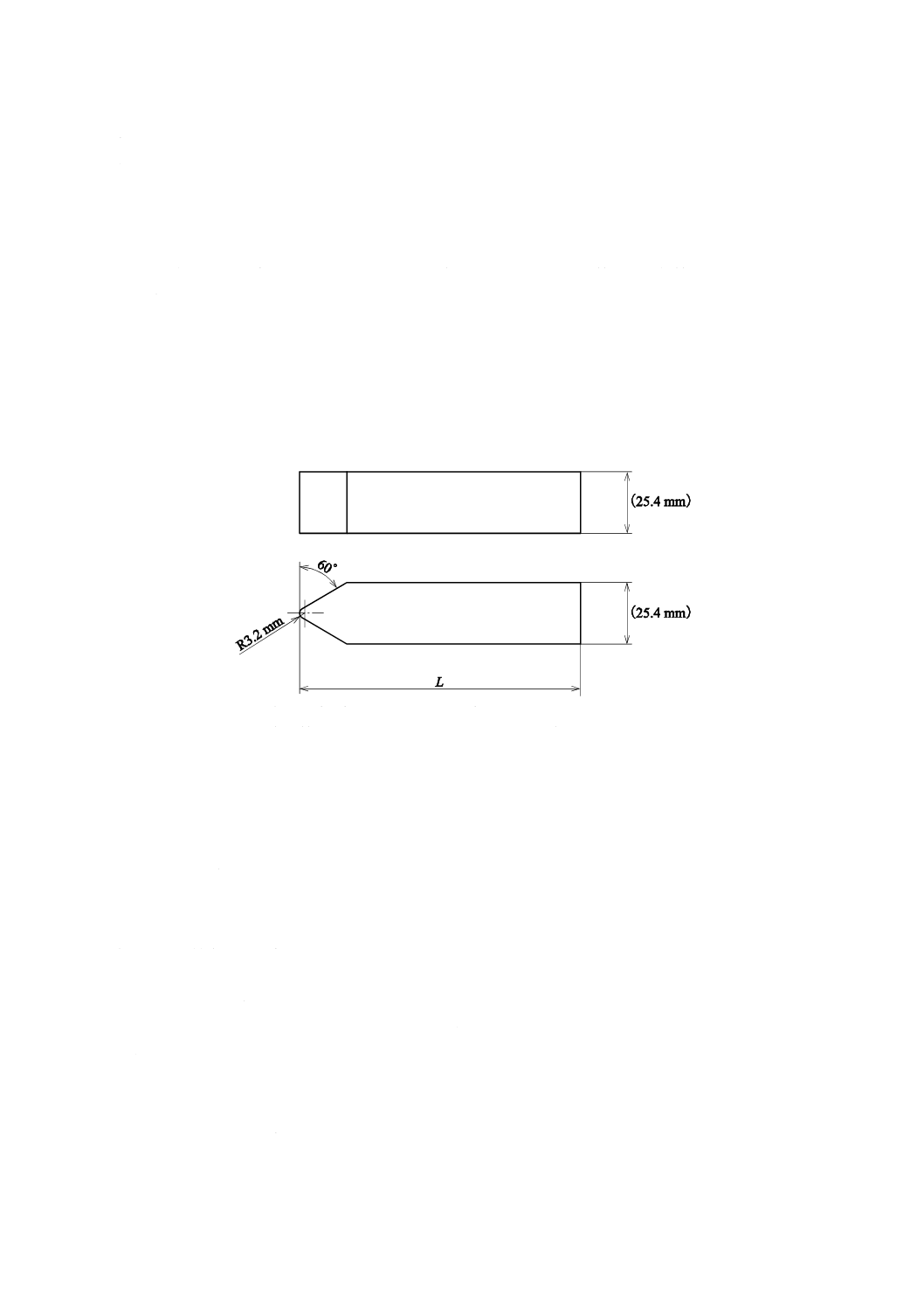
図11.4.13.102に示す衝撃工具のテーパのついた端末が,それに対して垂直な位置にある感温筒又は
毛細管を打撃するように,高さ0.60 mから1回落としたとき,満たした量からいくらかの漏れを起こ
すほど感温筒又は毛細管に損傷を生じてはならない。この試験において,感温筒又は毛細管は,コン
クリート面上に置く。
注記 毛細管が分離した外被又はスリーブを装備する場合,上記の試験中,正規の場所に置く。
材料:鋼又は冷延鋼 (CRS),すべての先端を面取りする。
Lは,合計質量が0.454 kgになるようにサイズを決定する。
図11.4.13.102−衝撃工具
11.4.101 タイプ2.N作動
タイプ2.N作動は,検出素子における,又はその検出素子とスイッチヘッドとの間の他の部品における
漏れが発生したとき,宣言された断路又は開路が宣言された動作値とドリフトとの和を超える前に発生す
る設計でなければならない。
適否は,次の試験によって判定する。
タイプ2.N制御装置の動作値は,JIS C 9730-1の箇条15の条件で測定する。制御装置が設定手段をもつ
場合,それは最高値に設定する。
この測定の後,穴を検出素子中に人工的に作る。再度,動作値の測定を行う。
正のドリフトは,宣言値の上側では許容しない。
注記1 試験は,物理的動作モードの理論的計算によって,置き換えることができる。
注記2 箇条18への適合を達成するための感温筒及び毛細管の保護のために分離できる外被又はス
リーブを使用してもよい。
11.4.102 タイプ2.P作動
タイプ2.P作動は,温度サイクル試験の後,それが,その意図したやり方で動作するように設計しなけ
ればならない。
8
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
適否は,17.101の試験によって判定する。
11.4.103 バイメタル式SOD
バイメタル式SODは,表7.2の項目103において宣言された復帰値を超えて復帰しないように設計しな
ければならない。
適否は,17.15の試験によって判定する。
11.4.104 タイプ1.X又は2.X
タイプ1.X又は2.X作動は,回転作動が1回の押込み作動又は1回の引張り作動の完了後に限り行える
ように設計しなければならない。制御装置の操作部をオフ又は休止位置に戻すためには,回転作動だけを
要求しなければならない。
適否は,18.101の試験によって判定する。
11.4.105 タイプ1.Z又は2.Z
タイプ1.Z又は2.Z作動は,回転作動が1回の押込み作動又は1回の引張り作動の完了後に限り行える
ように設計しなければならない。
適否は,18.101の試験によって判定する。
11.4.106 電圧維持形温度過昇防止装置
電圧維持形温度過昇防止装置は,表7.2の項目111で宣言された復帰値を超えて復帰しないように設計
しなければならない。
11.4.107 タイプ1.AM又は2.AM
タイプ1.AM又は2.AM作動は,宣言された農業環境へのばく露が明らかになった後,意図した様態で
動作するように設計しなければならない。
適否は,附属書DDの試験によって判定する。
11.6 制御装置の取付け
JIS C 9730-1の11.6によるほか,次による。
11.6.3 独立取付形制御装置の取付け
11.6.3.101
表7.2の項目117で宣言された農業用自動温度調節器の場合,取付方法は,外郭による保護の
完全性を損なってはならない。
11.101 時定数
時定数が宣言される場合,これは附属書BBに記載する適用できる決定法のうちの一つの方法によって
判定する。決定値は,宣言された値を超えてはならない。表BB.1参照。
12 耐湿性及び防じん性
耐湿性及び防じん性は,JIS C 9730-1の箇条12によるほか,次による。
12.101 冷却制御装置
冷凍機又は類似の機器の蒸発器(過温度並びに冷凍及び解凍条件を作り出す。)中にスイッチヘッド及び
検出素子を取り付けた制御装置は,絶縁の一体性を維持しなければならない。
12.101.1
適否は,12.101.2〜12.101.6の試験によって判定する。
12.101.2
注型封止用樹脂を使用する制御装置は,軟化試験を行う。2個の試験サンプルを,ポッティン
グ面を最も不利な状態にして,最大宣言動作温度より15 K高い温度の恒温槽中で16時間加熱する。ポッ
ティング材料は,過度に軟化するか又はひずみ,割れ若しくは劣化を生じてはならない。
12.101.3
軟化試験に使用した2個のサンプル及び1個の未試験サンプル(合計3個)を,90±5 ℃に維
9
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
持した水中に2時間配置する。その後,3個のサンプルを直ちに5 ℃未満の水に移し,−35 ℃で小形のフ
レキシブルな容器中で2時間凍結する。10サイクルの加熱冷凍サイクルが要求される。
12.101.4
1作業日中に連続する2回の加熱冷凍サイクルを実施する。その後,連続する5日で10サイク
ルを完了させる。そのサンプルは,4日間夜通しで室温で水中に放置する。
12.101.5
最後の冷凍試験後,サンプルは,水中でほぼ室温まで解凍する。絶縁抵抗は,通電部分と接地
された部分との間で,また,ポッティング材料及び/又は絶縁材料の表面との間で測定する。直流電圧計
法を使用する。絶縁抵抗は,50 000 Ω以上でなければならない。
12.101.6
サンプルがまだ湿っている間に,(2×VR)+1 000 Vに等しい電圧を通電部分と接地された部分と
の間に,また,ポッティング材料及び/又は絶縁材料の表面との間に,定格周波数で1分間加える。フラ
ッシオーバ又は絶縁破壊が試験中に発生してはならない。
13 耐電圧及び絶縁抵抗
耐電圧及び絶縁抵抗は,JIS C 9730-1の箇条13による。
(対応国際規格には,13.2に追加する事項があるが,カナダ及びアメリカ合衆国で適用するものであり,
この規格では採用しない。)
14 温度上昇
温度上昇は,JIS C 9730-1の箇条14によるほか,次による。
14.4.3.1 JIS C 9730-1の14.4.3.1によるほか,次による。
第2段落は検討中である。
電圧維持形温度過昇防止装置に対しては,14.4.3.1の温度試験は,検出素子の温度を接点が開くまで上昇
した後で完了する。このとき,温度検出素子の周囲温度は,時間範囲t1内にTmax1まで一定の割合で減らす。
14.5.1の試験は,そのときに完了する。
表14.1の注13) は検討中である。
14.101
次は,6.7.101〜6.7.103によって分類される制御装置に適用する。
14.101.1
表14.1の注12) を満足する手段として,絶縁用部品の温度が表14.1で許容する温度を超える場
合,17.16.101の試験は,14.102及び14.102.1の状態調節後,実施してもよい。
14.102
制御装置の未試験サンプルは,温度1.02T1+20 Kと,その1.05倍の温度との間(T1は箇条14の
試験中,絶縁部分上の最高実測温度である。)に維持した恒温槽中で1 000時間の状態調節を行う。制御装
置は,この試験中通電してはならない。
14.102.1
例えば,端子において又はその近傍で温度の上昇した場所が局所化される場合,通常状態でそ
の制御装置をTmaxとTmax+5 %との間にして,1 000時間の状態調節を行う。ただし,接点は閉路とし開閉
させない。必要であれば,接点は最も不利な温度条件を提供するために無理に閉じてもよい。配電線にま
たがるバイメタルヒータは,定格電圧の1.1倍の電圧で通電する。直列バイメタルヒータには,定格電流
の1.1倍で通電しなければならない。
15 製造偏差及びドリフト
製造偏差及びドリフトは,JIS C 9730-1の箇条15によるほか,次による。ただし,15.5.4及び15.5.5は,
この規格では適用しない。
15.1 JIS C 9730-1の15.1によるほか,次による。
10
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
製造偏差及びドリフトの値は,附属書AAに従っていなければならない。ただし,製造業者が別の宣言
をしている場合は除く。
15.4 JIS C 9730-1の15.4によるほか,次による。
宣言された製造偏差及びドリフトは,宣言された動作値に対する許容差として別々に表現してもよい。
15.5.3 JIS C 9730-1の15.5.3によるほか,次による。
15.5.3.101
使用者による設定を目的とする制御装置は,最高動作温度で設定しなければならない。ただ
し,製造業者によって別の宣言がされる場合は除く。
15.5.3.102
バイメタル若しくは類似の検出メカニズムを使用する制御装置又は制御する環境に露出され
る意図の制御装置の部分は,動作値を決定するために空気循環恒温槽中に配置する。
ただし,防水形のものは液槽を用いてもよい。
15.5.3.103
バイメタル及び類似のタイプの制御装置に対しては,温度は,空気循環恒温槽の中で,試験
中の制御装置に電気的には接続せず,隣接して取り付けた同一の制御装置の検出部又は制御装置の近傍に
0.25 mmの熱電対を取り付けることによって決定しなければならない。
15.5.3.104
液体膨張タイプの制御装置に対しては,最高0.25 mmの熱電対を,適切な接着剤を使用して,
検出部に取り付ける。
15.5.3.105
液体膨張タイプ又は収縮タイプ制御装置に対しては,完成した制御装置又は感温筒を使用中
に用いる場合,感温筒又は製造業者によって最小検出寸法であると宣言された制御装置の検出部は,空気
循環恒温槽又は液体槽中に配置する。
15.5.3.106
恒温槽又は槽の温度は,平衡状態に達成するまで,制御装置の予想動作温度より下10 Kまで
急速に上昇させるか,予想動作温度より上10 Kまで急速に降下させてもよい。その後,温度変化速度は最
高0.5 K/min,又は宣言された変化速度のうち,いずれか最も小さい速度まで低減させる。
15.5.3.107
制御装置の動作は,0.05 A以下の検出電流をもつ適切な装置によって検出する。
回路電圧は,監視機能が信頼できる指示を示す何らかの都合のよい値であってもよい。
15.5.3.108
制御装置の動作値を記録する。
15.5.3.109
バイメタル式SODに対しては,接点が動作した後,十分な断路が行われたかどうかは,各バ
イメタル式SODを事前に湿度処理をしないで,表13.2に規定する電圧を加えることによって,決定する。
15.5.6 JIS C 9730-1の15.5.6によるほか,次による。
代替として,製造偏差は,附属書AAに従わなければならない。
16 環境によるストレス
環境によるストレスは,JIS C 9730-1の箇条16によるほか,次による。
この箇条は,SODには適用しない。
17 耐久性
耐久性は,JIS C 9730-1の箇条17によるほか,次による。ただし,17.15は,この規格による。
17.3.1 JIS C 9730-1の17.3.1によるほか,次による。
− 制御装置全体が検出素子として宣言され,表7.2の項目48で宣言された最低動作温度が0 ℃未満であ
る制御装置は,17.8の試験を3個のサンプルの別のセットについて,宣言された最低動作温度に対し
許容差
5
0
+ Kで行う。サイクル数は,表7.2の項目27で宣言された数の5 %とする。
17.8.4 JIS C 9730-1の17.8.4によるほか,次による。
11
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
17.8.4.101
独立取付形制御装置及びインラインコード形制御装置に対する自動及び手動サイクル数は,
CC.1に記載するとおりでなければならない。ただし,これより高い数が製造業者によって宣言される場合
は除く。
17.15 SOD
17.15.1 バイメタル式SOD
バイメタル式SODは,次の試験を行う。
17.15.1.1 箇条15の適切な試験後,同じ6個のサンプルは,表7.2の項目103で宣言されたように,−35 ℃
又は0 ℃に7時間維持する。装置は,この期間中に復帰してはならない。この期間は,15.5.3.109の試験
によって決定する。
17.15.1.2 6個の未試験バイメタル式SODを,次のいずれかのうち,低い方の温度で720時間放置し,状
態調節を行う。
− 宣言された動作値の90 %の±1 K
− 宣言された動作値よりも7±1 K下の値。
17.15.1.2.1 この放置中に,バイメタル式SODは動作してはならない。バイメタル式SODの動作は,
15.5.3.107で述べるように検出しなければならない。
17.15.1.2.2 箇条15の適切な試験を,17.15.1.2の状態調節を受けた6個のサンプルについて繰り返さなけ
ればならない。測定した温度は,宣言された偏差限度値内になければならない。
17.15.1.3 −35 ℃の宣言された復帰温度をもつバイメタル式SODに対しては,6個の未試験サンプルを,
表17.2.1の電気的条件のうち,該当する条件で,1サイクルの過電圧試験を行う。
15.5.3.109の試験を繰り返す。
17.15.1.3.1 0 ℃の宣言された復帰温度をもつバイメタル式SODに対しては,1個のサンプルを,表17.2.1
の電気的条件のうち,該当する条件で,50サイクルの過電圧試験を行う。
その後,サンプルは,定格電流及び定格電圧で表7.2の項目104で宣言されたサイクル数の試験を行う。
注記 17.15.1.3.1の試験の目的は,0 ℃よりも低い温度にさらすことによって生じる,意図しない動
作の下で,その装置を評価することである。サイクルを実現するために,周囲温度を宣言され
た復帰値まで下げ,その後,周囲温度を通常の動作値まで上げることのできる試験槽の中で試
験を実施することが望ましい。
17.15.1.3.1の試験後,箇条15の該当する試験を繰り返し,測定温度は,宣言された偏差限度値内になけ
ればならない。
17.15.2
非バイメタル式SOD
非バイメタル式SODの温度検出素子は,JIS C 6691の箇条11(温度試験)の試験を行わなければなら
ない。このとき,適切な試験装置をサンプルの検出素子を熱するのに使用しなければならない。また,意
図した使用範囲を超えた温度に制御装置の他の部分をさらすことを避けるように注意しなければならない。
17.16
特殊目的の制御装置の試験
JIS C 9730-1の17.16によるほか,次による。
17.16.101
自動温度調節器
− 17.1〜17.5を適用する。
− 17.6は,タイプ1.M又は2.Mに分類される作動に適用する。“x”の値は,5±1 K又は元の作動量の±
5 %のうち,いずれか大きい方とする。
− 17.7を適用する。
12
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 17.8を適用する。
− 17.9を適用する。ただし,スローメイク及びスローブレイクの自動作動に限る。
− 17.9.3.1は適用しない。
− 17.10〜17.13は,手動作動をもつ自動温度調節器だけ(使用者によって設定される操作手段を含む。)
に適用する。
− 17.14を適用する。
− 17.15は適用しない。
17.16.102
(対応国際規格の規定は,カナダ及びアメリカ合衆国で適用するものであり,この規格では採用しない。)
17.16.103
温度制限装置
− 17.1〜17.5を適用する。
− 17.6は,タイプ1.M又は2.Mに分類される作動に適用する。“x”の値は,5±1 K又は元の作動量の±
5 %のうち,いずれか大きい方とする。
− 17.7及び17.8を適用するが,必要があり,操作によって得られる復帰動作が要求されるときを除く。
この操作は,加速試験に対して17.4に規定するとおりとする。これは,機構によって許される範囲
でできる限り早く,又は表7.2の項目37で製造業者が宣言した速度とする。
− 17.9を適用するが,スローメイク及びスローブレイクの自動作動をもつ温度制限装置に限る。17.7及
び17.8に対して,上に規定するのと同一の手動復帰条件を用いる。
− 17.9.3.1は適用しない。
− 17.10〜17.13は,17.7〜17.9の自動試験中に試験される通常の復帰手動作動には適用しない。温度制限
装置が自動試験中に試験されないその他の手動作動をもつ場合,これらの項目を適用する。
− 17.14を適用する。
− 17.15は適用しない。
17.16.104
温度過昇防止装置
− 17.1〜17.5を適用する。
− 17.6は,タイプ1.M又は2.Mに分類される作動に適用する。“x”の値は,5±1 K又は元の作動量の±
5 %のうち,いずれか大きい方とする。
− 17.7及び17.8を適用するが,必要があり,操作によって得られる復帰動作が要求されるときを除く。
この操作は,加速試験に対して17.4に規定するとおりとする。これは,機構によって許される範囲
でできる限り早く,又は表7.2の項目37で製造業者が宣言した速度とする。
− 17.9を適用するが,スローメイク及びスローブレイクの自動作動をもつ温度過昇防止装置に限る。17.7
及び17.8に対して,上に規定する条件と同一の手動復帰条件を用いる。
− 17.9.3.1は適用しない。
− 17.10〜17.13は,17.7〜17.9の自動試験中に試験される通常復帰手動作動には適用しない。温度過昇防
止装置が自動試験中に試験されないその他の手動作動をもつ場合,これらの項目を適用する。
− 17.14を適用する。
− 17.15は適用しない。
17.16.104.1 電圧維持形温度過昇防止装置に対しては,17.16.108の試験を適用する。
17.16.105
(対応国際規格の規定は,カナダ及びアメリカ合衆国で適用するものであり,この規格では採用しない。)
13
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
17.16.106
材料の評価
次の試験は,14.101.1に示すように実施する。
制御装置は,50回の動作で17.7の試験を,また,1 000回の動作で17.8の試験を行う。
17.7及び17.8の試験は,20±5 ℃の周囲温度で行う。これらの試験の後,17.5を満足しなければならな
い。
17.16.107
検出素子の温度過昇試験
表7.2の項目105で宣言された制御装置に対しては,未試験サンプルの検出素子部分は250回の温度上
昇サイクルにさらす。
試験周囲温度は,表7.2の項目37で宣言された最高温度変化速度で,40 ℃とTeとの間で変化させる。
温度の上下限値は,30分間維持する。
試験後,制御装置は,17.14を満足しなければならない。
17.16.108
電圧維持形温度過昇防止装置
6個の試験していない電圧維持形温度過昇防止装置を,−20 ℃(又は,宣言されていればこれより低い
温度)の温度で7時間,状態調節を行う。
上記の状態調整中及び終了時に,6個のすべてのサンプルが動作してはならない。
電圧維持形温度過昇防止装置の動作の検出は,15.5.3.107に規定するように行う。
これらの要求事項は,動作状態で電圧が印加されている電圧維持形温度過昇防止装置に適用する。
17.101 タイプ2.Pサイクル試験
タイプ2.P作動の温度検出制御装置は,次のように試験しなければならない。
17.101.1
17.16の該当する試験及び17.14の評価に続いて,制御装置は17.14において記録したスイッチ
オフ温度の50〜90 %に維持した温度で,50 000サイクルの温度サイクル試験を行う。この試験中,スイッ
チヘッドは20±5 ℃に維持する。
製造業者は,17.101.2又は17.101.3のいずれの方法を使用するかを宣言しなければならない。
試験は,表7.2の項目112で製造業者が宣言した内容に従って行わなければならない。
17.101.2 2槽法
二つの槽は,合成油,水又は空気(2槽)で満たす。第1槽は17.14において記録したスイッチオフ温度
(℃) の90 %に等しい温度に維持する。第2槽は17.14において記録したスイッチオフ温度の50 %に等し
い温度に維持する。
注記1 附属書BBで使用する媒体と異なる媒体をこの試験のために選択する場合,該当する変換係
数を次の段落に示す時定数に適用しなければならない。
温度検出素子(2.8.1及び表7.2の項目47参照)を,時定数の5倍以上の間,第1槽に浸せきする。その
後,温度検出素子を,第2槽中に同一の時間浸せきする。
注記2 槽間の移動は,できるだけ早く実施するが,温度検出素子に対する機械的ストレスを回避す
るように留意することが望ましい。
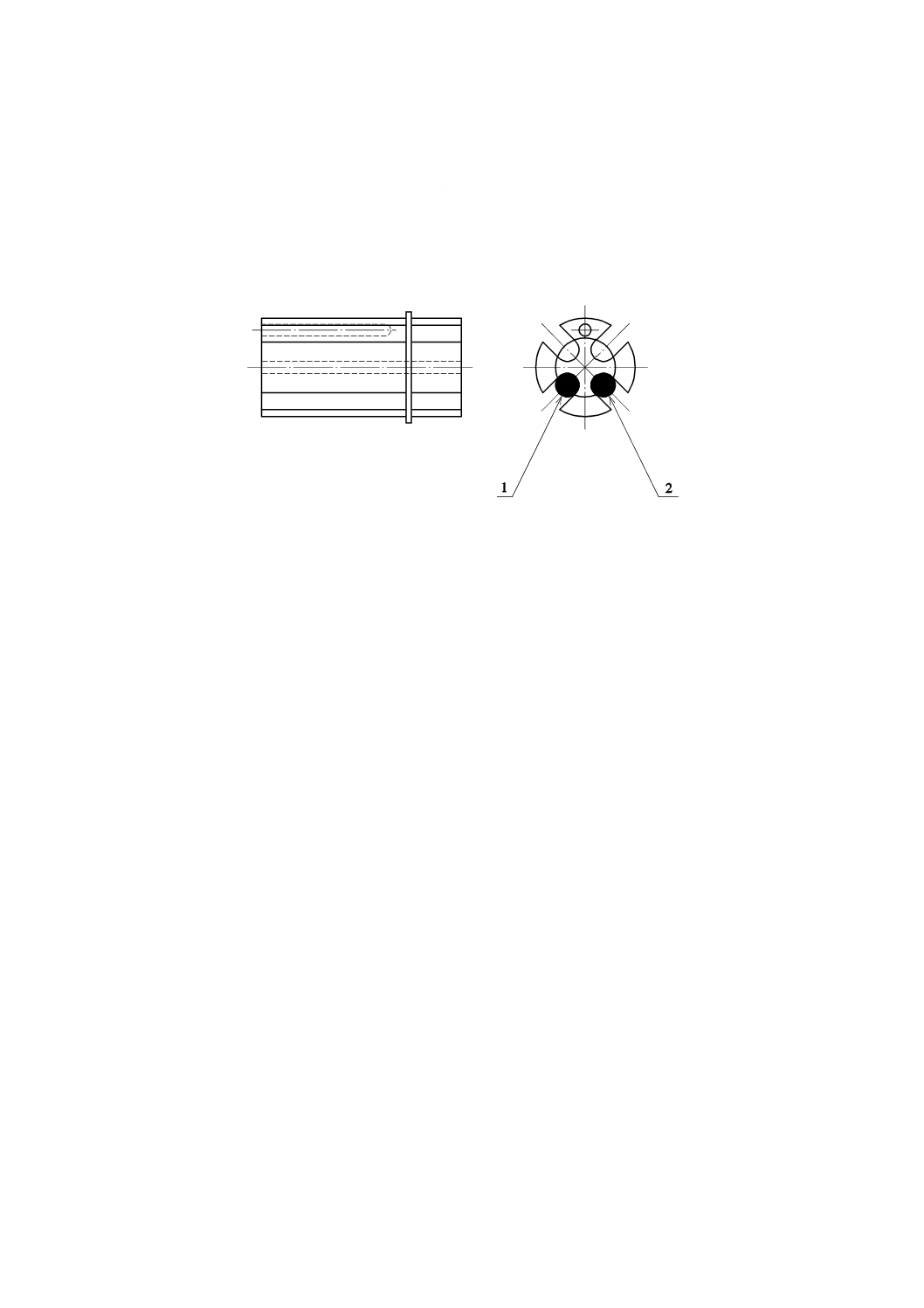
17.101.3 温度変化法
この試験方法は,連続した水冷オイル(合成油)充てん槽を基礎としている。
アルミニウム製の円筒(図17.101.3参照)を,この槽中に浸せきする。円筒は,試験中の温度検出素子
及び17.14において記録したスイッチオフ温度 (℃) の50〜90 %間の温度サイクルを制御するための温度
検出素子を入れておく。
アルミニウム製の円筒は,温度検出素子を加熱するよう抵抗線を巻く。試験中の温度検出素子の時定数
14
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
と試験温度範囲を制御している温度検出素子の時定数との差から発生する困難を除去するために,第2の
同一試験サンプルの温度検出素子を用いる。
スイッチオフ温度 (℃) の50 %及び90 %として算出される第2のサンプルの二つの膜の位置を位置セン
サによって測定し,抵抗線を通る電流(熱)を開閉するために用いる。
表7.2の項目37で製造業者によって別の宣言が行われない限り,温度上昇及び降下の変化速度は,35±
10 K/minでなければならない。
1
温度検出素子
2
スイッチオフ温度の50 %〜90 %の温度サイクルを制御するための温度検出素子
図17.101.3−温度変化法に用いるアルミニウム円筒
17.101.4
この試験後,バイメタル式SOD以外の制御装置に対しては追加の20サイクルを,その温度を
20±5 ℃からスイッチオフ温度の1.1倍まで増加させることによって実施する。
この試験中,手動復帰メカニズムは復帰させてはならない。17.101.1のその他の条件は変わらない。
注記 この試験の目的は,動作メカニズム(例えば,膜,ベローズなど)にストレスを加えることで
ある。
17.101.5
スイッチヘッドを完全に脱脂した後,動作温度(又は複数の温度)を箇条15の条件下で再判定
し,測定値(又は複数の測定値)は,偏差及びドリフトの宣言された限度値内でなければならない。
18 機械的強度
機械的強度は,JIS C 9730-1の箇条18によるほか,次による。
18.101 プッシュ アンド ターン又はプル アンド ターン操作
18.101.1
タイプ1.X,2.X,1.Z又は2.Zとして分類される作動をもつ制御装置は,18.101.2及び18.101.3
の試験を行う。
1個の新しいサンプルを,試験に対して用いる。これらの試験の後,制御装置が18.1.5の要求事項を満
足しなければならない。
18.101.2
タイプ1.X,2.X,1.Z又は2.Zとして分類される作動をもつ制御装置は,次の試験を行う。
− 操作部を押す又は引くために必要な軸方向の力は,10 N以上でなければならない。
− 操作部に加える140 Nの軸方向の押込み力又は引張り力は,18.1.5への適合に影響を与えてはならな
い。
− 50 mm以下の握り径又は握り長さをもつノブと共に使用する意図の制御装置は,押込み又は引張り操
作の前に軸の回転を防止する手段が損傷を受けることなく,又は制御装置に影響を及ぼすことなく,4
N・mのトルクに耐えなければならない。
15
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 上記の代わりに,軸の回転を防止する手段が2 N・m以上のトルクを加えたとき無効となる場合,その
効果は,次のいずれかでなければならない。
・ その装置は損傷を受けないが,接点を閉路するために無効となる場合,2 N・m未満のトルクにおけ
る引き続く操作は,接点を動作させるために,プッシュ アンド ターン又はプル アンド ターン操
作が必要である。
・ 接点の動作が起きないか,又は起こさせることができない。
− 押込み又は引張りを加えた後,必要があれば,初期の接触状態に制御装置を復帰させるのに必要なト
ルクは,0.5 N・mを超えてはならない。
− 6 N・mのトルクを調節装置に加える。軸の回転を防止する手段に対する破壊又は損傷によって,箇条
8,箇条13及び箇条20の要求事項に適合することができなくなってはならない。
− 50 mmより大きい握り径又は長さをもつノブと共に使用する意図の制御装置に対しては,トルクの値
はそれに合わせて大きくする。
18.101.3
タイプ1.X,2.X,1.Z又は2.Zとして分類される作動をもつ制御装置は,宣言された手動サイク
ル数だけ操作する。
この試験の後,制御装置は18.101.2の要求事項を満足しなければならない。回転を防止する手段が損傷
しないが,接点を動作させるために無効となる場合には,宣言された手動サイクルの最初の1/6は,操作
部の最初の押込み又は引張りを行わないで実施する。
18.102 液体金属が入っている部分
18.102.1 ナトリウム (Na),カリウム (K) 又は両方を含む制御装置の部品,及び水銀 (Hg) を含む6.7.101
〜6.7.103に分類される制御装置の部品は,漏えい又は破裂なしに動作中に起きる最高内部圧力の5倍に等
しい水圧に1分間耐えなければならない。
18.102.1.1
試験方法及び必要サンプル数は,製造業者と試験所との間で協定しなければならない。
注記 製造業者が,この試験の目的のために特別サンプル(例えば,水銀なし)を提供することが必
要な場合がある。適格な液体を液体金属の代わりに使用してもよい。ただし,試験用液体及び
試験法が,すべての液体収納部分に意図されたストレスを加えるときに限る。
18.102.1.2
18.102.1の試験後,水圧は,破裂が起こるまで増大させる。破裂は,スイッチヘッド又は制御
装置の外郭の内部にあるベローズ,ダイヤフラムその他の部分で発生しなければならない。
18.102.2 制御装置は,検出素子の最高温度の1.2倍まで加熱したとき,漏えい又は破裂が発生してはなら
ない。
この試験には,別のサンプルを使用する。
18.102.3 さらに,別のサンプルのベローズ又はダイヤフラムに対し,鋭いとがった端末の金属棒を用いて,
入念にせん(穿)孔したとき,次の状態でなければならない。
− ナトリウム,カリウム又は水銀は,スイッチヘッド又は制御装置の外郭中に留まらなければならない。
注記 破裂の位置を承認できるかどうかは,機器中で評価する。
19 ねじ山付き部品及び接続部
ねじ山付き部品及び接続部は,JIS C 9730-1の箇条19による。
20 沿面距離,空間距離及び固体絶縁物を通しての距離
沿面距離,空間距離及び固体絶縁物を通しての距離は,JIS C 9730-1の箇条20による。
16
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
21 耐熱性,耐火性及び耐トラッキング性
耐熱性,耐火性及び耐トラッキング性は,JIS C 9730-1の箇条21による。
22 耐腐食性
耐腐食性は,JIS C 9730-1の箇条22による。
23 電磁両立性 (EMC) 要求事項−エミッション
電磁両立性 (EMC) 要求事項−エミッションは,JIS C 9730-1の箇条23によるほか,次による。
23.101 自動温度調節器は,20ミリ秒間を超えて,無線障害を発生しない構造でなければならない。
適否は,23.101.1及び23.101.2の試験によって判定する。
23.101.1 試験条件
新品の3個のサンプルでこの試験を行う。
次に示すことを除き,電気的条件及び温度条件は,17.2及び17.3の規定による。
− 試験は,最低の宣言電圧及び最小の宣言電流で実施する(表7.2の項目108)。
− 温度変化速度は,α1及びβ1である。これらが宣言されていない場合,次を用いる。
ガス中の検出素子に対しては,1 K/15 min,
その他の媒体中の検出素子に対しては,1 K/min。
− 誘導負荷に使用すると宣言された制御装置は,力率0.2とする。純抵抗負荷に使用すると宣言された
制御装置は,力率1.0とする。
23.101.2 試験方法
制御装置は,接点を開路した状態で5動作サイクル,及び接点を閉路した状態で5動作サイクル試験を
行う。
無線障害の期間は,接点間の電圧降下を測定するように接続したオシロスコープによって測定する。
注記 この試験の目的に対しては,接点動作の結果,電源波形に重畳して観測された接点間のあらゆ
る電圧変動を無線障害とする。
24 部品
部品は,JIS C 9730-1の箇条24による。
25 通常動作
通常動作は,JIS C 9730-1の箇条25による。
26 電磁両立性 (EMC) 要求事項−イミュニティ
電磁両立性 (EMC) 要求事項−イミュニティは,JIS C 9730-1の箇条26による。
27 異常動作
異常動作は,JIS C 9730-1の箇条27による。
28 電子的断路の使用に関する指針
電子的断路の使用に関する指針は,JIS C 9730-1の箇条28による。
17
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書
JIS C 9730-1の附属書A〜附属書Uによるほか,次による。ただし,附属書C及び附属書Dは,この規
格では適用しない。
附属書H
(規定)
電子制御装置の要求事項
JIS C 9730-1の附属書Hによるほか,次による。
H.6 分類
分類は,JIS C 9730-1のH.6によるほか,次による。
H.6.18 ソフトウェアクラスによる分類
JIS C 9730-1のH.6.18によるほか,次による。
H.6.18.2
JIS C 9730-1のH.6.18.2によるほか,次の注記を追加する。
注記 一般的に,ソフトウェアを使う温度過昇防止装置は,ソフトウェアクラスB又はCで機能分類
する。
H.6.18.3
JIS C 9730-1のH.6.18.3によるほか,次の注記を追加する。
注記 一般的に,密閉形温水システムに使う温度過昇防止装置は,ソフトウェアクラスCで機能分類
する。
H.7 情報
情報は,JIS C 9730-1のH.7によるほか,表7.2に次を追加する。
表7.2−製造業者によって宣言された情報,適用箇条及び方法
情報
適用箇条
方法
58a
追加:表H.26.2.101のc による。
追加の項目
109
動作後の温度過昇防止装置,タイプ2自動温度調節器及びタイプ2温
度制限装置104) の出力状態
H26.2.103,H26.2.104,
H26.2.105
X
117
一体形及び組込形電子制御装置に対する製造者によって要求されたと
きの試験条件
H.23.1.2
X
JIS C 9730-1の表7.2に次の注を追加する。
注104) 適用できれば,例えば伝導性又は非伝導性。
H.11 構造要求事項
構造要求事項は,JIS C 9730-1のH.11によるほか,次による。
18
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.11.12 ソフトウェアを使用する制御装置
JIS C 9730-1のH.11.2によるほか,次による。
H.11.12.8 JIS C 9730-1のH.11.12.8によるほか,注記を次に置き換える。
注記 表7.2の項目71で宣言された値は,装置を適用する機器規格によってもよい。
H.11.12.8.1 JIS C 9730-1のH.11.12.8.1によるほか,次の注記を追加する。
注記 表7.2の項目72で宣言された値は,装置を適用する機器規格によってもよい。
H.23 電磁両立性 (EMC) 要求事項−エミッション
電磁両立性 (EMC) 要求事項−エミッションは,JIS C 9730-1のH.23によるほか,次による。
H.23.1.2
無線周波数放射
JIS C 9730-1のH.23.1.2によるほか,次による。
無線周波数放射の試験の結果は,自動制御装置の機器への組込み及び機器の中で使用されるエミッショ
ンを制御するための手段の使用の影響を受けるため,一体形及び組込形制御装置はこの細分箇条の試験の
対象ではない。ただし,製造業者から要請された場合は,宣言された条件によって試験を実施してもよい。
H.26 電磁両立性 (EMC) 要求事項−イミュニティ
電磁両立性 (EMC) 要求事項−イミュニティは,JIS C 9730-1のH.26によるほか,次による。
H.26.2 JIS C 9730-1のH.26.2によるほか,次による。
各試験後,次の一つ以上の基準を,表H.26.2.101で許容するように適用する。
H.26.2.101 制御装置は,その電流条件を維持しなければならない。その後,適用できれば,箇条15にお
いて検査した制限値内で,宣言されたとおりに動作し続けなければならない。
H.26.2.102 制御装置は,表7.2の項目109で宣言された条件を前提とし,それに従ってH.26.2.101に示す
とおりに動作しなければならない。
H.26.2.103 制御装置は,表7.2の項目109で宣言された条件を前提としなければならない。例えば,制御
装置が自動又は手動で復帰することができないという前提である。出力波形は,正弦波か又は通常動作に
対する表7.2の項目53で宣言されたとおりでなければならない。
H.26.2.104 制御装置は,表7.2の項目109で宣言された状態を維持しなければならない。非自己復帰形制
御装置は,手動に限り復帰できるものでなければならない。遮断が生じた温度を取り除いた後,H.26.2.101
の場合のように動作する,又はH.26.2.103の宣言された状態を維持しなければならない。
H.26.2.105 制御装置は,初期の状態に復帰してもよいが,その後,H.26.2.101のように動作しなければな
らない。
注記 制御装置が,表7.2の項目109で宣言された状態にある場合,それは復帰してもよいが,それ
を動作させた温度がまだ存在しているならば,宣言された状態を再びとらなければならない。
H.26.2.106 出力及び機能は,表7.2の項目58a又は58bで宣言されたとおりでなければならず,制御装置
は17.5の要求事項を満足しなければならない。
19
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.26.2.101−適否基準
適用できるH.26の試験
許容適否基準
温度過昇防止装置,タイプ2自
動温度調節器及びタイプ2の温
度制限装置
H.26.2.101
H.26.2.102
H.26.2.103
H.26.2.104
H.26.2.105
H.26.2.106 c
H.26.4〜H.26.14
b
b
b
a
a
x
その他の温度検出制御装置
H.26.2.101
H.26.2.102
H.26.2.103
H.26.2.104
H.26.2.105
H.26.2.106 c
H.26.8,H.26.9
x
x
x
a: 電磁妨害が動作後に印加されるとき,許容する。
b: 電磁妨害が動作前に印加されるとき,許容する。
c: この適否基準は,出力が許容できるかどうかを機器で判定しなければならないので,一体形又は組込形制御装
置についてだけ許容する。
x: 温度過昇防止装置以外に対して許容する。
H.26.5 電源回路網中の電圧ディップ及び短時間停電
JIS C 9730-1のH.26.5によるほか,次による。
H.26.5.4 電圧変動試験
JIS C 9730-1のH.26.5.4による。ただし,H.26.5.4.3は,この規格による。
H.26.5.4.3 制御装置は,規定する電圧試験サイクルのそれぞれで,各試験サイクルの間に10秒間の間隔
をとって,3回ずつ試験する。表7.2の項目109で宣言された制御装置については,制御装置を宣言された
状態において試験サイクルを3回実施し,その状態にないときに3回実施する。
H.26.8 サージイミュニティ試験
JIS C 9730-1のH.26.8によるほか,次による。
H.26.8.3 試験手順
JIS C 9730-1のH.26.8.3によるほか,次による。
H.26.8.3.101 表7.2の項目109で宣言された制御装置については,制御装置を宣言された状態において試
験を3回実施し,その状態にないときに2回実施する。
H.26.9 電気的ファストトランジェント/バースト試験
JIS C 9730-1のH.26.9によるほか,次による。
H.26.9.3.101 試験手続
制御装置は,5回の試験を受ける。表7.2の項目109で宣言された制御装置については,制御装置を宣言
された状態において試験を3回実施し,その状態にないときに2回実施する。
H.26.10 リング波試験
(対応国際規格の規定は,カナダ及びアメリカ合衆国で適用するものであり,この規格では採用しない。)
H.26.12 無線周波電磁界イミュニティ
JIS C 9730-1のH.26.12によるほか,次による。
H.26.12.2 伝導妨害に対するイミュニティ
JIS C 9630-1のH.26.12.2によるほか,次による。
H.26.12.2.2 試験手順
JIS C 9730-1のH.26.12.2.2によるほか,次による。
表7.2の項目109で宣言された制御装置については,掃引は,制御装置を宣言された状態及びその状態
にないときに実施する。
20
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.26.12.3 放射電磁界イミュニティの評価
JIS C 9730-1のH.26.12.3によるほか,次による。
H.26.12.3.101 表7.2の項目109で宣言された制御装置については,掃引は,制御装置を宣言された状態
及びその状態にないときに実施する。
H.26.13 電源周波数変動の影響試験
JIS C 9730-1のH.26.13によるほか,次による。
H.26.13.3 試験手順
JIS C 9730-1のH.26.13.3によるほか,次による。
表7.2の項目109で宣言された制御装置については,試験は,制御装置を宣言された状態及びその状態
にないときに実施する。
H.26.14 電力周波数磁界イミュニティ試験
JIS C 9730-1のH.26.14によるほか,次による。
H.26.14.3 試験手順
JIS C 9730-1のH.26.14.3によるほか,次による。
表7.2の項目109で宣言された制御装置については,試験は,制御装置を宣言された状態及びその状態
にないときに実施する。
H.26.15 適否の評価
JIS C 9730-1のH.26.15によるほか,次による。
H.26.15.2 JIS C 9730-1のH.26.15.2によるほか,次による。
適否基準は,表H.26.2.101による。
H.26.15.4 JIS C 9730-1のH.26.15.4によるほか,次による。
適否基準は,表H.26.2.101による。
H.27 異常動作
異常動作は,JIS C 9730-1のH.27によるほか,次による。
H.27.1.2
JIS C 9730-1のH.27.1.2による。ただし,第1行は,次による。
制御装置は,次の条件下で動作しなければならない。さらに,表7.2の項目109で宣言された制御装置
に対しては,試験は,その制御装置が宣言された状態及びその状態にないときに実施する。
21
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書J
(規定)
サーミスタ使用の制御装置の要求事項
JIS C 9730-1の附属書Jによるほか,次による。
J.4
試験に関する一般的注意
試験に関する一般的注意は,JIS C 9730-1のJ.4によるほか,次による。
J.4.3.5
目的に関するもの
JIS C 9730-1のJ.4.3.5によるほか,次による。
J.4.3.5.101 表7.2の項目64において,耐久サイクル数を宣言するという目的に対しては,サーミスタに
ついては,制御装置中で実施される機能について評価する。
注記 例えば,タイプ2作動をもつ制御装置の検出素子として用いるサーミスタ(ここでは制御装置
の1回の動作サイクルがサーミスタの各動作サイクルごとに発生するか,又はその逆)に対し
ては表7.2の項目27におけるのと同一のサイクル数が表7.2の項目64において宣言される。
J.7
情報
情報は,JIS C 9730-1のJ.7によるほか,次による。
表7.2の項目64の“適用箇条”の欄にJ.4.3.5.101を追加する。
22
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
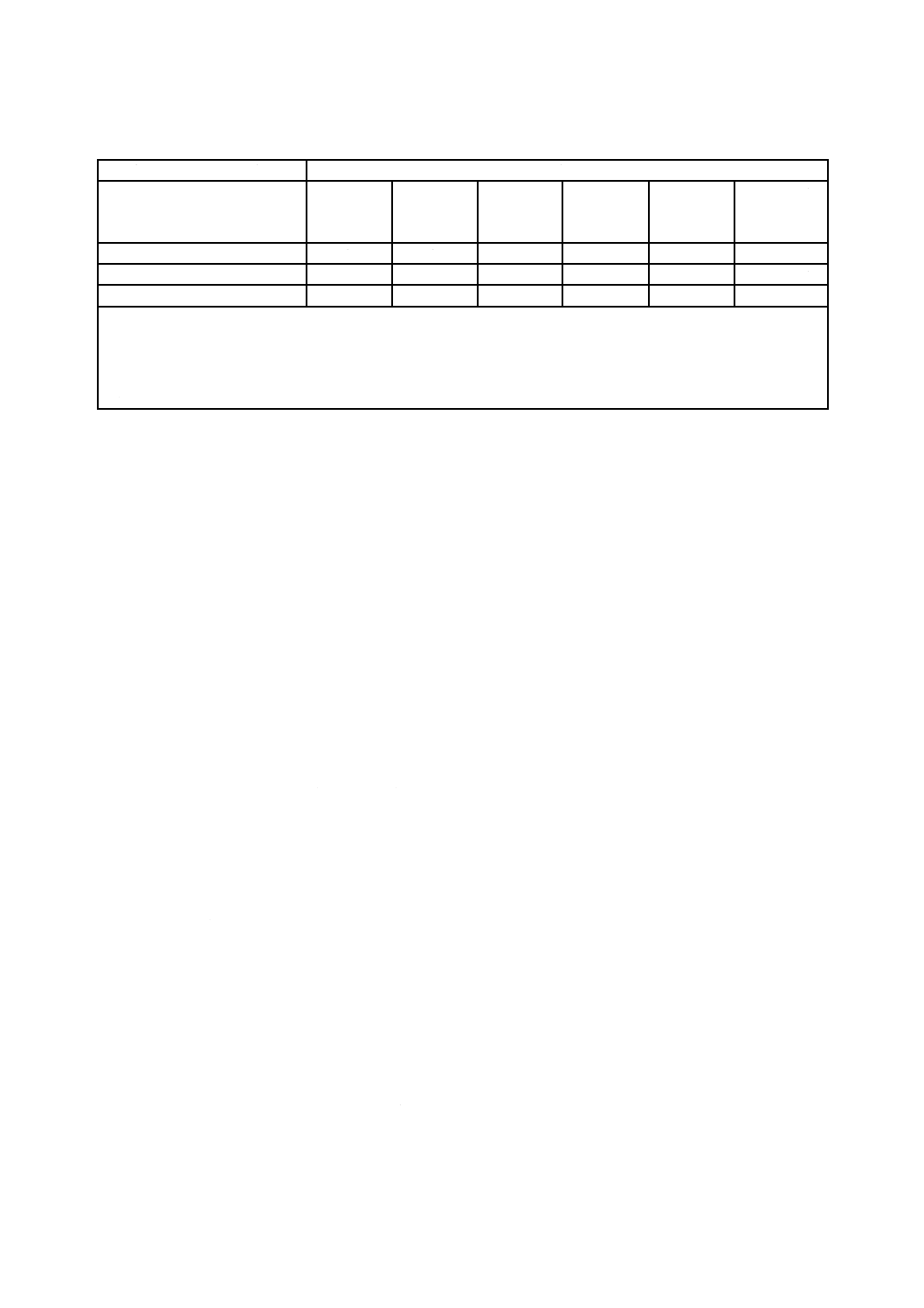
附属書AA
(参考)
最大製造偏差及びドリフトa), b)
制御装置の形式
温度範囲
℃
宣言された動作値から
の最大許容偏差
初期測定値からの
最大許容ドリフト
宣言された
動作値の%
K
宣言された
動作値の%
K
貯水形温水器用自動温度調節器
77以下e)
77を超え
−
−
3
4
−
−
6
6
貯水形温水器用温度過昇防止装置
任意
−
3
5
6
ダクトヒータ,温風暖炉及びボイラ用温
度過昇防止装置
150未満
150以上
−
5
8
−
5
5
−
−
床暖房用電気ヒータに用いる温度過昇
防止装置
任意
−
8
+2 d)
−
上述のもの以外の機器用温度過昇防止
装置c)
150未満
150以上204以下
204を超え
−
4
5
6
−
−
6
5
5
6
−
−
注a) 百分率及び偏差Kの両方を示す場合,大きい方の値を使用してもよい。
b) 宣言された動作値の百分率を用いるとき,次の値を表を用いて算出した最大偏差又はドリフトに加える。
− 5 %に対して:0.9 K
− 4 %に対して:0.7 K
− 2 %に対して:0.4 K
c) 機器用温度過昇防止装置に対しての下向きのドリフトは,宣言された動作値の20 %プラス4 Kであってもよ
い。このドリフトを受け入れるかどうかは,自動温度調節器又は類似の制御装置に対する使用者によるいじ
り,自動温度調節器の重複特性のような条件及び火災,感電又は事故の危険を招くおそれがあるその他の類
似の条件を考慮して,それらの用い方において決定しなければならない。
d) 下向きのドリフトは,床暖房用電気ヒータのための温度過昇防止装置に対しては制限しない。
e) 60 ℃以下の製造業者設定値をもつ家庭用制御装置に対して適用する。偏差及びドリフトは,60 ℃又は最大
設定点で判定する。
23
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書BB
(参考)
時定数
BB.0 序文
時定数は,次のいずれかの方法で決定する。
− 急激温度変化 (BB.2)
− 温度の直線的上昇 (BB.3)
注記1 通常,時定数は,一次の指数関数によって記述できる。
注記2 高次の指数関数の場合,不感時間を考慮に入れる。
BB.1
時定数Tの決定のための特性及び開閉点は,定常状態において判定する。
BB.1.1
時定数は,ガス又は液体の活性媒体のための適切な試験装置(例えば,2槽法又は傾斜法)によ
って決定する。万一,試験用媒体が動作媒体に対応しない場合,個々の伝達係数を規定する。
BB.1.2
時定数は,製造業者によって宣言されたとおりに,シース又は感温筒を付けた状態又はそれらを
付けないで測定する。
BB.1.3
試験媒体の(循環)速度は,次による。
液体の場合,0.2〜0.3 m/s
空気の場合,1.0〜1.5 m/s
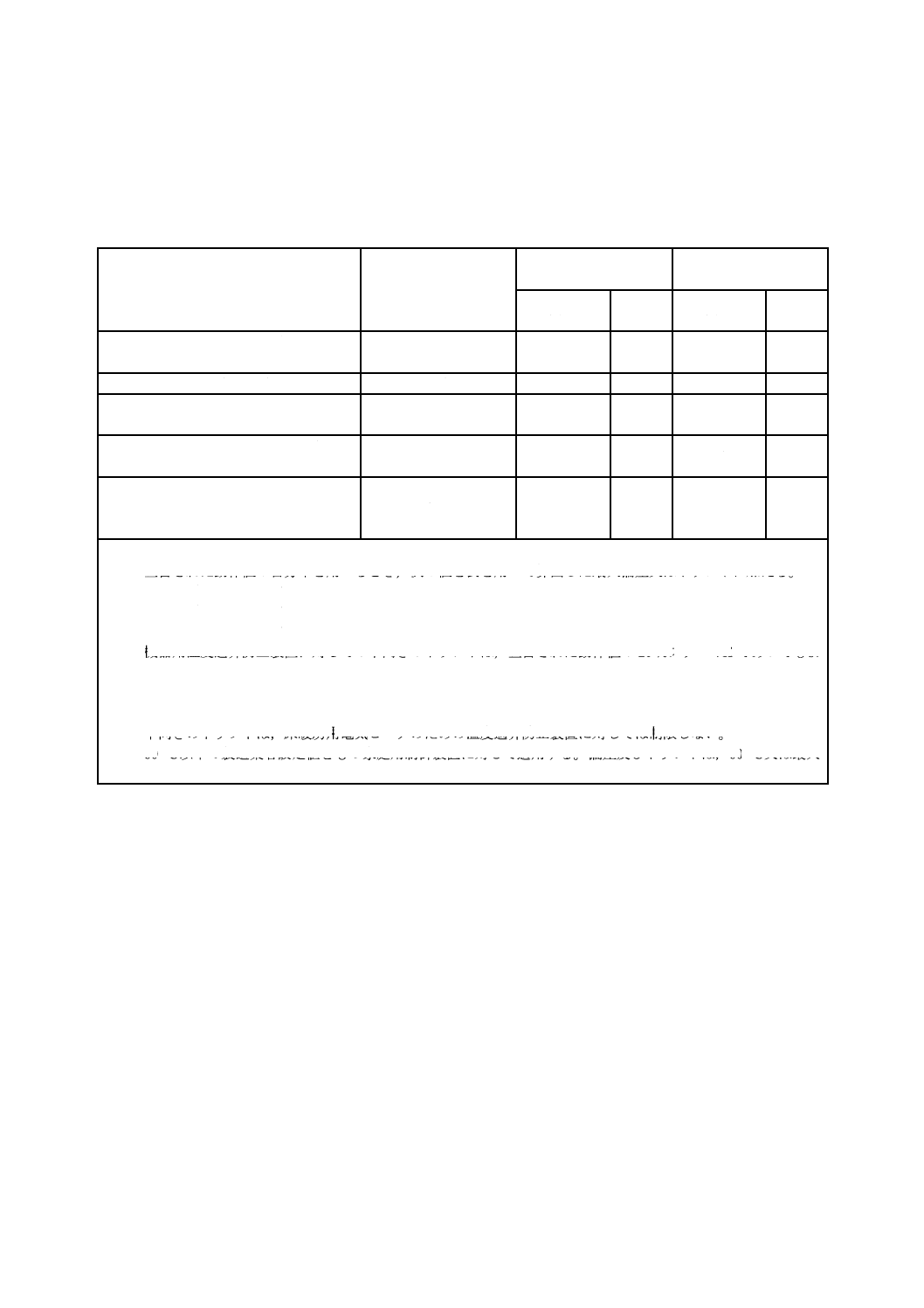
BB.2 2槽法
温度センサが定常温度に到達した後,温度センサに急激な温度上昇を加える。出力信号の値が急激な温
度上昇の63.2 %に等しい出力信号の値に到達する時間を,時定数T(図BB.1参照)として決定する。
連続形の自動温度調節器の場合,時定数は,この方法だけを用いて決定する。
BB.3 傾斜法
温度センサに,一定の傾度で上昇する槽温度を加える。時定数Tは,槽温度にほぼ平行に走るセンサ温
度における“時間の遅れ”として決定する。これは,温度上昇の開始から5Tが経過したときに発生する。
ここでは測定装置の時定数を考慮する(図BB.2参照)。
24
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図BB.1−急激温度変化時の時定数の決定
T及びAが既知のとき,試験条件下のスイッチオフ温度θAbの計算
θAb1) =T・A+θG
注1) ほぼ5Tが温度上昇開始時から経過したとき。
A:試験槽の温度傾度
図BB.2−試験槽温度直線的上昇時の時定数の決定
25
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
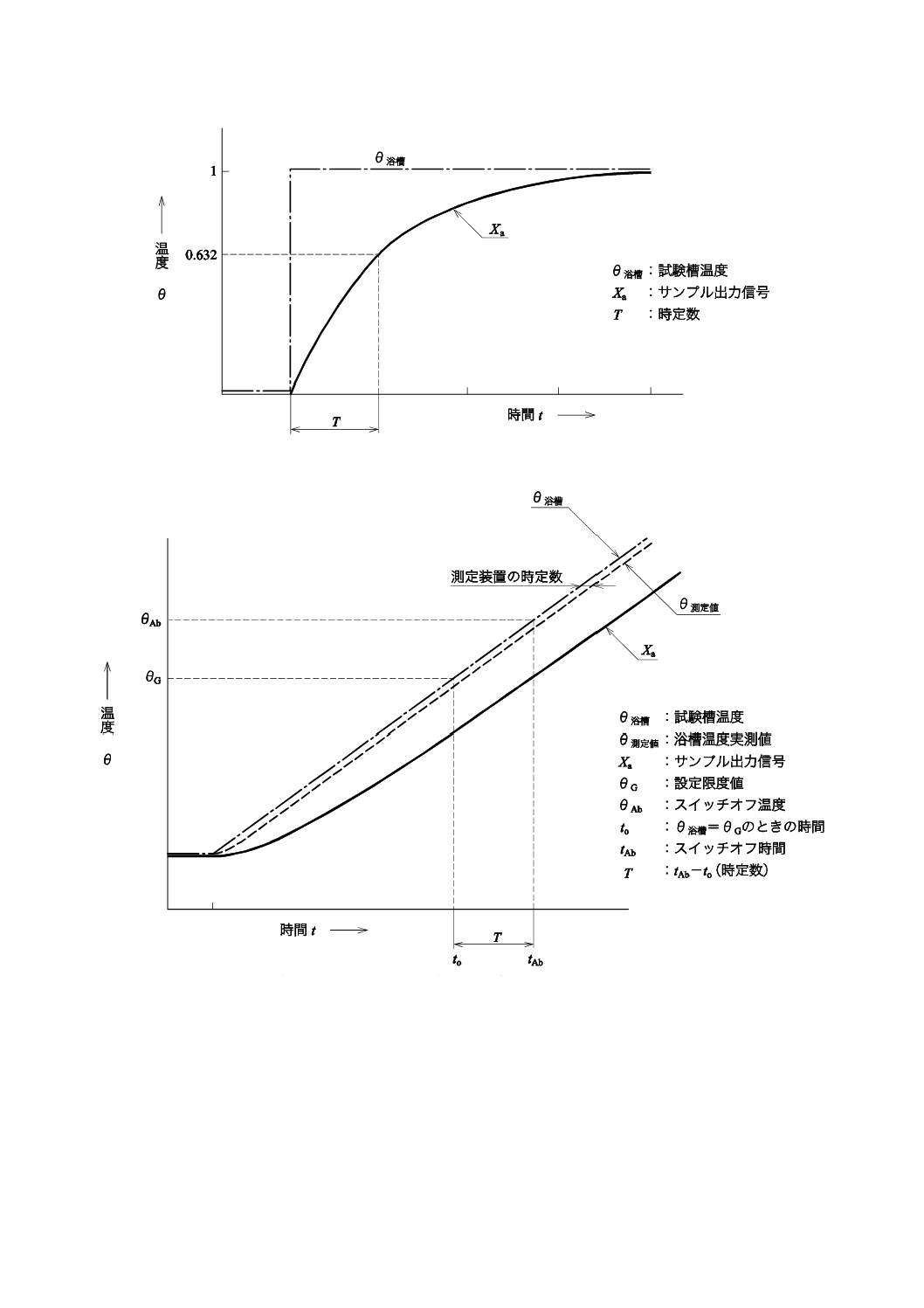
表BB.1−時定数の値の決定及び検証方法(11.101参照)
単位 s
動作モード
検出装置に動作液体をもつ
ときの,時定数T
水
空気
油
ボイラ自動温度調節器及びボイラ温度制限装置
連続
130
120
−
ボイラ自動温度調節器,ボイラ温度制限装置及び
ボイラ温度過昇防止装置
2点動作
45
120
60
煙道(炎管)ガス温度制限装置
2点動作
−
45
−
26
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書CC
(参考)
独立取付形及びインラインコード形制御装置のサイクル数
CC.1 独立取付形及びインラインコード形制御装置のサイクル数
独立取付形及びインラインコード形制御装置のサイクル数は,表CC.1による。
表CC.1−独立取付形及びインラインコード形制御装置のサイクル数
単位 サイクル
温度検出制御装置
自動作動
手動作動
自動温度調節器
6000
600
室内自動温度調節器
100000
600
自己復帰形温度過昇防止装置
1000
非自己復帰形温度過昇防止装置
300
その他手動作動
300
CC.2 独立取付形及びインラインコード形制御装置の最小サイクル数
(対応国際規格の規定は,カナダ及びアメリカ合衆国で適用するものであり,この規格では採用しない。)
27
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書DD
(規定)
農業用コンファインメント建家で使用する制御装置
DD.1 目的
この附属書の目的は,農業用コンファインメント建家環境での使用に付随する化学化合物について規定
された厳しさに対して,温度検出制御装置が耐えられる能力を判定するための標準試験方法を提示するこ
とである。この附属書の要求事項は,本体の要求事項に追加するものである。サンプル数が13のDD.7.7.2
の試験が要求されていない限り,この附属書の試験では12の新しいサンプルを使用する。
農業用コンファインメント建家で使用するように宣言及び意図された制御装置は,IEC TC 31の適用範
囲に含まれる潜在的爆発性雰囲気における使用を意図したものではない。
DD.2 定義
DD.2.1
農業用コンファインメント建家 (agricultural confinement building)
人工的手段によって暖房及び/又は冷房することを特徴とする農業施設。
ここでは,自由に換気されている農業用建家[例,きゅう(厩)舎]及び類似の使用に先立って定期的
に消毒される建家では通常みられない腐食性化合物が,動物用飼料及び廃棄物の蓄積によって集中する。
DD.3 試験装置
試験室及びサンプル棚は,腐食による副産物を付加しないように,試験媒体の腐食作用に耐えられるこ
とが分かっている材料とする。
DD.4 厳しさ
厳しさは,DD.7で規定する。
DD.5 事前の状態調節
この附属書は,事前の状態調節については,何ら要求事項を規定しない。ただし,取付中に引き込むよ
うに意図したタイプの配線,取付具及び/又はコードのための開口部をもつ制御装置を用意して,試験中
に使用しなければならない。ワイヤ又はコードの切断端末のためにこのような開口部を設ける場合は,試
験媒体が制御装置内に侵入することを防止するために密封しなければならない。その他の開口部がある場
合は,手を加えない。
DD.6 初期測定
この附属書では,初期測定について,何ら要求事項を規定しない。
DD.7 試験
次の試験の場合,10日間ばく露したサンプルのいずれかがDD.9.2の要求事項を満たさないときは,30
日間の試験を中断して,時間の節約及び試験室の使用を減らしてもよい。
28
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
DD.7.1 湿二酸化炭素−二酸化硫黄−空気の混合気体
2個のサンプルを試験室内におき,1個を10日間,もう1個を30日間ばく露する。試験室の容積の1 %
に相当する量の二酸化炭素及び同量の二酸化硫黄を,各作業日ごとに試験室内に導入する。毎日のガス導
入に先立って,前日からのガス−空気混合気体を排気する。この試験は継続的に実施し,ガスの導入は10
日間ばく露で8回以上,また,30日間ばく露で22回以上実施する。
湿度を与えるために,試験室容積の0.003 m3当たり10 mLの量の水を試験室の底に入れておく。
試験室の温度は,35±2 ℃に維持する。
DD.7.2 湿硫化水素−空気の混合気体
2個のサンプルを試験室内におき,1個を10日間,もう1個を30日間ばく露する。試験室の容積の1 %
に相当する量の硫化水素を,各作業日ごとに試験室内に導入する。毎日のガス導入に先立って,前日から
のガス−空気混合気体を排気する。この試験は継続的に実施し,ガスの導入は,10日間ばく露で8回以上,
また30日間ばく露で22回以上実施する。
湿度を与えるために,試験室容積の0.003 m3当たり10 mLの量の水を試験室の底に入れておく。
試験室の温度は,25±5 ℃に維持する。
DD.7.3 湿アンモニア−空気の混合気体
2個のサンプルを試験室内におき,1個を10日間,もう1個を30日間ばく露する。水酸化アンモニウム
の水溶液を,試験室の底に入れる。この溶液は,体積比で1 %のアンモニア蒸気を溶液上に生成し,残り
の蒸気は空気及び水で構成されるような濃度とする。試験中,この溶液は交換又は補給しない。
試験室の温度は,35±2 ℃に維持する。
DD.7.4 尿素−水の蒸気
2個のサンプルを試験室内におき,1個を10日間,もう1個を30日間ばく露する。飽和尿素水溶液(試
験室容積の0.003 m3当たり10 mLの水中に過剰結晶)を,試験室の底に入れる。試験中,この溶液は交換
又は補給しない。
試験室の温度は,35±2 ℃に維持する。
DD.7.5 温湿空気
2個のサンプルを試験室内におき,1個を10日間,もう1個を30日間ばく露する。試験室の湿度を,相
対湿度で (98±2) %に維持する。
試験室の温度は,60±1 ℃に維持する。
DD.7.6 消毒薬−殺菌剤−水の混合液へのばく露
1個の試料に対して,消毒薬−殺菌剤−水の混合液の間欠的散布及び乾燥を,1 300サイクル実施してば
く露する。散布−乾燥サイクルでは,散布を10分間,続いて散布しない期間を50分間とる。
試験室の温度は,35±2 ℃に維持する。
注記 乳製品の消毒薬−殺菌剤は,水1 Lに対して消毒薬−殺菌剤を7.8 mLの濃度で混合する。消毒
薬−殺菌剤は,ジメチル塩化アンモニア化合物を15 %,不活性成分を85 %として構成する。
DD.7.7 じんあい(塵埃)へのばく露
DD.7.7.1 じんあいの侵入
1個のサンプルを,最初の特性数5について,JIS C 0920のじんあい試験を行う。外郭は,カテゴリ1
でもカテゴリ2でもよい。
DD.7.7.2 じんあいの発熱及び異常
熱を発生する装置を内蔵する制御装置(例えば,変圧器,リレー,電子開閉装置)の場合,1個のサン
29
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
プルを,試験室内に意図されたように取り付けて,電気的に接続する。小麦粉及びコーンの粉末を,0.075
mmメッシュ幅のスクリーンに通して試験室上部に吹き込み,サンプル上のブランケットが安定するまで
垂直方向でサンプル上に落下させる。送風機の通電を切る。
ここで,試験室の温度をTmax又は40 ℃のうちのいずれか高い方の温度に上昇させ,また試験室の温度
が安定するまで,サンプルにVr及びIrで通電する。
DD.8 後処理
DD.7.1〜DD.7.7.1に従って試験したサンプルは,水洗いして,室温で乾燥させる。
DD.9 評価
DD.9.1 一般
ガスケット及びその他の外郭のシール材料が,過剰に劣化していてはならない。
外部調整装置及びその他の機構がある場合は,使用可能な状態を維持していなければならない。適否は,
操作及び目視検査によって判定する。
制御装置のサンプルは,各6回の腐食ばく露試験を完了したとき,この規格でいう機能を損なうような,
外郭の完全性に影響するような過度の腐食を起こしていてはならない。適否は,目視検査によって判定す
る。
DD.9.2 DD.7.1〜DD.7.6の試験において,各サンプルは,17.1.3.1の過電圧試験を室温で実施した後,箇
条8,17.5及び箇条20の要求事項を満たさなければならない。
DD.9.3 DD.7.7.1の試験の場合,じんあいが外郭内に入っていてはならない。適否は,目視検査によって
判定する。
DD.9.4 DD.7.7.2の試験の場合,箇条14に規定する温度を15 Kを超えて上回ってはならない。
30
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書EE
(参考)
この規格の適用範囲内にある温度検出制御装置の適用の指針
EE.1
一般
EE.1.1
この附属書は,家庭用及びこれに類する用途の機器の内側,外側又は機器と共に使用するための,
暖房,空気調節及び類似の用途の電気制御装置を含む自動温度検出制御装置に適用する。
この附属書の目的は,個別の用途に基づいた,使用者による温度検出制御装置の選定のための指針を示
すことである。この附属書はまた,この規格の様々な分類を使用する上での指針を専門委員会に示すこと
も意図している。
EE.1.2
概要
この規格に従って試験するすべての温度検出制御装置は,固有構造安全性及び安全動作を決定するため
に試験する。感電に対する保護,加熱,耐電圧,接地装置,機械的強度,耐久性,異常使用などの分野に
ついて適宜安全性を確認する。
同様に,複雑な電子機器及びソフトウェアを内蔵するものを含めて,電子制御装置に対する要求事項も
含まれる。
タイプ2として分類された制御装置も,その動作温度についての信頼の度合いを規定するために検査す
る。試験は,新しい条件での動作温度の幅が製造業者の宣言値内にあることを判定するために,また,動
作温度のドリフトが規定の耐久性試験の後で製造業者の宣言値内にあることを判定するために実施する。
EE.2
この規格の適用範囲内にある温度検出制御装置の選定
特定の用途に適した制御装置は,この規格の箇条6及び箇条7の関連試験報告書に記録された分類及び
宣言に基づいて選定する。このような,すべての自動制御装置に適用される分類及び宣言は,JIS C 9730-1
に含まれている。温度検出制御装置に関する第1部への修正及び追加の事項は,関連する第2部,すなわ
ちこの規格で規定する。
JIS C 9730シリーズの規格は,製造業者が自らの個別の制御装置に適用できる特性のまとまり,及び自
らが適切と判断する適用のタイプを規定することができる特性の便覧とみなすことが望ましい。
したがって,OEM(相手先商標製品製造業者)であれ,据付業者であれ,制御装置の使用者には,その
意図する用途にとって適切な制御装置を選択する責任がある。同様に,機器製品規格では,制御装置の適
用に関する最低限の要求事項を規定することが望ましい。制御装置がJIS C 9730-1及びこの規格に適合し
なければならないと単純に規定するだけでは不十分であって,むしろ,関連のタイプ及び特性に関して個
別の宣言を選択することが望ましい。
EE.3
温度検出制御装置に共通する分類
EE.3.1
電源の種類
交流専用,直流専用,交直両用など,制御装置に適した電源電圧のタイプを示す。また,特定のタイプ
の電源又は複式電源についての規定もある。
EE.3.2
負荷のタイプ
負荷のタイプを,次に示す。
31
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 純抵抗負荷
− 抵抗負荷又は誘導負荷,若しくは誘導素子が0.6以上の力率をもつ負荷となる両方の複合負荷
− 特定負荷
− 20 mA未満の電流
− 特定モータ負荷
− パイロット負荷
抵抗負荷用の制御装置は,力率が0.8以上で,かつ,誘導負荷が抵抗負荷に対する定格電流の60 %を超
えていない場合に限り,誘導負荷に使用してもよい。無効電流が抵抗負荷の定格電流の5 %を超えず,か
つ,負荷が10 VA以下であるならば,この回路を他の無効負荷に使用してもよい。
抵抗負荷と誘導負荷との複合負荷の一例として,加熱素子・モータの両方を内蔵したファンヒータ内の
回路がある。
誘導負荷だけに意図された回路は,抵抗負荷が誘導負荷に等しいものと宣言してこの箇条に基づいて分
類しても,又は宣言された特定負荷の場合のように分類してもよい。
特定負荷の例には,白熱電球又は蛍光ランプ負荷,0.6未満の力率をもつ高誘導負荷,容量負荷,及び無
負荷で使用するように意図された接点のための回路がある。
20 mA未満の回路の例には,ネオン指示管及びその他の信号灯のための回路がある。
EE.3.3
目的に合わせた温度検出制御装置のタイプ
温度検出制御装置は,複数の目的に対して分類してもよい。
自動温度調節器−制御対象機器の通常動作状態において,温度を二つの特定の値の間に維持するように
意図された循環温度検出制御装置で,使用者による設定のための手段がついていることがある。したがっ
て,自動温度調節器は動作制御装置としても分類される。
温度制限装置−制御対象機器の通常動作状態において,温度を一つの個別の値の下又は上に維持するよ
うに意図された温度検出制御装置で,使用者による設定のための手段がついていることがある。したがっ
て,温度制限装置は動作制御装置としても分類される。
温度制限装置は,自動式又は手動式の復帰タイプがある。機器の通常デューティサイクルの間は,逆作
動をしない。
温度過昇防止装置−制御対象機器の異常動作状態において,温度を一つの個別の値の下又は上に維持す
るように意図された温度検出制御装置で,使用者による設定のための手段はついていない。したがって,
温度過昇防止装置は保護制御装置としても分類される。
温度過昇防止装置は,自動式又は手動式の復帰タイプがある。
通常,温度過昇防止装置はタイプ2作動を備える。
バイメタル式SOD−バイメタル式温度検出素子をもつ制御装置であって,1回だけ動作して,その後は
完全な交換を必要とする。したがって,SODは保護制御装置としても分類される。
バイメタル式SODは,宣言温度より上では復帰しない。
非金属SODとは,非バイメタル式検出装置をもつ制御装置のことであり,その動作を制御装置の他の機
能から分けることはできず,また1回だけ動作して,その後は完全な交換を必要とする。このような装置
は,保護制御装置として分類される。
このような部品を個別に試験できる場合,これらの部品は温度ヒューズとして識別され,この規格の適
用範囲内に含まれず,JIS C 6691の対象となる。
32
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
EE.3.4
自動作動の機能
EE.3.4.1 タイプ1又はタイプ2として分類される制御装置
タイプ1の制御装置は,固有の安全性を判定するために完全な試験をするが,新しい条件におけるか又
は規定の耐久性試験後のいずれかでは,動作温度の一貫性を判定するための試験は行わない。したがって,
タイプ1の制御装置は,制御対象機器の性能又は安全性という面で制御温度が重要な意味をもたないよう
な用途で使用するように意図されている。
タイプ2の制御装置は,固有の安全性及び動作温度の一貫性に関して,いずれも新しい状態で試験して,
動作温度が製造業者の宣言した製造偏差の範囲内にあることを確認すると同時に,規定の耐久性試験後の
動作温度の変化(ドリフト)についても確認する。
製造偏差及びドリフトの両方ともに,制御装置の製造業者が宣言することに注意が必要である。したが
って,制御装置の使用者は,宣言された製造偏差及びドリフトを考慮して,用途に適した,また,その要
求事項を満たす制御装置を確実に選択することが望ましい。
タイプ1作動及びタイプ2作動は,EE.3.4.2及びEE.3.4.3に概要を示す,次の構造上又は動作上の一つ
又は複数の機能に従ってさらに分類する。
これらの再分類は,関連性のある宣言がされていて,かつ,該当する試験が完了している場合に限って
適用することができる。
複数の機能を実施する作動は,例えば,タイプ1.C.L又は2.A.Eのように,該当する文字を組み合わせ
て分類してもよい。
手動作動については,この箇条に従った分類をしない。
EE.3.4.2 構造上の機能
次の構造上の機能を宣言することができる。これらの機能の制御装置の設計への採用は,制御装置の最
終使用目的,機器内部での用途,又はこれを内蔵する機器のタイプに依存する。
− 故障に対して瞬間的にでも再閉路できないトリップフリー機構(タイプ1.D又は2.D,6.4.3.4参照)。
このタイプの機構は,機器が故障条件にあるときに,接点の非常に短時間の再閉路だけで故障条件
を拡大する原因となり得る場合に,一部の機器規格で要求されることがある。一例に,このような再
閉路が安全弁を動作させて蒸気を放出させることがある。
− 故障の継続に対して,接点が開放するのを防止できないか又は閉路状態を維持できないトリップフリ
ー機構(タイプ1.E又は2.E,6.4.3.5参照)。
一例に,過電流故障がまだ存在しているのを検出するために,瞬間的に再閉路する必要があるか又
は再閉路できる電流検出制御装置がある。このタイプの機構は,例えば,電気ルームヒータのように,
非常に短時間の再閉路が制御対象機器の故障条件に重大な悪影響を及ぼさない用途で許容される。
− 工具を使用してしか復帰ができない作動(タイプ1.F又は2.F,6.4.3.6参照)。
このタイプの作動は,例えば,特定のタイプの故障の後で熟練者によるサービスが必要な場合に必
要となる。
− 電気的に負荷を受けている条件下では復帰するように意図されていない作動(タイプ1.G又は2.G,
6.4.3.7参照)。
このタイプの作動は,低いレベルの接点仕様とするため,又は機器をオフ状態から再起動する必要
がある場合に使用できる。
− 接点が開放することを防止することができず,また,復帰手段が復帰位置に保持されている場合は,
通常動作を回復した後で自動的に閉位置に復帰できるトリップフリー機構(タイプ1.H又は2.H,
33
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.4.3.8参照)。
− 接点が開放することを防止することができず,また,復帰手段が復帰位置又はオン位置に保持されて
いる場合は,自動復帰装置として機能することが認められないトリップフリー機構(タイプ1.J又は
2.J,6.4.3.9参照)。
EE.3.4.3 動作上の機能
次の動作上の機能を宣言することができる。これらの機能の制御装置の設計への採用は,制御装置の最
終使用目的,機器内部での用途,又はこれを内蔵する機器のタイプに依存する。
− 検出作動については,検出素子又は検出素子をスイッチヘッドに接続している部品の破壊の結果とし
て,動作値が増加しない(タイプ1.K又は2.K,6.4.3.10参照)。
このタイプの設計は,例えば,加圧形温水器において,温度検出素子の破壊後の温度又は圧力が過
大になるのを防止するために使用することができる。
− 停電したときに,外部補助電源又は外部電源とは関係なく,意図された機能を果たすように設計され
ている作動(タイプ1.L又は2.L,6.4.3.11参照)。
− 宣言されたエージング期間の終了後に実施する作動(タイプ1.M又は2.M,6.4.3.12参照)。
このタイプの作動は,例えば,自己清掃形オーブンのように,その寿命の大部分を正常な運転温度
において過ごし,また機器の故障条件を検出したときに確実に動作する必要のある保護制御装置で必
要になる。
EE.3.5
制御装置の汚損状況
制御装置は,その外郭によって提供される,水の有害な浸入及び固体物(じんあい)の侵入に対する保
護の度合いに従って分類する。これらの分類はJIS C 0920に従うものであり,IPコードとして知られてい
る。IP00として表される制御装置は外郭のないものであり,したがって,水の浸入及びじんあいの侵入に
対する保護は,この制御装置が組み込まれている機器による保護に依存している。
特定の環境で使用するように意図された制御装置は,適切な措置が機器に設けられているなら,異なる
環境で使用してもよい。
EE.3.6
接続方法
固定配線の接続用として意図された端子を,少なくとも一つもつ制御装置。
(対応国際規格には,カナダ及びアメリカ合衆国で適用する情報を記載した段落があるが,この規格で
は採用しない。)
可とうコードの接続用として意図された端子を,少なくとも一つもつ制御装置。
固定配線及び可とうコードは,外部導体として定義される。
制御装置は,上記の両方のタイプの端子について分類してもよい。
外部導体の接続用として意図された端子を,全くもたない制御装置。
このタイプの制御装置は,一体形導体又は内部導体だけの接続用として意図されている。
外部導体とは,その一部がインラインコード形制御装置若しくは独立取付形制御装置の外部にあるか,
又は制御装置をその内部若しくは上部に取り付けた機器の外部にある導体である。
内部導体とは,外部導体でも一体形導体でもない導体である。この内部導体には,制御装置の外部にあ
るが,ただし機器の内部にある導体が含まれる。
一体形導体は,制御装置の内部にある導体か,又は制御装置の端子若しくは端末を永久的に相互接続す
るために使用される。
34
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
EE.3.7
スイッチヘッドの周囲温度限度
スイッチヘッドは,温度検出素子を除く,制御装置のすべての部品として定義する。構造上,スイッチ
ヘッドと温度検出素子との区別ができない場合は,制御装置全体を検出素子とみなす。
周囲温度の宣言がされていない場合,周囲温度は,最低値 (Tmin) の0 ℃と最高値 (Tmax) の55 ℃との
間にあるものと仮定する。このほかの値を宣言してもよいが,最高値 (Tmax) は30 ℃を下回ってはならず,
最低値 (Tmin) は0 ℃を上回ってはならない。
Tmaxの望ましい値は,30 ℃,55 ℃,70 ℃,85 ℃,105 ℃,125 ℃及び150 ℃である。Tminの望まし
い値は,0 ℃,−10 ℃,−20 ℃,−30 ℃及び−40 ℃である。
これらの望ましい値と異なる値も許容する。
EE.3.8
感電に対する保護
この分類は感電に対する保護を提供する方法を対象とするものであり,必要な保護を提供するために使
用する接地及び/又は絶縁,若しくは超低電圧の組合せである。
クラス0,クラス0I,クラスI,クラスII及びクラスIIIとして知られた,五つのタイプの保護がある。
これらクラスの定義は,JIS C 9730-1の2.7.2〜2.7.6で詳述されている。
この分類は,次のような制御装置の各タイプで異なってくる。
一体形制御装置は分類されないが,一体化された機器の分類に入る。
組込形制御装置は,クラス0,クラス0I,クラスI,クラスII又はクラスIIIの機器で使用するように分
類される。
インラインコード形制御装置,自立構造形制御装置又は独立取付形制御装置は,クラス0,クラス0I,
クラスI,クラスII又はクラスIIIとして分類される。
EE.3.9
回路の断路又は開路
接点分離は,次のタイプの一つに従って分類する。
− 完全断路
− マイクロ断路
− マイクロ開路
− 全極断路
− 電子的断路,H.28を参照
一部の機器規格には完全断路を要求するものもあるし,他の規格では完全断路又はマイクロ断路のいず
れかでもよいとするものもある。規格によっては,マイクロ断路だけを要求しているものもある。
制御装置の次のような異なる作動は,回路の断路又は開路を異なるものにすることがある。
・ 完全断路:接地を除くすべての電源電極における接点分離であり,主電源と断路対象の部品との間の
基礎絶縁に相当する。
このタイプの断路は,電気的絶縁が必要な状況に対して意図されるものである。一部の機器規格では,
サービス中などに断路した部品に接触する可能性のある状況の場合,3 mmの物理的接点ギャップを要求
している。
・ マイクロ断路:少なくとも一つの極で十分な接点分離を提供することで,機能上の安全を確保する。
マイクロ断路は,非検出制御装置の場合は,断路によって制御される機能が確保されること,また,検
出制御装置の場合は,表7.2の項目36で宣言されている作動量の限度値の間で機能が確保されることを意
味する。
このタイプの断路は電気的絶縁を提供することを意図しているのでなく,また,過渡過電圧条件の間に
35
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
フラッシオーバが発生することがある。
制御装置の極数がその制御装置と接続されている機器の電源極数と等しい場合は,完全断路によって全
極断路を提供する。
・ マイクロ開路:接点分離,サイクル作動又は非サイクル作動による回路の開路であって,完全断路又
はマイクロ断路は提供しない。
このタイプの開路は通常,例えば,オフ位置が表示されていない自動温度調節器に適用できる。
・ 全極断路:単相交流器具及び直流器具の場合は,単一の開閉動作による両方の電源導体の断路,又は
三つ以上の電源導体に接続する器具の場合は,単一の開閉動作による,接地導体を除いた,
すべての電源導体の断路。
保護接地導体は,電源導体とみなさない。
全極断路は,完全断路又はマイクロ断路のいずれかを提供することになる。
・ 電子的断路:機能的断路のための回路の電子装置による非サイクル断路で,少なくとも一つの極にお
いて一部の電気的要求事項を満たすことで,エアギャップの手段によるもの以外の断路
を提供する。
電子的断路は,用途においてマイクロ断路と類似のものであるが,オフ条件において電源波形の半サイ
クルを伝導すると危険な結果になり得るような,ある種のタイプの用途には適していないことがある。
EE.3.10 各手動作動の操作サイクル数 (M)
望ましい値は,次のとおりである。
− 100 000サイクル
− 30 000サイクル
− 10 000サイクル
− 6 000サイクル
− 3 000サイクル2)
− 300サイクル3)
− 30サイクル3)
EE.3.11 各自動作動における自動サイクル数 (A)
望ましい値は,次のとおりである。
− 300 000サイクル
− 200 000サイクル
− 100 000サイクル
− 30 000サイクル
− 20 000サイクル
− 10 000サイクル
− 6 000サイクル
− 3 000サイクル3)
− 1 000サイクル3)
− 300サイクル4)
− 30サイクル4), 6)
− 1サイクル5)
注2) 電圧タップ制御装置,温水器用の夏期又は冬期制御装置,該当する機器規格で認められる場
36
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
合などのように,特定の機器及び用途に対する制御装置の作動だけに適用する。
複数の手動作動をもつ制御装置の場合は,それぞれの作動について異なる値を宣言しても
よい。一つの制御装置が複数の意図的なオフ位置をもつ場合,操作サイクルは一つのオフ位
置から次のオフ位置への移動とみなさなければならない。
3) 自動温度調節器又はその他の高速サイクル作動には適用しない。
4) 手動復帰だけに適用する。
5) 各動作後に部品の交換を必要とする作動だけに適用する。
6) 製造業者のサービス中だけに復帰できる。
複数の自動作動をもつ制御装置の場合は,それぞれの作動について異なる値を宣言してもよい。
EE.3.12 制御装置の取付面の温度限度値
制御装置は,次のように分類できる。
− 6.7で分類した周囲温度を,20 Kを超えて上回ることのない表面に取り付けるのに適した制御装置
− 6.7で分類した周囲温度を,20 Kを超えて上回る表面に取り付けるのに適した制御装置
このような制御装置の一例に,冷凍機のコンプレッサユニットに取り付ける装置があるが,この場合,
検出素子の温度が−10 ℃で周囲温度が30 ℃にすぎないのに,取付面が150 ℃になることがある。
EE.3.13 使用絶縁材料の耐トラッキング指数 (PTI)
PTIの値は,次のとおりである。
− PTIが100以上175未満の材料グループIIIbの材料
− PTIが175以上400未満の材料グループIIIaの材料
− PTIが400以上600未満の材料グループIIの材料
− PTIが600以上の材料グループIの材料
EE.3.14 充電部支持用絶縁部品及び充電部と接地した金属との間に加わる電気的ストレスの期間
絶縁部を横断する電気的ストレスは,次に従って分類する。
− 短時間
− 長時間
制御装置を連続使用する機器内で使用する場合は,長時間の電気的ストレスが存在するとみなす。また,
プラグの引抜きによって,又は完全断路を行う制御装置の動作によって電源から断路されそうにない,そ
の他の機器内の制御装置の電源側でも長時間の電気的ストレスが存在するとみなす。
現時点では,この分類は使用しておらず,また試験も規定されていない。
EE.3.15 構造
構造は,次のタイプに従って分類する。
− 一体形制御装置
− 組込形制御装置
− インラインコード形制御装置
− 自立構造形制御装置
− 次のような独立取付形制御装置
− 露出形
− 埋込形
− パネル取付形
37
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
EE.3.16 内部に制御装置の使用を意図している機器のエージング要求事項
望ましい値は,次のとおりである。
− 60 000時間
− 30 000時間
− 10 000時間
− 3 000時間
− 300時間
− 15時間
機器規格の温度試験又は耐久性試験の間に動作する制御装置は,この箇条に従って分類しない。
EE.4
特定タイプの温度検出制御装置
様々なタイプの温度検出制御装置の用途に関する詳細な手引を,次に示す。
EE.4.1
自動温度調節器
EE.4.1.1 機能
定義されているように,自動温度調節器は,制御対象の媒体,空気,水,油,固形物又は表面の温度を,
上側温度と下側温度との間に維持するために自動的に動作するように意図されており,この差は差動と呼
ばれる。
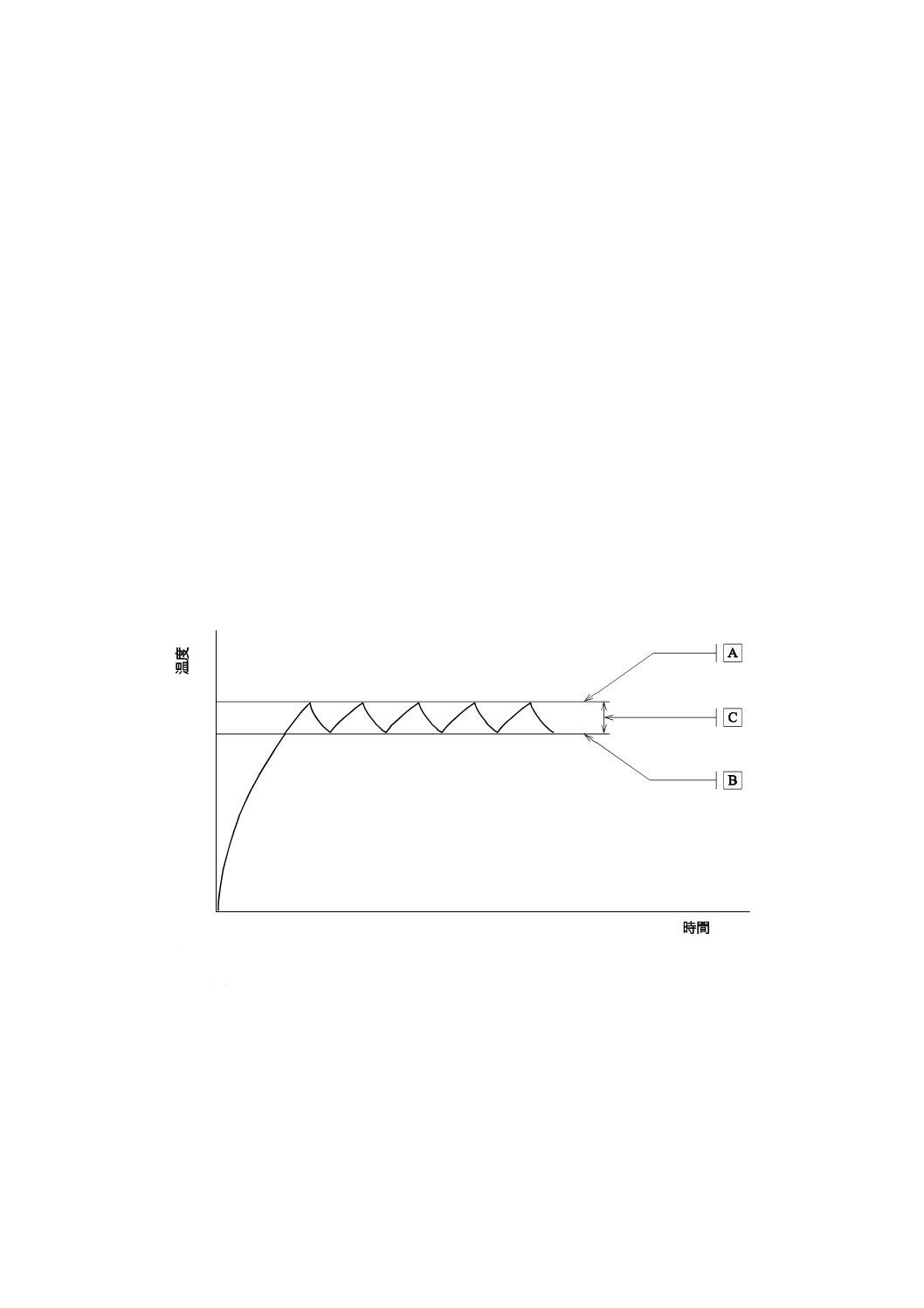
制御出力のタイプを,図EE.1に図式的に示す。
A 上側温度
B 下側温度
C 差動
図EE.1−自動温度調節器
自動温度調節器は,固定された設定であっても,又は最終使用者による制御温度の設定のための操作部
をもっていても,いずれでもよい。機器との一体化又は機器への内蔵が意図された自動温度調節器の場合
は,OEM又は据付業者が初期設定するための手段も備えてよい。
自動温度調節器は,機器の通常動作中に動作するように意図されており,6.10及び6.11に規定する動作
38
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
回数は,機器の推定寿命中に予想される動作回数を満たすように選択することが望ましい。これは主とし
て,機器の寿命中の安全動作を決定するものであり,タイプ2の制御装置の場合は,規定の限度内で動作
温度が維持されるだろうという信頼性を与えるためのものである。
例えば,接点溶着が原因による自動温度調節器の動作故障は,温度過昇防止装置又はSODを備えること
で,通常は機器において保護されている。
EE.4.1.2 動作の例
表EE.1を参照。
EE.4.2
温度制限装置
EE.4.2.1 機能
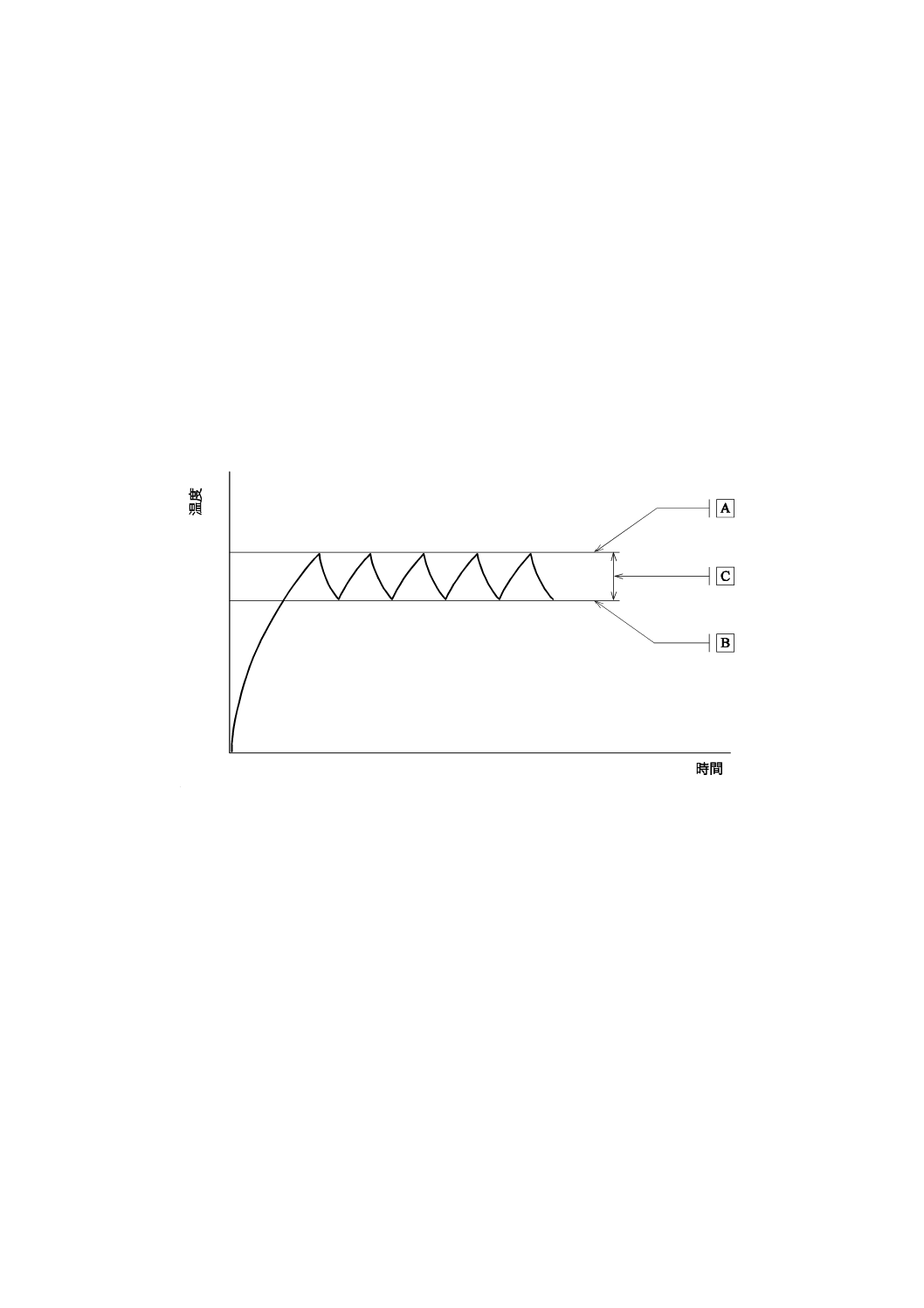
定義されているように,温度制限装置は,制御対象の媒体,空気,水,油,固形物又は表面の温度を,
上側温度と下側温度との間に維持するために動作するように意図されている。
制御出力のタイプを,図EE.2及び図EE.3に図式的に示す。
A 上側温度
B 下側温度
C 差動(通常,自動温度調節器よりはるかに大きい。)
図EE.2−自己復帰形温度制限装置
39
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
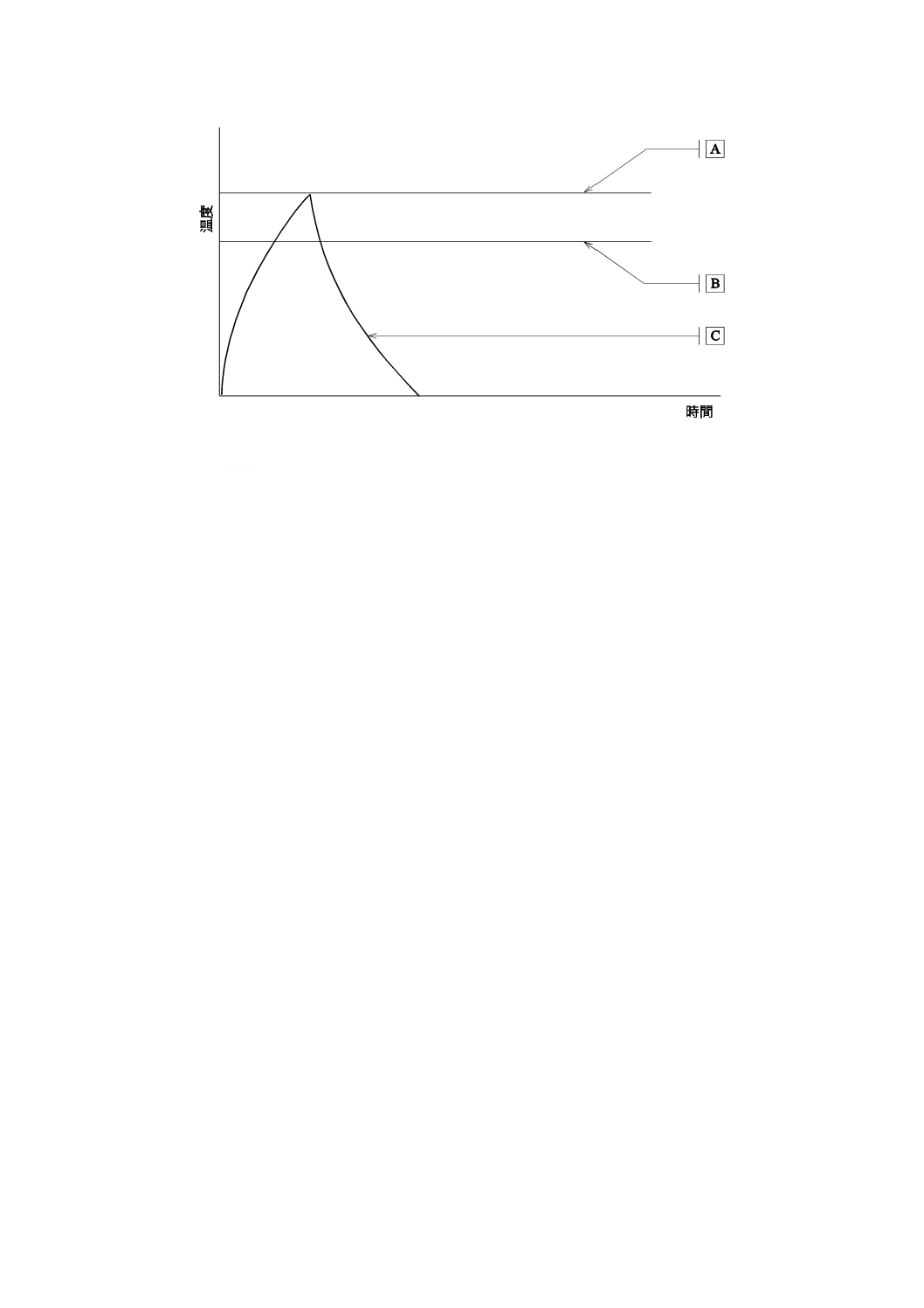
A 設定温度
B 復帰温度
C 手動復帰が必要
図EE.3−非自己復帰形温度制限装置
温度制限装置は,固定された設定であっても,又は最終使用者による制御温度の設定のための操作部を
もっていても,いずれでもよい。機器との一体化又は機器への内蔵が意図された温度制限装置の場合は,
OEM又は据付業者が初期設定するための手段も備えてよい。
温度制限装置は,機器の通常動作中に動作するように意図されており,6.10及び6.11に規定する動作回
数は,機器の推定寿命中に予想される動作回数を満たすように選択することが望ましい。これは主として,
機器の寿命中の安全動作を決定するものであり,タイプ2の制御装置の場合は規定の限度内で動作温度が
維持されるだろうという信頼性を与えるためのものである。
例えば,接点溶着が原因による温度制限装置の動作故障は,温度過昇防止装置又はSODを備えることで,
通常は機器において保護されている。
自動復帰温度制限装置は,動作上限温度と動作下限温度との差が自動温度調節器よりも大きいとはいえ,
試験を行った方法が異なるだけで,その構造は自動温度調節器と同じであってもよい。
EE.4.2.2 動作の例
表EE.1を参照。
EE.4.3
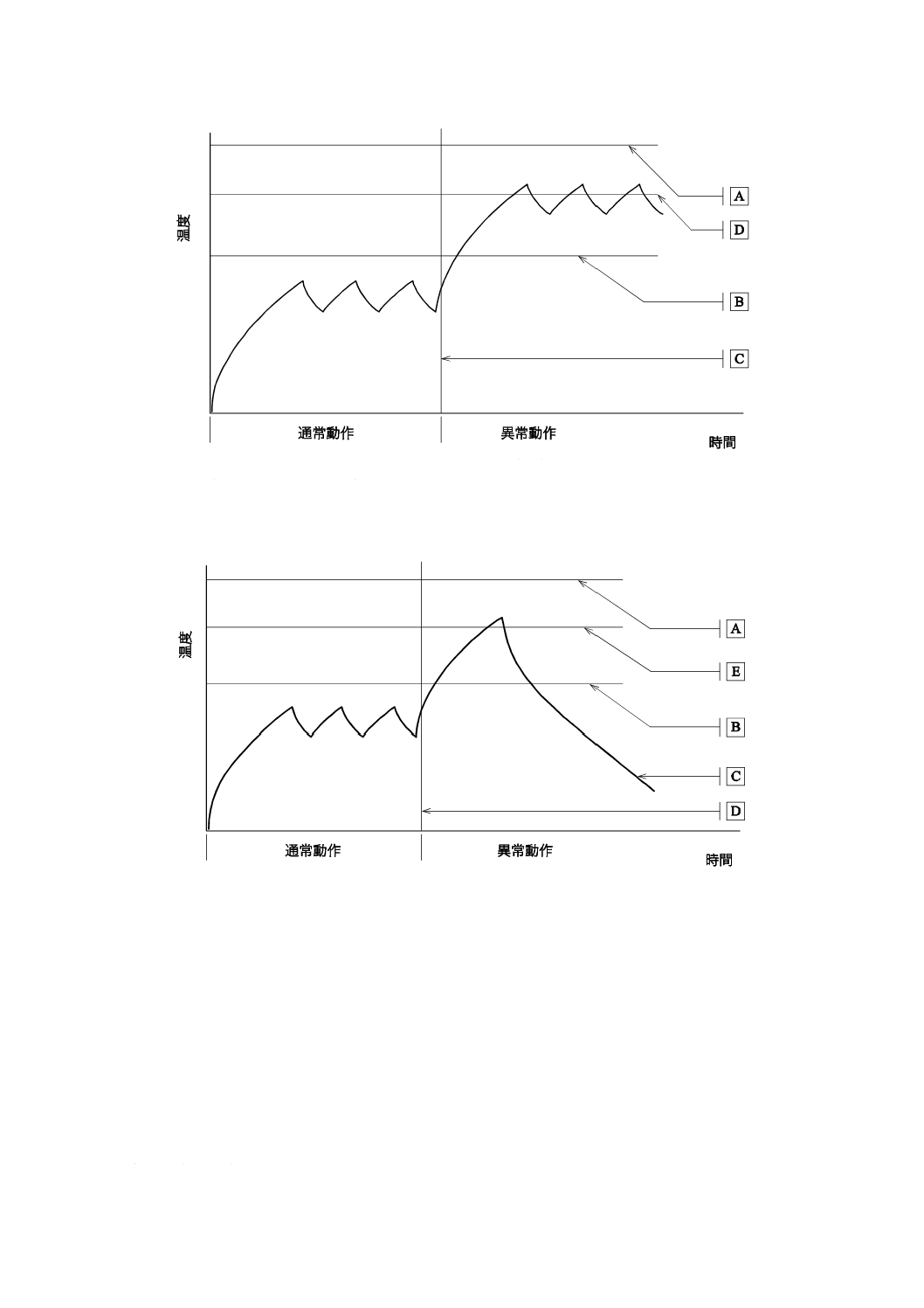
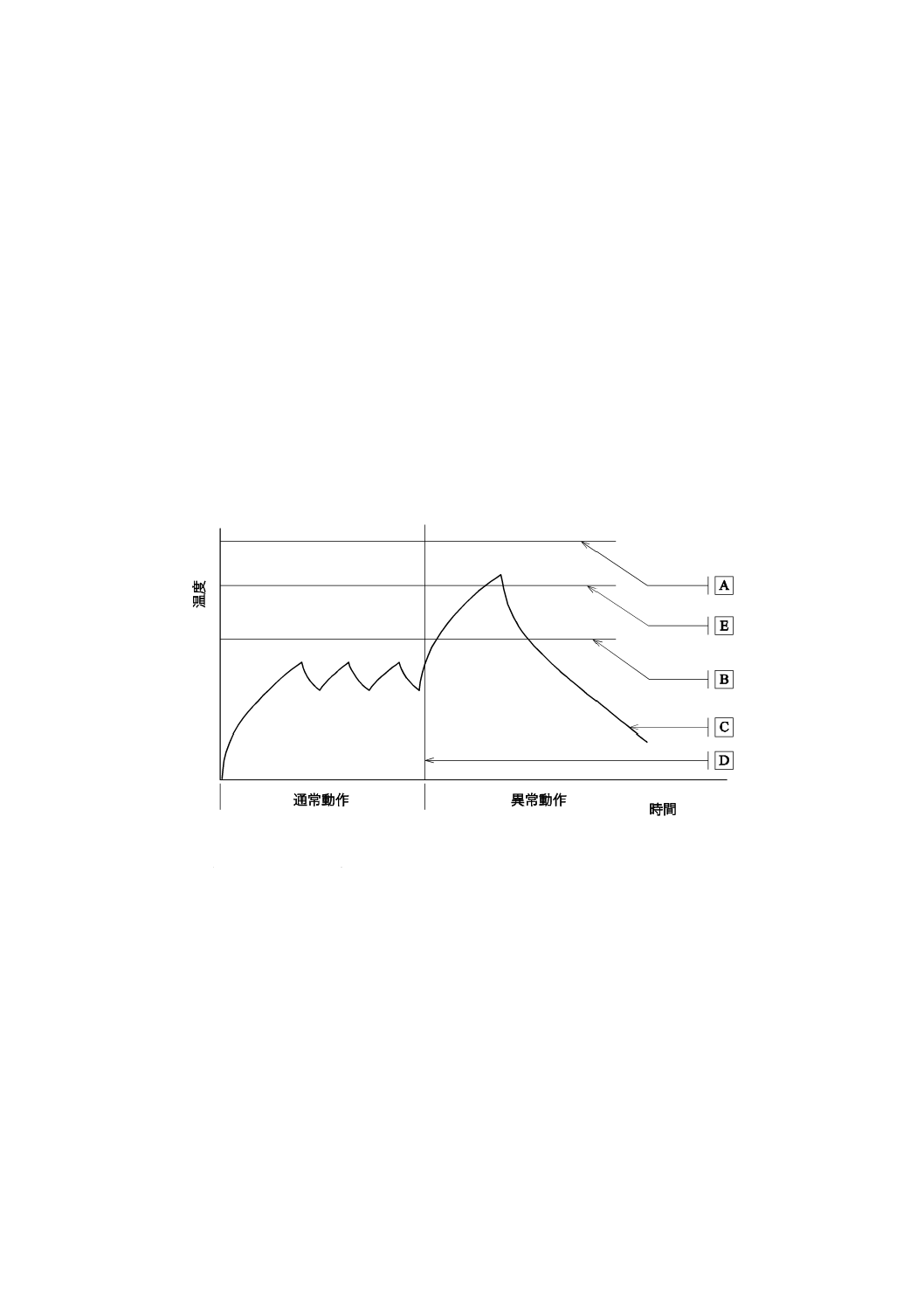
温度過昇防止装置
EE.4.3.1 機能
定義されているように,温度過昇防止装置は,機器の異常運転中,制御対象の媒体,空気,水,油,固
形物又は表面の温度を,設定温度の上又は下に維持することを意図している。
制御出力のタイプを,図EE.4及び図EE.5に図式的に示す。
40
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A 危険温度
B 通常使用における最大温度
C 故障状態
D 温度過昇防止装置の動作温度
図EE.4−自己復帰形温度過昇防止装置
A 危険温度
B 通常使用における最大温度
C 手動復帰が必要
D 故障状態
E
温度過昇防止装置の動作温度
図EE.5−手動復帰形温度過昇防止装置
温度過昇防止装置は自動又は手動復帰のいずれでもよく,また最終使用者による制御温度の設定のため
の操作部は内蔵していない。機器との一体化又は機器への内蔵が意図された温度過昇防止装置の場合は,
OEM又は据付業者が初期設定するための手段も備えてよい。
温度過昇防止装置は,機器の異常動作中にだけ動作するように意図されており,6.10及び6.11に規定す
る動作回数は,機器のタイプ及び使用形態に左右される。通常,機器規格では温度過昇防止装置のような
保護制御装置に必要な動作回数を規定している。
通常,温度過昇防止装置はタイプ2の制御装置として分類されるが,これは顧客の要求事項及び/又は
41
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
関連の機器規格で規定されている要求事項に依存している。
したがって,規定の動作回数は,通常,機器の寿命中の安全動作を決定するものであり,規定の限度内
で動作温度が維持されるだろうという信頼性を与えるためのものである。
一般に,温度過昇防止装置の動作は,機器内部における危険源又は故障条件に対する最終的保護制御装
置である。
温度過昇防止装置の構造は,試験を行った方法が異なるだけで,自動温度調節器又は温度制限装置と同
じであってもよい。
EE.4.3.2 動作の例
表EE.1を参照。
EE.4.4
SOD
EE.4.4.1 適用
定義したように,SODは,機器の異常動作中,制御対象の媒体,空気,水,オイル,固形物又は表面の
温度を,設定温度の下に維持することを意図している。
制御出力のタイプを,図EE.6に図式的に示す。
A 危険温度
B 通常使用における最大温度
C 制御装置又は部品の交換が必要
D 故障状態
E
SODの動作温度
図EE.6−SOD
SODは製造後の温度設定手段をもたず,すなわち,復帰不能として意図された温度ヒューズであり,制
御装置又は制御装置の一部の完全な交換が必要である。
ただし,専門機器を用いて復帰可能なバイメタルタイプが存在する。
EE.4.4.2 動作の例
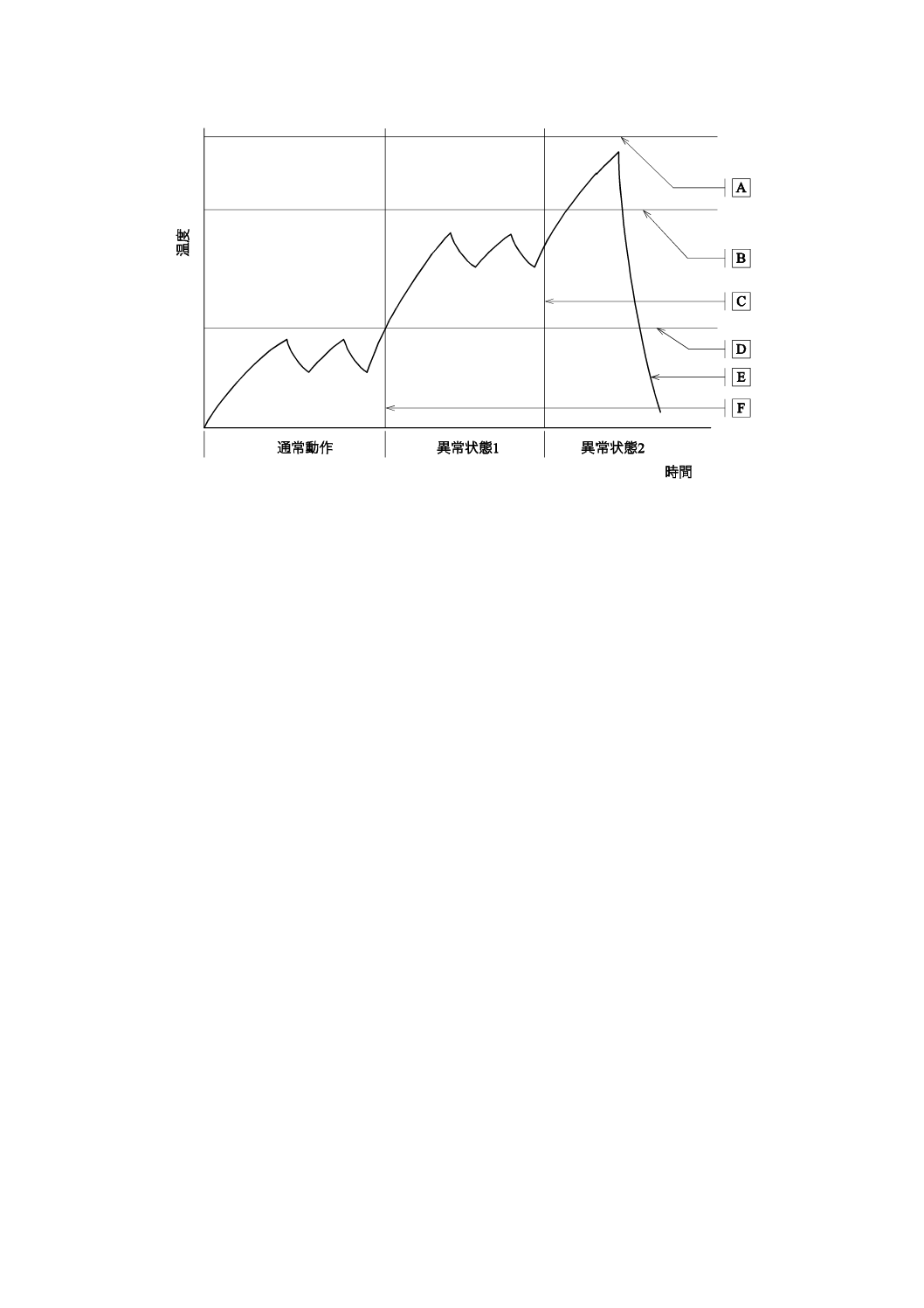
表EE.1を参照。
SODは,自動温度調節器,温度過昇防止装置及びSODで成り立つ3段階制御システムで使用されるこ
とがある。
このようなシステムを,図EE.7に図式的に示す。
42
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A 最終危険温度(異常状態2)
B 当座の危険温度(異常状態1)
C 温度過昇防止装置の応答がない温度過昇
防止装置の故障又は異常状態
D 通常使用における最大温度
E
制御装置又は部品の交換が必要
F
故障状態
図EE.7−3段階制御システム
EE.4.4.3 適用の例
表EE.1を参照。
43
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
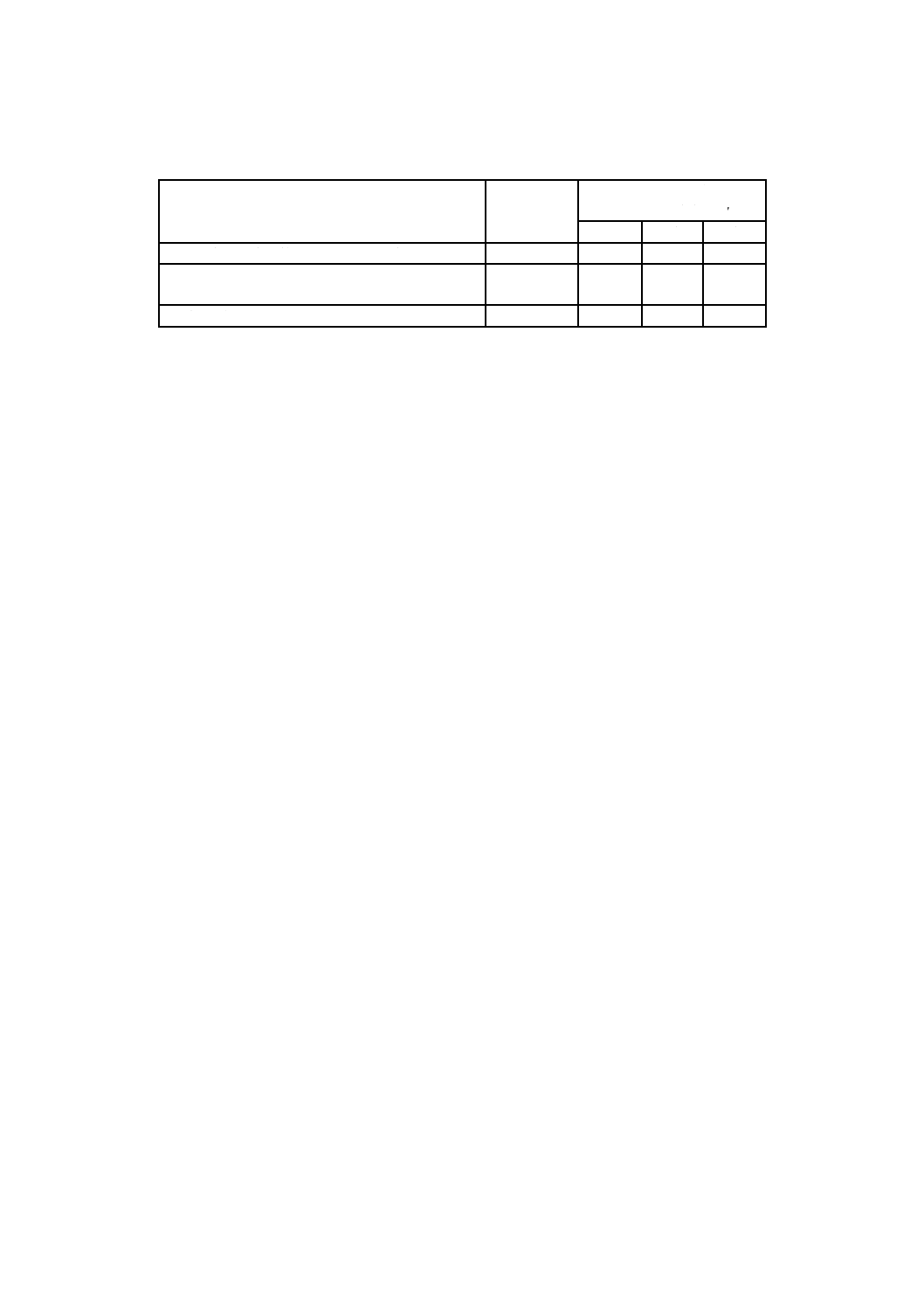
表EE.1−この規格に従った温度検出制御装置の分類の典型的な例
分類
宣言/作動
タイプ1
タイプ2
A
B
C
D
E
F
G
H
J
K
L
M
N
P
X
Z
制御装置の適用
ルームヒータ内の自動温度調節器
×
× ×
×
ルームヒータ内の手動復帰形温度過昇防止装置(小)
×
×
×
×
×
× × ×
×
電気ケトル用温度過昇防止装置
×
×
×
電気ケトル用温度制限装置
×
× ×
スペースヒータ内の自動復帰形温度過昇防止装置(住居)
×
×
スペースヒータ内の手動復帰形温度過昇防止装置
×
× × ×
×
冷蔵庫圧縮機制御用温度過昇防止装置
(感熱式モータ保護装置用はJIS C 9730-2-4参照)
×
×
ルームヒータ用温度過昇防止装置
×
×
ヘアドライヤ用温度過昇防止装置
×
×
変圧器用温度過昇防止装置
×
×
ファン用温度過昇防止装置
×
×
2
C
9
7
3
0
-2
-9
:
2
0
1
0
44
C 9730-2-9:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
JISと対応国際規格との対比表
JIS C 9730-2-9:2010 家庭用及びこれに類する用途の自動電気制御装置−第2-9
部:温度検出制御装置の個別要求事項
IEC 60730-2-9:2008,Automatic electrical controls for household and similar use−Part
2-9: Particular requirements for temperature sensing controls
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ご
との評価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
15.5.3.102
バイメタル式自動温度
調節器の特性試験装置
15.5.
3.102
JISとほぼ同じ
追加
IEC規格では,装置の温度制御方
法として空気循環式を指定して
いるが,JISでは防水形のものは,
液槽を用いてもよいとした。
防水形であれば,液槽の温度制御
でも同様の特性が得られると考
えられる。
15.5.3.103
バイメタル式自動温度
調節器の検出部の温度
測定
15.5.
3.103
JISとほぼ同じ
追加
IEC規格では,試験中の制御装置
に隣接して取り付けた同一の制
御装置の検出部を測定するとし
ているが,JISでは制御装置の近
傍で測定してもよいとした。
検出部の温度を測定することは
困難な制御装置もあり,そのよう
な装置に対して実際に運用で用
いられている方法を明記した。
JISと国際規格との対応の程度の全体評価:IEC 60730-2-9:2008,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
2
C
9
7
3
0
-2
-9
:
2
0
1
0