C 9730-2-15:2010 (IEC 60730-2-15:2008)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲及び引用規格 ······································································································· 1
2 用語及び定義 ··················································································································· 3
3 一般要求事項 ··················································································································· 4
4 試験に関する一般注意 ······································································································· 4
5 定格······························································································································· 5
6 分類······························································································································· 5
7 情報······························································································································· 6
8 感電に対する保護 ············································································································· 6
9 保護接地装置 ··················································································································· 7
10 端子及び端末 ················································································································· 7
11 構造要求事項 ················································································································· 7
12 耐湿性及び防じん性 ········································································································ 8
13 耐電圧及び絶縁抵抗 ········································································································ 8
14 温度上昇 ······················································································································· 9
15 製造偏差及びドリフト ····································································································· 9
16 環境によるストレス ········································································································ 9
17 耐久性 ·························································································································· 9
18 機械的強度 ··················································································································· 11
19 ねじ山付き部品及び接続部 ······························································································ 12
20 沿面距離,空間距離及び固体絶縁物を通しての距離 ····························································· 12
21 耐熱性,耐火性及び耐トラッキング性 ··············································································· 12
22 耐腐食性 ······················································································································ 12
23 電磁両立性 (EMC) 要求事項−エミッション ······································································ 12
24 部品 ···························································································································· 12
25 通常動作 ······················································································································ 12
26 電磁両立性 (EMC) 要求事項−イミュニティ ······································································ 12
27 異常動作 ······················································································································ 12
28 電子的断路の使用に関する指針 ························································································ 12
附属書 ······························································································································· 13
附属書H(規定)電子制御装置の要求事項 ··············································································· 13
附属書AA(規定)ボイラ用独立取付形制御装置に関するサイクル数············································· 18
附属書BB(規定)応答遅延に対する要求事項 ··········································································· 19
附属書CC(参考)独立取付形空気流量及び水流量検出制御装置に関するサイクル数 ························ 20
C 9730-2-15:2010 (IEC 60730-2-15:2008)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づいて,日本工業標準調査会の審議を経て,経済産業大臣が改正した日
本工業規格である。これによって,JIS C 9730-2-15:2004は改正され,この規格に置き換えられた。ただし,
この規格の製品は電気用品安全法によって規制されていたり,その規制の対象となる製品の部品として使
用されるものであり,この規格の改正時点においてはJIS C 9730-2-15:2004が規制上の技術基準として採
用されている。改正されたこの規格が,直ちに規制上の技術基準として採用されることを意味するもので
はないため,この規格を規制対象となる電気用品の適合義務を果たすために使用する場合には,規制上の
扱いに十分注意する必要がある。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権及び出願公開後の実用新案登録出願にかかわる確認について,責
任はもたない。
JIS C 9730の規格群には,次に示す部編成がある。
JIS C 9730-1 第1部:一般要求事項
JIS C 9730-2-2 第2-2部:感熱式モータ保護装置の個別要求事項
JIS C 9730-2-3 第2-3部:蛍光ランプ用安定器の感熱式保護装置の個別要求事項
JIS C 9730-2-4 第2-4部:密閉形及び半密閉形の電動圧縮機用の感熱式モータ保護装置の個別要求事
項
JIS C 9730-2-5 第2-5部:自動電気バーナコントロールシステムの個別要求事項
JIS C 9730-2-6 第2-6部:機械的要求事項を含む自動電気圧力検出制御装置の個別要求事項
JIS C 9730-2-7 第2-7部:タイマ及びタイムスイッチの個別要求事項
JIS C 9730-2-8 第2-8部:電動式ウォーターバルブの個別要求事項
JIS C 9730-2-9 第2-9部:温度検出制御装置の個別要求事項
JIS C 9730-2-10 第2-10部:モータ起動リレーの個別要求事項
JIS C 9730-2-11 第2-11部:エネルギー調整器の個別要求事項
JIS C 9730-2-12 第2-12部:電動式ドアロックの個別要求事項
JIS C 9730-2-13 第2-13部:湿度検出制御装置の個別要求事項
JIS C 9730-2-14 第2-14部:電気アクチュエータの個別要求事項
JIS C 9730-2-15 第2-15部:自動電気式の空気流量,水流量及び水位検出制御装置の個別要求事項
JIS C 9730-2-17 第2-17部:機械的要求事項を含む電動式ガスバルブの個別要求事項
JIS C 9730-2-19 第2-19部:機械的要求事項を含む電動式オイルバルブの個別要求事項
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 9730-2-15:2010
(IEC 60730-2-15:2008)
家庭用及びこれに類する用途の自動電気制御装置−
第2-15部:自動電気式の空気流量,水流量及び
水位検出制御装置の個別要求事項
Automatic electrical controls for household and similar use−
Part 2-15: Particular requirements for automatic electrical air flow, water flow
and water level sensing controls
序文
この規格は,2008年に第2版として発行されたIEC 60730-2-15を基に,技術的内容及び構成を変更する
ことなく作成した日本工業規格であり,JIS C 9730-1:2010と併読する規格である。
1
適用範囲及び引用規格
適用範囲及び引用規格は,JIS C 9730-1の箇条1によるほか,次による。ただし,1.1〜1.4は,この規格
による。
1.1
この規格は,暖房用,空調用及びこれに類する用途の制御装置を含む,圧力定格が2 000 kPa以下の
ボイラ,一般家庭用及びこれに類する用途の機器の中又はそれと共に使用する自動電気式の空気流量,水
流量及び水位検出制御装置に適用する。
注記 一例は,ボイラ用のフロート又は電極式の水流量及び水位検出制御装置,並びに水泳プールポ
ンプ,水タンクポンプ,冷却塔,食器洗い機,洗濯機,空調冷却装置及び換気装置用の空気流
量,水流量及び水位検出制御装置である。
1.1.1
この規格は,固有の安全性並びに機器の保護に関連する場合の動作値及び動作シーケンスに適用す
る。また,家庭用及びこれに類する用途の機器の中又はそれと共に使用する自動電気式の空気流量,水流
量及び水位検出制御装置の試験に適用する。
この規格は,JIS C 9335-1及びJIS C 0364-7-702の適用範囲に入る機器の制御装置にも適用する。
通常,家庭で使用しない機器であっても,店舗,軽工業及び農場において,一般の人が使用する可能性
がある機器の自動電気式の空気流量,水流量及び水位検出制御装置は,この規格の適用範囲である。
この規格は,制御システムの一部として使用する個別制御装置又は非電気出力をもつ多機能制御装置と
機械的に一体の制御装置にも適用する。
この規格は,JIS C 9730-2-6に要求事項が含まれている圧力動作式の空気流量,水流量及び水位検出制
御装置には適用しない。
この規格は,工業用に設計された空気流量,水流量及び水位検出制御装置には適用しない。
注記 規格全体を通して,“機器”という用語は,“器具及び機器”を意味する。
2
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1.1.2
この規格は,空気流量,水流量及び水位に応答する又はこれらを制御する機械駆動又は電気駆動の
自動電気制御装置に適用する。
1.1.3
この規格は,空気流量,水流量及び水位検出制御装置の電気的特性に関する要求事項並びにその意
図した動作,及び電気的安全性に影響を及ぼすような機械的特性に関する要求事項を含む。
1.1.4
この規格は,空気流量,水流量及び水位検出制御装置並びに電気的及び/又は機械的に一体となっ
た手動制御装置にも適用する。
自動制御装置の一部ではない手動スイッチに関する要求事項は,JIS C 8281及びJIS C 4526-1に含まれ
ている。
1.1.5
一般に,これらの空気流量,水流量及び水位検出制御装置は,機器と一体若しくは機器に組み込ん
だもの,又は機器と一体若しくは機器に組み込むことを意図したものである。独立取付形制御装置又はイ
ンラインコード形制御装置も,この規格の適用範囲に入る。
1.2
この規格は,定格電圧が690 V以下,定格電流が63 A以下の制御装置に適用する。
1.3
この規格は,制御装置の自動作動の応答値が制御装置の取付方法に依存するときは,その応答値に
ついて考慮する。応答値が使用者の保護のため又は周辺に対し重要な目的のものである場合,該当する家
庭用機器規格において規定する又は製造業者が指定する値を適用する。
1.4
この規格は,電子装置を組み込んだ制御装置にも適用する。それに対する追加の要求事項が附属書
Hに含まれている。
この規格は,NTC及びPTCサーミスタを使用する制御装置にも適用する。それに対する追加の要求事
項がJIS C 9730-1の附属書Jに含まれている。
注記 この規格の対応国際規格及びその対応する程度を表す記号を,次に示す。
IEC 60730-2-15:2008,Automatic electrical controls for household and similar use−Part 2-15:
Particular requirements for automatic electrical air flow, water flow and water level sensing
controls (IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
1.5
引用規格
JIS C 9730-1の1.5によるほか,次による。
JIS C 0364-7-702 建築電気設備 第7部:特殊設備又は特殊場所に関する要求事項 第702節:水泳
プール及びその他の水槽
注記 対応国際規格:IEC 60364-7-702,Electrical installations of buildings−Part 7: Requirements for
special installations or locations−Section 702: Swimming pools and other basins (IDT)
JIS C 4526-1 機器用スイッチ−第1 部:一般要求事項
注記 対応国際規格:IEC 61058-1,Switches for appliances−Part 1: General requirements (MOD)
JIS C 8281(規格群) 家庭用及びこれに類する用途の固定電気設備用スイッチ
注記 対応国際規格:IEC 60669 (all parts),Switches for household and similar fixed-electrical
installations (MOD)
JIS C 9730-1:2010 家庭用及びこれに類する用途の自動電気制御装置−第1部:一般要求事項
注記 対応国際規格:IEC 60730-1:1999,Automatic electrical controls for household and similar use−
Part 1: General requirements,Amendment 1:2003及びAmendment 2:2007 (MOD)
JIS C 9730-2-6 家庭用及びこれに類する用途の自動電気制御装置−第2-6部:機械的要求事項を含む
3
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
自動電気圧力検出制御装置の個別要求事項
注記 対応国際規格:IEC 60730-2-6,Automatic electrical controls for household and similar use−Part
2-6: Particular requirements for automatic electrical pressure sensing controls including mechanical
requirements (IDT)
2
用語及び定義
この規格で用いる主な用語及び定義は,JIS C 9730-1の箇条2によるほか,次による。
2.2
目的に関する制御装置のタイプの定義
JIS C 9730-1の2.2によるほか,次による。
2.2.19
JIS C 9730-1の2.2.19に,次を追加する。
注記 2.2.103,2.2.104,2.2.106及び2.2.107を参照。
2.2.20
JIS C 9730-1の2.2.20に,次を追加する。
注記 2.2.101,2.2.105,2.2.108及び2.2.109を参照。
2.2.101
ボイラ水位過昇防止装置 (boiler water level cut-out)
異常動作状態のときに低水位に応答するように設計した,使用者による設定のための設備をもたない,
ボイラ用のフロート形又は電極センサ形水位検出制御装置。
注記 水位過昇防止装置は,自動復帰形又は手動復帰形とすることができる。ボイラ水位過昇防止装
置は,水位保護制御装置の一種である(2.2.105参照)。
2.2.102
ボイラ水位制限器 (boiler water level limiter)
通常動作状態のときに水位を一つの特定の値以下又は以上に保つように設計した,使用者による設定の
設備をもつ,ボイラ用のフロート形又は電極センサ形水位検出制御装置。
注記 ボイラ水位制限器は,通常は自動復帰形である。
2.2.103
ボイラ給水制御装置 (boiler water feed control)
通常動作状態のときにボイラの水位を一つの特定の値以上に保つように設計した,使用者による設定の
設備をもつ,ボイラ用のフロート形又は電極センサ形水位検出制御装置。
注記 ボイラ給水制御装置は,自動復帰形である。ボイラ給水制御装置は,給水ポンプ又は給水弁を
作動させるためにボイラで使用する。この規格に関しては,タイプ2ボイラ給水制御装置を,
ボイラ水位制限器とみなす。
2.2.104
水位動作制御装置 (water level operating control)
通常動作状態のときに水位を特定の値以下又は以上に保つように設計した,使用者による設定の設備を
もっても差し支えない制御装置。
注記 水位動作制御装置は,自動復帰形である。
2.2.105
水位保護制御装置 (water level protective control)
4
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
次のいずれかによって,機器の異常動作中の危険な状態を回避するように設計した制御装置。
a) 水位を一つ以上の特定の値以下又は以上に保つ。
b) 水位の一つ以上の特定の値で関連装置を通電又は遮断する。
2.2.106
水流動作制御装置 (water flow operating control)
通常動作状態のときに水流を二つの特定の値の間に検出又は維持するように設計した,使用者による設
定の設備をもつ流れ検出制御装置。
注記 水流動作制御装置は,自動復帰形である。
2.2.107
空気流動作制御装置 (air flow operating control)
通常動作状態のときに空気流を二つの特定の値の間に検出又は維持するように設計した,使用者による
設定の設備をもつ流れ検出制御装置。
注記 空気流動作制御装置は,自動復帰形である。
2.2.108
水流過昇防止装置 (water flow cut-out)
異常動作状態のときに水流の欠如に応答するように設計した,使用者による設定のための設備をもたな
い流れ検出制御装置。
注記 水流過昇防止装置は,自動復帰形又は手動復帰形である。
2.2.109
空気流過昇防止装置 (air flow cut-out)
異常動作状態のときに空気流の欠如に応答するように設計した,使用者による設定のための設備をもた
ない流れ検出制御装置。
注記 空気流過昇防止装置は,自動復帰形又は手動復帰形である。
2.3
制御装置の機能に関連する定義
JIS C 9730-1の2.3によるほか,次による。
2.3.101
応答遅延 (response delay)
変動液位による機器の不必要なサイクルを回避することを目的とした水位動作制御装置の応答値を高め
るために提供される遅延。
注記 これは,通常は時間の単位で表現する。
3
一般要求事項
一般要求事項は,JIS C 9730-1の箇条3による。
4
試験に関する一般注意
試験に関する一般注意事項は,JIS C 9730-1の箇条4によるほか,次による。
4.1
試験条件
JIS C 9730-1の4.1によるほか,次による。
4.1.7
JIS C 9730-1の4.1.7によるほか,次による。
変化の割合は,製造業者と試験所との間で合意された許容差をもたなければならない。
5
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.1.101 箇条17のボイラ用の独立取付形水位検出制御装置の試験については,より大きな数字が宣言され
ている場合を除き,附属書AAの値を適用する。箇条17の独立取付形の空気流量及び水流量検出制御装置
の試験については,その他で宣言されている場合を除き,附属書CCの値を適用する。一体形及び組込形
制御装置に関する値は,関連機器規格に規定されている。
4.3
試験のための指示事項
JIS C 9730-1の4.3によるほか,次による。
4.3.5.1
共通の検出メカニズムを使用したボイラ水位検出制御装置の組合せには,第2文は適用しない。
5
定格
定格は,JIS C 9730-1の箇条5による。
6
分類
分類は,JIS C 9730-1の箇条6によるほか,次による。
6.3
目的による分類
JIS C 9730-1の6.3によるほか,次による。
6.3.9
JIS C 9730-1の6.3.9によるほか,次による。
6.3.9.101 ボイラ水位過昇防止装置
6.3.9.102 ボイラ水位制限器
6.3.9.103 ボイラ給水制御装置
6.3.9.104 水位動作制御装置
6.3.9.105 水位保護制御装置
6.3.9.106 空気流動作制御装置
6.3.9.107 水流動作制御装置
6.3.9.108 空気流過昇防止装置
6.3.9.109 水流過昇防止装置
6.4
自動作動の機能による分類
JIS C 9730-1の6.4によるほか,次による。
6.4.1
JIS C 9730-1の6.4.1によるほか,次による。
6.4.1.101 この規格の適用範囲に入るボイラ給水制御装置は,タイプ1作動をもつものとして分類される。
注記 この規格に関しては,タイプ2ボイラ給水制御装置は,ボイラ水位制限器とみなす。
6.4.2
JIS C 9730-1の6.4.2によるほか,次による。
6.4.2.101 この規格の適用範囲に入るボイラ水位過昇防止装置及びボイラ水位制限器は,タイプ2作動を
もつものとして分類される。
6.4.3
JIS C 9730-1の6.4.3によるほか,次による。
6.4.3.101 この規格の適用範囲に入る手動復帰形ボイラ水位検出制御装置は,タイプ2.D,2.H,又は2.J
作動として分類されるトリップフリーメカニズムをもたなければならない。
6.4.3.102 応答遅延を組み込んだ作動(タイプ1.AJ又は2.AJ)。
6.5
保護等級及び制御装置の汚損度による分類
JIS C 9730-1の6.5によるほか,次による。
6.5.2
JIS C 9730-1の6.5.2によるほか,次による。
6
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表7.2の項目107で,使用中に全面的又は部分的に水中に没すると宣言された制御装置は,JIS C 0920
に規定する継続的潜水に対する保護を与えるIPX8として分類された外郭をもたなければならない。
7
情報
情報は,JIS C 9730-1の箇条7によるほか,表7.2の一部を次に置き換え又は追加する。
表7.2−製造業者によって宣言された情報,適用箇条及び方法
情報
適用箇条
方法
(修正項目)
23 取付面の温度限度値 (TS)
6.12.2,14.1,17.3
D
27 各自動作動の自動サイクル数 (A) 101)
6.11,17.8,17.9
X
34 適用しない。
44 適用しない。
(追加項目)
101 最高水温 (TL) (℃)
14.5.1
D
102 ボイラ水位検出制御装置の応答時間
(適用可能な場合)
15
C
103 最大動作圧力(適用可能な場合)
2.3.29,18.102
C/D104)
104 ボイラ水位検出制御装置の応答時間の
決定方法
15.6.101
X
105 ボイラ水位検出制御装置の18.101.2に関する
試験方法
18.101.2
X
106 制御装置を使用するように意図したあらゆる
特別環境条件(表7.2の項目15で宣言されて
いるもの以外)102)
12.1.101
D
107 全面的又は部分的に水中に没することがある
又は項目106で宣言された他の特別環境条件
にかけられるコード接続形フロート制御装置
6.5.2,11.7.1.1,
11.7.1.2.1,11.7.1.2.2,
12.1.1.101
D
108 応答遅延
2.3.101,6.4.3.102,
11.4.101,H.11.12.8,
附属書BB
D
109 該当する場合,特別な取付手段の固有又は共
通の形式103)
11.6.3.1
C
110 該当する場合,取付けのための水平位置の表
示
11.11.101
C
注4) JIS C 9730-1 表7.2の注4)の“空気流れ”を“空気流れ又は水流”に置き換え,
また,次の文を追加する。
水位制御装置に対しては,作動量限度値は,機器の製造業者が適用する家庭
用機器の規格,又は水位制御装置の製造業者の宣言で示される(17.7及び17.8
参照)。
101) フロート式の水位検出制御装置に対する自動サイクル数は6 000以上とする。
102) この情報は,関連機器規格から得ることができる。又は製造業者によって宣言
されたとおりとしてもよい。
103) 固有又は共通の形式は,取付手段及び制御装置本体の両方に表示しなければな
らない。
104) 方法Cは,空気流れ,水流,ボイラ水位検出制御装置に要求される。
8
感電に対する保護
7
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
感電に対する保護は,JIS C 9730-1の箇条8による。
9
保護接地装置
保護接地装置は,JIS C 9730-1の箇条9よる。
10 端子及び端末
端子及び端末は,JIS C 9730-1の箇条10による。
11 構造要求事項
構造要求事項は,JIS C 9730-1の箇条11によるほか,次による。
11.4 作動
JIS C 9730-1の11.4によるほか,次による。
11.4.11 JIS C 9730-1の11.4.11による。ただし,最初の段落の最後の文を削除する。
11.4.12 JIS C 9730-1の11.4.12による。ただし,最初の段落の最後の文を削除する。
11.4.101 タイプ1.AJ又はタイプ2.AJ作動
タイプ1.AJ又はタイプ2.AJ作動は,宣言された応答遅延になるように設計する。
タイプ2.AJ作動に対しては,応答遅延は,15.5の試験によって判定する。
11.7.1 屈曲
JIS C 9730-1の11.7.1によるほか,次による。
11.7.1.1 JIS C 9730-1の11.7.1.1によるほか,次による。
表7.2の項目107で宣言された制御装置については,11.7.1.2.1の関係試験を実施する。
11.7.1.2.1 JIS C 9730-1の11.7.1.2.1は,表7.2の項目107で宣言された制御装置を除いて適用する。その
ように宣言された制御装置は,次の試験だけを行い,JIS C 9730-1の11.7.1.2.1の試験は行わない。
表7.2の項目107で宣言された制御装置のサンプル3個について,図9に示す屈曲試験装置に取り付け
た状態で屈曲試験を実施する。コードを90度の角度にわたって前後に動かす。コードは最大定格電圧で最
大定格電流を導通する。屈曲(つまり90度の動き1回)の回数は,毎分60回の速さで30 000回とする。
注記 この試験のために,コードに追加のおもりを足すことはしない。
11.7.1.2.1.101 屈曲試験の直後に,制御装置について,次の浸せき試験を実施する。
コードを含む制御装置を,水又は他の環境条件がフロート制御装置の最も高い点よりも1 m以上高くな
るように温度TLの水又は表7.2の項目106及び107で宣言された他の特別環境条件につ(浸)け,7日間
つ(浸)けたままにする。
11.7.1.2.2 11.7.1.2.1.101に従って試験を行った制御装置は,次の評価基準を使用する。試験後,制御装置
は,基礎絶縁に関する箇条8,12.3及び箇条13の要求事項に適合しなければならず,かつ,試験媒体が浸
入した形跡があってはならず,その場合の適否は目視検査によって判定する。
11.11 取付け,保守及び修理点検中の要求事項
JIS C 9730-1の11.11によるほか,次による。
11.11.101 フロートタイプのタイプ2水位制御装置の動作が,水位が超えることに影響を受ける場合,制御
装置は,レベル表示をしなければならない(例えば,浮き球,振り子,水平又は垂直ライン)。
適否は,目視検査及び15.5の試験によって判定する。
11.101 動作メカニズムに関する構造要求事項
8
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
11.101.1 部品を可動構成部品に取り付けるねじ及びナットは,据え込むか,又は他の方法で固定しなけれ
ばならない。
注記 例えば,これは,水位検出制御装置のフロートヒンジピボットに適用する。
11.101.2 動作部品は,導体が動作部品の動きを妨害するのを避けるために,隔壁によって又は動作部品の
物理的位置によって,制御装置に接続される導体から隔離しなければならない。
11.101.1及び11.101.2に関する適否は,目視検査によって判定する。
12 耐湿性及び防じん性
耐湿性及び防じん性は,JIS C 9730-1の箇条12によるほか,次による。
12.1 水及びじんあいの侵入に対する保護
JIS C 9730-1の12.1によるほか,次による。
12.1.1.101 表7.2の項目107で宣言され,IPX8に分類された外郭をもつ制御装置については,JIS C 9730-1
の12.1.2〜12.1.6の要求事項は,適用しない。これらの制御装置は,次の試験に耐えなければならない。
コード接続形フロート制御装置のサンプル3個について,次の浸せき試験を実施する前に,制御装置に
ついて18.2の耐衝撃試験を実施する。
制御装置を,試験媒体又は他の環境条件がフロート制御装置の最も高い点よりも1 m以上高くなるよう
に温度TLの試験媒体又は表7.2の項目106及び107で宣言された他の特別環境条件につ(浸)け,7日間
つ(浸)けたままにする。
試験後,制御装置は,基礎絶縁に関する箇条8,箇条13及び12.3の要求事項に適合しなければならず,
かつ,試験媒体が浸入した形跡があってはならず,その場合の適否は,目視検査によって判定する。
12.1.101 表7.2の項目106で宣言された特別環境条件で使用するための空気流れ,水流及び水位動作制御
装置は,さらに,この環境での使用について評価する。
適否は,関連する規格に示された宣言された環境に関する関係試験によって又は製造業者と試験機関と
の間で協定した試験方法によって判定する。
試験後,次の場合には,制御装置は適合しているとみなす。
− 試験媒体の浸入の形跡がない。
− すべての作動が,意図され宣言されたように自動的及び手動的に機能する。
− 17.5の要求事項がまだ満たされている。
13 耐電圧及び絶縁抵抗
耐電圧及び絶縁抵抗は,JIS C 9730-1の箇条13によるほか,次による。
13.101 プローブの耐電圧
電極センサ形ボイラ水位検出制御装置のプローブについては,次の試験を行う。
注記 この試験の目的は,ボイラ内の条件にさらされた結果としてのプローブ絶縁材の性能低下を評
価することにある。
3個のプローブサンプルを,製造業者によって宣言された最大使用圧力及び最高水温で動作する試験ボ
イラ内で10日間条件処理しなければならない。次いで,サンプルを試験ボイラから取り出し,表面の汚れ
を除去する。
その後直ちに,条件処理されたサンプルと3個の条件処理されていないサンプルとに,絶縁破壊が生じ
るまで電圧を上げる。
9
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
条件処理されたサンプルの平均破壊電圧は,条件処理されていないサンプルの破壊電圧の50 %以上でな
ければならず,更に表13.2の関係値以上でなければならない。
14 温度上昇
温度上昇は,JIS C 9730-1の箇条14による。ただし,14.5.1はこの規格による。また,14.4.3.1は,この
規格では適用しない。
14.5.1 水流量及び水位検出制御装置用の場合,制御装置を宣言されたとおりに取り付けて,TL(表7.2の
項目101)及び該当する場合は最大使用圧力にした水の中に維持する。Tmaxと (Tmax+5) ℃又はTmaxの1.05
倍のどちらか大きいほうとの間に維持した周囲温度で,スイッチヘッドとともに試験を行う。水流量検出
制御装置用の場合,水流あり及び水流なしで試験を行う。
15 製造偏差及びドリフト
製造偏差及びドリフトは,JIS C 9730-1の箇条15によるほか,次による。ただし,15.2〜15.4は,この
規格による。
15.2〜15.4 タイプ2制御装置が動作する空気流量,水流量又は水位の偏差及びドリフトの評価について
は,製造業者と試験機関とが合意して試験方法を定める。
15.6 JIS C 9730-1の15.6によるほか,次による。
15.6.101 応答時間が宣言されている場合にはサンプルの応答時間は,初めにTmaxとTminで測定しなければ
ならず,絶対値が宣言されている場合にはサンプルの応答時間が製造業者によって宣言された時間内でな
ければならない。範囲が宣言されている場合には,当初の測定応答時間が宣言された範囲内でなければな
らない。
箇条16の環境試験及び箇条17の耐久性試験後の反復試験でドリフトを決定できるようにするために,
各サンプルの測定値を基準値として記録する。反復試験中の測定値は,初めの測定値から5 %の範囲内で
なければならず,範囲が宣言されている場合には宣言された範囲内でなければならない。
16 環境によるストレス
環境によるストレスは,JIS C 9730-1の箇条16による。
17 耐久性
耐久性は,JIS C 9730-1の箇条17によるほか,次による。
17.1 一般要求事項
一般要求事項は,JIS C 9730-1の17.1によるほか,次による。
17.1.1.101 空気流量及び水流量検出制御装置は,意図したように動作しなければならない。制御装置に箇
条17の要求事項を適用するとき,流量検出制御装置は,実際の利用をシミュレートする方法で操作及びサ
イクルを行う。シミュレートする機械的サイクル方法は,製造業者と試験所との間で合意して実施する。
規定する液体及び/又は特定の流量の割合は,要求しない。
17.1.2.1 JIS C 9730-1の17.1.2.1によるほか,次による。
17.1.1及び17.1.2に関する適否は,17.16の試験によって判定する。
17.16 特定目的の制御装置
JIS C 9730-1の17.16によるほか,次による。
17.16.101 ボイラ水位過昇防止装置
10
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ボイラ水位過昇防止装置には,次を適用する。
− 17.1〜17.5を適用する。
− タイプ2.Mに分類される作動には,“x”の値をできる限り小さくして17.6を適用する。
− 必要な場合には,復帰動作を操作によって行う点を除き,17.7及び17.8を適用する。その操作は,メ
カニズムによって許容され次第,加速速度に関して17.4に規定するとおり又は表7.2で製造業者によ
って宣言されたとおりとする。
− 17.9,17.11及び17.12は適用しない。
− 17.7及び17.8の自動試験時に試験する通常復帰手動作動には,17.10及び17.13は適用しない。水位過
昇防止装置が自動試験時には試験しない他の手動作動をもつ場合は,17.10及び17.13を適用する。
− 17.14を適用する。
17.16.102 ボイラ水位制限器
ボイラ水位制限器には,次を適用する。
− 17.1〜17.5を適用する。
− タイプ2.Mに分類される作動には,“x”の値をできる限り小さくして17.6を適用する。
− 必要な場合には,復帰動作を操作によって行う点を除き,17.7及び17.8を適用する。その操作は,メ
カニズムによって許容され次第,加速速度に関して17.4に規定するとおり又は表7.2で製造業者によ
って宣言されたとおりとする。
− 17.9〜17.13は,適用しない。
− 17.14を適用する。
17.16.103 ボイラ給水制御装置
ボイラ給水制御装置には,次を適用する。
− 17.1〜17.5を適用する。
− タイプ2.Mに分類される作動には,“x”の値をできる限り小さくして17.6を適用する。
− 必要な場合には,復帰動作を操作によって行う点を除き,17.7及び17.8を適用する。その操作は,メ
カニズムによって許容され次第,加速速度に関して17.4に規定するとおり又は表7.2で製造業者によ
って宣言されたとおりとする。
− 17.9を適用する。
− 17.10〜17.13は,適用しない。
− 17.14を適用する。
17.16.104 水位動作制御装置
ボイラ水位動作制御装置には,次を適用する。
− 17.1〜17.5を適用する。
− 17.6は適用しない。
− 17.7及び17.8を適用する。
− 17.9〜17.13は適用しない。
− 17.14を適用する。
17.16.105 水位保護制御装置
水位保護制御装置には,次を適用する。
− 17.1〜17.5を適用する。
− 17.6は適用しない。
11
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 17.7及び17.8を適用する。
− 17.9〜17.13は適用しない。
− 17.14を適用する。
17.16.106 空気流量及び水流量検出制御装置
空気流量及び水流量検出制御装置には,次を適用する。
− 17.1〜17.5を適用する。
− 17.6は適用しない。
− 必要な場合には,復帰動作を操作によって行う点を除き,17.7及び17.8を適用する。その操作は,メ
カニズムによって許容され次第,加速速度に関して17.4に規定するとおり又は表7.2で製造業者によ
って宣言されたとおりとする。
− 17.9〜17.14を適用する。
18 機械的強度
機械的強度は,JIS C 9730-1の箇条18によるほか,次による。
18.101 ボイラ水位検出制御装置のボイラ圧力にさらされる部分は,破裂することなく表7.2の項目103
で宣言された最大動作圧力の400 %に等しい水圧に1分間耐えられなければならない。
フロート形ボイラ水位検出制御装置のフロートアセンブリは,表7.2の項目105で宣言されたとおりに
試験したときに,表7.2の項目103で宣言された最大動作圧力の200 %に耐えなければならない。
適否は,この節の試験によって判定する。
18.101.1 電極センサ形ボイラ水位検出制御装置を除き,1個のサンプルを使用して試験を行う。
電極センサ形ボイラ水位検出制御装置については,13.101の試験を受けた1個のサンプルを使用する。
さらに,第2のまだ試験を行っていない電極センサ形サンプルを,宣言された最高水温(表7.2の項目101)
の102〜105 %の温度に維持したオーブンで30日間状態調節したうえで使用する。
ボイラ水位検出制御装置を水が入ったタンクに取り付けて,水圧ポンプに接続する。宣言された最大動
作圧力の400 %まで徐々に圧力を上げ,その圧力を1分間維持する。
宣言された最大動作圧力の200 %未満で漏れが生じない限り,ガスケット又は管継手の漏れは許容する。
18.101.2 フロート形ボイラ水位検出制御装置のフロートアセンブリは,表7.2の項目105で宣言されたと
おりに試験したときに,宣言された最大動作圧力の200 %に耐えなければならない。
18.102
部分的強度(流体力学的)
18.102.1 外郭中には含まれない定格2 000 kPa以上のブルドン管,フレキシブル金属ベローズ,ダイアフ
ラム又は類似のものを使用する流量検出制御装置は,破裂することなく1分間,その制御装置の最大動作
圧力の4倍の水圧に耐えなければならない。
試験中の制御装置は,空気を除くために水で満たし,水圧ポンプに接続する。その圧力は,上記の要求
される試験圧力まで徐々に上昇させる。
試験中のガスケット又は継手において漏えいが生じてもよい。ただし,要求される試験圧力の50 %未満
では起こらず,かつ,制御装置の最大動作圧力の4倍で試験を継続できる場合に限る。
18.102.2 外郭中に含まれるブルドン管,フレキシブル金属ベローズ,ダイアフラム又は類似のものを使用
する流量検出制御装置は,18.102.1に適合するか,又は次に適合しなければならない。
− 最大動作圧力の2倍の水圧で1分間,目に見える漏れなしに耐える。
− 最大動作圧力の4倍の水圧に1分間耐えるか,又はこの水圧に到達しない場合には,最大動作圧力の
12
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3倍以上で機器に対する損傷がない。また,外郭は,人又は周囲を危険にさらすような破裂を起こさ
ずに最大動作圧力の4倍まで圧力を減らす又は試験圧力に耐えることを実証しなければならない。
試験は,18.102.1に規定するように実施する。
18.102.3 流量過昇防止装置は,最大動作圧力の4倍に等しい水圧で,破裂なしに1分間耐えなければなら
ない。
試験中の制御装置は,空気を除くために水で満たし,水圧ポンプに接続する。その圧力は,要求される
試験圧力まで徐々に上昇させる。
19 ねじ山付き部品及び接続部
ねじ山付き部品及び接続部は,JIS C 9730-1の箇条19による。
20 沿面距離,空間距離及び固体絶縁物を通しての距離
沿面距離,空間距離及び固体絶縁物を通しての距離は,JIS C 9730-1の箇条20による。
21 耐熱性,耐火性及び耐トラッキング性
耐熱性,耐火性及び耐トラッキング性は,JIS C 9730-1の箇条21による。
22 耐腐食性
耐腐食性は,JIS C 9730-1の箇条22による。
23 電磁両立性 (EMC) 要求事項−エミッション
電磁両立性 (EMC) 要求事項−エミッションは,JIS C 9730-1の箇条23による。
24 部品
部品は,JIS C 9730-1の箇条24による。
25 通常動作
通常動作は,JIS C 9730-1の箇条25による。
26 電磁両立性 (EMC) 要求事項−イミュニティ
電磁両立性 (EMC) 要求事項−イミュニティは,JIS C 9730-1の箇条26によるほか,附属書Hによる。
27 異常動作
異常動作は,JIS C 9730-1の箇条27によるほか,附属書Hによる。ただし,空気流量及び水流量検出
制御装置には,27.2及び27.3を適用しない。
28 電子的断路の使用に関する指針
電子的断路の使用に関する指針は,JIS C 9730-1の箇条28による。
13
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書
JIS C 9730-1の附属書A〜附属書Uによるほか,次による。
附属書H
(規定)
電子制御装置の要求事項
JIS C 9730-1の附属書Hによるほか,次による。
H.7 情報
JIS C 9730-1のH.7によるほか,表7.2に次を追加する。
表7.2−製造業者によって宣言された情報,適用箇条及び方法
情報
適用箇条
方法
58a
追加
表H.26.2.101の注a) による。
73
第2故障分析を受けた制御装置及び第2故障の結果として宣
言された条件
H.27.1.3.101
X
追加の項目
111
動作後の空気流過昇防止装置,水流過昇防止装置,ボイラ水
位過昇防止装置及びボイラ水位制限器の出力条件105)
H.26.2.102
H.26.2.103
H.26.2.104
H.26.2.105
X
JIS C 9730-1の表7.2の注に次の注を追加する。
注105) 例えば,該当する場合,導通又は非導通。
H.11 構造要求事項
JIS C 9730-1のH.11によるほか,次による。
H.11.12 ソフトウェアを使用する制御装置
JIS C 9730-1のH.11.12によるほか,次による。
通常,ソフトウェアを使用する水位動作制御装置はソフトウェアクラスAに分類される機能をもつ。
H.11.12.8 JIS C 9730-1のH.11.12.8による。ただし,注記を,次に置き換える。
注記 表7.2の項目71で宣言された値は,適用する関連機器規格によってもよい。
H.11.12.8.1 JIS C 9730-1のH.11.12.8.1によるほか,次を追加する。
注記 表7.2の項目72で宣言された値は,適用する関連機器規格によってもよい。
H.23 電磁両立性 (EMC) 要求事項−エミッション
電磁両立性 (EMC) 要求事項−エミッションは,JIS C 9730-1のH.23によるほか,次による。
14
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.23.1.2 無線周波数放射
JIS C 9730-1のH.23.1.2による。ただし,第2段落及び注記を,次に置き換える。
これらの試験の結果は,電子自動制御装置の機器への組込及びその中で使用されるエミッションを制御
するための手段の使用の影響を受けるため,一体形及び組込形自動電子式空気流量,水流量及び水位検出
制御装置は,この項の試験の対象ではない。ただし,製造業者から要請された場合は,宣言された条件に
よって試験を実施してもよい。
H.26 電磁両立性 (EMC) 要求事項−イミュニティ
電磁両立性 (EMC) 要求事項−イミュニティは,JIS C 9730-1のH.26によるほか,次による。
注記 水位動作制御装置はタイプ1作動のものとして分類されるため,H.26.8だけを適用する。
H.26.2 JIS C 9730-1のH.26.2によるほか,次による。
空気流量,水流量及びボイラ水位検出制御装置は,各試験後,次の要求の一つ以上を表H.26.2.101に従
って適用する。
H.26.2.101 空気流量,水流量又はボイラ水位検出制御装置は,現在の状態にとどまらなければならず,そ
の後,適用可能な場合には,箇条15で検証された限度値内で宣言されたとおりに動作し続けなければなら
ない。
H.26.2.102 空気流量,水流量又はボイラ水位検出制御装置は,表7.2の項目106で宣言された状態を取ら
なければならず,その後H.26.2.101の場合と同様に動作しなければならない。
H.26.2.103 空気流量,水流量又はボイラ水位検出制御装置は,それが自動的に又は手動で復帰しないよう
に,表7.2の項目106で宣言された状態を取らなければならない。出力波形は,正弦波でなければ又は通
常動作に関して表7.2の項目53で宣言されたとおりでなければならない。
H.26.2.104 空気流量,水流量又はボイラ水位検出制御装置は,表7.2の項目106で宣言された状態にとど
まらなければならない。非自己復帰形制御装置は,手動でしか復帰しないものでなければならない。遮断
を発生させた低空気流量,低水流量又は水位が存在しなくなった後,制御装置は,H.26.2.101に示すよう
に動作するか,又はH.26.2.103で宣言された状態にとどまらなければならない。
H.26.2.105 空気流量,水流量又はボイラ水位検出制御装置は,初期状態に戻ってもよいが,その後,
H.26.2.101に示すように動作しなければならない。
注記 制御装置が表7.2の項目106で宣言された状態にある場合,制御装置は,復帰してもよいが,
制御装置を動作させた低空気流量,低水流量又は水位が依然として存在する場合は,宣言され
た状態に再度戻らなければならない。
H.26.2.106 空気流量,水流量又はボイラ水位検出制御装置の出力及び機能は,表7.2の項目58a又は58b
で宣言されたとおりでなければならない。
15
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表H.26.2.101−空気流量,水流量及びボイラ水位検出制御装置の適否基準
適用するH.26の試験
許容する適否基準
空気流過昇防止装置,水流過昇防
止装置,ボイラ水位過昇防止装置
及びボイラ水位制限器
H.26.2.101 H.26.2.102 H.26.2.103
H.26.2.104 H.26.2.105
H.26.2.106 1)
H.26.4〜H.26.14
B
B
B
A
A
X
空気流動作制御装置,水流動作制
御装置及びボイラ給水制御装置
H.26.2.101 H.26.2.102 H.26.2.103
H.26.2.104 H.26.2.105
H.26.2.106 1)
H.26.8,H.26.9
X
X
X
X:空気流過昇防止装置,水流過昇防止装置及びボイラ水位過昇防止装置以外について許容する。
A:動作後に妨害が適用されるときに許容する。
B:動作前に妨害が適用されるときに許容する。
注1) この適否基準は,出力が許容できるかどうかを機器内で判定しなければならないので,一体形又は組込形制
御装置についてだけ許容する。
H.26.2.1 JIS C 9730-1のH.26.2.1によるほか,次による。
一体形及び組込形水位動作制御装置の適否は,表7.2の項目58aで宣言されている場合,H.26.8及びH.26.9
の試験によって判定する。
H.26.3 JIS C 9730-1のH.26.3によるほか,次による。
水位動作制御装置は試験の間,通電する。
空気流量及び水流量検出制御装置は,H.26.4〜H.26.14の試験の後に,サンプルは,JIS C 9730-1の箇条
8,17.5,及び箇条20の要求事項に適合しなければならない。
H.26.5 電源回路網中の電圧降下及び電圧遮断
JIS C 9730-1のH.26.5によるほか,次による。
H.26.5.4 電圧変動試験
JIS C 9730-1のH.26.5.4によるほか,次による。
H.26.5.4.3 制御装置に対しては,指定された各電圧試験サイクルを,各試験サイクルの間に10秒の間隔を
あけて3回行う。表7.2の項目111で宣言された制御装置に対しては,各試験サイクルは,制御装置が宣
言された状態にあるときに3回,また,その状態にないときに3回実施する。他の水位検出制御装置に対
しては,関連の動作モードは導通及び非導通である。
H.26.6 電圧不平衡の影響の試験
JIS C 9730-1のH.26.6によるほか,次による。
空気流量及び水流量検出制御装置には,H.26.6を適用しない。
H.26.8 サージイミュニティ試験
JIS C 9730-1のH.26.8によるほか,次による。
H.26.8.3 試験手順
JIS C 9730-1のH.26.8.3によるほか,次による。
関連する動作モードは,導通及び非導通である。
H.26.8.3.101 表7.2の項目111に基づいて宣言された制御装置については,制御装置が宣言された状態に
あるときに試験を3回行い,その状態にないときに試験を2回行う。
H.26.9 電気的ファストトランジェント/バースト試験
JIS C 9730-1のH.26.9によるほか,次による。
16
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
H.26.9.3 試験手順
JIS C 9730-1のH.26.9.3によるほか,次による。
関連する動作モードは,導通及び非導通である。
H.26.9.3.101 試験手順
制御装置について試験を5回行う。表7.2の項目111に基づいて宣言された制御装置については,制御
装置が宣言された状態にあるときに試験を3回行い,その状態にないときに試験を2回行う。
H.26.10 リング波試験
(対応国際規格の規定は,カナダ及びアメリカ合衆国で適用するものであり,この規格では採用しない。)
H.26.12 無線周波電磁界イミュニティ
JIS C 9730-1のH.26.12によるほか,次による。
H.26.12.2 伝導妨害に対するイミュニティ
JIS C 9730-1のH.26.12.2によるほか,次による。
H.26.12.2.2 試験手順
JIS C 9730-1のH.26.12.2.2によるほか,次による。
表7.2の項目111に基づいて宣言された制御装置については,掃引は,制御装置が宣言された状態及び
その状態にないときに行う。
H.26.12.3 放射電磁界イミュニティの評価
JIS C 9730-1のH.26.12.3によるほか,次による。
H.26.12.3.101 表7.2の項目111に基づいて宣言された制御装置については,掃引は,制御装置が宣言さ
れた状態及びその状態にないときに行う。
H.26.13 電源周波数変動の影響試験
JIS C 9730-1のH.26.13によるほか,次による。
H.26.13.3 試験手順
JIS C 9730-1のH.26.13.3によるほか,次による。
表7.2の項目111に基づいて宣言された制御装置については,試験は,制御装置が宣言された状態及び
その状態にないときに行う。
H.26.14 電力周波数磁界イミュニティ試験
JIS C 9730-1のH.26.14によるほか,次による。
H.26.14.3 試験手順
JIS C 9730-1のH.26.14.3によるほか,次による。
表7.2の項目111に基づいて宣言された制御装置については,試験は,制御装置が宣言された状態及び
その状態にないときに行う。他の水位検出制御装置は,導通している状態及び導通していない状態で試験
を行う。
H.26.15 適合性評価
JIS C 9730-1のH.26.15によるほか,次による。ただし,H.26.15.4はこの規格による。
H.26.15.2 JIS C 9730-1のH.26.15.2によるほか,次による。
空気流量,水流量及びボイラ水位検出制御装置の適否基準は,表H.26.2.101による。
H.26.15.4 空気流量,水流量及びボイラ水位検出制御装置の適否基準は,表H.26.2.101による。他の水位
検出制御装置は,試験後に制御装置が動作する場合,制御装置は,保護機能が失われることなく意図した
とおりに動作し続けなければならず,保護機能の動作は箇条15の要求事項によって検証しなければならな
17
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
い。水位検出制御装置が動作しない場合,試験の結果は,機器が安全に停止する場合に合格とする。H.26.1
も適用する。
H.27 異常動作
JIS C 9730-1のH.27によるほか,次による。
H.27.1.2 JIS C 9730-1のH.27.1.2による。ただし,第1行は,次に置き換える。
次の条件で,制御装置を動作させなければならない。さらに,表7.2の項目111に基づいて宣言された
制御装置は,制御装置が宣言された状態にあるとき及びその状態にないときに試験を行う。
H.27.1.3 JIS C 9730-1のH.27.1.3によるほか,次による。
H.27.1.3.101 表7.2の項目73に基づいて宣言された制御装置については,故障のシミュレーション又は適
用によって,次のa)又はb)が生じなければならない。
a) 制御装置は,箇条15で検証された宣言の範囲内で正常に動作し続けなければならない。その場合,第
2の故障を適用しなければならず,制御装置は箇条15で検証された宣言の範囲内で正常に動作し続け
るか又は次のb)を生じさせなければならない。
b) 制御装置の出力は,宣言された状態を取らなければならない。
空気流量及び水流量検出制御装置には,H.27.1.3.101を適用しない。
18
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書AA
(規定)
ボイラ用独立取付形制御装置に関するサイクル数
ボイラ用独立取付形制御装置に関するサイクル数は,表AA.1による。
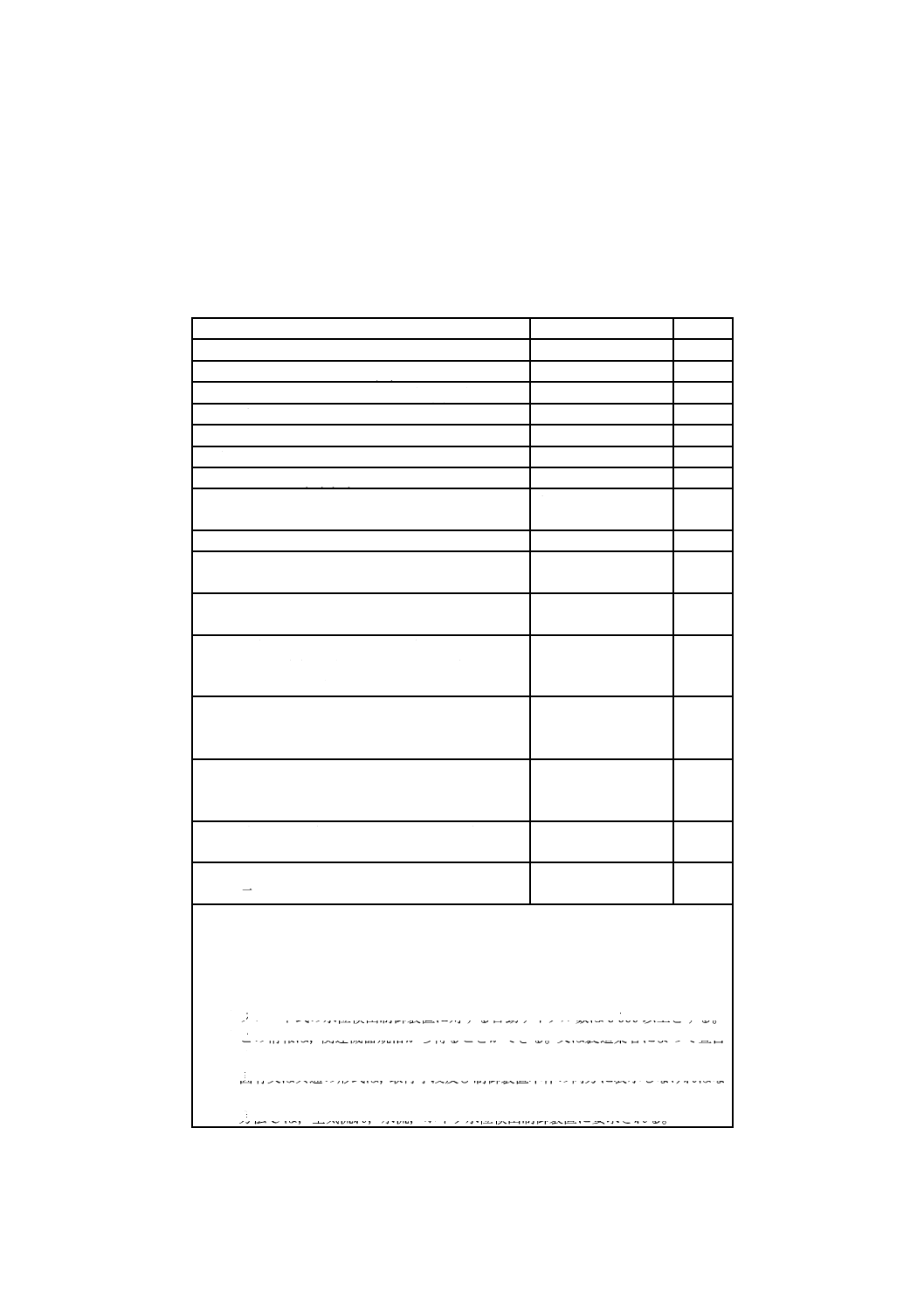
表AA.1−ボイラ用独立取付形制御装置に関するサイクル数a)
単位 サイクル
タイプ
自動作動
手動作動
有負荷
無負荷b)
有負荷
無負荷b)
自己復帰形過昇防止装置
100 000
非自己復帰形過昇防止装置
1 000*
5 000
1 000**
5 000
自己復帰形制限器
100 000
ボイラ給水制御装置
6 000
注a) 17.8に関するサイクル速度は,装置の性質によってもっと遅い速度が必要な場合を除き,毎分6
サイクルでなければならない。
b) 制御装置の動作を,感知電流が0.05 A以下の適当な装置で検出しなければならない。
注*
開路だけ。
** 閉路だけ。
19
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書BB
(規定)
応答遅延に対する要求事項
応答遅延に関する製造偏差及びドリフトの値は,製造業者によって宣言されていない限り,表BB.1に
よる。
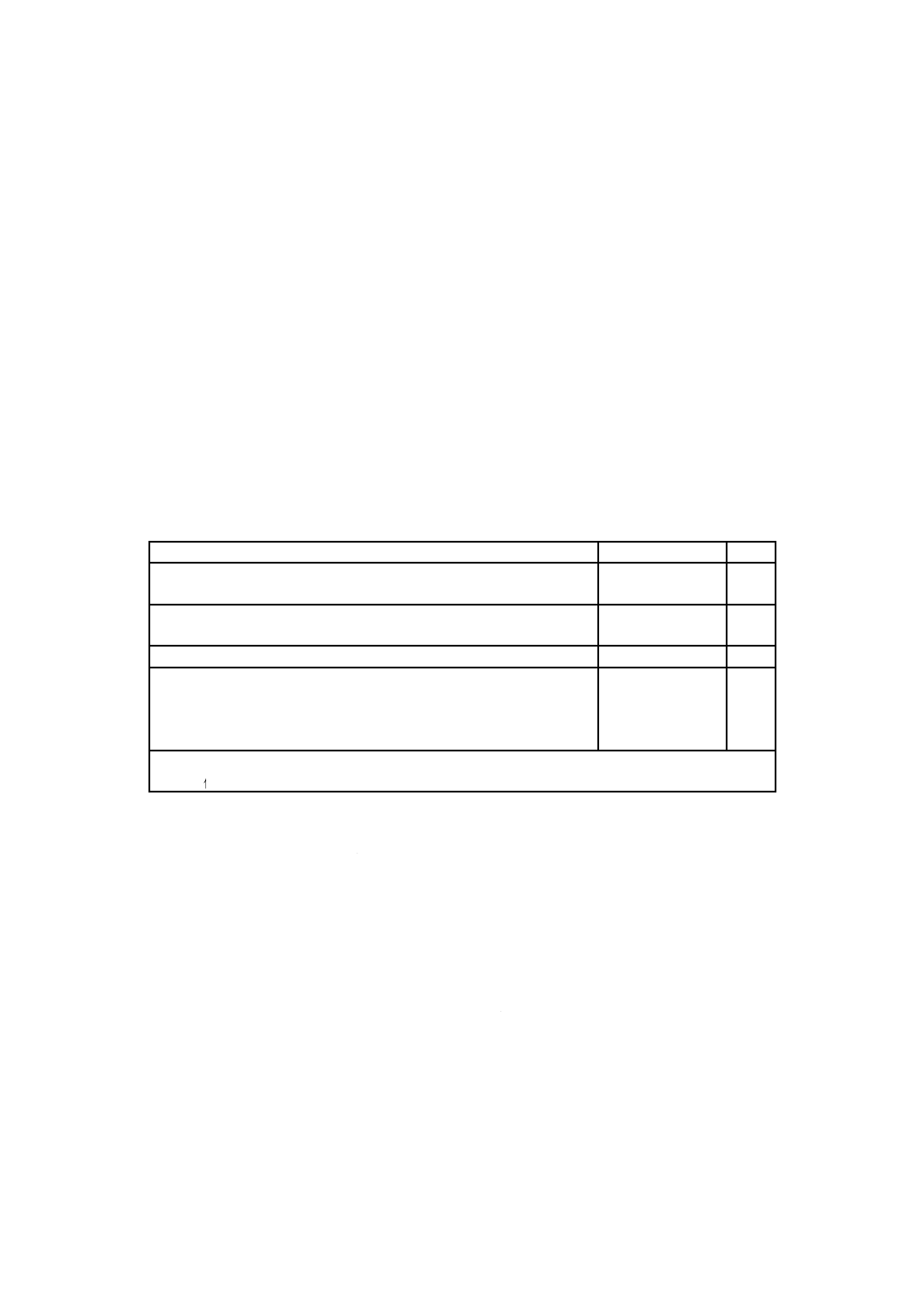
表BB.1−応答遅延に関する製造偏差及びドリフト
単位 %
応答遅延を備える方法
偏差
ドリフト
機械的
電気的又は電子的
25 ℃,定格電気的条件
0〜66 ℃,Vrの (85〜110) %
±10
最大±10
最大±50
±5
±5
−
20
C 9730-2-15:2010 (IEC 60730-2-15:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書CC
(参考)
独立取付形空気流量及び水流量検出制御装置に関するサイクル数
独立取付形空気流量及び水流量検出制御装置に関するサイクル数は,表CC.1による。
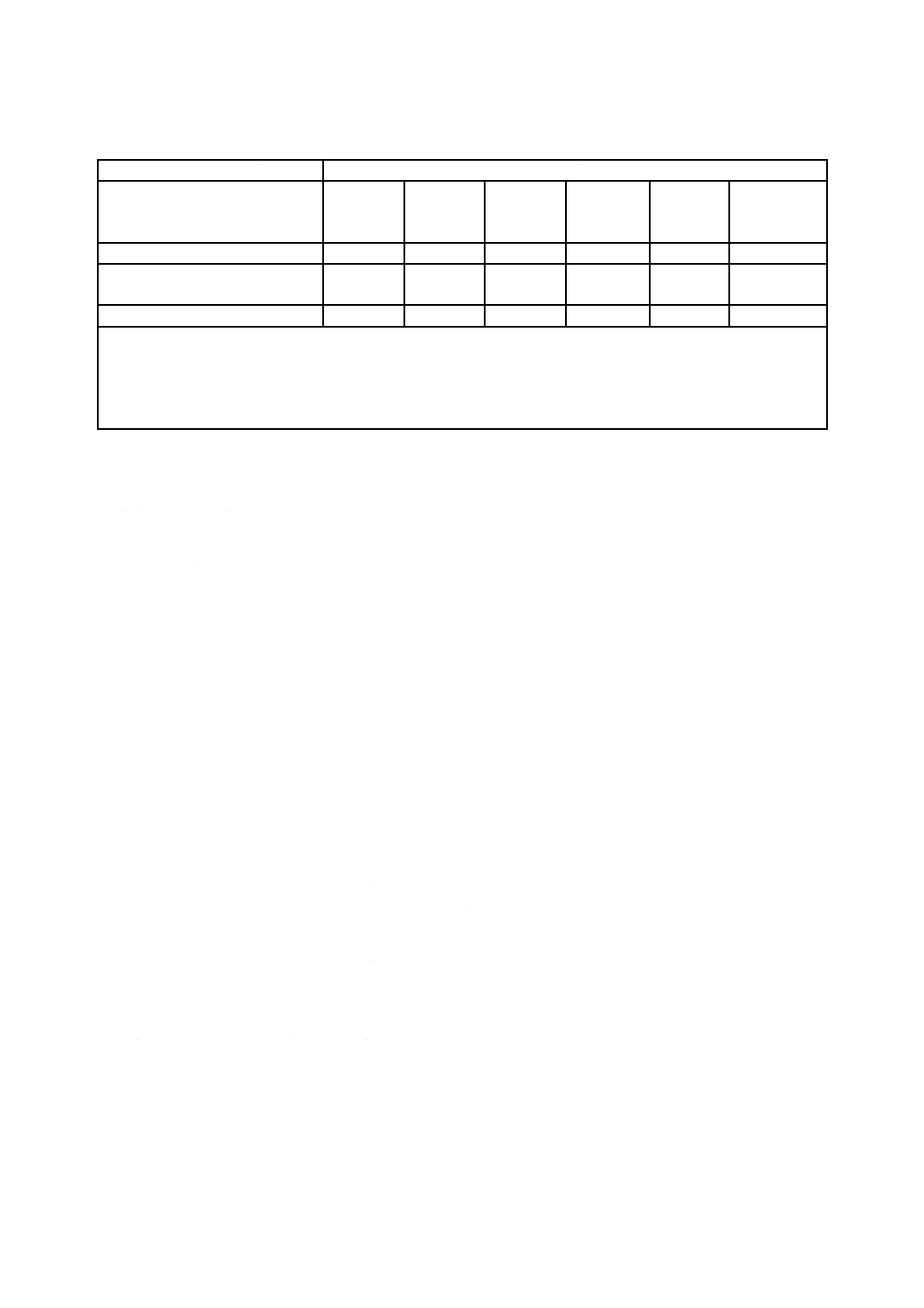
表CC.1−独立取付形空気流量及び水流量検出制御装置に関するサイクル数a)
単位 サイクル
タイプ
自動作動
負荷あり
負荷なしb)
自己復帰形過昇防止装置
100 000
−
非自己復帰形過昇防止装置
1 000
5 000
動作制御装置
6 000
−
注a) 17.8に関するサイクル速度は,装置の性質によってもっと遅
い速度が必要な場合を除き,毎分6サイクルでなければなら
ない。
b) 制御装置の動作を,感知電流が0.05 A以下の適当な装置で検
出してもよい。