C 9730-1:2019
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲及び引用規格 ······································································································· 1
2 用語及び定義 ··················································································································· 7
3 一般要求事項 ·················································································································· 29
4 試験に関する一般注意 ······································································································ 29
5 定格······························································································································ 32
6 分類······························································································································ 32
7 情報······························································································································ 39
8 感電に対する保護 ············································································································ 46
9 保護用接地の手段 ············································································································ 49
10 端子及び終端 ················································································································ 52
11 構造要求事項 ················································································································ 59
12 耐湿性及び防じん性 ······································································································· 77
13 耐電圧及び絶縁抵抗 ······································································································· 79
14 温度上昇 ······················································································································ 81
15 製造偏差及びドリフト ···································································································· 86
16 環境によるストレス ······································································································· 87
17 耐久性 ························································································································· 87
18 機械的強度 ··················································································································· 96
19 ねじ山付き部品及び接続部 ····························································································· 101
20 沿面距離,空間距離及び固体絶縁物を通しての距離 ···························································· 104
21 耐熱性,耐火性及び耐トラッキング性 ·············································································· 112
22 耐腐食性 ····················································································································· 115
23 電磁両立性(EMC)要求事項−エミッション ···································································· 115
24 部品 ··························································································································· 116
25 通常動作 ····················································································································· 118
26 電磁両立性(EMC)要求事項−イミュニティ ···································································· 118
27 異常動作 ····················································································································· 118
28 電子的断路の使用に関する指針 ······················································································· 120
附属書A(規定)表示の耐消滅性 ·························································································· 138
附属書B(規定)沿面距離及び空間距離の測定 ········································································· 140
附属書C(規定)水銀スイッチ試験に用いる綿
[欧州標準化委員会(CENELEC)に加盟している各国では,適用しない。] ··························· 144
附属書D(参考)耐熱性,耐火性及び耐トラッキング性 ···························································· 145
附属書E(規定)漏えい電流測定回路····················································································· 146
C 9730-1:2019 目次
(2)
ページ
附属書F(参考)引火危険度試験 ··························································································· 147
附属書G(規定)耐熱性及び耐火性試験 ················································································· 148
附属書H(規定)電子制御装置の要求事項 ·············································································· 150
附属書J(規定)サーミスタ素子及びサーミスタを使用する制御装置の要求事項 ···························· 206
附属書K(参考)過電圧制御の異なるモードに関する給電系統の公称電圧 ···································· 221
附属書L(規定)過電圧カテゴリ ·························································································· 223
附属書M(参考)過電圧カテゴリの一般的な取扱い ·································································· 224
附属書N(規定)汚損度 ······································································································ 225
附属書P(規定)プリント回路板塗装特性試験 ········································································· 226
附属書Q(規定)プリント回路板塗装特性試験 ········································································ 228
附属書R(参考)サージイミュニティ試験の解説 ····································································· 231
附属書S(参考)箇条20の適用指針 ······················································································ 235
附属書T(規定)SELV及びPELVに対する要求事項 ································································ 237
附属書U(規定)JIS C 9335の規格群に含まれる機器の制御装置として使用する
リレーに対する要求事項 ································································································ 240
附属書V(規定)二次電池で動作する制御装置に対する要求事項················································· 243
参考文献 ··························································································································· 245
附属書JA(参考)JISと対応国際規格との対比表 ····································································· 247
C 9730-1:2019
(3)
まえがき
この規格は,工業標準化法に基づき,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本
工業規格である。これによって,JIS C 9730-1:2010は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 9730の規格群には,次に示す部編成がある。
JIS C 9730-1 第1部:一般要求事項
JIS C 9730-2-2 第2-2部:感熱式モータ保護装置の個別要求事項
JIS C 9730-2-3 第2-3部:蛍光ランプ用安定器の感熱式保護装置の個別要求事項
JIS C 9730-2-4 第2-4部:密閉形及び半密閉形の電動圧縮機用の感熱式モータ保護装置の個別要求事
項
JIS C 9730-2-5 第2-5部:自動電気バーナコントロールシステムの個別要求事項
JIS C 9730-2-6 第2-6部:機械的要求事項を含む自動電気圧力検出制御装置の個別要求事項
JIS C 9730-2-7 第2-7部:タイマ及びタイムスイッチの個別要求事項
JIS C 9730-2-8 第2-8部:電動式ウォーターバルブの個別要求事項
JIS C 9730-2-9 第2-9部:温度検出制御装置の個別要求事項
JIS C 9730-2-10 第2-10部:モータ起動リレーの個別要求事項
JIS C 9730-2-11 第2-11部:エネルギー調整器の個別要求事項
JIS C 9730-2-12 第2-12部:電動式ドアロックの個別要求事項
JIS C 9730-2-13 第2-13部:湿度検出制御装置の個別要求事項
JIS C 9730-2-14 第2-14部:電気アクチュエータの個別要求事項
JIS C 9730-2-15 第2-15部:自動電気式の空気流量,水流量及び水位検出制御装置の個別要求事項
JIS C 9730-2-17 第2-17部:機械的要求事項を含む電動式ガスバルブの個別要求事項
JIS C 9730-2-19 第2-19部:機械的要求事項を含む電動式オイルバルブの個別要求事項
日本工業規格 JIS
C 9730-1:2019
自動電気制御装置−第1部:一般要求事項
Automatic electrical controls-Part 1: General requirements
序文
この規格は,2013年に第5版として発行されたIEC 60730-1及びAmendment 1:2015を基とし,我が国
の配電事情を考慮し,技術的内容を変更して作成した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JAに示す。
1
適用範囲及び引用規格
1.1
適用範囲
この規格は,家庭用及びこれに類する用途の機器の中若しくはその表面,又はそれと共に用いる自動電
気制御装置に適用する。この機器は,電気,ガス,油,固形燃料,太陽熱エネルギーなど,又はそれらの
組合せを制御してもよい。
注記1 この規格を通して,“機器”という用語は,“器具及び機器”を意味する。
例1 例えば,JIS C 9335の規格群の適用範囲に含まれる機器に使用する制御装置をいう。
ISO 16484規格群の適用範囲に含まれるビルの自動制御に用いる制御装置も,この規格の適用範囲であ
る。
商業用及び産業用であって,店舗,事務所,病院及び農場において,一般人が用いる機器のための自動
電気制御装置も,この規格の適用範囲である。
例2 例えば,業務用の厨房器,暖房機及び空調機器の制御装置をいう。
この規格は,制御システムに組み込んで使用する個別制御装置,又は非電気的出力をもつ多機能制御装
置と機械的に一体となっている制御装置にも適用する。
例3 例えば,独立して設置する水弁,並びにスマートグリッド内に組み込んだ制御装置,及びISO
16484-2の適用範囲に含まれるビルの自動システム用の制御装置をいう。
JIS C 9335機器の制御装置として使用するリレーの安全性及び動作値に関する追加の要求事項は,附属
書Uによる。
注記2 これらの要求事項は,JIS C 4540-1の適用範囲で参照されている。
注記3 この規格は,JIS C 9335機器の制御装置として使用するリレー単独の試験にも適用すること
を意図している。ただし,その他の独立したリレー又はIEC 61810の規格群と置き換えるリ
レーに適用することは意図していない。
この規格は,工業用の工程用自動電気制御装置には適用しない。ただし,JIS C 9730の規格群,又は製
品規格の適用範囲の機器に使用する制御装置に,適用する。
この規格は,一次電池又は二次電池によって動作する制御装置にも適用する。これらの要求事項は,附
2
C 9730-1:2019
属書Vを含むこの規格に規定する。
1.1.1
この規格は,動作値,動作時間及び動作シーケンスが機器の安全に関わる場合において,固有の安
全に関して規定する。また,機器において,又はそれらと関連して用いる自動電気制御装置の試験にも適
用する。
この規格は,サーミスタを使用した制御装置にも適用する。その要求事項は,附属書Jによる。
この規格は,複雑度の低い安全関連システム及び制御装置の機能安全にも適用する。
1.1.2
この規格は,温度,圧力,時間の経過,湿度,光,静電効果,流量,液体レベル,電流,電圧,加
速度若しくはそれらの組合せのような特性に反応する,又はそれらを制御する自動電気制御装置であって,
機械式又は電動式のものにも適用する。
1.1.3
この規格は,特殊タイプの自動電気制御装置である,モータの始動巻線を切り替えるような構造の
始動リレーにも適用する。このような制御装置は,モータ中に組み込むか又はモータから分離していても
よい。
1.1.4
この規格は,電気的及び/又は機械的に自動制御装置と一体であるときの手動制御装置にも適用す
る。
注記 自動制御装置の一部でない手動スイッチの要求事項は,JIS C 4526-1に規定されている。
1.1.5
この規格は,交流690 V以下又は直流600 V以下の定格電圧をもつ交流又は直流の電源の制御装置
に適用する。
1.1.6
この規格は,制御装置の自動作動の応答値が制御装置の機器への取付方法に依存するときは,その
応答値については考慮しない。応答値が使用者の保護のため,又は周辺に対し重要な目的のものである場
合,該当する家庭用機器規格において規定された値又は製造業者が決定した値を適用する。
1.1.7
この規格は,電子素子を組み込んでいる制御装置にも適用する。その要求事項は,附属書Hによ
る。
1.1.8
この規格は,NTCサーミスタ又はPTCサーミスタを用いる制御装置にも適用する。その要求事項
は,附属書Jによる。
1.1.9
この規格は,電力課金率及び需要応答に関する信号を含む信号通信のための受信及び応答ができる
制御装置の電気的安全性及び機能的安全性についても規定している。
この信号は,制御装置(有線)の一部分となる外部ユニットから,又は試験する制御装置(無線)の一
部ではない外部ユニットから送信又は受信してもよい。
1.1.10 他の装置との相互運用が可能なネットワークデバイスが,制御システムの一部でない限り,この規
格は,そのネットワークデバイスの出力信号の安全性については取り扱わない。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 60730-1:2013,Automatic electrical controls−Part 1: General requirements及びAmendment
1:2015(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
1.2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS C 0920:2003 電気機械器具の外郭による保護等級(IPコード)
3
C 9730-1:2019
注記 対応国際規格:IEC 60529:1989,Degrees of protection provided by enclosures (IP Code)及び
Amendment 1:1999(MOD)
JIS C 2134:2007 固体絶縁材料の保証及び比較トラッキング指数の測定方法
注記 対応国際規格:IEC 60112:2003,Method for the determination of the proof and the comparative
tracking indices of solid insulating materials及びAmendment 1: 2009(IDT)
JIS C 2570-1 直熱形NTCサーミスタ−第1部:品目別通則
注記 対応国際規格:IEC 60539-1,Directly heated negative temperature coefficient thermistors−Part 1:
Generic specification(MOD)
JIS C 2814-2-2 家庭用及びこれに類する用途の低電圧用接続器具−第2-2部:ねじなし形締付式接続
器具の個別要求事項
注記 対応国際規格:IEC 60998-2-2,Connecting devices for low-voltage circuits for household and
similar purposes−Part 2-2: Particular requirements for connecting devices as separate entities with
screwless-type clamping units(MOD)
JIS C 2814-2-3 家庭用及びこれに類する用途の低電圧用接続器具−第2-3部:絶縁貫通形締付式接続
器具の個別要求事項
注記 対応国際規格:IEC 60998-2-3,Connecting devices for low-voltage circuits for household and
similar purposes−Part 2-3: Particular requirements for connecting devices as separate entities with
insulation-piercing clamping units(MOD)
JIS C 3662-1 定格電圧450/750 V以下の塩化ビニル絶縁ケーブル−第1部:通則
注記 対応国際規格:IEC 60227-1,Polyvinyl chloride insulated cables of rated voltages up to and
including 450/750 V−Part 1: General requirements(MOD)
JIS C 3663-1 定格電圧450/750 V以下のゴム絶縁ケーブル−第1部:通則
注記 対応国際規格:IEC 60245-1,Rubber insulated cables−Rated voltages up to and including 450/750
V−Part 1: General requirements(MOD)
JIS C 4003 電気絶縁−熱的耐久性評価及び呼び方
注記 対応国際規格:IEC 60085,Electrical insulation−Thermal evaluation and designation(MOD)
JIS C 4526-1 機器用スイッチ−第1部:一般要求事項
注記 対応国際規格:IEC 61058-1,Switches for appliances−Part 1: General requirements(MOD)
JIS C 5101-14:2014 電子機器用固定コンデンサ−第14部:品種別通則:電源用電磁障害防止固定コ
ンデンサ
注記 対応国際規格:IEC 60384-14,Fixed capacitors for use in electronic equipment−Part 14: Sectional
specification: Fixed capacitors for electromagnetic interference suppression and connection to the
supply mains(IDT)
JIS C 5101-16 電子機器用固定コンデンサ−第16部:品種別通則:固定メタライズドポリプロピレン
フィルム直流コンデンサ
注記 対応国際規格:IEC 60384-16,Fixed capacitors for use in electronic equipment−Part 16: Sectional
specification: Fixed metallized polypropylene film dielectric d.c. capacitors(IDT)
JIS C 5101-17 電子機器用固定コンデンサ−第17部:品種別通則:固定メタライズドポリプロピレン
フィルム交流及びパルスコンデンサ
注記 対応国際規格:IEC 60384-17,Fixed capacitors for use in electronic equipment−Part 17: Sectional
4
C 9730-1:2019
specification: Fixed metallized polypropylene film dielectric a.c. and pulse capacitors(IDT)
JIS C 6065:2013 オーディオ,ビデオ及び類似の電子機器−安全性要求事項
注記 対応国際規格:IEC 60065:2001,Audio, video and similar electronic apparatus−Safety
requirements,Amendment 1: 2005及びAmendment 2: 2010(MOD)
JIS C 6575-1 ミニチュアヒューズ−第1部:ミニチュアヒューズに関する用語及びミニチュアヒュー
ズリンクに対する通則
注記 対応国際規格:IEC 60127-1,Miniature fuses−Part 1: Definitions for miniature fuses and general
requirements for miniature fuse-links(MOD)
JIS C 8269-1 低電圧ヒューズ−第1部:通則
注記 対応国際規格:IEC 60269-1,Low-voltage fuses−Part 1: General requirements
JIS C 8305 鋼製電線管
JIS C 9335-1:2014 家庭用及びこれに類する電気機器の安全性−第1部:通則
注記 対応国際規格:IEC 60335-1:2010,Household and similar electrical appliances−Safety−Part 1:
General requirements(MOD)
JIS C 60068-2-75 環境試験方法−電気・電子−第2-75部:ハンマ試験
注記 対応国際規格:IEC 60068-2-75,Environmental testing−Part 2-75: Tests−Test Eh: Hammer tests
(IDT)
JIS C 60364(規格群) 低圧電気設備
注記 対応国際規格:IEC 60364 (all parts),Low-voltage electrical installations
JIS C 60664-1:2009 低圧系統内機器の絶縁協調−第1部:基本原則,要求事項及び試験
注記 対応国際規格:IEC 60664-1:2007,Insulation coordination for equipment within low-voltage
systems−Part 1: Principles, requirements and tests(IDT)
JIS C 60664-3:2009 低圧系統内機器の絶縁協調−第3部:汚損保護のためのコーティング,ポッティ
ング及びモールディングの使用
注記 対応国際規格:IEC 60664-3:2003,Insulation coordination for equipment within low-voltage
systems−Part 3: Use of coating, potting or moulding for protection against pollution及び
Amendment 1: 2010(IDT)
JIS C 60664-4:2009 低圧系統内機器の絶縁協調−第4部:高周波電圧ストレスの考慮
注記 対応国際規格:IEC 60664-4,Insulation coordination for equipment within low-voltage systems−
Part 4: Consideration of high-frequency voltage stress
JIS C 60695-2-10 耐火性試験−電気・電子−第2-10部:グローワイヤ/ホットワイヤ試験方法−グ
ローワイヤ試験装置及び一般試験方法
注記 対応国際規格:IEC 60695-2-10,Fire hazard testing−Part 2-10: Glowing/hot-wire based test
methods−Glow-wire apparatus and common test procedure(IDT)
JIS C 60695-2-11:2004 耐火性試験−電気・電子−最終製品に対するグローワイヤ燃焼性試験方法
注記 対応国際規格:IEC 60695-2-11:2000,Fire hazard testing−Part 2-11: Glowing/hot-wire based test
methods−Glow-wire flammability test method for end-products(IDT)
JIS C 60695-10-2 耐火性試験−電気・電子−第10-2部:異常発生熱−ボールプレッシャー試験方法
注記 対応国際規格:IEC 60695-10-2,Fire hazard testing−Part 10-2: Abnormal heat−Ball pressure test
(IDT)
5
C 9730-1:2019
JIS C 61000(規格群) 電磁両立性
注記 対応国際規格:IEC 61000 (all parts),Electromagnetic compatibility(EMC)
JIS C 61000-3-2 電磁両立性−第3-2部:限度値−高調波電流発生限度値(1相当たりの入力電流が
20 A以下の機器)
注記 対応国際規格:IEC 61000-3-2,Electromagnetic compatibility (EMC)−Part 3-2: Limits−Limits for
harmonic current emissions (equipment input current ≤ 16 A per phase)(MOD)
JIS C 61000-4-2:2012 電磁両立性−第4-2部:試験及び測定技術−静電気放電イミュニティ試験
注記 対応国際規格:IEC 61000-4-2:2008,Electromagnetic compatibility (EMC)−Part 4-2: Testing and
measurement techniques−Electrostatic discharge immunity test(IDT)
JIS C 61000-4-3 電磁両立性−第4-3部:試験及び測定技術−放射無線周波電磁界イミュニティ試験
注記 対応国際規格:IEC 61000-4-3,Electromagnetic compatibility (EMC)−Part 4-3: Testing and
measurement techniques−Radiated, radio-frequency, electromagnetic field immunity test
JIS C 61000-4-4 電磁両立性−第4-4部:試験及び測定技術−電気的ファストトランジェント/バー
ストイミュニティ試験
注記 対応国際規格:IEC 61000-4-4,Electromagnetic compatibility (EMC)−Part 4-4: Testing and
measurement techniques−Electrical fast transient/burst immunity test(IDT)
JIS C 61000-4-5 電磁両立性−第4-5部:試験及び測定技術−サージイミュニティ試験
注記 対応国際規格:IEC 61000-4-5,Electromagnetic compatibility (EMC)−Part 4-5: Testing and
measurement techniques−Surge immunity test(IDT)
JIS C 61000-4-6 電磁両立性−第4-6部:試験及び測定技術−無線周波電磁界によって誘導する伝導
妨害に対するイミュニティ
注記 対応国際規格:IEC 61000-4-6,Electromagnetic compatibility (EMC)−Part 4-6: Testing and
measurement techniques−Immunity to conducted disturbances, induced by radio-frequency fields
(MOD)
JIS C 61000-4-8 電磁両立性−第4-8部:試験及び測定技術−電源周波数磁界イミュニティ試験
注記 対応国際規格:IEC 61000-4-8,Electromagnetic compatibility (EMC)−Part 4-8: Testing and
measurement techniques−Power frequency magnetic field immunity test
JIS C 61000-4-11 電磁両立性−第4-11部:試験及び測定技術−電圧ディップ,短時間停電及び電圧
変動に対するイミュニティ試験
注記 対応国際規格:IEC 61000-4-11,Electromagnetic compatibility (EMC)−Part 4-11: Testing and
measurement techniques−Voltage dips, short interruptions and voltage variations immunity tests
(IDT)
JIS C 61558-2-6 入力電圧1 100 V以下の変圧器,リアクトル,電源装置及びこれに類する装置の安
全性−第2-6部:安全絶縁変圧器及び安全絶縁変圧器を組み込んだ電源装置の個別要求事項及び
試験
注記 対応国際規格:IEC 61558-2-6,Safety of transformers, reactors, power supply units and similar
products for supply voltages up to 1 100 V−Part 2-6: Particular requirements and tests for safety
isolating transformers and power supply units incorporating safety isolating transformers(MOD)
JIS C 61558-2-16 入力電圧1 100 V以下の変圧器,リアクトル,電源装置及びこれに類する装置の安
全性−第2-16部:スイッチモード電源装置及びスイッチモード電源装置用変圧器の個別要求事項
6
C 9730-1:2019
及び試験
注記 対応国際規格:IEC 61558-2-16,Safety of transformers, reactors, power supply units and similar
products for voltages up to 1 100 V−Part 2-16: Particular requirements and tests for switch mode
power supply units and transformers for switch mode power supply units(MOD)
IEC 60038,IEC standard voltages
IEC 60099-1,Surge arresters−Part 1: Non-linear resistor type gapped arresters for a.c. systems(withdrawn)
IEC 60417 (all parts),Graphical symbols for use on equipment
IEC 60423,Conduit systems for cable management−Outside diameters of conduits for electrical installations
and threads for conduits and fittings
IEC 60738-1,Thermistors−Directly heated positive temperature coefficient−Part 1: Generic specification
IEC 60738-1-1,Thermistors−Directly heated positive step-function temperature coefficient−Part 1-1: Blank
detail specification−Current limiting application−Assessment level EZ
IEC 60999-1,Connecting devices−Electrical copper conductors−Safety requirements for screw-type and
screwless-type clamping units−Part 1: General requirements and particular requirements for clamping
units for conductors from 0.2 mm2 up to 35 mm2 (included)
IEC 61000-3-3:2008,Electromagnetic compatibility (EMC)−Part 3-3: Limits−Limitation of voltage changes,
voltage fluctuations and flicker in public low-voltage supply systems, for equipment with rated current ≤16
A per phase and not subject to conditional connection
IEC 61000-4-13:2002,Electromagnetic compatibility (EMC)−Part 4-13: Testing and measurement techniques
−Harmonics and interharmonics including mains signalling at a.c. power port, low frequency immunity
tests及びAmendment 1:2009
IEC 61000-4-28,Electromagnetic compatibility (EMC)−Part 4-28: Testing and measurement techniques−
Variation of power frequency, immunity test
IEC 61210,Connecting devices−Flat quick-connect terminations for electrical copper conductors−Safety
requirements
IEC 61249 (all parts),Materials for printed boards and other interconnecting structures
IEC 61643-11,Low-voltage surge protective devices−Part 11: Surge protective devices connected to
low-voltage power systems−Requirements and test methods
IEC 62151,Safety of equipment electrically connected to a telecommunication network
IEC 62326 (all parts),Printed boards
IEC 62368-1,Audio/video, information and communication technology equipment−Part 1: Safety
requirements
CISPR 11,Industrial, scientific and medical equipment−Radio-frequency disturbance characteristics−Limits
and methods of measurement
CISPR 14-1:2005,Electromagnetic compatibility−Requirements for household appliances, electric tools and
similar apparatus−Part 1: Emission及びAmendment 1: 2008
CISPR 22:2008,Information technology equipment−Radio disturbance characteristics−Limits and methods
of measurement
ISO 16484-2,Building automation and control systems (BACS)−Part 2: Hardware
7
C 9730-1:2019
2
用語及び定義
この規格で用いる主な用語及び定義は,次による。
なお,“電圧”及び“電流”という語を用いる場合,それらは,別に明示していない限り,実効値を意味
する。
2.1
定格,電圧,電流,周波数及び電力に関する定義
2.1.1
定格電圧,定格電流,定格周波数又は定格電力(rated voltage, current, frequency or wattage)
制御装置に対して,製造業者が指定した電圧,電流,周波数又は電力。
注記 三相電源の定格電圧は,電源電圧である。
2.1.2
定格電圧範囲,定格電流範囲,定格周波数範囲又は定格電力範囲(rated voltage, current, frequency or wattage
range)
制御装置に対して,製造業者が指定した,下限値及び上限値によって表す電圧,電流,周波数又は電力
の範囲。
2.1.3
動作電圧(working voltage)
制御装置が,定格電圧で動作しているとき,個々の絶縁部に加わる交流又は直流の最高実効値電圧。
注記1 過渡過電圧は,考慮しない。
注記2 開路状態及び通常動作状態は,考慮する。
2.1.4
特別低電圧,ELV(extra-low voltage, ELV)
導体間及び導体と大地との間が50 V以下の,又は三相接続において,相導体間では50 V以下及び相導
体と中性点との間が29 V以下の公称電圧。
注記1 これらの値は,JIS C 9335-1の3.4.1に基づいている。
注記2 この規格では,関連する適用規格で規定した特定の用途に使用するためのELVレベルを,適
用規格で規定する環境条件で使用する制御装置に対して規定してもよい。
2.1.5
安全特別低電圧,SELV(safety extra-low voltage, SELV)
導体間及び導体と大地との間は42 V以下,又は三相回路の場合には導体と中性線との間で24 V以下,
回路の無負荷電圧がそれぞれ50 V及び29 V以下であって,これらの電圧を電池から供給する,又は高い
電圧から得る場合は,安全絶縁変圧器若しくは分離巻線を備える変換器から供給する公称電圧。この電圧
は,SELVシステム又はPELVシステムで用いられる。
注記1 電圧限度値は,安全絶縁変圧器がその定格電圧で給電されるという前提に基づいている。
注記2 同等な絶縁を施した分離巻線を備える変換器は,JIS C 61558-2-6及びJIS C 61558-2-16で規
定する。
注記3 カナダ及び米国では,安全特別低電圧の限度値は,30 Vである。
注記4 SELVシステム(2.1.20)及びPELVシステム(2.1.21)も参照する。
2.1.6
安全絶縁変圧器(safety isolating transformer)
入力巻線を,二重絶縁又は強化絶縁と同等以上である絶縁によって電気的に出力巻線から分離し,安全
8
C 9730-1:2019
特別低電圧回路に給電するような構造の変圧器。
2.1.7
同極性(same polarity)
充電部間相互の接続によって負荷を通じて電流が流れ,この電流が負荷によって制限されるような,充
電部間の関係。
2.1.8
(規定なし)
2.1.9
制限二次絶縁回路(isolated limited secondary circuit)
容量が100 VA以下で,開路の二次定格電圧が1 000 V以下の変圧器の絶縁二次巻線からの回路。
2.1.10
パイロット負荷(pilot duty)
最終目的の電気負荷を,リレー又は接触器のような外部手段によって制御する動作クラス。
2.1.11
過渡過電圧(transient overvoltage)
数ms以下の短時間の過電圧。振動形又は非振動形であって,通常,急速に減衰する。
(IEC 60050のIEV 604-03-13参照)
2.1.12
定格インパルス電圧(rated impulse voltage)
製造業者がその装置又は部分に対して指定するインパルス耐電圧。過電圧に対して絶縁の規定耐容量を
特性付けるものである。
2.1.13
過電圧カテゴリ(overvoltage category)
過渡過電圧状態の特徴を示す数字値。
注記 過電圧カテゴリとしては,I,II,III又はIVを用いる(附属書L参照)。
2.1.14
露出導電部(exposed-conductive-part)
装置の導電部であって,通常は充電部ではないが,基礎絶縁不良が生じた場合に充電部となる,触れる
ことができる部分。
注記 充電部になる露出導電部との接触を通じてだけ充電部となる制御装置の導電部は,露出導電部
とは考えない。
(IEC 60050のIEV 195-06-10参照)
2.1.15
(導電)遮蔽体[(conductive) screen]
電気回路及び/又は導体を覆う又は分離する導電部。
(IEC 60050のIEV 195-02-38参照)
2.1.16
(電気的)保護遮蔽体[(electrically) protective screen]
危険な充電部から電気回路及び/又は導体を分離するために用いる導電遮蔽体。
(IEC 60050のIEV 195-06-17参照)
9
C 9730-1:2019
2.1.17
(電気的)保護遮蔽[(electrically) protective screening]
保護等電位ボンディングシステムに接続した電気的保護遮蔽体による,危険な充電部からの電気回路及
び/又は導体の分離。感電に対する保護の装備を意図する。
(IEC 60050のIEV 195-06-18参照)
2.1.18
単純分離(simple separation)
基礎絶縁による,回路相互間又は回路と大地との間の分離。
(JIS C 0365の3.23参照)
2.1.19
(電気的)保護分離[(electrically) protective separation]
次のいずれかの方法による,一つの電気回路と他との分離。
− 二重絶縁
− 基礎絶縁及び電気的保護遮蔽
− 強化絶縁
(IEC 60050のIEV 195-06-19参照)
2.1.20
SELVシステム(SELV system)
次のいずれの場合においても,電圧がELVを超えない電気的システム。
− 通常状態
− 他の回路の地絡故障を含む,単一故障状態
(JIS C 0365の3.26.1参照)
2.1.21
PELVシステム(PELV system)
次のいずれの場合においても,電圧がELVを超えない電気的システム。
− 通常状態
− 他の回路の地絡故障を除く,単一故障状態
(JIS C 0365の3.26.2参照)
2.2
目的に関する制御装置のタイプの定義
2.2.1
電気制御装置(electrical control)
機器からの出力を変化させる,又は変更する目的で,機器内若しくは機器表面又は機器と組み合わせて
使用し,開始,伝達及び動作の各状態を実現させるための装置。
注記1 電気制御装置は,以下,制御装置という。
注記2 これらのうち一つ又はそれ以上の状態は,電気式又は電子式である。
2.2.2
手動制御装置(manual control)
操作によって開始し,伝達及び動作がいずれも直接で,意図的な時間遅延がない制御装置。
10
C 9730-1:2019
2.2.3
自動制御装置(automatic control)
一つ又はそれ以上の状態の変更が,手動でない制御装置。
2.2.4
検出制御装置(sensing control)
特定の作動量に対して,感度をもつ素子によって開始する自動制御装置。例えば,特定の作動量とは,
温度,電流,湿度,光,液体レベル,位置,圧力又は速度である。
2.2.5
熱によって動作する制御装置(thermally operated control)
熱的駆動装置によって伝達を行う自動制御装置。
2.2.6
自動温度調節器(thermostat)
通常の動作状態において,特定の二つの値の間に温度を維持するような構造のサイクル動作をする温度
検出制御装置。使用者設定用手段を備えていてもよい。
2.2.7
温度制限装置(temperature limiter)
通常の動作状態において,一つの特定値より下又は上に温度を維持するような構造の温度検出制御装置。
使用者設定用手段を備えていてもよい。
注記 温度制限装置は,自動復帰形又は手動復帰形のものであってもよい。それは,機器の通常のデ
ューティサイクル中,逆方向の動作をしない。
2.2.8
温度過昇防止装置(thermal cut-out)
異常動作状態において,ある特定値の上又は下に温度を維持する目的の温度検出制御装置。これは,使
用者設定用手段を備えていない。
注記1 温度過昇防止装置は,自動復帰形又は手動復帰形のいずれであってもよい。
注記2 通常,温度過昇防止装置は,タイプ2作動をもつ。
2.2.9
(規定なし)
2.2.10
エネルギー調整器(energy regulator)
負荷装置に供給するエネルギーを変えるセルフサイクリングの制御装置。供給する平均エネルギーを変
えるために使用者設定用手段を備えていてもよい。
注記 オン時間とオフ時間との和に対するオン時間の比は,供給される平均エネルギーで決定する。
2.2.11
タイムベース制御装置(time-based control)
タイムベース駆動装置又はタイムベース電気回路によって伝達を行う自動制御装置。
2.2.12
電気的に動作する制御装置(electrically operated control)
電気的駆動装置によって伝達を行い,その動作が電気回路を制御し,意図的な有効遅延時間がない自動
制御装置。
注記1 例えば,リレーである。その要求事項は,附属書Uによる。
11
C 9730-1:2019
注記2 当事者間の協定によって,スラッジドリレーは,電気的に動作する制御装置又はタイムベー
ス制御装置のいずれかであってもよい。
2.2.13
タイマ(timer)
次のサイクルを実施する前に操作が必要な,タイムベース制御装置。
注記 あるサイクルにおいては,そのサイクルを継続するために休止位置から動く前に,外部から電
気的又は機械的信号が必要な場合がある。例えば,プログラミング装置である。
2.2.14
タイムスイッチ(time switch)
先行するサイクルが完了したときに後続サイクルを続ける,タイムベース制御装置。
注記 例えば,蓄熱ヒータ上の24時間制御装置である。
2.2.15
モータ保護装置(motor protector)
モータの巻線を過熱から保護するための特別な構造の自動制御装置。
2.2.16
感熱式モータ保護装置(thermal motor protector)
過負荷運転及び始動不良による過熱からモータを保護するための特別な構造の,モータ組込み又は外面
取付けの自動制御装置。
注記1 制御装置にはモータ電流が流れ,また,モータ温度及びモータ電流を検知する。
注記2 制御装置は,モータ温度が復帰値まで低下する場合,手動又は自動のいずれかによって復帰
させる。
2.2.17
電動バルブ(electrically operated valve)
電気的駆動装置によって伝達を行い,その動作が液体又はガスの流れを制御する自動制御装置。
2.2.18
電気駆動機構(electrically operated mechanism)
電気駆動装置によって伝達を行い,その動作が機械装置を制御する自動制御装置。
注記1 電気駆動機構の例は,回転乾燥機の蓋に用いる電気式インタロックである。
注記2 モータは,この定義の中には含まれない。
2.2.19
動作制御装置(operating control)
通常動作中に機器を始動又は調整する制御装置。
2.2.20
保護制御装置(protective control)
その動作が,機器の異常動作時に危険な状況を阻止することを意図した制御装置。
2.2.21
多目的制御装置(multipurpose control)
複数の目的に分類及び使用できる制御装置。
注記 多目的制御装置の例は,温度制限装置としても使用できる自動温度調節器である。
12
C 9730-1:2019
2.2.22
多機能制御装置(multifunctional control)
複数の機能を組み込んだ制御装置。
注記 多機能制御装置の例は,自動温度調節器と恒湿計との組合せである。
2.2.23
システム(system)
制御装置,制御センサ及びアプリケーション又はプロセスに適用する制御装置と制御用のセンサ及び/
又はアクチュエータとの組合せ。
2.3
制御装置の機能に関する定義
2.3.1
開始(initiation)
制御装置が伝達及び動作するため必要である,制御装置の状態の変更。
2.3.2
伝達(transmission)
その制御装置が目的を果たすために必要となる,開始と動作との間の基礎的な結合。
注記 次のいずれかの使用状態を含む。ただし,これらに限定しない。
a) 通信線・プロトコル
b) 追加のハードウェア及び/又はソフトウェア
c) IR・RF伝達
d) 上記a)〜c)の全ての組合せ。例えば,モデム,携帯電話などを経由してインターネットに
用いられる。
2.3.3
動作(operation)
機器又は機器の部分の入力を変える,制御装置の状態の変化。
2.3.4
自動作動(automatic action)
伝達及び動作が,操作の結果でない開始によって起きる自動制御装置の作動。
2.3.5
スローメイク及びスローブレイク自動作動(slow-make slow-break automatic action)
接点閉路及び/又は接点開路の速度が,直接的に作動量の変化率又は駆動装置の運動速度に比例する場
合の動作モード。
注記 この作動は,閉路及び/又は開路に適用できる。
2.3.6
手動作動(manual action)
伝達及び動作が,操作の結果である開始によって起きる自動制御装置又は手動制御装置の作動。
2.3.7
操作(actuation)
使用者の手,足,その他の人体の活動による,制御装置の操作部の運動。
13
C 9730-1:2019
2.3.8
定位置(located position)
操作部を僅かに動かした後に開放したとき,操作部がその位置に復帰するときの操作部の位置。
2.3.9
中間位置(intermediate position)
いずれの操作部についても定位置に隣接している位置で,そこに操作部がとどまり,また,その制御装
置の動作が中間状態になる操作部の位置。
2.3.10
作動量(activating quantity)
変動又は安定性を検出している媒体の物理特性。
2.3.11
動作値(operating value)
検出制御装置が作動量の上昇又は降下に基づいて動作する,関連温度,圧力,電流などの値。
2.3.12
動作時間(operating time)
タイムベース制御装置の自動作動中に発生する,電気的又は機械的な二つの機能の間の経過時間又は時
間差。
2.3.13
動作シーケンス(operating sequence)
制御装置の自動作動又は手動作動の結果として,制御装置の電気的又は機械的機能の動作を発生させる
ような構造のシーケンス,順序又はパターン。
注記 動作シーケンスには,次のいずれかの位置における開路又は閉路接点のパターンも含む。
a) 定位置
b) 中間位置
c) 製造業者又は使用者による設定位置
2.3.14
応答値(response value)
制御装置が特定の機器に関与したときの動作時間又は動作シーケンスの動作値。
2.3.15
トリップフリー(trip-free)
復帰機構の操作又はその位置と独立するような構造の復帰操作部をもつ自動作動。
2.3.16
漏えい電流(leakage current)
装置の露出導電表面と,装置のその他の露出導電表面又は大地との間に流れる容量性結合電流を含む全
ての電流。
2.3.17
設定(setting)
動作値を選択するための,制御装置の部分の機械的な位置決め。
14
C 9730-1:2019
2.3.18
制御装置製造業者による設定(setting by the control manufacturer)
制御装置の製造業者による設定。この設定には,機器製造業者,設置者又は使用者による変更を意図し
ていない。
2.3.19
機器製造業者による設定(setting by the equipment manufacturer)
機器の製造業者による設定。この設定には,設置者又は使用者による変更を意図していない。
2.3.20
設置者による設定(setting by the installer)
機器製造業者又は制御装置製造業者の指示に従って設置者が実施する設定。この設定には,使用者によ
る変更を意図していない。
2.3.21
使用者による設定(setting by the user)
動作値の選択を使用者の操作によって行う設定。
2.3.22
設定点(set point)
設定によって選択した値。
2.3.23
可変設定点(adjustable set point)
設定において選ぶことができる,範囲内の複数の値。
2.3.24
デューティサイクル(duty cycle)
非制御機器の1回の起動から完了までの動作の中に含まれる,全ての自動作動及び手動作動。
2.3.25
接点動作サイクル(cycle of contact operation)
接点の1回の閉路及びそれに引き続く接点の1回の開路作動,又は接点の1回の開路及びそれに引き続
く接点の1回の閉路作動。
2.3.26
動作偏差(operating differential)
動作値の上限値と下限値との間の差。
2.3.27
可変偏差(adjustable differential)
手動操作機構の動作によって,定格限度値内で変更ができる動作偏差。
2.3.28
固定偏差(fixed differential)
製造業者の設定値から変更ができない動作偏差。
2.3.29
最大動作圧力(最大定格圧力)[maximum working pressure (maximum rated pressure)]
制御装置又はその部品が受けるおそれがある,ライン又はシステムの最大の動作圧力。
15
C 9730-1:2019
2.3.30
最高温度,Tmax(maximum temperature)
スイッチヘッドが通常の動作中にさらされる最高連続周囲温度。
2.3.31
遠隔駆動形制御機能(remotely actuated control function)
外部の手段を経由した,制御装置による動作を備えた機能。
注記 次のいずれかの使用状態を含む。ただし,これらに限定しない。
a) 通信線・プロトコル
b) 追加のハードウェア及び/又はソフトウェア
c) IR・RF伝達
d) 上記a)〜c)の全ての組合せ。例えば,モデム,携帯電話などを経由してインターネットに
用いられる。
2.3.32
安全停止(safety shut-down)
制御装置の重要な全ての電気的出力が停止を含む安全な状態に移行するような,全ての電気的出力の状
態の変更。
2.4
断路及び開路に関する定義
制御装置によっては,2種類以上の回路の断路又は開路形式のものを組み込んでいるものもある。
2.4.1
全極断路(all-pole disconnection)
単相交流機器及び直流機器に対しては,単一切替作動による電源導体の両極断路,又は3個以上の電源
導体に接続する機器に対しては,単一切替作動による接地導体を除いた全電源導体の断路。
注記 保護用接地導体は,電源導体ではない。
2.4.2
完全断路(full-disconnection)
商用主電源と断路する部分との間に基礎絶縁と同等な絶縁を保証する,接地以外の全ての電源極におけ
る接点の分離。
注記1 耐電圧及び距離の要求事項が存在する。
注記2 制御装置の極数が,それを接続する機器の電源の極数に等しい場合,完全断路は全極断路で
ある。
注記3 (H.2.4.2の注記3参照)
2.4.3
マイクロ断路(micro-disconnection)
機能上の確実性を保証するための,1極以上における十分な接点の分離。
注記1 接点ギャップの耐電圧要求事項はあるが,距離要求事項はない。
注記2 マイクロ断路は,非検出制御装置においては,この断路による制御機能は確実であり,検出
制御装置においては,表1の項目36に製造業者が宣言する作動量の限度値間で確実であるこ
とを表す。
注記3 (H.2.4.3の注記3参照)
16
C 9730-1:2019
2.4.4
マイクロ開路(micro-interruption)
サイクル作動又は非サイクル作動による接点の分離による開路。完全断路又はマイクロ断路を保証しな
い。
注記1 接点ギャップに対しては,耐電圧及び距離要求事項はない。
注記2 (H.2.4.4の注記2参照)
2.4.5
オフ位置(OFF position)
完全断路又はマイクロ断路の可視的又はそれと分かる位置。
2.4.6
(H.2.4.6による。)
2.5
構造に関する制御装置のタイプの定義
2.5.1
一体形制御装置(integrated control)
機器中の適切な取付け及び固定に依存し,機器の関連部品と組み合わせたときに限り,試験ができる制
御装置。
注記1 機器には,電気,ガス,油,固体燃料又はこれらの組合せを制御するものもある。
注記2 一体形制御装置とは,より複雑な制御装置と(電気的又は非電気的に)一体である制御装置
とを含む。
2.5.2
組込形制御装置(incorporated control)
機器内又は機器の表面に組み込むように意図しているが,分離して試験を行うことができる制御装置。
注記1 組込形制御装置は,分離して試験ができるが,4.3.1.1に規定するように機器に入れて試験を
受けてはならないということではない。
注記2 機器には,電気,ガス,油,固形燃料又はこれらの組合せを制御するものもある。
注記3 組込形制御装置には,より複雑な制御装置に(電気的又は非電気的に)組み込むような制御
装置も含む。
2.5.3
インラインコード形制御装置(in-line cord control)
可とうコード,機器用インレット又はコンセントによって電源及び機器に接続するような構造とし,分
離したケースに入れた制御装置。手動操作を意図している。
注記 プラグの中のヒューズは,制御装置の一部ではない。
2.5.4
自立構造形制御装置(free-standing control)
卓上又は床上に自立するインラインコード形制御装置。
注記 自立構造形制御装置は,手,足,その他の人の行動によって操作できてもよい。
2.5.5
独立取付形制御装置(independently mounted control)
固定配線に恒久的に接続するが,非制御機器から離れて取り付ける構造の制御装置。
注記 独立取付形制御装置は,次のいずれであってもよい。
− 壁に取り付けるような表面取付用
17
C 9730-1:2019
− 壁の空洞のような部分への埋込形取付用で,前面から据付けが可能なもの。
− 制御盤のようなものの表面又は内部に取り付けるもの。この場合,取付けは裏側から行う
ものでもよい。
2.5.6
引きひも(紐)操作制御装置(pull-cord actuated control)
機器の中又は機器表面に取り付け,引きひもによって操作する制御装置。
2.5.7〜2.5.11(H.2.5.7〜H.2.5.11による。)
2.5.12
2段階操作(two-step actuation)
操作部の二つの判別できる動きによる連続的な行動。
2.6
試験手順による制御装置の自動作動のタイプの定義
2.6.1
タイプ1作動(type 1 action)
動作値,動作時間又は動作シーケンスの製造偏差及びドリフトが指定してなく,この規格によって試験
しない自動作動。
注記 タイプ1作動は,6.4に従って細分類する。
2.6.2
タイプ2作動(type 2 action)
動作値,動作時間又は動作シーケンスの製造偏差及びドリフトが指定してあり,この規格によって試験
する自動作動。
注記 タイプ2作動は,6.4に従って細分類する。
2.7
感電に対する保護に関する定義
2.7.1
充電部(live part)
通常使用時に充電する導電部分。この場合,慣例に従って,中性線は含むがPEN導体は含まない。
2.7.1.1
危険な充電部(hazardous live part)
一定の外部影響状態で感電することがあり得る充電部。
2.7.2
クラス0制御装置(class 0 control)
感電に対する保護を基礎絶縁だけに依存する制御装置。
注記1 このことは,可触導電部となる部分を設備の固定配線の保護用接地線に接続する方法がなく,
基礎絶縁が破損した場合に感電に対して周辺条件に依存するということを意味する。
注記2 オーストリア,ベルギー,デンマーク,フランス,ドイツ,イタリア,ノルウェー及び英国
では,クラス0制御装置は認めていない。
注記3 接地端子は,保護用接地とは区別される連続性(等電位)又は機能接地のためだけに許容し
ている。
2.7.3
クラス0I制御装置(class 0I control)
少なくとも全体に基礎絶縁を用いており,かつ,接地端子をもっているが,接地線がない電源コード及
18
C 9730-1:2019
び接地極がない差込プラグを用いているインラインコード形制御装置。
なお,接地用口出し線を設けた2ピンの差込プラグを用いたものは,クラス0I制御装置とみなす。
注記1 オーストリア,ベルギー,デンマーク,フランス,ドイツ,イタリア,ノルウェー及び英国
では,クラス0I制御装置は認めていない。
注記2 接地端子は,保護用接地とは区別される連続性(等電位)のためだけに許容している。
2.7.4
クラスI制御装置(class I control)
感電に対する保護を基礎絶縁だけに依存しないで,基礎絶縁が破損した場合に可触導電部が充電部とな
らないように,それを設備の固定配線の保護用接地線に接続することによって,追加の安全措置を備えて
いる制御装置。
注記1 この安全措置は,可とうコード又はケーブルの一部となっている保護導体を含む。クラスI
制御装置に2芯可とうコード又はケーブルを取り付け,接地極をもつコンセントに差し込め
ないプラグを取り付ける場合,保護はクラス0制御装置と同等であるが,その他の点では機
器の接地設備は,完全にクラスIの要求事項を満たすことが望ましい。
注記2 クラスI制御装置は,二重絶縁部分又はSELV若しくはPELVによる感電に対する保護を備
えた部分をもっていてもよい。
2.7.5
クラスII制御装置(class II control)
感電に対する保護を基礎絶縁だけに依存しないで,二重絶縁又は強化絶縁のような追加の安全措置を備
えている制御装置。クラスII制御装置は,保護用接地の手段を備えず,かつ,設置条件に依存しない。
注記1 このような制御装置は,2.7.5.1〜2.7.5.3に定義した形の中の一つであってよい。
注記2 クラスII制御装置は,SELVによる感電に対する保護を備えた部分をもっていてもよい。
注記3 クラスII制御装置は,接地端子への接続が要求されるPELVによる感電に対する保護を備え
た部分をもつことはできない。
注記3A 接地端子は,保護用接地とは区別される連続性(等電位)又は機能接地のためだけに許容し
ている。
2.7.5.1
絶縁物外郭クラスII制御装置(insulation-encased class II control)
強化絶縁と同等以上の絶縁によって充電部から絶縁した銘板,ねじ,リベットなどの小形部品は除き,
全ての金属部を被覆する,耐久性がある絶縁材料製の実質的に連続した外郭をもつ制御装置。
2.7.5.2
金属外郭クラスII制御装置(metal-encased class II control)
二重絶縁の使用が明らかにできない場合に強化絶縁を使用する部分を除き,二重絶縁を全面的に使用し
ており,実質的に連続した金属外郭をもつ制御装置。
2.7.5.3
絶縁物外郭と金属外郭との組合せ形クラスII制御装置(combination insulation-encased/metal-encased class II
control)
絶縁物外郭クラスII制御装置及び金属外郭クラスII制御装置に示すタイプの組合せの制御装置。
注記 この絶縁形クラスII制御装置の外郭は,付加絶縁又は強化絶縁の一部又は全体を構成してもよ
い。全面的に二重絶縁及び/又は強化絶縁を備えた制御装置が接地端子又は接地接点をもつ場
19
C 9730-1:2019
合,それは,クラス0I制御装置又はクラスI制御装置である。
2.7.6
クラスIII制御装置(class III control)
次の全てに該当する,感電に対する基本的な保護の装備を,ELVの値への電圧制限に依存する制御装置。
− 故障に対する保護を備えていない。
− SELVシステム又はPELVシステムの部分からだけ,電源供給を受ける。
− 内部回路は,ELVを超える値で動作しない。
− 制御装置内部の単一故障において,ELVを超える値の安定的な接触電圧が現れず,発生しない。
− 保護導体に接続するための手段を備えていない。
2.7.7
取外し可能な部分(detachable part)
工具を用いずに取り外すことができる部分又は取り外しできない部分ではない部分(11.11.1.5参照)。
2.7.8
可触部又は可触表面(accessible part or accessible surface)
制御装置を通常使用状態で取り付け,取外し可能な部分を外した後に,図2に示す標準試験指によって,
触れることができる部分又は表面。
2.7.9
機能絶縁(functional insulation)
複数の充電部間に電位差があり,制御装置又は非制御機器の適正な動作のために絶縁が必要である場合
の充電部間の絶縁(L-L)。
注記 2.7.9〜2.7.12において用いる略号は,次による。
L: 充電部
A: 可触部(導電又は絶縁物の表面)
I: 介在部分
2.7.10
基礎絶縁(basic insulation)
感電に対する基本的な保護を行うために,充電部に施した絶縁(L-A又はL-I)。
注記1 基礎絶縁は,充電部と次の各部との間の絶縁を含む。
− 介在導電部又は介在絶縁物の表面上の金属はく(箔)
− 可触導電部(クラス0,クラス0I及びクラスI状態)
− 可触導電部に接続した導電部(クラス0,クラス0I及びクラスI状態)
− 可触絶縁物の表面上の金属はく(クラス0状態)
注記2 これは,以前,機能絶縁とよばれた絶縁の一つである。
2.7.11
付加絶縁(supplementary insulation)
基礎絶縁が破損した場合,感電に対する保護に備えるために,基礎絶縁に追加した独立の絶縁(I-A)。
注記 付加絶縁には,介在導電部又は介在絶縁物の表面上の金属はくと次の各部との間の絶縁を含む。
− 可触導電部(クラスII状態)
− 可触導電部に接続する導電部(クラスII状態)
− 可触絶縁物の表面上の金属はく(クラスII状態)
20
C 9730-1:2019
2.7.12
強化絶縁(reinforced insulation)
この規格で規定する状態の下で,感電に対し二重絶縁と同程度の保護をもつ,充電部に施した単一の絶
縁システム[L- (I) -A]。
注記1 強化絶縁には,充電部と次の各部との間の絶縁を含む。
− 可触導電部(クラスII状態)
− 可触導電部に接続する導体(クラスII状態)
− 可触絶縁物の表面上の金属はく(クラスII状態)
注記2 “絶縁システム”とは,絶縁が1個の均一部であることを意味していない。絶縁は付加絶縁
又は基礎絶縁として単独に試験することができない数層からなっていてもよい。
2.7.13
二重絶縁(double insulation)
基礎絶縁及び付加絶縁の両方で構成する絶縁(クラスII状態)。
2.7.14 (H.2.7.14を適用)
2.7.15
等電位ボンディング(equipotential bonding)
等電位を達成するための,導電部間の電気的接続の措置。
(IEC 60050のIEV 195-01-10参照)
注記 等電位ボンディングの有効性は,ボンディング内の電流の周波数に依存する。
等電位ボンディングは,次のような導電部を接続して同じ電位にするために使用する。一つ
は構造物の導電部である。これは,電気設備の構成部分ではないが,一般に局部的な接地(外
部の導電部)の電位を誘導しがちである。他の一つは,設備内の制御装置,機器又は構成部品
の導電部である。これは,接触可能であり通常は充電部ではないが,棒状の主要な等電位ボン
ディング端子に対して基礎絶縁不良となった(露出導電部)場合に充電部となる。等電位ボン
ディングシステムに接続する部分に含まれるものは,保護導体,PE導体,PEN導体,接地線,
制御装置又は機器の保護用接地端子,建築物内の全ての導電部[例えば,水(飲用及び下水)
用の金属管,金属製浴槽,セントラルヒーティングシステム用配管,全ての内部ガス管(これ
は,外部のガス管からの分離も要求されている。),アンテナ及び通信システム用の接地コネク
タ],敷物及び鉄のような組立てに使用する建築物の全ての金属部,避雷用導体並びに設備シス
テムによっては接地電極などである。等電位ボンディングに対する要求事項は,建築物の設備
のためのJIS C 60364の規格群で規定している。これらは,建築物の固定式設備に並列か又は
経由して接続されている幾つかの構成部品(例えば,センサ,アクタ,中央制御要素,インタ
フェース要素)からなる制御装置の設備に当てはめてもよい。
2.7.15.1
保護等電位ボンディング(protective equipotential bonding)
安全を意図(感電に対する保護)した等電位ボンディング。
(IEC 60050のIEV 195-01-15修正)
注記 機能用等電位ボンディングは,IEC 60050のIEV 195-01-16に定義されている。
21
C 9730-1:2019
2.8
制御装置の構成部品に関する定義
2.8.1
検出素子(sensing element)
検出制御装置応答の自動作動が,それに対応する作動量の影響を受ける制御装置の部分。
2.8.2
スイッチヘッド(switch head)
完成した制御装置。ただし,検出素子は除く。
注記 構造上,スイッチヘッドと検出素子とを区別することが不可能である場合,制御装置全体は,
検出素子である。
2.8.3
操作部(actuating member)
制御作動の開始をするため,又は使用者による設定のために,手などによって動かし,引っ張り,押し
又は回転させる部分。
注記 “操作部”という用語は,装置が,更なる運動をしないように十分に固定される,又は制御装
置製造業者による設定に工具が必要であるような場合,制御装置製造業者による設定に用いる
止めねじのような装置は含まない。
2.8.4
操作手段(actuating means)
制御装置の機構に操作部を接続する何らかの部分。
2.8.5
引きひも(pull-cord)
操作を起こすために引っ張る可とう性の操作手段。
2.8.6
駆動装置(prime mover)
自動制御装置に対して動力を伝達するのに必要な機械的エネルギーを発生させるために用いられる装置。
例えば,電気的に動作する制御装置,電動バルブ,電気駆動機構又はタイムベース制御装置。
注記 駆動装置は,機械的蓄積装置(例えば,時計仕掛けのばね),電磁装置(例えば,モータ又はス
テッピングソレノイド),電熱装置(例えば,エネルギー調整器の電熱素子)又は機械的エネル
ギーを作る何らかの他の機構の場合がある。
2.8.7
クラッチ(clutch)
作動部の操作の開始若しくは取消しを引き起こす若しくは可能にする駆動装置,又は作動量のいずれか
を無効にすることができる機械装置。
2.8.8
カバー(cover)
カバープレート(cover plate)
制御装置が,通常使用状態で取り付けられているとき,可触であって工具を用いるときに限り外すこと
ができる部分。
注記 その取外しは,特殊工具の使用を必要としない。
22
C 9730-1:2019
2.8.9
ねじなし固定部(又は構成部品)[screwless fixed part (or component)]
ある機器又は構成部品の中,表面又は特別製の支持物に取り付け,設置,搭載又は組み立てた後,ねじ
に依存しない確実な手段によって,正しい位置に保持される可触部(又は構成部品)。
注記1 分解又は取外しは,その部分(又は構成部品)に直接行うか,又はその保持手段に接近する
ために,工具の使用を必要とする場合がある。
注記2 次のものは,ねじなし固定部又は構成部品とみなさない部分の幾つかの例である。
− リベット,接着又は類似の手段によって恒久的に固定される構成部品の部分
− 平形プッシュオンコネクタ
− ねじなし端子
− 標準プラグ及びコンセント
− 標準機器用カプラ[単一作動によるかん(嵌)合の外れを防止するための追加掛け金をも
つ場合であっても。]
− 差込み式ランプソケットとそれに接続されるランプ(口金)との組合せ
− ねじり−ラグ構造
− 摩擦はめあい構造
2.9
制御装置の端子及び端末の種類の定義
2.9.1
ピラー端子(pillar terminal)
導体を,単一ねじ又は複数のねじの軸の下で締め付ける穴又は空洞に挿入する端子。
注記 締付圧力は,ねじの軸によって直接に加えるか,又はねじの軸による圧力を介在する締付部位
を通して加えてもよい(図11参照)。
2.9.2
ねじ端子(screw terminal)
導体を,ねじの頭の下で締め付ける端子。
注記 締付圧力は,ねじの頭によって直接に加えるか,又は座金,締付板若しくは広がり防止装置の
ような,介在部を通して加えてもよい(図10参照)。
2.9.3
スタッド端子(stad terminal)
導体を,ナットの下で締め付ける端子。
注記 締付圧力は,適切な形状のナットによって直接に加えるか,又は座金,締付板若しくは広がり
防止装置のような介在部を通して加えてもよい(図10参照)。
2.9.4
ねじなし端子(screwless terminal)
ばね,くさび,偏芯,円すい又は類似のものによって,導体を直接的又は間接的に接続する端子。
注記 次のものは,ねじなし端子ではない。
− 端子中に導体を締め付ける前に,導体に特殊装置を固定することを必要とする端子。例え
ば,平形プッシュオンコネクタ
− 導体の巻付けを必要とする端子,例えば,巻付接続をもつ端子
− 絶縁を貫通する刃又は先端部によって,導体に直接接触する端子
23
C 9730-1:2019
2.9.5
平形プッシュオンコネクタ(flat push-on connector)
線芯又は導体を,制御装置又は他の線芯若しくは導体に接続することを可能にするタブ及びレセプタク
ルの組立品。
2.9.6
レセプタクル(receptacle)
線芯又は導体に恒久的に取り付けるような構造の平形プッシュオンコネクタの受金部(図16参照)。
2.9.7
タブ(tab)
平形プッシュオンコネクタの挿入部(図14及び図15参照)。
2.9.8
インラインタブ(in-line tab)
線芯又は導体に恒久的に取り付けるような構造のタブ。
2.9.9
制御装置の一部であるタブ(tab forming part of a control)
制御装置に恒久的に取り付けるか,又は制御装置と一体になったタブ。
2.9.10
端末(termination)
導体の取換えに,特殊工具,特殊プロセス又は導体の特別端末処理のいずれかを必要とする方法で,導
体を制御装置に接続できる部品。
注記 はんだ付けは,特殊工具を必要とする。溶接は,特殊プロセスを必要とする。導体に取り付け
られるケーブルラグは,特別端末処理である。
2.9.11
はんだ端末(solder termination)
導体を機械的手段によって固定し,回路の連続性をはんだによって保証する端末。
2.9.12
サドル端子(saddle terminal)
導体を複数のねじ又はナットによってサドルの下に締め付ける端子[図13 a)参照]。
2.9.13
ラグ端子(lug terminal)
ねじ又はナットによって,ケーブルラグ又はバーを締め付けるような構造のねじ端子又はスタッド端子
[図13 b)参照]。
2.9.14
マントル端子(mantle terminal)
導体をナットによって,ねじスタッド中の溝の底部に向けて締め付ける端子。
注記 導体は,ナットの下の適切な形状の座金によって,溝の底部に向けて締め付けられる。ナット
が,そのナットから溝内の導体への圧力を伝達するキャップナット又は同等に有効な装置であ
る場合,中央の栓によって締め付けられる(図12参照)。
24
C 9730-1:2019
2.9.15
等電位ボンディング端子(equipotential bonding terminal)
等電位ボンディングシステムへの電気的接続を意図する,機器上又は装置上に備えた端子。
(IEC 60050のIEV 195-02-32参照)
2.9.16
保護ボンディング端子(protective bonding terminal)
保護等電位ボンディングを目的とした端子。
注記 例えば,制御装置又は機器の,保護遮蔽体端子又はPE端子がある。
2.9.17
保護導体,PE(protective conductor, PE)
安全を目的として備えた導体。例えば,感電に対する保護。
(IEC 60050のIEV 195-02-09修正)
2.10 制御装置への接続部に関する定義
2.10.1
外部導体(external conductor)
インラインコード形制御装置,独立取付形制御装置,又は制御装置を機器内に取り付ける若しくは機器
上に載せる機器に対して,その一つの部分が外部にあるケーブル,可とうコード,線芯又は導体。
注記 例えば,外部導体は,電源リード線,機能コード又は機器の異なる部品間の相互接続コードで
あってもよく,固定配線の一部であってもよい。
2.10.2
固定配線(fixed wiring)
通常使用状態で,導体が機器又は制御装置に入る箇所で,ストレスがその導体に加わるおそれがないよ
うに,建物の構造部に恒久的に固定される外部導体。
注記 例えば,固定配線は,電線管中への導体の収納,壁中へのケーブルの埋設,壁などの表面への
ケーブル又はコードの十分な固定によってもよい。
2.10.3
内部導体(internal conductor)
外部導体でもなく,一体形導体でもないケーブル,可とうコード,線芯又は導体。
注記 例えば,制御装置と機器とを相互接続するための,機器内部にある導体である。
2.10.4
一体形導体(integrated conductor)
制御装置内にあるか,又は制御装置の端子若しくは端末に恒久的に相互接続するために使用されている
導体。
2.10.5
着脱式コード(detachable cord)
機器インレット又はプラグとソケットとの組合せによって,制御装置又は機器に接続する外部可とうコ
ード。
2.10.6
非着脱式コード(non-detachable cord)
X形,M形,Y形又はZ形取付け(2.10.6.1〜2.10.6.4参照)によって,制御装置に接続するか,又はそ
25
C 9730-1:2019
れに対して組み立てる外部可とうコード。
2.10.6.1
X形取付け(type X attachment)
コードを特殊工具を用いずに容易に取り換えることができ,特別な準備が必要ない標準コードを使用す
る取付方法。
2.10.6.2
M形取付け(type M attachment)
コードを特殊工具を用いずに容易に取り換えることができる,成形コードガード又は特殊端末が付いて
いる特殊コードだけを使用する取付方法。
注記 この取付方法は,サービス中に標準コードを取り付けることが可能であるものには適用しない
が,このようなことを特定の機器規格によって許容する場合は除く。
2.10.6.3
Y形取付け(type Y attachment)
製造業者,サービス代理店又は同等の有資格者によってコード交換を行うように意図した電源コードの
取付方法。
2.10.6.4
Z形取付け(type Z attachment)
制御装置の一部を切断又は破壊しない限り,可とうケーブル又はコードが交換できないようにした取付
方法。
2.10.7
口出し線(ピッグテイル)[flying lead (pigtail)]
制御装置製造業者によって,その一端が制御装置に恒続的に接続されている,制御装置接続用の1本又
は複数の線。
2.10.8
一次電池,セル(primary battery, cell)
主要な電気化学的反応が不可逆の電気化学的セルの種類。
注記 例えば,アルカリ電池をいう。
2.10.9
二次電池,充電式セル[secondary battery (rechargeable cell)]
主要な電気化学的反応が可逆の電気化学的セルの種類。
注記1 充電式電池とは,二次セルが2個又はそれ以上まとまったものをいう。
注記2 例えば,充電式電池とは,ニッケル水素電池(NiMH),リチウムイオン電池(Li-ion)など
をいう。
2.11 タイプ2作動の性能に関する定義
2.11.1
製造偏差(manufacturing deviation)
固有の形式番号で,製造業者によって供給されたいずれか2個の制御装置の間で要求される動作値,動
作時間又は動作シーケンスの最大偏差。ただし,供給された状態で,同一の方法で試験するときに限る。
注記 偏差は,箇条15の該当する細分箇条によって規定される許容値に関連する。
26
C 9730-1:2019
2.11.2
ドリフト(drift)
この規格で規定する状態の下で,試験するときに発生するおそれがある,いずれか1個のサンプルの動
作値,動作時間又は動作シーケンスの最大の変化。
注記 変化は,箇条15に該当する細分箇条によって許容する場合,絶対値を基準にしても,製造偏差
と組み合わせてもよい。
2.12 沿面距離及び空間距離のための要求事項に関する定義
2.12.1
空間距離(clearance)
空気を通して測定した二つの導電部間又は一つの導電部と絶縁物の可触表面と接触する金属はくとの間
の最短距離。
注記 測定方法は,附属書B及び図17による。
2.12.2
沿面距離(creepage distance)
絶縁物の表面に沿って測定した二つの導電部間又は一つの導電部と絶縁物の可触表面と接触する金属は
くとの間の最短距離。
注記 測定方法は,附属書B及び図17による。
2.12.3〜2.12.7 (定義なし)
2.12.8
汚損(pollution)
絶縁物の耐電圧又は表面抵抗を減少させることになる外来物,固形物,液体又はガス状物質のあらゆる
添加。
2.12.9 環境
2.12.9.1
マクロ環境(macro-environment)
装置を設置又は使用する,部屋又はその他の場所の環境。
2.12.9.2
ミクロ環境(micro-environment)
沿面距離の決定に特に影響を及ぼす,絶縁に近接した環境。
2.12.9.3
汚損度(pollution degree)
ミクロ環境の推測される汚損を特性付ける数値。
注記 汚損度は,1〜4を用いる。この要求事項は,附属書Nによる。
2.13 その他の定義
2.13.1
固有の形式番号(unique type reference)
その制御装置の製造業者が定めることによって,元のものと電気的,機械的,寸法的及び機能的に完全
に互換性がある交換品が供給できるような個々の制御装置特有の番号。
27
C 9730-1:2019
2.13.2
工具(tool)
ナット,ねじ又は類似部品を動作させるために用いることができる,ねじ回し,コイン,その他の物体。
2.13.3
特殊工具(special-purpose tool)
通常の家庭において,容易に入手することが困難な工具。例えば,六角穴付きねじ用のキーのような工
具である。
注記 四角又は六角ナットを動かすことが可能なコイン,ねじ回し,スパナのような工具は,特殊工
具ではない。
2.13.4
通常使用(normal use)
制御装置又は関連機器が作られた目的,及び製造業者が意図する方法に従った使用状態。
注記1 通常使用には,機器規格の中に規定した過負荷又は異常動作状態は含まれる。
注記2 制御装置又は機器を良好な状況に保守するために必要なプロセスを,製造業者の説明書に従
って使用者が実施するとしても,通常使用には含まれない。
2.13.5
使用者保守(user maintenance)
制御装置又は機器を良好な状況に維持するために必要な,詳細を使用者に対する製造業者の説明書中に
示す,定期的なプロセス。
2.13.6
サービス(servicing)
現場などで,有資格者,電気技術士,又はサービス組織によって行われる,制御装置又は機器を良好な
状態に維持するために必要なプロセス。
注記 これには,可とうコードの交換,温度ヒューズの交換又は類似作業が含まれている。
2.13.7
製造業者のサービス(manufacturer servicing)
製造業者又は製造業者が許可を与えた修理者に限り行うことができるサービス。
注記 製造業者のサービスは,特殊工具,又は特殊計装が必要なことによる場合があって,また,こ
れには,制御装置製造業者による設定も含まれている。
2.13.8
不良(failure)
要求する機能を実行するための能力の損失。
2.13.9
故障(fault)
要求する機能を実行できないことによって特徴付けられる事項の状態。ただし,予防の保守若しくは他
の計画的な動作,又は外部要因の不足による運転休止状態を除く。
注記1 “不良”は,“故障”と区別するような状態の事例である。
注記2 不良の後に故障がある。
注記3 定義した概念は,ソフトウェアだけからなる事例には適用しない。
注記4 故障は,多くの場合,その事項自体の不良の結果であるが,事前の不良なしでも存在する。
28
C 9730-1:2019
2.13.10
スマートグリッド,インテリジェントグリッド(smart grid, intelligent grid)
次のような目的で,情報の交換及び制御装置の技術の利用,分配計算,並びにセンサ及びアクチュエー
タを取り扱う電力システム
− ネットワーク使用者及びその他の利害関係者の行動及び活動の統合
− 持続可能で,経済的かつ安全な電気供給の効果的な配電
(IEC 60050の617 04-13参照)
2.13.11
スマートイネーブル制御装置(smart enabled control)
一般的に電力事業の通信によって又は使用者遠隔インタフェースによって,遠隔的に制御又は許可する,
電力課金率又は電力需要応答に関する一定の機能を可能にする,スマートグリッドと相互に作用すること
を意図する制御装置。
注記 例えば,遠隔インタフェースには,コンピュータ又はスマートフォンを含む。
2.14 製造業者及び使用者に関する定義
2.14.1
制御装置製造業者(control manufacturer)
制御装置の製造業者。
2.14.2
機器製造業者(equipment manufacturer)
制御装置を,機器の中若しくは表面に付けて又は組み合わせて使用する機器の製造業者。
注記 カナダ及び米国では,機器製造業者は,OEM(オリジナル機器製造業者)を示す。OEMは,
機器に組み込むか,又は統合するために制御装置製造業者から制御装置を受け取る。
2.14.3
設置者(installer)
制御装置及び場合によっては関連機器も据え付ける資格がある者。
2.14.4
使用者(user)
制御装置の通常の使用期間中,使用者保守文書に従って制御装置を使用する者。
注記 使用者とは,一般の人を想定する。
2.14.5
低複雑度の安全関連システム又は制御装置(low complexity safety-related systems or controls)
次のいずれも満足する安全関連システム又は制御装置。
− 個々の構成部品の不良モードを,適切に定義している。
− 故障状態におけるシステム又は制御装置の動作を完全に決定している。
2.15 サーミスタに関連する定義
(J.2.15による。)
2.16 ソフトウェアを使用する制御装置の構造に関連する定義
(H.2.16による。)
2.17 ソフトウェアを使用する制御装置におけるエラー防止に関連する定義
(H.2.17による。)
29
C 9730-1:2019
2.18 ソフトウェアを使用する制御装置のための故障/エラー抑制技術に関連する定義
(H.2.18による。)
2.19 ソフトウェアを使用する制御装置のためのメモリ試験に関連する定義
(H.2.19による。)
2.20 ソフトウェア用語の定義−一般事項
(H.2.20による。)
2.21 (規定なし)
2.22 制御機能の分類に関連する定義
(H.2.22による。)
2.23 機能安全に関連する定義
(H.2.23による。)
2.24 データ交換のアクセスに関連する定義
(H.2.24による。)
3
一般要求事項
制御装置は,通常使用の場合又は通常使用で発生するおそれがある不注意の使用の場合であっても,人
に対する傷害又は周囲の財物に対する損害を引き起こさないような構造でなければならない。
適否は,この規格及びこの規格群の関連する第2部において規定する関連試験を実施することによって
判定する。
4
試験に関する一般注意
この規格による試験は,形式試験とする。
注記1 規定の試験のいずれかの結果が,疑う余地のないものと判定できる場合,該当する試験は省
略できる。
注記2 この規格群の関連する第2部に規定する場合を除き,H.4の条件は,非電気制御装置には適
用しない。
4.1
試験条件
4.1.1
この規格において,特定の箇条で別に規定する場合を除き,サンプルは,製造業者が指定する状態
で取り付け,また,重要な要因がある場合,供給された状態で最も不利な位置で試験する。
4.1.2
試験結果が室温によって影響を受ける場合,20±5 ℃に維持する。ただし,疑義がある場合には,
この規格の個別規格に規定する場合を除き,23±2 ℃に維持する。
4.1.3
その他の指示事項を特定の箇条で規定する場合を除き,操作部は最も不利な位置,中間位置又は使
用者による設定位置のいずれかに置く。
4.1.4
この規格において,別に規定する場合を除き,試験は,この規格の箇条の順序で実施する。
H.4.1.4にもよる。
4.1.5
この規格の試験中,17.12の高速度での手動作動の試験を除き,制御装置の操作は,必要に応じて
試験機器によって実施してもよい。
4.1.6
17.12での試験を除き,この規格の試験及び目的に対して,操作部が製造業者によって供給されて
いない場合,制御装置を操作させるために操作手段を使用してもよい。
4.1.7
7.2で製造業者が宣言し,箇条17において使用する温度変化率(すなわち,α1,β1,α2及びβ2)は,
30
C 9730-1:2019
±12 K/hとする。その他の作動量に対しては,表1の項目37で製造業者が宣言し,箇条17で用いる最小
変化率及び/又は最大変化率(すなわち,α1,β1,α2及びβ2)は,JIS C 9730の規格群の関連する第2部
に規定する試験許容差とする。
4.1.8
全ての試験において,測定器又は測定装置は,測定する値に著しく影響を与えることがあってはな
らない。
4.1.9〜4.1.11 (H.4.1.9〜H.4.1.11による。)
4.2
必要とするサンプル
4.2.1
1個のサンプルを,関連する附属書を含み,箇条5〜箇条11及び箇条18〜箇条27の試験のために
使用する。一組3個のサンプルを,残りの試験に使用する。
1個のサンプルが,箇条12〜箇条17の試験を満たさない場合,不合格となった試験及びその試験結果に
影響を与えるおそれがある先行する試験について,同一のサンプルの別の組によって繰り返す。その場合
は,全てのサンプルが繰り返し行った試験を満たさなければならない。
製造業者は,第一の組のサンプルと共に,1個のサンプルが,試験を満たさない場合に要求される可能
性がある,追加の組又は追加の複数の組のサンプルを提出してもよい。その場合,新しく要求することな
く追加のサンプルで試験を行い,更に不合格が発生したときにだけ不合格とする。追加するサンプルの組
が同時に提出されない場合,1個のサンプルの不合格によって不合格とする。
注記 カナダ及び米国では,1台だけの試験品を,箇条12〜箇条17の試験に使用し,かつ,試験を満
たすことを求めている。
4.2.2
(規定なし)
4.2.3
この規格の幾つかの破壊試験のために,追加サンプルを要求してもよい。
4.2.4
JIS C 9730の規格群の2規格以上の第2部の要求事項を満たすような構造の制御装置は,一般に,
規格ごとに別々に試験しなければならない。
注記 当事者間の合意によって,JIS C 9730の規格群の2規格以上の第2部に共通である要求事項及
び試験は,1回だけ確認すればよいが,共通の試験が特定の試験の結果に影響を与える場合は
除く。
4.2.5
(J.4.2.5による。)
4.3
試験のための指示事項
4.3.1
提出状態について
4.3.1.1
制御装置が機器に取り付けられるか又は機器と共に提出される場合,機器に取り付けるか又は機
器と共に試験してもよい。この場合,制御装置は指定する特定負荷用として分類する。また,機器とは別々
に試験してもよいが,この場合,制御装置は,指定する特定負荷,抵抗負荷又は抵抗−誘導負荷用として
分類してもよい。抵抗負荷又は抵抗−誘導負荷用のいずれにおいても,その機器が通常の負荷で動作して
いる場合,該当する回路中の電流は,その回路の定格電流とみなす。
4.3.1.2
機器に取り付けた状態又は機器と共に提供された全ての制御装置に対しては,7.2で製造業者が
宣言する全ての他の関連情報は,提出された機器の目視検査及び測定によって得てもよい。
4.3.1.3
一体形制御装置は,指定する特定負荷用として分類し,制御装置を対象とする機器,又はその一
部に取り付けて試験する。
4.3.1.4
機器に取り付けてない状態又は機器と共に提出されたものではない制御装置は,分離した状態で
試験する。
4.3.1.5
非着脱式コードと共に使用する制御装置は,該当するコードを接続した状態で試験する。
31
C 9730-1:2019
4.3.2
定格に関するもの
(J.4.3.2にもよる。)
4.3.2.1
交流専用制御装置は,指定している場合,定格周波数の交流を用いて試験する。直流専用制御装
置は直流を用いて,また,交直両用制御装置は,直流又は交流のいずれかより不利な方の電源を用いて試
験する。
4.3.2.2
定格周波数を指定していない交流専用制御装置は,50 Hz又は60 Hzのいずれかより不利な方の
周波数で試験する。50〜60 Hz以外の指定する周波数範囲以内の定格周波数の制御装置は,表示する周波
数又は指定する周波数範囲内の最も不利な周波数で試験する。
4.3.2.3
直流専用の制御装置を試験するとき,極性が制御装置の動作に及ぼす影響を考慮に入れなければ
ならない。
4.3.2.4
異なる交流定格及び直流定格をもつ制御装置については,箇条12〜箇条14及び箇条17に対する
試験は,二組のサンプルで実施する。一組は,交流定格に従って試験し,他は直流定格に従って試験する。
注記 試験は,選択によって,幾つかの定格をカバーするように試験数を減少させて実施してよい。
4.3.2.5
他に指定していない場合,一つ又はそれを超える数の電圧範囲を指定する制御装置は,指定する
電圧範囲内の最も不利な電圧で試験する。また,この電圧は,試験項目ごとに規定する係数を乗じる(4.3.2.7
参照)。
4.3.2.6
複数の定格電圧又は定格電流の表示をもつか,又はそれを指定する制御装置については,箇条17
の試験は,定格電圧及び定格電流のそれぞれの組合せについて,複数の組のサンプルについて実施する。
注記 試験は,選択によって,幾つかの定格をカバーするように試験数を減少させて実施してよい。
4.3.2.7
電圧範囲を指定する制御装置に対しては,その範囲の各限度値で一組のサンプルについて試験す
る。ただし,限度値間の差が,その範囲の平均値の10 %を超えない場合は,試験は,その範囲の上限値に
おいて一組のサンプルについて実施する。
4.3.2.8
特定電源によって動作する制御装置は,その特定電源を用いて試験する。
4.3.2.9
直流電源に接続する回路は,SELV回路,PELV回路,ELV回路,又は電源の最大動作電圧に依
存する電源回路のいずれかに分類する。最大動作電圧は,機器の表示する定格電圧にかかわらず,接続す
る電源システムに関連する電池充電の“浮遊電圧”への考慮を含める。
注記 浮遊電圧は,完全充電状態のセルを保持する電池セルに連続的に給電する一定の電圧である。
浮遊電圧は,電池の科学的性質及び構造並びに周囲温度で著しく変化する。
4.3.2.10 充電式電池によって動作する制御装置は,更に附属書Vに従って試験する。
4.3.2.11 (J.4.3.2.11及びV.4.3.2.11による。)
4.3.3
感電に対する保護に関するもの
4.3.3.1
クラスI制御装置,又はクラス0,クラス0I若しくはクラスI機器に用いる制御装置においては,
二重絶縁又は強化絶縁の部品をもつことが必要である場合,このような部品はクラスII制御装置のために
規定する,該当する要求事項を満たすか否かを検査する。
4.3.3.2
クラスI制御装置及びクラスI機器に用いる制御装置は,接地されない可触金属部又は可触絶縁
表面は,クラスII制御装置の要求事項を満たす絶縁を備えていなければならない(9.1.1参照)。
4.3.3.3
クラスI若しくはクラスII制御装置,又はクラス0,クラス0I,クラスI若しくはクラスII機器
に用いる制御装置は,SELV回路を使用した部分をもつことが必要である場合,このような部分は,11.2.6
(附属書T)のSELVの使用による感電に対する保護のために規定する該当する要求事項を満たすか否か
を検査する。
32
C 9730-1:2019
クラスI制御装置又はクラスI機器に用いる制御装置は,PELV回路を使用した部分をもつことが必要で
ある場合,このような部分は,11.2.6(附属書T)のPELVの使用による感電に対する保護のために規定す
る該当する要求事項を満たすか否かも検査する。
注記 クラスII制御装置はPELV回路を使用できない(2.7.5参照)。
4.3.4
製造上の変動に関するもの
4.3.4.1
その他の点では同一であるが,製造業者が設定するか,又は入替え可能な構成部品を製造段階に
おいて含めることによって,いろいろな動作値,動作時間又はシーケンスを作り出すことができる制御装
置は,この規格の目的に対して,通常,同一機種の提出として取り扱う。通常,制御装置は,最も厳しく
なる条件に設定する。ただし,全範囲の承認を可能にするために追加のサンプルが必要である場合,他の
値に設定したこれらのサンプルを要求できる。
4.3.4.2
4.3.4.1による場合,いかなる動作値,動作時間又はシーケンスの製造偏差及びドリフトの変動性
に対しても注意する。また,検出制御装置に対しては,その範囲の異なる部分に適用する可能性のある,
該当する作動量の上昇及び降下の許容できる最小速度及び最大速度に十分に注意する。
4.3.5
目的に関するもの
4.3.5.1
多目的制御装置は,6.3に従って,一般的に目的ごとに別々に試験する。一つの目的のための試
験中,他の全ての目的に適用できる作動量及び駆動装置は,規定する範囲若しくは複数範囲内の最も厳し
い値,又は位置に維持する。
4.3.5.2
箇条17に該当する適切な細分箇条がない制御装置は,基本的に意図された動作値,動作時間及
び動作シーケンスを試験するように,当事者間で協定した方法で試験する。
4.3.5.3
6.3又はJIS C 9730の規格群の関連する第2部で分類していない目的をもった制御装置も,この
規格に従って試験し,要求事項への適否を判定してもよいが,箇条17は適用しない。できる限り,箇条
17で意図する試験計画を基礎とし,当事者間で協定する。
4.3.5.4
(J.4.3.5.4による。)
4.3.5.5
(U.4.3.5.5による。)
5
定格
5.1
最大定格電圧
最大定格電圧は,690 Vとする。
5.2
(規定なし)
5.3
適否
5.1の要求事項に対する適否は,箇条7の情報の要求事項によって判定する。
6
分類
制御装置は,次によって分類する。
6.1
電源の性質による分類
電源の性質による分類は,6.1.1〜6.1.5による。
6.1.1
交流専用制御装置
注記1 交流専用制御装置は,直流回路で使用してもよいが,電流が交流定格電流の10 %又は0.1 A
のうちいずれか少ない方を超えないときに限る。
注記2 直流定格を確定するために,追加試験が必要となる場合がある。
33
C 9730-1:2019
6.1.2
直流専用制御装置
6.1.3
交直両用制御装置
6.1.4
特定電源用又は多種電源用制御装置
6.1.5
電池駆動式制御装置
6.2
制御装置の各回路によって制御される負荷の種類による分類
制御装置の各回路によって制御される負荷の種類による分類は,6.2.1〜6.2.6による。
複数の回路をもつ制御装置は,各回路が同一の分類をもつ必要はない。
6.2.1
力率が0.95以上の実質的な抵抗負荷用の回路
注記 このような回路は,誘導負荷用に使用してもよいが,力率が0.8以上であり,誘導負荷は抵抗
負荷の電流定格の60 %を超えないときに限る。また,このような回路は他の無効負荷に対して
使用してもよいが,無効電流が定格抵抗性電流の5 %を超えず,負荷が10 VA以下であるとき
に限る。
6.2.2
抵抗負荷若しくは力率が0.6以上の誘導負荷又は両方の組合せのいずれかに適用する回路
注記1 例えば,加熱素子及びモータの両方を含むファンヒータの中の回路がある。
注記2 誘導負荷専用の回路は,抵抗負荷が誘導負荷に等しいことを指定することによって,この細
分箇条に分類しても,指定する特定負荷用として分類してもよい。
6.2.3
指定する特定負荷用の回路
注記 例えば,白熱電球又は蛍光灯負荷用,力率が0.6未満の高誘導負荷用,容量性負荷用及び無負
荷での動作を意図した接点用の回路がある。
6.2.4
20 mA未満の電流用回路
注記 例えば,ネオン指示器用及びその他の信号ランプ用回路がある。
6.2.5
特性が制御装置製造業者の指定によって示される交流モータ負荷用回路
6.2.6
パイロット負荷用の回路
6.3
目的による分類
目的による分類は,6.3.1〜6.3.15による。
一つの制御装置は,複数の目的に対して分類してもよい。このような制御装置は,多目的制御装置とよ
ぶ。
注記 自動制御装置の手動作動又は自動制御装置と一体であるが分離した手動作動は,この細分箇条
による分類はしない。
6.3.1
自動温度調節器
6.3.2
温度制限装置
6.3.3
温度過昇防止装置
6.3.4
(規定なし)
6.3.5
エネルギー調整器
6.3.6
タイマ
6.3.7
タイムスイッチ
6.3.8
手動制御装置
6.3.9
検出制御装置(6.3.1〜6.3.3は除く。)
6.3.10 電気的に動作する制御装置
6.3.10.1〜6.3.10.3 (U.6.3.10.1〜U.6.3.10.3による。)
34
C 9730-1:2019
6.3.11 モータ保護装置
6.3.11.1 感熱式モータ保護装置
6.3.12 電動式弁
6.3.13 電気駆動機構
6.3.14 保護制御装置
6.3.15 動作制御装置
注記 上記以外の分類は,この規格の規格群の第2部に示す。
6.4
自動作動の特徴による分類
自動作動の特徴による分類は,6.4.1及び6.4.2による。
6.4.1
タイプ1作動
6.4.2
タイプ2作動
6.4.3
タイプ1作動及びタイプ2作動は,構造上又は動作上の特徴のうちの1個又は複数の特徴に従って,
更に細かく6.4.3.1〜6.4.3.13に分類する。
注記1 更なる分類は,関連する規定があって,該当する試験を完了したときに限り,適用する。
注記2 複数の特徴を提供する作動は,該当する文字の組合せ,例えば,タイプ1.C.L又はタイプ2.A.E
によって分類してもよい。
注記3 手動作動は,この細分箇条によって分類しない。
6.4.3.1
動作時の完全断路(タイプ1.A又はタイプ2.A)
6.4.3.2
動作時のマイクロ断路(タイプ1.B又はタイプ2.B)
6.4.3.3
動作時のマイクロ開路(タイプ1.C又はタイプ2.C)
6.4.3.4
故障に対して瞬間的であっても再閉路することができないトリップフリー機構(タイプ1.D又は
タイプ2.D)
6.4.3.5
故障の継続に対して,接点が開放するのを防止できないか,又は閉路状態を維持できないトリッ
プフリー機構(タイプ1.E又はタイプ2.E)
注記 例えば,過電流の故障がまだ続いていることを検出するために再閉路するか,瞬間的に再閉路
する電流検出制御装置である。
6.4.3.6
工具を用いる場合だけ,復帰が可能である作動(タイプ1.F又はタイプ2.F)
6.4.3.7
電気的負荷が加わった状態では,復帰させない作動(タイプ1.G又はタイプ2.G)
6.4.3.8
接点が開路を妨害されるおそれがなく,復帰手段が“復帰”の位置にある場合,通常動作状態が
回復した後“閉路”位置に自動的に復帰できるトリップフリー機構(タイプ1.H又はタイプ2.H)
6.4.3.9
接点が開路を妨害されるおそれがなく,復帰手段が“復帰”又は“入り”位置に保持されている
場合,自動復帰装置として機能することが許されないトリップフリー機構(タイプ1.J又はタイプ2.J)
6.4.3.10 検出作動であって,検出素子又は検出素子をスイッチヘッドに接続する部品が破損してもその結
果として,動作値の増加がないもの(タイプ1.K又はタイプ2.K)
6.4.3.11 その意図した動作のために外部の補助的電気エネルギー源を必要としない作動(タイプ1.L又は
タイプ2.L)
6.4.3.12 規定するエージング期間の後,動作する作動(タイプ1.M又はタイプ2.M)。
6.4.3.13 (H.6.4.3.13による。)
6.5
保護等級及び制御装置の汚損度による分類
保護等級及び制御装置の汚損度による分類は,6.5.1〜6.5.3による。
35
C 9730-1:2019
6.5.1 外郭によって備える固形物及びじんあいの侵入に対しての保護等級は,次による(JIS C 0920参照)。
IP0X,IP1X,IP2X,IP3X,IP4X,IP5X,IP6X
6.5.2
外郭によって備える水の有害な浸入に対しての保護等級は,次による(JIS C 0920参照)。
IPX0,IPX1,IPX2,IPX3,IPX4,IPX5,IPX6,IPX7,IPX8
注記1 特定の環境において使用する制御装置は,適切な処置が装置の中で施されている場合,異な
る環境にも適用できる。
注記2 6.5.1及び6.5.2による保護等級の優先的な組合せは,表0Aのとおりである。
表0A−保護等級の優先的な組合せ
第1特性数字
異物の侵入保護
第2特性数字 水の浸入保護
0
1
2
3
4
5
6
7
8
0
IP00
−
−
−
−
−
−
−
−
1
−
−
−
−
−
−
−
−
−
2
IP20
IP21
−
−
−
−
−
−
−
3
−
−
−
−
−
−
−
−
−
4
−
IP41
−
IP43
IP44
−
−
−
−
5
−
−
−
−
IP54
IP55
−
−
−
6
−
−
−
−
−
IP65
−
IP67
IP68
6.5.3
制御装置は,汚損度(複数の場合もある。)に従って,規定する(附属書N参照)。
注記 制御装置を製造業者の指定に従って取り付けた場合,制御装置の異なる部品は,異なる汚損度
のマクロ環境の中に設置してもよい。
6.6
接続方法による分類
接続方法による分類は,6.6.1〜6.6.8による。
6.6.1
固定配線の接続を意図する1個又はそれ以上の端子をもつ制御装置
注記 カナダ及び米国では,空中配線が許容されている。
6.6.2
可とうコードの接続を意図する1個又はそれ以上の端子をもつ制御装置
一つの制御装置は,6.6.1及び6.6.2の両方に分類してもよい。
6.6.3
外部導体の接続を意図する端子をもたない制御装置
このタイプの制御装置は,制御装置と一体となった導体又は内部導体だけの接続を意図する。
6.6.4
一次電池への接続を意図する制御装置
6.6.5
二次電池(充電式セル)への接続を意図する制御装置
6.6.6〜6.6.8 (U.6.6.6〜U.6.6.8による。)
6.7
スイッチヘッドの周囲温度限度値による分類
スイッチヘッドの周囲温度限度値による分類は,6.7.1及び6.7.2による。
6.7.1
最低温度値(Tmin)が0 ℃と最高温度値(Tmax)が55 ℃との間の周囲温度において使用するスイ
ッチヘッドをもつ制御装置
6.7.2
30 ℃以上で55 ℃以外の最高温度値(Tmax)若しくは0 ℃より低い最低温度値(Tmin)又はその両
方の周囲温度において使用するスイッチヘッドをもつ制御装置
注記 Tmaxの優先値は,30 ℃,55 ℃,70 ℃,85 ℃,105 ℃,125 ℃及び150 ℃である。Tminの優
先値は,0 ℃,−10 ℃,−20 ℃,−30 ℃,及び−40 ℃である。
これらの優先値とは異なる値も許容される。
36
C 9730-1:2019
6.8
感電に対する保護による分類
感電に対する保護による分類は,6.8.1及び6.8.2による。
6.8.1
一体形制御装置
注記 一体形制御装置について分類はないが,制御装置が一体となっている機器の分類となる。
6.8.2
機器の中で使用するために組み込む制御装置の分類は,6.8.2.1〜6.8.2.5による。
6.8.2.1
クラス0機器用
6.8.2.2
クラス0I機器用
6.8.2.3
クラスI機器用
6.8.2.4
クラスII機器用
6.8.2.5
クラスIII機器用
注記1 クラス0,クラスI,クラスII及びクラスIIIの電気機器の協調関係については,JIS C 0365
を参照。電気設備内の保護措置については,JIS C 60364の規格群を参照。
注記2 特定のクラスの機器に組み込む制御装置は,機器内で適切な措置が施されている場合,異な
るクラスを使用してもよい。
6.8.3
インラインコード形制御装置,自立構造形制御装置又は独立取付形制御装置の分類は,6.8.3.1〜
6.8.3.5による。
6.8.3.1
(対応国際規格の“クラス0”を削除した。)
6.8.3.2
(対応国際規格の“クラス0I”を削除した。)
6.8.3.3
クラスI
6.8.3.4
クラスII
6.8.3.5
クラスIII
注記1 クラスI,クラスII及びクラスIIIの電気機器の協調については,JIS C 0365を参照。電気設
備内の保護措置については,JIS C 60364の規格群を参照。
注記2 特定のクラスの機器に組み込む制御装置は,機器内で適切な措置が施されている場合,異な
るクラスを使用してもよい。
注記2A この規格では,クラス0制御装置及びクラス0I制御装置を認めていない。
6.8.4
感電に対する保護のためにSELV又はPELVを使用する制御装置は,6.8.4.1又は6.8.4.2による。
6.8.4.1
SELVを使用する制御装置及び適用可能な場合,表1の項目86
6.8.4.2
PELVを使用する制御装置及び適用可能な場合,表1の項目86
6.8.5
(U.6.8.5による。)
6.8.6
(U.6.8.6による。)
6.9
回路の断路又は開路による分類
回路の断路又は開路による分類は,6.9.1〜6.9.5による。
6.9.1
完全断路
6.9.2
マイクロ断路
6.9.3
マイクロ開路
6.9.4
全極断路
6.9.5
(H.6.9.5による。)
注記1 幾つかの機器規格は,完全断路を要求している。その他の規格は,完全断路又はマイクロ断
路のいずれかを要求する場合がある。マイクロ開路だけを要求する規格もある。
37
C 9730-1:2019
注記2 制御装置の異なる作動では,異なる回路の断路又は開路を行ってもよい。
6.10 各手動作動の操作サイクル数(M)による分類
各手動作動の操作サイクル数(M)による分類の推奨値は,6.10.1〜6.10.7による。
6.10.1 100 000サイクル
6.10.2 30 000サイクル
6.10.3 10 000サイクル
6.10.4 6 000サイクル
6.10.5 3 000サイクル1)
6.10.6 300サイクル1)
6.10.7 30サイクル1)
注記 複数の手動作動をもつ制御装置は,異なる値を各操作に対して規定してもよい。制御装置が複
数の意図したオフ位置をもつ場合,1操作サイクルは,あるオフ位置からその次のオフ位置ま
での運動である。
注1) 電圧タップ制御装置,温水器の夏冬切替制御装置のような特定の機器及び該当する機器の規格
で許容する制御装置の作動だけに適用できる。
6.11 各自動作動の自動サイクル数(A)による分類
各自動作動の自動サイクル数(A)による分類の推奨値は,6.11.1〜6.11.12による。
6.11.1 300 000サイクル
6.11.2 200 000サイクル
6.11.3 100 000サイクル
6.11.4 30 000サイクル
6.11.5 20 000サイクル
6.11.6 10 000サイクル
6.11.7 6 000サイクル
6.11.8 3 000サイクル2)
6.11.9 1 000サイクル2)
6.11.10 300サイクル3)
6.11.11 30サイクル3), 5)
6.11.12 1サイクル4)
注記 複数の自動作動をもつ制御装置は,異なる値をそれぞれに対して規定してもよい。
注2) 自動温度調節器,又はその他の急速サイクル作動には適用しない。
3) 手動復帰形だけに適用する。
4) 各動作の後に部品の取換えを必要とする作動にだけ適用する。
5) 製造業者のサービス中に復帰できるものに限る。
6.12 制御装置の取付面の温度限度値による分類
制御装置の取付面の温度限度値による分類は,6.12.1及び6.12.2による。
6.12.1 6.7で分類する周囲温度から20 Kを超えない表面に取り付けるのに適切である制御装置。
6.12.2 6.7で分類する周囲温度から20 Kを超える表面に取り付けるのに適切である制御装置。
注記 例えば,冷蔵庫中のコンプレッサ上に取り付ける制御装置である。ここでは,検出素子が温度
−10 ℃であって,周囲温度が30 ℃を超えない場合であっても,取付面は150 ℃と考える。
38
C 9730-1:2019
6.13 使用絶縁材料の保証トラッキング指数(PTI)による分類
使用絶縁材料の保証トラッキング指数(PTI)による分類は,6.13.1〜6.13.4による。
6.13.1 PTI値が100以上175未満の材料は,材料グループIIIb
6.13.2 PTI値が175以上400未満の材料は,材料グループIIIa
6.13.3 PTI値が400以上600未満の材料は,材料グループII
6.13.4 PTI値が600以上の材料は,材料グループI
6.14 充電部支持用絶縁部品及び充電部と接地した金属との間に加わる電気的ストレスの期間による分類
充電部支持用絶縁部品及び充電部と接地した金属との間に加わる電気的ストレスの期間による分類は,
6.14.1及び6.14.2による。
6.14.1 短時間
6.14.2 長時間
注記 制御装置を連続使用機器中で使用する場合,長時間の電気的ストレスが存在する。また,プラ
グの引抜きによって,又は完全断路を行う制御装置の動作によって電源から断路されそうにな
いその他の機器内の制御装置の電源側も長時間の電気的ストレスが存在する。
6.15 制御装置の構造による分類
制御装置の構造による分類は,6.15.1〜6.15.8による。
6.15.1 一体形
6.15.2 組込形
6.15.3 インラインコード形
6.15.4 自立構造形
6.15.5 独立取付形。独立取付形は,更に6.15.1〜6.15.3に分類する。
6.15.5.1 露出形
6.15.5.2 埋込形
6.15.5.3 パネル取付形
6.15.6〜6.15.8 (J.6.15.6〜J.6.15.8による。)
6.16 機器の内部又は機器と組み合わせて制御装置を用いる場合のエージング要求事項(Y)による分類
機器の内部又は機器と組み合わせて制御装置を用いる場合のエージング要求事項(Y)による分類は,
6.16.1〜6.16.6による。
6.16.1 60 000時間
6.16.2 30 000時間
6.16.3 10 000時間
6.16.4 3 000時間
6.16.5 300時間
6.16.6 15時間
注記 機器規格の温度上昇試験又は耐久性試験中に動作する制御回路は,この6.16.6による分類はし
ない。
6.17 サーミスタの使用による分類
(J.6.17による。)
6.18 制御機能のクラス分けによる分類
(H.6.18による。)
39
C 9730-1:2019
7
情報
7.1
一般要求事項
制御装置の製造業者は,次の事項を確認するために十分な情報を準備しなければならない。
− 適切な制御装置を選択できる。
− この規格の要求事項を満たすような方法で取り付けた制御装置を使用できる。
− この規格が規定する関連試験を実施できる。
7.2
情報提供の方法
7.2.1
情報は,次の方法の一つ又はそれ以上の方法を用いて提供しなければならない。制御装置のために
要求される情報及びこの情報を提供する適切な方法は,表1に製造業者が宣言する方法とする。
注記1 表1自体は,必然的に当事者間で情報を伝達するために用いられる実際の方法として意図し
たものではない。
− 表示(C) 情報は,制御装置上に付けた表示によって提供しなければならない。ただし,一体形制御
装置の場合,表示は,制御装置に関係することが明白であるときだけ,制御装置の隣接部上にあって
もよい。
注記2 表示(C)が提供する情報は,文書(D又はE)中に含んでもよい。
− 文書(D) 情報は,制御装置の使用者又は設置者に提供し,また,読みやすい印刷物の説明書とする。
各制御装置は,このような使用説明書を添付しなければならない。取扱説明書及びその他のこの規格
によって要求する他のテキストは,販売する国の公用語とする。
製造業者へ提供することを意図する取扱説明書は,リーフレット,文字,図面などに代替してもよ
い。制御装置ごとに上記の文書を添付する必要はない。
− 内部又は外部メモリ上の電子媒体上の文書(E) 情報は,(D)の代替である。
− 宣言(X) 情報は,試験の目的で当事者間で協定した方法で,情報を提供しなければならない。例え
ば,それは,制御装置上の表示によって,又はリーフレット,文字若しくは図面によって与えること
ができ,機器に入れて,機器に付けて又は機器と共に提出した制御装置の場合,提出機器の測定,又
は目視検査によって与えることができる。該当する場合,この情報は,機器製造業者にも提供するこ
とが望ましい。
7.2.2
表示(C)又は文書(D又はE)によって必要であると指示される情報は,要求される場合,当事
者間の協定による方法で,情報を供給しなければならない。
7.2.3
機器に入れて,機器に付けて,又は機器と共に提出する制御装置については,文書(D又はE)の
要求事項は,宣言(X)によって代えることができる。
7.2.4
より複雑な制御装置の一部となる一体形制御装置に関連する表示は,より複雑な制御装置の表示に
含めてもよい。
7.2.5
文書(D又はE)の要求事項は,情報が表示(C)によって提供される場合,当該要求事項を満た
しているとみなす。
7.2.5.1
宣言(X)の要求事項は,情報が文書(D又はE)又は表示(C)のいずれかによって提供される
場合,当該要求事項を満たしているとみなす。
7.2.6
一体形制御装置に対しては,7.4に規定することを除き,全ての情報は宣言(X)によって提供す
る。JIS C 9730の規格群の関連する第2部で別に規定する場合を除き,組込形制御装置に対して最低限要
求される表示は,製造業者名又は商標,及び固有の形式番号だけである。ただし,その他の要求される表
示が文書(D又はE)によって提供される場合に限る。表1の項目50で製造業者が宣言する組込形制御装
40
C 9730-1:2019
置に対しては,7.2.1に含まれる文書(D又はE)の説明を参照する。
7.2.7
スペースがないために,この規格で要求する表示ができないもので,一体形でなく組込形でもない
制御装置の場合,制御装置には,製造業者名(又は商標)及び固有の形式番号を表示し,その他は表示し
なくてよい。必要とされるその他の表示は,文書(D又はE)に含めなければならない。
7.2.8
それが誤解を生じないときに限り,追加表示又は情報を許容する。
7.2.9
記号を用いるときは,次による。
アンペア ··················································· A
ボルト ······················································ V
ワット ······················································ W
ボルト−アンペア ······································· VA
交流(単相) ············································· 〜(IEC 60417-5032)
交流(三相) ············································· 3〜
交流(三相,中性線付き) ··························· 3N〜
直流 ·························································
(IEC 60417-5031)
クラスII構造 ·············································
(IEC 60417-5172)
クラスIII制御装置 ······································
(IEC 60417-5180)
スイッチヘッドの周囲温度限度 ····················· T
(Tminが0 ℃未満の場合,マイナス記号及び
低い方の温度の数値をTの前に記載し,Tmax
が55 ℃以外の場合,高い方の温度の数値を
Tの後に記載する。)
該当するヒューズの定格電流(A) ················
(IEC 60417-5016)
周波数 ······················································ Hz
接地端子(7.4.3.1参照) ······························
(IEC 60417-5019)
機能接地 ···················································
(IEC 60417-5018)
外郭による保護等級の識別に対しては,6.5による分類を使用しなければならない。
注記1 定格電流及び定格電圧についての情報の提供は,数値だけを使用してもよい。定格電流の数
値は,定格電圧の数値の前か,又はその数値の上に記載し,線によって区別する。抵抗負荷
及び誘導負荷回路に対しては,誘導負荷の定格電流は括弧書きとし,抵抗負荷の定格電流の
すぐ後に記載する。電源の性質のための記号は,電流値及び電圧値の後に記載する。
電源の電流,電圧及び電源の性質は,次のとおりに示すことができる。
16 (3) A250 V〜,16 (3)/250〜又は250)3(
16
〜
注記2 次は,制御装置の温度限度の情報を示す方法の例である。
− 20T30(−20 ℃〜+30 ℃を意味する。)
− T85(0 ℃〜+85 ℃を意味する。)
注記3 指定する特別負荷に関する情報は,図又は形式を引用して示してもよい。例えば,次のとお
りである。
“モータ図番第…号,部品リスト第…号製造”又は“5×80 W蛍光灯”。
41
C 9730-1:2019
表1−必要な情報及び提供方法
情報
適用箇条
方法
1
製造業者名又は商標
7.2.6
C
2
固有の形式番号a)
2.11.1,2.13.1,7.2.6
C
3
定格電圧又は定格電圧範囲(V)(U.7も適用)
2.1.2,4.3.2,14.4
C
4
制御装置が交直両用であるか,又は定格が交流及び直流に対して同
一である場合を除き,電源の性質(U.7も適用)
4.3.2,6.1
C
5
電圧範囲50〜60 Hz以外の周波数の場合,周波数
4.3.2
C
6
制御装置の目的
2.2,4.2.4,4.3.5,6.3,17.16
D又
はE
6a
制御装置の構造及びその制御装置が電子式であるかどうか。
6.15,H.2.5.7
X
7
各回路によって制御される負荷の形式b)
6.2,箇条14,箇条17,23.1.1
C
15
外郭によって備えられる保護等級c)
6.5.1,6.5.2,11.5
C
17
外部導体の接続に対して,端子のどれが適格であり,それらが相導
体若しくは中性導体又はその両方に対して適格であるかどうか。
6.6,7.4.2,7.4.3
C
18
外部導体用端子のどれが表3に示すものよりも広い範囲の導体寸法
に用いられるか。
10.1
D又
はE
19
定義が可能でない場合,ねじなし端子に対して,接続方法及び断路
方法d)
箇条10
D
20
内部導体用端子に接続する意図の特殊導体の詳細
10.2.1
D又
はE
21
一体形及び組込形制御装置の内部導体用端子及び外部導体用端子の
85 ℃より高い場合の最高温度
箇条14
X
22
Tminが0 ℃より低い又はTmaxが55 ℃とは異なる場合,スイッチヘ
ッドの温度限度値
6.7,14.5,14.7,17.3
C
23
取付面の温度限度値(Ts)
6.12.2,14.1,17.3
C
24
感電保護による制御装置の分類
6.8
X
25
クラスII制御装置に対しては,クラスII構造の記号
7.3
C
26
各手動作動に対する操作サイクル数(M)
6.10,17.10,17.11
X
27
各自動作動に対する自動サイクル数(A)
6.11,17.8,17.9
X
28
タイプ1.M又はタイプ2.M作動の制御装置に対するエージング期間
(Y)
6.16,17.6
X
29
各回路によって提供される断路形式又は開路形式
2.4.1,2.4.2,2.4.3,2.4.4,6.9
X
30
絶縁のために用いられる材料のPTI
6.13,表23 注b),表24注d),
21.2.7
X
31
制御装置の取付方法e)
11.6
D
31a
制御装置の接地方法
7.4.3,箇条9,9.1.1,9.1.2
D
32
非着脱式コードの取付方法f)
10.1,11.7
D又
はE
33
制御装置の意図した輸送条件g)
16.1
X
34
動作時間の制限の詳細h)
箇条14,箇条17
D又
はE
35
絶縁部に加わる電気的ストレス期間
6.14
X
36
マイクロ断路が保証される検出素子に対する作動量の限度値(表
H.0Aの項目36も適用)
11.3.2
X
37
検出制御装置の作動量の最小変化率及び/又は最大変化率並びにサ
イクル速度の最小及び/又は最大i)
4.1.7,箇条15,箇条17
X
38
正しい作動のために必要である,又は試験目的に使用する可能性が
ある検出制御装置の作動量のオーバシュート値
箇条17
X
42
C 9730-1:2019
表1−必要な情報及び提供方法(続き)
情報
適用箇条
方法
39
タイプ1又はタイプ2作動
6.4
D又
はE
40
タイプ1又はタイプ2作動の追加機能
6.4.3,11.4
D又
はE
41
製造偏差及び偏差に該当する試験条件
2.11.1,11.4.3,箇条15,17.14
X
42
ドリフト
2.11.2,11.4.3,箇条15,16.2.4
X
43
カットアウトの作動復帰特性j)
6.4
D又
はE
44
制御装置が手持ち形である,又は手持ち形機器用を意図しているか
どうか。
X
45
取り付けることができる平形プッシュオンレセプタクルの数又は分
配に対する制限
10.2.4.4
D又
はE
46
タイプ2作動では,動作値,動作時間又は動作シーケンスの製造偏
差及びドリフトは,この表の項目41及び項目42で製造業者が宣言
する限度値内での構造
11.4.3
D又
はE
47
検出素子があれば,その範囲
2.8.1
X
48
動作値(又は複数の動作値)又は動作時間
2.3.11,2.3.12,6.4.3.10,箇条
11,箇条14,15.6,箇条17
D
49
制御装置の汚損度
6.5.3
D又
はE
50
機器製造業者だけに供給される目的の制御装置
7.2.1,7.2.6
X
51
グローワイヤ試験温度
21.2.1,21.2.2,21.2.3及び21.2.4
X
52〜60 (H.7による。)
61〜65 (表J.5による。)
66〜74 (H.7による。)
75
定格インパルス電圧
2.1.12,20.1
D又
はE
76
プリント回路板の塗膜の形式
附属書P又は附属書Q
X
77
ボールプレッシャ試験の温度
21.2.1,21.2.2,21.2.3及び21.2.4
X
78
熱可塑性材料を使用する単一ブッシュ取付けの最大指示トルク
表20 注a)
D又
はE
79
制御装置よりも清浄な場合の沿面距離又は空間距離のミクロ環境に
おける汚損度,及びこれをどのような構造にするか
表H.24
X
80
制御装置のものと異なる場合の沿面距離又は空間距離のための定格
インパルス電圧,及びこれをどのように確保するか
表H.24
D又
はE
81
故障モード“短絡”からの除外を主張する距離の許容差
表H.24
X
82
(表J.5による。)
85
クラスIII制御装置に対して,クラスIII構造の記号
7.4.6
C
86
SELV又はPELVに対して,ELV限度値の実現
2.1.5,T.3.2
X
87
SELV又はPELV回路の接触可能な電圧の値が8.1.1と異なる場合,
制御装置の適用となる製品規格に記載された値
2.1.4,6.8.4.1,6.8.4.2,8.1.1
X
88
(U.7による。)
89
CISPR 11に従って規定するエミッション試験及びグループ
23.2,H.23.1.2
X
90
JIS C 9335に関連する機器に従って,使用する保護制御装置につい
てのイミニティ試験
表H.13
X
91〜
94
(H.7による。)
43
C 9730-1:2019
表1−必要な情報及び提供方法(続き)
情報
適用箇条
方法
95
規定する最大短絡回路電流
11.3.5.2.1 b)
X
96
制御装置の外側にある過電流保護装置
11.2.8
D又
はE
97
組込形制御装置又は一体形制御装置は,制御水準(27.5.1)で過負荷
試験を実施しない場合,その旨
27.5.3
X
98
海抜2 000 mを超える場合,制御装置が使用できる最大高度
20.1
X
J1
図14〜図16以外又はIEC 61210以外の平形プッシュオンコネクタ
の寸法
10.2.4.1
D
注a) 固有の形式番号は,それを省略なしに完全に引用するとき,制御装置の製造業者が,元のものと電気的,機
械的,寸法的及び機能的に完全に互換性のある交換品を供給できるようなものでなければならない。それは
その他の表示,例えば,電圧定格又は周囲温度表示をもつシリーズ形式名称でできていてもよい。それは一
緒で固有の形式番号となるものでもよい。
b) 2個以上の回路をもつ制御装置については,各回路及び各端子に適用できる電流。これらが相互に異なる場合
は,どの回路又はどの端子にその情報によるか明白にしなければならない。抵抗性及び誘導性負荷用回路に
対しては,表14に示す力率の定格電流又は定格負荷(VA)。
c) 表示(C)要求事項は,IP00,IP10,IP20,IP30及びIP40として分類される制御装置又はその部品には適用
しない。
d) カナダ及び米国では,表示(C)は,現場での配線のねじなし端子の開路及び断路の方法を要求する。
e) 独立取付形制御装置に対しては,制御装置の据付け中又は使用中に特殊な予防措置を講じる必要がある場合,
これらの詳細は,制御装置に添付されている取扱説明書で示さなければならない。
特別な予防措置が,例えば埋込形の独立取付形制御装置のためには,必要と思われる。埋込み後この規格
の要求事項を満たすために必要である条件が達成されることを保証するために,このような制御装置のため
の取扱説明書は,次に関する明白な情報を含まなければならない。
− 制御装置のために用意しなければならない空間の寸法
− この空間内で制御装置を支持し,固定する装置の寸法及び位置
− 制御装置の各種部品と附属品の周辺部との間の最小空間距離
− 換気用開口部の最小寸法及びその適正な配置
− その制御装置を電源に接続すること,及び離れた部品があれば相互接続
制御装置の電源導体が固定配線の端子ブロック又は仕切り空間の部品と接触するおそれがあり,これらの
部分が通常使用状態での温度が,表13に規定する最高許容温度を超える場合,取扱説明書には,その制御装
置が該当するT定格をもつ導体によって接続しなければならないことも記載しなければならない[表13の
注 a)参照]。
センサ,検出素子又は操作素子と,配線部分が固定配線に接続又は接続を意図する制御装置の他の部分と
の間の配線をもつ制御装置の場合,製造業者は,設置に関する適切な関連情報及び固定配線部分に要求され
るケーブル又はコードの適切なタイプについて文書に記載しなければならない。
f) インラインコード形制御装置,自立構造形制御装置及び独立取付形制御装置は,Y形取付け又はZ形取付け
を使用する非着脱式コードが取り付けられる場合,次の文章のうちのいずれか該当する1個の文章の趣旨を
含む文書(D)がなければならない。
− “この制御装置の電源コードは,交換できない。もしコードが損傷を受けた場合,その制御装置は捨て
ることが望ましい”(Z)。
− “この制御装置の電源コードは,製造業者又は認定されたサービスマンだけによって交換できる”(Y)。
g) 包装方法は指定する必要はない。
h) インラインコード形,自立構造形及び独立取付形制御装置については,この情報を方法(C)によって提供し
なければならない。
44
C 9730-1:2019
表1−必要な情報及び提供方法(続き)
注i) α1:最低上昇率
β1:最低降下率
作動量の変化率(α1及びβ1)は,通常使用状態に適用できる変化率である。
Α2:最高上昇率(タイプ2作動だけに対する)
Β2:最高降下率(タイプ2作動だけに対する)
試験の目的に対しては,α2及びβ2は,規定するとおりでなければならないが,タイプ1作動及び/又はタ
イプ2作動に対しては,JIS C 9730の規格群の関連する第2部に規定する限度値(又は複数の限度値)より
低くてはならない。値α1及びβ1は,ただ試験の目的に限られ,また,代わりに最大サイクル速度として規定
してもよい。この規格の目的に対する変化率は,次の表に示す単位で表現しなければならない。
作動量
変化率のための単位
圧力
Pa/s
温度
K/h
位置
mm/s
照度
lux/s
速度
mm/s2
液体レベル
mm/s
電流
A/s
相対湿度
%/s
空気流れ
m3/s2
その他の作動量を使用する場合,単位はSI単位で表す。
j) 製造業者は,それ以前に手動復帰が発生してはならない時間又はその作動量を超えて手動復帰が発生しては
ならない動作量の特定値を指定してもよい。
k)〜l)
(表J.5による。)
m)〜t)
(H.7による。)
7.3
クラスII記号
7.3.1
クラスII構造のための記号は,6.8.3.4(クラスII)に従って分類した制御装置に対してだけ使用す
る。
7.3.2
クラスII構造の記号の寸法は,外側の正方形の一辺の長さが内側の正方形の一辺の長さの約2倍
でなければならない。
7.3.2.1
記号の外側の正方形の一辺の長さは5 mm以上でなければならないが,制御装置の最大寸法が15
mm以下である場合は除く。このとき,記号の寸法は,減少してもよいが,外側の正方形の一辺の長さは
3 mm以上とする。
7.3.2.2
クラスIIに対して要求される感電保護を備えた制御装置が機能目的の接地連続用端子を含む場
合,IEC 60417-5172 (2003-02)のクラスII構造の記号を表示してはならず,クラスIの制御装置とみなさな
ければならない。
7.4
表示の追加要求事項
7.4.1
制御装置上の必要な表示は,制御装置の主要器体上になければならないが,取外しできない部分に
配置してもよい。
要求する表示は,読みやすく耐久性がなければならない。
適否は,目視検査及び附属書Aの試験によって判定する。
7.4.2
電源導体を接続する制御装置の端子は,商用主電源への接続方法が重要でないか又は自明である場
合を除き,端子に向けた矢印によって指示しなければならない。
45
C 9730-1:2019
適否は,目視検査によって判定する。
7.4.3
中性外部導体専用の端子は,文字“N”によって表示しなければならない。
注記 英国では,中性外部導体専用の端子は,文字“L”を適用している。
7.4.3.1
外部接地導体又は接地連続用の接地端子,及び機能目的(感電保護用とは対称的な)の接地端子
は,次の記号を表示しなければならない。
− 保護用接地については,保護用接地の接地記号IEC 60417-5019 (2006-08)
− 機能接地については,機能接地用の接地記号IEC 60417-5018 (2006-10)
7.4.3.2
全ての他の端子は,適切に識別できなければならない。それらの目的が自明であるか,又はその
制御回路構成は,目で見て識別できなければならない。矢印,文字“N”又は接地記号は,7.4.3及び7.4.3.1
に示す場合だけ,使用できる。
適否は,目視検査によって判定する。
注記1 カナダ及び米国では,接地した電源導体の接続を意図した端子は,白又は自然灰色で表示し
処理し,かつ,他の部分から識別が可能でなければならない旨を要求している。
注記2 カナダ及び米国では,機器の接地した導体の接続を意図した配線接続用ねじは,緑色であっ
て,溝付き又は六角頭付きをもっていなければならない旨を要求している。このような導体
の接続を意図した圧着配線コネクタは,“GROUND”,“GROUNDING”若しくは“EARTH”
と表示することによって,又は制御装置がもつ回路図に表示することによって識別しなけれ
ばならない旨を要求している。配線接続ねじ又は圧着配線コネクタは,制御装置の保守中に
容易に取外しできないような配置にする。
注記3 カナダ及び米国では,7.4.2〜7.4.3.2を含んだ観点から配線規則によって,追加又は変更の表
示が要求される。
注記4 英国では,7.4.3で示す場合を除き,文字“L”は用いてはならない旨を要求している。
7.4.4
使用者又は設置中に機器製造業者が設定する制御装置には,応答値が増加する方向又は減少する方
向を指示していなければならない。
注記 “+”又は“−”の指示で十分である。
機器製造業者又は設置者が設定する制御装置には,その設定値を確実にする適切な方法を示す文書(D)
をもっていなければならない。
7.4.5
制御装置の通常の動作中に壊れ,交換しなければならない部分には,製造業者のサービス中にだけ
交換を意図するものを除き,それが動作した後であってもカタログ又は類似のものからそれが識別できる
ように表示しなければならない。
7.4.6
SELVシステムへの接続だけを意図した制御装置には,IEC 60417-5180 (2003-02)の図記号で表示し
なければならない。電源への接続手段が特別の構造のSELV配列又はPELV配列とだけ結合するように形
成されている場合には,この要求事項は適用しない。
クラスIIIに対して要求される感電保護を備えた制御装置が,機能目的のために接地連続用の端子をもつ
場合,IEC 60417-5180 (2003-02)のクラスIII構造の記号を表示してはならない。
7.4.7
機器が取替え可能な電池をもち,異なった形式のものによる取替えによって,爆発(例えば,幾つ
かのリチウム電池によって)を結果として生じるおそれがある場合,次による。
− 使用者による電池の交換を意図している場合,電池の近傍に記号を表示,又は使用説明書及びサービ
ス説明書にその旨を記載しなければならない。
− 使用者による電池の交換を意図していない場合,電池の近傍に記号を表示,又はサービス説明書にそ
46
C 9730-1:2019
の旨を記載しなければならない。
記号及び説明書への記載には,次の趣旨を含んでいなければならない。
注意
異なった形式の電池に取り替えた場合,電池の爆発による危険あり。
取扱説明書に従って,使用済の電池を処理しなければならない。
7.4.8
使用者が交換することを意図した電池をもつ制御装置の電池の仕切りは,電池の電圧及び極性を表
示しなければならない。
表示に色を用いる場合,正端子には赤,負端子には黒を用いて識別する必要がある。
色は,極性だけの識別として用いる必要はない。
7.4.9
使用者が交換することを意図した電池をもつ制御装置の取扱説明書には,次の事項を含んでいなけ
ればならない。
− 電池の形式
− 電池の極性の向き
− 電池の交換方法
− 異なった形式の電池を用いることに対する警告
− 液漏れした電池の取扱方法
環境に対して有害な素材を含んでいる電池をもつ制御装置の取扱説明書には,電池の取外し方法の詳細
を含めて,次の事項を記載する。
− 廃棄する前に,電池を,制御装置から取り外さなければならない。
− 制御装置は,電池を取り外すときに,供給電源から遮断しなければならない。
− 電池は,安全に廃棄しなければならない。
7.4.10 (V.7.4.10による。)
8
感電に対する保護
8.1
一般要求事項
8.1.1
制御装置は,通常使用状態で発生するおそれがある不利な位置において,取外し可能な可触部を外
した後,充電部に偶然に接触しないようにする十分な保護が存在するような構造でなければならない。た
だし,取外し可能なカバーの内部にあるランプで,カバーを取り外した状態については除く。また,ラン
プの挿入及び取外し中については,ランプ口金の充電部への偶然の接触防止を確実にしなければならない。
別に指定のない場合,24 V以下の電圧で供給されるSELV回路又はPELV回路は,危険な充電部とはみ
なさない。
24 Vを超える電圧で供給されるSELV回路又はPELV回路が接触可能な場合,又は表1の項目87によ
る製造業者の宣言より高い場合,可触部とSELV回路又はPELV回路の電源のいずれかの電極との間の電
流は,H.8.1.10.1を満たさなければならない。
8.1.1.1
危険とみなさないSELV回路又はPELV回路の電圧値は,次の場合,異なる値で指定してもよい。
− SELVとPELVとで接触可能な裸の導体の電圧限度値が異なる,他の製品規格で規定する用途に使用
することだけを意図した制御装置の場合
− 製造業者が,用途,規定する製品規格,及びその適用規格で危険とみなさない接触可能なSELV回路
又はPELV回路の電圧レベルを製造業者が宣言する場合(表1の項目86)
47
C 9730-1:2019
注記 カナダ及び米国では,電圧が乾燥時,42.4 V(ピーク値)若しくは30 V(実効値),又は加湿時,
21.2 V(ピーク値)若しくは15 V(実効値)未満の安全絶縁変圧器から供給するELVへ接続し,
接触が発生する可能性がある部品は,危険となる導電部ではない。
8.1.2
クラスII制御装置及びクラスII機器用制御装置については,基礎絶縁だけによって危険な充電部
から分離する金属部との偶然の接触に関してもこの要求事項による。
8.1.3
ワニス,エナメル,紙,木綿,金属部品上の酸化膜,ビーズ及び密封コンパウンドは,危険な充電
部との偶然の接触を防止するために要求される絶縁物とみなさない。
注記 自己硬化性の密封用コンパウンドには,接触してもよい。
8.1.4
通常使用状態でガス管又は水道管に接続されるクラスII制御装置及びクラスII機器用制御装置に
おいては,ガス管に導電的に接続する又は水道システムと電気的に接触する金属部は,二重絶縁又は強化
絶縁によって危険な充電部から分離しなければならない。
8.1.5
固定配線に恒久的に接続するクラスII制御装置及びクラスII機器用制御装置は,必要な感電保護
の度合いが,その制御装置の設置によって低下しないような構造でなければならない。
注記 クラスII独立取付形制御装置の感電保護は,例えば,金属電線管又は金属シースを備えたケー
ブルの設置によって影響を受けるおそれがある。
8.1.6
一体形制御装置及び組込形制御装置に対しては,8.1.9の試験は,その部品を製造業者が指定する
位置に取り付け,かつ,取外し可能な部分の取外しの後,充電部に接近する可能性のある制御装置の部品
だけに適用する。
8.1.7
インラインコード形及び自立構造形制御装置に対しては,8.1.9〜8.1.9.5の試験は,その制御装置が
10.1.4で用いる最小又は最大公称断面積の可とうケーブルのうち,いずれかより不利となる方を取り付け
て行う。取外し可能な部分は外し,また,工具の使用なしに開けることができる丁番付きのカバーは開け
ておく。
8.1.8
独立取付形制御装置の試験は通常使用状態のように取り付け,10.1.4で規定する最小又は最大公称
断面積のケーブルのうち,より不利な方を取り付けるか,又は硬質,柔軟若しくは可とうの電線管を取り
付けて行う。取外し可能な部分は外し,工具の使用なしに開けることができる丁番付きのカバーは,開け
ておく。
8.1.9
8.1.1〜8.1.8の適否は,目視検査及びこの細分箇条の試験によって判定する。
図2による標準試験指は,力を加えないで,あらゆる可能な位置に当てる。標準試験指が入ることを防
止する開口部は,更に同一寸法の直線の関節なし試験指を20 Nの力で当てる。この試験指が入る場合は,
必要であれば,図2に示す標準試験指をその開口部に押し込んで試験を繰り返す。関節なし試験指が入ら
ない場合は,加える力を30 Nに増加する。そのとき,図2に示す標準試験指が力を加えないで挿入できる
ようにガードが動くか,又は開口部がひずむ場合,その試験指による試験を繰り返す。電気接触指示器を
接触を示すために用いる。
注記 電圧が40 V以上のランプを,接触の指示用に用いてもよい。
8.1.9.1
標準試験指は,各ジョイントセクションのそれぞれが同一方向に限り,試験指の軸を基準にして
角度90°にわたり回転できるものを用いる。
8.1.9.2
さらに,絶縁材料中及び非接地金属部中の開口部は,力を加えないであらゆる方向に図1に示す
試験ピンを当てることによって,試験する。
8.1.9.3
試験ピン及び標準試験指のいずれによっても,危険な充電部に接触できてはならない。
8.1.9.4
二重絶縁構造の部分をもつ制御装置に対しては,危険な充電部から基礎絶縁だけで分離した金属
48
C 9730-1:2019
部に標準試験指で接触できてはならない。
8.1.9.5
通常使用中又は使用者保守中に,ある部品を外すという指示があり,“外す前に電源から切り離
すこと”を示す警告が部品上にない場合,この部品はその取外しのために工具を使用する必要があっても,
取外し可能な部分とみなす。部品上に上記の警告が存在する場合,取外し後,基礎絶縁によって危険な充
電部から分離した部品に標準試験指が接触することを許容する。
8.1.10 (H.8.1.10による。)
8.1.11 クラスIII回路と商用主電源又は大地に接続する回路との間では,安全絶縁変圧器の外側(入出力
端子相互間など)の絶縁は,クラスII絶縁に対する全ての要求事項を満たさなければならない。
注記 回路がクラスIIIであることを特別には要求しない場合,クラスII要求事項をクラスIII回路と
大地との間に適用しなくてもよい。
8.1.12 次の場合,8.1.1に規定する値を超える充電部は,危険な充電部とみなす。
− H.8.1.10による保護インピーダンスによって,電源から切り離されない場合。
− PEN導体又は等電位ボンディングシステムの一部でない場合。
8.1.13 工具を使用することなく開けることのできる,又は取扱説明書に従って使用者が交換する電池収納
部をもつ制御装置は,充電部と電池収納部の内部表面との間は基礎絶縁だけを要求する。制御装置が電池
なしで通電できる場合,二重絶縁又は強化絶縁を要求する。
注記 制御装置を廃棄する前,電池を処分するために取り除く必要がある部品の場合,その手順は,
部品を取り除く必要があると記載してある場合であっても,この部品は,分離できないとみな
されている。
8.2
操作部及び操作手段
8.2.1
操作部は,充電部であってはならない。
8.2.2
操作手段は,十分に固定及び絶縁した操作部を備えているか,又は操作部を外したとき,その操作
手段に触れることができない場合を除き,充電部であってはならない。
8.2.1及び8.2.2の適否は,目視検査及び8.1の試験によって判定する。
注記 絶縁した操作部は,破壊若しくは切断だけによって,又は致命的な損傷を受けた後に限り外す
ことができる場合,十分に固定しているとみなされている。
8.2.3
クラスIII以外の制御装置又はクラスIII以外の機器用の制御装置に対しては,通常使用状態に保持
される操作部及びハンドルは,絶縁材料製であるか又は絶縁材料によって十分に覆わなければならない。
金属製の場合,その可触部は,絶縁故障のときに充電部となるおそれがあるときは,付加絶縁によってそ
の操作手段又は固定部から分離しなければならない。
固定配線に接続する制御装置又は据置形機器用の制御装置に対しては,次のいずれかの場合,この要求
事項は適用しない。
− 接地端子又は接地接点に確実に接続する。
− 接地した金属によって危険な充電部から遮蔽する。
適否は,目視検査によって判定する。
注記 二重絶縁又は強化絶縁によって危険な充電部から分離した部分は,絶縁故障のとき,充電部と
なるおそれがない。
8.3
コンデンサ
8.3.1
クラスIIインラインコード形制御装置及び独立取付形制御装置に対して,コンデンサは,可触金
属部に接続してはならない。クラスII機器用制御装置においては,制御装置を製造業者の指定に従って取
49
C 9730-1:2019
り付けるとき,コンデンサを可触金属に接続するおそれがある金属に接続してはならない。コンデンサの
金属ケースは,制御装置を製造業者の指定に従って取り付けるとき,可触金属部及び可触金属部に接続さ
れる他の金属から付加絶縁によって分離しなければならない。
適否は,目視検査,並びに箇条13及び箇条20の付加絶縁への要求事項によって判定する。
8.3.2
プラグによって電源に接続する制御装置は,通常使用状態でプラグに接触したとき,充電されたコ
ンデンサによる感電の危険がないような構造でなければならない。
適否は,8.3.2.1〜8.3.2.4の試験を10回実施することによって判定する。
8.3.2.1
制御装置は,定格電圧で又は定格電圧範囲の上限値で給電する。
8.3.2.2
次に,操作部がありオフ位置がある場合,そこまで動かし,制御装置は,プラグをコンセントか
ら外すことによって電源から遮断する。
8.3.2.3
遮断後1秒たってから,プラグのピンの間の電圧を測定する。
8.3.2.4
電圧は,34 Vを超えてはならない。試験は,プラグのピン間のコンデンサが0.1 μFを超える場合
に限り実施する。
8.4
カバー及び絶縁されていない危険な充電部品又は危険部品
非金属製のカバー(カバープレート)を備えた制御装置は,それらを接地するか,二重絶縁若しくは強
化絶縁によって危険な充電部から分離するか,又は機器に取り付けた後,可触でない場合を除き,カバー
固定用ねじが可触でないような構造でなければならない。
適否は,目視検査によって判定する。
注記1 カナダ及び米国では,カバーを取り外し,交換する間,作業者が感電しないように,危険と
なる充電部には,適切に配置し,かつ,保護カードを設置することを要求している。
注記2 カナダ及び米国では,電球,電子管若しくはヒューズを交換するとき,部品へ油を注入する
とき,又は使用者保守若しくはサービス中に,作業者が危険となる充電部又は可動部に接触
しないように,設置,保護又はカバーすることを要求している。
8.5
(V.8.5による。)
9
保護用接地の手段
9.1
一般要求事項
9.1.1
操作部を除き,絶縁故障のときに充電部となるおそれのあるクラスIのインラインコード形制御装
置,自立構造形制御装置及び独立取付形制御装置の可触金属部は,その制御装置内の接地端子若しくは接
地端末,又は機器用インレットの接地接点に,恒久的かつ確実に接続しなければならない。
注記1 “接地端子に,恒久的かつ確実に接続する”という語は,“ボンディング”という語と同じ意
味である。
注記2 二重絶縁又は強化絶縁によって充電部から分離した部分及び接地端子,接地端末又は接地接
点に接続する金属部によって充電部から遮蔽した部分は,絶縁故障の場合,充電部となるお
それがない。
注記3 操作部の要求事項は,8.2.3に規定している。
9.1.2
一つの絶縁故障によって充電部となるおそれのある,操作部を除いたクラス0I及びクラスI機器
用の一体形制御装置及び組込形制御装置の可触金属部は,接地の手段をもたなければならない。
注記1 一体形制御装置及び組込形制御装置は,それらの固定手段によって接地に接続してもよいが,
手段を清浄な金属面において行うときに限る。また,このことは,例えば,製造業者が,こ
50
C 9730-1:2019
れを接地する方法であると指定する場合,機器の金属部に確実に接続されている金属製の検
出素子をもつ制御装置にも適用している。
注記2 9.1.1 注記2を参照。
注記3 9.1.1 注記3を参照。
9.1.3
接地端子,接地端末及び接地接点は,中性点に電気的に接続してはならない。
9.1.1〜9.1.3の適否は,目視検査によって判定する。
9.2
クラスII及びクラスIII制御装置
クラスII及びクラスIII制御装置は,保護用接地の手段をもってはならない。
適否は,目視検査によって判定する。
9.3
接地接続の妥当性
9.3.1
一般要求事項
接地端子,接地端末又は接地接点とこれに接続する必要がある部分との間の接続は,低抵抗のものでな
ければならない。
適否は,次の試験によって判定する。
− 無負荷電圧12 V以下の交流電源によって,定格電流の1.5倍の電流,ただし,25 A以下の電流を接地
端子,接地端末又は接地接点と部分それぞれとの間に順番に通電する。
− 接地端子,接地端末又は接地接点とその部分との間の電圧降下を測定し,抵抗は,電流とこの電圧降
下とから計算する。いかなる場合でも,抵抗は,0.1 Ωを超えてはならない。試験は,定常状態が確
立するまで継続する。
注記1 測定用プローブの先端と試験している金属部との間の接触抵抗が,試験結果に影響を与えな
いように注意する。
注記2 外部導体又は内部導体の抵抗は,抵抗測定には含まないが,一体形導体の抵抗は含む。
9.3.2
固定配線並びにX形取付け及びM形取付け
固定配線の接続用接地端子又はX形取付け及びM形取付けを使用する非着脱式コード用の接地端子は,
10.1を満たさなければならない。
注記1 カナダ及び米国では,表2に規定する寸法をもつクイック接続端子は,使用中取外しを防ぐ
追加手段をもち,かつ,当該表で規定する保護部品をもつ回路を用いる接近することができ
ない接地端子を用いてもよい。
注記2 カナダ,中国及び米国では,固定配線又は電源コードにおける接地導体は,クイック接続端
子の手段によって終端にしてはならない旨,規定している。
表2−クイック接続端子の寸法(カナダ及び米国)
公称寸法
mm
保護装置の
回路の定格
A
幅
厚さ
長さ
4.8
0.5
6.4
20以下
4.8
0.8
6.4
20以下
5.2
0.8
6.4
20以下
6.3
0.8
8.0
60以下
9.3.3
外部導体
外部導体用の接地接続は,ねじなし端子を使用してはならない。ただし,Y形取付け及びZ形取付けの
51
C 9730-1:2019
場合,JIS C 2814-2-2若しくはJIS C 2814-2-3によるねじなし形固定装置,又はIEC 60999-1によるねじな
し形固定装置には,ねじなし端子を用いてもよい。
9.3.4
可触接地端子の寸法
通常使用状態において可触である接地端子は,公称断面積2.5〜6 mm2をもつ導体の接続ができなければ
ならない。また,当該接地端子は,工具を用いずに緩めることができてはならない。
注記 カナダ及び米国では,その他の公称断面積を許容している。
9.3.5
非可触形接地端子の寸法
通常使用状態において可触でない外部導体のための接地端子は,対応する導電端子に要求される寸法以
上のものでなければならない。
9.3.6
接地端子の固定
外部導体用の接地端子の締付手段は,偶然の緩みがないように十分に固定しなければならない。
9.3.2〜9.3.6の適否は,目視検査,手による試験及び10.1の該当する試験によって判定する。
注記 通常,導電端子に対して一般的に使用する構造では,過度の振動又は温度サイクルがない場合,
偶然の緩みに対して十分な固定のための要求事項を満たしている弾性を提供する。端子が過度
の振動又は温度サイクルを受ける場合,ピラー端子を用いるときに不注意で取り除かれるおそ
れがない圧力板のような,十分な弾性をもつ部品を使用するような,特別な準備が必要となる
ことがある。
9.4
耐食性
接地端子の全ての部分は,その部分と接地導体の銅又は接触している他の金属との間の接触による腐食
に耐えなければならない。
適否は,目視検査並びに疑義がある場合には,材料及びその被膜の分析によって判定する。
9.4.1
材料
接地端子の器体の材料は,金属フレーム又は外郭の一部である場合を除き,黄銅又は耐腐食性が同等以
上のその他の金属でなければならない。ねじ又はナットの材料は,黄銅,めっき鋼,箇条22によるその他
の金属又は耐食性が同等以上のその他の金属でなければならない。
適否は,目視検査並びに疑義がある場合には,材料及びその被膜の分析によって判定する。
9.4.2
アルミニウムのフレーム又は外郭
接地端子の器体の材料が,アルミニウム又はアルミニウム合金のフレーム又は外郭の一部である場合は,
銅とアルミニウム又はその合金との間の接触に起因する腐食のおそれを回避するための予防措置を講じな
ければならない。
適否は,目視検査並びに疑義がある場合には,材料及びその被膜の分析によって判定する。
注記 耐食性は,めっき加工又は類似の工程によって達成できる。
9.5
その他の要求事項
9.5.1
取外し可能な部分
制御装置の取外し可能な部分が接地接続をもつ場合,この接地接続は,その部品が通常の位置にあると
き,導電接続が行われる前に確立できなければならない。また,いかなる導電接続も,部品を外すとき接
地接続が切れる前に分離しなければならない。
適否は,目視検査によって判定する。
9.5.2
組込形制御装置
組込形制御装置が,機器が通電されている間,試験,設定又はサービスの目的で,機器の中へ取り付け
52
C 9730-1:2019
た後,その通常の接地手段から分離されるおそれがある場合,このような試験,設定又はサービスにおい
て,その制御装置から外す必要がない接地接続器又は接地導体を装備しなければならない。
適否は,目視検査によって判定する。
注記1 冷蔵庫の温度検出制御装置及び霜取り制御装置がその例である。
注記2 欧州標準化委員会(CENELEC)に加盟している各国では,この細分箇条を適用しない。
10 端子及び終端
箇条20の第3段落にもよる。
10.1 外部銅導体用端子及び終端
10.1.1 X形取付け及びM形取付けを使用する固定配線用及び非着脱式コード用の端子は,10.1.3に規定
する端末を除き,接続又は接続解除のために特殊工具を必要とせずに,ねじ,ナット又は同様に有効な装
置若しくは方法によって接続を行うものでなければならない。
適否は,目視検査によって判定する。
10.1.1.1 Y形取付け及びZ形取付けを使用する非着脱式コード用の端子又は端末は,内部導体用の端子及
び端末のための該当する要求事項を満たさなければならない。この場合,接続又は接続解除のために特殊
工具を必要としてもよい。
適否は,当該試験によって判定する。
注記1 JIS C 2814-2-1によるねじ形締付式端子,JIS C 2814-2-2又はJIS C 2814-2-3によるねじなし
端子及びIEC 60999-1による締付装置は,同等の有効な装置である。
注記2 平形プッシュオンコネクタは,かしめを実施するための特殊工具が必要である。
10.1.2 外部導体を締め付けるねじ及びナットは,ISOメートルねじ又は同等の有効性があるねじでなけれ
ばならない。それらは,他の構成部品を固定するために用いてはならない。ただし,外部導体を取り付け
るときに内部導体に変位が起こるおそれがないような処置がしてある場合に限り,それらに内部導体を取
り付けてもよい。
適否は,目視検査によって判定する。
注記1 SI,BA及びユニファイねじは,ISOメートルねじと等しい実効性がある。
注記2 ISO,SI,BA及びユニファイねじ以外の場合の同等の有効性をもつ試験は検討中であり,そ
れは,トルク値を20 %増加させるものである。
10.1.3 はんだ付け,溶接,かしめ又は類似の固定方法による端末
はんだ付け,溶接,かしめ又は類似の固定方法による端末は,該当する機器規格によって許容する場合
を除き,X形取付け及びM形取付けを使用する非着脱式コードの接続に用いてはならない。上記の端末を
外部導体のために使用するとき,それらは,10.2.2及び10.2.3も満たさなければならない。
適否は,目視検査によって判定する。
注記 一般に,機器の規格は,上記の接続の使用を制限している。
10.1.4 固定配線のための端子,又はX形取付け若しくはM形取付けに使用する非着脱式ケーブルのため
の端子は,表3に規定する公称断面積以上の導体の接続ができるようになっていなければならない。
適否は,目視検査,測定並びに表3に規定する最小断面積及び最大断面積の導体を取り付けることによ
って判定する。ただし,製造業者が規定値よりも広い範囲で製造業者が宣言する場合には,その最小断面
積及び最大断面積の導体を取り付けることによって判定する。
53
C 9730-1:2019
表3−導体の最小公称断面積
端子を流れる電流a)
A
公称断面積b)
mm2
可とうコード導体
固定配線用導体
6以下c)
0.5〜1
1〜1.5
6を超え 10以下
0.75〜1.5
1〜2.5
10を超え 16以下
1〜2.5
1.5〜4
16を超え 25以下
1.5〜4
2.5〜6
25を超え 32以下
2.5〜6
4〜10
32を超え 40以下
4〜10
6〜16
40を超え 63以下
6〜16
10〜25
注a) 63 Aを超えるものの要求事項は,検討中である。
b) 米国では,その他の導体寸法を許容している。
c) 規定する公称断面積は,3 A以下の電流のSELV回路内又は
PELV回路内の端子には適用しない。
10.1.4.1 固定配線のための端子,又はX形取付け若しくはM形取付けに使用する取外しできないケーブ
ルのための端子が,表3の第2欄及び第3欄に示す導体寸法より広い範囲の固定配線又は可とうコード導
体を収容する構造になっている場合には,これを製造業者が宣言しなければならない。
注記1 カナダ及び米国では,固定配線用外部導体用として規定する端子間及びアース端子以外のそ
れらの端子と隣接金属部との間の沿面距離及び空間距離は,箇条20を満たし,かつ,次の注
記2によって測定した場合,次の値以上でなければならない旨,要求している。
− 定格電圧250 Vを超えない場合,6.4 mm
− 定格電圧250 Vを超え400 V以下の場合,8.0 mm
− 定格電圧400 Vを超える場合,9.6 mm
注記2 カナダ及び米国では,端子部の沿面距離及び空間距離の測定は,2回行い,1回は使用する最
大断面積の導体で行い,あと1回は導体を取り付けない状態で行う。
10.1.5 X形取付け及びM形取付けを使用する固定配線又は非着脱式コード用の端子は,締付手段で固定
配線及び端子を締め付けるとき又は緩めるとき,端子が緩まず,内部導体にストレスを受けず,かつ,沿
面距離及び空間距離が箇条20に規定する値未満まで減少しないように固定しなければならない。
適否は,目視検査及び10.1.4で使用する最大断面積の導体を10回締め付け,また,緩めた後の測定によ
って判定する。導体は,それを緩めるごとに動かす。ねじを切った部品に対しては,加える全トルクは,
表20に示す全トルク又は関連図(図10〜図13)に規定するトルクのうち,いずれか大きい方のトルクと
する。
試験中,端子は緩まず,例えば,ねじの破損又はその端子を継続して使用することができなくなる可能
性がある頭部のすりわり,ねじ山,座金,受金,及びその他の部品に対する損傷があってはならない。
注記1 この要求事項は,端子の移動があっても,この規格の要求事項を満たす場合,端子の回転及
び変位を防止するような構造であってもよい。
注記2 端子は,2個のねじを用いての固定,くぼみの中に1個のねじを用いての固定,又はその他
の適切な手段によって,緩みを防止してもよい。
注記3 封止用コンパウンド又は樹脂による被覆は,次の場合に限り,端子の緩みを防止するのに十
分な手段である。
− その封止が,導体の接続若しくは断路の結果又はその装置の使用の結果として機械的ス
54
C 9730-1:2019
トレスを受けない場合。
− 封止用コンパウンドの有効性が,この規格に規定する最も不利な条件で,その端子が到
達する温度によって阻害されない場合。
10.1.6 X形取付け又はM形取付けを使用する固定配線又は非着脱式コード用の端子は,それらが十分な
接触圧力をもつ金属面の間で導体に対する過度な損傷なしに導体を締め付けるような構造でなければなら
ない。ただし,2 A以下の電流を通す回路に用いるねじなし端子の場合,その表面のうちの1個の表面は
非金属材料であってもよい。
適否は,10.1.5の試験後,端子及び導体の目視検査によって判定する。
注記 導体に鋭い又は深いくぼみがある場合,過度な損傷を受けるものである。
10.1.7 X形取付けを使用する固定配線及び非着脱式コード用の端子は,正しい接続を実施するために導体
の特別準備を必要としてはならない。
10.1.7.1 X形取付け用端子は,接続部にその他の手段を使用する場合でも,手段の中で,1個又はそれ以
上がこの要求事項を満たしている場合,代替の接続手段を用いていてもよい。この場合,内部導体の端子
及び端末のための要求事項を満たさなければならない。
適否は,目視検査によって判定する。
注記 “導体の特別準備”という用語は,よ(撚)り線のはんだ付け,ケーブルラグの使用,アイレ
ットの形成などを含むが,導体を端子に挿入する前の導体の整形又は導体の端末を固めるため
のより合せ導線のねじりは含まない。
10.1.8 X形取付け又はM形取付けを使用する固定配線及び非着脱式コード用の端子は,導体も,より合
せ導体の素線も,取付ねじ若しくはナットが締められている間又は同等に効果がある装置が動作している
間,滑り出るおそれがないような構造又は配置でなければならない。
10.1.8.1 適否は,次の試験によって判定する。
10.1.8.2 端子は,表4に規定する試験用導体又は製造業者が指定する電線に従って,端子の使用に合わせ
た導体を取り付ける。固定配線導体の素線は,端子に挿入する前に真っすぐに伸ばす。
10.1.8.3 可とうケーブル及びコードの素線は,20 mmに1回の完全ターンの均一なねじれが存在するよう
にねじる。導体は,最小規定距離まで端子に挿入するか,距離を規定しない場合,それが,端子の最も遠
い側から,僅かに突出するまで挿入する。導体は,素線が滑り落ちるのを最も促進するおそれがある位置
に挿入する。次に,ねじは,表20に規定するトルクの3分の2のトルクで締め付ける。
10.1.8.4 可とうコードに対しては,試験は新しい導体を用いて繰り返す。前と同様にねじるが,反対方向
にねじる。試験後,導体の素線が締付装置と保持装置との間のギャップに滑り出ていてはならない。
55
C 9730-1:2019
表4−試験用導体
端子を流れる電流a)
A
取り付ける導体(素線数及び各素線の公称径)
mm
可とうコード
導体
固定配線
導体
可とうコード
導体用
固定配線
導体用
0以上
6以下
−
32×0.20
−
6を超え 10以下
0を超え 6以下
40×0.25
7×0.52
10を超え 16以下
6を超え 10以下
50×0.25
7×0.67
16を超え 25以下
10を超え 16以下
56×0.30
7×0.85
25を超え 32以下
16を超え 25以下
84×0.30
7×1.04
−
25を超え 32以下
94×0.30
7×1.35
32を超え 40以下
32を超え 40以下
80×0.40
7×1.70
40を超え 63以下
40を超え 63以下
126×0.40
7×2.14
注a) 63 Aを超えるものの要求事項は,検討中である。
10.1.9 端子は,導体を確実に締め付けるような構造でなければならない。
適否は,10.1.9.1〜10.1.9.3の試験によって判定する。
10.1.9.1 端子は,10.1.4による最小断面積及び最大断面積の固定配線用導体又は可とう導体のうち,いず
れか該当するもの又はより不利なものを取り付け,表20に規定するトルクの3分の2に等しいトルクで
端子ねじを締め付ける。各導体に,表5に示す値の引張力を加える。引張力は,導体用スペースの軸方向
に1分間,反動を加えないように加える。
10.1.9.2 この引張試験は,通常,導体が端子に入る場所に隣接する位置の導体に直接適用する。ただし,
導体又は導体の周りの絶縁を保持する追加かしめ装置又はクランプ装置が,導体を端子に引き込む点から
導体の縦方向に沿って測定したとき30 mm以下のところに存在する場合,この試験は,かしめ又はクラン
プ装置に適用し,実際の端子には適用しないことが望ましい。
10.1.9.3 試験中,導体は端子の中で著しく動いてはならない。
表5−導体の引張試験の値
端子を流れる電流a)
A
引張力
N
可とうコードの導体
固定配線用端子
3以下
20 b)
20 b)
3を超え 6以下
30
30
6を超え 10以下
30
50
10を超え 16以下
50
50
16を超え 25以下
50
60
25を超え 32以下
60
80
32を超え 40以下
90
90
40を超え 63以下
100
100
注a) 63 Aを超えるものの要求事項は,検討中である。
b) SELV回路内又はPELV回路,及び特定導体を規定していないその
他の用い方に限って適用する。
10.1.10
端子は,通常使用状態で過度の温度に達することがなく,支持絶縁の材料又はクランプした導体
の絶縁被覆を損傷しない構造でなければならない。
適否は,箇条14の温度上昇試験中に判定する。
56
C 9730-1:2019
10.1.11
端子は,固定配線のシース又は可とうコードシースの中の各線芯が,同一シース中のその他の線
芯に対し,技術的利点がある場合を除き,合理的に近接して終端できるように配置しなければならない。
適否は,目視検査によって判定する。
10.1.12
X形取付け又はM形取付けを使用する非着脱式コード用の端子は,導体が取り付けられるとき,
万一素線が滑り出ても充電部と可接金属部との間の偶然の接触のおそれがなく,また,クラスII制御装置
及びクラスII機器用制御装置に対しては,充電部と付加絶縁だけによって可触金属部から絶縁した金属部
との間に偶然の接触のおそれがないように,配置又は遮蔽しなければならない。さらに,完全断路又はマ
イクロ断路を備えていると規定する作動を短絡するような危険があってはならない。
適否は,目視検査及び次の試験によって判定する。
− 10.1.4の試験中に用いる最小寸法に等しい公称断面積をもつ,より合せ導体の端末から絶縁部8 mm
を取り除く。より合せ導体の1本の素線は,固定しないままにし,その他の素線は完全に端子中に挿
入し締め付ける。固定しない素線はあらゆる方向に,絶縁部を後方に引き裂くことなく曲げられるが,
障壁の周りには鋭い曲げは作らない。
− 充電端子に接続されている導体の固定してない素線は,可触金属部又は可触金属部に接続されている
金属部に触れてはならない。クラスII制御装置及びクラスII機器用制御装置については,付加絶縁だ
けによって可触金属部から絶縁した金属部に接触してはならない。
− 接地端子に接続している導体の固定していない素線は,充電部に接触してはならない。
− 充電端子に接続している導体の固定しない素線は,可触になってはならず,完全断路又はマイクロ断
路を行う場合,規定する作動を短絡してはならない。
10.1.13
端子は,回路の連続性がセラミック又はセラミックと同等以上の特性をもつその他の絶縁材料以
外の絶縁材料を通して伝達される圧力によって維持されないような構造でなければならない。ただし,い
かなる収縮又はひずみをも補償するよう,適切な金属部品によって十分な弾性をもつ場合には除く。
適否は,箇条17の試験前及び試験後に目視検査することによって判定する。
注記 材料が適切であるかどうかは,その制御装置に適用できる温度範囲内の寸法の安定性について
考慮する。
10.1.14
端子のねじ及びねじ山付き部品は,金属製でなければならない。
適否は,目視検査によって判定する。
注記 カナダ及び米国では,ねじを直径2.5 mm以下の導体で用いる場合,接続は,配線の位置を保
持するため,引上げ式のつまみ,同等のものをもつ端子板付き締め金具,又は結束ねじである
ことを要求している。端子板は,直径1.6 mm(AWG14)を超える電線寸法の場合,厚さ1.27 mm
(0.050インチ),直径1.6 mm以下の電線寸法の場合,厚さ0.76 mm(0.030インチ)以上であ
る。端子ねじは,6番ユニファイねじが,1.29 mm(AWG16)線,1.02 mm(AWG18)線,又は
単芯1.6 mm(AWG14)線の接続用に用いてよいことを除き,8番ユニファイねじ以上とする。
10.1.15
ピラー端子及びマントル端子は,十分な長さの導体が端子に導入できるように,また,導体が脱
落しないことを保証するために,ねじの周縁の向こう側まで通るような構造でなければならない。
適否は,ピラー端子に対しては,図11において寸法“g”の測定によって,またマントル端子に対して
は,図12の表に規定する最小距離によって判定する。
注記 カナダ及び米国では,10.1.16及び10.1.16.1を適用する。
10.1.16
口出し線(ピッグテイル)
カナダ及び米国では,口出し線(ピッグテイル)を独立取付形制御装置の接続に用いる場合,配線は,

57
C 9730-1:2019
0.82 mm2以上でなければならない。絶縁被覆は,熱可塑性樹脂の場合,厚さ0.8 mm以上,又は厚さ0.8 mm
の網組付きの熱可塑性樹脂の場合,厚さ0.8 mm以上のゴムとしなければならない。
口出し線は,150 mm以上とし,国家配線規定に従って配線した場合,接近できないように設置しなけ
ればならない。また,同じ配線箱にある場合,接続手段が,外部導体の接続用に使用できないようになっ
ていない場合,口出し線の制御装置の接続端部は,ねじ端子接続でないことを要求する。
ねじ端子の構造は,口出し線を接続端部で絶縁し,かつ,装置上に口出し線を使用するためである旨を
明確に表示する場合,使用不可とする必要はない。
適否は,目視検査によって判定する。
10.1.16.1
カナダ及び米国では,口出し線は,端子,組継ぎ(例えば,接続器に巻き付け),又は内部配
線に配線する場合,機械的ストレスから保護するため,引張力に対して緩和手段をもたなければならない。
適否は,目視検査,及び口出し線を44 Nの引張力で1分間引っ張ることによって判定する。
試験中,口出し線は,損傷してはならず,かつ,2 mmを超えて縦方向に移動してはならない。
10.2 内部接続のための端子及び端末
10.2.1 導体の接続
端子及び端末終端端子は,表6に規定する公称断面積をもつ導体の接続ができなければならない。
表6−導体の公称断面積
端子又は端末を流れる電流a)
A
導体の最小公称断面積b)
mm2
3以下
−c)
3を超え 6以下
0.75
6を超え 10以下
1
10を超え 16以下
1.5
16を超え 25以下
2.5
25を超え 32以下
4
32を超え 40以下
6
40を超え 63以下
10
注a) 63 Aを超えるものの要求事項は,検討中である。
b) 米国では,別の寸法の導体を適用する。
c) 最小値の規定はないが,製造業者が試験目的のために導
体寸法を規定しなければならない。
注記 この細分箇条の要求事項は,特別な準備のない標準導体の受入れを考慮していない端子,その
構造及び使い方によって標準導体を受け入れることができない端子,又は異なる寸法の導体を
受け入れるように入念な構造がなされており,かつ,特定のタイプの機器の中でだけに使用さ
れる端子には適用しない。例えば,電気毛布の織物の内部で用いる自動温度調節器である。
10.2.2 目的に対する適否
端子及び端末は,その目的に対して適切でなければならない。はんだ付け,かしめ及び溶接する接続部
に作る端末は,通常のサービス中に発生するストレスに耐えなければならない。
適否は,目視検査によって判定する。
10.2.3 はんだ付け端子
はんだ付け端子を使用するとき,導体を正しい位置に維持するために,導体は,はんだ付けだけに頼ら
ないように配置又は固定しなければならない。ただし,充電部とその他の金属部との間の沿面距離及び空
58
C 9730-1:2019
間距離が,万一導体がはんだ付けした点で外れたとしても,箇条20に規定する値の50 %未満に減少する
おそれがないようにバリアが設けられる場合は除く。
適否は,目視検査によって判定する。
注記 一般に,はんだ付けの前に“引っ掛けて止めること”は,導体が通過する穴が過度に大きくな
い場合,及び導体が平形2芯金糸コードの部分でない場合,導体を正しい位置に維持するため
の適格な手段である。
導体を正しい位置に維持するその他の手段,例えば,はんだタグの側面の腰をくびれさせることも受け
入れられている。
10.2.4 平形プッシュオンコネクタ
10.2.4.1 制御装置と一体になっているタブは,図14又は図15の寸法要求事項を満たさなければならない。
ただし,次の場合は除く。
a) 寸法及び形状が標準レセプタクルと誤ったかみ合せが起きるおそれがないような異なった寸法及び形
状であるとき(図16参照)。
b) レセプタクルの極性を付けた受け口にかん合するタブ(図16参照)。
c) 表1の項目J1に従って使用するとき。
図14〜図16の寸法については,IEC 61210の物理的寸法を代替として使用してもよい。IEC 61210の性
能要求事項は適用しない。
適否は,測定によって判定する。
10.2.4.2 制御装置と一体になっているタブは,表7に示すタブの最高温度に適切な材料及びめっきを施し
たものでなければならない。表7に規定した以外の材料又は被覆を使用してもよいが,電気的及び機械的
特性が,特に耐食性又は機械的強度に関して同等以上に信頼できる場合に限る。
表7−タブの材料及びめっき
タブ材料及びめっき
タブの最高温度
℃
裸銅
155
裸黄銅
210
すずめっきの銅及び銅合金
160
ニッケルめっきの銅及び銅合金
185
銀めっきの銅及び銅合金
205
ニッケルめっきの鋼
400
ステンレス鋼
400
適否は,箇条14の試験中に達する温度を測定することによって判定する。
注記 規定温度は,連続使用温度である。これより高くても,過渡的温度は許容する。例えば,温度
検出制御装置の温度のオーバシュートの間である。
10.2.4.3 制御装置と一体になっているタブは,レセプタクルの挿入及び引抜きができる十分な強度をもた
なければならない。
適否は,表8に規定する力に等しい軸方向の力を,衝撃的ではなく静かに加えることによって判定する。
著しい変位又は損傷があってはならない。
59
C 9730-1:2019
表8−タブの挿入・引抜き時における軸方向の力の値
タブ寸法
(図16参照)
mm
押圧力a)
N
引張力a)
N
2.8
50
40
4.8
60
50
6.3
80
70
9.5
100
100
注a) この値は,レセプタクルにタブを挿入及び
引き抜くときに許容する最大値である。
10.2.4.4 制御装置と一体になっているタブは,該当するレセプタクルの接続を許すように,適切な間隔を
設けなければならない。
図14〜図16の表に規定する寸法については,IEC 61210の物理的寸法を代替として使用してもよい。IEC
61210の性能要求事項は適用しない。
適否は,7.2で製造業者が宣言する場合を除き,各タブに該当するレセプタクルを接続して判定する。接
続している間,応力又はひずみが,タブ又はそれらの隣接部分に対しても発生してはならず,沿面距離又
は空間距離の値が,箇条20に規定する値未満に減少してはならない。
注記 図14又は図15によるタブに対しては,該当するレセプタクルは,図16に示している。
10.3 一体となった導体のための端子及び端末
一体形導体の端子又は端末に対しては,箇条10に固有の要求事項又は試験はないが,その他の箇条の関
連する要求事項が適用できる。
11 構造要求事項
11.1 材料
11.1.1 絶縁材料−含浸した材料
木材,綿,絹,普通紙及び類似の繊維質又は吸湿性の材料は,含浸しない限り絶縁材料として用いては
ならない。
適否は,目視検査によって判定する。
注記 含浸している絶縁材料とは,材料の繊維間の隙間を適切な絶縁物で実質的に満たしている場合
である。
11.1.2 通電部分
黄銅を,端子のねじ部以外の通電部分に使用する場合,その部品が鋳造されるか又は棒材から作られて
いれば50 %以上,その部分が圧延薄板から作られていれば58 %以上の銅を含有していなければならない。
適否は,目視検査及び材料の分析によって判定する。
11.1.3 非着脱式コード
11.1.3.1 クラスI制御装置の非着脱式コードは,その制御装置の接地用端子若しくは端末,又は機器用イ
ンレット若しくはコンセントの接地極に接続するための緑と黄色との組合せによって識別する絶縁導体を
もたなければならない。
適否は,目視検査によって判定する。
11.1.3.2 緑と黄色との組合せによって識別する絶縁導体は,接地用端子又は端末以外に接続してはならな
い。
60
C 9730-1:2019
適否は,目視検査によって判定する。
11.2 感電に対する保護
11.2.1 二重絶縁
二重絶縁を用いるとき,両方の絶縁の性質について,その他の方法で規定する場合を除き,基礎絶縁及
び付加絶縁が別々に試験できるような構造でなければならない。
11.2.1.1 基礎絶縁及び付加絶縁を別々に分けて試験できない場合,又は両方の絶縁の性質に関して満たし
ていることがその他の方法では得られない場合,絶縁は強化絶縁とみなす。
適否は,目視検査及び二重絶縁に関する試験によって判定する。
注記 特別に作成されたサンプル又は絶縁部品のサンプルは,満足な結果を得るための方法である。
11.2.2 二重絶縁又は強化絶縁の劣化
クラスII制御装置及びクラスII機器中で使用する制御装置は,付加絶縁又は強化絶縁上の沿面距離又は
空間距離が摩耗の結果として箇条20に規定する値未満に減少しないような構造でなければならない。素線,
ねじ,ナット,座金,ばね,平形プッシュオンレセプタクル又は類似の部品が緩み,正規の位置から落下
しても,それが通常使用状態において,付加絶縁又は強化絶縁上の沿面距離又は空間距離が箇条20に規定
する値の50 %未満に減少する配置になるおそれがないような構造又は配置でなければならない。
適否は,目視検査,測定及び/又は手による試験によって判定する。
この判定に対しては,次を考慮する。
− 2個の独立した固定具が同時に緩くなることは想定しない。
− ロック座金を装備したねじ又はナットで固定した部品は,緩みやすくないとみなす。ただし,ロック
座金を使用者保守又はサービス中に外す必要がある場合は,緩みやすいとみなす。
− 箇条17及び箇条18の試験中に緩まない,又は正規の位置から落下しないばね及びばね部分は,満た
しているとみなす。
− はんだ付けによって接続する素線は,はんだに無関係に端末の近傍で正規の位置に保持する場合を除
き,十分に固定しているとはみなさない。
− 端子に接続する素線は,追加固定部品をその端子の近傍に設けている場合を除き,十分に固定してい
るとはみなさない。より線導体の場合,追加の固定部品は,導体ではなく絶縁を締め付けなければな
らない。
− 短く固い素線は,いずれかの端子ねじ又はナットが緩んでいるとき,正規の位置に保持する場合,端
子から離れやすいとはみなさない。
11.2.3 一体形導体
11.2.3.1 一体形導体は,通常使用状態において,沿面距離及び空間距離が箇条20に規定する値未満に減
少するおそれがないように,硬質であるか,固定するか,又は絶縁しなければならない。
適否は,目視検査,測定及び手による試験によって判定する。
11.2.3.2 絶縁がある場合,取付け中又は通常使用状態において損傷するおそれがあってはならない。
適否は,目視検査,測定及び手による試験によって判定する。
注記 導体上の絶縁が,該当するJISによるケーブル及び可とうコードの絶縁と電気的に等価でない
場合,又は箇条13に規定する条件で,導体と絶縁に巻いた金属はくとの間で行う耐電圧試験を
満たしていない場合,導体は裸導体である。
11.2.4 可とうコードのシース
制御装置内で,可とうケーブル又はコードのシース(ジャケット)を付加絶縁として使用する場合には,
61
C 9730-1:2019
それが,過度の機械的ストレス又は温度ストレスを受けない場所で,かつ,その絶縁特性がJIS C 3662-1,
JIS C 3663-1又はそれらと同等な基準に規定するシースの絶縁特性以上でなければならない。
適否は,目視検査によって,また必要である場合,JIS C 3662-1,JIS C 3663-1又はそれらと同等な基準
によって可とうコードのシースを試験することで判定する。
注記0A 電気用品の技術上の基準を定める省令の解釈(20130605商局第3号)の別表第一は,同等な
基準である。
11.2.5 保護インピーダンス
(H.11.2.5による。)
11.2.6 SELV又はPELVの使用による感電に対する保護
SELV又はPELVに対する要求事項は,附属書Tによる。
11.2.7 内部及び外部のSELV回路とPELV回路との接続
一体となったSELV回路と外部のPELV回路との相互接続を防止する適切な手段を備えなければならな
い。この逆も同様とする。
他の接続システムに適さない又は相互に接続するのが不可能な専用プラグ及びソケットシステムに限り,
分離可能な接続による外部のSELV電源からのクラスIII制御装置への供給が可能でなければならない。
適否は,目視検査によって判定する。
11.2.8 過電流保護
制御装置は,表1の項目96に従って製造業者が宣言している場合,保護装置の特性によって決定される
期間,異常状態で流れる電流を流せなければならない。
適否は,27.5の過負荷試験によって判定する。
11.3 操作及び動作
11.3.1 完全断路
完全断路として規定する位置をもつ制御装置は,規定する位置において,箇条20に規定する関連する値
以上の接点間隔が,接地極以外の全ての電源極において存在するような構造でなければならない。接点間
隔は,自動作動又は手動作動によって得ることができるが,それに続くどのような自動作動によっても,
接点間隔距離が規定する最小値未満に減少してはならない。
断路が,全極断路を備えていると製造業者が指定する場合,各電源極における接点動作は,実質的に同
時でなければならない。
適否は,目視検査,及び必要な場合,箇条13及び箇条20の試験によって判定する。
11.3.2 マイクロ断路
マイクロ断路であると製造業者が指定する位置をもつ制御装置は,断路状態において,箇条13の耐電圧
要求事項を満たすために,電源の1極以上において接点間隔が存在するような構造でなければならない。
ただし,空間距離の寸法は規定しない。接点間隔は,自動作動又は手動作動によって得られるが,表1の
項目36において製造業者が宣言する限度値間の作動量に引き続く変化又はいかなるスイッチヘッド温度
においても,表1の項目22において製造業者が宣言する限度値間の温度の引き続く変化が,接点間隔を
減少するおそれのある動作を引き起こしてはならない。
適否は,目視検査,及び必要な場合,規定する温度限度値において実施した箇条13の試験によって判定
する。
11.3.3 リセットボタン
制御装置のリセットボタンは,偶然に復帰するおそれがないよう配置するか,又は保護しなければなら
62
C 9730-1:2019
ない。
適否は,目視検査によって判定する。
注記1 この要求事項は,例えば,制御装置を壁に押し付けることによって,又は制御装置に向けて
家具を押し付けることによって復帰するような位置にリセットボタンを取り付けてはならな
いことを意味する。
注記2 この要求事項は,トリップフリー作動の手動復帰形制御装置には適用されない。
11.3.4 製造業者による設定
製造業者による制御装置の設定のために使用する部分は,設定後,設定の偶然のずれを防止するように
固定しなければならない。
適否は,目視検査によって判定する。
11.3.5 接点−一般事項
11.3.5.1 操作者によって動作させることができる0.1 Aを超える直流定格をもつ接点は,当該操作の動作
速度と両接点表面の接近速度及び分離速度が操作速度とは無関係であるような構造でなければならない。
適否は,目視検査によって判定する。
注記 この要求事項は,11.3.7によって除外する接点には適用しない。
11.3.5.2 クラスC制御機能システムは,安全関連端子の電源を直接遮断するために,複数の切換素子を含
まなければならない。
注記 二つの独立する接点を操作する単一リレーは,一つの切換素子である。
11.3.5.2.1 共通の過失原因を防止する手段
制御装置が安全停止を実施することを妨げるような外部の回路短絡によって,共通的な原因による複数
の切替素子が不良となることに対する保護手段を備えなければならない。
次のいずれかの方法は,容認する。
− 過電流保護装置
− 電流制限器
− 内部故障検出方法
保護手段が,1個又はそれ以上の切替素子によって,又は過電流保護装置の妨害によって安全関連出力
端子の駆動状態を妨害する能力を維持するための手段の適否は,次の試験によって判定する。
制御装置の安全関連出力端子は,短絡電流を切り替えることを意図するスイッチに接続する。開放した
スイッチにおいて,制御装置は,H.27.1.1.2に規定するように通常動作(内部の切換素子の接点は閉じた
状態)を模擬して駆動状態にした出力に接続する。
試験機器は,次の事項を備えていなければならない。
a) 過電流保護装置を保護手段として用いる場合,制御装置への電源供給は,500 A以上の短絡回路電流
を供給する機能をもつ。
b) 電流制限機能を保護手段(例えば,変圧器)として用いる場合,制御装置への電源供給は,製造業者
が宣言する(表1の項目95)短絡回路電流を制限しない。
11.3.5.2.1.1 制御装置の安全関連出力端子間では,スイッチを閉じることによって短絡を適用する。
試験は,1時間又はスイッチを通して電流が流れなくなるまで動作する。
過電流保護装置が取替え可能であって,試験中に過電流保護装置が動作した場合,過電流保護装置を取
り替えて,スイッチを閉じた状態に維持し制御装置を再起動することによって,試験を更に2回繰り返す。
試験は,最初の動作状態において,スイッチを閉じた位置に維持し,同じサンプル又は別のサンプルを
63
C 9730-1:2019
用いて繰り返す。
11.3.5.2.1.2 制御装置の内部故障を検知する機能によって切替素子を開路するか,又は安全停止を開始し
た場合,外部の短絡を維持した状態のままで,制御装置を再起動することによって,試験を2回繰り返す。
適否は,箇条15及びH.27.1.1.3によって判定する。
試験後,制御装置の一つ又はそれ以上の切換素子は,安全関連出力端子の電源を遮断するか,又は取替
え可能でない過電流保護装置は,安全関連出力端子への供給を恒久的に遮断する。
11.3.6 完全断路用及びマイクロ断路用の接点
交流定格又は0.1 A以下の直流定格をもち,操作によって動作させることができる完全断路用接点及び
マイクロ断路用接点は,閉位置又は開位置においてだけ静止できるような構造でなければならない。
適否は,目視検査,マイクロ断路に対して規定するとおり,閉位置に対しては箇条14,及び開位置に対
しては箇条13によって判定する。ただし,操作部の中間位置が,完全断路と製造業者が宣言された定位置
に隣接して発生する場合,完全断路に対して規定する箇条13及び箇条20の試験は,この中間位置に対し
て行う。
11.3.7 11.3.5及び11.3.6の除外事項
11.3.5及び11.3.6の要求事項は,目視検査の結果,接点が負荷時に動作できないか,又は負荷時に動か
す意図がないことが明白な場合の接点,及び通常使用状態でアークを生じない接点には適用しない。
11.3.7.1 適否は,目視検査,及び必要な場合,11.3.7.2の試験によって判定する。
11.3.7.2 最大動作電圧に等しい直流電圧を,通常使用状態によって発生する電流が得られるように,抵抗
を直列に接続して接点に印加する。その接点を徐々に開放する場合,継続してアークが発生してはならな
い。
11.3.8 接点静止位置
接点は,操作部のいずれの静止位置においても,意図したように開放するか,又は閉じなければならな
い。適用しない場合,制御装置又は機器内で危険が発生するおそれがないものでなければならない。
適否は,目視検査によって判定する。
注記1 “操作部の静止位置”という用語とは,中間位置であって使用者による設定位置を含む。
注記2 インデックスを付けた,表示した,又は意図した静止位置の間で操作部の中間位置を得よう
とする試みのためには,操作部は通常使用状態で操作することが望ましい。操作部をその位
置に保持しておくことは,操作ではない。
11.3.9 引きひも操作式制御装置
引きひも操作式制御装置は,引きひもを,その制御装置を操作させた後に放すとき,その機構の関連部
分が制御装置の操作サイクルにおける次の運動を直ちに実施できる位置に復帰できる構造でなければなら
ない。
適否は,目視検査及び次の試験によって判定する。
引きひも操作制御装置は,垂直下方に45 N又は垂直に対して45°の方向では70 N以下の定常引張力を
加え,また放すことによって定位置からその次の定位置に復帰する。その制御装置は,製造業者が意図す
る方法で取り付ける。
注記1 対応国際規格の注記は,規定であるため,本文へ移動した。
注記2 引きひも以外で操作する制御装置の操作力は,規定しない。この細分箇条の要求事項が規定
されている可能性がある関連機器規格に留意する。
11.3.10
(J.11.3.10による。)
64
C 9730-1:2019
11.4 作動
11.4.1 組合せ作動
複数の種類の作動がある制御装置で,作動のうちの一つが,その他の作動不良の後に動作するような構
造のものでは,その他の作動にどのような故障があっても,この作動が依然として動作するような構成で
なければならない。
適否は,目視検査,及び必要な場合,その他の作動の全てを作動不能にした後の試験によって判定する。
11.4.2 製造業者による設定
製造業者によって設定が提供されるタイプ2作動は,その動作値,動作時間又は動作シーケンスの設定
値がその後干渉しているかどうか明白に見分けられる構造でなければならない。
適否は,目視検査によって判定する。
11.4.3 タイプ2作動
タイプ2作動は,その動作値,動作時間又は動作シーケンスの製造偏差及びドリフトが,表1の項目41
及び項目42で製造業者が宣言する限度値内にあるような構造でなければならない。
適否は,箇条15〜箇条17の試験によって判定する。
11.4.4 タイプ1.A作動又はタイプ2.A作動
タイプ1.A作動又はタイプ2.A作動は,完全断路に対して規定する空間距離及び耐電圧要求事項を備え
るように動作をしなければならない。
適否は,箇条13の試験及び箇条20の関連要求事項によって判定する。
11.4.5 タイプ1.B作動又はタイプ2.B作動
タイプ1.B作動又はタイプ2.B作動は,マイクロ断路のための耐電圧の要求事項を満たすように動作を
しなければならない。
適否は,箇条13の試験及び箇条20によって判定する。
11.4.6 タイプ1.C作動又はタイプ2.C作動
タイプ1.C作動又はタイプ2.C作動は,マイクロ開路によって開路を行うように動作しなければならな
い。
適否は,箇条20によって判定する。
11.4.7 タイプ1.D作動又はタイプ2.D作動
タイプ1.D作動又はタイプ2.D作動は,断路が復帰機構によって妨害又は阻止されるおそれがないよう
に,また,断路後,超過した条件又は故障状態が継続している間は,瞬間的にもその回路を再閉路できな
いような構造でなければならない。
適否は,目視検査及び動作させることによって判定する。
11.4.8 タイプ1.E作動又はタイプ2.E作動
タイプ1.E作動又はタイプ2.E作動は,断路が復帰機構によって妨害又は阻止されるおそれがないよう
に,また,超過した条件又は故障状態が継続している間は,接点が開路を妨害されたり,閉路を維持した
ままとなることのないような構造でなければならない。
適否は,目視検査及び動作させることによって判定する。
11.4.9 タイプ1.F作動又はタイプ2.F作動
タイプ1.F作動又はタイプ2.F作動は,制御装置を製造業者の取扱説明書に従って取り付けた後,それ
を工具を用いたときに限り,復帰できる構造でなければならない。
適否は,目視検査及び動作させることによって判定する。
65
C 9730-1:2019
注記 制御装置に接触するために,工具が必要であるような機器の内部に取り付けることは,この要
求事項を満たしている。
11.4.10
タイプ1.G作動又はタイプ2.G作動
タイプ1.G作動又はタイプ2.G作動は,その制御装置が働いた後,電気的負荷条件下で制御装置を復帰
する(その意図がなくても)構造でなければならない。
適否は,目視検査並びに定格電圧及び定格電流で1回復帰させることによって判定する。
11.4.11
タイプ1.H作動又はタイプ2.H作動
タイプ1.H作動又はタイプ2.H作動は,接点の開放が妨害されるおそれがなく,復帰装置が復帰位置に
保持される場合,自動的に閉位置に復帰できるような構造でなければならない。制御装置は,復帰機構が
通常の位置で−35 ℃を超える温度で自動的に復帰してはならない。
適否は,目視検査及び動作させることによって判定する。
11.4.12
タイプ1.J作動又はタイプ2.J作動
タイプ1.J作動又はタイプ2.J作動は,接点の開放が妨害されるおそれがなく,制御装置は,復帰機構が
復帰位置に保持される場合,自動復帰機構として機能することがない構造でなければならない。制御装置
は−35 ℃を超える温度で自動的に復帰してはならない。
適否は,目視検査及び動作させることによって判定する。
11.4.13
タイプ1.K作動又はタイプ2.K作動
タイプ1.K作動又はタイプ2.K作動は,検出素子中又は検出素子とスイッチヘッドとの間のいずれかの
部分において破壊が生じた場合,製造業者が宣言する動作値,動作時間又は動作シーケンスを超える前に
製造業者が宣言する断路が行われるような構造でなければならない。
注記 この試験は,JIS C 9730の規格群の関連する第2部で行う。
11.4.14
タイプ1.L作動又はタイプ2.L作動
タイプ1.L作動又はタイプ2.L作動は,電源不良の場合,外部の補助エネルギー源又は補助電源とは無
関係に,その意図した機能を実施するような構造でなければならない。
適否は,目視検査によって判定する。
注記 単純な直動形ばね又はおもりは,補助エネルギー源又は補助電源ではない。
11.4.15
タイプ1.M作動又はタイプ2.M作動
タイプ1.M作動又はタイプ2.M作動は,製造業者が宣言するエージングの手順を経た後,製造業者が設
計において意図した方法で動作する構造でなければならない。
適否は,17.6の試験によって判定する。
11.4.16
(H.11.4.16による。)
11.4.17
(J.11.4.17による。)
11.5 外郭にある開口部
水抜口がある場合,面積は20 mm2〜40 mm2,寸法は3 mm以上とする。
適否は,目視検査によって判定する。
注記1 耐湿性のための追加要求事項は,箇条12に含まれている。
注記2 IPX7として分類する制御装置は,水抜口の開放装置をもっていてもよい。
注記3 米国では,ダイヤル,つまみ,レバー,ハンドル,キャピラリチューブ又はこれと同等品の
開口部,換気,水抜き又は部品の取付けにおいて,追加要求事項がある。
66
C 9730-1:2019
11.6 制御装置の取付け
11.6.1 制御装置は,製造業者の指定する取付方法が,制御装置に悪影響を与えないような構造でなければ
ならない。
適否は,目視検査及び手による試験によって判定する。疑義がある場合,この規格の該当する箇条によ
っても判定する。
11.6.2 指定する取付方法は,制御装置が回転したり,又は変位するおそれがなく,かつ,工具を用いない
限り機器から外すことができないものでなければならない。
適否は,目視検査及び手による試験によって判定する。疑義がある場合,取外し前及び取外し後に箇条
8,箇条13及び箇条20の一部又は複数によっても判定する。
注記 操作手段と同芯のナット及び単一ブッシングによって固定され,回転操作を備えた制御装置以
外であれば,制御装置はこの要求事項を満たしているものである。ただし,ナットの締付けに
工具の使用を必要とし,その部分が十分な機械的強度をもつときに限る。ねじなし固定装置に
よって取り付けられた組込形制御装置は,制御装置を機器から外すことができる前に工具の使
用が必要である場合,この要求事項を満たしている。
11.6.3 独立取付形制御装置の取付け
11.6.3.1 パネル取付用及び指定する制御装置以外の独立取付形制御装置は,次のいずれかによる。
− 指定する標準ボックスを満たしているもの。
− 特別な電線管用ボックスが必要である場合,電線管ボックスと共に供給されるもの。
− 平たんな表面上の表面取付けに適切なもの。
11.6.3.2 特別な電線管用ボックスが必要である場合,それは制御装置と共に供給されなければならず,そ
のボックスはIEC 60423又はJIS C 8305に示す電線管用の引込口を装備しなければならない。
11.6.3.3 アウトレット用ボックスを使用しない埋込設備(隠蔽配線)とともに用いる表面に取り付けるた
めの独立取付形制御装置は,制御装置の裏側に端子への容易な取付け及び接続ができる適切な穴を装備し
なければならない。
11.6.3.4 露出配線を使用する表面に取り付けるための独立取付形制御装置は,関連するJISによるケーブ
ル又は電線管の該当するタイプの接続ができるケーブル若しくは電線管引込口,ノックアウト又は独立グ
ランドを装備しなければならない。
11.6.3.5 表面に取り付けるための独立取付形制御装置,又はこのような制御装置のサブベースは,外部導
体用の端子が利用でき,その制御装置又はサブベースがその支持物に適切に固定され,そのカバー(又は
制御装置)を外せば,使用できる構造でなければならない。
11.6.3.6 アウトレット用ボックス又は類似の外郭上に取り付ける意図の制御装置の配線端子は,その他の
充電部及び鋭い縁の付いた金属部が接地されているかいないかにかかわらず,制御装置の取付け中に,そ
のボックス又は外郭内の配線に対して押し付けられないように配置する又は保護しなければならない。
11.6.3.7 裏側配線端子を使用する場合,それはへこんだ箇所に置くか,ボックス内の配線との接触を防止
するように接近して取り付けた隔壁,絶縁材料又はこれらと同等のものによって保護しなければならない。
ボックスの前面の縁で形成される平面を越えてボックス内に突出しない端子は,この要求事項を満たし
ているとみなす。
端子に沿って設けられ,配線前に6.5 mm以上端子を超える大きさのガードであって,二極構造の間に
対応するものは許容する。
11.6.3.1〜11.6.3.7の適否は,目視検査によって判定する。
67
C 9730-1:2019
11.7 コードの取付け
11.7.1 屈曲
11.7.1.1 インラインコード形制御装置及び自立構造形制御装置の可とうコードは,通常使用中に発生する
おそれがある屈曲に耐えなければならない。X形取付けを用いる場合で,この要求事項を満たすために用
いるコードガードは,可とうコードと一体であってはならない。
11.7.1.2 適否は,制御装置が用いている可とうコード又は用いる可能性のある可とうコードを取り付け
て,制御装置に次の試験を行って判定する。
11.7.1.2.1 制御装置は,図9に示す屈曲試験装置に取り付ける。振動軸は,コードに取り付けたおもり及
びコード自身が,試験中,横方向の動きが最小になるようにする。平形コードをもつサンプルは,断面の
主軸が振動軸に平行になるように取り付ける。導入孔開口部を通過する各可とうコードは,おもり1 kgの
負荷をかける。制御装置が定格電圧で動作するとき,その特定の線芯を通過する電流に等しい電流を各線
芯に通電する。線芯間の電圧は,最大定格電圧とする。振動部分は角度90°(垂線のいずれの側でも45°)
にわたり,前後に動かす。屈曲回数(90°の運動を1回とする。)は5 000回とし,屈曲速度は毎分60回
とする。
11.7.1.2.2 試験後サンプルは,試験中,電流の開路及び各個別導体間の短絡が発生してはならず,断線し
たより線が附属品の外面まで絶縁を突き破ってはならない。電流が試験電流の2倍の値に達した場合,個
別導体間の短絡が発生したとみなす。
試験後サンプルは,損傷があってはならない。疑義がある場合,この規格の該当する細分箇条によって
判定する。
11.7.1.2.3 可とうコードの導体全数の10 %を超えて断線していてはならない。
11.7.2 コード止め
11.7.2.1 非着脱式コードによって接続することを意図する一体形制御装置及び組込形制御装置以外の制
御装置は,端子に接続する場所で導体のねじれ又は引張りを防ぎ,その被覆が摩滅しないように保護する
コード止めをもっていなければならない。引張りひずみ及びねじれをどのように防止するか,明確でなけ
ればならない。
11.7.2.2 クラスII制御装置のコード止めは,絶縁材料製であるか,又は金属製の場合,可触金属部若しく
は可触非金属面上の金属はくから付加絶縁に対する要求事項による絶縁によって絶縁しなければならない。
11.7.2.3 クラスII以外の制御装置のコード止めは,コード上の絶縁故障が可触金属部の充電に至る場合,
絶縁材料製であるか,又は絶縁用裏打ちを装備しなければならない。この裏打ちがある場合,それが11.7.1
の要求事項を満たすために設けられるコードガードと一体であるブッシングのときを除き,コード止めに
固定していなければならない。
11.7.2.4 コード止めは,次のような構造でなければならない。
− コードは,コード止めの締付用のねじが可触金属部である場合,これらのねじに接触するおそれがな
い。
− コードは,そのコードと直接接触する金属ねじとによって締め付けてはならない。
− X形取付け又はM形取付けの場合,1か所以上が制御装置に確実に固定されている。
− X形取付け又はM形取付けの場合,可とうコードの交換が特殊工具の使用を必要としない。
− X形取付けの場合,コード止めは,接続できる範囲の異なるタイプの可とうコードに対して適してい
る。
− X形取付けの場合,可とうコードの交換が容易にできる構造及び位置である。
68
C 9730-1:2019
11.7.2.5 Z形取付け以外の場合,位置を固定するためにそのコードに結び目を作ること,又は末端をひも
で結ぶことといった構造であってはならない。
11.7.2.6 グランド(パッキン抑え)は,10.1.4で規定する全てのタイプ及び寸法のコードを締め付けるた
めの準備があるときを除き,X形取付けを使用するインラインコード形制御装置中のコード止めとして用
いてはならない。
11.7.2.7 コードを取り替えるとき動かすねじがある場合,他の部品を固定するために用いてはならない。
ただし,ねじを省略したとき若しくは正しく取り替えなかったときに,制御装置が動作しなくなるか,若
しくは明らかに不完全となる場合,又は固定されるような構造の部品が可とうコードを取り替えていると
き工具を用いないと取り外すことができない場合は除く。
11.7.2.8 11.7.2.1〜11.7.2.7の適否は,目視検査及び11.7.2.9〜11.7.2.15の試験によって判定する。可とうコ
ードを接続する一体形制御装置及び組込形制御装置は,一体とする又は組み込む機器の関連規格に従って
試験する。
11.7.2.9 制御装置に可とうコードを取り付け,導体を端子に導入する。端子ねじがある場合,導体がその
位置を変えることを防止するだけに必要な程度締め付ける。コード止めは,製造業者が意図するように取
り付け,そのねじは表20に示すトルクの3分の2に等しいトルクによって締め付ける。
11.7.2.10
この準備の後,制御装置のコード若しくは内部の部品が損傷を受けるおそれ,又は内部の部品
が妨害を受ける範囲まで,コードを制御装置に押し込むことができてはならない。疑義がある場合,この
規格の該当する箇条によって判定する。
11.7.2.11
次に,コードは,表9の値及び回数の引張力を加える。引張力は,毎回1秒間,静かに最も不
利な方向に加える。
11.7.2.12
その直後,コードに,表9の値のトルクを1分間加える。
表9−引張力及びトルク値
制御装置
引張力a)
N
トルクa)
N・m
引張回数a)
自立構造形制御
装置及び独立取
付形制御装置
1 kg以下
30
0.1
25
1 kgを超え4 kg以下
60
0.25
25
4 kgを超える
100
0.35
25
インラインコード形制御装置
(自立構造形制御装置以外のもの。)
90
0.25
100
注a) 幾つかの機器規格は,異なる値を要求する場合がある。
11.7.2.13
X形取付けに対しては,先ず,10.1.4に規定する最小断面積の可とうコードの許容できる最も
グレードの低い(軽い)タイプのものを付けて試験を行う。次に,使用する最も大きい断面積で2番目に
グレードの高い可とうコードを付けて試験を行う。M形取付け,Y形取付け又はZ形取付けに対しては,
規定しているか又は取り付けられているコードだけを使用する。
11.7.2.14
試験中,コードは損傷を受けてはならない。試験後,コードは2 mmを超えて縦方向に変位し
てはならない。導体は,端子内で1 mmを超える距離にわたって動いてはならない。また,接続部におい
て著しい張力が加わっていてはならない。沿面距離及び空間距離は,箇条20に規定する値未満に減少して
いてはならない。
11.7.2.15
縦方向の変位の測定に対しては,試験を開始する前に,コードに引張力を加えながらコード止
めから約20 mmの距離の箇所のコード上に表示を付ける。試験後,コード止めを基準にして,コードに引
69
C 9730-1:2019
張力を加えながらコード上の表示の変位を測定する。
11.8 コードの寸法−非着脱式コード
11.8.1 非着脱式コードは,オーディナリーゴムシース付きコード(コード分類60245 IEC 53)又はオーデ
ィナリービニルシースコード(コード分類60227 IEC 53)と同等以上の特性でなければならない。同等以
下の特性のコードの使用は,個別の機器規格で許容する場合,又は外部のSELV装置(センサ,ユニット)
との接続用の場合は許容する。
注記0A 電気用品の技術上の基準を定めるの省令の解釈(20130605商局第3号)の別表第一による適
切なコード又はケーブルを使用したものは同等である。ただし,シース付きに限る。
適否は,目視検査によって判定する。
11.8.2 非着脱式コードを取り付けた制御装置は,コードの導体断面積が,表10に規定する値以上でなけ
ればならない。
表10−コードの最小導体断面積
関連回路中の電流a)
A
公称断面積b)
mm2
6以下c)
0.75
6を超え 10以下
1
10を超え 16以下
1.5
16を超え 25以下
2.5
25を超え 32以下
4
32を超え 40以下
6
40を超え 63以下
10
注a) 63 Aを超えるものの要求事項は,検討中である。
b) 米国では,別の寸法の導体を使用する。
c) 0.75 mm2よりも低い値は,クラスIII制御装置だけに対して,
又は個別機器規格で許容する場合だけ許容する。
適否は,目視検査によって判定する。
次に従った電線を使用した場合は,表10を満たさない場合であっても,この細分箇条を満たしているも
のとして扱う。
a) 周囲温度が30 ℃の場合の許容電流
1) コード コードの許容電流は,表10Aによる。
表10A−コードの許容電流
断面積
mm2
素線数/直径
本/mm
許容電流
A
電気絶縁物の使用温度の上限値
60 ℃のもの
75 ℃のもの
80 ℃のもの
90 ℃のもの
0.75
30/0.18
7
8
9
10
1.25
50/0.18
12
14
15
17
2.0
37/0.26
17
20
22
24
3.5
45/0.32
23
28
29
32
5.5
70/0.32
35
42
45
49
2) キャブタイヤケーブル(電気絶縁物の使用温度の上限値が60 ℃のもの) キャブタイヤケーブルの
70
C 9730-1:2019
許容電流は,表10Bによる。
表10B−キャブタイヤケーブルの許容電流
断面積
mm2
素線数/直径
本/mm
許容電流
A
単芯
2芯
3芯
4芯及び5芯
0.75
30/0.18
14
12
10
9
1.25
50/0.18
19
16
14
13
2.0
37/0.26
25
22
19
17
3.5
45/0.32
37
32
28
25
5.5
70/0.32
49
41
36
32
8.0
50/0.45
62
51
44
39
14
88/0.45
88
71
62
55
22
7/20/0.45
115
95
83
74
30
7/27/0.45
140
100
98
89
38
7/34/0.45
165
130
110
100
注記0A 中性線,接地線及び制御回路用電線は,芯線数に含めない。
3) 絶縁電線(電気絶縁物の使用温度の上限値が60 ℃のもの) 絶縁電線の許容電流は,表10Cによる。
表10C−絶縁電線の許容電流
導体
許容電流
A
単線,より線の別
断面積
mm2
素線数/直径
本/mm
導体が銅のもの
導体がアルミニ
ウムのもの
単線
−
1.0
16
12
1.2
19
15
1.6
27
21
2.0
35
27
2.6
48
37
3.2
62
48
4.0
81
63
5.0
107
83
より線
0.9
7/0.4
17
13
1.25
7/0.45
19
15
2
7/0.6
27
21
3.5
7/0.8
37
29
5.5
7/1.0
49
38
8
7/1.2
61
48
14
7/1.6
88
69
22
7/2.0
115
90
30
7/2.3
139
108
38
7/2.6
162
126
4) 2)及び3)において電気絶縁物の使用温度の上限値が60 ℃以外のものの許容電流は,電気絶縁物の
使用温度の上限値に応じた表10Dの許容電流補正係数を許容電流に乗じた値とする。
71
C 9730-1:2019
表10D−電気絶縁物の使用温度の上限値が60 ℃以外のものの許容電流補正係数
電気絶縁の使用温度の上限値
許容電流補正係数
75 ℃のもの
1.22
80 ℃のもの
1.29
90 ℃のもの
1.41
注記0B 許容電流の値は,小数第1位を7捨8入する。
b) 周囲温度が40 ℃の場合の許容電流は,電気絶縁物の使用温度の上限値に応じた表10Eの許容電流補
正係数を許容電流に乗じた値とする。
表10E−周囲温度が40 ℃の場合の許容電流補正係数
電気絶縁の使用温度の上限値
許容電流補正係数
60 ℃のもの
0.82
75 ℃のもの
1.08
80 ℃のもの
1.15
90 ℃のもの
1.29
注記0C 許容電流の値は,小数第1位を7捨8入する。
c) 電線管工事によって配線される絶縁電線の許容電流は,表10Fの許容電流補正係数を許容電流に乗じ
た値とする。
表10F−電線管工事によって配線される絶縁電線の許容電流補正係数
同一管内の電線数
許容電流補正係数
3以下
0.79
4
0.63
5又は6
0.56
注記0D 許容電流の値は,小数第1位を7捨8入する。
d) コード及びキャブタイヤケーブルであって,表10A及び表10Bにない断面積をもつものの許容電流は,
各断面積の許容電流の値を直線で結ぶ内挿法によって求めた値とする。
11.8.3 制御装置の内部の可とうコード用スペースは,導体を容易に挿入し接続するのに十分でなければな
らない。また,カバーをもつものは,導体又はその絶縁に対する損傷の危険なしに取付けできなければな
らない。カバーを取り付ける前に,導体が適切に接続され,かつ,適切な位置にあることを検査できなけ
ればならない。
適否は,目視検査及び10.1.4に規定する最大断面積のコードを接続することによって判定する。
11.9 導入孔開口部
11.9.1 可とう外部コードのための導入孔開口部は,コードの被覆が損傷のおそれがなく導入できるように
構造及び形成する,又は入口ブッシングを装備していなければならない。
11.9.1.1 独立取付形制御装置の電線管引込口及びノックアウトは,電線管又は電線管取付器具の導入が感
電保護に影響を与えることなく,かつ,沿面距離及び空間距離を箇条20で規定する値未満に減少しないよ
うな構造又は配置でなければならない。
適否は,目視検査によって判定する。
11.9.2 入口ブッシングが設けられない場合,導入孔開口部は絶縁材料製でなければならない。
11.9.3 入口ブッシングが設けられる場合,それは絶縁材料製であって,かつ,次を満たさなければならな
72
C 9730-1:2019
い。
− コードの損傷が防止される形状とする。
− 確実に固定する。
− 工具の助けなしに外せない。
− X形取付けが使用される場合,コードと一体でない。
11.9.4 入口ブッシングは,クラスI制御装置のM形取付け,Y形取付け及びZ形取付けに対して,ブッ
シングがゴム製のコードのシースと一体である場合を除き,ゴム製であってはならない。
11.9.1〜11.9.4の適否は,目視検査及び該当する試験によって判定する。
11.9.5 固定配線に永続的に接続されるような構造の独立取付形制御装置の外郭は,該当する電線管,ケー
ブル又はコードの接続ができるケーブル引込口,電線管引込口,ノックアウト又はグランドをもたなけれ
ばならない。
11.10
機器用インレット及びコンセント
11.10.1
複数の制御装置及び機器の相互接続のために使用者が使用する複数の機器用インレット及びコ
ンセントの構造は,それらが相互に,又はその他のシステムに用いる機器用インレット若しくはコンセン
トとのかん合が起こらないようなものでなければならない。ただし,このようなかん合が,火災,人への
傷害若しくは感電,又は機器若しくは周囲への損傷を引き起こすおそれがない場合を除く。
適否は,目視検査によって判定する。
11.10.2
機器用インレット又はコンセントを装備するインラインコード形制御装置は,制御装置,機器用
インレット又はコンセントのいずれかの偶然の過負荷が通常使用状態において発生するおそれがない定格
であるか,又は過負荷に対して,保護しなければならない。
適否は,目視検査によって判定する。
11.10.3
固定コンセントに挿入するためのピン,刃,その他の接続・適応手段を備えた制御装置は,該当
するコンセントの要求事項を満たさなければならない。
プラグが制御装置のものより高い負荷電流の定格をもつコンセントに接続することができる,プラグ及
びコンセントをもつインラインコード形制御装置の場合,制御装置は,制御装置の定格に電流を制限する
ためのヒューズ又は保護装置を組み込まなければならない。保護機能の試験は,27.5の試験手順による。
制御装置のプラグ及びコンセント部分は,プラグ及びコンセントのための適切な規格を満たさなければ
ならない。制御装置部分は,この規格を満たさなければならない。
注記 カナダ及び米国では,この細分箇条を適用しない。
適否は,目視検査,及びコンセントシステムに対して,該当する試験によって判定する。
11.11
取付け,保守及びサービス中の要求事項
11.11.1
カバー及びその固定
11.11.1.1
一体形制御装置以外の制御装置においては,制御装置又は機器の取付け,使用者保守又はサー
ビス中に外される電池収納部カバーを含みカバー又はカバープレートの取外しは,制御装置の設定値に影
響を与えてはならない。
適否は,目視検査によって判定する。疑義がある場合,この規格の該当する箇条によっても判定する。
11.11.1.2
カバーの固定は,使用者の誤使用に至るおそれがある場合,カバーの位置を変えるか,又は不
適切に交換されるおそれがあるような構造であってはならない。取付けのために外す必要があるカバーの
固定は,操作部又はガスケット以外のどのような部分も固定するために共用してはならない。
適否は,目視検査によって判定する。
73
C 9730-1:2019
注記1 カナダ及び米国では,露出する導電部へ接近する場合,及び取外しに工具を使用しないねじ
なし式固定カバーの場合は,次の試験に耐えなければならない旨,規定している。
直接60 Nの引張力を適用する場合,カバーは容器から外れてはならない。この試験におい
て,カバーは任意のつかみやすい2点をつかむ。試験は,10回の取外し及び置換えの前後で
実施する。
カバーは,位置がずれることなく,カバーの接近しやすい面に適用した1.35 Nm(1面当た
り1回の打撃)の影響に耐え,かつ,制御装置の内部部品の損傷又は誤作動があってはなら
ない。試験に用いるボールの半径は,25.4 mm以上とする。
注記2 カナダ及び米国では,ねじなし式固定カバーの接地手段の接触継続性は,9.3及び9.5に規定
する要求事項を適用する。
11.11.1.3
外郭のカバー
注記 カナダ及び米国では,ヒューズ又は様々な過負荷保護装置に接近するための外郭のドア又はカ
バー,及び必要な場合,過負荷保護装置の通常運転に関連するカバーを開放することに関して,
追加の要求事項がある。
11.11.1.4
開口部を覆うガラス
注記 カナダ及び米国では,監視用開口部を覆うガラス又は同等の材料は,追加の要求事項がある。
11.11.1.5
取外しできない部分
感電,湿気,又は運動部との接触に対する必要な保護度を与える取外しできない部分は,確実な方法で
固定しなければならず,通常使用状態で生じる機械的ストレスに耐えなければならない。
取外しできない部分の固定用に使用するスナップイン装置は,明白な固定位置をもたなければならない。
設置のため又はサービス時に取り外す部分に使用するスナップイン装置の固定性能は,劣化してはならな
い。
適否は,11.11.1.5.1〜11.11.1.5.3の試験によって判定する。
11.11.1.5.1
設置のため又はサービス時に取り外す部分は,試験を行う前に10回分解して組み立てる。
注記 サービスには,電源コードの交換も含まれる。
11.11.1.5.2
11.11.1.5.3の試験については,制御装置を室温にして行う。ただし,適否が温度によって左右
される場合には,箇条14に規定する条件で制御装置を動作させた直後にも試験を行う。
11.11.1.5.3
急激に力を加えることなく,カバー,又はその他の部分の弱そうな箇所に対して,最も不利
になる方向に10秒間力を加える。適用する力は,次による。
− 押圧力
50 N
− 次の場合の引張力
a) 当該部分において指先が簡単に滑り落ちることがない形状である場合 50 N
b) 当該部分のつかむ突起部が取外しの方向で10 mm未満の場合
30 N
押圧力は,図2に示す標準試験指に類似した寸法の剛性の試験指で加える。
引張力は,試験結果が左右されないように適切な手段(例えば,吸盤)で加える。
a)又はb)の引張試験の実施中に,図3に示す試験指ネイルを10 Nの力で穴又は接合部に差し込む。次に,
試験指ネイルを10 Nの力で横方向へ滑らせる。試験指ネイルは,ねじらない及びレバーのように使用しな
い。
当該部分が軸方向の引張りの可能性がないような形状である場合,引張力は加えないが,図3に示す試
験指ネイルを10 Nの力で穴又は接合部に差し込み,次に,ループを使用して30 Nの力で軸方向又は取外
74
C 9730-1:2019
し方向に10秒間引っ張る。
カバー又はその他の部分がねじり力を受ける可能性がありそうな場合には,引張力又は押圧力と同時に,
次のトルクを加えなければならない。
− 50 mm以下の主要寸法
2 N・m
− 50 mmを超える主要寸法 4 N・m
ループで試験指ネイルを引っ張るときにもこのトルクを加える。
当該部分のつかむ突起部が10 mm未満の場合には,上記のトルクの値を50 %に引き下げる。
11.11.1.5.4
11.11.1.5.3の試験中及び試験後,一部分が外れてはならない。また,固定された位置にとどま
らなければならない。この要求事項を満たさない場合,その部分は取外し可能な部分とみなす。
11.11.1.6
片手で外すことができるカバーは,引張試験のための15 N以下の力と組み合わせた45 N以下
の絞り力を,カバー表面の手の平で包まれる部分にテープをぴったりと延ばした状態で間隔が125 mm以
下の任意の2か所に加えたときに外れてはならない。10回の取外し及び取付動作の前後に試験を行う。
11.11.2
カバー固定手段
設置,使用者保守又はサービス中に外す可能性があるカバー又はカバープレートの固定ねじは,係留式
でなければならない。
適否は,目視検査によって判定する。
注記 カードボード又は類似の材料による硬く密着した座金の使用は,この要求事項を満たしている。
19.1.5参照。
11.11.3
操作部
11.11.3.1
制御装置は,操作部を製造業者が意図する仕様で取り付ける又は取り外すとき,損傷を受けて
はならない。
11.11.3.2
タイプ2作動制御装置の製造業者又は使用者による最大又は最小の設定値が,操作部に関連す
る機械的方法によって制限される場合,このような操作部は工具を使用しないで外すことができてはなら
ない。
11.11.3.3
オフ位置を提供するタイプ1作動制御装置の操作部,又はタイプ2作動制御装置の操作部が,
その制御装置の状態を示すために用いられる場合,その操作部を正しくない位置に固定することが可能で
あってはならない。
11.11.3.1〜11.11.3.3の適否は,目視検査によって,また,取外しのために工具を必要としない操作部に
対しては,18.9の試験によって判定する。
注記 機器の規格は,制御装置の状態を示すために用いられる操作部が適切でない位置に固定される
おそれがないことを要求する場合がある。
11.11.4
付加絶縁又は強化絶縁となる部品
付加絶縁又は強化絶縁として用いる,使用者保守又はサービスの後の再組立て中に省かれるおそれのあ
る制御装置の部品は,ひどく損傷しない限り取り外すことができないように固定するか,又は部品が不適
切な位置で取り替えられるおそれがなく,かつ,部品が省かれたときに制御装置が動かなくなる若しくは
明白に不完全になるような構造でなければならない。
適否は,目視検査によって判定する。
注記 ラッカーコーティング,又はこすり落とすことによって容易に除かれるおそれがあるコーティ
ング状の他の材料で裏打ちした金属外郭は,この要求事項を満たしていない。
75
C 9730-1:2019
11.11.5
付加絶縁としてのスリーブ
一体形導体の付加絶縁としてのスリーブは,確実な方法によって適切な位置に保持しなければならない。
適否は,目視検査及び手による試験によって判定する。
注記 スリーブは,それを破壊するか若しくは切断することによってだけ外すことができる場合,又
はそれが締め付けられる場合,確実な手段による固定である。
11.11.6
引きひも
引きひもは,充電部から絶縁しなければならない。制御装置は,充電部が可触になることなく,引きひ
もを取り付ける又は交換することが可能である構造でなければならない。
適否は,目視検査によって判定する。
11.11.7
絶縁用裏打ち
絶縁用裏打ち,隔壁などは十分な機械的強度をもち,確実な方法で固定しなければならない。
適否は,目視検査によって判定する。
11.12
ソフトウェアを使用する制御装置
ソフトウェアを使用する制御装置の要求事項は,H.11.12による。
11.13
保護制御装置及び保護制御装置システムの構成部品
11.13.1
保護制御装置
保護制御装置は,次のとおりでなければならない。
− 意図された使用について信頼性を示し,かつ,それに適するように,また該当する場合は,装置の保
守及び要求事項を考慮するような構造とする。
− 安全機能が他の機能によって悪影響を受けない場合を除き,他の機能から独立する。
− 適切かつ信頼できる保護を得るために,適切な構造とする。
これらの原則には,特に,フェールセーフモード,冗長性,多様性及び自己診断が含まれる。
動作制御装置を,保護制御装置として使用してはならない。
適否は,この規格及びJIS C 9730の規格群の関連する第2部に規定する関連試験を実施することによっ
て判定する。
11.13.2
圧力制限器
この装置は,圧力が制御対象の機器の最高許容圧力を常に超えることがないような構造でなければなら
ない。ただし,適切な場合又は制御対象機器の関連規格で規定されていない場合,圧力サージの10 %以下
の短期的圧力サージは許容できる。
11.13.3
温度監視装置
この装置は,安全上の理由から,測定機能に整合した適切な応答時間をもたなければならない。
11.13.4
電池
11.13.4.1
電池をもつ制御装置は,制御装置の通常動作の下で,及び単一故障の後に,火災,爆発及び化
学物質の漏れによる危険を減少するような構造でなければならない。使用者による交換可能な電池が危険
を生じる可能性がある場合,異なった極性での挿入の可能性を減少するような構造でなければならない。
11.13.4.2
全充電容量が1 000 mAhを超える値の電池回路は,次の事項も考慮した構造でなければならな
い。
− 電池充電回路の出力特性は,充電式電池(附属書V参照)と一致する。
− 非充電式電池は,電池の製造業者の指示を超える速度での放電,及び故意でない逆充電を防止する。
− 充電式電池の場合,電池の製造業者の指示を超える速度での充電及び放電,並びに逆充電を防止する。
76
C 9730-1:2019
− 交換可能な電池は,次のいずれかによる。
・ 標準試験指(図2参照)で短絡できない電極の接点距離をもつ。
・ この規格で意図する危険を生じることを避けるために,本質的に保護する。
注記 充電回路の極性が逆接続されたとき,充電式電池への逆充電が発生し,電池の放電が促進され
る。
11.13.4.3
容量が1 000 mAhを超える電池が液状又はゲル状の電解質を含む場合,電池収納部は,電池内
の内部圧力の結果として漏れた液体を保持できなければならない。電池からの電解質の漏れが生じないよ
うな電池の構造の場合,電池収納部を備える要求事項は適用しない。
注記 電解液の漏れの可能性がある電池の構造の例は,封印したセルバルブ調節形である。
11.13.4.3.1
電池収納部が必要な場合,電池収納部の容量は,電池の全てのセルの電解液の容量,又は複
数のセルからの同時の液漏れが発生する可能性がない場合に限り,単一のセルの電池容量以上でなければ
ならない。
注記 複数のセル(例えば,12 Vの鉛電池の六つのセル)が単一の容器に入っている場合,その破損
は,単一のセルの場合よりも大きい大量の液漏れを発生するかもしれない。
11.13.4.4
11.13.4.1〜11.13.4.3.1の適否は,目視検査,並びに機器製造業者及び電池製造業者によって提出
されたデータの確認によって判定する。
適切なデータがない場合,適否は,11.13.4.4.1〜11.13.4.4.4及び11.13.4.5の試験によって判定する。ただ
し,通常使用状態において,電池単独で安全が担保されている場合,通常使用状態での試験はしない。一
般消費者が用いる等級の,非充電式乾電池又はアルカリ電池は,短絡回路条件で安全とみなし,放電状態
での試験はしない。ただし,保管状態での漏れ試験は実施する。11.13.4.4.1〜11.13.4.4.4及び11.13.4.5の試
験には,新規の非充電式電池若しくは制御装置と一緒に提出された電池,又は製造業者が制御装置と共に
使用することを推奨する電池を用いる。
11.13.4.4.1
非充電式電池の意図しない充電について,充電回路で発生し,結果として電池の意図しない
充電が生じる部品の単一不良を模擬した一時的な状態で,電池を充電する。試験時間を最少にするために,
最大充電電流を生じる不良を選択する。その後,電池は,適切な箇所で不良を模擬した状態で,7時間充
電する。
11.13.4.4.2
過度の放電速度について,電池は,電池の負荷回路で電流制限部品又は電圧制限部品を,開
路又は閉路によって急速放電を実施する。
注記 規定する幾つかの試験は,試験者に危険をもたらすため,起こり得る化学的危険又は爆発の危
険に対し,試験者を保護する適切な手段の検討を推奨する。
11.13.4.4.3
(V.11.13.4.4.3による。)
11.13.4.4.4
11.13.4.4.1〜11.13.4.3の試験は,結果として次のうちのいずれも生じてはならない。
− 漏れが必要な絶縁材に悪影響を与える場合,電池保護カバーのひび,破裂,又は破裂に起因する化学
物質の漏れ
− 電池内の圧力開放装置からの液体のこぼれ。ただし,こぼれが,絶縁の損傷又は人への傷害の危険が
なく制御装置内にとどまる場合を除く。
− 使用者が傷害を生じる可能性のある電池の爆発
− 制御装置の外郭の外への火炎の排出,又は溶解している金属の流出
11.13.4.5
試験終了後,機器は13.2の耐電圧試験を実施する。
77
C 9730-1:2019
11.13.5
スマートイネーブル制御装置
11.13.5.1
スマートイネーブル制御装置は,外部通信信号(データ又は電力需要)がタイプ2作動制御装
置の動作パラメータを故意である場合を除いて無効にすることなく,かつ,制御装置の全ての保護機能を
妨げないような構造でなければならない。
スマートイネーブル制御装置は,保護機能が損なわれない限り,定義した限度値以内のタイプ2制御装
置の動作パラメータに変更してもよい。
11.13.5.2
動作及び保護機能を統合したスマートイネーブル制御装置は,保護制御装置として確認する。
11.13.5.3
制御装置の外側にあって,制御装置と通信回路網との間のインタフェースとして動作する送信
機及び通信モジュールは,IEC 62151又はIEC 62368-1を満たさなければならない。さらに,感電に対す
る保護を確実にする場合は,この規格を満たさなければならない(例えば,附属書T)。
11.13.5.4
スマートイネーブル制御装置の一部である送信機又は通信モジュールは,この規格を満たさな
ければならない。
11.13.5.5
11.13.5.1〜11.13.5.4の適否は,H.27.1及びこの規格のその他の関連する要求事項によって判定
する。
12 耐湿性及び防じん性
12.1 水の浸入及びじんあいの侵入防止
12.1.1 制御装置は,指定する方法で取り付けて使用したとき,それらのIP分類に該当する水の浸入及び
じんあいの侵入に対する適切な保護分類を提供しなければならない。
12.1.2 適否は,12.1.3〜12.1.6に規定するように制御装置をまず準備し,次に,JIS C 0920に規定に従っ
て,該当する試験を実施することによって判定する。制御装置は,該当する試験の直後に13.2に規定する
耐電圧試験に耐え,かつ,制御装置への水の浸入があってはならない。特に沿面距離及び空間距離を箇条
20に規定した値未満に減少するおそれがある,絶縁物上に水の痕跡が存在してはならない。
12.1.3 制御装置は,該当する試験を行う前に,通常の試験室の雰囲気中に24時間放置する。
12.1.4 着脱式コードを装備した制御装置は,該当する機器用インレット及び可とうコードを取り付ける。
X形取付けを使用する非着脱式コードをもつ制御装置は,10.1.4に規定する最小断面積の適切な導体を取
り付ける。M形取付け,Y形取付け又はZ形取付けを使用する非着脱式コードをもつ制御装置は,製造業
者が宣言する又はサンプルと共に提出されたコードを用いて試験する。
12.1.5 取外し可能な部分は外し,必要な場合,主要部と共に試験を行う。
12.1.6 グランドのシーリング,その他のシーリング装置がある場合,周囲の空気の組成及び圧力をもつ雰
囲気中で,自然循環によって換気される恒温恒湿槽中に自由につり下げて,それらをエージングする。ま
た,10日間(240時間),温度70±2 ℃で恒温恒湿槽中に維持する。
注記 米国では,有害な水の浸入を保護するために用いる場合,及びカバー用又は雨にさらされたり,
60 ℃以下で運転する制御装置を覆うような保護用に使用する場合の粘着性ガスケット,グラン
ド及び封止剤において追加要求事項がある。
12.1.6.1 (規定なし)
12.1.6.2 エージングの直後に,その部品を恒温恒湿槽から取り出し,再組立てする前に16時間以上直射
日光を回避して室温に放置する。次に,グランド,その他のシーリング装置は,表20に規定するトルク
の3分の2のトルクで締め付ける。
78
C 9730-1:2019
12.2 湿気条件に対する保護
12.2.1 全ての制御装置は,通常使用状態で発生するおそれがある湿気条件に耐えなければならない。
J.12.2.1にもよる。
12.2.2 適否は,12.2.5〜12.2.9までの湿度処理の後,12.2.3に規定する試験シーケンスによって判定する。
12.2.3 インラインコード形,自立構造形及び独立取付形制御装置に対しては,13.1及び13.2の試験を湿
度処理の直後に実施する。一体形制御装置及び組込形制御装置に対しては,13.2の試験を湿度処理の直後
に実施する。これらの試験は,結露が試験サンプルの表面で発生しない方法で実施する。
12.2.4 制御装置には,損傷があってはならない。疑義がある場合,この規格の該当する箇条によって判定
する。
12.2.5 ケーブル挿入開口部及び排水口は開けたままにしておく。IPX7制御装置に設けられている排水口
の場合は,開けたままにする。
12.2.6 取外し可能な部分は,取り外し,必要がある場合,主要部分と共に湿度処理を行う。
12.2.7 恒温恒湿槽中に配置する前に,サンプルを20〜30 ℃の都合のよい値t ℃と(t+4) ℃との間の温度
にする。次に,サンプルを恒温恒湿槽中に,次に規定する時間保持する。
− IPX0制御装置に対しては,2日間(48時間)
− 他の全ての制御装置に対しては,7日間(168時間)
12.2.8 湿度処理は,相対湿度91〜95 %の雰囲気の恒温恒湿槽中で実施する。サンプルを配置できる全て
の場所で,空気の温度を20〜30 ℃の都合のよい値tから1 K以内に維持する。
12.2.9 この処理後,恒温恒湿槽中,又は室内で,取外し可能な部品を再度組み立てた後,サンプルが規定
温度になったとき,箇条13の試験を行う。
注記1 ほとんどの場合,サンプルを湿度処理の前,4時間以上の間,指定された温度に維持するこ
とによって,恒温槽と同じ温度になる。
注記2 91〜95 %の相対湿度は,空気と十分に大きい接触面をもつ硫酸ナトリウム(Na2SO4)又は硝
酸カリウム(KNO3)の飽和水溶液を恒温恒湿槽中に配置することによって得ることができる。
試験サンプルが,その水溶液から又は試験用機器のどの部分からも結露,その他の汚染を受
けないように留意することが重要である。
注記3 恒温恒湿槽内で規定の条件を達成するために,その中の空気の回流ができることが必要であ
り,一般に熱絶縁されている恒温恒湿槽を使用することが必要である。
12.3 インラインコード形及び自立構造形制御装置に対しては,1個のサンプルを箇条12の他の試験の前
に,12.3.1〜12.3.7の試験を行う。
クラスIII制御装置は,これらの細分箇条によっては試験しない。
注記 欧州標準化委員会(CENELEC)に加盟している各国では,この細分箇条を適用しない。
12.3.1 制御装置は,定格電圧の1.06倍の電圧に等しい電源電圧に接続する。この試験は,最高定格電流
及び指定する最大周囲温度で行う。
12.3.2 漏えい電流は,13.3.1に規定する複数部品の間で測定する。
12.3.3 異なる電源を使用する制御装置用の測定回路を,次の図に示す。
− 単相制御装置又は単相制御装置として用いられる三相制御装置に対しては,クラスII制御装置は図25
参照,クラスII制御装置以外は図26参照。
− 単相制御装置として用いるのに適さない三相制御装置に対しては,クラスII制御装置は図27参照,
クラスII制御装置以外は図28参照。
79
C 9730-1:2019
− クラスII制御装置以外の250 V以下の定格電圧をもつ単相3線式制御装置に対しては使用法に依存す
るが,図29又は図30参照。
250 Vを超える定格電圧をもつ単相機器用制御装置は,相導体の2本を接続する。残りの相導体は使用
しない。
適切な測定回路を,附属書Eに示す。
12.3.4 測定中,全ての制御装置回路は,閉路しなければならない。ただし,図26,図29及び図30を用
いて,漏えい電流測定を行う制御装置は,スイッチS1を開路位置及び閉路位置にして測定する。
閉路を模擬するために,接点を短絡してもよい。
12.3.5 測定回路は,全インピーダンスを1 750±250 Ωとする。また,回路の時定数が225±15 μsになる
コンデンサによって分流する。
12.3.6 測定回路は,漏えいの指示値0.75 mAで5 %を超える誤差があってはならない。また,20 Hz〜5 kHz
の範囲における全ての周波数に対して5 %以内の精度をもっていなければならない。
12.3.7 制御装置の温度が安定した後,最大漏えい電流が13.3.4に規定する値を超えてはならない。
13 耐電圧及び絶縁抵抗
13.1 絶縁抵抗
インラインコード形,自立構造形及び独立取付形制御装置の絶縁抵抗は,十分でなければならない。
13.1.1 適否は,13.1.2〜13.1.4の試験によって判定する。この試験は,箇条12で要求する場合に実施する。
13.1.2 金属以外の部品の強化絶縁又は付加絶縁について測定する場合,絶縁部の該当する表面は,それぞ
れ試験のための電極となるように金属はくで覆わなければならない。
13.1.3 絶縁抵抗は,約500 Vの直流電圧を加えて測定する。測定は,電圧印加1分後に行う。
13.1.4 絶縁抵抗は,表11に示す絶縁抵抗値以上でなければならない。
表11−最小絶縁抵抗値
試験する絶縁
絶縁抵抗値
MΩ
機能絶縁
−
基礎絶縁
2
付加絶縁
5
強化絶縁
7
13.2 耐電圧
全ての制御装置の耐電圧は,十分でなければならない。
13.2.1 適否は,表12に示す絶縁又は断路箇所に加える試験電圧を用いて,13.2.2〜13.2.4の試験によって
判定する。試験は,箇条12及び箇条17の規定で要求する場合に実施する。
80
C 9730-1:2019
表12−耐電圧試験電圧a)
試験する絶縁又は断路箇所c), d)
動作電圧に対する試験電圧(U)b), q)
SELV e)
動作電圧f)
50 V以下
動作電圧f)
50 Vを超え690 V以下
機能絶縁g)
100
100
2 x U
基礎絶縁h), i)
500
1250
1 200+U
付加絶縁h), i), j), k), l)
−
1250
1 200+(U)
強化絶縁h), i), j), k), l)
−
2500
2 400+(2 x U)
完全断路o)
該当なし
1250
1 200+U
マイクロ断路o)
100
100
2 x U
電子的断路m), n)
100
100
−
マイクロ開路p)
−
−
−
注記1 この表に規定する試験電圧の1.414倍の直流電圧を適用してもよい。
注記2 機器に組み込むことを意図した制御装置又はその他の装置に関連する制御装置の場合,装置の規格のより
高い耐電圧試験電圧を考慮する。
注a) (欠番)
b) 試験用の高電圧トランスは,出力電圧を試験電圧に調整した後,出力端子を短絡したとき,出力電流が200 mA
以上であるような構造でなければならない。過電流リレーは,出力電流が100 mA未満のとき,トリップして
はならない。試験電圧の実効値が±3 %で測定できるように留意しなければならない。
c) 電子部品,ネオンランプ,コイル又は巻線のような試験を実施不可能にするおそれがある特殊構成部品は,
試験する絶縁物に適するように一つの極で断路するか又は橋絡しなければならない。コンデンサは,単極で
断路したとき,機能絶縁に関する試験を除き,橋絡しなければならない。上記の手順が実施できない場合,
箇条15〜箇条17の試験で十分であると考える(附属書Jにもよる。)。
d) クラスI制御装置及びクラスI状態のための制御装置に対しては,充電部と接地された金属部との間の絶縁に
過剰な電圧を加えることを回避するために十分な空間距離を金属はくと可触金属部との間に維持するように
留意しなければならない。
e) 回路が,二重絶縁又は強化絶縁によって商用主電源から絶縁されている場合(接地でもよい。),交流24 V r.m.s.
までは要求事項がない。
f) 商用主電源に電気的に(galvanically)接続された制御装置に適用する。
g) 通常使用において50 V以下の電圧を供給した配線基板の機能絶縁は,この細分箇条の試験を行わない。
h) 13.3.1参照。
i) 可触金属に接触している金属も,また,可触とみなす。
j) 付加絶縁及び強化絶縁の試験では,可触絶縁表面として効果的に試験できるように,金属はくをシーリング
コンパウンドに当てる。
k) 保護インピーダンスによって保護される可触部分の場合,構成部品を切り離して試験する。2個のインピーダ
ンスの中点は,中間金属部とみなす。
l) 二重絶縁だけではなく,強化絶縁を組み込んでいる制御装置に対しては,強化絶縁に印加される電圧が二重
絶縁の基礎絶縁又は付加絶縁に過剰に電圧を加えないように留意することが望ましい。
m) 実際に遮断動作を行う装置は,回路から最初に切り離される。必要な場合,いずれの制御装置の入力も遮断
する装置に接続する。試験電圧は,負荷電流が流れる装置の端子及び端末に加える。
n) H.28参照。
o) 完全断路及びマイクロ断路の試験に対しては,接点を自動的に又は手動で開放し,接点間隔及び支持用絶縁
物が規定することを保証するために開路後できる限り早く試験する。
温度検出制御装置の場合,恒温恒湿槽中から取り出した直後,この試験を室温で実施できるようにするた
めに15〜25 ℃の間で開放するように特別に調整した特別サンプルを提供することが必要となる場合がある。
p) 箇条15〜箇条17の試験を満たしている場合,十分であると考えられるので,マイクロ開路のための耐電圧要
求事項はない。さらに,その操作手段の一つの位置においてマイクロ断路が行われず,他の位置でマイクロ
開路が行われる制御装置に対しては,マイクロ開路に対応する位置に対する耐電圧要求事項はない。
q) 全ての交流電圧は,50/60 Hzの実効値とする。
13.2.2 強化絶縁又は付加絶縁から金属以外の部分までの距離を測定する場合,絶縁の該当するそれぞれの
81
C 9730-1:2019
面を試験用電極とするために金属はくで覆う。
13.2.3 各絶縁には,周波数50 Hz又は60 Hzの実質的に正弦波形の電圧を加える。電圧は,1分間,表12
に示す絶縁又は断路箇所に,表中の規定値を加える。
13.2.4 最初に規定値の半分以下の電圧を加え,次に,規定値の電圧まで急速に上昇させる。フラッシュオ
ーバ又は絶縁破壊が生じてはならない。電圧降下がないグロー放電は,無視する。
13.3 インラインコード形及び自立構造形制御装置の場合,12.3の試験を行ったサンプルに対して,13.1
又は13.2の試験の後,13.3.1〜13.3.4の試験を行わなければならない。
クラスIIIの制御装置は,これらの細分箇条では,試験しない。
13.3.1 直流専用の制御装置には直流の試験電圧,及び他の全ての制御装置に対しては交流の試験電圧を,
充電部と次の部分との間に加える。
− 可触金属部
− 絶縁材料製の可触表面と接触している,面積20 cm×10 cm以下の相互接続した金属はく
測定は,同時に接触できる場合において,ある面からもう一つの面までまとめたもの,及び個別のもの
とそれぞれ実施する。
表面の面積が20 cm×10 cm未満である場合,金属はくは,その表面と同一の寸法とする。金属はくは,
その制御装置の温度に影響を与えるおそれがある場合,その位置にとどめない。
制御装置が接地用のピン又は接地用の導体を装備している場合,接地用導体は電源で断路する。
13.3.2 試験電圧は,次による。
− 直流専用制御装置,単相制御装置及び単相電源にも適切である三相制御装置に対しては,定格電圧又
は定格電圧範囲の上限値が250 Vを超えない場合,定格電圧の1.06倍又は定格電圧範囲の上限値の
1.06倍。
− その他の制御装置に対しても,定格電圧の1.06倍又は定格電圧範囲の上限値の1.06倍の電圧とする。
13.3.3 漏えい電流は,試験電圧の印加後,5秒以内に測定する。
13.3.4 可触金属部及び金属はくに対する最大漏えい電流は,次の値を超えてはならない。
− (対応国際規格のクラス0及びクラス0Iに関する規定を,この規格では適用しない。)
− クラスI制御装置に対しては,0.75 mA
− クラスII制御装置に対しては,0.25 mA
注記 カナダ及び米国では,250 V以下の電源を用いる制御装置は,次による。
a) クラス0制御装置,クラス0I制御装置及びクラスI制御装置に対しては,0.5 mA
b) クラスII制御装置に対しては,0.25 mA
14 温度上昇
14.1 制御装置及びその支持面は,通常使用状態において過度の温度に達してはならない。
14.1.1 適否は,14.2〜14.7の試験によって判定する。
14.1.2 この試験中,温度が表13で規定する値を超えてはならない。制御装置は,この規格,特に箇条8,
箇条13及び箇条20への適否を阻害するようないかなる変化もあってはならない。
14.2 M形取付け,Y形取付け又はZ形取付けを用いる非着脱式コード用の端子及び端末以外の,外部導
体の接続を目的とする端子及び端末は,10.1.4で用いる導体タイプ及び定格に該当する中間の断面積の導
体を取り付けなければならない。
14.2.1 M形取付け,Y形取付け又はZ形取付けを使用する場合は,指定するコード又は供給されたコー
82
C 9730-1:2019
ドを試験のために用いる。
14.2.2 端子が可とうコード及び固定導体のいずれにも適している場合,該当する可とうコードを用いる。
14.2.3 外部導体の接続を目的としない端子は,10.2.1において規定する最小導体面積の導体又は7.2で製
造業者が宣言する場合,その特殊導体を取り付ける。
14.3 インラインコード形制御装置は,つや消し黒色塗りの合板面上に立てるか又は横にする。
14.3.1 独立取付形制御装置は,通常使用状態のように取り付ける。
14.4 制御装置は,定格電圧VRの0.94〜1.06倍のうち,最も不利な電圧の電源に接続する。電圧検出形で
ない回路は,これより低い電圧に接続してもよい。ただし,VRの10 %以上で,定格電流の0.94〜1.06倍
の間の最も不利な電流が回路に流れ込むような負荷をかける(附属書Uにもよる。)。
注記 米国では,試験は,17.2.3による電圧で行う。
14.4.1 外部負荷を意図しない回路及び接点は,製造業者が指定しなければならない。
14.4.2 操作部は,最も不利な位置に配置する。
14.4.3 この試験の目的において,始めに閉路を要求される接点は,回路の定格電流及び定格電圧において
閉路する。
14.4.3.1 温度検出制御装置に対しては,この箇条の条件で測定する動作温度と5±1 ℃の差になるまで,
その接点が閉路位置にある状態で温度検出素子を上昇又は低下させる。
14.4.3.2 他の全ての検出用制御装置に対しては,接点を閉路位置で,実施できる限り開放点の近傍にある
ように検出素子を保持しなければならない。
14.4.3.3 一度,動作をさせてから,次に,必要レベルまで作動量の値を復帰させることが必要な場合があ
る。そのような場合,最初に動作値を超えて作動量の値を上昇又は低下させることが必要となる。
14.4.3.4 その他の自動制御装置に対しては,最も困難な動作シーケンス又は動作シーケンスのセグメント
を選択しなければならない。
14.4.4 制御装置が,この試験中動作を開始する場合,制御装置は,接点が閉路したままとなるように復帰
させる。
14.4.4.1 接点を再度閉路するための復帰が実施できない場合,試験を中断する。この場合,新しい動作値
を決定し,この新しい動作値を用いて試験を繰り返す。
14.5 制御装置は,14.5.1及び14.5.2の条件が得られるような適切な加熱装置及び/又は冷却装置中で試験
する。
機器に組み込むか,又は機器と共に提出される制御装置を除き,試験は,通風のない環境中で実施する。
自然対流は許容する。
14.5.1 スイッチヘッドの温度は,Tmaxと,(Tmax+5) ℃又はTmaxの1.05倍のうちのいずれか大きい方の温
度との間で維持する。取付面の最高温度Ts maxがTmaxと異なる場合には,Ts maxと,(Ts max+5) ℃又はTs max
の1.05倍のいずれか大きい方の温度との間に維持する。
14.5.2 インラインコード形制御装置,独立取付形制御装置並びに制御装置が通常使用状態のように取り付
けるとき可触となる一体形制御装置及び組込形制御装置の部品は,15〜30 ℃の室温中に置く。測定した温
度は,基準値25 ℃に合わせて補正する。
14.6 スイッチヘッド,取付面及び検出素子のために規定する温度へは,約1時間で到達させなければな
らない。
14.6.1 電気的条件及び温度条件は,4時間又は定常状態後1時間のいずれか,最初に到達するまでの時間
維持する。
83
C 9730-1:2019
14.6.2 短時間動作用又は間けつ(歇)的動作用の制御装置については,4時間の中に表1の項目34で製
造業者が宣言する休止時間を含む。
14.7 スイッチヘッドを入れる媒体の温度及び検出素子が暴露される作動量の値は,そのサンプルが占め
る空間の中心にできる限り近く,かつ,その制御装置から約50 mmの距離で測定しなければならない。
14.7.1 表13に規定する部品及び表面の温度は,細線熱電対又はその他の同等な手段を試験中の部品の温
度に極力影響を与えないように選択し配置して測定する。
14.7.2 支持表面温度の決定のための熱電対は,その支持表面に埋め込んだ直径15 mm,厚さ1 mmの銅又
は黄銅製の小形黒色塗装円板の裏面に取り付ける。制御装置の位置は,可能な限り最高温度に到達する可
能性がある部分が円板に接触するように配置する。
14.7.3 操作部,その他のハンドル,ノブ,グリップなどの温度を決定する場合に,通常使用状態で握られ
る他の部分,及び非金属製である場合,高温金属に接触する部分についても考慮しなければならない。
14.7.4 巻線温度以外の電気絶縁の温度は,絶縁破壊が次に示す不良を引き起こすおそれがある箇所の絶縁
表面で決定する。
− 短絡
− 火災の危険
− 感電保護に対する悪影響
− 充電部と可触金属部との間の接触
− 絶縁の橋絡
− 沿面距離又は空間距離の箇条20の規定値未満への減少
表13−最高許容温度
部品
最高許容温度
℃
機器用インレット及びプラグ−イン装置のピンa):
− 超高温用
155
− 高温用
120
− 低温用
65
次の材料の巻線b), c), d), e) 及びこれと接触しているコアの積層物:
− A種材料
100 [90]
− E種材料
115 [105]
− B種材料
120 [110]
− F種材料
140
− H種材料
165
外部導体用端子及び端末a), f), g)
85
その他の端子及び端末a), h)
85
導体のゴム絶縁又はポリ塩化ビニル絶縁a), aa):
− 屈曲が発生する又は,発生するおそれがある場合。
60
− 屈曲が発生しない又は,発生するおそれがない場合。
75
− 温度表示又は温度定格がついている場合。
表示値
付加絶縁として用いられるコードシースi), aa)
60
その劣化が,この規格への適否を阻害するおそれがある,ガスケット,その他の部分に対して用いら
れる,合成ゴム以外のゴム:
− 付加絶縁又は強化絶縁として使用する場合。
65
− その他の場合。
75
84
C 9730-1:2019
表13−最高許容温度(続き)
部品
最高許容温度
℃
配線絶縁用以外の絶縁として使用する材料i), j), k), bb):
− 含浸又はワニス処理した織物,紙又はプレスボード
95
− 次の材料で結合した積層板:
メラミンホルムアルデヒド,フェノール・ホルムアルデヒド又はフェノール・フルフラール樹脂
110 [200]
ユリア・ホルムアルデヒド樹脂
90 [175]
− 次の材料の成形品j)
セルロース充填剤入りフェノール・ホルムアルデヒド
110 [200]
無機充填剤入りフェノール・ホルムアルデヒド
125 [225]
メラミン・ホルムアルデヒド
100 [175]
ユリア・ホルムアルデヒド
90 [175]
ガラス繊維強化ポリエステル
135
付加絶縁又は強化絶縁として使用する純マイカ及び固く焼結したセラミック材料
425
その他の熱硬化性材料及び全ての熱可塑性材料l)
−
操作部,ハンドルノブ,グリップなどの表面を除く,全ての可触表面
85
制御装置の運搬又は移動に用いるハンドル,ノブ,グリップなどの可触表面:
− 金属製
55
− 陶磁器製又はガラス質の材料製
65
− 成形材料,ゴム又は木材製
75
操作部の可触表面又は短時間に限り保持するその他のハンドル,グリップ又は類似のものの可触表面
− 金属製
60
− 陶磁器製又はガラス質の材料製
70
− 成形材料,ゴム又は木材製
85
木材一般
90
支持され,塗装されたベニヤ表面
85
銅又は黄銅製の通分部分a), m), n)
230
鋼製の通電部分a)
400
その他の通電部分a), m)
−
注a) これらの部分に対しては,14.7の試験を箇条17の後,繰り返す。
b) 分類は,JIS C 4003による。
A種材料の例:含浸した綿,絹,人造絹糸及び紙,オレオ樹脂(含油樹脂)又はポリアミド樹脂を基材とする
エナメル
B種材料の例:ガラス繊維,メラミン及びフェノール・ホルムアルデヒド樹脂
E種材料の例:
− メラミン・ホルムアルデヒド,フェノール・フルフラール樹脂ではり合わされたセルロース充塡剤入りの
成形品,木綿織物積層板及び積層紙
− 架橋ポリエステル樹脂,セルローストリアセテートフィルム,ポリエチレンテレフタレートフィルム
− 油性アルキド樹脂ワニスで貼り合わされたワニス塗りポリエチレンテレフタレート布
− エナメル(基材がポリビニルホルマール,ポリウレタン又はエポキシ樹脂)
B種及びこれより高い温度種別の絶縁システムには,より広範囲の加速温度試験及び両立性試験が要求され
る。
A種,E種及びB種材料を使用する全密閉形モータの温度は,5 Kまでは超えてもよい。全密閉形モータは,
ケースの内側と外側との間の空気循環は防止されるが,必ずしも気密といえるほど十分には被覆されないよう
な構造をもつモータである。
この表中にない絶縁材料については,問題にならない温度にしなければならない。
注記0A 電気用品の技術上の基準を定める省令の解釈(20130605商局第3号)の別表第四の1 (1) ロ(ハ)に
記載している温度は,問題にならない温度である。
85
C 9730-1:2019
表13−最高許容温度(続き)
注c) ユニバーサルモータ,リレー,ソレノイドなどの巻線温度が,通常,熱電対に接触するおそれがある点で平均
値を下回るという事実を見こして,角括弧が付いていない数字は,抵抗法を使用するときに適用し,角括弧が
付いている数字は熱電対を使用するときに適用する。振動子コイルの巻線及び交流モータに対しては,いずれ
の場合にも角括弧が付いていない数字を適用する。
d) 銅巻線の温度上昇値は,次の式によって算出する。
)
(
)
5.
234
(
1
2
1
1
1
2
t
t
t
R
R
R
t
−
−
+
−
=
∆
ここに, Δt:温度上昇値
R1:試験開始時の抵抗値
R2:試験の終了時の抵抗値
t1:試験開始時の動作周囲温度であり,Tmaxで設定
t2:試験終了時の動作周囲温度
試験の開始時に,巻線は,Tmaxでなければならない。
スイッチを遮断した瞬間の抵抗を確かめるために,抵抗−時間曲線をプロットできるような短い間隔で,ス
イッチを切った後できる限り早く抵抗測定を行って試験の終了時の巻線抵抗を決定することが望ましい。
この箇条の目的のための到達した最高温度は,Tmaxにこの温度上昇を追加することによって求められる。
e) その最小寸法が5 mm未満である断面をもつ小形巻線に対しては,抵抗法によって測定する許容最高温度は,次
による。
種別
℃
A
105
E
120
B
130
F
155
H
180
f) 機器の内部に入れるか,又はその上に付けて提出される制御装置に対しては,普通は機器が外部導体と共に提
供されないため,固定導体用端子の温度だけを確認する。固定導体用端子以外の端子をもつ機器に対しては,
外部導体の絶縁部の温度を端子の温度の代わりに決定する。
g) 一体形及び組込形制御装置の場合は温度限度を適用しないが,ほとんどの機器規格が固定機器の端子の温度を
85 ℃,すなわち,通常のPVCケーブル絶縁物に対する最高許容温度に限定していることに注意する必要があ
る。記録した最高温度は,表1の項目21に製造業者が宣言する値を超えないことが望ましい。
制御装置を機器に一体及び/又は組み込む場合,外部導体の端子は,機器の一部として,機器規格の規定の
試験を受け,機器規格の温度限度値を満たしているか確認することになる。
h) より高い値が製造業者が指定する場合を除き,測定された温度は,85 ℃を超えてはならない。
i) 材料の耐熱特性に関連する規定した温度値は,個々の材料が検査され,特殊な耐熱特性をもつと承認されてい
る場合は超えてもよい。
j) 角括弧内の値は,操作部,ハンドル,ノブ,グリップなどのために用いる材料でできた部分(高温金属には接
触しているが可触ではない。)に適用できる。
k) 金属部が絶縁材料製の材料でできた部品と接触している場合,接触点で絶縁材料の温度は金属部の温度と同一
であると仮定する。
l) 最高許容温度は,これらの材料にとって使用が許容できると証明できる温度を超えてはならない。温度を,箇
条21の目的のために記録しなければならない。
m) 最高許容温度は,これらの材料にとって使用が許容できると証明された温度を超えてはならない。
n) 公認のや(冶)金規格を満たしているかを合金製造業者からの試験データによって立証できる場合,特定の銅
合金についてはこれより高い温度を受け入れることができる。注m)も参照。
aa) この値はIEC規格による電線に対して適用する。それ以外のものについては,同等の要求事項による。
bb) この表に規定したもの以外の材料で,同等の要求事項によるものは,最高許容温度を満たしているとみなす。
注記0A 電気用品の技術上の基準を定める省令の解釈(20130605商局第3号)の別表第四の1 (1) ロ(ハ)は,同等
の要求事項である。
86
C 9730-1:2019
15 製造偏差及びドリフト
15.1 制御装置のタイプ2作動となる部品は,指定する動作値,動作時間又は動作シーケンスに関して,
変化が生じてはならない。
注記 カナダ及び米国では,製造偏差及びドリフトは,指定する運転値に個別の偏差として表示する。
タイプ2作動の制御装置において,製造偏差及びドリフトの許容値は,規定される。その後の
変化は,規定した装置を使用して,サンプルの動作値の測定と指定する動作値との比較によっ
て決定している。
15.2 適否は,この箇条の該当する試験によって判定する。
15.3 平常動作中に完全に又は部分的に壊れる制御装置については,箇条17の該当する細分箇条の試験で
十分であるとみなす。
15.4 運転のために,機器上の取付け又は機器に組み込む方法に依存する制御装置に対しては,製造偏差
及びドリフトは別々に指定するが,比較できる値でなければならない。指定する製造偏差は,帯域幅又は
範囲(例えば,10 K)として,表現することが望ましい。ドリフトは値の変化(例えば,±10 K又は+5 K,
−10 K)によって表現することが望ましい。
15.5 一貫性は,15.5.1〜15.5.7に従って決定する。
15.5.1 使用する試験機器は,制御装置を製造業者が指定する方法で取り付けたものとする。
15.5.2 検出用制御装置について,試験装置は,できる限り制御装置の平常動作がその試験装置を制御する
ために用いるようなものとする。
15.5.3 この試験は,応答値よりも比較値を決定するために行われるため,その装置の形状は重大ではない。
ただし,それは実施できる限り使用条件に近付けて模擬することが望ましい。
15.5.4 試験の電気的条件は,異なる条件が表1の項目41で製造業者が宣言する場合を除き,通常,最大
定格電圧VR max及び最大定格電流IR maxとする。ただし,制御装置の動作は,0.05 A以下の検出電流をもつ
適切な装置によって検出する。
15.5.5 検出制御装置に対しては,作動量の変化率は,特別な値が表1の項目37で製造業者が宣言する場
合を除き,適切な値でなければならない。
15.5.6 該当する動作値,動作時間又は動作シーケンスを,各サンプルに対して記録する。いずれの2個の
サンプルにも,指定する製造偏差を超える大きさの差があってはならない。
15.5.7 記録値は,各サンプルに対する基準値として使用し,その結果,箇条16の環境試験及び箇条17
の耐久性試験後の再試験によってドリフトを決定できる。
15.6 ある機器への取付方法,又はその機器に組み込まれる方法に,制御装置の動作が依存しない制御装
置(例えば,タイマ,電流検出制御装置,電圧検出制御装置,エネルギー調節器又は電気的に動作する制
御装置のドロップアウト電流)に対する一貫性の決定は,15.6.1〜15.6.5による。
15.6.1 製造偏差及び/又はドリフトは,絶対値であってもよい。この場合,製造偏差及びドリフトの両方
を組み合わせる1個の指定が行われてもよい。
15.6.2 該当する動作値,動作時間又は動作シーケンスは,全てのサンプルにおいて最初に測定し,製造業
者が指定する制限値の中になければならない。
15.6.3 試験用装置は,指定する通常使用状態のうち,最も不利な状態を模擬するようなものでなければな
らない。
15.6.4 ドリフト値を表1の項目42に別々に製造業者が宣言する場合,各サンプルの実測値を基準値とし
て記録する。その結果,箇条16の環境試験及び箇条17の耐久性試験後の再試験によって,そのドリフト
87
C 9730-1:2019
を決定できる。
15.7 PTCサーミスタの校正試験
PTCサーミスタの校正試験は,J.15.7による。
15.8 NTCサーミスタの校正試験
NTCサーミスタの校正試験は,J.15.8による。
16 環境によるストレス
16.1 輸送及び貯蔵によるストレス
環境上の温度ストレスに敏感な制御装置は,輸送及び貯蔵中に発生するおそれがある該当するストレス
のレベルに耐えなければならない。
16.1.1 適否は,制御装置を輸送条件として,製造業者によって宣言された同一の条件の中に放置した状態
で実施する16.2の該当する試験によって判定する。輸送条件が指定していない場合,その制御装置は,操
作部又は操作手段を最も不利な位置にして試験する。
16.2 環境上の温度ストレス
16.2.1 温度の影響は,次のように試験する。
− 制御装置全体を,24時間,温度−10±2 ℃で維持する。
− 次に,制御装置全体を,4時間,温度60±5 ℃に維持する。
注記 フィンランド,ノルウェー及びスウェーデンでは,異なった値の温度及び時間を適用する。
16.2.2 制御装置は,いずれの試験中においても通電しない。
16.2.3 各試験後,操作部又は操作手段をもつ制御装置は,製造業者によって指定された断路クラスを適切
に提供するように操作ができなければならない。ただし,このことは制御装置を取り外すことなく,断路
クラスを決定できなければならない。
この試験は,室温で実施する。制御装置は,操作前に8時間室温に維持する。
16.2.4 さらに,タイプ2作動付きの制御装置に対しては,箇条15の該当する試験を16.2.1〜16.2.3の試験
の後,その都度繰り返さなければならない。これらの試験中の測定値は,同一サンプルについて表1の項
目42で製造業者が宣言するドリフトを超えて箇条15で記録した値と異なってはならない。
17 耐久性
17.1 一般要求事項
17.1.1 制御装置は機器に組み込むか又は機器と共に提出される制御装置を含み,通常使用状態で発生する
機械的,電気的及び熱的ストレスに耐えなければならない。
17.1.2 タイプ2作動付きの制御装置は,動作値,動作時間又は動作シーケンスが指定するドリフトよりも
大きく変化しないように動作しなければならない。
17.1.2.1 17.1.1及び17.1.2の適否は,17.1.3の試験によって判定する。
17.1.3 試験シーケンス及び条件
17.1.3.1 一般に,試験シーケンスは,次による。
− 17.6に規定するエージング試験(タイプ1.M又はタイプ2.Mとして分類される作動だけに適用)
− 17.7に規定する加速度での自動作動の過電圧試験(米国,カナダ及び全ての国々では,過負荷試験を
用いる。)。我が国では,過電圧試験を適用する。
− 17.8に規定する加速度での自動作動の試験
88
C 9730-1:2019
− 17.9に規定する低速度での自動作動の試験(スローメイク及びスローブレイク自動作動だけに適用)
− 17.10に規定する加速度での手動作動の過電圧試験(米国,カナダ及び全ての国々では,過負荷試験を
用いる。)。我が国では,過電圧試験を適用する。
− 17.11に規定する低速度での手動作動の試験
− 17.12に規定する高速度での手動作動の試験(2極以上の極をもち,動作中に極性逆転が起きる場合の
作動だけに適用)
− 17.13に規定する加速度での手動作動の試験
17.1.3.2 電気的,温度及び機械的試験条件は,一般的に,17.2〜17.4に規定する条件とする。一般的な試
験要求事項は,17.6〜17.14に規定する。個別の試験要求事項は,JIS C 9730の規格群の関連する第2部に
規定する。
17.1.3.3 自動作動動作の一部分となる手動作動の試験は,通常,その自動作動に該当する細分箇条に規定
する。規定がない場合は,17.10〜17.13をこのような手動作動の試験に適用する。
17.1.3.4 JIS C 9730の規格群の関連する第2部に規定する場合を除き,規定する全ての試験の後,サンプ
ルは17.14を満たさなければならない。
17.1.4 (H.17.1.4による。)
17.2 試験のための電気的条件
17.2.1 制御装置の各回路は,製造業者が指定する定格に従って負荷を接続しなければならない。外部負荷
を意図しない回路及び接点は,製造業者が意図した負荷を用いて動作させる。この方法が製造業者が指定
する場合,切換回路の各部分に対して別々に試験を行うことが必要となる場合がある。特に切換回路の1
個の部分の定格がその他の部分に通電される電流に依存する場合である。
17.2.2 過電圧試験を行う場合,使用する電気負荷は,定格電圧VRで,表14に規定する電気的負荷とする。
この電圧は,17.7及び17.10の過電圧試験に対しては,定格電圧VRの1.15倍に増加する。カナダ及び米国
では,過電圧試験は行わない。
17.2.3 過負荷試験を行うカナダ,米国及び他の全ての国々は,表15及び表16で規定する条件を適用する。
過負荷試験は,通常負荷で他の全ての極で実施,又は単極について実施する。
注記0A
我が国では,この細分箇条を適用しない。
17.2.4 接地された中性線システムがある場合,外郭は3A筒形ヒューズを通して回路の保護導体に接続し
なければならない。接地中性線システム以外に対しては,外郭は最も絶縁破壊して接地するおそれがない
充電極に当該ヒューズを通して接続しなければならない。
17.2.5 タイプ1.G若しくはタイプ2.G作動,又はその他の負荷切離し作動に対しては,試験時には補助ス
イッチを使用して意図した動作を模擬する。
89
C 9730-1:2019
表14−過電圧試験の電気的条件
6.2の分類
回路のタイプ
動作
交流回路
直流回路
電圧
V
電流
A
力率
(±0.05)a)
電圧
V
電流
A
時定数
(±1 ms)
実質的に抵抗性
(分類は6.2.1)
開路及び
閉路
VR
IR
0.95
VR
IR
非誘導形
抵抗又は誘導性
(分類は6.2.2)
閉路b)
VR
6.0 IX
0.6
VR
2.5 IX
7.5
又は算術的に大きい場合
IR
0.95
又は算術的に大きい場合
IR
開路
VR
IX
0.95
IX
非誘導形
又は算術的に大きい場合
IR
又は算術的に大きい場合
IR
指定する特定負荷
(分類は6.2.3)
開路及び
閉路
VR
負荷によって決定
VR
負荷によって決定
20 mA負荷
(分類は6.2.4)
開路及び
閉路
VR
20 mA
0.95
VR
20 mA
非誘導形
指定するモータ負荷
(分類は6.2.5)
開路及び
閉路
VR
指定どおり
VR
指定どおり
パイロット負荷
(分類は6.2.6)
閉路b)
VR
10 VA/VR
0.35
−c)
開路
VR
VA/VR
0.95
略号は,次のとおりである。
VR:定格電圧, IR:定格電流, IX:誘導負荷電流,VA:定格容量
注a) 抵抗器及びインダクタは,並列には接続しない。ただし,空芯インダクタを使用する場合,そのインダクタを流れる電流の約1 %を流す抵抗器は,
それと並列に接続する。鉄芯インダクタは使用してよいが,電流が実質的に正弦波形であるときに限る。三相の試験には3芯インダクタを用いる。
b) 規定した閉路条件は,50〜100 msの間維持し,次に,補助スイッチによって規定した開路条件に低減する。この箇条の試験中に,接点閉路から2
秒以内に接点開路が発生する場合,閉路のために規定した条件は,開路にも使用する。
c) これらの値は,適用しない。
2
6
C
9
7
3
0
-1
:
2
0
1
9
90
C 9730-1:2019
表15−17.7及び17.10の過負荷試験の電気的条件
(過負荷試験を用いるカナダ,米国及びその他の国々で適用。我が国は適用外)
回路のタイプ
動作
交流回路
直流回路
電圧
V
電流
A
力率
電圧
V
電流
A
実質的な抵抗性
(分類6.2.1)
開路及び閉路
VT
1.5IR
1.0
VT
1.5IR
誘導性
(モータ以外)
開路及び閉路
VT
1.5IX
0.75〜0.8
VT
1.5IX
指定するモータ負荷
(分類6.2.5)
開路及び閉路
VT
6Im
又は指定どおり
0.4〜0.5
又は指定どおり
VT
10Im
又は指定どおり
パイロットデューティ負荷
(分類6.2.6)
開路
1.1 VT
11 VA/ VT
最大0.35
又は指定どおり
指定どおり
閉路
1.1 VT
1.1 VA/ VT
又は指定どおり
略号は,次のとおりである。
VR:定格電圧,VT:試験電圧(17.2参照),Im:定格電流又はモータ負荷電流,IR:抵抗負荷の定格電流,IX:誘導性負荷の定格電流,VA:定格容量
閉路電圧がVTの100 %〜110 %である回路の場合,試験で適用する。
試験目的において,パイロットデューティ負荷は,典型的に制御するための磁力コイルの電磁石からなる。定格電流は,電圧及び電磁石の電圧−電流定
格から決定する。交流において,試験電圧は,定格電流及び力率が,0.35以下であり,かつ,突入電流は,定格電流の10倍である。試験用電磁コンダク
タは,動作を制限しない状態,例えば,開又は閉位置のいずれかで抑止しない。
交流パイロットデューティ定格は,交流モータを制御し,試験する制御装置において,次の事項を決定してもよい。
− 過負荷試験中,制御装置が毎分6回のサイクルで50回,力率0.5以下で,全負荷モータ電流の6倍と同等の電流値の閉路及び開路を引き起こす。
− パイロットデューティ定格電流(定格電流の10倍)は,上記で記載する過負荷試験において,電流値の67 %以下である。
回転子固定状態の下で,モータ回路を閉路とするが,当該状態で回路を開とするように要求されない制御装置は,次を適用する。
− 表15の場合は,次による。
a) 100 % VT:交流,及び0.5 VT:直流の場合は,定格電流の1.5倍
b) 100 % VT:回転子固定電流(閉路だけ)
− 表16の場合は,100 % VT:交流,及び0.5 VT:直流
回転子固定状態の下で,モータ電流を開閉することを主とするよう意図していないが,使用する可能性がある手動の調節又は調整手段をもつスイッチは,
固定回転子試験に関する17.7を満たさなければならない。
直流の運転を意図するスイッチにおいて,運転回数は,30秒の間隔で5回行い,かつ,装置は,上記a)の要求事項を満たさなければならない。
2
6
C
9
7
3
0
-1
:
2
0
1
9
91
C 9730-1:2019
表16−17.8,17.9,17.11,17.12及び17.13の過負荷試験の電気的条件
(過負荷試験を使用するカナダ,米国及びその他の国々で適用。我が国は適用外)
回路のタイプ
動作
交流回路
直流回路
電圧
V
電流
A
力率
電圧
V
電流
A
実質的な抵抗性
(分類6.2.1)
開路及び閉路
VT
IR
1
VT
IR
誘導性
(モータ以外)
開路及び閉路
VT
IX
0.75〜0.8
VT
IX
指定するモータ負荷
(分類6.2.5)
開路及び閉路
VT
Im
又は負荷によって決定したとおり
0.75〜0.8
又は指定どおり
VT
Im
パイロットデューティ負荷
(分類6.2.6)
開路
1.1 VT
10 VA/VT
最大0.35
又は指定どおり
指定どおり
閉路
1.1 VT
1.0 VA/VT又は指定どおり
略号は,次のとおりである。
VR:定格電圧,VT:試験電圧(17.2参照),Im:定格電流又はモータ負荷,IR:抵抗負荷の定格電流,IX:誘導性負荷の定格電流
注記 試験目的において,パイロットデューティ負荷は,典型的に制御するための磁力コイルの電磁石からなる。定格電流は,電圧及び電磁石の電
圧−電流定格から決定する。交流において,試験電圧は,定格電流及び力率が,0.35以下であり,かつ,突入電流は,定格電流の10倍である。
試験用電磁コンダクタは,動作を制限しない状態,例えば,開又は閉位置のいずれかで抑止しない。
交流パイロットデューティ定格は,交流モータを制御し,試験する制御装置において,次の事項を決定してもよい。
− 過負荷試験中,制御装置が毎分6回のサイクルで50回,力率0.5以下で,全負荷モータ電流の6倍と同等の電流値の閉路及び開路を引き起こす。
− パイロットデューティ定格電流(定格電流の10倍)は,上記で記載する過負荷試験において,電流値の67 %以下である。
2
6
C
9
7
3
0
-1
:
2
0
1
9
92
C 9730-1:2019
17.3 試験のための温度条件
17.3.1 温度検出素子以外の制御装置の部品への温度は,次による。
− 制御装置を指定する方法で取り付けるとき,可触になる部品は,通常の室温にさらす(4.1参照)。
− 制御装置の取付面は,Ts maxと,(Ts max+5) ℃又はTs maxの1.05倍のうち,いずれか大きい方の温度と
の間に維持する。
− スイッチヘッドの他の部分は,Tmaxと,(Tmax+5) ℃又はTmaxの1.05倍のうち,いずれか大きい方の
温度との間に維持する。Tminが0 ℃未満の場合,スイッチヘッドをTminと(Tmin−5) ℃との間に維持し
て追加試験を実施する。
17.3.2 17.8及び17.13の試験中に,17.3.1の温度を各試験の最後の50 %の間に加える。各試験の始めの50 %
の間は,スイッチヘッドを通常の室温に維持する。
試験を両方の温度(Tmax及びTmin)で実施する必要がある場合,追加サンプルを要求する。
17.4 試験のための手動及び機械的条件
17.4.1 全ての手動作動に対しては,各操作サイクルは,制御装置の作動のために適切な全ての位置に連続
して動かし,次に,その出発点まで戻るような操作部の運動で構成する。ただし,制御装置が複数の意図
したオフ位置をもつ場合,各手動作動は,あるオフ位置から次のオフ位置までの運動とする。
17.4.2 操作部の運動速度は,次による。
− 低速度
・ 回転作動については,(9±1)°/s
・ 直線作動については,5±0.5 mm/s
− 高速度 操作部は,できる限り早く手によって操作する。操作部が制御装置と共に供給されない場合,
適切な操作部をこの試験目的のために,試験者が取り付ける。
− 加速度
・ 回転作動については,(45±5)°/s
・ 直線作動については,25±2.5 mm/s
17.4.3 17.4.2の低速度試験中,試験装置が,その装置と操作部との間に著しい遊びがない状態で確実に操
作部を駆動するように留意する。
17.4.4 17.4.2の加速度試験中,次に留意する。
− 試験装置の決定は,機械部分の通常の作動を妨害しないように,操作部が自由に動くことができるこ
とを確実にするように留意する。
− 操作部の運動が制限される制御装置に対しては,次による。
・ 方向を逆転するごとに,2秒以上のドエル(一時的運転停止)期間が存在しなければならない。
・ トルク(回転式制御装置の場合)又は力(非回転式制御装置の場合)を,制限用終端停止装置の強
度を確認するために,各運動の末端部(位置)に加えなければならない。トルクは通常の操作トル
クの5倍又は1.0 N・mのうち,いずれか小さい方の値とする。ただし,0.2 N・m以上とする。力は
通常の操作力の5倍又は45 Nのうち,いずれか小さい方の値とする。ただし,9 N以上とする。通
常の操作トルクが1.0 N・m又は通常の操作力が45 Nを超えるものは,加えるトルク又は力は,通常
の操作トルク又は操作力と同一とする。
− 運動が一方向に限定されない回転動作用の制御装置は,各試験において動作サイクル数の4分の3を
時計方向に,4分の1を反時計方向に行う。
− 一方向だけに操作するような構造の制御装置に対しては,試験は製造業者が意図した方向で行わなけ
93
C 9730-1:2019
ればならない。ただし,上記に規定のトルクを使用して逆方向に操作部を回転することが不可能であ
る場合に限る。
17.4.5 追加の潤滑剤は,これらの試験中に加えてはならない。
17.5 耐電圧要求事項
17.5.1 この箇条の全ての試験後,13.2の要求事項を満たしているかを確認する。ただし,サンプルは試験
電圧印加前に,湿度処理は行わない。試験電圧は,13.2に規定する試験電圧の75 %とする。
注記 カナダ及び米国では,試験電圧は,13.2を適用する。
17.6 エージング試験
17.6.1 試験中,検出素子は,箇条14で決定し用いる作動量の値に維持しなければならない。その他の部
分は,17.3に規定するように維持しなければならない。制御装置は,該当する断路条件に対して17.2に規
定する電気的負荷をかける。試験継続時間は(100+0.02 Y)時間とする。ここに,“Y”は7.2で製造業者が
宣言する値とする。試験は,タイプ1.M又はタイプ2.Mの分類の作動をもつ制御装置に適用する。
17.6.2 この試験の間に試験品が作動した場合,作動量の値が逆動作を引き起こすように増加又は減少させ,
次に,試験を再開できるように元の値から量“X”だけ異なる値に復帰させる。この手順は,この試験を
完了するのに必要である回数だけ,又は箇条15の該当する手続を繰り返す場合,7.2で製造業者が宣言す
るドリフト限度値を超えるまで繰り返す。値“X”は,JIS C 9730の規格群の関連する第2部に規定する。
17.7 加速度での自動作動の過電圧試験(又は過負荷試験を用いるカナダ,米国及び全ての国々での過負
荷試験)
注記0A
我が国では,過電圧試験を適用する。
17.7.1 電気的条件は,17.2の過電圧(又は過負荷)条件に対して規定する電気的条件とする。
17.7.2 温度条件は,17.3に規定する条件とする。
17.7.3 動作方法及び動作速度は,次による。
− タイプ1作動に対して,動作速度及び動作方法は,当事者間の協定とする。
− タイプ2作動に対して,動作方法は,製造業者によって意図された方法とする。タイプ2検出用作動
に対しては,動作速度は,7.2で製造業者が宣言する定格最大サイクルまで,又は作動量の変化率が同
一の細分箇条内において規定するα2及びβ2を超えないように増加できる。
注記1 上記の方法の例は,空気圧力装置をもつ水圧システムの毛細管の交換又は速度の異なる駆
動装置の取付けである。
− タイプ2作動は,表1の項目48において製造業者が宣言する最も厳しい値で試験する。
注記2 温度及び圧力で動作する制御装置では,上記の値は,通常最大値である。
17.7.4 タイプ2検出用作動に対して,各動作におけるオーバシュートは,7.2で製造業者が宣言する値の
間になければならない。
17.7.5 検出用作動の場合に,作動量の変化率を増加すること,又は他のタイプ1作動において複数の動作
間で駆動装置を無効にすることは,結果に著しい影響を与えないときに限り,許容する。
17.7.6 試験のための自動サイクル数は,7.2で製造業者が宣言する数値の10分の1又は200回のうち,い
ずれか少ない方とする。
17.7.7 試験中,操作部を,その最も不利な位置に置く。
注記 カナダ及び米国では,過負荷試験を適用する場合,サイクル数は,50回である。
17.8 加速度での自動作動の試験
17.8.1 電気的条件は,17.2に規定する条件とする。
94
C 9730-1:2019
17.8.2 温度条件は,17.3に規定する条件とする。
17.8.3 動作方法及び動作速度は,17.7.3の試験中使用するとおりとする。
17.8.4 スローメイク及びスローブレイク自動作動を除く自動サイクル数は,7.2で製造業者が宣言するサ
イクル数から17.7の試験中に実施されるサイクル数を引いた数とする。試験中,操作部は最も不利となる
位置に置く。試験中,この試験の要求事項からみて重要ではない,加速試験による結果として破壊してい
ると考えられるタイプ1作動の構成部品の不良は,それが修理若しくは交換できるか,又は7.2で製造業
者によって宣言された自動サイクルの全サイクル数を完了できるような同意済みの代替方法で試験を継続
できる場合は,不合格の原因としてはならない。
17.8.4.1 スローメイク及びスローブレイク自動動作に対しては,17.8.4に規定する自動サイクル数の75 %
だけ実施する。残りの25 %は,17.9に規定するとおり実施する。
注記 カナダ及び米国では,サイクル数は,タイプ2作動及びタイプ1作動の規定を適用する。
17.9 低速度での自動作動の試験
17.9.1 スローメイク及びスローブレイク自動作動は,17.8に規定する自動サイクル数の残り25 %につい
て,試験する。
17.9.2 電気的及び温度条件は,17.2及び17.3に規定するように試験しなければならない。
17.9.3 動作方法は,作動量の値の変化を検出素子に加える,又は駆動装置による方法のいずれかである。
検出素子に対しては,作動量の変化率は,7.2で製造業者が宣言するようにα1及びβ1でなければならない。
複数の動作の間で,検出制御装置の場合には作動量の変化率を増大すること,又はその他の自動制御装置
の場合には駆動装置を無効にすることは,その結果に著しい影響を与えないときに限り,許容する。
検出制御装置の場合,各動作のオーバシュートは,7.2で製造業者が宣言する値の間になければならない。
このタイプ2作動に対する試験中に,動作値,オーバシュート又は動作シーケンスの記録を取るために連
続的にモニタすることが重要である。
17.9.3.1 上記のモニタリングは,試験での変化を保証するために,その他の制御装置に対しても行うこと
が望ましい。
17.9.4 閉路又は開路だけがスロー自動作動である場合,当事者間の協定によって,その作動を加速するこ
とが可能である。これには17.8の規定を適用する。
17.10
加速度での手動作動の過電圧試験(又は過負荷試験を用いるカナダ,米国及び全ての国々での過
負荷試験)
注記0A
我が国では,過電圧試験を適用する。
17.10.1
電気的条件は,17.2に規定する過電圧(又は過負荷)条件とする。
17.10.2
温度条件は,17.3に規定する条件とする。
17.10.3
動作方法は,加速度に対して17.4に規定する方法とする。操作サイクル数は,7.2で製造業者が
宣言する数値の10分の1又は100回のうちいずれか少ない方とする。試験中,検出用素子は作動量のうち
適切な値に維持し,駆動装置は,操作によって適切な動作が確実に起きるように配置する。
17.10.4
カナダ及び米国では,過負荷試験を適用する場合,サイクル数は,50回である。
17.11
低速度での手動作動の試験
17.11.1
電気的条件は,17.2に規定する条件とする。
17.11.2
温度条件は,17.3に規定する条件とする。
17.11.3
動作方法は,低速度に対して17.4に規定する方法とする。
17.11.4
操作サイクル数は,7.2で製造業者が宣言する数値の10分の1又は100回のうち,いずれか少な
95
C 9730-1:2019
い方とする。試験中,検出用素子は,作動量のうち適切な値に維持し,駆動装置は,操作によって適切な
動作が確実に起きるように配置する。
17.12
高速度での手動作動の試験
注記 この試験は,2極以上の作動で,極性逆転が作動中に発生する場合にだけ適用する。
17.12.1
電気的条件は,17.2に規定する条件とする。
17.12.2
温度条件は,17.3に規定する条件とする。
17.12.3
動作方法は,高速度に対して17.4に規定する方法とする。
17.12.4
操作サイクル数は100回とする。試験中,検出用素子は,作動量のうち適切な値に維持し,駆動
装置は,操作によって適切な動作が確実に起きるように配置する。
17.12.5
カナダ及び米国では,過負荷試験を適用する場合,サイクル数は,50回である。
17.13
加速度での手動作動の試験
17.13.1
電気的条件は,17.2に規定する条件とする。
17.13.2
温度条件は,17.3に規定する条件とする。
17.13.3
動作方法は,加速度に対して17.4に規定する方法とする。
17.13.4
操作サイクル数は,7.2で製造業者が宣言する数値から,17.10〜17.12の試験中,実際に行った
数を引いた数とする。試験中,検出素子は,作動量のうち適切な値に維持し,駆動装置は,操作によって
適切な動作が引き起こすことを確実にするように配置する。
17.13.5
試験中,この試験の要求事項からみて重要ではない,保護制御装置以外のタイプ1作動の構成部
品の不良は,それが修理若しくは交換できるか,又は全要求操作サイクル数を完了できるような同意済み
の代替方法で試験を継続できる場合,試験を満たしていない要因とはならない。
17.14
適否判定
JIS C 9730の規格群の関連する第2部に規定がある場合は,その規定に置き換えて適用する17.6〜17.13
の全ての該当する試験後,制御装置は,次の状態を満たす場合,要求事項を満たしているとみなす。
− この規格の意味する範囲内で意図し指定する方法で,自動及び手動の全ての作動が機能する場合。
− 表13の注a) によって指示された物品,すなわち,端子,通電部分及び支持面に関する箇条14を満た
している場合。
− 箇条8,17.5及び箇条20を満たしている場合。17.5及び箇条20の試験については,箇条13に対して
提出された特殊サンプルの制御装置を,その接点が開路していることを確認するために適切な条件で
試験する場合。
− タイプ2作動については,箇条15の該当する試験を繰り返し,動作値,動作時間又は動作シーケンス
が,ドリフト値,又はドリフト及び製造偏差の複合値のいずれか指定する方のものの範囲内にある場
合。
− 各手動作動に対して指定する回路断路を,初期のとおりに得ることができる場合。
− 充電部と接地された金属,可触金属部又は操作部との間に過渡的故障が発生したという痕跡がない場
合。
(H.17.14及びU.17.14にもよる。)
17.15
(規定なし)
17.16
特殊目的の制御装置の試験
特殊目的の制御装置のための試験は,JIS C 9730の規格群の関連する第2部で規定する。
(U.17.16にもよる。)
96
C 9730-1:2019
17.17
試験順序
試験順序は,J.17.17による。
17.18
試験条件
試験条件は,J.17.18による。
18 機械的強度
18.1 一般要求事項
18.1.1 制御装置は,通常使用状態で発生する機械的ストレスに耐える構造でなければならない。
18.1.2 クラスI及びクラスII制御装置の操作部並びにクラスI及びクラスII機器用制御装置の操作部は,
十分な機械的強度をもつか,又は操作部が壊れても十分な感電保護を維持するものでなければならない。
18.1.3 一体形制御装置及び組込形制御装置は,それらの耐衝撃性が,その機器規格によって試験されるた
め,18.2による試験は行わない。
18.1.4 適否は,1個のサンプルについて連続的に実施する,18.2〜18.8の該当する試験によって判定する。
18.1.5 該当する試験の後,制御装置は,いかなる損傷があってはならない。絶縁用裏打ち,隔壁及びこれ
らと類似のものは,緩んではならない。疑義がある場合,箇条8,箇条13及び箇条20の一部又は複数に
よって判定する。
カバーのような取外し可能な部品及びその他の外部部品は,それらの絶縁用裏打ちを壊すことなしに外
すこと及び交換することが可能でなければならない。
制御装置は,完全断路及びマイクロ断路が得られるような,どのような位置にも操作することができな
ければならない。
確証が得られない場合には,付加絶縁又は強化絶縁は,箇条13に規定する耐電圧試験を行う。
仕上げ部への損傷,沿面距離又は空間距離を箇条20に規定する値未満に減少しない小さいへこみ,及び
感電保護又は湿気保護に悪影響を与えない小さな欠けた箇所は無視する。裸眼で見ることができないクラ
ック,及び繊維強化成形品中の表面クラックは無視する。装飾用カバーが,内側のカバーで裏打ちされて
おり,装飾用カバーの取外し後,内側のカバーが試験に耐える場合,装飾用カバーの割れは無視する
(H.18.1.5にもよる。)。
18.1.6 カナダ及び米国では,金属製電線管の接続用ねじは,外郭の壁のねじ穴を通して全工程がねじ切り
する場合,又は同等の構造を使用する場合,金属に3山以上又は5山未満の全ねじ山に鋭い端部があって
はならない。また,装置は,適切な電線管ブッシングが適切に付けられる構造でなければならない。
適否は,目視検査によって判定する。
18.1.6.1 カナダ及び米国では,金属製電線管の接続用ねじが外郭の壁,電線管の取付け,又はこれらと同
等のその他のものの穴を通して全工程がねじ切りをしない場合,電線管留め,及び内径が電線管ブッシン
グの規定によって提供されるものと同等の処理方法で,入口部の穴に付けた金属に全3.5山のねじ山がな
ければならない。
適否は,目視検査によって判定する。
18.1.6.2 米国では,堅固な金属電線管によって支持するためにねじで締結した外郭は,5山以上の完全な
ねじ山を電線管を係合するために提供しなければならない。
適否は,目視検査によって判定する。
18.1.6.3 カナダ及び米国では,外郭に取り付けた成形加工,くい打ち又はこれらと類似の手段によって電
線管の取付け又はニップルは,次の試験を実施した後,外れたりせず耐えなければならない。
97
C 9730-1:2019
− 890 Nの引張力を5分間。この試験において,装置は,意図した方法で堅固な電線管で支持し,90.8 kg
の吊り下げた重りを保持する。
− 装置は,電線管取付金具以外の手段で,堅固に支持する。67.8 N・mの曲げ応力は,曲げ応力を印加す
る点に電線管取付部があるように,5分間,軸に正しい角度で電線管に印加し,電線取付部のレバー
アームは,外郭の壁から測定する。
− 67.8 N・mのトルクは,接続を締め付ける方向に,5分間,電線管に印加する。その後,レバーアーム
は,電線管取付部から測定する。
試験の結果,起こる可能性のある外郭の変形は,不良とはみなさない。
18.2 耐衝撃性
18.2.1 18.4による制御装置を除き,インラインコード形,自立構造形及び独立取付形制御装置は,JIS C
60068-2-75に規定する装置によって,打撃をサンプルに加えることによって判定する。
18.2.2 制御装置を通常使用状態のように取り付けたときに可触となる全ての表面は,この装置を用いて試
験する。
18.2.3 制御装置は,背後に金属製の板が付いていない厚さ8 mm,175 mm四方の合板の垂直シートと接
触するように保持する。合板は,れんが,コンクリート又はこれらと類似のものの板壁に固定した固く曲
がらない枠に取り付ける。
18.2.4 打撃は,操作部を含め,いかなる角度であっても,全ての可触表面に加える。試験装置は0.5±0.04
N・mのエネルギーを与えるように校正する。
18.2.4.1 足で操作する制御装置は,同一の試験を行わなければならないが,1.0±0.05 N・mのエネルギー
を与えるように校正した試験装置を使用する。
18.2.5 全ての可触面に対して3回の打撃を,弱いと思われる全ての点に加える。
18.2.5.1 一連の3回の打撃が,続いて行う一連の打撃に影響を与えないように留意しなければならない。
18.2.5.2 その欠陥が先に与えた打撃によるものかどうか分からないときは,その欠陥を無視して新しいサ
ンプルの同一の箇所に一連の3回の打撃を加え,その試験に耐えなければならない。
18.2.6 信号ランプ及びそのカバーは,外郭から10 mmを超えて突出するか,又は面積が4 cm2を超えると
きに限り試験する。ただし,それが操作部と一体となっているときは除く。この場合,それは操作部と同
一の方法で試験しなければならない。
18.3 (規定なし)
18.4 代替適否−耐衝撃性
注記 カナダ及び米国では,表17及び表18に示す最小厚さ以上の金属板又は金属容器には,18.2に
規定する耐衝撃性試験を適用しない。
98
C 9730-1:2019
表17−炭素鋼又はステンレス鋼製外郭における最小板厚さ
支持フレームなしa)
支持フレームあり又はこれと同等の
補強a)
最小厚さ
(mm)
最大幅b)
単位インチ(cm)
最大長さc)
単位インチ(cm)
最大幅b)
単位インチ(cm)
最大長さc)
単位インチ(cm)
表面処理なし
金属めっき
4.0
(10.2)
制限なし
6.25
(15.9)
制限なし
0.020 d) (0.51)
0.023 d) (0.58)
4.75
(12.1)
5.75
(14.6)
6.75
(17.1)
8.25
(21.0)
6.0
(15.2)
制限なし
9.5
(24.1)
制限なし
0.026 d) (0.66)
0.029 d) (0.74)
7.0
(17.8)
8.75
(22.2)
10.0
(25.4)
12.5
(31.8)
8.0
(20.3)
制限なし
12.0
(30.5)
制限なし
0.032
(0.81)
0.034
(0.86)
9.0
(22.9)
11.5
(29.2)
13.0
(33.0)
16.0
(40.6)
12.5
(31.8)
制限なし
19.5
(49.5)
制限なし
0.042
(1.07)
0.045
(1.14)
14.0
(35.6)
18.0
(45.7)
21.0
(53.3)
25.0
(63.5)
18.0
(45.7)
制限なし
27.0
(68.6)
制限なし
0.053
(1.35)
0.056
(1.42)
20.0
(50.8)
25.0
(63.5)
29.0
(73.7)
36.0
(91.4)
22.0
(55.9)
制限なし
33.0
(83.8)
制限なし
0.060
(1.52)
0.063
(1.60)
25.0
(63.5)
31.0
(78.7)
35.0
(88.9)
43.0
(109.2)
25.0
(63.5)
制限なし
39.0
(99.1)
制限なし
0.067
(1.70)
0.070
(1.78)
29.0
(73.7)
36.0
(91.4)
41.0
(104.1)
51.0
(129.5)
33.0
(83.8)
制限なし
51.0
(129.5)
制限なし
0.080
(2.03)
0.084
(2.13)
38.0
(96.5)
47.0
(119.4)
54.0
(137.2)
66.0
(167.6)
42.0
(106.7)
制限なし
64.0
(162.6)
制限なし
0.093
(2.36)
0.097
(2.46)
47.0
(119.4)
59.0
(149.9)
68.0
(172.7)
84.0
(213.4)
52.0
(132.1)
制限なし
80.0
(203.2)
制限なし
0.108
(2.74)
0.111
(2.82)
60.0
(152.4)
74.0
(188.0)
84.0
(213.4)
103.0
(261.6)
63.0
(160.0)
制限なし
97.0
(246.4)
制限なし
0.123
(3.12)
0.126
(3.20)
73.0
(185.4)
90.0
(228.6)
103.0
(261.6)
127.0
(322.6)
注a) 表17及び表18への参照について,堅固に取り付け,かつ,基本的に外郭の表面が外形と同じ寸法であって,
ひずませた場合,外郭の表面を通して,加える曲げ応力に耐える十分なねじれ鋼性をもつ支持フレームは,金
属薄板の山形,溝形又は折り曲げ部のような構造である。同等の補強をもつとみなす構造は,山形又は溝形の
フレームで構成する場合と同等の堅固であり,構造を作り出し,構造によって達成する可能性がある。支持フ
レームなしであっても同等の補強をもつとみなす構造は,次を含む。
a) 一つの成形したフランジ又は成形した端部をもつ1枚の薄板
b) 波形又はうね付きにする1枚の薄板
c) 例えば,ばねクリップで,緩くフレームに取り付けた外郭の表面
b) 幅は,外郭の一部であって,薄板の長方形の小片より小さな寸法である。外郭の隣接した表面は,共通の支持
体をもっていてもよく,1枚の薄板で作られていてもよい。
c) “制限なし”は,表面の端部が0.5インチ(12.7 mm)以上のフランジ加工しているが,又は通常使用中に取り
外さない隣接した表面に固定する場合だけ適用する。
d) 屋外の使用を意図した外郭用の金属薄板は,亜鉛めっき処理で厚さ0.003 4インチ(0.86 mm)以上,及びコー
ティングしていない場合,亜鉛の表面処理なしで,厚さ0.032インチ(0.81 mm)以上でなければならない。
99
C 9730-1:2019
表18−アルミニウム,銅又は黄銅製の外郭の最小板厚
支持フレームなしa)
支持フレームあり,又は同等の補強a)
最大幅b)
単位:インチ(cm)
最大長さc)
単位:インチ(cm)
最大幅b)
単位:インチ(cm)
最大長さc)
単位:インチ(cm)
最大厚さ
単位:インチ(cm)
3.0
(7.6)
制限なし
7.0
(17.8)
制限なし
0.023 d) (0.58)
3.5
(8.9)
4.0
(10.2)
8.5
(21.6)
9.5
(24.1)
4.0
(10.2)
制限なし
10.0
(25.4)
制限なし
0.029
(0.74)
5.0
(12.7)
6.0
(15.2)
10.5
(26.7)
13.5
(34.3)
6.0
(15.2)
制限なし
14.0
(35.6)
制限なし
0.036
(0.91)
6.5
(16.5)
8.0
(20.3)
15.0
(38.1)
18.0
(45.7)
8.0
(20.3)
制限なし
19.0
(48.3)
制限なし
0.045
(1.14)
9.5
(24.1)
11.5(29.2)
21.0
(53.3)
25.0
(63.5)
12.0
(30.5)
制限なし
28.0
(71.1)
制限なし
0.058
(1.47)
14.0
(35.6)
16.0
(40.6)
30.0
(76.2)
37.0
(94.0)
18.0
(45.7)
制限なし
42.0
(106.7)
制限なし
0.075
(1.91)
20.0
(50.8)
25.0
(63.4)
45.0
(114.3)
55.0
(139.7)
25.0
(63.5)
制限なし
60.0
(152.4)
制限なし
0.095
(2.41)
29.0
(73.7)
36.0
(91.4)
64.0
(162.6)
70.0
(198.1)
37.0
(94.0)
制限なし
87.0
(221.0)
制限なし
0.122
(3.10)
42.0
(106.7)
53.0
(134.6)
93.0
(236.2)
114.0
(289.6)
52.0
(132.1)
制限なし
123.0
(312.4)
制限なし
0.153
(3.89)
60.0
(152.4)
74.0
(188.0)
130.0
(330.2)
160.0
(406.4)
注a) 表17及び表18への参照について,堅固に取り付け,かつ,基本的に外郭の表面が外形と同じ寸法であ
って,ひずませた場合,外郭の表面を通して,加える曲げ応力に耐える十分なねじれ鋼性をもつ支持フ
レームは,金属薄板の山形,溝形又は折り曲げ部のような構造である。同等の補強をもつとみなす構造
は,山形又は溝形のフレームで構成する場合と同等の堅固であり,構造を作り出し,構造によって達成
する可能性がある。支持フレームなしであっても同等の補強をもつとみなす構造は,次を含む。
a) 一つの成形したフランジ又は成形した端部をもつ1枚の薄板
b) 波形又はうね付きにする1枚の薄板
c) 例えば,ばねクリップで,ゆるくフレームに取り付けた外郭の表面
b) 幅は,外郭の一部であって,薄板の長方形の小片より小さな寸法である。外郭の隣接した表面は,共通
の支持体をもっていてもよく,1枚の薄板で作られていてもよい。
c) “制限なし”は,表面の端部が0.5インチ(12.7 mm)以上のフランジ加工しているか,又は通常使用中
に取り外さない隣接した表面に固定する場合だけ適用する。
d) 屋外(防雨又は防滴)の使用を意図した外郭用の金属薄板は,亜鉛めっき処理で厚さ0.002 9インチ(0.74
mm)以上でなければならない。
18.4.1 鋳造された金属の厚さは,電線管用のねじ込み穴において,3 mm〜6 mmでなければならない。た
だし,電線管用の平面又はねじ込み用の孔以外の箇所では,ダイキャスト金属の厚さは,150 mm2以下で
全ての寸法が,150 mm以下の領域の場合1.6 mm以上,それより大きい領域の場合2.4 mm以上としても
よい。
18.5 自立構造形制御装置
18.5.1 自立構造形制御装置は,図4に示す装置を用いて,18.5.2及び18.5.3の追加試験を行う。
18.5.2 10.1.4で使用する最もグレードの低いタイプの可とうコード2 mを入力端子に接続し,製造業者の
意図するとおりに固定する。出力端子に接続した可とうコードと共に使用する制御装置は,長さ2 mの最
もグレードの低いタイプのコードを図4に示すように接続し,配置する。
サンプルは,図のとおりガラス表面上に立てるか,又は横にする。コードは,表9に示す値まで徐々に
増加し,静的な引張力を加える。ただし,その値を超えてはならない。試料が動いたとき,できる限りゆ
100
C 9730-1:2019
っくりガラス表面から引っ張り,コンクリートの裏打ちがある硬木基台の上に落下させる。
基台の上にある表面の高さは,0.5 mとする。硬木及びコンクリート基台の寸法は,その制御装置が落
下後,その上にとどまることを保証するのに十分な寸法とする。
試験は,3回繰り返す。
18.5.3 試験後,サンプルは18.1.5の要求事項によって判定する。
18.6 インラインコード形制御装置
18.6.1 自立構造形制御装置以外のインラインコード形制御装置は,更に図5に示すタンブリングバレルで
試験する。バレルの幅は200 mm以上で,18.6.2で規定するコードを取り付けたとき,制御装置の連続落
下を確実にするために必要である幅とする。
18.6.2 X形取付けを使用する非着脱式コードをもつ制御装置は,10.1.4で規定する最小断面積であって,
長さ約50 mmの可とうコード又は複数のコードを取り付ける。端子ねじを,19.1に規定するトルクの3分
の2のトルクで締め付ける。M形取付け,Y形取付け又はZ形取付けの非着脱式コードをもつ制御装置は,
製造業者によって指定又は供給されたコード又は複数のコードを用いて試験する。使用するコード又は複
数のコードは,約50 mmのコードの長さが制御装置から突き出すように切断する。
18.6.3 コードのないサンプルは,厚さ3 mmの鋼板上に高さ50 cmから落下させる。落下回数は,次によ
る。
− サンプルの質量が100 g以下の場合,1 000回
− サンプルの質量が100 g超え,200 g以下の場合,500回
18.6.4 質量が200 gを超えるインラインコード形制御装置は,タンブリングバレル中では試験せず18.5
で規定する試験を行う。
18.6.5 バレルは,毎分5回転の速度で回転させる。この状態で,毎分10回落下させる。
18.6.6 試験後,制御装置は18.1.5の要求事項によって判定する。可とうコード又は複数のコードの接続部
には,特に注意する。
18.7 引きひも操作制御装置
18.7.1 引きひも操作制御装置は,18.7.2及び18.7.3の試験を追加して行わなければならない。
18.7.2 制御装置を,製造業者が指定するように取り付け,引きひもを一気に引っ張ることなく滑らかに力
を加える。まず通常の方向に1分間,次に,最も不利な方向に1分間加える。ただし,通常の方向から45゜
以内とする。
18.7.3 引張力の値は,表19による。
表19−引きひもの引張力
定格電流
A
引張力
N
通常の方向
最も不利な方向
4以下
50
25
4を超え
100
50
18.7.4 試験後,制御装置は18.1.5によって判定する。
18.8 足で操作する制御装置
18.8.1 足で操作する制御装置は,次の試験を追加して行わなければならない。
18.8.2 制御装置は,直径50 mmの円形圧力鋼板によって力を加える。力は連続的に初期値約250 Nから
101
C 9730-1:2019
750 Nまで1分以内に増加させる。この後,この状態で1分間維持する。
18.8.3 制御装置は,該当する可とうコードを付けた状態で,平たんな水平鋼製支持物の上に置く。力は,
サンプルを異なる位置に配置した状態で3回加える。最も不利な位置を選択する。
18.8.4 試験後,制御装置は18.1.5によって判定する。
18.9 操作部及び操作手段
18.9.1 操作部と共に供給される,又は操作部と共に取り付ける意図の制御装置は,次のとおり試験する。
a) 軸方向の引張力を操作部を引き外すように1分間加える。
b) 形状が,軸方向の引張力を通常使用状態において加えることが不可能である場合,a)の試験は,適用
しない。
c) 通常使用状態において,軸方向の引張力が操作部の形状に加わるおそれがない場合,力は15 Nとする。
d) 形状が,軸方向の引張力が加わるおそれがある場合,力は30 Nとする。
e) 次に,30 Nの軸方向の押圧力を1分間,全ての操作部に加える。
18.9.2 制御装置が,操作部をもつことを意図しているが,操作部を後付けするもの,又は容易に外すこと
ができる操作部を備えているものは,30 Nの引張力及び押圧力を操作手段に加える。
注記 自己硬化性樹脂以外のシーリングコンパウンド及び類似のものは,緩みを防止するのに十分で
はない。
18.9.3 各試験の間及び試験後,制御装置は損傷を示してはならない。また,操作部は,移動してはならな
い。疑義がある場合,この規格の該当する箇条によって判定する。
19 ねじ山付き部品及び接続部
19.1 取付け又はサービス中に動かすねじ山付き部品
19.1.1 制御装置を取り付けている間又はサービス中に動かされる可能性があるねじ山付き部品は,電気的
であっても,その他のものであっても,通常使用状態で発生する機械的ストレスに耐えなければならない。
注記 制御装置を取り付けている間又はサービス中に動かすねじ山付き部品には,端子ねじ,コード
止めねじ,固定用及び取付用ねじ,ナット,ねじを切ったリング,カバー板ねじのようなもの
がある。
19.1.2 ねじ山付き部品は,完全に外すことができる場合,容易に交換ができなければならない。
注記 ねじ山付き部品の完全な取外しを制限する構造は,この要求事項を満たしているとみなしてい
る。
19.1.3 ねじ山付き部品は,ISOメートルねじ又は同等のねじ山をもたなければならない。
注記 SI,BA及びユニファイねじは,ISOメートルねじと同等の有効性があるものとみなしている。
ISO,SI,BA及びユニファイねじ以外のねじの場合の同等の有効性をもつ試験は,検討中であ
って,それは,トルク値を20 %増加させるものである。
19.1.4 ねじ山付き部品がねじであって,かつ,それが別の部分にねじ山を作る場合,そのねじは,スレッ
ドカッティング形のものであってはならない。ねじは,スレッドフォーミング(スウェージング)形のも
のであってもよい。そのようにして作られたスレッドフォーミング形のものは形状を問わない。
19.1.5 上記のねじは,緩みを防止する適切な装置を装備する場合,スペーススレッド(シートメタル)形
のものであってもよい。
注記 シートメタルねじの緩み防止に適切な装置は,スプリングナット,類似の弾性があるその他の
構成部品又は弾性材でできたねじ山である。
102
C 9730-1:2019
19.1.6 上記のねじ山付き部品は,寸法的に類似の金属ねじに交換した場合,非金属材料製であってはなら
ない。疑義がある場合,箇条13及び/又は箇条20によって判定する。
19.1.7 上記のねじは,亜鉛又はアルミニウムのような軟らかい又はクリープしやすい金属であってはなら
ない。
この要求事項は,設定手段に対する接近を制限するカバーとして使用する部品又はガス制御装置の流量
又は圧力調整装置のような設定手段として使用する部分には適用しない。
19.1.8 非金属材料製のねじ山の中で作用するねじは,その受入れ側にそのねじを適切に挿入することが確
実でなければならない。
注記 非金属材料製ねじ山に金属ねじを適切に挿入することの要求事項は,斜めにねじを挿入するこ
とが,例えば,ねじ又はめねじ山中のくぼみによって固定する部分を導くことによって,又は
引込みねじ山を除いた状態のねじの使用によって防止する場合,満たすことができる。
19.1.9 インラインコード形制御装置用に使用したとき,上記のねじ山付き部品は,接触圧を伝達している
場合,及び呼び径が3 mm未満である場合,金属ねじにねじ込まれなければならない。非金属材料製の場
合,3 mm以上の呼び径をもたなければならない。また,非金属材料製のねじ山付き部品は,電気的接続
用に使用してはならない。
19.1.10
19.1.1〜19.1.9の適否は,19.1.11〜19.1.15の試験によって判定する。
19.1.11
ねじ山付き部品は,次の回数を締め付け,そして緩める。
− ねじ山付き部品のうち片方が,非金属材料製である場合,10回
− ねじ山付き部品の両方が,金属材料製である場合,5回
19.1.12
非金属材料製のねじ1山とかみ合っているねじは,毎回完全に外し,再挿入する。端子ねじ及び
ナットを試験するときに,10.1.4で規定する最大断面積又は10.2.1に規定する最小断面積の導体を端子中
に配置する。
19.1.13
ねじ回しの形状は,試験するねじ頭部に合うことが望ましい。
19.1.14
導体は,ねじ山付き部品を緩めるごとに動かす。試験中,ねじ山付き部品の更なる使用を阻害す
る損傷,例えば,ねじの破損又はすりわり付き頭部若しくは座金の損傷が発生してはならない。
19.1.15
試験は,表20に示すトルクを急激ではなく,滑らかに加えながら適切な試験用ねじ回し,スパ
ナ又はキーを用いて行う。
103
C 9730-1:2019
表20−ねじ山付き部品のトルク試験
ねじ呼び径
mm
トルク
N・m
I
II
III
1.7以下
0.1
0.2
0.2
1.7を超え 2.2以下
0.15
0.3
0.3
2.2を超え 2.8以下
0.2
0.4
0.4
2.8を超え 3.0以下
0.25
0.5
0.5
3.0を超え 3.2以下
0.3
0.6
0.6
3.2を超え 3.6以下
0.4
0.8
0.6
3.6を超え 4.1以下
0.7
1.2
0.6
4.1を超え 4.7以下
0.8
1.8
0.9
4.7を超え 5.3以下a)
0.8
2.0
1.0
5.3を超えa)
−
2.5
1.25
欄Iの使用 ねじを締め付けるとき,その孔から突出していない場合又はねじ回しの接近が,そのね
じの主要な直径に制限される場合,頭なしの金属ねじに適用する。
欄IIの使用
− 次に示すその他の金属ねじ及びナットに適用する。
・ 円筒形頭部及び特殊工具用ソケット付きで,ソケットの対角寸法がねじ外径を超える寸法を
もつもの。
・ 長さがねじ外径の1.5倍を超える,単数又は複数のすりわりをもつ頭付きのもの。
− 非金属材料製で,平たん部の対角寸法がねじの外径より大きい六角頭付きねじに適用する。
欄IIIの使用 非金属材料製のその他のねじに適用する。
注a) 直径が4.7 mmを超え,かつ,単一ブッシュを取り付けて使用するナット及びねじを切ったリ
ングは,1.8 N・mのトルクで試験を行う。ただし,熱可塑性材料を使用する単一ブッシュ取付
の制御装置の場合,及び設定又は再設定のときに何らトルクを生じない場合(例えば,温度過
昇防止装置の場合),取付ねじは,製造業者が指定する最大トルクで試験するが,そのトルク
が0.5 N・m未満であってはならない。
19.2 導電接続
19.2.1 取付け又はサービス中に影響されない導電接続部で,効力又は確実性を,ねじ,ねじ切り部,リベ
ット又はそれに類似したものの圧力によって維持するものは,通常使用状態において発生する機械的,熱
的及び電気的ストレスに耐えなければならない。
19.2.2 通常使用状態でねじりも受ける,例えば,ねじ端子など一体になっているか堅固に接続されている
部品をもつ19.2.1で規定する導電接続部は,いかなる動きに対しても固定していなければならない。疑義
がある場合,箇条13及び/又は箇条20によって判定する。
注記1 この要求事項は,いかなる動きも適切に制限されており,この規格の要求事項を満たす場合
は,導電接続部の回転及び変位を防止するような構造であることを要求していない。
注記2 1個のねじ,リベット又は類似のものによって構成する接続は,その部品自身が部品の間の
機械的相互作用によって,又はばね座金若しくは類似のものの設置によって,上記の運動を
することを防止する場合は十分である。
注記3 通電部分中に開けた適切な形状の穴に一致する非円形又は切れ込み付きの軸をもつ1個のリ
ベットによる接続は,この要求事項を満たしている。複数又はリベットによる接続部も,こ
の要求事項を満たしている。
注記4 シーリングコンパウンドは,それでシールされた部分が通常使用状態でストレスを受けない
場合に限り使用できる。
104
C 9730-1:2019
19.2.3 19.2.1で規定する導電接続部は,接触圧力がセラミック又はこれと同等以上の適切な特性をもつそ
の他の非金属材料以外の非金属材料を通して,伝達されないような構造でなければならない。ただし,接
続する金属部品中において,非金属材料の収縮又はひずみを補償するために十分な弾性があるときはこの
限りではない。
注記 非金属材料が適切であるかどうかは,その制御装置に適用できる温度範囲内の寸法安定性に関
して考慮する。
19.2.4 19.2.1で規定する導電接続部は,そのねじが相互に直接接触している通電部分を締め付け,かつ,
適切な固定装置を装備している場合を除き,シートメタルねじを使用してはならない。
19.2.4.1 複数のねじを,それぞれの接続に対して用いる場合,シートメタルねじは,接地連続性を提供す
るために用いてもよい。
注記 カナダ及び米国では,設置連続性(接着)を確保するため,1本のねじの使用は,2山以上の全
ねじ山が掛っている場合,許容する。2本のねじを使用する場合,各ねじは,1山の全ねじ山が
掛っていることを要求している。
19.2.5 19.2.1で規定する導電接続部は,スレッドカッティングねじを使用してもよい。ただし,完全形状
の標準機械ねじのねじ山を作るときに限る。
19.2.5.1 複数のねじを,それぞれの接続に対して用いる場合,スレッドカッティングねじは,接地連続性
を提供するために用いてもよい。
注記 19.2.4.1の注記参照。
19.2.6 それらの部品の適切な機能が圧力に依存する上記の導電接続部は,接触面において,黄銅と同等以
上の耐食性をもたなければならない。この要求事項は,その本質的な特性が,例えば,バイメタルの薄板
のようにめっきすることによって悪い影響を受けるおそれがある部品には適用しない。めっきしない場合
は,十分な耐食性をもつ部品と接触するように締め付けなければならない。適切な耐食性は,めっき又は
類似の加工によって達成できる。
19.2.7 19.2.1〜19.2.6の適否は,目視検査によって判定する。さらに,19.2.3及び19.2.6の適否は,箇条
17の試験が完了した後,金属弾性部の目視検査によっても判定する。
20 沿面距離,空間距離及び固体絶縁物を通しての距離
制御装置は,想定できる電気的ストレスに対し,十分に耐えることができる空間距離,沿面距離及び固
体絶縁物を通しての距離を備えるような構造でなければならない。
JIS C 60664-3に規定するタイプ2保護に対する全ての要求事項を満たしているプリント配線板は,固体
絶縁物に対する20.3の要求事項を満たさなければならない。タイプ2保護の場合,導体間の距離は,JIS C
60664-3の表1に規定する値以上でなければならない。附属書Qにもよる。
外部導体を接続するための端子間の沿面距離及び空間距離は,2 mm,又は表22若しくは表24に規定す
る値のいずれか大きい方の値以上でなければならない。この要求事項は,製造業者が導体を接続する端子
部又はELV回路に接続する端子には適用しない。
スイッチモード電源回路又は基本周波数が30 kHzを超え10 MHz未満のその他の高周波スイッチング回
路内の沿面距離,空間距離及び固体絶縁を通しての距離は,JIS C 60664-4の規定による寸法でなければな
らない。
この箇条内の表の値は,全ての製造状態及び機器の使用期間を通して維持しなければならない絶対的な
最小値である。
105
C 9730-1:2019
(U.20にもよる。)
適否は,目視検査,測定及びこの箇条の試験によって判定する。
注記1 要求事項及び試験は,JIS C 60664-1を基礎としている。これ以上の情報は,当該規格から得
られる。
注記2 沿面距離は,それと関連する空間距離よりも小さくはできない。可能な沿面距離の最小値は,
空間距離と等しい。
注記3 指針については,附属書Sを参照。
20.1 空間距離
空間距離は,汚損度及び表21の過電圧カテゴリに従って要求される定格インパルス電圧を考慮して,表
22のケースAの値以上でなければならない。ただし,基礎絶縁及び機能絶縁については,制御装置が20.1.12
のインパルス耐電圧試験に耐え,かつ,その部品が堅固である場合若しくは成形(モールド)によって保
護されている場合,又はその構造が変形,若しくは例えば,動作中又は組込みによって部品の運動によっ
て距離が減少するようなおそれのない構造の場合,より小さい値を用いてもよいが,その場合でも,ケー
スBの値未満になってはならない。
適否は,目視検査,測定及び必要な場合,20.1.12の試験によって判定する。
注記1 制御装置は,特別な環境条件で他のカテゴリが適切である場合を除き,通常それが用いられ
る機器の過電圧カテゴリの要求事項を満たすことが期待される。附属書Lに指針を示す。
注記2 表22のケースAに従った最小寸法で構成されている制御装置では,20.1.12のインパルス試
験を行う必要はない。ケースA及びケースBについてのこれ以上の情報については,JIS C
60664-1の5.1.3.2及び5.1.3.3を参照。
取外し可能な部分は,取り外す。空間距離は,可動部及び六角ナットのような取付方向を変えて組み込
めるものは,最も不利な条件で測定する。
裸導体及び可触表面には,測定するときに空間距離を減少させるように次の力を加える。
− 裸導体には,2 N
− 可触表面には,30 N
力は,図2に示す標準試験指によって加える。開口部は,平面金属片によって覆われているものとみな
す。
注記3 空間距離は,附属書Bに示すように測定する。
106
C 9730-1:2019
表21−商用主電源から直接給電される機器のための定格インパルス電圧(JIS C 60664-1の表F.1から引用)
単位 V
IEC 60038に基づく
給電系統の公称電圧a), b)
交流又は直流公称電圧,
充電線の対地電圧
(次の値以下)
過電圧カテゴリに従って要求される
定格インパルス電圧c)
三相4線系統a)
単相系統d)
I
II
III
IV
−
−
−
50
330
500
800
1 500
100
500
800
1500
2 500
−
−
100
100-200
150 aa)
800
1500
2500
4 000
200
230/400
−
300
1500
2500
4000
6 000
−
−
−
600
2500
4000
6000
8 000
注a) 掲げられている最初の値は,三相4線系統の対地電圧の値で,2番目の数字は,線間電圧である。
b) 例えば,切換装置のように,制御装置の端子部で過電圧を発生するおそれのあるものでは,定格インパルス
電圧とは,関連規格及び製造業者の指示に従って使用したとき,この電圧以上の過電圧を発生してはならな
いことを示している。
c) 過電圧カテゴリについては附属書L,その適用指針については附属書Mによる。過電圧カテゴリは,JIS C 9730
の規格群の関連する第2部又は最終製品の規格に規定する場合がある。
d) その他の供給系統については,附属書Kを参照(例えば,幾つかの三相系統は,三線式のものが同じ電圧の
三相4線系統よりも高いインパルス耐電圧が要求されることに注意する。)。
aa) 我が国では,給電系統の公称(対地)電圧100 Vは,150 Vの欄を適用する(附属書K参照)。
表22−絶縁協調のための空間距離(JIS C 60664-1の表F.2から引用)
表21から
得られる定格
インパルス
電圧a)
kV
海抜2 000 mまでの空気中空間距離b)
mm
ケースA
ケースB
(インパルス耐電圧試験が要求される−
20.1.12参照)
汚損度c)
汚損度c)
1
2
3
4
1
2
3
4
0.33
0.01
0.2
0.8
1.6
0.01
0.2
0.8
1.6
0.50
0.04
0.04
0.80
0.10
0.10
1.5
0.5
0.5
0.3
0.3
2.5
1.5
1.5
1.5
0.6
0.6
4.0
3.0
3.0
3.0
3.0
1.2
1.2
1.2
6.0
5.5
5.5
5.5
5.5
2.0
2.0
2.0
2.0
8.0
8.0
8.0
8.0
8.0
3.0
3.0
3.0
3.0
注記 空間距離の小さな値の部分においては,電界の均一性が汚損の存在によって低下する。このため,ケースB
の空間距離値より増加させることが必要となる。
注a) 機能絶縁の場合,定格インパルス電圧は,製造業者が指定している場合を除き,空間距離における電圧測定
値を示す表21の値を用いる。降圧変圧器の二次巻線が接地してある場合,又は接地した遮蔽体が一次巻線と
二次巻線との間にある場合,二次側の基礎絶縁の空間距離に対する定格インパルス電圧の基準は,変圧器の
一次側の定格入力電圧に対する基準より1ステップ低くしなければならない。
接地した保護遮蔽体をもたない絶縁変圧器を使用する場合,定格インパルス電圧は低減できない。
b) 海抜2 000 mを超える場合,空間距離の値は,JIS C 60664-1の表A.2に規定している補正係数を乗じる。
c) 汚損度の説明は,附属書Nに示す。
20.1.1 基礎絶縁の空間距離は,定格インパルス電圧を考慮して,使用時に予測する過電圧に十分耐えなけ
ればならない。20.1.7で許容する場合を除き,表22のケースAの値を用いる。
107
C 9730-1:2019
適否は,測定によって判定する。
20.1.1.1 制御装置は,外部電源から充電する機能をもたない専用電池から電源給電する場合,定格インパ
ルス電圧は,71 Vピークと仮定する。
20.1.2 機能絶縁に対しては,次のいずれかの場合を除き,表22のケースAを適用する。
− 20.1.7を適用する場合。
− 空間距離を短絡してもH.27.1.1.3を満たしている場合には,電子制御装置に対して空間距離は規定し
ない。
20.1.3 20.1の適否は,附属書B及び図17に示す方法を用いて測定することによって判定する。
20.1.3.1 機器用インレット又はコンセントを備えている制御装置の場合,測定は2回行う。1回は適切な
コネクタ又はプラグを接続して行い,残りの1回はコネクタ又はプラグを接続せずに行う。
20.1.3.2 外部導体に接続する端子の測定は,2回行う。1回は10.1.4で用いられる最大断面積の導体を接
続して行い,残りの1回は導体を接続しないで行う。
20.1.3.3 内部導体を接続する端子については,測定は2回行う。1回は10.2.1で用いられる最小断面積の
導体を接続して行い,残りの1回は導体を接続せずに行う。
20.1.4 絶縁材料製の表面に開けた溝又は開口部を通しての距離は,表面と接触している金属はくまでを測
定する。金属はくは,図2に示す標準試験指によって隅などに押し込むが,開口部には押し込まない。
20.1.5 標準試験指は,8.1に規定する開口部に適用する。その場合,充電部と金属はくとの間の絶縁を通
しての距離は,規定する値未満になってはならない。
20.1.6 必要である場合,制御装置を取り付ける前に可触である裸の充電部上の点に,及び制御装置を取り
付けた後,可触である表面の外側に力を加える。測定を行っている間,沿面距離,空間距離及び絶縁物を
通しての距離を減少するように試みる。
20.1.6.1 力は標準試験指によって加え,その値は,次による。
− 裸充電部に対しては,2 N
− 可触表面に対しては,30 N
適否は,測定,及び必要である場合試験によって判定する。
20.1.7 基礎絶縁及び機能絶縁では,20.1.12のインパルス耐電圧試験を満たし,かつ,その部分が剛性で
あるか若しくは成形されている,又はその構造が変形,部品の運動若しくは組立てによって距離が減少す
ることがない場合には,より小さな値を用いることができる。ただし,いずれの場合も,空間距離はケー
スBの値未満になってはならない。
適否は,20.1.12の試験によって判定する。
機能絶縁を試験する場合,インパルス電圧は,空間距離の両端に加える。
注記 インパルス試験を行う場合,制御装置の部分又は構成部品を切り離す必要のある場合がある。
20.1.7.1 マイクロ断路及びマイクロ開路では,接点間及び接点の動きによって,空間距離が変化する通電
部間に最小空間距離は規定しない。
20.1.7.2 完全断路については,接点が完全な開位置にあるとき,表22のケースAに規定する値を,接点
によって分離された部分及び接点間隔に適用する。
20.1.8 付加絶縁の空間距離は,表22のケースAに規定する基礎絶縁に対する規定値以上でなければなら
ない。
適否は,測定によって判定する。
20.1.9 強化絶縁の空間距離は,基準となる定格インパルス電圧の一段上の電圧を用いて表22のケースA
108
C 9730-1:2019
の値を適用しなければならない。
注記 二重絶縁において,基礎絶縁と付加絶縁との中間に導電部がない場合,空間距離は,充電部と
可触表面又は可触金属部との間で測定する。この絶縁システムは,強化絶縁として扱う。
適否は,測定によって判定する。
20.1.10
制御装置又は制御装置の一部であって,二重絶縁を備えた変圧器から電圧を供給されている部分
で二次側にある機能絶縁及び基礎絶縁の空間距離は,二次側電圧を基礎として定めるが,その値は,表21
の公称電圧を基準とする。
注記1 一つの分離巻線の変圧器の使用では,過電圧カテゴリの変更はできない。
分離巻線を用いない変圧器から得る供給電圧の場合,表21から決定するインパルス耐電圧は,降圧変圧
器の場合,一次側電圧を基礎とし,昇圧変圧器の場合,二次側電圧の測定最高電圧の実効値を基礎とする。
幾つかの状態,例えば,高電圧着火装置に対しては,JIS C 9730の規格群の関連する第2部で,異なっ
た基準を規定する場合がある。
JIS C 60664-1の表F.2(過渡過電圧に耐える空間距離)においては,より高いインパルス耐電圧に対す
る空間距離を与えている。
注記2 箇条24も適用する。
適否は,必要である場合,測定又は試験によって判定する。
20.1.11
保護インピーダンスから得る特別低電圧を備えた回路では,機能絶縁の空間距離は,特別低電圧
回路内の動作電圧の最大測定値を基準として,表21から決定する。
20.1.12
インパルス耐電圧試験が要求される場合,JIS C 60664-1の6.1.2.2.1(インパルス耐電圧試験)に
従って適用する。
JIS C 9730の規格群の関連する第2部において,環境試験条件を規定する場合がある。
基礎絶縁又は機能絶縁で分離されている充電部と金属部との間に,インパルス電圧を加える。
注記 必要な場合,機能絶縁の制御装置の部分又は構成部品を取り外す。
20.1.13
変圧器の二次巻線が接地されている場合,又は接地した遮蔽体が一次巻線と二次巻線との間にあ
る場合,二次側の基礎絶縁の空間距離は,表22に規定する空間距離以上でなければならないが,定格イ
ンパルス電圧に対する次に低いステップを基準として用いる。
注記 接地した保護遮蔽体がない又は二次巻線を接地してない絶縁変圧器を使用する場合,定格イン
パルス電圧は低減できない。
定格電圧より低い電圧が供給される回路の場合,例えば,変圧器の二次側では,機能絶縁の空間距離は,
表21で定格電圧(公称電圧)としている箇所を,動作電圧に基づいたものとする。
20.1.14
空間距離
空間距離は,J.20.1.14による。
20.1.15
電子制御装置
電子制御装置は,H.20.1.15による。
20.2 沿面距離
20.2.1 制御装置は,基礎絶縁の沿面距離が,材料グループ及び汚損度を考慮して,定格電圧に対する表
23に規定する値以上の構造でなければならない。
沿面距離を短絡してもH.27.1.1.3を満たしている場合には,電子制御装置に対して沿面距離は規定しな
い。
適否は,目視検査及び測定によって判定する。
109
C 9730-1:2019
取外し可能な部分は,取り外す。沿面距離は,可動部及び取付方向を変えて組立てできる部分は,最も
不利な位置にして測定する。ただし,平面金属片によって覆われている開口部は除く。
裸導体及び可触表面には,測定するときに沿面距離を減少させるように次の力を加える。
− 裸導体には,2 N
− 可触表面には,30 N
力は,図2に示す標準試験指によって加える。
注記 沿面距離は,附属書Bに示すように測定する。
20.2.2 制御装置は,機能絶縁の沿面距離が,材料グループ及び汚損度を考慮して,動作電圧に対する表
24に規定する値以上となる構造でなければならない。
幾つかの状態,例えば,高電圧着火装置に対しては,JIS C 9730の規格群の関連する第2部で,異なっ
た基準を規定する場合がある。
適否は,目視検査及び測定によって判定する。
取外し可能な部分は,取り外す。沿面距離は,可動部及び取付方向を変えて組立てできる部分は,最も
不利な状態にして測定する。
裸導体及び可触表面には,測定するときに沿面距離を減少させるように次の力を加える。
− 裸導体には,2 N
− 可触表面には,30 N
力は,図2に示す標準試験指によって加える。開口部は,平面金属片によって覆われているものとみな
す。
注記1 沿面距離は,附属書Bに示すように測定する。
注記2 材料グループと保証トラッキング指数(PTI)との関係は,6.13に示している。
PTIの値は,JIS C 2134によって,溶液Aを使って測定する。
PTIの値が,その材料グループを満たすことが既に判明しているものは,試験を省略でき
る。
注記3 絶縁協調の目的で,ガラス,磁器,その他の無機絶縁材料でトラックを生じないものの沿面
距離は,関連する空間距離よりも大きくする必要はない。
110
C 9730-1:2019
表23−基礎絶縁の最小沿面距離
定格電圧
V
沿面距離a)
mm
プリント配線板材b)
それ以外の材料
汚損度
1 c),2 d)
2 d)
1
2
3
4
材料グループ
材料グループ
材料グループ
I
II
III e)
I
II
III e)
I
II
III e)
50以下
0.025
0.04
0.2
0.6
0.9
1.2
1.5
1.7
1.9
2.0
2.5
3.2
125以下
0.16
0.25
0.3
0.8
1.1
1.5
1.9
2.1
2.4
2.5
3.2
4.0
250以下
0.56
1
0.6
1.3
1.8
2.5
3.2
3.6
4.0
5.0
6.3
8.0
400以下
1
2
1.0
2.0
2.8
4.0
5.0
5.6
6.3
8.0
10.0
12.5
500以下
1.3
2.5
1.3
2.5
3.6
5.0
6.3
7.1
8.0
10.0
12.5
16.0
630以下
1.8
3.2
1.8
3.2
4.5
6.3
8.0
9.0
10.0
12.5
16.0
20.0
800以下
2.4
4
2.4
4.0
5.6
8.0
10.0
11.0
12.5
16.0
20.0
25.0
注a) 巻線のラッカーを塗布した導体は,裸導体とみなす。ただし,沿面距離は,表22に規定する関連す
る空間距離よりも大きくすることは要求しない。
b) プリント回路板が,附属書P又はQ.1によって塗装されており,かつ,その塗装のPTIが175以上で
ある場合,汚損度1の値を適用する。そのPTIは,JIS C 2134によって測定されたものとする。
c) 材料グループI,II,IIIa及びIIIbとする。
d) 材料グループI,II及びIIIaとする。
e) 材料グループIIIは,IIIa及びIIIbを含む。材料グループIIIbは,630 Vを超える用途,又は汚損度4
の用途には認められない。
適否は,測定によって判定する。
111
C 9730-1:2019
表24−機能絶縁の最小沿面距離
動作電圧
rms a)
V
沿面距離b), c)
mm
プリント配線板材d)
それ以外の材料
汚損度
1 e)
2 f)
1
2
3
4
材料グループ
材料グループ
材料グループ
I
II
III
I
II
III g)
I
II
III g)
10
0.025
0.04
0.08
0.40
0.40
0.40
1
1
1
1.6
1.6
1.6
12.5
0.025
0.04
0.09
0.42
0.42
0.42
1.05
1.05
1.05
1.6
1.6
1.6
16
0.025
0.04
0.1
0.45
0.45
0.45
1.1
1.1
1.1
1.6
1.6
1.6
20
0.025
0.04
0.11
0.48
0.48
0.48
1.2
1.2
1.2
1.6
1.6
1.6
25
0.025
0.04
0.125
0.5
0.5
0.5
1.25
1.25
1.25
1.7
1.7
1.7
32
0.025
0.04
0.14
0.53
0.53
0.53
1.3
1.3
1.3
1.8
1.8
1.8
40
0.025
0.04
0.16
0.56
0.8
1.1
1.4
1.6
1.8
1.9
2.4
3
50
0.025
0.04
0.18
0.6
0.85
1.2
1.5
1.7
1.9
2
2.5
3.2
63
0.04
0.063
0.2
0.63
0.9
1.25
1.6
1.8
2
2.1
2.6
3.4
80
0.063
0.1
0.22
0.67
0.95
1.3
1.7
1.9
2.1
2.2
2.8
3.6
100
0.1
0.16
0.25
0.71
1
1.4
1.8
2
2.2
2.4
3
3.8
125
0.16
0.25
0.28
0.75
1.05
1.5
1.9
2.1
2.4
2.5
3.2
4
160
0.25
0.4
0.32
0.8
1.1
1.6
2
2.2
2.5
3.2
4
5
200
0.4
0.63
0.42
1
1.4
2
2.5
2.8
3.2
4
5
6.3
250
0.56
1
0.56
1.25
1.8
2.5
3.2
3.6
4
5
6.3
8
320
0.75
1.6
0.75
1.6
2.2
3.2
4
4.5
5
6.3
8
10
400
1
2
1
2
2.8
4
5
5.6
6.3
8
10
12.5
500
1.3
2.5
1.3
2.5
3.6
5
6.3
7.1
8
10
12.5
16
630
1.8
3.2
1.8
3.2
4.5
6.3
8
9
10
12.5
16
21
800
2.4
4
2.4
4
5.6
8
10
11
12.5
16
20
25
注a) より高い電圧に対しては,JIS C 60664-1の表F.4(トラッキングによる障害を回避するための沿面距
離)の値を適用する。
b) ガラス,磁器その他の無機材料で,トラックを生じないものは,沿面距離は,関連する空間距離より
大きくする必要はない。
c) 端子と終端との間以外のマイクロ開路に対する要求事項はない。端子と終端との間に対する要求事項
は,この表に示すとおりとする。
d) プリント回路板が,附属書P又はQ.1によって塗装されており,かつ,その塗装のPTIが175以上の
場合,汚損度1の値を適用する。PTIは,JIS C 2134によって測定する。
e) 材料グループI,II,IIIa及びIIIbとする。
f) 材料グループI,II及びIIIaとする。
g) 材料グループIIIは,IIIa及びIIIbを含む。材料グループIIIbは,630 Vを超える用途,又は汚損度4
の用途には認められない。
適否は,目視検査によって判定する。
20.2.3 付加絶縁の沿面距離は,材料グループ及び汚損度を考慮して,基礎絶縁に対する規定値以上でなけ
ればならない。
適否は,目視検査及び測定によって判定する。
20.2.4 強化絶縁の沿面距離は,材料グループ及び汚損度を考慮して,基礎絶縁に対する規定値の2倍以上
でなければならない。
適否は,目視検査及び測定によって判定する。
112
C 9730-1:2019
20.2.5 沿面距離
沿面距離は,J.20.2.5による。
20.3 固体絶縁
固体絶縁は,電気的及び機械的ストレスに恒久的に耐えなければならない。また,機器の使用期間中に
発生する熱的及び環境的影響にも恒久的に耐えなければならない。
20.3.1 基礎絶縁及び機能絶縁に対する厚さの寸法要求事項はない。
20.3.2 300 V以下の動作電圧の場合,付加絶縁及び強化絶縁を通しての金属部品間の距離は,0.7 mm以上
でなければならない。
注記 これは,固体絶縁だけの厚さということを意味していない。絶縁は,固体材料と1層又は複数
の層の空気とで構成してもよい。
基礎絶縁と付加絶縁との間に金属がない二重絶縁を施した部品をもつ制御装置の場合,測定は2層の絶
縁の間に金属はくがあるものとみなす。
20.3.2.1 マイカ又は類似のりん(鱗)片状材料を除き,絶縁に薄いシート形状を適用する場合,次の試験
を満たさなければならない。ただし,20.3.2の要求事項は適用しない。
− 2層以上で構成する付加絶縁の場合,各層は付加絶縁に関する13.2の耐電圧試験
− 3層以上で構成する強化絶縁の場合,いずれか2層が一体となって13.2の耐電圧試験
適否は,目視検査及び試験によって判定する。
20.3.2.2 20.3.2の要求事項は,付加絶縁又は強化絶縁が接触可能ではなく,また,次の基準のいずれかを
満たしている場合は適用しない。
− 箇条27及びH.27の試験中に測定した最高温度が,表13に規定する許容値を超えない。
− 箇条14の試験で測定した最高温度より25 K高い温度に維持した炉内で168時間状態調節した後,絶
縁が13.2の耐電圧試験に耐える。この絶縁に対する試験は,炉内の規定温度において,また,ほぼ室
温まで冷却した後の両方の場合について実施する。
オプトカプラの場合,状態調節手順は,箇条14,箇条27及びH.27の試験中にオプトカプラで測定した
最高温度より25 K高い温度で実施し,オプトカプラは,試験中に発生する最も厳しい条件で動作させる。
適否は,目視検査及び試験によって判定する。
21 耐熱性,耐火性及び耐トラッキング性
21.1 一般要求事項
制御装置の全ての非金属部は,耐熱性,耐火性及び耐トラッキング性がなければならない。
適否は,21.2の試験によって判定する。ただし,独立取付形制御装置は,21.3の試験によって判定する。
JIS C 60695-2-11:2004の3.1で定義するような小部品には適用しない。
注記 米国では,適否は,附属書Dの手順によって判定する。
21.2 一体形,組込形及びインラインコード形制御装置
次の試験シーケンスを,該当する非金属部の位置又は機能に合わせ,及び指定するボールプレッシャ温
度及びグローワイヤ試験温度で実施しなければならない。
注記 制御装置は,広く異なった最終製品において用いることができる。21.2.1〜21.2.7での試験レベ
ルの選択は,最終製品の要求事項の考慮のために影響されることがある。
21.2.1 制御装置を製造業者が意図する方法で取り付ける場合,可触でその劣化によって制御装置が不安全
になる部品は,次の試験を行う。
113
C 9730-1:2019
− G.5.1のボールプレッシャ試験1
− 550 ℃で実施するG.2のグローワイヤ試験
21.2.2 電気接続部以外の通電部分を正しい位置に保持する部分に対しては,次の試験を行う。
− G.5.2のボールプレッシャ試験2
− 550 ℃で実施するG.2のグローワイヤ試験
注記 H.27.1.1.1で定義する低電力回路の通電部分を正しい位置に保持する部分には,試験を適用しな
い。
21.2.3 電気接続部を正しい位置に維持又は保持する部分に対しては,次の試験を行う。
− G.5.2のボールプレッシャ試験2
さらに,グローワイヤ試験を,制御装置の指定する適切な次の温度で行う。
注記1 詳細情報は,附属書F参照。
650 ℃のグローワイヤ試験
− 650 ℃で実施するG.2のグローワイヤ試験
750 ℃のグローワイヤ試験
− 750 ℃で実施するG.2のグローワイヤ試験
850 ℃のグローワイヤ試験:
− 850 ℃で実施するG.2のグローワイヤ試験
H.27.1.1.1で定義する低電力回路の通電部分を正しい位置に保持する部分には,試験を適用しない。
注記2 制御装置は,異なった最終製品において用いることができる。21.2.1〜21.2.7での試験レベル
の選択は,最終製品の要求事項の考慮のために影響されることがある。
注記3 JIS C 9335規格群の適用範囲に含まれる機器に用いることを意図する制御装置の場合,電気
的接続の3 mm以内の部分に対しては,JIS C 9335-1の30.2に従って確認できる。
21.2.4 その他の全ての部分に対しては,次の試験による。ただし,装飾用内装,ノブなどは除く。
− 550 ℃で実施するG.2のグローワイヤ試験
注記 JIS C 9730の規格群の関連する第2部に別の指示がない場合,仕切板,ガスケット(漏出防止
用の継ぎ目に詰めるパッキング)及びグランドのシーリングリングは,この細分箇条の試験を
行わない。
21.2.5 (規定なし)
21.2.6 (規定なし)
21.2.7 耐トラッキング性
20.2に規定する沿面距離の全ての非金属部は,規定する耐トラッキング性をもたなければならない。
注記1 耐トラッキング性の要求値は,JIS C 9730の規格群の関連する第2部又は関連機器規格のい
ずれかにおいて示される。
特別低電圧における動作用に意図された制御装置には,耐トラッキング試験は行わない。
注記2 制御装置内で異なる部分は,その部分のミクロ環境に該当する異なるPTI値をもってもよい。
適否は,表1の項目30で製造業者が宣言する次のいずれか一つの電圧で実施する,G.4の保証トラッキ
ング試験によって判定する。
− 100 V
− 175 V
− 250 V
114
C 9730-1:2019
− 400 V
− 600 V
注記3 この細分箇条の目的に対しては,アークを発生する接点の近傍は,箇条17の耐久性試験及び
続いて行う箇条13の耐電圧試験がその制御装置内で発生する汚損の影響を決定するのに十
分であるとみなせるため,外部からの導電性物質のたい(堆)の増加は考慮しない。
21.3 独立取付形制御装置
21.3.1の事前状態調節を行い,21.2.1〜21.2.7の試験を連続して適用する。
21.3.1 事前状態調節
事前状態調節は,恒温恒湿槽中で次のとおり実施する。
− T定格(スイッチヘッドの周囲温度限度)がない場合:80±2 ℃において,1×24時間。開閉部分の
回路及び駆動機構は接続せずに,取外し可能なカバーは外した状態とする。
− 温度に対するT定格が85 ℃以下の場合:80±2 ℃で,1×24時間。制御装置及び駆動機構の開閉部
分は接続せずにカバーは外す。次に,カバーを付けてTmax±2 Kで6×24時間。開閉部分の回路及び
駆動機構は接続した状態とする。
− 温度に対するT定格が85 ℃を超える場合:Tmax±2 Kで6×24時間。カバーは付けて開閉部分の回路
及び駆動機構は接続した状態とする。
21.4 水銀チューブスイッチを用いる制御装置
2.1.3で定義する動作電圧の回路に接続する水銀チューブスイッチを用いる制御装置は,17.1.1において
試験のために規定する電圧の直流回路で標準非交換形筒形ヒューズと直列に試験するとき,試験を満たさ
なければならない。ただし,その装置が交流専用を意図する場合,無誘導形負荷と共に交流を使用できる。
試験回路のヒューズ定格及び容量は,表25に規定するとおりでなければならない。
外郭及び全ての他の露出金属は,接地しなければならない。また,外郭の全ての開口部の周りに綿を配
置する。
綿又は回路導体上の絶縁物に着火があってはならない。また,スイッチを収容する外郭から炎又は水銀
を除く,溶融金属の放出があってはならない。その装置に取り付けた配線は,損傷してはならない。ただ
し,チューブリード線は除く。短絡回路において水銀チューブスイッチを閉じ,水銀チューブが接続され
ている短絡回路を他の適切な開閉装置で閉じる連続動作を交互に行う。
注記 欧州標準化委員会(CENELEC)に加盟している各国では,この細分箇条は,適用しない。
115
C 9730-1:2019
表25−水銀スイッチ短絡条件
V
最高定格a)
S. C.(短絡)電流
A
最小ヒューズ定格b), c)
V
0〜125
126〜250
251〜660
0〜250
2 000 VA
1 000
20
15
−
0〜250
30 A
3 500
30
30
−
0〜250
63 A
3 500
70
70
−
251〜660
63 A
5 000
−
−
30
注a) 63 Aを超えるものの要求事項は,検討中である。
b) 最小ヒューズ定格は,スイッチアンペア定格以上又はモータ全負荷アンペア定格の4倍以下の最も近い
標準ヒューズ定格とする。いかなる場合でも,示した定格以上でなければならない。
c) この試験の目的に対しては,ヒューズのアンペア定格は,15,20,25,30,35,40,45,50,60,70,
80,90,100,110,125,150,175,200,225及び250である。中間寸法のヒューズを使用してもよい。
使用する綿は,附属書Cによる。
スイッチは,試験後,機能する必要はない。
22 耐腐食性
22.1 防せい(錆)性
22.1.1 カバー及び外郭を含む鉄の部分は,腐食しないように保護しなければならない。ただし,腐食して
も安全に支障がない場合は除く。
22.1.2 この要求事項は,温度検出素子又はその性能が保護処理によって悪い影響を受けるその他の構成部
分には適用しない。
22.1.3 適否は,22.1.4〜22.1.6の試験によって判定する。
22.1.4 40±2 ℃,相対湿度の93〜97 %で継続時間14日間の試験を行う。
22.1.5 この部分を,温度100±5 ℃の恒温恒湿槽に入れて10分間乾燥した後,その面には,腐食があっ
てはならない。疑義がある場合,箇条8,箇条13及び箇条20の一部又は複数によって判定する。
22.1.6 鋭い縁の上のさびの痕跡及びこすることによって除くことができる黄色っぽい膜は無視する。
注記1 エナメル塗装,電気めっき,シェラダイズ,亜鉛めっき,その他の認知された同等の保護が,
この要求事項を満たしていると考える。
注記2 小形のら(螺)旋ばねなどに対して,及び摩耗を受ける部品に対しては,グリースの層がさ
びに対する十分な保護となる場合がある。このような部品は,グリース膜の有効性について
疑いがあるときに限り試験を行う。その場合,試験は,グリースを取り除かないで行う。
23 電磁両立性(EMC)要求事項−エミッション
(H.23及びU.23にもよる。)
23.1 自立構造形及び独立取付形制御装置で,通常運転中に繰り返し運転するものについては,過度の無
線障害を発生しないような構造でなければならない。機器への制御装置の組込みによって,試験結果に影
響が及ぶ可能性がある一体形及び組込形制御装置は,この試験を行わない。
注記0A
一体形及び組込形制御装置について,製造業者からの要求がある場合,関連した製品の
EMCに関する規格などに従って,最終製品において試験される。
適否は,次のいずれか一つによって判定する。
116
C 9730-1:2019
a) CISPR 14-1,及び/又はCISPR 22クラスBの試験及び判定基準。ただし,CISPR 14-1の4.2.3.4に
おいて,“200 ms”の値を“20 ms”に置き換えて適用する。
b) 20 msの無線周波数放射の最大持続期間で終了する23.1.1及び23.1.2に規定した試験及び判定基準。
ただし,クリック率が5を超えるものは,a)によって判定する。
c) 検査及び/又は試験によって,通常動作中に接点動作間の最短時間が10分未満にならないことを立証
する。
23.1.1 試験条件
新しい1個のサンプルでこの試験を行う。
次に示すことを除き,電気的条件及び温度条件は,17.2及び17.3の規定による。
− 検出制御装置の作動量の変化率は,α1及びβ1とする。
− 非検出制御装置は,制御装置を通常動作における最低接点動作速度となるように動作させる。
− 誘導負荷に使用するよう指定する制御装置は,表1の項目7で別に製造業者が宣言していない限り,
力率0.6とする。実質的に抵抗負荷に使用するよう指定する制御装置については,力率1とする。
23.1.2 試験方法
制御装置は,接点動作を5回とする。
無線障害の期間は,接点間の電圧変動を測定するように制御装置に接続したオシロスコープによって測
定する。
注記 この試験の意図については,接点動作の結果,電源波形に重畳して観測された接点間のあらゆ
る電圧変動を無線障害とする。
23.2 ISM(工業,科学及び医療装置)機器用制御装置,自立構造形制御装置,独立取付形制御装置,及び
ISM機器とともに使用するためのインラインコード形制御装置は,CISPR 11の要求事項を満たさなければ
ならない。
注記 表1の項目89も参照。
24 部品
U.24も適用する。
24.1 SELV回路又はPELV回路に電力を供給する変圧器は,安全絶縁形のものであって,JIS C 61558-2-6
の関連する要求事項を満たさなければならない。
二つの相導体間,相導体と中性線との間,又は危険な充電部と保護接地との間に接続するコンデンサは,
JIS C 5101-14を満たし,その定格値に従って使用する。
ヒューズは,JIS C 6575-1又はJIS C 8269-1の該当する要求事項による。
24.1.1 SELV回路又はPELV回路への電源として変圧器を組み込んだ制御装置は,一次回路に17.2に示す
定格電圧の上限値を印加した状態で出力試験を行う。
変換器に用いるスイッチモード電源装置又は変圧器は,JIS C 61558-2-16による。
非容量性負荷条件(無負荷から,いずれか又は全ての二次SELV回路又はPELV回路端子の短絡まで),
かつ,内部接続に干渉しない状態で,二次出力電圧は,2.1.5に定義する値以下でなければならない。
SELV回路又はPELV回路への電源として変換器又はスイッチモード電源装置を使用している場合,T.3
を適用する。
制限二次絶縁回路への端子における二次出力は,100 VA以下でなければならない。また,二次出力電流
は,過電流保護装置がある場合,それを回避した状態で1分間運転した後,8 A以下でなければならない。
117
C 9730-1:2019
24.2 24.1に記載する部品以外の部品は,この規格の試験を実施して判定する。
24.2.1 事前に関連するJIS又はIECの安全規格を満たしていると判断できる構成部品に対しては,必要
な試験を減少させるために,確認は次のように制限する。
a) 制御装置内の構成部品の用い方が,JISの安全規格に従って事前に行われた試験によってカバーされ
ていることを確認するために検査を行う。
b) JISの安全規格に従って事前に行われた試験によってカバーされていない場合,この規格の基準によ
る試験を行う。
(附属書Jにもよる。)
24.3 制御装置の構成部品として使用するリレーには,附属書Uを適用しない。
24.4 電子制御装置で用いられた,周辺の回路を含む24.2.1によってカバーされないスイッチモード電源
装置は,24.4.1及びこの規格の適用可能な要求事項の中の全ての試験を満たさなければならない。
注記 対応国際規格の注記は,この規格では適用しない。
24.4.1 スイッチモード電源装置の過負荷試験
24.4.1.1 各出力巻線又はタップ巻線部分は,一度に一つずつ過負荷試験を行う。この場合,他の巻線は負
荷又は無負荷のうち,通常使用状態で最も厳しい負荷とする。
24.4.1.2 過負荷試験は,巻線又は整流した出力を横切る可変抵抗器又は電子負荷を接続することによって
実行する。抵抗器は,できる限り早く調整し,必要な場合,適切な過負荷を維持するために,1分後に再
調整する。更なる再調整は,この場合行わない。
24.4.1.3 この試験は,ヒューズ,手動リセット回路保護装置,熱保護装置,及びその他の保護装置であっ
ても,回路から取り外さない状態で行う。
24.4.1.4 電流遮断装置によって過負荷保護を行う場合,過負荷試験電流は,過負荷保護装置に1時間通電
できる最大電流とする。製造業者が最大電流を明らかにしていない場合は,試験によって決定する。
24.4.1.5 過電流保護が提供されない場合,最大過負荷は,電源から得られる最大の出力とする。
24.4.1.6 電圧フォールドバック形の場合,過負荷は,出力電圧が5 %低下するまで,徐々に増加する。過
負荷は,出力電圧が回復するまで試験を継続する。
24.4.1.7 試験期間は,1時間又は最終結果が得られるまでとする。
24.4.1.8 各巻線の最大開路電圧及び最大負荷電流を測定及び記録し,最大出力を決定してもよい。変圧器
の巻線では直接行う。
24.4.1.9 最大開路電圧の測定は,通常動作の下で,一つの部品の不良状態で行う(表H.24参照)。
24.4.1.10
SELVへの適用においては,変圧器の二次側で直接測定した最大開回路電圧が2.1.5に規定する
限度値を超える場合,各巻線の最大出力電圧の測定は,信頼する保護インピーダンスの後で行ってもよい。
この場合,限度値はH.8.1.10.1に従わなければならない。
24.4.1.11
各々の試験の後(熱い状態である間),変圧器に,13.2の耐電圧試験を行う。
24.4.1.12
適否は,H.27.1.1.3のa)〜f)に従って判定する。
24.5 次の要求事項の全てに規定する回路で用いられるサーミスタには,附属書Jは適用しない。
− 表1の項目39で製造業者が宣言するタイプ1制御装置
− T.1に規定するSELV回路及び/又はPELV回路に接続
− H.27.1.1.1に規定する低電源回路
− サーミスタが開路又は短絡回路である場合,H.27による制御装置又は最終機器
− 表1の項目92で製造業者が宣言するクラスA制御機能をもつ制御装置
118
C 9730-1:2019
25 通常動作
25.1 一般事項
(附属書Hによる。)
25.2 過電圧及び減電圧試験
電磁石を組み込んだ制御装置は,最小定格電圧の85 %から最大定格電圧の110 %までの範囲の全ての電
圧で,動作しなければならない。
適否は,制御装置に製造業者が宣言する最大及び最小動作状態で,次の試験を実施することによって判
定する。ただし,Tminが0 ℃未満の制御装置は,Tminで試験する。
制御装置に,温度が一定状態になるまで,VRmaxの1.1倍の電圧を加える。その後,直ちにVRmaxの1.1
倍の電圧及び定格電圧で動作し,試験する。
次に,制御装置に温度が一定状態になるまで,VRminの0.85倍の電圧を加える。その後,直ちにVRminの
0.85倍の電圧で動作し,試験する。
26 電磁両立性(EMC)要求事項−イミュニティ
(附属書Hによる。)
注記 通常,非電子式制御装置は,電磁妨害に対して耐性があるため,H.26の試験は行わない。非電
子式制御装置の特別なタイプのものについての試験は,適切なJIS C 9730の規格群の関連する
第2部の別の項目に包含される場合がある。
27 異常動作
27.1
(附属書H及び附属書Jによる。)
27.2 焼損試験
電磁石を組み込んでいる制御装置は,制御機構の拘束の影響に耐えなければならない。
適否は,27.2.1及び27.2.2の試験によって判定する。
注記 リレー及び接触器に対しては,この要求事項への適否は,箇条17の試験によって判定すること
ができる。
27.2.1 制御機構は,その制御装置が電源を断路されたときに至る位置で拘束する。次に,制御装置は,17.2
に示す定格周波数及び定格電圧で通電する。
試験の継続時間は,7時間,内部保護装置がある場合,それが動作するまで,又は焼損するまでのうち,
いずれか最初に発生したときまでとする。
27.2.2 この試験後,制御装置は,次の事項を満たさなければならない。
− 炎又は溶融金属の放出がなく,制御装置には,損傷がない。疑義がある場合,この規格の関連する箇
条によって判定する。
− 13.2の要求事項
注記 試験後,制御装置は,機能する必要はない。
27.2.3 機械出力拘束試験(異常温度試験)
電気アクチュエータのようなモータを備えた制御装置は,表26に示す温度を超えず,出力拘束の影響に
耐えなければならない。温度は,14.7.1に規定する方法で測定する。7時間出力を拘束した状態で試験し
ても,保護装置がある場合,拘束状態で動作を繰り返すことがなく,かつ,表13に示す温度限度値を超
119
C 9730-1:2019
えない場合,電気アクチュエータのようなモータを備えた制御装置に対して,この試験は行わない。
27.2.3.1 電気アクチュエータのようなモータを備えた制御装置は,24時間にわたり定格電圧で出力を拘束
した状態で,室温15〜30 ℃の範囲で試験する。温度の測定結果を25 ℃の基準値に対して補正する。
注記 カナダ及び米国では,試験は,この細分箇条及び17.2に規定する電圧で実施する。
三相で動作することを意図するモータを備えた制御装置の場合,試験は,任意の一つの相を接続せずに
実施する。
表26−最高巻線温度
(機械出力拘束条件の試験用)
条件
クラスによる絶縁物の温度
℃
A
E
B
F
H
200
220
250
インピーダンス保護の場合
150
165
175
190
210
230
250
280
保
護
装
置
に
よ
る
保
護
の
場
合
初めの1時間
− 最大値
200
215
225
240
260
280
300
330
初めの1時間の後
最大値
175
190
200
215
235
255
275
305
算術平均
150
165
175
190
210
230
250
280
27.2.3.2 平均温度は,試験の2時間目〜24時間目の限度値(“初めの1時間の後”の限度値)以下でなけ
ればならない。
注記 巻線の平均温度は,その1時間の巻線温度の最高値と最低値との算術平均である。
27.2.3.3 試験の間,電力は継続的にモータに供給する。
27.2.3.4 この試験の終了後直ちに,モータは箇条13に規定する耐電圧試験に耐えなければならない。た
だし,初めに12.2の湿度処理は行わない。
27.3 過電圧及び減電圧試験
規定しない。
27.4 (附属書Hによる。)
27.5 過負荷試験
27.5.1 一般事項
試験は,次のとおり行う。
− 保護装置及び組み込みヒューズをもたない制御装置は,制御装置を保護する設備に入っているヒュー
ズの断路電流にて,1時間過負荷試験を行う。
− 保護装置(ヒューズを含む。)によって保護している制御装置は,制御装置に流れる電流を,1時間後
に保護装置が開放した電流の0.95倍の電流になるように過負荷試験を行う。定常状態に達した後又は
4時間後のいずれか短い時間の後,温度上昇を測定する。
− JIS C 6575-1による組み込んだヒューズによって保護している制御装置は,ヒューズをインピーダン
スが無視できるリンクに置き換え,ヒューズの定格電流の2.1倍の電流がそのリンクに流れる方法で
過負荷試験を行う。制御装置に負荷してから30分後に,温度上昇を測定する。過負荷試験を通常の室
温より高い温度で実施する場合,2.1倍の値を,1 K当たり0.5 %の割合で減じてもよい。
− 組み込んだヒューズ及び保護装置の両方によって保護している制御装置は,組み込んだヒューズ又は
他の保護装置で,より低い負荷となる試験を選択し,上記のいずれかの方法で過負荷試験を行う。
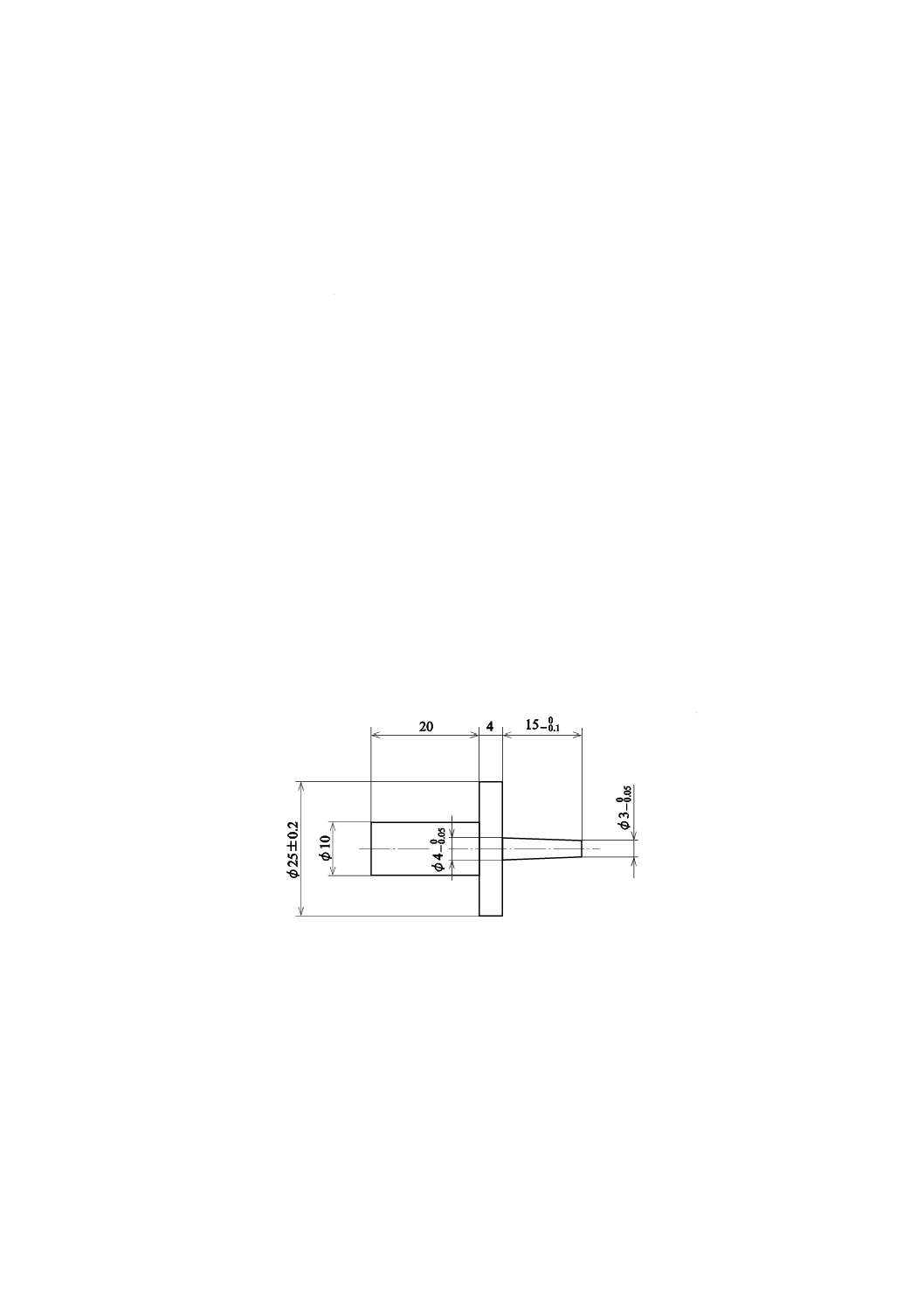
120
C 9730-1:2019
− 過負荷時に回路短絡だけ生じる保護装置によって保護している制御装置は,保護装置ありの制御装置,
及び予備保護装置なしの制御装置の両方の状態で試験する。
27.5.2 11.10.2に規定するプラグ及びコンセントをもつインラインコード形制御装置に対する過負荷試験
試験は,27.5.1に従って実施する。
温度は,表13に規定する値を超えてはならない。
27.5.3 27.5.2を適用していない制御装置
試験は,27.5.1に従って周囲温度20 ℃±5 ℃で実施する。表1の項目97に従って製造業者が宣言する
場合,組込形制御装置及び一体形制御装置には,試験を実施しない。
H.27.1.1.3のa)〜g)の適否は,該当する場合,判定する。
27.6 電池の回路短絡試験
工具なしで取り外せる電池をもち,細い真っすぐな棒で短絡できる端子をもっている制御装置の場合,
電池の端子は,電池を完全に充電し短絡する。
試験の期間は,1時間又は最終状態になるまでのいずれか先に生じるまでの間とする。
27.6.1 試験後,制御装置は,次の事項を満たなさければならない。
− 火炎又は溶融金属の放出が全くなく,制御装置への障害の痕跡が全くない状態。疑義がある場合,こ
の規格の関連する箇条によって判定する。
− 13.2の要求事項
注記 試験後,制御装置は,機能する必要がない。
28 電子的断路の使用に関する指針
(附属書Hによる。)
単位 mm
図1−試験ピン
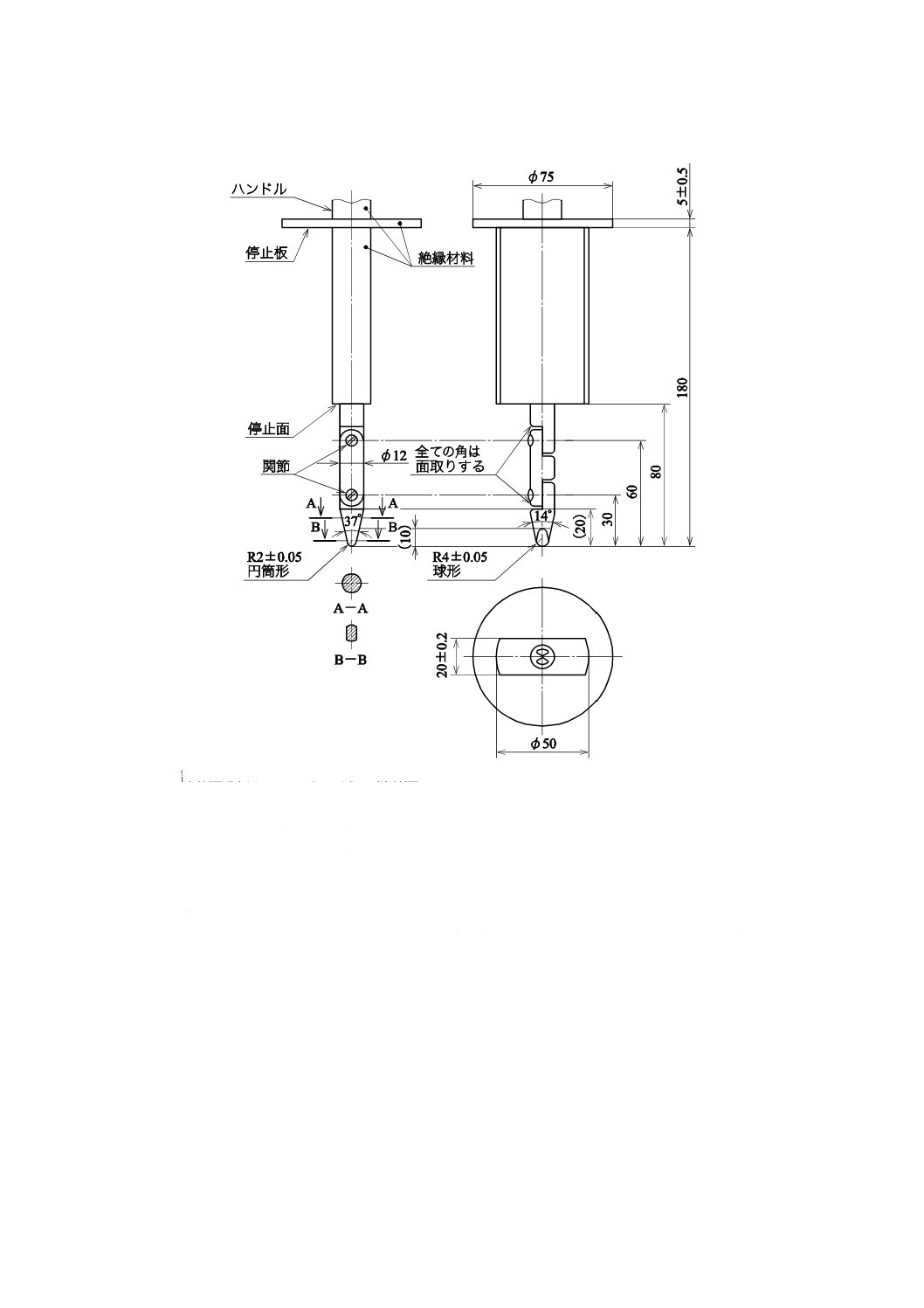
121
C 9730-1:2019
単位 mm
許容差を表示していない寸法の許容差:
− 角度(0〜−10°)
− 直線寸法:
− 25 mm以下:(0〜−0.05)
− 25 mmを超える:(±0.2)
試験指の材料:例えば,熱処理鋼
この試験指の両方の接合部は,角度90°(許容差0〜10°)まで曲げることができるが,同
一方向だけに限る。
ピン及び溝による手法を用いることが,曲げ角度を90°に制限するために可能な手法の唯一
のものである。この理由で,これらの詳細な寸法及び偏差は図面で示さない。実際の構造は,
屈曲角90°,許容差0〜10°を保証するものである。
図2−標準試験指
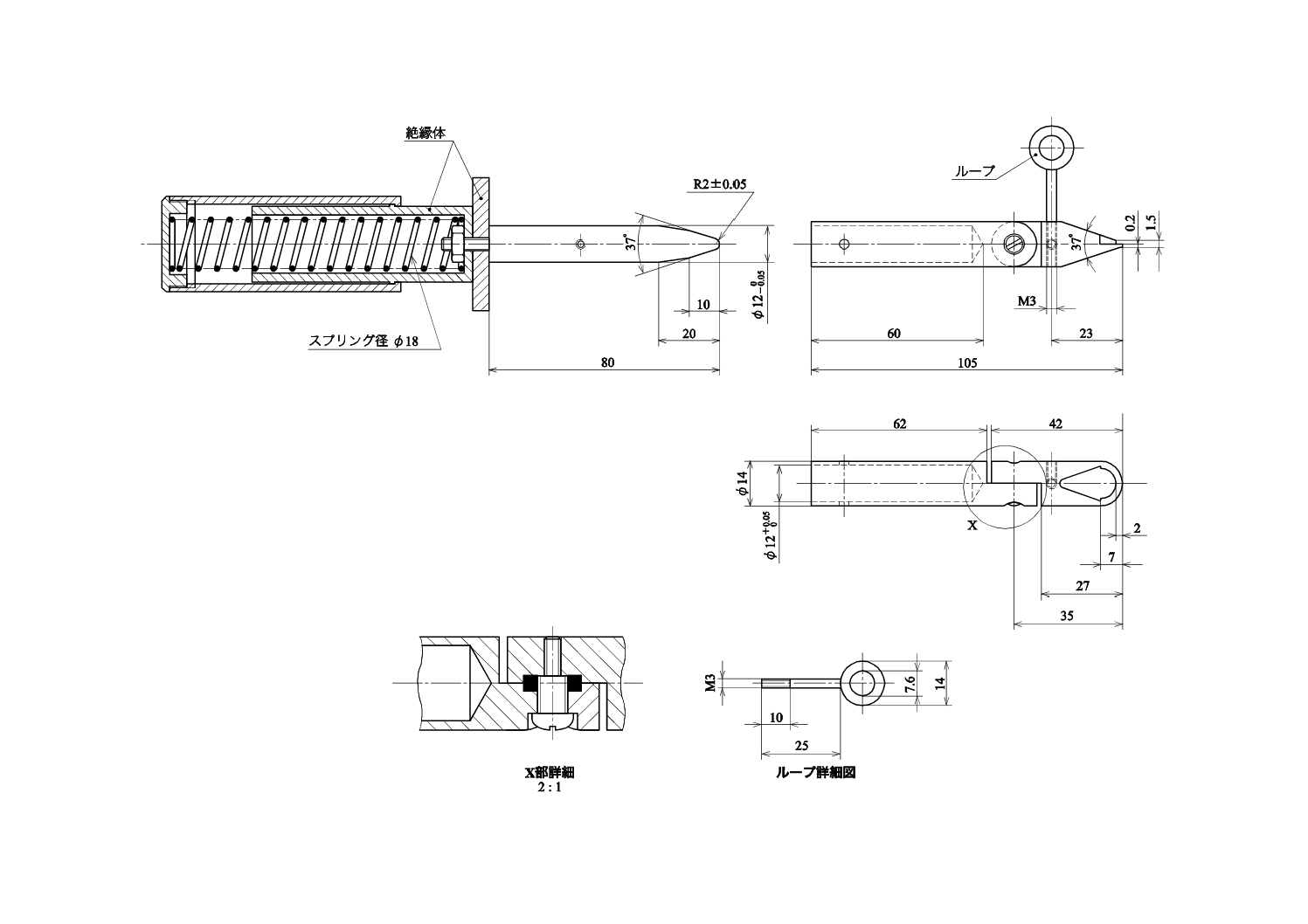
122
C 9730-1:2019
単位 mm
図3−試験指ネイル
2
6
C
9
7
3
0
-1
:
2
0
1
9
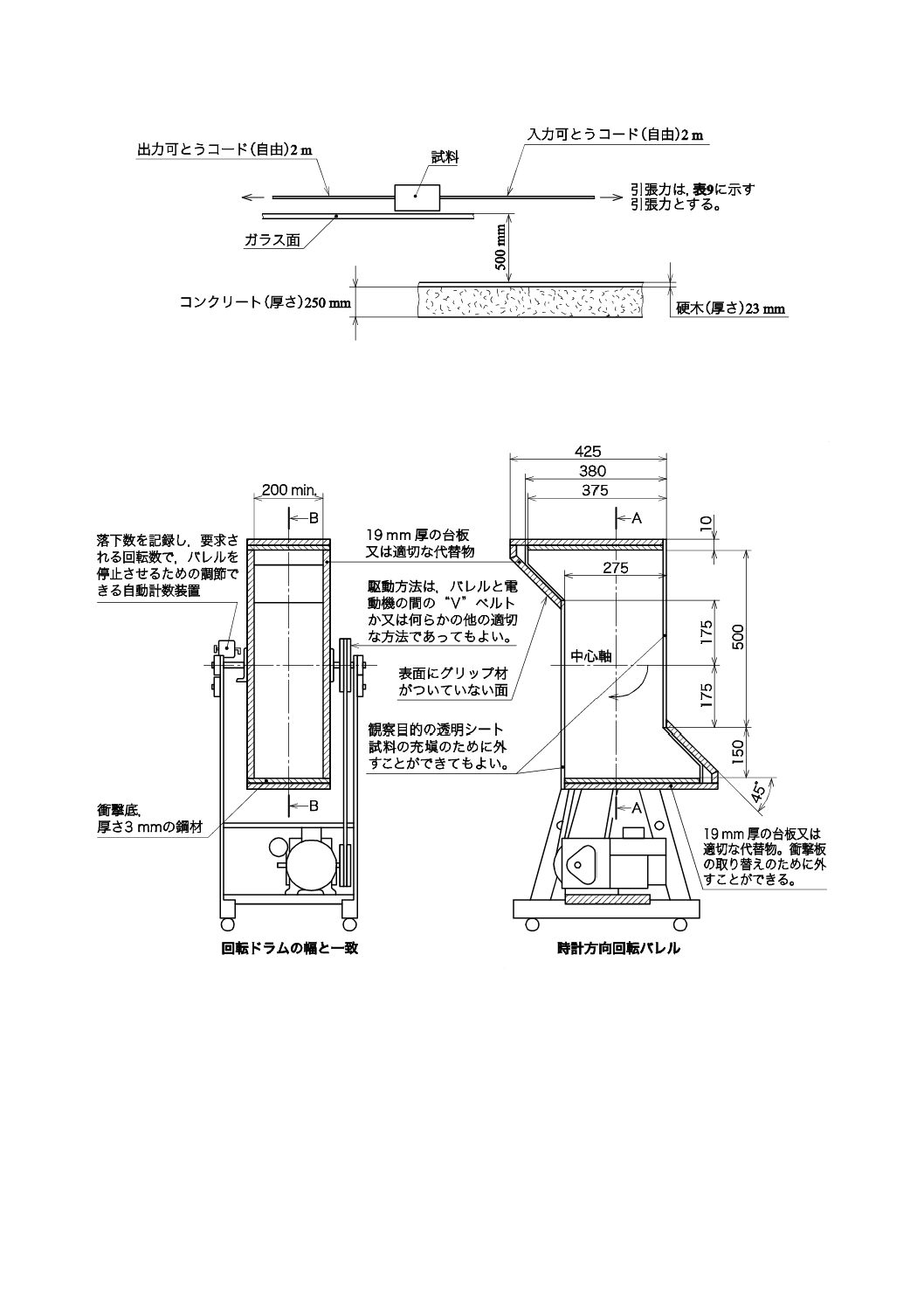
123
C 9730-1:2019
図4−自立構造形制御装置の衝撃試験
単位 mm
図5−タンブリングバレル
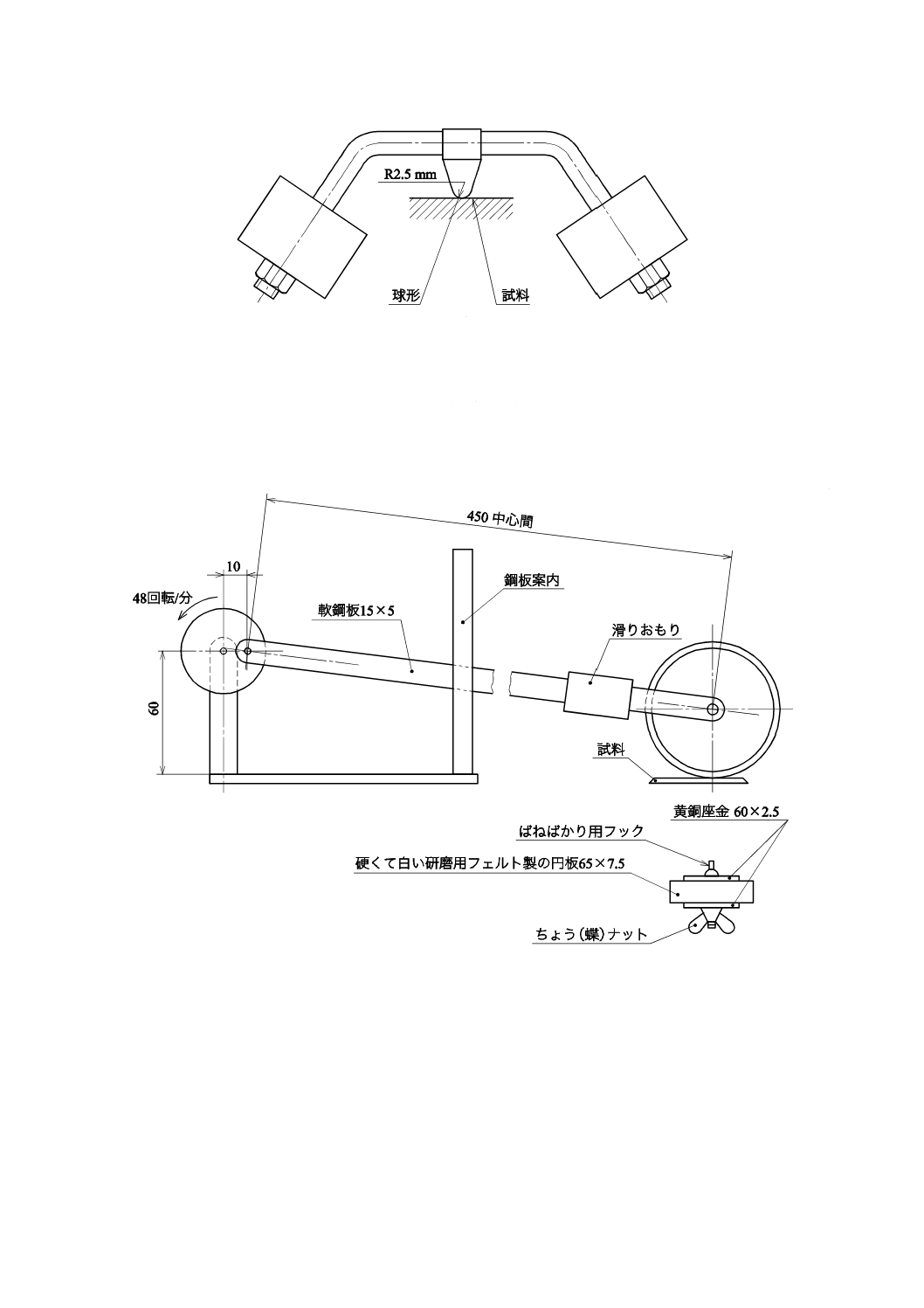
124
C 9730-1:2019
図6−ボールプレッシャ試験
図7−(規定なし)
単位 mm
図8−定格銘板上の表示の耐久性試験機器(例)
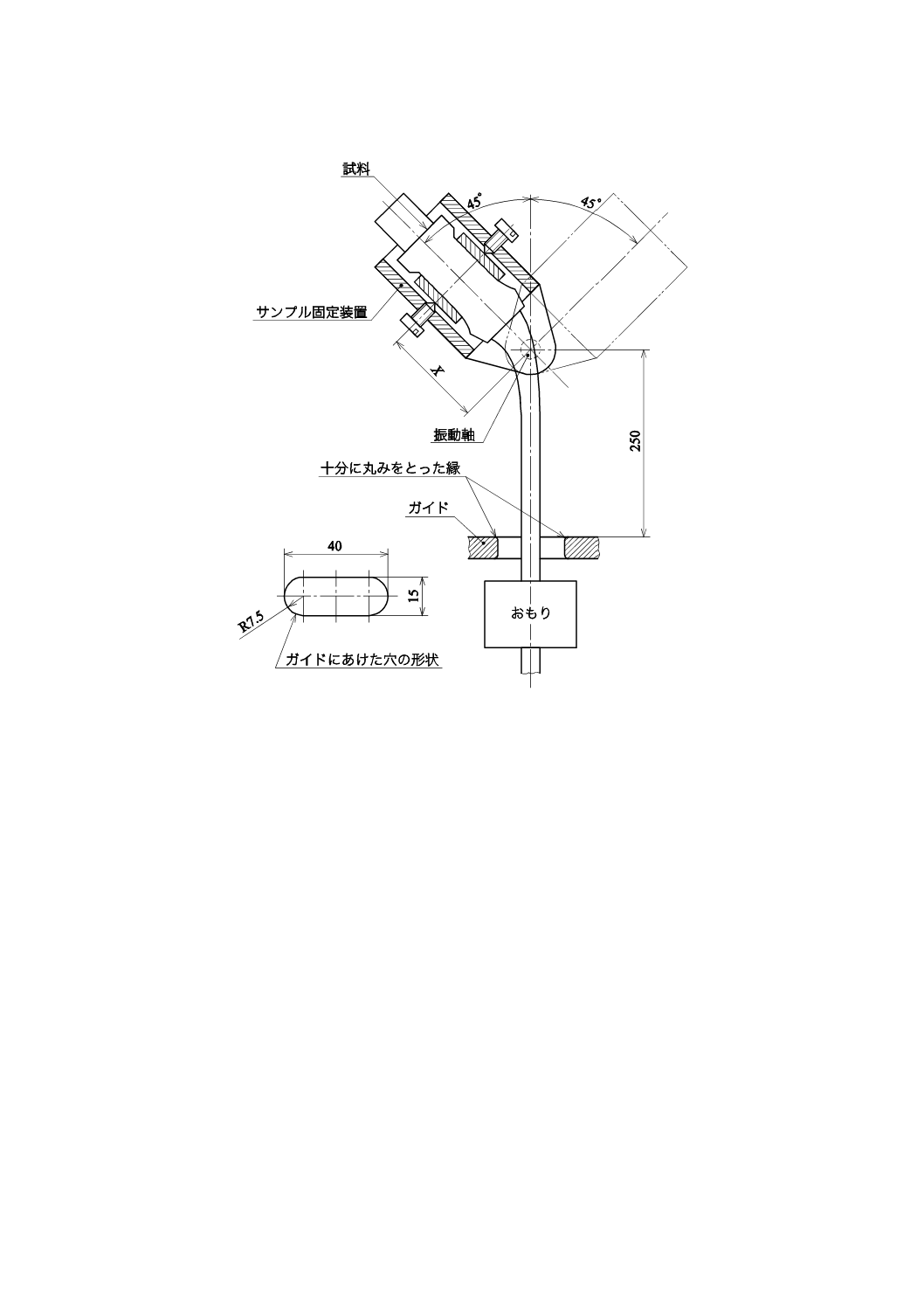
125
C 9730-1:2019
単位 mm
図9−屈曲試験装置
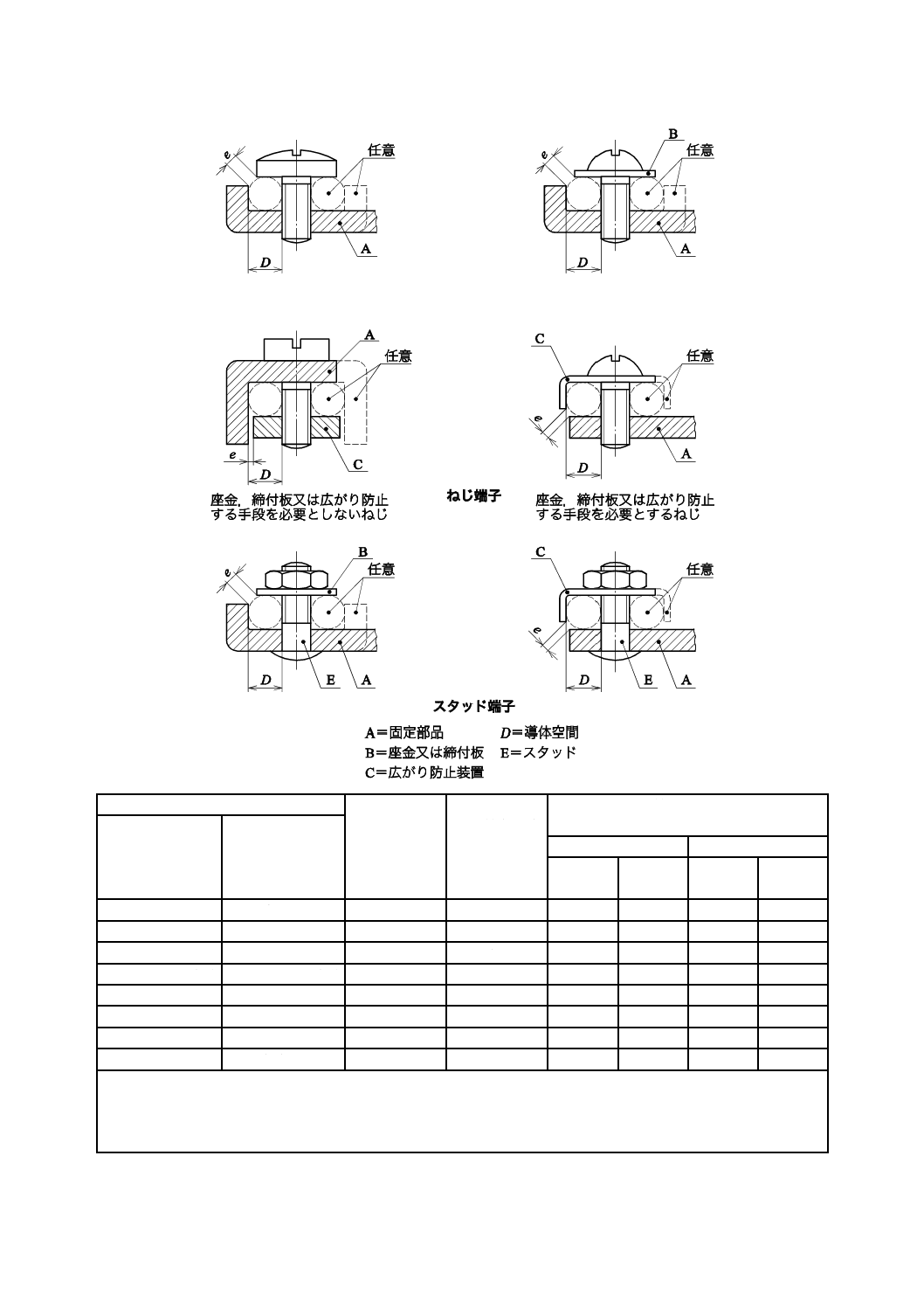
126
C 9730-1:2019
端子を流れる電流a)
最小直径の
導体空間
D
mm
導体捕捉部品
間の最大空隙
e
mm
最小トルク
N・m
可とう導体
A
非可とう導体
A
すりわり付きねじ
その他のねじ
1個の
ねじ
2個の
ねじ
1個の
ねじ
2個の
ねじ
0以上
6以下 0以上
6以下
1.4
1.0
0.4
−
0.4
−
6を超え 10以下 0以上
6以下
1.7
1.0
0.5
−
0.5
−
10を超え 16以下 6を超え 10以下
2.0
1.5
0.8
−
0.8
−
16を超え 25以下 10を超え 16以下
2.7
1.5
1.2
0.5
1.2
0.5
25を超え 32以下 16を超え 25以下
3.6
1.5
2.0
1.2
2.0
1.2
−
25を超え 32以下
4.3
2.0
2.0
1.2
2.0
1.2
32を超え 40以下 32を超え 40以下
5.5
2.0
2.0
1.2
2.0
1.2
40を超え 63以下 40を超え 63以下
7.0
2.0
2.0
2.0
3.0
2.0
導体を正しい位置に支持する部分は,その導体を締め付けるのに必要な圧力が,絶縁材料を通して伝達されない
場合,絶縁材料製でもよい。
指示図は,示された寸法を除き,構造を制限する意図はない。
注a) 63 Aを超えるものの要求事項は,検討中である。
図10−ねじ端子及びスタッド端子
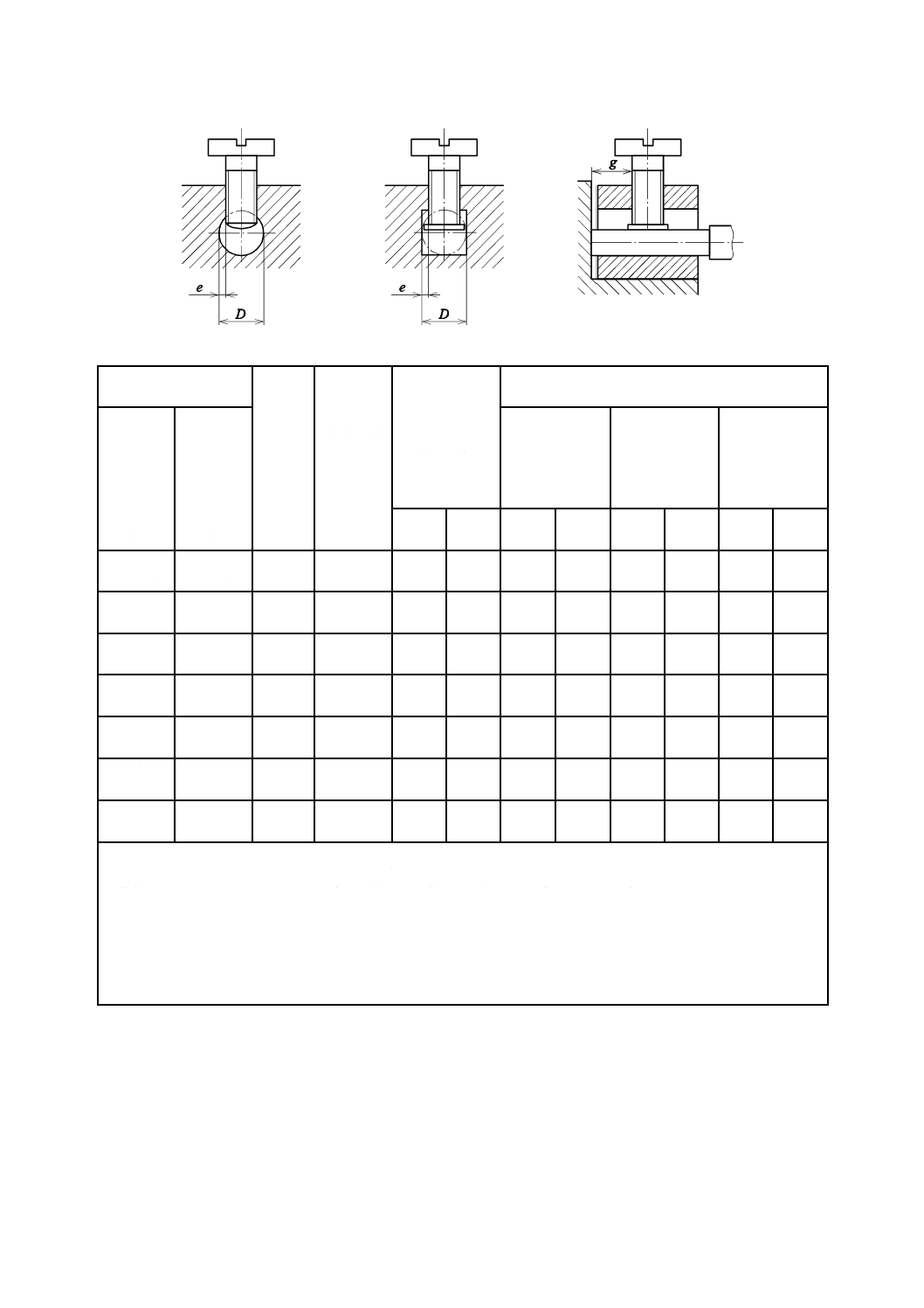
127
C 9730-1:2019
a) 圧力版なしの端子
b) 圧力版付きの端子
端子導電電流a)
最小径
導体
空間
D
mm
部品を
捕捉する
導体間の
最大間隙
e
mm
完全に挿入さ
れたとき,締め
ねじと導体の
端末との間の
最小距離
g
mm
最小トルク
N・m
可とう
導体用
A
非可とう
導体用
A
頭なしねじ
すりわり付き
のねじ
その他のねじ
1個の
ねじ
2個の
ねじ
1個の
ねじ
2個の
ねじ
1個の
ねじ
2個の
ねじ
1個の
ねじ
2個の
ねじ
0以上
10以下
0以上
6以下
2.5
0.5
1.5
1.5
0.2
0.2
0.4
0.4
0.4
0.4
10を超え
16以下
6を超え
10以下
3.0
0.5
1.5
1.5
0.25
0.2
0.5
0.4
0.5
0.4
16を超え
25以下
10を超え
16以下
3.6
0.5
1.8
1.5
0.4
0.2
0.8
0.4
0.8
0.4
25を超え
32以下
16を超え
25以下
4.0
0.6
1.8
1.5
0.4
0.25
0.8
0.5
0.8
0.5
−
25を超え
32以下
4.5
1.0
2.0
1.5
0.7
0.25
1.2
0.5
1.2
0.5
32を超え
40以下
32を超え
40以下
5.5
1.3
2.5
2.0
0.8
0.7
2.0
1.2
2.0
1.2
40を超え
63以下
40を超え
63以下
7.0
1.5
3.0
2.0
1.2
0.7
2.5
1.2
3.0
1.2
端子のねじ部付きの穴を含む部分,及び導体がねじによって締め付けられる部分は,2個の分離した部分であっ
てもよい。スターラップを装備した端子の場合も同じである。
導体空間の形状は,Dに対して規定する最小値に等しい直径の円が内接できる場合,図に示すものと異なっても
よい。
完全に挿入したとき,締付用のねじと導体の末端との間の最小距離は,導体がその中を通過できない端子に限り
適用する。
指示図は,示された寸法を除き,構造を制限する意図はない。
注a) 63 Aを超えるものの要求事項は,検討中である。
図11−ピラー端子
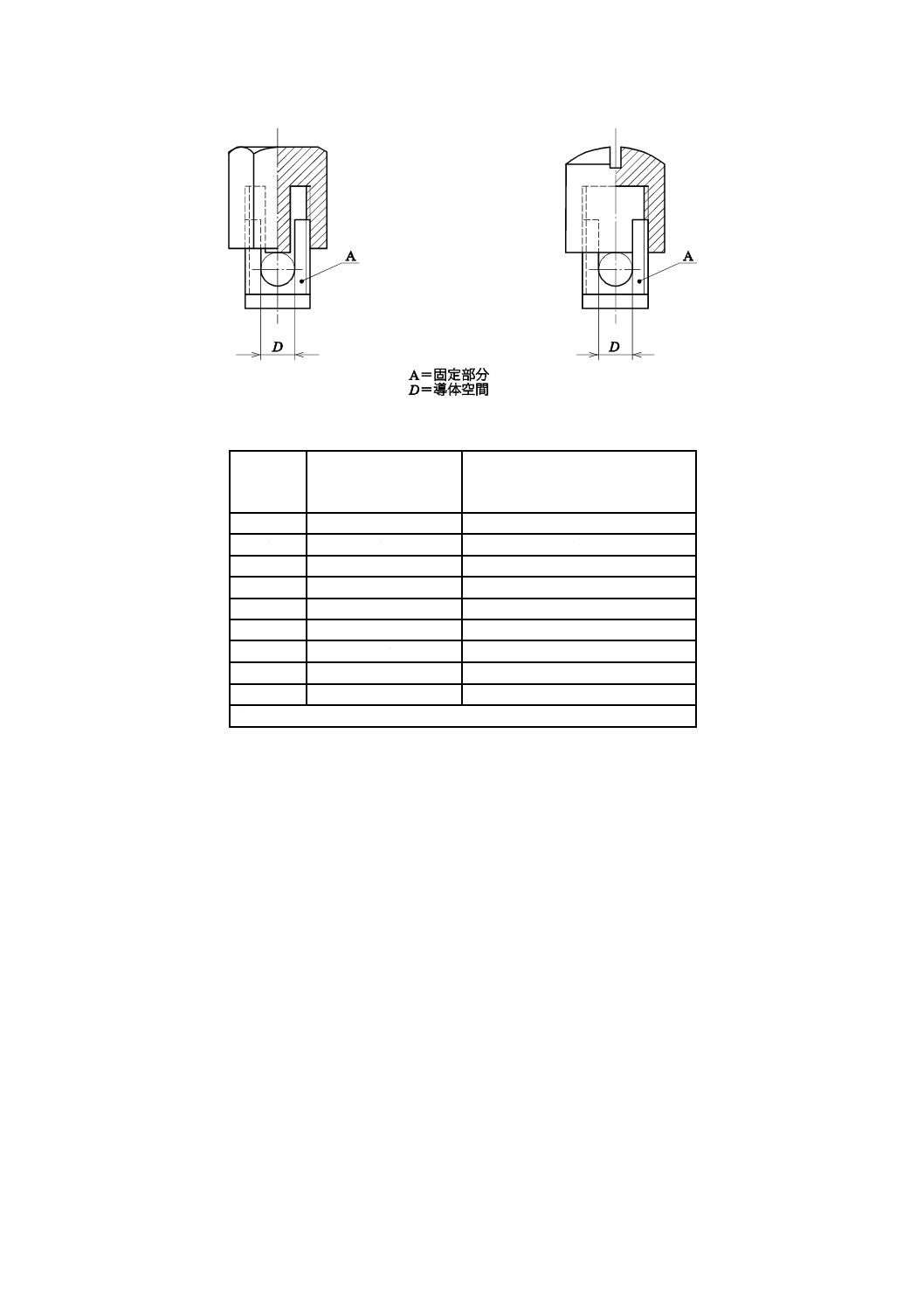
128
C 9730-1:2019
導体空間の底部は,信頼できる接続を得るために,軽く丸みを付ける。
端子寸法
導体空間の最小直径a)
mm
完全に挿入したとき,固定部分と
導体端末との間の最小距離
mm
0
1.4
1.5
1
1.7
1.5
2
2.0
1.5
3
2.7
1.8
4
3.6
1.8
5
4.3
2.0
6
5.0
2.5
7
7.0
3.0
8
8.5
4.0
注a) 加えるトルクの値は,表20に規定する値である。
図12−マントル端子
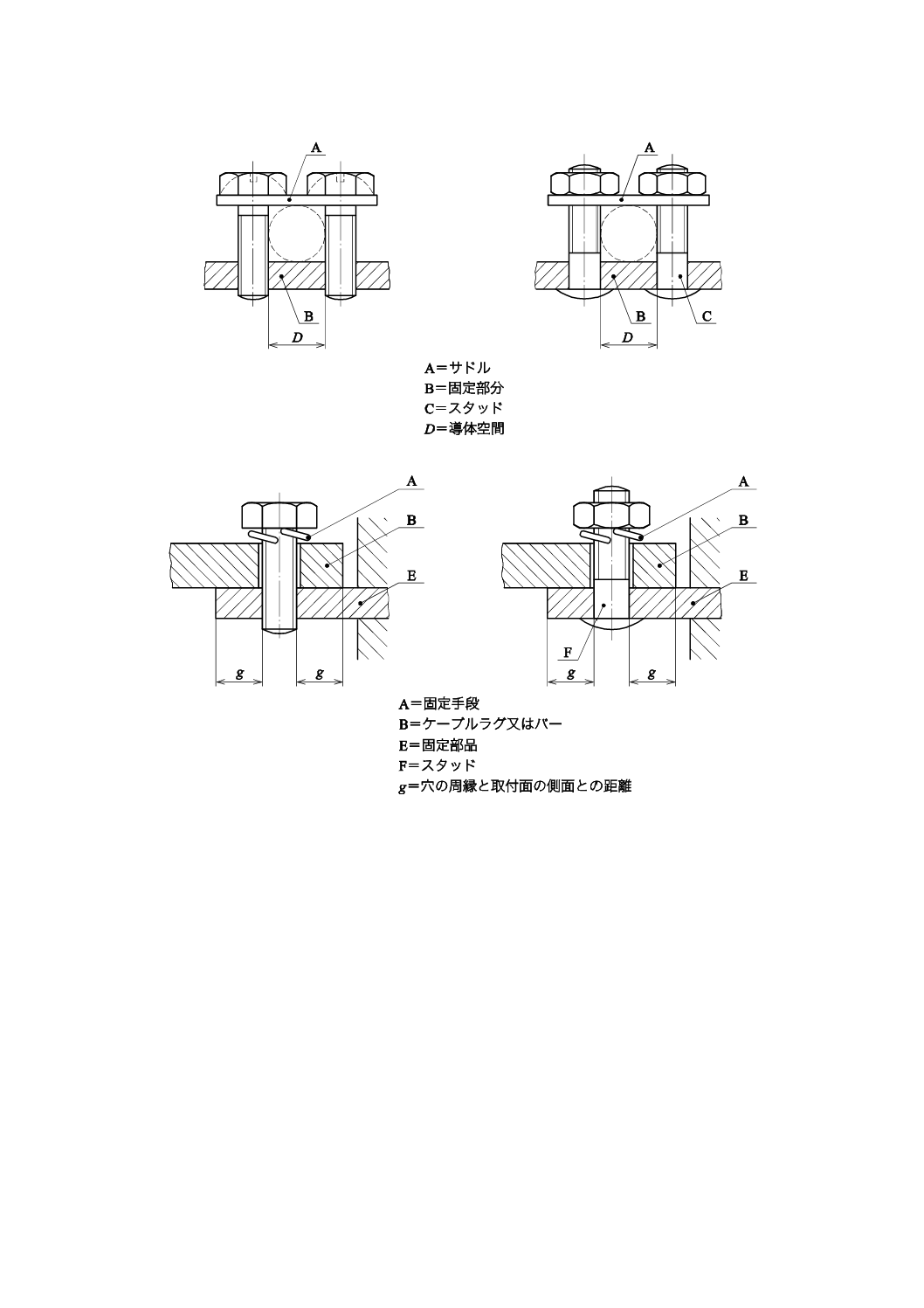
129
C 9730-1:2019
a) サドル端子
b) ラグ端子
図13−サドル端子及びラグ端子
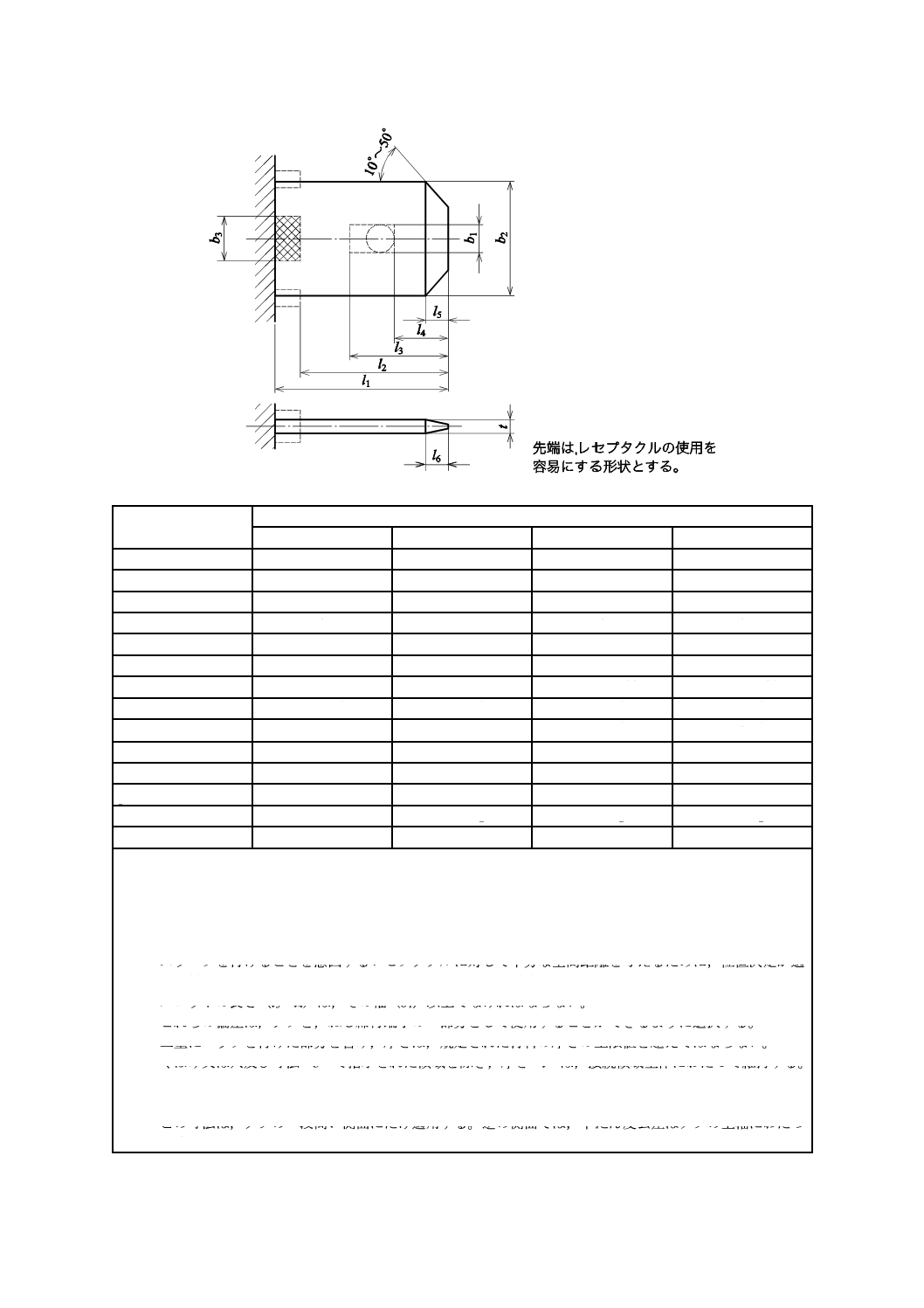
130
C 9730-1:2019
単位 mm
寸法
図14及び図15 a)
コネクタ寸法
2.8
4.8
6.3
9.5
l1(最小)b)
7.7
6.9
8.6
14.0
l2(最小)b)
7.0
6.2
7.9
12.0
l3(最大)c)
3.0
5.2
6.7
8.2
l4
1.0±0.2
2.5±0.25
3.2±0.3
4.2±0.3
l5(最大)
0.7
1.2
1.3
1.7
l6(最大)
0.7
1.2
1.3
1.7
b1(穴)a)
1.2
0.1
0
+
1.4
0.2
0
+
1.6
0
2.
0
+
d)
2.1
0
2.
0
+
d)
b1(スロット)a)
1.2
0.1
0
+
1.4
0.2
0
+
1.6
0.1
0
+
2.1
0.2
0
+
b2
2.8±0.1
4.75±0.2
6.3
15
.0
1.0
+
−
9.5
15
.0
1.0
+
−
b3(最小)e)
2.0
2.0
2.5
2.5
t f)
0.5±0.025
0.8±0.03
0.8±0.03
1.2±0.03
p(最大)g)
0.8
1.2
1.2
1.7
k
−
0.7
0
1.0
−
0.1
0
1.0
−
1.5
0
1.0
−
x
−
1.0±0.2
1.0±0.2
1.4±0.2
注記 指示図は,示された寸法を除き,構造を制限する意図のものではない。
注a) タブは,外れ止めがあってもよい。円形のくぼみの外れ止め,長方形のくぼみの外れ止め及び保持用の
外れ止めは,タブの中心線に沿って,寸法b1,l3及びl4で囲まれた領域内に配置しなければならない。
タブは,この規格を満たしている場合,2層以上の材料で製造してもよい。
波形又はくぼみをもつタブの詳細は,検討中である。
b) スリーブを付けることを意図するレセプタクルに対して十分な空間距離を与えるために,位置決定が適
切に働くことを確保するために,0.5 mmだけこの寸法を増加させることが必要であると思われる。
c) スロットの長さ(l3−l4)は,その幅(b1)以上でなければならない。
d) これらの偏差は,タブを,ねじ締付端子の一部分として使用することができるように選択する。
e) 二重にハッチを付けた部分を含み,厚さは,規定された材料の厚さの上限値を超えてはならない。
f) くぼみ又は穴及び寸法“b”で指示された領域を除き,厚さ“t”は,接続領域全体にわたって維持する。
適否は,円形領域内の任意の部分3.2±0.2 mm2を測定して判定する。さらに,全体の平たん度(t1)は,
0.03 mmの公差をもつ。
g) この寸法は,タブの一段高い側面にだけ適用する。逆の側面では,平たん度公差はタブの全幅にわたっ
て適用する。
図14−タブ
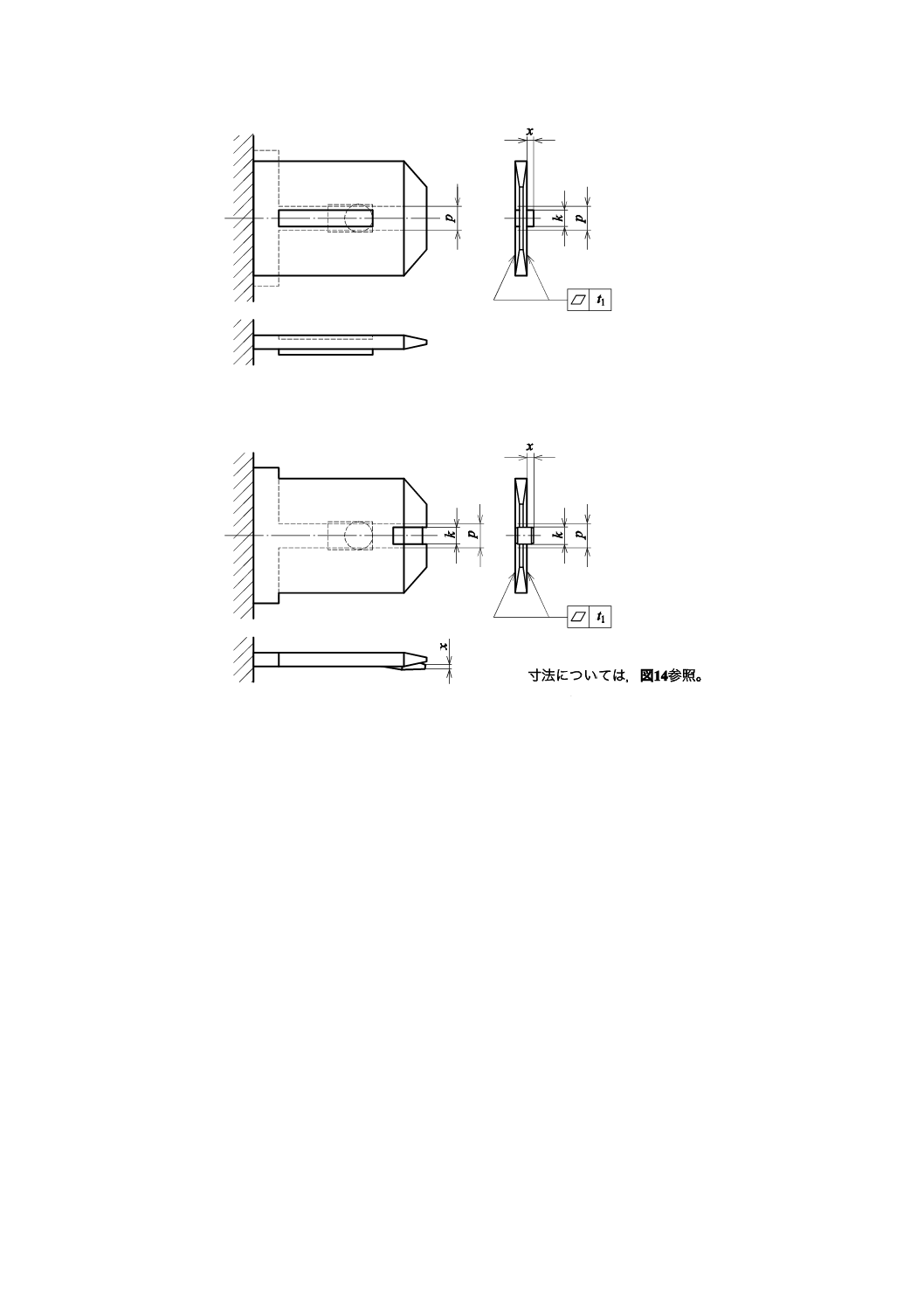
131
C 9730-1:2019
図15−非可逆コネクタ用のタブ
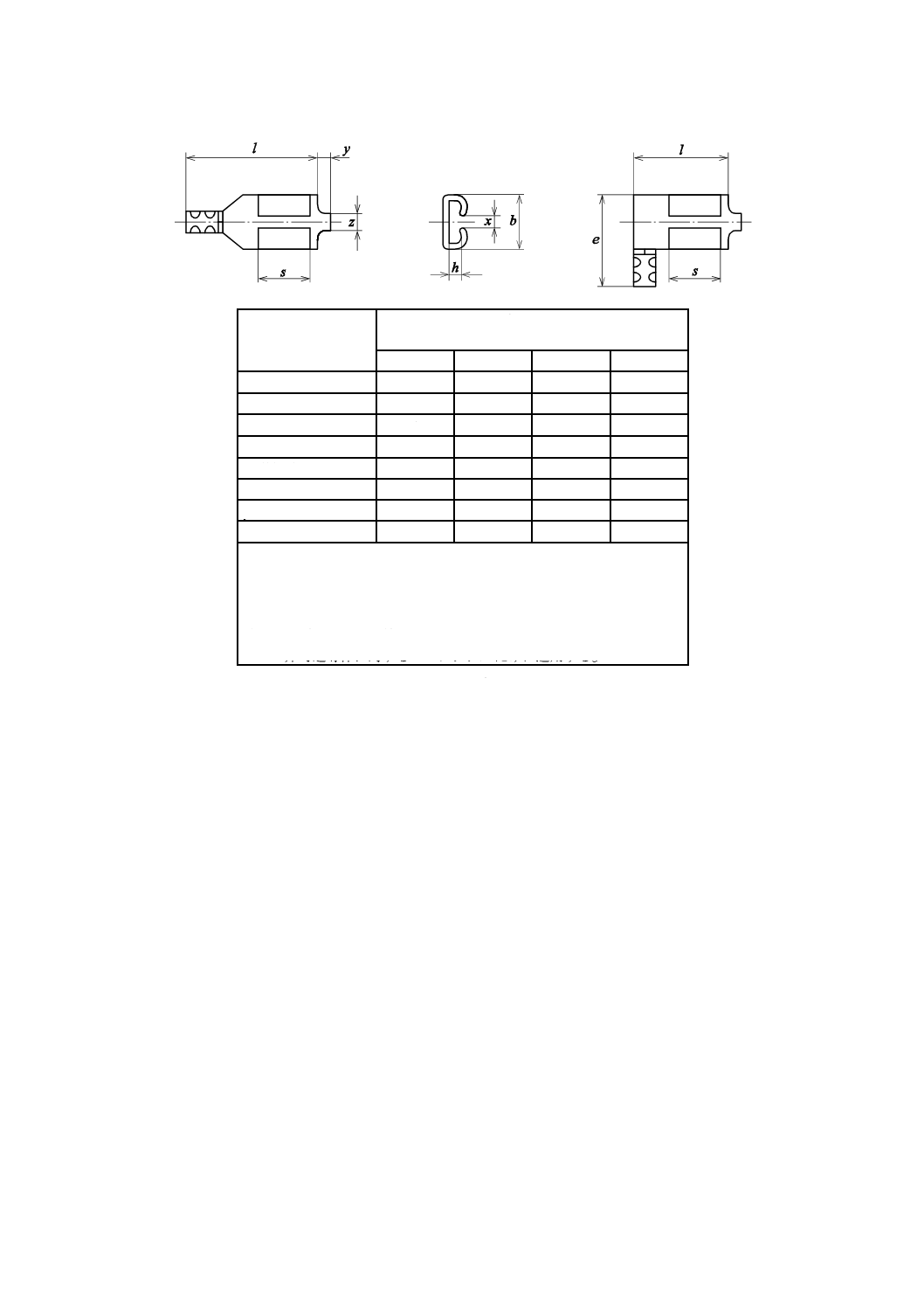
132
C 9730-1:2019
寸法
コネクタ寸法
mm
2.8
4.8
6.3
9.5
b(最大)
4
6
8
12.5
e(最大)
12
12
15
20
h(最大)a)
1
2
2.5
3.2
l(最大)
18
18
22
27
s(最小)
4.5
5
6
10
x(最小)b)
−
0.9
1.2
1.7
y(最大)
0.5
0.5
0.5
1.0
z(最大)
1.5
1.5
2.0
2.0
図に示す寸法は,圧着接続にだけ適用する。
スリーブ付きレセプタクル及び事前に絶縁した筒をもつレセプタク
ルの寸法は,検討中である。
図に示した寸法を除き,構造を制限する意図はない。
注a) タブの刃の中心線からの最大片寄り寸法である。
b) 非可逆導体に対するレセプタクルだけに適用する。
図16−レセプタクル
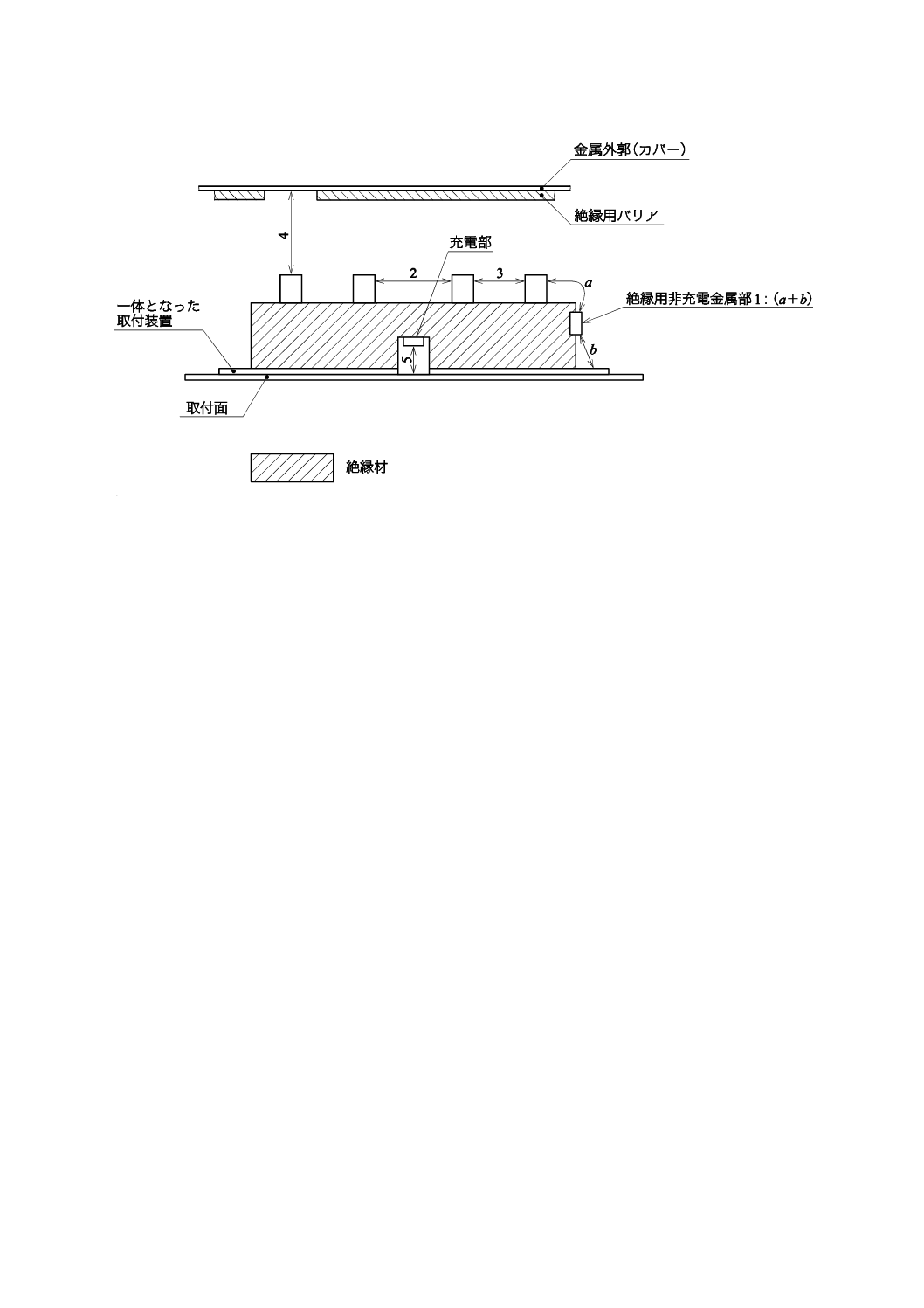
133
C 9730-1:2019
1: 充電部とその他の金属部(物理的に露出した電気的に絶縁された金属を含む。)との間。
2: 相互に絶縁する必要がある充電部(機能絶縁)間。ただし,接点間は除く。
3: 制御装置の作動によって,完全断路によって分離される充電部(同極性)間。
注記 2及び3の距離は,固定配線への接続を意図する端子間に適用しない。
4: 充電部と囲まれた制御装置の金属外郭との間。これらの距離は,制御されている機器の外郭内に据え付ける
ことを意図する制御装置の収容箱,フレーム又は一体となった取付装置には適用しない。
5: 独立取付形制御装置のくぼみの充電部と制御装置が取り付けられる表面との間。この距離は,適切なシール
又はバリアを追加することによって,減少させることができる。
図17−沿面距離及び空間距離の測定
図18〜図24(適用なし)
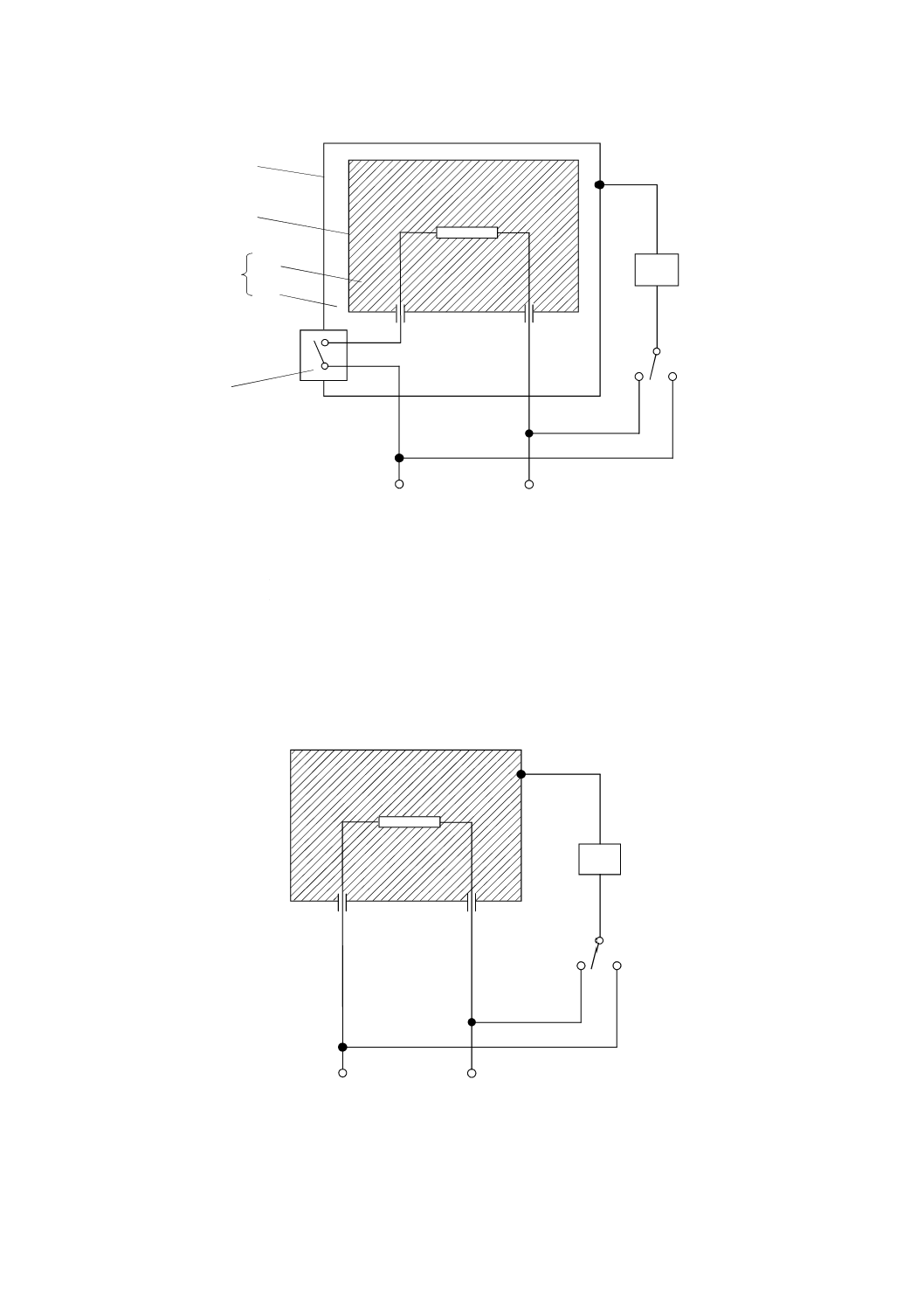
134
C 9730-1:2019
b
a
C
1
2
3
4
5
6
IEC 2492/13
記号
C: 図E.1の回路
1: 可触部分
2: 非可触金属部
3: 基礎絶縁
4: 付加絶縁
5: 二重絶縁
6: 強化絶縁
図25−クラスII制御装置の単相電源に対する漏えい電流測定回路
b
a
C
IEC 2493
記号
C: 図E.1の回路
図26−クラスII以外の制御装置の単相電源に対する漏えい電流測定回路
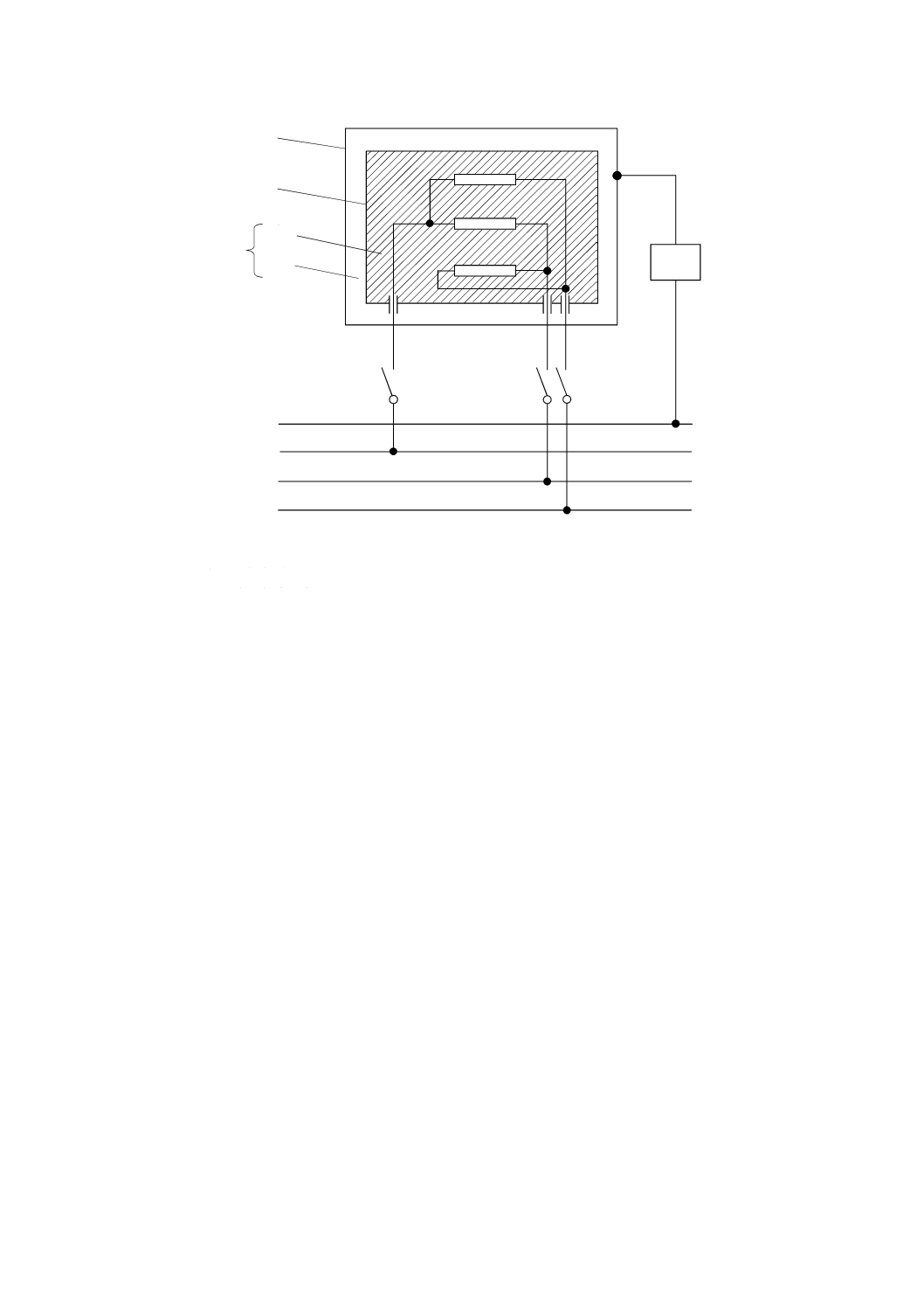
135
C 9730-1:2019
C
c
b
a
1
2
3
4
5
N
L1
L2
L3
記号
C: 図E.1の回路
1: 可触部分
2: 非可触金属部
3: 基礎絶縁
4: 付加絶縁
5: 二重絶縁
結合及び供給
L1,L2,L3:中点に対する供給電圧
N:スター結線の中性極又はデルタ結線の接地側極
図27−クラスII制御装置の三相電源に対する漏えい電流測定回路
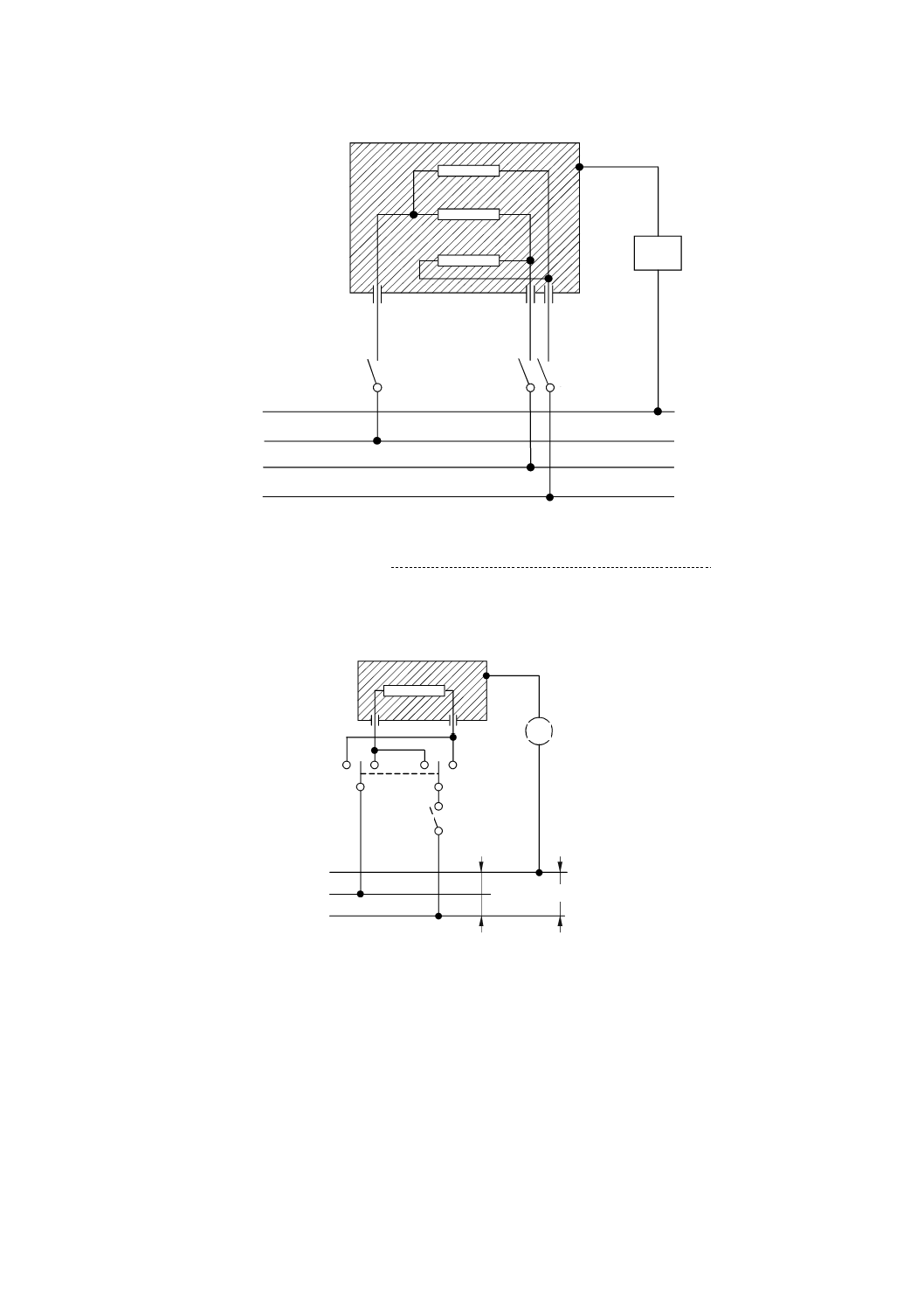
136
C 9730-1:2019
c
a
b
C
N
L1
L2
L3
記号
C: 図E.1の回路
結合及び供給
L1,L2,L3:中点に対する供給電圧
N:スター結線の中性極又はデルタ結線の接地側極
図28−クラスII以外の制御装置の三相電源に対する漏えい電流測定回路
mA
S1
120 V
240 V
120 V
IEC 2496
注記 図の試験電圧は,一例である。
図29−クラスII以外の制御装置の単相3線電源に対する漏えい電流測定回路
137
C 9730-1:2019
mA
S1
120 V
240 V
120 V
N-grounded
注記 図の試験電圧は,一例である。
図30−クラスII以外の制御装置の単相3線電源に対する漏えい電流測定回路
接地
138
C 9730-1:2019
附属書A
(規定)
表示の耐消滅性
A.1 制御装置上の表示は,安全のために十分な耐消滅性をもたなければならず,かつ,耐消滅性要求事
項によってA.1.1〜A.1.3のとおり分類する。
A.1.1 この規格の要求事項では,要求しない表示。
A.1.2 この規格の要求事項の範囲内で要求するが,制御装置を機器中に取り付けるか,又は据え付けたと
き,最終使用者が可触できない表示。
これらの表示は,最終検査の後,制御装置の製造業者の取扱い,つまり包装され,機器製造業者の輸送,
更に取付け中に扱われることに耐える,十分な除去抵抗力をもっていなければならない。さらに,表示は,
存在するおそれがある蒸気,及びその他の汚染があっても識別ができなければならない。
A.1.3 この規格の要求事項の範囲内で要求し,制御装置を通常使用のように取り付けるか,又は据え付け
た後,機器の最終使用者が可触である表示。
これらの表示は,A.1.2に示す取扱いなどに耐えることに加えて,機器の使用中に想定するこすり,及び
取扱いに耐えなければならない。ノブなどの上の表示は,手で操作するために連続的な取扱い,及びこす
った後でも表示が識別できなければならない。その他の表示は,掃除,研磨などに耐えることが望ましい。
A.1.4 A.1.2及びA.1.3によって分類する表示の耐消滅性要求事項の適否は,図8に示す耐久性試験機器
を用いて,A.2又はA.3の試験によって判定する。
主要部品は,直径65 mm,厚さ7.5 mmの硬くて白い研磨用フェルト製の円板で構成する。これは,回
転しないように固定し,試験する面を往復して20 mmのストロークで動くように,かつ,表面に掛かる力
が測定可能なように配置する。標準試験は,12ストローク(例えば,偏芯の回転数)とし,約15秒間か
ける。
試験中,研磨用円板の該当する部分は,ナップ(起毛して毛あしをそろえた柔らかい表面)を外側にし
て,白い吸収性リントの一層で覆う。
使用する溶剤は,次による。
− アルキルベンゼンスルホン酸と非イオン化洗剤とを混合する中性液体洗剤又は次から成る溶剤を脱イ
オン(蒸留)水に2 %溶かした水溶液
・ ドデシルベンゼンスルフォン酸ナトリウム(異性体),化学式C18H29NaO3S,CAS-No.25155-30-0が
体積分率70 %
・ グリセリン(別名:グリセロール,1,2,3-プロパントリオール,プロパントリオール,E 422),化学
式C3H8O3,CAS-No.56-81-5が体積分率30 %
− ノルマルヘキサン(脂肪族溶媒ヘキサンであって,芳香族含有量体積分率0.1 %,初期沸騰点約69 ℃
及び比重約0.66 g/cm3のもの,CAS-No. 110-54-3)
− 脱イオン(蒸留)水
A.2 A.1.2によって分類する表示の耐消滅性要求事項の適否は,A.2.1〜A.2.6の試験によって判定する。
A.2.1 表示は,4時間,表示面上にたまっている洗剤の滴に耐えなければならない。この期間の終了時に,
洗剤の“かさぶた”(痕跡)は,40±5 ℃の温水の非常に細かいスプレーによるか,又は湿った布で軽く拭
139
C 9730-1:2019
うことによって取り除く。
A.2.2 サンプルは,室内周囲温度25±5 ℃において,完全に乾燥する。
A.2.3 サンプルは,乾燥したリント及び250 gの“おもり”を用いて,図8に示す耐久性試験機器でこす
る。
A.2.4 サンプルは,水に浸したリント及び250 gの“おもり”を用いて,図8に示す耐久性試験機器でこ
する。
A.2.5 表示の形状又は位置(例えば,表示を付けた面をくぼみに入れることによって)が,この装置を用
いては漂白又はこすることができないような場合,A.2.3及びA.2.4の試験は適用しない。
A.2.6 これらの試験の終了時に,表示は識別できなければならない。
A.3 A.1.3によって分類する表示の耐消滅性要求事項の適否は,A.3.1〜A.3.7の試験によって判定する。
A.3.1 表示は,乾燥したリント及び750 gの“おもり”を用いて,図8に示す耐久性試験機器でこする。
A.3.2 表示は,水に浸したリント及び750 gの“おもり”を用いて,図8に示す耐久性試験機器でこする。
A.3.3 表示は,4時間,表示面上にたまっている洗剤の滴に耐えなければならない。この期間の終了時に,
洗剤の“かさぶた”は,40±5 ℃の温水の非常に細かいスプレーによるか,又は湿った布で軽く拭うこと
によって取り除く。
A.3.4 サンプルを乾燥させた後,洗剤に浸したリント及び750 gの“おもり”を用いて,図8に示す耐久
性試験機器でこする。
A.3.5 余剰洗剤を取り除いた後,石油アルコールに浸したリント及び750 gの“おもり”を用いて,図8
に示す耐久性試験機器でこする。
A.3.6 A.3.1及びA.3.5の試験に対して,研磨用円板の厚さは表示に接触し,こするように7.5 mmから漸
次減少してもよい。ただし,研磨用円板の最小厚さは2.5 mm以上とする。研磨用円板の厚さを減少する
場合は,750 gの“おもり”は比例して減少させる。
A.3.7 これらの試験の終了時に,表示は識別できなければならない。
140
C 9730-1:2019
附属書B
(規定)
沿面距離及び空間距離の測定
沿面距離及び空間距離を測定して決定する場合,次の事項が前提条件となる。ここで,Dは,検討する
距離に対して規定する空気中の空間距離に等しい(例えば,沿面距離及び空間距離の測定方法のための図
B.1〜図B.11参照)。
− 溝は,平行,収れん又は発散する側壁であってもよい。
− 溝が,発散形側壁をもつ場合,その最小幅がD/12を超え,その深さがD/2を超え,及び溝の底でその
幅がD/3以上(図B.8参照)である場合,空隙とみなす。ただし,溝の幅は,表B.1による。
− 80°未満の角度をもつ角は,D/3又は1 mmのうち,いずれか短い方に等しい幅をもつ絶縁連結物リ
ンク(最も不利な姿勢に置く。)によって,橋絡すると仮定する(図B.3参照)。
− 溝の頂上を横切る距離が,D/3又は1 mmのうち,いずれか短い方の距離以上の場合,別の規定があ
る場合を除き,沿面距離は溝の輪郭に従う(図B.2参照)。
− 相対的に相互に,動く部品間の沿面距離及び空間距離に対しては,これらの部分は,相互に最も不利
な位置にあるとみなす。
− これらの規定に従って決定する沿面距離は,対応する空間距離以上とする。
− D/3又は1 mmのうち,いずれか短い方未満の幅をもつ全ての空隙は,全ての空間距離を計算すると
きには無視する。
− 挿入又は据え付けるバリアに対して,沿面距離は,接合部を通して測定する。ただし,その部品が接
合部への湿気の浸入又はじんあい(塵埃)の侵入が発生しないように接着する場合,又は熱シールす
る場合は除く。
図B.1〜図B.11の例では,次のように識別する。
− “ ”は,沿面距離を示す。
− “ ”は,空間距離を示す。
溝の幅Xは,表B.1を参照する。
表B.1−溝の幅X
汚損度
溝の幅X:最小値
mm
1
0.25
2
1.0
3
1.5
4
2.5
関連する空間距離が3 mm未満の場合,最小溝幅は,この空間距離の1/3の値とする。
141
C 9730-1:2019
検討する経路は,X未満の幅の任意の深さの溝を含む。
空間距離は,直線距離とする。
図B.1−狭い溝
検討する経路は,X以上の幅の任意の深さの溝を含む。
空間距離は,直線距離とする。
沿面距離は,溝の輪郭に沿った距離とする。
図B.2−広い溝
検討する経路は,X以上の幅をもつV形の溝を含む。
空間距離は,直線距離とする。
沿面距離は,その溝の輪郭に沿うが,底部は幅がXに等しいところで溝を橋絡させた距離とする。
図B.3−V字溝
検討する経路は,リブを含む。
空間距離は,そのリブの頂上を通る最短の真っすぐな空間経路とする。
沿面距離は,リブの輪郭に沿った距離とする。
図B.4−リブ
142
C 9730-1:2019
検討する経路は,非接着接合部及びいずれの側にもX未満の幅をもつ溝を含む。
沿面距離及び空間距離は,図のとおりの直線距離とする。
図B.5−非接着接合部をもつ狭い溝
検討する経路は,非接着接合部及び幅がX以上の溝を含む。
空間距離は,直線距離とする。
沿面距離は,その溝の輪郭に沿った距離とする。
図B.6−非接着接合部をもつ広い溝
検討する経路は,非接着接合部,片側に幅がX未満の溝及び反対側に幅がX以上の溝を含む。
空間距離及び沿面距離は,図のとおりの距離とする。
図B.7−非接着接合部をもつ狭い溝及び広い溝
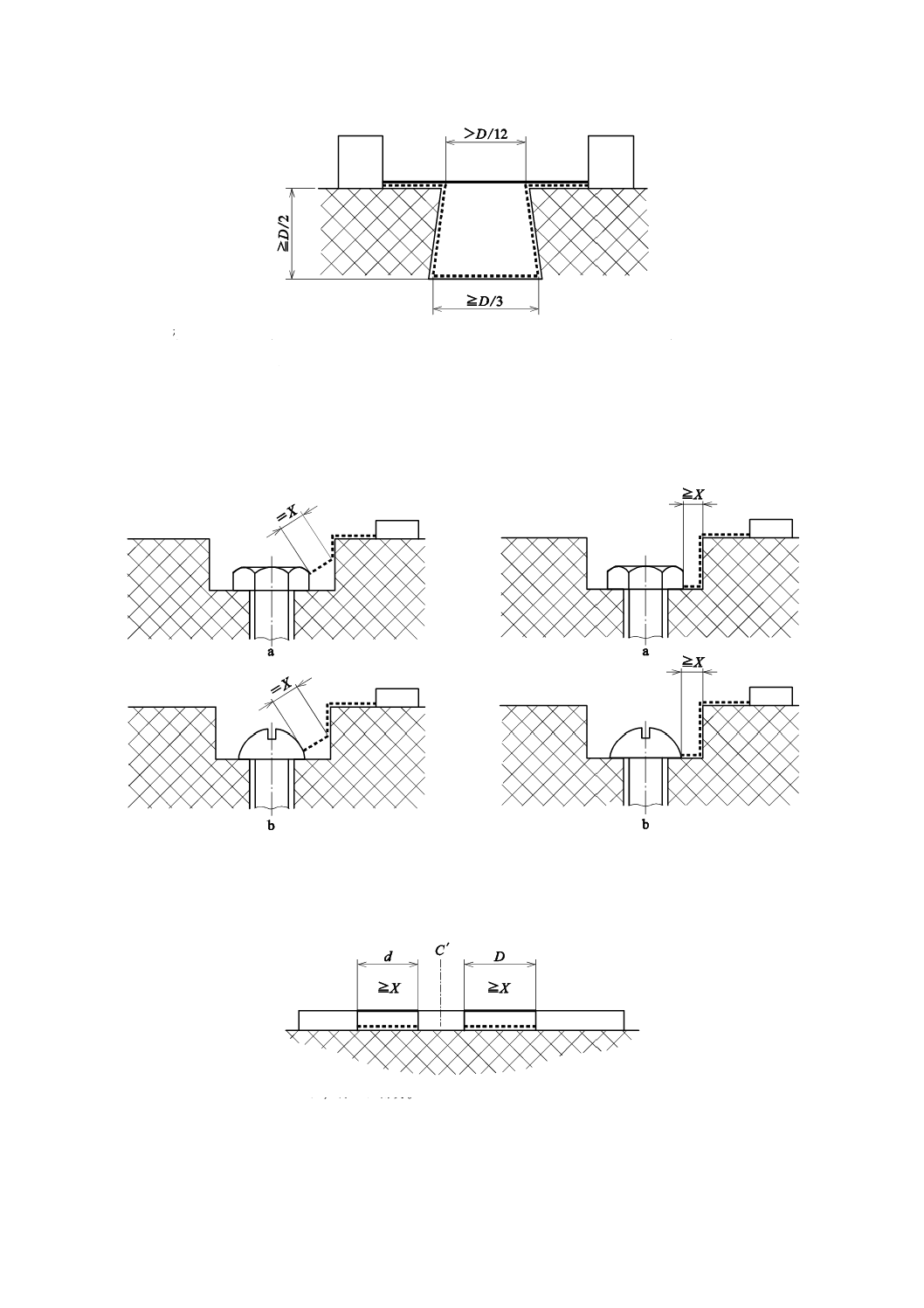
143
C 9730-1:2019
検討する経路は,発散形側壁でD/2以上の深さ及び最も狭い部分でD/12を超え,底でD/3以上
の幅をもつ溝を含む。
空間距離は,直線距離とする。
沿面距離は,溝の輪郭に沿った距離とする。
図B.3は,同様に内部のかどが,80゜未満である場合,それにも適用する。
図B.8−発散形側壁
ねじ頭部とくぼみの壁との空隙が狭く,空隙を沿面距離
の経路に算入できない場合。
ねじ頭部とくぼみの壁との空隙が十分に広く,空隙を沿
面距離の経路に算入できる場合。
図B.9−狭いくぼみ
図B.10−広いくぼみ
C'は,浮いた部分。
空間距離は,d+Dである。
沿面距離は,同じくd+Dである。
図B.11−浮いた導電部
144
C 9730-1:2019
附属書C
(規定)
水銀スイッチ試験に用いる綿
[欧州標準化委員会(CENELEC)に加盟している各国では,適用しない。]
C.1 分類
水銀スイッチ試験に用いる綿は,非殺菌とする。
C.2 一般要求事項
吸収綿は,漂白した白で,粘着性不純物及び脂肪質がない,うね織り繊維で作られていなければならな
い。
C.3 繊維の長さ
綿は,その質量の60 %以上は,長さ12 mm以上の繊維でなければならない。質量の10 %以下は,長さ
6 mm以下であってもよい。
C.4 吸水度
綿のサンプルは,10秒以内に完全に水中に浸水しなければならない。サンプルは,その質量の24倍以
上の水を保持しなければならない。
C.5 酸度及びアルカリ度
綿の抽出水は,中性でなければならない。
C.6 着火時の残さ
残さの0.2 %以下でなければならない。
C.7 水溶性物質
残さの0.25 %以下でなければならない。
C.8 脂肪質物質
青,緑,又は茶色がかった色の形跡が,エーテル溶液中にあってはならない。また,残さ量は,0.7 %を
超えてはならない。
C.9 染料
青又は緑の色合いの形跡があってはならない。軽微な黄は許容する。
C.10 その他の異物質
繊維長の決定のために取った綿のつまみは,油しみ又は金属粒子を含んでいてはならない。
145
C 9730-1:2019
附属書D
(参考)
耐熱性,耐火性及び耐トラッキング性
カナダ及び米国では,UL 746Dを適用する。改正は,検討中である。
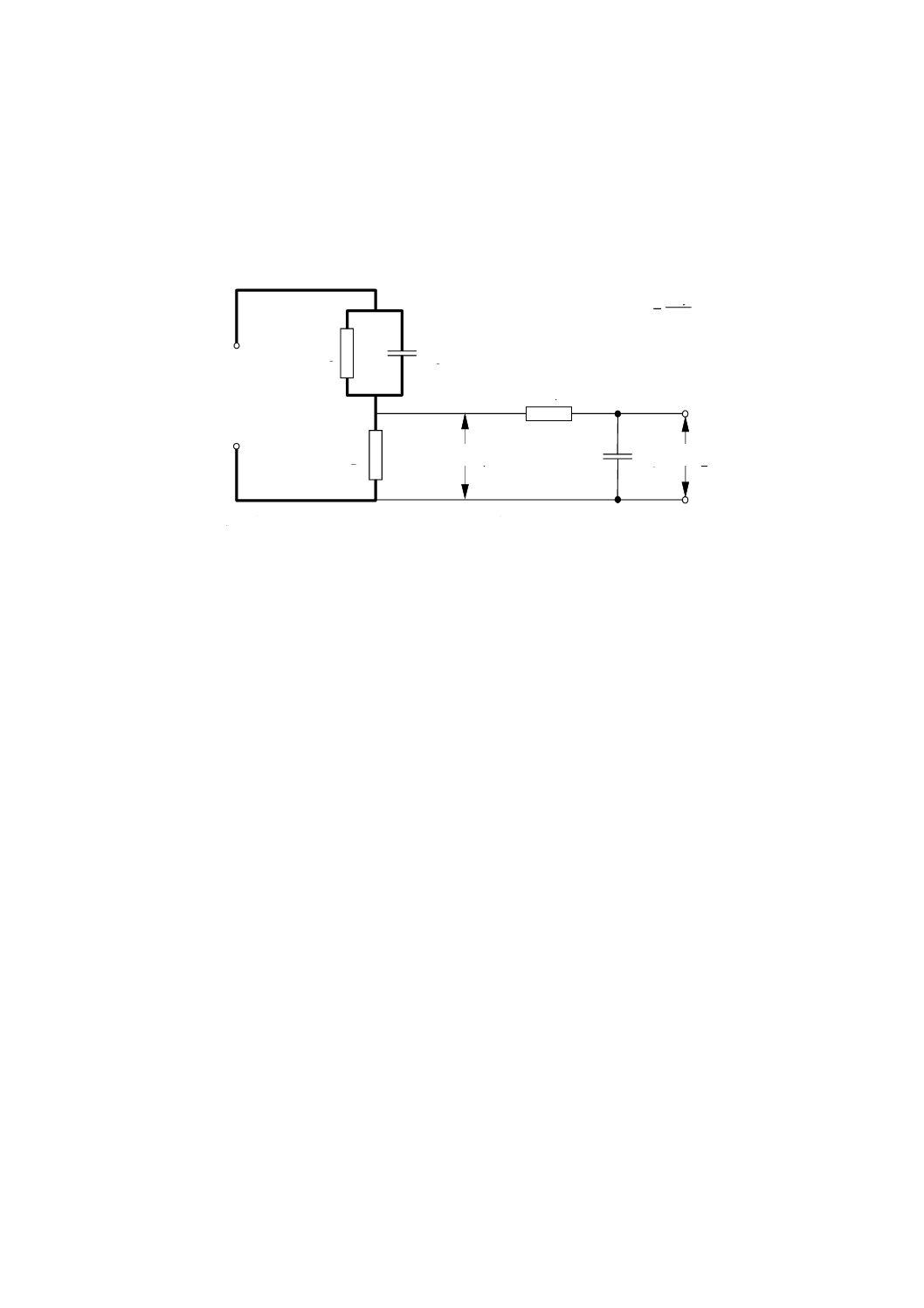
146
C 9730-1:2019
附属書E
(規定)
漏えい電流測定回路
H.8.1.10による漏えい電流測定のための適切な回路を,図E.1に示す。
A
B
C S
R S
R B
U 1
U 2
R 1
C 1
RS 1 500 Ω
RB 500 Ω
CS 0.22 μF
R1 10 000 Ω
C1 0.022 μF
注記
この図は,IEC 60990の図4を引用したものである。
図E.1−漏えい電流測定回路
試験端子
重み付けした接触電流
(知覚及び反応)
(ピーク値)
500
2
U
=
147
C 9730-1:2019
附属書F
(参考)
引火危険度試験
JIS C 9335の規格群に従って,制御装置が機器と一体化又は組み込まれる場合の情報は,JIS C 9335-1
による。
148
C 9730-1:2019
附属書G
(規定)
耐熱性及び耐火性試験
G.1
(規定なし)
G.2
グローワイヤ試験
グローワイヤ試験は,JIS C 60695-2-10及びJIS C 60695-2-11による。
グローワイヤ試験は,完成した制御装置で行わなければならない。完成した制御装置で行えない場合,
制御装置の部分は,この試験が実施できるように取り外してもよい。取り外すことができない場合,類似
の厚さの試験用板で実施する。ただし,制御装置の部分よりも厚くないものとする。
G.3
(規定なし)
G.4
保証トラッキング試験
保証トラッキング試験は,JIS C 2134による。
この規格の目的のため,JIS C 2134を次のように修正して適用する。
− 5.(試験片)の備考3.は,10.[保証トラッキング指数(PTI)の測定]にも適用する。
− 7.(測定装置)において,7.1(電極)は適用しない。
− 7.3(測定溶液)の試験溶液は,通常,溶液Aを用いなければならない。
− 8.2(準備)の最終段落に規定する電圧は,この規格の21.2.7に示す。
− 10.[保証トラッキング指数(PTI)の測定]において,試験は5回行う。
G.5
ボールプレッシャ試験
ボールプレッシャ試験は,JIS C 60695-10-2による(試験装置は図6参照)。
G.5.1 ボールプレッシャ試験1
恒温恒湿槽の温度は,次の温度のうち最も高い温度とする。
− 箇条14の試験中に測定する過度最高温度より20±2 ℃高い温度
− 75±2 ℃
− 製造業者が宣言する値
注記1 JIS C 9335-1の適用範囲の機器に組み込むことを意図する制御装置は,JIS C 9335-1の30.1
に規定する温度と異なってもよい。
保持部及びボールは,試験開始前に規定する試験温度になっていなければならない。
注記2 この試験は,セラミック製及びガラス製のものには適用しない。
G.5.2 ボールプレッシャ試験2
ボールプレッシャ試験は,G.5.1の規定に従って実施する。ただし,恒温恒湿槽の温度は,Tb±2 ℃とし,
Tbは次の温度とする。
− Tmaxが30 ℃以上,55 ℃未満の場合,100 ℃
− Tmaxが55 ℃以上,85 ℃未満の場合,125 ℃
149
C 9730-1:2019
− Tmaxが85 ℃以上の場合,Tmax+40 ℃
− 箇条14の加熱試験中における最高温度より20 K高い温度
− H.27.1.1.3の試験中における最高温度が,a)〜d)で規定する温度より高い場合,H.27.1.1.3の試験中に
おける最高温度
注記 JIS C 9335-1の適用範囲の機器に組み込むことを意図する制御装置は,JIS C 9335-1の30.1に
規定する温度と異なってもよい。
150
C 9730-1:2019
附属書H
(規定)
電子制御装置の要求事項
この附属書は,本体の対応する箇条の内容を補足又は変更するものである。
H.2 用語及び定義
H.2.4 断路及び開路に関する定義
H.2.4.2 追加
注記3 電子素子には,この断路(完全断路)はもたない。
H.2.4.3 追加
注記3 電子素子には,この断路(マイクロ断路)はもたない。
H.2.4.4 追加
注記2 電子素子には,この断路(マイクロ開路)はもたない。
追加(次の定義を追加する。)
H.2.4.6
電子的断路(electronic disconnection)
機能的に断路する回路をもつ電子素子による非周期的な開路であって,ある電気的要求事項を満たす,1
個又はそれ以上の極に対する空隙以外の断路。
注記 電子的断路は,全ての非検出制御装置に対して,断路によって制御される機能が確実であるこ
と,及び全ての検出制御装置に対しては,制御される機能が表1の項目36で製造業者が宣言す
る作動量の限度値間で確実であることを保証する。
断路は,自動作動又は手動作動によって得られてもよい。
制御装置によっては,2種類以上の形式の回路断路装置を組み込んでいる。
電子的断路は,用途によっては適切ではない場合がある(H.28参照)。
H.2.5 構造に関する制御装置のタイプの定義
追加(次の定義を追加する。)
H.2.5.7
電子制御装置(electronic control)
1個又はそれ以上の電子素子を組み込む制御装置。
H.2.5.8
電子素子(electronic device)
電子の動的不均衡を作る素子。
注記 対応国際規格の注記は,誤解を招く可能性があるため,この規格では適用しない。
H.2.5.9
電子式組立部(electronic assembly)
1個又はそれ以上が電子素子であって,個々の部分が組立部に対する損傷なしに取替えができる構成部
品群。
注記 例えば,プリント回路板上に取り付ける構成部品群がある。
151
C 9730-1:2019
H.2.5.10
集積回路(integrated circuit)
半導体材料のうちに含まれ,その材料の表面又は近傍で相互接続される電子素子。
注記 一般的に,集積回路は何らかの形状のパッケージで封止される。
H.2.5.11
ハイブリッド回路(hybrid circuit)
厚いフィルム,薄いフィルム又は表面実装素子(SMD)技術によってセラミック基板上に生成した回路
であって,表面にはI/Oポイントを除き,接触可能な電気的接続がなく,内部接続は全てがリードフレー
ム又はその他の一体構造として構築された回路。
H.2.7 感電に対する保護に関する定義
追加(次の定義を追加する。)
H.2.7.14
保護インピーダンス(protective impedance)
通常使用状態及び機器内で起こるおそれがある故障状態の下で,電流が安全値に制限されるような値の,
充電部と可触導電部との間に接続されたインピーダンス。
追加(次の定義を追加する。)
H.2.16
ソフトウェアを使用する制御装置の構造に関連する定義
H.2.16.1
デュアルチャンネル(dual channel)
規定の動作を実施するために,2個の相互に独立した機能的手段を含む構造。
注記 共通モードの故障/エラーの抑制のために特別処置を行ってもよい。2個のチャンネルは,そ
れぞれの性質がアルゴリズム又はロジックであることを必要としない。
H.2.16.2
比較付きデュアルチャンネル(異質形)[dual channel (diverse) with comparison]
それぞれ製造業者が宣言する応答をすることができる,2個の異なる相互に独立した機能的手段を含む
デュアルチャンネル構造。この中で,故障/エラー認識のために出力信号の比較を実施する。
H.2.16.3
比較付きデュアルチャンネル(同質形)[dual channel (homogeneous) with comparison]
それぞれ製造業者が宣言する応答をすることができる,2個の同一で相互に独立した機能的手段を含む
デュアルチャンネル構造。この中で,故障/エラー認識のために内部信号又は出力信号の比較を実施する。
H.2.16.4
単一チャンネル(single channel)
規定の動作を実施するために,単一の機能的手段をもつ構造。
H.2.16.5
機能試験付き単一チャンネル(single channel with functional test)
動作に先立ち,試験データを機能ユニットに導入する単一チャンネル構造。
H.2.16.6
定期的自己試験付き単一チャンネル(single channel with periodic self test)
制御装置の構成部品を,動作中に定期的に試験する単一チャンネル構造。
152
C 9730-1:2019
H.2.16.7
定期的自己試験及びモニタ付き単一チャンネル(single channel with periodic self test and monitoring)
独立した手段(それぞれ,指定する応答を提供する。)が安全関連タイミング,順序及びソフトウェア動
作の応答をモニタする,定期的自己試験付き単一チャンネル。
H.2.17
ソフトウェアを使用する制御装置におけるエラー防止に関連する定義
H.2.17.1
動的解析(dynamic analysis)
制御装置への入力を模擬し,回路節点(ノード)におけるロジック信号を適切な値及びタイミングに対
して調査する解析方法。
H.2.17.2
故障率計算(failure rate calculation)
一定種類の単位当たりの故障回数の理論数値の計算。
注記 例えば,1時間当たりの故障回数又は動作サイクル当たりの故障回数。
H.2.17.3
ハードウェア解析(hardware analysis)
制御装置の回路構成及び構成部品が,それらの指定する許容差及び定格内で適切に機能をしているかを
調査する評価プロセス。
H.2.17.4
ハードウェアシミュレーション(hardware simulation)
回路機能及び部品偏差を,コンピュータ上のモデルを用いて調査する解析方法。
H.2.17.5
検査(inspection)
ハードウェア又はソフトウェアの仕様,設計又はコードを,起こり得るエラーを確認するために,設計
者又はプログラマ以外の人若しくはグループが詳細に調査する評価プロセス。
注記 ウォークスルーとは対照的に,設計者又はプログラマは,この評価中は受動的である。
H.2.17.6
動作試験(operational test)
設計又は構造上のエラーを検知するために,制御装置をその意図する動作条件(例えば,サイクル速度,
温度,電圧)の上限値及び下限値で動作させる評価プロセス。
H.2.17.7
静的解析
H.2.17.7.1
静的解析−ハードウェア(static analysis−hardware)
ハードウェアモデルを,システム的に評価する評価プロセス。
注記 評価は,一般的にはコンピュータ支援形であって,部品表・回路配置の調査,インタフェース
解析及び機能確認を含んでもよい。
H.2.17.7.2
静的解析−ソフトウェア(static analysis−software)
ソフトウェアプログラムを,必ずしもそのプログラムを実施することなくシステム的に評価する評価プ
ロセス。
注記 評価は,一般的にはコンピュータ支援形であり,通常,プログラムロジック,データパス,イ
153
C 9730-1:2019
ンタフェース及び変数のような機能の解析を含む。
H.2.17.8
系統的試験(systematic test)
システム又はソフトウェアプログラムを,選択した試験データの導入によって適切に実行されているか
評価する解析方法。
注記 例えば,ブラックボックス試験(H.2.17.8.1)及びホワイトボックス試験(H.2.17.8.2)参照。
H.2.17.8.1
ブラックボックス試験(black box test)
機能仕様から得られる試験データを,機能ユニットが適切に動作しているかを評価するために,その機
能ユニットに入力する系統的試験。
H.2.17.8.2
ホワイトボックス試験(white box test)
ソフトウェア仕様に基づく試験データを,そのプログラムのサブパートが適切に動作しているかを評価
するために,プログラムに導入する系統的試験。
注記 例えば,できる限り多くの命令,できる限り多くの分岐,できる限り多くのサブルーチンなど
を実行する試験データを選択できる。
H.2.17.9
ウォークスルー(walk-through)
起こるおそれがあるエラーを識別するために,設計者又はプログラマが開発したハードウェア設計,ソ
フトウェア設計及び/又はソフトウェアコードの最初から最後まで,設計者又はプログラマが評価チーム
の構成員を率いる評価プロセス。
注記 検査とは対照的に,再評価中は,設計者又はプログラマは能動的である。
H.2.17.10
ソフトウェア故障/エラー検出時間(software fault/error detection time)
故障/エラーの発生と指定する制御応答のソフトウェアによる始動との間の時間。
H.2.18
ソフトウェアを使用する制御装置のための故障/エラー抑制技術に関連する定義
H.2.18.1
バス冗長性
H.2.18.1.1
全バス冗長性(full bus redundancy)
全冗長データ及び/又はアドレスを,冗長バス構造の方法によって備える故障/エラー抑制技法。
H.2.18.1.2
多重ビットバスパリティ(multi-bit bus parity)
バスを複数のビットによって拡張し,これらの追加したビットを,エラー検出のために用いる故障/エ
ラー抑制技法。
H.2.18.1.3
単一ビットバスパリティ(single bit bus parity)
バスを1ビットだけ拡張し,この追加したビットを,エラー検出のために用いる故障/エラー抑制技法。
H.2.18.2
コードの安全性(code safety)
入力及び出力情報中の同時発生する及び/又はシステムエラーに対する保護を,データ冗長性及び/又
154
C 9730-1:2019
は転送冗長性を用いることによって提供する故障/エラー抑制技法(H.2.18.2.1及びH.2.18.2.2参照)。
H.2.18.2.1
データ冗長性(data redundancy)
冗長データを扱う蓄積装置によって実現されるコードの安全性の形式。
H.2.18.2.2
転送冗長性(transfer redundancy)
データを複数回連続転送して比較する,コードの安全性の形式。
注記 この技術は,間けつ(歇)的エラーを認識できる。
H.2.18.3
コンパレータ(comparator)
デュアルチャンネル構造中の故障/エラー抑制に使用する装置。
注記 この装置は,2個のチャンネルからのデータを比較し,差異を検出した場合に,あらかじめ指
定した応答を始動させる。
H.2.18.4
DC故障モデル(d.c. fault model)
信号線間に短絡回路を含む,縮退故障モデル。
注記 試験中は装置内で幾つもの短絡が起こることがあるので,通常,該当信号線間の短絡だけを考
慮する。信号線を逆の論理レベルに駆動しようとするときでも,信号の論理が変化しないよう
に信号論理判定レベル(しきい値)は定義される。
H.2.18.5
等価性クラス試験(equivalence class test)
命令の解読及び実施が適切に動作するかどうかを決定する目的の系統的試験。
注記1 試験データは,CPU命令仕様書から得られる。
注記2 類似の命令をグループに分類し,入力データの組は特定のデータ間隔(等価クラス)に小分
割する。1個のグループプロセス内の各命令は,グループ全体が試験データの組全体を処理
するように,1個又はそれ以上の組の試験データを処理する。試験データは,次から作るこ
とができる。
− 有効範囲からのデータ
− 無効範囲からのデータ
− 境界からのデータ
− 上限値,下限値,及びそれらの組合せ
グループ内の試験は,グループ全体が全てのアドレスモードを実施するように,異なるア
ドレスモードで動作させる。
H.2.18.6
エラー認識手段(error recognizing means)
このシステム内部においてエラーを認識する目的のために設けた独立手段。
注記 例えば,モニタ装置,コンパレータ及びコード発生装置である。
H.2.18.7
ハミング距離(Hamming distance)
エラーを検出し,訂正するためのコードの能力を表す統計的手段。
155
C 9730-1:2019
注記1 2個のコードワードのハミング距離は,2個のコードワード中の異なる位置の数に等しい。
注記2 H. Holscher and J. Rader; “Microcomputers in safety techniques.” Verlag TUV Bayern. TUV
Rheinland. (ISBN 3-88585-315-9)参照。
H.2.18.8
入力比較(input comparison)
規定の許容差内にあるように設計された入力どうしを比較する故障/エラー抑制技法。
H.2.18.9
内部エラー検出(internal error detecting)
エラーを検出又は訂正するための特殊回路構成を組み込んだ故障/エラー抑制技法。
H.2.18.10 プログラム順序
H.2.18.10.1
周波数モニタ(frequency monitoring)
クロック周波数を独立した固定周波数と比較する故障/エラー抑制技法。
注記 例えば,電源周波数との比較である。
H.2.18.10.2
プログラム順序の論理的モニタ(logical monitoring of the programme sequence)
プログラム順序の論理的遂行をモニタする故障/エラー抑制技法。
注記 例えば,プログラム内のルーチン数,若しくは選択されたデータの計数,又は独立したモニタ
装置を用いるなどである。
H.2.18.10.3
タイムスロット及び論理的モニタ(time-slot and logical monitoring)
プログラム順序の論理的モニタ及びプログラム順序のタイムスロットモニタ(H.2.18.10.4)を組み合わ
せた故障/エラー抑制技法。
H.2.18.10.4
プログラム順序のタイムスロットモニタ(time-slot monitoring of the programme sequence)
独立したタイムベースをもつタイミングデバイスが,プログラム機能及び順序をモニタするために定期
的にトリガをかける故障/エラー抑制技法。
注記 例えば,ワッチドックタイマである。
H.2.18.11
多重並列出力(multiple parallel outputs)
複数の独立出力を,動作上のエラー検出のために,又は独立した複数のコンパレータのために供給する
故障/エラー抑制技法。
H.2.18.12
出力検証(output verification)
複数の出力を独立した複数の入力と比較する故障/エラー抑制技法。
注記 この技術は,エラーを欠陥出力に関連させても,させなくてもよい。
H.2.18.13
信頼性検査(plausibility check)
プログラムの実行,入力又は出力を,認めることができないプログラム順序,タイミング又はデータに
対して検査する故障/エラー抑制技法。
156
C 9730-1:2019
注記 例えば,あるサイクル数の完了後の追加割込みの導入又はゼロによる除算チェックである。
H.2.18.14
プロトコル試験(protocol test)
内部通信プロトコルにおけるエラーを検出するために,データをコンピュータ構成部品に対して,及び
コンピュータ構成部品から転送する故障/エラー抑制技法。
H.2.18.15
相互交換比較(reciprocal comparison)
2個の処理装置間で相互的に交換されたデータについて比較を実施する,デュアルチャンネル(同質形)
構造の中で使用する故障/エラー抑制技法。
注記 相互的とは,類似データの交換を示す。
H.2.18.16
冗長データ生成(redundant data generation)
同一のタスクを実行するための,例えば,コード発生装置のような,複数の独立手段の利用。
H.2.18.17
冗長モニタ(redundant monitoring)
同一のタスクを実行するための,例えば,ウォッチドッグ装置及びコンパレータのような,複数の独立
手段の利用。
H.2.18.18
計画伝送(scheduled transmission)
特定の送信機からの情報が,時間及び順序のあらかじめ明示された点においてだけ送信されることが認
められており,そうでなければ受信機はそれを通信エラーとして処理する通信手順。
H.2.18.19
ソフトウェア多様性(software diversity)
ソフトウェアの全体又は部分が代替ソフトウェアコードの形式で2回組み込まれる故障/エラー抑制技
法。
注記 例えば,ソフトウェアコードの代替形式は,異なるプログラマ,異なる言語又は異なるコンパ
イリングスキームによって作り出されてもよく,また,異なるハードウェアチャンネル又は単
一チャンネル内の異なる記憶域に常駐してもよい。
H.2.18.20
縮退故障モード(stuck-at fault mode)
回路の開放状態又は信号レベルが変化しない状態を表す故障モード。
注記 これらは通常,“開放縮退”,“1縮退”又は“0縮退”として引用される。
H.2.18.21
試験済みモニタ(tested monitoring)
開始時又は動作中に定期的に試験されるウォッチドッグ装置及びコンパレータのような(ソフトウェア
から)独立したモニタ手段の設置。
H.2.18.22
試験用パターン(testing pattern)
制御装置の入力装置,出力装置及びインタフェースの定期的試験のために用いる故障/エラー抑制技法。
注記 試験用パターンをそのユニットに入力し,その結果を期待値と比較する。試験用パターンの入
157
C 9730-1:2019
力及び結果の評価は相互に独立した手段を使用する。試験用パターンは,制御装置の適切な動
作に影響を与えないように構成する。
H.2.19
ソフトウェアを使用する制御装置のためのメモリ試験に関連する定義
H.2.19.1
アブラハム試験(Abraham test)
メモリセル間の全ての結合故障及び縮退を識別する,可変メモリパターン試験の特定の形態。
注記1 全メモリ試験を実施するために,要求される動作数は約30nである。ここでnは,メモリ中
のセル数である。試験は,メモリを区画化し,異なる時間セグメントにおいて各区画を試験
することによって,動作サイクル中の使用に対して透過性にしてもよい。
注記2 Abraham, J.A.; Thatte, S.M.; “Fault coverage of test programs for a microprocessor”, Proceedings of
the IEEE Test Conference 1979, pp 18-22.参照。
H.2.19.2
ガルパットメモリ試験(GALPAT memory test)
一律に書き込まれたメモリセルのフィールド中の単一セルに,逆に書き込んだ後に,残りの被試験メモ
リを検査する故障/エラー抑制技法。
注記1 フィールド中の残りのセルの各個の読取動作の後,逆書き込みセルもまた検査し,読み取る。
このプロセスは,試験中のメモリセル全てに対して繰り返す。次に,第2の試験は,この試
験セルに逆書き込みなしに,同一のメモリ範囲上でガルパットメモリ試験を行う。
注記2 試験は,メモリを区画化し,異なる時間セグメントにおいて各区画を試験することによって,
動作サイクル中の使用に対して透過性にしてもよい[透過性ガルパット試験(H.2.19.2.1)参
照]。
H.2.19.2.1
透過性ガルパット試験(transparent GALPAT test)
最初に,試験するメモリの範囲の内容を代表して署名ワードを形成し,このワードを保管するガルパッ
トメモリ試験。
注記1 試験するセルは逆の値を書き込み,この試験を上記のとおりに実行する。残りのセルは個別
的には検査しないが,第2署名ワードの形成及び第2署名ワードとの比較によって検査する。
次に,第2試験を,先に逆にした値を試験用セルに逆に書き込むことによって上記のとおり
に実行する。
注記2 この技術は,メモリセル間のインタフェースにおけるエラーだけでなく,全ての静的ビット
エラーを検出する。
H.2.19.3
チェックサム
H.2.19.3.1
変形チェックサム(modified checksum)
メモリ中の全てのワードの内容を代表する単一ワードを発生し,保管する故障/エラー抑制技法。
注記1 自己試験中,チェックサムを同一のアルゴリズムによって形成し,保管したチェックサムと
比較する。
注記2 この技術は,全ての奇数エラー及び幾つかの偶数エラーを認識する。
H.2.19.3.2
多重チェックサム(multiple checksum)
158
C 9730-1:2019
試験するメモリ領域の内容を代表する複数の別のワードを発生し,保管する故障/エラー抑制技法。
注記1 自己試験中,チェックサムを同一のアルゴリズムによって形成し,その領域に保管したチェ
ックサムと比較する。
注記2 この技術は,全ての奇数エラー及び幾つかの偶数エラーを認識する。
H.2.19.4
巡回冗長検査(CRC)(cyclic redundancy check)
H.2.19.4.1
CRC−単一ワード(CRC−single word)
メモリの内容を代表する単一ワードを発生する故障/エラー抑制技法。
注記1 自己試験中,同一のアルゴリズムによって,もう一つの署名ワードを発生し,保管したワー
ドと比較する。
注記2 この技術は,全ての1ビットエラー及び高い確率での多重ビットエラーを認識する。
H.2.19.4.2
CRC−二重ワード(CRC−double word)
メモリの内容を代表する複数のワードを発生する故障/エラー抑制技法。
注記1 自己試験中,同一のアルゴリズムによって同数の署名ワードを発生し,保管したワードと比
較する。
注記2 この技術は,1ビットエラー及びCRC−単一ワードの場合よりも高い精度で多重ビットエラ
ーを認識できる。
H.2.19.5
比較付き冗長メモリ(redundant memory with comparison)
メモリの安全関連内容を,エラー抑制のために比較できるように,異なる領域に,異なる書式で2回記
憶する構造。
H.2.19.6
静的メモリ試験(static memory test)
静的エラーだけを検出することを意図した故障/エラー抑制技法。
H.2.19.6.1
チェッカボードメモリ試験(checkerboard memory test)
0及び1のチェッカボードパターンを試験中のメモリ領域に書き込み,セルを対で検査する静的メモリ
試験。
注記 各対の第1セルのアドレスは可変であって,第2のセルのアドレスは,第1アドレスのビット
極性反転から得られる。第1の検査においては,まず可変アドレスをメモリのアドレススペー
スの終端まで増加し,次に,その元の値まで減らす。試験は,チェッカボードパターンの極性
を反転して繰り返す。
H.2.19.6.2
マーチングメモリ試験(marching memory test)
通常動作状態のように,試験中のメモリ領域に対して,データを書き込む静的メモリ試験。
注記 あらゆるセルを昇順で検査し,内容についてビット反転を実行する。次に,検査及びビット反
転を降順で繰り返す。その後,このプロセスを,初めに試験した全てのメモリセルについてビ
ット反転を実行した後に繰り返す。
159
C 9730-1:2019
H.2.19.7
ウォークパットメモリ試験(walkpat memory test)
通常の動作状態のように,標準データパターンを試験中のメモリ領域に書き込む故障/エラー抑制技法。
注記1 ビット反転を第1セルについて実行し,残りのメモリ領域を検査する。次に,第1セルを再
び反転し,そのメモリを検査する。このプロセスを試験中の全てのメモリセルについて繰り
返す。第2の試験は,試験中のメモリ中の全てのセルのビット反転を実行し,上記のように
進めることによって実施する。
注記2 この技術は,メモリセル間のインタフェース中のエラーだけでなく,全ての静的ビットエラ
ーを認識する。
H.2.19.8
ワードの保護
H.2.19.8.1
多重ビット冗長性によるワードの保護(word protection with multi-bit redundancy)
試験中のメモリ領域の各ワードにおいて,冗長ビットを生成し保管する故障/エラー抑制技法。
注記1 各ワードを読み取るときパリティチェックを行う。
注記2 例えば,幾つかの3ビット及び多重ビットエラーだけでなく,全ての1ビット及び2ビット
エラーを認識するハミングコードである。
H.2.19.8.2
単一ビット冗長性によるワードの保護(word protection with single bit redundancy)
単一ビットの偶数パリティ又は奇数パリティを作り,試験中のメモリ領域の各ワードに追加及び保管す
る故障/エラー抑制技法。
注記1 各ワードを読み取るときパリティチェックを行う。
注記2 この技術は,全ての奇数ビットエラーを認識する。
H.2.20
ソフトウェア用語の定義−一般事項
H.2.20.1
共通モードエラー(common mode error)
各チャンネル又は構造が,同時に同じ方法で影響を受けるような,デュアルチャンネル,その他の冗長
構造におけるエラー(又は複数のエラー)。
H.2.20.2
共通原因エラー(common cause error)
単一の事象に由来する,異なるアイテムのエラー。これらのエラーには,互いに因果関係はない。
注記 共通原因エラーは,共通モードエラーとは混同しない。
H.2.20.3
故障モード影響解析,FMEA(failure modes and effects analysis)
各ハードウェア構成部品の故障モードを識別し,制御装置の安全関連機能に及ぼすそれらの影響につい
て調査する分析的技術。
H.2.20.4
独立(independent)
制御データの流れによって悪い影響を受けず,かつ,制御機能のその他の故障によって,又は共通モー
ド効果によって阻害されない状態。
160
C 9730-1:2019
H.2.20.5
不変メモリ(invariable memory)
プログラム実行中に,変化することを意図しないデータを含むプロセッサシステム中のメモリ領域。
注記 不変メモリは,データがプログラム実行中に変化することを目的としない場合のRAM構造を
含んでもよい。
H.2.20.6
可変メモリ(variable memory)
プログラム実行中に変化する予定のデータを含む,プロセッサシステム中のメモリ領域。
H.2.21
(規定なし)
H.2.22
制御機能の分類に関連する定義
故障を許容するための,及び危険回避のための保護手段を評価するために,その故障の行動に関して制
御機能を分類する必要がある。
制御機能の分類では,機器の全体的な安全概念への統合を考慮しなければならない。
注記 制御機能は,検知手段から始まり,演算回路(ハードウェア及び使用する場合はソフトウェア)
及びアクチュエータ駆動部を含める一連のもの全てから構成される。
制御機能の設計を評価する目的で,現在,要求事項によって,三つの異なるクラスに分類している。
H.2.22.1
クラスA制御機能(class A control function)
機器の安全を担保することを意図していない制御機能。
注記 例えば,室内用自動温度調節器,温度制御装置。
H.2.22.2
クラスB制御機能(class B control function)
機器の不安全を防ぐことを意図する制御機能。
注記1 この制御機能の故障は,直接危険な状況に至らない。
注記2 例えば,温度制限器,圧力制限器。
H.2.22.3
クラスC制御機能(class C control function)
機器内での爆発又は故障が直接機器に危険の原因となるような特定の危険を防止するように意図した制
御機能。
注記 例えば,バーナ制御システム,密閉式給水システム(保護用排気なし)のための温度過昇防止
装置。
H.2.23 機能安全に関連する定義
H.2.23.1
故障許容時間(fault tolerating time)
危険状態を引き起こすことを防ぐために,故障の発生から非制御機器の遮断までの適用において許容す
る時間。
注記 危険状態を防止できる場合,非制御機器の遮断以外の動作を許容する。
H.2.23.2
故障応答時間(fault reaction time)
制御装置が定義された状態に達した時点と故障の発生時点との時間間隔。
161
C 9730-1:2019
H.2.23.3
定義された状態(defined state)
次のいずれかの特性をもつ制御装置の状態。
a) 制御装置は,その出力端子がどのような状況の下でも安全な状態に確実になる様相を受動的にとる。
定義された状態への移行の原因を取り除いたとき,適切な要求事項のとおりに機器が起動することが
望ましい。
b) 制御装置がJIS C 9730の規格群の関連する第2部で規定するタイミング以内に,遮断又は不安全な状
態を防止する保護動作を能動的に実行する。
c) 制御装置が,全ての安全関連の機能要求事項を満たし続けながら,動作を継続する。
H.2.23.4
複雑な電子機器(complex electronics)
次の特性をもつ電子部品を用いる組立品。
a) 部品は,複数の機能出力をもつ。
b) ピンの縮退及び短絡によって,又は表H.24に示す他の故障モードによって構成部品の故障モードを
代表することは実際的でない,又は不可能である。
H.2.23.5
リセット(reset)
システムの再起動を許容するための安全状態から設定し直す操作。
H.2.23.6
(規定なし)
H.2.23.7
(性能の)劣化[degradation (of performance)]
部品,機器又はシステムの意図する性能からの好ましくない離脱。
注記 用語“劣化”は,一時的又は永久的な故障についても適用する。
(IEC 60050-161:1990,161-01-19)
H.2.23.8
(規定なし)
H.2.23.9
危害(harm)
人の受ける身体的傷害若しくは健康障害,又は財産若しくは環境が受ける害。
(ISO/IEC Guide 51:1999,3.3)
H.2.23.10
危険(hazard)
危害の潜在的原因。
(ISO/IEC Guide 51:1999,3.5)
H.2.23.11
リスク(risk)
危害の発生確率と危害の程度との組合せ。
(ISO/IEC Guide 51:1999,3.2)
H.2.23.12
合理的に予見可能な誤使用(reasonably foreseeable misuse)
供給者が意図しない使用条件及び使用目的である,製品構造に起因して及び/又は通常の人間の行動か
162
C 9730-1:2019
ら生じることが容易に予測できる製品,過程又はサービスの使用。
(ISO/IEC Guide 51:1999,3.14を修正,−“供給者が意図しないが,通常の人間の行動から生じること
が容易に予測できる場合”を追加)
H.2.23.13
機能的安全(functional safety)
安全に関連する制御装置が適切に機能することに依存する,機器に関する安全。
H.2.24
データ交換のアクセスに関連する定義
H.2.24.1
順序番号(sequence number)
メッセージからメッセージへのあらかじめ定義した方法で変化する番号を含む追加データ部分。
H.2.24.2
タイムスタンプ(time stamp)
送信者によるメッセージに添付した伝送の時刻に関する情報。
H.2.24.3
送信元及び送信先の識別子(source and destination identifier)
各実体に割り当てた識別子。
注記 識別子は,名称,数字又は任意のピットパターンでよい。識別子は,安全に関連する通信用に
用いられる。通常,識別子は,使用者データに追加する。
H.2.24.4
フィードバックメッセージ(feed-back message)
返信チャンネルを通しての受信者から送信者への応答。
H.2.24.5
識別手順(identification procedure)
安全に関連する適用手順の一部を形成する手順。
注記 識別手順には,次の2種類の区分がある。
− 双方向識別 返信チャンネルを使用する場合,情報の送信者と受信者との間の実体の識別
子の交換は,通信が実際に意図した当事者間であることの追加の確証を提供する。
− 動的識別手順 伝送及び送信者への受信情報のフィードバックを含む送信者と受信者との
間の情報の動的交換である。通信する当事者が,適切な識別をもっていると主張するだけ
でなく,予期する方法で行動することの確証も提供できる。この種の動的識別手順は,通
信する安全関連プロセス間の情報の伝送の前処理として使用でき,及び/又は情報伝送自
体の中で使用できる。
H.2.24.6
安全コード(safety code)
安全に関連する伝送機能によってデータの破損の検出を可能にするために,安全に関連するメッセージ
中に含まれた冗長データ。
H.2.24.7
コード化技術(cryptographic techniques)
入力データ及びパラメータとしてのキーを使用したアルゴリズムによって演算した出力データ。
注記 出力データを知ることによって,キーの知識なしに入力データを解読することは,合理的な時
163
C 9730-1:2019
間内では不可能である。入力データを知った場合であっても,出力データからのコード化キー
を引き出すことは,合理的時間内では不可能である。
H.2.24.8
時間切れ(time-out)
あらかじめ設定した許容する最長時間を超える二つのメッセージ間の遅れ。
注記 時間切れの場合,エラーとなるかもしれない。
H.2.24.9
公共通信網(public network)
家庭内の物理的な空間,又はこの規格の範囲内に含まれる規定した位置に制限されないデータ及び信号。
注記 公共通信網の例を次に示すが,これらに制限していない。
− インターネット
− Wi-Fiデバイス
− 10 mを超えるブルートゥースデバイス
H.4 試験に関する一般注意
H.4.1 試験条件
H.4.1.4 追加
電子制御装置において,H.25〜H.27の試験は,箇条21の試験の前に行う。
追加(次の細分箇条を追加する。)
H.4.1.9 電子制御装置は,別に規定する場合を除き,電気制御装置として試験を実施する。
H.4.1.10 電子制御装置に対して試験順序を導入する場合,この規格において特に要求されていない限り,
試験結果がそのサンプルの先行する試験によって悪い影響を受けないように留意する。そのサンプル若し
くはサンプルの部品を交換し,又は追加のサンプルを使用することが必要となる場合もある。
注記 サンプル数は,関連回路の評価によって最小に維持できる。
H.4.1.11 H.26に規定する試験を除き,電源に電子制御装置の試験結果に影響を与えるおそれがある,外部
電源からのじょう乱がないように配慮しなければならない。
H.6 分類
H.6.4 自動作動の特徴による分類
H.6.4.3
追加(次の分類を追加する。)
H.6.4.3.13
動作時の電子的断路(タイプ1.Y又はタイプ2.Y)
H.6.9 回路の断路又は開路による分類
追加(次の分類を追加する。)
H.6.9.5 電子的断路
追加(次の分類を追加する。)
H.6.18
制御機能のクラス分けによる分類(表1の項目92参照)
制御機能のクラス分けによる分類は,H.6.18.1〜H.6.18.3による。
H.6.18.1
クラスA制御機能の制御装置
H.6.18.2
クラスB制御機能の制御装置
164
C 9730-1:2019
H.6.18.3
クラスC制御機能の制御装置
H.7 情報
追加(表1に,次の表の項目を追加又は修正する。)
表H.0A−表1への追加項目m)
情報
適用箇条
方法
修正
36
マイクロ断路又は電子的断路が保証される検出素子に対する作動
量の限度値
11.3.2,H.11.4.16,H.17.14,
H.18.1.5,H.27.1.1,H.28
X
追加 表1の追加項目
52
電子制御装置に装備していないが,その適切な動作に対して重要で
ある熱放射器(例えば,ヒートシンク)の最小パラメータ
箇条14
D
53
正弦波以外の場合,出力波形の形式
H.25
X
54
基礎絶縁の不良後に出現する漏えい電流波形の詳細
H.27
X
55
故障しそうでないと考えられる電子素子,その他の回路構成部品の
関連パラメータ(H.27.1.1.4の第1段落参照)
H.27
X
56
電子素子,その他の回路構成部品の不良後に発生する出力波形(又
は複数の波形)の形式[H.27.1.1.3のg)参照]
H.27
X
57
関連する場合,電子回路構成部品の不良後の制御された出力(単数
又は複数)に及ぼす影響[H.27.1.1.3のc)]
H.27
X
58a
一体形及び組込形電子制御装置については,主電源で発生したじょ
う乱並びに磁気的妨害及び電磁的妨害に対する保護が要求される
場合,実施しなければならないH.26の試験のうちのいずれか。ま
た,各試験の結果として動作不良となった後,制御される出力(複
数の出力)及び機能に及ぼす影響。
H.26.2,H.26.15
X
58b
一体形及び組込形電子制御装置以外の電子制御装置に対しては,
H.26の試験の結果として,動作不良となった後の制御された出力
(又は複数出力)及び機能に及ぼす影響。
H.26.2,H.26.15
X
59
表12の注n) の要求のとおりに断路される電子的断路に依存してい
る構成部品
13.2,H.27.1
X
60
設置クラス(サージイミュニティ)
H.26.8.2,附属書R
X
66
ソフトウェア順序文書m), n), o), p)
H.11.12.2.9
X
67
プログラム文書m), q), p)
H.11.12.2.9,H.11.12.2.12
X
68
ソフトウェア故障解析m), o), p)
H.11.12,H.27.1.1.4
X
69
ソフトウェアクラス(複数のクラス)及び構造r)
この情報は,クラスA制御装置には要求しない。
H.11.12.2,H.11.12.3,
H.27.1.2.2.1,H.27.1.2.3.1
D
70
用いられている解析方法及び故障/エラー制御技術m), s)
H.11.12.1.2,H.11.12.2.2,
H.11.12.2.4
X
71
ソフトウェアクラスB又はCのためのソフトウェア故障/エラー検
出時間m), t)
H.2.17.10,H.11.12.2.6
X
72
故障/エラーが検出された場合の制御装置の応答(複数の応答)m)
H.11.12.2.7
X
73
第2の故障解析を目的とする制御装置及び第2の故障結果として状
態を指定する制御装置
H.27.1.2.3
X
74
試験目的で使用する外部負荷及びエミッション制御手段
H.23.1.1
X
91
故障応答時間
H.2.23.2,H.27.1.2.2.2,
H.27.1.2.2.3,H.27.1.2.3.2,
H.27.1.2.3.3,H.27.1.2.4.2,
H.27.1.2.4.3
X
165
C 9730-1:2019
表H.0A−表1への追加項目m)(続き)
情報
適用箇条
方法
92
制御機能のクラス(複数のクラス)
H.6.18,H.27.1.2.2,H.27.1.2.3
X
93
期間内でのリセット操作の最大回数
H.11.12.4.3.6,H.11.12.4.3.4
D
94
遠隔リセット操作の回数
H.17.1.4.3
X
注m) 完全にソフトウェアクラスAと指定する制御装置に対しては,項目66,項目67,項目68,項目70,項目71
及び項目72の情報は必要でない。ソフトウェアクラスB又はクラスCと指定する制御装置に対しては,そ
のソフトウェアの安全に関連するセグメントだけに対して情報を提供しなければならない。安全に関連しな
いセグメントに関する情報は,それが安全に関連するセグメントに影響を与えないことを証明するのに十分
でなければならない。
n) ソフトウェア順序は,文書化する。また,表1の項目46の動作シーケンスと共に,制御システムの原理,制
御フロー,データフロー及びタイミングについての記載を含めなければならない。
o) ソフトウェア順序の安全に関連するデータ及び安全に関連するセグメントにおいて,その動作不良が項目17,
項目25,項目26及び項目27を満たさないおそれがある場合は,識別しなければならない。この識別には動
作シーケンスを含めなければならない。例えば,故障解析ツリー形式をとってもよい。これには不合格を招
くおそれがある表H.1の故障/エラーを含めなければならない。ソフトウェア故障解析は,H.27のハードウ
ェアの故障解析に関連していなければならない。
p) 注m)〜注o)及び注q)〜注s)によって要求している文書中に含めることが適切であるその他の情報の例。
オリジナルのソフトウェアシステム仕様。例えば,次に示すもの。
− 機能仕様。これには,電源停止時に再起動するための手順を含む。
− 機器インタフェースの記載及び使用者インタフェースの記載を含むモジュール設計
− メモリ使用の記載を含む詳細設計
− ソースコード。これにはプログラム言語の識別,コメント及びサブルーチンを含む。
− 試験仕様
− 設置,使用及び/又は保守の手引き
q) プログラム文書は,製造業者が指定するプログラム言語で供給しなければならない。
r) 制御装置内で異なる制御機能に対し,異なるソフトウェアクラスを適用してもよい。ソフトウェアクラスA
〜クラスCを含む制御機能の例は,次のとおりである。
− クラスA 例えば,室内用自動温度調節器,湿度制御装置,照明制御装置,タイマ及びタイムスイッチ
である。
− クラスB 例えば,温度過昇防止装置である。
− クラスC 例えば,自動バーナ用制御装置及び密閉形温水器(非換気形)用の温度過昇防止装置がある。
s) 宣言する手段は,H.11.12.1.2〜H.11.12.2.4から製造業者が選定する。
t) これは,特定のソフトウェアセグメントの実行に続く時間として表すことができる。
H.8 感電に対する保護
H.8.1 一般要求事項
追加(次の細分箇条を追加する。)
H.8.1.10
可触部分は,保護インピーダンスによって電源から分離している場合,危険な充電部とはみな
さない。
H.8.1.10.1
保護インピーダンスを使用する場合,その部分又は複数部分と電源のいずれかの極との間の
電流は,交流0.7 mA(ピーク値)又は直流2 mAを超えてはならない。また,次による。
− 1 kHzを超える周波数の場合,限度値0.7 mA(ピーク値)にkHzで表した周波数値を乗じた値とする
が,70 mA(ピーク値)を超えてはならない。
− 42.4 V(ピーク値)を超え450 V(ピーク値)以下の電圧の場合,静電容量は0.1 μFを超えてはなら
ない。
− 450 V(ピーク値)を超え15 kV(ピーク値)以下の電圧の場合,静電容量(μF)と電圧(V)との積
166
C 9730-1:2019
は,45 μCを超えてはならない。
− 15 kV(ピーク値)を超える電圧の場合,静電容量(μF)と電圧(V)の2乗との積は350 mJを超え
てはならない。
適否は,測定によって判定する。
電圧及び電流は,単一可触部分(又は上記の部分の組合せ)と保護接地導体との間で測定する。測定は,
通常の電源供給状態で実施し,電源極を入れ替えて実施する。
測定回路は,全インピーダンス1 750±250 Ωをもち,その回路の時定数が225±15 μsであるようにコ
ンデンサによって分岐したものとする。
漏えい電流測定用の適切な回路の詳細は,図E.1に示す。
測定回路は,20 Hz〜5 kHzの範囲で全ての周波数に対して,5 %以内の確度をもたなければならない。5
kHzを超える周波数の場合,この測定法を適用できない。適切な試験方法で行う。
H.11 構造要求事項
H.11.2
感電に対する保護
追加(次の細分箇条を追加する。)
H.11.2.5
保護インピーダンス
保護インピーダンスは,等価の抵抗値をもち,かつ,充電部と可触部との間に接続された複数のインピ
ーダンス構成部品を直列にして構成しなければならない。保護インピーダンスは,使用期間中のインピー
ダンス低下の確率が無視でき,かつ,短絡の可能性が無視できる構成部品で構成しなければならない。
コンデンサの関連安全特性が明記され,制御される場合,Y1コンデンサ一つで使用してもよい。
注記 これは,JIS C 0365の5.3.4に従っている。
このような構成部品は,次による。
− 表H.24の注c)に示す抵抗器。代替としての抵抗器は,JIS C 6065の14.1を満たさなければならない。
− コンデンサ。コンデンサは,JIS C 5101-14のクラスYを満たさなければならない。
これらの条件で,機器はH.8.1.10を満たさなければならない。
H.11.4
作動
追加(次の細分箇条を追加する。)
H.11.4.16 タイプ1.Y又はタイプ2.Y作動は,電子的断路を行うように動作しなければならない。
適否は,H.11.4.16.1及びH.11.4.16.2の試験によって判定する。
H.11.4.16.1 試験は,制御装置をその製造業者が宣言する最大負荷に接続した状態で,定格電圧を加え,
温度Tmaxにおいて実施する。
H.11.4.16.2 電子的断路部を流れる電流は,5 mA又はその定格電流の10 %のうち,低い方の値を超えて
はならない。
H.11.12 ソフトウェアを使用する制御装置
ソフトウェアを使用する制御装置は,ソフトウェアが制御装置のこの規格の要求事項から逸脱しない構
造でなければならない。
適否は,この規格中の電子制御装置に対する試験,この細分箇条の要求事項による目視検査及び表1の
項目66〜72の製造業者の宣言によって判定する。
H.11.12.1〜H.11.12.4は,ソフトウェアクラスB又はソフトウェアクラスCを用いた制御機能にだけ適
用する。
167
C 9730-1:2019
H.11.12.4は,遠隔駆動形制御機能に関する追加要求事項を含む。
H.11.12.1 構造要求事項
H.11.12.1.1 ソフトウェアクラスB又はソフトウェアクラスCをもつ制御機能は,H.11.12.1.2〜H.11.12.3
に規定するようなソフトウェアの安全に関連するデータ及び安全に関連するセグメント中のソフトウェア
に関連する故障/エラーを回避し,制御するための手段を用いなければならない。
H.11.12.1.2 ソフトウェアクラスB又はソフトウェアクラスCをもつ制御機能に関する構造は,
H.11.12.1.2.1〜H.11.12.1.2.2による。
H.11.12.1.2.1 ソフトウェアクラスCをもつ制御機能は,次のいずれか一つの構造をもっていなければな
らない。
− 定期的自己試験及びモニタ付き単一チャンネル(H.2.16.7)
− 比較付きデュアルチャンネル(同質形)(H.2.16.3)
− 比較付きデュアルチャンネル(異質形)(H.2.16.2)
注記 デュアルチャンネル構造間の比較は,次のいずれかによって実行できる。
− コンパレータの使用(H.2.18.3)
− 相互交換比較(H.2.18.15)
H.11.12.1.2.2 ソフトウェアクラスBをもつ制御機能は,次のいずれか一つの構造をもっていなければな
らない。
− 機能試験付き単一チャンネル(H.2.16.5)
− 定期的自己試験付き単一チャンネル(H.2.16.6)
− 比較のないデュアルチャンネル(H.2.16.1)
ソフトウェアクラスB構造は,ソフトウェアクラスC構造に対しても許容する。
H.11.12.1.3 その他の構造は,H.11.12.1.2の安全レベルと同等の安全レベルを備えていることが明らかな
場合には許容する。
H.11.12.2 故障/エラーの抑制手段
H.11.12.2.1 比較付き冗長メモリを,同一の構成部品の2個の領域中に設けている場合,一方の領域中の
データは,他方の領域の書式とは異なる書式で記憶しなければならない(ソフトウェア多様性参照)。
H.11.12.2.2 比較付きのデュアルチャンネル構造を使用するソフトウェアクラスCをもつ制御機能は,そ
の比較によって検出されない故障/エラーに対して,追加の故障/エラー検出手段(例えば,定期的機能
試験,定期的自己試験又は独立モニタ)をもたなければならない。
H.11.12.2.3 ソフトウェアクラスB又はソフトウェアクラスCをもつ制御装置は,外部の安全に関連する
データ伝送路での伝送中のエラーの認識及び制御手段を備えていなければならない。上記の手段は,デー
タ,アドレス指定,伝送タイミング及びプロトコルの順序におけるエラーを考慮する。
H.11.12.2.4 ソフトウェアクラスB又はソフトウェアクラスCをもつ制御装置の製造業者は,表1の項目
68及び表H.1に製造業者が宣言する安全に関連するセグメント及びデータ中の故障/エラーに対応するた
めの手段をその制御装置中に備えなければならない。
168
C 9730-1:2019
表H.1−故障/エラーに対応する受入れ可能な手段a)
構成部品b)
故障/エラー
ソフトウェ
アクラス
受入れ可能な手段c), d), e)
(次のいずれかを用いる。)
定義
B
C
1. CPU
1.1 レジスタ
縮退
rq
機能試験
定期的自己試験
− 静的メモリ試験
− 単一ビット冗長性によるワードの保護
H.2.16.5
H.2.16.6
H.2.19.6
H.2.19.8.2
DC故障
rq
冗長CPUの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
内部エラー検出
比較付き冗長メモリ
定期的自己試験
− ウォークパットメモリ試験
− アブラハム試験
− 透過性ガルパット試験
多重ビット冗長性によるワードの保護
静的メモリ試験及び単一ビット冗長性によるワ
ードの保護
H.2.18.15
H.2.18.3
H.2.18.9
H.2.19.5
H.2.19.7
H.2.19.1
H.2.19.2.1
H.2.19.8.1
H.2.19.6
H.2.19.8.2
1.2 命令復号
及び実行
間違い復号及び
実行
rq
冗長CPUの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
内部エラー検出
等価性クラス試験を使用する定期的自己試験
H.2.18.15
H.2.18.3
H.2.18.9
H.2.18.5
1.3 プログラ
ムカウンタ
縮退
rq
機能試験
定期的自己試験
プログラム順序の独立したタイムスロットモニ
タ
プログラム順序の論理的モニタ
H.2.16.5
H.2.16.6
H.2.18.10.4
H.2.18.10.2
DC故障
rq
定期的自己試験及びモニタ
− 独立タイムスロット及び論理的モニタ
− 内部エラー検出
冗長機能チャンネルの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
H.2.16.7
H.2.18.10.3
H.2.18.9
H.2.18.15
H.2.18.3
1.4 アドレス
指定
DC故障
rq
冗長CPUの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
内部エラー検出
アドレス線の試験用パターンを使用する定期的
自己試験
全バス冗長性
多重ビットバスパリティ
H.2.18.15
H.2.18.3
H.2.18.9
H.2.16.7
H.2.18.22
H.2.18.1.1
H.2.18.1.2
169
C 9730-1:2019
表H.1−故障/エラーに対応する受入れ可能な手段a)(続き)
構成部品b)
故障/エラー
ソフトウェ
アクラス
受入れ可能な手段c), d), e)
(次のいずれかを用いる。)
定義
B
C
1.5 データパ
ス命令復号
DC故障及び実行
rq
冗長CPUの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
内部エラー検出
試験用パターンを用いる定期的自己試験
データ冗長性
多重ビットバスパリティ
H.2.18.15
H.2.18.3
H.2.18.9
H.2.16.7
H.2.18.2.1
H.2.18.1.2
2. 割り込み処
理及び実行
“割り込みなし”
又は“頻度の高す
ぎる割り込み”
rq
機能試験
タイムスロットモニタ
H.2.16.5
H.2.18.10.4
“割り込みなし”
又は“異なる割り
込み源に関連す
る頻度の高すぎ
る割り込み”
rq
冗長機能チャンネルの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
独立タイムスロット及び論理的モニタ
H.2.18.15
H.2.18.3
H.2.18.10.3
3. クロック
間違い周波数(水
晶同期クロック
に対しては,高調
波・副高調波だ
け)
rq
周波数モニタ
タイムスロットモニタ
H.2.18.10.1
H.2.18.10.4
rq
周波数モニタ
タイムスロットモニタ
冗長機能チャンネルの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
H.2.18.10.1
H.2.18.10.4
H.2.18.15
H.2.18.3
4.メモリ
4.1 不変メモ
リ
全ての単一ビッ
ト故障
rq
定期的変形チェックサム
多重チェックサム
単一ビット冗長性によるワードの保護
H.2.19.3.1
H.2.19.3.2
H.2.19.8.2
全情報エラーの
99.6 %の範囲
rq
冗長CPUの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
比較付き冗長メモリ
定期的巡回冗長検査
− 単一ワード
− 二重ワード
多重ビット冗長性によるワードの保護
H.2.18.15
H.2.18.3
H.2.19.5
H.2.19.4.1
H.2.19.4.2
H.2.19.8.1
4.2 可変メモ
リ
DC故障
rq
定期的静的メモリ試験
単一ビット冗長性によるワードの保護
H.2.19.6
H.2.19.8.2
DC故障及び動的
クロスリンク
rq
冗長CPUの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
比較付き冗長メモリ
定期的自己試験
− ウォークパットメモリ試験
− アブラハム試験
− 透過性ガルパット試験
多重ビット冗長性によるワードの保護
H.2.18.15
H.2.18.3
H.2.19.5
H.2.19.7
H.2.19.1
H.2.19.2.1
H.2.19.8.1
170
C 9730-1:2019
表H.1−故障/エラーに対応する受入れ可能な手段a)(続き)
構成部品b)
故障/エラー
ソフトウェ
アクラス
受入れ可能な手段c), d), e)
(次のいずれかを用いる。)
定義
B
C
4.3 アドレス
指定(可変メモ
リ及び不変メ
モリ関連)
縮退
rq
アドレスを含む単一ビット冗長性によるワード
の保護
H.2.19.8.2
DC故障
rq
冗長CPUの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
全バス冗長性
試験用パターン
定期的巡回冗長検査
− 単一ワード
− 二重ワード
アドレスを含む多重ビット冗長性によるワード
の保護
H.2.18.15
H.2.18.3
H.2.18.1.1
H.2.18.22
H.2.19.4.1
H.2.19.4.2
H.2.19.8.1
5. 内部データ
パス
5.1 データ
縮退
rq
単一ビット冗長性によるワードの保護
H.2.19.8.2
DC故障
rq
冗長CPUの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
アドレスを含む多重ビット冗長性によるワード
の保護
データ冗長性
試験用パターン
プロトコル試験
H.2.18.15
H.2.18.3
H.2.19.8.1
H.2.18.2.1
H.2.18.22
H.2.18.14
5.2 アドレス
の指定
間違いアドレス
rq
アドレスを含む単一ビット冗長性によるワード
の保護
H.2.19.8.2
間違いアドレス
及び多重アドレ
スの指定
rq
冗長CPUの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
アドレスを含む多重ビット冗長性によるワード
の保護
全バス冗長性
アドレスを含む試験用パターン
H.2.18.15
H.2.18.3
H.2.19.8.1
H.2.18.1.1
H.2.18.22
6. 外部通信
6.1 データ
ハミング距離3
rq
多重ビット冗長性によるワードの保護
CRC−単一ワード
転送冗長性
プロトコル試験
H.2.19.8.1
H.2.19.4.1
H.2.18.2.2
H.2.18.14
ハミング距離4
rq
CRC−二重ワード
データ冗長性
冗長機能チャンネルの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
H.2.19.4.2
H.2.18.2.1
H.2.18.15
H.2.18.3
171
C 9730-1:2019
表H.1−故障/エラーに対応する受入れ可能な手段a)(続き)
構成部品b)
故障/エラー
ソフトウェ
アクラス
受入れ可能な手段c), d), e)
(次のいずれかを用いる。)
定義
B
C
6.2 アドレス
間違いアドレス
rq
アドレスを含む多重ビット冗長性によるワード
の保護
アドレスを含むCRC−単一ワード
転送冗長性
プロトコル試験
H.2.19.8.1
H.2.19.4.1
H.2.18.2.2
H.2.18.14
間違いアドレス
及び多重アドレ
スの指定
rq
アドレスを含むCRC−二重ワード
データ及びアドレスの全バス冗長性
冗長通信チャンネルの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
H.2.19.4.2
H.2.18.1.1
H.2.18.15
H.2.18.3
6.3 タイミン
グ
間違ったタイミ
ング
rq
タイムスロットモニタ
計画伝送
H.2.18.10.4
H.2.18.18
rq
タイムスロット及び論理的モニタ
冗長通信チャンネルの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
H.2.18.10.3
H.2.18.15
H.2.18.3
間違った順序
rq
論理的モニタ
タイムスロットモニタ
計画伝送
H.2.18.10.2
H.2.18.10.4
H.2.18.18
rq
(間違ったタイミングと同一のオプション)
7. I/O(入出力)
周辺
7.1 デジタル
I/O
H.27に規定する
故障状態
rq
信頼性検査
H.2.18.13
rq
冗長CPUの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
入力比較
多重並列出力
出力検証
試験用パターン
コードの安全性
H.2.18.15
H.2.18.3
H.2.18.8
H.2.18.11
H.2.18.12
H.2.18.22
H.2.18.2
7.2 アナログ
I/O
7.2.1 A/D−及
びD/A−コン
バータ
H.27に規定の故
障状態
rq
信頼性検査
H.2.18.13
rq
冗長CPUの比較
− 相互交換比較
− 独立ハードウェアコンパレータ
入力比較
多重並列出力
出力検証
試験用パターン
H.2.18.15
H.2.18.3
H.2.18.8
H.2.18.11
H.2.18.12
H.2.18.22
7.2.2 アナログ
マルチプレク
サ
間違いアドレス
の指定
rq
信頼性検査
H.2.18.13
rq
冗長CPUの比較
− 相互交換相比較
− 独立ハードウェアコンパレータ
入力比較
試験用パターン
H.2.18.15
H.2.18.3
H.2.18.8
H.2.18.22
8. モニタ用デ
バイス及びコ
ンパレータ
静的及び動的機
能仕様を外れた
出力
rq
試験済みモニタ
冗長モニタ及び比較
エラー認識手段
H.2.18.21
H.2.18.17
H.2.18.6
172
C 9730-1:2019
表H.1−故障/エラーに対応する受入れ可能な手段a)(続き)
構成部品b)
故障/エラー
ソフトウェ
アクラス
受入れ可能な手段c), d), e)
(次のいずれかを用いる。)
定義
B
C
9. カスタムチ
ップf)
例えば,ASIC,
GAL,ゲートア
レー
静的及び動的機
能仕様を外れた
出力
rq
定期的自己試験
H.2.16.6
rq
定期的自己試験及びモニタ
比較付きデュアルチャンネル(異質形)
エラー認識手段
H.2.16.7
H.2.16.2
H.2.18.6
CPU:中央演算処理装置
rq :故障の範囲は,表示したソフトウェアクラスに対して要求する。
注a) この表は,H.11.12の要求事項に従って適用する。
b) 故障/エラー評価に対しては,幾つかの構成部品は,それらの副機能に分割される。
c) 表中の各副機能に対してソフトウェアクラスCの手段は,ソフトウェアクラスB故障/エラーにも適用する。
d) 受入れ可能な手段の幾つかは,この規格が要求する保証より高レベルの保証を提供する。
e) 1副機能に複数の手段を示す場合,これらは選択肢である。
f) 必要に応じて,製造業者によって,副機能に分割しなければならない。
H.11.12.2.5 H.11.12.2.4で規定する以外の手段が,表H.1を満たしている場合,故障/エラーに対応する
受入れ可能な手段として許容する。
H.11.12.2.6 ソフトウェア故障/エラー検出は,表1の項目71で製造業者が宣言する時間以前に発生しな
ければならない。また,宣言する時間(又は複数の時間)が適切かどうかは,制御装置の故障解析中に評
価する。
JIS C 9730の規格群の第2部の規格では,この宣言を制限する場合がある。
H.11.12.2.7 ソフトウェアクラスB又はソフトウェアクラスCの機能をもつ制御装置において,故障/エ
ラーの検出は表1の項目72で製造業者が宣言する応答をしなければならない。ソフトウェアクラスCと
製造業者が宣言する機能をもつ制御装置に対しては,この応答を実施できる独立した手段が設けられなけ
ればならない。
H.11.12.2.8 デュアルチャンネル能力の喪失は,ソフトウェアクラスCをもつデュアルチャンネル構造を
使用する制御機能の中ではエラーとみなす。
H.11.12.2.9 ソフトウェアは,動作シーケンスの関連部分及び対応するハードウェア機能に関係づけなけ
ればならない。
H.11.12.2.10
ラベルをメモリ位置のために用いる場合,ラベルは一意的なものでなければならない。
H.11.12.2.11
ソフトウェアは,安全に関連するセグメント及びデータの使用者による変更を防止しなけ
ればならない。
H.11.12.2.12
ソフトウェア及びその制御下にある安全に関連するハードウェアは,表1の項目66中で製
造業者が宣言するように,規定する状態で開始し,終了しなければならない。
H.11.12.3 エラーを避ける手段
H.11.12.3.1 一般事項
ソフトウェアクラスB又はソフトウェアクラスCをもつ制御装置は,システムエラーを避けるために,
図H.1に示す手段を適用する。
ソフトウェアクラスCで用いる手段は,本質的にソフトウェアクラスBで受け入れられるものである。
この事項は,JIS C 0508-3から引用しており,この規格の必要に応じて適用する。
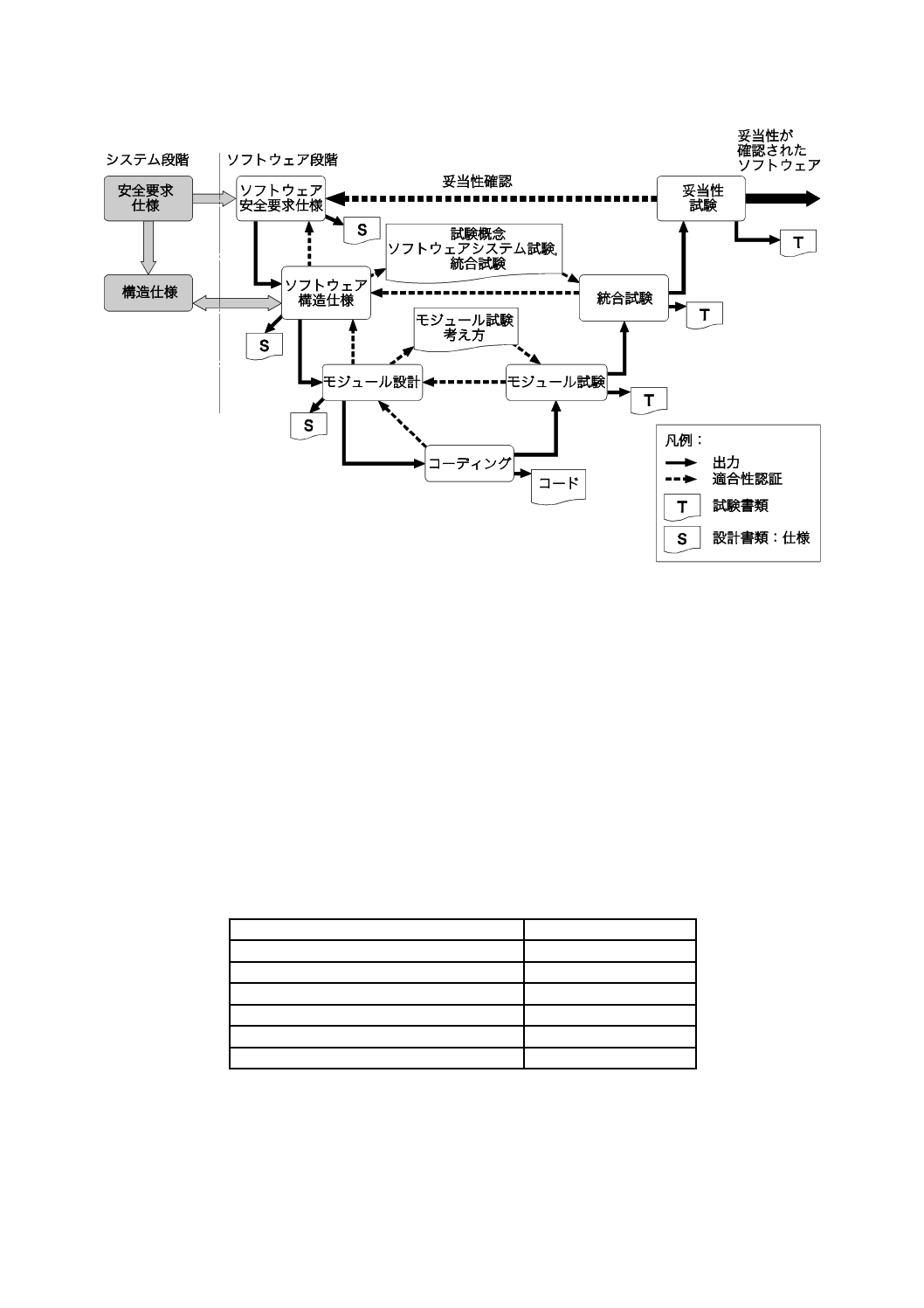
173
C 9730-1:2019
図H.1−ソフトウェアライフサイクルに関するVモデル
設計及び試験工程を含めて統制化及び構造化した手順を具体化する場合は,他の方法を認める。
H.11.12.3.2 仕様
H.11.12.3.2.1 ソフトウェアの安全要求事項
H.11.12.3.2.1.1 ソフトウェアの安全要求事項の仕様は,次の事項を含まなければならない。
− 実装する応答時間を含めた安全に関連する次の機能。
• 関連するソフトウェアクラスを含めて,適用に関連する機能
• ソフトウェア又はハードウェアの故障の検出,告知及び管理に関連する機能
− ソフトウェアとハードウェアとの間のインタフェース
− 安全に関連する機能と安全に関連しない機能との間のインタフェース
技法及び手段の事例は,表H.2に示す。
表H.2−準形式手法
技法及び手段
参照(情報)
規格による手法
−
準形式手法
−
− 論理及び/又は機能ブロック図
−
− シーケンス図
−
− 有限状態機械及び/又は状態遷移図
JIS C 0508-7のB.2.3.2
− デシジョンテーブル及び/又は真理値表 JIS C 0508-7のC.6.1
ソフトウェアの安全要求事項の仕様を満たしている場合は,他の方法も認める。
H.11.12.3.2.2 ソフトウェアの構造
H.11.12.3.2.2.1 ソフトウェアの構造の仕様は,次を含まなければならない。
174
C 9730-1:2019
− ソフトウェアの故障/エラーを抑制する技法及び手段(H.11.12.2)
− ハードウェアとソフトウェアとの間の相互作用
− モジュールへの分割及びそれらの安全機能仕様への割り当て
− モジュールの階層構造及び呼出し構造(制御フロー)
− 割り込み処理
− データフロー及びデータアクセスの制限
− データの構造及び蓄積
− シーケンス及びデータについての時間ベースの依存
技法及び手段の事例は,表H.3に示す。
表H.3−ソフトウェア構造仕様
技法及び手段
参照(情報)
故障検出及び診断
JIS C 0508-7のC.3.1
準形式手法
−
− 論理及び/又は機能ブロック図
−
− シーケンス図
−
− 有限状態機械及び/又は状態遷移図
JIS C 0508-7のB.2.3.2
− データフロー図
JIS C 0508-7のC.2.2
H.11.12.3.2.2.2 構造仕様は,ソフトウェアの安全要求事項の仕様を満たすことを静的分析によって確認す
る。
注記 静的分析のために許容する方法は,次のとおりである。
− 制御フロー分析
− データフロー分析
− ウォークスルー及び設計レビュー
H.11.12.3.2.3 モジュール設計及びコード化
注記1 コンピュータ支援設計ツールを使用するのがよい。
注記2 防御的プログラミング(例えば,範囲確認,ゼロ除算確認及び信頼性確認)については,JIS
C 0508-7のC.2.5参照。
H.11.12.3.2.3.1 構造設計に基づいて,ソフトウェアは,適切にモジュール化しなければならない。ソフト
ウェアのモジュール設計及びコード化は,ソフトウェア構造及び要求事項へ追跡可能な方法で実装しなけ
ればならない。
モジュール設計は,次の事項を指定しなければならない。
− 機能
− 他のモジュールとのインタフェース
− データ
技法及び手段の事例は,表H.4に示す。
175
C 9730-1:2019
表H.4−モジュール設計仕様
技法及び手段
参照(情報)
ソフトウェアモジュールの限定サイズ
JIS C 0508-7のC.2.9
情報の隠蔽及びカプセル化
JIS C 0508-7のC.2.8
サブルーチン及び機能における単一開始点
/単一終了点
JIS C 0508-7のC.2.9
詳細に定めたインタフェース
JIS C 0508-7のC.2.9
準形式手法
−
− 論理及び/又は機能ブロック図
−
− シーケンス図
−
− 有限状態機械及び/又は状態遷移図
JIS C 0508-7のB.2.3.2
− データフロー図
JIS C 0508-7のC.2.2
H.11.12.3.2.3.2 ソフトウェアコードは,構造化しなければならない。
注記 次の原則を適用することによって,構造的な複雑さを最小にすることができる。
− ソフトウェアモジュールを通る可能な経路の数を少なく,かつ,入力と出力パラメータと
の間の関係を可能な限り単純に維持する。
− 複雑な分岐を避け,特に,高水準言語における無条件のジャンプ指令(GOTO)を避ける。
− 可能な場合,入力パラメータにループ制約及び分岐を関連付ける。
− 分岐及びループの判断条件として,複雑な計算の使用を避ける。
技法及び手段の事例は,表H.5に示す。
表H.5−設計及びコード化標準
技法及び手段
参照(情報)
コード化標準の使用(H.11.12.3.2.4参照)
JIS C 0508-7のC.2.6.2
動的オブジェクト及び変数を使用しない(注記参照)
JIS C 0508-7のC.2.6.3
割り込みの限定使用
JIS C 0508-7のC.2.6.5
ポインタの限定使用
JIS C 0508-7のC.2.6.6
再帰の限定使用
JIS C 0508-7のC.2.6.7
高水準言語でプログラムにおける無条件ジャンプの無使用
JIS C 0508-7のC.2.6.2
実行前に全ての動的なオブジェクト及び/又は変数に十分なメモリが割り当てられ
ることを確実にするコンバイラを使用する場合,又はメモリの適切なオンライン割り当
てのための実行時チェックを挿入するコンパイラを用いる場合,動的なオブジェクト及
び/又は変数の使用を認める。
H.11.12.3.2.3.3 コード化したソフトウェアは,モジュール仕様を確認する。また,モジュール仕様は,静
的解析によって構造仕様を確認する。
注記 静的解析の方法の例は,次のとおりである。
− 制御フロー解析
− データフロー解析
− ウォークスルー及び設計レビュー
H.11.12.3.2.4 設計及びコード化標準
ソフトウェア設計から保守に至る間,プログラム設計及びコード化標準は一貫していなければならない。
コード化標準は,プログラミングの慣例,言語の安全ではない機能の禁止,ソースコード文書の記載手
順,及びデータ命名の基準を含まなければならない。
176
C 9730-1:2019
H.11.12.3.3 試験
H.11.12.3.3.1 モジュール設計(ソフトウェアシステム設計,ソフトウェアモジュール設計及びコード化)
H.11.12.3.3.1.1 適切な試験ケースを含む試験コンセプトは,モジュール設計仕様に基づいて定めなければ
ならない。
H.11.12.3.3.1.2 各ソフトウェアモジュールは,試験コンセプトに定めたとおり,試験を行わなければなら
ない。
H.11.12.3.3.1.3 試験ケース,試験データ及び試験結果は,文書化する。
H.11.12.3.3.1.4 静的手段によるソフトウェアモジュールのコードの検証には,ソフトウェアの検査,ウォ
ークスルー,静的解析及び形式的証明の技法を含む。
動的手段によるソフトウェアモジュールのコードの検証には,機能試験,ホワイトボックス試験及び統
計試験を含む。
これは,各ソフトウェアモジュールが関連した仕様を満たしているといった確証を提供する証拠の両方
の手段(静的手段及び動的手段)の組合せである。
技法及び手段の事例は,表H.6に示す。
表H.6−ソフトウェアモジュール試験
技法及び手段
参照(情報)
動的解析及び試験
JIS C 0508-7のB.6.5
− 境界値を用いた試験ケースの実行
JIS C 0508-7のC.5.4
− 構造ベースの試験
JIS C 0508-7のC.5.8
データの記録及び解析
JIS C 0508-7のC.5.2
機能的及びブラックボックス試験
JIS C 0508-7のB.5.1及びB.5.2
− 境界値解析
JIS C 0508-7のC.5.4
− プロセス・シミュレーション
JIS C 0508-7のC.5.18
性能試験
JIS C 0508-7のC.5.20
− アバランシェ試験及び/又はストレス試験
JIS C 0508-7のC.5.21
− 応答時間及びメモリの制約
JIS C 0508-7のC.5.22
インタフェース試験
JIS C 0508-7のC.5.3
注記 ソフトウェアモジュール試験は,検証活動である。
H.11.12.3.3.2 ソフトウェア統合試験
H.11.12.3.3.2.1 適切な試験ケースを含む試験コンセプトは,構造設計仕様に基づいて定めなければならな
い。
H.11.12.3.3.2.2 ソフトウェアは,試験コンセプトに定めたとおりに試験を行わなければならない。
H.11.12.3.3.2.3 試験ケース,試験データ及び試験結果は,文書化する。
技法及び手段の事例は,表H.7に示す。
177
C 9730-1:2019
表H.7−ソフトウェア統合試験
技法及び手段
参照(情報)
機能的及びブラックボックス試験
JIS C 0508-7のB.5.1及びB.5.2
− 境界値解析
JIS C 0508-7のC.5.4
− プロセス・シミュレーション
JIS C 0508-7のC.5.18
性能試験
JIS C 0508-7のC.5.20
− アバランシェ試験及び/又はストレス試験
JIS C 0508-7のC.5.21
− 応答時間及びメモリの制約
JIS C 0508-7のC.5.22
注記 ソフトウェア総合試験は,検証活動である。
H.11.12.3.3.3 ソフトウェアの妥当性確認
H.11.12.3.3.3.1 適切な試験ケースを含む妥当性確認のコンセプトは,ソフトウェアの安全要求事項の仕様
に基づいて定めなければならない。
H.11.12.3.3.3.2 ソフトウェアは,妥当性確認のコンセプトに定めたとおり,ソフトウェアの安全要求事項
の仕様の要求事項を参照し,妥当性を確認しなければならない。
ソフトウェアは,シミュレーション又は次の事項によって実施しなければならない。
− 通常動作時の入力信号
− 予測する出来事
− システム動作を要求する望ましくない状態
H.11.12.3.3.3.3 試験ケース,試験データ及び試験結果は,文書化する。
技法及び手段の事例は,表H.8に示す。
表H.8−ソフトウェア安全確認
技法及び手段
参照(情報)
機能的及びブラックボックス試験
JIS C 0508-7のB.5.1及びB.5.2
− 境界値解析
JIS C 0508-7のC.5.4
− プロセス・シミュレーション
JIS C 0508-7のC.5.18
シミュレーション及びモデリング
−
− 有限状態機械
JIS C 0508-7のB.2.3.2
− 性能のモデリング
JIS C 0508-7のC.5.20
注記 試験は,ソフトウェアのための主な妥当性確認方法であって,モデリングは,妥当性確認の活
動を補うために用いることができる。
H.11.12.3.4 その他の項目
H.11.12.3.4.1 ツール及びプログラム言語
設計ツール,プログラム言語,翻訳器及び試験用ツールのようなソフトウェア設計,検証及び保守のた
めに用いられる装置は,適切に検定し,かつ,多用な利用において目的に適していることを示さなければ
ならない。
JIS C 0508-7のC.4.4に従って,“使用実績あり”の場合,適切であるとみなす。
H.11.12.3.4.2 ソフトウェアのバージョン管理
モジュールレベルのソフトウェアのバージョン管理システムは,適切に整備しなければならない。全て
のバージョンは,追跡可能性のため一意に識別できなければならない。
178
C 9730-1:2019
H.11.12.3.4.3 ソフトウェアの修正
H.11.12.3.4.3.1 ソフトウェアの修正は,次を詳述した修正要求に基づいていなければならない。
− 影響する可能性のある危険
− 変更提案
− 変更理由
H.11.12.3.4.3.2 解析は,機能安全に対する修正提案の影響を決定するために,実施しなければならない。
H.11.12.3.4.3.3 修正の詳細仕様は,適切な試験ケースの定義のような妥当性確認及び検証のための,必要
な活動を含めて作成しなければならない。
H.11.12.3.4.3.4 修正は,計画したとおりに実施しなければならない。
H.11.12.3.4.3.5 修正の評価は,規定した妥当性及び検証活動に基づいて実施しなければならない。この改
訂の評価には,次を含む。
− 変更するソフトウェアモジュールの再検証
− 影響を受けたソフトウェアモジュールの再検証
− システム全体の再妥当性確認
H.11.12.3.4.3.6 全ての修正活動の詳細は,文書化する。
H.11.12.3.5
クラスC制御機能の製造業者は,ハードウェア開発中に,表H.9に示す解析手段の組合せ
(a〜p)のうちのいずれか一つを使用していなければならない。
表H.9−ハードウェア開発中の解析手段の組合せ
ハードウェア開発段階
a
b
c
d
e
f
g
h
i
j
k
l
m
n
o
p
H.2.17.5
検査
× − × − × − × − × − × − × − × −
H.2.17.9
ウォークスルー
− × − × − × − × − × − × − × − ×
H.2.17.7.1 静的解析−ハードウェア
× × − − − − − − × × − − − − − −
H.2.17.1
動的解析
− − × × − − − − − − × × − − − −
H.2.17.3
ハードウェア解析
− − − − × × − − − − − − × × − −
H.2.17.4
ハードウェアシミュレーション
− − − − − − × × − − − − − − × ×
H.2.17.2
故障率計算
× × × × × × × × − − − − − − − −
H.2.20.3
FMEA
− − − − − − − − × × × × × × × ×
H.2.17.6
動作試験
× × × × × × × × × × × × × × × ×
H.11.12.4 遠隔駆動形制御機能
H.11.12.4.1 データ交換
H.11.12.4.1.1 一般事項
遠隔駆動形制御機能は,分離した独立の装置と接続してもよい。その装置は,それ自身が制御機能を含
んでもよく,又はその他の情報を備えてもよい。それらの装置間のあらゆるデータ交換は,クラスB制御
機能又はクラスC制御機能の完全度を損なってはならない。
H.11.12.4.1.2 データの区分
制御機能又は機能群のデータ交換のメッセージ区分は,クラスA制御機能,クラスB制御機能又はクラ
スC制御機能に割り当てる。安全又は保護に関連する又は影響するものについて,メッセージ区分又はデ
ータ交換は,クラスB制御機能又はクラスC制御機能だけに割り当てる。表H.10参照。
179
C 9730-1:2019
表H.10−データの交換
データ
安全関連
非安全関連
操作データ
“安全状態からのリセット”のようなメッセージ
オン−オフ指令又は室内温度情報のよう
なメッセージ
設定パラメータ
クラスB制御機能又はクラスC制御機能に関連する
決定をするパラメータを修正するメッセージ
機能に関する性能を決定するパラメータ
を修正するメッセージ
ソフトウェア
モジュール
クラスB制御機能又はクラスC制御機能に関連する
決定をするシステムへダウンロードするモジュール
機能に関する性能を決定するシステムへ
ダウンロードするモジュール
H.11.12.4.1.3 安全に関連するデータの通信
H.11.12.4.1.3.1 伝送
安全に関連するデータは,次の事項に関して確実に伝送しなければならない。
− データ破損
− アドレス破損
− タイミングエラー又はシーケンスエラー
データの変化又は破損によって,不安全状態になってはならない。伝送したデータの使用前に,その機
能を用いるこの附属書で規定するソフトウェアクラスと同等,又はより高いソフトウェアクラスの手段を
用いて,上記の項目が対処されることを確実にしなければならない。
適否は,この附属書による評価によって判定する。
注記1 次の事項に関して,表H.1の項目6に特別な注意を払う。
− 元のメッセージからのデータの消滅
− 元のメッセージへのデータの挿入
− 元のメッセージのデータの破損
− 元のメッセージのデータの順序の変化
− 認証されたメッセージであるかのような認証されていないメッセージの作成
− 不完全なアドレス
− 元のメッセージのアドレスの破損
− 誤ったアドレス
− 過剰なアドレス
− 複数のメッセージ受信
− メッセージの送信又は受信の遅延
− 送信及び受信の誤った順序
注記1の事項に追加して,次の故障モードも扱わなければならない。
− 恒久的な“自動送信”又は繰り返し
− データ伝送の中断
注記2 手段についての追加事例は,表H.11に示す。
H.11.12.4.1.3.2 データ交換へのアクセス
クラスB制御機能又はクラスC制御機能に関連するデータ交換システムへの全てのアクセスは,明確に
制限しなければならない。
クラスB制御機能又はクラスC制御機能に関連する操作データ,設定パラメータ及び/又はソフトウェ
アモジュールは,適切なハードウェア又はソフトウェア手段が,制御機能への未承認アクセスを防止する
180
C 9730-1:2019
ために用いられる場合,通信で伝送してもよい。例を,表H.11に示す。
クラスB制御機能又はクラスC制御機能に関連する操作データのデータ交換のアクセスにおいて,公共
通信網を通す場合,適切な暗号技術を実行しなければならない。H.11.12.4.5参照。
注記 セキュリティ関連は,ISO/IEC JTC 1/SC 27(TC 205)の作業の下で規定される。
表H.11−未承認アクセス及び伝送故障モードへの保護の例
脅威となる事象
保護手段
シーケン
ス番号
タイム
スタンプ
時間
切れ
フィードバッ
クメッセージ
送付元付き
送付先識別子
識別
手順
安全
コード
暗号
技術
メッセージの繰返し
×
×
−
−
−
−
−
−
メッセージのデータの
消滅
×
−
−
−
−
−
−
−
メッセージへのデータ
の挿入
×
−
−
×
×
×
−
−
メッセージのデータの
シーケンスの変化
×
×
−
−
−
−
−
−
データ破損されたメッ
セージ
−
−
−
−
−
−
×a)
×
メッセージの送信又は
受信の遅延
−
×
×
−
−
−
−
−
真のメッセージである
ような真でないメッセ
ージの作成
−
−
−
×
−
×
−
×
承認されていないアクセスに対する保護の事例も,EN 50159:2011の適用に含まれる。
注a) 表H.1の項目6.1及び項目6.2参照。
H.11.12.4.1.3.3 ソフトウェアクラスB及びソフトウェアクラスCの修正
H.11.12.3の要求事項は,ソフトウェアクラスB及びソフトウェアクラスCの修正に適用しなければな
らない。さらに,ハードウェアの構成管理が要求されなければならず,かつ,制御装置がこの規格に従っ
て,その保護機能を維持することを確実にする手段が取られなければならない。
注記 ハードウェアの構成管理は,制御装置の完全な状態を維持するために,ソフトウェア検証に追
加されることを意図している。システムレベルの関連性は,検討中である。
H.11.12.4.1.4 遠隔駆動形制御機能の動作において,自動切換オフが動作の最後で作動するか,又はシス
テムが連続動作用しない限り,動作期間又は動作の制限時間をスイッチオンの前に設定しなければならな
い。
適否は,ソフトウェアの検査によって判定する。
H.11.12.4.2 制御機能より高い優先権が危険状態を,引き起こさないように配慮しなければならない。
適否は,目視検査によって判定する。
H.11.12.4.3 遠隔リセット作動
H.11.12.4.3.1 遠隔リセット作動は,手動で起動しなければならない。リセット機能を,手持形装置によ
って行う場合,複数の手動作動によってリセットを有効にすることを要求する。
注記 2回の手動作動は,別個のもの及び分離したものであるように考慮する。
H.11.12.4.3.2 リセット機能は,システムを製造業者が意図するとおりにリセットすることができなけれ
ばならない。
181
C 9730-1:2019
H.11.12.4.3.3 安全状態からの意図しないリセットが,生じてはならない。
H.11.12.4.3.4 リセット機能のあらゆる故障は,制御装置又は被制御機能の危険な状態をもたらす原因に
なってはならない。また,クラスB区分として評価しなければならない。
H.11.12.4.3.5 機器が見えない場合での手動作動によるリセット機能は,次の追加要求事項を適用する。
− 制御下のプロセスの実際の状態及び関連情報は,リセット操作の前,操作中及び操作後において,使
用者に対し可視化されなければならない。
− 期間内でのリセット操作の最大回数は,指定しなければならない(例えば,15分間に5回)。また,
機器が物理的に確認できない場合,更にいかなるリセットも受け付けてはならない。
H.11.12.4.3.6 最終製品でのリセット機能の評価に関する考察
リセット機能は,最終製品で評価しなければならない。
注記 全てのタイプの遠隔リセット機能が,適用品によっては適切であるとはみなせない場合もある。
自動温度調節器又は類似の機能装置の手動切替えによってリセットが作動する場合,製造業者が指定し,
かつ,最終製品に適切でなければならない。
H.11.12.4.4 ソフトウェアのダウンロード及びインストール
H.11.12.4.4.1 製造業者によるソフトウェアの更新版及び遠隔通信を通した制御装置への伝送は,それを
使用する前に,次を確認しなければならない。
− ソフトウェアクラスBの場合ハミング距離3,ソフトウェアクラスCの場合ハミング距離4を確実に
する通信を通しての破損防止(表H.1の外部通信の欄参照)。
− ソフトウェアのバージョンが,バージョン管理する文書に従って,制御装置のハードウェアのバージ
ョンと一致しているかどうか。
さらに,上記の確認を実施するソフトウェアは,H.11.12.2に規定する故障/エラー状態を制御するため
の手段を含まなければならない。
H.11.12.4.4.2 ソフトウェアのダウンロードを遠隔通信を通して行う場合,H.11.12.4.5の暗号技術を備えな
ければならない。さらに,H.11.12.4.5の要求事項に加えて,識別手段も,ソフトウェアパッケージに備え
なければならない。
用いた暗号技術は,制御装置の一部とし,ルータ又は類似のデータ伝達デバイス自体の部分に依存して
はならない。また,暗号技術は,伝達の前に実施しなければならない。
H.11.12.4.4.3 ソフトウェアの各更新版において,制御装置は,使用者が許可する手段,及びアクセス可
能なバージョンID番号をもたなければならない。
H.11.12.4.4.4 ソフトウェアクラスB又はソフトウェアクラスCのインストールは,ソフトウェアインス
トール手順中及びその後に,制御装置がこの規格の要求事項を満たした状態にとどまる場合に許容する。
適否は,ソフトウェアの検査によって判定する。
H.11.12.4.5 暗号技術
クラスB制御機能又はクラスC制御機能に関連する操作データ,設定パラメータ及び/若しくはソフト
ウェアモジュールが公共通信網を伝送される場合,並びに/又はソフトウェアの更新版が製造業者によっ
て遠隔通信で供給される場合,暗号技術を用いなければならない。
適否は,一般的に認められるデータの完全性の保護方法を支持する技術文書のレビュー及びソフトウェ
アの検査によって判定する。
注記 一般的に認められる暗号技術の例は,ISO/IEC 9796,ISO/IEC 9797,ISO/IEC 9798,ISO/IEC
10118,ISO/IEC 11770,ISO/IEC 14888,ISO/IEC 15946,ISO/IEC 18033,ISO/IEC 29192及び
182
C 9730-1:2019
ISO/IEC 19772に定義及び記載されている。
H.17
耐久性
H.17.1
一般要求事項
追加(次の細分箇条を追加する。)
H.17.1.4
耐久性試験は,タイプ1作動の電子制御装置について実施しない。ただし,手動作動装置,リ
レーなどをもつ構成部品のような関連構成部品は適用する。
H.17.1.4.1
耐久性試験は,タイプ2作動の電子制御装置について実施しない。ただし,H.17.1.4.2に規定
する温度サイクル試験を適用する。可能な場合,試験は,手動作動,リレーなどいずれの構成部品と組み
合わせて行ってもよい。
H.17.1.4.2
温度サイクル試験
試験の目的は,通常使用状態の間に発生するおそれがあって,周囲の温度変化,取付面の温度変化,電
源電圧の変化,又は動作状態から非動作状態までの変化及びその逆から発生するおそれがある温度の上限
値と下限値との間で電子回路の部品をサイクルさせることである。
上記の状態に達するために必要である試験は,個々の制御装置のタイプに大きく依存し,必要な場合,
JIS C 9730の規格群の該当する第2部による。
次の状態を,試験の基本的要求事項とする。
a) 持続時間 14日間,又はJIS C 9730の規格群の関連する第2部で規定する継続時間のうち,いずれか
長い試験時間とする。電子的断路(タイプ2.Y)を提供する制御装置は,14日間,又は表1の項目26
及び項目27で製造業者が宣言するサイクル数のうち,いずれか長い試験時間とする。
b) 電気的条件 制御装置は,製造業者が宣言する定格に従って負荷をかける。その場合,電圧は1.1 VR
に増加する。ただし,24時間ごとに30分は電圧を0.9 VRに低減する。電圧変化は,温度の変化と同
期してはならない。また,24時間ごとに,約30秒間電源電圧を遮断する期間を1回以上含める。
c) 温度条件 周囲温度及び/又は取付面の温度は,電子回路の構成部品の温度を発生した上限値と下限
値との間で循環させるためにTmax (Ts max)とTmin (Ts min)との間で変化させる。周囲温度及び/又は取付
面の温度の変化率は,約1 ℃/分オーダであって,温度の上限値及び下限値は,約1時間の間維持す
る。
d) 動作の割合 試験中,制御装置は動作モードによって,最高6回/分までの最高速度でサイクル動作
を行う。構成部品は,その温度限度値の範囲の極限値でサイクル動作を行う。
速度制御のような動作モードを使用者によって設定する場合,試験時間は,三つの期間に分割する。
この三つの期間は,最大設定値,最小設定値及び中間設定値である。
電子的断路(タイプ2.Y)を提供する制御装置の試験は,導通状態から非導通状態,及びその逆の
製造業者が宣言する動作数を含む。
H.17.1.4.3
遠隔リセット操作をもつ制御装置
遠隔リセット機能を行う独立して設置する装置は,1 000回以上のリセット操作の試験を行わなければな
らない。一体形及び組込形の装置の場合,他に規定する場合を除き,最小リセット回数は,製造業者が宣
言する。試験後,リセット装置は,製造業者の意図するようにシステムをリセットすることが可能でなけ
ればならない。意図しないリセットは,生じてはならない。
H.17.14 適否判定
置換 第1段落を,次に置き換える。
183
C 9730-1:2019
JIS C 9730の規格群の関連する第2部に規定がある場合は,その規定に置き換えて適用する17.6〜17.13
及びH.17.1.4の全ての該当する試験後,制御装置は,次の状態を満たす場合,要求事項を満たしていると
みなす。
追加 次の細別を追加する。
− 電子的断路(タイプ1.Y又はタイプ2.Y)をもつ制御装置がH.11.4.16を継続して満たしている場合。
H.18
機械的強度
H.18.1
一般要求事項
H.18.1.5
追加(次の段落を追加する。)
電子的断路(タイプ1.Y及びタイプ2.Y)をもつ制御装置は,H.11.4.16を満たさなければならない。
H.20
沿面距離,空間距離及び固体絶縁物を通しての距離
H.20.1
空間距離
追加(次の細分箇条を追加する。)
H.20.1.15 電子制御装置
H.20.1.15.1 商用主電源に電気的に接続する充電部と可触表面又は可触部との間の沿面距離,空間距離及
び固体絶縁物を通しての距離は,箇条20を満たさなければならない。
H.20.1.15.2 沿面距離,空間距離及び固体絶縁物を通しての距離は,次による。
− 保護インピーダンスの両側では,二重絶縁又は強化絶縁に対する箇条20を満たさなければならない。
− 保護インピーダンスの個々の構造部品の両端では,付加絶縁に対する箇条20を満たさなければならな
い。
H.20.1.15.3 機能絶縁をもつ沿面距離及び空間距離は,箇条20を満たさなければならない。
H.23
電磁両立性(EMC)要求事項−エミッション
追加(次の段落を追加する。)
一体形又は組込形制御装置を使用する機器は,関連する製品EMC規格を満たしていることが望ましい。
一体形及び組込形制御装置は,最終製品によって試験される。
H.23.1
電子制御装置は,過度の電気又は電磁妨害をその周辺環境に放射しないような構造でなければな
らない。
H.23.1.1
低周波放射妨害,電源系統における伝導妨害
制御装置を機器に組み込んだ状態によって,またその中での放射を抑制する手段によって試験結果に影
響が及ぶ可能性があるため,一体形及び組込形制御装置は,この箇条の試験は行わない。ただし,製造業
者からの要求がある場合,製造業者が宣言する条件によって試験を行ってもよい。
電子素子を含む制御装置で,商用主電源に接続する外部負荷を,その制御装置用端子で直接制御するも
のは,JIS C 61000-3-2及びIEC 61000-3-3を満たさなければならない。これらの試験は,負荷及び放射抑
制手段をもつ場合,表1の項目74において,製造業者が宣言するように使用する。ただし,この要求事
項は,製造業者による自動制御装置に対して,パイロット負荷だけは適用しない。
H.23.1.2
無線周波数放射
自立構造形,独立取付形及びインラインコード形電子制御装置で,通信ポート,ソフトウェア,発信回
路又はスイッチモード電源装置を用いているものは,表H.12に示すように,CISPR 14-1及び/又はCISPR
184
C 9730-1:2019
22クラスBを満たさなければならない。
注記1 通信ポートは,CISPR 22の3.6に定義している。
ISM制御装置,並びにISM機器とともに用いる自立構造形,独立取付形及びインラインコード形制御装
置は,CISPR 11を満たさなければならない。
追加の詳細事項は,JIS C 9730の規格群の第2部で規定する場合がある。
注記2 JIS C 9730の規格群の第2部では,この箇条の要求事項を一体形及び組込形電子制御装置に
適用するかどうかを示している。
表H.12−放射
端子
周波数帯
限度値
基本規格
適用する注記
備考
外郭
30 MHz以上230 MHz以下
30 dB (μV/m)
10 m法
CISPR 22
クラスB
注記1参照
基本規格の統
計上の数値を
適用する。
230 MHzを超え1 000 MHz
以下
37 dB (μV/m)
10 m法
1 GHzを超えるもの
注記3参照
注記3参照
交流商用
主電源
0 kHz以上2 kHz以下
JIS C 61000-3-2
IEC 61000-3-3
注記2参照
0.15 MHz以上0.5 MHz以下
限度値は,周波数の対数に
従って直線的に減少する。
66〜56 dB (μV)
準せん頭値
56〜46 dB (μV)
平均値
CISPR 22
クラスB
基本規格の統
計上の数値を
適用する。
0.5 MHzを超え5 MHz以下
56 dB (μV)
準せん頭値
46 dB (μV)
平均値
5 MHzを超え30 MHz以下
60 dB (μV)
準せん頭値
50 dB (μV)
平均値
負荷端子
0.15 MHz以上30 MHz以下 基本規格による。
箇条:不連続妨害
CISPR 14-1
注記1 処理装置を含む制御装置,例えば9 kHzを超える周波数で動作するマイクロプロセッサだけに適用する。
注記2 JIS C 61000-3-2及びIEC 61000-3-3の適用範囲の機器だけに適用する。現在JIS C 61000-3-2及びIEC
61000-3-3に含まない制御装置の限度値は検討中である。
注記3 限度値及び適否は,CISPR 22の6.2参照。
H.25
通常動作
追加(次の細分箇条を追加する。)
H.25.1
電子制御装置の出力波形は,製造業者が宣言するとおりでなければならない。
制御装置の出力波形は,全ての通常の動作条件で確認しなければならない。その波形は,正弦波又は表
1の項目53で製造業者が宣言するとおりのいずれかでなければならない。
注記 商用主電源における妨害の制限は,JIS C 61000-3-2及びIEC 61000-3-3の規定を考慮する。
H.26
電磁両立性(EMC)要求事項−イミュニティ
追加(次の細分箇条を追加する。)
185
C 9730-1:2019
H.26.1
電子制御装置は,通常使用状態で発生するおそれがある配電線で発生するじょう乱及び電磁現象
に耐えるような構造でなければならない。タイプ2制御装置は,制御装置が安全機能を作動する状態の後
に,H.26の試験も実施する。
試験レベル2及び/又は試験レベル3に該当する制御装置に対する評価基準は,JIS C 9730の規格群の
該当する第2部に示す。詳細は,H.26.15の全ての細分箇条を参照する。これらの試験レベルは,JIS C 61000
の規格群及びIEC 61000の規格群に規定する試験レベルに対応する。JIS C 9730の規格群の第2部には,
試験レベル2の試験後の通常使用,及び試験レベル3の試験後の装置の安全使用・安全停止のような,試
験レベル2及び/又は試験レベル3を用いる試験の結果,制御装置に及ぼす許容できるレベルを示さなけ
ればならない。JIS C 9730の規格群の第2部で,より高い試験レベルを規定してもよい。
JIS C 9730の規格群の第2部では,H.26の試験に対する試験レベルを規定しなければならない。試験レ
ベル3は,最低限,洗濯設備のカットアウト及びドアロックのような,非制御機器の安全でない動作を防
止するための保護制御装置,並びにバーナ制御装置に適用する。試験レベル2は,最低限,自動温度調節
器,タイマなど,機器の通常動作のために必要とする動作制御装置に適用する。
H.26の試験は,上記のじょう乱に耐えるための非電子式制御装置には適用しない。非電子式制御装置に
おける特定の種類のための試験は,JIS C 9730の規格群の該当する第2部の他の箇条に含めてもよい。
H.26.2
適否は,表H.13に示す試験レベルにおいて判定する。制御装置は,H.26.15を満たさなければな
らない。
表H.13−適用可能な試験レベル
制御装置のタイプ
作動タイプ
H.26の適用試験
H.26.15.3に関連する
適用試験レベルa)
動作制御装置
タイプ1
H.26.8,H.26.9
2
動作制御装置
タイプ2
H.26.4〜H.26.14
2,3又は4
(規定による)
保護制御装置
タイプ2
H.26.4〜H.26.14
3
JIS C 9335-1に従って用いる,
表1の項目90によって製造業
者が宣言する保護制御装置
タイプ2
H.26.4〜H.26.14
JIS C 9335-1の19.11.4に
よる適用試験レベル
注a) より低い試験レベルは,IEC 61000-4の規格群によって検討する。
H.26.2.1
タイプ1作動の一体形及び組込形制御装置について,適否は,表1の項目58aで製造業者が宣
言する場合,H.26.8及びH.26.9の試験によって判定する。
H.26.2.2
タイプ2作動の一体形及び組込形制御装置について,適否は,表1の項目58aで製造業者が宣
言する場合,H.26.5及びH.26のその他の試験によって判定する。
注記 対象とする制御装置に対するH.26の中の各試験が適切であるかどうかは,該当する規格(又は
複数の規格)又は製造業者の意図する用途に関する指定を参照して決定する。
適切であるかどうかの決定は,次の評価を含むことが望ましい。
− 制御装置がその用途に対して,特定形式の妨害にさらされるかどうか。
− 特定形式の妨害に対して,制御装置の応答がその用途における安全に関連するかどうか。
H.26.3
提出された状態の異なるサンプルを,各試験に対して使用してもよい。制御装置の製造業者の選
択によって,複数の試験を単一のサンプルで実施してもよい。
186
C 9730-1:2019
H.26.4
交流電力ポートにおける電源線信号を含む高調波及び中間高調波の低周波イミュニティ試験
表1の項目90によって製造業者が宣言する保護制御装置は,次の試験を適用する。
制御装置に,IEC 61000-4-13に従って,適用可能な試験レベルのクラス2によって,主電源信号を印加
する。
試験中,制御装置に,定格電圧を供給する。IEC 61000-4-13の表1〜表4に従ったクラス2環境におけ
る試験レベルをサンプルの交流電源端子に適用する。制御装置は,制御装置の個別規格に規定する試験条
件の下で試験する。
次の試験は,IEC 61000-4-13の図1 a)によるクラス2環境によって実施する。
− 高調波の組合せ(IEC 61000-4-13参照)
− マイスターカーブ(IEC 61000-4-13の8.2.4参照)
H.26.5
電源回路網中の電圧ディップ,短時間停電及び電圧変動
制御装置は,電源回路網中の電圧ディップ,短時間停電及び電圧変動に耐えなければならない。
適否は,H.26.5.1及びH.26.5.2の試験によって判定する。
H.26.5.1
電圧ディップ及び短時間停電
この試験の目的は,電圧ディップ及び短時間停電に対する機器のイミュニティを検査することである。
電圧ディップ及び短時間停電は,LV(低電圧),MV(中電圧)及びHV(高電圧)回路網中の故障によっ
て引き起こす(短絡又は接地故障)。
H.26.5.1.1
電圧ディップ及び短時間停電における試験レベル
表H.14の試験値は,全ての試験レベルに適用する。
表H.14−電圧ディップ,短時間停電及び電圧変動
継続時間
ΔU
30 %
60 %
100 %
供給電圧波形の0.5サイクル
−
−
×
供給電圧波形の1サイクル
−
−
×
2.5サイクル
×
×
×
25サイクル
×
×
×
50サイクル
×
×
×
注記 短時間停電の中間持続時間が制御装置の本質安全性又はタイプ2制御
装置の出力に悪影響を与える可能性がある場合,JIS C 9730の規格群の
関連する第2部でその他の地点における短時間停電を示してもよい。
H.26.5.1.2
電圧ディップ及び短時間停電の試験手順
試験装置及び手順は,JIS C 61000-4-11による。試験中,制御装置は,最初,その定格電圧で動作させ
る。
商用主電源周波数に関するランダムな位相における電圧ディップ及び短時間停電は,関連する動作モー
ドにおいて,3回以上実施する。
制御装置は,電圧ディップ及び短時間停電に特に敏感になることがある動作モードに対して,注意をす
ることが望ましい。
電圧ディップと短時間停電との間には,10秒以上の待機時間を確認する。
三相機器の場合,電圧ディップ及び短時間停電を3相同時に適用するか,又は1相若しくは2相だけに
適用する必要がある。
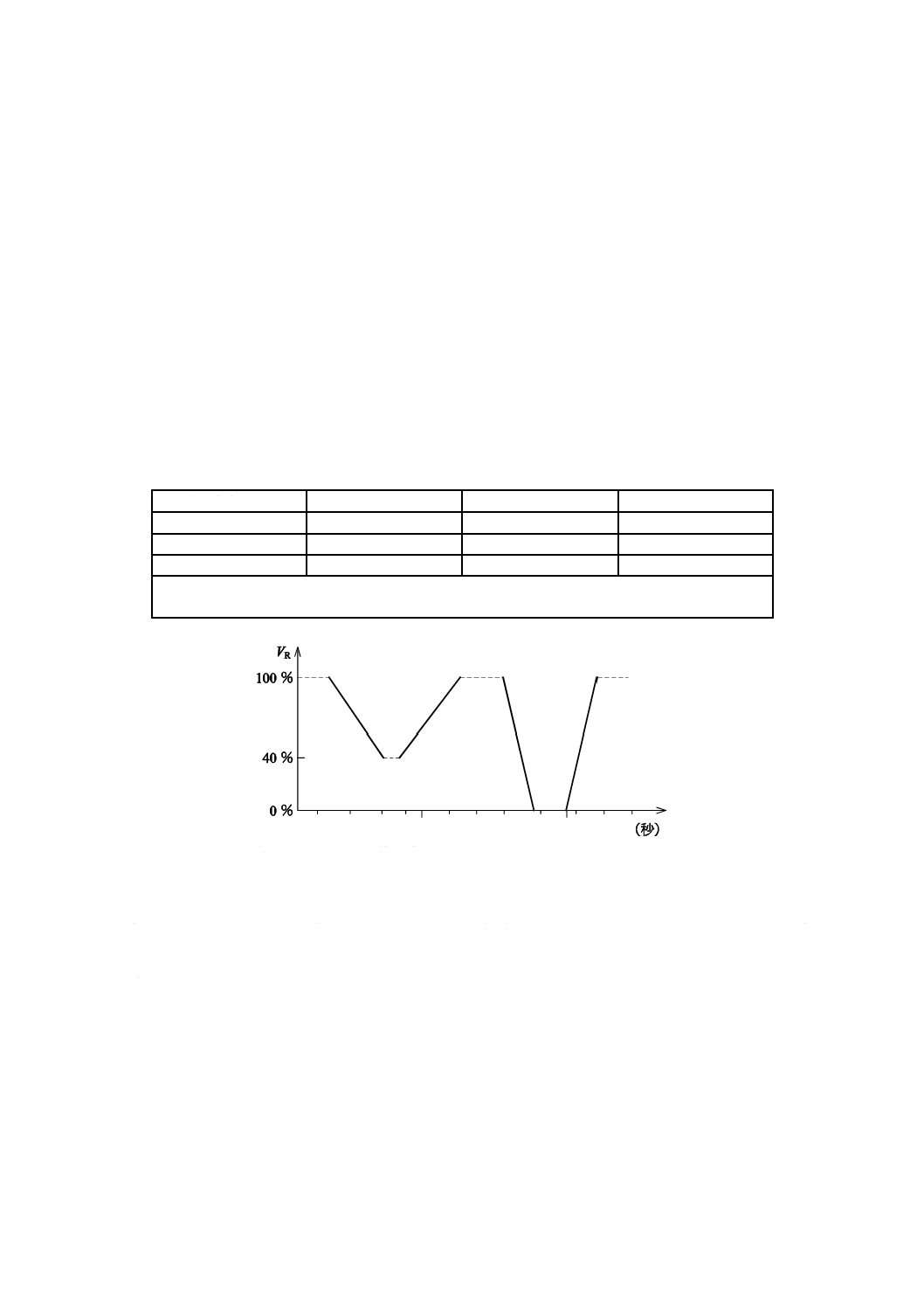
187
C 9730-1:2019
表1の項目90によって製造業者が宣言する保護制御装置は,追加の試験として,供給電圧のゼロ交差と
同時に,主電源周波数での電圧ディップ試験及びランダム位相の短時間停電試験を実施する。
H.26.5.2
電圧変動試験
この試験の目的は,地域の電力網の負荷又は貯蔵エネルギーの変動によって発生することのある短期的
な電圧変化に対する,制御装置のイミュニティを検証することである。
H.26.5.2.1
電圧変動の試験レベル
表H.15の試験値は,全ての試験レベルに適用する。
H.26.5.2.2
試験手順
試験機器及び手順は,JIS C 61000-4-11による。電圧変化の持続時間及び電圧低下の時間は,表H.15及
び図H.2に示すとおりに維持する。電圧変化率は一定とする。ただし,電圧はステップ電圧としてもよい。
このステップは,ゼロ交差に位置決め,またVRの10 %以下とする。VRの1 %未満のステップは,一定の
電圧変化率として評価する。
表H.15−電圧変動の試験値
電圧試験レベル
電圧低下に要する時間
電圧低下の時間
電圧上昇の時間
40 % VR
2秒±20 %
1秒±20 %
2秒±20 %
0 % VR
2秒±20 %
1秒±20 %
2秒±20 %
−
x
x
x
注記 xは,持続時間の開集合を表し,また,JIS C 9730の規格群の関連する第2部で規定しても
よい。
注記 電圧は,段階的に減少する。
図H.2−電圧変動試験
制御装置は,ほとんどの代表的動作モードについて,各試験サイクルの間に10秒の間隔をおき,規定の
電圧試験サイクルで3回ずつ試験する。追加の電圧試験レベルは,JIS C 9730の規格群の第2部で規定し
ている。
H.26.6
電圧不平衡の影響の試験
H.26.6.1
試験の目的−適用範囲
この試験は,三相機器だけに適用する。
試験の目的は,次のような,この種の障害に感度が高い機器に及ぼす三相電圧システム中の不平衡の影
響を検査することにある。
− 交流回転機の過熱
− 電子式電力変換装置中の特徴的でない高調波の生成
188
C 9730-1:2019
不平衡の度合は,不平衡率Tiで定義する。
d
i
i
U
U
T=
ここに,
Ui: 逆相回転電圧
Ud: 正相回転電圧
H.26.6.2
試験電圧特性
規定する不平衡率をもつ電力周波数三相電圧を,制御装置に印加する。
注記 精度の高い結果を得るために,非常に小さい高調波含有量をもつ電圧を用いることが望ましい。
H.26.6.3
試験機器−試験用発生器
試験装置は,3個の単相単巻変圧器(出力を個別に調整する。)又は類似のもので構成する。
H.26.6.4
試験レベル
この試験レベルは,不平衡率2 %で実施しなければならない。
H.26.7
交流回路網中の直流の影響試験
注記 要求事項及び試験は,検討中である。
H.26.8
サージイミュニティ試験
制御装置は,商用主電源及び関連する信号端子上の電圧サージに耐えなければならない。
適否は,H.26.8.2及びH.26.8.3の試験によって判定する。
H.26.8.1
試験の目的
この試験は,電源端子に適用し,また特定のケースでは,制御装置の端子に適用する(H.26.8.2参照)。
電子的断路をもつ制御装置は,17.2に示すように負荷をかけ,また制御装置が電子的断路をもっている
場合,製造業者が制御装置について製造業者が宣言する設置クラスに対するレベルとして試験する。試験
中及び試験後,制御装置は,H.11.4.16.2の試験で測定したように,電子的断路をもち続けなければならな
い。試験中,1回のサージを適用した後で,電源周波数の1/2サイクルだけ電子的断路が導通状態になっ
た場合は,これを故障と判断しない。
試験の目的は,次のような,様々な現象によって起きる単一方向性のサージに対する制御装置のイミュ
ニティを検査することにある。
− 電力系統における開閉現象(例えば,コンデンサバンクの開閉)
− 電力系統の故障
− 雷撃
誘起する電圧サージは,電源及び制御装置の相対的インピーダンスに依存して,次のような,異なる影
響をもつことがある。
− システムが電源と比較して高いインピーダンスをもつ場合,サージは電圧パルスを発生する。
− 制御装置が比較的低いインピーダンスをもつ場合,サージは電流パルスを発生する。
この反応は,過電圧抑制装置によって保護する入力回路に特性付ける。過電圧抑制装置が絶縁破壊され
ると,すぐに,入力インピーダンスは非常に低くなる。実際の試験では,この反応に対応しなければなら
ない。また,試験用発振器は,低インピーダンスだけではなく,高インピーダンスに対しても電圧パルス
を発生することができなければならない(ハイブリッド発振器)。
H.26.8.2
試験値
表H.16に規定する試験を,適用する。
信号線,データ線,制御線,その他の入力線のための端子に関する試験は,これらの端子が10 mより
189
C 9730-1:2019
も長いケーブルで接続するような構造となっている場合には,製造業者の仕様書に従って実施する。
表1の項目90によって製造業者が宣言する保護制御装置は,追加の試験として,制御装置の電源供給端
子について,電源インピーダンスが12 Ωの信号源を使用し,開路試験電圧4 kV(ライン−接地間へのカ
ップリングモードで適用),及び電源インピーダンスが2 Ωの信号源を使用し,開路試験電圧2 kV(ライ
ン相互間へのカップリングモードで適用)によって実施する。
表H.16−試験レベル2に関する試験電圧(設置クラス条件による。)
試験電圧
ピークkV
JIS C
61000-4-5
設置クラス
電源
不平衡動作回路及びライン
平衡動作回路及びライン
カップリングモード
カップリングモード
カップリングモード
ライン
相互間
ライン−
接地間
ライン
相互間
ライン−
接地間
ライン
相互間
ライン−
接地間
2
0.5
1.0
0.5
1.0
試験なし
1.0
3
1.0
2.0
1.0
2.0
試験なし
2.0
4
2.0
4.0
2.0
4.0
試験なし
2.0
注記1 試験レベル3の要求事項の場合は,次に高い設置クラスを適用する。試験レベル4の要求事項
の場合は,設置クラス4を適用する。
注記2 試験は,意図したサージ抑制装置を適切に据え付けて試験を実施する。
注記3 制御装置では,適切な過渡過電圧制御手段を装備している場合,低い方のカテゴリが高い方の
カテゴリに従う。
注記4 設置クラスの概要及び詳細な説明については,附属書Rを参照。
試験後,試験レベル2及び試験レベル3の試験では,サージ抑制装置が破壊してはならない。
H.26.8.3 試験手順
試験装置及び手順は,JIS C 61000-4-5による。インパルス発生装置を端子間に接続した状態で,定格電
圧で動作する該当する電源に制御装置を接続する。
試験では,関連する動作モード全体に分布させた少なくとも0°,90°,180°及び270°の位相関係の
正と負(+,−)の各極性のパルスを,表H.16に示す電圧値で,60秒以上の間隔で又はJIS C 9730の規
格群の関連する第2部で規定するように,5パルスだけシステムに適用する。
バリスタをサージ保護装置として使用する場合,バリスタは,IEC 61643-11を満たさなければならない。
さらに,バリスタは,制御装置が使用を意図した設置クラスに関連するインパルスに耐えるものを選定し
なければならない。
放電ギャップを組み込んだ避雷器をサージ保護装置としている制御装置について,試験は,放電開始電
圧の95 %である試験レベルで繰り返す。
制御装置は,JIS C 9730の規格群の関連する第2部の規定によって,関連する動作モードにおいて試験
し,判定する。
H.26.9
電気的ファストトランジェント/バーストのイミュニティ試験
制御装置は,商用主電源及び信号線上のファストトランジェント/バーストに耐えなければならない。
適否は,H.26.9.2及びH.26.9.3の試験によって判定する。
H.26.9.1
試験の目的
この試験は電源端子に適用し,また特定のケースでは,制御端子に適用する(H.26.9.2参照)。
この試験の目的は,リレー,接触器などで発生することのある,スイッチ誘導負荷並びに信号及びデー
190
C 9730-1:2019
タ回路内に誘導することのある低エネルギーのファストトランジェント/バーストに対する,制御装置の
イミュニティを実証することである。
H.26.9.2
試験レベル
試験レベルは,表H.17の規定による。
インタフェースケーブル用の端子に関する試験は,これらの端子が3 mよりも長いケーブルで接続する
ような構造となっている場合には,製造業者の仕様書に従って実施する。
発生器ドライブ: 内部
持続時間:
正(+)及び負(−)の各極性について1分間
使用条件:
JIS C 9730の規格群の関連する第2部による。
電源端子部の試験電圧は,グラウンド基準面と全ての電源端子部(コモンモード)との間に同時に印加
する。
表H.17−電気的ファストトランジェント/バースト試験のための試験レベル
H.26.15.3に対応する
適用試験レベル
JIS C 61000-4-4による
試験レベル
開放端子出力試験電圧及びインパルス繰返し速度
電源端子部,PE
入出力信号,データ及び
制御端子部
ピーク電圧
kV
繰返し速度
kHz
ピーク電圧
kV
繰返し速度
kHz
2
2
1
5
0.5
5
3
3
2
5
1
5
JIS C 9335-1に従って用いる,
表1の項目90によって製造業
者が宣言する保護制御
4
4
5
−
−
H.26.9.3
試験手順
試験装置及び試験手順は,JIS C 61000-4-4による。
制御装置は,JIS C 9730の規格群の関連する第2部で規定するように,それぞれ関連する動作モードで
試験する。
H.26.10 リング波イミュニティ試験
注記 カナダ及び米国では,この細分箇条のリング波イミュニティ試験を要求する。
H.26.10.1 試験の目的−適用範囲
試験の目的は,屋内(ケーブル)住居用及び産業用LV回路網中に現れる振動性過渡現象(リング波)
に対する機器のイミュニティを確認することである。この試験は,屋外(架空線)回路網中に現れる過渡
現象をカバーする1.2/50 μsサージ試験に対する補助である。リング波に伴うエネルギーは,サージに関連
するエネルギーより小さいが,それらは,電圧極性変化による制御装置への影響を発生するおそれがある。
H.26.10.2 試験波形特性
試験波形は,立ち上がり時間0.5 μsのパルス,それに続く100 kHzの振動で,各ピークが先行するピー
クの60 %に減少する波形で構成する。図H.3参照。
H.26.10.3 試験装置−試験波形発生器
イミュニティ試験のためのサージ発振装置は,図H.4に示す。
H.26.10.4 試験レベル
試験電圧は,表H.18に規定する電圧を適用する。
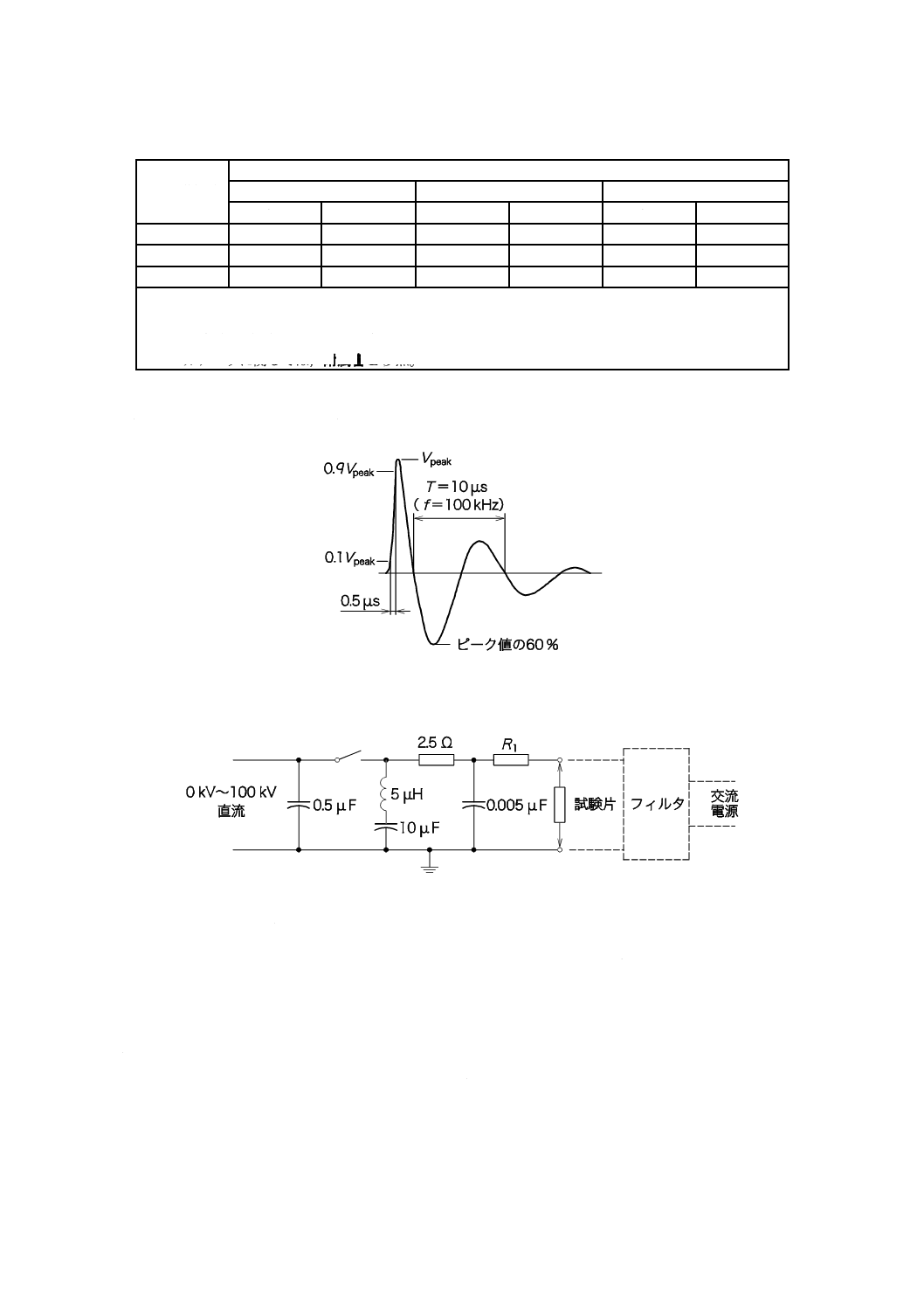
191
C 9730-1:2019
表H.18−ピーク電圧
定格入力
電圧(最高)
V
カテゴリa), b)
I
II
III
kV
R1
kV
R1
kV
R1
100
0.5
25
0.8
25
1.5
25
300
1.0
25
1.6
25
2.5
25
600
2.0
25
3.0
25
5.0
25
注記 米国では,インパルス波形のピーク電圧は,定格電圧及びJIS C 60664-1に規定する制御装置の
カテゴリによる。
注a) 開路電圧(kV)。図H.4のR1参照。
b) カテゴリに関しては,附属書L参照。
H.26.10.5 試験手順
制御装置は,H.26.8.3に従って試験する。
図H.3−リング波特性
(開路電圧)
注記 R1の値は,表H.22に規定する。短絡電流は次のとおり。
− R1が2.5 Ωの場合,短絡回路電流は,500 A(ピーク)である。
− R1が25 Ωの場合,短絡回路電流は,200 A(ピーク)である。
図H.4−リング波発生器(0.5 μs /100 kHz)の回路図
H.26.11 静電気放電試験
試験は,JIS C 61000-4-2による。
試験値は,JIS C 61000-4-2の試験レベル3を適用する。
直接放電の場合,可触金属部には接触放電6 kV,絶縁材料の可触部には気中放電8 kVを適用する。
間接放電の場合,水平又は垂直のカップルプレートには,接触放電6 kVを適用する。
表1の項目90で製造業者が宣言する保護制御装置には,追加の試験として,JIS C 61000-4-2の箇条5
の試験を試験レベル4を適用する。可触金属部には接触放電8 kV,絶縁材料の可触部には気中放電15 kV
192
C 9730-1:2019
を適用する。
H.26.12 無線周波電磁界イミュニティ
H.26.12.1 試験の目的
試験の目的は,無線送信機又は連続波放射電磁エネルギーを放出する他の装置によって発振される電磁
界に対する,制御装置のイミュニティを検証することである。手持形トランシーバ(ウォーキトーキ)の
放射に対する制御装置のイミュニティが主たる問題であるが,固定無線局,テレビジョン送信機,車載無
線送信機及び各種の断続的放射源の産業用電磁波発生源のようなその他の電磁放射源も関連する。
H.26.12.1.1 レベル2の試験の限度値がレベル3の試験後に影響を受けない場合,レベル2の試験を実施
する必要はない。
H.26.12.2 伝導妨害に対するイミュニティ
制御装置は,商用主電源及び関連する信号端子上の高周波信号に耐えなければならない。
適否は,H.26.12.2.1及びH.26.12.2.2の試験によって判定する。
H.26.12.2.1 伝導妨害の試験レベル
表H.19に示す規定値以上の試験レベルを加える。
試験は,製造業者の宣言によって,相互接続用ケーブルだけに適用する。ケーブルは1 mより長くても
よい。
表H.19−商用主電源及びI/Oラインにおける伝導妨害の試験レベル
周波数レンジ:150 kHz〜80 MHz
試験レベル
電圧レベル(実効値)
U0
dBμV
U0
V
2
130
3
3
140
10
注記 ISM及びCBバンドにおけるレベルは,6 dB高い値を選択する。
(ISM:工業用,科学用及び医療用無線周波数機器:13.56±0.007 MHz及び40.68±0.02 MHz
CB:シチズンバンド: 27.125±1.5 MHz)
H.26.12.2.2 試験手順
この試験は,JIS C 61000-4-6による。
制御装置を,システムをそれぞれの関連モードで動作し,各々1回以上完全な周波数レンジを掃引する
ことによって試験を行う。この場合の周波数は,増加方向に掃引し,そのステップサイズは,校正点間の
直線内挿で先行する周波数の値の1 %を超えてはならない。各周波数における休止時間は,0.5秒以上かつ
制御装置が動作し,そして応答するために必要な時間より少なくてはならない。ISM及びCBバンドは,
試験周波数範囲の全てで,かつ,検討するISM及びCBバンドを含めた掃引で用いる試験周波数によって
試験を実施する。
注記 敏感な周波数又は注意したほうがよい有力な周波数については,別に分析してもよい。
H.26.12.3 放射妨害イミュニティ
制御装置は,商用主電源及び関連する信号端子上の高周波信号に耐えなければならない。
適否は,H.26.12.3.1及びH.26.12.3.2の試験によって判定する。
H.26.12.3.1 放射電磁界に対する試験レベル
放射電磁界イミュニティの試験レベルは,表H.20による。
193
C 9730-1:2019
放射イミュニティに関する増加した試験レベルは,表H.21の試験レベルを適用しなければならない。
表H.20−放射電磁界に対するイミュニティの試験レベル
試験レベル
試験周波数レンジ/電界強さ
V/m
80 MHz〜960 MHz
1.4 GHz〜2.0 GHz
2.0 GHz〜2.7 GHz
2
3
3
1
3
10
3
1
表H.21−放射イミュニティに関する増加した試験レベル
(ISM,GSM及びDECTバンド)
試験レベル
試験周波数レンジ/電界強さ
V/m
433 MHz〜
435 MHz
864 MHz〜
915 MHz
935 MHz〜
960 MHz
1 710 MHz〜
1 784 MHz
1 805 MHz〜
1 960 MHz
2 446 MHz〜
2 454 MHz
2
6
6
6
6
6
2
3
20
20
10
6
6
2
H.26.12.3.2 試験手順
この試験は,JIS C 61000-4-3による。
制御装置の,それぞれ関係動作モードで,全ての試験の周波数範囲について,アンテナ垂直及び水平方
向で掃引する。この場合の周波数は,増加方向に掃引し,そのステップサイズは,校正点間の直線内挿で
先行する周波数の値の1 %を超えてはならない。各周波数における休止時間は,0.5秒以上,かつ,制御装
置が動作しそして応答するために必要な時間より少なくてはならない。ISMバンド,GSMバンド及びDECT
バンドは,試験周波数範囲の全てで,かつ,検討するISMバンド,GSMバンド及びDECTバンドを含め
た掃引で用いる試験周波数で試験を実施する。
試験は,通常,制御装置のアンテナとして働く面に実施する。機器が異なる方向(垂直又は水平方向)
で使用できる場合,試験中,全ての面を電磁界にさらす。技術的な根拠がある場合,幾つかの制御装置で
は,アンテナとして働く面を減らして試験してもよい。制御装置の種類及び大きさ,又は試験周波数によ
っては,4方位以上を電磁界にさらす必要がある場合もある。
注記 敏感な周波数又は注意したほうがよい有力な周波数については,別に分析してもよい。
H.26.13 電源周波数変動の影響試験
適切な動作が商用主電源周波数に依存するクラスB制御機能及び/又はクラスC制御機能のソフトウェ
アを利用する制御装置をベースとしたマイクロプロセッサは,H.7の表1への追加項目を製造業者が宣言
する場合,商用主電源周波数の周波数変動に耐えなければならない。
H.26.13.1 試験の目的
試験の目的は,商用主電源における周波数変動による制御装置への影響を検証することである。
H.26.13.2 試験レベル
試験レベルは,表H.22の試験レベルを適用する。
194
C 9730-1:2019
表H.22−電源周波数変動の試験レベル
試験レベル
電源周波数の変動
% a)
2
±1及び±2
3
±3,±4及び±5
注a) その他の値を,JIS C 9730の規格群の第2部に規定してもよい。
H.26.13.3 試験手順
試験装置及び手順は,IEC 61000-4-28による。
制御装置は,最初にその定格電圧で動作させ,次に,H.26.13.2に規定する周波数変動にさらさなければ
ならない。
H.26.14 電力周波数磁界イミュニティ試験
ホール効果装置を使用する制御装置のような,磁界の影響を受けやすい制御装置は,電力周波数磁界に
耐えなければならない。
適否は,H.26.14.2の試験によって判定する。
注記 このような制御装置の例には,ホール効果装置を使用する圧力センサ,リードリレーを組み込
んだ制御装置及び双安定リレーを利用する制御装置が含まれている。
H.26.14.1 試験の目的
試験の目的は,制御装置の特定の位置条件及び据付条件(例えば,機器が妨害発生源に近い)に関して,
電力周波数磁界の影響を受けることのある制御装置のイミュニティを実証することである。
電力周波数磁界は,導体内の電力周波数電流又は機器の近くにある他の装置(例えば,変圧器の漏電)
からの電力周波数電流によって発生する。
通常使用条件下での電流が比較的小さな定常的(連続的)磁界を発生する場合は,近くの導体の影響だ
けを考慮すればよい。
H.26.14.2 試験レベル
試験レベルは,表H.23の試験レベルを適用する。
表H.23−連続磁界の試験レベル
試験レベル
連続磁界の強さ
A/m
2
3
3
10
H.26.14.3 試験手順
制御装置には,定格電圧で給電する。試験機器,試験構成及び試験手順は,JIS C 61000-4-8による。制
御装置は,JIS C 9730の規格群の関連する第2部に規定しているような試験条件下で試験する。
H.26.15 適否判定
H.26.15.1 H.26.2〜H.26.14の試験の後,サンプルは,箇条8,17.5及び箇条20を満たさなければならな
い。
H.26.15.2 制御装置は,H.26.15.1の要求事項に追加して,次のいずれかを満たさなければならない。
a) H.17.14の要求事項
b) 出力及び機能は,表1の項目58a及び項目58bに製造業者が宣言する要求事項
195
C 9730-1:2019
上記のb)の適否については,一部の用途に関して制御装置を容認できなくなる場合がある。
JIS C 9730の規格群の第2部では,特定のタイプの制御装置への制御された出力又は試験レベルのため
の制御機能について,許容できる影響に関する制限を規定している。
H.26.15.3 製造業者は,試験レベル2,又は該当する場合,試験レベル3で試験した後,異なる出力及び
機能を宣言してもよい。JIS C 9730の規格群の第2部は,これらの各試験後の特別な基準を規定している。
H.26.15.4 適否基準は,JIS C 9730の規格群の第2部による。また,試験対象の制御装置の動作出力条件
及び次に示す機能仕様に基づかなければならない。
a) 保護機能を喪失することのない正常な性能,及び仕様又は指定する限度内にある制御
b) 指定する限度内での保護機能の喪失
c) 保護機能の喪失及び安全停止
d) 保護機能の喪失及び安全でない動作
H.27 異常動作
H.27.1
電子制御装置−内部不良に対する評価
H.27.1.1
電子制御装置は,電気的安全を保障するために,回路部品の不良又は誤動作の影響に対して評
価しなければならない。
適否は,H.27.1.1.1〜H.27.1.1.6及びH.27.4の試験によって判定する。
累積ストレスの結果として,不良となる構成部品は必要があれば取り替える。
注記 箇条24又はこの規格の関連する要求事項に従って評価される非電子部品,例えばスイッチ,リ
レー及び変圧器は,この細分箇条の試験は,適用しない。
この細分箇条の試験中,電子的断路(タイプ1.Y又はタイプ2.Y)を提供する制御装置に対しては,そ
の装置の,表12の注n)に規定するいかなる不良も許容する。
H.27.1.1.1
表H.24に規定する故障状態は,次の条件による回路又は回路の部品には適用しない。
a) 制御装置の他の部分における感電,火災の危険,機械的危険又は危険な誤動作に対する保護が,電子
回路の適切な機能に依存しない。
b) 電子回路は,次の手順によって決定する小電力回路でなければならない(図H.5参照)。
1) 制御装置を,定格電圧又は定格電圧範囲の上限電圧で動作させる。また,可変抵抗器をその最高抵
抗値に調節した状態で,検査する点と電源の反対極との間に接続する。
2) 次に,抵抗値を,抵抗器による消費電力が最大値に達するまで低減する。電源に最も近く,この抵
抗器に供給される最大電力が5秒後に15 Wを超えない点を,小電力点とする。小電力点よりも電
源から遠い回路の部分は小電力回路であるとみなす。
3) 測定は,電源の1極だけから行い,なるべく最も数の少ない小電力点を与える極で行う。
注記 小電力点を決定するとき,電源に接近している点で始めることが望ましい。可変抵抗器に
よって消費される電力は,例えば,電力計など都合のよい方法によって測定する。
4) 電子回路をH.27を満たすために動作させる場合,関連する試験は,H.27.1.1.5に示すとおりに,1
個の故障を模擬して繰り返す。
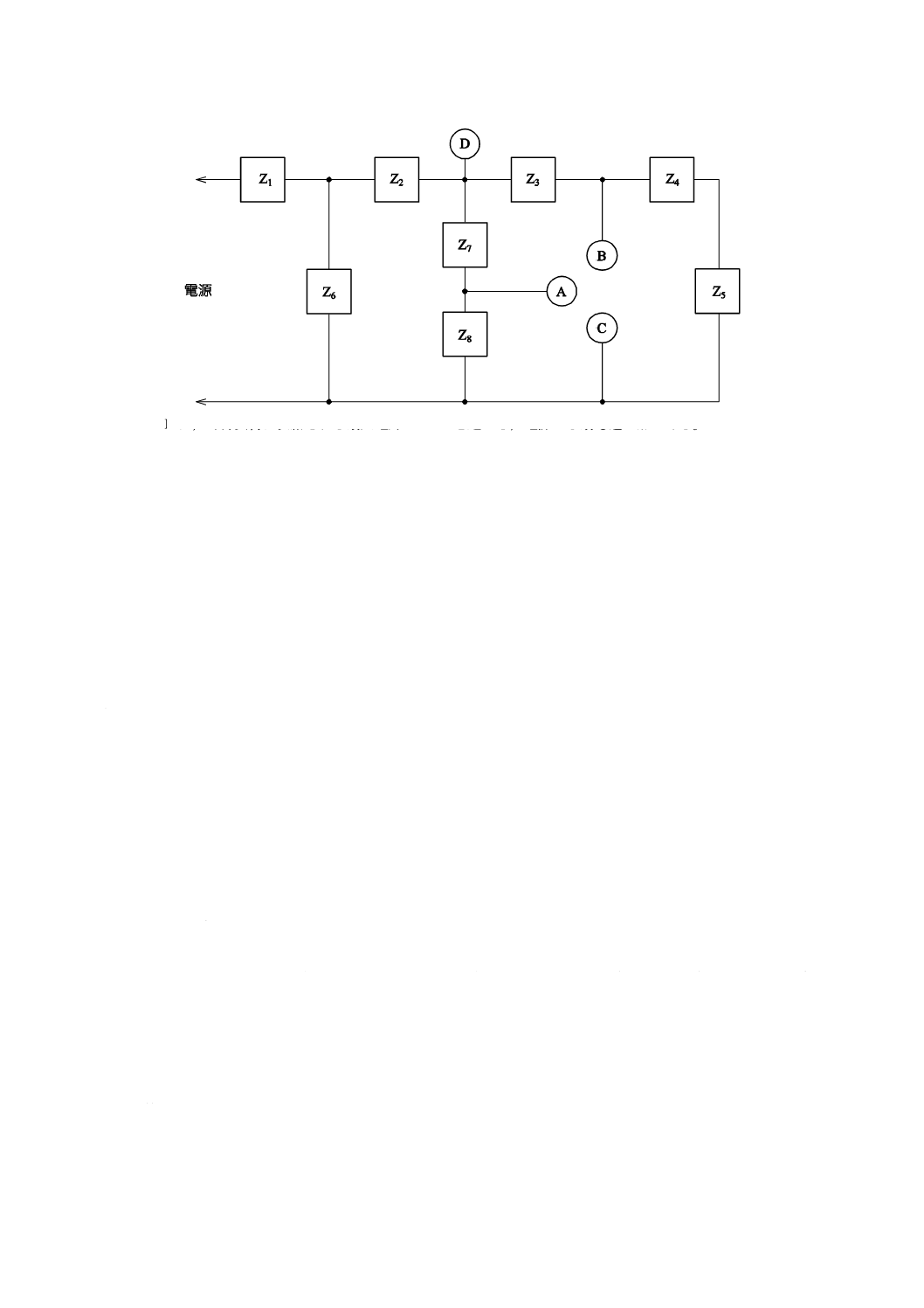
196
C 9730-1:2019
Dは,外部負荷に供給される最大電力が15 Wを超える,電源から最も遠い点である。
A及びBは,外部負荷に供給される最大電力が15 Wを超えない,電源に最も近い点である。これ
らは,小電力点である。
A及びBは,別々にCと短絡する。
H.27.1.1.5に規定する故障状態は,適用する場合,個々にZ1,Z2,Z3,Z6及びZ7に適用する。
図H.5−小電力点がある電子回路の例
H.27.1.1.2
制御回路は,次の条件で動作させる。
a) 定格電源電圧の0.9〜1.1倍の範囲の最も不利な電圧
b) 指定又は測定するパラメータ内で,最も不利な影響を生じるタイプの負荷をかける。
c) 重大な理由[例えば,H.27.1.1.1のb)に示すような]があって,製造業者が宣言する範囲内の別の温
度で試験を実施する場合を除き,周囲温度20±5 ℃とする。
d) 試験の結果が,ヒューズの動作によって影響されないような定格のヒューズをもつ電源に接続する。
e) 操作部を最も不利な位置に設定した状態で行う。
H.27.1.1.3
表H.24に示す各故障を,1回に一つの回路構成部品でシミュレーションするか,又は適用す
るとき,この制御装置は,次の事項を満たさなければならない。
− a)〜g)による。JIS C 6065の箇条14(部品)による構成部品の場合,制御装置は,a),c),d),f)及び
g)を満たせばよい。
注記1 カナダ及び米国では,IECQプログラムによる品質認証を受けている構成部品であって,
適切な条件設定時間,及びストレス要因である場合は,表H.24の故障は適用する必要がな
い。
a) 制御装置は,炎,高温の金属又は高温の合成樹脂を放出してはならず,また,爆発してはならない。
インラインコード形制御装置及び独立取付形制御装置に対しては,適否は次の試験によって判定す
る。
内部に制御装置をもつ外郭は,包装用ティッシュペーパで巻く。制御装置は,定常状態になるま
で,又は1時間のうち,いずれか始めに到達するまで動作させる。包装用ティッシュペーパが燃焼
してはならない。外郭の内部で幾つかの部品は,一時的に赤熱してもよい。また,煙又は炎の一時
的な放出があってもよい。
注記2 カナダ及び米国では,包装用ティッシュペーパの代わりにチーズクロスを用いる。
一体形制御装置及び組込形制御装置は,インラインコード形制御装置及び独立取付形制御装置に
197
C 9730-1:2019
対して規定した試験を満たすか,又は機器若しくは装置内で更にシールドなどを必要とするという
分類でなければならない。
b) 付加絶縁及び強化絶縁の温度は,熱可塑性材料の場合を除き,箇条14に規定する関連値の1.5倍を
超えてはならない。
熱可塑性材料の付加絶縁及び強化絶縁に対しての特定の温度限度値は,規定しない。ただし,そ
れらの温度は,箇条21の目的に対しては記録する必要がある。
c) 制御する出力中の変化は,表1の項目57によって製造業者が宣言するとおりでなければならない。
d) 制御装置は,基礎絶縁に関して,箇条8及び13.2を満たさなければならない。
e) 制御装置の部品に劣化があってはならない。疑義がある場合,箇条20によって判定する。
f)
試験中の制御装置の外側にあって,H.27.1.1.2のd)に規定するような電源中のヒューズは,溶断し
てはならない。ただし,工具の使用後に限り可触である内部保護装置も動作した場合は除く。
内部保護装置は,サンプルが電源中のヒューズの交換後,今までどおり,次を満たしている場合,
必要ではないとみなす。
− 上記のa),b)及びd)
− 制御装置をその意図する使用状態のように取り付けるとき,充電部から可触である制御装置の表
面までの空間距離及び沿面距離に対する箇条20の要求事項
g) 出力波形は,表1の項目56中に製造業者が宣言するとおりでなければならない。
− JIS C 9730の規格群の第2部の該当する細分箇条に規定する追加の適否基準
− 指定する場合は,規定のソフトウェアクラスの要求事項
H.27.1.1.4
H.27.1.1.3の試験のためのガイドライン
この細分箇条の要求事項に逸脱するおそれがある全ての条件を評価するために,必要ない試験を回避す
るあらゆる努力を払うことが望ましい。このような評価は,回路図の評価及び関連する故障状態が発生す
るかどうかを試験するための故障の模擬を含まなければならない。ソフトウェアを用いる制御装置に対し
て,この故障解析は,表1の項目68のソフトウェア故障解析に関連付けなければならない。
H.27.1.1.5で規定する一つの電子回路の故障の実施から発生する全ての状態は,1個の故障とみなす。
試験中,劣化の徴候があるプリント回路板導体は,故障のおそれがあると考える。
H.27.1.1.5
電子回路故障状態
H.27の目的に対して,表H.24に示す故障モードを適用する。
表H.24−電気及び電子構成部品の故障モード表
構成部品のタイプ
短絡a)
開放b)
注記
固定抵抗器
薄膜c)
−
×
SMDタイプを含む。
厚膜c)
−
×
SMDタイプを含む。
巻線c)(単層)エナメル処理又はコーティング処理
−
×
その他の全てのタイプ
×
×
可変抵抗器(例:ポテンショメータ,トリマー)
巻線
−
×
その他の全てのタイプ
×d)
×
198
C 9730-1:2019
表H.24−電気及び電子構成部品の故障モード表(続き)
構成部品のタイプ
短絡a)
開放b)
注記
コンデンサ
JIS C 5101-14によるタイプX1及びタイプY
−
×
JIS C 5101-16及びJIS C 5101-17によるメタライズドフィルム
−
×
その他の全てのタイプ
×
×
インダクタ
巻線
−
×
その他の全てのタイプ
×
×
ダイオード
全てのタイプ
×
×
トランジスタのような半導体タイプの素子
全てのタイプ(例:バイポーラ,LF,RF,マイクロ波,FET,
サイリスタ,ダイアック,トライアック,ユニジャンクション)
×d)
×
e)
ハイブリッド回路
f)
f)
集積回路
H.11.12でカバーされない全てのタイプ
×g)
×
IC出力は,注e)を適用。
オプトカプラ
JIS C 9335-1による。
×h)
×
リレー
コイル
−
×
接点
×i)
×
リードリレー
×
×
接点だけ
変圧器
JIS C 61558-2-6又はJIS C 61558-2-16による。
−
×
その他の全てのタイプ
×d)
×
クリスタル(水晶振動子)
×
×
j)
スイッチ
×
×
k)
接続部(ジャンパ線)
−
×
l)
ケーブル及び配線
×
プリント回路板導体
IEC 62326の規格群による。
×m)
×n)
センサー
ポリマー形サーミスタ
×
×
o)
セラミック形サーミスタ
−
×
注a) 故障モードから“短絡”を除外するように要求しているアセンブリに関して,箇条20による空間距離及び沿
面距離の条件は,制御装置の使用期間中維持しなければならない。
これらの条件は,次のように製造業者が宣言又は文書化する。
− 制御装置の汚損度(表1の項目49)
− 制御装置よりも清浄な場合,沿面距離又は空間距離のミクロ環境における汚損度,及びその設計方法(文
書化)(表1の項目79)
− 制御装置の定格インパルス電圧(表1の項目75)
− 制御装置と異なる場合の沿面距離又は空間距離に対する定格インパルス電圧,及びその確保の方法(文
書化)(表1の項目80)
− 故障モード“短絡”を除外するように要求している距離の許容差に対する値(規定及び文書化)(表1の
項目81)
b) 1回につき一つのピンだけを開放。
c) これらの構成部品は,そのインピーダンスがH.20.1.15.3を満たし,かつ,過電圧カテゴリIII以上に対する
20.1.12のインパルス電圧に耐えることができる場合は,保護インピーダンスとして使用してもよい。
d) 各ピンを順次,他のピンと短絡。1回に二つのピンだけ行う。
199
C 9730-1:2019
表H.24−電気及び電子構成部品の故障モード表(続き)
注e) トライアック及びSCRのような離散形又は集積形サイリスタタイプの装置の場合,故障状態には,いずれか
の端子と開路状態にある第3の端子との短絡を含めなければならない。半波状態に入るトライアックのよう
な全波タイプの構成部品は,制御されているか又は制御されていないか(それぞれ,サイリスタ又はダイオ
ード)によって,検討しなければならない。
フィールド効果ベースの電力半導体(FET,MOSFET及びIGBT)のゲート(ベース)制御信号損失による
不良(例えば,FETのはんだ不良によってゲート制御機能損失が考えられる。)には,部分点弧モード又は限
定していない状態(不安全状態)を引き起こすことを考慮する。
試験及び評価基準は,特定の制御機能及び回路構成に対応しなければならない。手引きは,JIS C 9730の
規格群の第2部に記載する場合がある。
f) ハイブリッド回路の個々の構成部品の故障モードは,この表で個々の構成部品について規定するように適用
する。
g) 二つの隣接端子の短絡,及び次の短絡。
− ICで該当する場合,IC電源と各端子との短絡
− ICで該当する場合,IC接地と各端子との短絡
集積回路を含む場合,推奨される試験数では,一般に,全ての関連する故障状態を適用すること,又は集
積回路の回路図の評価から可能性のある危険性の評価ができなくなる。
したがって,電子素子又はその他の回路構成部品の不具合による制御装置自体の,又はその出力で発生す
ることがある全ての機械的,熱的及び電気的な故障を,個別に又は組み合わせて最初に詳細に分析してもよ
い。
H.11.12で評価するタイプを除き,検討のための付加的な故障状態を特定するために,正常分析を実施して
複数の定常状態の出力条件及びプログラムした双方向端子を含めなければならない。“短絡”不良モードは,
隔離区間をもつICの場合,隔離区間の間で除外する。区間どうしの隔離は,機能絶縁に関する13.2を満た
さなければならない。
h) オプトカプラが20.3.2.2の基準を満たしている場合,入力ピンと出力ピンとの間の短絡は考慮しない。
i) 短絡故障モードは,箇条17によるリレーについても除外する。この試験は,適切な評価を受けたリレーを使
用することによって代用できる。
短絡モードは,リレーにおいて接点がクラスA制御機能又はクラスB制御機能を制御する場合,及び接点
を適用の規定巡回動作に含まない場合,除外する。ただし,次の条件の下で,箇条17の試験を満たさなけれ
ばならない。
− クラスA制御機能の場合,製造業者が指定する回数,又は適用対象において認証された回数。
− クラスB制御機能の場合,100 000回以上若しくは別の方法で製造業者が指定する回数のいずれか多い方,
又は適用対象において認証された回数。
− クラスC制御機能の場合,次のリレーは,短絡回路モードを除外する。
・ 接触機能が通常運転の下で,無負荷(接点のオン又はオフの状態で,電流を流さない。)での切換えで
あるリレー。
・ 接触機能がバーナ制御システムの異常動作時に,安全停止を実施するために負荷を切り離すリレー。
・ 箇条17の,100 000回以上の動作試験を満たしているリレー。ただし,製造業者が指定する出力負荷
を適用,又は適用対象において認証したものとする。
・ 制御装置が11.3.5.2.1を満たしている。
j) クリスタル(水晶振動子)ベースのクロックの場合,タイミングに影響を与える高調波周波数及び副高調波
周波数の変動を検討することが望ましい。
k) 安全時間,パージ時間,プログラム及び/又はその他の安全に関連する設定の選択にスイッチを使用する場
合,これらの装置は,開いたときに最も安全な状態となるように機能することが望ましい(例 バーナ制御
システムにおける最短安全時間,最長パージ時間)。
短絡回路モードは,接点がクラスA制御機能又はクラスB制御機能を制御するスイッチにおいて,除外す
る。ただし,次の条件の下で,箇条17による試験を満たさなければならない。
− クラスA制御機能の場合,製造業者が指定する回数,又は適用対象において認める回数。
− クラスB制御機能の場合,手動操作において6 000回以上,自動操作において100 000回以上,別の方法
で製品規格によって規定する回数,又は適用対象において認める回数。
− クラスC制御機能の場合,短絡回路モードは除外しない。
200
C 9730-1:2019
表H.24−電気及び電子構成部品の故障モード表(続き)
注l) 要求事項は注n) と同じであるが,設定を選択するときにクリッピング用のジャンパ線に適用する。
m) 箇条20の要求事項を満たしている場合は,短絡不良モードを除外する。
n) 導体の中断のような開路不良モードについて,次の場合は除外する。
・ 導体の厚さが公称値35 μm以上で−30 %までの許容幅をもち,かつ,導体の全幅が公称値0.3 mm以上で
−30 %までの許容幅をもつ場合。
・ 導体が,例えば圧延すずめっきしてあるように,中断に対して付加的な注意措置をとっている場合。
出力端子での短絡がプリント回路板導体を開路させてしまう場合,この導体には開路故障分析をしなけれ
ばならない。
導体寸法を受容するときの温度及び電流の条件については,IEC 62326の規格群による。
o) 温度,圧力などのような作動量を測定するためのセンサ部品について,開放及び短絡を加えた故障モードを
考慮しなければならない。故障モードは,抵抗値の段階的変化,応答しない部品状態,及び確度が外れる変
化をする部品を含めることができる。
H.27.1.1.6
負荷がモータ負荷(6.2.2又は6.2.5参照)を含み,電子回路構成部品の不良又は誤動作が制
御されるモータの電源波形に変化を引き起こす場合,制御装置は次の試験を実施する。
a) 負荷は,通常の波形状態で定格負荷又は製造業者が宣言する回転子拘束定格の6倍に調整する。
b) 次に,故障状態を導入する。
c) 試験は,H.27.1.1.2のa),c),d)及びe)に規定する条件で実施する。
制御装置は,評価する構成部品に該当するH.27.1.1.3のa)〜e)に従って,評価する。
H.27.1.2
機能安全を保障する内部故障に対する保護
H.27.1.2.1
設計要求事項及び構造要求事項
H.27.1.2.1.1
故障の回避及び許容性
H.27.1.1に追加して,クラスB制御機能又はクラスC制御機能を組み込んだ制御装置は,表H.24の故
障モード及びソフトウェアが適用可能の場合,H.11.12の要求事項を考慮して,H.27.1.2に従って設計しな
ければならない。
複雑な電子機器の不良は,システムエラー(設計内に生じる。H.11.12.3参照)又はランダム故障(部品
故障,H.11.12.2参照)のいずれかによって生じる。したがって,システムは,システムエラーが発生しな
い設計とし,ランダム故障は適切なシステム構成によって発生しないように設計しなければならない。
ソフトウェア及びハードウェアの設計は,アプリケーションの機能解析に基づいて行わなければならな
い。それによって,アプリケーションが要求する制御フロー,データフロー及び時間関連の機能を組み込
んだ構造化設計となる。カスタムチップの場合,システムエラーを最小にする手法によって特に注意しな
ければならない。
ソフトウェア及びハードウェアでは,本質的なフェールセーフであるシステム構成であるか,又は安全
上重要な機能に直接関わる構成部品(例えば,ガス弁駆動素子,関連する回路をもつマイクロプロセッサ
など)がH.11.12のソフトウェアクラスB若しくはソフトウェアクラスCに従った安全保護によって防護
するシステム構成になっていなければならない。安全防護は,ハードウェア(例えば,ワッチドッグ,供
給電圧の監視など)へ組み込まなければならない。ただし,ソフトウェア(例えば,ROM試験,RAM試
験など)によって補ってもよい。さらに,これらの防護は,完全に独立する安全停止をすることが必要で
ある。
タイムスロットモニタを用いる場合,時間枠の上限値及び下限値の両方で感知できなければならない。
時間枠の上限値及び/又は下限値が変位する故障モードを,考慮しなければならない。
201
C 9730-1:2019
クラスC制御機能の場合,第一次防護の一つの故障が防護の効力をなくす場合,第二次防護を備えなけ
ればならない。第二次防護の応答時間は,H.27.1.2.3の規定に従わなければならない。
注記1 防護の応答時間は,関連する故障許容時間以下とする。
注記2 第二次保護手段は,次のいずれかの事項によって実行する。
a) 第一次防護機能をモニタする物理的に独立する回路
b) 防護対象回路と第一次防護との間の相互作動(例えば,マイクロプロセッサが防護する
ワッチドッグ)
c) 第一次防護機能同士(例えば,RAM試験を防護するROM試験)の作動
部品は,製造業者が宣言する制御装置に生じる最悪条件の状態を基として,決定しなければならない。
注記3 部品不良によっては,安全上重要な絶縁が劣化するおそれがある。
H.27.1.2.1.2
文書
一般に文書は,H.11.12.3.2に従って文書化する。
制御装置及びその制御装置の下の安全に関連するプログラムの機能解析は,安全性ポリシー及びプログ
ラム要求事項による明確で階層的な方法で文書化する。
評価のために提出するシステムには,最小限,次の事項の文書を提供しなければならない。
a) システム原理,制御フロー,データフロー及びタイミングの情報
b) 全ての安全防護及び安全機能の明示を含むシステムの安全原理の明確な情報。安全機能又は防護機能
を評価するための十分な設計情報
c) システムで用いる全てのソフトウェア情報
プログラム文書は,製造業者が宣言するプログラム言語で提供しなければならない。
安全に関連するデータ及び動作シーケンスの安全に関連するセグメントは,H.11.12.3.2に従って,識別
及び分類する。
例えば,プロセス,ハードウェア及びソフトウェア文書で用いるラベリングとの相互接続のような,様々
な文書の部分との間の関係を明確にする。
製造業者がハードウェア及びソフトウェアの開発中に実施した解析手段の文書を提供する場合,この文
書を評価手順の一部として使用する。
H.27.1.2.2
クラスB制御機能
H.27.1.2.2.1
設計及び構造要求事項
クラスB制御機能は,単一故障状態の下で,定義された状態を維持するか,又はその状態になるような
構造でなければならない。第二の独立する故障は考慮しない。
注記 他の故障の状態下でのクラスB制御機能の故障,又はクラスC制御機能だけの故障は,機器の
危険な機能不全,感電,火災,機械的又は他の危険が生じる可能性がある。
ソフトウェアは,ソフトウェアクラスBを満たさなければならない。
制御機能のクラスは,表1の項目92で識別する。
評価は,H.27.1.2.5に規定する試験状態及び規定の下でのH.27.1.2.2.2及びH.27.1.2.2.3に従って実施す
る。
H.27.1.2.2.2
一次故障
いずれかの部品の一次故障(表H.24参照)及び一次故障が原因となる他の単一の故障は,次のいずれ
かの状態にならなければならない。
a) 制御装置は,全ての安全に関連する出力端子を不活性化するか,又は安全状況を確実にする状態を取
202
C 9730-1:2019
り,不作動状態になる。
b) 制御装置は,安全状態へ移行することによって,故障応答時間内(表1の項目91参照)に応答する。
ただし,同じ故障状態の下,定義された状態からの次のリセットがシステムを定義された状態に戻す
結果となることを条件とする。
c) 制御装置は動作を継続するが,次の始動シーケンスの間に故障を識別し,上記のa)又はb)の状態にな
る。
d) 制御装置は,関連するJIS C 9730の規格群の第2部の安全に関連する機能的要求事項に従って動作を
継続する。
c)の適用性及び故障応答時間は,JIS C 9730の規格群の関連する第2部において,規定している。
機械的なアクチュエータをもつ定義された状態については,スイッチ接点の手前までの試験でも十分で
ある。定義された状態の試験に不合格の場合,システムは安全停止に移行しなければならない。試験の頻
度は,JIS C 9730の規格群の関連する第2部による。検査回路の部品の内部故障は,考慮しない。
H.27.1.2.2.3
定義された状態での故障
制御装置が,内部故障のない定義された状態のときは,次の要求事項を適用する。
制御装置が,定義された状態にある場合に発生する,単一の部品(表H.24参照)の一次故障(一次故
障によって引き起こす他のいかなる故障も含む。)は,次のいずれかを満たさなければならない。
a) 安全に関連する出力端子が非駆動状態を維持し,制御装置が,定義された状態を維持する。
b) 全ての安全関連の出力端子が,非駆動状態を維持し,制御装置が非作動となる。
c) 制御装置の動作状態への復帰は,a)又はb)の結果になる。ただし,安全に関連する出力端子が駆動状
態を維持するのが故障応答時間(表1の項目91参照)以内であることを条件とする。定義された状態
が維持できず,制御装置が再び動作する状態になる場合,制御装置は,JIS C 9730の規格群の関連す
る第2部の安全に関連する機能要求事項に従って動作しなければならない。
H.27.1.2.3
クラスC制御機能
H.27.1.2.3.1
設計要求事項及び構造要求事項
クラスC制御機能は,一次及び二次故障状態の下で,そのままの状態で維持するか,又は定義された状
態になるような構造でなければならない。三次の独立する故障は考慮しない。
注記 他の故障の状態下でのクラスB制御機能の故障,又はクラスC制御機能だけの故障は,機器の
危険な機能不全,感電,火災,機械的危険又は他の危険を生じる可能性がある。
ソフトウェアは,ソフトウェアクラスCを満たさなければならない。
制御機能の分類は,表1の項目92で確認する。
評価は,H.27.1.2.5に規定する試験状態及び規定の下で,H.27.1.2.3.2,H.27.1.2.3.3,H.27.1.2.4.2及び
H.27.1.2.4.3による。
H.27.1.2.3.2
一次故障
単一の部品の一次故障(表H.24参照)及び一次故障が原因となる他の単一の故障は,次のいずれかを
満たさなければならない。
a) 制御装置は,全ての安全に関連する出力端子を不活性化するか,又は安全状況を確実にする状態を取
り,不作動状態になる。
b) 制御装置は,安全状態へ移行することによって,故障応答時間(表1の項目91参照)内に応答する。
ただし,同じ故障状態の下,定義された状態からの次のリセットがシステムを定義された状態に戻す
結果となることを条件とする。
203
C 9730-1:2019
c) 制御装置が,作動を継続するが,次の始動シーケンスの間に故障を識別し,上記のa)又はb)の状態に
なる。
d) 制御装置が,JIS C 9730の規格群の関連する第2部の安全関連の機能的要求事項に従って,動作を継
続する。
c)の適用性と同様に故障応答時間は,JIS C 9730の規格群の関連する第2部において,規定している。
H.27.1.2.3.3
二次故障
一次故障の評価において,制御装置がJIS C 9730の規格群の安全に関連する機能要求事項に従って動作
を継続する場合,一次故障とともに考慮する更なる独立した故障は,H.27.1.2.3.2のa)〜d)のいずれかを満
たさなければならない。
評価において,二次故障は,次のいずれかの条件だけで生じるものでなければならない。
a) 起動シーケンスが,一次故障と二次故障との間で実行された場合。
b) 一次故障の後,24時間後。
a)又はb)の適用性,及び故障応答時間は,JIS C 9730の規格群の関連する第2部において,規定してい
る(表1の項目91参照)。
24時間以内と異なる場合,二次故障が発生しない異なる時間間隔を同様に規定してもよい。
H.27.1.2.4
定義された状態での故障
H.27.1.2.4.1
一般事項
制御装置が,内部故障のない定義された状態である場合,H.27.1.2.4.2及びH.27.1.2.4.3に従って評価を
実施する。
制御装置が,全ての安全に関連する出力端子を非駆動状態にするか,又は安全状態を確実にする状態を
取り,不動作状態になる場合,一つの内部故障をもつ定義された状態において,H.27.1.2.4.3に従って追加
の単一故障評価を実施しなければならない。
注記 H.27.1.2.4.2及びH.27.1.2.4.3で使用するような安全に関連する出力端子は,例えば,ガスバル
ブ端子のような,安全停止又は定義された状態においても安全に関連する端子である。ただし,
定義された状態で安全が低下しない制御素子を駆動するアクチュエータの端子ではない。
H.27.1.2.4.2
定義された状態中の一次故障
制御装置が安全停止状態にあるとき引き起こされる一つの部品の一次故障(この故障が原因で発生する
他の故障も含む。)では,次のいずれかを満たさなければならない。
a) 制御装置は,定義された状態を維持するか,安全に関連する出力端子を非駆動状態に維持するか,又
は安全状態であることを確実にする状態にある。
b) 制御装置は,安全に関連する全ての出力端子が駆動しない状態,又は安全状態であることを確認でき
る状態で効力がなくなる。
c) 制御装置の動作状態への復帰は,a)又はb)の結果になる。ただし,安全に関連する出力端子の駆動状
態が故障応答時間(表1の項目91参照)以内であることを条件とする。元の安全停止状態の原因が残
留してない場合,及び制御装置が再び動作状態になる場合,制御装置は,JIS C 9730の規格群の関連
する第2部の安全に関連する機能への要求事項に従って動作しなければならず,二次故障の評価を
H.27.1.2.3.3に従って実施しなければならない。
H.27.1.2.4.3
定義された状態での二次故障
制御装置が定義された状態にあるときに発生する,任意の構成部品の二次故障(この故障が原因で発生
する他の故障も含む。)は,H.27.1.2.4.2のa),b)又はc)のいずれかを満たさなければならない(表H.24参
204
C 9730-1:2019
照)。
評価を行う場合,二次故障は,一次故障の後,24時間以内に生じることは考慮しない。
故障応答時間は,JIS C 9730の規格群の関連する第2部において,規定している。
24時間以内と異なる場合,二次故障が生じない異なる時間間隔を第2部において,別途規定している。
H.27.1.2.5
回路及び構造評価
H.27.1.2.5.1
試験条件
内部故障の影響は,シミュレーション及び/又は回路の試験によって評価しなければならない。
故障は,制御装置プログラムシーケンスの全ての段階で,発生することを考慮しなければならない。
制御装置は,次の状態で動作するか,又は操作することを考慮する。
a) 定格の85 %〜110 %の電圧範囲で最も条件が悪い電圧
b) 製造業者が宣言する最も条件の悪い負荷
c) 周囲温度は20±5 ℃。ただし,製造業者が宣言する周囲温度の範囲内での,他の周囲温度で試験を実
施することに特別な理由がある場合を除く。
d) 作動要素を最も悪い条件にした状態
e) 制御装置の外郭の表面の上にティッシュペーパを置く。
f)
試験中,可燃ガスを放出する可能性がある部品は,0.5 J以上で約3 mmの空隙において放電する状態
とする。
H.27.1.2.5.2
試験判断基準
評価中は,H.27.1.2.5.1の条件の下で,次の判断基準を満たしていることを確認しなければならない。
a) 制御装置は,次による。
なお,制御装置が機器に組み込まれる場合,機器が供給する外郭を考慮する。
− 炎,高温の金属又は高温の合成樹脂を放出してはならない。
− ティッシュペーパは,発火してはならない。
− 可燃性ガスの放出に起因して爆発してはならない。
− 点火発生器のスイッチを遮断した後,火炎は,10秒を超えて燃え続けてはならない。
b) 制御装置が機能を継続する場合は,箇条8及び箇条13,又はJIS C 9730の規格群の関連する第2部を
満たさなければならない。ただし,機能が停止する場合は,箇条8又はJIS C 9730の規格群の関連す
る第2部を満たさなければならない。
c) 保護機能の低下があってはならない。
試験後,箇条20又はJIS C 9730の規格群の関連する第2部の箇条20を満たさなくなるような制御装置
の様々の部品の故障があってはならない。
H.27.1.2.5.3
評価
回路の完全な評価は,規定する故障状態の下で動作を評価するために行わなければならない。評価では,
理論的な分析及び部品の故障シミュレーション試験を実施する。故障シミュレーションは,例えば,EPROM
エミュレーション試験のような複雑な装置内の故障を模擬して実施してもよい。
H.27.1.2.1.2に従って識別した安全に関連するソフトウェア(ソフトウェアクラスB及びソフトウェアク
ラスC)だけは,それ以上の評価を行わなければならない。クラス識別のために,故障系統図分析を用い
てもよい。
H.27.4
電子的断路(タイプ1.Y又はタイプ2.Y)を行う制御装置は,発生するおそれがある異常な過電
圧状態に耐えなければならない。
205
C 9730-1:2019
適否は,H.27.4.1及びH.27.4.2の試験によって判定する。
H.27.4.1
制御装置を,17.2に規定するように負荷し,制御装置が電子的断路を行っているとき,5秒間
定格電圧の1.15倍の電圧を加える。
H.27.4.2
試験中及び試験後,制御装置はH.11.4.16.2の試験によって決定する電子的断路を継続して行わ
なければならない。
H.28
電子的断路の使用に関する指針
追加(次の細分箇条を追加する。)
H.28.1
半導体開閉装置の主な機能
H.28.1.1
半導体開閉装置は,次の三つの性質をもっており,この性質は,電気機械的開閉装置とは異な
るものである。
a) 電子的断路を備えている場合,常に制御している回路に小電流が通過することを許容する。
b) 商用主電源の配電線のじょう乱に対してより感度が高い。
c) 温度に対して感度が高い。
H.28.1.2
電子的断路の要求事項は,次による。
a) 電子的断路を流れる電流は,5 mA又は定格電流の10 %のうち,いずれか低い方の電流を超えてはな
らない。その場合の負荷は,回路について指定する最高負荷以下とする。
b) 配電線のじょう乱の極端な状態においても,制御装置は悪影響を受けてはならない。また,電源波形
の1/2サイクルを超えてその装置に導通してはならない。
c) 装置が動作するように設計される温度の上限値と下限値との間で,十分な耐久性をもっていなければ
ならない。
H.28.2
半導体開閉装置の応用
H.28.2.1
電子的断路は,十分な電圧のパルスを印加することによって,電源周波数の1/2サイクルの間,
導通するおそれがある。電源からの完全な分離が常に完全断路と同等な方法によって達成される場合,た
とえ1/2サイクル間であっても,動作することが承認できない幾つかの用途が存在することがあり得る。
家電機器に関する限り,極めてまれに電源波形の1/2サイクル以下の間,導通することは無視できる。
電熱器具及び多くのモータ駆動機器にとっては,それは重要ではない。
使用者が危険な可動部に接触,又は通常使用時若しくは使用者保守(例えば,清掃)時に充電する部分
に接触する可能性がある場合のモータ駆動機器については,更なる安全手段を要求するか,又はこのよう
な装置を許容しないことが必要となる場合がある。電子的断路が許容できない機器の例は,可動部又は充
電部に接触できる,ある種の調理用機器である。
警告 ある種のモータ駆動機器に対しては,1/2サイクルの間,商用主電源周波数で制御されている負
荷に通電することは,モータの回転を引き起こすおそれがある。ソレノイド装置の動作も発生
するおそれがある。
H.28.2.2
制御する負荷がリレーコイル又はソレノイドのような,高インピーダンス負荷である場合,制
御装置が電子的断路を行っているときに,その制御装置を通過する許容電流は,負荷の断路を保証するの
に十分な低さであるように留意しなければならない。
206
C 9730-1:2019
附属書J
(規定)
サーミスタ素子及びサーミスタを使用する制御装置の要求事項
この附属書は,本体の対応する箇条内容を補足又は変更するものである。
J.1
適用範囲
J.1.1.1
追加(次の段落を追加する。)
この規格は,セラミック又は高分子半導体材料で作られる,個別のサーミスタ素子及びサーミスタを使
用する制御装置にも適用する。
この規格は,組み込んで又は離してサーミスタを使用する制御装置の固有の安全,動作温度値及び試験
にも適用する。
注記 これらのサーミスタは,次のような使用ができる。
− 自己制御形ヒータのような自己加熱モード又は類似の用い方
− 制御素子
− 検出素子
安全を担保するためにサーミスタに加えて更なる手段を制御装置内に実装しているサーミスタの場合,
この要求事項は適用しない。
これらの要求事項は,正の温度係数(PTC)のサーミスタ及び負の温度係数(NTC)のサーミスタに適
用する。
電流制限装置のような制御装置は,ヒューズなどの電流遮断デバイスの置換えを意図していない。これ
は,最終製品の要求事項を満たす過電流保護レベルを提供することを意図している。
JIS C 9730の規格群の関連する第2部は,完成する制御装置として用いられるサーミスタに対する追加
の要求事項を含む場合がある。
J.2
用語及び定義
J.2.15 サーミスタに関連する定義
追加(次の定義を追加する。)
J.2.15.1
サーミスタ(thermistor)
熱的に感度の高い半導体抵抗器。少なくともその抵抗−温度(R/T)特性の一部分において,温度の変
化によってその電気抵抗の著しい非直線変化を示す。
注記1 温度変化は,サーミスタを通過する電流によるか,周囲温度の変化によるか,又はこれらの
両方の現象の組合せによって発生する場合がある。
注記2 サーミスタは,電子素子(附属書H参照)とは考えない。
J.2.15.2
PTCサーミスタ(PTC thermistor)
抵抗−温度(R/T)特性の有用な部分において,温度が上昇するとともに抵抗が増加する正の温度係数
のサーミスタ。
207
C 9730-1:2019
注記1 PTCサーミスタは,2番目の特性として,印加電圧とともに抵抗値が減少する。
注記2 PTCサーミスタでは,抵抗−温度特性の有用な部分は,通常,温度の変化に対し,抵抗値の
階段状変化をする部分である。通常低温側では,温度上昇に対し,抵抗が緩やかに変化する
ことが先行し,また,抵抗が階段状に変化する温度より上においても同様に緩やかな変化が
ある。ある種のPTCサーミスタの抵抗−温度特性は,階段状の増加に続くゆっくりした増加
の後,負の傾斜をとることがある。
J.2.15.3
NTCサーミスタ(NTC thermistor)
抵抗−温度特性の有用な部分において,温度が上昇するとともに抵抗が減少する負の温度係数のサーミ
スタ。
J.2.15.4
サーミスタ制御素子(thermistor control element)
負荷と直列に接続されることによって,直接負荷を制御するPTCサーミスタ又はNTCサーミスタ。
注記1 制御サーミスタは,主電源のライン相互間に接続することを意図していない。
注記2 一般的な用途は,電流制限器,突入電流制限器,消磁コイル電流制限器及びモータ起動電流
制限器である。
J.2.15.5
自己制御形ヒータ(self-controlled heater)
追加の温度制限装置を必要とせず,自身の自己加熱効果によってヒータ素子として用いられているPTC
サーミスタ。
注記1 一般的には,ライン相互間に用いる。
注記2 通常,自己制御形ヒータは,タイプ2作動を提供する。
J.2.15.6
サーミスタ検出素子(thermistor sensing element)
センサとして用いられるPTCサーミスタ又はNTCサーミスタ。負荷電流は流さない。
J.2.15.7
B定数(B value)
製造業者が指定する抵抗−温度(R/T)曲線の任意の2点によって計算する抵抗値の変化の程度を示す
NTCサーミスタの指標。
J.2.15.8
保護電流,Ih(hold current, Ih)
製造業者が指定する時間,定格周囲温度において低抵抗値の“オン”状態を維持することができる電流
制限PTCサーミスタの最大電流値。
J.2.15.9
突入電流,In(inrush current, In)
25±2 ℃,又は製造業者が指定する周囲温度において,定格電圧で通電直後に測定される最大電流値。
J.2.15.10
トリップ電流,It(trip current, It)
電流制限PTCサーミスタの指定する温度又は温度範囲において,PTCサーミスタが低抵抗値から高抵抗
値に切り換わる最小電流値。製造業者が宣言する。
208
C 9730-1:2019
注記 It=Y×Ihである。ここで,Yは製造業者が宣言するトリップ電流値の乗数である。
J.2.15.11
最大電流,Imax(maximum current, Imax)
この規格の全ての要求事項を満たす,製造業者が指定する電流値。
注記 各種デバイスのImaxとして指定する関連する電流値を表J.1に示す。
表J.1−最大電流
素子
最大電流(Imax)で指定する関連電流値
PTC自己制御形ヒータ
最大定常電流a)
PTCモータ起動器
最大巻線電流
PTC電流制限器,消磁器
最大トリップ電流b)
NTC突入電流制限器
最大定常電流
PTC又はNTCセンサ
適用外
注a) 製造業者によるワット定格のデバイスでは,Imaxを計算する。この電流は,突入電流を意味しない。
b) 製造業者が提供するトリップ時間−電流カーブによって指定するデバイスにおいては,最大電流
(Imax)を識別しなければならない。
J.2.15.12
短絡電流,Isc(short-circuit current, Isc)
供給電源のようなインピーダンスの制限がある電源から流れる最大電流。
J.2.15.13
定常電流,Iss(steady-state current, Iss)
25±2 ℃の周囲温度の大気中でサーミスタ温度が安定になった後,又は製造業者が指定する周囲温度の
大気中で,定格電圧を接続し,PTCサーミスタは高抵抗状態,及びNTCサーミスタは低抵抗状態で動作
しているときに測定する電流値。
注記 NTCサーミスタは,IssとImaxとが同じ値になる場合がある。
J.2.15.14
抵抗値,Rmin(resistance, Rmin)
セラミックPTCサーミスタにおいて,R/T曲線上の抵抗値が最小になる点。
J.2.15.15
抵抗値,Rx(R25)[resistance, Rx (R25)]
Rxは製造業者が指定する温度,R25は25±2 ℃での定格抵抗値。
J.2.15.16
スイッチング抵抗値,Rsw(switching resistance, Rsw)
セラミックPTCサーミスタにおいて,温度上昇に伴い,抵抗値が急激に増加し始めるときの抵抗値。
注記 製造業者が,RswをRminの2倍以外の倍率で参照し,Rswを指定するか,又はRxを参照し,Rsw
を指定しない限り,RswはRminの2倍の抵抗値である。
J.2.15.17
トリップ抵抗値,Rtr(tripped resistance, Rtr)
PTC制御サーミスタにおいて,最大電圧でのトリップ状態におけるサーミスタの抵抗値。
注記 Rtrは,サーミスタ両端の電圧降下をサーミスタに流れる定常電流で除することによって求める。
209
C 9730-1:2019
J.2.15.18
スイッチング温度,Tsw(switching temperature, Tsw)
セラミックPTCサーミスタにおいて,抵抗値がRswとなる温度。
J.2.15.19
表面温度,Ts(surface temperature, Ts)
通常動作状態で通電するときのサーミスタの表面温度。
注記 サーミスタの一般的な通常動作条件を表J.2に示す。
表J.2−定格動作状態
サーミスタタイプ
電圧
電流
PTC自己制御形ヒータ
Vmax
Iss
PTCモータ起動器
Vmax
Iss
PTC消磁器
Vmax
Iss
PTC電流制限器
Vmax
Ih及びIss a)
NTC突入電流制限器
Vmax
Vmax
注a) Issにおける表面温度は,トリップ状態のサーミスタの状態を
反映している。状態とは,PTCの通常動作状態,PTCによっ
て制御される回路及び応用製品の異常動作の状態である。
J.2.15.20
トリップ時間(time-to-trip)
定格電圧及び周囲温度で通電するとき,PTCサーミスタが,製造業者が指定するトリップ電流をその値
の50 %に制限するまでに必要な時間。
J.2.15.21
熱暴走温度,TR(thermal runaway temperature, TR)
温度が上昇する場合であっても,PTCサーミスタの抵抗値が上昇しなくなるR/T曲線上の最高温度点。
J.2.15.22
最大電圧,Vmax(maximum voltage, Vmax)
製造業者が宣言するサーミスタの最大電圧。
注記 モータ起動コイル制限器のような最終製品で使用し,特定条件の下では,より高い動作電圧で
ある場合,Vmaxは定格電圧(Vr)よりも高い。
J.4
試験に関する一般注意
J.4.2
必要とするサンプル
追加(次の細分箇条を追加する。)
J.4.2.5
他に規定していない場合,表J.3に示す代表サンプルにJ.17.18に定める試験を実施する。過負荷
及び耐久試験を除いて,全ての試験で新しいサンプルを用いる。
210
C 9730-1:2019
表J.3−試験用サンプル(箇条参照)
試験項目
エージング
(J.17.18.3)
加熱−冷温
−湿度
サイクル
(J.17.18.1)
過負荷
(J.17.18.2.1
及び
J.17.18.7.1)
耐久性
(J.17.18.2.2
及び
J.17.18.7.2)
低温動作
サイクル
(J.17.18.4及
びJ.17.18.8)
低温
サイクル
(J.17.18.6)
熱暴走
(J.17.18.5)
1回の試験で使用す
るサンプル数
3
3
3 a)
3 a)
3
3
3
サ
ー
ミ
ス
タ
の
用
途
PTC自己制御
形ヒータ
×
×
×
×
×
−
×
PTC制御装置
×
×
×
×
×
−
×
PTCセンサ
×
×
×
×
−
×
−
NTC制御装置
×
×
×
×
×
−
−
NTCセンサ
×
×
×
×
×
×
−
熱暴走試験を除き,全ての試験の前後で,J.15.7及びJ.15.8の校正試験を実施する。
注a) 3個の同じサンプルを過負荷試験及び耐久性試験に用いる。
J.4.3.2
定格に関するもの
追加(次の段落を追加する。)
サーミスタの定格電圧(Vr)は,製造業者が宣言するサーミスタの入力電圧とする。
注記 Vrは,通常,供給電源電圧と同じである。
追加(次の細分箇条を追加する。)
J.4.3.2.11 サーミスタの電気的定格及び熱的定格は,意図する用途に基づき,表J.4による。
表J.4−サーミスタの電気的定格及び熱的定格
特性
サーミスタタイプ
PTC
NTC
自己制御
形ヒータ
モータ
起動器
電流
制限器a)
センサa)
消磁器
センサa)
突入電流
制限器
B定数
−
−
−
−
−
R
−
校正クラス数
−
−
−
R
−
R
−
容量−負荷又はジュール定格
−
−
−
−
−
−
R
トリップ電流(It)
−
−
R
−
−
−
−
突入電流(In)
R
R
−
−
R
−
R
保護電流(Ih)
−
−
R
−
−
−
−
最大電流(Imax)
−
R
R
−
R
−
R
定常電流(Iss)
R
R
R
−
R
−
R
コイルインピーダンス
−
−
−
−
R
−
−
抵抗値−R25及び限度値
R
R
R
R
R
R
R
最大動作周囲温度
−
R
R
R
R
R
R
スイッチング温度(Tsw)
R
R
R
R
R
−
−
最大表面温度(Ts)
R
R
R
−
R
−
R
トリップ時間
−
−
R
−
−
−
−
最大電圧(Vmax)
R
R
R
−
R
−
R
定格電圧(Vr)
R
R
R
−
R
−
R
“R”は,製造業者が提供する必要がある素子の定格値を示す。
注a) 動作周囲温度の範囲は,製造業者が指定する。
211
C 9730-1:2019
J.4.3.5
目的に関するもの
追加(次の細分箇条を追加する。)
J.4.3.5.4
サーミスタのタイプ及び特定用途に基づき,サーミスタは,表J.3に規定する試験,及びJ.15.7
又はJ.15.8の該当する方の校正試験を実施しなければならない。
J.4.3.5.4.1
IEC 60539規格群又はIEC 60738規格群によるタイプ1作動制御で使用するサーミスタは,
J.17.18.5の熱暴走試験だけを実施する。サーミスタが,この要求事項を満たしている場合,IEC 60539の
規格群又はIEC 60738-1の規格群への適否は要求しない。
J.6
分類
J.6.4
自動作動の特徴による分類
J.6.4.3.3
置換(次に置き換える。)
この規格の目的のため,スイッチモード(高抵抗)にあるPTCサーミスタ制御装置若しくは検出素子又
は非スイッチモード(高抵抗)にあるNTCサーミスタは,電子的断路,及びタイプ1.YJ作動又はタイプ
2.YJ作動とみなす。
− サーミスタ(タイプ1.YJ又はタイプ2.YJ)
注記 J.11.4.17も参照。
J.6.15 構造による分類
追加(次の分類を追加する。)
J.6.15.6 NTC又はPTCサーミスタを使用する制御装置
J.6.15.7 セラミック素子
J.6.15.8 ポリマー素子
追加(次の分類を追加する。)
J.6.17 サーミスタの使用による分類
サーミスタの使用による分類は,J.6.17.1〜J.6.17.3.2による。
J.6.17.1 サーミスタ制御素子。サーミスタ制御素子は,更にJ.6.17.1.1〜J.6.17.1.4による。
J.6.17.1.1 PTC電流制限器
J.6.17.1.2 PTCモータ起動器
J.6.17.1.3 PTC消磁器
J.6.17.1.4 NTC突入電流制限器
J.6.17.2 自己制御形ヒータ
J.6.17.3 サーミスタ検出素子。サーミスタ検出素子は,更にJ.6.17.3.1〜J.6.17.3.2による。
J.6.17.3.1 PTCセンサ
J.6.17.3.2 NTCセンサ
J.7
情報
表1に表J.5の要求事項を追加する。
212
C 9730-1:2019
表J.5−表1への追加項目
情報
細分箇条
方法
61
サーミスタの構造及び使用方法
J.6.15,J.6.17
X
62
R/T特性,校正基準k)
J.15.7,J.15.8
X
63
R/T特性,校正基準,ドリフトl)
J.15.7,J.15.8
J.17.17.1
X
64
サイクル数
J.17.18.2
X
65
R/T測定法
J.15.7.4,J.15.8.3
X
82
最大電流を5秒以内に8A以下に減少するPTC電流制限器
J.15.7.6.1.1
X
注k) R/T特性は,曲線,表又は種々の動作点の形式で表現され,指定する偏差を含めなければならない。
l) 追加の製造業者による宣言は,J.17.18.2の試験に対して中間のサイクル数で行ってもよい。
J.11 構造要求事項
追加(次の細分箇条を追加する。)
J.11.3.10
機能安全を提供するために,制御装置内で使用するサーミスタ,又は制御アプリケーションの
ために機能安全を提供する制御素子としてのサーミスタは,タイプ2作動(タイプ2.YJ)を提供し,他の
アプリケーションには,タイプ1作動(タイプ1.YJ)以上を提供しなければならない。
注記 制御アプリケーションの機能安全を提供するために使用するサーミスタの例は,温度遮断アプ
リケーションのための温度センサ,又は制限なしエネルギー回路の電流制限PTC素子である。
J.11.4.17
タイプ1.YJ又はタイプ2.YJ作動
サーミスタのタイプ1.YJ作動又はタイプ2.YJ作動は,抵抗値の固有の変化を提供するよう動作しなけ
ればならない。
適否は,この附属書の対応する要求事項の試験によって判定する。
J.13 耐電圧及び絶縁抵抗
J.13.2 耐電圧
置換[表12の注c)の第1文を,次に置き換える。]
c) 電子部品,サーミスタ,ネオンランプ,コイル又は巻線のような試験を実施不可能にするおそ
れがある特殊構成部品は,試験する絶縁物に適するように一つの極で断路するか又は橋絡しな
ければならない。
注記101A 対応国際規格の“修正”(Modification)は,規格利用者の利便性を考慮して,“置換”
とした。
J.15 製造偏差及びドリフト
追加(次の細分箇条を追加する。)
J.15.7 PTCサーミスタの校正試験
J.15.7.1 セラミックサーミスタは,同一サンプルで実施するJ.15.7.4〜J.15.7.8の校正試験の順番には,影
響されない。ただし,ポリマー形は,素材の性質から試験の順番に影響を受ける可能性がある。したがっ
て,ポリマー形サーミスタでは,J.15.7.4に規定する試験は,全ての校正試験の最後に実施することが望
ましい。
J.15.7.2 各PTCサーミスタのサンプルは,“受け入れたのまま”の状態で,表J.6で規定する試験を実施
213
C 9730-1:2019
し,表J.6に規定する各試験基準を満たさなければならない。
J.15.7.3 J.17.17 a)に規定する試験に続いて,同じPTCサーミスタのサンプルは,表J.6に規定する試験を
実施し,表J.6に規定する各判定基準を満たさなければならない。PTCセンサは,表J.7に規定する各基
準を満たさなければならない。
表J.6−PTCサーミスタのための校正及び環境試験の順序
PTCサーミス
タのタイプ
J.17.18に規定の環境試験の
前に実施するサンプルに対
する校正試験a)
環境試験に先立つ
判定基準指定b)
J.17.18に規定の環境試験の
後サーミスタサンプルに対
して実施する校正試験a)
合格基準
(環境試験後)b)
自己制御形ヒ
ータ
R/T
A
Ts
D
Ts
−
In
−
In
モータ起動器
R/T
A
Ts
D
Ts
In
In
−
消磁器
R/T
A
Ts
D
Ts
In
In
電流制限器
R/T
B
TT
E
Ts
TT
Iss
Ih
センサ
R/T
C
R/T
F
R/T:PTCサーミスタのR/T測定値−全てのタイプ(J.15.7.4)
Ih: PTC電流制限器のための保護電流試験(J.15.7.5)
TT:PTC電流制限器のためのトリップ時間試験(J.15.7.6)
Ts: 表面温度試験(J.15.7.7)
In: 突入電流(適否はJ.15.7.8の測定による。)
Iss: 定常電流(適否は測定による。)
限度基準は,次に示す。
A: 25 ℃での抵抗値,表面温度及び突入電流値は,製造業者が宣言する公称偏差の範囲とする。
B: 25 ℃での抵抗値,表面温度,定常電流及びトリップ時間は,製造業者が指定する公称偏差の範囲とする。サー
ミスタは,製造業者が宣言する周囲温度の期間は,トリップしないで保護電流を維持する。
C: スイッチング抵抗値(Rsw)に対応する温度,及びR/T曲線のRswの上下の追加2点の温度は,製造業者が指定
する偏差の許容範囲である。
D: 表面温度及び突入電流値は,製造業者が指定する公称ドリフト偏差の範囲とする。
E: トリップ時間は,製造業者が指定する公称ドリフト偏差の範囲とする。
F: スイッチング抵抗値(Rsw)に対応する温度,及びR/T曲線上のRswの上下の追加2点の温度は,対応する“受
け入れたまま”の値から,表J.7に示す値より大きく変化してはならない。
注a) 試験略語
b) 限度基準
214
C 9730-1:2019
表J.7−PTC検知サーミスタ用の区分
特性
区分番号
C1
C2
C3
C4
与えられた抵抗値での温度ドリフト K
±0.5
±1.0
±2.0
±5.0
温度ドリフトを決定する場合,温度値は,ケルビンスケールに正規化するほうがよい。
J.15.7.4 PTCサーミスタのR/T測定
J.15.7.4.1 フルドラフト空気循環オーブン,又は試験で規定する±1 ℃に温度を維持するシリコンオイル
のような液体の中にサーミスタのサンプルを配置する。試験は,室温から開始し,スイッチング温度(Tsw)
を経由し,R/T曲線の熱暴走温度(TR)を超えない範囲で,様々な温度で試験を実施する。抵抗値は,完
全なR/T曲線を作成するのに必要な数の温度点において,抵抗計によって測定する。
J.15.7.5 PTC電流制限器の保護電流(Ih)試験
J.15.7.5.1 電流制限器は,製造業者が指定する周囲温度及び試験時間の間,保護電流(Ih)をトリップする
ことなしに維持する。
J.15.7.6 PTC電流制限器のトリップ時間試験
J.15.7.6.1 あるトリップ時間仕様をもつ電流制限サーミスタは,指定するトリップ電流(It)及び対応する
定格電圧(Vr)において,トリップ時間内でトリップしなければならない。複数のトリップ電流及びトリ
ップ時間をもつサーミスタは,指定された電流の最大値と最小値で試験を実施する。電流は,トリップ時
間対電流曲線上の最大電流(Imax)点を超えてはならない。
J.15.7.6.1.1 表J.5の項目82で製造業者が宣言するように,電流制限サーミスタは,製造業者が宣言する
トリップ電流(It)及び対応する定格電圧(Vr)において,トリップ時間内でトリップしなければならない。
J.15.7.7 表面温度試験
J.15.7.7.1 PTCサーミスタの表面温度(Ts)は,熱電対又は同様のデバイスを用いて測定する。電流制限
器以外のPTCサーミスタの場合,表面温度(Ts)は,サーミスタが最大電圧(Vmax)及び定常電流で動作
する間に測定する。PTC電流制限器の場合,表面温度(Ts)は,次の二つの条件で測定する。
a) デバイスが定格最大電圧(Vmax)及び定格保護電流(Ih)で動作する保持状態での動作条件
b) デバイスが定格最大電圧(Vmax)及び定格定常電流(Iss)で動作するトリップ状態での動作条件
表J.2参照。
J.15.7.8 突入電流の測定
J.15.7.8.1 自己制御形ヒータ,モータ起動器又は消磁器としての使用を意図するPTCサーミスタは,サー
ミスタが定格負荷条件の下で最大電圧で動作する間に,オシロスコープによって突入電流を測定する。
J.15.8 NTCサーミスタの校正試験
J.15.8.1 各NTCサーミスタのサンプルは,“受け入れたまま”の状態で,表J.8に規定する試験を実施し,
表J.8に規定する各判定基準を満たさなければならない。
J.15.8.2 J.17.17 b)に規定する試験に続いて,同じNTCサーミスタのサンプルを用いて,表J.8に規定する
試験を実施し,表J.8に規定する各判定基準を満たさなければならない。NTCセンサは,表J.9に規定す
る基準を満たさなければならない。
215
C 9730-1:2019
表J.8−NTCサーミスタ用の校正及び環境試験の順序
NTCサーミス
タのタイプ
J.17.18に規定の環境試験の
前に実施するサンプルに対
する校正試験a)
環境試験に先立つ
判定基準指定b)
J.17.18に規定の環境試験の
後サーミスタサンプルに対
して実施する校正試験a)
限度基準
(環境試験後)b)
突入電流制限
器
R/T
A
Ts
C
Ts
In
In
センサ
R/T
B
R/T
D
Beta
R/T:NTCサーミスタのR/T測定値−全てのタイプ(J.15.8.4)
Ts: 表面温度試験(J.15.8.4)
Beta:抵抗値(R25)及びNTCサーミスタのB定数試験(J.15.8.6)
In: 突入電流(適否はJ.15.8.5の測定による。)
限度基準は,次に示す。
A: 25 ℃での抵抗,表面温度,及び突入電流値は,製造業者が指定する偏差の許容範囲以内とする。
B: R/T曲線上の2点以上の温度点での抵抗値及び(指定する場合)B定数は,製造業者が指定する偏差の許容範
囲以内とする。温度点の一つは,25 ℃とする。
C: 表面温度及び突入電流値は,製造業者が指定するドリフト許容誤差以内とする。
D: R/T曲線上の複数の温度点での抵抗値は,“受け入れたまま”の状態でのR/T曲線上の“受け入れたまま”の状
態での対応する温度から,表J.9に示す値より変化してはならない。温度点の一つは,25 ℃とする。
注a) 試験略語
b) 限度基準
表J.9−NTC検知サーミスタ用の区分
特性
区分番号
C1
C2
C3
C4
与えられた抵抗値での温度ドリフト K
±0.5
±1.0
±2.0
±5.0
温度ドリフトを決定する場合,温度値は,ケルビンスケールに正規化するほうがよい。
J.15.8.3 NTCサーミスタのR/T測定
J.15.8.3.1 フルドラフト空気循環オーブン,又は試験で規定する±1 K以内に温度を維持するシリコンオ
イルのような液体の中にサーミスタのサンプルを配置する。試験は室温から開始し,センサの場合は仕様
上の最大センシング温度,突入電流制限器の場合はJ.15.8.4に従って決定する最大表面温度(Ts)を超え
ない範囲で,様々な温度で試験を実施する。完全なR/T曲線を作成するのに必要な数の温度点で,抵抗値
を測定する。
J.15.8.4 表面温度試験(突入電流制限器に限る。)
J.15.8.4.1 NTCサーミスタに負荷と並列な定格のコンデンサで接続し,最大電圧(Vmax)及び最大電流(Imax)
で動作する状態で,NTC突入電流制限器の表面温度(Ts)を,熱電対又は同等な素子を用いて測定する。
温度は,製造業者が指定する限度値以内とする。表J.8を参照。
J.15.8.5 突入電流測定(突入電流制限に限る。)
J.15.8.5.1 NTC突入電流制限器において,サーミスタに負荷と並列な定格のコンデンサで接続し,最大電
圧(Vmax)及び最大電流(Imax)で動作する状態で,突入電流はオシロスコープを用いて測定する。
J.15.8.6 NTCサーミスタの抵抗値(R25)及びB定数
J.15.8.6.1 B定数定格をもつサーミスタのB定数は,製造業者が指定する限度値以内でなければならない。
周囲温度25 ℃でNTCサーミスタの抵抗値(R25)を測定し,続いて製造業者が指定する温度T1及びT2に
216
C 9730-1:2019
おける抵抗値R1及びR2の測定を実施する。B定数は,次の式を用いて求める。
B=(In×R1−In×R2)/(1/T1−1/T2)
ここに,
B: 計算するB定数。
R1: T1における抵抗値。
R2: T2における抵抗値。
T1: 製造業者が指定するR/T曲線上の温度値(K)。
T2: 製造業者が指定するR/T曲線上の2番目の温度値(K)。
J.17 耐久性
追加(次の細分箇条を追加する。)
J.17.17
試験順序は,次による。
a) PTCサーミスタ
− 劣化試験(J.17.18.3.1又はJ.17.18.3.2)
− 冷温湿度試験(J.17.18.1)
− 過負荷試験(J.17.18.2.1)
− 耐久性試験(J.17.18.2.2)
− 低温動作サイクル試験(J.17.18.4)
− 低温サイクル試験(J.17.18.6)
− 熱暴走試験(J.17.18.5)
b) NTCサーミスタ
− 劣化試験(J.17.18.3.1)
− 冷温湿度試験(J.17.18.1)
− 過負荷試験(J.17.18.7.1)
− 耐久性試験(J.17.18.7.2)
− 低温動作サイクル試験(J.17.18.8)
− 低温サイクル試験(J.17.18.6)
J.17.17.1
J.17.18.1〜J.17.18.4の試験後,制御装置の性能は悪影響を受けてはならず,製造業者の意図及
び宣言するとおりに機能しなければならない。
適否は,J.15.7又はJ.15.8のいずれかの試験によって判定する。
J.17.17.2
J.17.18の適切な試験後,引き続き,制御装置は箇条8及び箇条13を満たさなければならない。
試験の間及びその後,炎又は破片の放出があってはならない。
J.17.18
試験条件
J.17.18.1
冷温湿度試験
J.17.18.1.1に規定する条件に従って,サーミスタは表J.6,表J.7,表J.8又は表J.9のいずれかを満たさ
なければならない。
J.17.18.1.1
通電していない三つのサーミスタの試験サンプルは,次のa)又はb)に規定する冷温湿度試験
を3サイクル実施する。
a) 室内温度使用
1) 測定した表面温度(Ts)又は指定された動作温度で24時間。いずれの場合も,温度は70 ℃以上と
する。試験温度は,±5 Kを維持する。オーブン温度は,オーブン内の試験サンプルを配置する領
域の温度をモニタする。
217
C 9730-1:2019
2) 40 ℃で相対湿度90 %〜95 %の非結露(凝縮)雰囲気中に168時間。
3) 0 ℃又は製造業者の指定する周囲温度のいずれか低い方の温度で8時間。
b) 室外温度使用
1) 25 ℃の水に24時間浸せき(漬)する。
2) −35 ℃又は製造業者が指定する周囲温度のいずれか低い方の温度で8時間。
3) 測定した表面温度(Ts)又は指定された最高動作温度で24時間。いずれの場合も,温度は70 ℃以
上とする。オーブン温度は,試験温度の±5 Kを維持する。オーブン温度は,オーブン内の試験サ
ンプルを配置する領域の温度をモニタする。
4) 40 ℃で相対湿度90 %〜95 %の非結露(凝縮)雰囲気中に168時間。
J.17.18.2
延長サイクル試験(PTC)
J.17.18.2.1
過負荷
J.17.18.2.1.1
J.17.18.2.1.2,J.17.18.2.1.3又はJ.17.18.2.1.4,及びJ.17.18.2.2.1に規定する試験に続き,サ
ーミスタは,表J.6又は表J.7を満たさなければならない。
J.17.18.2.1.2
自己制御形ヒータにおいて,三つのサンプルを設置し,最大電圧(Vmax)の120 %の電圧に
接続し,意図する動作を50サイクル行う。各サイクルは,R/T曲線の低抵抗値の状態から高抵抗値の状態
までのR/T曲線の部分に試験を実施する。
J.17.18.2.1.3
制御サーミスタにおいて,三つのサンプルを設置し,最大電圧(Vmax)で,次のa)又はb)
のうち,より低い電流値で,製造業者が意図する動作を50サイクル行う。
a) 定格最大電流(Imax)の120 %
b) 定格短絡電流(Isc)の120 %
各サイクルは,サンプルの温度が25±5 ℃に安定した状態から開始する。各サイクルは,低抵抗値の状
態から高抵抗値の状態までのR/T曲線の部分に試験を実施する。
J.17.18.2.1.4
センシングサーミスタにおいて,三つのサンプルを設置し,サンプルの温度が25±5 ℃に
安定した状態からサーミスタの最大センシング温度の120 %まで,意図する動作を50サイクル行う。
J.17.18.2.2
耐久性
J.17.18.2.2.1
J.17.18.2.1に規定する過負荷試験を行った三つのサーミスタは,次のa)〜c)に規定する条件
で,表J.10に規定するサイクル数だけ動作を行う。各サイクルは,R/T曲線における重要部分をカバーし
なければならない。
a) 自己制御形ヒータ 自己制御形ヒータサーミスタ又はヒータアセンブリを設置し,最大電圧(Vmax),
最大定格電力,又は最大電流(Imax)で試験を実施する。ヒートシンクの量,空気流の量,又は最終製
品内で提供される同種の変動要因によって消費電力が変化するため,サーミスタは,最終製品のヒー
トシンク,空気流,又は他の使用条件において,最大定格電力又は最大電流(Imax)にて試験を実施す
る。
b) 制御 制御サーミスタは,最大電圧(Vmax)及び次に示す電流で試験を実施する。
1) 電流制限器の試験電流は,最小トリップ電流(It)又は最小機能電流(Ifun)以上とする。
2) 消磁器の試験電流は,最大電流(Imax)とする。
3) モータ起動器の試験電流は,最大電流(Imax)とする。
c) センシング センサ用サーミスタは,25±5 ℃と最高動作温度との間でサイクル試験を実施する。
218
C 9730-1:2019
表J.10−耐久試験のサイクル数
サーミスタタイプ
動作サイクル数
自己制御形ヒータ
100 000
機能安全回路での使用を製造業者が意図する電流制限器
100 000 a)
機能安全回路での使用を製造業者が意図しない電流制限器
6 000
消磁器又はモータ起動器
30 000
機能安全回路での使用を製造業者が意図しないセンサ
6 000
機能安全回路での使用を製造業者が意図するセンサ
100 000
注a) 次の条件の場合,最小サイクル数を6 000とする。
− サーミスタのトリップ状態が,最終製品において明確である場合。
− サーミスタをリセットするために,手による操作が必要である場合。
J.17.18.3
熱的状態調節
J.17.18.3.1
受動的エージング
J.17.18.3.1.1及びJ.1.17.18.3.2.1に規定する条件試験の後,サーミスタは,該当する表J.6〜表J.9を満た
さなければならない。
J.17.18.3.1.1
サーミスタの三つの非通電のサンプルは,空気循環オーブンによって,表J.11に規定する
温度より30 K高い温度で1 000時間の状態調整試験を実施する。いずれの場合であっても,温度が70 ℃
以上とする。オーブン温度は,試験に規定する温度の±5 ℃に維持する。オーブン温度は,オーブン内の
サンプルを試験する領域の温度をモニタする。
表J.11−エージング試験温度
サーミスタタイプ
温度
センサを除く全てのタイプ
J.15.7.7(PTC)及びJ.15.8.4(NTC)の表面温度試験に従って決定する温度
センシング
最高温度定格
J.17.18.3.2
能動的エージング
J.17.18.3.2.1
電流制限器は,J.17.18.3.1.1に規定する試験に加えて,この試験を実施する。電流制限PTC
サーミスタの三つのサンプルに通電し,最大電圧(Vmax)及び定常電流(Iss)でのトリップ状態で1 000
時間の状態調整試験を実施する。
J.17.18.4
低温動作サイクル(PTC)
J.17.18.4.1
サーミスタは,J.17.18.4.2に規定する試験の後で,表J.6を満たさなければならない。
J.17.18.4.2
0 ℃又は製造業者が指定する周囲温度のいずれか低い方の温度で,サーミスタの三つのサン
プルについて,1 000サイクルの動作試験を実施する。自己制御形ヒータの試験条件は,J.17.18.2.2.1 a)に
規定する。制御サーミスタの試験条件は,J.17.18.2.2.1 b)に規定する。各試験サイクルの前に,サーミスタ
温度は,開始温度に戻さなければならない。
J.17.18.5
熱暴走
サーミスタは,熱的に安定するまで最大定格条件で通電し,動作させる。次に,破壊が起きるまで,又
はサーミスタの動作電圧の2倍に達する(その時点で試験は終了する。)まで,電圧を徐々に増加する。
注記 サーミスタの動作電圧の0.1倍のステップで2分ごとに電圧を増加することは,適切な上昇率
である。
J.17.18.6
低温サイクル試験
J.17.18.6.1
サーミスタは,J.17.18.6.1.1に規定するサイクル試験後,該当する表J.7又は表J.9を満たさ
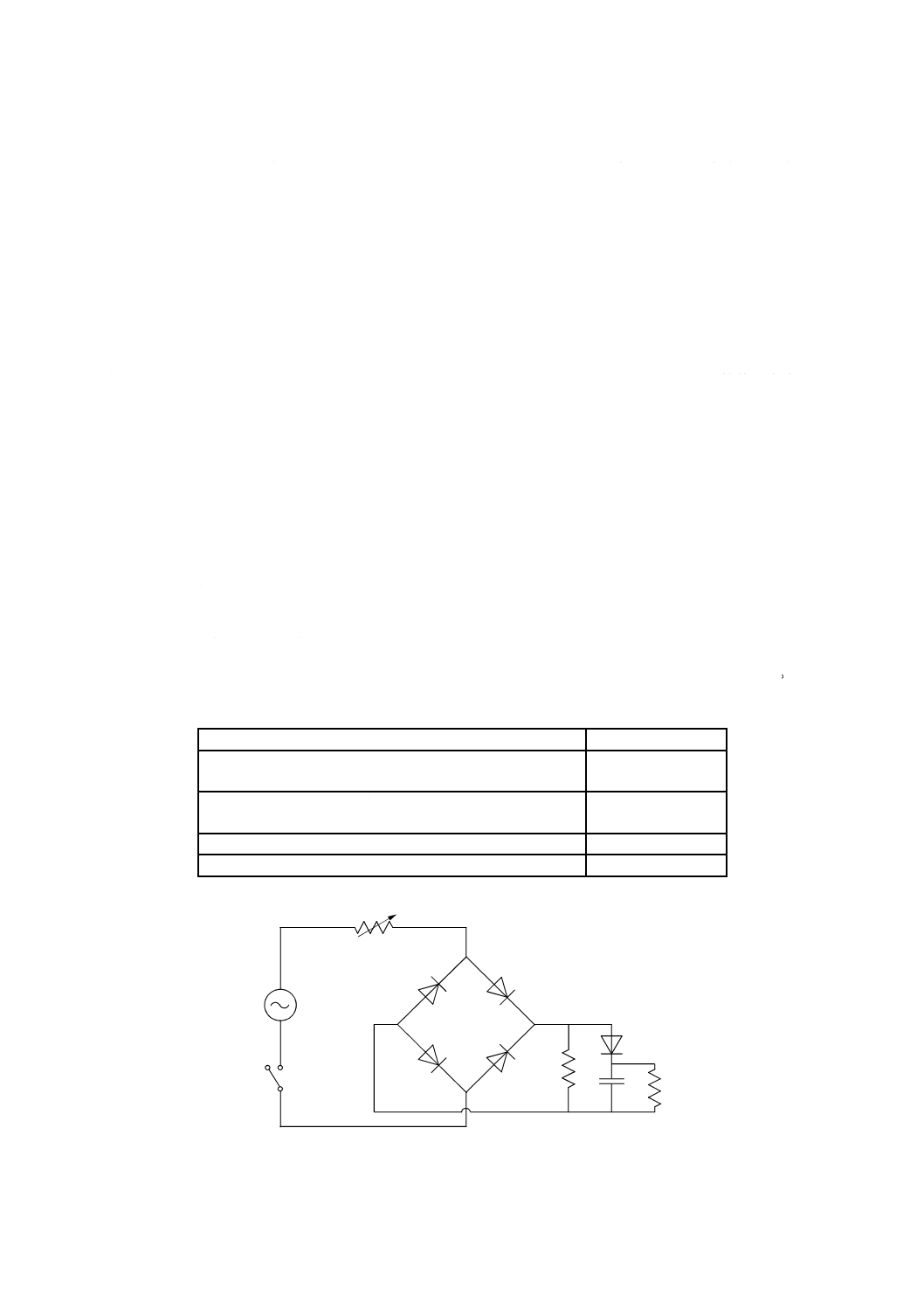
219
C 9730-1:2019
なければならない。
J.17.18.6.1.1
センシングサーミスタの三つのサンプルは,低温サイクル運転を1 000回実施する。各サイ
クルは,0 ℃又は製造業者が指定する周囲温度のいずれか低い方の温度で開始し,開始温度から最大定格
温度までのR/T曲線の部分をカバーする。
J.17.18.7
延長サイクル試験(NTC)
J.17.18.7.1
過負荷
J.17.18.7.1.1
サーミスタは,J.17.18.7.1.2又はJ.17.18.7.1.3,及びJ.17.18.7.2.1に規定する試験の後,表
J.8を満たさなければならない。
J.17.18.7.1.2
突入電流制限サーミスタにおいて,三つのサンプルを設置し,最大電圧(Vmax)で最大電流
(Imax)の120 %に接続し,意図する動作を50サイクル実施する。各サイクルは,25 ℃で熱的に安定する
サンプルで開始する。
J.17.18.7.1.3
センシングサーミスタにおいて,三つのサンプルを設置し,25±5 ℃で熱的に安定するサ
ンプルから開始し,サーミスタの最大検出温度の120 %に温度が上昇することからなる意図する動作を50
サイクル実施する。
J.17.18.7.2
耐久性
J.17.18.7.2.1
J.17.18.7.1の過負荷試験に用いた三つのサーミスタのサンプルは,表J.12に示すサイクル
数の期間,次のa)又はb)に規定する条件で動作させる。各サイクルは,R/T曲線の重要な部分をカバーし
ていることを確認する。
a) 突入電流制限 突入電流を制限するサーミスタは,負荷と並列の定格容量値において,最大電圧(Vmax)
及び最大電流(Imax)で試験を行う(図J.1参照)。
b) センシング センシングサーミスタは,25± 5 ℃と最大動作温度との間でサイクル試験を行う。
表J.12−耐久試験のサイクル数
サーミスタタイプ
操作サイクル数
機能安全回路での使用を製造業者が意図する突入電流制限
器
100 000
機能安全回路での使用を製造業者が意図しない突入電流制
限器
6 000
機能安全回路での使用を製造業者が意図するセンサ
100 000
機能安全回路での使用を製造業者が意図しないセンサ
6 000
NTC
図J.1−突入電流制限サーミスタの耐久試験用試験回路
220
C 9730-1:2019
J.17.18.8
低温動作サイクル(突入電流制限用NTCサーミスタだけに適用)
J.17.18.8.1
サーミスタは,J.17.18.8.2に規定するサイクル試験の後,表J.8を満たさなければならない。
J.17.18.8.2
サーミスタの三つのサンプルについて,0 ℃の周囲温度又は製造業者の指定する周囲温度の
いずれか低い方の温度において,最大電流(Imax)及び最大電圧(Vmax)で1 000サイクルの動作試験を実
施する。各サイクルは,R/T曲線の開始温度から定常条件までの部分をカバーする。サーミスタ温度は,
各サイクルの前に開始温度の±2 ℃の範囲で安定していなければならない。
J.20 沿面距離,空間距離及び固体絶縁物を通しての距離
追加(次の細分箇条を追加する。)
J.20.1.14
空間距離
J.20.1.14.1
主電源に電気的に接続する充電部と,可触表面又は可触部との空間距離は,20.1に規定する
要求事項を満たさなければならない。
J.20.1.14.2
機能絶縁を提供する充電部間の空間距離は,20.1に規定する要求事項を満たさなければなら
ない。
J.20.2.5 沿面距離
J.20.2.5.1
主電源に電気的に接続する充電部と,可触表面又は可触部との沿面距離は,20.2を満たさな
ければならない。
J.20.2.5.2
機能絶縁を提供する充電部間の沿面距離は,20.2を満たさなければならない。
J.24 部品
J.24.2.1 追加(次を追加する。)
この細分箇条は,JIS C 2570-1,IEC 60738-1又はIEC 60738-1-1によって,既に試験されたサーミスタ
に適用する。
J.27 異常動作
J.27.1 保護制御装置に使用するサーミスタは,表H.24に従って,故障モードを考慮しなければならない。
221
C 9730-1:2019
附属書K
(参考)
過電圧制御の異なるモードに関する給電系統の公称電圧
過電圧制御の異なるモードに関する給電系統の公称電圧を表K.1及び表K.2に示す。
表K.1−本質的な制御又は同等の保護制御
単位 V
公称電圧
ACのライン−
中性線間
電圧又はDC a)
世界の現行公称電圧
機器用定格インパルス電圧a)
接地された
中性線のある
三相4線
システム
接地なし
三相3線
システム
AC又は
DCの
単相2線
システム
AC又は
DCの
単相3線
システム
過電圧カテゴリ
I
II
III
IV
50
−
−
12.5,24,25,
30,42,48
30/60
330
500
800
1500
100
66/115
66
60
−
500
800
1500
2500
150
120/208 b)
127/220
115,120,127 100,110,120
100/200
110/220
120/240 c)
800
1500
2500
4000
300
220/380
230/400
240/415
260/440
277/480
220,230,240,
260,277,347,
380,400,415,
440,480
220
220/440
1500
2500
4000
6000
600
347/600
380/660
400/690
417/720
480/830
500,577,600
480
480/960
2500
4000
6000
8000
1000
−
660,690,720,
830,1 000
1 000
−
4000
6000
8000
12000
注a) これらの欄の定格インパルス電圧値は,JIS C 60664-1の表F.1によるものであって,保護制御及び本質的な
制御の定義は,JIS C 60664-1の4.2.3による。
b) 米国及びカナダで実行する。
c) 我が国での120 V及び240 Vにおいて,1 500 V,2 500 V,4 000 V,及び6 000 Vの定格インパルス電圧の適
切なシリーズは,過電圧カテゴリI〜IVに相当するものを使用する。
222
C 9730-1:2019
表K.2−保護装置が必要で,かつ,制御がIEC 60099-1によって想定する電圧より低くない
定格電圧に対する制限電圧比をもつサージ避雷器によってもたらされる場合
単位 V
公称電圧AC
のライン−
中性線間電圧
又はDC a)
世界の現行公称電圧
機器用定格インパルス電圧a)
接地された
中性線のある
三相4線
システム
接地なし
三相3線
システム
AC又はDC
の単相2線
システム
AC又はDC
の単相3線
システム
過電圧カテゴリ
I
II
III
IV
50
−
−
12.5,24,25,
30,42,48
30/60
330
500
800
1500
100
66/115
66
60
500
800
1500
2500
150
120/208 b)
127/220
115,120,127 100,110,120
100/200
110/220
120/240
800
1500
2500
4000
300
220/380
230/400
240/415
260/440
277/480
220,230,240,
260,277
220
220/440
1500
2500
4000
6000
600
347/600
380/660
400/690
417/720
480/830
347,380,400,
415,440,480,
500,577,600
480
480/960
2500
4000
6000
8000
1000
−
660,690,720,
830,1 000
1 000
−
4000
6000
8000
12000
注a) これらの欄の定格インパルス電圧値は,JIS C 60664-1の表F.1によるもので,保護制御及び本質的な制御の
定義は,JIS C 60664-1の4.2.3による。
b) 米国及びカナダで実行する。
223
C 9730-1:2019
附属書L
(規定)
過電圧カテゴリ
過電圧カテゴリは,過渡過電圧状態の特性を数値で示す。
次の過電圧カテゴリの情報は,JIS C 60664-1に基づく。JIS C 9730の規格群の関連する第2部では,個
別適用に関する異なる過電圧カテゴリが規定される場合がある。
過電圧カテゴリIVの機器は,設備の引込口部で使用する機器となる。
注記1 例えば,このような機器には,電力量計及び一次過電流保護装置がある。
過電圧カテゴリIIIの機器は,固定設備中の機器であり,その信頼性及び有用性が特別な要求事項として
求められる場合がある。
注記2 このカテゴリは,通常,固定配線に接続することを意図する制御装置又は固定配線に恒久的
に接続する機器に組み込むことを意図する制御装置に適用する。ただし,過渡電圧抑制の手
段をもつ制御装置又は機器に,より低いカテゴリが適用される場合を除く。
過電圧カテゴリIIの機器は,固定設備から供給されるエネルギーを消費する機器となる。
注記3 このカテゴリは,通常,固定配線用端子をもたない制御装置,又はコンセント以降に接続す
る制御装置及び機器に組み込むことを意図する制御装置に適用する。固定配線に恒久接続を
意図する制御装置も,ライン端子の電圧制限手段のような過渡電圧抑制の手段がある場合又
は導電部間の空間距離が制御装置若しくは機器内に組み込まれた場合,このカテゴリに含ま
れる場合がある。制御装置の接点が過渡電圧のフラッシュオーバを許すように設計されてお
り,かつ,レットスルー電流に耐えることに適している場合,例えば,上記の事項を満たし
ている家庭機器用制御装置のような適切な抑制手段を備えてもよい。
機器が信頼性及び有用性に関して特別な要求が求められる場合,過電圧カテゴリIIIを適用する。
過電圧カテゴリIの機器は,過渡過電圧を適切に低レベルに制限するための処置が講じられている回路
に接続する機器である。
注記4 このカテゴリは,通常,カテゴリIIの機器に接続する制御装置,例えば,電子論理システム,
絶縁制限二次回路,SELV回路又はPELV回路,変圧器の二次側回路に適用する。
224
C 9730-1:2019
附属書M
(参考)
過電圧カテゴリの一般的な取扱い
この附属書は,過電圧カテゴリの一般的な取扱いを示す。
表M.1−過電圧カテゴリの一般的な取扱い
制御状況
過電圧カテゴリ
I
II
III
IV
特殊
絶縁制限二次回路
×
−
−
−
電源で制限された過渡現象
×
×
×
×
エネルギー消費形機器
家庭用機器内の一体形及び組込形制御装置
−
×
−
−
固定配線用エネルギー消費負荷に取り付ける独立取付形制御
装置
−
×
×
−
その他の家庭用及び類する機器
一体形,組込形,及び固定配線のエネルギー消費負荷用でもな
い制御装置
−
−
×
−
設備の引込口に取り付けている制御装置(例 サービス入口機
器,電力量計,一次過電流装置)
−
−
−
×
JIS C 9730の規格群の関連する第2部を適用する特殊制御装置
×
×
×
×
225
C 9730-1:2019
附属書N
(規定)
汚損度
N.1 汚損
ミクロ環境は,絶縁に関する汚損の影響を決定する。ただし,マクロ環境を検討する場合,ミクロ環境
を考慮しなければならない。
検討する絶縁における汚損を減少する手段として,塗装,外郭,封入(エンキャプシュレーション)又
は封止(ハーメチックシール)を用いてもよい。これらの汚損を減少させる方法は,機器が結露を生じた
場合,又は通常動作においてそれ自体が汚損物を発生する場合には,効果がない。
小さな空間距離は,固形物質,ほこり及び水によって完全に橋絡されるため,ミクロ環境で汚損が存在
する場合に最小空間距離が規定される。
注記1 汚損は,湿度の存在によって導電性になる。汚損した水,すす,金属又はカーボンのほこり
は,本質的に導電性である。
注記2 イオン化したガス及び金属析出物による導電性の汚損は,特別な場合にだけ発生する。例え
ば,スイッチ装置,制御装置のアーク室中のような場合であって,この規格ではカバーして
いない。
注記2A 接点動作からの汚損は,その領域が他の汚損に影響されない限り,汚損度2に分類する。他
の汚損に影響されている場合には,その汚損による汚損度を適用する。
N.2 ミクロ環境内の汚損度
空間距離及び沿面距離を評価するために,ミクロ環境において次に示す四つの汚損度を規定する。
汚損度1
どのような汚損も発生しないか,又は乾燥状態で非導電性の汚損だけを発生する。この汚損は,どのよ
うな影響も及ぼさない。
注記1 汚損度1には,特別な考慮(附属書P又は附属書Qの塗装,密封した外郭など)が必要であ
る。
汚損度2
非導電性の汚損だけを発生するが,時折結露によって一時的に導電性が引き起こされることが想定され
る。
注記2 汚損度2は,通常の屋内の空気循環状態を代表するものである。
汚損度3
導電性の汚損が発生する,又は想定される結露のために導電性となる乾燥した非導電性の汚損が発生す
る。
汚損度4
汚損が,導電性のほこり,又は雨若しくは雪によって永続的な導電性を発生させる。
226
C 9730-1:2019
附属書P
(規定)
プリント回路板塗装特性試験
P.1
箇条20の汚損度1の沿面距離をもつプリント回路板に施される塗装は,この附属書の要求事項を満
たさなければならない。
P.2
インク,ソルダレジスト及び組み込まれた部品を含んで塗装されたプリント回路板組立品は,温度,
はんだ付け条件,導体寸法及びIEC 61249の規格群の接着性に関する要求事項を満たさなければならない。
P.3
塗装の耐電圧
塗装における機能絶縁については,回路板組立品に加わる最高動作電圧に基づき表12に規定する試験電
圧において,P.3.3及びP.3.4の処理の後に,13.2の耐電圧試験に耐えなければならない。
P.3.1
図P.1に示すパターンを用い,適用する最小沿面距離及び最小塗装厚さによる10個のサンプルを
準備する。サンプルは,回路板に塗装する前にプライマ(下塗り剤)又は洗浄剤を用いる。そこに含まれ
る電圧及び温度に適切な配線を取り付ける。
P.3.2
老化試験
P.3.1に規定するように塗装した回路板の5個のサンプルを,130±2 ℃の温度に1 000時間の老化試験
を実施する。
P.3.3
湿度処理
P.3.2の老化試験を行った塗装した回路板の5個のサンプルを,温度35±1 ℃及び相対湿度(90±5) %
の恒温恒湿槽で48時間処理する。各サンプルは,恒温恒湿槽から取り出した直後にP.3.5及びP.3.6に規
定する耐電圧試験を行う。
P.3.4
環境サイクル処理
P.3.1に規定するように塗装した回路板のサンプル5個について,表P.1で規定する環境処理を,全て3
サイクル行う。処理が終了した直後,各サンプルにP.3.5及びP.3.6に規定する耐電圧試験を行う。
P.3.5
規定する処理の後,P.3.1で規定するように塗装した回路板は,絶縁する口出し線及びはんだ付け
点を除き,試験用パターンを覆うようにアルミニウムはく[塗膜の上にたい(堆)積する導電性じんあい
を代表するもの]を密着させる。
P.3.6
各々処理されたサンプルにP.3に従って,電圧を口出し線A,口出し線B及び口出し線Cそれぞれ
と共通口出し線との間に加える(図P.1参照)。フラッシュオーバ及び絶縁破壊を生じてはならない。電圧
低下を伴わないグロー放電は,無視する。
表P.1−環境サイクル処理
屋内用途
屋外用途
Tmaxで24時間,次に35±2 ℃,相対湿度(90±5) %
で96時間以上,最後に0±2 ℃で8時間
25±2 ℃で24時間以上浸せき(漬),次に直ちに
35±2 ℃,相対湿度(90±5) %で96時間以上,最
後に−35±2 ℃で8時間
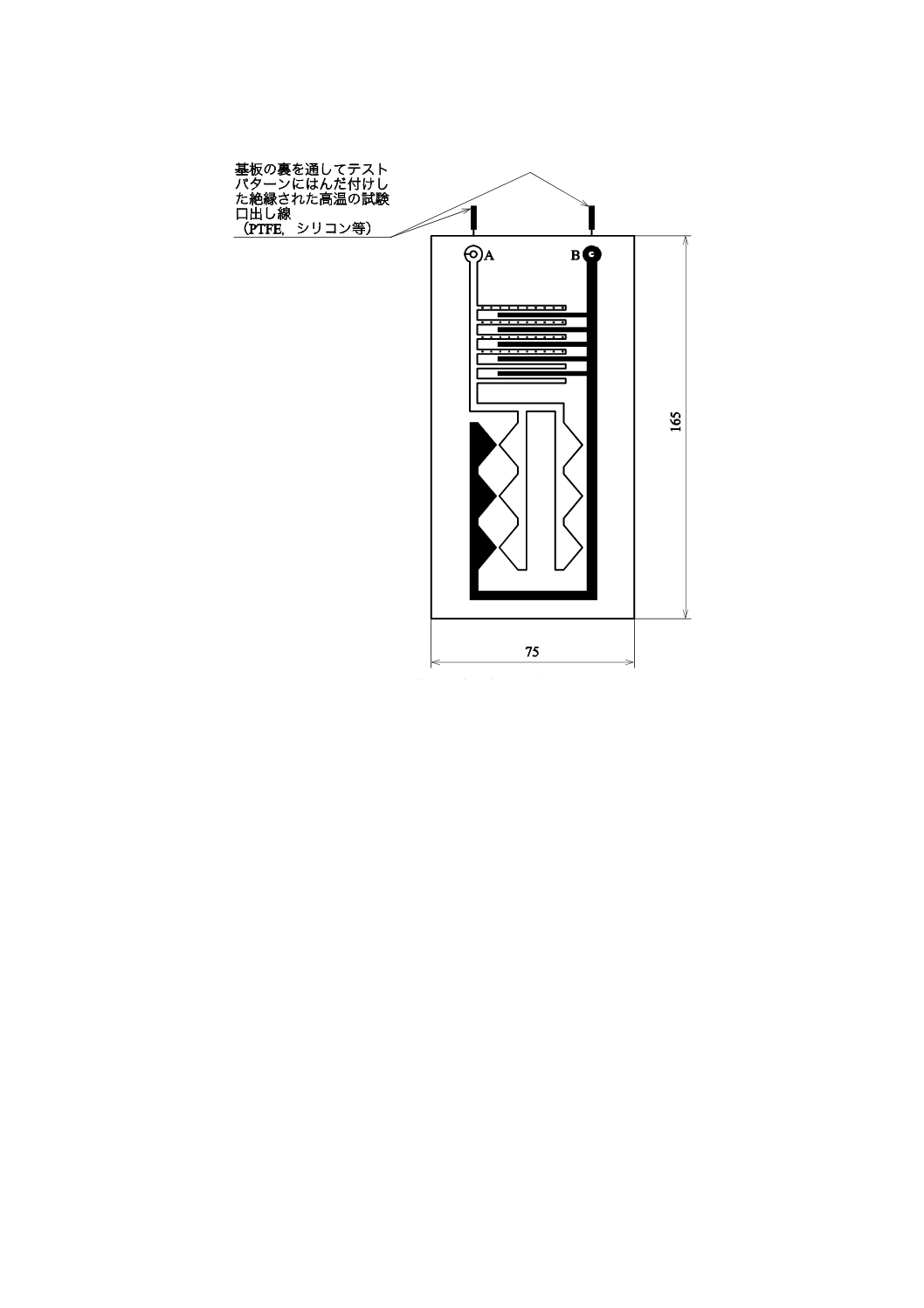
227
C 9730-1:2019
単位 mm
注記 トラック間の最小距離(点−点,点−線及び線−線)は,製品組立てで許容する最小距離である。
図P.1−試験サンプル
228
C 9730-1:2019
附属書Q
(規定)
プリント回路板塗装特性試験
Q.1 JIS C 60664-3に規定しているタイプ1塗装の全ての要求事項を満たしているプリント回路板は,こ
の規格の箇条20の汚損度1の最小沿面距離の要求事項を満たさなければならない。
Q.2 JIS C 60664-3に規定しているタイプ2塗装の全ての要求事項を満たしているプリント回路板は,20.3
に規定する固体絶縁の最小要求事項を満たさなければならない。保護を適用する前の導体間の距離は,JIS
C 60664-3の表1で規定する値以上でなければならない。
Q.3 製品サンプルの代表として実際のプリント回路板,又は図Q.1若しくは図Q.2による標準試験基板
をこの試験に用いてもよい。タイプ1試験には,13個のサンプルが,タイプ2試験には,17個のサンプル
が必要である。
Q.4 タイプ1又はタイプ2塗装の要求事項の適否は,JIS C 60664-3の箇条5によって判定する。
Q.5 JIS C 60664-3の箇条5の試験に対しては,表Q.1の試験レベル又は条件を適用する。
表Q.1−JIS C 60664-3の試験レベル又は条件
JIS C 60664-3 細分箇条
この規格における試験レベル
5.7.1 低温
−25 ℃
5.7.3 温度急変
厳しさの度合い2 (−25 ℃〜+125 ℃)
5.7.4.2 エレクトロマイグレーション
に関する追加コンディショニング
この規格の規格群の第2部で規定しない場合,適用しない。
5.8.5 部分放電停止電圧
この規格の規格群の第2部で規定しない場合,適用しない。
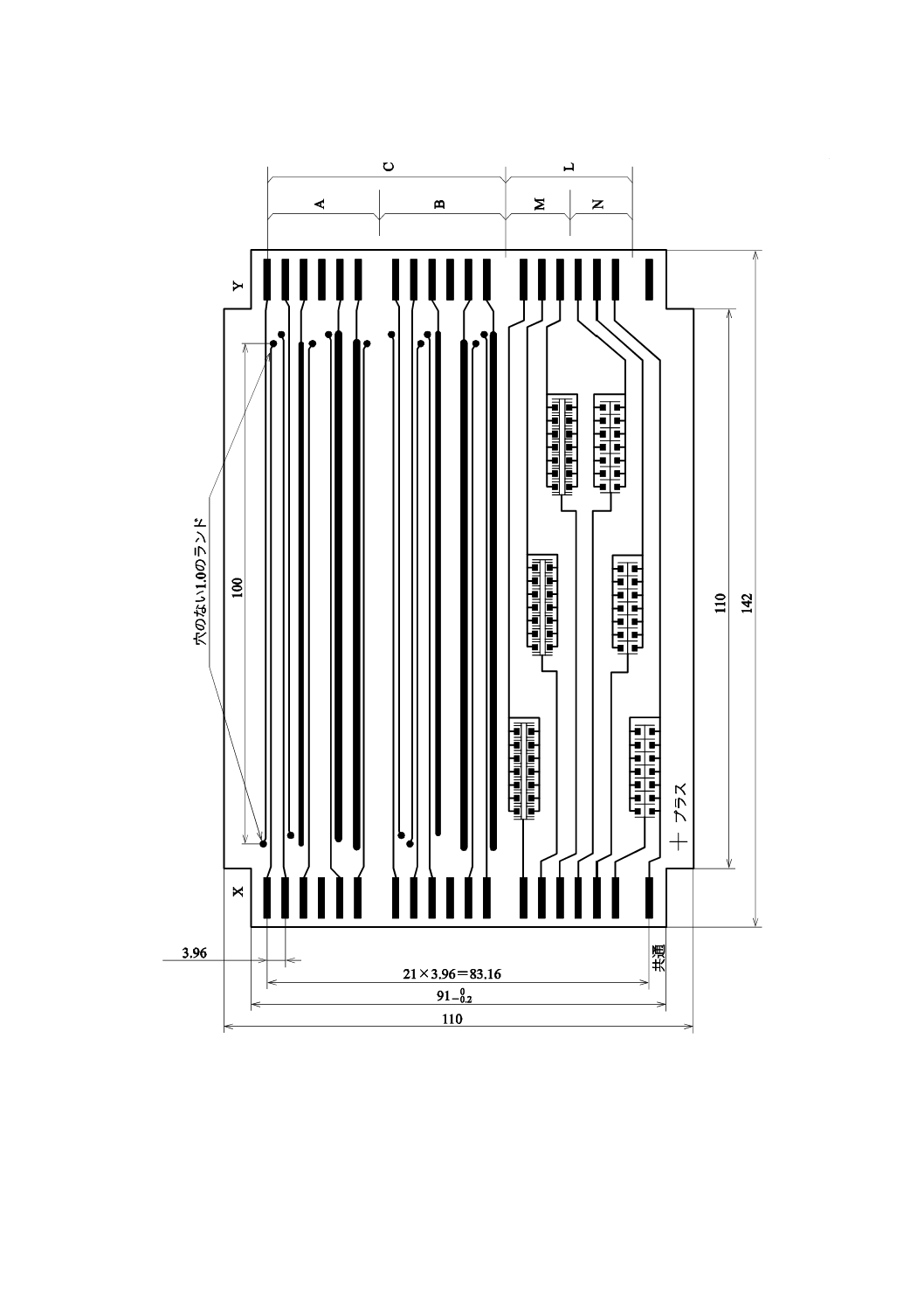
229
C 9730-1:2019
単位 mm
図Q.1−試験サンプル
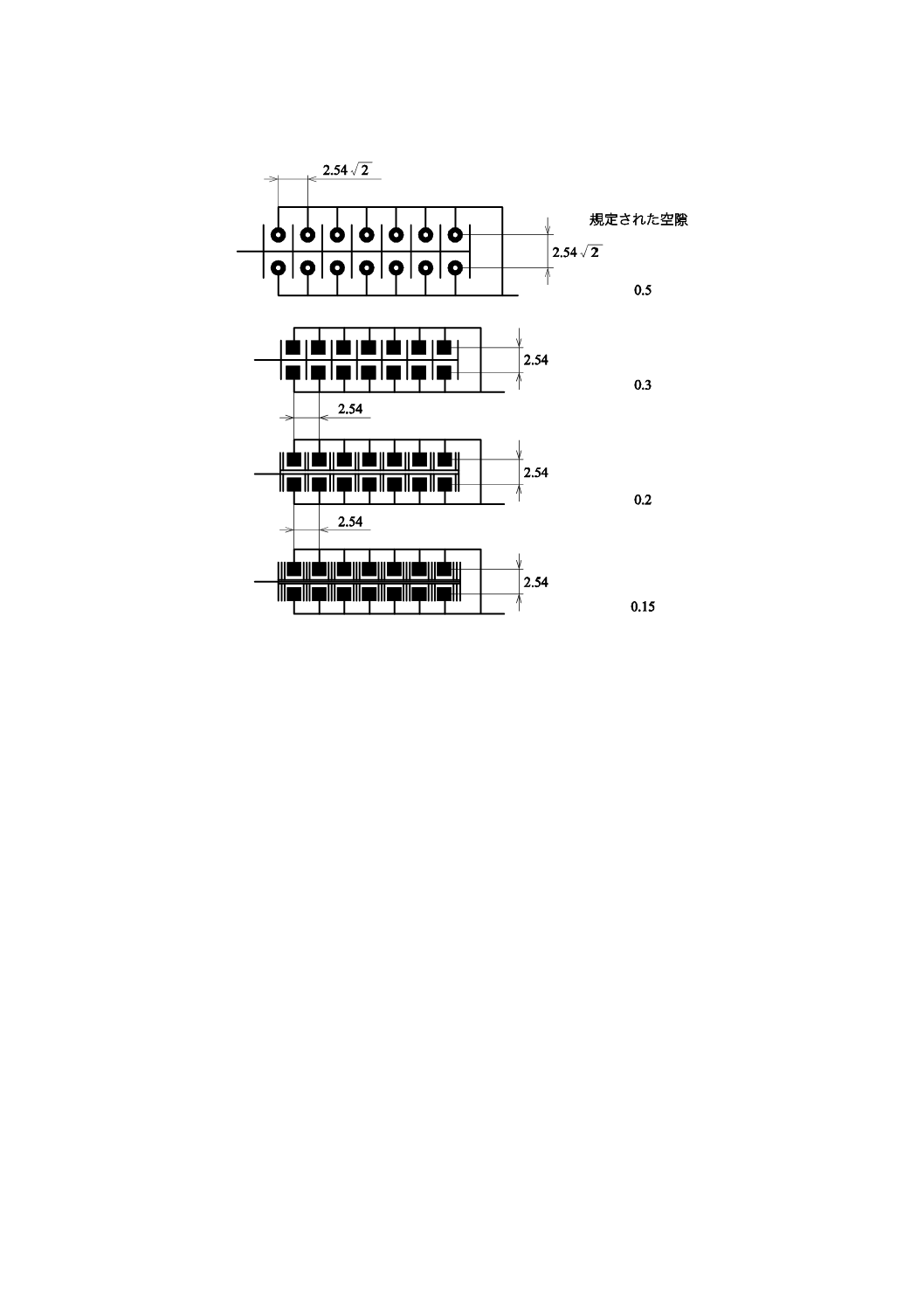
230
C 9730-1:2019
単位 mm
図Q.2−ランド配置の例(図Q.1も参照)
231
C 9730-1:2019
附属書R
(参考)
サージイミュニティ試験の解説
R.1 異なる電源インピーダンス
発生器の電源インピーダンスの選択は,次による。
− ケーブル・導体・配線(交流供給電源,直流供給電源,相互接続など)の種類
− ケーブル・配線の長さ
− 屋内・屋外の条件
− 試験電圧の印加(ライン相互間,ライン−接地間)
2 Ωのインピーダンスは,低圧配電系統の電源インピーダンスを代表する。
実効出力インピーダンスが,2 Ωの発生器を用いる。
12 Ω(10 Ω+2 Ω)のインピーダンスは,低圧配電系統及び接地の電源インピーダンスを代表する。
10 Ωの付加抵抗を,直列に接続する発生器を用いる。
42 Ω(40 Ω+2 Ω)のインピーダンスは,その他全てのライン−接地間の電源インピーダンスを代表する。
40 Ωの付加抵抗を,直列に接続する発生器を用いる。
R.2 試験の適用
2種類の異なる試験を区別する。すなわち,機器レベル及びシステムレベルによる。
R.2.1 機器レベルのイミュニティ
試験は,単体のEUTに対して実施する。したがって,試験されるEUTのイミュニティは,機器レベル
のイミュニティに対応する。
試験電圧は,高電圧ストレスに対するEUTの絶縁耐圧能力以下とする。
R.2.2 システムレベルのイミュニティ
試験は,EUTについて実施する。機器レベルの試験は全ての場合において,システムレベルのイミュニ
ティを確実にするものではない。したがって,システムレベルの試験は,実際の設備を模擬して行うこと
が望ましい。模擬された設備には,保護装置(避雷器,バリスタ,シールド配線など)並びに実長及び実
際のタイプの相互接続線を装備する。
この試験では,できる限り設備条件に近似させ,それ以後,EUT又は複数のEUTが意図するとおり動
作することを確認する。
実際の設備条件におけるイミュニティは,より高い試験レベルが加えられる場合がある。ただし,そこ
に含まれるエネルギーは,電流制限特性のある各種保護装置によって制限されることがある。
この試験は更に,保護装置によって発生する二次的効果(波形,モード又は電圧若しくは電流の振幅の
変化)が,EUTに許容できない影響を及ぼさないことを示すことも目的である。
R.3 設置クラス
R.3.1 一般事項
設置クラスの範囲は,次による。
− クラス2:短い配線ケーブルでも十分に分離された電気的環境。
232
C 9730-1:2019
この設備は,電源設備の接地設備に,分離する接地線で接地されている。したがって,本質的に設
備によって発生する又は雷によって発生する妨害電圧にさらされる。電子機器への供給電源は,多く
の場合,電源用の特別な変圧器によって他の回路から分離されている。設備内には,保護されていな
い回路も存在する。ただし,良好に分離され限定された数である。
このクラスは,カテゴリIの機器に適用する。カテゴリIは,通常カテゴリIIの機器の後段に適用
する。例えば,ELVの電子的論理回路,制限二次絶縁回路,ELV回路,SELV回路,PELV回路,変圧
器の二次回路が含まれる。
サージ電圧は,1 kVを超えない電圧とする。
− クラス3:電力線と信号ケーブルとが平行に走る電気的環境。
この設備においては,電源設備の共通接地システムに接地されている。したがって,本質的に設備
によって発生する又は雷によって発生する妨害電圧にさらされる。
電源設備内における接地故障による電流,切替動作及び雷は,接地システム内で,相対的に振幅の
大きい妨害電圧を発生する。保護された電子機器及び感度の低い電子機器が同一配線網に接続されて
いる。相互接続ケーブルは,部分的に屋外ケーブルと類似の経路で配線される。ただし,接地配線網
に近接している。設備内には,抑制されていない誘導回路が設置されており,通常異なる分野のケー
ブルと分離されていない。
このクラスは,カテゴリIII又はカテゴリIIの機器に適用する。
カテゴリIIIは,通常固定配線への接続を意図する,又は固定配線に接続する機器に組み込むように
意図する制御装置に適用する。ただし,制御装置又は機器が,過渡電圧を制御できる手段があれば,
より低いカテゴリを適用する。
カテゴリIIは,通常コンセントの後段に接続するか又はコンセントの後段に接続される機器に組み
込まれる制御装置に適用する。固定配線に永久的に接続する制御装置もこのカテゴリに入る場合もあ
るが,その場合は,過渡電圧を制限する手段,例えば,制御装置又は機器の配線端子に電圧制限器を
組み込むか,又は導電部間に空間距離をもたせる場合である。制御装置の接点が,過渡電圧のフラッ
シュオーバを許容し,かつ,レットスルー電流に適切に耐えることができる設計である場合,十分な
抑制を備えているとみなす。例えば,家電機器用制御装置は,上記の事項を備えている。
サージ電圧は,2 kVを超えない電圧とする。
− クラス4:相互接続が,屋外ケーブルのように,電力線に沿って配線されている電気的環境であって,
更にケーブルは,電子的及び電気的回路にも使用されている。
この設備においては,電源設備の接地システムに接地されている。したがって,本質的に設備によ
って発生する又は雷によって発生する妨害電圧にさらされる。接地故障によるキロアンペア級の電流,
電源設備内の切替動作及び雷は,接地システム内部で,相対的に大きい振幅の妨害電圧を発生する。
電源配線は,電気的機器及び電子的機器と同一である。相互接続電線は,高圧機器用においても屋外
用ケーブルと同様に配線される。
この環境の特殊な例としては,電子機器が人口高密度な地域で,通信回路網に接続される場合であ
る。この場合には,電子機器の外部ではシステム的に建設された接地網は存在せず,パイプ,ケーブ
ルなどで構成する接地システムだけである。
サージ電圧は,4 kVを超えない電圧とする。
異なる区域でのこのような設備の例を,図R.1〜図R.3に示す。
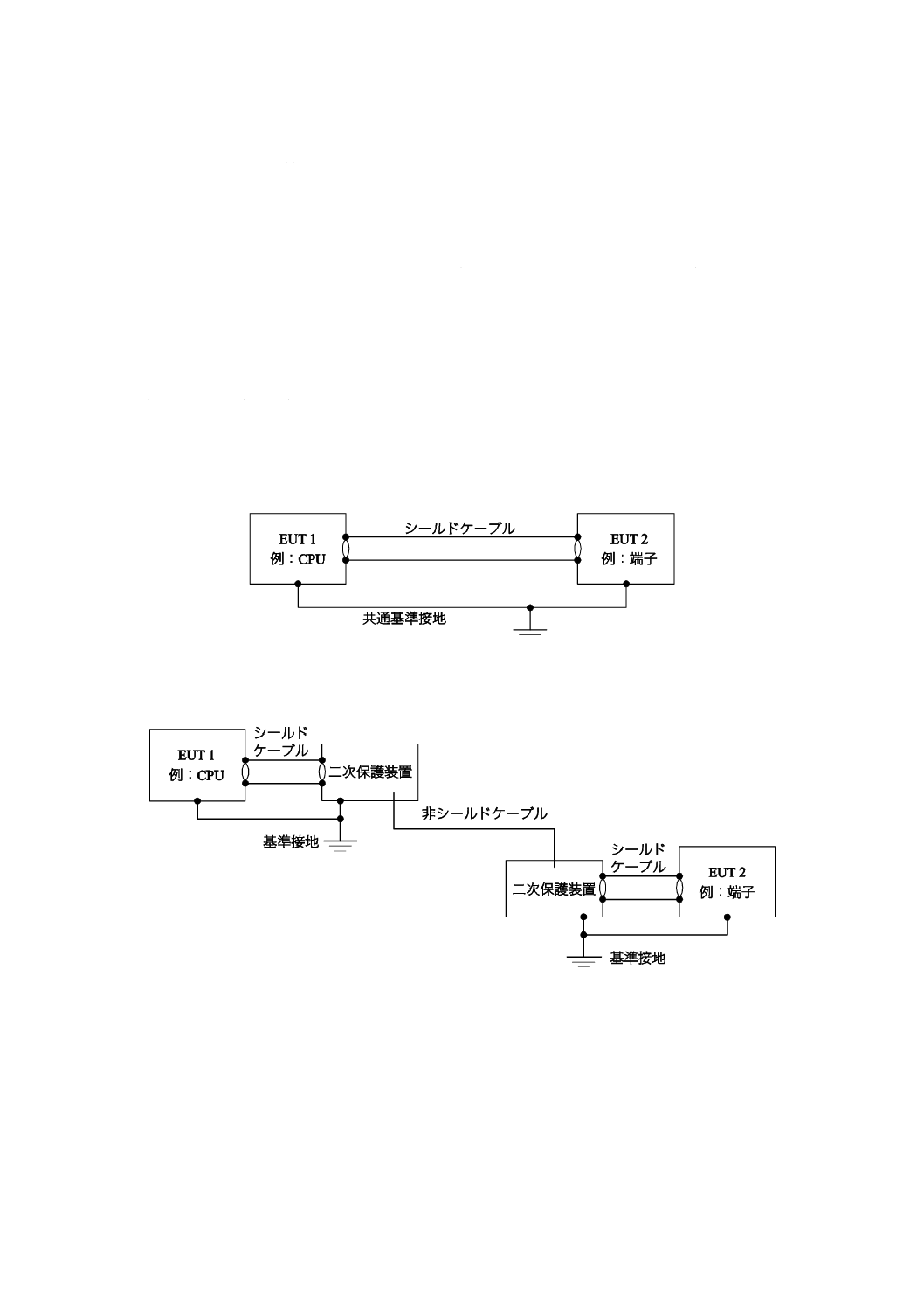
233
C 9730-1:2019
R.3.2 電力系統に接続されるポートの機器レベルのイミュニティ
公共電源系統に接続する最小イミュニティレベルは,次のとおりである。
ライン相互間結合:
0.5 kV
ライン−接地間結合:
1 kV
R.3.3 相互間接続されるポートの機器レベルのイミュニティ
相互接続回路のサージ試験は,外部接続(キャビネット又はきょう体の外部)の場合だけ要求される。
システムレベルで試験することが可能(相互接続ケーブルが付いたEUT)であれば,機器レベルで試験す
る必要はない(例えば,工作用制御及び信号の入出力ポート)。特に,相互接続用ケーブルのシールドが保
護手段の一部のような場合である。プラントの設置を機器製造業者以外で実施する場合,機器の入出力(特
に,工作用制御のインタフェース)の許容電圧を指定することが望ましい。
機器製造業者は,自社の製品を機器レベルのイミュニティを満たしていることを確認するために規定さ
れた試験レベルで試験することが望ましい。例えば,EUTポートの二次保護は,0.5 kVの試験レベルであ
る。したがって,雷撃によって生じる妨害電圧が,選択するイミュニティレベルを超えないことを確実に
するために,必要な手段(例えば,シールド,ボンディング,接地,保護)を講じることが望ましい。
図R.1−建築設備内の共通基準接地システムによるサージ保護の事例
図R.2−分離する共通接地基準システムをもつ建築設備内の二次サージ保護の事例
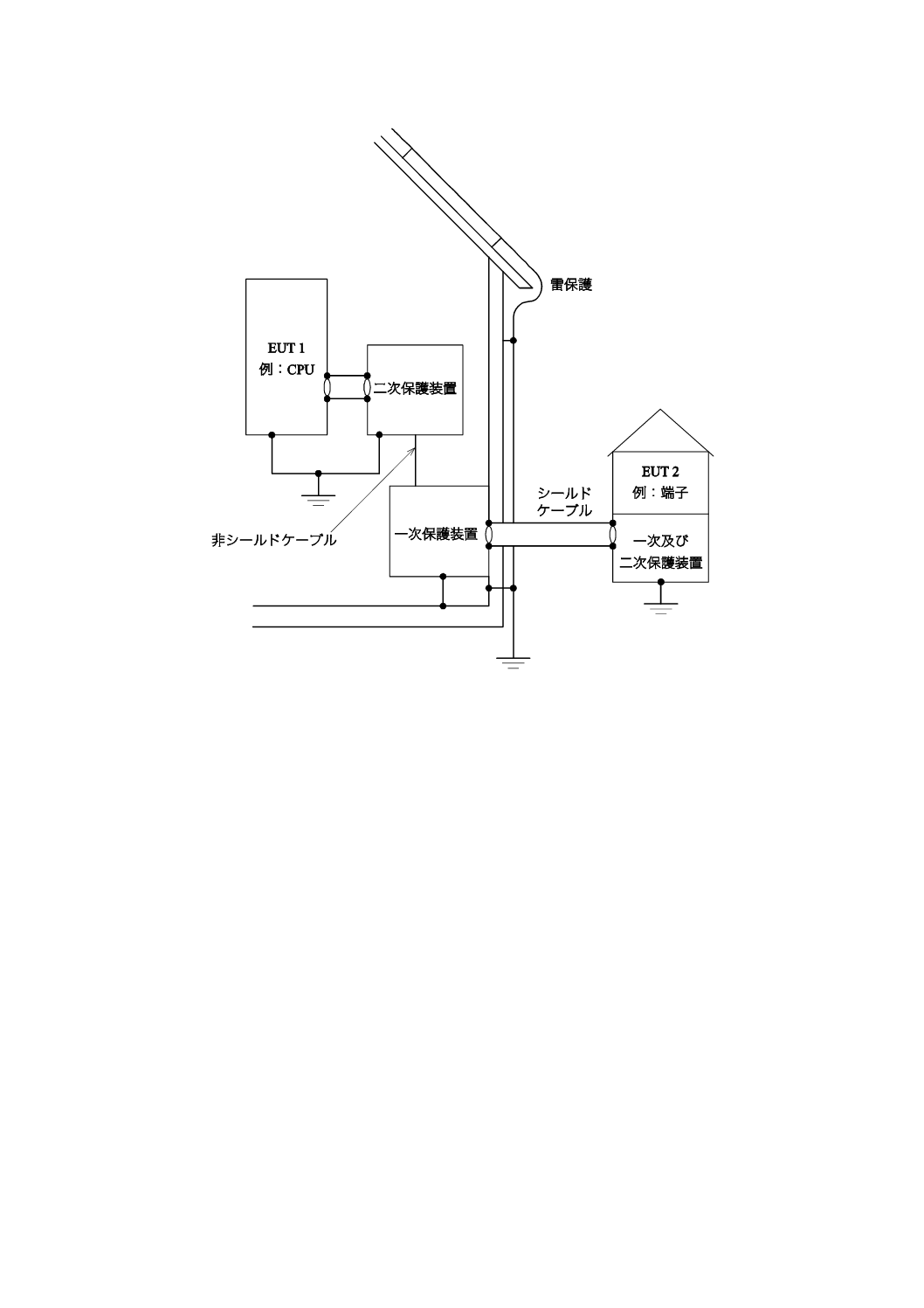
234
C 9730-1:2019
図R.3−屋内用及び屋外用機器の一次サージ保護及び二次サージ保護の事例
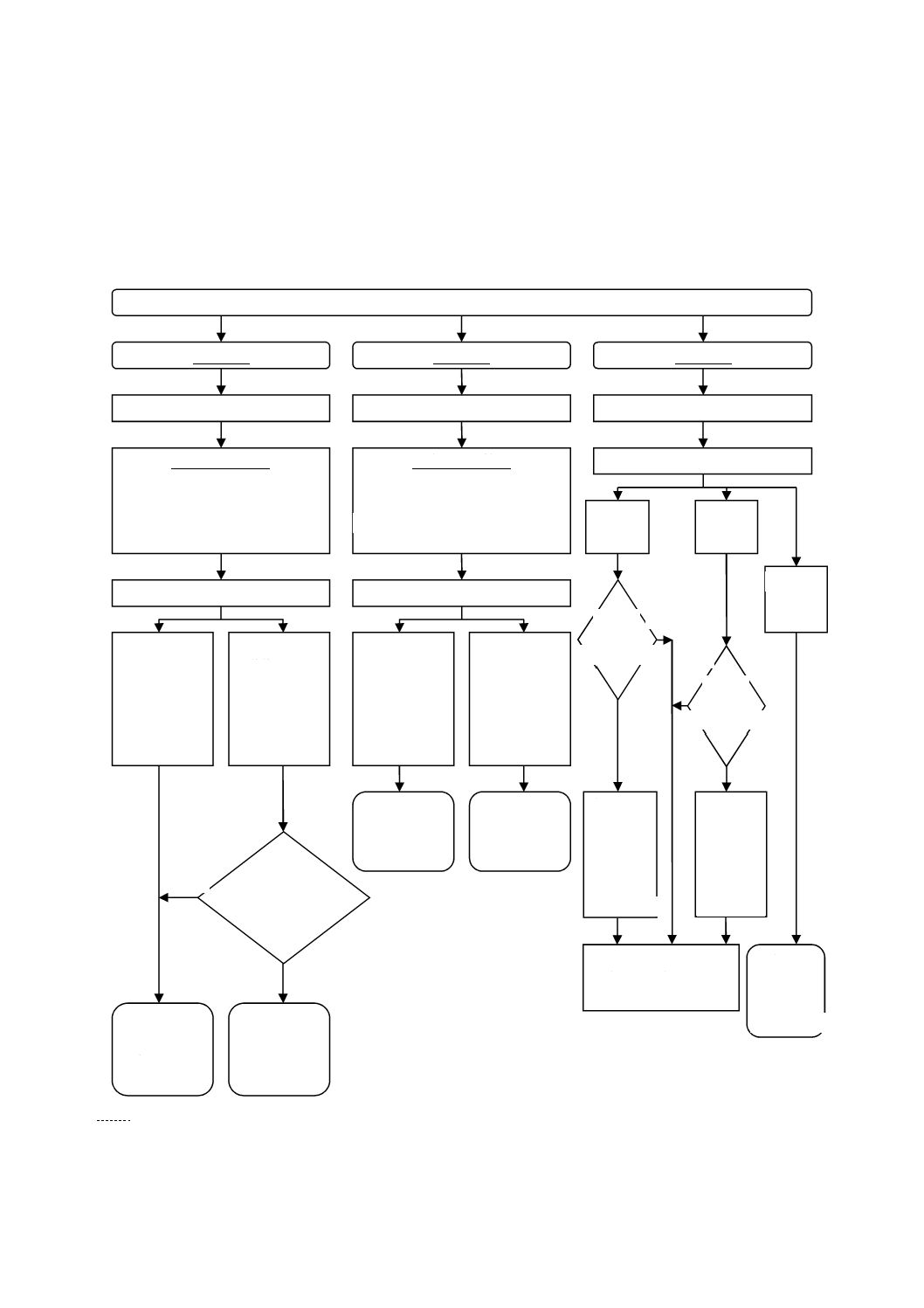
235
C 9730-1:2019
附属書S
(参考)
箇条20の適用指針
箇条20の適用指針を,図S.1,表S.1及び表S.2に示す。
注a) “厚さ”とは,絶縁物を通しての距離を意味する。
図S.1−箇条20の要求事項の適用指針に対するフローチャート
検討する絶縁距離の種類(箇条2参照)
空間距離
沿面距離
固体絶縁
20.1
要求される情報
電力系統電圧又は動作電圧
過電圧カテゴリ(附属書L)
定格インパルス電圧(表21)
汚損度(附属書N)
絶縁の種類(箇条2参照)
付加20.1.8
強化20.1.9
完全断路
20.1.7.2
基礎20.1.1
動作20.1.2
マイクロ断路
20.1.7.1
マイクロ開路
20.1.7.1
インパルス
試験の実施
20.1.12
20.2
要求される情報
電力系統電圧又は動作電圧
汚損度(附属書N)
材料グループ[6.13,20.2.2の注記
3]
絶縁の種類(箇条2参照)
付加20.2.3
強化20.2.4
基礎20.2.1
次を含む機能
絶縁
完全断路
マイクロ断路
マイクロ開路
20.2.2
最小
沿面距離
表23
最小
沿面距離
表24
最小
空間距離
ケースA
表22
最小
空間距離
ケースB
表22
いいえ
はい
付加
20.3.2
強化
20.3.2
20.3
絶縁の種類(箇条2参照)
動作又は
基礎
20.3.1
絶縁物
可触か?
絶縁物
可触か?
いいえ
いいえ
最小厚さa)
0.7 mm
(20.3.2)
又は
2層絶縁
(20.3.2.1)
はい
最小厚さa)
0.7 mm
(20.3.2)
又は
3層絶縁
(20.3.2.1)
はい
厚さの要
求事項は
規定され
ていない。
温度試験を考慮し,熱劣
化試験が要求される。
(20.3.2.2)
(20.3.2.2)
(20.3.2.2)
236
C 9730-1:2019
表S.1−事例A 箇条20適用指針の使用
質問
回答
説明
検討中の絶縁は,空間を通るものか,
又は表面を横断するものか。
空間を通る。
フローチャートの空間距離の経路に
従う。
電力系統電圧は何か,又は機能絶縁の
場合,動作電圧は何か。
230 V/400 V,三相,4線
a)として記録する。
過電圧カテゴリは何か(附属書L参
照)。
カテゴリII参照
b)として記録する。
定格インパルス電圧は何か。
表21からa)及びb)を用いて決定す
る。
c)として記録する。
汚損度は何か(附属書N参照)。
汚損度2
d)として記録する。
絶縁の種類は何か(定義などを参照)。 強化絶縁
20.1.9を参照する。強化絶縁に対して
は,ケースAを用い,表22から一段
階高いインパルス電圧を選ぶ。e)とし
て記録する。
この絶縁距離の限度値は何か。
表22参照
d)及びe)を用いて限度値を決定する。
限度値は3 mmである。
表S.2−事例B 箇条20適用指針の使用
質問
回答
説明
検討中の絶縁は,空間を通るものか,
又は表面を横断するものか。
表面を横断
沿面距離の経路に従う。
電力系統電圧は何か,又は機能絶縁の
場合,動作電圧は何か。
230 V
a)として記録する。
汚損度は何か(附属書N参照)。
汚損度2
b)として記録する。
材料グループは何か(20.2.2の注記2
参照)。
材料グループIIIb
c)として記録する。
絶縁の種類は何か(定義などを参照)。 機能絶縁
20.2.2参照
この絶縁距離の限度値は何か。
表24参照
a),b)及びc)を用いて限度値を決定す
る。
限度値は2.5 mmである。
237
C 9730-1:2019
附属書T
(規定)
SELV及びPELVに対する要求事項
T.1
SELV及びPELVの要求事項の概要
T.1.1
SELVによる保護
T.1.2
PELVによる保護
注記 バリアに対するJIS C 0365の要求事項は,この規格の箇条8,箇条11,箇条18,箇条20,そ
の他で考慮及び包含されている。
T.2
SELV又はPELVによる感電に対する保護
T.2.1
SELV
感電に対する保護は,次の手段によって備えなければならない。
− 電圧の制限,回路(SELVシステム)内でT.3.1に従ったELV
− T.3.2に従った,SELV及びPELV以外の全ての回路からのSELVシステムの保護分離
− T.3.3に従った,他のSELVシステム,PELVシステム及び大地からのSELVシステムの単純分離
制御装置の露出導電部の保護導体又は接地導体への製造業者による意図的な接続は,許容しない。
SELVが要求される特別な場所及びT.3.2.1に従った保護遮蔽が適用される特別な場所の場合,保護遮蔽
体は,存在する最高電圧に対する定格の基礎絶縁によって,それぞれの隣接の回路から分離しなければな
らない。
SELVの要素に対する要求事項は,T.3に規定している。
T.2.2
PELV
感電に対する保護は,次の手段によって備えなければならない。
− 電圧の制限,接地される可能性のある回路内及び/又は接地される可能性のある露出導電部のT.3.1
に従ったELV(PELVシステム)
− T.3.2に従った,SELV及びPELV以外の全ての回路からのPELVシステムの保護分離
PELV回路を接地する場合及びT.3.2.1に従った保護遮蔽を使用する場合,保護遮蔽体とPELVシステム
との間に基礎絶縁を設ける必要はない。
PELVによる保護
(T.2.2参照)
電圧の制限
(T.3.1参照)
保護分離
(T.3.2参照)
機能接地の選択肢
(T.3.4参照)
場合によって,
追加の基礎絶縁
(2.7.10参照)
及び
及び
(JIS C 0365から採用した。)
及び
SELVによる保護
(T.2.1参照)
電圧の制限
(T.3.1参照)
保護分離
(T.3.2参照)
接地,PELV及び他
のSELVシステム
からの単純分離
(T.3.3参照)
及び
238
C 9730-1:2019
PELVシステムの複数の充電部が同時に導電部にアクセス可能(接触可能)であって,故障時にそれが
一次回路の電位とみなせる場合,感電に対する保護は,そのような全ての導電部の保護等電位ボンディン
グ(T.3.4)に依存する。そのような部分は,保護接地端子又は制御装置の終端に結合しなければならない。
PELVの要素に対する要求事項は,T.3に規定している。
T.3
SELV及びPELVの要素としてのELV,保護分離,単純分離及び保護ボンディング
T.3.1
電圧の制限は,同時に可触部間の電圧が,2.1.4及び8.1.1に規定する関連するELV限度値を超えな
いように備えなければならない。
T.3.2
SELV回路及び/又はPELV回路と他の充電回路との間の保護分離は,次のいずれかの手段によっ
て備えなければならない。
− それぞれ存在する最高電圧に対する定格をもつ基礎絶縁及び付加絶縁,すなわち,二重絶縁
− 存在する最高電圧に対する定格をもつ強化絶縁
− 近接回路の最高電圧に対する定格の基礎絶縁によって各近接回路から分離する保護遮蔽体を備える
T.3.2.1に従った保護遮蔽(T.2.1の最終段落も参照)
− これらの装備の組合せ
分離回路の導体が,多芯ケーブルの中又は他の導体の組合せの中で,他の回路導体と共に収容されてい
る場合,それは,二重絶縁又は強化絶縁が達成できるように,存在する最高電圧に対して,個別又は集合
的に絶縁しなければならない。
分離する回路間に構成部品を接続している場合,その構成部品は,保護インピーダンスの要求事項を満
たさなければならない。
SELV回路又はPELV回路の電源を高い電圧の商用主電源から供給している場合は,次のいずれかを満
たさなければならない。
− 安全絶縁変圧器を介する。
− 等価絶縁を施し,巻線をもつコンバータを介する。
注記1 電圧限度値は,安全絶縁変圧器がその定格電圧の上限で供給されるという仮定に基づいてい
る。
注記2 カナダ及び米国では,安全絶縁変圧器を介して電源供給するELVに接続する部品の動作電圧
は,乾燥状態では42.4 V(ピーク値)又は30 V(実効値)を,湿った接触の可能性がある状
態では21.2 V(ピーク値)又は15 V(実効値)を超えてはならない旨,要求している。
制御装置は,コンバータを使用することを製造業者が宣言している場合は,次による。
− 6.5.2でIPX7に分類された制御装置は,回路及びコンバータ巻線相互間の絶縁に対して,二次故障分
析(表1の項目73)を行うことを条件として製造業者が宣言しなければならず,かつ,二次故障の結
果として0 VのELV値を超えてはならない。出力の電極間電流は,H.8.1.10を満たさなければならな
い。
適否は,目視検査,測定及びこの規格の順番に従った適切な試験を実施することによって判定する。
T.3.2.1 保護遮蔽は,制御装置,設備又はシステムの危険な充電部と保護されている部分(例えば,SELV
回路又はPELV回路)との間に挿入する導電遮蔽体で構成しなければならない。保護遮蔽体は,次による。
− 制御装置の保護接地端子に恒久的に,かつ,確実に接続し,その接続は,箇条9を満たさなければな
らない。
− 保護遮蔽体は,それ自体が箇条9を満たさなければならない。
239
C 9730-1:2019
T.3.3
SELV回路と他のSELVシステム,PELVシステム又は大地との間の単純分離では,全てを通して,
存在する最高電圧に対する定格の基礎絶縁の要求事項を満たさなければならない。
分離された回路間に接続する部品がある場合,その構成部品は,橋絡する絶縁に対して規定する電気的
ストレスに耐えなければならない。また,そのインピーダンスは,その構成部品を通して流れる予測され
る電流を,保護インピーダンスについてH.8.1.10及びH.11.2.5に示す定常状態の電流値に制限しなければ
ならない。
T.3.4
保護ボンディング
保護ボンディングに対する要求事項は,この規格の箇条9の保護接地に対するものである。
幾つかの構成部品部分(検出用構成部品,送信機,中央制御ユニット,受信機,アクタ及びインタフェ
ース・ユニット)からなり,そのような構成部品の部分が建築物の固定電気設備の一部である場合の制御
装置の据付けについては,建築物の設備に関するJIS C 60364の規格群の保護ボンディングに対する要求
事項を適用する。
注記 機能接地は,保護接地とは対照的に,電気的に動作する回路を機能目的で大地に接続すること
である。設備システムのタイプに基づき,異なる要求事項が適用され,これは,建築物の設備
に関するJIS C 60364の規格群に規定している。機能接地は,製品規格が適用される通信機器
に対して必要となる場合がある。
この規格は,この第1部及びJIS C 9730の規格群の関連する第2部の特定用途のために規定する条件で,
内部PELV回路の内部導体として露出導電部を機能接地用に使用することを認めている。
240
C 9730-1:2019
附属書U
(規定)
JIS C 9335の規格群に含まれる機器の制御装置として使用する
リレーに対する要求事項
この附属書は,本体の対応する箇条の内容を補足又は変更するものである。
注記 この附属書は,JIS C 9730-2-1:2000が廃止されたため,この規格の附属書として規定する。
U.2 用語及び定義
U.2.2 目的に関する制御装置のタイプの定義
U.2.2.12
電気的に動作する制御装置(electrically operated control)
この附属書の目的において,2.2.12で定義したとおり,リレーは制御装置の一つである。
置換(注記1を次の注記に置き換える。)
注記1 例えば,リレー,電流動作リレー,電圧動作リレー又はサイクリングリレーである。
U.4 試験に関する一般注意
U.4.3 試験のための指示事項
U.4.3.5 目的に関するもの
追加(次の細分箇条を追加する。)
U.4.3.5.5 換気の手段としてリレーを組み込む場合,箇条12〜箇条17の試験ではリレーを取り外して行
う。
U.6 分類
U.6.3 目的による分類
追加(次の分類を追加する。)
U.6.3.10.1 リレー
U.6.3.10.2 電流動作リレー
U.6.3.10.3 電圧動作リレー
U.6.6 接続方法による分類
追加(次の分類を追加する。)
U.6.6.6 PWB(プリント配線板)搭載用制御装置
U.6.6.7 PWBトラック以外を経由する接点接続のPWB搭載用制御装置
U.6.6.8 プラグインリレー
U.6.8 感電に対する保護による分類
追加(次の細分箇条を追加する。)
U.6.8.5 リレーについては,コイルと接点回路との間の絶縁の分類は,U.6.8.5.1〜U.6.8.5.5による。
U.6.8.5.1 クラス0
U.6.8.5.2 クラス0I
241
C 9730-1:2019
U.6.8.5.3 クラスI
U.6.8.5.4 クラスII
U.6.8.5.5 クラスIII
U.6.8.6 リレーについては,充電部と試験機能及び手動作動の操作部との間の絶縁の分類は,U.6.8.6.1〜
U.6.8.6.5による。
U.6.8.6.1 クラス0
U.6.8.6.2 クラス0I
U.6.8.6.3 クラスI
U.6.8.6.4 クラスII
U.6.8.6.5 クラスIII
U.7 情報
置換(表1の項目3,項目4及び項目88の列を,次に置き換える。)
情報
箇条又は細分箇条
方法
3
同一でない場合,コイル及び接点の定格電圧
U.14,U.17
C
4
同一でない場合,コイル及び接点の電源の性質
U.14,U.17
C
88
意図する最大クリック率
U.23
D
U.14 温度上昇
置換(次の細分箇条を置き換える。)
U.14.4
試験は,次の条件で実施する。
− コイル電圧を0.9倍とし,接点に負荷を接続,又はコイル電流を0.9倍とし,接点に負荷を接続する。
− コイル電圧を1.1倍とし,接点に負荷を接続,又はコイル電流を1.1倍とし,接点に負荷を接続する。
− コイルは通電せず,接点に負荷を接続(通常“閉”の接点)する。
− リレーは規定されたとおりに取り付ける。PWB(プリント配線板)に接続するリレーは,試験を行う
リレーと共にPWBが提出された場合には,PWBに取り付ける。PWBが提出されない場合は,リレー
を平たん(坦)なPWB材に取り付ける。適切な寸法の導体(表6に基づく。)を,PWBピンにはん
だ付けする。
U.17 耐久性
U.17.14 適否判定
置換(第2ダッシュを次に置き換える。)
− 表13の注a) によって指示された物品,すなわち,端子,通電部分及び支持面に関する箇条14の要求
事項に,U.14.4に示す条件を満たしている場合。
U.17.16 特殊目的の制御装置の試験
追加(次を追加する。)
リレーは,次の手順に従って耐久性試験を実施する。
− 適用する場合,17.6のエージング試験
− 17.7の加速度での自動作動の過電圧試験
− 17.8の加速度での自動作動の試験
242
C 9730-1:2019
− 適用する場合,17.9の低速度での自動作動の試験
− 適用する場合,17.10の加速度での手動作動の過電圧試験
− 適用する場合,17.11の低速度での手動作動の試験
− 適用する場合,17.12の高速度での手動作動の試験
− 適用する場合,17.13の加速度での手動作動の試験
U.20 沿面距離,空間距離及び固体絶縁物を通しての距離
追加(次を追加する。)
リレーに対する評価は,通電して,通電せずに,及び適用する場合,手動動作で実施する。
U.23 電磁両立性(EMC)要求事項−エミッション
追加(次を追加する。)
EMC要求事項がリレーに適用可能であるかどうかについて,考慮することが望ましい。
U.24 部品
追加(次を追加する。)
電子部品を組み込んだリレーは,附属書Hに従って評価する。
243
C 9730-1:2019
附属書V
(規定)
二次電池で動作する制御装置に対する要求事項
この附属書は,本体の対応する箇条の内容を補足又は変更するものである。
この附属書は,充電式電池によって動作する制御装置に適用する。
V.4.3.2 定格に関するもの
追加(次の細分箇条を追加する。)
V.4.3.2.11 次の条件のもとで,制御装置を動作させる。
− 満充電の蓄電池から電源供給を受ける制御装置について,この規格又はJIS C 9730の規格群の第2部
の規定に従って動作する。
− 制御装置が動作しない程度に電池を放電した後,充電を行う。
− 制御装置が動作しない程度に電池を放電した後,可能な場合,その充電器を介して主電源から制御装
置に電源供給する。制御装置は,JIS C 9730の規格群の第2部の規定に従って動作する。
− 制御装置に,取外し可能な部分の相互間の誘導結合部分が存在する場合,制御装置の取外し可能な部
分を分離し,電源を供給する。
V.7
情報
V.7.4
表示の追加要求事項
追加(次の細分箇条を追加する。)
V.7.4.10 取扱説明書には,電池の充電についての情報を提供しなければならない。
V.8
感電に対する保護
追加(次の細分箇条を追加する。)
V.8.5
電池駆動の制御装置は,直流供給電源を分離する外部点で使用者が接触可能な部分に対して,次の
設計も行わなければならない。
− 最大可触電圧(例えば,制御装置内の電池に蓄積された電荷による電圧,又はバックアップ用の冗長
な直流供給電源による電圧)は,SELV回路及びPELV回路の限度値以下とする。
− 5秒後に取り出せる電力は,15 W未満とする。
V.8.5.1 検証は,次の試験によって判定する。
試験は,満充電の制御装置から直流供給電源を分離して行う。主電源を分離した1秒後に,主電源端子
間の電圧を測定する。次に,通常は直流供給電源を接続する入力端子に可変抵抗負荷を接続する。制御装
置は内臓電池によって動作させる。回路を介して最大電力を引き出すように,可変抵抗負荷を調整する。5
秒後に取出した最大電力を記録する。
電圧及び記録した電力がV.8.5で規定する限度値以下である場合,回路は,V.8.5を満たしている。
244
C 9730-1:2019
V.11 構造要求事項
V.11.13
保護制御装置及び保護制御装置システムの構成部品
V.11.13.4
電池
追加(次の細分箇条を追加する。)
V.11.13.4.4.3 V.11.13.4.4.3.1〜V.11.13.4.4.3.3の試験に使用する電池は,機器と共に提供される充電式電池,
又は製造業者が推奨する充電式電池であって,満充電したものとする。
V.11.13.4.4.3.1 充電式電池の過充電。電池は,V.11.13.4.4.3.1.1及びV.11.13.4.4.3.1.2の順番で各条件の下
で充電する。
V.11.13.4.4.3.1.1 充電回路は,電池分離状態で充電器の定格出力電圧の106 %,又は(模擬の故障のない
状態で)充電器からの利用可能な最大充電電圧のうちで,より到達可能な高い電圧に調整する。次に,電
池を7時間連続で充電する。
V.11.13.4.4.3.1.2 充電回路の出力は,電池分離状態で充電器の定格出力電圧の100 %に調整する。充電回
路内で発生し,電池の過充電を起こす可能性のある単一部品不良を模擬した状態で,電池を充電する。試
験時間を最短にするために,模擬する条件は,最大の過充電電流を発生する状態を選択する。その後,故
障を模擬した状態で,電池を7時間連続で充電する。
V.11.13.4.4.3.2 充電式電池の逆充電。充電回路で発生し,結果として電池の逆充電を起こす可能性のある
単一部品不良を模擬した状態で,電池を逆充電する。試験時間を最短にするために,模擬する条件は,最
大逆充電電流を生じる状態を選択する。その後,故障を模擬した状態で,電池を7時間連続で逆充電する。
V.11.13.4.4.3.3 電池の過度の放電速度。試験に供する負荷回路の電流制限部品又は電圧制限部品を,開路
又は閉路によって急速放電を実施する。
V.11.13.4.4.3.4 適否は,11.13.4.4.4及び11.13.4.5によって判定する。
245
C 9730-1:2019
参考文献
JIS C 0365:2007 感電保護−設備及び機器の共通事項
注記 対応国際規格:IEC 61140:2001,Protection against electric shock−Common aspects for installation
and equipment(IDT)
JIS C 0508-3:2014 電気・電子・プログラマブル電子安全関連系の機能安全−第3部:ソフトウェア要求
事項
注記 対応国際規格:IEC 61508-3:2010,Functional safety of electrical/electronic/programmable electronic
safety-related systems−Part 3: Software requirements(IDT)
JIS C 0508-7:2017 電気・電子・プログラマブル電子安全関連系の機能安全−第7部:技術及び手法の概
観
注記 対応国際規格:IEC 61508-7:2010,Functional safety of electrical/electronic/programmable electronic
safety-related systems−Part 7: Overview of techniques and measures(IDT)
JIS C 2110-1:2010 固体電気絶縁材料−絶縁破壊の強さの試験方法−第1部:商用周波数交流電圧印加に
よる試験
注記 対応国際規格:IEC 60243-1:1998,Electrical strength of insulating materials−Test methods−Part 1:
Tests at power frequencies
JIS C 2139:2008 固体電気絶縁材料−体積抵抗率及び表面抵抗率の測定方法
注記 対応国際規格:IEC 60093:1980,Methods of test for volume resistivity and surface resistivity of solid
electrical insulating materials(MOD)
JIS C 2814-2-1:2009 家庭用及びこれに類する用途の低電圧用接続器具−第2-1部:ねじ形締付式接続器具
の個別要求事項
注記 対応国際規格:IEC 60998-2-1,Connecting devices for low-voltage circuits for household and similar
purposes−Part 2-1: Particular requirements for connecting devices as separate entities with screw-type
clamping units
JIS C 4540-1:2010 電磁式エレメンタリ リレー−第1部:一般要求事項
注記 対応国際規格:IEC 61810-1:2008,Electromechanical elementary relays−Part 1: General requirements
(IDT)
JIS C 6950-1 情報技術機器−安全性−第1部:一般要求事項
注記 対応国際規格:IEC 60950-1,Information technology equipment−Safety−Part 1:General
requirements(MOD)
JIS C 8281-1:2011 家庭用及びこれに類する用途の固定電気設備用スイッチ−第1部:一般要求事項
注記 対応国際規格:IEC 60669-1:1998,Switches for household and similar fixed-electrical installations−
Part 1: General requirements,Amendment 1:1999及びAmendment 2:2006(MOD)
JIS C 9335(規格群) 家庭用及びこれに類する電気機器の安全性
注記 対応国際規格:IEC 60335 (all parts),Household and similar electrical appliances−Safety
JIS C 60050(規格群) 電気技術用語
注記 対応国際規格:IEC 60050 (all parts),International Electrotechnical Vocabulary
JIS Z 8051:2004 安全側面−規格への導入指針
246
C 9730-1:2019
注記 対応国際規格:ISO/IEC Guide 51:1999,Safety aspects−Guidelines for their inclusion in standards
(IDT)
IEC 60990:1999,Methods of measurement of touch current and protective conductor current
ISO/IEC 9796 (all parts),Information technology−Security techniques−Digital signature scheme giving message
recovery
ISO/IEC 9797 (all parts),Information technology−Security techniques−Message Authentication Codes (MACs)
ISO/IEC 9798 (all parts),Information technology−Security techniques−Entity authentication
ISO/IEC 10118 (all parts),Information technology−Security techniques−Hash-functions
ISO/IEC 11770 (all parts),Information technology−Security techniques−Key Management
ISO/IEC 14888 (all parts),Information technology−Security techniques−Digital signatures with appendix
ISO/IEC 15946 (all parts),Information technology−Security techniques−Cryptographic techniques based on
elliptic curves
ISO/IEC 18033 (all parts),Information technology−Security techniques−Encryption algorithms
ISO/IEC 19772 (all parts),Information technology−Security techniques−Authenticated encryption
ISO/IEC 29192 (all parts),Information technology−Security techniques−Lightweight cryptography
ISO 62:2008,Plastics−Determination of water absorption
ISO 75-1:2004,Plastics−Determination of temperature of deflection under load−Part 1: General test method
ISO 178:2010,Plastics−Determination of flexural properties
ISO 180:2000,Plastics−Determination of Izod impact strength
ISO 527-1:2012,Plastics−Determination of tensile properties−Part 1: General principles
ISO 8256:2004,Plastics−Determination of tensile-impact strength
ISO 16484 (all parts),Building automation and control systems (BACS)
EN 50159,Railway applications−Communication, signalling and processing systems−Safety-related
communication in transmission systems
UL 746C,Polymeric Materials−Use in Electrical Equipment Evaluations
UL 746D,Polymeric Materials−Standard for Polymeric Materials−Fabricated Parts
H. Holscher and J. Rader; “Microcomputers in safety techniques.” Verlag TUV Bayern. TUV Rheinland. (ISBN
3-88585-315-9)
Abraham, J.A.; Thatte, S.M.; “Fault coverage of test programs for a microprocessor”, Proceedings of the IEEE Test
Conference 1979, pp 18-22
IECQ programme http://www.iecq.org
247
C 9730-1:2019
附属書JA
(参考)
JISと対応国際規格との対比表
JIS C 9730-1:2019 自動電気制御装置−第1部:一般要求事項
IEC 60730-1:2013,Automatic electrical controls−Part 1: General requirements及び
Amendment 1:2015
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異の理由
及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
2.7.3
クラス0I制御装置の
用語の定義
2.7.3
JISとほぼ同じ
変更
対応国際規格では,“接地極がある
コンセントに差込みできないイン
ラインコード形制御装置”としてい
るが,“接地極があるコンセントに
差込みできない”は,我が国の配電
事情では対応できないため,削除す
ることとした。また,2ピンプラグ
から接地用口出し線を出している
プラグもクラス0I制御装置とする
ことから,定義全体をJIS C 9335-1
の3.3.8に準じて修正した。
我が国の配電事情による。
4.3.3.1
クラスII以外のクラ
スに対するクラスII
構造
4.3.3.1
JISとほぼ同じ
削除
クラス0制御装置及びクラス0I制
御装置を削除した。
対応国際規格のクラス0制御装置及びク
ラス0I制御装置に対する要求事項が不十
分であり,安全上の問題から,この規格
では認めないこととした。
IECへの提案を検討する。
4.3.3.3
SELV回路を使用し
た部分
4.3.3.3
JISとほぼ同じ
削除
4.3.3.1と同じ。
4.3.3.1と同じ。
6.8.3
インラインコード形
制御装置,自立構造形
制御装置又は独立取
付形制御装置の分類
6.8.3
JISとほぼ同じ
削除
追加
クラス0制御装置及びクラス0I制
御装置の分類を削除し,注記でそれ
らの分類をこの規格では認めない
ことを明確にした。
対応国際規格のクラス0制御装置及びク
ラス0I制御装置に対する要求事項が不十
分であり,安全上の問題から,この規格
では認めないこととした。
IECへの提案を検討する。
2
6
C
9
7
3
0
-1
:
2
0
1
9
248
C 9730-1:2019
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異の理由
及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
7 情報
表1
必要な情報及び提供
方法
7
表1
JISとほぼ同じ
追加
この規格では,図14〜図16以外又
はIEC 61210以外の平形プッシュ
オンコネクタの寸法を使用する場
合は,コネクタの規格情報を文書で
与えるため,J1を追加した。
この規格では,図14〜図16又はIEC
61210コネクタを原則として使用すると
したため,その他を使用する場合は,情
報が必要である(10.2.4.1参照)。
9.1.1
接地接続
9.1.1
JISとほぼ同じ
削除
この規格では,クラス0I制御装置
を削除した。
対応国際規格のクラス0I制御装置に対す
る要求事項が不十分であり,安全上の問
題から,この規格では認めないこととし
た。
IECへの提案を検討する。
10.1.8.2
端子に表4の電線を
挿入する試験
10.1.8.2 JISとほぼ同じ
追加
対応国際規格では,規格で決められ
た寸法のコードを挿入するが,この
規格では,我が国固有の電線を考慮
して,製造業者による指定電線寸法
で試験を行うことも可能とした。
当面,我が国では,対応国際規格による
電線及び我が国固有電線の寸法が両方存
在するので,試験用電線も我が国固有の
電線寸法を考慮する必要があった。
10.2.4.1
平形プッシュオンコ
ネクタの寸法
10.2.4.1 JISとほぼ同じ
変更
対応国際規格では,図14〜図16で
平形プッシュオンコネクタの寸法
を決定しているが,この規格では,
通常,図14〜図16又はIEC 61210
の共通規格を引用し,その他の寸法
を使用する場合は,コネクタを指定
することとした。
対応国際規格で規定された寸法は,IEC
60760及びJIS C 2809とは,少し異なっ
ている。標準寸法は,一つに決める必要
があるため,対応国際規格の寸法以外は,
我が国独自のコネクタを指定することに
よって使用することとした。
11.2.4可と
うコードの
シース
付加絶縁として認め
る可とうコードのシ
ース
11.2.4
JISとほぼ同じ
追加
対応国際規格では,付加絶縁として
認める可とうコードのシースは,
IEC規格による電線以上のシース
としているが,この規格では,我が
国固有の電線のシースも付加絶縁
として認め,注記を追加した。
我が国はIEC規格による電線と我が国固
有の電線との寸法が両方存在するので,
対応国際規格に追加して我が国固有の電
線寸法を考慮する必要がある。
2
6
C
9
7
3
0
-1
:
2
0
1
9
249
C 9730-1:2019
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異の理由
及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
11.6.3.2
電線管引込口をもつ
制御装置の引込口寸
法
11.6.3.2 JISとほぼ同じ
追加
対応国際規格では,電線管引込口を
もつ制御装置の引込口寸法として
IEC 60423を引用しているが,JIS C
8305(我が国固有の電線管規格)も
必要であるため,追加した。
我が国は対応国際規格による電線管と我
が国固有の電線管との寸法が両方存在す
るため,対応国際規格に追加して我が国
固有の電線管寸法を考慮する必要があ
る。
11.8.1
電源電線の特性
11.8.1
JISとほぼ同じ
追加
この規格では,旧省令1項による電
線を認めるが,シース付きに限定
し,その旨を追加した。
我が国固有の電線を認めた。ただし,ク
ラス0制御装置はこの規格では認めない
ので,二重絶縁相当のシース付き電線に
限定した。
11.8.2
使用電線の公称断面
積
11.8.2
JISとほぼ同じ
追加
この規格では,我が国固有の電線断
面積の許容電流として我が国の内
線規程を引用し,追加した。
対応国際規格の表10の電線断面積は我が
国の内線規程の許容電流に対応していな
いため,安全上,我が国固有の電線につ
いては従来の許容電流を用いることとし
た。
11.9.4
X形取付け以外の電
線挿入口の絶縁
11.9.4
JISとほぼ同じ
削除
この規格では,クラス0制御装置及
びクラス0I制御装置を削除した。
対応国際規格のクラス0制御装置及びク
ラス0I制御装置に対する要求事項が不十
分であり,安全上の問題から,この規格
では認めないこととした。
IECへの提案を検討する。
13.2.1
表12
注d)
耐電圧試験電圧
13.2.1
表12
注d)
JISとほぼ同じ
削除
この規格では,クラス0I制御装置
を削除した。
対応国際規格のクラス0I制御装置に対す
る要求事項が不十分であり,安全上の問
題から,この規格では認めないこととし
た。
IECへの提案を検討する。
13.3.2
漏えい電流試験の試
験電圧
13.3.2
JISとほぼ同じ
変更
この規格では,三相機器の試験電圧
も単相機器と同じく,定格電圧の
1.06倍とする(IEC規格は,定格電
圧の1.06倍を√3で除した電圧)た
め変更した。
対応国際規格は,三相機器の試験電圧と
してスター結線を意図しており,我が国
の標準であるデルタ結線が考慮されてい
ない。
2
6
C
9
7
3
0
-1
:
2
0
1
9
250
C 9730-1:2019
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異の理由
及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
13.3.4
漏えい電流試験限度
値
13.3.4
JISとほぼ同じ
削除
この規格では,クラス0制御装置及
びクラス0I制御装置の規定を削除
した。
対応国際規格のクラス0制御装置及びク
ラス0I制御装置に対する要求事項が不十
分であり,安全上の問題から,この規格
では認めないこととした。
14
表13
温度上昇
14
表13
JISとほぼ同じ
変更
この規格では,表13において,例
示されていない材料及び対応国際
規格による電線以外の温度限度デ
ータに電気用品の技術上の基準を
定める省令の解釈の絶縁材料温度
上限値を適用できるようにした。
対応国際規格では絶縁材料の温度上限値
が不明確なものがあり,そのような絶縁
物は対応国際規格に基づく確認試験が必
要と考えられるが,我が国では材料の温
度上限値登録制度があり,これを活用で
きるようにした。
20.1
表21
商用主電源から直接
給電される機器のた
めの定格インパルス
電圧
20.1
表21
JISとほぼ同じ
変更
三相4線系統及び単相系統の公称
電圧を変更した。
我が国の機器の公称電圧に合わせた。
23.1
電磁両立性(EMC)
要求事項−エミッシ
ョン
23.1
JISとほぼ同じ
変更
一体形及び組込形制御装置につい
ての要求を本文から注記に変更し
た。
対応国際規格では,既に本文において,
一体形及び組込形制御装置を除いてお
り,再度,本文で規定するのは矛盾があ
るため,この規格では,注記とした。
IECへの提案を検討する。
JISとほぼ同じ
変更
対応国際規格では,a)でCISPR 14-1
の4.2.3.3を引用しているが,4.2.3.4
に変更した。
対応国際規格の誤記と思われる。
IECへの提案を検討する。
JISとほぼ同じ
削除
対応国際規格の“b)又はc)の方法に
よる適合性は,a)の方法に対する適
合性を示す。”の記述を削除した。
この記述の必要性が判明できず,また誤
解を生じる可能性があるため,削除した。
IECへの提案を検討する。
図27
図28
三相電源に対する漏
えい電流試験回路
図27
図28
JISとほぼ同じ
変更
この規格ではN極をスター結線の
中性極又はデルタ結線の接地側極
に変更した。
我が国の三相電線は,スター結線又はデ
ルタ結線なので,N極はない。
2
6
C
9
7
3
0
-1
:
2
0
1
9
251
C 9730-1:2019
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異の理由
及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
表H.24
注i)
リレー接点の短絡故
障モード
表H.24
注i)
JISとほぼ同じ
変更
箇条17の基準に関する試験に合格
したリレーを除外した。
IEC 60730-2-5では,我が国はカナダ及び
米国と同じ対応をすることを提案し採用
されたため,IEC 60730-2-5に対応するJIS
C 9730-2-5に合わせた。
JISと国際規格との対応の程度の全体評価:(IEC 60730-1:2013及びAmd.1:2015,MOD)
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
2
6
C
9
7
3
0
-1
:
2
0
1
9