C 8963:2011
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 2
4 試験回路························································································································· 3
4A 測定項目 ······················································································································ 5
5 試験装置························································································································· 5
5.1 測定機器 ······················································································································ 5
5.2 直流電源 ······················································································································ 5
5.3 交流電源 ······················································································································ 6
5.4 負荷装置(RASC) ·········································································································· 6
6 試験方法························································································································· 7
6.1 試験手順 ······················································································································ 7
6.1A 負荷条件 ···················································································································· 8
6.1B 単独運転時間測定方法 ·································································································· 9
6.2 判定条件 ······················································································································ 9
7 試験結果及び試験設備の記載例 ·························································································· 10
附属書JA(参考)複数台(2〜3台)のパワーコンディショナを設置する場合の試験方法·················· 12
附属書JB(参考)JISと対応国際規格との対比表 ······································································ 19
C 8963:2011
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般社団法人日本電機工業会(JEMA)から,
工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,経
済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格
JIS
C 8963:2011
系統連系形太陽光発電システム用
パワーコンディショナの単独運転検出機能の
試験方法
Test procedure of islanding detection measures for utility-interconnected
photovoltaic inverters
序文
この規格は,2008年に第1版として発行されたIEC 62116を基とし,技術的内容を変更して作成した日
本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JBに示す。また,附属書JAは対応国際規格にはない事項であ
る。
1
適用範囲
この規格は,次の項目に該当する系統連系形太陽光発電システム用パワーコンディショナ(以下,パワ
ーコンディショナという。)の単独運転検出機能の試験方法について規定する。
a) 交流定格出力 10 W以上で100 W未満の場合
1) 直流入力電圧 30 V以上,750 V以下
2) 交流出力電圧 30 V以上,600 V以下
b) 交流定格出力 100 W以上で20 kW未満の場合
1) 直流入力電圧 750 V以下
2) 交流出力電圧 600 V以下
c) 運転形態 配電線へ系統連系運転するもの。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 62116:2008,Test procedure of islanding prevention measures for utility-interconnected
photovoltaic inverters(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS C 8905 独立形太陽光発電システム通則
2
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS C 8960 太陽光発電用語
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS C 8905及びJIS C 8960によるほか,次による。
3.1
(対応国際規格のこの用語及び定義は,引用JISにあるため削除した。)
3.1A
多入力形パワーコンディショナ
複数の直流入力回路をもつパワーコンディショナ。
3.2
EUT(Equipment Under Testing)
供試機器。インバータ機能及び単独運転検出機能をもち,それらの性能を試験する。
3.2A
並列
太陽光発電システムを系統に接続すること。
3.2B
解列
太陽光発電システムを系統から切り離すこと。
3.2C
連系
太陽光発電システムが系統へ並列する時点から解列する時点までの状態。
3.3
(対応国際規格のこの用語及び定義は,引用JISにあるため削除した。)
3.4
(対応国際規格のこの用語及び定義は,この規格にないため削除した。)
3.5
(対応国際規格のこの用語及び定義は,引用JISにあるため削除した。)
3.6
(対応国際規格のこの用語及び定義は,この規格にないため削除した。)
3.6A
受動的方式
太陽光発電システムが単独運転に移行したときに生じる周波数などの変化を検出して,単独運転状態を
検出する方式。
3.6B
能動的方式
太陽光発電システムの有効電力出力又は無効電力出力にパワーコンディショナが常時から変動を与えて
おくことによって,太陽光発電システムが単独運転に移行したときに生じる周波数などの変化を検出する
ことで,単独運転状態を検出する方式。
3
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.7
クオリティファクタ(Qf)(quality factor)
単独運転防止機能試験に用いる並列共振回路の共振曲線の鋭さを表す係数。次の式で定義する。
注記 この用語及び定義の“並列”は,電気回路で部品を並列接続することを指し,3.2Aの“並列”
とは定義が異なる。
L
C
R
Q=
f
ここに,
Qf: クオリティファクタ
R: 抵抗負荷(Ω)
C: 容量性負荷(F,シャント容量も含む。)
L: 誘導性負荷(H)
なお,システムの有効電力,誘導性負荷容量及び容量性負荷容量によって,次のようにQfを決定するこ
ともできる。
qC
qL
f
1
P
P
P
Q=
ここに,
P: 有効電力(W)
PqL: 誘導性負荷容量(Var)
PqC: 容量性負荷容量(Var)
3.8
単独運転時間(run-on time)
単独運転を開始してからパワーコンディショナを解列するまでの時間。
3.9
ゲートブロック信号(stopping signal)
主回路パワースイッチング素子(IGBTなど)のドライバに対し,主回路パワースイッチング素子をオ
フ(連系保護検知,その他の異常検知,運転スイッチのオフなどの場合)にする信号。
3.10
(対応国際規格のこの用語及び定義は,この規格にないため削除した。)
4
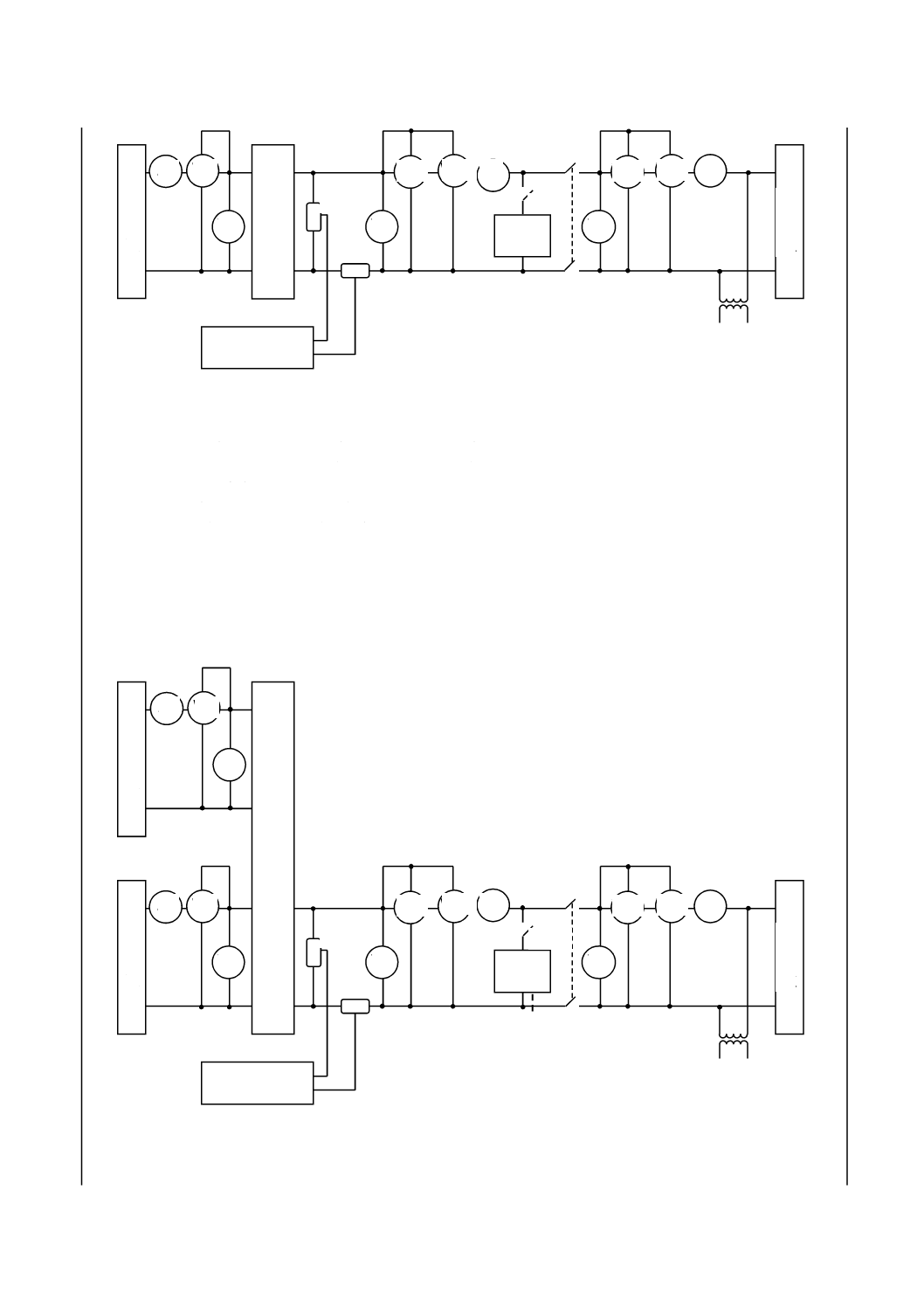
試験回路
試験回路は,単一入力形の場合は図1,多入力形の場合は図1Aを用いる。
なお,図1及び図1Aは,単相2線式交流出力の場合の標準試験回路を示したもので,単相3線式及び
三相の場合は,これに準じる。他の試験回路を適用する場合は,受渡当事者間の協定による。
4
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
VD:直流電圧計
VP:交流電圧計
VN:交流電圧計
AD:直流電流計
AP:交流電流計
AN:交流電流計
WD:直流電力計
WAP:有効電力計
WAN:有効電力計
WRP:無効電力計
WRN:無効電力計
VT:電圧変成器
SWCB:開閉器
CT:変流器
SWLD:負荷装置用開閉器
RASC:負荷装置(回転機負荷を含む。)
Tr:変圧器(第3次高調波検出装置の場合に限る。)
EUT:供試機器(パワーコンディショナ)
図1−パワーコンディショナの試験回路(単一入力の場合)
計器類の説明は図1参照。
図1A−パワーコンディショナの試験回路(多入力形の場合)
交
流
電
源
波形記録装置
直
流
電
源
EUT
AD WD
VD
VP
WAP WRP AP
RASC
VN
WRN AN
WAN
VT
CT
SWCB
SWLD
Tr
AD WD
VD
直
流
電
源
交
流
電
源
波形記録装置
直
流
電
源
EUT
AD WD
VD
VP
WAP WRP AP
RASC
VN
WRN AN
WAN
VT
CT
SWCB
SWLD
Tr
5
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4A 測定項目
単独運転検出機能の試験に必要な測定項目は,表1による。
表1−測定項目
パラメータ
記号
単位
EUT 直流入力a),b)
直流電圧
直流電流
直流電力
日射強度c)
V1
A1
W1
G
V
A
W
W・m−2
EUT 交流出力
交流電圧b),d),e)
交流電流b),d),e)
有効電力b)
無効電力b)
電圧波形 d),e),f),g)
電流波形d),e),f),g)
リレー信号d)
単独運転時間
ゲートブロック信号h)
V2
A2
We
Wr
−
−
−
tR
SS
V
A
W
Var
−
−
−
s
−
系統側交流電源b)
系統側交流電圧b),d),e)
系統側交流電流b),d),e)
系統側有効電力
系統側無効電力
V3
A3
We
Wr
V
A
W
Var
注a) 記録の必要がある場合に測定する。
b) 測定は,SWCB開放前から行う。
c) 日射計は,太陽電池アレイを使用して試験を行う場合に使用するもので,熱電対形式ではなくシ
リコン形式の高速性能をもつものを使用する。
d) 電圧及び電流の測定に使用するトランスデューサは,サンプリングレートが同じものを使用する。
e) 電圧及び電流の波形測定は,単相2線式を除き,各相を測定する。
f) 波形データの測定は,単独運転試験前からEUTの出力がなくなるまで行う。時間測定の精度及び
分解能は,1 ms以下とする。
g) 波形記録を行う場合は,SWCBの開放信号の直前から開始する。
h) EUTから信号が記録できる場合に適用する。
5
試験装置
5.1
測定機器
試験に使用する測定機器類は,アナログ計器若しくはデジタル計器のいずれか,又は併用とする。測定
器の確度は,波形記録装置を除き0.5級以上とする。波形記録装置は,1級以上とする。必要であれば他の
測定器(オシロスコープなど)を適宜併用する。
5.2
直流電源
5.2.0A 直流電源の種類
直流電源は,太陽電池アレイ模擬電源装置又は太陽電池アレイを使用する。
なお,上記電源を準備できない場合は,定電圧直流電源装置を使用してもよい。
5.2.1
太陽電池アレイ模擬電源装置
太陽電池アレイ模擬電源装置は,次による。
6
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 太陽電池アレイ模擬電源装置は,所定の太陽電池アレイ出力特性を模擬するもので,任意の日射強度
及び任意の素子温度に相当する太陽電池アレイの電流−電圧特性を示すように出力調整が可能で,パ
ワーコンディショナの過入力耐量に相当する出力電力が得られなければならない。
b) 直流電源に太陽電池アレイ模擬電源装置を使用する場合は,次の要求を満足しなければならない。
1) パラメータ 太陽電池アレイの構成は,EUTが太陽光発電システムの一部として機能するために推
奨する太陽電池アレイのパラメータ(短絡電流,開放電圧,フィルファクタなど)を模擬できなけ
ればならない。
2) 応答性能 太陽電池アレイ模擬電源装置の応答速度は,1×10−3秒以下とする。
注記 応答性能は,EUTの最大出力追従制御,及び太陽電池特性の電流−電圧特性において,直
流リプルなどの発生に影響があるため記載した。
3) 太陽電池アレイ特性の安定性 太陽電池アレイ特性は,EUTによる変化を除いて単独運転が継続し
ている間は出力が2 %以内で安定し続けなければならない。
(対応国際規格の表2は,この規格では本文に規定したため削除した。)
5.2.2
定電圧直流電源装置
定電圧直流電源装置は,次による。
a) 定電圧直流電源装置は,EUTの過入力耐量に相当する出力電力が得られ,かつ,指定する範囲で出力
電圧を変化できなければならない。
b) 定電圧直流電源装置は,直列抵抗と組み合わせ,太陽電池アレイの電流−電圧特性を示すように出力
調整が行えなければならない。
(対応国際規格の表2は,この規格では本文に規定したため削除した。)
5.2.3
太陽電池アレイ
太陽電池アレイは,次による。
a) 太陽電池アレイは,EUTの定格交流出力を,継続的かつ安定に出力できなければならない。
なお,試験開始から終了までの太陽電池出力変動は,2 %以下とする。
b) 太陽電池アレイの構成は,EUTが定格交流出力を安定に出力できる仕様範囲内となるように組み合わ
せた構成とする。
(対応国際規格の表3は,この規格では本文に規定したため削除した。)
5.3
交流電源
交流電源は,系統電源を模擬するもので,EUTの出力又は運転力率によらずに,設定した電圧及び周波
数を維持し,安定的に供給できなければならない。
なお,交流電源を交流模擬電源装置で代用する場合は,試験開始から終了までの間について,次に示す
要求事項を満足する電源装置を用いる。
a) 電圧 EUTの定格電圧の±1 V以内とする。
b) 周波数 EUTの定格周波数の±0.1 Hz以内とする。
c) 相間位相 相間の基本波電圧の位相は,単相3線式の場合,180°±1.5°,三相3線式の場合,120°
±1.5°とする。
d) 高調波 交流電圧の総合電圧ひずみ率は,2.5 %以下とする。
(対応国際規格の表4は,この規格では本文に規定したため削除した。)
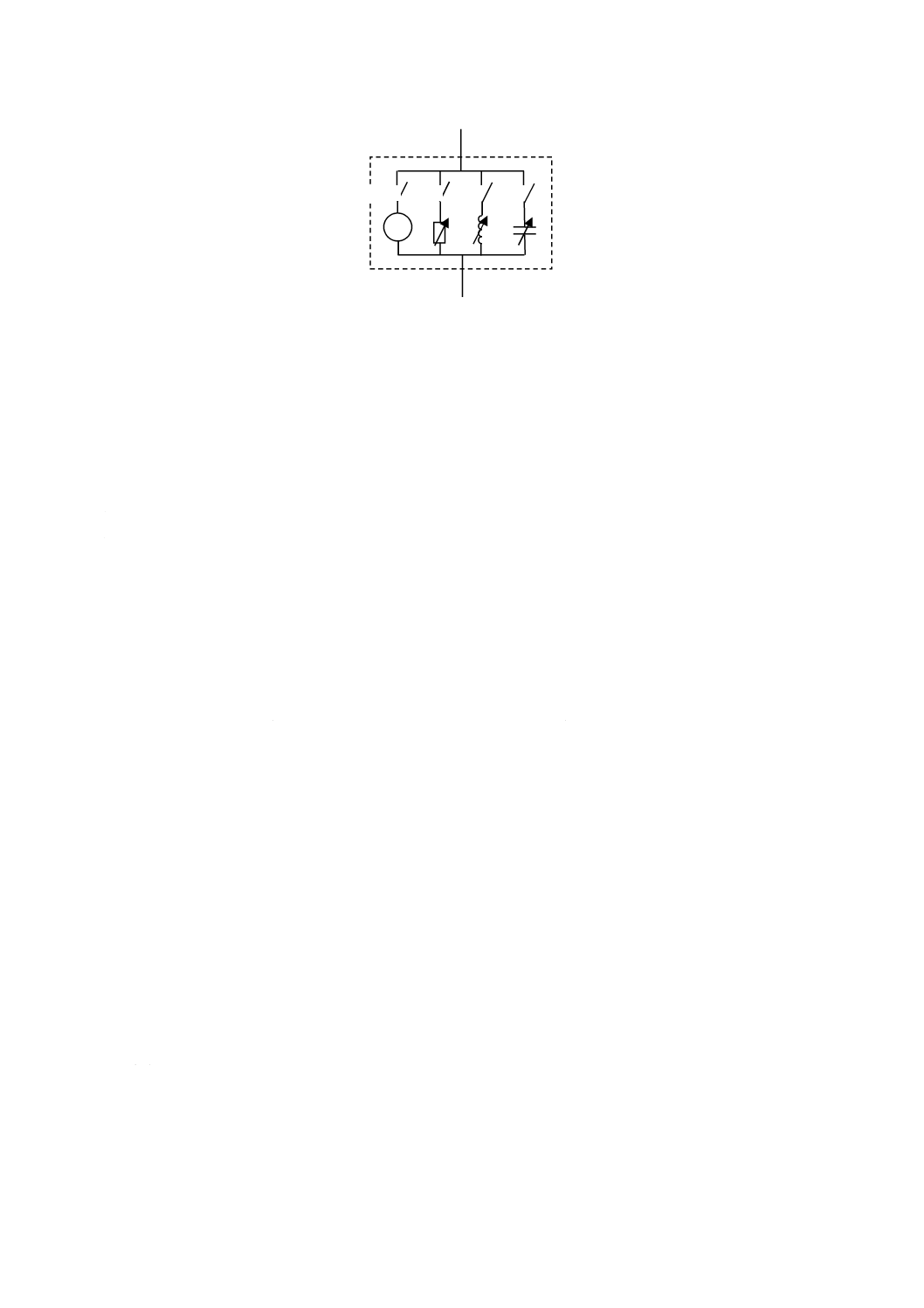
5.4
負荷装置(RASC)
負荷装置は,図1Bに示す,抵抗負荷,回転機負荷及び共振回路負荷の3種類とする。それぞれの構成

7
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
要素は,次を満足しなければならない。
a) 各負荷装置に使用する抵抗性負荷,誘導性負荷及び容量性負荷は,線形負荷とする。
b) 各負荷装置は,EUTの定格出力に相当する電力を消費し,かつ,所定の範囲で有効電力及び無効電力
を可変できなければならない。
c) EUTの電気方式が単相3線式及び三相3線式出力の場合は,それぞれの相間に負荷を挿入する。ただ
し,EUTの電気方式が単相2線式であって,単相3線式の系統に接続する場合は,単独運転検出機能
上問題がなければ,電圧相間に負荷を接続できる。
なお,これ以外の負荷装置を使用する場合は,受渡当事者間の協議による。
d) 回転機負荷で使用する回転機は,フライホイールなどの慣性のある誘導電動機を用いる。
なお,慣性モーメントは,0.015 kg・m−2程度とする。
a) 抵抗負荷
b) 回転機負荷
c) 共振回路負荷
M:回転機
R:抵抗性負荷
L:誘導性負荷
C:容量性負荷
SWM,SWR,SWL,SWC:開閉器
図1B−負荷装置RASC
6
試験方法
6.1
試験手順
試験手順は,次による。
(対応国際規格の表5は,この規格では適用しないため削除した。)
a) 試験回路は,箇条4による。
b) 5.3に規定する交流模擬電源装置は,定格電圧及び定格周波数で運転する。
c) EUTの出力は,定格出力(100 %)となるように設定する。ただし,定格出力以外[例えば,定格出
力の1/2(50 %),定格出力の1/4(25 %)など]で行う場合は,受渡当事者間の協議による。
d) 最初に,図1B a)に示す抵抗負荷で試験を行う。負荷条件は,6.1A.1の抵抗負荷の条件とする。
e) 引き続き,図1B b)に示す回転機負荷又は図1B c)に示す共振回路負荷のいずれかで試験を行う。負荷
条件は,回転機負荷の場合は6.1A.2,共振回路負荷の場合は6.1A.3とする。
f)
単独運転検出機能以外の保護機能の設定は,工場出荷時の整定値とする。
なお,試験実施中に単独運転検出機能以外の保護装置が動作する場合は,それらの検出機能を無効,
又は検出値を最も検出しにくくなる値にすることができる。ただし,その場合は,無効又は最も検出
しにくくなる値にした保護機能を試験結果リスト(表9参照)に記載する。
g) 単独運転検出機能の試験は,表1Aに示す3通りのそれぞれについて,a)〜f)の手順で行う。
R
C
L
SWC
SWL
SWR
R
SWR SWL
SWC
M
L
C
SWM
R
SWR
8
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1A−単独運転検出機能の方式の組合せ
受動的方式だけ
検出方式の組合せ
能動的方式だけ
受動的方式と能動的方式との組合せ
6.1A 負荷条件
6.1A.1 抵抗負荷
図1B a)に示す抵抗負荷を使用して,次の手順で試験を行う。
a) 図1B a)のSWRを投入し,図1及び図1Aに示すSWLDを投入して,抵抗性負荷Rを接続する。
b) EUTが6.1 c)で規定した出力となり,図1又は図1Aに示す有効電力計WANが表1Bに示す値となるよ
うに,抵抗性負荷Rを調整する。この状態で,単独運転時間を6.1Bに規定する方法によって測定す
る。測定後,SWCBを閉路する。
なお,0 %は平衡負荷条件に対応し,それ以外は抵抗負荷による不平衡負荷条件に対応している。
表1B−抵抗負荷の設定
有効電力の比
(%)
−10
−5
0
+5
+10
表中の値は,EUTの定格出力電力に対する有効電力の比(%)。
符号は,交流電源からEUTへの有効電力の潮流を正とする。
6.1A.2 回転機負荷
図1B b)に示す回転機負荷を使用して,次の手順で試験を行う。
a) 図1B b)に示すSWMを投入し,図1又は図1Aに示すSWLDの投入によって5.4 d)で規定した回転機M
を負荷として接続する。
b) 回転機負荷を無負荷運転状態とする。
c) 図1B b)に示すSWRを投入し,抵抗性負荷Rを接続する。抵抗性負荷Rは,図1及び図1Aに示す有
効電力計WANの示す値がほぼ0となるように設定する。
d) 次に,図1B b)に示すSWL及びSWCを投入し,誘導性負荷L及び容量性負荷Cを接続する。誘導性負
荷L又は容量性負荷Cは,図1及び図1Aに示す無効電力計WRNの示す値がほぼ0となるように設定
する。
e) 次に,抵抗性負荷R,誘導性負荷L及び容量性負荷Cを調整して,図1及び図1Aに示す有効電力計
WAN及び無効電力計WRNの示す値が表6に示す負荷条件となるよう設定する。この状態で,単独運転
時間を6.1Bに規定する方法によって測定する。測定後,SWCBを閉路する。
6.1A.3 共振回路負荷
図1B c)に示す共振回路負荷を使用して,次の手順で試験を行う。
a) クオリティファクタ(Qf)が1.0となるよう,式(1)によって誘導性負荷容量(PqL)を算出する。
PqL=Qf・PEUT ··········································································· (1)
ここに,
PqL: 誘導性負荷容量(Var)
PEUT: EUTの定格出力容量(W)
Qf: 1.0
9
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
b) 図1B c)に示すSWLを投入し,更に図1及び図1Aに示すSWLDを投入することによって,式(1)で算出
した誘導性負荷容量PqLとなるように誘導性負荷Lを調整する。
c) 次に図1B c)に示すSWCを投入し,容量性負荷Cを接続する。容量性負荷Cは,図1及び図1Aに示
す無効電力計WRNの値が表6に示す負荷条件となるよう設定する。
d) 次に図1B c)に示すSWRを投入し,抵抗性負荷Rを接続する。抵抗性負荷Rは,EUTの出力が定格出
力となり,図1及び図1Aに示す有効電力計WANの値が表6に示す負荷条件となるよう設定する。こ
の状態で,単独運転時間を6.1Bに規定する方法によって測定する。測定後,SWCBを閉路する。
表6−負荷条件設定(有効電力,無効電力)
単位 %
−10, +10
−5, +10
0,
+10
+5, +10
+10, +10
−10, +5
−5, +5
0,
+5
+5, +5
+10, +5
−10, 0
−5, 0
0,
0
+5, 0
+10, 0
−10, −5
−5, −5
0,
−5
+5, −5
+10, −5
−10, −10
−5, −10
0,
−10
+5, −10
+10, −10
表中の値は,EUTの定格出力電力に対する有効電力及び無効電力の比(%)。符号は,
交流電源からEUTへの有効電力及び無効電力(遅れ)の潮流を正とする。
(対応国際規格の表7は,この規格では適用しないため削除した。)
6.1B 単独運転時間測定方法
試験回路(図1又は図1A参照)のSWCBを開路し,SWCBを開路したときからEUTのゲートブロック機
能又は開閉器が動作するまでの時間を測定する。
6.2
判定条件
判定条件は,表1Aの組合せのそれぞれの場合について,次のとおりとする。
a) 受動的方式 6.1の試験手順g)において単独運転検出方式を受動的方式に設定した場合は,単独運転
時間を0.5 秒以下とする。通常は,ゲートブロック信号による解列で確認する。
なお,受動的方式は,一般に高速性に優れているが,不感帯領域がある点,急激な負荷変動などに
よる頻繁な不要動作を避けることに留意する必要がある。
b) 能動的方式 6.1の試験手順g)において単独運転検出方式を能動的方式に設定した場合は,単独運転
時間を0.5 秒以上1 秒以下とする。通常は,ゲートブロック機能の動作又は開閉器の開放による解列
で確認する。
c) 受動的方式と能動的方式との組合せ 6.1の試験手順g)において単独運転検出方式を受動的方式と能
動的方式との組合せに設定した場合は,EUTが単独運転を能動的方式によって検出したときの単独運
転時間を0.5 秒以上1 秒以下とする。通常は,ゲートブロック機能の動作又は開閉器の開放による解
列で確認する。
EUTが単独運転を受動的方式によって検出した場合の単独運転時間を0.5秒以下とする。通常は,
ゲートブロック信号による解列で確認する。
なお,受動的方式だけで行った試験において単独運転となった領域(不感帯領域)については,こ
の組合せにおいて解列することを確認する。
10
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7
試験結果及び試験設備の記載例
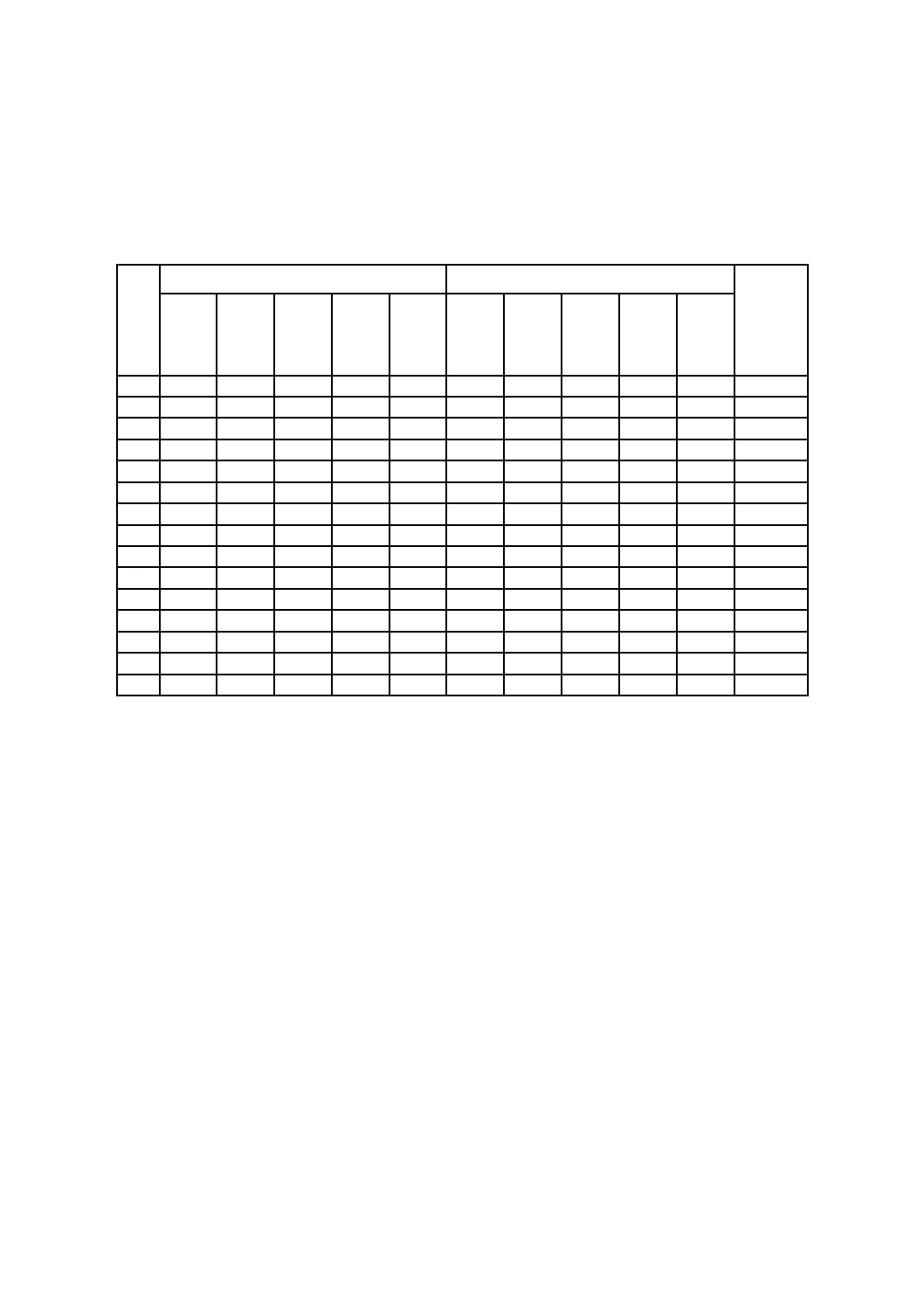
試験結果は試験結果リストとして記録する。試験結果リストの例を,表9に示す。
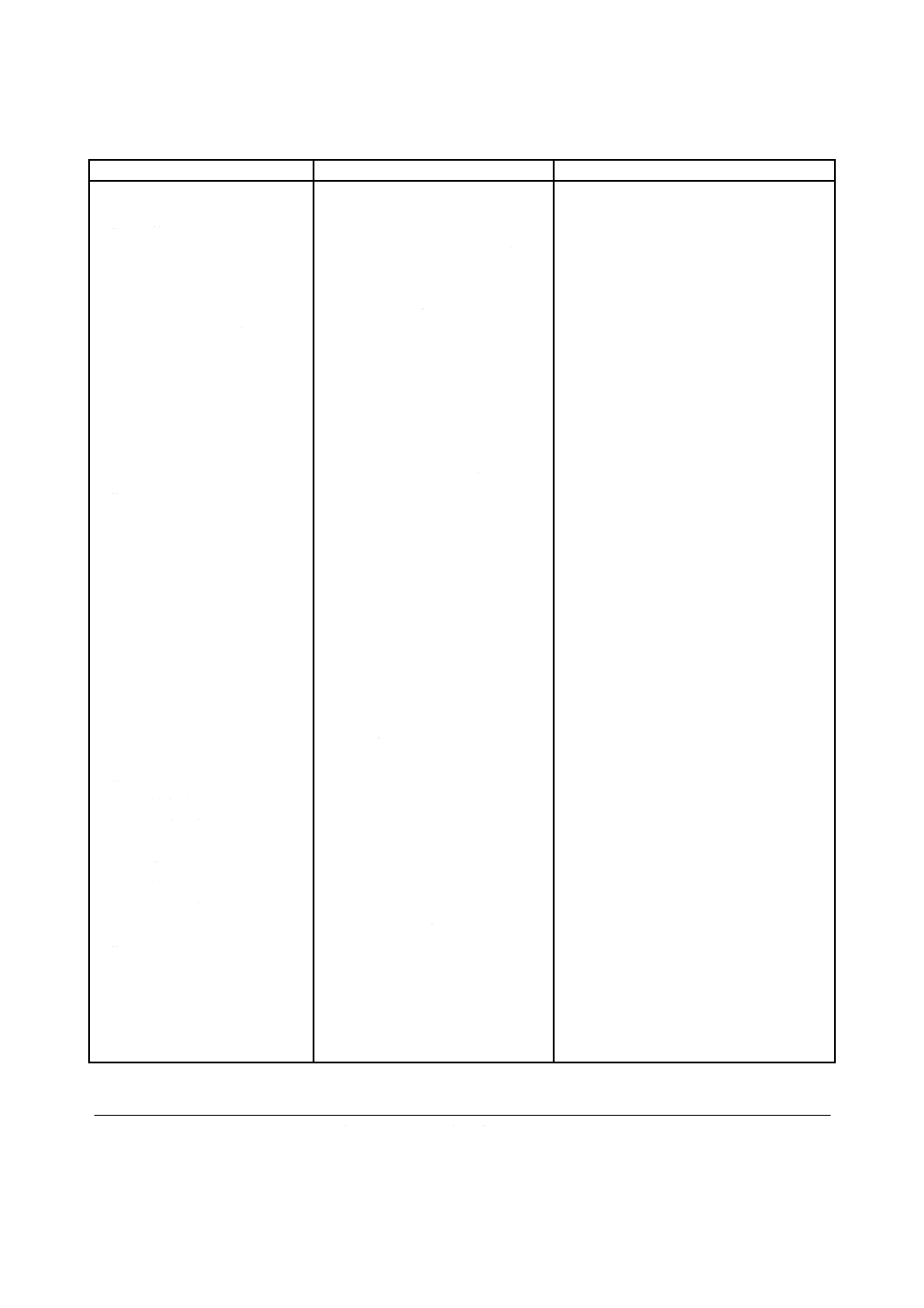
また,試験設備の仕様の表示例を,表10に示す。
(対応国際規格の表8は,この規格では適用しないため削除した。)
表9−試験結果リストの例
試験番号
有効電力の比
(%)
無効電力の比
(%)
単独運転時間
(ms)
インバータ
出力有効電力
P
(W)
インバータ
出力無効電力
Q
(Var)
備考
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
11
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表10−試験設備の仕様例
設備
仕様
備考
a) 直流側電源又は太陽電池アレイ
模擬電源装置(EUT直流入力)
1) 開放電圧
0.0〜400.0 V(0.1 Vステップ)
2) 短絡電流
0.0〜30.0 A(0.1 Aステップ)
b) 交流側電源(EUT交流出力)
1) 単相/三相
単相○線式,三相○線式
2) 出力容量
kVA
3) 出力電圧範囲(実効値)
0〜220 V(0.2 V)
4) 周波数範囲(安定度)
5 Hz〜1 100 Hz(0.01 Hz)
5) 電圧精度(安定度)
±0.01 %/℃(代表値)
8 h当たり±0.01 %(代表値)
6) 電圧ひずみ
最大0.05 %
c) デジタルメータ
1) 電圧レンジ
15/30/60/150/300/600 V
2) 電流レンジ
0.5/1/2/5/10/20 A
3) 周波数レンジ
DC,10 Hz〜50 kHz(0.5 %)
4) 測定項目
電圧(V)
電流(A)
有効電力(W)
無効電力(Var)
皮相電力(VA)
力率(%)
周波数(Hz)
電力量(Wh)
d) 波形測定器
1) サンプリング速度
100 kHz サンプリング
2) 記録装置
オシロスコープ
3) 時間精度
±0.05 %(代表値)
e) 交流負荷
1) 抵抗性負荷
最大電圧
電流設定範囲
電力容量
250 V(DC or AC)
2.5〜50 A,(0.3 Ωステップ)
10 kVA
2) 誘導性負荷
最大電圧
電流設定範囲
電力容量
250 V(DC or AC)
2.5 〜 50 A
10 kVA
3) 容量性負荷
最大電圧
電流設定範囲
電力容量
200 V
0.2 〜 50 A
10 kVA
4) 電動機負荷(回転機)
慣性モーメント0.015 kg・m2程度
の誘導電動機負荷。
フライホイールとして直径205 mmのと石
を装備する,650 Wのグラインダを想定。
12
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
複数台(2〜3台)のパワーコンディショナを設置する場合の試験方法
JA.1 一般
この附属書では,太陽光発電システムの系統連系システムにおいて,複数台(2〜3 台)のパワーコンデ
ィショナを設置する場合の単独運転検出機能の試験方法について記載する。この試験方法は,一般社団法
人日本電機工業会が提案し,参加のメーカが実施してきたが,技術の進展・太陽光発電システムの普及状
況などを勘案しつつ,今後の改正に合わせて規定することを想定して記載するもので,規定事項ではなく
参考事項である。
この試験方法の考え方は,次のとおりである。
この試験の対象であるパワーコンディショナは,一般財団法人電気安全環境研究所(JET)の認証登録
品,又はその相当品とし,基本的な性能は保証されていることを前提とする。また,ここでは,パワーコ
ンディショナを複数台(2〜3台)並列運転させたときの,能動的方式による単独運転検出について,試験
を実施する。
なお,試験方法は,JETの“小形太陽電池発電システム系統連系保護装置等の試験方法”による。
JA.2 適用範囲
この附属書は,次の項目に該当する太陽光発電システム用系統連系形パワーコンディショナの,複数台
(2〜3台)の場合の単独運転検出機能の試験方法について記載する。対象となるパワーコンディショナは,
この規格の本体の単独運転検出試験(単機での試験)に合格していなければならない。
a) 交流定格出力 10 W以上で100 W未満の場合
1) 直流入力電圧 30 V以上,750 V以下
2) 交流出力電圧 30 V以上,600 V以下
b) 交流定格出力 100 W以上で20 kW未満の場合
1) 直流入力電圧 750 V以下
2) 交流出力電圧 600 V以下
c) 運転形態 配電線へ系統連系運転するもの。
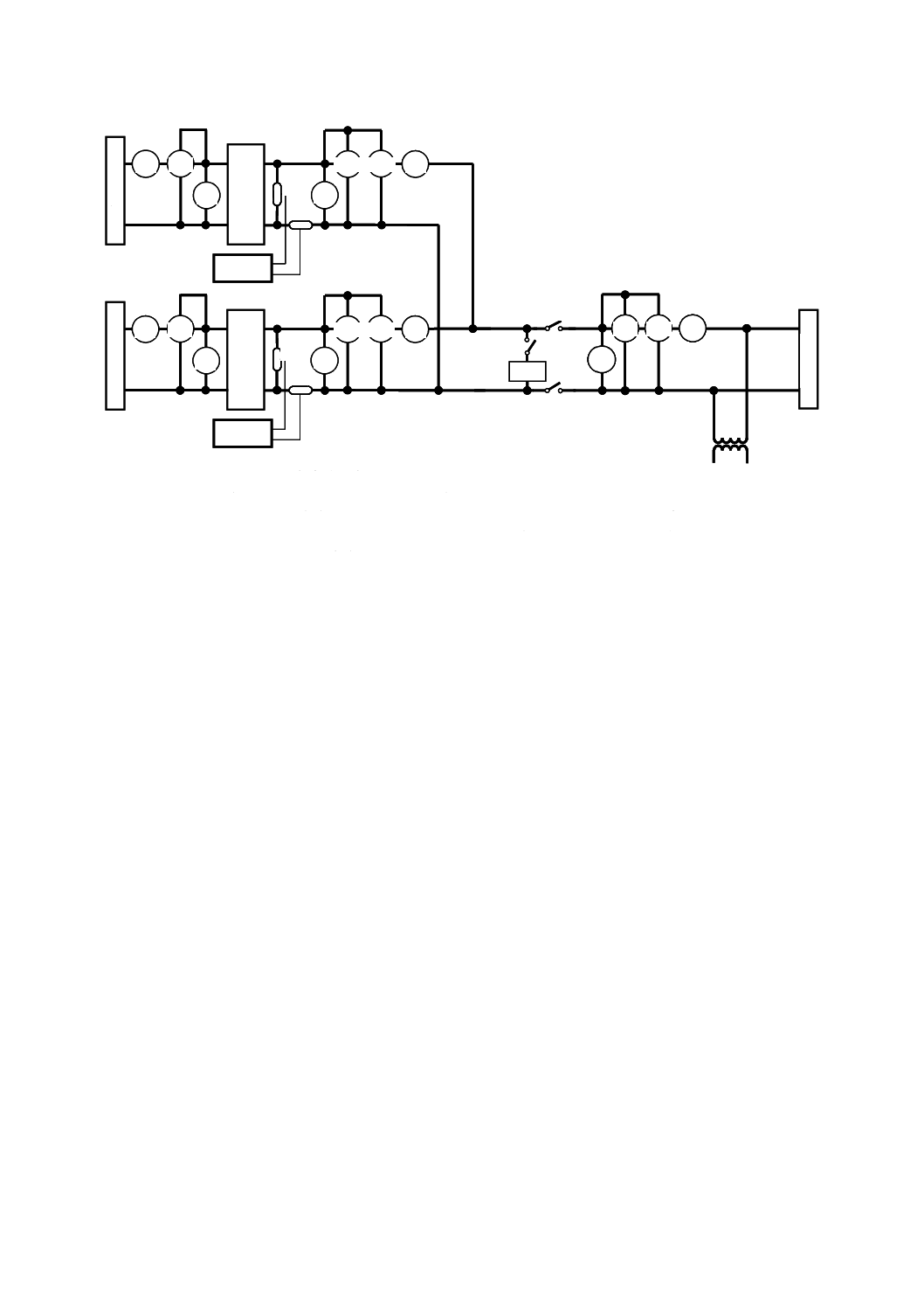
JA.3 試験回路
パワーコンディショナが複数台(2〜3台)の場合の試験回路を,図JA.1に示す。図JA.1は,2台の場
合を示す。
なお,多入力の場合は,図1Aと同様に,パワーコンディショナ入力の直流電源及び測定装置を追加す
る。
13
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
交
流
電
源
VN
AN
WAN
WRN
Tr
波形記録
直
流
電
源
EUT2
VD1
AD2
WD2
VP2
AP2
WAP2WRP2
RASC
VT2
CT2
波形記録
直
流
電
源
EUT1
VD1
AD1
WD1
VP1
AP1
WAP1WRP1
VT1
CT1
SWCB
SWLD
交
流
電
源
VN
VN
AN
AN
WAN
WAN
WRN
WRN
Tr
波形記録
直
流
電
源
EUT2
VD1
AD2
WD2
VP2
AP2
WAP2WRP2
RASC
VT2
CT2
波形記録
直
流
電
源
EUT1
VD1
AD1
WD1
VP1
AP1
WAP1WRP1
VT1
CT1
SWCB
SWLD
VD1, VD2:直流電圧計
VP1, VP2:交流電圧計
VN:交流電圧計
AD1, AD2:直流電流計
AP1, AP2:交流電流計
AN:交流電流計
WD1, WD2:直流電力計
WAP1, WAP2:有効電力計
WAN:有効電力計
WRP1, WRP2:無効電力計
WRN:無効電力計
VT1, VT2:電圧変成器
SWCB:開閉器
CT1, CT2:変流器
SWLD:負荷装置用開閉器
RASC:負荷装置
Tr:変圧器(第3次高調波検出装置の場合に限る。)
EUT1, EUT2:供試機器(パワーコンディショナ)
図JA.1−パワーコンディショナが複数台の単独運転検出装置の試験回路(2台の場合)
JA.4 測定項目
複数台(2〜3台)の単独運転検出機能の試験に必要な測定項目は,表JA.1による。
D2
14
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表JA.1−測定項目(EUT2台の例)
パラメータ
記号
単位
EUT 直流入力a),b)
直流電圧
直流電流
直流電力
日射強度c)
VD1, VD2
AD1, AD2
WD1, WD2
G
V
A
W
W・m−2
EUT 交流出力
交流電圧b), d), e)
交流電流b), d), e)
有効電力b)
無効電力b)
電圧波形d), e), f), g)
電流波形d), e), f), g)
リレー信号d)
単独運転時間
ゲートブロック信号h)
VP1, VP2
AP1, AP2
WAP1, WAP2
WRP1, WRP2
−
−
−
tR
SS
V
A
W
Var
−
−
−
s
−
系統側交流電源b)
系統側交流電圧b), d), e)
系統側交流電流b), d), e)
系統側有効電力
系統側無効電力
VN
AN
WAN
WRN
V
A
W
Var
注a) 記録の必要がある場合に測定する。
b) 測定は,SWCB開放前から行う。
c) 日射計は,太陽電池アレイを使用して試験を行う場合に使用するもので,熱電対形式ではなくシリコン形式
の高速性能をもつものを使用する。
d) 電圧及び電流の測定に使用するトランスデューサは,サンプリングレートが同じものを使用する。
e) 電圧及び電流の波形測定は,単相2線式を除き,各相を測定する。
f) 波形データの測定は,単独運転試験前からEUTの出力がなくなるまで行う。時間測定の精度及び分解能は,
1 ms以下とする。
g) 波形記録を行う場合は,SWCBの開放信号の直前から開始する。
h) EUTから信号が記録できる場合に適用する。
JA.5 試験装置
JA.5.1 測定機器
試験に使用する測定機器類は,アナログ計器若しくはデジタル計器のいずれか,又は併用とする。測定
器の確度は,波形記録装置を除き0.5級以上とする。波形記録装置は,1級以上とする。必要であれば他の
測定器(オシロスコープなど)を適宜併用する。
JA.5.2 直流電源
直流電源は,太陽電池アレイ模擬電源装置又は太陽電池アレイを使用する。
なお,複数台の場合には,それぞれのEUTの容量が異なることがあるので留意が必要である。
JA.5.2.1 太陽電池アレイ模擬電源装置
太陽電池アレイ模擬電源装置は,次による。
a) 太陽電池アレイ模擬電源装置は,所定の太陽電池アレイ出力特性を模擬するもので,任意の日射強度
及び任意の素子温度に相当する太陽電池アレイの電流−電圧特性を示すように出力調整が可能でなけ
ればならない。
b) 直流電源に太陽電池アレイ模擬電源装置を使用する場合は,次の要求を満足しなければならない。
1) パラメータ 太陽電池アレイの構成は,EUTが太陽光発電システムの一部として機能するために,
推奨する太陽電池アレイのパラメータ(短絡電流,開放電圧,フィルファクタなど)を模擬できな
15
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ければならない。
2) 応答性能 太陽電池アレイ模擬電源装置の応答速度は,1×10−3秒以下とする。
注記 応答性能は,EUTの最大出力追従制御,及び太陽電池特性の電流−電圧特性において,直
流リプルなどの発生に影響があるため記載した。
3) 太陽電池アレイ特性の安定性 太陽電池アレイ特性は,EUTによる変化を除いて単独運転が継続し
ている間は出力が2 %以内で安定し続けなければならない。
JA.5.2.2 太陽電池アレイ
太陽電池アレイは,次による。
a) 太陽電池アレイは,対象である複数台のEUTの定格交流出力の合計を,継続的かつ安定に出力できな
ければならない。
なお,試験開始から終了までの太陽電池の出力変動は,2 %以下とする。
b) 太陽電池アレイの構成は,対象である複数台のEUTの定格交流出力の合計を,安定に出力できる仕様
範囲内となるように組み合わせた構成とする。
JA.5.3 交流電源
交流電源は,系統電源を模擬するもので,EUTの出力又は運転力率によらずに,設定した電圧及び周波
数を維持し,安定的に供給できなければならない。
なお,交流電源を交流模擬電源装置で代用する場合は,試験開始から終了までの間について,次に示す
要求事項を満足する電源装置を用いる。
a) 電圧 EUTの定格電圧の±1 V以内とする。
b) 周波数 EUTの定格周波数の±0.1 Hz以内とする。
c) 相間位相 相間の基本波電圧の位相は,単相3線式の場合,180°±1.5°,三相3線式の場合,120°
±1.5°とする。
d) 高調波 交流電圧の総合電圧ひずみ率は,2.5 %以下とする。
JA.5.4 負荷装置RASC
負荷装置は,図JA.2に示すように,回転機負荷であり,その構成要素は次を満足しなければならない。
なお,複数台数の場合には,それぞれのEUTの容量が異なることがあるので留意が必要である。
a) 負荷装置に使用する抵抗性負荷,誘導性負荷及び容量性負荷は線形負荷とする。
b) 負荷装置は,EUTの定格出力に相当する電力を消費し,かつ,所定の範囲で有効電力及び無効電力を
可変できなければならない。
c) EUTの電気方式が単相3線式及び三相3線式出力の場合は,それぞれの相間に負荷を挿入する。ただ
し,EUTの電気出力が単相2線式であって,単相3線式の系統に接続する場合は,両端の相に負荷を
接続できなければならない。
なお,これ以外の負荷装置を使用する場合は,受渡当事者間の協議による。
d) 回転機負荷で使用する回転機は,フライホイールなどの慣性のある誘導電動機を用いる。
なお,慣性モーメントは0.015 kg・m−2程度とする。
16
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
M:回転機
R:抵抗性負荷
L:誘導性負荷
C:容量性負荷
SWM,SWR,SWL,SWC:開閉器
図JA.2−負荷装置(回転機負荷)RASC
JA.6 試験方法
JA.6.1 試験条件
試験手順は,次による。
a) 試験回路は,図JA.1による。また,図JA.2に示す回転機負荷を用いる。
b) 交流電源は,定格電圧及び定格周波数で運転する。
c) EUTの出力は,定格出力(100 %)となるように設定する。ただし,定格出力以外[例えば,定格出
力の1/2(50 %),定格出力の1/4(25 %)など]で行う場合は,受渡当事者間の協議による。
d) 単独運転検出の整定値(感度及び変動量)が出力に依存して変化する場合は,定格出力以外の整定値
においても実施し,その場合の他方のEUTの出力は,同様の割合にて低減する。ただし,連続的に整
定値が変化するなど多数の整定条件がある場合には定格出力の1/2程度で実施する。また,負荷条件
は,バランス条件とするが,1/2(50 %)以下の出力条件においては回転機負荷を省略する。
能動的方式だけの場合は,受動的方式をマスクし,保護継電器(OVR,UVR,OFR及びUFR)も
マスクするか,又は整定値を最も検出しにくくなる値として実施する。試験時間は,最大時間とする。
また,能動的方式の感度を整定できる場合はメーカ推奨値で実施する。
能動的方式と受動的方式とを併用する場合には,保護継電器(OVR,UVR,OFR及びUFR)はマ
スク又は整定値を最も検出しにくくなる値及び最大時間として実施する。また,能動的方式及び受動
的方式の感度を整定できる場合はメーカ推奨値で実施する。
e) 単独運転検出機能以外の保護機能の設定は,工場出荷時の整定値とする。
なお,試験実施中に単独運転検出機能以外の保護機能が動作する場合は,それらの検出機能を無効
にすることができる。ただし,その場合は,無効にした保護機能を表JA.2の記録に記載する。
f)
単独運転検出装置は,“能動的方式”又は“受動的方式と能動的方式との組合せ”だけで試験を行う。
JA.6.2 単独運転時間測定方法
試験回路(図JA.1参照)のSWCBを開路し,それぞれのEUTのゲートブロック機能又は開閉器が動作
するまでの時間を測定する。
JA.6.3 判定条件
判定条件は,次による。
a) 能動的方式 系統連系規程JEAC 9701-2006(p.50)の“多数台連系時は少なくとも5秒以内に発電設
備が停止・解列することが望ましい。”との記載に従い,5 秒以内の停止を確認する。
b) 受動的方式及び能動的方式 上記条件と同じとするが,1秒以内に解列する。
R
SWR SWL
SWC
M
L
C
SWM
17
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JA.7 試験結果及び試験設備の記載例
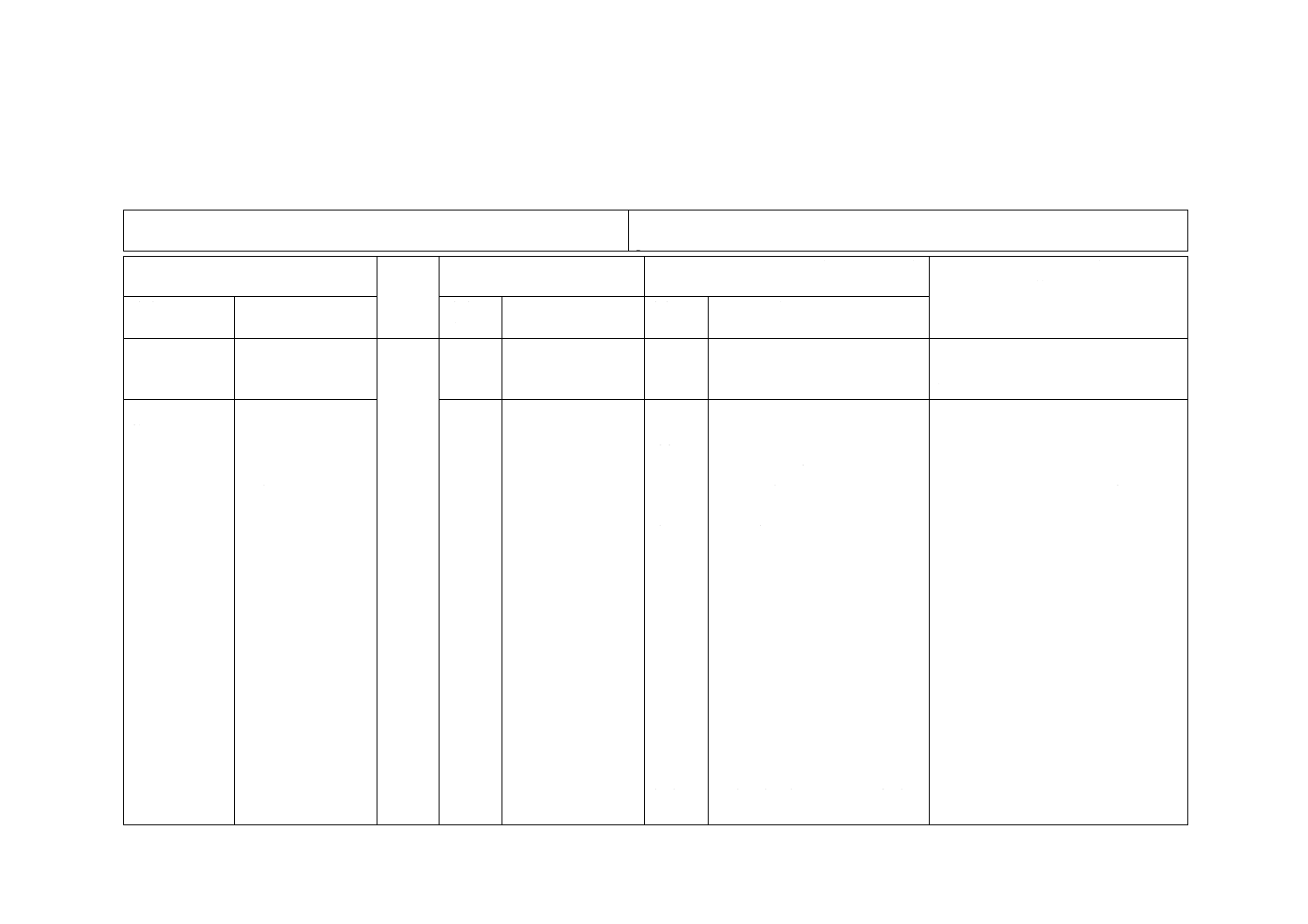
試験結果は,試験結果リストとして記録する。試験結果リストの例を,表JA.2に示す。
また,試験設備の仕様の表示例を,表JA.3に示す。
表JA.2−試験結果リストの例
試験
番号
EUT1
EUT2
備考
有効電
力の比
(%)
無効電
力の比
(%)
単独運
転時間
(ms)
EUT
出力有
効電力
P(W)
EUT
出力無
効電力
Q(Var)
有効電
力の比
(%)
無効電
力の比
(%)
単独運
転時間
(ms)
EUT
出力有
効電力
P(W)
EUT
出力無
効電力
Q(Var)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
18
C 8963:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表JA.3−試験設備の仕様例
設備
仕様
備考
a) 直流側電源又は太陽電池模擬
電源装置(EUT直流入力)
1) 開放電圧
0.0〜400.0 V(0.1 Vステップ)
2) 短絡電流
0.0〜30.0 A(0.1 Aステップ)
b) 交流側電源(EUT交流出力)
1) 単相/三相
単相○線式,三相○線式
2) 出力容量
kVA
3) 出力電圧範囲(実効値)
0〜220 V(0.2 V)
4) 周波数範囲(安定度)
5 Hz〜1 100 Hz(0.01 Hz)
5) 電圧精度(安定度)
±0.01 %/℃(代表値)
8 h当たり±0.01 %(代表値)
6) 電圧ひずみ
最大0.05 %
c) デジタルメータ
1) 電圧レンジ
15/30/60/150/300/600 V
2) 電流レンジ
0.5/1/2/5/10/20 A
3) 周波数レンジ
DC,10 Hz〜50 kHz(0.5 %)
4) 測定項目
電圧(V)
電流(A)
有効電力(W)
無効電力(Var)
皮相電力(VA)
力率(%)
周波数(Hz)
電力量(Wh)
d) 波形測定器
1) サンプリング速度
100 kHzサンプリング
2) 記録装置
オシロスコープ
3) 時間精度
±0.05 %(代表値)
e) 交流負荷
1) 抵抗性負荷
最大電圧
電流設定範囲
電力容量
250 V(DC or AC)
2.5〜50 A,(0.3 Ω ステップ)
10 kVA
2) 誘導性負荷
最大電圧
電流設定範囲
電力容量
250 V(DC or AC)
2.5〜50 A
10 kVA
3) 容量性負荷
最大電圧
電流設定範囲
電力容量
200 V
0.2〜50 A
10 kVA
4) 電動機負荷(回転機)
慣性モーメント0.015 kg・m2程度の
誘導電動機負荷。
フライホイールとして直径205 mmのと石
を装備する,650 Wのグラインダを想定。
参考文献 JEAC 9701-2006,系統連系規程,系統連系専門部会 編,社団法人日本電気協会,2006年6
月
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JB
(参考)
JISと対応国際規格との対比表
JIS C 8963:2011 系統連系形太陽光発電システム用パワーコンディショナの単
独運転検出機能の試験方法
IEC 62116:2008 Test procedure of islanding prevention measures for utility-interconnected
photovoltaic inverters
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差異の理
由及び今後の対策
箇条番号及び
題名
内容
箇条番
号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範囲
この規格の適用範囲
を規定
1
変更
適用範囲をJIS C 8980と同様と
した。
日本で配電線への系統連系として普及
している出力範囲を想定して,適用範
囲を,JIS C 8980と同様とした。
3 用語及び定
義
3.1A多入力形
パワーコンデ
ィショナ
3.2A 並列
3.2B 解列
3.2C 連系
3.6A 受動的方
式
3.6B 能動的方
式
多入力形パワーコン
ディショナの定義を
規定
3
−
−
−
−
−
−
3.1
3.3
3.4
3.5
−
−
−
−
−
−
PV array simulator
MPPT(Maximum
Power Point Tracking)
non-islanding inverter
island
追加
追加
追加
追加
追加
追加
削除
削除
削除
削除
多入力形パワーコンディショナ
は対応国際規格に項目はないが,
JISでは定義した。
並列,解列,連系,受動的方式及
び能動的方式は対応国際規格に
項目はないが,JISでは定義した。
対応国際規格のPVアレイシミュ
レータを削除した。
対応国際規格のMPPTを削除し
た。
対応国際規格のnon-islanding
inverterを削除した。
対応国際規格のislandを削除し
た。
日本では,直流入力が複数ある多入力
形パワーコンディショナを供給してい
るが,引用したJISでは規定していな
いため規定した。
日本では,系統連系ガイドラインなど
で並列,解列,連系,受動的方式及び
能動的方式の用語を使用しているが,
引用したJISでは規定していないため
規定した。
PVアレイシミュレータは,引用した
JISで定義している。
MPPTは,引用したJISで定義してい
る。
この規格にないため削除した。
islandは,引用したJISで定義している。
7
C
8
9
6
3
:
2
0
11
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ご
との評価及びその内容
(V)JISと国際規格との技術的差異の理
由及び今後の対策
箇条番号及び
題名
内容
箇条番
号
内容
箇条ごと
の評価
技術的差異の内容
3 用語及び定
義(続き)
3.6
3.10
intentional island
unintentional island
削除
削除
対応国際規格のintentional island
を削除した。
対応国際規格のunintentional
islandを削除した。
この規格にないため削除した。
この規格にないため削除した。
4 試験回路
表1 測定項目
図1 パワーコ
ンディショナ
の試験回路(単
一入力形の場
合)
図1A パワーコ
ンディショナ
の試験回路(多
入力形の場合)
試験で測定する項目
を規定
単一入力の場合の試
験回路を規定
多入力形の場合の試
験回路を規定
4
表1
図1
−
変更
変更
追加
シンボルを変更し,試験用負荷
個々に流れる電流を削除し,系統
側交流電圧を追加した。
測定項目を測定器の記号に変更
した。
対応国際規格に多入力形パワー
コンディショナの項目はないが,
JISでは定義した。
シンボルを測定器の記号に変更し,測
定項目を実態に合わせた。
測定項目を測定器の記号に変更し,分
かりやすくした。
日本では,直流入力が複数ある多入力
形パワーコンディショナを製造業者等
が供給しているので,試験回路を規定
した。
5 試験装置
5.1 測定機器
5.4 負荷装置
試験装置について規
定
5
5.1
5.4
変更
追加
対応国際規格では,測定精度を
1 %以下としているが,波形記録
装置を除き,0.5級以上(0.5 %以
下)とした。
抵抗負荷及び回転機負荷を追加
した。
試験用の測定機器には,精度が0.5級以
上(0.5 %以下)のものが一般に用いら
れている。
日本では,認証試験で抵抗負荷及び回
転機負荷を使用しているので,負荷装
置として規定した。
6 試験方法
6.1 試験手順
試験条件を規定
6
6.1
試験手順(試験条
件,試験方法)を
規定
変更
試験条件(6.1及び6.1A)と試験
方法(6.1B)とを,項目を分けて
規定した。
試験条件及び負荷条件と,試験方法と
を分けて,分かりやすくした。
7
C
8
9
6
3
:
2
0
11
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号及び
題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
6.1A 負荷条件
6.1B 単独運転
時間測定方法
6.2 判定条件
抵抗負荷,回転機
負荷及び共振回
路負荷の各条件
における試験方
法を規定
単独運転時間測
定方法を規定
判定基準を規定
−
−
6.2
追加
追加
変更
抵抗負荷及び回転機負荷条件を
追加した。
単独運転検出方式ごとに単独運
転時間を規定した。
日本では,認証試験で抵抗負荷及
び回転機負荷を使用しているの
で,負荷条件として規定した。
単独運転時間は,“JEAC
9701-2006系統連系規程”の規定に
合わせて規定した。
7 試験結果及
び試験設備の
記載例
表10 試験設備
の仕様例
試験結果及び試
験設備の記載例
を規定
7
表10
試験報告書に記載する
情報を規定
試験設備の仕様の記載
例
変更/
削除
変更
対応国際規格の試験報告書に記
載する情報のうち,EUTの仕様の
記載例については削除した。
電動機負荷の仕様を追加した。
この項では,試験結果及び試験設
備の記載例に限定して規定した。
日本で認証試験に使用している電
動機負荷の仕様を規定した。
−
−
附属書A 太陽光発電システムに
適用する単独運転につ
いての情報
削除
対応国際規格の“附属書A:太陽
光発電システムに適用する単独
運転(情報)”を削除した。
この附属書は解説に記載するにと
どめた。
−
−
附属書B
独立した単独運転検出
装置(リレー)の試験に
ついての情報
削除
対応国際規格の“附属書B:独立
した単独運転検出装置(リレー)
の試験(情報)”を削除した。
日本では,この規格の対象の範囲
のパワーコンディショナには,独
立した単独運転装置は用いられて
いないため削除とした。
−
−
附属書C
ゲートブロック信号に
ついての情報
削除
対応国際規格の“附属書C:ゲー
トブロック信号(情報)”を削除
した。
日本では一般的であり,用語及び
定義でその内容が説明されている
ので,特に必要な情報ではない。
附属書JA
(参考)
−
−
追加
7
C
8
9
6
3
:
2
0
11
JISと国際規格との対応の程度の全体評価:IEC 62116:2008,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除……………… 国際規格の規定項目又は規定内容を削除している。
− 追加……………… 国際規格にない規定項目又は規定内容を追加している。
− 変更……………… 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD…………… 国際規格を修正している。
7
C
8
9
6
3
:
2
0
11
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。