C 8201-4-3:2010
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 2
3 用語及び定義 ··················································································································· 4
3.1 交流半導体制御器(非モータ負荷用)に関する定義 ······························································ 5
3.2 EMCの定義 ················································································································· 10
3.3 記号及び略語 ··············································································································· 11
4 分類······························································································································ 12
5 交流半導体制御器及び接触器の特性 ···················································································· 12
5.1 特性の要約 ·················································································································· 12
5.2 装置の形式 ·················································································································· 12
5.3 主回路の定格値及び限界値······························································································ 14
5.4 使用負荷種別 ··············································································································· 16
5.5 制御回路 ····················································································································· 17
5.6 補助回路 ····················································································································· 17
5.7 空欄 ··························································································································· 18
5.8 短絡保護装置(SCPD)との保護協調 ················································································ 18
6 製品情報 ························································································································ 18
6.1 情報の性質 ·················································································································· 18
6.2 表示 ··························································································································· 19
6.3 取付け,操作及び保守にかかわる指示 ··············································································· 19
7 標準使用,取付け及び輸送条件 ·························································································· 19
7.1 標準使用条件 ··············································································································· 19
7.2 輸送中及び保管中の条件 ································································································ 20
7.3 取付け ························································································································ 20
7.4 電気系統の妨害及び影響 ································································································ 20
8 構造及び性能に関する要求事項 ·························································································· 20
8.1 構造に関する要求事項 ··································································································· 20
8.2 性能に関する要求事項 ··································································································· 21
8.3 EMCに関する要求事項 ·································································································· 31
9 試験······························································································································ 34
9.1 試験の種類 ·················································································································· 34
9.2 構造に関する要求事項に対する適合性 ··············································································· 35
9.3 性能に関する要求事項に対する適合性 ··············································································· 35
附属書A(規定)端子の表示及び識別 ····················································································· 49
C 8201-4-3:2010 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
附属書B(参考)制御器及び接触器の標準責務 ·········································································· 51
附属書C(空欄) ················································································································ 52
附属書D(規定)放射エミッション試験に対する要求事項 ··························································· 53
附属書E(参考)CISPR 11による放射エミッション限度値に等価な送信電力への変換方法 ················ 54
附属書F(参考)動作性能 ····································································································· 55
附属書G(参考)制御回路構成の例 ························································································ 58
附属書H(参考)製造業者と使用者との間で協定を必要とする項目··············································· 60
附属書I(規定)半導体接触器及び制御器の短絡試験用に変更した試験回路 ···································· 61
附属書J(参考)バイパス式半導体制御器の試験のフローチャート ··············································· 63
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 64
C 8201-4-3:2010
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人日本電機工業会(JEMA)から,工
業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会の審議を経て,経済
産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権にかかわる確認について,責任はもたない。
JIS C 8201の規格群には,次に示す部編成がある。
JIS C 8201-1 第1部:通則
JIS C 8201-2-1 第2-1部:回路遮断器(配線用遮断器及びその他の遮断器)
JIS C 8201-2-2 第2-2部:漏電遮断器
JIS C 8201-3 第3部:開閉器,断路器,断路用開閉器及びヒューズ組みユニット
JIS C 8201-4-1 第4-1部:接触器及びモータスタータ:電気機械式接触器及びモータスタータ
JIS C 8201-4-2 第4-2部:接触器及びモータスタータ:交流半導体モータ制御器及びスタータ
JIS C 8201-4-3 第4-3部:接触器及びモータスタータ:非モータ負荷用交流半導体制御器及び接触器
JIS C 8201-5-1 第5部:制御回路機器及び開閉素子−第1節:電気機械式制御回路機器
JIS C 8201-5-2 第5部:制御回路機器及び開閉素子−第2節:近接スイッチ
JIS C 8201-5-5 第5部:制御回路機器及び開閉素子−第5節:機械的ラッチング機能をもつ電気的非
常停止機器
JIS C 8201-5-8 第5-8部:制御回路機器及び開閉素子−3ポジションイネーブルスイッチ
JIS C 8201-5-101 第5部:制御回路機器及び開閉素子−第101節:接触器形リレー及びスタータの補
助接点
JIS C 8201-7-1 第7部:補助装置−第1節:銅導体用端子台
C 8201-4-3:2010 目次
(4)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
白 紙
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格
JIS
C 8201-4-3:2010
低圧開閉装置及び制御装置−
第4-3部:接触器及びモータスタータ:
非モータ負荷用交流半導体制御器及び接触器
Low-voltage switchgear and controlgear−
Part 4-3: Contactors and motor-starters−
AC semiconductor controllers and contactors for non-motor loads
序文
この規格は,2007年に第1.1版として発行されたIEC 60947-4-3を基とし,我が国の実情を考慮して,
技術的内容を変更して作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JAに示す。また,JIS C 8201-1で規定する通則の箇条は,この規格にも
適用する。この規格で,引用する通則の箇条,表,図及び附属書は,例えば,JIS C 8201-1の1.2.3,JIS C
8201-1の表4又はJIS C 8201-1の附属書Aのように,JIS C 8201-1に関連することを示して区別する。
1
適用範囲
この規格は,交流電気回路のオン(ON)状態及びオフ(OFF)状態の変化によって電気的な動作をする
非モータ負荷用交流半導体制御器及び接触器について規定する。用途の代表例は,表2による。制御器は,
負荷側端子の連続する又は特定周期における適用電圧から交流電圧実効値の振幅を減少させるために用い
てもよい。交流波形形状の半波周期は,適用電圧の波形から変化しない。制御器は,定格電圧が交流1 000
V以下の回路に接続を意図し,直列機械式開閉機器を含んでもよい。
この規格は,バイパス開閉機器の使用の有無に関係なく,制御器及び接触器の特性を示す。
この規格で取り扱う半導体制御器及び接触器は,通常,短絡電流を遮断するように設計しているとは限
らない。したがって,適切な短絡保護(8.2.5参照)は,設備の一部ではあっても,必ずしも制御器の一部
である必要はない。
この規格は,別個の短絡保護装置と組み合わせる半導体制御器及び接触器に対する要求事項を規定する。
この規格は,次には適用しない。
− 交流モータ及び直流モータの連続運転
− JIS C 8201-4-2に規定する低圧交流半導体モータ制御器及びスタータ
− IEC 60146シリーズに規定する半導体電力変換装置
− オールオアナッシングソリッドステートリレー
半導体制御器及び接触器において用いる接触器及び制御回路装置は,関連する製品規格の要求事項に適
合することが望ましい。機械式開閉機器を用いる場合は,個別製品規格の要求事項及びこの規格の追加要
2
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
求事項に適合することが望ましい。
この規格の目的は,次の事項を規定することにある。
a) 半導体制御器,接触器及びこれらの組合せ装置の特性
b) 半導体制御器及び接触器が適合しなければならない次の条件
− 動作及び挙動
− 耐電圧性能
− 該当する場合,それらのエンクロージャの保護等級
− 構造
c) これらの条件に適合することを確認する,試験項目及び試験方法
d) 装置又は製造業者発行の資料で表示しなければならない情報
注記1 我が国の配電電圧は,関係法規において,低圧は交流600 V以下と規定している。
注記2 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 60947-4-3:2007,Low-voltage switchgear and controlgear−Part 4-3: Contactors and
motor-starters−AC semiconductor controllers and contactors for non-motor loads(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 3502 プログラマブルコントローラ−装置への要求事項及び試験
注記 対応国際規格:IEC 61131-2:2003,Programmable controllers−Part 2: Equipment requirements and
tests(MOD)
JIS C 8201-1:2007 低圧開閉装置及び制御装置−第1部:通則
注記 対応国際規格:IEC 60947-1:2004,Low-voltage switchgear and controlgear−Part 1: General rules
(MOD)
JIS C 8201-4-2 低圧開閉装置及び制御装置−第4-2部:接触器及びモータスタータ:交流半導体モー
タ制御器及びスタータ
注記 対応国際規格:IEC 60947-4-2:2007,Low-voltage switchgear and controlgear−Part 4-2: Contactors
and motor-starters−AC semiconductor motor controllers and starters(MOD)
JIS C 8269-1 低電圧ヒューズ−第1部:一般要求事項
注記 対応国際規格:IEC 60269-1:1986,Low-voltage fuses−Part 1: General requirements並びに
Amendment 1 (1994) 及びAmendment 2 (1995)(IDT)
JIS C 60050-161 EMCに関するIEV用語
注記 対応国際規格:IEC 60050-161:1990,International Electrotechnical Vocabulary−Chapter 161:
Electromagnetic compatibility(IDT)
JIS C 60664(すべての部) 低圧系統内機器の絶縁協調
注記 対応国際規格:IEC 60664 (all parts),Insulation coordination for equipment within low-voltage
systems(IDT)
3
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS C 61000-3-2 電磁両立性−第3-2部:限度値−高調波電流発生限度値(1相当たりの入力電流が
20 A以下の機器)
注記 対応国際規格:IEC 61000-3-2:2000,Electromagnetic compatibility (EMC)−Part 3-2: Limits−
Limits for harmonic current emissions (equipment input current ≤ 16 A per phase) 並びに
Amendment 1 (2001) 及びAmendment 2 (2004)(MOD)
JIS C 61000-4-2 電磁両立性−第4部:試験及び測定技術−第2節:静電気放電イミュニティ試験
注記 対応国際規格:IEC 61000-4-2:1995,Electromagnetic compatibility (EMC)−Part 4: Testing and
measurement techniques−Section 2:Electrostatic discharge immunity test並びにAmendment 1
(1998) 及びAmendment 2 (2000)(IDT)
JIS C 61000-4-3 電磁両立性−第4-3部:試験及び測定技術−放射無線周波電磁界イミュニティ試験
注記 対応国際規格:IEC 61000-4-3:2002,Electromagnetic compatibility (EMC)−Part 4-3: Testing and
measurement techniques−Radiated, radio-frequency, electromagnetic field immunity test及び
Amendment 1 (2002)(IDT)
JIS C 61000-4-4 電磁両立性−第4-4部:試験及び測定技術−電気的ファストトランジェント/バー
ストイミュニティ試験
注記 対応国際規格:IEC 61000-4-4:2004,Electromagnetic compatibility (EMC)−Part 4-4: Testing and
measurement techniques−Electrical fast transient/burst immunity test(IDT)
JIS C 61000-4-5 電磁両立性−第4-5部:試験及び測定技術−サージイミュニティ試験
注記 対応国際規格:IEC 61000-4-5:2005,Electromagnetic compatibility (EMC)−Part 4-5: Testing and
measurement techniques−Surge immunity test(IDT)
JIS C 61000-4-6 電磁両立性−第4-6部:試験及び測定技術−無線周波電磁界によって誘導する伝導
妨害に対するイミュニティ
注記 対応国際規格:IEC 61000-4-6:2003,Electromagnetic compatibility (EMC)−Part 4-6: Testing and
measurement techniques−Immunity to conducted disturbances, induced by radio-frequency fields
(MOD)
JIS C 61000-4-11 電磁両立性−第4-11部:試験及び測定技術−電圧ディップ,短時間停電及び電圧
変動に対するイミュニティ試験
注記 対応国際規格:IEC 61000-4-11,Electromagnetic compatibility (EMC)−Part 4-11: Testing and
measurement techniques−Voltage dips, short interruptions and voltage variations immunity tests
(IDT)
IEC 60146 (all parts),Semiconductor converters−General requirements and line commutated converters
IEC 60410,Sampling plans and procedures for inspection by attributes
IEC 60417,Graphical symbols for use on equipment
IEC/TR 61000-2-1,Electromagnetic compatibility (EMC)−Part 2: Environment−Section 1: Description of
the environment−Electromagnetic environment for low-frequency conducted disturbances and signalling
in public power supply systems
CISPR 11,Industrial, scientific and medical equipment−Radio-frequency disturbance characteristics−Limits
and methods of measurement
CISPR 14-1,Electromagnetic compatibility−Requirements for household appliances, electric tools and similar
apparatus−Part 1: Emission
4
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS C 8201-1の箇条2(用語及び定義)によるほか,次による。
定義の五十音順の索引
イミュニティ(妨害に対する)[Immunity (to a disturbance)]
3.2.9
運転制御(Controlled operation)
3.1.7
OCPM(Overcurrent protective means OCPM)
3.1.21
オフ時間(OFF-time)
3.1.23
オフ状態(OFF-state)
3.1.12
オフ状態漏れ電流(OFF-state leakage current)
3.1.13
オン時間(ON-time)
3.1.22
オン状態(ON-state)
3.1.9
開閉位相(Switching point)
3.1.14.4
開閉機能(Switching function)
3.1.14.1
開路位置(Open position)
3.1.2.3
過渡(トランジェント)[Transient (adjective and noun)]
3.2.6
過負荷電流波形(Overload current profile)
3.1.17
完全オン状態[Full-on (state of controllers)]
3.1.10
交流半導体制御器(AC semiconductor controller)
3.1.1.1
最小負荷電流(Minimum load current)
3.1.11
最小負荷電流検出(Minimum load current detection)
3.1.11.1
瞬時開閉機能(Instantaneous switching function)
3.1.14.3
徐降(Ramp-down)
3.1.6
徐昇(Ramp-up)
3.1.5
徐昇開閉機能及び徐降開閉機能(Ramp switching function)
3.1.14.2
(制御器の)動作[Operation (of a controller)]
3.1.14
(制御器の)動作サイクル[Operating cycle (of a controller)]
3.1.15
(制御器の)引外し動作[Tripping operation (of a controller)]
3.1.19
定格インデックス(Rating index)
3.1.18
電圧サージ(Voltage surge)
3.2.8
電磁エミッション[(Electromagnetic) Emission]
3.2.2
電磁妨害(Electromagnetic disturbance)
3.2.3
電磁両立性(EMC)(Electromagnetic compatibility)
3.2.1
電流制限機能(Current-limit function)
3.1.3
動作能力(Operating capability)
3.1.16
トリップフリーの制御器(Trip-free controller)
3.1.20
バイパス制御器(Bypassed controller)
3.1.24
ハイブリッド制御器又はハイブリッド接触器,フォームHxA(ここに,x=4又は5)
[Hybrid controllers or contactors, form HxA (where x = 4 or 5)]
3.1.2.1
ハイブリッド制御器又はハイブリッド接触器,フォームHxB(ここに,x=4又は5)
(Hybrid motor controllers or starters, form HxB)
3.1.2.2
5
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バースト(パルス又は振動の)[Burst (of pulses or oscillations)]
3.2.7
半導体じか入れ(DOL)制御器(非モータ負荷用)(フォーム5)
[Semiconductor direct-on-line (DOL) controller (form 5)]
3.1.1.1.3
半導体制御器のゼロ位相開閉[Zero-point switching (of a semiconductor controller)]
3.1.14.4.2
半導体制御器の特定位相開閉[Defined-point switching (of a semiconductor controller)]
3.1.14.4.1
半導体制御器のランダム位相開閉[Random point switching (of a semiconductor controller)]
3.1.14.4.3
半導体制御器(非モータ負荷用)(フォーム4)[Semiconductor controller (form 4)]
3.1.1.1.1
負荷制御(Load control)
3.1.4
無線周波障害(RFI)[Radio frequency interference, RFI (abbreviation)]
3.2.5
無線(周波)妨害[Radio (frequency) disturbance]
3.2.4
3.1
交流半導体制御器(非モータ負荷用)に関する定義
3.1.1
交流半導体制御器及び接触器(ソリッドステートコンタクタ)(図1参照)
3.1.1.1
交流半導体制御器(AC semiconductor controller)
交流電気負荷(非モータ負荷)の開閉機能及びオフ状態を保つ機能を備えた半導体開閉機器(JIS C 8201-1
の2.2.3参照)。
注記1 オフ状態の半導体制御器は,危険なレベルの漏れ電流(3.1.13参照)が流れているため,負
荷端子は,常に充電状態にあると考えることが望ましい。
注記2 電流がゼロ点を通過する回路において,そのゼロ点に続く電流を閉路しなければ,遮断して
いることと等しい。
3.1.1.1.1
半導体制御器(非モータ負荷用)(フォーム4)[Semiconductor controller (form 4)]
製造業者が指定したすべての開閉機能をもつ交流半導体開閉器。徐昇,負荷制御又は徐降のすべての組
合せをもち,完全オン状態があってもよい。
3.1.1.1.2
空欄
3.1.1.1.3
半導体じか入れ(DOL)制御器(非モータ負荷用)(フォーム5)[Semiconductor direct-on-line (DOL) controller
(form 5)]
全電圧を印加する開閉機能だけに限定し,負荷制御は完全オン状態になることに限定した交流半導体制
御器(半導体接触器又はソリッドステートコンタクタとしても知られている。)。
半導体開閉機器(JIS C 8201-1の2.2.3参照)によって,接触器の機能をもつ機器(JIS C 8201-1の2.2.13
参照)。ただ一つの停止の位置(オフ状態又はHxBハイブリッド制御器における開路状態)をもち,制御
信号の適用によって動作する。動作過負荷条件を含み,通常の回路状態の下,完全オンとオフ状態(開路)
との間の前記負荷(電気回路)の状態を変えるだけでなく,負荷電流の通電も可能である。
3.1.1.2
空欄
6
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
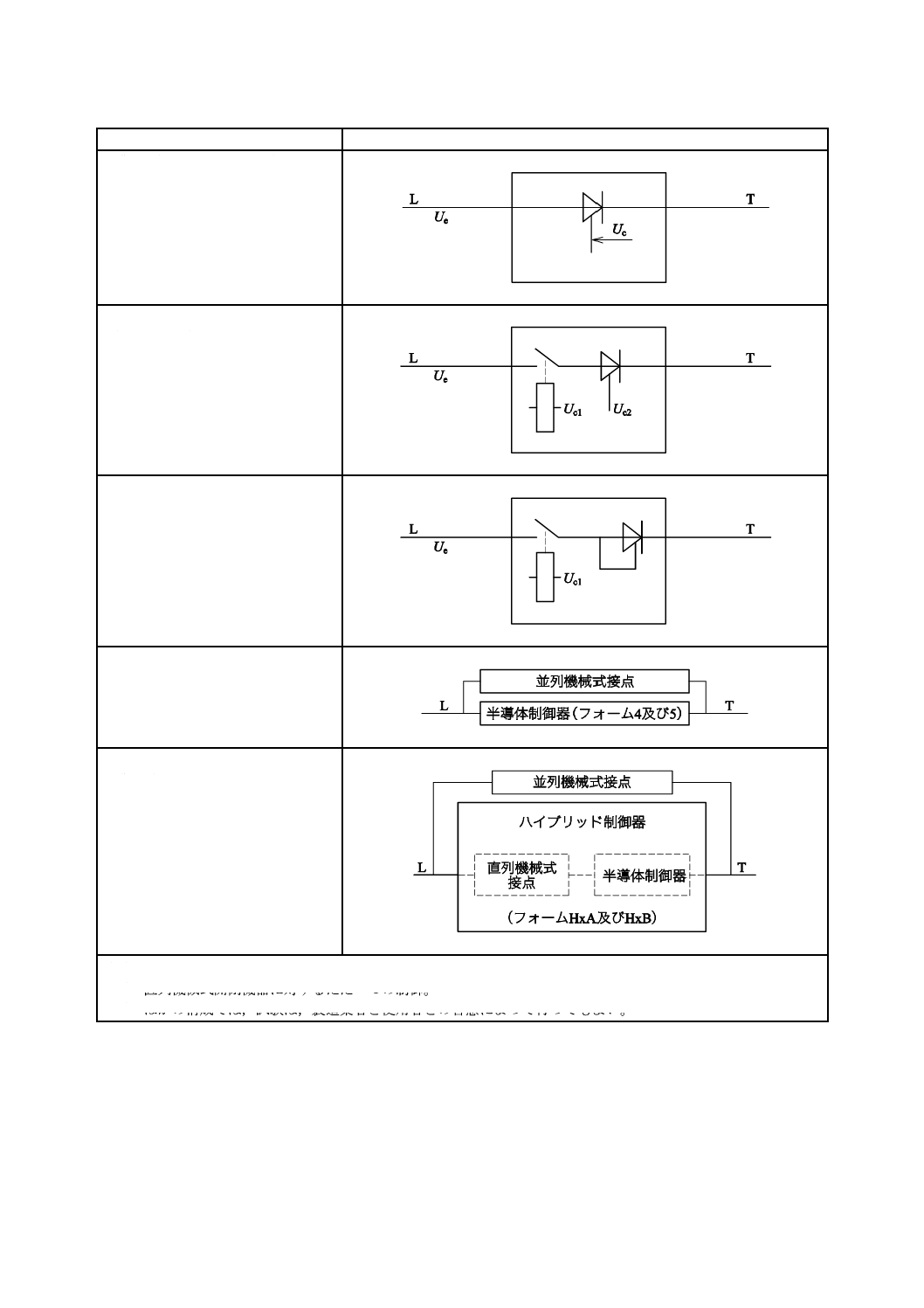
機器
回路構成例
制御器(すべてのフォーム)
ハイブリッド制御器フォームHxA a)
(x=4又は5)
ハイブリッド制御器フォームHxB b)
(x=4又は5)
バイパス制御器
バイパスハイブリッド
制御器c)
注a) 制御器及び直列機械式開閉機器に対する二つの独立した制御。
b) 直列機械式開閉機器に対するただ一つの制御。
c) ほかの構成では,試験は,製造業者と使用者との合意によって行ってもよい。
図1−制御器の構成
7
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
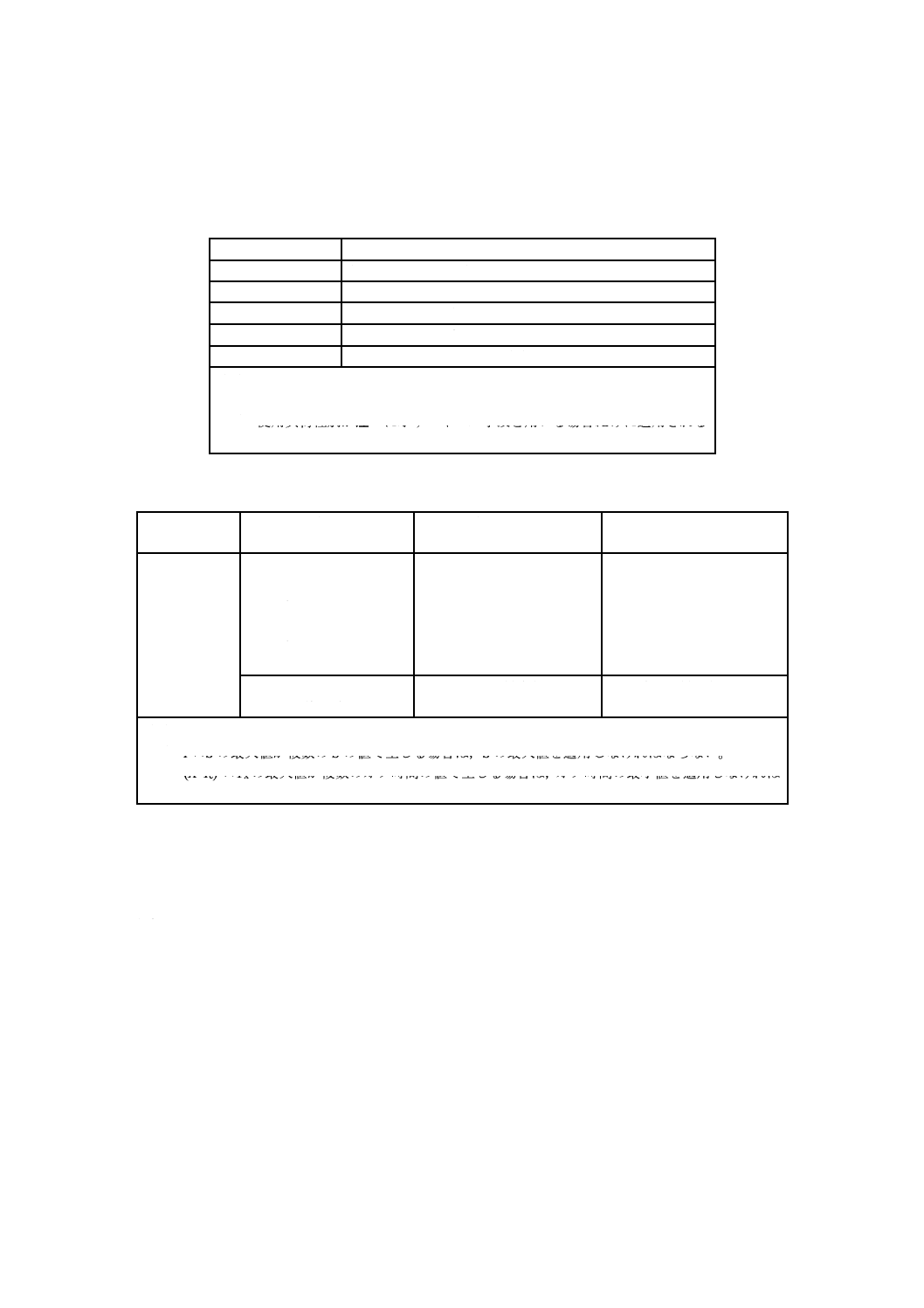
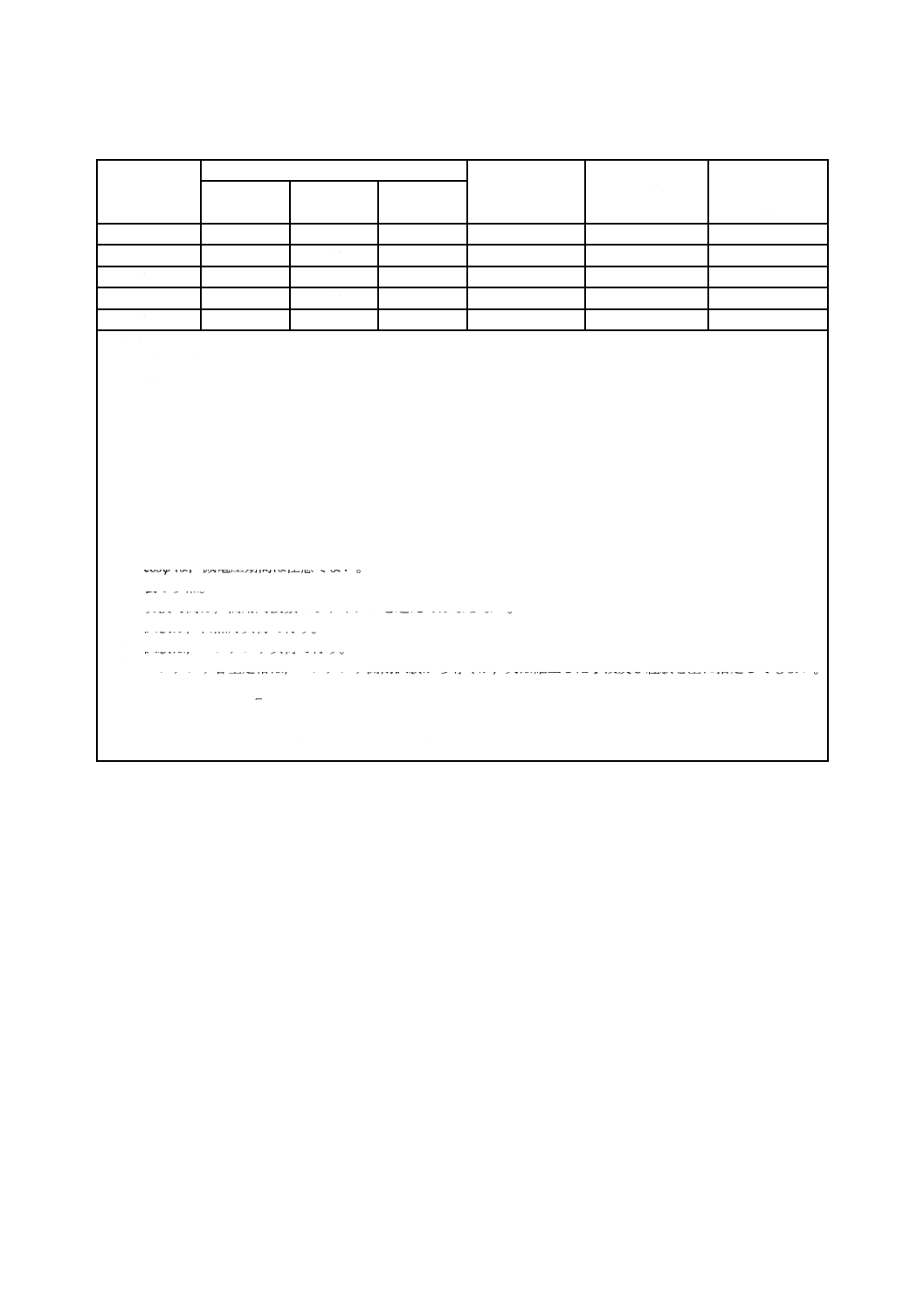
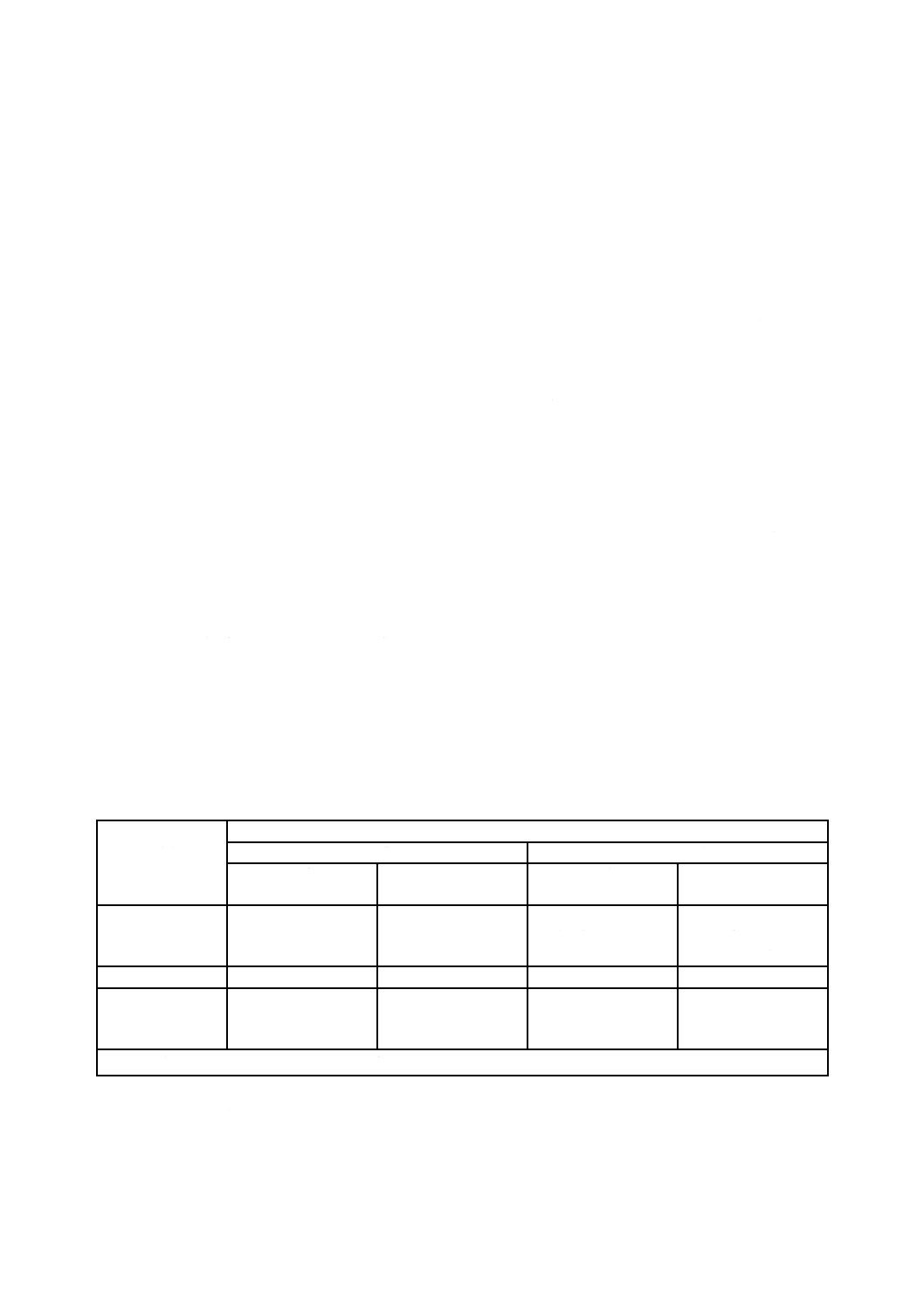
表1−制御器及び接触器の機能
機器
フォーム4
フォーム5
半導体制御器
− オフ状態
− 徐昇
− 負荷制御
− 完全オン
− 徐降
適用外
半導体じか入れ(DOL)制御器
適用外
− オフ状態
− 開閉機能
− 完全オン
ハイブリッド制御器フォームHxA a)
(ここに,x=4又は5)
H4A:
− 開路状態
− オフ状態
− 徐昇
− 負荷制御
− 完全オン
− 徐降
H5A:
− 開路状態
− オフ状態
− 開閉機能
− 完全オン
ハイブリッド制御器フォームHxB b)
(ここに,x=4又は5)
H4B:
− 開路状態
− 徐昇
− 負荷制御
− 完全オン
− 徐降
H5B:
− 開路状態
− 開閉機能
− 完全オン
注a) 制御器及び直列機械式開閉機器に対する二つの独立した制御。
b) 直列機械式開閉機器に対するただ一つの制御。
3.1.2
ハイブリッド制御器及びハイブリッド接触器(図1参照)
3.1.2.1
ハイブリッド制御器又はハイブリッド接触器,フォームHxA(ここに,x=4又は5)[Hybrid controllers or
contactors, form HxA (where x = 4 or 5)]
一つのユニットとして機械式開閉機器と半導体制御器とを直列に接続したフォーム4又はフォーム5の
制御器又は接触器。個々の制御指令を直列機械式開閉機器,及び半導体制御器又はハイブリッド接触器に
与える。半導体制御器は,フォームごとのすべての制御機能をもち,開路状態をもつ。
3.1.2.2
ハイブリッド制御器又はハイブリッド接触器,フォームHxB(ここに,x=4又は5)(Hybrid motor controllers
or starters, form HxB)
一つのユニットとして機械式開閉機器と半導体制御器とを直列に接続したフォーム4又はフォーム5の
制御器又は接触器。一つの制御指令を直列機械式開閉機器,及び半導体制御器又はハイブリッド接触器の
両方に与える。制御器は,フォームごとのすべての制御機能をもつが,オフ状態はない。
3.1.2.3
開路位置(Open position)
直列機械式開閉機器が開路位置にある場合のハイブリッド半導体制御器の状態(JIS C 8201-1の2.4.21
参照)。
3.1.3
電流制限機能(Current-limit function)
8
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
負荷電流を特定値に制限する制御器の機能。ただし,短絡状態の瞬間電流を制限する能力は含まない。
3.1.4
負荷制御(Load control)
次のいずれかを変えることによって,負荷機器に加わる有効電力を変化させるすべての意図的な操作。
− 責務サイクル(オン時間率F及び/又は毎時動作サイクル数S,5.3.4.6参照。)
− 負荷電圧(例えば,位相制御などによる。)
− これらの組合せ
注記1 オン動作は,負荷制御での個別の必す(須)動作である。
注記2 外部の開閉機器又は制御回路によってオフ状態から完全オン状態へ,そして再び逆へ(例え
ば,動作サイクルによる負荷制御)周期的に移行する場合,負荷制御は,フォーム5の制御
器によって行うことができる。
3.1.5
徐昇(Ramp-up)
定められた時間(徐昇時間)に,オフ状態(HxBのハイブリッド制御器の場合は開路状態)からオン状
態(完全オン状態又は負荷制御)へ移行する閉路機能。
3.1.6
徐降(Ramp-down)
定められた時間(徐降時間)に,オン状態(完全オン状態又は負荷制御)からオフ状態(HxBのハイブ
リッド制御器の場合は開路状態)へ移行する開路機能。
3.1.7
運転制御(Controlled operation)
規定しない(3.1.4参照)。
3.1.8 空欄
3.1.9
オン状態(ON-state)
主回路電流が流れるときの制御器の状態。
3.1.10
完全オン状態[Full-on (state of controllers)]
負荷に全電圧を印加したときの制御器の状態。
3.1.11
最小負荷電流(Minimum load current)
制御器がオン状態を正常に維持するために必要な主回路の最小電流。
注記 最小負荷電流は,実効値で表すことが望ましい。
3.1.11.1
最小負荷電流検出(Minimum load current detection)
負荷電流が最小値以下になったことを検出し,信号を発生する制御器の機能。信号は,オフ又は開路状
態まで維持しなければならない。
3.1.12
オフ状態(OFF-state)
制御信号がなく,オフ状態漏れ電流を超える電流が主回路に流れないときの制御器の状態。
9
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.1.13
オフ状態漏れ電流,IL(OFF-state leakage current)
オフ状態の制御器の主回路を流れる電流。
3.1.14
(制御器の)動作[Operation (of a controller)]
オン状態からオフ状態への変化又はその逆の変化。
3.1.14.1
開閉機能(Switching function)
制御器の動作中に電流を開閉する制御器の機能。
3.1.14.2
徐昇開閉機能及び徐降開閉機能(Ramp switching function)
徐昇(3.1.5)及び徐降(3.1.6)参照。
3.1.14.3
瞬時開閉機能(Instantaneous switching function)
オン状態(完全オン又は負荷制御)から,オフ状態(HxBハイブリッド制御器の場合は開路状態)への
瞬間的な変化又はその逆の開閉機能。開路の場合,“瞬時”とは,開路動作時間(JIS C 8201-1の2.5.39参
照)を意味する。閉路の場合,“瞬時”とは,投入時間(JIS C 8201-1の2.5.43参照)に外部回路インピー
ダンスによって決まる過渡時間を加えた値を意味する。
3.1.14.4
開閉位相(Switching point)
半導体開閉素子が閉路動作時,導通になる給与電圧(JIS C 8201-1の2.5.32参照)の波形の位置。
3.1.14.4.1
半導体制御器の特定位相開閉[Defined-point switching (of a semiconductor controller)]
交流給与電圧(JIS C 8201-1の2.5.32参照),又はそれに代わる交流制御回路電圧の特定位相から主回路
に電流を流す半導体開閉器の機能。このスイッチング方式は,変圧器の突入電流抑制又は“ソフトスイッ
チング”に用いる。
3.1.14.4.2
半導体制御器のゼロ位相開閉[Zero-point switching (of a semiconductor controller)]
非モータ負荷に対し,単極半導体制御器の場合だけに適用する特殊な特定位相開閉。制御信号を印加後,
交流給与電圧(JIS C 8201-1の2.5.32参照)がゼロ点を通過する瞬時に半導体開閉素子が導通となるよう
なオフ状態からオン状態への変化。
注記 ゼロ位相開閉は,特に抵抗負荷及び白熱電球負荷に最適である。誘導性負荷又は容量性負荷に
は用いない方がよい。これは,負荷電流と運転電圧との間の位相差によって過大な過渡電流を
発生する可能性があるためである。
3.1.14.4.3
半導体制御器のランダム位相開閉[Random point switching (of a semiconductor controller)]
交流給与電圧(JIS C 8201-1の2.5.32参照)又はそれに代わる交流制御回路電圧が,任意位相で主回路
に電流を流す半導体開閉器の機能。
3.1.15
(制御器の)動作サイクル[Operating cycle (of a controller)]
10
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ある状態からほかの状態になり,それから最初の状態に戻る一連の動作。
注記 動作サイクルを形成しない一連の動作は,動作シリーズという。
3.1.16
動作能力(Operating capability)
規定の条件の下で,故障なく一連の動作サイクルを行う能力。
3.1.17
過負荷電流波形(Overload current profile)
過負荷電流に対応する要求事項を規定する短時間の電流−時間波形。5.3.5.1を参照。
3.1.18
定格インデックス(Rating index)
定格使用電流,対応する使用負荷種別,過負荷電流波形及び動作周期又はオフ時間を規定様式で表した
定格情報。6.1 e) を参照。
3.1.19
(制御器の)引外し動作[Tripping operation (of a controller)]
制御信号でオフ状態(HxBハイブリッド制御器の場合は開路状態)を確立し,維持するための動作。
3.1.20
トリップフリーの制御器(Trip-free controller)
引外し条件が存在するとき,オフ状態となること及び維持することを妨げることができない制御器。
注記 フォームHxBの場合は,“オフ状態”を“開路状態”に置き換える。
3.1.21
OCPM(Overcurrent protective means OCPM)
あらかじめ定めた値を超えた電流が流れたとき,オフ状態又は開路状態に戻る瞬時又は時延式開閉装置。
3.1.22
オン時間(ON-time)
制御器に,例えば,図F.1のように負荷が加わっている時間(附属書F参照)。
3.1.23
オフ時間(OFF-time)
制御器から,例えば,図F.1のように負荷が外れている時間(附属書F参照)。
3.1.24
バイパス制御器(Bypassed controller)
機械式開閉装置の主回路接点が,半導体開閉装置の主回路端子と並列に接続され,かつ,二つの開閉装
置の操作手段の協調が保たれている装置。
3.2
EMCの定義
各種のEMCの定義は,JIS C 60050-161による。より詳細な情報は,IEC/TR 61000-2-1による。便宜性
及び混乱回避のため,JIS C 60050-161から主な定義の幾つかを次に示す。
3.2.1
電磁両立性(EMC)(Electromagnetic compatibility)
装置又はシステムの存在する環境において,いかなるものに対しても許容できないような電磁妨害を与
えず,かつ,その電磁環境において満足に機能する装置又はシステムの能力(JIS C 60050-161 161-01-07)。
11
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2.2
電磁エミッション[(Electromagnetic) Emission]
ある発生源から電磁エネルギーが放出する現象(JIS C 60050-161 161-01-08)。
3.2.3
電磁妨害(Electromagnetic disturbance)
機器,装置若しくはシステムの性能を低下させる可能性があり,又は生物,無生物にかかわらずすべて
のものに悪影響を及ぼす可能性がある電磁現象(JIS C 60050-161 161-01-05)。
注記 電磁妨害は,電磁雑音,不要信号又は伝搬媒質自体の変化である場合がある。
3.2.4
無線(周波)妨害[Radio (frequency) disturbance]
無線周波数の成分をもつ電磁妨害(JIS C 60050-161 161-01-13)。
3.2.5
無線周波障害(RFI)[Radio frequency interference, RFI (abbreviation)]
無線周波妨害によって引き起こされる希望信号の受信品質の低下(JIS C 60050-161 161-01-14)。
注記 英語の術語“interference(障害)”及び“disturbance(妨害)”は,しばしば区別なく用いられる。
また,“radio frequency interference(無線周波障害)”という表現は,無線周波妨害又は不要信号
に対して通常用いられる。
3.2.6
過渡(トランジェント)[Transient (adjective and noun)]
対象とする時間スケールに比べて短い時間間隔で,二つの連続する定常状態の間を変化する現象若しく
は量に関係するもの,又はその呼称(JIS C 60050-161 161-02-01)。
3.2.7
バースト(パルス又は振動の)[Burst (of pulses or oscillations)]
ある限られた個数の異なるパルスから成るパルス列又は限られた時間の間継続する振動(JIS C
60050-161 161-02-07)。
3.2.8
電圧サージ(Voltage surge)
電圧の急激な上昇の後,ゆっくりと低下する特徴をもった,送電線又は回路を伝搬する過渡的な電圧波
形(JIS C 60050-161 161-08-11)。
3.2.9
イミュニティ(妨害に対する)[Immunity (to a disturbance)]
電磁妨害が存在する環境で,機器,装置又はシステムが性能低下せずに動作することができる能力(JIS
C 60050-161 161-01-20)。
3.3
記号及び略語
Af
最終周囲温度(9.3.3.3.4)
Cf
最終ケース温度(9.3.3.3.4)
EMC
電磁両立性
EUT
供試機器
Ic
閉路及び遮断電流(表10)
Ie
定格使用電流(5.3.2.3)
12
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
IF
阻止及び転流能力試験後の漏れ電流(9.3.3.6.3)
IL
オフ状態漏れ電流(3.1.13)
IO
阻止及び転流能力試験前の漏れ電流(9.3.3.6.3)
Ith
開放熱電流(5.3.2.1)
Ithe
閉鎖熱電流(5.3.2.2)
Iu
定格連続電流(5.3.2.4)
SCPD
短絡保護装置
Uc
定格制御回路電圧(5.5)
Ue
定格使用電圧(5.3.1.1)
Ui
定格絶縁電圧(5.3.1.2)
Uimp
定格インパルス耐電圧(5.3.1.3)
Ur
商用周波回復電圧(表8)
Us
定格制御電源電圧(5.5)
4
分類
分類の基準に用いる全事項は,5.2による。
5
交流半導体制御器及び接触器の特性
5.1
特性の要約
制御器及び接触器の特性は,製造業者が使用者に次の項目から該当項目を明示しなければならない。
− 装置の形式(5.2参照)
− 主回路の定格値及び限界値(5.3参照)
− 使用負荷種別(5.4参照)
− 制御回路(5.5参照)
− 補助回路(5.6参照)
− 短絡保護装置との保護協調(5.8参照)
5.2
装置の形式
装置の形式は,次の項目を明示しなければならない。
5.2.1
装置のフォーム
制御器及び接触器のフォーム(3.1.1及び3.1.2参照)
5.2.2
極数
5.2.2.1
主回路の極数
5.2.2.2
動作が半導体開閉素子によって制御される場合の主回路の極数
5.2.3
電流の種類
交流専用とする。
5.2.4
遮断媒体(空気,真空など)
ハイブリッド制御器及び接触器の機械式開閉機器だけに対して適用する。
5.2.5
装置の動作条件
5.2.5.1
動作方法
動作方法の例は,次による。
13
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例
− 対称的に制御した制御器(完全に位相を制御した半導体など)
− 非対称的に制御した制御器(サイリスタ,ダイオードなど)
5.2.5.2
制御方法
制御方法の例は,次による。
例
− 自動(パイロットスイッチ又はシーケンス制御によるもの)
− 非自動(押しボタンスイッチによるもの)
− 半自動(部分的自動で部分的非自動のもの)
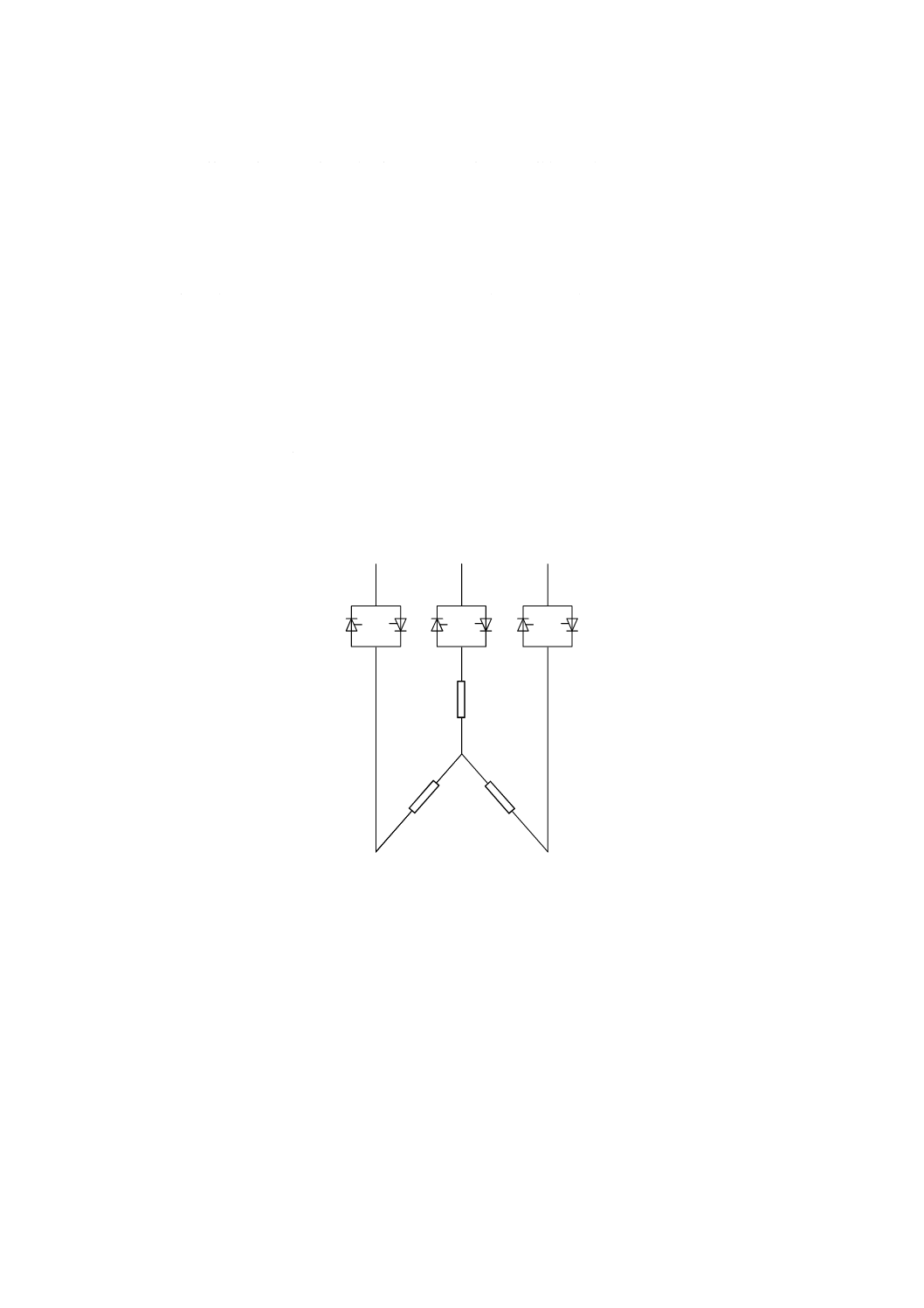
5.2.5.3
接続方法
接続方法の例は,次による。
例 (図2参照)
− 負荷はスター結線,サイリスタは負荷と電源との間に接続。
− 負荷はデルタ結線,サイリスタは負荷と電源との間に接続。
− 単相負荷,サイリスタは負荷と電源との間に接続。
a) 負荷はスター結線,サイリスタは負荷と電源との間に接続
図2−接続方法
14
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
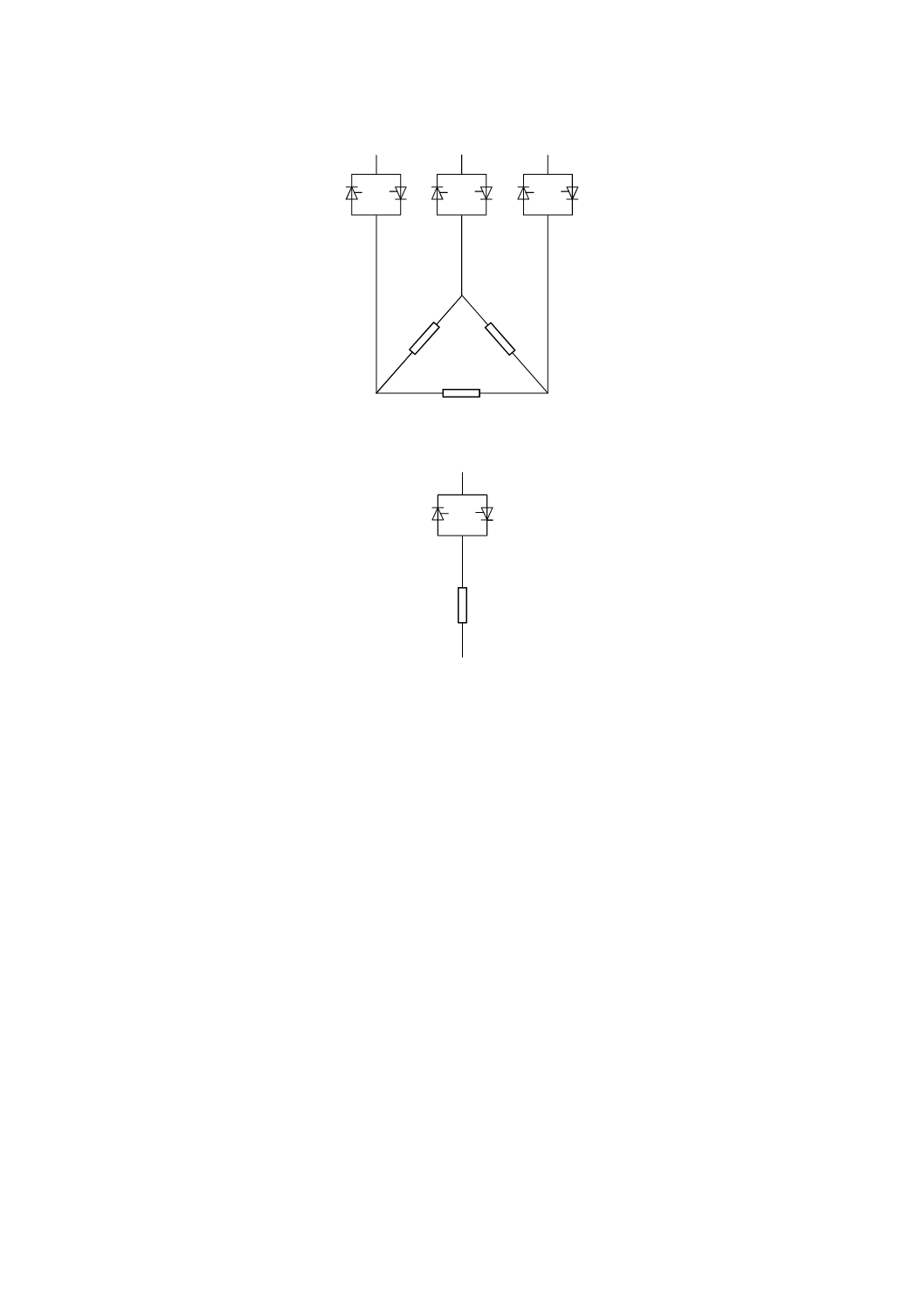
b) 負荷はデルタ結線,サイリスタは負荷と電源との間に接続
c) 単相負荷,サイリスタは負荷と電源との間に接続
図2−接続方法(続き)
5.3
主回路の定格値及び限界値
制御器及び接触器の定格値及び限界値は,5.3.1〜5.3.6に従って明示しなければならない。ただし,試験
によっては,すべての適合する値を設定する必要はない。
5.3.1
定格電圧
制御器及びスタータの定格電圧は,次による。
5.3.1.1
定格使用電圧(Ue)
JIS C 8201-1の4.3.1.1(定格使用電圧)による。
5.3.1.2
定格絶縁電圧(Ui)
JIS C 8201-1の4.3.1.2(定格絶縁電圧)による。
5.3.1.3
定格インパルス耐電圧(Uimp)
JIS C 8201-1の4.3.1.3(定格インパルス耐電圧)による。
5.3.2
電流
制御器及び接触器の電流は,次による。
5.3.2.1
開放熱電流(Ith)
JIS C 8201-1の4.3.2.1(開放熱電流)による。
5.3.2.2
閉鎖熱電流(Ithe)
15
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS C 8201-1の4.3.2.2(閉鎖熱電流)による。
5.3.2.3
定格使用電流(Ie)
制御器及び接触器の定格使用電流Ieは,装置が完全オン状態で,定格使用電圧(5.3.1.1参照),定格周
波数(5.3.3参照),定格責務(5.3.4参照),使用負荷種別(5.4参照)及び過負荷特性(5.3.5参照)を考慮
した使用電流とする。エンクロージャの保護等級も考慮する必要がある。
5.3.2.4
定格連続電流(Iu)
JIS C 8201-1の4.3.2.4(定格連続電流)による。
5.3.3
定格周波数
JIS C 8201-1の4.3.3(定格周波数)による。
5.3.4
定格責務
定格責務は,標準的なものとして,次がある。
5.3.4.1
8時間責務
制御器が完全オン状態で,装置が熱平衡状態に達し,8時間以下で,遮断することなく定常電流を通電
する責務。
5.3.4.2
連続責務
制御器が完全オン状態で,8時間を超えて(数週間,数箇月又は数年),遮断することなく定常電流を通
電する責務。
5.3.4.3
反復責務又は間欠責務
JIS C 8201-1の4.3.4.3(反復責務又は間欠責務)の最初の段落を次のように修正して適用する。
“制御器が完全オン状態(又は負荷制御状態)で,無通電期間との関係が規定する通電期間をもつ責務。
その通電期間及び無通電期間は,両方とも,装置が熱平衡状態に達するよりも短い時間である。”
5.3.4.4
一時的責務
半導体制御器が熱平衡状態に到達するよりも短い時間,完全オン状態(又は負荷制御状態)を維持し,
機器が冷却媒体と同じ温度まで低下するのに十分な無通電期間をもつ責務。一時的責務の標準値は,次に
よる。
30秒,1分,3分,10分,30分,60分及び90分。
5.3.4.5
周期的責務
JIS C 8201-1の4.3.4.5(周期的責務)による。
5.3.4.6
責務サイクルの値及び記号
責務サイクルは,二つの記号F及びSによって表す。これによって,冷却時間も設定される。
Fは,オン時間の全期間に対する比を百分率で表す。Fの推奨値を,次に示す。
F=1,5,15,25,40,50,60,70,80,90,99(%)
Sは,毎時動作サイクル数である。Sの推奨値は,次による。
S=1,2,3,4,5,6,10,20,30,40,50,60(動作サイクル/時)
注記 製造業者は,F及び/又はSの推奨値のほかの値を設定してもよい(附属書H参照)。
5.3.5
通常負荷及び過負荷特性
JIS C 8201-1の4.3.5(通常負荷及び過負荷特性)に,次を追加して適用する。
5.3.5.1
過負荷電流波形
過負荷電流波形は,制御された過負荷電流における電流−時間の関係によって与えられる。これは,二
つの記号,X及びTxによって表す。
16
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Xは過負荷電流比で,表6から選択する定格使用電流(Ie)の倍数であり,過負荷状態での使用電流の最
大値を表す。
X・Ieの所定値を超えることがある電源周波数の10サイクル以下の過電流は,過電流波形としては無視す
る。
Txは,開閉機能(例えば,金属蒸気ランプの予熱素子),負荷制御及び定常運転間の過負荷電流持続時
間の和を示す(表6参照)。
5.3.5.2
動作能力
動作能力は,使用負荷種別,過負荷電流波形,特定の動作周期に従った通常負荷及び過負荷状態におけ
る全電圧状態での,次のものの複合した能力を表す。
− オン状態における電流転流及び通電
− オフ状態(阻止)の確立及び維持
動作能力は,次のものによって特性を明らかにする。
− 定格使用電圧(5.3.1.1参照)
− 定格使用電流(5.3.2.3参照)
− 定格責務(5.3.4参照)
− 過負荷電流波形(5.3.5.1参照)
− 使用負荷種別(5.4参照)
要求事項は,8.2.4.1による。
5.3.5.3
オン,徐昇,徐降及び負荷制御特性
非モータ負荷を制御する制御器及び接触器の代表的な使用条件は,附属書Bによる。
5.3.6
定格条件付短絡電流
JIS C 8201-1の4.3.6.4(定格条件付短絡電流)による。
5.4
使用負荷種別
JIS C 8201-1の4.4(使用負荷種別)に,次の事項を追加して適用する。
制御器及び接触器の使用負荷種別の推奨を表2に示す。表2に記載がない使用負荷種別は,受渡当事者
間の合意による。受渡当事者間の合意は,製造業者のカタログ又は資料に記載する情報で規定してもよい。
各使用負荷種別(表2参照)は,表3,表6,表7及び表8に示す電流値,電圧値,力率及びほかのデー
タ,並びにこの規格で規定する試験条件による特性をもつ。
使用負荷種別の識別文字の第一数字は,半導体開閉機器(例えば,この規格の中では,制御器又は接触
器)を示す。
第二数字は,代表的適用を示す。
AC-55及びAC-56の場合,添え字a又はbは,適用する負荷の種類を示す。
注記 JIS C 8201-4-2で用いられる添え字とは異なり,これらの添え字は,バイパス開閉機器の使用
には関連がない。
5.4.1
試験に基づく定格の指定
試験によって検証した,ある使用負荷種別をもつ制御器又は接触器は,次の条件のいずれかを満足する
場合,試験なしで検証した以外の定格を指定してもよい。
− 試験していない定格使用電流及び電圧が,試験した定格以下の場合。
− 試験していない使用負荷種別及び責務サイクルの要求事項が,試験した定格と同等又は相対的厳しさ
レベル(表3参照)以下の場合。
17
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 試験していない過負荷電流波形が,試験した表3の相対的厳しさレベル以下の場合。試験した過負荷
電流比Xより低い値を指定してもよい。
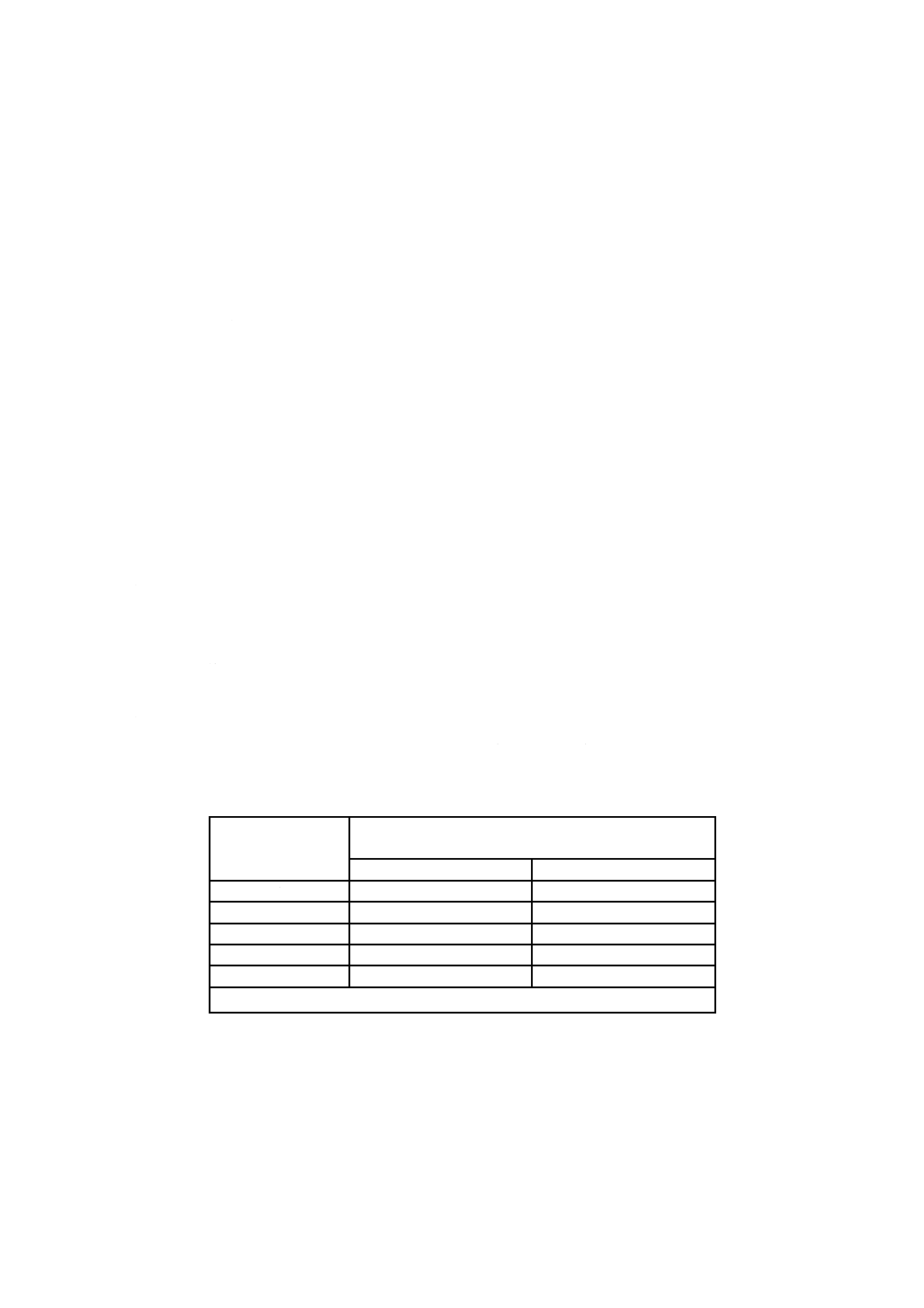
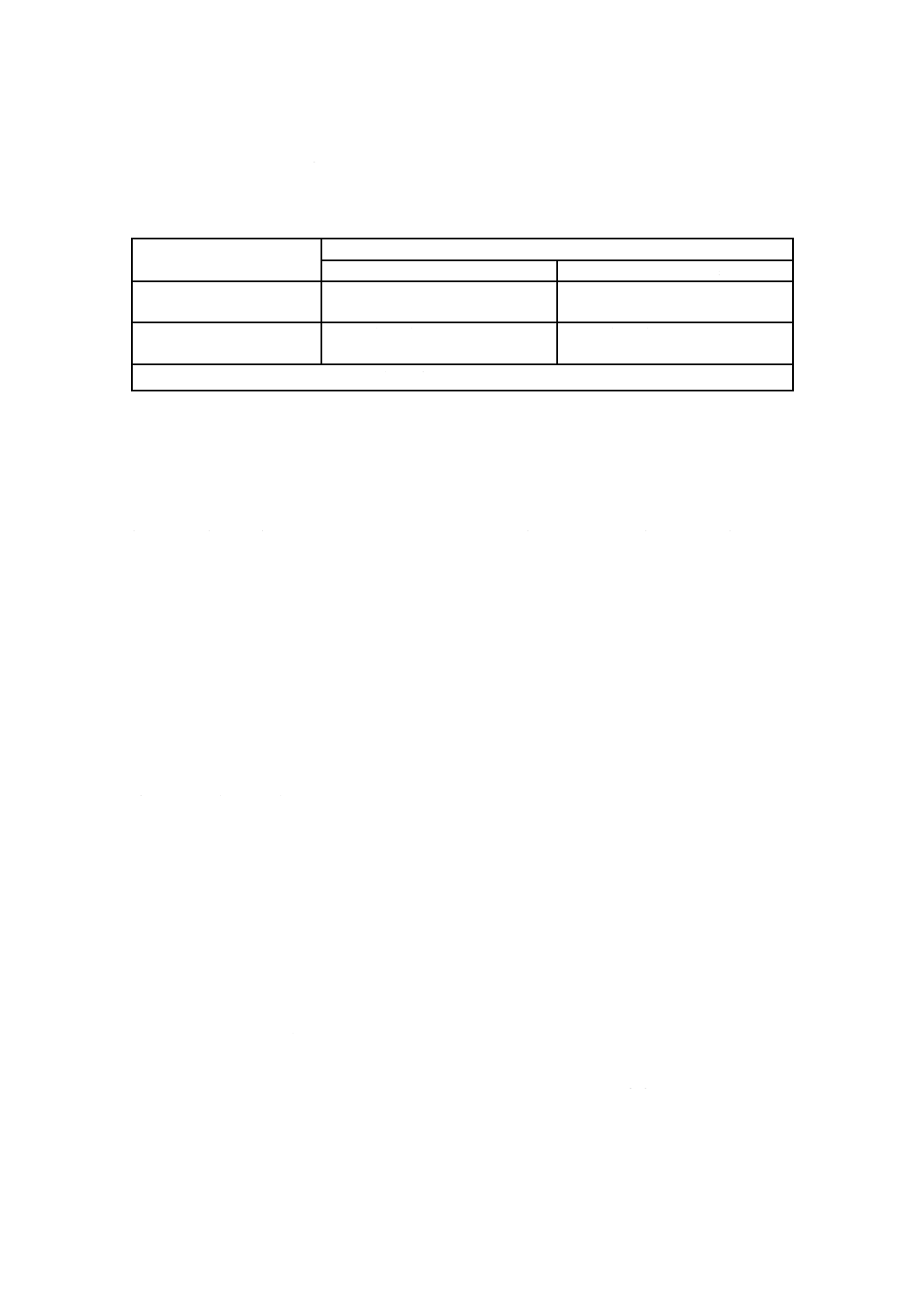
表2−使用負荷種別
使用負荷種別
代表的適用
AC-51
無誘導又は低誘導負荷,抵抗炉a), b)
AC-55a
放電灯制御装置の開閉a), b)
AC-55b
白熱灯の開閉a), b)
AC-56a
変圧器の開閉a), b)
AC-56b
コンデンサバンクの開閉a), b)
注a) 完全オン状態に到達後,半導体制御器をバイパスする装置を用いてもよ
い。半導体接触器と一体であっても,又は分離して据え付けてもよい。
b) 使用負荷種別が注a)に示すバイパス手段を用いる場合だけに適用される
ときは,製造業者がこのことを示さなければならない。6.1参照。
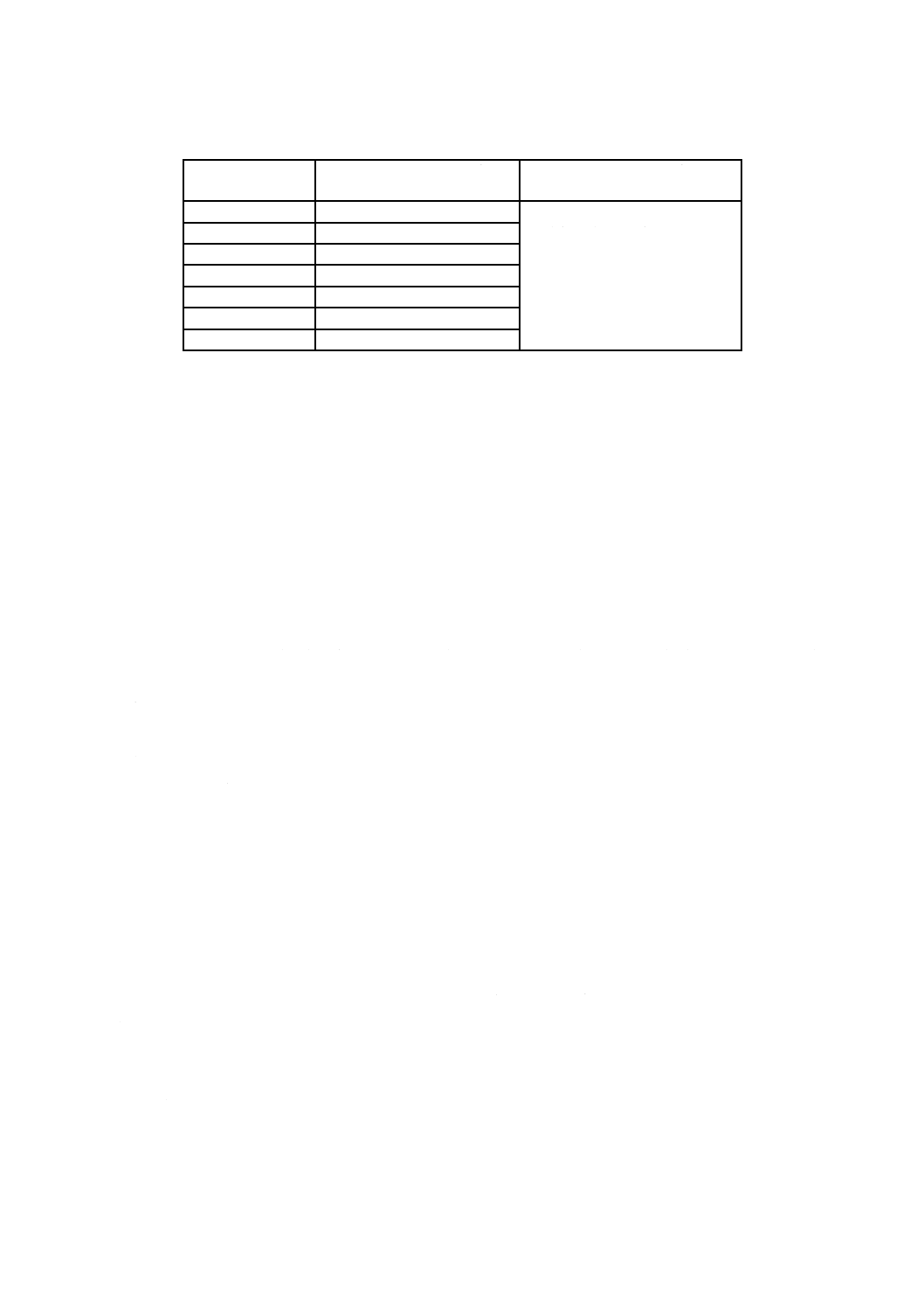
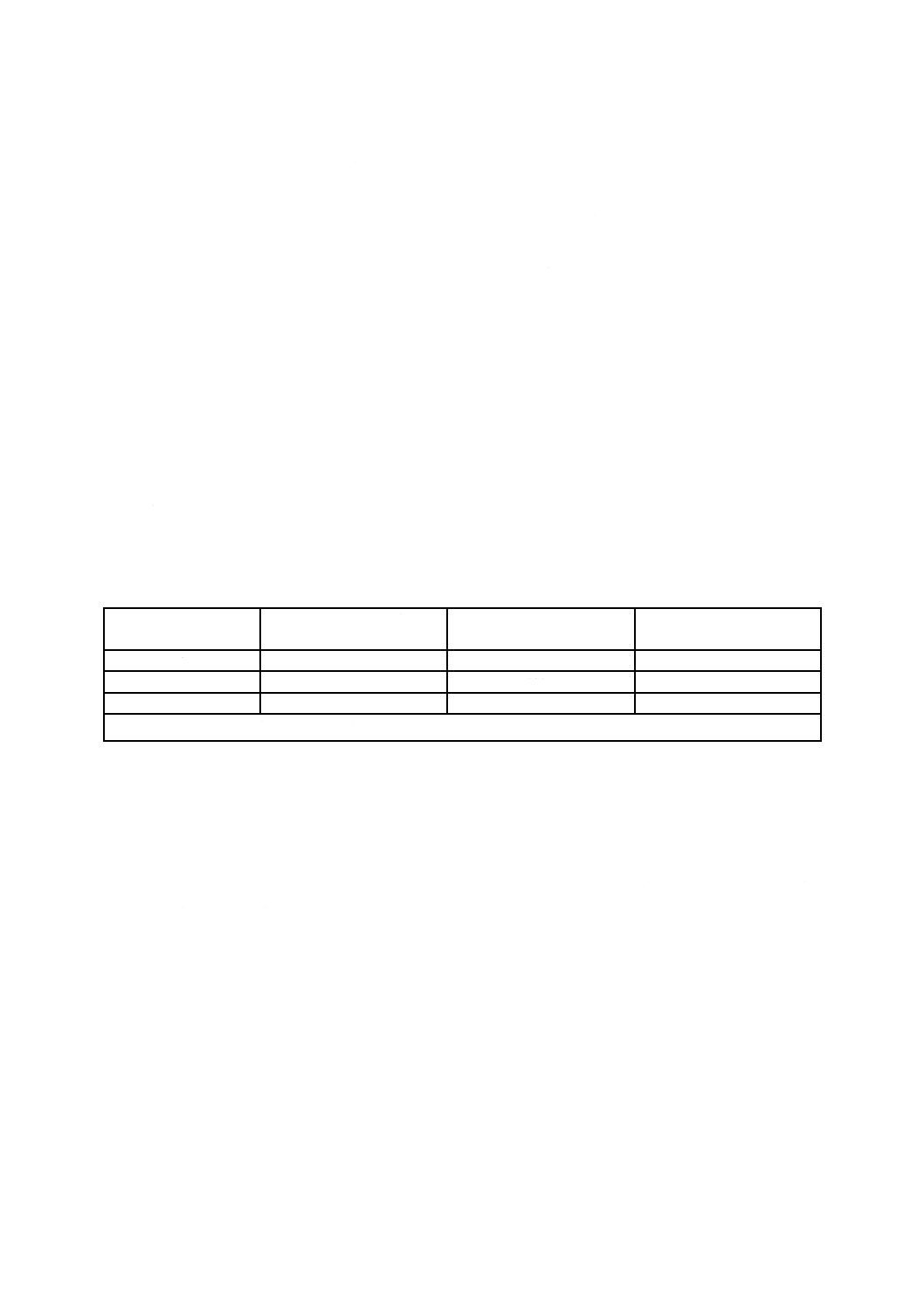
表3−相対的厳しさレベル
厳しさレベル
使用負荷種別
過負荷電流波形
X・Tx
時間に関係する要求事項
最も厳しい
AC-51
AC-55a
AC-55b
AC-56a
AC-56b
すべてバイパスなし
(X・Ie)2×Txの最大値a)
F×Sの最大値b)
AC-55a
バイパス使用時
(X・Ie)2×Txの最大値a)
オフ時間の最小値c)
注a) (X・Ie)2×Txの最大値が複数のX・Ieの値で生じる場合は,X・Ieの最大値を適用しなければならない。
b) F×Sの最大値が複数のSの値で生じる場合は,Sの最大値を適用しなければならない。
c) (X・Ie)2×Txの最大値が複数のオフ時間の値で生じる場合は,オフ時間の最小値を適用しなければ
ならない。
5.5
制御回路
JIS C 8201-1の4.5.1(電気制御回路)に,次を追加して適用する。
制御回路の例及び図解については,附属書Gを参照。電子制御回路の特性は,次による。
− 電流の種別
− 消費電力
− 定格周波数(又は直流)
− 定格制御回路電圧,Uc(種類:交流/直流)
− 定格制御電源電圧,Us(種類:交流/直流)
− 制御回路装置の種類(接点,センサ)
注記 制御回路装置の電源端子に印加する制御電源電圧Usは,内蔵の変圧器,整流器,抵抗器など
のために,入力信号を制御する制御回路電圧Ucとは異なることがあるので,区別する。
5.6
補助回路
JIS C 8201-1の4.6(補助回路)に,次を追加して適用する。
18
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
電子補助回路は,この規格で規定する性能及び特性に直接関連しない機能(例えば,監視,データ取得
など)をもつ。
標準状態において,補助回路は,制御回路と同じ方法で特性を示し,また,同じ種類の要求事項をもつ。
補助回路が特殊な動作特性をもつ場合は,その限界特性については,製造業者と相談することが望ましい。
制御器又は接触器に内蔵し,かつ,プログラマブルコントローラ(PLC)と互換性をもつことを意図し
たデジタル入力及び/又はデジタル出力は,JIS B 3502の要求事項を満たさなければならない。
5.7
空欄
5.8
短絡保護装置(SCPD)との保護協調
制御器及び接触器は,SCPDの形式,定格及び特性によって,SCPDとの過電流動作協調及び短絡時の適
切な保護を行う。この要求事項は,8.2.5及びJIS C 8201-1の4.8[短絡保護装置(SCPD)との協調]によ
る。
6
製品情報
6.1
情報の性質
次の情報は,製造業者が提供しなければならない。
識別
a) 製造業者名又は商標
b) 形式又は製造番号
c) この規格の番号
特性,基本的な定格値及び使用
d) 定格使用電圧(5.3.1.1参照)
e) 定格インデックスを構成する定格使用電流,対応する使用負荷種別(5.4参照),過負荷電流波形(5.3.5.1
参照)及び責務サイクル(5.3.4.6参照)又はオフ時間
AC-51の様式の例は,次による。
100 A:AC-51:1.5×Ie−46 s:50−30
これは,無誘導又は低誘導負荷に適用される定格電流100 Aの装置で,150 Aを46秒間通電でき,
通電率50 %,30標準動作サイクル/時で使用可能であることを示す。
定格使用電流だけが適用され,制御器がバイパスと同時に用いられる場合,規定された様式に従い,
定格インデックスを示さなければならない。
AC-55aの様式の例は,次による。
100 A:AC-55a:2×Ie−30 s:180 s
これは,放電灯制御の開閉に適用される定格電流100 Aの機器装置で,200 Aを30秒間通電でき,
オフ時間は,次のオン操作までに180秒以上必要であることを示す。
f)
定格周波数の値(例えば,50 Hz又は50/60 Hz)
g) 該当する場合,定格責務の表示(5.3.4.3参照)
h) フォーム指定(例えば,フォーム4又はフォームH4A,表1参照)
安全及び据付け
j)
定格絶縁電圧(5.3.1.2参照)
k) 定格インパルス耐電圧(5.3.1.3参照)
l)
閉鎖形装置の場合には,IPコード(8.1.11参照)
19
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
m) 汚損度(7.1.3.2参照)
n) 定格条件付短絡電流,制御器の協調の種類,組み合わせるSCPDの形式,電流定格及び特性(5.8参照)
p) 空欄
q) 定格制御回路電圧Uc,電流及び定格周波数の種類。必要な場合は,定格制御電源電圧Us,電流の種類,
定格周波数の種類及び制御回路(制御回路構成の例については,附属書Gを参照)の正常な動作を確
保するために必要なその他の情報(例えば,入力インピーダンス)
補助回路
r) 補助回路の種類及び定格(5.6参照)
s)
空欄
EMCエミッション及びイミュニティレベル
t)
機器の等級及び適合性を保つために必要な特別の要求事項(8.3.2参照)
u) イミュニティレベル及び適合性を保つために必要な特別の要求事項(8.3.3参照)
6.2
表示
JIS C 8201-1の5.2(表示)に次を追加して適用する。
6.1のd)〜u) のデータは,銘板,装置又は製造業者発行の資料に記載しなければならない。
6.1のc) 及びl) のデータは,装置に表示することが望ましい。
6.3
取付け,操作及び保守にかかわる指示
JIS C 8201-1の5.3(取付け,操作及び保守にかかわる指示)に,次の事項を追加して適用する。
この規格に適合する製品は,次の特別な事項を考慮しなければならない。
− 短絡事故発生時の処置。
− 機器の金属ラジエータ表面の温度上昇50 Kを超える場合。
7
標準使用,取付け及び輸送条件
7.1
標準使用条件
JIS C 8201-1の6.1(標準使用条件)に,次の事項を追加して適用する。
7.1.1
周囲温度
周囲温度は,40 ℃以下で,かつ,24時間の平均が35 ℃以下とする。
周囲温度の下限は,0 ℃とする。
周囲温度は,エンクロージャがない場合は装置の周辺,エンクロージャがある場合はエンクロージャ近
傍の温度をいう。
注記 装置が,40 ℃を超える周囲温度(例えば,開閉装置及び制御装置内,鍛造工場,ボイラ室並び
に熱帯地方の国)又は0 ℃より低い周囲温度(例えば,IEC 60439-1では,−25 ℃として要求
されている)で用いる場合は,製造業者と使用者との合意による。製造業者のカタログに示さ
れる情報は,この要求事項を満たすことがある。
7.1.2
標高
据付場所の標高は,1 000 m以下とする。
注記 さらに高い標高で用いられる装置に対しては,絶縁耐力の低下及び空気の冷却効果の低下を考
慮に入れることが必要である。これらの条件で用いる電気装置は,製造業者と使用者との合意
によって設計又は用いられる。
20
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.1.3
雰囲気
7.1.3.1
湿度
JIS C 8201-1の6.1.3.1(湿度)による。
7.1.3.2
汚損度
製造業者の指定がない場合,接触器及びスタータは,JIS C 8201-1の6.1.3.2(汚損度)に規定する汚損
度3の環境において用いる。ただし,ミクロ環境条件によっては,ほかの汚損度の適用を考慮してもよい。
7.1.4
衝撃及び振動
JIS C 8201-1の6.1.4(衝撃及び振動)による。
7.2
輸送中及び保管中の条件
JIS C 8201-1の6.2(輸送中及び保管中の条件)による。
7.3
取付け
JIS C 8201-1の6.3(取付け)による。また,EMCの考慮については,8.3及び9.3.5を参照。
7.4
電気系統の妨害及び影響
EMCの考慮については,8.3及び9.3.5を参照。
8
構造及び性能に関する要求事項
8.1
構造に関する要求事項
注記 JIS C 8201-1の7.1.1(材料)及び7.1.2(通電部及び接続)について,材料及び通電部に関する
追加要求事項を検討中。
8.1.1
材料
JIS C 8201-1の7.1.1による(8.1の注記を参照)。
8.1.2
通電部及び接続
JIS C 8201-1の7.1.2による(8.1の注記を参照)。
8.1.3
空間距離及び沿面距離
JIS C 8201-1の7.1.3(空間距離及び沿面距離)に,次を追加して適用する。
半導体の特性は,断路(アイソレーション)の目的には不適切である。
8.1.4
空欄
8.1.5
空欄
8.1.6
空欄
8.1.7
端子
JIS C 8201-1の7.1.7(端子)に,次の要求事項を追加して適用する。
ただし,JIS C 8201-1の7.1.7.4(端子の識別及び表示)の要求事項に,附属書Aを追加して適用する。
8.1.8
空欄
8.1.9
接地の規定
JIS C 8201-1の7.1.9(保護接地に関する規定)による。
8.1.10 装置のエンクロージャ
JIS C 8201-1の7.1.10(装置のエンクロージャ)による。
8.1.11 閉鎖形の制御器及び接触器の保護等級
JIS C 8201-1の7.1.11(箱入り装置の保護等級)による。
21
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.2
性能に関する要求事項
8.2.1
動作条件
8.2.1.1
一般事項
制御器及び接触器で用いられる補助装置は,製造業者の取扱説明書及びそれらの関連製品規格に従って
動作しなければならない。
8.2.1.1.1
制御器及び接触器は,次のような構造でなければならない。
a) トリップフリーである(3.1.20参照)。
b) オフからオン状態に開閉するいつの時点においても,又は完全オン状態のときには,動作手段によっ
て開路又はオフ状態に復帰することができる。
適合性は,9.3.3.6.3に従って検証する。
8.2.1.1.2
制御器及び接触器は,その内部装置の動作によって生じる機械的衝撃又は電磁干渉によって,機能不良
を起こしてはならない。
適合性は,9.3.3.6.3に従って検証する。
8.2.1.1.3
ハイブリッド制御器及び接触器で用いる直列機械式開閉機器の可動接点は,手動又は自動にかかわらず,
すべての極が同時に閉路遮断するように,機械的に連結しなければならない。
8.2.1.2
制御器の動作限界
制御器及び接触器は,9.3.3.6.3に従って試験するとき,定格使用電圧Ue及び定格制御電源電圧Usの85 %
〜110 %の値で確実に動作できなければならない。範囲を宣言する場合は,85 %を低い値に,110 %を高い
値に適用する。
8.2.1.3
空欄
8.2.1.4
空欄
8.2.1.5
空欄
8.2.1.5.1
空欄
8.2.1.5.2
制御器と組み合わせたリレー及び引外し装置
負荷を保護するために制御器と組み合わせたリレー及び引外し装置は,X・Ieの電流で時間Tx以内に動作
しなければならない。ここに,X及びTxは,定格インデックスによって与えられた値である。二つ以上の
定格インデックスが示されている場合は,(X・Ie)2×Txが最大となるX及びTxを用いる。
8.2.1.6
バイパス制御器の形式試験した部品
8.2.1.6.1 関連する規格の要求事項に適合する開閉機器は,次の追加要求事項に従っている場合,部分的
に形式試験された機器とみなす。
a) 機械式開閉機器の温度上昇は,8.2.2に適合する。
b) 機械式開閉機器の閉路及び遮断容量は,8.2.4.2に適合する。
c) 半導体開閉機器は,バイパス制御器の適用する定格による使用負荷種別に対して8.2.4.1に適合する。
8.2.1.6.2 バイパス制御器の組合せのための要求事項に対して,組合せ前に8.2.1.6.1のすべての要求事項
に適合した開閉機器は,バイパス制御器の限定しない使用に適した,形式試験をした部品とみなす(附属
書J参照)。
22
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.2.1.7
バイパス制御器における組込部品
バイパス制御器の組合せのための要求事項に対して,8.2.1.6.1のすべての要求事項に適合しない開閉機
器は,バイパス制御器に限定して用いる組込部品とみなす(附属書J参照)。
8.2.1.8
バイパス制御器における開閉機器の限定しない使用
機械式開閉機器及び半導体開閉機器が,形式試験した部品であるとき,これらの機器は,製造業者によ
って,指定した定格,動作責務及び最終使用条件に従い,組み合わせ,接続しなければならない。これ以
上の制限があってはならない。
8.2.1.9
バイパス制御器における開閉機器の限定した使用
一方又は両方の開閉機器を組込部品とみなすとき,この開閉機器は,次の規定による。
a) 開閉機器は,ユニットとして結合,評価及び試験しなければならない。
b) 開閉機器は,電気,電子又は機械的手段の組合せで,インタロックしなければならない。機械式開閉
接点は,半導体開閉機器による指令なしに,過負荷電流の閉路及び遮断をしてはならない。
c) 半導体開閉機器は,過負荷電流を閉路及び遮断するときは,いつでも主回路電流を制御できなければ
ならない。
8.2.2
温度上昇
JIS C 8201-1の7.2.2(温度上昇)に,次の項目を追加して,適用する。
半導体機器の金属ラジエータの表面温度上昇は,通常使用状態において触れない箇所は,50 Kを超えて
もよい。
50 Kを超える場合,危険回避のための防護及び位置は,設置者の責任による。
製造業者は,この規格の6.3の適切な警告(例えば,IEC 60417のシンボル5041)を表示しなければな
らない。
8.2.2.1
端子 空欄
8.2.2.2
アクセスできる部品 空欄
8.2.2.3
周囲温度 空欄
8.2.2.4
主回路
8.2.2.4.1
一般
完全オン状態で電流を流す制御器又は接触器の主回路は,過電流引外し装置とともに,9.3.3.3.4に基づ
いて試験し,JIS C 8201-1の7.2.2.1(端子)に規定する温度上昇限度を超えることなく,電流Ieを通電で
きなければならない。
− 8時間責務の制御器又は接触器:規約熱電流(5.3.2.1及び/又は5.3.2.2参照)
− 連続責務,間欠又は一時的責務の制御器又は接触器:対応する定格使用電流(5.3.2.3参照)
8.2.2.4.2
ハイブリッド制御器の直列機械式開閉機器
ハイブリッド制御器の主回路に直列接続した部品の温度上昇は,9.3.3.3.4及び9.3.3.6.1に示す方法で検
証しなければならない(表13参照)。
8.2.2.4.3
バイパス制御器の並列機械式開閉機器
バイパス制御器の並列機械式開閉機器は,次による。
a) 形式試験された部品とみなす機器(8.2.1.6参照)は,JIS C 8201-1の7.2.2.1に規定する温度上昇限度
を超えてはならない。
b) 組込部品(8.2.1.7参照)とみなす機器の温度上昇は,9.3.3.3.4及び9.3.3.6.1に示す方法で検証しなけ
ればならない(表7及び表13を含む。)。この機器は,二つの開閉機器(表7)が標準使用と同じ操作
23
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
手順で決まるオン状態で試験しなければならない。
8.2.2.4.4
主回路に接続された半導体機器
主回路に接続した半導体機器の温度上昇は,9.3.3.3.4及び9.3.3.6.1に示す方法で検証しなければならな
い(熱安定度試験)。
8.2.2.5
制御回路
JIS C 8201-1の7.2.2.5(制御回路)による。
8.2.2.6
コイル及び電磁石の巻線
8.2.2.6.1
連続及び8時間責務の巻線
コイル巻線は,バイパス回路に電流の最大値を通電し,連続負荷条件で定格周波数の最大定格制御電源
電圧を印加したとき,表4及びJIS C 8201-1の7.2.2.2(アクセスできる部品)に規定する温度上昇限度を
超えてはならない。
注記 この規格の表4及びJIS C 8201-1の7.2.2.2で規定する温度上昇限度は,周囲温度が−5 ℃〜
+40 ℃の限度内の場合だけに適用可能である。
8.2.2.6.2
間欠責務の巻線
コイル巻線は,バイパス回路が無通電条件で,間欠責務の分類に従って,表5に示す動作サイクルで定
格周波数の最大定格制御電源電圧を印加したとき,表4及びJIS C 8201-1の7.2.2.2に規定する温度上昇限
度を超えてはならない。
注記 この規格の表4及びJIS C 8201-1の7.2.2.2で規定する温度上昇限度は,周囲温度が−5 ℃〜
+40 ℃の限度内の場合だけに適用可能である。
8.2.2.6.3
特殊定格(一時的又は周期的責務)の巻線
特殊定格の巻線は,それが意図している最も厳しい動作条件下で試験し,かつ,その定格は,製造業者
が明示しなければならない。
注記 特殊定格の巻線は,始動時間だけ励磁する接触器のコイル,ラッチ式接触器のトリップコイル
及びインタロック付空気式接触器の電磁バルブのコイルを含めてもよい。
表4−空気中及び油中の絶縁コイルの温度上昇限度
絶縁材料の階級
温度上昇限度(抵抗法)
K
空気中のコイル
油中のコイル
A
85
60
E
100
60
B
110
60
F
135
−
H
160
−
注記 絶縁材料の階級は,JIS C 4003の表1を参照。
24
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表5−間欠責務の動作サイクル
間欠責務の分類
1開閉動作サイクルの時間
s
操作コイルのオン時間
1
3 600
オン時間は,製造業者が指定した
通電率に従うのが望ましい。
3
1 200
12
300
30
120
120
30
300
12
1 200
3
8.2.2.7
補助回路
JIS C 8201-1の7.2.2.7(補助回路)による。
8.2.2.8
その他の部分
JIS C 8201-1の7.2.2.8(その他の部分)による。
8.2.3
耐電圧性能
次に示す要求事項は,JIS C 60664規格群に基づいたものであり,設置の条件にかかわる機器の絶縁協調
を達成する方法を規定する。
機器は,次の項目に耐えなければならない。
− JIS C 8201-1の附属書H(電源システムの公称電圧と装置の定格インパルス耐電圧との間の相関関係)
に示す過電圧種別に基づく定格インパルス耐電圧(5.3.1.3参照)
− JIS C 8201-1の表14(断路に適した装置の開路接点間の試験電圧)に示す断路(アイソレーション)
に適した機器の接点ギャップに対するインパルス耐電圧
− 商用周波耐電圧
注記1 値が交流試験電圧の波高値以上である場合には,直流電圧を用いてもよい。
注記2 給電システムの公称電圧と機器の定格インパルス耐電圧との関係は,JIS C 8201-1の附属書
Hによる。
定格使用電圧(JIS C 8201-1の4.3.1.1の注記1及び注記2参照)に対する定格インパルス耐電圧は,機
器を用いる給電システムの公称電圧及び適切な過電圧種別によって,JIS C 8201-1の附属書Hに規定する
インパルス耐電圧値以上でなければならない。
この要求事項は,9.3.3.4の試験によって,検証しなければならない。
8.2.3.1
インパルス耐電圧
インパルス耐電圧は,次による。
a) 主回路 JIS C 8201-1の7.2.3.1(インパルス耐電圧)の1) による。
b) 補助回路及び制御回路 JIS C 8201-1の7.2.3.1の2) による。ただし,2) a) を次のとおり変更する。
a) 定格使用電圧で主回路から直接操作する補助回路及び制御回路は,充電部と接地される部分との間
及び極間の空間距離に,JIS C 8201-1の表12(インパルス試験耐電圧値)に規定する定格インパル
ス耐電圧に応じた試験電圧を加えたとき,これに耐えなければならない。
注記 空間距離及び固体絶縁を加えた機器の絶縁は,インパルス電圧を印加することが望ましい。
8.2.3.2
主回路,補助回路及び制御回路の商用周波耐電圧
JIS C 8201-1の7.2.3.2(主回路,補助回路及び制御回路の商用周波耐電圧)による。
25
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.2.3.3
空間距離
JIS C 8201-1の7.2.3.3(空間距離)による。
8.2.3.4
沿面距離
JIS C 8201-1の7.2.3.4(沿面距離)による。
8.2.3.5
固体絶縁
JIS C 8201-1の7.2.3.5(固体絶縁)による。
8.2.3.6
分離した回路間の絶縁距離
JIS C 8201-1の7.2.3.6(分離された回路間の距離)による。
8.2.4
通常負荷及び過負荷性能に関する要求事項
5.3.5に従う通常負荷及び過負荷特性に関する要求事項は,8.2.4.1及び8.2.4.2に示す。
8.2.4.1
動作能力に関する要求事項(非モータ負荷の場合)
制御器及び接触器は,9.3.3.6に従って試験したとき,故障又は損傷がなく,オン状態の確立,転流,指
定レベルの過負荷電流の通電,オフ状態の確立及び維持ができなければならない。
使用負荷種別AC-51,AC-55a,AC-55b,AC-56a及びAC-56bを指定する,バイパス手段なしで用いる制
御器及び接触器の場合,Xに対応するTxの値は,表6に示す値以上でなければならない。
使用負荷種別AC-55aを指定する,バイパス手段を用いる制御器及び接触器は,定格使用電流よりも大
きな電流で長いオン時間が要求される場合に適用する(例えば,予熱時間の必要なランプの開閉)。
制御器の発熱量が,通電期間中に許容値に達するため,オン期間の終了後,制御器に対し,直ちに適切
な無負荷期間(例えば,バイパス手段)を与えなければならない。
最小無負荷期間と同様に,Xに対するTxの値は,製造業者と使用者との間の合意による。また,前述の
様式によって定格指標を表示しなければならない(6.1参照)。
定格は,この規格の表7及び表8並びにJIS C 8201-1の8.3.3.5.2(試験回路),8.3.3.5.3(過渡回復電圧
の特性)及び8.3.3.5.4(空白)の関連部分に示す条件によって検証する。
X・Ieが1 000 Aを超える場合,過負荷能力の検証は,製造業者と使用者との合意によらなければならな
い(例えば,コンピュータモデリングによる。)。
表7及び表8において,バイパス手段がない使用負荷種別AC-51,AC-55a,AC-55b,AC-56a及びAC-56b
に対する責務サイクル(F−S=50−1)及びバイパス手段がある使用負荷種別AC-55aに対するオフ時間(オ
フ時間=1 440秒)は,8時間動作責務に対する最低限の要求事項である。
製造業者は,表3の最も厳しい責務を満足する試験を実施する場合,それ以下の責務に適合しているこ
とを表示できる。
バイパス手段がない使用負荷種別AC-51,AC-55a,AC-55b,AC-56a及びAC-56bにおいて,オン時間及
びオフ時間のより厳しい試験値は,F及びSを用いて次の式によって算出する。
S
F
T
36
on=
(
)S
F
T
−
=
100
36
off
ここに,
Ton: オン時間(秒)
Toff: オフ時間(秒)
バイパス手段がある使用負荷種別AC-55aにおいて,製造業者は,標準として認められる1 440秒未満の
オフ時間をもつ起動責務に適合していることを表示してもよい。ただし,この場合,製造業者は,表示し
26
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
たオフ時間で試験を行って検証しなければならない。
間欠・一時的・周期的責務を意図した制御器又は接触器に対して,製造業者は,5.3.4.6に示すF及びS
の列から選択しなければならない。
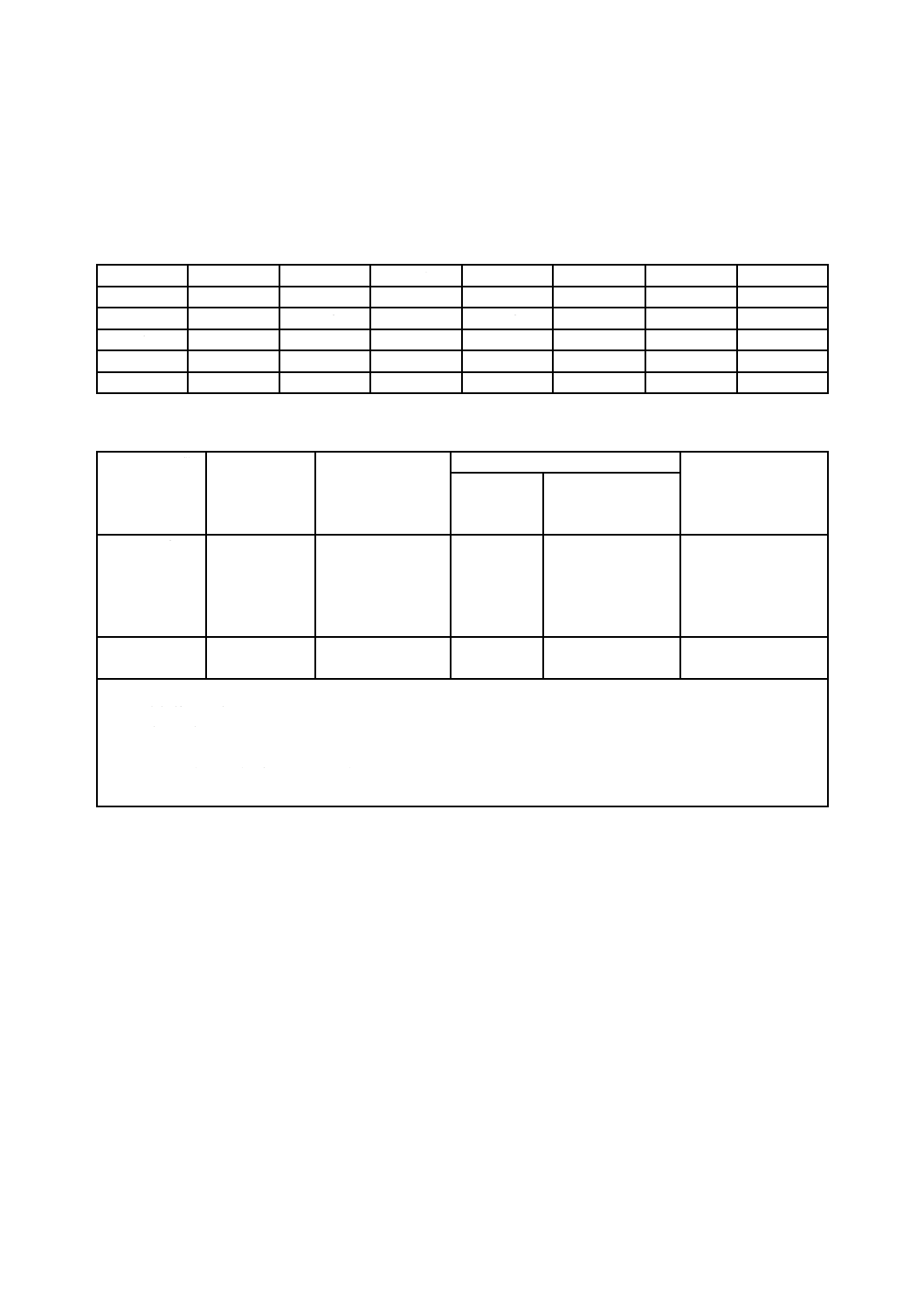
表6−最小過負荷電流許容時間(Tx)に対応する過負荷電流比(X)
Tx=20 ms
Tx=200 ms
Tx=1 s
Tx=10 s
Tx=60 s
Tx=300 s
連続
AC-51
X= 1.4
X=1.4
X=1.4
X=1.2
X=1.1
X=1
X=1
AC-55a
X=10
X=6
X=4
X=3
X=2
X=1.8
X=1
AC-55b
X=10
X=6
X=1.2
X=1.1
X=1
X=1
X=1
AC-56a
X=30
X=6
X=1.2
X=1.1
X=1
X=1
X=1
AC-56b
X=30
X=1.4
X=1.1
X=1
X=1
X=1
X=1
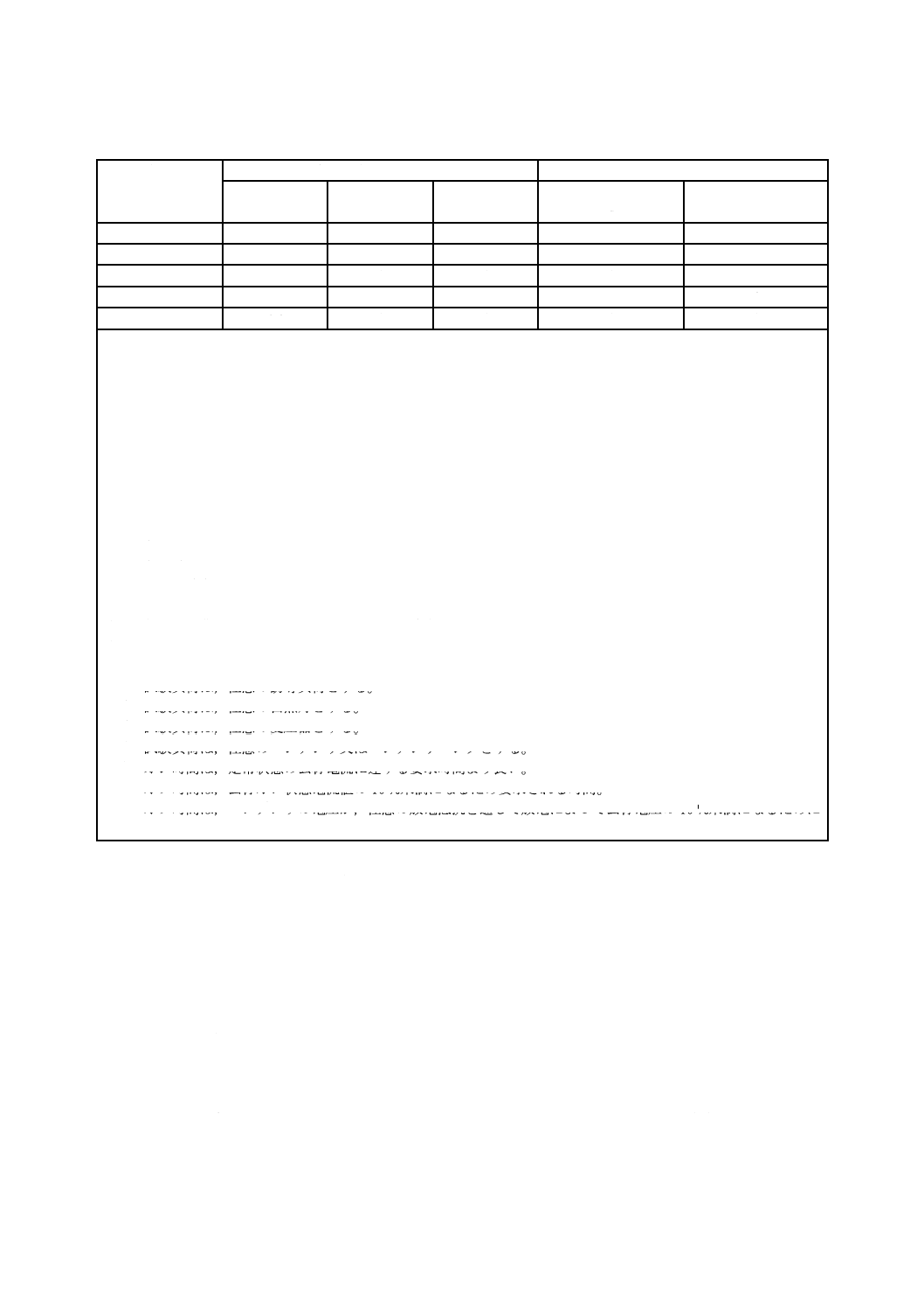
表7−熱安定度試験条件に対する最小要求事項
バイパス手段
使用負荷種別
制御器のフォーム
試験レベル
動作サイクルa)
オフ時間
試験電流
動作サイクルa)
オン時間
IT
s
s
バイパスなし
AC-51
AC-55a
AC-55b
AC-56a
AC-56b
4,H4
5,H5
X・Ie
Tx
Tx
バイパスあり
AC-55a
4,H4
5,H5
3・Ie
240
≦1 440
試験回路のパラメータは,次による。
Ie :定格使用電流
IT :試験電流
UT :試験電圧(任意の値でよい。)
cosϕ:試験回路力率(任意の値でよい。)
注a) 動作サイクル数は,制御器が熱平衡に達するのに必要な時間によって決まる。
27
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表8−過負荷能力試験条件に対する最小要求事項
使用負荷種別
試験回路のパラメータ
動作サイクルd)
オン時間
動作サイクルd)
オフ時間
動作サイクル数
Ic/Ie
Ur/Ue a)
cosϕ b)
s
s
回
AC-51
X
1.1
0.8
Tx c)
≧10
5
AC-55a
3
1.1
0.45
0.05
≧10
5
AC-55b
1.5
1.1
e)
0.05
60
50
AC-56a
30
1.1
≦1
0.05
≧10
5
AC-56b
g)
1.1
f)
0.05
≧10
1 000
試験回路のパラメータは,次による。
Ic :試験電流
Ie :定格使用電流
Ue :定格使用電圧
Ur :商用周波回復電圧
温度条件は,次による。
各々の試験において初期のケース温度Ciは,40 ℃と温度上昇試験(9.3.3.3)中における最大ケース温度との合計
値以上か,又は表7の熱安定度試験条件に対するそれぞれの最小要求事項に相当するケース温度でなければならな
い。試験中,周囲温度は,10 ℃と40 ℃との間になければならない。
注a) Ur/Ueは,オン時間に対する商用周波数の最後の3サイクルとオフ時間に対する最初の1秒に対する規定値で
ある。
b) cosϕ は,減電圧期間は任意でよい。
c) 表6参照。
d) 切換時間は,商用周波数の3サイクルを超えてはならない。
e) 試験は,白熱灯負荷で行う。
f) 試験は,コンデンサ負荷で行う。
g) コンデンサ容量定格は,コンデンサ開閉試験から導くか,又は確立した手段及び経験を基に指定してもよい。
参考までに,関係は,次の式によってもよい。
Ipmax≦ITSM×2
ここに, Ipmax :コンデンサの突入電流ピーク値
ITSM :繰返しがないオン状態でのサージ電流
28
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表9−阻止及び転流能力を含んだ性能試験に対する最小要求事項及び条件
使用負荷種別
試験回路のパラメータ
動作サイクル
U/Ue
試験電流
cosϕ
オン時間
s
オフ時間
s
AC-51
1.0
a)
0.8〜1.0
0.5
0.5
AC-55a
1.0
b)
0.45
0.5
0.5
AC-55b
1.0
c)
c)
f)
0.5
AC-56a
1.0
d)
≦0.45
f)
g)
AC-56b
1.0
e)
e)
f)
h)
次の試験を実施する。
− 試験1:85 % Ue,85 % Usで100サイクル
− 試験2:110 % Ue,110 % Usで1 000サイクル
試験の期間中は,次の事項に留意する。
− 負荷及び周囲温度は,10 ℃〜40 ℃の範囲内とする。
− EUTの各極の電源側端子と負荷側端子との間に,真の実効値電圧の測定器を接続する。
− 設定は,製造業者が標準製品条件として提供する外部調整器だけに制限する。ランプアップ機能を含む制御器
は,その最大ランプアップ時間又は10秒の,短い方で設定する。
この試験で得られる結果は,次に示すとおりでなければならない。
1) 次の1.1) 又は1.2) を満足する。
1.1) IO<1 mA,かつ,IF<1 mA
1.2) IO>1 mA又はIF>1 mAの場合は,次の内容をすべて満足する。
− 各極において,∆I<1である。ここに,∆I=(IF−IO) /IO
− IO及びIFが半導体データシートに示す限度内である。
2) 外観上の損傷があってはならない(発煙及び変色)。
3) 製造業者が指定する機能の喪失があってはならない。
注a) 試験負荷は,任意の軽誘導負荷とする。
b) 試験負荷は,任意の誘導負荷とする。
c) 試験負荷は,任意の白熱灯とする。
d) 試験負荷は,任意の変圧器とする。
e) 試験負荷は,任意のコンデンサ又はコンデンサバンクとする。
f) オン時間は,定常状態の公称電流に達する要求時間より長い。
g) オフ時間は,公称オン状態電流値の10 %未満になるため要求される時間。
h) オフ時間は,コンデンサの電圧が,任意の放電抵抗を通じて放電によって公称電圧の10 %未満になるために
要求される時間。
8.2.4.2
主回路開閉機器の閉路及び遮断容量
8.2.4.2.1
一般
過電流引外し装置及び付帯する機械式開閉機器を含む制御器又は接触器は,過負荷電流に対して,正常
に動作しなければならない。
電流の閉路及び遮断容量は,表10及び表11に示す使用負荷種別及び指定する動作サイクル数の条件に
よって検証する。
8.2.4.2.2
ハイブリッド制御器の直列機械式開閉機器
制御器及び接触器の主回路直列機械式開閉機器は,独立した機器として試験を行う場合は,その製品規
格の要求事項及び8.2.4.2の追加要求事項を満足しなければならない。
バイパスハイブリッド制御器及び接触器(図1参照)の直列機械式開閉機器は,半導体制御器の間欠責
務定格に相当する責務定格で選定してもよい。
閉路及び遮断容量は,9.3.3.5.1及び9.3.3.5.2の手順で検証しなければならない。
29
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.2.4.2.3
形式試験したバイパス制御器の並列機械式開閉機器
閉路及び遮断容量は,独立した機器として試験を行う場合,9.3.3.5.1及び9.3.3.5.3の手順で検証しなけ
ればならない。
8.2.4.2.4
組み込まれたバイパス制御器の並列機械式開閉機器
閉路及び遮断容量は,組み合わせたユニットとして試験を行う場合,9.3.3.5.1及び9.3.3.5.4の手順で検
証しなければならない。
8.2.4.2.5
半導体開閉機器
過負荷電流を制御する能力は,9.3.3.6.2及び9.3.3.6.3の手順で検証しなければならない。
8.2.4.3
校正負荷についての要求事項
短絡試験のための校正負荷(図I.1参照)は,次の特性の受動負荷である。
a) 定格電圧は,試験する装置のUeに等しいか,又は大きくなければならない。
b) 力率は,0.8〜1.0の範囲内でなければならない。
c) 校正負荷に電圧Ueを印加したとき,流れる電流は1 Aよりも大きい値でなければならない。
30
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表10−閉路及び遮断容量試験:
ハイブリッド制御器及び接触器の,機械式開閉機器H4及びH5のフォームに対する
使用負荷種別に従う閉路及び遮断条件
使用負荷種別
閉路及び遮断条件
Ic/Ie
Ur/Ue
cosϕ
オン時間
s
オフ時間
s
動作サイクル数
回
AC-51
1.5
1.05
0.8
0.05
a)
50
AC-55a
3
0.45
AC-55b
1.5 b)
b)
AC-56a
30
c)
AC-56b
d)
d)
試験回路のパラメータは,次による。
Ic :閉路及び遮断電流(a.c.対称実効値で示す。)
Ie :定格使用電流
Ue :定格使用電圧
Ur :商用周波回復電圧
注a) オフ時間は,次の表に規定する値以下とする。
電流Ic
A
オフ時間
s
Ic ≦
100
10
100 < Ic ≦
200
20
200 < Ic ≦
300
30
300 < Ic ≦
400
40
400 < Ic ≦
600
60
600 < Ic ≦
800
80
800 < Ic ≦ 1 000
100
1 000 < Ic ≦ 1 300
140
1 300 < Ic ≦ 1 600
180
1 600 < Ic
240
b) 試験は,白熱灯負荷で行う。
c) Icpeak=30×Ie×2
ただし,cosϕ ≦0.45であることが望ましい。
d) コンデンサ容量定格は,コンデンサ開閉試験から導くか,又は確立した手段及び経験を基に指定してもよい。
31
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
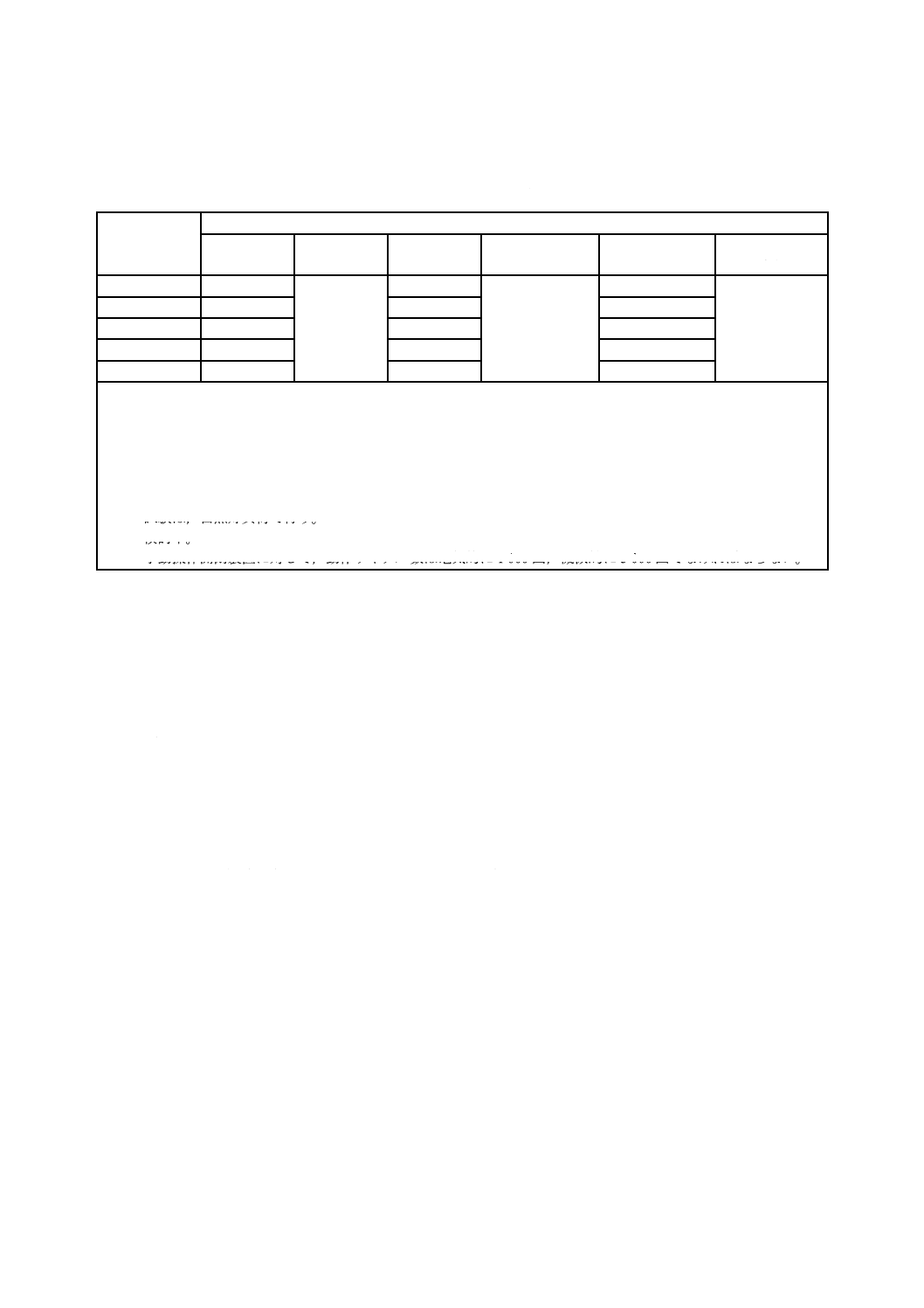
表11−動作性能:
ハイブリッド制御器及び接触器の,機械式開閉機器H4B及びH5Bのフォームに対する
使用負荷種別に従う閉路及び遮断条件
使用負荷種別
閉路及び遮断条件
Ic/Ie
Ur/Ue
cosϕ
オン時間
s
オフ時間
s
動作サイクル数
回
AC-51
1
1.05
0.8
0.05
a)
6 000 d)
AC-55a
2
0.45
a)
AC-55b
1 b)
b)
60
AC-56a
c)
c)
AC-56b
c)
c)
試験回路のパラメータは,次による。
Ic :閉路及び遮断電流(a.c. 対称実効値で示す。)
Ie :定格使用電流
Ue :定格使用電圧
Ur :商用周波回復電圧
注a) オフ時間は,表10に規定する値を超えてはならない。
b) 試験は,白熱灯負荷で行う。
c) 検討中。
d) 手動操作開閉装置に対して,動作サイクル数は電気的に1 000回,機械的に5 000回でなければならない。
8.2.5
短絡保護装置(SCPD)との協調
8.2.5.1
短絡状態における性能
短絡保護装置(SCPD)でバックアップした制御器及び接触器に対する定格条件付短絡電流は,9.3.4に
規定する短絡試験で検証する。これらの試験は,すべて満足しなければならない。
短絡保護装置の定格は,任意の定格使用電流,定格使用電圧及び対応する使用負荷種別に対して十分で
なければならない。
短絡保護装置との協調には,タイプ“1”又はタイプ“2”の2種類がある。両者に対する試験条件は,
9.3.4.3による。
タイプ“1”は,短絡状態では器具が,人又は設備に危害を与える要因になってはならない。ただし,部
品の修理又は交換をしないで引続き用いることができなくてもよい。
タイプ“2”は,短絡状態では器具が,人又は設備に危害を与える要因になってはならない。かつ,引続
き用いることができなければならない。ハイブリッド式の制御器及び接触器では,製造業者が,装置の保
守に関して取る処置を指示している場合は,接点は溶着してもよい。
注記 製造業者の推奨に適合しない短絡保護装置の使用は,協調を無効にする可能性がある。
8.2.5.2
空欄
8.3
EMCに関する要求事項
8.3.1
総則
各種の電気装置間・電子装置間で電磁両立性の達成が望ましいことは広く認められている。実際,多く
の国には,EMCに対する強制的な要求事項が存在する。EMCの許容レベルを達成するための試験レベル
及び要求事項は,箇条8及び箇条9による。
半導体制御器の特質のため,放射エミッション試験の要求事項は,附属書Dによる。
8.3.2及び8.3.3に規定する要求事項は,制御器及び接触器の電磁両立性を達成するために,関連するす
32
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
べてのイミュニティ及びエミッションの要求事項が対象になっている。追加試験は,要求しないか又は必
要ではない。EMC性能は,制御器及び接触器の電子部品が故障した場合には,保証しない。これらの条件
は考慮しておらず,試験要求事項ではない。
エミッション又はイミュニティにかかわらず,すべての現象は,個別に検討する。限度値は,累積効果
を考慮しない状態に対するものである。
制御器及び接触器は,システムを構成するためにほかの機器(負荷,ケーブルなど)と相互に接続しな
ければならない複雑な機器である。ほかの機器又はそれらとの接続は,制御器又は接触器の製造業者の管
理によらないため,制御器及び接触器は,製造業者の施設又は製造業者が選んだ試験所のいずれかで行う
試験によって,独立の機器としての特性を明らかにしなければならない。設置者は,制御器又は接触器が,
システムレベルに適用するどの要求事項にも適合することを確認する責任がある(設置者は,制御器及び
接触器の製造業者である場合もある。)。
EMCの要求事項は,制御器又は接触器の感電に対する保護,絶縁協調,耐電圧試験,不適切な操作又は
故障による危険などの安全要求事項を規定せず,影響も及ぼさない。
規定するエミッション限度値は,制御器又は接触器を受信アンテナに10 m未満まで近づけて用いると
き,ラジオ及びテレビジョン受信状態への干渉を完全に防ぐことができない場合がある。
8.3.2
エミッション
CISPR 11による次の二つの機器クラスとする。
a) クラスA機器 クラスAの機器は,通常のクラスであって,工業環境の中で用いることを目的として
いる。
このクラスが対象とする場所に設置する機器は,商用低電圧配電網に直接接続しないで,工業用電
力配電網に専用の配電変圧器を用いて接続するとみなせる。
例えば,高感度の計測用周波数帯域で動作する機器が障害を受けるような,特定の工業環境に対し
て,クラスA機器の規格では不十分な場合には,使用者はクラスBの機器を指定しなければならない。
クラスAの半導体制御器又は接触器は,工業環境以外,例えば,住宅環境内で用いると,無線障害
の原因になり得るということを示す次の例のようなラベルを張り付けなければならない。
例
注意
この製品はクラスA機器として設計したものです。住宅環境でこの製品を用いると無線障害を起こ
すことがあります。その場合,使用者は,対策することが必要なことがあります。
製品にラベルを張り付けられない場合は,製造業者は,使用者向け情報資料の中に明記してもよい。
b) クラスB機器 機器を商業又は軽工業地区に設置し,商用低電圧配電網に直接接続する場合は,クラ
スBの機器を指定しなければならない。
機器のクラスは,使用者向け情報資料の中に,目立つ方法で明示しなければならない。
8.3.2.1
商用電源周波数と関連した低周波エミッション
8.3.2.1.1
高調波
定格電流20 A以下で,商用低電圧配電網に接続する制御器は,JIS C 61000-3-2の要求事項に適合しなけ
ればならない。JIS C 61000-3-2の適用範囲以外の制御器は,検討中である。高調波エミッションは,起動
期間中の短期間に発生し,また,完全オン状態では重大な高調波エミッションは発生しないため,完全オ
ン状態で運転する制御器では,EMC試験を省略できる。
33
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例 省略できるものは,次による。
フォーム5及び一部のフォーム4
8.3.2.1.2
電圧変動
この現象は,半導体制御器の動作からは発生しないため,試験は省略できる。
8.3.2.2
高周波エミッション
8.3.2.2.1
伝導無線周波(RF)エミッション
表15に示す限度値は,9.3.5.1.1の手順に従って検証しなければならない。
8.3.2.2.2
放射エミッション
表16に示す限度値は,9.3.5.1.2の手順に従って検証しなければならない。
8.3.3
イミュニティ
8.3.3.1
一般事項
電気系統の影響は,その影響の強さによって破壊的であることも,非破壊的であることもある。破壊的
な影響(電圧又は電流)は,制御器に回復できない損傷を引き起こす。非破壊的な影響は,一時的な機能
不良又は異常な動作を引き起こすことがあるが,制御器は,その影響が小さくなったり,除去された後は,
正常な動作に戻る。回復のためには,これに手動操作の介入が必要な場合があってもよい。
制御器が,試験したレベルより厳しい外部の影響を受ける可能性がある場合,例えば,長距離の電力送
電線とともに,遠隔地での設置並びにCISPR 11に定義するような工業用,科学用及び医療用(ISM)機器
への極端に接近した設置の場合には,製造業者の意見を聞くことが望ましい。
注記 設置時に減結合手法を注意深く応用する場合,外部の過渡現象の影響を最小化するのに有効で
ある。例えば,制御回路配線は,電源回路配線から隔離することが望ましい。密接した配線が
避けられない場合は,より(撚)線対又はシールド配線を制御回路接続用に用いることが望ま
しい。
試験結果は,JIS C 61000-4規格群の性能基準を引用するが,詳細は表12による。
性能基準は,次による。
1) 仕様の限度値内での正常な性能の維持。
2) 自己回復が可能な機能・性能の一時的低下又は喪失。
3) 人の操作介入又はシステムのリセットが必要な機能・性能の一時的低下又は喪失。通常の機能は,手
動のリセット又は再始動のような簡単な操作によって回復する。損傷を受けた部品があってはならな
い。
表12で,合格判定基準は,制御器全体で試験する場合に用いる総合性能(A)に対して規定する。制御
器を全体で試験することができない場合は,機能要素性能(B及びC)による。
34
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表12−電磁妨害がある場合の性能基準及び合格判定基準
項目
性能基準(合格判定基準)
1
2
3
A 総合性能
動作特性に顕著な変化なし
意図したとおりの動作
動作特性の顕著な変化(可視
的又は可聴的)
自己回復可能
動作特性の変化
保護装置の作動
自己回復不能
B 表示装置及
び操作盤の
動作
目に見える表示情報に変化なし
発光ダイオードのわずかなちら
つき,又は文字のわずかな動き
一時的に発生する目に見える
情報の変化又は喪失
発光ダイオードの不要な発光
運転停止
表示不能又は誤表示
許可されない動作モード
自己回復不能
C 情報処理及
び検出機能
外部装置への通信及びデータ交
換に障害がない
内部及び外部装置のエラーレ
ポートを伴う一時的な通信障
害
情報の誤った処理
データ及び/又は情報の喪失
通信エラー
自己回復不能
8.3.3.2
静電気放電
試験値及び手順は,9.3.5.2.1による。
8.3.3.3
無線周波電磁界
試験値及び手順は,9.3.5.2.2による。
8.3.3.4
ファストトランジェント(5/50 ns)
試験値及び手順は,9.3.5.2.3による。
8.3.3.5
サージ(1.2/50 μs〜8/20 μs)
試験値及び手順は,9.3.5.2.4による。
8.3.3.6
高調波及び転流ノッチ
試験値及び手順は,9.3.5.2.5による。
8.3.3.7
瞬時電圧降下(電圧ディップ)及び瞬時停電
試験値及び手順は,9.3.5.2.6による。
8.3.3.8
商用周波磁界
試験は省略できる。イミュニティは,動作性能試験(9.3.3.6参照)の合格が証明となる。
9
試験
9.1
試験の種類
9.1.1
一般
JIS C 8201-1の8.1.1(一般)による。
9.1.2
形式試験
形式試験は,すべての形式の制御器及び接触器の設計が,この規格に適合することを検証するために行
う。形式試験は,次による。
a) 温度上昇限度(9.3.3.3参照)
b) 耐電圧性能(9.3.3.4参照)
c) 動作性能(9.3.3.6参照)
d) 動作及び動作限界(9.3.3.6.3参照)
e) ハイブリッド機器の直列機械式開閉機器の定格閉路,遮断容量及び規約一般動作性能(9.3.3.5参照)
35
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
f)
短絡状態での性能(9.3.4参照)
g) 端子の機械的性能[JIS C 8201-1の8.2.4(端子の機械的特性)参照]
h) 箱入り制御器及び接触器の保護等級[JIS C 8201-1の附属書C(箱入り装置の保護等級)参照]
i)
EMC試験(9.3.5参照)
9.1.3
受渡試験
JIS C 8201-1の8.1.3(受渡試験)は,抜取試験(9.1.4)をしない場合,その代わりとして適用する。制
御器及び接触器の受渡試験は,次の項目による。
− 動作及び動作限界(9.3.6.2参照)
− 耐電圧試験(9.3.6.3参照)
9.1.4
抜取試験
制御器及び接触器の抜取試験は,次の項目による。
− 動作及び動作限界(9.3.6.2参照)
− 耐電圧試験(9.3.6.3参照)
次を追加してJIS C 8201-1の8.1.4(抜取試験)による。
製造業者は,受渡試験の代わりに抜取試験を用いてもよい。抜取りは,IEC 60410(IEC 60410 の表II-A
参照)に規定する要求事項に適合するか,又はこれを超えたものでなければならない。抜取りは,AQL≦
1を基本とする。
− 適合判定個数Ac=0(受入れに欠陥があってはならない。)
− 不適合判定個数Re=1(1台欠陥がある場合,ロット全体を試験する。)
抜取りは,各々特定のロットごとに定期的間隔で行わなければならない。
上記のIEC 60410の要求事項を満足することが確実なほかの統計的手法,例えば,能力指数による連続
的な製造管理又は工程管理の統計的手法などを用いてもよい。JIS C 8201-1の8.3.3.4.3(空間距離検証の
ための抜取試験)に従った空間距離の検証を行うための抜取試験は検討中。
9.1.5
特殊試験 検討中
9.2
構造に関する要求事項に対する適合性
JIS C 8201-1の8.2(構造に関する要求事項に対する適合性)による(ただし,この規格の8.1の注記を
参照)。
9.3
性能に関する要求事項に対する適合性
9.3.1
試験シーケンス
各試験シーケンスは,新品で実施する。
注記1 一つ以上の試験シーケンス又はすべての試験シーケンスは,製造業者との合意によって1試
料で行ってもよい。ただし,試験は,各々の試料に与える試験シーケンスによって行う。
注記2 幾つかの試験は,要求する試料数を減らすため一つの試験シーケンスの中に含まれるが,そ
の結果は,シーケンスの中における前後の試験に対しては重要ではない。したがって,これ
らの試験は,試験の都合及び使用者と製造業者との合意によって,別々の新しい試料につい
て行い,そのシーケンスから省いてもよい。このことは,要求がある場合に,次の試験だけ
に適用する。
− JIS C 8201-1の8.3.3.4.1の7) :沿面距離の検証
− JIS C 8201-1の8.2.4
:端子の機械的性能
− JIS C 8201-1の附属書C
:箱入り装置の保護等級
36
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
試験の都合で,8.2.4.2の適合性は,次の試験シーケンスから省略される。製造業者は,ほかの手段によ
って検証しなければならない。
試験シーケンスは,次による。
a) 試験シーケンスI
1) 温度上昇の検証(9.3.3.3参照)
2) 耐電圧性能の検証(9.3.3.4参照)
b) 試験シーケンスII 動作性能検証(9.3.3.6参照)
1) 熱安定度試験(9.3.3.6.1参照)
2) 過負荷能力試験(9.3.3.6.2参照)
3) 阻止及び転流能力試験(9.3.3.6.3参照),動作及び動作限界の検証を含む。
c) 試験シーケンスIII
短絡状況下の性能(9.3.4参照)
d) 試験シーケンスIV
1) 端子の機械的性能の検証(JIS C 8201-1の8.2.4参照)
2) 箱入り装置の保護等級の検証(JIS C 8201-1の附属書C参照)
e) 試験シーケンスV
EMC試験(9.3.5参照)
9.3.2
一般的試験条件
JIS C 8201-1の8.3.2(一般試験条件)に,次の事項を追加して適用する。
関連の試験条項に規定がない場合,接続のための締付トルクは,製造業者が指定する。その指定がない
場合は,JIS C 8201-1の表4(機械的強度の検証を行うときのねじ式端子に加える締付トルク)に示すト
ルクとする。
各種のヒートシンクが規定されている場合には,一番高い熱抵抗をもつヒートシンクを用いなければな
らない。
適正な実効値電圧及び電流測定手段を用いなければならない。
9.3.3
無負荷,通常負荷及び過負荷状態での性能
9.3.3.1
空欄
9.3.3.2
空欄
9.3.3.3
温度上昇
9.3.3.3.1
周囲温度
JIS C 8201-1の8.3.3.3.1(周囲温度)による。
9.3.3.3.2
部品の温度測定
JIS C 8201-1の8.3.3.3.2(部品の温度測定)による。
9.3.3.3.3
部品の温度上昇
JIS C 8201-1の8.3.3.3.3(部品の温度上昇)による。
9.3.3.3.4
主回路の温度上昇
JIS C 8201-1の8.3.3.3.4(主回路の温度上昇)に,次の事項を追加して適用する。
主回路(8.2.2.4参照)に接続した半導体開閉機器の場合,温度検出手段をこの試験中で最も高い温度上
昇が起こる部分の半導体開閉機器のケースの外面に取り付けなければならない。最終ケース温度Cf及び最
終周囲温度Afを,9.3.3.6.2の試験で用いるために記録しなければならない。主回路には,8.2.2.4に規定す
37
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
る負荷を加えなければならない。電流を通電するすべての補助回路(5.6参照)に最大定格使用電流で負荷
を加え,制御回路には,その定格電圧を加えなければならない。
9.3.3.3.5
制御回路の温度上昇
JIS C 8201-1の8.3.3.3.5(制御回路の温度上昇)に,次の事項を追加して適用する。
温度上昇は,9.3.3.3.4の試験中に測定する。
9.3.3.3.6
コイル及び電磁石の温度上昇
JIS C 8201-1の8.3.3.3.6(電磁石コイルの温度上昇)に,次の事項を追加して適用する。
半導体制御器に用いる又は機械式バイパス開閉手段として用いる機械式開閉機器の電磁石は,試験中,
主回路に定格電流を通電した状態で8.2.2.6に適合しなければならない。
温度上昇は,9.3.3.3.4の試験中に測定する。
9.3.3.3.7
補助回路の温度上昇
JIS C 8201-1の8.3.3.3.7(補助回路の温度上昇)に,次の事項を追加して適用する。
温度上昇は,9.3.3.3.4の試験中に測定する。
9.3.3.4
耐電圧性能
9.3.3.4.1
形式試験
形式試験は,次による。
a) 耐電圧試験に関する一般条件 JIS C 8201-1の8.3.3.4.1(形式試験)の1) による。8.2.3も参照する。
b) インパルス耐電圧の検証
1) 一般 JIS C 8201-1の8.3.3.4.1の2) a) による。
2) 試験電圧 JIS C 8201-1の8.3.3.4.1の2) b) に,次の事項を追加して適用する。
耐電圧性能が標高に影響されにくい部品(例えば,フォトカプラ,ポッティングされた部品など)
については,標高に対する補正係数は適用しない。
3) 試験電圧の印加 a) で規定するように装置を取り付け,かつ,準備を行ったうえで,試験電圧を次
のように印加する。
3.1) 相互接続した主回路(主回路に接続した制御回路及び補助回路を含む。)の全端子と,エンクロー
ジャ又は取付板との間。接点がある場合は,すべて通常の動作位置とする。
3.2) ほかの極との電気的な分離を宣言した主回路の極においては,主回路の各極と,エンクロージャ
又は取付板及び相互に接続したほかの極との間。接点がある場合は,すべて通常の動作位置とす
る。
3.3) 通常は,主回路に接続しないそれぞれの制御回路及び補助回路と次の項目との間。
− 主回路
− その他の回路
− 露出導電部
− エンクロージャ又は取付板
上記の回路は,適切な場合には共に接続してもよい。
3.4) 断路(アイソレーション)に適した装置の場合,一括して接続した電源側端子と負荷側端子との
間。試験電圧は,電源側端子と負荷側端子との間に各接点を開路位置にして加える。その値は,
JIS C 8201-1の7.2.3.1の1) b) に規定する値とする。
4) 合格判定基準 JIS C 8201-1の8.3.3.4.1の2) d) による。
c) 固体絶縁に対する商用周波耐電圧の検証
38
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1) 一般 JIS C 8201-1の8.3.3.4.1の3) a) による。
2) 試験電圧 JIS C 8201-1の8.3.3.4.1の3) b) の最初の段落の最後に,次の事項を追加して適用する。
容易に分離できないEMCフィルタ部品のために,交流試験電圧を印加できない場合には,交流
試験電圧の波高値と同じ値の直流試験電圧を用いても差し支えない。
3) 試験電圧の印加 JIS C 8201-1の8.3.3.4.1の3) c) による。ただし,最後の2文節を次のとおり修正
する。
試験電圧を,次の条件の下で5秒間印加する。
− JIS C 8201-1の8.3.3.4.1の2) c) のi),ii) 及びiii) の項目に適合しなければならない。
− ハイブリッド式の半導体制御器又は接触器の場合は,一括して接続した電源側端子と負荷側端
子との間。
4) 合格判定基準 JIS C 8201-1の8.3.3.4.1の3) d) による。
d) 開閉試験及び短絡試験後の商用周波耐電圧の検証
1) 一般 JIS C 8201-1の8.3.3.4.1の4) a) による。
2) 試験電圧 JIS C 8201-1の8.3.3.4.1の4) b) による。
3) 試験電圧の印加 JIS C 8201-1の8.3.3.4.1の4) c) に,次の事項を追加して適用する。
JIS C 8201-1の8.3.3.4.1の1) に規定する金属はく(箔)の使用についてはこれを要求しない。
4) 合格判定基準 JIS C 8201-1の8.3.3.4.1の4) d) による。
e) 湿度試験後の商用周波耐電圧の検証 JIS C 8201-1の8.3.3.4.1の5) による。
f)
直流耐電圧の検証 JIS C 8201-1の8.3.3.4.1の6) による。
g) 沿面距離の検証 JIS C 8201-1の8.3.3.4.1の7) による(8.1.3参照)。
h) 断路に適した機器の漏れ電流の検証 最大漏れ電流は,JIS C 8201-1の7.2.7(断路に適した装置の漏
れ電流)の値以下とする。
9.3.3.4.2
空欄
9.3.3.4.3
空間距離検証のための抜取試験
空間距離検証のための抜取試験は,次による。
a) 一般 JIS C 8201-1の8.3.3.4.3の1) による。
b) 試験電圧 試験電圧は,定格インパルス耐電圧に対応していなければならない。抜取方法及び手順は,
検討中である。
c) 試験電圧の印加 JIS C 8201-1の8.3.3.4.3の3) による。
d) 合格判定基準 JIS C 8201-1の8.3.3.4.3の4) による。
9.3.3.5
機械式開閉機器の閉路及び遮断容量
9.3.3.5.1
一般
機械式開閉機器が8.2.4.2の要求事項を満たすことを検証しなければならない。機械式開閉機器が8.2.4.2
の試験に合格しない場合,8.2.4.2に続く細分箇条に従う検証が必要である。
閉路及び遮断容量は,JIS C 8201-1の8.3.3.5(投入容量及び遮断容量)に従って検証しなければならな
い。
9.3.3.5.2
ハイブリッド制御器の直列機械式開閉機器
直列機械式開閉機器を,次のいずれかで試験する。
a) 直列機械式開閉機器を,分離した機器として試験。
b) ハイブリッド制御器を,通常の使用状態に設置し,半導体機器の各極を短絡した状態で試験。
39
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.3.3.5.3
形式試験したバイパス制御器の並列機械式開閉機器
並列機械式開閉機器の試験を,分離した機器として試験しなければならない。(8.2.1.6参照)。
9.3.3.5.4
組み込まれたバイパス制御器の並列機械式開閉機器
バイパス機能を備えた完全な機器を,標準使用状態として試験しなければならない。始動及び停止をシ
ミュレートする操作手順は,標準使用状態と同じでなければならない。(8.2.1.7参照)。
9.3.3.6
動作能力
8.2.4.1の動作能力の要求事項との適合性を,次の三つの試験によって検証しなければならない。
a) 熱安定度試験
b) 過負荷能力試験
c) 阻止及び転流能力試験
試験は,8時間動作責務をシミュレートする。
主回路の接続は,機器を運転時に用いる場合と同様でなければならない。制御回路電圧は,定格制御電
源電圧Usの110 %に固定しなければならない。
9.3.3.6.1
熱安定度試験方法
試験方法及び判定基準は,表13による。試験波形を参考として,図F.1に示す(附属書F参照)。
a) 試験シリーズ内の各オン期間に,シーケンス番号n(n=0,1,2,……,n−1,n)を割り当てる。
b) 初期ケース温度C0を記録する。初期周囲温度A0を記録する。
c) 試験電流ITを設定する(表7参照)。nをn=n+1の新しい値に変更する。
d) 試験電圧UTをEUT[供試機器(以下,EUTという。)]の入力主回路端子に加える。UTは,試験期間
中加えたままでもよく,又は制御電圧Ucの動作と同期してオン,オフしてもよい。EUTをオン状態
に切り換える(EUT制御電圧Ucは,オンである。)。
注記 試験電流がX・Ieの値に達したときに時間Txが始まる。それゆえ,試験電流が徐昇してX・Ie
に達する時間の分,全体の試験時間は長くなる。
e) 時間Tx(表7参照)経過後,EUTをオフ状態に切り換える。
f)
ケース温度Cnを記録する。周囲温度Anを記録する。
g) 試験終了(又は継続)の判定
1) 次のケース温度上昇変化率を算出する。
(
)(
)
1
n
1
n
n
1
n
n
n
−
−
−
+
−
−
=
C
A
A
C
C
Δ
2) 試験結果(表13参照)の適合性を判定する。
∆n>0.05であって,総試験時間が8時間以内で試験結果[表13の1) 及び2)]に問題がない場合,
処置c)〜g) を繰り返す。
∆n>0.05であって,総試験時間が8時間を超えるか又は試験結果に問題がある場合,試験を終了
する。これは不適合である。
∆n≦0.05であって,総試験時間が8時間以内で表13の1),2),3) 及び4) の結果に問題がない場
合は,試験を終了し,適合とする。
40
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
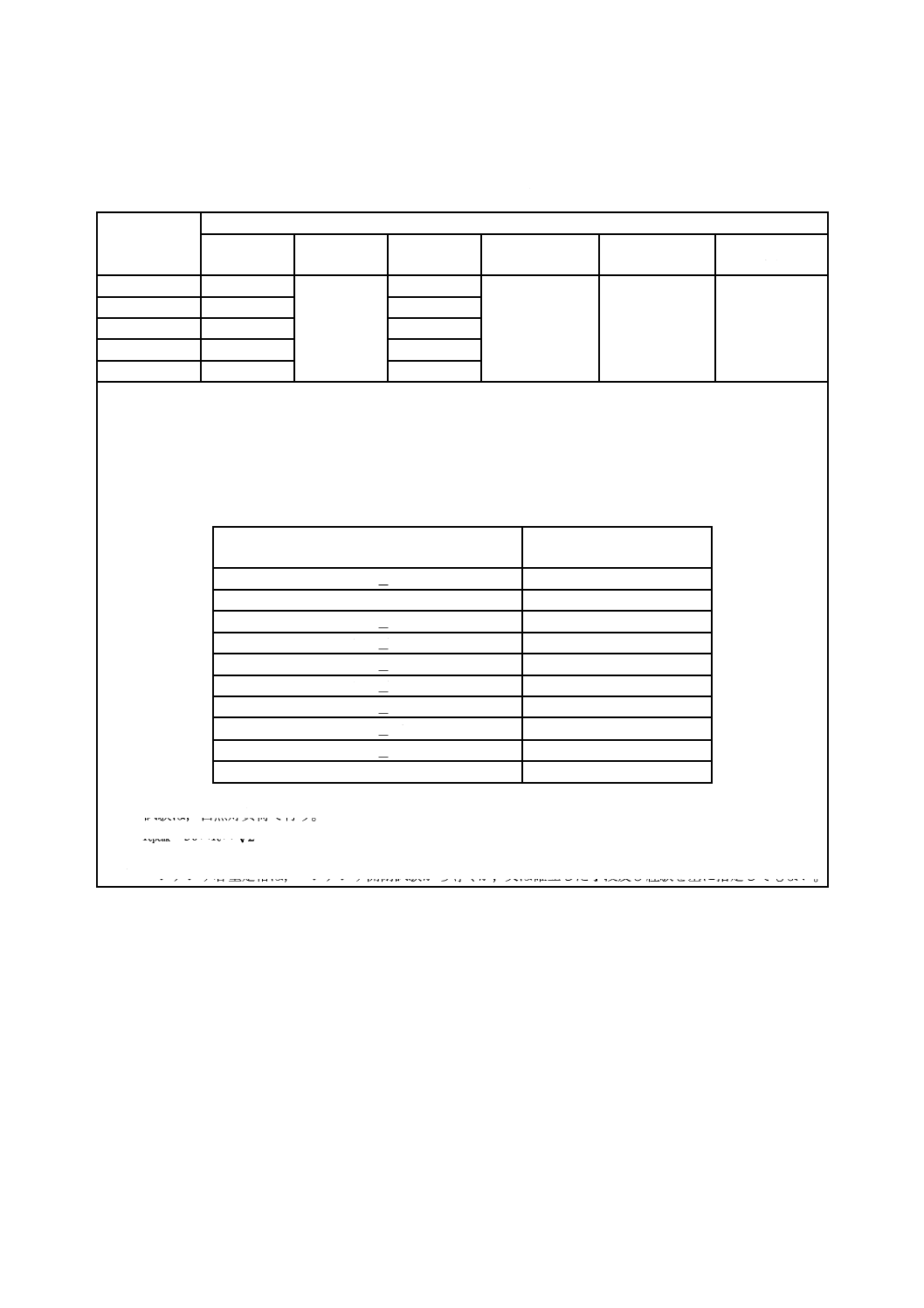
表13−熱安定度試験仕様
項目
仕様
試験目的
一連の動作サイクルの温度変動が,8時間以内で5 %未満に減少することの検証。
機械式開閉機器の主回路のアクセスできる端子の温度上昇が,JIS C 8201-1の表2(端
子の温度上昇限度)で規定する限度以下であることの検証。
試験持続時間
∆n≦0.05であるか又は8時間試験を行わなければならない。
∆n=(Cn−Cn−1−An+An−1) / (Cn−1)
試験条件
表7
EUT a) 温度
Cn,ケース温度:
半導体開閉機器の外面に取り付けた温度検知手段(9.3.3.3.4)
最も高温になる半導体開閉機器を監視しなければならない。
周囲温度
An,任意の温度:
周囲温度の変化を監視する温度検知手段(JIS C 8201-1の8.3.3.3.1による。)
試験結果の判定
1) 8時間以内では,∆n≦0.05
2) 目に見える損傷の形跡(煙,変色など)なし
3) 機械式開閉機器の主回路のアクセスできる端子の温度上昇が,JIS C 8201-1の表
2で規定する限度以下でなければならない。
4) 端子にアクセスできない構造の場合,端子に隣接する部品が損傷しない場合は,
JIS C 8201-1の表2の値を超えてもよい。
注a) 供試機器
9.3.3.6.2
過負荷能力試験方法
過負荷能力試験方法は,次による。
a) 試験条件
1) 表8による。試験波形を参考として,図F.2に示す(附属書F参照)。
2) 完全オン状態での運転中の過負荷状態を保護する過負荷リレー又は過負荷保護手段に追加して,電
流動作形カットアウト装置を用いる制御器及び接触器は,カットアウト装置とともに試験しなけれ
ばならない。この試験では,カットアウト装置は,規定のオン時間以下の時間でEUTをオフ状態に
切り換えてもよい。
b) EUT調整
1) EUTを,試験電流レベルに到達する時間が最小になるように調整する。
2) 電流制限機能を備えたEUTを,定格使用電流Ieに対して指定したXの最大値に設定する。
c) 試験
1) 初期条件を設定する。
2) 試験電圧を,EUTの入力主回路端子に印加する。
(フォームHxAの場合には,直列機械式開閉機器の接点は閉路する。フォームHxBの場合には,
直列機械式開閉機器は開路する。)
試験が続く間,試験電圧を加えなければならない。
3) EUTをオン状態に切り換える。
4) オン時間の後(表8参照),EUTをオフ状態に切り換える。
注記 フォームHxBの場合,オフ状態は,開路位置で置き換える。
5) 3) 及び4) を2度繰り返した後,試験を終了する。
2動作サイクルごとの電流通電開始時のケース温度(初期ケース温度)は,表14による。
41
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表14−初期ケース温度要求事項
動作サイクル数
初期ケース温度 Ci
℃
1
40以上
2
制御器又は接触器とともに用いる,製造業者が推奨する過電流保護手段の最初の動作
サイクルの後,リセット操作が可能な最高温度。
3及び4
≧40+[温度上昇試験中のケース温度上昇の最大値(9.3.3.3)]
d) 判定基準(9.3.3.6.4参照)。
1) 転流能力の喪失がない。
2) 阻止能力の喪失がない。
3) 機能の喪失がない。
4) 目に見える損傷がない。
9.3.3.6.3
阻止及び転流能力試験
試験仕様は,表9による。試験波形を参考として,図F.3に示す(附属書F参照)。フォームHxAの場
合は,試験期間中を通して,直列機械式開閉機器の接点を閉路位置に維持しなければならない。フォーム
HxBの場合は,直列機械式開閉機器の接点を動作サイクルによって操作してもよい。ただし,極間の電圧
の測定は,直列の接点を閉路し,かつ,半導体開閉機器をオフ状態にして行う。製造業者は,電圧測定要
求事項に適合できる特別の機能をEUTにもたせるための取扱説明書を提供しなければならない。
a) EUTは,通常用いる場合のように据え付け,接続しなければならない。EUTと試験負荷との間のケー
ブルの長さを10 m以下にしなければならない。
b) 電流測定装置は,c) 及びg) での制御器の漏れ電流の値を適切に記録できる方法で据え付けなければ
ならない。ほかの補助回路又は機器が半導体素子と並列に接続する場合は,この並列に流れる電流を
測定しないようにし,半導体素子の漏れ電流だけを測定する手段及び装置を適切に取り付けなければ
ならない。
c) EUTに電圧(表9参照)を印加し,制御電圧Ucはオフの状態で,EUTの各極の電流を測定し,初期
データIOとして記録する。試験回路は,d) の開始からg) の完了まで閉路状態を保持しなければなら
ない。電流測定装置は,e) 及びf) の期間,遠隔制御によって短絡してもよいが,回路開放によって
取り外してはならない。
d) 試験開始時,試験電圧(表9で規定)をEUTに印加し,g) が完了するまでこの電圧を維持する。
e) EUTは,制御電圧Ucによって,表9に規定するオン状態及びオフ状態を繰り返す。
なお,制御器が誤動作したか,又は損傷した場合には,試験は中止し,不適合とみなす。
f)
所要数の動作サイクルが終わった後,Ucをオフにして,Ue及びUsはオンを保持する。EUTの温度は,
初期の周囲温度に戻ってもよい。
g) c) と同じ手順で電流を測定し,初期データIOに対応する最終データIFとして記録する。
h) 表9の1) で規定するように,各極の漏れ電流に関する値を決定する。
適合するには,表9の1),2) 及び3) による判定を満たさなければならない。
9.3.3.6.4
制御器の動作能力試験中の挙動及び試験後の状態
制御器の動作能力試験中の挙動及び試験後の状態は,次による。
a) 転流能力 半導体装置が正常に転流しない場合には,故障の初期段階は,性能の低下によって明らか
になる。このモードで引続き動作を行うと,熱暴走が起こる。最終的には,過度の加熱及び阻止能力
42
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の損失が生じる。
b) 熱安定度 高頻度で動作する半導体装置は,適切に冷却されないことがある。その影響で,阻止能力
の喪失を引き起こす熱暴走状態となることがある。
c) 阻止能力 阻止能力は,必要なときはいつでもオフにし,また,オフを継続する能力である。過度の
熱ストレスは,阻止能力を低下させる。この故障は,部分的又は全面的な制御喪失で確認できる。
d) 機能性 初期段階では致命的でない故障もある。これらの故障は,機能が徐々に失われることで確認
される。初期の検知及び修正によって,永久的な損傷を予防することができる。
e) 目視検査 過度の熱ストレスが,永久的な損傷を引き起こす場合がある。目に見える形跡(煙又は変
色)は,致命的な故障の早期警告となる。
9.3.4
短絡状態における性能
8.2.5.1の要求事項に適合することを検証するための試験条件について規定する。試験手順,試験シーケ
ンス,試験後の機器の状態及び保護協調のタイプに関する要求事項は,9.3.4.1及び9.3.4.3による。
9.3.4.1
短絡試験に関する一般条件
短絡試験に関する一般条件は,次による。
− O操作 試験前の条件として,接触器又は制御器は,擬似負荷によってオン状態に保たなければなら
ない。試験前電流は,接触器又は制御器の最小負荷電流(3.1.11参照)を超える任意の電流でよい。
短絡スイッチを閉じて,接触器又は制御器に短絡電流を供給する。このとき,短絡保護装置(SCPD)
は短絡電流を遮断し,接触器又は制御器は通過電流に耐えなければならない。
− じか入れ機器に対するCO操作 初期のケース温度は,40 ℃未満であってはならない。短絡試験時に
EUTを予備加熱したり,初期ケース温度を維持したりすることができない場合には,製造業者は,使
用者との合意によって,周囲温度でEUTを試験してもよい。この場合,温度を試験報告書に記録しな
ければならない。
9.3.4.1.1
短絡試験に関する一般要求事項
JIS C 8201-1の8.3.4.1.1(一般要求事項)による。
9.3.4.1.2
短絡定格の検証のための試験回路
可溶性素子F及び抵抗RLが,タイプ“1”の保護協調において,中性極又は製造業者の同意によって,
極の一つに接続された長さ1.2 m〜1.8 mで6 mm2のソリッド電線に置き換えられる場合を除き,JIS C
8201-1の8.3.4.1.2(試験回路)による。
注記 この大きなサイズの電線は,検出器として用いるのではなく,接地状態を確実にし,損傷を評
価するためのものである。
JIS C 8201-1の8.3.4.1.2の試験回路を修正し,図I.1に規定するように接続する(附属書I参照)。擬似
負荷及び短絡スイッチは,次の特性をもたなければならない。
a) 擬似負荷は,8.2.4.3に示す要求に合致するものでなければならない。
b) 短絡スイッチ(EUTの一部ではない)は,短絡電流を妨げることなく(例えば,接点のバウンス又は
ほかの断続的な開放),短絡電流を閉路及び通電できる性能をもたなければならない。
9.3.4.1.3
試験回路の力率
JIS C 8201-1の8.3.4.1.3(試験回路の力率)による。
9.3.4.1.4
空欄
9.3.4.1.5
試験回路の校正
JIS C 8201-1の8.3.4.1.5(試験回路の校正)による。
43
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.3.4.1.6
試験手順
JIS C 8201-1の8.3.4.1.6(試験順序)に,次の事項を追加して適用する。
制御器又は接触器及び関連する短絡保護装置(SCPD)を,通常の使用状態に取り付け接続する。これら
は,主回路ごとに,制御器又は接触器の使用電流に応じた最長2.4 mのケーブルを用いて試験回路に接続
しなければならない。
短絡保護装置(SCPD)が制御器又は接触器と分離している場合,上記規定のケーブル(ケーブルの全長
は,2.4 m以下とする。)を用いて接続しなければならない。
三相回路試験は,単相回路を含んでいるとみなす。
試験シーケンスのタイムチャートは,図I.2による。
a) 試験は,短絡スイッチを開路位置として開始する(時刻T0)。
b) 次に試験電圧を供給し,擬似負荷は,制御器をオン状態に保持するために十分なレベルの電流を流さ
なければならない(時刻T1)。
c) 制御器の電流が安定した後,短絡スイッチを閉路し,EUTに電流が流れる(時刻T2)。この電流は,
短絡保護装置(SCPD)によって遮断する(時刻T3)。
9.3.4.1.7
空欄
9.3.4.1.8
試験の判定
JIS C 8201-1の8.3.4.1.8(試験の解釈)による。
9.3.4.2
空欄
9.3.4.3
制御器及び接触器の条件付短絡電流
制御器又は接触器及びそれに関連する短絡保護装置(SCPD)は,9.3.4.3.1に規定する試験を行う。
独立部品をもつバイパス制御器の場合,これ以上の試験は必要ない。
組込用部品をもつバイパス制御器は,次の二つの別々の試験を行う。
a) 試験1 この試験は,バイパス接点を開き,半導体素子を導通状態で行う。これは,半導体素子で制
御した場合での,始動時に起こる短絡条件のシミュレーションを,意図したものである。
b) 試験2 この試験は,バイパス接点を閉じ,半導体素子がバイパスした状態で行う。これは,EUTの
半導体素子がバイパスした場合に起こる短絡条件のシミュレーションを,意図したものである。
使用負荷種別AC-51に対する最大定格使用電流Ie及び最大定格使用電圧Ueに対応した条件で,試験を
行う。
数種類の定格に対して同一の半導体要素を用いる場合には,最大定格使用電流Ieに対応した条件で試験
を行う。
個別の電源によって,規定された制御電圧を,制御部に供給する。短絡保護装置(SCPD)は,8.2.5.1
による。
短絡保護装置(SCPD)が電流可調整形の回路遮断器である場合,タイプ“1”の保護協調試験は,回路
遮断器の最大設定電流で,タイプ“2”の保護協調試験は,回路遮断器の設定電流を製造業者が宣言した電
流の最大値で試験を行う。
試験中,エンクロージャのすべての開口部は,通常用いるようにふさぎ,ドア又はカバーは,装備して
いる手段によって固定しなければならない。
交換可能な過電流保護装置を装備した制御器又は接触器は,最大インピーダンスをもつ過電流保護装置,
及び最小インピーダンスをもつ過負荷保護手段を組み込み,対応する短絡保護装置(SCPD)とともに試験
を行わなければならない。
44
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
O操作又はCO操作を,供試機器を用いて定格条件付短絡電流Iqで行う。
9.3.4.3.1
定格条件付短絡電流Iqによる試験
試験電流が定格条件付短絡電流Iqに等しくなるように,回路を調整する。
短絡保護装置(SCPD)がヒューズであり,かつ,試験電流がヒューズの限流領域以下である場合,ヒュ
ーズは,カットオフ電流(Ic)[JIS C 8269-1の図3(一連の交流用ヒューズリンクの限流値特性の一般的
表示方法)による。]の最大値及び最大通過エネルギー(I2t)を許容するものを選定しなければならない。
じか入れ接触器以外の場合は,接触器を完全オン状態,かつ,短絡保護装置(SCPD)を閉路状態とし,
短絡電流を別の開閉スイッチで投入して,短絡保護装置(SCPD)で1回の遮断操作を行わなければならな
い。
じか入れ接触器の場合,接触器を閉じることによって短絡回路を構成し,短絡保護装置(SCPD)で1
回の遮断操作を行わなければならない。
9.3.4.3.2
試験結果
制御器又は接触器が,次の保護協調のタイプに対する要求条件を満足する場合には,定格条件付短絡Iq
における試験に適合したと判断する。
両タイプの保護協調
a) 短絡電流は,短絡保護装置(SCPD)又は接触器で確実に遮断し,エンクロージャと電源との間に接続
した可溶性素子又は接続導体は,溶断してはならない。
b) エンクロージャのドア又はカバーは,吹き飛ばず,ドア又はカバーは開くことができなければならな
い。エンクロージャの変形は,IP2X以上のエンクロージャ保護等級に適合しなければならない。
c) 導体又は端子には損傷がなく,導体は端子から外れてはならない。
d) 絶縁台には,充電部の完全な固定を損なうクラック又は破損があってはならない。
タイプ“1”保護協調
e) エンクロージャから外への部品の吹出しがあってはならない。制御器及び過負荷リレーには損傷があ
ってもよい。接触器又は制御器は,試験後に用いることができなくてもよい。
タイプ“2”保護協調
f)
過電流保護装置又はほかの部品に損傷が生じてはならない。また,試験中の部品の交換は認められな
い。ハイブリッド制御器及び接触器場合,著しい変形なしで(例えば,ドライバで)容易に外れる接
点溶着は許容してもよい。この接点溶着の場合,機器の機能は,適用する使用負荷種別に対する表8
の条件で,(5回ではなく)10回の操作を行うことによって検証する。
g) 過電流保護装置の引外し特性は,電流整定の倍数の電流について確認し,短絡試験前及び試験後に,
公表された引外し特性に適合しなければならない。
h) 絶縁が正常であることを検証するため,耐電圧試験を行う。試験電圧は,9.3.3.4.1のd) の規定によっ
て印加する。
9.3.5
EMC試験
すべてのエミッション及びイミュニティ試験は,形式試験であって,代表的な動作及び製造業者が推奨
する配線方式,かつ,製造業者が指定するエンクロージャを含む環境条件下で行う。
すべての試験は,定常状態の条件で行う。
使用負荷種別AC-55b及びAC-56bでは,それぞれ白熱灯負荷及びコンデンサ負荷が試験には必要である。
幾つかの使用負荷種別で用いる機器は,AC-51に対応する負荷で試験を行わなければならない。
機器が使用負荷種別AC-51での使用を目的としない場合には,試験は,使用者と製造業者との合意によ
45
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
って決定した使用負荷種別で行わなければならない。高調波エミッション試験以外では,負荷は,照明負
荷又はコンデンサ負荷に限定する必要はない。試験に用いる負荷が半導体制御器の意図した電力範囲より
小さい場合には,試験報告書にその旨を明記しなければならない。
使用負荷種別AC-51に関しては,機器は,定格使用電流及び回路力率cosϕ =0.95〜1で試験する。電流
Ieが20 A以下の装置の場合には,試験電流はIeとする。電流Ieが20 Aを超える装置の場合には,試験電
流は,電流が20 Aを超えることを条件として,使用者と製造業者との間の合意によらなければならない。
試験電流は,試験報告書に明記する。
試験は,電力出力端子部においては行わない。製造業者が別に指定しない限り,負荷への配線の長さは
3 mとする。
試験報告書は,試験に関連する情報(例えば,負荷条件,ケーブル配置など)をすべて記載しなければ
ならない。性能基準のための規格限界の機能的説明及び定義は,製造業者が提供し,かつ,試験報告書に
記載しなければならない。試験報告書には,適合性を得るために講じられたすべての処置,例えば,遮へ
い(蔽)又は特殊ケーブルの使用などを記載しなければならない。制御器とともに,イミュニティ又はエ
ミッション要求事項に適合するために必要な機器を構成する補助機器の一覧表も,報告書に記載しなけれ
ばならない。試験は,定格電源電圧Usで,かつ,再現可能な方法で行う。
定常状態の動作モードの期間に完全導通状態とならない電力開閉素子,例えば,サイリスタを含むフォ
ーム4の制御器は,製造業者が示す持続性最大エミッション妨害感受性項目について,制御器の動作を代
表するために選んだ伝導条件のもとで試験しなければならない(9.3.5.1及び9.3.5.2参照)。
9.3.5.1
EMCエミッション試験
9.3.5.1.1
伝導無線周波エミッション試験
試験方法及び試験手順は,CISPR 11による。
種々の電力定格をもつ制御器から,その範囲の最大及び最小の電力定格を代表する二つの供試品を試験
すればよい。
エミッションは,表15に規定するレベル以下でなければならない。
表15−伝導無線周波エミッションに対する端子妨害電圧限度値
周波数
MHz
機器クラス(ネットワーク)
A a)(産業用)
B(公共用)
準せん(尖)頭値
dB(μV)
平均値
dB(μV)
準せん(尖)頭値
dB(μV)
平均値
dB(μV)
0.15〜0.5
100
90
66〜56
(周波数の対数に
比例して減少)
56〜46
(周波数の対数に
比例して減少)
0.5〜5
86
76
56
46
5〜30
90〜70
(周波数の対数に
比例して減少)
80〜60
(周波数の対数に
比例して減少)
60
50
注a) 限度値は,CISPR 11,グループ2を適用している。
9.3.5.1.2
放射無線周波エミッション試験
試験方法及び試験手順は,CISPR 11による。特殊試験条件は,附属書Dによる。
注記 (北米独自の内容のため削除)
46
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
異なる電力定格の制御器又は接触器の範囲から,一つの代表的サンプルで試験をすれば十分である。
エミッションは,表16に規定する値以下とする。
表16−放射エミッション試験限度値
周波数帯域
MHz
電界強度
クラスA機器a)
クラスB機器
30〜230
30 dB(μV/m)
30 mでの準せん頭値
30 dB(μV/m)
10 mでの準せん頭値
230〜1 000
37 dB(μV/m)
30 mでの準せん頭値
37 dB(μV/m)
10 mでの準せん頭値
注a) クラスA機器試験は,10 dB上げた限度値を用いて,10 mの距離で行ってもよい。
9.3.5.2
EMCイミュニティ試験
制御器が,類似のフレームサイズ内で,類似の構成とした電子制御回路から成る場合は,製造業者が指
定する制御器又は接触器の代表的な供試品一つを試験すればよい。
9.3.5.2.1
静電気放電
制御器及び接触器の試験は,JIS C 61000-4-2による。4 kV接触放電又は8 kV気中放電の試験レベルを,
単一放電による時間間隔1秒で連続した正極性パルス及び負極性パルスを選定した箇所に各10回印加する。
電源端子について試験をする必要はない。放電は,通常使用時にアクセスできるポイントだけに印加する。
制御器は,表12の性能基準2に適合しなければならない。
制御器が,開放フレーム,シャーシ式ユニット又は保護等級IP00のものである場合,試験は不可能であ
る。その場合,製造業者は,静電気放電による損傷の可能性について警告するラベルを,ユニットに張り
付けなければならない。
9.3.5.2.2
無線周波電磁界
無線周波電磁界試験は,0.15 MHz〜80 MHz及び80 MHz〜1 000 MHzの二つの周波数範囲に分けられる。
0.15 MHz〜80 MHzの範囲の場合,試験方法は,JIS C 61000-4-6による。試験レベルは,140 dB・μVでな
ければならない(レベル3)。
製造業者が周波数を選択し,これを試験報告書に明記しなければならない。制御器又は接触器は,表12
の性能基準1に適合しなければならない。
80 MHz〜1 000 MHzの範囲の場合,試験方法は,JIS C 61000-4-3による。試験レベルは,80 MHz〜1 000
MHzの周波数範囲全域にわたり10 V/mでなければならない。制御器又は接触器は,表12の性能基準1に
適合しなければならない。
制御器がEMC対策用の金属製エンクロージャ内に設置されるとみなされる場合には,試験は必要ない。
その場合,製造業者は,エンクロージャを開くときに常に講じなければならない予防手段を示す注意書又
は指示書を提供しなければならない。
9.3.5.2.3
ファストトランジェント(5/50 ns)
制御器又は接触器の試験は,JIS C 61000-4-4による。
交流電力線に対する試験レベルは,結合/減結合回路網を経由して,2 kV/5 kHzでなければならない。
試験電圧は,1分間印加する。
3 m以上の配線の接続を意図した制御回路及び補助回路の端子は,結合クランプを用いて,2 kV/5 kHz
で試験しなければならない。
47
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
制御器又は接触器は,表12の性能基準2に適合しなければならない。
9.3.5.2.4
サージ(1.2/50 μs〜8/20 μs)
制御器又は接触器の試験は,JIS C 61000-4-5による。
電力端子の試験レベルは,ライン〜接地間2 kV及びライン〜ライン間1 kVでなければならない。
3 m以上の配線の接続を意図した制御回路及び補助回路の端子は,ライン〜接地間2 kV及びライン〜ラ
イン間1 kVで試験しなければならない。試験は,保護回路には適用しない。
繰返し間隔1分で,正極性パルス及び負極性パルスを各5回印加する。
制御器又は接触器は,表12の性能基準2に適合しなければならない。
制御器が,例えば,JIS C 61000-4-5の設置クラス4又は設置クラス5のような,保護が十分でない設備
で動作することを要求されている場合,使用者は,このことを明示しなければならない。この場合には,
試験レベルは,ライン〜接地間4 kV及びライン〜ライン間2 kVでなければならない。
9.3.5.2.5
高調波及び転流ノッチ 検討中
9.3.5.2.6
瞬時電圧降下(電圧ディップ)及び瞬時停電
試験Aの要求事項を検証するために,JIS C 61000-4-11の試験方法による。試験B及び試験Cの検証方
法は,検討中である。
表17の基準を満たさなければならない。
表17−瞬時電圧降下(電圧ディップ)及び瞬時停電試験
試験
試験レベルUT a)
%
持続時間
性能基準
(表12による。)
A
0
5 000 ms
3
B
40
100 ms
検討中
C
70
半周期
検討中
注a) ここに,UTは,適宜,Ue及び/又はUsを表す。
9.3.6
受渡試験及び抜取試験
受渡試験は,各個の制御器又は接触器が規定の要求事項に適合することを検証するために,製造中又は
製造後に行う。
9.3.6.1
一般事項
受渡試験又は抜取試験は,9.1.2に関連する部分で形式試験に対して規定する条件と同一又は同等の条件
のもとで実施しなければならない。
なお,9.3.6.2における動作限界は,過電流保護装置については,周囲温度で検証してもよいが,標準の
周囲条件に合わせて補正が必要なことがある。
9.3.6.2
動作及び動作限界
8.2.1.2及び8.2.1.5の要求事項に従って機器が動作することを検証しなければならない。
8.2.1.2に規定する性能は,表9及び9.3.3.6.3による阻止及び転流能力試験によって検証しなければなら
ない。85 %Usによる85 %Ueでの動作サイクル,及び110 %Usによる110 %Ueでの動作サイクルの二つが
必要である。
8.2.1.5の要求事項に従う試験は,選択した代表電流で(この規格に示すものと異なる場合がある),任意
の電圧で実施してよい。
48
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9.3.6.3
耐電圧試験
金属はくは,用いる必要はない。試験は,乾燥した清浄な制御器及び接触器を用いて行わなければなら
ない。
耐電圧の検証は,装置の最終組立前に(フィルタ用コンデンサなどの部品を接続する前に)実施しても
よい。
a) インパルス耐電圧 JIS C 8201-1の8.3.3.4.2の1) による。
b) 商用周波耐電圧 JIS C 8201-1の8.3.3.4.2の2) による。
c) インパルス耐電圧及び商用周波耐電圧の合成したもの a) 及びb) の試験は,正弦波のピーク値がa)
又はb) に規定する値のうちの高い方の値に対応する単一の商用周波耐電圧試験と置き換えてもよい。
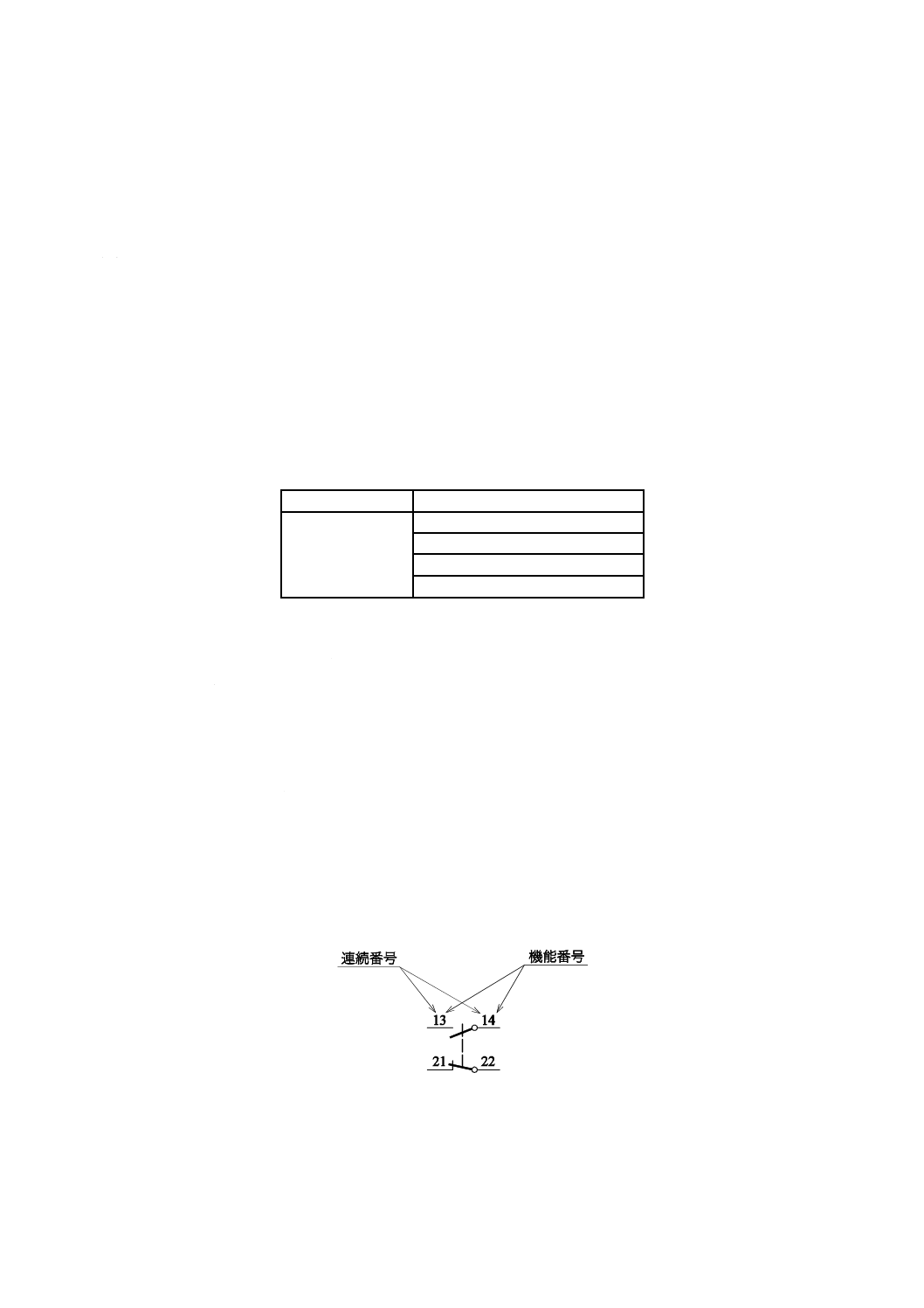
49
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
端子の表示及び識別
A.1 総則
端子を識別する目的は,各々の端子の機能,関連するその他の端子の配置及び用い方に関する情報を明
確にするためである。
A.2 制御器及び接触器の端子の表示及び識別
A.2.1 主回路の端子番号の表示及び識別
主回路の端子は,1けた(桁)の番号及び英数字によって,表A.1に示すように表示しなければならな
い。
表A.1−主回路端子表示
端子
表示
主回路
1/L1−2/T1
3/L2−4/T2
5/L3−6/T3
7/L4−8/T4
特殊な形式の制御器及び接触器(5.2.5.3参照)の場合は,製造業者が接続図を供給しなければならない。
A.2.2 制御回路の端子の表示及び識別
A.2.2.1 制御回路電源端子
検討中
A.2.2.2 制御回路入出力信号端子
検討中
A.2.3 補助回路の表示及び識別
補助回路の端子番号は,次に示すように2けたの数字によって図の中で表示しなければならない。
− 1の位の数字は,機能番号を表す。
− 10の位の数字は,連続番号を表す。
次の例は,このような表示方法を表す。
A.2.3.1 機能番号
機能番号1及び2はb接点,機能番号3及び4はa接点を表す。
注記1 a接点及びb接点の定義は,JIS C 8201-1の2.3.12及び2.3.13による。
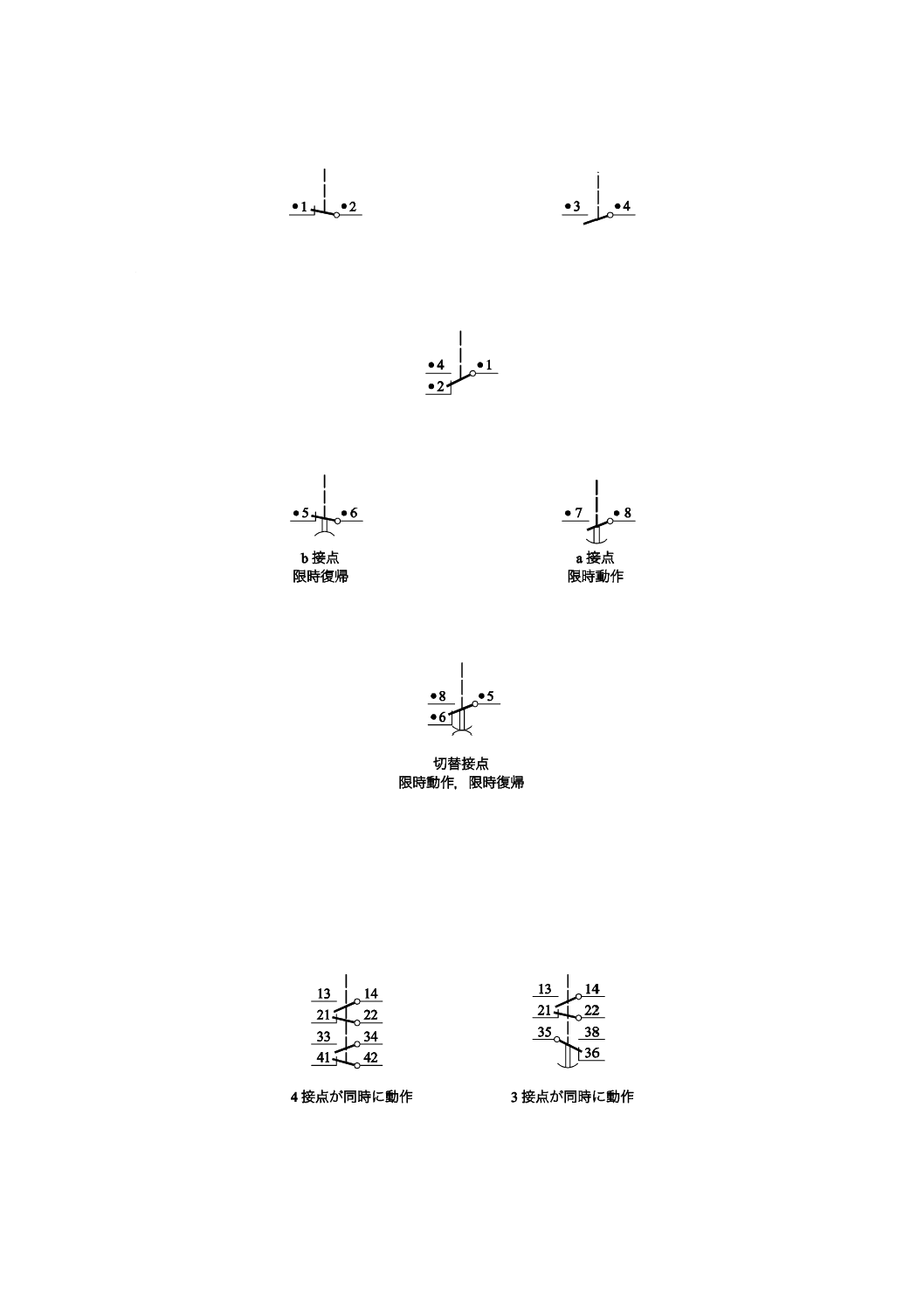
50
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例1
注記2 図中の黒点には,対応する連続番号を用いる。
切換接点がある端子は,機能番号1,2及び4で表示しなければならない。
例2
機能番号5,6(b接点),7及び8(a接点)は,特別な機能をもつ補助端子に用いる。
例3
特別の機能をもつ切換接点回路の端子番号は,機能番号5,6及び8で表示しなければならない。
例4
A.2.3.2 連続番号
同時に動作する接点の端子は,同じ連続番号で表示しなければならない。
同一機能をもつすべての接点は,異なった連続番号を付けなければならない。
製造業者又は使用者が提供する付加情報によって明確にこのような番号が与えられる場合に限り,端子
から連続番号を省略してもよい。
例
51
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
制御器及び接触器の標準責務
B.1 抵抗ヒータ素子の制御
抵抗ヒータ素子の制御は,次による。
a) 単純なオン及びオフスイッチング機能の接触器に関し,ゼロ位相開閉機能を備えた単極形の半導体制
御器又は接触器(フォーム5の制御器)は,オン時の過渡現象を最小にするために用いてもよい(AC-51)。
b) 巻線形抵抗素子においては,オン時の電流は定格電流の1.4倍の大きさになることがある。このよう
なヒータ素子は,徐々に端子電圧を増加させる徐昇オンする方法で,機械的及び電気的ストレスを最
小化することができる。
c) 抵抗ヒータ素子の負荷制御は,負荷端子の電圧調整(電圧制御)及びオン/オフ時間比率(全電圧制
御),又はこれらの組合せによる。
負荷の制御は,半導体制御器の動作サイクル及び/又は出力電圧を決定する負荷から比較回路又は装置
へのフィードバック信号によって実現することができる。この比較回路又は装置は,半導体制御器に組み
込むか,又は単にスイッチング信号を発生するために用いる(例えば,フォーム5の制御器,すなわち,
半導体接触器の場合)。
B.2 放電灯制御器の開閉
放電灯制御器の開閉は,次による。
a) 通常のオン状態の期間,力率改善器がない蛍光灯又は二つのリードラグを接続した蛍光灯の予熱電流
は,短期間,定格電流の2倍に達する(AC-55a)。
並列補償形蛍光灯の場合,コンデンサ定格電流の20倍の突入電流が発生する(AC-56b)。
電子安定器付蛍光灯の場合,ランプ定格電流の10倍の短時間の突入電流が発生する。
b) 高圧水銀灯及びハロゲンランプ(力率改善器あり又はなし)は,直列インダクタを形成する安定器を
経由してオンされ,ハロゲンランプにおいては点弧素子でオンされる。スイッチオン後,3分〜5分間
で機器が通常動作状態になるまでは,大きな誘導性電流が流れる。この電流は,ランプの定格電流の
2倍程度になる。半導体接触器は,この電流に耐える過電流特性をもたなければならない(AC-55a)。
c) 高圧ナトリウムランプ(力率改善器なし)は,その通常の動作状態になる前の5分〜10分間,定格電
流の1.7倍〜2.2倍の誘導性電流が流れる。半導体接触器は,この電流に耐える過電流特性をもたなけ
ればならない(AC-55a)。
d) 力率改善器付高圧水銀灯,ハロゲンランプ及びナトリウムランプは,大きな容量性の過渡電流が流れ
る。このような負荷に対する半導体接触器の選定には,これらを考慮するのが望ましい(AC-56b)。
B.3 白熱灯の開閉
半導体接触器は,閉路時に大きな過渡電流を伴う白熱灯負荷に用いることができる(AC-55b)。
白熱灯のフィラメント巻線間の短絡は,直列接続した開閉素子に過度な過電流を発生させる。この現象
は,短絡状態に分類する。半導体接触器と,(白熱灯と保護協調可能な)短絡保護素子との間の保護協調は,
8.2.5による。
52
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.4 変圧器の開閉
変圧器の開閉時に発生する大きな過渡電流は,電流が流れる瞬間の印加電圧の位相角に依存するので,
位相スイッチング機能及び徐昇スイッチング機能を備えた半導体接触器は,変圧器負荷の最適な開閉を行
うために用いる(サージ抑制)。
B.5 コンデンサバンクの開閉
開閉時の過渡電流の大きさ及び周波数は,負荷のコンデンサ容量だけではなく,組み合わせた回路及び
電源ラインのリアクタンス並びに電流が流れ始めたときに印加したAC電圧の波形の印加位相によっても
決定される。(例えば,力率調整システムのような)コンデンサバンクの場合,コンデンサは,既に回路中
に蓄積エネルギーをもっており,低インダクタンスの接続導体及び開閉器(半導体接触器)を経由して切
り替えたコンデンサ負荷に放電する。これらの大きな過渡電流は,スイッチング素子の選択時に考慮する
のが望ましい(AC-56b)。
さらに,過電圧にも注意を払うことが望ましい(コンデンサ電圧と供給電圧との間の差)。
附属書C
空欄
53
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(規定)
放射エミッション試験に対する要求事項
D.1 制御器及び接触器の特性
制御器及び接触器の主回路は,非モータ負荷に直列に接続した半導体素子を含む。半導体素子の動作に
よって,電源の半周期単位の時間及び通電期間を調整して,固定又は可変量のエネルギーを電源から負荷
へ供給する。負荷に供給する電力の基本周波数は,制御器の主回路端子への供給電力と同じである。制御
器は,電気エネルギーをほかの形に変換することはない。
この附属書では,制御器は,次の構成部品から成るとみなす。
− エネルギーを負荷に伝える半導体開閉素子を含む主回路。
− 制御機能を発生するためのすべての必す(須)部品を含む制御回路。
− デジタル通信及び電力線通信システムなどの機能をもつ補助回路。
D.2 放射エミッション
D.2.1 主回路
D.2.1.1 完全オンモード
完全オンモードにおいては負荷への電圧及び電流波形は,実質的に正弦波であり,電源周波数である。
高周波の高調波は,波形が正弦波の場合には存在しないので,電力回路の無線周波(RF)エミッション試
験は,完全オンモードでの動作中においては必要ない。
D.2.1.2 位相制御モード
制御器の電力回路内部の無線周波エネルギーの唯一の発生源は,電力半導体を通電状態から非通電状態
に,また,その逆に切り換えるために必要なエネルギーである。スイッチングの性質は,スイッチングの
発生時(例えば,自然転流では),常に電流がゼロか又はゼロに近いことを確保することである。スイッチ
ングエネルギーは,非常に小さく,また,無線周波(RF)エミッションを発生する能力も非常に小さい。
したがって,次による。
− 無線周波(RF)エミッションを発生する能力は,完全オン状態にある電力回路中の電流の量とは関係
がなく,また,定格電流Ieの値には無関係である。
− 主回路の放射エミッション試験は必要ない。
D.2.2 制御回路及び補助回路
制御回路及び補助回路の場合は,次の規定を適用し,電力回路とは分割して検討してよい。
同様の装置に対して,CISPR 14-1に規定するように,制御器においては,妨害エネルギーは主として制
御器に接続した外部接続線によって放射されることが経験上知られている。したがって,この規格では,
制御器の妨害能力は,制御器がその接続線に供給し得る高周波電力として定義する。
正弦波形を発生するか又はそれによって動作する回路は,含まれる基本周波数が30 MHz以上である場
合には,試験を行わなければならない。
30 MHz以上のどの周波数でも,18 nW(クラスA機器)又は2.0 nW(クラスB機器)より大きい電力
成分を含む制御回路端子又は補助回路端子に電線が接続されていない場合には,試験は必要ない(附属書
E参照)。
54
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(参考)
CISPR 11による放射エミッション限度値に等価な送信電力への変換方法
ローレンツの相反定理を含む周知の確立された原理から,CISPR 11に規定した電磁界の強さを得るため
に必要な送信電力PTは,次の式から計算できる。
G
30
2
2
T
d
E
P=
ここに,
PT: 送信電力(W)
E: 電磁界の強さ(V/m)
G: アンテナの利得(理想半波長ダイポールの場合,G=1.64)
d: 送信アンテナと受信アンテナとの間の距離(m)
例えば,
d=30 m及びE=31.6 μV/m(30 dBμV/m)の場合,PT=18 nWとなる。
d=10 m及びE=31.6 μV/m(30 dBμV/m)の場合,PT=2 nWとなる。
このことから,理想半波長ダイポールアンテナを,18 nW又は2 nWを発生し得る信号源送信機に適切
に接続すれば,放射エミッションの電磁界の強さは,CISPR 11によってそれぞれクラスA機器及びクラ
スB機器に対して規定する限度値に等しくなる。
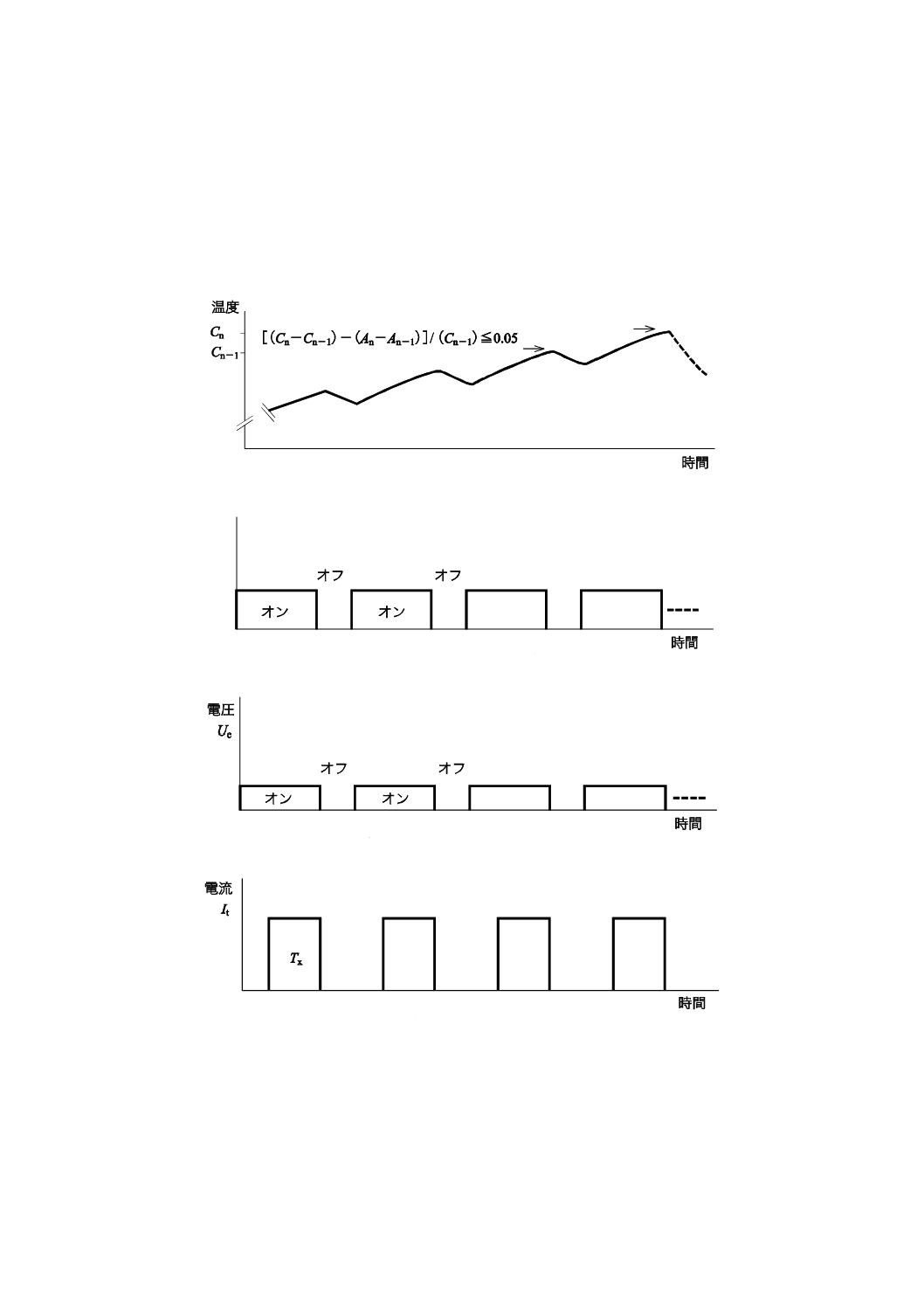
55
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書F
(参考)
動作性能
動作能力の試験波形を,次に示す。
a) 温度上昇の一般的な特性
b) 負荷のオンオフサイクルの一般的な特性
c) 制御電圧Ucの一般的な特性
d) 試験電流特性
図F.1−熱安定度試験波形
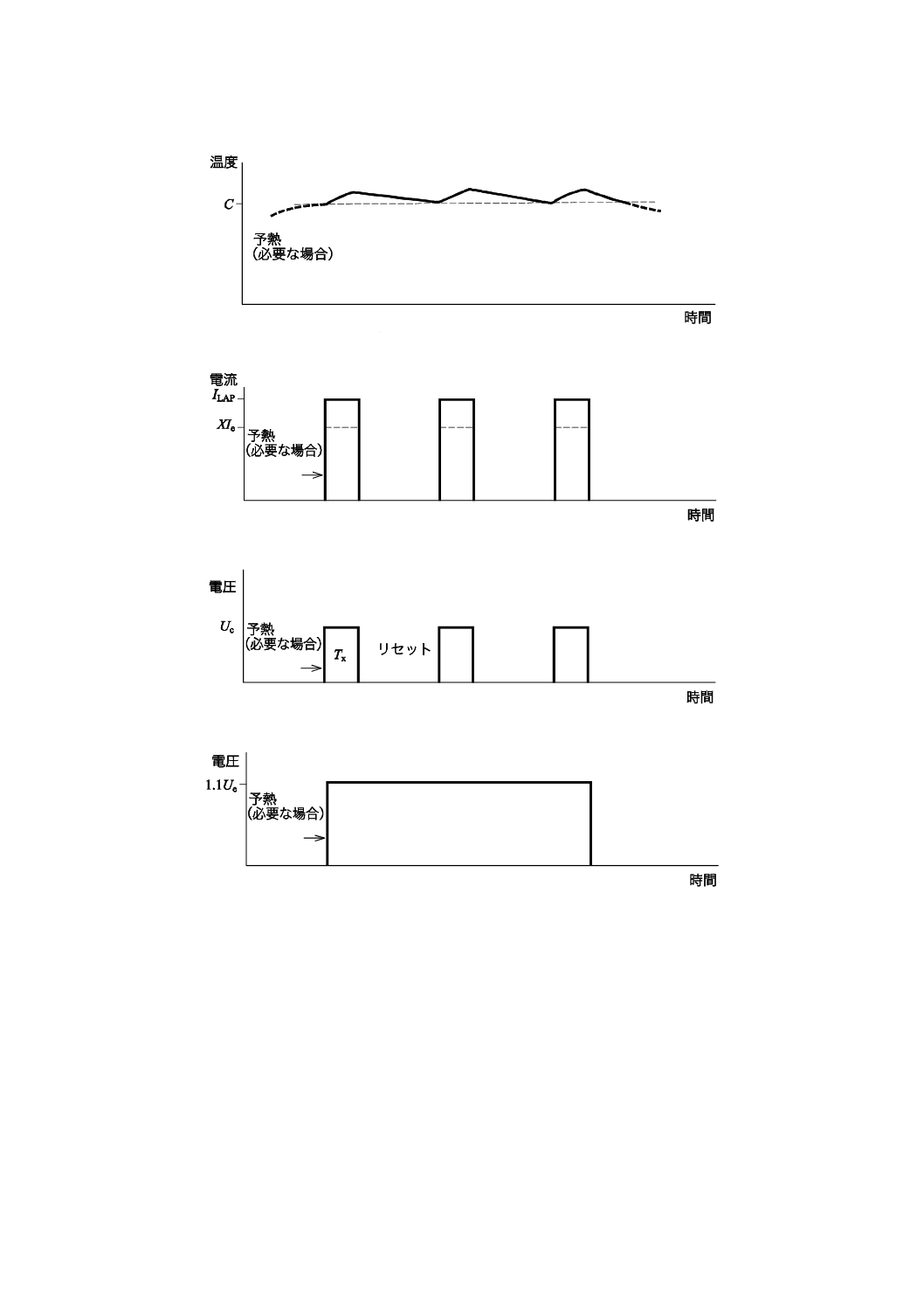
56
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 温度上昇の一般的な特性
b) 試験電流特性
c) 操作電圧Uc特性
d) 主回路試験電圧UT特性
図F.2−過負荷容量試験波形
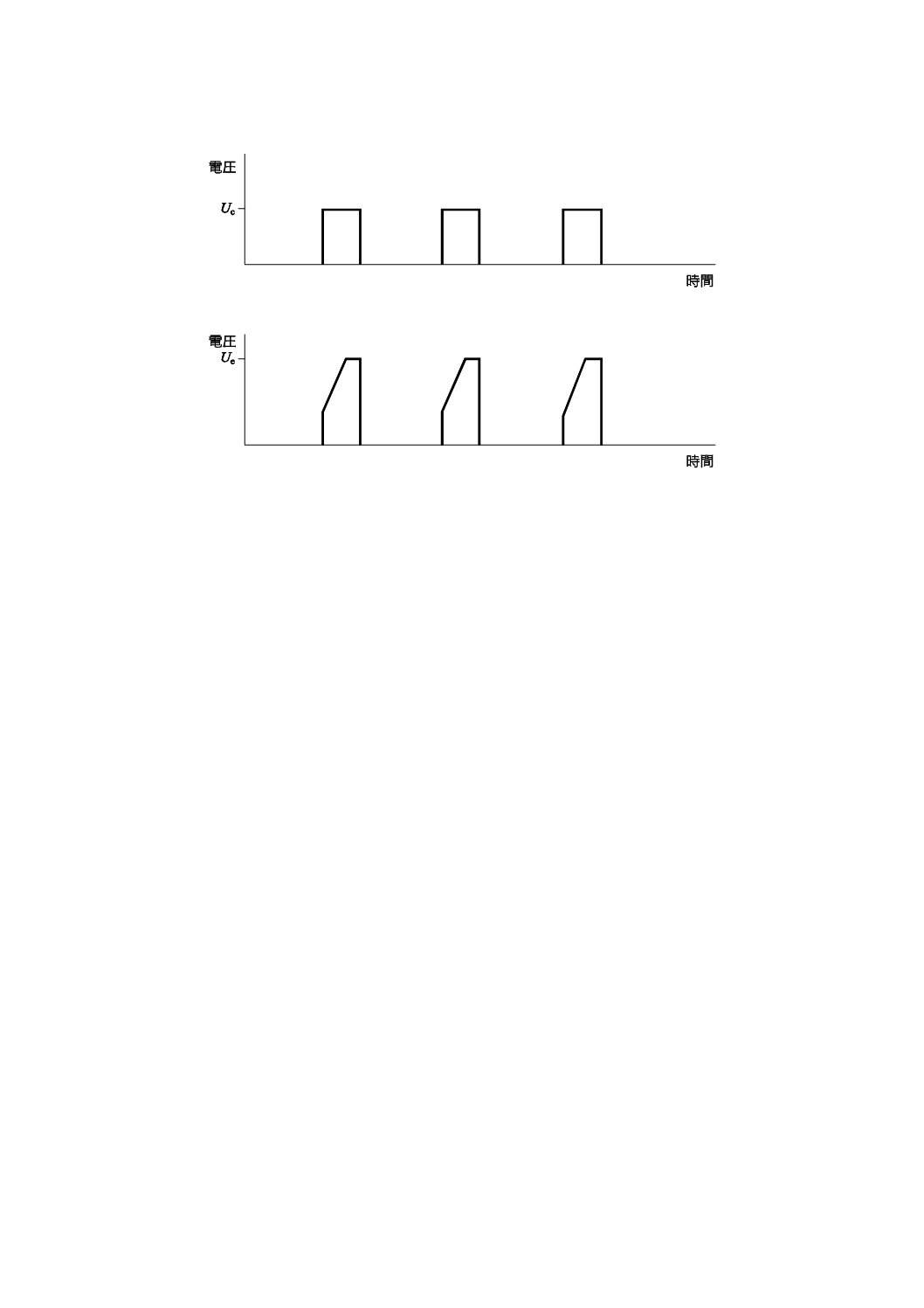
57
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 操作電圧Uc特性
b) モータ電圧特性
図F.3−阻止及び転流能力試験波形
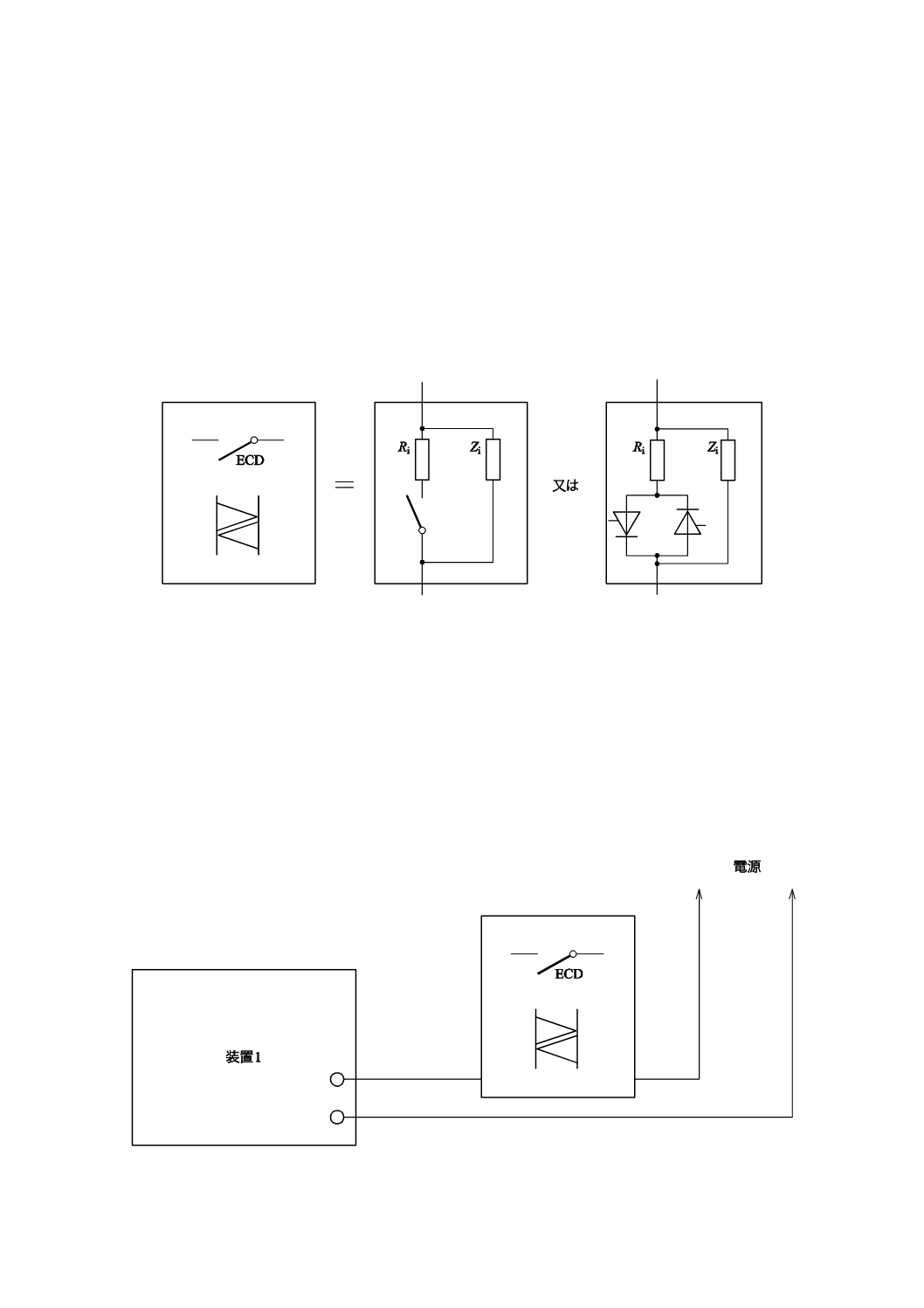
58
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書G
(参考)
制御回路構成の例
G.1 外部制御装置(ECD)
G.1.1 ECDの定義
制御器の制御に影響を与える外部素子。
G.1.2 ECDの図示
G.1.3 ECDのパラメータ
Ri:内部抵抗
Zi:内部漏れインピーダンス
注記 ECDが機械式押しボタンの場合は,Riを無視し,Ziは無限大とみなす。
G.2 制御回路構成
G.2.1 外部制御電源をもつ制御器
G.2.1.1 共通の電源及び制御入力
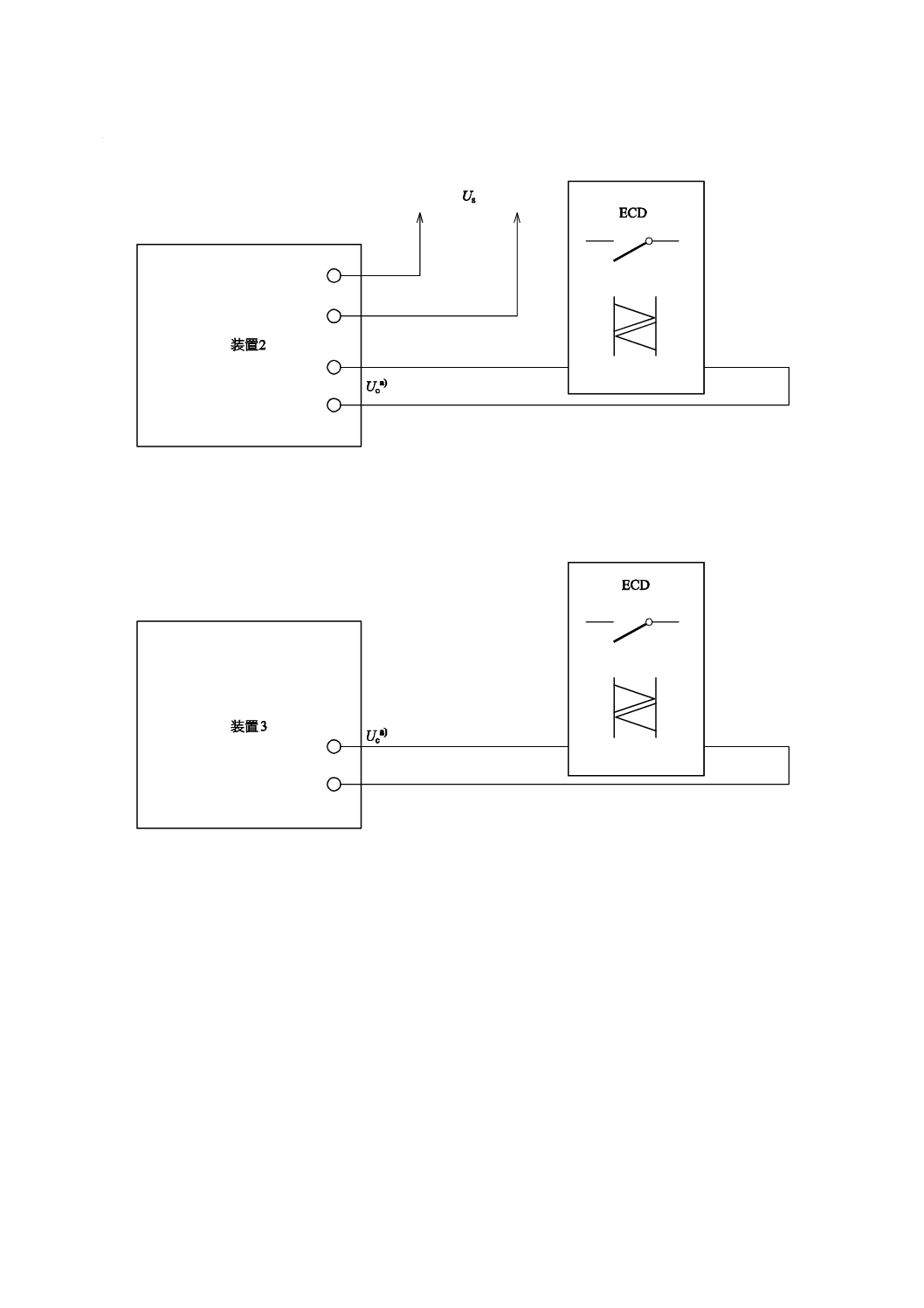
59
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
G.2.1.2 別個の電源及び制御入力
注a) 回路電圧
G.2.2 内部の制御電源を備え制御入力だけをもつ制御器
注a) 回路電圧
60
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書H
(参考)
製造業者と使用者との間で協定を必要とする項目
注記 この附属書では,“協定”は,非常に幅広い意味に用いる。また,“使用者”には,試験所を含
む。
この規格の箇条及び細分箇条に含まれる範囲において,JIS C 8201-1の附属書J(受渡当事者間で協定を
必要とする項目)に,次の表H.1の事項を追加して適用する。
表H.1
本体の箇条番号
項目
5.3.4.6 注記
F及び/又はSのほかの値(製造業者が指定してもよい。)
5.4
表2に規定する使用負荷種別以外の使用負荷種別
5.6
補助機能又は補助回路が通常でない動作特性
7.1.1 注記
40 ℃を超える周囲温度環境で用いる装置
7.1.2 注記
1 000 mを超える標高で用いる装置
8.2.4.1
1 000 Aを超えるX・Ieをもつ制御器の過負荷能力の検証
表9
阻止及び転流能力の検証結果
製造業者が指定した機能の喪失
8.3.1
EMC要求事項:
a) システムがそのシステムレベルに適用する規則及び法規に適合するというシステ
ム設置者(使用者)の責任
b) 機器に多大なる影響を及ぼす項目
8.3.3.1
イミュニティ:厳しい外部影響をもつ場所(製造業者の意見を聞くことが望ましい。)
8.3.3.3
80 MHz〜1 000 MHzの周波数範囲のイミュニティの検証
9.3.1 注記1及び注記2
試験シーケンスのための供試器数(製造業者との協定が必要)
9.3.3.6.3
EUTに電圧測定に適する特別の機能をもたせるための指示
9.3.5
EMC試験:
a) 試験用負荷種別
b) 合格基準のための規格限界の機能的説明及び定義(製造業者が提供)
c) 最小伝導条件(製造業者が選定)
9.3.5.2
EMCイミュニティ試験:(製造業者の指定による)1台の代表供試器の試験
9.3.5.2.2
EMC対策用の金属製エンクロージャを開くときに常に講じなければならない予防手段
を示す
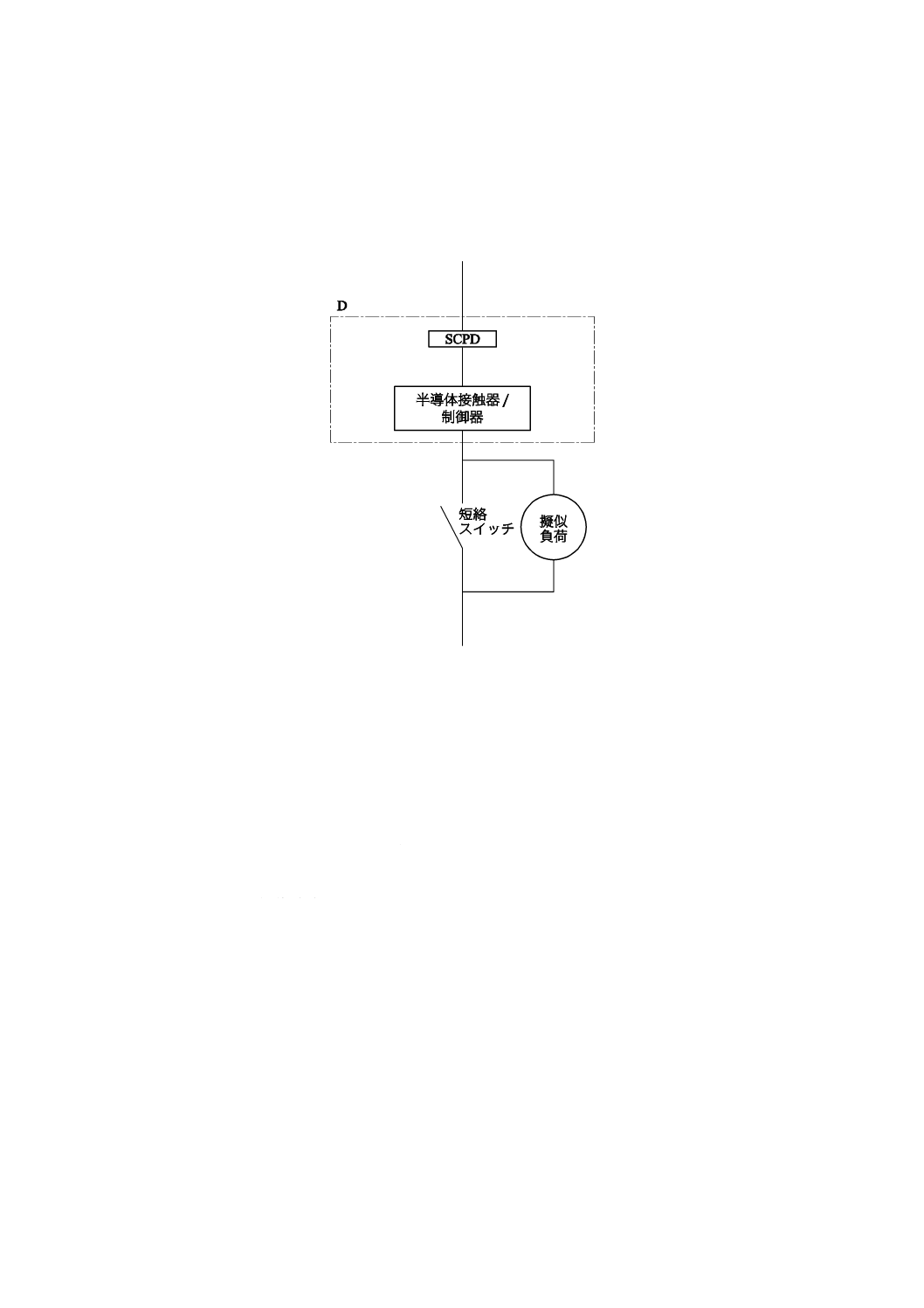
61
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書I
(規定)
半導体接触器及び制御器の短絡試験用に変更した試験回路
D:供試機器(接続導体を含む)
注記 外郭は,金属遮へい又はエンクロージャを含む。
図I.1−半導体機器の短絡試験用に変更した試験回路
標準の短絡試験用の回路は,JIS C 8201-1の図9(単相交流又は直流の単極装置の短絡投入容量及び短絡
遮断容量検証回路図)〜図12(4極装置の短絡投入容量及び短絡遮断容量検証試験回路)参照。
図I.1に半導体機器の短絡試験用に変更した試験回路を示す。ここには,半導体制御器用標準短絡試験
回路の一つの相だけの変更を記載するが,多相機器用試験回路では各相の変更部分は同一である。
変更は,図I.1に示した部分だけである。
図I.2に,9.3.4.1.6の短絡試験のタイムチャートを示す。
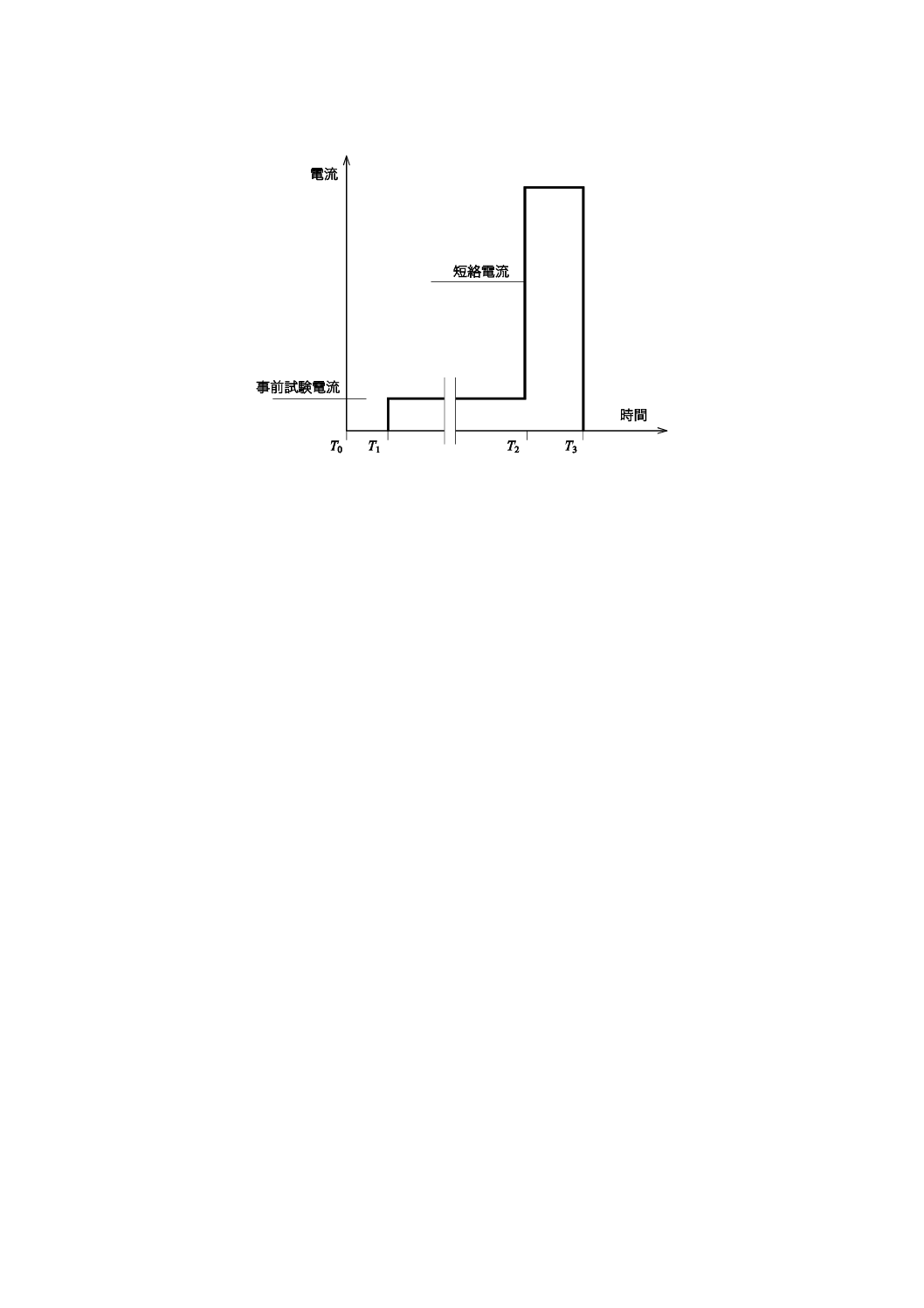
62
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
T0 :短絡スイッチ開[9.3.4.1.6のa)]
T1 :試験電流通電[9.3.4.1.6のb)]
T2 :短絡スイッチ閉[9.3.4.1.6のc)]
T3 :SCPDによる短絡電流遮断
図I.2−9.3.4.1.6の短絡試験のタイムチャート
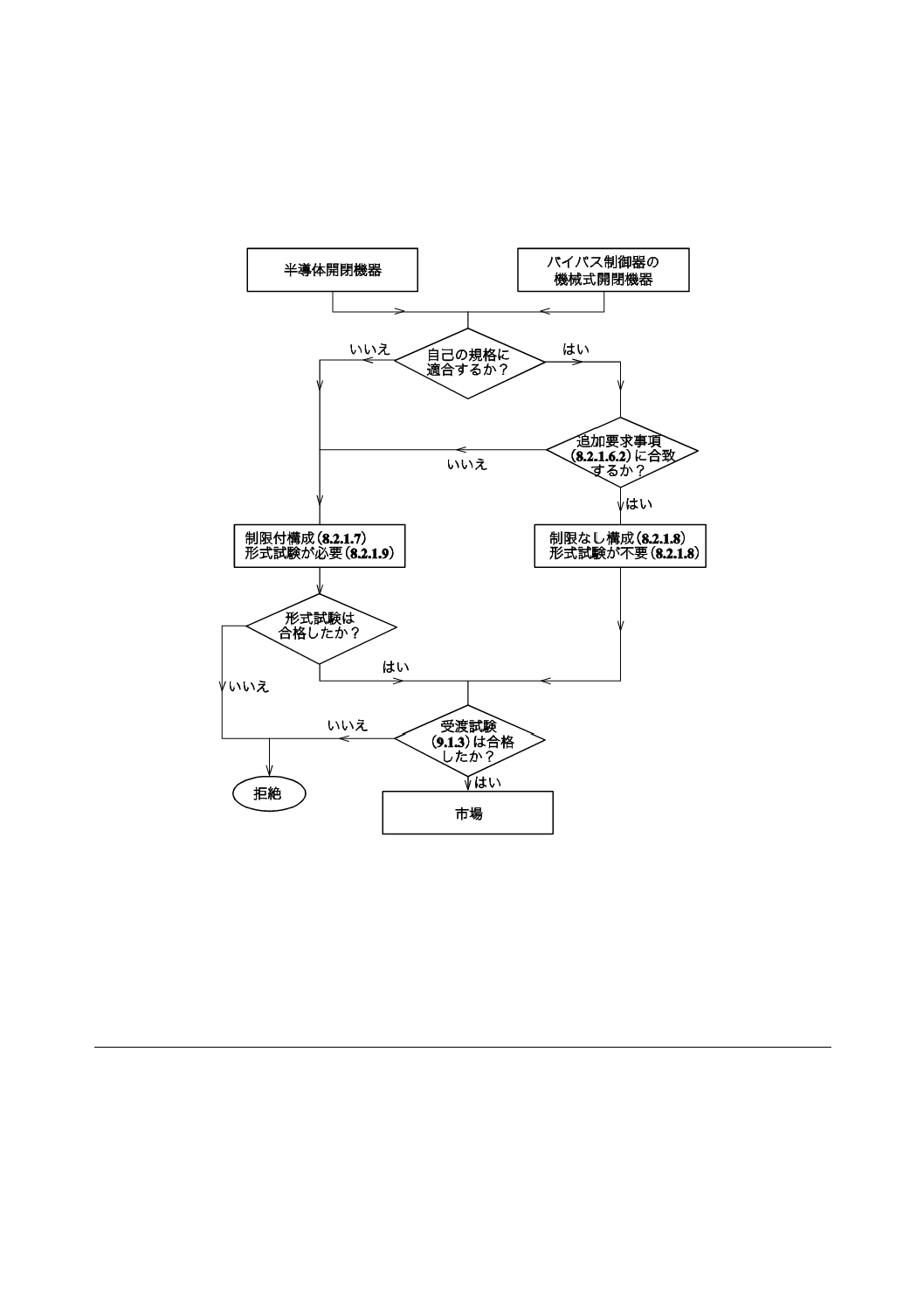
63
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書J
(参考)
バイパス式半導体制御器の試験のフローチャート
参考文献 JIS C 4003 電気絶縁−熱的耐久性評価及び呼び方
注記 対応国際規格:IEC 60085,Electrical insulation−Thermal evaluation and designation(MOD)
IEC 60439-1:1999,Low-voltage switchgear and controlgear assemblies−Part 1: Type-tested and
partially type-tested assemblies及びAmendment 1 (2004)
64
C 8201-4-3:2010
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
JISと対応国際規格との対比表
JIS C 8201-4-3:2010 低圧開閉装置及び制御装置−第4-3部:接触器及びモータスタ
ータ:非モータ負荷用交流半導体制御器及び接触器
IEC 60947-4-3:2007 Low-voltage switchgear and controlgear−Part 4-3: Contactors and
motor-starters−AC semiconductor controllers and contactors for non-motor loads
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差異の
理由及び今後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
8 構造及
び性能に
関する要
求事項
8.3.2.1.1 高調波
JIS C 61000-3-2に
適合しなければな
らない。
定格電流20 A以下。
8
8.3.2.1.1 高調波
IEC 61000-3-2に適合し
なければならない。
定格電流16 A以下。
変更
制御器又はスタータの定格電
流について“16 A以下”を,“20
A以下”に修正。
対応国際規格のこの箇条で引用して
いるIEC 61000-3-2の適用範囲は“16
A以下”であるが,この規格で引用
しているJIS C 61000-3-2では“20 A
以下”と規定しているため。
9 試験
9.3.5 EMC試験
エミッション及び
イミュニティ試験。
9
9.3.5 EMC試験
JISとほぼ同じ。
変更
使用負荷種別AC-51の試験電
流について“16 A”を,“20 A”
に修正。
JISと国際規格との対応の程度の全体評価:IEC 60947-4-3:2007,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 変更……………… 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD…………… 国際規格を修正している。
6
4
C
8
2
0
1
-4
-3
:
2
0
1
0
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。