C 8201-4-1:2020
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲及び目的 ············································································································· 1
1.1 適用範囲 ······················································································································ 1
1.2 この規格の適用除外 ······································································································· 3
1.3 目的 ···························································································································· 3
2 引用規格························································································································· 4
3 用語及び定義 ··················································································································· 6
3.1 一般 ···························································································································· 6
3.2 定義の五十音順の索引 ···································································································· 6
3.3 接触器に関する用語及び定義 ··························································································· 7
3.4 スタータに関する用語及び定義 ························································································ 8
3.5 特性値に関する用語及び定義 ·························································································· 12
3.6 記号及び略語 ··············································································································· 12
4 分類······························································································································ 13
5 接触器及びスタータの特性 ································································································ 13
5.1 特性の要約 ·················································································································· 13
5.2 装置の形式 ·················································································································· 13
5.3 主回路の定格値及び限界値 ····························································································· 14
5.4 使用負荷種別 ··············································································································· 19
5.5 制御回路 ····················································································································· 21
5.6 補助回路 ····················································································································· 21
5.7 リレー及び引外し装置(過負荷リレー)の特性 ··································································· 21
5.8 短絡保護装置(SCPD)との保護協調 ················································································ 23
5.9 (空欄) ····················································································································· 23
5.10 自動切換機器及び自動加速制御機器の形式及び特性 ··························································· 23
5.11 2段動作単巻変圧器スタータ用単巻変圧器の形式及び特性 ··················································· 24
5.12 加減抵抗ロータスタータ用始動抵抗器の形式及び特性 ························································ 24
6 製品情報························································································································ 24
6.1 情報の性質 ·················································································································· 24
6.2 表示 ··························································································································· 26
6.3 取付け,操作及び保守に関する指示·················································································· 26
7 標準使用,取付け及び輸送条件 ·························································································· 26
8 構造及び性能に関する要求事項 ·························································································· 26
8.1 構造に関する要求事項 ··································································································· 26
8.2 性能に関する要求事項 ··································································································· 28
C 8201-4-1:2020 目次
(2)
ページ
8.3 電磁両立性(EMC) ····································································································· 39
9 試験······························································································································ 40
9.1 試験の種類 ·················································································································· 40
9.2 構造に関する要求事項に対する適合性··············································································· 41
9.3 性能に関する要求事項への適合性····················································································· 42
9.4 EMC試験 ···················································································································· 57
附属書A(規定)接触器及び組合せる過負荷リレーの端子番号の表示及び識別 ································ 68
附属書B(規定)特殊試験 ···································································································· 71
附属書C(空白) ················································································································ 78
附属書D(参考)受渡当事者間での協定を必要とする項目 ·························································· 79
附属書E(空白) ················································································································ 80
附属書F(規定)主接点とリンクした補助接点の要求事項(ミラーコンタクト) ····························· 81
附属書G(参考)モータ用開閉機器の定格使用電流及び定格容量 ················································· 84
附属書H(規定)電子式過負荷リレーの拡張機能 ······································································ 89
附属書I(参考)半導体で制御するモータ負荷に用いるAC-1接触器 ············································· 91
附属書J(空白) ················································································································· 92
附属書K(規定)機能安全用途に使用する電気機械式接触器の信頼性データの解析法······················· 93
附属書JA(規定)電磁接触器の性能分類 ················································································ 101
参考文献 ··························································································································· 102
附属書JB(参考)JISと対応国際規格との対比表 ····································································· 103
C 8201-4-1:2020
(3)
まえがき
この規格は,産業標準化法第16条において準用する同法第12条第1項の規定に基づき,一般社団法人
日本電機工業会(JEMA)及び一般財団法人日本規格協会(JSA)から,産業標準原案を添えて日本産業規
格を改正すべきとの申出があり,日本産業標準調査会の審議を経て,経済産業大臣が改正した日本産業規
格である。これによって,JIS C 8201-4-1:2010は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本産業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 8201の規格群には,次に示す部編成がある。
JIS C 8201-1 第1部:通則
JIS C 8201-2-1 第2-1部:回路遮断器(配線用遮断器及びその他の遮断器)
JIS C 8201-2-2 第2-2部:漏電遮断器
JIS C 8201-3 第3部:開閉器,断路器,断路用開閉器及びヒューズ組みユニット
JIS C 8201-4-1 第4-1部:接触器及びモータスタータ:電気機械式接触器及びモータスタータ
JIS C 8201-4-2 第4-2部:接触器及びモータスタータ:交流半導体モータ制御器及びスタータ
JIS C 8201-4-3 第4-3部:接触器及びモータスタータ:非モータ負荷用交流半導体制御器及び接触器
JIS C 8201-5-1 第5部:制御回路機器及び開閉素子−第1節:電気機械式制御回路機器
JIS C 8201-5-2 第5-2部:制御回路機器及び開閉素子−近接スイッチ
JIS C 8201-5-5 第5部:制御回路機器及び開閉素子−第5節:機械的ラッチング機能をもつ電気的非
常停止機器
JIS C 8201-5-8 第5-8部:制御回路機器及び開閉素子−3ポジションイネーブルスイッチ
JIS C 8201-7-1 第7部:補助装置−第1節:銅導体用端子台
JIS C 8201-7-2 第7-2部:補助装置−銅導体用保護導体端子台
JIS C 8201-7-3 第7-3部:補助装置−ヒューズ端子台に対する安全要求事項
JIS C 8201-7-4 第7-4部:補助装置−銅導体用プリント回路板端子台
日本産業規格 JIS
C 8201-4-1:2020
低圧開閉装置及び制御装置−
第4-1部:接触器及びモータスタータ:
電気機械式接触器及びモータスタータ
Low-voltage switchgear and controlgear-
Part 4-1: Contactors and motor-starters-
Electromechanical contactors and motor-starters
序文
この規格は,2012年に第3.1版として発行されたIEC 60947-4-1を基に,我が国の実情に合わせるため,
技術的内容を変更して作成した日本産業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JBに示す。また,附属書JAは対応国際規格にはない事項であ
る。
この規格の通則規格であるJIS C 8201-1で規定する箇条は,必要がある場合,この規格に適用する。適
用するJIS C 8201-1の箇条,表,図及び附属書は,例えば,“JIS C 8201-1:2020の1.2.3”,“JIS C 8201-1:2020
の表4”,“JIS C 8201-1:2020の附属書A”などのように,参照部分を表示した。
1
適用範囲及び目的
1.1
適用範囲
この規格は,定格電圧が交流1 000 V又は直流1 500 V以下の回路に接続する主接点をもつ,1.1.1及び
1.1.2の装置類について規定する。
この規格で規定するスタータ及び/又は接触器は,通常,短絡電流を遮断するために設計したものでは
ない。したがって,適切な短絡保護(9.3.4参照)は,設備の一部を構成するが,接触器又はスタータは必
ずしも必要なものではない。
短絡保護に関して,この規格は,次のものに関する要求事項を規定する。
− 過負荷保護装置及び/又は短絡保護装置(SCPD)付きの接触器
− 分離した短絡保護装置付き並びに/又は分離した短絡保護装置及び一体形過負荷保護装置付きのスタ
ータ
− ある条件下で,それ自体の短絡保護装置と組合せた接触器又はスタータ。この組合せは,例えば,保
護付きスタータ又はコンビネーションスタータは,ユニットとして格付けられる。
コンビネーションスタータ又は保護付きスタータの中に短絡保護装置として用いる回路遮断器及びヒュ
ーズ組みユニットは,それぞれJIS C 8201-2-1:2011及びJIS C 8201-3:2009による。
この規格で規定する装置の詳細は,1.1.1及び1.1.2による。
2
C 8201-4-1:2020
注記1 我が国の配電電圧は,電気設備に関する技術基準を定める省令において,低圧は交流600 V
以下,直流750 V以下と規定している。
注記2 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 60947-4-1:2009,Low-voltage switchgear and controlgear−Part 4-1: Contactors and
motor-starters−Electromechanical contactors and motor-starters及びAmendment 1:2012
(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
1.1.1
交流及び直流接触器
交流及び直流接触器とは,電気回路を閉路及び開路するものである。接触器と適切なリレー(1.1.2参照)
とを組み合わせた場合1)は,過負荷保護する。
注1) 適切なリレーと組み合わせ,短絡保護することを意図する接触器は,回路遮断器(JIS C
8201-2-1:2011参照)に関する条件が追加になる。
この規格は,接触器形リレーの操作部及び接触器のコイル回路専用に用いる接点にも適用する。
この規格は,電子制御電磁石をもつ接触器にも適用する。
1.1.2
交流モータスタータ
交流モータスタータ(モータマネジメントスタータを含む)とは,モータの始動,通常の速度へ加速,
モータの連続的な動作の確保,モータから電源の切断,かつ,過負荷動作に対してモータ及び関連する回
路の保護が可能である。
スタータ用の過負荷リレーは,附属書Hに従った拡張機能の有無にかかわらず,電子技術に基づくもの
も含めこの規格の要求事項を適用する。
電子制御電磁石をもつスタータにもこの規格を適用する。
1.1.2.1
直入れ(全電圧)交流スタータ
直入れスタータとは,モータの始動,通常の速度へ加速,過負荷動作に対してモータ及び関連する回路
の保護,モータから電源の切断が可能である。
この規格は,可逆用スタータにも適用する。
1.1.2.2
減電圧交流スタータ
減電圧交流スタータとは,モータ端子にかかる電源電圧を,複数の段階に接続又は端子にかかる電圧を
次第に増加させることによるモータの始動,通常の速度へ加速,過負荷動作に対してモータ及び関連する
回路の保護,モータから電源の切断が可能である。
自動切換機器は,ある段階から他の段階への連続的なスイッチング動作を制御するのに用いてもよい。
このような自動切換機器には,例えば,時延接触器形リレー,定限時オール・オア・ナッシングリレー,
不足電流機器,自動加速制御機器がある(5.10参照)。
1.1.2.2.1
スターデルタスタータ
スターデルタスタータとは,スター接続で三相モータの始動,デルタ接続で連続的な動作の確保,過負
荷動作に対してモータ及び関連する回路の保護及びモータから電源の切断が可能である。
この規格で規定するスターデルタスタータは,急速にモータを逆転することを意図したものではない。
したがって,使用負荷種別AC-4は適用しない。
注記 スター接続において始動電流及びモータのトルクは,デルタ接続の約1/3となる。したがって,
スターデルタスタータは,始動時の突入電流を抑制するとき又は運転中の機械で始動時に抑制
3
C 8201-4-1:2020
したトルクが必要なときに用いられる。モータの始動電流,始動トルク及び運転中の機械のト
ルクの代表的な曲線を,図1に示す。
1.1.2.2.2
2段動作単巻変圧器スタータ
2段動作単巻変圧器スタータとは,交流誘導モータの休止位置から低減したトルクでの始動,通常の速
度への加速,過負荷動作に対してモータ及び関連する回路の保護,並びにモータから電源の切断が可能で
ある。
この規格は,スタータの一部である単巻変圧器,又はスタータへの組込用として特別に設計したユニッ
トを構成する単巻変圧器に適用する。
2段動作を超える単巻変圧器スタータには,この規格を適用しない。
この規格で規定する単巻変圧器スタータは,インチング責務又は急速にモータを逆転することを意図し
たものではない。したがって,使用負荷種別AC-4は適用しない。
注記 始動位置において,定格電圧での電流及び始動に相応するモータのトルクは,およそ始動電圧
を定格電圧で除した値の2乗の割合で減少する。したがって,単巻変圧器スタータは,始動時
の突入電流を抑制するとき,又は運転中の機械で,始動時に抑制したトルクが必要なときに用
いられる。モータの始動電流,始動トルク及び運転中の機械のトルクの代表的な曲線を,図2
に示す。
1.1.2.3
加減抵抗ロータスタータ
加減抵抗ロータスタータとは,巻線形交流誘導モータのロータ回路にあらかじめ挿入した抵抗を短絡す
ることによる始動,過負荷動作に対するモータ保護,及びモータから電源の切断が可能である。
この規格は,モータが停止した状態で接続を入れ換えて,次に逆方向へ回転させる方式にも適用する
(5.3.5.5参照)。インチング及びプラッギングを含む動作の追加の要求事項については,受渡当事者間で
の協定が必要である。
この規格は,スタータの一部である抵抗器,又はスタータの組込用として特別に設計した抵抗器にも適
用する。
1.2
この規格の適用除外
この規格は,次のものには適用しない。
− 直流スタータ
− 特殊な用い方及び始動位置での連続動作をするように設計したスターデルタスタータ,加減抵抗ロー
タスタータ及び2段動作単巻変圧器スタータ
− 全ての相の抵抗値が同じでない不平衡加減抵抗ロータスタータ
− 始動だけでなく速度調整の機能をもつ装置
− 液体形スタータ及び“液体−蒸気”形のスタータ
− 半導体接触器及び主回路に半導体接触器を用いたスタータ
− 加減抵抗ステータスタータ
− 特殊な用途用に設計した接触器又はスタータ
− 接触器の補助接点及び接触器形リレーの接点。これらはJIS C 8201-5-1:2010を参照。
1.3
目的
この規格は,次の事項を規定することを目的とする。
a) 接触器,スタータ及びこれらの組合せ装置の特性
b) 接触器又はスタータが満足しなければならない条件
4
C 8201-4-1:2020
満足しなければならない条件は,次による。
1) 動作及び挙動
2) 耐電圧性能
3) 該当する場合,エンクロージャによって得られる保護の等級
4) 構造
c) これらの条件を満足していることを確認する,試験項目及び試験方法
d) 装置又は製造業者の印刷物で表示しなければならない情報
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 9705-1:2011 機械類の安全性−制御システムの安全関連部−第1部:設計のための一般原則
注記 対応国際規格:ISO 13849-1:2006,Safety of machinery−Safety-related parts of control systems−
Part 1: General principles for design
JIS B 9961:2008 機械類の安全性−安全関連の電気・電子・プログラマブル電子制御システムの機能
安全
注記 対応国際規格:IEC 62061:2005,Safety of machinery−Functional safety of safety-related electrical,
electronic and programmable electronic control systems
JIS C 0508(規格群) 電気・電子・プログラマブル電子安全関連系の機能安全
注記 対応国際規格:IEC 61508 (all parts),Functional safety of electrical/electronic/programmable
electronic safety-related systems
JIS C 4003:2010 電気絶縁−熱的耐久性評価及び呼び方
注記 対応国際規格:IEC 60085:2004,Electrical insulation−Thermal classification
JIS C 5750-3-5:2006 ディペンダビリティ管理−第3-5部:適用の指針−信頼性試験条件及び統計的方
法に基づく試験原則
注記 対応国際規格:IEC 60300-3-5:2001,Dependability management−Part 3-5: Application guide−
Reliability test conditions and statistical test principles
JIS C 8201-1:2020 低圧開閉装置及び制御装置−第1部:通則
注記 対応国際規格:IEC 60947-1:2007,Low-voltage switchgear and controlgear−Part 1: General rules
JIS C 8201-2-1:2011 低圧開閉装置及び制御装置−第2-1部:回路遮断器(配線用遮断器及びその他の
遮断器)
注記 対応国際規格:IEC 60947-2:2006,Low-voltage switchgear and controlgear−Part 2: Circuit-
breakers
JIS C 8201-2-2:2011 低圧開閉装置及び制御装置−第2-2部:漏電遮断器
注記 対応国際規格:IEC 60947-2:2006,Low-voltage switchgear and controlgear−Part 2: Circuit-
breakers
JIS C 8201-3:2009 低圧開閉装置及び制御装置−第3部:開閉器,断路器,断路用開閉器及びヒュー
ズ組みユニット
注記 対応国際規格:IEC 60947-3:1999,Low-voltage switchgear and controlgear−Part 3: Switches,
5
C 8201-4-1:2020
disconnectors, switch-disconnectors and fuse-combination units,Amendment 1:2001及び
Amendment 2:2005
JIS C 8201-5-1:2010 低圧開閉装置及び制御装置−第5部:制御回路機器及び開閉素子−第1節:電
気機械式制御回路機器
注記 対応国際規格:IEC 60947-5-1:2003,Low-voltage switchgear and controlgear−Part 5-1: Control
circuit devices and switching elements−Electromechanical control circuit devices及びAmendment
1:2009
JIS C 61000-4-2:2012 電磁両立性−第4-2部:試験及び測定技術−静電気放電イミュニティ試験
注記 対応国際規格:IEC 61000-4-2:2008,Electromagnetic compatibility (EMC)−Part 4-2: Testing and
measurement techniques−Electrostatic discharge immunity test
JIS C 61000-4-3:2012 電磁両立性−第4-3部:試験及び測定技術−放射無線周波電磁界イミュニティ
試験
注記 対応国際規格:IEC 61000-4-3:2010,Electromagnetic compatibility (EMC)−Part 4-3: Testing and
measurement techniques−Radiated, radio-frequency, electromagnetic field immunity test
JIS C 61000-4-4:2015 電磁両立性−第4-4部:試験及び測定技術−電気的ファストトランジェント/
バーストイミュニティ試験
注記 対応国際規格:IEC 61000-4-4:2012,Electromagnetic compatibility (EMC)−Part 4-4: Testing and
measurement techniques−Electrical fast transient/burst immunity test
JIS C 61000-4-5:2018 電磁両立性−第4-5部:試験及び測定技術−サージイミュニティ試験
注記 対応国際規格:IEC 61000-4-5:2014,Electromagnetic compatibility (EMC)−Part 4-5: Testing and
measurement techniques−Surge immunity test
JIS C 61000-4-6:2017 電磁両立性−第4-6部:試験及び測定技術−無線周波電磁界によって誘導する
伝導妨害に対するイミュニティ
注記 対応国際規格:IEC 61000-4-6:2013,Electromagnetic compatibility(EMC)−Part 4-6:Testing and
measurement techniques−Immunity to conducted disturbances, induced by radio-frequency fields
JIS Z 9015-1 計数値検査に対する抜取検査手順−第1部:ロットごとの検査に対するAQL指標型抜
取検査方式
注記 対応国際規格:ISO 2859-1,Sampling procedures for inspection by attributes−Part 1: Sampling
schemes indexed by acceptance quality limit (AQL) for lot-by-lot inspection
IEC 60034-1:2017,Rotating electrical machines−Part 1: Rating and performance
IEC 61051-2:1991,Varistors for use in electronic equipment−Part 2: Sectional specification for surge
suppression varistors及びAmendment 1:2009
IEC 61439-1:2011,Low-voltage switchgear and controlgear assemblies−Part 1: General rules
IEC 61511 (all parts),Functional safety−Safety instrumented systems for the process industry sector
IEC 61513:2011,Nuclear power plants−Instrumentation and control important to safety−General
requirements for systems
IEC 61649:2008,Weibull analysis
CISPR 11:2003,Industrial, scientific and medical (ISM) radio-frequency equipment−Electromagnetic
disturbance characteristics−Limits and methods of measurement,Amendment 1:2004及びAmendment
2:2006
6
C 8201-4-1:2020
3
用語及び定義
3.1
一般
この規格で用いる主な用語及び定義は,JIS C 8201-1:2020の箇条2によるほか,次による。
3.2
定義の五十音順の索引
インチング(ジョギング)[inching (jogging)](3.4.24)
インヒビット時間(inhibit time)(3.4.30)
“O”操作(“O”operation)(3.5.3)
可逆スタータ(reversing starter)(3.4.3)
加減抵抗スタータ(rheostatic starter)(3.4.6)
加減抵抗ステータスタータ(rheostatic stator starter)(3.4.6.1)
加減抵抗ロータスタータ(rheostatic rotor starter)(3.4.6.2)
過渡回復電圧(TRV)[transient recovery voltage (TRV)](3.5.1)
空気式接触器(pneumatic contactor)(3.3.3)
欠相検出熱動形過負荷リレー又は引外し装置(phase loss sensitive thermal overload relay or release)
(3.4.17)
減電圧スタータ(reduced voltage starter)(3.4.5)
コンビネーション開閉機器(combination switching device)(3.4.27)
コンビネーションスタータ(combination starter)(3.4.8)
“CO”操作(“CO” operation)(3.5.2)
直入れスタータ(direct-on-line starter)(3.4.2)
(加減抵抗スタータの)始動時間[starting time (of a rheostatic starter)](3.4.20)
(単巻変圧器スタータの)始動時間[starting time (of an auto-transformer starter)](3.4.21)
ジャム検出用電子式過負荷リレー(jam sensitive electronic overload relay)(3.4.29)
手動スタータ(manual starter)(3.4.9)
真空接触器(又はスタータ)[vacuum contactor (or starter)](3.3.6)
スタータ(starter)(3.4.1)
スターデルタスタータ(star-delta starter)(3.4.5.1)
ストール検出用電子式過負荷リレー[stall sensitive electronic overload relay](3.4.28)
(接触器の)静止位置[position of rest (of a contactor)](3.3.7)
接触器(機械的)[contactor (mechanical)](3.3.1)
単巻変圧器スタータ(auto-transformer starter)(3.4.5.2)
電気空気式接触器(electro-pneumatic contactor)(3.3.4)
電子制御電磁石(electronically controlled of electromagnet)(3.3.8)
電磁接触器(electromagnetic contactor)(3.3.2)
(接触器の)投入電力[pick-up power (of a contactor)](3.3.10)
2方向スタータ(two-direction starter)(3.4.4)
不足電圧リレー又は引外し装置(under-voltage relay or release)(3.4.19)
不足電流リレー又は引外し装置(under-current relay or release)(3.4.18)
プラッギング(plugging)(3.4.25)
保護付き開閉機器(protected switching device)(3.4.26)
7
C 8201-4-1:2020
保護付きスタータ(protected starter)(3.4.7)
(接触器の)保持電力[holding power (of a contactor)](3.3.9)
ミラーコンタクト(mirror contact)(F.2.1)
ラッチ式接触器(latched contactor)(3.3.5)
3.3
接触器に関する用語及び定義
3.3.1
接触器(機械的)[contactor (mechanical)]
過負荷動作状態を含む通常の回路状態で電流を閉路,通電及び遮断ができ,かつ,一つの静止状態だけ
をもつ手以外の方法で操作する,機械式開閉機器。
注記1 主接点を閉じる力の供給方法に従い,接触器を表す場合がある。
注記2 “手以外の方法で操作”とは,機器を一つ又は複数の外部電源(供給源)から制御したり,
動作状態を保持したりすることをいう。
注記3 フランス語で,静止位置で主接点が閉路する接触器は,通常“ラプチャ”と呼ばれている。
英語での類似の単語はない。
注記4 接触器は,通常は頻繁に操作することを意図している。
(IEV 441-14-33)
3.3.2
電磁接触器(electromagnetic contactor)
常時開主接点の閉路又は常時閉主接点の開路を,電磁石の力で行う接触器。
注記 電磁石を,電子制御する電磁接触器もある。
3.3.3
空気式接触器(pneumatic contactor)
常時開主接点の閉路又は常時閉主接点の開路を,電気的手段を用いずに圧縮空気の力で行う接触器。
3.3.4
電気空気式接触器(electro-pneumatic contactor)
常時開主接点の閉路又は常時閉主接点の開路を,電気的バルブで制御する圧縮空気の力で行う接触器。
3.3.5
ラッチ式接触器(latched contactor)
操作手段への通電がなくなったとき,ラッチ装置によって動作部分が静止位置に戻らないようにする接
触器。
注記1 ラッチ装置の保持及び引外しは,機械式,電磁式,空気式などによる場合がある。
注記2 ラッチ式接触器は,第二の静止位置をもつので,厳密には接触器でない。ただし,その用途
及び設計でラッチ式接触器は,開閉機器の他の分類に対するよりも一般に接触器に関係があ
るので,接触器の規格を適用するのが適切である。
(IEV 441-14-34)
3.3.6
真空接触器(又はスタータ)[vacuum contactor (or starter)]
高度に真空状態を維持した外郭内で,主接点が開閉動作する接触器(又はスタータ)。
3.3.7
(接触器の)静止位置[position of rest (of a contactor)]
8
C 8201-4-1:2020
電磁力又は圧縮空気力が加わらないときに接触器の動作部分がとる位置。
(IEV 441-16-24)
3.3.8
電子制御電磁石(electronically controlled electromagnet)
能動電子素子を備えた電子回路によって制御されたコイルをもつ電磁石。
3.3.9
(接触器の)保持電力[holding power (of a contactor)]
電磁石の動作保持に必要な電力。
3.3.10
(接触器の)投入電力[pick-up power (of a contactor)]
無励磁状態から励磁状態へ接触器を動作させるために必要な電力。
3.4
スタータに関する用語及び定義
3.4.1
スタータ(starter)
適切な過負荷保護機能をもち,モータの始動及び停止に必要な全ての開閉手段を組み合わせたもの。
(IEV 441-14-38を変更して適用)
3.4.2
直入れスタータ(direct-on-line starter)
電源電圧を,モータ端子へ1段階で接続するスタータ。
(IEV 441-14-40)
3.4.3
可逆スタータ(reversing starter)
モータの回転中であっても,モータへの本来の接続を逆にすることによって,回転方向を逆転させる方
式のスタータ。
3.4.4
2方向スタータ(two-direction starter)
モータの停止中だけ,モータへの本来の接続を逆にすることによって,回転方向を逆転させる方式のス
タータ。
3.4.5
減電圧スタータ(reduced voltage starter)
モータ端子にかかる電源電圧を複数の段階に接続,又は端子にかかる電圧を次第に増加させる方法によ
るスタータ。
3.4.5.1
スターデルタスタータ(star-delta starter)
始動時にステータ巻線にスター接続し,最終回転状態ではデルタ接続する三相誘導モータ用のスタータ。
(IEV 441-14-44)
3.4.5.2
単巻変圧器スタータ(auto-transformer starter)
一つ以上の減電圧を単巻変圧器から印加する誘導モータ用のスタータ。
注記 単巻変圧器は,IEC 60076-1の3.1.2で,“複数の巻線が共通部分をもつ変圧器”と定義してい
9
C 8201-4-1:2020
る。
(IEV 441-14-45)
3.4.6
加減抵抗スタータ(rheostatic starter)
始動時,一つ以上の抵抗器によってモータトルク特性を決め,また,電流を制限するスタータ。
(IEV 441-14-42)
注記 加減抵抗スタータは,用いる場所で接続する一体形機器又は分離形機器のいずれについても,
一般に,次の三つの基本部分によって構成される。
− ステータに供給するための機械式開閉機器(一般に,過負荷保護が組み合わされている。)
− ステータ回路又はロータ回路に接続する抵抗器
− 抵抗器を段階的に切り離すための機械式開閉機器
3.4.6.1
加減抵抗ステータスタータ(rheostatic stator starter)
始動時,ステータ回路に前もって準備した一つ以上の抵抗器を段階的に切り離す,かご形モータ用のス
タータ。
3.4.6.2
加減抵抗ロータスタータ(rheostatic rotor starter)
始動時,ロータ回路に前もって準備した一つ以上の抵抗器を段階的に切り離す,非同期巻線形モータ用
のスタータ。
(IEV 441-14-43)
3.4.7
保護付きスタータ(protected starter)
スタータ,手動操作用開閉機器及び短絡保護装置によって構成する装置で,製造業者によって一つのユ
ニットとして定格付けたもの。
注記1 保護付きスタータは,箱入りの場合と箱なしの場合とがある。
注記2 この規格において“製造業者”とは,次の事項に最終責任を負うものを意味する。
− 適用する規格を満足する。
− 箇条6による製品情報の提供
注記3 手動操作開閉機器及び短絡保護装置は,一つの装置である場合と,スタータの過負荷保護を
備えている場合とがある。
3.4.8
コンビネーションスタータ(combination starter)(図3参照)
断路(アイソレーション)機能をもった保護付きスタータで構成する装置。
注記 コンビネーションモータコントローラとも呼ばれる。
3.4.9
手動スタータ(manual starter)
主接点の閉路を,手動力だけで行うスタータ。
(IEV 441-14-39)
3.4.10
電磁スタータ(electromagnetic starter)
10
C 8201-4-1:2020
(対応国際規格のこの用語は,この規格で用いておらず,不採用とした。)
3.4.11
電動操作スタータ(motor-operated starter)
(対応国際規格のこの用語は,この規格で用いておらず,不採用とした。)
3.4.12
空気式スタータ(pneumatic starter)
(対応国際規格のこの用語は,この規格で用いておらず,不採用とした。)
3.4.13
電気空気式スタータ(electro-pneumatic starter)
(対応国際規格のこの用語は,この規格で用いておらず,不採用とした。)
3.4.14
1段動作スタータ(single-step starter)
(対応国際規格のこの用語は,この規格で用いておらず,不採用とした。)
3.4.15
2段動作スタータ(two-step starter)
(対応国際規格のこの用語は,この規格で用いておらず,不採用とした。)
3.4.16
n段動作スタータ(n-step starter)
(対応国際規格のこの用語は,この規格で用いておらず,不採用とした。)
3.4.17
欠相検出熱動形過負荷リレー又は引外し装置(phase loss sensitive thermal overload relay or release)
指定した要求事項に従って,過負荷のとき及び欠相のときも動作する多極形熱動形過負荷リレー又は引
外し装置。
注記 熱動形過負荷リレーは,サーマルリレーともいう。
3.4.18
不足電流リレー又は引外し装置(under-current relay or release)
電流があらかじめ設定した値未満になったとき,自動的に動作するリレー又は引外し装置。
3.4.19
不足電圧リレー又は引外し装置(under-voltage relay or release)
印加電圧があらかじめ設定した値未満になったとき,自動的に動作するリレー又は引外し装置。
3.4.20
(加減抵抗スタータの)始動時間[starting time (of a rheostatic starter)]
始動抵抗器又はそれらの部分に電流が流れている時間。
注記 スタータの始動時間は,オン位置への開閉操作に続く最後の加速期間も考慮に入れているモー
タの全始動時間よりも短い。
3.4.21
(単巻変圧器スタータの)始動時間[starting time (of an auto-transformer starter)]
単巻変圧器に電流が流れている時間。
注記 スタータの始動時間は,オン位置への開閉操作に続く最後の加速期間も考慮に入れているモー
タの全始動時間よりも短い。
11
C 8201-4-1:2020
3.4.22
(単巻変圧器スタータ又はスターデルタスタータでの)オープントランジション方式[open transition (with
an auto-transformer starter or star-delta starter)]
(対応国際規格のこの用語は,この規格で用いておらず,不採用とした。)
3.4.23
(単巻変圧器スタータ又はスターデルタスタータでの)クローズドトランジション方式[closed transition
(with an auto-transformer starter or star-delta starter)]
(対応国際規格のこの用語は,この規格で用いておらず,不採用とした。)
3.4.24
インチング(ジョギング)[inching (jogging)]
被駆動機構の寸動を得るために,モータ又はソレノイドを短時間繰り返し励磁する操作。
3.4.25
プラッギング(plugging)
モータの運転中にモータへの本来の結線の接続を逆にすることによって,急速にモータを停止又は逆転
する操作。
3.4.26
保護付き開閉機器(protected switching device)
製造業者によって一つのユニットとして定格付けた,接触器又は半導体コントローラ,過負荷保護,手
動操作開閉機器及び短絡保護装置によって構成する装置(非モータ負荷)。
注記1 保護付き開閉機器は,箱入りの場合と箱なしの場合とがある。
注記2 この規格において“製造業者”とは,次の事項に最終責任を負うものを意味する。
− 適用する規格を満足する。
− 箇条6による製品情報の提供
注記3 手動操作開閉機器及び短絡保護装置は,一つの装置である場合と,過負荷保護を備えている
場合とがある。
3.4.27
コンビネーション開閉機器(combination switching device)
断路(アイソレーション)機能をもった保護付き開閉機器で構成する機器。
3.4.28
ストール検出用電子式過負荷リレー(ストールリレー)(stall sensitive electronic overload relay)
明記した要求事項に従って,特定の始動時間の間に,電流があらかじめ設定した値未満に減少しないと
き,又はあらかじめ設定した時間の後に,モータが回転していないことを検知したときに動作する電子式
過負荷リレー。
注記1 ストールとは,始動時にロータがロックすることをいう。
注記2 電流及び始動時間の設定を適切に調整することで,リレーは,超過始動時間を検出すること
が可能である。
3.4.29
ジャム検出用電子式過負荷リレー(ジャムリレー)(jam sensitive electronic overload relay)
明記した要求事項に従って,過負荷のとき及び運転中に,あらかじめ設定した時間を上回って電流が設
定値を超え続けたときに動作する電子式過負荷リレー。
12
C 8201-4-1:2020
注記 ジャムとは,電流が始動時間終了後にモータのロータをロックしたときの電流値に達するよう
な極度の過負荷状態をいう。
3.4.30
インヒビット時間(inhibit time)
リレーのトリップ機能が働かない時延期間(調整可能でもよい。)。
3.4.31
モータマネジメントスタータ(motor management starter)
(対応国際規格のこの用語は,この規格で用いておらず,不採用とした。)
3.5
特性値に関する用語及び定義
3.5.1
過渡回復電圧(TRV)[transient recovery voltage (TRV)]
重大な過渡特性期間中の回復電圧。
注記 真空接触器又はスタータにおいて,最高の過渡回復電圧は,最初の極以外の極で発生する。
(JIS C 8201-1:2020の2.5.34を変更して適用)
3.5.2
“CO”操作(“CO” operation)
試験中の装置の閉路の結果に基づく短絡電流の短絡保護装置による遮断。
3.5.3
“O”操作(“O” operation)
試験中の装置が閉路状態で発生する短絡電流の短絡保護装置による遮断。
注記 短絡保護装置は,回路を閉路する前に通常は閉路状態にあるが,短絡保護装置で回路を閉じな
ければならない場合もある[9.3.4.2.2のb)参照]。
3.6
記号及び略語
AQL 許容品質レベル
EMC 電磁両立性
SCPD 短絡保護装置
Ic
閉路及び遮断電流(表7参照)
Ie
定格使用電流(5.3.2.5参照)
Ier
定格ロータ使用電流(5.3.2.7参照)
Ies
定格ステータ使用電流(5.3.2.6参照)
Iq
最大条件付き短絡試験電流
Ith
開放熱電流(5.3.2.1参照)
Ithe
閉鎖熱電流(5.3.2.2参照)
Ithr
ロータ熱電流(5.3.2.4参照)
Iths
ステータ熱電流(5.3.2.3参照)
Iu
定格連続電流(5.3.2.8参照)
Pc
直流制御接触器の公称保持電力
Pp
別々の投入及び保持用巻線を備えた直流制御接触器の投入電力
“r”
最小短絡試験電流
Sh
交流制御接触器の保持電力
13
C 8201-4-1:2020
Sp
交流制御接触器の投入電力
Tp
トリップ時間(表2参照)
Uc
定格制御回路電圧(5.5参照)
Ud
接触器の1極当たりの電圧降下
Ue
定格使用電圧(5.3.1.1参照)
Uer
定格ロータ使用電圧(5.3.1.1.2参照)
Ues
定格ステータ使用電圧(5.3.1.1.1参照)
Ui
定格絶縁電圧(5.3.1.2参照)
Uimp
定格インパルス耐電圧(5.3.1.3参照)
Uir
定格ロータ絶縁電圧(5.3.1.2.2参照)
Uis
定格ステータ絶縁電圧(5.3.1.2.1参照)
Ur
商用周波数又は直流の回復電圧(表7参照)
Us
定格制御電源電圧(5.5参照)
Z
接触器の1極当たりのインピーダンス(5.3.7参照)
4
分類
分類の基準に用いる情報は,5.2による。
5
接触器及びスタータの特性
5.1
特性の要約
接触器又はスタータの特性は,次のうち該当する項目を明示しなければならない。
− 装置の形式(5.2参照)
− 主回路の定格値及び限界値(5.3参照)
− 使用負荷種別(5.4参照)
− 制御回路(5.5参照)
− 補助回路(5.6参照)
− リレー及び引外し装置の形式及び特性(5.7参照)
− 短絡保護装置との保護協調(5.8参照)
− 自動切換機器及び自動加速制御機器の形式及び特性(5.10参照)
− 2段動作単巻変圧器スタータ用単巻変圧器の形式及び特性(5.11参照)
− 加減抵抗ロータスタータ用始動抵抗器の形式及び特性(5.12参照)
− 受渡当事者間での協定を必要とする事項(附属書D参照)
5.2
装置の形式
次について,明示しなければならない(箇条6参照)。
a) 装置の種類 次の装置を対象とする。
− 接触器
− 直入れ交流スタータ
− スターデルタスタータ
− 2段動作単巻変圧器スタータ
− 加減抵抗ロータスタータ
14
C 8201-4-1:2020
− コンビネーションスタータ又は保護付きスタータ
b) 極数
c) 電流の種別(交流又は直流)
d) 遮断媒体(空気,油,ガス,真空など)
e) 装置の動作条件
1) 操作方法
例 手動,電磁石,電動,空気及び電気空気式
2) 制御方法 次の例のような制御方法を明示する。
例 − 自動(パイロットスイッチ又はシーケンス制御による。)
− 非自動(手動操作又は押しボタンによる。)
− 半自動(部分的自動で部分的非自動。)
3) スタータの特別な形式による切換方法 スターデルタスタータ,加減抵抗ロータスタータ及び単巻
変圧器スタータの切換えは,自動,非自動又は半自動でもよい(図4及び図5参照)。
4) スタータの特別な形式による接続方法 例えば,オープントランジションスタータ及びクローズド
トランジションスタータ(図5参照)。
5.3
主回路の定格値及び限界値
接触器又はスタータの定格値は,5.3.1〜5.3.7,5.4,5.8及び5.9に従って明示する。ただし,全ての値を
明示しなくてもよい。
注記 例えば,加減抵抗ロータスタータの定格値は,5.3.1.1,5.3.1.2,5.3.2.3,5.3.2.4,5.3.2.6,5.3.2.7,
5.3.4.1,5.3.4.2及び5.3.5.5に従って明示するが,全ての定格を指定しなくてもよく,指定しな
い定格を明示する必要はない。
5.3.1
定格電圧
接触器又はスタータは,次の定格電圧を明らかにしなければならない。
5.3.1.1
定格使用電圧(Ue)
定格使用電圧(Ue)は,JIS C 8201-1:2020の4.3.1.1を適用する。
5.3.1.1.1
定格ステータ使用電圧(Ues)
加減抵抗ロータスタータの定格ステータ使用電圧は,定格ステータ動作電流と組合せた機械式開閉機器
を含むステータ回路の適用を決める電圧値で,かつ,閉路・遮断容量,責務及び始動特性に適用する電圧
値とする。最大定格使用電圧は,定格絶縁電圧を超えてはならない。
注記 定格ステータ使用電圧は,相間電圧で表す。
5.3.1.1.2
定格ロータ使用電圧(Uer)
加減抵抗ロータスタータの定格ロータ使用電圧は,定格ロータ使用電流と組合せた機械式開閉機器を含
むロータ回路の適用を決める電圧値で,かつ,閉路・遮断容量,責務及び始動特性に適用する電圧値とす
る。
ステータに定格電圧が印加されているときに,この定格電圧は,モータ停止中でロータ回路開の場合は,
スリップリング間の測定電圧に等しい。
ロータ回路に挿入された開閉機器の定格絶縁電圧は,開放したスリップリング間の最大電圧の50 %以上
でなければならない。
注記 ロータにおける電気的ストレスは,ステータにおける電気的ストレスより低く短い。
定格ロータ使用電圧は,始動期間中の短時間だけに適用する。この短時間中だけ,定格ロータ使用電圧
15
C 8201-4-1:2020
が定格ロータ絶縁電圧の100 %を超過してもよい。
さらに,スタータのロータ回路の異なる充電部(例えば,開閉機器,抵抗器,接続部)間の最高電圧が
異なるので,加減抵抗ロータスタータの選定及び配置に注意しなければならない。
5.3.1.2
定格絶縁電圧(Ui)
定格絶縁電圧(Ui)は,JIS C 8201-1:2020の4.3.1.2を適用する。
5.3.1.2.1
定格ステータ絶縁電圧(Uis)
加減抵抗ロータスタータの定格ステータ絶縁電圧は,耐電圧試験及び沿面距離を決めるとともに,ユニ
ットの部分及びステータ内蔵機器に指定した電圧値とする。
別に取決めがない場合は,定格ステータ絶縁電圧は,スタータの最大定格ステータ使用電圧値とする。
5.3.1.2.2
定格ロータ絶縁電圧(Uir)
加減抵抗ロータスタータの定格ロータ絶縁電圧は,耐電圧試験及び沿面距離を決めるとともに,ユニッ
トの部分(コネクティングリンク,抵抗器及びエンクロージャ)及びロータ内蔵機器に指定した電圧値と
する。
5.3.1.3
定格インパルス耐電圧(Uimp)
定格インパルス耐電圧(Uimp)は,JIS C 8201-1:2020の4.3.1.3を適用する。
5.3.1.4
単巻変圧器スタータの定格始動電圧
単巻変圧器スタータの定格始動電圧は,変圧器から得る減電圧とする。
定格始動電圧の推奨値は,定格使用電圧の50 %,65 %又は80 %のいずれかとする。
5.3.2
電流又は電力
接触器又はスタータは,次の電流によって規定する。
注記 スターデルタスタータの場合はデルタ接続での電流値,2段動作単巻変圧器及び加減抵抗ロー
タスタータの場合は完全オン位置での電流値で示す。
5.3.2.1
開放熱電流(Ith)
開放熱電流(Ith)は,JIS C 8201-1:2020の4.3.2.1を適用する。
5.3.2.2
閉鎖熱電流(Ithe)
閉鎖熱電流(Ithe)は,JIS C 8201-1:2020の4.3.2.2を適用する。
5.3.2.3
ステータ熱電流(Iths)
スタータのステータ熱電流は,5.3.2.1及び5.3.2.2に基づいて,開放ステータ熱電流Iths又は閉鎖ステー
タ熱電流Ithesとしてもよい。
加減抵抗ロータスタータのステータ熱電流は,9.3.3.3に従って試験したとき,8.2.2に規定した各部分の
温度上昇限度を超過することなく,8時間責務(5.3.4.1参照)を満足する最大電流とする。
5.3.2.4
ロータ熱電流(Ithr)
スタータのロータ熱電流は,5.3.2.1及び5.3.2.2に基づいて,開放ロータ熱電流Ithr又は閉鎖ロータ熱電
流Itherとしてもよい。
加減抵抗ロータスタータのロータ熱電流は,9.3.3.3に従って試験したとき,8.2.2に規定した各部分の温
度上昇限度を超過することなく,8時間責務(5.3.4.1参照)を満足し,オン位置,すなわち,抵抗器切離
し後のロータ電流が流れるスタータの各部分での最大電流とする。
開閉機器,コネクティングリンク,抵抗器などの素子に流れる電流は,オン位置で実際に流れる電流値
ではないため,製造業者が明示する定格責務(5.3.4参照)における次の式の値によって,8.2.2の温度上
昇を超えないことを検証することが望ましい。
16
C 8201-4-1:2020
∫t
t
i
0
2d
抵抗器を内蔵する場合は,温度上昇を考慮することが望ましい。
注記 対応国際規格では,注記(NOTE)で記載されているが,推奨事項であり,本文に移した。
5.3.2.5
定格使用電流(Ie)又は定格容量
接触器又はスタータの定格使用電流は,定格使用電圧(5.3.1.1参照),開放熱電流,閉鎖熱電流,過負荷
リレーの定格電流,定格周波数(5.3.3参照),定格責務(5.3.4参照),使用負荷種別(5.4参照)及びエン
クロージャによる保護形式を含んで製造業者が明示する。
個々のモータを直接開閉する装置の場合,定格使用電流の表示は,装置を構成するモータの定格使用電
圧を考慮して最大定格出力の表示に代えるか又は補足してもよい。製造業者は,電流と電力との関係を明
示が可能なようにしなければならない。
注記 附属書Gに定格使用電流と定格容量との関係に関する値を示す。
スタータの定格使用電流(Ie)は,スタータがオン位置における電流とする。
5.3.2.6
定格ステータ使用電流(Ies)又は定格ステータ使用電力
加減抵抗ロータスタータの定格ステータ使用電流は,スタータに組み込んだ過負荷リレーの定格電流,
定格ステータ使用電圧(5.3.1.1.1参照),開放ステータ熱電流,閉鎖ステータ熱電流,定格周波数(5.3.3
参照),定格責務(5.3.4参照),始動特性(5.3.5.5参照)及びエンクロージャによる保護形式を含んで製造
業者が明示する。
定格ステータ使用電流の表示は,スタータのステータ要素を構成するモータの定格ステータ使用電圧を
考慮して最大定格出力の表示に代えてもよい。製造業者は,モータ容量とステータ電流との関係を明示可
能なようにしなければならない。
5.3.2.7
定格ロータ使用電流(Ier)
加減抵抗ロータスタータの定格ロータ使用電流は,定格ロータ使用電圧(5.3.1.1.2参照),開放ロータ熱
電流,閉鎖ロータ熱電流,定格周波数(5.3.3参照),定格責務(5.3.4参照),始動特性(5.3.5.5参照)及
びエンクロージャによる保護形式を含んで製造業者が明示する。
定格ロータ使用電流は,ロータを短絡し,スタータに定格電圧及び定格周波数を供給し,モータが全負
荷で回転しているときにロータに流れる電流と等しいとみなす。
加減抵抗ロータスタータのロータ部分が個別の定格をもつ場合,定格ロータ使用電流の表示は,スター
タの部分(開閉機器,コネクティングリンク,リレー及び抵抗器)を用いるモータの定格ロータ使用電圧
を考慮して最大定格出力の表示で補足してもよい。予測する切離しトルクによって,この電力は変動する
ので,始動特性(5.3.5.5参照)を考慮しなければならない。
5.3.2.8
定格連続電流(Iu)
定格連続電流(Iu)は,JIS C 8201-1:2020の4.3.2.4を適用する。
5.3.3
定格周波数
定格周波数は,JIS C 8201-1:2020の4.3.3を適用する。
5.3.4
定格責務
定格責務は,JIS C 8201-1:2020の4.3.4を適用する。
5.3.4.1
8時間責務
8時間責務は,JIS C 8201-1:2020の4.3.4.1に,次の事項を追加して適用する。
17
C 8201-4-1:2020
スターデルタスタータ,2段動作単巻変圧器スタータ及び加減抵抗ロータスタータは,スタータがオン
位置で,かつ,開閉機器の主接点が閉じている状態で,スタータが熱的平衡に達するのに十分な時間,安
定した電流を中断することなく通電する責務。ただし,8時間を超えない。
5.3.4.2
連続責務
連続責務は,JIS C 8201-1:2020の4.3.4.2に,次の事項を追加して適用する。
スターデルタスタータ,2段動作単巻変圧器スタータ及び加減抵抗ロータスタータは,スタータがオン
位置で,かつ,開閉機器の主接点が閉じている状態で,8時間を超えて(数週間,数箇月又は数年)安定
した電流を中断することなく通電する責務。
5.3.4.3
反復責務又は間欠責務
反復責務又は間欠責務は,JIS C 8201-1:2020の4.3.4.3に,次の事項を追加して適用する。
減電圧スタータは,スタータがオン位置で,かつ,スタータを構成する開閉機器の主接点を無負荷期間
と関連する期間閉じ続けたとき,両方の期間はスタータが熱的平衡に達するには短い責務。
間欠責務の基準となる等級は,次による。
− 接触器用:1,3,12,30,120,300,1 200(動作サイクル/時)
− スタータ用:1,3,12,30(動作サイクル/時)
動作サイクルとは,1回の閉操作と1回の開操作とから成る,完全な動作回数の繰返しをいう。
スタータの場合は,始動,全速運転及びモータの電源切断操作を含む動作サイクルをいう。
間欠責務用スタータの場合は,モータ及び過負荷リレーの熱特性が異なるので,過負荷保護に熱動形リ
レーが適さないことがある。間欠責務に使用する装置の過負荷保護については,受渡当事者間での協定に
よる。
注記 対応国際規格では,注記(NOTE)で記載されているが,要求事項であり,本文に移した。
5.3.4.4
一時的責務
一時的責務は,JIS C 8201-1:2020の4.3.4.4を適用する。
5.3.4.5
周期的責務
周期的責務は,JIS C 8201-1:2020の4.3.4.5を適用する。
5.3.5
通常負荷及び過負荷特性
通常負荷及び過負荷特性は,JIS C 8201-1:2020の4.3.5に,5.3.5.1〜5.3.5.5を追加して適用する。
5.3.5.1
モータ開閉過負荷電流耐量
接触器に適用する要求事項は,8.2.4.4による。
5.3.5.2
定格閉路容量
それぞれの使用負荷種別(5.4参照)に対する要求事項は,8.2.4.1による。定格閉路容量は,接触器又は
スタータが,8.2.1.1及び8.2.1.2の要求事項に従って操作したときだけ有効とする。
5.3.5.3
定格遮断容量
それぞれの使用負荷種別(5.4参照)に対する要求事項は,8.2.4.1による。定格遮断容量は,接触器又は
スタータが,8.2.1.1及び8.2.1.2の要求事項に従って操作したときだけ有効とする。
5.3.5.4
規約動作性能
8.2.4.2の閉路及び遮断操作の級別によって規定する。
5.3.5.5
スタータの始動及び停止の特性(図6参照)
スタータの代表的な使用状態は,次による。
a) 1方向回転で,標準使用条件で運転中のモータを開放する(使用負荷種別AC-2及びAC-3)。
18
C 8201-4-1:2020
b) 2方向回転であるが,2番目の方向への運転は,スタータが開放してモータが完全に停止した後に行う
(使用負荷種別AC-2及びAC-3)。
c) 1方向回転又はb)による2方向回転。ただし,まれにインチング(ジョギング)もあり得る。一般に,
直入れスタータは,この使用状態で利用する(使用負荷種別AC-3)。
d) 1方向回転で,頻繁にインチング(ジョギング)を行う。一般に,直入れスタータ(使用負荷種別AC-4)
は,この責務で用いる。
e) 1方向回転又は2方向回転であるが,モータを停止してまれにプラッギングもあり得る。ロータ抵抗
制動(制動付き可逆スタータ)と組み合わせてプラッギングする。一般に,加減抵抗ロータスタータ
は,この責務状態で用いる(使用負荷種別AC-2)。
f)
2方向回転であるが,標準使用条件で運転中のモータを開放して,もう一方の回転方向にするために,
最初の方向で回転したままでモータの結線を逆にする(プラッギング)こともあり得る。一般に,直
入れ可逆スタータは,この責務状態で用いる(使用負荷種別AC-4)。
特に規定がない場合,スタータは,表7の閉路容量に対応したモータの始動特性に基づいて設計する。
この閉路容量には,標準的なモータの過渡時始動電流及び定常時始動電流の両方が含まれる。大容量のモ
ータでは,始動電流の力率が,表7で規定した試験回路の値よりかなり小さく,始動電流はこの力率に相
当するピーク値に達する場合がある。このような場合,接触器又はスタータの閉路容量がその定格値を超
えないように,それらの定格値より低くなるように使用電流を下げることが望ましい。
5.3.5.5.1
加減抵抗ロータスタータの始動特性
スリップリングモータのステータ回路及びロータ回路の電流及び電圧には違いがある。ただし,ステー
タ回路とロータ回路との電流値の違いは,始動過程が原因であり,通常動作条件ではほとんど比例してい
る。
ロータ回路の特性の主要な定義は,次による。
er
er
r
3I
U
Z
×
=
ここに,
Zr: 交流スリップリング誘導モータのロータのインピーダンス特
性
Uer: 定格ロータ使用電圧
Ier: 定格ロータ使用電流
Im=1/2(I1+I2)
ここに,
I1: 抵抗器部分短絡直前のロータ回路の電流
I2: 抵抗器部分短絡直後のロータ回路の電流
Te: 定格モータ使用トルク
ts: 始動時間
k: 始動の過酷さ k=erm
I
I
ほとんどの加減抵抗ロータスタータは,多数の異なった始動段階,並びに異なったI1及びI2の値だけで
なく,I1及びI2の値も抵抗器の各段階とで異なるため,非常に特殊な始動時要求となる。したがって,標
準的パラメータを設けないが,次の事項を考慮することが望ましい。
− ほとんどの場合,二つ〜六つの始動段階は,負荷トルク,慣性及び始動の過酷さの要求事項に十分で
ある。
− 抵抗器部分は,負荷トルク又は負荷慣性に依存する始動時間を考慮した十分な熱定格の設計とするこ
19
C 8201-4-1:2020
とが望ましい。
5.3.5.5.2
加減抵抗ロータスタータ用始動特性に適した閉路及び遮断の標準状態
これらの状態は,表7に規定し,高トルク始動に適用する(機械式開閉機器の内容は,図4参照。)。
表7による使用負荷種別AC-2の閉路及び遮断の条件は,標準と考えることが可能である。
スタータ回路は,全てのロータ抵抗開閉機器をステータ開閉機器とほぼ同時又はそれ以前に開路する設
計でなければならない。一方,ステータ開閉機器は,使用負荷種別AC-3の要求事項を満足しなければな
らない。
5.3.5.5.3
2段動作単巻変圧器スタータ用始動特性
他に規定がない場合は,単巻変圧器スタータ及び特殊な単巻変圧器は,全等級の責務(5.3.4参照)にお
いて始動時間が15秒以下の条件で設計する。スタータ及び単巻変圧器が,始動前に周囲温度まで冷却する
ことが許される場合を除き,操作周期が急で連続している場合の1時間当たりの始動回数は,始動間隔に
等しいとみなす。
始動時間が15秒を超える必要がある場合は,受渡当事者間での協定による。
5.3.6
定格条件付短絡電流
定格条件付短絡電流は,JIS C 8201-1:2020の4.3.6.4を適用する。
5.3.7
接触器の1極当たりのインピーダンス(Z)
1極当たりのインピーダンスは,製造業者が宣言してもよい。また,1極当たりのインピーダンスは,電
圧降下(極を通過する電流の電圧降下を測定すること)によって決定する。
5.4
使用負荷種別
5.4.1
一般
使用負荷種別の一般は,JIS C 8201-1:2020の4.4に,次の事項を追加して適用する。
表1に規定する使用負荷種別を,接触器及びスタータの基準と考える。他の使用上の種類については,
受渡当事者間での協定による。ただし,製造業者のカタログ又は提供物に記載する情報で,このような協
定を定めてもよい。
各使用負荷種別は,表7及び表10に規定する電流値,電圧値,力率又は時定数並びに他のデータ,及び
この規格で規定する試験条件による特性をもつ。
したがって,使用負荷種別によって定義する接触器又はスタータについては,表7に規定する使用負荷
種別によって直接決まる値である定格閉路容量及び定格遮断容量を別々に規定する必要はない。
全ての使用負荷種別に対する電圧は,加減抵抗ロータスタータを除いて,接触器又はスタータの定格使
用電圧とし,加減抵抗ロータスタータの場合,定格ステータ使用電圧とする。
全ての直入れスタータは,使用負荷種別AC-3,AC-4,AC-7b,AC-8a及びAC-8bのいずれか一つ又は
複数に属する。
全てのスターデルタスタータ及び2段動作単巻変圧器スタータは,使用負荷種別AC-3に属する。
加減抵抗ロータスタータは,使用負荷種別AC-2に属する。
5.4.2
試験結果に基づく使用負荷種別の指定
試験結果に基づく使用負荷種別の指定は,次による。
a) 一つの使用負荷種別又はパラメータ(最大使用電圧,最大使用電流など)の組合せで試験を行った接
触器又はスタータは,指定しようとする使用負荷種別に対応する表7及び表10に規定する“電流”,
“電圧”,“力率又は時定数”,“動作サイクル回数”,“オン時間”,“オフ時間”及び“試験回路”が,
接触器又はスタータについて実施した試験よりも過酷ではなく,かつ,温度上昇が連続責務において
20
C 8201-4-1:2020
指定しようとする最大定格使用電流以上の電流で検証されている場合,試験することなく他の使用負
荷種別を指定してもよい。
例えば,接触器が使用負荷種別AC-4で試験した場合,同じ定格使用電圧において,AC-3に対する
定格使用電流(Ie)がAC-4に対する1.2 Ieより小さい場合は,AC-3を指定してもよい。
b) 使用負荷種別DC-3及びDC-5の接触器は,次の場合,試験した負荷以外の負荷の開閉が可能とみなす。
− 電圧及び電流は,Ue及びIeの規定値を超えない。
− 実際の負荷の蓄積エネルギーJは,試験時の負荷に蓄えるエネルギーJc以下。
試験回路に蓄えるエネルギーの値は,次による。
使用負荷種別
蓄積エネルギーJc
DC-3
0.005 25×Ue×Ie
DC-5
0.031 5×Ue×Ie
定数値0.005 25及び0.031 5は,Jc=1/2×LI2から導かれる。
ここに,時定数は,2.5×10−3 s(DC-3)及び15×10−3 s(DC-5)に置き換えている。
なお,U=1.05Ue,I=4Ie及びL=試験回路インダクタンスである(表7参照)。
表1−使用負荷種別
電流の種類
使用負荷種別
追加の種別
代表的な適用
交流
AC-1
一般的使用
無誘導又は低誘導負荷,抵抗炉(附属書I参照)
AC-2
−
巻線形モータ:始動,停止
AC-3
−
かご形モータ:始動,運転中の停止a)
AC-4
−
かご形モータ:始動,プランギング,インチング
AC-5a
バラスト
放電灯の開閉
AC-5b
白熱灯
白熱灯の開閉
AC-6a
−
変圧器の開閉
AC-6b
−
コンデンサバンクの開閉
AC-7a c)
−
家庭用及び同様の用途における低誘導負荷
AC-7b c)
−
家庭用のモータ負荷
AC-8a
−
手動リセット式過負荷引外し装置付き密閉形冷媒コンプレ
ッサモータの制御b)
AC-8b
−
自動リセット式過負荷引外し装置付き密閉形冷媒コンプレ
ッサモータの制御b)
直流
DC-1
−
無誘導又は低誘導負荷,抵抗炉
DC-2
−
分巻モータ:始動,停止
DC-3
−
分巻モータ:始動,プランギング,インチング
直流モータのダイナミックブレーキング
DC-4
−
直巻モータ:始動,停止
DC-5
−
直巻モータ:始動,プランギング,インチング
直流モータのダイナミックブレーキング
DC-6
白熱灯
白熱灯の開閉
注a) 使用負荷種別AC-3は,機械を調整する場合のような限定した時間及び回数に対して,一時的にイン
チング(ジョギング)又はプラッギングに用いてもよい。1分間に5回以下の操作回数で,10分間に
10回以下の時間及び回数に限定することが望ましい。
b) 密閉形冷媒コンプレッサモータは,コンプレッサとモータとの組合せによって構成し,両者は,共に
同一のハウジング内に収め,外部シャフト又はシャフトシールはなく,モータは,冷媒中で運転する。
c) 使用負荷種別AC-7a及びAC-7bについては,IEC 61095参照。
21
C 8201-4-1:2020
5.5
制御回路
制御回路は,JIS C 8201-1:2020の4.5による。
5.6
補助回路
補助回路は,JIS C 8201-1:2020の4.6を適用する。
接触器及びモータスタータに組み込まれて,PLC対応のデジタル入力及び/又は出力は,JIS C
8201-1:2020の附属書Sの要求事項を満足しなければならない。
5.7
リレー及び引外し装置(過負荷リレー)の特性
注記 以下,“過負荷リレー”は,過負荷リレー又は過負荷引外し装置に対して用いる。
5.7.1
特性の要約
リレー又は引外し装置に関する次の特性は,適用可能な場合には必ず指定しなければならない。
− リレー又は引外し装置の形式(5.7.2)
− 特性値(5.7.3)
− 過負荷リレーの指定及び整定電流(5.7.4)
− 過負荷リレーの時間−電流特性(5.7.5)
− 周囲温度の影響(5.7.6)
5.7.2
リレー又は引外し装置の形式
リレー又は引外し装置の形式は,次による。
a) シャントコイル(シャントトリップ)付き引外し装置
b) 不足電圧及び不足電流リレー又は引外し装置
c) 時間遅れが,次に該当する過負荷時延リレー
1) それまでの負荷に本質的に依存しないもの
2) それまでの負荷に依存するもの
3) それまでの負荷に依存し欠相にも応動するもの
d) 瞬時過電流リレー又は引外し装置(例えば,ジャム検出用)
e) a)〜d)以外のリレー又は引外し装置(例えば,モータの熱保護用の機器を組合せた制御リレー)
f)
ストールリレー又は引外し装置
5.7.3
特性値
特性値は,次による。
a) シャントコイル付き引外し装置,不足電圧(不足電流)リレー又は引外し装置,過電圧(瞬時過電流)
リレー又は引外し装置,電流不平衡リレー又は引外し装置,電圧不平衡リレー又は引外し装置,及び
反相リレー又は引外し装置
− 定格電圧(電流)
− 定格周波数
− 動作電圧(電流)
− 動作時間(適用可能な場合。)
− インヒビット時間(適用可能な場合。)
b) 過負荷リレー
− 指定及び整定電流(5.7.4参照)
− 必要な場合,定格周波数(例えば,変流器動作の過負荷リレーの場合。)
− 必要な場合,時間−電流特性(又は特性の範囲)
22
C 8201-4-1:2020
− 表2に規定するトリップクラス,又は8.2.1.5.1,表3のD列に規定する条件下における動作時間が
40秒を超えるときには,秒単位での最大動作時間
− リレーの種類:熱動形,電磁式,電子式又はサーマルメモリがない電子式(サーマルメモリがない
電子式では,8.2.1.5.1.2のサーマルメモリの試験検証を満足しない電子式リレーとして,“
”
を記載しなければならない)。
− リセットの種類:手動及び/又は自動と,手動又は自動との切換式の場合,セット位置を表示する。
− −5 ℃以下の周囲温度におけるトリップクラス10Aの過負荷リレーの2分よりも長い場合のトリッ
プ時間[8.2.1.5.1.1 c)参照]
c) 漏電検出リレー付き引外し装置
− 定格電流
− 動作電流
− JIS C 8201-1:2020の表T.1に基づいた動作時間又は時間−電流特性
− インヒビット時間(適用可能な場合)
− 形式記号(JIS C 8201-1:2020の附属書T参照)
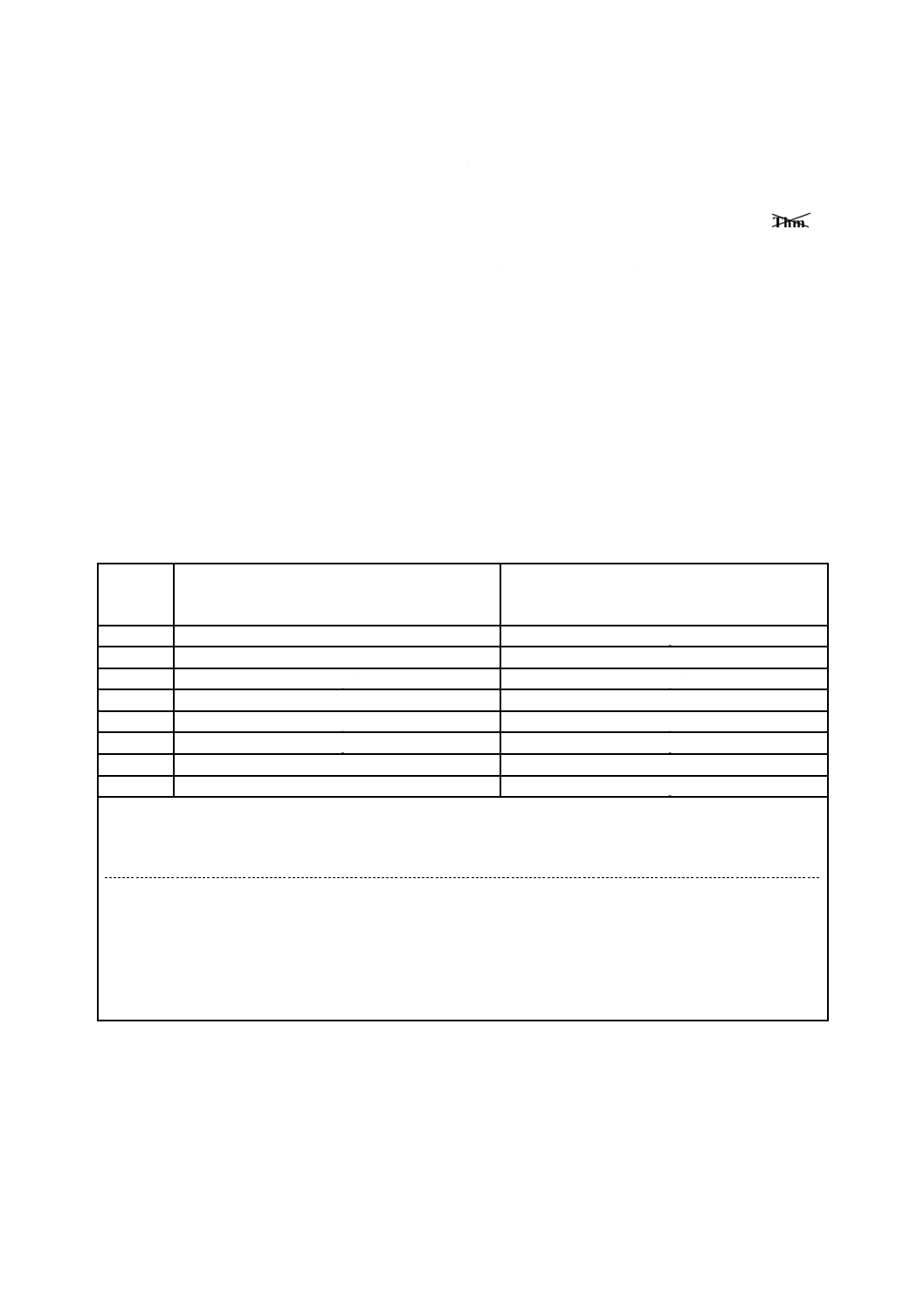
表2−過負荷リレーのトリップクラス
単位 s
トリップ
クラス
8.2.1.5.1,表3のD列に規定する各条件下における
トリップ時間Tp
より厳しい許容範囲[許容範囲帯E a)]の8.2.1.5.1,
表3のD列に規定する各条件下におけるトリップ
時間Tp
2
−
Tp≦ 2
3
−
2 <Tp≦ 3
5
0.5 <Tp≦ 5
3 <Tp≦ 5
10A
2
<Tp≦ 10
−
10
4
<Tp≦ 10
5 <Tp≦ 10
20
6
<Tp≦ 20
10 <Tp≦ 20
30
9
<Tp≦ 30
20 <Tp≦ 30
40
−
30 <Tp≦ 40
注記1 リレーの種類によるトリップ条件は,8.2.1.5に規定がある。
加減抵抗ロータスタータの場合,過負荷リレーは,一般にステータ回路に挿入する。その結果,過負荷リレーは,
ロータ回路及び抵抗器を有効に保護することが可能でない(始動が失敗した場合には,ロータ自体又は開閉装置よ
りも一般に損傷を受けやすい。)。ロータ回路の保護は,受渡当事者間での協定を取り交わすことが望ましい(8.2.1.1.3
参照)。
2段動作単巻変圧器スタータの場合,始動用単巻変圧器は,一般に始動期間中だけの使用として設計する。その
結果,単巻変圧器は始動に失敗した場合には過負荷リレーによって適切に保護されない。単巻変圧器の保護は,受
渡当事者間での協定を取り交わすことが望ましい(8.2.1.1.4参照)。
Tpの下限値は,ヒータの特性の相違及び製造上のばらつきを許容可能なように指定する。
注記2 対応国際規格では注記(NOTE)で記載されているが,推奨事項又は要求事項であり,本文に移した。
注a) 製造業者は,許容範囲帯Eに従うことを表示するためにトリップクラスにEを付け加える。
5.7.4
過負荷リレーの指定及び整定電流
過負荷リレーは,整定電流(可調整の場合は,整定電流範囲の上限及び下限)及びトリップクラスによ
って指定する。
整定電流(又は整定電流範囲)は,リレーに表示する。ただし,整定電流が使用状態又は他の要因によ
って影響され,それらをリレーに表示しない場合には,製造業者のカタログ又は可能な場合,スタータに
23
C 8201-4-1:2020
添付する資料から関連する情報が得られるように,リレー又は交換部品(例えば,ヒータ,動作コイル又
は変流器)へ番号又は識別表示を行う。
変流器動作の過負荷リレーの場合,表示は,変流器の一次側電流又は過負荷リレーの整定電流であって
もよい。いずれの場合にも,変流器の変流比を明示する。
5.7.5
過負荷リレーの時間−電流特性
代表的な時間−電流特性は,製造業者が供給する曲線の形で与える。この曲線には,コールド状態から
の動作時間を示し(5.7.6参照),リレーが用いるモータの全負荷電流の8倍まで表す。製造業者は,この
曲線の一般的な許容差及びこの曲線を作るときに用いた導体断面積を,適切な方法で表示する[9.3.3.2.2 c)
参照]。
対数目盛用紙を用い,電流を横軸に,時間を縦軸にして作図することが望ましい。JIS C 8269-1:2016の
5.6.1及び図1,JIS C 8269-2:2016の図104,図503及び図504に詳細が示されている標準グラフシートへ,
電流は整定電流の倍数,時間は秒で作図することが望ましい。
注記 対応国際規格では注記(NOTE)で記載されているが,推奨事項であり,本文に移した。
5.7.6
周囲温度の影響
時間−電流特性(5.7.5参照)は,ある一定の周囲温度で過負荷リレーに前もって通電していない状態(す
なわち,初期コールド状態)を基準にしている。周囲温度の値は曲線に明記し,推奨値は+20 ℃又は+40 ℃
とする。
過負荷リレーは,周囲温度が−5 ℃〜+40 ℃の範囲内で動作し,製造業者は,過負荷リレーの特性に与
える周囲温度の影響について資料を準備する。
5.8
短絡保護装置(SCPD)との保護協調
接触器及びスタータの保護協調は,短絡電流に対して接触器及びスタータを保護する短絡保護装置
(SCPD)の形式,定格及び特性によって与えられる。
要求事項は,8.2.5.1,8.2.5.2及びJIS C 8201-1:2020の4.8による。
5.9
(空欄)
5.10 自動切換機器及び自動加速制御機器の形式及び特性
5.10.1 形式
形式は,次による。
a) 時延機器,例えば,制御回路機器に適用する時延接触器形リレー(JIS C 8201-5-1:2010参照)又は定
限時オール・オア・ナッシングリレー(IEC 61810-1参照)。
b) 不足電流機器(不足電流リレー)
c) 自動加速制御のための他の機器
− 電圧に依存する機器
− 電力に依存する機器
− 速度に依存する機器
5.10.2 特性
特性は,次による。
a) 時延機器の特性
− 定格時延又は可調整の場合は,時延の範囲
− コイルを備えた時延機器について,スタータの電源電圧と異なる場合は,その定格電圧
b) 不足電流機器の特性
24
C 8201-4-1:2020
− 定格電流(製造業者が表示する定格熱電流及び/又は定格短時間耐電流)
− 整定電流又は可調整の場合,その範囲
c) 他の機器の特性 他の機器の特性は,受渡当事者間での協定によって決定する。
5.11 2段動作単巻変圧器スタータ用単巻変圧器の形式及び特性
始動特性(5.3.5.5.3参照)を考慮し,始動用単巻変圧器は,次の特性で指定する。
− 単巻変圧器の定格電圧
− 始動トルク及び始動電流を調整するために利用可能なタップの数
− 始動電圧,すなわち,タップ端子における電圧であり,単巻変圧器の定格電圧に対する百分率
− 規定した期間に通電可能な電流
− 定格責務(5.3.4参照)
− 冷却方法(空冷,油冷)
単巻変圧器は,次のいずれかによる。
− 単巻変圧器をスタータに内蔵する場合,スタータの定格は,温度上昇を考慮する。
− 単巻変圧器を別置きする場合,コネクティングリンクの特性及び寸法は,変圧器の製造業者とスター
タの製造業者との協定によって決定する。
5.12 加減抵抗ロータスタータ用始動抵抗器の形式及び特性
始動特性(5.3.5.5.1参照)を考慮し,始動抵抗器は,次の特性で指定する。
− 定格ロータ絶縁電圧(Uir)
− 抵抗値
− 規定した期間に通電可能な定常電流によって定義する平均熱電流
− 定格責務(5.3.4参照)
− 冷却方法(空冷,強制空冷及び油冷)
始動抵抗器は,次のいずれかによる。
− 始動抵抗器をスタータに内蔵する場合,スタータの他の部品に損傷を与えないように温度上昇を制限
しなければならない。
− 始動抵抗器を分離する場合,コネクティングリンクの特性及び寸法は,抵抗器の製造業者とスタータ
の製造業者との協定によって,指定しなければならない。
6
製品情報
6.1
情報の性質
6.1.1及び6.1.2の情報は,製造業者が提供しなければならない。
6.1.1
識別
a) 製造業者名又は商標
b) 形式指定又は製造番号
c) 製造業者が満足していることを主張する場合,この規格の規格番号。
6.1.2
特性,基本的な定格値及び使用
特性:
d) 定格使用電圧(5.3.1.1参照)
25
C 8201-4-1:2020
aa) 端子の極性(適用する場合。)
e) 使用負荷種別及び装置の定格使用電圧における定格使用電流(又は定格容量)(5.3.2.5及び5.4参照)
f)
交流の場合,定格周波数の値“50/60 Hz”,又は他の定格周波数,例えば,“16 2/3 Hz”,“400 Hz”直
流の場合,“直流”,“d.c.”,“DC”又は記号
の表示
g) 該当する場合,間欠責務の等級を含む定格責務(5.3.4参照),及び必要な場合,表10の注d)に規定さ
れたオフ時間
関連する値:
h) 定格閉路及び遮断容量。これらの表示は,適用可能な場合には,使用負荷種別を表示することによっ
て置き換えてもよい(表7参照)。
端子間インピーダンス(1極当たりのインピーダンス)などの他の情報は,製品の出版物に記載し
てもよい。
注記 対応国際規格では注記(NOTE)で記載されているが,許容事項であり,本文に移した。
安全及び据付け:
i)
定格絶縁電圧(5.3.1.2参照)
j)
定格インパルス耐電圧(5.3.1.3参照)
k) 箱入装置の場合には,IPコード(8.1.11参照)
l)
汚損度(箇条7参照)
m) 接触器又はスタータの場合:定格条件付短絡電流(5.3.6参照),保護協調のタイプ(8.2.5.1参照)並
びに組合せる短絡保護装置の形式,電流定格及び特性
コンビネーションスタータ,コンビネーション開閉機器,保護付きスタータ又は保護付き開閉機器
の場合:定格条件付短絡電流(5.3.6参照)及び保護協調のタイプ(8.2.5.1参照)
n) (空欄)
制御回路:
制御回路に関するo)及びp)の情報は,コイル又は装置に表示する。
o) 定格制御回路電圧(Uc),電流の種類及び定格周波数 保持電力,投入電力などの他の情報は,製品の
出版物に記載してもよい。
注記 対応国際規格では注記(NOTE)で記載されているが,許容事項であり,本文に移した。
p) 必要な場合,電流の種類,定格周波数及び定格制御電源電圧(Us)
圧縮空気によって操作する,スタータ又は接触器に用いる空気供給装置:
q) 8.2.1.2で規定するものと異なっている場合には,圧縮空気の定格供給圧力及び圧力の変動限界
補助回路:
r) 補助回路の定格(5.6参照)
過負荷リレー及び引外し装置:
s1) 5.7.2,5.7.5及び5.7.6に従った特性
s2) 5.7.3及び5.7.4に従った特性
特定の種類の接触器及びスタータの追加情報
加減抵抗ロータスタータ
t)
回路図
u) 始動の過酷さ(5.3.5.5.1参照)
v) 始動時間(5.3.5.5.1参照)
26
C 8201-4-1:2020
単巻変圧器スタータ
w) 定格始動電圧,すなわち,タップ端子部分における電圧 これは,スタータの定格使用電圧に対する
百分率で表現してもよい。
注記 対応国際規格では注記(NOTE)で記載されているが,許容事項であり,本文に移した。
真空接触器及びスタータ
x) 取付け場所の最大許容標高が2 000 m未満である場合,その標高
EMC
y) 環境A又はB:JIS C 8201-1:2020の7.3.1による。
z) 該当する場合には,特別要求事項。例として,シールド又はツイスト導線
シールド又はツイストがされていない導線は,標準設置状態とみなす。
注記 対応国際規格では注記(NOTE)で記載されているが,推奨事項であり,本文に移した。
6.2
表示
接触器,スタータ及び過負荷リレーは,JIS C 8201-1:2020の5.2に,次の事項を追加して適用する。
6.1.2 d)〜x)の情報は,銘板,装置又は製造業者の出版物に含める。
6.1.1 c)並びに6.1.2 aa),k)及びs2)のデータは,装置に表示する。時間電流特性(又は特性の範囲)は,
製造業者の出版物に記載してもよい。
電子制御式電磁石の場合,6.1.2 o)及びp)以外の情報も必要な場合がある。5.5及びJIS C 8201-1:2020の
附属書Uを参照。
注記 米国及びカナダでは,装置には表1の“追加の種別”を製品上に記載している。
6.3
取付け,操作及び保守に関する指示
取付け,操作及び保守に関する指示は,JIS C 8201-1:2020の5.3に,次の事項を追加して適用する。
製造業者は,短絡事故発生時及び必要な場合,EMCに関し,装置に対して,適切な処置を使用者に助言
するための情報を準備しなければならない。
保護付きスタータの場合は,製造業者は,必要な取付け及び配線指示も準備する。
自動再スタートが可能な回路に接続する自動リセット式の過負荷リレーを組み込んだスタータの製造業
者は,自動再スタートの可能性があることを使用者に警告する必要な情報をスタータと共に提供しなけれ
ばならない。
7
標準使用,取付け及び輸送条件
標準使用,取付け及び輸送条件は,JIS C 8201-1:2020の箇条6に,次の事項を追加して適用する。
製造業者の指定がない場合,接触器及びスタータは,JIS C 8201-1:2020の6.1.3.2に規定する汚損度3の
環境において用いる。ただし,ミクロ環境条件によっては,他の汚損度の適用を考慮してもよい。
8
構造及び性能に関する要求事項
8.1
構造に関する要求事項
8.1.1
一般
構造に関する要求事項の一般は,JIS C 8201-1:2020の7.1.1を適用する。
8.1.2
材料
8.1.2.1
一般的な材料要求事項
一般的な材料要求事項は,JIS C 8201-1:2020の7.1.2.1を適用する。
27
C 8201-4-1:2020
8.1.2.2
グローワイヤ試験
グローワイヤ試験は,JIS C 8201-1:2020の7.1.2.2に,次の事項を追加して適用する。
機器又は機器から得られた一部分を試験する場合,通電部品を規定の位置に保持するのに必要な絶縁材
料の部品は,JIS C 8201-1:2020の8.2.1.1.1のグローワイヤ試験で,試験温度が850 ℃に適合しなければな
らない。
8.1.2.3
燃焼性分類に基づく試験
燃焼性分類に基づく試験は,JIS C 8201-1:2020の7.1.2.3を適用する。
8.1.3
通電部及び接続
通電部及び接続は,JIS C 8201-1:2020の7.1.3を適用する。
8.1.4
空間距離及び沿面距離
空間距離及び沿面距離は,JIS C 8201-1:2020の7.1.4を適用する。
8.1.5
操作部
操作部を手動で操作する場合は,JIS C 8201-1:2020の7.1.5に,次の事項を追加して適用する。
コンビネーションスタータの手動操作開閉機器の操作ハンドルは,施錠可能な方法を備えていてもよい。
8.1.5.1
絶縁
絶縁は,JIS C 8201-1:2020の7.1.5.1を適用する。
8.1.5.2
動作方向
動作方向は,JIS C 8201-1:2020の7.1.5.2を適用する。
8.1.5.3
取付け
取外しできるパネル及び開閉する扉に装着した操作部は,パネルを交換したとき又は扉が閉じられたと
きには,操作部は関連する機構と正しく連結するように設計する。
8.1.6
接点位置の表示
8.1.6.1
表示手段
表示手段は,JIS C 8201-1:2020の7.1.6.1を,手動操作スタータに適用する。
8.1.6.2
操作部による表示
操作部による表示は,JIS C 8201-1:2020の7.1.6.2を適用する。
8.1.7
断路に適した装置の追加安全要求事項
断路に適した装置の追加安全要求事項は,JIS C 8201-1:2020の7.1.7を適用する。
8.1.8
端子
端子は,JIS C 8201-1:2020の7.1.8に,次の事項を追加して適用する。
8.1.8.1
端子の識別及び表示
端子の識別及び表示は,JIS C 8201-1:2020の7.1.8.4に,附属書Aの要求事項を追加する。
8.1.9
中性極付き装置に対する追加要求事項
中性極付き装置に対する追加要求事項は,JIS C 8201-1:2020の7.1.9を適用する。
8.1.10 接地に関する規定
接地に関する規定は,JIS C 8201-1:2020の7.1.10を適用する。
8.1.11 装置のエンクロージャ
8.1.11.1 構造
構造は,JIS C 8201-1:2020の7.1.11に,次の事項を追加して適用する。
エンクロージャ内に取り付けた始動抵抗器は,発熱がエンクロージャ内の他の機器,又は材料に有害と
28
C 8201-4-1:2020
ならないように取り付けるか又はガードしなければならない。
コンビネーションスタータの特別な場合として,カバー又は扉は,手動操作開閉機器が開路位置でなけ
れば開くことができないインタロックを設けなければならない。ただし,手動操作開閉機器がオン位置で
も工具を用いることによってカバー又は扉が開くようになっていてもよい。
8.1.11.2 絶縁
絶縁は,JIS C 8201-1:2020の7.1.11.2を適用する。
8.1.12 箱入装置の保護等級
箱入装置の保護等級は,JIS C 8201-1:2020の7.1.12を適用する。
8.1.13 金属電線管の引張強度,ねじり強度及び曲げ強度
金属電線管の引張強度,ねじり強度及び曲げ強度は,JIS C 8201-1:2020の7.1.13を適用する。
8.2
性能に関する要求事項
8.2.1
動作条件
8.2.1.1
一般
動作条件の一般は,JIS C 8201-1:2020の7.2.1.1に,次の事項を追加して適用する。
8.2.1.1.1
一般条件A
スタータの構造は,次による。
a) トリップフリー
b) 運転中及び始動シーケンスのいつの時点においても,用意した手段によってスタータの接点を開路で
きなければならない。
c) 正常な始動シーケンス以外では,機能してはならない。
8.2.1.1.2
一般条件B
接触器を用いたスタータは,基準周囲温度(すなわち,+20 ℃)において,調整可能な場合は過負荷リ
レーの最大及び最小整定の両方において,定格全負荷電流を通電し熱的平衡に達した後,9.3.3.1の試験を
したとき,接触器の操作による衝撃でトリップしてはならない。
8.2.1.1.3
一般条件C
加減抵抗器スタータの場合,過負荷リレーはステータ回路に接続する。使用者の要求がある場合,ロー
タ用の接触器及び抵抗器を過熱から保護するために特別な配置としてもよい。
8.2.1.1.4
一般条件D
始動抵抗器又は変圧器の過熱が,特に危険となるような状況でスタータを用いるときには,危険な温度
に達する前に,スタータを自動的にスイッチオフする適切な機器を取り付けることが望ましい。
8.2.1.1.5
一般条件E
閉路及び遮断の両方に用いる多極機器の可動接点は,手動又は自動のいずれで操作したときでも,全て
の極が同時に閉路及び遮断するように,連結しなければならない。
8.2.1.2
接触器及び動力操作スタータの動作限界
接触器及び動力操作スタータの動作限界は,JIS C 8201-1:2020の7.2.1.2に,次の事項を追加して適用す
る。
ラッチ式接触器において,定格引外し電圧が85 %〜110 %の範囲において,接触器は開放し,完全に開
路しなければならない。
8.2.1.3
不足電圧リレー及び引外し装置の動作限界
不足電圧リレー及び引外し装置の動作限界は,JIS C 8201-1:2020の7.2.1.3に,次の事項を追加して適用
29
C 8201-4-1:2020
する。
試験は,この規格の9.3.3.2.2による。
8.2.1.4
シャントコイル操作引外し装置(シャントトリップ)の動作限界
シャントコイル操作引外し装置(シャントトリップ)の動作限界は,JIS C 8201-1:2020の7.2.1.4に,次
の事項を追加して適用する。
試験は,この規格の9.3.3.2.2による。
8.2.1.5
電流検出リレー又は引外し装置の動作限界
8.2.1.5.1
全ての極に通電したときの時延過負荷リレーの動作限界
8.2.1.5.1.1
過負荷リレーの一般的引外し要求事項
注記1 高調波が加えられたモータの熱保護については検討中。
次の試験をしたとき,リレーは,表3の要求事項に満足しなければならない。
a) 通常,組み合わせて用いる場合,エンクロージャの中の過負荷リレー又はスタータは,整定電流のA
倍において,表3の基準周囲温度の値でコールド状態から始め2時間未満でトリップしてはならない。
ただし,過負荷リレー端子の温度上昇がその試験電流であって,2時間未満で熱的平衡に達する場合,
試験時間は,その熱的平衡に達する時間としてもよい。
b) 引き続いて電流を整定電流のB倍に上げたとき,2時間未満でトリップしなければならない。
c) トリップクラス2,3,5及び10Aの過負荷リレーは,IEC 60034-1:2017の9.3.3に準じ整定電流で熱
的平衡状態になった後,整定電流のC倍の電流を流したとき,2分未満でトリップしなければならな
い。10Aの過負荷リレーで周囲温度が−5 ℃以下の場合,製造業者は,20 ℃の要求値で2倍を超えな
い長いトリップ時間を宣言してもよい。
注記2 IEC 60034-1:2017の9.3.3では,“315 kW以下の出力で定格電圧が1 kV以下の多相交流モ
ータは,定格の1.5倍の電流に2分以上耐えなければならない。”と規定している。
d) トリップクラス10,20及び30の過負荷リレーは,整定電流で熱的平衡状態になった後,整定電流の
C倍の電流を流したとき,各々4分,8分及び12分未満でトリップしなければならない。
e) 整定電流のD倍では,コールド状態から始め,該当するトリップクラス及び許容範囲帯に対応する表
2に規定する限界以内でトリップしなければならない。
電流整定範囲をもつ過負荷リレーの場合,動作限界は,リレーが最大整定に関連する電流を流すとき及
び最小整定に関連する電流を流すときの両方に適用する。
周囲温度補償がない過負荷リレーの電流倍数/周囲温度特性は,1.2 %/K以下とする。
注記3 1.2 %/Kは,PVC絶縁導体の低減率特性である。
過負荷リレーは,20 ℃で表3(図7参照)の関連要求に従い,かつ,他の温度で表3に規定する限界以
内の場合,周囲温度補償されているものとみなす。
30
C 8201-4-1:2020
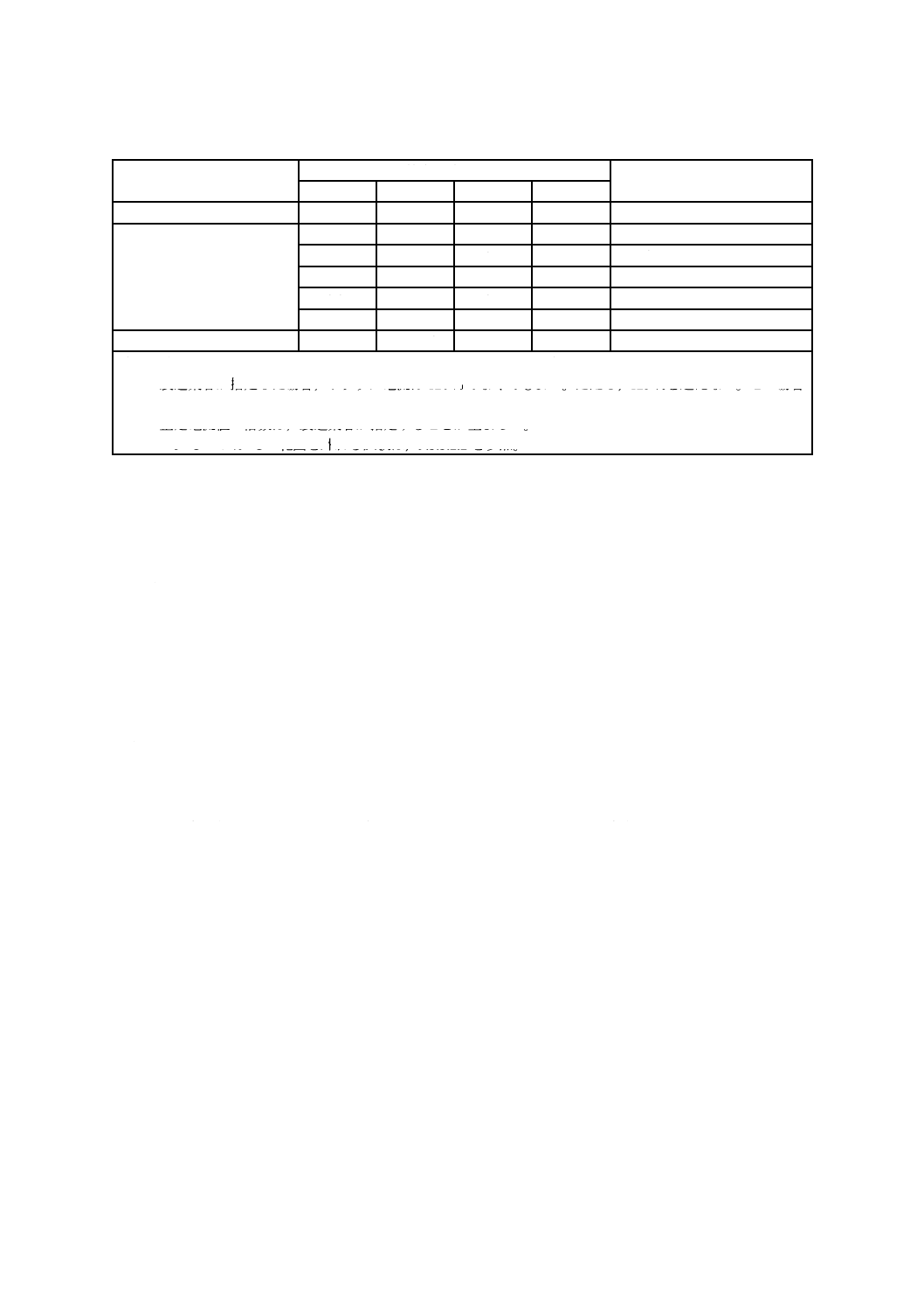
表3−全ての極に通電したときの時延過負荷リレーの動作限界
過負荷リレーの形式
整定電流の倍数
基準周囲温度
A
B
C
D
周囲温度補償がない熱動形
1.0
1.2 b)
1.5
7.2
+40 ℃
周囲温度補償がある熱動形
c)
c)
−
−
−5 ℃未満d)
1.05
1.3
1.5
−
−5 ℃
1.05
1.2 b)
1.5
7.2
+20 ℃
1.0
1.2 b)
1.5
−
+40 ℃
c)
c)
−
−
+40 ℃を超えd)
電子式
1.05 a)
1.2 a)
1.5
7.2 a)
0 ℃,+20 ℃及び+40 ℃
注a) 整定電流の倍数A,B及びDにおける試験は,20 ℃だけで実施する。
b) 製造業者が指定した場合,トリップ電流は120 %でなくてもよい。ただし,125 %を超えない。この場合
の試験電流値は,トリップ電流値と同じにする。また,この場合,トリップ電流値を機器に表示する。
c) 整定電流値の倍数は,製造業者が指定することが望ましい。
d) −5 ℃〜+40 ℃の範囲を外れる試験は,9.3.3.2.2を参照。
8.2.1.5.1.2
サーマルメモリ試験検証
機器にサーマルメモリをもっていない場合,製造業者が指定しない限り,電子式過負荷リレーは,次の
要求事項を満たさなければならない(図8参照)。
− Ieと等しい電流を機器が熱的平衡に達するまで通電する。
− 通電を2×Tp±10 %(表2参照)の時間中断する(ここに,Tpは,表3の電流Dで測定した時間を示
す。)。
− 電流7.2×Ieを通電する。
− リレーは,Tpの50 %以下の時間でトリップしなければならない。
8.2.1.5.2
2極通電された3極3素子の時延過負荷リレーの動作限界
次の事項は,表4に関して記載する。
過負荷リレー又はスタータは,それが通常取り付けられるエンクロージャ内で試験する。整定電流のA
倍で3極通電したとき,リレーは,表4の基準周囲温度の値で,コールド状態から2時間未満でトリップ
してはならない。
さらに,2極(欠相検出リレーの場合には,大きい電流を通電していた極)に通電している電流の値を
整定電流のB倍に上昇させ,3極目の通電を0としたとき,リレーは2時間未満でトリップしなければな
らない。
この規格値は,全ての極の組合せに適用する。
調整可能な整定電流をもつ過負荷リレーの場合,特性は,リレーが最大整定に関連する電流を流すとき
及び最小整定に関連する電流を流すときの両方に適用する。
31
C 8201-4-1:2020
表4−2極に通電したときの3極3素子時延過負荷リレーの動作限界
過負荷リレーの形式
整定電流の倍数
基準周囲
温度
A
B
周囲温度補償付き熱動形又は電子式
欠相検出機能なし
3極
1.0
2極
1極
1.32
0
+20 ℃
周囲温度補償なし熱動形
欠相検出機能なし
3極
1.0
2極
1極
1.25
0
+40 ℃
周囲温度補償付き熱動形又は電子式
欠相検出機能付き
2極
1極
1.0
0.9
2極
1極
1.15
0
+20 ℃
8.2.1.5.3
瞬時動作電磁過負荷リレーの動作限界
瞬時動作電磁過負荷リレーは,全ての整定電流値において整定電流値の±10 %の精度でトリップしなけ
ればならない。
注記 この規格に規定する瞬時動作電磁過負荷リレーは,短絡保護を意図していない。
8.2.1.5.4
自動切換用不足電流リレー及び引外し装置の動作限界
8.2.1.5.4.1
不足電流リレーの動作限界
開閉機器と組合せた不足電流リレー又は引外し装置は,運転中の全極の電流が不足電流整定値の0.9倍
未満となったときに,整定時間の80 %〜120 %の範囲で動作し,開閉機器を開放しなければならない。整
定時間が1秒未満の場合,上記と異なった許容差を製造業者が提示してもよい。ただし,動作時間は1.2
秒を超えてはならない。
注記 許容差は,計測技術に依存する。
8.2.1.5.4.2
不足電流リレーによる自動切換えの動作限界
この箇条は,次の場合に適用する。
− スターデルタスタータでの,スターからデルタへの切換え
− 単巻変圧器スタータでの,始動位置からオン位置への切換え
不足電流リレーの最低ドロップアウト電流は,始動又はスター結線に働いている過負荷リレーの実際の
設定電流の1.5倍を超えてはならない。不足電流リレーは,最大電流設定の過負荷リレーから決まるトリ
ップ時間の間,始動位置又はスター結線で,その最低電流設定からストール電流までの全ての電流値を通
電できなければならない。
8.2.1.5.5
ストールリレーの動作限界
開閉機器と組合せたストールリレーは,次の場合に,設定時間(ストールインヒビット時間)の80 %〜
120 %で,又は製造業者が指定した精度範囲内で開閉機器を開放しなければならない。
a) 電流検出リレー:電流が設定ストール電流値より20 %大きい場合。
例 ストールリレーの設定電流が100 A,設定時間が6秒,精度が±10 %で,電流が100 A×1.2=
120 A以上の場合,リレーは5.4秒〜6.6秒の範囲内にトリップしなければならない。
b) 回転検出リレー:モータの回転がないことを示す入力信号がある場合。
8.2.1.5.6
ジャムリレー及び引外し装置の動作限界
開閉機器と組合せたジャムリレー又は引外し装置は,始動完了後の動作中に,電流がジャムリレーの設
定電流値の1.2倍を超える場合,設定時間(ジャムインヒビット時間)の80 %〜120 %で,又は製造業者
が指定した精度範囲内で開閉機器を開放しなければならない。
32
C 8201-4-1:2020
8.2.2
温度上昇
8.2.2.1
一般
温度上昇の一般は,JIS C 8201-1:2020の7.2.2を,清浄かつ新品の接触器及びスタータに適用する。
試験電圧100 V未満の場合,酸化皮膜による接触抵抗が,温度上昇試験に影響を与えるかもしれない。
試験電圧100 V未満の通電試験の場合,表面をきずつけない接点の清浄化,又は任意の使用負荷種別・
任意の電圧で表10の条件に従い10回の開閉動作によって清浄化を行ってもよい。
注記1 対応国際規格では注記(NOTE)で記載されているが,許容事項であり,本文に移した。
接触器又はスタータの各部の温度上昇は,9.3.3.3に規定した条件で行った試験で測定し,表5並びにJIS
C 8201-1:2020の7.2.2.1及び7.2.2.2に規定した限度値を超えてはならない。
電子制御式電磁石の場合,抵抗法による温度測定が困難な場合がある。その場合,熱電対又は他の適し
た手段での測温を認める。
表5−空気中及び油中の絶縁コイルの温度上昇限度
単位 K
絶縁材料の階級
(JIS C 4003:2010による。)
温度上昇限度(抵抗法)
空気中のコイル
油中のコイル
A
85
60
E
100
60
B
110
60
F
135
−
H
160
−
単巻変圧器スタータでは,単巻変圧器は間欠的に励磁されているだけなので,スタータを5.3.4及び
5.3.5.5.3に従って操作する場合,変圧器巻線の最大温度上昇は,表5に規定する値より15 K高い値を許容
する。
注記2 表5及びJIS C 8201-1:2020の7.2.2.2に規定する温度上昇限度は,周囲温度が−5 ℃〜+40 ℃
の限界内にあるときにだけ適用可能である。
8.2.2.2
端子
端子は,JIS C 8201-1:2020の7.2.2.1を適用する。
8.2.2.3
アクセス可能な部品
アクセス可能な部品は,JIS C 8201-1:2020の7.2.2.2を適用する。
8.2.2.4
周囲温度
周囲温度は,JIS C 8201-1:2020の7.2.2.3を適用する。
8.2.2.5
主回路
接触器又はスタータの主回路は,オン位置において,組合せる過電流引外し装置と一緒に,9.3.3.3.4に
よって試験したとき,JIS C 8201-1:2020の7.2.2.1に規定した温度上昇限度を超えることなく,次の電流を
通電できなければならない。
− 8時間責務の接触器又はスタータの場合:熱電流(5.3.2.1及び/又は5.3.2.2参照)
− 連続責務,間欠責務又は一時的責務の接触器又はスタータの場合:関連する定格使用電流(5.3.2.5参
照)
8.2.2.6
制御回路
制御回路は,JIS C 8201-1:2020の7.2.2.5を適用する。
33
C 8201-4-1:2020
8.2.2.7
コイル巻線及び電磁石
8.2.2.7.1
連続及び8時間責務の巻線
主回路に8.2.2.5の最大電流を通電する条件で,電気空気式接触器又はスタータの電動バルブのコイルも
含め,コイル巻線は,表5及びJIS C 8201-1:2020の7.2.2.6に規定した温度上昇限度を超えることなく,
連続負荷及び定格周波数の最大定格制御電源電圧に耐えなければならない。
注記 電磁石の制御方法によっては,例えば,電子制御式電磁石の場合のように,通常使用状態で接
続するときに制御供給電圧がコイル巻線に直接印加しないものもある。
8.2.2.7.2
間欠責務の巻線
主回路は無通電条件で,コイル巻線は,表5及びJIS C 8201-1:2020の7.2.2.2に規定した温度上昇限度
を超えないで,その間欠責務の分類に従って表6に規定するサイクルで,定格周波数の最大定格制御電源
電圧に耐えなければならない。
注記 電磁石の制御方法によっては,例えば,電子制御式電磁石の場合のように,通常使用状態で接
続するときに制御供給電圧がコイル巻線に直接印加しないものもある。
表6−間欠責務の試験サイクル
間欠責務の分類
1開閉動作サイクルの時間
s
操作コイルのオン時間
接触器
スタータ
1
1
3600
オン時間は,製造業者が指
定した通電率に従うことが
望ましい。
3
3
1200
12
12
300
30
30
120
120
−
30
300
−
12
1200
−
3
8.2.2.7.3
特殊定格(一時的又は周期的責務)の巻線
特殊定格の巻線は,最も厳しい責務に従った動作条件下で試験し,かつ,その定格は製造業者が記載し
なければならない。
注記 特殊定格の巻線には,始動期間だけ励磁するスタータのコイル,ラッチ式接触器のトリップコ
イル及びインタロックする空気式接触器又はスタータの電磁弁コイルを含む場合がある。
8.2.2.8
補助回路
補助回路は,JIS C 8201-1:2020の7.2.2.7を適用する。
8.2.2.9
その他の部分
その他の部分は,JIS C 8201-1:2020の7.2.2.8を適用する。
8.2.3
耐電圧性能
耐電圧性能は,JIS C 8201-1:2020の7.2.3に,次の事項を追加して適用する。
接地されない回路間に接続したバリスタなどの電圧制限コンポーネントを含んだ機器の一般的要求事項
は,次による。
機器の中で,サージから電子部品を保護するために使用されるバリスタなどの電圧制限コンポーネント
は,IEC 61051-2:1991による。この箇条において空間距離を減少させることは意図しない。機器の形式試
験では,電圧制限コンポーネントは取り外して試験してもよい。
IEC 61051-2:1991は,次のとおり適用する。
34
C 8201-4-1:2020
a) バリスタの推奨温度条件カテゴリ
・ 下限温度の最大値:−10 ℃
・ 上限温度の最小値:+85 ℃
上記温度範囲を拡大した場合,製造業者は,バリスタが拡大した温度範囲で使用することに適して
いることを検証しなければならない。
b) バリスタの最小定格電圧は,バリスタを接続したときの最大ピーク電圧の1.2倍でなければならない。
c) 主回路に接続する場合,バリスタは9.4.2.5のサージ試験に耐えなければならない。
注記1 バリスタの検証において,バリスタを保護するヒューズは必要ない。
注記2 受渡試験では,JIS C 8201-1:2020の8.3.3.4.1 a)で規定した極間の耐電圧試験の関連部品の取
り外しは,適切でない。なぜならば,バリスタを組み込んだ製品は,完成品であり,それら
を分解して試験することは適切でないからである。この試験の主な目的は,電圧制限コンポ
ーネントが,機能しているかを検証することにある。
8.2.4
通常負荷及び過負荷性能に関する要求事項
5.3.5による通常負荷及び過負荷特性に関する要求事項は,8.2.4.1,8.2.4.2及び8.2.4.4に規定する。
8.2.4.1
閉路及び遮断容量
接触器又はスタータは,9.3.3.5の規定に従い,必要な使用負荷種別に対する表7に規定した条件及び動
作サイクル数の電流を問題なく,閉路及び遮断できなければならない。
表7及び表8に規定したオフ時間及びオン時間を超えてはならない。
表7−使用負荷種別による定格閉路及び遮断容量並びに閉路及び遮断条件
使用負荷
種別
閉路及び遮断条件
Ic/Ie
Ur/Ue
cosφ
オン時間b)
s
オフ時間
s
動作サイクル数
回
AC-1
1.5
1.05
0.8
0.05
f)
50
AC-2
4.0 h)
1.05
0.65 h)
0.05
f)
50
AC-3 i)
8.0
1.05
a)
0.05
f)
50
AC-4 i)
10.0
1.05
a)
0.05
f)
50
AC-5a
3.0
1.05
0.45
0.05
f)
50
AC-5b
1.5 c)
1.05
c)
0.05
60
50
AC-6a
j)
j)
j)
j)
j)
j)
AC-6b
1.5 e)
1.05
−
l)
m)
50
AC-8a k)
6.0
1.05
a)
0.05
f)
50
AC-8b k)
6.0
1.05
a)
0.05
f)
50
使用負荷
種別
Ic/Ie
Ur/Ue
L/R
ms
オン時間b)
s
オフ時間
s
動作サイクル数
回
DC-1
1.5
1.05
1.0
0.05
f)
50 d)
DC-2
4.0
1.1
2.5
0.05
f)
50 d)
DC-3
4.0
1.05
2.5
0.05
f)
50 d)
DC-4
4.0
1.1
15.0
0.05
f)
50 d)
DC-5
4.0
1.05
15.0
0.05
f)
50 d)
DC-6
1.5 c)
1.05
c)
0.05
60
50 d)
35
C 8201-4-1:2020
表7−使用負荷種別による定格閉路及び遮断容量並びに閉路及び遮断条件(続き)
使用負荷
種別
閉路条件i)
I/Ie
U/Ue
cosφ
オン時間b)
s
オフ時間
s
動作サイクル数
回
AC-3
10
1.05 g)
a)
0.05
10
50
AC-4
12
1.05 g)
a)
0.05
10
50
I :閉路電流。閉路電流は,直流又は交流の対称実効値で表現しているが,交流の場合,閉路動作中の実際のピ
ーク値は,対称電流のピーク値より大きい値になる。
Ic :閉路及び遮断電流。直流又は交流の対称実効値で表現している。
Ie :定格使用電流
U :印加電圧
Ur :商用周波数又は直流の回復電圧
Ue :定格使用電圧
cosφ :試験回路の力率
L/R :試験回路の時定数
注a) cosφは,Ieが100 A以下の場合は0.45,Ieが100 Aを超える場合は0.35。
b) 接点が再開路する前に,十分に接触することが確認可能な場合,時間は,0.05 s未満でもよい。
c) 試験は,白熱灯負荷で行う。
d) 極性が表示されていない場合,一方の極性で25回の動作サイクル,逆極性で25回の動作サイクル。
e) 9.3.3.3.4に従って計算した安定状態の無効電流Ieを得るために,負荷は汎用で入手可能なコンデンサの組合
せで構成する。代わりに,コンデンサ定格は,コンデンサ開閉試験から引用,又は,実測値から割り当てて
もよい。手引きとして,高調波電流による温度効果を考慮していない表9の公式を参照してもよい。試験端
子の利用可能な電流容量は,推定電流“r”以上でなければならない。電流容量は,分析評価によって決定し
てもよい。
f) 表8参照。
g) U/Ueに対して±20 %の許容差を許容する。
h) 示す値は,ステータ用の接触器に対するものである。ロータ用の接触器の場合,試験は,定格ロータ使用電
流の4倍の電流で,力率0.95で行う。
i) 使用負荷種別AC-3及びAC-4に対する閉路条件も検証する。検証は,閉路遮断試験時に行ってよいが,製造
業者との協定を必ず必要とする。この場合,閉路電流の倍数は,I/Ieに関して示した値とする。また,遮断電
流は,Ic/Ieに関して示した値とする。定格制御電源電圧Usの110 %に等しい制御電源電圧で,25回の動作サ
イクルを行い,Usの85 %の電圧で,25回の動作サイクルを行う。オフ時間は,表8で決定する。
j) 製造業者は,変圧器によって試験してAC-6aを検証する。表9によるAC-3の試験値からの定格で導いても
よい。
k) 製造業者が指定した場合,Ic/Ie(全負荷電流に対する固定値拘束時の電流比)のより低い値を用いてもよい。
l) オン時間は,定常電流に達するために十分長くなければならない。
m) オフ時間は,表8による。放電抵抗の値は,オフ時間の最後に50 V以下になるように設定しなければならな
い。
36
C 8201-4-1:2020
表8−定格閉路・遮断容量を検証するための遮断電流Ic及びオフ時間の関係
遮断電流 Ic
A
オフ時間
s
100以下
10
100を超え
200以下
20
200を超え
300以下
30
300を超え
400以下
40
400を超え
600以下
60
600を超え
800以下
80
800を超え
1000以下
100
1000を超え
1300以下
140
1300を超え
1600以下
180
1600を超え
240
オフ時間は,製造業者の同意によって減少することが可能である。
表9−使用負荷種別AC-3からの使用負荷種別AC-6a及びAC-6bの使用電流決定
定格使用電流
使用負荷種別AC-3の閉路電流からの算出
突入電流のピークが定格電流の30倍以下
の変圧器を開閉する場合のIe(AC-6a)。
0.45 Ie(AC-3)
コンデンサバンク設置点での推定短絡電
流がikとなる回路内の単一コンデンサバン
クを開閉する場合のIe(AC-6b)。
2
2
k
)1
(−
x
x
i
ここに,x=13.3×
k
e
)3
AC
(
i
-
I
また,ik>205Ie(AC-3)
使用電流Ie(AC-6b)の表現は,最大突入電流ピークから発展したものである。
C
L
L
C
e
max
p
1
3
2
X
X
X
X
U
I
−
+
=
×
ここに,Ue :定格使用電圧
XL :回路の短絡インピーダンス
XC :コンデンサバンクのリアクタンス
この式は,接触器又はスタータの電源側のキャパシタンスは無視でき,かつ,コンデ
ンサには初期充電はないという条件の下に有効である。
8.2.4.2
規約動作性能
規約動作性能は,JIS C 8201-1:2020の7.2.4.2に,次の事項を追加して適用する。
接触器又はスタータは,9.3.3.6の規定に従い,必要な使用負荷種別に対する表10に規定した条件及び動
作サイクル数の電流を問題なく,閉路及び遮断できなければならない。
使用負荷種別DC-2及びDC-4の場合,電気的耐久性(B.3)に規定する条件で規約動作性能を検証しな
ければならない。動作サイクル数は6 000回とする。
37
C 8201-4-1:2020
表10−使用負荷種別に対する閉路及び遮断条件(規約動作性能)
使用負荷
種別
閉路及び遮断の試験条件
Ic/Ie
Ur/Ue
cosφ
オン時間
s
オフ時間
s
動作サイクル数
回
AC-1
1.0
1.05
0.80
0.05 b)
c)
6000 i)
AC-2
2.0
1.05
0.65
0.05 b)
c)
6000 i)
AC-3
2.0
1.05
a)
0.05 b)
c)
6000 i)
AC-4
6.0
1.05
a)
0.05 b)
c)
6000 i)
AC-5a
2.0
1.05
0.45
0.05 b)
c)
6000 i)
AC-5b
1.0 e)
1.05
e)
0.05 b)
60
6000 i)
AC-6a
g)
g)
g)
g)
g)
g)
AC-6b
1 k)
1.05
−
l)
m)
6000
AC-8a
1.0
1.05
0.80
0.05 b)
c)
30000
AC-8b h) j)
6.0
1.05
a)
1
10
9
90 d)
5900
100
使用負荷
種別
Ic/Ie
Ur/Ue
L/R
ms
オン時間
s
オフ時間
s
動作サイクル数
回
DC-1
1.0
1.05
1.0
0.05 b)
c)
6000 f)
DC-3
2.5
1.05
2.5
0.05 b)
c)
6000 f)
DC-5
2.5
1.05
7.5
0.05 b)
c)
6000 f)
DC-6
1.0 e)
1.05
e)
0.05 b)
60
6000 f)
Ic :閉路及び遮断電流。使用負荷種別AC-5b,AC-6又はDC-6を除いて,閉路電流は,直流又は交流の対称実
効値で表現しているが,実際の値は,閉路動作中の実際のピーク値は,対称電流のピーク値より大きい値に
なる。
Ie :定格使用電流
Ur :商用周波数又は直流の回復電圧
Ue :定格使用電圧
cosφ :試験回路の力率
L/R :試験回路の時定数
注a) cosφはIeが100 Aの場合は0.45,Ieが100 Aを超える場合は0.35。
b) 接点が再開路する前に,十分に接触することが確認可能な場合,時間は0.05 s未満でもよい。
c) これらのオフ時間は,表8に規定した値を超えてはならない。
d) 製造業者は,200 sまでの任意のオフ時間を選択してもよい。
e) 試験は,白熱灯負荷で行う。
f) 一方の極性で3 000回の動作サイクル,逆極性で3 000回の動作サイクル。
g) 製造業者は,変圧器を使った試験によって,AC-6aの評価を検証しなければならない,又は表9に記載のAC-3
の値から定格を導き出してもよい。
h) 使用負荷種別AC-8bに対する試験は,使用負荷種別AC-8aの試験と一緒に実施する。試験は,異なる試料で
行ってよい。
i) 手動操作の開閉装置の開閉回数は,負荷開閉1 000回,無負荷開閉5 000回とする。
j) 製造業者が指定した場合,Ic/Ie(全負荷電流に対する固定値拘束時の電流比)の値を用いてもよい。
k) 9.3.3.3.4に従って計算した安定状態の無効電流Ieを得るために,負荷は汎用で入手可能なコンデンサの組合
せで構成しなければならない。代わりに,コンデンサ定格は,コンデンサ開閉試験から引用又は,実測値か
ら割り当ててもよい。手引きとして,高調波電流による温度効果を考慮していない表9の公式を参照しても
よい。試験端子の利用可能な電流容量は,推定電流“r”以上でなければならない。
電流容量は,分析評価によって決定してもよい。
l) オン時間は,定常電流に達するために十分長くなければならない。
m) オフ時間は,表8による。放電抵抗の値は,オフ時間の最後に50 V以下になるように設定しなければならな
い。
38
C 8201-4-1:2020
8.2.4.3
耐久性
耐久性は,JIS C 8201-1:2020の7.2.4.3に,次の事項を追加して適用する。製造業者が電磁接触器の耐久
性を性能分類により明示する場合,附属書JAによる。
8.2.4.3.1
機械的耐久性
接触器又はスタータの機械的耐久性は,製造業者が行う特殊試験で検証する。この試験の推奨試験規定
は,附属書Bによる。
8.2.4.3.2
電気的耐久性
接触器又はスタータの電気的耐久性は,製造業者が行う特殊試験で検証する。この試験の推奨試験規定
は,附属書Bによる。
8.2.4.4
接触器の過負荷電流耐量
使用負荷種別AC-3用又はAC-4用の接触器は,表11の過負荷電流に耐えなければならない。試験方法
は,9.3.5参照。
注記 この試験は,I2tの値が表11の値を超過しないという前提で,表11に規定する電流より小さく,
かつ,試験時間は10秒より長い責務もカバーする。
表11−過負荷電流耐量条件
定格使用電流
試験電流
試験時間
630 A以下
8×Ie max/AC-3
10 s
630 Aを超え
6×Ie max/AC-3 a)
10 s
注a) 最小値は,5 040 A。
8.2.4.5
コイルの消費電力
コイルの消費電力は,9.3.3.2.1.2の試験による。
8.2.4.6
1極当たりのインピーダンス
1極当たりのインピーダンスは,9.3.3.2.1.3の試験による。
8.2.5
短絡保護装置(SCPD)との協調
8.2.5.1
短絡条件における性能(定格条件付短絡電流)
短絡保護装置[SCPD(s)]でバックアップされている接触器並びにスタータ,コンビネーションスター
タ,コンビネーション開閉機器,保護付きスタータ及び保護付き開閉機器の定格条件付短絡電流は,9.3.4
に規定した短絡試験で検証しなければならない。試験は,a)及びb)によって行う。
a) 表13に規定する推定電流“r”
b) 定格条件付短絡電流に相当する試験電流Iq(推定電流“r”より大きい場合。)
短絡保護装置の定格は,定格使用電流,定格使用電圧及び相当する使用負荷種別に対し十分でなければ
ならない。
協調のタイプには“1”及び“2”がある。両者に対する試験条件は,9.3.4.2.1及び9.3.4.2.2による。
タイプ“1”は,短絡状態では接触器又はスタータが,人又は設備に危害を与える要因になってはならな
い。ただし,部品の修理又は交換をしないで引き続き用いることができなくてもよい。
タイプ“2”は,短絡状態では接触器又はスタータが,人又は設備に危害を与える要因になってはならず,
かつ,引き続き用いることができなければならない。製造業者が,装置の保守に関して取らなければなら
ない処置を指示している場合,接点は,溶着してもよい。
注記 製造業者の推奨に従わない短絡保護装置の使用は,協調を無効にする可能性がある。
39
C 8201-4-1:2020
これらの試験は,交流モータ定格だけに適用する。
8.2.5.2
スタータと短絡保護装置との間の交差電流での協調
スタータとこれと組合せる短絡保護装置との間の交差電流での協調は,特殊試験で検証する。試験規定
は,B.4による。
8.3
電磁両立性(EMC)
8.3.1
一般
電磁両立性(EMC)の一般は,JIS C 8201-1:2020の7.3.1に,次の事項を追加して適用する。
この機器は,本来商用周波数磁界環境に設置されるので,商用周波数磁界試験は,必要としない。イミ
ュニティは,閉路及び遮断容量試験(9.3.3.5参照)並びに動作性能試験(9.3.3.6参照)によって検証する。
この機器は,制御電源の電圧ディップ及び短時間停電の影響を受ける。8.2.1.2の動作限界内で応答する
必要があり,9.3.3.2の動作限界試験で検証する。
8.3.2
イミュニティ
8.3.2.1
電子回路を搭載しない装置
電子回路を搭載しない装置は,JIS C 8201-1:2020の7.3.2.1を適用する。
8.3.2.2
電子回路を搭載する装置
電子回路を搭載する装置は,JIS C 8201-1:2020の7.3.2.2に,次の事項を追加して適用する。
試験結果は,表12に示した性能判定基準による。
表12−イミュニティ試験の性能基準
項目
性能基準
A
B
C
一般事項
仕様の限度値内の正常な性能
の維持
自己回復が可能な機能又は性
能の一時的低下又は喪失
人の操作介入又はシステムの
リセットが必要な,機能又は性
能の一時的低下又は喪失。
通常の機能は,手動のリセット
又は再始動のような簡単な操
作によって回復する。損傷を受
けた部品があってはならない。
主回路及び制
御回路の動作
動作不良なし。
− 接触器は,期待する状態を
維持しなければならない。
− 過負荷リレーはトリップし
てはならない。
トリップの原因とならない一
時的な誤動作。
意図していない接点の開閉は,
許容可能でない。
自己回復する。
過負荷リレーのトリップ。
意図していない接点の開閉。
自己回復しない。
表示及び補助
回路の動作
目に見える表示情報に変化が
ない。
LEDの僅かなちらつき又は表
示文字の動きだけ。
一時的な目に見える変化。例え
ば,望ましくないLEDの点灯。
補助接点の動作不良なし。
表示情報が恒久的に失われる。
補助接点の動作不良あり。
情報処理及び
検出機能
望ましくない動作又は誤情報
のない外部装置への通信及び
データ交換。
外部への影響の可能性を伴っ
た一時的な通信障害はあるが,
自己回復可能。
情報の誤った処理
データ及び/又は情報の喪失
自己回復不能
8.3.3
エミッション
環境Bで要求される厳しさのレベルは,環境Aのレベルよりも厳しい。
この規格で扱う装置は,重大なレベルの高調波を発生しないので,高調波試験は,要求しない。
40
C 8201-4-1:2020
8.3.3.1
電子回路を搭載しない装置
電子回路を搭載しない装置は,JIS C 8201-1:2020の7.3.3.1に,次の事項を追加して適用する。
ダイオード,バリスタ,抵抗器,コンデンサなどの部品だけを組み込んだ機器は,試験を必要としない
(例えば,サージ吸収器)。
8.3.3.2
電子回路を搭載する装置
電子回路を搭載する装置は,JIS C 8201-1:2020の7.3.3.2を適用する。
9
試験
9.1
試験の種類
9.1.1
一般
試験の種類の一般は,JIS C 8201-1:2020の8.1.1を適用する。
9.1.2
形式試験
形式試験は,全ての形式の接触器及びスタータの設計が,この規格に適合することを検証するために行
う。この試験は,次によって構成する。
a) 温度上昇限度(9.3.3.3参照)
b) 耐電圧性能(9.3.3.4参照)
c) 定格閉路及び遮断容量(9.3.3.5参照)
d) 適用可能な場合,切換能力及び可逆性(9.3.3.5参照)
e) 規約動作性能(9.3.3.6参照)
f)
動作及び動作限界(9.3.3.1及び9.3.3.2参照)
g) 接触器の過負荷電流耐量(9.3.5参照)
h) 短絡状況下の性能(9.3.4参照)
i)
端子の機械的特性(JIS C 8201-1:2020の8.2.4参照)
j)
箱入接触器及びスタータの保護等級(JIS C 8201-1:2020の附属書C参照)
k) EMC(適用する場合)(9.4参照)
9.1.3
受渡試験
JIS C 8201-1:2020の8.1.3は,抜取試験(9.1.4参照)をしない場合に,その代わりとして適用する。
接触器及びスタータの受渡試験は,次によって構成する。
− 動作及び動作限界(9.3.6.2参照)
− 耐電圧試験(9.3.6.3参照)
9.1.4
抜取試験
接触器及びスタータの抜取試験は,次によって構成する。
− 動作及び動作限界(9.3.6.2参照)
− 耐電圧試験(9.3.6.3参照)
抜取試験は,JIS C 8201-1:2020の8.1.4に,次の事項を追加して適用する。
製造業者は,受渡試験の代わりに抜取試験を用いてもよい。抜取りは,JIS Z 9015-1[付表2-A(なみ検
査の1回抜取方式)参照]に規定する要求事項を満足する,又はこれを超えるものでなければならない。
− 抜取りの基本 AQL≦1
− 合格判定数
Ac=0(受入れに欠陥があってはならない。)
41
C 8201-4-1:2020
− 不合格判定数 Re=1(1台欠陥がある場合,ロット全体を試験する。)
抜取りは,各々特定のロットで一定間隔で行わなければならない。
前記のJIS Z 9015-1の要求事項を満足することが確実な他の統計的手法,例えば,能力指数による連続
的な製造管理,又は工程管理の統計的手法を用いてもよい。
空間距離の検証のための抜取試験は,JIS C 8201-1:2020の8.3.3.4.3を適用する。
9.1.5
特殊試験
9.1.5.1
一般
特殊試験は,機械的及び電気的耐久性試験,並びにスタータと短絡保護装置との交差電流での協調試験
とする(附属書B参照)。試験結果は,機能安全に適用するために必要なデータを入手する目的で利用可
能である(附属書K参照)。
9.1.5.2
特殊試験−温湿度,塩水噴霧,振動及び衝撃
これらの特殊試験のために,JIS C 8201-1:2020の附属書Qに,次の事項を追加して適用する。
JIS C 8201-1:2020の表Q.1において,動作能力の検証が必要な場合,この規格の9.3.6.2を適用する。
振動試験は,機器の開位置及び閉位置で行わなければならない。過負荷リレーは,試験中トリップして
はならない。主接点及び補助接点を確認するために,試験は,任意の電流及び電圧の下で実施してもよい。
衝撃試験は,開位置で行わなければならない。
高温(耐熱性)試験のために,機器は規定の条件の間(JIS C 60068-2-2の5.3.3参照),閉位置でなけれ
ばならない。カテゴリA,B及びCの場合,試験は通電せずに実施してもよい。また,カテゴリD,E及
びFの場合,試験は使用負荷種別AC-3の定格電流で行わなければならない。ただし,試験電流は実質的
な理由によって,100 Aに制限してもよい。試験期間中の最後の時間で,接触器を5回動作させなければ
ならない。全試験期間中,過負荷リレーはトリップしてもよい。
低温(耐寒性)試験のために,試験Abの代わりに試験Adを選択してもよい。また,機器は冷却期間中,
開位置でなければならない。機器は,試験期間中の最後の時間,励磁する。カテゴリA,B及びCの場合,
試験は通電せずに実施してもよい。また,カテゴリD,E及びFの場合,試験は使用負荷種別AC-3の定
格電流で行わなければならない。ただし,試験電流は実質的な理由によって,100 Aに制限してもよい。
試験期間中の最後の時間で,接触器を5回動作させなければならない。全試験期間中,過負荷リレーはト
リップしてもよい。
温湿度試験のために,カテゴリA,B及びCの場合,試験は通電せずに実施してもよい。また,カテゴ
リD,E及びFの場合,機器は,最初のサイクル(12時間)の間,使用負荷種別AC-3の定格電流の下で
励磁する。2回目のサイクル(12時間)の間,消磁する。試験電流は実質的な理由によって,100 Aに制
限してもよい。温度が安定した後に,最初のサイクルの最初の2時間及び2回目のサイクルの最後の2時
間の間,接触器を5回動作する。温度特性に従って,過負荷リレーはトリップしてもよい(表3参照)。
製造業者との協定がある場合,回復期間は減らしてもよい。
塩水噴霧試験後,製造業者との協定によって,機器を洗浄してもよい。
9.2
構造に関する要求事項に対する適合性
9.2.1
一般
構造に関する要求事項に対する適合性の一般は,JIS C 8201-1:2020の8.2に,次の事項を追加して適用
する。
9.2.2
ねじなし端子及び締付具の電気的性能
ねじなし端子及び締付具の電気的性能は,次の変更とともに,JIS C 8201-1:2020の8.2.4.7を適用する。
42
C 8201-4-1:2020
試験サンプル数は,4個とする。
導体の挿入及び引抜きは,製造業者の取扱説明書に従って行う。
適切な試験配置は,図10に示す。測定ポイントが,接触ポイントから10 mm以内にとれない場合,理
想と現実との測定ポイントの電位差は,測定した電位差から控除する。導体の部分の電位差は,安定した
温度においてサンプル上で適切な方法で決定する。測定方法及びその結果を試験報告書に記載する。試験
電流は,定格開放熱電流(Ith)とする。
注記1 JIS C 8201-4-1に準拠した製品は,多数の異なる種類の電線(より線,単線,可とうより線
など)を装着することが可能なため,結果として同一の端子に多数の試験をすることになる。
注記2 断面積が10 mm2を超える導体の試験方法は,検討中である。
サンプルには,端子の電圧降下測定用の穴又はそれに準じる測定箇所があってもよい。
注記3 対応国際規格では注記(NOTE)で記載されているが,許容事項であり,本文に移した。
9.2.3
ねじなし端子及び締付具のエージング試験
ねじなし端子及び締付具のエージング試験は,次の変更とともに,JIS C 8201-1:2020の8.2.4.8を適用す
る。
試験は,締付具を装着した装置で実施する。
試験電流は,定格開放熱電流(Ith)とする。
サンプルには,端子の電圧降下測定用の穴又はそれに準じる測定箇所があってもよい。
注記 9.2.2の注記3と同じ。
9.3
性能に関する要求事項への適合性
9.3.1
試験シーケンス
各試験シーケンスは,新しい試料で実施する。
複数の試験シーケンス又は全ての試験シーケンスは,製造業者との協定によって一つの試料で行っても
よい。ただし,試験は,各々の試料に与える試験シーケンスによって行う。
幾つかの試験は,要求する試料数を減らすため一つの試験シーケンスの中に含まれるが,その結果は,
シーケンスの中における前後の試験に対して重要なものでない。したがって,次の試験は,試験の都合及
び使用者と製造業者との協定によって,別々の新しい試料について行い,そのシーケンスから省略しても
よい。
− JIS C 8201-1:2020の8.3.3.4.1のg)(沿面距離の検証)
− JIS C 8201-1:2020の8.2.4(端子の機械的及び電気的特性)
− JIS C 8201-1:2020の附属書C(箱入装置の保護等級)
注記 対応国際規格では注記(NOTE)で記載されているが,許容事項であり,本文に移した。
試験シーケンスは,次による。
a) 試験シーケンスI
1) 温度上昇の検証(9.3.3.3参照)
2) 動作及び動作限界の検証(9.3.3.1及び9.3.3.2参照)
3) 耐電圧性能の検証(9.3.3.4参照)
b) 試験シーケンスII
1) 適用可能な場合,定格閉路・遮断容量,切換能力及び可逆性の検証(9.3.3.5参照)
2) 規約動作性能の検証(9.3.3.6参照)
c) 試験シーケンスIII 短絡状況下の性能(9.3.4参照)
43
C 8201-4-1:2020
d) 試験シーケンスIV(接触器に限定) 過負荷電流耐量の検証(9.3.5参照)
e) 試験シーケンスV
1) 端子の機械的特性の検証(9.2.1,9.2.2及びJIS C 8201-1:2020の8.2.4参照)
2) 箱入接触器及びスタータの保護等級の検証(JIS C 8201-1:2020の附属書C参照)
いずれの試験においても,不適合があってはならない。
9.3.2
一般試験条件
一般試験条件は,JIS C 8201-1:2020の8.3.2に,次の事項を追加して適用する。
同じ基本的な設計及び構造上重大な差異がない機器のシリーズにおける試験サンプルの選択は,エンジ
ニアリングに基づいて判断による。
単一周波数だけの定格に特定した機器を除いて,50 Hzで行った試験は,60 Hzもカバーすると考えられ
る。逆も同じである。
接続のための締付トルクは,関連する試験の条項で規定がない場合は,製造業者が指定したトルクとす
る。ただし,指定がない場合は,JIS C 8201-1:2020の表4に規定するトルクとする。
9.3.3
無負荷,通常負荷及び過負荷条件下の性能
9.3.3.1
動作
接触器及びスタータが,8.2.1.1.2の要求事項に合致して動作することを検証しなければならない。
接触器の動作に対するスタータの非感受性を確認するため,8.2.2に規定した定常状態温度に達するまで,
スタータに負荷を加え,接触器を通常の開閉順序で速やかに3回動作させる。接触器の動作によって,ス
タータがトリップしてはならない。
ストップ及びリセット機構が一体の過負荷リレーは,接触器を閉路にしてリセット機構を動作させる。
これによって,接触器は開放しなければならない。また,リセット機構だけ又はストップ及びリセット機
構が分離した過負荷リレーは,接触器を閉路とし,リセット機構をリセット位置にして,トリップ機構を
動作させる。これによって,接触器は開放しなければならない。これらの試験は,過負荷トリップ動作に
おいて,リセット機構をリセット位置で保持することによって,無効とならないことを確認するために行
う。
加減抵抗ロータスタータの場合には,時延リレーの時間設定及び始動速度を調整するために用いる他の
装置の校正が,製造業者が決めた限界内にあることを確認するための試験を実施する。
各段階において,始動抵抗器の値は,規定数値の±10 %内にあることを検証しなければならない。
ロータ開閉機器が,正しい順序で抵抗器を切り離していることも検証しなければならない。
単巻変圧器のタップ端子の開路電圧は,設計値に相当すること,並びに2段動作単巻変圧器スタータの
モータ端子での相順序は,始動及びスタータのオン位置において正しいことを検証しなければならない。
9.3.3.2
動作限界
9.3.3.2.1
動力操作装置
9.3.3.2.1.1
一般
接触器及びスタータの性能が,8.2.1.2の要求事項を満足することを検証するために試験を行う。
開放試験は,JIS C 8201-1:2020の8.3.3.2.1を適用する。
9.3.3.2.1.2
コイルの消費電力
9.3.3.2.1.2.1 一般
接触器のコイルは,保持電力及び投入電力によって評価する。
電圧によってコイルが異なる場合は,五つの代表的なコイルを次のように試験する。
44
C 8201-4-1:2020
五つのコイルは,最小,最大及び他の三つの定格制御電源電圧(Us)を製造業者が指定することによっ
て,最も高い保持電力を代表する。
試験は,周囲温度23 ℃±3 ℃で実施する。主回路及び補助回路は,無負荷とする。コイルは,定格制
御電源電圧(Us)及び定格周波数を供給する。コイルに定格電圧に範囲が宣言された場合,各周波数の最
大電圧で行われなければならない。
測定値は,0 Hz〜10 kHz以上の周波数帯をカバーする実効値計測器を用い,得られた電力値は,測定不
確かさが5 %よりもよいものでなければならない。
9.3.3.2.1.2.2 保持電力(電子制御式電磁石を含む。)
コイル電流[I(i)]の測定は,励磁後安定した温度に達した時点で測定する。
保持電力消費は,次に定義する。
Sh(i)=Us(i)×I(i) [VA](交流制御接触器)
Pc(i)=Us(i)×I(i) [W](直流制御接触器)
公表値は,試験した五つのコイルの平均値とする。
Sh=Σ (Us(i)×I(i))/5 [VA]
Pc=Σ (Us(i)×I(i))/5 [W]
注記 交流制御式接触器の消費電力は,単位を力率を考慮した上で[W]で表すことも可能である。
9.3.3.2.1.2.3 交流制御接触器又は異なる投入及び保持巻線をもつ直流制御接触器の投入電力
保持電流の測定直後に,投入電流の計測をする(9.3.3.2.1.2.2参照)。
コイルの電流測定I(i)は,コイル非励磁後直後に接触器をオフ位置に固定し,再励磁した直後に実施する。
投入電力消費は,次による。
Sp(i)=Us(i)×I(i) [VA](交流制御接触器)
Pp(i)=Us(i)×I(i) [W](異なる投入及び保持巻線をもつ直流制御接触器)
公表値は,試験した五つのコイルの平均値とする。
Sp=Σ (Us(i)×I(i))/5 [VA]
Pp=Σ (Us(i)×I(i))/5 [W]
注記 製造業者の発行物に記載がない場合,通常の直流制御式接触器(電子制御式及び異なる投入及
び保持巻線式を除く)の投入電力と保持電力とは等しい。
Pc 直流制御接触器の公称保持電力
Pp 別々の投入及び保持用巻線を備えた直流制御接触器の投入電力
“r” 最小短絡試験電流
Sh 交流制御接触器の保持電力
Sp 交流制御接触器の投入電力
9.3.3.2.1.2.4 電子制御電磁石の投入電力
(検討中)
9.3.3.2.1.3
1極当たりのインピーダンス
1極当たりのインピーダンスは,9.3.3.3.4の条件で,試験中に決定する。接触器を個別のエンクロージャ
に入れて使用することが可能な場合でも,エンクロージャに入れて試験する必要はない。
電圧降下Udは,接触器の電源側端子と負荷側端子との間(端子を含む)で測定しなければならない。温
度上昇を計測するのと同時に測定することが望ましい。
1極当たりのインピーダンスは,次のように定義する(図9参照)。
45
C 8201-4-1:2020
Z=Ud/Ith [Ω]
電圧降下測定が,温度上昇及び抵抗値に重大な影響を与えないように注意しなければならない。
注記 試験方法は,接触器の極数に関係なく同じである。
9.3.3.2.2
リレー及び引外し装置
リレー及び引外し装置は,次による。
a) 不足電圧リレー及び引外し装置の動作 不足電圧リレー又は引外し装置が,8.2.1.3の要求事項を満足
することを検証するために試験する。開閉機器と組み合わせる場合は,最大定格電流のものと組み合
わせる。
1) 開放電圧 電圧をおおよそ30秒以内に一定の割合で,定格制御電源電圧から0 Vまで下げなければ
ならない。
開放電圧の下限値は,予熱なしで試験しなければならない。定格制限電源電圧に範囲がある場合
は,試験を最大電圧に適用する。開閉機器と組み合わせる場合,下限値は主回路に電流を通電しな
いで行わなければならない。
試験の上限値は,引外し装置に定格制御電源電圧及び主回路の定格電流を与えた状態に相当する
飽和温度状態で行う。この試験は,9.3.3.3に規定する温度上昇試験と同時に行ってもよい。定格制
御電源電圧に範囲がある場合は,試験を最小電圧に適用する。
2) 開閉機器と組合せた場合の動作限界試験 主回路は開放状態で始め,温度は室温状態で,最大制御
電源電圧の35 %を加えて,開閉機器がアクチュエータの操作で閉路しないことを確認しなければな
らない。最小制御電源電圧の85 %を加えて,開閉機器がアクチュエータの操作で閉路することを確
認しなければならない。
3) 過電圧条件下での性能 開閉機器と組み合わせた場合,主回路に電流を通電しないで行う。定格電
源電圧の110 %の試験は,30分間又は,熱飽和状態に至るまで行う。試験中有害な機能損傷があっ
てはならない。試験後の検証は上記2)で行う。
b) シャントコイルの引外し動作 シャントコイルの引外し動作が,周囲温度で8.2.1.4の要求事項に適合
していることを検証するために試験する。開閉機器と組み合わせた場合,最大定格電流のものと組み
合わせる。
定格制御電源電圧に範囲がある場合は,試験電圧は最小定格制御電源電圧の70 %及び最大定格制御
電源電圧の110 %を適用する。
c) 熱動形,電子式及び時延電磁過負荷リレー 過負荷リレー及びスタータは,次の試験電流に応じたJIS
C 8201-1:2020の表9〜表11に規定した導体を接続する。
− 全ての形の過負荷リレーに対しトリップクラス2,3,5及び10A(表2参照)の過負荷リレー及び
電子式過負荷リレーに対し,トリップクラス10,20,30及び40のものは,整定電流の100 %
− トリップクラス10,20,30及び40(表2参照)の熱動形過負荷リレー及び最大動作時間が40秒を
超える(5.7.3参照)ものは,整定電流の125 %
リレー及び引外し装置の動作を,全極に通電して8.2.1.5.1の規定で検証する。
8.2.1.5.1で定義する特性は,−5 ℃,+20 ℃及び+40 ℃で検証する。さらに,−5 ℃,+40 ℃の
範囲外の時間−電流特性が示された場合は,その最低及び最高温度で検証する。ただし,周囲温度補
償があるリレー及び引外し装置は,製造業者が表3より広い温度範囲を示した場合,その最低及び最
高温度での各々の引外し特性が−5 ℃及び/又は+40 ℃における引外し電流値で規定する動作限界
を満足するときは,表3の−5 ℃及び/又は+40 ℃での検証を行わなくてもよい。
46
C 8201-4-1:2020
電子式過負荷リレーは,8.2.1.5.1.2のサーマルメモリ試験検証は+20 ℃で実施する。
2極だけに通電した3極3素子熱動形又は電子式過負荷リレーは,全ての極の組合せで,調整可能
なリレーは,最大整定電流及び最小整定電流について,8.2.1.5.2に規定した試験を行う。
d) 瞬時電磁過負荷リレー 各リレーを個々に試験する。リレーを通過する電流は,正しい読取りを行う
のに適した割合で上げていく。値は,8.2.1.5.3による。
e) 不足電流リレー 動作限界は,8.2.1.5.4.1に満足することを検証する。
f)
自動切換えにおける不足電流リレー 動作限界は,8.2.1.5.4.2に満足することを検証する。
g) ストールリレー 動作限界は,8.2.1.5.5に満足することを検証する。
電流を検出するストールリレーは,最小及び最大の整定電流値で,また,最短及び最長のストール
インヒビット時間(4設定)で検証する。
回転検出手段と連動するストールリレーは,最短及び最長のストールインヒビット時間で検証する。
ストールリレーのセンサ入力に,適切な信号を与えることでセンサの実動作を模擬することが可能で
ある。
h) ジャムリレー 動作限界は,8.2.1.5.6を満足することを検証する。
最小及び最大の整定電流値で,また,最短及び最長のジャムインヒビット時間(4設定)で検証し
なければならない。
4設定のそれぞれで,次の状況で試験する。
− 整定電流値の95 %の試験電流を通電。ジャムリレーは,トリップしてはならない。
− 整定電流値の120 %まで試験電流を増加。ジャムリレーは,8.2.1.5.6の要求事項に従ってトリップ
しなければならない。
9.3.3.3
温度上昇
9.3.3.3.1
周囲温度
周囲温度は,JIS C 8201-1:2020の8.3.3.3.1を適用する。
9.3.3.3.2
部品の温度測定
部品の温度測定は,JIS C 8201-1:2020の8.3.3.3.2を適用する。
9.3.3.3.3
部品の温度上昇
部品の温度上昇は,JIS C 8201-1:2020の8.3.3.3.3を適用する。
9.3.3.3.4
主回路の温度上昇
主回路の温度上昇は,JIS C 8201-1:2020の8.3.3.3.4に,次の事項を追加して適用する。
8.2.2.5で規定するとおり,主回路に通電しなければならない。
通常は,電流を通電する全ての補助回路(5.6参照)を最大定格使用電流で負荷を加え,制御回路を定格
電圧で励磁しなければならない。
スタータは,5.7.4に従い,次のように選択した過負荷リレーを備える。
− 非調整式リレー 整定電流は,スタータの最大使用電流に等しいものでなければならない。試験は,
この電流で行う。
− 調整式リレー 最大整定電流は,スタータの最大使用電流の直近下位のものでなければならない。
試験は,過負荷リレーの電流を最大限界値に最も近い整定電流で行う。
上記の選択方法は,過負荷リレー及び接触器のあらゆる組合せにおいて,過負荷リレーの配線端子の温
度上昇及びスタータによって消費する電力が最大になることを意図している。
これらの値への影響がほとんど見られない過負荷リレーの場合(すなわち,ソリッドステート過負荷リ
47
C 8201-4-1:2020
レー),試験電流は,常にスタータの最大使用電流としなければならない。
注記1 対応国際規格では注記(NOTE)で記載されているが,要求事項であり,本文に移した。
使用負荷種別AC-6bの機器については,温度上昇試験用の試験電流はIe(コンデンサの定格電流)の1.35
倍と等しくなければならない。Ieは次のように計算する。
− Ie=Q (var)/Ue
単相の場合,ここにUeは最小定格電圧
− Ie=Q (var)/(Ue×3) 三相の場合,ここにUeは最小定格電圧
注記2 この計算は,IEC 60381-1の要求に従っている。
この試験は定格電流Ie(コンデンサの定格電流)の1.35倍に基づいた導体の断面積で行う。
9.3.3.3.5
制御回路の温度上昇
制御回路の温度上昇は,JIS C 8201-1:2020の8.3.3.3.5に,次の事項を追加して適用する。
9.3.3.3.4の試験中,温度上昇を測定する。
9.3.3.3.6
コイル及び電磁石の温度上昇
コイル及び電磁石の温度上昇は,JIS C 8201-1:2020の8.3.3.3.6に,次の事項を追加して適用する。
9.3.3.2.1.2.2による特定の周波数の交流又は直流の最大の消費電力をもつコイルが,全てのコイルの代表
とみなし,接触器の温度上昇試験に使用する。
a) 連続又は8時間責務に指定した接触器又はスタータの電磁石は,試験期間中,主回路へは対応した定
格電流を通電し,8.2.2.7.1に規定した条件に従わなければならない。温度上昇は,9.3.3.3.4の試験中に
測定する。
b) 間欠責務に指定した接触器又はスタータの電磁石は,a)及び8.2.2.7.2に規定した責務の等級ごとの試
験を実施しなければならない。このとき,主回路は,電流を通電してはならない。
c) 特殊定格(一時的及び周期的責務)の巻線は,主回路に電流を流さず,8.2.2.7.3に指示した試験を行
う。
9.3.3.3.7
補助回路の温度上昇
補助回路の温度上昇は,JIS C 8201-1:2020の8.3.3.3.7に,次の事項を追加して適用する。
温度上昇は,9.3.3.3.4の試験中に測定する。
9.3.3.3.8
加減抵抗ロータスタータの始動抵抗器の温度上昇
スタータが定格責務(5.3.4参照)及び始動特性(5.3.5.5.1参照)に従って動作する場合,抵抗器の温度
上昇は,JIS C 8201-1:2020の表3に規定する限度値を超えてはならない。
抵抗器の各部品に流れる電流は,制御するモータがスタータの定格(5.3.4及び5.3.5.5.1参照)における
最大始動トルク及び始動時間で動作するときの始動時間中の電流と,熱的に等価でなければならない。実
際には,電流値Imを用いてもよい。
始動動作は,1時間当たりの回数に従い,時間的に等間隔で配分しなければならない。
エンクロージャ及び流出空気の温度上昇は,JIS C 8201-1:2020の表3に規定する限度値を超えてはなら
ない。
モータ出力,ロータ電圧及び電流のあらゆる組合せについて,始動抵抗器の性能を試験することは実用
的ではない。したがって,補間法又は推論によって,規格を満足することを証明するのに十分な回数の試
験だけをすることが望ましい。
注記 対応国際規格では注記(NOTE)で記載されているが,推奨事項であり,本文に移した。
9.3.3.3.9
2段動作単巻変圧器スタータにおける単巻変圧器の温度上昇
スタータが定格責務(5.3.4参照)で動作する場合,単巻変圧器の温度上昇は,表5に規定した限度値よ
48
C 8201-4-1:2020
り15 K高い値(8.2.2参照)及びJIS C 8201-1:2020の表3に規定する限度値を超えてはならない。
単巻変圧器の各巻線に流れる電流は,制御するモータがスタータの定格(5.3.5.5.3参照)における最大
始動電流及び始動時間で動作するときに印加する電流と,熱的に等価とする。この条件は,始動時間中,
単巻変圧器から流れる電流が,5.3.5.5.3で規定する最大始動電流と次の式で得られる値との積に等しい場
合に達成するとみなす。
e
start
8.0
U
U
×
(5.3.1.4参照)
ここに, Ustart: 始動電圧
動作サイクルは,1時間当たりの始動回数に従い,時間的に等間隔で配分しなければならない(5.3.4.3
参照)。
二つの連続動作サイクル(5.3.4.3参照)の場合,単巻変圧器の温度上昇は,8.2.2に示した最大値を超え
てもよいが,単巻変圧器にいかなる支障も来してはならない。
数組のタップ付き単巻変圧器の場合には,変圧器に最大電力損失を与えるタップを用いて試験を行う。
この試験は,温度上昇が安定するのに十分な時間実施する。
この試験を容易にするために,モータの代わりにスター接続インピーダンスを用いてもよい。
9.3.3.4
耐電圧性能
耐電圧性能は,JIS C 8201-1:2020の8.3.3.4を,次のように修正して適用する。
9.3.3.4.1
形式試験
形式試験は,JIS C 8201-1:2020の8.3.3.4.1に,次の文を追加して適用する。
− 次の文を,JIS C 8201-1:2020の8.3.3.4.1のa)の最後に追加する。
通常の操作又は装置の調整時に人が触れるおそれがある全ての面,及び標準のテストフィンガによ
って触れることが可能な全ての面は,金属はくで覆わなければならない。
金属はくは,開閉試験及び短絡試験後の商用周波耐電圧の検証には覆う必要はない。
− 次の文を,JIS C 8201-1:2020の8.3.3.4.1のb) 2)の第2段落の後に追加する。
JIS C 8201-1:2020の7.2.3.1及び8.3.3.4.2で規定する電圧よりも低いインパルス耐電圧Uimpに従う装
置を含む接触器及びスタータの回路は,製造業者の取扱説明書に従って,その試験において切り離し
てもよい。
− 次の文を,JIS C 8201-1:2020の8.3.3.4.1のc) 2) ii)の段落の後に追加する。
通常の状態で主回路に接続する制御回路が,[JIS C 8201-1:2020の8.3.3.4.1のb) 2)に従って]切り
離されるような場合は,主接点をオン状態に保つ方法を試験報告書の中に示さなければならない。
− 次の文を,JIS C 8201-1:2020の8.3.3.4.1のh)の最後に追加する。
断路に適した装置の漏えい電流は,開路状態の各極間について定格使用電圧Ueの1.1倍で測定し,
0.5 mAを超えてはならない。
開いた接点間のインパルス耐電圧を検証する試験は,不要とする[JIS C 8201-1:2020の8.3.3.4.1のb) 3)
iv)参照]。
9.3.3.5
閉路及び遮断容量
閉路及び遮断容量は,JIS C 8201-1:2020の8.3.3.5に,次の事項を追加して適用する。
9.3.3.5.1
一般試験条件
試験は,表7の試験条件によって実施し,9.3.3.5.5 f)の条件を満足しなければならない。
制御電源電圧は,100 % Usで実施する。ただし,使用負荷種別AC-3及びAC-4の閉路試験では,試験回
49
C 8201-4-1:2020
数の半数は110 % Usの制御電源電圧を印加し,残りの半数は85 % Usの制御電源電圧で実施する。
Us及びUcの区別がない場合,試験は,Ucで行う。
注記 対応国際規格では注記(NOTE)で記載されているが,要求事項であり,本文に移した。
主回路への接続は,接触器又はスタータを実使用のときに用いる状態と同等でなければならない。必要
がある場合又は便宜上,制御回路及び補助回路,並びに特に接触器又はスタータの電磁コイルは,独立し
た電源によって供給してもよい。その場合の電源は,使用条件として指定したものと同じ種類の電流及び
電圧でなければならない。
スタータの過負荷リレー及び短絡保護装置は,定格閉路及び遮断試験を実施するために短絡してもよい。
9.3.3.5.2
試験回路
試験回路は,JIS C 8201-1:2020の8.3.3.5.2を適用する。
9.3.3.5.3
過渡回復電圧の特性
過渡回復電圧の特性は,JIS C 8201-1:2020の8.3.3.5.3を使用負荷種別AC-2,AC-3,AC-4,AC-8a及び
AC-8bに適用する(表1参照)。
AC-3及びAC-4の閉路容量試験においては,係数γ及び振動周波数を調整する必要はない。
9.3.3.5.4
(空欄)
9.3.3.5.5
定格閉路及び遮断容量
スタータに用いる接触器が,スタータの使用負荷種別に対応するa)の要求事項を満足する場合には,そ
のスタータの試験は必要ない。
定格閉路及び遮断容量は,次による。
a) 接触器の定格閉路及び遮断容量 接触器は,使用負荷種別に応じた電流を,表7に規定する回数だけ
閉路及び遮断しなければならない。可逆接触器については,d)も参照。
使用負荷種別AC-3及びAC-4の接触器は,50回の閉路試験に引き続き,50回の閉路及び遮断試験
を実施する。
b) 直入れ及び2方向スタータ(AC-3)並びに加減抵抗ロータスタータのステータ開閉機器(AC-2)の
定格閉路及び遮断容量 スタータは,使用負荷種別に応じた電流を,表7に規定する回数だけ閉路及
び遮断しなければならない。
使用負荷種別AC-3のスタータは,50回の閉路試験に引き続き,50回の閉路及び遮断試験を実施す
る。
c) スターデルタスタータ(AC-3)及び2段動作単巻変圧器スタータ(AC-3)の定格閉路及び遮断容量
並びに切換能力 スタータは,表7に規定する使用負荷種別に応じた電流を,閉路及び遮断しなけれ
ばならない。
スタータの始動位置及びオン又はデルタ位置は共に,試験電流を別の開閉機器によって遮断する50
回の閉路試験を,最初に実施する。
続いてスタータは,50回の閉路及び遮断試験を実施する。各試験サイクルは,次の順序でなければ
ならない。
− 始動又はスター位置での閉路
− 始動又はスター位置での遮断
− オン又はデルタ位置での閉路
− オン又はデルタ位置での遮断
− 休止期間
50
C 8201-4-1:2020
負荷回路は,モータの巻線のようにスタータに接続する。スタータの定格使用電流(Ie)は,オン
又はデルタ位置での電流とする。
注記 スターデルタスタータは,電源のインピーダンスによって変換比率に大きな影響があるため,
試験電流をスター接続及びデルタ接続の位置で測定することが重要である。
単巻変圧器が複数の出力電圧タップをもつ場合は,一番高い始動電圧を与えるように接続する。
始動位置及びオン位置でのオン時間及びオフ時間は,表7による。
d) 直入れ及び可逆スタータ(AC-4)の定格閉路及び遮断容量 スタータは,表7に規定する電流を閉路
及び遮断しなければならない。
試験電流を別の開閉機器によって遮断する50回の閉路試験を実施し,引き続き50回の閉路及び遮
断試験を実施する。
負荷回路は,モータ巻線のようにスタータに接続する。
2台の接触器を含むスタータでは,A及びBの二つの接触器は,通常の使用状態のように接続しな
ければならない。50回の動作順序は,次による。
閉路A−開路A−閉路B−開路B−休止期間
開路Aから閉路Bへの切換えは,通常の制御システムで許容可能な限り速やかに行う。
スタータ又は可逆構成の接触器がもっている機械的又は電気的インタロックは,用いなければなら
ない。
可逆回路の構成が,両方の接触器が同時に励磁するような場合には,両方の接触器を同時に励磁す
る10回の追加試験を実施しなければならない。
e) 加減抵抗ロータスタータのロータ開閉機器の定格閉路及び遮断容量 ロータ開閉機器の閉路及び遮
断容量の検証は,Ie=Ierである使用負荷種別AC-2に対しては,スタータの設計値の最大定格ロータ電
流で9.3.3.5.5 b)によって実施する。Ue=Uer(定格ロータ使用電圧)及びU/Ue=0.8として実施する。
回路力率は0.95とする。これらの試験では,始動抵抗器は切り離してもよい。3段階以上のスタータ
は,各開閉機器を順に切り換えて実施する。3段階以上のスタータのロータ開閉機器は,全てのロー
タ電圧で遮断及び閉路をすることはないので,これらの試験電圧を,開閉する始動抵抗値を全始動抵
抗値で除した割合に低減してもよい。
スタータが,ロータ開閉機器開路より前にステータ開閉機器が回路を遮断するように接続する場合,
遮断容量の検証は,不要とする。
前記の規定に応じた要求事項をあらかじめ満足するロータ開閉機器に対しては,これ以上の試験は
必要ない。
f)
閉路及び遮断容量,切換え及び可逆性試験の試験中及び試験後の接触器又はスタータの特性及び状態
9.3.3.5の閉路及び遮断容量試験と,9.3.3.6.1〜9.3.3.6.6の規約動作性能の検証の試験との間に,アーク
の持続,極間のフラッシオーバ,接地回路のヒューズの溶断(9.3.3.5.2参照)及び接点溶着があって
はならない。
接触器又はスタータを適切な方法で制御したとき,接点は,動作しなければならない。
9.3.3.6
動作性能能力
動作性能能力は,JIS C 8201-1:2020の8.3.3.6に,次の事項を追加して適用する。
規約動作性能の検証に関する試験は,接触器又はスタータが表10に規定する要求事項を満足することを
検証するために行う。
主回路の接続は,接触器又はスタータが実使用状態と同等でなければならない。
51
C 8201-4-1:2020
スタータの過負荷リレー及び短絡保護装置は,試験実施のために短絡してもよい。
9.3.3.5.2に規定する試験回路を適用し,負荷は9.3.3.5.3に従って調整する。
制御電圧は,定格制御電源電圧の100 %でなければならない。
スタータの接触器が,スタータの使用負荷種別に対する9.3.3.6.1の要求事項を満足する場合は,そのス
タータの試験は,必要ない。
9.3.3.6.1
接触器の規約動作性能
接触器は,使用負荷種別に応じた電流で,表10に規定する動作回数を閉路及び遮断しなければならない。
9.3.3.6.4も参照する。
9.3.3.6.2
直入れ及び2方向スタータ(AC-3)並びに加減抵抗ロータスタータのステータ開閉機器(AC-2)
の規約動作性能
スタータは,使用負荷種別に応じた電流で,表10に規定する動作回数を閉路及び遮断しなければならな
い。
9.3.3.6.3
スターデルタスタータ(AC-3)及び2段動作単巻変圧器スタータ(AC-3)の規約動作性能
スタータは,使用負荷種別に応じた電流で,表10に規定する動作回数を閉路及び遮断しなければならな
い。
試験方法は,50回の閉路だけの試験を実施しないこと以外は,9.3.3.5.5 c)による。
9.3.3.6.4
直入れ及び可逆スタータ(AC-4)の規約動作性能
スタータは,使用負荷種別に応じた電流で,表10に規定する動作回数を閉路及び遮断しなければならな
い。
試験方法は,50回の閉路だけの試験及び10回の同時励磁試験を実施しないこと以外は,9.3.3.5.5 d)によ
る。
9.3.3.6.5
加減抵抗ロータスタータのロータ開閉機器の規約動作性能
ロータ開閉機器の規約動作性能の検証は,表10に規定するAC-2に対して9.3.3.6.1によって実施する。
試験方法は,9.3.3.5.5 e)による。
9.3.3.6.6
規約動作性能試験中及び試験後の接触器又はスタータの特性及び状態
9.3.3.5.5 f)の要求事項を満足し,JIS C 8201-1:2020の8.3.3.4.1のd)に従って商用周波耐電圧の検証をし
なければならない。
断路に適した装置の漏えい電流は,開路状態の各極間について定格使用電圧Ueの1.1倍で測定し,2 mA
を超えてはならない。
ミラーコンタクト(附属書F参照)を備える機器には,F.7.3の試験を追加して実施しなければならない。
9.3.4
短絡状況下の性能
この細分箇条は,8.2.5.1の要求事項を検証するための試験条件について規定する。試験方法,試験順序,
試験後の機器の状態及び保護協調のタイプに関する特別な要求事項は,9.3.4.1及び9.3.4.2に規定する。
9.3.4.1
短絡試験の一般条件
9.3.4.1.1
一般要求事項
短絡試験の一般条件の一般要求事項は,JIS C 8201-1:2020の8.3.4.1.1に,次の事項を追加して適用する。
開放状態で試験した機器は,個別のエンクロージャで使用する場合,製造業者が指定した最小のエンク
ロージャで追加の試験をしなければならない。開放状態だけで試験した機器には,個別のエンクロージャ
で使用するための評価をしていないことを示す情報を提供しなければならない。
注記 個別のエンクロージャは,1台の機器(スタータなど)だけを搭載するよう設計し,寸法を指
52
C 8201-4-1:2020
定したものである。
個別のエンクロージャは,製造業者の仕様に従わなければならない。複数個のエンクロージャがある場
合,最も小さな容積のエンクロージャで試験しなければならない。
固定形及び可搬形の盤の試験は,IEC 61439-1:2011による。
9.3.4.1.2
試験回路
試験回路は,JIS C 8201-1:2020の8.3.4.1.2を適用する。ただし,JIS C 8201-1:2020の8.3.4.1.2 d)の適用
に当たっては,タイプ1の保護協調において,中性線又は製造業者の協定の下に一相に接続したヒューズ
素子F及び抵抗RLを,断面積が6 mm2で,長さが1.2 m〜1.8 mの電線へ置き換える。
注記 この大きなサイズの電線は,検出器として用いるのではなく,接地状態を確実にし,損傷を評
価するためのものである。
9.3.4.1.3
試験回路の力率
試験回路の力率は,JIS C 8201-1:2020の8.3.4.1.3を適用する。
表17を適用した場合,力率は,表17の値を使用する。
9.3.4.1.4
試験回路の時定数
試験回路の時定数は,JIS C 8201-1:2020の8.3.4.1.4を適用する。
9.3.4.1.5
試験回路の校正
試験回路の校正は,JIS C 8201-1:2020の8.3.4.1.5を適用する。
9.3.4.1.6
試験順序
試験順序は,JIS C 8201-1:2020の8.3.4.1.6に,次の事項を追加して適用する。
接触器又はスタータ及びそれに組合せる短絡保護装置,コンビネーションスタータ,コンビネーション
開閉機器,保護付きスタータ又は保護付き開閉機器は,通常の使用状態のように取り付けて配線する。そ
れらは,主回路ごとにスタータの定格電流に応じた2.4 m以下のケーブルを用いて,試験回路に接続する。
短絡保護装置がスタータから分離している場合,短絡保護装置は,前記ケーブルを用いてスタータに接
続する。ケーブル全長は2.4 mを超えてはならない。
三相回路試験は,単相回路を含んでいるとみなす。
9.3.4.1.7
(空欄)
9.3.4.1.8
試験の解釈
試験の解釈は,JIS C 8201-1:2020の8.3.4.1.8を適用する。
9.3.4.2
接触器,スタータ,コンビネーションスタータ,コンビネーション開閉機器,保護付きスタータ
及び保護付き開閉機器の条件付き短絡電流
接触器又はスタータ及びそれに組合せる短絡保護装置,コンビネーションスタータ,コンビネーション
開閉機器,保護付きスタータ又は保護付き開閉機器は,9.3.4.2.1及び9.3.4.2.2によって試験を行う。試験
は,使用負荷種別AC-3を満足する最大電流Ie及び最大電圧Ueの条件で実施する。
電磁力で操作する接触器又はスタータは,電磁石に,定格制御電源電圧を別電源によって供給し,閉路
状態とする。8.2.5.1に規定する短絡保護装置を使用する。短絡保護装置が電流可調整の回路遮断器の場合,
最大電流にセットし,宣言した保護協調のタイプ及び選択動作の試験を実施する。
試験の間,エンクロージャの全ての開口部は,通常用いるように塞ぎ,備えられた手段によって,扉又
はカバーを閉めなければならない。
モータ定格がある範囲をカバーし,かつ,取り換えることが可能な過負荷リレーをもつスタータは,最
大インピーダンスの過負荷リレー及び最小インピーダンスの過負荷リレーを,対応する短絡保護装置と組
53
C 8201-4-1:2020
み合わせて試験する。
タイプ1の保護協調は,9.3.4.2.1及び9.3.4.2.2での試験における各操作は,新品の試料で実施してもよ
い。
タイプ2の保護協調は,推定電流“r”(9.3.4.2.1参照)での試験は,1台の試料で実施する。定格条件付
短絡電流Iq(9.3.4.2.2参照)での試験は,1台の試料で実施する。
製造業者との協定によって,推定電流“r”及び定格条件付短絡電流Iqの試験は,同じ試料で実施しても
よい。
9.3.4.2.1
推定電流“r”における試験
試験回路は,製造業者が指定する表13又は表17による定格使用電流Ieに対応した推定電流に調整する
(表17を推奨する)。二つの表はこの製品に対して同等であり,いずれの表を用いてもよい。
接触器又はスタータ及びそれに組合せる短絡保護装置,コンビネーションスタータ,コンビネーション
開閉機器,保護付きスタータ又は保護付き開閉機器は,試験回路に接続しなければならない。次の手順で
試験を実施する。
a) 全ての開閉機器を,試験前に閉路状態として短絡保護装置で1回の遮断操作をする(“O”操作)。
b) 接触器又はスタータの閉路によって,短絡回路を構成し,短絡保護装置で1回の遮断操作をする(“CO”
操作)。
表13−定格使用電流に対する推定電流
定格使用電流Ie(AC-3) a)
A
推定電流“r”
kA
16以下
1
16を超え
63以下
3
63を超え
125以下
5
125を超え
315以下
10
315を超え
630以下
18
630を超え
1000以下
30
1000を超え
1600以下
42
1600を超え
受渡当事者間での協定による。
注a) 接触器又はスタータが使用負荷種別AC-3の指定がない場合,推定電流
“r”は,製造業者が申請した全ての使用負荷種別に対して,最も大き
な定格使用電流に対応したものでなければならない。
54
C 8201-4-1:2020
表17−定格使用電流に対する推定電流(整合表)
定格使用電流Ie(AC-3) a) e)
A
推定電流“r”f)
kA
力率
12以下
1
0.7以上 0.8以下
12を超え
50以下b)
3
0.7以上 0.8以下
50を超え
100以下c)
5
0.7以上 0.8以下
100を超え
250以下d)
10
0.5以上 0.7以下
250を超え
500以下
18
0.2以上 0.3以下
500を超え
800以下
30
0.2以上 0.3以下
800を超え 1300以下
42
0.2以上 0.3以下
1300を超え
受渡当事者間での協定による。
0.2以上 0.3以下
注記 この表はUL 60947-4-1との整合のために作成された表である。
注a) 接触器又はスタータが使用負荷種別AC-3の指定がない場合,推定電流“r”は,受渡当事
者間での協定による。
b) 定格使用電圧Ue:690 V以上では,定格使用電流Ieは,12 Aを超え,63 A以下とする。
c) 定格使用電圧Ue:690 V以上では,定格使用電流Ieは,63 Aを超え,125 A以下とする。
d) 定格使用電圧Ue:690 V以上では,定格使用電流Ieは,125 Aを超え,250 A以下とする。
e) 定格使用電流は,北米において,“motor full load current”と表示することがある。
f) 推定電流“r”は,北米において,“standard fault current”と表示することがある。
9.3.4.2.2
定格条件付短絡電流Iqにおける試験
この試験は,短絡電流が“r”より大きいときに実施する。
注記 対応国際規格では注記(NOTE)で記載されているが,要求事項であり,本文に移した。
推定短絡電流Iqが,定格条件付短絡電流に等しくなるように,回路を調整する。
短絡保護装置がヒューズで,試験電流がヒューズの電流制限領域以内であれば,可能な場合,ヒューズ
は,最大ピーク通過電流(Ip)及び最大通過エネルギー(I2t)のものを選択する。
接触器又はスタータ及びそれに組合せる短絡保護装置,コンビネーションスタータ,コンビネーション
開閉機器,保護付きスタータ又は保護付き開閉機器を,試験回路に接続する。
次の手順で試験を実施する。
a) 全ての開閉装置を,試験前に閉路状態(“O”操作)として,短絡保護装置で1回の遮断操作をする。
b) 接触器又はスタータの閉路(“CO”操作)によって,短絡回路を構成し,短絡保護装置で1回の遮断
操作をする。
c) コンビネーションスタータ又は保護付きスタータにおいて,装置を構成する短絡保護装置の開閉機器
の短絡遮断容量又は定格条件付短絡電流が,コンビネーションスタータ又は保護付きスタータの定格
条件付短絡電流未満の場合は,次の追加試験を実施しなければならない。接触器又はスタータを閉路
した状態で開閉機器(スイッチ又は配線用遮断器)の閉路によって(“CO”操作)短絡回路を構成し,
短絡保護装置で1回の遮断操作をする。この操作は,新しい試料(スタータ及び短絡保護装置)又は
製造業者との協定がある場合,最初の試料で実施してもよい。この操作の後で,9.3.4.2.3のa)〜g)の
条件だけ検証する。
9.3.4.2.3
試験結果
接触器,スタータ,コンビネーションスタータ,コンビネーション開閉機器,保護付きスタータ又は保
護付き開閉機器は,推定電流“r”で,Iqが適用可能な場合にはIqによって試験を行い,次の条件が保護協
調のタイプの要求事項を満足する場合は,試験に合格したと判断する。
両タイプの保護協調(全装置に適用)
55
C 8201-4-1:2020
a) 異常電流は,短絡保護装置,コンビネーションスタータ又はコンビネーション開閉機器で遮断し,エ
ンクロージャと電源との間に接続したヒューズ,可溶素子又は接続導体は,溶断してはならない。
b) エンクロージャのドア又はカバーは吹き飛ばず,ドア又はカバーは開けることができなければならな
い。エンクロージャの変形は,エンクロージャがIP2X以上の保護等級を満足すると判断できなけれ
ばならない。
c) 導体又は端子は損傷がなく,導体は端子から外れてはならない。
d) 絶縁台には,充電部の完全な固定が損なわれるようなクラック又は破損があってはならない。
両タイプの保護協調(コンビネーションスタータ,コンビネーション開閉機器,保護付きスタータ及び保
護付き開閉機器に限定)
e) 回路遮断器又はスイッチは,その操作装置で手動操作によって開閉できなければならない。
f)
短絡保護装置の端部は,取付装置から外れて,導電部分が露出してはならない。
g) コンビネーションスタータ,コンビネーション開閉機器,保護付きスタータ又は保護付き開閉機器に
対する定格条件付短絡電流未満の定格短絡遮断容量をもつ回路遮断器を用いたとき,遮断器は,次の
条件でトリップ試験を実施する。
1) 瞬時トリップリレー又は引外し装置付きの回路遮断器は,トリップ電流の120 %。
2) 過負荷リレー又は引外し装置付きの回路遮断器は,定格電流の250 %。
タイプ“1”保護協調(全装置に適用)
h) エンクロージャから外への部品の吹き出しがあってはならない。接触器及び過負荷リレーは,損傷が
あってもよい。スタータは,各試験の後は操作できなくてもよい。したがって,スタータを点検し,
必要な場合,接触器及び/又は過負荷リレー並びに回路遮断器の引外し装置をリセットする。ヒュー
ズ保護方式の場合,全てのヒューズリンクは交換する。
タイプ“1”保護協調(コンビネーションスタータ及び保護付きスタータに限定)
i)
JIS C 8201-1:2020の8.3.3.4.1のd)に従って(電流“r”及びIqでの)各試験後の絶縁が正常であるこ
とを検証するため,試験状態のままの完全な試料(部品を取り替える前の短絡保護装置,接触器及び
スタータ)に,定格使用電圧Ueの2倍の電圧で,かつ,1 000 V以上の商用周波耐電圧試験を実施す
る。スイッチ又は遮断器の開路状態で,次の部分間に印加する。
− 各極とスタータのフレームに接続した全ての他極との間
− 一括接続した全ての極の全充電部とスタータのフレームとの間
− 電源側で一括接続した端子と負荷側で一括接続した端子との間
断路に適した装置の漏えい電流は,開路状態の各極間について定格使用電圧Ueの1.1倍の電圧で測
定し,6 mAを超えてはならない。
タイプ“2”保護協調(全装置に適用)
j)
過負荷リレー,その他の部品は,損傷があってはならない。接触器又はスタータの接点溶着は,それ
が著しい変形なしで(ドライバなどで)容易に外れる場合,許容してもよい。ヒューズ保護方式で全
てのヒューズリンクを交換することを除き,試験中の部品を交換してはならない。
上記の接点溶着の場合,機器の機能は,適用する使用負荷種別に対する表10の条件で10回の操作
を実施することによって検証する。
k) 過負荷リレーの引外し特性は,電流整定の倍数の電流について確認し,短絡試験前及び試験後に,5.7.5
に規定した引外し特性を検証する。
l)
JIS C 8201-1:2020の8.3.3.4.1のd)に従って絶縁が正常であることを検証するため,接触器,スタータ,
56
C 8201-4-1:2020
コンビネーションスタータ,コンビネーション開閉機器,保護付きスタータ及び保護付き開閉機器に,
定格使用電圧Ueの2倍の電圧で,かつ,1 000 V以上の商用周波耐電圧試験を実施する。
コンビネーションスタータ,コンビネーション開閉機器,保護付きスタータ及び保護付き開閉機器
の場合は,スイッチ又は回路遮断器の接点は開路し,スタータの接点は閉路した状態で,装置の主回
路極間で,JIS C 8201-1:2020の8.3.3.4.1のc)による追加試験を実施しなければならない。
断路に適した装置の漏えい電流は,開路状態の各極間について定格使用電圧Ueの1.1倍の電圧で測
定し,2 mAを超えてはならない。
ヒューズリンクがある場合は,短絡する。
9.3.5
接触器の過負荷電流耐量
接触器は,9.3.2に規定するように取り付け,配線し,試験しなければならない。
接触器の全極同時に,8.2.4.4に規定した過負荷電流及び通電時間によって試験を行う。試験は,任意の
電圧で実施し,接触器は,室温から試験を開始する。
試験後,接触器は,試験前の同じ状態になければならない。これは,目視点検によって検証する。
この試験から計算したI2t(ジュール積分)を,短絡状態での接触器の性能を評価することに用いてはな
らない。
注記 対応国際規格では注記(NOTE)で記載されているが,要求事項であり,本文に移した。
9.3.6
受渡試験及び抜取試験
9.3.6.1
一般
試験は,9.1.2の関連部分の形式試験の規定と同じか又は同等な条件下で実施する。9.3.3.2の動作限界は,
通常の周囲空気温度,かつ,過負荷リレー単体で確認してもよい。ただし,正規の周囲状態とするための
補正を必要としてもよい。
機器を個別に試験している場合,それらの機器を組み合わせて耐圧試験及び他の関連試験を実施しなけ
ればならない。しかし,既に試験された接続システム又は補助製品と組み合わせた場合,追加の耐圧試験
は必要ない。
9.3.6.2
動作及び動作限界
電磁式,空気式及び電気空気式操作の接触器又はスタータは,8.2.1.2で規定する限界内での動作を検証
するために試験を実施する。
手動スタータの場合は,スタータの適切な動作を検証するために試験を実施する(8.2.1.2〜8.2.1.4参照)。
注記1 これらの試験において,熱的平衡状態に達する必要はない。熱的平衡に達しない場合は,直
列抵抗を用いるか又は電圧限界を下げて補えばよい。
過負荷リレーの校正を検証するために試験を実施しなければならない。時延過負荷リレーの場合,この
試験は製造業者が提示する特性曲線に引外し時間が(許容差内で)一致することを確認するために,整定
電流がある倍数の電流を,全極に等しく通電する一つの試験でよい。瞬時動作電磁過負荷リレーの場合,
整定電流値の1.1倍の電流で試験を実施しなければならない。不足電流リレー,ストールリレー及びジャ
ムリレーの場合,これらのリレーが適切に動作することを確認しなければならない(8.2.1.5.4〜8.2.1.5.6参
照)。
液体のダッシュポットで構成する時延電磁過負荷リレーの場合は,ダッシュポットを空の状態にして,
製造業者が指定した整定電流がある比率の電流において校正を実施し,特別な試験によって判定してもよ
い。
注記2 対応国際規格では注記(NOTE)で記載されているが,許容事項であり,本文に移した。
57
C 8201-4-1:2020
9.3.6.3
耐電圧試験
9.3.6.3.1
一般
耐電圧試験の一般は,JIS C 8201-1:2020の8.3.3.4.2に,次の事項を追加して適用する。
加減抵抗ロータスタータの場合,ロータ開閉機器の全極は,通常始動抵抗器を介して接続する。したが
って,耐電圧試験は,ロータ回路とスタータのフレームとの間に試験電圧を印加する。
金属はくは,必要ない。
JIS C 8201-1:2020の8.3.3.4.2のc)で規定した統合した試験を実施してもよい。
注記 対応国際規格では注記(NOTE)で記載されているが,許容事項であり,本文に移した。
9.3.6.3.2
電圧制限コンポーネントを含む機器に対する受渡試験での耐電圧の検証
製造業者の判断によって,電圧制限コンポーネントを含む機器の試験は,次による。
a) 試験電圧の印加 JIS C 8201-1:2020の8.3.3.4.2のb)に従って試験を行う。試験電圧は,電圧制限コン
ポーネントの最大適用使用電圧UV(交流の場合は実効値の最大)で行う。許容差は,−10 %とする。
合格基準:試験器の過電流リレーがトリップしてはならない(トリップ下限値)。
b) 電圧制限コンポーネントの適切な機能の検証 JIS C 8201-1:2020の8.3.3.4.2のb)に従って試験を行う。
試験電圧は,電流値が試験器のトリップ上限値と下限値との間になるように製造業者が指定する。
合格基準:電圧制限コンポーネントはダメージを受けてはならない。
注記 この試験の主目的は,電圧制限コンポーネントの適切な動作を確認するためである。
9.4
EMC試験
9.4.1
一般
EMC試験の一般は,JIS C 8201-1:2020の8.3.2.1,8.3.2.3及び8.3.2.4に,次の事項を追加して適用する。
製造業者の同意がある場合は,複数のEMC試験又は全てのEMC試験を同一の1台の試料で行ってもよ
い。その試料は,試験開始時に新品でもよいし,9.3.1による試験シーケンスを実施したものでもよい。EMC
試験の順序は,どのような順序でもよい。
試験報告書には,満足する結果を得るために講じた特別な手段を全て記載しなければならない。例えば,
シールド又は特殊なケーブルを用いた場合など,イミュニティ又はエミッションの要求事項を満足するた
めに,接触器又はスタータに補助機器を用いた場合は,このことを報告書に記載する。
試料は,閉路又は開路状態のいずれかの厳しい条件にして,定格制御電源で動作させる。
9.4.2
イミュニティ
表14の試験を実施する。特別な要求事項は9.4.2.1〜9.4.2.6による。
EMC試験において,試料に接続する電線は,その断面積及び形式は任意であるが,製造業者の資料によ
らなければならない。
58
C 8201-4-1:2020
表14−EMCイミュニティ試験
試験項目
要求される厳しさのレベル
静電気放電試験
JIS C 61000-4-2:2012
JIS C 8201-1: 2020の表23の試験
レベルを適用する。
放射無線周波電磁界試験
(80 MHz〜1 GHz,及び1.4 GHz〜2 GHz)
JIS C 61000-4-3:2012
JIS C 8201-1: 2020の表23の試験
レベルを適用する。
電気的ファストトランジェント/バースト試験
JIS C 61000-4-4:2015 a)
JIS C 8201-1: 2020の表23の試験
レベルを適用する。
1.2/50 μs〜8/20 μsサージ試験
JIS C 61000-4-5:2018 a)
JIS C 8201-1: 2020の表23の試験
レベルを適用する。
無線周波電磁界によって誘導する伝導妨害に対
する試験
(150 kHz〜80 MHz)
JIS C 61000-4-6:2017 b) c)
JIS C 8201-1: 2020の表23の試験
レベルd)を適用する。
注a) 試験中に,接触器は1回以上動作させなければならない。また,過負荷継電
器には,整定値の0.9倍の電流を通電する。ただし,最大100 Aとする。
b) 製造業者が全長が3 mを超えて使用可能と指定したケーブルで接続するポー
トに適用する。
c) 試験レベルは150 Ω負荷を接続したときと同等の電流として定義することも
可能である。
d) 47 MHz〜68 MHzのITU放送周波数帯を除く。また,波高値は3 Vとする。
9.4.2.1
試験中及び試験後の試料の性能
他に規定がない限り,性能基準Bを適用する(8.3.2.2参照)。
試験中及び試験後も規定の性能が失われてはならない。試験後には,9.3.3.2の動作限界を検証しなけれ
ばならない。
9.4.2.2
静電気放電
試験は,JIS C 61000-4-2:2012による。
金属部分には,接触放電を行い,それ以外の部分には,気中放電を行う。
時間間隔1秒の連続した,正極性パルス10回及び負極性パルス10回を指定した箇所に印加する。
電源端子は,試験をする必要はない。コイルに通電するため以外には,導線を接続する必要はない。
9.4.2.3
放射無線周波電磁界
試験は,JIS C 61000-4-3:2012の方法に従って行う。試験の順序はJIS C 61000-4-3:2012を適用する。
装置は,表12の性能基準Aを満足しなければならない。
9.4.2.4
電気的ファストトランジェント/バースト
試験は,JIS C 61000-4-4:2015の方法による。ただし,繰返し率は5 kHzとする。
電子回路又は接点を含むかどうかにかかわらず,試験電圧は,全ての主回路,制御回路及び補助回路端
子に印加する。
試験電圧は,1分間印加する。
9.4.2.5
サージ(1.2/50 μs〜8/20 μs)
試験は,JIS C 61000-4-5:2018による。容量性カップリングを推奨する。電子回路又は接点を含むかどう
かにかかわらず,全ての主回路,制御回路及び補助回路端子にサージを印加する。
試験電圧は,表14の値で,JIS C 8201-1:2020の7.2.3によって,製造業者が宣言したインパルス耐電圧
59
C 8201-4-1:2020
Uimpを超えてはならない。
繰返しの間隔は1分間とし,正極性パルス及び負極性パルスを各5回印加する。
9.4.2.6
高調波
(検討中)
9.4.2.7
無線周波電磁界によって誘導する伝導妨害
無線周波電磁界によって誘導する伝導妨害は,JIS C 8201-1:2020の8.4.1.2.6に,次の事項を追加して適
用する。
装置は表14の試験条件下で,表12の性能基準Aを満足しなければならない。
9.4.3
エミッション
環境Aに対して設計した機器を環境Bで用いると無線放射妨害を引き起こすことがあり,追加の軽減措
置を講じる必要があることを明記した適切な警告を使用者に提供しなければならない(例えば,取扱説明
書の中に記載)。
9.4.3.1
伝導無線周波数エミッション試験
試験方法及び試験手順は,CISPR 11:2003による。
この試験を合格するためには,表15のレベルを超えてはならない。
表15−伝導無線周波数エミッション試験限度値
周波数帯
MHz
環境A
環境B
0.15以上
0.5以下
79 dB(μV) 準せん頭値
66 dB(μV) 平均値
66 dB(μV)〜56 dB(μV) 準せん頭値
56 dB(μV)〜46 dB(μV) 平均値
(周波数の対数に比例して減少)
0.5を超え
5.0以下
73 dB(μV) 準せん頭値
60 dB(μV) 平均値
56 dB(μV) 準せん頭値
46 dB(μV) 平均値
5.0を超え
30以下
73 dB(μV) 準せん頭値
60 dB(μV) 平均値
60 dB(μV) 準せん頭値
50 dB(μV) 平均値
9.4.3.2
放射無線周波数エミッション試験
試験方法及び試験手順は,CISPR 11:2003による。
この試験は,制御及び補助回路に,基本スイッチング周波数が9 kHzを超える部品を含んでいる場合に
要求する。例えば,スイッチング電源などがある。
この試験を合格するためには,表16の限度値を超えてはならない。
表16−放射エミッション試験限度値
周波数帯
MHz
環境Aa)
環境B
30以上
230以下
30 dB(μV/m)
30 m地点での準せん頭値
30 dB(μV/m)
10 m地点での準せん頭値
230を超え
1 000以下
37 dB(μV/m)
30 m地点での準せん頭値
37 dB(μV/m)
10 m地点での準せん頭値
注a) これらの試験は,10 mの距離で限度値を10 dBに上げて実行してもよい。
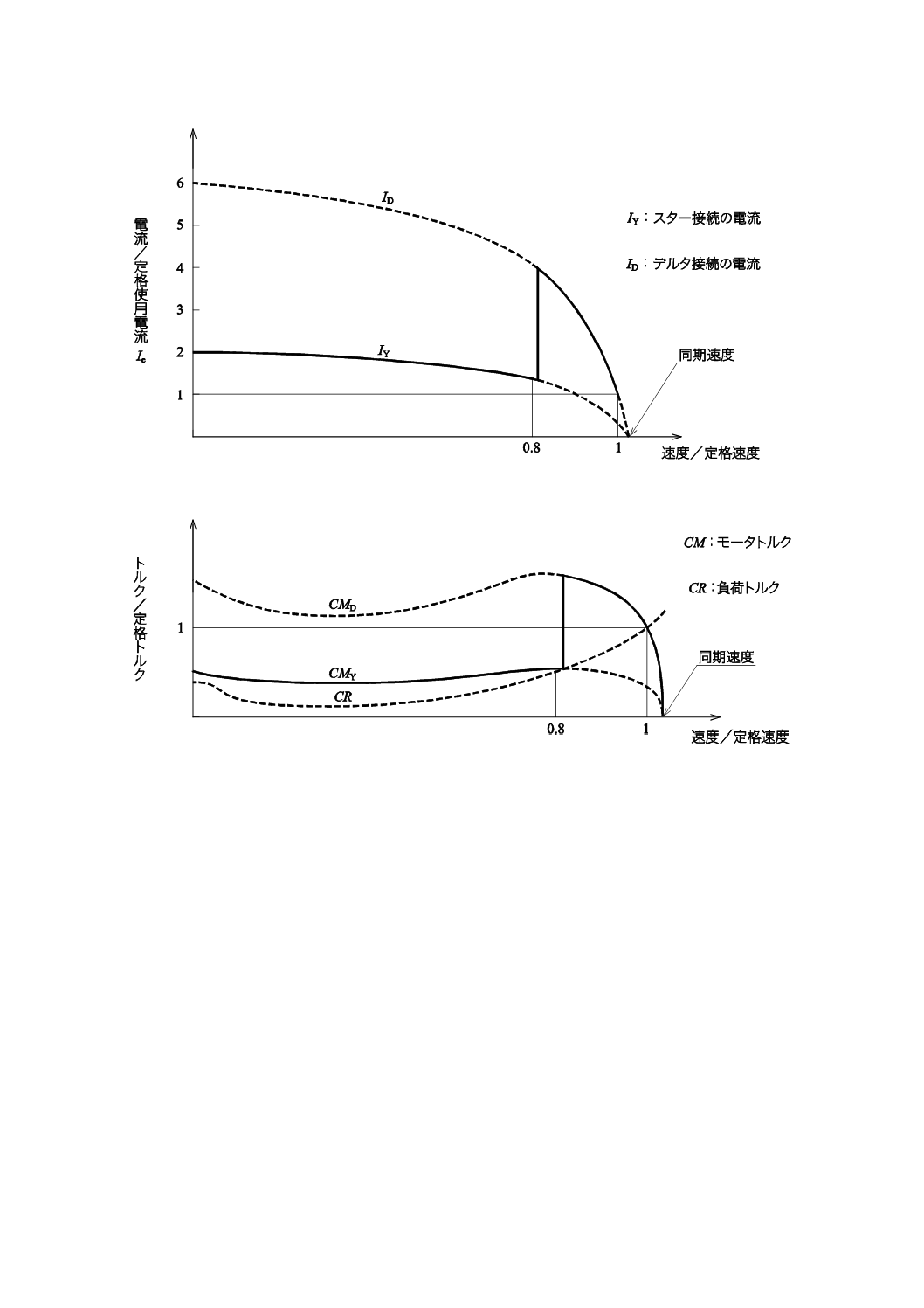
60
C 8201-4-1:2020
図1−スターデルタスタータ始動中の代表的な電流及びトルク曲線(1.1.2.2.1参照)
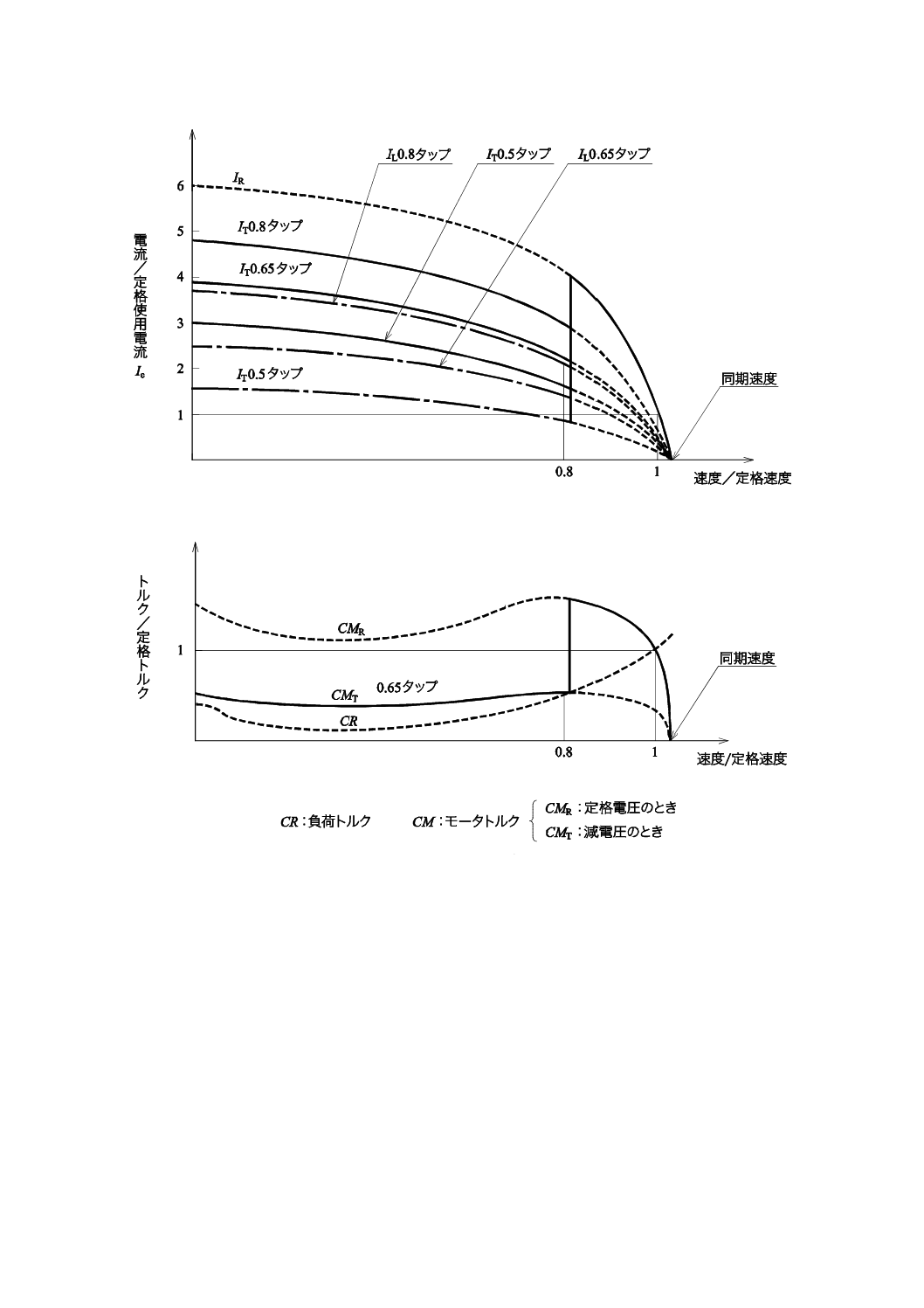
61
C 8201-4-1:2020
図2−単巻変圧器始動中の代表的な電流及びトルク曲線(1.1.2.2.2参照)
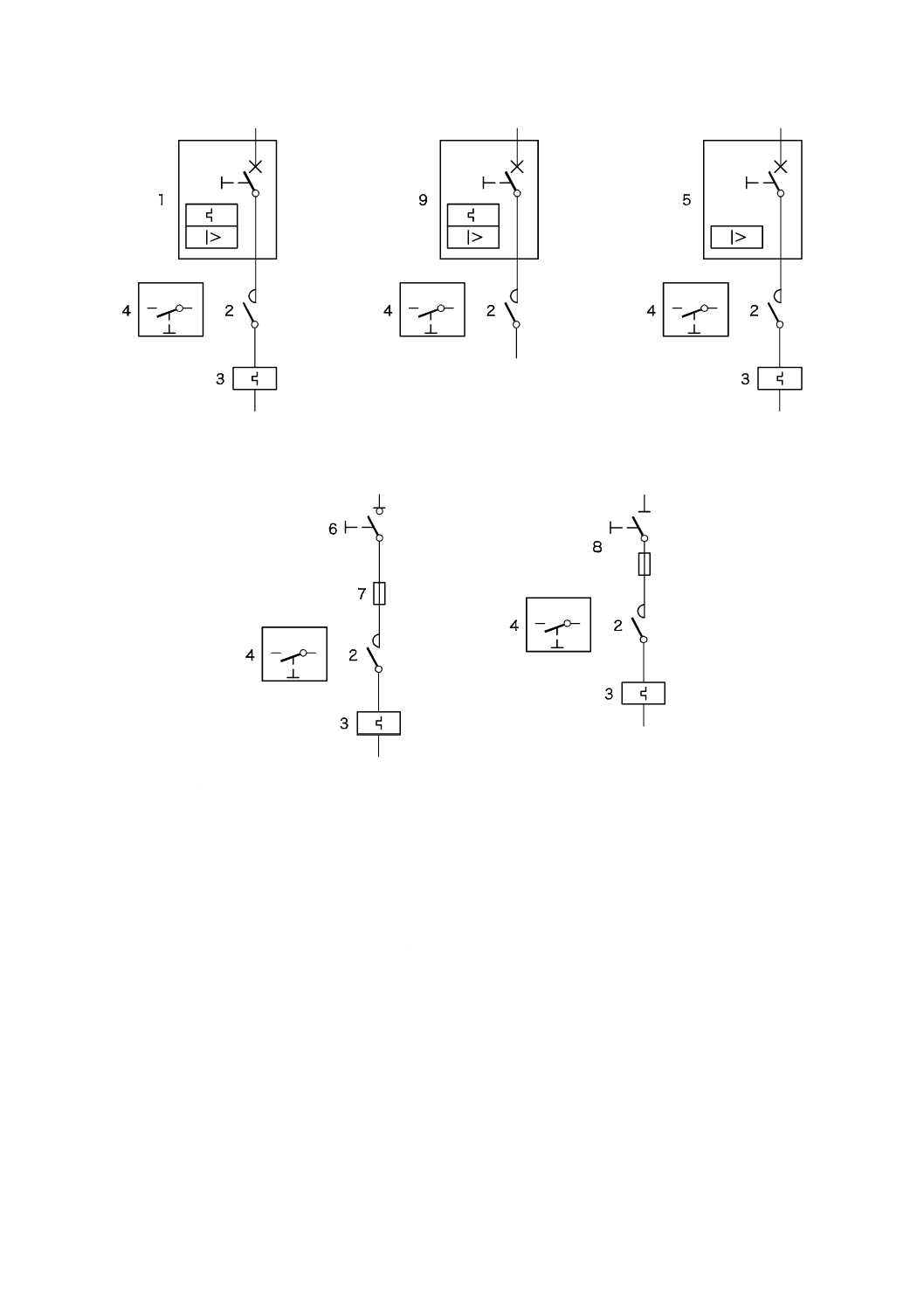
62
C 8201-4-1:2020
記号
1
回路遮断器(JIS C 8201-2-1:2011又はJIS C 8201-2-2:2011による)
2
接触器
3
過負荷リレー
4
制御スイッチ
5
電磁トリップだけの回路遮断器
6
断路用開閉器
7
ヒューズ
8
断路用ヒューズ
9
この規格を満足するモータ保護用回路遮断器
図3−保護付きスタータ,コンビネーションスタータ,
保護付き開閉機器及びコンビネーション開閉機器の代表的応用例
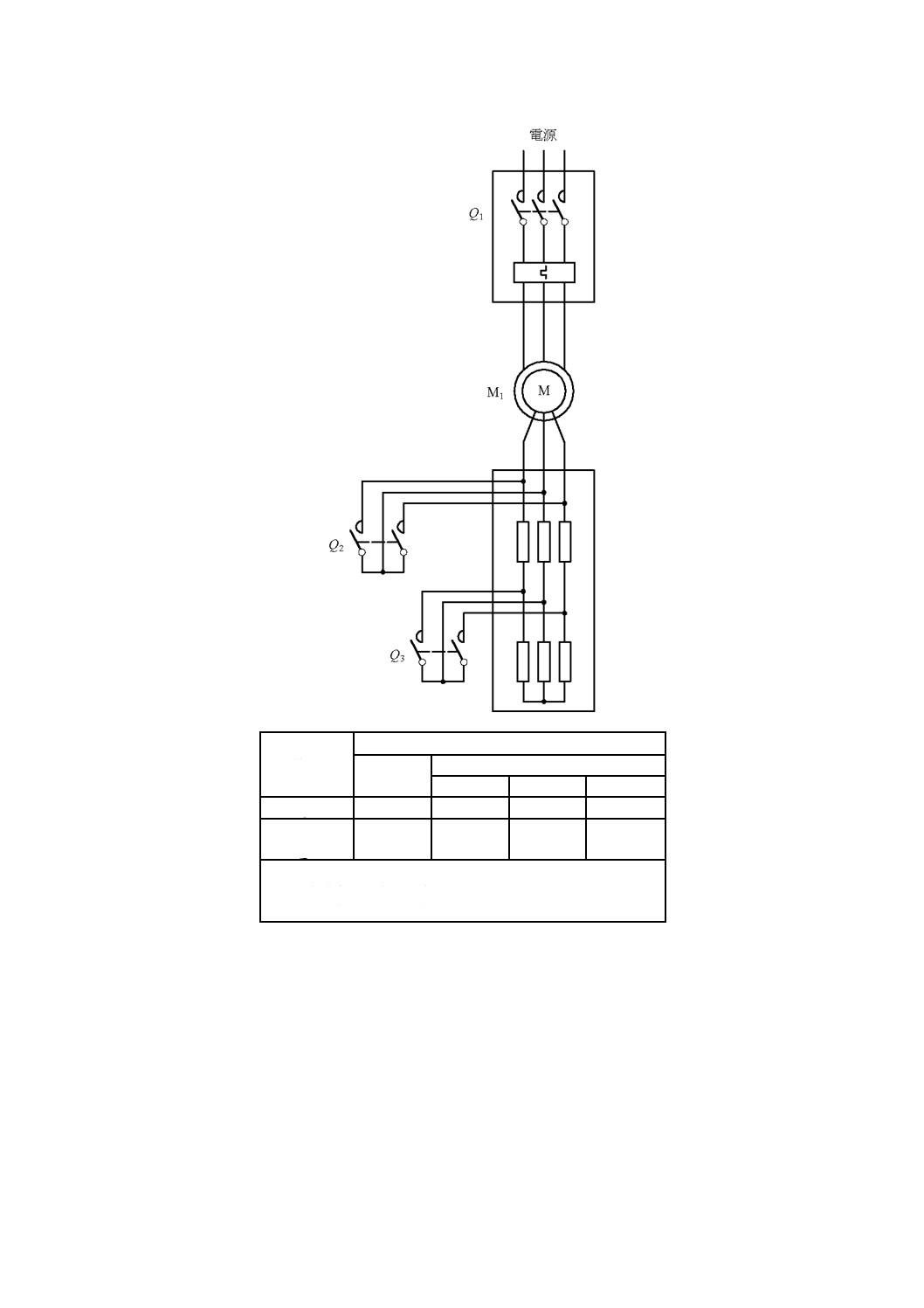
63
C 8201-4-1:2020
機械式開閉機器の位置
機械式開閉
機器
スタータの位置
停止
始動
1段階
2段階
3段階
Q1
O
C
C
C
Q2
O
O
O
C
Q3
O
O
C
C
記号
O:機械式開閉機器開路
Q:接触器
C:機械式開閉機器閉路
M:モータ
図4−(全ての開閉機器が機械的接触器である場合の)3段階始動及び
1方向回転の加減抵抗ロータスタータの三相結線図の例
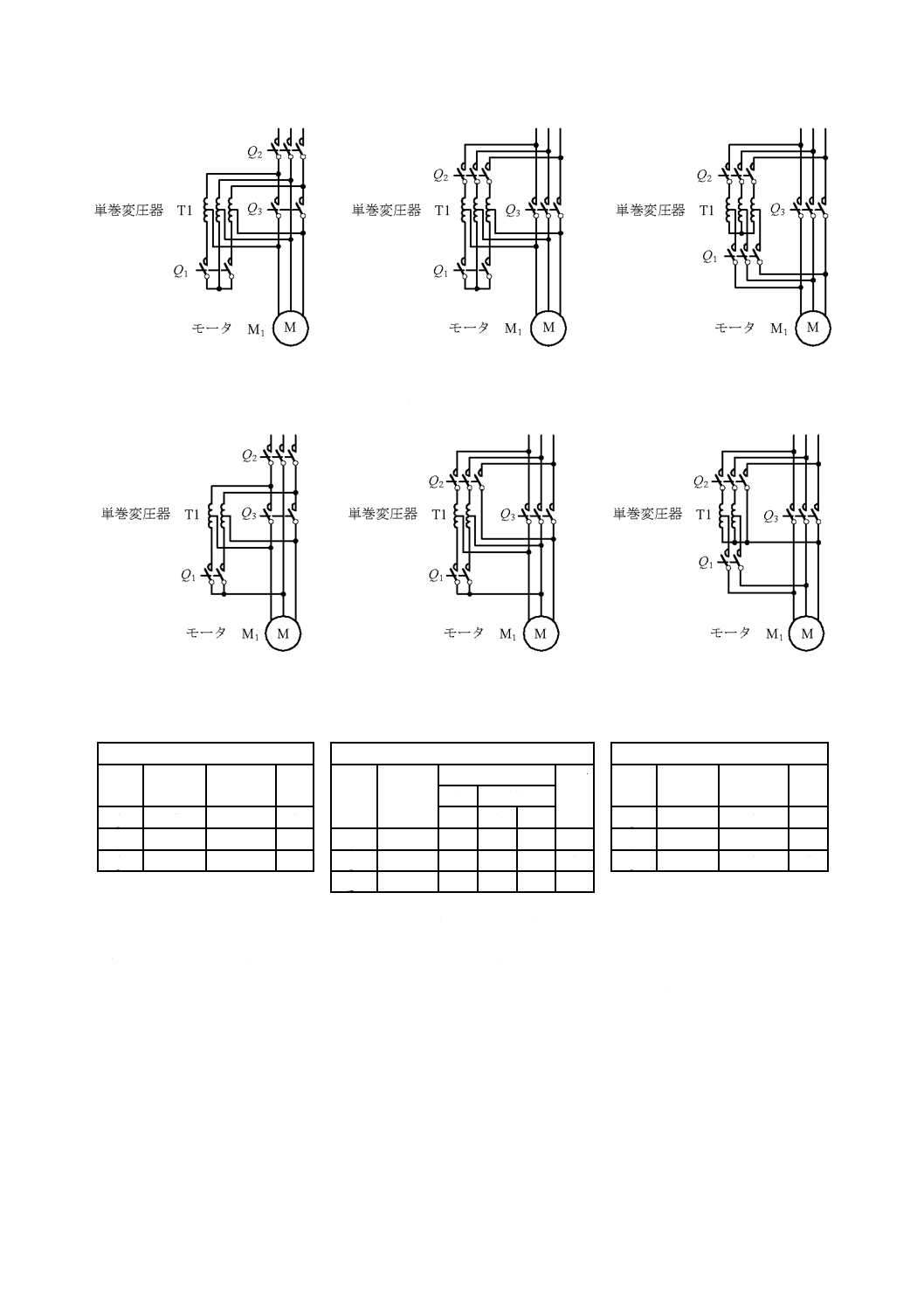
64
C 8201-4-1:2020
a-1) 直列クローズド
トランジション
a-2) 並列オープン又は
クローズドトランジション
a-3) 並列オープン
トランジション
a) 3コイル変圧器
b-1) 直列クローズド
トランジション
b-2) 並列オープン又は
クローズドトランジション
b-3) 並列オープン
トランジション
b) 2コイル変圧器
接触順序
接触順序
接触順序
接触器 スタート トランジ
ション
オン 接触器 スタート トランジション オン 接触器 スタート トランジ
ション
オン
開
閉
Q1
C
O
O
1
2
Q1
C
O
O
Q2
C
C
C
Q1
C
O
O
O
O
Q2
C
O
O
Q3
O
O
C
Q2
C
O
C
C
O
Q3
C
O
C
C=接点閉路
O=接点開路
Q3
O
O
O
C
C
Q1及びQ2は,同じ機械式開閉
機器の接点でもよい。
オープントランジションでは,Q1及び
Q2は,同じ機械式開閉機器の接点でもよ
い。
注記 図中の記号は,全ての機械式開閉機器が接触器である場合に対応している。
図5−単巻変圧器による交流誘導モータの始動の代表的な方法及び結線図
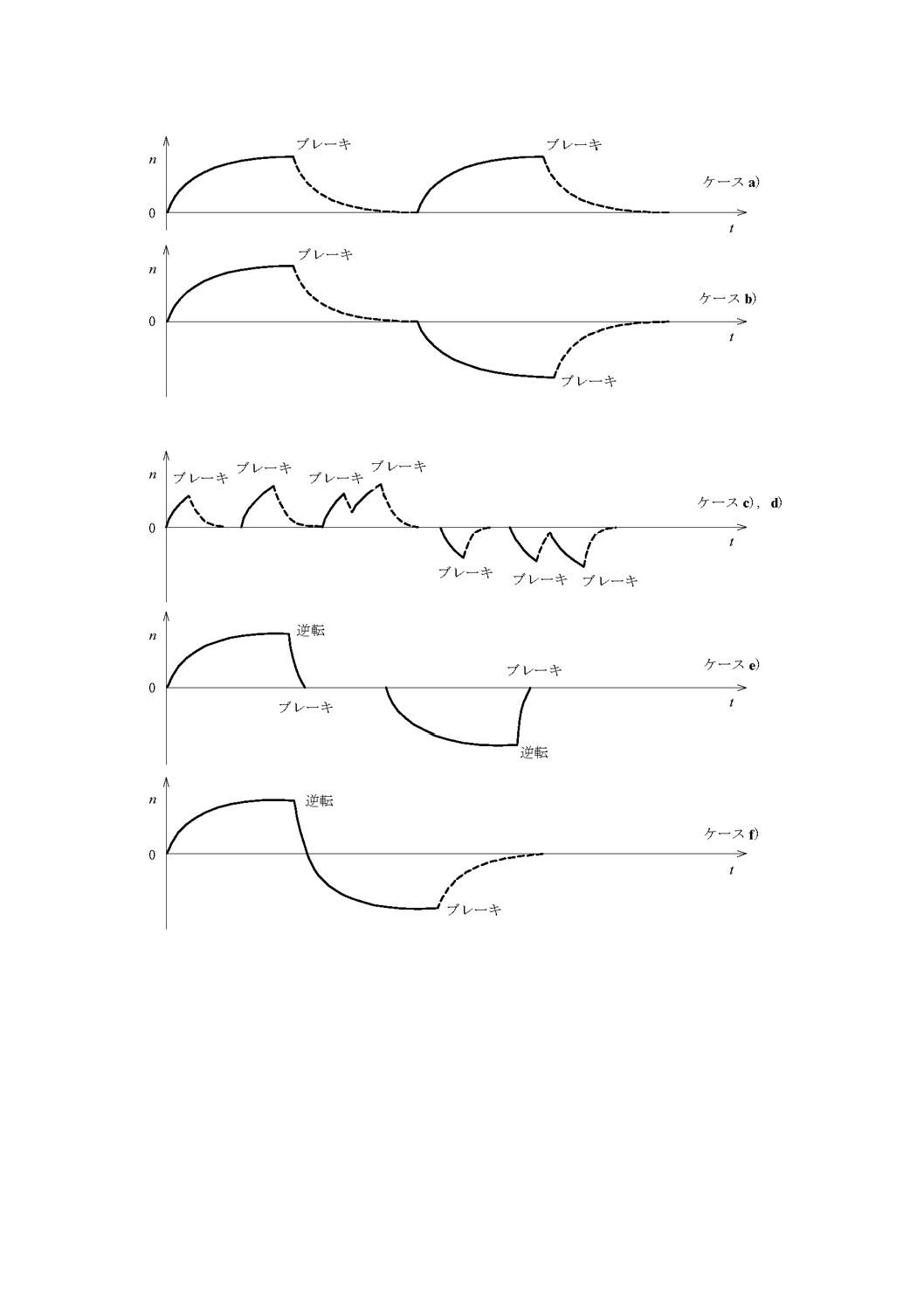
65
C 8201-4-1:2020
図6−5.3.5.5 a)〜f)の場合に対応する速度(n)−時間(t)の例(点線部はモータに電流が流れない期間)
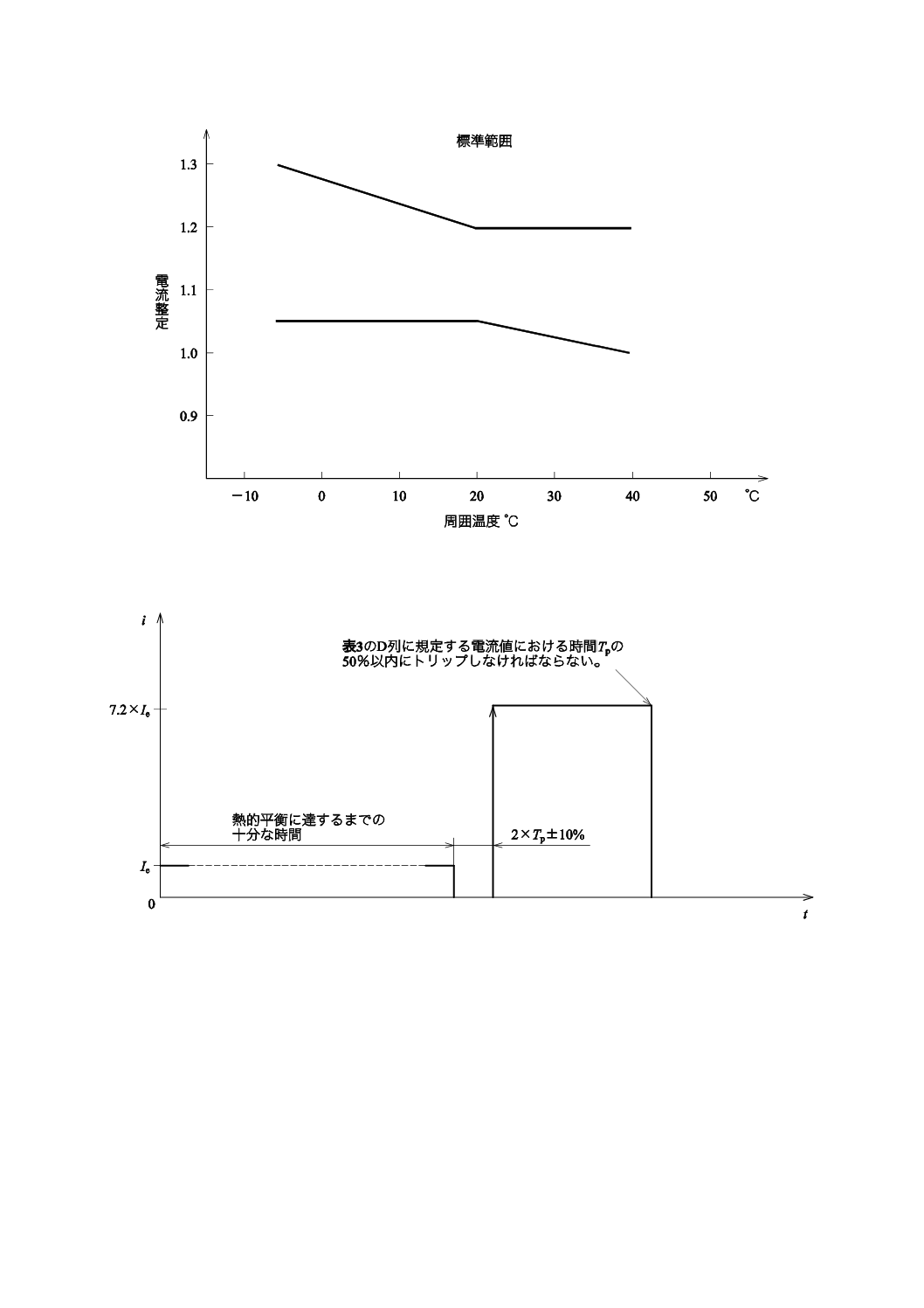
66
C 8201-4-1:2020
図7−周囲温度補償付き時延過負荷リレーの周囲温度に対する電流整定限界の倍数(8.2.1.5.1参照)
図8−サーマルメモリ試験
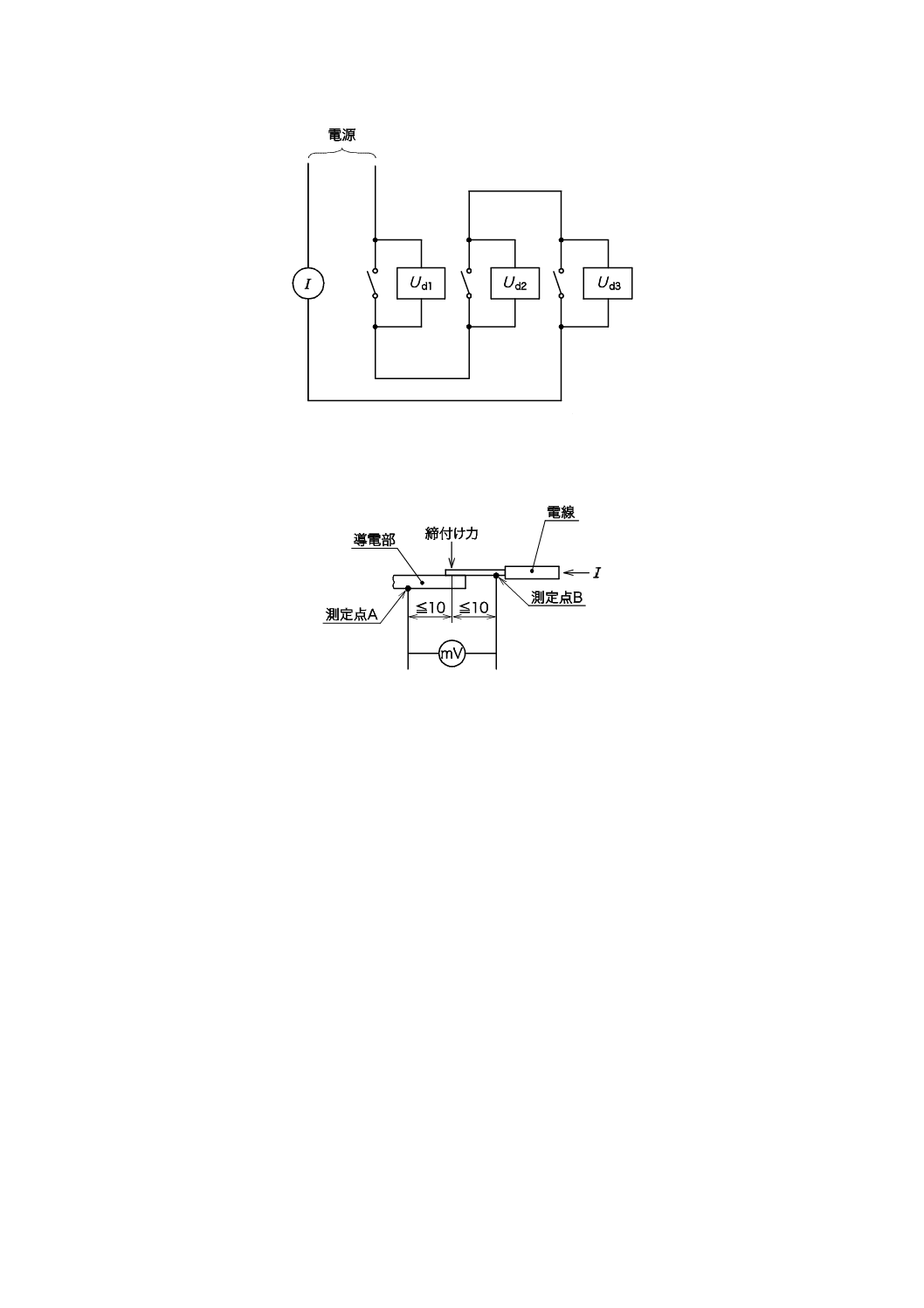
67
C 8201-4-1:2020
図9−3極の接触器の1極当たりのインピーダンス測定の例
単位 mm
図10−締付け端子の接触点での電圧降下測定
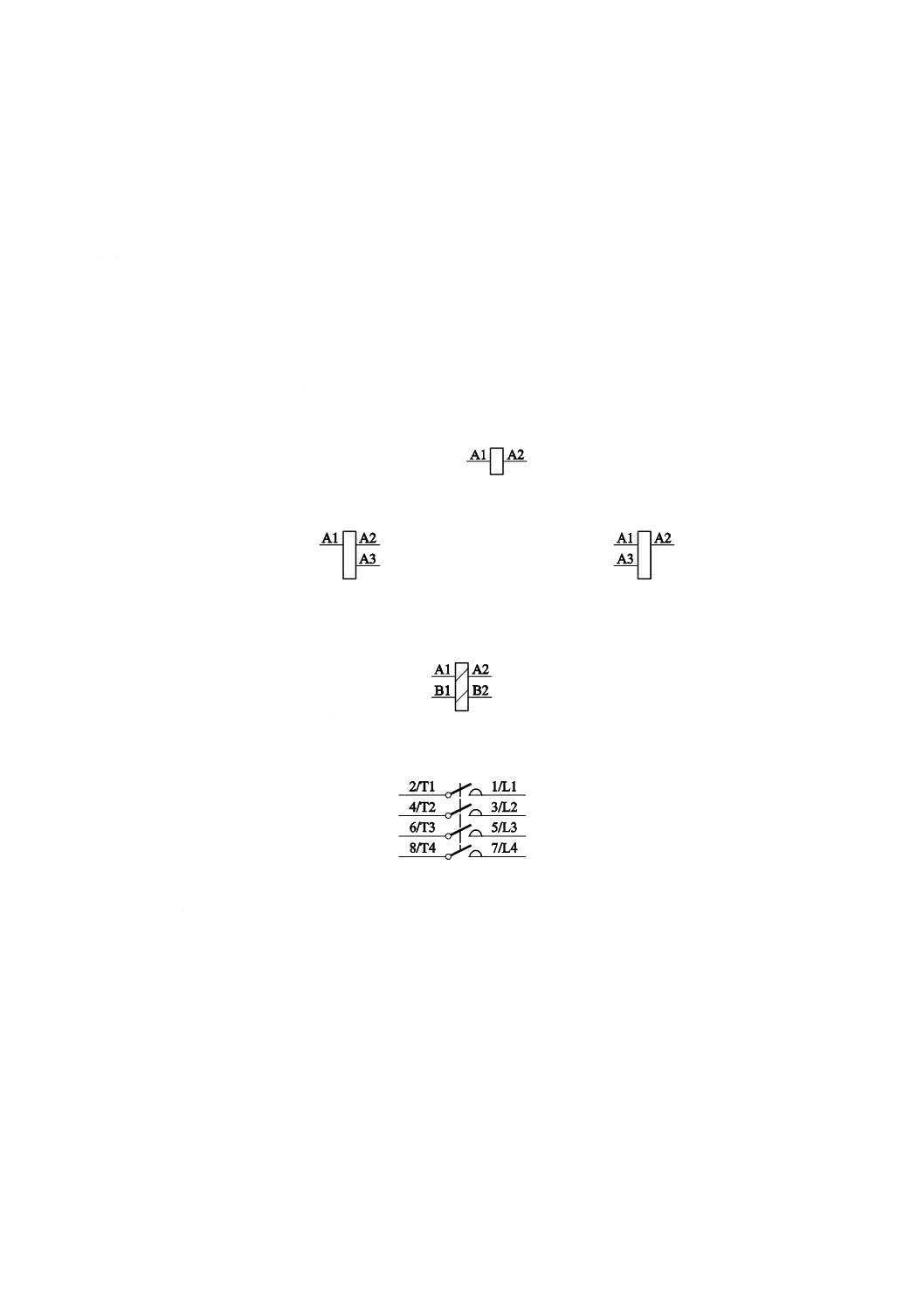
68
C 8201-4-1:2020
附属書A
(規定)
接触器及び組合せる過負荷リレーの端子番号の表示及び識別
A.1 一般
接触器及び組合せる過負荷リレーの端子番号を区別する目的は,各々の端子の機能及び位置を,他の端
子及び用い方に関連して明確にするためである。
A.2 接触器端子番号の表示及び識別
A.2.1 コイル端子の表示及び識別
英数字で表示して識別する場合,電磁接触器のコイルのそれぞれの端子にA1及びA2と表示する。
例
タップ付きコイルに対しては,タップ端子に続き番号であるA3,A4などと表示する。
例
注記 この結果,入出力端子の両方に奇数又は偶数番号をもつ場合がある。
二つの巻線があるコイルには,最初の巻線コイルにA1及びA2,次の巻線には,B1及びB2を表示する。
A.2.2 主回路端子番号の表示及び識別
主回路の端子番号は,一つの数字及び英数字によって表示する。
注記 現在用いられている1-2及びL1-T1の二つの表示方法は,順次上記の新しい方法に移行してい
く。
端子番号は,その機器に添付する接続図に明示してもよい。
A.2.3 補助回路の端子番号の表示及び識別
補助回路の端子番号は,2桁の数字によって図の中で表示する。
− 1の位の数字は,機能番号とする。
− 10の位の数字は,連続番号とする。
次の例は,このような表示の方法の説明である。
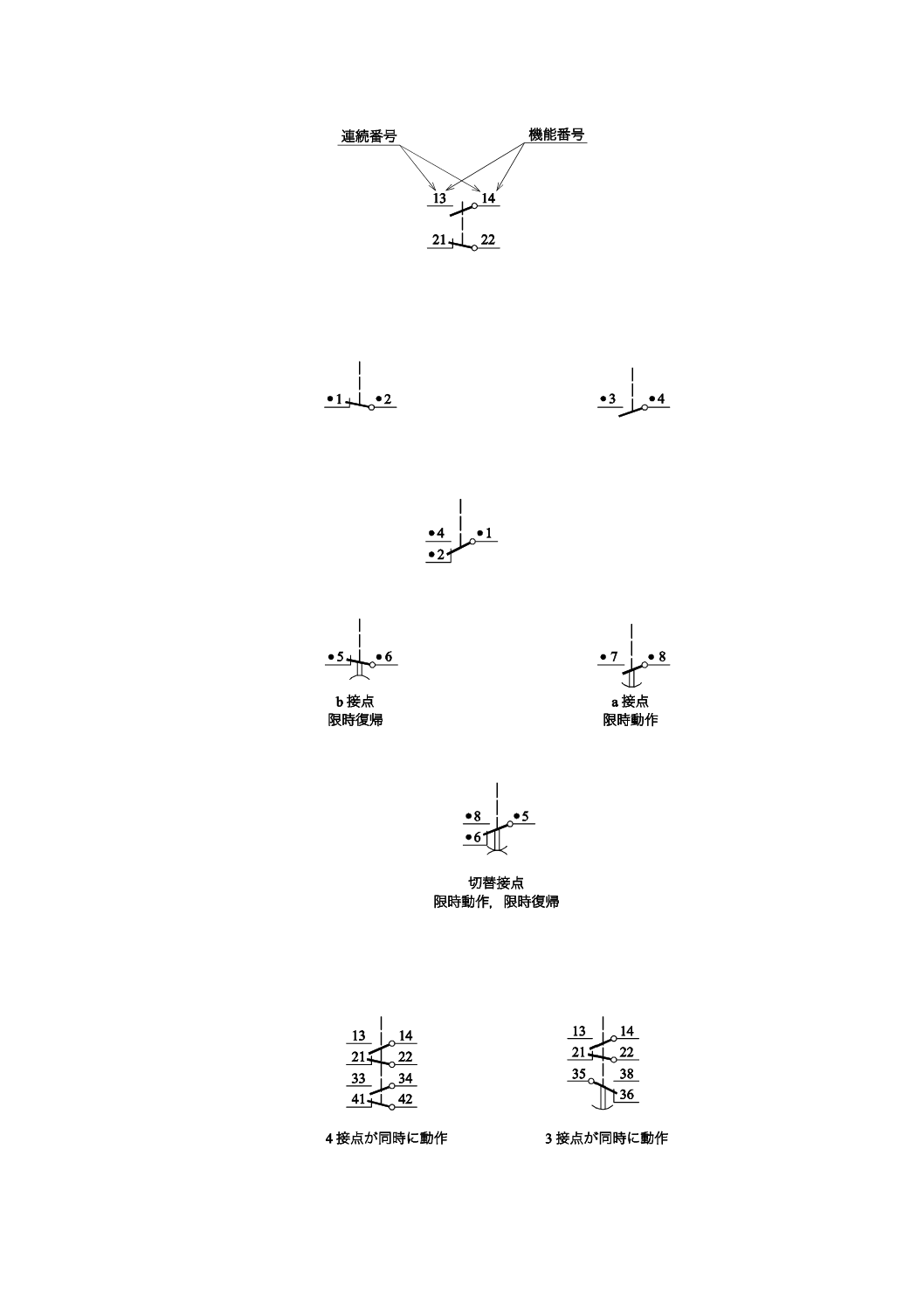
69
C 8201-4-1:2020
A.2.3.1 機能番号
機能番号の1及び2はb接点を,3及び4はa接点を表す。
注記1 a接点及びb接点の定義は,JIS C 8201-1:2020の2.3.12及び2.3.13に規定がある。
例
注記2 図中の黒点は,用途に対して適切に追加する必要がある連続番号に置き換わる。
切換接点がある端子は,機能番号1,2及び4で表示する。
機能番号5及び6(b接点)並びに7及び8(a接点)は,特別な機能をもつ補助端子に用いる。
例
特別な機能をもつ切換接点の端子番号は,機能番号5,6及び8で表示する。
例
A.2.3.2 連続番号
同時に動作する接点の端子には,同じ連続番号で表示する。
同一機能をもつ全ての接点には,異なった連続番号で表示する。
例
製造業者から付加的な情報があるか,又は使用者が明確に番号を判断可能な場合に限り,端子記号から
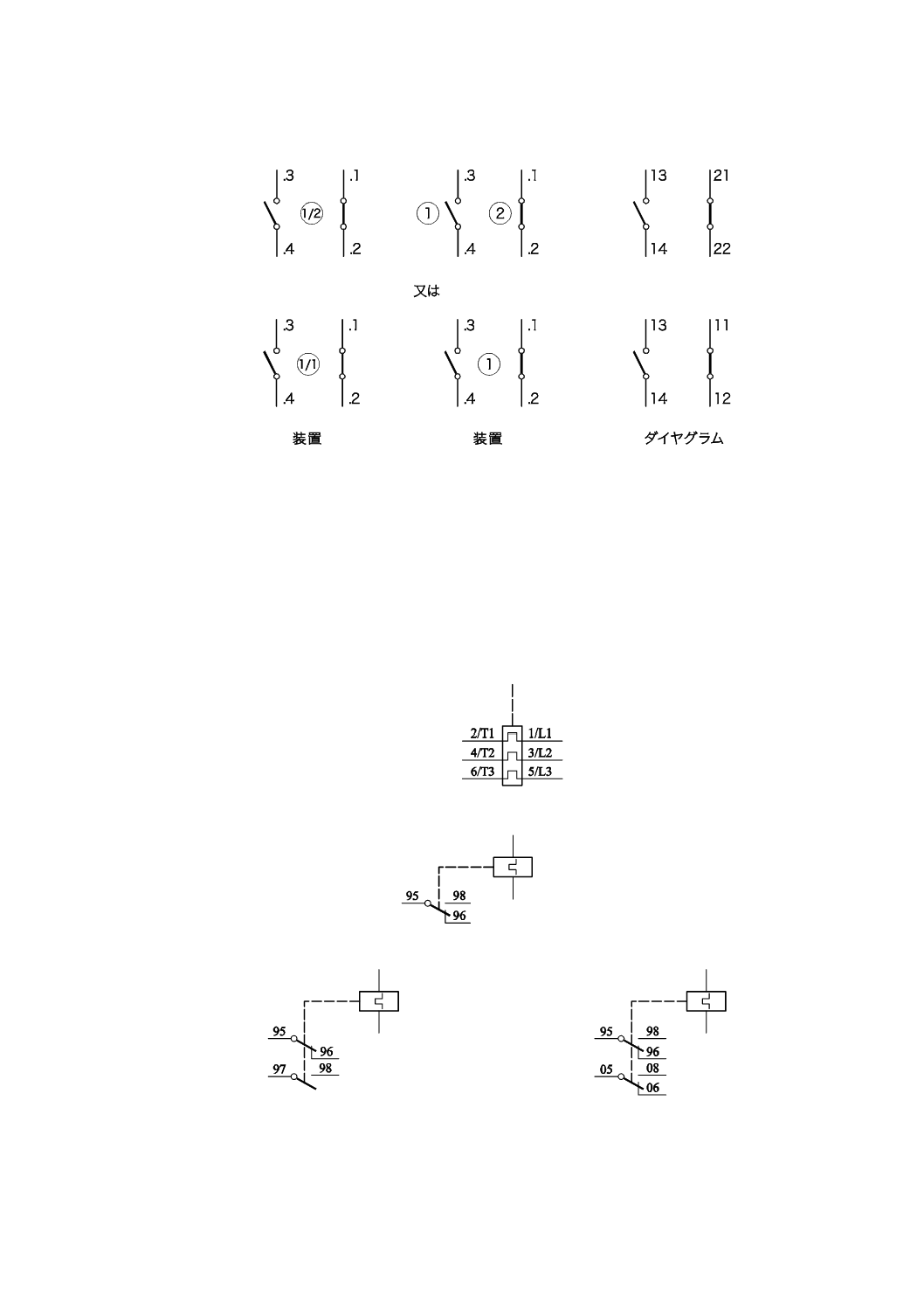
70
C 8201-4-1:2020
連続番号を省略してもよい。
例
注記 上例中の黒点は,単に関連を示すもので,実際には必要でない。
A.3 過負荷リレーの端子番号の表示及び識別
過負荷リレーの主回路端子は,接触器の主回路端子の場合と同じ方法によって表示しなければならない
(A.2.2参照)。
過負荷リレーの補助端子は,接触器の特殊機能をもつ補助端子の場合と同じ方法によって表示しなけれ
ばならない(A.2.3参照)。
連続番号は9とし,2個目が必要な場合は,0とする。
例
端子番号は,その機器に添付する接続図に明示してもよい。
71
C 8201-4-1:2020
附属書B
(規定)
特殊試験
B.1
一般
特殊試験は,製造業者の判断によって行う。
B.2
機械的耐久性
B.2.1 一般
接触器又はスタータの機械的耐久性は,慣例から,同じ設計の全ての機器の90 %以上が耐える無負荷動
作回数によって指定する。動作回数は,B.2.2.1及びB.2.2.3で規定する接点交換を含む通常保守を除いて,
機械的部品の補修又は交換を必要とするまでの回数とする。
無負荷動作回数の推奨値を,百万回を単位として次に示す。
0.001,0.003,0.01,0.03,0.1,0.3,1,3又は10
B.2.2 機械的耐久性の検査
B.2.2.1 試験する接触器又はスタータの状況
接触器又はスタータは,通常用いるように取り付けなければならない。特に配線は,通常用いる形態と
同じにする。
試験中,主回路には電圧をかけず,電流も通電しない。接触器又はスタータに注油することを指定する
場合には,試験の前に注油をしてもよい。
B.2.2.2 動作条件
操作電磁石コイルには,定格電圧を加えなければならない。また,交流の場合は,定格周波数とする。
抵抗又はインピーダンスをコイルに直列に取り付ける場合,動作中に短絡する,短絡しないにかかわら
ず,試験は通常の使用と同様に,これらの素子を接続して行う。
空気式又は電気空気式の接触器又はスタータは,定格圧力を加える。
手動スタータは,通常使用状態と同様操作する。
B.2.2.3 試験手順
試験手順は,次による。
a) 試験は,間欠責務の等級に従った動作頻度で実施する。ただし,製造業者が高い開閉頻度にも耐える
と判断した場合,高い開閉頻度で試験してもよい。
b) 電磁式又は電気空気式の接触器又はスタータの場合,操作コイルの励磁時間は,接触器又はスタータ
の動作時間より長くし,コイルの励磁されていない時間は,接触器又はスタータが,完全に止まる位
置に来るのに十分な時間とする。
試験動作回数は,製造業者が指定した無負荷動作回数未満であってはならない。
機械的耐久性の検証は,以前に接触器と共に試験の行われていない機械的インタロックを伴わない
場合は,機械的につながっていないスタータの様々な構成要素について,独立に行ってもよい。
c) シャントコイル引外し装置又は不足電圧引外し装置を備えた接触器又はスタータに対しては,全開閉
回数の10 %以上は,その引外し装置を用いて動作させなければならない。
d) B.2.1で規定する試験の全動作回数の10分の1ごとに,次の事項を試験継続前に行ってもよい。
72
C 8201-4-1:2020
− 分解しないで接触器又はスタータを清掃する。
− 製造業者によって,通常注油することが決められている部分に注油する。
− 接点ストローク及び接触圧力を調整する。ただし,調整が行える接触器又はスタータに限る。
e) この保守作業には,部品の交換を含んではならない。
f)
スターデルタスタータの場合,スター運転とデルタ運転との間の閉路時間の時延用組込器具は,調整
が可能な場合は,その時間を最小値に設定してもよい。
g) 加減抵抗スタータの場合,ロータ開閉機器間の閉路時間の時延用組込器具は,調整が可能な場合は,
その値を最小値に設定してもよい。
h) 単巻変圧器スタータの場合,始動位置での閉路とオン位置での閉路との間の時延用組込器具がある場
合は,その値を最小値に設定してもよい。
B.2.2.4 結果
機械的耐久性試験後,接触器又はスタータは,室温において,9.3.6.2及び9.3.6.3に規定する動作条件を
満たさなければならない。
自動制御用のタイミングリレー又は他の装置は,試験後において動作しなければならない。
B.2.2.5 接触器又はスタータにおける試験結果の統計的分析
接触器又はスタータの機械的耐久性は,製造業者が指定し,この試験の結果の統計的分析によって検証
する。
少量生産の接触器又はスタータは,B.2.2.6及びB.2.2.7に規定する試験は適用しない。
少量生産で,かつ,基本設計との違いが特性に著しい影響を与えない細部の変化だけの接触器又はスタ
ータは,類似設計,解析,材料の特性などの経験を基にして,更に同じ基本設計の大量生産のものの試験
結果の解析を基にして,製造業者が機械的耐久性を指定してもよい。
この機械的耐久性を指定をした後,次のB.2.2.6又はB.2.2.7のうちいずれかの試験を行う。例えば,計
画した生産台数,又は熱電流によって,場合に応じて,製造業者が最適のものを選ぶことが望ましい。
注記 この試験は,ロットごとの又は使用者の受入試験を意図したものではない。
B.2.2.6 シングル8テスト
指定した機械的耐久性に対し,8台の接触器又はスタータに対して試験を行う。
不良数が2台以下の場合は,この試験は合格とする。
B.2.2.7 ダブル3テスト
指定した機械的耐久性に対し,3台の接触器又はスタータに対して試験を行う。
試験は,破損がない場合は合格とし,2台以上の不良がある場合は不合格とする。1台不良の場合は,3
台を追加して接触器又はスタータの試験を行い,3台とも不良がない場合は,その試験は合格とする。い
かなる場合であっても,2台以上の不良がある場合,不合格とする。
B.2.2.8 他の方法
JIS Z 9015-1による他の方法も使用可能である。最大許容品質レベルは10 %とする。選択した方法を試
験報告書に記載する。
注記 シングル8テスト及びダブル3テストは,共にJIS Z 9015-1に規定されている(付表10-C-2及
び付表10-D-2参照)。この二つのテストは,限られた試料数で,同等の統計的特性(許容品質
レベル10 %)を得る目的で選択されている。
73
C 8201-4-1:2020
B.3
電気的耐久性
B.3.1 一般
電気的消耗に対する耐力に関して,接触器又はスタータは,慣例から,表B.1の使用負荷種別に対応す
る負荷開閉回数によって特徴付ける(この開閉回数は,修理又は交換することなしに開閉可能な回数であ
る。)。
スターデルタスタータ,2段動作単巻変圧器スタータ及び加減抵抗スタータは,使用条件によって大き
く影響を受けるので,試験条件の標準値を決定できない。ただし,製造業者は,それぞれの使用条件につ
いてのスタータの電気的耐久性を示すことが望ましい。この電気的耐久性は,スタータの構成部品の試験
結果から推定してもよい。
使用負荷種別AC-3及びAC-4に対する試験回路は,表B.1に規定する電流,電圧及び力率を出すための
リアクトルと抵抗とで構成する。さらに,使用負荷種別AC-4に関しては,閉路及び遮断試験の試験回路
を用いる(9.3.3.5.2参照)。
いかなる場合でも,動作の速度は製造業者が指定する。
試験は,試験報告の次の許容差の範囲内である場合,有効とみなす。
− 電流:±5 %
− 電圧:±5 %
B.2.2.3の適切な試験手順によって,B.2.2.1及びB.2.2.2の適切な状態の接触器又はスタータについて試
験を行う。ただし,接点の交換は許容しない。
スタータの場合,用いられている接触器が同等の試験を既に満足しているとき,その試験をスタータで
繰り返す必要はない。
表B.1−負荷開閉数の検証,各使用負荷種別に対する閉路及び遮断の条件
使用負荷
種別
定格使用電流
閉路
遮断
I/Ie
U/Ue
cosφa)
Ic/Ie
Ur/Ue
cosφa)
AC-1
全てに対して
1
1
0.95
1
1
0.95
AC-2
全てに対して
2.5
1
0.65
2.5
1
0.65
AC-3
Ie≦17 A
6
1
0.65
1
0.17
0.65
Ie>17 A
6
1
0.35
1
0.17
0.35
AC-4
Ie≦17 A
6
1
0.65
6
1
0.65
Ie>17 A
6
1
0.35
6
1
0.35
I/Ie
U/Ue
L/R b)
ms
Ic/Ie
Ur/Ue
L/R b)
ms
DC-1
全てに対して
1
1
1
1
1
1
DC-2
全てに対して
2.5
1
2
1
0.1
7.5
DC-3
全てに対して
2.5
1
2
2.5
1
2
DC-4
全てに対して
2.5
1
7.5
1
0.3
10
DC-5
全てに対して
2.5
1
7.5
2.5
1
7.5
74
C 8201-4-1:2020
表B.1−負荷開閉数の検証,各使用負荷種別に対する閉路及び遮断の条件(続き)
記号
Ie :定格使用電流
Ue :定格使用電圧
I :投入する電流
交流の場合,閉路電流は実効値で表すが,回路力率に対応して,非対象電流分のピーク値は,
高くなると思われる。
U :印加電圧
Ur :商用周波数又は直流回復電圧
Ic :遮断する電流
注a) cosφの許容差:±0.05
b) L/Rの許容差:±15 %
B.3.2 試験結果
試験後,接触器又はスタータは,9.3.3.2に規定する動作条件を満足し,かつ,JIS C 8201-1:2020の8.3.3.4.1
のd) 2)の耐電圧試験電圧に耐えなければならない。JIS C 8201-1:2020の8.3.3.4.1のd)を適用して,試験電
圧を,次の箇所に印加する。
− 一括接続した全ての極と接触器又はスタータのフレームとの間
− 各極と接触器又はスタータのフレームに接続した全ての他極との間
B.3.3 接触器及びスタータの試験結果の統計的分析
接触器又はスタータの電気的耐久性は,製造業者が指定し,この試験の結果の統計的分析によって検証
する。製造業者は,例えば,計画した生産台数又は熱電流によって最も適切な試験を,B.3.3.1,B.3.3.2及
びB.3.3.3から一つ選択する。少量生産の接触器及びスタータは,B.3.3.1及びB.3.3.2に規定する試験は適
用しない。
少量生産で,かつ,基本設計との違いが特性に著しい影響を与えない細部の変化だけの接触器又はスタ
ータは,類似設計,解析,材料の特性などの経験を基にして,更に同じ基本設計の大量生産のものの試験
結果の解析を基にして,製造業者が電気的耐久性を指定してもよい。
注記 この試験は,ロットごとの又は使用者の受入試験を意図したものではない。
B.3.3.1 シングル8テスト
指定した電気的耐久性に対し,8台の接触器又はスタータの試験を行う。不良の数が2台以下の場合は,
この試験は合格とする。
B.3.3.2 ダブル3テスト
指定した電気的耐久性に対し,3台の接触器又はスタータの試験を行う。
試験は,故障がない場合は合格とし,2台以上の不良がある場合は不合格とする。1台不良の場合は,3
台を追加して接触器又はスタータの試験を行い,3台とも不良がない場合は,その試験は合格とする。い
かなる場合でも,2台以上の不良がある場合,不合格となる。
B.3.3.3 他の方法
JIS Z 9015-1による他の方法も使用可能である。最大許容品質レベルは10 %としなければならない。選
択した方法を試験報告書に記載する。
注記 シングル8テスト及びダブル3テストは,共にJIS Z 9015-1に規定されている(付表10-C-2及
び付表10-D-2参照)。この二つのテストは,限られた試料数で,同等の統計的特性(許容品質
レベル10 %)を得る目的で選択されている。
75
C 8201-4-1:2020
B.4
スタータと,スタータと組合せる短絡保護装置(SCPD)との間の交差電流における協調
B.4.1 一般及び定義
B.4.1.1 一般
この附属書は,スタータ及びこれと組合わせる短絡保護装置の,スタータ及び短絡保護装置の製造業者
が指定する各々の時間−電流特性が交差する電流(Ico)の上下での特性並びに8.2.5.1で規定する保護協調
の対応するタイプについて,異なる検証方法を規定する。
スタータと短絡保護装置との間の交差電流における協調は,B.4.2にあるような特殊試験による直接法又
はタイプ2協調のためのB.4.5にあるような間接法だけによって検証する。
B.4.1.2 定義
B.4.1.2.1
交差電流,Ico(crossover current)
過負荷リレー及び短絡保護装置の,各々の代表的な時間−電流特性の中間曲線又は発表曲線の交点に相
当する電流。
注記 中間曲線は,製造業者によって与えられた時間−電流特性上の範囲から求めた平均値である。
B.4.1.2.2
間接法による交差電流での協調の検証の試験電流,Icd(test current)
製造業者によって与えられた表B.2の要求事項を検証した,許容差を含んだIcoより大きな電流。
B.4.1.2.3
接触器及びスタータの時間−電流耐量(time-current withstand characteristic capability of contactors/starters)
接触器及びスタータが時間関数として耐えることが可能な電流値。
B.4.2 直接法による交差電流での協調試験の条件
スタータ及びこれと組合せる短絡保護装置は,通常用いるように,取付け及び接続しなければならない。
全ての試験は,コールド状態から始める。
B.4.3 試験電流及び試験回路
試験回路は,JIS C 8201-1:2020の8.3.3.5.2による。ただし,過渡電圧を調整する必要はない。試験電流
は,次の二通りとする。
a)
%
5
0
75
.0
co−
I
b)
%
0
5
25
.1
co
+
I
試験回路の力率は,表7による。高い抵抗をもつ小形のリレーの場合,可能な限り低い力率を得るよう
なインダクタンスを用いることが望ましい。回復電圧は,定格使用電圧の1.05倍の電圧とする。
短絡保護装置は,8.2.5.1に規定するもので,9.3.4.2の試験で用いる同じ定格及び特性をもっているもの
とする。
開閉機器が接触器の場合,そのコイルには定格制御電源電圧を別電源によって供給し,さらに,過負荷
リレーがトリップしたときには,接触器は開放するよう接続しなければならない。
B.4.4 試験手順及び結果
B.4.4.1 試験手順
スタータ及び短絡保護装置を閉路状態にしておき,B.4.3に規定した電流を別の装置で閉路する。試験す
る個々の装置は,室温にする。
76
C 8201-4-1:2020
試験後,短絡保護装置の点検並びに過負荷リレー及び回路遮断器のリセットをし,また,必要な場合,
ヒューズの1本以上が溶断していた場合は,全てのヒューズを取り換える必要がある。
B.4.4.2 結果
B.4.3のa)の小さい電流の場合,短絡保護装置は動作せず,過負荷リレー又は引外し装置が動作して,ス
タータを開放させなければならない。スタータに損傷があってはならない。
B.4.3のb)の大きい電流の場合,短絡保護装置はスタータよりも先に動作しなければならない。スター
タは,製造業者が指定した,協調条件の対応するタイプに対する9.3.4.2.3の条件を満足しなければならな
い。
B.4.5 間接法による交差電流での協調の検証
間接法は,交差電流における協調の検証のため,次の条件が満たされていることを線図(図B.1参照)
上で確認しなければならない。
− 製造業者は,Icoの値以上までの過負荷リレー/引外し装置のコールドスタートの時間−電流特性を示
さなければならない。この曲線は,Icoまで短絡保護装置の時間−電流特性より下になければならない。
− B.4.5.1によって試験するスタータのIcdは,Icoより大きくなければならない。
− B.4.5.2によって試験する接触器の時間−電流耐量特性は,Icoまで過負荷リレーの時間−電流特性(コ
ールドスタート)より上でなければならない。
B.4.5.1 Icdのための試験
9.3.4.1を,次の条件とともに適用する。
− 試験順序 接触器又はスタータは,表B.2に規定する動作サイクル数の間,試験電流Icdを閉路・遮断
する。これは,短絡保護装置がない回路で行う。
表B.2−試験条件
Ur/Ue
cosφ
オン時間a)
s
オフ時間
s
動作回数
Icd
1.05
b)
0.05
c)
3
注a) 接点が再開路する前に,十分に接触することが確認可能な場合,時間は0.05 s未満でもよい。
b) 力率は,JIS C 8201-1: 2020の表16から指定する。
c) 表8参照
− Icdの試験中及び試験後の接触器又はスタータの状態
a) 試験中の状態 アークの持続,極間のフラッシオーバ,接地回路のヒューズの溶断(9.3.4.1.2参照)
及び接点溶着があってはならない。
b) 試験後の状態 試験後の状態は,次による。
1) 接触器又はスタータは,開閉時,接点が正常に動作する。
2) 接触器又はスタータの絶縁性能は,最小を1 000 Vとし,接触器又はスタータのIcd試験で用いた定
格使用電圧の2倍の商用周波耐電圧試験によって検証する。試験電圧は,JIS C 8201-1:2020の
8.3.3.4.1のb) 3) i)及びb) 3) ii)によって,60秒間印加する。
B.4.5.2 接触器/スタータの時間−電流耐量特性
この特性は製造業者が提供し,値は9.3.5に規定した試験順序に従い,8.2.4.4の内容に加えて,Ico以上
の特性を得るための過負荷電流と時間との関係で示す。
接触器の過負荷電流特性試験は,室温で行う。過負荷電流試験間に接触器に必要な最小冷却時間は,製
造業者が示すのが望ましい。
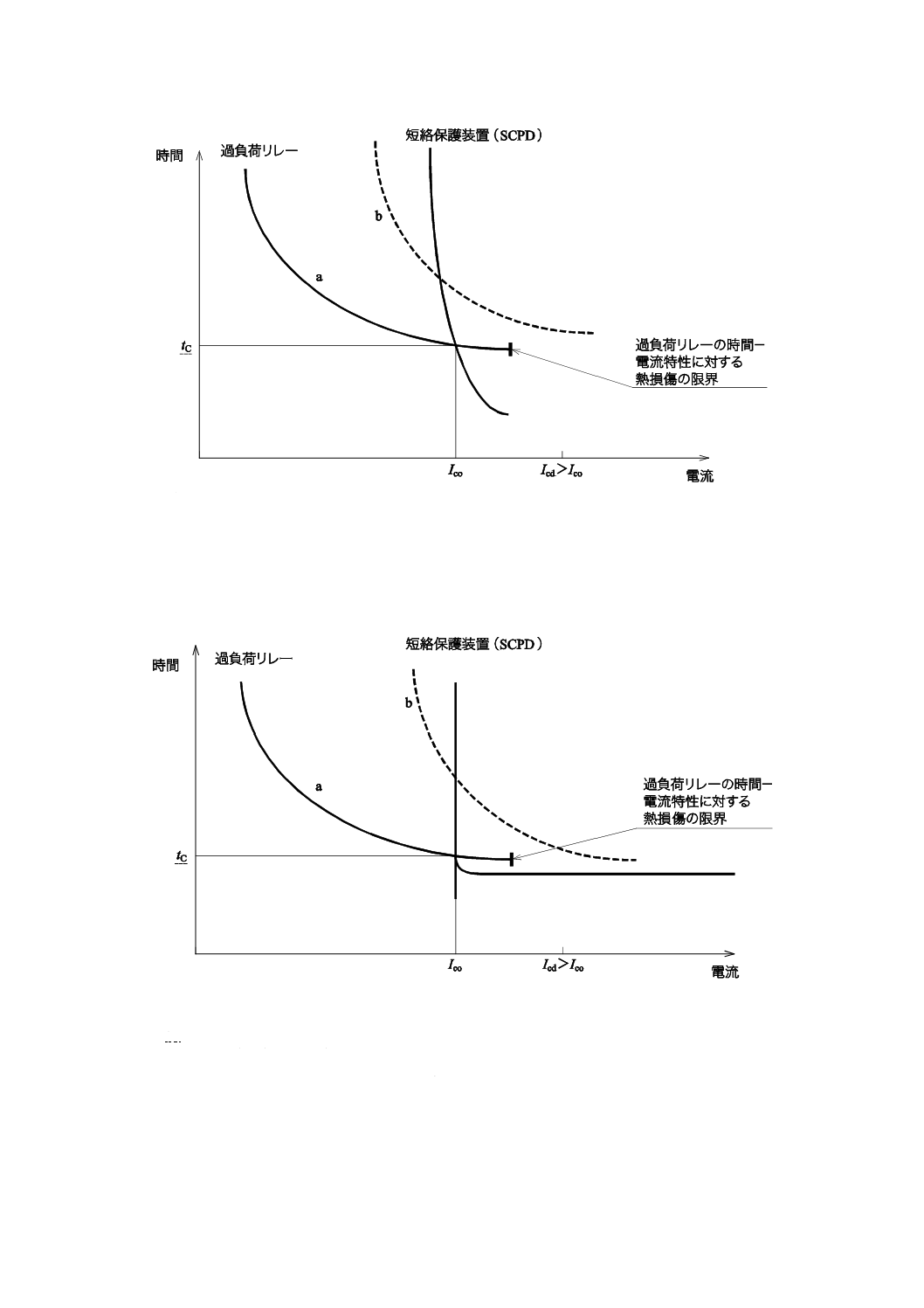
77
C 8201-4-1:2020
記号
a
:コールド状態からの過負荷リレーの時間−電流特性(平均)
b
:接触器の時間−電流耐量特性
tC :過負荷リレー及び短絡保護装置の各々の代表的な時間−電流特性の中間曲線又は発表曲線
の交点に相当する時間
a) ヒューズとの協調
a
:コールド状態からの過負荷リレーの時間−電流特性(平均)
b
:接触器の時間−電流耐量特性
tC :過負荷リレー及び短絡保護装置の各々の代表的な時間−電流特性の中間曲線又は発表曲線
の交点に相当する時間
b) 回路遮断器との協調
図B.1−時間−電流特性の例
78
C 8201-4-1:2020
附属書C
(空白)
79
C 8201-4-1:2020
附属書D
(参考)
受渡当事者間での協定を必要とする項目
注記 この附属書の目的から,用語を次のように用いている。
− “協定”は,非常に幅広い意味に用いている。
− “受渡当事者”には,試験所も含まれる。
この規格の箇条及び細分箇条に含まれる範囲において,JIS C 8201-1:2020の附属書Jに,次の事項を追
加して適用する。
箇条番号
項目
1.1.2.3
2方向のスタータ及びインチング並びにプラッギングに関する追加要求事項
5.3.4.3
間欠責務に対するスタータの過負荷保護
5.3.5.5.3
15秒を超える始動時間をもつ単巻変圧器スタータの連続する二つの始動の間の時間間隔
5.4
表1に規定する使用上のカテゴリ以外の使用上の種類
5.7.2
5.7.2 e)に規定するリレー又は引外し装置,及び瞬時過電流リレー又は引外し装置の特別の適用
5.7.3
加減抵抗スタータのロータ回路の保護
5.7.3
単巻変圧器スタータに対する単巻変圧器の保護
5.7.5
過負荷リレーの時間−電流特性の許容差(製造業者によって示す。)
5.10.2
自動加速制御に対する機器の特性
5.11,5.12
接続リンクの性質及び寸法
a) これを別に設ける場合には,単巻変圧器スタータと単巻変圧器との間
b) これを別に設ける場合には,加減抵抗スタータと抵抗との間
a)及びb)に対する協定は,場合によって抵抗又は変圧器の製造業者とスタータの製造業者との
間で決定しなければならない。
8.2.2.7.3
定格付けした巻線の定格(製造業者によって指定する。)
表7
閉路及び遮断試験中に行う閉路条件の検証(製造業者との協定)
表13
Ieが1 600 Aを超える機器の条件付き短絡電流に対する推定電流“r”の値
80
C 8201-4-1:2020
附属書E
(空白)
81
C 8201-4-1:2020
附属書F
(規定)
主接点とリンクした補助接点の要求事項(ミラーコンタクト)
F.1
適用範囲及び目的
F.1.1
適用範囲
この附属書は,接触器の主接点と機械的に結合し,ミラーコンタクトとして設計した補助接点に適用し,
JIS C 8201-5-1:2010の附属書Lで規定する機械的に結合した接点素子と混同することを避けるためのもの
である。ただし,この規定は,補助接点がこの附属書によるミラーコンタクトの要求事項及びJIS C
8201-5-1:2010の附属書Lの機械的リンク接点の要求事項を満足することを妨げるものではない。
ミラーコンタクトの代表的な使用は,機械制御回路の接触器の状態を高い信頼性をもって監視するもの
である。ただし,ミラーコンタクトを単独では,安全性を確立する手段として頼らないほうがよい。
注記1 対応国際規格では,注記(NOTE)で記載されているが,推奨事項であり,本文に移した。
注記2 ミラーコンタクトは,これまで,ポジティブセーフティコンタクト,フォースドコンタクト,
リンクドコンタクト又はポジティブドライブコンタクトと呼ばれていた。
注記3 機械的リンク接点の意味は,使用者によって取付け可能な追加の補助接点にも当てはまる。
F.1.2
目的
この附属書は,ミラーコンタクトに要求する,設計特性,表示及び性能を示す追加要求事項(定義,要
求事項及び試験)を規定する。
F.2
定義
次の,追加の定義を適用する。
F.2.1
ミラーコンタクト(mirror contact)
F.7に定義した条件で,常開主接点と同時に閉路状態にならない常閉補助接点。
注記 1台の接触器は,複数のミラーコンタクトをもつ場合がある。
F.3
特性
全てのミラーコンタクトは,この規格に規定する要求事項を満足しなければならない。
F.4
製品情報
箇条6に,次の事項を追加して適用する。
ミラーコンタクトは,次のいずれかによって,明確に識別できなければならない。
− 接触器本体上
− 製造業者の文書
− その両方
ミラーコンタクトを識別するために,図F.1に示す図記号を用いる。
82
C 8201-4-1:2020
図F.1−ミラーコンタクト
F.5
標準使用,据付け及び輸送条件
追加の要求事項はない。
F.6
構造及び性能に関する要求事項
箇条8に,次の事項を追加して適用する。
主接点のいずれかが閉路しているときは,ミラーコンタクトは閉路してはならない。
ミラーコンタクト回路の自己確認を行うことが望ましい。
注記 対応国際規格では注記(NOTE)で記載されているが,推奨事項であり,本文に移した。
F.7
試験
F.7.1
一般
箇条9に,次の事項を追加して適用する。
試験は,F.7.2及びF.7.3による試験を実施しなければならない。
F.7.2
新品状態の製品での試験
それぞれのミラーコンタクトは,主接点の数だけの製品数で試験を実施しなければならない。
それぞれのミラーコンタクト及び主接点の試験には,新しい製品を用いる。
試験は,新しく清浄な製品で実施する。試験手順は,次による。
a) 試験の準備 主回路の1極の溶着現象を模擬し,一つの主接点を,例えば,溶接又は接着によって接
触点を閉路位置に保持しなければならない(ダブルブレイク接点は,二つの接触点で溶接する。)。
溶接又は接着の厚さは,接点間隔に著しい変化を与えず,接合方法は,試験報告書に記載しなけれ
ばならない。
b) 試験 試験は,1)又は2)のいずれかによる。
1) 操作コイルを消磁した状態で,海面レベルで2.5 kVのインパルス試験電圧をミラーコンタクトに印
加(JIS C 8201-1:2020の表12から計算した表F.1による補正をすることが可能である。)した場合,
放電破壊を発生してはならない。
表F.1−標高による試験電圧
標高
海面レベル(0 m)
200 m
500 m
1 000 m
2 000 m
試験電圧
2.5 kV
2.37 kV
2.37 kV
2.29 kV
2.12 kV
注記 この試験は,JIS C 8201-1: 2020の表13が引用しているJIS C 60664-1の図A.1〜図
A.3によって0.5 mmの最小ギャップを確認するものである。
2) 操作コイルを消磁した状態で接点のギャップを直接計測し,0.5 mmを超えていなければならない。
複数の接点ギャップを直列にもつ場合は,接点ギャップの総和が0.5 mmを超えていなければなら
83
C 8201-4-1:2020
ない。
a)及びb)[1)又は2)]を,それぞれの主接点を結合した新しい試料で繰り返し実施する。
F.7.3
規約動作性能試験後の試験(表10に規定)
9.3.3.6による規約動作性能試験の最後に,操作コイルを励磁状態で,ミラーコンタクトは,定格絶縁電
圧Uiに耐えることを検証しなければならない。
84
C 8201-4-1:2020
附属書G
(参考)
モータ用開閉機器の定格使用電流及び定格容量
G.1
総則
表G.1及び表G.1Aの値は,モータの全負荷電流と定格出力との関係を示す値である。使用者に製品に
関する情報を与える場合は,モータの全負荷電流を開閉機器の定格使用電流に,モータの定格出力を開閉
機器の定格容量に置き換えた値を考慮することが望ましい。
この附属書は,全てのモータ開閉機器に適用する。
この値は,IEC規格又はJIS C 4210と調和しており,したがって,製造業者が示す全ての製品情報の基
本となる。
表G.1及び表G.1Aの値は,定格出力に相当するモータの代表的な全負荷電流である。
装置がこれらの値に準拠する場合,その装置は大部分の既存のモータをオン・オフすることが可能であ
る。
これらの値は,開閉機器の設計の指針を表す。
G.2
定格出力及び全負荷電流
表G.1及び表G.1Aに従って,定格出力は,各電圧によって全負荷電流が異なる。
表G.1の全負荷電流の基準値は,4極かご形モータ(400 V,1 500 min−1,50 Hz)に合わせ決定した値
である。表G.1Aの値は,JIS C 4210の各種モータの最大電流から引用した値である。
表G.1の場合,他の異なる電圧での全負荷電流は,これら400 Vの値を基準に算出する。表G.1Aの場合,
これら200 Vの値を基準に算出する。
85
C 8201-4-1:2020
表G.1−定格出力及び定格使用電流
単位 A
定格出力
定格使用電流のガイド値
(kW)a)
馬力
(hp)b)
110〜
120 V
200 V
208 V
230 V
220〜
240 V
380〜
415 V
400 V
440〜
480 V
500 V
550〜
600 V
690 V
0.06
−
−
−
−
0.35
−
−
0.20
−
0.16
−
0.12
0.09
−
−
−
−
0.52
−
−
0.30
−
0.24
−
0.17
0.12
−
−
−
−
0.70
−
−
0.44
−
0.32
−
0.23
0.18
−
−
−
−
1.0
−
−
0.60
−
0.48
−
0.35
0.25
−
−
−
−
1.5
−
−
0.85
−
0.68
−
0.49
0.37
−
−
−
−
1.9
−
−
1.10
−
0.88
−
0.64
−
1/2
4.4
2.5
2.4
−
2.2
1.3
−
1.1
−
0.9
−
0.55
−
−
−
−
2.6
−
−
1.5
−
1.2
−
0.87
−
3/4
6.4
3.7
3.5
−
3.2
1.8
−
1.6
−
1.3
−
−
1
8.4
4.8
4.6
−
4.2
2.3
−
2.1
−
1.7
−
0.75
−
−
−
−
3.3
−
−
1.9
−
1.5
−
1.1
1.1
−
−
−
−
4.7
−
−
2.7
−
2.2
−
1.6
−
1-1/2
12.0
6.9
6.6
−
6.0
3.3
−
3.0
−
2.4
−
−
2
13.6
7.8
7.5
−
6.8
4.3
−
3.4
−
2.7
−
1.5
−
−
−
−
6.3
−
−
3.6
−
2.9
−
2.1
2.2
−
−
−
−
8.5
−
−
4.9
−
3.9
−
2.8
−
3
19.2
11.0
10.6
−
9.6
6.1
−
4.8
−
3.9
−
3.0
−
−
−
−
11.3
−
−
6.5
−
5.2
−
3.8
4
−
−
−
−
15
−
−
8.5
−
6.8
−
4.9
−
5
30.4
17.5
16.7
−
15.2
9.7
−
7.6
−
6.1
−
5.5
−
−
−
−
20
−
−
11.5
−
9.2
−
6.7
−
7-1/2
44.0
25.3
24.2
−
22.0
14.0
−
11.0
−
9.0
−
−
10
56.0
32.2
30.8
−
28.0
18.0
−
14.0
−
11.0
−
7.5
−
−
−
−
27
−
−
15.5
−
12.4
−
8.9
11
−
−
−
−
38.0
−
−
22.0
−
17.6
−
12.8
−
15
84
48.3
46.2
−
42.0
27.0
−
21.0
−
17.0
−
−
20
108
62.1
59.4
−
54.0
34.0
−
27.0
−
22.0
−
15
−
−
−
−
51
−
−
29
−
23
−
17
18.5
−
−
−
−
61
−
−
35
−
28
−
21
−
25
136
78.2
74.8
−
68
44
−
34
−
27
−
2
C
8
2
0
1
-4
-1
:
2
0
2
0
86
C 8201-4-1:2020
表G.1−定格出力及び定格使用電流(続き)
単位 A
定格出力
定格使用電流のガイド値
(kW)a)
馬力
(hp)b)
110〜
120 V
200 V
208 V
230 V
220〜
240 V
380〜
415 V
400 V
440〜
480 V
500 V
550〜
600 V
690 V
22
−
−
−
−
72
−
−
41
−
33
−
24
−
30
160
92
88
−
80
51
−
40
−
32
−
−
40
208
120
114
−
104
66
−
52
−
41
−
30
−
−
−
−
96
−
−
55
−
44
−
32
37
−
−
−
−
115
−
−
66
−
53
−
39
−
50
260
150
143
−
130
83
−
65
−
52
−
−
60
−
177
169
−
154
103
−
77
−
62
−
45
−
−
−
−
140
−
−
80
−
64
−
47
55
−
−
−
−
169
−
−
97
−
78
−
57
−
75
−
221
211
−
192
128
−
96
−
77
−
−
100
−
285
273
−
248
165
−
124
−
99
−
75
−
−
−
−
230
−
−
132
−
106
−
77
90
−
−
−
−
278
−
−
160
−
128
−
93
−
125
−
359
343
−
312
208
−
156
−
125
−
110
−
−
−
−
340
−
−
195
−
156
−
113
−
150
−
414
396
−
360
240
−
180
−
144
−
132
−
−
−
−
400
−
−
230
−
184
−
134
−
200
−
552
528
−
480
320
−
240
−
192
−
150
−
−
−
−
−
−
−
−
−
−
−
−
160
−
−
−
−
487
−
−
280
−
224
−
162
185
−
−
−
−
−
−
−
−
−
−
−
−
−
250
−
−
−
−
604
403
−
302
−
242
−
200
−
−
−
−
609
−
−
350
−
280
−
203
220
−
−
−
−
−
−
−
−
−
−
−
−
−
300
−
−
−
−
722
482
−
361
−
289
−
250
−
−
−
−
748
−
−
430
−
344
−
250
280
−
−
−
−
−
−
−
−
−
−
−
−
−
350
−
−
−
−
828
560
−
414
−
336
−
−
400
−
−
−
−
954
636
−
477
−
382
−
300
−
−
−
−
−
−
−
−
−
−
−
−
2
C
8
2
0
1
-4
-1
:
2
0
2
0
87
C 8201-4-1:2020
表G.1−定格出力及び定格使用電流(続き)
単位 A
定格出力
定格使用電流のガイド値
(kW)a)
馬力
(hp)b)
110〜
120 V
200 V
208 V
230 V
220〜
240 V
380〜
415 V
400 V
440〜
480 V
500 V
550〜
600 V
690 V
315
−
−
−
−
940
−
−
540
−
432
−
313
−
450
−
−
−
−
1030
−
−
515
−
412
−
335
−
−
−
−
−
−
−
−
−
−
−
−
355
−
−
−
−
1061
−
−
610
−
488
−
354
−
500
−
−
−
−
1180
786
−
590
−
472
−
375
−
−
−
−
−
−
−
−
−
−
−
−
400
−
−
−
−
1200
−
−
690
−
552
−
400
425
−
−
−
−
−
−
−
−
−
−
−
−
450
−
−
−
−
−
−
−
−
−
−
−
−
475
−
−
−
−
−
−
−
−
−
−
−
−
500
−
−
−
−
1478
−
−
850
−
680
−
493
530
−
−
−
−
−
−
−
−
−
−
−
−
560
−
−
−
−
1652
−
−
950
−
760
−
551
600
−
−
−
−
−
−
−
−
−
−
−
−
630
−
−
−
−
1844
−
−
1060
−
848
−
615
670
−
−
−
−
−
−
−
−
−
−
−
−
710
−
−
−
−
2070
−
−
1190
−
952
−
690
750
−
−
−
−
−
−
−
−
−
−
−
−
800
−
−
−
−
2340
−
−
1346
−
1076
−
780
850
−
−
−
−
−
−
−
−
−
−
−
−
900
−
−
−
−
2640
−
−
1518
−
1214
−
880
950
−
−
−
−
−
−
−
−
−
−
−
−
1000
−
−
−
−
2910
−
−
1673
−
1339
−
970
注a) IEC 60072-1(第1シリーズ)に従って指定した定格値。
b) UL 508(60 Hz)による。
2
C
8
2
0
1
-4
-1
:
2
0
2
0
88
C 8201-4-1:2020
表G.1A−交流電動機用の定格出力及び全負荷電流値
定格出力
kW
電動機の全負荷電流値
A
単相誘導電動機の定格電圧
100 V
三相誘導電動機の定格電圧
200 V
0.1
5.1
−
0.2
7.2
1.8
0.4
11.1
3.2
0.75
17.7
4.8
1.5
−
8.0
2.2
−
11.1
3.7
−
17.4
5.5
−
26
7.5
−
34
11
−
48
15
−
65
18.5
−
79
22
−
93
30
−
124
定格電圧が表G.1Aの電圧と異なる場合の全負荷電流値(Iʼ)は,次の式
によって算出した値とする。
ʼ
=
ʼ
E
E
I
I
×
ここに, I及びE :表G.1Aの全負荷電流及び定格電圧
Eʼ :表G.1Aと異なる定格電圧
三相誘導電動機において,定格電圧200 Vで30 kWを超過するものの全
負荷電流値は,1 kWについて4 Aとして算出した値とする。
89
C 8201-4-1:2020
附属書H
(規定)
電子式過負荷リレーの拡張機能
H.1 一般
この附属書は,JIS C 8201-1:2020の附属書Tに,次の事項を追加して適用する。
H.2 用語及び定義
この附属書で用いる主な用語及び定義は,次による。
H.2.1
制御機能付き電子式過負荷リレー(electronic overload relay with control functions)
入力及び出力によってモータを制御する多極電子式過負荷リレー。
注記 制御機能の例:可逆制御,二速制御,スターデルタ始動
H.2.2
不足電圧再始動機能付き電子式過負荷リレー(electronic overload relay with under-voltage restarting function)
主回路又は制御回路の電圧があらかじめ設定した値未満になると動作し,電圧が回復すると自動リセッ
ト(瞬時又は時延)する電子式過負荷リレー。
H.2.3
主回路不足電圧再始動機能付き電子式過負荷リレー(electronic over relay with main circuit under-voltage
restarting function)
主回路の不足電圧だけ動作する再始動機能付き電子式過負荷リレー。
H.2.4
制御回路不足電圧再始動機能付き電子式過負荷リレー(electronic overload relay with control circuit
under-voltage restarting function)
制御回路の不足電圧だけ動作する再始動機能付き電子式過負荷リレー。
自動再始動機能は無効にできてもよい。
注記 対応国際規格では注記(NOTE)で記載されているが,許容事項であり,本文に移した。
H.3 制御機能の動作限界
H.3.1 一般
動作シーケンス,入力と出力との相互作用,及び動作の限界は,製造業者の出版物に記載しなければな
らない。
モータ再始動機能について,電圧ディップの検出の時間及び値並びに電圧回復後の再始動時間の範囲及
び許容差は製造業者の出版物に記載しなければならない。
H.3.2 主回路不足電圧再始動機能付き電子式過負荷リレーの限界
不足電圧又は電圧損失が主回路で発生し,リレーが動作したときは,次による。
a) 電圧がT1以内に回復する場合(瞬時リセットするオフ時間),過負荷リレーは,モータスタータの回
路を即座に運転状態に回復させなければならない。
b) 電圧がT1とT2(リセットするオフ時間)との間で回復する場合,過負荷リレーは,始動シーケンス
90
C 8201-4-1:2020
にリセットしなければならない。
c) 電圧がT2を超過したあとに回復する場合,過負荷リレーは自動リセットしてはならない。
T1及びT2が調整可能であり,T2の値はT1より大きい。
電圧のしきい値及び時間の設定の許容差は,製造業者が指示しなければならない。ただし,許容差の最
大値は±10 %とする。時間の設定値が1秒間未満の場合,製造業者はその範囲を宣言しなければならない。
H.4 制御機能の試験
制御機能の試験はH.3に従って検証し,かつ,各制御機能は3回以上検証する。
再始動機能について,電圧ディップの検出時間及び再始動時間は,H.3に従って検証する。
91
C 8201-4-1:2020
附属書I
(参考)
半導体で制御するモータ負荷に用いるAC-1接触器
接触器は,半導体コントローラ,スタータ又はドライブ装置と共によく用いる。このような用途に用い
る接触器は,規定のシステム電圧でモータ負荷電流を開閉するようには意図していない。
意図した用い方は,コントローラの電源側又は負荷側でモータ電流を通電させ,オフ状態でコントロー
ラが電源及び/又は負荷から切り離されるようにすることである。
さらに,接触器が,モータの定常状態になった後のコントローラの熱損失を低減するため,コントロー
ラをバイパスする使用方法がある。このような用途では,接触器は負荷電流が流れているときに接触器が
開閉しないように制御し,インタロックすることが望ましい。
上記の条件(電流の零開閉)を満足するとき,接触器は,使用負荷種別AC-1に基づいて選択してもよ
い。
92
C 8201-4-1:2020
附属書J
(空白)
93
C 8201-4-1:2020
附属書K
(規定)
機能安全用途に使用する電気機械式接触器の信頼性データの解析法
K.1 一般
K.1.1 まえがき
信頼性データの解析は,次の方法によって製造業者が決定する。
K.1.2 適用範囲及び目的
この附属書は,機能安全用途に使用する電気機械式接触器の信頼性データの解析方法を規定する。
これらのデータは,JIS C 0508の規格群,JIS B 9961:2008,IEC 61511の規格群,IEC 61513:2011,JIS B
9705-1:2011などの機能安全規格が要求している。
機能安全用途が要求する特定データは,例えば,動作サイクル数当たりの故障率,耐用寿命,信頼水準,
総合的な寿命である。
この附属書は,電気機械式接触器の主要機能だけに適用する。
K.1.3 一般要求事項
機能安全のための特定データはこの手法で得られなければならない。
この手法は,信頼性データを提供するための試験結果の統計的分析に基づいている。
機器の使用寿命期間中の故障率計算に関連する信頼水準は,製造業者が指定しない限り60 %としなけれ
ばならない。
注記 信頼性データに関連するパラメータは,同様に機能安全用途に使用する他のパラメータと矛盾
なく選択される。
この附属書によって得られた統計データは接触器の耐用寿命期間の間だけ有効である。
この附属書において,統計的な一貫性を保つために,“時間”は動作サイクル数を意味する。
この附属書は,試験期間中の接触器の部品取替えは考慮していない。
K.2 用語及び定義並びにシンボル
K.2.1 用語及び定義
この附属書で用いる主な用語,定義及びシンボルは,次による。
K.2.1.1
信頼性,信頼性性能(reliability,performance)
アイテムが与えられた条件の下で,与えられた期間,要求機能を遂行可能な能力。
[IEV 191-02-06を修正,(JIS Z 8115:2000)]
K.2.1.2
耐用寿命(useful life)
与えられた条件で,与えられた時間から故障強度が許容できなくなるまでの時間。
注記 接触器では,耐用寿命は,動作サイクル数で表される。
K.2.1.3
偶発故障期間(constant failure rate period)
非修理アイテムの運用期間中,故障率がほぼ一定である期間。
94
C 8201-4-1:2020
[IEV 191-10-09]
K.2.1.4
有効期間(overall lifetime)
ランダムハードウェア故障による想定した故障率の信頼性を維持するために超過しないことが望ましい
機器の使用年数。
注記1 有効期間は,保管期間などの非使用期間も含む。有効期間は,年によって表される。
注記2 有効期間は,JIS B 9961:2008に従ったT1(プルーフテスト間隔)及びJIS B 9705-1:2011に従
ったTM(使命時間)に対応している。
K.2.1.5
中途打切り(censoring)
複数のアイテムについて実施する試験において,規定故障数の発生時点又は規定動作時間への到達時点
での観測(試験)の終了。
K.2.1.6
サスペンション(suspension)
アイテムが故障していない又は調査中(他の原因のため故障した状況を取り除くなど)で故障していな
い状況。
K.2.1.7
無負荷開閉(no-make-break-current utilization)
開閉装置が無負荷にて,閉路及び遮断する状態。
K.2.1.8
故障までの時間(time to failure)
アイテムが動作可能状態になった時点から最初の故障までの全運用時間。
注記 接触器では,故障までの時間は,動作サイクル数で表される。
K.2.2 シンボル
n:
サンプル数
r:
故障数
t:
動作サイクル数
η:
尺度パラメータ
β:
形状パラメータ(ワイブル係数:m)
c:
時間当たりの動作サイクル数
λu:
信頼水準60 %における動作単位ごとの故障率(上限)
λ:
単位時間当たりの故障率
λD:
単位時間当たりの危険側故障率
K.3 耐久性試験の結果の解析手法
K.3.1 一般的な方法
適切な耐久性試験の下,接触器の故障を継続的に監視し,ランダム性の故障が発生しているとして計算
する方法である。
K.3.2 試験の要求事項
機械的耐久性は,B.2.1〜B.2.2.4を適用して評価する。無電流閉路及び遮断の使用条件では,機械的耐久
95
C 8201-4-1:2020
性を適用してよい。
電気的耐久性は,製造業者が指定しない限り,使用負荷種別AC-3を用いてB.3.1〜B.3.2を適用して評
価する。
試験環境は,箇条7による。
K.5にリストアップされたデータに影響を及ぼさない製品の変更は,再試験を要求しない。
K.3.3 故障モードの特徴
表K.1の故障モードの一つ以上の発生,又は製造業者が指定する規定の動作サイクル数の到達によって,
その機器の試験を終了する。
表K.1−接触器の故障モード
故障モード
通常のオープン接触器の特徴
開路不良
コイルを消磁しても電流が継続する。
閉路不良
コイルを励磁しても1極又はそれ以上の極に電流が流れない。
極間の短絡
極間の絶縁故障
極と隣接する部品間の短絡
隣接する部品との絶縁故障
K.3.4 ワイブル解析
K.3.4.1 解析方法
信頼性データは,IEC 61649:2008によるワイブル分布によって,試験結果データをモデル化することで
得る。
故障数が20又は20以下の場合,メディアンランク法(MRR)を用いる。故障数が10を超える場合,γ
=60 %でのフィッシャー分配(Fγ)で,コルモゴロフスミルノフ適合度検定(H)の確認後,ワイブルパ
ラメータのβ及びηの推定値を得るのに最ゆう推定(MLE)方法を用いることが可能である。
(
)
2/
2,
2/)1
(
2
r
r
F
H
γ
−
≧
ここで記号
xは,xに等しいかそれ以下の整数で最大の値を表している。
注記1 IEC 61649:2008は,計算の詳細及び例を提供している。
注記2 サンプル数が少ない場合,ワイブルパラメータを推定するのに不確実性を増大させる可能性
があるため,動作サイクル数当たりの故障率の下限が低くなることがある。
全てのアイテムが故障する前に,指定時間Tで試験を終了した場合,データは中途打切りといわれてい
る。試験中に故障していないアイテムは,サスペンションといわれている。そのサスペンションは,通常,
ランク表に入っているが,この附属書では,サスペンションを除外し,ワイブルパラメータの評価を簡素
化している。中途打切り及びサスペンションについては,JIS C 5750-3-5:2006に詳細に規定され,関連す
る計算はIEC 61649:2008に規定されている。
K.3.4.2 メディアンランク法
メディアンランク法(MRR)は,メディアンランク及び動作サイクルである変数とともに,直線回帰技
術を使用することでワイブルパラメータを算出する方法である。
メディアンランクの表及びベータ分布を使用することでメディアンランクについて計算する手段が利用
可能でない場合,バーナードの近似方程式(K.1)を用いてもよい。
%
100
)4.0
(
)3.0
(
i
×
+
−
=Ni
F
······························································ (K.1)
ここに,
N: サンプル数
i: 対象アイテムの故障順位
96
C 8201-4-1:2020
注記 この方程式は,主に“N≦30”の場合に使用され,“N>30”の場合は,累積度数の修正は無視
してもよく,Fi=(i/N)×100 %の式になる。
少ないサンプル数で一致度を評価することは難しい。次の係数は,ワイブル分布に合うかどうかを確認
するのに最も一般的に使用される係数である。方程式(K.2)を用いることで計算が可能である。
()
()
−
−
−
=
∑
∑
∑
∑
∑
=
=
=
=
=
n
i
i
n
i
i
n
i
i
n
i
i
n
i
i
i
y
n
y
x
n
x
n
y
x
y
x
r
1
2
2
1
2
2
2
1
1
1
2
············································ (K.2)
ここに,
(xi): メディアンランク
(yi): 故障寿命(ここに,i=1...nはサフィックス)
r2: 線形回帰で説明可能なデータの変化の割合
r2が1に近くあればあるほど,データはワイブル分布となる。0により近い場合は,一致度が小さいこ
とを示す。
手順は,次のとおり。
a) 最初に,動作サイクル数が最も早いものから最も遅い順に並べる。
b) バーナードの近似方程式(K.1)を用いて,メディアンランクを計算する。
c) メディアンランク(x)と故障回数Fi(y)とを
xのワイブル確率紙,又はxln及びylnを引き出すため対
数方眼紙上にプロットする。
d) 次の直線の方程式を得るために,線形回帰関数によって,β)を計算する。
yln=β)xln+b
e)
=
β
b
e
η
ˆ
ˆ
を計算する。
f)
一致度を確認するために,グラフ上に回帰線をプロットする。
通常,電気機械式接触器は,β)が1以上である。
K.3.5 耐用寿命及び故障率の上限値
K.3.5.1 数値解法
一定の故障率を仮定して,耐用寿命は,製品母集団の10 %(B10|lowerlimit)が故障する動作サイクル数を低
い信頼水準で決定する。
20回以下のデータについて,センサーリング時間のあるなしにかかわらず,K.3.4.2におけるメディア
ンランク法(MRR)とともに得たワイブルパラメータβ)及びη)を使用する。
K.3.5.2 故障までの時間のフラクタイル(10 %)のポイントの予測
方程式(K.3)に使用する10
ˆβ,B10値の予測(母集団の10 %が故障する動作サイクル数)を入力して計算す
る。
β
η
B
ˆ
/1
10
9.0
1
ln
ˆ
ˆ
=
································································· (K.3)
97
C 8201-4-1:2020
K.3.5.3 耐用寿命
方程式(K.4),(K.5),(K.6)を用いてB10の下側の(1−y)100 %信頼水準を計算する。
h1=ln[−ln(0.9)] ······································································ (K.4)
5
2
2
1
5
6
1
4
2
5
4
2
6
1
2
6
1
2
)
(
A
x
r
h
rA
A
rh
rA
x
A
A
A
x
h
r
x
A
δ
−
+
+
+
−
+
−
−
=
··············· (K.5)
ここに,
x=uγは正規分布のyフラクタイル値。製造業者で規定しない限り,60 %の信頼限界を使用しなければな
らない(よって,y=0.4,uγ=0.253 3)。
A4=0.49q−0.134+0.622q−1
A5=0.244 5(1.78−q)(2.25+q)
A6=0.029−1.083 ln(1.325q)
+
−
=
β
h
δ
e
Q
ˆ
1
1
1
··········································································· (K.6)
B10|lowerlimit=Q110
ˆβ ···································································· (K.7)
B10|lowerlimitが,耐用寿命とみなされる。
K.3.5.4 故障率の上限値
動作サイクル数当たりの故障率の上限値は,次の方程式(K.8)によって求める。
lowerlimit
|
10
lowerlimit
|
10
u
10
1
)9.0
ln(
B
B
λ
×
≈
−
=
··············································· (K.8)
K.3.5.5 試験条件
標準条件は,箇条7による。
その他の条件は,受渡当事者間での協定による。このような場合,これらの条件の下で値を得るものと
する。
K.3.6 信頼性データ
信頼性データの結果は,次によって表す。
− 動作サイクル数当たりの故障率:λu
− 耐用寿命:B10|lowerlimit
K.4 フィールドデータによる方法
この方法は同じ統計的計算を使用できる場合が,フィールドから収集した故障データは非常に広範囲の
環境と使用負荷種別とが関連している場合がある。
この方法については検討中。
K.5 データの表現
製品についての1セットの信頼性データには,次の関連特性を含まなければならない。
− 動作サイクル数当たりの故障率:λu(K.3.6参照)
− 耐用寿命(K.3.6参照)
− 60 %と異なる場合,信頼水準
− AC-3と異なる場合,閉路・遮断なしの電流又は使用負荷種別
98
C 8201-4-1:2020
− 開閉頻度の最大値
− Ueと異なる場合,使用電圧の最大値
− Ieと異なる場合,指定する使用負荷種別の使用電流の最大値
− 有効期間=製造業者が指定しない限り,20年
− 標準条件と異なる場合,環境条件
注記1 “1時間当たり”の故障率λは,“動作サイクル数当たり”の故障率λuと1時間当たりの動作
回数cとの積から得られる。
λ=λu×c
注記2 20年の有効期間は,一般に,信頼性解析の統計情報として用いられる。
一般に,接触器1台に対するハードウェア故障許容は,ゼロである。
注記3 JIS B 9961:2008では,ハードウェア故障許容がNとは,N+1のハードウェア故障で初めて
システムの安全機能が失われることを意味する。
表K.2に危険側故障率λDを計算するために使用する代表的な故障比率を示す。この危険側故障率は,次
の方程式で計算する。
λD=λ×F
表K.2−常開接点をもつ接触器の代表的な故障比率
故障モード
常開接点をもつ接触器のAC-3
電気的耐久性試験結果について
の代表的な故障比率F a)
常開接点をもつ接触器の機械的
耐久性試験結果についての代表
的な故障比率F a)
開路不良b)
73 %
50 %
閉路不良
25 %
50 %
極間の短絡
1 %
0 %
極と隣接する部品(例:補助,
接地板,コイル)間の短絡
1 %
0 %
注記 故障比率40 %を超える故障モードによって,危険な状況が発生するような方法で,接触器を
使用する場合,システムには診断機能及び適切な故障対応機能が必要になる可能性がある。
注a) 代表的な値は,異なる接触器の試験結果による。
b) 適切な故障対応機能が与えられている場合,ミラーコンタクトをもつ接触器を含むサブシステ
ムの診断範囲は,99 %となる。
K.6 事例
K.6.1 試験結果
全台数が故障するまで,合計15個の接触器(n=15)を同時に試験する。15個の故障時間(r=15)を
表K.3に示すように,iの小さい順から並べる。
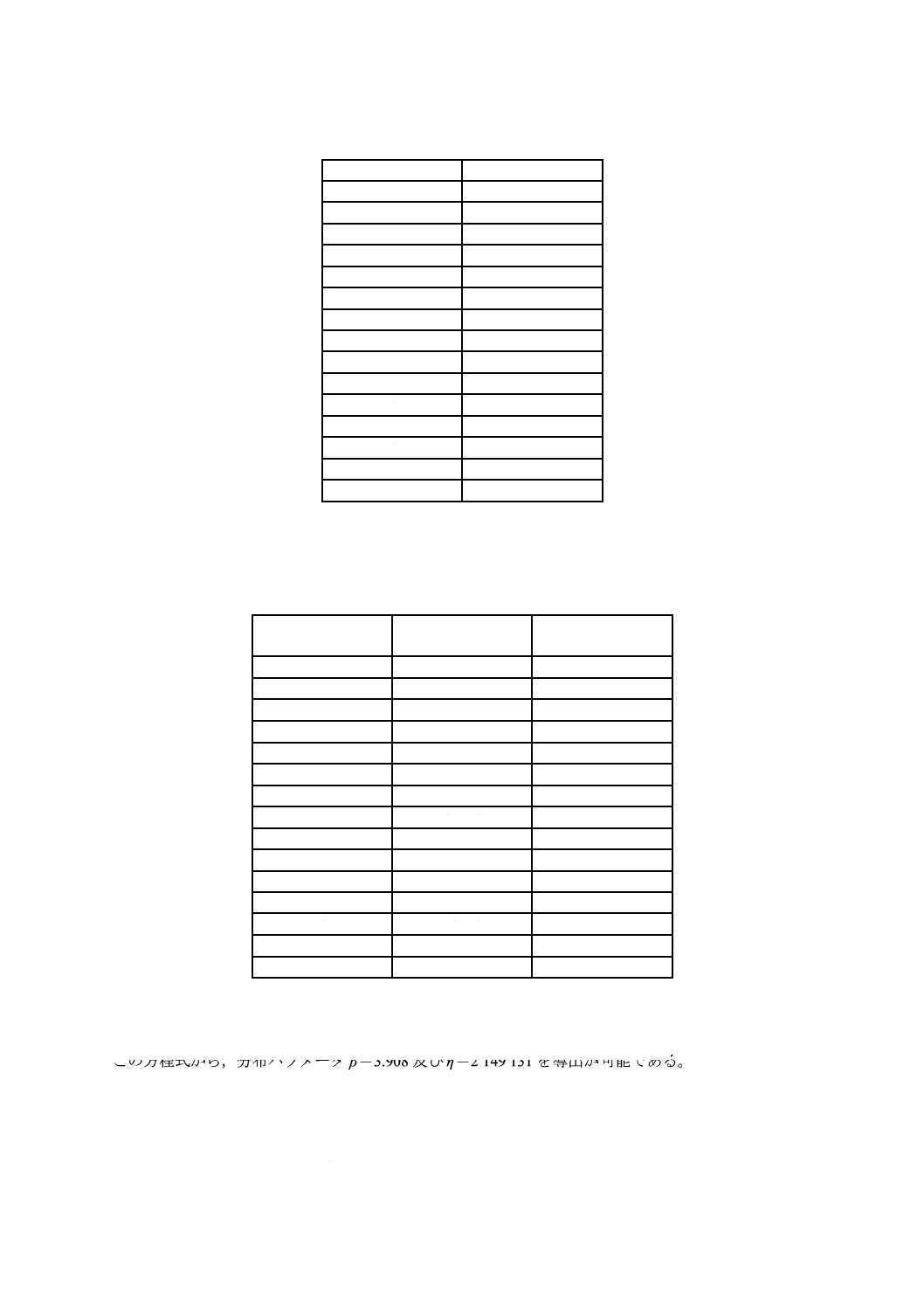
99
C 8201-4-1:2020
表K.3−15個の接触器の故障時間を昇順に並べた例
順位i
サイクル数ti
1
1 000 000
2
1 250 000
3
1 400 000
4
1 550 000
5
1 650 000
6
1 750 000
7
1 850 000
8
1 950 000
9
2 050 000
10
2 150 000
11
2 280 000
12
2 420 000
13
2 500 000
14
2 700 000
15
2 800 000
K.6.2 ワイブル分布及びメディアンランク法
メディアンランクの計算結果は,表K.4による。
表K.4−メディアンランクの計算結果
順位i
サイクル数ti
メディアンランク
(%)
1
1 000 000
4.5
2
1 250 000
11.0
3
1 400 000
17.5
4
1 550 000
24.0
5
1 650 000
30.5
6
1 750 000
37.0
7
1 850 000
43.5
8
1 950 000
50.0
9
2 050 000
56.5
10
2 150 000
63.0
11
2 280 000
69.5
12
2 420 000
76.0
13
2 500 000
82.5
14
2 700 000
89.0
15
2 800 000
95.5
相関係数は,r2=0.998。この値は1に近く,ワイブル分布に良く合致している。
二つの自然対数目盛の線形回帰からy=3.908x−57が得られる。
この方程式から,分布パラメータβ)=3.908及びη)=2 149 131を導出が可能である。
メディアンランク法(MRR)によって得られる適切な結果はワイブル分布に良く合致する(図K.1参照)。
K.6.3 耐用寿命及び故障率
接触器の10 %が故障する動作サイクル数の下側信頼水準を計算するために,この例はK.3.5による。
耐用寿命の予測:B10=1 212 879
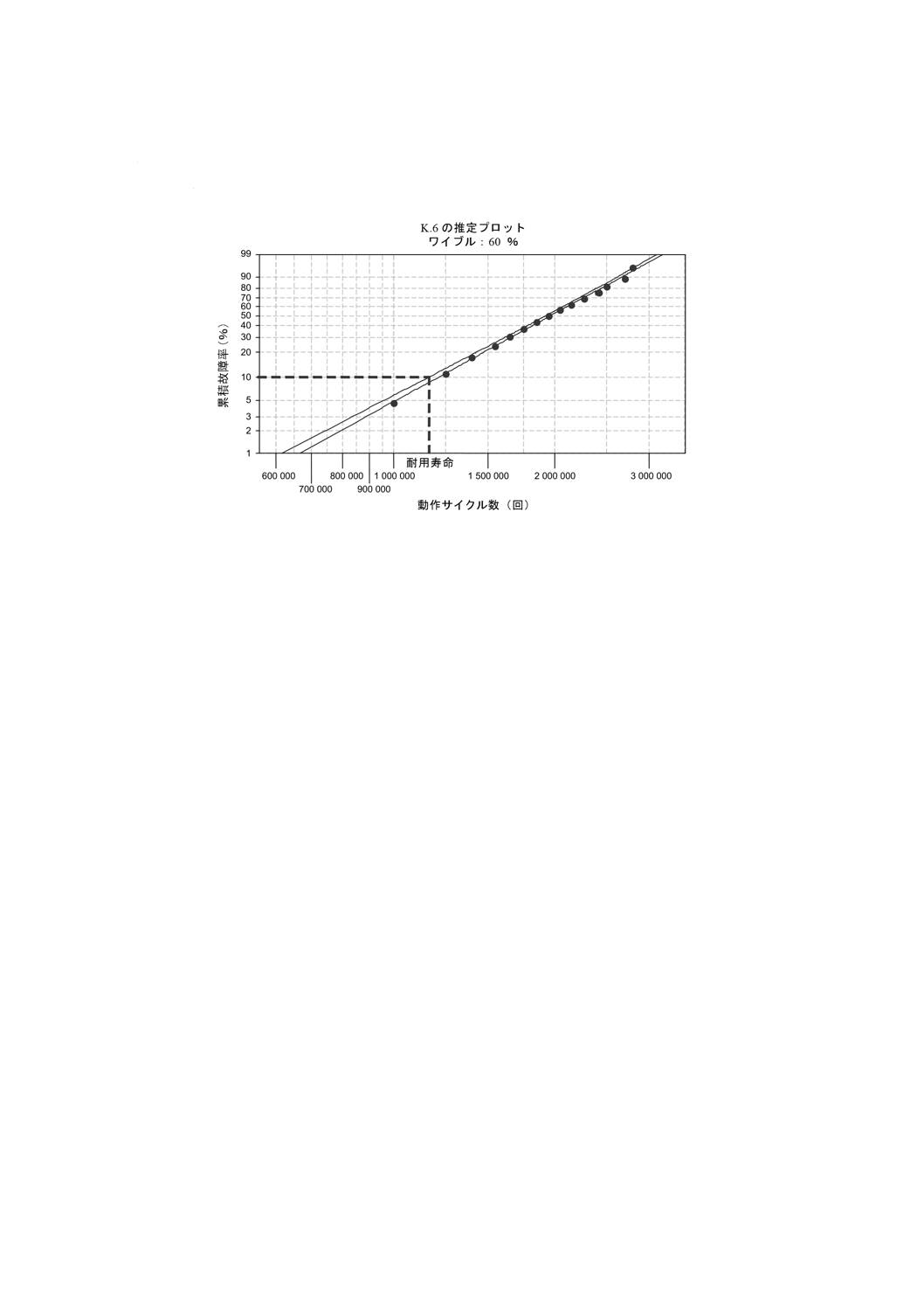
100
C 8201-4-1:2020
ファクタ:Q1=0.9601及びB10|lowerlimit=1 164 541
故障率の上限値:λu=9.05×10−8
この数値計算の結果を,図K.1に示す。
図K.1−ワイブルメディアンランク法のプロット
101
C 8201-4-1:2020
附属書JA
(規定)
電磁接触器の性能分類
製造業者が電磁接触器の耐久性を性能分類によって明示する場合,この附属書を適用する。
開閉頻度の号別は,開閉頻度によって区分し,表JA.1のとおりとする。
表JA.1−開閉頻度及び通電率の組合せの号別
号別
0号
1号
2号
3号
4号
5号
6号
開閉頻度 回/時
1 800
1 200
600
300
150
30
6
通電率a)
%
交流接触器
15
25
40
60
直流接触器
25
40
開閉頻度は,開動作及び閉動作を組にして1回と数える時間当たりの回数で表す。
注a) AC-4,DC-3及びDC-5の通電率は,製造業者の保証値とする。
開閉耐久性の種別は,開閉耐久性によって区分し,表JA.2のとおりとする。ただし,機械的開閉耐久性
と電気的開閉耐久性の種別とは,別個に組み合わせる。
表JA.2−耐久性の種別
種別
機械的耐久性
種別
電気的耐久性
0種
1000万回以上
0種
100万回以上
1種
500万回以上
1種
50万回以上
2種
250万回以上
2種
25万回以上
3種
100万回以上
3種
10万回以上
4種
25万回以上
4種
5万回以上
5種
5万回以上
5種
1万回以上
6種
0.5万回以上
6種
0.1万回以上
耐久性は,開動作及び閉動作を組にして1回と数える回数で表す。
種別の組合せ表示は,機械的耐久性と電気的耐久性の種別とが異なるときは,それぞれの
種別を表示し,種別が一致するときは,いずれかを省略して表示してもよい。例えば,機械
的耐久性が250万回以上で電気的耐久性が50万回以上の開閉器は,機械的耐久性2種,電気
的耐久性1種とし,その耐久性の種別を2-1種と呼ぶ。機械的耐久性及び電気的耐久性の種
別が同一の場合,例えば,2-2種の場合,その耐久性の種別は単に2種と表示してもよい。
102
C 8201-4-1:2020
参考文献
JIS C 4210 一般用低圧三相かご形誘導電動機
注記 対応国際規格:IEC 60072-1:1991,Dimensions and output series for rotating electrical machines−Part
1: Frame numbers 56 to 400 and flange numbers 55 to 1080(MOD)
JIS C 8269-1:2016 低電圧ヒューズ−第1部:通則
注記 対応国際規格:IEC 60269-1:2006,Low-voltage fuses−Part 1: General requirements, Amendment
1:2009及びAmendment 2:2014(IDT)
JIS C 8269-2:2016 低電圧ヒューズ−第2部:専門家用ヒューズの追加要求事項(主として工業用ヒュ
ーズ)−標準化されたヒューズシステムA〜K
注記 対応国際規格:IEC 60269-2:2013,Low-voltage fuses−Part 2: Supplementary requirements for fuses
for use by authorized persons (fuses mainly for industrial application)−Examples of standardized
systems of fuses A to K(IDT)
JIS C 60068-2-2:2010 環境試験方法−電気・電子−第2-2部:高温(耐熱性)試験方法(試験記号:B)
注記 対応国際規格:IEC 60068-2-2:2007,Environmental testing−Part 2-2: Tests−Test B: Dry heat(IDT)
JIS C 60664-1:2009 低圧系統内機器の絶縁協調−第1部:基本原則,要求事項及び試験
注記 対応国際規格:IEC 60664-1:2007,Insulation coordination for equipment within low-voltage systems
−Part 1: Principles, requirements and tests(IDT)
JIS Z 8115:2000 ディペンダビリティ(信頼性)用語
IEC 60034-11:2004,Rotating electrical machines−Part 11: Thermal protection
IEC 60050-441:1984,International Electrotechnical Vocabulary Chapter 441: Switchgear, controlgear and fuses
及びAmendment 1:2000
IEC 60072-1:1991,Dimensions and output series for rotating electrical machines−Part 1: Frame numbers 56 to
400 and flange numbers 55 to 1080
IEC 60076-1:2011,Power transformers−Part 1: General
IEC 60381-1:1982,Analogue signals for process control systems−Part 1: Direct current signals
IEC 61095:2009,Electromechanical contactors for household and similar purposes
IEC 61810-1:2008,Electromechanical elementary relays−Part 1: General requirements
IEC 61915-2:2011,Low-voltage switchgear and controlgear−Device profiles for networked industrial devices−
Part 2: Root device profiles for starters and similar equipment
UL 508,Industrial control equipment
UL 60947-4-1:2007,Low-voltage switchgear and controlgear−Part 4-1: Contactors and motor-starters−
Electromechanical contactors and motor-starters
103
C 8201-4-1:2020
附属書JB
(参考)
JISと対応国際規格との対比表
JIS C 8201-4-1:2020 低圧開閉装置及び制御装置−第4-1部:接触器及びモータ
スタータ:電気機械式接触器及びモータスタータ
IEC 60947-4-1:2009,Low-voltage switchgear and controlgear−Part 4-1: Contactors and
motor-starters−Electromechanical contactors and motor-starters及びAmendment 1:2012
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差異の理由
及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
5.1
特性の要約
−
−
追加
受渡当事者間での協定を必要
とする事項(附属書D参照)は
明示しなければならない項目
として追加した。
IEC規格の審議段階における記載漏れと
考えられる。IEC規格の第4版には追加
されている。
5.4
使用負荷種別
5.4
JISとほぼ同じ
追加
我が国で使用する使用負荷種
別DC-2及びDC-4を追加した。
JEM 1038廃止及び当該JISへ統合するこ
とに伴い,JEM規格独自に規定した使用
負荷種別を追加した。国内独自の要求仕
様のため,IEC規格への提案は行わない。
6.1.2 特性,
基本的な定格
値及び使用
製品の特性,基本的な
定格値及び使用
6.1.2
JISとほぼ同じ
追加
直流の場合の表示として,記号
だけでなく,“直流”,“d.c.”及
び“DC”の表記を追加した。
我が国において,直流であると分かる表
記を追加した。IEC規格の改正時に提案
を検討する。
8.2.1.5.2 2極
通電された3
極3素子の時
延過負荷リレ
ーの動作限界
時延過負荷リレーの動
作限界
8.2.1.5.2 JISとほぼ同じ
追加
題名に“3素子”を明示した。
IEC規格では,3極の場合は3素子を前提
とするが,我が国においては2素子と3
素子とを区別して取り扱うため,“3素
子”を追加して題名を明確化した。国内
事情のため,IEC規格への提案は行わな
い。
8.2.4
通常負荷及び過負荷性
能に関する要求事項
8.2.4
JISとほぼ同じ
追加
5.4と同じ。
5.4と同じ。
附属書B
電気的耐久性
B.3
JISとほぼ同じ
追加
5.4と同じ。
5.4と同じ。
(規定)
2
C
8
2
0
1
-4
-1
:
2
0
2
0
104
C 8201-4-1:2020
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差異の理由
及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
B.4.5.1
Icdのための試験
B.4.5.1
JISとほぼ同じ試
験の試験時間5 s。
変更
商用周波耐電圧試験の試験時
間60 sに変更した。
商用周波耐電圧試験の試験時間は,一般
的に60 sである。IEC規格の第4版にお
いても,60 sに訂正されている。
図B.1
時間−電流特性の例
図B.1
JISとほぼ同じ
追加
線図a,bの交点に相当する時間
tC及びその説明を図に追加し
た。
図の理解を促すために追加した。IEC規
格の改正時に提案を検討する。
附属書G
(参考)
定格使用電流及び定格
容量
Annex G JISとほぼ同じ
追加
モータの定格出力及び全負荷
電流をJIS C 4210に整合させ
た。
国内で広く用いられている標準効率モー
タに対応した特性値を追加した。IEC規
格の改正時に提案を検討する。
附属書JA
(規定)
電磁接触器の性能分類
−
−
追加
我が国で使用している性能分
類を追加した。
我が国において,電磁接触器の指定に当
該性能分類が広く用いられているため,
今回規定化した(従来は解説に記載)。国
内独自の性能分類のため,IEC規格への
提案は行わない。
JISと国際規格との対応の程度の全体評価:(IEC 60947-4-1:2009,Amd.1:2012,MOD)
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
2
C
8
2
0
1
-4
-1
:
2
0
2
0