C 61300-3-47:2016 (IEC 61300-3-47:2014)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 用語及び定義··················································································································· 1
3 測定装置························································································································· 3
3.1 一般事項 ······················································································································ 3
3.2 フェルール保持具 ·········································································································· 4
3.3 干渉光学系 ··················································································································· 4
3.4 顕微鏡及びカメラ付き画像処理装置 ·················································································· 4
4 干渉光学系に対する要求事項 ······························································································ 4
4.1 X座標及びY座標の校正(曲率半径の測定不確かさ) ·························································· 4
4.2 Z座標の校正(光ファイバ引込み量の測定不確かさ) ··························································· 4
4.3 干渉光学系の光軸に対するフェルール中心軸の調整(頂点偏心量の測定値の校正) ···················· 5
4.4 公称端面角度及びガイドキー方向の回転角度の校正(斜めPC端面光コネクタプラグ用) ··········· 5
5 測定手順························································································································· 5
5.1 装置の校正 ··················································································································· 5
5.2 測定領域の設定 ············································································································· 5
5.3 曲率半径の測定手順 ······································································································· 6
5.4 頂点偏心量の測定手順 ···································································································· 6
5.5 光ファイバ引込み量の測定手順 ························································································ 6
6 個別に規定する事項·········································································································· 9
附属書A(規定)干渉光学系の校正 ························································································ 10
附属書B(参考)斜めPC端面フェルール又は光コネクタプラグの角度ずれの測定方法 ···················· 11
附属書C(参考)フェルールの幾何学的形状の計算式 ································································ 13
附属書JA(参考)斜めPC端面フェルールの用語及び定義 ························································· 14
附属書JB(参考)フェルールの物理的な回転角度と頂点偏心量のY成分との関係 ·························· 16
C 61300-3-47:2016 (IEC 61300-3-47:2014)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般財団法人光産業技術振興協会(OITDA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。これによって,
JIS C 61300-3-15:2012,JIS C 61300-3-16:2012,JIS C 61300-3-17:2013及びJIS C 61300-3-23:2013は廃止さ
れ,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 61300の規格群には,次に示す部編成がある。
JIS C 61300-1 第1部:通則
JIS C 61300-2-1 第2-1部:正弦波振動試験
JIS C 61300-2-2 第2-2部:繰返しかん合試験
JIS C 61300-2-4 第2-4部:光ファイバクランプ強度試験(軸方向引張り)
JIS C 61300-2-5 第2-5部:光ファイバクランプ強度試験(ねじり)
JIS C 61300-2-6 第2-6部:かん合部締結強度試験(軸方向引張り)
JIS C 61300-2-7 第2-7部:かん合部締結強度試験(曲げモーメント)
JIS C 61300-2-9 第2-9部:衝撃試験
JIS C 61300-2-11 第2-11部:光ファイバクランプ強度試験(軸方向圧縮)
JIS C 61300-2-12 第2-12部:落下衝撃試験
JIS C 61300-2-14 第2-14部:光パワー損傷のしきい値試験
JIS C 61300-2-15 第2-15部:結合部ねじり試験
JIS C 61300-2-17 第2-17部:低温試験
JIS C 61300-2-18 第2-18部:高温試験
JIS C 61300-2-19 第2-19部:高温高湿試験(定常状態)
JIS C 61300-2-21 第2-21部:混合温湿度サイクル試験
JIS C 61300-2-22 第2-22部:温度サイクル試験
JIS C 61300-2-24 第2-24部:応力印加によるセラミック割りスリーブのスクリーニング試験
JIS C 61300-2-26 第2-26部:塩水噴霧試験
JIS C 61300-2-27 第2-27部:ダスト試験(層流)
JIS C 61300-2-40 第2-40部:SM調心円筒形斜めPC端面光ファイバコネクタプラグの挿入損失スク
リーニング試験
JIS C 61300-2-41 第2-41部:SM調心円筒形直角PC端面光ファイバコネクタプラグの挿入損失スク
リーニング試験
JIS C 61300-2-44 第2-44部:光ファイバクランプ強度試験−繰返し曲げ
C 61300-3-47:2016 (IEC 61300-3-47:2014)
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS C 61300-2-45 第2-45部:浸水試験
JIS C 61300-2-46 第2-46部:湿熱サイクル試験
JIS C 61300-2-47 第2-47部:熱衝撃試験
JIS C 61300-2-48 第2-48部:温湿度サイクル試験
JIS C 61300-2-49 第2-49部:取付け済み光ファイバコード付き光ファイバコネクタプラグの曲げ試
験
JIS C 61300-2-50 第2-50部:光ファイバクランプ強度試験−非通光左右曲げ引張り
JIS C 61300-2-51 第2-51部:光ファイバクランプ強度試験−通光左右曲げ引張り
JIS C 61300-3-1 第3-1部:外観検査及び機械的検査
JIS C 61300-3-2 第3-2部:シングルモード光デバイスの光損失の偏光依存性
JIS C 61300-3-3 第3-3部:挿入損失及び反射減衰量変化のモニタ方法
JIS C 61300-3-4 第3-4部:損失測定
JIS C 61300-3-6 第3-6部:反射減衰量測定
JIS C 61300-3-7 第3-7部:シングルモード光部品の光損失及び反射減衰量の波長依存性測定
JIS C 61300-3-11 第3-11部:結合力及び離脱力測定
JIS C 61300-3-14 第3-14部:可変光減衰器の減衰量の設定の誤差及び再現性測定
JIS C 61300-3-20 第3-20部:波長選択性のない光ブランチングデバイスのディレクティビティ測定
JIS C 61300-3-21 第3-21部:切替時間測定
JIS C 61300-3-22 第3-22部:フェルール押圧力測定
JIS C 61300-3-24 第3-24部:偏波面保存光ファイバ付き光ファイバコネクタのキー位置精度測定
JIS C 61300-3-25 第3-25部:フェルール及び光ファイバ取付け直角PC端面フェルールの同心度測定
JIS C 61300-3-26 第3-26部:光ファイバとフェルール軸との角度ずれの測定
JIS C 61300-3-27 第3-27部:多心光ファイバコネクタプラグの穴位置測定
JIS C 61300-3-28 第3-28部:過渡損失測定
JIS C 61300-3-30 第3-30部:多心光ファイバコネクタ用フェルールの研磨角度及び光ファイバ位置
測定
JIS C 61300-3-31 第3-31部:光ファイバ光源の結合パワー比測定
JIS C 61300-3-32 第3-32部:光受動部品の偏波モード分散測定
JIS C 61300-3-33 第3-33部:ピンゲージを用いた割りスリーブのフェルール引抜力測定
JIS C 61300-3-34 第3-34部:ランダム接続時の挿入損失
JIS C 61300-3-36 第3-36部:光ファイバコネクタフェルールの内径及び外径の測定
JIS C 61300-3-38 第3-38部:群遅延,波長分散及び位相リップルの測定
JIS C 61300-3-40 第3-40部:偏波面保存光ファイバ付き光ファイバコネクタプラグの偏波消光比測
定
JIS C 61300-3-43 第3-43部:光ファイバ光源のモードトランスファファンクション測定
JIS C 61300-3-47 第3-47部:干渉法による直角PC端面及び斜めPC端面単心円筒形フェルールの端
面形状測定
JIS C 61300-3-50 第3-50部:光スイッチのクロストーク測定
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 61300-3-47:2016
(IEC 61300-3-47:2014)
光ファイバ接続デバイス及び光受動部品−
基本試験及び測定手順−
第3-47部:干渉法による直角PC端面及び
斜めPC端面単心円筒形フェルールの端面形状測定
Fiber optic interconnecting devices and passive components-
Basic test and measurement procedures-Part 3-47: End face geometry of
PC and Angled PC spherically polished ferrule using interferometry
序文
この規格は,2014年に第1版として発行されたIEC 61300-3-47を基に,技術的内容及び構成を変更する
ことなく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項並びに附属書JA及び附属書JBは,対応国際規格に
はない事項である。
1
適用範囲
この規格は,球面研磨した直角フィジカルコンタクト(Physical Contact,PC)(以下,PCという。)端面
及び斜めPC端面の光ファイバ取付け済み単心円筒形フェルール(以下,フェルールという。)並びにこれ
らの単心円筒形フェルールをもつ光ファイバコネクタプラグ(以下,光コネクタプラグという。)のフェル
ール端面形状の測定方法について規定する。
注記1 この規格でいうフェルールとは,光ファイバ取付け済みフェルール及び光コネクタプラグの
フェルールをいう。
注記2 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 61300-3-47:2014,Fibre optic interconnecting devices and passive components−Basic test and
measurement procedures−Part 3-47: Examinations and measurements−End face geometry of
PC/APC spherically polished ferrules using interferometry(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”
ことを示す。
2
用語及び定義
この規格で用いる主な用語及び定義は,次による。
注記1 この箇条では,直角PC端面フェルールを測定の対象としたときの用語及び定義を示す。こ
の規格による測定方法では,直角PC端面フェルールと斜めPC端面フェルールとの違いを意
2
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
識することなく測定できることから,ここではそのように記載している。
注記2 斜めPC端面フェルールを測定の対象としたときの用語及び定義は,附属書JAを参照。
2.1
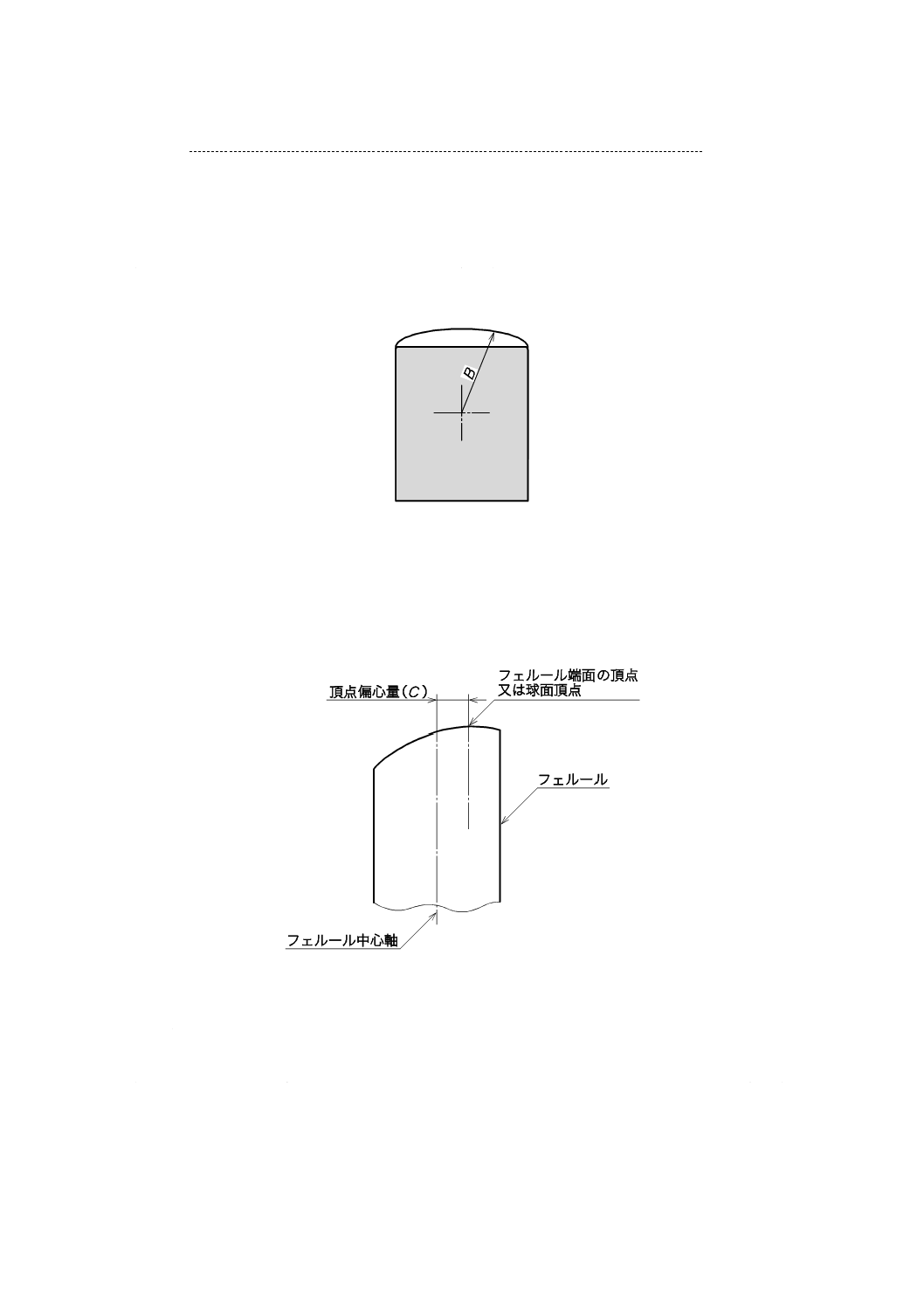
曲率半径,B(radius of curvature)
PCを実現するために,フェルール端面をドーム形状に球面研磨した部分の曲率半径。
注記 フェルール端面は,実際には非球面の場合が多いが,ここでは球面と仮定する(図1参照)。
この規格では,仮定した球面を仮想球面(附属書C参照)という。
図1−球面研磨したフェルール端面の曲率半径
2.2
頂点偏心量,C(apex offset)
フェルール中心軸とフェルール端面の頂点(又は球面頂点)を通るフェルール中心軸に平行な線との距
離(図2参照)。
図2−球面研磨したフェルール端面の頂点偏心量
2.3
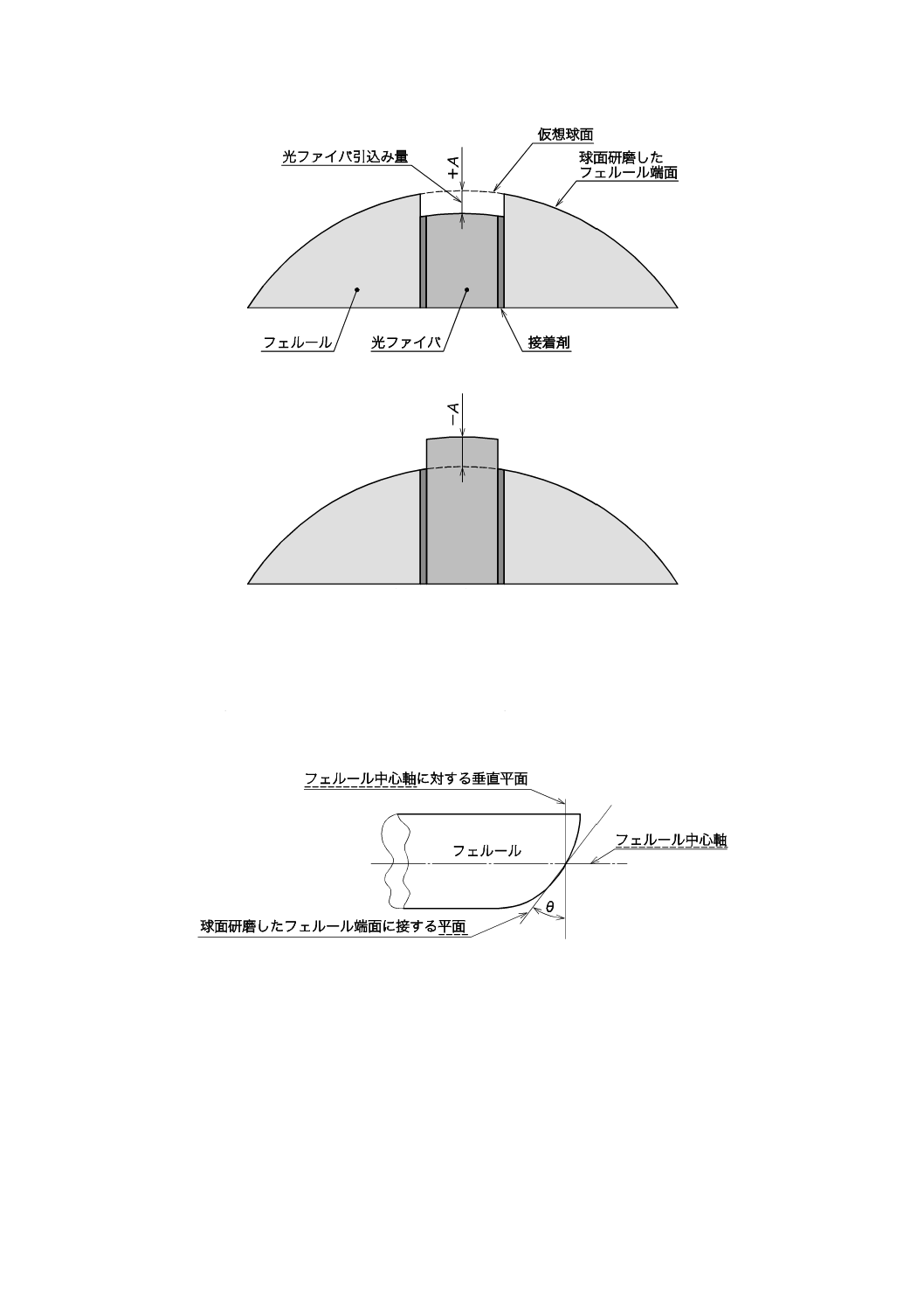
光ファイバ引込み量,A(fiber height)
光ファイバ端面と球面研磨したフェルール端面の仮想球面(附属書C参照)との距離の平均値。
注記 フェルール中心軸を中心とするフェルール端面の環状領域は,実際には非球面の場合が多いが,
ここでは球面と仮定する。正の値は,光ファイバの引込みを示す[図3 a)参照]。負の値は,光
ファイバの突出しを示す[図3 b)参照]。
3
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 光ファイバ引込み量が正の値のとき(引込み)
b) 光ファイバ引込み量が負の値のとき(突出し)
図3−球面研磨したフェルールの光ファイバ引込み量
2.4
フェルール端面角度,θ(end face angle)
フェルール中心軸に対する垂直平面と,フェルール中心軸と仮想球面とが交差する点を通り,仮想球面
に接する平面との角度(図4参照)。
図4−球面研磨したフェルールのフェルール端面角度
3
測定装置
3.1
一般事項
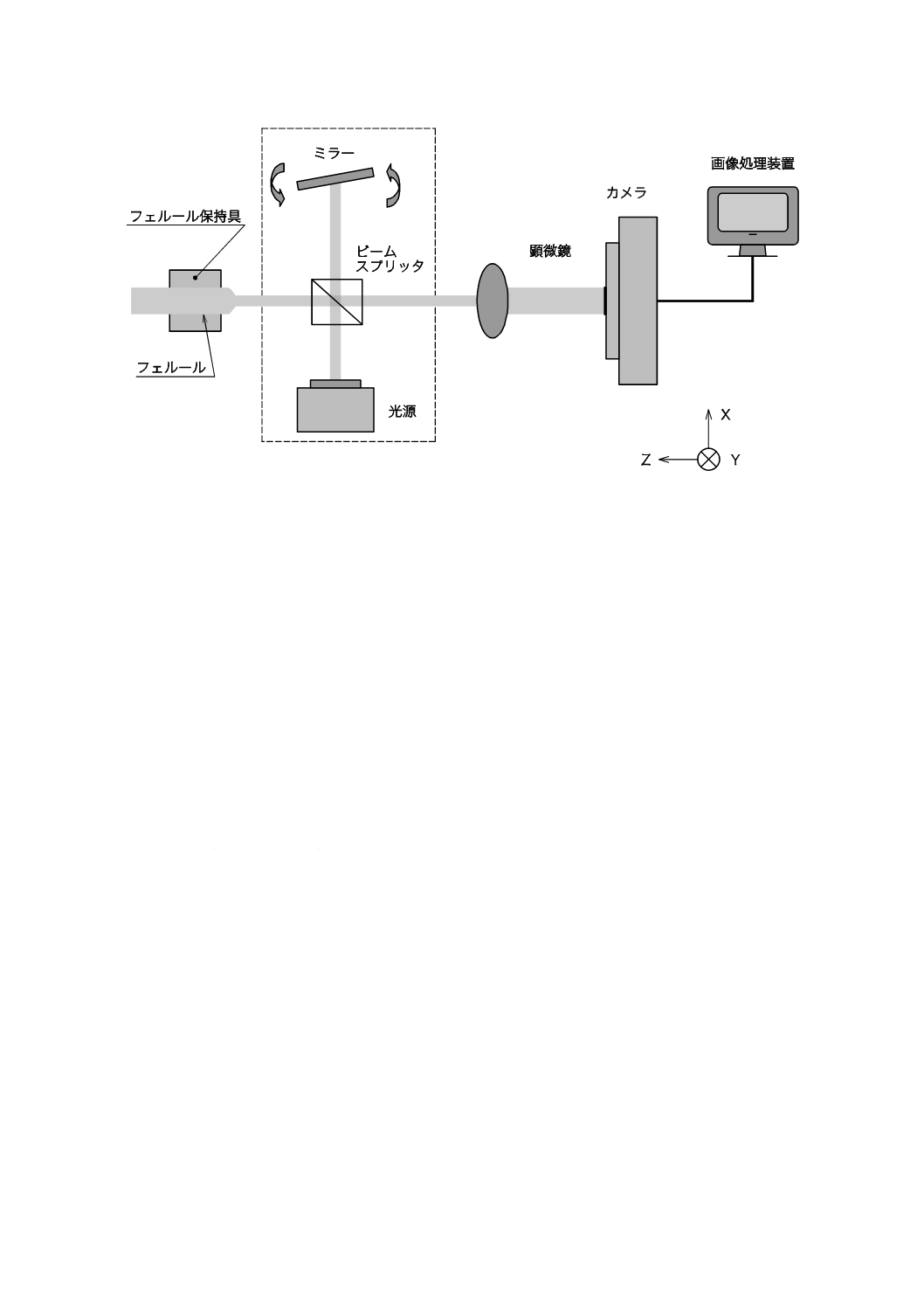
一般的な測定装置の構成を図5に示す。測定装置は,フェルール保持具,干渉光学系,並びに顕微鏡及
びカメラ付き画像処理装置で構成する。
4
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 ミラー近傍の矢印は,ミラーの調整の例を表す。
図5−一般的な測定装置の構成
3.2
フェルール保持具
フェルールは,干渉光学系の光軸に対し適切な位置に固定できるものとする。フェルール保持具は,フ
ェルールを安定的に固定するため,フェルール端面に対しできるだけ近くを保持できるように設計する。
保持具の保持長は,フェルール直径の2倍以上とする。フェルール保持具は,フェルール中心軸と干渉光
学系の光軸とを平行に調整できる機能をもつことが望ましい,又は,干渉光学系のミラーを調整すること
で,これを実現してもよい。斜めPC端面フェルールの場合は,斜めPC基準線と干渉光学系の光軸とを合
わせる調整機能が必要である。
注記 斜めPC端面光コネクタプラグを測定する場合には,ガイドキーを位置決めする構造が必要で
ある(附属書B参照)。
3.3
干渉光学系
例えば,マイケルソン干渉計のような適切な干渉光学系による観察が可能な装置とする。
3.4
顕微鏡及びカメラ付き画像処理装置
フェルール端面の直径250 μm以上の画像を観察できるカメラをもっている顕微鏡及びカメラ付き画像
処理装置とする。画像処理装置は,カメラで取得した画像データを処理することが可能で,性能パラメー
タを計算することが可能な装置とする。
4
干渉光学系に対する要求事項
4.1
X座標及びY座標の校正(曲率半径の測定不確かさ)
干渉光学系は,曲率半径5 mm〜30 mmの範囲において,0.1 mm未満の不確かさで曲率半径を測定でき
るものとする(附属書A参照)。
4.2
Z座標の校正(光ファイバ引込み量の測定不確かさ)
干渉光学系は,光ファイバ引込み量を,±10 nm未満の不確かさで測定できるものとする(附属書A参
照)。
5
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.3
干渉光学系の光軸に対するフェルール中心軸の調整(頂点偏心量の測定値の校正)
干渉光学系は,フェルール中心軸まわりにフェルールを180度回転して測定したとき,0度(回転前)
の測定に対し,頂点偏心量の測定値の差が5 μm未満にできるものとする(附属書A参照)。
注記 この調整は,直角PC端面フェルールだけに適用できる。
4.4
公称端面角度及びガイドキー方向の回転角度の校正(斜めPC端面光コネクタプラグ用)
斜めPC端面光コネクタプラグの測定には,フェルール保持具の位置の校正が必要である。A.4 b)に示す
校正ゲージを用いる場合,ガイドキー方向の回転角度に対し±0.1度未満及び公称端面角度に対し±0.03
度未満の不確かさであることが望ましい(附属書A参照)。
注記 ガイドキー方向の回転角度とは,斜めPC端面光コネクタプラグのガイドキー方向に対する設
計上のフェルール端面の回転角度と,供試品のフェルール端面の回転角度との角度差のことを
いう。
5
測定手順
5.1
装置の校正
全ての性能パラメータの測定の前に,箇条4に示すとおり,次に示す手順で装置の校正を行う。
a) 供試品(フェルール又は光コネクタプラグ)をフェルール保持具に取り付ける。
b) フェルール端面の光ファイバ付近の画像を画像処理装置のディスプレイに表示する。
c) フェルール端面に干渉じま(縞)を映す。
d) 干渉光学系の光軸に対しフェルール中心軸を平行にする(頂点偏心量の測定値の校正)。
e) その他の調整を行う。
f)
実施する測定タイプ(例えば,フェルールが直角PC端面又は斜めPC端面なのか)に合わせ装置を調
整する。
5.2
測定領域の設定
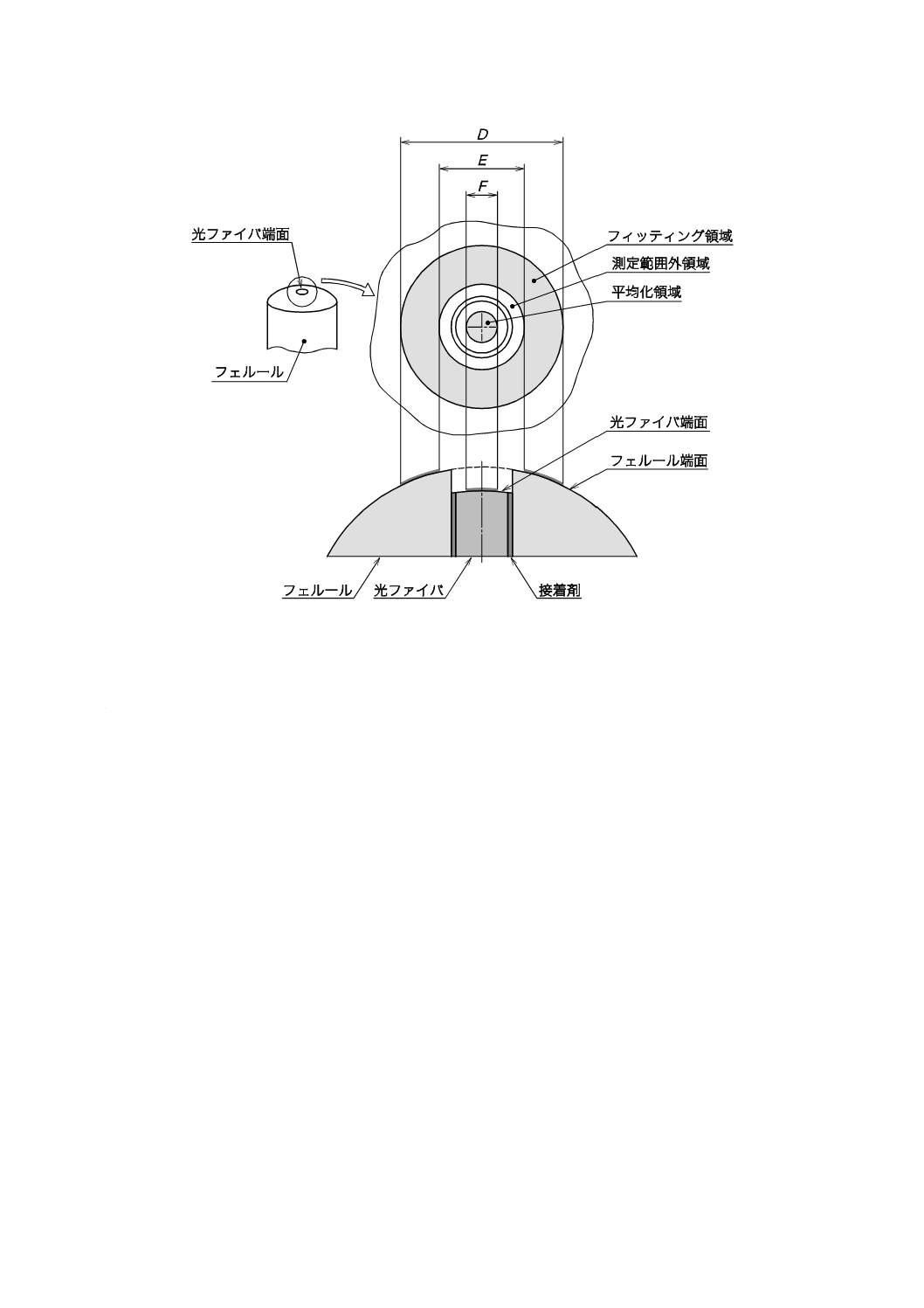
ここでは,次の三つの測定領域を定義する(図6参照)。
a) フィッティング領域:フェルール端面の,直径Dの内側から直径E(測定範囲外領域)の内側を除い
た環状の領域。光コネクタプラグを接続するとき,フェルール端面の接触部分を含むように定義する。
b) 測定範囲外領域:光ファイバ端面,及び光ファイバとフェルールとの接着層を含む,直径Eの内側か
ら直径F(平均化領域)の内側を除いた環状の領域。
c) 平均化領域:フェルール端面の直径Fの円状の領域。平均化領域は,光ファイバ引込み量の平均化を
行う場合に適用する。
これら三つの領域は,フェルール中心軸に対し同心円であることが望ましい。光ファイバ直径の公称値
が125 μm,かつ,曲率半径の公称値が5 mm〜30 mmの光コネクタプラグの場合,次の数値を適用する。
D=250 μm
E=140 μm
F=50 μm
6
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図6−フェルールの端面及び測定領域
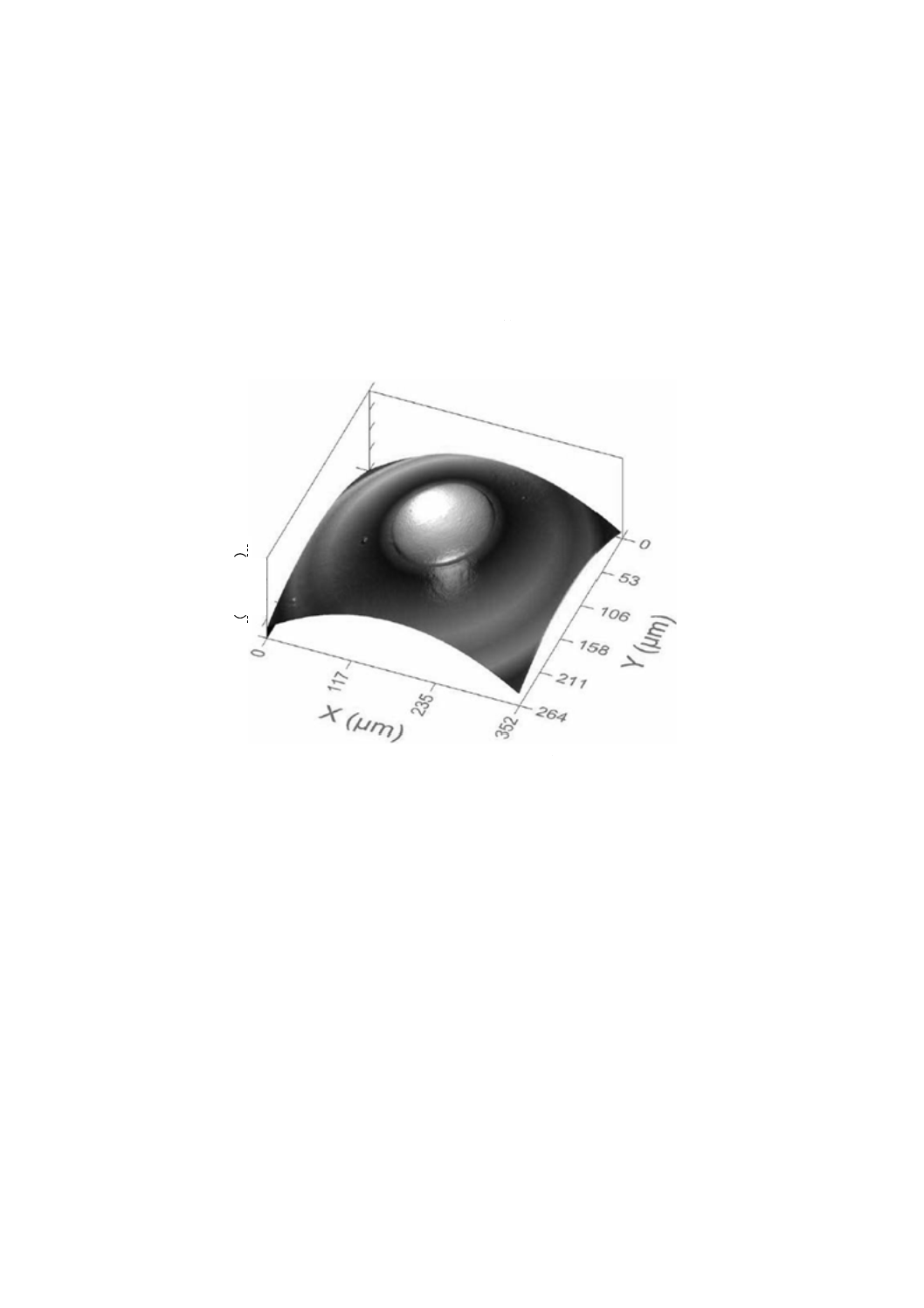
5.3
曲率半径の測定手順
次に示す手順による。
a) 干渉光学系によってフェルール端面の表面を測定し,3次元表面測定データを表面データ処理装置に
記録する(図7参照)。
b) 光ファイバ及びフェルールの,屈折率及び吸収係数を考慮して,表面のデータを補正する。
c) フィッティング領域の端面形状データを用いて,最もよく近似する仮想球面の曲率半径を求める(附
属書C参照)。
5.4
頂点偏心量の測定手順
次に示す手順による。
a) 干渉光学系によってフェルール端面の表面を測定し,3次元表面測定データを表面データ処理装置に
記録する(図7参照)。
b) 光ファイバ及びフェルールの,屈折率及び吸収係数を考慮して,表面のデータを補正する。
c) 干渉光学系によって得た画像データの解析結果を用いて,端面のフィッティング領域の仮想球面(附
属書C参照)の中心と,光ファイバ中心軸との距離を測定する。この距離が頂点偏心量である。
5.5
光ファイバ引込み量の測定手順
次に示す手順による。
a) 干渉光学系によってフェルール端面の表面を測定し,3次元表面測定データを表面データ処理装置に
記録する(図7参照)。
b) 光ファイバ及びフェルールの,屈折率及び吸収係数を考慮して,表面のデータを補正する。
c) フィッティング領域及び平均化領域の端面形状データだけを用いて,光ファイバ引込み量(図7〜図
7
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10及び附属書C参照)を求める。
次に示す手順によって計算する。
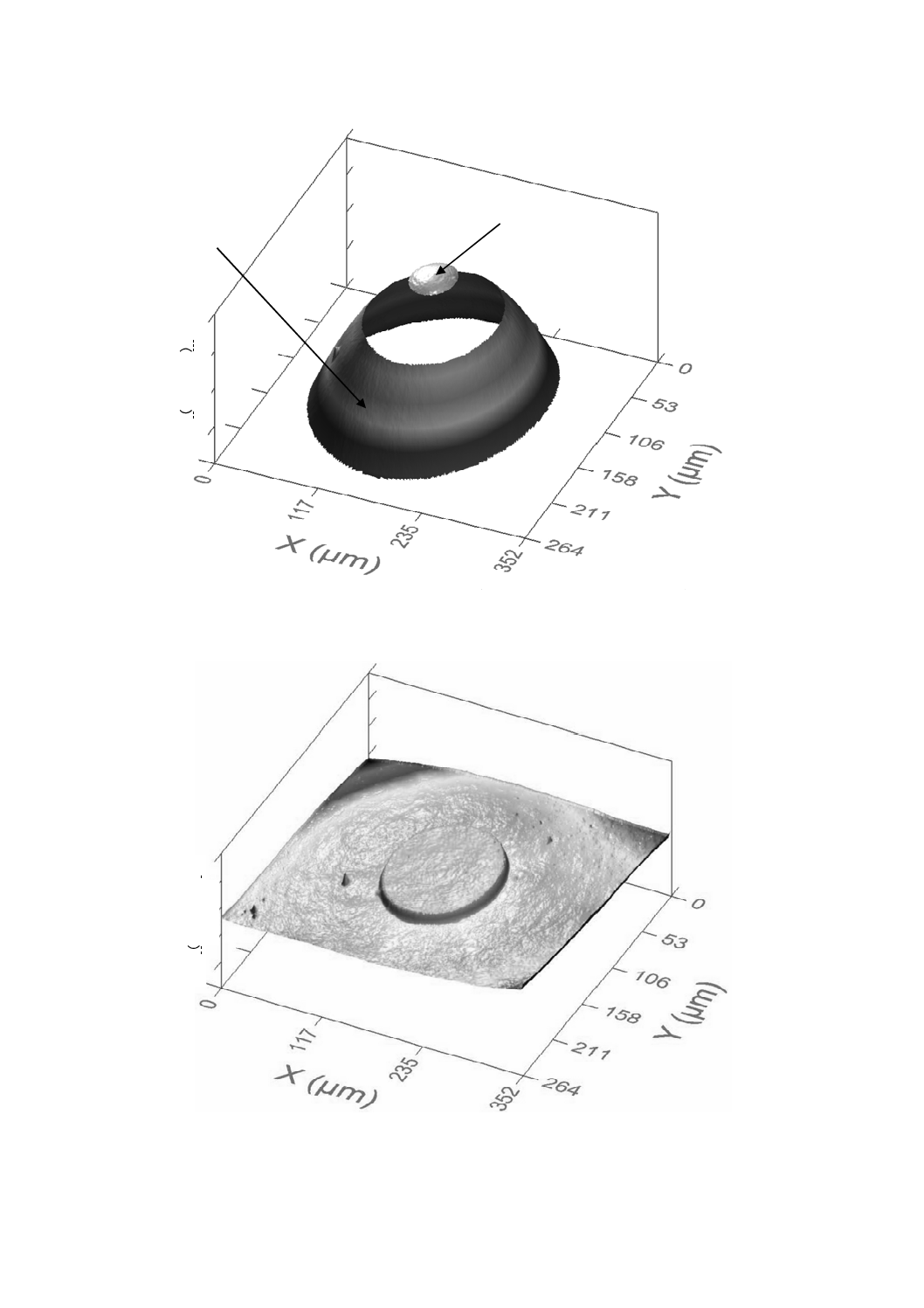
1) 補正済みの表面データから,フィッティング領域に最も適合する曲率半径をもつ球面形状を差し引
いた表面形状を計算する。球面形状を差し引いた表面形状のフィッティング領域は,フェルール端
面が理想的な球面形状の場合,平たんとなる(図9参照)。
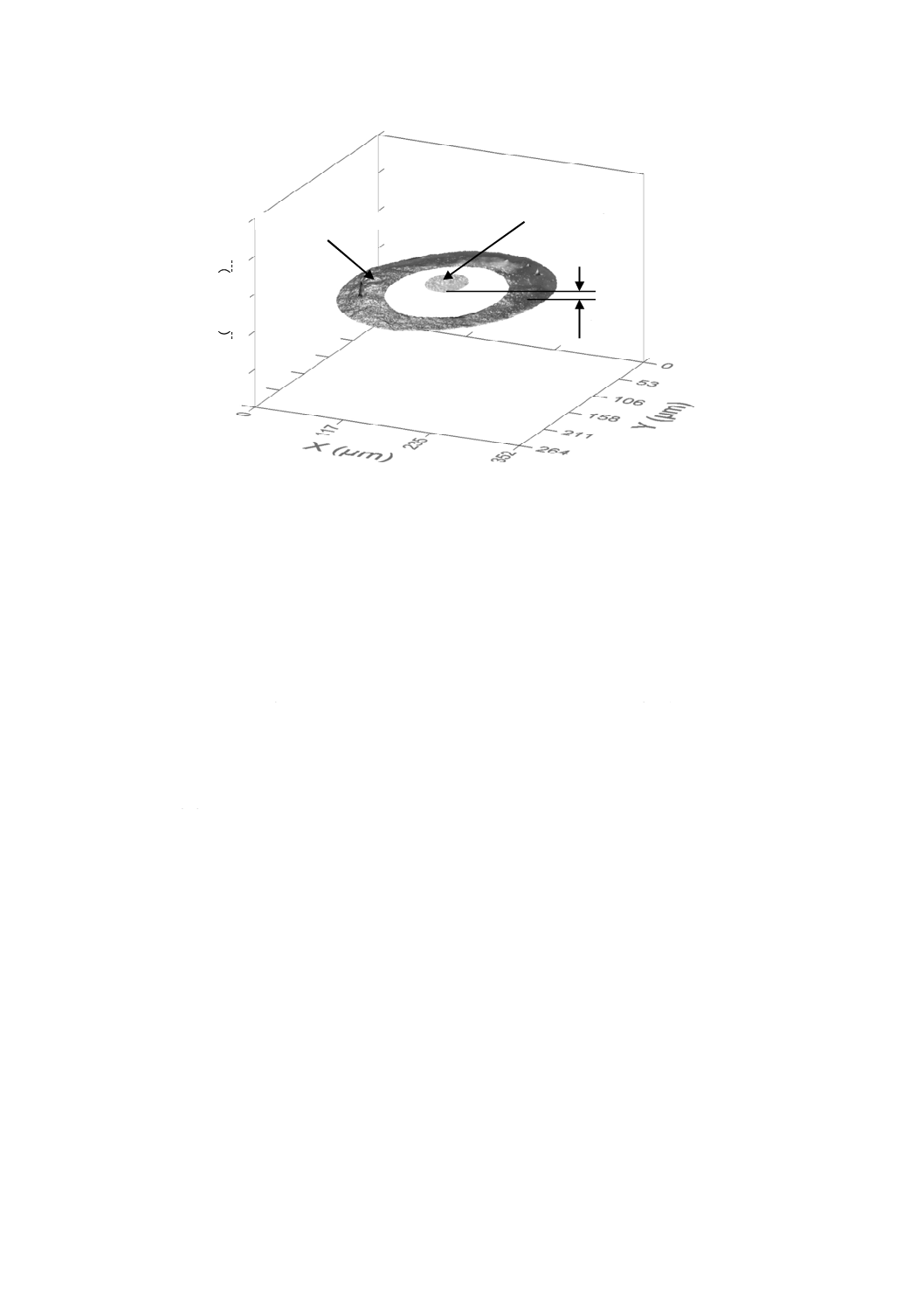
2) 球面形状を差し引いた表面形状から,平均化領域の光ファイバの平均高さ及びフィッティング領域
のフェルールの平均高さを計算する。図10に示すように,光ファイバ引込み量Aは,光ファイバ
の平均高さとフェルールの平均高さとの差として計算できる。値が正の場合は光ファイバの引込み
を表し,負の場合は光ファイバの突出しを表す。
図7−フェルール端面の画像データ
Z
(
任
意
単
位
)
8
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
平均化領域
フィッティング領域
図8−フェルール端面のフィッティング領域及び平均化領域の画像データ
図9−球面形状を差し引いたフェルール端面の画像データ
Z
(
任
意
単
位
)
Z
(
任
意
単
位
)
9
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A
平均化領域
フィッティング領域
図10−フィッティング領域を除き球面形状を差し引いたフェルール端面の画像データ
測定した表面データを処理するとき,フェルールと光ファイバとの間の屈折率と吸収係数との差を考慮
することが望ましい。これらの差を考慮しない場合,光ファイバの突出し又は引込みは,小さい不確かさ
で測定できないことがある。
6
個別に規定する事項
必要に応じて,次の事項を製品規格などに規定する。
− 干渉計のタイプ
− 供試品の公称端面角度(個別に規定がない場合,直角PC端面の場合は0度,斜めPC端面の場合は8
度)
− 測定装置の構成(ガイドキーの位置決め構造,フェルール保持具など)
− フェルール保持具中でのフェルールの回転方向の公差(ガイドキー方向の回転角度の誤差)
− この測定方法との差異
− 測定不確かさ
Z
(
任
意
単
位
)
10
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
干渉光学系の校正
A.1 X座標及びY座標の校正
4.1で規定している不確かさで測定ができないとき,X座標及びY座標の校正が必要となる。干渉光学
系は,あらかじめ校正している球面をもったゲージを用いて,X座標及びY座標を校正する(Z座標はあ
らかじめ校正が完了している場合)。球面をもったゲージとは,例えば,プラグ形曲率ゲージである。また,
校正用の格子パターンをもったウェハを,X座標及びY座標の校正に用いることができる。
A.2 Z座標の校正
干渉光学系が単色位相シフト法を用いる場合,干渉光学系で用いる光源の1/4波長未満の公称段差をも
つ段差ゲージを用いる。
干渉光学系が白色光干渉法を用いる場合,干渉光学系のZ座標スキャン幅のおおよそ1/4〜3/4の公称段
差をもつ段差ゲージを用いる。
A.3 干渉光学系の光軸に対するフェルール中心軸の調整(頂点偏心量の測定値の校正)
直角PC端面フェルール又は光コネクタプラグの校正では,60度ごとにフェルール又は光コネクタプラ
グをフェルール中心軸まわりに360度回転し,六つの頂点偏心量を測定し,最小二乗法で六つの頂点偏心
量からなる仮想円を形成し,その中心値を算出する。フェルール保持具,又は干渉光学系の基準ミラーを
調整することで,仮想円の中心が,光ファイバの中心へ移動し,干渉光学系の光軸とフェルール中心軸と
が調整できる。斜めPC端面光コネクタの校正については,A.4に記載する。
A.4 公称端面角度及びガイドキー方向の回転角度の校正(斜めPC端面光コネクタプラグ用)
斜めPC端面光コネクタプラグの測定は,A.3だけでは調整できない。公称端面角度及びガイドキー方向
の回転角度の校正が必要である。次の二つの方法が適用できる[推奨方法はb)]。
a) フェルール端面が干渉光学系に対し直角な状態で,A.3の調整を実施し,測定する光コネクタプラグ
の公称端面角度(個別に規定がない場合は,8度)にフェルール保持具又は干渉光学系を傾ける。
b) 校正ゲージを用いて,保持具又はミラーの向きを校正する。校正ゲージとは,例えば,プラグ形角度
ゲージのことをいう。この校正ゲージは,回転方向を定めるガイドキーがあり,端面が平滑な斜め平
面であることが望ましい。ガイドキー位置角度ずれについては,ソフトウェアを用いて補正してもよ
い。
注記 ガイドキー位置角度ずれについては,附属書Bを参照。
11
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
斜めPC端面フェルール又は光コネクタプラグの角度ずれの測定方法
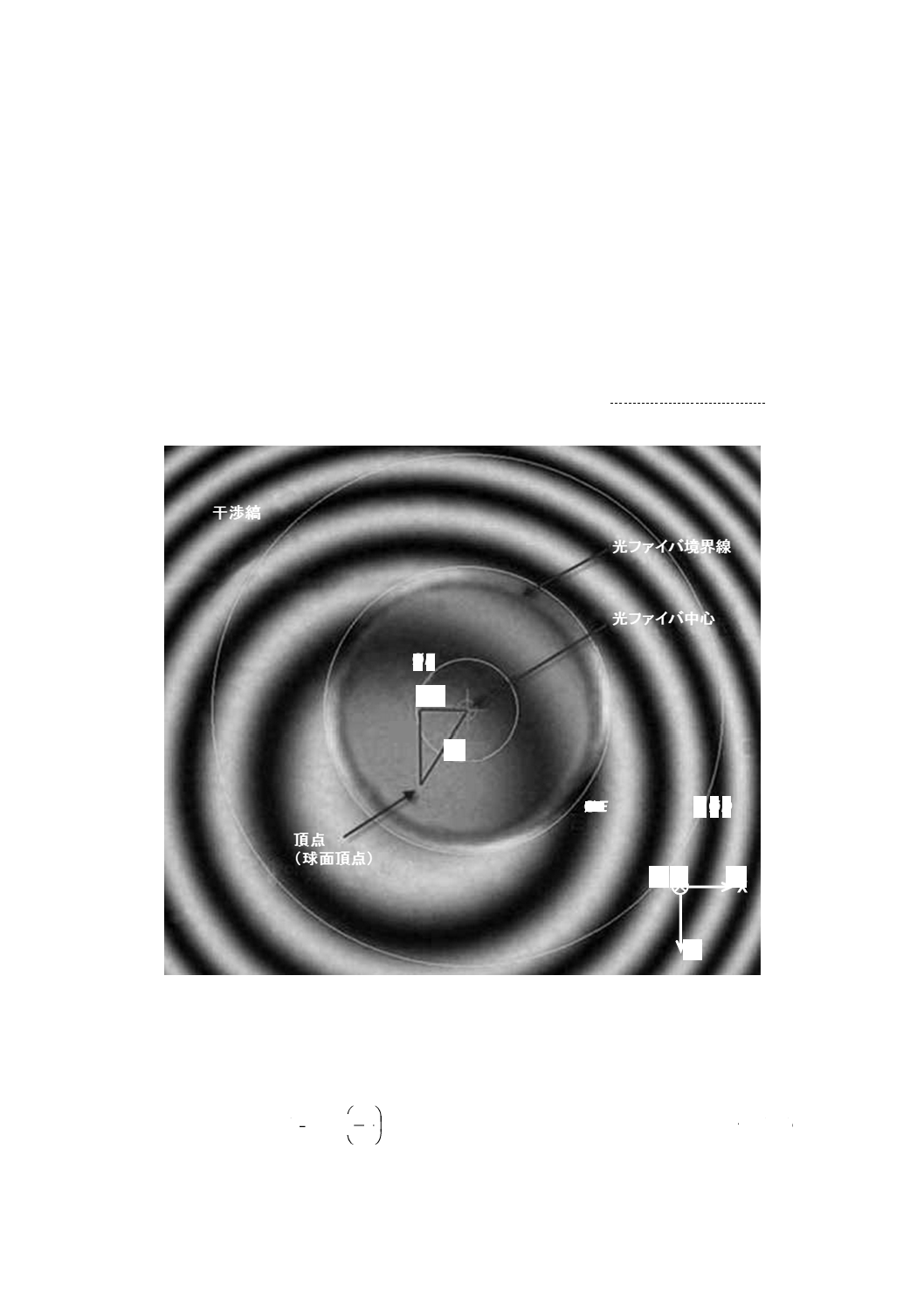
球面研磨したフェルールについて,曲率半径B並びに頂点偏心量のX方向成分Cx及びY方向成分Cy
は,干渉じま(縞)(図B.1参照)の解析結果から計算する。斜め角度ずれは,B及びCxの値から計算す
る[式(B.1)参照]。ガイドキー位置角度ずれは,B及びCyの値から計算する[式(B.2)参照]。斜めPC端面
フェルール又は光コネクタプラグを測定するときは,干渉光学系に対してフェルール又は光コネクタプラ
グを傾けるだけではなく,干渉光学系に光アダプタ又はガイドキーの位置決め構造が設置されていること
が望ましい。ガイドキーの位置決め構造は,ガイドキーに対しフェルール又は光コネクタプラグの回転方
向を拘束するように設計している。
図B.1−干渉じま(縞)から計算した斜めPC端面フェルール又は光コネクタプラグの角度ずれの例
干渉じま(縞)画像から偏心した頂点と光ファイバ中心との距離Cを算出し,X方向の成分Cxが計算
できる(図B.1参照)。Cxを仮想球面上で角度に換算した値は,フェルール端面角度θと公称端面角度θ0
(8度)との差に等しく,一般的に斜め角度ずれという。
0
x
arcsin
θ
θ
+
=
B
C
·································································· (B.1)
干渉じま(縞)画像から偏心した頂点と光ファイバ中心との距離Cを算出し,Y方向の成分Cyが計算
ØF
Cx
Cy
C
ØE ØD
Z ⊗ X
Y
12
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
できる(図B.1参照)。Cyを仮想球面上で角度に換算した値は,一般的にガイドキー位置角度ずれαとい
う。
=
B
C
α
y
arcsin
······································································· (B.2)
ガイドキー位置角度ずれは,頂点偏心量CのY方向の成分(図B.1のCy)から,式(B.2)を用いて算出
することを理解することが重要である。関連はしているが,フェルールの物理的な回転角度と混乱しない
ほうがよい。フェルール(又は干渉光学系)を傾けることには機械的な優位性があり,角度ずれ測定の再
現性は,ガイドキーの位置決め精度の高さ及びその他の要因,例えば光コネクタプラグ内部のはめあい部
品の公差によって決まる。
このことは,特にフェルールの浮動構造を採用した光コネクタプラグに当てはまる。
注記 フェルールの物理的な回転角度の定義については,附属書JBを参照。
13
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
フェルールの幾何学的形状の計算式
フェルールの仮想球面は,次の式(C.1)で計算できる。
(
)
(
)
(
)
2
2
0
2
0
2
0
B
Z
Z
Y
Y
X
X
=
−
+
−
+
−
············································ (C.1)
仮想球面の中心座標は,(X0,Y0,Z0)であり,Bは球面の半径である。
14
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
斜めPC端面フェルールの用語及び定義
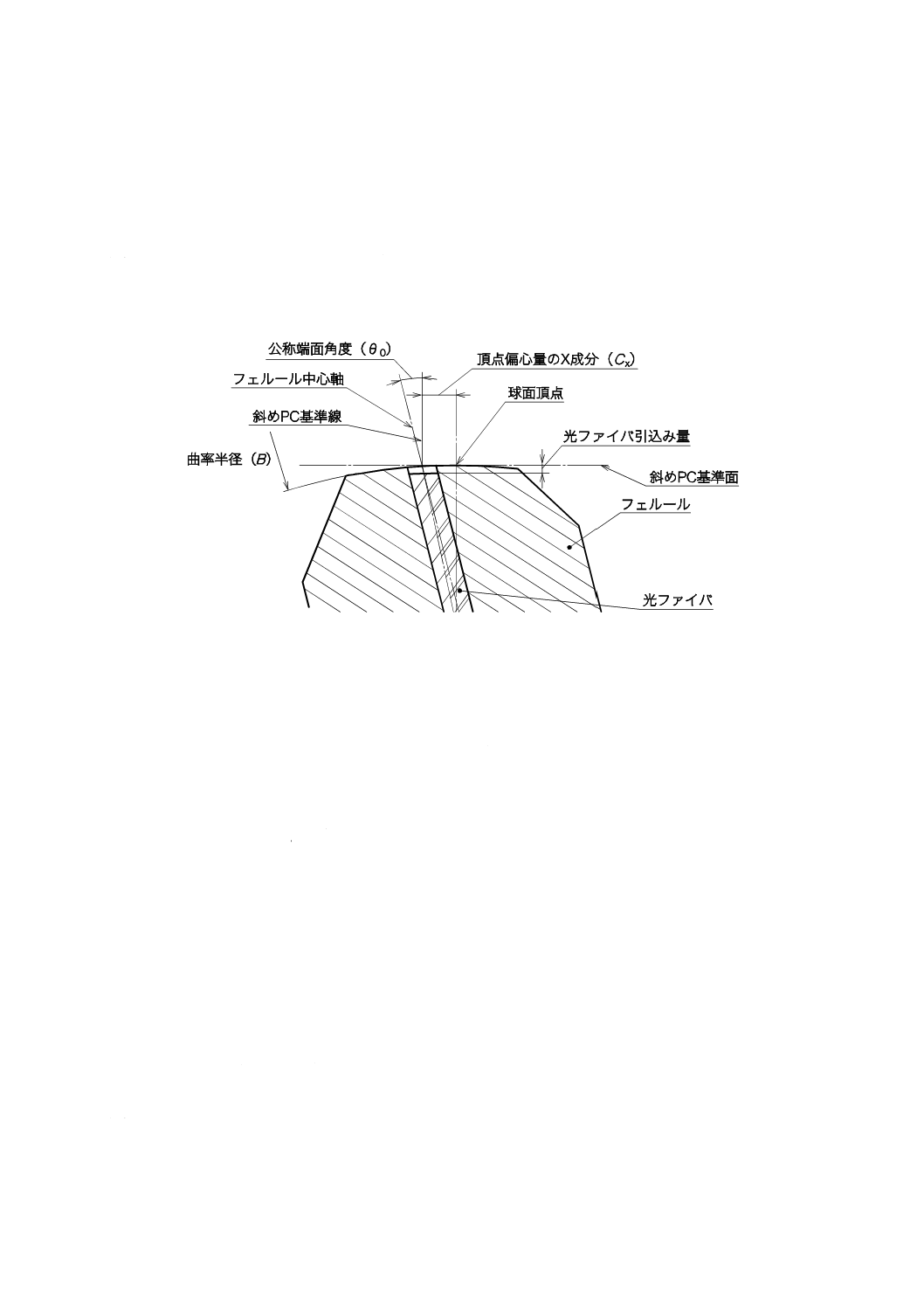
JA.1 斜めPC端面フェルールの用語及び定義
斜めPC端面フェルール(図JA.1参照)の用語及び定義は,次による。図JA.1は,附属書JBで定義さ
れている仮想球面の平面C及び平面Dとの交線(円)の半径が一致する近似的な場合を示している。
図JA.1−斜めPC端面フェルールの形状
JA.1.1
曲率半径,B(radius of curvature)
PCを実現するために,フェルール端面をドーム形状に球面研磨した部分の曲率半径(図JA.1参照)。
注記 フェルール端面は,実際には非球面の場合が多いが,ここでは球面と仮定する(図JA.1参照)。
この規格では,仮定した球面を仮想球面(附属書C参照)という。
JA.1.2
ガイドキー中心面(guide key center plane)
フェルール中心軸を含み,ガイドキーの中心を通る平面。
注記 ガイドキー中心面は,図JB.1における平面Aを指す。図JA.1において紙面に垂直な平面であ
る。
JA.1.3
斜めPC基準面(angled PC nominal plane)
面の方向が,フェルール中心軸に対して,ガイドキー中心面と垂直な方向に公称端面角度(8度)の傾
きをもつ平面であって,仮想球面の一点と接する平面(図JA.1参照)。
JA.1.4
球面頂点(highest point on dome)
斜めPC基準面と仮想球面とが接する点(図JA.1及び図JB.3参照)。
JA.1.5
斜めPC基準線(polish angle axis)
15
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
フェルール中心軸と仮想球面との交点を通り,斜めPC基準面と垂直な線(図JA.1参照)。
JA.1.6
頂点偏心量,C(apex offset)
球面頂点と,斜めPC基準線との距離(図JA.1及び図JB.3参照)。
JA.1.7
光ファイバ引込み量,A(fiber height)
斜めPC基準線と平行な向きに測った,光ファイバ端面と斜めPC基準線上の仮想球面との距離の平均値。
光ファイバ端面が仮想球面に対し,フェルール内部にある場合に正の値とする(図JA.1参照)。
JA.1.8
フェルール端面角度,θ(end face angle)
フェルール中心軸に対する垂直平面と,フェルール中心軸と仮想球面とが交差する点を通り,仮想球面
に接する平面との角度(図JB.1参照)。
注記 2.4では二つの平面がなす角度で定義しているが,図JB.1では仮想球面の中心とフェルール中
心軸と仮想球面との交点とを通る直線と,フェルール中心軸とのなす角度で示している。
JA.2 直角PC端面フェルールの用語及び定義との関係
直角PC端面フェルールの場合,公称端面角度が0度の斜めPC端面フェルールと考えられるので,フェ
ルール中心軸に対し垂直な平面を直角PC基準面として定義することができ,斜めPC基準線はフェルール
中心軸に置き換えることができる。斜めPC基準面及び斜めPC基準線を直角PC基準面及びフェルール中
心軸に置き換えると,直角PC端面フェルールの,頂点偏心量及び光ファイバ引込み量の定義となる。
16
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JB
(参考)
フェルールの物理的な回転角度と頂点偏心量のY成分との関係
JB.1 一般事項
この附属書では,JIS C 5961の6.9で“プラグのキーと斜め研磨面傾斜方向との角度”として規定して
いた斜めPC端面フェルールの物理的な回転角度と,この規格で規定している頂点偏心量のY成分との関
係を示す。併せて,頂点偏心量のX成分とθ−θ0との関係も導出する。
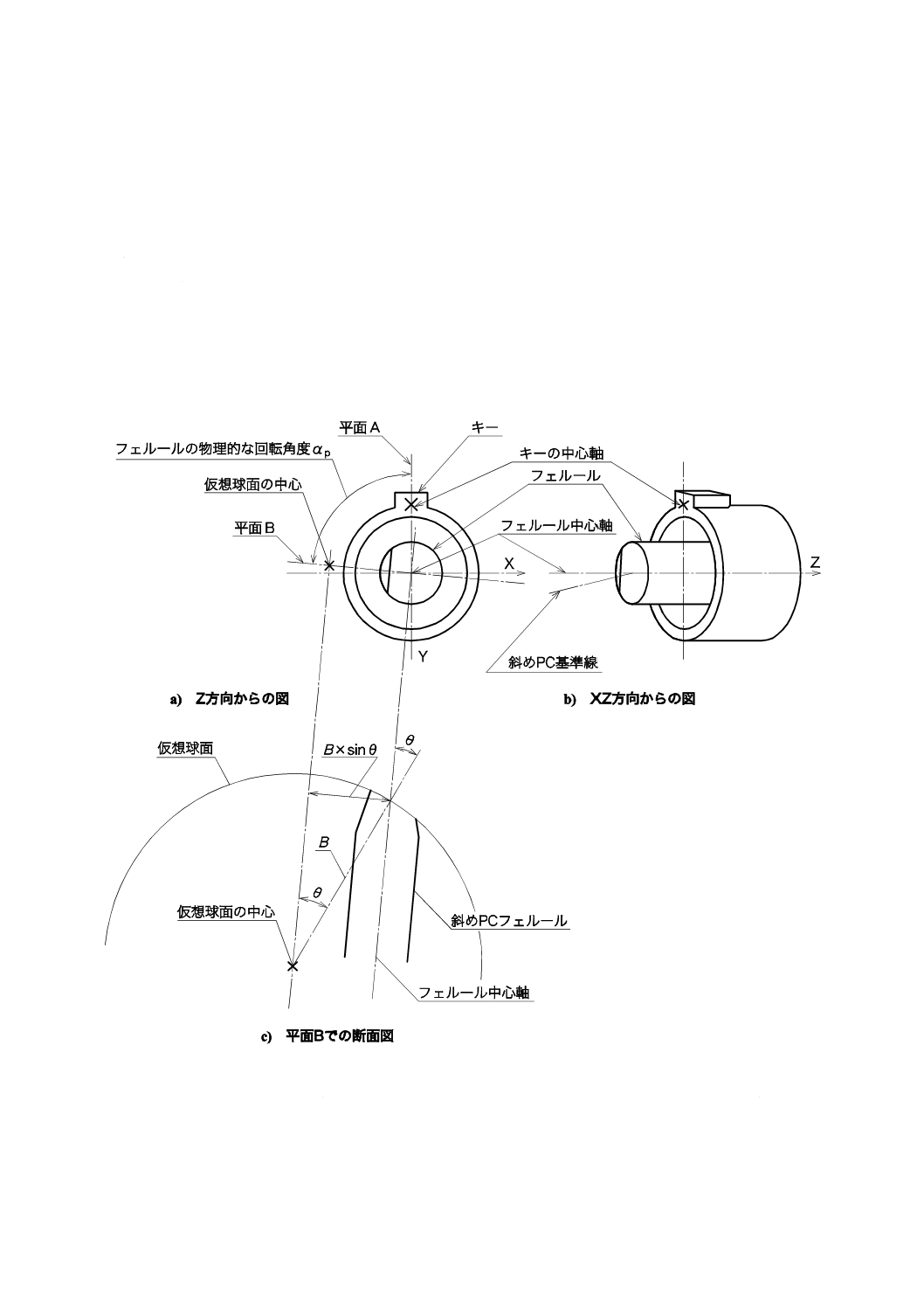
JB.2 フェルールの物理的な回転角度αpの定義
図JB.1−フェルールの物理的な回転角度αpの定義
フェルールの物理的な回転角度αpを図JB.1に示す。平面Aをフェルール中心軸とキーとを含む平面と
し,平面Bをフェルール中心軸と仮想球面の中心とを含む平面としたとき,平面Aと平面Bとがなす角
度をフェルールの物理的な回転角度αpと定義する[図JB.1 a)参照]。フェルールの物理的な回転角度αp
17
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
は,理想的には90度である。
平面Bでの断面図を図JB.1 c)に示す。平面Bは,フェルール中心軸及び仮想球面を含むので,フェル
ール端面角度(フェルール中心軸と仮想球面との交点を仮想球面の中心と結ぶ直線と,フェルール中心軸
とがなす角度)をその平面内に含む。
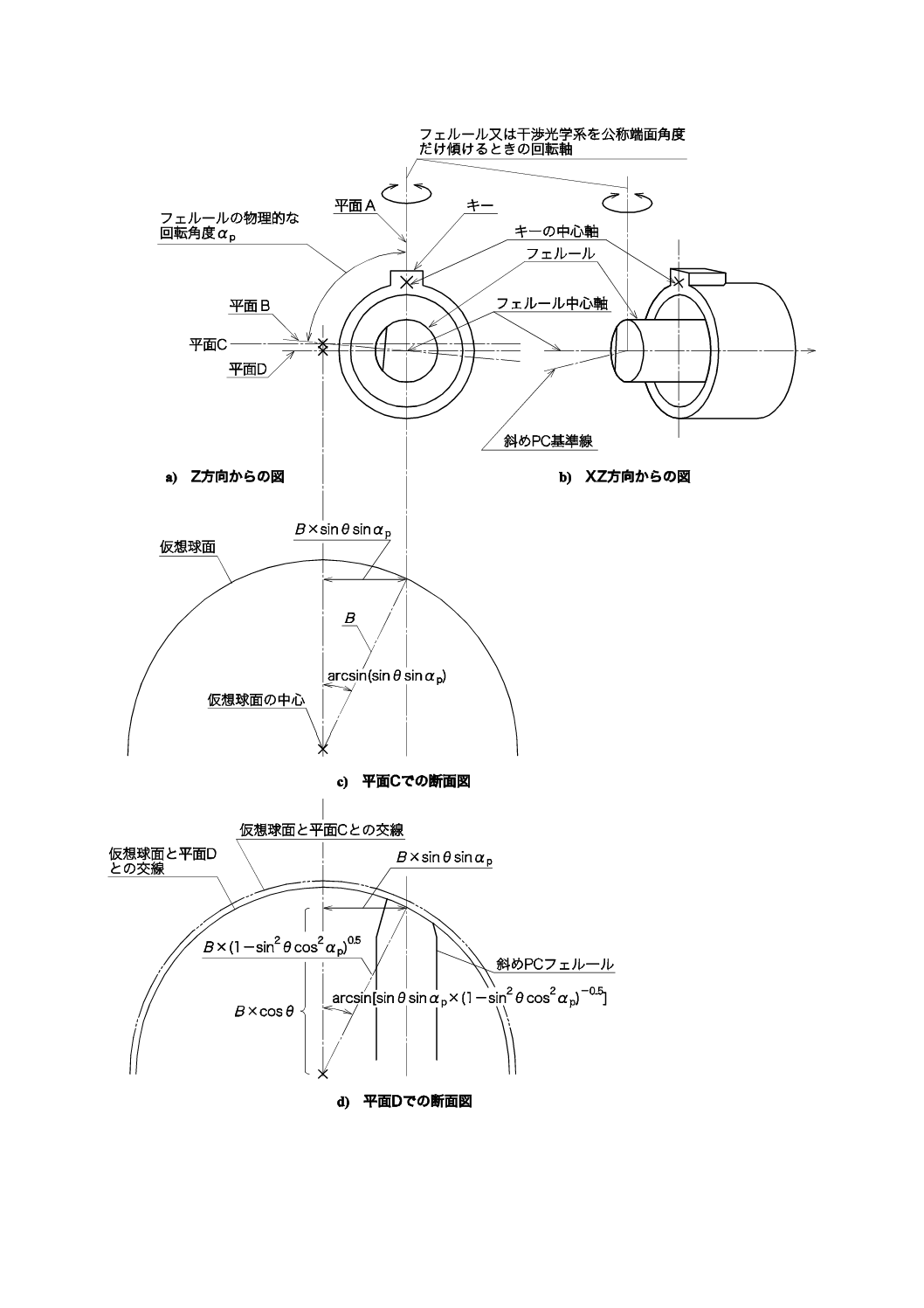
JB.3 公称端面角度の回転
頂点偏心量を測定するための公称端面角度θ0だけ傾ける回転操作の回転軸は,平面A内のフェルール中
心軸に垂直な直線に平行である[図JB.2のa)及びb)参照]。回転軸に垂直かつ仮想球面の中心を含む面を
平面C,回転軸に垂直かつフェルール中心軸を含む面を平面Dとする。回転操作によって回転軸に垂直な
平面C及び平面Dの位置は動かないので,仮想球面の中心及びフェルール中心軸は,それぞれ,平面C
内及び平面D内を動く。フェルールの物理的な回転角度αpが90度の場合には平面Cと平面Dとは一致す
る。αpが90度と異なる場合,平面Cと平面Dとは一致しないので,仮想球面の中心及びフェルール中心
軸は,それぞれ,異なった面内を動く。回転操作前の平面C及び平面Dにおける,仮想球面の中心及びフ
ェルール中心軸の位置を,図JB.2のc)及びd)に示す。
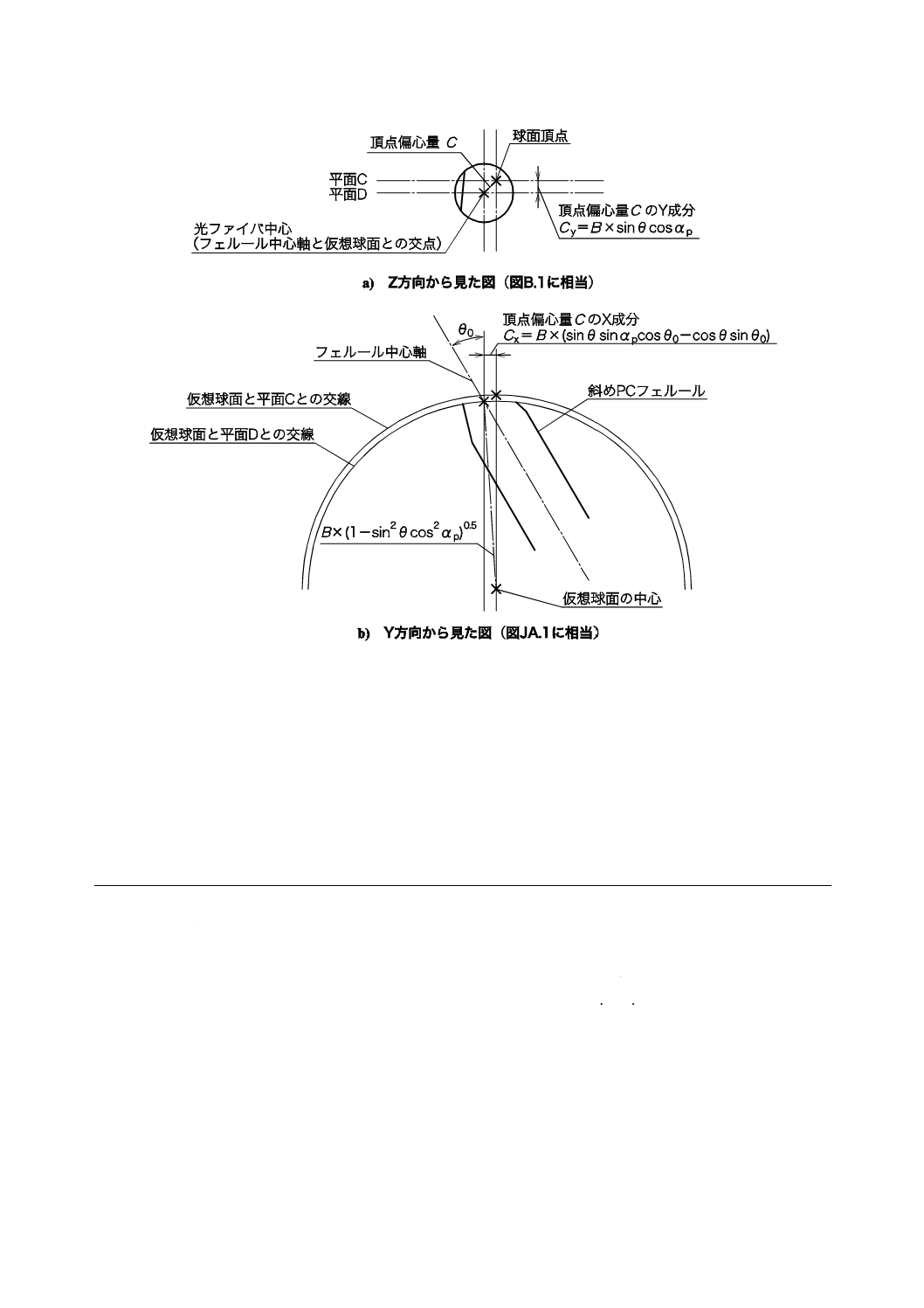
公称端面角度θ0の回転操作後の仮想球面の中心及びフェルール中心軸の位置を図JB.3に示す。図JB.3 b)
において,平面Cにある仮想球面の中心と平面Dにあるフェルール中心軸とを重ね描きしている。仮想球
面の中心からZ軸に平行に伸ばした直線が仮想球面と接する点が頂点である。頂点と,フェルール中心軸
と仮想球面との交点(光ファイバの中心と一致)とのXY平面上の距離が頂点偏心量Cである[図JB.3 a)
参照]。図JB.3 a)は,図B.1に相当する。頂点偏心量CのX成分Cxは,図JB.2のc)及びd)から公称端面
角度θ0の回転によって計算できる[式(JB.1)参照]。頂点偏心量CのY成分Cyは,平面Cと平面Dとの間
の距離であり,回転操作中変化しないため,公称端面角度θ0に依存せず,θ及びαpだけに依存する[式(JB.2)
参照]。
(
)
0
0
p
x
sin
cos
cos
sin
sin
θ
θ
θ
α
θ
−
×
=B
C
········································ (JB.1)
p
y
cos
sin
α
θ
×
=B
C
································································ (JB.2)
Cx及びCyには正負が存在するが,公称端面角度の回転操作時の回転の方向及びキーの位置に応じて適
切に定まる。
ここで,αpが90度に非常に近い(αp=π/2−Δ,Δ<<1)とし,Δの1次までとる(2次以上を無視する)
と,sinαp≒1−Δ2/2≒1,cos2αp≒Δ2≒0となるので,頂点偏心量CのX成分Cxは,θ−θ0との関係が簡潔に
なる[式(JB.3)参照]。また,仮想球面と平面Cとの交線の円の半径が仮想球面と平面Dとの交線の円の半
径に一致する[式(JB.4)参照]。この近似のもとで,図JB.3 b)の仮想球面と平面Cとの交線及び仮想球面と
平面Dとの交線は重なり,図JA.1に相当する図が導かれる。
(
)
(
)
(
)
0
0
0
0
0
p
x
sin
sin
cos
cos
sin
sin
cos
cos
sin
sin
θ
θ
θ
θ
θ
θ
θ
θ
θ
α
θ
−
×
=
−
×
≈
−
×
=
B
B
B
C
································· (JB.3)
B
B
≈
×
−
×
p
2
2
cos
sin
1
α
θ
······················································ (JB.4)
18
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図JB.2−プラグのキーと斜め研磨面傾斜方向との角度
19
C 61300-3-47:2016 (IEC 61300-3-47:2014)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図JB.3−斜めPC端面フェルールの頂点偏心量(図JB.2に対し公称端面角度θ0の回転操作を行っている)
参考文献 JIS C 5961 光ファイバコネクタ試験方法
JIS C 5965-3-1 光ファイバコネクタ光学互換−第3-1部:シングルモード光ファイバ用直径2.5
mm及び1.25 mm円筒形全ジルコニア直角PC端面フェルール光学互換標準
注記 対応国際規格:IEC 61755-3-1,Fibre optic connector optical interfaces−Part 3-1: Optical
interface, 2,5 mm and 1,25 mm diameter cylindrical full zirconia PC ferrule, single mode fibre
(IDT)
JIS C 5965-3-2 光ファイバコネクタ光学互換−第3-2部:シングルモード光ファイバ用直径2.5
mm及び1.25 mm円筒形全ジルコニア8度斜めPC端面フェルール光学互換標準
注記 対応国際規格:IEC 61755-3-2,Fibre optic connector optical interfaces−Part 3-2: Optical
interface, 2,5 mm and 1,25 mm diameter cylindrical full zirconia ferrules for 8 degrees
angled-PC single mode fibres(IDT)