C 61300-3-38:2015 (IEC 61300-3-38:2012)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 略語······························································································································· 2
4 一般事項························································································································· 2
5 測定装置························································································································· 3
5.1 変調位相シフト法 ·········································································································· 3
5.2 波長掃引干渉法 ············································································································· 6
5.3 偏光位相シフト法 ·········································································································· 8
6 測定手順························································································································· 9
6.1 変調位相シフト法 ·········································································································· 9
6.2 波長掃引干渉法 ············································································································ 12
6.3 偏光位相シフト法 ········································································································· 15
6.4 各波長における測定範囲(全ての測定方法に対しての共通事項) ··········································· 16
7 解析······························································································································ 18
7.1 群遅延測定の雑音低減 ··································································································· 18
7.2 位相変化の線形性 ········································································································· 18
7.3 波長分散 ····················································································································· 19
7.4 位相リップル ··············································································································· 21
8 測定例··························································································································· 22
8.1 50 GHzバンドパス薄膜フィルタ ······················································································ 22
8.2 平面導波路フィルタ部品 ································································································ 22
8.3 可変分散補償器[ファイバブラッググレーティング(FBG)] ··············································· 23
8.4 ランダム偏光モード結合デバイス····················································································· 24
9 個別に規定する事項 ········································································································· 25
附属書A(参考)群遅延差の算出 ··························································································· 26
C 61300-3-38:2015 (IEC 61300-3-38:2012)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般財団法人光産業技術振興協会(OITDA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 61300の規格群には,次に示す部編成がある。
JIS C 61300-1 第1部:通則
JIS C 61300-2-1 第2-1部:正弦波振動試験
JIS C 61300-2-2 第2-2部:繰返しかん合試験
JIS C 61300-2-4 第2-4部:光ファイバクランプ強度試験(軸方向引張り)
JIS C 61300-2-5 第2-5部:光ファイバクランプ強度試験(ねじり)
JIS C 61300-2-6 第2-6部:かん合部締結強度試験(軸方向引張り)
JIS C 61300-2-7 第2-7部:かん合部締結強度試験(曲げモーメント)
JIS C 61300-2-9 第2-9部:衝撃試験
JIS C 61300-2-11 第2-11部:光ファイバクランプ強度試験(軸方向圧縮)
JIS C 61300-2-12 第2-12部:落下衝撃試験
JIS C 61300-2-14 第2-14部:光パワー損傷のしきい値試験
JIS C 61300-2-15 第2-15部:結合部ねじり試験
JIS C 61300-2-17 第2-17部:低温試験
JIS C 61300-2-18 第2-18部:高温試験
JIS C 61300-2-19 第2-19部:高温高湿試験(定常状態)
JIS C 61300-2-21 第2-21部:混合温湿度サイクル試験
JIS C 61300-2-22 第2-22部:温度サイクル試験
JIS C 61300-2-26 第2-26部:塩水噴霧試験
JIS C 61300-2-27 第2-27部:ダスト試験(層流)
JIS C 61300-2-40 第2-40部:SM調心円筒形斜めPC端面光ファイバコネクタプラグの挿入損失スク
リーニング試験
JIS C 61300-2-41 第2-41部:SM調心円筒形直角PC端面光ファイバコネクタプラグの挿入損失スク
リーニング試験
JIS C 61300-2-44 第2-44部:光ファイバクランプ強度試験−繰返し曲げ
JIS C 61300-2-45 第2-45部:浸水試験
JIS C 61300-2-46 第2-46部:湿熱サイクル試験
JIS C 61300-2-47 第2-47部:熱衝撃試験
JIS C 61300-2-48 第2-48部:温湿度サイクル試験
C 61300-3-38:2015 (IEC 61300-3-38:2012)
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS C 61300-3-1 第3-1部:外観検査及び機械的検査
JIS C 61300-3-2 第3-2部:シングルモード光デバイスの光損失の偏光依存性
JIS C 61300-3-3 第3-3部:挿入損失及び反射減衰量変化のモニタ方法
JIS C 61300-3-4 第3-4部:損失測定
JIS C 61300-3-6 第3-6部:反射減衰量測定
JIS C 61300-3-7 第3-7部:シングルモード光部品の光損失及び反射減衰量の波長依存性測定
JIS C 61300-3-11 第3-11部:結合力及び離脱力測定
JIS C 61300-3-15 第3-15部:球面研磨光ファイバコネクタのフェルール端面の頂点偏心量測定
JIS C 61300-3-16 第3-16部:球面研磨光ファイバコネクタのフェルール端面の曲率半径測定
JIS C 61300-3-17 第3-17部:斜め研磨光ファイバコネクタのフェルールの端面角度測定
JIS C 61300-3-20 第3-20部:波長選択性のない光ブランチングデバイスのディレクティビティ測定
JIS C 61300-3-22 第3-22部:フェルール押圧力測定
JIS C 61300-3-23 第3-23部:フェルール端面からの光ファイバ引込み量測定
JIS C 61300-3-24 第3-24部:偏波面保存光ファイバ付き光ファイバコネクタのキー位置精度測定
JIS C 61300-3-25 第3-25部:フェルール及び光ファイバ取付け直角PC端面フェルールの同心度測定
JIS C 61300-3-26 第3-26部:光ファイバとフェルール軸との角度ずれの測定
JIS C 61300-3-27 第3-27部:多心光ファイバコネクタプラグの穴位置測定
JIS C 61300-3-28 第3-28部:過渡損失測定
JIS C 61300-3-30 第3-30部:多心光ファイバコネクタ用フェルールの研磨角度及び光ファイバ位置
測定
JIS C 61300-3-31 第3-31部:光ファイバ光源の結合パワー比測定
JIS C 61300-3-32 第3-32部:光受動部品の偏波モード分散測定
JIS C 61300-3-33 第3-33部:ピンゲージを用いた割りスリーブのフェルール引抜力測定
JIS C 61300-3-34 第3-34部:ランダム接続時の挿入損失
JIS C 61300-3-36 第3-36部:光ファイバコネクタフェルールの内径及び外径の測定
JIS C 61300-3-38 第3-38部:群遅延,波長分散及び位相リップルの測定
JIS C 61300-3-40 第3-40部:偏波面保存光ファイバ付き光ファイバコネクタプラグの偏波消光比測
定
JIS C 61300-3-43 第3-43部:光ファイバ光源のモードトランスファファンクション測定
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 61300-3-38:2015
(IEC 61300-3-38:2012)
光ファイバ接続デバイス及び光受動部品−
基本試験及び測定手順−
第3-38部:群遅延,波長分散及び位相リップルの測定
Fiber optic interconnecting devices and passive components-
Basic test and measurement procedures-Part 3-38: Examinations and
measurements-Group delay, chromatic dispersion and phase ripple
序文
この規格は,2012年に第1版として発行されたIEC 61300-3-38を基に,技術的内容及び構成を変更する
ことなく作成した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある参考事項は,対応国際規格にはない事項である。
1
適用範囲
この規格は,光受動部品及び光ダイナミックモジュールの群遅延特性の測定方法について規定する。こ
の規格で規定する測定方法によって,群遅延リップル,線形位相偏差,波長分散,波長分散スロープ及び
位相リップルを求めることができる。偏光に基づいて,これらの光特性を測定することによって,JIS C
61300-3-32で規定する測定方法の代替として,群遅延差を測定することができる。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 61300-3-38:2012,Fibre optic interconnecting devices and passive components−Basic test and
measurement procedures−Part 3-38: Examinations and measurements−Group delay, chromatic
dispersion and phase ripple(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
IEC 60050-731,International Electrotechnical Vocabulary−Chapter 731: Optical fibre communication
IEC 61300-3-29,Fibre optic interconnecting devices and passive components−Basic test and measurement
procedures−Part 3-29: Examinations and measurements−Spectral transfer characteristics of DWDM
devices
2
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3
略語
この規格で用いる略語は,IEC 60050-731及びIEC 61300-3-29によるほか,次による。
APC
斜めPC(angled physical contact)
CD
波長分散(chromatic dispersion)
D
受光装置(detector)
DGD
群遅延差(differential group delay)
DUT
供試品(device under test)
DWDM
高密度波長分割多重(dense wavelength division multiplexing)
FBG
ファイバブラッググレーティング(fiber Bragg grating)
δ
波長可変光源の波長掃引ステップ幅(step size of the VWS during a wavelength swept measurement)
fRF
変調周波数(modulation frequency)
GD
群遅延(group delay)
GDR
群遅延リップル(group delay ripple)
LN
ニオブ酸リチウム(LiNbO3)
MPS
変調位相シフト(modulation phase shift)
PBS
偏光ビームスプリッタ(polarizing beam splitter)
PDL
偏光依存性損失(polarization dependent loss)
PMD
偏波モード分散(polarization mode dispersion)
PPS
偏光位相シフト(polarization phase shift)
PSP
主偏光状態(principal states of polarization)
RBD
基準光ブランチングデバイス(reference branching device)
SOP
偏光状態(state of polarization)
SSE
光源の自然放出光(source spontaneous emission)
SWI
波長掃引干渉(swept wavelength interferometry)
Δθ
位相リップル(phase ripple)
TJ
テンポラリジョイント(temporary joint)
VWS
波長可変光源(variable wavelength source)
4
一般事項
この規格は,光受動部品及び光ダイナミックモジュールの群遅延特性の測定に適用する。群遅延特性を
求めるために,振幅スペクトル分布を測定する必要がある。そのため,正しい波長分散測定値が得られる
よう,振幅スペクトル分布測定の波長範囲を包含する波長範囲で,光損失を測定する必要がある。
この規格では,例としてCバンドにおける測定を記載しているが,この規格に記載する測定方法は,C,
L,Oバンドなど,任意の波長帯域に適用可能である。
この規格は,測定方法及び測定データ分析の二つの部分によって構成する。測定方法として,変調位相
シフト(MPS)法,波長掃引干渉(SWI)法及び偏光位相シフト(PPS)法を規定する。波長ごとの測定結
果を得ることができるため,これらの測定方法を選択する。これらの中で,MPS法は基準測定方法である。
波長ごとの測定結果は,光受動部品,特に波長選択性のある部品に必要である。
群遅延リップルを評価するためにふさわしい測定パラメータ,及び群遅延リップルの測定結果から位相
リップルを推定する方法を,7.4に規定する。多くの可変分散補償器は干渉効果を用いているが,可変分散
3
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
補償器の干渉効果で生じる位相リップルは伝送品質に大きな影響を与えるため,光部品の群遅延(GD)特
性が光伝送品質に与える影響をはかる尺度として,GDから生じる位相リップルを測定することが重要で
ある。
5
測定装置
5.1
変調位相シフト法
5.1.1
一般事項
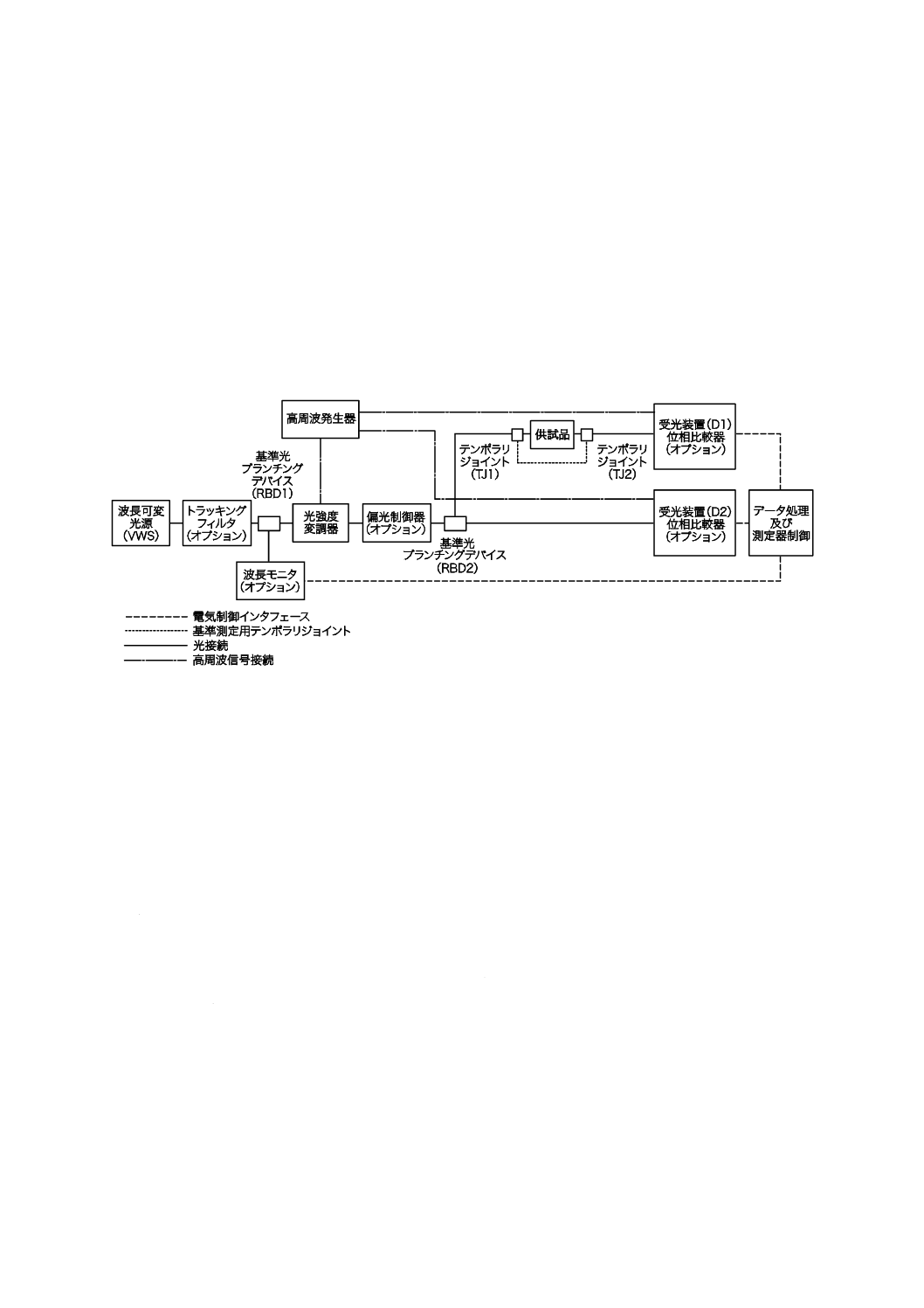
MPS法による光部品のGDの測定系を,図1に示す。この測定系に使用する測定器の詳細説明及び機能
を,5.1.2〜5.1.13に規定する。
図1−MPS法測定系
5.1.2
波長可変光源 VWS
波長可変光源(VWS)は,規定の波長範囲において,選択した特定の波長を出力することのできる,偏
光特性をもった光源である。VWSは,次による。
− 位相比較に影響を及ぼす測定誤差を生じないよう,選択波長において,光出力は十分に安定であると
する。
− 相対的な波長精度及び波長再現性は,VWSの設定及び波長モニタ測定によって決まり,測定範囲内で
3 pmの精度をもつとする。
− 波長の不確かさは,供試品の波長仕様に適合する。
− 光源の線幅は,100 MHz未満とする。
− VWSの波長可変範囲は,供試品の規定波長範囲を含む。
− 光源は,可変する波長範囲でモードホッピングを起こさないものとする。
− VWSは,位相比較測定に十分な光出力を供給する。
− VWSの最小の波長可変ステップは,供試品の想定する群遅延リップル(GDR)周期の1/10に設定す
ることが望ましい。
5.1.3
トラッキングフィルタ(オプション)
供試品の透過特性及びVWSの広帯域な自然放出光(SSE)の影響によって,VWS及び受光装置の測定
ダイナミックレンジが40 dB未満の場合,トラッキングフィルタを測定に用いてもよい。トラッキングフ
4
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ィルタは,最大のSSE抑圧及び最大の出力を得るように,測定波長範囲内でVWSの波長が変化したとき,
VWSの波長に追従する。受光装置のダイナミックレンジが40 dB以上となるように,トラッキングフィル
タの通過帯域形状は,通過帯域外の成分を十分に抑圧するものとする。
5.1.4
基準光ブランチングデバイス RBD1及びRBD2
基準光ブランチングデバイス(RBD)の端子構成は,1×2又は2×2である。2×2端子構成の場合,一
つの端子は,50 dB以上の反射減衰量となるように終端する。RBDの分岐比は,波長に対して一定である
とする。偏光依存性は,測定に影響を与えないように小さく,偏光依存性損失は,デバイスの波長依存性
損失の1/10未満又は0.1 dB未満とする。また,ディレクティビティは,反射減衰量の最大値よりも10 dB
以上大きいものとする。RBDの分岐比は,伝達関数の測定において,十分なダイナミックレンジを確保で
き,波長モニタに必要なパワーが得られる値とする。
5.1.5
波長モニタ(オプション)
この規格に規定する試験手順において,光源の波長精度を詳細にモニタする必要がある。VWSの波長可
変時の精度が不十分である場合,波長モニタが必要である。この試験手順では,デバイスの通過帯域内で
3 pmの精度で,どのような入力信号のスペクトルのピークも測定できる必要がある。許容できる波長モニ
タは,波長計又はガス吸収セル(アセチレンセルなど)を含む。ガス吸収セルを使用する場合,VWSの波
長精度は,吸収線の波長を決定するのに十分な精度をもつこととする。VWSの出力波長は,吸収線と吸収
線との間で線形であることとする。
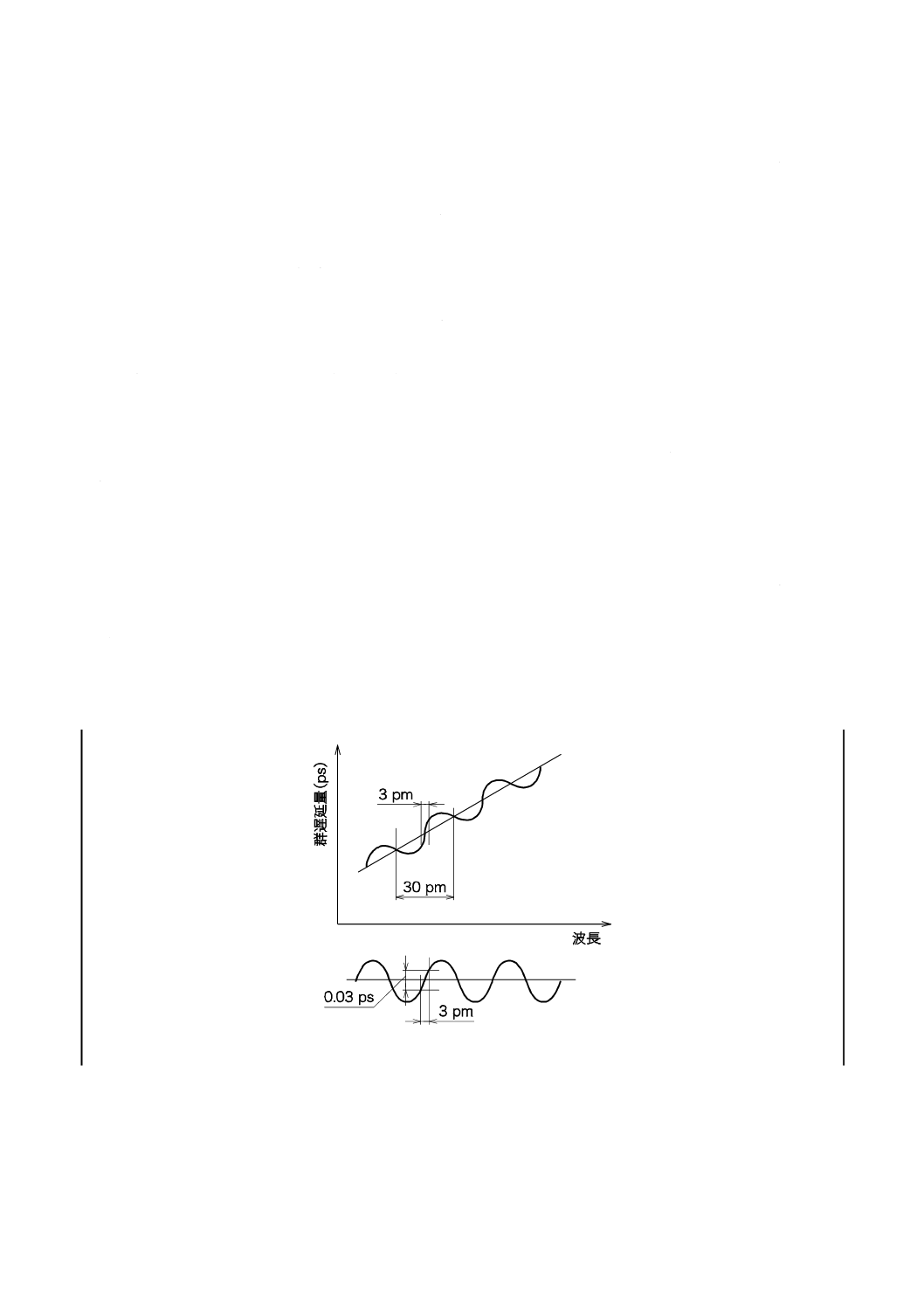
この規格には,VWS及びモニタの波長再現性を含む。試験装置が30 pmの周期で0.1 psのリップルをも
つ場合,リファレンス測定時から供試品の測定にかけて,ランダムな3 pmの変化が生じるということは,
群遅延特性に約0.03 psの測定雑音を含むことを意味する。測定雑音の概念図を,図1Aに示す。
注記 群遅延が振幅0.1 ps(peak-to-peak)かつ周期30 pmの正弦波状に変化する場合,任意の3 pmに
おける群遅延の最大変化量は0.03 psであり,これが測定雑音となる。
図1A−測定雑音の概念図
5.1.6
供試品
この規格の目的において,試験対象となる端子は単一の“入力−出力”経路とする。この規格に規定す
る測定方法は,m×nの端子をもつ部品の測定に拡張することができる。複数端子をもつ部品は,光ファイ
5
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
バピッグテール又は光コネクタで接続することによって終端する。この測定系は反射の影響を受けやすい
ため,供試品内で発生する反射を正しく検出するよう,測定系で発生する反射を起こさないようにするこ
とは重要である。
多くの場合,DWDM用の部品の特性は温度依存性をもつ。この規定における測定手順では,供試品は
一定温度に置くことを想定している。測定の不確かさは,一定温度に保つように加熱又は冷却するときの
温度精度によって制限を受ける。例えば,あるデバイスが1 ℃当たり0.01 nmの温度依存性をもち,測定
において温度が±1 ℃の範囲内に保たれる場合,この測定で得られる結果は,温度依存によって合計で0.02
nmの不確かさをもつ。
5.1.7
受光装置 D1及びD2
受光装置は,受光部分,それを制御する電気回路及び接続手段である光ファイバで構成する。受光装置
(D2)の使用はオプションであるが,6.1.3に規定する手順c) 及び手順d) による,光強度変調器と供試
品との間に挿入する装置の群遅延の不安定性を補正することができる。光コネクタプラグの場合は受光装
置のレセプタクルに直接接続する。光ファイバピッグテール,ベアファイバアダプタを用いて受光装置に
接続してもよい。受光装置D1及びD2からの反射は,最小限となるようにする。適切な方法は,APCコ
ネクタを使用することであり,APCコネクタを使用することで空気に対して良好な終端を行うことができ
るが,端面での空気に対する特性から,PDLが約0.03 dB発生し,測定に影響する場合があることに留意
する。
受光装置のダイナミックレンジ及び感度は,変調光源が供給する光出力パワーによって,要求測定範囲
において十分な値をもつこととする。受光装置は,変調信号のパワーを精度よく測定するために十分な線
形性をもつこととする。受光装置は,光信号レベルに依存せず,光変調位相を高周波(RF)信号の位相に
対して安定に変換するものとする。
測定中に受光装置と測定系とを外して再接続する場合には,再接続時の挿入損失の再現性は,光コネク
タの接続再現性以下とする。
5.1.8
高周波発生器
高周波発生器は,光強度変調器を駆動するための電気信号を供給する。電気信号は参照信号として受光
装置D1及びD2の位相比較器に入力する。高周波発生器は,例えば,正弦波変調波のような,単一フーリ
エスペクトルをもつ波形を生成する。一般的には,100 MHz〜3 GHzの周波数の正弦波を使用する。高周
波発生器は,その出力周波数が群遅延測定の時間的な基準を作り出すことを考慮した場合,十分な周波数
精度及び必要な測定精度が得られるように安定であることとする。
5.1.9
光強度変調器
光強度変調器は,高周波発生器からの変調信号を用いて,光源からの連続光を強度変調する。光強度変
調器は,高周波発生器からの変調信号を光変調信号に変換する。光強度変調器は整った正弦波変調信号を
生成するために,十分な線形性をもつ必要がある。また,変調振幅は,受光装置のダイナミックレンジを
超えてはならない。
5.1.10
位相比較器(オプション)
位相比較器は,光変調信号及び高周波信号の位相を比較するものであり,受光装置D1及びD2とともに
用いる。一般的に,ネットワークアナライザ又はロックイン増幅器を位相比較器として用いる。位相検出
として知られる方法は,決まった参照信号の周波数及び位相において,単一信号を出力するものである。
参照信号の周波数以外の周波数成分をもつ雑音信号は除去して位相測定に影響を与えないようにする。高
周波信号出力は,位相測定に影響を与えないレベルとする。
6
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.1.11
テンポラリジョイント TJ1及びTJ2
テンポラリジョイントは,供試品へ入力信号を接続する部分及び供試品を受光装置(D1)に接続する部
分で用いる。テンポラリジョイントは一般的に,光コネクタ又はファイバ融着を用いるが,真空チャック,
微小調心機など,他の方法を用いることもできる。測定は,反射光の影響を大きく受けるので,これらの
方法によるテンポラリジョイントの反射減衰量は,50 dBを超えるものとする。
5.1.12
偏光制御器(オプション)
変調光信号の偏光状態を,ミュラー法におけるポアンカレ球上の四つの偏光状態に調整するために,偏
光制御器を用いてもよい。四つの偏光状態のうち三つは,0°,45°及び90°の直線偏光状態となるよう,
ポアンカレ球の赤道上で90°ずつ差をもつように配置する。四つ目の偏光状態は,円偏光としてポアンカ
レ球の極に配置する。供試品が偏光モード分散特性をもつ場合,直交する偏光状態での結果を平均処理し,
全ての入力偏光状態における群遅延量の平均として扱ってもよい。四つの偏光状態で群遅延測定を行った
結果から,群遅延差(DGD)を算出することができる。偏光制御器は,測定波長範囲において,測定に十
分な偏光安定性をもつものとする。
5.1.13
基準光パッチコード
基準光パッチコードは,シングルモード光ファイバを用い,光コネクタ,光ファイバピッグテール又は
光ファイバ素線を用いて接続する。基準光パッチコードは供試品と同じ光接続形態とする。
5.2
波長掃引干渉法
5.2.1
一般事項
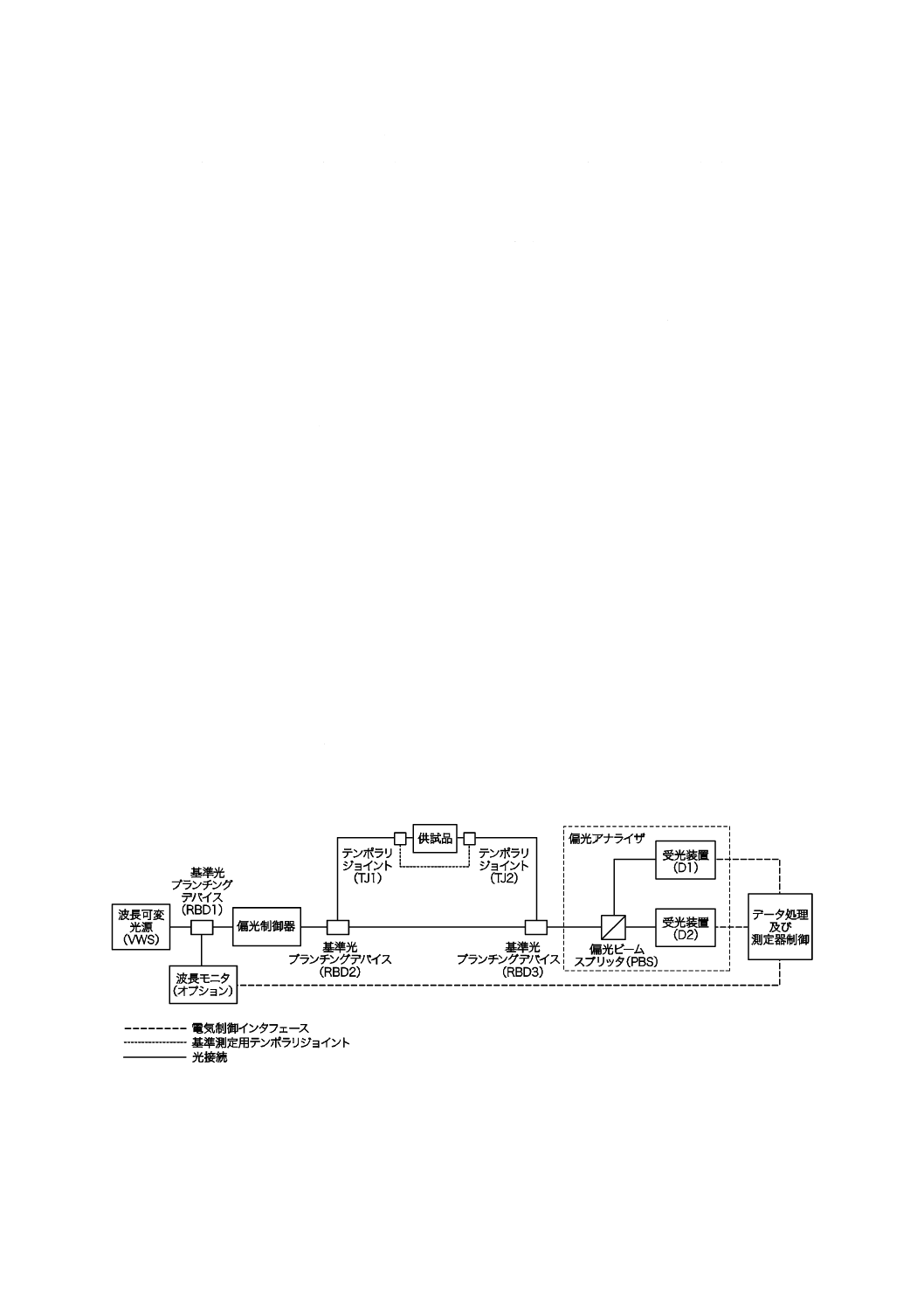
SWI法による光部品のGDの測定系を,図2に示す。この測定系に使用する測定器の詳細説明及び機能
を,5.2.2〜5.2.7に規定する。図2では,二つの端子がある供試品の透過測定について示す。
通常,群遅延の測定は,波長依存性及び偏光依存性の測定に影響する。ただし,光ファイバネットワー
クを構成する光ファイバ及び機器の群遅延は,温度,圧力,機械的応力,雑音などの外的要因に敏感であ
る。このため,群遅延の測定系は,測定中に光ファイバが動かないように,かつ,外的変化を与えないよ
うにする。SWI法は,光位相を追跡して測定する方法である。光位相は光ファイバの群遅延及び群遅延の
変化に敏感なため,測定系の安定性はこの測定において特に重要である。
図2−SWI法測定系
5.2.2
波長可変光源 VWS
SWI法はコヒーレント干渉を用いるため,波長が可変な狭帯域光源が必要である。波長可変光源(VWS)
7
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
は,要求波長範囲において波長を変化させることができなければならない。標準的なコヒーレンス及び必
要な波長分解能を考慮すると,線幅は1 MHz未満とする。光ファイバピッグテールを含めた光受動部品に
光ファイバコードを接続した場合の標準的な長さである10 mでは,共振周波数間隔は約10 MHzである。
正確な特性評価には十分に小さい分解能が必要である。6.2.1に規定するように,供試品の長さ及び供試品
のもつ群遅延特性の範囲に依存するが,一般的に,狭い波長間隔で測定が必要であるため,連続的に光源
の波長を掃引して測定することを強く推奨する。したがって,測定系には,掃引中に規定の波長制御及び
波長モニタ機能を備える必要がある。
5.2.3
波長モニタ
VWSが適切な波長精度を備えていない場合は,波長モニタを使って高い精度で波長を測定する。波長モ
ニタは,波長掃引中の各測定点の波長精度及び相対波長精度を改善する。
5.2.4
基準光ブランチングデバイス RBD1,RBD2及びRBD3
干渉計を構成するために,基準光ブランチングデバイス(RBD2及びRBD3)を用いる。干渉計では,
光の一部が供試品を通過し,残りの光が基準光路に沿って伝搬するように光路を分岐する。二つの光路を
伝搬する光は再結合し,受光装置で干渉する。これらのブランチングデバイスは,標準的には50対50の
分岐比である。ブランチングデバイスは,波長モニタ用の光を分岐するためにも用いる。ブランチングデ
バイスは,1×2又は2×2の端子構成である。基準光ブランチングデバイスの未使用の端子は,反射減衰
量が50 dBを超えるように終端する。
5.2.5
受光装置 D1及びD2
受光装置は,波長に対する光パワーを測定するために用いる。推奨する構成では,直交する二つの直線
偏光状態における光パワーを測定する。5.2.1の規定によって,この測定では,一般的に,非常に短い波長
周期で光パワーが変化する。それゆえ,狭い波長間隔で光パワーを測定する必要がある。したがって,高
速でデータを取得する検出システムを推奨する。各測定方法における群遅延の算出では,出力信号が光パ
ワーに対応していることを前提としている。光パワーの相対変化を評価するため,実際の光入力パワーの
変化に対する,受光装置の光パワー測定値の変化の線形性がよいことが望ましく,飽和状態にならないよ
うに注意する。
5.2.6
偏光制御器
互いに直交する偏光の信号は干渉しないため,干渉計から十分な干渉信号を得るために,二つの光路か
らの光を確実に同じ偏光で結合する。一般に,供試品の出力光の偏光状態は定まらないため,偏光の制御
が必要である。偏光制御器及び5.2.7に規定する偏光アナライザは,この機能に適合している。一般に,
偏光制御器は,供試品に入力する偏光を定め,干渉計の参照経路から二つの受光装置における光パワーを
均等にするために用いる。偏光制御器は,例えば,ゼロ次の位相差板を使って,測定波長範囲において十
分な偏光安定性をもつこととする。偏光制御器と偏光アナライザとを組み合わせることで,異なる偏光条
件における一連の群遅延測定によって,群遅延差を算出することも可能となる。
5.2.7
偏光アナライザ
偏光アナライザは,偏光の観点から適切な干渉条件を実現するための二つ目の構成部分である。二つの
受光装置を組み合わせる偏光ビームスプリッタ(PBS)を使うことが一般的である。5.2.6に規定する偏光
制御器によって,参照経路からそれぞれの受光装置に同等の光パワーが入力することが保証できる場合,
供試品の出力光もまた,それぞれの受光装置へ参照光と同じ偏光成分で分離する。これは観測しやすい干
渉信号を得るために重要である。
8
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3
偏光位相シフト法
5.3.1
一般事項
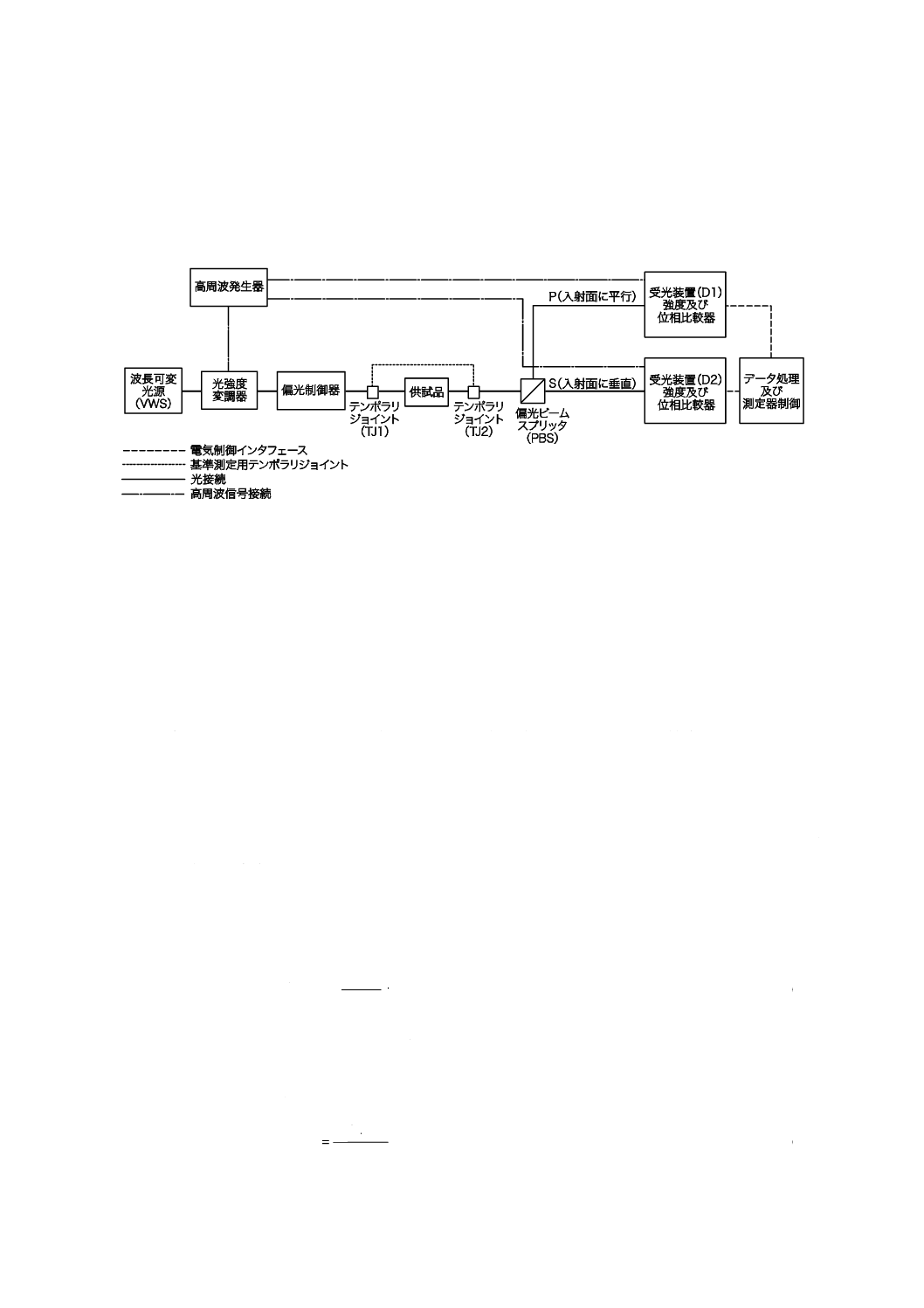
PPS法による光部品のGDの測定系を,図3に示す。この測定系に使用する測定器の詳細説明及び機能
を,5.3.2〜5.3.8に規定する。
図3−PPS法測定系
5.3.2
波長可変光源 VWS
光源として,VWSを使用し,出力する波長範囲は測定する波長範囲を十分にカバーする必要がある。測
定結果において,十分なSN比及び波長分解能を得るために,VWSは,測定結果に要求するSN比に対し
て十分な光パワーをもち,要求される波長分解能に対して十分狭いスペクトル線幅をもつことが望ましい。
一般的には,完全内蔵形の温度制御器及び電流制御された波長安定化用外部共振器を備えている。VWS
の出力は,偏波面保存光ファイバを用いて光強度変調器に接続する。
VWSの波長ステップ幅は,供試品の群遅延リップル(GDR)の周期に対して,最適化する。
5.3.3
高周波発生器
高周波発生器は,光強度変調器に変調信号を印加するために用いる。変調信号の一部は,参照信号とし
て,強度及び位相比較器に供給する。一般的には50 MHz〜3 GHzの周波数範囲をもつ正弦変調信号を生成
する必要があるため,高周波発生器は広帯域特性が必要である。変調周波数は,変調側波帯の影響及び色
分散の測定分解能を考慮して決める。
側波帯は,光信号の両側に,変調周波数fの差をもって現れる。
光スペクトルの広がりを表す実効的な波長分解能Δλ(nm)は,側波帯によって制限を受け,一般的に
は,式(1)で表す。
c
f
×
×
=
2
2
Δ
λ
λ
·········································································· (1)
ここに,
λ: 波長(nm)
f: 変調周波数(GHz)
c: 真空中の光の速度(m/s)
さらに,群遅延の測定分解能ΔGD(ps)も変調周波数fによって制限を受け,一般的には,式(2)で表す。
f
GD
π
2
10
Δ
Δ
3
×
=φ
········································································ (2)
9
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに,
Δφ: 位相比較器の位相分解能(rad)
f: 変調周波数(GHz)
5.3.4
光強度変調器
光強度変調器は,高周波発生器からの変調信号に同期して,VWS出力を光強度変調する。挿入損失,
ON/OFF消光比,偏光消光比などの光学特性は,測定する波長範囲全体にわたって要求値に適合する必要
がある。これらの特性に適合するために,一般にLiNbO3(LN)変調器を用いる。VWSを接続するための
入力用光ファイバとして,偏波面保存光ファイバを用いる。駆動電圧は,一般的に,LN変調器の半波長
電圧から決定し,高周波発生器の出力は,光強度の変調度が約20 %になるように調整する。
5.3.5
偏光制御器
偏光制御器は,供試品に対し,特定の偏光状態(SOP)の光を供給するために用いる。偏光制御器は,
偏光子,四分の一波長板及び二分の一波長板の三つの部品で構成する。二つの遅延板を回転することで,
あらゆる偏光状態を生み出すことができる。角度調整の分解能は±0.1°以内とし,偏光消光比は測定する
波長範囲において20 dBを超えるものとする。
5.3.6
偏光ビームスプリッタ PBS
PBSを供試品の後に置き,出力光を二つの直交する偏光信号,P偏光とS偏光とに分離する。それぞれ
の信号を,受光装置に入力する。PBSは,20 dBを超える高い偏光消光比をもつ方解石プリズムのような
異方性結晶で構成する。挿入損失は1 dB未満とする。PBSの偏光消光比,挿入損失などの光学特性は,測
定する波長範囲全域にわたって要求値に適合する必要がある。
5.3.7
受光装置 D1及びD2
受光装置は,供試品の変調した出力光を電気信号に変換する。一般的に,高い線形性及び約10 pA/(Hz)1/2
という低い雑音密度をもつPIN-PDを用いる。PIN-PDは,高周波発生器の変調周波数の応答に対して十分
な応答特性をもつものとする。さらに,高いSN比を保証するために,受光装置の光検出部の後に広帯域
で低雑音の増幅器を用いる。
5.3.8
強度及び位相比較器
強度及び位相比較器は,信号をそれぞれの偏光ごとに高周波発生器からの参照信号と比較することによ
って,強度及び位相を測定する。群遅延τ(ps)は,式(3)によって位相から算出する。
f
π
2
103
×
=φ
τ
··············································································· (3)
ここに,
φ: 位相(rad)
f: 変調周波数(GHz)
高周波発生器の変調信号の一部を参照信号として,強度及び位相比較器に供給する。参照信号は変調信
号に同期するようにする。高周波発生器の周波数安定性を含む全体の位相精度は,±0.3°以内又は適正な
測定精度を確保できる十分な精度とする。
6
測定手順
6.1
変調位相シフト法
6.1.1
測定原理
群遅延τgは,式(4)のように,光位相をΦoptとしたとき,その角振動数ωoptに対する微分係数として定義
する。
10
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
()
()
()
0
0
opt
opt
opt
opt
opt
opt
0
g
d
d
π
2
1
d
d
ν
ω
ω
ω
ω
τ
f
f
Φ
Φ
=
=
·········································· (4)
ここに,
ωopt: 角振動数。2πfoptに等しい。
MPS法では,VWSの出力光を,標準的には100 MHz〜3 GHzの範囲の高周波又はマイクロ波の周波数
fRFで,正弦波形で強度変調する。変調した光信号を供試品に入力し,受光装置で検出する。参照信号源に
対するRF信号の位相(φRF1,φRF2,…,φRFn)は,光周波数(fopt1,fopt2,…,foptn)に対応する波長(λ1,λ2,
…,λn)で記録する。これらの測定は,相対的な群遅延,つまり,波長幅における群遅延の変化を決定す
るために用いる。隣接した二つの波長であるλi及びλjにおけるRF位相測定から,式(5)によって,群遅延
の変化Δτg(λi,λj) を算出する。
(
)
()
()
RF
RF
RF
g
π
2
,
f
i
j
j
i
λ
ϕ
λ
ϕ
λ
λ
τ
−
=
∆
························································ (5)
ここで,jはiより大きいこととする。
6.1.2
RF変調周波数
RF変調周波数は,慎重に選定しなければならない。測定における群遅延雑音及び波長分解能はトレード
オフの関係にある。表1は,要求される波長分解能に対する,推奨するRF変調周波数の最大値を示して
いる。
波長のサンプリング間隔と変調周波数との関係には,注意が必要である。特に,高い波長分散特性を示
すデバイスに対しては,隣接する波長間の群遅延差が180°以上の位相シフトにならないように最大変調
周波数を制限し,誤った位相情報を用いた計算によって不正確な結果をもたらさないように,変調周波数
は,式(6)の条件に適合するように設定する。
max
RF
Δ
1
τ
<
f
············································································· (6)
ここに,
Δτmax: サンプル間隔における最大群遅延差
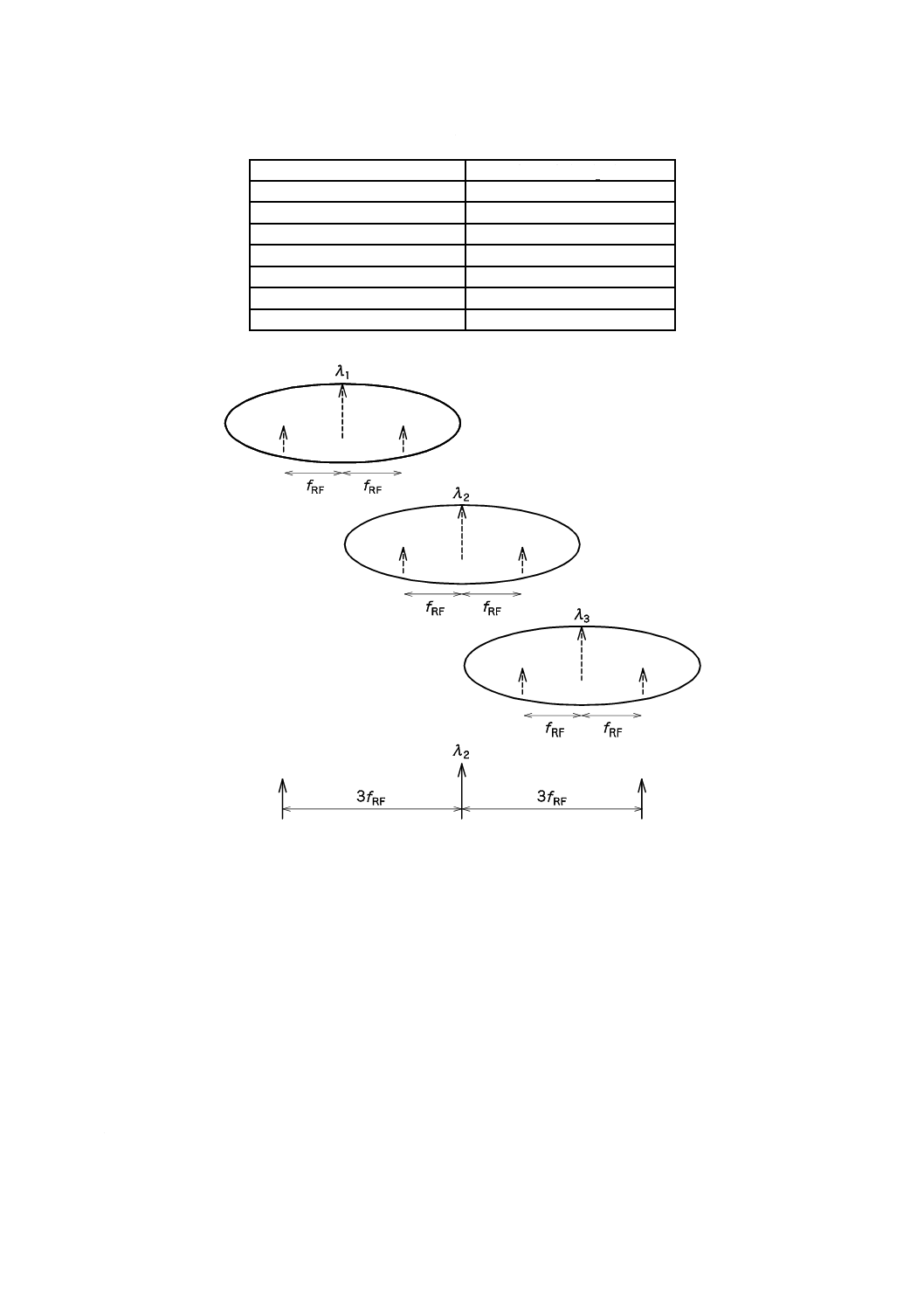
変調による波長分解能が波長のサンプリング間隔と同等である場合,連続する波長の測定は,合成して
平均化する,すなわち,より高いfRFの値を用いた場合と同等の結果を得ることができる。これは,ある波
長の測定における上側の側波帯からの位相の寄与は,隣接する波長の測定における下側の側波帯からの,
大きさが等しく位相が逆向きの寄与と相殺するからである。
図4は,波長サンプリング間隔が変調周波数と等しい場合の三つの測定波長例を示している。それぞれ
のだ円は,それぞれの波長近傍における波長スペクトルを表している。前述のように,三つの一連の波長
スペクトルを平均化した場合,実効的な変調周波数が3fRFで,実効的な中心波長がλ2(λ1,λ2及びλ3の平
均)の場合と同等になる。
11
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−変調周波数及びCバンドの波長分解能
変調周波数(GHz)
波長分解能(pm)
0.1
1.6
0.2
3.2
0.3
4.8
0.5
8.0
1.0
16.0
2.0
32.1
3.0
48.1
図4−変調周波数におけるサンプリング
6.1.3
測定手順
図1の測定系を用いて,次の手順で測定を行う。
a) 高周波発生器を使って正弦波電気信号を発生させる。周波数fRFは,標準的には100 MHz〜3 GHzの範
囲で選定する。正弦波電気信号は強度変調を行うため,かつ,受光装置D1及びD2の位相検出器を同
期するために使用する。オプションとして,周波数fRFは,図4に示すとおり,連続したサンプリング
が重なるように,波長サンプリング間隔と関連して選ぶ。
b) オプションとして,偏光制御器は0°で直線偏光になるように調整する。偏光の実際の方向は任意だ
が,通常,偏光制御器で生成する状態を参照する。さらに,SOPは,手順g) において,これを参照
する。
c) 供試品を測定系に接続せずに,TJ1とTJ2との間を基準光パッチコードで接続する。選定した波長サ
ンプリング間隔でVWSの波長を掃引しながら,波長に対するD1及びD2の出力として位相を記録す
12
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
る。光源の位相をφRefとして,結果は,(λi,
1
D
f
Rei
ϕ
,
2
D
f
Rei
ϕ
)のデータ列となり,供試品の信号の位相
を正規化するための“損失のない”リファレンスを得る。
d) 供試品をTJ1及びTJ2に接続する。選定した波長サンプリング間隔でVWSの波長を掃引しながら,
波長,D1及びD2の出力として位相を記録する。供試品を接続したときの位相をφDUTとして,結果は,
(λi,
1
D
DUTi
ϕ
,
2
D
DUTi
ϕ
)のデータ列となり,供試品の信号の位相を得る。
e) 複数回の測定の平均化によって位相測定におけるランダム雑音を減らすため,手順c)〜手順d) を繰
り返す。
f)
オプションとして,6.1.2の規定によって,変調周波数fRFが波長サンプリング間隔と同じ場合は移動
平均を適用することで,より高い周波数で測定する場合と同様の結果を得ることができる。
g) 推奨する拡張測定として,偏光制御器を使って,45°及び90°の直線偏光の状態,並びに円偏光に対
するポアンカレ球の極上の第4の状態で,手順c)〜手順f) を行う。これによって,入力する全ての偏
光状態における群遅延の平均を決めることが可能となる。
6.1.4
群遅延リップル測定における注意事項
波長分解能は,供試品の群遅延リップル(GDR)の周期に対して適切にするため,慎重に選ばなければ
ならない。波長分解能が大きくなると群遅延雑音は減少するが,平滑化のために群遅延リップルを決定す
る能力が低下する。
6.1.5
相対的な群遅延の算出
6.1.3に規定する手順c) 及び手順d) によって,“損失のない”リファレンス及び供試品の位相測定が得
られる。波長λiでの相対的な群遅延は,式(7)によって算出する。
()(
)(
)
12
RF
D1
Ref
D1
DUT
D2
Ref
D2
DUT
g
10
π
2
×
−
−
−
=
f
i
i
i
i
i
ϕ
ϕ
ϕ
ϕ
λ
τ
······································· (7)
ここに,
φ: 位相(rad)
fRF: 変調周波数(Hz)
τg(λi): 群遅延(ps)
MPS法による測定結果からのDGDの算出は,A.2及びA.3に記載する。
6.2
波長掃引干渉法
6.2.1
測定原理
この方法は,光干渉計及びコヒーレントなVWSを用いて,供試品で生じる光位相φの波長依存性を測
定する。群遅延の絶対値は,光周波数における位相の微分係数として定義し,式(8)を用いて算出する。
ω
ϕ
d
d
=
GD
················································································· (8)
ここに,
φ: 電磁波である光の位相
ω: 光周波数(rad/s)
例えば,真空中をx方向に伝達する電界強度は,式(9)によって表すことができる。
()
−
=
t
x
E
t
x
E
ω
λ
π
2
cos
,
0
·························································· (9)
ここで,余弦関数の引数が位相φに相当し,電界振幅E0は光出力パワーの平方根に比例する。
この方法は,低コヒーレント光源を用いて光ファイバの波長分散を測定する,JIS C 6827に規定する方
法Dである“干渉法”とは異なる。方法Dでは,干渉計の参照経路の光路長を,供試品につながる経路の
13
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
光路長と整合するように変える。その方法では,広帯域光源が十分な群遅延測定の分解能をもたないため,
高い波長測定分解能を必要とする光フィルタのような部品の測定には適さない。
干渉計は,参照経路に対する供試品からの出力光の位相の相対的な変化を,光波長に対して測定する。
光が互いに強め合うように干渉する場合,参照経路からの光パワーに比べて,検出する光パワーは大きく
なる。光が互いに弱め合うような場合,逆に検出する光パワーは小さくなる。光路長が異なる場合,波長
が変化すると光は二つの経路を異なる速度で伝搬するため,波長掃引することによって,検出する光パワ
ーは周期的に変動する。光路長差が大きくなると,検出する光パワーは波長に対して急激に変化するよう
になる。変動周期Δλは,式(10)によって算出する。
L
Δ
Δ
2λ
λ=
··············································································· (10)
ΔLは,二つの経路間の光路長差を表す。光路長が1 m異なる場合,波長帯1 550 nmにおける変動周期
は2.4 pmとなる。光路長差が10 mの場合は,変動周期は0.24 pmとなる。測定系を再構築することなし
に,異なるデバイスの測定に柔軟に対応して,0.1 pm未満の波長分解能をもつ測定系にすることが望まし
い。
波長に対する光パワーの変化,すなわち,干渉波形から,位相の光周波数依存性を求め,群遅延の絶対
値を算出することができる。群遅延は,周波数又は波長の関数となる。
6.2.2
試験手順
図2に記載する測定系を用いて,次の手順で測定を行う。
a) 供試品を接続しない,すなわち,TJ1及びTJ2には何も接続しない状態で,D1とD2とが同じパワー
になるように偏光制御器を調整する。VWSの波長を,測定する波長範囲の中心に設定することを推奨
する。ブランチングデバイス(RBD)のディレクティビティは50 dBを超えることが望ましい。
b) 供試品をTJ1及びTJ2に接続する。RBD2に2×2ブランチングデバイスを用いた場合,TJ2を供試品
の出力端子に接続する代わりにRBD2の左側の空き端子に接続すると,供試品の反射スペクトルを測
定することができる。測定の不確かさを小さくし,温度及び光ファイバピッグテールの状態が安定す
るために,接続後に数分間待つのが望ましい。
c) VWSの波長を掃引しながら,波長に対するD1及びD2のパワーを記録する。供試品の長さによって
決まる測定波長間隔は,0.1 pm以下に設定する。測定結果はデータ列(λi,P1i,P2i)となる。ここで,
Pは波長を掃引して,各受光装置で測定した光パワーである。
d) オプションとして,TJ1とTJ2との間に基準光パッチコードを接続してリファレンスを測定する。こ
れは,供試品からの出力光を正規化する“ゼロ損失”リファレンスとなる。これによって,光損失の
正確な測定ができる。また,この測定結果はデータ列(λi,N1i,N2i)となる。ここで,Nは波長を掃
引して,各受光装置で測定した光パワーである。
e) 手順c) 及び手順d) を繰り返し,複数の掃引の測定結果を平均化することで,ランダムな雑音成分の
影響を低減することができる。ただし,この手順で,干渉による振動的変化を平準化してしまうこと
がないように,手順c) 及び手順d) の生のデータ列を分析した結果に対して,平均化を行うのがよい。
f)
推奨するオプションの手順として,偏光制御器を調整して最初の偏光状態に対して直交する第二の偏
光状態を作り,手順b)〜手順e) を行う。これによって,供試品に入力する全ての偏光状態における
平均の群遅延量及び群遅延差を求めることが可能となる。
6.2.3
群遅延リップル測定における注意事項
供試品の群遅延リップルの周期に対して適切な波長分解能を選ばなければならない。波長分解能が大き
14
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
くなると,群遅延の雑音を低減することができるが,平滑化によって群遅延リップルが正しく測定できな
くなる。
6.2.4
群遅延の算出
6.2.2に規定する手順c) での測定の結果,データ列(λi,P1i)及び(λi,P2i)によって与えられる二つの
干渉波形を得る[6.2.2の手順f) の結果を含め,全てで四つの干渉波形を得る。]。これらのデータ列を,
式(11)を用いて,同じ方法で個別に処理する。これらの手順で群遅延のスペクトルを算出できるが,供試
品がDGD特性をもつ場合,直交する二つの偏光成分で測定した群遅延差による計算結果は異なる可能性
がある。
ωを用いて,干渉波形P(ω) は,式(11)によって表す。
()
()
()
()
()
()
[
]
ω
ϕ
ω
ω
ω
ω
ω
cos
2
D
R
D
R
P
+
+
=
····································(11)
ここに,
ω: 光周波数。2πc/λに等しい。
R(ω): 参照経路における受光装置での光パワー
D(ω): 供試品からの受光装置に入る光パワー
φ(ω): 二つの経路間の光位相差
これらは全てωの関数である。位相情報をもつこの式(11)の右辺第3項を得るため,P(ω) をハイパスフ
ィルタで処理する。デバイスの群遅延量に関係する干渉波形の周波数を特定するため,フーリエ変換を用
いてハイパスフィルタのカットオフ周波数を算出することができる。この項のヒルベルト変換を用いて,
振幅を式(12-1)に,位相のω依存性を式(12-2)に示す。
)
(
)
(
2
ω
ωD
R
······································································ (12-1)
)
(ω
ϕ
·················································································· (12-2)
6.2.2に規定する手順e) に示したとおり,必要であれば繰り返し波長掃引してこれらのデータ列の結果
を平均化する。測定データ点が多い場合は,移動平均を用いて,必要な波長分解能になるまで計算に使用
する測定データを減らすことができる。
群遅延は,式(13)によって算出する。
(
)
()
i
i
i
i
i
i
GD
ω
ω
ω
ϕ
ω
ϕ
ω
ω
−
−
=
+
+
+
+
1
1
1
2
··················································· (13)
二つの受光装置の干渉波形について個別にこの計算を行い,入力光の偏光状態に対して平均化した群遅
延スペクトルを得るよう,二つの受光装置検出器の結果を波長ごとに平均化し,結果をω又はλの関数と
して表す。さらに,6.2.2に規定する手順f) の結果について同様の解析を行って得た群遅延の計算結果と
平均することによって,十分に平均化された群遅延スペクトルを得る。ピッグテール形光ファイバの長さ
をゼロ補正するリファレンス測定を行う場合,得られる群遅延量は絶対群遅延であって,かつ,デバイス
の長さに対応した値を表す。
N(ω) データのヒルベルト変換から振幅
()
()
ω
ω
N
D
R
2
を得るため,6.2.2に規定する手順d) で得た正規
化の結果に対して同様の分析を行い,その分析結果から供試品の挿入損失を算出することができる。偏光
状態に対して平均化した供試品のTaveは,式(14)によって算出する。
()
()()
()
()
∑
=
ω
ω
ω
ω
ω
N
D
R
D
R
Tave
····························································· (14)
ここで,Σは,二つの偏光干渉波形,又は6.2.2に規定する手順f) を実行した場合は四つの偏光干渉波
15
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
形に対して総和をとることを表す。
デバイスの平均光損失は,二つの受光装置で測定した干渉波形に対する平均で求め,dBを単位として,
式(15)で算出する。
()
()
[
]
ω
ω
ave
10
log
10
T
IL
−
=
···························································· (15)
SWI法による測定結果からのDGDの算出は,A.4に記載する。
6.3
偏光位相シフト法
6.3.1
変調周波数
必要な波長分解能,群遅延又は波長分散雑音を考慮して,変調周波数を決める。詳細は,6.3.2で規定す
る。
波長分解能は,供試品の群遅延リップルの周期に対して適切となるように,慎重に選定しなければなら
ない。大きな波長分解能で測定するとき,群遅延雑音を減少させることができるが,平滑化の影響で群遅
延リップルを正確に測定することができなくなる。
6.3.2
波長ステップ幅
波長分散値を求めるためには,波長の差Δλで波長微分を行う必要がある。そのため,二つの波長で測
定する。位相比較器で測定できる位相差は,±180°の範囲である。したがって,隣接する波長間で測定し
た群遅延差の最大値Δτmaxは,式(16)による。
f
f
2
10
10
360
180
Δ
3
3
max
=
×
±
≦
τ
························································· (16)
波長増分Δλを,波長ステップ幅と呼ぶ。正確な測定をするため,波長ステップ幅は,式(17)によって決
定する。
max
max
Δ
Δ
CD
τ
λ
±
≦
········································································ (17)
ここに,
Δλ: 波長ステップ幅(nm)
Δτmax: 供試品の群遅延差の最大値(ps)
f: 変調周波数(GHz)
CDmax: 測定する波長分散の最大値(ps/nm)
VWSの最小波長ステップ幅は,供試品の群遅延リップルの周期に応じて適切な値を選ばなければならな
い。
6.3.3
波長掃引及び波長分散の測定
VWSを用いて必要な波長範囲で波長を掃引し,各波長での測定値から群遅延を求める。さらに,測定に
よって求めた各波長における群遅延量を波長に対して微分することで,供試品の波長分散を算出すること
ができる。
この方法は,直交する偏光の組合せ(0°及び90°の直線偏光)を用いる。0°及び90°の直線偏光を供
試品に入力し,供試品の出力をPBSによって二つの偏光成分に分離する。このあと,規定の波長における,
P偏光及びS偏光の各偏光成分の光強度及び群遅延を測定する。つまり,0°の直線偏光に対して,P偏光
及びS偏光の光強度(|T11|2mea及び|T21|2mea)並びに群遅延[(dΦ11/dω)mea及び(dΦ21/dω)mea]を測定し,90°
の直線偏光に対して,P偏光及びS偏光の光強度(|T12|2mea及び|T22|2mea)並びに群遅延[(dΦ12/dω)mea及び
(dΦ22/dω)mea]を測定する。
6.3.4
校正
供試品の測定を行う前に,長さ1 m以下のシングルモード光ファイバを使って測定系を校正する。最初
16
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
に,偏光スプリッタのP偏光の偏光方向と一致する0°の直線偏光を生成するため,四分の一波長板及び
二分の一波長板を調整する。次に,規定の波長において,PBSによって分離した二つの偏光(P偏光及び
S偏光)を交互に出力し,それぞれの光強度及び群遅延を測定する。つまり,P偏光及びS偏光における
光強度(|T11|2cal及び|T21|2cal)並びに群遅延[(dΦ11/dω)cal及び(dΦ21/dω)cal]を測定する。波長分散は,6.3.5
に規定した方法で測定した結果を用いて算出する。
6.3.5
相対的な群遅延及び波長分散の算出
P偏光及びS偏光の群遅延は,6.3.3及び6.3.4によって測定した値を用いて,式(18-1)〜式(18-4)によっ
て算出する。
P偏光の群遅延:
cal
11
mea
d
d
d
d
d
d
ω
ω
ω
Φ
Φ
Φ
kl
kl
−
=
·························································· (18-1)
ここに,
kl: 11及び12
P偏光の平均群遅延:
2
d
d
d
d
d
d
12
11
ave1
+
=
ω
ω
ω
Φ
Φ
Φ
··························································· (18-2)
S偏光の群遅延:
cal
22
mea
d
d
d
d
d
d
ω
ω
ω
Φ
Φ
Φ
mn
mn
−
=
························································ (18-3)
ここに,
mn: 21及び22
S偏光の平均群遅延:
2
d
d
d
d
d
d
22
21
ave2
+
=
ω
ω
ω
Φ
Φ
Φ
·························································· (18-4)
それぞれの波長における群遅延及び波長分散を,式(19-1)及び式(19-2)を用いて算出する。
偏光状態に依存しない平均群遅延GDaverageを,式(19-1)によって算出する。
()
2
d
d
d
d
ave2
ave1
+
=
ω
ω
λ
Φ
Φ
GD
························································ (19-1)
偏光状態に依存しない平均波長分散CDaverageを,式(19-2)によって算出する。
()
(
)
(
)
[
]
λ
λ
λ
λ
λ
λ
Δ
2
Δ
Δ
×
−
−
+
=
GD
GD
CD
············································· (19-2)
偏光状態に依存しない平均化した群遅延及び波長分散を算出することによって,偏波モード分散が引き
起こす測定誤差を測定結果から除くことができる。
PPS法による測定結果からのDGDの算出は,A.5に記載する。
6.4
各波長における測定範囲(全ての測定方法に対しての共通事項)
規定波長(DWDMデバイスに対しては,規定周波数)における測定範囲は,通常は供試品の仕様によ
って決める。一般的に,規定波長における測定範囲は二つの方法で定義する。一つ目の方法は,規定周波
数を中心に,規定の周波数幅で測定範囲を設定する(ITU-T G.694.1参照)。例えば,多チャネル用の供試
17
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
品においては,図5に示すように,ITU-Tの規定周波数を中心とした25 GHz(±12.5 GHz)の範囲で群遅
延を分析し,それぞれのチャネルにおける結果を規定周波数に対してプロットする。
二つ目の方法は,供試品の光損失特性によって決まる測定範囲において,供試品の波長分散特性を分析
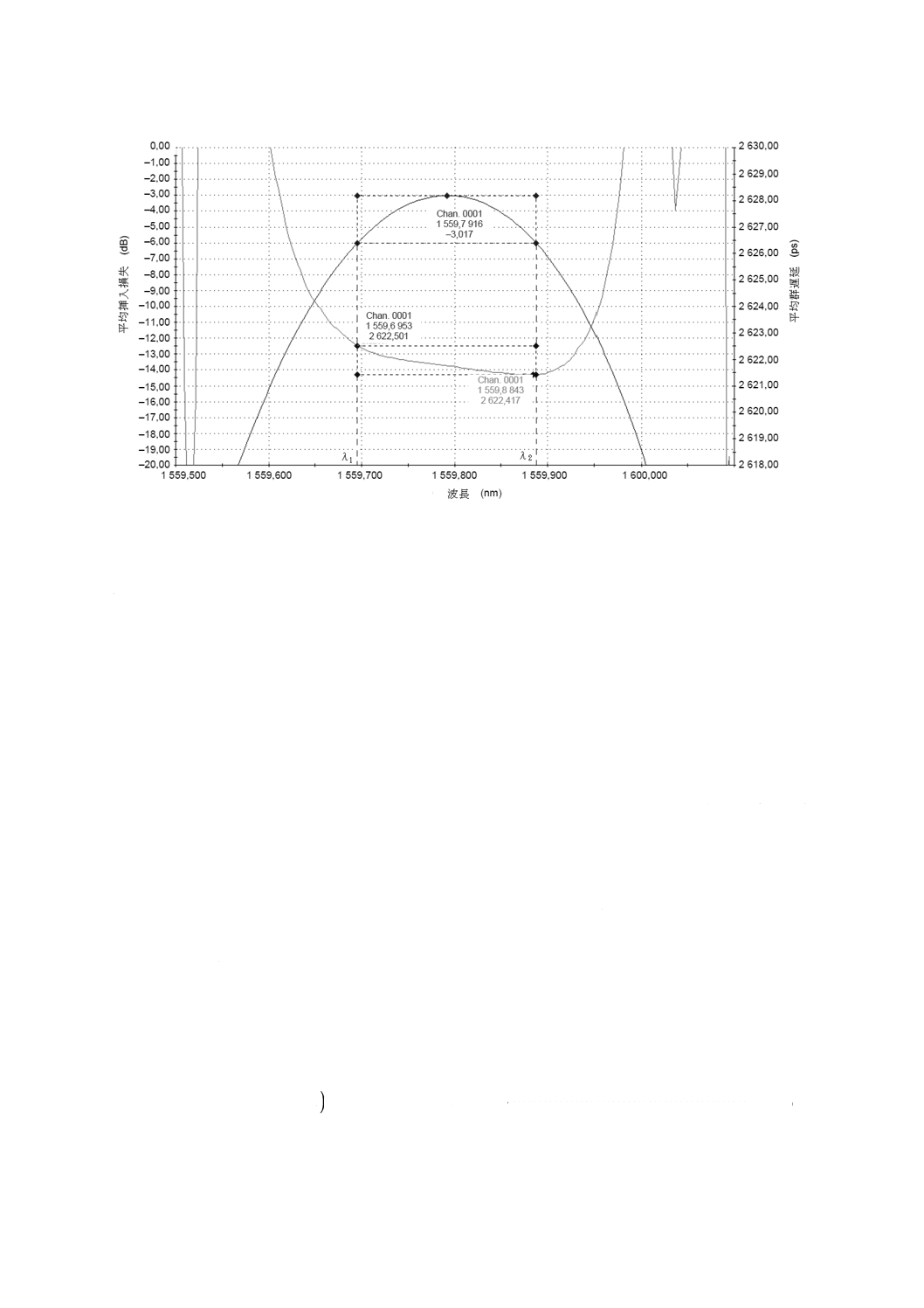
する。例えば,供試品が,図6に示した波長依存性損失をもつフィルタの場合,波長分散測定は,波長λ1
〜λ2の範囲にて実行する。λ1及びλ2は,損失曲線においてピークからx dB低下する波長で決める。xは一
般的に,0.5〜5の範囲の値とする。
図5−ITU-T規定周波数を中心とする規定(25 GHz)幅の測定範囲
25 GHz範囲
18
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図6−光損失曲線の3 dB低下の点で規定する測定範囲
7
解析
7.1
群遅延測定の雑音低減
7.1.1
平均化処理
群遅延測定では,リファレンス光と供試品を通過した光との位相差を複数回にわたって測定し,平均化
してもよい。非決定論的雑音の場合,雑音レベルは平均する測定回数の平方根に従って減少する。平均化
は,波長分解能に影響を与えることはないが,測定時間とはトレードオフの関係となる。
7.1.2
波長フィルタリング
測定ノイズを低減するためにフィルタ法を適用してもよい。最も一般的に適用するフィルタは,定義し
た波長範囲内での平均化である。高密度波長分割多重(DWDM)用部品で一般的に使用する波長範囲は,
5〜10 pmである。広波長帯域用部品では,波長幅を1 nm以上にすることができる。光信号の波長は高周
波で変調することによって幅が広がり,それによって波長領域で平均化した測定値となることを考慮する
必要がある。これらの要因を基に,測定における光強度変調器に印加する周波数及びフィルタリングの帯
域幅を決める。
DWDM用部品について波長領域で平均化する場合は,波長範囲内の複数の測定点での平均化を行う。
波長分解能を下げることによって,より滑らかな測定曲線を得ることができる。ただし,本来の測定結果
として得るべきデータまで平均化しないように注意しなければならない。
7.2
位相変化の線形性
位相に対する応答が高い線形性をもっている場合,遅延はあっても,信号のひずみは起こらない。信号
通過帯域内における線形性のばらつきは,信号ひずみの要因となる。
位相の線形性を,式(20)に示す。
()(
)
(
)
opt0
opt
g
opt0
opt
π
2
f
f
f
f
−
+
=
τ
φ
φ
················································· (20)
ここで,群遅延τgは定数である。ほとんどの部品では,位相について線形補間を行い,補間直線をもと
の位相から減算する。結果として得られる位相が線形位相からのかい(乖)離値である。
19
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.3
波長分散
7.3.1
一般事項
波長分散は,波長の関数である群遅延の微分係数である。波長分散を,式(21)に示す。
()
()
λ
λ
τ
λ
d
d
CD
g
=
······································································· (21)
測定結果の処理では,式(22)の数値演算によって微分を行う。
()
(
)
(
)
1
1
1
g
1
g
−
+
−
+
−
−
=
i
i
i
i
i
CD
λ
λ
λ
τ
λ
τ
λ
·························································· (22)
ここに,
i: 1,2,...,n
λi+1,λi及びλi−1: (λi+1−λi)及び(λi−λi−1)は,波長サンプリング
間隔Δλを表す。
測定波長間隔Δλが小さくなれば,群遅延雑音は大きくなる。計算によって増大した群遅延雑音を最小
化するための多くの方法がある。一般的には,7.3.2及び7.3.3に規定する二つの方法を推奨する。
7.3.2
有限差分計算
群遅延雑音を低減するため,波長分散を算出する前に,波長フィルタリング法(又は平均化)を適用す
る。一般的に,この方法は狭帯域特性をもつ部品に適用する。測定範囲内においてフィルタリング(又は
平均化)するための測定ポイント数は,本来の測定結果として得るべきデータの平均化を避けるとともに
群遅延曲線のひずみを抑えることによって,波長分散の測定結果の雑音成分がどの程度低減できるかの状
態に依存する。
7.3.3
特性曲線のフィッティング
最小二乗平均法を用いて,6.4に規定する測定波長範囲における群遅延測定データに対し,フィッティン
グを行う。波長分散は,群遅延雑音の影響を低減するために,波長に対してフィッティングした群遅延曲
線を微分することで算出する。この方法は,通常,広帯域特性をもつ部品,すなわち,長尺光ファイバに
適用する。ただし,測定範囲内における群遅延の変化が滑らかな場合,この方法は狭帯域特性をもつ部品
にも適用が可能である。複数チャネルに対応する供試品の一つの例を,図7に示す。波長分散は,それぞ
れのチャネルに対して,次のa)〜c) に示す方法で算出する。
a) 図8に示すように,ITU-Tの規定周波数を中心とした25 GHz(±12.5 GHz)の帯域における群遅延デ
ータを,最小二乗平均法を用いて,6次の多項式曲線でフィッティングする。
b) ITU-Tの規定周波数に対してオフセット周波数を与え,生データとフィッティング曲線との差が最小
になるようにする。フィッティング曲線と生データとの群遅延量の差は,±0.5 psとする。
c) フィッティングした群遅延曲線を波長に対して微分し,波長分散を算出する。計算に用いる波長間隔
は6 pmとする。
20
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図7−ITU-T規定周波数を中心にした25 GHzの帯域における
フィッティングした群遅延から算出した波長分散
図8−ITU-T規定周波数を中心にした25 GHzの帯域における相対群遅延データを
フィッティングした6次多項式曲線
21
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.4
位相リップル
7.4.1
一般事項
群遅延の測定データから位相リップルを算出する方法を,7.4.2〜7.4.4に規定する。これは,DWDM用
分散補償器に対してだけ有効な方法である。
7.4.2
傾斜フィッティング
供試品の仕様に規定する帯域幅(別途規定していない限り,光損失の3 dB帯域幅を用いる。)に対して,
最小二乗法を用いて,群遅延の測定結果を直線でフィッティングし,群遅延のフィッティング直線からの
偏差を得る。これらの値は,群遅延リップルを含んでいる。
7.4.3
群遅延リップルの算出
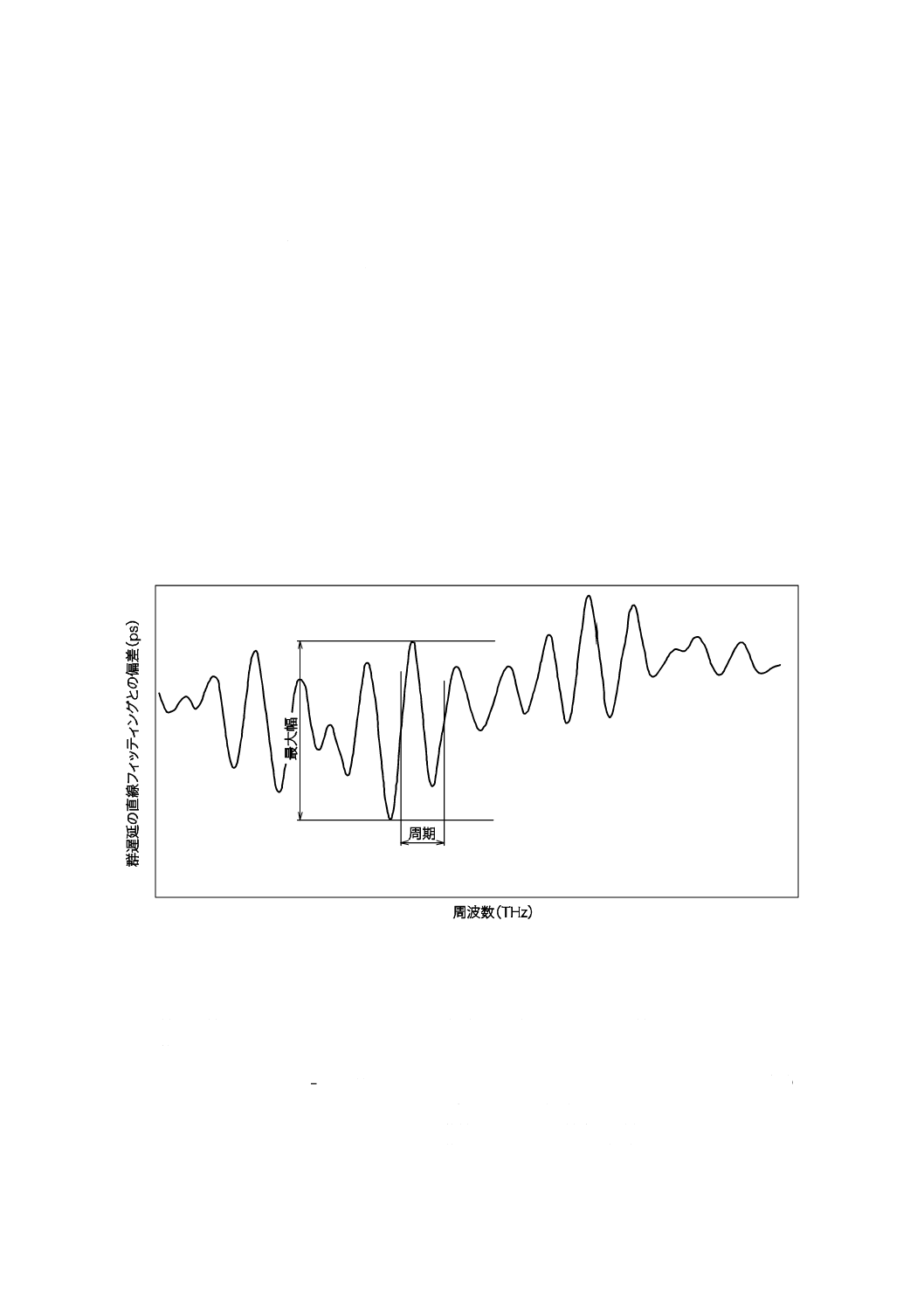
7.4.2に規定する測定結果を用いて,群遅延リップルの最大幅及びその周期を求める。群遅延リップルの
最大幅は,リップルの2サイクル以上の範囲で決めるのが望ましい。群遅延リップルの最大幅は,その範
囲内における群遅延とフィッティング直線との差の,最大(正の最大)と最小(負の最大)との差から求
める。群遅延リップルの周期は,最大幅を含む数サイクル以上の範囲における平均から求めるのが望まし
い。また,群遅延リップルの周期は,それぞれのリップルにおける平均線と群遅延リップルの波形との交
点から求める。群遅延リップルの推定例を,図9に示す。これは,群遅延リップルを周波数に対してプロ
ットする場合にだけ用いる。
図9−群遅延リップルの最大幅及び周期の推定
7.4.4
位相リップルの算出
位相の最大と最小との差分である位相リップル(Δθ)は,群遅延リップルの最大幅及び周期から,式(23)
によって算出する。
rip
period
Δ
A
f
×
=
θ
······································································ (23)
ここに,
Δθ: 位相リップル(rad)
Arip: 群遅延リップルの最大幅(s)
fperiod: 群遅延リップルの周期(Hz)
22
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8
測定例
8.1
50 GHzバンドパス薄膜フィルタ
50 GHzバンドパス薄膜フィルタにおける群遅延及び光損失スペクトルの測定例を,図10に示す。
図10−50 GHzチャネル間隔DWDMフィルタにおける群遅延及び光損失スペクトル
8.2
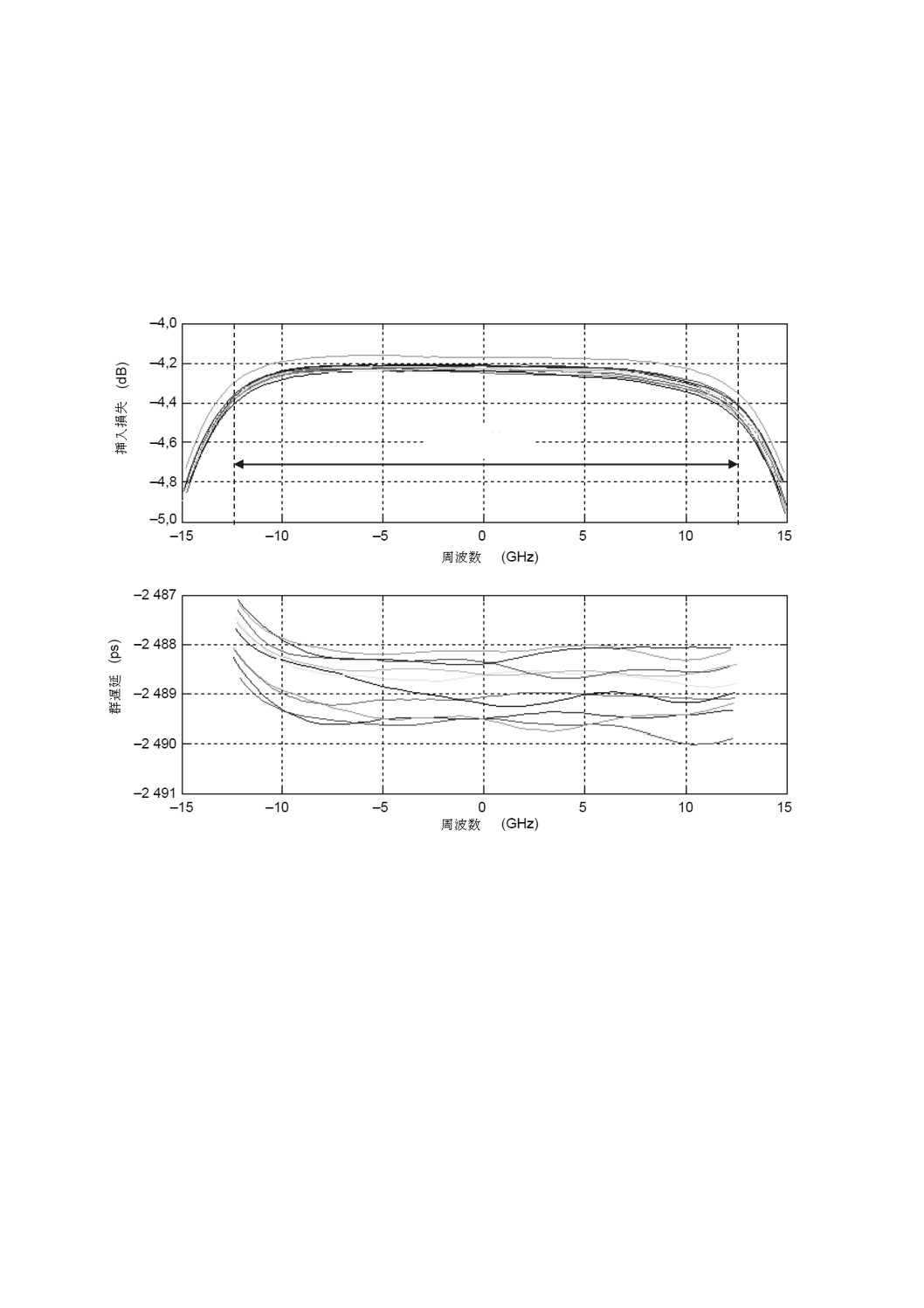
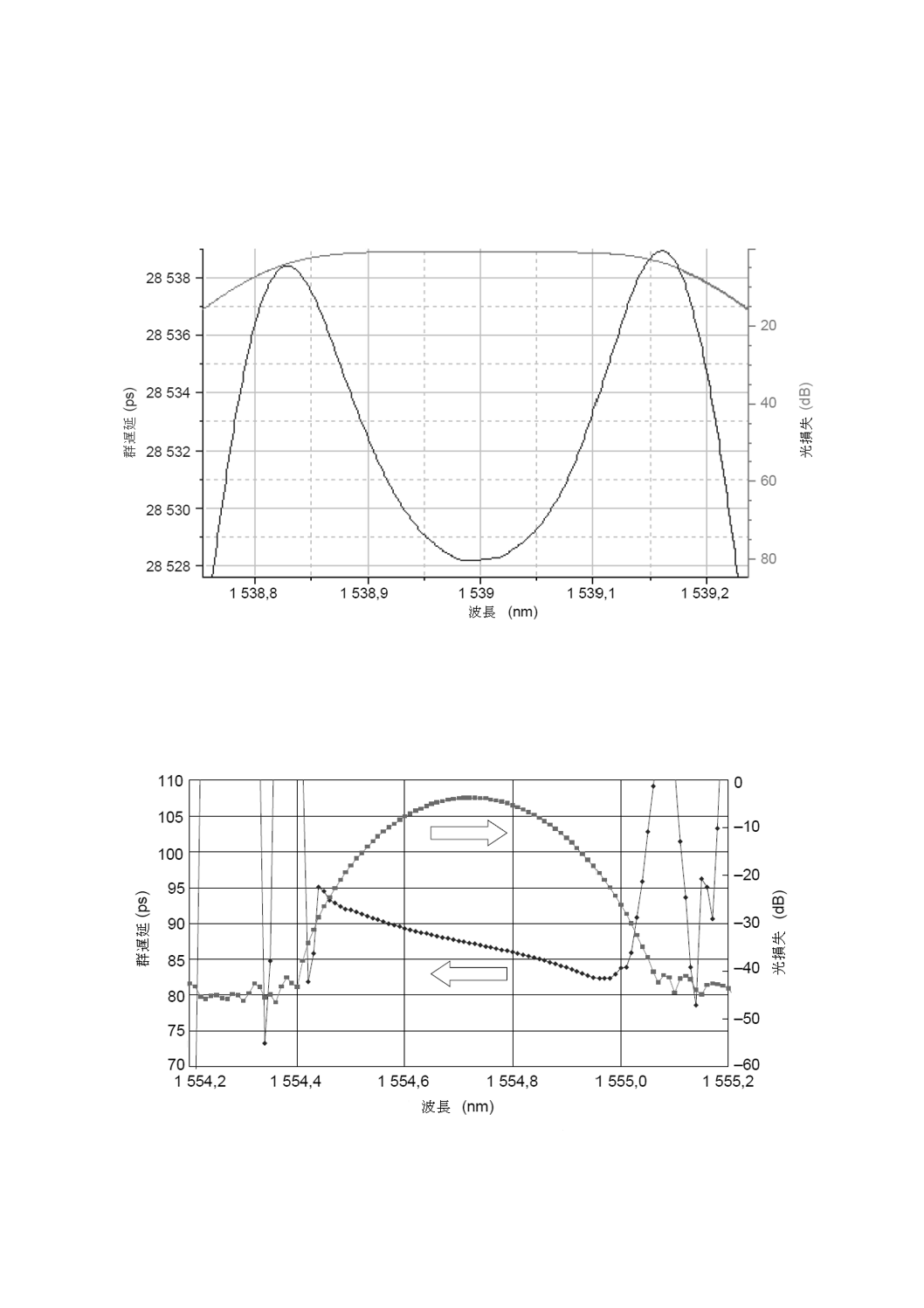
平面導波路フィルタ部品
平面導波路フィルタ部品における群遅延及び波長分散の測定例を,図11及び図12に示す。
図11−平面導波路フィルタにおける群遅延及び光損失スペクトル
23
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
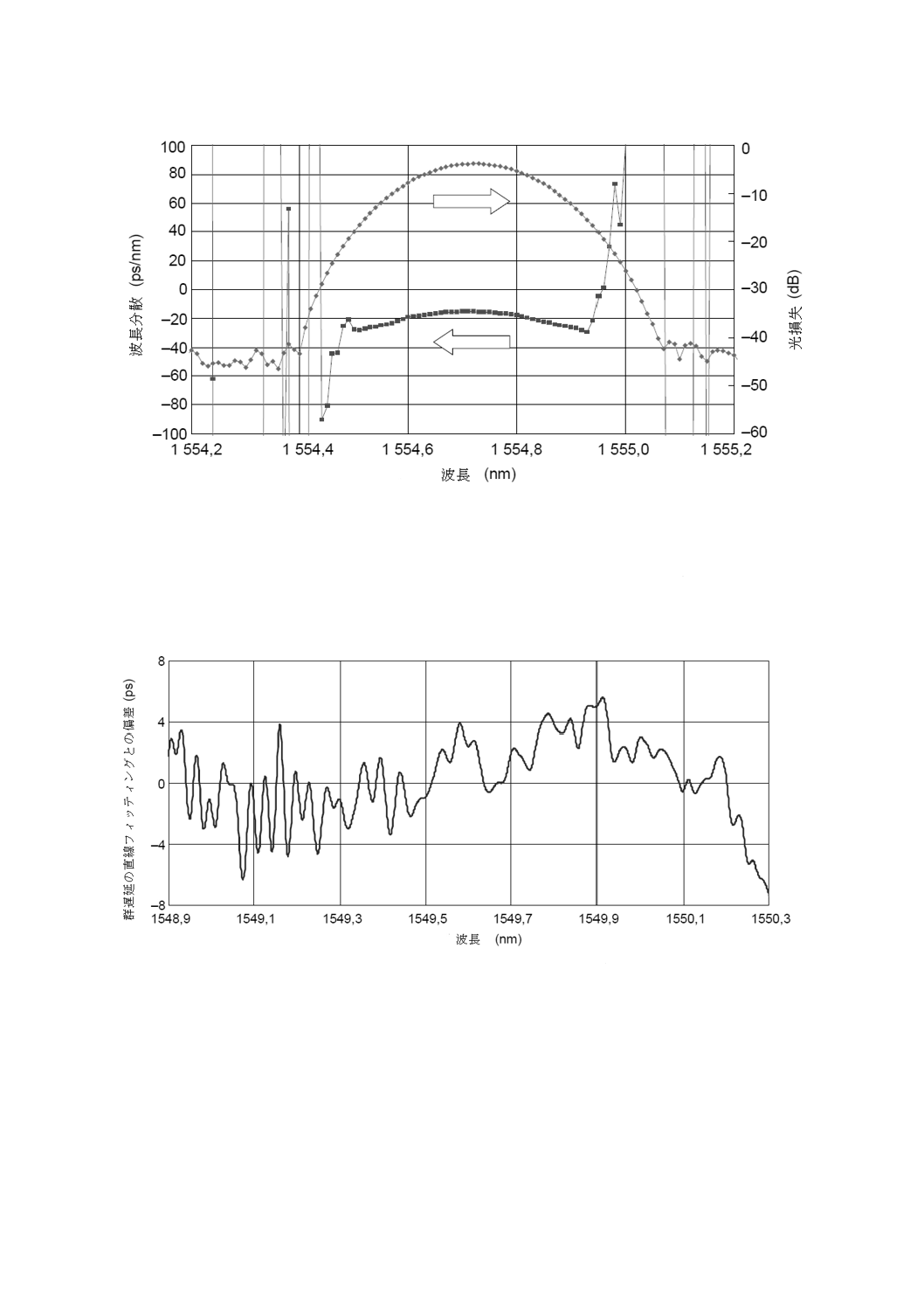
図12−平面導波路フィルタにおける波長分散及び光損失スペクトル
8.3
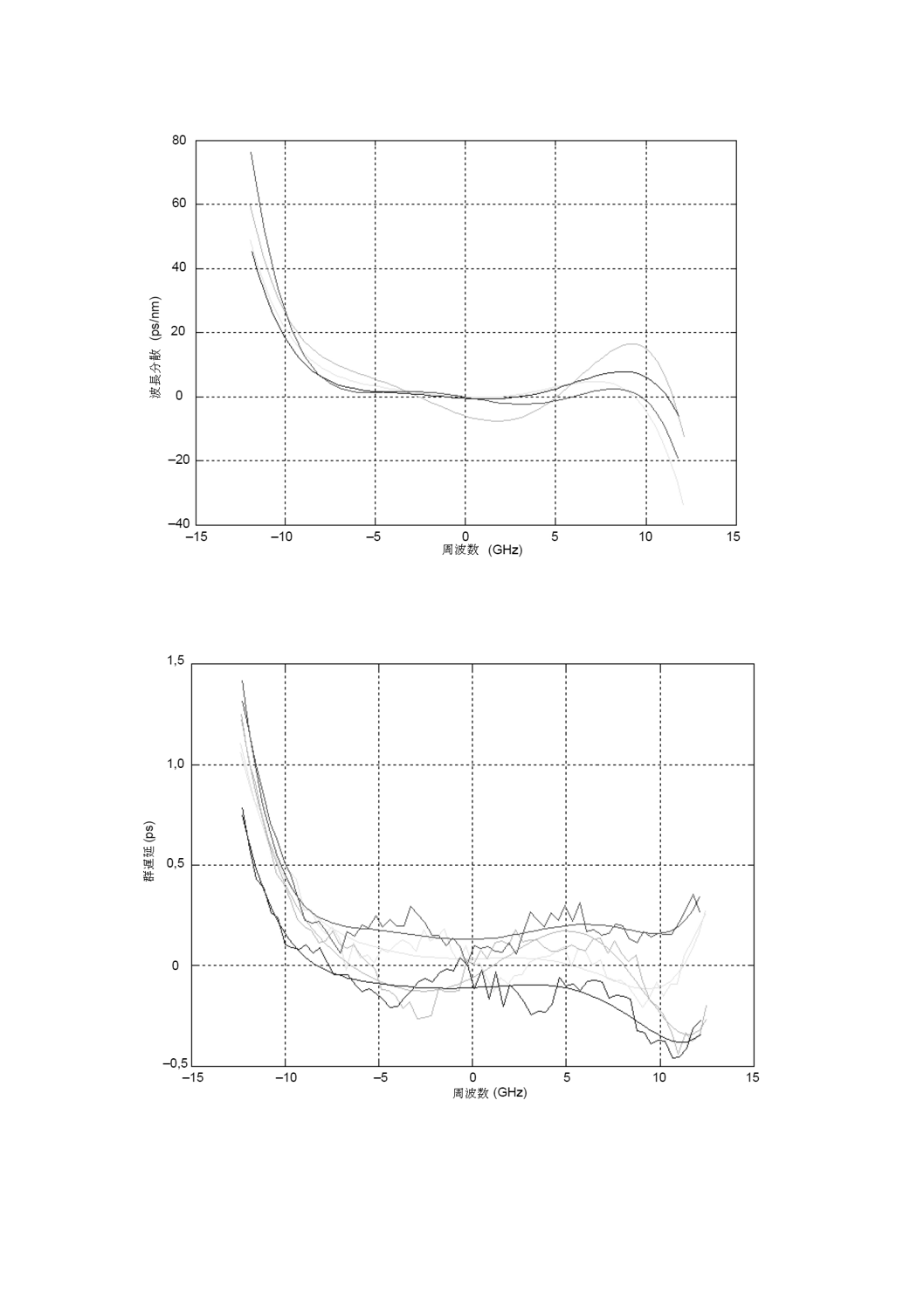
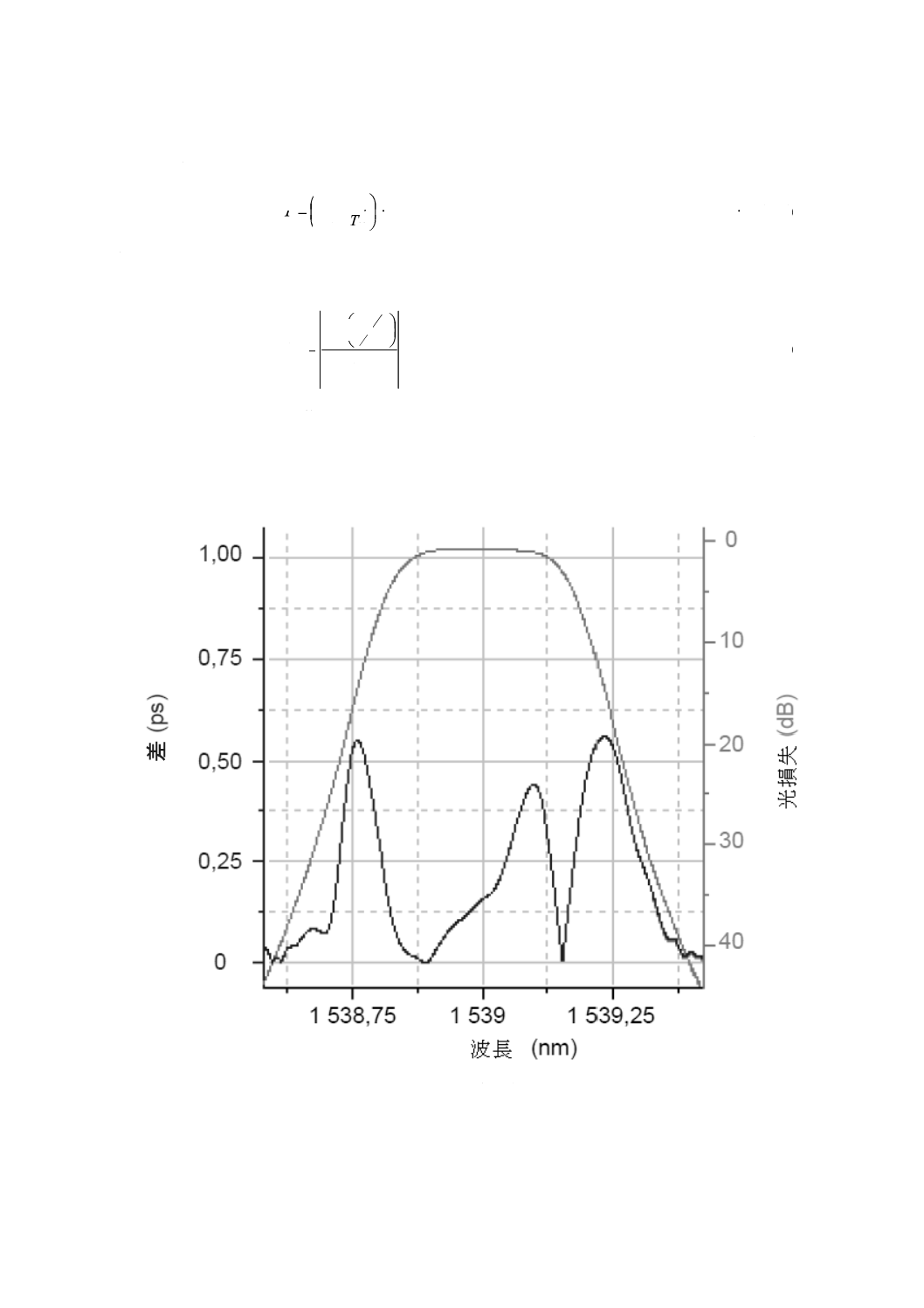
可変分散補償器[ファイバブラッググレーティング(FBG)]
偏光による変動を平均化するMPS法を用いて測定したFBGの群遅延と,その直線フィッティングとの
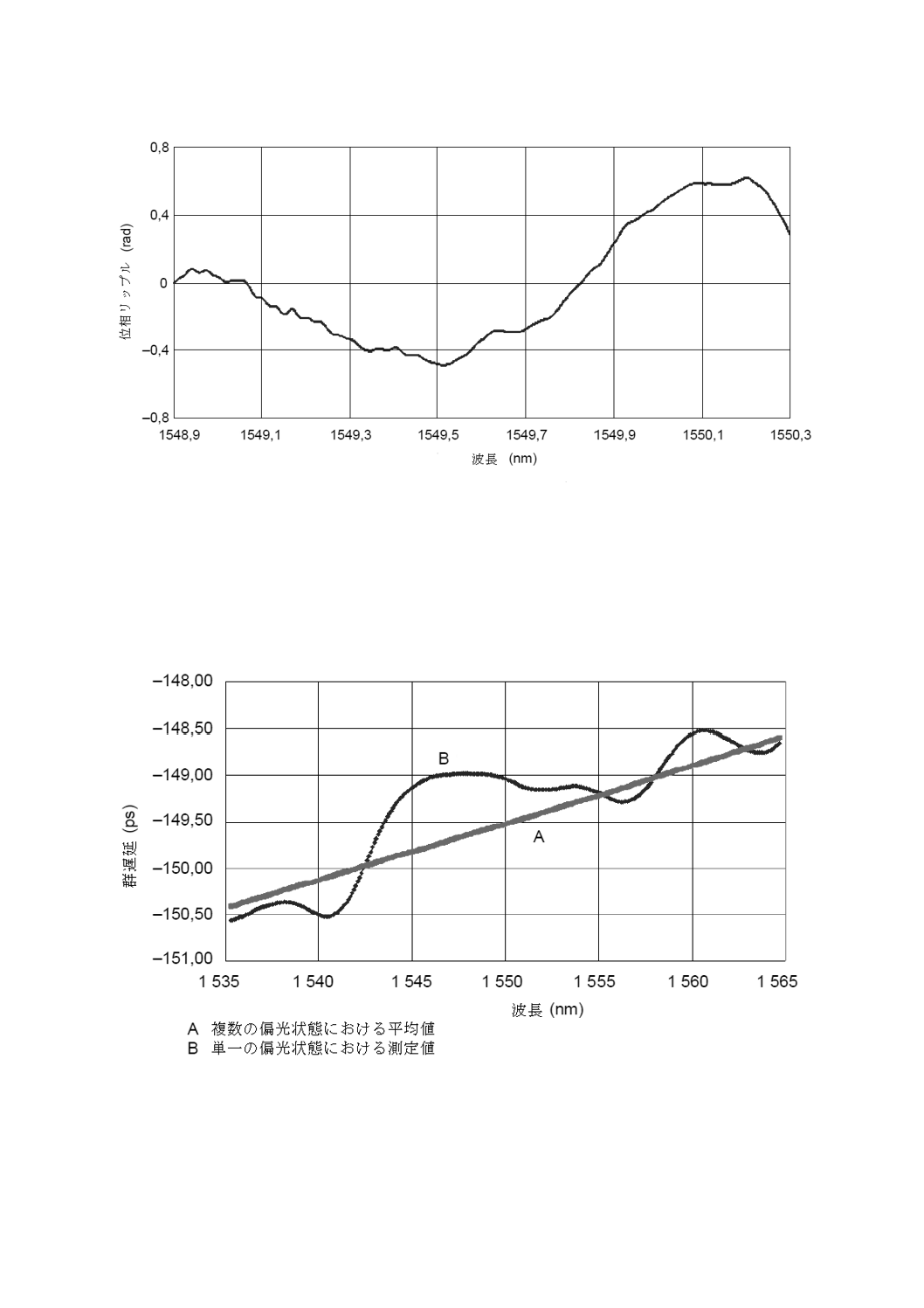
偏差及び位相リップルを,図13及び図14に示す。変調周波数fRFは,500 MHzである。
図13−FBGにおける群遅延と直線フィッティングとの偏差
24
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図14−FBGにおける位相リップル
8.4
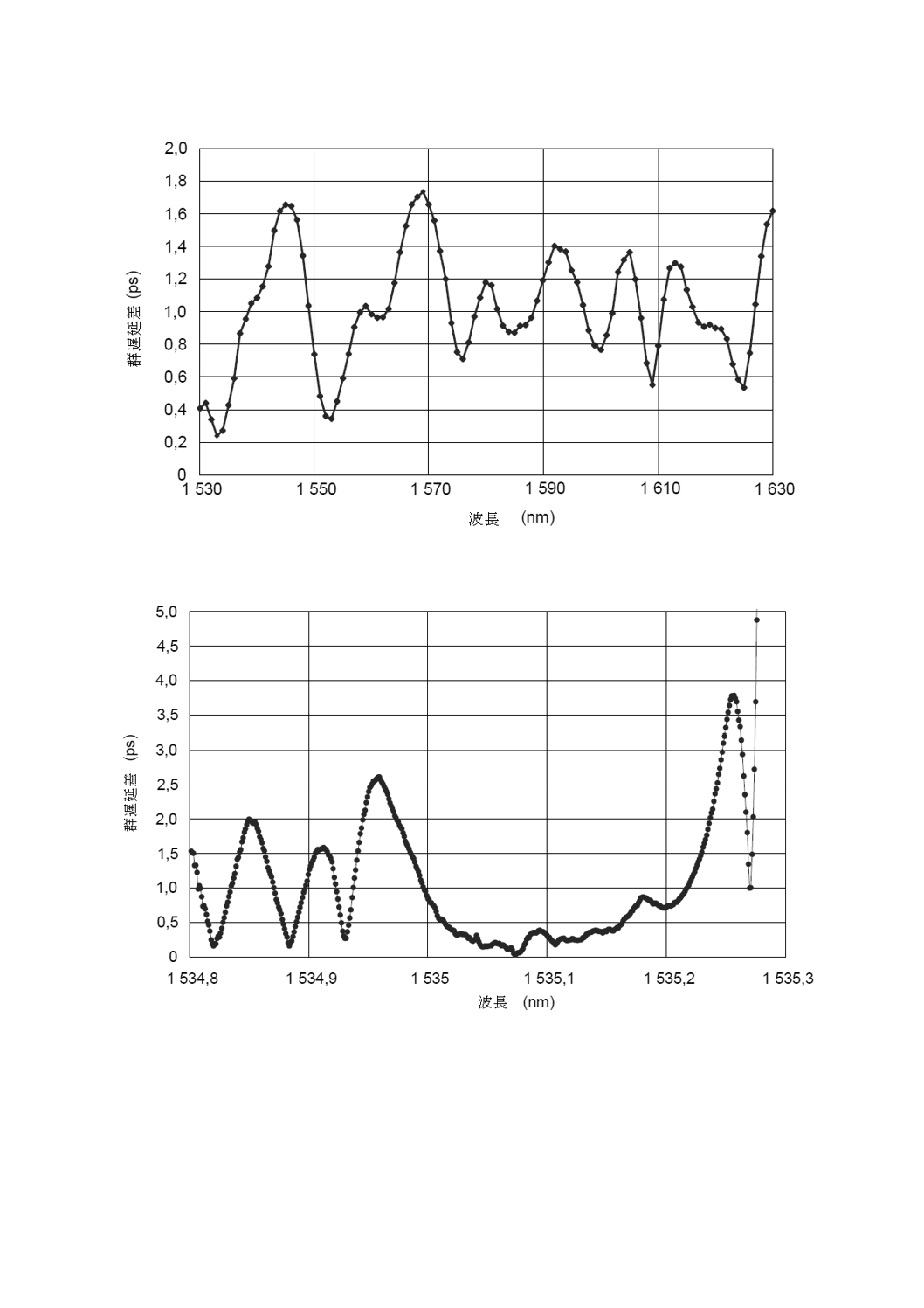
ランダム偏光モード結合デバイス
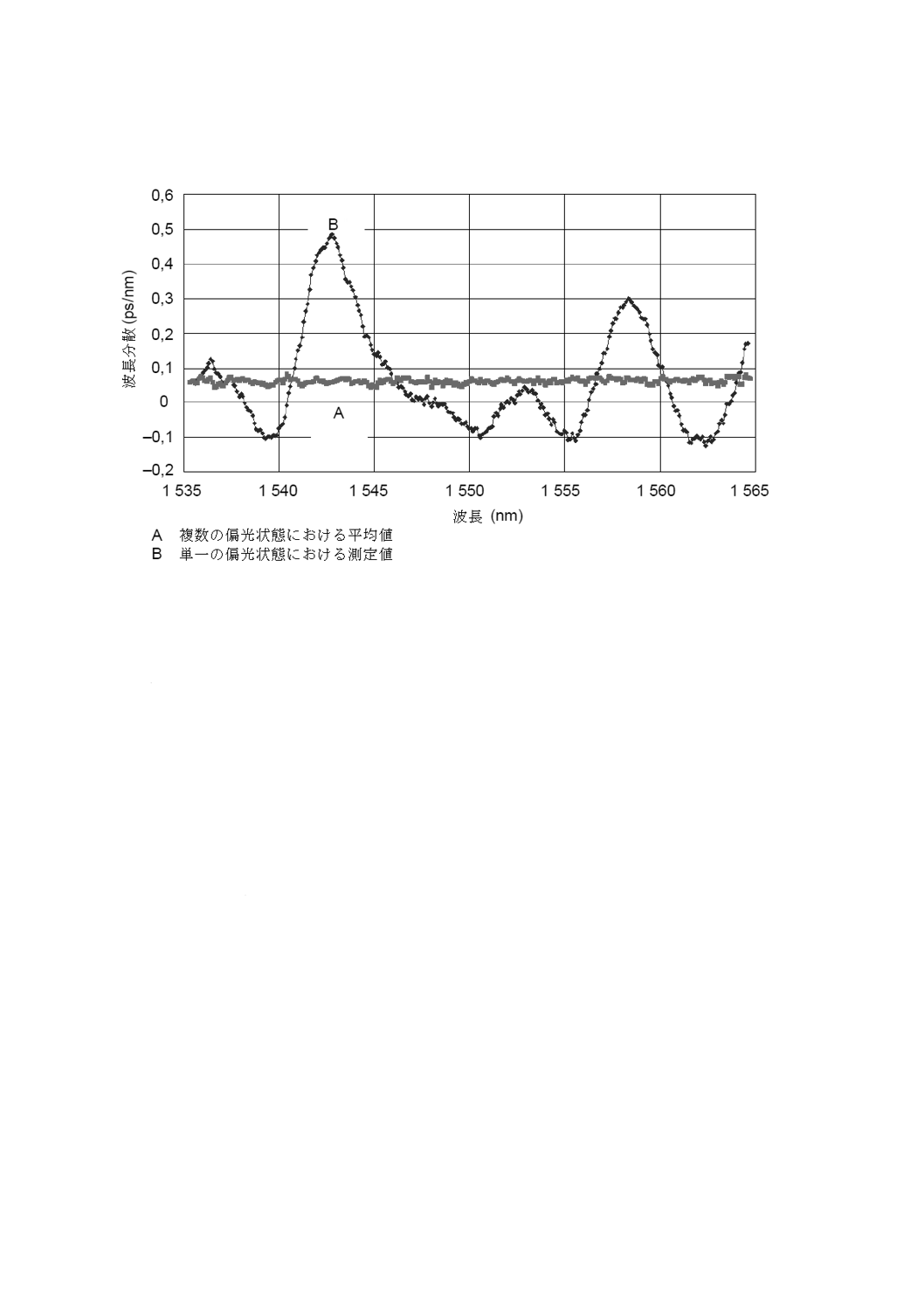
ランダム偏光モード結合をもつデバイスにおける群遅延の測定例を,図15に示し,複数の偏光状態にお
いて群遅延を平均化処理することの利点を示す。平均化しない場合,群遅延カーブはDGDの1/2まで変化
する。
図15−ランダム偏光モード結合をもつデバイスの群遅延
25
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ランダム偏光モード結合をもつデバイスにおける波長分散の測定例を,図16に示す。
図16−ランダム偏光モード結合をもつデバイスの波長分散
9
個別に規定する事項
必要に応じて,次の事項を製品規格などに規定する。
− 測定の不確かさ
− 用いる測定方法
− 測定波長範囲
− 波長精度
− 波長分解能
− 環境条件(気温,気圧及び湿度)
− 高周波変調周波数
− 位相測定の平均化回数
− スペクトルの平均化範囲
26
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
群遅延差の算出
A.1 一般事項
この測定方法では,偏光した光源を使う。多くの光部品は偏光依存性を示すため,6.1に規定する偏光に
対して平均化した群遅延スペクトルを得るため,十分に多い入力偏光状態において測定する。この附属書
に記載する手順によって,DGDのスペクトルを示すDGD(λ) を求めるための十分な測定値を得る。この附
属書の目的は,同じ測定装置で群遅延及びDGDを同時に測定するための方法を示すことである。DGD又
はPMDに特化した方法は,JIS C 61300-3-32及びIEC 61282-9に記述する。
A.2 入力偏光の四つの状態でMPS法による測定値からのDGDの算出
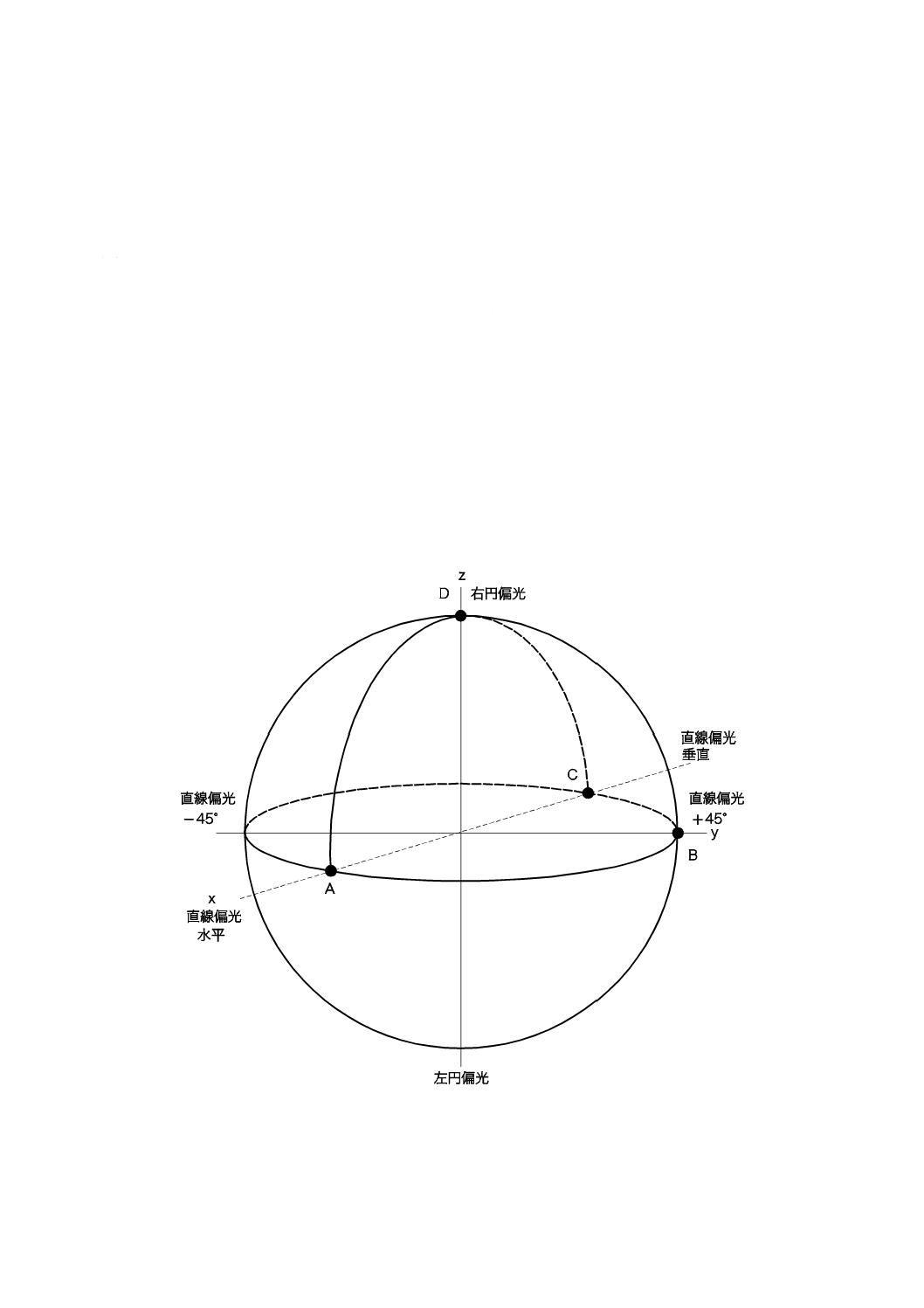
この方法では,ミュラー法の入力偏光状態として選択した四つの異なる偏光状態の光を入力して,6.1.3
に規定する手順c)〜手順f) を繰り返す必要がある。ミュラー法における四つの偏光状態は,図A.1に示し
たポアンカレ球上で容易に表現することができる。
図A.1−ポアンカレ球上に示したミュラー法における入力光の偏光状態
27
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 対応国際規格では,ポアンカレ球上にミュラー行列の基準となる四つの偏光状態を点A,B,C
及びDとして示しているが,式(A.1)におけるジョーンズベクトルのパラメータも記載している。
このパラメータを,ポアンカレ球の球座標と誤解する可能性があるため,図A.1の四点のパラ
メータの記載を削除した。
互いに直交する偏光状態は,ポアンカレ球上では180°離れた位置となる。図A.1に示すように,三つ
の偏光状態は,ポアンカレ球上の大円上にあり,互いに90°ずつ離れている。大円上の任意の点Aで始ま
り,“北極点”に対して右手の法則で90°ずつ加えると,点B及び点Cの位置になる。点Dの位置は,他
の三点と直交し,右手の法則を使って“上”に位置付けられる。正規化した入力ストークスベクトルs0及
び正規化したジョーンズベクトルj0を,式(A.1)に示す。ストークスベクトルは,大円が赤道上にあるミュ
ラー法での偏光状態の組合せ例を定義するために用いる。パラメータθは,正規化したジョーンズベクト
ルj0の傾きを表す。パラメータμは,ベクトルのx成分とy成分との間の位相差である。
=
μ
θ
μ
θθ
sin
2
sin
cos
2
sin
2
cos
0s
(
)
(
)
−
=
2/
i
exp
sin
2/
i
exp
cos
0
μ
θ
μ
θ
j
···························· (A.1)
ミュラー法での偏光状態の組合せ例を,表A.1に示す。
表A.1−ミュラー法での偏光状態の組合せ
位置
θ
μ
説明
A
0
0
直線偏光0°(水平方向)
B
π/4
0
直線偏光45°(45°方向)
C
π/2
0
直線偏光90°(垂直方向)
D
π/4
π/2
円偏光(右回転)
注記 この表のθ及びμは,図A.1のポアンカレ球で示すミュラー行列の基準となる
四つの偏光状態に対する,ジョーンズベクトルのパラメータを示す。
点A,B,C及びDにおける位相シフト(ラジアン)φA(λ),φB(λ),φC(λ) 及びφD(λ) を,6.1.3の方法に従
って,測定する。
二つの偏光状態の位相平均をφRF(λ) として,式(A.2)によって算出する。
()
()
()
2
C
A
RF
λ
φ
λ
φ
λ
φ
+
=
······························································ (A.2)
位相平均を用いて,測定した位相値を,式(A.3)によって補正する。
()
()
()
()
()
()
()
()
()
λ
φ
λ
φ
λ
φ
λ
φ
λ
φ
λ
φ
λ
φ
λ
φ
λ
φ
RF
D
D
RF,
RF
B
B
RF,
RF
A
A
RF,
−
=
−
=
−
=
···························································· (A.3)
位相差δRF(λ) を,式(A.4)によって算出する。
()
()
[
]
()
[
]
()
[
]
{
}
λ
φ
λ
φ
λ
φ
λ
δ
D
RF,
2
B
RF,
2
A
RF,
2
RF
tan
tan
tan
arctan
2
+
+
=
·········· (A.4)
DGDを,δRF(λ)(ラジアン)及び変調周波数f(GHz)を用いて,式(A.5)によって算出する。
()
()
f
DGD
π
2
10
RF
3
λ
δ
λ
×
=
····························································· (A.5)
28
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.3 全ての偏光状態を走査するMPS法による測定結果からのDGDの算出
この測定は,固定波長間隔においてVWSを設定し,図1の偏光制御器によって入力偏光を走査して多
数の偏光状態を作り,相対的な群遅延を測定することで実施する。ps単位で表示するDGDは,特定の波
長における群遅延の最大と最小との差として,定義する。
必要な精度を得るために,十分に速い速度で,又は十分に長い時間をかけて走査することによって,多
数の偏光状態を作り出すようにする。また,偏光の変化する速度に対して十分に短い時間で個々の測定デ
ータを平均化して,十分な偏光分解能があることも必要である。
最大及び最小の群遅延を用いてDGDを計算する代わりに,これら偏光状態における全ての群遅延デー
タの分布を評価することで,雑音レベルを改善し,正確なDGDを求めることができる。入力偏光状態を
ランダムに走査して群遅延を測定するとき,最大最小差(peak to peak値)と,分布の標準偏差との間には
単純な関係がある。例えば,ポアンカレ球上で偏光状態を表現することによって分かるように,二つの直
交する偏光状態に沿った偏光ベクトル成分間の違いに対しての偏光状態の密度は一定である。これら二つ
の直交した偏光状態を光部品のもつ二つの主要な偏光状態(PSP)となるように選べば,群遅延の最小値
から最大値までの範囲で,測定した群遅延に対して,偏光状態が一定の密度をもつことになる。したがっ
て,この群遅延の最小値から最大値までの範囲の大きさは,群遅延の分布の標準偏差から,式(A.6)によっ
て算出することができる。
σ
3
2
min
max
=
−
=
GD
GD
DGD
···················································· (A.6)
ここに,
σ: 群遅延分布の標準偏差
A.4 SWI法による測定結果からのDGDの算出
6.2.2に規定する手順f) に記載する二つの直交する入力偏光状態での測定値を含め,5.2で規定するSWI
法は,二つの直交する入出力偏光状態に対する部品の伝達行列要素の振幅及び位相を与える。この行列の
波長依存性は,ジョーンズ行列固有解析(JME)によって,DGDの算出に用いることができる。
伝達行列T(ω) は,次の方法で算出する。最初の入力偏光状態における二つの出力偏光状態に対する振幅
及び位相を用いて,6.2.4に規定する結果から,複素行列要素T11及びT21を,式(A.7)によって算出する。
ここで,振幅及び位相はωの関数,φ11及びφ21は偏光状態での位相である。
()
()
()
()
[
]
()
()
()
()
[
]
ω
φ
ω
ω
ω
ω
φ
ω
ω
ω
21
21
21
21
11
11
11
11
i
exp
i
exp
N
N
D
D
T
D
D
T
=
=
···················································· (A.7)
同様に,第二の入力偏光状態の結果から,複素行列要素T12及びT22を,式(A.8)によって算出する。
()
()
()
()
[
]
{
}
()
()
()
()
[
]
ω
φ
ω
ω
ω
ω
φ
ω
ω
ω
22
22
22
22
12
12
12
12
i
exp
π
i
exp
N
N
D
D
T
D
D
T
=
+
=
·············································· (A.8)
図2の測定系を用いる場合,第一の入力偏光状態に対して第二の入力偏光状態の関係は,2台の受光装
置における干渉計の参照経路からの位相関係が反転するので,πのオフセットでT12の位相が反転すること
29
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
になる。
これらの成分を用いて,行列T(ω) は,式(A.9)となる。
=
22
21
12
11T
T
T
T
Tτ
········································································ (A.9)
次に,T(ωn+1)T−1(ωn) に対して,固有値ρ1及びρ2を算出する。ここで,ωn及びωn+1は,隣接する測定点
の光周波数である。ωn〜ωn+1の間で平均したDGD値∆τを,式(A.10)によって算出する。
n
n
ω
ω
ρ
ρ
τ
−
=
∆
+1
2
1
Arg
··································································(A.10)
ここで,Arg()は,括弧内の複素数の偏角を表す[すなわち,Arg(aeiϕ) はϕである。]。このようにして,
測定範囲でDGDスペクトルを生成することができる。例として,図10に示した部品における計算結果を,
図A.2に示す。
図A.2−分解能30 pmで測定した50 GHzバンドパスフィルタのDGDスペクトル
群
遅
延
差
30
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.5 PPS法による測定結果からのDGDの算出
PPS法は,5.3及び6.3に規定する。6.3.3及び6.3.4での測定値を使って,パラメータを,式(A.11)及び
式(A.12)によって算出する。
2
21
2
11
2
21
2
11
0
2
21
2
11
2
21
2
11
1
12
21
22
11
1
12
21
22
11
1
f
i
1
2
cos
cos
2
1
d
d
d
d
d
d
d
d
4
1
d
d
d
d
d
d
d
d
4
1
δ
π
2
Δ
Δ
Δ
T
T
T
T
Θ
T
T
T
T
Θ
Φ
Φ
Φ
Φ
Φ
Φ
Φ
Φ
c
Θ
Θ
+
−
=
+
−
=
−
+
−
=
+
−
−
=
×
×
=
=
−
ω
ω
ω
ω
γ
ω
ω
ω
ω
β
λ
λ
λ
ω
α
············································ (A.11)
ここに,
λi: 波長幅δλの両側の波長における最短波長
λf: 波長幅δλの両側の波長における最長波長
dΦ/dω: 群遅延
cal
22
mea
cal
2
22
mea
2
2
cal
11
mea
cal
2
11
mea
2
2
d
d
d
d
d
d
d
d
d
d
d
d
ω
ω
ω
ω
ω
ω
Φ
Φ
Φ
T
T
T
Φ
Φ
Φ
T
T
T
mn
mn
mn
mn
kl
kl
kl
kl
−
=
=
−
=
=
·····························(A.12)
ここに,
kl: 11及び12
mn: 21及び22
それぞれの波長のDGD値は,
1
α,
1β, 1γ及びΘ0を用いて,式(A.13)によって算出する。
()
0
1
1
2
1
2
1
2
1
2
cos
2
2
Θ
DGD
γ
β
γ
β
α
λ
+
+
+
=
···································(A.13)
これによって,波長に対するDGD値を算出する。例を,図A.3及び図A.4に示す。
31
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.3−ランダム偏光モード結合デバイスにおけるDGDの波長特性(例)
図A.4−Fibre Bragg Grating形フィルタにおけるDGDの波長特性(例)
この方法によるDGDの算出は,ジョーンズ行列固有解析法に類似し,伝達関数行列は,式(A.14)のよう
に表す。
32
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
()
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
Φ
Θ
Θ
Θ
Θ
Φ
T
Φ
T
Φ
T
Φ
T
T
i
exp
i
i
exp
cos
i
i
exp
sin
i
i
exp
sin
i
i
exp
cos
i
exp
i
exp
i
exp
i
exp
22
22
21
21
12
12
11
11
−
×
+
+
×
−
+
×
+
−
×
−
−
−
×
=
−
×
−
×
−
×
−
×
=
ψ
φ
ψ
φ
ψ
φ
ψ
φ
ω
········(A.14)
ここに,
Θ: 偏光角
φ: T11とT21との位相差
ψ: T11とT12との位相差
Φ: 偏光無依存位相シフト
出力の偏光ベクトルEout(ω) は,T(ω) を用いて,式(A.15)で表す。
()
()
()
ω
ω
ω
in
out
E
T
E
×
=
·····························································(A.15)
ここに,
Ein(ω): 光入力信号のフーリエ変換
光搬送波周波数ω0の近傍でテイラー展開して,Eout(ω) を,式(A.16)のように表す。
()
()
2
2
out
2
out
0
out
out
δ
d
d
2
1
δ
d
d
0
0
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
E
E
E
E
=
=
+
+
=
························(A.16)
ここに,
δω: ω−ω0
一次のPMDの演算子D(ω) は,差動伝達関数と呼び,式(A.17)で表す。
()
()
()1
d
d
−
×
=
ω
ω
ω
ω
T
T
D
·····························································(A.17)
式(A.15)及び式(A.17)から次を得ることができる。
)
(
d
)
(
d
out
out
ω
ω
ω
DE
E
=
これを用いると,式(A.16)は,式(A.18)によって算出することができる。
()
()
()
0
out
2
0
out
2
2
2
out
δ
d
d
2
1
δ
exp
δ
d
d
2
1
δ
2
1
δ
1
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
E
D
D
E
D
D
D
E
×
+
≅
×
+
+
+
=
·······················(A.18)
ここで,高次PMDの項は微小であるため無視する。D(ω) は一次のPMDの演算子であり,dD(ω)/dωは
二次のPMDの演算子である。これらは交換可能ではない。
ユニタリー演算子XでD(ω) を対角化して,式(A.19)のように表す。
()
(
)
()
(
)
(
)
()
0
out
1
0
out
1
1
out
1
δ
i
exp
0
0
δ
i
exp
δ
exp
ω
ω
ω
ω
ω
ω
E
X
Γ
Γ
E
X
X
D
X
E
X
−
−
+
−
−
−
×
×
−
×
−
=
×
×
=
×
···········(A.19)
ここで,−iΓ+及び−iΓ−はD(ω) の固有値であり,Γ+及びΓ−は,それぞれ群遅延の最大値及び最小値で
ある。つまり,D(ω) の固有値であるΓ+及びΓ−の虚数部の差は,群遅延差と呼ぶ一次のPMDである。
式(A.14)の中の四つの独立したパラメータΘ,φ,ψ及びΦは,テイラー展開を用いて,式(A.20)のよう
に表す。
33
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
2
1
0
2
2
1
0
2
2
1
0
2
2
1
0
δ
2
1
δ
δ
2
1
δ
δ
2
1
δ
δ
2
1
δ
ω
β
ω
β
ω
γ
ω
γ
ψ
ψ
ω
β
ω
β
φ
φ
ω
α
ω
α
+
+
=
+
+
=
+
+
=
+
+
=
Φ
Φ
Θ
Θ
··························································(A.20)
ここに,
δω: ω−ωc
Θ0,φ0,ψ0及びΦ0: ω−ωcが0のときのΘ,φ,ψ及びΦの値
1
α,
1β,1γ及びβ1: Θ,φ,ψ及びΦのテイラー展開の一次の係数
2
α,
2
β,
2γ及びβ2: Θ,φ,ψ及びΦのテイラー展開の二次の係数
一次のPMD演算子D(ω) は,式(A.20)を用いて,式(A.21)によって表す。
()
(
)
(
)
(
)
(
)
−
−
+
×
+
+
−
×
+
−
+
−
−
=
Θ
Θ
Θ
Θ
D
2
cos
2i
exp
2
sin
i
2i
exp
2
sin
i
2
cos
i
1
0
0
1
i
1
1
1
1
1
1
1
1
1
γ
β
φ
γ
α
φ
γ
α
γ
β
β
ω
··························································································(A.21)
これよって,D(ω) の固有値は,式(A.22)となる。
Θ
Γ
2
cos
2
i
i
i
1
1
2
1
2
1
2
1
1
γ
β
γ
β
α
β
+
+
+
±
−
=
±
···································(A.22)
ここで,β1は,偏光無依存群遅延である。
群遅延差Δτは,二つの固有値の虚数部の差によって,式(A.23)によって算出することができる。
Θ
Γ
Γ
2
cos
2
2
1
1
2
1
2
1
2
1
γ
β
γ
β
α
τ
+
+
+
=
−
=
∆
−
+
······························(A.23)
波長範囲におけるPMD値は,測定波長範囲において平均化したDGDとなる。
34
C 61300-3-38:2015 (IEC 61300-3-38:2012)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献 JIS C 61300-1 光ファイバ接続デバイス及び光受動部品−基本試験及び測定手順−第1部:通
則
注記 対応国際規格:IEC 61300-1,Fibre optic interconnecting devices and passive components
−Basic test and measurement procedures−Part 1: General and guidance(MOD)
JIS C 61300-3-1 光ファイバ接続デバイス及び光受動部品−基本試験及び測定手順−第3-1
部:外観検査及び機械的検査
注記 対応国際規格:IEC 61300-3-1,Fibre optic interconnecting devices and passive components
−Basic test and measurement procedures−Part 3-1: Examinations and measurements−
Visual examination
JIS C 61300-3-32 光ファイバ接続デバイス及び光受動部品−基本試験及び測定手順−第3-32
部:光受動部品の偏波モード分散測定
注記 対応国際規格:IEC 61300-3-32,Fibre optic interconnecting devices and passive components
−Basic test and measurement procedures−Part 3-32: Examinations and measurements−
Polarization mode dispersion measurement for passive optical components(MOD)
JIS C 6827:2005 光ファイバ波長分散試験方法
注記 対応国際規格:IEC 60793-1-42,Optical fibres−Part 1-42: Measurement methods and test
procedures−Chromatic dispersion(MOD)
IEC 61282-9,Fibre optic communication system design guides−Part 9: Guidance on polarization mode
dispersion measurements and theory
IEC/TR 62343-6-3,Dynamic modules−Part 6-3: Round robin measurement results for group delay
ripple of tunable dispersion compensators
ITU-T G.694.1,Spectral grids for WDM applications: DWDM frequency grid
Frederick W. King,Hilbert Transforms: Volume 1 (Encyclopedia of Mathematics and its Applications)