C 61300-3-32:2013
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 2
3 略語······························································································································· 2
4 概要······························································································································· 3
4.1 モード結合 ··················································································································· 3
4.2 狭帯域光受動部品 ·········································································································· 4
4.3 偏光依存性 ··················································································································· 4
4.4 多重光路干渉 ················································································································ 4
4.5 光ファイバピッグテール ································································································· 5
4.5A 要件 ·························································································································· 5
4.6 基準測定方法 ················································································································ 5
4.7 偏波モード分散係数 ······································································································· 5
4.8 さまざまな測定方法における解析······················································································ 5
4.9 偏波モード分散の算出 ···································································································· 6
4.10 校正 ··························································································································· 6
5 供試品···························································································································· 6
6 ストークスパラメータ評価法 ······························································································ 9
6.1 測定装置 ······················································································································ 9
6.2 測定手順 ····················································································································· 12
7 偏光位相シフト法 ············································································································ 16
7.1 測定装置 ····················································································································· 16
7.2 測定手順 ····················································································································· 18
8 固定アナライザ法 ············································································································ 20
8.1 装置 ··························································································································· 21
8.2 測定手順 ····················································································································· 22
9 干渉法··························································································································· 26
9.1 測定装置 ····················································································································· 26
9.2 測定手順 ····················································································································· 28
10 変調位相シフト(MPS)法 ······························································································ 32
10.1 測定装置 ···················································································································· 32
10.2 測定手順 ···················································································································· 37
11 個別に規定する事項 ······································································································· 39
11.0A 一般事項 ·················································································································· 39
11.1 光源 ·························································································································· 39
C 61300-3-32:2013 目次
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ページ
11.2 偏光子/検光子(受信器を含む) ··················································································· 39
11.3 テンポラリジョイント ·································································································· 39
11.4 供試品 ······················································································································· 39
11.5 測定方法 ···················································································································· 40
附属書A(参考)コサインフーリエ変換法 ··············································································· 41
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 45
C 61300-3-32:2013
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般財団法人光産業技術振興協会(OITDA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 61300の規格群には,次に示す部編成がある。
JIS C 61300-1 第1部:通則
JIS C 61300-2-1 第2-1部:正弦波振動試験
JIS C 61300-2-2 第2-2部:繰返しかん合試験
JIS C 61300-2-5 第2-5部:光ファイバクランプ強度試験(ねじり)
JIS C 61300-2-9 第2-9部:衝撃試験
JIS C 61300-2-12 第2-12部:落下衝撃試験
JIS C 61300-2-14 第2-14部:光パワー損傷のしきい値試験
JIS C 61300-2-15 第2-15部:結合部ねじり試験
JIS C 61300-2-17 第2-17部:低温試験
JIS C 61300-2-18 第2-18部:高温試験
JIS C 61300-2-19 第2-19部:高温高湿試験(定常状態)
JIS C 61300-2-21 第2-21部:混合温湿度サイクル試験
JIS C 61300-2-22 第2-22部:温度サイクル試験
JIS C 61300-2-26 第2-26部:塩水噴霧試験
JIS C 61300-2-45 第2-45部:浸水試験
JIS C 61300-2-46 第2-46部:湿熱サイクル試験
JIS C 61300-2-47 第2-47部:熱衝撃試験
JIS C 61300-2-48 第2-48部:温湿度サイクル試験
JIS C 61300-3-2 第3-2部:シングルモード光デバイスの光損失の偏光依存性
JIS C 61300-3-3 第3-3部:挿入損失及び反射減衰量変化のモニタ方法
JIS C 61300-3-4 第3-4部:損失測定
JIS C 61300-3-6 第3-6部:反射減衰量測定
JIS C 61300-3-7 第3-7部:シングルモード光部品の光損失及び反射減衰量の波長依存性測定
JIS C 61300-3-11 第3-11部:結合力及び離脱力測定
JIS C 61300-3-15 第3-15部:球面研磨光ファイバコネクタのフェルール端面の頂点偏心量測定
JIS C 61300-3-16 第3-16部:球面研磨光ファイバコネクタのフェルール端面の曲率半径測定
JIS C 61300-3-20 第3-20部:波長選択性のない光ブランチングデバイスのディレクティビティ測定
JIS C 61300-3-24 第3-24部:偏波面保存光ファイバ付き光ファイバコネクタのキー位置精度測定
C 61300-3-32:2013 目次
(4)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS C 61300-3-26 第3-26部:光ファイバとフェルール軸との角度ずれの測定
JIS C 61300-3-27 第3-27部:多心光ファイバコネクタプラグの穴位置測定
JIS C 61300-3-28 第3-28部:過渡損失測定
JIS C 61300-3-30 第3-30部:多心光ファイバコネクタ用フェルールの研磨角度及び光ファイバ位置
測定
JIS C 61300-3-31 第3-31部:光ファイバ光源の結合パワー比測定
JIS C 61300-3-32 第3-32部:光受動部品の偏波モード分散測定
JIS C 61300-3-34 第3-34部:ランダム接続時の挿入損失
JIS C 61300-3-36 第3-36部:光ファイバコネクタフェルールの内径及び外径の測定
JIS C 61300-3-43 第3-43部:光ファイバ光源のモードトランスファファンクション測定
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 61300-3-32:2013
光ファイバ接続デバイス及び光受動部品−
基本試験及び測定手順−
第3-32部:光受動部品の偏波モード分散測定
Fiber optic interconnecting devices and passive components-
Basic test and measurement procedures-
Part 3-32: Examinations and measurements-
Polarization mode dispersion measurement for passive optical components
序文
この規格は,2006年に第1版として発行されたIEC 61300-3-32を基とし,技術的内容及び構成を変更し
て作成した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,光受動部品の偏波モード分散(PMD)基準測定方法及び幾つかの代替測定方法について規
定する。これらの方法では,一般的に周波数領域又は時間領域におけるPMD測定方法に大別できる。周
波数領域における測定方法では,供試品の偏光に対する特性を測定する。時間領域における測定では,パ
ルス遅延及びパルス広がりを測定する。
この測定方法は,WWDMデバイス,CWDMデバイス及びDWDMデバイスに適用する。光受動部品の
種類によって,測定方法は異なる。
この測定方法は,実験,製造又は運用中の光受動部品のPMD測定に適用できる。幾つかの測定項目に
ついては,制限事項があることに注意する。
この測定方法は,同一端子に同一波長の信号を双方向に流す光受動部品にも適用できる。この場合,光
受動部品との接続には,低いPMD特性をもつ光カプラ又は光サーキュレータを用いて測定する。
注記1 関連する基本試験及び測定手順の通則は,JIS C 61300-1に規定する。
注記2 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 61300-3-32:2006,Fibre optic interconnecting devices and passive components−Basic test and
measurement procedures−Part 3-32: Examinations and measurements−Polarization mode
dispersion measurement for passive optical components(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS C 6842 光ファイバ偏波モード分散試験方法
注記 対応国際規格:IEC 60793-1-48,Optical fibres−Part 1-48: Measurement methods and test
procedures−Polarisation mode dispersion(MOD)
JIS C 61300-3-2 光ファイバ接続デバイス及び光受動部品−基本試験及び測定手順−第3-2部:シン
グルモード光デバイスの光損失の偏光依存性
注記 対応国際規格:IEC 61300-3-2,Fibre optic interconnecting devices and passive components−Basic
test and measurement procedures−Part 3-2: Examinations and measurements−Polarization
dependence of attenuation in a single-mode fibre optic device(MOD)
IEC/TR 61282-3,Fibre optic communication system design guides−Part 3: Calculation of link polarization
mode dispersion
IEC/TR 61282-9,Fibre optic communication system design guides−Part 9: Guidance on polarization mode
dispersion measurements and theory
3
略語
この規格で用いる略号は,次による。
ASE
増幅された自然放出光
(amplified spontaneous emission)
CWDM
コースWDM
(coarse WDM)
DGD
群遅延時間差
(differential group delay)
DOP
偏光度
(degree of polarization)
DUT
供試品
(device under test)
DWDM
高密度波長分割多重
(dense wavelength division multiplexing)
FA
固定アナライザ
(fixed analyser)
FAFT
固定アナライザによるフーリエ変換
(fixed analyser Fourier transform)
FAEC
固定アナライザによる極値分析
(fixed analyser extrema counting)
FWHM
半値全幅
(full width at half the maximum)
GINTY
一般化した干渉法
(generalized interferometry)
INTY
干渉法
(interferometry)
ISI
符号間干渉
(inter-symbol interference)
JME
ジョーンズ行列固有値解析
(Jones matrix eigenanalysis)
MMA
ミュラー行列分析
(Mueller matrix analysis)
MPS
変調位相シフト
(modulation phase shift)
PDL
偏光依存性損失
(polarization dependent loss)
PMD
偏波モード分散
(polarization mode dispersion)
PDV
偏光分散ベクトル
(polarization dispersion vector)
PPS
偏光位相シフト
(polarization phase shift)
PS
ポアンカレ球
(Poincaré sphere)
PSA
ポアンカレ球解析
(Poincaré sphere analysis)
3
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PSP
主偏光状態
(principal states of polarization)
RBW
波長分解能
(resolution bandwidth)
RMS
二乗平均平方根
(root mean square)
SOP
偏光状態
(state of polarization)
SPE
ストークスパラメータ評価
(Stokes parameter evaluation)
TINTY
従来の干渉法
(traditional interferometry)
WDM
波長分割多重
(wavelength division multiplexing)
WWDM
ワイドWDM
(wide WDM)
4
概要
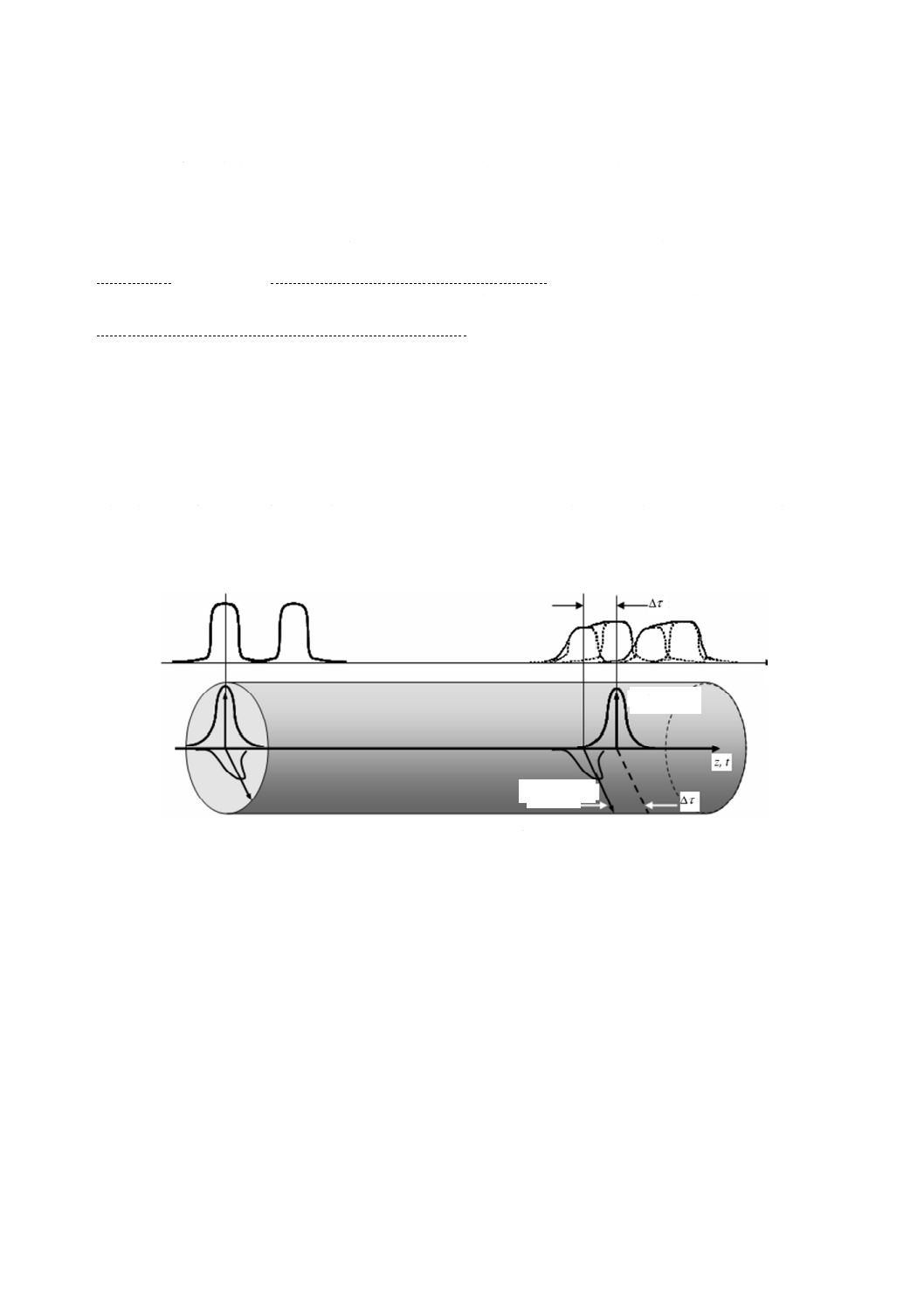
PMDは,媒質の屈折率が光の振動面によって異なるため発生し,光信号パルスが伝搬するにつれて波形
の広がりをもたらす。光信号パルスの広がりは,受信機での符号間干渉(ISI)による受信誤りを引き起こ
し,その結果として伝送可能な信号帯域を制限する。
光信号パルスは,光受動部品中に存在する二つの複屈折軸に対応する,互いに直交する二つの主SOP
(PSP)と呼ばれる偏光成分の組合せによって,表すことができる(図1参照)。この二つの偏光成分は,
異なる群速度で伝搬するため,光受動部品出力端に到達する時間が異なる。PMDは,互いに直交する二つ
のPSP間の時間差であるDGD値Δτに関係する。
進相軸
遅相軸
図1−光受動部品内での光信号パルス伝搬におけるPMDの影響
4.1
モード結合
光受動部品のPMDは,通常,光受動部品の性質によって決まり,現象は予測可能,再現可能かつ制御
可能である。光受動部品内で,二つの主偏光状態の成分がどのように結合するかを知ることは重要である。
実際,偏光成分の結合方法は,光受動部品の性質によって異なる。長尺ファイバの場合にしばしば見られ
るようなランダム又は強いモード結合に対して,通常の光受動部品(偏波面保存光ファイバ及び通常の短
い光ファイバの場合も含める。)の場合,モード結合は無視できる。モード結合が無視できる場合,光受動
部品内の複屈折軸は,一つの固定された複屈折領域となる。そのため,DGDは波長に対して一定となり,
PMDはDGDに一致する。
それに対し,固定された複屈折軸をもつ多くの領域を内蔵する光受動部品の場合,波長に対してランダ
ムなDGDを作り出す。その場合,モード結合はランダムである。DGDは波長の関数として変化し,モー
ド結合はランダムである。たとえDGDが様々な値をとっても,DGDの時間的変化は測定時間で一定とな
り,予想できるものである。また,現象は一つに決まる。この場合,PMDはDGDの波長特性の平均値と
4
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
なる。一般的には,RMS値を用いてもよい。
光受動部品が複屈折の領域をほとんどもたない場合,上述の二つの場合の中間の事例もあり得る。この
場合,DGDは波長に対して単調又は正弦関数的なランダム性の低い変化を示す。PMDはDGDの波長平均
値又は二乗平均平方根となり,現象は予測可能であるが,モード結合は無視できるものではなく,ランダ
ムに発生もしない。
モード結合が強い又は弱いというのは,信号が光受動部品内を伝搬するときに,SOPを保つかどうかと
同義である。言い換えれば,入力光のSOPを用いて出力光のSOPを表す,いわゆる偏光変換関数として
光受動部品を捉えることもできる。この偏光変換関数は,一般的にジョーンズ行列で表すことができる。
これについては,この規格の後半で示す。
4.2
狭帯域光受動部品
PMDの現象に関連して注意すべき他の分類があり,それには狭帯域光受動部品も含む。狭帯域光受動部
品のDGDの分布は,波長領域では小さいが,時間領域では複雑で広いフーリエ時間スペクトルをもち得
る。DGDを波長領域ではなく時間領域で分析する場合は,十分に注意しなければならない。
4.3
偏光依存性
さらに,複雑な要因として,供試品中のPDLの影響がある。供試品の出力において,光パルスが広がる
だけ(PDLがない場合)ではなく,媒質がPDL特性をもち,ゆが(歪)んだ状態で伝搬する例を,図1
に示す。PDLがある場合,二つのPSPは必ずしも直交する(ポアンカレ球上で180度離れる)とは限らな
い。この場合,この規格の全ての測定方法は1 dB以下のPDLをもつ光受動部品に適用が限定される。こ
の条件は,DWDMシステムに使用される代表的な光受動部品の通過帯域内であれば適用できる。
PDLは,供試品の正確なDGDを決める上で大きく影響することがある。PDLは,JIS C 61300-3-2を使
用して測定してもよい。
また,起こり得る例外又は仮定は,状態の複雑さを軽減することができる。例えば,10 dBを超える高
いPDL をもつ光受動部品は一般的に単一偏光で用いる。そのような光受動部品では,PMDではなくPDL
を適切なパラメータとして議論することができる。
それゆえ,この規格の適用範囲には,上述の理由によって,10 dBを超える高いPDLをもつ光受動部品
を除外する。除外する光受動部品としては,例えば,偏光子,偏光依存性をもつスプリッタ,変調器など
がある。
DWDMに用いる,典型的な,1 dB未満の低いPDLをもつ光受動部品の場合,PDLは一般的にはDGD
測定にほとんど影響は与えないが,不確かさが僅かに増加する。つまりPDLが大きくなると,この不確か
さも大きくなる。
10 dBを超える高いPDLをもつ光受動部品では,この不確かさは許容できないほど大きくなる。
4.4
多重光路干渉
光受動部品は,バルク光学素子,光ファイバと光導波路との接続,光ファイバと光学レンズとの境界な
どを含んでおり,それら光部材間の屈折率不整合によって反射光が生じる。この効果によって,多重光路
による分散が生じる可能性があるが,PMDに影響する場合(つまり,光路差に偏光依存性がある場合)と
PMDに影響しない場合(光路差に偏光依存性がない場合)とがある[1] 1)。
注1) 角括弧内の数字は,参照する参考文献の番号を示す。
偏光依存性をもたない反射光及び多重光路干渉による遅延は,DGDから分離して取り除くことができる。
ただし,偏光に依存する遅延差は,いかなる場合もDGDとみなす。
5
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.5
光ファイバピッグテール
光ファイバピッグテールはそれ自体がPMDをもち,曲げ,巻付け,ねじりなどによってPMDの値が変
化する。
供試品の入力部及び出力部に用いる光ファイバピッグテール(通常は,供試品のハウジング内に密閉す
る。)は,PMDの要因となる。光受動部品に具備している光ファイバは,通常は,高々数mの長さである
ため,その内部のランダムなモード結合は僅かで,PMDは実際には一つの値に決まる。数mの長さをも
つ一般的な光ファイバにおける標準的なPMDは,1 fs/m又はそれ以下のオーダである。光ファイバの複屈
折軸と供試品の主軸との間の一致の程度によって,数mの光ファイバのPMDが,供試品のDGDに加わ
ることも供試品のDGDを減らすこともある。この光ファイバの影響は,供試品のDGDを決める上での不
確定要素となる。曲げによる複屈折の発生を避けるため,光ファイバピッグテール部は50 mmより大きい
曲げ半径で,可能な限り直線となるように保持することが望ましい。それに加え,光ファイバ部でのPMD
への影響をランダムにするため,必要に応じて,光ファイバの状態を変えてDGD測定を何度も繰り返し
行ってもよい。光受動部品の真のDGDは,それら測定結果の平均値である。PMDが取り得る範囲を全て
カバーできるような光ファイバを準備しているか,確認する必要がある。
偏波面保存光ファイバをピッグテールとする光部品は,通常,高い偏光依存性をもつか,又は直線偏光
を出力する光源となるので,光ファイバピッグテールの偏光軸は,光受動部品の偏光軸に合わせる。また,
偏光軸を合わせるためのパラメータとしては,偏光消光比が適切である。いかなる偏光軸間のずれも重大
なPMDを引き起こす。
4.5A 要件
光受動部品のPMDに関わる主な特徴を,次に示す。
− モード結合が小さい場合,個別の,複屈折率が一つに決まる光学素子を(相互の光学軸を調整しない
で)組み合わせた光学部品である。
− 比較的波長に依存しない進相軸と遅相軸との間のモード結合が限定的又は小さい場合,一般的にDGD
は一つに決まる。
− PMDの大きさは0.1 ps未満の小さい場合から2 psを超える大きい場合まである。
− 波長通過帯域は,限定的又は場合によっては非常に狭い。
− 光ファイバピッグテールは,PMDの変動をもたらす。
− 供試品内では,反射,多重光路などが生じて,分散の元になる可能性がある。
− 大きなPDL(1 dBを超え10 dB未満)をもつことがある。
4.6
基準測定方法
この規格における基準測定方法は,ストークスパラメータを用いたポラリメータによる測定方法である。
また,この基準測定方法に従った形式的に等価な二つの解析方法がある[2],[4]。それらは,ジョーンズ行
列固有値解析(JME)法及びポアンカレ球解析(PSA)法である。この規格に規定する,JME法及びPSA
法以外の全ての測定方法は,代替の測定方法とする。
4.7
偏波モード分散係数
光受動部品の場合,PMDの値は一つに決まるので,JIS C 6842に規定する光ファイバが短い場合と長い
場合との間の換算に用いるPMD係数の概念は,適用しない。光受動部品のPMDの単位は,ピコ秒(ps)
だけで表現する。
4.8
さまざまな測定方法における解析
これらの測定法の基になる数学的なモデルは,IEC/TR 61282-9に記載している。
6
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.9
偏波モード分散の算出
PMDの数学的な算出手法については,IEC/TR 61282-3に記載している。
4.10 校正
モード結合が無視できる場合,既知のPMD値をもつ偏波面保存光ファイバを用いて測定器を校正する。
ランダムなモード結合の場合,正確な四分の一波長板を複数枚ランダムな方向に重ね合わせるのがよい。
1 psを超える大きなPMD値をもつランダムなモード結合の場合,簡単に校正できる基準器及び測定方法
はない。
5
供試品
供試品は,一般に光ファイバピッグテールをもっており,PMD測定器,測定コード,光ファイバピッグ
テールなどと融着接続又はコネクタ接続する。供試品は実験室環境に置くが,必要に応じて測定中に低温
及び高温又は湿気にさらすために,恒温槽中に置くこともできる。
− PDLが10 dBよりも小さいこと,及びおおよその波長帯域が分かっていることを確認する。
光受動部品のPMD測定は,供試品のモード結合及びその結果として生じる複屈折軸の数に依存するた
め,この規格では次のように供試品を分類する。
− モード結合が無視できる
− ランダムなモード結合
− 中間的なモード結合
− 狭帯域のDWDM
測定のSOPに対する依存性のため,実際の光受動部品の次の構成を確認する必要がある。
− 光ファイバから光ファイバ
− プラグからプラグ
− レセプタクルからレセプタクル
− レセプタクルからプラグ
光受動部品が1 kmを超える長い光ファイバをもつ場合,DGD測定において,光ファイバ長によってラ
ンダム性を示す可能性に注意する。これは,大半の光ファイバがランダムなモード結合特性をもつことに
起因し,その結果としてPMDが確率的な振舞いを示す。対象となる供試品は,1 kmよりも十分に短い光
ファイバをもつものと考えられるため,PMDは一つに決まるものと考えられる。
測定のとき,供試品の二つの入出力端子構成は,光ファイバ素線,プラグ及び/又はレセプタクルとな
る。光受動部品が光ファイバ素線をもつ場合,供試品を偏光子及び検光子に一時的にメカニカルスプライ
ス接続してもよい。メカニカルスプライスの場合,反射光による干渉を避けるよう注意し,屈折率整合材
を使用することが望ましい。
光受動部品が二つ以上の伝達を意図する端子対をもつ場合,測定は一つの光路に対するものとなるが,
測定手順は全ての光路に対して同様に適用するのがよい。また,この場合,それぞれの光路に対するDGD
又はPMDを報告することが望ましい。
ランダムなモード結合による不確かさを減らすため,測定の間,供試品及び光ファイバピッグテールを
一定温度に保ち,固定しなければならない。供試品の機械的安定性及び温度安定性は,供試品の出力光の
SOPをポアンカレ球上の観測で確認してもよい。測定中の出力光のSOP変化は,波長の掃引によって生じ
7
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
るSOPの変化に比べて小さくなるようにすることが望ましい。
PMD測定時,測定方法によって仕様及び特性並びに測定精度が若干異なるので,供試光受動部品のDGD
特性がどのくらいになるかを把握しておく必要がある。
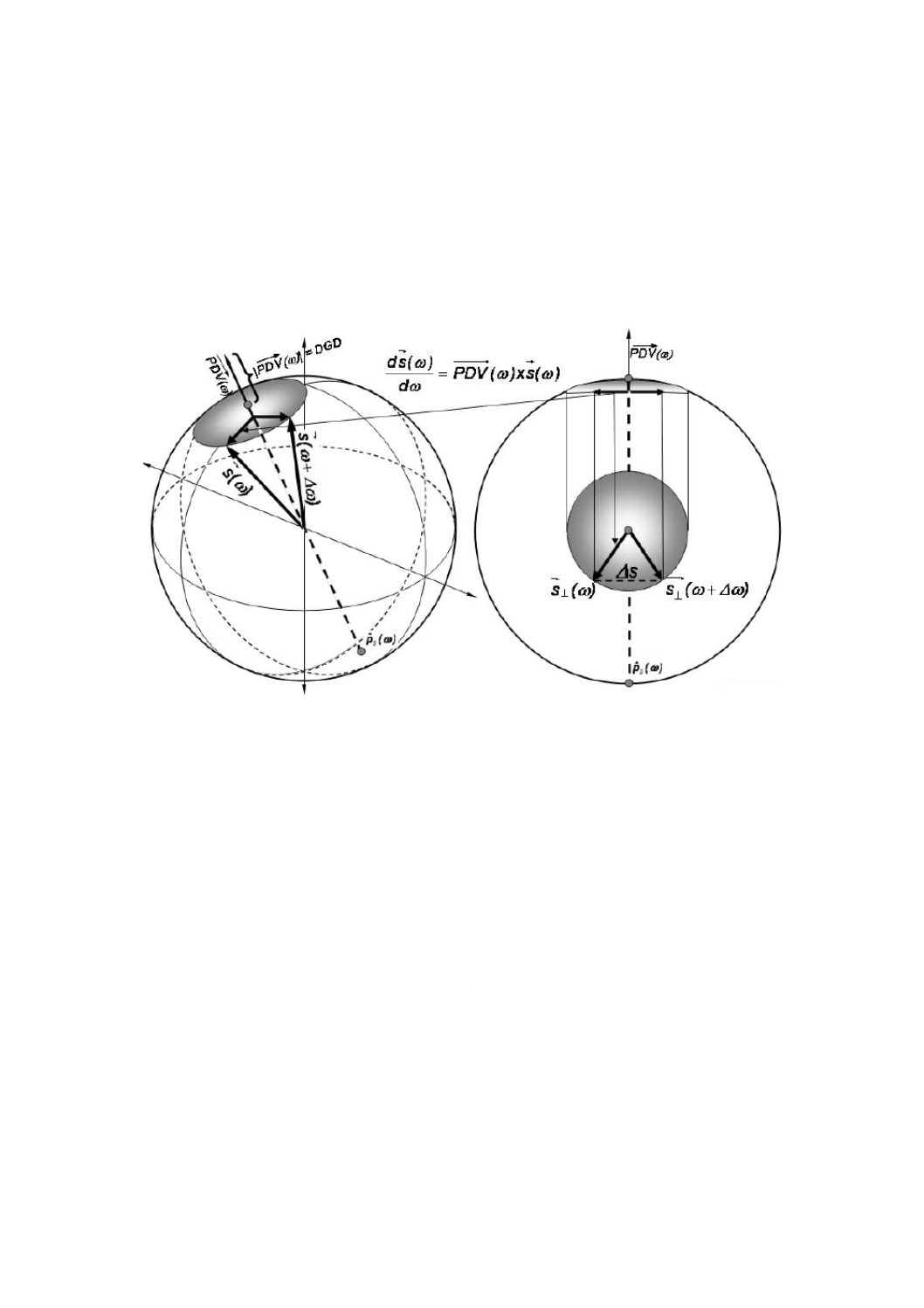
モード結合が無視できる場合,簡単にPMD値が一つに決まる光受動部品に対しては,DGDは波長に対
してほぼ一定になる。この場合,光受動部品の出力光のSOPは,ポアンカレ球上(図2参照)において,
円に近い軌跡を描く。角速度及びPDV長は一定となり,その結果DGDも一定となる。この場合,波長の
測定数及びその精度を,必要以上に高くする必要はない。
図2−偏波モード分散ベクトル及び主偏光状態の決定
ただし,出力光のSOPの角速度が変化する供試品がある。二つの等しい複屈折領域をもつ供試品の場合,
PSPは光周波数の関数として変化(PDVの変化,すなわち,速度又は光周波数に関する1次微分)する。
ただし,DGD(PDV長)は一定のままである。三つの複屈折領域をもつ場合,PDV(DGD)長及びその
速度の両方が変化する。ただし,DGDの変化は単調であり,結果としてDGDは波長の関数として正弦的
に変化する。
また,幾度も複屈折軸が変化する供試品(多くの複屈折領域をもつ複雑な供試品)もあり得る。SOPは
固定の複屈折軸について進相軸PSPの周りで回転する。ただし,PSP軸もまた変化し,その結果,出力光
のSOPはポアンカレ球上のPSP軸変化に追従する。その回転は単調な変化ではなく,かなり複雑なもの
となる。そのときのDGDは,波長の関数として複雑ではあるが,予想可能な変化(ランダムなモード結
合)をする。これは,供試品が固定の複屈折軸をもつ多くの領域からなる場合に発生し,そのときのPMD
は波長の関数として複雑な変化をするDGDの平均値である。
DWDM用光受動部品は,信号波長ごとに非常に狭い帯域をもつので,PMD測定においてDWDM用光
受動部品に特有の配慮が必要である。すなわち,DWDM用光受動部品は波長の関数としてのDGD,すな
わち,PMDを適切に推定するために,非常に高い波長分解能が必要となる。この場合,狭帯域光受動部品
のフーリエスペクトルは,非常に複雑な時間スペクトルをもつ。このフーリエスペクトルは,DGDとは異
なる紛らわしい時間遅延をもたらすことがあるため,注意が必要である。また,ナイキスト定理を配慮し
8
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
た対策(例えば,光源の線幅は波長掃引の測定間隔の2倍を超える。)を施すことが望ましい。
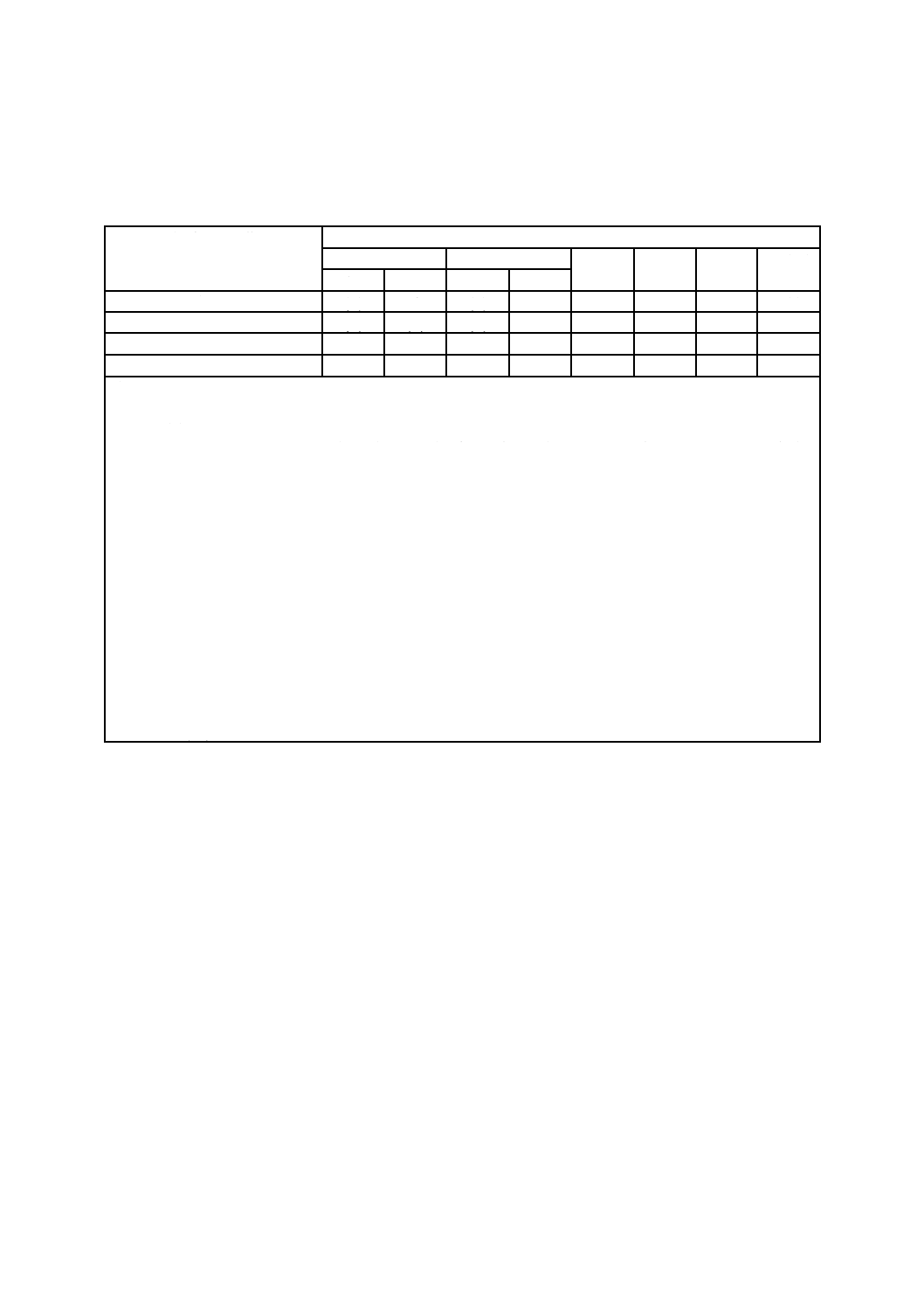
供試品の特徴に応じた測定方法の技術的適用性を,表1に示す。
表1−供試品の特徴に応じた測定方法の技術的適用性
供試品の特徴
(光受動部品のタイプ)
測定方法
FA
INTY
MPS
PPS
SPE
PS (arc)
FAFT
FAEC
TINTY
GINTY
モード結合が無視できる場合
(X)
N/A
(X)
X
X
X
X
X**
ランダムなモード結合の場合
(X)
(X)
(X)
X
X
X
X
N/A
中間的なモード結合の場合
N/A
N/A
N/A
X
X
X
X
N/A
狭帯域DWDM
N/A
N/A
N/A
X
X
X
X
X**
注記1 記号の意味
X
適用できる。
(X)
目的,測定範囲又は特性によって適用に制限がある,又は適用できるか確認できていない。
**
ポアンカレ球円弧(PS arc)法は,単一素子構成の供試品にだけしか適用できない。この場合(モ
ード結合が無視できる場合),DGDは基本的に仕様波長範囲で一定となる。
N/A
適用できない。
注記2 PMD測定方法の略語の意味
FA
固定アナライザ
FAFT
固定アナライザによるフーリエ変換
FAEC
固定アナライザによる極値分析
INTY
干渉法
TINTY 従来の干渉法
GINTY 一般化した干渉法
MPS
変調位相シフト
PPS
偏光位相シフト
SPE
ストークスパラメータ評価(ジョーンズ行列固有値解析法,ポアンカレ球解析法及びミュラー
行列解析法を含む。)
PS (arc) ポアンカレ球円弧
9
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6
ストークスパラメータ評価法
6.1
測定装置
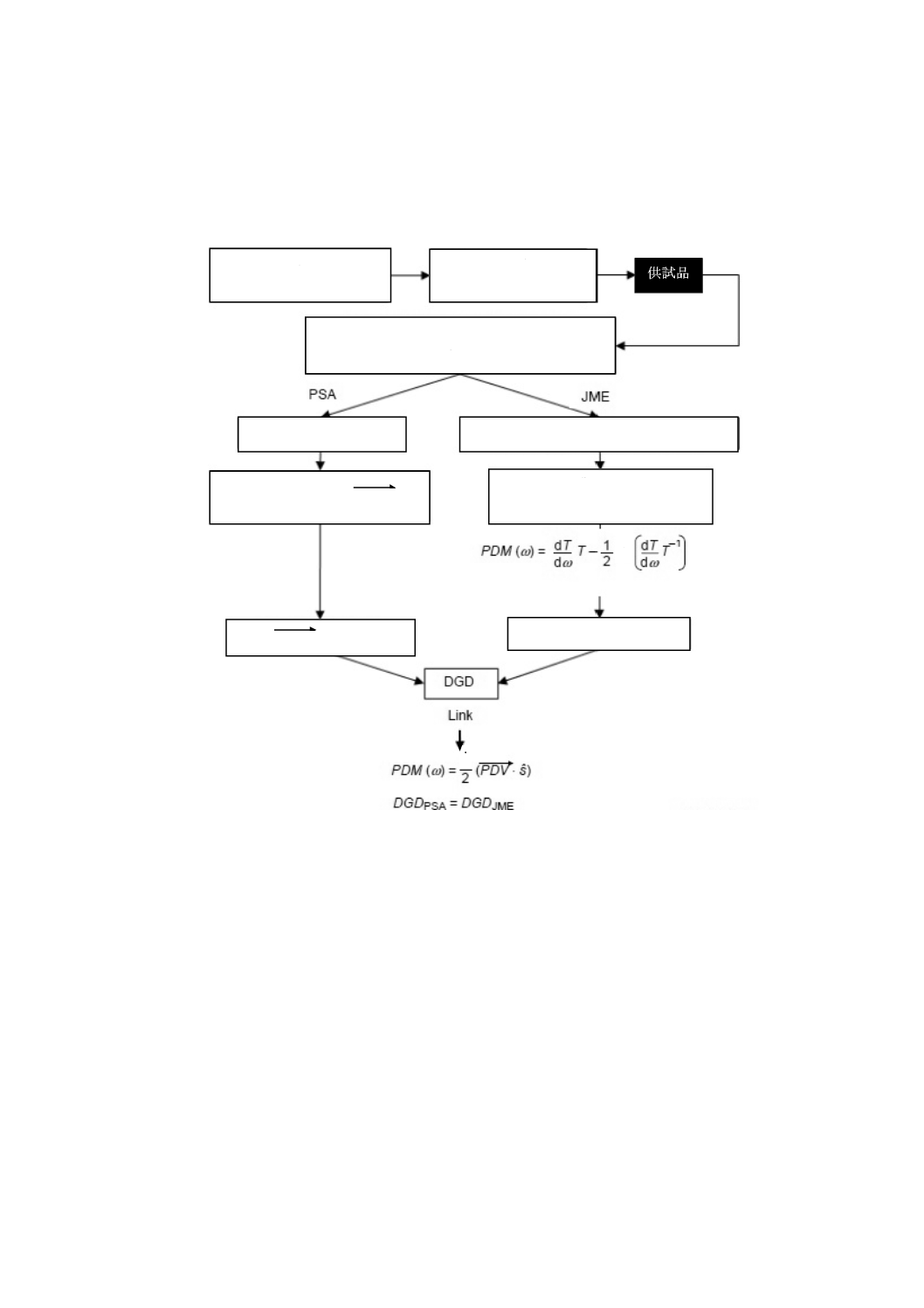
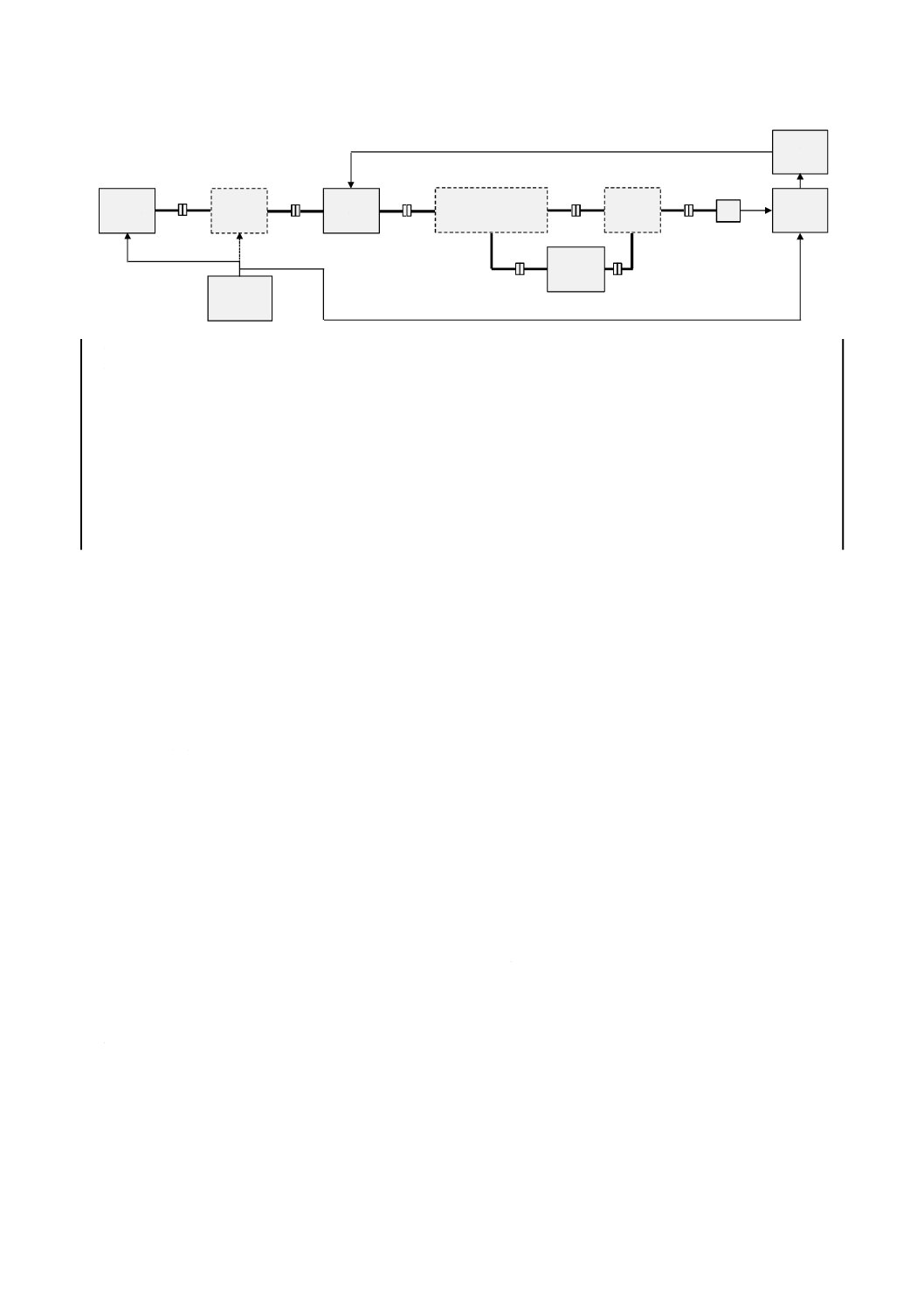
JME法及びPSA法によるPMD測定方法の基本的な機能図を,図3に示す。測定系を構成する装置につ
いては,6.1.1〜6.1.3Aに規定する。
図3−ストークスパラメータ評価による測定法の基本的な機能図
供試品
光源
アークサイン式
T(ω+Δω)T -1(ω)の固有値
偏光分散ベクトルPDV(ω)
偏光分散マトリクス
PDM(ω)
式の独立変数
SOP生成器
Sin(ω)
正規化したストークスパラメータ
Sout(ω)測定値の分析器
PDV(ω)の係数
i
tr
10
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ストークスパラメータ評価(SPE)における二つの測定系を,図4に示す。
波長可変
光源
供試品
ポラリメータ
偏光状態変更装置
0度
90度
45度
受光装置
コンピュータ
偏光
制御器
偏光状態解析装置
偏光子
1つの偏光子を挿入する
a) ジョーンズ行列解析系
ASE光源
供試品
マイケルソン干渉計
ポラリメータ
偏光状態
変更装置
受光装置
コンピュータ
偏光状態解析装置
b) ポアンカレ球解析系
図4−ストークスパラメータ評価法の測定系
6.1.1
光源
全ての測定において,直線偏光を出力する光源を使用しなければならない。特に,使用する偏光状態解
析装置の種類によって,次の二種類の光源を用いることができる。例えば,狭帯域光源は,ポラリメータ
内蔵の偏光状態解析装置とともに用いることができ,広帯域光源は,狭帯域バンドパスフィルタ内蔵の解
析装置とともに用いることができる。
DWDM用光受動部品の測定において,測定系の波長精度は,有意義かつ信頼のおける結果となるよう,
要求精度に合わせて設定することが望ましい。また,波長分解能は,ナイキスト定理に従うように光受動
部品の帯域に合わせて設定することが望ましい。これは,必要に応じて設定手順の中で,波長計を使用し
て行う。
a) 狭帯域光源 単一スペクトルのレーザ及び狭帯域光源は,必要な測定波長範囲をカバーするように波
長を変更できるものを使用しなければならない。いずれの測定状態においても,供試品の出力光が偏
光状態を維持するよう,波長スペクトルの広がりは十分に狭くなければならない。ただし,不要な雑
音及びオーバーサンプリングを避け,かつ,ナイキスト限界を無視しないようにするため,過度に狭
帯域のレーザを使用してはならない。偏光度(DOP)は90 %以上が望ましいが,低い測定精度でよい
場合は25 %以上のDOPで測定を行ってもよい。与えられたDGD値Δτが得られる最小のDOPは,式
(1)によって求める。
一つの偏光子を挿入する
11
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
20FWHM
π
2
ln
4
1
e
100
∆
∆
−
×
=
λ
λ
τ
c
DOP
························································ (1)
ここに,
DOP: Δτが得られる最小のDOP(%)
ΔλFWHM: 中心波長λ0におけるガウシアンスペクトル幅
b) 広帯域光源 広帯域光源として,70 nm以上の半値全幅及び20 dBより大きい偏光消光比をもつLED
を使用することができる。フィルタ内蔵の解析装置を用いる場合は,式(1)のDOPが90 %の場合の
ΔλFWHMより小さな帯域幅のフィルタが望ましい。
6.1.2
偏光状態変更装置
偏光状態変更装置は,入力光のストークスベクトルSin(ω)を生成するために使用する。偏光状態変更装
置は,次に示す偏光制御器,偏光子及び供試体への入力部に配置する光学素子から成る。
a) 偏光制御器 偏光制御器は光源の後に設置し,偏光子への入力光がおおよそ円偏光となるように調整
して,入力光が偏光子の偏光方向に対して直交しないようにする。
偏光を調整する方法は,次による。
− 光源の波長範囲が,測定する波長範囲の中心に設定されていることを確認する。
− 三つの偏光子のうち一つだけを,光の経路に挿入する。
− それぞれの偏光子を挿入する都度,出力光パワーを測定する(全3回)。
− 3回の光パワー測定結果で,偏光制御器の出力光パワーの偏差がおおよそ3 dB以下となるように,
偏光制御器を用いて光源の偏光状態を調整する。
空間ビーム系の場合,波長板を偏光調整に使用してもよい。
偏光制御器に加え,三つの直線偏光子を,偏光面が互いに45度の角度をなすように光の経路に順々
に配置する。別の方法として,回転式の偏光子を使用することもできる。
b) 入力部に配置する光学素子 供試品に光を入力するために,レンズ又はシングルモード光ファイバピ
ッグテールを用いる。
光ファイバピッグテールを使う場合,反射による干渉効果が発生しないようにする。このために屈
折率整合材を用いてもよい。また,光ファイバピッグテールは,シングルモード形光ファイバを用い
るのがよい。光ファイバピッグテールは,可能な限り直線状に配置した状態を保つようにし,測定結
果に影響を与える曲げ,応力などを避けるため触らないようにする。
レンズを使う場合,供試品に入力する状態を非常に安定にするために,真空チャックなどの最適な
方法を用いる。
6.1.3
偏光状態解析装置
偏光状態解析装置は,次に示す方法で使用する。
− 供試品の出力部におけるストークスパラメータを測定するため,供試品から出力する全ての光出力を
偏光状態解析装置に接続する。
ここで,レンズ又はシングルモード形光ファイバピッグテール同士の融着接続は,接続手段の一例であ
る。
− 三つの偏光子の挿入に対応する,それぞれの出力での偏光状態を測定する。
ここで,偏光状態解析装置の波長範囲は,光源の波長範囲を含まなければならない。一般に,出力はス
トークスパラメータの形式となる。
− 光フィルタ又は光スペクトラムアナライザを使用する場合,6.2の手順に従って波長分解能(RBW)
12
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を設定する。
6.1.3A コンピュータ
得られた数値を解析するため,適切なソフトウェアを具備したコンピュータを使用しなければならない。
6.2
測定手順
この箇条は,測定データ収集及びSPEによるPMDの算出方法について規定する。測定の準備手順は,
次による。
− 光源の出力を偏光状態変更装置(偏光制御器及び偏光子)に接続する。
− 偏光状態変更装置(偏光子)の出力を供試品に接続する。
− 供試品の出力を偏光状態解析装置の入力に接続する。
− ストークスパラメータの測定波長範囲を含む波長範囲を選択する。
− 波長可変光源又は偏光状態解析装置(広帯域光源を使用する場合)の波長間隔Δλ(又は光周波数間隔
Δν)を設定する。
中心波長λ0付近における許容できる最大のΔλ又はΔνは,式(2)に基づいて設定する。
c
2
2
0
max
λ
λ
τ
≦
∆
∆
,
2
1
max
≦
ν
τ∆
∆
······················································ (2)
ここに, Δτmax: 測定波長範囲において予想されるDGDの最大値
例えば,DGDの最大値と波長間隔との積は,1 550 nmの場合4 ps・nmより小さくなるように,1 300 nm
の場合2.8 ps・nmより小さくなるように,それぞれしなければならない。この条件を満たすことによって,
一つの測定波長から次の波長に移るときに,ポアンカレ球上におけるPSPに対する出力光のSOP変化量
を,180度より小さくすることができる。Δτmaxの概略算出ができない場合,測定波長範囲において数回
DGDを測定する。各測定では,光源又は解析装置のスペクトル幅及び最小波長間隔を考慮して,近接した
二波長を用いる。この方法で測定した最大のDGDに,安全係数である3を乗じ,その値を式(2)のΔτmax
に代入して,実際の測定で用いるΔλ又はΔνの値を算出する。測定に用いた波長間隔又は光周波数間隔が
大きすぎるという懸念がある場合,より小さい波長間隔又は光周波数間隔に設定した上で,再度測定を行
うのがよい。波長に対するDGD値曲線の形状又は平均DGDが本質的に変化しない場合,元々の測定にお
ける波長間隔又は光周波数間隔は十分な値になっていたとみなす。測定の手順は次による。
− 必要な場合(広帯域光源と光スペクトラムアナライザとを組み合わせて測定を行う場合),式(3)を用
いて光スペクトラムアナライザの波長分解能(RBW)を設定する。
c
RBW
5
2
0
max
λ
τ
λ≦
∆
,
5
1
max
≦
ν
τRBW
∆
·············································· (3)
− 測定データを収集する。
− 波長ごとに,複数の偏光子を順に又は回転式の偏光子を挿入し,変化させたそれぞれの偏光状態にお
ける光出力を測定し,その波長におけるストークスパラメータを解析装置から読み取り,記録する。
光受動部品のモード結合のタイプも,波長間隔を決めるのに重要な要素である。複雑でDGDが一つに
決まらないランダムな光受動部品(又は光受動部品のタイプが不明)の場合,測定間隔を決めるために上
記の方法を用いるのがよい。
単純でDGDが一つに決まる光受動部品では,使用波長領域にわたりDGDはほぼ一定である。この場合,
波長間隔及び測定点数はそれほど重要ではない。
13
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
DWDM用光受動部品の場合,波長間隔は,通過帯域幅又はチャネル間隔に応じて設定するのがよく,
絶対波長精度(不確かさ)は,パスバンドの中心波長に対する光受動部品の要求精度に合わせて,その精
度を決めてよい。これらの光受動部品のフィルタの通過帯域を正確に求めるために,十分に狭い波長間隔
で測定を行う必要がある。
ナイキスト定理に従って測定するのがよい。レーザ光源の線幅は,波長間隔の2倍を超えなければなら
ない。また,解析装置の光検出器の帯域幅は,隣接する測定2点間の波長間隔の2倍を超えなければなら
ない。
注記 環境変化によって特性が敏感に変化するため,測定中に測定環境条件が一定となるような措置
を施すのがよい。環境条件又は励振条件の変動を最小にする一つの方法は,全てのストークス
パラメータを数秒のうちに測定することである。
6.2.1
DGD(群遅延時間差)の算出
ジョーンズ行列による算出方法[5]並びにポアンカレ球及びストークスパラメータを用いた方法の基本
的な考え方は,IEC/TR 61282-9に記載している。これらの考え方及び定義を用いて,測定データ(出力光
のSOPを光周波数の関数として表すストークスベクトル)からDGDを求める方法を,次に示す。
a) ジョーンズ行列固有値解析法による算出(JME法)
− ストークスパラメータから,各波長におけるジョーンズ行列の応答特性を求める。
− それぞれの波長間隔において,高周波側(短波長側)でのジョーンズ行列T(ω+Δω)及び低周波側(長
波長側)でのジョーンズ行列の逆行列T−1(ω)との積を求める。光の角周波数ωは毎秒のラジアン値
で表し,ω=2πνで定まる光周波数ν又はω=2πc/λで定まる光の波長λに関係する。
− 式(4)を用いて,特定の波長間隔におけるDGD値Δτ(λ)を求める。
ω
ρ
ρ
λ
τ
∆
=
∆
2
1
Arg
)
(
····································································· (4)
ここに, ρ1及びρ2: T(ω+Δω)T−1(ω)の複素固有値
Arg: 複素数成分の偏角を表す関数Arg(ηeiθ)=θ
データ解析においては,それぞれのDGD値は,対応する光周波数間隔の中心の波長におけるDGD
値として取り扱う。一回の測定は,測定波長範囲内での連続した波長ペアから得られるDGD値によ
って構成する。
b) ポアンカレ球解析法による算出(PSA法)
− 0度,45度及び90度の三つの偏光状態に対する解析装置の出力から得られる値を単位長さ当たりに
規格化したストークスベクトルHˆ,Vˆ及びQˆから,式(5)を用いて,hˆ,νˆ及びqˆを求める[2]。
H
h
ˆ
ˆ=
,
H
Q
H
Q
H
q
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
×
×
×
=
,
q
V
q
V
q
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
×
×
×
=
ν
·········································· (5)
これらは,入力光のSOPに関係ないため,入力光のSOPが分からなくても,解析を行うことがで
きる。
− ストークスベクトルhˆ,νˆ及びqˆから,各光周波数に対するベクトル積
q
h
c
ˆ
ˆ
ˆ
×
=
及び
ν′
×′
=
′
ˆ
ˆ
ˆ
q
c
を求
める。ここで,プライム(')はωで微分することを表す。各光周波数対において,差分を式(6)に
よって求める。
14
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
)
(
ˆ
)
(
ˆ
ˆ
)
(ˆ
)
(ˆ
ˆ
)
(ˆ
)
(ˆ
ˆ
)
(ˆ
)
(ˆ
ˆ
)
(ˆ
)
(ˆ
ˆ
ω
ω
ω
ω
ω
ω
ω
ν
ω
ω
ν
ν
ω
ω
ω
ω
ω
ω
c
c
c
c
c
c
q
q
q
h
h
h
′
−
∆
+
′
=
′
∆
−
∆
+
=
∆
−
∆
+
=
∆
−
∆
+
=
∆
−
∆
+
=
∆
,
,
,
,
······················································· (6)
− DGD値Δτは,光周波数増分を用いて,式(7)によって求める。
(
)
(
)
′
∆
+
∆
+
∆
+
∆
+
∆
+
∆
∆
=
∆
2
2
2
2
2
2
ˆ
ˆ
ˆ
2
1
2
1
arcsin
ˆ
ˆ
ˆ
2
1
2
1
arcsin
1
)
(
c
q
c
q
h
ν
ω
λ
τ
···· (7)
ここでのDGDは,対応する波長間隔の中心の波長におけるDGD値を表す。
6.2.2
DGD(群遅延時間差)の波長特性
JME法又はPSA法によって算出したデータは,縦軸をDGD,横軸を波長として図5に示すようなグラ
フに描くのがよい。
波長(nm)
a) ジョーンズ行列解析結果
図5−ストークスパラメータ評価法による結果例
D
G
D
(
p
s)
15
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
195.96
195.97
195.98
195.99
196.00
196.01
196.02
196.03
1 528.16 1 528.08 1 528.00 1 527.92 1 527.84 1 527.76 1 527.68 1 527.60
光周波数(THz)
波長(nm)
b) ポアンカレ球分析結果
図5−ストークスパラメータ評価法による結果例(続き)
縦軸をDGDとして,波長のグラフを描く。モード結合が無視でき,かつ,PMD値が予測可能な光受動
部品の結果は,波長に対してほぼ一定のDGDを示す。
DWDM用光受動部品の場合,通過帯域内でどのようにDGDが変化するかを示すために,DWDMデバ
イスの通過帯域特性(波長に対する光損失)とDGDの波長特性とを重ね合わせて表示するのがよい。
6.2.3
偏波モード分散値
測定波長全体にわたる1回の測定で得られるPMD値の期待値<Δτ(λ)>λは,使用波長範囲内のDGD測定
値の単純平均(又はRMS値)である。サンプル数を増やすために異なる条件の下で複数回の測定を行う
場合,アンサンブル平均を用いる。
PMDを,次の手順に従って求める。
− それぞれの波長増分で得たDGDを全測定値について平均する。
− 測定した波長範囲全体について,DGDの平均値及びRMS値を求める。
− 求めたDGDの平均値及びDGDのRMS値を,それぞれ供試品のPMDmean及びPMDRMSとして,ピコ
秒(ps)で試験報告書に記載する。
− DGDの最大値(波長間隔の平均波長におけるDGD)をピコ秒(ps)で試験報告書に記載する。
− 指定波長におけるDGDの値をピコ秒(ps)で試験報告書に記載する。
全ての場合において,供試品のDGD値,DGDの最大値及びPMD値を,ピコ秒(ps)で試験報告書に
記載する。
6.2.4
測定の不確かさ
DGDの最大値,平均値及びRMS値について,測定の不確かさの妥当性を確認する。
D
G
D
(
p
s)
アレイ形光導波路グレーティ
ング(AWG)合波チャンネル
DGDmean=0.8 ps
PMD=0.9 ps
1.2
1.0
0.8
0.6
0.4
0.2
16
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7
偏光位相シフト法
この箇条では,偏光位相シフト(PPS)法に対する要求特性について規定する。
この方法は,二つの直交するSOP(0度と90度との直線偏光)の対を使用する([6]〜[9])。0度及び90
度の直線偏光を供試品に入力し,図6に示した偏光ビームスプリッタによって,出力光を二つのSOP成分
に分離する。それぞれのSOP(P偏光及びS偏光)の振幅及び群遅延を,規定する波長において測定して,
次の情報を得る。
− 0度の直線偏光入力に対して,
供試品の出力光のP偏光成分及びS偏光成分における,振幅(|T11|2mea及び|T21|2mea)及び群遅延
(dΦ11/dωmea及びdΦ21/dωmea)
− 90度の直線偏光入力に対して,
供試品の出力光のP偏光成分及びS偏光成分における,振幅(|T12|2mea及び|T22|2mea)及び群遅延
(dΦ12/dωmea及びdΦ22/dωmea)
波長可変
光源
変調器
偏光
制御器
高周波
信号
発生器
増幅器
及び
位相比較
偏光ビームスプリッタ
P偏光
S偏光
受光装置
受光装置
参照信号
増幅器
及び
位相比較
供試品
コンピュータ
変調信号
図6−偏光位相シフト法の測定系
7.1
測定装置
測定系のブロック図を,図6に示す。
7.1.1
光源
SPEと同様に,狭帯域波長可変光源を用いる。波長可変範囲は,PMDを測定する波長範囲に対して十分
に広くなければならない。一般に,温度制御及び電流制御を内蔵する外部共振器レーザを用いる。
7.1.2
変調器及び信号発生器
変調器は,光源の出力光を強度変調して,単一のフーリエスペクトル成分をもつ波形を作り出す。適切
な測定精度が得られるよう,変調周波数は十分に高く,かつ,十分に安定していなければならない。
光源に注入する電流を制御する(直接変調)ことによって変調してもよいし,他の変調方法(外部変調)
を用いてもよい。例えば,供試品に変調光を入力するため,光源の後に電気光学変調器を配置する事例を,
図6に示す。変調器は適切な測定精度を得るため,安定に動作しなければならない。正弦状又は長方形状
の変調波形を用いることができる。変調周波数は,一般に,0.01 ppmの安定性があれば十分である。
変調信号の一部を,参照信号として振幅及び位相比較器に入力する。
供試品の帯域によって決まる制限内で,位相検波に適切な変調周波数fをもつ正弦波状の変調信号を供
給するために,信号発生器は広い周波数特性が必要である。変調周波数fは,一般に,10 MHzから10 GHz
までの範囲である。変調周波数を選ぶとき,変調のサイドバンド成分による悪影響及びDGD測定分解能
を考慮する。周波数fでの変調は,光源出力光の中心波長から±f離れた周波数のサイドバンド成分を生み
出す。非常に狭い帯域特性をもつ供試品においては,サイドバンドをもつことが測定に制限を与える場合
17
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
がある。正確な位相測定を行うため,変調によって生じるサイドバンド成分及び光源自体の線幅を含む全
帯域は,供試品のもつ帯域以下でなくてはならない。
位相シフトを測定する場合,360n度(nは整数)の曖昧さを防ぐことは不可欠である。これは,大きな
PMDが予想されるとき,変調周波数を低くするなどの方法で実現することができる。例えば,変調周波数
は,位相差が360度となる周波数を超えないようにしなければならない。この変調周波数の上限fmaxは,
式(8)によって概算できる。
max
12
max
10
τ
∆
=
f
············································································· (8)
ここに, fmax: 変調周波数の上限(Hz)
Δτmax: 波長λにおける最大の推定DGD値(ps)
実際,DGD値が100 psより小さいと,fmaxは10 GHzより大きくなり,変調周波数として一般に実現で
きる周波数を超える。
変調周波数の下限fminも決めておく必要がある。fminは,DGD測定の分解能のRMS値Δτres及び位相比較
器の位相分解能φ
δを用い,式(9)によって求める。
res
12
min
360
10
δ
τ
φ
∆
=
f
········································································ (9)
ここに, fmin: 変調周波数の下限(Hz)
Δτres: 波長λにおけるRMS値のDGD分解能(ps)
φ
δ: 位相比較器のRMSでの位相分解能(度)
7.1.3
偏光制御器
供試品への入力光のSOPを,偏光制御器で制御する。入力光のSOPは,コンピュータからの制御信号
によって設定する。コンピュータは,適切に直交したSOPを決め,それらの偏光状態の間で遅延差を測定
する。
光源が偏光状態にない場合,光源の後に偏光子を配置し,その直後に偏光制御器を配置する。偏光制御
器の例として,液晶又はバルク形光学遅延板(四分の一波長板及び二分の一波長板),機械的に可変な複屈
折光ファイバを巻いた可変複屈折素子,電気光学特性をもつ光受動部品などがある。あらかじめ予想する
測定精度を得るため,偏光制御器には十分な特性が必要である。角度設定分解能は±0.1度が必要である。
一般的に,使用波長範囲で,偏光消光比は30 dB又はそれ以上が必要である。
注記 一般に,四分の一波長板及び二分の一波長板の位相遅延量は波長特性をもつため,ある波長範
囲においてだけ,所期の位相遅延を与えることができる点が,測定における制限となる。
7.1.4
偏光ビームスプリッタ
偏光ビームスプリッタ(PBS)は,入力光を,互いに直交する成分(P偏光及びS偏光)に分離するた
めに用いる(直交するとは,ポアンカレ球上で正反対の位置にあることをいう。)。PBS以外の方法を用い
て,これら互いに直交するSOPを得てもよい。PBSは,方解石などの非等方性の結晶から成り,一般に,
非常に高い偏光消光比を得ることができ,非常に低いDGD,群遅延及びPDLを実現できる。また一般に,
対応する波長範囲は非常に広い。
7.1.5
受光装置
受光装置は,供試品で変調された光信号を電気信号に変換する。高い直線性をもつPINフォトダイオー
ドが,一般によく用いられる。また,PINフォトダイオードは,高い変調周波数に応答するよう,十分に
広い動作帯域をもたなければならない。それに加え,高い信号−雑音比をもつよう,受光装置の後ろに広
帯域の増幅器を用いるのがよい。
18
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.1.6
振幅及び位相比較器
振幅及び位相比較器は,信号の振幅及び位相を測定する。信号の位相は,各偏光成分を信号発生器から
の参照変調信号と比較することによって測定する。群遅延は,式(10)を用いて位相から求める。
f
=36010
)
(
3
φ
λ
τ
········································································· (10)
ここに, τ(λ): 群遅延(ps)
φ: 位相(度)
f: 変調周波数(GHz)
7.1.7
参照信号
信号発生器から変調器に入力する変調信号と同じフーリエ成分をもつ参照信号とを位相比較器に入力し,
信号源の位相差を測定する。
参照信号は,変調信号と同期していなければならない。変調信号を分岐して,参照信号として用いても
よい。
参照信号の例を,次に示す。
− 信号発生器と位相比較器の参照信号入力部とを,電気的に接続する。
− 供試品の前に光カプラを挿入し,光源出力を分岐して受光装置に接続する。受光装置の出力を増幅し
て,位相比較器の参照信号として用いる。
7.1.7A コンピュータ
適切なソフトウェアを具備したコンピュータを用い,測定した振幅及び群遅延の値からDGD値Δτ(λ)を
算出する。
7.2
測定手順
PPS法の測定手順は,次による。
7.2.1
変調周波数
測定結果によって決まる波長分解能Δλ及びDGD測定分解能Δτresによって,変調周波数を選択する。
7.2.2
波長間隔
DGDの算出には波長の増加量δλを使うため,二つの波長で測定する必要がある。
波長増加量δλを波長間隔と呼び,δλの決定手順を次に説明する。波長可変レーザ光源の波長をδλ[δλ=(λ
+δλ)−λ]だけ変える。このとき,供試品からの出力の偏光角度の変化が45度より小さくなるようにする。
δλ(nm)は,通常,式(11)のように表す。
max
3
2
4
10
δ
τ
λ
λ
∆
c
≦
·······································································(11)
ここに,
δλ: 波長間隔(nm)
λ: 測定波長範囲(nm)
c: 真空中での光速(m/s)
Δτmax: 供試品で予想される最大のDGD量(ps)
例えば,DGDの最大値τmaxと波長間隔δλとの積は,波長1 550 nmにおいて2 ps・nm未満でなければな
らない。
7.2.3
波長掃引による測定
波長可変レーザ光源は,必要な測定波長範囲で波長ごとの測定に用い,DGD値は,それぞれの波長で求
める。さらに,測定波長範囲内で得たDGD値を基にして平均のDGD値を求め,供試品のPMD値を求め
ることができる。校正及び測定は,次による。
19
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 校正 長さ1 m以下の低PMDシングルモード光ファイバを用いて,測定前に校正を行う。はじめに,
偏光制御器及び偏光ビームスプリッタ(PBS)を調整し,偏光制御器がPBSのP偏光に一致する0度
直線偏光を出射するようにする。続いて,偏光制御器が,PBSのS偏光に一致する90度直線偏光を
出射するように調整する。次に,それぞれの測定波長に対して,偏光制御器から0度直線偏光と90
度直線偏光とを交互に出射し,PBSによって分離した二つの偏光成分(P偏光及びS偏光)の振幅及
び群遅延を測定する。すなわち,0度直線偏光を入射したときのP偏光及びS偏光の振幅(それぞれ
|T11|2cal及び|T21|2cal)及び群遅延(それぞれdΦ11/dωcal及びdΦ21/dωcal)を測定する。続いて,90度直線
偏光を入射したときのP偏光及びS偏光の振幅(それぞれ|T12|2cal及び|T22|2cal)及び群遅延(それぞれ
dΦ12/dωcal及びdΦ22/dωcal)を測定する。
b) 測定 測定には,一対の直交する偏光(0度及び90度の直線偏光)を用いる。0度及び90度の直線偏
光を供試品に入力し,供試品の出力光を偏光ビームスプリッタで,二つの偏光成分に分離する。その
後,特定の波長において,それぞれの偏光成分(P偏光及びS偏光)の振幅及び群遅延量を測定する。
すなわち,0度の直線偏光におけるP偏光及びS偏光成分の振幅(|T11|2mea及び|T21|2mea)並びに群遅延
(dΦ11/dωmea及びdΦ21/dωmea)を測定する。さらに,90度の直線偏光において,P偏光及びS偏光の振
幅(|T12|2mea及び|T22|2mea)並びに群遅延(dΦ12/dωmea及びdΦ22/dωmea)を測定する。
7.2.4
DGD(群遅延時間差)の算出
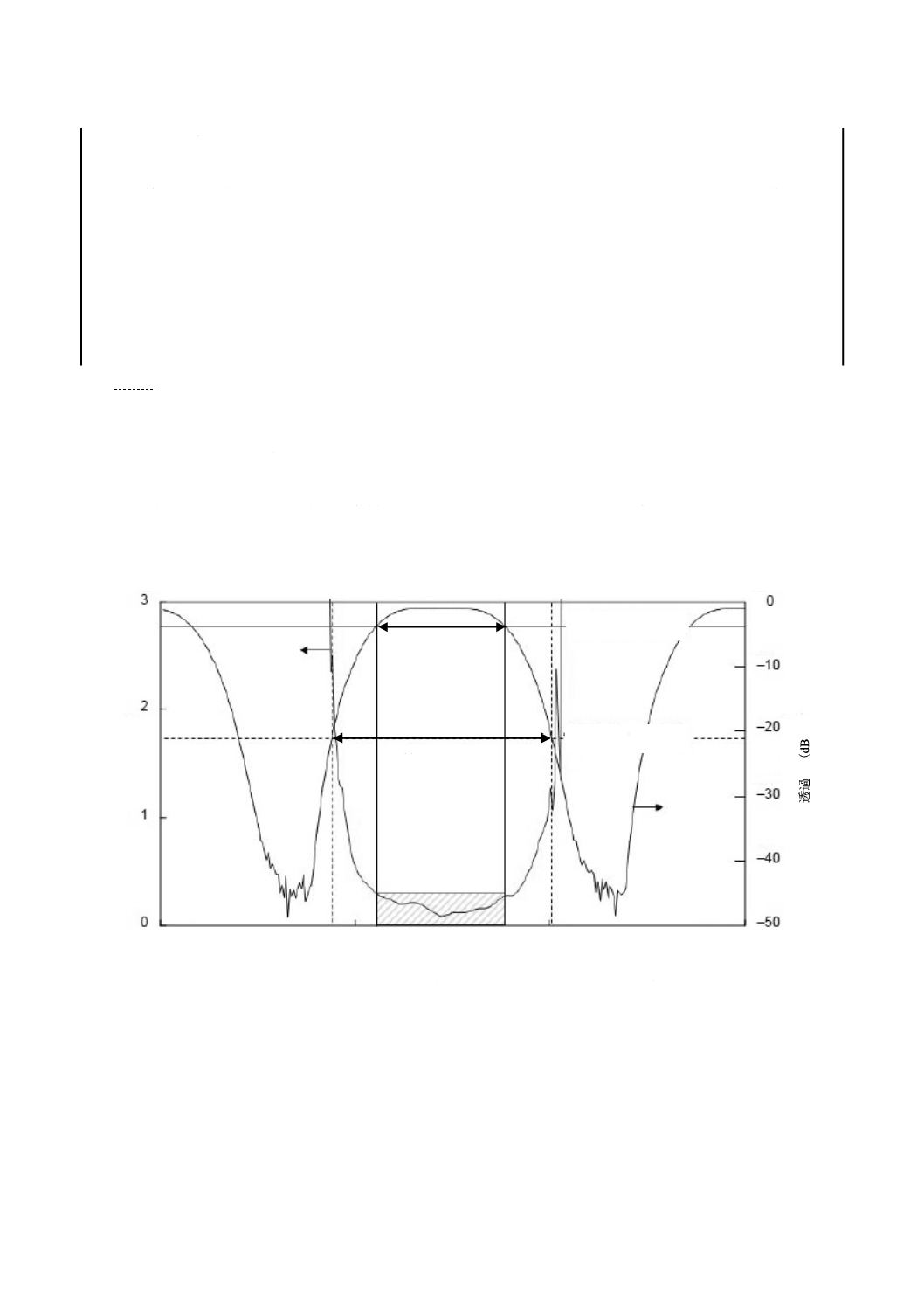
各波長に対するDGD値を,計算で求める。光伝送用部品の特性例を,図7に示す。
1 549
1 549.5
1 550
1 550.5
波長(nm)
図7−50/100 GHzインターリーバにおける,波長と群遅延時間差との関係
測定結果から,式(12)及び式(13)を用いて,パラメータを求める。
ピークから−3 dB
ピークから−20 dB
D
G
D
(
p
s)
透
過
率
(
d
B
)
3 dB帯域幅
20 dB帯域幅
20
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
21
2
11
2
21
2
11
0
2
21
2
11
2
21
2
11
1
12
21
22
11
1
12
21
22
11
1
f
i
1
2
cos
cos
2
1
d
d
d
d
d
d
d
d
4
1
d
d
d
d
d
d
d
d
4
1
δ
π
2
T
T
T
T
Θ
T
T
T
T
Θ
Φ
Φ
Φ
Φ
Φ
Φ
Φ
Φ
c
Θ
Θ
+
−
=
+
−
=
−
+
−
=
+
−
−
=
∆
=
∆
∆
=
−
ω
ω
ω
ω
γ
ω
ω
ω
ω
β
λ
λ
λ
ω
α
········································ (12)
ここに,
λi及びλf: 波長間隔δλでの最短波長及び最長波長
ΔΘ: λiにおけるΘとλfにおけるΘとの差分
2
cal
11
2
mea
kl
2
kl
T
T
T
=
,
cal
11
mea
kl
kl
d
d
d
d
d
d
ω
ω
ω
Φ
Φ
Φ
−
=
,kl=11及び12
········ (13)
2
cal
11
2
mea
mn
2
mn
T
T
T
=
,
cal
22
mea
mn
mn
d
d
d
d
d
d
ω
ω
ω
Φ
Φ
Φ
−
=
,mn=21及び22
各波長におけるDGD値は,
1
α,
1β, 1γ及び
0
Θを用いて,式(14)で求める。
()
0
1
1
2
1
2
1
2
1
2
cos
2
2
Θ
γ
β
γ
β
α
λ
τ
+
+
+
=
∆
········································· (14)
7.2.5
偏波モード分散値
測定波長全体にわたる1回の測定で得られるPMD値の期待値<Δτ(λ)>λは,使用波長範囲内のDGD測定
値の単純平均(又はRMS値)とする。サンプル数を増やすために,異なる条件の下で複数回の測定を行
う場合,アンサンブル平均を用いる。
次の手順に従って,PMDを求める。
− それぞれの波長間隔で得たDGDを全測定値について平均する。
− 測定した波長範囲にわたって,DGDの平均値及びDGDのRMS値を求める。
− 求めたDGDの平均値及びDGDのRMS値を,それぞれ供試品のPMDmean及びPMDRMSとして,ピコ
秒(ps)で試験成績書に記載する。
− DGDの最大値(波長間隔の中心波長におけるDGD)をピコ秒(ps)で試験成績書に記載する。
− 指定波長におけるDGDの値を,ピコ秒(ps)で試験成績書に記載する。
全ての場合において,DGDの値,DGDの最大値及びPMDの値を,ピコ秒(ps)で記録する。
7.2.6
測定の不確かさ
DGDの最大値及びDGDの平均値並びにDGDのRMS値について,測定の不確かさの妥当性を確認する。
8
固定アナライザ法
この箇条では,固定アナライザ(FA)法に対する要求特性について規定する。
21
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.1
装置
測定系のブロック図の例を,図8に示す。
供試品
狭帯域
光源
偏光子
検光子
受光装置
コンピュータ
a) 狭帯域光源及び受光装置を用いた固定アナライザ
供試品
広帯域
光源
光スペクトラム
アナライザ
偏光子
検光子
コンピュータ
b) 広帯域光源及び光スペクトラムアナライザを用いた固定アナライザ
図8−固定アナライザを用いた測定系のブロック図
8.1.1
光源
全ての場合において,解析装置の種類に応じ,二種類の光源のうち適切な一つを選択して用いる。広帯
域光源とモノクロメータとの組合せ,又は図8 a)に示す波長可変光源などの狭帯域光源は,偏光状態解析
装置とともに用いることができる。図8 b)に示すLEDなどの広帯域光源は,狭帯域通過フィルタ内蔵の解
析装置とともに用いることができる。狭帯域通過フィルタ内蔵の解析装置の例としては,光スペクトラム
アナライザ,検光子の前に配置したフーリエ変換光スペクトラムアナライザとして用いる干渉計などがあ
る。広帯域光源を使用する場合,DGD算出のために必要なスペクトル幅で,フィルタの通過帯域幅を定め
る。
いずれの光源を用いる場合も,必要な偏光度を保つため,検出スペクトル幅は十分に小さくする。また,
規定の波長領域でPMD測定の十分な精度が得られるよう,測定波長範囲は十分広くする。
広帯域特性をもつ供試品の光スペクトルにおいて,全ての特性を適切に求めるために,狭帯域光源のス
ペクトル幅は,式(15)を満たすようにする。
(
)1
max
0
8
−
∆
<
∆
τ
ν
λ
λ
······································································ (15)
ここに,
ν: 光周波数
λ0: 中心波長
Δλ: スペクトル幅
Δτmax: 予想される最大のDGD値
1 550 nm付近の波長では,式(15)によって,Δλ(nm)はΔτ(ps)の逆数よりも小さくする必要があるこ
とが分かる。狭帯域の供試品の場合,スペクトル幅は供試品の3 dB帯域幅の1/10以下とする。
全ての場合において,波長可変光源の線幅又はフィルタの通過帯域は,ナイキスト定理に従い,波長間
隔の2倍を超えることが望ましい。
8.1.2
検光子
検光子の透過光の偏光軸の角度設定方向は,測定中一定に維持する。モード結合が無視できる場合又は
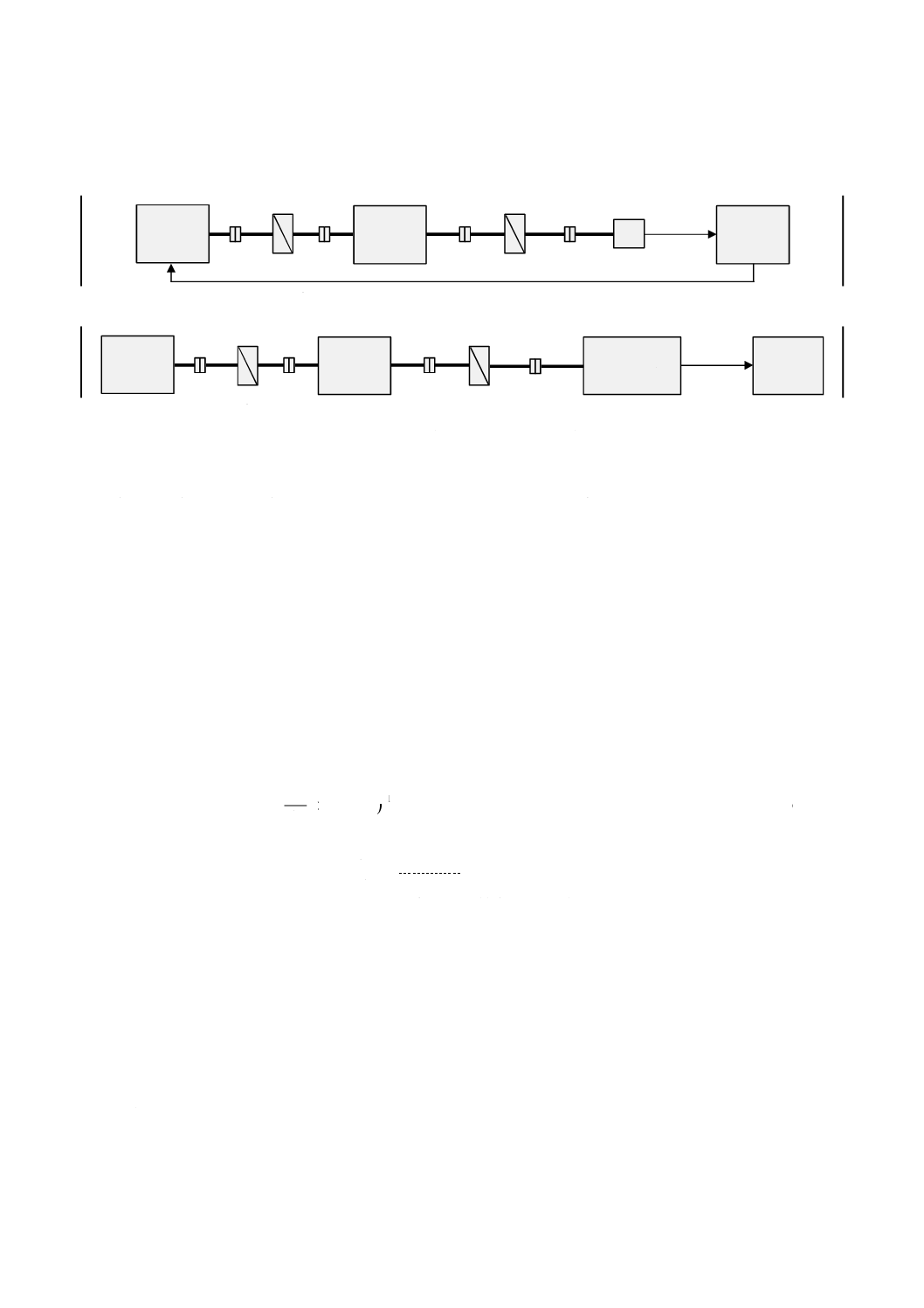
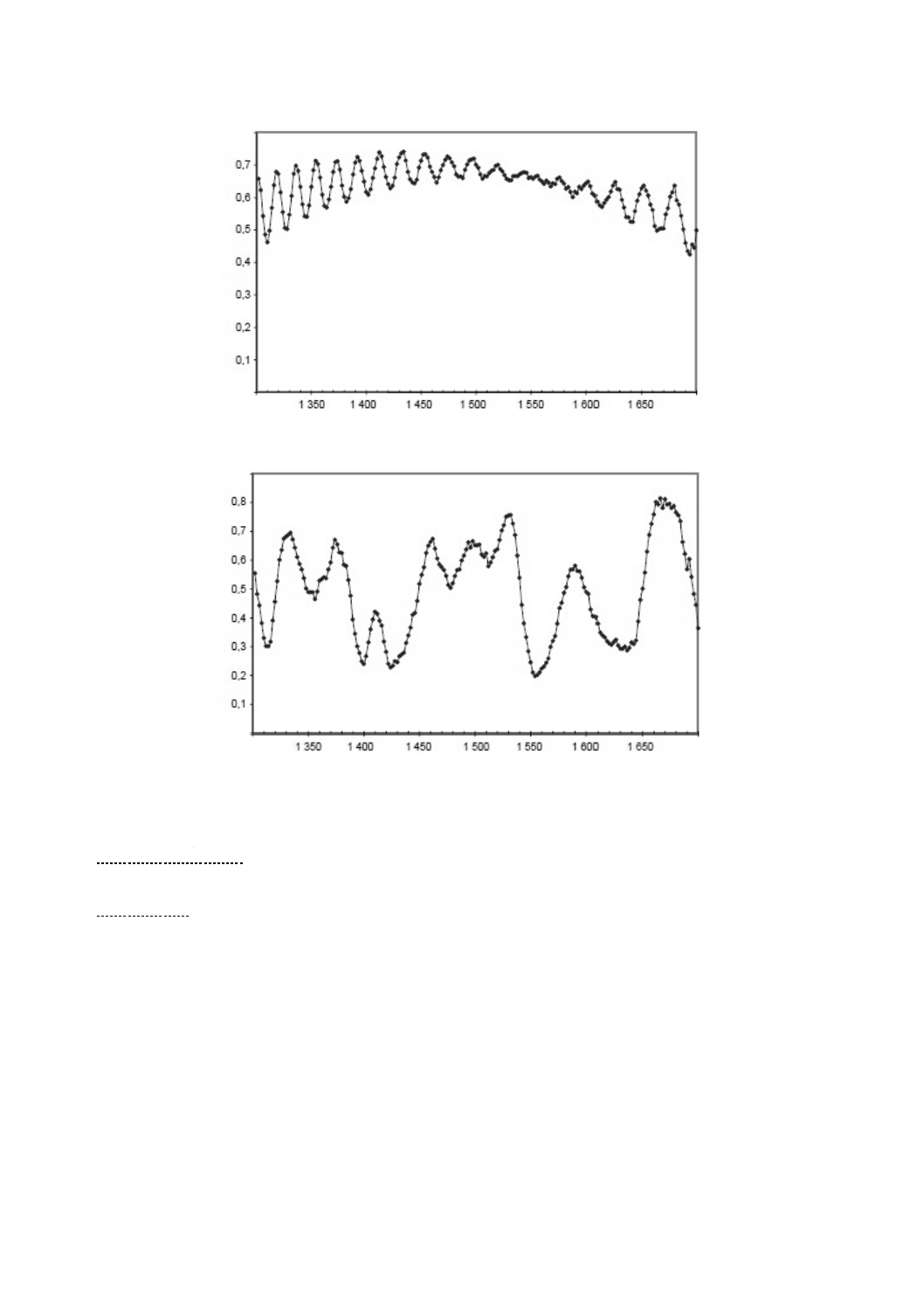
低いPMDの場合,検光子の調整によって,図9に示す変動振幅を最大にできることもある。
注記 検光子は,ポラリメータで置き換えることができる。
22
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
波長(nm)
a) モード結合が無視できる場合
波長(nm)
b) ランダムなモード結合の場合
図9−固定アナライザ法における比率関数Rの例
8.1.2A コンピュータ
測定によって得たデータを解析するため,適切なソフトウェアを具備したコンピュータを使用しなけれ
ばならない。
8.2
測定手順
8.2.1
波長間隔
この測定手順では,光路中に検光子を挿入した場合及び挿入しない場合に対して,波長範囲内で規定し
た波長間隔で,光パワーを波長(又は光周波数)の関数として測定する。波長範囲は,測定精度に影響を
与える。波長間隔δλは,Δλをδλで置き換えて,式(15)を満足するように設定する。
フーリエ変換法を用いる場合,光周波数の測定間隔を理想的には均一とし,測定間隔は2のべき乗とす
る。モノクロメータ使用時の光周波数間隔δνは,測定で予測される最大DGDに相当する振動周期の二分
の一よりも小さくする。強いモード結合を示す供試品に対しては,二次モーメントの平方根より大きな光
パワーが多く存在するため,ナイキスト条件は,予想される最大DGDのRMSが示す光周波数の2倍超え
とする[式(15)参照]。
比
率
比
率
23
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 フーリエ変換によって,Δτmax近傍に多くのエネルギーが存在していることが明らかになった場
合には,測定間隔を狭めて再度測定するのがよい。
8.2.2
波長掃引による測定
波長掃引による測定は,次による。
− 光路中に検光子を設定して,波長を掃引し,受光パワーをPA(λ)として記録する。
− 光路から検光子を取り外し,再度,波長掃引を繰り返す。
− 受光パワーをPTot(λ)として記録する。
− 比率関数R(λ)を式(16)によって求める。
()
()()
λ
λ
λ
Tot
A
P
P
R
=
········································································· (16)
代替の手順は,検光子を90度回転して二回目の波長掃引を行う方法である。光パワーをPB(λ)として記
録する。比率関数は,式(17)によって求める。
()
()
()
()
λ
λ
λ
λ
B
A
A
P
P
P
R
+
=
································································· (17)
注記1 極値分析を適用する場合には,比率関数PA/PBを用いることもできる。
注記2 検光子としてポラリメータを用いる場合,波長に対する正規化ストークスパラメータを測定
する。この場合,光パワーの絶対値ではなく,三つの独立したパワー相対値のスペクトル関
数(ベクトル成分に対する)として同様の方法で解析が可能である。
モード結合が無視できる場合及びランダムなモード結合の場合の測定結果の例を,図9に示す。
8.2.3
PMDの算出
測定した比率関数を用いたPMDの算出は,次のいずれかによる。
− 極値分析法
− フーリエ変換法
極値分析法の算出方法は,次のa)に,また,フーリエ変換法の算出方法は,次のb)〜h)による。
a) 極値分析法 関数R(λ)は,最短波長λ1から最長波長λ2までの間で一定の波長間隔で求める。この波長
範囲における極値(極小値及び極大値)の数をEとする。また,λ1及びλ2が極値に当たるように波長
範囲を再定義することもでき,その場合には,Eはλ1及びλ2を含む極値の数から1を減じた値である。
PMD値<Δτ>は,式(18)によって求める。
(
)
1
2
2
1
2
λ
λ
λ
λ
τ
−
=
∆
c
kE
>
<
·································································· (18)
ここに,
c: 真空中での光速
k: モード結合係数。ランダムなモード結合がない場合:1.0,
ランダムなモード結合の場合の極限:0.82
検光子としてポラリメータを用いる場合,三つの正規化されたストークスパラメータから得られる
値の平均値(又はRMS値)を,PMDとする。
b) フーリエ変換法 この方法では,通常,R(λ)を光周波数νの関数で表し,PMDを導出するためにフー
リエ解析を用いる。フーリエ変換によって光周波数領域データを時間領域データに変換し,光の到着
時間δτの分布情報を直接得ることができる。このデータを後で示すように後処理して,供試品のPMD
期待値<Δτ>を導く。この方法は,供試品におけるモード結合が無視できる場合及びランダムなモー
24
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ド結合の場合に適用できる。
固定アナライザによるフーリエ変換(FAFT)の拡充については,附属書Aに記載する。
c) データの前処理及びフーリエ変換 この方法を用いるため,フーリエ変換では,通常,波長λに対し
て得られるR(λ)のデータが,光周波数領域で等間隔となるように測定する必要がある。等間隔の光周
波数で測定する代わりに,等間隔の波長で測定したデータをフィッティング(例えば,三次スプライ
ンの関数を用いて)させて補間によって光周波数領域で等間隔の点を求めるか,又はより高度なスペ
クトル推定方法を用いて求めてもよい。いずれの場合でも,波長λにおける比率R(λ)は,式(16)又は
式(17)によって求める。
R(λ)に対して,ゼロ点付加,データ補間及び直流成分の除去を行ってもよい。フーリエ変換前の前
処理として,データに窓関数処理を行ってもよい。δτに対する強度データ分布P(δτ)を求めるために,
フーリエ変換を行う。
d) 変換データのフィッティング R(λ)における直流成分は,部分的には例えば検光子の挿入損失という
可能性があるため,注意深く除去しないと,ゼロ点δτにおけるフーリエ変換データは意味をもたない。
直流成分を除去しない場合,その後の計算においては,通常2点のデータまでは無視する。変数jは,
δτを0以上で区分けしたときに,それぞれの区分に順に割り当てられる数で,最初に有効な区分が
j=0に対応するように割り当てることができる。
この後の計算から測定雑音を取り除くため,通常,検出システムのRMS雑音レベルの200 %に設定
したしきい値レベルT1とP(δτ)とを比較する。この時点で,供試品のモード結合が無視できるか又は
ランダムなモード結合状態であるかを決めておく必要がある。
P(δτ)の有効データの最初のX点が全てT1よりも小さい場合は,P(δτ)がモード結合が無視できる供
試品の離散的なスパイク状の特性をもつことを示している。フーリエ変換前にゼロ挿入を行わない場
合,Xの値は3である。ゼロ挿入を行った場合,Xの値は式(19)で決まる。
p
p
3
L
N
X=
··············································································· (19)
ここに,
Np: 元々の測定データの総数
Lp: ゼロ挿入を行った後のアレイの総長
供試品においてモード結合が無視できる場合,PMDは式(20)によって求める。ランダムなモード結
合の場合は,PMDは式(21)によって求める。
e) モード結合が無視できる場合のPMDの計算 供試品においてモード結合が無視できる(例えば,複
屈折性をもつ供試品の)場合,R(λ)は図9 a)に示す周期的な変動成分をもつ正弦波状の特性を示す。
相対パルスの到着時間δτに相当する位置に離散的スパイクをもつ出力P(δτ)をフーリエ変換によって
求め,その重心がPMD値<Δτ>である。
P(δτ)があらかじめ定めた二番目のしきい値T2を超える点は,式(20)を用いて,スパイクの重心<Δτ
>を定義する。T2は,通常,受光装置の雑音レベルのRMSの200 %とする。
()
[
]
()
∑
∑
′
=
′
=
=
∆
M
e
e
M
e
e
e
P
P
0
0
δ
δ
δ
τ
τ
τ
τ>
<
·························································· (20)
ここに,
M'+1: T2を超えるスパイクのうちのPのデータ数
<Δτ>: 平均のDGD値(ps)
スパイクが検出されない(すなわち,M'+1=0)場合,PMDは0とする。スパイクのRMS幅,ス
25
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
パイクのピーク値などの他のパラメータも必要に応じて記録する。
供試品が二つ以上の複屈折素子を含む場合には,二つ以上のスパイクが発生する。
f)
ランダムなモード結合の場合のPMDの計算 ランダムなモード結合の場合は,R(λ)は図9 b)に示すよ
うな複雑な波形となる。これは,供試品の中での実際のモード結合過程に基づく正確な特性である。
フーリエ変換データは,供試品中での光パルス到着時間δτの確率分布の自己相関を表す分布P(δτ)と
なる(図10参照)。
データ点は,T1を超えたデータ点をPの最初の点とするj=0から,X個のT1以下になるデータ点が
後ろに続く点まで数える。ランダムなモード結合の場合,この点は分布P(δτ)で最後の重要な(すなわ
ち最終の)点を表し,測定雑音によって大きな影響は受けない。この点に対するδτの値をδτlastで表し,
δτlastでのjの値をM"で表す。この供試品におけるモード結合は,ランダムに発生する。
PMD<Δτ>を,この分布の二次モーメントの平方根σRとして定義し,式(21)によって求める。
()
[
]
()
2
1
0
0
2
R
δ
δ
δ
=
=
∆
∑
∑
′′
=
′′
=
M
j
j
M
j
j
j
P
P
τ
τ
τ
σ
τ>
<
··············································· (21)
g) モード結合が混在する場合のPMDの計算 被測定系を,モード結合が無視できる供試品と,モード
結合がランダムに発生する供試品とを縦続に接続して構成する場合,重心の決定[式(20)]及び二次
モーメントの導出[式(21)]の両方が必要である。P(δτ)のスパイクは,計算で求めたδτlastとは関係な
く,決定されることに注意する。
0 0.1 0.2 0.3 0.4 0.5
パルス到達時間の相対差(ps)
図10−フーリエ分析によるPMD
h) 測定波長範囲 モード結合がランダムな供試品の場合,十分な精度でのアンサンブル平均となるよう
に,十分な測定波長範囲をとらなければならない。必要な精度及び測定波長範囲は,測定の前に決め
ておかなければならない。
さらに,δτ値が非常に低いとき,R(λ)の測定に非常に長い時間が必要になる。また,λ1からλ2まで
の波長範囲は二つ以上の周期をもつことが望ましい。波長範囲は,式(22)を用いて,P(δτ)において決
発
生
確
率
(
任
意
単
位
)
PMD=0.167 ps(二次モーメントの平方根)
FFT振幅
しきい値=0.001 5
ガウシアン適合
x2=22.61,ガウシアン
j=0
j=M''=9
0.04
0.03
0.02
0.01
0
26
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まる最も短いδτであるδτminで定義する。
(
)c
1
2
2
1
min
2
λ
λ
λ
λ
δτ
−
=
····································································· (22)
ここで,Pのゼロ点及びゼロ点に隣接する二つの測定点を,一般には無視するということから,係数2
を導入している。例えば,λ1が1 270 nm,λ2が1 700 nmの場合,δτminは0.033 psとなる。
モード結合が無視できる供試品,及び図9 a)と類似したR(λ)特性をもつPMDが大きい供試品に対しては,
モード結合がランダムな供試品のような波長に対する平均化の要求を緩和し,平均化する波長範囲を狭く
して(例えば,λ2−λ1が30 nm),PMDの波長依存性を調べることができる。
8.2.4
偏波モード分散値の記録
8.2.3の方法によって算出したPMD値を,供試品のPMD値としてピコ秒(ps)で試験報告書に記載する。
8.2.5
測定の不確かさ
PMDについて,測定の不確かさの妥当性を評価する。
9
干渉法
この箇条では,干渉を用いてPMDを測定する方法について詳細事項を規定する。干渉を用いた方法
(INTY)は,供試品のタイプに応じて,二つの分析方法を用いる。一つは,特殊な条件の下で行う,従来
から実施している分析方法(TINTY)([10]〜[12])であり,もう一つは,TINTY法とは異なる測定系で一
般化した分析を元にした方法(GINTY)[13]である。
9.1
測定装置
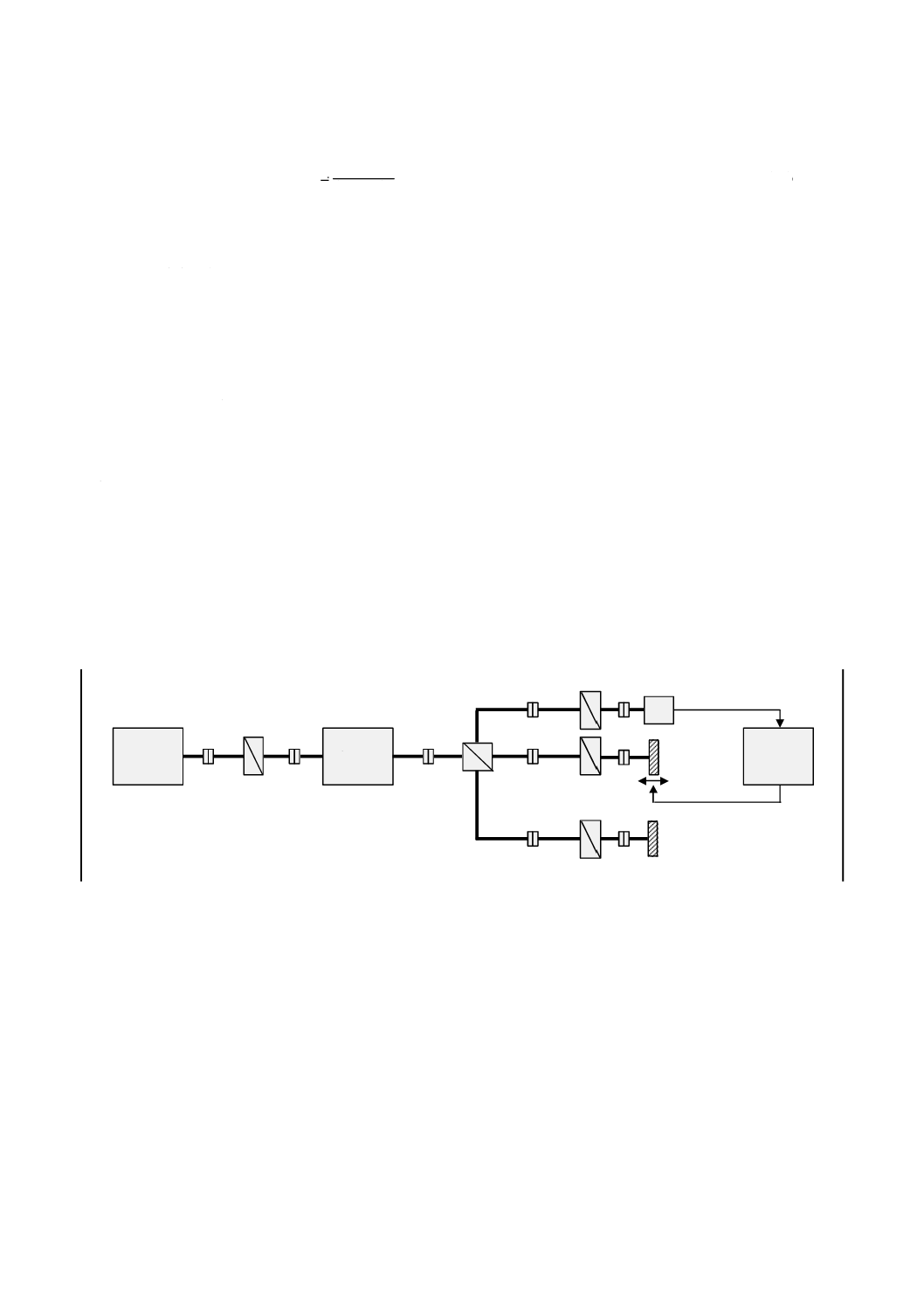
干渉法(INTY)の測定系を,図11に示す。
光源
供試品
ビーム
スプリッタ
干渉包絡線受光装置
偏光子
偏光子
検光子
可動ミラー
ミラー
偏光子
コンピュータ
a) マイケルソン干渉計を用いた従来分析法(TINTY)
図11−干渉法の測定系
27
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
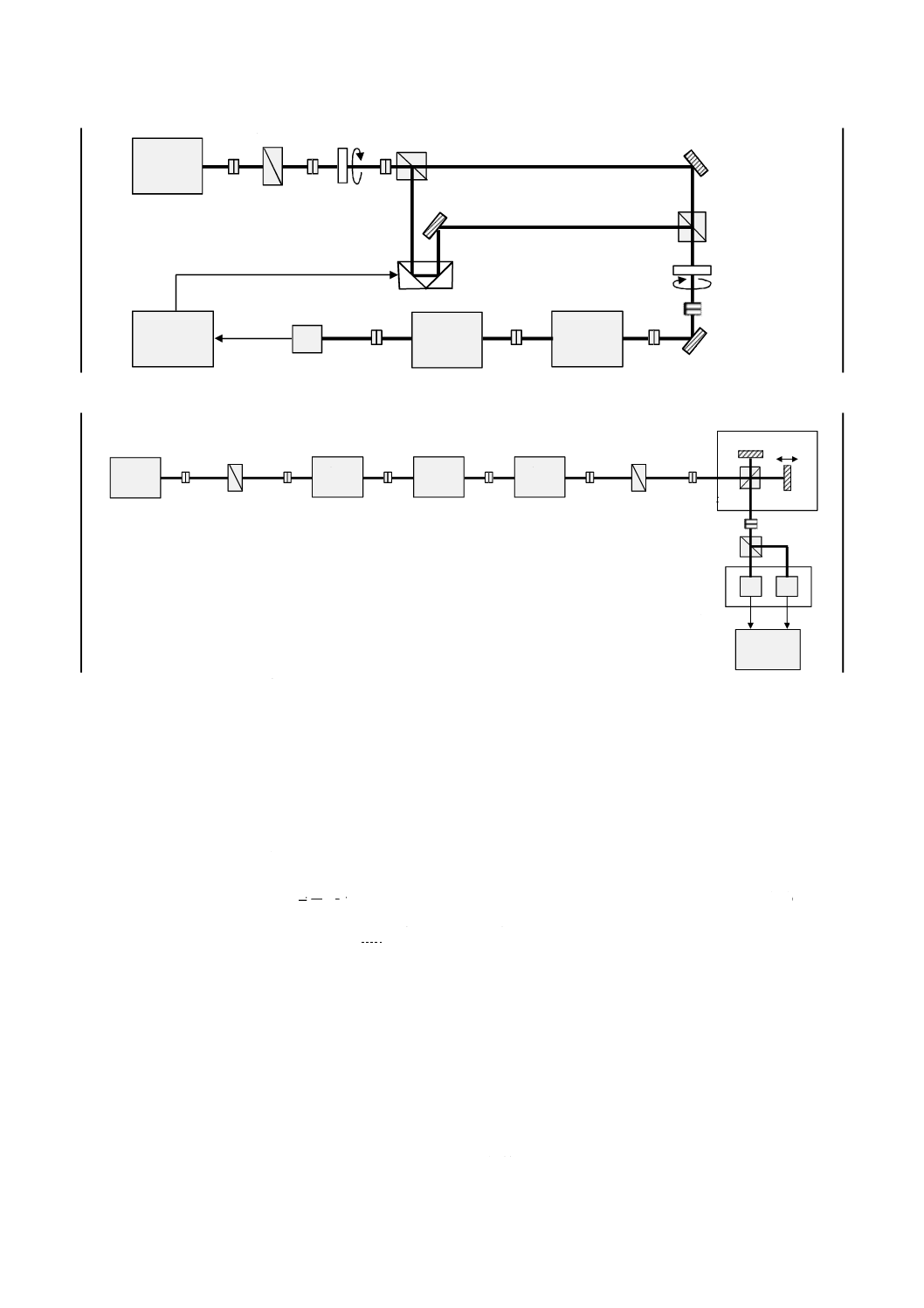
光源
偏光子
ビームスプリッタ
λ/2板
λ/2板
ビームスプリッタ
可動形反射コーナー
ミラー
ミラー
ミラー
供試品
受光装置
解析装置
コンピュータ
b) マッハツェンダ干渉計を用いた従来分析法(TINTY)
広帯域
光源
偏光子
マイケルソン干渉計
偏光ビームスプリッタ
偏光ダイバシティ受光装置
ミラー
可動ミラー
Px(τ)
Py(τ)
干渉データ
供試品
偏光
制御器
検光子
偏光
制御器
ビームスプリッタ
コンピュータ
c) マイケルソン干渉計を用いた一般化した分析法(GINTY)
図11−干渉法の測定系(続き)
9.1.1
光源
広帯域光源は,LED又はスーパールミネッセント光源のように,所望の測定波長域で光を出力するもの
を使う。TINTYでは,発光の自己相関特性に影響を与えるリップルがないガウシアン形のスペクトル分布
をもつ光源が必要である。GINTYでは,光源のスペクトル分布に対する要求仕様はない。式(23)で定める
コヒーレンス時間tcを計算するために,光源の線幅Δλの値が必要である。
c
t
λ
λ
∆
=
2
0
c
················································································ (23)
ここに,
c: 真空中での光速
λ0: 中心波長
9.1.2
解析装置
検光子は,光源の全波長範囲において偏光状態をもつのが望ましい。GINTYでは,検光子は初期の偏光
方向から直交方向まで偏光を回転する機能をもたなければならない。
9.1.3
ビームスプリッタ
干渉計のビームスプリッタは,入力偏光を,二つの干渉アームに分岐するために用いる。ビームスピリ
ッタとして,光ファイバカプラ又はブロック形ビームスプリッタを用いることができる。
9.1.4
干渉計
干渉計は,空間ビーム形又は光ファイバ形がある。具体的には,マイケルソン干渉計又はマッハツェン
Py(τ)
Px(τ)
28
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ダ干渉計があり,供試品の光源側又は受光装置側に設置する。例えば,四分の一波長板を用いて,干渉計
の自己相関のピーク応答を取り除くことができる。
9.1.5
偏光制御器
図11 c)において,偏光制御器によって,供試品のいかなる入力SOP及び出力SOPをも選択することが
できる。偏光ビームスプリッタによって,二つの互いに直交する偏光成分をもつ検光子を設置して,同時
に受光することができる。供試品への様々な入力SOPの選択,及び供試品からの出力における様々な検光
子の設定という偏光制御器の機能は,他の手段によっても実現することができる。
9.1.6
受光装置
供試品からの出力光は,測定に最適なSN比をもつ受光装置に接続する。受光装置は,チョッパ及びロ
ックインアンプ又はそれらに相当する方法で同期した受光装置を含んでもよい。
9.1.7
コンピュータ
干渉パターンを分析するため,適切なソフトウェアを具備したコンピュータを使わなければならない。
9.2
測定手順
9.2.1
TINTYの手順
偏光特性をもった光を出力する光源に,供試品の片端を接続する。もう片端は,干渉計の入力に接続す
る。これら接続には,標準的な光ファイバコネクタ,融着又は光ファイバアライメント装置のいずれかを
使用することができる。光ファイバアライメント装置を用いる場合,端面における屈折率不整合による反
射を抑えるため,屈折率整合材を用いる。
光源からの出力光パワーを,使用する受光装置の特性に合わせて調整する。十分な干渉のコントラスト
が得られるよう,干渉計の両光路における光パワーを同一レベルにしなければならない。TINTYの測定手
順は,次による。
− 干渉計内のミラーを動かし,光強度を記録することによって,最初のデータを取得する。
− 干渉の結果から,τが0のときに得られた結果を減算して,() τ
P~
を得る。() τ
P~
の絶対値は,干渉包絡
線E(τ)である。後述するように,あるSOPにおいて得られる干渉パターンから,PMDによる遅延時
間を求めることができる。モード結合が無視できる場合及びランダムなモード結合の場合における干
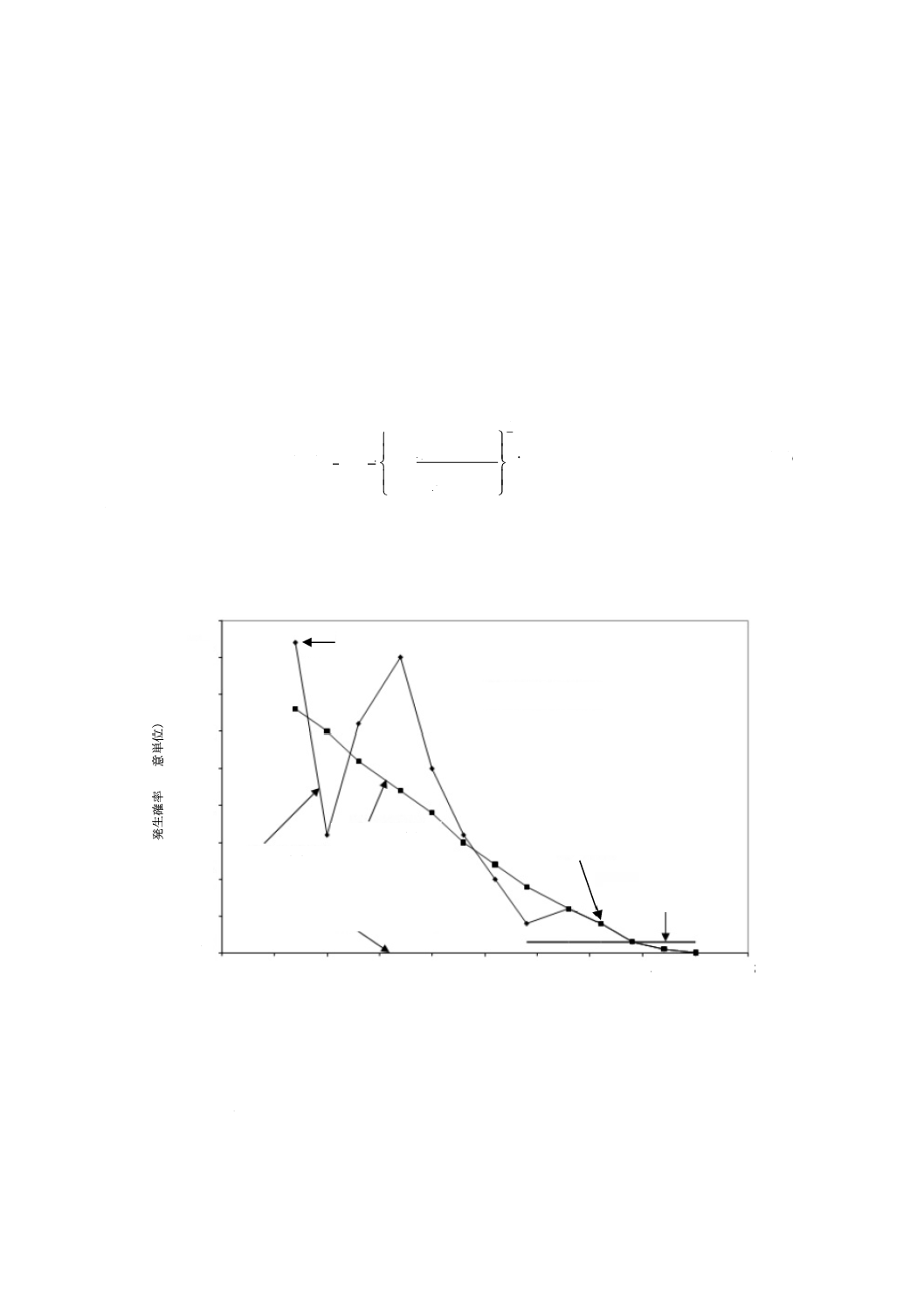
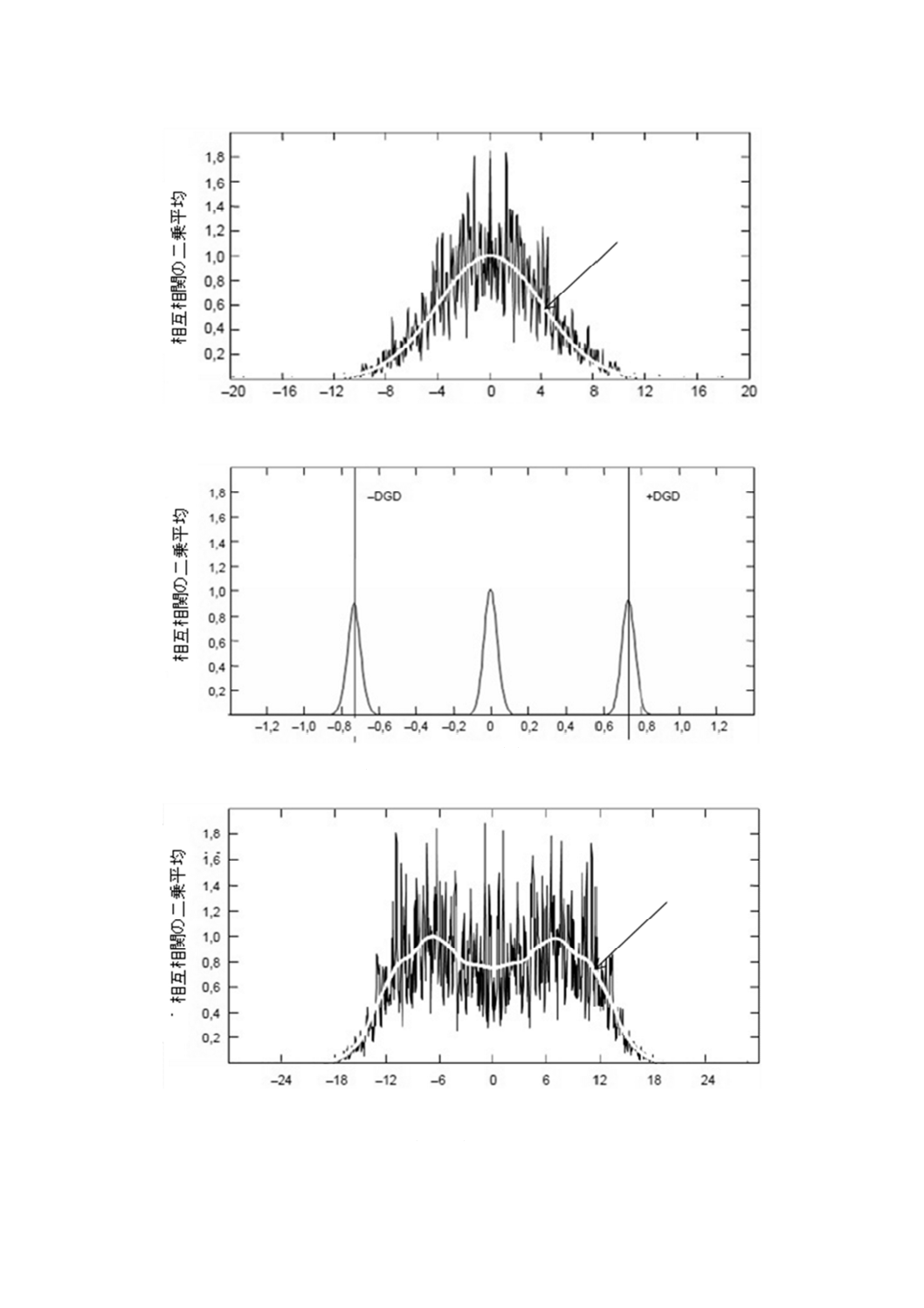
渉パターンの典型例を,図12に示す。
TINTYによって得られる干渉包絡線は,相互相関関数と自己相関関数との結合によるものである。相互
相関による部分を分離するアルゴリズムを用いなければならない。
29
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) モード結合が無視できる場合
b) ランダムなモード結合の場合
図12−TINTYでの測定結果例
モード結合が無視できる場合又はPMD値が小さい場合,全てのSOPに対する平均的な結果を得るため,
異なるSOPで繰り返し測定を行うか又はSOPを変化させて測定を行うのがよい。
供試品の透過特性によって,光源のスペクトルが削られると測定誤差の原因となるため,そのようなこ
とがないことを確認しなければならない。
9.2.2
TINTYの計算
この計算は,次に規定するとおり,モード結合が無視できる場合とランダムなモード結合の場合とに分
かれる。いずれの場合においても,中央部分のピークを無視して,この干渉波形の広がりを特性として表
す。
a) モード結合が無視できる場合 モード結合が無視できる場合,PMDによる遅延は,供試品のDGD特
30
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
性によって現れる二つのコヒーレンスのサテライトピークの中心からの分離度合で決まる。この場合,
PMDによる遅延は,DGDと等価である。式(24)によってPMDを求める。
c
L
PMD
∆
=
∆
=
2
>
<τ
································································ (24)
ここに,
ΔL: 光路における二つの付随コヒーレンスピーク間のミラーの作
動距離
c: 真空中の光速
b) ランダムなモード結合の場合 ランダムなモード結合の場合,干渉パターン出力波形の包絡線から
PMDによる遅延を求める。PMDによる遅延PMDRMSは,受信した光(干渉包絡線の出力波形)の相
互相関関数の二次モーメント(RMS幅)を用い,式(25)によって求める。
ε
2
1
2
RMS
4
3σ
τ
=
∆
=
>
<
PMD
···················································· (25)
ここに,
σε: 相互相関の包絡線のRMS幅
式(25)は,次の仮定の下で,DGDのRMS値に適用する。詳細は,IEC/TR 61282-9に記載している。
− モード結合は,理想的にランダムに発生する
− 光源は,リップルのない理想的なガウシアン状のスペクトル特性をもつ
− エルゴード状態
− PMD>>σ0(ここで,σ0は自己相関の包絡線のRMS幅である。)
平均DGDを定義するために,別の係数が必要となることがある。測定した干渉包絡線からσεを算
出するアルゴリズムの詳細は,IEC/TR 61282-9に記載している。
9.2.3
GINTYの手順
特定の入力偏光子の設定と互いに直交する一対の検光子との組合せを,入力及び出力偏光状態と呼ぶ。
二つの干渉波形から直流成分を減算して,互いに直交する干渉波形() τ
x
~P
及び() τ
y
~P
を求める。
相互相関及び自己相関干渉包絡線であるEx(τ)及びE0(τ)を,式(26)で求める。
()
()
()
τ
τ
τ
y
x
x
~
~
P
P
E
−
=
,()
()
()
τ
τ
τ
y
x
0
~
~
P
P
E
+
=
···································· (26)
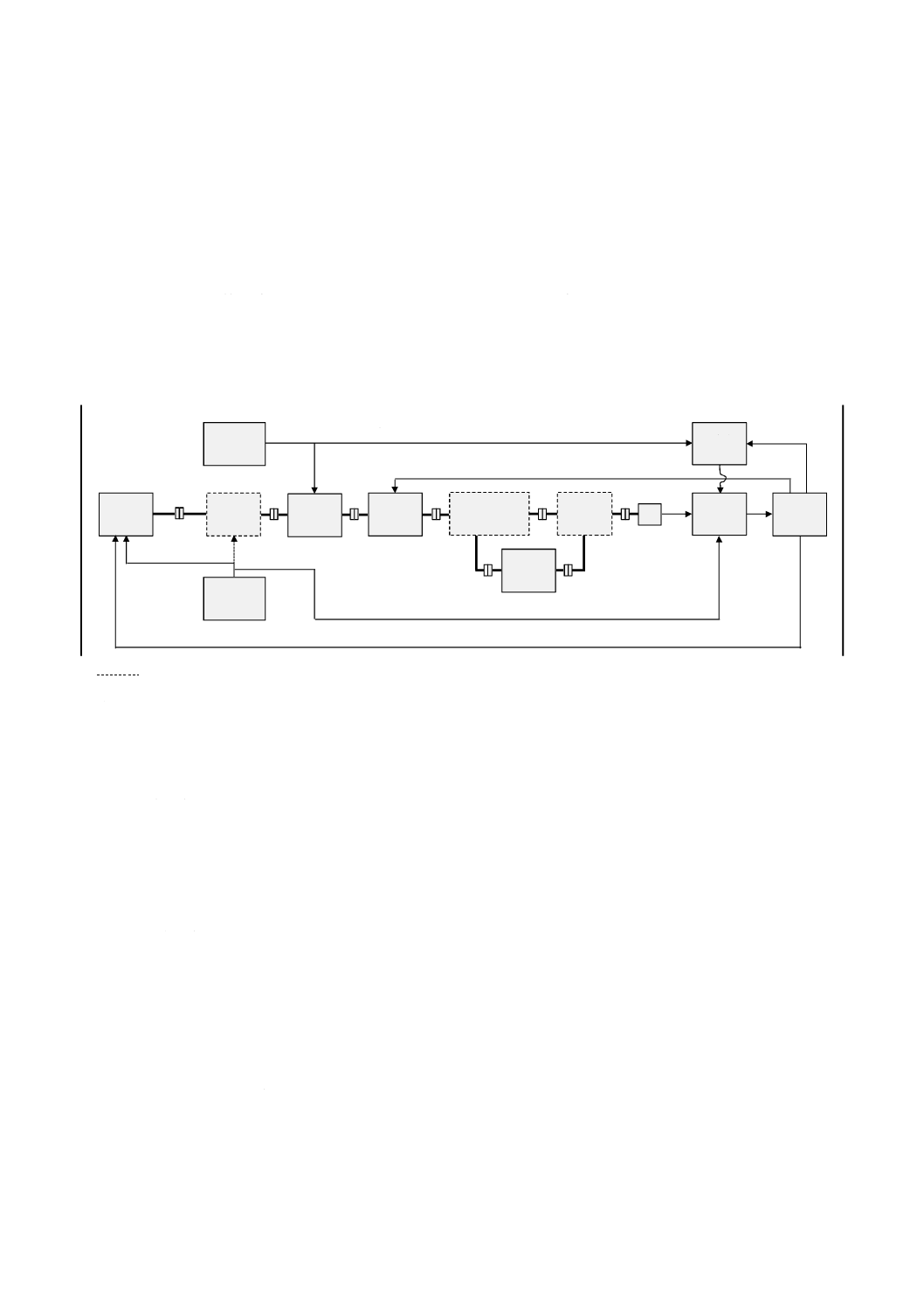
計算によって干渉状態を求め,表示するため,これらの関数は二乗して表す。二乗した相互相関の計算
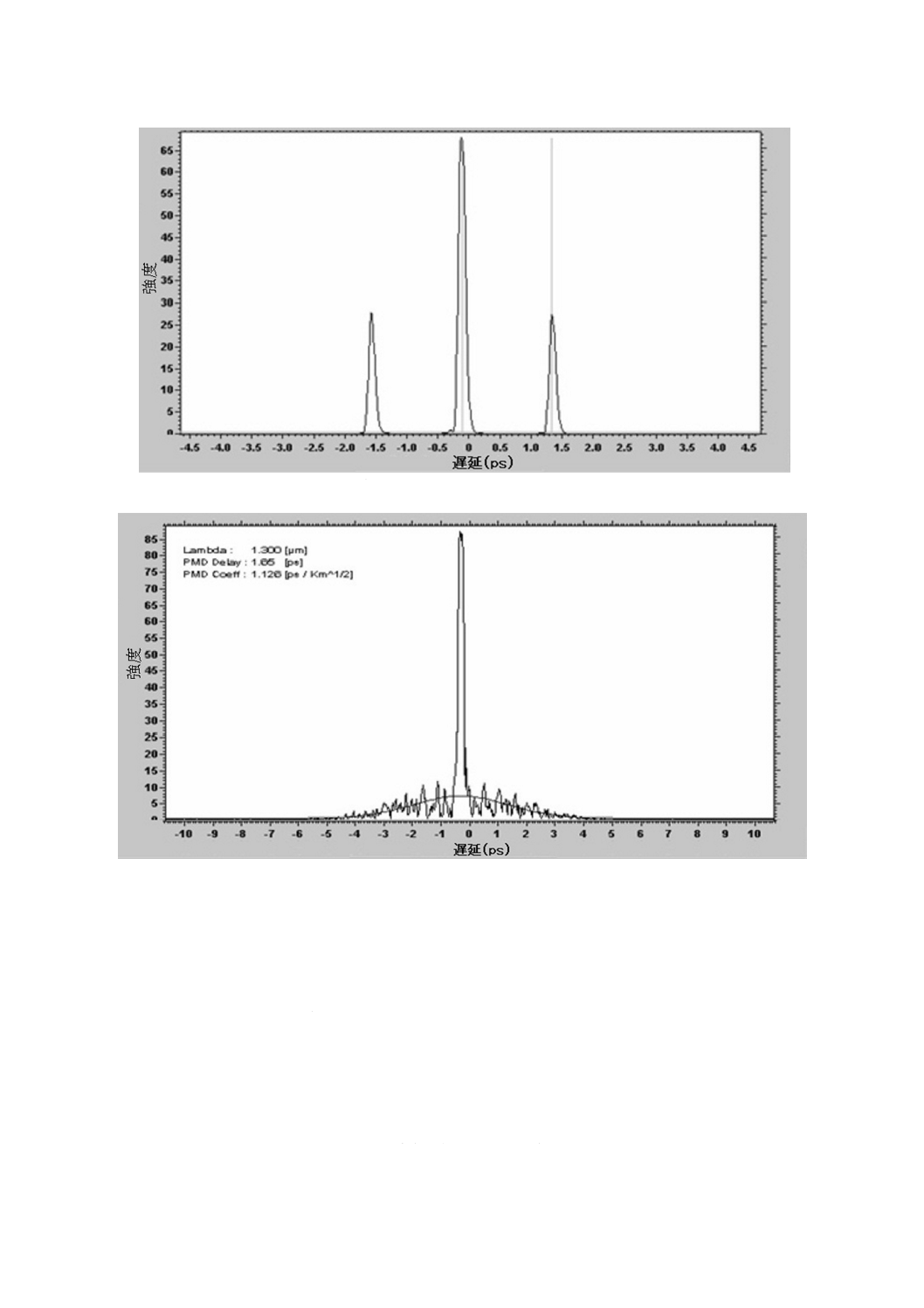
結果の例を,図13に示す。TINTYにみられた自己相関によるピークが現れていないことに注意する。
31
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
遅延(ps)
a) ランダムなモード結合の場合
遅延(ps)
b) モード結合が無視できる場合
遅延(ps)
c) モード結合が混在する場合
図13−入力及び出力偏光状態のスクランブリングを用いたGINTYによって得られる干渉パターン
二乗平均包絡線
二乗平均包絡線
32
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
偏光のスクランブリングに関するオプションは,IEC/TR 61282-9に記載している。複数の入力及び出力
偏光状態を測定する場合,9.2.4の計算で関係する量に添字iを付ける。
9.2.4
GINTYの計算
GINTYでは,TINTYのような仮定は必要ない。GINTYの計算は,次による。
− 相互相関及び自己相関の包絡線の二乗平均から,
()
τ
2
x
E
及び
()
τ
2
0
E
は,式(27)と表せる。
()
()
∑
=
i
i
E
N
E
τ
τ
2
x
2
x
1
,
()
()
∑
=
i
i
E
N
E
τ
τ
2
0
2
0
1
····································· (27)
ここに,
N: 入力及び出力偏光状態の数
− 相互相関及び自己相関から求めた
()
τ
2
x
E
及び
()
τ
2
0
E
の二乗平均の包絡線から,RMS幅σ0及びσxを求め
る。
計算のための標本化アルゴリズムは,IEC/TR 61282-9に記載している。これらのRMS幅の理想的
な定義を,式(28)に示す。
()
()
∫
∫
=
τ
τ
τ
τ
τ
τ
τ
σ
d
d
2
x
2
x
2
2
x
E
E
,
()
()
∫
∫
=
τ
τ
τ
τ
τ
τ
τ
σ
d
d
2
0
2
0
2
2
0
E
E
······································ (28)
式(28)における期待値演算子(〈 〉)は,入力及び出力偏光状態の均一かつランダムな標本化に関連
している。
− PMDRMSを,式(29)によって求める。
(
)21
2
0
2
x
RMS
2
3
−
=
σ
σ
PMD
··························································· (29)
9.2.5
偏波モード分散値の記録
9.2.2及び9.2.4によって求めた供試品のPMD値を,ピコ秒(ps)で試験成績書に記載する。
9.2.6
測定の不確かさ
PMDについて,測定の不確かさの妥当性を確認する。
10 変調位相シフト(MPS)法
この箇条では,時間領域解析を用いたDGD決定方法[14]を規定する。
この方法では,ある波長の変調光を供試品に入力し,最初のSOPに対する供試品の出力変調信号の位相
と,これと直交したSOPに対する出力変調信号の位相とを比較する。入力光のSOPを供試品の二つの主
軸に合わせて最大の位相差を求めた場合,これは遅延差として考えることができ,その遅延差をこの波長
におけるDGDとすることができる。
この測定方法では,供試品は,一つの波長だけで一つの測定を行う。そのため,この結果は特定の波長
における正確なDGDとなる。
10.1 測定装置
反射光の測定を行う場合の接続法とともに,基本的な測定系を,図14に示す。
33
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
高周波
信号発生器
位相
比較器
参照信号
供試品
光スイッチ
受光装置
コンピュータ
f=0.01〜10 GHz
光源
(例:レーザ)
変調器
光カプラ又は
光サーキュレータ
偏光
制御器
変調信号
注記1 破線で示す項目は,代替法を表す。
注記2 変調器は,光源を変調させる方法の代替法である。
注記3 サーキュレータ及び光スイッチを用いることによって,透過形デバイス及び反射形デバイスの測定系を構成
することができる。
図14−DGD測定系
10.1.1 光源
測定に用いる光源は,次による。
− 規定の波長におけるDGDを測定するため,レーザダイオード(複数),波長可変レーザ又はLED[広
帯域光源(6.1.1,8.1.1及び9.1.1参照)]をモノクロメータ又は光フィルタによって単波長化した光源
を用いる。最適な光源として重要な点は,光源が供試品の通過帯域と同等又は狭い線幅をもつことで
ある(光増幅器を供試品とする場合は,利得波長幅を通過帯域とみなす。)。
− 一般に,極力狭い線幅の光を得るため,レーザ又は波長可変レーザを使う。
全ての場合において,波長可変レーザの線幅又はフィルタの通過帯域幅は,ナイキスト定理に従い,波
長間隔の2倍を超えることが望ましい。
a) レーザダイオード レーザ光源の中心波長及び変調出力光の位相は,測定を行っている間,測定中の
バイアス電流,変調周波数及び素子温度が変化しても安定していなければならない。
温度制御及び出力パワー安定制御(すなわちPINフィードバック)された単一縦モードレーザダイ
オードが最適である。
b) フィルタリングしたLED光 フィルタリングしたLEDは,次による。
− 1個のLED又は複数のLEDを使用する。
光源の中心波長及び変調出力光の位相は,測定を行っている間,測定中のバイアス電流,変調周
波数及び素子温度が変化しても安定していなければならない。
− 最大の半値全幅が1〜5 nmの範囲となるスペクトル線幅を得るよう,光源からの光をフィルタリン
グする。
フィルタリング又は波長選択のために,モノクロメータを使用してもよい。
c) 波長可変レーザダイオード
− 1個のレーザダイオード又はレーザダイオードアレイを使用する。
測定波長における中心波長及び変調出力光の位相は,測定のバイアス電流,変調周波数及び素子
温度が変化しても安定していなければならない。一般には,内蔵形温度制御機能をもつ外部共振器
レーザを使用してもよい。
f=0.01〜10 GHz
34
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.1.2 変調器
− 変調器は,単一のフーリエスペクトル成分をもつ波形を作り出すため,光源の出力光を強度変調する。
適切な測定精度が得られるよう,変調周波数は,十分に高くかつ十分に安定していなければならない。
変調は,光源に注入する電流を制御する(直接変調)ことによって行ってもよいし,他の変調方法(外
部変調)を用いてもよい。例えば,供試品に変調光を入力するため,光源の後に電気光学変調器を配置す
る事例を,図14に示す。変調器は,適切な測定精度を得るため,安定に動作しなければならない。
正弦状及び長方形状の変調波形を用いることができる。変調周波数は,一般に,0.01 ppmの安定性があ
れば十分である。
位相変化の測定において,360n度(nは整数)の曖昧さが生じることを防ぐことが重要である。大きな
PMDを測定する場合,変調周波数を低くするなどの方法によって,これを実現することができる。
例えば,変調周波数は,位相差が360度となる周波数を超えないようにしなければならない。この変調
周波数の上限fmaxは,式(30)によって概算できる。
max
12
max
10
τ
∆
=
f
··········································································· (30)
ここに, fmax: 変調周波数の上限(Hz)
Δτmax: 測定波長において予想する最大のDGD(ps)
実際,DGD値が100 psより小さい場合,fmaxは10 GHzより高くなり,変調周波数として一般に実現で
きる周波数を超える。
周波数fでの変調は,光源出力光の中心波長から±f離れた周波数のサイドバンド成分を生み出す。非常
に狭い帯域特性をもつ供試品においては,サイドバンドをもつことが測定に制限を与える場合がある。正
確な位相測定を行うため,変調によって生じるサイドバンド成分及び光源自体の線幅を含む全帯域は,供
試品のもつ帯域以下でなければならない。通常は,供試品のもつ制限範囲以下の変調周波数で,位相比較
器に適した変調周波数fを選ぶ。一般に,fは10 MHzから10 GHzまでの範囲内で選択する。
DGD測定におけるRMS分解能Δτres及び変調周波数の下限fminを使う。fminは,位相比較器の位相分解能
φ
δによって,式(31)で決まる。
res
12
min
360
10
δ
τ
φ
∆
=
f
······································································ (31)
ここに, fmin: 変調周波数の下限(Hz)
Δτres: 測定波長におけるRMSでのDGD測定分解能(ps)
φ
δ: RMSでの位相測定分解能(度)
10.1.3 偏光制御器
供試品に入力するSOPは,偏光制御器を用いて制御する。偏光制御器をコンピュータで制御して,SOP
を選択する。コンピュータは最適な直交する偏光成分を選択し,それぞれの条件における群遅延時間差を
測定する。
偏光制御器は,偏光した光を,設定したSOPで供試品に入力する。光源の出力光が無偏光状態である場
合,偏光制御器は入力部に偏光子を具備しなければならない。偏光子の後に配置する可変の複屈折素子に
よって,SOPを制御する。偏光制御器の例として,液晶を用いた位相子,ループ状にして機械的に可動の
複屈折光ファイバ及び電気光学結晶を用いたデバイスがある。
10.1.4 入力用及び出力用光学デバイス
入力用及び出力用光学デバイスは,次による。
a) 透過形デバイス
35
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 測定を通じて光源から受光装置までの物理長及び光路長が一定となるように,光源の出力と供試品
の入力との接続及び供試品の出力と受光装置との接続,並びに光源の出力と位相校正用光ファイバ
(基準光ファイバ)との接続及び位相校正用光ファイバ(基準光ファイバ)と受光装置との接続を
行う。
この接続で,光路長の変化によって,それぞれのSOPにおける位相差が変化しないことを保証する。
最適な接続用のデバイスとしては,一般的に融着接続を用いるが,多チャンネルのシングルモード用
光スイッチ又は着脱可能な光コネクタを用いてもよい。
b) 反射形デバイス
− 測定を通じて光源から受光装置までの物理長及び光路長が一定となるように,光源の出力と供試品
の入力との接続及び供試品の出力と受光装置との接続を,光カプラ又は光サーキュレータを用いて
行う。
この接続で,光路長の変化によって,それぞれのSOPにおける位相差が変化しないことを保証する。
最適な接続用のデバイスは,多チャンネルのシングルモード用光スイッチ又は着脱可能な光コネクタ
を含んでもよい。さらに,光受動部品と測定装置との接続には,一般にスプライスを使う。
c) 光ファイバコード及び光ファイバピッグテール 偏光制御器の後に配置される全ての光ファイバコー
ド,光ファイバピッグテール及び他の受動光部品(例えば,図14に示す光スイッチ)は,供試品の予
想されるDGD値に比べて,十分小さいPMDをもたなければならない。
これら光ファイバコードにおけるPMDは,供試品のDGDを求める上で,不確かさが増える要因と
なる。
d) 一般的な注意事項
− クラッドモードを除去するデバイスを使用する。場合によっては,光ファイバ被覆がその機能をも
つ。
− 高次モードが伝搬する場合は,高次モードを除去するデバイスを使用する。
例えば,供試品の光ファイバコードを直径30 mmで1周巻くことで,曲げによる複屈折がDGD測
定への影響を及ぼさない範囲で,クラッドモードを除去することができる。
10.1.5 受光装置
− 測定する波長範囲で感度をもつ受光装置を,位相比較器と連結して使用する。
受光装置の感度を補うために,光増幅器を使用することができる。一般的な測定系では,PINフォトダ
イオード,FET増幅器及び位相比較器,又はベクトル電圧計を使用する。
可変光減衰器又は光ファイバ増幅器のような装置を,受光パワーを制御するために使用してもよい。必
要に応じて,偏光制御器又は偏光解析器をDGDを検出するのに使ってもよい。これらデバイスは,位相
比較器,受光装置などの直前に配置する。
受光装置−増幅器−位相比較器を配置した装置は,変調信号の基本フーリエ成分だけに応答しなければ
ならない。また,受信光パワー範囲にわたって,信号の位相シフトが一定でなければならない。
位相比較器及びコンピュータは,各SOPの位相を記録し,二つのSOP間の位相差及び遅延を出力する。
SOPの選択は,通常,コンピュータが行い,二つの直交するSOP間の相対的な位相関係の測定は,測定
結果が供試品の光ファイバの遅延量の温度ドリフトの影響を受けないよう,短時間で行わなければならな
い。入力のSOPを掃引し,供試品の出力で得られた最大の位相差をDGDとして求めることができる。位
相比較器及びコンピュータの系を実現する構成は幾つかある。二つの例を,次に示す。
図14に示す一つ目の例では,位相比較器及びコンピュータは,最初に一つ目のSOPの位相を記録する。
36
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
次に偏光制御器の偏光状態を,直交するSOPにセットする。この直交SOPにおける位相を,同様に記録
する。測定波長におけるDGDは,測定した二つの位相の差分から求める。
図15に示す二つ目の例では,偏光制御器への入力におけるSOPを変調するために,偏光スイッチを使
用する。偏光スイッチは,回転機構を備えた複屈折素子,電気光学変調器又は光弾性変調器などの部品で
構成してもよい。二つの直交するSOP間で,おおよそ数十Hzの周波数Fで交互に切替える。位相比較器
から正しい位相差出力が得られるよう,ロックイン検出を用いてもよい。この偏光変調によって,温度ド
リフト効果を効果的に除去することができる。位相比較器は,偏光変調に同期して,二つのSOP間の位相
差に比例した振幅の交流信号を出力する。続いて,位相差を表す直流成分を得るため,ロックインアンプ
によってこの信号を復調する。測定波長におけるDGDは,ポアンカレ球上の全てにわたってSOPを走査
して得た最大の位相差から求める。
参照信号
位相
比較器
参照信号
光スイッチ
受光装置
コンピュータ
f=0.01〜10 GHz
光源
(例:レーザ)
変調器
光カプラ又は
光サーキュレータ
偏光
制御器
変調信号
F=1〜1000 Hz
偏光
スイッチ
ロックイン
アンプ
低周波
信号発生器
高周波
信号発生器
制御信号
供試品
注記1 破線で示す項目は,代替法を表す。
注記2 変調器は光源を変調させる方法の代替法である。
注記3 サーキュレータ及び光スイッチを用いることによって,透過形デバイス及び反射形デバイスの測定系を構成
することができる。
図15−偏光変調を用いたDGD測定系
10.1.6 参照信号
− 高周波を出力することができる信号発生器から,光源又は変調器に変調信号を入力する。
その変調信号と同じフーリエ成分をもつ参照信号を位相比較器に入力し,信号源の位相との差分を測定
する。
参照信号は,変調信号と同期していなければならない。変調信号を分岐して,参照信号として使用して
もよい。参照信号の例を,次に示す。
− 信号発生器と位相比較器の参照信号入力部とを電気的に接続する。
− 供試品の前に光カプラを挿入し,光源出力を分岐して受光装置に接続する。受光装置の出力を増幅し
て位相比較器の参照信号として用いる。
10.1.7 反射及び透過の構成
図14及び図15は,供試品の出力光ファイバに光スイッチを接続し,反射モード(光カプラ又は光サー
キュレータを使用)と透過モードとの間で光路を選択する方法を示している。光スイッチは,測定の構成
又はモードを選択するために使用する。代替の方法として,光スイッチを別の光ファイバ接続手段又は二
つ目の受光装置及び電気的切替手段から成る系で置き換えて,測定の構成又はモードを選択してもよい。
f=0.01〜10 GHz
F=1〜1 000 Hz
37
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
グレーティングのように,あるデバイスは反射光路で用いる。この場合,反射光路のデバイスを,図14
及び図15に示す1×2光カプラ又は光サーキュレータを用いて,測定系に接続する。用いる光カプラ及び
光サーキュレータは,低いPMD及びDGDをもつものでなくてはならない。
− 光学系及び測定器内の部品におけるDGDを補正するために,位相差校正用光ファイバを使う。
この光ファイバ長は,2 m以下でなければならない。また,PMD及びDGDは無視できるほど小さくな
ければならない。一般には,通信用途で用いるシングルモード形光ファイバを使用するのがよい。
10.2 測定手順
10.2.1 偏光状態の設定
一般に,供試品の偏光軸の方向及び/又はだ(楕)円率[PSP(主偏光状態)]は,測定機器の主軸の方
向との関係において未知である。不確かさの主要因は,供試品の光ファイバコード及び測定機器内にある
光ファイバにおける有限な複屈折性による。パッケージ内の供試品の主軸そのものも,十分に制御するこ
とができない。さらに,PSP及び主軸は波長によって変化する。
PSPが前述のように任意で一意的に定まらない場合,進相軸と遅相軸との間又はPSP間の正確なDGD
を求めるには,幾つかの方法がある。SOPを探索する方法において,不確かさの要因は,入力SOPと実際
の主軸との間の調整誤差である。例えば,5度の調整誤差によって,DGDは0.4 %の不確かさをもつこと
になる。偏光の調整誤差が小さくなるように制御されていることを確認する。
測定に適した構成の例を,次に示す。
− 各測定波長に対して,偏光制御器を“探索−測定”の繰返し操作で使う。測定速度を最適化するため
の様々な探索アルゴリズムを適用してもよい。
− 与えられた測定波長において,偏光制御器を用いて入力SOPを連続的に変化させ,入力及び出力にお
ける各SOPにおける位相変化量を記録する。
十分な範囲でSOPを変化させて得られる位相変化量の最大値及び最小値は,供試品の進相軸及び遅相軸
の入力状態での結果と一致する。その波長におけるDGDは,位相変化量の最大値と最小値との差分に比
例する。その差分を,位相シフト差とみなす。供試品そのものへの入力偏光状態を供試品の二つのPSP又
は主軸に一致するように調整すれば,光ファイバコードの複屈折性は,供試品全体の複屈折性に含むとみ
なすことができる。最大及び最小の位相を検出すれば,その波長における真のDGDは,これら二つのSOP
間の差で求めることができる。
偏光変調(図15参照)を用いる場合,“探索−測定”方法を適用して偏光制御器で偏光状態を連続的に
変化させ,位相変化量の差を直接検出してもよい。この方法によって,DGDに比例する最大の位相差を求
める過程を簡略化できる。この時点で,PSP又は主軸を見つけることができる。
幾つかの特定のSOPを入力及び/又は検出することで,群遅延を検出することができる。それぞれの
SOPにおける遅延量の固有値解析によって,PSP間又は主軸間の真のDGDを求めることができる。適用
例は,現在検討中である。
10.2.2 測定
− 供試品を指定の環境条件で前処理する。
− 供試品を測定系に挿入し,信号を入力する。
− 受信信号レベルが,供試品及び測定系の適正な範囲になるように調整する。
− 特に,光増幅器を含む供試品の試験を行うとき,不適切な信号レベル,低いOSNR又は他の異常な出
力結果で,過剰なASE雑音がないことを確認する。
38
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 異常な点がある場合は,測定を行わない。
− PSP及び主軸を決めるための適切な方法を用いて,波長λにおいて位相差
)
(λ
φ
∆
を測定し,記録する。
精度を改善するために,データの平均化処理を行ってもよい。
− 測定波長が他にある場合は,測定手順を繰り返す。
10.2.3 校正
− 定期的に(例えば,毎日又は毎週),位相校正用光ファイバを測定系に挿入し,参照信号を入力する。
− PSPを決めるための適切な方法を用いて,波長λにおいて位相差
)
(λ
φ′
∆
を測定し,記録する。精度を
改善するために,データの平均化処理を行ってもよい。
− 測定波長が他にある場合は,測定手順を繰り返す。平均化した位相差が無視できるような値の場合,
再校正を省略してもよい。これらの場合,
)
(λ
φ′
∆
は無視できる値である。
注記 全ての供試品測定及び校正測定では,検出器及び電気回路におけるレベル依存の位相変化量が
最小となる受信側レンジを用いるように,入力光レベルを調整することが望ましい。
10.2.4 測定の繰返し
− 必要に応じて,光ファイバコードがDGDの測定結果に影響を与えていないことを確認するため,光
ファイバコードの位置をずらして測定を繰り返す。光ファイバコードの位置によってDGDの測定結
果がランダムな相関を示す場合,光ファイバコードのDGDへの影響が無視できないことを意味する。
− PMDを記録する。
− 必要に応じて,光ファイバコードを動かして,3回までこの手順を繰り返す。
10.2.5 DGD(群遅延時間差)及びPMDの算出
全ての方法において,重要なパラメータは,通常,次のとおりである。
− 規定する波長におけるDGD
− 波長範囲内における最大のDGD
− 規定の測定波長範囲内における平均DGD(PMDmean)及びDGDのRMS値(PMDRMS)で定義される
供試品のPMD
a) DGD(群遅延時間差)の算出
− DGDを求めるために,供試品の位相差から,それぞれの波長における校正用光ファイバの位相差を
減算する。
それぞれの波長λにおけるDGDを,式(32)によってピコ秒(ps)で求める。
′
∆
−
∆
=
∆
f
360
)
(
)
(
10
)
(
12
λ
φ
λ
φ
λ
τ
···················································· (32)
ここに, Δτ(λ): DGD(ps)
λ: 波長(nm)
Δφ(λ): 供試品の測定位相差(度)
Δφ'(λ): 校正時の測定位相差(度)
f: 変調周波数(Hz)
b) PMD(偏波モード分散)の計算 次に示す手順で,PMDを計算する。
− 全ての測定における各波長でのDGDを平均処理する。
− 波長帯全域での平均のDGD及びRMSのDGDを求める。
− 平均のDGD及びRMSのDGDを,ピコ秒(ps)を単位として,それぞれPMDmean及びPMDRMSと
39
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
して試験成績書に記載する。
− 特定の波長における最大DGDを,ピコ秒(ps)を単位として試験報告書に記載する。
− 規定波長におけるDGDを,ピコ秒(ps)を単位として試験報告書に記載する。
全ての場合において,DGD,最大DGD及びPMDはピコ秒(ps)で試験報告書に記載する。
10.2.6 測定の不確かさ
DGDの最大値及びDGDの平均値並びにDGDのRMS値について,測定の不確かさの妥当性を確認する。
11 個別に規定する事項
11.0A
一般事項
製品規格など個別の規格でこの規格を引用する場合は,11.1〜11.5に記載する事項を規定しなければな
らない。また,この規格を用いて光受動部品のDGD及びPMDを測定する場合には,これらの事項を記録
しなければならない。
11.1 光源
− 出力光パワー
− 出力光パワー安定性
− 波長精度
− 波長帯域又は波長範囲
− スペクトル線幅
− 波長掃引の波長間隔
− 変調周波数(MPS法のための)
− DOP(偏光度)
11.2 偏光子/検光子(受信器を含む)
− 適用波長範囲
− 測定波長範囲における最大受信感度
− 測定波長範囲における偏光消光比
− 光パワーに対する直線性
− 偏光スクランブルの方法(適用する場合)
11.3 テンポラリジョイント
− 接続形態(コネクタ接続,融着接続,メカニカルスプライス接続など)
− 最大光損失
− 反射減衰量の最小値
11.4 供試品
− 部品の分類(広帯域用部品,CWDM用部品,DWDM用部品など)
− 部品接続形態(光ファイバピッグテール−光ファイバピッグテール形,光コネクタプラグ−光コネク
タプラグ形,光コネクタプラグ−光ファイバピッグテール形,光コネクタレセクタブル−光ファイバ
ピッグテール形,光コネクタレセクタブル−光コネクタプラグ形,及び光コネクタレセクタブル−光
コネクタレセクタブル形)
− 光ファイバピッグテール長(接続形態が光ファイバピッグテール形の場合)
− PDL
40
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 予想する最大のDGD値(MPS法において変調周波数の上限を算出するのに用いる。)
− 使用温度条件
11.5 測定方法
− 選択する測定方法
− この規格に規定する測定方法との差異
41
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
コサインフーリエ変換法
この分析は,固定アナライザ(FA)法の検光子から出射する光のスペクトルのコサインフーリエ変換が,
一般化した干渉法(GINTY:箇条9参照)から得られる出力波形の干渉パターンであるという見解に基づ
いている。両方の分析は,IEC/TR 61282-9で詳細に記載している。
GINTY[13]で求まる相互相関関数及び自己相関関数の二乗解析では,これらの関数の二乗されたRMS幅
の差が,DGD値のスペクトルで加重したRMSの二乗に比例している。
GINTYと同じように,この附属書の分析によって得られた結果もまた,モード結合の程度に依存しない。
これは,モード結合が異なる場合でも,解析手段を変更する必要がないことを意味する。
解析結果は,測定するスペクトル幅及び光周波数間隔によって制限される。PMDが増加するに従い,光
周波数間隔は小さくする必要があるが,ある条件の下では,GINTYよりも実用的な場合がある。
その分析では,PMDRMSの量が,二乗平均平方根である。理想的なランダムなモード結合が存在する場
合,二乗平均平方根の結果は,式(A.1)を用いて線形平均であるPMDmeanに変換することができる。
[
]
2
2
)
(
8
π
3
)
(
λ
τ
λ
τ
∆
=
∆
··························································· (A.1)
A.1 概要
− 互いに直交する二つの検光子の角度設定で出力光パワーを測定する。
式(17)の比率関数Rは,式(A.2)のように書き直すことができる。
()
()
()
()
()
ν
ν
ν
ν
ν
B
A
B
A
P
P
P
P
R
+
−
=
································································· (A.2)
ここに, ν=c/λ: 光周波数(THz)
ポラリメータを用いる場合,三つの正規化出力ストークスベクトル成分は,式(A.2)によって表される量
と等価な三つの独立した正規化比率となる。各々のストークスベクトル成分は,互いに直交する二つの検
光子の角度設定条件における光パワーの差に相当する。また,三つの成分は,検光子の角度基準が直交す
るという点で異なる。
両端で滑らかにゼロとなる窓関数W(ν)を,データに乗じる。R(ν)W(ν)及びW(ν)は,測定に用いない低い
光周波数に対して,ゼロ点を付加した配列に置き換える。高速コサインフーリエ変換(FCFT)を適用して,
時間領域干渉包絡線r(t)w(t)及びw(t)を得る。これらを二乗してそれぞれ相互相関関数及び自己相関関数の
二乗(Ex2及びE02)を求める。例えば,入力及び出力偏光状態をスクランブルするなどして,入力偏光子
に対する検光子の角度基準設定が異なる複数の条件(又は異なるストークス出力ベクトル成分)から,多
重(N)の比率関数を用いることができる場合,二乗平均包絡線は,式(A.3)及び(A.4)となる。
∑
=
i
i
E
N
E
2
x
2
x
1
······································································· (A.3)
∑
=
i
i
E
N
E
2
0
2
0
1
······································································· (A.4)
− これら二つの関数のRMS幅,σx及びσ0を,9.2.4に規定するDGDのRMS値を用いて計算する。PMDRMS
42
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
値は,式(A.5)によって求める。
(
)21
2
0
2
x
RMS
2
3
−
=
σ
σ
PMD
·························································· (A.5)
この値は,式(A.6)のような,DGDを(窓関数の二乗による。)スペクトルで加重した二乗平均平方根と
関連している。
()()
()
2
1
2
2
2
RMS
d
d
∆
=
∫
∫
ν
ν
ν
ν
ν
τ
W
W
PMD
················································ (A.6)
期待値演算子は,ランダムな入力及び出力偏光状態に関連している。
− データの光周波数間隔は均一とし,付加したゼロ点を含むデータ点の総数は,1+2k(k:整数)とす
る。
測定データの両端がνminM及びνmaxMであり,最小光周波数が十分ゼロより高いので,周波数シフトを適
用することで,処理する配列のサイズを小さくすることができる。任意のnを選んで,測定データ配列の
中で計算に用いる光周波数の両端を,式(A.7)のように設定することができる。
M
min
min
max
1
ν
ν
ν
≦
=
−
n
n
,
M
max
maxν
ν
=
·········································· (A.7)
ここに,
n: 正の整数
測定光周波数範囲よりも低い光周波数での値は,ゼロとする。
FCFTを行った場合,データ配列は時間ゼロからtmax=Δt2kまでの時間領域干渉パターンを含み,時間間
隔Δtは,式(A.8)で求める。
(
)
min
max
max
2
1
2
ν
ν
ν
−
=
=
∆
n
t
························································· (A.8)
干渉法から得た干渉パターンを,正の時間から負の時間に拡張する。負の時間での値は,正の時間での
値と等しい。関数は偶関数で,原点に関して対称である。
RMS幅計算には,測定可能な最小PMDRMSよりも小さい時間領域の値も必要となるため,光周波数シフ
トの選択では,留意して行う。
光周波数間隔は,測定ポイント数,光周波数シフト及び測定できる最大PMDRMSにも関連している。Δν
は,式(A.9)の条件を満足する必要がある。
max
RMS
min
max
24
1
2
−
−
=
∆
PMD
k
≦
ν
ν
ν
··············································· (A.9)
フィルタ後の光源のスペクトル幅は,この値の半分とする。実際の掃引を均一な波長間隔で行った場合,
測定範囲の短波長端での波長間隔が式(A.9)の条件を満たす必要がある。
窓関数W(ν)は,二次関数など,理論的にはいかなる関数でもよいが,σ0値を最小にするように選ぶのが
望ましい。関数は,両端で滑らかにゼロになり,一次微分も両端でゼロになるものが望ましく,これによ
って,σ0が増加する波形振動を最小にする。
A.2 測定波長範囲
ランダムなモード結合の場合,十分な精度でアンサンブル平均をとるために,十分な測定波長範囲を用
いる必要がある。最大可能な広い測定波長範囲(例えば,200 nm以上)を用いて,統計的な不確かさを最
小にすることができる。必要な精度,すなわち,そのために必要な測定波長範囲は,測定前に規定する。
43
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
さらに,δτ値が非常に低いとき,R(λ)の測定に非常に長い時間が必要になる。また,λ1からλ2までの波
長範囲は二つ以上の周期をもつようにすることが望ましい。波長範囲は,P(δτ)において決まる最も短いδτ
であるδτminで定義する。
(
)c
1
2
2
1
min
2
δ
λ
λ
λ
λ
τ
−
=
···································································(A.10)
ゼロ点及びゼロ点に隣接する二つの測定点を,一般には無視することから,式(A.10)において係数2を
導入している。例えば,λ1が1 270 nmで,λ2が1 700 nmの場合,δτminは0.033 psとなる。
モード結合が無視できる場合,ランダムなモード結合の場合のような波長に対する平均化の要求が緩和
され,平均化する波長範囲を狭くして(例えば,λ2−λ1が30 nm),PMDの波長依存性を調べることができ
る。
44
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
JIS C 61300-1 光ファイバ接続デバイス及び光受動部品−基本試験及び測定手順−第1部:通則
[1]
CYR, N., BRETON, M., and SCHINN, G.W. “PMD or Multipath Interference Dispersion: Which
Measurement is of More Practical Importance?” Optical Fibre Measurement Conference '97, Teddington, UK,
Sept. 29-Oct. 1, 1997, pp. 130-135.
[2]
CYR, N., GIRARD, A., and SCHINN, G.W., “Stokes Parameter Analysis Method, the Consolidated Test
Method for PMD Measurements”, National Fibre Optic Engineering Conference, Sept. 1999.
[3]
CYR, N., GIRARD, A., and SCHINN, G.W., “Demonstration of the Formalistic Equivalence of the JME and
Poincaré Sphere Techniques for PMD Measurement: Is There Really Only One Polarimetric PMD
Measurement Method?” CLEO Pacific Rim Conference '99, Seoul.
[4]
CYR, N., “Equivalence of Poincaré Sphere and Jones Matrix Analysis for Determination of PMD”, Optical
Fibre Measurement Conference ʼ99.
[5]
JONES, R.C. A new calculus for the treatment of optical systems. VI: Experimental determination of the
matrix. Journal of the Optical Society of America, 1947, 37, p.110-112.
[6]
SANO, K., KUDOU, T., and OZEKI, T., “Simultaneous measurement of group delay time dispersion and
polarization mode dispersion”, 22nd European Conference on Optical Communication (ECOC '96), Tech.
Proc., Paper TuP-09, pp.253-256 (1996)
[7]
SANO, K., KUDOU, T., and OZEKI, T., “A new measurement method of polarization mode dispersion,”
OECC ʼ96, Oslo Norway (1996)
[8]
OZEKI, T., “Mathematical analysis on definition, and statistics of polarization mode dispersion”, IEICE
Spring Conference, Hiroshima Japan, Paper SB-8-1 (2000)
[9]
YAMASHITA, T., and IMAMURA, M., “Simultaneous and high resolution measurement of polarization mode
dispersion, group delay, chromatic dispersion and amplitude for ultrahigh speed optical components”, 17th
National Fiber Optic Engineering Conference (NFOEC ʼ01) Denver CO, Jul. 2001, Tech. Proc. 3, 1348-1352,
(2001)
[10] GISIN, N., VON DER WEID, J.P., and PELLAUX, J.P., “Polarization mode dispersion of short and long
single-mode fibers”, J. Lightwave Tech. 9(7), 821-827 (1991)
[11] GISIN, N., PASSY, R., and VON DER WEID, J.P., “Definitions and measurements of polarization mode
dispersion: Interferometric versus fixed analyzer methods”, J. Lightwave Tech. 6, 730-732, 1994
[12] GISIN, N., “Solutions of the dynamical equation for polarization dispersion”, Opt. Commun. 86, 371-373,
1991
[13] CYR, N., “Polarization-mode dispersion measurement: generalization of the interferometric method to any
coupling regime”, J. Lightwave Tech., 22(3), 794-805 (2004)
[14] WILLIAMS, P.A., “Modulation phase-shift measurement of PMD using only four launched polarisation states:
a new algorithm”, Electronics Letters Online No. 19991068, (Jul. 1999)
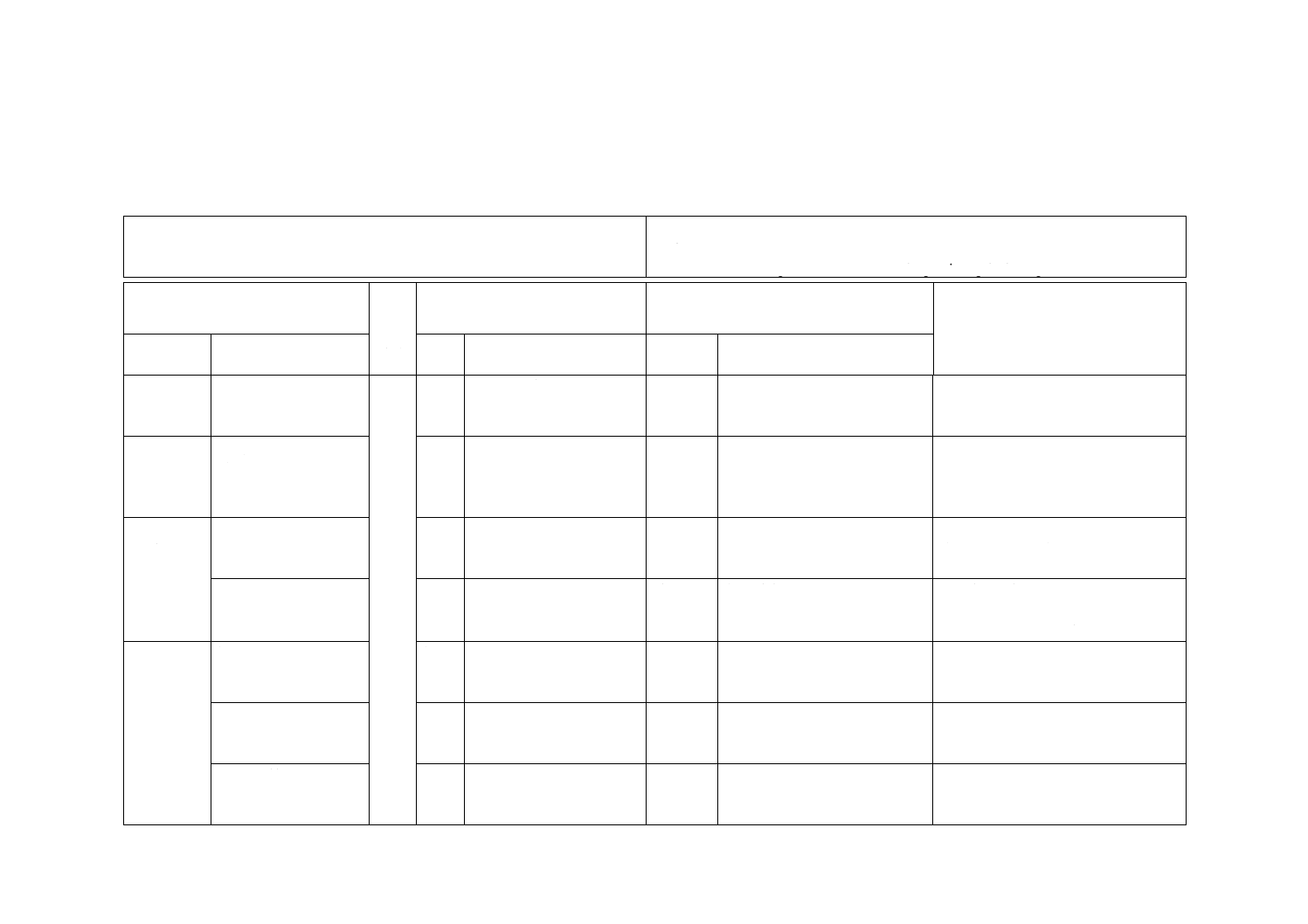
45
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
JISと対応国際規格との対比表
JIS C 61300-3-32:2013 光ファイバ接続デバイス及び光受動部品−基本試験及び
測定手順−第3-32部:光受動部品の偏波モード分散測定
IEC 61300-3-32:2006 Fibre optic interconnecting devices and passive components−
Basic test and measurement procedures−Part 3-32: Examinations and measurements−
Polarization mode dispersion measurement for passive optical components
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差異の
理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
3 略語
3
JISとほぼ同じ
追加
TINITY,GINTY,CWDM,
WWDMの規定を追加した。
利用者が分かりやすいように用語を
追加した。IEC規格見直しの際,提案
を行う。
4 概要
4.5 光ファイバピッグ
テール
4.5A 要件
4.5
JISとほぼ同じ
変更
4.5を4.5(光ファイバピッグテ
ール)と4.5A(要件)とに細分
箇条を分割した。
IEC規格の4.5について構成間違いが
あるため,内容に合わせて項目を分け
た。実質的な差異はない。IEC規格見
直しの際,提案を行う。
6 ストーク
スパラメー
タ評価法
図4
図4
JISとほぼ同じ
変更
本文に合わせ,図4を修正した。 利用者の理解が容易となるよう図を
修正したが,技術的な差異はない。
IEC規格見直しの際,提案を行う。
6.1.3A コンピュータ
−
−
追加
細分箇条番号,題名及び本文を
追加した。
利用者の理解を深めるために,コンピ
ュータに関する規定を追加した。IEC
規格見直しの際,提案を行う。
7 偏光位相
シフト法
図6
図6
JISとほぼ同じ
変更
本文に合わせ,図6を修正した。 利用者の理解が容易となるよう図を
修正したが,技術的な差異はない。
IEC規格見直しの際,提案を行う。
7.1.7A コンピュータ
−
−
追加
細分箇条番号,題名及び本文を
追加した。
利用者の理解を深めるために,コンピ
ュータに関する規定を追加した。IEC
規格見直しの際,提案を行う。
7.2.3 a) 校正
−
−
追加
7.2.3 a)を追加規定した。
必須の細分箇条がIEC規格に抜けて
いたため,追記した。IEC規格見直し
の際,提案を行う。
4
5
C
6
1
3
0
0
-3
-3
2
:
2
0
1
3
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
46
C 61300-3-32:2013
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(V)JISと国際規格との技術的差異の
理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
8 固定アナ
ライザ法
図8
図8
JISとほぼ同じ
変更
本文に合わせ,図8を修正した。 利用者の理解が容易となるよう図を
修正したが,技術的な差異はない。
IEC規格見直しの際,提案を行う。
8.1.2A コンピュータ
−
−
追加
細分箇条番号,題名及び本文を
追加した。
利用者の理解を深めるために,コンピ
ュータに関する規定を追加した。IEC
規格見直しの際,提案を行う。
9 干渉法
図11
図11 JISとほぼ同じ
変更
本文に合わせ,図11を修正し
た。
利用者の理解が容易となるよう図を
修正したが,技術的な差異はない。
IEC規格見直しの際,提案を行う。
10 変調位
相シフト
(MPS)法
図14
図15
図14
図15
JISとほぼ同じ
変更
本文に合わせ,図14及び図15
を修正した。
利用者の理解が容易となるよう図を
修正したが,技術的な差異はない。
IEC規格見直しの際,提案を行う。
11 個別に
規定する事
項
−
−
追加
個別に規定する事項の説明を
規定した。
利用者の理解を深めるために,説明を
追加したが,実質的な差異はない。
IEC規格見直しの際,提案を行う。
JISと国際規格との対応の程度の全体評価:IEC 61300-3-32:2006,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
4
6
C
6
1
3
0
0
-3
-3
2
:
2
0
1
3
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。