C 61300-3-2:2012
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 測定方法························································································································· 2
3.1 全偏光状態法 ················································································································ 2
3.2 ミュラー行列法 ············································································································· 2
4 装置······························································································································· 3
4.1 光源(S) ····················································································································· 3
4.2 テンポラリジョイント(TJ) ··························································································· 4
4.3 偏光状態変更装置(PSCS) ····························································································· 4
4.4 基準光ブランチングデバイス(RBD)(任意選択) ······························································· 6
4.5 光パワーメータ(D1及びD2) ························································································· 6
4.6 データ収集・記録・処理装置 ··························································································· 6
5 手順······························································································································· 6
5.1 前処理 ························································································································· 6
5.2 初期試験及び初期測定 ···································································································· 6
5.3 試験に関する注意 ·········································································································· 7
5.4 リファレンス測定 ·········································································································· 7
5.5 供試品測定 ··················································································································· 8
6 データ解析 ······················································································································ 8
6.1 全偏光状態法 ················································································································ 8
6.2 ミュラー行列法 ············································································································· 9
7 個別規格に規定する事項 ···································································································· 9
附属書A(参考)測定の不確かさ ··························································································· 11
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 14
C 61300-3-2:2012
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般財団法人光産業技術振興協会(OITDA)
及び財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出があ
り,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 61300の規格群には,次に示す部編成がある。
JIS C 61300-1 第1部:通則
JIS C 61300-2-2 第2-2部:繰返しかん合試験
JIS C 61300-2-12 第2-12部:落下衝撃試験
JIS C 61300-2-14 第2-14部:光パワー損傷のしきい値試験
JIS C 61300-2-17 第2-17部:低温試験
JIS C 61300-2-18 第2-18部:高温試験
JIS C 61300-2-19 第2-19部:高温高湿試験(定常状態)
JIS C 61300-2-22 第2-22部:温度サイクル試験
JIS C 61300-2-45 第2-45部:浸水試験
JIS C 61300-2-46 第2-46部:湿熱サイクル試験
JIS C 61300-2-47 第2-47部:熱衝撃試験
JIS C 61300-2-48 第2-48部:温湿度サイクル試験
JIS C 61300-3-2 第3-2部:シングルモード光デバイスの光損失の偏光依存性
JIS C 61300-3-3 第3-3部:挿入損失及び反射減衰量変化のモニタ方法
JIS C 61300-3-4 第3-4部:損失測定
JIS C 61300-3-6 第3-6部:反射減衰量測定
JIS C 61300-3-20 第3-20部:波長選択性のない光ブランチングデバイスのディレクティビティ測定
JIS C 61300-3-26 第3-26部:光ファイバとフェルール軸との角度ずれの測定
JIS C 61300-3-28 第3-28部:過渡損失測定
JIS C 61300-3-30 第3-30部:多心光ファイバコネクタ用フェルールの研磨角度及び光ファイバ位置
測定
JIS C 61300-3-31 第3-31部:光ファイバ光源の結合パワー比測定
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 61300-3-2:2012
光ファイバ接続デバイス及び光受動部品−
基本試験及び測定手順−
第3-2部:シングルモード光デバイスの光損失の
偏光依存性
Fiber optic interconnecting devices and passive components-
Basic test and measurement procedures-
Part 3-2: Examinations and measurements-
Polarization dependent loss in a single-mode fiber optic device
序文
この規格は,2009年に第3版として発行されたIEC 61300-3-2を基に,技術的内容を変更することなく
作成した日本工業規格であるが,JIS C 61300規格群における細分箇条の構成を統一するため,対応国際規
格の一部を日本工業規格として変更している。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて附属書JAに示す。
1
適用範囲
この規格は,シングルモードの光デバイス(光ファイバ接続デバイス及び光受動部品)の光損失の偏光
依存性を測定する方法について規定する。この規格は,単一波長に固定した光源を用いた測定方法を規定
している。そのため,特性の波長依存性が無視でき,ある波長での特性が,ある波長帯域内での測定を代
表できる光デバイスに適用できる。そのような光デバイスの代表例は,光コネクタ,スプライス,光ブラ
ンチングデバイス,光減衰器,光アイソレータ及び光スイッチを含む,シングルモード光ファイバ接続デ
バイス及び光受動部品である。測定した透過損失変動の最大値を偏光依存性損失(PDL)という。
この規格は,広帯域光デバイスに適用するものであり,光フィルタ,光合波器などの狭帯域光デバイス
には適用しない。それらについては,IEC 61300-3-29を用いる。
注記1 関連する試験及び測定方法の通則は,JIS C 61300-1に規定する。
注記2 広帯域光デバイスとは,例えば,ワイドWDMデバイスであり,狭帯域光デバイスとは,例
えば,高密度WDMデバイスである。
注記3 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 61300-3-2:2009,Fibre optic interconnecting devices and passive components−Basic test and
measurement procedures−Part 3-2: Examinations and measurements−Polarization dependent
loss in a single-mode fibre optic device(MOD)
2
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。この引用
規格は,その最新版(追補を含む。)を適用する。
IEC 61300-3-29,Fibre optic interconnecting devices and passive components−Basic test and measurement
procedures−Part 3-29: Examinations and measurements−Measurement techniques for characterizing the
amplitude of the spectral transfer function of DWDM components
3
測定方法
PDLを測定する2種類の方法について規定する。全偏光状態法は,直線偏光,円偏光及びだ(楕)円偏
光を含む,全ての可能な偏光状態の代表的な組合せを与えて得る,透過損失の最大変動量でPDLを求める。
ミュラー行列法では,固定状態の組合せを用いて感度を求め,行列計算を用いてPDLを求める。
3.1
全偏光状態法
この方法では,供試品の透過応答特性を光パワーメータでモニタしながら,入力光の可能な全ての偏光
状態のうち,代表的な組合せに偏光状態を変化させてPDLを求める。入力光の偏光状態は,規則性のある
方法又は疑似ランダムな方法のいずれによって変化させてもよい。
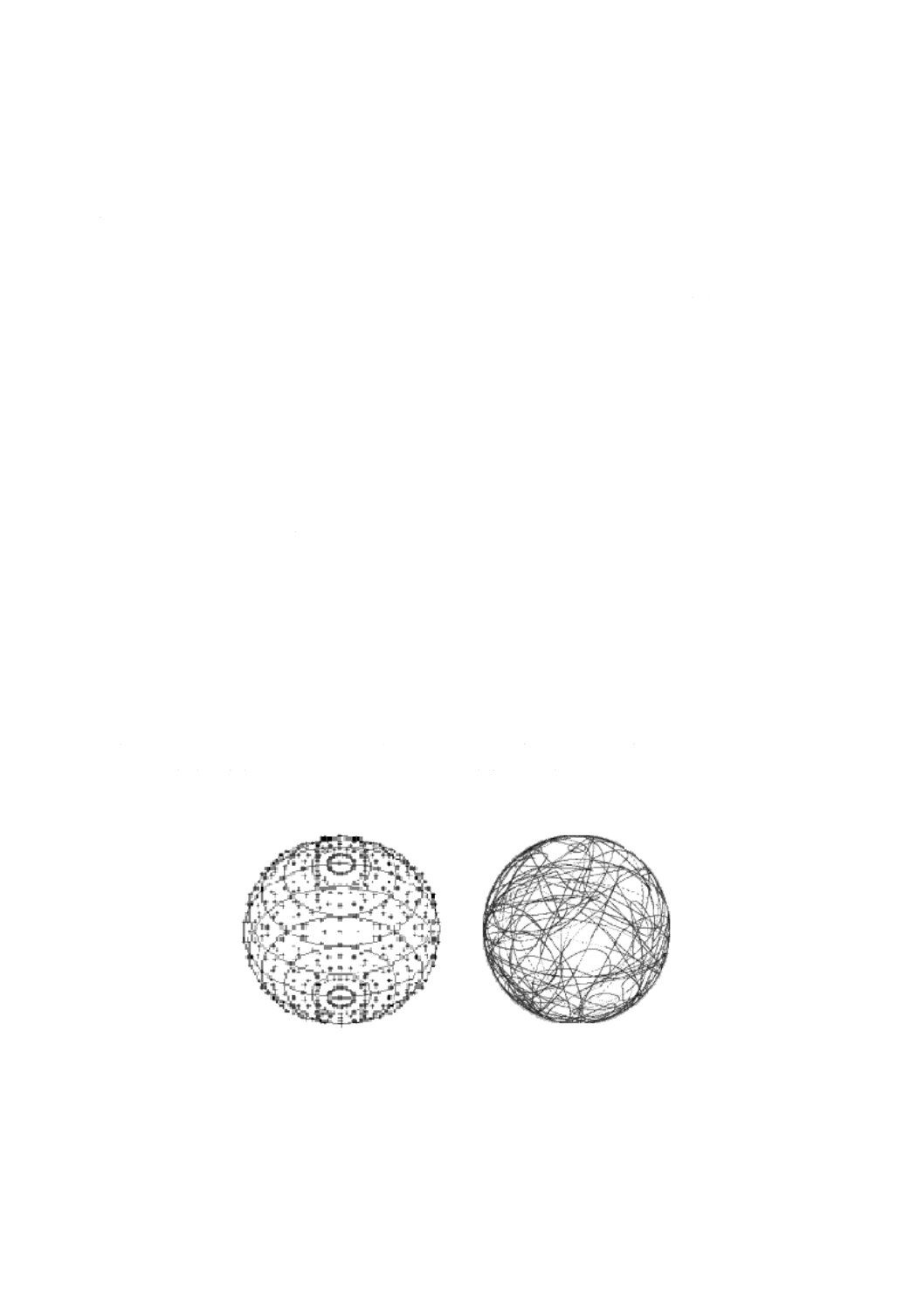
規則性のある方法とは,全偏光状態を示す座標空間を,再現性よく広範囲に走査する方法である。この
方法は,ポアンカレ球面のあらかじめ定めた軌跡を走査することによって,近似的に全球面を包括する。
疑似ランダムな方法とは,光路の遅延の疑似ランダムな変動によって偏光状態を走査する方法である。
一般に光ファイバループを動かすことによって得る遅延分布を用いる。
図1は,これら二つの方法のカバー範囲の違いをポアンカレ球で示したものである。いずれの方法でも,
精度は,ポアンカレ球面のカバー率に依存しており,その精度は,偏光状態変更装置が生成する偏光状態
と,偏光状態走査速度に対する光パワーメータの応答速度との組合せによって決まる。
IEC 2363/08
図1−偏光状態分布の違い
3.2
ミュラー行列法
ミュラー行列法は,入力光を複数の特定の偏光状態で入力し,入力に応じた供試品の透過損失の変化を
a) 規則性のある方法
b) 疑似ランダムな方法
3
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
測定する。この測定の後,行列計算によって供試品のPDLを求める。一般に,偏光による状態変化を定量
的に記述する二つの行列形式がある。一つはミュラー行列に基づくもので,もう一つはジョーンズ行列に
基づくものである。PDLを求めるのに用いる,完全に偏光した光に対しては,ミュラー行列形式とジョー
ンズ行列形式とは数学的に等価である。ミュラー行列における必要な要素は,電界強度及び位相ではなく
パワー比に対応した要素で,これは供試品の入力側だけに偏光制御器を配置することによって,直接的に
測定ができる。ここではミュラー行列計算によってPDLを求める手順を規定する。
ミュラー行列形式では,部品の特性を光パワーで表示する。この行列は16の要素をもつ正方行列である。
ここで,光の偏光状態(SOP)は四つの要素をもつストークスベクトルで記述する。入力光のストークス
ベクトルに供試品のミュラー行列を乗じることで,透過光,反射光及び散乱光で構成する出力光ストーク
スベクトルを得る。ミュラー行列を用いて部品のPDLを求めるには,通常,ミュラー行列の全体を求める
必要はなく,行列の第1行だけが必要である。この第1行によって光強度の完全な情報が得られるが,偏
光状態は求められない。
この測定方法の精度は,光源の波長安定性,測定系の信号対雑音比及び測定系の複屈折の変化に依存す
る。
4
装置
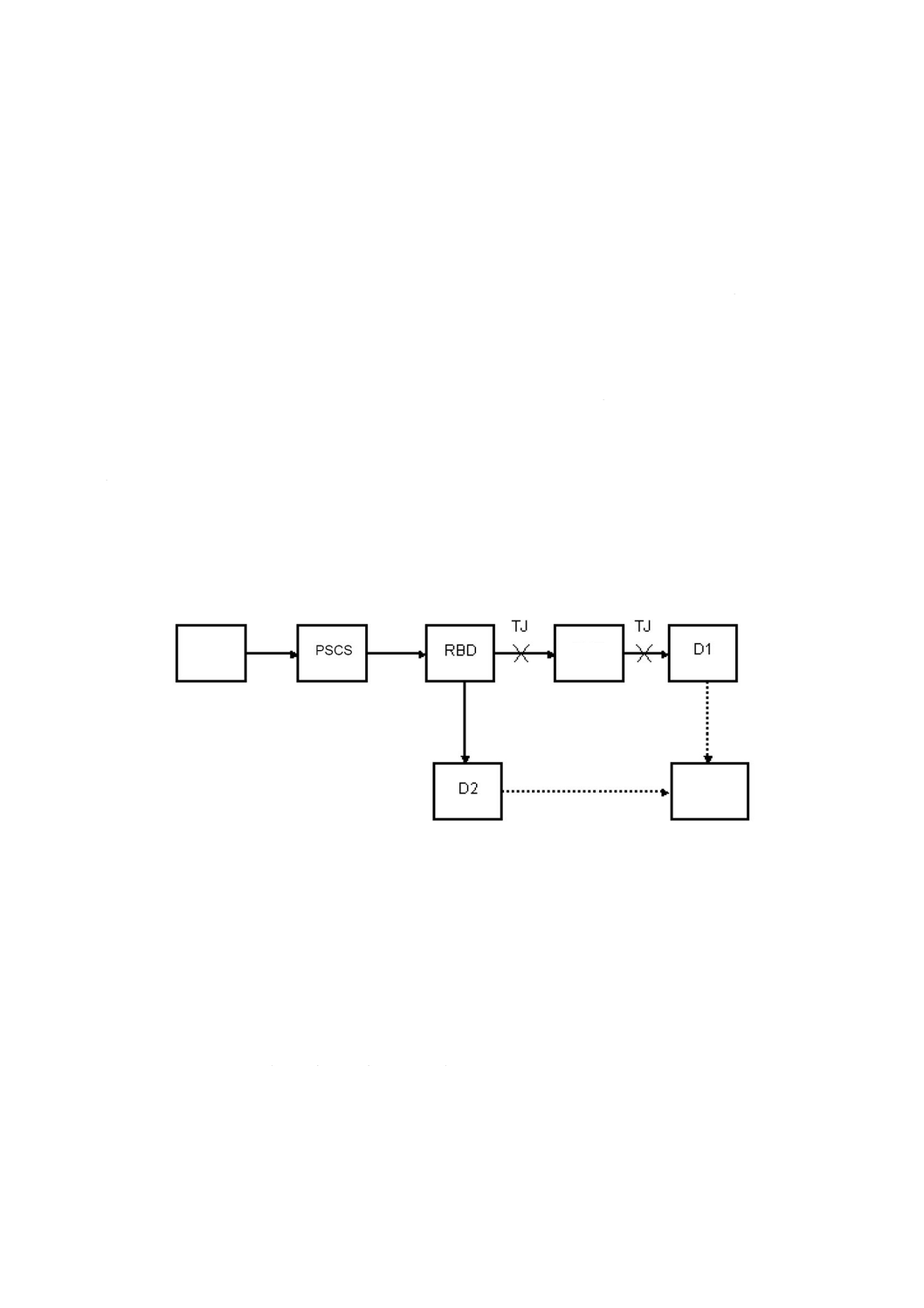
PDL測定に用いる装置の構成を,図2に示す。
図2−測定装置の構成
測定装置は,次の部品で構成する。
4.1
光源(S)
光源は,個別規格に規定するスペクトル特性(波長及びスペクトル幅の両方)を満たすものを用いる。
個別規格に規定がない場合,スペクトル幅は,測定に必要な波長分解能を得るのに十分狭い幅とする。
光源の光パワーは,用いる光パワーメータの感度との組合せにおいて,測定に必要なダイナミックレン
ジを得るのに十分なものを用いる。
光源の偏光消光比は,個別規格に規定がない場合,13 dB以上とする。測定の不確かさを十分に低減す
るため,光源の偏光消光比を20 dBとすることが望ましい。光源の偏光消光比が不十分である場合には,
測定波長の全帯域にわたって十分な偏光消光比を確保するために偏光子を用いることが望ましい。
光源の光パワー安定性,偏光消光比・偏光状態(SOP)の安定性及び波長安定性は,測定時間にわたっ
S
データ
記録
供試品
4
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
て,所定の測定精度を得るのに十分なものとする。複数経路間の干渉光の影響を低減するため,不要な反
射光を防止しなければならない。一部の用途では,単一縦モードレーザなどの狭線幅光源を用いることが
有効である。
光源の出力は,シングルモード光ファイバであるか,又はシングルモード光ファイバに入力可能な結合
光学系とする。箇条5に規定する当該光ファイバの基本横モードだけが伝搬するようにする。
注記 マルチモードレーザの偏光安定性は,この測定に用いるには不十分な場合がある。
4.2
テンポラリジョイント(TJ)
テンポラリジョイントは,二つの光ファイバ端を安定で再現性よく低損失・低PDLな状態に一時的に結
合する手段,光デバイス又は機械的な保持手段である。光コネクタ,メカニカルスプライス,光ファイバ
ピッグテールへの直接入力又は光源の光ファイバピッグテールへのスプライスを用いる。偏光制御器の後
段では,一般的には融着スプライスを用いる。光ファイバの機械的な接続は,光ファイバ端面が光ファイ
バ軸に直交していない場合は,偏光依存性を示す可能性があるため,適切ではない。テンポラリジョイン
トの安定性及び挿入損失は,要求する測定精度及びダイナミックレンジに照らして問題のない値とする。
4.3
偏光状態変更装置(PSCS)
偏光状態変更装置の選択は,採用した測定方法に依存する。
注記 偏光状態変更装置は,偏光状態を規則性をもって変化させる偏光制御器及び疑似ランダムに変
化させる偏光スクランブラの両方を含むもので,これらの上位概念である。
4.3.1
全偏光状態法
全偏光状態法では,入力光の偏光をポアンカレ球面の全域で変化させるために偏光状態変更装置を用い
る。規則性のある方法(明確な位相関係をもつ方法)では,光路中に置いた四分の一波長板と二分の一波
長板との組を連続的に調整する方法を用いてもよい。また,疑似ランダムな方法では,偏光スクランブラ
(例えば,三つ以上の可動光ファイバループで構成する。)を用いてもよい。構成例を,次に示す。
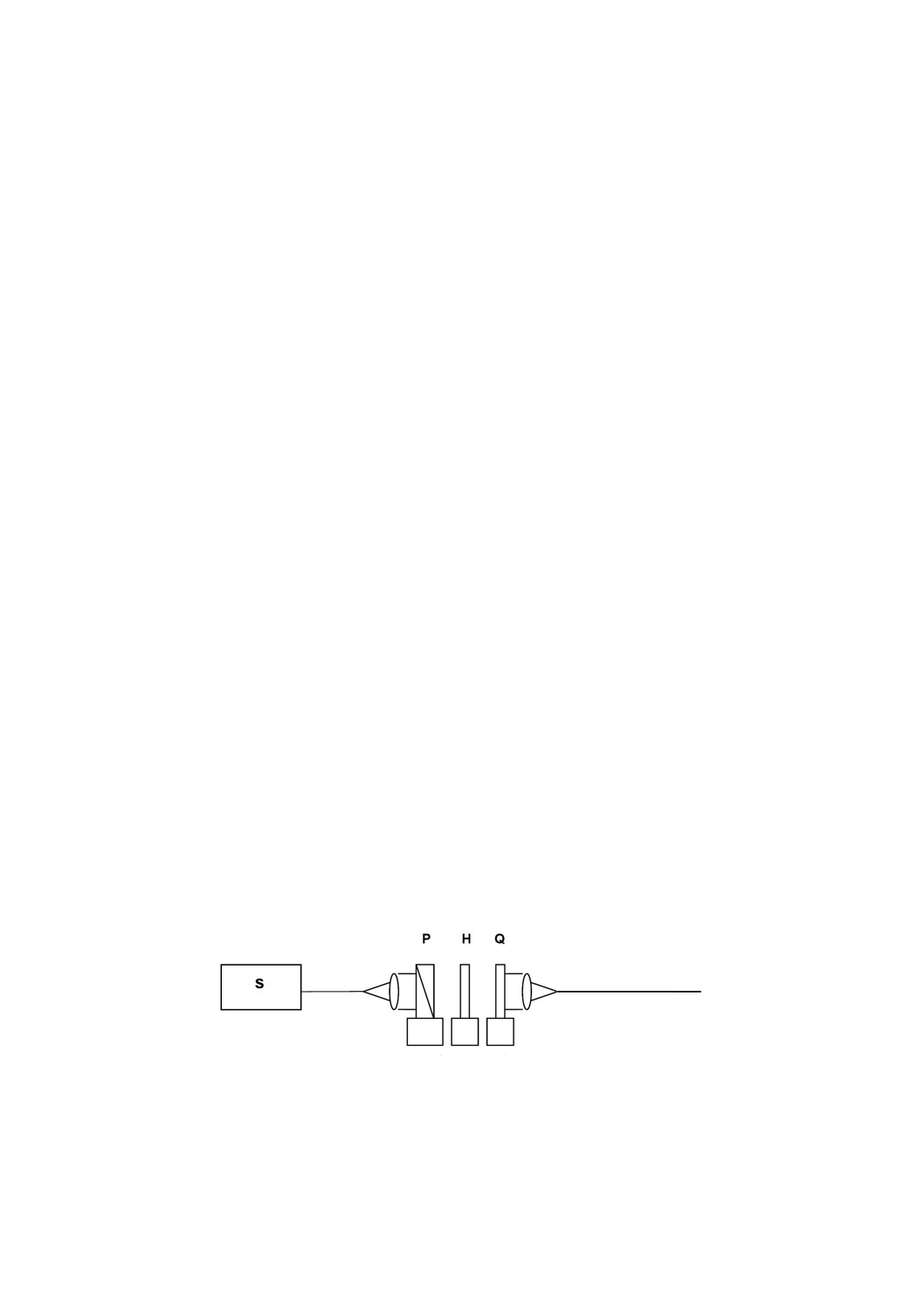
− バルク光学形偏光状態変更装置 バルク光学形偏光状態変更装置は,連続した三つの偏光選択光学部
品で構成する(偏光状態変更装置に入射する前の偏光状態が光源によってあらかじめ決まっている場
合は,二つでよい。)。光学系の位置合せ精度は,光学部品の同一方向に対して入力光パワーが十分な
再現性をもつものとする。図3 a)に示す一例は,平行光路に,回転ステージに搭載した偏光子P,二
分の一波長板H及び四分の一波長板Qを挿入した構成である。
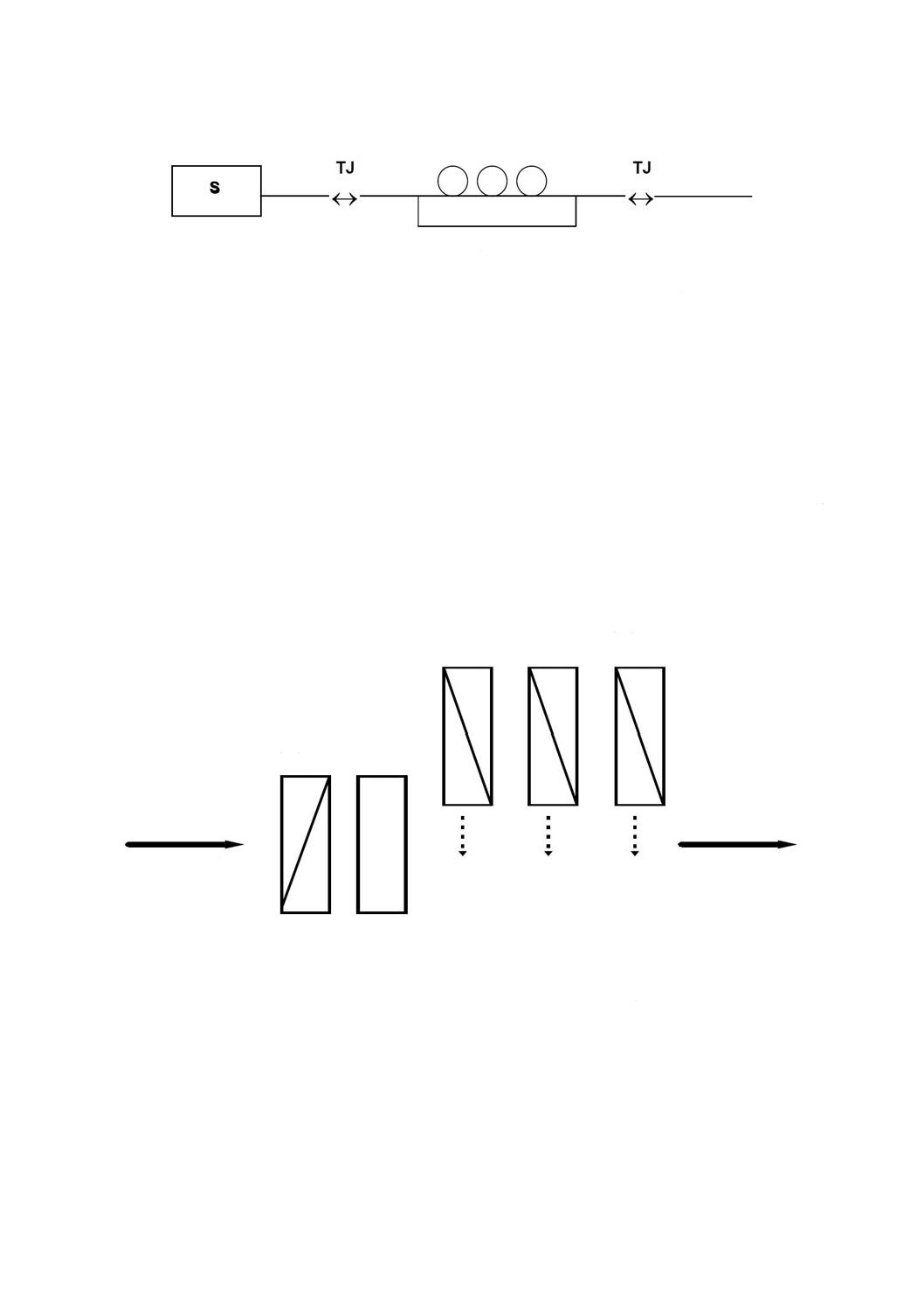
− インライン光ファイバ形偏光状態変更装置 インライン光ファイバ形偏光状態変更装置は,シングル
モード光ファイバを巻き付けた回転可能な連続した三つのマンドレルで構成する。図3 b)に示す。
a) バルク光学形偏光状態変更装置
図3−全偏光状態法で用いる偏光状態変更装置の例(規則的及び疑似ランダム)
回転ステージ
供試品の入力ピッグテール
5
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3−全偏光状態法で用いる偏光状態変更装置の例(規則的及び疑似ランダム)(続き)
全偏光状態法の測定精度は,偏光状態変更装置と光パワーメータとの組合せが偏光状態を表す座標空間
を十分にサンプリングできるかどうかに強く依存する。また,偏光が変化したときの偏光状態変更装置の
挿入損失の安定性にも強く依存する。附属書Aに,全偏光状態法に関連した測定の不確かさについて記載
する。
4.3.2
ミュラー行列法
ミュラー行列法では,偏光制御器は,入力光を,一次独立なストークスベクトルで表した複数の特定の
偏光状態に調整する手段である。任意の偏光状態の組合せを選択することができるが,一般には水平直線
偏光,垂直直線偏光,45°直線偏光及び右回り円偏光の組合せを用いる。6.2に規定する数式は,この選択
に基づいている。四つの偏光状態を定めるのに必要とする精度はPDLの要求測定精度に依存するが,一つ
の目安として±0.5°未満とする。構成の一例を,図4に示す。
図4−ミュラー行列法で用いる偏光制御器の例
上記の構成によって,円偏光,及び,互いに45°又は90°をなす三つの直線偏光で構成する四つの偏光
状態の光を出力することができる。入力光を,偏光子Aによって十分な直線偏光に調整する。次に,この
偏光子に対し光学軸が45°の角度をなす四分の一波長板によって円偏光に変える。三つの直線偏光状態を,
三つの偏光子B,C及びDを順次一つずつ光路へ入れることによって作り出す。偏光子B〜Dは,偏光方
向が光路中で互いに45°の角度をなす。光学系の位置合わせ精度は,偏光子を同一方向に配置した場合に,
供試品に入力する光パワーの再現性が十分なものとする。
供試品の入力ピッグテール
b) インライン光ファイバ形偏光状態変更装置
入力光路
出力光路
四分の一
波長板
偏光子A
偏光子B
0°
偏光子C
90°
偏光子D
45°
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3 a)に示すようなバルク光学部品,液晶可変波長板,プログラム済み光ファイバ偏光制御器など,再
現性のあるその他の偏光状態変更装置を用いてもよい。
4.4
基準光ブランチングデバイス(RBD)(任意選択)
基準光ブランチングデバイスは,入力端子からの光パワーを約50対50又はその他適切な分岐比で二つ
の出力端子へ分岐するものである。最適分岐比は,光源の強度,及び用いる光パワーメータの光パワー感
度に依存する。その他の規定がない場合,基準光ブランチングデバイスのPDLは,供試品の仕様において
試験の結果合格と判断する最小のPDLの1/10以下の値とする。測定のダイナミックレンジは,分岐比に
依存していることに留意する。
基準光ブランチングデバイスを用いることは,光源の光パワーをモニタすることを想定したオプション
である。供試品のPDLと比較して,偏光状態変更装置からの出力が十分安定している場合は,基準光ブラ
ンチングデバイスを用いる必要はない。
4.5
光パワーメータ(D1及びD2)
全ての光パワーメータは,その他の測定機器との連携において,測定に必要となる十分に広いダイナミ
ックレンジをもつものを用いる。また,光パワーメータは,測定誤差を最小とするため,その測定より一
桁小さい偏光依存性をもつものを用いる。必要がある場合,供試品と光パワーメータとの間に偏光解消子
を用い,要求測定精度を確保する。
光パワーメータは,想定する全パワーレベルにわたって感度の直線性がよいものを用いる。光パワーメ
ータのいかなる非直線性及び偏光依存性も測定誤差に直結する。したがって,光パワーメータ及びこれに
接続する増幅回路が全測定範囲にわたって感度の直線性がよいことが重要である。光パワーメータに達す
る光パワーが,常に光パワーメータの飽和レベルよりも十分小さくなるように測定を実施する。測定機器
の相対精度が基準を超える光パワーレベルを飽和レベルと定義した場合,これに対して光パワーが3 dB以
上小さいことが望ましい。この場合は,通常,非直線性の原因は,光パワーメータ内部の増幅器であり,
特にトランスインピーダンス増幅器のレンジ切り替えが発生した場合に顕著である。小さいPDL値を測定
する場合は,レンジ切り替えが発生しないようにして測定する。
光パワーメータは,十分な受光面積をもち,出力端子の十分近くに配置して,供試品の出力光ファイバ
から出力された光を全て受光するようにする。
全偏光状態法で偏光を連続的に走査する場合は,測定結果と偏光状態との対応が十分細かい分解能で取
得できるように,光パワーメータは偏光走査速度との関係において十分高速にパワーを測定できるものを
用いる。これは,通常,光パワーメータの周波数応答帯域幅及び平均化時間によって決まる(附属書A参
照)。
4.6
データ収集・記録・処理装置
偏光状態の走査で得た透過光パワーのデータ収集手段,計算実施手段及び試験終了後の結果出力手段を
提供する。これらのデータ収集・解析機能を実現するコンピュータシステムを用いてもよい。
5
手順
5.1
前処理
製造業者の指示に従って,供試品を清掃する。
清掃以外の前処理について,別途規定がある場合は,その規定に従う。
5.2
初期試験及び初期測定
個別規格の規定に従って,供試品の初期試験及び初期測定を行う。
7
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3
試験に関する注意
測定中にいずれかの光ファイバが動いた場合,偏光状態に影響を与え,測定誤差となる。このことは,
全偏光状態法よりミュラー行列法で特に顕著である。そのため,測定中に光ファイバ及び装置が動かない
よう注意する。
装置の各構成要素の入出力端でクラッドモードを除去する。光ファイバの被覆の影響によって,クラッ
ドモードが除去できない場合は,クラッドモード除去器が必要である。
5.4
リファレンス測定
図2に示す装置から供試品を取り除き,図5に示すように接続する。供試品は,図5 a)に示すように完
全に取り除いてもよいし,又は図5 b)に示すように供試品の光ファイバピッグテール長さと等価な長さの
光ファイバループに置き換えてもよい。いずれの場合でも,この測定中装置のテスト用ケーブルは取り除
いてはならない。
最初に,偏光状態変更装置を第一の偏光状態に設定し,D1及び(用いる場合は)D2で光パワーをワッ
ト単位(W)で測定する。
この測定で用いる全ての偏光状態となるよう偏光状態変更装置を順次設定し,それぞれの偏光状態につ
いてD1及びD2によって光パワーを測定する。
図5−リファレンス測定時の機器
リファレンス測定結果は,各々の測定点について,D2を用いる場合は,式(1)によって記録する。
()
()()i
P
i
P
i
P
2
1
ref
=
············································································ (1)
ここに,
P1: D1で測定した光パワー(W)
置き換え用光ファイバ
S
S
データ
記録
データ
記録
a) 供試品を取り除いた構成
b) 供試品を光ファイバループに置き換えた構成
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
P2: D2で測定した光パワー(W)
D2を用いていない場合は,式(2)によって記録する。
()
()i
P
i
P
1
ref
=
·············································································· (2)
5.5
供試品測定
測定装置を,図2に示すように接続する。
最初に,偏光状態変更装置を第一の偏光状態に設定し,D1及び(用いる場合は)D2で光パワーをワッ
ト単位(W)で測定する。
この測定で用いる全ての偏光状態となるよう偏光状態変更装置を順次設定し,それぞれの偏光状態のD1
及びD2によって光パワーを測定する。
供試品測定結果は,各々の測定点について,D2を用いる場合は,式(3)によって記録する。
()
()()i
P
i
P
i
P
2
1
msd
=
··········································································· (3)
ここに,
P1: D1で測定した光パワー(W)
P2: D2で測定した光パワー(W)
D2を用いていない場合は,式(4)によって記録する。
()
()i
P
i
P
1
msd
=
············································································· (4)
6
データ解析
6.1
全偏光状態法
全偏光状態法では,測定でサンプリングした偏光状態がリファレンス測定と対応している場合は,各偏
光状態について,式(5)で透過率を求める。
()
()()i
P
i
P
i
T
ref
msd
=
············································································· (5)
式(6)及び式(7)で,dB単位によるPDL及び平均挿入損失ILを求める。
PDL=10×log10 (Tmax / Tmin) ························································· (6)
IL=−10×log10 [(Tmax+Tmin) / 2] ··················································· (7)
ここに,
Tmax: 全てのT (i)の最大値
Tmin: 全てのT (i)の最小値
疑似ランダム走査など,リファレンス測定と供試品の測定とにおいて偏光状態の対応がとれていない場
合は,透過率を個別の偏光状態について分離して計算することはできない。この場合は,式(8)によって
PDLを求める。
PDL=10×log10 (Pmsd,max / Pmsd,min) ·················································· (8)
続いて,式(9)によって測定系のPDLであるPDLsetupを求める。
PDLsetup=10×log10 (Pref,max / Pref,min) ················································ (9)
ここに,
Pmsd,max: 全てのPmsd (i)の最大値
9
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Pmsd,min: 全てのPmsd (i)の最小値
Pref,max: 全てのPref (i)の最大値
Pref,min: 全てのPref (i)の最小値
PDLsetupは,測定の不確かさの原因の一つとなる。これが最小となるよう留意して測定系を構築すること
が望ましい。
6.2
ミュラー行列法
ミュラー行列法では,リファレンス測定及び供試品測定の両方において,4.3.2に規定する偏光状態の組
とする。
これらの偏光状態から,ストークスパラメータを用いてミュラー行列の第1行を求める。
四つの偏光状態を,水平直線偏光(i=1),垂直直線偏光(i=2),45°直線偏光(i=3),及び右回り円
偏光(i=4)としたとき,計算過程は次による。
供試品の透過係数を,式(10)〜式(13)によって求める。
()
()()11
1
ref
msd
P
P
T
=
··········································································· (10)
()
()()22
2
ref
msd
P
P
T
=
···········································································(11)
()
()()33
3
ref
msd
P
P
T
=
·········································································· (12)
()
()()44
4
ref
msd
P
P
T
=
·········································································· (13)
続いて,ミュラー行列の第1行を,式(14)〜式(17)によって求める。
m11=[T(1)+T(2)] / 2 ································································ (14)
m12=[T(1)−T(2)] / 2 ································································ (15)
m13=T(3)−m11 ······································································· (16)
m14=T(4)−m11 ······································································· (17)
最大及び最小透過係数を,式(18)及び式(19)によって求める。
2
14
2
13
2
12
11
max
m
m
m
m
T
+
+
+
=
························································ (18)
2
14
2
13
2
12
11
min
m
m
m
m
T
+
+
−
=
························································ (19)
式(20)及び式(21)で,供試品のPDL及び平均挿入損失ILをdB単位で求める。
PDL=10×log10 (Tmax / Tmin) ······················································· (20)
IL=−10×log10 (m11) ······························································· (21)
7
個別規格に規定する事項
次の事項は,それぞれの事項の必要がある場合,個別規格に規定する。
a) 光源のピーク波長及びスペクトル幅
b) 偏光消光比
10
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) 偏光状態変更装置の仕様
d) 装置のポアンカレ球面の有効カバー率(全偏光状態法の場合)
e) 基準光ブランチングデバイスの仕様
f)
光ファイバピッグテールの長さ
g) 測定精度の要求仕様
h) 測定方法の種類
i)
リファレンス測定の方法
j)
この規格に規定する試験手順からの変更点
11
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
測定の不確かさ
A.1 全偏光状態法
全偏光状態法で用いる偏光スクランブラは,安定した光源から入力する固定偏光状態を,可能な全ての
偏光状態に変換して出力できるものを用いる。偏光制御器は,ステップモードで動作するものでも連続的
走査モードで動作するものでもよい。いずれの場合でも,測定精度は,ポアンカレ球面の偏光状態のカバ
ー率と,装置の偏光状態分解能との関数である。偏光状態変更装置の走査速度及び光パワーメータの応答
速度は,測定系の精度において非常に重要である。
通常,偏光スクランブラは二つの走査速度パラメータをもっており,測定精度は走査速度に依存する。
第一に,光パワーメータの平均化時間内における偏光状態の変化量が,測定系の偏光状態分解能を決める。
この偏光状態変化量が大きすぎる場合は,そのサンプリング頻度からは十分な精度で最大値及び最小値を
求めることはできない。走査速度の変更又は光パワーメータの平均化時間の変更のいずれによっても改善
ができる。第二には,全偏光状態を十分カバーするのに必要な測定時間である。全測定時間と偏光状態の
カバー率との関係は,偏光状態走査手段に依存する。偏光状態変更装置が偏光状態をランダムに変える場
合(偏光スクランブラを用いる場合)には,偏光状態のカバー率は統計的に決まり,測定時間が長くなる
に連れて増加する。偏光状態変更装置が規則性のある方法によって偏光状態を変える場合(偏光制御器を
用いる場合)には,反復性をもつときがあり,そのときには,走査サイクルが一巡した後は,カバー率は
それ以上増えない。
偏光アナライザを用いて,規則性のある方法又は疑似ランダムな方法によって生成した偏光状態をモニ
タすることで,測定系の精度を明確にできる。例えば,図A.1は,平均化時間20ミリ秒(ms)間の光パ
ワーメータを用いて,10秒(s)間で95 %の精度でポアンカレ球面をカバーする市販の光ファイバループ
形スクランブラについて,測定誤差の動作時間に対する依存性を計算したものである。
なお,測定装置内部の変化が発生するため,極端に長い走査時間は逆効果であり,測定誤差は増加に転
じる。
12
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 この図は一例である。詳細は本体を参照。
図A.1−全偏光状態法の装置の測定の不確かさ
光源の安定性及び光パワーメータの偏光依存性の影響は,一般的に5.4に規定するリファレンス測定に
おける光パワー測定値の変動を評価することで簡単に求めることができる。
A.2 ミュラー行列法
ミュラー行列法でも,終始一貫した重要な結果を得ることに対して一定の制約が存在する。偏光制御器,
光パワーメータ(D1及びD2)などの測定系を構成する部品が,供試品と同程度のPDLをもつ場合,供試
品を複屈折を無視し得ない長い光ファイバピッグテールで終端している場合などには,測定の不確かさ及
び不正確さが顕著になる。内部応力に加えて,光ファイバピッグテールをコイル状に巻くことによっても
コイルの直径に応じた量の応力誘起複屈折が生じる。応力誘起複屈折によって,光路中で異なる偏光状態
間に遅延が生じ,これによって偏光制御器,供試品及び光パワーメータD1の間でPDLの相対軸方向が変
化する。この余分な遅延の発生は,全偏光状態法では問題にならない場合もあるが,四偏光状態測定では
不可避の校正上の不確かさが生じる。接続用光ファイバコードの静的で大きな複屈折によって,供試品を
取り除いたリファレンス測定と供試品測定との間に必要な偏光の対称性がなくなる。静的で大きな複屈折
の実際の影響としては,PDLをリファレンス測定と供試品測定とで異なる倍率で拡大又は縮小してしまう
ことになる。さらに,長い接続用光ファイバコードによる動的な複屈折は,長時間にわたる測定の実施中
にベースラインPDLを変化させてしまう。
これらの問題を最小限に抑えるためには,次の対策を推奨する。接続用の光ファイバコードには,でき
るだけ短く真っすぐなものを表面に固定して用い,内部PDLが小さい(供試品の推定PDL値に対して10 %
未満の)光パワーメータを用いて,各初期測定の間の測定時間に制限を設ける。このようにすることが不
可能な場合は,接続用光ファイバコードの複屈折の影響を最小化するために,測定を完了してから,接続
用光ファイバコードの向きをランダムに変更して,再度測定をし,平均化する。接続用光ファイバコード
のランダム化を完璧にするため,光ファイバコイルを同一平面内に横にして置くことがないようにする。
偏光スキャン時間[s]
P
D
L
エ
ラ
ー
[
%
]
13
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
又は,(光ファイバループ形などの低PDLな)第2の偏光制御器(PSCS2)を図A.2に示すように第1の
偏光制御器と供試品との間に配置することが必要である。
図A.2−ミュラー行列法の代替測定装置
S
供試品
データ
記録
14
C 61300-3-2:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
JISと対応国際規格との対比表
JIS C 61300-3-2:2012 光ファイバ接続デバイス及び光受動部品−基本試験及び測定手
順−第3-2部:シングルモード光デバイスの光損失の偏光依存性
IEC 61300-3-2:2009 Fibre optic interconnecting devices and passive components−
Basic test and measurement procedures−Part 3-2: Examinations and measurements−
Polarization dependent loss in a single-mode fibre optic device
(I)JISの規定
(II)
国際規
格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇
条ごとの評価及びその内容
(V)JISと国際規格との技術的差異
の理由及び今後の対策
箇条番号及び
題名
内容
箇条番号
内容
箇条ご
との評
価
技術的差異の内容
3 測定方法
試験手順が2種類
であることを規
定。
3
JISとほぼ同じ。
削除
IEC 61300-3-12との関係につ
いて,廃止予定であるとの記載
を削除した。実質的な技術的差
異はない。
IEC 61300-3-12はJIS制定前に廃止
となったため,削除した。
5 手順
手順について規
定。
5.1
5.2
5.3
5.4
5.5
5.6
JISとほぼ同じ。
変更
JISの5.1に,IEC規格の5.1
及び5.2が対応する。以降の細
分箇条は,項番を繰り上げて
JISと対応している。
一連のJIS C 61300規格群において
細分箇条の構成を統一するため,変
更した。今後,IECに修正提案する。
JISと国際規格との対応の程度の全体評価:IEC 61300-3-2:2009,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除……………… 国際規格の規定項目又は規定内容を削除している。
− 変更……………… 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD…………… 国際規格を修正している。
3
C
6
1
3
0
0
-3
-2
:
2
0
1
2
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。