C 60068-2-64:2011 (IEC 60068-2-64:2008)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語及び定義 ··················································································································· 3
4 試験要求事項 ··················································································································· 7
4.1 概要 ···························································································································· 7
4.2 基本運動 ······················································································································ 7
4.3 横運動 ························································································································· 8
4.4 取付け ························································································································· 8
4.5 測定系 ························································································································· 8
4.6 振動の許容差 ················································································································ 9
4.7 制御方法 ····················································································································· 11
4.8 振動応答検査 ··············································································································· 12
5 厳しさ··························································································································· 13
5.0A 概要 ························································································································· 13
5.1 試験振動数範囲 ············································································································ 13
5.2 加速度rms値 ··············································································································· 13
5.3 加速度スペクトル密度曲線の形 ······················································································· 13
5.4 試験時間 ····················································································································· 13
6 前処理··························································································································· 14
7 初期測定························································································································ 14
8 試験······························································································································ 14
8.1 概要 ··························································································································· 14
8.2 振動応答検査 ··············································································································· 14
8.3 等化のための低レベル予備加振 ······················································································· 15
8.4 ランダム振動試験 ········································································································· 15
8.5 最終振動応答検査 ········································································································· 15
9 後処理··························································································································· 16
10 最終測定 ······················································································································ 16
11 製品規格に規定する事項 ································································································· 16
12 試験報告書に記載する情報 ······························································································ 16
附属書A(参考)標準的な環境条件における試験スペクトル························································ 18
附属書B(参考)ガイダンス ································································································· 23
C 60068-2-64:2011 (IEC 60068-2-64:2008)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,財団法人日本電子
部品信頼性センター(RCJ)及び財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格
を改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格
である。
これによって,JIS C 60068-2-64:1997は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 60068の規格群には,次に示す部編成がある。
JIS C 60068-1 通則
JIS C 60068-2-1 第2-1部:低温(耐寒性)試験方法(試験記号:A)
JIS C 60068-2-2 第2-2部:高温(耐熱性)試験方法(試験記号:B)
JIS C 60068-2-6 第2-6部:正弦波振動試験方法(試験記号:Fc)
JIS C 60068-2-7 加速度(定常)試験方法
JIS C 60068-2-11 塩水噴霧試験方法
JIS C 60068-2-13 減圧試験方法
JIS C 60068-2-14 第2-14部:温度変化試験方法(試験記号:N)
JIS C 60068-2-17 封止(気密性)試験方法
JIS C 60068-2-18 第2-18部:耐水性試験及び指針
JIS C 60068-2-20 第2-20部:試験−試験T−端子付部品のはんだ付け性及びはんだ耐熱性試験方法
JIS C 60068-2-21 第2-21部:試験−試験U:端子強度試験方法
JIS C 60068-2-27 第2-27部:衝撃試験方法(試験記号:Ea)
JIS C 60068-2-30 第2-30部:温湿度サイクル(12+12時間サイクル)試験方法(試験記号:Db)
JIS C 60068-2-31 面落下,角落下及び転倒(主として機器)試験方法
JIS C 60068-2-32 自然落下試験方法
JIS C 60068-2-38 温湿度組合せ(サイクル)試験方法
JIS C 60068-2-39 第2-39部:低温,減圧及び高温高湿一連複合試験
JIS C 60068-2-40 低温・減圧複合試験方法
JIS C 60068-2-41 高温・減圧複合試験方法
JIS C 60068-2-42 接点及び接続部の二酸化硫黄試験方法
JIS C 60068-2-43 接点及び接続部の硫化水素試験方法
JIS C 60068-2-45 耐溶剤性(洗浄溶剤浸せき)試験方法
JIS C 60068-2-46 接点及び接続部の硫化水素試験−指針
JIS C 60068-2-47 第2-47部:動的試験での供試品の取付方法
C 60068-2-64:2011 (IEC 60068-2-64:2008)
(3)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS C 60068-2-48 第2-48部:保存の影響をシミュレートするために,環境試験方法に関するJIS規格
群の試験を適用する場合の指針
JIS C 60068-2-49 接点及び接続部の二酸化硫黄試験−指針
JIS C 60068-2-50 発熱供試品及び非発熱供試品に対する低温/振動(正弦波)複合試験
JIS C 60068-2-51 発熱供試品及び非発熱供試品に対する高温/振動(正弦波)複合試験
JIS C 60068-2-52 塩水噴霧(サイクル)試験方法(塩化ナトリウム水溶液)
JIS C 60068-2-53 発熱供試品及び非発熱供試品に対する低温・高温/振動(正弦波)複合試験の指針
JIS C 60068-2-54 はんだ付け性試験方法(平衡法)
JIS C 60068-2-57 時刻歴振動試験方法
JIS C 60068-2-58 表面実装部品(SMD)のはんだ付け性,電極の耐はんだ食われ性及びはんだ耐熱性
試験方法
JIS C 60068-2-59 サインビート振動試験方法
JIS C 60068-2-60 混合ガス流腐食試験
JIS C 60068-2-61 一連耐候性試験
JIS C 60068-2-64 第2-64部:広帯域ランダム振動試験方法及び指針(試験記号:Fh)
JIS C 60068-2-65 第2-65部:音響振動
JIS C 60068-2-66 高温高湿,定常(不飽和加圧水蒸気)
JIS C 60068-2-67 基本的に構成部品を対象とした高温高湿,定常状態の促進試験
JIS C 60068-2-68 砂じん(塵)試験
JIS C 60068-2-69 第2-69部:試験−試験Te:表面実装部品(SMD)のはんだ付け性試験方法(平衡
法)
JIS C 60068-2-70 第2-70部:指及び手の擦れによる印字の摩滅試験
JIS C 60068-2-75 第2-75部:ハンマ試験
JIS C 60068-2-77 表面実装部品(SMD)の本体強度及び耐衝撃性試験方法
JIS C 60068-2-78 第2-78部:高温高湿(定常)試験方法
JIS C 60068-2-80 第2-80部:混合モード振動試験方法(試験記号:Fi)
JIS C 60068-2-81 第2-81部:衝撃応答スペクトル合成による衝撃試験方法
JIS C 60068-2-82 第2-82部:試験−試験XW1:電気・電子部品のウィスカ試験方法
JIS C 60068-3-1 低温試験及び高温試験を理解するための必す(須)情報
JIS C 60068-3-2 第3-2部:温度/減圧複合試験を理解するための必す(須)情報
JIS C 60068-3-3 機器の耐震試験方法の指針
JIS C 60068-3-4 第3-4部:高温高湿試験の指針
JIS C 60068-3-5 第3-5部:温度試験槽の性能確認の指針
JIS C 60068-3-6 第3-6部:支援文書及び指針−温湿度試験槽の性能確認の指針
JIS C 60068-3-7 第3-7部:支援文書及び指針−負荷がある場合の低温試験(試験A)及び高温試験(試
験B)の試験槽の温度測定のための指針
JIS C 60068-3-8 第3-8部:振動試験方法の選択の指針
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 60068-2-64:2011
(IEC 60068-2-64:2008)
環境試験方法−電気・電子−
第2-64部:広帯域ランダム振動試験方法及び指針
(試験記号:Fh)
Environmental testing-Part 2-64: Tests-
Test Fh: Vibration, broadband random and guidance
序文
この規格は,2008年に第2版として発行されたIEC 60068-2-64を基に,技術的内容及び構成を変更する
ことなく作成した日本工業規格である。対応国際規格IEC 60068-2-64は,IEC Guide 104に基づく基本安
全規格(BASIC SAFETY PUBLICATION)と位置付けられている。
なお,この規格で点線の下線を施してある参考事項又は補足事項は,対応国際規格にはない事項である。
この規格は,ランダムな振動を受ける電気製品及び電子製品(以下,供試品という。)に一般的に適用す
ることを目的としたものである。この規格の試験方法及び指針は,デジタル技術を用いた広帯域ランダム
振動(以下,ランダム振動という。)に基づいている。個別の製品規格で規定する場合,個々の製品に適用
するための変更は許容する。
ランダム振動試験は,他のほとんどの試験と比べて,決定論的ではなく,統計的技術に基づいている。
したがって,ランダム振動試験は,確率的用語及び統計的平均を用いて規定する。
ランダム振動試験は,常にある程度の技術的判断を必要とするものであること,及び供給者と購入者と
の双方で,このことを十分に認識する必要がある。製品規格を定める場合は,供試品及びその使用条件に
適合した試験手順及び試験条件を選択することが望ましい。
この試験方法は,コンピュータ制御器を備えた動電式又はサーボ油圧式の振動発生機を用いることを前
提としている。
各環境における試験条件の例を附属書Aに示す。附属書Bには,ランダム振動試験の指針を示す。
1
適用範囲
この規格は,ランダム振動を受ける一般の電気製品及び電子製品(供試品)に適用する。
この規格は,規定する厳しさのランダム振動を供試品に与えた場合,機能的及び/又は構造的に許容で
きない劣化がなく,供試品が動的な負荷に耐える能力を実証するための標準的な試験手順について規定す
る。
ランダム振動は,応力の累積効果,並びにその結果として生じる機械的欠陥及び規定された性能の劣化
を特定するのに使用できる。この情報は,製品規格と関連させて供試品の合否判定に使用してもよい。こ
の規格は,供試品の機械的強度の実証及び/又は動特性の調査にも使用できる。
2
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この規格は,例えば,航空機,宇宙船,地上車両などの場合の輸送又は使用環境で生じるランダム振動
を受ける供試品に適用する。この試験は,主に包装されていない供試品及び輸送容器が供試品の一部とな
る場合の供試品に適用することを意図したものである。包装された製品の場合は,製品と包装材とを合わ
せたものを供試品と呼ぶ。この規格は,供試品の取付方法を規定したJIS C 60068-2-47に関連して,包装
された製品にも適用できる。
供試品が,不規則性及び規則性の振動が混合した振動(例えば,航空機,宇宙船,及び輸送用容器の中
の製品など,輸送又は使用環境で生じる振動)を受ける場合は,純粋なランダム振動による試験では十分
でない場合がある。振動試験の選択指針を規定したJIS C 60068-3-8を参照し,適切な試験方法を選択する
とよい。
この規格は,主として電気製品及び電子製品を対象としたものであるが,これらの製品に制限せず,他
の分野の製品に使用することもできる。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 60068-2-64:2008,Environmental testing−Part 2-64: Tests−Test Fh: Vibration, broadband random
and guidance(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0153 機械振動・衝撃用語
注記 対応国際規格:ISO 2041,Vibration and shock−Vocabulary(MOD)
JIS C 60068-1 環境試験方法−電気・電子−通則
注記 対応国際規格:IEC 60068-1,Environmental testing−Part 1: General and guidance(IDT)
JIS C 60068-2-6 環境試験方法−電気・電子−第2-6部:正弦波振動試験方法(試験記号:Fc)
注記 対応国際規格:IEC 60068-2-6,Environmental testing−Part 2-6: Tests−Test Fc: Vibration
(sinusoidal)(IDT)
JIS C 60068-2-47:2008 環境試験方法−電気・電子−第2-47部:動的試験での供試品の取付方法
注記 対応国際規格:IEC 60068-2-47:2005,Environmental testing−Part 2-47: Tests−Mounting of
specimens for vibration, impact and similar dynamic tests(IDT)
JIS C 60068-3-8:2006 環境試験方法−電気・電子−第3-8部:振動試験方法の選択の指針
注記 対応国際規格:IEC 60068-3-8:2003,Environmental testing−Part 3-8: Supporting documentation
and guidance−Selecting amongst vibration tests(IDT)
JIS C 60721-3(規格群) 環境条件の分類 環境パラメータとその厳しさのグループ別分類
注記 対応国際規格:IEC 60721-3 (all parts),Classification of environmental conditions−Part 3:
Classification of groups of environmental parameters and their severities(IDT)
IEC 60050-300,International Electrotechnical Vocabulary−Electrical and electronic measurements and
measuring instruments−Part 311: General terms relating to measurements−Part 312: General terms
relating to electrical measurements−Part 313: Types of electrical measuring instruments−Part 314:
3
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Specific terms according to the type of instrument
IEC 60068-5-2:1990,Environmental testing. Part 5: Guide to drafting of test methods−Terms and definitions
IEC Guide 104,The preparation of safety publications and the use of basic safety publication and group safety
publications
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
注記 一般的な用語は,JIS B 0153,JIS C 60068-1,JIS C 60068-2-6,IEC 60050-300及びIEC 60068-5-2
に定義されている。次の用語の定義が,これらの出典の定義から派生又は修正されたものであ
る場合は,そのことも示す。
3.1
横運動(cross-axis motion)
加振した方向以外の運動。一般に加振する軸に直交する2軸で規定する。
注記 横運動は,固定点の近傍で計測するのが望ましい。
3.2
実際の運動(actual motion)
基準点の変換器からの応答で,広帯域信号によって表される運動。
注記 この用語は,本文中では使われていないが,対応国際規格で定義されており,この規格でもそ
のままとした。
3.3
固定点(fixing point)
通常,供試品を使用中に固定している点で,取付具又は振動台に接している供試品の部分。
注記1 実際の取付構造物の一部を取付具として使用するときは,固定点は,供試品上の点ではなく,
取付構造物上の点とする。
注記2 包装された製品が供試品の場合は,固定点は,振動台と接する包装材を含む供試品の表面と
解釈する。
3.4
制御方法
3.4.1
1点制御(single point control)
基準点の変換器からの信号を用いて,この点を規定の振動レベルに保つ制御方法。
3.4.2
多点制御(multipoint control)
監視点の各変換器からの信号を用いる制御方法。
注記 これらの信号は,製品規格の規定に従って,連続的に算術平均するか又は比較方法を用いて処
理する(3.13参照)。
3.5
gn
地球の重力による標準加速度。地球上の加速度は,高度及び緯度によって変化する。
注記 この規格では,gnの値を10 m/s2に丸める。
4
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.6
計測点(measuring points)
試験を実施するときにデータを収集する特定の点。
注記 計測点には,次に定義する監視点,基準点及び架空の基準点の3種類がある。
3.7
監視点(check point)
取付具,振動台又は供試品上の点で,固定点の一つに可能な限り近く,取付具,振動台又は供試品と強
固に結合している点。
注記1 試験要求事項を満たすために,複数の監視点を使用する場合がある。
注記2 固定点が4点以下の場合は,それぞれの点の近傍を監視点として使用するのがよい。振動台
と接する包装材の表面を固定点と解釈するような包装された製品の場合は,1点の監視点を
使用するのがよい。ただし,試験振動数範囲において,振動台又は取付構造物の共振の影響
がない場合に限る。共振の影響がある場合は,多点制御が必要となる場合がある。固定点が
4点を超える場合は,製品規格で代表的な固定点4点を監視点として規定するのがよい。
注記3 供試品が大きいか又は複雑なため,固定点に近接した点を監視点とすることができないよう
な特別の場合は,製品規格で監視点を規定するのがよい。
注記4 多数の小形の供試品を1個の取付具に取り付ける場合,又は幾つかの固定点がある小形の供
試品の場合は,制御信号を取り出すために監視点を1点としてもよい(すなわち,基準点と
なる。)。したがって,この信号は,供試品の固定点よりも,むしろ取付具に関係しているこ
とになる。この方法は,供試品を取り付けた状態の取付具の最低共振振動数が,試験上限振
動数よりも十分高いときに限り使用できる。
3.8
基準点(reference point)
この規格の要求事項を満たすように試験の制御に使用する点で,監視点から選んだ点。
3.9
架空の基準点(fictitious reference point)
この規格の要求事項を満たすように試験の制御に使用する点で,複数の監視点から手動又は自動で導き
出した架空の点。
3.10
応答点(response points)
供試品の振動応答検査の目的のためにデータを収集する供試品上の特定の点。
注記 これらの点は,監視点又は基準点と同一ではない。
3.11
推奨試験軸(preferred testing axes)
供試品の最も弱い軸を含む直交する3軸。
3.12
サンプリング周波数(sampling frequency)
時刻歴をデジタル形式で記録又は表現するための,離散的な値の1秒間当たりの数。
注記 この用語は,本文中では使われていないが,対応国際規格で定義されており,この規格でもそ
のままとした。
5
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.13
多点制御方法(multipoint control strategies)
多点制御を使用する場合に,基準となる制御信号を計算する方法。
注記 多点制御方法には,次に定義する平均値制御及び極値制御の2種類があり,これらの違いは4.7.1
を参照。
3.14
平均値制御(averaging)
2点以上の監視点の加速度スペクトル密度の振動数ラインごとの算術平均から制御加速度スペクトル密
度を作る制御方法。
3.15
極値制御(extremal)
2点以上の監視点の加速度スペクトル密度の振動数ラインごとの最大値又は最小値から制御加速度スペ
クトル密度を作る制御方法。
3.16
波高率(crest factor)
時刻暦波形の,rms値に対するピーク値の比(JIS B 0153参照)。
3.17
−3 dB帯域幅(−3 dB bandwidth)
単一の共振ピークがあるとき,最大応答の0.707倍となる振動数応答関数上の2点の間の振動数の幅。
3.18
加速度スペクトル密度,ASD(acceleration spectral density)
ある中心振動数の狭帯域フィルタを通過した加速度信号のその部分の2乗平均値で,単位帯域幅当たり
で表し,帯域幅をゼロに近付け,かつ,平均化時間を無限大に近付けたときの極限値。
3.19
制御加速度スペクトル密度(control acceleration spectral density)
基準点又は架空の基準点で測定した加速度スペクトル密度。
3.20
制御システムループ(control system loop)
次に示す一連の動作。
− 基準点又は架空の基準点から取り出したアナログ波形信号のデジタル化。
− 必要な信号処理の実施。
− 振動試験装置の電力増幅器に対して,更新されたアナログ信号を出力(B.1参照)。
注記 この用語は,本文中では使われていないが,対応国際規格で定義されており,この規格でもそ
のままとした。
3.21
駆動信号クリッピング(drive signal clipping)
波高率による,駆動信号の最大値の制限。
3.22
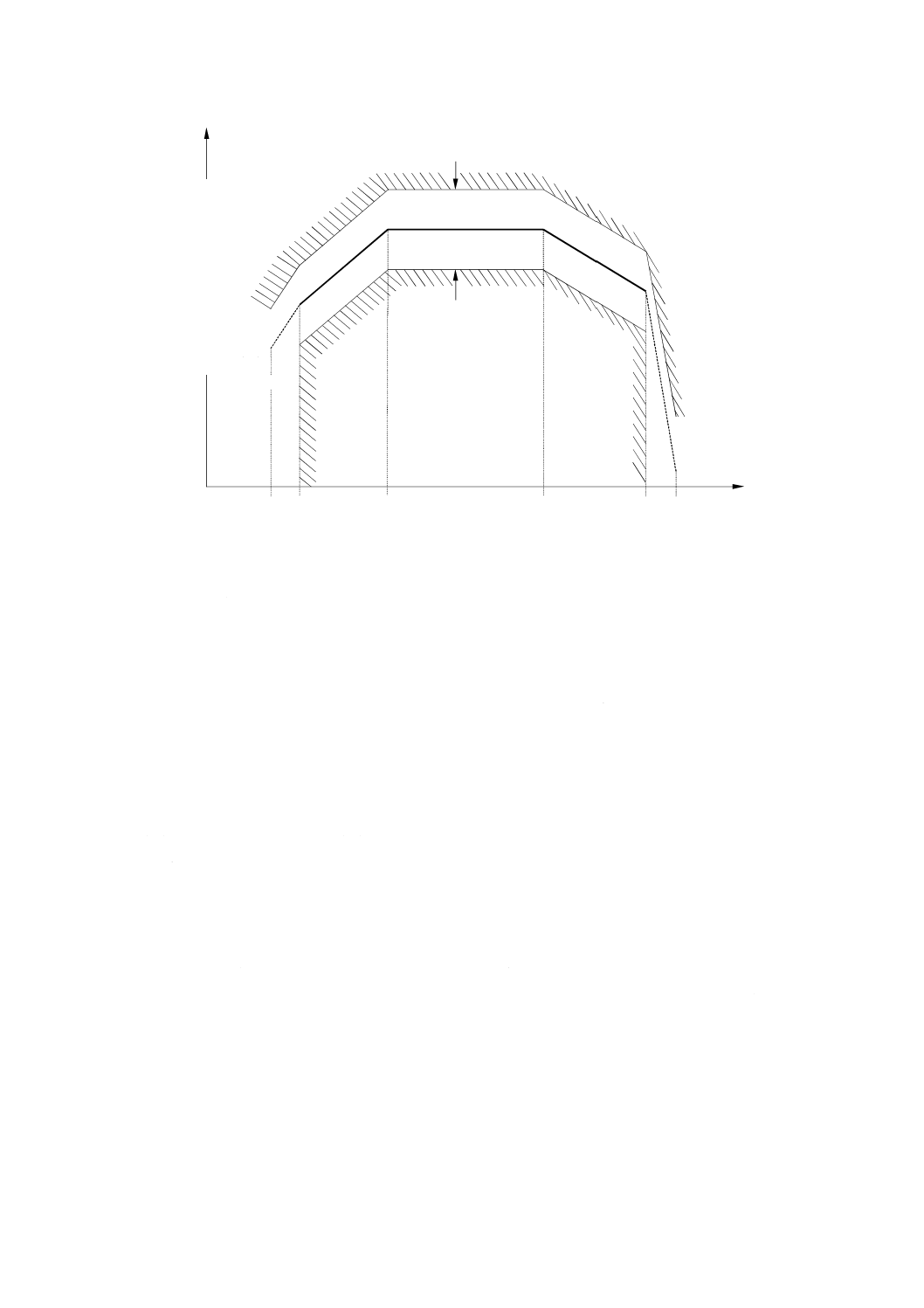
有効振動数範囲(effective frequency range)
試験振動数範囲内の最低振動数(f1)の0.5倍から最大振動数(f2)の2倍までの振動数範囲(図1参照)。
6
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 初期傾斜及び最終傾斜によって,有効振動数範囲は試験振動数範囲(f1〜f2)よりも広くなる。
3.23
加速度スペクトル密度誤差(error acceleration spectral density)
規定の加速度スペクトル密度と制御加速度スペクトル密度との差。
3.24
等化(equalization)
加速度スペクトル密度誤差を最小にすること。
3.25
最終傾斜(final slope)
規定の加速度スペクトル密度のf2以上の部分(図1参照)。
3.26
振動数分解能Be(frequency resolution)
加速度スペクトル密度の振動数間隔をヘルツ(Hz)で表した幅。
注記 これは,デジタル解析での時刻歴レコード長(T)の逆数に等しい。振動数ラインの本数は,
与えられた振動数範囲内の振動数間隔の数に等しい。
3.27
表示加速度スペクトル密度(indicated acceleration spectral density)
解析器が表示する値から読み取った真の加速度スペクトル密度の推定値。これには,計器誤差,偶然誤
差及び偏り誤差を含む。
3.28
初期傾斜(initial slope)
規定の加速度スペクトル密度のf1以下の部分(図1参照)。
3.29
計器誤差(instrument error)
制御システムヘ入力する各アナログ回路及び制御システムのアナログ回路によって発生する誤差。
3.30
偶然誤差(random error)
加速度スペクトル密度の推定値間のばらつきによる誤差。この誤差は,平均化時間及びフィルタの実際
の帯域幅に影響される。
3.31
レコード(record)
高速フーリエ変換に用いる,時間領域で等間隔に採取したデータの集合。
3.32
再現性(reproducibility)
個々の測定を次の条件で行った場合の,同じ試験条件の同じ値の測定結果間の一致の度合い(IEC
60050-300修正)。
− 異なる方法
− 異なる測定器
− 異なる測定者
− 異なる試験所
7
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 1回の測定時間に比べ,十分長い時間が経過した後の測定
− 使用する測定器の使用条件の違い
注記 用語“再現性”は,前記の条件の一つだけを考慮する場合にも使う。
3.33
rms値(root-mean-square value)
f1とf2との間の区間全体にわたる関数の二乗平均の平方根。
3.34
標準偏差,σ(standard deviation)
偏差の二乗平均の平方根。振動理論では,振動の平均値はゼロである。ランダム振動の時刻歴の場合,
標準偏差はrms値に等しい。
3.35
統計的確度(statistical accuracy)
表示加速度スペクトル密度に対する真の加速度スペクトル密度の比。
3.36
統計的自由度(statistical degrees of freedom)
ある量を推定するときの独立変数の数(JIS B 0153参照)。
時間平均によってランダムデータの加速度スペクトル密度を推定する場合,統計的自由度は,振動数分
解能及び有効平均化時間から求める。
3.37
試験振動数範囲(test frequency range)
製品規格に規定した加速度スペクトル密度のf1〜f2の振動数範囲(図1参照)。
3.38
真の加速度スペクトル密度(true acceleration spectral density)
供試品に作用するランダム波の加速度スペクトル密度。
4
試験要求事項
4.1
概要
この要求事項は,試験に用いる電力増幅器,振動発生機,試験用取付具,供試品及び制御システムが完
備している振動系に適用する。
標準的な試験方法は,次の試験手順で構成し,供試品の互いに直交する軸のそれぞれについて適用する。
a) 低レベルの正弦波加振又はランダム波加振を用いた,初期振動応答検査(8.2参照)。
b) 負荷試験又は耐久試験としてのランダム波加振。
c) 初期振動応答検査の結果との比較,及び動的挙動の変化による潜在的な機械的故障を検出するための
最終振動応答検査(8.2及び8.5参照)。
ただし,供試品の動的挙動が分かっている,重要な意味をもたない,又は規定レベルでの試験時にそれ
らの応答が測定できる場合には,製品規格で応答検査に関する要求事項を省略してもよい。
4.2
基本運動
供試品の固定点における基本運動を,製品規格に規定する。供試品の固定点は,加振方向に対して直線
的で,位相及び振幅共に同一の運動をしなければならない。複数の固定点を実質的に同一の運動とするこ
とが困難であれば,多点制御を使う。
8
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 大きな構造物又は広い振動数範囲(例えば,20 Hz〜2 000 Hz)で試験する場合に,多点制御が
必要になる場合がある。
4.3
横運動
製品規格で規定している場合,横運動を観測する。横運動は,試験前に製品規格で規定するレベルの正
弦波振動若しくはランダム波振動で調査する,又は直交する2軸にモニタチャンネルを追加して試験中に
監視する。
規定の軸に直交する2軸の監視点では,500 Hzを超える各振動数の加速度スペクトル密度が基本運動の
規定値を超えてはならない。また500 Hz以下では規定値の−3 dB以下とする。規定の軸に直交する各軸
のrms値は,規定した軸に対するrms値の50 %以下とする。例えば,小形の供試品のような場合,製品規
格で,横運動の許容値を,基本運動の−3 dB以下に制限してもよい。
大形の若しくは質量の大きな供試品又は特定の振動数において,これらの値を実現することが困難な場
合がある。また,製品規格に,広いダイナミックレンジをもつ厳しさを要求する場合にも,同じように困
難な場合がある。そのような場合,次の要求事項のいずれかを製品規格に規定する。
a) 上記の値を超える横運動は,全て試験報告書に記載する。
b) 供試品に危害がないことが分かっている横運動なので観測をしない。
4.4
取付け
供試品は,JIS C 60068-2-47に従って取り付ける。ただし,通常,防振装置とともに使用する供試品を,
防振装置のない状態で試験する場合は,そのことを考慮して,加振レベルを修正することが望ましい。こ
の場合,JIS C 60068-2-6の図A.1(防振装置の一般化した伝達率)から該当する伝達率曲線を選択して,
規定の加速度スペクトル密度に,この曲線から得た値の二乗値を乗じて修正を行う。
4.5
測定系
測定系は,基準点の試験軸方向で測定した振動レベルが,試験で要求する許容差内であることを判断で
きる特性とする。
センサ,シグナルコンディショナ及びデータ収集・処理装置を含む計測系全体の振動数応答は,測定の
精度に重大な影響を与える。測定系の振動数範囲は,有効振動数範囲より広くする(図1参照)。測定系
の振動数応答は,この振動数範囲において,±5 %以内で平たん(坦)とする。測定系の特性がこの範囲
を逸脱する場合,試験報告書にそのことを記載する。
9
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
0.5f1
+3 dB
加
速
度
ス
ペ
ク
ト
ル
密
度
d
B
振動数 Hz(対数目盛)
−3 dB
初期傾斜
+6 dB/oct
以上
最終傾斜
−24 dB/oct
以下
f1
fa
fb
f2
2f2
図1−加速度スペクトル密度の許容差範囲
4.6
振動の許容差
4.6.1
加速度スペクトル密度及びrms値
基準点の規定の軸方向での,図1に示すf1とf2との間の表示加速度スペクトル密度は,計器誤差及び偶
然誤差を含んで規定値の加速度スペクトル密度の±3 dB以内とする。f1とf2との間で測定又は計算した加
速度rms値は,規定の加速度スペクトル密度に基づくrms値の±10 %以内とする。これらの値は,基準点
及び架空の基準点の両方に適用する。
ある振動数において,これらの値を実現することが困難な場合がある。また,大形の供試品又は質量の
大きな供試品の場合にも,これらの値を実現することが困難なことがある。このようなとき,製品規格に,
より広い許容差を規定する。
初期傾斜は+6 dB/oct以上,最終傾斜は−24 dB/oct以下とする(B.2.3参照)。
4.6.2
分布
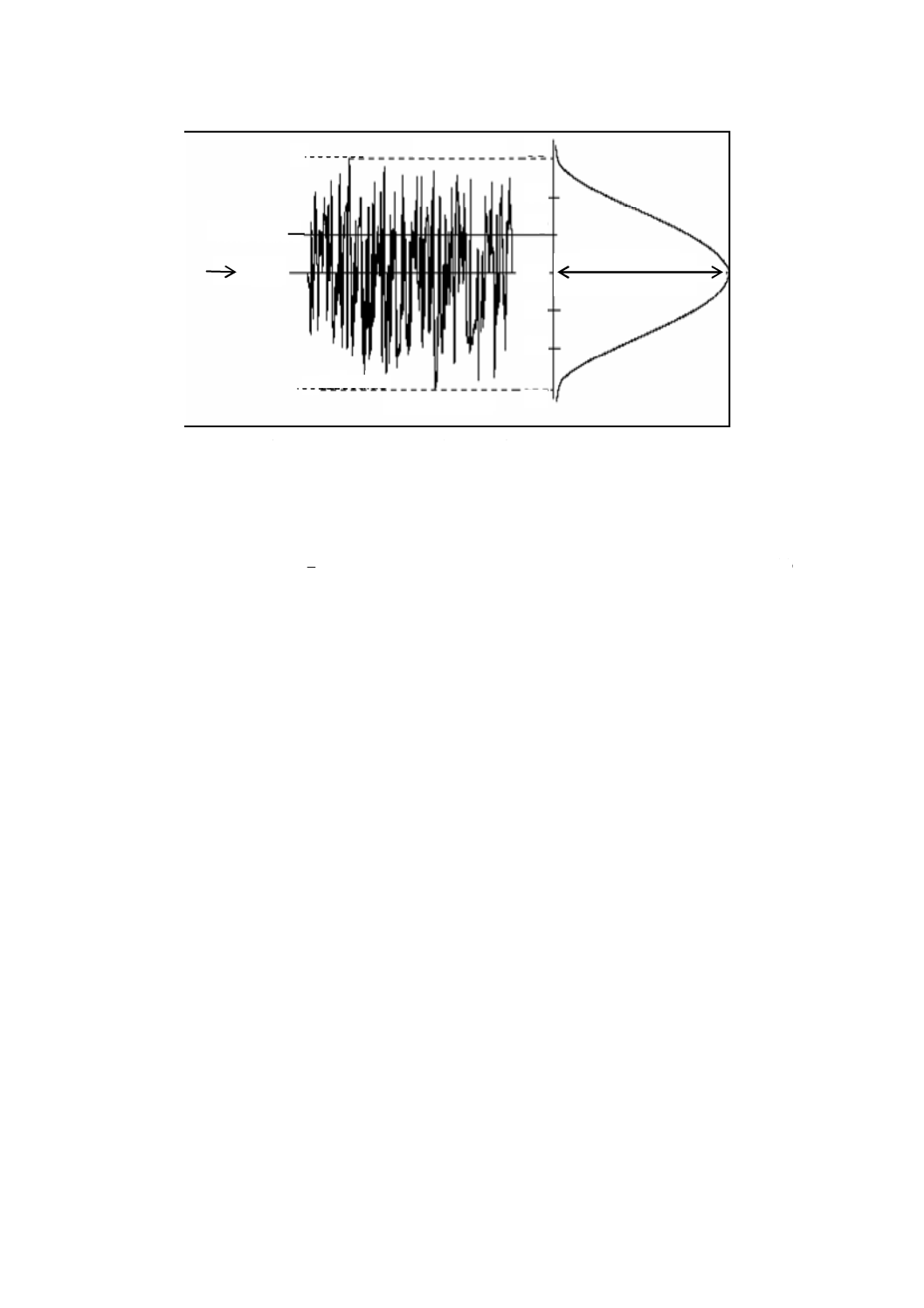
基準点の加速度瞬時値は,図2に示すように,ほぼ正規(ガウス)分布でなければならない。このこと
は,通常の装置校正の場合に確認する(B.2.2参照)。
駆動信号クリッピングは,2.5以上とする。製品規格に特に規定がない限り,基準点における加速度波形
の波高率を調べて,信号が規定のrms値の3倍以上の値を含むことを確認する。
架空の基準点を制御に使用する場合,波高率の要求事項は,制御加速度スペクトル密度の計算に用いる
全ての監視点に適用する。
確率密度関数は,試験中の2分間,基準点について計算する。許容できる正規分布からの逸脱を,製品
規格に規定する。
10
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
加速度瞬時値
rms値
3σ
2σ
σ
σ
2σ
3σ
確率
時間
0
加速度瞬時値
図2−ランダム振動の時刻歴波形及び正規(ガウス)分布(波高率=3の場合)
4.6.3
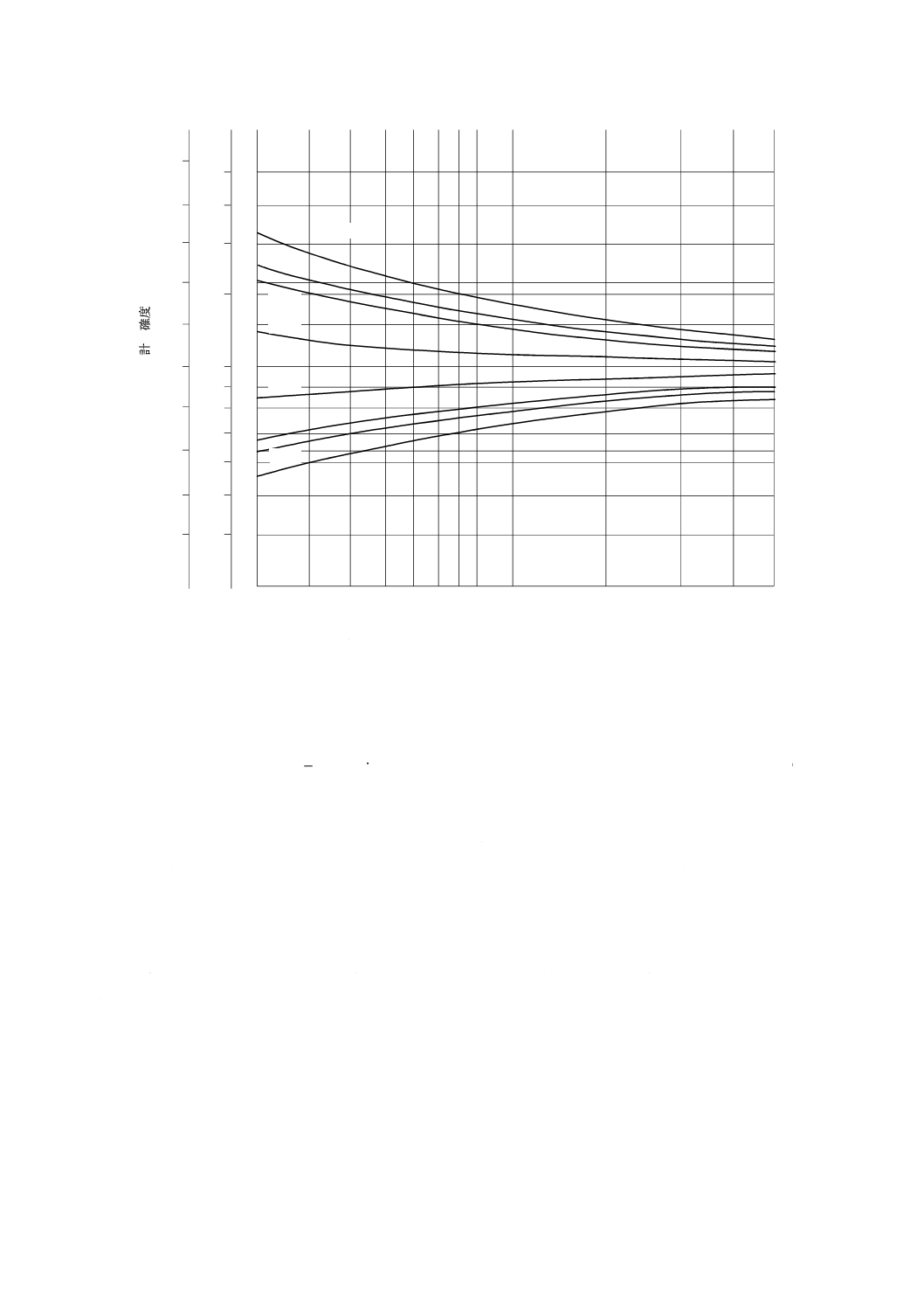
統計的確度
統計的確度は,統計的自由度及び信頼水準から求める(図3参照)。統計的自由度は,式(1)によって求
める。
a
e
d
2
T
B
N
×
=
············································································ (1)
ここに,
Nd: 統計的自由度
Be: 振動数分解能
Ta: 有効平均化時間
統計的自由度は,製品規格に特に規定がない限り,120以上とする。製品規格が信頼水準を規定する場
合には,図3を使用して統計的確度を計算するとよい。
11
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5
4
3
2
1
0
‒1
‒2
‒3
‒4
dB
%
300
250
200
150
100
90
80
70
60
50
40
99 %
95 %
90 %
50 %
50 %
90 %
95 %
99 %
信頼水準
30
40
50
60 70 80 90 100 120
200
300
400
500
統計的自由度
統計
的確度
図3−種々の信頼水準及び統計的自由度に対する加速度スペクトル密度の統計的確度
4.6.4
振動数分解能
真の加速度スペクトル密度と表示加速度スペクトル密度との差を最小にするために,必要な振動数分解
能は,式(2)によって求める。
n
f
B
/
high
e=
·············································································· (2)
ここに,
Be: 振動数分解能(Hz)
fhigh: デジタル振動制御器が分析する最大の振動数(Hz)
n: 試験振動数範囲を超えてfhighまで均等に分散している振動数
ラインの本数
fhighは,最大振動数の2倍以上,すなわち,fhigh≧2f2であることが望ましい(図1参照)。
振動数ラインの本数nは,200以上とする。振動数分解能は,製品規格によって規定し,試験報告書に
も記載する[箇条11 j)参照]。
振動数分解能は,f1及び0.5f1の振動数を含むように規定する。また,初期傾斜の中で2本の振動数ライ
ンが存在するように規定する。その結果,異なる二つの振動数分解能を得た場合,小さい方の振動数分解
能を選択する。
注記 振動数分解能を小さくすると,スペクトルを細かく定義できるが,長い制御ループタイムを必
要とする。振動数分解能を規定する場合は,これらのバランスの検討が必要となる。
4.7
制御方法
4.7.1
1点制御及び多点制御
製品規格には,1点制御又は多点制御のどちらを使用するかを規定する。多点制御を使用する場合,監
視点の信号の平均値を規定値に制御するのか,又は選択した点(例 最大振幅をもつ点)の信号の値を規
12
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
定値に制御するのかを,製品規格に規定する。さらに,多点制御の場合は,制御する加速度スペクトル密
度に大きな影響を与えた入力信号の有無を,試験報告書に追加するのが望ましい。
注記 1点制御が実施できない場合は,監視点における信号の平均値又は極値を用いた多点制御を使
用するのがよい。多点制御の場合の基準点は架空の基準点である。使用した制御方法は,試験
報告書に記載するのがよい。
多点制御では,次の方法を利用することができる。
4.7.1.1
平均値制御
この方法では,制御信号を各監視点からの信号によって計算する。監視点からの信号値を,振動数ごと
に算術平均をとり,制御加速度スペクトル密度とする。この算術平均をとった制御加速度スペクトル密度
が規定の値となるように制御する。
4.7.1.2
重み付き平均値制御
各振動数の制御加速度スペクトル密度は,複数の監視点からの加速度スペクトル密度に重みを付け,式
(3)によって求める。
(
)
(
)
n
n
n
w
w
w
a
w
a
w
a
w
a
+
+
+
×
+
+
×
+
×
=
Λ
Λ
2
1
2
2
1
1
c
················································ (3)
ここに,
ac: 各振動数の制御加速度スペクトル密度
an: 各監視点の加速度スペクトル密度
wn: 各監視点の重み付け
n: 監視点の数
重み付き平均値制御では,各振動数の制御信号に対する,監視点ごとの影響度合いを変えることができ
る。
4.7.1.3
極値制御
極値制御では,制御加速度スペクトル密度を,各監視点で測定した各振動数ラインの信号値の最大値又
は最小値から求める。各振動数の制御加速度スペクトル密度は,各監視点からの信号値を包絡する関数,
又は信号値の下限値の関数として求める。
4.7.2
複数基準制御
製品規格で規定する場合は,異なる監視点又は測定点ごとに,複数の基準スペクトルを規定できる。さ
らに,力による制限を加えた振動試験のような,異なる制御量について複数基準スペクトルを定義しても
よい。
複数基準制御を指定する場合,次のどちらかによって制御方法を規定する。
− 制限法:全ての制御信号を該当する基準スペクトルより小さくする。
− 優先法:全ての制御信号を該当する基準スペクトルより大きくする。
4.8
振動応答検査
振動応答検査は,振動試験結果の評価をするのに有効な方法である。振動応答検査の目的,効果及び方
法については,JIS C 60068-3-8を参照するとよい。振動応答検査に正弦波振動を使用する場合の要求事項
は,JIS C 60068-2-6に,ランダム振動を使用する場合の要求事項は,この規格による。
非線形な応答をもつ供試品を正弦波振動で検査する場合,固有振動数が掃引方向によって変化するので
注意する。ランダム振動の場合は,非線形性の影響が固有振動数の挙動として現れる。正弦波振動及びラ
ンダム振動いずれの場合も,共振振動数での増幅度合いは,入力する振動の大きさ及びQ値に依存する。
内容物が不明な供試品を振動応答検査する場合は,駆動力,速度など,異なる信号を計測するのがよい。
13
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
製品規格に規定がある場合は,例えば,供試品の機械的インピーダンスを試験の前後に計算で求めておく。
注記 機械的インピーダンス及びその他の用語は,JIS B 0153による。
5
厳しさ
5.0A 概要
試験の厳しさは,次の全てのパラメータの組合せによって規定する。
− 試験振動数範囲
− 加速度rms値
− 加速度スペクトル密度曲線の形
− 試験時間
各パラメータは,次の方法のいずれかによって,製品規格に規定する。
a) 5.1〜5.4に示す値から選択
b) 幾つかの環境条件例を記載した附属書Aから選択
c) それらが既知の環境と著しく異なる場合は,既知の環境を適用
d) 他の既知の情報源のデータ(例えば,JIS C 60721-3規格群)を適用
5.1
試験振動数範囲
5.0Aでa)を選択した場合,下限振動数f1及び上限振動数f2は次の値から選ぶのが望ましい(単位はHz)。
a) f1:1,2,5,10,20,50,100
b) f2:20,50,100,200,500,1 000,2 000,5 000
f1及びf2並びに加速度スペクトル密度の関係の例を,附属書Aに示す。
5.2
加速度rms値
5.0Aでa)を選択した場合,f1からf2までの加速度rms値(図1の規定値)は,次の値から選ぶのが望ま
しい(単位はm/s2)。
1,1.4,2,2.8,3.5,5,7,10,14,20,28,35,50,70,100,140,200,280
注記 この規格の目的上,10 m/s2はgnに相当すると考えてよい。
5.3
加速度スペクトル密度曲線の形
この試験では,平たん(坦)で水平な直線部及びその前後に傾斜をもった加速度スペクトル密度曲線を
規定する(図A.1〜図A.4参照)。試験の標準化のため,供試品の動的環境に応じた加速度スペクトル密度
曲線の形を規定する。規定する加速度スペクトル密度の値は,rms値,折れ点振動数及びスペクトルの形
から,制御システムによって計算する。特別な場合,個別の加速度スペクトル密度曲線を規定してもよい。
この場合,製品規格に振動数の関数としてその形状を規定する。レベル及びそれに対応する振動数範囲,
すなわち折れ点(break point)振動数は,可能ならば5.1及び5.2並びに図A.1〜図A.4のスペクトル値か
ら選択する。
5.4
試験時間
試験時間を製品規格に規定する。試験時間は,次の値から選択してもよい。
− 1,2,5,10,20,30,45,60 (分)
− 2,5,8,12,24 (時間)
許容差は,0〜+5 %とする。
14
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6
前処理
製品規格に前処理の要求がある場合は,前処理の条件を規定する。
7
初期測定
製品規格の規定に従って,供試品の目視,寸法,機能検査及びその他の検査を実施する(B.7参照)。
8
試験
8.1
概要
試験は,製品規格で規定する順序に従って実施する。試験手順は,次による。
− 初期振動応答検査(規定している場合)
− 等化のための低レベル予備加振(規定したレベルに到達するまで繰り返し行う。)
− ランダム振動試験
− 最終振動応答検査(規定している場合)
製品規格に特別の規定がない限り,供試品を各推奨試験軸で順次加振する。加振する軸の順序は,製品
規格に特別の規定がなければ,重要ではない。供試品が重力方向に敏感な場合,例えば,水銀を用いた傾
斜スイッチなど,通常の使用方向だけに限る場合があり,製品規格によって試験軸を規定する。
基準点の制御加速度スペクトル密度は,1点制御の場合には一つの監視点から,多点制御の場合には複
数の監視点から求める。
多点制御の場合,次のどの制御方式によって監視点の信号を制御に用いるかを製品規格に規定する。
− 各監視点の加速度スペクトル密度の平均値を用いる方式(平均値制御)
− 各監視点の加速度スペクトル密度に重みを付けた平均値を用いる方式(重み付け平均値制御)
− 全ての監視点からの信号のうち,各振動数における極値(最大値又は最小値)を用いる方式(極値制
御)
いずれの方式でも,多点制御の制御スペクトルは,実在の監視点からではなく,架空の監視点から求め
ることになる。
通常,防振装置を使うことになっている供試品を,防振装置を付けないで試験する必要がある場合,特
別の処置が必要となる(JIS C 60068-2-47参照)。
8.2
振動応答検査
製品規格に規定がない場合は,振動応答検査は必要ではない。しかし,製品規格にランダム振動試験の
前又は前後に,各方向の振動応答検査を規定してもよい(4.8参照)。
製品規格で規定する場合,規定した振動数範囲内で供試品の1点以上における動的応答を検査する。応
答点の数及び位置は,製品規格に規定する。振動応答検査は,試験振動数範囲内及び製品規格で規定する
試験レベルで,正弦波振動又はランダム振動を用いて実施する。正弦波振動についてはJIS C 60068-2-6に,
ランダム振動についてはこの規格による。各振動の長所,短所及び詳細については,JIS C 60068-3-8によ
る。
振動応答検査の試験レベルは,ランダム試験中に比べて供試品の応答が小さく,かつ,臨界振動数を検
出できるだけの十分な大きさのレベルを選択して,応答検査を実施する。
正弦波加振を使う場合,製品規格に規定した全振動数範囲を加速度振幅10 m/s2又は変位振幅±1 mmの
どちらか小さい方の振幅で最低1往復掃引する。振動応答検査の試験レベルは,ランダム試験中よりも高
い応力が供試品にかかることを防ぐために,規定されたランダム振動試験の加速度rms値を考慮して決定
15
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
する。固有振動数及び共振の応答を正確に確定するために,掃引速度は1 oct/min以下とする。共振で建屋
等の構造物まで励振される心配がある場合は,共振振動数の目安及び相対的な振幅を調べるために,対象
となる振動数範囲の掃引速度を速くしてもよい。より正しい結果を得るために,既知の共振振動数周辺で
掃引を往復する,又は掃引速度を遅くするような検査を規定してもよいが,最小限の時間に制限し,過度
のストレスを与えないように注意する。
ランダム振動による振動応答検査は,応答の確率的変動を小さくするために,必要な時間を確保して実
施する。検査する振動数範囲は,ランダム試験の試験振動数範囲f1〜f2とする。応答ピークを正確に測定
できるように最も狭い−3 dB帯域幅に5本以上の振動数ラインが含まれていなければならない。
ランダム振動による応答検査を行う場合,加速度rms値は,試験時の規定値の25 %以下が望ましい。加
振時間はできるだけ短く,かつ,統計的自由度Nd=120の解析が可能なだけ十分に長くする(図3参照)。
規定されたランダム振動試験中に,共振の応答を周期的に検査し,記録するのであれば,特別な振動応答
検査は必要ではない。
製品規格で規定する場合,供試品は,この検査中動作させる。供試品が動作しているために機械的振動
特性を評価できない場合は,供試品を動作させない状態での初期振動応答検査を別に実施する。供試品の
臨界振動数は,供試品を調査して決定し試験報告書に記載する。
8.3
等化のための低レベル予備加振
規定レベルのランダム振動試験の前に,実際の供試品を用いた低レベルの予備ランダム加振が,信号を
等化し予備解析をするために必要なことがある。この加振では,加速度スペクトル密度のレベルを最小に
することが必要である。
予備ランダム加振の許容時間を,次のように規定する。
− 規定の加速度rms値の−12 dB以下:時間制限なし
− 規定の加速度rms値の−12 dBから−6 dBまで:規定試験時間の1.5倍以下
− 規定の加速度rms値の−6 dBから0 dBまで:規定試験時間の10 %以下
予備ランダム加振の時間は,規定のランダム振動試験時間には含めない。
8.4
ランダム振動試験
8.4.1
概要
製品規格では,適切な試験振動数範囲(f1〜f2),加速度rms値,加速度スペクトル密度曲線の形状及び
試験時間を選択する。製品規格に規定がある場合,ランダム入力波形が安定していることを検証するため
に,監視点の加速度スペクトル密度及び加速度rms値を適切な間隔で繰り返し測定し,試験報告書にこれ
を記載する。
8.4.2
中間測定
製品規格に規定がある場合,供試品を試験中に規定の時間間隔で動作させ,供試品の機能及び性能を調
べる(B.6参照)。
8.5
最終振動応答検査
製品規格に初期振動応答検査の規定がある場合,初期振動応答検査以後に変化又は故障の発生があった
かどうかを判定するため,ランダム振動試験完了時に最終の振動応答検査を実施することを,製品規格に
規定してもよい。最終振動応答検査は,初期振動応答検査で使用したのと同じ応答点,同じパラメータ及
び同じ方法で実施する。臨界振動数の変化など,振動応答の変化を合否判定に使用するための指針が,JIS
C 60068-3-8に規定されている。製品規格には,初期及び最終の振動応答検査の結果が異なっている場合に
とる処置を規定する。
16
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
9
後処理
供試品を初期測定時と同じ条件(例えば,温度)にするために,試験後及び最終測定の前に一定の時間
が必要なことがある。製品規格に,後処理に必要な条件を規定する。
10 最終測定
製品規格の規定に従って,供試品の目視,寸法,機能検査及びその他必要な検査を実施する。製品規格
に,供試品の合否の判定基準を規定する。
振動応答検査結果の評価には,JIS C 60068-3-8を参照する。
11 製品規格に規定する事項
この試験を製品規格に規定する場合,適用可能な限り次の事項を規定することとし,特にアスタリスク
(*)付きの事項は,必須となる。
a) 制御点*
3.4
b) 計測点*
3.6
c) 基本運動*
4.2
d) 固定点*
4.2
e) 横運動
4.3
f)
供試品の取付け*
4.4
g) 大形又は質量の大きな供試品の場合の許容差
4.6
h) 波高率*,分布及び/又は駆動信号クリッピング
4.6.2
i)
統計的確度
4.6.3
j)
振動数分解能*
4.6.4
k) 制御方法
4.7
l)
試験振動数範囲*
5.1
m) 加速度rms値*
5.2
n) 加速度スペクトル密度の形*
5.3
o) 試験時間*
5.4
p) 前処理
箇条6
q) 初期測定*
箇条7
r) 試験軸及び試験順序*
8.1
s)
臨界振動数
8.2
t)
初期及び最終振動応答検査
8.2及び8.5
u) 中間測定
8.4.2
v) 後処理
箇条9
w) 最終測定及び合否判定基準*
箇条10
x) 測定系の不確かさ
B.1
y) 性能及び機能検査
箇条10
12 試験報告書に記載する情報
試験報告書には,少なくとも,次の事項を記載する。
17
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 顧客
(名称及び所在地)
b) 試験所
(名称及び所在地)
c) 試験報告書の識別
(発行日及び識別番号)
d) 試験日
e) 試験の目的
(開発試験,認定試験など)
f)
試験規格及び発行年(又は版)
(関連試験手順)
g) 供試品の記述
(初期状態,識別番号,数量,図面,写真など)
h) 供試品の取付け
(取付具の識別,図面,写真など)
i)
試験装置の性能
(横運動など)
j)
測定系及びセンサの位置
(概要,図面,写真など)
k) 測定系の不確かさ(製品規格で要求された場合)
(不確かさ,校正データ,校正日並びに前回及び次回の校正日)
l)
制御方法
(1点制御,多点制御又は複数基準制御)
m) 初期測定,中間測定及び/又は最終測定
n) 要求する厳しさ
(試験仕様)
o) 実施した試験の厳しさ(製品規格で要求された項目)
(測定点,試験スペクトル,試験時間,振動数分解能,統計的確
度,分布など)
p) 試験結果
(供試品の最終状態)
q) 試験中の観察事項及び行った処置
r) 試験の要約
s)
試験管理者
(氏名及び署名)
t)
配付先
(報告書の受領者リスト)
注記1 試験を文書に記録する場合(例えば,試験パラメータを併記した時系列の試験実施リスト,
試験中の観察事項及び実施処置並びに測定データシート)は,試験について試験実施記録を
作成するのがよい。この試験実施記録を,試験報告書に添付してもよい。
注記2 JIS Q 17025を参照。
18
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
標準的な環境条件における試験スペクトル
ここでは,標準的な環境条件における試験のパラメータの例を示す。詳細な仕様に関しては,表中に示
す関連規格を参照するとよい。
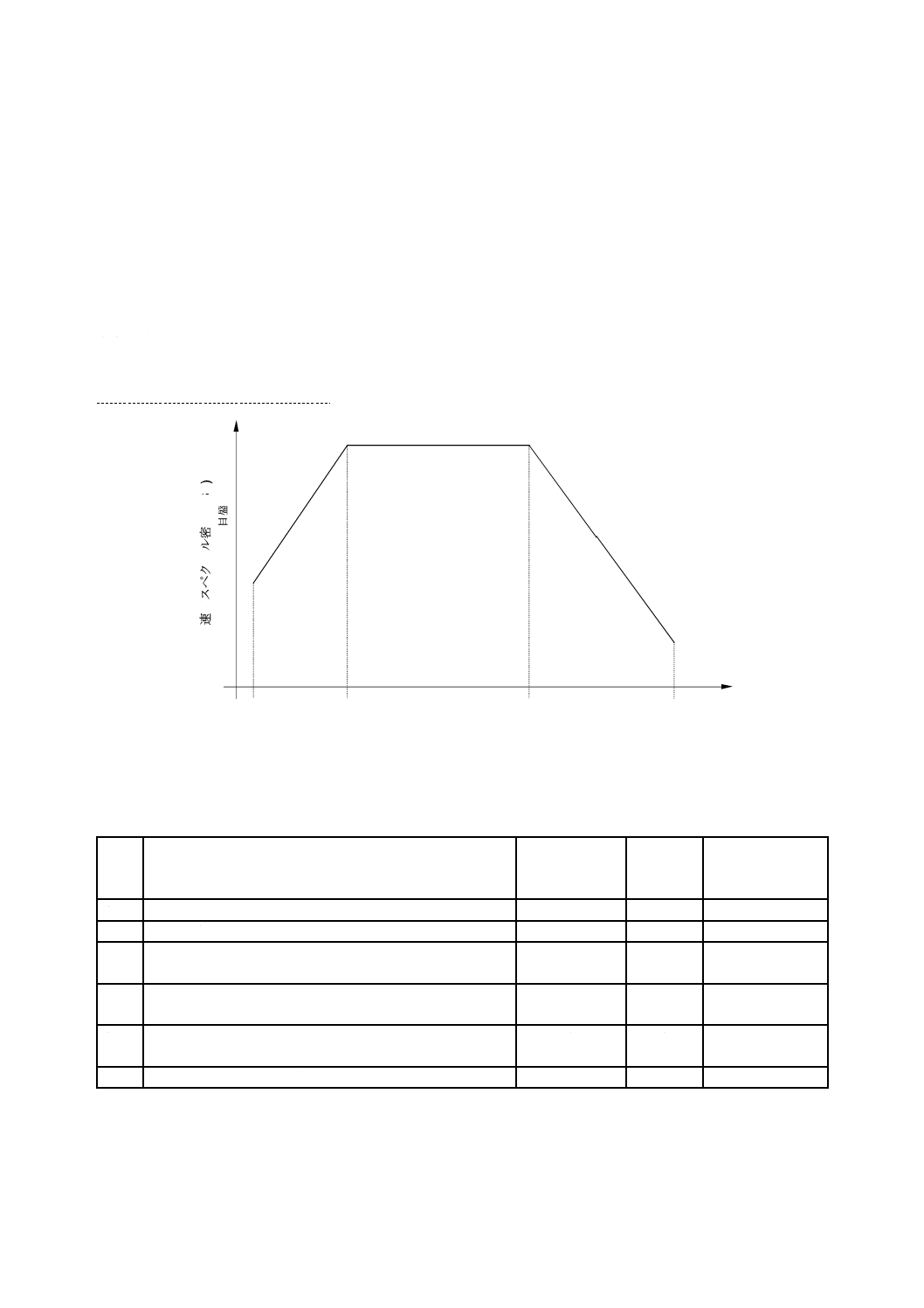
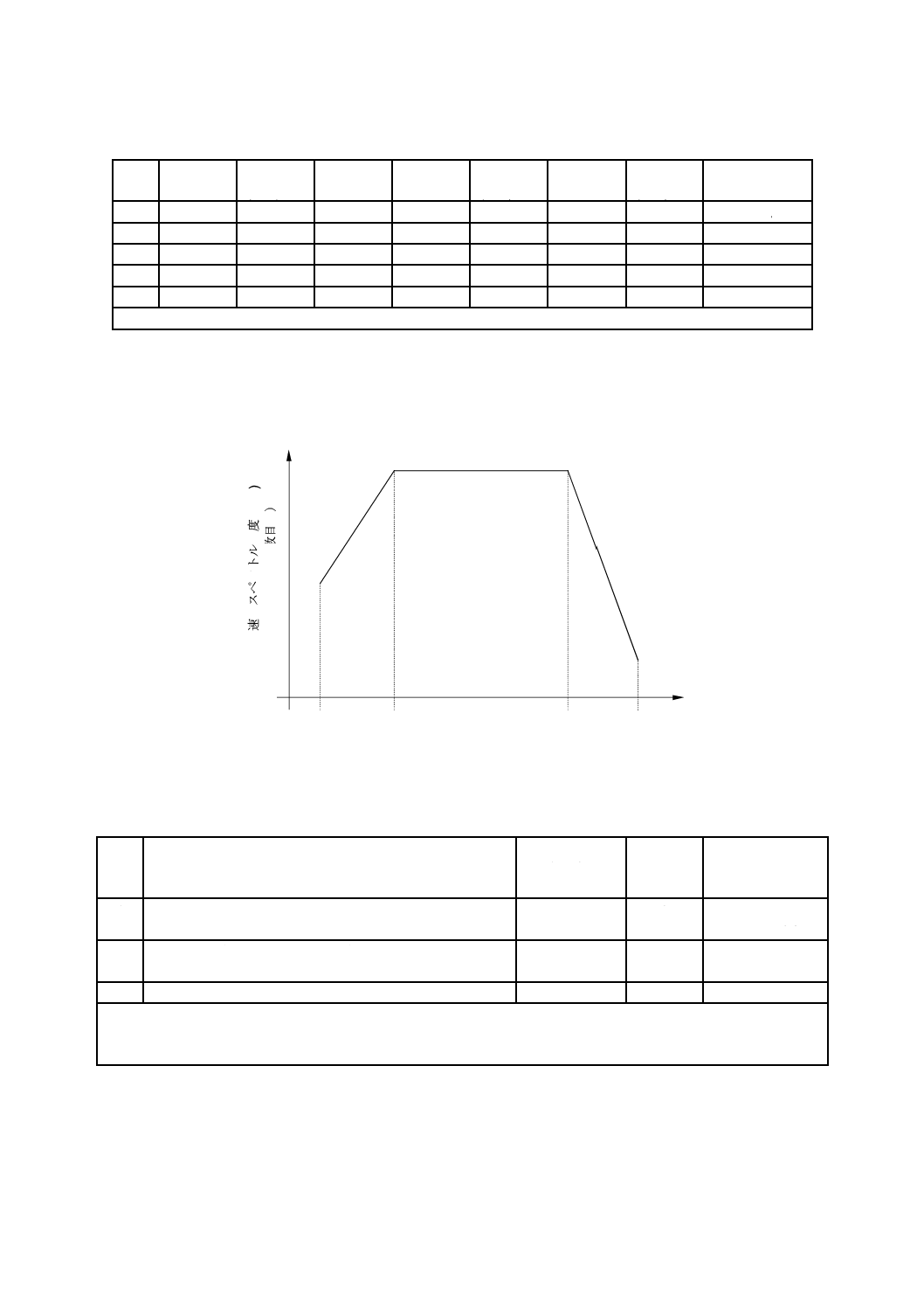
A.1 輸送
輸送時における試験は,表A.1での事例から使用条件を参照し,図A.1の振動スペクトルで表A.2に示
す条件を参考にして行うとよい。詳細は,関連規格を参照する。
f1
振動数 Hz(対数目盛)
fa
fb
f2
加速
度スペク
トル密
度
(A
S
D
)
(
m
/s
²)
²/
H
z
(
対
数目盛
)
図A.1−振動数 対 加速度レベル(輸送時)
表A.1−使用分類別試験条件(輸送時)
分類
使用条件
1軸当たりの
試験時間
時間
試験軸
関連規格
1
高速道路(米国)でのトラック輸送:固定された荷物
1a
垂直方向
1
1
MIL-STD-810F
1b
水平方向
1
2
MIL-STD-810F
によって導く
2
陸上輸送,海上輸送:過酷な環境条件
硬いサスペンションの貨車による鉄道輸送
0.5
3
−
3
通信用機器:携帯及び移動使用の条件
乱暴な荷扱い及び運搬
0.5
3
ETSI EN 300
019-2-7
4
携帯形機器:使用中の条件
0.5
3
−
19
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.2−折れ点振動数の試験条件(輸送時)
分類
f1
Hz
ASDf1
(m/s2)2/Hz
fa
Hz
fb
Hz
ASDfa,fb
(m/s2)2/Hz
f2
Hz
ASDf2
(m/s2)2/Hz
加速度rms値
m/s2
1a
10 a)
1.44
5
40
1.44
500
0.014 4
10.2 a)
1b
5
0.65
5
20
0.65
500
0.015
6.5
2
10
1.0
10
200
1.0
500
0.3
18.7
3
10
2.0
10
12
2.0
150
0.16
8.0
4
10
0.037
30
200
0.33
500
0.053
9.9
注a) 固定金具上の値。詳細は関連規格参照。
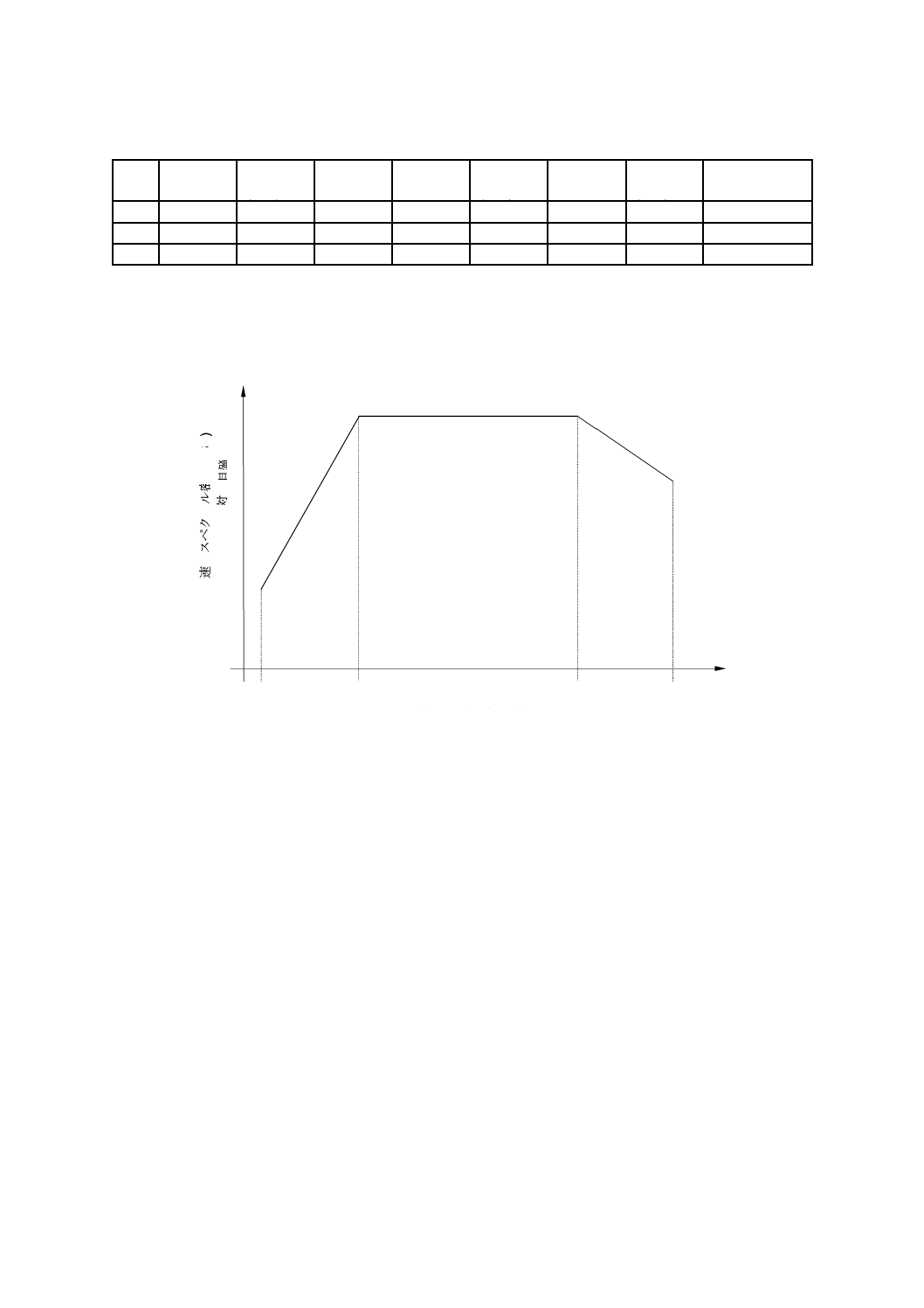
A.2 据え付ける機器
据え付ける機器の試験は,表A.3での事例から使用条件を参照し,図A.2の振動スペクトルで表A.4に
示す条件を参考にして行うとよい。詳細は,関連規格を参照する。
f1
振動数 Hz(対数目盛)
加速
度スペ
クトル
密度
(A
S
D
)
(m
/s
²)
²/
H
z
(
対数目
盛)
fa
fb
f2
図A.2−振動数 対 加速度レベル(据付け時)
表A.3−使用分類別試験条件(据付け時)
分類
使用条件
1軸当たりの
試験時間
時間
試験軸
関連規格
1
使用中の通信用機器(設置環境条件:屋内固定使用で多少
の温度管理のある場所)
0.5
3
ETSI EN 300
019-2-3,T 3.2
2
使用中の通信用機器(設置環境条件:屋内固定使用で屋外
環境が直接影響しないように保護された場所)
0.5
3
ETSI EN 300
019-2-3,T 3.5
3
外部に振動源がある建物:停止中の条件
1
3
注記1 分類1の例としては,顕著な振動のない建物内で固定使用されている,振動で壊れやすい動作中の機器,
具体的には動作中の中央コンピュータ,パーソナルコンピュータ,プリンタなど。
注記2 分類2における屋内は,外部に振動源はないが,顕著な振動のある建物。
20
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.4−折れ点振動数の試験条件(据付け時)
分類
f1
Hz
ASDf1
(m/s2)2/Hz
fa
Hz
fb
Hz
ASDfa,fb
(m/s2)2/Hz
f2
Hz
ASDf2
(m/s2)2/Hz
加速度rms値
m/s2
1
5
0.001 3
10
50
0.02
100
0.001 3
1.1
2
5
0.002 5
10
50
0.04
100
0.002 5
1.5
3
10
0.022
30
200
0.20
500
0.005 2
7.0
A.3 車両に取り付ける機器
車両に取り付ける機器の試験は,表A.5での事例から使用条件を参照し,図A.3の振動スペクトルで表
A.6に示す条件を参考にして行うとよい。詳細は,関連規格を参照する。
f1
加速
度スペク
トル密
度
(A
S
D
)
(
m
/s
²)
²/
H
z
(対
数目盛
)
振動数 Hz(対数目盛)
fa
fb
f2
図A.3−振動数 対 加速度レベル(一般路上車両取付け時)
21
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.5−使用分類別試験条件(一般路上車両取付け時)
分類
使用条件
1軸当たりの
試験時間
時間
試験軸
関連規格
1
自動車:車台取付け
8
3
−
2
自動車:エンジンルーム内(区画):車体取付け又はラ
ジエータ上の部品
−
2a
垂直方向
8
1
2b
水平 縦方向
8
1
2c
水平 横方向
8
1
3
鉄道車両:車体取付け:供試品質量500 kg未満
JIS E 4031 区分1,
等級B
3a
垂直方向
5
1
3b
水平 縦方向
5
1
3c
水平 横方向
5
1
4
鉄道車両:台車枠取付け:供試品質量100 kg未満
JIS E 4031 区分2
4a
垂直方向
5
1
4b
水平 縦方向
5
1
4c
水平 横方向
5
1
5
鉄道車両:輪軸取付け:供試品質量50 kg未満
JIS E 4031 区分3
5a
垂直方向
5
1
5b
水平 縦方向
5
1
5c
水平 横方向
5
1
表A.6−折れ点振動数の試験条件(一般路上車両取付け時)
分類
f1
Hz
ASDf1
(m/s2)2/Hz
fa
Hz
fb
Hz
ASDfa,fb
(m/s2)2/Hz
f2
Hz
ASDf2
(m/s2)2/Hz
加速度rms値
m/s2
1
10
10
10
50
10
1000
0.1
33.8
2a
5
0.4
11
15
4.0
200
0.1
11.0
2b
5
0.15
12
18
0.9
200
0.07
6.7
2c
5
0.15
10
15
1.9
200
0.15
10.0
3a
5
1.86
5
20
1.86
150
0.034
7.8
3b
5
0.9
5
20
0.9
150
0.016
5.4
3c
5
0.37
5
20
0.37
150
0.006 7
3.5
4a
5
1.49
10
100
11.8
250
1.9
42.4
4b
5
0.33
10
100
2.62
250
0.42
20.0
4c
5
1.13
10
100
8.96
250
1.44
37.0
5a
10
68.6
20
100
545
500
22
300
5b
10
13.9
20
100
110
500
4.45
135
5c
10
55.5
20
100
441
500
17.84
270
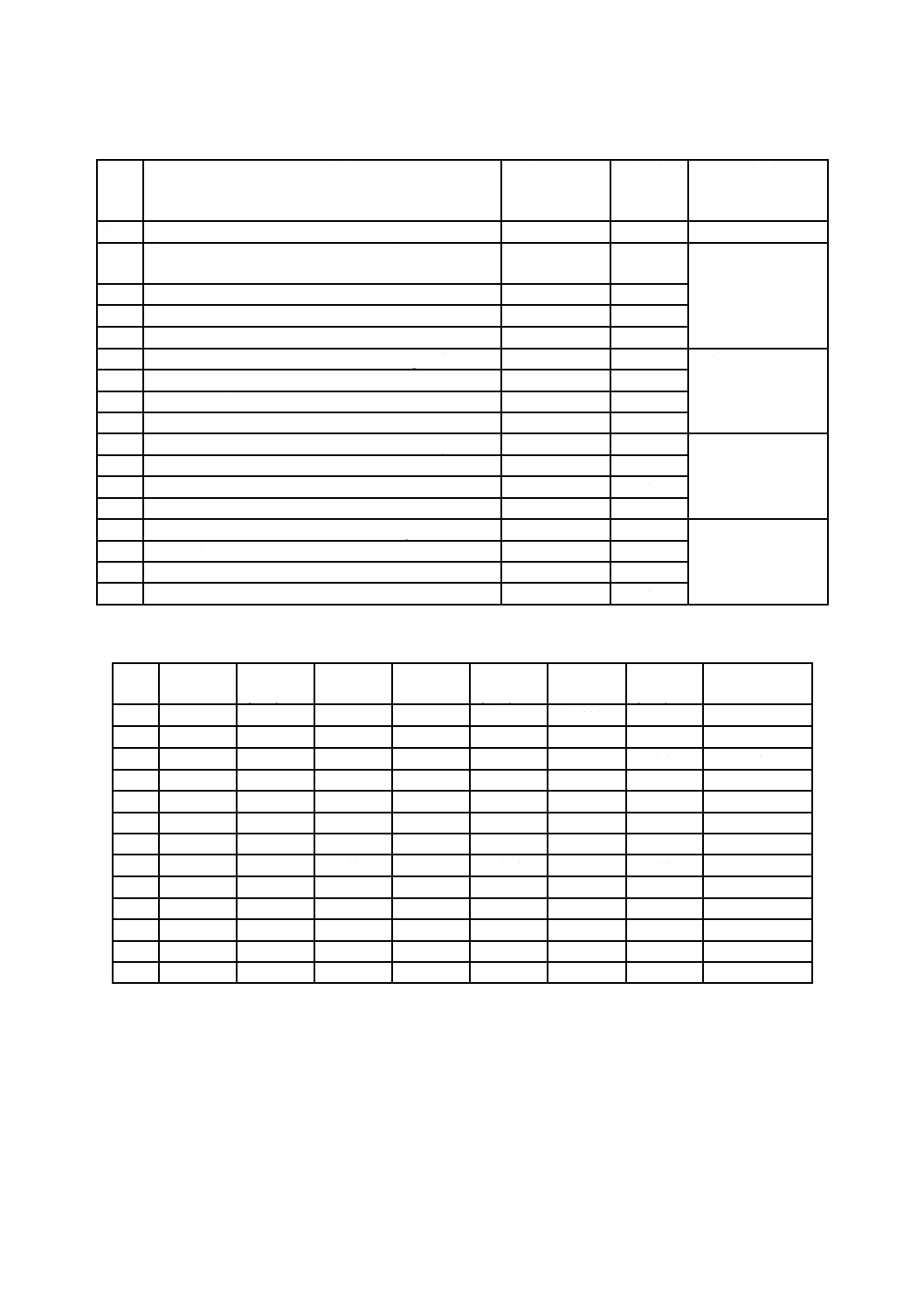
A.4 航空機及びヘリコプターに取り付ける機器
航空機及びヘリコプターに取り付ける機器の試験は,表A.7での事例から使用条件を参照し,図A.4の
振動スペクトルで表A.8に示す条件を参考にして行うとよい。詳細は,関連規格を参照する。
22
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
f1
振動数 Hz(対数目盛)
加
速度
スペク
トル
密度
(A
S
D
)
(m
/s
²)
²/
H
z
(対数目
盛)
fa
fb
fc
fd
f2
図A.4−振動数 対 加速度レベル(航空機及びヘリコプター取付け時)
表A.7−使用分類別試験条件(航空機及びヘリコプター取付け時)
分類
使用条件
1軸当たりの
試験時間
時間
試験軸
関連規格
1
固定翼ターボジェット機又は固定翼ターボファン機(亜音
速及び超音速)
RTCA DO-160D
1a
胴体
1
3
1b
胴体
1
3
1c
計器板,コンソール及びラック
1
3
1d
主翼,脚室,尾翼
1
3
2
プロペラ機
1
3
−
3
ヘリコプター
−
3a
駆動要素部品以外
1
3
3b
駆動要素部品
1
3
注記1 分類1aは,構造に取り付く部品を除いた胴体で,エンジンの影響を直接受ける部位の標準振動試験。
注記2 分類1bは,構造に取り付く部品を除いた胴体で,エンジンの影響を直接受ける部位の厳しい振動試験。
注記3 分類1dは,エンジンポッド,パイロン,主翼,尾翼及び降着装置区画。
表A.8−折れ点振動数の試験条件(航空機及びヘリコプター取付け時)
分
類
f1
Hz
ASDf1
(m/s2)2/Hz
fa
Hz
fb
Hz
ASDfa,fb
(m/s2)2/Hz
fc
Hz
fd
Hz
ASDfc,fd
(m/s2)2/Hz
f2
Hz
ASDf2
(m/s2)2/Hz
加速度rms値
m/s2
1a
10
1.2
10
40
1.2
52
500
2.0
2000
0.13
41.4
1b
10
2.4
10
40
2.4
52
500
4.0
2000
0.25
58.3
1c
10
1.2
10
40
1.2
100
500
0.2
2000
0.012 6
14.9
1d
10
4.0
10
100
4.0
200
500
8.0
2000
0.5
79.7
2
10
2.4
10
40
2.4
52
500
4.0
2000
0.25
58.3
3a
5
0.2
70
300
2.0
500
500
2.0
500
0.2
26.0
3b
10
0.012
150
2000
2.58
2000 2000
2.58
2000
2.58
70.0
23
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
ガイダンス
B.1
序文
再現性を高めることは容易ではない。ランダム信号の統計的性質,供試品の複雑な応答及び解析過程で
発生する誤差のために,供試品に対するランダム入力の真の加速度スペクトル密度が,あらかじめ規定し
た一連の許容差内で,表示加速度スペクトル密度に一致するかどうかを確実に予知することは不可能であ
る。試験の後で,複雑な,時間のかかる解析が必要であり,オンラインでの確認は不可能である。
ランダム振動試験用に使われると考えられるほとんどのデジタル振動制御器の性能は似ていると考えら
れる。振動制御器の選択可能な幾つかのパラメータを使って,表示加速度スペクトル密度と真の加速度ス
ペクトル密度との差に対応する統計的確度を推定するために,予備計算を行うことができる。この場合,
GUM(計測における不確かさの表現ガイド)を参照しているJIS Q 17025で定義する他の不確かさの発生
源は考慮に入れていない。したがって,これらのパラメータは相互に依存しているために,二つの加速度
スペクトル密度の最適な一致が得られるように選択することができる。
規定の加速度スペクトル密度を得るための等化には,何回かの制御ループの繰り返しが必要であり,そ
の時間は,ハードウエアの構成,系全体の伝達関数,規定の加速度スペクトル密度の形,制御アルゴリズ
ム,試験前に調節可能な試験パラメータなど幾つかの要素に影響される。その試験パラメータは,解析最
高振動数,振動数分解能及び駆動信号クリッピングである。
ランダム振動の制御アルゴリズムには,制御精度と制御ループタイムとの妥協が必要であり,それらは,
例えば,ループ当たりのレコード数に影響される。高い制御精度を必要とすれば,より多くの入力データ,
したがって,より長いループタイムが必要となり,実際の加速度スペクトル密度の変化に対する応答が遅
くなる。振動数分解能もまた,誤差及びループタイムに重大な影響を与える。通常高い分解能(狭い帯域
幅)は,高い制御精度を可能とするが,長い制御ループタイムを必要とする。供試品の真の加速度スペク
トル密度と表示加速度スペクトル密度との偏差を最小にするために,上記の試験パラメータの最適化が必
要である。
振動応答検査によって供試品と振動発生機の相互作用に関する必須の情報が得られる。例えば,この検
査では,試験用取付具の極端な振動応答倍率又は試験用取付具と供試品の共振の一致を明らかにすること
ができる。したがって,再現性を高めるために最適な試験用取付具及びパラメータを選択することが可能
となる。そのために,取付具に供試品を取り付ける前の動的応答の検査,取付具上でのモーダル試験,及
び実際の負荷条件に近付けるための供試品への修正が望ましい。
B.2
試験要求事項
B.2.1 1点及び多点制御
試験要求事項は,基準点で測定したランダム信号から計算した加速度スペクトル密度によって確認する。
例えば,部品の試験のように,剛性の高い供試品若しくは小形の供試品の場合,又は供試品が与える動
的な影響が小さい場合及び取付具の剛性を試験振動数範囲で確保している場合,基準点となる一つの監視
点だけが必要となる。
例えば,かなり離れた固定点をもつ機器のように,大形又は複雑な供試品の場合,一つの監視点又は複
24
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
数の点を基準点として規定する。架空の基準点の場合は,加速度スペクトル密度は監視点(複数)で測定
したランダム信号から計算する。大形及び/又は複雑な供試品の場合,架空の基準点を使用することを推
奨する。
B.2.1.1 1点制御
測定は一つの基準点で行い,表示加速度スペクトル密度を直接規定加速度スペクトル密度と比較する。
B.2.1.2 多点制御
多点制御が規定されるか又は必要な場合,次の二つの制御方法を選択できる。
B.2.1.2.1 平均値制御
この方法では,各監視点の信号から加速度スペクトル密度を計算する。合成加速度スペクトル密度は,
各監視点からの加速度スペクトル密度を算術平均することによって得る。次に,その算術平均した加速度
スペクトル密度を,規定加速度スペクトル密度と比較する。
B.2.1.2.2 極値制御
この方法では,各監視点で測定した加速度スペクトル密度の振動数ラインごとの最大値又は最小値から
合成加速度スペクトル密度を計算する。
この方法は,最大値制御又は最小値制御及び各監視点の加速度スペクトル密度の最大値又は最小値を包
絡する加速度スペクトル密度を発生するため,“最大値制御方法”又は“最小値制御方法”ともいう。
B.2.2
分布
B.2.2.1 瞬時値の分布
試験に用いる駆動信号の瞬時値の分布は,正規分布又はガウス分布として知られているもので,式(B.1)
によって定義する。
()
(
)2
/σ
1/2
e
2π
σ
1
p
χ
χ
−
=
································································ (B.1)
ここに, p(x): 確率密度
σ: 駆動信号rms値(標準偏差に等しい)
x: 駆動信号の瞬時値
駆動信号の時刻歴の平均値は,ゼロと仮定する。
正規確率密度関数を,図2に示す。
B.2.2.2 波高率
波高率は,rms値に対する最大の瞬時値の比率によって,励振(制御)信号の分布を特徴付ける(図2
参照)。
システム,すなわち,電力増幅器,振動発生機,試験用取付具及び供試品がもつ非線形性によって,監
視点におけるランダム波形が変形してしまうことがあるため,波高率は,デジタル振動制御システムの出
力,すなわち駆動信号にだけ適用する。これらの非線形性を広帯域にわたって制御することは,一般に不
可能である。
この規格では,波高率を2.5以上と規定している(4.6.2参照)。正規分布のランダム波の場合,波高率
2.5は,駆動信号の全瞬時値の約99 %が電力増幅器へ入力されることを意味する。
B.2.3 初期及び最終傾斜
この規格では,f1及びf2の間で平たん(坦)又は任意の形状の加速度スペクトル密度を規定している(図
A.1〜図A.4参照)。しかし,実際の試験では,初期傾斜及び最終傾斜が付く。加速度rms値を規定値に可
能な限り近付けるためには,傾斜を可能な限り急しゅん(峻)にすればよい。
25
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
通常初期傾斜は,6 dB/oct以上の傾斜とする。f1の加速度スペクトル密度が高く変位振幅を振動試験装置
の能力まで下げる必要があるときは,初期傾斜を増加させてもよい。
一般に,デジタル振動制御機器では,隣接する二つの振動数ライン間で,加速度スペクトル密度に関し
て8 dB程度のダイナミックレンジをもっている。より急しゅんな傾斜を実現するためには,もともと定義
されているよりも狭い振動数分解能Beを使用することが必要になる。狭い振動数分解能を使用できない場
合,又は最大可能な傾斜にしても必要な変位低減ができない場合には,加速度スペクトル密度の負側の許
容差を下方の振動数範囲で修正することが必要になるときがある。
これらの処置は,f2以上の最終傾斜には適用しない。最終傾斜は−24 dB/octに等しいか又はより急しゅ
んであることが望ましい。
B.3
試験手順
試験の目的が適切な加振レベルで供試品が耐える能力及び作動する能力を単に実証するためのものであ
る場合,規定振動数範囲でこの要求事項を実証するのに十分な時間試験を実施すればよい。例えば,疲労
及び機械的変形のような,振動の累積効果に供試品が耐える能力を実証しなければならない場合,試験時
間は必要な応力サイクルを累積させるために十分長くすることが望ましいが,この場合,5.4の試験時間の
範囲を超えることがある。
通常,防振装置に取り付ける機器の耐久試験では,常に防振装置を取り付けて試験する。適切な防振装
置を付けて試験を行うことが不可能な場合,例えば,機器を他の機器と共通の取付装置に組み込むような
場合,機器を防振装置なしで,規定された別の厳しさで試験してもよい。試験の厳しさは,試験に使用す
る防振装置の各軸方向の伝達率を考慮して決定することが望ましい。防振装置の特性が未知の場合,B.4.1
を参照することが望ましい。
製品規格で,供試品が最低限許容できる構造的強度を実証するために,外付の防振装置を外した試験又
は働かないように固定した試験を追加することがある。この場合,製品規格で適用する厳しさを規定する
ことが望ましい。
B.4
通常防振装置付で使う機器
B.4.1 防振装置の伝達率係数
JIS C 60068-2-47は,防振装置付きで試験を実施することが望ましいが,防振装置を試験で利用できな
い場合について,詳細に説明している。
B.4.2 温度の影響
多くの防振装置は,温度依存性がある材料を用いていることに注意する必要がある。防振装置上の供試
品の基本共振振動数が試験振動数範囲内にある場合,適用する加振時間を決定する際に注意が必要である。
状況によっては,回復なしで連続して加振することが不合理なことがある。基本共振振動数で励振される
実際の時間配分が既知の場合は,それをシミュレートするように試みることが望ましい。実際の時間配分
が未知の場合は,技術的判断によって加振時間を分割することで,過度の加熱を避けることが望ましい。
B.5
試験の厳しさ
この規格で規定した振動数範囲及び加速度スペクトル密度は,広い範囲の用途に適用できるように選択
したものである。供試品が一つの用途にだけ使われる場合,実環境の振動特性が既知であれば,その厳し
さを基準とすることが望ましい。
26
C 60068-2-64:2011 (IEC 60068-2-64:2008)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
供試品に適用する試験の厳しさは,可能な限り輸送中又は使用中に供試品がさらされる環境に関連付け
ることが望ましく,試験の目的が機械的強度の評価である場合は設計要求事項に関連付けることが望まし
い。
試験の厳しさを決定するときは,その厳しさと実環境条件との間に適切な安全余裕を設定することを考
慮することが望ましい。
一般に,短時間の試験では信頼水準は低い。したがって,偶然誤差及び偏り誤差を最小にするために,
振動数分解能Be及び有効平均化時間Taの選択には特別の考慮を払うことが望ましい。
B.6
機器の作動性能
適切であれば,試験中又は試験の適切な段階で,供試品の機能条件を代表するような方法で供試品を作
動させることが望ましい。
例えば,リレーの動作に対する干渉のように,振動がスイッチオン及びオフに影響を与える可能性があ
る供試品の場合,試験振動数範囲に関して性能を満足することを実証するためにそのような機能の点検を
試験中に繰り返すことが望ましい。
試験の目的が供試品の耐性だけである場合,供試品の作動性能は振動試験終了後に評価するとよい。
B.7
初期測定及び最終測定
初期測定及び最終測定の目的は,供試品に対する振動の影響を評価するために,特定のパラメータを比
較することである。
測定には,目視検査と同様に,電気的作動及び機械的作動並びに構造特性を含むことがある。
参考文献 JIS E 4031:2008 鉄道車両用品−振動及び衝撃試験方法
注記 対応国際規格:IEC 61373:1999,Railway applications−Rolling stock equipment−Shock
and vibration tests(MOD)
JIS Q 17025:2005 試験所及び校正機関の能力に関する一般要求事項
注記 対応国際規格:ISO/IEC 17025:2005,General requirements for the competence of testing and
calibration laboratories(IDT)
ENV 13005:1999,Guide to the expression of uncertainty in measurement
ETSI EN 300 019-2-3,Environmental Engineering (EE); Environmental conditions and environmental
tests for telecommunications equipment−Part 2-3: Specification of environmental tests; Stationary
use at weather- protected locations
ETSI EN 300 019-2-7,Environmental Engineering (EE); Environmental conditions and environmental
tests for telecommunications equipment−Part 2-7: Specification of environmental tests; Portable
and non-stationary use
MIL-STD-810F:2000,Test method standard for environmental engineering considerations and
laboratory tests
RTCA DO-160D:1997,Environmental conditions and test procedures for airborne equipment