C 6821 : 1999
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づいて,日本工業標準調査会の審議を経て,通商産業大臣が改正した日
本工業規格である。これによって,JIS C 6821 : 1991は改正され,この規格に置き換えられる。
今回の改正では,日本工業規格と国際規格との一致に留意したが,これについては解説にその詳細を記
述した。この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権又は出願公開
後の実用新案登録出願に抵触する可能性があることに注意を喚起する。通商産業大臣及び日本工業標準調
査会は,このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実
用新案登録出願にかかわる確認について,責任はもたない。
JIS C 6821には,次に示す附属書がある。
附属書A(規定) 破断応力試験に関する統計計算
附属書B(参考) 疲労係数のガイダンス
附属書C(参考) 光ファイバカールのモデルの誘導式
附属書D(参考) レーザ光散乱による光ファイバカールの測定
C 6821 : 1999
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 1
2. 引用規格 ························································································································ 1
3. 測定方法の分類 ··············································································································· 1
4. 動作定義 ························································································································ 2
5. 物理的欠陥 ····················································································································· 3
6. スクリーニング(プルーフ)試験方法(IEC 60793-1-B1) ··························································· 3
6.4 一定応力スクリーニング試験 ···························································································· 3
6.5 一定伸びひずみスクリーニング試験 ··················································································· 4
6.6 一定曲げひずみスクリーニング試験 ··················································································· 5
7. 短尺光ファイバの引張強度測定法 (IEC 60793-1-B2A) ······························································ 6
8. 被覆除去性の測定法 (IEC 60793-1-B6) ·················································································· 6
9. 疲労係数の説明 ··············································································································· 9
10. 引張りによる動的疲労係数測定法 (IEC 60793-1-B7A) ··························································· 10
11. 曲げによる動的疲労係数測定法 (IEC 60793-1-B7B) ······························································ 15
12. 引張りによる静的疲労係数測定法 (IEC 60793-1-B7C) ··························································· 19
13. 曲げによる静的疲労係数測定法 (IEC 60793-1-B7D) ······························································ 21
14. 均一な巻き付けによる静的疲労係数測定法 (IEC 60793-1-B7E)················································ 22
15. 側面顕微鏡法による光ファイバカールの測定法 (IEC 60793-1-B8A) ········································· 24
16. レーザ光散乱による光ファイバカールの測定法 (IEC 60793-1-B8B) ········································· 27
17. 引張試験方法 ··············································································································· 28
18. 圧壊試験方法 ··············································································································· 28
19. 衝撃試験方法 ··············································································································· 29
20. 繰返し曲げ試験方法 ······································································································ 30
21. コード曲げ試験方法 ······································································································ 31
22. コードねじり試験方法···································································································· 32
附属書A(規定) 破断応力試験に関する統計計算 ···································································· 34
附属書B(参考) 疲労係数のガイダンス ················································································ 37
附属書C(参考) 光ファイバカールのモデルの誘導式 ······························································ 41
附属書D(参考) レーザ光散乱による光ファイバカールの測定 ·················································· 42
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 6821 : 1999
光ファイバ機械特性試験方法
Test methods for mechanical characteristics of optical fibers
序文 この規格は,1995年に発行されたIEC 60793-1-3 : 1995, Optical fibers−Part 1 : Generic specification−
Section 3 : Measuring methods for mechanical characteristics,及び1996年に発行されたIEC 60793-1-3 : 1996,
Amendment 1を元に,機械特性試験測定法による光ファイバ素線,光ファイバ心線の機械的な強度,強度
劣化係数の測定法を翻訳し,作成した日本工業規格である。ただし,点線の下線部分については,対応国
際規格には規定されていないため追加している。
1. 適用範囲 この規格は,光ファイバ素線,光ファイバ心線及び光ファイバコードの機械特性試験方法
について規定する。この規格は,光ファイバの機械的特性試験方法の一定の要求条件を取り決めているこ
とにある。
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版を適用する。
IEC 60793-2 Optical fibres−Part 2 : Product specifications
備考 この規格には,次の日本工業規格が対応している。
JIS C 6832 石英系マルチモード光ファイバ素線
JIS C 6833 多成分系マルチモード光ファイバ素線
JIS C 6834 プラスチッククラッドマルチモード光ファイバ素線
JIS C 6835 石英系シングルモード光ファイバ素線
IEC 60793-1-1 Optical fibres−Part 1 : Generic specifications−Section 1 : General
備考 この規格には,次の日本工業規格が対応している。
JIS C 6820 光ファイバ通則
IEC 60068-1 Environmental testing−Part 1 : General and guidance
備考 この規格には,次の日本工業規格が対応している。
JIS C 0010 環境試験方法−電気・電子−通則
JIS B 7721 引張試験機−力の検証方法
3. 測定方法の分類 光ファイバの機械的特性は,サンプルを表1から選択した試験に供して,確認する。
適用する試験,受入基準,サンプル数は,個別規格で規定される。
2
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1 光ファイバの機械的特性
試験方法
試験方法の対象特性
対応国際規格
光ファイバ素線
又は
光ファイバ心線
スクリーニング試験方法
短尺光ファイバの引張強度測定法
機械的な強度
IEC 60793-1-B1
IEC 60793-1-B2A
OTDR法(パルス試験法)*:IEC 60793-1-4による 物理的な欠陥
IEC 60793-1-C1C
被覆除去性の測定法
被覆除去性
IEC 60793-1-B6
引張りによる動的疲労係数測定法
疲労係数
IEC 60793-1-B7A
曲げによる動的疲労係数測定法
IEC 60793-1-B7B
引張りによる静的疲労係数測定法
IEC 60793-1-B7C
曲げによる静的疲労係数測定法
IEC 60793-1-B7D
均一な巻き付けによる静的疲労係数測定法
IEC 60793-1-B7E
側面顕微鏡法による光ファイバカールの測定法
カール量
IEC 60793-1-B8A
レーザ散乱光による光ファイバカールの測定法
IEC 60793-1-B8B
光ファイバコード 引張試験方法
機械的な強度
圧壊試験方法
衝撃試験方法
繰返し曲げ試験方法
コート曲げ試験方法
コードねじり試験方法
注*
JIS C 6823によって規定される。
4. 動作定義
4.1
ある長さの光ファイバの機械的強さ
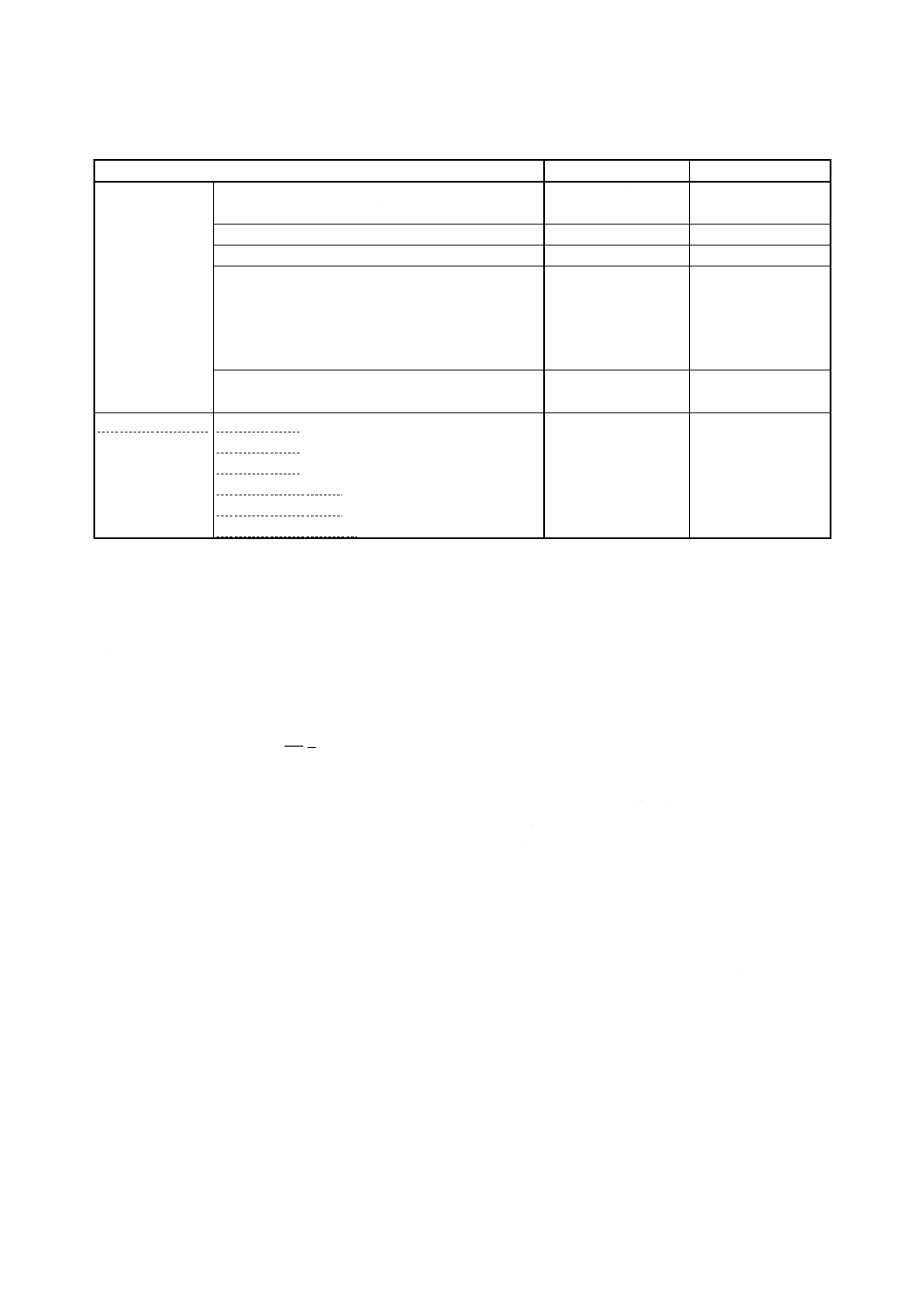
a) ある長さの光ファイバの機械的強さは,この長さに存在する最も深い傷の深さによって決まる。ある
周囲温度及び湿度条件下で,ある長さの光ファイバに応力αを加えると,傷の深さはチャールズ提案
の関係式に基づいて増加する。
n
AK
dt
da
1
=
グリフィスによるKIはKI=Y・α・a1/2となる。
ここに, KI: 応力靱性係数
Y: 形状係数(定数)
α: 応力
n: 疲労係数(定数)
a: 傷の深さ
A: 比例定数(実験による)
時間△tの間に傷がKI=KIc(破壊靱性臨界値)となる値まで大きくなると,光ファイバは破断する
(図1参照)。
b) 図示するように,時間△t=t2−t1の間に光ファイバに応力α1を印加すると,傷はat1からat2へと大き
くなる。しかし,製品用では光ファイバに応力α1のスクリーン試験を実施した後では,傷はほとんど
値ac(すなわち,光ファイバの破損が生じる値)に達すると想定されるので,光ファイバの破断を避
ける場合には,その後の応力α2(t>t2のとき)はα1未満のままでなければならない。
3
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1 応力が印加されている光ファイバの傷の成長図
5. 物理的欠陥 光ファイバ内には物理的欠陥(例えば,異物や気泡)が存在し,それは光学性能及び機
械性能に影響を与えることが認められている。ある種の欠陥は反射法や他の測定法によって検出できる。
6. スクリーニング(プルーフ)試験方法(IEC 60793-1-B1)
6.1
目的 この試験は光ファイバの全長について,機械的強さがスクリーニング試験レベルと同等以下
の箇所がないことを保証するものである。
6.2
試験条件 この試験は,IEC 60068-1の5.3に基づく試験の標準大気条件によって実施する。
6.3
一般試験手順
6.3.1
スクリーニング試験は,次のいずれかの方法で行う。
a) 一定応力法
b) 一定伸びひずみ法
c) 一定曲げひずみ法
6.3.2
一定応力及び一定伸びひずみによる試験は,光ファイバの長手方向及び半径方向に加えられる応力
に十分耐えられ,かつ,光ファイバの表面を有害な半径方向応力から保護するのに適した弾性係数と厚さ
がある保護被覆及び緩衝層をもつ光ファイバに適している。光ファイバ素線及び光ファイバ心線がこのよ
うな力に耐えられない場合は,一定曲げひずみによる試験が適切である。
6.3.3
スクリーニング試験レベルは,保護被覆及び緩衝層による材料の補正を行い,光ファイバが直接受
けるレベルとする。
6.3.4
光ファイバの送出し及び巻取りの張力変動は,装置のスクリーニング試験領域に影響を与えないも
のとする。
6.3.5
装置を通過する光ファイバ速度,及び装置の構造は,個別規格で要求される時間を満足するスクリ
ーニング試験で取り決められる。
6.4
一定応力スクリーニング試験
4
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.4.1
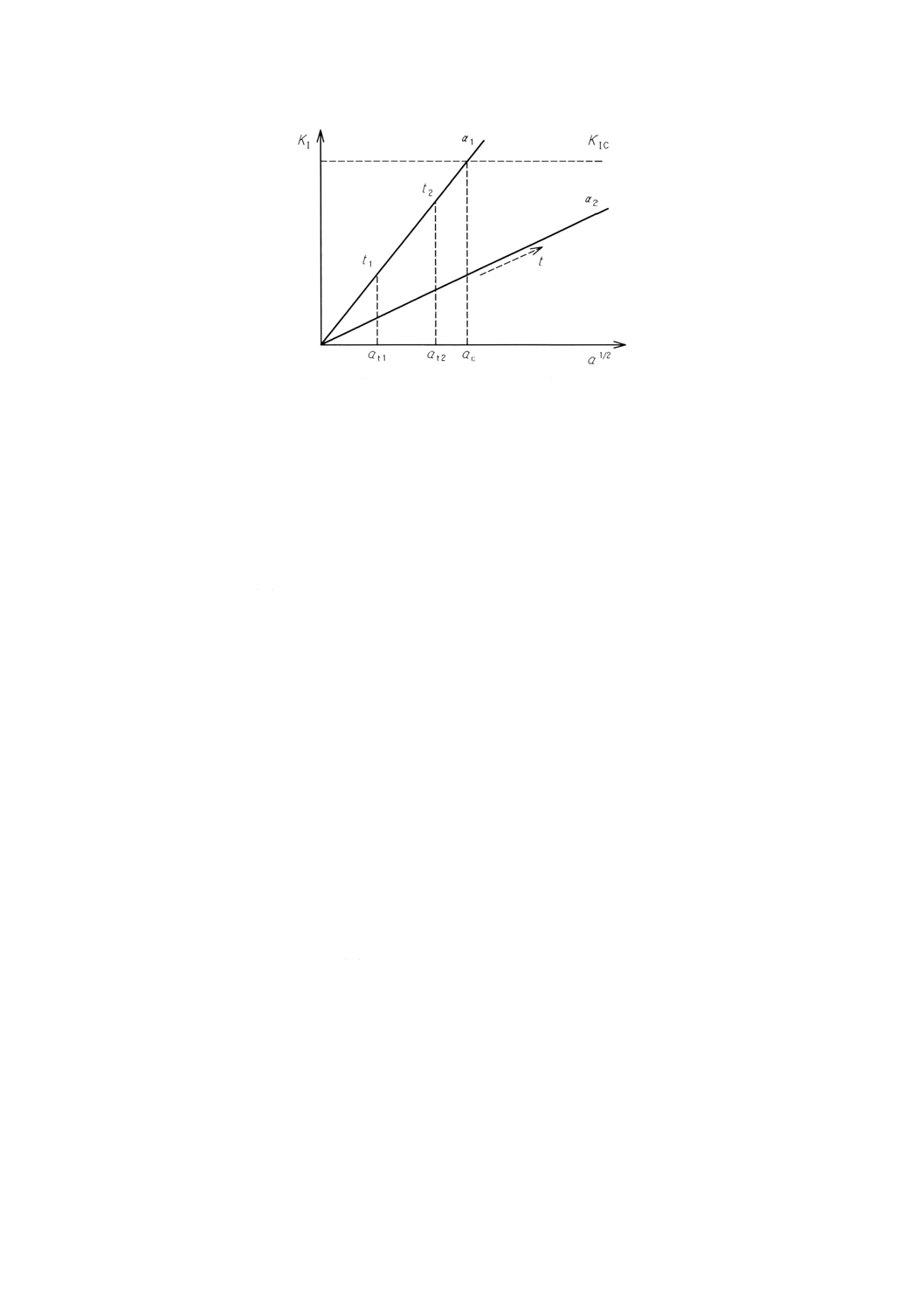
装置 一定応力スクリーニング試験装置は,一般的に図2のとおりとする。A及びCは駆動する
動輪又はプーリであり,Bはその他の二つと同一平面上にある空走動輪又はプーリである。Bの自由空間
運動は軸を通る垂直線に限定され,負荷される荷重Wは張力Tを与える。光ファイバと動輪A,B,Cの
間の静摩擦係数が高いことが不可欠な要求事項であり,圧力ベルトなどの手段を講じてすべりを最小にす
る。いずれかの動輪を一定の角速度で駆動させるとともに,動輪Cの角速度を変えることによって動輪B
の垂直位置を一定に保つ手段を講じる。送出し張力Tiは試験張力Tの10%を超えてはならない。動輪径は,
光伝送要素の任意の箇所における曲げによる応力が試験値の10%を超えることがないようにする。
6.4.2
手順 光ファイバは個別規格で要求されるスクリーニング試験時間に対応する速度で図2に示す
ような装置を通過する。空走動輪又はプーリBに印加される荷重Wの質量は個別規格で規定される。
6.4.3
要求事項 試験後にOTDR又はその他の手段を用いて光ファイバの破断を調べる。光ファイバに
破断があってはならない。
図2 一定応力試験装置の概略図
6.5
一定伸びひずみスクリーニング試験
6.5.1
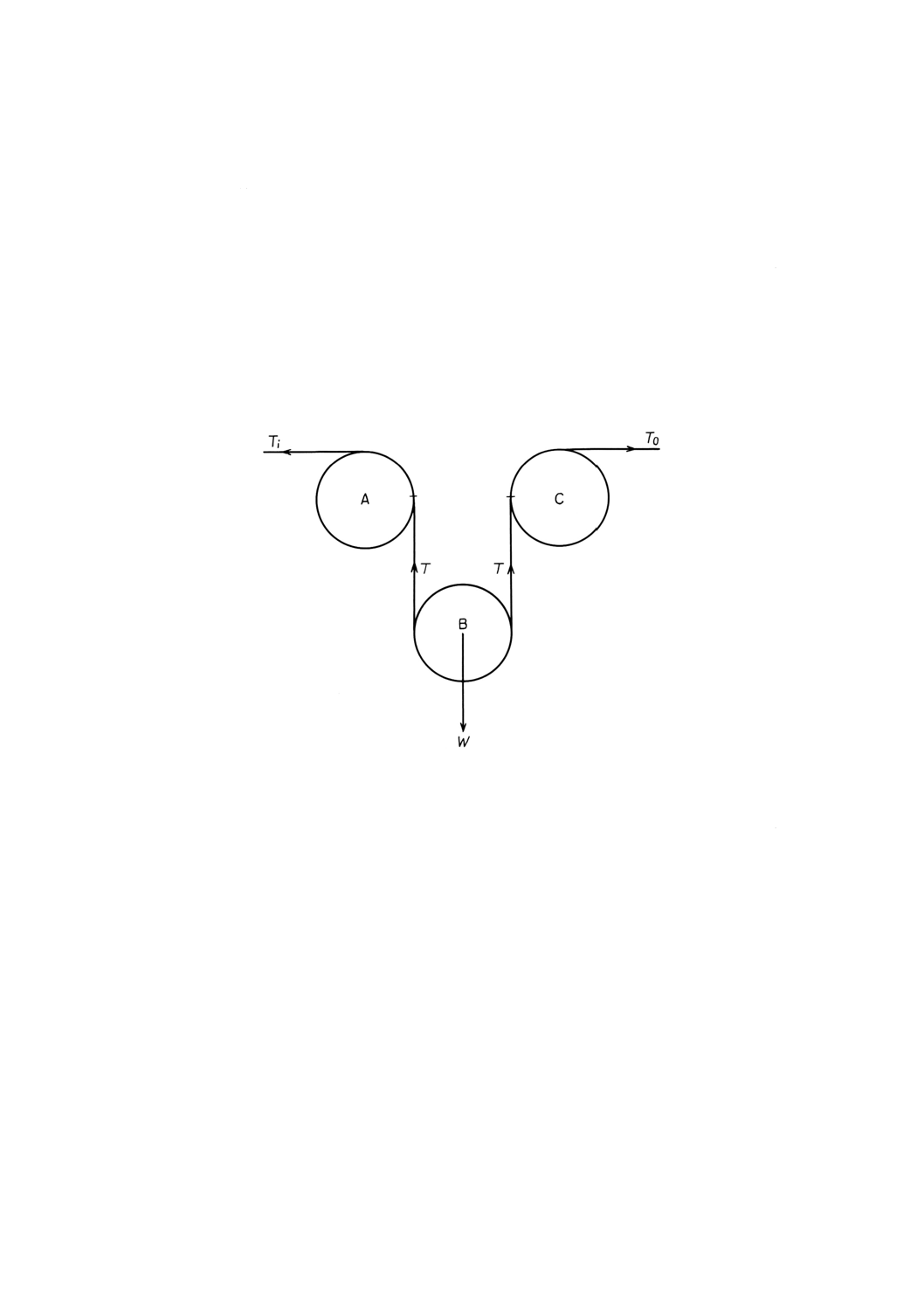
装置 一定ひずみスクリーニング試験は,一般的に図3のとおりとする。A及びBは動輪又はプ
ーリであり,必要なひずみと等しい速度差で回転するように配置されている。この速度差を達成するには,
動輪を直径は同じであるが,必要なひずみレベルと一致する角速度差で回転するようにするか,又は動輪
径は必要なひずみレベルと一致する固定比率とし,動輪を同じ角速度で回転するように連結する。光ファ
イバと動輪間の静摩擦係数はすべりを最小にするように高くし,圧力ベルト又は同様の装置を使用する。
送出し張力Tiに対応するひずみは,試験値の10%を超えてはならない。動輪径は,光伝送要素の任意の箇
所における曲げによるひずみが試験値の10%を超えないようにする。
5
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3 一定伸びひずみ試験装置の概略図
6.5.2
手順 印加するひずみは,動輪に対する速度制御機構を調整して必要な回転差が得られるようにす
るか,動輪を必要な直径差と合うようにして,個別規格の規定値に設定する。光ファイバは,個別規格に
規定されている試験時間に対応する速度で,一定ひずみスクリーニング試験装置を通過させる。
6.5.3
要求事項 試験後に,OTDR又はその他の手段を用いて光ファイバの破断を調べる。光ファイバに
破断があってはならない。
6.6
一定曲げひずみスクリーニング試験
6.6.1
装置 一定曲げひずみ試験装置は,一般的に図4のとおりとする。A,B及びCは互いに平行な軸
の周りに自由に回転できる3本のローラである。光ファイバは,ローラ構造に順応する十分な張力のもと
で,自由に回転するローラ上で曲げられる経路に沿って引っ張られる。ローラの直径は,光ファイバ表面
の最大曲げひずみが,保護被覆又は緩衝層の厚さを補正したひずみと等しくなるように選定する。
光ファイバの全表面でほぼ一定の最大曲げひずみを確保するためには,複数組のローラを使用して,異
なる角度でローラを配置する。
通常は,4組のローラを使用して,相互に45°の角度で配置する(図5)。
光ファイバの送出し及び巻取り機構は,光ファイバが機械を通過するときにねじれないように配置する。
図4 一定曲げひずみ試験装置の概略図
図5 複数組ローラの概略図
6.6.2
手順 ひずみはローラ径の選択によって個別規格の規定値に設定する。光ファイバは,個別規格に
規定する試験時間に対応する速度で一定曲げひずみ試験装置を通過させる。
6.6.3
要求事項 試験後にOTDR又はその他の手段を用いて光ファイバの破断を調べる。
光ファイバに破断があってはならない。
6
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7. 短尺光ファイバの引張強度測定法 (IEC 60793-1-B2A)
7.1
目的 この試験は短尺光ファイバの引張強度を測定する方法である。所定の光ファイバの引張強度
分布は試料の長さ,荷重速度及び環境条件に強く依存している。この試験は引張強度の統計データが必要
な場合の検査用である。結果は統計的品質管理分布によって報告される。通常,この試験は試料を温度及
び湿度の供試条件に供した後に実施する。
なお,一般的な周囲温度及び湿度条件で値を測定すれば十分である場合もある。
7.2
試料の作成 試料は試験をする長さが最大で1mとなるように作成する。
7.3
装置 試料の損傷及びすべりを防止する把持部を備えた適切な引張試験機を使用する。引張速度は1
分間に試料長の約3%から5%とする。
備考 引張りの方向は垂直又は水平とする。光ファイバは,チャックドラム又はその他適切な手段に
よって把持する。
7.4
供試条件(個別規格を参照) 必要な場合は,試料を温度が20℃の水槽又は耐候性試験槽(例えば,
温度23℃,相対湿度95%に調節する)に入れて供試条件に供することができる。供試条件時間は24時間
以上とする。
7.5
手順
試験A(供試条件なし) 把持部間の試料長が最大1mとなるように,試料を引張試験機に据え付ける。
引張速度は個別規格に規定する。
試験B(供試条件あり) 試料を供試装置から取り出してから,試験Aと同じ手順で5分以内に試験を開
始する。
7.6
結果 次のデータを報告する。
− 標点距離
− 把持部の種別
− 引張速度
− 相対湿度及び周囲温度
− 光ファイバ識別記号
− 試料長
− 引張強度(光ファイバが破断するひずみを光ファイバの引張強度)
− 参考として,例えば,ワイブル分布のような品質分布
分布プロットの妥当性は被試験光ファイバの全長と試験試料の長さによって決まる。
備考 把持部分の近くに破断がある場合(例えば,10〜15mm),その値は統計品質管理分布には組み
込まず,別途報告する。
8. 被覆除去性の測定法 (IEC 60793-1-B6)
8.1
目的
8.1.1
この試験は,光ファイバの長手方向に沿って保護被覆を機械的に除去するために必要な力を測定す
るものである。
この試験は被覆を除去した後の光ファイバの強さを最大にする方法を示すものではなく,光ファイバの
実使用時の除去性の最良の条件を規定するものでもない。
7
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.1.2
この試験は主として光ファイバ製造業者が生産した光ファイバ素線,又は各種のポリマを使って被
覆(タイト緩衝構造)した光ファイバ心線を試験するものである。また,この試験は製造された光ファイ
バ素線(心線)か,又は各種環境下に放置された光ファイバ素線(心線)に適用されるものである。
8.2
装置
8.2.1
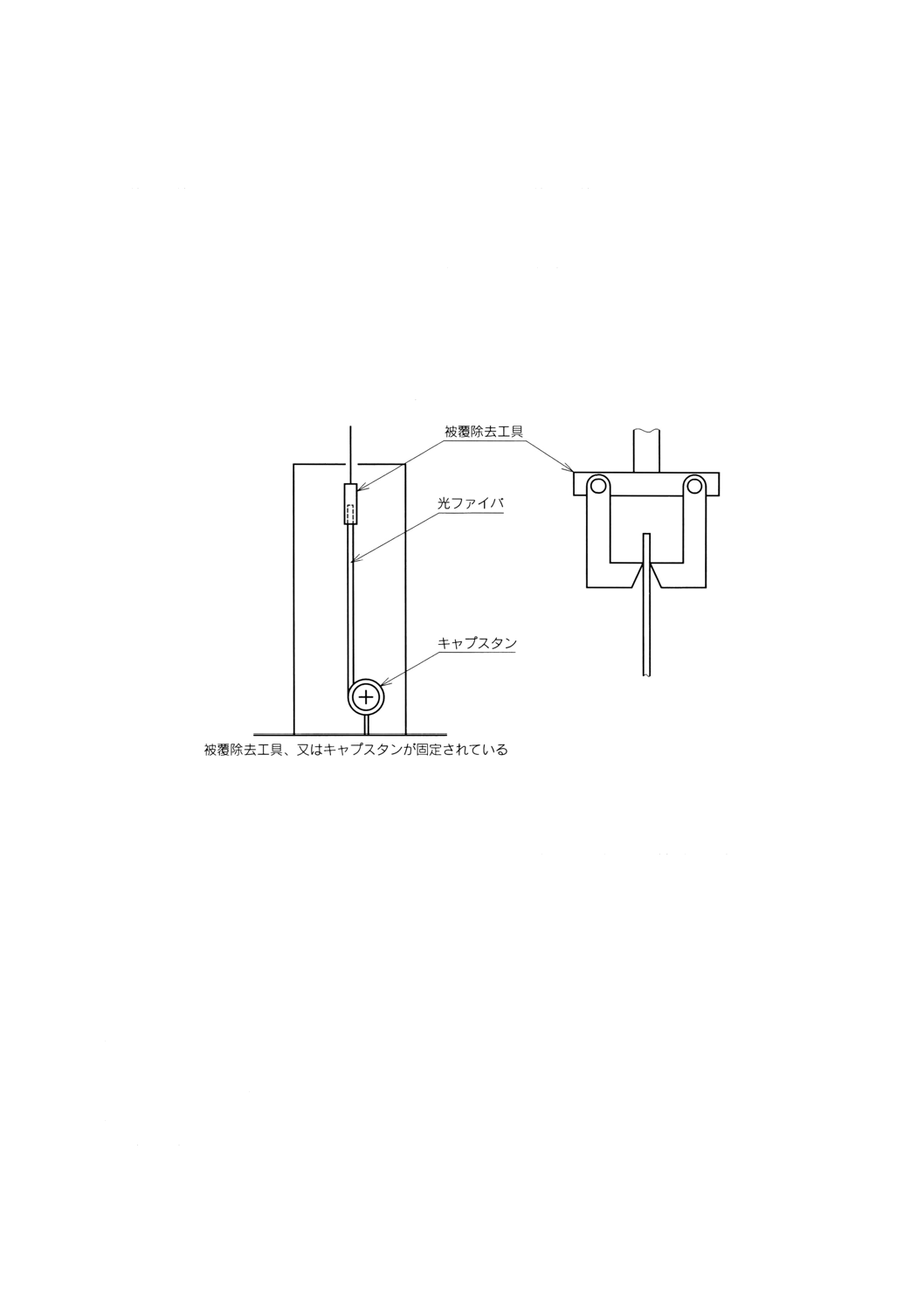
試験装置 試料光ファイバ及び除去工具間の相対運動を提供する適切な装置,例えば,垂直引張試
験機を使用する。この装置は試料光ファイバ又は除去工具に,急峻な動きなしに,一定の運動を与えなけ
ればならない。その移動は11.2.4に規定する速度で行うものとする。
引張装置はリセットできるように2方向で相対運動ができなければならない。除去工具の刃が光ファイ
バ軸に垂直になるか,光ファイバの曲げを防止する位置になるようにクランプしてその状態を保ち,試料
光ファイバの一端を固定する適切な手段を設ける。光ファイバの破断を防止するため,光ファイバをクラ
ンプ点に固定する場合には,光ファイバに過度の応力を加えない。試験装置の構成を図6に示す。
図6 被覆除去性の試験装置の概略図
8.2.2
ロードセル 光ファイバの被覆を除去する際には,光ファイバに加わる力を検知できる適切な装置
を使用する。
8.2.3
トランスデューサ増幅器 この装置はロードセルからの信号を受信して,被覆が完全に取り外され
る時点まで試料光ファイバにかかる張力を示す。その表示は,ストリップチャートレコーダなどのように,
連続したものとし,最大及び平均張力,除去作業時における張力の振動振幅及び振動周波数を算出するた
めの十分な情報を提供するものとする。張力測定精度は個別規格に規定する。
8.2.4
被覆除去工具
8.2.4.1
この試験の結果は使用工具の設計に強く依存しているため,次に示す工具設計ガイドラインを厳
守することが重要である。
a) 個別規格に特に指示がなければ,工具刃の穴径又は刃と刃の距離は,クラッド面を損傷させないため,
被覆除去される光ファイバの標準クラッド径よりも大きくするものとする。
実際の例を挙げれば,穴径又は刃と刃の距離は公称クラッド径よりも50μm大きい。
b) 被覆除去工具の刃は光ファイバを曲げない構造とする。刃が同一面でぶつかる被覆除去工具がこの試
験では望ましい。
8
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.2.4.2 被覆除去工具は試験取付具に取り付け,適切なクランプを使って光ファイバの周辺に密着させる。
8.2.4.3
被覆除去工具は,文書化されている品質スケジュールの指示間隔で,又は試験結果に影響するほ
ど摩耗しているときにはいかなる場合も,交換する。
備考 工具が摩耗していると,次の一部又は全部に影響を与える。光ファイバの破断,光ファイバ面
に残る残留物の量,被覆を光ファイバから除去する方法,被覆を除去するために必要な力。
8.2.5
光ファイバガイド 被覆除去工具の刃により,被覆除去される部分の光ファイバは次の要求事項に
適合する適切なガイド(被覆除去工具と一体設計されていてもよい。)を使ってまっすぐに保持する。
a) ガイドは光ファイバを支えて光ファイバの重さによるたるみを防止する。
b) ガイドは光ファイバの被覆を除去する際,その被覆の曲げによって生じる光ファイバの曲げを防止す
る。
c) ガイドは除去作業の妨げにならないように,除去工具のできるだけ近くに配置する。
d) ガイドは試験装置に簡単に挿入でき,また,簡単に清掃でき,被覆がたわんでもそれが妨げにはなら
ないものでなければならない。
8.3
試料の準備
8.3.1
代表的な試料 試料は評価の対象となる光ファイバ母集団を代表するものとする。試験の変動を考
慮し,最低10個の試料を試験し,その平均を求めて特定試料についての結果を得る。
8.3.2
試料長 被覆除去光ファイバ長は被覆除去力に影響する。しかし,光ファイバの標準被覆径が
250μmの場合,被覆除去光ファイバ長が被覆除去力に与える影響は最小である。被覆除去光ファイバ長は
個別規格に規定される(光ファイバの標準被覆径が250μmの場合,推奨値は20mm,30mm,又は50mm
である。被覆径がそれより大きい場合,被覆除去長は短いほうがよい。)。
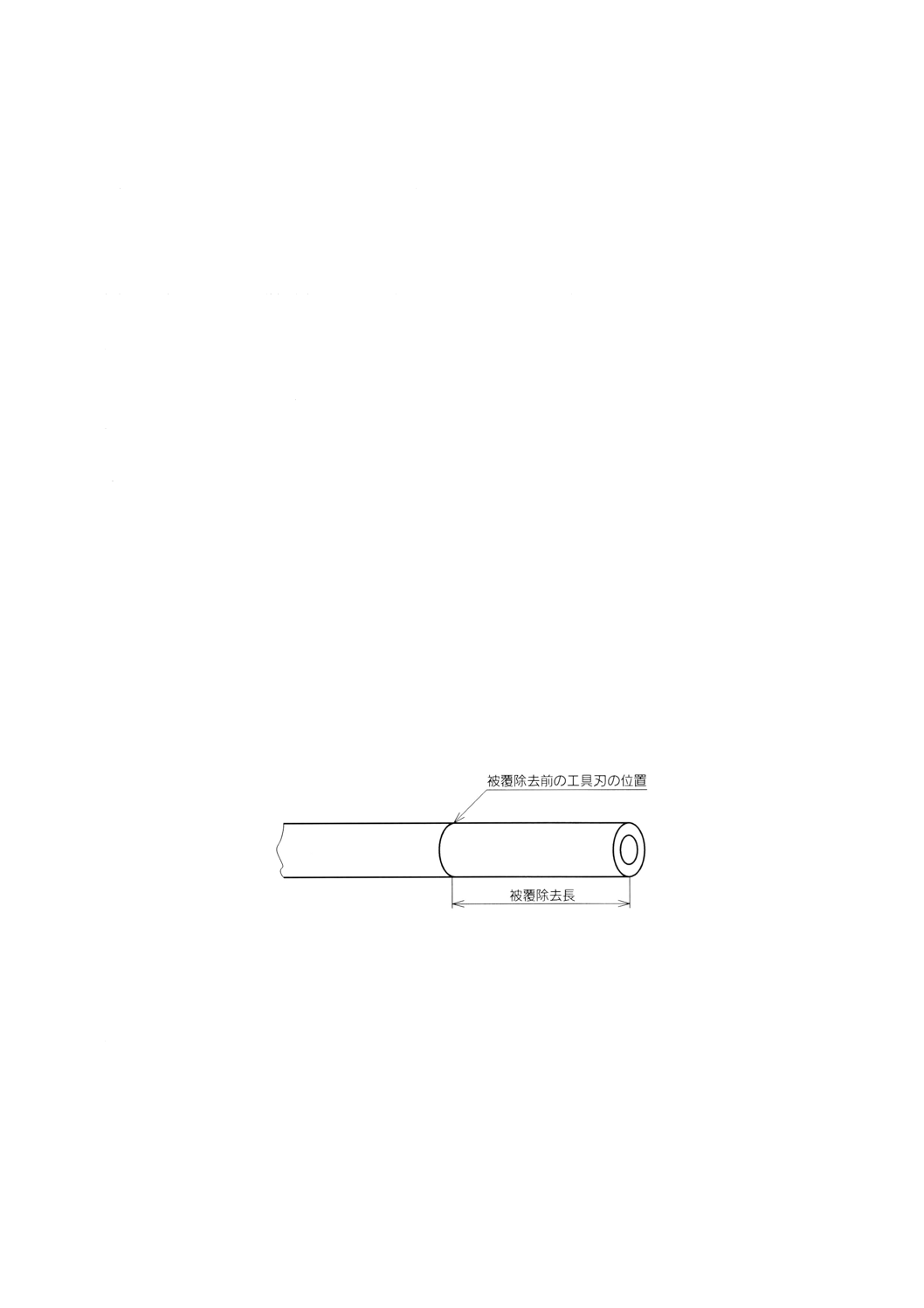
総試料長は固定光ファイバ端部と被覆除去工具との距離,除去工具によって除去される規定光ファイバ
長(図7参照),及び光ファイバを試験取付具に固定するために必要な光ファイバ長によって決まる。試験
結果は被覆除去工具によって除去される光ファイバ長によって一部左右される。結果は総試料長に左右さ
れることはない。
図7 試料光ファイバの構成
8.4
手順
8.4.1
はじめに この手順は,次の点を含んでいる。
a) 光ファイバの端部からの規定位置で被覆を切り取る。
b) 光ファイバから被覆を除去する際,この除去に必要な力を測定する。
9
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.4.2
除去速度 光ファイバから被覆を除去するのに要する力は,被覆除去速度に一部左右される。異な
る試験結果を比較する場合は,同じ被覆除去速度の条件で評価する。試験装置は,光ファイバと被覆除去
工具間の相対運動を個別規格で規定する速度で処理できるように設定する(標準被覆径が250μmの光ファ
イバの推奨値は100mm/分,又は500mm/分である。被覆径がそれより大きい場合の推奨値は100mm/
分である)。
8.4.3
前処理 特に指示がなければ,試料を温度25℃±5℃,相対湿度30〜60%で最低24時間放置する。
8.4.4
トランスデューサ増幅器の校正 トランスデューサ及びロードセルは,各一連の試験前,又は文書
化されている校正スケジュールの指示どおりに校正する。
8.4.5
試料の装着 試料を装着する前,被覆除去工具の両刃の周辺には前の使用から生じた破片及び/又
はたい積物があってはならない。
試料の一端を試験取付具に固定して装着時に滑らないようにする(例えば,試料を直径80mmのキャプ
スタンの回りに3回巻く。)。他の一端は被覆除去工具を通して光ファイバガイド/支持体から挿入する。
8.4.6
被覆除去
8.4.6.1
試験装置を始動して,光ファイバと被覆除去工具の間に一定の相対運動を与える。
8.4.6.2
試料から被覆を除去するために必要な力を観察して記録する。試験時に光ファイバが破断するデ
ータは除外する。
8.4.6.3
試料から被覆が完全に除去されれば,試験は完了である。
備考 肉眼で見える被覆の残留物は,試料を試験室用ティシュで軽くふけば,簡単に取れなければな
らない。
8.5
結果 各試験ごとに,次のデータを報告する。
− 試験日
− 被覆外径及び被覆材種別を含む試験対象光ファイバの識別記号
− 製造業者及び標準刃ホールサイズを含む使用被覆除去工具種別識別記号
− 被覆除去速度
− 被覆除去長
− 次の内容を含む試験結果
a) 破断のない,又は損傷のない試験対象光ファイバの数
b) 最初のピークを除いた平均被覆除去力に関して,10以上の試料で求めた結果の平均値
c) 試料母集団の標準偏差又は範囲
d) 被覆を完全に除去する前に,破断又は損傷した試験対象光ファイバの数
e) 温度及び相対湿度を含む前処理,及び試験中の環境条件
f)
被覆残留物が8.4.6.3の指示どおり,容易に除去できない場合は,その事実を報告する。
9. 疲労係数の説明 応力疲労係数の決定に関する五つの主要な試験方法を説明する。実際には,動的疲
労と静的疲労の両方の試験を採用する。いずれの試験でも,できるだけ実際の適用事例に近い条件の下で
破断応力と疲労特性を決定するものとする。次の一連の試験方法が利用できる。
a) 引張りによる動的疲労係数測定法(10.)
b) 曲げによる動的疲労係数測定法(11.)
c) 引張りによる静的疲労係数測定法(12.)
d) 曲げによる静的疲労係数測定法(13.)
10
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
e) 均一な巻き付けによる静的疲労係数測定法(14.)
上記すべての試験方法は,一定の環境条件で実施する。製品規格に特に規定されない限り,公称温度値
は20〜23℃の範囲(公差は試験中±2℃)であり,公称相対湿度値 (RH) は40〜60%の範囲(公差は試験
中±5%)である。その解釈としては,推奨値により近いことが望ましい。推奨公称値は50%RHである。
また,特に規定されない限り,すべての試料を最低12時間試験環境において前処理する。
信頼性評価に関して,疲労係数(及びスクリーニング強度)を使用することはまだ検討中である。これ
らのパラメータを上記の環境とは異なる使用環境に適用する方法は開発されていない。
上記の試験によって得られる疲労係数nの値は,光ファイバを規定の温度と湿度以上に一定期間放置し
た後では,変化することが観測されている。
これらの方法の使用に関する指針を,附属書Bに示す。
備考 疲労係数の観測値であるnは疲労試験により異なる。測定時間と適用応力レベルにより,その
結果に影響を与えることが観測されている。試験方法を選択するときには注意すること。これ
は,使用者と製造業者の合意による。
静的及び動的疲労試験方法は,その両方の試験を同じ有効測定時間で実施すれば,同等の結果を示す。
動的疲労試験の場合,これは,静的疲労試験の測定時間よりも (n+1) 倍長い測定時間を意味する。
静的疲労試験方法を用いるとき,測定時間を長くして,その結果,適用応力レベルが低ければ,n値が
増大することが観測されている。この規格で与えた静的疲労試験の測定時間範囲は,一般に比較的短い時
間枠で実行される動的疲労試験よりも良好な実際的な状況に近づく。
10. 引張りによる動的疲労係数測定法 (IEC 60793-1-B7A)
10.1 目的 この方法は,指定した一定のひずみ率で光ファイバの動的疲労パラメータを決定するもので
ある。
この方法は,メジアン破断応力が最高指定ひずみ率において3 100MPaよりも大きい光ファイバにだけ
使用する。メジアン破断応力が3 100MPaより小さいファイバの場合,この条件は十分な精度を実証して
いない(10.4.2参照)。
この方法は,ひずみ率を変えることによって光ファイバの疲労特性を評価するものである。この試験は
ひずみ率特性と破断応力が対数的に線形である光ファイバに適用できる。
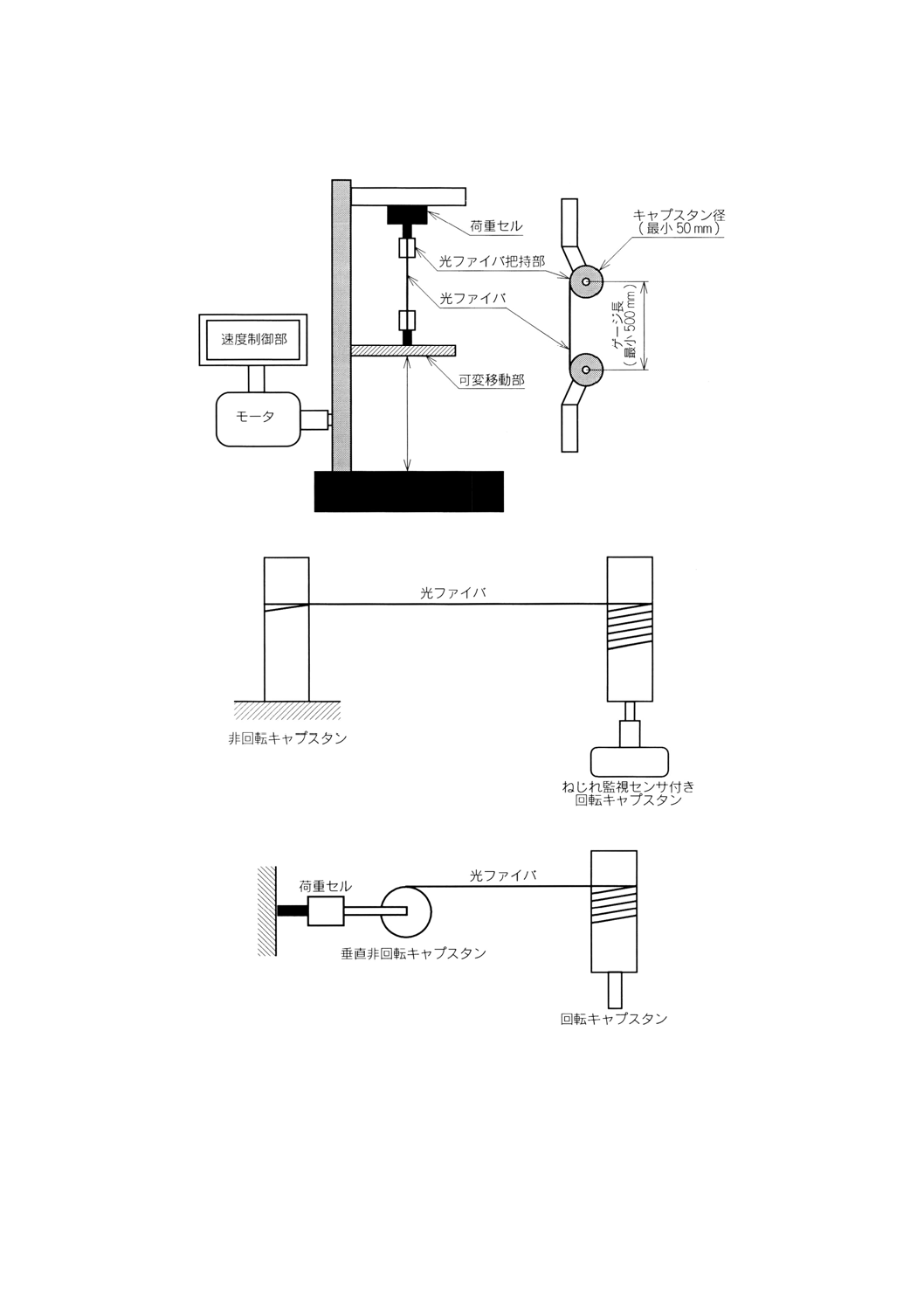
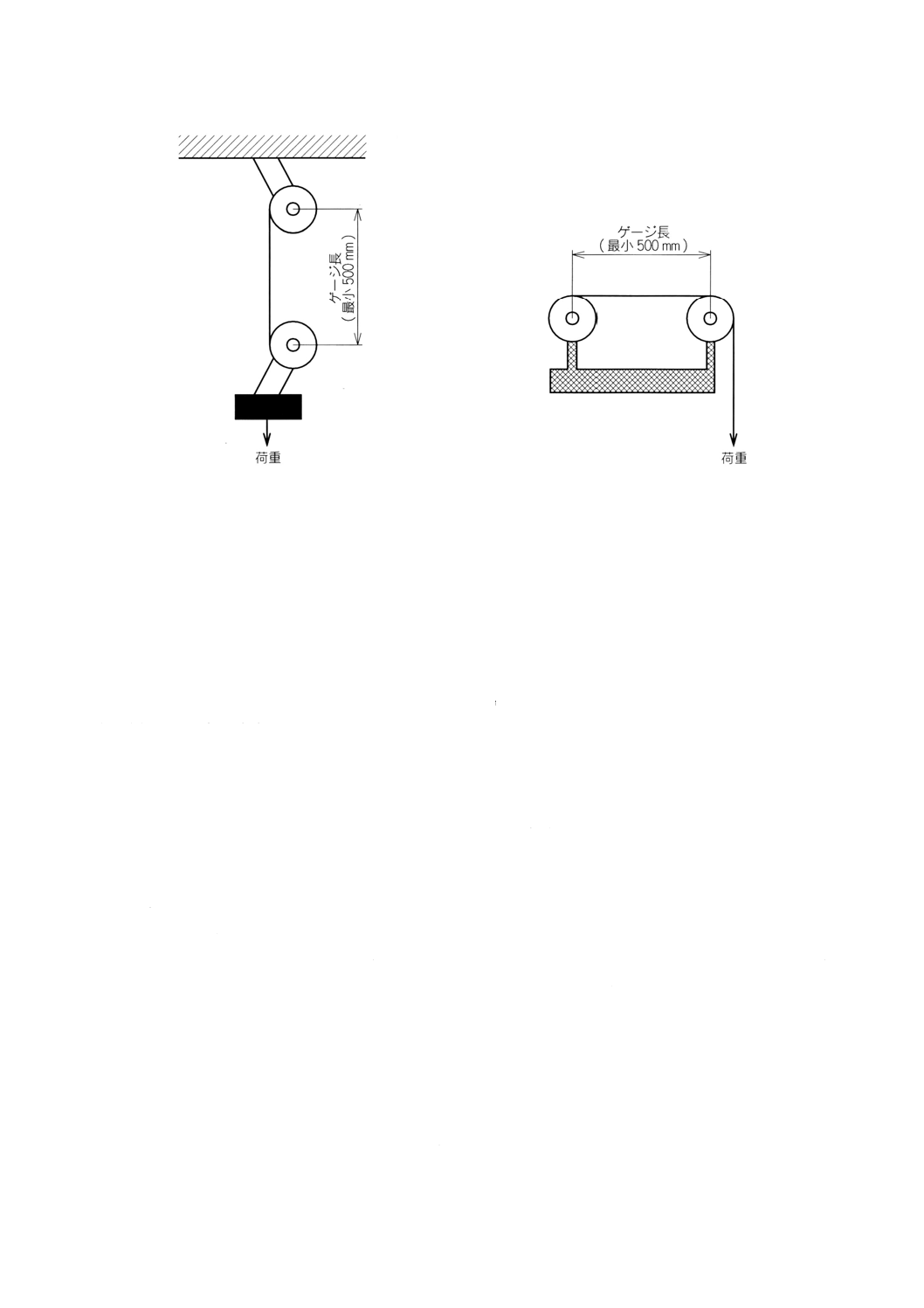
10.2 装置 この項では,動的破断応力の試験に使用する装置の基本的な要求事項を述べる。これらの要
求事項に合致する構成は多数ある。図8,図9,図10に幾つかの例を示す。
製品規格に規定されていない限り,引張試験試料には500mmのゲージ長を使用する。
10.2.1 試料の保持方法 試料光ファイバを両端で把持し,光ファイバのゲージ長の部分に破断が生じるま
で引っ張る。
把持部での光ファイバ破断は最小限に抑える。
把持部に生じる破損は記録するが,サンプルの一部とはみなさず,以後の計算では使用しない。
キャプスタン(オプションとしてエラストマシースで覆うことがある。)は,光ファイバを把持するため
に使用される(図8)。試験評価の対象ではない光ファイバの部分をキャプスタンの回りに数回巻き,例え
ば,弾性バンドやマスキングテープなどを使って端部を固定する。光ファイバは交差させずに巻く。ゲー
ジ長は,引き延ばす前の把持キャプスタンの軸から軸までの光ファイバ長である。
キャプスタンとプーリの径は,破損させる曲げ応力がキャプスタン上で光ファイバに加わらないように
決定する。代表的な石英系光ファイバの場合,曲げ応力は,光ファイバを図8に示すように巻く際,又は
11
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
プーリを横断する際,175MPaを超えてはならない(125/250μm−クラッド/一次被覆−石英系光ファイバ
の場合,最小キャプスタン径は50mmである。)。キャプスタン表面は,光ファイバが完全に張力負荷され
ているとき,食い込まないような十分な堅さをもたせる。この状態は予備試験によって決定する。
10.2.2 光ファイバへの応力印加 光ファイバが破損するまで,一定のひずみ率速度で引き伸ばす。伸び速
度はゲージ長に対して,%/分として表現する。次にこの例を二つ示す。
a) 把持キャプスタンの一方又は両方を一定の速度で動かすことによって,キャプスタン間の間隔を大き
くする。この場合,開始間隔はゲージ長と同じとする(図8)。
b) 把持キャプスタンの一方又は両方を回転させて試料ファイバを巻き取る(図9及び図10参照)。
ひずみ速度は二つのキャプスタン間の長さの変化であり,単位は時間で割った%である。方法b)を使用
する場合,キャプスタン上の光ファイバを巻くとき,交差しないように注意する。
複数の光ファイバを同時に評価する場合,破断時における衝撃が他の試料光ファイバに損傷を与えない
ように,各光ファイバを隣接光ファイバから保護する。
10.2.3 破断応力の測定 各試料光ファイバの試験中及び破断時の引張応力は,荷重セルによって測定する。
その荷重セルは,各破断応力範囲について破断又は最大荷重の0.5% (0.005) 内に校正されているものとす
る。荷重セルは,光ファイバに荷重を加えて評価するときと同じような方向で校正する。方法b)の場合,
ひもと校正用おもりの付いている荷重セルで校正する際には,1個の軽い低摩擦プーリ(又は複数のプー
リ)を非回転キャプスタン(図9参照),又は回転キャプスタン(図10参照)の代わりに使用する。ひも
はその一端を荷重測定装置(又はそのキャプスタン)に接続し,実際の光ファイバ方向と同じにし,その
厚さ又は径は試料光ファイバの厚さ又は径と同等とする。荷重セルの校正には,代表的な破断又は最大荷
重を含む最低三つの校正用おもりを推奨する(最大より50%少ない,最大,最大より50%多いもの3種類)。
破断時における最大引張荷重を,例えば,ストリップチャートレコーダなどによって記録する。応答時
間は実際の1%以内で破断応力を記録するのに十分なものとする。
備考 プーリからの摩擦効果により,水平に取り付けた回転キャプスタンテスターの荷重セルの校正
に大幅な誤差が生じることがある。
10.2.4 ひずみ速度の設定 速度制御装置の設定は,規定ひずみ速度を満たすために試行によって決定する。
ひずみ速度は単位時間当たりのゲージ長の変化%として表現する。製品規格に規定されない限り,最大ひ
ずみ速度は100%/分以下とする。実際の最大ひずみ速度は,装置の注意事項,サンプルの材料特性など
試験方法の形態を考慮して選択する。
三つのひずみ速度を使用し,各ひずみ速度は最大値からほぼ10の累乗で順次減らす。
荷重を減らすとともに,より速いひずみ速度を使って試験期間を最小限にすることが可能である。例え
ば,0.025%/分のひずみ速度を指定する場合,破断応力の範囲を設定するために,次の最も速いひずみ速
度(0.25%/分)で一部の試料を評価する。そして,初期試行試料より得られた最低の破断応力の80%以
下のレベルまで,最も速いひずみ速度で荷重を加える。
10.2.5 応力負荷速度の特性 応力負荷速度は光ファイバタイプ,装置,破断応力,光ファイバのすべり,
ひずみ速度によって変動する。次の式によって,疲労計算で使用する各ひずみ速度によって応力負荷速度
(
a
σ&) を計算する。
)
8.0(
)
(
2.0
f
f
f
a
σ
σ
σ
σ
×
−
×
t
t
=
&
································································ (1)
ここに,
σf: 破断応力
t (σf) : 破断までの時間
12
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
t (0.8×σf) : 破断応力の80%における時間
この勧告は検討中である。
図8 平行引張り試験の概略図
図9 回転引張り試験の概略図
図10 回転引張り試験の概略図
10.3 被測定試料
13
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10.3.1 試料数 試験結果は変動しやすいため,各ひずみ速度について最低15の試料を試験し,各ひずみ
速度について最も低い破断応力データポイントを除く。又は,対数σf対対数
a
σ&の傾き推定値標準誤差
(SEE) が0.001 7以上であれば(10.5.3に説明されている。),各ひずみ速度について最低30の試料を評価
し,各ひずみ速度について最も低い二つの破断応力データポイントを除く。
10.3.2 試料数(オプション) 附属書AのA.1に説明されているように,動的疲労係数 (nd) の推定値に
関して信頼区間が判明している一部の適用事例には,試料を追加しなければならないことがある。予想さ
れる動的ワイブル傾き (md) によって決まる各種試料サイズについては,表A.1を参照すること。附属書
AのA.2に示すアルゴリズムの適切な使用方法は,同一の試料サイズが各ひずみ速度に指定されている試
験に限定されている。
10.4 手順 この手順は,所定のひずみ速度で評価する試料セットに加わる光ファイバ破断応力を求める
方法を述べる。母集団統計の計算を10.5に示す。
10.4.1 ゲージ長を設定し,記録する(10.2.2参照)。
10.4.2 ひずみ速度を設定し,記録する(10.2.4参照)。
10.4.3 方法a)を使用する場合,把持キャプスタンをゲージ長に合わせる。
10.4.4 試験試料を一度に一端ずつ把持キャプスタンに固定する。光ファイバの接線ポイントは荷重校正の
場合と同じ位置にある。光ファイバが交差せずにキャプスタンの周りに少なくとも必要巻数巻けるように
各試料を誘導する。
10.4.5 荷重記録計器をリセットする。
10.4.6 モータを始動させて光ファイバに応力を加える。光ファイバが破損するまで,応力対時間を記録す
る。
10.4.7 試料セット内のすべての光ファイバについて,ステップ10.4.3から10.4.6を繰り返す。
10.4.8 各破断について光ファイバ破断応力 (σf) は,10.5.1の式を使用して計算する。
10.4.9 10.5.3の使用の有無のため,10.2.5によって応力負荷速度 (σa) を計算する。
10.4.10 10.5.2の式を使用して,必要な母集団統計計算を行う。
10.5 計算
10.5.1 破断応力 被覆径が250μm(プラスチック被覆)の一般的な125μm径光ファイバのように被覆の
影響を無視できる(5%未満)とき,破断応力 (σf) は次の式で計算できる。
g
f
A
T
=
σ
·················································································· (2)
ここに,
T: 破断時において複合試料が受ける力(引張り)
Ag: 光ファイバ公称断面積
被覆の影響が重要であるときは,より完全な方法として附属書AのA.3がある。
10.5.2 所定のひずみ速度における破断応力 母集団を特性化するワイブルプロットを作成するには,次の
ステップが必要である。
a) 破断応力を最小から最大まで分類する。各応力にランク (k) を割り当てる。ランクは1番目が最も弱
く,2番目が次に弱くなどの順番である。幾つかの破損の破断応力が同じであっても各破損には異な
るランクを割り当てる。
b) 各破損について,故障の累積確率 (Fk) を計算する。
14
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Fk=
N
k 5.0
−
k=1,2,……,N ············································· (3)
ここに,
N: 試料数
c) ワイブルプロットを作成するためにln [−ln (1−Fk)] 対ln (σf) をグラフ化する。
備考 これには特別なワイブルグラフ用紙が利用できる。
d) プロットに必要な情報を付ける。
所定のゲージ長と径の場合,動的疲労ワイブルプロットは次の累積確率関数と関連がある。
Fk=1−exp [− (σf/σ0) md] ··························································· (4)
k (P) =P・N+0.5とし,所定の確率 (P) と関連のあるランクと定義する。k (P) が整数であれば,σf (P) =
σfk (P) をk (P) 番目のランクの破断応力とする。k (P) が整数でなければ,k1はk (P) より下の整数とし,
k2=k1+1とする。σf (P) = (σfk1+σfk2) 1/2とする。
メジアン破断応力はσf (0.5) である。ワイブル傾きは,次の式で与えられる。
[
]
[
])
15
.0(
)
85
.0(
298
457
.2
f
f
σ
σ
n
n
d
l
l
m
−
=
ワイブルパラメータは,次の式で与えられる。
[
]
+
=
)5.0(
512
366
.0
exp
f
d
0
σ
σ
nl
m
各応力負荷速度ごとにワイブルプロットをグラフ化し,各応力負荷速度ごとにメジアン破断応力σf (0.5)
を決定する。
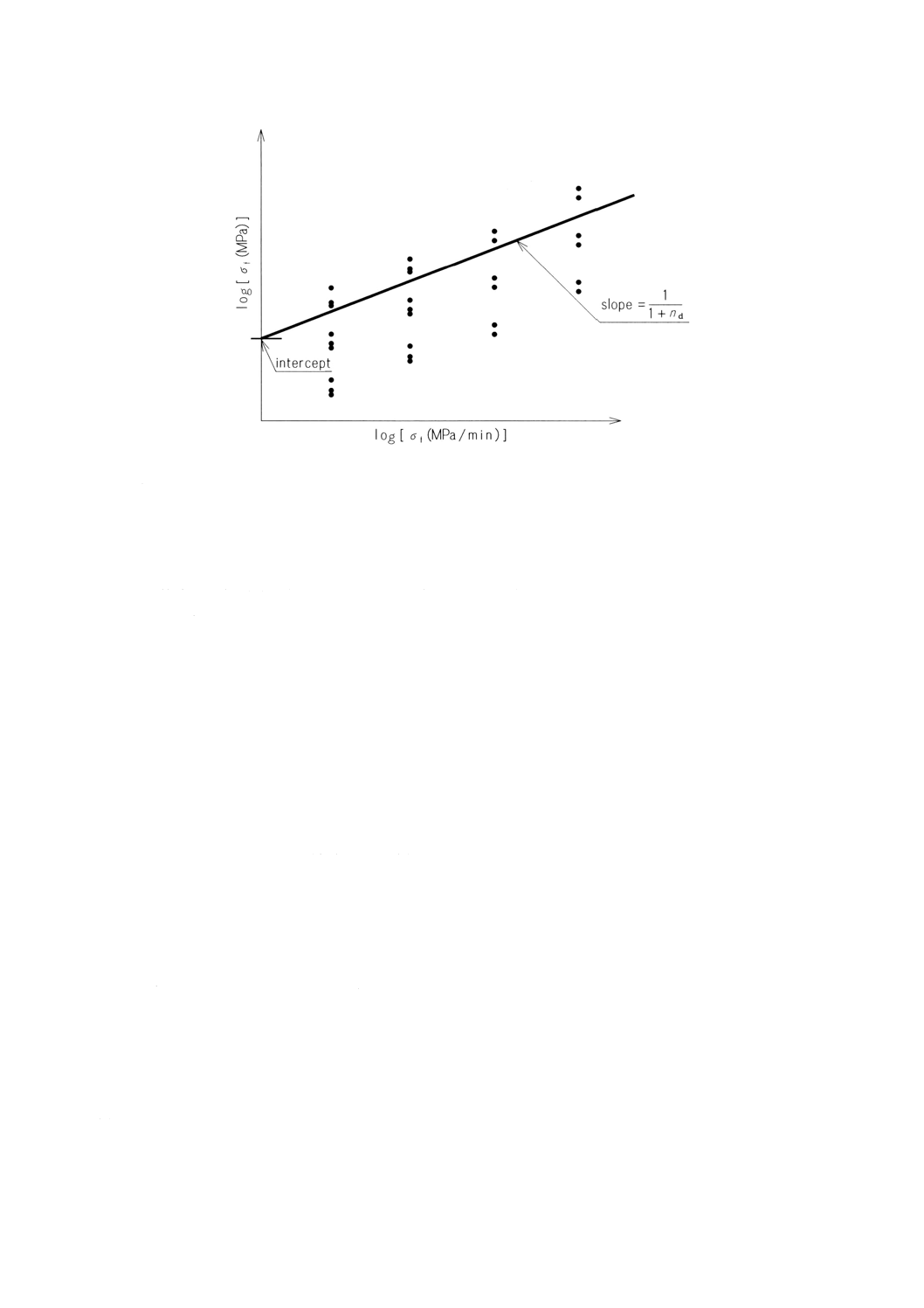
10.5.3 動的疲労係数 (nd) 10.5.2に定義するメジアン破断応力 (σf) は,一般には,次の式に基づき一定
の応力速度 (
a
σ&) とともに変動する。
d
a
f
1
log
log
n
+
=
σ
σ
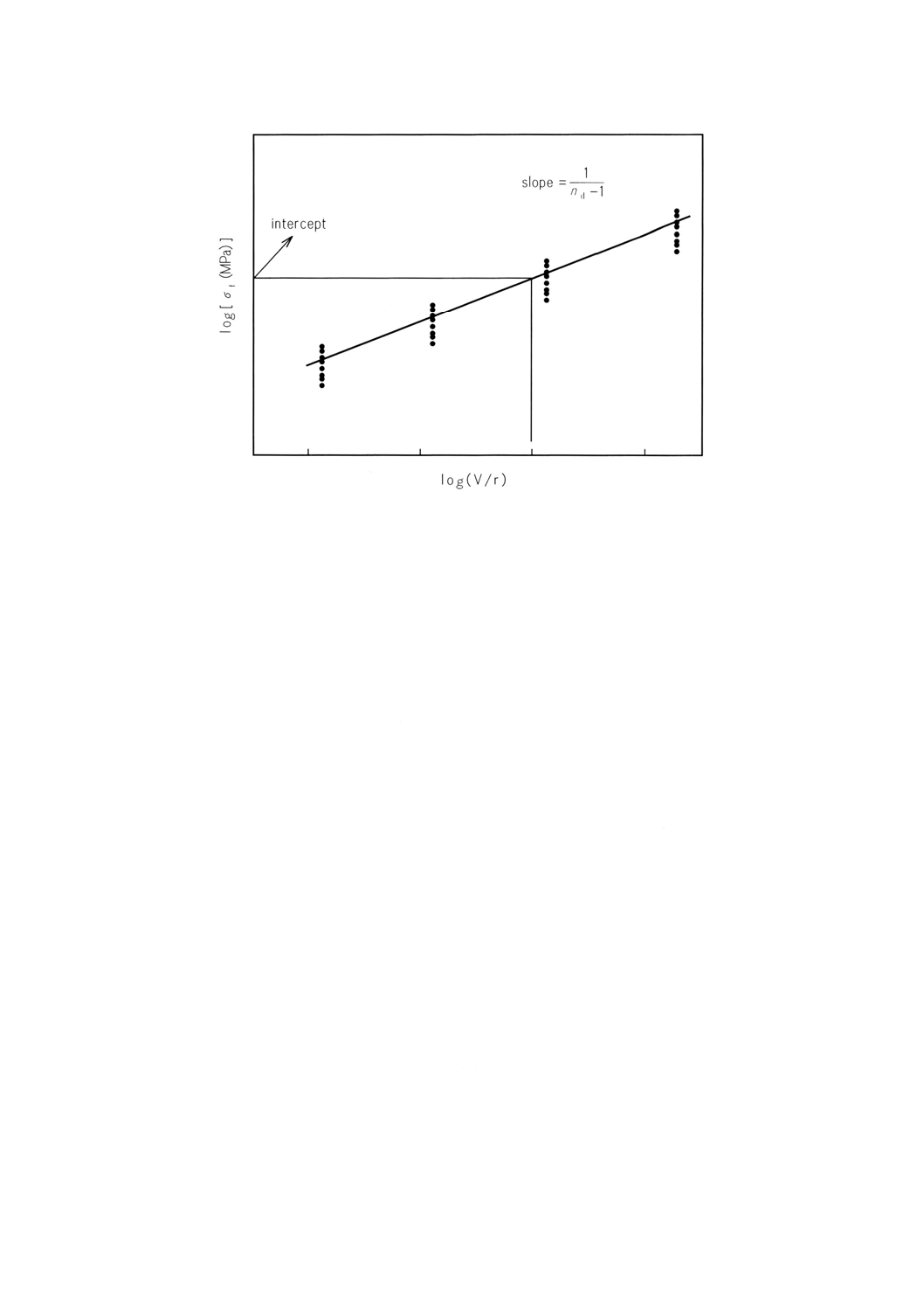
&+ intercept ····························································· (5)
ここで,interceptは図11に示すように,均一の応力負荷速度における破断応力の対数グラフより,次の
式から算出できる。
intercept=Y− (slope) X ··························································· (6)
特に規定されていない限り,A.2のアルゴリズムを使って推定値nd,X,Yと試験の95%信頼区間を算
出する。
特に規定されていない限り,対数
a
σ&対 対数σfの傾き推定値標準誤差 (SEE) は,0.001 7未満とする。
SEEの決定については,A.2を参照すること。
15
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図11 動的疲労のデータ構成
10.6 結果
10.6.1 次のデータを報告する。
− 光ファイバ識別記号
− 試験日
− 動的疲労係数 (nd) (他のパラメータは検討中である。)
10.6.2 次のデータは,要求があれが,入手できるものとする。
− ひずみ速度
− ひずみ速度当たりの試料数
− 推定値標準誤差 (SEE)
−
X,及びY
− ゲージ長
− 試験環境
− 試験前処理時間
− 破断応力計算法
− 光ファイバのヤング率(考慮した場合)
− 被覆のヤング率(考慮した場合)
− 全ひずみ速度のワイブル・プロット(使用した場合)
− 10.2.5と異なる場合の応力負荷速度の計算法
11. 曲げによる動的疲労係数測定法 (IEC 60793-1-B7B)
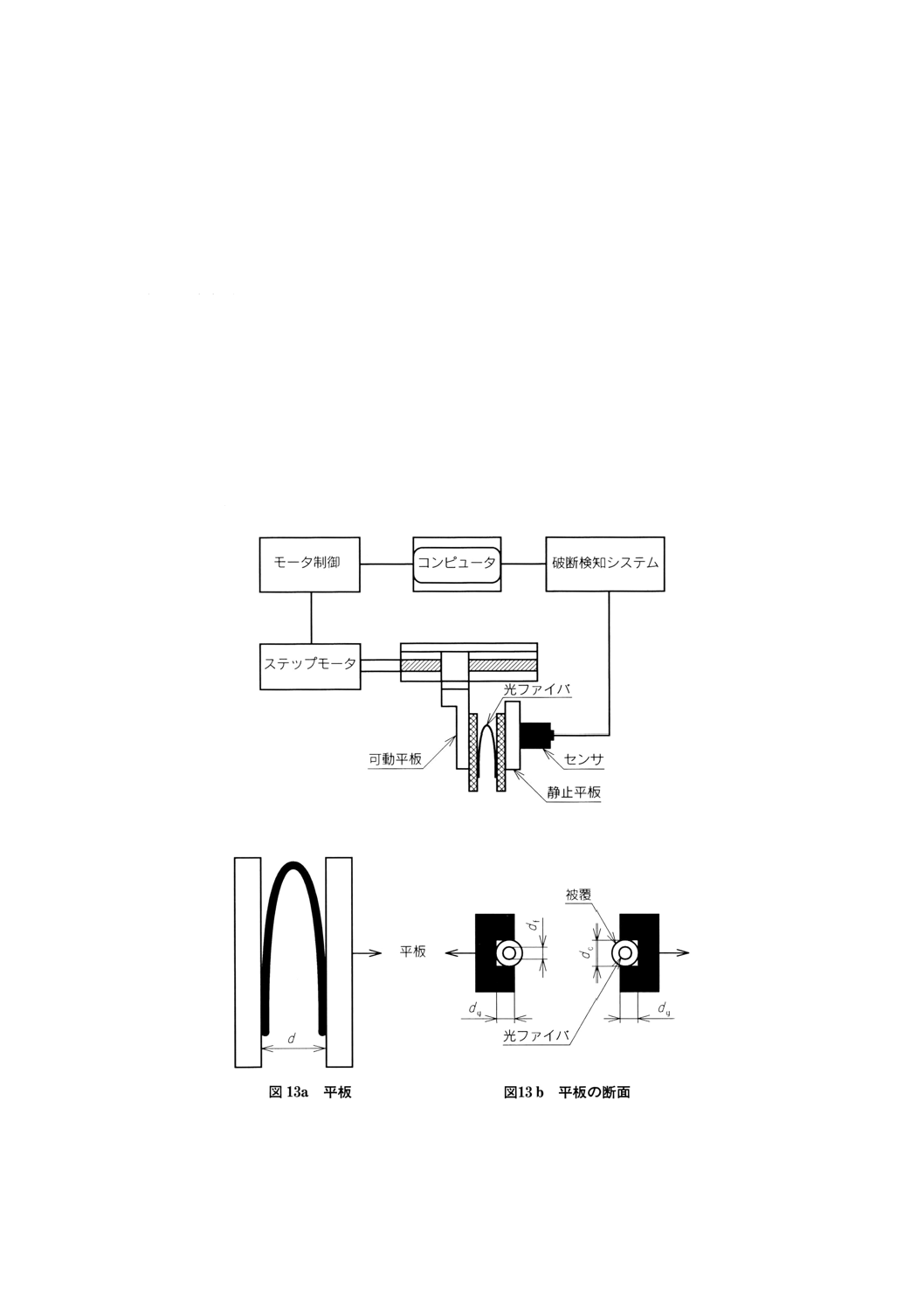
11.1 目的 この試験は,一定の平板速度による曲げによって,光ファイバの動的疲労係数を測定するも
のである。曲げ試験は,実布設の光ファイバに加わる応力が曲げから生じる場合には,引張試験よりむし
ろこの測定法で評価する。この方法は平板速度を変えることによって光ファイバの疲労特性を評価するも
のである。この試験は,光ファイバの破断応力の対数と平板速度の対数が線形となる平板速度の場合に適
用できる。
16
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
11.2 装置 試験の概略図を図12に示す。この装置は,破断時における平板間距離を測定することによっ
て,光ファイバを破断させるのに要するひずみ応力を測定するものである。この手法は各種の試験環境に
容易に対応できる。
11.2.1 ステップモータ制御 この装置は線形的に正確で信頼性のある繰り返し可能な電子制御が行える
ものとする。1μmの最大ステップ長を使用する。より高い精度には0.1μmのステップ長を使用できる。
11.2.2 ステップモータ駆動可動平板 ステップモータの回転を親ねじ (lead screw) によって線形並進運
動に変換された可動平板を用いる。
11.2.3 静止平板 この平板は光ファイバを保持するものである。
11.2.4 平板可動速度 光ファイバは破断するまで,規定の一定平板速度(V=定数)で電子制御のステッ
プモータによって構成されている2本の平板の間に置く。特に製品規格に規定されない限り,精度が±10%
である1,10,100,1 000,μm/sの速度を使用する。
11.2.5 光ファイバ破断検出の方法 光ファイバの破断を検出するには次のいずれかの手法を使用する。
11.2.5.1 方法1 音響的な検出器又はトランスジューサを使用して光ファイバの破断を検知し,コンピュ
ータに可動平板を停止させる信号を送り,破断時の平板間距離を表示する。
11.2.5.2 方法2 力(圧力)トランスジューサを静止平板に組み込み,適切な信号調節装置に接続し,試
験中に光ファイバに及ぶ力を測定する。光ファイバが破断すると,力はゼロに落ちてその破断が検出され
る。
11.2.5.3 方法3 試験中,光ファイバに光を通し,出力信号を監視することも光ファイバの破断を検出す
る別の手法である。光ファイバが破断すると,伝送は失われる。
上記すべての手法から,破断時における平板の距離(分離長) (d) を次の式から算出する。
d=平板の開始位置−平板の移動距離
11.3 被測定試料 試料は,長さが約30〜120mmの被覆光ファイバである。光ファイバ径は±1μmまで,
被覆径は±5μmまで判明しているものとする。特に製品規格に規定されない限り,各速度の試料数は最低
15とする。
11.4 手順
11.4.1 校正手順の一例を次に示す。平板の面が完全に接触しているときは,平板間の距離をゼロに設定す
る。接触が行われているとき,ステップモータコントローラ上の読みはゼロである。光ファイバが破断す
るときの平板の分離長dはゲージブロックで距離を調べれば確認できる。ゼロの位置は±5μmの再現性が
ある。
注 平板を接触させる前に,その表面を清掃すること。
11.4.2 特に製品規格に規定されない限り,溝の深さを含め,平板の初期開口ギャップを12.00mmに設定
する。
11.4.3 所定の平板速度についての光ファイバ母集団を評価するときは,同一母集団からの同じ光ファイバ
を破断させて,破断時における平板の分離長を決定する。この平板の分離長 (d) を使って,式(7)〜(9)によ
り破断応力を算出する。初期(開始)平板の分離長は応力の値が破断応力の50%に等しい値を使って式(7)
〜(10)から決定できる。これによって,試験期間を短縮でき,最高平板速度を達成できることになる。こ
れは,最大ステップモータ速度が最大達成可能平板速度を制限できるからである。
曲げ応力が小さいときは,より速い平板速度を使用すれば,試験期間を最小限に抑えることができる。
例えば,1μm/sの平板速度を指定する場合,次に早い速度 (10μm/s) で幾つかの試料を試行試験して破断応
力の範囲を設定する。そこで,1μm/sの平板速度では,次に早い速度 (10μm/s) で行った初期試行試料に対
17
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
する最も低い破断応力の80%以下のレベルまで予備荷重を加えることができる。
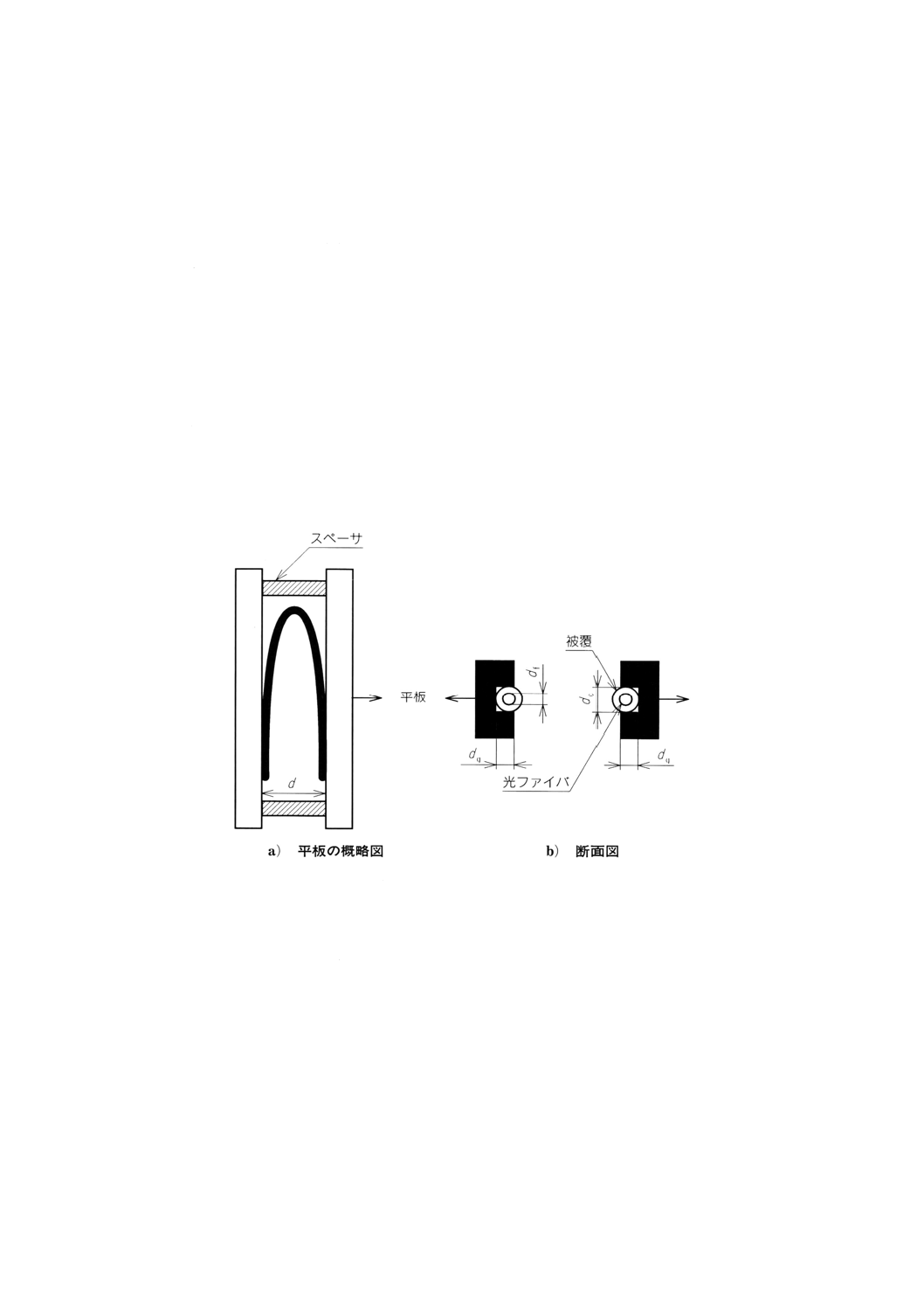
11.4.4 試料の両端を慎重につかみ,試料を慎重に曲げて平板間に挿入し,上に引っ張り,図13に示すよ
うに位置づける。光ファイバを取り扱うときや装着するときには,曲げた光ファイバ(ゲージ長)を指で
触れないようにする。光ファイバの頂点は常に取付具と同じ位置にあるものとする。これによって,非並
列平板の影響が最小となる。上か下かの光ファイバ方向は重要ではない。
11.4.5 試料が破断したら,ステップモータにブレーキをかけ,停止させて破断時の平板の分離長を記録す
る。
11.4.6 各試料について規定の平板速度でステップ11.4.1から11.4.5を繰り返し,すべての試料について他
の規定平板速度で前記ステップを繰り返す。
11.4.7 11.5.1の式を使用して,各破断について光ファイバ破断応力 (σf) を算出する。
11.4.8 11.5.2の式を使用して,必要な母集団の統計計算を完了する。
11.5 計算
11.5.1 破断応力 各光ファイバの破断応力は次の式から算出する。
σf=E0×εf (1+0.5α'εf) ································································ (7)
g
c
f
d
d
d
d
2
198
.1
f
+
−
×
=
ε
······························································ (8)
α'=0.75×α−0.25 ······································································ (9)
ここに,
σf: 破断応力 (GPa)
E0: ヤング率 (72GPa)
εf: 光ファイバの頂点における破断ひずみ
α: 非線形応力/ひずみ特性の修正パラメータ(αの代表的な値
は,6である。)
df: 光ファイバ径 (μm)
d: 光ファイバ破断時における平板間の距離 (μm)
dc: 被覆を含む全体の光ファイバ径 (μm)
2dg: 両方の溝の全体の深さ (μm)(図13参照)
11.5.2 一定平板速度での破断応力 13.5.2を参照すること。
11.5.3 曲げによる動的疲労係数 (nd) 一般に,メジアン破断応力 (σf) は次の式に基づき一定の平板速度
(V) とともに変動する。
r
V
n
log
1
1
log
d
f
×
−
=
σ
+intercept ··················································· (10)
ここに,
r: 光ファイバの半径
interceptは図14に示すように,一定の平板速度における破断応力の対数である。
interceptは次の式から算出できる。
intercept=Y− (slope) ・X ························································· (11)
特に規定されない限り,附属書AのA.2のアルゴリズムを使って推定値 (nd), X,Yと試験の95%信頼
区間を算出する。特に規定されていない限り,対数σf対 対数Vの傾き推定値標準誤差 (SEE) は,0.001 7
未満とする。SEEの決定については,A.2を参照すること。
11.6 結果
18
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
11.6.1 次のデータを報告する。
− 光ファイバ識別記号
− 試験日
− 曲げによる動的疲労係数 (nd) (他のパラメータは検討中である)
11.6.2 次のデータは,要求があれば,入手できるものとする。
− 平板速度
− 各平板速度ごとの試料数
− 推定値標準誤差 (SEE)
− 試験環境
− 試験前処理時間
− 光ファイバのヤング率(A.3に示す以外のものを想定した場合)
− 適合パラメータ;メジアン破断応力 (md) 及びワイブルパラメータ (σ0)
− すべての平板速度に関するワイブルプロット
−
X及びY
− 光ファイバ径
図12 曲げによる動的疲労係数の測定概略図
図13 平板の構造図
19
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図14 動的疲労のデータ構成
12. 引張りによる静的疲労係数測定法 (IEC 60793-1-B7C)
12.1 目的 この試験は,引張り状態における個々の光ファイバ長の静的疲労係数を決定するものである。
この方法は,印加応力レベルを変えることによって光ファイバの静的疲労特性を評価する。
12.2 装置 試験装置の概略図を図15に示す。各構成とも応力を光ファイバに加えて破断に至る時間を監
視する手段である。特に製品規格に規定されない限り,ゲージ長,すなわち,キャプスタン相互間の距離
は500mmとする。
12.2.1 試料の両端末の把持方法 10.2.1を参照すること。
12.2.2 光ファイバへの応力印加 応力は既知のおもりを一方のキャプスタンにつるすことによって印加
する(図15参照)。幾つかの試料を所定の公称応力レベルで評価する。所定の公称レベルに対する実際の
応力レベルの範囲が,測定の品質に影響する。簡単なメジアン計算法の場合,所定の公称値に対する応力
レベル範囲はその公称値の±0.5%以内とする。相同法 (homologous method) の場合と最ゆう(尤)推定法
(MLE : maximum likelihood estimate) の場合,各試料の個別応力レベルを計算で使用するために記録する。
10.5.2を参照すること。
12.2.3 破断時間の測定 この試験方法の要求事項に合致する破断に至る時間を監視する手法は多数ある。
破断に至る時間を監視する一つの方法は,応力を光ファイバに印加するために使用するつり下げ用おもり
の下にタイマーを設定することである。
12.3 被測定試料
12.3.1 各水準(公称応力)レベルごとの試料数 特に製品規格に規定されていない限り,各公称応力レベ
ルごとの試料数は少なくとも15とする。
12.4 手順 最低五つの異なる公称印加応力レベル (σa) で評価する。この公称応力は,破断に至るメジア
ン時間が対数目盛り上で,約1時間から約30日の範囲でほぼ等しい距離となるように選択する。標準石英
系光ファイバについてこれを達成するために必要な荷重は30Nから50Nの範囲内である。
破断に至る時間は光ファイバの破断応力と疲労係数の両方によって決まるため,印加される実際の公称
20
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
応力レベルとその数は繰り返し決定できる。代わりに,広範囲なレベルを測定の開始時に印加することも
できる。あまりにも早く破断したり,破断までに長時間を要する試験セットからのデータは無視してもよ
い。
前処理が完了したら,光ファイバをユニットに装着する。各光ファイバの破断について破断に至る時間
を監視し,記録する。所定の公称応力レベルについて試料を評価し,メジアン試料が破損したら直ちに試
験を早期に終了する。すなわち,試料の半分以上が破損した場合,計算を行い,すべての残りの試料が破
断になる前に,破断に至るまでのメジアン時間を決定する。各測定ごとに推定値標準誤差 (SEE) を計算し,
報告する。特に製品規格に規定されない限り,推定値標準誤差 (SEE) は1未満とする。
12.5 計算
12.5.1 破断応力 10.5.1を参照すること。
12.5.2 引張りによる静的疲労係数 (ns) 特に規定されない限り,次の方法を使ってnsを決定する。代わ
りに,他の方法,例えば,相同法又は最大推定 (MLE) 法を使ってnsを決定することもできる(附属書A
のA.4を参照)。
12.5.2.1 シンプルメジアン法 この方法にはワイブル傾きの線形性の前提は不要である。すべてのデータ
を使用するわけではないため,他の方法よりも推定値標準誤差 (SEE) は大きくなる。各公称応力レベル
(σi) について,破断に至るメジアン時間 (ti) を決定する。二乗誤差 (squared errors) の和を最小にすること
によってデータを次の一次回帰モデルに合わせる。
−nsln (σi) +intercept=ln (ti) ························································ (12)
nsの推定値標準誤差 (SEE) を最も統計的なパッケージによって報告する。ln (σi) のメジアンとln (ti) の
メジアンも報告する。上記方程式のinterceptの値は次のとおりである。
intercept=median [ln (ti)] +nsmedian [ln (σi)] ·································· (13)
12.6 結果
12.6.1 次のデータを報告する。
− 光ファイバ識別記号
− 試験日
− 引張りによる静的疲労係数 (ns) (他のパラメータは検討中である。)
12.6.2 次のデータは,要求があれば,入手できるものとする。
− 光ファイバ径
− 被覆径(考慮する場合)
− 試験環境
− ゲージ長
− 各公称応力レベルごとの初期試料数及び公称応力レベルの数
− 適用可能な場合,試験前処理時間
− nsの計算法
− ln (ti) とln (σi) のメジアン
− 破断応力計算法。A.3の方法を使用する場合,被覆とガラスのヤング率
− 公称応力レベル
21
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図15 引張りによる静的疲労係数の測定概略図
13. 曲げによる静的疲労係数測定法 (IEC 60793-1-B7D)
13.1 目的 この試験は,曲げにおける光ファイバの静的疲労パラメータを決定するものである。使用中
の光ファイバに加わる応力が曲げによって生じる場合,引張りに優先して曲げ試験を使用する。
13.2 装置
13.2.1 試験装置の概略図を図16に示す。溝のある並列平板とスペーサは熱に対して安定した材料(ステ
ンレススチールなど)で作る(スペーサは平板間に必要なギャップを作るのに使用する。)。並列平板の代
わりに精密ボアガラス管 (precision-bore glass tubes) や精密リーマ加工金属プレート
(precision-reamedmetal plates) を使用してもよい。この場合,管の壁は並列平板と同じ機能を果たす。
13.2.2 光ファイバの破断検出には,音響センサや適切な出力電圧モニタを使用する。光を光ファイバの中
に通し,パワーの急激な下降によって破断を検知する他の方法を使用してもよい。検知装置は1%以上の
精度で破断に至る時間を測定できなければならない。
13.3 被測定試料 試験試料は長さが約30mmから120mmの被覆光ファイバである。ガラス径は±1μmま
で,被覆径は±5μmまで判明しているものとする。特に製品規格に規定されない限り,各公称応力レベル
の試料数は少なくとも15とする。
13.4 手順 最低五つの異なる公称応力レベルで評価する。公称応力は,破断に至るメジアン時間が1時
間から約30日の範囲となるように選択する。
希望する最大応力を光ファイバの曲げの頂点に発生させるために,適切な長さのスペーサを使って曲げ
取付具を組み立てる。印加応力の希望値を発生させるスペーサの長さを計算するには,式(7),(8),(9)を使
用する。精密ボアガラス管や精密リーマ加工金属プレートを使用する場合,式(8)のdgはゼロである。前処
理が完了したら,光ファイバを取付具に装着する。検出器を使って各破断ごとに破断に至る時間を記録す
る。検出器が誤った破断を記録することがなく,真の破断を記録できることを確認する。
13.5 計算
13.5.1 破断応力 11.5.1を参照すること。
13.5.2 曲げによる静的疲労係数 (ns) 12.5.2を参照すること。
22
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
13.6 結果
13.6.1 次のデータを報告する。
− 光ファイバ識別記号
− 試験日
− 曲げによる静的疲労係数 (ns) (他のパラメータは検討中である。)
13.6.2 次のデータは,要求があれば,入手できるものとする。
− 光ファイバ径
− 被覆径
− 試験環境
− 光ファイバのヤング率
− 各公称応力レベルごとの初期試料数及び公称応力レベルの数
− nsの計算法
− 各試験済のひずみ値。12.5.2からのワイブル形状パラメータ (ms)
− nsの推定値標準誤差 (SEE)
− 公称応力レベル
図16 曲げによる静的疲労係数の測定概略図
14. 均一な巻き付けによる静的疲労係数測定法 (IEC 60793-1-B7E)
14.1 目的 この試験は,一定曲げにより個々の光ファイバ長の静的疲労パラメータを決定するものであ
る。この方法は,マンドレル径を変えて光ファイバの静的疲労特性を評価するものである。
14.2 装置 曲げ応力の試験装置は径が異なる精密マンドレルから成る。光ファイバをマンドレルの周り
に巻くことによって,光ファイバに曲げ応力を加える(図17参照)。
14.2.1 試料の把持方法 試料光ファイバは,その両端で把持する。光ファイバは,例えば,ゴム輪,接着
剤,テープなどでマンドレルの両端に固定できる。保持は光ファイバが破断の前にすべらないようにし,
保持側での光ファイバの破断を最小限に抑える。保持側で生じる破壊を記録するが,サンプルの一部とは
みなさず,以後の計算で使用することはない。
23
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
試料光ファイバをマンドレルに巻き付ける巻付け機構が必要である。光ファイバは最小ピッチで巻き付
ける。巻付け中に不必要な引張応力が生じないよう注意する。光ファイバがその全体の長さにわたりマン
ドレルに接触するように十分な巻付け力,例えば,0.25Nが必要である。
14.2.2 光ファイバへの応力印加 応力レベルは,マンドレルサイズの適正な選択によって,変えることが
できる。幾つかの試料を所定の公称応力レベルで評価する。簡単なメジアン計算法の場合,所定の応力レ
ベルに関するマンドレル径の範囲は公称値の±0.5%以内とする。相同法の場合と最ゆう(尤)推定法 (MLE)
の場合,各試料の個別応力レベルを計算で使用するために記録しておく。
14.2.3 破断に至る時間の測定 上記の要求事項に合致する破断に至る時間のモニター法は多数ある。その
一つの方法は,音響的な検出器やトランスジューサを使って光ファイバの破断を検知し,破断時にコンピ
ュータに信号を送ることである。また,別の方法としてはマンドレルを特殊ホルダに収めておく方法があ
る。光ファイバが破断すると,マンドレルはホルダから押し出される。さらに,光ファイバを通過する伝
送光を光学的に検出する方法もある。
14.3 試験サンプル 特に製品規格に規定されない限り,各公称応力レベルの試料数は少なくとも15とす
る。特に製品規格に規定されない限り,個々の試験の光ファイバ長は1mとする。ガラス径は±1μmまで,
被覆径は±5μmまで判明しているものとする。
14.4 手順 最低五つの異なる公称応力レベルで評価する。これらの公称応力は,破断に至るメジアン時
間が約1時間から約30日の範囲にあるように選択する。
14.5 計算
14.5.1 破断応力 各光ファイバの破断応力は,次の式から算出する。
σf=E0・εf・ (1+0.5・α″・εf) ······················································· (14)
c
f
d
D
d
+
=
fε
············································································ (15)
α″=0.75・α ··········································································· (16)
ここに, σf: 破断応力 (GPa)
E0: ヤング率 (72GPa)
εf: 破断ひずみ
α: 非線形応力/ひずみ特性の修正パラメータ(αの代表的な値は6
である。)
df: 光ファイバ径 (μm)
D: マンドレル径 (μm)
dc: 被覆を含む全体の光ファイバ径 (μm)
14.5.2 巻付けによる静的疲労係数 (ns) 12.5.2を参照のこと。
14.6 結果
14.6.1 次のデータを報告する。
− 光ファイバ識別記号
− 試験日
− 巻付けによる静的疲労係数 (ns) (他のパラメータは検討中である。)
14.6.2 次のデータは,要求があれば入手できるものとする。
− 光ファイバ径
− 被覆径
24
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− マンドレル径
− 試験環境
− nsの推定値標準誤差 (SEE)
− マンドレルに巻かれた光ファイバ長
− 巻付け力
− 各試験セットの初期試料数及び試験セット数
− 一連のマンドレル径のマンドレル数(巻数)
− ns計算法
図17 巻付けによる静的疲労係数の測定概略図
15. 側面顕微鏡法による光ファイバカールの測定法 (IEC 60793-1-B8A)
15.1 目的 この試験は,被覆されていない光ファイバの曲率半径又はカールを,側面顕微鏡法によって
測定するものである。光ファイバのカールは,非調心アライメント融着スプライサ又は調心アライメント
融着スプライサを使用するとき,光ファイバのスプライス損失を極力少なくするための重要なパラメータ
として識別されている。手順は,支持されていない光ファイバ端部を光ファイバ軸の周りに回転させると
生じる偏位量を決定することによって被覆されていない光ファイバの曲率半径を測定する。光ファイバの
最大偏位と光ファイバ取付具から測定点までのオーバハング距離を知ることによって,光ファイバの曲率
半径を簡単な円形モデルから計算できる。
なお,このモデルの誘導式を附属書Cに示す。
この手順はデータ収集と計算によって求めるものである。方法Aでは,通常,μm単位で測定される光
ファイバ偏位(曲がり)δfは,ファイバを回転させると生じる偏位(曲がり)の最大値と最小値の差の1/2
として決定される。方法Bでは,偏位は回転増分を均一にして測定し,そのデータを正弦関数に適合させ
る。この場合,δfは最適正弦波のピーク間の振幅の1/2として計算される。
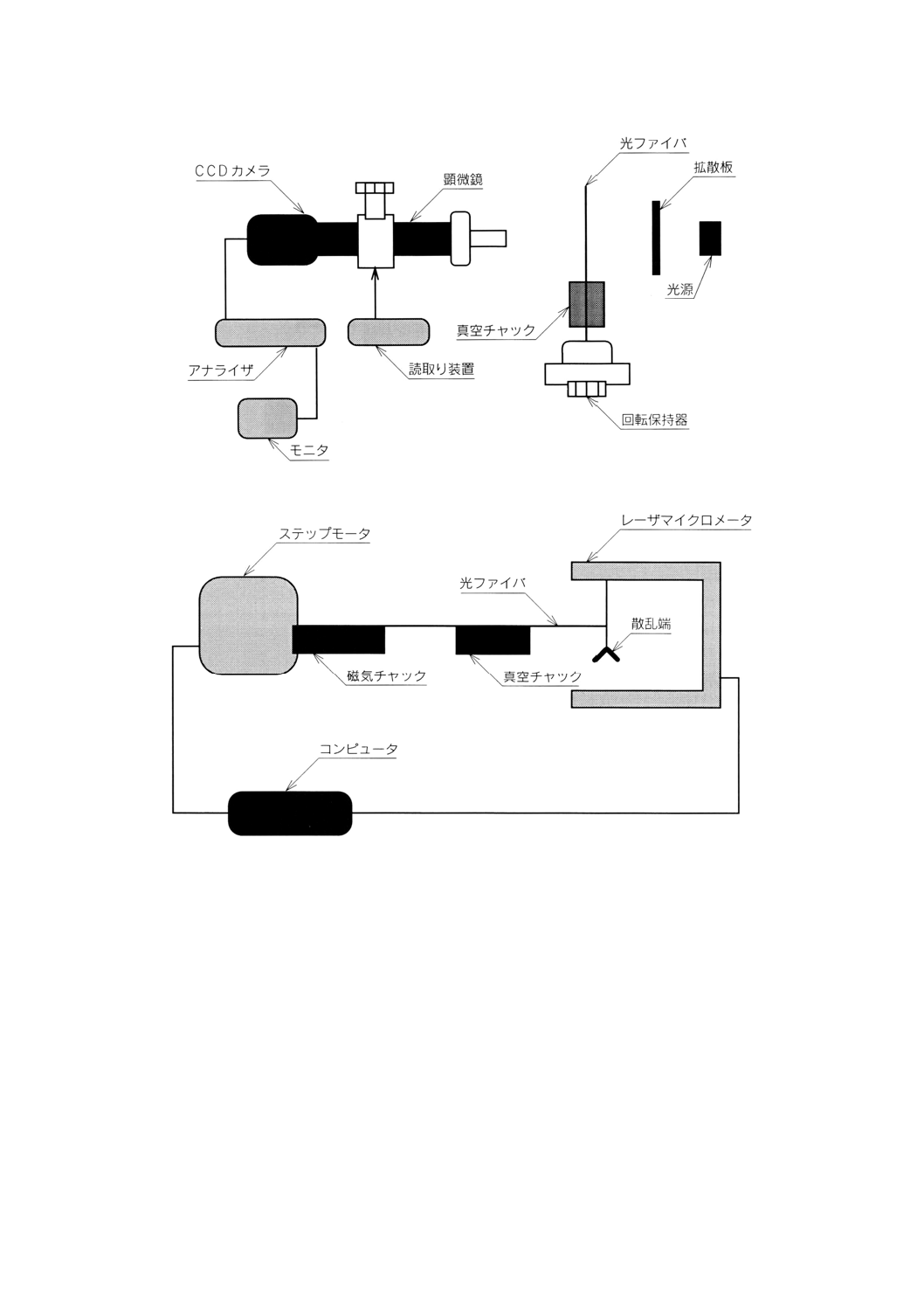
15.2 装置 上記手法の代表的な試験装置の概略図を,図18,図19,及び図20に示す。
15.2.1 光ファイバ取付具 光ファイバを一定の軸に取り付けて,光ファイバが360°回転できるようにす
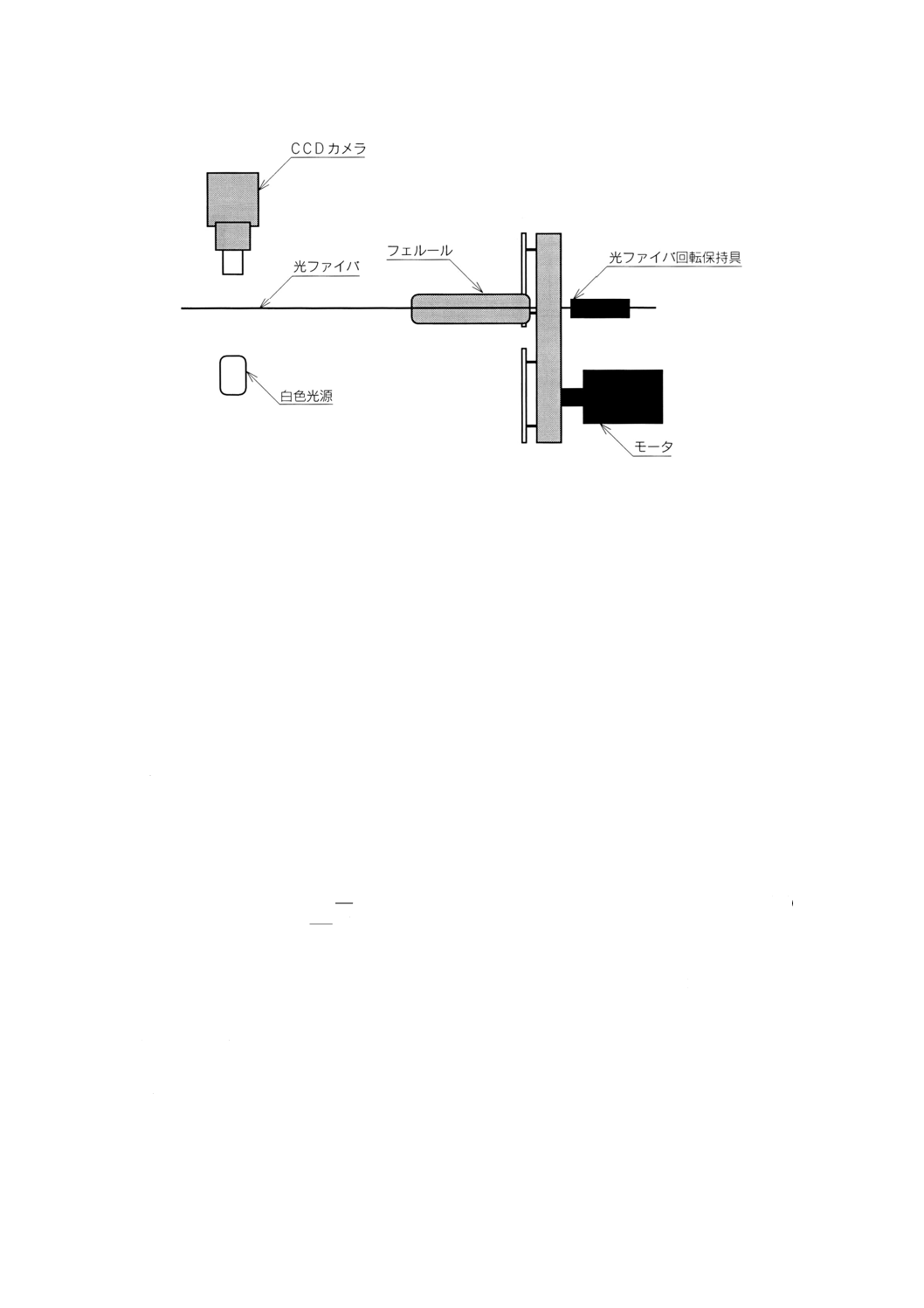
る適切な取付具を使用する。取付具は真空チャックのようなV状の固定保持器や光ファイバフェルールで
もよい。フェルールを使用する場合,偏位測定の可変性を最小限にするため,内径が光ファイバ径に十分
に近くなるように注意する。
15.2.2 回転保持器 保持器は,光ファイバ端部をつかみ,試料を360°回転させる正確な方法を提供する
のに使用する。この装置は手動でも,ステッパモータのような回転装置でも駆動できる。
15.2.3 偏位測定装置 光ファイバを360°回転させたとき,その偏位を測定する装置を用意する。このよ
うな装置は顕微鏡,レーザマイクロメータなどの光学測定器である。顕微鏡を使用する場合,目盛付き接
眼レンズや像解析システムなど,光ファイバ偏位を正確に測定できる手段を設ける。
25
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
15.2.4 ビデオカメラ及びモニタ ビデオカメラ及びモニタを使用して手動又は自動操作の測定観察シス
テム系を向上させることもできる。
15.2.5 試験手順 目盛りの位置をより正確にするため,ビデオアナライザを使用することもできる。
15.2.6 コンピュータ コンピュータシステムを使用して測定制御,データ収集,計算を行うこともできる。
15.3 試験試料 試験試料は,長さが装置設計に適したケーブル化されていない光ファイバとする。試料
の被覆は必要なオーバハング距離を採って光ファイバ取付具に取り付けられるように十分に一端からはが
す。
15.4 試験手順 被覆のない光ファイバ端を光ファイバ取付具に取り付け,光ファイバ端が取付具を超え
て適切なオーバハング距離まで伸ばせるようにする。代表的なオーバハング距離としては,10〜20mmが
用いられる。試料の他端を回転装置に接続する。
15.4.1 方法Aの手順 試料を偏位が最大又は最小となるまで回転し,偏位値 (D0) を記録する。試料を,
約180°回転した位置になるまで回転し,偏位値 (D1) を記録する。
15.4.2 方法Bの手順 試料の偏位をその初期位置 (D0) と角度位置 (θ0) で記録する。試料を360°にわ
たって回転し,等しい角増分ごとに停止し,角増分D1…nとその角増分θ1…nにおける変位値を記録する。通
常,10°〜15°の角増分を使用する。
15.5 計算
15.5.1 方法Aの手順 光ファイバ偏位 (δf) は,次の式から算出する。
2
1
0
f
D
D−
=
δ
·········································································· (17)
ここで, D0とD1は,一般にμm単位で記述される最小偏位値と最大偏位値であ
る。
15.5.2 方法Bの手順 係数A0とA1は位置データD0…nと角度データθ0…nを次の形式の正弦波に合わせる
ことによって決定する。
Y=A0+A1×sinθ ······································································ (18)
A1=δf ···················································································· (19)
15.5.3 両方法に共通する計算 試料によって測定される光ファイバ偏位はオーバハング距離Xによって
左右されるため,円形モデルを使って光ファイバカールを曲率半径として算出することが便利である。
f
2
f
2
2δ
δ
+
=X
R
·········································································· (20)
ここに,
R: 曲率半径
X: オーバハング距離
δf: 光ファイバ偏位
15.6 結果
15.6.1 次のデータを報告する。
− 試験日
− 試料識別
− 光ファイバ曲率半径
15.6.2 次のデータは,要求があれば,入手できるものとする。
− 使用試験方法
− 使用装置の説明
− 校正データ
26
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図18 顕微鏡による光ファイバカール量の測定概略図
図19 レーザマイクロメータによる光ファイバカール量の測定概略図
27
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図20 真空チャックの代わりにフェルールを用いる光ファイバカール量の測定概略図
16. レーザ光散乱による光ファイバカールの測定法 (IEC 60793-1-B8B)
16.1 目的 この試験は,レーザ光散乱によって光ファイバ内の潜在的な曲率(カール)を測定するもの
である。このパラメータは,同時複数の光ファイバ接続及びコネクタ技術に関連があることが立証済であ
る。
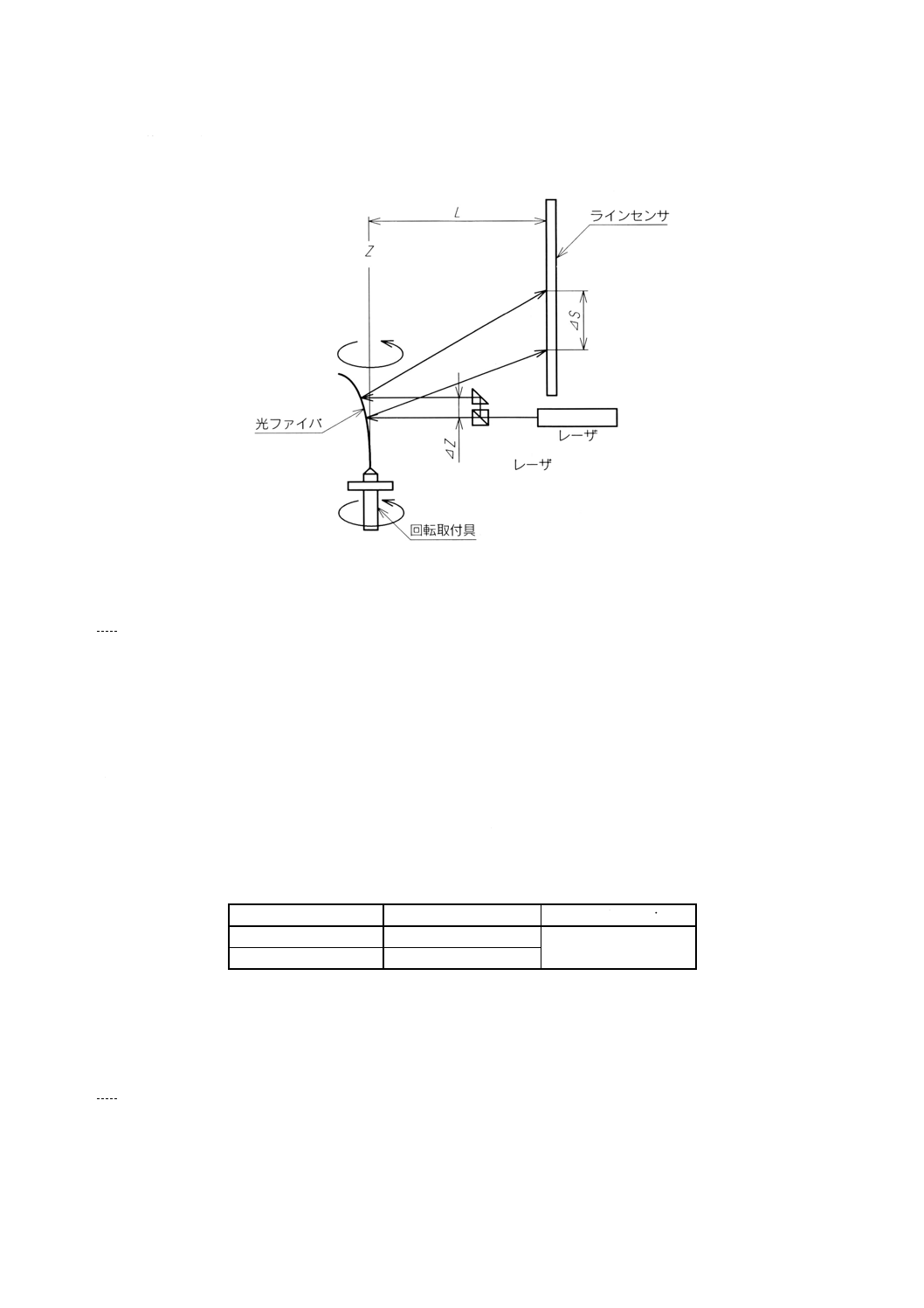
16.2 装置 試験装置の概略図を図21に示す。
16.2.1 光源 分割He-Neレーザ光を,光源として使用する。
16.2.2 検出器 CCDラインセンサなどのイメージセンサを,検出器として使用する。
16.3 試験試料 試料保持器は,光ファイバが固定軸において360°回転できる回転取付器に固定する。被
覆されていない光ファイバを,規定のオーバハング長さが垂直に伸びるように試料保持器で保持する。
16.4 手順
16.4.1 校正 システムの校正係数は,非カールの光ファイバで決定する。
16.4.2 測定 試料を回転させながらラインセンサによって,反射光距離を読み取る。最大反射光距離を
∆Sとして記録する。光ファイバカールの曲率半径は,次の式から算出する。
1
⊿
⊿
2
−
=
Z
S
L
r
············································································· (21)
ここに,
r: 曲率半径
L: 光ファイバからラインセンサまでの距離
∆S: 光ファイバからの反射光の広がり
∆Z: 光ファイバへの入射光の間隔
16.5 結果 次のデータを報告する。
− 試験日
− 試料識別
− 光ファイバカール
次のデータは,要求があれば入手できるものとする。
28
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 装置の説明
− 校正データ
図21 レーザ光散乱による光ファイバカールの測定概略図
17. 引張試験方法
17.1 装置 引張試験装置は,JIS B 7721に規定の試験機とする。
17.2 手順
a) 準備 試料長は,把持部の間隔が500mm以上取れる長さとし,両端を適切な樹脂で固める。その際,
把持部で光ファイバ心線,抗張力体及びシース(外被)が互いにずれないように均一に固定し,かつ,
試験終了後,光ファイバの光学的な導通状態を確認できるようにする。
b) 試験 引張試験は,個別規格に規定がない限り,表2の試験条件によって行う。
なお,規定の張力に到達するまでの引張速度は,100mm/minとする。
c) 最終測定 試験後の光ファイバコードの,光学的な導通状態の確認を行う。
なお,光ファイバコードの把持部で断線しているときは,その試験を無効とし再試験する。
表2 引張試験条件
光ファイバ心線数
張力 N
印加時間 min
単心
80
5
2心
160
17.3 個別規格に規定する事項
a) 張力
b) 印加時間
18. 圧壊試験方法
29
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
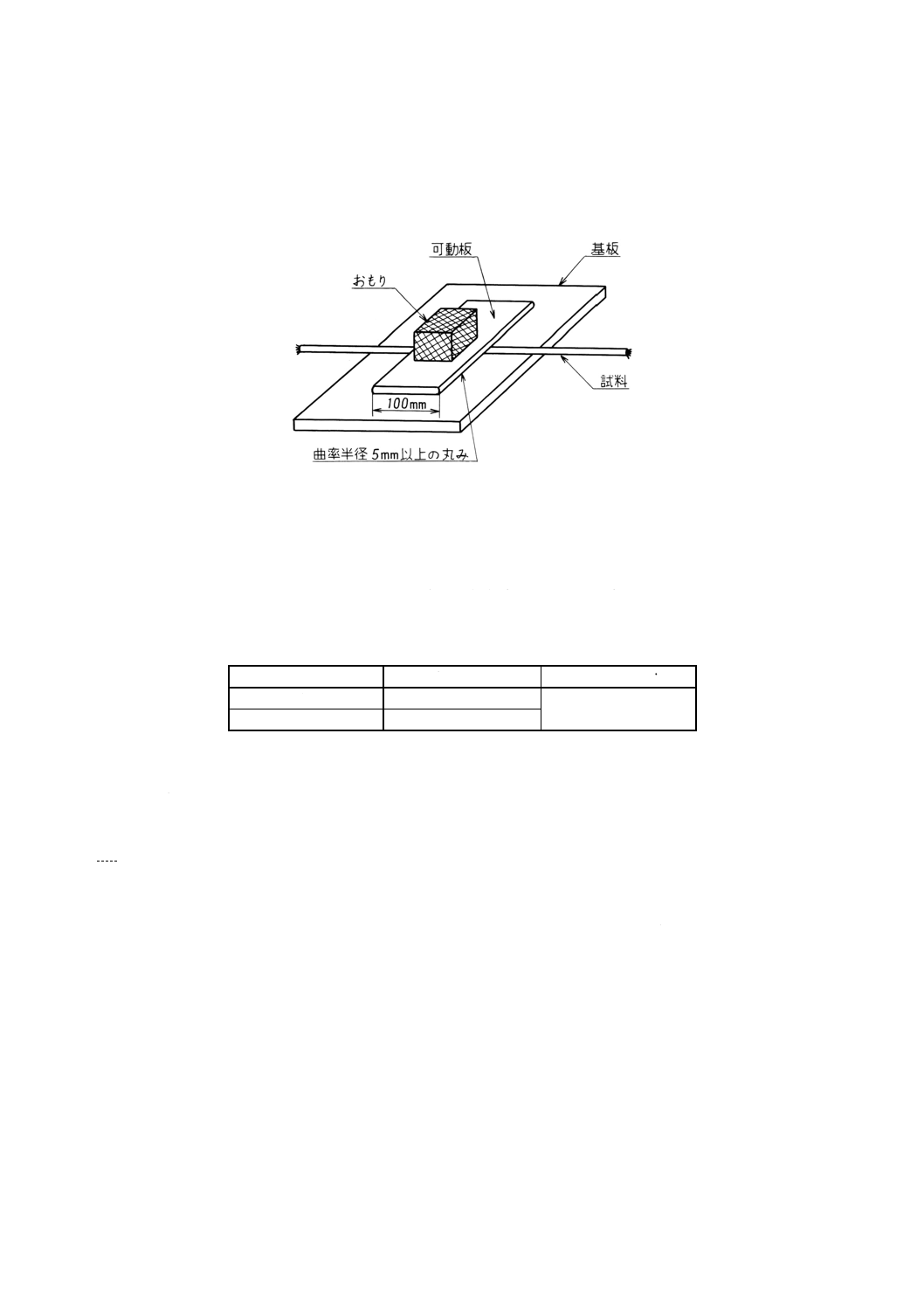
18.1 装置 圧壊試験装置の概略図を,図22に示す。図22のように平たんな鋼板(基板)と光ファイバ
コードに圧壊力を加える,可動の鋼板及びおもりから構成する。可動の鋼板の幅は100mmとし,光ファ
イバコードに均一に圧壊力を加えられるものとする。また,その鋼板の角は,5mm以上の曲率半径で丸み
を付ける。
図22 圧壊試験装置の概略図
18.2 手順
a) 試験 圧壊試験は,個別規格に規定がない限り,表3の試験条件によって行う。
なお,圧壊力は光ファイバコードの長手方向に均一に,かつ,徐々に加えられるようにする。また,
光ファイバコードの断面が円形状でない場合は,短径方向に圧壊力を加える。
b) 最終測定 試験後の光ファイバコードの,外観試験及び光学的な導通状態の確認を行う。
表3 圧壊試験条件
光ファイバ心線数
圧壊力 N/mm
印加時間 min
単心
5
1
2心
10
18.3 個別規格に規定する事項
a) 圧壊力
b) 印加時間
19. 衝撃試験方法
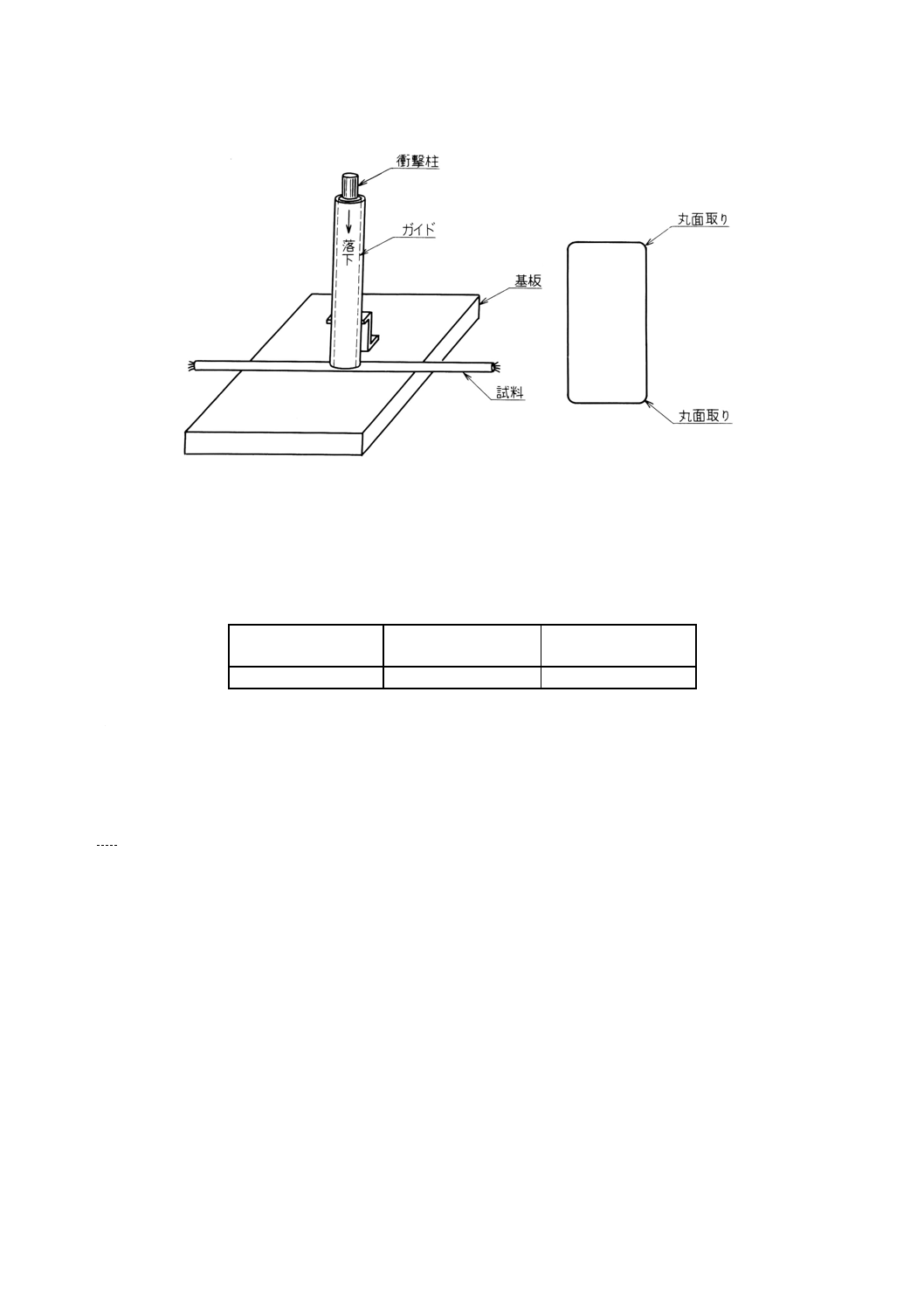
19.1 装置 衝撃試験装置の概略図を,図23に示す。図23のように平たんな鋼板(基板)と光ファイバ
コードに衝撃力を加えるため,規定の高さから落下させる衝撃柱及び衝撃柱を光ファイバコード上に落下
させるためのガイドから構成する。光ファイバコードに当たる衝撃柱の直径は,個別規格に規定する。ま
た,衝撃柱は円柱上で,その角は図24のように面取りする。
30
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図23 衝撃試験装置の概略図
図24 衝撃柱の縦断面図
19.2 手順
a) 試験 衝撃試験は,個別規格に規定がない限り,表4の試験条件によって行う。
なお,光ファイバコードの断面が円形状でない場合は,短径方向に衝撃力を加える。
b) 最終測定 試験後の光ファイバコードの,外観試験及び光学的な導通状態の確認を行う。
表4 衝撃試験条件
衝撃柱の位置エネルギー
N・m
衝撃柱の直径
mm
衝撃回数
1.0
25
3
19.3 個別規格に規定する事項
a) 衝撃柱の位置エネルギー
b) 衝撃柱の直径
c) 衝撃回数
20. 繰返し曲げ試験方法
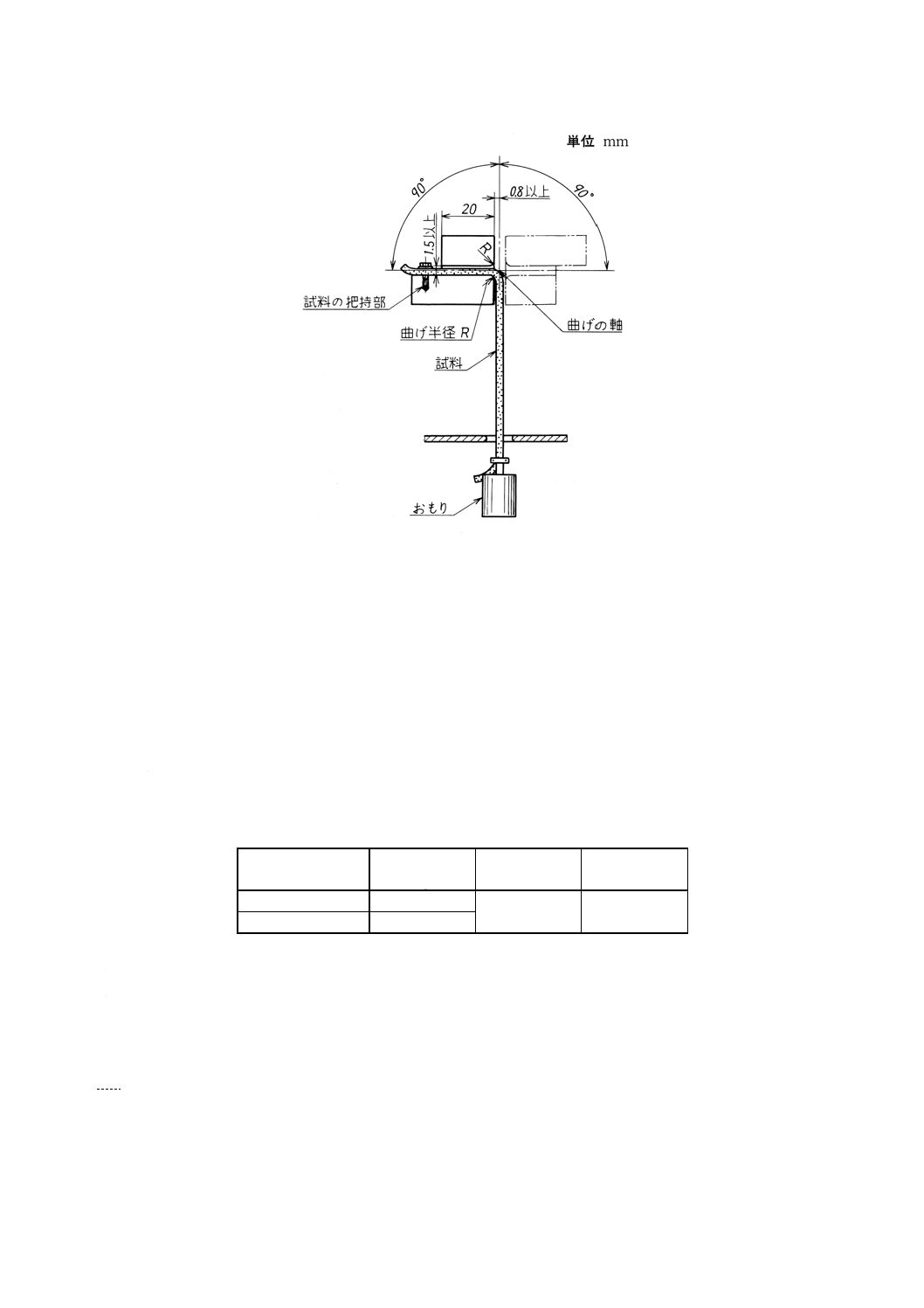
20.1 装置 繰返し曲げ試験装置の概略図を,図25に示す。図25のように試料を固定して往復180度(垂
直方向に対して両側に90度)曲げるための移動部,試料に一定の曲率の曲げを与える曲げ部及び試験中一
定の引張荷重を試料にかけるためのおもりから構成する。
31
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図25 繰返し曲げ試験装置の概略図
20.2 手順
a) 準備 試料の両端末は,光コネクタ又は光ファイバ心線,抗張力体及びシースを一体にして把持でき
る方法で処理する。試験終了後,光ファイバの光学的な導通状態が確認できるようにする。
b) 試験 繰返し曲げ試験は,個別規格に規定がない限り,表5の試験条件によって行う。
試料を図25に示したような装置に取り付け,荷重を加えながら垂直方向に対して,両側に90度の
角度で曲げる。曲げのサイクルは,垂直状態から,まず右方向へ曲げて垂直方向に戻し,続いて左方
向に曲げ,更に垂直方向に戻して1サイクルとする。曲げの速度は,約2秒で1サイクルとする。
なお,光ファイバコードの断面が円形状でない場合は,短径方向に曲げる。
c) 最終測定 試験後の光ファイバコードの,光学的な導通状態の確認を行う。
なお,光ファイバコードの把持部で断線しているときは,その試験を無効とし,再試験する。
表5 繰返し曲げ試験条件
光ファイバ心線数
おもりの質量
kg
曲げ半径
mm
サイクル数
単心
2.0
50
1 000
2心
4.0
20.3 個別規格に規定する事項
a) おもりの質量
b) 曲げ半径
c) サイクル数
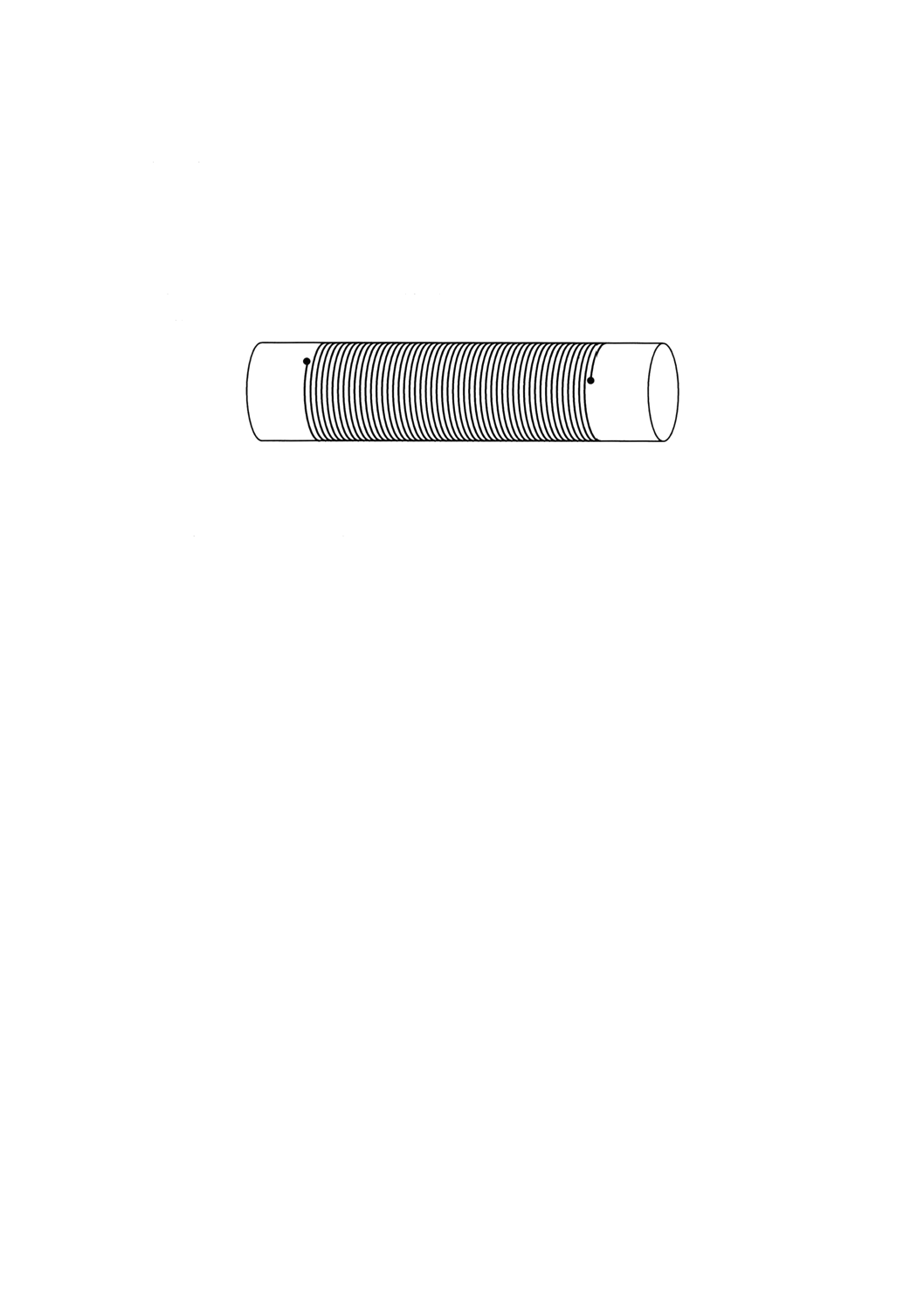
21. コード曲げ試験方法
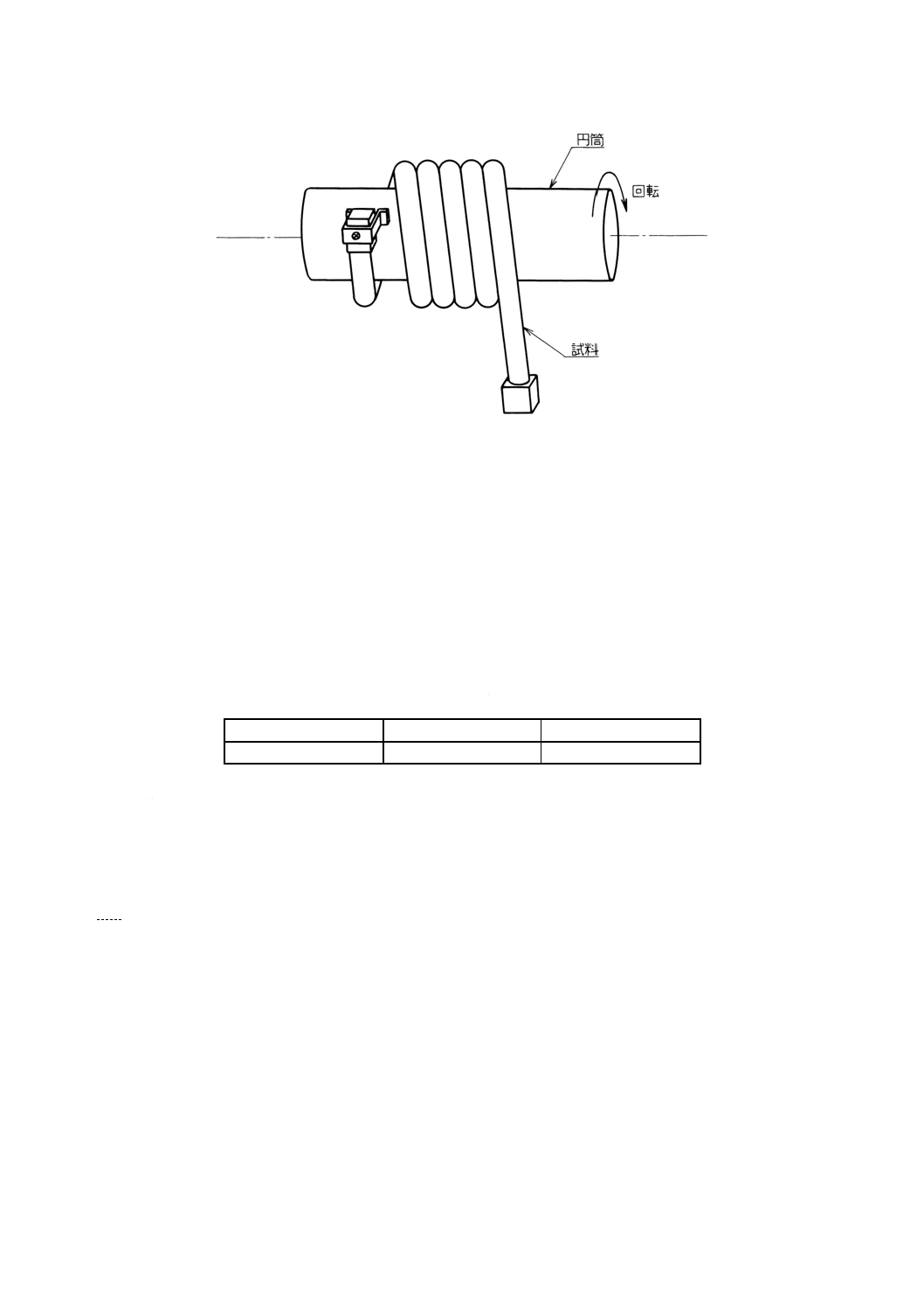
21.1 装置 コード曲げ試験装置の概略図を,図26に示す。図26のように,試料をら線状に密着して巻
き付けることのできる円筒から構成する。
32
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図26 コード曲げ試験装置の概略図
21.2 手順
a) 準備 試料の両端末は,光コネクタ又は光ファイバ心線,抗張力体及びシースを一体にして把持でき
る方法で処理する。試験終了後,光ファイバの光学的な導通状態が確認できるようにする。
b) 試験 コード曲げ試験は,個別規格に規定がない限り,表6の試験条件によって行う。試料をゆっく
りした一様な速さで円筒の周囲に巻き付け,その後解きほどく。これを1サイクルとする。巻き付け
るときの張力は,試料を円筒に巻き付けるために十分な力とする。
なお,光ファイバコードの断面が円形状でない場合は,短径方向に曲げる。
c) 最終測定 試験後の光ファイバコードの,外観試験及び光学的な導通状態の確認を行う。
なお,光ファイバコードの把持部で断線しているときは,その試験を無効とし,再試験する。
表6 コード曲げ試験条件
円筒の直径 mm
巻付け数
サイクル数
50
6
10
21.3 個別規格に規定する事項
a) 円筒の直径
b) 巻付け数
c) サイクル数
22. コードねじり試験方法
22.1 装置 コードねじり試験装置の概略図を,図27及び図28に示す。図27又は図28のように固定ク
ランプ,試料にねじれを与える回転クランプ及び試験中一定の引張荷重を試料にかけるためのおもりから
構成する。
33
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図27 コードねじり試験装置の概略図(横型)
図28 コードねじり試験装置の概
略図(縦型)
22.2 手順
a) 準備 試料の両端末は,光コネクタ又は光ファイバ心線,抗張力体及びシースを一体にして把持でき
る方法で処理する。試験終了後,光ファイバの光学的な導通状態が確認できるようにする。
b) 試験 コードねじり試験は,個別規格に規定がない限り,表7の試験条件によって行う。
試料をシースが動かないように固定クランプに固定し,他端を回転クランプに固定する。回転クラ
ンプを180度だけ時計方向に回転させる。次に,スタート位置まで戻し,同じ角度だけ反時計方向に
回転させる。さらに,スタート位置まで戻して,1サイクルとする。
c) 最終測定 試験後の光ファイバコードの,外観試験及び光学的な導通状態の確認を行う。
なお,光ファイバコードの把持部で断線しているときは,その試験を無効とし,再試験する。
表7 コードねじり試験条件
試料長 mm
おもりの質量 kg
サイクル数
250
2.0
20
22.3 個別規格に規定する事項
a) 試料長
b) おもりの質量
c) サイクル数
34
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A(規定) 破断応力試験に関する統計計算
A.1 試料の大きさ及び試料数
A.1.1 試料の大きさ 破断応力試験の特長は統計的なものである。それぞれの光ファイバが所定の母集団
を代表するものとして,破断応力を評価する。その結果は集団全体に関して確率分布として報告される。
母集団が代表する度合と測定確率の範囲を決定するのは製品試料数とゲージ長である。
なお,ゲージ長は結果にも影響を与える。それは,一般に,ゲージ長が増加すると,測定破断応力が減
少するためである。
A.1.2 試料数 実際には,各ひずみ速度において試験用に同一のきずを事前に選択することはできない。
代わりに,平均的なきずの特性を推定するためにサンプリングが必要となる。試験の信頼区間幅は,異な
るひずみ速度において評価するきずの類似性が欠けていることによって管理されている。すなわち,信頼
区間は疲労試験の精度の尺度であり,光ファイバ属性の直接的な尺度ではない。
表A.1は,動的疲労係数 (nd),ワイブル傾き (md),各ひずみ速度当たりの試料数の各種組合せに関する
代表的な信頼区間である。これらの結果は本体の式(5)(10.5.3)によって定義されている疲労特性とともに,
理想的なワイブル分布のモンテカルロシミュレーションから導かれたものである。このシミュレーション
では大きさ順に分けられている四つのひずみ速度当たりの試料数が使用されている。
表A.1 (nd)の95%信頼区間
nd
md
ひずみ速度当たりの試料数
15
30
45
60
10
15
8.7- 11.0
9.3- 10.6
9.5- 10.5
9.5- 10.5
10
30
9.5- 10.5
9.6- 10.4
9.7- 10.3
9.8- 10.3
10
60
9.7- 10.3
9.8- 10.2
9.9- 10.2
9.9- 10.1
10
90
9.8- 10.2
9.9- 10.1
9.9- 10.1
9.9- 10.1
20
15
16.7- 24.0
17.6- 23.2
18.3- 22.6
18.4- 22.0
20
30
18.2- 22.0
18.9- 21.6
19.5- 22.6
19.2- 21.0
20
60
19.1- 21.1
19.5- 20.9
19.8- 20.5
19.6- 20.5
20
90
19.5- 20.8
19.6- 20.7
19.8- 20.5
19.8- 20.4
30
15
22.8- 39.2
24.9- 37.1
26.2- 35.5
26.6- 34.4
30
30
26.0- 34.1
27.3- 33.3
28.0- 32.7
28.3- 32.3
30
60
28.0- 32.0
29.2- 31.2
29.4- 31.0
29.2- 31.2
30
90
28.7- 31.4
29.2- 31.2
29.4- 31.0
29.3- 30.8
50
15
33.2- 80.6
37.5- 72.3
40.5- 67.3
41.5- 63.7
50
30
40.0- 62.2
43.0- 59.8
45.0- 57.7
45.6- 56.4
50
60
44.6- 55.8
46.5- 54.7
48.1- 53.8
47.9- 53.3
50
90
46.4- 53.9
47.8- 53.3
49.1- 52.7
49.0- 52.3
100
15
49.8- 380.0
60.8- 258.7
68.5- 198.0
71.2- 170.7
100
30
67.1- 162.3
76.1- 147.7
81.5- 135.1
83.9- 129.7
100
60
81.5- 125.8
87.2- 120.7
90.4- 116.2
92.2- 114.4
100
90
87.4- 123.2
91.7- 113.8
93.9- 110.8
95.2- 110.0
35
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.2 動的疲労係数 (nd) の算出アルゴリズム このアルゴリズムは最小二乗法によって,ndの推定値とそ
の95%の信頼区間の推定値を算出する。このアルゴリズムの適切な使用は,各ひずみ速度に対して同一試
料数で行う試験に限定されている。
σij:i番目のひずみ速度に関するj番目の破損の破断応力
a
σ&:i番目のひずみ速度に対する応力負荷速度
i番目のひずみ速度 (i=1〜L) におけるj番目の試料番号 (j=1〜Ni) に関して,
yij=log (σij),xij=log
a
σ&とする。
∑
=
i
N
N
,
∑∑
=
=
=
L
i
N
j
N
y
Y
1
1
ij
i
,
∑
=
N
x
N
X
)
(
i
i
2
1
2
i
i
X
N
x
N
XX
L
i
−
=∑
=
,
2
1
1
2
ij
i
Y
N
y
YY
L
i
N
j
−
=∑∑
=
=
XY
N
Y
X
XY
L
i
N
j
−
=∑∑
=
=
0
0
ij
1
i
slope
XX
YY
S
=
=
[
])2
(
)
(
−
−
=
N
XX
XY
S
YY
SEE
ここで, SEEはSの推定値標準誤差である。
Su=S−1.96×SEE,SL=S−1.96×SEEとすると,
1
1
d
−
=S
n
,
1
1
U
du
−
=S
n
,
1
1
L
dL
−
=S
n
ここで, ndUとndLは,推定値ndに関する95%の信頼区間を形成する。
次の式の計算を行う。
intercept=Y− (S・X)
ここで, 傾きは次の式から求められる。
S
n
slope
=
+
=
1
1
d
A.3 破断応力を算出する詳細な方法 この方法の場合,被覆材の弾性係数を直接考慮する。
EcとAcをそれぞれ被覆材の弾性係数と断面積。EgとAgをそれぞれ光ファイバの弾性係数(ヤング率)
と断面積。Tを試料が破断するときの測定引張力とする。石英系光ファイバの場合,ヤング率は次の式に
よって与えられる。
Eg=72GPa
また,次の式が成立する。
g
g
c
c
g
f
A
E
A
E
1
A
T
+
=
σ
タイプA1とBファイバ(公称光ファイバ径と被覆径はそれぞれ125μmと250μmである)の場合,本
36
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
体の式(2)(10.5.1)の公称光ファイバ断面積を使用すると±2μmの光ファイバ径公差に対する計算上の最大
誤差は±3%である。
A.4 静的疲労係数 (ns) の算出アルゴリズム
A.4.1 最小二乗法 この方法はすべてのデータを使用するが,各セットのワイブルプロットは同じであり,
線形であるという前提条件が必要である。この方法はすべてのデータを使用するため,推定値の標準誤差
が小さくなる場合もある。
tij: i番目の公称応力レベルにおけるj番目の試料が破断に至る時間
σia: 当該試料の公称応力レベル
Ni: i番目の試験セットにおけるサンプル数
各i,jごとにワイブル・パラメータWijを算出する。
−
−
−
=
i
n
n
ij
5.0
1
l
l
N
j
W
二乗誤差の和を最小にすることによって、データを次の一次回帰モデルに合わせる。
a・ln (tij) +b・ln (σa) +const=Wij
a
b
ns=
は推定値として報告する。
推定値の標準誤差は,aとbの分散 (Var) と共分散 (Cov) 及びそれぞれの値によって概算する。分散と
共分散の項は統計的なパッケージによって報告する。
)
,
(
2
)
(
)
(
)
(
ov
ar
2
2
2
ar
ar
b
a
C
a
b
a
V
a
b
a
a
V
n
V
−
+
=
推定値の標準誤差は[
]21
(n)
Var
である。また,ln (tij) とln (σa) のメジアンを報告する。
A.4.2 最ゆう(尤)推定法 (MLE) この方法も,各公称応力レベルごとのワイブルブロットが一つの基
本的な破断応力分布から誘導され,線形であるという前提条件を必要とする。この方法は最良であるが,
最も複雑である。この方法は,すべてのサンプルが破損する前に試験を打ち切ることによって,データが
切り捨てられる事例を正確に処理できる。計算を完了するためには,統計的なパッケージが利用できる。
これは,次の確率モデルに基づく。
−
−
=
s
m
t
t
F
0
f
exp
1
ここに,
F: 破断時間tfに対する累積破断確率
t0: ワイブル目盛パラメータ
ms: 静的ワイブル形状パラメータ
37
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B(参考) 疲労係数のガイダンス
B.1 まえがき この附属書における試験方法IEC 60793-1-B7AからB7Eは,光ファイバの疲労係数を決定
するために使用できる多数の試験方法について述べている。
この指針は,この機械的なパラメータに関する幾つかの背景を述べるとともに,異なる試験方法の結果
間の相互関係を示すものである。
B.2 傷の成長 マルチモード光ファイバとシングルモード光ファイバが,S1O4の四面体のリング構造から
成るシリカガラス製であるとする。これらの四面体の機械結合によって,20GPaの破断応力となる(すな
わち,傷の成長がない不活性状態での強度)。傷の先端における応力集中によって,光ファイバはより低い
応力レベルで破断する[1]*(*角括弧内の数字はB.6の参考文献リストを指す。)。この応力集中は応力じん
(靱)性係数
a
Y
K
σ
=
1
によって特長付けられる。ここで,Y:形状係数,a:傷の深さ,σ:印加応力であ
る。
K1が約0.8MPa・mの破壊じん(靱)性臨界値K1cに達すると,破断が生じる[2],[3]。半だ円又は半円形
の傷の場合,Yは1.24である[2]。したがって,傷の深さと破断応力の固有な関係が存在する。
実際には,傷の深さと破断応力の関係に従うよりも低い破断応力が観測される。さらに,光ファイバの
破断応力は時間によって決まる。これは,応力化学反応によって結合が切られ,傷が成長することで説明
できる。実験条件,特に水が,この傷の成長の重要な要因である (da/dt)。通常,シリカガラスの応力破断
は,べき乗則によって記述される。ここで,傷の成長速度Vは,AK1nに等しく,Aは傷の成長速度のスケ
ール係数であり,nは疲労係数である[1]。光ファイバ信頼性モデルにおいては,このべき乗則が使用され
ることが多く[5],n値を決定することの重要性を示している。この値は,光ファイバ及び/又はその被覆
の具体的な特性によって決まる[6],[7],[8],[9]。
この附属書に述べる試験方法は,相対的に短長の光ファイバだけを評価するものであり,本質的な強度
分布の応力疲労データを示すことになる。
実際には,光ファイバの弱い傷(ガラス本来の強度以下の外部的な強度分布など。)によって,光ファイ
バは破断する。したがって,寿命計算にはこれらの弱い傷の疲労係数を使用することが適切といえる。こ
のパラメータを決定することは極めて難しく,現在のところ,ガラス本来の強度分布の疲労係数が使用さ
れている。これは,研磨光ファイバに関する実験によって証明されており,この選択が最悪の状況さえ反
映していることを示している。研磨光ファイバのn値は内部的な強度分布のn値よりも高くなっている[5],
[10],[11],[12],[13]。
B.3 疲労係数測定方法の種類 標準光ファイバに関して得られる疲労係数は,一般には,17〜40であり,
高い値は割れの成長が遅いことを示している。これらの差は,主として測定法の相違によって説明できる。
実際には,静的試験と動的試験の二つの疲労試験群が使用されている。この規格では,次の試験を述べる。
動的疲労試験 方法IEC 60793-1-B7A 引張りによる動的疲労係数測定法
方法IEC 60793-1-B7B 曲げによる動的疲労係数測定法
静的疲労試験 方法IEC 60793-1-B7C 引張りによる静的疲労係数測定法
方法IEC 60793-1-B7D 曲げによる静的疲労係数測定法
38
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
方法IEC60793-1-B7E
均一な巻付けによる静的疲労係数測定法
現行試験方法に示すように,上記試験は標準室内環境において実施する。これらの試験結果は標準環境
とは異なる信頼性の推定には使用すべきではない。
両群の疲労試験を比較するため,動的疲労試験によって荷重履歴を破断に至る“実効”静的時間 (teff) に
翻訳することができる[14]。
引張試験の場合,teffは次の式から求められる。
)1
(
)1
(
1
d
d
eff
+
=
+
×
=
n
t
n
t
σ
σ
&
σ (t) =σ&・tであり,σ&は応力負荷速度である。動的疲労強さはσd=σ&tdであり,tdは破断に至る動的時
間である。また,nは疲労係数である。
この方程式はすべての割れ成長パラメータが一定であると想定している。応力が直接測定されない他の
試験方法の場合(ひずみや曲げにさらされている光ファイバなど。),データを応力に変換する。[14]参照。
このように,動的疲労強さは静的疲労試験と同じように破断に至る有効時間に対してlog/logプロットでき
る。
B.4 異なる方法によって得られたn値の比較 ヨーロッパにおけるCOST 218によって実施されるラウン
ドロビン試験 (round robin test) [14]では,ほぼすべての応力疲労試験方法が使用されている。結果を図B.1
に示すが,測定破断応力の変動が実証されている。試験方法に応じて,結果は実効試験光ファイバ表面の
差(長さと形状)によって相互に垂直に移動している。
図B.2は結果であるが,ガラス面積の差に関して修正されており[8],[14],“有効”破断応力におけるば
らつきが減少されている。べき乗則によって規定される応力疲労は,破断に至る時間と印加応力をlog/log
プロットに基づきプロットすると,直線(定数n)となる。図B.2は破断応力が破断に至る時間の増加と
ともに次第に減少し,同時に傾きが減少する(nが増加する。)ことを示している。この効果はガラス表面
の時間効果によるものと思われる。これは,割れの鈍化が原因となることもあり[13],[15],応力疲労と競
合する[16]。一部の研究者は疲労限界と見ている[12],[17]。
動的疲労試験と静的疲労試験の二つの基本的な試験方法群は,図B.2で識別できる。一般に,動的疲労
試験法は,高い疲労強さとともに小さな時間枠で作動する。より小さな有効時間枠まで減少されることが
ある。この試験はより小さな応力疲労係数 (nd) を示すのが一般的である。静的試験方法は若干長い測定時
間とより低い印加応力レベルで作動し,より大きなns値が得られる。
B.5 結論 異なる疲労試験の結果を比較するときは,破断に至る動的時間と破断に至る実効静的時間の解
釈を行うことができる。さらに,破断応力レベルは試験中の実効ガラス面積について修正を要する。これ
らの修正を行えば,疲労係数は一定とはならず,破断に至る有効時間によって変動する(図B.2参照)。一
般に,このことは動的疲労試験方法と静的疲労試験方法の規定が異なることを説明している。
B.6 参考文献
[ 1 ] A.G.Evans, S.M.Wiederhorn, “Proof testing of ceramic materials-an analytical basis for failure predic-tion”
Int.J.Frac.10 (1974) 379-392.
[ 2 ] D.Kalish, B.K.Tarical, “Static and dynamic fatigue of a polymer-coated fused silica optical fiber”, J.Am.
Ceram.Soc. (USA) 61 (1981) 518-523.
39
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
[ 3 ] V.A.Bogatyrjov, M.M.Budnov, E.M.Dianov, S.D.Rumyantzev, S.I.Semjonov, “Mechanical reliability of
polymer coated and hermetically coated optical fibers based on proof testing”, Optical Engineering, Vol.30,
No.6, pp.690-699 (June 1991).
[ 4 ] “Power Law Theory of Optical Fibre Reliability”, TIA TSB-61, August 1994.
[ 5 ] W.Griffioen, T.Breuls, G.Cocito, S.Dodd, G. Ferri, P.Haslov, L.Okasanen, D.Stockton, T.Svensson, “COST 218
evaluation of optical fibre lifetime models”, SPIE Vol.1791 Optical Material Reliability and Testing, Boston,
MA, USA (8-9 September 1992).
[ 6 ] S.T.Gulati, J.D.Helfinstine, G.S.Glaesemann, D.R.Roberts, E.Cueller, L.M.Middleman, “Improve-ments in
optical fiber reliability via high fatigue resistant composition, SPIE Vol.842 Fiber Optics Reliability : Benign
and Adverse Environments (1987), 22-31.
[ 7 ] V.A.Bogatyrjov, M.M.Bubnov, A.N.Guryanov, N.N.Vechkanov, G.G.Devyatykh, E.M.Dianov, S.L.Semyonov,
“Influence of various pH solutions on strength and dynamic fatigue of silicon-resin-coated optical fibers”, Eletr.
Letters, 11th Sept. 1986, Vol.22, No.18, 1013-1014.
[ 8 ] M.J.Matthewwson, C.R.Kurkjian, S.T.Gulati, “Strength Measurement of optical fibers by bending”,
J.Am.Ceram. Soc., 69 [11] (1986) 815-821.
[ 9 ] J.W.Leclercq, A.H.E.Breuls, “Influence of adhesion promoters on the aging characteristic of optical fibers in
water”, Submitted to SPIE int. symposium on optics, imaging, and instrumentation (fiber optic materials and
components), San Diego, 24-29 July 1994.
[10] S.P.Craig, W.J.Duncan, P.W.France, J.E.Snodgas, “The strength and fatigue of large flaws in silica optical fibre”,
ECOC (1982) 205-208.
[11] G.S.Glaesemann, M.G.Estep, J.D.Helfinstine, J.J.Carr, “Examining the mechanical behavior of intrinsic and
extrinsic flaws in optical glass fiber”, 94th annual meeting of the Am.Cer.Soc., 4-JXVI-92, Minneapolis, April
1992.
[12] A.Breuls, T.Svensson, “Strength and fatigue of zirconia induced weak spots in optical fibre”, SPIE, Boston,
September 1993.
[13] H.H.Yuce, P.L.Key, H.C.Chand an, “Aging behavior of low strength fused silica fibres”, SPIE Vol.1366 Fiber
optic reliability benign and adverse environments IV (1990) 120-128.
[14] A.Breuls, “A COST 218 comparison of n-values obtained with different techniques”, Proceeding of OFMCʼ93,
Torino (1993) 9-12.
[15] S.Gulati, “Reliability considerations of long length optical fibres”, 41th IWCS (1992) 612-621.
[16] W.Griffoen, “Effects influencing measurements of optical fibre corrosion susceptibility”, Proceeding of
OFMCʼ93, Torino (1993) 13-16.
[17] C.Kurkjian et al., “Current issues in mechanical reliability of optical fibres”, 41th IWCS (1992) 599-604.
40
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.1 ラウンドロビン法による破断時間と破断応力の関係
図B.2 ラウンドロビン法による破断時間と破断応力の関係
41
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
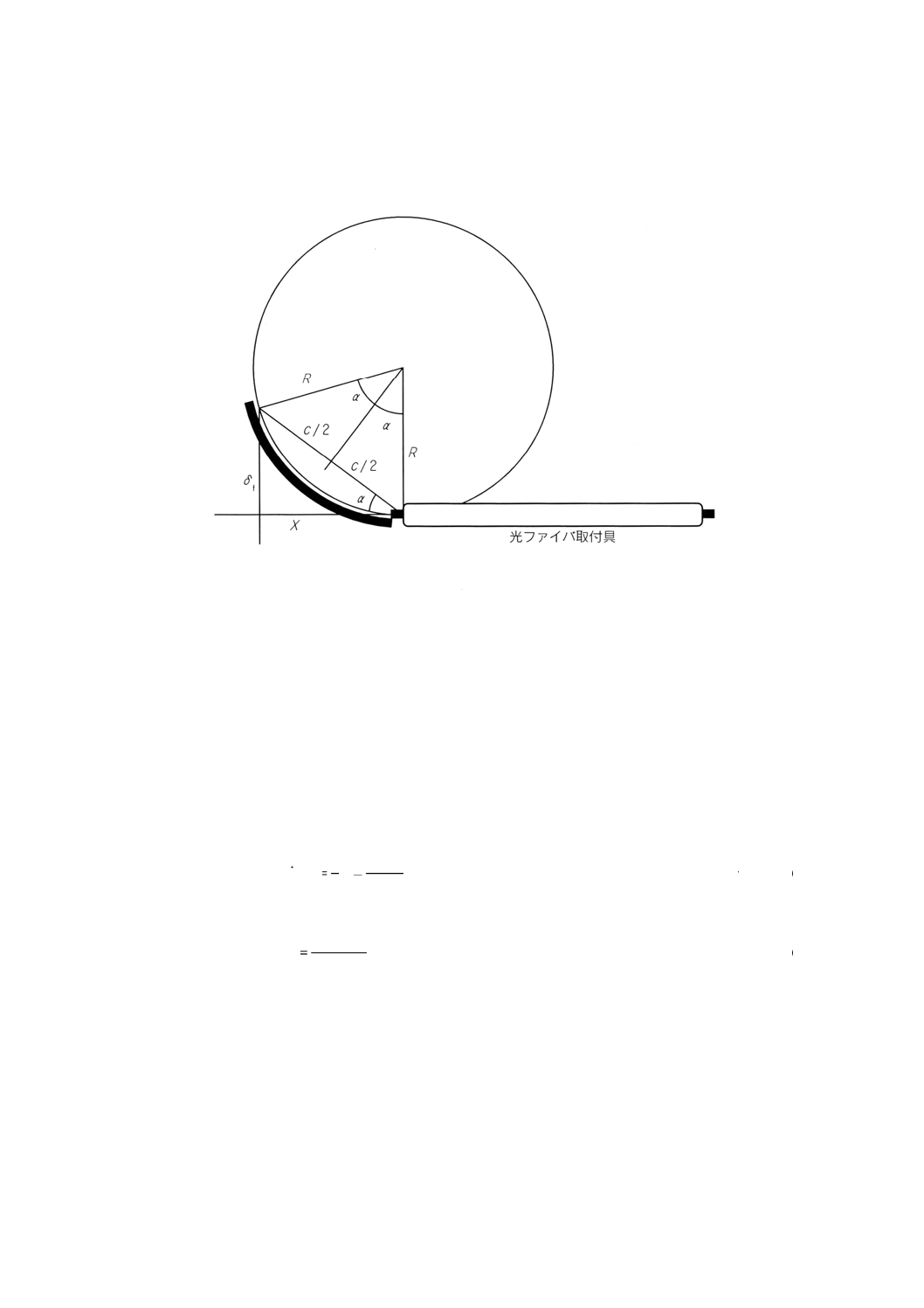
附属書C(参考) 光ファイバカールのモデルの誘導式
図C.1 光ファイバカールのモデル図
図C.1に示すように,光ファイバカールの量は,式(C.3)として表現される。
xをオーバハング距離に等しくする。
δfを取付具からのX距離における光ファイバ変位に等しくする。
cはx,δfによって形成される直角三角形の底辺である。
したがって,cは
c= (x2+δf2) 1/2 ······································································· (C.1)
cを底辺とし,辺Rが円の中心から伸びている二等辺三角形を形成する。cを二等分し,二等辺三角形か
ら二つの直角三角形を形成する。新たに形成した直角三角形の角αはx,δf及びcからなる直角三角形の角
度αと等しい。
したがって,
R
c
c
)2/
(
sin
f=
=δ
α
·································································· (C.2)
(C.1)を(C.2)に代入すると,次の式で求められる。
f
2
f
2
2δ
δ
+
=x
R
·········································································· (C.3)
42
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
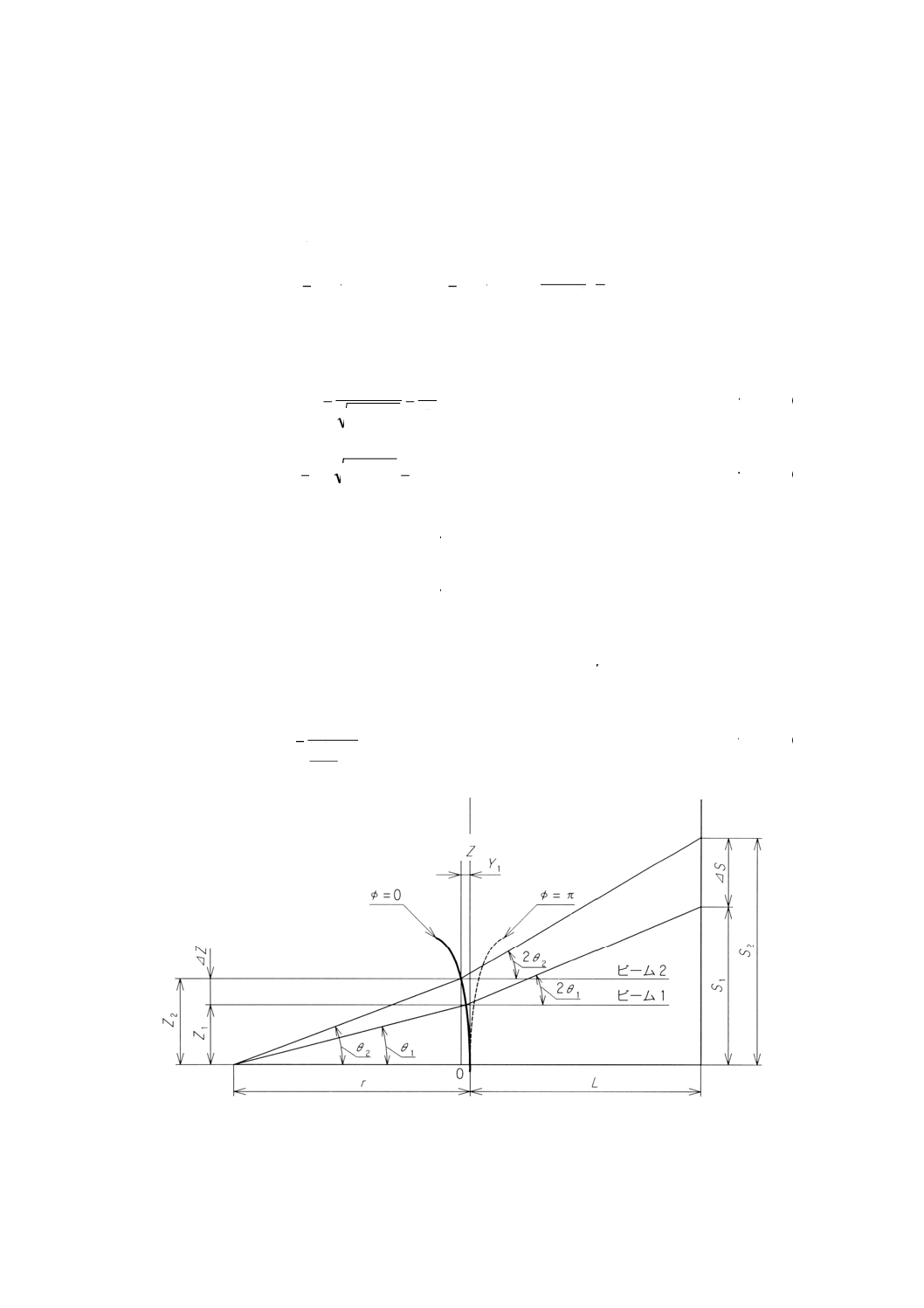
附属書D(参考) レーザ光散乱による光ファイバカールの測定
本体の式(21)は,次のとおりに導き出される。
図D.1に示すように,S1は式(D.1)として表現される。
1
2
1
1
1
1
1
1
1
tan
1
tan
2
)
(
)
2
tan(
)
(
θ
θ
θ
−
+
+
=
+
+
=
Y
L
Z
Y
L
Z
S
···························· (D.1)
ここに,r2>>Z12······································································ (D.2)
tanθ1とY1はそれぞれ式(D.3)と(D.4)として表現される。
r
Z
Z
r
Z
1
2
1
2
1
1
tan
=
−
=
θ
···························································· (D.3)
0
2
1
2
1
=
−
−
=
Z
r
r
Y
······························································· (D.4)
式(D.1)に,tanθ1とY1を挿入すると,S1は式(D.5)で表現される。
S1=Z1 (1+2L/r) ······································································ (D.5)
S2も同様に誘導され,式(D.6)として表現される。
S2=Z2 (1+2L/r) ······································································ (D.6)
そこで,△Z=Z2−Z1及び△S=S2−S1とし ··································· (D.7)
式(D.5)及び(D.6)を(D.7)に代入すると,次の式が求められる。
△S= (1+2L/r) ・ (Z2−Z1) = (1+2L/r) ・△Z ······························ (D.8)
また,rについては,式(D.9)として解を求めることができる。
1
2
−
=
Z
S
L
r
⊿
⊿
··········································································· (D.9)
図D.1 曲率半径パラメータrの定義
43
C 6821 : 1999
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
光ファイバ標準化委員会 構成表
氏名
所属
(委員長)
川 瀬 正 明
日本電信電話株式会社
五十嵐 嘉 彦
株式会社フジクラ
石 田 之 則
日本工業大学
岩 崎 匡 利
株式会社協和エクシオ
植 山 範 行
日本ルーセント・テクノロジー株式会社
生 方 裕 史
三菱電線工業株式会社
江 上 浩 二
コーニングインターナショナル株式会社
大 島 良 夫
東日本旅客鉄道株式会社
大 橋 省 吾
昭和電線電纜株式会社
小 田 英 輔
社団法人日本電線工業会
木 下 和 孝
東京電力株式会社
佐々木 豊
茨城大学
高 橋 聡
三菱レイヨン株式会社
戸木田 茂
株式会社マイクロオプト
波 平 宜 敬
国際電信電話株式会社
橋 爪 邦 隆
通商産業省工業技術院標準部
宮 崎 康 秀
シーコアインターナショナルコーポレーション
山 崎 秀 夫
日立電線株式会社
山 村 修 蔵
財団法人日本規格協会
脇 田 徹
古河電工株式会社
和 田 英 男
防衛庁技術研究本部
増 田 岳 夫
財団法人光産業技術振興協会
(オブザーバ)
田 村 正 之
社団法人日本化学工業協会
(事務局)
堀 切 賢 治
財団法人光産業技術振興協会