C 6191:2019
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 2
3 用語,定義及び略語 ·········································································································· 2
3.1 用語及び定義 ················································································································ 2
3.2 略語 ···························································································································· 5
4 校正の準備 ······················································································································ 5
4.1 組織 ···························································································································· 5
4.2 トレーサビリティ ·········································································································· 5
4.3 準備 ···························································································································· 5
4.4 参照条件 ······················································································································ 5
5 波長校正························································································································· 6
5.1 概要 ···························································································································· 6
5.2 参照条件における波長校正 ······························································································ 6
5.3 動作条件における波長校正 ······························································································ 9
6 光パワー校正 ·················································································································· 10
6.1 概要 ··························································································································· 10
6.2 参照条件における光パワー校正 ······················································································· 11
6.3 動作条件における光パワー校正 ······················································································· 15
7 文書化··························································································································· 16
7.1 校正データ及び不確かさ ································································································ 16
7.2 校正条件 ····················································································································· 17
附属書A(規定)数学的根拠 ································································································· 18
附属書B(参考)一定の波長(又は光パワー)範囲にわたる偏差の平均化 ······································ 21
附属書C(参考)その他の試験 ······························································································ 23
附属書JA(規定)不確かさと確度との関係 ·············································································· 29
附属書JB(規定)強度試験 ··································································································· 31
参考文献 ···························································································································· 32
附属書JC(参考)JISと対応国際規格との対比表 ······································································ 33
C 6191:2019
(2)
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般財団法人光産
業技術振興協会(OITDA)及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業
規格を改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業
規格である。
これによって,JIS C 6191:2005は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
日本工業規格 JIS
C 6191:2019
波長可変光源試験方法
Test methods of tuneable laser sources
序文
この規格は,2014年に第1版として発行されたIEC 62522を基とし,旧規格との整合性確保のため,技
術的内容を変更して作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JCに示す。また,附属書JA及び附属書JBは,対応国際規格にはない
事項である。
幹線系光通信網においては,波長分割多重(WDM)光伝送システムの導入が進んでいる。WDM用の光
周波数及び波長のグリッドに関しては,ITU-TのG.694勧告群に記載がある。例えば,G.694.1の光周波数
グリッドでは,チャンネル間隔は,12.5 GHzから100 GHz以上にまで多岐にわたっている。WDM光伝送
システムには,狭チャンネル間隔用のアレイ導波路回折格子(AWG),薄膜フィルタ形又は回折格子形の
合波器(MUX)及び分波器(DMUX)が組み入れられている。これらの部品の特性を計測する際に主に用
いる波長可変光源は,十分な校正に基づいた性能が要求される。その波長不確かさ,波長設定の繰返し性,
波長安定性及び出力光パワーの安定性が重要な性能である。
波長可変光源(TLS)が一般に具備する特徴は,次のとおりである。
a) 出力波長は,1 260 nm以上から1 675 nm未満までの範囲にわたって連続的に可変である(出力光は,
光ファイバの基本LP01モードだけを励振するものが望ましい。)。
b) 光ファイバコネクタの出力端子をもつ。
スペクトル形状は,単一縦モードとし,半値全幅(FWHM)は0.1 nm以下とする。近接モードは,いず
れも,主モードよりも20 dB以上低い強度とする。これらに該当するものは,例えば,分布帰還形半導体
レーザ(DFB-LD),外部共振器レーザなどである。
注記 この規格では,a) で規定する出力波長のもののほか,光ファイバコネクタの出力端子をもつ,
出力波長400 nm以上,1 800 nm以下の波長可変光源も対象としている。
1
適用範囲
この規格は,波長可変光源の波長及び出力光パワーについて事前校正した,光波長計(光周波数計を含
む。),光パワーメータなどの基準計測器による安定かつ再現性のある校正手順について規定する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 62522:2014,Calibration of tuneable laser sources(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
C 6191:2019
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS C 1002 電子測定器用語
JIS C 6187-2 光波長計−第2部:校正方法
注記 対応国際規格:IEC 62129-2,Calibration of wavelength/optical frequency measurement instruments
−Part 2: Michelson interferometer single wavelength meters
JIS C 6802 レーザ製品の安全基準
注記 対応国際規格:IEC 60825-1,Safety of laser products−Part 1: Equipment classification and
requirements
JIS C 6803 レーザ製品の安全−光ファイバ通信システムの安全
注記 対応国際規格:IEC 60825-2,Safety of laser products−Part 2: Safety of optical fibre
communication systems (OFCS)
JIS C 6835 石英系シングルモード光ファイバ素線
注記 対応国際規格:IEC 60793-2-50,Optical fibres−Part 2-50: Product specifications−Sectional
specification for class B single-mode fibres
JIS C 60068-2-6 環境試験方法−電気・電子−第2-6部:正弦波振動試験方法(試験記号:Fc)
JIS C 60068-2-31 環境試験方法−電気・電子−第2-31部:落下試験及び転倒試験方法(試験記号:
Ec)
JIS Q 17025 試験所及び校正機関の能力に関する一般要求事項
注記 対応国際規格:ISO/IEC 17025,General requirements for the competence of testing and calibration
laboratories
JIS Z 8103 計測用語
JIS Z 8120 光学用語
ISO/IEC Guide 98-3:2008,Uncertainty of measurement−Part 3: Guide to the expression of uncertainty in
measurement (GUM: 1995)
ISO/IEC Guide 99:2007,International vocabulary of metrology−Basic and general concepts and associated
terms (VIM)
3
用語,定義及び略語
この規格で用いる用語,定義及び略語は,JIS C 1002,JIS Z 8103及びJIS Z 8120によるほか,次によ
る。
3.1
用語及び定義
3.1.1
認定校正機関(accredited calibration laboratory)
適切な国の機関の認定の下,国家標準へのトレーサビリティを保証する校正証明書を発行できる校正機
関。
3
C 6191:2019
3.1.2
調整(adjustment)
ある測定量の値に対応するある指示値を表示するために,機器に対して行う一連の作業。
(IEC 60050-300:2001の311-03-16を一部修正し,注記省略)
(ISO/IEC Guide 99:2007の3.11も参照。一部修正し,注記省略)
3.1.3
校正(calibration)
測定器が指示した量の値と標準器が示す標準値との関係を,規定した条件の下で確定する一連の作業。
注記1 校正の結果によって,指示値に対する測定量の値の指定又は指示値に関する補正の決定が可
能になる。
注記2 校正によって,影響量の効果のような他の計量特性を決定できることもある。
注記3 校正証明書又は校正報告書と呼ぶ文書で校正の結果を記録することもある。
(ISO/IEC Guide 99:2007の2.39を参照。一部修正し,注記変更)
3.1.4
校正条件(calibration conditions)
校正を実施する際の測定の条件。
3.1.5
参照条件における校正(calibration at reference conditions)
参照条件における不確かさ評価を含む被校正光源の校正。
3.1.6
動作条件における校正(calibration at operating conditions)
動作条件における不確かさ評価を含む被校正光源の校正。
3.1.7
信頼の水準(level of confidence)
測定されたパラメータの真の値が,与えられた範囲内に存在する確率。
3.1.8
包含係数,k(coverage factor)
標準不確かさuから拡張不確かさUの算出に用いる係数。
3.1.9
デシベル,dB,dBm(decibels)
光パワーを対数スケールで表す単位,ベル(B)の分量。
注記1 光パワーレベルは,基準光パワーP0を基準とした相対値で表す。
×
=
0
10
0
̲
/
log
10
P
P
LP
P
ここに,PとP01)とは,同じ線形の単位で表す。
注1) P0を,式の添字では,“P̲0”と表記している。
単位dBmは,1 mWに対する相対的な光パワーレベルを示す。
4
C 6191:2019
×
=
mW
1
log
10
10
mW
1/
P
LP
光パワーP1とP2との線形比Rlinは,デシベル(dB)では光パワー値の差として表すことが
できる。
)
(
log
10
)
(
log
10
log
10
)
(
log
10
2
10
1
10
2
1
10
lin
10
P
P
P
P
R
LP
×
−
×
=
×
=
×
=
∆
同様に,相対不確かさUlin及び相対偏差も次のようにデシベルで表すことができる。
(
)
lin
10
dB
1
log
10
U
U
−
×
=
注記2 数理処理のために,全ての測定結果は,線形単位[例えば,ワット(W)]で表現することが
望ましく,全ての不確かさは,線形表記で表現することが望ましい。これは,対数単位での
不確かさの合成が数学的に難しいからである。最終的な不確かさの表記は,線形表記でもdB
表記でもよい。
注記3 詳細は,ISO 80000-3及びIEC 60027-3を参照することが望ましい。IEC 60027-3では,単位
記号の追記を許していないが,この規格では,光計測で広く用いられ認識されている単位
dBmを用いてもよい。
3.1.10
光パワー偏差,DP(optical power deviation)
被校正光源の設定値PTLSと参照光パワーメータで測定された参照光パワーPmeasとの差。
meas
meas
TLS
P
P
P
DP
−
=
3.1.11
動作条件(operating conditions)
測定器の不確かさを規定するための,影響量の範囲を規定したもの。通常,参照条件よりも範囲は広い。
注記 動作条件及び動作条件下の不確かさは,通常,製造業者が使用者の便宜のために規定する。
3.1.12
参照条件(reference conditions)
測定器の性能試験のため又は測定結果の相互比較のために用いる条件。
注記 参照条件は,一般に,測定器に影響を及ぼす影響量の基準値又は基準範囲を含む。
3.1.13
サイドモード抑圧比,SMSR(side-mode suppression ratio,SMSR)
DFB-LDなどの単一縦モードレーザにおける,主モードスペクトルと最大サイドモードスペクトルのピ
ーク光パワーとの比。
注記 サイドモード抑圧比は,通常,dBで表記する。
3.1.14
波長(wavelength)
光源の(真空中の)波長。
5
C 6191:2019
3.1.15
波長偏差,Dλ(wavelength deviation)
被校正光源の波長設定値λTLSと,測定された波長λmeasとの差。単位はnm又はμm。
meas
TLSλ
λ
λ
−
=
D
3.2
略語
APC
斜め研磨(Angled physical contact)
DFB-LD
分布帰還形半導体レーザ(Distributed feedback laser diode)
FWHM
半値全幅(Full-width/half-maximum)
OSA
光スペクトラムアナライザ(Optical spectrum analyzer)
SMSR
サイドモード抑圧比(Side-mode suppression ratio)
TLS
波長可変光源(Tuneable laser source)
WDM
波長分割多重(Wavelength-division multiplexing)
4
校正の準備
4.1
組織
校正機関は,JIS Q 17025の要求を満たすことが望ましい。その場合,実施する各種の校正作業を順を追
って指示したもの,及び用いる装置について,測定手順書として文書化しなければならない。
4.2
トレーサビリティ
トレーサビリティは,JIS Q 17025の要求を満たすことが望ましい。
校正手順で用いる全ての標準器は,国立標準機関又は認定校正機関に対するトレーサビリティを確保し
たうえで,手順書に従って校正する。
校正手順の階層ごとに複数の標準器を維持することで,標準器の性能を階層ごとに比較検証できるよう
にすることが望ましい。校正結果に重大な影響を及ぼすその他全ての校正装置が,全て校正済みであるこ
とを確認する。
4.3
準備
環境条件は,校正で要求される不確かさレベルに見合ったものとする。
a) 校正は,清浄な環境で行う。
b) 温度モニタ及び温度制御を行う。
c) 全てのレーザ光源の操作は,安全に配慮する(JIS C 6802及びJIS C 6803参照)。
d) 波長可変光源の出力は,光スペクトラムアナライザ(OSA)によって単一縦モード動作であるかを確
認することが望ましい。
推奨温度は,23 ℃(例えば,23 ℃±2 ℃)である。試験に先立ち,校正機器が周囲環境で平衡状態に
なるまで2時間以上を要する。波長可変光源の予熱時間については,製造業者の手引に従う。
4.4
参照条件
参照条件には,通常,日付,温度,相対湿度,大気圧,表示光パワー,表示波長,光ファイバ種類,コ
ネクタとアダプタとの組合せ,スペクトル幅及びスペクトル分解能の設定,並びに必要に応じてこれらの
許容幅を含む。特に指定がない限り,JIS C 6835に規定するカテゴリB1.1又はB1.3の長さ2 m以上のシ
ングルモード光ファイバピッグテールを用いる。全ての校正は,後方反射が無視できる状況で行うことが
望ましい。したがって,可能な限り斜め研磨(APC)コネクタ又は光アイソレータを使用することが望ま
6
C 6191:2019
しい。
製造業者の仕様及び操作手順に従い,波長可変光源を操作する。実用的には,被校正波長可変光源の実
際の現場での動作条件を模擬するような校正条件,及びパラメータの範囲を選択する。製造業者の操作手
順書の規定に沿って,波長可変光源の確度を最適化できるパラメータを選ぶ。
箇条7に規定するとおり,これらの条件を文書化する。
注記 校正結果は,校正作業で用いた校正条件においてだけ有効である。
5
波長校正
5.1
概要
被校正光源の波長の不確かさを構成する要因を,次に示す。
a) 被校正光源を参照条件で校正した際の不確かさ。参照条件内での温度依存性,及び時間依存性を含む。
b) より広い動作条件で校正した際に,光パワー依存性,温度依存性,及び時間依存性に起因する不確か
さ。
5.2に記載の,参照条件における波長校正は,必須である。5.3に記載の,動作条件における校正は,任
意である。
5.2
参照条件における波長校正
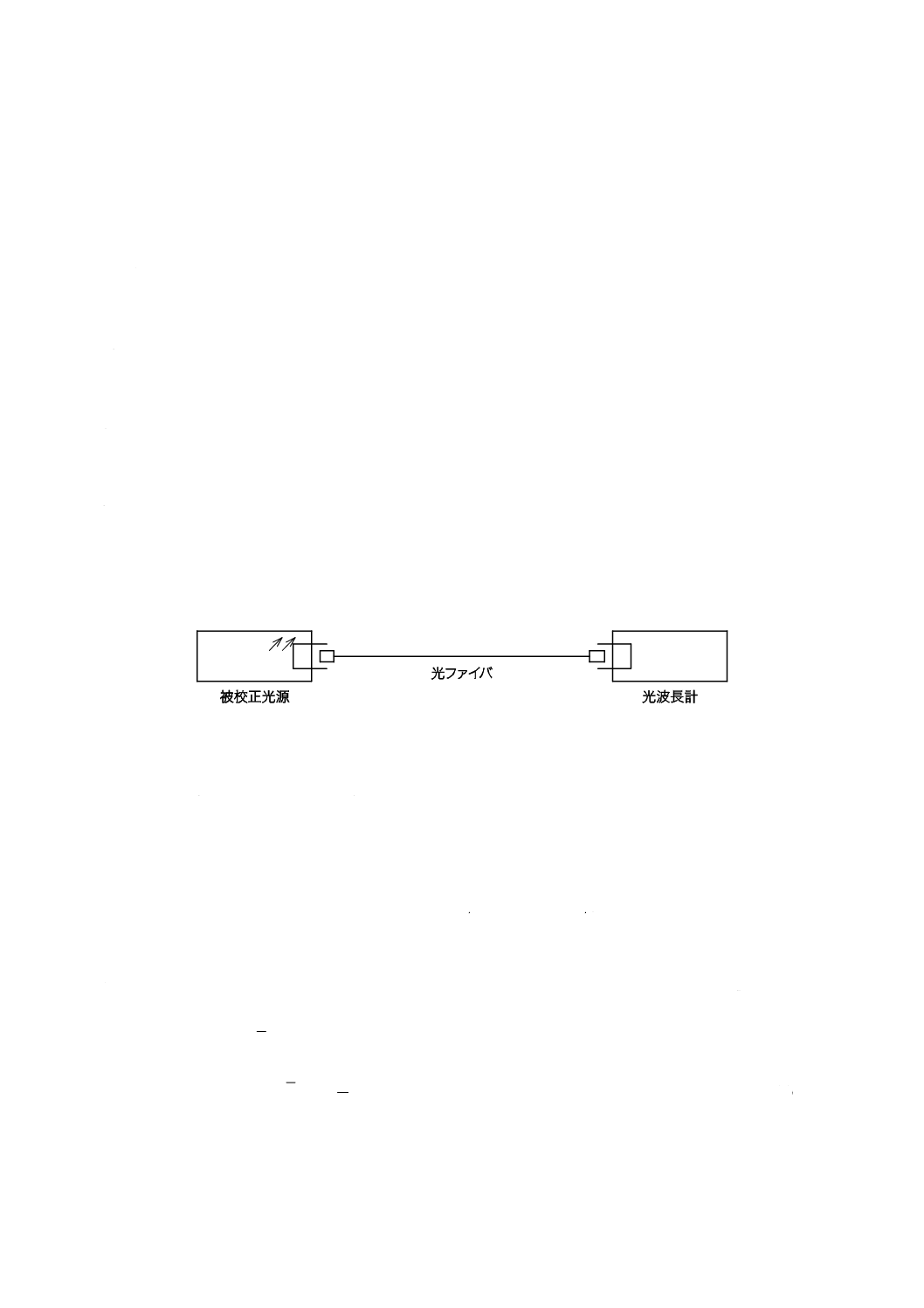
5.2.1
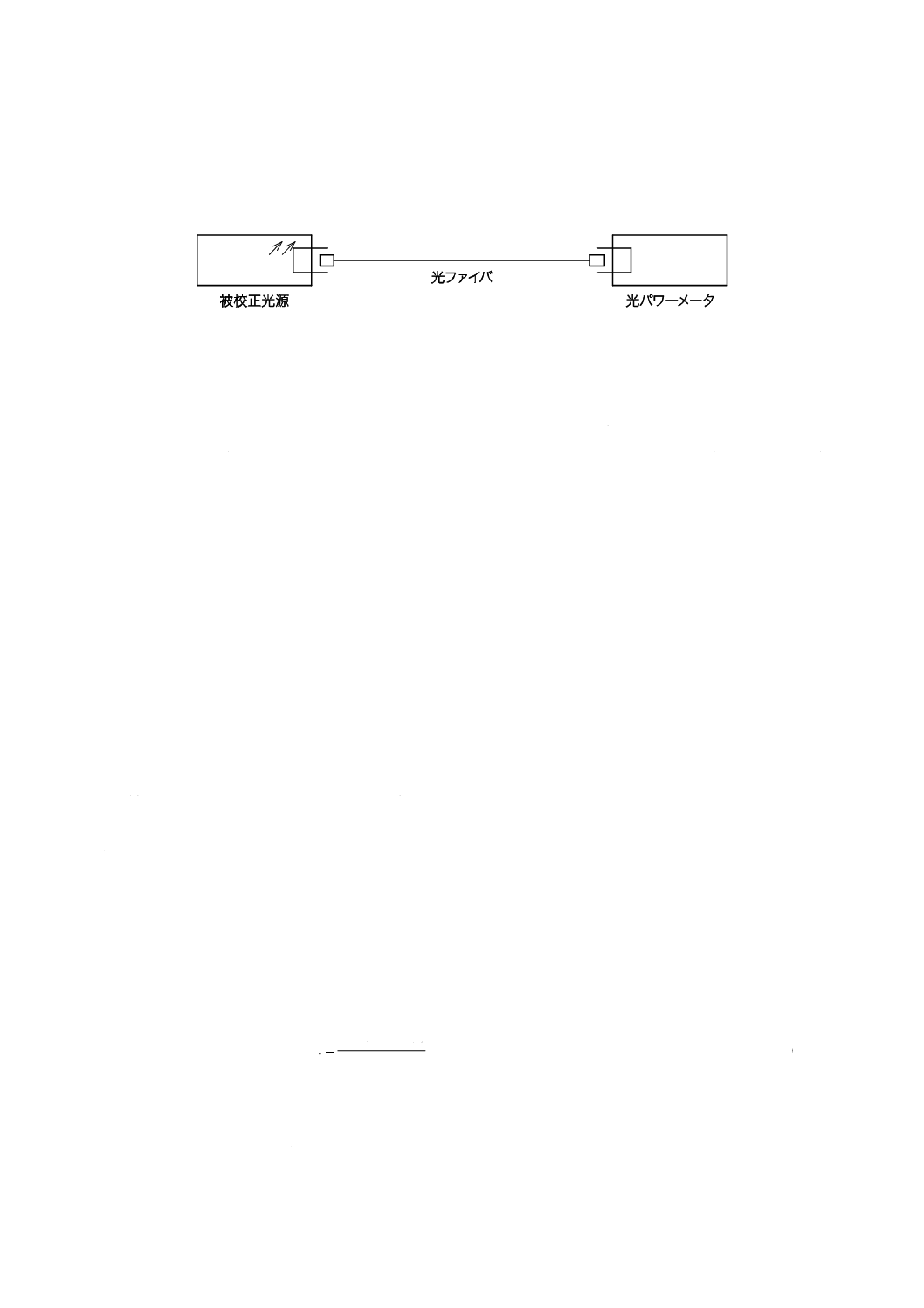
測定系の構成
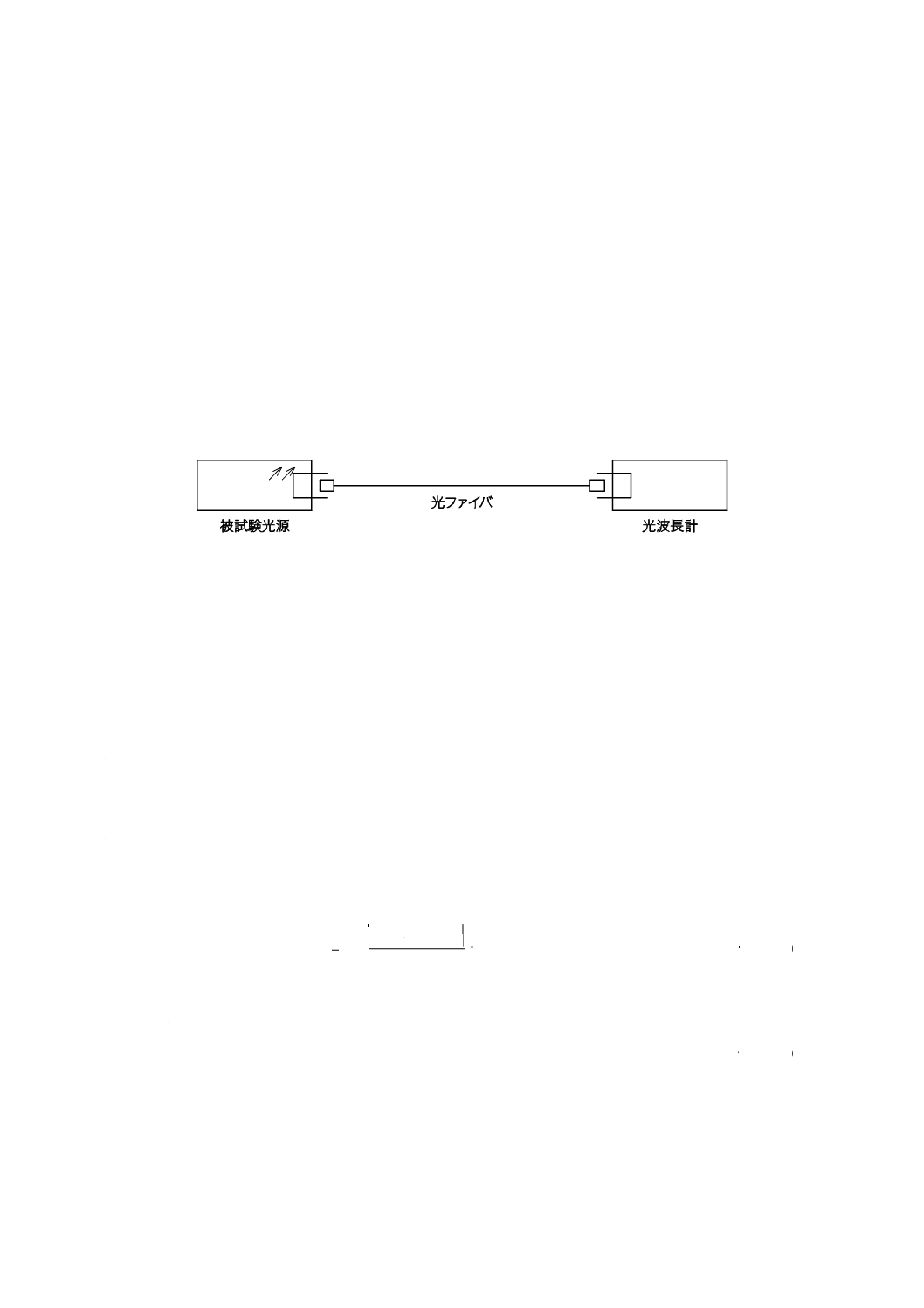
波長校正の測定系を図1に示す。校正は,参照条件の下で行う。
図1−波長校正の測定系
5.2.2
校正装置
校正には光波長計を使用する。光波長計は,JIS C 6187-2に沿って校正したものを用いることが望まし
い。
5.2.3
波長校正手順
波長校正は,次の手順で行う。
a) 図1に示した測定系で,光源波長の設定値を
j
TLS
λ
,測定値を
j
i,
meas
λ
とする。波長測定の不確かさは,
波長可変光源(TLS)の波長設定の繰返し性及びヒステリシスを考慮する。ヒステリシスは,設定波
長に短波長側から設定されたとき,及び長波長側から設定されたときの,測定波長の偏差と定義する。
b) 10回以上,波長
j
i,
meas
λ
の測定を繰り返す。各測定に先立ち,波長可変光源の設定が
j
TLS
λ
であること
を確認する。波長は,短波側,長波側の双方から近づけて目標波長(j)に設定することが望ましい。
c) 測定波長の平均値
j
meas
λ
の算出は,次の式(1)による。
∑
=
=
m
i
j
i
j
m
1
,
meas
meas
1
λ
λ
··································································· (1)
ここに,
m: 測定回数
それぞれのλmeas i,jは,光波長計上で平均化処理された表示値である。
7
C 6191:2019
波長偏差Dλ̲ jの算出は,次の式(2)による。
j
j
j
D
meas
TLS
̲
λ
λ
λ
−
=
··································································· (2)
ここに,
λTLS j: 波長可変光源の設定波長
d) m回の測定結果から算出されるλjの標準偏差sλ̲ jは,次の式(3)による。
2
1
1
2
meas
,
meas
̲
)
(
1
1
−
−
=
∑
=
m
i
j
j
i
j
m
s
λ
λ
λ
················································ (3)
e) 波長設定の繰返し性Srep, λ̲ jの算出は,次の式(4)による。
j
j
s
S
̲
̲
,
rep
2
λ
λ
×
=
········································································ (4)
校正する全ての波長において,この手順を実施しなければならない。レンジ内の最短波長,中心波長,
及び最長波長を含む,最低10点の波長又は10 nmごとに測定を行う。
5.2.4
各種条件依存性
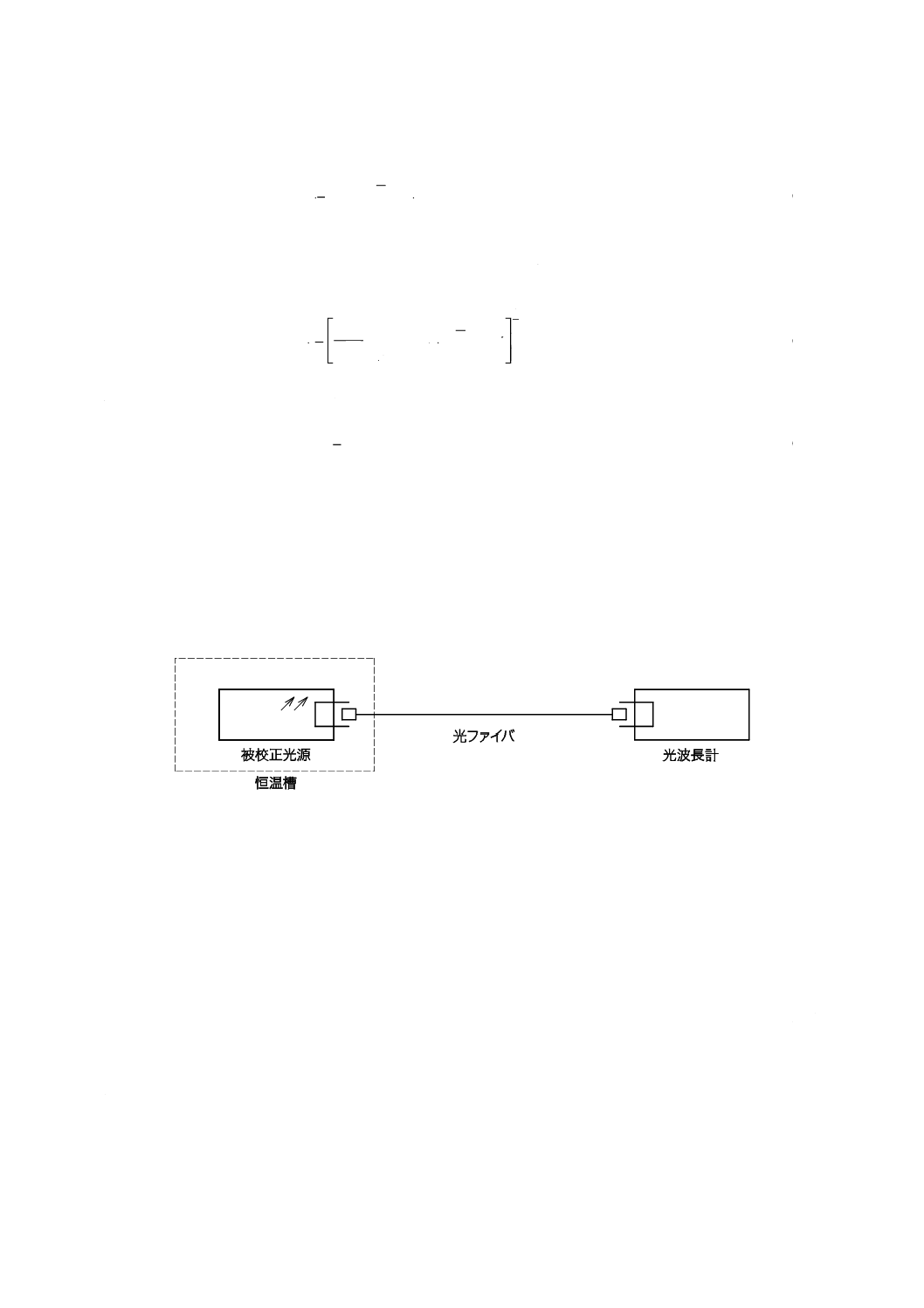
5.2.4.1
温度依存性(既知の場合は任意)
5.2.4.1.1
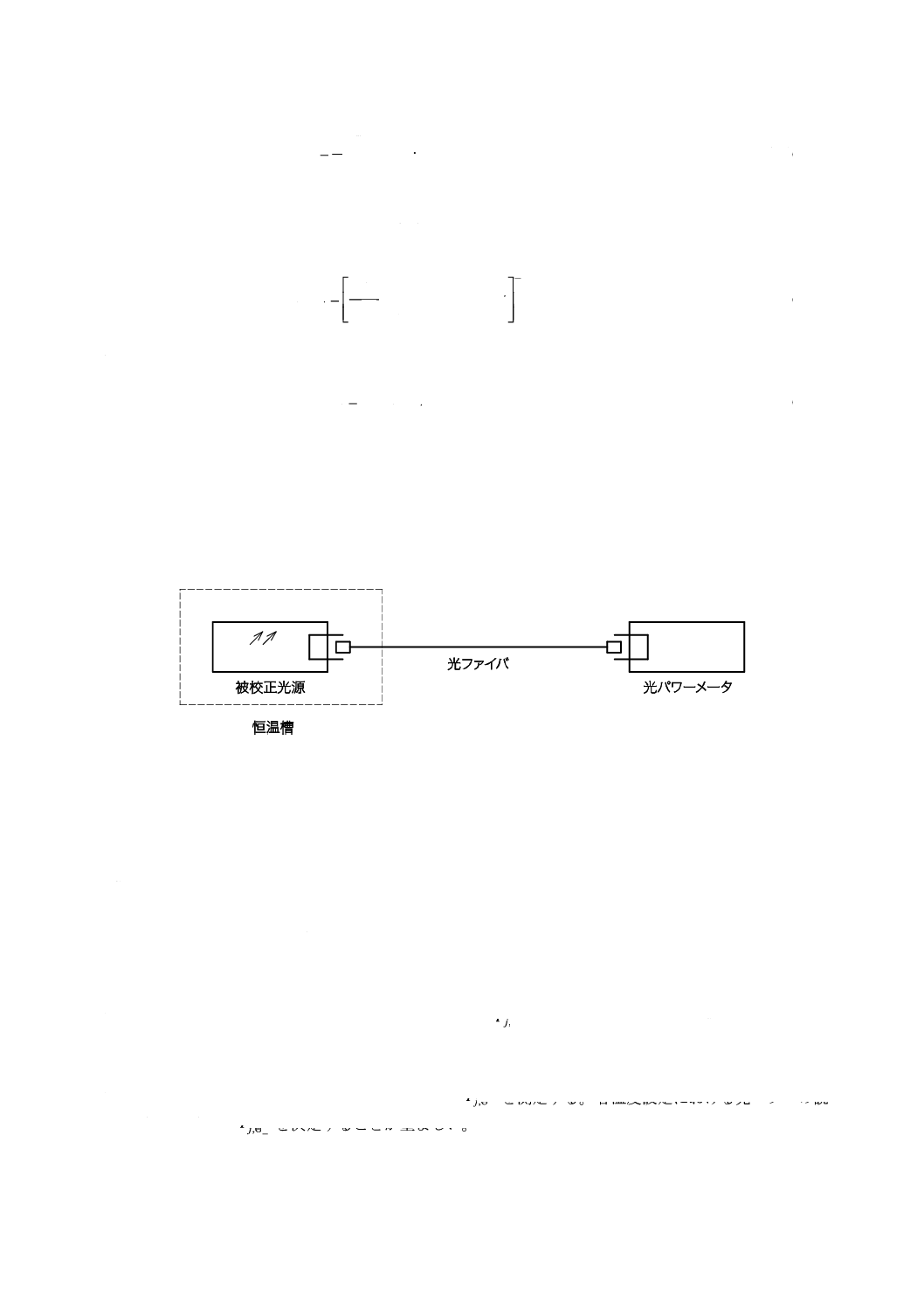
測定系の構成
温度依存性の測定系を,図2に示す。この校正は,温度条件以外は参照条件の下で行う。
図2−温度依存性の測定系
5.2.4.1.2
校正装置
校正装置は,次による。
a) 光波長計は,波長可変光源の波長安定性の1/10以下の変動を検出できなければならない。
b) 恒温槽 恒温槽内部の温度分布が,測定結果に影響を与えない恒温槽を使用する。
5.2.4.1.3
温度依存性測定のための校正手順
校正は,次の手順で行う。
a) 図2の測定系について,被測定光源の名目波長(j)を参照条件の下,光パワー
j
PTLSで,波長
ref
,j
λ
を測
定する。このとき,波長は,温度変動に対して最大の変化をする波長で行うことが望ましい。そうで
ない場合は,幾つかの波長で評価する。
b) i番目の温度における,波長可変光源の波長
i
j
̲
,Θ
λ
を測定する。各温度設定における波長の読み値を平
均して
i
j
̲
,Θ
λ
を決定することが望ましい。
c) 波長の相対偏差の算出は,次の式(5)による。
8
C 6191:2019
ref
,
̲
,
̲
,
̲
j
i
j
i
j
D
λ
λ
λ
−
=
Θ
Θ
······························································· (5)
d) m点の異なる温度
i
Θに設定し,機器が温度勾配をもたないように十分な時間をおいてから,b)及びc)
の操作を繰り返す。
e) 波長偏差の最大値
(
)
m
i
i
i
j
D
=
=
Θ
1
̲
,
̲
max
λ
及び最小値
(
)
m
i
i
i
j
D
=
=
Θ
1
̲
,
̲
min
λ
を計算する。
f)
波長の温度依存性による標準不確かさ
∆Θ
,
̲j
uλ
は,く(矩)形分布を仮定して,次の式(6)によって算出
する。
(
)
(
)
−
=
=
=
Θ
=
=
Θ
∆Θ
m
i
i
i
j
m
i
i
i
j
j
D
D
u
1
̲
,
̲
1
̲
,
̲
,
̲
min
max
3
2
1
λ
λ
λ
···························· (6)
ここに,
ΔΘ: 温度変動
この試験中,波長を光波長計でモニタすることを推奨する。
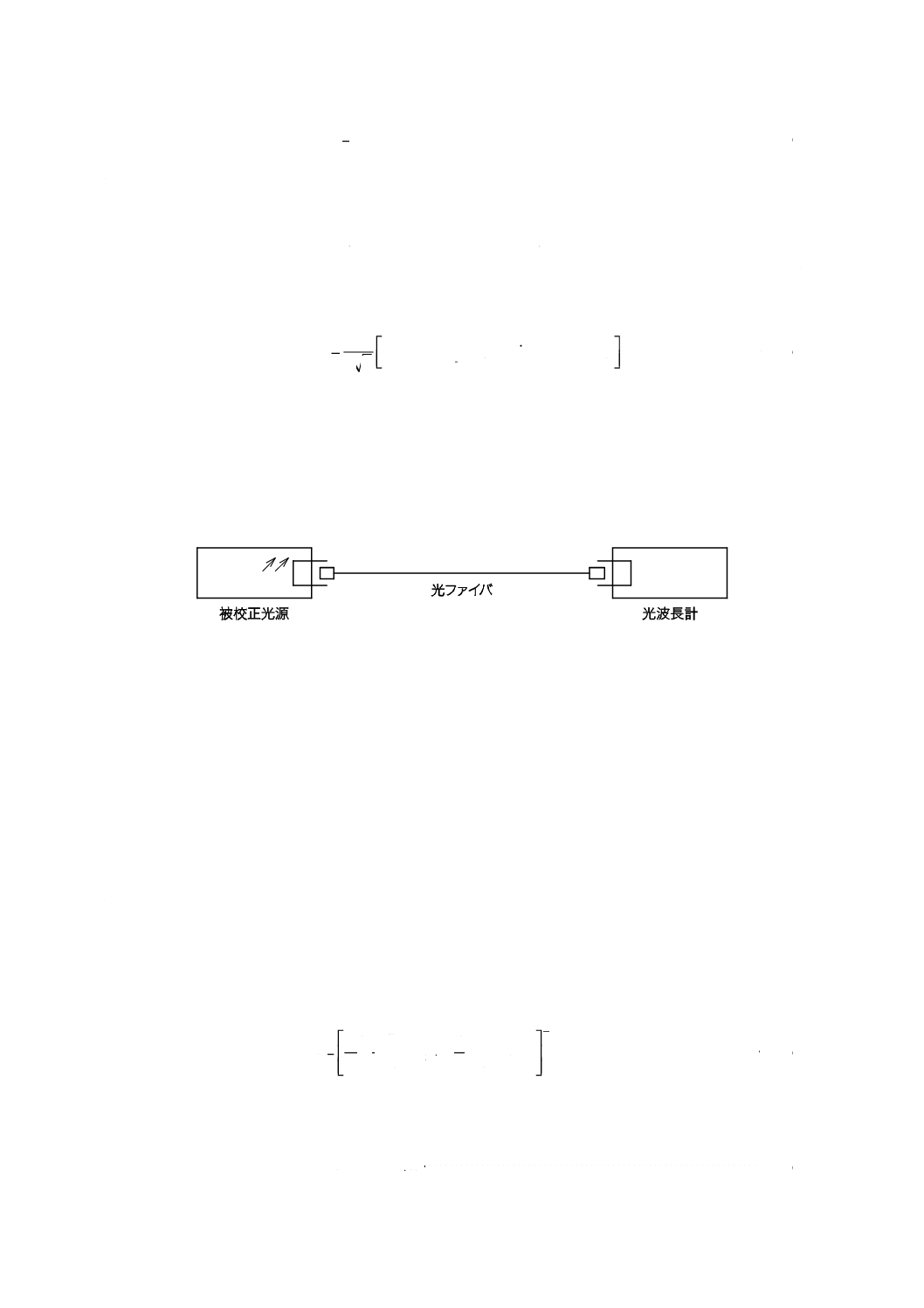
5.2.4.2
波長安定性
5.2.4.2.1
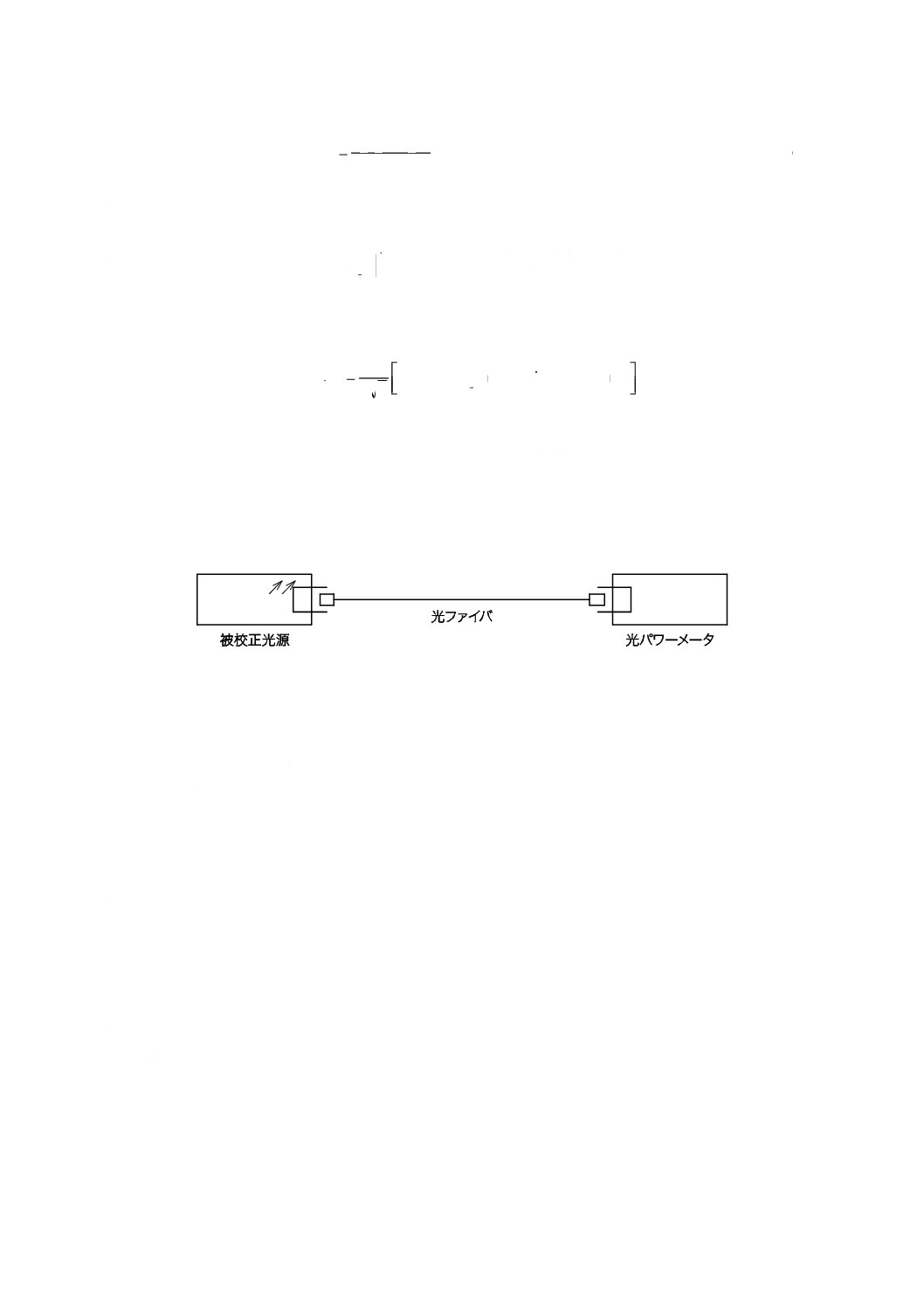
測定系の構成
波長安定性の測定系を図3に示す。この校正は,時間条件以外は参照条件の下で行う。
図3−波長安定性の測定系
5.2.4.2.2
校正装置
光波長計は,TLSの波長安定性の1/10以下の変動を検出できるものを推奨する。
5.2.4.2.3
波長安定性測定のための校正手順
校正は,次の手順で行う。
a) 図3の測定系について,被校正光源を発光させ,製造業者の取扱説明書で規定する時間のウォームア
ップ後,測定を実施する。
b) 一定の時間間隔Δt(例えば,10分間)を選び,光波長計で10回以上,繰返し測定を行う(例では,
10分間ごとの安定性を測定することになる。)。
c) 波長は,連続的に取得し,タイムスタンプとともにコンピュータに記録する。
d) 設定した時間間隔ごとに,m回(10回以上)の測定が行われ,規定の時間間隔Δtとなっていること
を確認する。
e) 時間間隔Δtに対するm回の測定の標準偏差を,次の式(7)によって計算する。
2
1
1
2
1
̲
,
̲
,
,
̲
)
1
(
1
1
−
−
=
∑
∑
=
=
∆
m
i
m
i
i
t
j
i
t
j
t
j
m
m
u
λ
λ
λ
·········································· (7)
f)
最低1回は,波長可変光源の波長安定性を評価する。この場合,波長安定性の不確かさは,次の式(8)
による。
t
j
t
j
u
S
∆
∆
×
=
,
̲
,
̲
,
stab
2
λ
λ
··································································· (8)
9
C 6191:2019
光源の波長は,連続的に10回以上(m回)測定することが望ましく,毎分数回以上の測定を推奨する。
繰返し測定の間隔は,光波長計の応答時間よりも十分に長くする。取得したデータから走査サンプリング
して,幾つかの時間間隔について安定性を計算し,最大値を報告することが望ましい。
5.2.5
参照条件における不確かさ
参照条件における,被校正光源の校正波長の不確かさは,次の式(9)による。
2
1
2
̲
̲
2
res
,
̲
2
,
̲
2
,
̲
2
̲
ref
,
̲
+
+
+
+
=
∆
∆Θ
j
WM
j
t
j
j
j
j
u
u
u
u
m
s
u
λ
λ
λ
λ
λ
λ
······················ (9)
ここに,
∆Θ
,
̲j
uλ
: 参照条件における温度依存性に起因する不確かさ
t
j
u
∆
,
̲
λ
: 参照条件における波長安定性に起因する不確かさ
res
,
̲j
uλ
: 光波長計の分解能に起因する不確かさ
3
2
/
res
,
̲
j
j
d
u
λ
λ
=
ここに,
j
dλ: 光波長計の分解能
j
WM
u
̲
̲λ: 波長(j)における,証明書に記載の,光波長計の不確かさ
参照条件における,被校正光源の波長校正の拡張不確かさ
ref
,
̲j
Uλ
は,包含係数kを用いて,次の式(10)
によって算出する。
ref
,
̲
ref
,
̲
j
j
u
k
U
λ
λ
±
=
··································································· (10)
ここに,
k: A.5に記載の,適切な信頼の水準に対応する包含係数
校正結果に基づいて波長を補正する必要がある場合,通常,機器に対するソフトウェア的な補正,結果
に対する数学的な補正,又は機器のハードウェア的な調整によって補正する。調整後は,再度校正を行い,
補正が正しいかを検証することを推奨する。
5.3
動作条件における波長校正
5.3.1
一般事項
被校正光源を,参照条件の範囲外で使用する場合は,別途必要な校正を行う。
動作条件における波長校正の不確かさ要因は,次の項目による。
a) 光パワー依存性
b) 温度依存性
c) 波長安定性
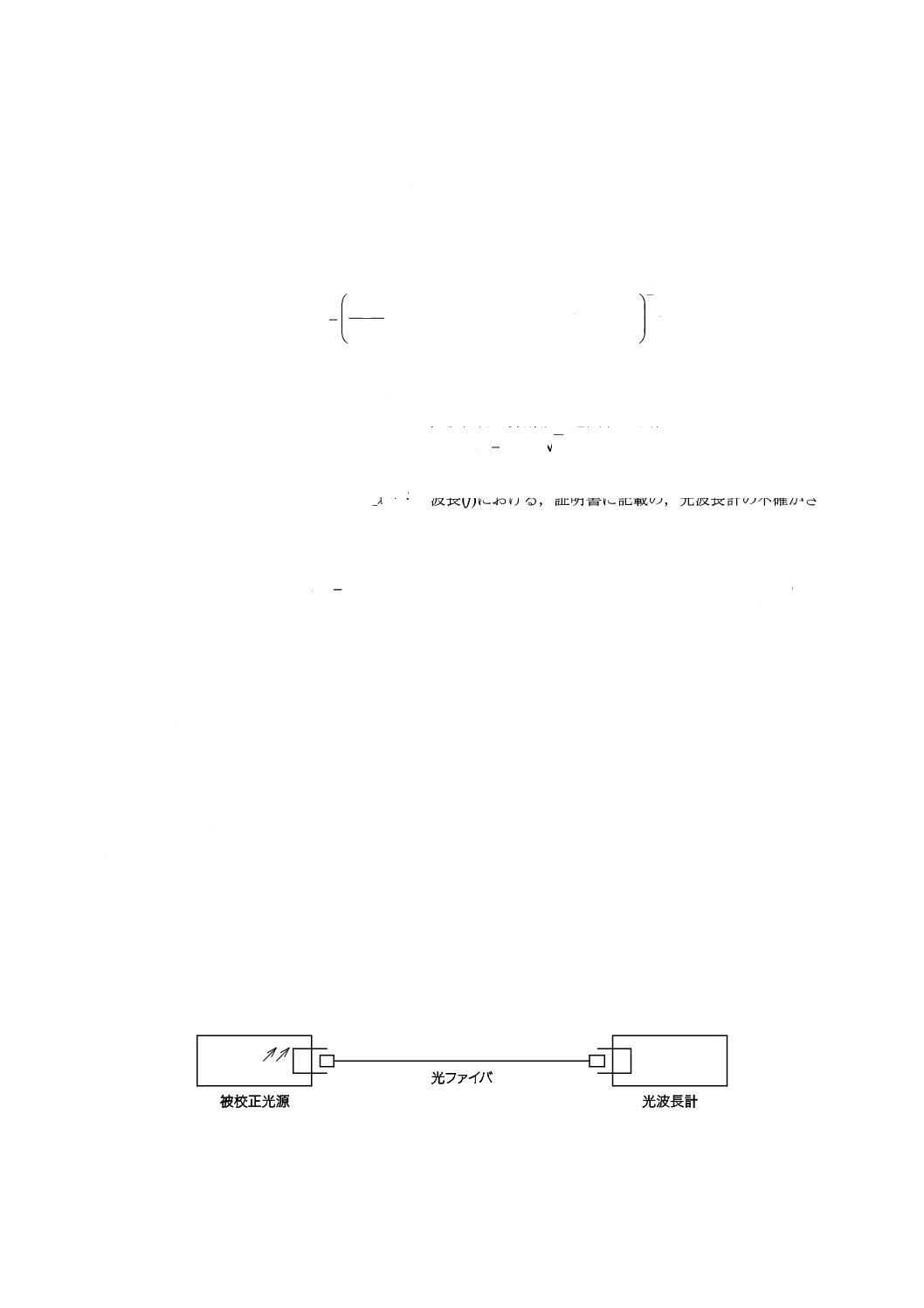
5.3.2
光パワー依存性
5.3.2.1
一般事項
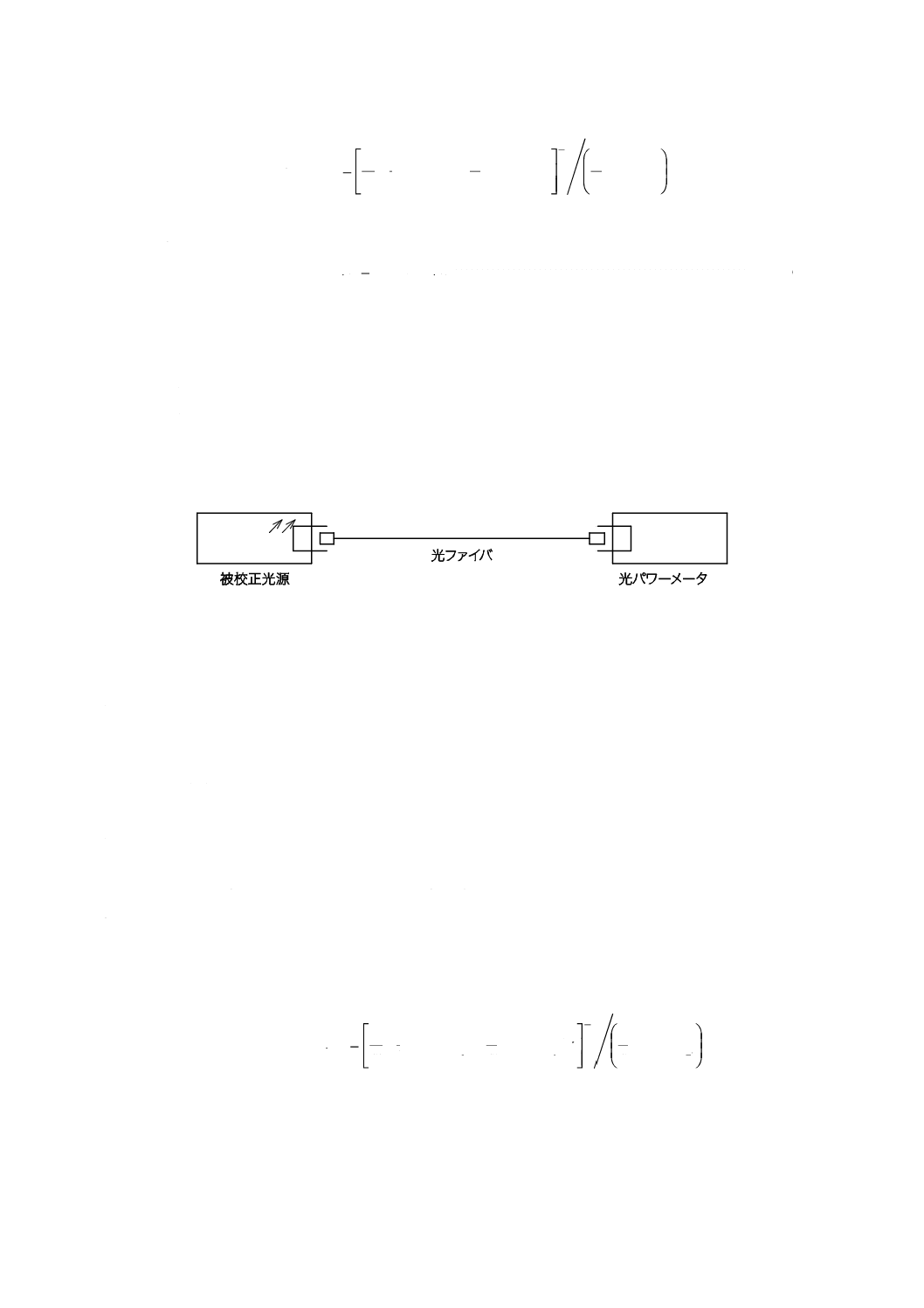
光パワー依存性の測定系を,図4に示す。光パワー条件以外は,参照条件の下で行う。
この測定は,光パワー校正(6.2.3)を実施してから行う。
図4−光パワー依存性の測定系
10
C 6191:2019
5.3.2.2
校正装置
校正装置は,次による。
a) 光波長計は,TLSの波長安定性の1/10以下の変動を検出できなければならない。
5.3.2.3
光パワー依存性の校正手順
校正は,次の手順で行う。
a) 仕様に規定する光パワー範囲の上限及び下限を含むm点(5点以上)の光源の光パワー
j
i
P
,
TLS
におい
て,波長を測定する。光パワー測定の間隔は,10 dBよりも小さいことが望ましい。
b) 図4の測定系について,被校正光源の設定波長を
j
i,
TLS
λ
とし,光波長計の読み値を
j
i
P ,
̲
λ
とする。
c) m点全ての光源の光パワー
j
i
P
,
TLSについて,波長の測定値
j
i
P ,
̲
λ
を記録する。
d) 被校正光源の波長の光パワー依存性に起因する標準不確かさは,次の式(11)によって算出する。
2
1
1
2
1
,
̲
,
̲
,
̲
)
1
(
1
1
−
−
=
∑
∑
=
=
m
i
m
i
j
i
P
j
i
P
P
j
m
m
u
λ
λ
λ
·······································(11)
5.3.3
動作条件における不確かさ
全ての動作条件における,被校正光源の波長校正の不確かさは,次の式(12)による。
(
)21
2
̲
̲
2
res
,
̲
2
,
̲
2
,
̲
2
,
̲
2
̲
op
,
̲
j
WM
j
t
j
j
P
j
j
j
u
u
u
u
u
s
u
λ
λ
λ
λ
λ
λ
λ
+
+
+
+
+
=
∆
∆Θ
········· (12)
ここに,
P
j
u
,
̲
λ
: 動作条件における光パワー依存性に起因する不確かさ
∆Θ
,
̲j
uλ
: 動作条件における温度依存性に起因する不確かさ
t
j
u
∆
,
̲
λ
: 動作条件における波長安定性に起因する不確かさ
res
,
̲j
uλ
: 光波長計の分解能に起因する不確かさ
3
2
/
res
,
̲
j
j
d
u
λ
λ
=
ここに,
j
dλ: 光波長計の分解能
j
WM
u
̲
̲λ: 波長(j)における,証明書に記載の,波長の不確かさ
全ての動作条件における,被校正光源の波長(j)の拡張不確かさ
op
,
̲j
Uλ
は,包含係数kを用いて,次の式
(13)によって算出する。
op
,
̲
op
,
̲
j
j
u
k
U
λ
λ
±
=
···································································· (13)
ここに,
k: A.5に記載の,適切な信頼の水準に対応する包含係数
6
光パワー校正
6.1
概要
被校正光源の光パワーを決める上での不確かさ要因を,次に示す。
a) 被校正光源を参照条件で校正した際の不確かさ。参照条件内での温度依存性,安定性,及び接続の繰
返し性(再現性)を含む。
b) より広い動作条件で校正した際の不確かさで,波長依存性,温度依存性,安定性,及び接続の繰返し
性(再現性)に起因するもの。
6.2に記載の,参照条件における光パワー校正は必須である。6.3に記載の,動作条件における校正は任
意である。
11
C 6191:2019
6.2
参照条件における光パワー校正
6.2.1
測定系の構成
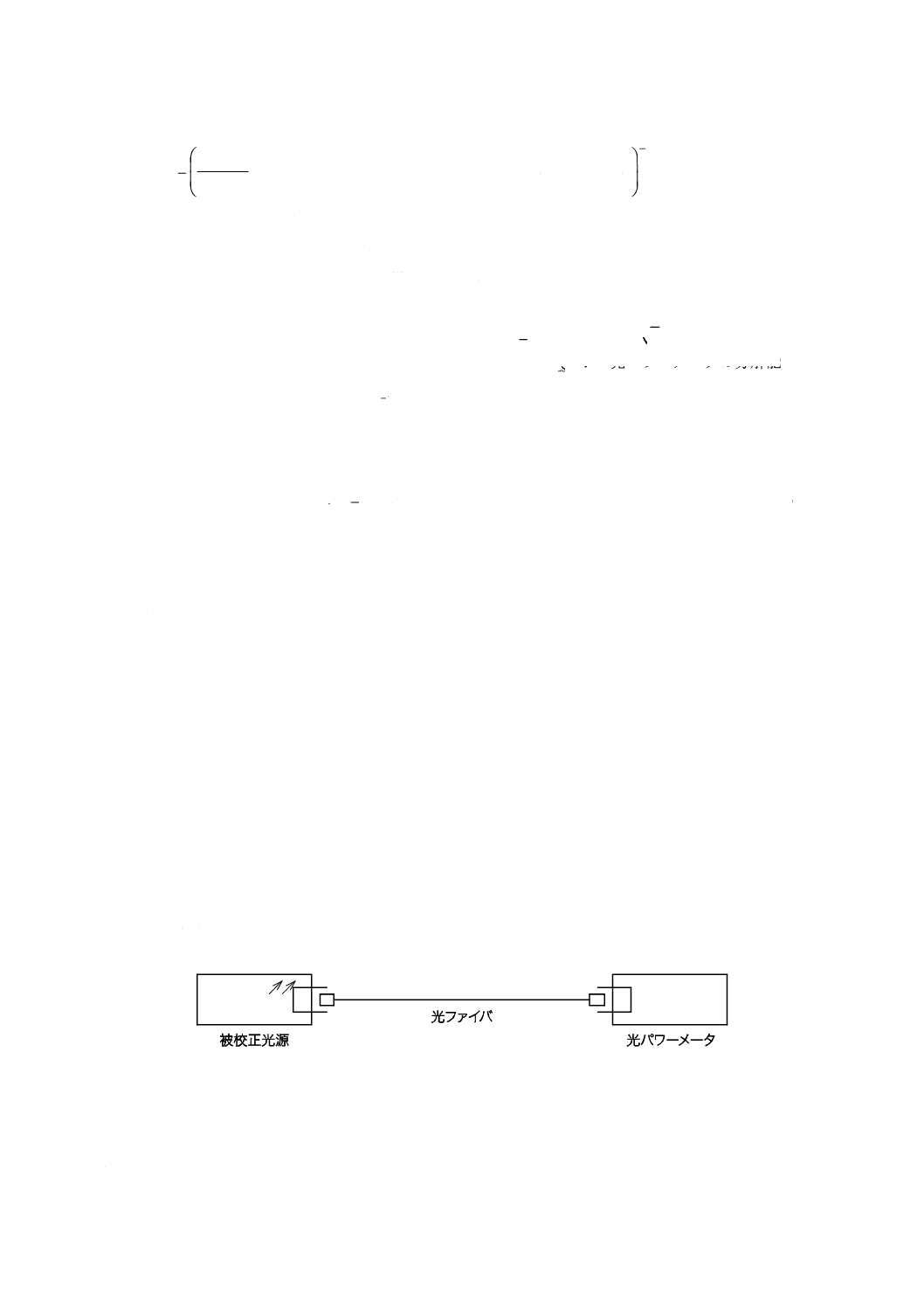
光パワー校正の測定系を,図5に示す。校正は,参照条件の下で行う。
図5−光パワー校正の測定系
注記 可干渉性の高いレーザ光源の光パワーを校正する場合は,光ファイバコネクタ端面,及び光パ
ワーメータからの反射に起因する干渉効果によって問題が生じることがある。斜め研磨コネク
タ若しくはインライン光アイソレータを使用する,又はレーザ光源に干渉制御機能が備わって
いる場合は,これを使用することで,干渉効果を受容可能なレベルにまで低減可能となる場合
がある。
光パワーの校正は,光ファイバケーブルの終端における測定に基づくので,挿入損失を伴うことがある。
光ファイバケーブルに関する校正条件,例えば,光ファイバ長,光コネクタの種類,及びインライン光ア
イソレータの有無について,報告することが望ましい。
6.2.2
校正装置
校正装置は,次による。
a) 光パワーメータ 参照条件で,次のいずれかによって校正した光パワーメータを用いる。
1) 校正業務を行う公的機関で校正した光パワーメータで,不確かさを表明したもの
2) 1)へのトレーサビリティを確保した光パワーメータで,不確かさを表明したもの
参照光パワーメータの不確かさは既知であり,証明書に記載されている。
6.2.3
参照条件における光パワー校正の手順
校正は,次の手順で行う。
a) 被校正光源及び光パワーメータを,測定用光ファイバで接続する。
b) 被校正光源の波長を,規定の波長に設定する。
c) 被校正光源の出力光パワーをPTLS, jに設定する。光パワーメータ測定の不確かさには,波長可変光源
の設定の繰返し性及びヒステリシスを考慮する。ヒステリシスは,規定の光パワーに低パワー側及び
高パワー側から設定した際の偏差と定義する。
d) 光パワーメータでの測定値を読み取る。
e) c)及びd)の操作を,10回以上(m回)繰り返す。各測定に先立ち,波長可変光源の設定がPTLS, jであ
ることを確認する。設定光パワーは,低パワー側及び高パワー側の双方から近づけて設定することが
望ましい。
j
i
j
i
j
j
i
P
P
P
P
D
,
meas
,
meas
TLS
,
̲
−
=
······························································· (14)
ここに,
PTLS j: 波長可変光源の設定光パワー
それぞれのPmeas̲i,jは,光パワーメータ上で平均化処理された表示値である。
光パワー偏差DP̲ jの算出は,次の式(15)による。
12
C 6191:2019
∑
=
=
m
i
j
i
P
j
P
D
m
D
1
,
̲
̲
1
··································································· (15)
ここに,
m: 測定回数
f) DP̲ jの標準偏差は,m回の光パワー測定結果Pmeas i, jから,次の式(16)で求める。
2
1
1
2
̲
,
̲
̲
̲
)
(
1
1
−
−
=
∑
=
m
i
j
P
j
i
P
j
P
D
D
D
m
s
············································· (16)
g) 光パワー設定の繰返し性
j
P
D
S
̲
̲
,
rep
は,次の式(17)で求める。
j
P
D
j
P
D
s
S
̲
̲
̲
̲
,
rep
2×
=
································································ (17)
不確かさの算出[6.2.3のa)〜g)]は,校正光パワーごとに行うことが望ましい。
6.2.4
各種条件依存性
6.2.4.1
温度依存性(既知の場合は任意)
6.2.4.1.1
測定系の構成
温度依存性の測定系を,図6に示す。この校正は,温度条件以外は参照条件の下で行う。
図6−温度依存性の測定系
6.2.4.1.2
校正装置
校正装置は,次による。
a) 光パワーメータ 参照条件で,次のいずれかによって校正した光パワーメータを用いる。
1) 校正業務を行う公的機関で校正した光パワーメータで,不確かさを表明したもの
2) 1) へのトレーサビリティを確保した光パワーメータで,不確かさを表明したもの
b) 恒温槽 恒温槽内部の温度分布が,測定結果に影響を与えない恒温槽を使用する。
6.2.4.1.3
温度依存性測定のための校正手順
校正は,次の手順で行う。
a) 図6の測定系について,被校正光源の名目光パワー
ref
,jP
を参照条件の下,波長
j
TLS
λ
で測定する。こ
のとき,光パワーは,温度変動に対して最大の変化をするレベルであることが望ましい。そうでない
場合は,幾つかの出力光パワーで評価する。
b) i番目の温度における,波長可変光源の光パワー
i
jP
̲
,Θを測定する。各温度設定における光パワーの読
み値を平均して
i
jP
̲
,Θを決定することが望ましい。
c) 光パワーの相対偏差の算出は,次の式(18)による。
13
C 6191:2019
ref
,
ref
,
̲
,
̲
,
̲
j
j
i
j
i
j
P
P
P
P
D
−
=
Θ
Θ
······························································ (18)
d) m点の異なる温度
i
Θに設定し,機器が温度勾配をもたないように十分な時間をおいてから,b)及びc)
の操作を繰り返す。
e) 光パワー偏差の最大値
(
)
m
i
i
i
j
P
D
=
=
Θ
1
̲
,
̲
max
及び最小値
(
)
m
i
i
i
j
P
D
=
=
Θ
1
̲
,
̲
min
を計算する。
f)
光パワーの温度依存性による標準不確かさ
∆Θ
,
̲j
P
u
は,く(矩)形分布を仮定して,次の式(19)によっ
て算出する。
(
)
(
)
−
=
=
=
Θ
=
=
Θ
∆Θ
m
i
i
i
j
P
m
i
i
i
j
P
j
P
D
D
D
u
1
̲
,
̲
1
̲
,
̲
,
̲
̲
min
max
3
2
1
······················· (19)
ここに,
ΔΘ: 温度変動
この試験中,光パワーを光パワーメータでモニタすることを推奨する。
6.2.4.2
光パワー安定性
6.2.4.2.1 測定系の構成
光パワー安定性の測定系を,図7に示す。この校正は,時間条件以外は参照条件の下で行う。
図7−光パワー安定性の測定系
6.2.4.2.2
校正装置
校正装置は,次による。
a) 光パワーメータ 参照条件で,次のいずれかによって校正した光パワーメータを用いる。
1) 校正業務を行う公的機関で校正した光パワーメータで,不確かさを表明したもの
2) 1)へのトレーサビリティを確保した光パワーメータで,不確かさを表明したもの
6.2.4.2.3
光パワー安定性測定のための校正手順
校正は,次の手順で行う。
a) 図7の測定系について,測定は,被校正光源の電源を投入した後,製造業者の取扱説明書で規定する
時間のウォームアップ後に行う。
b) 一定の時間間隔Δt(例えば,10分)を選び,光パワーメータで10回以上,繰返し測定を行う(例で
は,10分間ごとの安定性を測定することになる。)。
c) 光パワーは連続的に取得し,タイムスタンプとともにコンピュータに記録する。
d) 設定した時間間隔ごとに,m回(10回以上)の測定が行われ,規定の時間間隔Δtとなっていること
を確認する。
e) 時間間隔Δtに対応するm回の測定の標準偏差を,次の式(20)によって算出する。
14
C 6191:2019
−
−
=
∑
∑
∑
=
=
=
∆
m
i
i
t
j
m
i
m
i
i
t
j
i
t
j
t
j
P
D
P
m
P
m
P
m
u
1
̲
,
2
1
1
2
1
̲
,
̲
,
,
̲
̲
1
)
1
(
1
1
················· (20)
f)
最低1回は,波長可変光源の光パワー安定性を評価する。この場合,光パワー安定性の不確かさは,
次の式(21)による。
t
j
P
D
t
j
P
D
u
S
∆
∆
×
=
,
̲
̲
,
̲
̲
,
stab
2
··························································· (21)
連続取得したデータから走査サンプリングして,幾つかの時間間隔について安定性を計算し,最大
値を報告することが望ましい。
光源の光パワーは連続して10回以上(m回)測定することが望ましく,毎分数回以上の測定を推奨
する。繰返し測定の間隔は,光パワーメータの応答時間よりも十分に長くする。
6.2.4.3
接続繰返し性(再現性)
6.2.4.3.1
測定系の構成
接続繰返し性(再現性)の測定系を,図8に示す。この校正は,参照条件の下で行う。
図8−接続繰返し性(再現性)の測定系
6.2.4.3.2
校正装置
校正装置は,次による。
a) 光パワーメータ 参照条件で,次のいずれかによって校正した光パワーメータを用いる。
1) 校正業務を行う公的機関で校正した光パワーメータで,不確かさを表明したもの
2) 1)へのトレーサビリティを確保した光パワーメータで,不確かさを表明したもの
6.2.4.3.3
接続繰返し性(再現性)測定のための校正手順
校正は,次の手順で行う。
a) 図8の測定系について,被校正光源と光パワーメータとを光ファイバで接続する。
b) 光パワーメータの測定値
i
j
Pcon̲
,
を読み取る。
c) 光ファイバを被校正光源から取り外し,再度,被校正光源に接続する。
d) b)及びc)の操作をm回繰り返す。
e) 被校正光源の光パワーの接続繰返し性(再現性)に起因する不確かさは,次の式(22)によって算出す
る。
−
−
=
∑
∑
∑
=
=
=
m
i
i
j
m
i
m
i
i
j
i
j
j
P
D
P
m
P
m
P
m
u
1
con̲
,
2
1
1
2
1
con̲
,
con̲
,
con
,
̲
̲
1
)
1
(
1
1
·········· (22)
6.2.5
参照条件における不確かさ
参照条件における,被校正光源の光パワー校正の不確かさは,次の式(23)による。
15
C 6191:2019
2
1
2
̲
̲
2
res
,
̲
̲
2
con
,
̲
̲
2
,
̲
̲
2
,
̲
̲
2
̲
̲
ref
,
̲
̲
+
+
+
+
+
=
∆
∆Θ
j
P
PM
j
P
D
j
P
D
t
j
P
D
j
P
D
j
P
D
j
P
D
u
u
u
u
u
m
s
u
····················· (23)
ここに,
∆Θ
,
̲
̲
j
P
D
u
: 参照条件における温度依存性に起因する不確かさ
t
j
P
D
u
∆
,
̲
̲
: 参照条件における光パワー安定性に起因する不確かさ
con
,
̲
̲
j
P
D
u
: 参照条件における接続繰返し性(再現性)に起因する不
確かさ
res
,
̲
̲
j
P
D
u
: 光パワーメータの分解能に起因する不確かさ
3
2
/)
/
(
,
TLS
,
TLS
res
,
̲
̲
j
j
j
P
D
P
dP
u
=
ここに,
j
dP
,
TLS: 光パワーメータの分解能
j
P
PM
u
̲
̲
: 光パワー
j
Pにおける,証明書に記載の,光パワーメータ
の不確かさ
参照条件における,被校正光源の光パワー校正の拡張不確かさ
ref
,
̲
̲
j
P
D
U
は,包含係数kを用いて,次の
式(24)によって算出する。
ref
,
̲
̲
ref
,
̲
̲
j
P
D
j
P
D
ku
U
±
=
····························································· (24)
ここに,
k: A.5に記載の,適切な信頼の水準に対応する包含係数
校正結果に基づいて光パワーを補正する必要がある場合は,通常,機器に対するソフトウェア的な補正,
結果に対する数学的な補正,又は機器のハードウェア的な調整によって補正する。調整後は,再度校正を
行い,補正が正しいかを検証することを推奨する。
6.3
動作条件における光パワー校正
6.3.1
概要
被校正光源を,参照条件の範囲外で使用する場合は,別途必要な校正を行う。
動作条件における光パワー校正の不確かさ要因は,次の項目による。
a) 波長依存性
b) 温度依存性
c) 光パワー安定性
d) 接続繰返し性(再現性)
6.3.2
波長依存性
6.3.2.1
測定系の構成
波長依存性の測定系を,図9に示す。波長条件以外の測定は,参照条件で行う。この測定は,波長校正
(5.2.3)を実施してから行う。
図9−波長依存性の測定系
6.3.2.2
校正装置
校正装置は,次による。
a) 光パワーメータ 参照条件で,次のいずれかによって校正した光パワーメータを用いる。
16
C 6191:2019
1) 校正業務を行う公的機関で校正した光パワーメータで,不確かさを表明したもの
2) 1)へのトレーサビリティを確保した光パワーメータで,不確かさを表明したもの
6.3.2.3
波長依存性測定のための校正手順
校正は,次の手順で行う。
a) 仕様に規定する波長範囲の上限及び下限を含むm点の光源波長(5点以上)
j
i,
TLS
λ
において,光パワ
ーを測定する。
b) 図9の測定系について,被校正光源の光パワーを
j
i
P
,
TLSとし,光パワーメータの読み値を
j
i
P
,
̲
λ
とする。
c) 全てのm波長点における光パワー設定値
j
i
P
,
TLSについて,光パワーの測定値
j
i
P
,
̲
λ
を記録する。
d) 被校正光源の光パワーの波長依存性に起因する標準不確かさは,次の式(25)によって算出する。
−
−
=
∑
∑
∑
=
=
=
m
i
j
i
m
i
m
i
j
i
j
i
j
P
D
P
m
P
m
P
m
u
1
,
̲
2
1
1
2
1
,
̲
,
̲
,
̲
̲
1
)
1
(
1
1
λ
λ
λ
λ
················ (25)
6.3.3
動作条件における不確かさ
全ての動作条件における,被校正光源の光パワー校正の不確かさは,次の式(26)による。
(
)21
2
̲
̲
2
res
,
̲
̲
2
con
,
̲
̲
2
,
̲
̲
2
,
̲
̲
2
,
̲
̲
2
̲
̲
op
,
̲
̲
j
P
PM
j
P
D
j
P
D
t
j
P
D
j
P
D
j
P
D
j
P
D
j
P
D
u
u
u
u
u
u
s
u
+
+
+
+
+
+
=
∆
∆Θ
λ
·········· (26)
ここに,
λ
,
̲
̲
j
P
D
u
: 動作条件における波長依存性に起因する不確かさ
∆Θ
,
̲
̲
j
P
D
u
: 動作条件における温度依存性に起因する不確かさ
t
j
P
D
u
∆
,
̲
̲
: 動作条件における光パワー安定性に起因する不確かさ
con
,
̲
̲
j
P
D
u
: 動作条件における接続繰返し性(再現性)に起因する不
確かさ
res
,
̲
̲
j
P
D
u
: 光パワーメータの分解能に起因する不確かさ
3
2
/)
/
(
,
TLS
,
TLS
res
,
̲
̲
j
j
j
P
D
P
dP
u
=
ここに,
j
dP
,
TLS: 光パワーメータの分解能
j
P
PM
u
̲
̲
: 光パワー
j
Pにおける,証明書に記載の,光パワーメータ
の不確かさ
全ての動作条件における,被校正光源の光パワー校正の拡張不確かさ
op
,
̲
̲
j
P
D
U
は,包含係数kを用いて,
次の式(27)によって算出する。
op
,
̲
̲
op
,
̲
̲
j
P
D
j
P
D
ku
U
±
=
······························································· (27)
ここに,
k: A.5に記載の,適切な信頼の水準に対応する包含係数
7
文書化
7.1
校正データ及び不確かさ
この規格に基づく校正証明書には,次のデータ及びそれらの不確かさを記載する。また,それらの不確
かさには,当該標準偏差に±kを乗じることによって推定信頼区間の形で記載しなければならない。
a) 真空中の波長偏差Dλ̲ j及びその不確かさ±kuλ̲ j,ref(例えば,単位は,nm)。箇条5での詳細要求事項
を参照。
b) 表示光パワーレベル偏差DP̲ j及びその不確かさ±kuD̲P̲j,ref(例えば,単位は,%又はdB)。箇条6での
詳細要求事項を参照。
17
C 6191:2019
7.2
校正条件
校正方法及び測定結果の取得方法を記載する。被校正光源の状態及び適用する測定条件とともに,各々
の仕様も説明することが望ましい。最も重要なパラメータは,校正日,表示出力光パワー,表示波長,温
度,湿度及び大気圧である。
注記 校正結果は,校正過程において使用した校正条件においてだけ有効である。
18
C 6191:2019
附属書A
(規定)
数学的根拠
A.1 概要
この附属書は,測定における不確かさの評価,合成及び報告について簡潔に記載する。これは,ISO/IEC
Guide 98-3(GUM)の“計測における不確かさの表現のガイド”に基づくが,この附属書は,上記指針に
記載されている詳細内容を十分には反映していない。
この規格では,測定の不確かさの評価方法を二つのタイプに区別している。タイプAは,同じ測定に対
する一連の繰返し測定を統計的に分析し,不確かさを評価する方法である。タイプBは,他の知識に基づ
いて,不確かさを評価する方法である。
A.2 タイプA評価の不確かさ
タイプA評価の標準不確かさは,同じ測定条件の下で,個別の独立した測定の場合に適用できる。
量Xについて,n回の独立な測定で得たXkに対しての算術平均は,式(A.1)で算出する。
∑
=
=
n
k
k
X
n
X
1
1
········································································· (A.1)
この平均は,その量の推定値とされる。つまり,
X
x=
とする。測定に基づいて実験の標準偏差は,式
(A.2)で算出する。
()
(
)
2
/1
1
2
1
1
−
−
=
∑
=
n
k
k
X
X
n
X
s
····················································· (A.2)
ここに,
X: 測定値の算術平均
Xk: 一連の測定の測定サンプル
n: 測定の回数で,例えば,n≧10のような大きな数字を想定する。
推定値をxとするとき,タイプAの標準不確かさutypeA(x)は,式(A.3)で算出し,実験の平均値における
標準偏差で表す。
()()
()
n
X
s
X
s
x
u
=
=
typeA
······························································ (A.3)
A.3 タイプB評価の不確かさ
タイプB評価の標準不確かさは,一連の測定の統計的な分析以外によって不確かさを評価する方法であ
る。ここでは,数値の変動に関して得られるあらゆる情報に基づいた科学的な判断によって評価する。
量Xの推定値xが,製造業者の仕様,校正証明書,ハンドブック又は他の情報源から得られ,その引用
した不確かさU(x)が,標準偏差のk倍である場合,標準不確かさu(x)は,単に,式(A.4)となる。
()
()
k
x
U
x
u
=
············································································ (A.4)
19
C 6191:2019
量Xについて,上限値Xmax及び下限値Xminだけが評価できる場合(例えば,製造業者の仕様,温度範囲
など),く(矩)形の確率分布を仮定して,推定値xは,式(A.5)で算出する。
(
)
min
max
2
1
X
X
x
+
=
·································································· (A.5)
標準不確かさは,式(A.6)で算出する。
()
(
)
min
max
3
2
1
X
X
x
u
−
=
··························································· (A.6)
入力推定値xの標準的不確かさが要因となって生じる,出力推定値yの標準不確かさへの寄与は,式(A.7)
となる。
()
()x
u
c
y
u
×
=
········································································· (A.7)
ここに,cは,入力推定値xに関連付けられる感度係数であって,これは,モデル関数y(x)の入力推定値
xに関する偏導関数である。
x
y
c∂∂
=
·················································································· (A.8)
感度係数cは,出力推定値yが,入力推定値xの変化によってどの程度影響されるかを示す。感度係数
cは,出力推定値yの変化分であって,それは,入力推定値xの変化によってモデル関数y(x)から計算でき
る。また,式(A.8)又は数値計算でも計算できる。xの変化によって生じる出力推定値yの変化は,実験で
求めるのがよい。
A.4 標準不確かさの合成
合成標準不確かさとは,個々の不確かさを集めて一つの量にまとめたものである。
標準不確かさは,個々の不確かさが統計上互いに独立であるとして,式(A.9)に示すようにタイプA及び
タイプBによって見積もった全ての不確かさの二乗和の平方根をとって合成する。
()
()
∑
=
n
i
iy
u
y
u
1
2
c
=
··································································· (A.9)
ここに,
i: 個々の要因の数
ui(y): それぞれの標準不確かさ
n: 不確かさの数
注記 式(A.9)では,個々の要因のうち最大の不確かさの1/10以下の不確かさの要因は,二乗すると
1/100以下の寄与となるので無視してもよい。
上記の量を基に,更に詳細に不確かさを計算する場合は,合成標準不確かさucを式(A.9)に再度代入する。
ここに,ucは,部分的にはタイプA起源であるが,タイプBの不確かさを示していると考えることが望ま
しい。
20
C 6191:2019
A.5 報告
校正報告書及び技術データシートには,合成標準不確かさを拡張不確かさの形で,適用する信頼の水準
とともに記載する。偏差の補正係数も記載する。拡張不確かさUは,標準不確かさuc(y)に包含係数kを乗
じることによって求められる。
()y
u
k
U
c
×
=
·········································································(A.10)
通常用いる約95 %の信頼の水準では,k=2である。約99 %の信頼の水準を用いる場合は,k=3とする。
ある条件下では,上記の値は適切なものとなる。詳細は,ISO/IEC Guide 98-3(GUM)を参照。もしこれら
の条件が合致しない場合は,適用する信頼の水準に見合う大きな包含係数を用いる。
21
C 6191:2019
附属書B
(参考)
一定の波長(又は光パワー)範囲にわたる偏差の平均化
この附属書は,波長(又は光パワー)校正において,補正の便宜上,ある波長(又は光パワー)の範囲
にわたって,波長(又は光パワー)の平均偏差を決定する方法を解説する。
この範囲の一部において特異な振る舞いを示す場合には,波長(又は光パワー)範囲にわたる偏差の平
均化を行わないことが望ましい。
ISO/IEC Guide 98-3 (GUM)によれば,単一の平均補正は,式(B.1)で算出する。
∫
−
=
2
1
)
(
1
1
2
t
t
dt
t
b
t
t
b
··································································· (B.1)
ここに,t1及びt2は,パラメータtの範囲を定義し,
b
t
y
t
y
+
=
)
(
)
('
となる測定量Y(t)の最良推定値をと
るものであり,y(t)は,Y(t)の最良未補正推定値である。
ある範囲における平均値の補正値bに関連した分散は,式(B.2)で算出する。
[
]
∫
−
−
=
2
1
2
1
2
2
)
(
1
)
(
t
t
dt
b
t
b
t
t
b
u
······················································· (B.2)
補正値b(t)を決める際の不確かさは考慮していない。補正値b(t)を決める際の平均分散は,式(B.3)で算出
する。
[
]
[
]
∫
−
=
2
1
)
(
1
)
(
2
1
2
2
t
t
dt
t
b
u
t
t
t
b
u
······················································· (B.3)
ここに,
)]
(
[
2
t
b
u
は,補正値b(t)の分散である。同様に,b(t)以外の全ての不確かさの要因から得られる
y(t)の平均分散は,式(B.4)で算出する。
[
]
[
]
∫
−
=
2
1
)
(
1
)
(
2
1
2
2
t
t
dt
t
y
u
t
t
t
y
u
······················································· (B.4)
ここに,
)]
(
[
2
t
y
u
は,b(t)以外の全ての不確かさの要因から得られるy(t)の分散である。測定量Y(t)の
b
t
y
t
y
+
=
)
(
)
('
を推定するために用いられる標準不確かさは,式(B.5)の正の平方根で算出する。
[
]
[
]
)
(
)
(
)
(
)'
(
2
2
2
2
b
u
t
b
u
t
y
u
y
uc
+
+
=
················································· (B.5)
例えば,波長可変光源における波長の校正においては,補正値が定数であると仮定することによって,b
及びtは,それぞれ波長偏差
j
D̲
λと波長設定
j
λとに一致する。平均波長偏差
λ
Dは,式(B.1)より,式(B.6)
で算出する。
∑
=
=
n
j
j
D
n
D
1
̲
1
λ
λ
······································································ (B.6)
式(B.6)において,式(B.1)のような積分の代わりに全ての波長にわたって和をとることによって平均波長
22
C 6191:2019
偏差を算出することができる。
ここに,
n:波長の数
λ
D及び
)
(
2
λ
D
u
の分散は,式(B.2)より,式(B.7)で算出する。
∑
=
−
−
=
n
j
j
D
D
n
D
u
1
2
̲
2
)
(
1
1
)
(
λ
λ
λ
··················································· (B.7)
式(B.7)の和も積分の代わりに用いられる。
参照条件における全波長にわたる標準不確かさは,式(B.5)より,式(B.8)で算出する。
2
1
2
1
2
̲
̲
2
res
,
̲
2
,
̲
2
,
̲
2
̲
ref
̲
)
(
1
+
+
+
+
+
=∑
=
∆
∆Θ
λ
λ
λ
λ
λ
λ
λ
D
u
u
u
u
u
m
s
n
u
n
j
j
WM
j
t
j
j
j
····················· (B.8)
式(B.8)において,第1項が
)]
(
[
2
t
b
u
に一致し,第2項から第5項までが
)]
(
[
2
t
y
u
に一致する。
動作条件における全ての波長校正についての標準不確かさは,式(B.9)で算出する。
(
)
2
1
2
1
2
̲
̲
2
res
,
̲
2
,
̲
2
,
̲
2
,
̲
2
̲
op
̲
)
(
1
+
+
+
+
+
+
=∑
=
∆
∆Θ
λ
λ
λ
λ
λ
λ
λ
λ
D
u
u
u
u
u
u
s
n
u
n
j
j
WM
j
t
j
j
P
j
j
············· (B.9)
式(B.9)において,第1項が
)]
(
[
2
t
b
u
に一致し,第2項から第6項までが
)]
(
[
2
t
y
u
に一致する。
平均光パワー偏差についても同様に算出することができる。
23
C 6191:2019
附属書C
(参考)
その他の試験
C.1 概要
この附属書は,一般的な項目又は精密な試験には適用されない,波長可変光源の性能に関する試験方法
を説明する。
C.2 波長分解能
C.2.1 試験系の構成
図C.1に,波長分解能の試験系を示す。試験は,参照条件の下で行う。
図C.1−波長分解能の試験系
C.2.2 試験装置
試験装置は,次に示す。
光波長計は,被試験光源の分解能よりも分解能が高いものを用いる。
C.2.3 波長分解能を決める試験手順
試験手順は,次に示す。
a) 被試験光源の波長をλTLSに設定する。被試験光源の光出力は適切な値に設定する。
b) 光波長計に被試験光源の光出力を入射する。光波長計で測定した波長をλmeasとする。
c) 被試験光源の波長を,λTLSに対し,長い(又は短い)波長qdλに設定する。ここで,dλは,λTLSに設
定することが可能な最小の変化幅,qは,整数とする。
d) 光波長計に被試験光源の光出力を入射する。光波長計で測定した波長をλmeas+1とする。
e) 被試験光源の波長をλTLSに戻した後,測定を10回以上繰り返す(m回)。
f)
波長分解能dλTLS, jを,式(C.1)で算出する。
∑
=
+
×
−
=
m
i
i
i
j
q
m
d
1
,
meas
,1
meas
TLS,
λ
λ
λ
······················································· (C.1)
g) 要求される波長範囲をカバーする幾つか(j)の波長の測定を繰り返す。式(C.2)を用いて,波長設定分解
能を算出する。
)
max(
,
TLS
TLS
j
d
d
λ
λ
=
································································ (C.2)
C.3 光パワー分解能
C.3.1 試験系の構成
図C.2に,光パワー分解能の試験系を示す。試験は,参照条件の下で行う。
24
C 6191:2019
図C.2−光パワー分解能の試験系
C.3.2 試験装置
試験装置は,次に示す。
光パワーメータは,高分解能のものを用いる。
C.3.3 光パワー分解能を決める試験手順
試験手順は,次に示す。
a) 被試験光源の光パワーをPTLSに合わせる。被試験光源の波長は,適切な値に設定する。
b) パワーメータに被試験光源の光出力を入射する。光パワーメータで測定した光パワーをPmeasとする。
c) 試験光源の出力光パワー設定PTLSに対し,最小の設定幅dPだけ高い(又は小さい)値に設定する。
d) パワーメータに被試験光源の光出力を入射する。光パワーメータで測定した光パワーをPmeas+1とする。
e) 試験光源の光パワーをPTLSに戻した後,測定を10回以上繰り返す(m回)。
f)
パワー設定分解能dPTLS/PTLSを,式(C.3)を用いて算出する。
∑
∑
=
=
+
−
=
m
i
i
m
i
i
i
j
j
m
P
m
P
P
P
dP
1
,
meas
1
,
meas
,1
meas
,
TLS
,
TLS
/
········································· (C.3)
g) 要求される光パワー範囲をカバーする幾つか(j)の光パワーの測定を繰り返す。式(C.4)によって光パ
ワー設定分解能を算出する。
=
j
j
P
dP
P
dP
,
TLS
,
TLS
TLS
TLS
max
······························································· (C.4)
C.4 信号対自然放出光比
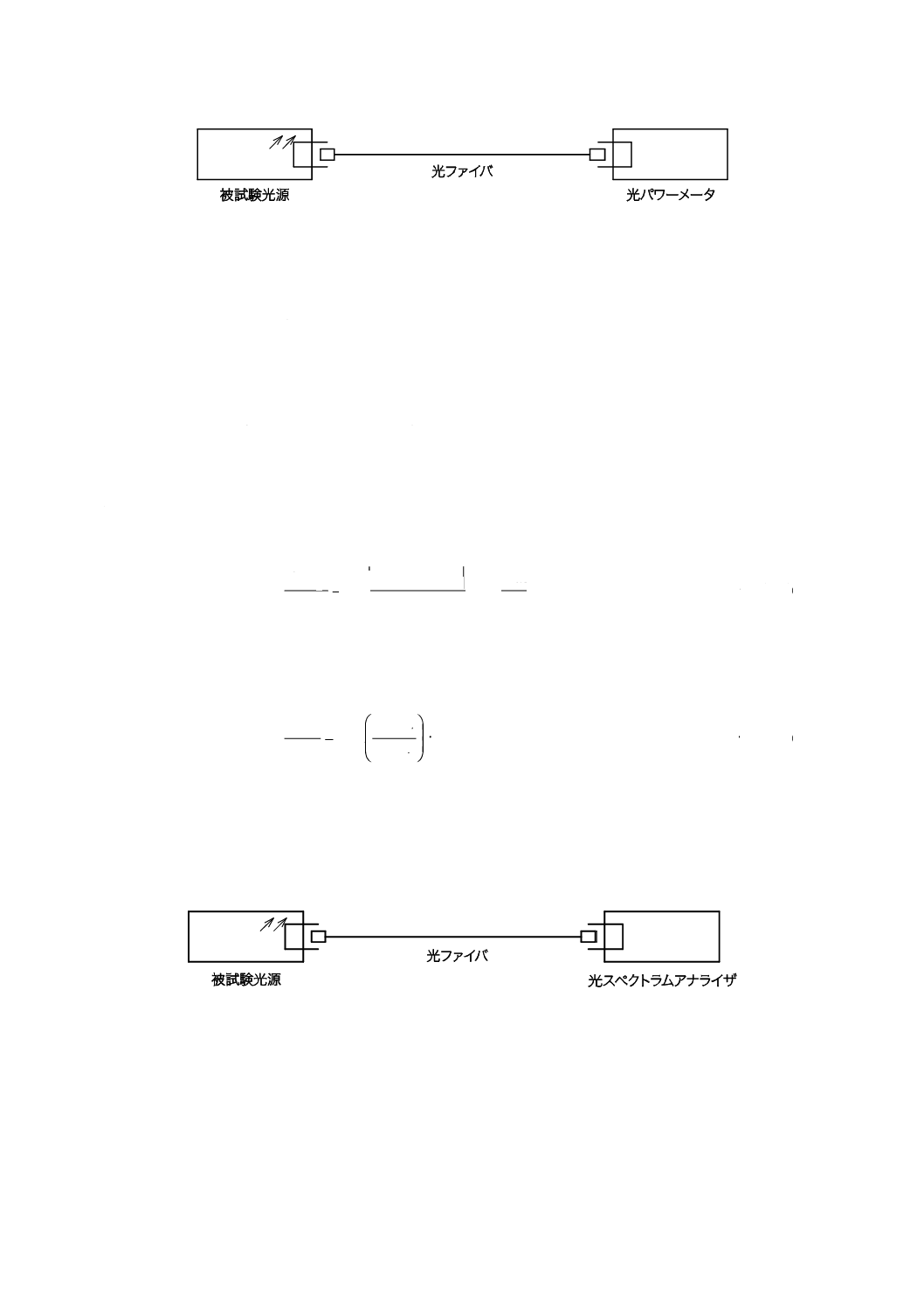
C.4.1 試験系の構成
図C.3に信号対自然放出光比測定の試験系を示す。試験は,参照条件の下で行う。
図C.3−信号対自然放出光比測定の試験系
C.4.2 試験装置
光スペクトラムアナライザは,光出力及び自然放射光を測定するために使用する。
C.4.3 信号対自然放出光比を求める試験手順
試験は,次の手順で行う。
a) 被試験光源の波長をλTLSに設定する。出力光パワーを適切な値に設定する。通常,出力光パワーは,
25
C 6191:2019
被試験光源の仕様書で規定する最大出力光パワーに設定する。
b) 光スペクトラムアナライザの中心波長,波長掃引幅,及び分解能帯域幅を各々λTLS,λspan及びλresに設
定する。通常,λspanは100 nm程度,λresは1 nm程度である。
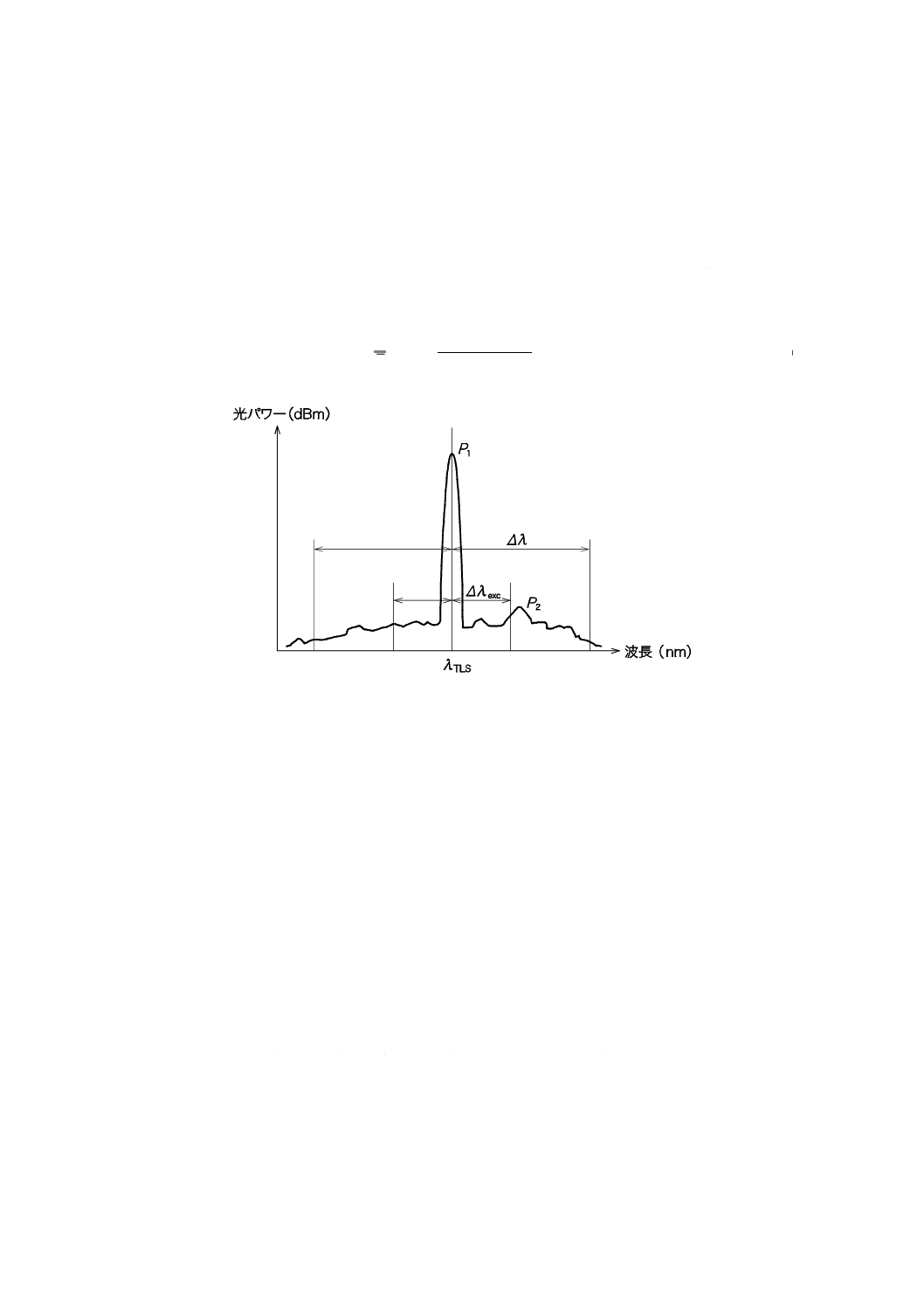
c) 被試験光源の光出力を光スペクトラムアナライザに入射する。出力光パワーP1(W)を測定する。λTLS
±Δλ内の自然放射光レベルの最大値P2(W)を測定する。ただし,自然放出光の測定範囲として,λTLS
±Δλexcの範囲は除外する(図C.4参照)。通常,Δλは50 nm程度,Δλexcは1 nm程度である。
d) 信号対自然放出光比SSERは,次の式(C.5)によって算出する。
)
dB/nm
(
/)
nm
(1
log
10
)
dB/nm
(
1
res
2
P
P
SSER
λ
×
−
=
······························· (C.5)
図C.4−信号対自然放出光比測定
注記1 SSERが高い被試験光源では,光スペクトラムアナライザの光除去比によって測定値が制限さ
れる場合がある。
注記2 測定結果として信号対自然放射光比を記録する。
C.5 サイドモード抑圧比
C.5.1 概要
一般にレーザ光源のサイドモード抑圧比は,IEC 61280-1-3:2010の8.8に記載されるように光スペクトラ
ムアナライザで測定することができる。しかし,外部共振器レーザなどの狭線幅レーザ光源の場合,メイ
ンモードとサイドモードとの間隔が極めて接近しているため,光スペクトラムアナライザで両者を区別す
ることが難しい場合がある。この箇条では,このような狭線幅レーザ光源のサイドモード抑圧比の測定方
法について説明する。
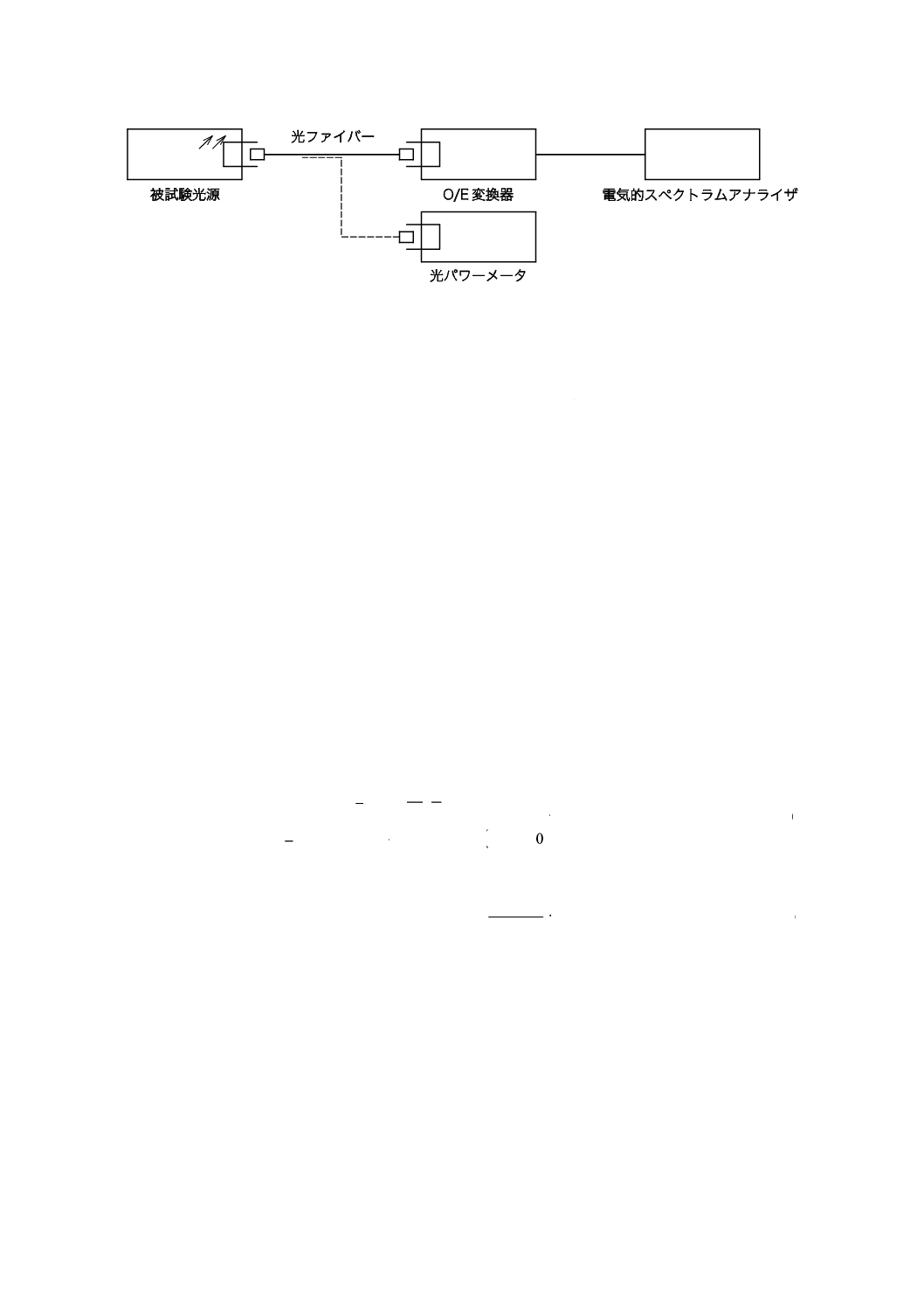
C.5.2 試験系の構成
サイドモード抑圧比の試験は,波長可変光源の試験であるが,特別な試験系が必要である。例として,
図C.5にサイドモード抑圧比測定の試験系を示す。試験は,参照条件の下で行う。
26
C 6191:2019
図C.5−サイドモード抑圧比測定の試験系
C.5.3 試験装置
試験装置は,次による。
a) O/E(光−電気)変換器 信号光及びサイドモード光をヘテロダイン検波し,ビート信号を電気信号
に変換するために用いる。周波数帯域は,モード間隔の数倍以上広くすることが望ましい。光−電気
変換効率は,あらかじめ校正しておくことが望ましい。
b) 電気的スペクトラムアナライザ 信号光及びサイドモード光のビート信号レベルを測定するために用
いる。
c) 光パワーメータ 出力光パワーを測定するために用いる。
C.5.4 試験手順
試験は,次の手順で行う。
a) 被試験光源の波長をλTLSに設定する。被試験光源の出力光パワーを適切な値に設定する。
b) 被試験光源の光出力をO/E変換器に入射し,電気的スペクトラムアナライザに表示されたビート信号
の最大値をPbeat, max(dBm)とする。
c) 次に,被試験光源の光出力を光パワーメータに入射し信号光パワーを測定する。この値をP0(W)と
する。
d) 波長λTLSにおけるサイドモード抑圧比(SMSR)を,次の式(C.6)によって算出する。
(
)30
8
log
10
)
dB
(
2
log
10
)
dB
(
max
,
beat
0
max
,
0
+
+
+
−
=
=
i
s
R
R
P
P
P
P
SMSR
········································ (C.6)
ここに, Ps, max: サイドモード光パワーの最大値(W)
R: O/E変換器の変換効率
)
A/W
(1
)
A/W
(
log
20
dB
R
R=
········································· (C.7)
Ri: 電気的スペクトラムアナライザの入力インピーダンス(Ω)
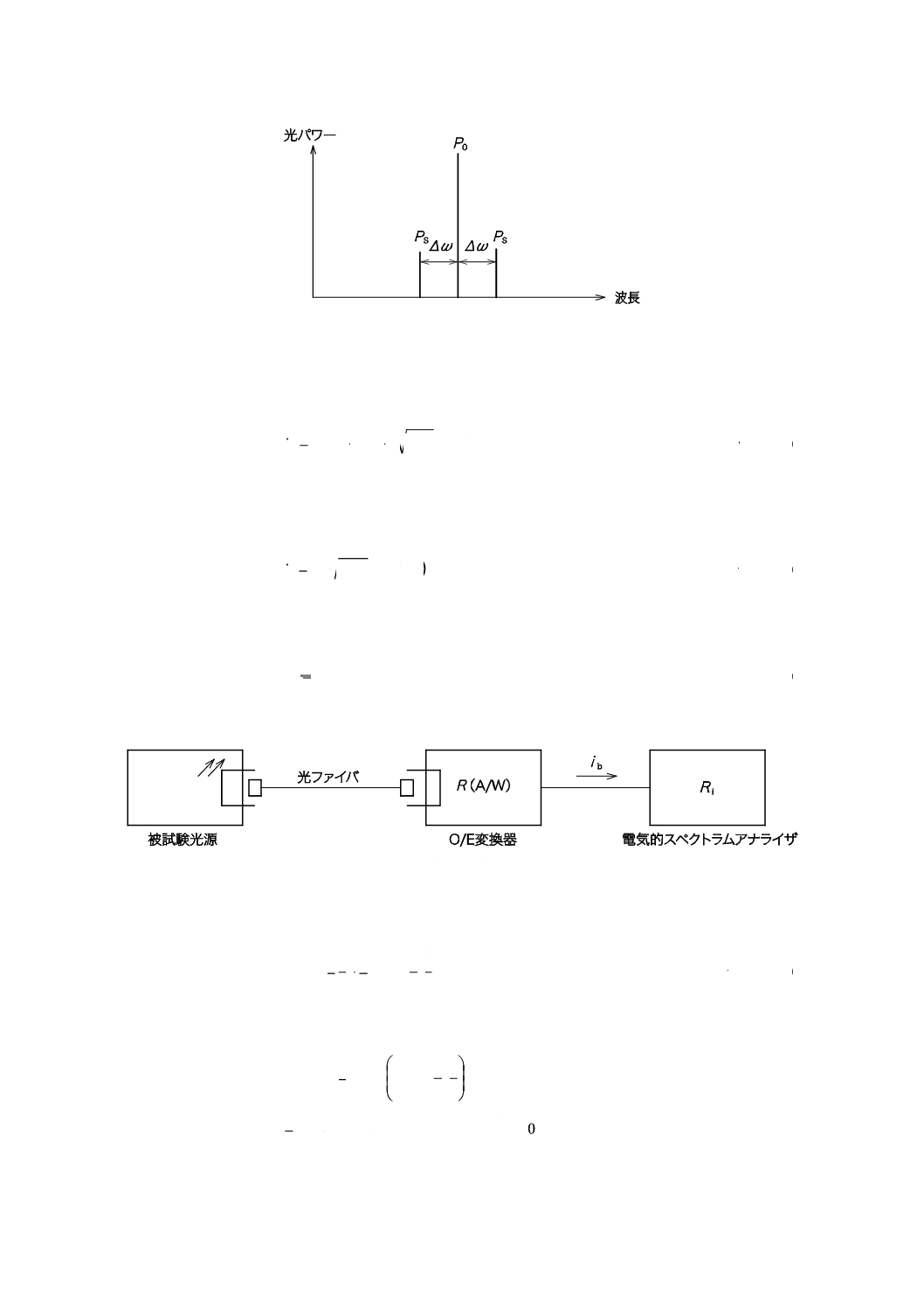
サイドモード抑圧比の測定原理及び式(C.6)の導出について,次に説明する。
被試験光源の出力スペクトルは,信号光P0(W)と,その両側にΔω離れて存在するサイドモードPs(W)
とから構成されていると仮定する(図C.6参照)。
27
C 6191:2019
図C.6−波長可変光源の光スペクトル
この光信号を図C.7で示す測定系に入力したとき,O/E変換器の出力電流iE(A)は,次の式(C.8)で算
出される。
(
)
{
}
t
P
P
P
P
R
iE
ω
∆
+
+
=
cos
4
2
s
0
s
0
················································· (C.8)
ここに,
R: O/E変換器の変換効率(A/W)
信号光及びサイドモード光から発生したビート電流をib(A)とすると,式(C.8)から,
(
)t
P
P
R
i
ω
∆
=
cos
4
s
0
b
······························································ (C.9)
電気的スペクトラムアナライザで測定されるビート信号電力Pb(W)は,次の式(C.10)によって算出さ
れる。
2
s
0
b
8
R
P
P
R
P
i
=
······································································· (C.10)
ここに,
Ri: 電気的スペクトラムアナライザの入力インピーダンス(Ω)
図C.7−サイドモード抑圧比の測定系
式(C.10)から,サイドモード抑圧比SMSRは,式(C.11)によって算出する。
b
2
0
2
s
0
8
P
P
R
R
P
P
SMSR
i
=
=
···························································· (C.11)
dB値の場合は,SMSRを次の式(C.12)によって算出する。
=
b
2
0
2
dB
8
log
10
P
P
R
R
SMSR
i
(
)30
8
log
10
2
dB
dBm
,b
dBm
,0
+
+
+
−
=
i
R
R
P
P
········································ (C.12)
28
C 6191:2019
ここに,
3
0
dBm
,0
10
log
10
−
=
P
P
3
dBm
,
10
log
10
−
=
b
b
P
P
)
A/W
(1
)
A/W
(
log
20
dB
R
R=
注記 ここで適用する試験手順は,外部共振器レーザにだけ有効である。
29
C 6191:2019
附属書JA
(規定)
不確かさと確度との関係
JA.1 概要
この規格の対応国際規格をはじめとして,光測定器の校正方法の規格は,測定器の校正を通じて“偏差
(偏り)”を決定し,精度は,全て“不確かさ”で表記し,その数学的根拠を附属書で簡潔に記載する構成
となっている。一方,これまで国内独自に制定した光測定器の試験方法の規格は,測定器の精度を“偏り”
及び“不確かさ”のいずれの概念も包含する“確度”で表記してきた。近年の産業のグローバル化の流れ
を考慮すれば,将来的には国内においても“不確かさ”表記に移行していくと考えられるが,これまでの
“確度”表記から“不確かさ”表記への移行をスムーズにするため,校正結果として得られた“不確かさ”
の値から“確度”を評価する方法を示す。
JA.2 確度の算出方法
被試験光源の測定確度は,波長確度及び光パワー確度について評価する。評価方法は,まず5.2及び6.2
の参照条件における校正を実施して偏差D及び不確かさurefを求め,次に5.3及び6.3の動作条件における
校正を実施して不確かさuopを求める。動作誤差の限界を式(JA.1)によって求め,被試験光源の確度とする。
2
op
tl
tu
u
k
D±
=
ε
ε
··································································· (JA.1)
ここに,
εtu: 動作誤差の上限
εtl: 動作誤差の下限
D: 被試験器の偏差(標準試験条件において求めたもの)
uop: 動作条件における不確かさ
k: 包含係数
ここで,偏差補正ができる場合は,式(JA.1)の第1項Dを除いてもよい。また,式(JA.1)の第2項におけ
る係数kは,包含係数を表し,k=2の場合,信頼の水準約95 %に相当する。
JA.3 製品群としての確度(参考)
偏差Dは,被試験光源ごとに固有の値をもつが,同一仕様の複数の被試験光源に対してDを評価すれば,
その値はある統計分布に従う確率変数とみなすことができる。したがって,その統計分布を知ることがで
きれば,Dを被試験光源ごとのばらつきと捉え,その不確かさの寄与を評価することが可能となり,これ
を被試験光源が属する製品群の仕様値としての確度の算出に用いることができる。例えば,被試験光源の
確度が式(JA.1)で与えられており,被試験光源が属する製品群におけるDの分布の標準偏差がσDである場
合,製品群としての確度は式(JA.2)によって算出する。
2
op
2
D
tl
tu
u
k
+
±
=
σ
ε
ε
····························································· (JA.2)
さらに,Dが一様分布に従い,かつ,その上限Du及び下限Dlが既知である場合,製品群としての確度
は,式(JA.3)によって算出する。
30
C 6191:2019
{
}
2
op
2
l
u
tl
tu
3
)|
|,|
|
max(
u
D
D
k
+
±
=
ε
ε
············································ (JA.3)
ただし,測定する被試験光源の台数が少ない場合は,式(JA.3)では過小評価になることがあるので,被
試験光源ごとの偏差のばらつきが,他の不確かさ要因と比べて支配的な場合は,十分に注意することが望
ましい。
31
C 6191:2019
附属書JB
(規定)
強度試験
JB.1 概要
機械的な振動及び衝撃を与えて,被試験光源の損傷の有無の確認,並びに5.2及び6.2の校正を実施する。
波長偏差Dλ̲ j及び光パワー偏差DP̲ jの,強度試験前後の変化が,それぞれの拡張不確かさUλ̲ j,ref及びUP̲ j,ref
以内かどうかで合否判断することが望ましい。
被試験光源が,機械的にぜい(脆)弱な構造となっていて,強度試験によって回復不可能となるおそれ
がある場合には,この試験を省いてもよい。また,被試験光源が製品規格によって他の規格又は他の試験
の厳しさを規定している場合は,それに従う。
なお,強度試験は,被試験光源を包装していない状態で行う。
JB.2 振動試験
試験は,JIS C 60068-2-6に従って実施する。
なお,試験の厳しさは,次による[JIS C 60068-2-6の表C.2(掃引耐久試験−高い折れ点振動数の例)
を適用する。]。
a) 振動数範囲:10 Hz〜55 Hz
b) 振幅(片振幅):0.15 mm
c) 各軸方向の掃引サイクル数:10
JB.3 落下試験
試験は,JIS C 60068-2-31の5.1.3.1(面落下)又は5.1.3.2(角落下)に従って実施する。試験の厳しさ
は,次のいずれかによる。
a) 面落下:25 mm又は30°の厳しさの小さい方
b) 角落下:25 mm又は30°の厳しさの小さい方
32
C 6191:2019
参考文献
IEC 60027-3,Letter symbols to be used in electrical technology−Part 3: Logarithmic and related quantities, and
their units
IEC 60050-300:2001,International Electrotechnical Vocabulary−Electrical and electronic measurements and
measuring instruments−Part 311: General terms relating to measurements−Part 312: General terms relating
to electrical measurements ‒ Part 313: Types of electrical measuring instruments−Part 314: Specific terms
according to the type of instrument
IEC 60050-731,International Electrotechnical Vocabulary−Chapter 731: Optical fibre communication
IEC 60359,Electrical and electronic measurment equipment−Expression of performance
IEC 60793-1 (series),Optical fibres−Part 1: Measurement methods and test procedures
IEC 60793-2,Optical fibres−Part 2: Product specifications−General
IEC 61280-1-3:2010,Fibre optic communication subsystem test procedures−Part 1-3: General communication
subsystems−Central wavelength and spectral width measurement
IEC 61300-3-2,Fibre optic interconnecting devices and passive components−Basic test and measurement
procedures−Part 3-2: Examination and measurements−Polarization dependent loss in a single-mode fibre
optic device
IEC 61315,Calibration of fibre-optic power meters
IEC/TR 61930,Fibre optic graphical symbology
IEC/TR 61931,Fibre optic−Terminology
ISO 80000-3,Quantities and units−Part 3: Space and time
ITU-T G.694 (all parts),Spectral grids for WDM applications

33
C 6191:2019
附属書JC
(参考)
JISと対応国際規格との対比表
JIS C 6191:2019 波長可変光源試験方法
IEC 62522:2014,Calibration of tuneable laser sources
(I)JISの規定
(II)国際
規格番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごと
の評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
2 引用規格
3 用語,定
義及び略語
用語,定義及び略語
は,JIS C 1002,JIS
Z 8103及びJIS Z
8120によるほか,次
によることを規定
3
用語,定義及び略語は,
次による。
追加
用語,定義及び略語に,JIS C 1002,
JIS Z 8103及びJIS Z 8120の引用を
追加した。
使用者に必要な用語,定義及び略
語として追加した。対応国際規格
の見直し時に提案を行う。
附属書JA
(規定)
不確かさと
確度との関
係
不確かさと確度と
の関係を規定する。
−
−
追加
不確かさと確度との関係を規定し
た。
“不確かさ”表記への移行をスム
ーズにするために追加した。対応
国際規格の見直し時に提案を行
う。
附属書JB
(規定)
強度試験
JIS C 60068-2-6に
従った振動試験,JIS
C 60068-2-31に従っ
た落下試験を規定
−
−
追加
強度試験の手順を規定した。
使用者に必要な試験として追加し
た。対応国際規格の見直し時に提
案を行う。
JISと国際規格との対応の程度の全体評価:IEC 62522:2014,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
2
C
6
1
9
1
:
2
0
1
9