2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 4906-1991
シンクロ電機
Synchros
1. 適用範囲 この規格は,角度信号の伝達,指示などの目的に用いるシンクロ電機で,周波数50Hz, 60Hz,
50/60Hz共用,交流電圧250V以下の電路に使用するものについて規定する。
備考1. この規格の引用規格を,次に示す。
JIS C 0911 小形電気機器の振動試験方法
JIS C 0912 小形電気機器の衝撃試験方法
JIS C 3306 ビニルコード
2. この規格の中で{ }を付けて示してある単位及び数値は,従来単位によるものであって,
参考として併記したものである。
2. 用語の定義 この規格で用いる主な用語の定義は,次のとおりとする。
(1) シンクロ電機 回転角度に対する電気対機械,機械対電気相互間のアナログ変換機の一種で,電磁誘
導によって,回転子角度位置をその関数である電気信号に変換するか又はその逆変換を行うもの。
(2) トルクシンクロ電機 機械的な装置を操作する機械的出力を得る際に使用されるシンクロ電機。
機種としては,シンクロトルク発信機,シンクロトルク受信機,シンクロトルク差動発信機及びシ
ンクロトルク差動受信機がある。
(3) 制御シンクロ電機 機械的な装置を制御するための電気信号を得る際に使用されるシンクロ電機。
機種としては,シンクロ制御発信機,シンクロ制御差動発信機及びシンクロ制御変圧機がある。
(4) シンクロトルク発信機 角度変位に対応する電気信号を送出するトルクシンクロ電機。
(5) シンクロトルク受信機 シンクロトルク発信機からの電気信号を受け,その電気信号に対応する角度
変位に変換するトルクシンクロ電機。
(6) シンクロトルク差動発信機 シンクロトルク発信機と接続して,その発信機と本機の角度変位の和又
は差に対応する電気信号を送出するトルクシンクロ電機。
(7) シンクロトルク差動受信機 2個のシンクロトルク発信機の送出する電気信号を受け,それぞれの電
気信号に対応する角度変位の和又は差に変換するトルクシンクロ電機。
(8) シンクロ制御発信機 角度変位に対応する電気信号を送出する制御シンクロ電機。
(9) シンクロ制御差動発信機 シンクロ制御発信機と電気的に接続して,その発信機と本機の角度変位と
の和又は差に対応する電気信号を送出する制御シンクロ電機。
(10) シンクロ制御変圧機 シンクロ制御発信機又はシンクロ制御差動発信機からの電気信号を受け,その
電気信号に対応する角度変位と本機の角度変位との差を,電気信号に対応する電圧として送出する制
御シンクロ電機。
(11) トルク トルクシンクロ電機のトルクとは,発信機と受信機とを電気的に接続し,両者の軸の間に角
2
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
差を与えた場合に発生するトルク。
(12) 固有トルク率 トルクシンクロ電機単体の発生できるトルク出力で,角度対トルク曲線のこう配。
(13) 電気的零位置 シンクロ電機に互換性をもたせるために決められた電気角の基準となる固定子と,回
転子の相対的な基準位置。
(14) 残留電圧 制制シンクロ電機の出力電圧曲線が,理論上零になる位置で残留している電圧。
なお,高調波成分を含んだ値を残留電圧の総合値 (T) といい,高調波成分を取り除いた基本波成分
の値を残留電圧の基本波値 (F) という。
(15) 電気誤差 シンクロ電機の理論理想電気角度と回転子の角度との差。
(16) 指度誤差 標準シンクロトルク発信機の指示角度と,シンクロトルク受信機又はシンクロトルク差動
受信機の指示角度との差。
(17) 変圧比 シンクロ電機の定格一次電圧 (VP) (1)に対する定格二次電圧 (VS) (1)との比。
注(1) ここにいう定格一次電圧とは,シンクロ電機の一次巻線に加える励磁電圧をいい,定格二次電
圧とは,シンクロ電機の二次巻線に誘起する無負荷最大電圧をいう。
3. 使用状態
3.1
常規使用状態 シンクロ電機は,次の使用状態をすべて満足する場合を常規使用状態とする。
(1) 周囲温度が最高50℃,最低−20℃の範囲を超えないで,しかも24時間の平均周囲温度が35℃以下の
場合。
(2) 標高1 000mを超えない場合。
(3) 3.2 特殊使用状態のいずれにも該当しない場合。
3.2
特殊使用状態 シンクロ電機は,次のいずれかに該当する使用状態を特殊使用状態とする。
この使用状態の場合は,特に指定しなければならない。
(1) 設置場所の標高及び周囲温度が,3.1常規使用状態に定める範囲以外の場所で使用する場合。
(2) 潮風を著しく受ける場所で使用する場合。
(3) 湿潤な場所で使用する場合。
(4) 過度の水蒸気又は過度の油蒸気がある場所で使用する場合。
(5) 爆発性,可燃性その他有害なガスがある場所及び同ガスの襲来のおそれがある場所で使用する場合。
(6) 過度のじんあいのある場所で使用する場合。
(7) 異常な振動又は衝撃を受ける場所で使用する場合。
(8) 氷雪の特に多い場所で使用する場合。
(9) 以上のほか,特殊な条件の下で使用する場合。
4. 形名
4.1
形別及びその記号 形別は,シンクロ電機の最大外径寸法で呼び,表1の記号による。
表1 形別の記号
最大外径mm
形別の記号
37
S37
45
S45
60
S60
95
S95
3
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2
機種及びその記号 機種及びその記号は,表2による。
表2 機種及びその記号
機種
記号
用途
シンクロトルク発信機
TX
トルク用
シンクロトルク受信機
TR
シンクロトルク差動発信機
TDX
シンクロトルク差動受信機
TDR
シンクロ制御発信機
CX
制御用
シンクロ制御差動発信機
CDX
シンクロ制御変圧機
CT
4.3
定格周波数,定格電源電圧及びその記号 定格周波数,定格電源電圧及びその記号は,表3による。
表3 定格周波数,定格電源電圧及びその記号
単位 V
項目
記号
定格周波数
50Hz及び60Hz共用
5
定格電源電圧
50Hzの場合
60Hzの場合
電源電圧略称
26
29
26V系
L
100
110
100V系
M
200
220
200V系
H
4.4
機種による定格一次電圧 機種による定格一次電圧は,表4による。
表4 定格一次電圧
単位 V
定格一次電圧
電源電圧
50Hzの場合
60Hzの場合
機種
26V系
26
29
TX, TR, CX
11.8
13.1
CDX, CT
100V系
100
110
TX, TR, CX
78
86
TDX, TDR,
CDX, CT
200V系
200
220
TX, TR, CX
4.5
機種による形別 機種による形別は,表5のとおりとする。
表5 機種による形別
電源電圧
26V系
100V系
200V系
形別
機種
S37
S45
S45
S60
S95
S45
S60
S95
TX
−
○
○
○
○
○
○
○
TR
−
○
○
○
○
○
○
○
TDX
−
−
−
○
○
−
−
−
CX
○
○
○
○
○
○
○
○
CDX
○
○
○
○
−
−
−
−
CT
○
○
○
○
○
−
−
−
4.6
形名の構成 形名の構成は,表示記号を次のように配列して構成する。
例
4
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5. 性能
5.1
電気的零位置 電気的零位置は,ブラケットに付けた印と軸上に付けた印とを合わせたとき,8.3.4
の方法で求めた電気的零位置から±10度でなければならない。
5.2
巻線抵抗 巻線抵抗は,8.3.5の方法で試験を行ったとき,その値は製造業者があらかじめ設定した
範囲の値でなければならない。
5.3
電気誤差 電気誤差は,8.3.6の方法で試験を行ったとき,その最大値(絶対値)が表6〜10の値以
下でなければならない。
5.4
指度誤差 指度誤差は,8.3.7の方法で試験を行ったとき,その最大値が,表6〜10の値以内でなけ
ればならない。
5.5
変圧比 変圧比は,8.3.8の方法で試験を行ったとき,表6〜10の値の97〜103%の範囲になければ
ならない。
5.6
無負荷励磁電流 無負荷励磁電流は,8.3.9の方法で試験を行ったとき,表6〜10の値以下でなけれ
ばならない。
5.7
残留電圧 残留電圧は,8.3.10の方法で試験を行ったとき,その総合値及び基本波の最大値が,それ
ぞれ表6〜10の値以下でなけれならない。
5.8
固有トルク率 固有トルク率は,8.3.11の方法で試験を行ったとき,表6〜10の値以上でなければな
らない。
5.9
摩擦トルク 摩擦トルクは,8.3.12の方法で試験を行ったとき,表6〜10の値以下でなければならな
い。
5.10 温度上昇 温度上昇は,8.3.13の方法で試験を行ったとき,各巻線の温度上昇が,表6〜10の値以下
でなければならない。
5.11 自転 自転は,8.3.14の方法で試験を行ったとき,シンクロトルク受信機又はシンクロトルク差動受
信機の回転子が,任意の初期角度位置から自転することなく同期位置に安定しなければならない。
5.12 安定度 安定度は,シンクロトルク受信機又はシンクロトルク差動受信機について,8.3.15の方法で
試験を行ったとき,表6〜10の値以下でなければならない。
5.13 絶縁抵抗 絶縁抵抗は,8.3.16の方法で試験を行ったとき,常温においてその値が10MΩ以上でなけ
ればならない。
5.14 耐電圧 耐電圧は,8.3.17の方法で試験を行ったとき,これに耐えなければならない。
5.15 耐湿性 耐湿性は,8.3.18の方法で試験を行った直後において,5.3,5.4,5.13及び5.14の性能を満
足しなければならない。
5.16 耐久性 耐久性は,8.3.19の方法で試験を行った直後において,5.3,5.4,5.9及び5.12の性能を満
足しなければならない。
5.17 耐振動性 耐振動性は,8.3.20の方法で試験を行った直後において,5.3〜5.7,5.9,5.11,5.12,5.13
及び5.14の性能を満足しなければならない。
5.18 耐衝撃性 耐衝撃性は,8.3.21の方法で試験を行った直後において,5.3,5.4,5.6,5.7,5.9,5.11,
5.12,5.13及び5.14の性能を満足しなければならない。
5
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
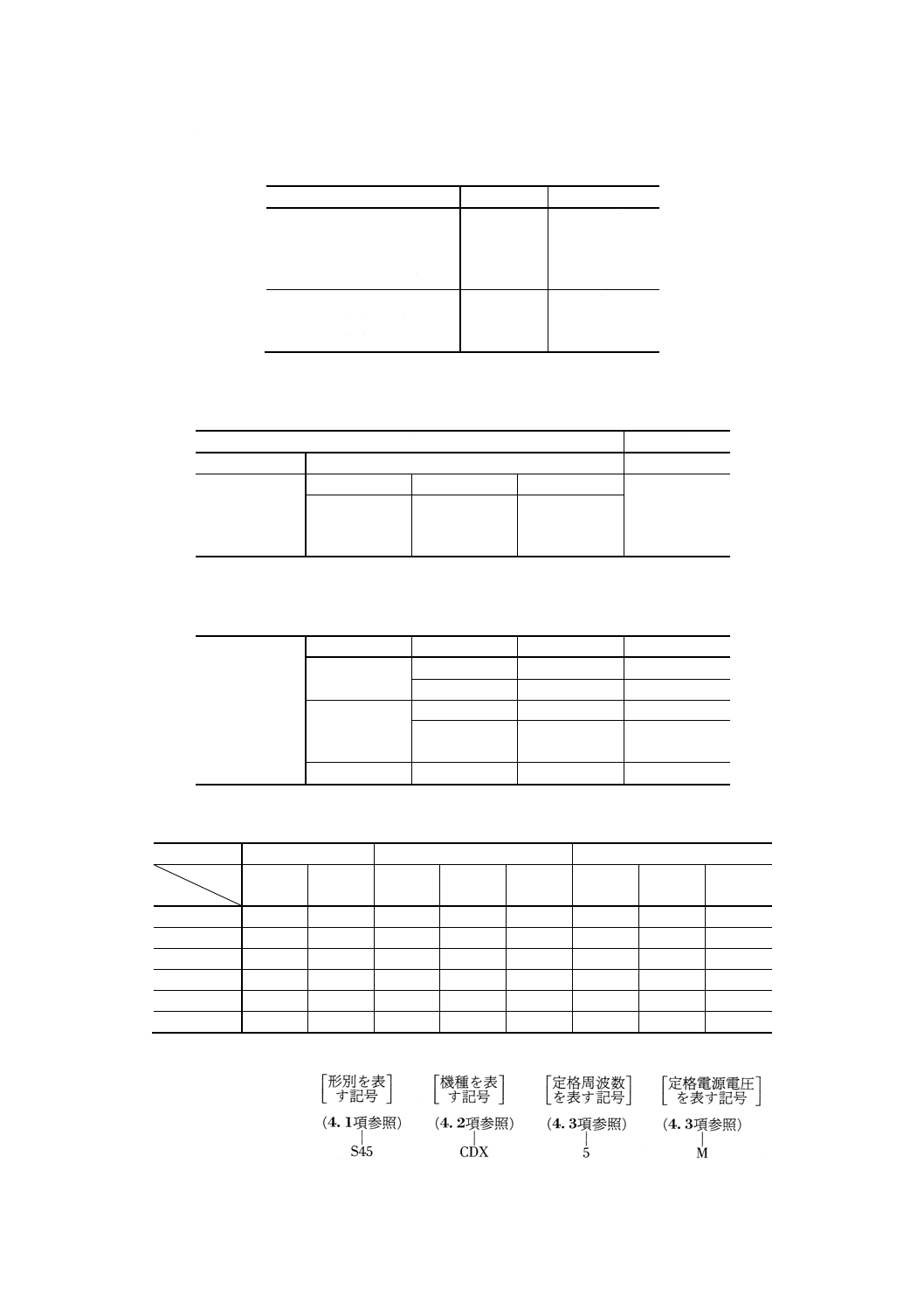
表6 形名による性能
形名
項目
S37CX5L
S37CT5L
S37CDX5L
無負荷励磁電流 (A)
0.1
0.06
0.1
変圧比 VS/VP
0.454
2.203
1.154
指度誤差 (min)
−
−
−
電気誤差 (min)
20
20
20
固有トルク率
(mN・m/度{gf-cm/度})
−
−
−
安定度 (s)
−
−
−
残留電圧 (mV) 総合値
45
45
45
基本波値
35
35
35
摩擦トルク (mN・m {gf-cm} )
0.98 {10}
0.98 {10}
1.47 {15}
湿度上昇 (℃)
40
40
40
表7 形名による性能
形名
項目
S45TX5L
S45TR5L
S45CX5L
S46CT5L
S45CDX5L
無負荷励磁電流 (A)
0.55
0.55
0.4
0.15
0.4
変圧比 VS/VP
0.454
0.454
0.454
2.203
1.154
指度誤差 (min)
−
±60
−
−
−
電気誤差 (min)
20
−
20
20
20
固有トルク率
(mN・m/度{gf-cm/度})
0.098 {1}
0.098 {1}
−
−
−
安定度 (s)
−
4
−
−
−
残留電圧
(mV)
総合値
−
−
40
40
40
基本波値
−
−
30
30
30L
摩擦トルク
(mN・m {gf-cm} )
1.47 {15}
−
1.47 {15}
1.47 {15}
1.96 {20}
温度上昇 (℃)
60
60
40
40
40
表8 形名による性能
形名
項目
S45
TX5M
S45
TX5H
S45
TR5M
S45
TR5H
S45
CX5M
S45
CX5H
S45
CT5M
S45
CDX5M
無負荷励磁電流 (A)
0.15
0.08
0.15
0.08
0.1
0.05
0.07
0.15
変圧比 VS/VP
0.783
0.39
0.783
0.39
0.783
0.39
0.735
1.154
指度誤差 (min)
−
−
±60
±60
−
−
−
−
電気誤差 (min)
20
20
−
−
20
20
20
20
固有トルク率
(mN・m/度{gf-cm/度})
0.098
{1}
0.098
{1}
0.098
{1}
0.098
{1}
−
−
−
−
安定度 (s)
−
−
4
4
−
−
−
−
残留電圧
(mV)
総合値
−
−
−
−
130
130
130
130
基本波値
−
−
−
−
90
90
90
90
摩擦トルク
(mN・m {gf-cm} )
1.47
{15}
1.47
{15}
−
−
1.47
{15}
1.47
{15}
1.47
{15}
1.96
{20}
温度上昇 (℃)
60
60
60
60
40
40
40
40
6
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
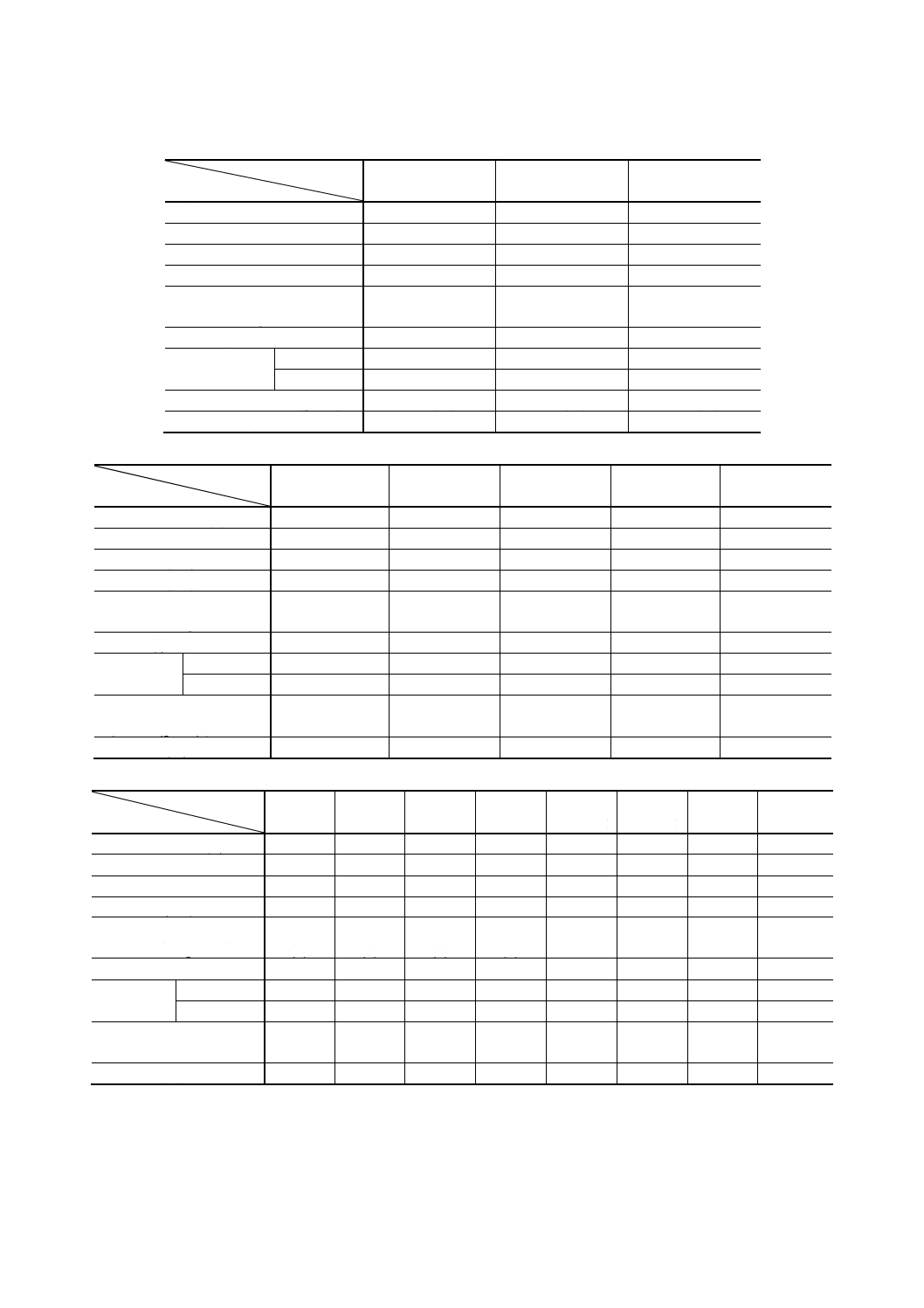
表9 形名による性能
形名
項目
S60
TX5M
S60
TX5H
S60
TR5M
S60
TR5H
S60
TDX5M
S60
TDR5M
S60
CX5M
S60
CX5H
S60
CT5M
S60
CDX5M
無負荷励磁電流 (A)
0.3
0.15
0.3
0.15
0.3
0.3
0.15
0.08
0.06
0.15
変圧比 VS/VP
0.783
0.39
0.783
0.39
1.154
1.154
0.783
0.39
0.735
1.154
指度誤差 (min)
−
−
±60
±60
−
±60
−
−
−
−
電気誤差 (min)
20
20
−
−
20
−
20
20
20
20
固有トルク率
(mN・m/度{gf-cm/度})
0.29
{3}
0.29
{3}
0.29
{3}
0.29
{3}
0.098
{1}
0.98
{1}
−
−
−
−
安定度 (s)
−
−
4
4
−
4
−
−
−
−
残留電圧
(mV)
総合値
−
−
−
−
−
−
125
125
125
150
基本波値
−
−
−
−
−
−
80
80
80
100
摩擦トルク
(mN・m {gf-cm} )
1.96
{20}
1.96
{20}
−
−
1.96
{20}
−
1.96
{20}
1.96
{20}
1.96
{20}
2.45
{25}
温度上昇 (℃)
60
60
60
60
60
60
40
40
40
40
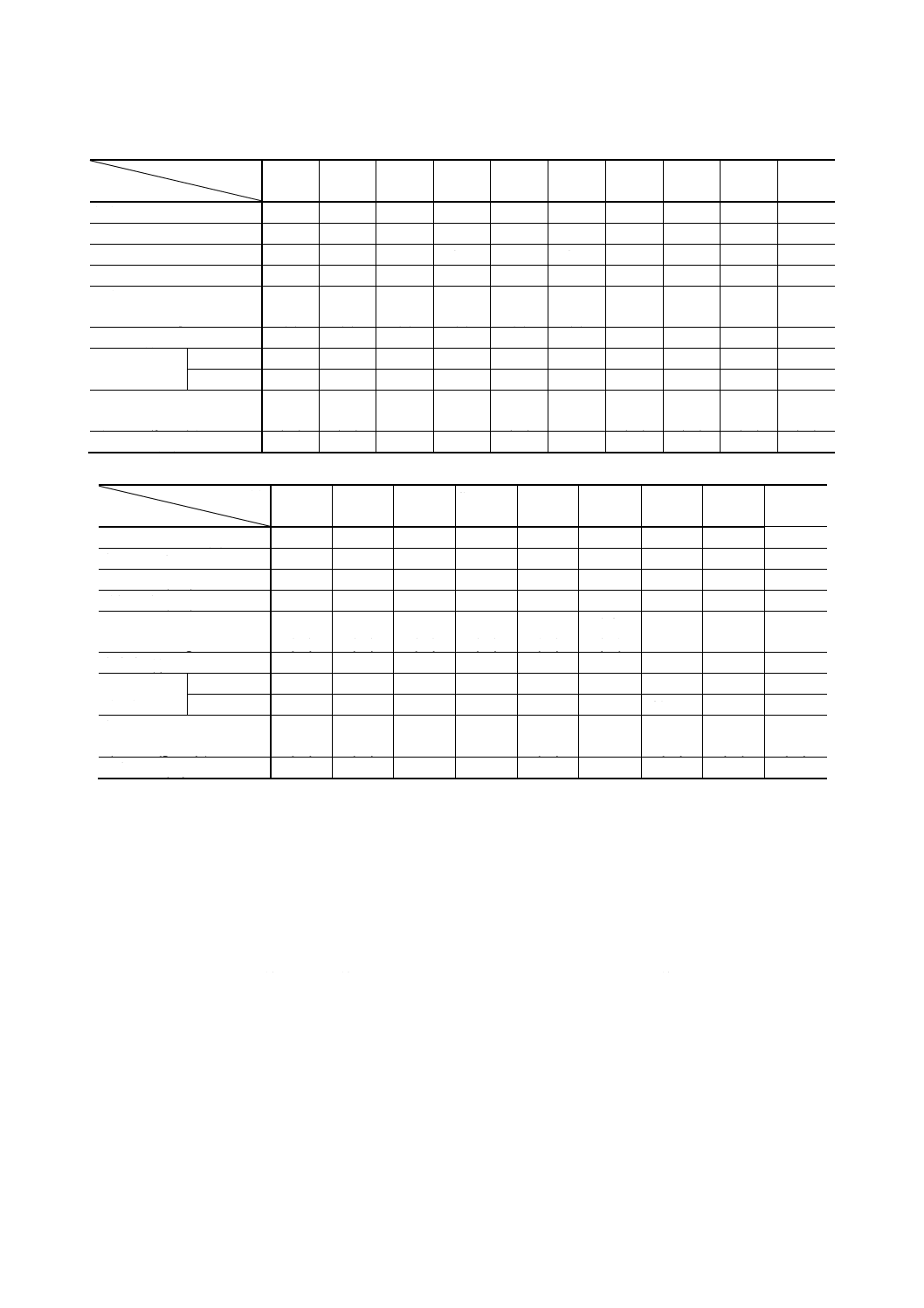
表10 形名による性能
形名
項目
S95
TX5M
S95
TX5H
S95
TR5M
S95
TR5H
S95
TDX5M
S95
TDR5M
S95
CX5M
S95
CX5H
S95
CT5M
無負荷励磁電流 (A)
0.7
0.35
0.7
0.35
0.6
0.6
0.7
0.35
0.05
変圧比 VS/VP
0.783
0.39
0.783
0.39
1.154
1.154
0.783
0.39
0.735
指度誤差 (min)
−
−
±60
±60
−
±60
−
−
−
電気誤差 (min)
20
20
−
−
20
−
20
20
20
固有トルク率
(mN・m/度{gf-cm/度})
1.96
{20}
1.96
{20}
1.96
{20}
1.96
{20}
1.47
{15}
1.47
{15}
−
−
−
安定度 (s)
−
−
4
4
−
4
−
−
−
残留電圧
(mV)
総合値
−
−
−
−
−
−
125
125
125
基本波値
−
−
−
−
−
−
80
80
80
摩擦トルク
(mN・m {gf-cm} )
3.92
{40}
3.92
{40}
−
−
3.92
{40}
−
3.92
{40}
3.92
{40}
3.92
{40}
温度上昇 (℃)
60
60
60
60
60
60
40
40
40
6. 構造
6.1
構造一般 シンクロ電機は,それぞれの用途に適した構造をもち,機械的に十分な強さをもつもの
でなければならない。
6.2
口出線 口出線に使用する電線は,JIS C 3306又はこれと同等以上の品質の電線を用いていなけれ
ばならない。
6.3
接続端子 接続端子は銅又は銅合金とし,配線を確実に接続できるものでなければならない。
6.4
励磁巻線 励磁巻線(一次巻線)は,発信機及び受信機では,回転子側の巻線とする。制御変圧機,
差動発信機及び差動受信機では,固定子側の巻線とする。
6.5
端子記号及び口出線の色別 端子記号及び口出線の色別は,原則として表11による。
7
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表11 端子記号及び口出線の色別
機種
回転子
固定子
TX
一次巻線
R1−白
二次巻線
S1−赤
TR
R2−黒
S2−黄
CX
S3−青
TDX
二次巻線
R1−白
一次巻線
S1−赤
TDR
R2−黒
S2−黄
CDX
R3−緑
S3−青
CT
二次巻線
R1−白
一次巻線
S1−赤
R2−黒
S2−黄
S3−青
備考 シンクロ電機の各巻線の端子記号は,S1, S2及びS3又はR1, R2
及びR3端子へ三相交流電源を位相の遅れる順に印加したと
き,発生する回転磁界の方向が,軸端側又は取付面側から見て
逆時計回りになるような順序とする。
6.6
電気的零位置表示 制御シンクロ電機のブラケットの前面と軸上には,容易に消えない方法で電気
的零位置を表す印を付けていなければならない。
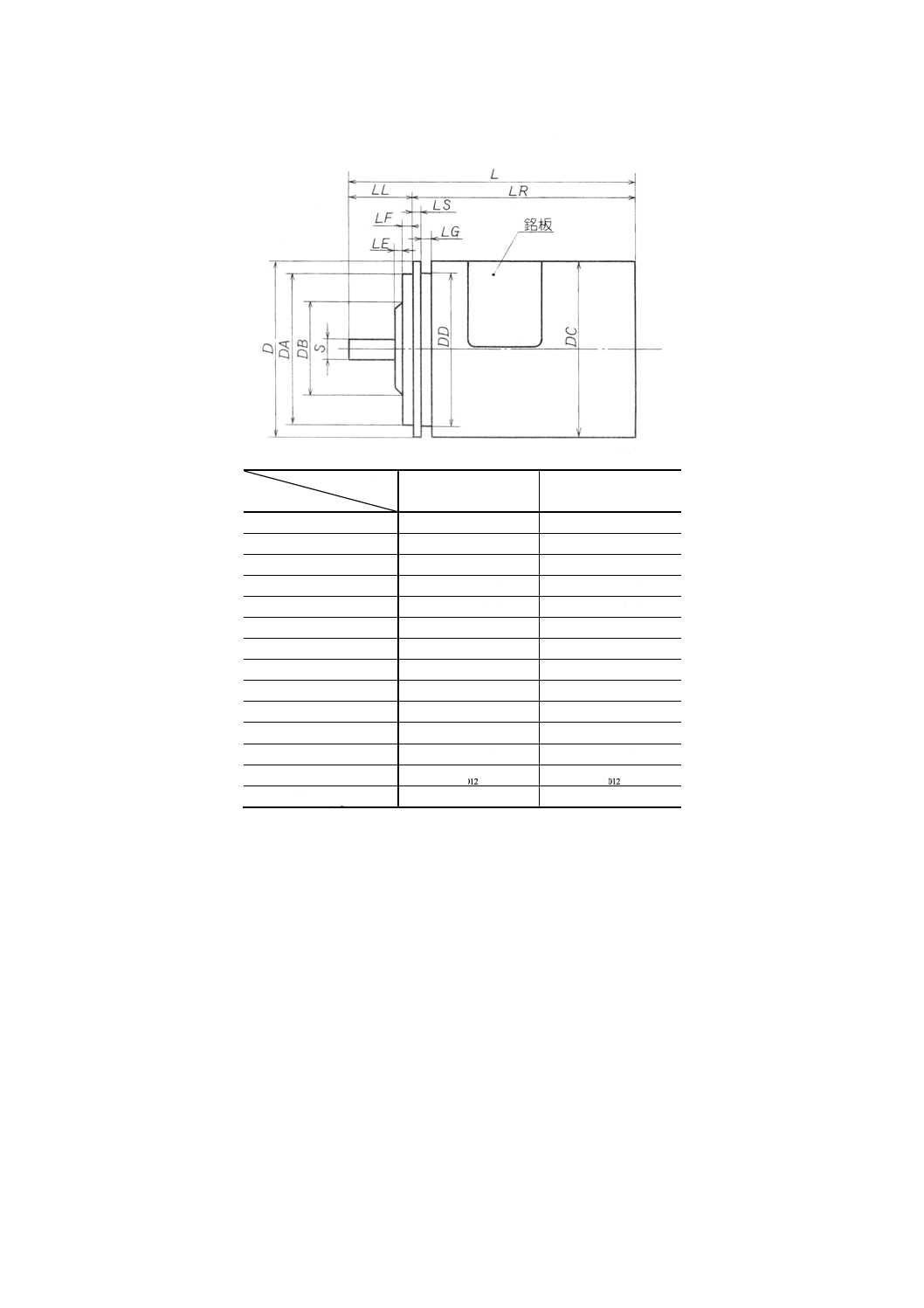
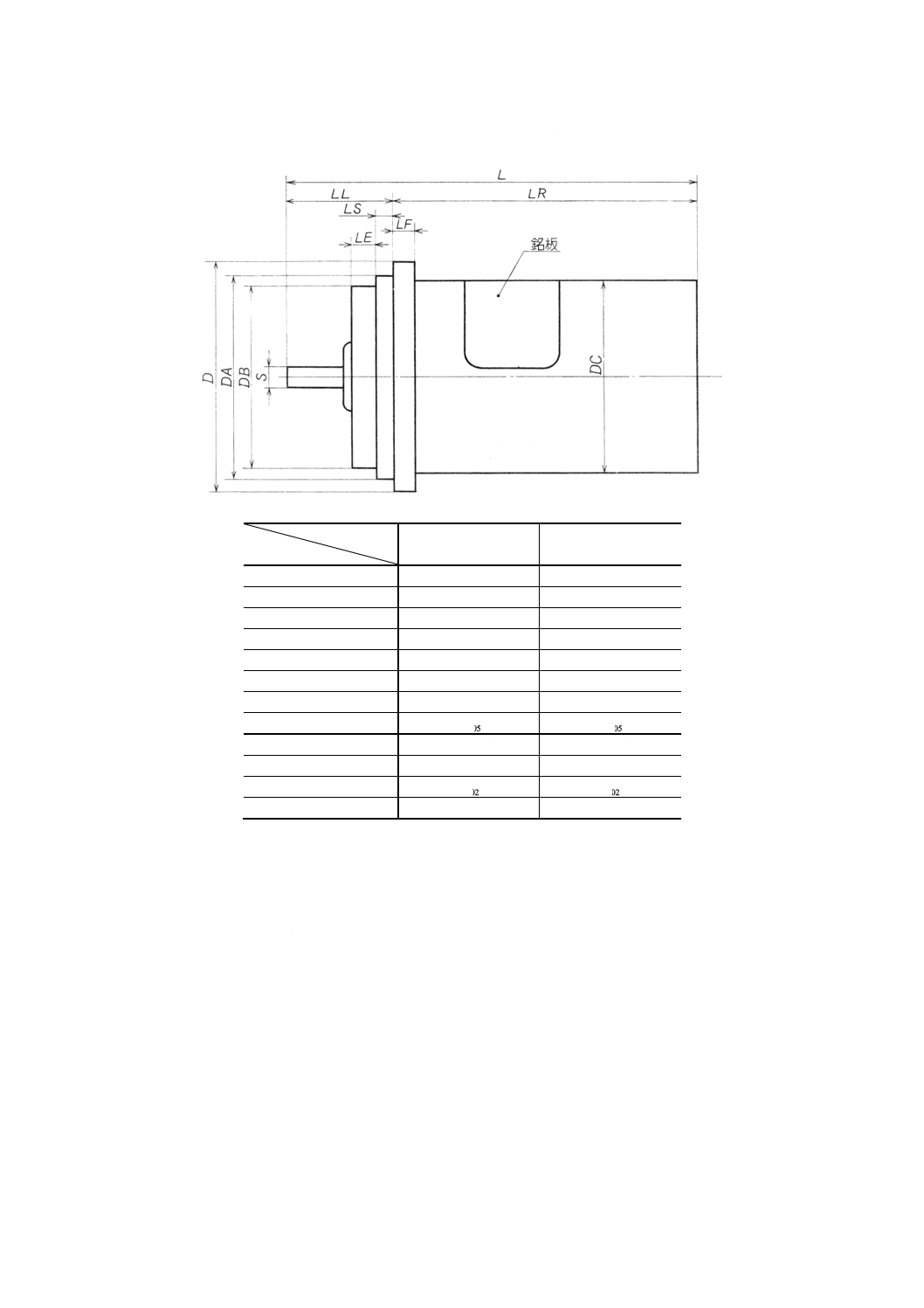
7. 外形寸法及び質量 シンクロ電機の外形寸法及び質量は,表12及び表13のとおりとする。
8
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表12 形別による外形寸法及び質量
単位 mm
形別
寸法
S37
S45
D
37±0.15
45±0.15
L
67.5以下
92.5以下
LL
21以下
21以下
LR
46.5以下
71.5以下
LE
1.5以下
1.5以下
LF
3.5
3.5
LS
2.5
2.5
LG
2.0以上
2.0以上
DA
0
015
.0
33−
0
015
.0
40−
DB
23以下
24以下
DC
37以下
45以下
DD
33以下
41以下
S
0012
.0
3−
0012
.0
4−
質量 (kg)
0.3以下
0.4以下
9
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表13 形別による外形寸法及び質量
単位 mm
形別
寸法
S60
S95
D
60±0.2
95±0.2
L
123以下
187以下
LL
34以下
54以下
LR
89以下
133以下
LE
9以下
20以下
LF
4.0
8.0
LS
4.0
8.0
DA
005
.0
48−
005
.0
87−
DB
48以下
85以下
DC
51以下
87以下
S
002
.0
6−
002
.0
8−
質量 (kg)
0.7以下
3.5以下
8. 試験及び試験方法
8.1
試験 試験の種類は,次のとおりとする。
(1) 形式試験 製品の品質全般にわたり,その良否を判定するための試験
(2) 受渡試験 受渡しを決定するための試験
8.2
試験項目 試験項目は,次のとおりとする。
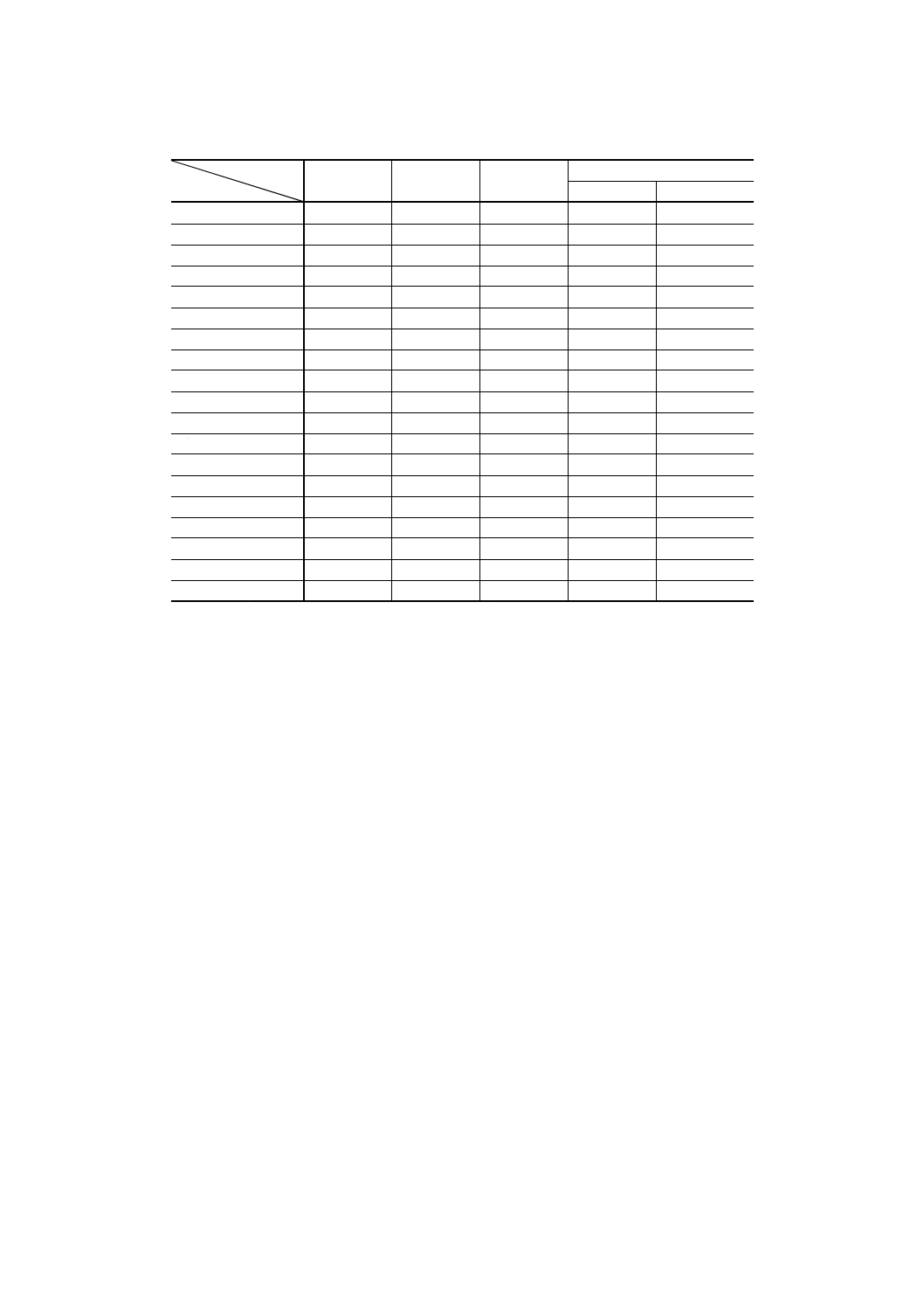
(1) 形式試験項目 同一機種の供試品3個について,表14に示す項目について行う。
10
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表14 形式試験項目
供試品
試験項目
供試品A
供試品B
供試品C
参考
試験方法
性能
構造
○
○
○
8.3.3
6.,7.及び10.
電気的零位置
○
○
○
8.3.4
5.1
巻線抵抗
○
○
○
8.3.5
5.2
電気誤差
○
○
○
8.3.6
5.3
指度誤差
○
○
○
8.3.7
5.4
変圧比
○
○
○
8.3.8
5.5
無負荷励磁電流
○
○
○
8.3.9
5.6
残留電圧
○
○
○
8.3.10
5.7
摩擦トルク
○
○
○
8.3.12
5.9
自転
○
○
○
8.3.14
5.11
安定度
○
○
○
8.3.15
5.12
絶縁抵抗
○
○
○
8.3.16
5.13
耐電圧
○
○
○
8.3.17
5.14
温度上昇
○
○
○
8.3.13
5.10
固有トルク率
○
○
○
8.3.11
5.8
耐振動性
○
−
−
8.3.20
5.17
耐衝撃性
○
−
−
8.3.21
5.18
耐湿性
−
○
−
8.3.18
5.15
耐久性
−
−
○
8.3.19
5.16
備考1. 電気誤差は,比例電圧零位法によって測定する。
2. 電気誤差は,TR及びTDRについては行わない。
3. 指度誤差,自転及び安定度は,TR及びTDRについてだけ行う。
4. 残留電圧は,CX, CDX及びCTについてだけ行う。
5. 摩擦トルクは,TR及びTDRについては行わない。
6. 固有トルク率は,CX, CDX及びCTについては行わない。
(2) 受渡試験項目 受渡試験項目は,表15に示す項目について行う。ただし,受渡当事者間の協定によっ
て試験項目の一部を省略することができる。
なお,試験個数及び合否判定基準は,受渡当事者間の協定による。
11
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表15 受渡試験項目
試験項目
構造
電気的零位置
電気誤差
指度誤差
変圧比
無負荷励磁電流
残留電圧
摩擦トルク
自転
安定度
絶縁抵抗
耐電圧
備考1. 電気誤差は,比例電圧傾度法又は標準器比較法によって測定する。
2. 電気誤差は,TR及びTDRについては行わない。
3. 指度誤差,自転及び安定度は,TR及びTDRについてだけ行う。
4. 残留電圧は,CX,CDX及びCTについてだけ行う。
5. 摩擦トルクは,TR及びTDRについては行わない。
6. 自転及び安定度は,TR及びTDRについてだけ行う。
8.3
試験方法
8.3.1
試験条件 試験は,特に指定がない限り標準試験状態で行うものとする。
標準試験状態は,温度20℃,相対湿度65%とする。ただし,疑義を生じない場合,温度5〜35℃,相対
湿度45〜85%の範囲で試験を行ってもよい。
8.3.2
試験電源 試験電源の電圧及び周波数は,特に指定がない限りシンクロ電機の端子で定格電圧の±
5%以内,定格周波数の±5%とする。
また,電源の無負荷端子電圧の波形の狂い率は8%以内とする。
8.3.3
構造試験 構造試験は,6.構造,7.外形寸法及び質量及び10.表示に規定する事項について調べる。
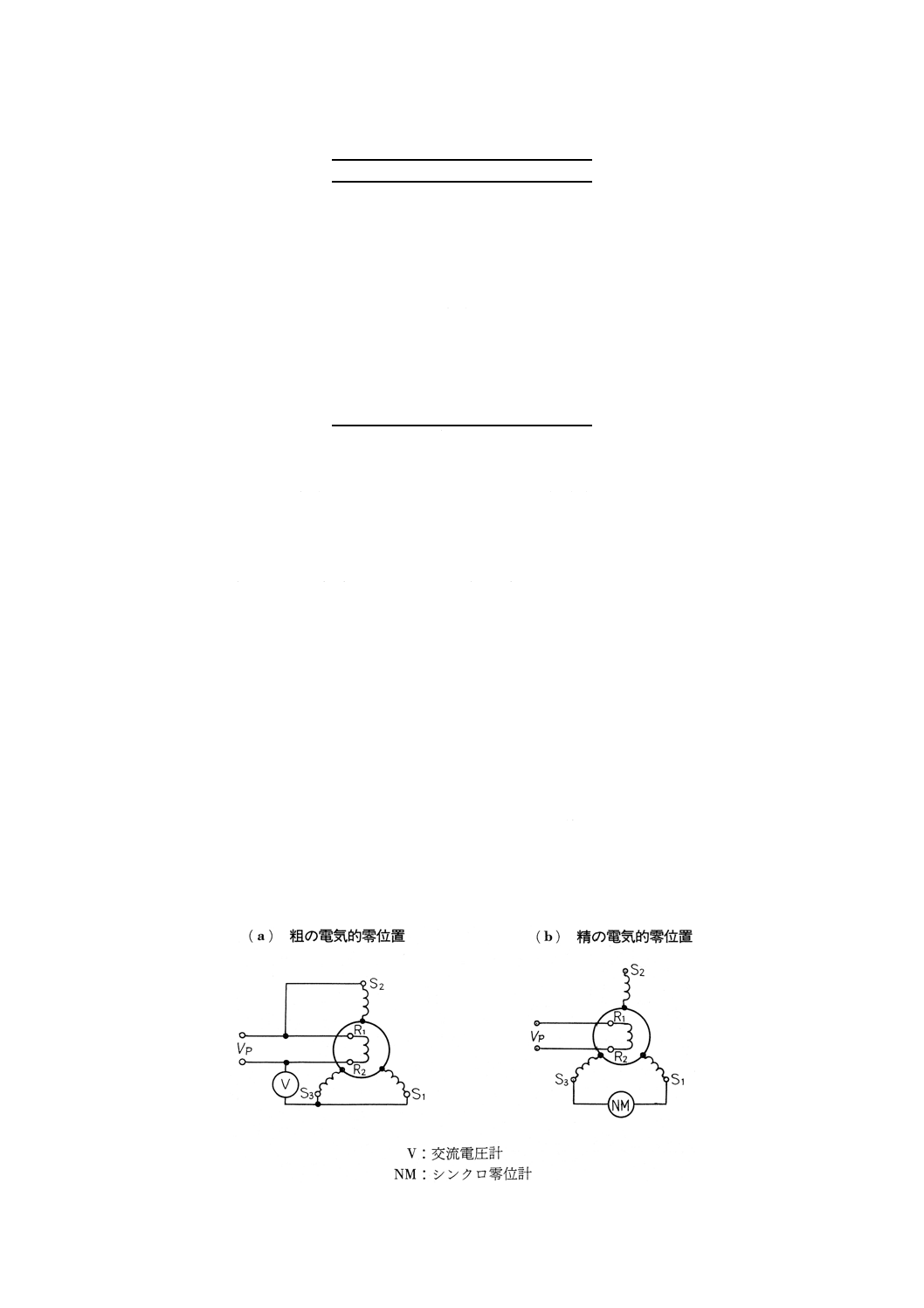
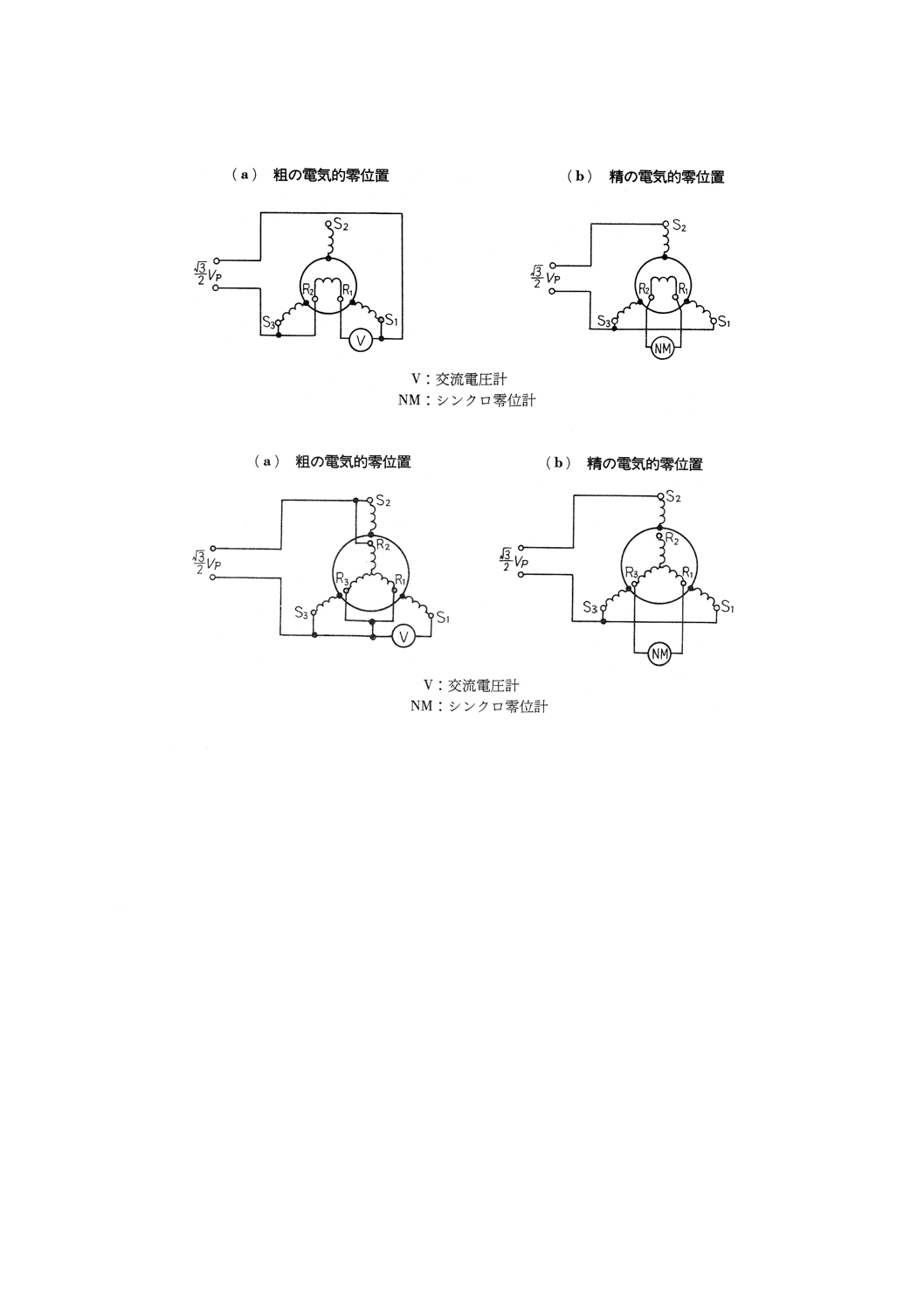
8.3.4
電気的零位置試験 電気的零位置試験は,電気的零位置を図1〜3に示すとおり結線して求める。
粗の電気的零位置は図1〜3の(a)に示すとおり結線し,交流電圧計の読みが最小になるように回転子軸を
回転して求める。精の電気的零位置は図1〜3の(b)に示すとおり結線し,シンクロ零位計の振れが中性点
を示すように回転子軸をわずかに回転して求める。この試験はあらかじめ粗の電気的零位置を求め,次に
精の電気的零位置を求める。
図1 TX, TR又はCXの場合
12
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図2 CTの場合
図3 TDX, TDR又はCDXの場合
8.3.5
巻線抵抗試験 巻線抵抗試験は,一次巻線及び二次巻線の直流抵抗を直流ブリッジで測定する。
8.3.6
電気誤差試験 電気誤差試験は,供試シンクロ電機をシンクロ角度測定装置に取り付けて電気誤差
を測定する。測定法は,試験の種類に応じて,次のいずれかによる。
なお,測定は,すべて電気的零位置から測定するものとし,回転子の0〜360度の間を10度間隔で行う。
(1) 比例電圧零位法(測定法I)
(2) 比例電圧傾度法(測定法II)
(3) 標準器比較法(測定法III)
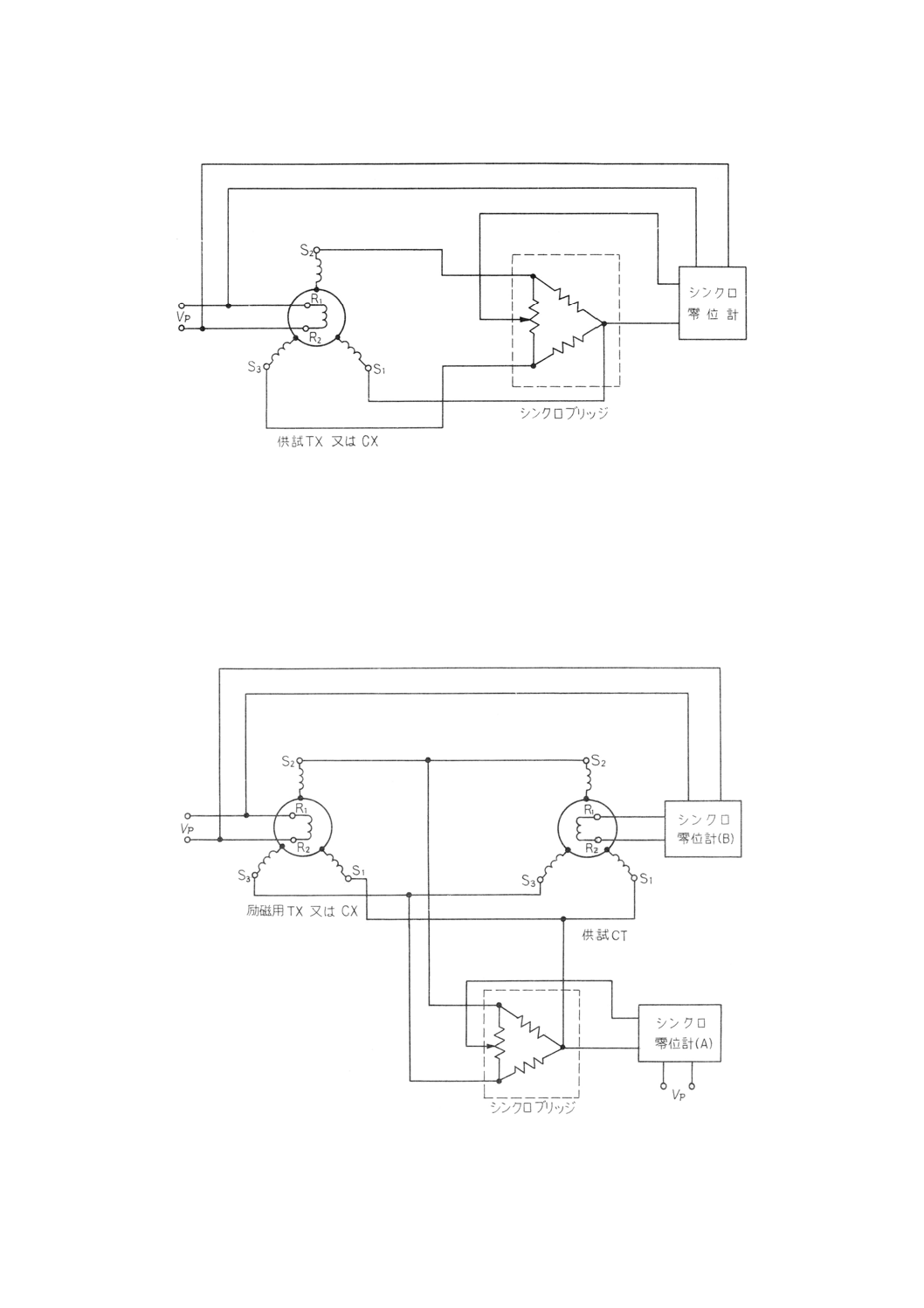
(a) 発信機 シンクロ発信機(TX又はCX)の電気誤差は,測定法I及び測定法IIによって測定する。
測定法I:図4において,シンクロブリッジを所定の理論的角度に定め,シンクロ零位計の指示が零
になるまで,供試シンクロ発信機(TX又はCX)の回転子を回転させ,その回転子の位置をシンクロ
角度測定装置で読み取る。
測定法II:図4において,シンクロブリッジを所定の理論的角度に定め,更に供試シンクロ発信機の
回転子を,シンクロブリッジの理論角に対応する回転角まで,シンクロ角度測定装置によって正確に
回転させ,シンクロ零位計の指針の振れ角,すなわちその電圧傾度によって誤差角度を読み取る。
13
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図4 発信機の測定回路
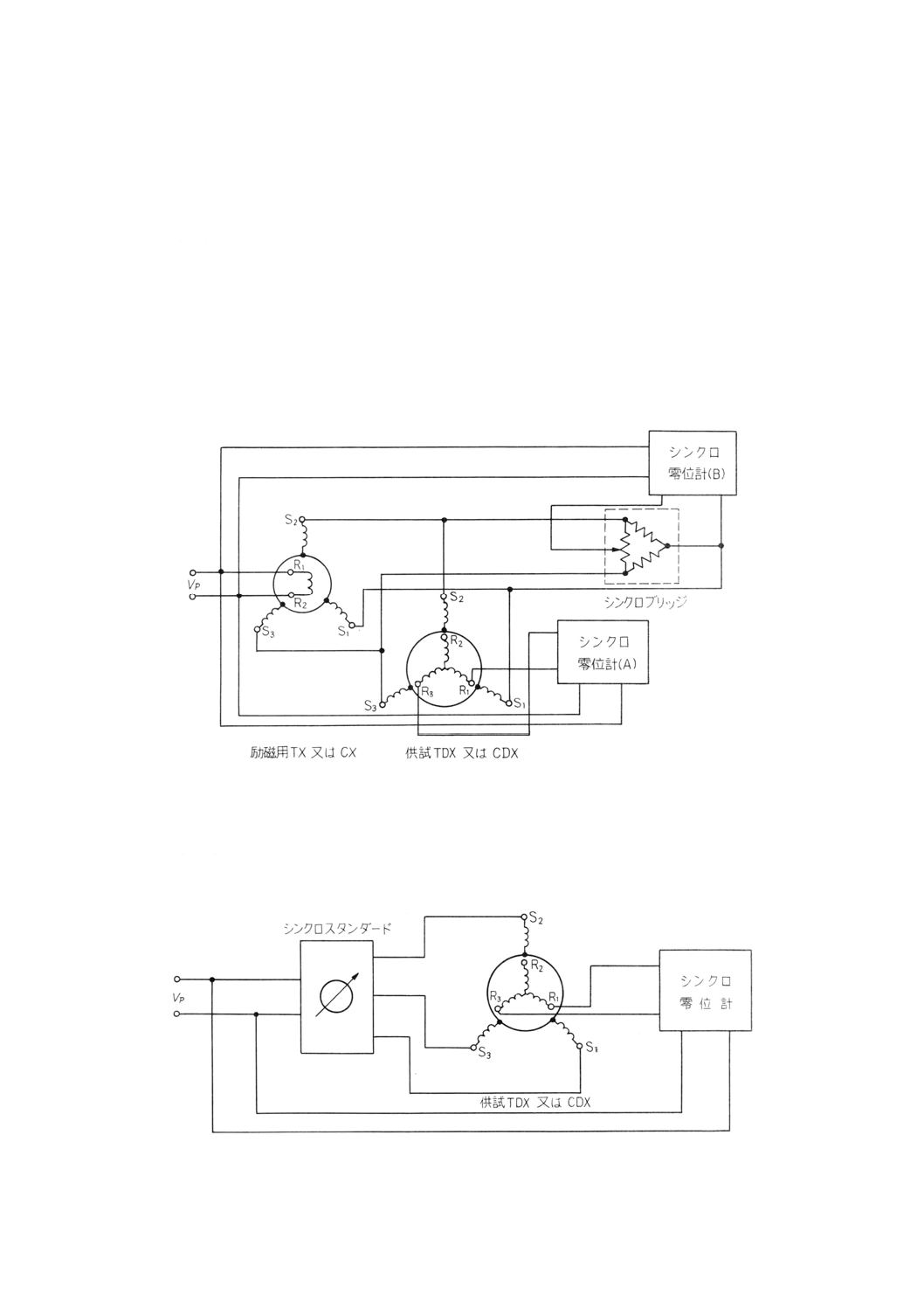
(b) 制御変圧機 制御変圧機の電気誤差は,測定法I,II及びIIIによって測定する。
測定法I:図5において,シンクロブリッジを所定の理論的角度に定め,励磁用シンクロ発信機(TX
又はCX)の回転子をシンクロブリッジの角度と一致する(シンクロ零位計Aが零になる。)まで回転
させる。次に,供試シンクロ制御変圧機に接続されたシンクロ零位計Bが零になるまで供試シンクロ
制御変圧機の回転子を回転させ,その回転子位置をシンクロ角度測定装置で読み取る。
なお,励磁用シンクロ発信機(TX又はCX)の代わりに,図6のようにシンクロスタンダードを用い
てもよい。
図5 制御変圧機の測定回路(1)
測定法II:図5において,シンクロブリッジを所定の理論的角度に定め,励磁用シンクロ発信機(TX
又はCX)の回転子をシンクロ零位計Aが零になるまで回転させる。次に,供試シンクロ制御変圧器
14
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
の回転子をシンクロブリッジの理論角に対応する回転角までシンクロ角度測定装置によって正確に回
転させ,シンクロ零位計Bの指針の振れ角,すなわちその電圧傾度によって誤差角度を読み取る。
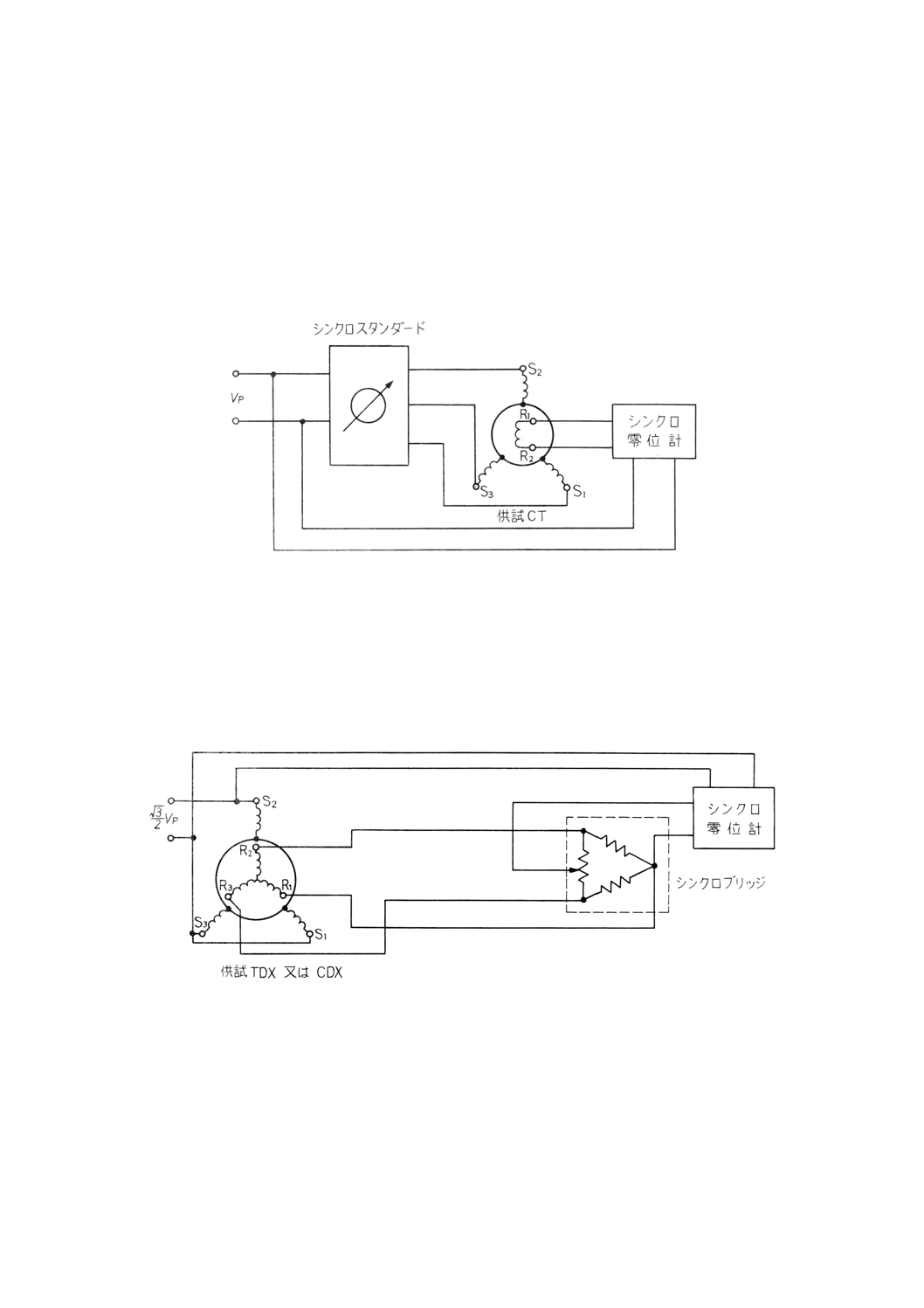
測定法III:図6において,シンクロスタンダードを所定の理論的角度に定め,供試シンクロ制御変圧
機の回転子を,シンクロスタンダードの理論角に対応する回転角までシンクロ角度測定装置によって
正確に回転させ,シンクロ零位計の指針の振れ角,すなわちその電圧傾度によって誤差角度を読み取
る。
図6 制御変圧機の測定回路(2)
(c) 差動発信機の電気誤差 シンクロ差動発信機(TDX又はCDX)の回転子及び固定子の電気誤差の
測定は,(a)及び(b)による。
(i) 回転子の電気誤差 回転子の電気誤差は,測定法I及び測定法IIによる。
測定法I:図7においてシンクロブリッジを所定の理論的角度に定め,シンクロ零位計の指示が零に
なるまで供試シンクロ差動発信機(TDX又はCDX)の回転子を回転させ,その回転子の位置をシン
クロ角度測定装置で読み取る。
図7 差動発信機の電気誤差の測定回路(1)
測定法II:図7においてシンクロブリッジを所定の理論的角度に定め,更に供試シンクロ差動発信機
(TDX又はCDX)の回転子を,シンクロブリッジの理論角に対応する回転角まで,シンクロ角度測
定装置によって正確に回転させ,シンクロ零位計の指針の振れ角,すなわちその電圧傾度によって誤
差角度を読み取る。
(ii) 固定子の電気誤差 固定子の電気誤差は,測定法I,II及びIIIによる。
測定法I:図8においてシンクロブリッジを所定の理論的角度に定め,励磁用シンクロ発信機(TX又
はCX)の回転子をシンクロ零位計Aの指示が零になるまで回転する。
15
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
次に,供試シンクロ差動発信機(TDX又はCDX)に接続されたシンクロ零位計Bが零になるまで供
試シンクロ差動発信機(TDX又はCDX)の回転子を回転させ,その回転子の位置をシンクロ角度測
定装置で読み取る。
なお,励磁用シンクロ発信機(TX又はCX)の代わりにシンクロスタンダードを用いることができる
(図9参照)。
測定法II:図8においてシンクロブリッジを所定の理論的角度に定め,励磁用シンクロ発信機(TX
又はCX)の回転子をシンクロ零位計Aの指示が零になるまで回転させる。
次に,供試シンクロ差動発信機(TDX又はCDX)の回転子をシンクロブリッジの理論角に対応する
回転角まで,シンクロ角度測定装置によって正確に回転させ,シンクロ零位計Bの指針の振れ角,す
なわちその電圧傾度によって誤差角度を読み取る。
図8 差動発信機の電気誤差の測定回路(2)
測定法III:図9においてシンクロスタンダードを所定の理論的角度に定め,供試シンクロ差動発信機
(TDX又はCDX)の回転子をシンクロスタンダードの理論角に対応する回転角まで,シンクロ角度
測定装置によって正確に回転させ,シンクロ零位計の指針の振れ角,すなわちその電圧傾度によって
誤差角度を読み取る。
図9 差動発信機の電気誤差の測定回路(3)
16
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.3.7
指度誤差試験 指度誤差試験は,シンクロトルク受信機について標準シンクロトルク発信機と組み
合わせて測定し,次の式によって指度誤差を算出する。この測定は,回転子の0〜360度の間を最低20度
間隔で行う。
)
(
2
1
C
B
A
+
=
ここに, A: 指度誤差
B: 指度誤差曲線の山の値
C: 指度誤差曲線の谷の値
この試験で供試シンクロトルク受信機は,その回転軸が水平になるように固定する。
また,シンクロ目盛板は,直径約20cmで一度分割目盛のものを用いる。その目盛誤差は,±0.05度以
下でなければならない。
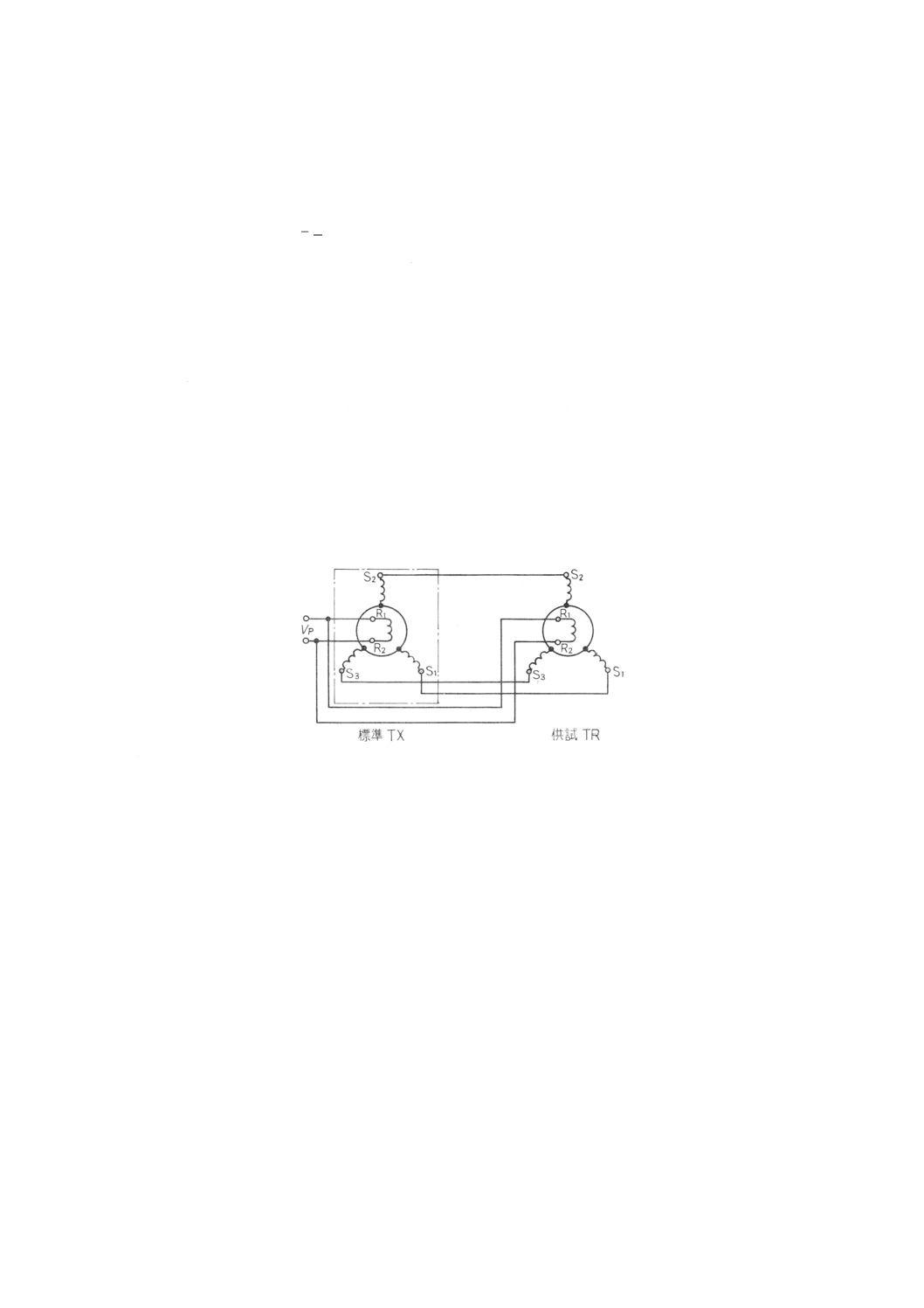
(1) 受信機 標準シンクロトルク発信機及び供試シンクロトルク受信機を図10のように接続し,両機の回
転子軸にシンクロ目盛板を取り付け,標準シンクロトルク発信機を零位置に固定して,供試シンクロ
トルク受信機の目盛を零に合わせる。
標準シンクロトルク発信機を20度おきに,正逆360度回転させて,供試シンクロトルク受信機の指
度誤差を読み取る。
図10 指度誤差試験の測定回路(受信機)
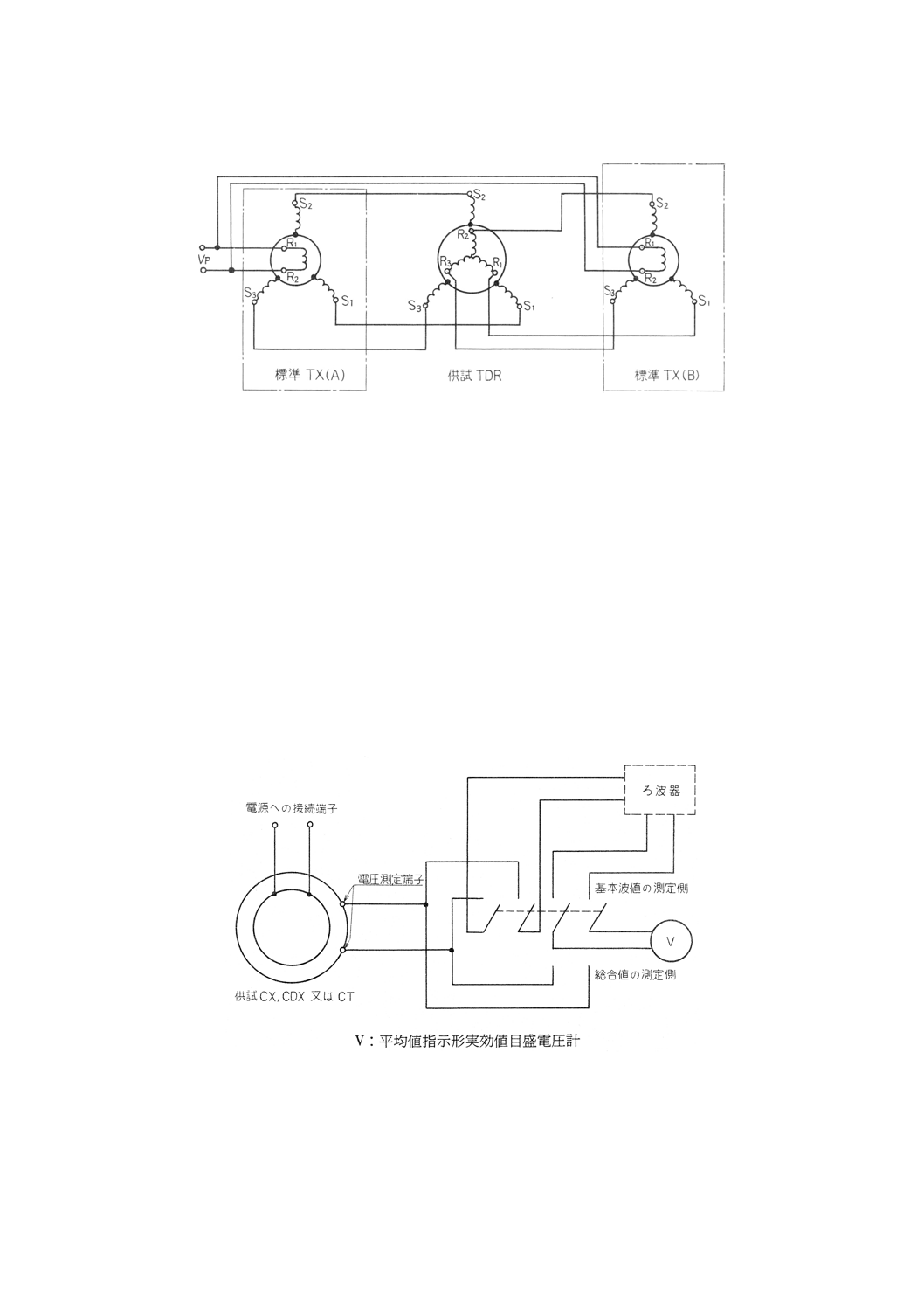
(2) 差動受信機 標準シンクロトルク発信機A,標準シンクロトルク発信機B及び供試シンクロ差動受信
機を図11のように接続し,標準トルク発信機Aを零位置に固定し,標準シンクロトルク発信機Bと
供試シンクロトルク差動受信機の目盛を零に合わせる。
標準シンクロトルク発信機Bを零位置に固定し,標準シンクロトルク発信機Aだけを20度おきに,
正逆360度回転させて供試シンクロトルク差動受信機の指度誤差を読む。次に,その指度誤差曲線の
最高の山ができる位置にAを固定し,Bを正方向に360度回転させる。
また,最低の谷ができる位置にAを固定しBを逆方向に360度回転させ,供試シンクロトルク差動
受信機の指度誤差を読み取る。
17
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図11 指度誤差試験の測定回路(差動受信機)
8.3.8
変圧比試験 変圧比試験は,供試シンクロ電機を表16の試験電圧によって励磁し,電気的零位置
から回転子軸を逆時計回りに回転させ,最初に得られた最大電圧の実効値を測定し,電源電圧との比を取
る。測定器の入力インピーダンスは,5kΩ以上あるものを使用する。ただし,最大電圧は無負荷開放状態
の値とする。
8.3.9
無負荷励磁電流試験 無負荷励磁電流試験は,供試シンクロ電機の一次側を定格一次電圧によって
励磁し,二次側を無負荷にした状態で励磁電流を測定する。
8.3.10 残留電圧試験 残留電圧試験は,シンクロ電機の残留電圧を図12の回路によって測定する。表16
に示す接続端子にその試験電圧を加え,回転子角度に対応する電圧測定端子で,一次側各端子間の残留電
圧を平均値指示形実効値目盛電圧計(高入力インピーダンス)で測定する。
なお,電圧測定端子は,表16に従って順次切り換える。
また,基本波値の測定では,図12のように供試シンクロ電機と上記電圧計の間に低域ろ波器を挿入して
行うので,ろ波器による電圧の減衰は補正することとする。
図12 残留電圧試験の測定回路
18
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表16 残留電圧試験
供試品
一次巻線
二次巻線
試験電圧 電源への接続端子
電圧測定
端子
測定時の近似的
回転子角度(度)
CX
Vp
R1-R2
S1-S3*
0及び180
S3-S2
60及び240
S2-S1
120及び300
CDX
P
V
2
3
S2- (S3・S1) *
R1-R3*
0及び180
R2-R1
60及び240
R3-R2
120及び300
P
V
2
3
S3- (S1・S2)
R2-R1
0及び180
R3-R2
60及び240
R1-R3
120及び300
P
V
2
3
S1- (S2・S3)
R3-R2
0及び180
R1-R3
60及び240
R2-R1
20及び300
CT
P
V
2
3
S2- (S1・S3) *
R1-R2*
0及び180
S1- (S2・S3)
R1-R2
60及び240
S3- (S1・S2)
R1-R2
120及び300
備考1. 変圧比の測定は,*印の接続端子及び測定端子で行う。
2. 括弧内は,端子一括を示す。
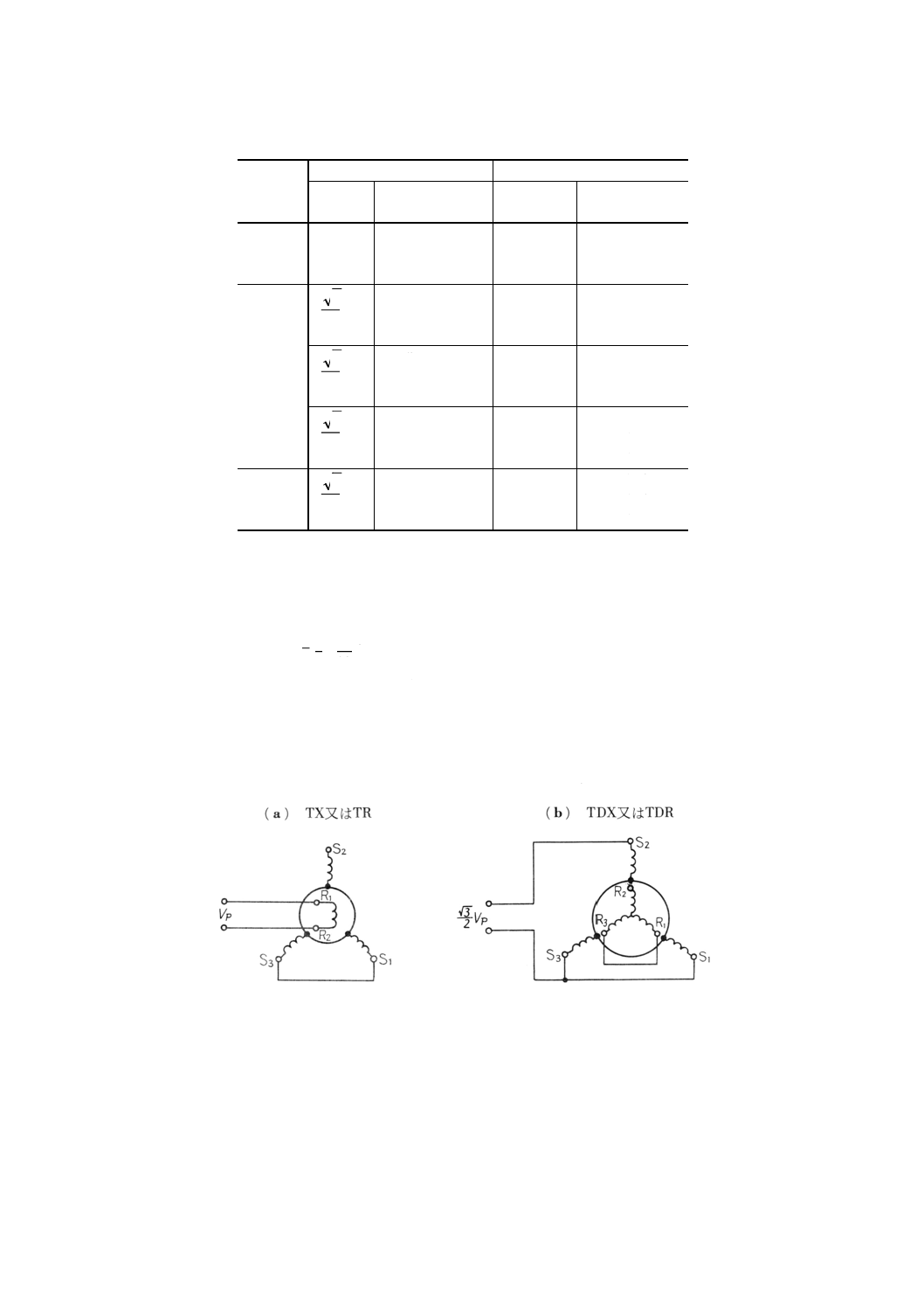
8.3.11 固有トルク率試験 固有トルク率試験は,図13(a)及び(b)に示す接続で,回転子軸にトルクゲージ
を取り付けて,角度10度におけるトルクを測定し,次の式によって固有トルク率を算出する。
})
/
{
/
(
10
2
1
度
−
度
=
cm
gf
m
mN
E
D
×
ここに, D: 固有トルク率
E: 角度10におけるトルク
なお,トルクゲージで測定が困難な場合は,適当な滑車を取り付けて,そのリムに取り付けた糸に“お
もり”をつり下げて,角差10度でトルクを測定してもよい。
図13 固有トルク率試験の測定回路
8.3.12 摩擦トルク試験 摩擦トルク試験は,供試シンクロ電機の軸を水平にし,回転子軸にトルクゲージ
を取り付けて摩擦トルクを測定する。
8.3.13 温度上昇試験 温度上昇試験は,供試シンクロ電機を木製又は遮熱材の台上に載せ,一次側に定格
一次電圧を加え,無負荷状態で各部の温度がほぼ一定となった後,巻線の温度上昇を抵抗法によって測定
する。
19
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8.3.14 自転試験 自転試験は,供試シンクロトルク受信機又はシンクロトルク差動受信機を同形のシンク
ロトルク発信機と電気的に接続した後,発信機の回転子を発信機の電気的零位置に固定し,供試受信機軸
を電気的零位置から175度ずらし,定格一次電圧の120%の電圧を発信機の一次巻線に印加する。この測
定は時計回りに3回,逆時計回りに3回行う。
8.3.15 安定度試験 安定度試験は,供試シンクロトルク受信機又はシンクロトルク差動受信機を同形のト
ルク発信機と電気的に接続した後,発信機の回転子を固定し,供試受信機(TR又はTDR)の軸を発信機
回転子位置に対し,175度の角度を与えて定格一次電圧で励磁するとき,供試受信機(TR又はTDR)の
回転子が同期して,同期位置に安定するまでの時間を測定する。
この測定は時計回りに3回,逆時計回りに3回行い,その平均値を読み取る。
8.3.16 絶縁抵抗試験 絶縁抵抗試験は,シンクロ電機の一次,二次巻線と固定子胴との間及び一次巻線と
二次巻線との間の絶縁抵抗を,直流500V絶縁抵抗計によって測定する。
8.3.17 耐電圧試験 耐電圧試験は,シンクロ電機の一次,二次巻線と固定子胴との間及び一次巻線と二次
巻線との間に正弦波に近い波形をもった商用周波数の表17に示す試験電圧を1分間加える。
表17 試験電圧
単位 V
電源電圧
試験電圧
26V系
500
100V系
1 000
200V系
1 500
8.3.18 耐湿試験 耐湿試験は,供試シンクロ電機を温度40±2℃で,相対湿度90〜95%に7時間保った後,
徐冷し,温度20±2℃,相対湿度60〜70%に24時間放置する。
8.3.19 耐久試験 耐久試験は,供試シンクロ電機を使用状態に近い取付方法で耐久試験装置に取り付け,
定格一次電圧で励磁し,回転子を約600rpmの速度で駆動し,1 000時間連続回転させる。
8.3.20 耐振動試験 耐振動試験は,供試シンクロ電機を使用状態に近い取付方法で振動試験機に取り付け,
供試シンクロ電機が発信機の場合は通常それと組み合わせて用いられる受信機,受信機の場合は発信機を
1台結線し,定格一次電圧で励磁し,両機の軸を自由にしたまま,次の方法によって各軸について単弦振
動を与える。
振動数範囲…………10〜55Hz
振動数変化…………繰返し周期1分30±15秒
試験時間……………2時間
振動を与える方向…回転子軸を含む一軸と,それに直角な任意の一軸
複振幅………………0.5mm
振動試験機の具備すべき条件は,JIS C 0911による。
8.3.21 耐衝撃試験 耐衝撃試験は,供試シンクロ電機を使用状態に近い取付方法で衝撃試験機に固定し,
回転子を自由に回転し得るようにし,任意の角度位置で,次の方法で各軸に衝撃を与える。
衝撃を与える方向… 回転子軸を含む一軸について一方向に連続5回,それと逆方向に5回,回転子軸
と直角な任意の一軸について一方向に5回,それと逆方向に5回,合計20回衝
撃を与える。
衝撃の大きさ……… 98m/s2 {10g}
衝撃時間…………… 0.02秒
20
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
衝撃の波形………… 正弦波に近い波形
衝撃試験の具備すべき条件は,JIS C 0912による。
9. 製品の呼び名 製品の呼び方は,名称,形名(形別,機種,定格周波数,定格一次電圧)による。
例1. S45形シンクロ制御差動発信機50/60Hz 100V
例2. シンクロ電機S45CDX5M
参考表1 和文表示と英文表示との対照例
項目
和文
英文
名称又は機種
シンクロトルク発信機
SYNCHRO (TORQUE) TRANSMITTER
シンクロトルク受信機
SYNCHRO (TORQUE) RECEIVER
シンクロトルク差動発信機
SYNCHRO (TORQUE) DIFFERENTIAL TRANSMITTER
シンクロトルク差動受信機
SYNCHRO (TORQUE) DIFFERENTIAL RECEIVER
シンクロ制御発信機
SYNCHRO (CONTROL) TRANSMITTER
シンクロ制御差動発信機
SYNCHRO (CONTROL) DIFFERENTIAL TRANSMITTER
シンクロ制御変圧機
SYNCHRO (CONTROL) TRANSFORMER
形名
形名○○○○○○
TYPE No. ○○○○○○
定格一次電圧
一次電圧○○V
INPUT VOLTAGE ○○VOLTS
定格周波数
50/60Hz
50/60Hz
無負荷励磁電流
無負荷励磁電流○○A
INPUT CURRENT ○○ Ampss (ma)
定格一次電圧対定格
二次電圧又は変圧比
一次/二次○○V/○○V
又は変圧比○○○
VOLTAGE RATIO○○V/○○VorTRANSFORMATI0N
RATIO○○○
製造番号
製造番号
MANUFACTURERS SERIAL No.
製造業者の形式番号 形式番号
MANUFACTURERS TYPE No.
製造年月
製造年月 1991年10月
DATE OCT.1991
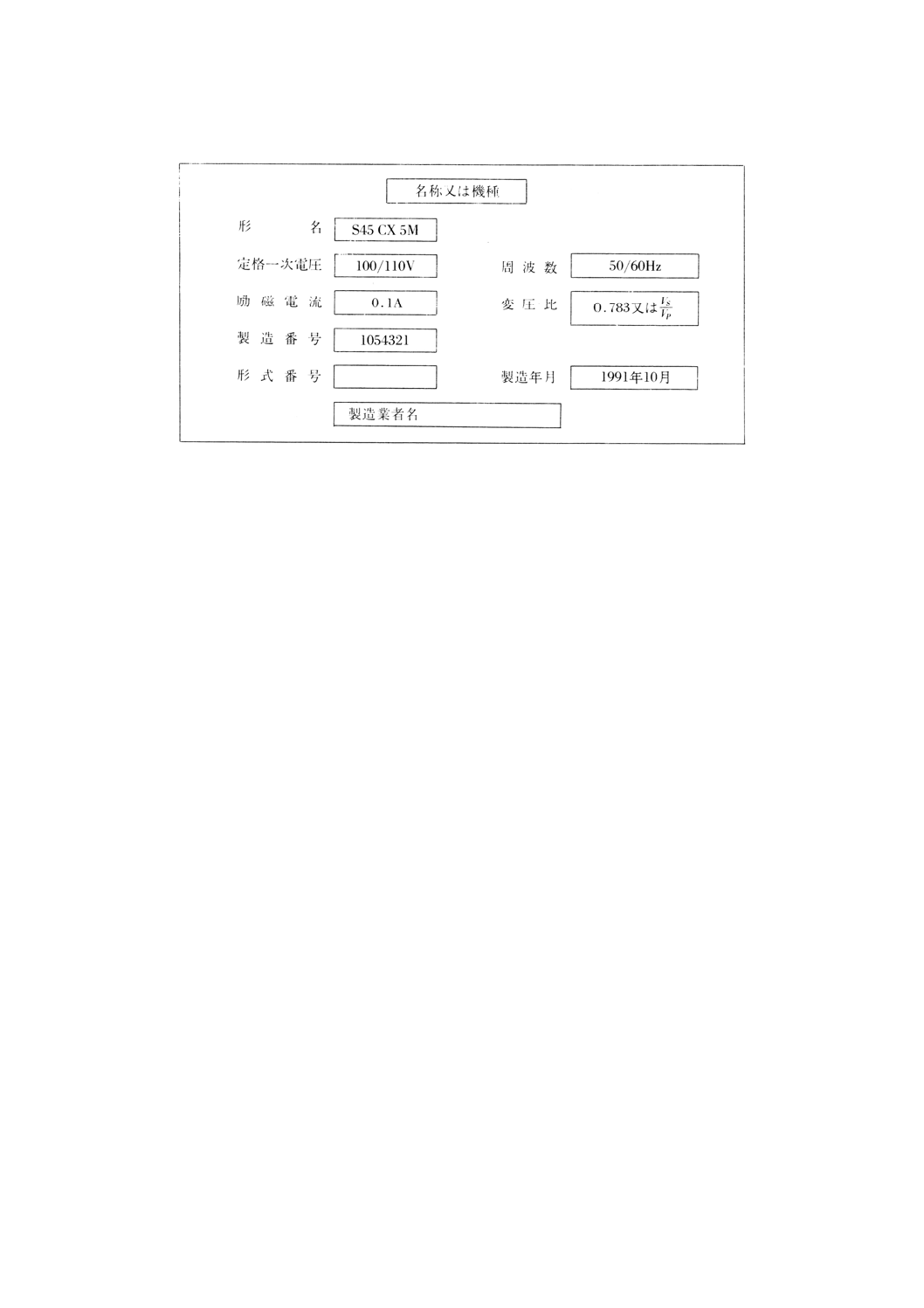
10. 表示 シンクロ電機には見やすいところに,図14に示す記載例に倣い容易に消えない方法で,次の事
項を明示する。ただし,S37, S45形のシンクロ電機では,(1),(2),(7)だけを記載してもよい。
(1) 名称及び形名(定格一次電圧,定格周波数)
(2) 無負荷励磁電流
(3) 変圧比又は
p
s
V
V
(4) 製造番号
(5) 製造業者の形式番号
(6) 製造年月
(7) 製造業者名又はその略号
21
C 4906-1991
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図14 記載例