C 4421:2008
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲及び目的 ············································································································· 1
2 引用規格 ························································································································· 2
3 用語及び定義 ··················································································································· 4
3.1 概要 ···························································································································· 4
3.1A システム ···················································································································· 5
3.2 分類 ···························································································································· 7
3.3 設置場所,ポート及びインタフェース ················································································ 7
3.4 PDSのコンポーネント ··································································································· 10
4 共通要求事項 ·················································································································· 11
4.1 一般条件 ····················································································································· 11
4.2 試験 ··························································································································· 11
4.3 使用者のための説明書 ··································································································· 12
5 イミュニティ要求事項 ······································································································ 12
5.1 一般条件 ····················································································································· 12
5.2 イミュニティの基本的要求事項−低周波妨害 ······································································ 15
5.3 高周波妨害に対する基本イミュニティ要求事項 ··································································· 21
5.4 イミュニティ要求事項の適用−統計の概要 ········································································· 24
6 エミッション ·················································································································· 24
6.1 一般的なエミッション要求事項························································································ 24
6.2 低周波エミッション限度値······························································································ 25
6.3 高周波エミッション測定条件··························································································· 26
6.4 基本高周波エミッション限度値························································································ 26
6.5 施工時の計画 ··············································································································· 30
6.6 エミッション要求事項の適用−統計的評価 ········································································· 33
附属書A(参考)EMC技術··································································································· 34
附属書B(参考)低周波現象 ································································································· 43
附属書C(参考)無効電力補償−フィルタ ··············································································· 72
附属書D(参考)高周波エミッションの考察 ············································································ 82
附属書E(参考)EMC解析及びEMCプラン ··········································································· 88
附属書JA(規定)高調波 ······································································································ 97
附属書JB(規定)装置の適合性評価 ······················································································ 101
附属書JC(参考)JISと対応する国際規格との対比表 ······························································· 106
C 4421:2008
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人電気学会(IEEJ)及び財団法人日本規
格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工業標準調査会
の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に係る確認について,責任は
もたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 4421:2008
可変速駆動システム (PDS)−
電磁両立性 (EMC) 要求事項及び試験方法
Adjustable speed electrical power drive systems (PDS)-
Electromagnetic compatibility (EMC) requirements and specific test methods
序文
この規格は,2004年に第2版として発行されたIEC 61800-3を基に作成した日本工業規格であるが,電
力系統の違いなどによって技術的内容を変更して作成した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JCに示す。
1
適用範囲及び目的
この規格は,可変速の駆動システム(以下,PDSという。)の電磁両立性(以下,EMCという。)の要求
事項について規定する。PDSの定義は,3.1による。PDSには,可変速交流電動機駆動及び直流電動機駆
動がある。要求事項は,変換装置の入力電圧及び/又は出力電圧(線間電圧)が6.6 kV以下のPDSにつ
いて規定する。
この規格は,住宅地域,商業地域及び工業地域に設置するPDSを対象とし,鉄道用途,電気自動車及び
昇降機には適用しない。PDSは,工業用配電系統又は商用電力系統に接続してよい。工業用配電系統は,
工業地域に隣接又は内部に設置する配電用変圧器から供給するもので,工業用途のためだけに供給する。
また,工業用配電系統は,工業用途の使用者が所有する発電機から供給するものでもよい。一方,PDSは,
住宅に供給する低電圧の商用電力系統に直接接続してもよい。この場合,通常,1点が接地されている。
EMCに関連するこの規格は,PDSの容量にかかわらず適用する。より大きなシステムがPDSを内蔵す
る場合もある。PDSを含むこのようなシステムについては,この規格では規定していないが,指針を附属
書Eに示す。
EMCを確実に実現するために,住宅地域,商業地域及び工業地域におけるPDSについて要求事項を規
定する。ただし,極めてまれな確率で発生する事象には,適用しない。故障状態におけるPDSのEMC特
性の変化は,考慮しない。
この規格は,想定する使用において,PDSに関する限度値及び試験方法を規定することを目的とする。
この規格は,イミュニティの要求事項及びエミッションに関する要求事項について規定する。
注記1 エミッションは,ほかの電子機器(例えば,無線受信機,計測器及び計算機)に対して電磁
妨害を引き起こす場合がある。イミュニティは,静電気放電を含む連続的及び過渡的な伝導
妨害及び放射妨害から装置を保護するために必要である。エミッション及びイミュニティの
要求事項は,互いに均衡し,かつ,PDSの実環境とも均衡するように決めている。
この規格は,PDSの最小限のEMC要求事項について規定する。
2
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
イミュニティの要求事項は,環境によって分類する。低周波エミッションの要求事項は,接続する電力
系統の性質によって規定する。高周波エミッションの要求事項は,想定する使用条件の四つのカテゴリに
分けて規定する。これらのカテゴリは,環境,PDSの定格,及び運用開始までの過程の違いを網羅してい
る。
この規格は,製品規格として,PDSの評価のために用いてもよい。さらに,この規格は,個別に販売さ
れる駆動モジュール(以下,CDMという。)又は基本駆動モジュール(以下,BDMという。)(3.4参照)
の評価に用いてもよい。
この規格は,次の事項を含む。
・ 市場に流通する製品の適合性評価条件
・ 市場に流通する前に高周波エミッションが測定できない場合(3.2.6のカテゴリC4で定義するような
PDS)における推奨する技術検討方法(6.5参照)
この規格は,市場に流通するカテゴリC1,C2及びC3の製品のEMC適合性評価のための完結したEMC
製品規格を想定する(3.2.3〜3.2.5参照)。
カテゴリC4のPDSの高周波エミッションは,最終設置場所で評価する。したがって,カテゴリC4の
PDSは固定設備として扱い,エミッション限度値は規定しないが,6.5及び附属書Eに技術検討を示して
いる。
この規格は,感電保護,絶縁協調及び関連する耐電圧試験,不安全な運転,故障の結果によって生じる
不安全な状態などの安全要求事項については,規定しない。また,電磁現象に起因する安全性及び機能安
全も,対象としない。
特殊な場合,例えば,感度が高い装置を近くで用いる場合には,この規格でPDSに規定する値よりも更
にエミッションを低減するために,又は感度が高い装置のイミュニティを高めるために,対策を講じなけ
ればならないこともある。
この規格は,PDSのEMC製品規格として共通規格よりも優先し,追加のEMC試験は必要としない。ほ
かのEMC製品規格の対象となる装置にPDSを内蔵する場合には,装置に対して,そのEMC製品規格を
適用する。
注記2 この規格は,PDSのEMCに関する特性について規定するものであるが,その特性にかかわ
る規定は,設計の目標値を示すものであり,この規格によって適合性評価を行うことは,意
図していない。
注記3 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 61800-3 : 2004,Adjustable speed electrical power drive systems−Part 3 : EMC requirements
and specific test methods (MOD)
なお,対応の程度を表す記号 (MOD) は,ISO/IEC Guide 21に基づき,修正していること
を示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
には適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS C 0664 : 2003 低圧系統内機器の絶縁協調 第1部:原理,要求事項及び試験
注記 対応国際規格:IEC 60664-1 : 1992,Insulation coordination for equipment within low-voltage
3
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
systems−Part 1 : Principles, requirements and tests (MOD)
JIS C 60050-161 : 1997 EMCに関するIEV用語
注記 対応国際規格:IEC 60050-161 : 1990,International Electrotechnical Vocabulary (IEV)−Chapter
161 : Electromagnetic compatibility (IDT)
JIS C 61000-3-2 電磁両立性−第3-2部:限度値−高調波電流発生限度値(1相当たりの入力電流が
20 A以下の機器)
注記 対応国際規格:IEC 61000-3-2,Electromagnetic compatibility (EMC)−Part 3-2 : Limits−Limits
for harmonic current emissions (equipment input current ≤ 16 A per phase) (MOD)
JIS C 61000-4-2 電磁両立性−第4部:試験及び測定技術−第2節:静電気放電イミュニティ試験
注記 対応国際規格:IEC 61000-4-2,Electromagnetic compatibility (EMC)−Part 4-2 : Testing and
measurement techniques−Electrostatic discharge immunity test (IDT)
JIS C 61000-4-3 電磁両立性−第4-3部:試験及び測定技術−放射無線周波電磁界イミュニティ試験
注記 対応国際規格:IEC 61000-4-3,Electromagnetic compatibility (EMC)−Part 4-3 : Testing and
measurement techniques−Radiated, radio-frequency, electromagnetic field immunity test (IDT)
JIS C 61000-4-4 電磁両立性−第4-4部:試験及び測定技術−電気的ファストトランジェント/バー
ストイミュニティ試験
注記 対応国際規格:IEC 61000-4-4,Electromagnetic compatibility (EMC)−Part 4-4 : Testing and
measurement techniques−Electrical fast transient/burst immunity test (IDT)
JIS C 61000-4-5 電磁両立性−第4部:試験及び測定技術−第5節:サージイミュニティ試験
注記 対応国際規格:IEC 61000-4-5,Electromagnetic compatibility (EMC)−Part 4-5 : Testing and
measurement techniques−Surge immunity test (MOD)
JIS C 61000-4-6 電磁両立性−第4-6部:試験及び測定技術−無線周波電磁界によって誘導する伝導
妨害に対するイミュニティ
注記 対応国際規格:IEC 61000-4-6,Electromagnetic compatibility (EMC)−Part 4-6 : Testing and
measurement techniques−Immunity to conducted disturbances, induced by radio-frequency fields
(MOD)
JIS C 61000-4-8 電磁両立性−第4部:試験及び測定技術−第8節:電源周波数磁界イミュニティ試
験
注記 対応国際規格:IEC 61000-4-8,Electromagnetic compatibility (EMC)−Part 4-8 : Testing and
measurement techniques−Power frequency magnetic field immunity test (MOD)
JIS C 61000-4-11 電磁両立性−第4-11部:試験及び測定技術−電圧ディップ,短時間停電及び電圧
変動に対するイミュニティ試験
IEC 60146-1-1 : 1991,Semiconductor convertors−General requirements and line commutated convertors−
Part 1-1 : Specifications of basic requirements
IEC/TR 61000-1-1,Electromagnetic compatibility (EMC)−Part 1 : General−Section 1 : Application and
interpretation of fundamental definitions and terms
IEC/TR 61000-2-1,Electromagnetic compatibility (EMC)−Part 2 : Environment−Section 1 : Description of
the environment−Electromagnetic environment for low-frequency conducted disturbances and signalling
in public power supply systems
IEC 61000-2-2,Electromagnetic compatibility (EMC)−Part 2-2 : Environment−Compatibility levels for
4
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
low-frequency conducted disturbances and signalling in public low-voltage power supply systems
IEC 61000-2-4,Electromagnetic compatibility (EMC)−Part 2-4 : Environment−Compatibility levels in
industrial plants for low-frequency conducted disturbances
IEC 61000-4-34,Electromagnetic compatibility (EMC)−Part 4-34 : Testing and measurement techniques−
Voltage dips, short interruptions and voltage variations immunity tests for equipment with input current
more than 16 A per phase
IEC 61800-1,Adjustable speed electrical power drive systems−Part 1 : General requirements−Rating
specifications for low voltage adjustables speed d.c. power drive systems
IEC 61800-2,Adjustable speed electrical power drive systems−Part 2 : General requirements−Rating
specifications for low voltage adjustable frequency a.c. power drive systems
IEC 61800-4,Adjustable speed electrical power drive systems−Part 4 : General requirements−Rating
specifications for a.c. power drive systems above 1 000 V a.c. and not exceeding 35 kV
CISPR 11 : 2003,Industrial, scientific and medical (ISM) radio-frequency equipment−Electromagnetic
disturbance characteristics−Limits and methods of measurement
CISPR 14-1,Electromagnetic compatibility−Requirements for household appliances, electric tools and similar
apparatus−Part 1 : Emission
CISPR 16-1-2 : 2006,Specification for radio disturbance and immunity measuring apparatus and methods−
Part 1-2 : Radio disturbance and immunity measuring apparatus−Ancillary equipment−Conducted
disturbances
CISPR 16-1-4 : 2004,Specification for radio disturbance and immunity measuring apparatus and methods−
Part 1-4 : Radio disturbance and immunity measuring apparatus−Ancillary equipment−Radiated
disturbances
CISPR 22 : 2003,Information technology equipment−Radio disturbance characteristics−Limits and methods
of measurement
3
用語及び定義
3.1
概要
この規格で用いる主な用語及び定義は,JIS C 60050-161によるほか,次による。
PDSは,電動機及びCDMからなる。PDSには,電動機によって駆動する装置を含まない(電動機の軸
に機械的にセンサを取り付けた場合は,そのセンサを含む。)。CDMは,BDM,及び受電部,補助装置(例
換気装置)などの必要に応じて追加する部分からなる。BDMには,変換器,制御装置及び保護装置を含
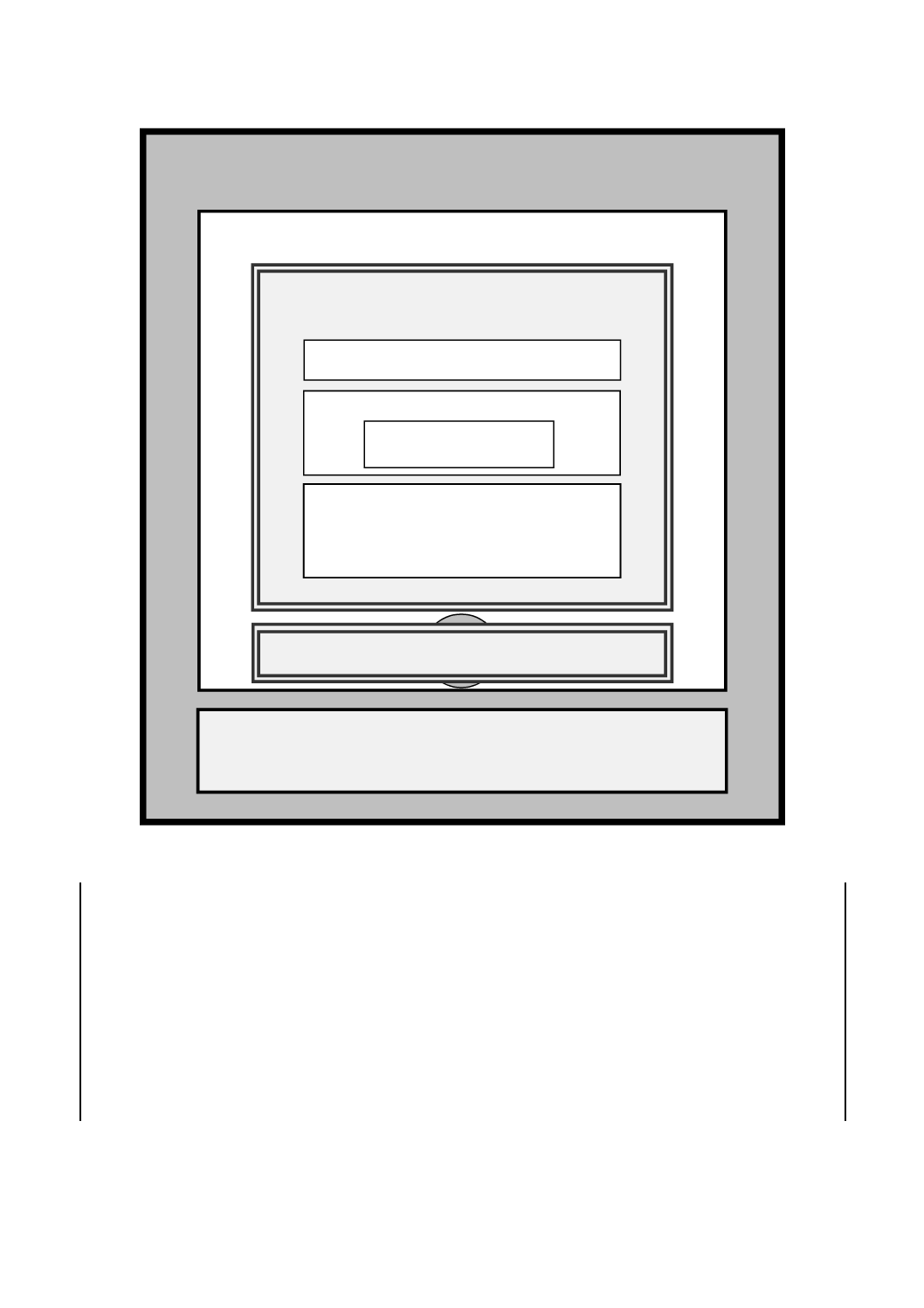
む。PDSと設備との境界を,図1及び図1Aに示す。これらの定義のための詳細は,IEC 61800-1,IEC 61800-2
及びIEC 61800-4による。
PDSが専用の変圧器をもつ場合には,変圧器はCDMの一部となる。
5
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1−PDSを含む設備の構成
3.1A システム
3.1A.1
駆動システム,PDS (power drive system)
主回路機器(変換器,電動機,電源受電部など)及び制御装置(スイッチング制御,電圧制御,周波数
制御,電流制御,ゲート駆動,保護,状態監視,伝送などを行う機器)で構成するシステム。交流電動機
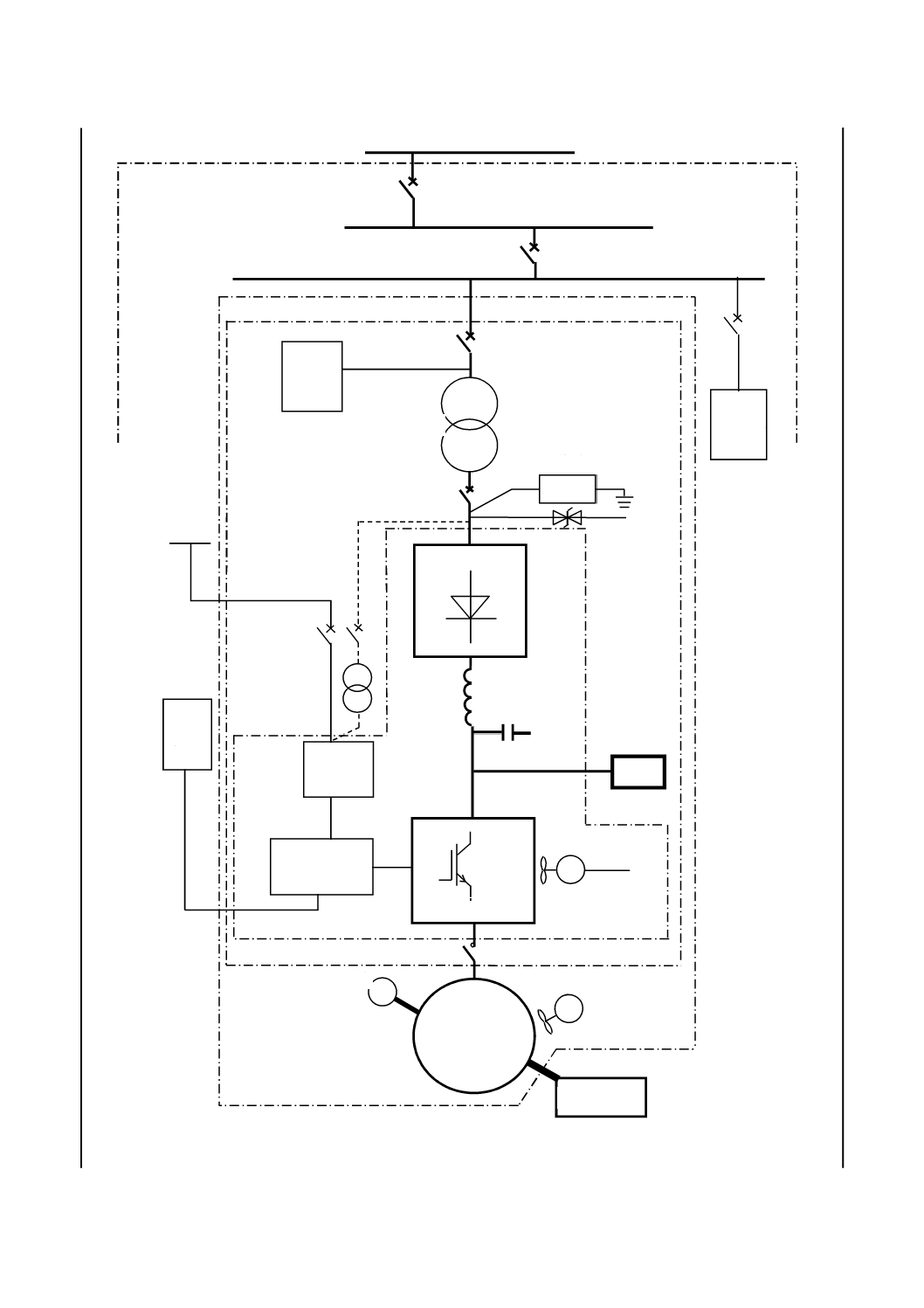
を用いたPDSの例を,図1Aに示す。
3.1A.2
設備 (installation)
少なくとも,PDS及びPDSが駆動する負荷装置を備えた装置又は装置群。
設備又は設備の一部
PDS(駆動システム)
CDM(駆動モジュール)
電動機及びセンサ
被駆動装置
BDM(基本駆動モジュール)
制御装置及び保護装置
変換器
受電部
界磁電源
発電制動装置
システム制御及びシーケンス制御
その他
6
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図1A−PDSの構成図(交流電動機を用いた例)
工業用配電系統又は商用電力系統
PCC(共通結合点)
IPC(構内結合点)
地絡検出
電動機
被駆動装置
センサ
電動機冷却ファン
変換器冷却ファン
制御装置及び
保護装置
上位
制御
装置
高調波
フィルタ
発電制動
装置
順変換器
逆変換器
制御装置
電源
補助電源
インタフェース
BDM
CDM
PDS
変圧器
高調波
フィルタ
7
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2
分類
3.2.1
第1種環境 (first environment)
住宅環境,並びに住宅用の低電圧商用電力系統に中間変圧器なしで接続する商業及び軽工業施設を含む
環境。
3.2.2
第2種環境 (second environment)
商業,軽工業及び工業用環境。ただし,住宅用の低電圧商用電力系統に中間変圧器なしで接続する商業
及び軽工業施設を除く。
3.2.3
カテゴリC1のPDS (PDS of category C1)
第1種環境で用いることを想定した,定格電圧が600 V以下のPDS。
3.2.4
カテゴリC2のPDS (PDS of category C2)
第1種環境及び第2種環境で用いることを想定し,組込み装置でも移動可能な装置でもない,定格電圧
600 V以下のPDS。ただし,第1種環境で用いる場合には,専門家だけが設置及び調整することができる。
注記 専門家とは,EMCの特性を含め,PDSの設置及び調整において必要な技術をもつ人又は組織を
いう。
3.2.5
カテゴリC3のPDS (PDS of category C3)
第2種環境で用いることを想定し,かつ,第1種環境で用いることを想定していない定格電圧600 V以
下のPDS。
3.2.6
カテゴリC4のPDS (PDS of category C4)
定格電圧600 V若しくは定格電流100 Aを超える,又は第2種環境の複雑なシステムで用いることを想
定したPDS。
3.3
設置場所,ポート及びインタフェース
3.3.1
使用場所(試験のための)[in situ (for test)]
最終使用者の通常の使用のために装置を設置する場所。
3.3.2
テストサイト(放射)[test site (radiation)]
規定の条件で,供試機器が放射する電磁波を正確に測定するために必要な要求事項を満たすサイト。
3.3.3
ポート (port)
電磁エネルギー若しくは信号を送り出す若しくは受け取る,又は装置若しくはネットワークの変数を観
測若しくは測定する,装置又はネットワークの入出力。
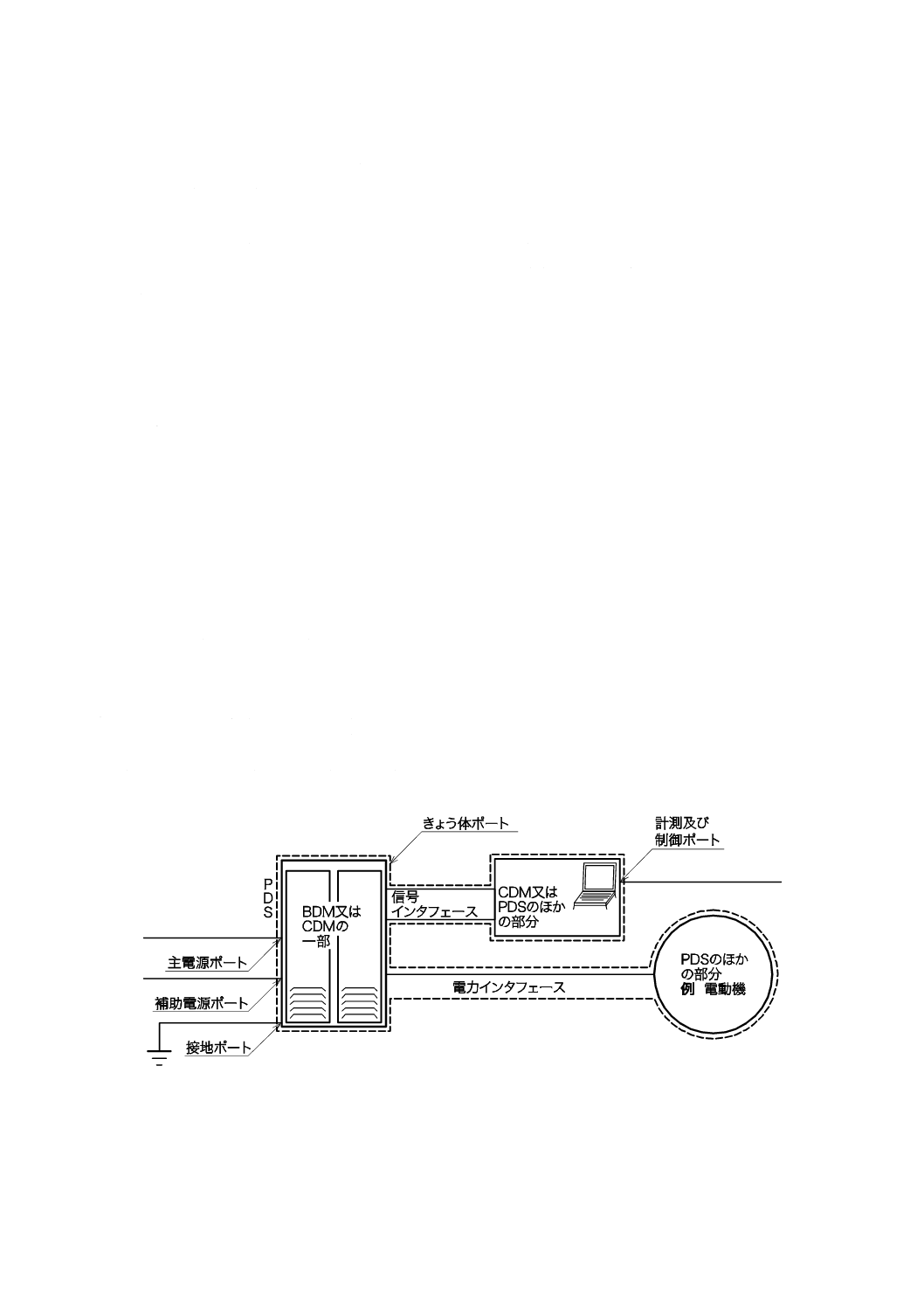
注記 PDSのポートの多様性を,図2に示す。
8
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.3.4
きょう(筐)体ポート (enclosure port)
電磁界を放射又は入射するPDSの物理的な境界(図2参照)。
3.3.5
計測及び制御ポート (port for process measurement and control)
図1Aで定義したPDSに,計測装置及び制御装置を接続する導体又はケーブルのための入出力ポート(図
2参照)。
3.3.6
電源ポート (power port)
ほかの設備にも給電する電源にPDSを接続するポート。
3.3.7
主電源ポート (main power port)
PDSに供給する電力のうち,電力変換を経て,電動機が機械的な力に変換する電力を供給するための電
源ポート。
3.3.8
補助電源ポート (auxiliary power port)
PDSの補助回路だけに電力を供給する電源ポート。界磁回路がある場合には,補助回路は界磁回路も含
む。
3.3.9
機械的リンク (mechanical link)
PDSの電動機の軸とプロセスの被駆動装置との間の機械的な接続。
3.3.10
信号インタフェース (signal interface)
BDM又はCDM(以下,BDM/CDMという。)を,PDS内部の別の部分に接続する信号線のための入出
力(以下,I/Oという。)接続部(図2参照)。
図2−PDSの内部インタフェース及びポートの例
3.3.11
電力インタフェース (power interface)
PDS内の電力を分配するための接続部(図3及びE.1参照)。
9
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 PDSの電力インタフェースは,異なる形態及び接続をもつ場合がある。
・BDM/CDM内
電力インタフェースは,BDM/CDMのある部分からBDM/CDMの別の部分への電力の分配
のための接続の場合がある。一つの電力インタフェースが,PDSの異なるコンポーネントに
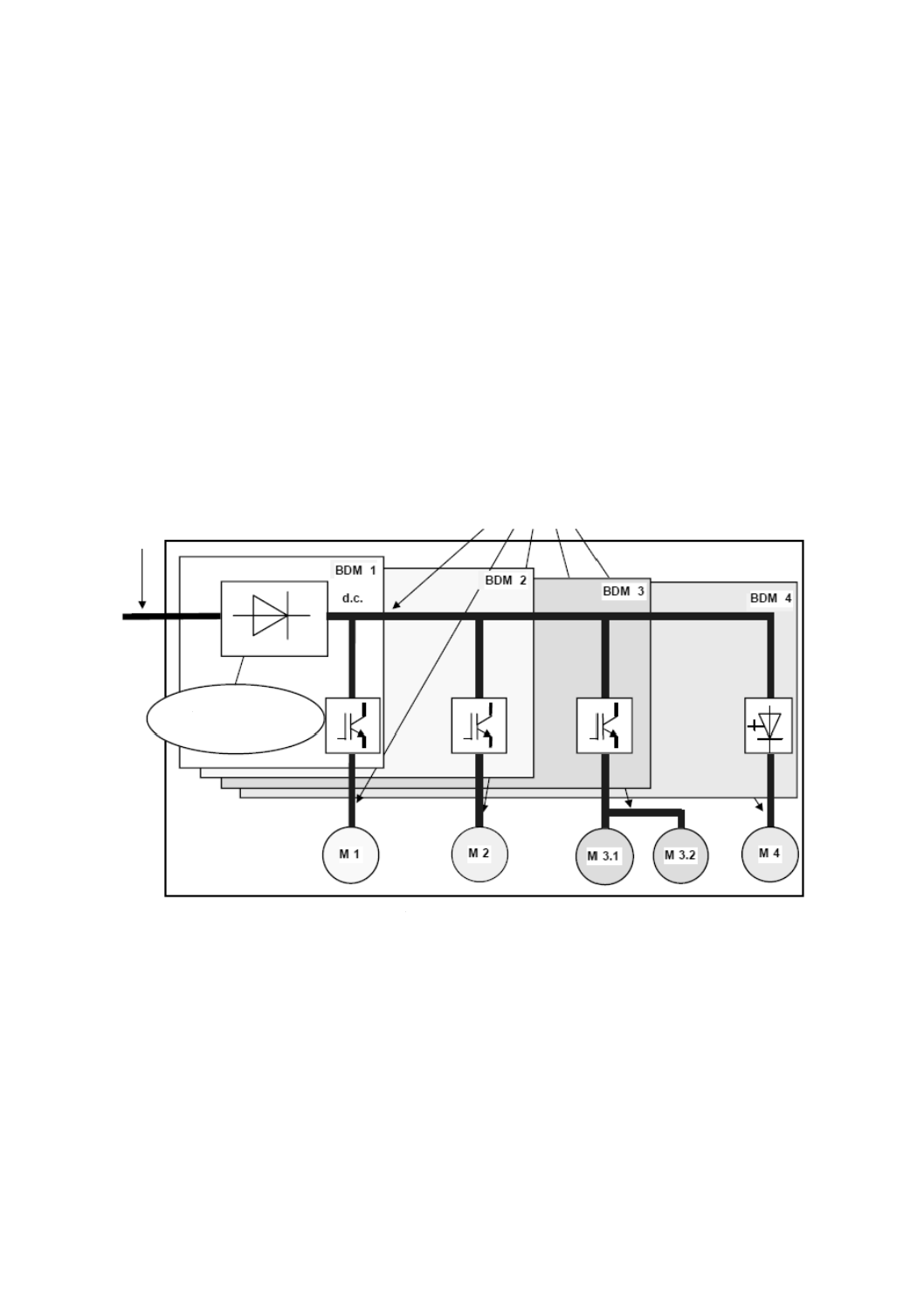
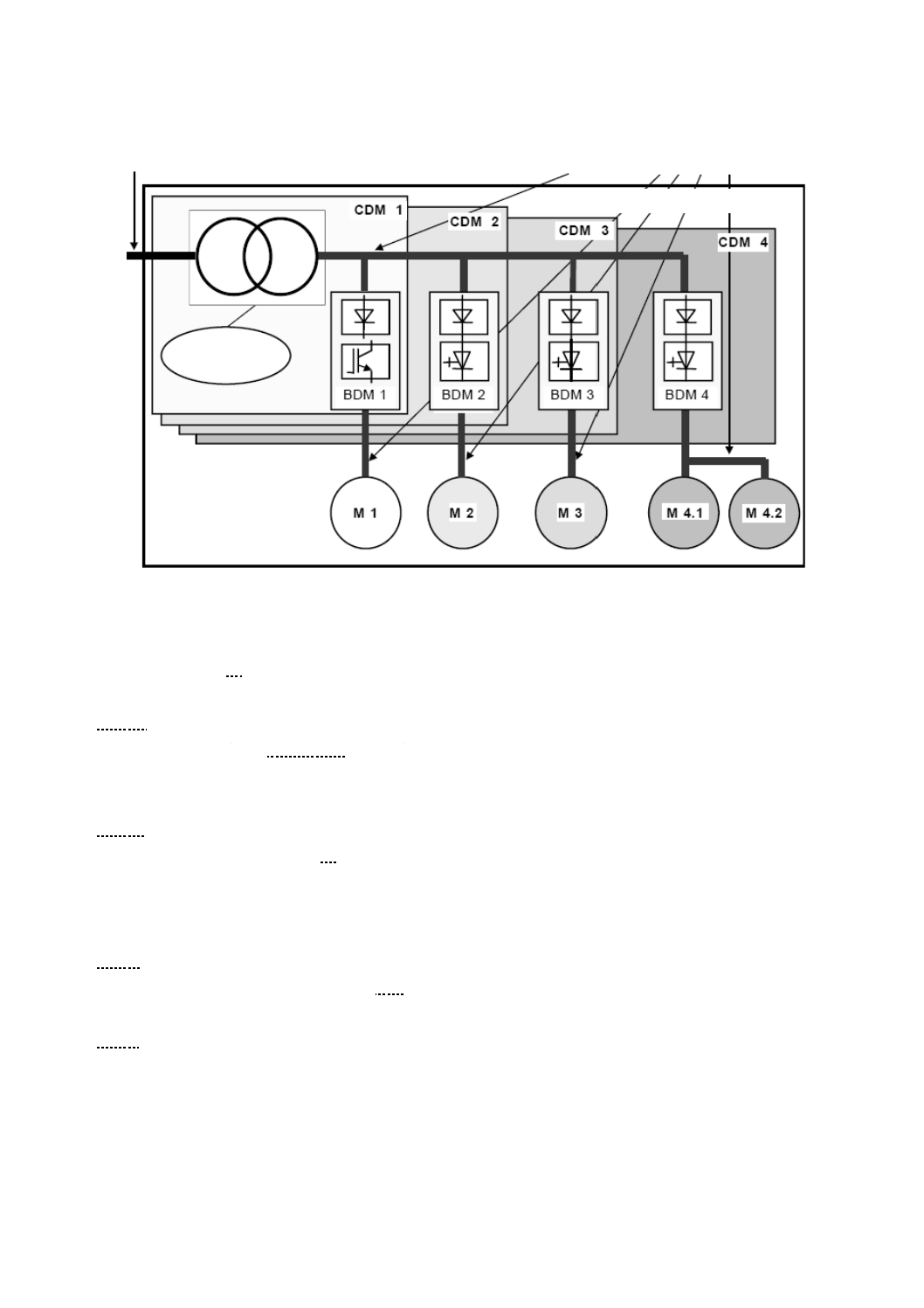
共通の場合もある。例として,図3及び図4参照。
図3は,1台の順変換器から複数の逆変換器に電力を分配する電力インタフェースを示す。
順変換器では,電力は主電源から直流に変換される。逆変換器では,電力は直流から交流電
動機に直接供給できる交流に変換される。
図4は,変圧器(CDMの一部である)の二次側から個別のBDMに電力を分配する電力イ
ンタフェースを示す。
・PDS内
逆変換器と電動機との接続も電力インタフェースである。電動機によって電力を機械的な
力に変換する前の電力インタフェースである。
図3−共通直流母線をもつPDSの電力インタフェース
電源ポート
電力インタフェース
全BDMに共通
複数の電動機をもつPDS
10
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図4−共通入力変圧器をもつ電力インタフェース
3.3.12
結合点,PC (point of coupling)
電磁両立性を考慮する点。
3.3.12A
共通結合点,PCC (point of common coupling)
商用電力系統又は工業用配電系統において,特定の負荷設備に電気的に最も近い結合点。その他の負荷
が既に接続しているか,接続する可能性がある(図1A参照)。
3.3.12B
構内結合点,IPC (in-plant point of coupling)
構内の電力系統のうち,特定の負荷に電気的に最も近い結合点。その他の負荷が既に接続しているか,
接続する可能性がある。
3.4
PDSのコンポーネント
3.4.0A
コンポーネント(PDSの)[component (of the PDS)]
PDSを構成する,駆動モジュール及び電動機。
3.4.0B
サブコンポーネント(PDSの)[sub-component (of the PDS)]
製造業者が指定する固有の機能をもち,切り離して動作できる,装置の物理的な一部。PDSのコンポー
ネントは,サブコンポーネントに分割してもよい。
注記 例えば,CDMの制御装置が切り離して動作できるような場合,この制御装置はサブコンポー
ネントである。
電源ポート
電力インタフェース
複数の電動機をもつPDS
全BDMに
共通
11
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.4.1
駆動モジュール,CDM (complete drive module)
BDM及び入力変圧器,遮断器,サージ電圧保護機器,BDMの入力側又は出力側に接続した開閉器,発
電制動装置,変換器冷却用熱交換器,純水装置などの周辺機器を含む駆動システム。電動機及び電動機の
軸に機械的に取り付けるセンサは,含まない。
3.4.2
電動機 (motor)
電気的エネルギーを機械的エネルギーに変換する電気機械。コンポーネントとしての電動機には,運転
モードの支援及びCDMとの相互作用に関連し,電動機に取り付けるセンサをすべて含む。
3.4.3
(対応国際規格の定義を不採用とした。)
3.4.3A
基本駆動モジュール,BDM (basic drive module)
変換器及びそのほかに,回転速度,トルク,電流,周波数,電圧などの制御装置,保護装置,デバイス
のゲート駆動装置,制御装置・ゲート駆動装置の電源,直流リンクに接続したリアクトル,コンデンサな
どで構成するフィルタ,変換器の冷却ファンなどで構成する駆動モジュール。
3.4.3B
(BDMの)変換器 [converter (of the BDM)]
電圧,電流及び/又は周波数の一つ以上を変えることによって,主電源から供給される電力の形態を電
動機に供給する電力の形態に変換するユニット。
注記1 変換器は,転流回路で構成し,トランジスタ,サイリスタ又はほかのパワー半導体デバイス
によって制御する。
注記2 変換器の転流方式には,電源転流,負荷転流又は自励転流がある。変換器は,例えば,1台
以上の順変換器又は逆変換器で構成する。
4
共通要求事項
4.1
一般条件
エミッション又はイミュニティの観点から,すべての現象は個別に考慮する。限度値は,異なる現象の
組合せによる影響は考慮しないという条件で規定する。
EMCに関する状況を現実的に評価するため,試験は,代表的な機器構成で行う。
イミュニティの評価では,対象とするPDS,構成,ポート,技術仕様及び動作条件に応じて試験内容を
規定している(附属書A及びB参照)。
4.2
試験
4.2.1
条件
IEC 60146-1-1及びIEC 61800-2は,行う試験を形式試験,常規試験及び特殊試験に区別している。この
規格で規定するすべての試験は,別の指定がない限り形式試験として行う。PDSは,この規格で規定する
試験方法で測定し,EMC要求事項に適合しなければならない。
EMC試験中にPDSに故障が発生したときに備えて,必要に応じて安全対策を施す。
CDMの試験は,製造業者が指定したケーブル及び接地方式を用いて行う。製造業者から特に指定がな
い限り,適切な定格*の標準電動機に接続する。受動負荷条件(抵抗又は誘導性抵抗)を追加して適用する
12
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
場合もある(例えば,低周波エミッションの評価のため)。
注*
適切な定格とは,規定の試験を行うために適切な定格であり,CDMの容量に対応した定格とは
限らない。
試験,試験方法,試験特性及び試験セットアップは,引用規格で規定しており,この規格で重複して規
定しない。ただし,実際の試験の実施及び適用に当たって,変更若しくは追加の要求事項及び情報,又は
特有の試験方法が必要な場合は,この規格で規定する。
4.2.2
試験報告書
試験結果は,試験報告書に記載する。試験報告書は,明確に,かつ,あいまいにならないように試験の
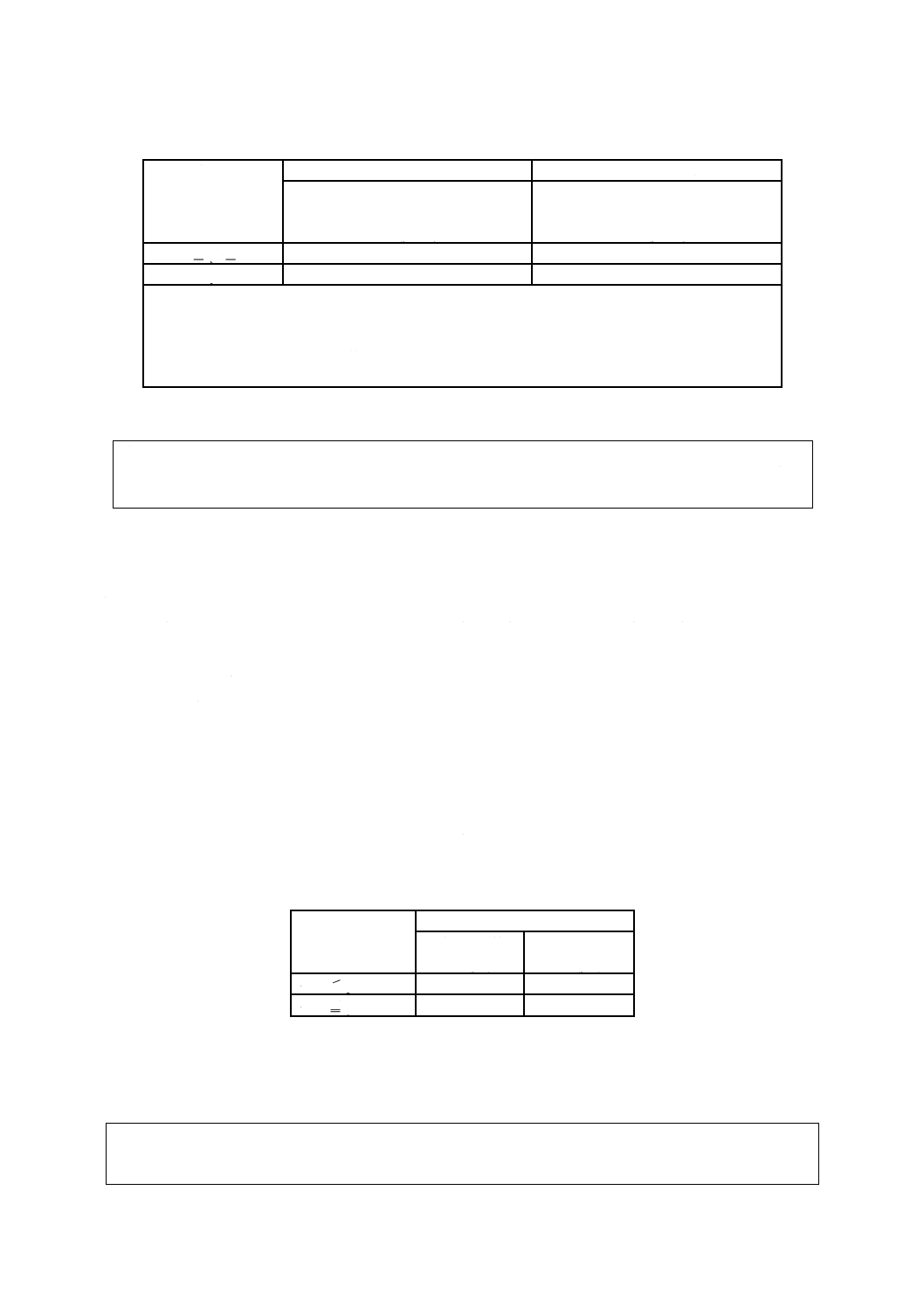
必要関連情報(例えば,負荷条件,ケーブル配置など)を記載する。製造業者は,表1のどの項目に対し
て,どの性能判定基準を指定し,どのような内容で合否を判定したかを記載する。表1のどの項目を選定
するかは,製造業者の責任とする。
試験報告書には,試験時の機器配置の選定理由を説明する。実際の動作条件相当になるように,かつ,
端子のすべての終端方式を確認できるように,十分な数の端子に対して試験する。
試験は,定格入力電圧で,かつ,再現可能な方法で行う。
4.3
使用者のための説明書
限度値の設定及びこの規格の構成は,設置業者及び使用者には製造業者からのEMCに関する推奨事項
に従う責任があるという考えに基づいている。
製造業者は,想定する使用環境における典型的なシステムを対象として,BDM及びCDMの設置業者,
又はPDSの使用者が正しく設置するために必要な説明書を提供しなければならない。
要求限度値を満たすために特別なEMC対策及び条件が必要な場合,説明書にそのことを明記する。特
別なEMC対策及び条件には,次のような事項がある。
・ 許容される最大及び最小の電力系統インピーダンス
・ シールドケーブル又は特殊ケーブルの使用(電力用及び/又は制御用)
・ ケーブルのシールドの接続に関する要求事項
・ 許容最大ケーブル長
・ ケーブルの分離
・ フィルタなどの外部機器の使用
・ 機能接地(安全対策以外を目的とした装置又はシステムの接地)
異なる環境で用いる場合に異なる機器又は接続要求事項を適用する場合,そのことも記載する。
PDSに追加でき,かつ,EMC要求事項に適合する補助装置の一覧表を使用者が入手できるようにする。
この説明は,試験結果で決定する推奨配置条件を説明するために,試験報告書の一部として記載しても
よい。
5
イミュニティ要求事項
5.1
一般条件
5.1.1
性能判定基準
システム性能は,BDM/CDM又はPDS全体に対して製造業者が指定した機能に関係する。
BDM/CDM又はPDSのサブコンポーネントの性能は,サブコンポーネントに対して製造業者が指定した
機能に関係する。
イミュニティを示すために,システム性能の代わりにサブコンポーネントの性能を試験してもよい(5.1.2
13
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参照)。
この規格は,サブコンポーネント(BDM/CDMのコンポーネントの場合もある。)に対して試験するこ
とを認めているが,サブコンポーネントだけを分離して適合性を評価するための規格ではない。
性能判定基準は,外部からの妨害に対するPDSのイミュニティを確認するために用いる。EMCの観点
から,図1に示すどの設備も適切に動作しなければならない。
PDSの主機能には,電気系と機械系との間でのエネルギーの変換,及びそのための情報処理がある。
PDS及びそのサブコンポーネントに対してある種の妨害が与える影響の程度を,表1に示す三つの性能
判定基準A,B及びCに分類する。PDSは,5.2及び5.3で規定する試験を行ったときに,試験ごとに適用
する性能判定基準を満足しなければならない。
5.1.2
性能判定項目の分類及び選定
5.1.2.1
一般又は特定システム性能
表1 a) の“一般システム性能”の項目は,PDSの用途及びPDSの基本構成に従って指定する。負荷は,
製造業者の仕様の範囲内とし,実際の負荷を試験報告書に記載する。
“特定システム性能:トルク特性”は,製品仕様で明確に指定する場合だけ試験する。この場合,トル
ク特性は,直接的に又は間接的に試験できる。直接的試験では,イミュニティをもったトルクメータを用
いてトルク変動の有無を測定する。
トルク特性試験は,試験で加える妨害に対して指定のイミュニティをもつ特別の試験装置を必要とする。
この試験装置は,試験セットアップのイミュニティを参考測定によって証明してから用いることができる。
トルクへの妨害の評価は,トルクトランスジューサによるトルク測定,トルクを発生させる電流の計算若
しくは測定,又はその他の間接的方法によって評価できる。
なお,イミュニティをもった適切な負荷を試験場所に用意する。
トルク性能は,妨害を加えたときに指定された裕度の範囲内で電流又は回転速度を一定に保持する能力
によって指定する(5.1.3も参照)。したがって,電流性能の試験は,トルク特性の間接的試験として採用
できる。EMCに関する試験では,特に指定がない限り,変換装置の出力電流が十分な精度でトルクを表す
ものとみなす。これに代わる間接的試験方法として,慣性定数の合計値が与えられる場合は,トルク性能
の評価に速度性能を用いることができる。
5.1.2.2
サブコンポーネントの性能
PDSの物理的寸法の制約,試験場所の電流若しくは定格電源容量の制約,又は負荷条件の理由でPDS
を試験場所で運転できない場合は,表1 b) の“サブコンポーネントの性能”の項目で分類するサブコンポ
ーネントの試験を行うことが望ましい。いずれの場合も試験セットアップは,試験中のPDS又はサブコン
ポーネントに印加する電磁妨害の最大レベルに耐えなければならない。
情報処理装置及びセンサ並びに追加補助機器(ある場合)の試験は,PDSが関連するポート又はインタ
フェースをもつ場合だけ行う。サブコンポーネントがこの規格に準拠しているかを判定するには,表1 b)
のサブコンポーネントの性能試験で十分とする。
情報処理装置又はセンサの試験では,データが正しく検出,処理又は通信されているかを確認するため
の適切な装置を用意しなければならない。この装置は,試験中,正しく動作できるための十分なイミュニ
ティをもたなければならない。
14
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
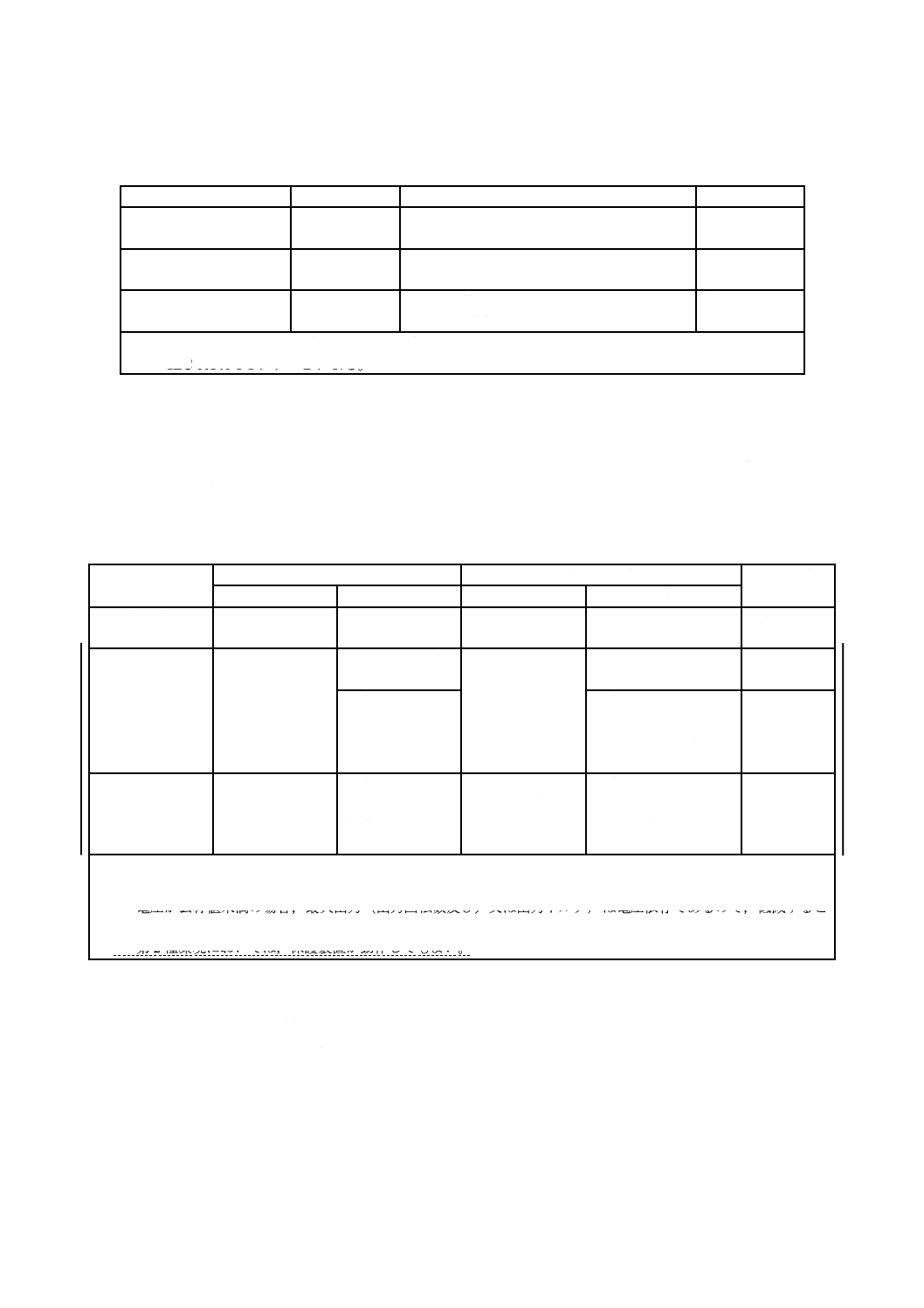
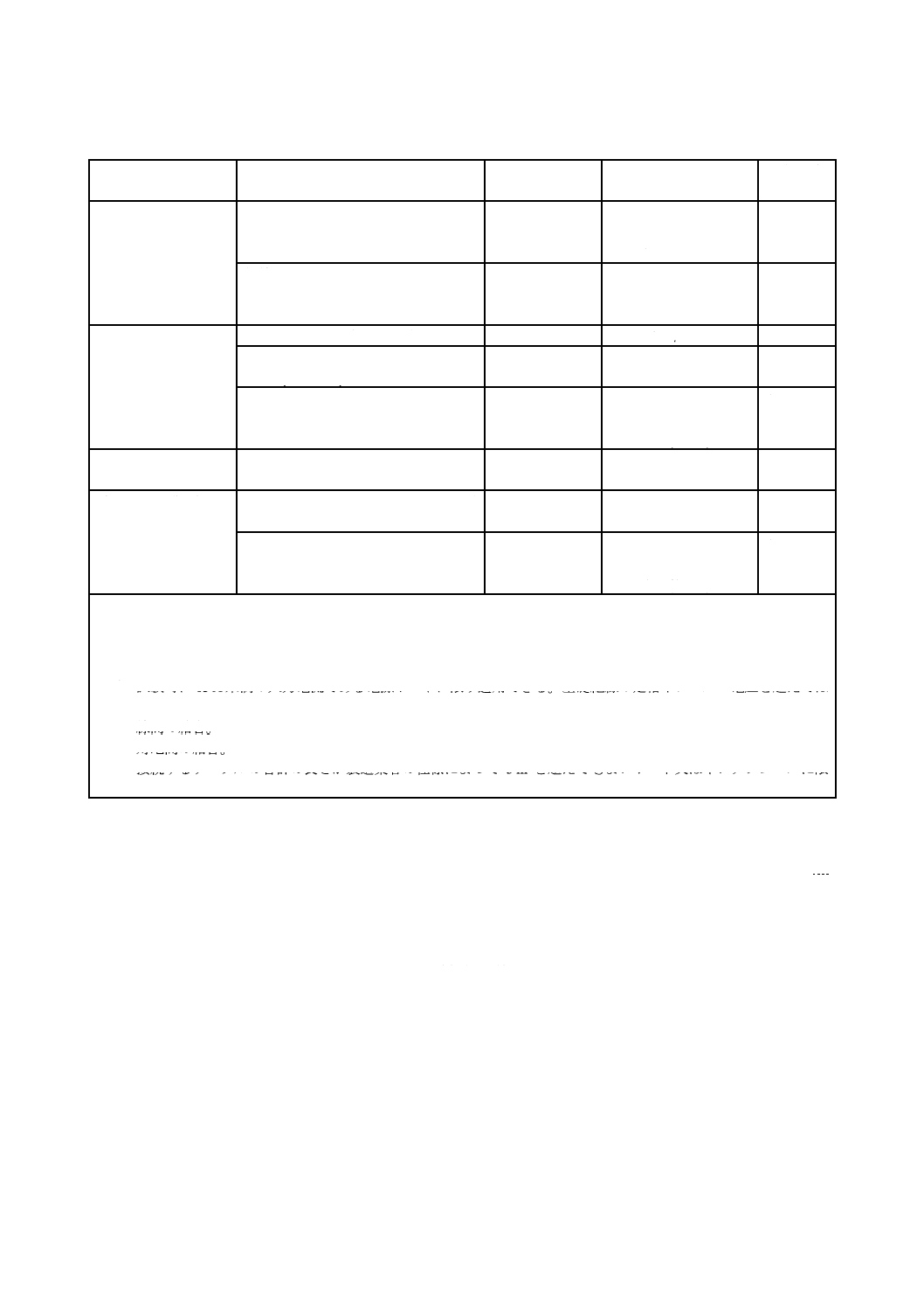
表1−PDSの受入れを検証するための電磁妨害に対する性能判定基準
a) システム性能
項目
性能判定基準a)
A
B
C
一般システム性能
動作特性に特別な変化がな
い。
規定裕度の範囲で想定する動
作を行っている。
動作特性のわずかな変化(目
に見える,又は耳に聞こえる)
が生じる。
自己回復する。
運転停止,動作特性の大きな
変化がある。
保護装置の動作b)。
自己回復しない。
特定システム性能
トルク特性
規定裕度内のトルク変動しか
ない。
規定裕度を超えた一時的なト
ルクの変動がある。
自己回復する。
トルクの喪失。
自己回復しない。
注a) 性能判定基準A,B及びC:誤始動があってはならない。誤始動は,電動機が“停止”状態から,意図せずに
動作する異常動作である。
b) 性能判定基準C:操作者の操作(手動リセット)によって機能が回復する。回生運転している電源転流形変換
器では,ヒューズが溶断してもよい。
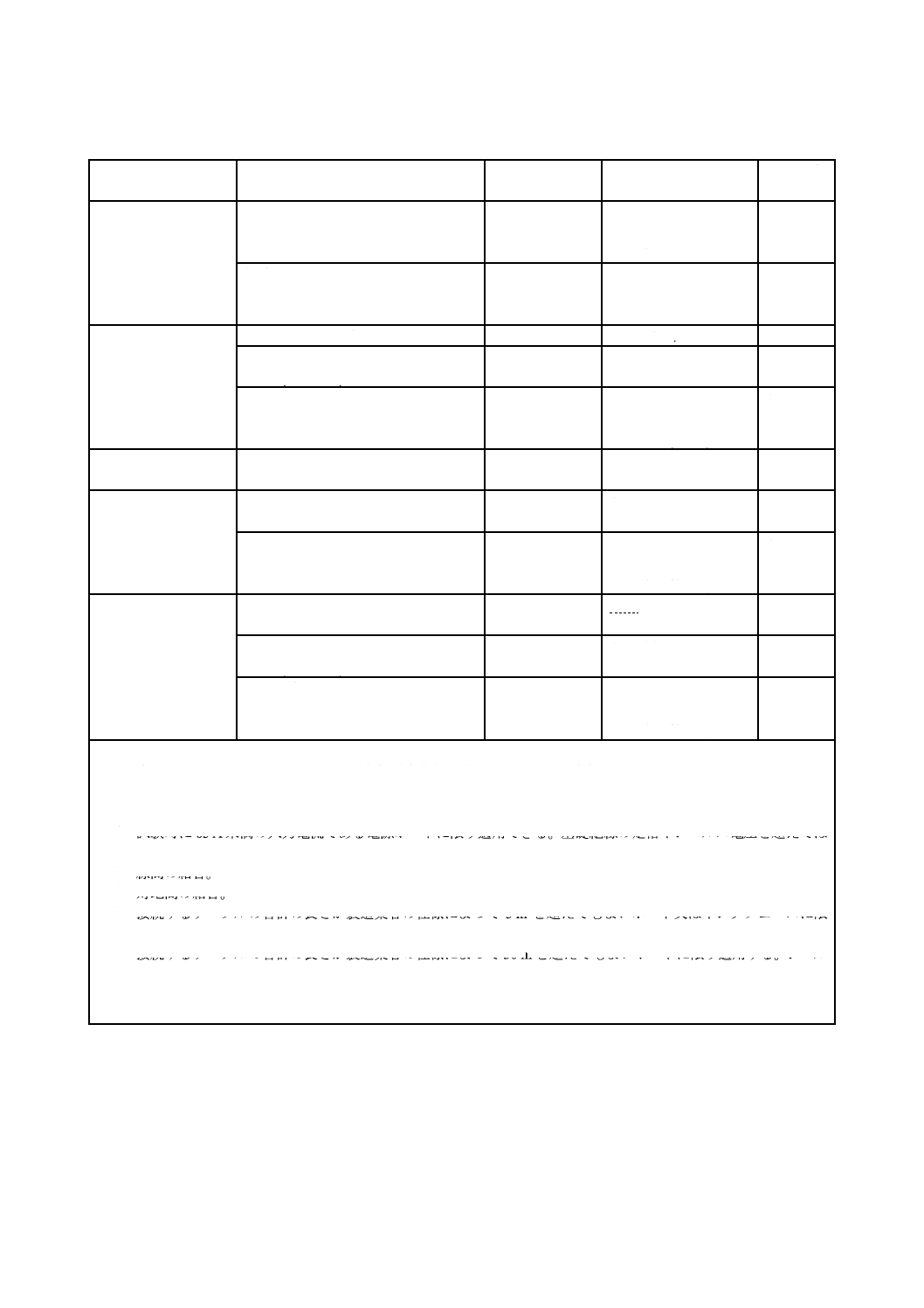
b) サブコンポーネントの性能
項目
性能判定基準a)
A
B
C
変換器の動作
変換器の動作が正常。
一時的な動作不良。PDSの意
図しない運転停止はない。
運転停止,保護装置の動作b)。
変換器内のプログラムが喪失
しない(使用者のプログラム
を含む。)。
設定が喪失しない。
自己回復しない。
情報処理装置及び
センサ
外部機器との通信及びデータ
交換に障害が生じない。
通信が一時的に妨害される
が,内部又は外部の装置に運
転停止を起こすような誤動作
は発生しない。
通信の誤動作,データ,情報
の喪失。
情報処理装置内のプログラム
が喪失しない(使用者のプロ
グラムを含む。)。
設定が喪失しない。
自己回復しない。
表示装置及び制御
パネルの動作
発光ダイオードの輝度にわず
かな変動がある,又は文字表
示にわずかな動きがあるだけ
で,表示装置の情報表示に変
化がない。
情報表示の一時的変化,発光
ダイオードの不要な点滅。
動作停止,データの喪失,又
は許容外の動作,明らかに誤
った表示。
表示装置及び制御パネル内の
プログラムが喪失しない(使
用者のプログラムを含む。)。
設定が喪失しない。
注a) 性能判定基準A,B及びC:誤始動があってはならない。誤始動は,電動機が“停止”状態から,意図せずに
動作する異常動作である。
b) 性能判定基準C:操作者の操作(手動リセット)によって機能が回復する。回生運転している電源転流形変換
器では,ヒューズが溶断してもよい。
5.1.3
試験中の条件
試験中にBDM/CDMに電動機を接続している場合は,電動機そのものに対するイミュニティ試験は,必
要としない。
該当する関連ポートがあるときは,関連ポートに対して試験を行う。オプションの附属器具があるとき
15
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
は,附属器具のポートも試験する。これらの試験は,明確に指定し,かつ,再現できる方法で,ポート単
位で行う。ただし,幾つかの計測及び制御ポート,又は信号インタフェースが物理的に同じ構成(配置)
である場合には,その形式のポート又はインタフェースの一つにだけ行えばよい。
最小要求事項,試験及び性能判定基準を5.2及び5.3で規定する。性能判定基準は,5.1.1参照。
5.2
イミュニティの基本的要求事項−低周波妨害
5.2.1
共通原則
この箇条の要求事項は,低周波妨害に対するPDSのイミュニティを設計するために用いる。
イミュニティ要求事項のために,製造業者は,試験,計算,又はシミュレーションを用いて適合するこ
とを示してもよい。ほかに指定がない限り,主回路が要求する性能判定基準に従い,かつ,入力回路(フ
ィルタなど)の定格を超えない場合,適合しているとみなす。
注記1 これらの現象の多くは共通規格では要求しないが,PDSの主回路の容量を決める上で重要で
ある。特に,入力電流が16 Aを超えるか,又は供給電圧が400 Vを超えるときに,これらの
現象の多くに対してイミュニティ試験を行うことは難しい。ただし,長年の経験から,主回
路が正しく動作する場合,一般に制御回路及び補助回路もイミュニティがあることが分かっ
ている。例えば,電源装置はコンデンサをもつため,電圧変動の影響を受けにくい。また,
ファンは慣性があるので,電圧変動の影響を受けにくい。
この規格の要求事項に適合することを,説明書に記載する。その適合を試験によって立証する場合には,
関連するJIS C 61000-4 (IEC 61000-4) 規格群を参考にしてもよい。
注記2 PDSの主回路及び補助回路の電力供給条件は,IEC 61800-1,IEC 61800-2又はIEC 61800-4
で既に規定している。これらの供給条件には,周波数変動,周波数変化率,電圧変動,電圧
揺動,電圧不平衡,高調波及び転流ノッチがある。
電気的妨害がイミュニティレベルを超えたときに起こり得る結果の定義(IEC 60146-2による。)は,次
のとおりとする。
F:性能低下するが運転継続
T:保護装置による運転停止
D:損傷(ヒューズの溶断は除く。)
これらの結果はEMC関連事項ではなく,安全解析の一部とみなすのが望ましい。
5.2.2
高調波及び転流ノッチ又は電圧ひずみ
5.2.2.1
低電圧PDS−(電圧ひずみ)
PDS又はBDM/CDMは,表2に規定するイミュニティレベルを満足しなければならない。表2のレベル
が,入力回路(フィルタなど)の定格を超えないことを確認する。転流ノッチの解析は,時間領域で行う。
製造業者は,5.2.1に従って計算,シミュレーション又は試験によってイミュニティを確認してもよい。
注記 総合高調波ひずみ率 (THD) に対するノッチの影響を周波数領域で解析した場合には,B.1に示
す特定の悪影響を明確にできない。
16
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2−低電圧PDSの電源ポートにおける
高調波及び転流ノッチ又は電圧ひずみに関する最小イミュニティ要求事項
現象
第1種環境
第2種環境
性能判定
基準
参照規格
レベル
参照規格
レベル
高調波
(THD及び
各次高調波)
IEC 61000-2-2
両立性レベル(THD:
8 %,各次高調波:表2A)
の値
IEC 61000-2-4
クラス3
両立性レベル(THD:
10 %,各次高調波:表2B,
表2C及び表2D)の値
A
短時間高調波
(15秒未満)
IEC 61000-2-2
定常両立性レベル
(THD:8 %,各次高調
波:表2A)の1.5倍
IEC 61000-2-4
クラス3
定常両立性レベル
(THD:10 %,各次高調
波:表2B,表2C及び表
2D)の1.5倍
B
転流ノッチ
IEC/TR
61000-1-1
要求なし
IEC 60146-1-1
クラスB
ノッチ深さ40 %
ノッチ面積 250 %度
A
表2A−第1種環境における各次高調波電圧の両立性レベル
3の倍数以外の奇数次高調波
3の倍数の奇数次高調波
偶数次高調波
高調波次数
h
高調波電圧
%
高調波次数
h
高調波電圧
%
高調波次数
h
高調波電圧
%
5
6
3
5
2
2
7
5
9
1.5
4
1
11
3.5
15
0.4
6
0.5
13
3
21
0.3
8
0.5
17≦h≦49
2.27×(17/h)−0.27
21<h≦45
0.2
10≦h≦50
0.25×(10/h)+0.25
表2B−第2種環境における各次高調波電圧の両立性レベル(3の倍数以外の奇数次高調波)
高調波次数
h
クラス1
%
クラス2
%
クラス3
%
5
3
6
8
7
3
5
7
11
3
3.5
5
13
3
3
4.5
17
2
2
4
17<h≦49
2.27×(17/h)−0.27
2.27×(17/h)−0.27
4.5×(17/h)−0.5
表2C−第2種環境における各次高調波電圧の両立性レベル(3の倍数の奇数次高調波)
高調波次数
h
クラス1
%
クラス2
%
クラス3
%
3
3
5
6
9
1.5
1.5
2.5
15
0.3
0.4
2
21
0.2
0.3
1.75
21<h≦45
0.2
0.2
1
17
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2D−第2種環境における各次高調波電圧の両立性レベル(偶数次高調波)
高調波次数
h
クラス1
%
クラス2
%
クラス3
%
2
2
2
3
4
1
1
1.5
6
0.5
0.5
1
8
0.5
0.5
1
10
0.5
0.5
1
10<h≦50
0.25×(10/h)+0.25
0.25×(10/h)+0.25
1
5.2.2.2
600 Vを超える定格電圧のPDS(電圧ひずみ)
5.2.2.2.1
主電源ポート
PDS又はBDM/CDMは,表3に規定するイミュニティレベルを満足しなければならない。表3のレベル
が,入力回路(フィルタなど)の定格を超えないことを確認する。転流ノッチの解析は,時間領域で行う。
製造業者は,5.2.1に従って,計算,シミュレーション又は試験によってイミュニティを確認してもよい。
注記 総合高調波ひずみ率 (THD) に対するノッチの影響を周波数領域で解析した場合には,B.1に示
す特定の悪影響を明確にできない。
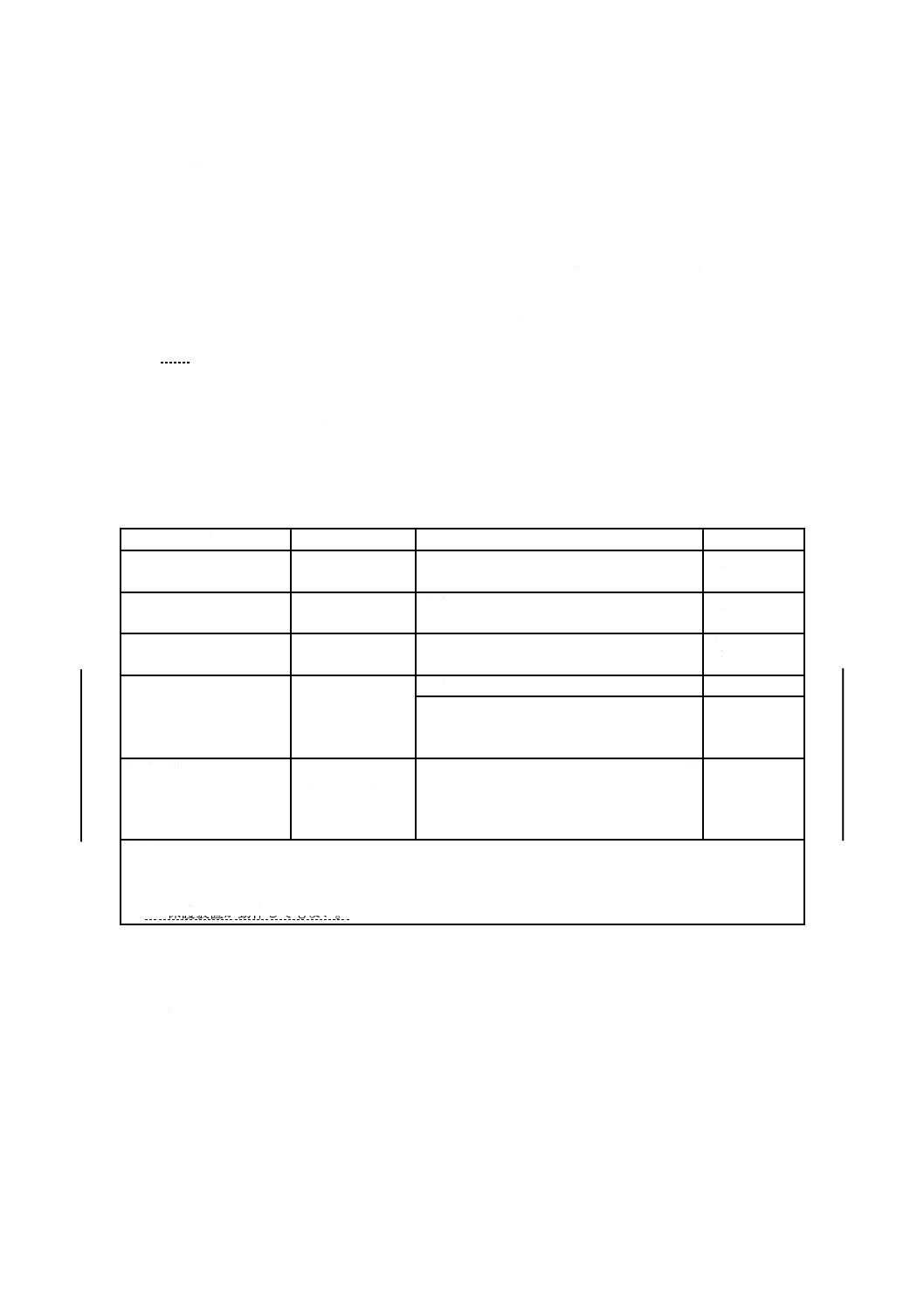
表3−600 Vを超える定格電圧のPDSの主電源ポートにおける
高調波及び転流ノッチ又は電圧ひずみに対する最小イミュニティ要求事項
現象
参照規格
レベル
性能判定基準
高調波
(THD及び各次高調波)
IEC 61000-2-4
クラス3
両立性レベル(THD:10 %,各次高調波:
表2B,表2C及び表2D)の値
A a)
短時間高調波
(15秒未満)
IEC 61000-2-4
クラス2
定常両立性レベル(THD:10 %,各次高調波:
表2B,表2C及び表2D)の1.5倍
A a)
次数間高調波
(対応国際規格の規定を不採用とした)
短時間次数間高調波
(15秒未満)
(対応国際規格の規定を不採用とした)
転流ノッチ
IEC 60146-1-1
ノッチ深さ:40 %ULWM(クラスB)b)
ノッチ面積c):125 %度(クラスC)
A a)
注a) このレベルを超えた場合の起こり得る結果は,T(5.2.1参照)とする。
b) ULWMは,過渡的な値を除く線間電圧の瞬時最大値(B.1.1参照)。
c) IEC 60146-1-1のクラスCは,変圧器の一次側に適用する。
5.2.2.2.2
補助電源ポート
PDSの補助電源ポートは,表4に規定するイミュニティレベルを満足しなければならない。表4のレベ
ルが,入力回路(フィルタなど)の定格を超えないことを確認する。転流ノッチの解析は,時間領域で行
う。製造業者は,5.2.1に従って,計算,シミュレーション又は試験によってイミュニティを確認してもよ
い。
注記 総合高調波ひずみ率 (THD) に対するノッチの影響を周波数領域で解析した場合には,B.1に示
す特定の悪影響を明確にできない。
18
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
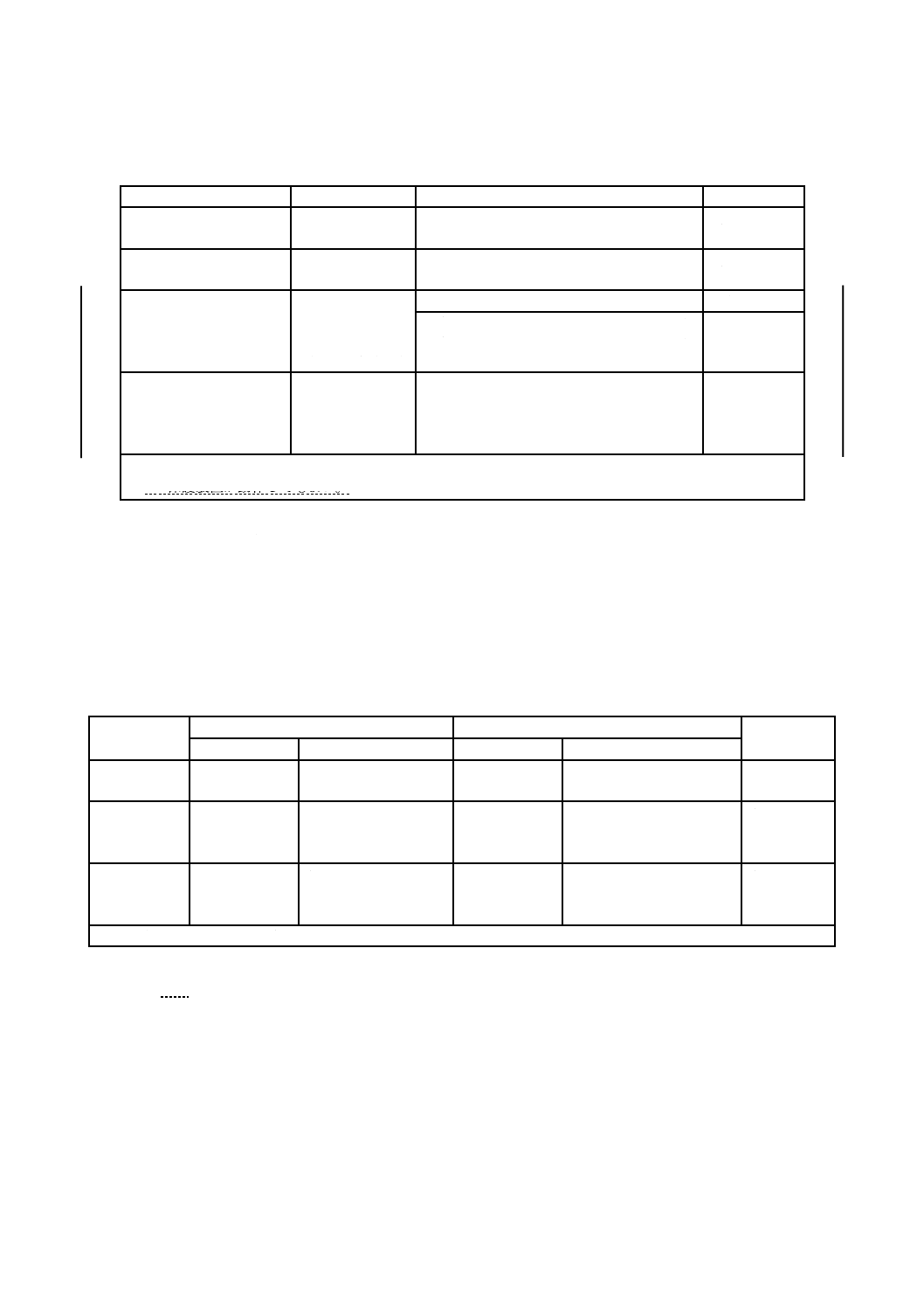
表4−PDSの低電圧補助電源ポートにおける
高調波及び転流ノッチ又は電圧ひずみに対する最小イミュニティ要求事項
現象
参照規格
レベル
性能判定基準
高調波
(THD及び各次高調波)
IEC 61000-2-4
クラス2
両立性レベル(THD:10 %,各次高調波:
表2B,表2C及び表2D)の値
Aa)
短時間高調波
(15秒未満)
IEC 61000-2-4
クラス2
定常両立性レベル(THD:10 %,各次高調波:
表2B,表2C及び表2D)の1.5倍
Aa)
転流ノッチ
IEC 60146-1-1
ノッチ深さ:40 %ULWM
ノッチ面積b):250 %度
Aa)
注a) このレベルを超えた場合の起こり得る結果は,T(5.2.1参照)とする。
b) IEC 60146-1-1クラスBによる。
5.2.3
電圧変動(電圧変動,電圧変化,電圧揺動),電圧ディップ及び短時間停電
5.2.3.1
低電圧PDS(電圧変動)
PDS又はBDM/CDMは,表5に規定するイミュニティレベルを満足しなければならない。製造業者は,
5.2.1に従って計算,シミュレーション又は試験によってイミュニティを確認してもよい。
表5−低電圧PDSにおける電圧変動,電圧ディップ及び短時間停電に対する最小イミュニティ要求事項
現象
第1種環境
第2種環境
性能判定
基準
参照規格
レベル
参照規格
レベル
電圧変動(公称電
圧に対する偏差)
IEC 61000-2-2
±10 %
IEC 61000-2-4
クラス2
±10 % a)
A b)
電圧ディップ
JIS C 61000-4-11
(16 A以下)
残存電圧0 %で1
サイクル
JIS C 61000-4-11
(16 A以下)
残存電圧0 %で1サイ
クル
B c)
IEC 61000-4-34
(16 Aを超える)
残存電圧70 %で
25/30サイクル
(50/60 Hz)
IEC 61000-4-34
(16 Aを超える)
残存電圧40 %で10/12
サイクル (50/60 Hz)
残存電圧70 %で25/30
サイクル (50/60 Hz)
C
短時間停電
JIS C 61000-4-11
(16 A以下)
IEC 61000-4-34
(16 Aを超える)
残存電圧0 %で
250/300サイクル
(50/60 Hz)
JIS C 61000-4-11
(16 A以下)
IEC 61000-4-34
(16 Aを超える)
残存電圧0 %で
250/300サイクル
(50/60 Hz)
C
注a) IEC 61000-2-4のクラス3への適合を要求する場合は,このレベルは,製造業者と使用者との間で合意すること
が望ましい。
b) 電圧が公称値未満の場合,最大出力(出力回転数及び/又は出力トルク)は電圧依存であるので,低減するこ
とがある。
c) 第2種環境においては,保護装置が動作してもよい。
注記1 PDSはエネルギーを変換するものであり,電圧ディップによって利用可能なエネルギーが減
少する。電圧低下が30 %〜50 %で0.3秒間の電圧ディップであっても,安全上,トリップ動
作が必要になる場合がある。
注記2 電源転流サイリスタ変換器で用いるヒューズは,回生動作中,数ミリ秒間の入力電圧低下に
よって溶断する場合がある。
注記3 設備に対する電圧ディップ(エネルギー低下)の影響は,その設備の詳細な知識がない場合
は,明確にすることはできない。この影響は,システム及び定格に関連する。PDSが必要と
19
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
する電力(PDSの損失を含む。)が電源から供給可能な電力より大きくなる場合,一般的に
最も影響が大きい。
装置として問題なく,かつ,危険性がない場合は,PDSの標準動作条件下で主電源のオフ及びオンによ
って短時間停電中のPDSの動作を実証してもよい(B.6.1参照)。
製造業者は,電圧ディップ又は短時間停電による性能低下について,説明書に記載しなければならない。
注記4 イミュニティの改善によってPDSの著しい大形化及び費用上昇を招く場合がある(UPS,予
備発電機の使用,ディレーティングなど)。また,効率又は力率が低下する場合もある。自動
再始動のような動作は,安全に重大な影響を及ぼすことがあり,この規格では対象としない。
5.2.3.2
600 Vを超える定格電圧のPDS(電圧変動)
5.2.3.2.1
主電源ポート
PDSの主電源ポートは,表6に規定するイミュニティレベルを満足しなければならない。
製造業者は,5.2.1に従って計算,シミュレーション又は試験によってイミュニティを確認してもよい。
表6−600 Vを超える定格電圧の主電源ポートの
電圧変動,電圧ディップ及び短時間停電に対する最小イミュニティ要求事項
現象
参照規格
レベル
性能判定基準
1分間を超える電圧変動
IEC 61000-2-4
クラス3
±10 %
A a)
1分間以下の電圧変動
IEC 61000-2-4
クラス 3
最大ステップ振幅:12 %
公称電圧の許容範囲内
A a)
電圧変化
IEC 61000-2-4
クラス3
ステップ間の最小間隔:2秒
A a)
電圧ディップ
JIS C 61000-4-11
(16 A以下)
IEC 61000-4-34
(16 Aを超える)
残存電圧0 %で1サイクル
B b)
残存電圧40 %で10/12サイクル (50/60 Hz)
残存電圧70 %で25/30サイクル (50/60 Hz)
C
短時間停電
JIS C 61000-4-11
(16 A以下)
IEC 61000-4-34
(16 Aを超える)
残存電圧0 %で250/300サイクル (50/60 Hz) C
注a) 電圧が公称値未満の場合,最大出力(出力回転数及び/又は出力トルク)は,電圧依存であるので,
低減することがある。このレベルを超えた場合の起こり得る結果は,T又はDとする(5.2.1参照)。
Dの場合,システム供給者は,PDSの実際の動作情報を提供することが望ましい。
b) 保護装置が動作してもよい。
製造業者は,説明書に,電圧ディップ又は短時間停電から生じる性能の低下を明示しなければならない。
5.2.3.2.2
補助電源ポート
PDSの補助電源ポートは,表7に規定するイミュニティレベルを満足しなければならない。製造業者は,
計算,シミュレーション又は試験によってイミュニティを確認してもよい。
20
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表7−低電圧の補助電源ポートの電圧変動,電圧ディップ及び短時間停電に対する
最小イミュニティ要求事項
現象
参照規格
レベル
性能判定基準
1分間を超える電圧変動
IEC 61000-2-4
クラス 3
±10 %
A a)
1分間以下の電圧変動
IEC 61000-2-4
クラス 3
+10 %〜−15 %
A a)
電圧ディップ
JIS C 61000-4-11
(16 A以下)
IEC 61000-4-34
(16 Aを超える)
残存電圧0 %で1サイクル
B b)
残存電圧40 %で10/12サイクル (50/60 Hz)
残存電圧70 %で25/30サイクル (50/60 Hz)
C
短時間停電
JIS C 61000-4-11
(16 A以下)
IEC 61000-4-34
(16 Aを超える)
残存電圧0 %で250/300サイクル (50/60 Hz) C
注a) このレベルを超えた場合の起こり得る結果は,Tとする(5.2.1参照)。
b) 保護装置が動作してもよい。
5.2.4
電圧不平衡及び周波数変動
5.2.4.1
低電圧PDS
電圧不平衡の定義及び評価は,B.5.2に示す。PDS又はBDM/CDMは,表8に規定するイミュニティレ
ベルを満足しなければならない。製造業者は,計算,シミュレーション又は試験によってイミュニティを
確認してもよい。
表8−低電圧PDSの電源ポートにおける電圧不平衡及び周波数変動の最小イミュニティ要求事項
現象
第1種環境
第2種環境
性能判定
基準
参照規格
レベル
参照規格
レベル
電圧不平衡a)
IEC 61000-2-2
逆相成分:2 %
IEC 61000-2-4
クラス3
逆相成分:3 %
A
周波数変動
IEC 61000-2-2
±2 %
IEC 61000-2-4
±2 %
±4 %(商用電力系統から
分離して供給する場合)
A
周波数変化率
1 %/s
±1 %/s
2 %/s(商用電力系統から
分離して供給する場合)
A
注a) 単相入力PDSには,適用しない。
5.2.4.2
600 Vを超える定格電圧のPDS
5.2.4.2.1
主電源ポート
電圧不平衡の定義及び評価は,B.5.2に示す。
PDS又はBDM/CDMは,表9に規定するイミュニティレベルを満足しなければならない。製造業者は,
計算,シミュレーション又は試験によってイミュニティを確認してもよい。
21
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表9−600 Vを超える定格電圧のPDSの主電源ポートにおける
電圧不平衡及び周波数変動の最小イミュニティ要求事項
現象
参照規格
レベル
性能判定基準
電圧不平衡
IEC 61000-2-4
クラス2
逆相成分:2 %
A a)
周波数変動
IEC 61000-2-4
±2 %
±4 %(商用電力系統から分離して供給する場合)
A b)
A c)
周波数変化率
±1 %/s
2 %/s(商用電力系統から分離して供給する場合)
A b)
A c)
注a) レベルを超えたときに起こり得る結果は,F又はTとする。Tの場合,システム供給者は,PDSの実
際の動作情報を提供することが望ましい(5.2.1参照)。
b) レベルを超えたときに起こり得る結果は,Fとする(5.2.1参照)。
c) レベルを超えたときに起こり得る結果は,Tとする(5.2.1参照)。
5.2.4.2.2
補助電源ポート
電圧不平衡の定義及び評価は,B.5.2に示す。PDSの補助電源ポートは,表10に規定するイミュニティ
レベルを満足しなければならない。製造業者は,計算,シミュレーション又は試験によってイミュニティ
を確認してもよい。
表10−PDSの低電圧補助電源ポートにおける電圧不平衡及び周波数変動の最小イミュニティ要求事項
現象
参照規格
レベル
性能判定基準
電圧不平衡
IEC 61000-2-4
クラス 3
3 %逆相成分
A a)
周波数変動
IEC 61000-2-4
±2 %
±4 %(商用電力系統から分離して供給する場合)
A b)
A c)
注a) このレベルを超えたときに起こり得る結果は,F又はTとする。Tの場合,システム供給者は,PDS
の実際の動作情報を提供することが望ましい(5.2.1参照)。
b) レベルを超えたときに起こり得る結果は,Fとする(5.2.1参照)。
c) レベルを超えたときに起こり得る結果は,Tとする(5.2.1参照)。
5.2.5
電源の影響−磁界
JIS C 61000-4-8に従ったイミュニティ試験は,必要としない。(説明は,A.3.1参照)
5.3
高周波妨害に対する基本イミュニティ要求事項
5.3.1
条件
表11及び表12に,高周波妨害試験用の最小イミュニティ要求事項及び性能判定基準を規定する。性能
判定基準は,5.1.1参照。詳細な説明は,A.3に示す。
5.3.2
第1種環境
表11のレベルは,第1種環境で用いるPDSに適用する。
表11のイミュニティをもつように設計したCDM/BDMは,工場設備で用いてはならないことを示す警
告を取扱説明書に記載する。
注記 警告文の記載例を,次に示す。
警告
この装置は,住宅環境で用いることを想定しています。この装置を工業環境で用いると正常に
動作しないおそれがあります。
22
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表11−第1種環境で用いるPDSのための最小イミュニティ要求事項
ポート
現象
試験方法規格
レベル
性能判定
基準
きょう体ポート
静電気放電
JIS C 61000-4-2
4 kV CD
CDが不可能な場合は
8 kV AD
B
無線周波数電磁界
振幅変調
JIS C 61000-4-3
(5.3.4も参照)
80 MHz〜1 000 MHz
3 V/m
80 % AM (1 kHz)
A
電源ポート
ファストトランジェント/バースト
JIS C 61000-4-4
1 kV/5 kHz a)
B
サージ b)
1.2/50 μs,8/20 μs
JIS C 61000-4-5
1 kV c)
2 kV d)
B
伝導無線周波数コモンモード
JIS C 61000-4-6
(5.3.4も参照)
0.15 MHz〜80 MHz
3 V
80 % AM (1 kHz)
A
電力インタフェース
ファストトランジェント/バーストe) JIS C 61000-4-4
1 kV/5 kHz
容量性結合クランプ
B
計測及び制御ポート
信号インタフェース
ファストトランジェント/バーストe) JIS C 61000-4-4
0.5 kV/5 kHz
容量性結合クランプ
B
伝導無線周波数コモンモードe)
JIS C 61000-4-6
(5.3.4も参照)
0.15 MHz〜80 MHz
3 V
80 % AM (1 kHz)
A
CD:接触放電,AD:気中放電,AM:振幅変調
注a) 定格電流100 A以下の電源ポート:結合/減結合回路網を用いた直接結合。
定格電流100 Aを超える電源ポート:減結合回路網を用いない直接結合又は容量性クランプ。容量性クランプ
を用いる場合,試験レベルは,2 kV/5 kHzとする。
b) 試験時に63 A未満の入力電流である電源ポートに限り適用できる。基礎絶縁の定格インパルス電圧を超えては
ならない(JIS C 0664参照)。
c) 線間の結合。
d) 対地間の結合。
e) 接続するケーブルの合計の長さが製造業者の仕様によって3 mを超えてもよいポート又はインタフェースに限
り適用する。
5.3.3
第2種環境
表12のレベルは,第2種環境で用いるPDSに適用する。表12のレベルは,低電圧ポート,又は600 V
を超える定格電圧のPDSの低電圧インタフェース(電力,信号)にも適用する。
注記 低電圧ポート及び定格電圧600 Vを超えるPDSの低電圧インタフェースの例を,次に示す。
低電圧きょう体ポート
:補助電源,制御及び保護装置のきょう体
低電圧電源ポート
:PDSの低電圧電源
低電圧電力インタフェース :PDSの主要コンポーネント間の補助電源の分配
低電圧信号インタフェース :PDSの主要コンポーネント間の低電圧信号インタフェース
低電圧計測及び制御ポート :PDSの信号ポート
23
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表12−第2種環境で用いるPDSのための最小イミュニティ要求事項
ポート
現象
試験方法規格
レベル
性能判定
基準
きょう体ポート
静電気放電
JIS C 61000-4-2
4 kV CD
CDが不可能な場合は
8 kV AD
B
無線周波数電磁界
振幅変調
JIS C 61000-4-3
(5.3.4も参照)
80 MHz〜1 000 MHz
10 V/m
80 % AM (1 kHz)
A
電源ポート
ファストトランジェント/バースト
JIS C 61000-4-4
2 kV/5 kHz a)
B
サージb)
1.2/50 μs,8/20 μs
JIS C 61000-4-5
1 kV c)
2 kV d)
B
伝導無線周波数コモンモードe)
JIS C 61000-4-6
(5.3.4も参照)
0.15 MHz〜80 MHz
10 V
80 % AM (1 kHz)
A
電力インタフェース
ファストトランジェント/バーストe) JIS C 61000-4-4
2 kV/5 kHz
容量性結合クランプ
B
信号インタフェース
ファストトランジェント/バーストe) JIS C 61000-4-4
1 kV/5 kHz
容量性結合クランプ
B
伝導無線周波数コモンモードe)
JIS C 61000-4-6
(5.3.4も参照)
0.15 MHz〜80 MHz
10 V
80 % AM (1 kHz)
A
計測及び制御ポート
ファストトランジェント/バーストe) JIS C 61000-4-4
1 kV/5 kHz
容量性結合クランプ
B
サージf)
1.2/50 μs,8/20 μs
JIS C 61000-4-5
1 kV d) f)
B
伝導無線周波数コモンモードe)
JIS C 61000-4-6
(5.3.4も参照)
0.15 MHz〜80 MHz
10 V
80 % AM (1 kHz)
A
CD:接触放電,AD:気中放電,AM:振幅変調
注a) 定格電流100 A以下の電源ポート:結合/減結合回路網を用いた直接結合。
定格電流100 Aを超える電源ポート:減結合回路網を用いない直接結合又は容量性クランプ。容量性クランプ
を用いる場合,試験レベルは,4 kV/2.5 kHzとする。
b) 試験時に63 A未満の入力電流である電源ポートに限り適用できる。基礎絶縁の定格インパルス電圧を超えては
ならない(JIS C 0664参照)。
c) 線間の結合。
d) 対地間の結合。
e) 接続するケーブルの合計の長さが製造業者の仕様によって3 mを超えてもよいポート又はインタフェースに限
り適用する。
f) 接続するケーブルの合計の長さが製造業者の仕様によって30 mを超えてもよいポートに限り適用する。シール
ドケーブルの場合には,シールドへの直接結合を適用する。このイミュニティ要求事項は,技術的な理由でサ
ージ保護装置の使用が実用的でないフィールドバス又はほかの信号インタフェースには適用しない。供試装置
の結合/減結合回路網の影響で,通常の機能が保てない場合は,この試験は必要としない。
定格絶縁電圧が600 Vを超えるポートには,これらの現象を適用しない。便宜的に,このようなポート
を,定格電圧600 Vを超えるPDSの高電圧ポートと呼ぶ。
注記 高電圧ポート及び定格電圧600 Vを超えるPDSのインタフェースの例を,次に示す。
高電圧きょう体ポート
:変圧器,変換器及び電動機のきょう体
高電圧電源ポート
:変圧器の一次側
24
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
高電圧電力インタフェース :PDSの主要コンポーネント間の高電圧電源の分配
高電圧信号インタフェース :PDSの主要コンポーネント間の高電圧側の信号インタフェース
5.3.4
電磁界に対するイミュニティ
次の事項に該当するPDSには,JIS C 61000-4-3及びJIS C 61000-4-6の試験を行う。5.3.2及び5.3.3参照。
・ 定格電圧が600 V以下
・ 定格電流が100 A以下
・ 合計質量が250 kg以下
・ 高さ,幅及び奥行きが1.9 m以下
PDSの定格が,これらの値を超える場合,製造業者は,感受性が高いサブコンポーネントでJIS C
61000-4-3及びJIS C 61000-4-6の試験を行う。5.3.2及び5.3.3参照。
試験場所の中に入れることができない大きな電動機の場合,CDM/BDMの動作に悪影響を及ぼさない小
さい電動機に置き換えてもよい。
サブコンポーネントだけを試験する場合には,一般工業用途の無線通信装置に対する試験は,A.3.2.2に
記述するようにPDS全体で行う。この試験は,特定の位置,備付けの装置,及び試験する周波数にだけ有
効とする。
5.4
イミュニティ要求事項の適用−統計の概要
具体的な合否基準を選定するときには,PDSの特定の試験項目に対する試験結果が現象の起こりやすさ
を示すに過ぎない。したがって,試験回数又は試験期間を特定する場合には,性能判定基準及びPDSの適
用方法に応じて,この起こりやすさを考慮しなければならない。
5.3のイミュニティ要求事項は,代表的なユニットに対する形式試験によって確認する。すべての製品に
おけるEMCに関する性能は,製造業者又は供給者が何らかの品質管理手順を適用して,維持しなければ
ならない。
試験場所以外の使用場所に設置したPDSから得られた測定結果は,その設置環境だけに有効とする。
6
エミッション
6.1
一般的なエミッション要求事項
測定は,通常の用途を前提として,測定する周波数帯で最大のエミッションが発生する動作モードで行
う。
PDSの分類(3.2参照)に従った要求事項を,表13に示す。
25
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表13−エミッション要求事項のまとめ
カテゴリ
低周波
(電源ポート)
妨害電圧
(電源ポート)(参考)
放射エミッション
(きょう体ポートほか)
C1
製品評価,要求事項:6.2.2,6.2.3及び6.2.5
負荷条件:B.2.3.3及びB.3.2
第1種環境
製品評価
6.4.1.1の表14
製品評価
6.4.1.3の表15,6.4.1.2及び
6.4.1.4
C2
製品評価,要求事項:6.2.2,6.2.3及び6.2.5
負荷条件:B.2.3.3及びB.3.2
第1種又は第2種環境
製品評価
6.4.1.1の表14
取扱説明書の警告
製品評価
6.4.1.3の表15,6.4.1.2及び
6.4.1.4
取扱説明書の警告
C3
要求事項:6.2.2,6.2.3及び6.2.5
負荷条件:B.2.3.3
一般的な方法:B.3.3及びB.4
第2種環境
製品評価
6.4.2.1及び6.4.2.2の表17
取扱説明書の警告
製品評価
6.4.2.3及び6.4.2.4の表18
取扱説明書の警告
C4
施工時の計画要求事項:6.2.2,6.2.3及び6.2.5
負荷条件:B.2.3.3
一般的な方法:B.3.3及びB.4
第2種環境
施工時の計画
6.4.2.1及び6.4.2.2の表17
又は
6.5.1のEMCプラン及び
6.5.2の表19及び表20
施工時の計画
6.4.2.1及び6.4.2.4の表18
又は
6.5.1のEMCプラン及び6.5.2
の表21及び表22
6.2
低周波エミッション限度値
6.2.1
適合性の確認方法
この規格への適合性は,計算,シミュレーション又は試験によって確認する。
6.2.2
転流ノッチ
転流ノッチは,オシロスコープ(B.1.1参照)を用いて電源ポートで測定する。転流ノッチのエミッショ
ンは,位相制御する他励変換装置(IEC 60146-1-1の2.5.4.1参照)によって発生する。
PDSの入力回路がノッチを発生しないか,無視できる場合(例えば,ダイオード整流器),ノッチのエ
ミッションを考慮する必要はない。
注記1 電源転流形サイリスタ変換器は,ノッチのエミッションを考慮するのが望ましい主な事例で
ある。無線周波数妨害フィルタ(以下,RFIフィルタという。)は,ノッチが影響を与える機
器の事例である。RFIフィルタは,ノッチによって過負荷になるか,又は反復性の過電圧を
受けることになる。
注記2 ダイオード整流器は,非可制御の他励変換器であり,転流ノッチは無視できる。自励変換装
置(例えば,PWM整流器を備えた電圧形間接変換装置)は,PWMパターンに依存する転流
ノッチを発生することがある。
製造業者は,ノッチを考慮するために,次の情報を使用者に提供する。
・ PDSに内蔵する減結合リアクタンスの値
・ ノッチの緩和(B.1.2参照)のために外部に追加できる減結合リアクタンスの許容値
B.1.3を考慮するのが望ましい。
6.2.3
高調波及び次数間高調波
高調波のエミッションは,附属書JAによる。
6.2.4
電圧揺動
(対応国際規格の規定を不採用とした。)
26
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.2.5
コモンモード高調波エミッション(低周波のコモンモード電圧)
PDSの変換器のスイッチング周波数は,可聴周波数帯域,特に一般的に電話及びデータ通信システムに
用いる周波数範囲に含まれる場合がある。信号ケーブルへの漏話の危険性を避けるため,設置説明書で電
力インタフェースケーブルを信号インタフェースケーブルから分離するように推奨するか,又は代わりの
緩和方法を提示する。
6.3
高周波エミッション測定条件
6.3.1
一般要求事項
6.3.1.1
共通条件
電圧又は電流の変化率が,高周波エミッションの主な発生源になると考えられる。この種のエミッショ
ンでは,PDS内の電圧変化率(以下,dv/dtという。)が特に重要で,これらはPDSの定格電流よりも低い
出力電流状態でも発生する。したがって,これらの試験は,軽負荷試験とする。試験は,適切なポートで
行い,明確に定義した再現可能な方法でポートごとに行う。試験方法は,6.2〜6.4及びCISPR 11の箇条7
による。試験のときには,接地の接続に特に注意する。
負荷は,製造業者が指定する範囲内とし,実負荷を試験報告書に記載する。
6.3.1.2
伝導エミッション
電源ポートの妨害電圧(雑音端子電圧)の評価のための測定機器として,擬似電源回路網(50 Ω/50 μH,
CISPR 16-1-2 : 2004の4.3又はCISPR 11 : 2003の6.2.2参照),及び擬似電源回路網が適用できない場合の
CISPR 16-1-2 : 2004の5.2.1又はCISPR 11の6.2.3に従った電圧プローブがある。
設置場所での雑音端子電圧の測定では,擬似電源回路網でなく,電圧プローブを用いる。PDSの入力電
流が100 Aより大きい場合,入力電圧が500 V以上の場合,又はPDSが他励変換装置を含んでいる場合に
も,電圧プローブを適用できる。
6.3.1.3
放射エミッション
カテゴリC1及びカテゴリC2のPDSは,CISPR 16-1-4 : 2004の箇条5の要求事項に適合するテストサ
イトで測定する。
カテゴリC3のPDSは,CISPR 16-1-4 : 2004の箇条5の要求事項に適合するテストサイトで試験するこ
とが望ましい。ただし,質量,寸法又は容量によって現実的に不可能な場合,テストサイトの要求事項に
完全には適合しない場所で試験してもよい。この場合,試験報告書の中で,この場所で試験することの正
当性を説明する。
測定距離の選択は,CISPR 11の5.2.2及び7.2.3の要求事項による。
6.3.2
接続要求事項
テストサイトでPDSを測定する場合,試験セットアップは,電力ケーブル及び制御ケーブルの長さ及び
位置を含めて,製造業者が指定する。このセットアップは,使用者のための説明書(4.3参照)に記載する,
想定する適用状態の代表的なセットアップとする。試験セットアップは,試験報告書に記載する。
設置場所でPDSを測定する場合,ケーブル及び接地の配置は,実際の適用状態とする。
6.4
基本高周波エミッション限度値
6.4.1
カテゴリC1及びC2の装置
6.4.1.1
電源ポートの妨害電圧
雑音端子電圧の限度値は,参考値を示し,表14によることが望ましい。
27
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表14−150 kHz〜30 MHzの雑音端子電圧の限度値(参考値)
周波数範囲
MHz
カテゴリ C1
カテゴリ C2
準せん頭値
dB (μV)
平均値
dB (μV)
準せん頭値
dB (μV)
平均値
dB (μV)
0.15 ≦ f < 0.50
66〜56
周波数の対数値に対
して直線的に減少
56〜46
周波数の対数値に対
して直線的に減少
79
66
0.5 ≦ f ≦ 5.0
56
46
73
60
5.0 < f < 30.0
60
50
73
60
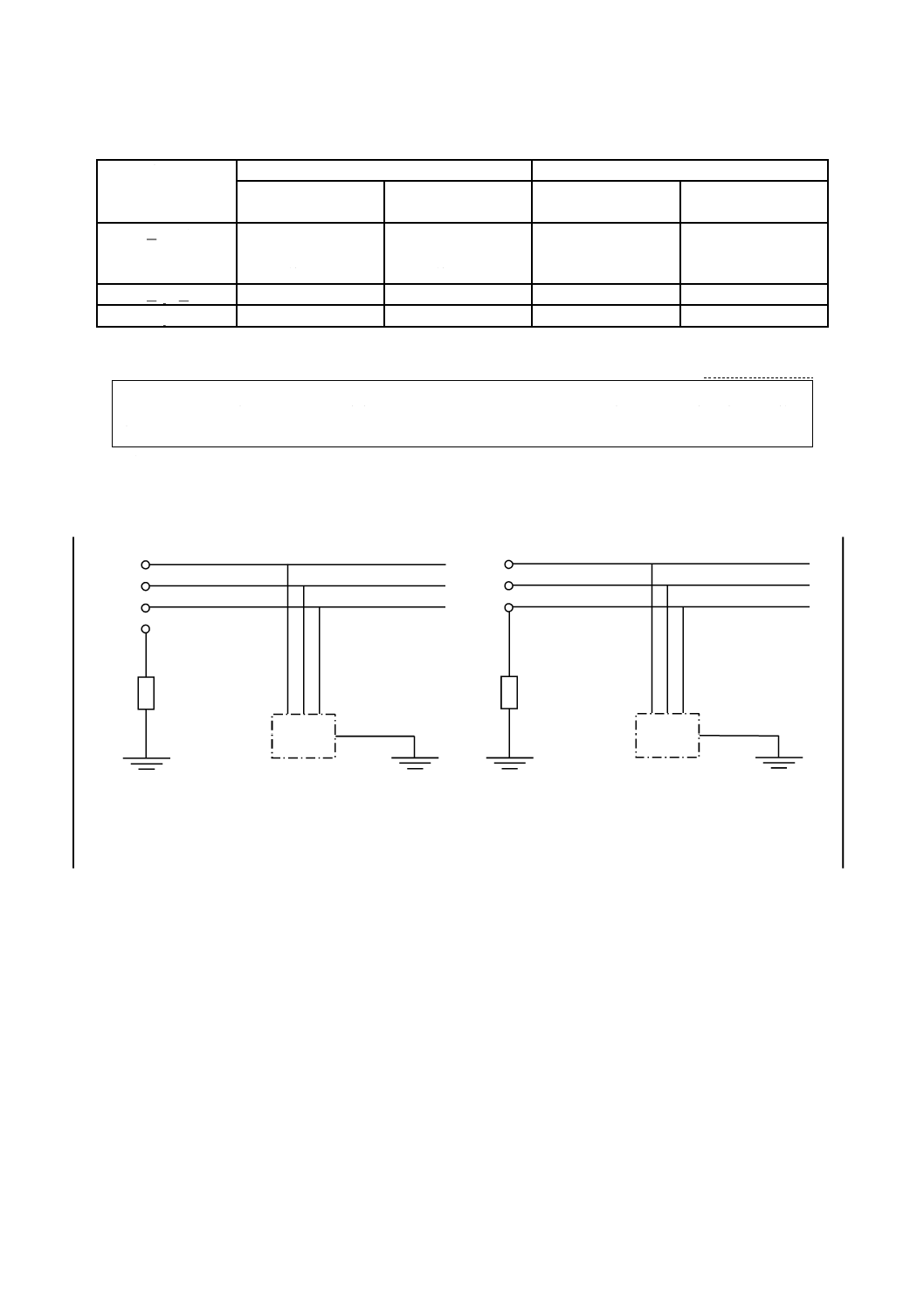
PDSがカテゴリC1の限度値を満足しない場合は,次の警告文を取扱説明書に記載することが望ましい。
警告
この装置を住宅環境で用いると電磁障害を引き起こすことがあります。この場合には,使用者に適切な対策を
求められることがあります。
注記 高周波コモンモードフィルタによって,大地への容量性結合の経路ができる。図4Aに示す電
源の中性点を大地と絶縁するか,又は高インピーダンスを介して大地と接続する電源系統(以
下,IT電源系統という。)の場合は,容量性結合パスは有害となるときがある(D.2.2参照)。
注*
系統は,大地と絶縁する場合がある。中性線を設ける場合と,設けない場合とがある。
図4A−IT電源系統
6.4.1.2
計測及び制御ポート
計測及び制御ポートは,フィールドバスに接続することを想定している場合は,フィールドバスの関連
規格の伝導エミッション要求事項を満足しなければならない。
計測及び制御ポートを公共通信ネットワークに接続することを想定している場合は,CISPR 22 クラス
Bの伝導エミッション要求事項を適用する。
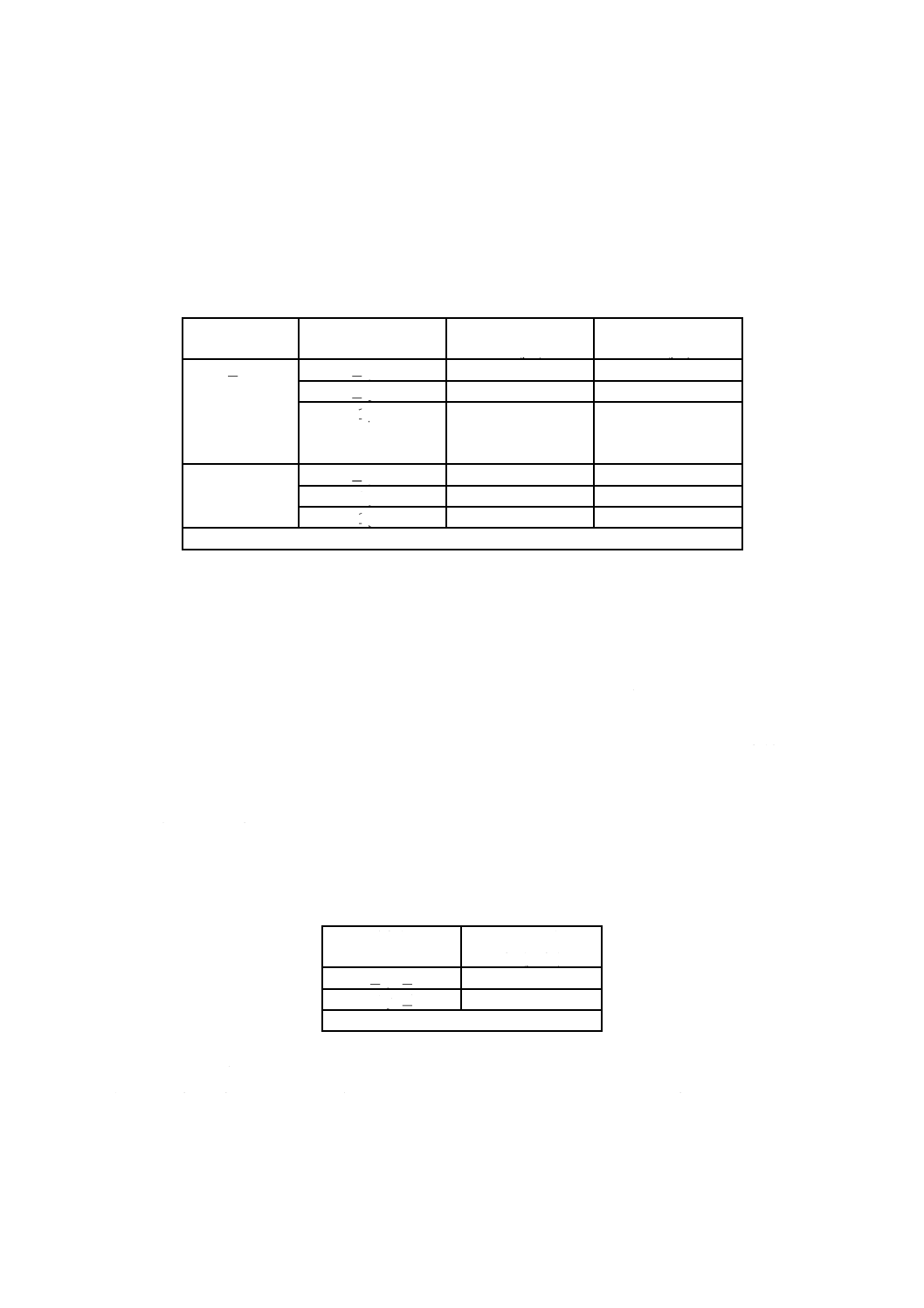
6.4.1.3
放射−きょう体ポート
電磁放射妨害の限度値は,表15による(きょう体ポートについては,3.3.4の定義及び図2参照)。
インピーダンス*
系統接地
露出導電性部分
保護導体
L1
L2
L3
N
インピーダンス*
系統接地
露出導電性部分
保護導体
L1
L2
L3
28
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表15−30〜1 000 MHzの(電磁)放射妨害の限度値
周波数範囲
MHz
カテゴリC1
カテゴリC2
電界強度成分
準せん頭値
dB (μV/m)
電界強度成分
準せん頭値
dB (μV/m)
30 ≦ f ≦ 230
30
40
230 < f ≦ 1 000
37
47
測定距離10 m。
カテゴリC1の場合,周囲の雑音レベルが高いなどの理由で10 m法での電界強度測定ができない
ときは,3 m法を用いてもよい。3 m法を用いた場合は,得られた測定結果は,その結果から10 dB
を減じ,10 m法での測定値に換算しなければならない。この場合,特にPDSが小形のものではなく,
周波数が30 MHzの近傍のときには,近傍界の影響を避けることに注意することが望ましい。
PDSがカテゴリC1の限度値を満足しない場合は,次の警告文を取扱説明書に記載する。
警告
この装置を住宅環境で用いると電磁障害を引き起こすことがあります。この場合には,使用者に適切な対策を
求められることがあります。
6.4.1.4
電力インタフェースのエミッション
第1種環境で運転するPDSのエミッションの限度値は,次のいずれかの方法で測定する。
a) 適用ケーブルの長さが2 m以下の場合,又はシールドケーブルを用いる場合は,電力インタフェース
の測定を行う必要はない。シールドは,高い周波数に適した品質で長さ方向に連続性があり,シール
ド終端の全周をCDM及び電動機に接続しなければならない。
b) エミッションは,CISPR 14及び表16の適用限度値に従って,BDMの電力インタフェース部の妨害
電圧を測定することによって確認する。
c) 適用する低減手段が,b) の確認方法に適切ではない場合(例えば,コモンモード低減手段),低減手
段の効果は,6.4.1.1に従って雑音端子電圧を測定する間,電源入力ケーブルと電動機ケーブルとの間
の結合を確立することによって確認する。この結合では,供試装置と擬似電源回路網とを分離する間
隔を1 m以上に保たなければならない。電動機ケーブル及び電源ケーブルは,0.6 m以上にわたって
10 cm以下の間隔を保って平行に布設しなければならない。
表16−電力インタフェースにおける妨害電圧の限度値
周波数範囲
MHz
定格出力電流における測定
準せん頭値
dB (μV)
平均値
dB (μV)
0.15 ≦ f < 0.5
80
70
0.5 ≦ f < 30
74
64
6.4.2
カテゴリC3の装置
6.4.2.1
提供情報に関する要求事項
PDSがカテゴリC1又はC2の限度値を満足しない場合は,次のような警告文を取扱説明書に記載する。
警告
この装置は,住宅に電力を供給する低電圧配電線に接続して用いることを想定していません。低電圧配電線に接
続して用いた場合は,電磁障害を引き起こすことがあります。
29
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
製造業者は,推奨する低減装置を記載した据付及び使用の指針を提供する。
6.4.2.2
電源ポートの妨害電圧
PDSの雑音端子電圧(電源ポート妨害電圧)の限度値は,参考値を示し,表17によることが望ましい。
この限度値は,定格電圧600 Vを超えるPDSの低電圧電源ポートにも適用する。
表17−150 kHz〜30 MHzの雑音端子電圧の限度値(参考値)
第2種環境のPDS−カテゴリC3のPDS
定格電流 I
A
周波数範囲
MHz
準せん頭値
dB (μV)
平均値
dB (μV)
I ≦ 100
0.15 ≦ f < 0.50
100
90
0.5 ≦ f < 5.0
86
76
5.0 ≦ f < 30.0
90〜70
周波数の対数値に対
して直線的に減少
80〜60
周波数の対数値に対
して直線的に減少
100 < I
0.15 ≦ f < 0.50
130
120
0.5 ≦ f < 5.0
125
115
5.0 ≦ f < 30.0
115
105
これらの参考限度値は,600 Vを超えて動作する電源ポートには適用しない。
D.2参照。
専用変圧器がない100 Aを超えるPDSでは,信号ケーブルへの漏話を避けるために,電力ケーブルを信
号ケーブルから隔離するように推奨するか,又は代わりの低減手段を設置説明書に明記する。
6.4.2.3
計測及び制御ポート
計測及び制御ポートは,フィールドバスに接続することを想定している場合は,フィールドバスの関連
規格の伝導エミッション要求事項を満足しなければならない。
計測及び制御ポートを公共通信ネットワークに接続することを想定する場合は,CISPR 22 クラスAの
伝導エミッション要求事項を適用する。
6.4.2.4
放射−きょう体ポート
電磁放射妨害の限度値は,表18による(きょう体ポートについては,3.3.4の定義及び図2を参照)。
表18−30 MHz〜1 000 MHzの電磁放射妨害の限度値
第2種環境のPDS−カテゴリC3のPDS
周波数範囲
MHz
準せん頭値
dB (μV/m)
30 ≦ f ≦ 230
50
230 < f ≦ 1 000
60
測定距離10 m
6.4.2.5
電力インタフェース
第2種環境で運転するPDSの場合,電力インタフェースの設置に関し,4.3で要求するすべての必要な
情報を設置及び取扱説明書に記載する。
30
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.5
施工時の計画
6.5.1
カテゴリC4のPDS
カテゴリC4のPDSの場合は,次の手順を用いる。
一般条件
技術的な理由によって,PDSが表17及び表18の限度値に適合することができないような幾つかの適用
形態がある。これらの適用形態とは,次に示すような,大きな定格をもつ場合,又は特別な技術的要求事
項に該当する場合などである。
・ 600 Vを超える電圧
・ 100 Aを超える電流
・ IT電源系統
・ フィルタを用いると要求された動的性能が達成できない場合
カテゴリC4のPDSをこれらの適用形態で用いる場合,使用者と製造業者との間で,想定する適用形態
におけるEMC要求事項を満足するためのEMCプランに合意しなければならない(附属書E参照)。この
場合,使用者は,全体の設備及び近隣を含む環境のEMC特性を指定する(図5参照)。製造業者は,設置
するPDSの代表的なエミッションレベルの情報を提供する。電磁障害が生じた場合,6.5.2で規定する要
求事項及び手順を適用する。
注記 EMCプランによる共通的な緩和方法の例としては,設備全体へのフィルタの設置,専用の特別
な変圧器の設置,ケーブルの分離などがある。
IT電源系統のフィルタ
適切な設計を行わない場合,IT電源系統にフィルタを接続したPDSを用いることによって,安全上の
問題を生じるおそれがある。IT電源系統の場合には,電磁妨害の限度値を決めることはできない。システ
ムの知識から考えられる解決策は多様であり,標準化できない。主な検討事項は,次に示す故障状態及び
フィルタの漏れ電流に関係がある。
a) PDSの電動機側での地絡。IT電源系統の接地状態を監視するシステムがトリップし,設備の予期しな
い停止に至る場合がある。
b) 電動機側での地絡は,隣接したほかの設備にコモンモード電圧を印加する原因となる場合がある。
c) 対地容量の増加を原因とする,IT電源系統監視システムによる故障の誤検知。設備の予期しない停止
に至る。
解決策は,通常,個々の事例に応じて検討することを基本とする。
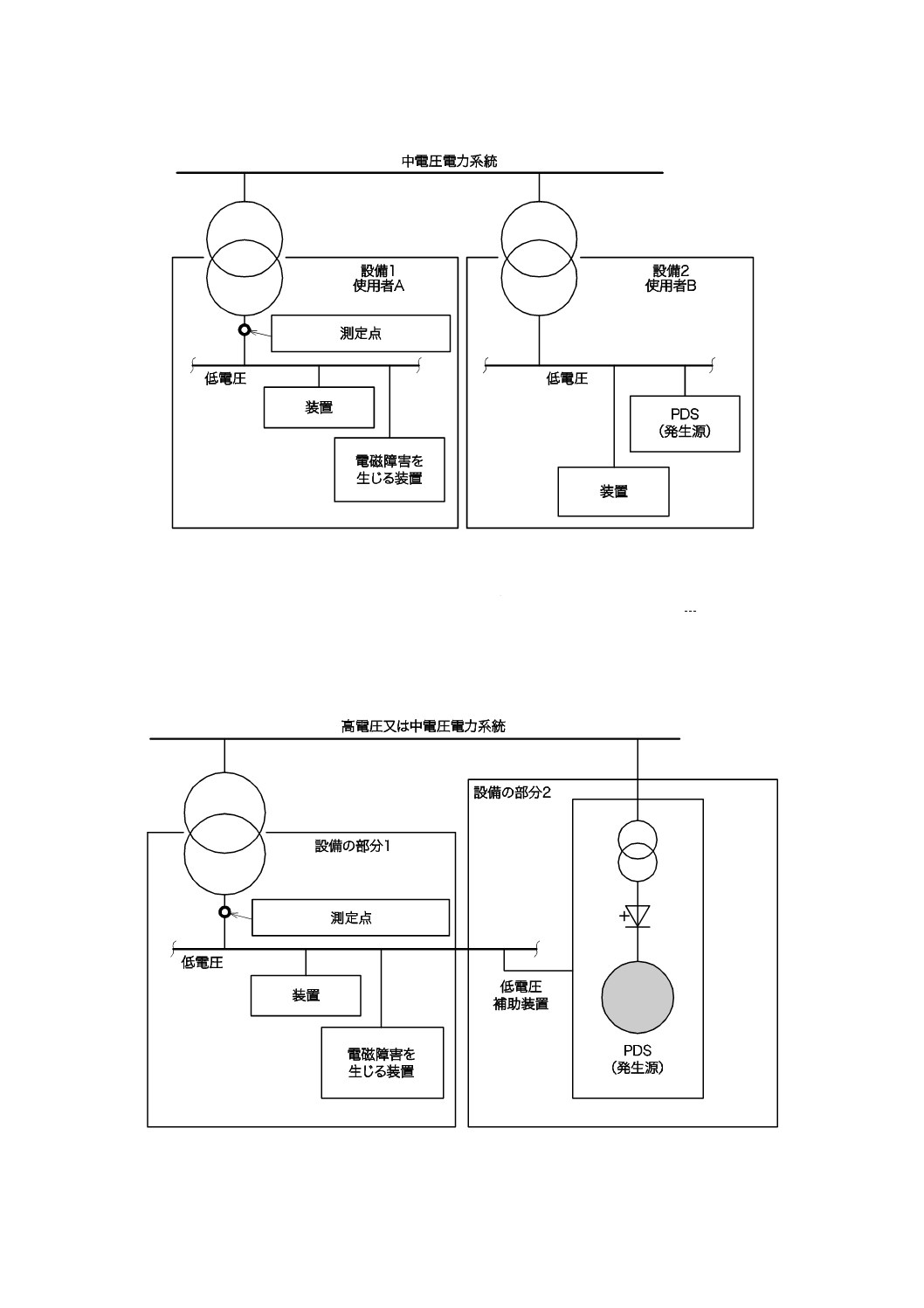
6.5.2
カテゴリC4のPDSのための設備境界外の限度値−電磁妨害伝搬の例
6.5.2.1
一般
第2種環境のPDSの場合,電磁妨害が中電圧電力系統を介して伝搬したときでも,使用者は,隣接した
低電圧電力系統に過度の電磁妨害を発生させてはならない。
隣接する低電圧電力系統で発生した電磁障害についての申立て,又はPDSの使用者(図5の設備2の使
用者B)と別の電力系統の被害者(図5の設備1の使用者A)との間の論争の場合,電磁妨害の発生源と
みなすPDS(設備2)が動作したときに,電磁障害を生じる設備(設備1)で電磁妨害が発生しているこ
とを最初に明らかにしなければならない。
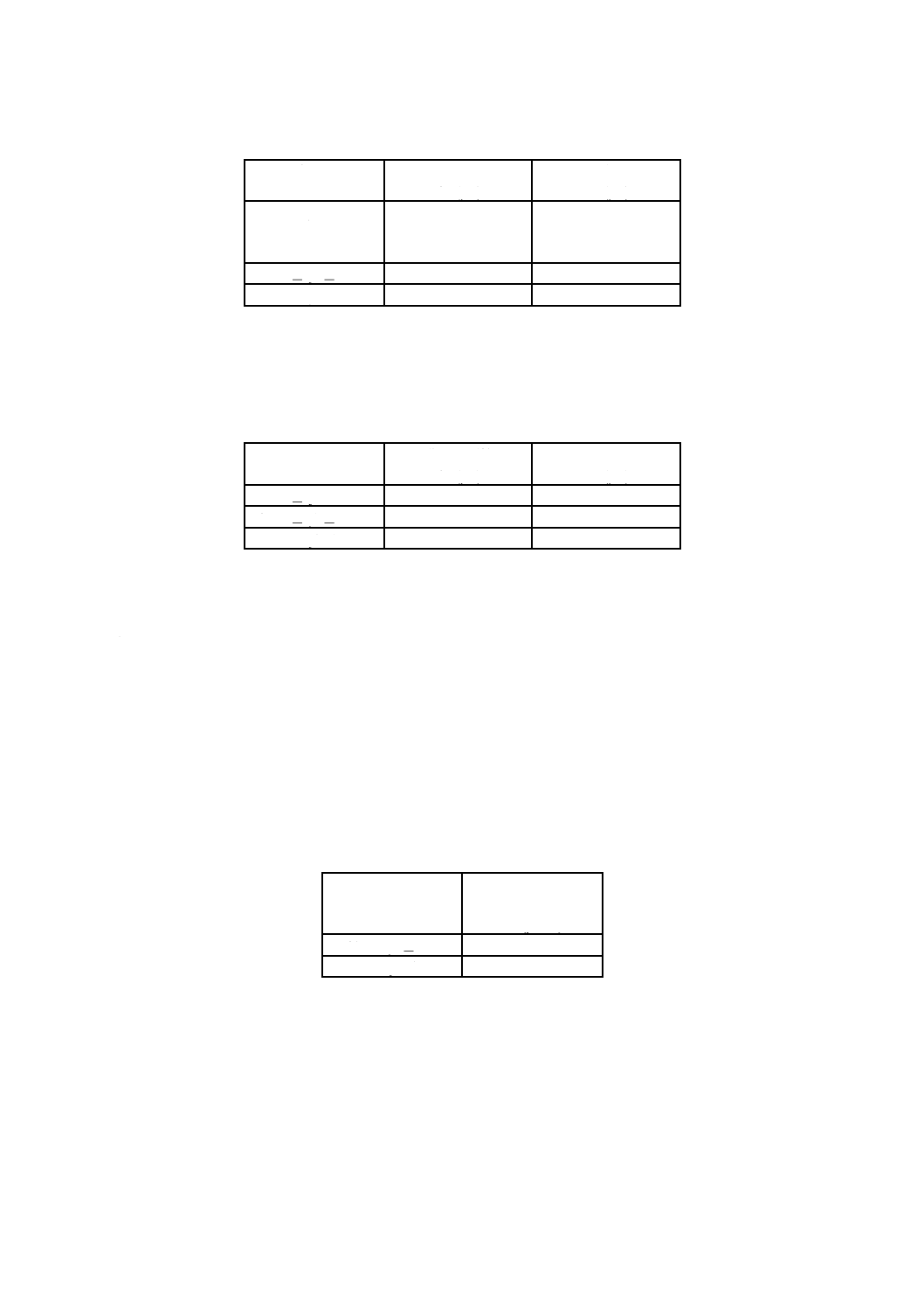
6.5.2.2
伝導妨害による電磁障害
6.5.2.1の場合,電磁障害を生じる装置を含む設備(設備1)の中電圧変圧器の二次側低電圧部で電磁妨
害を測定する(測定点は,図5を参照)。周囲雑音も含め,表19又は表20で規定する要求事項を満足しな
31
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ければならない。
図5−電磁妨害の伝搬
注記 この方法は,EMCプランの中で報告された限度値をもつ,定格電圧600 Vを超えるPDSの場
合,同じ設備の中の異なる部分にも適用できる。この場合,伝搬した妨害電圧の設置場所での
測定は,電磁妨害の発生源とみなすPDSに,電気的に最も接近している高電圧変圧器(図6の
設備の部分1)の二次側低電圧部において行う(測定点については図6参照)。
図6−定格電圧600 Vを超えるPDSがある設備の電磁妨害の伝搬
図5の設備1が第1種環境に属する場合,妨害電圧は,表19の限度値に適合しなければならない。
32
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
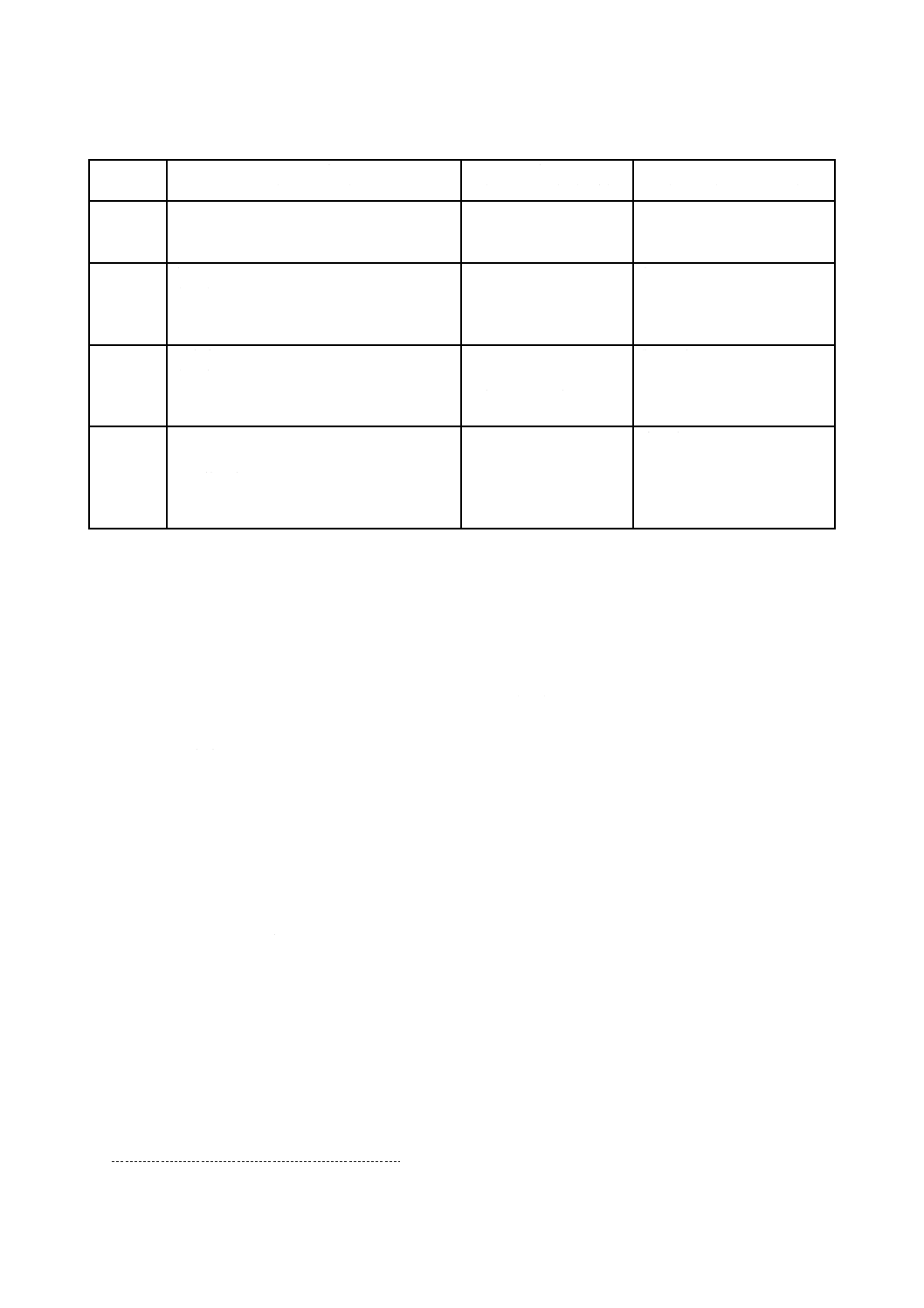
表19−伝搬する妨害電圧の限度値(境界外が第1種環境に相当する場合)
周波数範囲
MHz
準せん頭値
dB (μV)
平均値
dB (μV)
0.15 ≦ f < 0.50
66〜56
周波数の対数値に対
して直線的に減少
56〜46
周波数の対数値に対
して直線的に減少
0.5 ≦ f ≦ 5.0
56
46
5.0 < f < 30.0
60
50
図5の設備1又は図6の設備の部分1が,第2種環境に属する場合,妨害電圧は,表20の限度値に適合
しなければならない。
表20−伝搬する妨害電圧の限度値(境界外が第2種環境に相当する場合)
周波数範囲
MHz
準せん頭値
dB (μV)
平均値
dB (μV)
0.15 ≦ f < 0.50
79
66
0.5 ≦ f ≦ 5.0
73
60
5.0 < f < 30.0
73
60
発生源と思われるPDSを運転しない状態での周囲雑音が限度値(表19及び表20)を超える場合,放射
する周波数に特徴的なスペクトルがあり,周囲雑音を超えているときに限って,発生源と思われるPDSを
不合格とみなす。
6.5.2.3
放射による電磁障害
6.5.2.3.1
30 MHzを超える放射
設備の境界外で電磁障害が発生した場合,放射の測定方法は,次による。
a) 障害が第1種環境で発生した場合,設備の境界から10 m離れて測定する。
b) 障害が第2種環境で発生した場合,設備の境界から30 m離れて測定する。
測定した電界強度は,表21に適合しなければならない。
表21−30 MHzを超える電磁妨害の限度値
周波数範囲
MHz
電界強度
準せん頭値
dB (μV/m)
30 < f ≦ 230
30
230 < f ≦ 1 000
37
発生源と思われるPDSを運転しない状態での周囲雑音が限度値(表21)を超える場合,放射する周波
数に特徴的なスペクトルがあり,周囲雑音を超えているときに限って,発生源と思われるPDSを不合格と
みなす。
当該PDSからのエミッションは,周囲雑音又は限度値のいずれか高い方を下回るまで抑制しなければな
らない。
33
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.4.3も参照。
6.5.2.3.2
0.150 MHz〜30 MHzの放射
電磁障害が発生した場合,放射の測定方法は次による。
a) 障害が第1種環境で発生した場合,設備の境界から10 m離れて測定する。
b) 障害が第2種環境で発生した場合,設備の境界から30 m離れて測定する。
ループアンテナは,CISPR 16-1-4 : 2004の4.7.1及び附属書Cによるものを用いる。電磁障害を発生す
る周波数において,表22の値を超えてはならない。
表22−30 MHz以下の電磁妨害の限度値
周波数範囲
MHz
電界強度で表現する磁界強度
準せん頭値
dB (μV/m)
0.15 ≦ f ≦ 0.49
75
0.49 < f ≦ 3.95
65
3.95 < f ≦ 20
50
20
< f ≦ 30
40
6.6
エミッション要求事項の適用−統計的評価
カテゴリC1,C2及びC3のPDSにだけ,次を適用する。
利便性を図るために,適合性試験は,一つの装置に対してだけ行う。カテゴリC1,C2及びC3のPDS
の適合性は,代表的なユニットに対する形式試験によって確認する。すべての製品におけるEMCに関す
る性能は,製造業者又は供給者が何らかの品質管理手順を適用して,維持しなければならない。
疑義が生じた場合,PDSが附属書JBに従った適合性評価の要求事項を達成できないときに限り,この
規格の要求事項に適合しないとみなす。したがって,評価は,仕様が明確なテストサイトで行う。
34
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(参考)
EMC技術
序文
この附属書は,本体の規定を補足するものであって,規定の一部ではない。
A.1 EMC現象の概要
A.1.1 現象
多くのEMC現象は,IEC 61000-2-5に記載する。低周波数現象の定義は,IEC 61000-2-1に定義する。
PDSを運転するとき,変換装置の非線形性に起因して高調波成分が基本波成分に重畳し,また,パワー
半導体デバイスの高速スイッチングに起因して高周波現象が発生する。したがって,PDSは,低周波及び
高周波の両方の妨害を発生する。
逆に,PDSの近くにあるほかの機器又はシステムから低周波及び高周波の妨害が発生して,PDSの動作
に影響を与える可能性がある。
パワーエレクトロニクスを利用したPDSの設置及び使用に当たって,電磁妨害は,低周波妨害又は高周
波妨害に分類して考えることができる。低周波と高周波との境界は,この規格では,国際電気通信連合
(ITU) での規定に従い,9 kHzとしている。
PDSに関しては,低周波妨害及び高周波妨害の両方とも問題となる。
・ 電動機に電力を供給するために,9 kHz未満の基本波周波数を発生する。
・ 二次的現象として,例えば変換器のPWM制御,マイクロプロセッサのクロックなど,制御に9 kHz
を超える周波数を用いることがある。
いずれの周波数に対しても,伝導及び放射妨害を規定している。
伝導妨害に関しては,次の点が重要である。
・ ディファレンシャルモード電圧(ノーマルモード電圧):入力端子(又は出力端子)間に現れる妨害に
関係する。
・ コモンモード電圧:入力又は出力値と,大地又は基準接地接続点との間に現れる妨害の平均に関係す
る。
これらは,説明のためのものであり,詳細な定義は,JIS C 60050-161を参照。
放射妨害に関しては,次の点が重要である。
・ 近傍界:発信源からの距離がλ/(2π) より近い場所。
・ 遠方界:発信源からの距離がλ/(2π) より遠い場所。
λは,対象信号の波長とする。
システムの電磁両立性を調べるには,低周波・高周波の伝導妨害・放射妨害それぞれについて,エミッ
ション及びイミュニティの両方の観点から検討する。
EMC現象を分類・要約して表A.1に示す。
35
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表A.1−EMCの概要
周波数
伝搬
結合
エミッション
イミュニティ
低周波
0≦f<9 kHz
伝導
コモンモード
3の倍数次の高調波(零相)
漏れ電流
電源周波数電圧
ディファレン
シャルモード
高調波,次数間高調波及び
転流ノッチ
電力線通信への影響
転流ノッチ
電圧揺動
電圧ディップ及び短時間停電
過渡過電圧
位相揺動
電圧不平衡
周波数揺動
直流成分
放射
近傍界
磁気結合
磁界
磁界
容量性結合 電界
電界
遠方界
高周波
9 kHz≦f
伝導
コモンモード
誘導RF a) 電圧及び電流
誘導RF a) 電圧及び電流
一方向過渡現象
ディファレン
シャルモード
誘導RF a) 電圧及び電流
一方向過渡現象
放射
近傍界
電気的
(高インピーダンス)
磁気的
(低インピーダンス)
パルス磁界(携帯送信機)
携帯送信機
遠方界
電磁界
RF a) 電磁界
広帯域スペ
クトル
気中放電
接触放電
注記 この規格では,低周波と高周波との境界をITUの規定に従って9 kHzとしている。この用語は,放送周波数
帯には関係しない。
注a) RF:無線周波
工業上の経験から,トランシーバのような携帯送信機は除き,両立しない主な原因は,伝導妨害による
ものである。この規格は,特にPDSに関係する妨害を扱う。
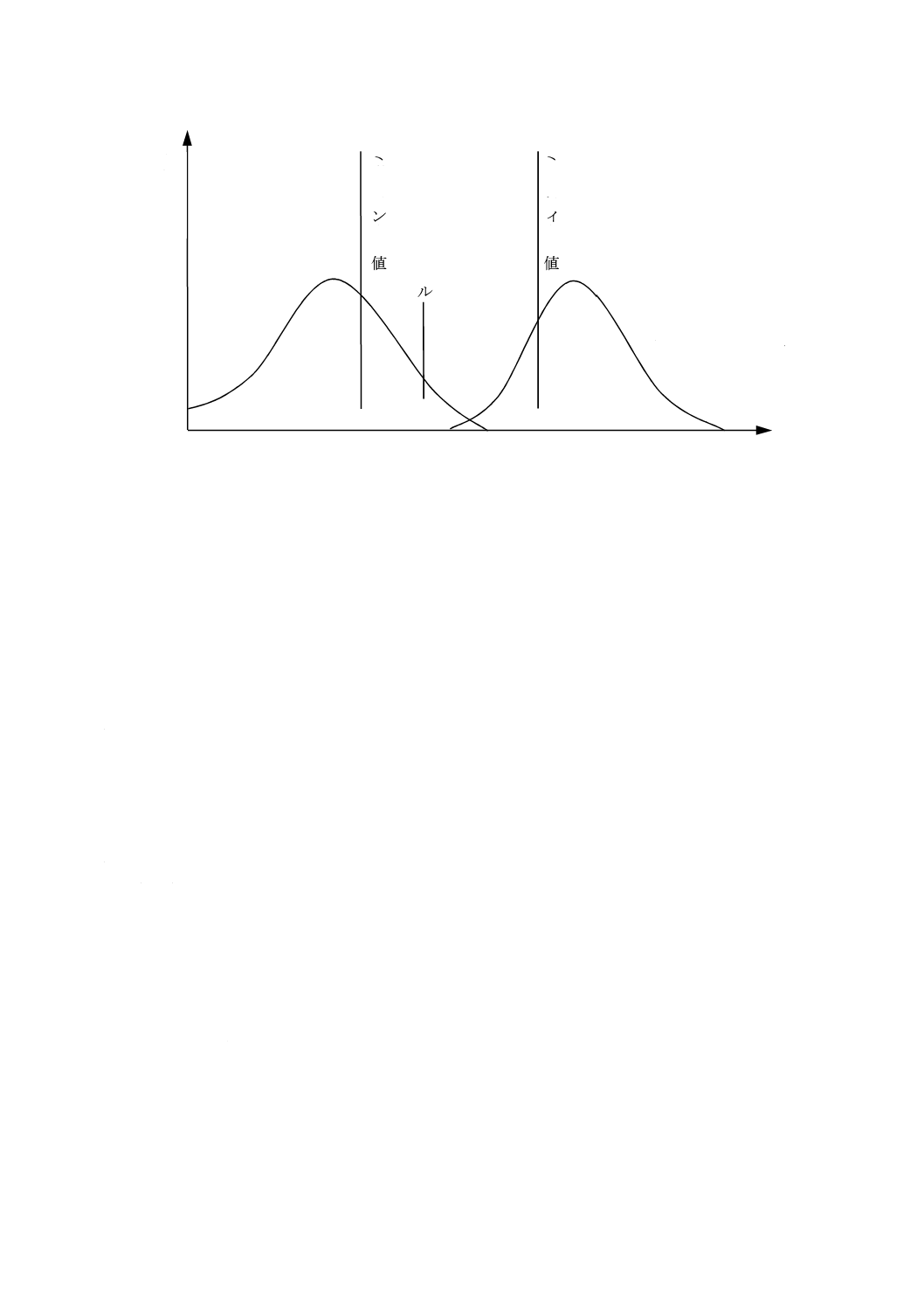
A.1.2 電磁両立性レベル
EMCを確実にする場合,装置からのエミッション及びその装置が受信する妨害を測定し,特性を示すこ
とが望ましい。図A.1は,知っていることが望ましい各種のレベルを要約している。
36
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図A.1−妨害とイミュニティとの協調
A.1.3 PDSの適用及びEMC
PDSの適用範囲は極めて広いため,すべてを網羅したリストを構築できない。ここでは,環境が大きく
異なっている例を示す。EMCの定義は,製品自体よりも環境に依存しているので,基準の適用に当たって
は,このことを考慮することが望ましい。例えば,住宅用建築物内でのエミッションの限度値は,産業用
プラントで圧延装置に用いる限度値とは,異なっていることが望ましい。
PDSの適用例を,次に示す。
・ 工作機械,ロボット,生産用試験装置,テストベンチ
・ 製紙機器,紡織機,ゴムのつや(艶)出し機
・ プラスチック工業又は金属工業における処理工程,圧延装置
・ セメント粉砕機,セメント炉,ミキサー,遠心分離機,押出し機
・ せん孔器
・ コンベヤ,荷役運搬機,ホイスト(クレーン,ガントリーなど)
・ 船舶推進装置など
・ ポンプ,ファン,その他
これらの例には,この規格が対象とするPDSを用いる。ただし,電気自動車,鉄道車両用駆動装置及び
昇降機は,この規格の適用範囲外とする(箇条1参照)。
A.2 高周波現象に関する負荷条件
A.2.1 エミッション試験における負荷条件
通常,電動機の負荷は,PDSのEMC特性にわずかな影響しか与えない。したがって,PDSは,すべて
の負荷条件で試験する必要はなく,すべてのエミッションを代表する負荷だけEMC特性を試験すればよ
い。製造業者は,選定した負荷条件がこの試験の性能判定基準に合致することを証明することが望ましい。
PDSの放射及び伝導エミッションは,主に,低周波,又は直流出力電力を作るために用いる出力電圧の
急しゅんな変化によって生じる。波形の電圧スペクトルは,PDSが入力電力線,キャビネット,電動機配
イ
ミ
ュ
ニ
ティ
限
度値
エ
ミ
ッ
シ
ョン
限
度値
妨害レベル
確
率
密
度
妨害レベル
イミュニティレベル
両
立
性
レ
ベル
37
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
線,及び電動機ケースから電気エネルギーを放射するのに十分な高周波エネルギーをもつことがある。放
射エネルギーは,電圧の急しゅんな変化に起因するため,試験は高周波成分が最も大きくなる電圧変化の
条件で行うことが望ましい。
試験は,ほかの条件で行う必要はない。
電圧変化の急しゅんの程度は,PDSに用いるパワーデバイスのスイッチング速度の影響を受ける。イン
バータに用いる非常に速いIGBT(トランジスタ)は,ダイオードの逆回復特性と組み合わされて,1 000 V/μs
を超えるdv/dtを発生する。ダイオード逆回復の急しゅんの程度がこの高いdv/dtの重要な要素であること
に着目することは重要である。逆回復電流のレベルは負荷に依存するが,ダイオード逆回復の急しゅんの
程度は,負荷レベルに依存しない。その抑制対策は,フィルタ要素の飽和効果(例えば,障害抑制インダ
クタの飽和)が評価できる。
他方では,電圧上昇率を抑制するのに用いるスナバのような,受動の容量性,抵抗性,又は誘導性の主
回路部品の効果が評価できる。これらの装置の出力波形は,負荷に依存するdv/dt特性をもつことがある。
この場合,動作上,最悪の場合のdv/dtでPDSを試験することが重要である。
A.2.2 イミュニティ試験における負荷条件
通常,電動機の負荷は,PDSのEMCの特性にわずかな影響しか与えない。したがって,PDSのEMC
特性は,すべての負荷条件で試験する必要はなく,すべてのイミュニティを代表する負荷だけで試験すれ
ばよい。製造業者は,選定した負荷条件がこの試験の性能判定基準に合致していることを証明するのが望
ましい。
一般に,低周波又は高周波の妨害に対し,負荷条件は,PDSのイミュニティに影響しない。一般に,主
回路及び制御回路網の故障は,電流レベルでなく電圧レベルに関連する。軽負荷による試験は,過電圧,
過電流などの保護回路の設定値のわずかな変化を検出しない。これらのレベルがPDSの適切な動作に重要
な場合,試験は,これらの動作点でのイミュニティを確認することが望ましい。
発生トルク特性の性能判定基準を用いる場合,負荷は,低周波又は高周波試験に伴うトルク妨害を測定
することが可能なレベルにすることが望ましい。このため,電動機及びトルク測定装置が必要になる。電
動機は,その試験の電磁環境で用いることができる負荷をもつことが望ましい。間接的なトルク測定方法
を用いるとき,PDSは,どのようなトルク妨害も測定できるような十分な負荷レベルで動作することが望
ましい。
A.2.3 負荷試験
A.2.1及びA.2.2条件が満たされるとき,PDSのEMC特性について確かめるため,軽負荷試験(すなわ
ち,無負荷の電動機運転試験)を行ってもよい。負荷がかかった電動機を模擬する受動負荷(抵抗器及び
インダクタ)を用いて試験してもよい。また,電動機のきょう体がアンテナ素子として作用することも注
意する重要な点である。受動負荷を用いる場合,このアンテナ効果も模擬することが望ましい。
PDS製造業者は,いかなる試験中でもPDSに加える負荷がその特定の製品に対して最悪の場合又は最も
感度が高い状態を作り出すことを証明することが望ましい。これは,代表製品の試験によって,計算又は
シミュレーションによって証明できる。
A.3 イミュニティ
A.3.1 電源周波数磁界
JIS C 61000-4-8の試験は,通常,磁界に敏感な部品を用いる箇所で行う。PDSは,ホール効果を用いた
電流検出器を用いることが多い。ただし,これらの検出器は,高レベルの電磁界が存在する位置(電力線
38
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
導体の付近)で動作するように設計する。高レベルの電磁界の振幅は,JIS C 61000-4-8の試験レベルより
はるかに高い。例えば,電流10 A(無限の直線で単独であると仮定)は,5 mmで320 A/mの磁界を発生
すると計算できる。したがって,この磁界に敏感な部品の動作環境と比べて,試験による妨害は,無視で
きると考えることができる。
A.3.2 電磁界イミュニティ試験
A.3.2.1 低レベル電磁界
産業,科学及び医学 (ISM) 用の無線周波数装置,溶接機,乾燥機などは,低レベルの電磁界の発生源と
なり得る。これらの装置は,住宅及び工業環境のいずれにもあり,発生する電磁界強度は,PDSのきょう
体ポートにおいては3 V/mより小さいと考えられる。
PDSでのこれまでの経験から,本質的な運用上の利便性が確保されている場合,ほかのPDSによる放射
電磁界及び放送波による低レベル電磁界は問題ないといえる。
A.3.2.2 代替試験
電磁界強度は,送信アンテナと影響を受けるものとの間の距離に反比例して減少し,アンテナ入力電力
の平方根に比例して増加する。したがって,PDSから約1 m以内で動作する送信機に注意することが望ま
しい。これらの通信機器は,電子装置に影響を与える主な放射妨害の発生源である。連続的な高周波妨害
の通常の発生源の例は,トランシーバ又は携帯電話のような移動式通信機器である。
大容量PDS は,JIS C 61000-4-3の試験を行うための試験場所(シールドルーム)に,適切に設置して
運転することはできない。したがって,サブコンポーネントだけに対して試験を行ったPDSの全体に対し
て検証するために,一般産業用の無線通信装置を発信源として,補足試験を代替することができる。
試験の間,PDSは5.1.3 に従って通常運転状態(例えば,扉を閉めた状態)で運転及び監視する。
この試験は,シールドルーム内では行わないので,法的に認可された送信機だけを試験する場所で用い
ることができる。送信機は,次のようなものが望ましい。
・ 使用者の構内で短距離使用が一般的なトランシーバのような装置。
・ デジタル携帯電話(使用者の構内での使用が禁止されておらず,かつ,定格電力で送信できる場合。)
送信機の電池パック又は電源が満充電状態であることに注意することが望ましい。送信機の送信出力の
強さを調整可能な場合(節電機能など),この機能を停止することが望ましい。試験中に用いる送信機のリ
スト及び特性(形式,出力及び周波数)は,製造業者から使用者への提供情報のために記載することが望
ましい。
送信機は,CDM/BDMの垂直面に近いところで操作する。アンテナからPDSへの最短距離は,0.5 m〜
1.0 mとする。送信機は,受信から送信に切り換え,再び受信に切り換える。送信時間は,PDSが応答で
きるのに必要な時間を下回らないように注意することが望ましい。電話タイプの装置の場合,使用者が“受
信”と“送信”とを切り換えられないときには,代わりに電話番号を発信する。
各アンテナ方向に最低限3種類送信することが望ましい(PDSの表面に平行な面上で垂直及び水平,並
びにPDS表面に対して垂直)。
試験は,次の手順で行うことが望ましい。
・ CDM/BDMの各垂直面に対して5か所以上で行う。
・ これらの垂直面のすべての開口部。換気口は,開口部とみなす。
・ 電動機にセンサがある場合,電動機の表面
全手順を二つ以上の異なる送信周波数で行う。
39
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.4 高周波エミッション測定技術
A.4.1 インピーダンス及び擬似電源回路網
A.4.1.1 擬似電源回路網の回路
PDS内の高周波妨害源は,電源インピーダンスをもっているので,妨害電圧の測定は,回路網のインピ
ーダンスの影響を受ける。特に,低周波数帯では,電源インピーダンスは,誘導性とみなすことができる。
ただし,システムの様々な静電容量のために共振を生じる場合がある。詳細は,IEC 61000-2-3 : 1992の6.6
参照。
可能な限り,形式試験においては,電源インピーダンスを標準化するために擬似電源回路網を用いるこ
とが望ましい。これによって,異なるテストサイトでの再現性が向上する。
擬似電源回路網の特性は,CISPR 16-1-1の5.1で規定する。この規格は,妨害電圧測定の周波数領域に
対して50 Ωの抵抗と50 μHのインダクタとを並列接続した回路(以下,“50 Ω/50 μH回路網”とする。),
又はその回路に5 Ωの抵抗を直列接続した回路(以下,“50 Ω/50 μH+5 Ω回路網”とする。)を用いる。
150 kHz〜30 MHzの帯域で,供試装置(可変速のPDS)は,入力電源回路のインピーダンスに関係なく,
50 μHが並列に接続した50 Ωの基準接地に対するインピーダンスとみなせる。
擬似電源回路網は,各相に同じ回路をもつ。中性線を用いる場合は,中性線の接続で各相の回路が同じ
になる。
A.4.1.2 擬似電源回路網を使用できないPDS
A.4.1.2.1 不可能な理由
低周波数帯では,50 Ω/50 μHの擬似電源回路網内インダクタによって,主電源のインピーダンスに50 μH
が加わる。50 Ω/50 μH+5 Ωの擬似電源回路網内インダクタによって,主電源のインピーダンスに300 μH
が加わる。このインピーダンス増加が,PDSの正常な運転を阻害する場合がある(例えば,電源インダク
タンスが大きすぎると,大電流及び小制御角の領域で転流ノッチが大きくなりすぎる。)。このような場合
には,擬似電源回路網は,使用できない。
この擬似電源回路網は,100 A以下での使用について規定しているので,100 Aを超えるPDSには,使
用できない。大容量PDS(例えば,定格電流が400 Aを超える)では,電源インピーダンスは,擬似電源
回路網のインピーダンスに比べて小さい。この場合に,擬似電源回路網を用いたときは,極端に高い測定
値となる。
公称電源電圧が400 Vを超える場合は,一般市場で擬似電源回路網を入手するのは,困難である。
このような場合,PDSは,主電源に直接接続することが望ましく,妨害電圧は,高インピーダンスプロ
ーブを用いて測定できる。
A.4.1.2.2 高インピーダンスプローブ
擬似電源回路網が使用できない場合は,CISPR 16-1-1の5.2.1で規定する高インピーダンスプローブで
妨害電圧を測定できる。電源周波数の電流は,プローブを通過しないため,大電流定格のPDSにも使用で
きる。
コンデンサの容量及び電圧定格を調整することによって,このプローブは,600 V以下の電源に使用で
きる。コンデンサ容量を減らす場合,測定時の換算値は,CISPR 16-1-2で規定する校正値を考慮したもの
でなければならない。
プローブは,ラインと基準接地との間に接続する。CDM/BDMが接地した金属フレームをもつ場合,そ
れは基準接地とみなせる。この接続は,CDM/BDMの入力部で行うことが望ましい。このプローブへの接
続は,できる限り短くし,0.5 m以下とすることが望ましい。
40
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
CISPR 16-1-2は,プローブに接続するリード線,試験導体及び基準接地相互間で形成するループを最小
にするように警告している。これは,磁界の影響を減少させるためである。
A.4.1.2.3 大電流PDSの代替試験方法
相を変更する場合の安全上の理由によって,又は擬似電源回路網で測定した数値より数十デシベル高い
測定値になることがある(インピーダンスの不整合のため)という理由によって,高インピーダンスプロ
ーブを使用できない場合がある。
近年,数箇国で行われている代替試験方法は,大電流PDS(数百アンペアを超える)に対して,低電流
容量の擬似電源回路網(例えば,25 A)を電圧プローブとして用いる手法である。この方法は,CISPR 16-2-1
のA.5で規定する。PDSは,その電源網から切り離されることはない。
擬似電源回路網の負荷側回路は,1 mのケーブルによってPDSの電源線の電源端子に接続する。結合点
と擬似電源回路網との間には,インダクタンス成分がある(接続用配線などによって)。擬似電源回路網の
電源側は,開放のままとすることが望ましい(周辺機器は,接続しない。)。受信機は,通常どおり,擬似
電源回路網に接続する。この方法による測定結果は,数百アンペアの仮想的な擬似電源回路網による結果
に非常に近い。
A.4.2 高周波エミッション試験の実施
A.4.2.1 測定装置
A.4.2.1.1 目的
定義に関しては,この規格の本体並びにCISPR 11及びCISPR 16-1規格群を参照することが望ましい。
無線周波妨害の測定方法について詳しくない,この規格の使用者のために,付加的な説明を記載する。
A.4.2.1.2 スペクトラムアナライザ
高周波妨害の評価には,スペクトラムアナライザを頻繁に用いることが多い。ただし,多くのスペクト
ラムアナライザは,CISPR 16-1-4に完全に適合しているわけではなく,問題が発生することがある。
入力回路の選択度が低い場合には,混変調が発生し,不正確な測定値を示す場合がある。スペクトラム
アナライザによっては,正しい帯域幅がなく,同様に誤差の原因となる場合がある。
スペクトラムアナライザは,通常の走査ではせん頭値検波器を用いる。しかし,CISPR規格は,準せん
頭値及び平均値として知られる特別な検波器をもつ受信機の使用を要求する。準せん頭値検波器は,
“CISPR検波器”としても知られている。これらの検波器をオプションとして備えているスペクトラムア
ナライザもある。CISPR 16-1-1は,準せん頭値検波器及び平均値検波器に高い過負荷能力を要求するが,
多くのスペクトラムアナライザでは,問題になる場合がある。
スペクトラムアナライザがCISPR 16-1-1に完全に適合しているときには,アナライザの製造業者がその
ことを示すことが望ましい。
A.4.2.1.3 試験用受信機の適合性
測定器(スペクトラムアナライザ又は試験用受信機)が適切かどうかを決定するためには,測定器が
CISPR 16-1-1に完全に適合しているかどうかを測定器の供給者に確認することが望ましい。しかし,要求
事項を理解するために,主な特性の概要を示す。
雑音端子電圧の測定に対して,受信機は,150 kHz〜30 MHzの周波数帯を測定できることが望ましい。
準せん頭値検波器及び平均値検波器を共に備えていることが望ましい。その帯域幅は,9 kHzであること
が望ましい。
9 kHz〜150 kHzの周波数帯域を測定できる受信機もある。この周波数帯において,帯域幅200 Hzの準せ
ん頭値検波器があることが望ましい。
41
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
電磁放射妨害(放射エミッション)測定用受信機は,30 MHz〜1 000 MHzの周波数帯域を測定できるこ
とが望ましい。ここで,その帯域幅は,120 kHzで,準せん頭値検波器を用いることが望ましい。
A.4.2.2 測定技術
A.4.2.2.1 エイリアシング
受信機は,検波器の出力が安定するまでに十分な時間,指定した周波数に同調させたままにすることが
望ましい。試験用受信機(又はスペクトラムアナライザ)の走査が速すぎる場合には,検波器の出力は正
しい値に落ち着かず,エイリアシングと呼ばれる現象が起きて,誤った測定値となる。PDSを含むパワー
エレクトロニクス装置では,パルス繰返し周波数が低い(50/60 Hz〜数キロヘルツ)ため,このことは非
常に重要である。波形のせん頭値又は谷がスクリーンを横切って動いて現れるときにはエイリアシングが
起きており,掃引時間を増加させることが望ましい。
高周波妨害の評価に頻繁に用いるスペクトラムアナライザの方式の中には,ローカル発振器をその周波
数帯で掃引するものがある。これを時間領域の離散的フーリエ変換を用いたアナライザと混同しないよう
にする。
測定値が限度値に近い周波数では,受信機の走査を用いずに測定を行うことが望ましい。これによって,
これらの周波数でのエイリアシングによる不正確さを避けることができる。
A.4.2.2.2 せん頭値,準せん頭値及び平均値
せん頭値,準せん頭値及び平均値検波器は,帯域幅が同じ場合,連続的な正弦波信号に対して同じ測定
値を示す。PWMのようなインパルス性の信号に対しては,せん頭値検波器が最も高い値を示し,平均値
検波器が最も低い値を示す。パルスの繰返し周波数が受信機の帯域幅に比べて非常に低い場合,検波器の
違いによる測定値の違いは最も大きくなる。
A.4.2.2.3 暗雑音
暗雑音の制限に関する要求事項は,CISPR 11 : 2003の6.1に規定する。
暗雑音が測定(読取り)誤差の原因にならないように注意することが望ましい。電源からの暗雑音を監
視する場合,開路している接触器又は開閉器が,PDSが運転中には存在しない減衰を引き起こすことに注
意することが望ましい。
A.4.2.2.4 試験中のPDSの配置
試験は,実際の動作状態を模擬することを想定している。したがって,装置は,通常使用状態で運転す
ることが望ましい。例えば,通常の動作中に閉まっているカバー及び扉は,試験中にも閉まっていること
が望ましい。ほかの要求事項は,本体で規定する。
A.4.2.2.5 放射エミッションの測定
放射エミッションを測定するためのアンテナ及びテストサイトは,CISPR 16-1-4 : 2004の箇条4及び箇
条5で規定する。
放射エミッションの測定値を標準化するために,特別なオープンサイトを用いる。このテストサイトで
は,一様な反射を得るために十分な導電率をもった金属グラウンド面がある。
いろいろな方向の放射エミッションを測定するために,供試装置は,ターンテーブルの上に配置する。
最も低い周波数 (30 MHz) での遠方界での測定を確実にするために,アンテナは,供試装置から10 m又
は30 mの距離に設置する。
指定する周波数における最大のエミッションを検出するために,アンテナは,垂直偏波,水平偏波の両
方向についてアンテナ高さを上下に変化させる。
42
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
A.4.2.2.6 現地試験
テストサイトで装置を試験できない場合,現地試験を行う。現地試験の場合,A.4.2.2.3に示した暗雑音
の問題を避けるため,特別に注意することが望ましい。
現地試験は,試験場での試験ほどに再現性はない。したがって,ある場所での現地試験の結果を用いて
量産製品の適合性を予想する場合は,注意することが望ましい。
テストサイトで試験できない場合,米国では,装置を設置する最初の3か所で現地試験を行う方法も用
いている。3か所すべてで限度値を満足している場合,装置は,一般的に限度値を満足しているとみなす。
A.4.3 大容量PDSの確立した経験
高周波妨害に対する法律制定及び無線通信の保護を確立することの有効性は,数十年間の異なる国々の
経験が実証している。例として,何年間もドイツで行われてきた方法を次に記述する。
この方法において,第2種環境での使用を想定する大容量装置は,設備の一部であるため,テストサイ
トでの試験は,行わない。[4] 1) 参照。同じ原理は,使用者自身が自らの責任によって構築した装置にも適
用する。[5] 参照。その場所に設置することを想定した測定及び制御装置であっても,このような大容量
設備のエミッション限度値は,実際の設備領域の境界において参照する。エミッション限度値は,設備の
境界において適用している(伝導妨害電圧の測定点は,上位の中電圧変圧器の低電圧の二次側,放射エミ
ッションに対しては境界から30 mの距離)。[4] 及び [5] 参照。
結果として,6.5に規定する方法は,このような経験に従っている。このようなPDS(カテゴリC4)の
使用も,EMCの能力を要求する。このような能力は,設備の設計に適用することが望ましく,製造業者及
び使用者は,この環境において最も経済的な両立性レベルを決定することが望ましい。
注1) 角括弧内の数字は,参考文献を示す。
43
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
低周波現象
序文
この附属書は,本体の規定を補足するものであって,規定の一部ではない。
この附属書は,国内では適用できない事項,並びに他国の運用及び/又は技術動向に関する事項がある
が,参考情報として対応国際規格を翻訳して記載している。
B.1
転流ノッチ
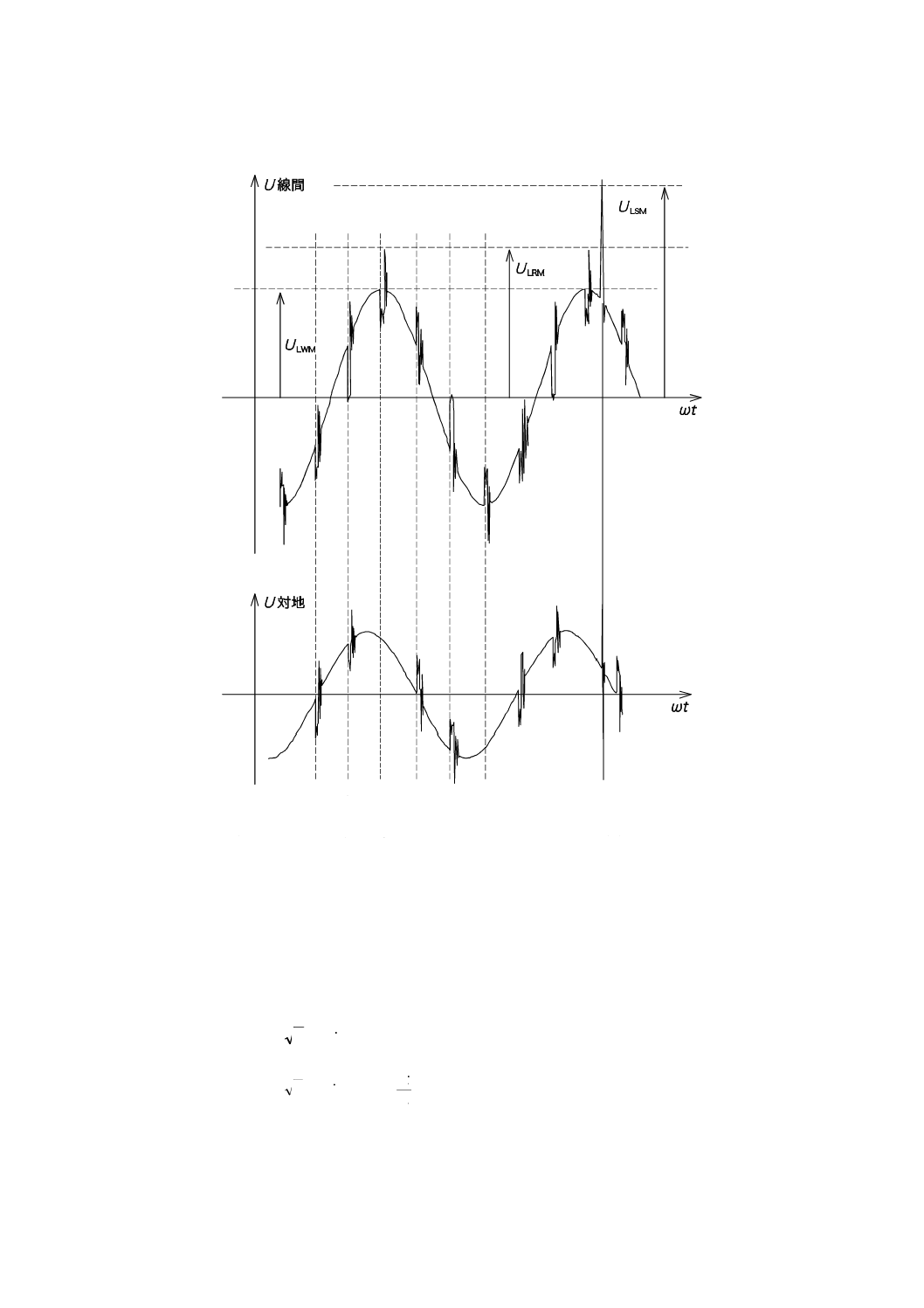
B.1.1 発生−説明
転流ノッチは,サイリスタ変換器の端子に発生する線間の短絡現象によって生じる。転流ノッチは,電
源の1相から次の相に電流が転流するために生じる。電圧ノッチは,交流主電源電圧の基本波瞬時値との
差分である。転流ノッチの大きさは,電源のインピーダンスとサイリスタ変換器内の減結合リアクタンス
との比によって電源システム内のどこにでも現れる(図B.1参照)。
ノッチの解析は,通常の高調波よりも広い周波数範囲を考慮する。その時間領域の特性は,簡単な高調
波解析によって得ることができない影響を及ぼす。したがって,オシロスコープを用いて時間領域の解析
を行う。
次の事項は,最初に考慮することが望ましい。
・ 法則を適用する簡単な場合,電力系統インピーダンスが純リアクタンスZ=Lωでモデル化できると仮
定する(キャパシタ又は長いケーブルが存在するところでは共振が発生するので,この仮定は,有効
ではない。)。
・ 転流ノッチのイミュニティは,IEC 60146-1-1 : 1991の2.5.4.1でクラス分けする。計測値は,深さ(ULWM
に対する%)及び面積(%度で示される深さと幅との積)で定義する。ULWMは,IEC 60146-1-1で過
渡的な値を除くULの瞬時最大値と定義する。ここで,ULは,変換装置又は変圧器の電源側の線間電
圧とする。
変換装置がインダクタンスを含まない場合,BDM/CDMの端子ではなく,変換装置自身の端子での線間
電圧の原理的なノッチの深さdは,次の式で示す。
d=100 sin α (%)
ここに,
α: ダイオードの自然転流点を基準にしての位相制御変換装置の
制御角。
・ 原理的なノッチは,変換装置の端子での線間電圧で0 Vの値となる特徴をもつ。
・ dの概算値は,α<90°では低めになり,α>90°では大きめになる。
ノッチ面積aは,簡単な関係によって見積もることができる(三相ブリッジの例。≒の条件は,次の注
記を参照)。
L
1L
t
000
8
U
I
Z
a=
(%度)
ここに,
Zt: 1相当たりの総合の線路インピーダンス(ここでは,純リアク
タンスと仮定),CDM内のインピーダンスも含む。
I1L: 電源側電流の基本波成分
44
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
UL: 線間電圧
注記 p.u.値の範囲は,参考として示す。
図は,PDSの端子と変換装置との間にインピーダンスがないと仮定している。
繰返し過渡電圧 (ULRM / ULWM)=1.25〜1.5:di/dtとIRR(半導体の逆回復電流)と
に関するスナバ回路の設計に依存する。
非繰返し過渡電圧 (ULSM / ULWM)=1.8〜2.5:追加の保護装置に依存する。
図B.1−転流ノッチの代表的な波形−非繰返しの過渡現象とは区別
PDSが電流制限状態にあるときに,最悪の状態が発生する。
注記 転流重なり角μの期間,α〜(α+μ) において,転流電圧は,次の式で表す。
t
U
ω
sin
2
L
及び
t
i
L
t
U
d
d
2
sin
2
t
L
=
ω
転流ノッチの面積は,
45
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
∫
∫
+
+
×
μ
α
α
μ
α
α
θ
θ
θ
θ
d
d
d
d
d
2
d)
(
t
t
t
i
L
U
A
=
=
(Vrad)
A=2 LtωIα,すなわち,A=2 Zt Iα
ここに,
Iα: 転流電流
三相ブリッジにおけるリプルを考慮してIα=0.75Idと仮定する。
ここに,
Id: 直流電流
A=1.5 Zt Id
Aを%度で表してaとした場合,次のようになる。
L
1L
t
L
d
t
L
794
7
077
6
2
1
π
2
360
100
U
I
Z
U
I
Z
U
A
a
=
=
=
近似して,
L
1L
t
000
8
U
I
Z
a=
又は単位法で表してa ≒ 4 500 (zt iL)
ここに,
zt: 単位法で表した1相当たりの総合の線路インピーダンス
iL: 単位法で表した電源側電流
B.1.2 計算
B.1.2.1 一般的な評価
B.1.1に示した仮定が成り立つとき,PCにおけるノッチの深さは,次の式で示す。
t
c
d
c
c
PC
sin
100
sin
100
Z
Z
Z
Z
Z
d
α
α
=
+
=
%
ここに,
Zt: 電源インピーダンスの合計
Zt = Zc + Zd
ここに,
Zd: PCと変換器の端子との間の減結合リアクタンス
(CDMに含むか含まないかに関係なく)
Zc: PCにおける電力系統インピーダンス
変換装置の制御範囲(例えば,三相制御ブリッジの場合)は,制御角αの最大値を用いてsinαで示すこ
とが多い。ノッチの深さは,変換装置の端子での100 %からゼロインピーダンス電源での0 %まで変化す
る。
PCとBDMとの間に接続した減結合リアクタンスZdは,ノッチの深さを減少させ,PCにおけるノッチ
の幅を増加させる,ただし,ノッチの面積は一定である。
L
1L
c
PC
000
8
U
I
Z
a=
(%度)
上の仮定を適用する簡単な場合,これらの式は,必要な減結合リアクタンスの決定に用いることができ
る。ノッチの深さの限度値(表B.1参照)及び変換装置の制御範囲を用いて,PCにおけるノッチの深さか
ら,Zc/(Zc+Zd) の値を求められる。
したがって,設置者は,使用者が指定するZcを用いて計算できる。減結合リアクタンスがある場合(製
造業者が指定する。)はそれを差し引いて,残りの値が指定の減結合を行うために加えるリアクタンスとな
る。
注記 この箇条で示す計算は,ノッチの最初及び最後の過渡状態は,計算に含んでいない。
B.1.2.2 実用的解析
B.1.2.1の計算は,リアクタンスZdによるエミッションの減結合の実用的な解析を示す。このことを,次
のとおり要約する。電力系統インピーダンスが,純リアクタンスと仮定する場合,基本的な関係は,次の
46
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
式のようになる。
Zc = Lc × ω
Zt = Zc + Zd
t
c
PC
sin
100
)
(
Z
Z
d
α
=
%
L
1L
c
PC
000
8
)
(
U
I
Z
a
=
%度
同一のラインに接続する多相整流装置の場合,IEC 60146-1-2の3.5を考慮することが望ましい。ただし,
ノッチエミッションの判定基準を守ることが,自動的に高調波エミッションの判定基準を守ることにはな
らない。同様に,高調波エミッションの判定基準を守ることが,自動的にノッチエミッションの判定基準
を守ることにはならない。高調波ひずみの判定基準は,イミュニティの見地を完全には網羅しない。高調
波の判定基準は,異なる高調波成分間の位相関係を包含していないので,特殊な電圧波形がPDSに供給さ
れることを避けることができない。転流ノッチの特殊な波形(dv/dt,ゼロクロス)は,スナバ回路の動作,
又は電子制御回路の動作に影響を及ぼすので,特別のイミュニティ判定基準は,IEC 61800-1 : 1997及び
IEC 61800-2 : 1998の4.1.1にある電気的使用状態で規定する。
B.1.3 転流ノッチに関する推奨
B.1.3.1 エミッション
この推奨は,転流ノッチが発生しない,又は無視し得る大きさであることが既知の構成の変換装置には,
適用しない。
注記1 例えば,スイッチング周波数の影響を減少するように設計した減結合フィルタをもつ入力回
路がある電圧形インバータ方式の間接変換装置は,ノッチを発生しない。簡単なダイオード
整流器のノッチの大きさは,無視できる。ノッチのエミッションが存在する主な例は,電源
転流形サイリスタ変換器の場合である。
転流ノッチに関する推奨を守ることが,高調波に対する要求事項を守ることを証明するものではない。
PCにおける原理的なノッチの深さは,電源インピーダンスがZ=Lωという純リアクタンスと仮定して
1.5 %(PDSの定格電力に対して)の値のときに,表B.1による値以下に制限することが望ましい。
注記2 PDS設置時に,電源インピーダンスは,PCにおける短絡容量によって定義する。
sc
2
LN
sc
S
U
Z=
表B.1−PCにおける転流ノッチの最大許容値
第1種環境
第2種環境
最大ノッチ深さ
20 %
IEC 60146-1-1のクラスC又は電源
供給者の要求事項を満足
40 %
IEC 60146-1-1のクラスB又は使用
者による同意
注記3 この規則は,コンデンサ又は長い距離のケーブルのために共振のおそれがある場所では,用
いることができない。
注記4 特別な考慮が必要な配電系統もある(例えば,病院内の配電系統)。このような場合,使用者
が条件を決定することが望ましい。
47
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
適合性は,計算,シミュレーション及び測定によって判定してもよい。
PDSがこの推奨条件から逸脱している場合には,製造業者は使用者がこの推奨条件に適合させるための
次に示す情報を説明書で提供することが望ましい。
・ CDM/BDMの正しい動作のための,最大及び最小の電源インピーダンス。
・ CDM/BDMが内蔵する減結合リアクタンスZdがある場合,その詳細。
・ オプションとして納入できる減結合リアクタンスZdの詳細。
注記5 最大の線路インピーダンスは,PCにおけるノッチの最大面積に直接関係する(B.1.1参照)。
ただし,複数のPDSが同一のPCに接続する場合には,ノッチの制限はシステムでの考察となり,簡単
な解析では決定できない。
注記6 ほかの装置に関してノッチに対するイミュニティを考慮することが望ましい事例の一つに,
RFIフィルタがある。
B.1.3.2 イミュニティ
PDSにおけるノッチの有害な影響は,高調波ひずみ率に与える周波数領域での解析結果が示す影響より
も大きい場合があるので,ノッチを時間領域で解析する必要がある。高調波及び転流ノッチによるストレ
スは,電子制御回路及びパワーデバイス,例えば,スナバに影響を与えることに注意しなければならない。
電子制御回路の動作不良はすぐに発生し,かつ,スナバ回路は熱時定数が短いので,連続条件に対する試
験時間は,1時間を超える必要はない。
次に示すようなノッチに対するイミュニティを考慮することが望ましい。
・ 動作が瞬間的に影響を受ける部分。例えば,電圧のゼロクロスを基準とする電子同期回路での影響。
・ 熱的過負荷。例えば,変換装置内のスナバ回路の過負荷。
・ LC回路での過電圧。例えば,RFIフィルタ。
B.2
高調波及び次数間高調波に関する定義
B.2.1 一般的議論
B.2.1.1 非正弦波電圧及び電流の解析
古典的フーリエ級数解析 (IEV 101-13-08) は,非正弦波であるが周期性のある量を,直流成分を加えて
一連の周波数での正弦波成分に解析できる。次数が最も低い周波数を基本波周波数 (IEV 101-14-49) と呼
ぶ。ほかの級数の周波数は,基本周波数を整数倍したもので,高調波周波数と呼ぶ。対応する成分は,そ
れぞれ基本波成分,高調波成分と呼ぶ。
フーリエ変換(IEV 101-13-09)は,周期性,非周期性のどのような関数に適用してもよい。変換の結果は,
周波数領域でのスペクトルになり,非周期性関数の場合,それは連続的なものになり,基本波成分がない。
周期性関数に適用した特別な場合,周波数領域における線スペクトルを示す。ここで,スペクトルの線は,
対応するフーリエ級数の基本波及び高調波である。
注記1 電源システムの電圧を解析したとき,基本波周波数の成分は,最も大きな成分になる。これ
は,時間関数に離散的フーリエ変換を適用したときに得られるスペクトルの最初の線とは限
らない。
注記2 電流を解析したとき,基本波周波数の成分は,最も大きな成分とは限らない。
B.2.1.2 時間変化現象
典型的な電力系統の電圧及び電流は,線形及び非線形負荷の絶え間ない開閉及び変動の影響を受ける。
ただし,解析の目的に対しては,それらは,電源電圧の周期の整数倍である測定窓(約200 ms)内で定常
48
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
とみなす。高調波解析は,技術が供与する最もよい解を与えるように設計する(JIS C 61000-4-7 : 2007参
照)。
B.2.2 現象に関連する定義
B.2.2.1
基本波周波数 (fundamental frequency)
時間関数のフーリエ変換によって得られるスペクトルにおいて,すべての周波数の基準となる周波数。
この規格では,変換装置に供給電源周波数,又は変換装置が供給する電源周波数と同じ。
[IEV 101-14-50変更]
注記1 JIS C 60050-551 20-01及び20-02は,フーリエ解析の結果としての成分と定義する。よって,
周波数は,結果となる。この箇条では,最初に周波数で成分は結果であるというIEC/SC77A
(低周波EMC)のアプローチに従っている。この二つの異なるアプローチに矛盾はない。
注記2 周期関数の場合には,基本波周波数は,一般に関数自身の周波数に等しい(JIS C 60050-551
20-03及び20-01参照)。上の定義は,JIS C 60050-551 20-04及び20-02による基準基本波周
波数の定義を参照する基準の用語は除いても,あいまいとなるおそれはない。
注記3 あいまいとなるおそれが残る場合,電源周波数は,電力系統に接続する同期発電機の回転の
極性及び速度を基準とする。
注記4 電力系統に接続する発電機が半導体変換装置の場合でも,この定義は,供給する負荷(単一
負荷,組合せ負荷,回転機又はほかの負荷)を考慮することなしに,どのような工業用配電
系統に適用してもよい。
B.2.2.2
基本波成分(又は基本波)[fundamental component (or fundamental)]
周波数が基本波周波数である成分。
B.2.2.3
高調波周波数 (harmonic frequency)
基本波周波数の2以上の整数倍の周波数。基本波周波数に対する高調波周波数の比は,高調波次数と呼
ぶ(推奨表記 “h”)。
JIS C 60050-551 20-05,20-07及び20-09参照。
B.2.2.4
高調波成分 (harmonic component)
高調波周波数の成分。高調波成分の値は,通常,実効値で表す。
注記 簡単化のために,これらの成分は高調波と表現してもよい。
B.2.2.5
次数間高調波周波数 (interharmonic frequency)
基本波周波数の整数倍でない周波数。
JIS C 60050-551 20-06及び20-08参照。
注記1 高調波次数の拡張によって,次数間高調波の次数は,基本波周波数に対する次数間高調波周
波数の比である。この比は,整数ではない(推奨表記 “m”)。
注記2 m<1の場合には,分数調波周波数の用語も用いる(JIS C 60050-551 20-10参照)。
B.2.2.6
次数間高調波成分 (interharmonic component)
次数間高調波周波数の成分。次数間高調波成分の値は,通常,実効値で表す。
49
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記1 簡単化のために,次数間高調波成分は,次数間高調波と表現してもよい。
注記2 この規格の目的のために,また,JIS C 61000-4-7で規定するように,時間窓は,基本波10
周期(50 Hzシステム)又は基本波12周期(60 Hzシステム)の幅をもつ。例 約200 ms。
そのため,二つの連続的な次数間高調波成分間の周波数の差は,約5 Hzとなる。ほかの基本
波周波数の場合では,時間窓は,基本波6周期(6 Hzで約1 000 ms)から基本波18周期(180 Hz
で約100 ms)までの間で選定することが望ましい。
B.2.2.7
高調波含有量 (HC) (harmonic content)
周期的に変化する量の高調波成分の和。
[JIS C 60050-551 20-12]
注記1 高調波含有量は,時間の関数である。
注記2 実際には,十分に長い期間の波形をとって,それを周期波形とみなしてフーリエ級数展開す
ることがある。
注記3 高調波含有量は,基本波成分に基準基本波成分を用いたかどうかによって違ってくる。いず
れを用いたかが明らかではない場合には,明記することが望ましい。
注記4 高調波含有量の実効値は,次の式で表す。
∑
=
=
H
h
h
Q
HC
2
2
h)
(
=
ここに,
Q: 電流又は電圧のいずれかを表す。
h: 高調波次数(B.2.2.3による。)
H: この規格では,40とする。
B.2.2.8
総合高調波ひずみ率 (THD) [total harmonic distortion (THD)]
交流量の基本波成分又は基準基本波成分の実効値に対する,高調波含有量の実効値の比。
[JIS C 60050-551 20-13]
注記1 基本波成分に基準基本波成分を用いたかどうかによって違ってくる。いずれを用いたかが明
らかでない場合は,明記することが望ましい。
注記2 総合高調波ひずみ率は,特定の高調波次数(推奨表記H)までに限定してもよい。この規格
では,40とする。
∑
=
=
H
h
h
h
Q
Q
THD
2
2
1
=
ここに,B.2.2.7の表記に加えて,Q1は,基本波成分の実効値である。
注記3 交流量(略語Q)とは,直流成分を含まない,周期的に変化する量である。
B.2.2.9
総合ひずみ含有量 [total distortion content]
交流量から基本波成分又は基準基本波成分を差し引いた量。
[JIS C 60050-551 20-11]
注記1 総合ひずみ含有量は,高調波成分のほか,次数間高調波成分がある場合は,それも含む。
注記2 総合ひずみ含有量は,基本波成分に基準基本波成分を用いたかどうかによって違ってくる。
50
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
いずれを用いたかが明らかでない場合は,明記することが望ましい。
注記3 総合ひずみ含有量は,時間の関数である。
注記4 総合ひずみ含有量の実効値は,
2
1
2Q
Q
DC
−
=
ここで,記号は,B.2.2.7及びB.2.2.8によって,また,IEV 101-14-54及びJIS C 60050-551
20-06参照。
B.2.2.10
総合ひずみ率,TDR [total distortion ratio (TDR)]
交流量の基本波成分又は基準基本波成分に対する,総合ひずみ含有量の実効値の比。
[JIS C 60050-551 20-14]
注記 総合ひずみ率は,用いる基本波成分によって違ってくる。いずれを用いたかが明らかでない場
合は,明記することが望ましい。
1
2
1
2
1
Q
Q
Q
Q
DC
TDR
−
=
=
B.2.2.11
総合ひずみ含有率,TDF [total distortion factor (TDF)]
交流量の全実効値に対する,総合ひずみ含有量の実効値の比。
[IEV 101-14-55及びJIS C 60050-551 20-16]
注記1 総合ひずみ含有率は,用いる基本波成分によって違ってくる。いずれを用いたかが明らかで
ない場合は,明記することが望ましい。
Q
Q
Q
Q
DC
TDF
2
1
2−
=
=
注記2 TDFのTDRに対する比は,基本波成分の実効値の全実効値に対する比に等しい。この値は,
JIS C 60050-161 02-22及び02-17の基本波率である。
1
1≦
=
=
Q
Q
TDR
TDF
FF
B.2.2.12
各次ひずみ率,h次高調波比,IDR [individual distortion ratio (IDR)]
任意の次数の高調波成分実効値の,基本波実効値に対する比。
1
h
Q
Q
IDR=
B.2.3 適用条件
B.2.3.1 参照値
この規格の目的及び明確化のため,限度値は対応する定格値を基にして示す。
THD及びTDRの限度値は,次の式の値に適用する。
N1
h
N1
2
1
2
2
2
N1
h
Q
Q
IDR
Q
Q
Q
TDR
Q
Q
THD
H
h
h
=
又は
−
=
及び
=∑
=
=
ここに, QN1: 基本波の定格実効値
注記1 THDは,次数間高調波を含んでおらず,また,Hは,通常40次までとすることに注意する。
TDRは,次数間高調波を含み,40次を超え9 kHzまでの周波数も含む。次数間高調波及び
51
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
40次を超えた周波数のエミッションが無視できる場合,THDとTDRとは等しい。電圧又は
電流の全実効値に対するひずみを示す総合ひずみ含有率TDFは,ほとんど用いないので,混
乱を避けるために用いないことが望ましい。
エミッションの評価は,IEC 61000-3-12に従って電流の高調波含有量が最大になる運転条件,及び参考
用に定格値条件で行うことが望ましい。次数間高調波についても,分けて考慮することが望ましい。
注記2 電流の高調波含有量 (HCI) は,IEC 61000-3-12では総合高調波電流 (THC) と呼んでいる。
これは,次数間高調波が無視できる場合,電流の総合ひずみ含有量 (DCI) にほぼ等しい。
)
(
)
(
2
1
2
40
2
2
h
I
I
DCI
I
HCI
THC
h
h
−
=
≒
=
=
∑
=
=
B.2.3.2 システム及び設備
一般的に,PDSは,製紙産業又は金属産業のプロセス全体のようなより大きなシステムの一部である。
この規格では,混乱を避けるため,“設備”という用語は,商用電力系統のPCに接続された全体設備を呼
ぶときにだけ用いる。
B.2.3.3 負荷条件
システムにとって,定常状態条件とは,過負荷条件(加速中又はそれ以外での)期間が24時間中合計で
5 %を超えず,かつ,1週間に1 %を超えないという条件で,最悪条件を意味する。システムの負荷が繰返
し負荷で指定されている場合は,最大負荷の期間における高調波エミッションの評価は,JIS C 61000-4-7
で規定する測定方法によって行うことが望ましい。
定格入力電流が75 A未満の低電圧PDSの評価では,過負荷条件は考慮しない(B.3.2.2参照)。
B.2.3.4 契約電力
契約電力SSTによって,等価基準電流ITN(全実効値)が定義される。
3
TN
N
ST
×
×I
U
S=
ここに,
UN: PCCにおける公称(又は規定)線間電圧
ITN: 基準電流
ITNは,設備の主遮断器のトリップ電流値に近い値であることに注意する。SSTは,商用電力系統から設
備にいつでも供給可能な電力容量を表す。内部契約電力ごとにPCCにおいて指定された適切な短絡容量
(事故レベル)SSCがあることを仮定している。この値を決めるのは,電気事業者の責任である。
注記 “契約電力”は,使用者(設備の持主)と電気事業者との間の合意によって決められる。
高調波電流をp.u.(単位当たり)で比較して表すための基準電流を定義するために契約電力を用いる場
合,基準電流ITN1は,慣例によってITNと同じとする。
B.2.3.5 内部契約電力(契約電力の定義の拡張)
内部契約電力SITAによって,設備内の特定のIPC “α ” について,αから給電される設備の部分Aの等価
基準電流ITNA(全実効値)が定義される。
3
TNA
N
ITA
×
×I
U
S
=
ここに,
UN: IPC “α” における定格線間電圧
ITNAは,設備のうち部分Aで表す供給区分の定格電流であることに注意する。ITNAは,この部分Aを保
護する遮断器の定格に近い値である。内部契約電力ごとにIPC “α” において規定する適切な短絡容量(事
52
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
故レベル)SSCαがあることを仮定している。この値を決めるのは,構内の電力配電担当者の責任である。
B.2.3.6 設備内の電源の短絡電流比
RSIは,特定のPCから給電される設備又は設備の一部の定格皮相電力に対する,そのPCにおける電源
の短絡容量の比である(図B.2参照)。
TNA
α
SC
ITA
α
SC
SIA
I
I
S
S
R
=
=
添字 “A” は,設備のうちの検討対象部分Aを示し,添字 “α” は,この部分に給電するPCを示す。
注記1 IEC 60146-1-1:1991の1.5.35及びIEC 62103:2003の3.69では,短絡容量比(RSC)を“変換装置
の入力側の基本波皮相電力に対する電源短絡容量の比。特定の運転状態,及び特定の系統構
成において,系統上の任意の点で規定する。”と定義している。これは,同じ概念である。た
だし,RSIは,PCの下流の特定の負荷(変換装置)の基本波皮相電力ではなく,PCの下流の
全負荷合計の定格皮相電力を用いている。
注記2 この定義は,設備全体に適用できる。この場合,PCは,PCCであり,ITNAは,契約電力に対
応する。
注記3 この定義は,定格電流がITNAである設備の一部にも適用できる。設備電源の短絡電流比RSIA
は,設備のその部分の内部結合点(IPCα)における短絡電流の,定格電流に対する比で表す。
注記4 この定義は,拡張して,定格電流がITNiである装置の一部にも適用できる。RSIiは,(電源か
ら供給される)内部対象点における短絡電流のうち,対象点を経由して給電される装置の一
部分の定格電流に対する比として表す。この拡張は,装置内部の限定範囲を検討するためだ
けのものである。
注記5 図B.2において,設備は,電源短絡電流比RSIAをもった部分Aを表す。部分Aは部分Bを
含み,部分Bは電源短絡電流比RSIBであり,部分Aは部分Cなども含んでいる。一方,部
分Bは,部分B1,部分B2などを含む。このように分割することは,異なる結合点における
異なる電源短絡電流比の解析及び評価を可能とする。
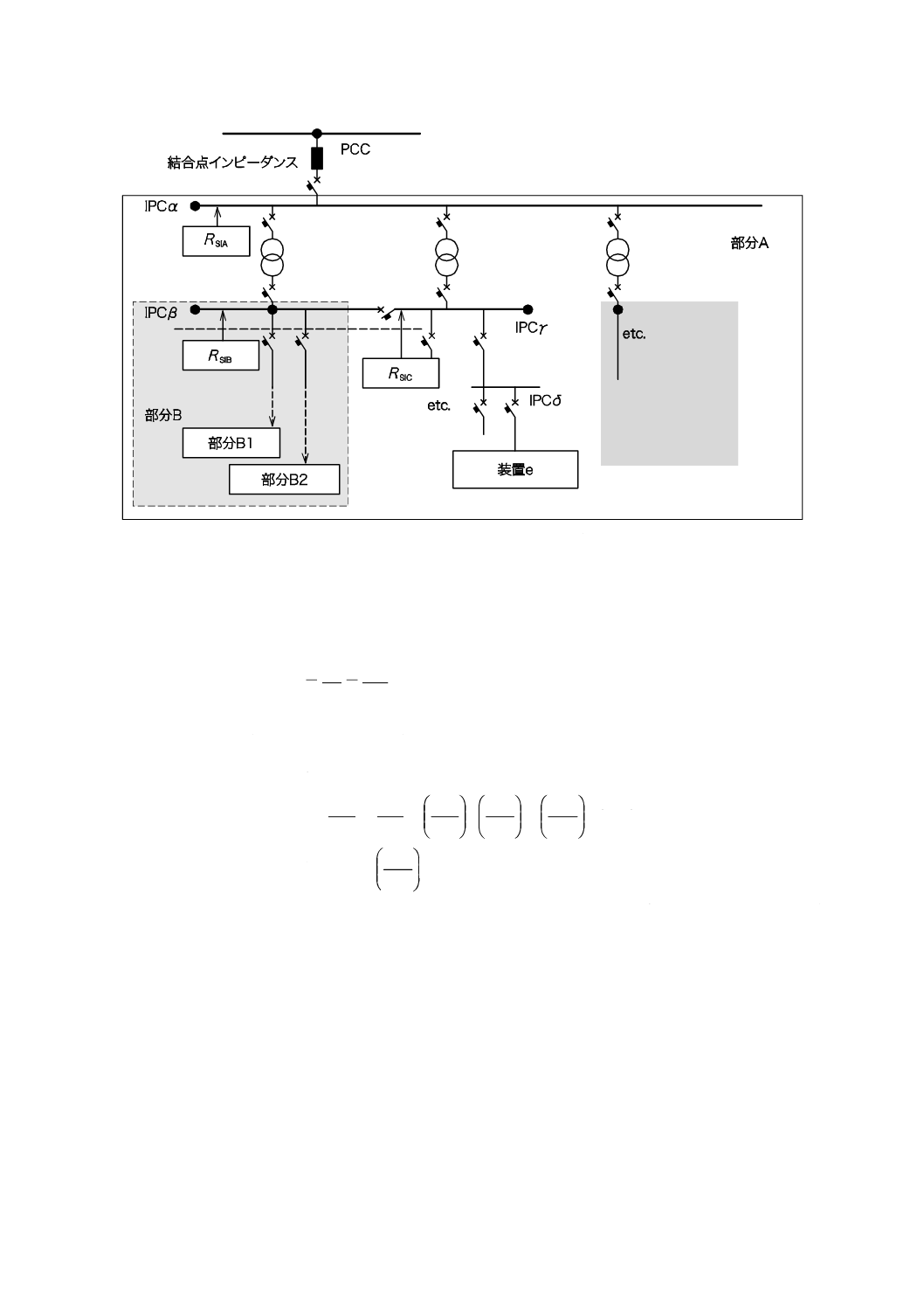
53
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.2−PCC,IPC,設備の電流比及びRSI
B.2.3.7 短絡比
RSCは,PCCにおける電源短絡容量の,装置の定格皮相容量に対する比である(IEC 61000-3-4又はIEC
61000-3-12参照)。
LNe
SC
Ne
SC
SC
I
I
S
S
R
=
=
注記1 短絡比は,図B.3の例を用いて,関連するRSIの関数として表すことができる。1台の装置 (e)
は,短絡電流がISCであるPCCに接続された母線 (IPCδ) から給電され,定格電流ILNeが流れ
る。この定義を適用して,次が得られる。
)
(
SCe
SC
δ
SC
LNe
SC
SC
δ
SC
LNe
δ
SC
ITe
δ
SC
SIe
R
S
S
I
I
I
I
I
I
S
S
R
×
×
=
=
=
=
又は,
SIe
δ
SC
SC
SCe
R
S
S
R
×
=
この定義は,IEC 61000-3-4又はIEC 61000-3-12を適用して,装置を低電圧商用電力系統に接続する条
件を指定するのに適している。
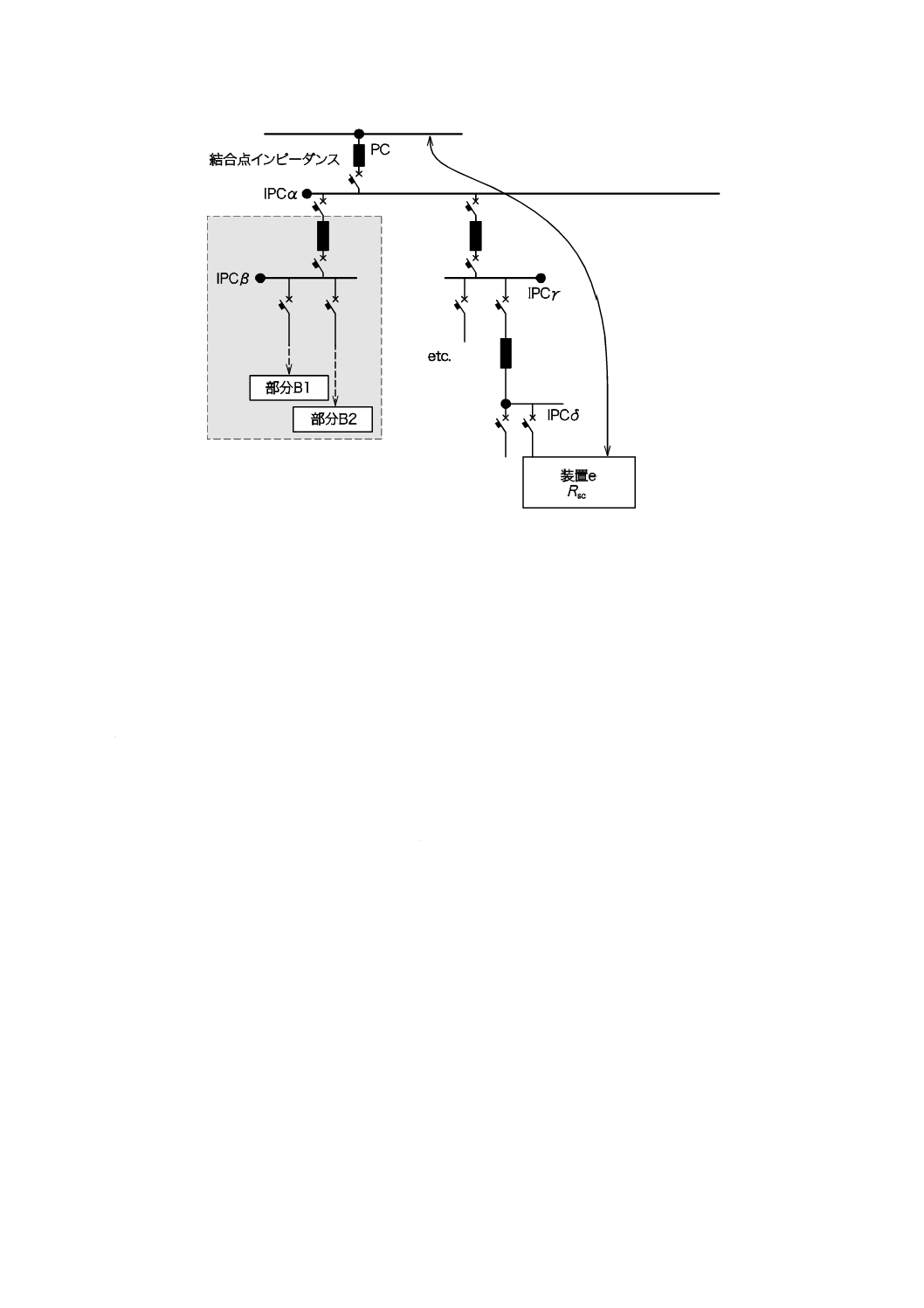
54
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.3−PCC,IPC,設備の電流比及びRSC
注記2 IEC 61000-2-6のA.2は,整流装置に対して,直流電流を用いて別のRSCの定義を記載してい
る。
B.2.3.8 正弦波PDS
JIS C 61000-3-2の限度値又はIEC 61000-3-4のステージ1の限度値を満足するPDSは,“正弦波PDS”
と表示してよい。このPDSは,高調波についての制約を受けることなく用いてよい。
B.3
高調波エミッション規格の適用
B.3.1 一般
変換装置の理論的検討時及び使用時,変換装置は,高調波電流源としてモデル化されてきた。しかし,
この共通モデルは,変換装置の内部高調波インピーダンスが電力系統のインピーダンスに比較して低い場
合には,適切でない。簡単な例として,コンデンサインプット形のダイオード整流器がある。最小の高調
波インピーダンスをもつ回路要素が,高調波電圧を決定する。
最近の電圧形変換装置(自励及びPWM制御)では,高調波電圧源として扱ったほうがよい。このため,
それらは,PC(これも電圧源である。)に限流用のインピーダンス(リアクトル)を介して接続される。
高調波源のモデルを決めるには,システムについての最小限の知識が必要である。高調波電流源モデル
は,大部分の変換装置の25次までの高調波に適用できる。ただし,40次を超える周波数に対しては,こ
のモデルを修正することが望ましく,高調波電圧源モデルの方が一般的に適用しやすい。中間の25次を超
え40次までの範囲に対しては,適切なモデルを決めるために特に注意することが望ましい。
各種方式の変換装置に対して,高調波成分の次数及び振幅を求めるために様々なモデルが公表されてい
る。これらの出版物の要約は,IEC 61000-2-6のA.1,及びIEC 60146-1-2の内容を含むIEC 61800-1附属
書B又はIEC 61800-2附属書Bに記載する。
解析については,ここでは繰り返さない。
PDSは,通常,高調波電圧を引き起こす高調波電流源である。高調波電圧は,IEC 61000-2-2又はIEC
55
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
61000-2-4に規定する両立性レベルと比較しなければならない。運転及び設置条件の影響についても考慮す
ることが望ましい。このことは,IEC 61000-2-6に指摘しており,そこでは高調波の加算方法も示している。
PDSを接続するに当たっての適切な高調波抑制方法(附属書C参照)及び実際的方法(B.4参照)も示し
ている。
カテゴリC4のPDSについては,技術及び経済の両方の面から最適な方法を実用的に確立している。例
えば,別のPDSに対しては,指定の移相変位角の変圧器を用いるといった,抑制方法がある。
個々のPDSごとにフィルタを設けることは,深刻な多重高調波共振を起こすことがある。さらに,高調
波インピーダンス及びバックグラウンドの高調波電圧ひずみは,一般的に不明で,かつ,一定していない
ため,フィルタの定格を決めることが極めて難しい。そのため,設備全体に対してフィルタを設けるとい
った全体での対策が望ましい。この方法は,IEEE 519で詳しく説明している。
B.3.2 商用電力系統
B.3.2.1 一般条件
相当たりの定格電流が16 Aを超え75 A以下の低電圧のPDSについては,IEC 61000-3-12に商用電力系
統に流出する高調波電流の限度値を規定している。IEC 61000-3-12が規定する限度値は,本来は,低電圧
商用電力系統に接続する電気・電子装置に適用する限度値である。
PDSがIEC 61000-3-12の適用範囲内の装置の場合,IEC 61000-3-12の要求事項を適用する。ただし,IEC
61000-3-12の適用範囲の装置に1台又は複数台のPDSが含まれる場合,IEC 61000-3-12の要求事項は,個々
のPDSにではなく,装置全体に適用する。
IEC 61000-3-4又はIEC 61000-3-12の適用範囲であるPDSに対して,エミッションの直接測定のために,
又は計算機シミュレーションの検証のために試験を行う場合,その試験設備構成は,IEC 61000-3-12で規
定する電圧源及び測定装置で構成する。試験のための独立電源として同期機を用いる場合は,その高調波
インピーダンスは,短絡電流によってではなく,逆相インピーダンスによって決めるということに注意す
ることが望ましい。
注記1 PDSが移相変圧器を備えている場合は,測定点は,その一次側とする。
測定は,定常運転条件で行う。過負荷条件(最高速度におけるトルクに影響する)は,極めて例外的な
用途の短時間の現象であり,考慮する必要はない。
パワーエレクトロニクス変換装置の高調波発生作用については,エネルギー消費モードでもエネルギー
回生モードでもその動作モードに関しては基本的な違いはない。このため,四象限PDSは,電動機駆動モ
ードだけで試験すればよい。
エミッションレベルは,直接の測定か,又はIEC 61000-3-12で規定する条件で検証されたシミュレーシ
ョンのいずれで評価してもよい。評価方法の全体は,図B.4及び図B.5のフローチャートによって確認す
ることができる。
異なる形式のPDSに対応できるように,二つの動作条件がある。
・ 電圧形インバータの場合:電動機駆動モード及び基底速度において定格入力電流で運転時。
・ サイリスタ直流電動機駆動又は電流形インバータの場合:電動機駆動モード及び基底速度の66 %速度
において定格トルクで運転時。
注記2 IEC 61800-1及びIEC 61800-2では,基底速度を電動機が最大出力を出せる最低速度と定義し
ている。電圧形インバータの場合,基底速度は,主電源から直接給電されたときの速度と同
じであることが多い。
JIS C 61000-3-2及びIEC 61000-3-12が規定しない装置(例 定格電流が75 Aを超える)については,
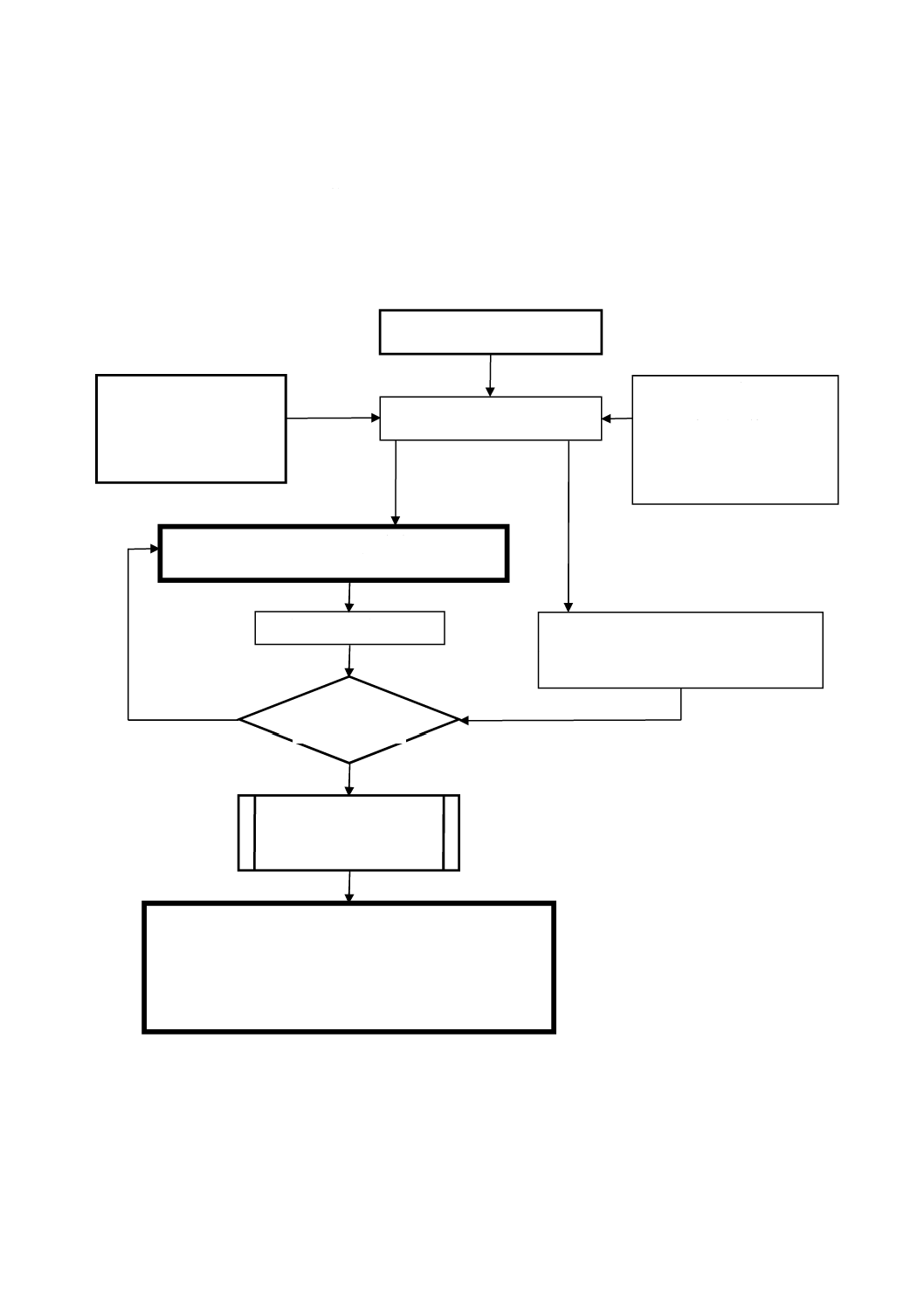
56
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
IEC 61000-3-4及びB.4に推奨方法を示す。
注記3 装置の各種電気部品から発生する高調波は,PDSの特性及びその他の部品の特性に対応した
解析方法を用いて加算できる(B.3.3参照)。
B.3.2.2 シミュレーションによる評価
PDSの個別の高調波エミッションのシミュレーション評価は,図B.4に示す基本的手順に従うことが望
ましい。PDS及び電源の特性を決めることが最初の作業である。
図B.4−PDSの高調波エミッションの評価
大容量又は中電圧の装置の場合,シミュレーションによる確認は,ここに記載した方法よりも複雑な方
法が必要になることがある。
高調波エミッションの評価
PDS及び電源の特性決定
PDSの特性を確認する
・変換器の方式
・電圧及び電流定格
・RSCe min
電源の特性を確認する
UN:電圧値
Uh:ひずみ電圧値
τ:電圧不平衡
Z(h):電源インピーダンス
RSCe
PDS及び電源の特性を考慮して
シミュレーションモデルを決定する
モデル確認試験
製品範囲(同じ方式の装置)について:
範囲上下限値又はその近くの製品各1台
シミュレーション
裕度内にあるか
結果を確認する
はい
いいえ
範囲内のすべての定格の
当該方式のPDSについて
モデルを検証する
公称電圧,ひずみ,不平衡なし,Z(h)=2πhF1×Lの
理想条件電源として高調波エミッションを求めるために
シミュレーションを継続
ここに,h :高調波次数
F1 :基本波周波数
L :電源インダクタンス
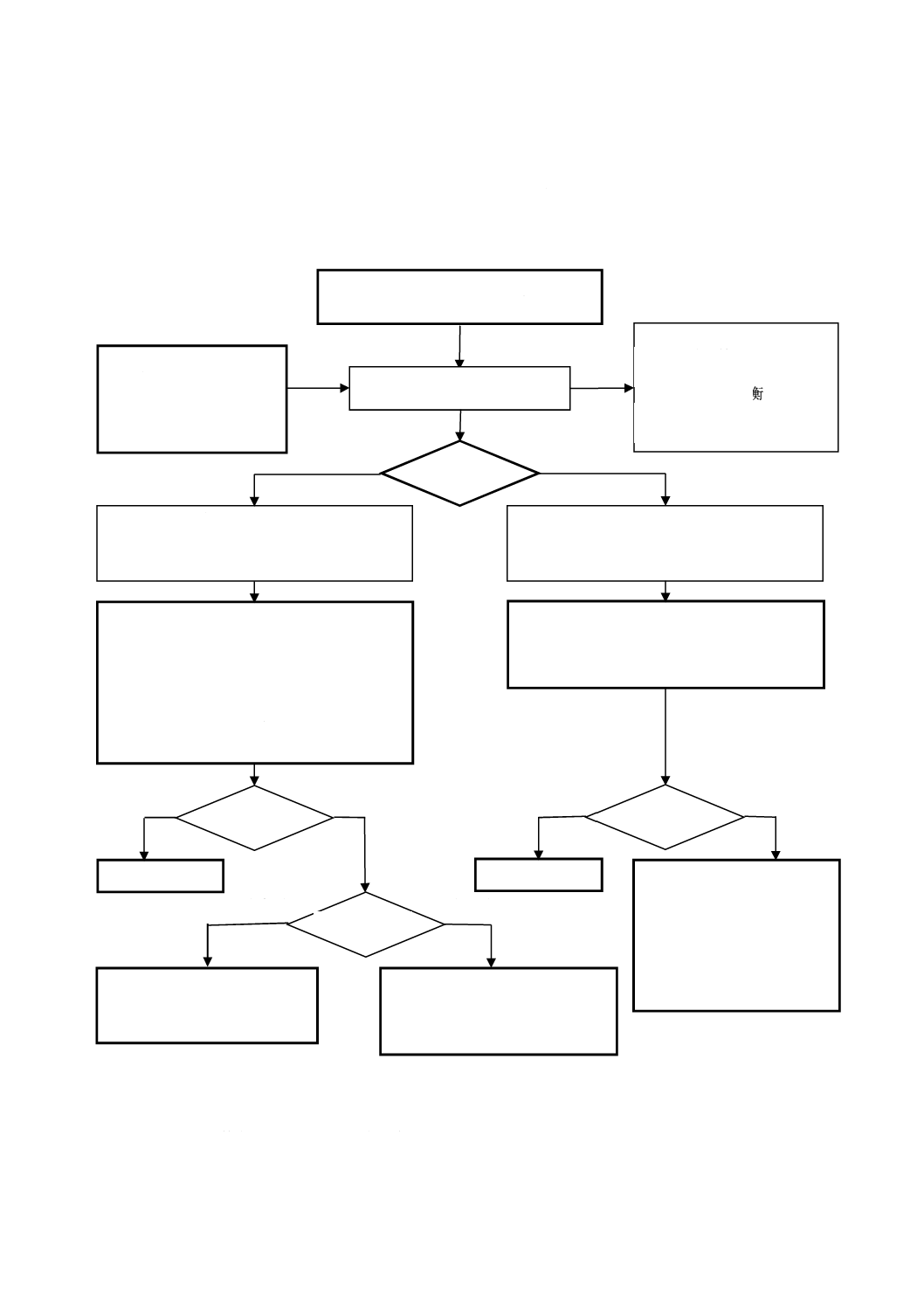
57
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.3.2.3 試験による評価のための負荷条件
B.3.2.3.1 一般的条件
PDSの高調波エミッションを個別に測定するときのPDSの変換器の種類に応じた負荷条件の要約を,図
B.5に示す。詳細は,B.3.2.2及びB.3.2.3に示す。
図B.5−PDSの高調波エミッション測定のための負荷条件
図B.6に,機械的負荷による試験回路構成を示す。
図B.7及び図B.8に,機械的負荷が用意できない場合の電気的負荷による試験回路構成を示す。
高調波エミッションの形式試験又は
シミュレーションによる確認試験
PDS及び電源の特性決定
PDSの特性を確認する
・変換器の方式
・電圧及び電流定格
・RSCe min
電源の特性を確認する
UN :電圧値
Uh :ひずみ電圧値
τ :電圧不平衡
Z(h) :電源インピーダンス
RSCe
PDSの種類
ダイオード整流器
(又はダイオードとして用いるサイリスタ)
サイリスタ整流器
自励整流器
定格電流が75A未満の場合
100 %の入力電流
定常状態
定格電流が75A以上の場合
100 %の入力電流
又はTHCが最大となるより
少ない入力電流力行モード
定常状態
100 %の入力電流
又はTHCが最大となるより
少ない入力電流力行モード
定常状態
負荷の種類
負荷付き電動機
機械的
電気的
変換器の種類
電流形
電圧形
負荷の種類
負荷付き電動機
機械的
電気的
直流リンク出力に接続した
抵抗
又は
バックツーバック接続構成
(入力変換器及び出力変換器
を使用)
直流リンク出力に接続した
短絡回路又はリアクトル
(THCを最大にする負荷条件)
直流リンク出力に接続した抵抗
又は
変換器出力に接続した
抵抗及びリアクトル
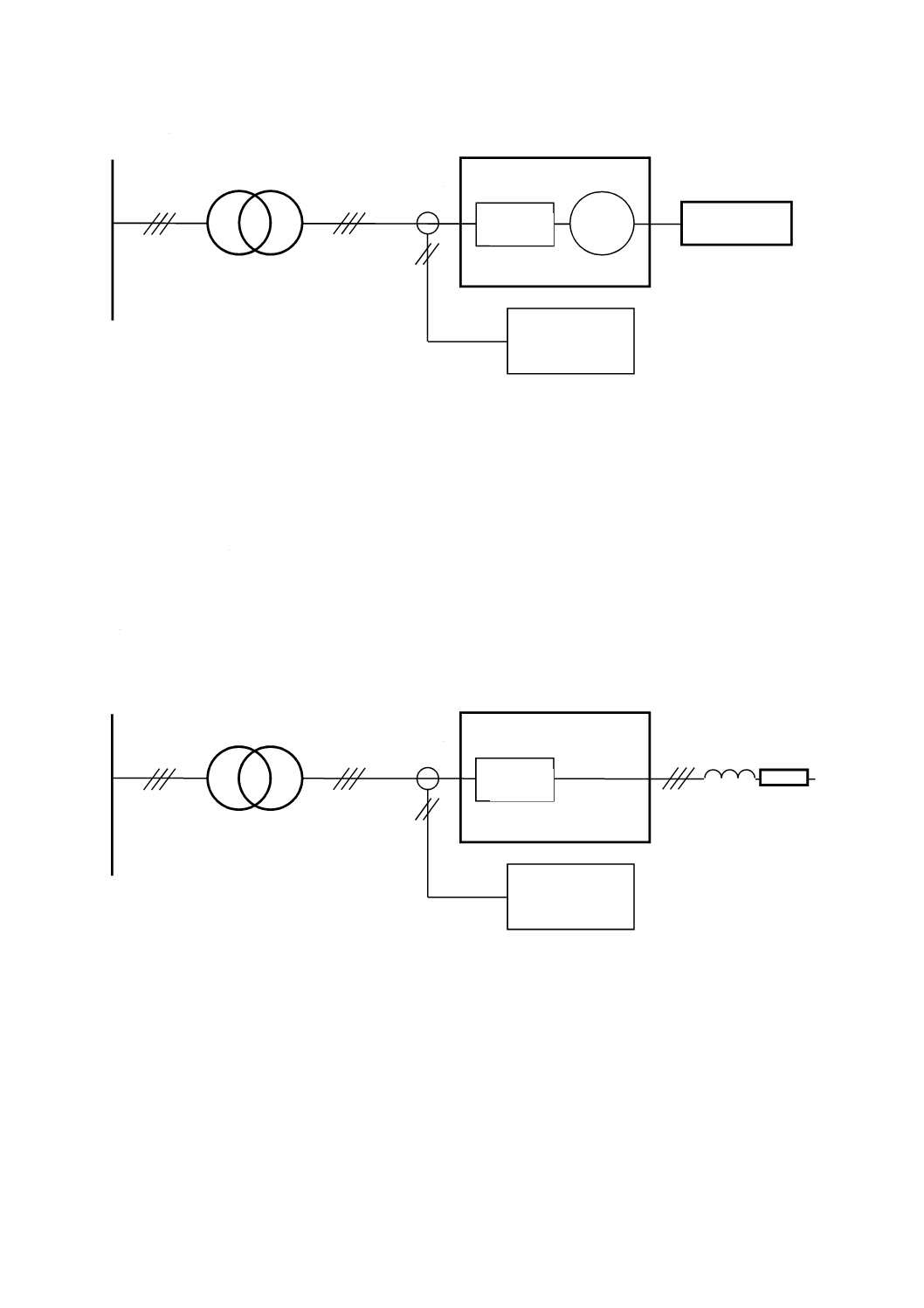
58
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.6−機械的負荷の試験回路構成
B.3.2.3.2 ダイオード整流器
ダイオード整流器(又はサイリスタ整流器若しくは開閉器機能付きダイオードとして用いるサイリスタ)
をもつPDSは,製造業者が指定する100 %定格入力実効値電流で試験してもよい。入力電流を得るために
必要な負荷は,製造業者が指定する電動機及び定常状態動作のための機械的負荷によって与えてもよい。
負荷電動機は,変換器の出力又は直流リンク出力に接続する電気的負荷としてもよい。
・ 変換器の出力に接続する電気的負荷は,リアクトル及び抵抗とするのが望ましい。図B.7参照。
・ 直流リンク出力に接続する電気的負荷は,抵抗とするのが望ましい。図B.8参照。
定格入力電流が75 A以上のPDSの場合,定格入力電流条件をTHCが最大となる条件としてもよい。
図B.7−電動機負荷を電気的負荷で置換する場合の試験回路構成
試験装置
変換器
供試PDS
電流プローブ
変圧器
電圧調整及び/又は
RSCe調整用
電力系統
電動機
機械的負荷
試験装置
変換器
供試PDS
電流プローブ
変圧器
電圧調整及び/又は
RSCe調整用
電力系統
負荷電動機の
代用電気的負荷
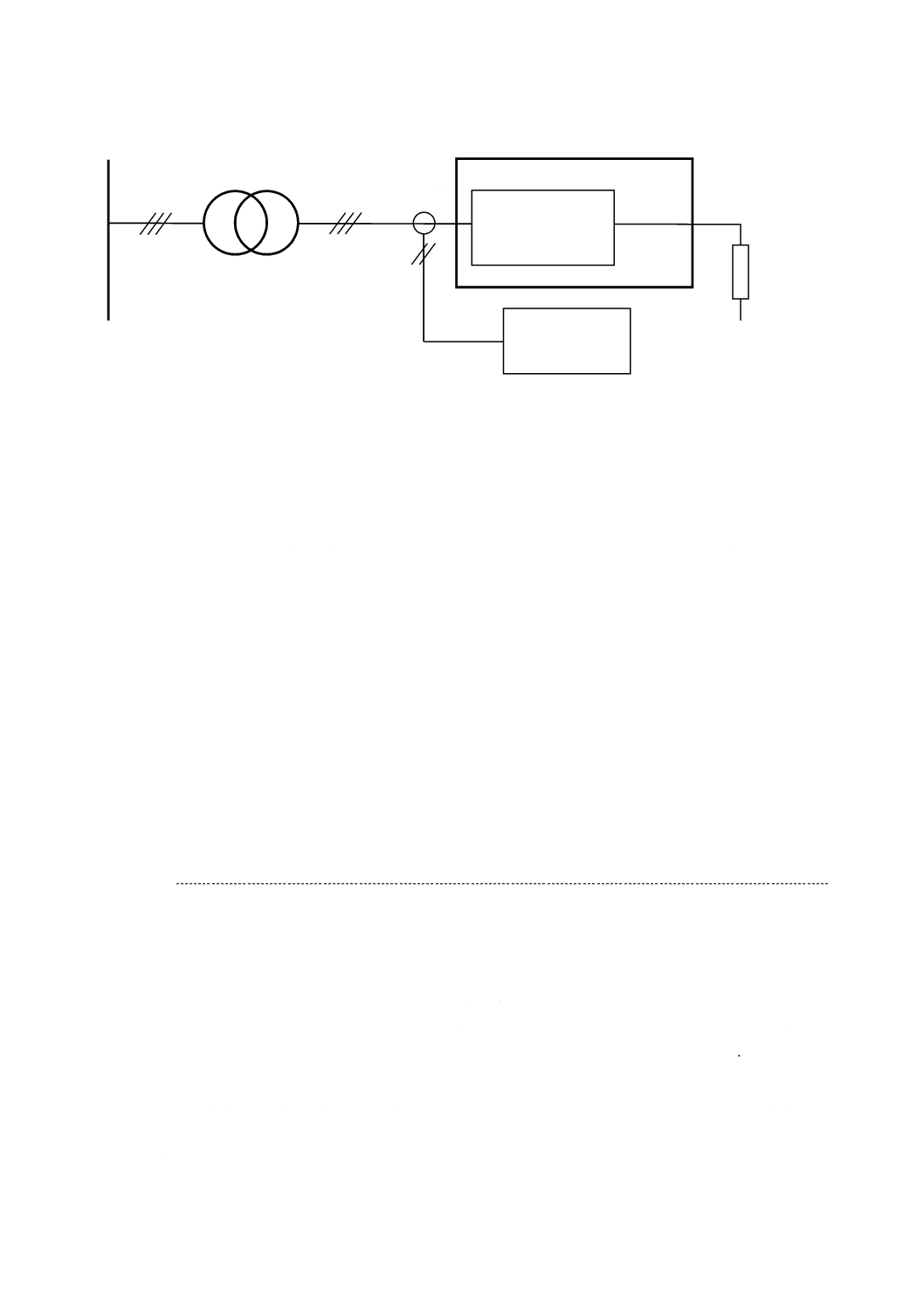
59
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.8−抵抗負荷の試験回路構成
B.3.2.3.3 他励順変換器
他励順変換器(サイリスタ変換器)をもつPDSは,製造業者が指定する定格実効入力電流で試験するか,
又はTHCを最大とするための少ない電流値で試験する。回生状態での試験は,不要とする。当該入力電流
を得るために必要な負荷は,製造業者が指定する電動機及び定常動作のための機械的負荷でよい。
直流リンクが電流形の場合は,負荷電動機を直流リンク出力に接続したリアクトルで置き換えてもよい。
直流リンクが電圧形の場合は,負荷電動機を直流リンク出力に接続した抵抗で置き換えてもよい(図B.8
参照)。
注記 最大THCを生み出す条件は,順変換器の出力における直流リンクのリプル電流のピーク−ピー
ク値が最大値となる条件に近い。
B.3.2.3.4 自励順変換器
自励順変換器をもつPDSは,製造業者が指定する定格実効入力電流で試験するか,又はTHCを最大と
するための少ない電流値で試験する。回生状態での試験は,不要とする。当該入力電流を得るために必要
な負荷は,製造業者が指定する電動機及び定常動作のための機械的負荷でよい。
負荷電動機を直流リンク出力に接続した抵抗で置き換えてもよい。バックツーバックにして負荷を加え
ることも可能である。そのような場合は,順変換器の電流を測定しなければならない。
注記 バックツーバックとは,別の一組の試験用PDSを用意し,供試PDSの電動機軸をその電動機
に接続し,試験用PDSを回生運転することによって供試PDSの電動機出力動力を電源側に帰
還して試験する方法をいう。
B.3.2.4 THCの代表的最大値
電流THC(電流の総合高調波含有量)を最大にするためには,定格入力電流で常に動作させる必要はな
い。
注記 この規格では,THCは総合高調波含有量 (Total Harmonic Content) を表す。B.2.2.7参照。ここ
での定義は,JIS C 60050-551 20-12と一致している。IEC 61000-3-12では,THCは,総合高調
波電流 (Total Harmonic Current) を表す。これは,電流の総合高調波含有量 (THC in Current) の
省略形と考えることもでき,意味は電流THCと同じである。
あるタイプの変換装置(例えば,電流形)においては,直流リンクのリプル電流は,電動機の速度に依
存する。最悪条件は,ゼロ速度のときである。これは,負荷電動機を直流リンク出力に接続したリアクト
ルで置き換えたことと等価である。この状態は,一般的に,PDSの通常の運転状態を再現したものとはい
試験装置
入力変換器及び
直流リンク
フィルタ
供試PDS
電流プローブ
変圧器
電圧調整及び/又は
RSCe調整用
出力変換器及び負荷電
動機の代用電気的負荷
電力系統
60
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
えない。
定格電流が75 A以上のPDSで異なる種類のPDSの高調波エミッションを評価するためには,次の二つ
の動作条件で評価する必要がある。
・ 力行モードの基底速度における定格入力電流(電圧形インバータ)
・ 力行モードの基底速度の66 %における定格電動機電流(サイリスタ直流駆動又は電流形インバータ)
ほかのタイプのPDSでは,これらの条件が最悪の状態であることが明確ではない場合,これらの二つの
条件をいずれも評価することが望ましい。いずれの場合にも,高調波電流は,定格基本波入力電流に対す
る割合として評価することが望ましい。THCが大きい値の状態を,最悪の事例とみなすことが望ましい。
これらの二つの条件が試験又はシミュレーションによって評価できない場合,又は定格入力電流が75 A
未満の低電圧PDSの場合,代わりの方法として,次のような簡単な方法で最大THC状態を確かめてもよ
い。電流は,直流リンクに最大リプル電流が生じるような定格入力電流以下に設定してよい。その条件は,
直流リンクの適切な測定箇所でその電流の波形を確認することによって確認できる。
THCの代表的最大値を与える条件は,直流リンクにおける電流の平均値の調節によって電気的負荷にも
適合する。それらは,シミュレーションの確認のための試験の負荷条件を採用してもよい。
これらの条件で測定するIDR(各次ひずみ率,B.2.2.12参照)は,電流の代表的な高調波成分の過大評
価を与える。これらは,定格電流以下での試験,及びシミュレーションを用いなかった場合に試験結果と
して扱ってよい。
B.3.3 設備における高調波の加算による方法−実用的な方法
B.3.3.1 原理
異なる部品からの高調波エミッションは,最も適切な方法で加算する。加算による方法は,簡単である
が安全サイドの近似法である。より高い精度が必要な場合,PDSの変換器の構成及び特性に従って,適切
な加算方法を選んでもよい。結果は,機器又はシステム(契約内部電力)の定格基本波電流と比較される。
B.3.3.2 高調波電流の単純和
この手法において,高調波電流は,算術的に加算する(この手法は単純であるが,しばしば大きすぎる
値になる。)。各次ひずみ率 (IDR) 又は総合高調波ひずみ率 (THD) の計算は,設備又は設備の一部に属す
るすべてのひずみを発生する部品について,次の式を用いて三相の各相に対して計算する。
HDは,IDR又はTHDに共用の記号として用いる。添字eqは,この値がシステム内の装置の個々の部
品に付けられていることを示す。添字ITは,設備の一部に関連がある例として示し,すべての設備(添字
ST)に適用する。
∑
×
eq
IT
eq
eq
S
S
HD
HD=
式では,HDeqは,部品の定格基本波電流に対する比率によって示す。また,HDは,設備(契約内部電
力)の一部の定格基本波電流に対する比率によって示す。
単相部品は,不平衡のペナルティ係数を考慮する。
・ 単相負荷,相間の場合の係数は,3である。
×
IT
eq
eq
3
S
S
HD
・ 単相負荷,対地間の場合の係数は,3である。
61
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
×
IT
eq
eq
3
S
S
HD
ペナルティ係数は,過度に不平衡状態を引き起こす負荷に関係したそれらの条件に適用する。
例 SIT=150 kVA
ひずみを発生する装置 No.1: 装置定格電流に対して,HD=65 %のとき,Seq=25 kVA
ITN1(又はSIT)に対して,HDeq1=65×(25/150) %=10.8 %
ひずみを発生する装置 No.2: 装置定格電流に対して,HD=10 %のとき,Seq=10 kVA
ITN1(又はSIT)に対して,HDeq2=10×(10/150) %=0.7 %
ひずみを発生する装置 No.3: 装置定格電流に対して,HD=85 %のとき,Seq=1 kVA
ただし,単相相間では,3の倍数の高調波をもち,平衡負荷1.73倍に等しい。
ITN1(又はSIT)に対して,HDeq3=85×(1.0/150)×1.73=1.0 %
システムとしては
240
.0
150
1)
10
(25
IT
eq
=
+
+
=
∑
S
S
のとき,HD=(10.8+0.7+1.0) %=12.5 %
計算は,各次高調波及びTHDに対して行うのが望ましい。
B.3.3.3 擬似二次式(可変指数)合計法
高調波電流の合計は,代表的な方法によって,より正確に求めることができる。
・ 同相の電流(例えば,ダイオード整流器),各次数の算術合計
∑
=
i
i
I
I
h
h
・ 不規則な位相の電流,べき指数,及び各次数の合計
α
α
1
h
h
∑
i
i
I
I=
h<5のときα=1,5≦h<10のときα=1.4 ,及び10≦hのときα=2
この式は,個々の高調波次数及びTHDに適用できる。
この方法は,システムからの高調波電流エミッションの評価を示す。結果は,システム(契約内部電力)
の定格基本波電流を基準にしており,JIS C 61000-3-2又はIEC 61000-3-12(ステージ1又はステージ2)
に適合することを示すために使用できる。さらに,より大きな産業システム又は設備の評価のために使用
できる。
この手法が当てはまる典型的な環境は,“契約電力”が30 kVA〜100 kVAの軽工業用装置,又は“契約
電力”が100 kVA〜300 kVAまでの軽工業用設備である。
B.3.3.4 計算及び/又は測定に基づいた工場用配電系統への適用手法
高調波エミッション限度値を満たしていることがB.3.3.3の近似手法によって立証できないときは,より
正確な高調波エミッションの評価方法を用いることが望ましい。これは,設備全体の電流容量を考慮する
手法である。
既設の負荷を含めて,設備から生じる総合高調波電流は,計算又は測定によって求めることが望ましい。
高調波を発生する負荷間の実際の位相関係を考慮することが望ましいので,キャンセル効果は,無視しな
い。
この手法を適用する典型的な環境は,“契約電力”が100 kVAを超える軽工業又は工業用環境である。
62
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.4
設備規約又は高調波両立性の評価
B.4.1 小容量工業用低電圧三相系統
この箇条は,機器,装置又はより一般的なシステムに組み込むPDSを用いるときの情報を提供すること
を目的とする。高調波限度値を各PDSに適用することは,非経済的及び/又は技術的に無意味となる場合
がある。包括的な手法として,設備全体へのフィルタを適用するほうがよい場合が多い。この場合,設備
の内部に生じる高調波電流の合計を求める必要がある。
高調波エミッションの評価手順を,図B.9に示す。
JIS C 61000-3-2及びIEC 61000-3-12は,低電圧商用電力系統のPCCに直接接続するPDSを含む装置に
適用する。適合性の確認は,該当する関連規格に記載する表の規定値とシステム又は装置から発生する各
次ひずみ率 (IDR) 及び総合ひずみ率 (THD) とを比較して行う。
これらの規格に該当しないPDSに関しては,次の手法を指針として用いることができる。通常の手法は,
設備全体に高調波電流の限度値を適用することである。総合高調波エミッションの評価は,要求する近似
精度に従って,適切な加算方法を用いて行う(B.3.3参照)。契約電力が中程度であるときに(例えば,100 kVA
〜300 kVA),図B.9に示すような,又は特定の地域規則に従うような簡単化された手法及び性能判定基準
が,適用可能である。PCCにおける適切な限度値を満たすことは,使用者の責務である。
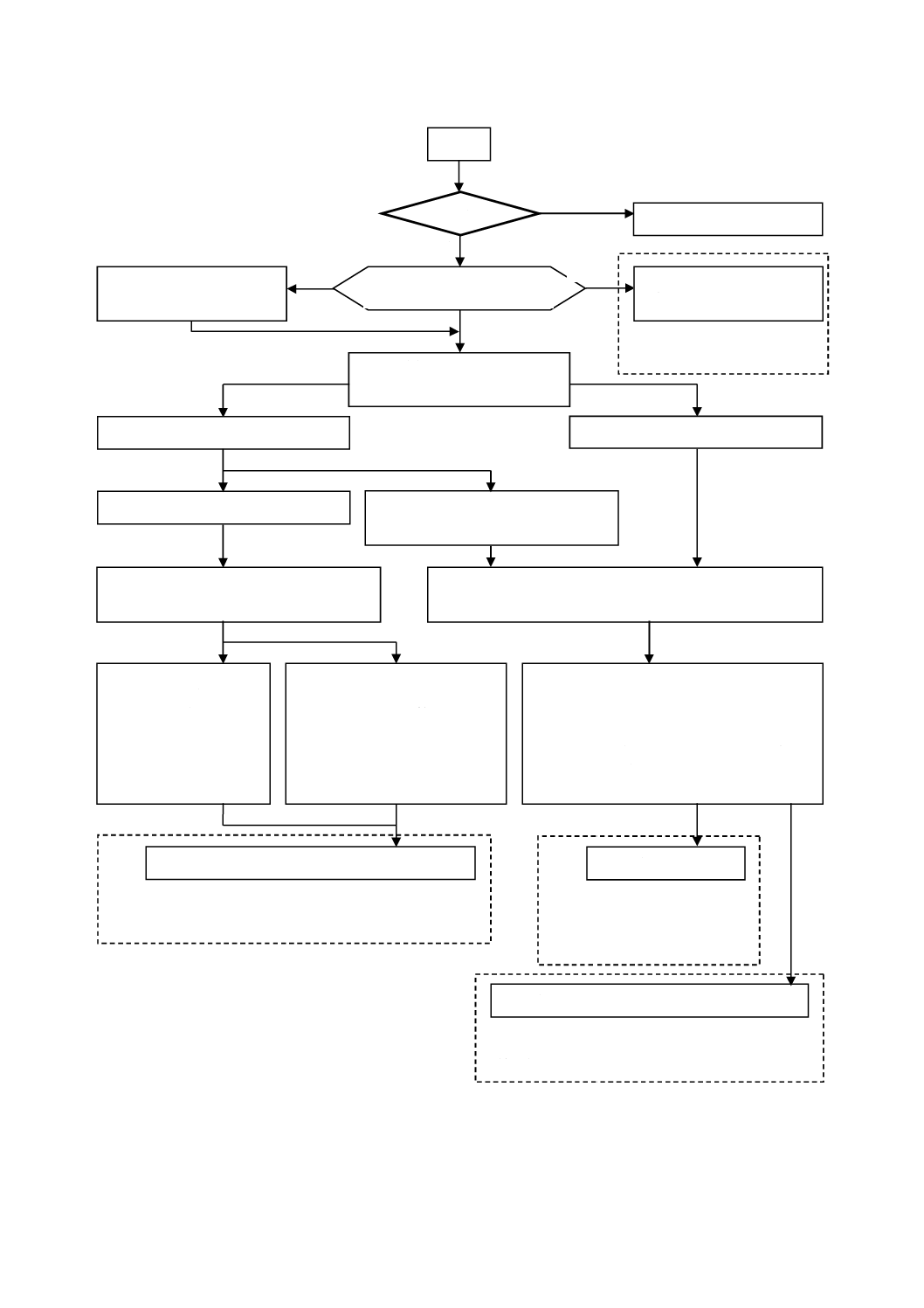
63
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
すべての高調波の基準は,電流とする。
図B.9−PDSを用いる箇所(装置,システム及び設備)における高調波エミッションの評価手順
典型的な環境:
商業地域の事務所
軽工業
契約電力が100 kVA〜300 kVA
典型的な環境:
住宅及び商業地域の事務所
PDSがIEC 61000-3-12の
ステージ1を満足している
開始
THD<5 %
評価不要
はい
いいえ
特に制限なくPDSが使用
可能
はい
いいえ
次の条件の機器又はシス
テムでPDSが使用可能
PDSを用いているシステムの
高調波エミッションの評価
低電圧商用電力系統
工業用配電系統
契約電力が100 kVA以下
契約電力が100 kVAを超え
300 kVA以下
基準:装置全体の定格電流
(契約電力又は内部契約電力)
基準:装置又はシステムの定格電流
(システムの定格電力)
高調波電流の合計
・B.3.3.3に従って,算術和,擬平方和又
は指数和の法則(既知の位相関係の関
数)で計算する。
・B.3.3.4に従って,できる限り正確に,
システムの負荷ごとに各次高調波電流
をベクトル計算及び/又は測定する。
高調波電流の合計
・B.3.3.2に従って,シ
ステムの負荷ごとに
各次高調波電流の算
術和を計算するか,又
は個別に評価する。
高調波電流の合計
・B.3.3.3に従って,算術和又
は擬平方和を計算する。
・B.3.3.4に従って,できる限
り正確にベクトル和を計算
する。
THDが10.0 %以下
典型的な環境:
契約電力が100 kVAを超える(かつ,中電圧電力
系統の)工場
IDRが表B.2を満たしているか確認する
典型的な環境:
商業地域の事務所
軽工業
IEC 61000-3-12を満足しているか確認する。
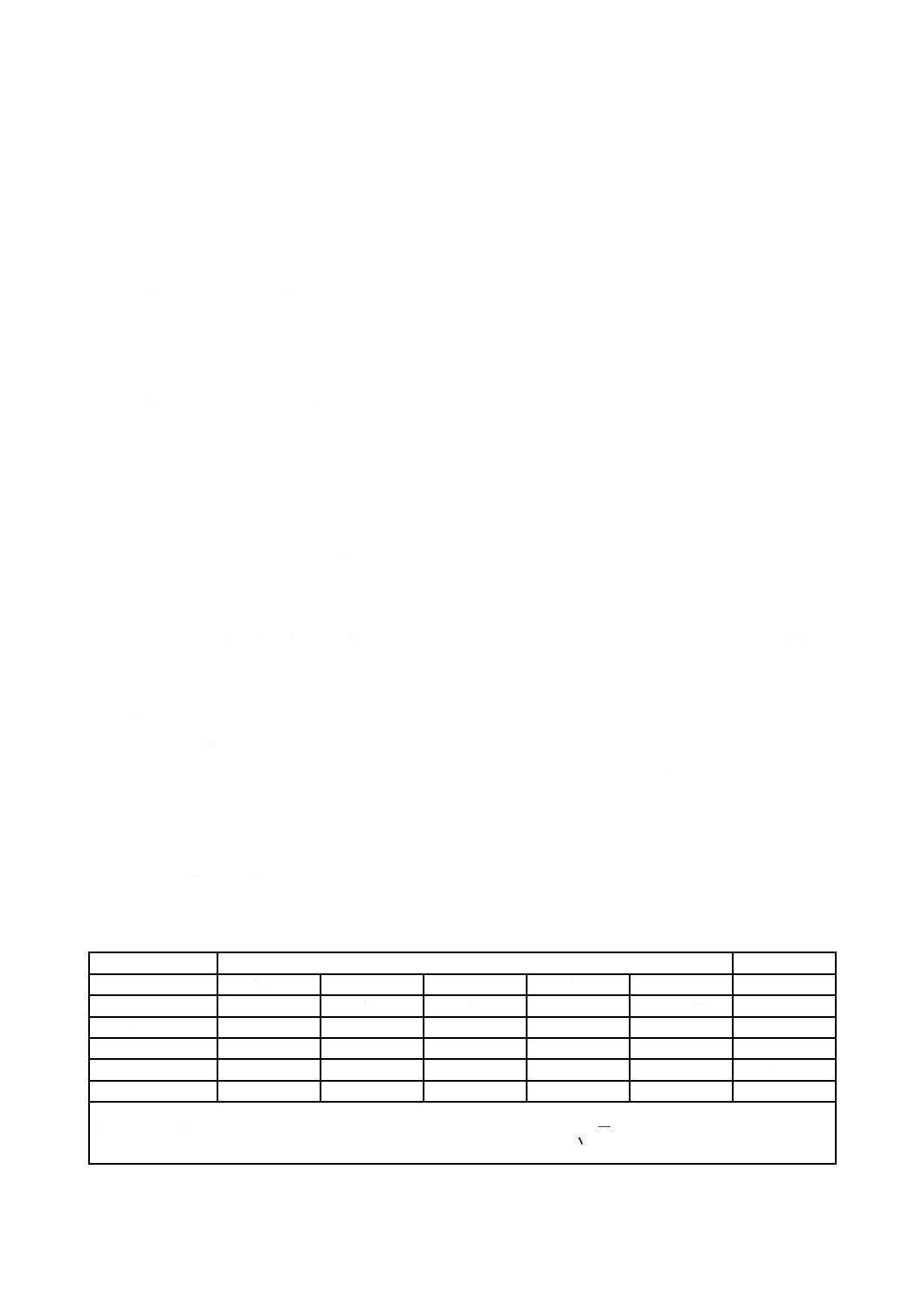
64
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.4.2 大規模産業システム
B.4.2.1 原則
この箇条は,システムに組み込むPDSを用いるときの情報を提供することを目的とする。高調波限度値
を各PDSに適用することは,非経済的及び/又は技術的に無意味となる場合がある。包括的な手法として,
設備全体へのフィルタを適用するほうがよい場合が多い。この場合,設備の内部に生じる高調波電流の合
計を求める必要がある。
高調波エミッションの評価手順を,図B.9に示す。
IEC 61000-3-6は,中電圧電力系統に接続された設備に適用することが望ましい。その設備は,大容量
PDSの場合であり,また,特に定格電圧が交流1 000 Vを超える場合である。
通常,減結合装置(変圧器など)によって異なる部分に設備が分割されている。その分割は,共振の可
能性を考慮した電力系統全体の解析の結果から行うことが望ましい(図B.2参照)。
要求されるフィルタは,注意して配置することが望ましいが,各PDSにフィルタを付けることは実用的
ではない。
通常の手法は,設備全体,又は設備全体として扱えるような部分に対する,高調波電流の限度値を適用
することである。限度値と発生値との差が小さい場合,既存レベルの電圧高調波ひずみを含めた詳細な解
析を行う。
B.4.2.2 設備全体に対する電流ひずみ方法
この手法では,高調波電流の限度値は,設備全体に適用する。限度値は,各次数における各次ひずみ率
(IDR) 及びTHDの両方に適用する。
すべての設備の高調波電流は,規定されたPCで,表B.2に従うことが望ましい。B.2.3.6のRSIの定義を
参照。PDSの供給者及び使用者は,PCと地域規則によるほかのエミッション限度値の適用に合意するこ
とが望ましい。PCは,指定された母線であることが望ましい。
注記 指定された母線のRSIの定義から,この母線に接続するすべての負荷が,高調波エミッション
を計算するための,ITNの定義に寄与する。
米国では,IEEE 519で,電力系統のためのすべての電圧レベルで,この手法を適用する。表B.2は,北
米で一般的な実用限度値に関する例を示す。
高調波電流は,全設備の契約電力の総電流に対する割合 (IDR) として表す。PCCの場合,負荷電流は,
需要家と電気事業者との間で決めた契約電力によって定義する。IPCの場合,定格の基本波負荷電流は,
IPCへの給電線の定格負荷電流に等しい。B.2.3.5及びB.2.3.6参照。
表B.2−PCC又はIPCでの契約電力総電流に対する高調波電流エミッションの限度値
各次ひずみ率 IDR
RSI
h<11
11≦h<17
17≦h<23
23≦h<35
35≦h
TDR
RSI<20
4 %
2 %
1.5 %
0.6 %
0.3 %
5 %
20≦RSI<50
7 %
3.5 %
2.5 %
1 %
0.5 %
8 %
50≦RSI<100
10 %
4.5 %
4 %
1.5 %
0.7 %
12 %
100≦RSI<1 000
12 %
5.5 %
5 %
2 %
1 %
15 %
1 000≦RSI
15 %
7 %
6 %
2.5 %
1.4 %
20 %
偶数次高調波は,奇数次高調波の25 %に制限する。
注記 パルス数 (q) が6より大きいシステムでは,各次高調波の限度値は,
6
/
q
の率で増加する。12パルスシステ
ムでは,比率2に相当する。THDの限度値は,変わらない。
65
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
B.4.2.3 個々の事象ごとの解析
ほかの手法として,システム全体の解析を行ってもよく,限度値に近い場合は,システム全体の解析を
行うことが望ましい。この解析結果は,全体としてフィルタで対策する場合,又はその他の緩和方法を正
しく指定するために用いることができる。
次の手順を適用することが望ましい。
・ PCCで既存のレベルの高調波電圧ひずみの評価(公共又は私有の電力系統の操作者の責任で)。
・ PCで電源側の高調波インピーダンスの計算又は測定(PCCの場合,公共又は私有の電力系統の操作
者の責任,IPCの場合,使用者の責任で)。IEC 61000-2-6のA.2は,ネットワークの高調波インピー
ダンスに関する情報を示す。
・ 接続するPDSからシステムに流出する高調波電流の測定又は計算(製造業者の責任で)。
・ 結果として生じる高調波電圧の計算(使用者の責任で)
注記 IEC 61000-3-6に示すすべての規則及び方法は,電力系統の中電圧(1 kVを超え,35 kV以下),
又は高電圧(35 kVを超える)のための規定であるが,工業用配電系統内の低電圧の部分にも
適用できる。
PCCの場合,結果として発生する高調波電圧は,電気事業者が指定した計画レベルを超えないことが望
ましい。
IPCの場合,発生した高調波電圧は,両立性レベルを超えないことが望ましい。
高調波電圧のための両立性レベルは,低電圧商用電力系統はIEC 61000-2-2,中電圧電力系統はIEC
61000-2-12及び工場内電力系統はIEC 61000-2-4で規定する。
PCでは,利用可能な定格電力(契約内部電力)を定義できる。PCCの場合では,これは“契約電力”(B.2.3.4
及びB.2.3.5参照)となる。妨害の許容値を接続するPDSに割り当てることができる。適切な解決策は,
PCで契約電力に対するPDSの定格出力の割合に比例した,又はこれらの規格で規定する両立性レベルに
比例した妨害の限度値を定義することからなる。
B.4.2.4 電話障害
北米及びフィンランドでは,配電線と電話回線とが平行に配置されているため,TIF(電話障害率)を導
入している。IEEE 519の6.8は,各種高調波の影響度結果を示す。
等価雑音電流は,IP=I×TIFで定義する。
北米及びフィンランドでの推奨は,IP <IPAを必要とする。
設備の中で,電話回線と電動機ケーブルとを平行に配置している電動機ケーブル上のコモンモード高調
波エミッションは,電話回線の障害を起こす。このような障害は,避けることが望ましい(6.2.5参照)。
B.4.3 より高い周波数での次数間高調波及び電圧又は電流
40次を超え,9 kHzまでの周波数範囲では,PDSは,電圧発生源とみなすことが望ましい。この周波数
に対するPDSのためのエミッションに関する要求事項は,両立性レベルが規格化されるまでない。
ただし,PDSの幾つかのタイプは,より高い周波数(9 kHz以下)で次数間高調波,又は電圧若しくは
電流のエミッションを考慮する必要がある。これは,主にサイクロコンバータ又は電流形インバータのよ
うな容量の大きいPDSの場合である。電力系統に直接接続したPWM方式の変換器の場合もある。
基本波又は主要高調波からわずかに異なる周波数の次数間高調波は,電圧揺動を引き起こす原因になる
こともある(B.6.2参照)。このような次数間高調波は,照明(電圧の二乗関数)などの非線形のシステム
に見られるうなり周波数から生じる。不安定な装置の非線形の応答は,異なる高調波と次数間高調波との
和及び差が現れる原因となる。異なる周波数は,フリッカの要因の一つである。主な要因は,サイクロコ
66
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ンバータ及び電流形インバータである。このような事例は,IEC 61000-2-4の両立性レベルによって規定す
る。
次数間高調波は,特に共振のため,力率改善コンデンサバンクと共振フィルタとに直接影響することが
ある。
エミッションは,次に示す電圧レベルの80 %に制限することが望ましい(IEC 61000-2-4 : 2002の附属
書C参照)。
クラス2のIPCに対して,u=0.2 %
クラス3のIPCに対して,u=1 %
クラス2のIPCに対して,ub=0.3 %
クラス3のIPCに対して,ub=1.5 %
“u” は,基本波の実効値に対するその周波数における電圧実効値の比である。“ub” は,周波数Fを中心
とした200 Hzの帯域幅に関係するレベルで,次に示す。
∫
+
−
×
×
×
Hz
100
Hz
100
2
1N
b
d
)
(
Hz
200
1
1
F
F
f
f
V
V
u=
ここに,
V1N: 基本波の定格電圧実効値
V( f ): 周波数fにおける電圧実効値
F: 帯域の中心周波数(40次を超える高調波)
高い周波数の成分は,系統に接続したPWM方式の変換装置から主に発生する。
B.5
電圧不平衡
B.5.1 はじめに
三相システムにおける電圧不平衡は,一般に3相のうちの2相に単相負荷が加わることによって生じる。
電圧不平衡は,単相負荷の定格に対する割合,及び主電源のインピーダンスによって決まる。例として,
ある電圧変動率をもった三相変圧器の2相に単相負荷だけを接続した場合を考える。負荷が変圧器の定格
容量に対してかなりの割合のとき,負荷を接続した2相の出力電圧は低下するが,負荷を接続していない
3番目の電圧は一定に保たれる。
変圧器に大きな不平衡負荷が加わる場合,過熱を引き起こす。単相負荷の割合がかなり大きな場合,変
圧器が供給可能かどうかを変圧器製造業者に相談することが望ましい。
不平衡な三相電源に接続するほかの三相負荷は,一般に有害な影響を受ける。例えば,三相誘導電動機
では,逆相電流が流れる原因となり,定格電流でのトルク出力が低下するか,又は電動機の定格出力で過
熱を引き起こすことがある。一部の電動機では,3 %の不平衡が10 %の出力低下を引き起こすこともある。
三相電動機の主電源に不平衡がある場合,安全運転できる適切な負荷軽減を決定するために,電動機製造
業者に相談することが重要である。
B.5.2 定義及び評価
B.5.2.1 定義
電圧不平衡は,IEC 61000-2-2,IEC 61000-2-4及びIEC 61000-2-12で規定する。幾つかの計算方法を,
次に示す。
多相交流システムでは,電圧不平衡は,線間電圧の基本波成分の実効値,及び連続した相間の位相角の
すべてが等しいというわけではない状態である。この規格では,不平等の度合いを逆相成分の正相成分に
67
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
対する割合,すなわち,不平衡率として表す。
零相成分も電圧不平衡の評価に含めることが望ましい場合もある。
B.5.2.2 正確な計算方法
正確な値は,三相システムの対称座標法で求められる。この解析方法は,理想的な三相平衡システムか
らずれた三相電圧は,三つのフェーザの和によって表されるという考えに基づいている。三つのベクトル
は,零相,正相及び逆相成分と呼び,次の式で定義する。
UA = UA0 + UA1 + UA2
A相の電圧
UA0 = (UA + UB + UC) / 3
零相成分
UA1 = (UA + a UB + a2 UC) / 3
正相成分
UA2 = (UA + a2 UB + a UC) / 3
逆相成分
ここに,UA,UB及びUCは,相電圧ベクトルであり,“a” は,次の式で表す。
2
3
2
1
j
a
+
=−
逆相電圧の正相電圧に対する割合は,電圧不平衡率τである。電圧不平衡率(%)は,次のとおりである。
100
1
2×
U
U
=
τ
例1 相電圧の振幅及び位相角から線間電圧及び三つのベクトルの振幅及び位相角を計算できる。
UAN = 231.0 0.0°
UBN = 220.0 −125.1°
UCN = 215.0 109.8°
UAB = 400.3 26.7°
UBC = 386.0 −98.0°
UCA = 365.0 146.3°
上の条件のとき,
U0 = 22.4 35.2°
U1 = 383.5 −5.0°
U2 = 20.4 90.7°
電圧不平衡率:τ = 100×(20.4 / 383.5) = 5.3 %,5.8 %の零相成分を含む。
例2 相電圧の振幅及び位相角から,線間電圧が計算できる。
UAN = 230.0 0.0°
UBN = 280.0 −135.0°
UCN = 170.0 130.0°
UAB = 471.5 24.8°
UBC = 339.9 −105.1°
UCA = 363.4 159.0°
上の条件のとき,
U0 = 59.3 −138.8°
U1 = 386.4 −3.7°
U2 = 85.8 48.1°
電圧不平衡率:τ = 100×(85.8 / 386.4) = 22.2 %,15.4 %の零相成分をもつ。
B.5.2.3 近似計算方法
三つの近似計算式を,次に示す。最初の近似式は,通常,最もよい結果が得られる。平衡システムに対
して,各相電圧の位相ずれが±15°以内で,かつ,振幅の差が±20 %以内である場合は,5 %以下の相対
誤差で不平衡率を求められる。
三つの線間電圧U12,U23及びU31並びにその平均値Uaverageから,δij = (Uij−Uaverage) / (3×Uaverage) × 100
を計算する。不平衡率τ は,次の式で示す。
100
6
3
1
2
ij×
∑δ
τ≒
さらに簡単な近似式を,次に示す。線間電圧の最大値Umax及び最小値Uminを用いて,次の式で計算する。
100
3
2
average
min
max
×
×
U
U
U−
≒
τ
68
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
この式では,7 %のτ まで,実用的な精度で計算できる(絶対誤差は,一般に1 %より小さい)。
NEMAによる式も,10 %のτ まで,又は位相角が大きい場合にも,前の式と同等の精度で計算できる。
100
MAX
average
average
ij
×
U
U
U−
≒
τ
例1 B.5.2.2の例1と同じ条件の場合,最初の近似式を用いると次のようになる。
UAN=231.0
UBN=220.0
UCN=215.0
UAB=400.3
UBC=386.0
UCA=365.0
Uaverage=(400+386+365)/3=383.7
δ12=1.432 %
δ23=0.197 %
δ31=−1.629 %
電圧不平衡率は,
%
3.5
)
1.629
0.197
(1.432
6
2
2
2
=
+
+
×
2番目の近似式の場合,(2/3) × (Umax−Umin)/Uaverage=(2/3) × (400−365)/383.7=6.1 %
3番目の近似式の場合,18.7/383.7=4.9 %
例2 B.5.2.2の例2と同じ条件の場合,次のようになる。
UAN=230.0
UBN=280.0
UCN=170.0
UAB=471.5
UBC=339.9
UCA=363.4
Uaverage=(472+340+363)/3=391.7
δ12=6.801 %
δ23=−4.397 %
δ31=−2.404 %
電圧不平衡率は,
%
7.
20
397
.4
397
.4
801
.6
6
2
2
2
=
+
+
×
2番目の近似式の場合,(2/3) × (Umax−Umin)/Uaverage=(2/3) × (472−340)/391.7=22.4 %
3番目の近似式の場合,80.3/391.7=20.5 %
B.5.3 PDSへの影響
PDSへの影響は,主回路方式及び制御方式に依存する。各主回路方式及び制御方式は,詳細に解析する
ことが望ましい。その影響は,抵抗性負荷に電力を供給する制御又は無制御整流器では一般に小さい。線
間電圧の位相をシフトして位相制御を行う整流器は,交流電圧のゼロクロスに同期したランプ電圧を用い
て位相制御を行う整流器より影響が小さい。間接変換装置(電圧形インバータ)の直流リンクコンデンサ
バンクに電力を供給する制御又は無制御整流器の電流不平衡は,電圧不平衡よりもかなり大きく,直流電
動機のような誘導性負荷に電力を供給する整流器よりも大きくなる。
コンデンサバンクに電力を供給する整流器では,ピーク電流が電圧不平衡によってかなり大きくなるた
め,設計では特別に注意することが望ましい。電圧リプルが小さい非常に大きなコンデンサバンクでは,
各相のピーク電流は,コンデンサバンク電圧と電源電圧との差,並びにPDSに追加されたインピーダンス
及び電源インピーダンスだけで制限される。電源インピーダンスが1 %で電圧不平衡が3 %の場合,相間
のピーク電流の不平衡が20 %になることもある。幸いなことに,電源インピーダンスが1 %では単相負荷
を加えてもこのような電圧不平衡を生じることはなく,これは極端な条件である。
B.6
電圧ディップ及び電圧揺動
B.6.1 電圧ディップ
B.6.1.1 定義
最も一般的な低周波妨害は,1相から3相全部までの電圧ディップ又は電圧低下である。電圧ディップ
は,電力系統のある箇所で突然発生する電圧低下であり,半サイクルから数秒間の短時間経過後に復帰す
69
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
る。電圧ディップは,一般に,電力系統における短絡などの事故及び電気事業者による事故の除去,又は
使用者の場所若しくは付近での大形電動機の始動によって発生する。各国の電気事業者の調査では,電圧
変動の裕度10 %を外れる時間が半サイクルから15サイクル又はそれ以上に及ぶことがある。残留電圧(電
圧低下中の最低電圧)は,電圧ディップの深さを特徴付ける(電圧ディップの深さは,基準電圧と残留電
圧との差)。残留電圧は,主として電圧源(一般に高電圧又は中電圧の変電所),短絡に等しい事故発生点
及び観察ポイントの相対的な位置に依存する。全体的な説明は,IEC 61000-2-8に記載している。
B.6.1.2 PDSへの影響
B.6.1.2.1 基本事項
電圧ディップは,PDSの性能に有害な影響を与える。供給電圧が低下したとき,通常,主電源から電動
機に供給する電力も低下する。ただし,入力整流器の制御角を変えて制限範囲内の電圧ディップを補償す
るPDSもある。可逆変換器を用いて電動機からの機械エネルギーを電源に回生運転しているときも,電圧
ディップによって問題が発生することに注意する必要がある。
電圧ディップのPDSに対する影響は,被駆動装置の物理的な特性に従って検討することが望ましい。さ
らに,PDSの電子制御部と変換器とは,区別しなければならない(IEC 61000-2-8参照)。
制御部がディップに対して性能判定基準Aを満たすイミュニティをもっている場合も,制御部が変換器
又は被駆動装置の動きと合っていない限り有効でない場合もある。変換器は,エネルギー貯蔵機能をもっ
ていない。被駆動装置は,エネルギー貯蔵機能をある条件でもつこともあるが,一般にほとんどもってい
ない。制御部のイミュニティだけに基づいて,PDSが電圧ディップにイミュニティがあるということは,
誤解を招く。制御で特性のシーケンスを用いるときは,使用者が被駆動装置に対して適切に適用できるよ
うに文書で説明することが望ましい。
B.6.1.2.2 制御整流器
サイリスタ,GTO(ゲートターンオフサイリスタ),IGBT(絶縁ゲートバイポーラトランジスタ)など
を用いた整流器は,一般に主回路交流電圧を可変の直流電圧に整流するために用いる。電源電圧に同期し
てバルブデバイスを制御する回路は,電源電圧があらかじめ決められた値以下となった場合,整流動作を
停止するように設計することが多い。使用者が制御回路をリセットするまで制御を停止するか,又は電圧
が指定された時間内で復帰した場合だけ運転を継続する場合もある。通常,PDSは,電圧ディップの間は
電動機を制御できず,また,制御回路がリセットされるまで,制御が失われることがある。PDSが制御し
ているプロセスが重要な場合,電圧ディップに対する制御の応答がプロセスの必要事項と両立するように,
PDS製造業者と協議することが望ましい。重要な場合は,厳しい電圧ディップにプロセスが耐えられるよ
うに追加の手段(例えば,代わりの電源)を適用する必要がある。
電圧ディップの間,BDM/CDMから電動機に供給する電力は減少する。これは,電動機の動作点に応じ
て動作に影響する。三相サイリスタ整流器で,直流電動機に電力を供給する場合を考える。電動機が高速
運転しているときは,電圧ディップによって電源電圧ピークが電機子電圧以下に低下することがある。電
機子回路よりサイリスタ変換器の電圧のほうが低くなるので,電機子電流は,低下する。一方,電動機の
低速運転時に電圧ディップが発生したとき,制御回路は,電圧低下を補うために制御角を進める。この場
合,電動機の制御は,影響されない。重要負荷の場合は,電圧ディップの影響によって,制御がどのよう
に応答するかを確認するために,PDS製造業者と協議することが望ましい。
他励サイリスタ変換器で回生運転する場合は,特に電圧ディップに敏感である。回生時に電源電圧が低
下しすぎた場合,サイリスタが転流できなくなり,電動機から電源への回生ができなくなる。制御回路が
即応しない場合,又は電圧ディップが特に急しゅんな場合,若しくはサイリスタがターンオンした直後に
70
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
電圧ディップが発生した場合,サイリスタが転流失敗し,過大な無制御電流が電動機から流れる。この電
流は,プロセスへの有害な影響を生じることがあり,更には電動機の損傷を生じることもある。重要負荷
に対しては電圧ディップの回生変換装置への影響についてPDS製造業者と協議を行い,制御回路及び主回
路が電圧ディップの期間にどのように応答するかを確認することが望ましい。重要負荷に対しては,電圧
ディップの間,PDSが運転できるように,サイリスタを強制転流するための回路を追加するか,又は代わ
りの電源を用いてもよい。
自励逆変換装置も,電圧ディップがある程度影響する。これは,電圧ディップの間の電圧低下が,負荷
から電動機を通して電源に回生される電力を減らすためである。この条件がある場合,電動機の制御がこ
の期間失われることがある。
B.6.1.2.3 無制御整流器
ダイオード整流器のような無制御整流器は,復電後,電圧形逆変換器用のコンデンサバンクに流入する
大きな突入電流を除いて,電圧ディップに対しては大きな影響を受けない。ただし,整流器の出力電力及
び電圧は,電圧ディップの間,低下する。これは,PDSのその他の部分へ有害な影響を与えることがある。
例えば,整流器がインバータに電力を供給している場合,インバータの出力電圧は制限され,交流電動機
の制御が失われることになる。
インバータへの供給電圧があらかじめ指定された値以下に低下したときは,運転を停止させる装置もあ
る。再始動のためにリセットが必要な設計もある。ほかの設計では,復電時に再始動するが,運転停止中,
電動機の制御が失われる。再始動までの時間は,制御が失われた後,インバータの制御が電動機の速度に
同期するまで延びる。
同期は,インバータの出力周波数を電動機の実際の速度と合わせるために必要である。同期のプロセス
は,惰走状態から制御状態へのスムーズな移行のために電動機に加える適切な周波数及び電圧を決定する。
非常に大きいコンデンサバンクを備えたPDSは,コンデンサバンクに蓄えられたエネルギーによって短
時間の電圧ディップがあっても運転を継続できることがある。一般に,電圧ディップの間も運転できるよ
うにコンデンサバンクを大きくすることは経済的ではない。重要負荷の場合は,電圧ディップの間に電力
を供給するために蓄電池を用いることもできる。出力がほとんどゼロの場合は,PDSの制御が適応してい
るときは,停電の間も運転を続けることができる。すべての場合において電圧ディップによるPDSの運転
への影響について製造業者と協議し,PDSがプロセスの必要事項に両立しているかを確認することが望ま
しい。
B.6.1.2.4 一般的な保護方式
電圧ディップに対するイミュニティは,変換装置の特性,及び負荷の動作に強く依存することを説明し
ている。完全な保護は,非常に高価になることがあり,また,このため,プロセスからの要求事項を十分
に比較評価して保護方式を決めることが望ましい。
完全な保護は,予備電源を必要とする。例えば,PDS外部へのUPS(無停電電源装置)又は電圧形イン
バータの直流リンクへの直流電源(蓄電池)の適用などがある。
継続運転は,バックアップエネルギーを用いないで過渡的な過電流を避けるように指令する方法である。
したがって,受動負荷の回転速度は,慣性に対する負荷のトルクの比によってほぼ決まる減速率で低下す
る。この種類の保護は,安全上の理由から,能動負荷(例えば,ブレーキ期間に回生ブレーキを行うホイ
スト)では用いてはならない。
惰走再始動は,継続運転を継続する方式であり,惰走時間が長い又は非常に長い受動負荷の場合に用い
ることができる。この方式は,ディップ又は短時間停電に対する保護となることもある。
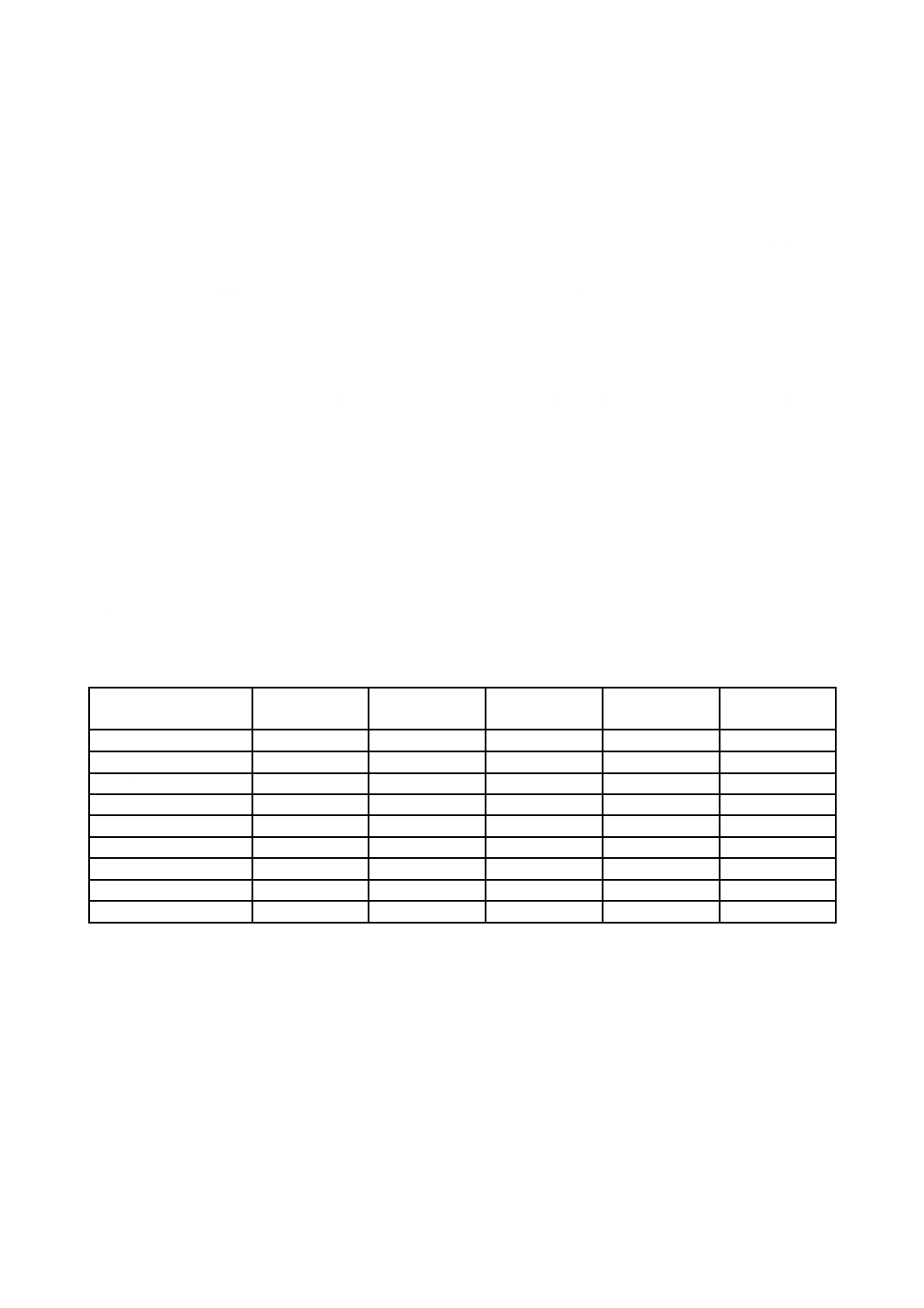
71
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
自動再始動は,常に安全条件を考慮する必要があり,これは使用者の責任である。
B.6.2 電圧揺動
次数間高調波は,照明設備のちらつきを起こす。次数間高調波の内容は,B.4.3で説明し,両立性レベル
は,電力系統の種類に応じてIEC 61000-2-2,IEC 61000-2-4及びIEC 61000-2-12で規定する。PDSの次数
間高調波エミッションは,IPCにおける次数間高調波電圧の算出値が電圧両立性レベルの80 %を超えない
ように制限することが望ましい。
パンチ圧さく(搾)器,フライング・ソー,工作機械などの大きい負荷を駆動するPDSは,主電源から
大電流を周期的に必要とする。これは,主電源の電圧変動を起こす。これらのPDSに給電している主電源
の電源インピーダンスは,電圧変動が10 %を超えないようにすることが望ましい。
このインピーダンスによる電圧変動の大きさは,平均的には電源システムの定格を超えないが,ピーク
時には供給電圧が許容値を超える逸脱を引き起こすので,ピーク負荷を考慮することが望ましい。商用電
力系統では,一つの機器からの電圧変動は,3 %を超えてはならない。フリッカが頻繁に起こる場合,そ
の限度値は,商用電力系統に,そして照明負荷(6.2.4参照)に給電するどのような電力系統にも適用され
る必要がある。
B.7
低周波妨害のイミュニティの立証
5.2.1に従って,PDSの低周波現象のイミュニティは,計算,シミュレーション又は試験によって確認す
る。製造業者は,各現象のためにどの立証方法を用いるかを確認するために,表B.3を用いることができ
る。
表B.3−低周波妨害のイミュニティの立証プラン
現象
計算
シミュレー
ション
試験
解析
適用不可
高調波
転流ノッチ
電圧変動
電圧変化
電圧揺動
電圧ディップ
電圧不平衡
周波数変動
供給による影響 磁界
72
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
無効電力補償−フィルタ
序文
この附属書は,本体の規定を補足するものであって,規定の一部ではない。
C.1 設備
C.1.1 通常の運転
商用電力系統によって給電される電気の使用者は,一般に,最終的に同じPCCに接続した幾つかの又は
多くの装置をもっている。用語“設備”は,PCCに接続した装置,機器又はシステム,及びそれらの給電
システムとの組合せを説明するために用いる。
同様に,多くの産業用装置は,複数のPDSを含む。
一つのPDSの力率,無効電力及び高調波エミッションは重要でない上,技術的に困難な不要な議論を引
き起こす。実際には,これらは設備として検討する。設備は,多くの異なった負荷を含む。
相電圧及び線電流は,定常状態において,三相の交流系統のどのような点でも,周期T及び周波数f =
1/Tの周期的な量をもつ。電圧及び電流は,ほぼ常に位相がずれており,かつ,正弦波をひずませる高調
波を含む。ただし,電気エネルギーは電圧源によって給電されるので,どの給電点(変換装置への供給又
は産業用設備への供給)においても,電流波形は電圧波形よりひずむ。このことから,有効電力及び無効
電力の計算のために,電力系統のどのような点においても,電圧は,相電圧の実効値Vのひずみのない正
弦波と仮定する。単相における有効電力Pの計算式の定義は,次による。
∫T
t
t
i
t
T
P
0
)d
()
(
1ν
=
これを簡略化すると,
P=V I1 cos(ϕ1)
ここに,
I1: 線電流の基本波成分の実効値
ϕ1: 線電流と相電圧との基本波成分間の位相差
電流I1と電圧Vとの位相差がπ/2より小さい場合,Pは,正となる[電圧はボルト (V),電流はアンペ
ア (A) 及び電力はワット (W) で与えられる。]。同じ仮定によって,バール (var) で表す無効電力Qは,
次のように定義する。
Q=V I1 sin(ϕ1)
この無効電力Qは,産業用設備の中のリアクトル,コンデンサなどの無効要素があることを示す。Qが
正の場合(リアクトル),遅れの無効電力を示し,Qが負の場合(コンデンサ),進みの無効電力を示す。
同様に,電力系統のある点での皮相電力S[ボルトアンペア (VA) で表記]は,相電圧の実効値Vと線
電流の実効値Iとの積で定義する。
S=VI
三相電力系統で,有効電力,無効電力及び皮相電力は,各相におけるそれぞれの電力の合計となる。三
相平衡システムでは,次による。
73
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
I
U
I
V
S
I
U
I
V
Q
I
U
I
V
P
3
3
)
sin(
3
)
sin(
3
)
cos(
3
)
cos(
3
1
1
1
1
1
1
1
1
=
=
=
=
=
=
ϕ
ϕ
ϕ
ϕ
ここに,
U: 電源の線間電圧実効値
力率λは,皮相電力に対する有効電力の比で定義し,単相及び三相において,次の式で表す。
)
cos(1
1
ϕ
λ
I
I
S
P=
=
この基本式は,力率が,基本波力率,及び電流の高調波含有量の両方に依存することを示す。
要約すると,電圧は,ひずみのない正弦波で,電流はひずんでいるというのが基本的な仮定である。こ
の仮定は,電力及び力率のようなすべての計算のために用いられる。負荷の高調波電圧ひずみなど,その
他の計算のためには,電力系統の内部インピーダンスを考慮する。この負荷の電圧ひずみは,この点に流
れているひずみ電流及びこの点に見られるインピーダンスから算出される。
C.1.2 実際的な解決策
C.1.2.1 一般的な手段
設備定格超過,及び商用電力系統の電流の不要な増加を避けるために,高力率が必要であることは,よ
く知られている。しかし,事実上,力率は,無効電力の観点からだけでなく,実際は高調波含有量が関係
することを考慮しなければならない。
通常,産業用設備が無効電力を消費する。したがって,通常,基本波力率を改善し,設備の無効電力の
消費を減らすために,全体的な補償装置を設置する。そのために,コンデンサが無効電力を消費する装置
の近く,又はPCCの近くに設置されている。
C.1.2.2 一般的な手段の展開
力率が問題となるため,また,ひずみを発生する負荷の使用が増えているため,高調波補償も必要であ
る。高調波補償は,全体的には,設備全体用のフィルタを設置するか,又は部分的にひずみを発生する負
荷の近くにフィルタを設置することによって行うことができる。高調波を出さない負荷を用いることは,
更に好ましい。
この説明から,2種類の補償,すなわち,基本波力率及び高調波含有量に対する補償が必要であること
が分かる。二つの方法,すなわち,設備全体のための全体的な手法,又はひずみを発生する負荷ごとの部
分的な手法を,これらの補償のそれぞれに用いることができる。四つのケースがあるが,四つのいずれも
が独立していないので,この問題は,より多くの詳細な内容の中で議論する必要がある。
C.1.3 無効電力補償
C.1.3.1 一般的な補償基準
力率改善装置は,機械式又は電子式接触器によって電源線に接続するコンデンサバンクで構成する。次
は,機械式接触器によって接続するコンデンサバンクの使用に関連した現象を取り扱う。
設置するコンデンサバンクの大きさは,システムに必要な有効電力及び無効電力の補償で決まる。また,
1日間のそれらの変動(負荷−時間特性)にも関係する。さらに,電気事業者の価格設定にも影響する。
力率改善効果は,1か月間のうちで,1日の重負荷時のエネルギー消費(有効電力及び無効電力)の平均
値で定義することが多い。
注記 この附属書で用いる無効エネルギーとは,無効電力の時間積分を意味する。
評価には,電気事業基準を知る必要がある。
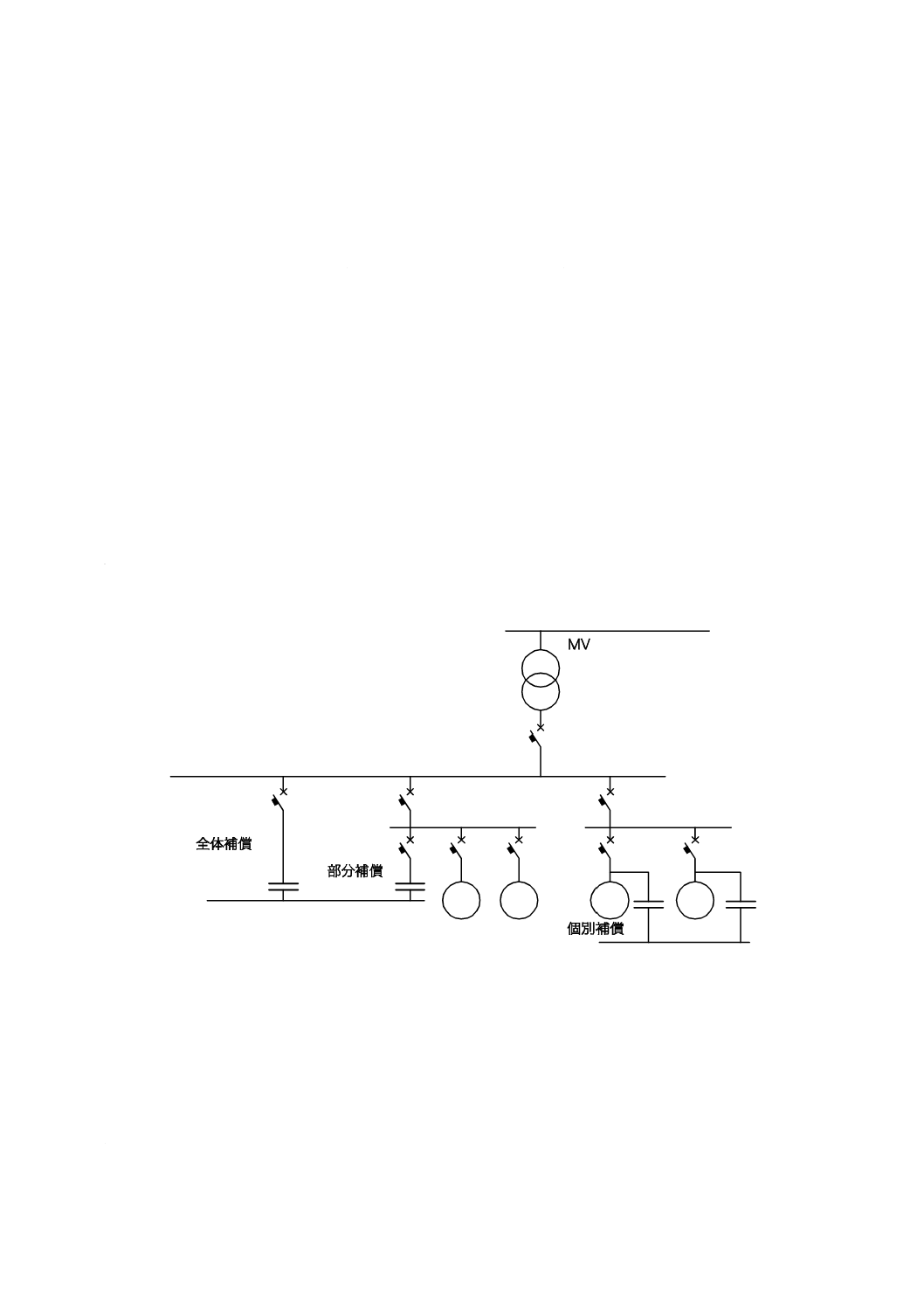
74
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
・ 1日の中の重負荷時間
・ 電力料金に影響しない範囲の無効電力比(例えば,tanϕ)
・ 負荷−時間特性のような需要家データ
無効電力補償は,一定でも永続的でも不可である。永続的改善は,時間帯によっては,電力供給に対し
て進み過補償になることがある。その結果,需要家設備の電圧の上昇となる。この結果は,利点になると
は限らない。このような検討は,全体の設備に対して行うもので,個々のPDSに対して行うことは,ほと
んど不可能である。
もう一つの点は,コンデンサが低電圧側又は中電圧側のいずれかに設置できるということである。無効
電力補正が600 kvarに達した場合,中電圧側への設置に経済的な利点があるのが一般的である。補償量が
少ない場合は,低電圧側を選択することが望ましい。
力率改善用コンデンサを高調波電流源が存在する電力系統に設置する場合,コンデンサに直列にリアク
トルを追加することが望ましい。結果的に共振周波数は,理論高調波の最低周波数(通常5次)より低い
周波数に移る(C.1.3.4参照)。
C.1.3.2 低電圧電力系統での補償
C.1.3.2.1 各種補償方法
図C.1に示す3種類の補償方法がある。
・ 個別補償
・ 部分補償
・ 全体補償
図C.1−無効電力補償
C.1.3.2.2 個別補償−電動機が直接電力系統に結合する場合
25 kWを超える定速電動機が存在し,ほとんどの時間稼働している場合,個別補償が特に適切である。
個別補償は,ファンのような大きな慣性定数をもった機械を駆動している電動機に特に適用する。電動機
の操作スイッチは,コンデンサへの接続又は解離を自動的に行う。共振の危険性がないことを確認した方
がよい。
a) 利点 無効エネルギーは,無効エネルギーを消費する点において直接生成される。無効電流負荷の減
75
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
少が,電力供給ケーブルの長さ全体にわたって無効電流を減少させることができる。個別の補償が,
皮相電力の減少,導体における電圧降下及び損失の減少に最も大きく寄与する。
b) 欠点 幾つかの小さいコンデンサに分けた方が大きなコンデンサバンクより高価なので,個別補償は,
相対的に高価である。コンデンサを接続する場合,工場の系統電圧は,局部的に上昇する。したがっ
て,電圧を降下させるためには,工業用配電系統(高電圧)で低負荷の期間にコンデンサを解離でき
る必要がある。実際,高電圧は,過度のストレスを装置に与える危険を伴い,寿命低下を招く。した
がって,コンデンサは,可能な場合,コンデンサ専用の開閉装置を用いて電力系統に接続することが
望ましい。もう一つの重要な欠点は,工業用配電系統内のコンデンサの急増が共振の危険性を増やす
ということである。これらすべての要因は,個別補償で得られる潜在的利点を著しく低減させる。
C.1.3.2.3 部分補償
部分補償の場合は,専用の開閉装置によって動作する単一のコンデンサバンクで,作業場又はある地域
に位置した無効エネルギーの需要機器の一群を補償する。
a) 利点 部分補償は,個別補償より少ない投資で済む。ただし,過補償(必要無効電力より供給量が大
きい場合)を避けて,コンデンサ群を適正な容量にするために,事前に負荷カーブを十分に知ってお
くことが望ましい。過補償は,永続的過電圧を引き起こし,寿命低下を招く。コンデンサバンクは,
専用の開閉装置を備えており,商用電力系統上での軽負荷期間には,対応する電力需要機器が接続さ
れたままでも容易に解離できる。
b) 欠点 種々の電力需要機器の電力供給ケーブルは,無効電流及び有効電流の両方が流せる寸法を決め
なければならない。さらに,コンデンサを保護する機器を準備することが望ましい(例えば,ヒュー
ズ,遮断器など)。また,保守時には,安全のためにそれらを放電しなければならない(放電抵抗)。
また,ヒューズは,定期的に監視することが望ましい。
C.1.3.2.4 全体補償
全体補償の場合は,1か所で集中して無効エネルギーを生成させる。多くは変電所内又は十分な空間が
あって,十分換気のよい場所である。小電力の需要機器だけを備えている設備では,過補償を避けるよう
に,自動制御された集中補償を採用することが一般に適切である。負荷曲線がほとんど揺動を示さない場
合は,設備の動作期間,単に全コンデンサ容量を稼働させるだけでよい。
a) 利点 コンデンサは利用率をよくすることができ,設備は監視することがより容易である。さらに,
同時に手動の操作(手動入切)を避けてコンデンサバンクによる自動制御によって,プラントの負荷
曲線に効果的に追従させることができる。負荷変動が特定の電力需要機器に起因しないとき,この解
決策は,経済的見地からも有利である。
b) 欠点 全体補償接続の下流にある設備には,すべての無効電力が伝わる。
C.1.3.3 中電圧電力系統での補償
補償は,一般的に集中して行う。中電圧変電所のコンデンサ設備は,バンクに分けられる。そのバンク
は,遮断器を介して中電圧線に接続する。それらのバンクの容量は,数メガバール (Mvar) に達する可能
性があり,更に小さなコンデンサ群に分割して,最適に補償するように負荷曲線に追従して順次投入され
ることもある。それぞれのコンデンサ群は,日ごと負荷曲線又はオンライン制御の機能として,この目的
のために備えた開閉器によって操作する。
a) 利点 コンデンサバンクの容量が,600 kvarを超える場合,中電圧補償の費用は,低電圧補償より一
般的に小さい。
b) 欠点 この補償方法は,コンデンサの下流に配置する電力系統の部分を補償しない。コンデンサバン
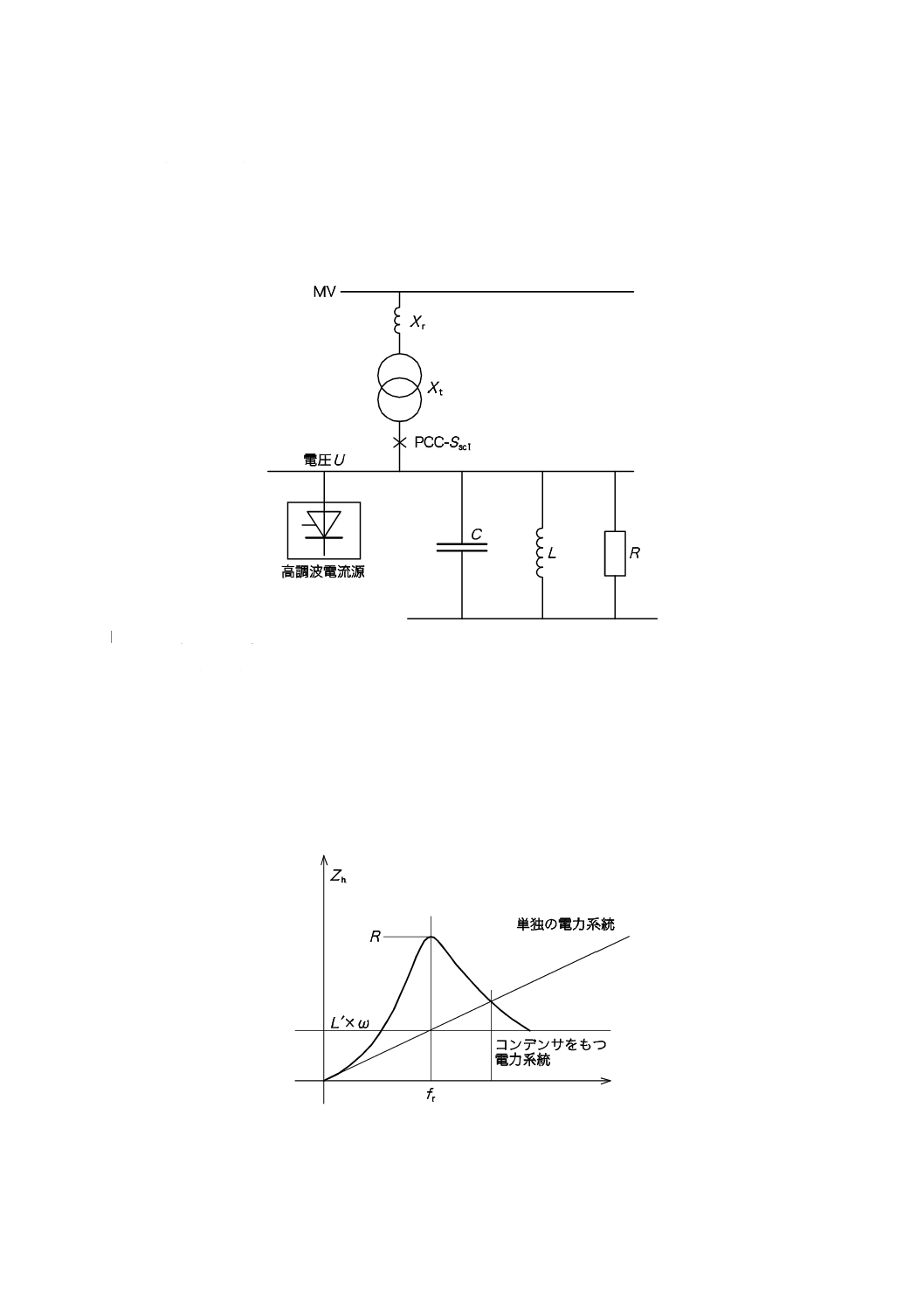
76
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
クを投入させると電圧トランジェントが生じる。開閉においては,低電圧電力系統にコンデンサがあ
る場合よりも注意が必要である。
C.1.3.4 共振の危険性
電力系統の中に無効電力補償用のコンデンサ及び変換装置からなる高調波電流源が同時に存在するため
に,共振の危険性がある。RL受動負荷及び全体補償しているコンデンサ群を含む簡略単線結線図を,図
C.2に示す。
図の記号は,次による。
P:
Q:
Xr:
Xt:
PCC:
R,L:
C:
受動負荷及び損失の有効電力
受動負荷の無効電力
短絡容量Ssc0の電力系統のインピーダンス
無効電力SN(リアクタンスxsc)の変圧器のインピーダンス
短絡容量Ssc1をもつ二次バスの共通結合点
負荷の有効電力P及び無効電力Qに対応する抵抗及びリアクタンス
無効エネルギーの電力Qcondの補償用コンデンサ
図C.2−工業用配電系統の概略図
図C.3−単純化された電力系統のインピーダンス−周波数特性
77
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図C.3は,PCCにおける電力系統の高調波インピーダンスの変化及び高調波電流源の存在に関係する共
振の危険性を例示する。上流のインピーダンスXr及びXtは,PCCにおける短絡容量をSSC0からSSC1に低
減することに寄与する。
1
N
sc
SC0
1
C
S
1
−
+
=
S
X
S
S
したがって,PCCにおける電力系統の等価インピーダンスZhは,高調波次数をhとすると,次の値とな
る。
Zh = (h U)2 [(h2 Qcond−SSC1−Q)2 + h2 P2]−1/2
さらに,共振周波数は,次のとおりとなる。
fr = f1 [(SSC1 + Q) / Qcond]1/2
ここに,
f1: 基本周波数
図C.3は,周波数に対するインピーダンスZhの変化を表す。また,電力系統のインピーダンスは,Xr
及びXtだけに依存する。Zhは,電力系統単独のインピーダンスと対比した,共振周波数frにおける増幅率
を表すことに注意する。電力系統インピーダンスの例及びダンピングの考察は,IEC 61000-3-6に示す。
ある高調波周波数において,電力系統インピーダンスが高く,かつ,高調波電流の注入が対応する周波
数において生じるとき,オームの法則から分かるように,かなりの高調波電圧が発生する。誘導性リアク
トルと電力系統のコンデンサとの間に共振が存在する。これによって,様々な結果を生じる。
a) コンデンサに流れる過電流によってコンデンサが過負荷になる危険性がある。特に高い高調波周波数
の場合がそうである。
b) 高い高調波電圧のために,これらコンデンサの端子で絶縁破壊する危険性がある。
c) 産業設備の端子における高い高調波電圧によって,感受性が高い電子機器の異常動作,及び電動機巻
線の過熱を引き起こす。
d) 高調波電圧の発生は,配電系統及びほかの使用者の設備に高調波電流を誘発する。
高調波電流源からのエミッションを低減させるか,又はフィルタを設置することが望ましい。したがっ
て,工業用配電系統内のコンデンサ配置場所は,共振発生に重要な影響を及ぼす。
共振の問題を解決するには,多くの場合,電気系統の詳細な解析を必要とする。これらの問題は,本質
的に系統的ではない。ただし,それらの問題が起こると,寿命低下を加速するのはいうまでもなく,多く
の場合,結果的に機器に損傷を与えることを意味する。
これらの解析は,一つの無効電力補償回路に限定されている。電力系統でのこのような回路の増加は,
共振の危険性を増加させる。
C.1.4 フィルタ方式
C.1.4.1 判定基準
設備のフィルタをこの規格で扱うのは,適切ではない。PDSにフィルタを適用する場合にも困難が生じ
る。さらに,無効電力補償についてC.1.3.2,C.1.3.3及びC.1.3.4で行った解析は,最初の判定基準を除い
て,類似の手法で類似の結論となり得る。
高電圧のひずみ率が過度に大きいと予想される場合,フィルタを適用することが望ましい。電圧ひずみ
率は,B.3及びB.4に従って評価する。フィルタを施す特定のPDSは,一般的な高調波エミッション特性,
すなわち,高調波電流のレベルが知られている。ただし,この特性は,フィルタを決定するのに十分では
ない。
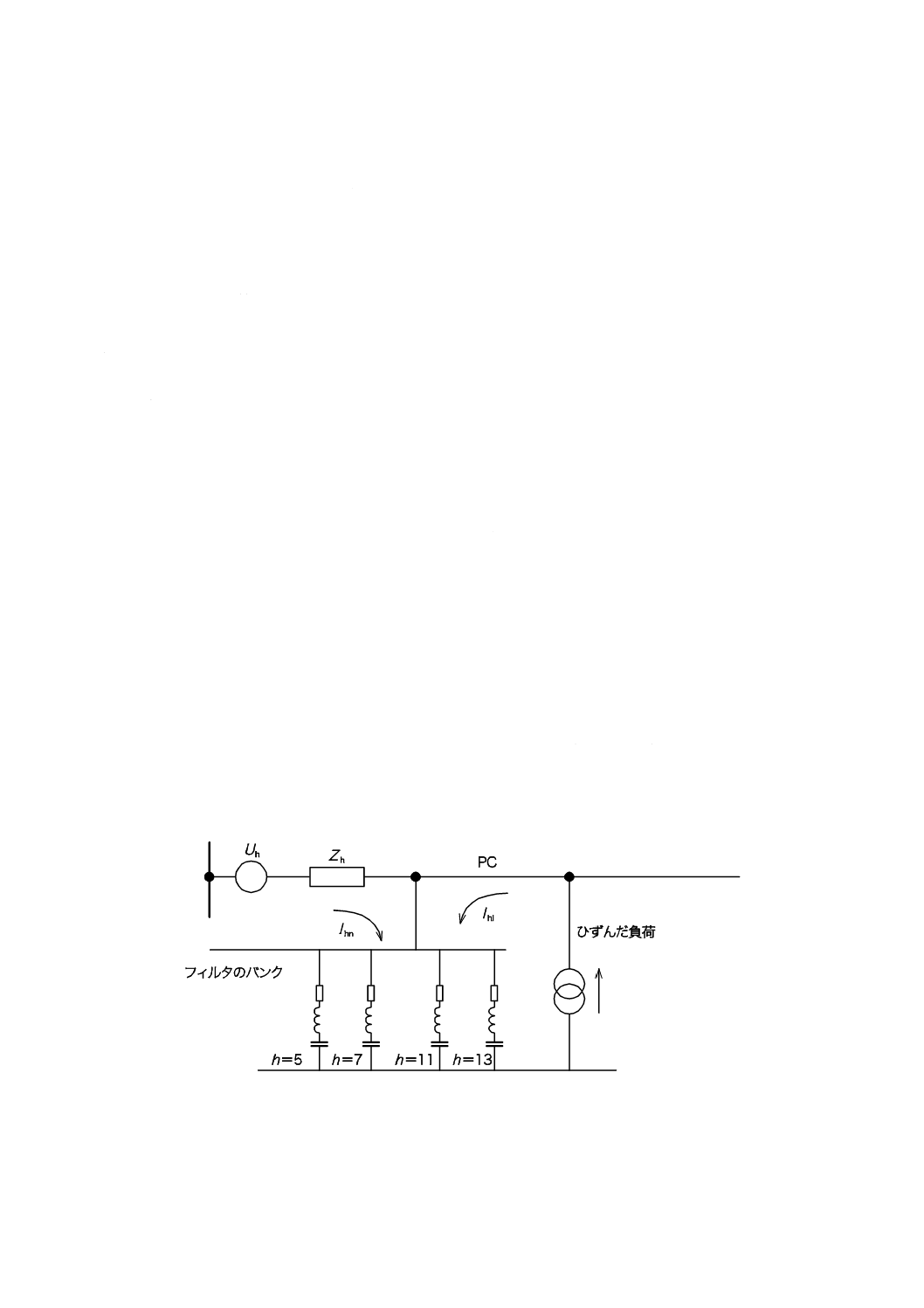
78
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
一般に,フィルタは,電力系統に接続し,低減する特定の周波数で非常に低いインピーダンスをもつ装
置で構成する。したがって,フィルタは,それら特定周波数の高調波電流を吸収する。しかし,PDSから
流れる高調波電流と,電力系統に存在する高調波電圧から流れる高調波電流との間に区別はない。高調波
電流は,高インピーダンスの電力系統ではなく低インピーダンス経路であるフィルタに流れやすい。後者
の電流は,電力系統の高調波インピーダンスとフィルタのインピーダンスとの合計によってだけ制限され
る(図C.4参照)。この議論から,フィルタを設計することは,複雑な問題であることが分かる。設計には,
次に示す三つの基本的なパラメータの知識を必要とする。
・ 低減する電流。その電流の発生源は,PDSである(PDS製造業者の責任)。
・ 存在する高調波電圧(両立性レベルを選択することもできるが,一般にフィルタの定格超過を招く。)
・ PCにおける高調波インピーダンス(配電系統の運用者の責任。運用者は,IPCの場合の工場内部の需
要家か,又はPCCの場合の公共配電系統の運用者である。)
このようなフィルタを設計するには,システム供給者と使用者との情報交換が必要である。
高調波電圧が分かっても高調波インピーダンスが分からない場合は,意味がないことに注意する必要が
ある。多くの場合,高調波電圧及びインピーダンスをあらかじめ測定しておくことは,フィルタの正しい
定格を決めるために必要である。
最後に,C.1.3.4で明らかになったのと類似の理由で,多周波数での共振の危険性があることを指摘して
おく。
C.1.4.2 受動フィルタ
最も伝統的なフィルタは,共振回路(インダクタンス及びコンデンサの直列回路)か,又は抵抗若しく
はフィルタのインピーダンスの周波数特性に極及びゼロを付け加えるための複雑な構造を付加したダンピ
ング回路である。
フィルタは,電源周波数の倍数である特定の周波数において,非常に低いインピーダンスとなる。並列
で異なる共振回路を用いたフィルタのバンクは,複数の高調波次数(例えば,5,7,11及び13次)のフ
ィルタとなる(図C.4参照)。また,フィルタには,ハイパス回路を追加する場合もある。フィルタは,特
定の電源周波数用に設計し,特にダンピングが非常に小さい場合,電源周波数が変わるとフィルタの効果
が大きく変動する。
図C.4−受動フィルタ群の例
次数間高調波の低減には,ダンピングフィルタが必要で,狭い周波数帯域においてだけ効果があること
に注意する必要がある。
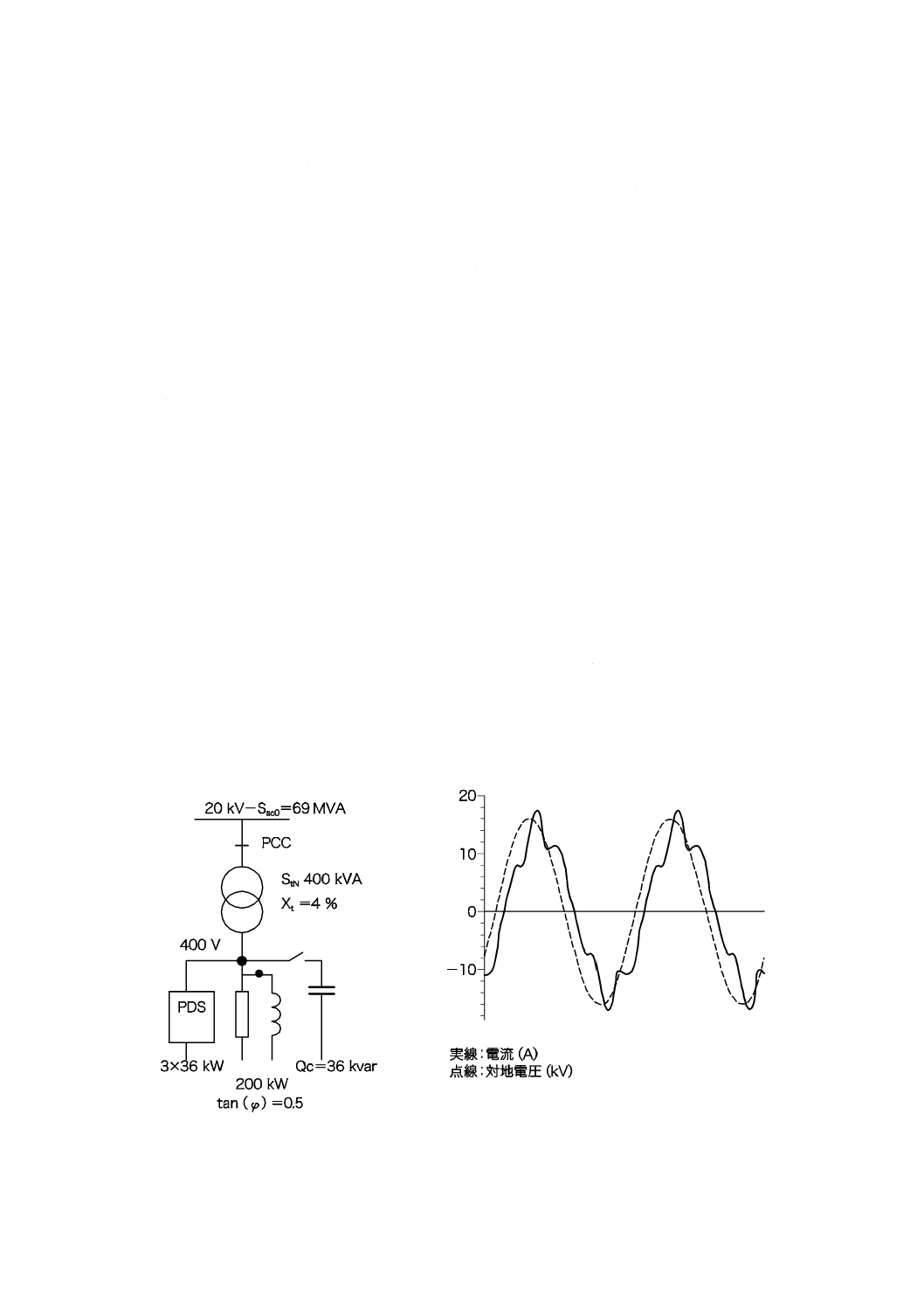
79
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
共振の危険性に関して,次の二つの主な現象が指摘されている。
・ 一般に,共振は,同調周波数より少し低い周波数で生じる。共振が電力系統で用いるリプル制御又は
電力線通信に影響を与えないことを確認する必要がある。電気事業者の協力を得て,特定のキャリア
周波数の特性を使用する電力線通信があることを製造業者に知らせるのは,使用者の責務である。
・ それぞれのPDSごとにフィルタを設置することは,共振の危険性を増やし,その結果が,設備の多く
の部分に影響を与える可能性がある。一般に,事象ごとの解析だけが,これらの困難を除去できる。
このことが,全体補償を優先することが望ましい理由である。
C.1.4.3 フィルタの配置
個別フィルタの場合,フィルタ装置は,ひずみを発生するPDSのできるだけ近くに設置する。
ただし,より好ましい方法である全体補償の場合,フィルタの配置及び構造は,次のような設備のパラ
メータを考慮して選択することが望ましい。
・ 電力系統内の特性的な分離区域(例えば,高調波エミッションが多い区域と少ない区域との分離)
・ ほかのひずみを発生するPDS,又はひずみを発生する負荷及びそのひずみ発生特性,すなわち,一般
的な高調波電流発生
・ 配電系統(特に長距離ケーブルがある場合)のインピーダンス,又は無効電力補償回路(C.2参照)。
C.2 無効電力及び高調波
C.2.1 通常設備の軽減方法
C.1.1で示したように,無効電力補償技術及び高調波電流のフィルタ技術は,関連しており,分けて考え
ることはできない。
C.1.3.4で示すように,電力系統は本質的に誘導的であるので,コンデンサを接続するだけで,直ちに共
振する危険がある。電力ケーブルも,また,電力系統に静電容量をもたらす。次の例は,無効電力を補償
するコンデンサで,PCCの高調波電流が増加することを示す。かなり大きい高調波電流が,コンデンサに
も流れる。
a) 回路図
b) QCを接続しない場合のPCCでの波形
図C.5−不適切な無効電力補償例
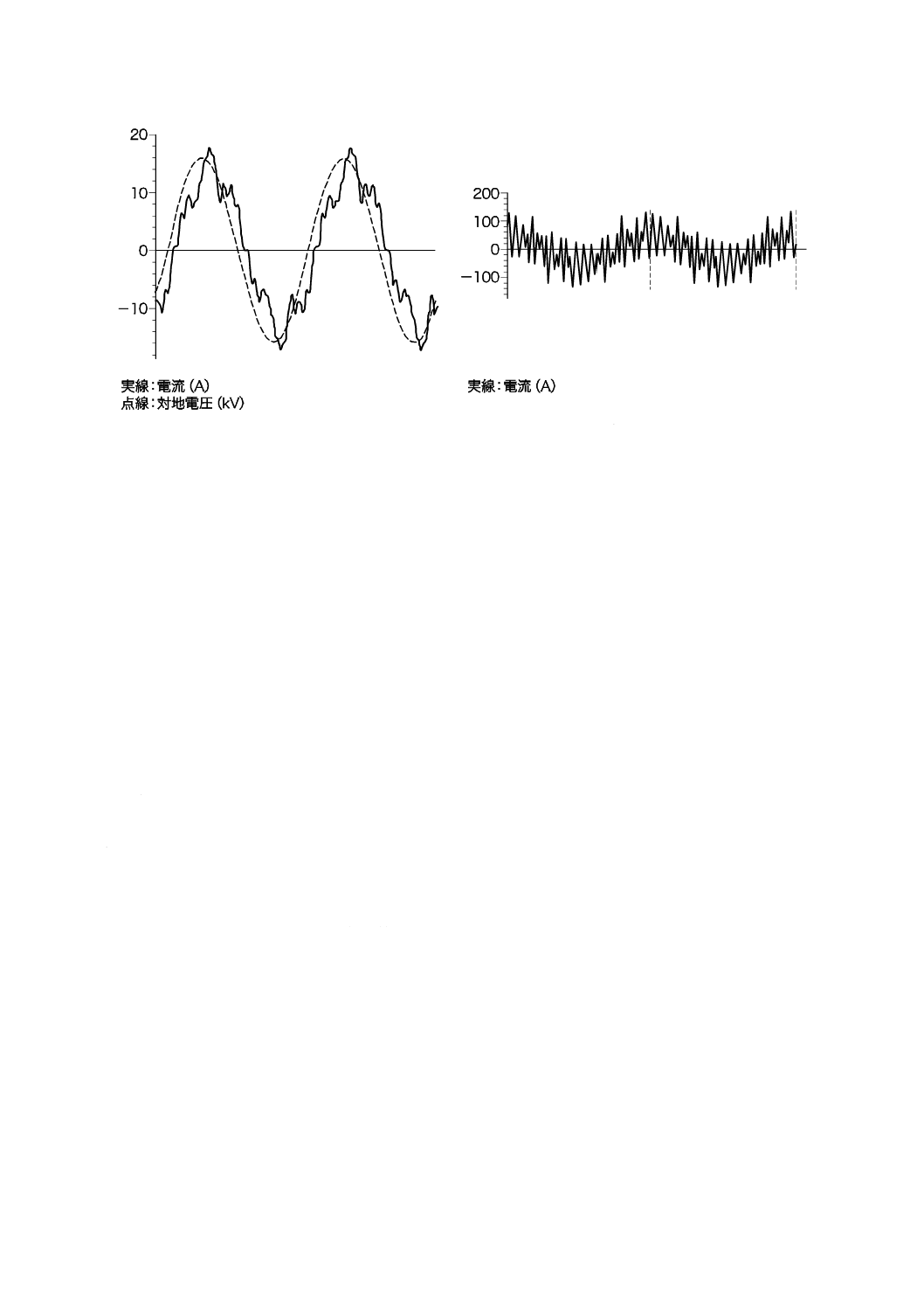
80
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) QCを接続した場合のPCCでの波形
d) QCの電流
図C.5−不適切な無効電力補償例(続き)
無効電力を補償するために,ただ1個のコンデンサでも問題は複雑であり,用いるコンデンサの数が増
すにつれて問題がより複雑化することが図C.5で分かる。電力系統の受動フィルタ用及び無効電力補償用
のコンデンサの増加によって,より多くの周波数で共振するおそれがある。したがって,すべてのシステ
ムを考慮に入れた全体補償が,最善の結果を導く。
さらに,無効電力補償及びフィルタ設置を別々に進めることは,無効電力を過剰に発生する危険を増加
させる。実際,効果がある受動フィルタは,著しい量の無効電力を発生する。したがって,両方の現象を
同時に考慮することは,設備全体に最適な装置を設計することとなり,よりよい解決策が得られる。
C.2.2 その他の解決策
C.2.2.1 一般
受動フィルタの主な欠点は,多くの場合,電力系統の変更及びフィルタ部品の変化(劣化,温度など)
に適応する能力がないことである。受動フィルタは,対応する周波数におけるインピーダンスが電源イン
ピーダンスと比較して非常に低い場合に効果的である。ただし,電源(すなわち,電力系統)のインピー
ダンスが低い,又はフィルタの周波数特性が負荷によって発生した高調波に正確に合わせられない場合,
補償は困難となる。しかし,とりわけ最も重大な問題は,電力系統で生じる直列又は並列共振である。
その結果として,電気事業者及び/又は使用者のため,ほかの補償方法は,電力系統から取り出された
エネルギーを最も有効に利用できる。よりよい性能を提供する新しい解決策は考案中であり,幾つかは既
に生産段階に達している。これらの解決策には,能動フィルタ,及び力率改善機能をもったPDSがある。
C.2.2.2 能動フィルタ
能動フィルタは,負荷と電力系統との間に接続することで,電流又は電圧高調波を補償できるインバー
タタイプの電力変換装置で構成する。能動フィルタを並列に接続し,負荷で発生した高調波電流と反対向
きに高調波電流を注入するとき,並列又は分流フィルタという。能動フィルタを電力系統と直列に接続す
る場合,負荷接続点において高調波電圧を補償する。能動フィルタの基本的な利点は,受動フィルタと比
較して,電力系統又は負荷の変化への適応能力である。
様々なフィルタ構成は,並列又は直列接続で用いることができる。ただし,受動フィルタと組み合わせ
て能動フィルタを用いることで,性能を向上し,適用容量を拡張でき,MVレベルへも接続できるように
なる。
81
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
C.2.2.3 力率改善機能をもったPDS
新しい変換器構成は,能動フィルタへの代案となる。これらの単相又は三相構成は,ダイオード又はサ
イリスタ他励変換装置に置き換わる。新回路方式は,回路電圧と同位相の回路から取り出した電流を流す
こと,及び高調波電流を最小限にすることの両方によって,PDSの力率を改善する。新回路方式の変換器
では,ターンオン及びターンオフスイッチングの両方で制御するため,より高価である。この変換装置の
基本的な構成は,6個のトランジスタ又は6個のGTOを用いた,電圧形インバータと同様の構成である。
C.2.2.4 適用
(対応国際規格の記載内容を不採用とした。)
82
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(参考)
高周波エミッションの考察
序文
この附属書は,本体の規定を補足するものであって,規定の一部ではない。
D.1 使用者への指針
D.1.1 PDSの予想されるエミッション
D.1.1.1 PDS及びPDSのコンポーネント
工業環境,又は一般家庭用に用いない建物には供給しない商用電力系統にPDSを用いる使用者は,一般
的な技術力をもち,EMC現象を知っている。
PDSのコンポーネントを販売する場合,製造業者は,設置場所のEMC限度条件を知らないため,電波
障害に対する緩和方法を組み込むことができない。さらに,コンポーネントの使用者は,個々の場合に応
じたやり方で電磁両立性を達成するため,全体又は部分的なフィルタ,選抜の方法,距離をおく自然な緩
和,又は現行設備の寄生要素を分散して用いるなど,経済的視点から見て自由な決定を行うことが望まし
い。
D.1.1.2 伝導による電圧妨害
EMCを達成する量的判断の方法及び値は,この規格の本体に規定する。緩和可能な方法を評価するフィ
ルタなしPDSの使用者のための情報の重要な項目は,PDSの電源ポートで予想される,150 kHz〜30 MHz
の周波数範囲の伝導による電圧妨害のレベルである。
次の結果は,1990年から1994年の間に様々な国において,幾つかの種類のPDS(電圧形及び電流形)
で行った測定に基づいている。通常,予想できるエミッションレベルの範囲の評価のため,周波数範囲は,
通常行う三つの部分(CISPR 11:0.15 MHz〜0.50 MHz,0.5 MHz〜5.0 MHz及び5.0 MHz〜30 MHz)に分
割し,すべての部分の各PDSからの最大レベルは,その部分の代表として記載する。測定は,ほとんどの
場合,せん頭値検知器を用いて行っている。平均値Udistから±20 dBの範囲の幅(図D.1参照)を仮定し
た場合,異なる負荷条件(軽負荷及び最大負荷),異なる定格入力電圧 (230V,400 V,460 V,690 V),及
び異なる定格電力 (0.75 kVA〜740 kVA) によって発生するばらつきの約91 %を包含する。
エミッションの物理的背景によると,せん頭値の平均は,20 dB/decade及び40 dB/decadeの傾斜をもつ
二つの直線で近似できる。二つの直線は,遷移周波数ftrans≒2 MHzで交差し,参考文献[7]によると,解析
的に次のように記載できる。
100 kHz ≦f ≦ftransの場合,
μV
1
π
kHz
10
V
80
log
20
)
μV
(
dB
dist
×
×
×
f
U
=
ここに,
dist
U
: せん頭値の平均値
ftrans ≦f ≦30 MHzの場合,
μV
1
π
kHz
10
V
80
log
20
)
μV
(
dB
2
trans
dist
×
×
×
×
f
f
U
=
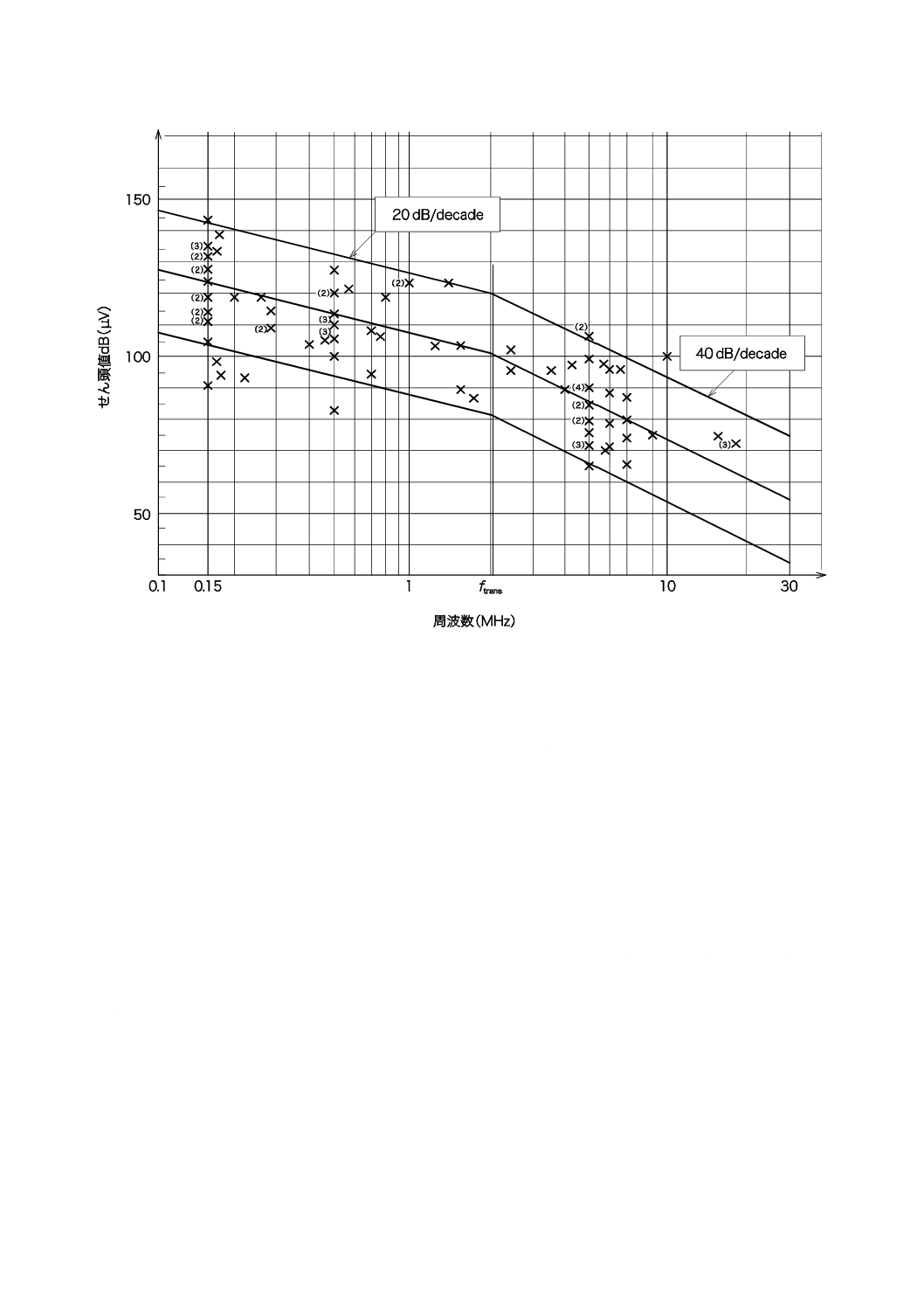
83
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図D.1−様々なフィルタなしPDSの伝導エミッション
結果は,せん頭値で示す。参考文献[2]によると,準せん頭値は,半導体デバイスのスイッチング周波数
が低減されるとともに次第に低くなり,せん頭値よりも低い。200 Hzから10 kHzの範囲でスイッチング
周波数をもつPDSの準せん頭値は,一般にせん頭値より5 dBから2 dB低い。準せん頭値としてだけ有効
な測定結果の場合,補正は,図D.1の評価のために用いる。
ほとんどの場合,この装置は,障害なしで用いる。ただし,緩和方法(例えば,高周波フィルタ)は,
無線受信機又は非常に低い電圧測定のような感受性が高い装置の近くに施す。
D.1.1.3 放射妨害
放射エミッションに関係する測定は,この範ちゅうの苦情が少ないため調査が進んでいない。ただし,
図D.2に設備からの放射エミッションの推定値を示す。低減手段の有無及び差異によらず,PDSから10 m
の距離で測定したせん頭値を補正した評価結果を表す。
非常に少ない代表的な値での粗い推定であるが,図D.2の30 MHz以上の範囲から予想される妨害電圧
範囲の延長(図D.2参照)は,苦情が少ない理由を明らかにする十分なデータとなる。図D.2から分かる
ように,100 MHzを超える放射エミッションの平均値は,低減手段なしでCISPR 11の限度値以下で交差
している。
この範ちゅうの解析的解決手法はない。放射妨害の主な発生源は,変換装置の主要パワーエレクトロニ
クスではなく,マイクロプロセッサ又は装置内のスイッチング電源であるためである。
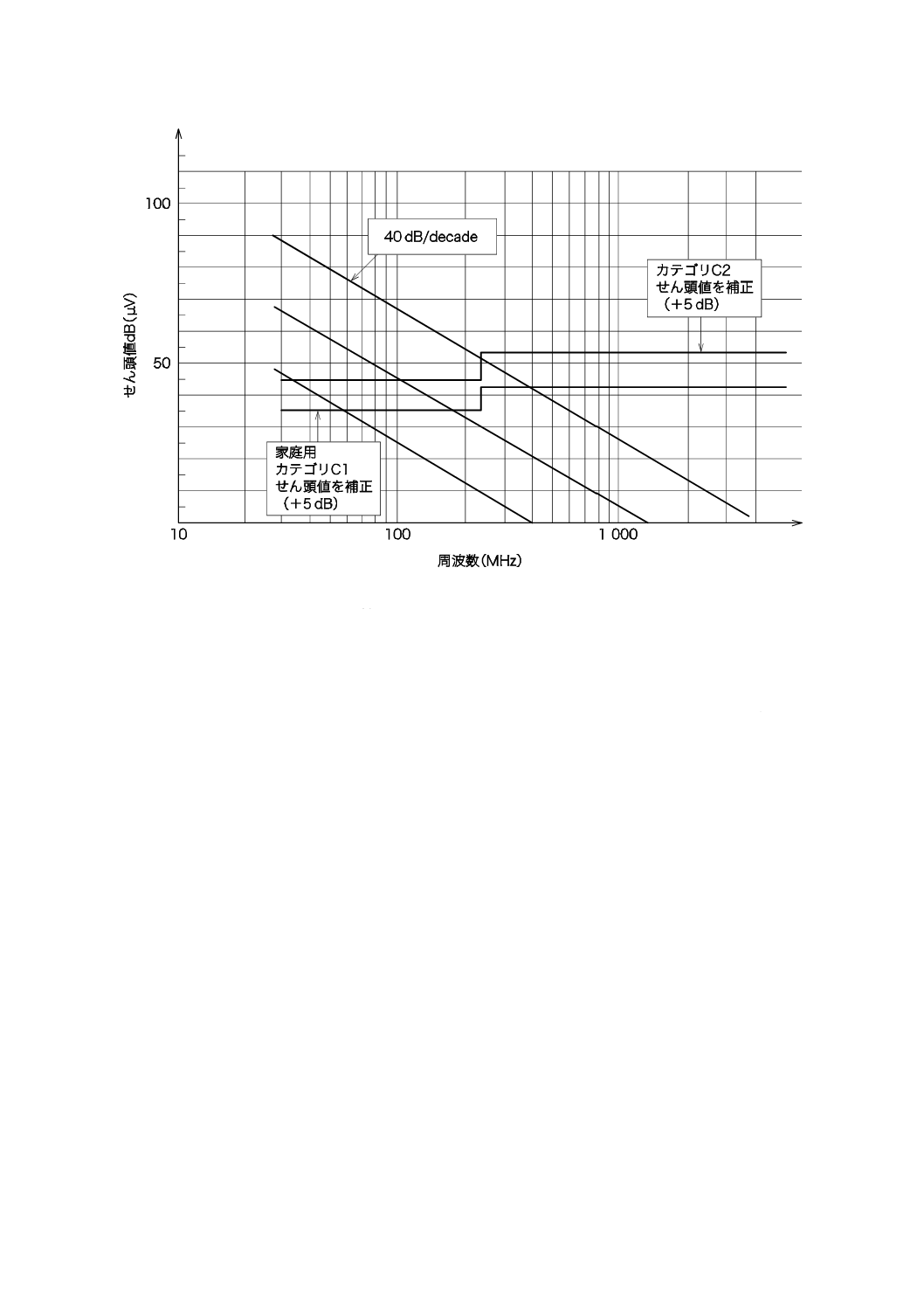
84
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図D.2−定格電圧400 VまでのPDSの推定放射エミッション
10 mで標準化されたせん頭値
D.1.1.4 電力インタフェースのエミッション
電力インタフェースからのエミッションは,主としてコモンモード電圧による。電力インタフェースの
コモンモード電圧は,ケーブル及び電気的負荷(一般的に,電気的負荷は,電動機の電機子巻線で構成す
る。)の浮遊容量に電流を誘導する急しゅんなdv/dtを含むことがある。これらの漏れ電流は,大地及び電
力系統又は対応する変換器の入力フィルタを通って出力発生源に戻る。したがって,電力インタフェース
からのエミッションは,電源ポートで測定される妨害電圧と関連する。
D.1.2 指針
D.1.2.1 低電圧商用電力系統
PDSから発生する妨害によって起こり得る影響は,PDSを用いる環境に依存する。
住宅地域に供給している低電圧商用電力系統から,小規模な商業又は軽工業地域にも電力を供給するこ
とがある。このような電力系統では,商業又は軽工業地域で用いるPDSの三相入力端子と,住宅地域にお
ける電源用コンセントとの間で電気的な絶縁がない。
エミッションを抑制対策していないPDSを住宅地域にも供給している低電圧商用電力系統に直接接続
した場合は,ラジオ及びテレビに妨害を与える可能性が高い。この環境では,PDSの主電源入力にフィル
タを取り付けることを強く推奨する。このため,使用者は,6.4で規定する適切な限度値を満足するPDS
を選択することが望ましい。
D.1.2.2 第2種環境
低電圧商用電力系統に接続しない工業環境では,フィルタがないPDSを長年にわたって用いてきた実績
がある。一般的に,これらの装置は正しく動作し,ほかの装置への妨害も発生していない。このことは,
産業界からラジオ障害に対する苦情がこれまで起きていないことによって明らかにされている。したがっ
85
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
て,PDSとほかの装置とは,両立している。
問題が発生した場合は,BDM/CDMからの伝導妨害に起因すると考えられる。これらの妨害は,電源と
電動機との接続ケーブルに沿って伝わり,伝導,誘導若しくは容量性結合,又は放射によってほかの装置
に結合することがある。
感受性が高い装置をフィルタがないPDSの直近で用いる場合には,問題が生じる場合がある。ただし,
PDSだけが妨害の発生源とは限らず,また,感受性が高い装置は,一般にPDSより低電力の装置である。
このため,PDSからのエミッションをフィルタで抑制するよりも,感受性が高い装置のイミュニティを向
上するほうが,より経済的な対策方法である。
問題は,次に記載する信号ケーブルと電力ケーブルとの分離を含む標準的な設置への指針によって,通
常,防止する。それで不十分な場合,いずれが経済的かに応じて,被害発生機器のイミュニティを強化す
るか,又はPDSからのエミッションを減少させることが望ましい。
BDM/CDMと電動機との間の電力インタフェースに市販のEMCフィルタを用いることによって,問題
が生じる場合がある。電力インタフェースのBDM/CDM側に発生する高速のスイッチング変化波形によっ
て,このフィルタのコンデンサが損傷することがある。
入力にフィルタが付いていないBDM/CDMで,電動機との間をシールドケーブル又は防護ケーブルで接
続した場合は,電動機接続ケーブルからの結合は減少するが,ケーブルの静電容量に起因して主電源の伝
導妨害は増加すると考えられる。このため,EMC対策のためにBDM/CDMと電動機との間にシールドケ
ーブル又は防護ケーブルを用いる場合は,BDM/CDMの入力にフィルタを接続することが望ましい。ただ
し,電動機へのケーブル長を最小限とすることが,そのケーブルからの放射エミッションを減らすのに一
般的に有効と考えられる。
フィルタは,大地から絶縁されているシステムにおいては,安全に対して問題になることがある。この
場合の唯一の対策は,ほかの装置にこの環境において十分なイミュニティをもたせることである。1線が
接地されているシステムでは,接地(線−大地間)コンデンサは,線間電圧に対応した定格とすることが
望ましい。
D.1.2.3 カテゴリC1及びC3
製造業者は,使用者がエミッションカテゴリを選択して,装置を適切に設置するのに必要な情報を提供
することが望ましい。この情報には,オプションで納入するフィルタの設置に関する明確な説明を含める
ことが望ましい。特殊ケーブルが必要な場合,そのことも記載することが望ましい。
盤の据付業者は,正しく配線したことを確認するために,通常,耐電圧試験を行う。ただし,EMCフィ
ルタは,一般的にこの試験に対する耐量が変換装置よりも低い。このため,製造業者は,このことを明確
に使用者に説明することが望ましい。
PDSにエミッション対策を行っていない,又はエミッションが高いカテゴリのものである場合は,製造
業者は,このことを説明書に明確に記載することが望ましい。この場合,製造業者は,6.4.1.1及び6.4.1.3
に従って,住宅地域にも供給されている低電圧商用電力系統にPDSを用いてはならないことを警告しなけ
ればならない。
PDSが入力に転流ノッチを発生する場合は,使用者への情報にそのことを記載することが望ましい。
問題が発生した場合,製造業者は,より低いエミッションカテゴリに対応させるための方法を提供する
ことが望ましい。
D.1.2.4 カテゴリC2及びC4
この場合,使用者は,設備に対して正しいEMCの考え方を適用する能力がある。製造業者は,PDSの
86
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
エミッションカテゴリについての情報を提供することが望ましい。
使用者は,設備にとって最も経済的な解決方法を採用するために,エミッションカテゴリと低減手段と
の適切な組合せを選ぶことができると考えられる。
D.2 電力系統の安全及びRFIフィルタ
D.2.1 安全及び漏れ電流
現状の技術水準では,エミッション限度値に適合する方法として,RFIフィルタがある。静電容量,そ
のエネルギー量及びフィルタに用いる接地コンデンサの有効性を検討することが重要であり,これらは,
家庭用電子装置に関するJIS C 6065のように安全規格の要求事項によって制限される。RFIフィルタのコ
ンデンサを通して大地に流れる漏れ電流が大きすぎる場合には,この電力系統の別の保護要素(地絡保護)
の動作を引き起こすことがある。
警告の要求事項を含む,漏れ電流に関する安全の要求事項は,IEC 61800-5-1で規定する。
D.2.2 非接地電力系統における安全及びRFIフィルタ
砂糖製造における遠心分離機又は補助装置,クレーン及び化学工業と同様にローリングミル,バーミル
又はペーパーミルのような複合プロセスでは,絶縁された配電システムが有用で,一般的である。例えば,
電動機を屋外に設置し,高湿度にさらしても,1か所の地絡ではプロセスの運転を継続する必要がある。
地絡監視システムによってこの地絡を検出するが,全体プロセスは次の点検まで安全に運転できる。
図D.3に示す多くの漂遊要素によって,工業設備におけるこの“プロセス安全原理”が阻害される場合
がある。例えば,電力系統と大地との間の静電容量Cpである。結果としての静電容量は,すべての接地コ
ンデンサの静電容量と漂遊容量との総和となる。すべてのCpvの総和は,数マイクロファラドに達する。
多くの接地コンデンサの使用のため(例えば,コンデンサCyのn倍),RFIフィルタは,大地との静電容
量を非常に大きい値に増加させる。静電容量の増加によって,正確に地絡を検出することが困難になり,
最終的には検出できなくなる。
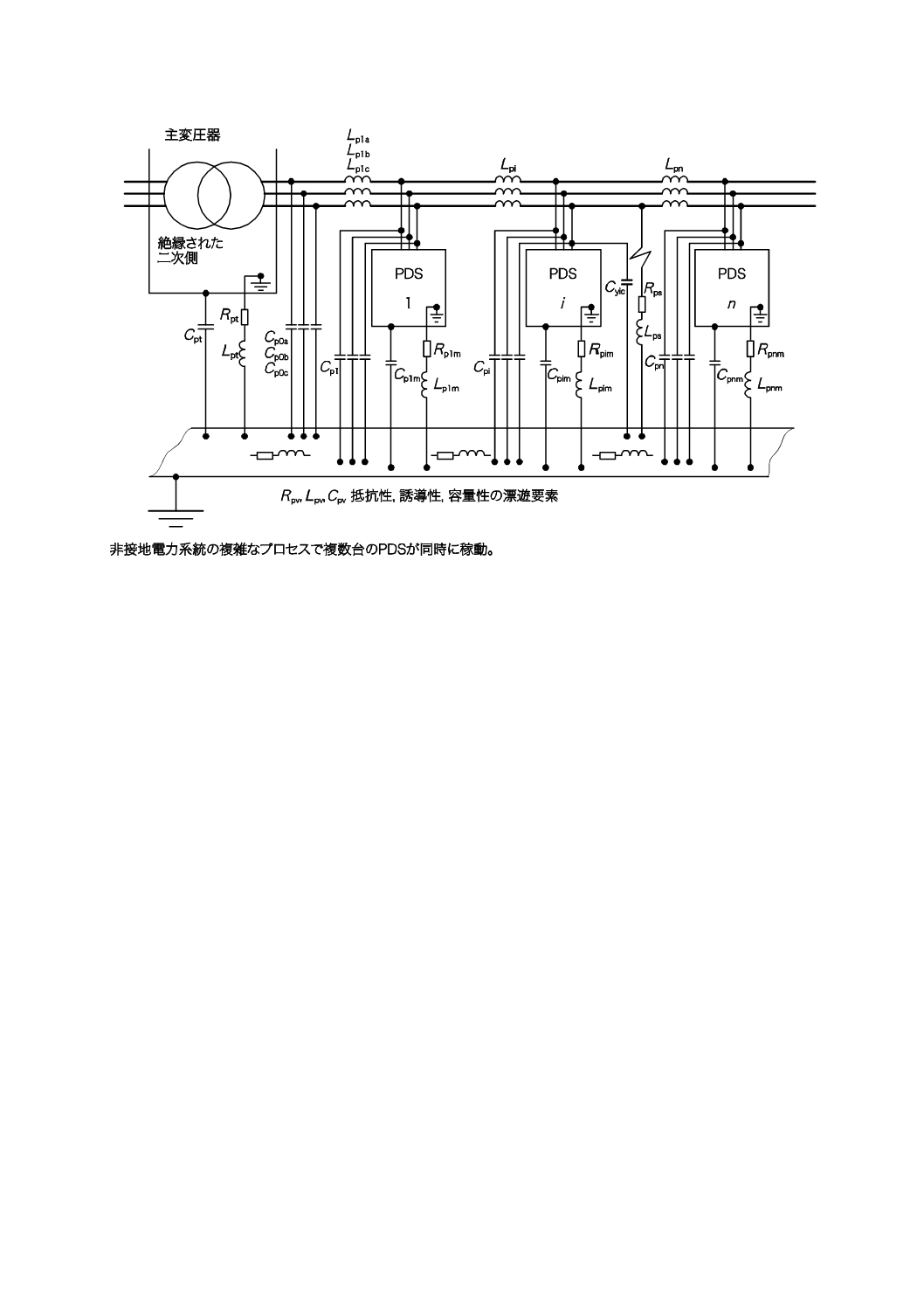
87
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図D.3−安全及びフィルタ
RFIフィルタのコンデンサ (Cy) によってPDS内の半導体スイッチを通って流れる地絡電流は,非常に
大きな値になる。これは,接地電力系統の出力故障の短絡状態と同じ状態である。これは,機能の喪失及
び非常保護装置の動作に至り,最終的には望ましくない予期しない経済的な損失を伴うプロセスの停止に
至る。
これらが,RFIフィルタが非接地の電力系統に適合せず,前述の例で議論していない理由である。一方
で,これらの電力系統において,十分に効果的であるとも考えられていない。これは,非接地の妨害電源
を流れる妨害電流の帰路が,静電容量だけのためである。漂遊インダクタンスLpvとの共振のために,静
電容量を決定又は計算することは困難である。あるCyを通り,定義できない経路を通る妨害電流の増加
は,同じ電力系統にあるほかの装置に電磁障害を引き起こす。
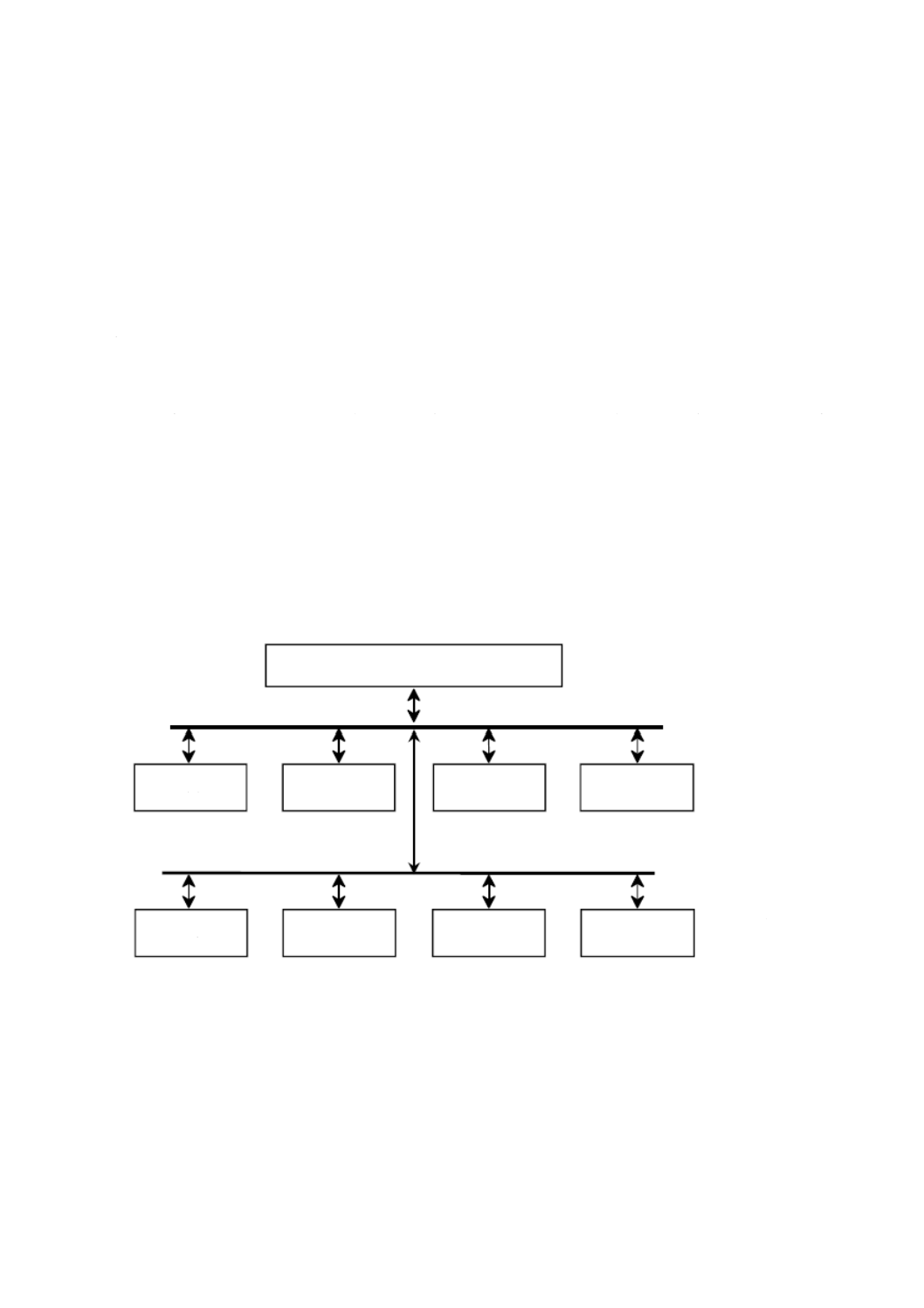
88
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書E
(参考)
EMC解析及びEMCプラン
序文
この附属書は,本体の規定を補足するものであって,規定の一部ではない。
E.1
一般:PDSに適用するシステムEMC解析
E.1.1 電磁環境
E.1.1.1 一般
3.2で規定する分類に従い,より詳細で,より適した説明を行うことが可能となる場合がある。電磁環境
を説明するのに様々な手法を用いてもよい。両立性レベルが基本としているであろう環境の一般的な特性
を定義することが望ましい。システムの電磁両立性を達成するためには,設置方法,並びに設計,物理的
な分離,フィルタリング及びシールドとともに装置のイミュニティ特性を考慮することが望ましい。
PDSの種類によって,環境の特定のクラスを決定することができる。
E.1.1.2 一般モデル
システムは,幾つかのサブシステムで構成する。既存の機器(サブシステム)は,エミッション及び/
又は感受性の二つの作用をもつ(図E.1)。
図E.1−システムと電磁環境との間の相互作用
エミッションを発生する機器は,電磁環境を決定する。エミッションは,様々な種類の結合を通じて感
受性が高い機器に達する場合がある。一般的な相互作用は,サブシステムiとサブシステムjとの間,及
びサブシステムiと環境との間で決定する。これらの相互作用は,様々な結合の種類を用いた結合モデル
で決定する[共通インピーダンス結合,誘導による結合,及び放射(表E.1参照)]。
このモデルは,様々なEMC問題及び特定の限度値の決定を助ける。幾つかの例を,図E.1及び表E.1
に示す。
電磁環境
サブシステム
A1
サブシステム
A2
サブシステム
A3
サブシステム
A4
サブシステム
B1
サブシステム
B2
サブシステム
B3
サブシステム
B4
システム
A
システム
B
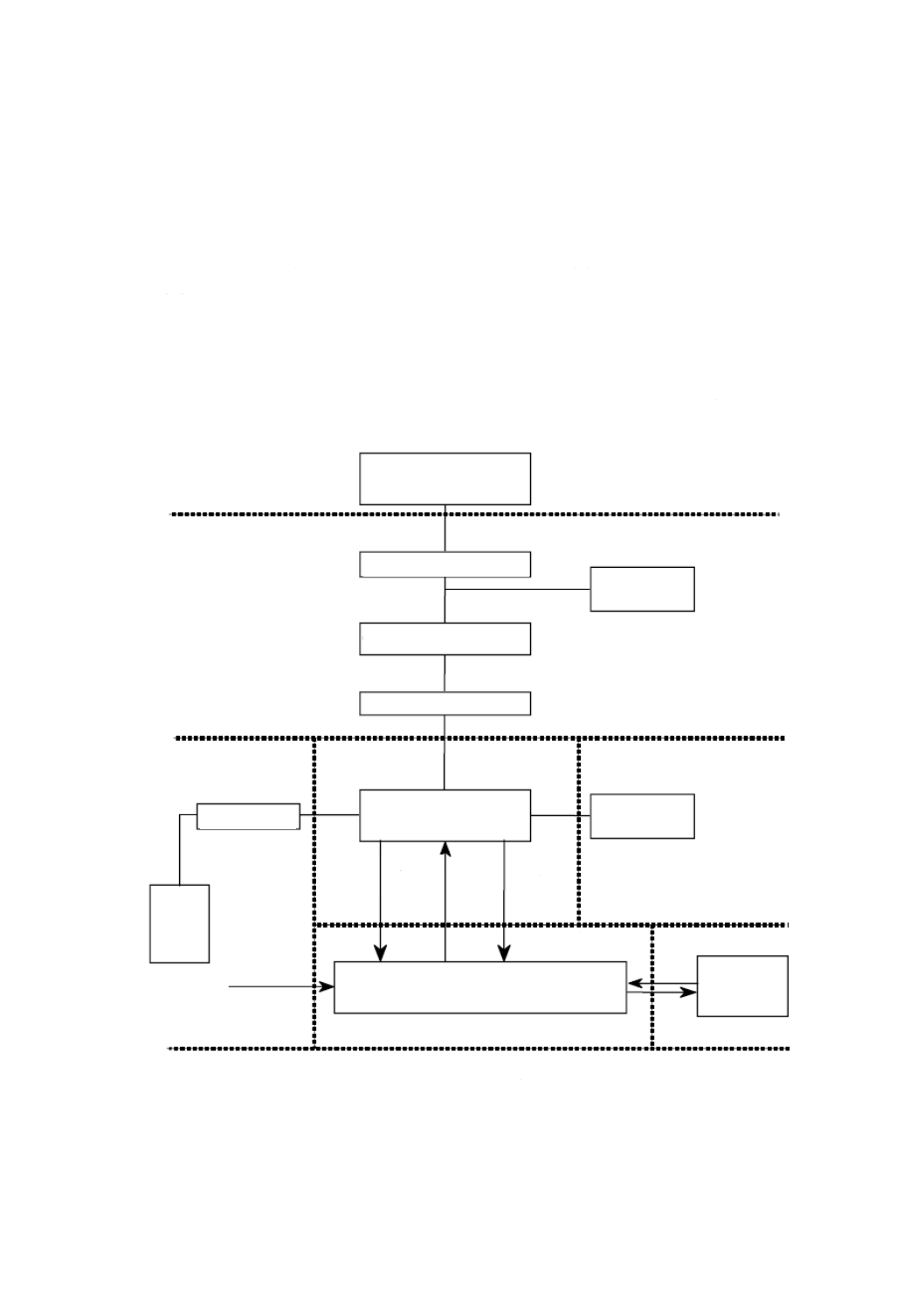
89
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.1.2 システムEMC解析技術
E.1.2.1 領域の概念
システムEMC解析は,それぞれのサブシステムの信号特性,重要な回路のノイズイミュニティレベル,
技術評価試験及び動作上の電磁環境の検討に関する知識を利用することによって行うことが望ましい。発
生源(送信機),受信機,アンテナ,伝ぱ(播)媒体及び結合経路のモデルは,必要に応じて開発すること
が望ましい。システムEMC解析の目的は,PDSがEMC要求事項に適合することを確実にするために,設
計への要求事項及び手順の開発を助けることである。
PDSのための領域の概念は,サブシステム及び装置の動作上の電磁環境及び感受性に基づいて定義する
ことが望ましい。特定の性能判定基準は,それぞれのEMC試験に先だって各領域に対して確立すること
が望ましい。これらの性能判定基準は,イミュニティ試験期間におけるPDSの性能評価手法,及び動作不
良又は仕様書要求事項からの逸脱を検出する手法を定義することが望ましい。特定のサブシステム又は装
置のための性能判定基準は,適切なEMC試験手順に含むことが望ましい。領域の概念を,図E.2で示す。
図E.2−領域の概念
E.1.2.2 インタフェース
表E.1は,PDS(図E.3参照)のサブシステムと環境との間の電磁相互作用の種類の例を示す。
工業用配電系統
領域0
領域1
領域2
変換装置用変圧器
遮断器
高調波
フィルタ
母線
変換器
冷却
システム
母線
負荷
アラー
ム信号
ゲート
信号
補助シ
ステム
補助システム
領域4
領域3
制御回路・保護回路
使用者制御
システム
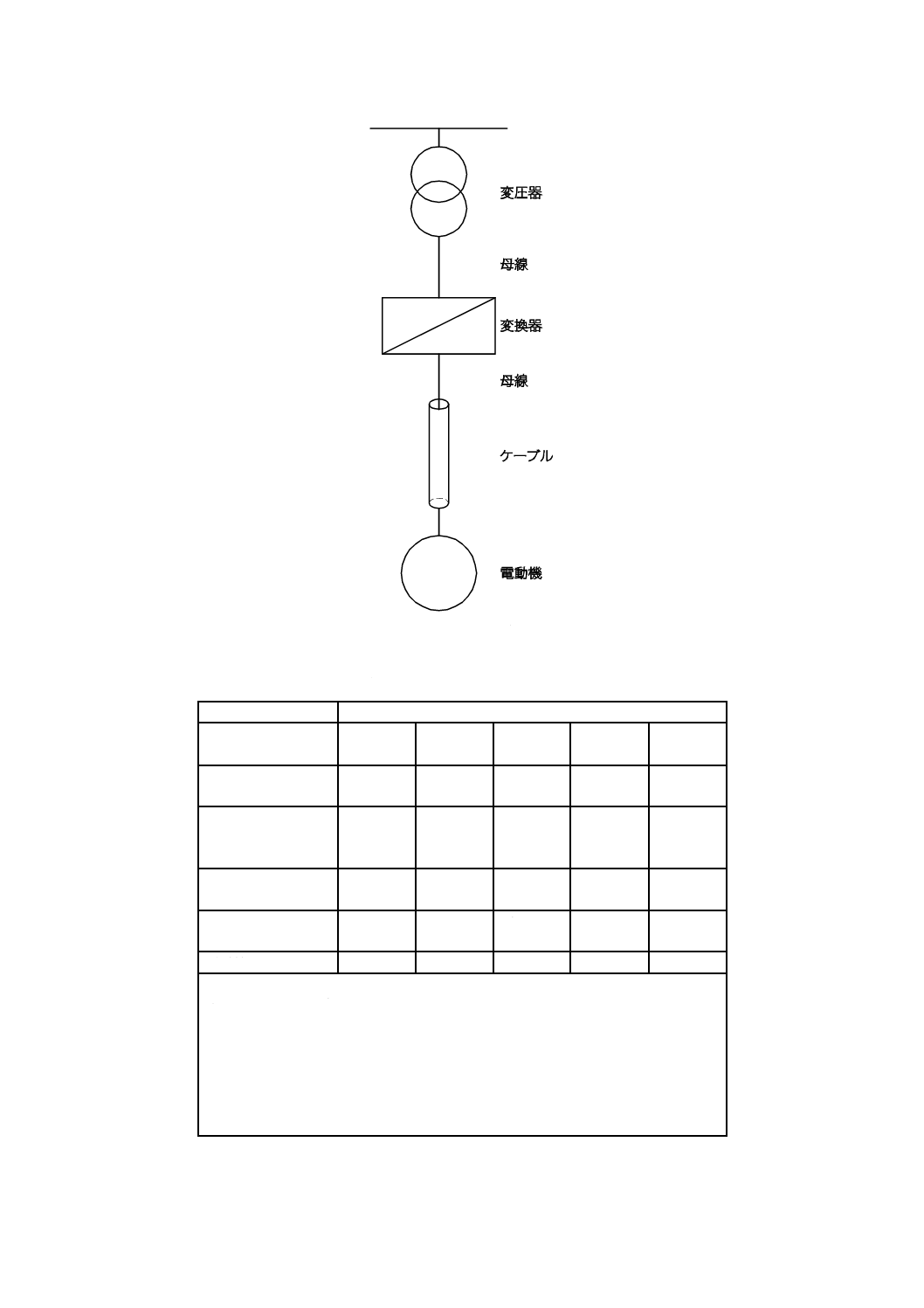
90
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図E.3−PDSの例
表E.1−サブシステムと環境との間の電磁相互作用
感受性が高い機器としてのサブシステム
電磁波発生源とし
てのサブシステム
環境
変圧器
変換装置
ケーブル
電動機
環境
N/A
Cl
Cl
Rad.
Cl
Cl
変圧器
Cl
E, H,
Rad.
N/A
Cl
N/A
N/A
変換器
Cl
Rad.
Cl
N/A
Cl
N/A
ケーブル
Cl
Rad.
Rad.
Cl
Rad.
N/A
Cl
電動機
Rad.
N/A
Cl
Cl
N/A
注記 結合モデル
・ 共通インピーダンス結合
Cl 抵抗性結合及び誘導性結合
N/A 適用外
・ 誘導結合
E:電界結合
H:磁界結合
Rad.:放射結合
91
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.1.2.3 装置
それぞれの装置の電磁特性(エミッション,イミュニティ)及びそれが属する領域を決定することが望
ましい。
6.5.1に従ってEMCプランが必要な場合は,次の様式を用いることができる。
注記 このプランは,IEC 61000-5-1に基づく。
EMCプランは,特定の設備におけるPDSの使用を対象とする。EMCプランの目的は,設備レベルで
EMC解析を行うことである。EMC解析に基づいて,電磁両立性を達成するための方法を決定する。
E.2
一般的な適用におけるEMCプランの例
E.2.1 プロジェクトのデータ及び詳細
6.5.1に従って,使用者と製造業者との間の合意及び技術情報のやりとりをEMCプランに反映する。PDS
製造業者は,設置者及び使用者の責任範囲をEMCプランに明示することが望ましい。EMCプランは,製
造業者,設置者及び使用者の三者が共同して計画する。対象とする用途に関係しない質問は,省略しても
よい。
EMCプランは,次の二つの部分に分けられる。
・ E.2は,通常合意することが望ましい項目を定義する。
・ E.3は,特定の用途において必要になることがある付加項目を定義する。
注記 要求事項を適用しない場合には,記号N/Aを用いる。このような場合には,説明を付ける。
次に示す推奨例は,EMCプランを構成する質問及び回答である。
製造業者名又は供給者名
最終使用者名
注文番号 .............................................................. 日付
設備の種類(例 化学工場,製紙機)
用途(例 ポンプ,ファン,コンベヤ) .........
EMC担当者 .........................................................
E.2.2 電磁環境解析
E.2.2.1 設備データ
設置場所
(PDSを設置する第2種環境に隣接した)周辺の詳細
第1種環境 第2種環境
PDSを設置する建物又は部屋から第1種環境までの距離 .......................................... m
PDSを設置する建物又は部屋から第2種環境のほかの設備までの距離 ................... m
建物及び部屋の構造
種類(木造,れんが,コンクリート,鉄筋,アルミニウムなど) ...........................
補強(鉄,ほか)
あり ........................ なし .....................
システムのための専用室
あり ........................ なし .....................
部屋の配置
部屋の配置をできる限り縮尺どおり図示する。すべての主な装置,窓,ドアなどを表示する。
92
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.2.2.2 電源及び接地に関するデータ
電力系統
PDSへの電力系統:
結合点の明確化(配電盤,開閉装置又は変圧器の表示記号によって示す。).......
電源系統の方式(例 TN-C,TN-S,TT,IT)
PDSに対する電源方式:
星形結線......... 三角結線.......... 相数........... 線数............
接地母線:接続方式及び接続点 ............................
結線図
主変圧器からPDSまでの当該電力系統の単線結線図を描く。すべての変圧器,配電盤などを示す。公称
電圧,定格容量,ケーブル経路及び布設方法,導体数,並びに用いるケーブル又は母線の概略長も記載す
る。
E.2.2.3 EMCデータ
PDSの接地
PDSの接地点..........
1点接地...........メッシュ接地...........
等電位ボンディングの概要図を示す。
PDSのシールド
CDM/BDMは,シールドされたきょう体を用いているか。
用いている ....... 用いていない ........
説明:
シールドケーブルを用いているか。
用いている ....... 用いていない .......
説明:
その他の対策を施しているか(例 コンテナへの収納)。
対策している ....... 対策していない .......
説明(電動機及びケーブルについても検討する):
設備中でRFIの影響を受けやすい装置
建物内又は設備の付近で,ラジオ周波数妨害の影響を受けやすい装置があるか。
ある .............................. ない
説明:(例 プロセス制御及び計測装置,データバス,コンピュータなど)
PDS又はPDS用ケーブルからの概略距離:......................... m
妨害に対して最も結合すると考えられる経路:
伝導性 .......... 放射性 .......
設備外でRFIの影響を受けやすい装置
設備又はその周辺で放送用又は通信用の受信アンテナがないか。
ある.............................. ない
説明(例 レーダ,ラジオ又はテレビ,アマチュア無線,マイクロ波,その他):
周波数.......... アンテナからの距離 ............................. m
設備において市民無線(CB電波),トランシーバ,無線通信,遠隔制御又は時報同期システムを用いて
いるか。
93
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
用いている.............................. 用いていない
説明:
E.2.3 EMC解析
E.2.3.1 最も影響を受けやすい装置又はシステムの明確化
設備に対する電磁環境の制約を解析する。
E.2.3.2 最も妨害が発生するPDSの部分の明確化
設備に対する電磁環境の制約を解析する。
E.2.3.3 PDSからの妨害によるE.2.3.1に記載した項目の機能喪失の可能性
ある.............................. ない
説明:
E.2.4 設置規則の作成
E.2.4.1 接地
設置方式を決定するとき,PDS製造業者の推奨事項に注意する。EMCに関する接地の有効性を確実にす
るために,次の項目を評価する。
・ PDSの接地点(1点接地又はメッシュ接地)
・ 等電位ボンディング
− 露出導電部の接続
− PDSの金属構造物部分の接地
・ 接地に対する高周波特性
− ファスナによる金属同士の接続
− 塗料又はその他の絶縁材の除去
・ 説明(EMC解決策)
E.2.4.2 ケーブル及び配線
E.2.4.2.1 ケーブルの選定
設置方式を決定するとき,PDS製造業者の推奨事項に注意する。EMCに関するケーブルの有効性を確実
にするため,次の項目を評価する。
・ 信号の種類(例えば,デジタルデータ,電動機へのPWM信号など)
・ 未使用の導体
・ ケーブルの種類及びシールドの種類(ある場合)
・ 説明(EMC解決策)
E.2.4.2.2 配線経路
設置方式を決定するとき,PDS製造業者の推奨事項に注意する。EMCに関する配線の有効性を確実にす
るため,次の項目を評価する。
・ 大電力と小電力との分離,又は信号ケーブルとの分離
・ 平行となる距離の最小化
・ 離隔距離
・ 90°のケーブル交差
・ ケーブルトレー及び導管を並列接地導体としての使用
・ ケーブルトレーの中のケーブル位置決め
・ ケーブルトレーの接地
94
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
・ 説明(EMC解決策)
E.2.4.3 PDSのきょう体のシールド
設置方式を決めるとき,PDS製造業者の推奨事項に注意する。きょう体のEMCに関する有効性を確実
にするために,次の項目を評価する。
・ 金属製きょう体の電位的一体化
・ スロット及び開口部の寸法
・ 接地基準面を貫通するケーブル接続口
・ 接地基準面へのケーブルシールドの接続(360°が望ましい)
・ 説明(EMC解決策)
E.2.4.4 専用変圧器
設置方式を決めるとき,PDS製造業者の推奨事項に注意する。EMCに関する有効性を確実にするために,
次の項目を検討する。
・ 専用の絶縁変圧器
・ 静電シールド付き変圧器
・ 説明(寸法,設置場所)
E.2.4.5 フィルタ
設置方式を決めるとき,PDS製造業者の推奨事項に注意する。EMCに関する有効性を確実にするために,
次の項目を検討する。
・ 集中する又は分散するRFIフィルタ構成
・ 信号線のフィルタ
・ 必要な場合,フィルタ用電力インタフェースのフィルタ
・ 説明(EMC解決策)
E.2.4.6 追加の軽減対策
設置方式を決めるとき,PDS製造業者の推奨事項に注意する。
その他の軽減対策は必要か。 必要 不要
次の手法を検討する。
・ 回路の電気的分離
・ 光ファイバ
・ データ線の電位的な絶縁(例 フォトカプラ,パルストランス)
・ 影響を受けやすい機器のための特別な保護
・ 説明(EMC解決策)
E.2.5 正規の結果及び保守
設備が決められた設置方式に従って設置されているか確認する。
全細目にわたって決められた設置方式に従っているか。 はい いいえ
欠陥を修復する処置について記述する。
設備のEMC特性を維持するための指針を決定する(例 腐食対策,ドア及びフレームの接触性を悪化
させるほこり対策,接続部の緩み対策など)。
EMC責任者の署名
日付
署名
95
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.3
特定の用途に対するEMCプランへの追加内容の例
E.3.1 電磁環境の補足的解析
E.3.1.1 電気事業者変電所から設備の主変圧器までの配電系統
E.3の質問は,より外部の要因に関係し,PDSの外面的要素に関係する。
電気事業者:
最も近い変電所からの概略距離(分かる場合):
変電所からの配電の形態: 架空線 埋設 複合
説明
設備の主変圧器特性:kVA
入力(一次): 電圧 相数
結線方式: 三角結線 星形結線
その他,説明
内部配電への出力(二次)
電圧 線数 相数
結線方式: 三角結線 星形結線
変圧器は接地されているか(方法及び場所の説明)。
建物の接地電極の構成
接地棒 多点接地棒 接地格子 接地プレート
埋設導管 水道管 鉄骨
その他,説明
配線図の作成
変電所から主変圧器までの配電系統の単線図を作成する。すべての変圧器,配電盤などを記載する。
接地電極のインピーダンス (Ω)(分かる場合)
E.3.1.2 主電源変圧器設備からPDS用の配電盤,開閉装置又は変圧器までの配電
E.3の質問は,より複雑な適用における,EMC性能に関連する,PDSの外部の要因に関係する。
結線図
主電源変圧器から配電盤,開閉装置又は変圧器までの配電系統単線図を記載する。
配電盤,開閉装置又は変圧器
配電盤,開閉装置又は変圧器の識別
配電盤の構成:どこにどのように接続しているか
配電盤,開閉装置又は変圧器のための電源の形式
星形結線 三角結線 相数
線数 線寸法(相,中性相又はPE):銅 アルミニウム
中性相母線:どのように,どこへ接続しているか
接地母線:どのように,どこへ接続しているか
PDS又はPDSの一部から個々に絶縁されたPE電線
はい いいえ
説明
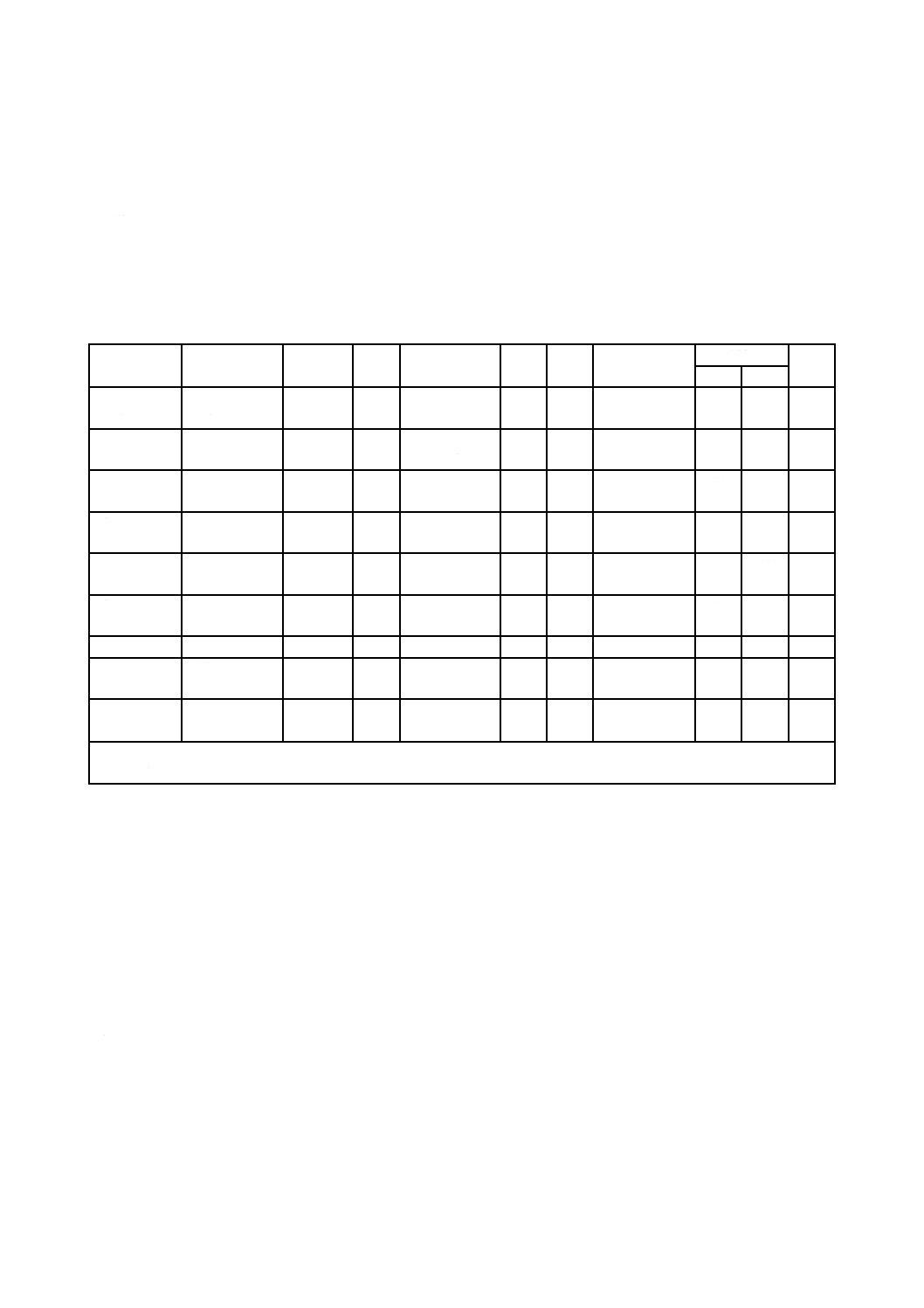
96
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
E.3.2 EMC解析
E.3.2.1 周波数帯域別の解析
RFI調査の必要性 必要 不要
説明
必要な場合,周波数帯域別の解析を行うことによって,状況を明確にできる場合がある。例を,表E.2
に示す。
表E.2−周波数解析
装置
ユニット
周波数
帯域
周波数発生源
の詳細
波形
種類
参考
文献
V
A
Em
Im
インバータ
No.1
IGBTモジュ
ール
5 kHz
出力スイッチ
ング周波数
510
PWM
×
インバータ
No.2
IGBTモジュ
ール
5 kHz
出力スイッチ
ング周波数
510
PWM
×
インバータ
No.1
電動機制御
40 MHz
TTL clock
15
TTLクロック
×
インバータ
No.2
電動機制御
40 MHz
TTL clock
15
TTLクロック
×
インバータ
出力電流セン
サ
1 kHz
サンプリング
周波数
0.03
×
補助装置
電源
200 kHz
サンプリング
周波数
230
スパイク
×
携帯電話
×
業務用無線
送信機又は受
信機
×
×
アマチュア
無線
送信機又は受
信機
144 MHz
×
Em:エミッション
Im:イミュニティ
表E.2に記載する装置がPDSからの妨害によって誤動作しないか解析し,適切な対策を明確にすること
が望ましい。
E.3.2.2 EMC試験
EMC試験報告書の参考資料を記載する。
更に詳細なEMC試験は必要か。
必要
不要
必要な場合,次のような手順が必要になることがある。
・ EMC試験計画(EMC解析を参照)を準備する。
・ EMC試験を行い,試験報告書に記載する。
試験結果は,許容できるか。
許容できる
許容できない
不合格項目を修正するための対策を記載する。
97
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(規定)
高調波
序文
この附属書は,高調波について規定する。
JA.1
適用対象となる需要家
この附属書の対象となる需要家は,次のいずれかに該当する需要家(以下,特定需要家という。)とする。
a) 6.6 kVの系統から受電する需要家であって,その施設する高調波発生機器の種類ごとの高調波発生率
を考慮した容量(以下,等価容量という。)の合計が50 kVAを超える需要家。
b) 22 kV又は33 kVの系統から受電する需要家であって,等価容量の合計が300 kVAを超える需要家。
c) 66 kV以上の系統から受電する需要家であって,等価容量の合計が2 000 kVAを超える需要家。
この附属書は,特定需要家が対象となる高調波発生機器を新設,増設又は更新する場合に適用する。ま
た,対象となる高調波発生機器を新設,増設又は更新することによって,特定需要家に該当することにな
る場合にも適用する。
注記 更新する場合とは,既設設備のすべて又は一部を更新する場合,及び契約電力又は契約種別を
変更する場合をいう。
JA.2
用語及び定義
この附属書で用いる主な用語及び定義は,次による。
JA.2.1
等価容量
需要家がもつ高調波発生機器の容量を,6パルス変換装置容量に換算して求めるそれぞれの換算容量の
総和。式 (JA.1) で表す。
∑
i
iP
K
P=
0
·········································································· (JA.1)
ここに,
P0: 等価容量[kVA(6パルス変換装置換算)]
Ki: 換算係数(表JA.2参照)
Pi: 入力定格容量 (kVA)
i: 変換回路種別を示す数字
JA.2.2
契約電力
電気事業者と需要家との間の契約で取り決めた受電電力量。次のa)〜c) による。
a) 契約設備電力又は電力会社との協議値を原則とする。
b) 契約電力500 kW未満の高圧電力用又は業務用電力で,実量制が適用される需要家の契約電力は,契
約設備電力を適用する。
c) 時間帯別調整契約需要家のように,需要家に複数の契約電力がある場合の高調波電流目標値は,同需
要家の最大の契約電力に対応する高調波電流とする。このため,同需要家の契約電力は,電気事業者
と契約している最大値とする。
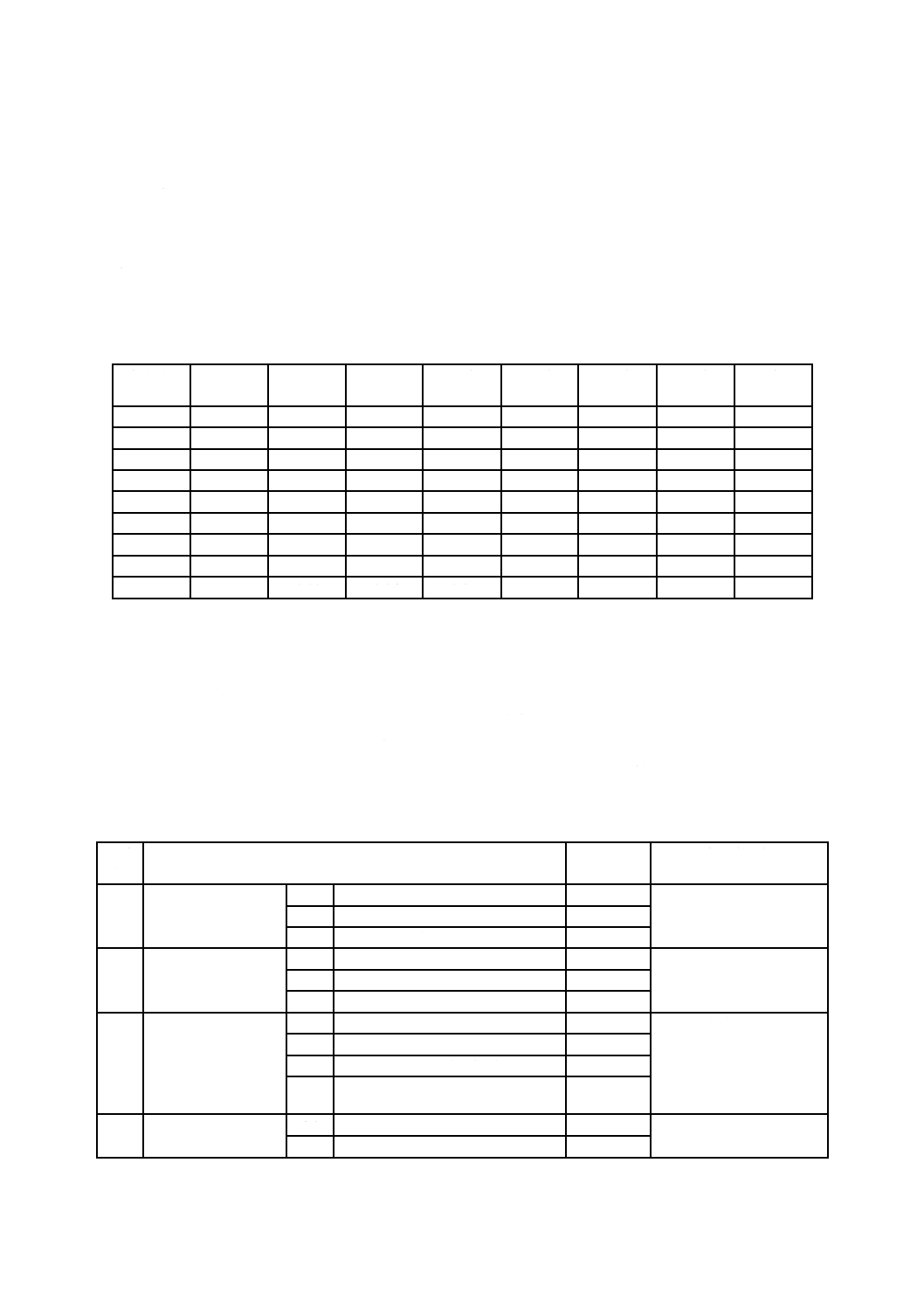
98
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JA.3
高調波流出電流の上限値
特定需要家から系統に流出する高調波電流の許容される上限値は,高調波の次数ごとに,表JA.1に示す
需要家の契約電力1 kW当たりの高調波電流の上限値に,当該需要家の契約電力[キロワット (kW) 単位
とする。]を乗じた値とする。
なお,施設する高調波発生機器が低圧機器の場合は,表JA.1の受電電圧6.6 kVの欄の値を電圧換算し
て適用する。
表JA.1−契約電力1 kW当たりの高調波電流上限値
単位 mA/kW
受電電圧
kV
5次
7次
11次
13次
17次
19次
23次
23次を
超える
6.6
3.5
2.5
1.6
1.3
1.0
0.90
0.76
0.70
22
1.8
1.3
0.82
0.69
0.53
0.47
0.39
0.36
33
1.2
0.86
0.55
0.46
0.35
0.32
0.26
0.24
66
0.59
0.42
0.27
0.23
0.17
0.16
0.13
0.12
77
0.50
0.36
0.23
0.19
0.15
0.13
0.11
0.10
110
0.35
0.25
0.16
0.13
0.10
0.09
0.07
0.07
154
0.25
0.18
0.11
0.09
0.07
0.06
0.05
0.05
220
0.17
0.12
0.08
0.06
0.05
0.04
0.03
0.03
275
0.14
0.10
0.06
0.05
0.04
0.03
0.03
0.02
JA.4
等価容量の計算
需要家がもつ高調波発生機器の容量を6パルス変換装置容量に換算し,それぞれの機器の換算容量を総
和する。式 (JA.1) によって算出し,特定需要家に該当するかどうかを判定する。
なお,6パルス変換装置容量に換算するための換算係数 (Ki) は,高調波発生機器から発生した高調波電
流がそのまま電源側に流出するときの総合電源電圧ひずみ率の比のことをいう。ただし,ここでは,電源
インピーダンスを純リアクタンスと仮定する。表JA.2に,回路種別ごとの換算係数を示す。
表JA.2−換算係数
回路
分類
回路種別
換算係数
Ki
主な利用例
1
三相ブリッジ
1-1
6パルス変換装置
K11=1
−直流電鉄変電所
−電気化学
−その他一般
1-2
12パルス変換装置
K12=0.5
1-3
24パルス変換装置
K13=0.25
2
単相ブリッジ
2-1
直流電流平滑
K21=1.3
−交流式電気鉄道車両
2-2
混合ブリッジ
K22=0.65
2-3
均一ブリッジ
K23=0.7
3
三相ブリッジ
(コンデンサ平滑)
3-1
リアクトルなし
K31=3.4
−はん(汎)用インバータ
−サーボアンプ
−エレベータ
−冷凍空調機
−その他一般
3-2
リアクトルあり(交流側)
K32=1.8
3-3
リアクトルあり(直流側)
K33=1.8
3-4
リアクトルあり(交流側・直流側) K34=1.4
4
単相ブリッジ
(コンデンサ平滑)
4-1
リアクトルなし
K41=3.32
−はん用インバータ
−サーボアンプ
4-2
リアクトルあり(交流側)
K42=1.67
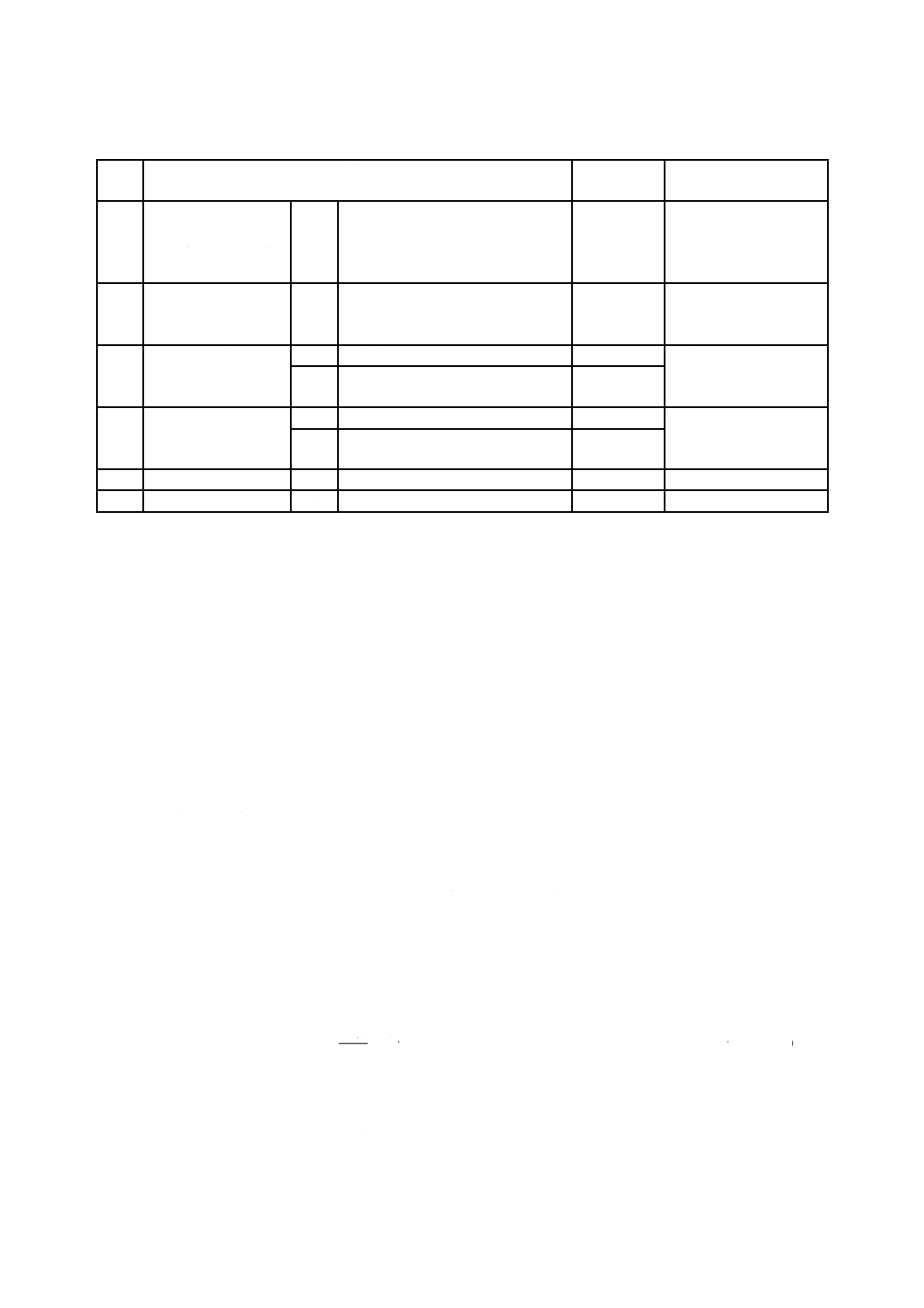
99
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表JA.2−換算係数(続き)
回路
分類
回路種別
換算係数
Ki
主な利用例
5
自励三相ブリッジ
(電圧形PWM制御)
(電流形PWM制御)
5
−
K5=0
−無停電電源装置
−通信用電源装置
−エレベータ
−系統連系用分散電源
6
自励単相ブリッジ
(電圧形PWM制御)
6
−
K6=0
−通信用電源装置
−交流式電気鉄道車両
−系統連系用分散電源
7
交流電力調整装置
7-1
抵抗負荷
K71=1.6
−無効電力調整装置
−大形照明装置
−加熱器
7-2
リアクタンス負荷
(交流アーク炉用を除く。)
K72=0.3
8
サイクロコンバータ
8-1
6パルス変換装置相当
K81=1
−電動機(圧延用,セメ
ント用,交流式電気鉄道
車両用)
8-2
12パルス変換装置相当
K82=0.5
9
交流アーク炉
9
単独運転
K9=0.2
−製鋼用
10
その他
10
−
K10=申告値
−
JA.5
高調波電流の計算
特定需要家から系統に流出する高調波電流は,次のとおり計算する。
a) 高調波流出電流は,高調波発生機器ごとの定格運転状態において発生する高調波電流を合計し,これ
に高調波発生機器の最大稼働率を乗じる。高調波発生機器の最大稼働率とは,高調波発生機器の総容
量に対する実稼働している機器が最大となる容量の比とする。実稼働している機器の容量は,30分間
の平均値とする。
b) 高調波流出電流は,高調波の次数ごとに合計する。高調波電流は,一般的には高調波電流の各次数ご
とに各高調波発生機器の高調波電流を合計して求めるが,各次数内での高調波電流の位相差を考慮せ
ず電流値を合計してもよい。
c) 対象とする高調波の次数は40次以下とする。対象次数は,高次の高調波が特段の支障とならない場合
は,5次及び7次とする。
d) 特定需要家の構内に高調波流出電流を低減する設備がある場合は,その低減効果を考慮することがで
きる。高調波流出電流を低減する設備及びその効果は,次のことなどをいう。
1) フィルタ,自家発電設備,力率改善用コンデンサ(低圧も含む。),電動機などによる吸収効果。
2) Y−Δ(真近の変電所の同一母線を介して形成されるものを含む。)の組合せ,能動フィルタなどに
よるキャンセル効果。
高調波電流は,表JA.3に示す個別機器の高調波電流各次ひずみ率を用いて,式 (JA.2) で算出する。
なお,数値が表JA.3の範囲を超える場合は,算出資料の適用ができないので,別途計算する必要がある。
A
I
I
I
n
n
×
×
=
100
1
%
···································································· (JA.2)
ここに,
In: n次高調波電流 (A)
I1: 基本波入力電流 (A)
%In: n次高調波電流各次ひずみ率 (%)
A: 最大稼働率
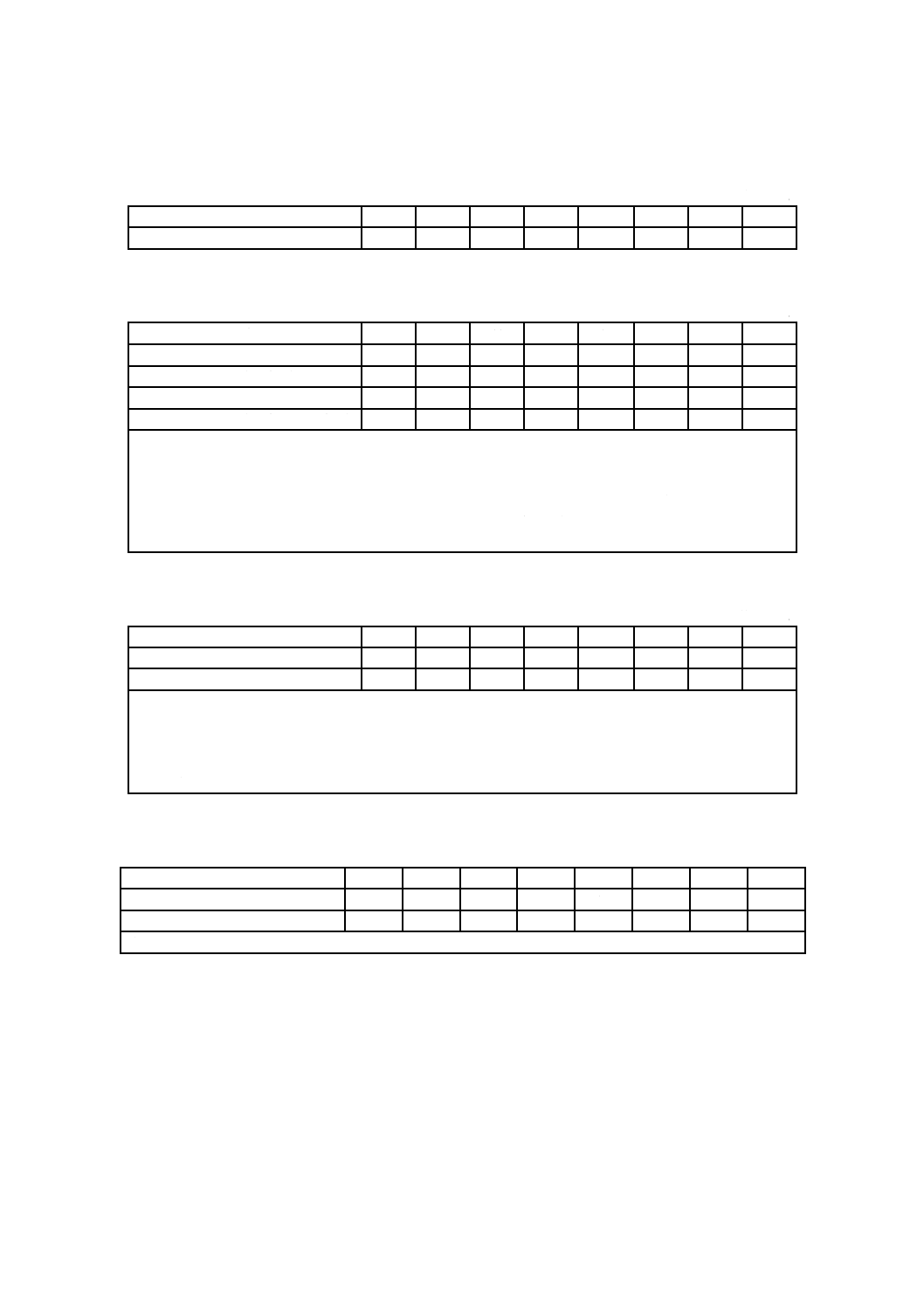
100
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表JA.3−個別機器の高調波電流各次ひずみ率
a) 6パルス変換装置
単位 %
次数
5
7
11
13
17
19
23
25
6パルス変換装置
17.5
11.0
4.5
3.0
1.5
1.25
0.75
0.75
b) 三相ブリッジ(コンデンサ平滑)
単位 %
次数
5
7
11
13
17
19
23
25
リアクトルなし
65
41
8.5
7.7
4.3
3.1
2.6
1.8
リアクトルあり(交流側)
38
14.5
7.4
3.4
3.2
1.9
1.7
1.3
リアクトルあり(直流側)
30
13
8.4
5.0
4.7
3.2
3.0
2.2
リアクトルあり(交流側・直流側)
28
9.1
7.2
4.1
3.2
2.4
1.6
1.4
注記 表中の値は,次の条件で求めたひずみ率である。
電源インピーダンス :1 %
交流側リアクトル
:3 %(電源インピーダンス1 %を含む。)
直流側リアクトル
:蓄積エネルギーが0.08 ms〜0.15 ms相当(100 %負荷換算)
平滑コンデンサ
:蓄積エネルギーが15 ms〜30 ms相当(100 %負荷換算)
負荷
:100 %
c) 単相ブリッジ(コンデンサ平滑)
単位 %
次数
5
7
11
13
17
19
23
25
リアクトルなし
66.6
42.4
6.6
4.3
3.1
1.7
−
−
リアクトルあり(交流側)
39.9
12.3
5.2
2.6
1.6
1.4
−
−
注記 表中の値は,次の条件で求めたひずみ率である。
電源インピーダンス :1.6 %
交流側リアクトル
:5 %(電源インピーダンス1.6 %を含む。)
平滑コンデンサ
:蓄積エネルギーが15 ms〜30 ms相当(100 %負荷換算)
負荷
:100 %
d) サイクロコンバータ
単位 %
次数
5
7
11
13
17
19
23
25
6パルス変換装置相当
17.5
11.0
4.5
3.0
1.5
1.25
0.75
0.75
12パルス変換装置相当
2.0
1.5
4.5
3.0
0.2
0.15
0.75
0.75
注記 三相ブリッジの変換装置相当とする。
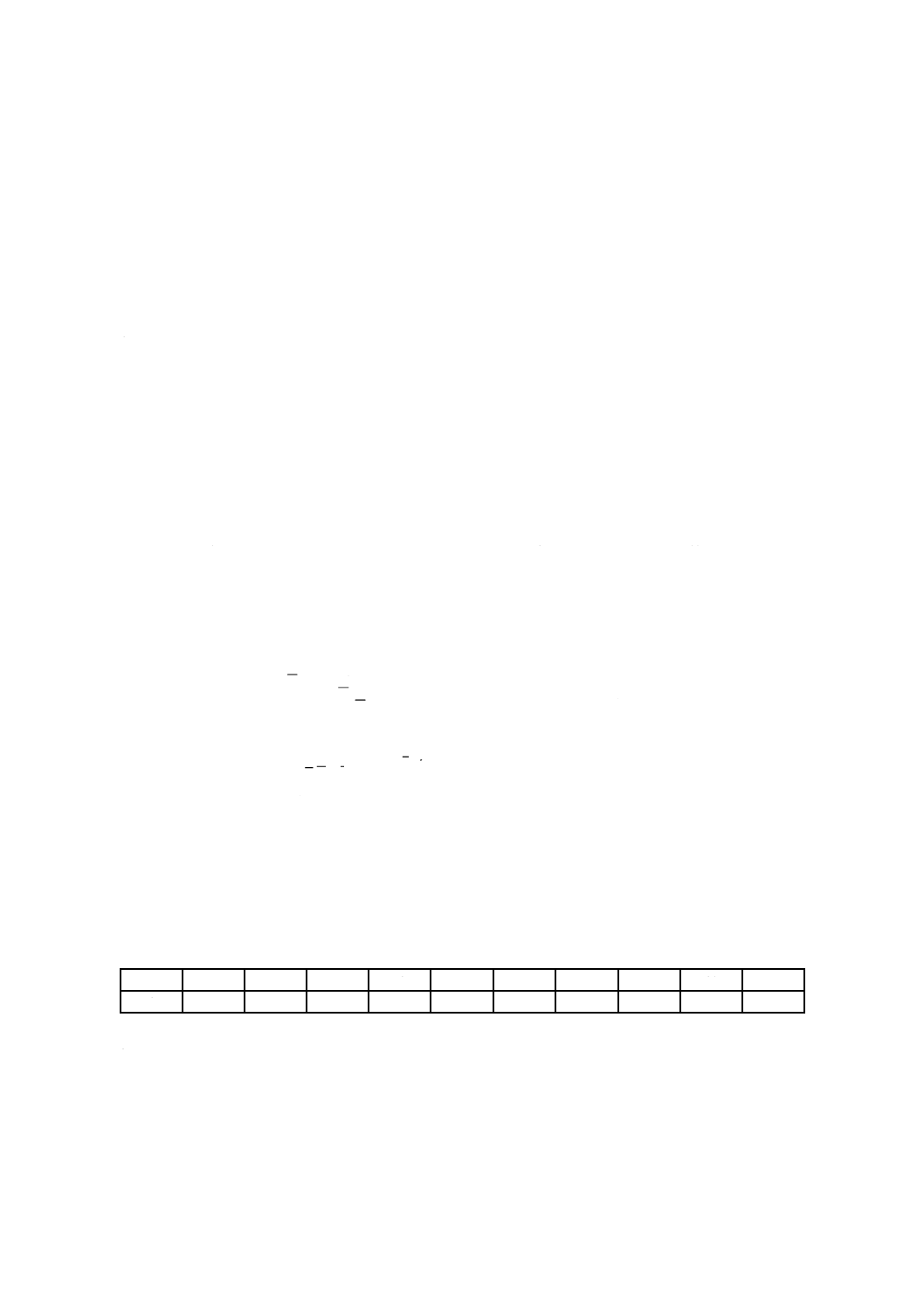
101
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JB
(規定)
装置の適合性評価
序文
この附属書は,装置の適合性評価について規定する。
JB.1
概要
テストサイトで試験した装置の適合性評価は,CISPR 11箇条6の規定に従う。量産装置の場合,製造し
た装置の80 %以上が80 %の信頼性で規定の限度値を満足しなければならない。統計評価方法を,JB.2に
規定する。少量生産装置の場合,JB.3又はJB.4で規定する評価方法を適用してもよい。使用場所で測定
し,テストサイトでは測定しない装置の測定結果は,その設備にだけ関係するものであり,任意の別の設
備を代表するものとはみなせないため,統計評価の目的に用いてはならない。
JB.2
量産装置の統計的適合評価
量産装置の場合,5台以上,12台以下の供試装置について測定する。ただし,例外的な状況で5台の供
試装置を用いることができない場合には,3台又は4台の供試装置について測定すればよい。
注記 n台の供試装置を用いて得られる測定結果の評価は,すべてが同一形式の供試装置であること
が前提であり,量産技術によって生じることが推測できるばらつきについては,許容される。
次の関係を満足している場合には,適合性が得られているものとする。
L
kS
X
n≦
+
ここに,
X: n個の供試装置の妨害レベルの算術平均
Sn: 次の式から得られる供試装置の標準偏差
(
)
∑
−
−
=
2
2
1
1
X
X
n
Sn
ここに, X: それぞれの供試装置の妨害レベル
L: 限度値
k: 80 %以上の製品が80 %の信頼性で限度値以下であることを保証
する非心t分布の表から得られる係数。nの関数としてのkの値
を表JB.1に示す。
X,X,Sn,及びL: dB (μV),dB (μV/m) 又はdB (pW)
表JB.1−供試装置の台数nの関数としての非心t分布係数k
n
3
4
5
6
7
8
9
10
11
12
k
2.04
1.69
1.52
1.42
1.35
1.30
1.27
1.24
1.21
1.20
JB.3
少量生産装置
連続生産又はロット生産する装置の場合,1台の供試装置を用いて適合性評価を行う。
供試装置は,生産ロットから無作為に抽出するか,又は全数生産を行う前に製品の評価を行うことがで
きるように,生産の前段階又は試験用装置を評価してもよい。一台の供試装置が該当する限度値を満足し
ていない場合には,JB.2に従って統計的評価を行ってもよい。
102
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JB.4
個別生産装置
量産しない装置の場合,個別に試験を行う。規定の方法で測定した場合,それぞれの個別生産装置が限
度値を満足しなければならない。
103
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
参考文献
[1] ENEL (Italian Electricity Supply Industry) Specification GLI (EMC) 07, Appendix A
[2] T. Williams : “EMC for Product Designers”−Butterworth-Heinemann Ltd, Oxford, 1992
[3] IEC 61000-4-3 : 1997,Electromagnetic compatibility (EMC)−Part 4 : Testing and measurement techniques−
Section 3 : Radiated, radio-frequency, electromagnetic field immunity test−Annex A
[4] Post Verfügung. Amtsbl Vfg 1045−December 1984 Anlage 1−§2, Nr 4
“... for installations, or for components which are parts of an installation, no mark of built-in radio-interference
suppression is required, but that the customer attention shall be drawn to the aspect, that for the final installation
mitigation measures could be necessary...”.
[5] Post Verfügung Amtsbl Vfg 1046-1984 Anlage 1, §6 & §7
[6] Regulations of documents mentioned in the references [4] and [5] are harmonized with the electrotechnical
standard VDE 0875
[7] W. Graupner; Rolle, S. : “Funkstörspannungen leistungselektronischer Antriebe” Symposium der Gesellschaft
für Mikroelektronik GME des VDI, Frankfurt 1993
JIS C 6065 : 2007 オーディオ,ビデオ及び類似の電子機器−安全性要求事項
注記 対応国際規格:IEC 60065 : 2001,Audio, video and similar electronic apparatus−Safety
requirements (MOD)
JIS C 60050-551 : 2005 電気技術用語−第551部:パワーエレクトロニクス
注記 対応国際規格:IEC 60050-551-20 : 2001,International Electrotechnical Vocabulary (IEV)−Part
551-20 : Power electronics−Harmonic analysis (MOD)
JIS C 60364-1 : 2006 建築電気設備−第1部:基本的原則,一般特性の評価及び用語の定義
注記 対応国際規格:IEC 60364-1 : 2001,Electrical installations of buildings−Part 1 : Fundamental
principles, assessment of general characteristics, definitions (IDT)
JIS C 61000-4-7 : 2007,電磁両立性−第4-7部:試験及び測定技術−電力供給システム及びこれに接
続する機器のための高調波及び次数間高調波の測定方法及び計装に関する指針
注記 対応国際規格:IEC 61000-4-7 : 2002,Electromagnetic compatibility (EMC)−Part 4-7 : Testing and
measurement techniques−General guide on harmonics and interharmonics measurements and
instrumentation, for power supply systems and equipment connected thereto (IDT)
JIS C 61000-6-1 : 2008,電磁両立性−第6-1部:共通規格−住宅,商業及び軽工業環境におけるイミ
ュニティ
注記 対応国際規格:IEC 61000-6-1 : 2005,Electromagnetic compatibility (EMC)−Part 6-1 : Generic
standards−Immunity for residential, commercial and light-industrial environments (IDT)
JIS C 61000-6-2 : 2008,電磁両立性−第6-2部:共通規格−工業環境におけるイミュニティ
注記 対応国際規格:IEC 61000-6-2 : 2005,Electromagnetic compatibility (EMC)−Part 6-2 : Generic
standards−Immunity for industrial environments (MOD)
IEC 60038 : 1983,IEC standard voltages
IEC 60050 (101) : 1998,International Electrotechnical Vocabulary−Part 101 : Mathematics
IEC 60050 (551) : 1998,International Electrotechnical Vocabulary (IEV)−Part 551 : Power electronics
IEC 60146-1-2 : 1991,Semiconductor convertors−General requirements and line commutated convertors−
104
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Part 1-2 : Application guide
IEC 60146-1-3 : 1991,Semiconductor convertors−General requirements and line commutated convertors−
Part 1-3 : Transformers and reactors
IEC 60146-2 : 1999,Semiconductor converters−Part 2 : Self-commutated semiconductor converters including
direct d.c. converters
IEC/TR 61000-2-3 : 1992,Electromagnetic compatibility (EMC)−Part 2 : Environment−Section 3 :
Description of the environment−Radiated and non-network-frequency-related conducted phenomena
IEC/TR 61000-2-5 : 1995,Electromagnetic compatibility (EMC)−Part 2 : Environment−Section 5 :
Classification of electromagnetic environments−Basic EMC publication
IEC/TR 61000-2-6 : 1995,Electromagnetic compatibility (EMC)−Part 2 : Environment−Section 6 :
Assessment of the emission levels in the power supply of industrial plants as regards low-frequency
conducted disturbances
IEC 61000-2-8 : 2002,Electromagnetic compatibility (EMC)−Part 2-8 : Environment−Voltage dips and short
interruptions on public electric power supply systems with statistical measurement results
IEC 61000-2-12 : 2003,Electromagnetic compatibility (EMC)−Part 2-12 : Environment−Compatibility
levels for low-frequency conducted disturbances and signalling in public medium-voltage power supply
systems
IEC 61000-3-3 : 1994,Electromagnetic compatibility (EMC)−Part 3 : Limits−Section 3 : Limitation of
voltage fluctuations and flicker in low-voltage supply systems for equipment with rated current ≦ 16
A
IEC/TS 61000-3-4 : 1998,Electromagnetic compatibility (EMC)−Part 3-4 : Limits−Limitation of emission
of harmonic currents in low-voltage power supply systems for equipment with rated current greater than
16 A
IEC/TR 61000-3-5 : 1994,Electromagnetic compatibility (EMC)−Part 3 : Limits−Section 5 : Limitation of
voltage fluctuations and flicker in low-voltage power supply systems for equipment with rated current
greater than 16 A
IEC/TR 61000-3-6 : 1996,Electromagnetic compatibility (EMC)−Part 3 : Limits−Section 6 : Assessment of
emission limits for distorting loads in MV and HV power systems−Basic EMC publication
IEC/TR 61000-3-7 : 1996 Electromagnetic compatibility (EMC)−Part 3 : Limits−Section 7 : Assessment
of emission limits for fluctuating loads in MV and HV power systems−Basic EMC publication
IEC 61000-3-11 : 2000 Electromagnetic compatibility (EMC)−Part 3-11 : Limits−Limitation of voltage
changes, voltage fluctuations and flicker in public low-voltage supply systems−Equipment with rated
current ≦ 75 A and subject to conditional connection
IEC 61000-3-12,Electromagnetic compatibility (EMC)−Part 3-12 : Limits−Limits for harmonic currents
produced by equipment connected to public low-voltage systems with input current>16 A and ≦ 75A
per phase
IEC 61000-4-1 : 2000,Electromagnetic compatibility (EMC)−Part 4-1 : Testing and measurement techniques
−Overview of IEC 61000-4 series
IEC 61000-4-9 : 1993,Electromagnetic compatibility (EMC)−Part 4 : Testing and measurement techniques−
Section 9 : Pulse magnetic field immunity test. Basic EMC publication
105
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
IEC 61000-4-10 : 1993,Electromagnetic compatibility (EMC)−Part 4 : Testing and measurement techniques
−Section 10 : Damped oscillatory magnetic field immunity test. Basic EMC publication
IEC 61000-5-1 : 1996,Electromagnetic compatibility (EMC)−Part 5 : Installation and mitigation guidelines
−Section 1 : General considerations−Basic EMC publication
IEC/TR 61000-5-2 : 1997,Electromagnetic compatibility (EMC)−Part 5 : Installation and mitigation
guidelines−Section 2 : Earthing and cabling
IEC 61000-6-3 : 1997,Electromagnetic compatibility (EMC)−Part 6 : Generic standards−Section 3 :
residential, commercial and light-industrial environments
IEC 61000-6-4 : 1997,Electromagnetic compatibility (EMC)−Part 6 : Generic standards−Section 4 :
Emission standard for industrial environments
IEC/TS 61000-6-5 : 2001,Electromagnetic compatibility (EMC)−Part 6-5 : Generic standards−Immunity for
power station and substation environments
IEC 61800-5-1 : 2003,Adjustable speed electrical power drive systems−Part 5-1 : Safety requirements−
Electrical, thermal and energy
IEC 62103 : 2003,Electronic equipment for use in power installations
CISPR 16-1-1,Specification for radio disturbance and immunity measuring apparatus and methods−Part 1-1 :
Radio disturbance and immunity measuring apparatus−Measuring apparatus
CISPR 16-2-1,Specification for radio disturbance and immunity measuring apparatus and methods−Part 2-1 :
Methods of measurement of disturbances and immunity−Conducted disturbance measurements
China
“Provisional Regulation for Harmonics in Electricity Distribution Systems.”SD 126-84
Germany
“Grundsätze für die Beurteilung von Netzrückwirkungen.” VDEW 1992
Switzerland
“Limitation des Perturbations Electriques dans les Réseaux Publics de distribution.
ASE 3600-1-1987 et ASE 3600-1987/SNV4 3600-1 et-2
United-Kingdom “Planning levels for harmonic voltage distortion and the connection of non-linear
equipment to transmission systems and distribution networks in the United Kingdom”
G5/4 February 2001 from Electricity Association
USA
“IEEE Recommended Practices and Requirements for Harmonic Control in Electric Power
Systems.” IEEE 519-1992
106
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JC
(参考)
JISと対応する国際規格との対比表
JIS C 4421 : 2008 可変速駆動システム (PDS)−電磁両立性
(EMC) 要求事項及び試験方法
IEC 61800-3 : 2004,Adjustable speed electrical power drive systems−Part 3 : EMC requirements and
specific test methods
(Ⅰ) JISの規定
(Ⅱ)
国際
規格
番号
(Ⅲ) 国際規格の規
定
(Ⅳ) JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(Ⅴ) JISと国際規格との技術的差異の理由及び今後
の対策
箇条番号
及び名称
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範囲
及び目的
上限電圧,用途など
を規定
1
JISにほぼ
同じ
変更
変換装置の入力電圧及び/又は
出力電圧をIEC規格では35 kV
以下,JISでは6.6 kV以下のPDS
を対象としている。また,JISで
は昇降機を対象外としている。
国内の変換装置の電圧として一般的である6.6 kV以
下に変更した。
また,昇降機については,欧州のEN規格を国内で
も準用しており,国際的にもISO規格で昇降機用の
EMC規格作成作業が進んでいることから,この規格
から除外することとした。
2 引用規格
3 用語及び
定義
3.1A システム
3
JISにほぼ
同じ
追加
IEC 61800の別のシリーズで定義
している用語を追加。
国内ではほかのシリーズはJISになっていないため
追加した。IEC規格としては問題なし。
3.2 分類
3.2
変更
カテゴリ分類の電圧値及び電流
値をIEC規格では1000 V・400 A,
JISでは600 V・100 Aで規定して
いる。これに伴い,関連する箇所
はすべて変更している。
電圧値は,電気設備の技術基準に合わせて変更。電
流値は,テストサイトでの試験可否を勘案して変更。
3.3.5 計測及び制御
ポート
3.3.9 機械的リンク
3.3.5
3.3.9
変更
IEC規格では箇条3を参照してい
る。
該当箇所が不明りょうなため削除。3.3.5については,
追加した図1Aを参照。
3.3.12 結合点,PC
3.3.12A 共通結合
点,PCC
3.3.12B 構内結合
点,IPC
3.3.12
追加
IEC規格ではIEC 61000-2-4の引
用だけ。JISではIEC 61000-2-4
から定義を翻訳して抜粋。
使用者の利便性向上のための修正。IEC規格改正時
に提案する。
2
2
C
4
4
2
1
:
2
0
0
8
2
2
C
4
4
2
1
:
2
0
0
8
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
107
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(Ⅰ) JISの規定
(Ⅱ)
国際
規格
番号
(Ⅲ) 国際規格の規
定
(Ⅳ) JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(Ⅴ) JISと国際規格との技術的差異の理由及び今後
の対策
箇条番号
及び名称
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
3 用語及び
定義(続き)
3.4 PDSのコンポー
ネント
3.4
変更・
追加
IEC規格ではサブコンポーネン
ト,電動機,(電気)電動機及び
変換器について定義。JISでは(電
気)電動機と電動機とを一つの定
義にまとめ,コンポーネント,
CDM及びBDMを追加した。
IEC規格の電動機の用語は説明でしかない。定義と
して不適切であり,IEC改正時に提案する。
4 共通要求
事項
4.2.1 条件
4
JISにほぼ
同じ
追加
JISでは,注として“規定の試験
を行うために適切な定格であり,
CDMの容量に対応した定格とは
限らない。”を追加。
使用者の利便性のため,補足説明を追加。
5 イミュニ
ティ要求事
項
5.1.1 性能判定基準
5
JISにほぼ
同じ
追加
IEC規格では,性能判定基準の適
用方法が規定されていない。
IEC規格改正時に提案する。
5.2.2.2.1 主電源ポ
ート
削除
IEC規格で規定している次数間
高調波に関する規定をJISでは削
除している。
IEC規格の規定は,230 V及び120 Vを対象とし,
日本では適用していないフリッカメータによる測定
値を基にした限度値を規定している。
5.2.3 電圧変動(電
圧変動,電圧変化,
電圧揺動),電圧デ
ィップ及び短時間
停電
変更
電圧ディップ及び短時間停電に
ついて,IEC規格では両立性レベ
ルを規定する基本規格を参照し
ている。JISでは試験レベル及び
測定方法を規定する基本規格を
引用している。
IEC規格は規定があいまいであるため,試験レベル
に応じた電圧及び継続時間を規定しているJIS C
61000-4-11及びIEC 61000-4-34を引用する。性能判
定基準は,共通規格を参考にして規定する。IEC改
正時に提案する。
5.3 高周波妨害に対
する基本イミュニ
ティ要求事項
5.3
変更
IEC規格では通信及び制御ポー
トに対するファストトランジェ
ント/バーストの要求事項が過
度に厳しくなっている。
イミュニティは,同等の試験レベルの要求事項を満
たす必要があるが,IECでは左記だけ基本規格の規
定と矛盾する規定となっている。IEC規格改正時に
提案する。
6 エミッシ
ョン
6.2.3 高調波及び次
数間高調波
6.2.3
変更
IEC規格は,400/230 V系統だけ
を対象とした規格を基にした規
定となっている。
国内では,“高圧又は特別高圧で受電する需要家の
高調波抑制対策ガイドライン”によって運用してい
るため,同ガイドラインの概要を附属書JAとして規
定し,本体で引用している。IEC規格改正時に
400/230 V系統にだけ適用する旨を提案する。
2
2
C
4
4
2
1
:
2
0
0
8
2
2
C
4
4
2
1
:
2
0
0
8
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
108
C 4421:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(Ⅰ) JISの規定
(Ⅱ)
国際
規格
番号
(Ⅲ) 国際規格の規
定
(Ⅳ) JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(Ⅴ) JISと国際規格との技術的差異の理由及び今後
の対策
箇条番号
及び名称
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
6 エミッシ
ョン(続き)
6.2.4 電圧揺動
6.2.4
削除
IEC規格で規定している電圧揺
動に関する規定をJISでは削除し
ている。
IEC規格の規定は,400/230 V系統を対象とした基本
規格を引用している。フリッカメータの特性の違い
から,日本では電圧揺動は規定していないため,今
回は不採用とし,今後必要に応じて見直していく。
6.4 基本高周波エミ
ッション限度値
6.4
変更
IEC規格で規定している限度値
を,JISでは“参考限度値”とし
ている。
エミッションの抑制には,フィルタの設置が必要と
なるが,電源系統の違いから,欧州で有効なフィル
タを国内で適用すると,漏れ電流が増加してしまう。
これによって,漏電遮断器の動作を引き起こし,設
備として問題が生じる。フィルタの設置と漏れ電流
の増加との間にはトレードオフの関係があり,また,
フィルタ以外の有効な対策は現状の技術レベルでは
困難であることから,今回は“参考限度値”とする
ことにした。IEC規格改正時に日本の電力系統を考
慮した限度値を提案する。
附属書JA
(規定)
高調波
追加
JISでは,IEC規格では規定して
いない国内電力系統のエミッシ
ョンを規定する。
国内では,“高圧又は特別高圧で受電する需要家の
高調波抑制対策ガイドライン”によって運用してい
るため,同ガイドラインの概要を附属書として規定
し,本体で引用している。
附属書JB
(規定)
装置の適合性評価
追加
IEC規格で引用しているCISPR
11の規定を,JISでは附属書とし
て規定している。
使用者の利便性を図り,引用規格の該当部分を翻訳
し,附属書として規定している。
JISと国際規格との対応の程度の全体評価:IEC 61800-3 : 2004,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
− 変更 ················ 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
2
2
C
4
4
2
1
:
2
0
0
8
2
2
C
4
4
2
1
:
2
0
0
8
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。